Embed Size (px)
DESCRIPTION
În primul capitol se face o scurtă trecere în revistă a principalelor tipuri de defecte întâlnite la motoarele electrice asincrone trifazate, precum şi a metodelor de diagnoza a acestora. Sunt prezentate şi analizate:- defectele cauzate de rulmenţi; - defectele statorice; - defectele cauzate de intreruperea unei bare rotorice; - defectele cauzate de excentricitatea întrefierului.În cel de-al doilea capitol se face o analiză a aparatelor şi echipamentelor utilizate pentru monitorizarea şi diagnoza motoarelor asincrone trifazate. Se porneşte de la prezentarea echipamentelor simple, ce au implementată o singura funcţie de protecţie, se continuă apoi cu analiza echipamentelor mai complexe, ce asigura protecţia motoarelor asincrone la mai multe tipuri de defecte, capitolul încheindu-se cu prezentarea unei soluţii de monitorizare şi diagnoză a unui motor asincron trifazat ce echipează o maşină electrică hibridă.
Citation preview

1 Defectele motoarelor electrice şi diagnosticarea lor
Problema protecţiei a fost trecută cu vederea vreme îndelungată de către constructorii de maşini electrice, aceştia considerând că ea aparţine inginerilor de exploatare. Un astfel de punct de vedere, poate fi cu uşurinţă justificat, deoarece atât timp cât protecţia se realizează exclusiv prin relee, nici unul dintre elementele schemei de protecţie nu intră în componenţa maşinii.
După părerea specialiştilor, protecţia termică reprezintă soluţia ideală pentru multe dintre aceste probleme, în măsura în care ea este elaborată pornind de la un model realist al motorului protejat. Opinia aceasta este justificată, cel mai adesea apelându-se la faptul că majoritatea regimurilor anormale de lucru conduc la o creştere a temperaturii materialului activ al maşinii; deci este suficient ca maşina să fie dotată cu o protecţie termică sensibilă, pentru ca funcţionarea îndelungată în regimul anormal să fie exclusă.
O altă metodă de protecţie a motoarelor asincrone, constă în monitorizarea parametrilor acţionării electomecanice din care face parte şi motorul electric.
1.1 Analiza metodelor utilizate pentru monitorizarea şi diagnoza motoarelor asincrone
Pentru analiza metodelor utilizate pentru monitorizarea şi diagnoza motoarelor asincrone este suficient să se identifice principalele tipuri de defecte. Pe baza acestor identificari se poate realiza un model matematic ce va asigura o protecţie corespunzătoare pentru motorul asincron.
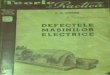
1.1.1 Analiza defectelor cauzate de rulmenţi
Fig 2.1 Un exemplu tipic de rulment
Majoritatea lagărelor în instalaţii industriale funcţionează în condiţii diferite de cele ideale şi sunt supuse la oboseală, vibraţii ale mediului înconjurător, supraîncărcare, nealinieri, contaminarea, caneluri curente, coroziune şi lubrifiere greşită. Datorită funcţionării în condiţii reale apar diverse defecte neglijabile, care cu timpul se raspândesc şi se propagă în sistemele interioare ale motorului, ducând la deteriorarea elementelor de rulare. După un timp apariţia
Un punct arbitrar de pe colivia rulmentului
Dia
met
rul m
ediu
al
rulm
entu
lui
Inel exterior
Inel interior
Rulment
Diametrul unei bile (DB)
rout
rin

defectului devine semnificativă şi generează defecte mecanice, vibraţii sonore care cauzează zgomot. Practic, defectarea rulmentului poate fi cauzată de defectarea inelului exterior, defectarea inelului interior, defectarea bilelor şi reprezintă principalele surse de vibraţii ale maşini asincrone. Aceste vibraţii mecanice pot duce la deplasări uşoare ale rotorului şi în final la excentricităţile ale acestuia. Analiza acustică, în infraroşu sau termică a vibraţiilor mecanice, reprezintă una dintre cele mai frecvent utilizate metode de intretinere predictiva pentru a monitoriza starea lagărelor pentru a preveni apariţia avariilor în motorul de inducţie. În timp ce unele motoare mari pot veni deja echipate cu traductoare de vibraţii şi de temperatură, nu este din punct de vedere economic sau fizic posibil să se doteze şi motoarele mici cu astfel de traductori. Apoi, motoarele mici şi mijlocii sunt verificate periodic cu ajutorul unui echipament portabil prin toate cele trei metodele. Unele motoare folosite in aplicatii critice, cum ar fi motoarele pompelor de racire din reactoarele nucleare nu pot fi uşor accesibile în timpul funcţionării reactorului. Lipsa de monitorizarea continuă şi accesibilitatea sunt principalele deficienţe ale metodelor menţionate mai sus. O abordare alternativă bazată pe monitorizare curentului a primit mai mult atenţie din partea cercetătorilor în căutarea de a oferi o soluţie practică pentru monitorizarea continuă şi rezolvarea problemelor de accesibilitate. Această nouă metodă de oferă o monitorizare continuă a motorului cu costuri suplimentare minime.
Fiecare tip de avarie are o caracteristică de frecvenţă vibraţiilor care este o funcţie atât de geometria motorului cât şi de viteza rotorului. Punctul de mijloc dintre exteriorul şi interiorul rulmentului reprezintă punctul de referinţă în dezvoltarea caracteristicilor frecvenţelor vibraţiilor motorului asincron. Practic viteza punctului de mijloc wx reprezintă media vitezelor interioară şi exterioară şi este dată de relaţia:
wx = (1.1)
unde: rx este raza de cuşcă, win şi wout reprezintă vitezele unghiulare interioară şi exterioră a rulmentului. Relaţia
dintre frecvenţele de rotaţie fx, fin şi fout este:
fx = (1.2)
Frecvenţa de avarie a părţii exterioare a rulmentului ford este asociată cu rata cu care bilele trec prin punctul de defect de pe inelul exterior. Evident, frecvenţa creşte liniar cu numărul de bile, prin urmare, frecvenţa exterioră a cursei de defect se calculează prin înmulţirea numărului de bile cu diferenţa dintre punctul de referinţă şi exterior:
fx = n|fx – fout|= n =
= (1.3)
unde: n este numărul de bile, β este unghiul de contact, BD şi PD sunt diametrele unei bile de rulment şi respectiv diametrul mediu al rulmentului. Deoarece inelul exterior este în regim staţionar şi inelul interior se roteşte cu aceeaşi viteză
ca a arborelui rotorului, caracteristica de defect a frecvenţei de vibraţii a inelului exterior este:
ford = (1.4)
1

