Embed Size (px)
Citation preview
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Kočenje - uvod
Aspekti razmatranja procesa kočenja:
• Dinamičke performanse vozila pri kočenju PREDMET PROUČAVANJA DINAMIKE VOZILA
• Konstruktivne karakteristike kočnog sistema i njihov uticaj na kočne performanse vozila
• Uticaj vozača i uslova okoline na proces kočenja
• Pouzdanost, habanje i vek trajanja elemenata kočnog sistema (uticaj ispravnosti sistema na kočne performanse)
• Vibracije i buka pri kočenju (komfor)
• itd.
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Zadaci kočenja:
• smanjenje brzine vožnje (po potrebi do zaustavljanja) od interesa za DINAMIKU VOZILA
• sprečavanje povećanja brzine (na uzdužnom nagibu - nizbrdici) od interesa za razmatranje toplotnog opterećenja kočnog sistema
• držanje zaustavljenog vozila u mestu statički problem
Parametre procesa kočenja / kočne performanse određuje regulativa:
• norme ECE13
• Pravilnik o podeli motornih i priključnih vozila i tehničkim uslovima za vozila u saobraćaju na putevima (čl. 26. – 40.)
Kočenje - uvod
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
MK
FX
GT
rD
e
RZ
RX
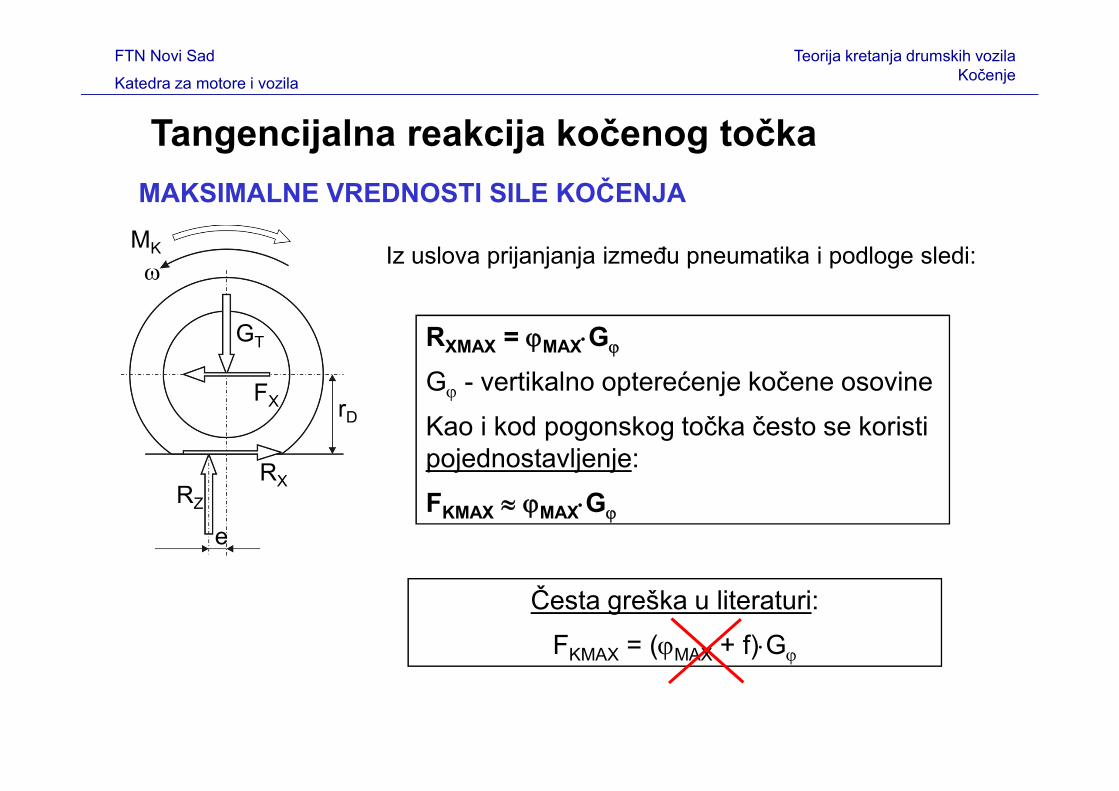
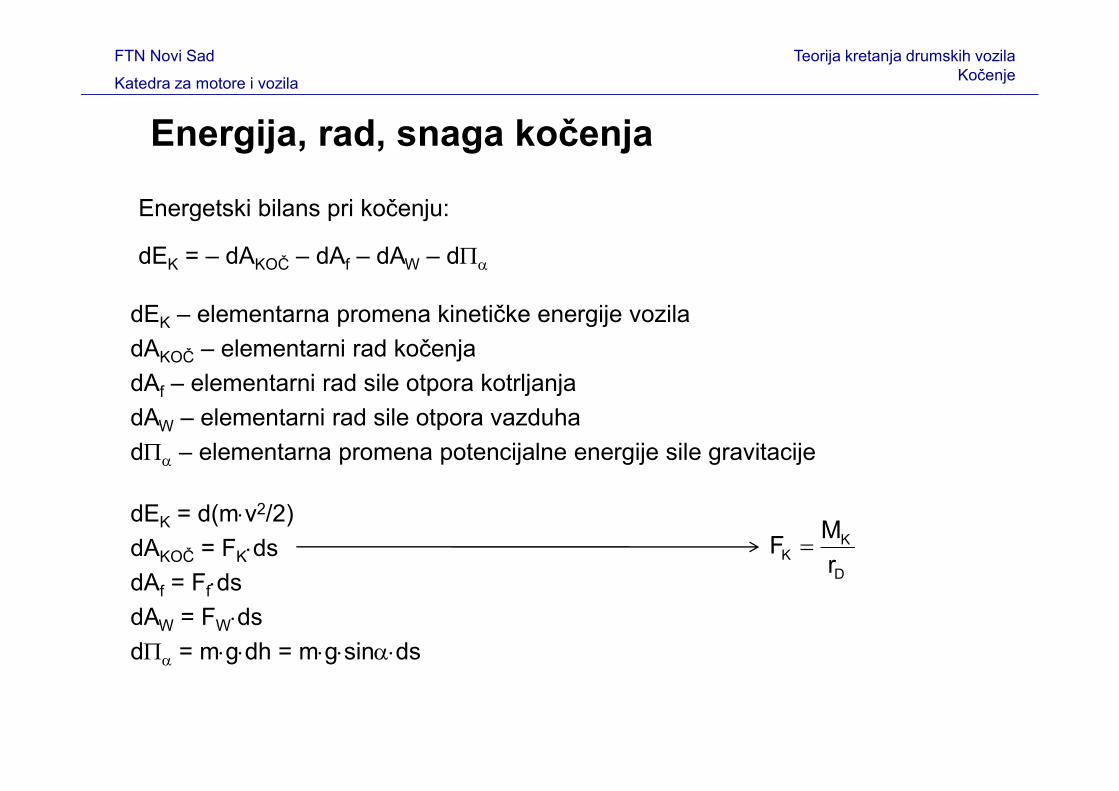
FK – kočna sila na točku fiktivna (računska!) veličina
K
D
K Fr
M definicija
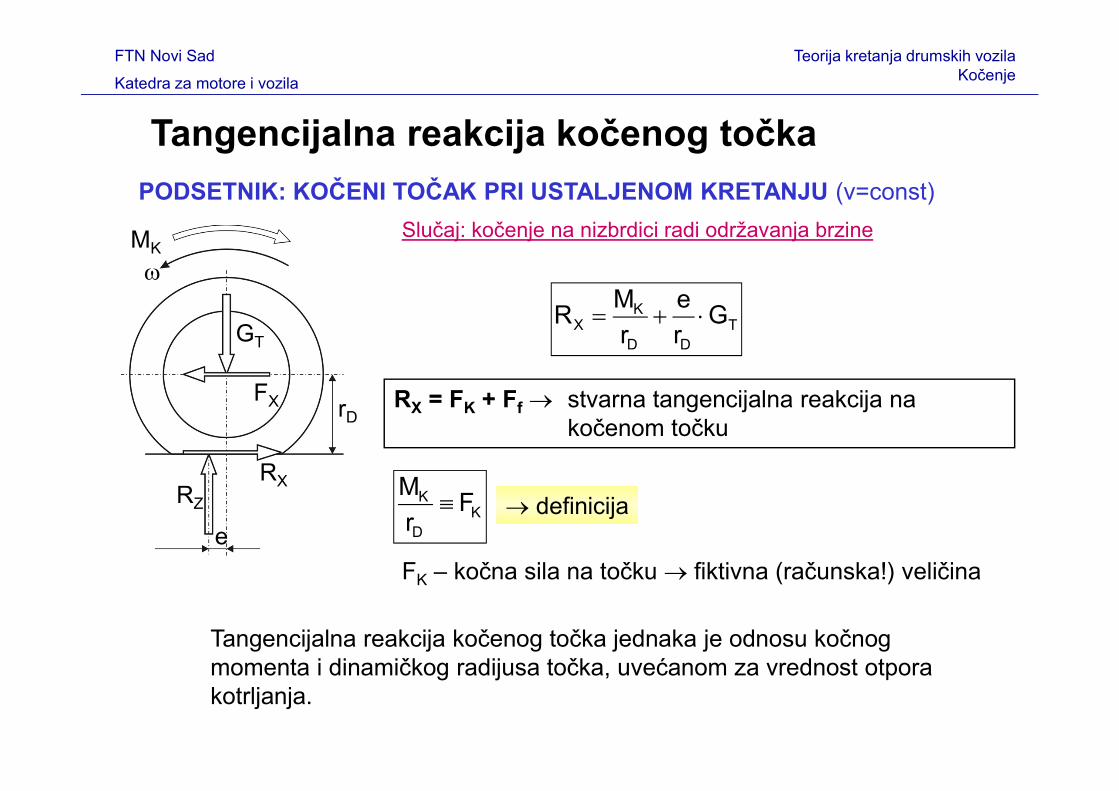
PODSETNIK: KOČENI TOČAK PRI USTALJENOM KRETANJU (v=const)
Slučaj: kočenje na nizbrdici radi održavanja brzine
Tangencijalna reakcija kočenog točka
T
DD
KX G
r
e
r
MR
RX = FK + Ff stvarna tangencijalna reakcija na kočenom točku
Tangencijalna reakcija kočenog točka jednaka je odnosu kočnog momenta i dinamičkog radijusa točka, uvećanom za vrednost otpora kotrljanja.
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Tangencijalna reakcija kočenog točka
MK
FX
GT
rD
e
RZ
RX
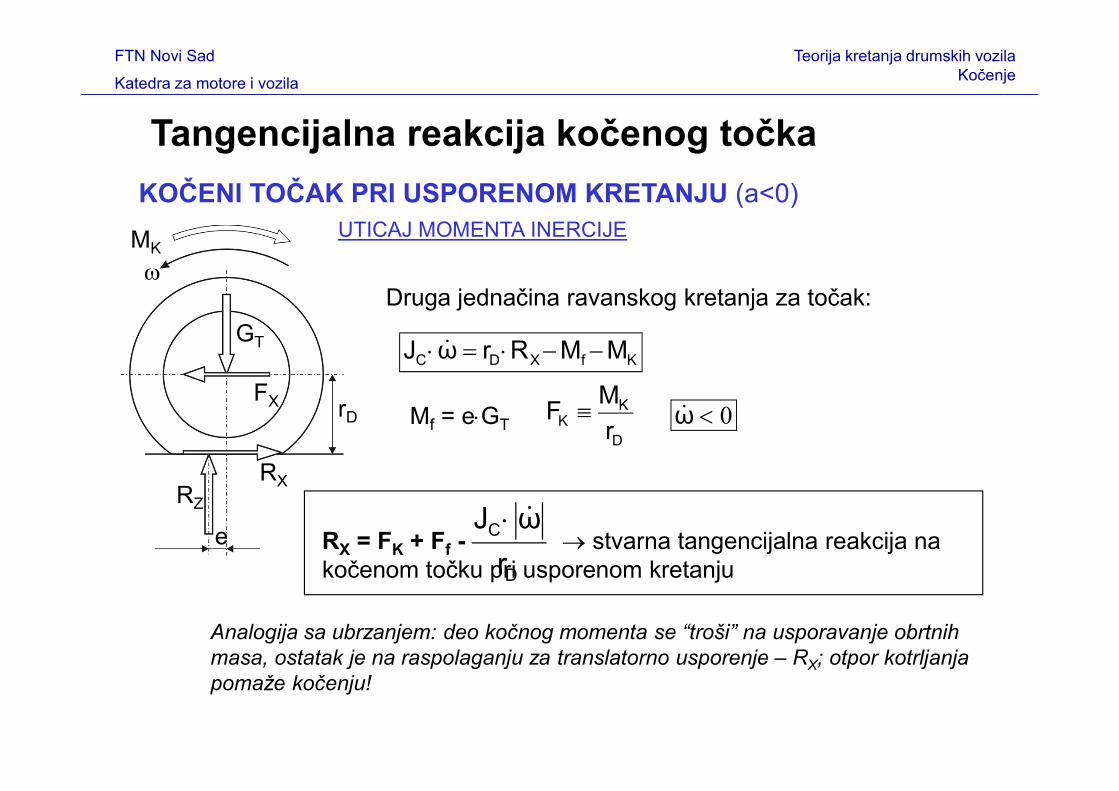
KOČENI TOČAK PRI USPORENOM KRETANJU (a<0)
Analogija sa ubrzanjem: deo kočnog momenta se “troši” na usporavanje obrtnih masa, ostatak je na raspolaganju za translatorno usporenje – RX; otpor kotrljanja pomaže kočenju!
