Embed Size (px)
Citation preview
8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ
Predavanje - 8
DINAMIKA NOSEĆIH STRUKTURA
Generacija 2010/2011
Male oscilacije mehaničkih sistema
Materijalni mašinski sistemi, izloženi promenljivim spoljašnjim uticajima, osciluju. Oscilatorni procesi su jedan od oblika
dinamičkog ponašanja mehaničkog sistema. Dinamičko ponašanje opisuje radna stanja mehaničkih sistema pogonskih mehanizama ili
noseće konstrukcije. Izučavanje oscilatornih dinamičkih procesa je osnov projektovanja najvećeg broja mašinskih sistema. Osnovna
teorijska podloga za dinamičku analizu je u klasičnoj mehanici. Materijalni sistemi se postupcima mehanike svode (diskretizuju) na
mehaničke sisteme sa konačnim brojem stepeni slobode oscilovanja. Takvi mehanički sistemi se dalje tretiraju Teorijom malih oscilacija
sa konačnim brojem stepeni slobode, koja predstavlja osnov najvećeg broja univerzalnih softvera za dinamičku analizu. Zavisno od
namene komercijalnih programa za računare, dinamička analiza se može izvršiti i sa znatno većom širinom.
Teorija malih oscilacija sa konačnim brojem stepeni slobode kretanja pogodna je za analizu oscilacija nosećih struktura
različitih tipova mašina. Ova teorija opisuje dinamičko ponašanje konstrukcije, talasnim parcijalnim diferencijalnim jednačinama sa
odgovarajućim graničnim i početnim uslovima. Polazeći od pretpostavke o solidifikaciji pojedinih elemenata, zanemarivanjem elastičnih
deformacija i inercionih svojstava nekih elemenata, zadržavajući se samo na elastičnim osobinama konstrukcije, prelazimo na
ekvivalentni model. Na bazi energije ekvivalentnog modela, primenom nekog od principa mehanike (Lagrange-II), formiraju se obične
diferencijalne jednačine kretanja.
Matematički modeli, koji uzimaju i elastične deformacije u obzir, vode nelinearnim diferencijalnim jednačinama koje se ne
mogu tačno analitički rešiti, pa se rešavaju aproksimativno. Ponekad je moguće izvršiti linearizaciju jednačina, čime se ubrzava postupak
traženja rešenja. Očigledno da su ovako dobijena rešenja malih oscilacija približna, ali su osnovna dinamička karakteristika, dobijena
primenom nelinearne analize.
Posmatrajmo mehaničku strukturu, diskretno predstavljenu sa n materijalnih tačaka, pojedinačnih koncentrisanih masa mi. Kretanje - oscilovanje sistema se opisuje generalisanim koordinatama kretanja qi. Da bi diferencijalne jednačine sistema bile linearne,
pojedine energije struktura (kinetička, potencijalna i disipativna) moraju imati homogenu, kvadratnu formu generalisanih koordinata,
koja u indeksnoj i matričnoj notaciji izgleda:
qaq21qqa
21E T
j
n
1i
n
1j
iijK
qcq21qq c
21E T