iar caracteristica de defect a frecvenţei de vibraţii a inelului interior este dată de relaţia:
fird = (1.5)
unde: frmech este viteza mecanică a rotorului.Oscilaţiile mecanice cauzate de defectarea rulmentului schimbă simetria întrefierului din
maşina de inductanţe ducând la defecte de excentricitate. Variaţiile inductivităţilor maşinii se reflectă în forma de undă a curentului statoric, respectiv în ceea ce priveşte armonicilor de curent, care sunt principalii indicatori de prezenţă a defectului în rulment asociat cu oscilaţiile mecanice. Prin urmare, avariile cauzate de rulment induc anumite armonici de curent a căror frecvenţă este dată de relaţia:
fcf = |f1 ± mfv| (1.6)
unde: f1 reprezintă frecvenţa fundamentală , a curentului statoric, fV este caracteristica mecanică a frecvenţei vibraţiilor cauzate de rulment, m este un număr întreg.
Un instrument generic de diagnoză, bazat pe funcţii discriminative de energie este propus de în [L59]. Aceste funcţii de energie dezvăluie discriminativ în domeniu de frecvenţă regiunile în care sunt identificate erori. Schoen [L89] a implementat un sistem de supraveghere online a motorului bazat pe analiza curenţilor statorici. Un detector bazat pe o modulare a amplitudini (AM) pentru a detecta defectul de rulment în timp ce acesta este încă într-un stadiu incipient de dezvoltare este prezentat în lucrarea [L91]. Lucrarea [L75], prezintă un model ascuns dezvoltat de Markov (HMM) pentru detectarea defectelor cauzate de rulmenţi. Yazici [L111], a propus o statistică adaptive frecvenţă - timp pentru detectarea de bare rupte şi a defectului de rulment în motoarele asincrone utilizând un model creat pe baza curentului statoric.
1.1.2 Analiza defectelor statorice
Cea mai importantă funcţie a materialelor de izolatoare este, în mod normal, aceea de a rezista stresului electric; însă, în multe cazuri, acestea trebuie să suporte, de asemenea, un stres mecanic, de mediu etc. De cele mai multe ori materialele de izolare mai au şi o funcţie de a sustine conductoare electrice în interiorul maşinilor electrice [L93]. Într-un motor cuplul este rezultatul forţei create de curentul electric, în conductorul pe care il parcurge şi din jurul câmpului magnetic. Acest capitol prezintă proprietăţile pe cere trebuie să le aibă izolaţia electrică precum şi proprietăţile mecanice necesare pentru a rezista tensiunilor mecanice la care este supus un conductorul electric pe care în deserveşte [L19]. În plus, vibraţiile electromagnetice de două ori mai mari decât frecvenţa de putere, extinderea diferenţială a forţelor datorate temperaturii variante în urma modificărilor de sarcină, precum şi forţele de impact din cauza electrice / sau asimetrii mecanice sunt, de asemenea, eficiente în procesul de îmbătrânire a izolaţiilor. Distribuţia neuniformă a temperaturii în interiorul motorului va determina, de asemenea, distrugeri mecanice din cauza dilataţiilor termice. Procesul de fabricaţie în sine poate constitui un factor dăunător sau o acţiune de îmbătrânire. Izolaţia electrică trebuie să fie suficient de puternică pentru a rezista solicitărilor mecanice datorate imperfecţiunii pieselor mecanice cu care intră în contact. Astfel, stresul mecanic este adesea foarte sever, comparativ cu abuzul ulterioar la care este supus materialul de izolare [L19].
Creşterea temperaturilor poate provoca nenumărate defecte. Materialul poate fi în mod inerent mai slab la temperaturi ridicate şi o avarie poate apărea pur şi simplu din cauza topireii
2