D
KK
r
MF
RX = FK + Ff - stvarna tangencijalna reakcija na kočenom točku pri usporenom kretanju
Druga jednačina ravanskog kretanja za točak:
KfXDC MMRrωJ
Mf = eGT
D
C
r
ωJ
0ω
UTICAJ MOMENTA INERCIJE
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
RXMAX = MAXG
G - vertikalno opterećenje kočene osovine
Kao i kod pogonskog točka često se koristi pojednostavljenje:
FKMAX MAXG
Tangencijalna reakcija kočenog točka
MK
FX
GT
rD
e
RZ
RX
MAKSIMALNE VREDNOSTI SILE KOČENJA
Iz uslova prijanjanja između pneumatika i podloge sledi:
Česta greška u literaturi:
FKMAX = (MAX + f)G
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Energija, rad, snaga kočenja
Energetski bilans pri kočenju:
dEK = – dAKOČ – dAf – dAW – d
dEK – elementarna promena kinetičke energije vozila
dAKOČ – elementarni rad kočenja
dAf – elementarni rad sile otpora kotrljanja
dAW – elementarni rad sile otpora vazduha
d – elementarna promena potencijalne energije sile gravitacije
dEK = d(mv2/2)
dAKOČ = FKds
dAf = Ffds
dAW = FWds
d = mgdh = mgsinds
D
KK
r
MF
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
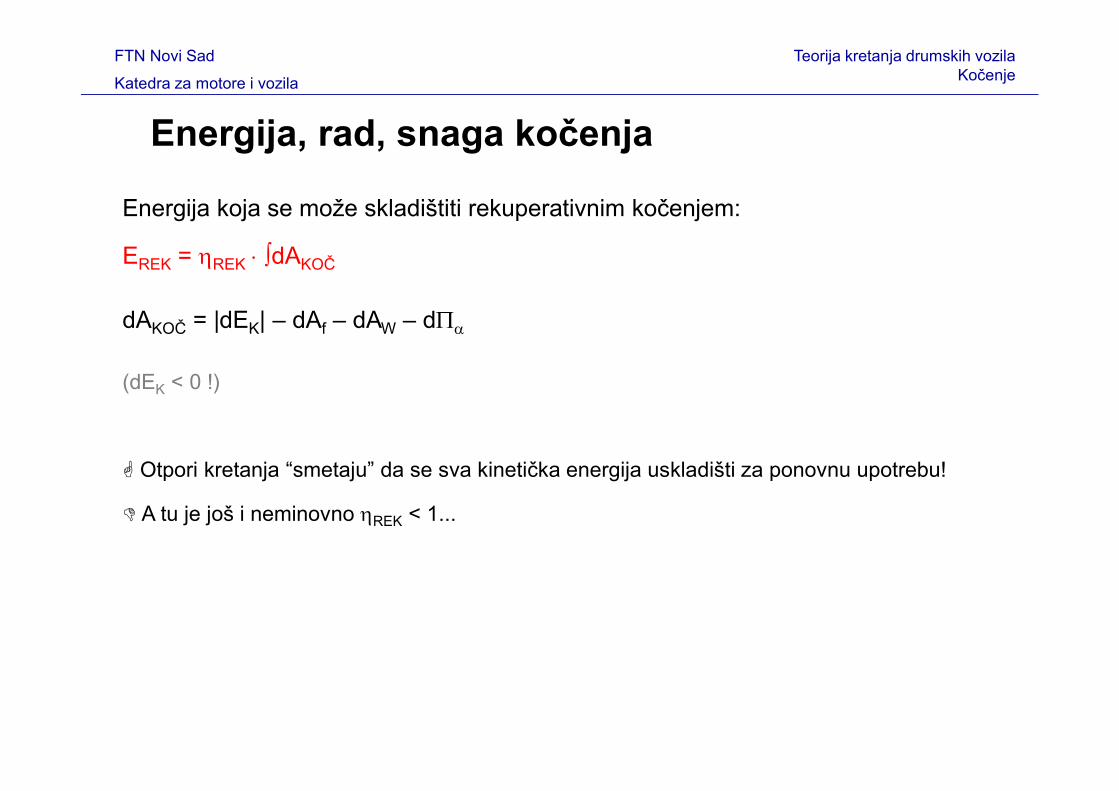
Energija, rad, snaga kočenja
Energija koja se može skladištiti rekuperativnim kočenjem:
EREK = REK dAKOČ
dAKOČ = |dEK| – dAf – dAW – d
Otpori kretanja “smetaju” da se sva kinetička energija uskladišti za ponovnu upotrebu!
A tu je još i neminovno REK < 1...
(dEK < 0 !)
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
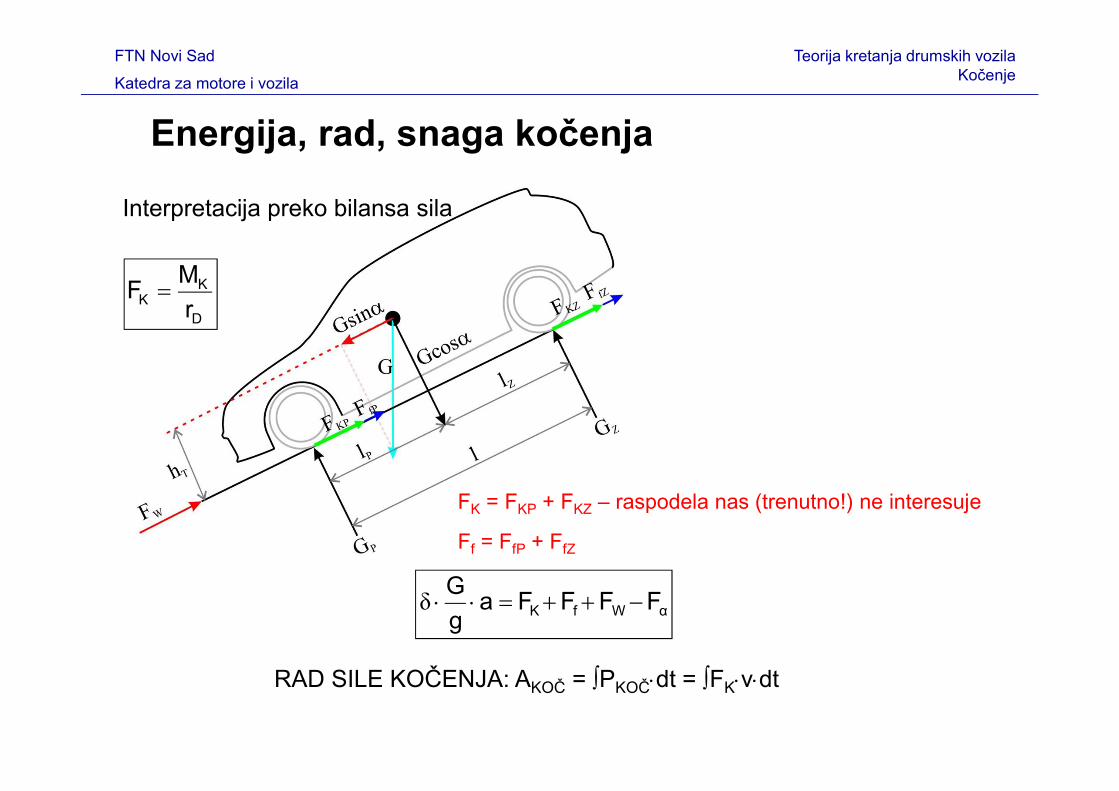
Energija, rad, snaga kočenja
αWfK FFFFag
Gδ
RAD SILE KOČENJA: AKOČ = PKOČdt = FKvdt
Interpretacija preko bilansa sila
FK = FKP + FKZ – raspodela nas (trenutno!) ne interesuje
Ff = FfP + FfZ
D
KK
r
MF

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Energija, rad, snaga kočenja
a ma
FKP + FfP
FKZ + FfZ
FW
αWfK FFFFag
Gδ
Posmatramo dva slučaja:
1) v=const, a=0; 2) a=const
Usvaja se: FW 0
RAD SILE KOČENJA: A = Pdt = FKvdt
1. α = 7% (tg α = 0,07 α 4); m = 16 t; f = 0,007; v = 30 km/h = const;
dužina puta L = 6 km ( trajanje 12 minuta, H = 420 m)
SNAGA KOČENJA: P = 84 kW; RAD KOČENJA: A = 60500 kJ
2. α = 0; m = 16 t; f = 0,007; v0 = 60 km/h; a = 5 m/s2 ( trajanje 3,3 s); 1;
SREDNJA SNAGA KOČENJA: PSR = 657 kW;
RAD KOČENJA: A = 2189 kJ
FK = ma - mgf + mgsin
Primer
= 1

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Energija, rad, snaga kočenja
1. SNAGA KOČENJA: P = 84 kW; trajanje 12 min;
RAD KOČENJA: A = 60500 kJ
HIPOTETIČKI PORAST TEMPERATURE FRIKCIONIH ELEMENATA: 400C
NEOPHODNA UPOTREBA RETARDERA!
2. SREDNJA SNAGA KOČENJA: PSR = 657 kW; trajanje 3,3s;
RAD KOČENJA: A = 2189 Kj
PORAST TEMPERATURE: 2025C
VAŽEĆI EVROPSKI I DOMAĆI PROPISI ZA RETARDER: podaci iz prethodnog primera pod 1)
α = 7%; m = 16 t; f = 0,007; v = 30 km/h = const na deonici puta dužina puta dužine L = 6 km

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
Prva faza – zakašnjenje, obuhvata:
• psihofizičku reakciju vozača
• odziv kočnog sistema – do trenutka početka porasta sile kočenja (poništavanje zazora, elastične deformacije elemenata, porast pritiska...)
Trajanje prve faze: t1 = vreme zakašnjenja
Druga faza – aktiviranje sistema
• porast pritiska, uspostavljanje reakcija veze na pojedinim elementima uključujući točak
Trajanje druge faze: t2 = vreme aktiviranja sistema
Treća faza – puno usporenje, a = aP
• sile kočenja dostigle punu vrednost dostignuto puno usporenje
Trajanje treće faze: t3 – vreme kočenja sa punim usporenjem
Napomena: puno usporenje je vrednost koja odgovara datom pritisku u hidrauličkom sistemu (tj. pritisku na pedalu kočnice); ne podrazumeva se obavezno da je reč o maksimalno mogućoj vrednosti sa stanovišta iskorišćenja prijanjanja
Proces kočenja se odvija po fazama:
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
Ukupni pređeni put i potrebno vreme za zaustavljanje vozila:
sZ – put zaustavljanja
tZ – vreme zaustavljanja
Pređeni put i vreme u fazi punog usporenja:
sK – put kočenja
tK – vreme kočenja
Prva faza – zakašnjenje, i druga faza – aktiviranje sistema
Zbog subjektivnog uticaja vozača i većeg broja parametara vozila koji se teško mogu uzeti u obzir, koriste se empirijski / statistički podaci.
Treća faza – vreme punog usporenja (sK,tK), a = aP
Vrši se analitičko razmatranje prema zakonima mehanike i dinamike vozila.
OBUHVATA SVE TRI FAZE
OBUHVATA SAMO FAZU PUNOG USPORENJA
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
Ukupni pređeni put i potrebno vreme za zaustavljanje vozila:
sZ – put zaustavljanja
tZ – vreme zaustavljanja
Pređeni put i vreme u fazi punog usporenja:
sK – put kočenja
tK – vreme kočenja
Prva faza – zakašnjenje, i druga faza – aktiviranje sistema
Zbog subjektivnog uticaja vozača i većeg broja parametara vozila koji se teško mogu uzeti u obzir, koriste se empirijski / statistički podaci.
Treća faza – vreme punog usporenja (sK,tK), a = aP
Vrši se analitičko razmatranje prema zakonima mehanike i dinamike vozila.
