Embed Size (px)
Citation preview

UNIVERZA V LJUBLJANI
PEDAGOŠKA FAKULTETA
BLAŽ URŠIČ
STATIČNA STABILNOST JADRNICE
DIPLOMSKO DELO
Ljubljana, 2015


UNIVERZA V LJUBLJANI
PEDAGOŠKA FAKULTETA
Študijski program: FIZIKA - TEHNIKA
BLAŽ URŠIČ
Mentor: doc. dr. JURE BAJC
Somentorica: asist. dr. BARBARA ROVŠEK
STATIČNA STABILNOST JADRNICE
DIPLOMSKO DELO
Ljubljana, 2015


Statična stabilnost jadrnice
B. Uršič i
Zahvala
Zahvaljujem se somentorici dr. Barbari Rovšek in mentorju dr. Juriju Bajcu, ki sta s
strokovno pomočjo, nasveti in idejami prispevala k nastanku diplomskega dela.
Največja zahvala gre mojim staršem Elju in Branki ter bratu Luki, ki so me vsa leta šolanja
podpirali in verjeli vame.

Statična stabilnost jadrnice
B. Uršič ii

Statična stabilnost jadrnice
B. Uršič iii
Povzetek V diplomski nalogi obravnavam statično stabilnost jadrnice za rotacijo okrog vzdolžne osi.
Trup jadrnice pri pojasnjevanju osnovnih pojmov, ki se dotikajo plovnosti in statične
stabilnosti, poenostavim do te mere, da lahko parametre opišem z enostavnimi matematičnimi
izrazi. V teoretičnem delu vpeljem vse osnovne pojme, ki so pomembni za opis plavajočega
telesa. Definiram in pojasnim krivuljo statične stabilnosti plovila, ki predstavlja osrednji del
diplomske naloge. Z računalniškim programom Geogebra analitično določim položaje vodne
gladine za različne kote nagiba ter vpeljem skupno potencialno energijo sistema. V
nadaljevanju statično stabilnost obravnavam z vidika treh spremenljivk – balasta, oblike
prečnega prereza trupa in širine trupa.
V praktičnem delu s pomočjo treh poenostavljenih modelov trupov analiziram vpliv vseh
obravnavanih spremenljivk (balasta, širine in oblike) na statično stabilnost. Za vsakega od
primerov izrišem krivuljo stabilnosti. Rezultate povežem s teoretičnimi predpostavkami,
predstavljenimi v prvem delu diplome. V tem delu predstavim tudi eksperimentalno metodo, s
katero sem določil izravnalni navor brez določanja prijemališča vzgona.
Ključne besede: Plavanje, nagibanje, statična stabilnost, prijemališče vzgona, težišče,
izravnalni navor, krivulja stabilnosti, metacenter.

Statična stabilnost jadrnice
B. Uršič iv
Abstract
In this thesis static stability of a sailboat is presented with focus on rotation about its
longitudinal axis. For an explanation of basic concepts which are connected to buoyancy and
static stability of the boat, the boat’s hull is simplified to the extent which allows for
description of all parameters with simple mathematical expressions. In the theoretical part
basic terms which are important for the description of a floating body are intoduced and the
curve of static stability of the vessel is explained, which represents the central part of the
thesis. A computer program Geogebra is used for analytical determination of the position of
the water line for different angles of inclination and the total potential energy of the system is
introduced. Further, static stability is discussed in terms of three variables – ballast, cross-
sectional shape of the hull and the width of the hull.
In the practical part of this thesis the impact of all previously introduced variables (ballast,
width and shape) is analyzed with the help of three simplified models of hulls. For each case,
the curve of static stability is plotted. Data, obtained at measurements is linked to the
theoretical results, presented in the first part of the thesis. Experimental method used for
determining the balancing torque without determining the center of buoyancy is also
explained in this part.
Keywords: Floating, rolling, statical stability, center of buoyancy, center of gravity, righting
moment, metacentre.

Statična stabilnost jadrnice
B. Uršič v
Kazalo
Zahvala ....................................................................................................................................... i
Povzetek .................................................................................................................................... iii
Abstract .................................................................................................................................... iv
Kazalo ........................................................................................................................................ v
Slike .......................................................................................................................................... vi
1 Uvod ................................................................................................................................... 1
2 Statična stabilnost jadrnice okrog vzdolžne osi .................................................................. 3
2.1 Sile pri nagibu .................................................................................................................. 3
2.2 Delo nagiba ...................................................................................................................... 6
2.3 Krivulja osi vrtenja plovila pri nagibanju ........................................................................ 7
2.4 Skupna potencialna energija sistema .............................................................................. 11
2.5 Začetni metacenter ......................................................................................................... 12
2.6 Odvisnost statične stabilnosti od balasta ........................................................................ 16
2.7 Odvisnost statične stabilnosti od oblike in širine prečnega prereza trupa ...................... 18
3 Praktični del ......................................................................................................................... 21
3.1 Prikaz meritve in teoretični izračun izravnalnega navora za primer kvadra .................. 21
3.2 Odvisnost statične stabilnosti od oblike trupa ................................................................ 23
3.2.1 Krivulje stabilnosti ................................................................................................................ 24
3.2.2 Delo nagiba ........................................................................................................................... 31
3.2.3 Interpretacija rezultatov ....................................................................................................... 34
3.3 Odvisnost stabilnosti od širine trupa .............................................................................. 35
3.3.1 Delo nagiba ........................................................................................................................... 36
3.3.2 Interpretacija rezultatov ....................................................................................................... 37
3.4 Odvisnost stabilnosti od balasta ..................................................................................... 37
3.4.1 Delo nagiba ........................................................................................................................... 39
3.4.2 Interpretacija rezultatov ....................................................................................................... 40
4 Zaključek .............................................................................................................................. 41
5 Literatura ............................................................................................................................. 43

Statična stabilnost jadrnice
B. Uršič vi
Slike
Slika 1: Prečni prerez kvadra s koordinatnim sistemom plovila. .............................................. 3 Slika 2: Prikaz položaja težišča in prijemališča vzgona ............................................................ 4 Slika 3: Tipična krivulja stabilnosti za jadrnico. ....................................................................... 5 Slika 4: Položaj težišča jadrnice in prijemališča vzgona pri kotu prevrnitve. ........................... 6
Slika 5: Primerjava izravnalnih navorov za jadrnici z različnim izpodrivom. .......................... 7 Slika 6: Koordinatni sistem plovila in koordinatni sistem okolice. ............................................ 7 Slika 7: Premikanje točke O pri nagibanju delno potopljenega valja . ..................................... 8 Slika 8: Dva položaja, kjer točka O miruje glede na koordinatni sistem kvadra. ..................... 9 Slika 9: Vodna črta (g) pri kotih α1 < α < α2. ............................................................................ 9
Slika 10: Premikanje središča vodne črte v koordinatnem sistemu kvadra pri nagibanju. ..... 10 Slika 11: Premikanje točke O, prijemališča vzgona V ter razdalji yt in yh. ............................. 11
Slika 12: Oblika grafa skupne potencialne energije za primer homogenega kvadra .............. 12 Slika 13: Prijemališče vzgona (Vx), težišče (T) in začetni metacenter (M0). ............................ 13 Slika 14: Stabilna (a), indiferentna (b) in nestabilna ladja (c). ............................................... 15 Slika 15: Indiferentno plavanje homogenega valja. ................................................................. 16
Slika 16: Oblika krivulje statične stabilnosti za idealno obteženo telo. ................................... 17 Slika 17: Dva enako stabilna trupa. ......................................................................................... 18
Slika 18: Krivulja statične stabilnosti za homogeno telo z idealno obliko. ............................. 19 Slika 19: Primerjava začetnih metacentričnih višin in dolžin izravnalnih ročic ..................... 20 Slika 20: Primerjava začetnih metacentričnih višin in dolžin izravnalnih ročic ..................... 20
Slika 21: Prikaz postavitve poskusa za meritev izravnalnega navora. .................................... 22 Slika 22: Sile in ročice pri meritvi. .......................................................................................... 22
Slika 23: Modela trupa s pravokotnim in polkrožnim presekom. ............................................ 24
Slika 24: Ročno nagibanje in označevanje ugreznjenega dela trupa. ..................................... 24
Slika 25: Težišče krožnega segmenta ....................................................................................... 25 Slika 26: Določanje težišča (prijemališča vzgona) za sestavljen lik ABC. .............................. 26 Slika 27: Prijemališča vzgona V za pozitivno stabilnost polvalja. .......................................... 27
Slika 28: Prijemališča vzgona V za negativno stabilnost polvalja. ......................................... 27 Slika 29: Krivulja statične stabilnosti za polvalj. .................................................................... 28
Slika 30: Načrtovalno določanje težišča trapeza. .................................................................... 29 Slika 31: Prijemališča vzgona V za pozitivno stabilnost kvadra. ............................................ 29 Slika 32: Prijemališča vzgona V za negativno stabilnost kvadra. ........................................... 30
Slika 33: Krivulja statične stabilnosti za kvader. ..................................................................... 31 Slika 34: Krivulja pozitivnih izravnalnih ročic za polvalj. ...................................................... 32 Slika 35: Krivulja pozitivnih izravnalnih ročic za kvader. ....................................................... 33 Slika 36: Prijemališča vzgona za pozitivno stabilnost širokega kvadra. ................................. 35 Slika 37: Krivulja pozitivne statične stabilnosti za širok kvader. ............................................ 36
Slika 38: Prijemališča vzgona za pozitivno stabilnost kvadra z nizkim težiščem. ................... 38 Slika 39: Krivulja pozitivne statične stabilnosti za kvader z nizkim težiščem. ......................... 39