materialului izolator. Acest lucru se poate întâmpla într-un timp foarte scurt, din cauza că durata de timp necesară pentru ca temperatura să crească până la punctul de topire este mică. Pe de altă parte, pe termen lung temperatura ridicată poate provoca reacţii chimice interne ale materialului izolator [L93].
Din acest motiv stresul termic reprezintă, probabil, cauza cea mai recunoscută de degradare a izolaţiei şi apariţie a defectelor. Principalele surse de stres termic în maşini electrice sunt pierderile în cupru, pierderile datorate apariţiei de curenţi turbionari, pierderile în Fe şi pierderi suplimentare. Temperatură înaltă provoacă o o reacţie chimică în izolatori făcându-i fragili. O altă problemă o constitue variaţiile bruşte de temperatură din conductoare, tendinţa de a se dilata conductorul de cupru mai repede decât materialul izolator [L93].
Un alt efect semnificativ asupra îmbătrânirii izolaţie îl reprezintă problema descărcărilor parţiale (PD). Descărcările parţiale sunt mici scântei electrice care au loc în locurile în care apar bule de aer în izolaţie şi sunt datorate distribuţiei neuniforme a câmpului magnetic din interiorul motorului. Odată începutacest proces(PD) va duce la degradarea progresiva a materialului izolator, culminând cu distrugerea acestuia. Pe de altă parte, tensiunea la care trebuie să reziste materialul izolator trebuie să fie mai mare pentru motoarele alimentate de la un invertor de c.a. decât a celor alimentate de la reţeaua trifazată. Trebuie subliniat căci lungimea cablurilor de alimentare ale motorului este dependentă de puterea motorului şi frecvenţa impulsurilor transmise prin cablu[L94][L46].
În plus faţă de cauzele de mai sus, prezenţa umidităţii, prezenţa materialelor abrazive, descompunerea chimica, şi radiaţiile pot fi, de asemenea, luate în considerare ca efecte ce duc la îmbătrânirea accelerată a materialelor izolatoare[L64].
Distrugerea izolaţiei statorului în timpul funcţionării maşinii poate duce la o defecţiune a echipamentului şi implicit la costuri ridicate de timp şi bani. Prevenirea unui astfel de defect este o preocupare majoră atât pentru producătorul de maşini cât mai ales pentru utilizator, deoarece aceasta poate duce la pierderi semnificative de venituri în timpul cât motorul este defect, cât şi pentru repararea sa. În literatura de specialitate [L93],[ 24], PD este considerată ca o semnătură de îmbătrânire de izolare care începe de la bulele de aer din izolator. Odată început, PD provoacă deteriorarea progresivă a materialului izolator, în cele din urmă conducând la defecte electrice. Când se produce o descărcare parţială, evenimentul poate fi detectat ca o foarte mică schimbare în forma de undă a unui curent de probă. Curenţii PD sunt dificil de măsurat din cauza amplitudinii lor mici şi a duratei scurte [L64]. Prin urmare, problema descărcărilor parţiale (PD) dintr-un motor, înainte de o străpungere a materialului izolator nu are efect semnificativ asupra sistemului de putere.
În literatura de specialitate există mai multe metode de monitorizare şi protecţie a stării motoarelor şi generatoarelor de curent alternativ . Alegerea acestor metode depinde de tipul de cerinţe, de puterea echipamentului, locaţia echipamentului, costul motorului, costul traductorilor necesari pentru implementarea soluţiei de protecţie, etc [L46],[L64]. Monitorizarea temperaturii motorului de mare putere reduce riscul de deteriorare termică. Acest lucru poate fi făcut prin termocuple încorporat sau crestături, carcasă, etc. În plus, prin monitorizarea termică se poate studia evoluţia termică pentru acelaşi tip de opetaţie executată într-un anumit interval de timp. Acest studiu se poate constitui într-o informaţie utilă pentru detectarea îmbătrânirii materialului izolator.
Descărcările parţiale duc la eliberarea unui gaz (O3). Prin monitorizarea de concentraţia de gaz în timp, se pot monitoriza aceste descărcări şi prognoza evoluţia în timp a îmbătrânirii izolaţiei. Monitorizarea continuă a ozonului este acum realizabilă cu ajutorul detectoarelor electronice. În plus, se montează pe fiecare fază relee de protecţie ultrarapide pentru a preveni distrugerea instalaţiei electrice cauzată de distrugerea izolaţiei. O altă soluţie eficientă o constituie monitorizarea on-line a descărcării parţiale care avertizează utilizatorul în faţa unei avarii iminente. Acest lucru se poate face fie prin monitorizarea curenţilor de fază, fie folosind traductoare diferenţiale de curent, de construcţie specială.
3