OBUHVATA SVE TRI FAZE
OBUHVATA SAMO FAZU PUNOG USPORENJA
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
a (m/s2)
v (m/s)
s (m)
s1
s2
s3
t (s)
t (s)
t (s)
t1
t2 t3
ti
aP
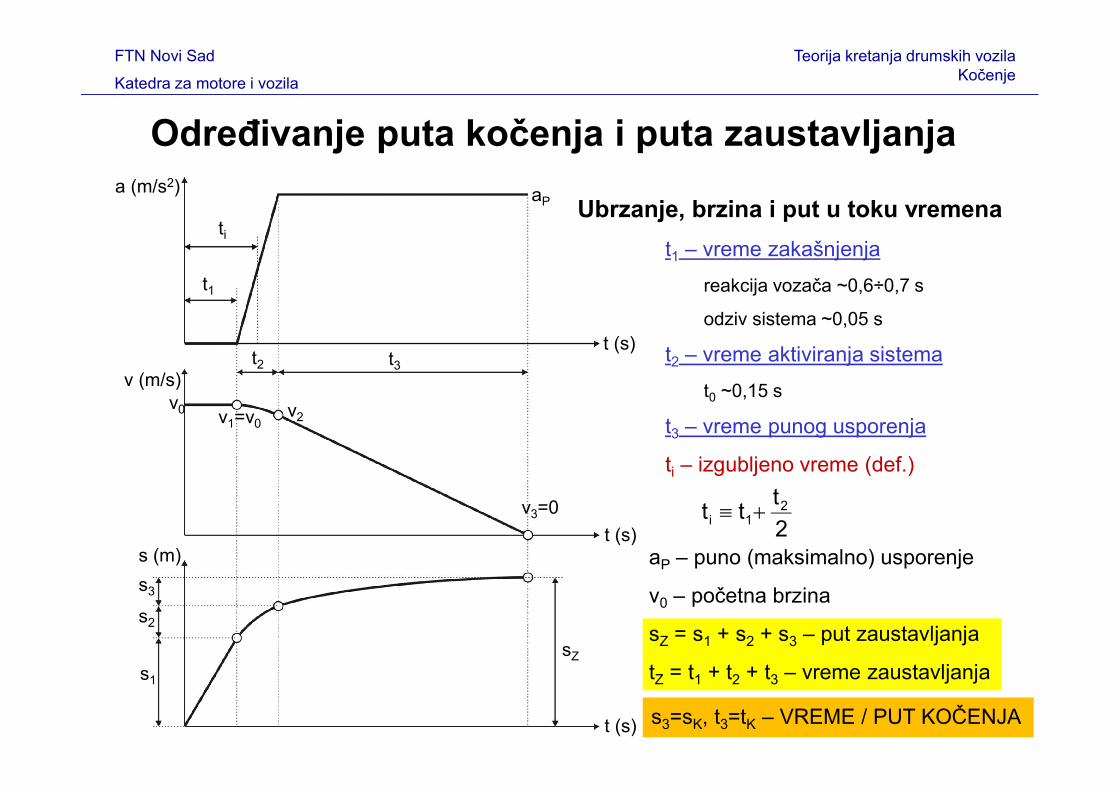
t1 – vreme zakašnjenja
reakcija vozača ~0,6÷0,7 s
odziv sistema ~0,05 s
t2 – vreme aktiviranja sistema
t0 ~0,15 s
t3 – vreme punog usporenja
ti – izgubljeno vreme (def.)
2
ttt 21i
sZ
aP – puno (maksimalno) usporenje
v0 – početna brzina
sZ = s1 + s2 + s3 – put zaustavljanja
tZ = t1 + t2 + t3 – vreme zaustavljanja
v0
Ubrzanje, brzina i put u toku vremena
v1=v0 v2
v3=0
s3=sK, t3=tK – VREME / PUT KOČENJA
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
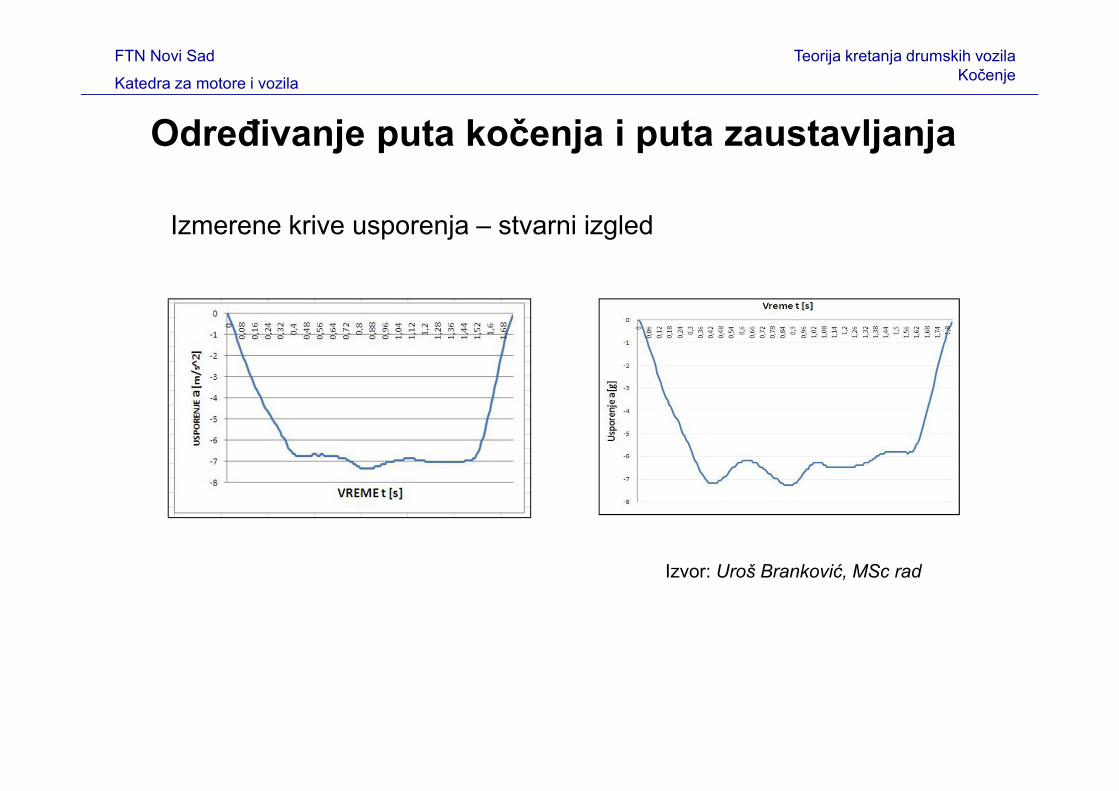
Izmerene krive usporenja – stvarni izgled
Izvor: Uroš Branković, MSc rad
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
a (m/s2)
v (m/s)
s (m)
s1
s2
s3
t (s)
t (s)
t (s)
t1
t2 t3
ti
a = aP
sZ
v1 = v0
v2 v0
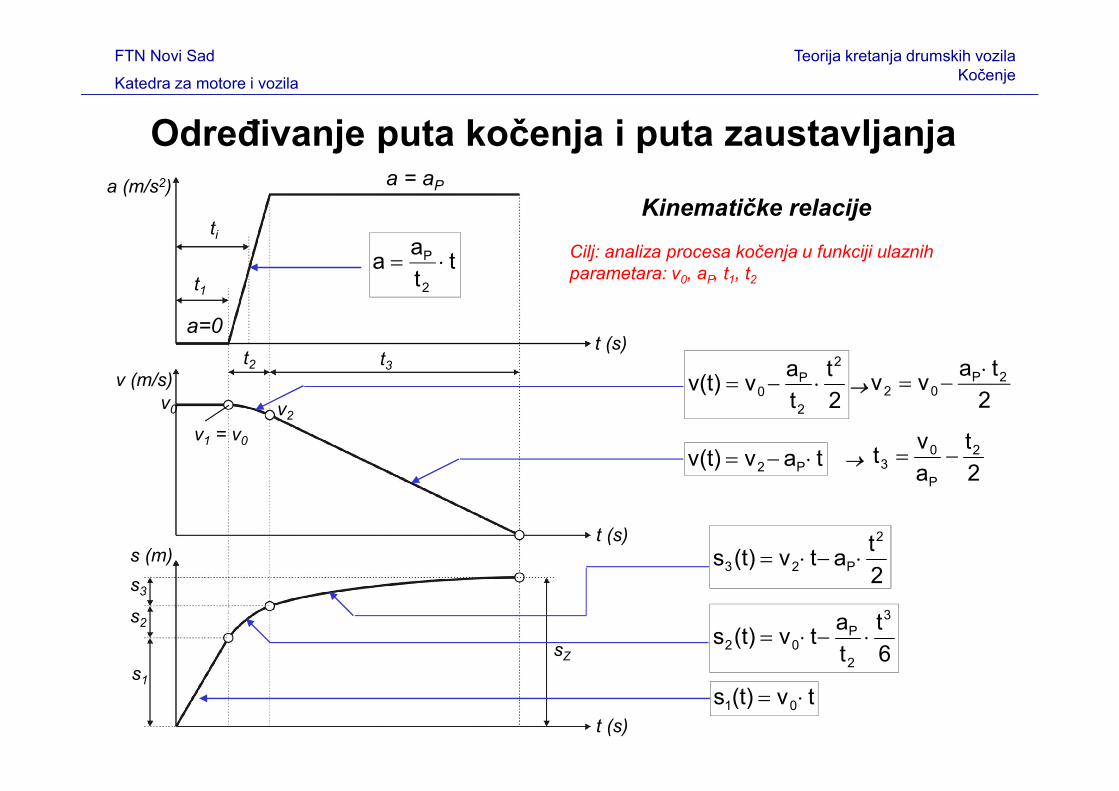
Kinematičke relacije
tt
aa
2
P
2
t
t
avv(t)
2
2
P0
tavv(t) P2
tv(t)s 01
6
t
t
atv(t)s
3
2
P02
2
tatv(t)s
2
P23
a=0
2
tavv 2P
02
2
t
a
vt 2
P
03
Cilj: analiza procesa kočenja u funkciji ulaznih parametara: v0, aP, t1, t2
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
s (m)
s1
s2
s3
t (s)
sZ
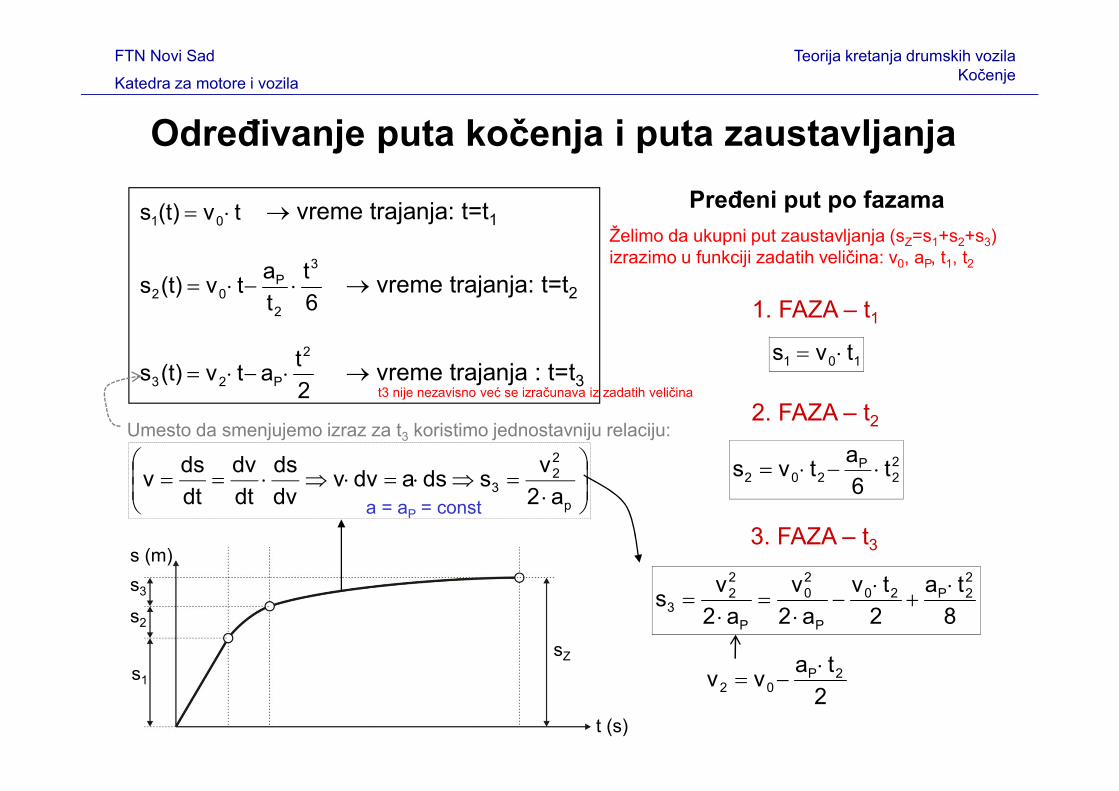
101 tvs
1. FAZA – t1
2. FAZA – t2
3. FAZA – t3
Pređeni put po fazama
22
P202 t
6
atvs
8
ta
2
tv
a2
v
a2
vs
22P20
P
20
P
22
3
tv(t)s 01
6
t
t
atv(t)s
3
2
P02
2
tatv(t)s
2
P23
vreme trajanja: t=t1
vreme trajanja: t=t2
vreme trajanja : t=t3
p
22
3a2
vsdsadvv
dv
ds
dt
dv
dt
dsv
2
tavv 2P
02
a = aP = const
Umesto da smenjujemo izraz za t3 koristimo jednostavniju relaciju:
Želimo da ukupni put zaustavljanja (sZ=s1+s2+s3) izrazimo u funkciji zadatih veličina: v0, aP, t1, t2
