Embed Size (px)
Citation preview

CAPÍTULO 0 1
CAPÍTULO 0
REPASO DE CONCEPTOS GENERALES
ÍNDICE
0.1 Introducción.
0.2 Algunas notas históricas sobre la Teoría de la Elasticidad.
0.3 Generalidades sobre vectores, puntos y escalares
0.4 Operaciones elementales con vectores
0.5 Bases de vectores y coordenadas
0.6 Notación de índices
0.7 Nociones sobre tensores.
0.8 Propiedades de las matrices y tensores:
0.9 Repaso de conocimientos sobre operadores diferenciales:
0.10 Algunos teoremas importantes de cálculo integral

CAPÍTULO 0 2
0.1 Introducción
La Asignatura de Elasticidad y Resistencia de Materiales se encuadra en el Área deConocimiento de " Mecánica de los Medios Continuos y Teoría de Estructuras" deacuerdo con el Catálogo de Áreas de Conocimiento publicado por el Ministerio deEducación y Ciencia de nuestro país.
Para entender esta denominación es necesario hacer un desglose de significados, asíMecánica es la ciencia que estudia el movimiento de los cuerpos; Medio Continuo esaquel que no tiene discontinuidades a nivel microscópico o lo que es lo mismo que lamateria tiene una distribución molecular uniforme (Medio Continuo puede ser una piezasólida, un volumen de agua o de aire); por último Teoría de Estructuras es la parte de laIngeniería que trata sobre la determinación de los esfuerzos y desplazamientos que sufreun sistema resistente (un sistema resistente siempre está constituido por materia sólida).
De lo expuesto se infiere que el concepto de Mecánica del Medio Continuo ( o bien:ciencia que estudia el movimiento de los medios continuos) es muy amplio y engloba atres grandes disciplinas: Mecánica del Sólido, Mecánica de Fluidos y Termodinámica.Por tanto su estudio puede ser incluido en cualquiera de esas tres grandes Áreas. Sinembargo, en las Escuelas de Ingenieros esta materia siempre ha estado ligada al Área deMecánica Estructural, siendo quizás este el motivo de que el Ministerio de Educaciónuniera en la misma área Mecánica del Medio Continuo y Teoría de Estructuras.
La Mecánica del Medio Continuo es una Ciencia básica cuyo objetivo es proveer leyeslemas y teoremas de índole general válidos para un medio continuo dando sustento ycoherencia matemática y física a las ciencias que de ella se ramifican, es decir laElasticidad, la Mecánica de Fluidos, y la Termodinámica. Estos teoremas se refieren ala conservación de la energía, equilibrio de fuerza y de momentos, momento cinético,Momentum, etc. Sin embargo los planes de estudio actuales no contemplan su inclusiónen los estudios de Ingeniero Industrial por lo que estos Apuntes intentan paliar eldesconocimiento de los alumnos aludiendo al teorema que lo fundamenta pero sindemostrarlo.
En general la Teoría de la Elasticidad se engloba dentro del apartado de Mecánica delSólido, denominándose a veces Mecánica del Sólido Deformable para distinguirla de laMecánica del Sólido Rígido, y constituye, junto con la Resistencia de Materiales, elobjetivo de la Asignatura. Es necesario hacer un inciso para clarificar estos dosconceptos: la Mecánica del Sólido Rígido considera que la distancia entre dos puntos deun sólido cualquiera es invariable en todo el proceso, sin embargo la Mecánica delSólido Deformable considera que puede variar, definiéndose una nueva variabledenominada deformación.
Su nombre: Elasticidad y Resistencia de Materiales, parece indicar que se trata de dosasignaturas en una o de dos grandes materias en una sola asignatura. Nada mas lejos dela realidad pues la Teoría de la Elasticidad estudia cuerpos elásticos, es decir cuerposque recuperan su forma inicial una vez halla desaparecido la causa que lo deforma, y laResistencia de Materiales estudia el mismo tipo de cuerpos pero con una geometríaespecial, concretamente la barra. A lo largo del curso se verá que ambas estáníntimamente relacionadas, aunque es necesario reconocer que históricamente sendasmaterias eran independientes pues la Elasticidad nació en la década de 1820 como una
CAPÍTULO 0 3
ciencia aparte e independiente de la Resistencia de Materiales que ya existía. Sinembargo a partir de los trabajos de Saint-Venant, a finales del siglo XIX, la confluenciacomenzó a ponerse de manifiesto, y a partir de la primera década de 1920 la unión eraya indiscutible. Sin embargo la incorporación de la Teoría de la Elasticidad a losProgramas Oficiales de estudio de las Escuelas de Ingenieros Industriales de nuestropaís no fue inmediata, teniendo lugar en 1947 y sustituyendo a la asignatura " MecánicaAplicada a la Construcción" que pasaría a denominarse en adelante "Elasticidad yResistencia de Materiales".
Hoy en día nadie discute que para entender Resistencia de Materiales previamentedeben haberse adquirido ciertos conocimientos sobre Elasticidad. Por ello losestudiantes estudiarán en primer lugar la Elasticidad y a continuación la Resistencia deMateriales. En lo que respecta a la Elasticidad, se comenzará estudiando los conceptosde fuerzas y tensiones, para luego estudiar las deformaciones que llevan aparejadas laaplicación de tales fuerzas. La ley de comportamiento, que liga ambos conceptos es devital importancia para completar el modelo matemático, terminándose una primera partecon la determinación de las ecuaciones de Navier. Puede decirse que con ello se planteatoda la Teoría de la Elasticidad, aunque lógicamente es necesario extenderse un pocomás para estudiar los Teoremas Energéticos el caso de Elasticidad Plana, laconsideración de incrementos de temperatura, y por último una introducción a losMétodos Numéricos de cálculo.
0.2 Algunas notas históricas sobre la Teoría de la Elasticidad.
Puede decirse que el astrónomo, ingeniero, físico y matemático Galileo-Galilei (1564-1642) inició el camino del conocimiento sobre la Elasticidad y Resistencia deMateriales al ser el primero (al menos que se tenga conocimiento) que estudia laresistencia de un tronco de árbol a flexión. Sus experiencias son recogidas en su últimapublicación " Dos nuevas Ciencias" (1638) y básicamente discuten el problema de laviga en voladizo. Aunque el tratamiento no fue correcto ni tampoco resuelto, la cienciasuele referirse a este problema como " Problema de Galileo".
Paralelamente uno de los cerebros más brillantes de la Universidad de Oxford deaquella época y fundador de la Royal Society Robert Hooke (1635-1703) estudiaba laelasticidad de los materiales llegando en 1660 a la ley que lleva su nombre aplicándolaal caso de resortes (Hooke inventó el resorte espiral que sustituyó al péndulo en losmecanismos de relojería). Hay indicios de que Hooke no extendió su ley a la Elasticidadni a la Resistencia de Materiales, aunque existen dibujos sobre cúpulas que hacen pensarlo contrario.
Quien si lo hizo de manera fehaciente fue Mariotte (1654-1684) en 1680 que dedujo lamisma ley que Hooke y la aplicó a vigas. Este autor, haciendo uso de una tremendaintuición imaginaba las vigas formadas por láminas delgadas (fibras) y suponía quealgunas se alargaban y otras se acortaban respecto a una que permanecía invariablesituada en la mitad de la sección construyendo así el primer modelo (muy simplificado)de Resistencia de Materiales.
El problema de Galileo vuelve a ser estudiado por James Bernoulli (1654-1705) (cabezade la zaga familiar más curiosa de la ciencia moderna pues tanto su hermano Johanncomo su nieto Daniel se dedicaron a los mismos temas y siempre con planteamientos