Aceşti senzori sunt sensibili la frecvenţa înaltă datorată descărcărilor parţiale, dar sunt insensibile la tensiunea de alimentare şi frecvenţa curenţilor armonici[L64].
1.1.3 Analiza defectelor cauzate de intreruperea unei bare rotorice
Rotoarele în scurtcircuit sunt practic de două tipuri: turnate si prin bobinare. Înainte, rotoarele obţinute prin turnare erau folosite numai pentru maşini de puteri mici. Astazi, tehnologia de turnare poate fi utilizat chiar şi pentru producerea rotoarelor maşinilor de puteri mari, de câteva mii de kW. Aproape toate motoarele cu rotoare în colivie, realizate din bare de cupru sau aliaje de aluminiu, legate între ele prin inele. Rotoarele din cupru şi aliaje pe bază de cupru sunt de obicei cele obţinute prin bobinare. Rotoarele din aluminiu sunt însă cele predominante, fiind realizate din bare legate între ele cu câte un inel la fiecare capăt. Deşi sunt mai robuste decât celalalt tip de motor, acestea pot fi cu greu reparate în cazul întreruperii unei bare sau a inelului de legătură.
Exista o multime de motive care pot cauza întreruperea unei bare rotorice sau a unui inel rotoric. Acestea pot fi cauzate de fenomene termice, magnetice, dinamice, de mediu, mecanice sau de tensiunile reziduale. În mod normal, şi cu o bară întreruptă motorul poate să funcţioneze în banda de toleranţă acceptată timp de mai mulţi ani. Dar cu toatea acestea, durata de viaţă a motorului se scurtează cu fiecare avarie apărută. Un rotor cu una sau mai multe bare rupte poate fi considerat ca rotor asimetric [L72], [L43], care cauzează curenţi dezechilibraţi, pulsaţii ale cuplului şi o scădere a cuplului mediu [L59]. Asimetriile electrice şi magnetice ce i-au naştere în rotorul maşinii de inducţie duc la creşterea frecvenţă de excitaţie [L72]. În cazul întreruperii unei bare rotorice apare o frecvenţă nouă, în jurul frecvenţei fundamentale, situată în partea stângă a acesteia şi dată de relaţia:
fleft_sideband = (1 ± 2s)fe (1.7)
în cazul în care poziţia laterală stânga se datorează asimetriei electrice şi laterală dreapta se datorează vitezei de oscilaţii. Datorită interacţiunilor mecanice şi electrice in interiorul motorului, model de analiză a frecvenţei defectelor poate fi extins [L47]:
fleft_sideband = (1 ± 2ks)fe, k = 1,2,3 .... (1.8)
Momentul de inerţie al motorului afectează, de asemenea, amplitudinea acestor semnale. Alte componentelor în spectru actuale sunt date de [L62].
fleft_sideband = (1.9)
unde: k = indicele armonici (k / p = 1,3,5, ...)s = alunecareap = numărul de perechi de polife = frecvenţa de alimentare
În [L42], se arată că avariile cauzate de ruperea unei bare rotorice pot fi detectate din timp prin efectuarea unei analize armonice a curentului statoric. Prin efectuarea unor măsurători la intervale regulate de timp, se poate observa că un curent statoric de frecvenţă fe induce în rotor un curent de frecvenţă s*fe[L47]. Atunci când o asimetrie este indusă în structura rotorică, prin rotaţie, un curent de succesiune inversă - s fe ia naştere din cauza interacţiunilor mecanice dintre rotor şi stator. Iniţial, EMF-ul statoric de frecvenţă (1 – 2s) fe este indus de cuplu în forma variaţie a vitezei de rotaţie. Ulterior, cuplul şi variaţiile de viteză sunt reflectate la stator în forma de undă a curenţilor statorici de frecvenţă (1 + 2s) fe. Apoi, curenţii statorici de frecvenţă (1 + 2s)fe induc în rotor curenţi de frecvenţă ± 3s fe şi apoi reacţia se repetă în lanţ până la
4

filtrarea completă a acestora de momentul de inerţie al rotorului. O estimare de parametri bazată pe tehnica barelor întrerupte din rotor este prezentată în [L26]. Armonicile de tensiune ce iau naştere la bornele motorului, imediat după oprirea motorului constituie o altă metodă de diagnoză [L66].
1.1.4 Analiza defectelor cauzate de excentricitatea întrefierului
Avariile cauzate de excentricitatea rotorului apar atunci când există o distanţă neuniformă între stator şi rotor dealungul întrefierului. Atunci când apare o excentricitatea, în întrefier are loc o variaţie a inductanţelor cauzate de dezechilibrele fluxului magnetic, generând armonici de anumite frecvenţe ce pot fi identificate în spectrul de frecvenţe radio. Există două tipuri de excentricitate: statice şi dinamice. Când apare o excentricitate statică, axul arborelui reprezintă o constantă de compensare de-a lungul axului statoric sau rotoric. Pe de altă parte atunci când apare o excentricitate dinamică, axul arborelui este o variabilă de compensare între centrul statoric şi distanţa minimă dintre stator şi rotor, atunci când rotorul se roteşte cu viteza n. În cazul în care distanţa dintre stator şi rotor nu este egală pe întreaga lungime a axului rotoric, variaţiile de flux magnetic creează dezechilibre în fluxul curentului statoric, dezechilibre, care pot fi identificate în spectrul de frecvenţe radio. Excentricitatea rotorică poate fi cauzată de montarea incorectă a motorului, de lipsa unui bolţ, de un rotor dezechilibrat, etc. Aceste cauze duc la o excentricitate a întrefierului.
Problemele cauzate de excentricitatea întrefierului sunt bine-cunoscut, fiind susţinute de rezultatele analitice şi experimentale obţinute de diverşi cercetători din domeniul masililor electrice. În literatura de specialitate, există de asemenea lucrări de diagnosticare a acestui fenomen bazate pe măsurarea şi interpretarea online a curenţilor statorici, semnate de specialişti ca Nandi, Dorrell sau Debortoli.
Spre deosebire de defectul de rulment, este mai uşor să se diagnosticheze excentricitatea întrefierului, chiar şi pentru cazul alimentării de la un invertor, din cauză că semnalele de zgomot au o amplitudine mare, atât cele statice cât şi cele dinamice. Deoarece au tendinţa de a coexista, în practică, numai excentricitatea mixtă este considerată ca fiind o sursă de avarii. Câmpul magnetic din întrefierul unui motor excentric este întotdeauna neuniform. Deoarece fluxului în întrefier oscilează cu o frecvenţă sincronă, armonici suplimentare oscilante cu viteza de rotaţie a rotorului, datorate neuniformităţii întrefierului, se aşteaptă să apară de o parte si de alta a frecvenţei curenţilor statorici.
Excentricităţile statice şi dinamice pot fi modelate în spectrul de frecvenţe ale curentului statoric pe baza următoarei relaţii:
Fsidebands = fe (2.10)
unde: nd = 0 în caz de excentricitate statică, şi nd = 1,2,3... în caz de excentricitate dinamică (nd este cunoscut ordin de excentricitate), fe este frecvenţa fundamentalei, R este numărul de crestături, s este alunecarea, p este numărul de perechi de poli, k este un număr întreg, v este ordinul armonicilor pe unitatea de timp prezente în forma de undă a curentului de alimentare a motorului. Cu toate acestea, dacă ambele tipuri de excentricităţi (statice şi dinamice) sunt prezente,
atunci frecvenţa acestora este data de [L35]:
f1 = fe ± fr (2.11)
5