t3 nije nezavisno već se izračunava iz zadatih veličina
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
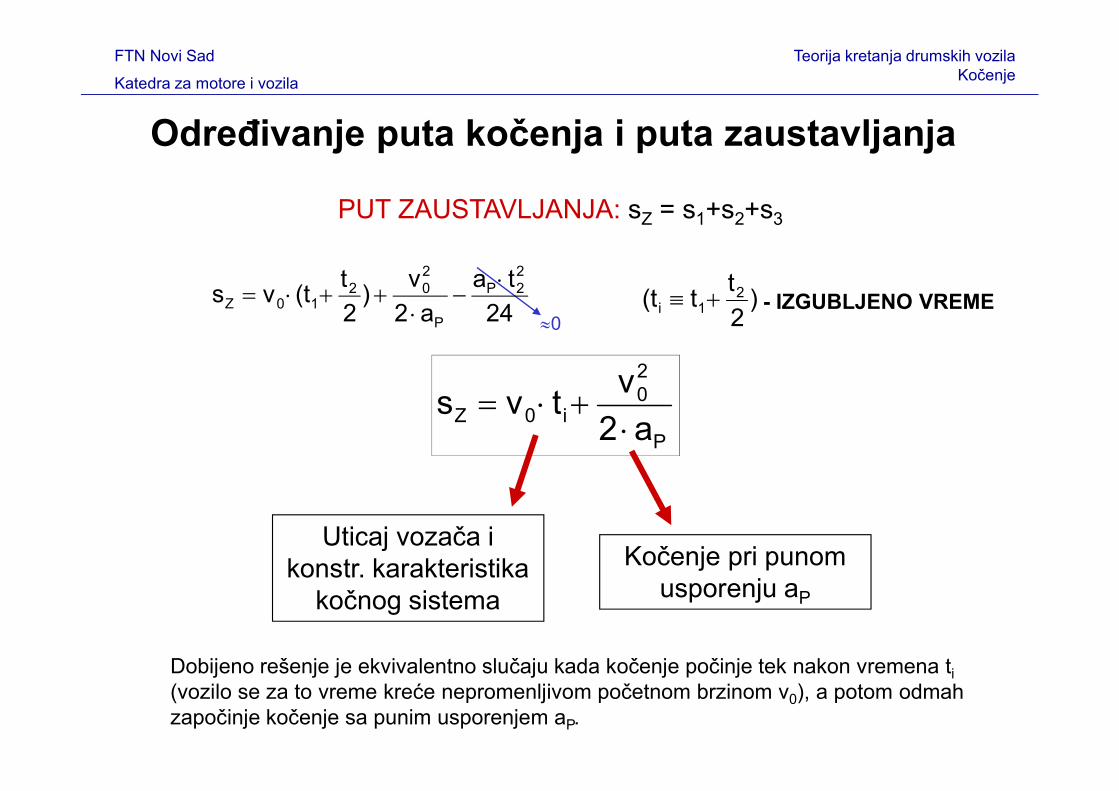
PUT ZAUSTAVLJANJA: sZ = s1+s2+s3
0 24
ta
a2
v)
2
t(tvs
22P
P
202
10Z
P
20
i0Za2
vtvs
)2
tt(t 21i
Uticaj vozača i konstr. karakteristika
kočnog sistema
Kočenje pri punom usporenju aP
Dobijeno rešenje je ekvivalentno slučaju kada kočenje počinje tek nakon vremena ti (vozilo se za to vreme kreće nepromenljivom početnom brzinom v0), a potom odmah započinje kočenje sa punim usporenjem aP.
- IZGUBLJENO VREME
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Određivanje puta kočenja i puta zaustavljanja
a (m/s2)
t (s)
t (s)
t1
ti
2
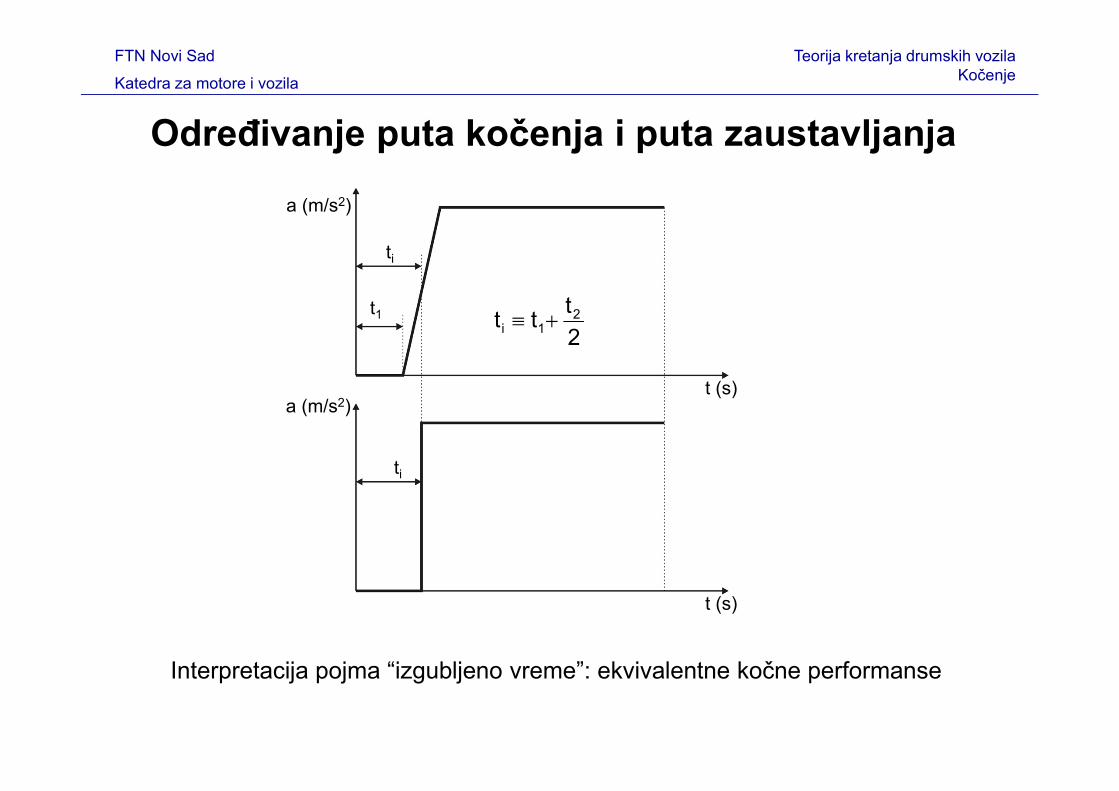
ttt 21i
ti
Interpretacija pojma “izgubljeno vreme”: ekvivalentne kočne performanse
a (m/s2)

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
PUT ZAUSTAVLJANJA:
P
20
i0Za2
vtvs
PUT KOČENJA: P
20
Ka2
vs
Određivanje puta kočenja i puta zaustavljanja
Statistika, empirija…
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
s
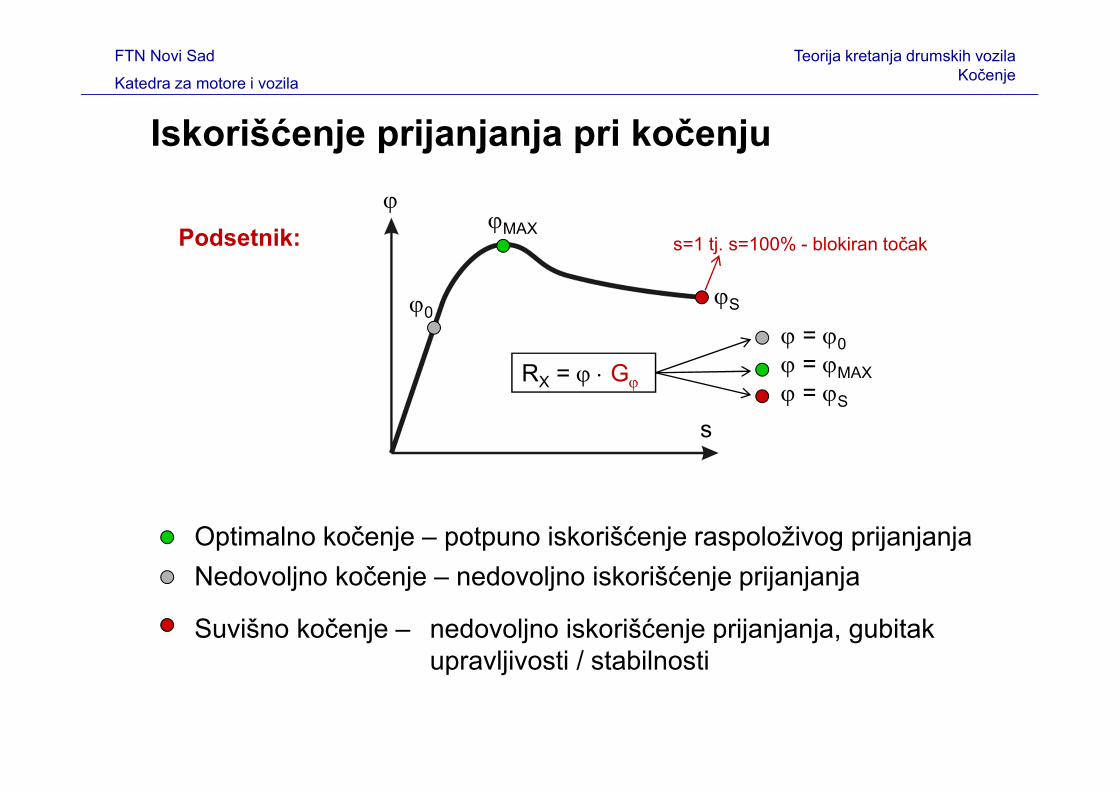
Optimalno kočenje – potpuno iskorišćenje raspoloživog prijanjanja
Nedovoljno kočenje – nedovoljno iskorišćenje prijanjanja
Suvišno kočenje – nedovoljno iskorišćenje prijanjanja, gubitak upravljivosti / stabilnosti
MAX
S
Podsetnik:
Iskorišćenje prijanjanja pri kočenju
0
RX = G
= 0
= MAX
= S
s=1 tj. s=100% - blokiran točak
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
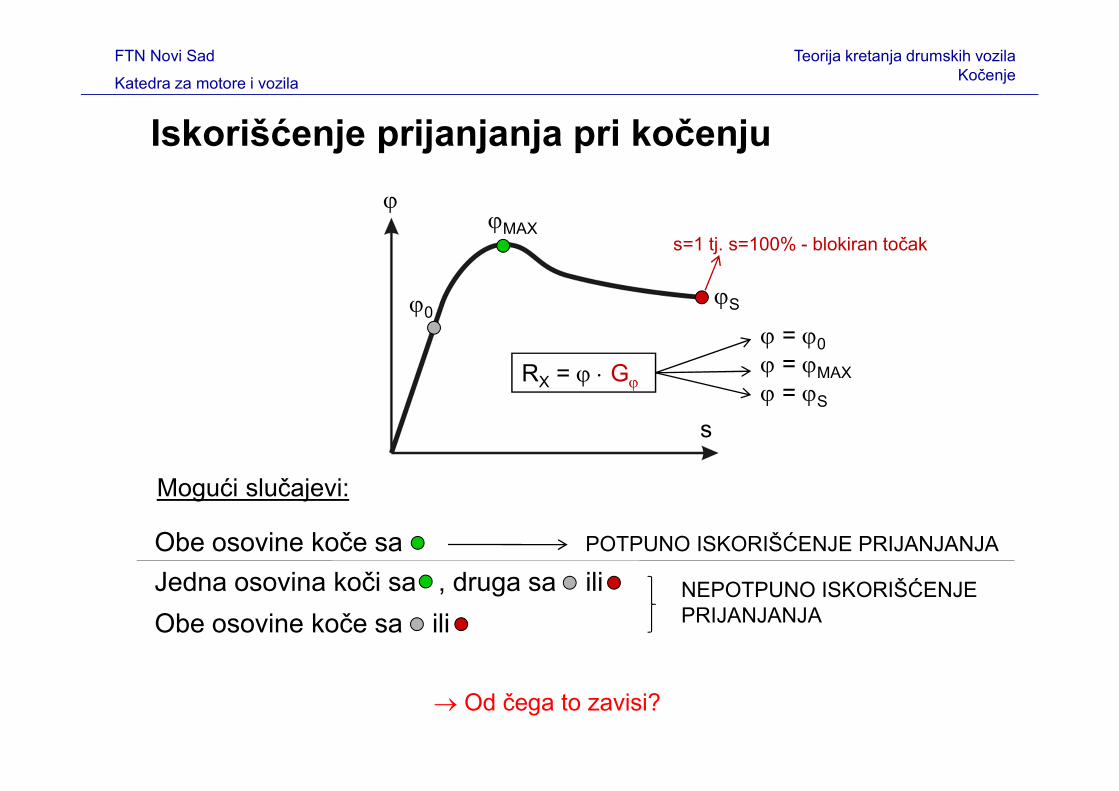
Iskorišćenje prijanjanja pri kočenju
s
MAX
S
RX = G
Obe osovine koče sa
Jedna osovina koči sa , druga sa ili
Obe osovine koče sa ili
Mogući slučajevi:
POTPUNO ISKORIŠĆENJE PRIJANJANJA
NEPOTPUNO ISKORIŠĆENJE PRIJANJANJA
= 0
= MAX
= S
0
Od čega to zavisi?