ji
n
1i
n
1j
ijP
(3.3.4)
qbq21qqb
21 T
j
n
1i
n
1j
iij
gde je [a] - inerciona matrica sa aij - inercionim koeficijentima materijalnog sistema (mase ili aksijalni momenti inercije masa), [c] -
kvazielastična matrica sa cij - koeficijentima krutosti i [b] - matrica koeficijenata otpornih sila bij. Inerciona matrica [a],
kvazielastična matrica [c] i matrica otpornih sila [b] su oblika (3.3.5):
nn2n1n
n22221
n11211
nn2n1n
n22221
n11211
nn2n1n
n22221
n11211
ccc
ccc
ccc
c ,
bbb
bbb
bbb
b ,
aaa
aaa
aaa
a
(3.3.5)
Posmatrajmo osnovni zadatak analize materijalnog sistema koji slobodno osciluje (bez spoljašnje pobude Qi*) i bez prigušnih
sila. Ovaj idealiziran zadatak daje osnovne podatke o karakteristikama oscilatornog sistema i primenjuje se za traženje sopstvenih
frekvencija (rezonantnih brzina), amplituda dinamičkih procesa a time i naponskih svojstava konstrukcije. Primenom Lagrange-ovih
jednačina druge vrste (3.3.6), može se formirati sistem diferencijalnih jednačina koji opisuje dinamičko ponašanje sistema (3.3.7):
i
i
P
i
K
i
K Qq
E
q
E
q
E
dt
d
(3.3.6)

0qcqcqcqaqaqa
0qcqcqcqaqaqa
0qcqcqcqaqaqa
nnn22n11nnnn22n11n
nn2222121nn2222121
nn1212111nn1212111
(3.3.7a)
Ovaj sistem jednačina u matričnoj formi ima oblik:
0qcqa (3.3.7b)
Rešenje se prema tipu diferencijalnih jednačina i oscilatornom karakteru problema, može potražiti u trigonometrijskom obliku, forme:
)tsin(Aq ii (3.3.8)
gde su iii i ,A (i=1n), karakteristike oscilovanja sistema (amplituda, kružna frekvencija oscilovanja i fazna pomeranja).
Ova forma rešenja u diferencijalnim jednačinama daje oblik:
0A)ac(A)ac(A)ac(
0A)ac(A)ac(A)ac(
0A)ac(A)ac(A)ac(
n2
nnnn22
2n2n12
1n1n
n2
n2n222
222212
2121
n2
n1n122
121212
1111
(3.3.9a)
Ili matrično: 0AH (3.3.9b)
Uvedena matrica [H] je karakteristična matrica sistema. Pomoću nje se formira frekventna jednačina (3.3.10) njenim
izjednačavanjem sa nulom. Rešenja frekventne jednačine daju sopstvene frekvencije posmatranog sistema. Zato je ova jednačina poznata
pod imenom frekventna ili karakteristična jednačina sistema.
0ac
acacac
acacac
acacac
HHdet 2
2nnnn
22n2n
21n1n
2n2n2
22222
22121
2n1n1
21111
21111
(3.3.10)
Rešenja frekventne jednačine se mogu poredjati po veličini (3.3.11) i predstavljaju kvadrate sopstvenih kružnih frekvencija sistema:
0 , (1)2
)n(2
)3(2
)2(2
)1(
(3.3.11)
Rešenja polinoma frekventne jednačine se traže nekom od numeričkih metoda (postupak Bairstowa). Najniža kružna frekvencija ovog
polinoma ω(1), naziva se osnovnom frekvencijom. Ona je jedan od osnovnih dinamičkih svojstava konstrukcije i na osnovu nje se
može birati prinudna frekvencija mašine tako da je izvan oblasti sopstvenih frekvencija.