CAPÍTULO 0 4
brillantes), que supone que una sección plana antes de la flexión permanece planadespués de la flexión. No llegó a la solución definitiva, pero en 1717 si lo hace suhermano Johann (1667-1748) con el principio de los desplazamientos virtuales. Su nietoDaniel (1700-1782) estudia diversos problemas, entre ellos la determinación de laelástica así como el pandeo de columnas. Puede decirse que en esa fecha el modelo devigas de Resistencia de Materiales estaba completo, en cuanto a tensiones normales serefiere faltando incluir la influencia del cortante
En 1784 Charles Coulomb (1736-1806) hace importantes contribuciones al estudio de latorsión y empujes de tierra, y en 1826 Louis Marie Henri Navier (1785-1836) publica suprimer gran texto de mecánica de materiales: " Resistencia y Deformación en Vigas deCualquier Sección Transversal”. Hoy en día se le considera fundador de la teoríamatemática de la Elasticidad, de tener en cuenta la influencia del cortante en vigas, y dedar solución a la flexión de placas. Aparte Navier tiene también el mérito de dirigir eimpulsar la E’cole du Ponts et Chausses y la Polytechnic cuna de la ciencia actual.
Otros autores que contribuyeron al desarrollo de la Teoría de la Elasticidad en esa épocafueron Lamé (1795-1870) y Clapeyron (1799-1864) que resolvieron problemas concilindros y esferas, así como plantear el principio de la igualdad de trabajo externo einterno. Poissón que observó y definió la contracción que sufrían los cuerpos cuando setraccionan. Cauchy (1789-1857) que modifica el planteamiento original de Navierllegando a las ecuaciones que actualmente se emplean. George Green (1793-1841) queplantea el revolucionario principio de conservación de la energía elástica. Barre deSaint-Venant (1797-1886) quizás el ingeniero más cuidadoso en sus planteamientos queha existido. Unía una tremenda inteligencia, una habilidad matemática inusual y unavisión práctica de un problema que hacía que enfocara el trabajo en la dirección precisa.Sus trabajos sobre torsión y flexión de vigas en que da una visión correcta al tratamientodel esfuerzo cortante están vigentes hoy en día. Rankine (1820-1872) que obtuvo lasecuaciones de transformación de coordenadas y de tensiones.
Puede decirse que a comienzos del siglo XX la Teoría de la Elasticidad estaba completay casi al mismo nivel que hoy en día, pero solo se había aplicado al caso de vigas. Apartir de esa fecha da comienzo el desarrollo de las aplicaciones de la elasticidad adiversos campos de la ingeniería Mecánica. Cabe citar a Lord Rayleigh, Love, y Clebshen sismología, Lamb en vibración de placas, Griffith en fractura, Timoshenko enpandeo de placas, Truesdell en leyes de comportamiento, y un largo etcétera que esimposible de resumir en tan corto espacio.
No quisiera terminar sin remarcar la importancia (injustamente olvidada por loshistoriadores) que ha tenido en la ciencia e ingeniería actual la creación de la E´cole duPonts et Chausses en Paris a finales del siglo XVII. Hasta esa fecha las universidadesseguían teniendo un marcado corte medieval, es decir enseñaban Filosofía, Teología,Derecho, y Medicina. La ingeniería estaba restringida a los Cuerpos de Ingenieros delEjército, los cuales hacían tanto la ingeniería civil como la militar y los monarcas solíancontratar a las grandes mentes científicas de aquella época (Euler, Bernouilli,etc) paratrabajar en unión de estos Cuerpos o para resolver problemas directamente relacionadoscon el mecenas. A partir de la fundación de la E´cole (nació como institución civil queformaba a alumnos que no eran militares) la enseñanza de la ingeniería propicia que secreen núcleos de profesores ingenieros que piensan que es necesario fomentar eimpulsar las enseñanzas en matemáticas y mecánica como base científica y de