s=1 tj. s=100% - blokiran točak
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
UTICAJ KONSTRUKCIJE KOČNOG SISTEMA
• Posmatra se hidraulični kočni sistem bez regulacije pritiska po osovinama / točkovima
• Kočni moment raste proporcionalno porastu normalne sile između frikcionih i obrtnih elemenata
• Ova normalna sila raste proporcionalno porastu pritiska u kočnoj instalacji pi
• Može se usvojiti:
MKP = CP pi – kočni moment na prednjoj osovini
MKZ = CZ pi – kočni moment na zadnjoj osovini
CP, CZ – karakteristike kočnog sistema
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
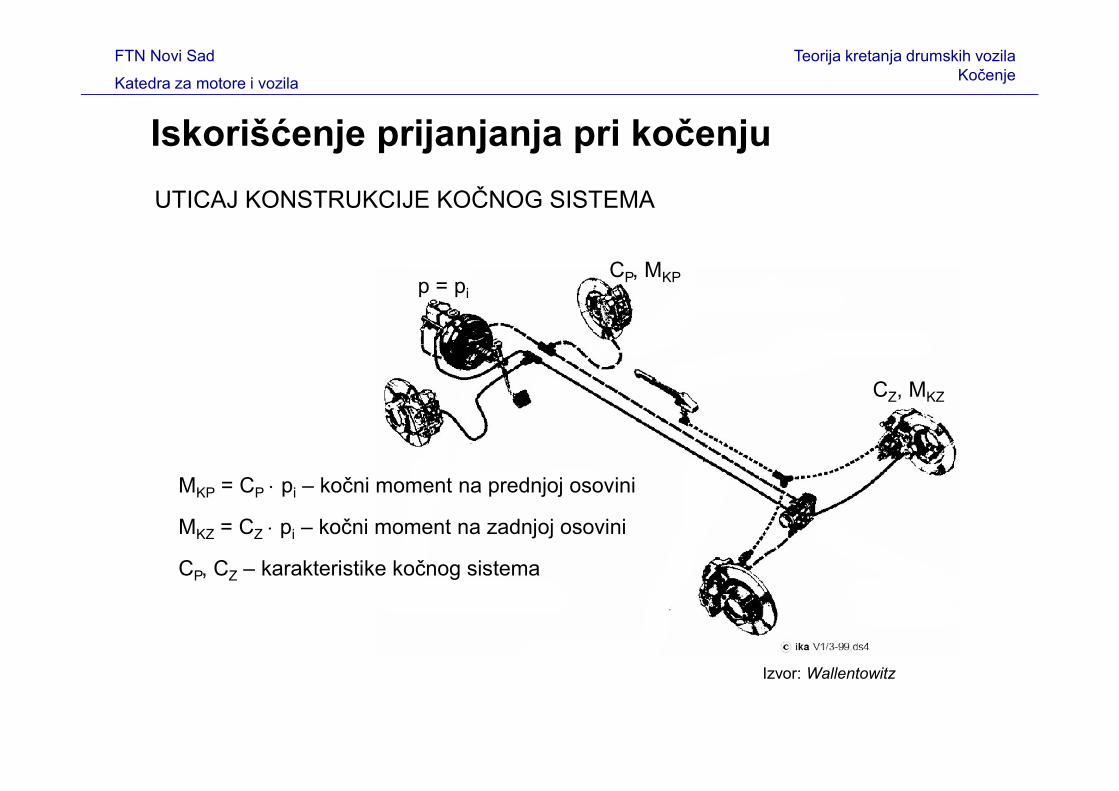
UTICAJ KONSTRUKCIJE KOČNOG SISTEMA
MKP = CP pi – kočni moment na prednjoj osovini
MKZ = CZ pi – kočni moment na zadnjoj osovini
CP, CZ – karakteristike kočnog sistema
CP, MKP
CZ, MKZ
p = pi
Izvor: Wallentowitz
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
UTICAJ KONSTRUKCIJE KOČNOG SISTEMA
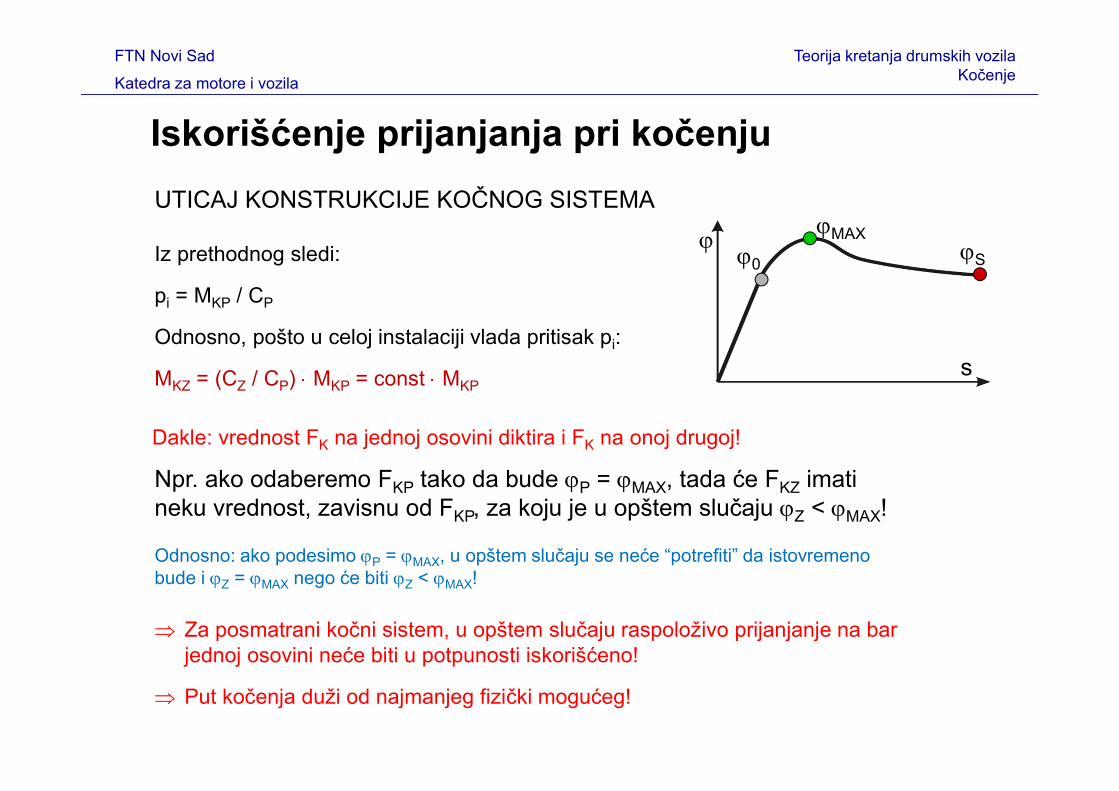
Iz prethodnog sledi:
pi = MKP / CP
Odnosno, pošto u celoj instalaciji vlada pritisak pi:
MKZ = (CZ / CP) MKP = const MKP
Dakle: vrednost FK na jednoj osovini diktira i FK na onoj drugoj!
Npr. ako odaberemo FKP tako da bude P = MAX, tada će FKZ imati neku vrednost, zavisnu od FKP, za koju je u opštem slučaju Z < MAX!
s
MAX
S 0
Odnosno: ako podesimo P = MAX, u opštem slučaju se neće “potrefiti” da istovremeno bude i Z = MAX nego će biti Z < MAX!
Za posmatrani kočni sistem, u opštem slučaju raspoloživo prijanjanje na bar jednoj osovini neće biti u potpunosti iskorišćeno!
Put kočenja duži od najmanjeg fizički mogućeg!
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
Uvode se oznake:
zg
a - kočni koeficijent (oznaka korišćena u EU i ECE regulativi)
aMAX – maksimalno usporenje ostvarljivo pri potpunom iskorišćenju prijanjanja na obe osovine - P = Z = MAX
aGr aMAX – granično (najveće) usporenje ostvarljivo u posmatranim uslovima (vozilo, kočni sistem, podloga - ,)
aP aGr – puno usporenje za dati pritisak u kočnom sistemu (stacionarna vrednost)
zMAX = aMAX / g; zGr = aGr / g; zP = aP / g

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
Jednačina kretanja vozila u izvornom obliku (II Nj. z.):
RX = G = FK + Ff -
D
EKV
r
ωJ
Tangencijalna reakcija kočenog točka:
Posmatrajući slučaj =0 i usvajajući FW0, dobijamo:
Gz = PGP + ZGZ
Stvarne tangencijalne reakcije točkova obuhvataju uticaj:
• kočnog momenta
• otpora kotrljanja
• inercije obrtnih masa ( koef. se ne pojavljuje u j-ni kretanja!)
ma = Fi Gz = PGP + ZGZ + FW - Gsin
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
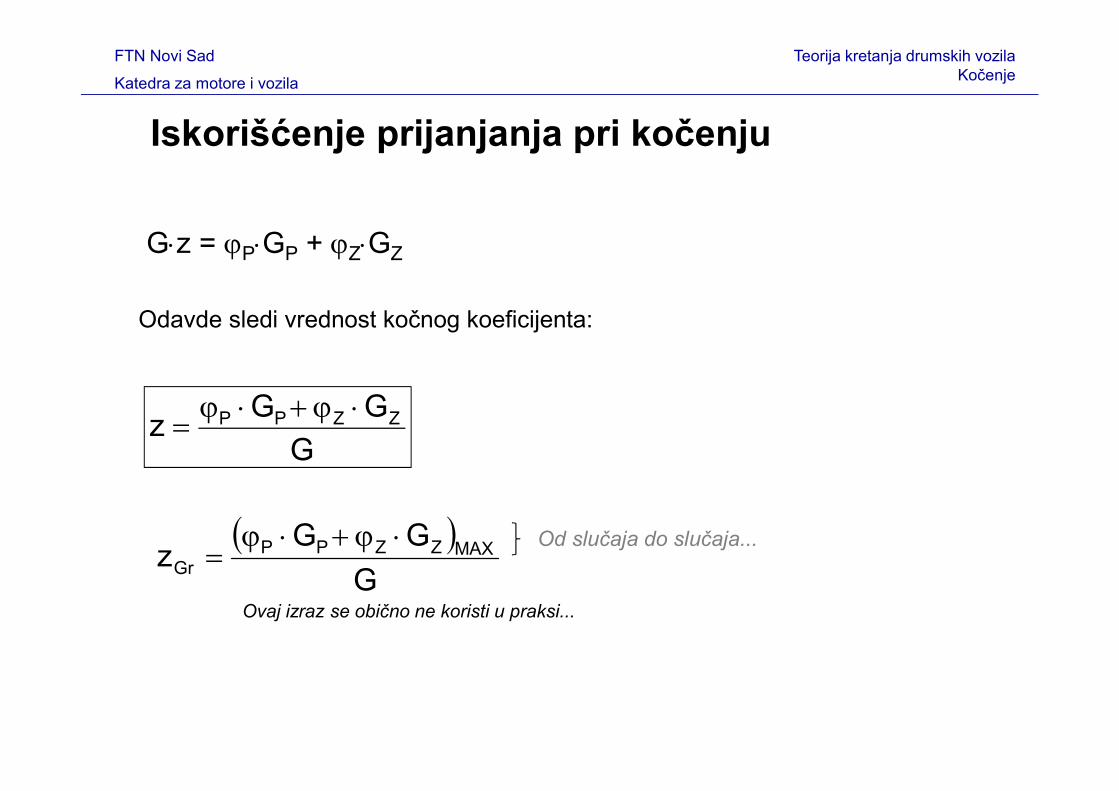
Gz = PGP + ZGZ
G
GGz ZZPP
Odavde sledi vrednost kočnog koeficijenta:
G
GGz MAXZZPP
Gr
Od slučaja do slučaja...