Statična stabilnost jadrnice 1 UVOD
B. Uršič 1
1 Uvod
Vodna plovila so za človeka že od nekdaj pomemben način transporta, v moderni dobi pa tudi
rekreacije in sprostitve. Pri projektiranju plovila se moramo zavedati njegove dinamike pri
plavanju, saj je od tega odvisna njegova uporabnost in tudi varnost. V tem diplomskem delu
bomo obravnavali le eno od možnih gibanj plovila, pri čemer se bomo osredotočili na
specifično plovilo – jadrnico. Poznavanje pojmov, ki se nanašajo na statično stabilnost je za
jadrnico toliko bolj pomembna, saj za pogon uporablja veter in se zato že pri normalnem
obratovanju močno nagiba. Model jadrnice bomo pri obravnavi poenostavili do te mere, da
postanejo računi pregledni, pri čemer pa vseeno lahko vpeljemo vse pojme in parametre, s
katerimi opišemo plovnost realnih plovil z netrivialnimi oblikami trupov.
Plovilo na mirujoči vodni gladini in takrat, ko ne piha, zavzame stabilno ravnovesno lego.
Zunanja motnja – val, veter ali premikanje posadke na plovilu – pa povzroči translacijo
plovila in tudi odmik plovila od ravnovesne lege. Gibanja plovila okoli njegove ravnovesne
lege, pri čemer se v povprečju plovilo nikamor ne premakne, lahko opišemo kot rotacije okoli
treh osi – navpično (y), vzdolžno (z) in prečno (x). Tako poznamo tri rotacijska periodična
gibanja: nagib (ang. roll), naklon (ang. pitch), odklon (ang. yaw) [1]. Angleška poimenovanja
so bila dodana zaradi neenotnosti slovenskih izrazov za opis naštetih gibanj. V nadaljevanju
diplomskega dela bo predstavljena le rotacija okrog vzdolžne osi (z).
V teoretičnem delu diplome najprej pojasnim osnovne pojme, ki so pomembni za
obravnavanje nagiba pri plavanju telesa. Celotna diploma opisuje stanje plovila, ko so vse sile
v ravnovesju, ne pa nujno tudi navori. Tako pri plavanju obravnavamo dve sili – silo teže in
vzgon. Za opis različnih stanj nagiba moramo poznati tudi njuni prijemališči. Že pri rahlem
nagibu pride do razmika med omenjenima silama. Pojavi se navor, ki skuša jadrnico zopet
zravnati - imenujemo ga izravnalni navor. Pri nagibanju telesa v vodi hitro ugotovimo, da se
izravnalni navor spreminja s kotom nagiba. Tako lahko stabilnost plovila izrazimo s funkcijo
izravnalnega navora v odvisnosti od kota nagiba. Imenujemo jo tudi krivulja statične
stabilnosti, ki predstavlja osrednji del diplome. V nadaljevanju so predstavljeni podatki,
pomembni za opis statične stabilnosti plovila, ki jih lahko razberemo iz grafov omenjenih
krivulj.
Kot študenta fizike me je zanimalo, ali lahko za preprosto obliko trupa (kvader) krivuljo
stabilnosti določim tudi analitično, kar je pojasnjeno v poglavju 2.3. Izkaže se, da je os
nagibanja plavajočega telesa relativno zapleteno določiti, saj pri določenih nagibih poleg
rotacije telesa opisujemo tudi translacijo. Za opis nagiba sta bila na tem mestu definirana dva
koordinatna sistema – sistem okolice in sistem plovila. Premikanje osi vrtenja je bilo
prikazano s pomočjo računalniškega programa Geogebra. Ker tako določimo lego vodne
gladine pri vseh kotih, je bilo mogoče prikazali tudi obliko grafa skupne potencialne energije,
ki predstavlja spremembo dela nagiba.

Statična stabilnost jadrnice 1 UVOD
B. Uršič 2
V poglavju 2.5 je računsko in grafično predstavljeno osnovno merilo za oceno stabilnosti
plovila – začetni metacenter. Opisani so trije možni načini plavanja in njihove relacije do
omenjenega parametra. V nadaljevanju teoretičnega dela je stabilnost jadrnice smiselno
razčlenjena na osnovne spremenljivke. To so balast, oblika in širina. Predstavljeni so vplivi
posamezne spremenljivke na statično stabilnost jadrnice in posledično tudi obliko krivulje
statične stabilnosti.
V praktičnem delu s pomočjo enostavnih modelov trupov preverim odnose med vsemi
naštetimi spremenljivkami. Najprej predstavim še en način, s katerim lahko narišemo krivuljo
statične stabilnosti za telo s poljubno obliko brez določanja prijemališča vzgona za vsak kot
nagiba. Nato za primer kvadra in polvalja eksperimentalno določim dolžine izravnalnih ročic
in v programu Microsoft Excel izrišem krivuljo stabilnosti za posamezen primer. V
nadaljevanju s pomočjo teoretičnih predpostavk, predstavljenih v drugem poglavju, iz krivulj
stabilnosti izračunam delo prevrnitve za primer kvadra in polvalja. Nato preverim odvisnost
stabilnosti od širine trupa, za kar uporabim dva kvadra različnih širin. Tudi tokrat izračunam
delo nagiba, pri čemer se osredotočim na začetno stabilnost. Nazadnje eksperimentalno
preverim odvisnost stabilnosti od balasta, pri čemer sem pozoren na kot prevrnitve (absolutno
stabilnost). Vsaki meritvi sledi interpretacija rezultatov, kjer ugotovitve povežem s teorijo,
predstavljeno v drugem poglavju.

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 3
2 Statična stabilnost jadrnice okrog vzdolžne osi
V tem poglavju se bomo osredotočili na nagibanje jadrnice (plovila) okrog vzdolžne osi. Vse
spremenljivke bodo obravnavane na poenostavljenih modelih trupov, ki se jim prerez
pravokotno na vzdolžno os ne spreminja. Tako vse probleme omejimo na prerez trupa. Za
lažji prikaz dolžin in položajev pomembnih točk, uporabljamo koordinatni sistem, ki je
predstavljen na sliki 1. Ta slika predstavlja prečni prerez kvadra, ki velja za najpogosteje
uporabljeno poenostavitev trupa plovila. Kvader plava na vodi, vodna linija (gladina) je
označena z g. Točka T predstavlja težišče plovila v tem pogledu, točka V0 pa začetno
prijemališče vzgona. Slika 1 predstavlja plovilo v ravnovesni legi.
Slika 1: Prečni prerez kvadra s koordinatnim sistemom plovila [2].
2.1 Sile pri nagibu
Na mirujočo jadrnico v vodi delujeta dve sili, ki sta po velikosti enaki – sila vzgona, ki kaže
navpično navzgor ter sila teže, ki kaže navpično navzdol. Sila vzgona prijemlje v prijemališču
vzgona (V), ki se nahaja v težišču izpodrinjene tekočine. Sila teže prijemlje v težišču jadrnice
(T), kot kaže slika 2. Ko je jadrnica v pokončnem položaju, se nosilki obeh sil prekrivata, kar
pomeni, da se točki V in T nahajata na premici, ki gre skozi središče prereza jadrnice. Drugače
je, ko se jadrnica nagne. V tem primeru se zaradi spremenjene oblike potopljenega dela trupa,
točka V premakne iz prejšnje lege. Težišče jadrnice se glede na sistem jadrnice ne premika,
zato se med nosilkama sile teže in sile vzgona pojavi razdalja, ki jo imenujemo izravnalna
ročica (r*) in jo merimo v vodoravni smeri, kot je prikazano na sliki 2. Zaradi izravnalne
ročice, na jadrnico deluje t.i. izravnalni navor

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 4
𝑀𝑖𝑧𝑟𝑎𝑣𝑛𝑎𝑙𝑛𝑖 = 𝑚𝑔𝑟∗, (1)
ki jo skuša vrniti v pokončno lego. Iz slike 2 je razvidno, da je to navor dvojice enakih, a
nasprotno predznačenih sil. Pri nagibanju torej vedno predpostavljamo, da so sile v statičnem
ravnovesju (∑ �⃑� = 0), ne pa tudi navori. V enačbi je z m označena masa jadrnice, ki je enaka
masi izpodrinjene tekočine (t.i. izpodrivu jadrnice). V navtični terminologiji se namesto mase
plovila večinoma uporablja izraz izpodriv. Navadno je označen z ∆ in se podaja v kilogramih
(tonah) [3].
Slika 2: Prikaz položaja težišča in prijemališča vzgona pri zravnani a) in nagnjeni jadrnici b).
Prijemališče vzgona V se pri nagibanju jadrnice premika (glede na jadrnico), zato se
spreminja tudi dolžina izravnalne ročice in navor omenjenih sil, ki skušata jadrnico zravnati.
Stabilnost jadrnic (ladij) pogosto podajamo s krivuljami izravnalnih ročic (r*) v odvisnosti od
kota nagiba (α) do 180°. Ker pa je možno, da imajo manjša plovila enake ali daljše izravnalne
ročice kot večja, je bolje podajati graf izravnalnih navorov (1) v odvisnosti od kota nagiba.
Ker je odvisnost med izravnalnimi ročicami in izravnalnimi navori premo-sorazmerna, imata
obe krivulji enako obliko, vendar drugačne enote [3]. Smisel krivulje izravnalnih navorov bo
predstavljen v naslednjem podpoglavju. Primer tipične krivulje stabilnosti je prikazan na sliki
3.

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 5
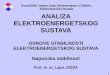
Slika 3: Tipična krivulja stabilnosti za jadrnico [4].
Iz krivulje stabilnosti je mogoče razbrati nekatere podatke, ki so pomembni za jadrnico:
- Strmina krivulje pri majhnih kotih nam pove, ali se jadrnica bolj ali manj upira
nagibanju zaradi vetra. Jadrnica je lahko ''mehka'' (ang. tender) ali ''trda'' (ang. stiff).
Pri prvi je krivulja pri majhnih kotih bolj položna, kar pomeni, da sta za nagib
potrebna manjša sila in navor.
- Pri kotu največje izravnalne ročice bo tudi izravnalni navor največji. Ta kot bo v
nadaljevanju označen z αmax. V navtični literaturi je za ta kot uveljavljena kratica AMS
(ang. angle of maximum stability). Če je ta kot majhnen, se jadrnica pri običajnem
jadranju malo nagiba, vendar pri manjšem kotu - ki je večji od αmax - izgubi stabilnost.
V kolikor je kot največje izravnalne ročice velik, se jadrnica pri jadranju nagiba
nekoliko bolj, vendar se težje prevrne.
- Pri kotu prevrnitve je prijemališče vzgona zopet poravnano s težiščem jadrnice
(gledamo navpično os), zato na jadrnico preneha delovati izravnalni navor, kar vodi v
prevrnitev (slika 4). Pri tem kotu je jadrnica v meta-stabilni legi. Le majhna zunanja
motnja jo lahko sune v napačno smer in jadrnica se prevrne. Ta kot bo v nadaljevanju
označen z αp. V navtični literaturi je za ta kot uveljavljena kratica AVS (ang. angle of
vanishing stability). Jadrnica z večjim αp se težje prevrne.
- V kolikor v graf M(α) vnašamo vrednosti izravnalnega navora (1), ploščina pod
krivuljo predstavlja delo, ki je potrebno za nagib jadrnice do določenega kota. Če je
ploščina pod delom krivulje, ki predstavlja negativno stabilnost, glej sliko 3, majhna,
lahko pričakujemo, da se bo jadrnica izravnala že zaradi vetra in valov, ki so jo
prevrnili (v kolikor ne upoštevamo upora potopljenih jader) [4].
(𝛼𝑚𝑎𝑥)
(𝛼𝑝)