CAPÍTULO 0 5
formación de los futuros ingenieros (cabe citar como gran impulsor de esta idea aMonge). Estos grupos de ingenieros (Cauchy, Lagrange, Poisson ,etc) fueron los quepropiciaron el nacimiento de las actuales Facultades de Matemáticas y Físicas y endefinitiva de la Ingeniería y Ciencia actual. Estas líneas están dedicadas a todosaquellos grandes ingenieros que dedicaros sus esfuerzos a lograr este bello fin.
0.3 Generalidades sobre vectores, puntos y escalares
Como se sabe los escalares son números pertenecientes al conjunto de los NúmerosReales. Los Vectores pertenecen al espacio vectorial Euclídeo de dimensión 3: 3Ε , yPuntos son entes asociados al espacio Afín Euclideo 3ℑ .
Sean A y B dos puntos cualesquiera, en general al segmento orientado con origen en elpunto A y final en el B se denomina vector:
• B
• A
Figura 0- 1
El conjunto de vectores en unión de las operaciones de suma, producto por un escalar,norma, y producto escalar tienen la estructura de espacio euclídeo 3Ε . Fijado un origenarbitrario O (O∈ 3Ε ) existe una equivalencia entre puntos y vectores pues a cada puntoP se le puede asociar el vector OP .
En resumen las propiedades axiomáticas de los vectores son:
Commutativa: abba +=+Asociativa: ( ) ( ) cbacba ++=++
Conjunto vacio: ( ) aa =+∃ 0/0Inversa: ( ) ( ) 0/ =−+−∃ aaaVectores y escalares (distributiva):
( ) baba ⋅+⋅=+⋅ ααα( ) aaa ⋅+⋅=+⋅ βαβα( ) ( ) aa ⋅⋅=⋅⋅ βαβα
Elemento neutro aa =⋅1

CAPÍTULO 0 6
0.4 Operaciones elementales con vectores
Los vectores pueden sumarse y/o restarse de acuerdo con la regla del paralelogramo:
a b
ba +
Figura 0- 2
La multiplicación por un escalar da como resultado otro vector igualmente orientadopero de módulo diferente:
a a⋅β
Figura 0- 1
Producto escalar de dos vectores:
Es una operación simétrica cuyo resultado es un escalar:
λ=⋅ba
donde ℜ∈∈ λybya 3Ε
Las propiedades son las siguientes:
Conmutativa: abba ⋅=⋅Asociativa: ( ) ( ) ( )cbcacba ⋅⋅+⋅⋅=⋅⋅+⋅ βαβαEn general: 0≠⋅ aa ; si 0=⋅ aa 0=⇔ a
Se denomina Norma o Módulo de un vector a la raíz cuadrada del producto escalar delvector por si mismo :
aaa ⋅=
y geométricamente se interpreta como la distancia entre los puntos origen y destino delvector.
El producto escalar puede interpretarse geométricamente como la proyección de unvector sobre el otro, así:
CAPÍTULO 0 7
a
b
φ
Figura 0- 2
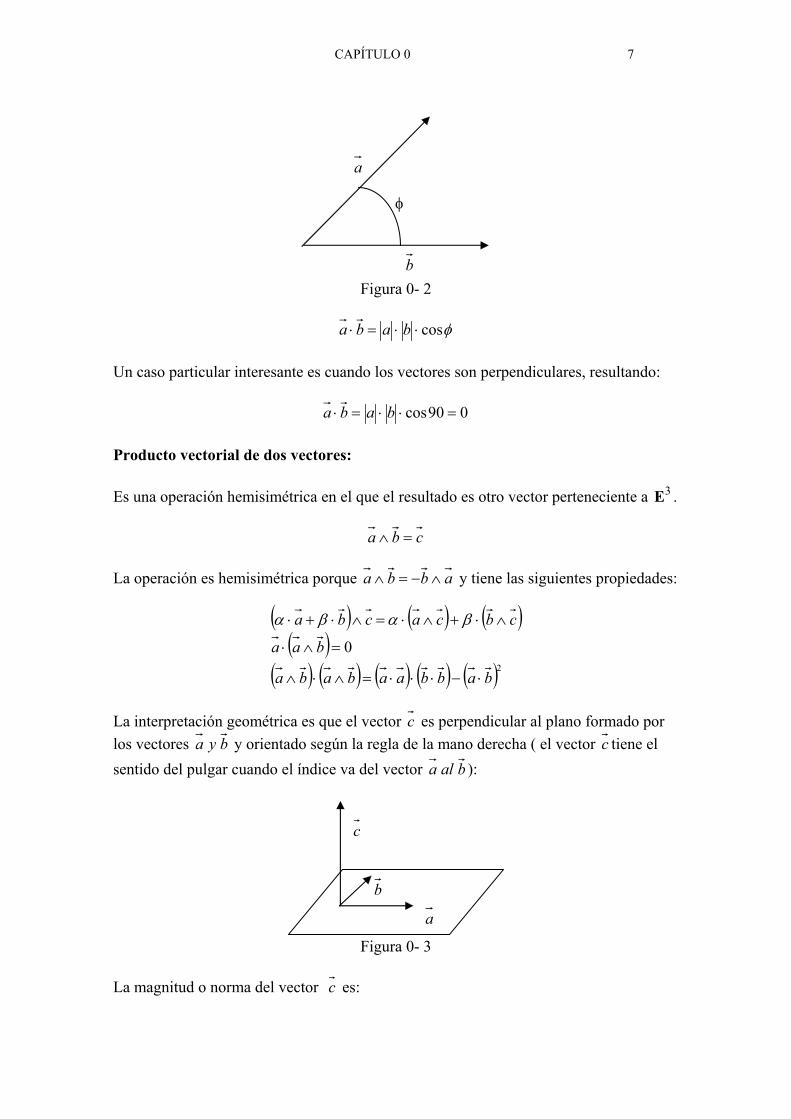
φcos⋅⋅=⋅ baba
Un caso particular interesante es cuando los vectores son perpendiculares, resultando:
090cos =⋅⋅=⋅ baba
Producto vectorial de dos vectores:
Es una operación hemisimétrica en el que el resultado es otro vector perteneciente a 3Ε .
cba =∧
La operación es hemisimétrica porque abba ∧−=∧ y tiene las siguientes propiedades:
( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( )20
babbaababa
baa
cbcacba
⋅−⋅⋅⋅=∧⋅∧
=∧⋅
∧⋅+∧⋅=∧⋅+⋅ βαβα
La interpretación geométrica es que el vector c es perpendicular al plano formado porlos vectores bya y orientado según la regla de la mano derecha ( el vector c tiene elsentido del pulgar cuando el índice va del vector bala ):
a
b
c
Figura 0- 3
La magnitud o norma del vector c es:

CAPÍTULO 0 8
φsenbabac ⋅⋅=∧=
Otra interpretación geométrica interesante es observar que el módulo del vector c es elárea del paralelogramo formado por los vectores a y b , así:
φ
a
b
c
Figura 0- 4
Producto mixto de vectores:
Se define a partir del conocimiento del producto escalar y vectorial de vectores, así:
[ ] ( )cbacba ∧⋅=,,
Obviamente el producto mixto es un escalar y tiene las siguientes propiedades:
[ ] [ ] [ ] [ ] [ ] [ ][ ] ( ) [ ] [ ]
[ ] ntesindependieelinealmentsonnocbacbaSi
cbdcbacbda
abccabbcabacacbcba
,,0,,
,,,,
,,,,,,,,,,,,
⇔=
⋅+⋅=∧⋅⋅+⋅
−=−=−===
λβλβ
La interpretación geométrica del producto mixto es el volumen del paralelepípedo queforman los tres vectores:
a
b c
0.5 Bases de vectores y coordenadas
En el espacio euclídeo 3Ε se puede establecer una base de tres vectores linealmenteindependientes ( )321 ,, eee de tal forma que cualquier vector a puede ser expresadocomo una combinación lineal de la base, así:

CAPÍTULO 0 9
332211 eaeaeaa ++=
Los coeficientes a1, a2, a3, se denominan coordenadas de a en la base ( )321 ,, eee
Cuando los vectores ( )321 ,, eee son mutuamente perpendiculares entre si se dice que labase es ortonormal. Un sistema de referencia es cartesiano cuando se dispone de unorigen O ( O ∈ 3ℑ ) y una base de vectores ( )321 ,, eee pertenecientes a 3Ε . En este
sistema las coordenadas cartesianas de un punto x cualquiera (x perteneciente a 3ℑ )son las coordenadas del vector x ( 3Ε∈x ) de tal forma que:
O x1
x2
x3
Figura 0- 5
En función de las coordenadas y en una base ortonormal el producto escalar de dosvectores es:
332211 babababa ⋅+⋅+⋅=⋅
En la denominación clásica de un sistema de referencia cartesiano se emplea la notaciónX, Y, Z para referirse a los tres ejes coordenados. Sin embargo es conveniente elegiruna nomenclatura diferente para el sistema de referencia, esto que en un principio puederesultar extraño al alumno, pronto verá su utilidad. Consiste en definir los ejes de lasiguiente forma:
X1
X2
X3
Figura 0- 6O más genéricamente:

CAPÍTULO 0 10
1
2
3
Figura 0- 7
Por otra parte, existen varias formas de expresar la base de vectores cartesianas. Laclásica es a través de las letras i, j, k. Con esta nomenclatura un vector se expresaríacomo:
kxjxixx ⋅+⋅+⋅= 321
Otra bastante usual es emplear la notación anterior, es decir:
332211 eaeaeaa ++=
Y cuando se emplea notación tensorial se usa:
iij exx =
Normalmente en Teoría de Elasticidad se emplean los cosenos directores como base delsistema cartesiano. Así sea un vector P de coordenadas (P1, P2, P3) que forma con losejes coordenados los siguientes ángulos:
X1
l
m
n
α
β
γ
O
P
X2
X3
P1
P2
P3
Figura 0- 8
l = cos α ; m = cos β; n = cos γ
La distancia entre los puntos O y P o módulo del vector OP es:

CAPÍTULO 0 11
23
22
21 PPPOP ++=
el vector unitario en la dirección de OP es:
++++++=
23
22
21
32
32
22
1
22
32
22
1
1 ,,PPP
P
PPP
P
PPP
PVunitr
Sin embargo puede observarse que estas componentes del vector unitario unitV son
precisamente los cosenos de los ángulos que forma el vector OP con cada uno de losejes coordenados, que denominándolos adecuadamente resulta:
( ) ),,(cos,cos,cos nmlVunit == γβαr
0.6 Notación de índices
Conocida como notación de Einstein, es una ayuda importante para simplificar toda laescritura de las ecuaciones, y se basa en las siguientes premisas:
- Un solo índice representa a un vector y varía desde 1 hasta 3
Ejemplo: Sea M un vector de componentes sobre los ejes 1,2,3 (M1, M2, M3)Mj representaría a cualquiera de las tres componentes del vector M.
- Dos índices no repetidos representan a un tensor de orden 2 (por ejemplo εij). Dosíndices no repetidos particularizados representan a un término del tensor (por ejemploσ12).Ejemplo:
=
333231
232221
131211
σσσσσσσσσ
σ ij
- Dos índices repetidos implican siempre una suma.Ejemplo:
332211 σσσσ ++=kk
- Si existen índices repetidos entre una multiplicación o división implica una sumade la operación multiplicación o división que se está realizando.