Ovaj izraz se obično ne koristi u praksi...
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
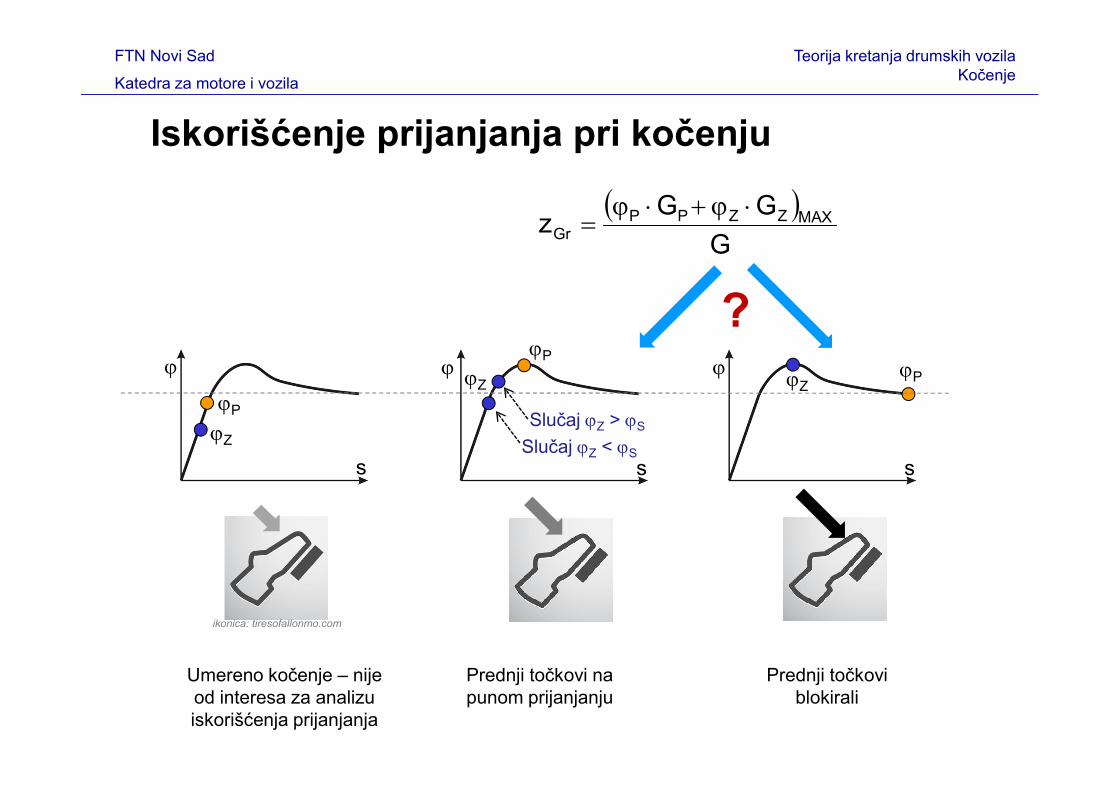
G
GGz MAXZZPP
Gr
s
Z
P
s
Z
P
s
Z P
ikonica: tiresofallonmo.com
?
Slučaj Z > S
Slučaj Z < S
Umereno kočenje – nije od interesa za analizu iskorišćenja prijanjanja
Prednji točkovi na punom prijanjanju
Prednji točkovi blokirali
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
s
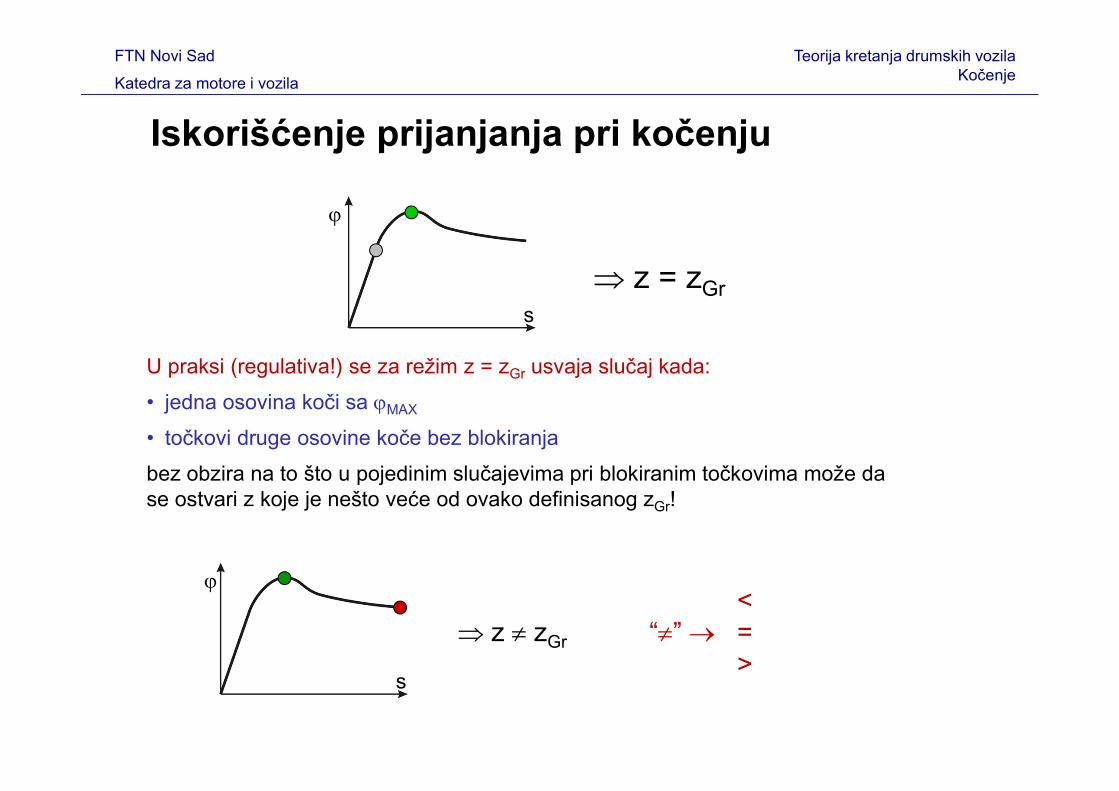
z = zGr
U praksi (regulativa!) se za režim z = zGr usvaja slučaj kada:
• jedna osovina koči sa MAX
• točkovi druge osovine koče bez blokiranja
bez obzira na to što u pojedinim slučajevima pri blokiranim točkovima može da se ostvari z koje je nešto veće od ovako definisanog zGr!
s
z zGr “”
< = >
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
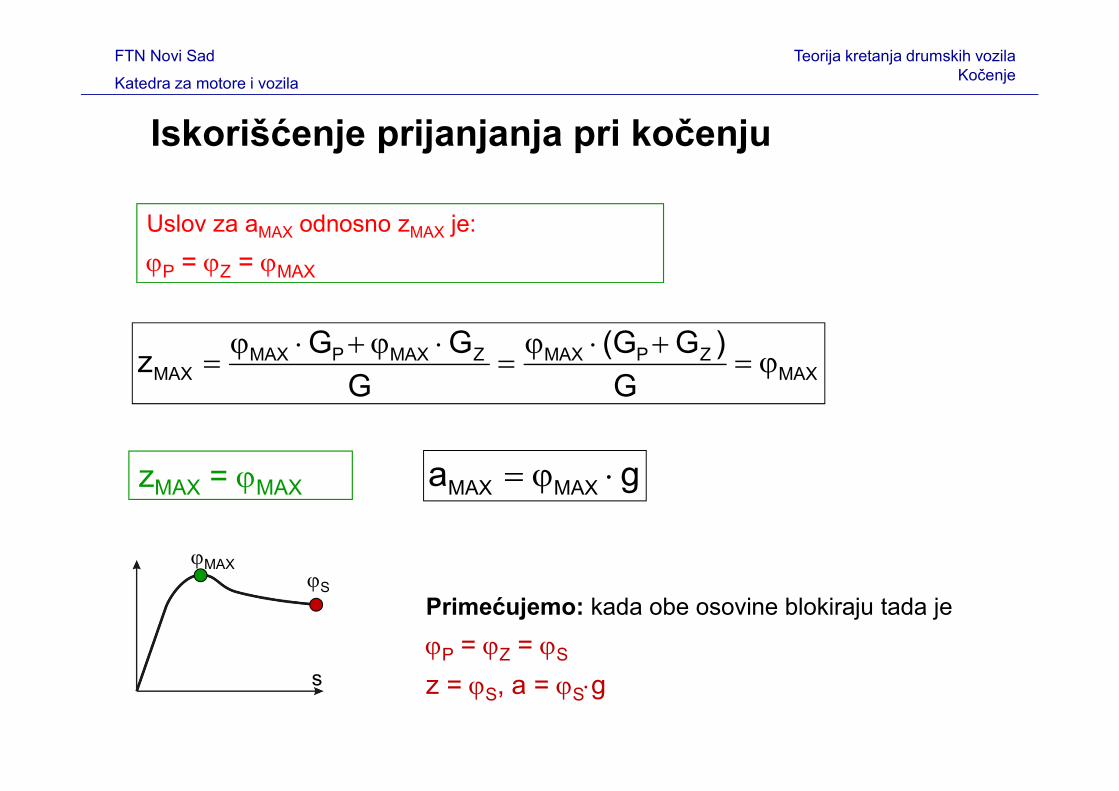
MAXZPMAXZMAXPMAX
MAXG
)G(G
G
GGz
Uslov za aMAX odnosno zMAX je:
P = Z = MAX
zMAX = MAX ga MAXMAX
s
MAX
S
Primećujemo: kada obe osovine blokiraju tada je
P = Z = S
z = S, a = Sg

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
1z
z
z
MAX
Gr
MAX
GrK
- efikasnost kočenja
• Efikasnost kočenja nije stalni parametar već zavisi od podloge i uslova opterećenja vozila
• Pri konstantnoj raspodeli FKP / FKZ, za date parametre vozila (lP, lZ, hT) postoji tačno jedna vrednost MAX za koju će biti K = 1 tj. zGr = zMAX = MAX
pokazaćemo u nastavku
zGr = K zMAX = K MAX
aGr = K aMAX = K MAX g
| g
Dakle: vrednost K = 1 se praktično može ostvariti samo na jednoj vrsti podloge.
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Iskorišćenje prijanjanja pri kočenju
Najkraći put kočenja u posmatranim uslovima – aP = aGr:
MAXK
20
P
20
Kg2
v
a2
vs
aP = aGr = K aMAX = g K zMAX = g K MAX
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Optimalna raspodela sila kočenja
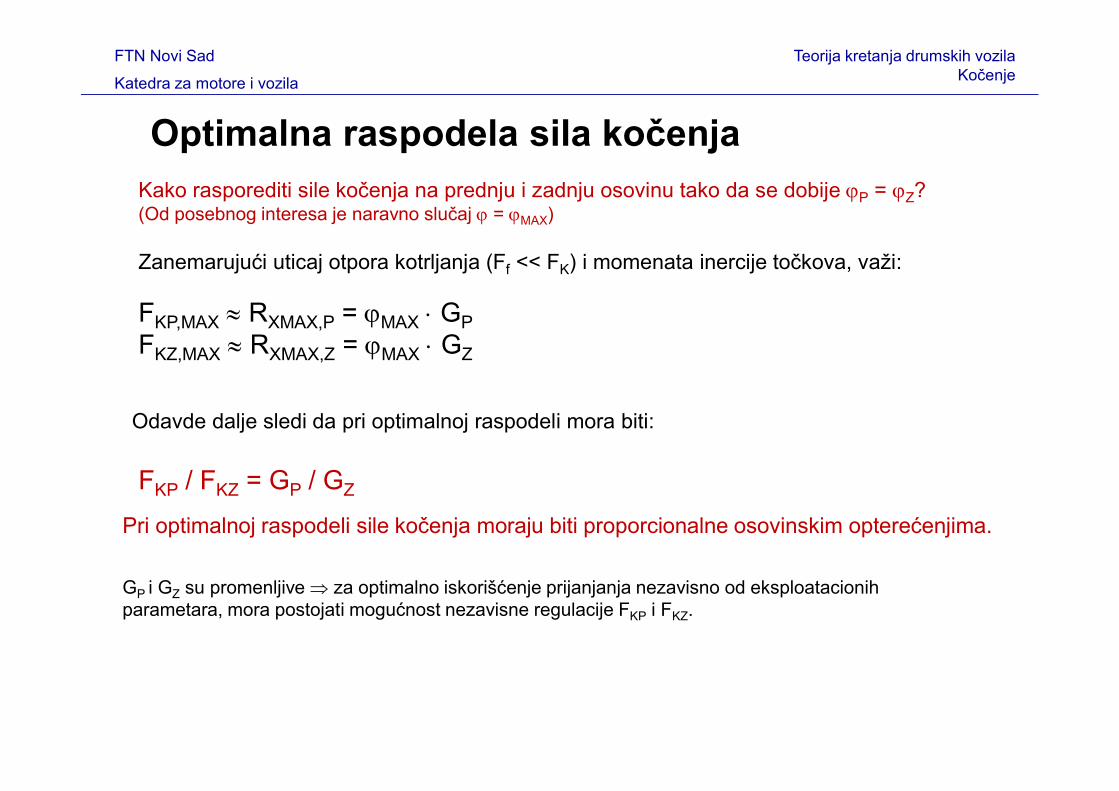
Pri optimalnoj raspodeli sile kočenja moraju biti proporcionalne osovinskim opterećenjima.