Amplitude oscilovanja se ne mogu analitički direktno odrediti u zatvorenom obliku, već samo njihovi odnosi. Ovi odnosi se
traže za svaku sopstvenu frekvenciju konstrukcije ω (r). Da bi sistem homogenih algebarskih jednačina imao n-1 nezavisno rešenje,
obično se izostavlja jedna jednačina (prva). Deljenjem sa A1 i prebacivanjem slobodnog člana na desnu stranu sledi:
)ac(A
A)ac(
A
A)ac(
)ac(A
A)ac(
A
A)ac(
)ac(A
A)ac(
A
A)ac(
21n1n
1
n2nnnn
1
222n2n
22121
1
n2n2n2
1
222222
21111
1
n2n1n1
1
221111
(3.3.12)
Nepoznati količnici amplituda mogu se označiti sa ik
i odredjuju se pomoću kofaktora k(r)ik determinante matrice H, za svaku r-tu
sopstvenu frekvenciju:
)r(
11
)r(n1
)r(1
)r(n)r(
1n)r(11
)r(13
)r(1
)r(3)r(
31)r(11
)r(12
)r(1
)r(2)r(
21k
k
A
A ......,
k
k
A
A ,
k
k
A
A
(3.3.13)
8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ
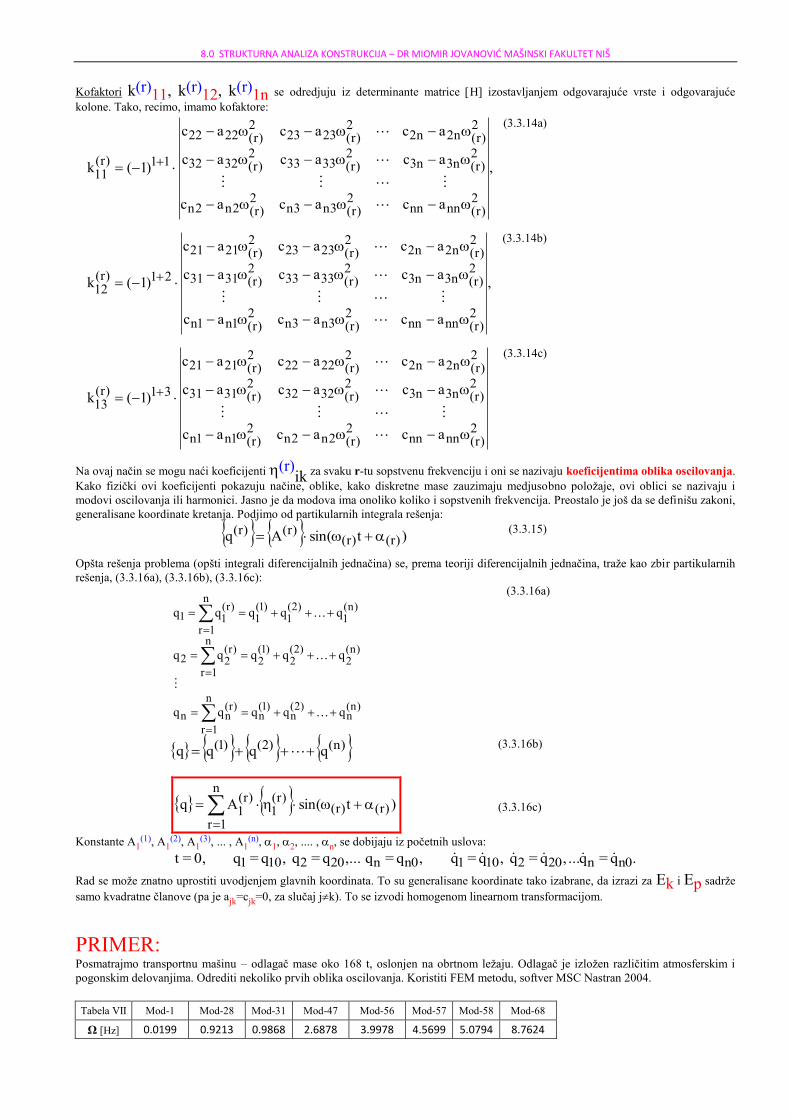
Kofaktori k(r)11, k(r)
12, k(r)1n se odredjuju iz determinante matrice H izostavljanjem odgovarajuće vrste i odgovarajuće
kolone. Tako, recimo, imamo kofaktore:
,
acacac
acacac
acacac
)1(k
2)r(nnnn
2)r(3n3n
2)r(2n2n
2)r(n3n3
2)r(3333
2)r(3232
2)r(n2n2
2)r(2323
2)r(2222
11)r(11
(3.3.14a)
,
acacac
acacac
acacac
)1(k
2)r(nnnn
2)r(3n3n
2)r(1n1n
2)r(n3n3
2)r(3333
2)r(3131
2)r(n2n2
2)r(2323
2)r(2121
21)r(12
(3.3.14b)
2)r(nnnn
2)r(2n2n
2)r(1n1n
2)r(n3n3
2)r(3232
2)r(3131
2)r(n2n2
2)r(2222
2)r(2121
31)r(13
acacac
acacac
acacac
)1(k
(3.3.14c)
Na ovaj način se mogu naći koeficijenti (r)ik za svaku r-tu sopstvenu frekvenciju i oni se nazivaju koeficijentima oblika oscilovanja.