CAPÍTULO 0 12
Ejemplo de productos:
a) módulo de un vector
23
22
21321321 ),,(),,( dxdxdxdxdxdxdxdxdxSdSddS ++=⋅=⋅=
rr ( ⋅ significa producto
escalar)
En notación de índices la operación anterior es: ii dSdSdS =
b) Multiplicación de una fila de una matriz por un vector:
3332321313 gFgFgFgF ii ++=
Cocientes:
3
23
2
22
1
212hf
hf
hf
hf
k
k ++=
3
3
2
2
1
1xxxxiii
j
ij∂∂
+∂∂
+∂∂
=∂
∂ σσσσ
- Una coma (,) indica que se realiza una derivación
Ejemplo: m
m x∂∂
= 12,12 )( σ
σ
La diferencial total de una función f es:
33
22
11
dxxfdx
xfdx
xfdf
∂∂
+∂∂
+∂∂
=
y en notación de índices se escribiría:
jj
dxxfdf
∂∂
=
o bien:
jdxjfdf ,=
Sea el siguiente sistema de ecuaciones:

CAPÍTULO 0 13
33
32
2
31
1
33
33
22
2
21
1
22
33
12
2
11
1
11
dxxf
dxxf
dxxf
df
dxxfdx
xfdx
xfdf
dxxf
dxxf
dxxf
df
∂∂
+∂∂
+∂∂
=
∂∂
+∂∂
+∂∂
=
∂∂
+∂∂
+∂∂
=
puede ser representado por:
jj
ii dx
xfdf
∂∂
=
ya que al no estar el índice i repetido no implica una suma sino cualquiera de las tresecuaciones.
- Existen dos tensores especiales que se emplean con profusión en la notación deíndices. Tales son: El tensor unidad y el de permutación de índices
- Tensor Unidad
El tensor unidad se construye con la delta de Kronecker ijδ que tiene la siguiente
definición
ijδ = 1 si i = j ; ijδ = 0 si i ≠ j
Es decir:
=
100010001
ijδ
Aplicaciones:
332211 σσσσσδσ ++=== jjiiijij
ikjkij σδσ =
jmkmjk δδδ =
Para demostrar la primera de ellas:
( ) ( )( ) 332211333322221111333323231313
323222221212313121211111332211
σσσδσδσδσδσδσδσ
δσδσδσδσδσδσδσδσδσδσ
++=++=++
++++++=++= iiiiiiijij
La segunda sería:

CAPÍTULO 0 14
kikikijkij 332211 δσδσδσδσ ++=
En esta ecuación el índice i puede tomar valores 1,2,3 y el índice k 1,2,3, pero esimportante darse cuenta que en cada caso el índice i y el índice k sólo toman un valordeterminado y fijo. Por tanto para un valor fijo del índice k sólo existe un sumandodistinto de cero. Así, si k = 1 el único sumando no nulo es ( )11 =kiσ . Si k=2 el únicosumando no nulo es ( )22 =kiσ . Y si k = 3 entonces es ( )33 =kiσ . En definitiva se puedeescribir: ikjkij σδσ =
La demostración de la tercera es inmediata, pues simplemente se desarrolla la suma deproductos y se sustituye por su valor.
- Los símbolos de permutación de índices:
Se suele emplear la letra e para su denominación y en general tiene la forma eijk es muyútil para expresar determinantes y productos vectoriales. Su definición es la siguiente:
( )kji eee ∧⋅
El resultado de esta operación es:
Esto conduce a:
e e e e e e e e e etc111 222 333 112 113 221 223 331 332 0= = = = = = = = =e e ee e e123 231 312
213 321 132
11
= = == = = −
0 si dos o más índices están repetidos
1 si los índices tiene una permutación par o estánsituados de acuerdo con el producto vectorial 1-2-3
-1 en caso contrario
eijk =

CAPÍTULO 0 15
1
2 3 +
Aplicaciones de estos símbolos:
Determinante:
Aa a aa a aa a a
a a a a a a a a a
a a a a a a a a a
= = + + −
− −
11 12 13
21 22 23
31 32 33
11 22 33 21 32 13 31 12 23
11 32 23 12 21 33 13 22 31
y en notación de índices es: A e a a aijk i j k= 1 2 3
que desarrollada (sólo se tienen en cuenta los términos distintos de cero):
e a a a e a a a e a a a
e a a a e a a a e a a a
a a a a a a a a a a a a a a a a a a
123 11 22 33 231 21 32 13 312 31 12 23
2 13 21 12 33 321 31 22 13 132 11 32 23
11 22 33 21 32 13 31 12 23 21 12 33 31 22 13 11 32 23
+ + +
+ + =
+ + − − −
Producto vectorial:
( ) ( )
( ) ( ) ( )kbabajbabaibaba
bbbaaakji
bbbaaabac
122131132332
321
321321321 ,,,,
−+−+−
==∧=∧=
Y en notación de índices: tsrstr baec =Que desarrollada es:
12321213123
31213132312
23132321231
baebaecbaebaecbaebaec
+=+=+=
o bien en forma de vector:
( ) ( )122131132332321 ,,,, babababababaccccr −−−==