FKP,MAX RXMAX,P = MAX GP FKZ,MAX RXMAX,Z = MAX GZ
Zanemarujući uticaj otpora kotrljanja (Ff << FK) i momenata inercije točkova, važi:
Odavde dalje sledi da pri optimalnoj raspodeli mora biti:
FKP / FKZ = GP / GZ
Kako rasporediti sile kočenja na prednju i zadnju osovinu tako da se dobije P = Z? (Od posebnog interesa je naravno slučaj = MAX)
GP i GZ su promenljive za optimalno iskorišćenje prijanjanja nezavisno od eksploatacionih parametara, mora postojati mogućnost nezavisne regulacije FKP i FKZ.
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
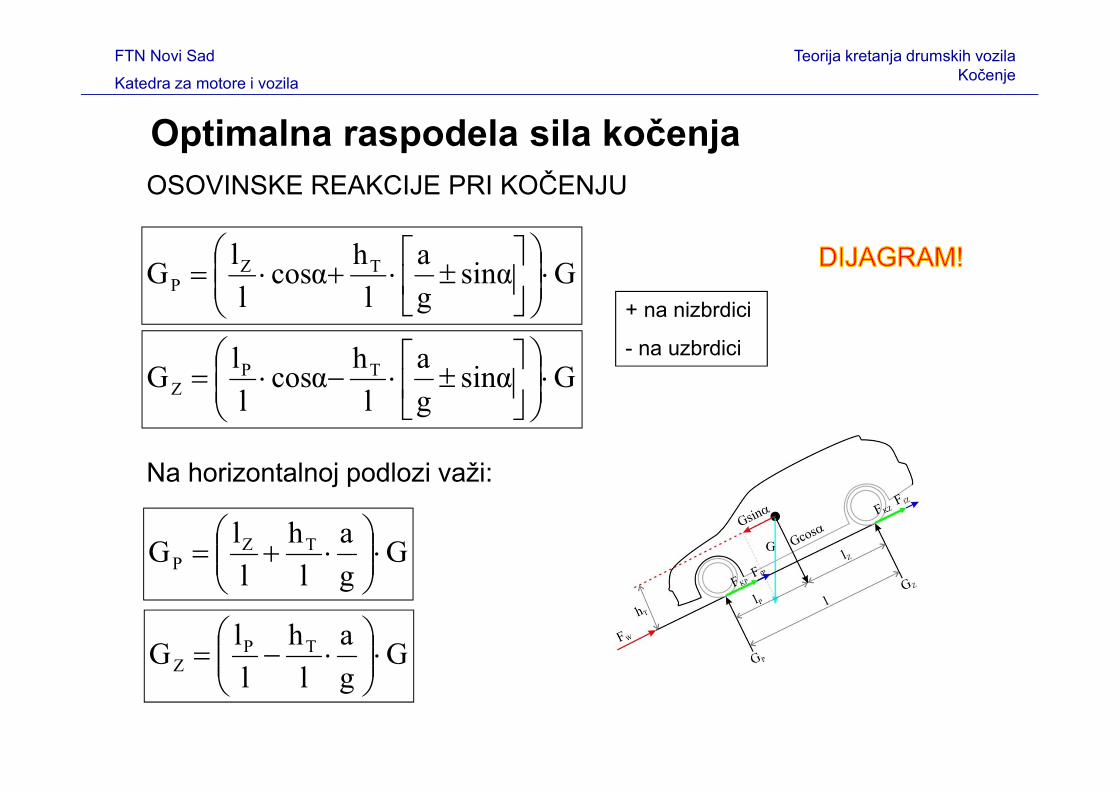
OSOVINSKE REAKCIJE PRI KOČENJU
Gsinαg
a
l
hcosα
l
lG TZ
P
Gg
a
l
h
l
lG TZ
P
Gg
a
l
h
l
lG TP
Z
Na horizontalnoj podlozi važi:
Gsinαg
a
l
hcosα
l
lG TP
Z
+ na nizbrdici
- na uzbrdici
Optimalna raspodela sila kočenja

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Uslov punog iskorišćenja raspoloživog prijanjanja:
P = Z = MAX
Važi: Z
KZZ
P
KPP
G
F;
G
F
P = Z Z
KZ
P
KP
G
F
G
F
z)h(ll
G
F
z)h(ll
G
F
TP
KZ
TZ
KP
KP
TZ
TPKZ F
zhl
zhlF
Već sada uočavamo: optimalna raspodela zavisi od usporenja i položaja težišta – što se menja u toku eksploatacije!
Napomena: z takođe nije nezavisna promenljiva već zavisi od FKP i FKZ za određivanje optimalne raspodele potrebno je eliminisati z iz izraza!
Optimalna raspodela sila kočenja
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
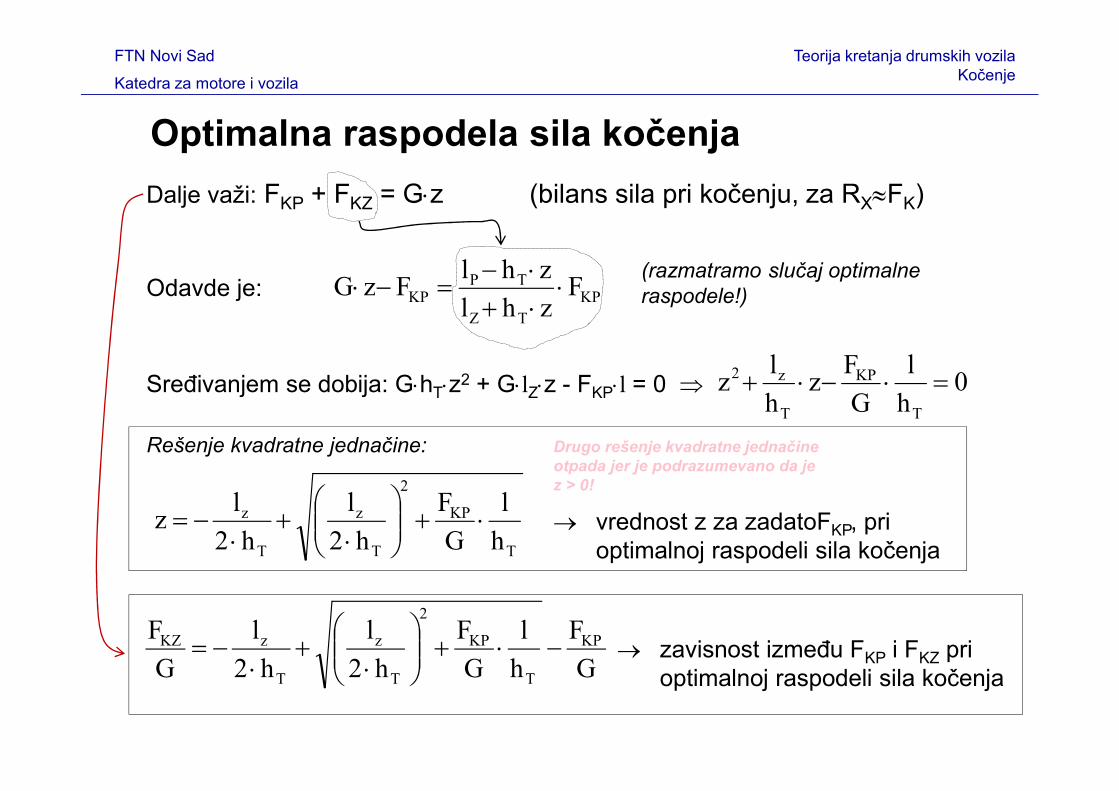
Dalje važi: FKP + FKZ = Gz (bilans sila pri kočenju, za RXFK)
Odavde je: KP
TZ
TPKP F
zhl
zhlFzG
Sređivanjem se dobija: GhTz2 + GlZz - FKPl = 0 0
h
l
G
Fz
h
lz
T
KP
T
z2
Rešenje kvadratne jednačine:
vrednost z za zadatoFKP, pri optimalnoj raspodeli sila kočenja T
KP
2
T
z
T
z
h
l
G
F
h2
l
h2
lz
(razmatramo slučaj optimalne raspodele!)
G
F
h
l
G
F
h2
l
h2
l
G
F KP
T
KP
2
T
z
T
zKZ
zavisnost između FKP i FKZ pri
optimalnoj raspodeli sila kočenja
Drugo rešenje kvadratne jednačine otpada jer je podrazumevano da je z > 0!
Optimalna raspodela sila kočenja
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
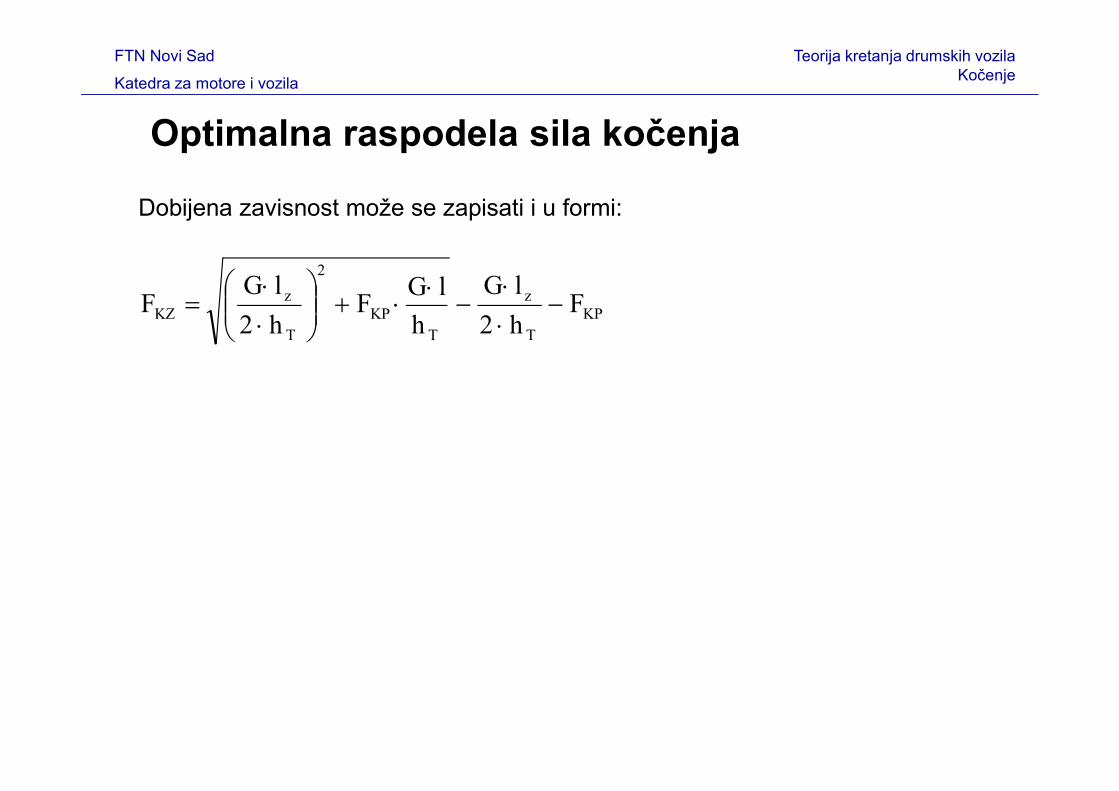
Dobijena zavisnost može se zapisati i u formi:
Optimalna raspodela sila kočenja
KP
T
z
T
KP
2
T
zKZ F
h2
lG
h
lGF
h2
lGF

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Optimalna raspodela sila kočenja
0
500
1000
1500
2000
2500
3000
3500
0 2000 4000 6000 8000 10000 12000 14000
FKP (N)
FK
Z (
N)
PODRUČJE Z > P
PODRUČJE P > Z
KRIVA P = Z
Kriva menja oblik pri promeni lP, lZ, hT i !