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 6
Slika 4: Položaj težišča jadrnice in prijemališča vzgona pri kotu prevrnitve.
2.2 Delo nagiba
Iz dela nagiba lahko neposredno sklepamo na površino jader, pri kateri bo jadrnica še lahko
obratovala, saj se jadrnica nagiba zaradi navora sile vetra, ki deluje na jadra in se preko
jambora ter drugih vpetij prenaša na trup jadrnice. Navor sile vetra je večji, ko je površina
jader večja. Ali drugače – ko predvidimo površino jader, lahko s pomočjo krivulje stabilnosti
ugotovimo kot, za katerega se bo jadrnica nagnila ob določeni hitrosti vetra [3]. Delo,
opravljeno do določenega nagiba lahko izračunamo po formuli:
𝐴𝛼 = 𝐹𝑣𝑠,
(2)
oziroma
𝐴𝛼 = ∫ 𝑀𝑑𝛼.
(3)
Izkaže se, da je delo nagiba odvisno od višinske razlike, ki jo je opravilo prijemališče vzgona
V [2]. V enačbi (2) je ta razdalja označena z s, Fv pa predstavlja velikost sile vzgona. Razdalja
s se povečuje do kota prevrnitve (αp). Delo nagiba lahko ocenimo tudi s pomočjo krivulj
stabilnosti. Ploščina dS pod krivuljo izravnalnih ročic je enaka vertikalni kompomenti
premika prijemališča vzgona. Če jo pomnožimo s silo vzgona, dobimo delo dA, potrebno za
nagib jadrnice za dα. Integral nam da celotno delo, potrebno za prevrnitev jadrnice, oziroma
njen nagib do določenega kota. Če za oceno dela uporabimo krivuljo izravnalnih navorov,
delo predstavlja kar ploščina pod to krivuljo (enačba 3) [2]. Ploščino pod krivuljo dobimo z
integracijo funkcije v določenih mejah:
𝑆 = ∫ 𝑓(𝛼) 𝑑𝛼
𝑏
𝑎
.
(4)

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 7
Krivulje stabilnosti so izdelane na podlagi meritev, zato jih navadno aproksimiramo s
polinomi in ploščino izračunamo numerično, kakor bo predstavljeno v praktičnem delu. Na
sliki 5 sta predstavljeni krivulji izravnalnih momentov dveh jadrnic z enakimi krivuljami
izravnalnih ročic, vendar različnim izpodrivom. Izravnalni moment jadrnice z večjim
izpodrivom (polna črta) je večji, zato ta jadrnica prenese večjo površino jader, kar pa je za
njeno gibanje nujno, saj mora odrivati večjo prostornino vode [3].
Slika 5: Primerjava izravnalnih navorov za jadrnici z različnim izpodrivom [5].
2.3 Krivulja osi vrtenja plovila pri nagibanju
Če želimo natančno opisati nagibanje plovila, moramo poznati os vrtenja. Za opis gibanja v
prostoru, moramo plovilo postaviti v koordinatni sistem okolice. Postavimo ga tako, da
njegova abscisna os (X) leži na vodni gladini, ordinatna (Y) pa je pravokotna nanjo.
Koordinatni sistem okolice ima izhodišče v točki O, ki označuje središče vodne črte na
preseku (slika 6) [6].
Slika 6: Koordinatni sistem plovila in koordinatni sistem okolice [6].

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 8
Čeprav ni očitno, se izkaže, da os vrtenja plovila sovpada s točko O, ki v koordinatnem
sistemu okolice miruje, ne pa tudi v koordinatnem sistemu plovila, ki je označen z osema x in
y. V nadaljevanju bomo pokazali, kako se os vrtenja (oziroma točka O) premika v
koordinatnem sistemu plovila. Vodna linija presek plavajočega telesa zaradi zahteve po
ravnovesju sil vedno razdeli tako, da je ploščina potopljenega dela konstantna. Zaradi
enostavnosti, bo premikanje točke O najprej predstavljeno na primeru delno potopljenega
homogenega valja. Na sliki 7 vidimo, da središče vodne linije v koordinatnem sistemu valja
pri nagibanju potuje po krožnici [6].
Slika 7: Premikanje točke O pri nagibanju delno potopljenega valja [6].
Drugače je pri nagibanju kvadra, ki ima pravokoten presek. Takoj lahko vidimo, da gre pri
nagibanju do kota α1 (slika 8) le za rotacijo okrog osi, ki leži na presečišču navpične simetrale
in vodne gladine. Do tega kota je pogoj o konstantni ploščini potopljenega preseka vedno
izpolnjen, saj se pri določenem nagibu iz vode dvigne enaka ploščina preseka, kakor na drugi
strani potone. Podobno se točka O pri nagibu, večjem od kota α2 nahaja na presečišču
horizontalne simetrale in vodne gladine (slika 8).

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 9
Slika 8: Dva položaja, kjer točka O miruje glede na koordinatni sistem kvadra.
Pogoja za mirovanje točke O na presečiščih simetral in vodne gladine se glasita:
𝛼 ≤ 𝛼1 = tan−1 (
2𝑐
𝑎) in
(5)
𝛼 ≥ 𝛼2 = tan−1 (
𝑏2
2𝑎𝑐)
(6)
Pri vmesnih kotih (α1 < α < α2) nagibanja kvadra ne moremo opisati le z rotacijo, ampak s
kombinacijo rotacije in translacije. Točka O v tem primeru potuje po krivulji, razpeti med
točkama O1 in O2. Za prikaz premikanja vodne gladine v koordinatnem sistemu kvadra, si
bomo pomagali s premico, ki predstavlja vodno gladino. Če izhodišče koordinatnega sistema
kvadra postavimo v enega od kotov kvadra, se enačba premice za vmesne kote glasi:
𝑏 = 𝑘𝑥1 + 𝑛 (7)
ali
𝑥1 =
1
𝑘(𝑏 − 𝑛),
(8)
pri čemer je vrednost n vedno pozitivna, k pa predstavlja vrednost tan α.Vse uporabljene
spremenljivke so prikazane na sliki 9.
Slika 9: Vodna črta (g) pri kotih α1 < α < α2.
Vodna linija mora presek razdeliti tako, da je ploščina pod (ali nad) njo konstantna (S1), zato
lahko zapišemo:

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 10
𝑆1 = 𝑎(𝑏 − 𝑐) =
1
2(𝑏 − 𝑛)𝑥1 =
1
2𝑘(𝑏 − 𝑛)2.
(9)
Za izris položaja gladine na preseku kvadra, moramo izraziti vrednost n:
𝑛 = 𝑏 − √2𝑘𝑎(𝑏 − 𝑐) = 𝑏 − √2𝑘(𝑆 − 𝑆1) (10)
ali x1:
𝑥1 = √2(𝑆 − 𝑆1)
𝑘,
(11)
kjer S predstavlja ploščino celotnega preseka kvadra. Z zgornjimi izrazi lahko v koordinatnem
sistemu kvadra zapišemo enačbo premice (y = kx + n), ki ponazarja vodno gladino za
poljuben kot nagiba. Spomnimo se, da točka O leži na sredini vodne črte na preseku kvadra. S
pomočjo računalniškega programa Geogebra lahko z vnosom enačbe za vodno gladino na
enostaven način prikažemo premikanje točke O v koordinatnem sistemu kvadra. Na ta način
poiščemo krivuljo, po kateri se točka O premika med skrajnima legama O1 in O2, kakor je
prikazano na sliki 10.
Slika 10: Premikanje središča vodne črte (O) v koordinatnem sistemu kvadra pri nagibanju
od 0 do 90°.
O1
O2
O

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 11
2.4 Skupna potencialna energija sistema
Vpeljemo lahko pojem skupne potencialne energije [7], ki je vsota potencialne energije telesa,
ki plava (Wp) in potencialne energije izpodrinjene tekočine (Wh). Wh vpeljemo kot t.i.
hidrostatično potencialno energijo [7]. Skupno potencialno energijo zapišemo kot:
𝑊𝑠𝑘𝑢𝑝𝑛𝑎 = 𝑊𝑝 + 𝑊ℎ.
(12)
Skupna potencialna energija je definirana v koordinatnem sistemu okolice. Potencialna
energija plavajočega telesa je določena z višino težišča yt:
𝑊𝑝 = 𝑦𝑡𝐹𝑔,⃑⃑⃑⃑⃑ (13)
Hidrostatična potencialna energija pa z višino prijemališča vzgona yv:
𝑊ℎ = 𝑦ℎ𝐹𝑣 .⃑⃑⃑⃑⃑
(14)
Skupna potencialna energija doseže največjo vrednost pri kotu prevrnitve, najmanjšo vrednost
pa zavzame v ravnovesju, zato sistem teži k tej legi. Sprememba skupne potencialne energije
sistema je enaka delu nagiba [7]. S pomočjo animacije nagiba kvadra v programu Geogebra
lahko narišemo graf skupne potencialne energije. Za določitev razdalje yh moramo poznati
položaj prijemališča vzgona za vse kote nagiba. Krivulja, po kateri se premika prijemališče
vzgona v sistemu kvadra je prikazana na sliki 11.
Slika 11: Premikanje točke O, prijemališča vzgona V ter razdalji yt in yh.
Sedaj lahko narišemo graf skupne potencialne energije za primer kvadra, ki je prikazan na
sliki 12.