2 Analiza metodelor şi echipamentelor pentru monitorizarea şi diagnoza motoarelor asincrone
Din bibliografia consultată au fost reţinute soluţii reprezentative pentru fiecare principiu de funcţionare identificat. Analiza a fost făcută evolutiv din punct de vedere tehnologic (de la logică cablată la logică programată), de la simplu la complex, de la aparate de protecţie dedicate protejării motorului asincron trifazat numai pentru un singur tip de defect sau regim (aparate monoparametrice de protecţie), la aparate de protecţie complexe, dedicate protecţiei pentru un număr din ce în ce mai ridicat de defecte sau regimuri (aparate multiparametrice de protecţie).
1.2 Aparate cu o singură funcţie de protecţie
1.2.1 Aparatul de protecţie şi semnalizare a întreruperii unei faze
În literatura de specialitate este propus un model generic de aparat de protecţie şi semnalizare la întreruperea unei faze statorice a unui motor asincron trifazat(L2).
Acest model se bazează pe obţinerea tensiunii alternative de deplasare a unui punct de nul artificial, creat cu ajutorul unei stele de condensatoare, redresarea (cu un redresor cu dublare de tensiune) şi filtrarea acestei tensiuni în scopul comparării cu o valoare de prag prestabilită (lipsa unei faze determină deplasarea punctului de nul, deci apariţia unei tensiuni de deplasare).
Aparatul pentru protecţie şi semnalizare (fig.2.1) este format dintr-un circuit de intrare A, urmat de un circuit redresor cu dublare de tensiune B, de o celulă de integrare C şi de un circuit comutator pentru semnalizare şi comanda unui releu D.
Fig. 2.1 Schema electrică de principiu a aparatului în varianta pentru consumator trifazic
În varianta din figura următoare (fig.2.2), se multiplică de n ori modulul M1 ce cuprinde circuitul de intrare, circuitul redresor şi circuitul comutator, circuitul de comandă pentru releu rămânând unul singur, la el ajungând semnalul de comandă de la n module printr-un circuit SAU realizat cu diode D5-Dn. La dispariţia unei faze la bornele unui consumator, modulul corespunzător semnalizează şi trimite semnalul circuitului de comandă al releului realizat cu un tranzistor T3.
R
S
T
N
C1
C2
C3
R1D2
D1
R2
A B C D
C4 C5
T1
D3
RL
T2
+ 24 V
N
6

Fig. 2.2 Schema electrică de principiu a aparatului în varianta pentru consumatori trifazici de pe un utilaj
1.2.2 Aparat de protecţie în funcţie de alunecare
Principiul de funcţionare al acestui tip de aparat se bazează pe supravegherea alunecării motorului electric asincron.
Traductorul numeric pentru măsurarea alunecării motoarelor electrice sincrone sau asincrone este realizat în structură numerică şi are posibilitatea de a afişa valoarea instantanee a alunecării, precum şi elaborarea comenzilor la valori anterior precizate ale alunecării.
Traductorul numeric de alunecare (fig.2.3) este constituit din numărătorul reversibil NR cu intrarea de numărare conectată la traductorul de impulsuri TI, circuitul de reciclare CR având intrarea conectată la una din fazele tensiunii reţelei de alimentare şi ieşirile 1 de transfer şi 2 de iniţializare, memoria M, decodificatorul D, circuitul de afişare CA, aparatul de prescriere numeric DPN, circuitul numeric de coincidenţă CNC, bistabilul B, poarta P, circuitul de ieşire CE şi releul R pentru comenzi exterioare.
Plecând de la definiţia alunecării s a motorului de curent alternativ, se obţine:
(2.1)
unde: n0 este viteza sincronă a motorului, T0 ≈ 20 ms este perioada tensiunii reţelei de alimentare, ∆t ≈ 40 ms este timpul de măsură, N este numărul de impulsuri numărate de numărător în timpul de măsură.
Fig. 2.3. Traductor de alunecare
C2
R
S
T
N
C1
C3
R1D2
D1
R2
M1
C4 C5
T1
D3
RL
+ 24 V
N
T2
Mn
Dn
D5
D4
T3
2
1
μR CR D PN
C NC
D
B
NR
P
M
CA
TI
R
CE
7