CAPÍTULO 0 16
Otras aplicaciones:
mnpkpjnimijk ee =δδδ
kmjnknjmimnijk ee δδδδ −=Triple producto escalar:
( ) kjiijk CBAeCBA =∧⋅
- Un índice no se debe repetir más de dos veces en la misma operación, si ello ocurrese debe emplear el símbolo sumatorio para tal fin.
Ejemplo: iijijk CBe está mal expresada pues el índice i se repite tres veces. En este caso
se debe escribir: 333222111
3
1CBeCBeCBeCBe jjkjjkjjk
i
iiijijk ++=∑
=
= y luego desarrollar
cada uno de los sumandos empleando las reglas de la notación de índices.
0.7 Nociones sobre tensores.
Un tensor se puede definir desde la ingeniería y desde la matemática. Desde el punto devista ingenieril un tensor es un ente que ante tal que la operación transformación decoordenadas lo hace según ciertas reglas. A la hora de representar los tensores existeuna cierta confusión entre los alumnos pues muchos textos escriben y tratan a un tensorexactamente igual que si fuese una matriz. Ello ocurre cuando esa matriz es también untensor lo que implica que entonces tienen las propiedades de matrices y tensores. Enotras palabras un tensor puede que cumpla con las propiedades de tensor y de matrizsiendo entonces ambas cosas a la vez, pero puede que no cumpla con las propiedades dematriz siendo en este caso sólo un tensor. En general los tensores cartesianos puedenser tratados, la mayoría de las veces, como matrices. Sin embargo, en aras de lageneralidad y entrenamiento del alumno hacia una profundización en temasrelacionados con la materia, este autor entiende que es mejor tratarlos como tensores.
La palabra tensor, fue introducida por Einstein, es de origen latino para significar algoque se estira, es decir la causa de la tensión. Fue desarrollada por Ricci en 1890 y dadaa conocer por su discípulo Levi en 1900 aunque su auge no llegó hasta que Einstein lapopularizó con su famosa teoría de la relatividad
Una de las grandes ventajas de los tensores es que transforman un vector en otro vector,es decir el producto de un tensor por un vector es otro vector, y en general sistematizantodo lo relacionado con los cambios de sistemas de referencia de magnitudes derivadas(por ejemplo pasar de coordenadas cartesianas a esféricas los operadores diferenciales,etc).
Rango de un tensor:
Los tensores pueden ser escalares, vectores, etc. Un escalar es un tensor de orden 0, unvector es un tensor de orden 1, una matriz de 3x3 puede ser un tensor de orden 2. En

CAPÍTULO 0 17
general el rango de un tensor viene expresado por el número de índices que contenga,así:
2ordendetensorCvectorCescalarC
ij
i
===
En general los escalares son magnitudes que no dependen del sistema de coordenadaselegido como por ejemplo la masa, el tiempo, la temperatura, etc.
Transformación de coordenadas
Sea un vector cualquiera F cuyas componentes referidas al sistema X, Y son Fx y Fy yrespecto al sistema X´, Y´ son F´x y F´y. Se trata de expresar las componentes delvector F en el sistema girado en función de las componentes del vector en el sistemasin girar.
Y F
F Y
F X
F X ´ F Y ´
Y ´
X ´
X α
Las relaciones que se obtienen de la figura anterior son:
αα
αα
cos
cos
´
´
yxy
yxx
FsenFF
senFFF
+−=
+= =>
−=
yx
yx
FF
FF
αααα
cossensencos
´´
Que se pueden observar en las dos figuras siguientes:

CAPÍTULO 0 18
Y F F Y
F X
F X ´ F Y ´
Y ´
X ´
X α O
A B
α
F x´ = O A + A B = F x cos α + F y sen α
Y
F F Y
F X
F X ´ F Y ´
Y ´
X ´
X α
O
A
B
α
F y´ = O A – A B = F y cosα - F x senα
F xsenα
Resultando:
[ ]
=
⇒
−=
yx
yx
FF
LFF
L´´
cossensencos
αααα
La siguiente figura muestra los cosenos directores de los ejes X´e Y´, así :
α
( )βα cos,cos
( )ηφ cos,cos
X
X´
Y Y´
β φ
η
Como puede observarse, el tensor de Transformación de Coordenadas cartesianas [L] seconstruye colocando en filas las componentes de los vectores unitarios de cada uno de

CAPÍTULO 0 19
los ejes girados. Si, como es usual en Elasticidad, se emplean los cosenos directorespara representar a los vectores unitarios resulta, que las filas de la Matriz deTransformación de Coordenadas serán los cosenos directores de cada eje.
Para el caso tridimensional, la matriz de transformación de coordenadas se construyeextrapolando los resultados del bidimensional, así
X1
X2
X3
X´1
X´2 X´3
X1
X2
X3
X´1 (l11, l12, l13 )
X1
X2
X3
X´2(l21, l22, l23 )
X1
X2
X3
X´3(l31, l32, l33 )
α1
α2 α3
β1
β2 β3
γ1
γ2 γ3
[ ]
=
=
333
222
111
333231
232221
131211
coscoscoscoscoscoscoscoscos
γβαγβαγβα
lllllllll
L
Transformación de tensores en sistemas ortonormales:
Sean dos vectores bya relacionados a través de un tensor T en un referencial (x1,x2, x3 ), así:
jiji bTa = 0-20
Si se realiza un cambio de sistema de referencia a los ejes ( x´1, x´2, x´3 ) resulta:
jiji bTa ´´´ = 0-21