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 12
Slika 12: Oblika grafa skupne potencialne energije za primer homogenega kvadra pri
nagibanju do 90°.
Teoretično je mogoče določiti tudi kot prevrnitve. Ta se zgodi, ko je prijemališče vzgona na
isti vertikali kakor težišče. Pri homogenem kvadru kot prevrnitve znaša 90°. Opazimo lahko,
da je skupna potencialna energija največja pri kotu prevrnitve. Pri tem kotu je največje tudi
delo nagiba, oziroma vertikalen razmik med težiščem in prijemališčem vzgona.
2.5 Začetni metacenter
Pomemben pojem, ki se pogosto uporablja pri opisovanju statične stabilnosti plovil, je začetni
metacenter (M0). To je točka, v kateri nosilka sile vzgona seka simetralo prečnega prereza
plavajočega telesa (jadrnice). Položaj metacentra je grafično prikazan na sliki 13. Za prikaz
nagiba bomo v nadaljevanju obravnavali prečni prerez kvadra – pravokotnik. Koordinatni
sistem predstavljata osnovnica pravokotnika (os x) in njena simetrala (os y). Izhodišče
koordinatnega sistema je v točki K.
Wskupna
α α1 90°

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 13
Slika 13: Prijemališče vzgona (Vx), težišče (T) in začetni metacenter (M0) [4].
Pri majhnih kotih nagiba (do okrog 10°) predpostavljamo, da metacenter v koordinatnem
sistemu jadrnice miruje, saj se prijemališče vzgona pri majhnem nagibu premakne le v smeri
osi x. Oddaljenost začetnega metacentra od začetnega prijemališča vzgona v tem primeru
računamo po formuli:
𝑉0𝑀0 =
𝑉0𝑉𝑥
tan 𝛼,
(15)
pri čemer z 𝑉0𝑉𝑥 označimo premik prijemališča vzgona v smeri osi x. Položaj prijemališča
vzgona lahko dobimo na več načinov, na primer z grafičnimi metodami. Tokrat bomo
uporabili metodo momentov. Iz slike 13 je razvidno, da se pri nagibu del preseka trupa
pogrezne v vodo, del pa dvigne iz vode. Na levi strani je dvignjen trikotnik s težiščem -bα in
na desni ugreznjen s težiščem v bα [2]. Ploščina tega trikotnika je:
𝐴∆ =
1
2(
𝑏
2) (
𝑏
2) tan 𝛼 = (
𝑏2
8) tan 𝛼.
(16)
Razdalja med težiščema trikotnikov v smeri x je:
𝑟𝑥 =2 (
𝑏2)
3+
2 (𝑏2)
3= 2 (
𝑏
3).
(17)
S pomočjo razdalje rx in znane ploščine 𝐴∆ lahko izrazimo ravnovesje navorov:
𝑉0𝑉𝑥 ̅̅ ̅̅ ̅̅ 𝐴0 = 𝑟𝑥𝐴∆ (18)

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 14
in premik prijemališča vzgona v smeri x:
𝑉0𝑉𝑥 =
𝑟𝑥𝐴∆
𝐴0= (
𝑏3
12𝐴0) tan 𝛼,
(19)
pri čemer je A0 ploščina potopljenega dela pravokotnika, ki se ne spreminja. Najlažje jo
izračunamo s pomočjo začetnega ugreza d0:
𝐴0 = 𝑏𝑑0. (20)
Če izračunan premik prijemališča v smeri osi x vstavimo v enačbo (15), dobimo:
𝑉0𝑀0 =(
𝑏3
12𝐴0) tan 𝛼
tan 𝛼=
𝑏3
12𝐴0.
(21)
Formulo moramo prilagoditi za kvader, ki ima razsežnost tudi v smeri z (dolžino l). Ploščina
podvodnega dela A0 se tako spremeni v prostornino podvodnega dela V, vztrajnostni moment
daljice (𝑏3/12) pa v drugi moment ploskve plavajočega telesa na ravnini plavanja okrog osi
z:
𝐼𝑧 =
𝑏3
12𝑙.
(22)
Enačba za oddaljenost začetnega metacentra od začetnega prijemališča vzgona, ki velja za
kvader je nato:
𝑉0𝑀0 =
𝑏3𝑙
12 𝑉=
𝐼𝑧
𝑉.
(23)
Razdaljo med težiščem in začetnim metacentrom imenujemo metacentrična višina in jo
označimo s TM0 ali hm. Metacentrična višina je kriterij, na podlagi katerega najlažje ocenimo
stabilnost plavajočega telesa (jadrnice) [8]. Poznamo tri vrste ravnotežja:
- Stabilno plavanje (hm > 0).
- Indiferentno plavanje (hm = 0).
- Nestabilno (labilno) plavanje (hm < 0) [9].
Vse tri vrste ravnotežja so predstavljene na sliki 14. Puščice označujejo silo vzgona in silo
teže.

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 15
Slika 14: Stabilna (a), indiferentna (b) in nestabilna ladja (c) [9].
a) Stabilno plavanje
Pogoj za stabilno plavanje telesa je pozitivna metacentrična višina. To pomeni, da se mora
začetni metacenter nahajati nad težiščem. Ko se telo (jadrnica) nagne, se med navpičnima
nosilkama prijemališča vzgona in težišča pojavi izravnalna ročica in navor, ki skuša jadrnico
zopet postaviti v ravnovesno lego (slika 14) [10].
b) Indiferentno plavanje
Metacenter v tem primeru sovpada s težiščem telesa. Telo pri vsaki zunanju motnji zavzame
novo lego, saj je pri nagibu dolžina izravnalne ročice enaka 0, zato ni navora, ki bi telo
postavil v prvotno lego (slika 14) [10]. Indiferentno plavanje najlažje ponazorimo s
homogenim valjem, kot je prikazano na sliki 15. Pri homogenem valju težišče sovpada z
metacentrom. Prijemališče vzgona je vedno pod težiščem, zato se izravnalna ročica ne pojavi
pri nobenem kotu nagiba.
a) b)
c)
𝐹𝑉⃑⃑⃑⃑⃑
𝐹𝑉⃑⃑⃑⃑⃑
𝐹𝑉⃑⃑⃑⃑⃑
𝐹𝑔⃑⃑⃑⃑
𝐹𝑔⃑⃑⃑⃑
𝐹𝑔⃑⃑⃑⃑

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 16
Slika 15: Indiferentno plavanje homogenega valja [6].
c) Nestabilno plavanje
Metacenter se v tem primeru nahaja pod težiščem. Ko se telo nagne za majhen kot, se med
silo teže in silo vzgona pojavi ročica. Na telo začne delovati prevrnitveni moment, ki ga zavrti
tako, da zavzame novo stabilno lego (slika 14) [10].
V kolikor je težišče nižje od prijemališča vzgona, je plavanje vedno stabilno. V ostalih
primerih je potrebno izračunati metacentrično višino ter oceniti stabilnost po omenjenih
kriterijih. Iz napisanega lahko sklepamo, da morajo imeti vse jadrnice (in ladje) pozitivno
metacentrično višino. Okvirne vrednosti metacentričnih višin za različne vrste plovil so
zbrane v preglednici 2.1.
Preglednica 2.1: Tipične vrednosti hm za različne vrste plovil [4].
Vrsta plovila Metacentrična višina
Tovorne ladje 0,3 m – 0,5 m
Tankerji 0,5 m – 2 m
Supertankerji 2 m – 5 m
Ladje za prevoz vozil (Ro – Ro) 1,5 m
Ladje za razsuti tovor 2 m – 3 m
Jadrnice Do 4 m
2.6 Odvisnost statične stabilnosti od balasta
Zaradi potrebe po večji stabilnosti nagiba, jadrnice običajno dodatno obtežujemo ter jim tako
znižamo težišče. Poleg tega z dodajanjem mase jadrnici povečujemo silo teže (in vzgon). To
pomeni večje izravnalne navore pri nagibanju, kar smo že omenili (slika 5). Utež je

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 17
nameščena na kobilici, saj tako povečamo učinek dodajanja mase. Pri modernejših jadrnicah
se uporabljajo tudi premične kobilice, ki se po potrebi nagibajo proti vetru ter tako povečujajo
razdaljo med prijemališčem vzgona in težiščem (r*), kar vodi v povečano stabilnost. Na ta
način lahko jadrnica z relativno majhnim izpodrivom prenaša veliko površino jader in
posledično pluje hitreje. Podoben učinek je mogoče doseči tudi s prečrpavanjem vode med
balastnimi posodami na bokih jadrnice ali s pravilno razporeditvijo oseb na jadrnici med
jadranjem v bočnem vetru [11]. Omenjene metode premikajo težišče v smeri osi x v
koordinatnem sistemu jadrnice. V tem poglavju bomo premikanje težišča jadrnice omejili na
dve spremenljivki – pomikanje uteži v smeri y v koordinatnem sistemu jadrnice in maso uteži.
Čeprav se zdi, da je balast za jadrnice ključnega pomena, se izkaže, da prispeva le del
stabilnosti. Balast ključno vpliva na stabilnost, če želimo izdelati jadrnico, ki se bo pri
zunanjih motnjah vedno postavila v pokončen položaj [3]. Taka jadrnica bi bila podobna
obteženi boji in ne bi imela negativnega dela krivulje stabilnosti (slika 16).
Slika 16: Oblika krivulje statične stabilnosti za idealno obteženo telo [5].
Večji del stabilnosti pri jadrnicah prispeva oblika trupa (predvsem širina), kar bo podrobneje
opisano v naslednjem poglavju. Naloga balasta je predvsem znižanje težišča jadrnice. Za
računanje težišča v smeri y (v koordinatnem sistemu jadrnice) uporabimo enačbo:
𝑦𝑡 =
𝑦𝑡1𝑚1 + 𝑦𝑡2𝑚2
𝑚1 + 𝑚2,
(24)
pri čemer yt1 in yt2 predstavljata koordinate težišča uteži ter trupa, m1 in m2 pa maso uteži in
maso trupa [12]. Ta enačba bo uporabljena za računanje težišča obteženih modelov trupov v
praktičnem delu. Nižanje težišča jadrnice neposredno vpliva na dolžino izravnalne ročice r*,
vendar prinaša tudi nekatere slabosti. Iz enačbe (24) je razvidno, da lahko za nižanje težišča
povečujemo maso uteži na kobilici (m1) ali pa podaljšujemo kobilico (yt1). Podaljševanje
kobilice je najboljši način za nižanje težišča, saj lahko ob minimalnem povečanju izpodriva
jadrnice dosežemo velike učinke na stabilnost. Tak način nižanja težišča se uporablja pri
tekmovalnih jadrnicah, kjer nismo bistveno omejeni z ugrezom. Hkrati manjši izpodriv