Optimalna raspodela sila kočenja

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Kočne sile po jedinici težine vozila
0
0,05
0,1
0,15
0,2
0,25
0,3
0 0,2 0,4 0,6 0,8 1 1,2
FKP/G
FK
Z/G
Linije z=const
z=0,2
z=0,4 z=0,6 z=0,8 z=1 z=1,2
G
Fz
G
F KPKZ Jednačine linija konstantnog usporenja: FKP + FKZ = Gz
Optimalna raspodela sila kočenja
PODRUČJE Z > P
PODRUČJE P > Z
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
0
0,05
0,1
0,15
0,2
0,25
0,3
0 0,2 0,4 0,6 0,8 1 1,2
FK
Z/G
FKP/G
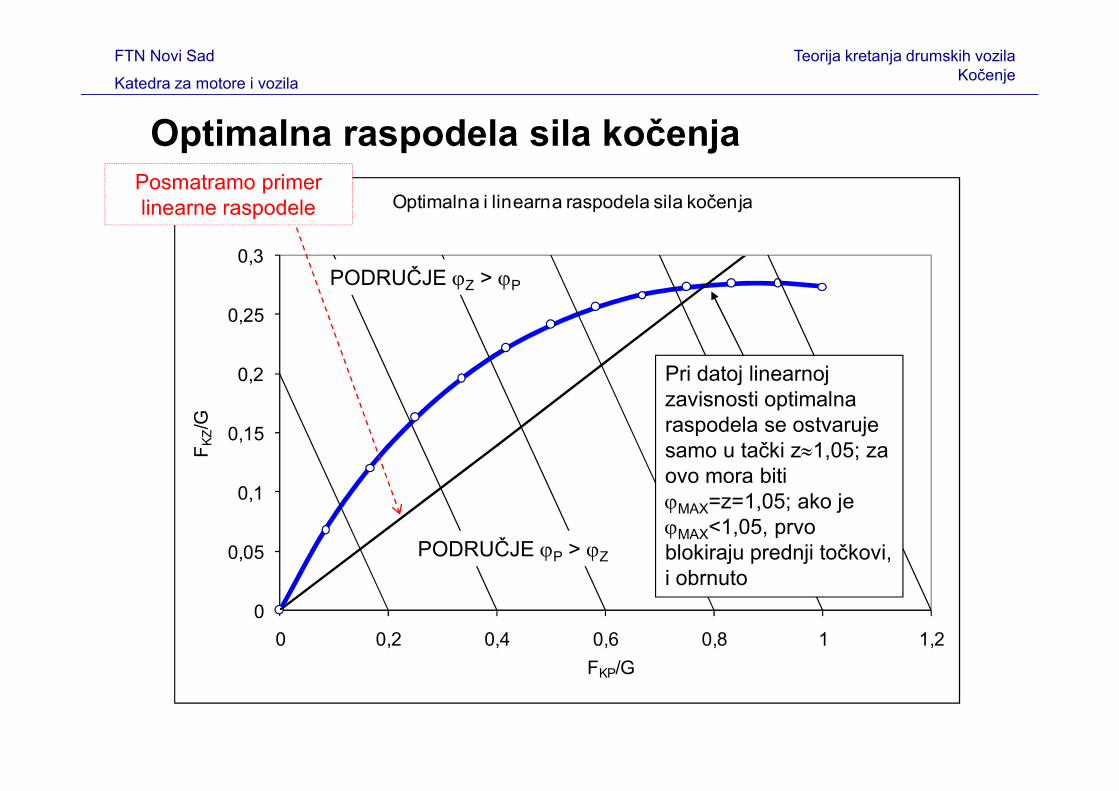
Optimalna i linearna raspodela sila kočenja
Pri datoj linearnoj zavisnosti optimalna raspodela se ostvaruje samo u tački z1,05; za ovo mora biti MAX=z=1,05; ako je MAX<1,05, prvo blokiraju prednji točkovi, i obrnuto
Optimalna raspodela sila kočenja
PODRUČJE Z > P
PODRUČJE P > Z
Posmatramo primer linearne raspodele

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Optimalna i linearna raspodela sila kočenja
0
0,05
0,1
0,15
0,2
0,25
0,3
0 0,2 0,4 0,6 0,8 1 1,2
FKP/G
FK
Z/G
Ako je na primer: MAX = 0,6 zMAX = 0,6
Za prikazanu linearnu raspodelu biće: zGr 0,52
Optimalna raspodela sila kočenja
NEISKORIŠĆEN POTENCIJAL NA ZADNJOJ OSOVINI
P > Z:
P = MAX , Z < MAX
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Optimalna i linearna raspodela sila kočenja
0
0,05
0,1
0,15
0,2
0,25
0,3
0 0,2 0,4 0,6 0,8 1 1,2
FKP/G
FK
Z/G
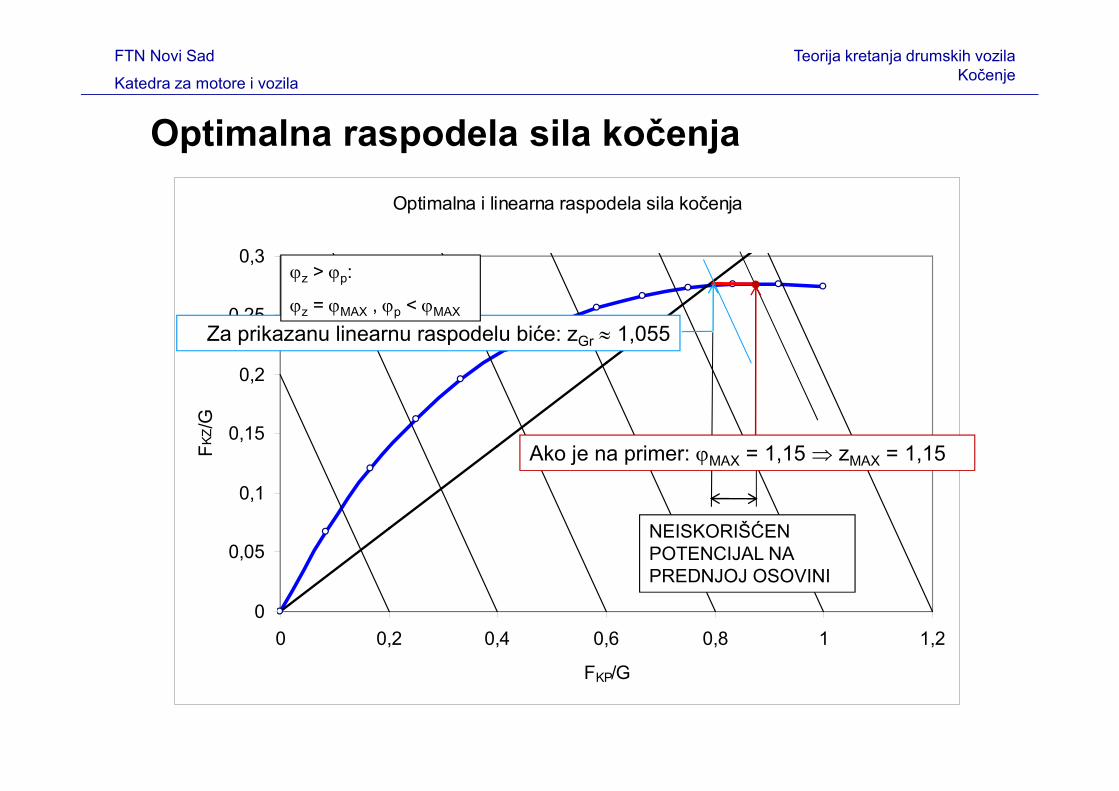
Za prikazanu linearnu raspodelu biće: zGr 1,055
Optimalna raspodela sila kočenja
z > p:
z = MAX , p < MAX
NEISKORIŠĆEN POTENCIJAL NA PREDNJOJ OSOVINI
Ako je na primer: MAX = 1,15 zMAX = 1,15
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Optimalna raspodela sila kočenja
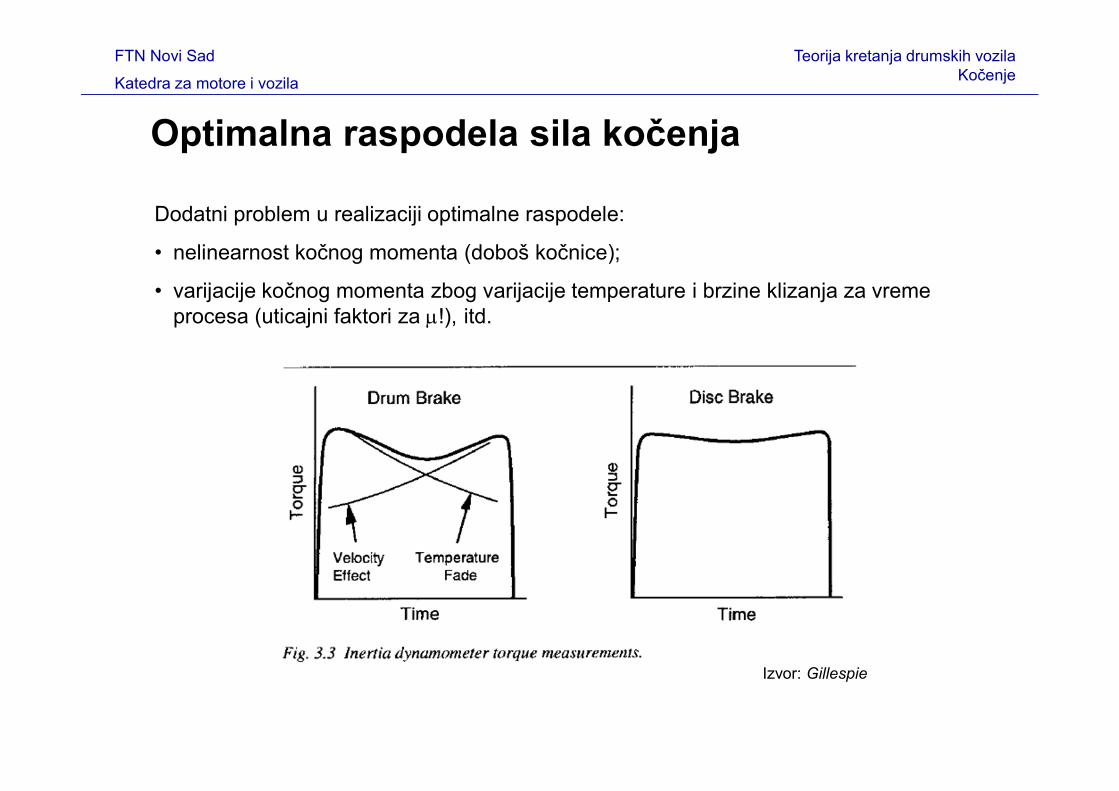
Dodatni problem u realizaciji optimalne raspodele:
• nelinearnost kočnog momenta (doboš kočnice);
• varijacije kočnog momenta zbog varijacije temperature i brzine klizanja za vreme procesa (uticajni faktori za !), itd.
Izvor: Gillespie
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Uticaj raspodele kočnih sila na upravljivost i stabilnost vozila
Prema ECE13 zahteva se da prvi blokiraju prednji točkovi [izvor: J.Todorović, Kočenje m.v.]
Blokiranje prednjih točkova gubitak upravljivosti
(povoljnija reakcija sa stanovišta netreniranog vozača)
Blokiranje zadnjih točkova gubitak stabilnosti

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila Kočenje
Uticaj blokiranja točkova na upravljivost
Vođenje vozila po zadatoj putanji BOČNA REAKCIJA NA TOČKU
Blokiranje točka NEMOGUĆNOST REALIZACIJE BOČNE SILE
K
2
R
vm
Blokiranje prednjih točkova GUBITAK UPRAVLJIVOSTI
Blokiranje zadnjih točkova GUBITAK STABILNOSTI
Povoljnija situacija za netreniranog vozača!
SPREG
Obezbeđenje bočne reakcije na obe osovine UPRAVLJIVO I STABILNO VOZILO





