Kako fizički ovi koeficijenti pokazuju načine, oblike, kako diskretne mase zauzimaju medjusobno položaje, ovi oblici se nazivaju i
modovi oscilovanja ili harmonici. Jasno je da modova ima onoliko koliko i sopstvenih frekvencija. Preostalo je još da se definišu zakoni,
generalisane koordinate kretanja. Podjimo od partikularnih integrala rešenja:
)tsin(Aq )r()r()r()r(
(3.3.15)
Opšta rešenja problema (opšti integrali diferencijalnih jednačina) se, prema teoriji diferencijalnih jednačina, traže kao zbir partikularnih
rešenja, (3.3.16a), (3.3.16b), (3.3.16c):
n
1r
)n(n
)2(n
)1(n
)r(nn
n
1r
)n(2
)2(2
)1(2
)r(22
n
1r
)n(1
)2(1
)1(1
)r(11
qqqqq
qqqqq
qqqqq
(3.3.16a)
)n()2()1( qqqq (3.3.16b)
)tsin(Aq )r()r()r(
1
n
1r
)r(1
(3.3.16c)
Konstante A1(1), A1
(2), A1(3), ... , A1
(n), 1, 2, .... , n, se dobijaju iz početnih uslova:
.q =q... ,q =q ,q =q ,q =q ,...q =q ,q =q 0,=t n0n202101n0n202101
Rad se može znatno uprostiti uvodjenjem glavnih koordinata. To su generalisane koordinate tako izabrane, da izrazi za Ek i Ep sadrže
samo kvadratne članove (pa je ajk=cjk=0, za slučaj jk). To se izvodi homogenom linearnom transformacijom.
PRIMER: Posmatrajmo transportnu mašinu – odlagač mase oko 168 t, oslonjen na obrtnom ležaju. Odlagač je izložen različitim atmosferskim i
pogonskim delovanjima. Odrediti nekoliko prvih oblika oscilovanja. Koristiti FEM metodu, softver MSC Nastran 2004.
Tabela VII Mod-1 Mod-28 Mod-31 Mod-47 Mod-56 Mod-57 Mod-58 Mod-68
Ω [Hz] 0.0199 0.9213 0.9868 2.6878 3.9978 4.5699 5.0794 8.7624

Title : MODALNA analiza sa gornjim osloncem Output Set 01 - Mode 1, ω= 0.0199211 Hz
Set MAX/MIN Summary Table Set ID Value
T1 Translation Minimum 101 1068 -0.00028391
Maximum 101 1008 0.00028391
T2 Translation Minimum 101 1065 -0.0013422
Maximum 101 1005 0.0013422
T3 Translation Minimum 101 1039 -0.0011061
Maximum 101 170 0.008734
R1 Rotation Minimum 101 1150 0.00051951
Maximum 101 1149 0.00055493
R2 Rotation Minimum 101 1150 -0.00018757
Maximum 101 1152 -0.000040145
R3 Rotation Minimum 101 1147 -1.2894E-6
Maximum 101 1150 0.0000012896
Mod 1, Frekvencija 0.0199211 Hz (bočno kladenje celine oko uzdužne ose strele)
Output Set 28 - Mode 28, ω= 0.921305 Hz Set MAX/MIN Summary Table Set ID Value
T1 Translation Minimum 128 1151 -0.0077007
Maximum 128 1147 0.00071326
T2 Translation Minimum 128 1151 -0.019526
Maximum 128 1150 0.015404
T3 Translation Minimum 128 532 -0.00027012
Maximum 128 750 0.0002698
R1 Rotation Minimum 128 217 -0.000065389
Maximum 128 216 0.0001008
R2 Rotation Minimum 128 234 -0.000062802
Maximum 128 182 0.000066206
R3 Rotation Minimum 128 1150 -0.0029217
Maximum 128 1152 0.0033823
Mod 28, Frekvencija 0.921305 Hz
Output Set 47 - Mode 47, ω= 2.687841 Hz Set MAX/MIN Summary Table Set ID Value