CAPÍTULO 0 20
y el objetivo es encontrar una relación entre Tij y T´ij. A tal fin se hace uso de la relaciónobtenida anteriormente sobre el cambio de sistema de referencia de vectores, así:
jijijiji bLbyaLa == ´´ 0-22
y en virtud de que la matriz de transformación de coordenadas es ortogonal (una matrizes ortogonal si [M]T = [M]-1 ) entonces:
´´11´1´i
Tijjjiijjijijiijjiji bLbbbLbLLbLbLb =→=→=→= −−− 0-23
Por tanto partiendo de que jiji aAa =´ resulta sustituyendo:
[ ] [ ][ ] [ ][ ][ ] [ ] [ ][ ][ ]TT LTLT´b´LTLbTLaLa´ =⇒=== 0-24
Inversamente es inmediato comprobar que:
[ ] [ ] [ ][ ]LT´LT T= 0-25
El alumno puede comprobar que:
[ ] [ ][ ][ ] mnjnimij TAAT =≡= TLTLT´ 0-29
0.8 Propiedades de las matrices:
Las dimensiones de una matriz se obtienen a partir del número de filas y columnas quecontengan, así una matriz de 2 x 4 quiere decir que tiene dos filas y cuatro columnas.Casos especiales es cuando se tratan de matrices filas o columnas. Así una matriz fila sedenominaría 1 x n (por ejemplo una matriz A de dimensión 1x3 sería (a,b,c)), y una
matriz columna nx1 (por ejemplo una matriz A de dimensión 3x1 sería
321
).
Usualmente se emplea la notación siguiente: cba ,, para denominar a una matriz fila y
cba
para designar a una matriz columna
Suma-resta de matrices
La operación suma o resta de matrices consiste en sumar o restar término a términoambas matrices, así:

CAPÍTULO 0 21
±±±±±±±±±
=
±
333332323131
232322222121
131312121111
333231
232221
131211
333231
232221
131211
bababababababababa
bbbbbbbbb
aaaaaaaaa
La operación suma/resta es conmutativa y asociativa
[ ] [ ] [ ] [ ] [ ] [ ]( ) [ ] [ ] [ ] [ ]( )CBACBAABBA ++=+++=+
Multiplicación de matrices
La multiplicación de matrices se realiza mediante la regla de la multiplicación de filaspor columnas:
++++++++
=
232322222121312321221121
231322122111311321121111
2331
2221
2111
232221
131211
babababababababababababa
bbbbbb
aaaaaa
El producto de matrices no es conmutativo pero si asociativo:
[ ] [ ]( ) [ ] [ ] [ ] [ ]( )CBACBA ⋅⋅=⋅⋅
El producto de un escalar por una matriz es el producto del escalar por todos loscoeficientes de la matriz:
⋅⋅⋅⋅⋅⋅
=
⋅
232221
131211
232221
131211
akakakakakak
aaaaaa
k
Matrices simétricas:
Una matriz es simétrica si se cumple que: Aij = Aji.
Matrices hemisimétricas:
Una matriz se dice que es hemisimétrica cuando: jiij AA −= y Aii = 0 por ejemplo:
−−−=
00
0
2313
2312
1312
aaaaaa
Aij
Matriz Diagonal

CAPÍTULO 0 22
Una matriz se dice diagonal cuando únicamente son distintos de cero los términoscorrespondientes a la diagonal principal. Si además los términos de la diagonal principaltodos tiene valor unidad se denomina matriz unidad
Matriz Traspuesta
La matriz traspuesta [B]T de una matriz [B] se construye intercambiando filas porcolumnas en la matriz [B], por ejemplo:
[ ] [ ]
=→
=
332313
322212
312111
333231
232221
131211
aaaaaaaaa
aaaaaaaaa
TBB
Una de las operaciones más importantes con matrices traspuestas es:
[ ] [ ]( ) [ ] [ ]TTT ABBA ⋅=⋅
También es fácil comprobar que: CC T =
Y que: [ ] ( ) [ ]TT BCCB ⋅=⋅
La traspuesta de la traspuesta de una matriz es la matriz original: [ ]( ) [ ]BBTT =
La traspuesta de una matriz simétrica es la matriz original.
Una matriz se dice que es ortogonal si [M]T = [M]-1
Matriz Inversa
Para ciertas matrices cuadradas (como por ejemplo [B]) se puede definir la matrizinversa de tal forma que:
[ ] [ ] [ ]IBB 1 =⋅ −
Donde [I] es la matriz unidad y [ ] 1B − es la matriz inversa de [B]
Derivada de una matriz
La derivada de una matriz es la derivada de cada uno de sus componentes:
Ejemplo:
=
163012
31
223
2
xxx
xxxxx
dxd

CAPÍTULO 0 23
La derivada de matrices tiene la siguiente propiedad:
[ ] [ ]( ) [ ][ ] [ ] [ ]dx
BdABdx
AdBAdxd
+=⋅
Integral de matrices
La integral de una matriz es la integral de cada uno de sus componentes
Ejemplo:
=
∫
233
4
233
1234
23
23
2
xxx
xxx
dxxxx
xx
0.9 Álgebra de tensores
- Suma resta de tensoresEs una operación que da como resultado otro tensor Cij cuyas componentes son la sumao resta de las correspondientes componentes de los tensores primitivos Aij y Bij:
ijijij BAC ±=
- Multiplicación de tensoresEl producto de un tensor Aij por un vector Ck es un tensor de rango 3 Dijk
kijijk CAD =
El producto del tensor Aij por el tensor Bkm es un tensor de rango 4 Cijkm
kmijijkm BAC =
- Contracción o multiplicación de tensores con índices repetidosCuando los tensores a multiplicar tienen un índice repetido el resultado es un tensor derango N-2. Por ejemplo en el caso de multiplicar un tensor por un vector resulta:
( ) ( )13 RangoCADRangoCAD jijikijijk =→=
Si se multiplican dos tensores con los dos índices repetidos el resultado es un escalar
( ) ( )04 RangoBACRangoBAC ijijkmijijkm =→=
- Regla del cocienteSea ai un vector, bi otro vector y cij una matriz. Si ocurre que: jiji bca = entonces cij esun tensor