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 18
prinaša večje hitrosti pri jadranju. Pri običajnih potovalnih jadrnicah, ki morajo biti uporabne
tudi v plitvejšem morju, moramo za isti učinek na krajši kobilici povečati maso uteži. To
pomeni večji izpodriv, večji upor in nižje hitrosti jadranja [11]. Na sliki 17 je prikazan odnos
med maso uteži in dolžino kobilice za doseganje enake stabilnosti za dva enaka trupa.
Slika 17: Dva enako stabilna trupa, pri čemer ima a) večjo maso uteži in b) daljšo kobilico
[11].
Povečevanje stabilnosti s pomočjo balasta največ prispeva k povečanju kota prevrnitve (αp).
Tako bo ozka jadrnica z zelo nizkim težiščem podobna obteženi boji, zato se bo lažje nagnila
do velikega kota (bo ''mehkejša''), vendar se bo težko prevrnila. To pomeni, da bo krivulja
stabilnosti take jadrnice pri nižjih kotih položnejša, vendar bo na negativen del prešla pri
večjem kotu nagiba. Ali nasprotno – krivulja stabilnosti široke jadrnice z višjim težiščem, bo
pri majhnih kotih bolj strma. Jadrnica se bo v normalnih pogojih manj nagibala, vendar se bo
prevrnila pri manjšem kotu [11].
2.7 Odvisnost statične stabilnosti od oblike in širine prečnega prereza trupa
Kot je bilo že omenjeno, lahko statično stabilnost jadrnice razdelimo na dva dela. Prvi je
stabilnost zaradi balasta, drugi pa stabilnost zaradi oblike in širine prečnega prereza trupa.
Izkaže se, da lahko z obliko prečnega prereza trupa vplivamo predvsem na začetno stabilnost
jadrnice (to je pri majhnih kotih nagiba), ne pa tudi na kot prevrnitve. Idealno oblikovano telo
s strani statične stabilnosti je raven ploh [5]. Oblika krivulje stabilnosti takega telesa je
prikazana na sliki 18.
a) b)

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 19
Slika 18: Krivulja statične stabilnosti za homogeno telo z idealno obliko [5].
Krivulja stabilnosti ravnega ploha je pri majhnih kotih nagiba bolj strma od krivulje
stabilnosti idealno obteženega telesa (boje). Jadrnice s širokim trupom in ravnim dnom se zato
pri jadranju v normalnih razmerah manj nagibajo, vendar v slabših razmerah prej dosežejo kot
prevrnitve. Balast podaljšuje izravnalno ročico r* s pomočjo premikanja težišča, s pomočjo
oblike pa lahko izravnalno ročico podaljšujemo s premikanjem prijemališča vzgona V.
Prijemališče vzgona se pri ravnem plohu pri majhnih kotih nagiba premakne vstran za
relativno veliko vrednost, kar pomeni velik začetni izravnalni navor in bolj strmo krivuljo
stabilnosti. V kolikor povečamo širino ploha, se prijemališče vzgona pomakne za večjo
razdaljo, kar pomeni večjo začetno stabilnost (slika 19) [3].
a) b)

Statična stabilnost jadrnice 2 STABILNOST JADRNICE
B. Uršič 20
Slika 19: Primerjava začetnih metacentričnih višin in dolžin izravnalnih ročic pri ožjem (a) in
za eno tretjino širšem trupu (b) pri nagibu 5°. Trupa imata enak izpodriv.
Poleg širine trupa je ključnega pomena tudi njegova oblika. Obravnavali bomo dve skrajni
obliki – trup z ravnim dnom ter trup s polkrožnim dnom. Trup z ravnim dnom je bolj stabilen
od tistega s polkrožnim, saj pokrije večjo površino vodne gladine [13]. Posledično je drugi
moment ploskve na ravnini plavanja (22) večji, kar pomeni daljšo metacentrično višino in
večjo stabilnost. Primerjava stabilnosti trupov z enako širino, izpodrivom in višino težišča,
vendar različnih oblik je prikazana na sliki 20.
Slika 20: Primerjava začetnih metacentričnih višin in dolžin izravnalnih ročic pri trupu s
polkrožnim dnom (a) in trupu z ravnim dnom (b) pri nagibu 10°.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 21
3 Praktični del
V praktičnem delu diplomskega dela smo izvajali poskuse s poenostavljenimi modeli trupov,
s katerimi smo izolirali posamezne spremenljivke, ki vplivajo na statično stabilnost plovila.
Izdelani so bili trije modeli iz ekspandiranega polistirena – eden s polkrožnim presekom ter
dva s pravokotnim presekom, vendar različnih širin. Modeli so imeli pri vseh meritvah enako
maso.
Cilj praktičnega dela je bil preveriti teoretične predpostavke, ki so bile opisane v drugem
poglavju. Najprej smo preverili veljavnost enačbe (1) za računanje izravnalnega navora.
Predstavljen je način, s katerim je mogoče eksperimentalno določiti izravnalne navore za
različne kote brez določanja prijemališč vzgona. Nato smo preverjali odvisnost statične
stabilnosti trupa od oblike, širine in balasta.
3.1 Prikaz meritve in teoretični izračun izravnalnega navora za primer kvadra
Za preverjanje enačbe izravnalnega navora je bil iz ekspandiranega polistirena izdelan
poenostavljen model trupa s pravokotnim presekom. Njegove gabaritne izmere so podane v
preglednici 3.1.
Preglednica 3.1: Gabaritne izmere modela trupa.
Dolžina (l) 250 mm
Širina (b) 180 mm
Višina (a) 75 mm
Model je bil obtežen tako, da je imel težišče na višini y = 30 mm – merjeno od izhodišča
koordinatnega sistema, predstavljenega na sliki 1. Položaj težišča je bil določen s pomočjo
enačbe (24). Njegova masa je znašala 407 g. Zunanja sila, ki je nagnila kvader do določenega
kota je bila zagotovljena z utežjo z maso m1 = 120 g. Z utežjo modelu spreminjamo maso
(izpodriv) in položaj težišča, zato je za smiselno meritev potrebno na drugi strani model vleči
iz vode z enako silo. To je bilo zagotovljeno z drugo utežjo z enako maso (m2 = 120 g), ki je
bila pripeta na vrv, speljano preko škripca na drugo stran kvadra. Na ta način smo zagotovili,
da so vse sile delovale v isti smeri – pravokotno na vodno gladino. Postavitev je prikazana na
sliki 21.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 22
Slika 21: Prikaz postavitve poskusa za meritev izravnalnega navora.
Na nagnjenem modelu trupa je bil označen položaj vodne gladine. Nato smo potopljenemu
delu preseka določili položaj prijemališča vzgona ter označili položaj težišča. Izmerjena je
bila izravnalna ročica (r*) ter ročica zunanjega navora (r). Meritve so prikazane na sliki 22.
Slika 22: Sile in ročice pri meritvi.
Navor dvojice zunanjih sil je enak izravnalnemu navoru, saj sistem miruje. Velja
𝑀𝑖𝑧𝑟𝑎𝑣𝑛𝑎𝑙𝑛𝑖 = − 𝑀𝑧𝑢𝑛𝑎𝑛𝑗𝑖 (25)
𝑚𝑔𝑟∗ = − 𝑚1𝑔𝑟 (26)
Vrednosti izravnalnega in zunanjega navora sta podani v preglednici 3.2. Odstopanje je
določeno s pomočjo obrazca za določanje napake dveh vrednosti:

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 23
𝑜𝑑𝑠𝑡𝑜𝑝𝑎𝑛𝑗𝑒 =
|𝑀𝑖𝑧𝑟𝑎𝑣𝑛𝑎𝑙𝑛𝑖 − 𝑀𝑧𝑢𝑛𝑎𝑛𝑗𝑖|
(𝑀𝑖𝑧𝑟𝑎𝑣𝑛𝑎𝑙𝑛𝑖 + 𝑀𝑧𝑢𝑛𝑎𝑛𝑗𝑖),
(27)
pri čemer izračunano število pomnožimo s 100 %.
Preglednica 3.2: Primerjava izračunanih navorov.
Mizravnalni [Nm] Mzunanji[s] Odstopanje [%]
0,15 0,17 6
Odstopanje nastane zaradi napake pri določanju težišča ter nenatančnosti pri izdelavi kvadra.
Na opisan način je mogoče na enostaven način izmeriti vrednosti izravnalnih navorov za
različne kote ter izrisati krivuljo le-teh. Prednost te metode je, da ni potrebno za vsak kot
določati prijemališča vzgona. Na ta način lahko izravnalne navore (in posredno izravnalne
ročice) določimo tudi za telesa nepravilnih oblik.
3.2 Odvisnost statične stabilnosti od oblike trupa
Za preverjanje teoretičnih predpostavk glede stabilnosti zaradi oblike, sta bila iz
ekspandiranega polistirena izdelana dva poenostavljena modela trupov – eden s polkrožnim in
eden s pravokotnim presekom. Trupa sta imela enake gabaritne izmere. Le – te so podane v
preglednici 3.3.
Preglednica 3.3: Gabaritne izmere modelov trupov.
Dolžina (l) 250 mm
Širina (b) 150 mm
Višina (a) 75 mm
Oba modela sta bila obtežena tako, da sta imela enako maso (380 g) ter težišče na enaki višini
y = 30 mm - merjeno od izhodišča koordinatnega sistema, predstavljenega na sliki 1. Položaj
težišča je bil določen s pomočjo enačbe (24). V tem poglavju bosta izrisani in primerjani
krivulji stabilnosti za oba modela ter s pomočjo integracije izračunano delo nagiba za
posamezen model. Oba modela sta prikazana na sliki 23.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 24
Slika 23: Modela trupa s pravokotnim in polkrožnim presekom.
3.2.1 Krivulje stabilnosti
Zaradi spreminjanja položaja položaja osi pri rotaciji, je določanje ugreznjenega dela trupa
zahtevno opravilo, saj trupa ne moremo enostavno vpeti med dve točki in ga vrteti na gladini
(to bi bilo mogoče le pri zelo majhnih kotih nagiba). Položaje vodne gladine pri različnih
kotih je mogoče določiti tudi analitično, kot je bilo pokazano v poglavju 2.3. Zaradi
enostavnosti je bila v tem poglavju izbrana eksperimentalna metoda. Pri poskusu smo trupa
nagibali ročno, pri čemer smo pazili, da se jima izpodriv ne spreminja. Ta način ni najboljši,
vendar lahko z njim dosežemo zadovoljive rezultate za prikaz pomena oziroma vloge
posameznih spremenljivk. Način nagibanja trupa je prikazan na sliki 24. Pri vsakem kotu je
bilo potrebno označiti položaj vodne gladine na preseku trupa oziroma njegov ugreznjen del.
V ta namen je bila na eno krajišče vsakega trupa nalepljena bela samolepilna folija, na katero
je bilo mogoče s svinčnikom začrtati položaj vodne gladine.
Slika 24: Ročno nagibanje in označevanje ugreznjenega dela trupa.
Po končanem začrtovanju je bila samolepilna folija odlepljena z modelov in prilepljena na list
papirja, kjer so bile meritve obdelane. Najprej so bile narisane črte, ki označujejo vodno
gladino za vsak kot, nato pa so bili izmerjeni posamezni koti. Črte, ki označujejo gladino vode
skupaj z obliko trupa tvorijo različne like (segment kroga, trikotnik, trapez) in tudi manj
pravilne like. Ker se prijemališče vzgona nahaja v težišču potopljenega dela trupa in ker se
trupom prerez po dolžini ni spreminjal, je bilo za položaj prijemališča vzgona potrebno
poiskati težišča omenjenih likov (za vsak kot posebej). V nadaljevanju bo opisan način, s
katerim so bila določena težišča ugreznjenih delov trupov.
a) Določanje prijemališč vzgona pri polvalju
Dokler se vodna gladina pri nagibanju polvalja ne dotakne ravnega zgornjega dela, se oblika
preseka ugreznjenega dela ne spreminja, saj trup vedno izpodriva enako količino vode. Tako v