1.2.3 Aparat de protecţie la suprasarcină
În literatura de specialitate este propus un model generic de aparat de protecţie la suprasarcină pentru protecţia unui motor asincron trifazat(L57).
Principiul de funcţionare al acestui aparat constă în transformarea supracurentului într-o tensiune în vederea aplicării unei metode de prag.
Metoda sesizează existenţa unui curent prin faze prin amplasare pe fazele R şi S a două traductoare curent-tensiune Tcr şi Tcs (fig.2.4). Pentru a obţine o liniaritate între curentul din primar şi tensiunea din secundar energia magnetică a transformatorului trebuie consumată pe o rezistenţă echivalentă Pr, respectiv Ps, ale căror valoare şi putere sunt bine determinate în funcţie de numărul de amper - spire din secundar, n2.Is, deci implicit de puterea motorului din primar care dă numărul de amper - spire din primar, n1.Ip şi parametrii constructivi ai transformatorului. Pentru a acoperi o gamă mare de puteri, se pot varia numărul de spire din secundar şi valorile rezistenţelor echivalente Pr şi Ps.
Fig. 2.4. Schema electronică
1.2.4 Aparatul de protecţie homopolară
Principiul de funcţionare al acestui tip de aparat se bazează pe monitorizarea fazei curentului homopolar, pentru a stabili dacă sistemul de măsură se află pe linia cu defect, şi compararea amplitudinii curentului homopolar cu o valoare prescrisă pentru a stabili dacă faza curentului este cea corespunzătoare liniei defecte.
Releul de protecţie homopolară (fig.2.5), în structură electronică, asigură acest tip de pro-tecţie în toate categoriile de reţele şi pentru orice valoare a curentului homopolar.
Tr
T
S
R
N
I
C1
Pt
C2 C3 C4
BA
T1
R6
C8
R5
R4
C7
C6C5
R3R2R1
T3
PRL Ps
0
D1
D3
P1
TCS
Pr
TCR
Au
P2 P4
RL
P3
BAD4
D2R7
A R8
R9T5
R10 D5
M
8

Fig. 2.5. Schema bloc a releului de protecţie homopolară Fig. 2.6. Tensiuni în principalele puncte ale schemei, pentru o reţea parţial
compensată şi cu o punere la pământ
1.2.5 Aparatul de protecţie la contraconectare
În literatura de specialitate este propus un model generic de aparat de protecţie la contraconectare pentru protecţia unui motor asincron trifazat(L34).
Principiul de funcţionare al acestui aparat constă în supravegherea scăderii turaţiei motorului, ca semn al unui posibil regim de avarie. Aparatul electronic de protecţie a motoarelor electrice(fig.2.7), este utilizat ca protecţie la contraconectare, în special la mecanismele podurilor rulante, pentru diferite motoare electrice, atât de curent alternativ, cât şi de curent continuu, ce acţionează un mecanism în ambele sensuri (fig.2.8), şi ca protecţie în regimuri de avarie ce duc la scăderea vitezei de rotaţie: suprasarcină, întreruperea unei faze, lipsă tensiune de excitaţie. Aparatul preia informaţia asupra mişcării de rotaţie a mecanismului printr-un traductor - detector de proximitate, ale cărui impulsuri sunt transmise printr-o priză şi un divizor rezistiv unui monostabil ce genereaza impulsuri de durată reglabilă, ce reprezintă turaţia impusă, care sunt transmise printr-un circuit de temporizare şi o poartă Trigger Schmitt tranzistorului final, în al cărui colector se afla releul de acţionare a contactorului de alimentare a motorului electric.
Fig. 2.7. Schema logică a aparatului de protecţie a motorului electric
μH
Ieşire AO.1
Imp. de testIeşire COMP.
IHP
0
V+
V-
iH
Ieşire AO.2
Ieşire AO.3
0
t
t
μHTc
.1MS
R1
FTc
.2Tc
.3
R2
R3
TCH
R7
DVAP
AO.1
-+
+-
-+
-+
AO.2
R9
AO.3Comp.
P
V+
IHP
Reset
D2D1
MR
CI
B
AV+
REL
G
KH
A
B
a
b
c
9
T
8
11
1
10
2
S1
2
11 M’1
0V
+24V
+24V
Pt2D4
R1
D1
D2
D5
R2
R8
+15V+15V
C1
I3’ 5’ 6’
1’ 2’78
Q
R3
C2 Pt1
+15V
P2
C4
6
4
+24V R10
4 13
9
P3
R4
R5
10
C3
1
2
P1
3
R9
+15V
DZ1
R6
B1
D6
T2
D3
+24V
T1
1B1
7
6 C
D
3 9
1B2
E F
9

Fig. 2.8. Modul de conectare a aparatuluiîn circuitul de acţionare a unui motor cu două sensuri
1.2.6 Aparat de protecţie pentru circuitul rotoric al motoarelor
asincrone trifazate cu rotor bobinat
În literatura de specialitate este propus un model generic de aparat de protecţie pentru circuitul rotoric al motoarelor asincrone trifazate cu rotor bobinat (L9).
Aparatul de protecţie pentru circuitul rotoric al motoarelor asincrone trifazate cu rotor bobinat acţionează în caz de întrerupere a curentului pe una din faze, deteriorare a izolaţiei rotorice, pornire grea, suprasarcini accidentale mari şi de durată, calare a rotorului, depăşirea timpului normal de rămânere în circuit a rezistenţei de pornire sau pentru alte defecte care se manifestă prin creşterea alunecării motorului.
Fig.2.9 Schema bloc a aparatului Fig. 2.10 Reprezentarea schematică de protecţie. a senzorului de curent
RST
S
e1
K1
e2 e3
K2
PT
M
0v
K
Vcc
BP
A
B
2k
1k
F
E
1B2
1K1
Cd1
1K2
1B1
3K2
K1 K2
Cd2
3K1
2K1 2K2
H
T
C
M3~
1
~
I3 I2 I1 2 U2 C1
3
V2
U3 U4
4C4
m1
u1
2
I1
m2
u2
I2
+V0
I3
V1
V2
R1
u2
10