CAPÍTULO 0 24
- Multiplicación de un escalar α por un tensor AijEl resultado es otro tensor cuyas componentes son el resultado de multiplicar todas lascomponentes del tensor por el escalar: Cij = α Aij
0.10 Repaso de conocimientos sobre operadores diferenciales:
En todas las ramas de la Mecánica, del Electromagnetismo, y en general en toda laIngeniería los operadores diferenciales son de una importancia capital. Los operadoresdiferenciales son dos: el gradiente y el laplaciano. Sin embargo dependiendo de cómose operen se subdividen en cuatro:
- Gradiente- Divergencia- Rotacional- Laplaciano
Aún así cada uno de ellos tiene sus particularidades que es necesario tener en cuenta. Acontinuación se exponen sin demostrar estas particularidades y exclusivamente encoordenadas cartesianas.
El operador Gradiente
Se define como un vector cuyas componentes son:
∂∂
∂∂
∂∂
=∇zyx
,,
Si se aplica a un campo escalar ( )zyx ,,φφ = se obtiene un vector que tiene la siguientepropiedad: La dirección del vector gradiente es aquella en que el campo varía másrápidamente (el gradiente es normal a la superficie en un punto determinado).
kz
jy
ixzyx ∂
∂+
∂∂
+∂∂
=
∂∂
∂∂
∂∂
=∇φφφφφφφ ,,
Hay que tener en cuenta que el vector gradiente de φ es diferente en cada punto puesdepende de las coordenadas.
En función del gradiente se puede hallar la variación que experimente el campo en lasinmediaciones de un punto, así:
dsdzz
dyy
dxx
d ⋅∇=∂∂
+∂∂
+∂∂
= φφφφφ
El operador divergencia

CAPÍTULO 0 25
El gradiente se puede aplicar a un campo vectorial dando como resultado un escalardenominándosele entonces divergencia del campo vectorial así:
Sea un campo vectorial F , entonces:
zF
yF
xFFFdeadivergenci zyx
∂∂
+∂
∂+
∂∂
=⋅∇=
La divergencia en notación de índices se escribiría:
i
iii x
FFF∂∂
==⋅∇ ,
El operador rotacional
Sea un campo vectorial F se define el rotacional de F como:
FFRot ∧∇=
Como puede observarse el rotacional es otro vector y tiene la siguiente expresión:
ky
Fx
Fj
zF
xFi
zF
yF
FFFzyx
kji
F xyxzyz
zyx
∂∂
−∂
∂+
∂∂
−∂∂
−
∂
∂−
∂∂
=∂∂
∂∂
∂∂
=∧∇
El operador Laplaciano
El operador laplaciano se puede aplicar a campos escalares o a campos vectoriales. Si seaplica a un campo escalar φ, resulta:
2
2
2
2
2
2
zyxdeLaplaciano
∂∂
+∂∂
+∂∂
=φφφφ
Normalmente no se escribe laplaciano de φ sino:
( ) ( ) 2
2
2
2
2
2
zyxdegraddiv
∂∂
+∂∂
+∂∂
=∇⋅∇=φφφφφ
usualmente también se emplea la notación siguiente φ2∇ o bien: φ∆ o en notación deíndices: φ,ii

CAPÍTULO 0 26
Si el operador laplaciano se aplica a un campo vectorial F resulta otro campo vectorialasí:
( ) ( )k
zF
yF
xF
zj
zF
yF
xF
yi
zF
yF
xF
x
FFdegraddivF
zyxzyxzyx
∂∂
+∂∂
+∂∂
∂∂
+
∂∂
+∂∂
+∂∂
∂∂
+
∂∂
+∂∂
+∂∂
∂∂
=⋅∇⋅∇==∆
0.11 Algunos teoremas importantes de cálculo integral
- La circulación del vector gradiente a lo largo de una línea cerrada es nula
0==⋅∇ ∫∫ΓΓ
φφ dds
consecuencia: la circulación del gradiente a lo largo de una línea es independiente delcamino y sólo depende del valor de la función en los extremos
- Teorema de Stokes
( ) ∫∫∫ΓΩ
Γ⋅=Ω⋅∧∇ dtFdnF
Donde n es la normal al elemento diferencial de superficie y t es el sentido de avance alo largo de la curva Γ, de tal forma que si se avanza a lo largo de la curva Γ en ladirección de t la superficie queda a la izquierda.
- Teorema de la divergencia
Establece que:
Ω∂∂
=≡Ω⋅∇=⋅ ∫∫∫∫∫∫∫∫∫∫ΩΩ
dxFVdnFdFVdnF
i
i
Vii
V
La primera integral se denomina Flujo de un campo vectorial.
Si el vector campo y el vector normal a la superficie coinciden el flujo es máximo. Enbase a ello se dice que si en un punto:
- La divergencia de F es positiva significa que el flujo en ese punto aumenta (existeuna fuente)

CAPÍTULO 0 27
- La divergencia de F es negativa significa que el flujo en ese punto disminuye(existe un sumidero)
- La divergencia de F es nula significa que el flujo entrante y saliente es el mismo (noexiste fuentes ni sumideros)