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 25
našem primeru do kota 42° prijemališča vzgona določimo s pomočjo enačbe za izračun
težišča odseka kroga:
𝑦𝑇 =
4𝑅sin3𝜗/2
3(𝜗 − sin𝜗),
(28)
pri čemer je 𝜗 kot krožnega loka, ki določa segment kroga (slika 25) in ga v enačbo (28)
vstavimo v radianih [14].
Slika 25: Težišče krožnega segmenta [14].
Težišče se nahaja na simetrali segmenta, zato določimo samo njegov navpični položaj, ki
velja za kote do 42°:
𝑦𝑇 =4 ∙ 75 mm ∙ sin3 (
1,642 )
3 ∙ (1,64 − sin 1,64) = 60,8 mm.
(29)
Pri večjih kotih je potrebno lik razdeliti na dva dela – segment kroga in trikotnik. Vsakemu
delu nato določimo položaj težišča ter ju grafično seštejemo. V nadaljevanju je prikazan
postopek določanja prijemališča vzgona za nagib 56°. Težišče T1 pripada segmentu kroga.
Izračunamo ga po enačbi (28):
𝑦𝑇1 =4 ∙ 75 mm ∙ sin3 (
1,472 )
3 ∙ (1,47 − sin1,47) = 63,5 mm.
(30)
Težišče T2 pripada trikotniku ABC. Lahko ga določimo načrtovalno – s presečiščem težiščnic,
ali pa s pomočjo koordinat. Prikazana bosta oba načina. Da lahko določimo koordinate težišča
nepravilnega lika, mu moramo pripeti koordinatni sistem, ki je prikazan na sliki 26 [12].
Koordinate oglišč A, B in C so: A(67, 0), B(17, 74), C(0, 74). Koordinate težišča trikotnika
izračunamo s pomočjo izrazov:
𝑥𝑇2 =
𝑋𝑎 + 𝑋𝑏 + 𝑋𝑐
3=
67 mm + 17 mm + 0
3= 28 mm
(31)
in
T

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 26
𝑦𝑇2 =
𝑌𝑎 + 𝑌𝑏 + 𝑌𝑐
3=
0 + 74 mm + 74 mm
3= 49 mm.
(32)
Koordinate težiča trikotnika ABC so T2(28, 49). Za izračun skupnega težišča moramo določiti
koordinate tudi težišču T1: T1(28, 32), nato pa ju sešteti po enačbah:
𝑥𝑡 =
𝑥𝑇1𝑃1 + 𝑥𝑇2𝑃2
𝑃1 + 𝑃2
(33)
in
𝑦𝑡 =
𝑦𝑇1𝑃1 + 𝑦𝑇2𝑃2
𝑃1 + 𝑃2,
(34)
kjer P1 in P2 predstavljata ploščino segmenta kroga in trikotnika. Ploščino segmenta kroga
izračunamo po enačbi [14]:
𝑃1 =
𝑅2
2(𝜗 − sin𝜗) =
75 mm2
2(1,64 − sin1,64) = 1336 mm2.
(35)
Ploščino trikotnika izračunamo po enačbi [9]:
𝑃2 =
𝑎𝑣𝑎
2=
𝑏𝑣𝑏
2=
𝑐𝑣𝑐
2=
13 mm ∙ 100 mm
2= 650 mm2
(36)
Z upoštevanjem enačb (33) in (34), sta koordinati skupnega težišča T(28, 38). Tako smo
določili prijemališče vzgona za nagib 56°. Njegov položaj je razviden na sliki 26. Pri poskusu
so bila prijemališča vzgona na enak način določena še za kote 67°, 84°, 103° in 116°.
Slika 26: Določanje težišča (prijemališča vzgona) za sestavljen lik ABC.
Ko določimo prijemališča vzgona za vse izbrane kote, lahko izmerimo dolžine izravnalnih
ročic (r*) ter narišemo krivuljo stabilnosti (slika 29). Položaji vodnih gladin za pozitivno

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 27
stabilnost so prikazani na sliki 27, za negativno stabilnost pa na sliki 28. Zaradi boljše
preglednosti je merjenje dolžine r* prikazano le za kot 67° (slika 27).
Slika 27: Prijemališča vzgona V za pozitivno stabilnost polvalja.
Slika 28: Prijemališča vzgona V za negativno stabilnost polvalja.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 28
Dolžine izravnalnih ročic za pozitivno in negativno stabilnost so podane v preglednici 3.4.
Preglednica 3.4: Vrednosti izravnalnih ročic za polvalj.
α [5°] GZ [mm] α [5°] GZ [mm]
0 0 125 -8
9 7 142 -21
14 11 156 -27
20 16 164 -28
25 19 172 -19
29 23 180 0
34 26
42 30
56 35
67 32
84 23
103 10
116 0
Slika 29: Krivulja statične stabilnosti za polvalj.
b) Določanje prijemališč vzgona pri kvadru
Pri določanju prijemališč vzgona za kvader moramo določati težišča trapezom in trikotnikom.
Težišče trapeza lahko izračunamo z metodo momentov, ki je bila predstavljena v poglavju 2.5
ali pa načrtovalno. Načrtovalno določanje težišča trapeza (pri nagibu 75°) je predstavljeno na
sliki 30 [9].
-40
-30
-20
-10
0
10
20
30
40
0 20 40 60 80 100 120 140 160 180 200
Izra
vnal
ne
ro
čice
[m
m]
Kot nagiba [°]
GZ (α)

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 29
Slika 30: Načrtovalno določanje težišča trapeza.
Ko določimo prijemališča vzgona za vse kote, lahko izmerimo dolžine izravnalnih ročic ter
narišemo krivuljo stabilnosti (slika 33). Položaji vodnih gladin za pozitivno stabilnost so
prikazani na sliki 31, za negativno stabilnost pa na sliki 32. Zaradi boljše preglednosti je
merjenje dolžine r* prikazano le za kot 75° (slika 31).
Slika 31: Prijemališča vzgona V za pozitivno stabilnost kvadra.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 30
Slika 32: Prijemališča vzgona V za negativno stabilnost kvadra.
Dolžine izravnalnih ročic za pozitivno in negativno stabilnost so podane v preglednici 3.5.
Preglednica 3.5: Vrednosti izravnalnih ročic za kvader.
α [°] GZ [mm] α [°] GZ [mm]
0 0 118 -14
7 16 130 -19
13 25 145 -25
20 32 159 -29
29 40 165 -27
42 32 172 -23
57 26 180 0
75 18
94 4
100 0

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 31
Slika 33: Krivulja statične stabilnosti za kvader.
3.2.2 Delo nagiba
Delo nagiba izračunamo po enačbi (2), pri čemer pot s predstavlja razdaljo, za katero sta se
razmaknila prijemališče vzgona in težišče. To razdaljo lahko izmerimo ali pa z integracijo
krivulje statične stabilnosti izračunamo ploščino pod grafom (4), ki prav tako predstavlja
razdaljo s. Vertikalni premik prijemališča vzgona s do kota prevrnitve za primer pozitivne
stabilnosti polvalja izmerimo tako, da od razdalje V12T odštejemo razdaljo V0T (slika 27).
Razlika za ta primer znaša 40 mm. Za primer pozitivne stabilnosti kvadra jo izmerimo tako,
da od razdalje V9T odštejemo razdaljo V0T (slika 31). Razlika za ta primer znaša 38 mm. V
kolikor je trditev, da je ploščina pod krivuljo izravnalnih ročic enaka vertikalnemu razmiku
težišča in prijemališča vzgona pravilna, mora biti rezultat integracije enak izmerjeni vrednosti.
Pri merjenju ploščine si pomagamo z aproksimacijo krivulje s polinomom. To lahko storimo z
računalniškim orodjem Microsoft Excel, ki nam poda funkcijo krivulje, ki se najbolje prilega
krivulji statične stabilnosti. Slika 34 predstavlja krivuljo pozitivnih izravnalnih ročic za
polvalj, pri kateri so koti podani v radianih. Aproksimirana funkcija je na grafu predstavljena
s prekinjeno rdečo črto.
-40
-30
-20
-10
0
10
20
30
40
50
0 20 40 60 80 100 120 140 160 180 200
Izra
vnal
ne
ro
čice
[m
m]
Kot nagiba [°]
GZ (α)

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 32
Slika 34: Krivulja pozitivnih izravnalnih ročic za polvalj.
Enačba aproksimirane funkcije za primer polvalja, ki jo bomo uporabili za integracijo in
določitev ploščine se glasi:
𝑦 = −15,1𝑥6 + 87,0𝑥5 − 170,0𝑥4 + 118,5𝑥3 − 35,3𝑥2 + 49,2𝑥. (37)
Funkcijo integriramo v mejah od 0 do 2,02:
𝑠 = ∫ −15,1𝑥6 + 87,0𝑥5 − 170,0𝑥4 + 118,5𝑥3 − 35,3𝑥2 + 49,2𝑥 𝑑𝑥2,02
0
𝑠 = (−15,1𝑥7
7 + 87,0
𝑥6
6 − 170,0
𝑥5
5 + 118,5
𝑥4
4 − 35,3
𝑥3
3 + 49,2
𝑥2
2)|
0
2,02
𝑠 = 41,69 mmRad.
Rezultat se dobro ujema z izmerjeno razdaljo, ki je znašala 40 mm. Postopek ponovimo še za
pozitivno stabilnost kvadra. Slika 35 predstavlja krivuljo pozitivnih izravnalnih ročic za
kvader, pri kateri so koti podani v radianih. Aproksimirana funkcija je na grafu predstavljena
s prekinjeno rdečo črto.
0
5
10
15
20
25
30
35
40
0 0,5 1 1,5 2 2,5
Izra
vnal
ne
ro
čice
[m
m]
Kot nagiba [rad]