1.3 Aparate cu mai multe funcţii de protecţie
1.3.1 Aparatul de protecţie la suprasarcină şi întrerupere a unei faze
În literatura de specialitate este propus un model generic de aparat de protecţie la suprasarcină şi intreruperea unei faze pentru protecţia unui motor asincron trifazat(L37).
Principiul de funcţionare al acestui aparat(fig.2.11) constă în aproximarea unei caracteristici declanşare-curent a motorului, în funcţie de raportul între valoarea maximă a curentului din linie şi o valoare prestabilită.
Fig. 2.11 Schema bloc a releului
Stabilirea valorilor exacte ale acestor tensiuni se face în funcţie de caracteristica timp de declanşare-curent supravegheat impusă (fig. 2.12).
Fig. 2.12 Exemplu de caracteristică timp de declanşare-curent impusă
1.3.2 Aparat cu mai multe funcţii de protecţie
În literatura de specialitate este propus un model generic de aparat cu mai multe funcţii de protecţie a unui motor asincron trifazat(L98).
Principiul de funcţionare al acestui aparat constă în testarea cu impuls activ a parametrilor consumatorului înainte de conectarea motorului la reţea/sursă de alimentare, urmată de acceptarea conectării când parametrii se găsesc în domeniul prestabilit, respectiv refuzul conectării cu memorarea refuzului şi semnalizarea parametrilor care ies din domeniul prestabilit ca funcţional.
Ulterior sau simultan cu aceasta se verifică în mod pasiv reţeaua/sursa în privinţa amplitudinii tensiunii, dezechilibrului fazelor sau deformarea undei de tensiune, rezultatul acestor verificări conducând la acceptarea sau refuzul conectării cu memorarea refuzului şi semnalizarea parametrilor care ies din domeniul prestabilit.
Periodic în timpul funcţionării au loc deconectări de scurtă durată şi reconectări (astfel ca să nu se perturbe prin aceasta buna funcţionare a consumatorului), timp în care se refac cele două
AMP C RTM F
CMP1
GC1
CMP2
GC2
CMPn
GCn
UP1
UP2
UPN
I1
I2
In
I1+I2+…+In
R
N EECMP
1000
IInom
6
4
2,5
1,51,2
1,051
10010 10000 r(s)
11

tipuri de verificări menţionate mai sus şi/sau se efectuează măsurători pasive ale parametrilor de funcţionare a consumatorului fără deconectare, urmate de acelaşi tip de decizii şi comenzi.
Aparatul de protecţie (fig.2.13) prevede ca un motor asincron trifazat 1 să se racordeze la reţeaua de alimentare 2 cu un element de comutare 3 la comanda data printr-un buton de alimentare 4 ce porneşte un programator 5. Acesta va comanda succesiv măsurătorile pentru motor şi reţea prin acţionarea unui bloc de conectare 6, care va lega un bloc de măsurători 7 activ prin impuls şi măsurare sau pasiv prin măsurare, printr-un adaptor 8 la motorul 1 sau la reţeaua2.
Măsurătorile blocului 7 se vor compara într-un bloc de comparare 9 cu valorile prestabilite ca admisibile pentru fiecare parametru şi produse de un bloc al parametrilor prestabiliţi 10, reglabili fiecare prin elementele de reglaj 11 exterioare.
Elementul de comparare 9 va comanda printr-un amplificator 12 elementul de comutaţie 3 şi va porni motorul în cazul în care parametrii măsuraţi sunt acceptabili, iar în caz contrar va refuza pornirea motorului şi va semnaliza cauza refuzului printrun bloc de semnalizare 13, prevăzut cu un adaptor 14.
Programatorul 5 va comanda măsurarea parametrilor, atât la pornirea voită prin butonul 4, cât şi periodic în timpul funcţionării. Conform comenzilor unui ceas 15, se vor face periodic deconectări de foarte scurtă durată urmate de reanclanşări ale motorului, iar în micile pauze se vor efectua măsurătorile arătate mai sus.
Blocurile 5, 7, 9, 10 şi 15 se vor realiza cu circuite integrate modulare pe câteva tipuri, iar realizarea cerinţelor schemei se va face prin asocieri şi combinări de module de tip în funcţie de consumatorul 1, care este un motor mai mic sau mai mare, dar care poate fi şi un transformator, un bloc transformator cu redresoare sau o altă maşină electrică statică sau rotativă.
Blocurile 6, 8, 11, 12, 13 şi 14 vor fi şi ele tipizate pentru câteva scopuri şi puteri (mărimi), astfel încât orice fel de consumator se va proteja printr-o simplă combinaţie de elemente tip.
Fig.2.13 Schema bloc a aparatului de protecţie
Aparatul de protecţie, conceput pentru motoare asincrone trifazate cu rotorul în scurtcircuit (fig.2.14), de joasă tensiune şi de putere mică, este construit cu aceleaşi blocuri modulare ca în
12