T1 Translation Minimum 147 1149 -0.00062309
Maximum 147 215 0.0010408
T2 Translation Minimum 147 215 -0.00091302
Maximum 147 472 0.0048171
T3 Translation Minimum 147 218 -0.00048009
Maximum 147 234 0.00053636

8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ
R1 Rotation Minimum 147 1038 -0.00060863
Maximum 147 1097 0.00068772
R2 Rotation Minimum 147 1097 -0.00030119
Maximum 147 1038 0.00029156
R3 Rotation Minimum 147 1036 -0.0005846
Maximum 147 318 0.0023072
Mod 47, Frekvencija 2.6878 Hz (poskakivanje krajeva)
Output Set 87 - Mode 87, ω= 15.95396 Hz Set MAX/MIN Summary Table Set ID Value
T1 Translation Minimum 187 651 -0.010046
Maximum 187 1048 0.0054741
T2 Translation Minimum 187 824 -0.0091452
Maximum 187 505 0.0091113
T3 Translation Minimum 187 307 -0.010581
Maximum 187 306 0.0097016
R1 Rotation Minimum 187 391 -0.0064671
Maximum 187 476 0.006184
R2 Rotation Minimum 187 359 -0.011596
Maximum 187 388 0.012048
R3 Rotation Minimum 187 1054 -0.0094465
Maximum 187 651 0.017005
Mod 87, Frekvencija 15.9539 Hz (dvostruki vertikalni sinusni talas)
Numeričke metode za rešavanje problema malih oscilacija
Rešavanje diferencijalnih jednačina oscilovanja konstrukcija stvara ozbiljne poteškoće kod velikih i složenih sistema konstrukcija
izloženih dejstvu proizvoljnih pobudnih sila. Tada se po pravilu rešenje traži numerički. U tu svrhu, razvijene su numeričke metode koje
se zasnivaju na prevodjenju diferencijalnih jednačina u približne jednačine. Osnovna metoda je metoda konačnih razlika, kod koje se
kontinualni proces izučava u konačnom broju dovoljno malih vremenskih intervala. U tim malim intervalima moguće je funkcije
vremena (koordinate, sile, brzine) aproksimovati približnim izrazima. Zatim se vrši integracija u svakom elementarnom intervalu, pri
čemu se rezultati integracije u prethodnom intervalu uzimaju kao početni za naredni vremenski interval. U okviru ovog koncepta koriste
se dve opšte metode: metoda direktnog integraljenja i metoda slaganja glavnih oblika oscilovanja. Metode direktnog integraljenja se
sastoje u zameni diferencijalnih jednačina malih oscilacija sistema, sistemom algebarskih jednačina sa nepoznatim priraštajima
koordinata. To se realizuje tako što se funkcija pomeranja (generalisana koordinata), funkcija brzine i ubrzanja u malim vremenskim
intervalima mogu zameniti približnim funkcijama, pa se onda uvode u sistem diferencijalnih jednačina i vrši njihova integracija. Termin
"direktna" integracija je vezan za činjenicu da se ne vrše mnogobrojne operacije nad sistemom jednačina, već se neposredno integrale.
Danas se u dinamičkoj analizi koriste tri metode za direktnu integraciju: Metoda centralnih razlika, Wilson-ova "teta" metoda i
Newmark-ova metoda.





