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 33
Slika 35: Krivulja pozitivnih izravnalnih ročic za kvader.
Enačba aproksimirane funkcije za primer kvadra, ki jo bomo uporabili za integracijo in
določitev ploščine se glasi:
𝑦 = 82,3𝑥6 − 443,1𝑥5 + 863,4𝑥4 − 684,8𝑥3 + 88,7𝑥2 + 118,9𝑥. (38)
Funkcijo integriramo v mejah od 0 do 1,75:
𝑠 = ∫ (82,3𝑥6 − 443,1𝑥5 + 863,4𝑥4 − 684,8𝑥3 + 88,7𝑥2 + 118,9𝑥)𝑑𝑥1,75
0
𝑠 = (82,3𝑥7
7− 443,1
𝑥6
6+ 863,44
𝑥5
5− 684,8
𝑥4
4+ 88,7
𝑥3
3 + 118,9
𝑥2
2)|
0
1,75
𝑠 = 37,84 mmRad.
Rezultat se dobro ujema z izmerjeno razdaljo, ki je znašala 38 mm. Za izračun dela nagiba
moramo razdaljo s pomnožiti s silo vzgona (1). Masi modelov sta bili enaki, zato lahko z
zbranimi podatki primerjamo delo, ki je potrebno za nagib posameznega trupa do določenega
kota (na primer do kota prevrnitve – αp). Delo, potrebno za prevrnitev polvalja je torej:
𝐴𝛼𝑝1 = 𝐹𝑣⃑⃑⃑⃑ ∙ 𝑠1 = 𝑚𝑔𝑠1 = 0,380 kg ∙ 9,81
m
s2∙ 0,042m = 0,157 J, (39)
za prevrnitev kvadra pa:
𝐴𝛼𝑝2 = 𝐹𝑣⃑⃑⃑⃑ ∙ 𝑠2 = 𝑚𝑔𝑠2 = 0,380 kg ∙ 9,81
m
s2∙ 0,038m = 0,142 J. (40)
-5
0
5
10
15
20
25
30
35
40
45
0 0,5 1 1,5 2
Izra
vnal
ne
ro
čice
[m
m]
Kot nagiba [rad]

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 34
Za primerjavo začetne stabilnosti, bomo krivulji integrirali do kota 10°. Vertikalni razmik
prijemališča vzgona in težišča za nagib polvalja pri kotu 10° znaša:
𝑠 = ∫ −15,1𝑥6 + 87,0𝑥5 − 170,0𝑥4 + 118,5𝑥3 − 35,3𝑥2 + 49,2𝑥 𝑑𝑥0,18
0
𝑠 = (−15,1𝑥7
7 + 87,0
𝑥6
6 − 170,0
𝑥5
5 + 118,5
𝑥4
4 − 35,3
𝑥3
3 + 49,2
𝑥2
2)|
0
0,18
𝑠 = 0,77 mmRad.
Za nagib kvadra pa:
𝑠 = ∫ (82,3𝑥6 − 443,1𝑥5 + 863,4𝑥4 − 684,8𝑥3 + 88,7𝑥2 + 118,9𝑥)𝑑𝑥0,18
0
𝑠 = (82,3𝑥7
7− 443,1
𝑥6
6+ 863,4
𝑥5
5− 684,8
𝑥4
4+ 88,7
𝑥3
3 + 118,9
𝑥2
2)|
0
0,18
𝑠 = 1,94 mmRad.
Delo za nagib polvalja do kota 10° znaša 0,003 J, za nagib kvadra pa 0,007 J.
3.2.3 Interpretacija rezultatov
Krivulji statične stabilnosti uporabljenih modelov se razlikujeta v skladu s pričakovanji.
Polvalj doseže maksimalno stabilnost (αmax) pri kotu nagiba 56°, medtem ko kvader
maksimalno stabilnost doseže pri kotu 29°. Krivulja statične stabilnosti kvadra pri majhnih
kotih hitro narašča, kar pomeni, da ima kvader boljšo začetno stabilnost kot polvalj. To smo
pokazali tudi z integracijo krivulj stabilnosti do kota nagiba 10°. Vertikalni razmik težišča in
prijemališča vzgona je večji pri kvadru (1,94 mm), kar pomeni večje delo začetnega nagiba
(0,007 J) in boljšo začetno stabilnost. Prav tako kvader doseže daljšo izravnalno ročico pri
kotu največje stabilnosti (αmax). Kljub temu se kvader prevrne pri manjšem kotu (100° nagiba)
v primerjavi s polvaljem (116° nagiba). Z izračunanim delom smo pokazali, da je za
prevrnitev polvalja kljub slabši začetni stabilnosti potrebna večja energija.
Ugotovitve lahko povežemo tudi z realnimi jadrnicami, oziroma plovili. Jadrnica z dnom, bolj
podobnim kvadru, bi se v normalnem vetru manj nagibala, kar je za posadko udobnejše.
Jadrnice, ki se zanašajo na boljšo začetno stabilnost potrebujejo manj balasta, zato so lahko
lažje in imajo nižji ugrez, vendar v izrednih razmerah prej dosežejo kot prevrnitve, saj je za
prevrnitev take jadrnice potrebno vložiti manj dela. Nasprotno velja za jadrnico z dnom, bolj
podobnim polvalju.
Za jadrnice, ki plujejo v slabih razmerah je pomemben tudi negativen del krivulje stabilnosti,
saj nam ta pove, kolikšno delo je potrebno za ponovno izravnavo jadrnice ob morebitni
prevrnitvi. V kolikor je ploščina nad negativnim delom krivulje majhna, lahko za izravnavo

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 35
zadostuje že delo valov, ki obdajajo jadrnico. Za ponovno izravnavo je pomembna tudi
strmina negativnega dela krivulje. V kolikor je strmina krivulje (gledano od kota 180° proti
manjšemu kotu) majhna, je za izravnavo potreben manjši sunek sile. V primeru modelov
polvalja in kvadra sta strmini krivulj negativne stabilnosti na tem delu podobni, saj sta obliki
potopljenih delov v obrnjenem stanju podobni.
3.3 Odvisnost stabilnosti od širine trupa
Za preverjanje odvisnosti statične stabilnosti od širine trupa je bil izdelan še en model v obliki
kvadra, ki je bil 20% širši od prejšnjega, torej 180 mm. Nov model je imel enako maso kot
prejšnji ter težišče na enaki višini. Merjenje nagibov je bilo opravljeno le za pozitivno
stabilnost. Zanimal nas je vpliv povečanja širine na obliko krivulje, delo prevrnitve ter kot
prevrnitve. Prijemališča vzgona in izravnalne ročice so bile izmerjene na že opisan način. Na
sliki 3.12 so prikazana izmerjena prijemališča vzgona za pozitivno stabilnost širokega kvadra.
Slika 36: Prijemališča vzgona za pozitivno stabilnost širokega kvadra.
Dolžine izravnalnih ročic r* so podane v preglednici 3.6. Krivulja stabilnosti je prikazana na
sliki 37.
Preglednica 3.6: Dolžine izravnalnih ročic za pozitivno stabilnost širokega kvadra.
α [°] GZ [mm]
0 0
5 21
12 38
20 46
29 47

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 36
38 46
50 39
65 31
88 11
98 0
Slika 37: Krivulja pozitivne statične stabilnosti za širok kvader.
3.3.1 Delo nagiba
Delo nagiba izračunamo na enak način kot pri prejšnjih primerih. Tokrat bomo za izračun
upoštevali kar izmerjeno vrednost vertikalnega razmika prijemališča vzgona in težišča. Na
sliki 36 sta kotirani razdalji V0T in V9T, ki ju moramo odšteti:
s = V9T − V0T = 79 mm − 24 mm = 55 mm. (41)
Sedaj lahko izračunamo delo nagiba do kota prevrnitve:
𝐴𝛼𝑝 = 𝐹𝑣⃑⃑⃑⃑ ∙ 𝑠 = 𝑚𝑔𝑠 = 0,380 kg ∙ 9,81
m
s2∙ 0,055 m = 0,205 𝐽. (42)
Za primerjavo začetne stabilnosti, bomo krivuljo integrirali do kota 10°. Enačba
aproksimirane funkcije za primer kvadra, ki jo bomo uporabili za integracijo in določitev
ploščine se glasi:
𝑦 = −20,7𝑥6 + 157,9𝑥5 − 487,6𝑥4 + 773,8𝑥3 − 682,0𝑥2 + 294,3𝑥 (43)
Vertikalni razmik prijemališča vzgona in težišča za nagib širokega kvadra pri kotu 10° znaša:
0
5
10
15
20
25
30
35
40
45
50
0 10 20 30 40 50 60 70 80 90 100 110
Izra
vnal
ne
ro
čice
[m
m]
Kot nagiba [°]
GZ [α]

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 37
𝑠 = ∫ −20,7𝑥6 + 157,9𝑥5 − 487,6𝑥4 + 773,8𝑥3 − 682,0𝑥2 + 294,3𝑥0,18
0
𝑠 = (−20,7𝑥7
7 + 157,9
𝑥6
6 − 487,6
𝑥5
5 + 773,8
𝑥4
4 − 682,0
𝑥3
3 + 294,3
𝑥2
2)|
0
0,18
𝑠 = 3,25 mmRad.
Delo za nagib širokega kvadra do kota 10° znaša 0,012 J.
3.3.2 Interpretacija rezultatov
S širjenjem trupa ob ohranitvi višine težišča in izpodriva bistveno povečamo začetno
stabilnost, kar je razvidno iz krivulje pozitivne statične stabilnosti (slika 37). Kot največje
stabilnosti (αmax) je ostal nespremenjen (29°), vendar se je izravnalna ročica pri tem kotu
povečala iz 40 mm na 47 mm. To pomeni, da je za nagib do tega kota potrebno opraviti več
dela. Kot prevrnitve (αp) se ob širitvi trupa ni povečal. Širina trupa torej ne vpliva na
absolutno stabilnost, temveč le na začetno. To smo pokazali tudi z integracijo krivulje
stabilnosti do kota nagiba 10°. Vertikalni razmik težišča in prijemališča vzgona je večji pri
širokem kvadru (3,25 mm), kar pomeni večje delo začetnega nagiba (0,012 J) in boljšo
začetno stabilnost. Kljub enakemu αp, je delo, potrebno za prevrnitev trupa večje (0,205 J),
kar je 45% več kot pri ožjem trupu.
Ugotovitve lahko povežemo tudi z realnimi plovili (jadrnicami). Strma krivulja stabilnosti pri
majhnih kotih nagiba ter velik razmik prijemališča vzgona in težišča (posledično večje delo)
sta značilna za katamarane. Katamarani se večinoma zanašajo na stabilnost zaradi oblike
(širine). Ob majhnem izpodrivu so sposobni prenašati veliko površino jader, zato dosegajo
večje hitrosti. Njihova slabost je majhen kot prevrnitve, ki ga v močnejšem vetru hitro
dosežemo.
3.4 Odvisnost stabilnosti od balasta
Za preverjanje odvisnosti statične stabilnosti od balasta je bil izbran kvader s širino 150 mm.
Izpodriv ni bil povečan, saj je bistvo balasta le premikanje težišča. Težišče je bilo znižano za
16 mm. Nahajalo se je torej na višini 14 mm od izhodišča koordinatnega sistema,
predstavljenega na sliki 1. Merjenje nagibov je bilo opravljeno le za pozitivno stabilnost.
Zanimal nas je vpliv znižanja težišča na obliko krivulje statične stabilnosti, kot maksimalne
stabilnosti (αmax), delo prevrnitve ter kot prevrnitve (αp). Prijemališča vzgona in izravnalne
ročice so bile izmerjene na že opisan način. Na sliki 38 so prikazana izmerjena prijemališča
vzgona za pozitivno stabilnost kvadra z znižanim težiščem.

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 38
Slika 38: Prijemališča vzgona za pozitivno stabilnost kvadra z nizkim težiščem.
Dolžine izravnalnih ročic r* so podane v preglednici 3.7. Krivulja stabilnosti je prikazana na
sliki 39.
Preglednica 3.7: Dolžine izravnalnih ročic za pozitivno stabilnost kvadra z nizkim težiščem.
α [°] GZ [mm]
0 0
5 18
8 27
15 35
22 41
32 44
43 44
57 41
74 35
91 22
106 11
114 3
122 0

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 39
Slika 39: Krivulja pozitivne statične stabilnosti za kvader z nizkim težiščem.
3.4.1 Delo nagiba
Delo nagiba izračunamo na enak način kot pri prejšnjih primerih. Tokrat bomo za izračun
upoštevali kar izmerjeno vrednost vertikalnega razmika prijemališča vzgona in težišča. Na
sliki 38 sta kotirani razdalji V0T in V12T, ki ju moramo odšteti:
𝑠 = 𝑉12𝑇 − 𝑉0𝑇 = 68 mm − 8 mm = 60 mm. (44)
Sedaj lahko izračunamo delo nagiba do kota prevrnitve:
𝐴𝛼𝑝 = 𝐹𝑣⃑⃑⃑⃑ ∙ 𝑠 = 𝑚𝑔𝑠 = 0,380 kg ∙ 9,81
m
s2∙ 0,06 m = 0,224 J. (45)
Za primerjavo začetne stabilnosti, bomo krivuljo integrirali do kota 10°. Enačba
aproksimirane funkcije za primer kvadra, ki jo bomo uporabili za integracijo in določitev
ploščine se glasi:
𝑦 = −19,2𝑥6 + 153,3𝑥5 − 471,6𝑥4 + 715,7𝑥3 − 588,3𝑥2 + 251,6𝑥 (46)
Vertikalni razmik prijemališča vzgona in težišča za nagib kvadra z nizkim težiščem pri kotu
10° znaša:
𝑠 = ∫ −19,2𝑥6 + 153,3𝑥5 − 471,6𝑥4 + 715,7𝑥3 − 588,3𝑥2 + 251,6𝑥0,18
0
𝑠 = (−19,2𝑥7
7 + 153,3
𝑥6
6 − 471,6
𝑥5
5 + 715,7
𝑥4
4 − 588,3
𝑥3
3 + 251,6
𝑥2
2)|
0
0,18
0
5
10
15
20
25
30
35
40
45
50
0 10 20 30 40 50 60 70 80 90 100 110 120 130
GZ (α)

Statična stabilnost jadrnice 3 PRAKTIČNI DEL
B. Uršič 40
𝑠 = 3,102 mmRad.
Delo za nagib polvalja do kota 10° znaša 0,012 J.
3.4.2 Interpretacija rezultatov
Z znižanjem težišča pri ozkem kvadru smo dosegli predvsem izboljšanje absolutne stabilnosti,
torej povečanje kota prevrnitve (αp pri visokem težišču znaša 100°, pri nizkem pa 122°). S
tem se je povečalo tudi delo, potrebno za prevrnitev modela (delo prevrnitve pri nizkem
težišču znaša 0,142 J, pri visokem pa 0,224 J). Podaljšala se je tudi izravnalna ročica pri kotu
maksimalne stabilnosti (r*(αmax) je pri visokem težišču dolga 40 mm, medtem ko je pri
nizkem težišču dolga 44 mm). Z znižanjem težišča se je bistveno izboljšala tudi začetna
stabilnost, kar smo pokazali s primerjavo razmikov težišča in prijemališča vzgona in dela za
kot nagiba 10°.

Statična stabilnost jadrnice 4 ZAKLJUČEK
B. Uršič 41
4 Zaključek
V diplomskem delu sem teoretično in praktično obravnaval osnovne spremenljivke, s katerimi
opisujemo statično stabilnost plovila. V začetku diplomskega dela sem razjasnil pojme, ki se
nanašajo na osnove plavanja teles. Nadaljeval sem z definicijo izravnalnih ročic, ki se jim
med nagibanjem plovila spreminja dolžina. Preko izravnalnih ročic sem pojasnil izravnalni
navor in krivuljo statične stabilnosti, ki jo uporabljamo pri opisovanju stabilnosti plovila za
nagibanje. Pomen takih krivulj sem predstavil na primeru tipične krivulje stabilnosti za
jadrnico.
Pri opisovanju nagibanja plovila sem naletel na problem analitičnega določanja položaja
vodne gladine za različne kote nagiba. Problem sem rešil za primer poenostavljenega trupa s
pravokotnim presekom. Za nazoren prikaz premikanja osi vrtenja plovila sem uporabil
program Geogebra, ki omogoča animacijo tega geometrijskega problema. Tako sem v
koordinatnem sistemu kvadra določil pot premikanja osi vrtenja, ki ni trivialna. Ko sem
poznal položaj vodne gladine za vse kote, sem lahko narisal tudi graf skupne potencialne
energije za ta primer.
V teoretičnem delu sem opisal tudi pomen začetnega metacentra, ki ga uporabljamo za oceno
statične stabilnosti plovil. Glede na prečno stabilnost sem opisal tri načine plavanja telesa in
njihovo povezanost z začetnim metacentrom. Nato sem statično stabilnost obravnaval z vidika
treh osnovnih spremenljivk – balasta, širine trupa in oblike trupa. Vpliv spremenljivk je bil
opisan tudi za realne jadrnice.
V praktičnem delu sem najprej predstavil metodo, s katero sem pokazal, da je navor zunanjih
sil, ki jadrnico nagiba, nasprotno enak navoru dvojice sil teže in vzgona. Na ta način sem
eksperimentalno določil izravnalni navor za izbran kot brez računanja prijemališča vzgona. V
nadaljevanju sem s pomočjo treh poenostavljenih modelov trupov eksperimentalno določil
položaje vodnih gladin za različne kote nagiba ter izrisal krivuljo stabilnosti za vsako od
spremenljivk (balast, oblika in širina). S pomočjo krivulj sem nazorno pokazal veljavnost
teoretičnih predpostavk, opisanih v prvem delu diplome ter ugotovitve povezal z realnimi
plovili. Ugotovili smo, da nižanje težišča vpliva predvsem na povečanje kota prevrnitve,
širina trupa pa predvsem na začetno stabilnost. Poenostavljen model trupa v obliki polvalja
ima manjšo začetno stabilnost, vendar se prevrne pri večjem kotu. Ali nasprotno – kvader je
pri majhnih kotih bolj stabilen, vendar prej doseže kot prevrnitve.
Čeprav se zdi, da je problem opisovanja statične stabilnosti plovila enostaven, se že na
preprostem primeru modela trupa s pravokotnim presekom pokaže, da temu ni tako. V
diplomi sem pokazal, da je mogoče vse pojme, povezane s plovnostjo in nagibanjem plovila
razumeti že s pomočjo poenostavljenega trupa v obliki homogenega kvadra.
V nadaljevanju raziskovanja bi bilo smiselno:
ob poznavanju premikanja osi vrtenja natančno določiti vztrajnostni polmer ter
izračunati nihajni čas nagiba za primer kvadra in polvalja,

Statična stabilnost jadrnice 4 ZAKLJUČEK
B. Uršič 42
povezati krivuljo stabilnosti s nihajnim časom nagiba,
analitično določiti krivuljo statične stabilnosti za primer kvadra, polvalja in tudi
kompleksnejših oblik.

Statična stabilnost jadrnice 5 LITERATURA
B. Uršič 43
5 Literatura
[1] [Elektronski]. Dostopno na: https://en.wikipedia.org/wiki/Ship_motions. [Poskus
dostopa: 25. 7. 2015].
[2] N. Petrovič, Nauk o ladji, Portorož: Fakulteta za pomorstvo in promet, 2003.
[3] D. Phillips-Birt, Sailing yacht design, London: Adlard Coles, 1971.
[4] [Elektronski]. Dostopno na: http://marine.marsh-design.com/content/understanding-
monohull-sailboat-stability-curves. [Poskus dostopa: 20. 6. 2015].
[5] [Elektronski]. Dostopno na: http://www.wavetrain.net/boats-a-gear/471-modern-
sailboat-design-quantifying-stability. [Poskus dostopa: 20. 6. 2015].
[6] J. M. a. J. Kliava, „Metacenter and ship stability,“ American Journal of Physics, let.
78, Julij, str. 738 - 747, 2010.
[7] J. K. a. J. Megel, „Non-uniqueness of the point of application of the buoyancy
force,“ European journal of physics, let. 31, Maj, str. 741 - 762, 2010.
[8] J. Stropnik, Hidromehanika, Ljubljana: Tehniška založba Slovenije, 1999.
[9] [Elektronski]. Dostopno na: file:///D:/My%20Documents/Downloads/PPPP-
Stabilnost_splosno_nasedanje_vdor.pdf . [Poskus dostopa: 9. 7. 2015].
[10] [Elektronski]. Dostopno na: http://seaworm.narod.ru/2/Stab1.pdf. [Poskus dostopa:
9. 7. 2015].
[11] [Elektronski]. Dostopno na: http://www.wavetrain.net/boats-a-gear/458-modern-
sailboat-design-ballast-stability. [Poskus dostopa: 14. 7. 2015].
[12] B. Zalar, Težišča in vztrajnostni momenti, Ljubljana: DMFA, 2005.
[13] [Elektronski]. Dostopno na: http://www.wavetrain.net/boats-a-gear/454-modern-
sailboat-design-form-stability. [Poskus dostopa: 14. 7. 2015].
[14] [Elektronski]. Dostopno na: https://en.wikipedia.org/wiki/List_of_centroids [Poskus
dostopa: 10. 7. 2015].