schema bloc, mai puţin blocurile 8 şi 11 de adaptare, care sunt totdeauna necesare, cum s-a arătat la sistem. Funcţionarea este identică cu cea arătată la sistem.
Fig.2.14 Schema aparatului de protecţie.
1.4 Monitorizarea unui motor asincron destinat acţionării unui vehicul hibrid
Integritatea motoarelor electrice destinate autoturismelor şi vehiculelor de pasageri poate fi cel mai bine menţinută de monitorizare frecventă a funcţionarii lor la bordul vehiculului. În acest capitol, este prezentată o schemă pentru monitorizarea şi diagnoza unui motor asincron trifazat ce echipează un vehicul hibtid. Principala metodă de diagnoză o constitue depistarea nesimetriei întrefierului, avarie cu poate avea consecinţe grave asupra funcţionării motorului dar mai ales asupra performanţelor acestuia. Testele pentru depistarea asimetriei întrefierului se efectuează doar atunci când motorul rulează la viteză constantă, relanti, curentul statoric fiind în regim staţionar. Este destul de dificil de a obţine aceste condiţii de încercare la intervale regulate de timp, deoarece motorul funcţionează o perioadă destul de redusă în aceste condiţii speciale. În plus, vibraţiile autoturismului constituie un factor perturbator şi afectează în mod direct inductanţele motorului electric, rezultând un spectru destul de zgomotos în domeniul frecvenţelor radio pentru curenţii statorici. Prin urmare, examinarea stării motorului electric ce echipează vehiculul hibrid (HEV - HYBRID ELECTRIC VEHICLES), prin metode de detectare a nesimetriei întrefierului, la intervale regulate de timp devinde nepotrivită. Metoda propusă depăşeşte problemele cauzate de metodele clasice, deoarece testează asimetria întrefierului la viteză zero. Acest test poate fi realizat şi repetat la pornirea motorului şi în timpul funcţionării la relanti. Metoda propusă poate fi pusă în aplicare fără costuri suplimentare utilizând practic informaţiile furnizate de senzorii disponibili pentru acţionarea motorului electric.
1.4.1 Diagnoza on-board pentru detectarea defectelor motorului
electric
Este foarte important pentru orice vehicul să se realizeze o monitorizare continuă a funcţionării sale. Prin urmare, în prezent aproape toate vehiculele hibride sau electrice sunt
4
x
Rh
L1
ML3
L2
5
13
12
10
13
8
7
6
11Z.1÷
3U ITOITOO T
3
2
1
13

echipate cu sistem de monitorizare şi diagnoză de bord (OBD) [L61]. Acest sistem este folosit pentru monitorizarea şi avertizare în caz de avarii critice în vehicul, cum ar fi nivel baterie, nivel minim de ulei, nivel minim benzină, stare frâne, etc Dacă o problemă sau defecţiune este detectată, sistemul OBD semnalizează problema prin intermediul unui indicator luminos (MIL) ce este vizibil uşor de operator pe tabloul de bord, informând conducătorul auto că a apărut o problemă în funcţionarea sistemului. Indicatorul luminos reprezintă un simbol universal recunoscut, sau un simbol similar pentru fiecare tip de avarie. OBD reprezintă un instrument valoros, ce ajută la întreţinerea şi repararea autovehiculului prin asigurarea unui mod simplu, rapid şi eficient de identificare a problemelor [L48].
Conform codului federal de reguli al SUA (CFR), toate vehicule uşoare, camioanele uşoare şi grele, vehicule mai ieftine de 14000 de lire sterline (inclusiv MDPVs) trebuie să fie echipat cu un sistem de monitorizare şi diagnoză on-bord (OBD), sistem capabil să monitorizeze toate sistemele: sistemul de propulsie, sistemul electric, sistemul de frânare şi sistemul de siguranţă al pasagerilor, pe toată durata de viaţă a vehiculului. Orice vehicul trebuie să fie echipate cu un indicator cu scop general. De asemenea trebuie să existe cel puţin un indicator pentru fiecare sistem în parte [L48]. Deşi cerinţelor CFR pentru OBD sunt unele de principiu, în legătură cu sistemele ce echipează vehiculul, CFR nu precizează cerinţele de monitorizare şi diagnosticare pentru maşinile electrice din componenţa HEV. Pe lângă baterie, care este vitală pentru HEV, monitorizarea condiţiilor de funcţionare a maşinii electrice în cazul oricărui tip de defect, statoric sau rotoric, nu reprezintă o cerinţă a CFR.
Prin monitorizarea şi diagnoza maşini electrice se poate prelungi durata de viaţă a acesteia, se pot efectua lucrări de întreţinere ori de câte ori situaţia o cere şi se poate evita astfel apariţia unui defect catastrofal pentru maşina electrică (fig 2.15). Prin urmare, în procesul de dezvoltare a unui prototip de vehicul hibrid, este necesar să se prevadă un indicator, pentru defectarea motorului electric, pe panoul de bord în scopul de a furniza cheltuieli de întreţinere eficiente pe toată durata de viaţă a vehiculului.
14

Fig 2.15 Martor afişat pe panoul de bord al unui vehicul hibrid (Lexus GS 450h)În cazul unui defect catastrofal, într-o maşină electrică ar putea apărea situaţii periculoase
pentru pasagerii maşinii, în special în timpul conducerii pe autostradă. Cu excepţia cazului în care maşina este monitorizată în permanenţă, în toate celelalte cazuri apariţia unui defect de nesimetrie se poate accentua, ducând la distrugerea maşinii. Prin urmare, un accident cauzat de motorul electric ar deveni practic inevitabil. Odată ce este diagnosticată o problemă în motorul electric informaţia este transmisă la calculatorul de bord al vehiculului, acesta patând lua decizia de oprire a motorului şi pornire a motorului cu ardere internă în scopul de a evita distrugerea motorului electric şi a pune în pericol viaţa pasagerilor. Practic, această soluţie este aplicabilă în cazul în care HEV este conceput pe baza unei arhitecturi de conducere paralele sau serie (fig 2.16). Cu toate acestea, în configuraţiile de conducere serie, ICE este direct conectat la motorul electric [L41]. În arhitecturile serie soluţiile propuse sunt limitate la diagnoza defectelor electrice şi la diagnoza parţială a defectelor de natură mecanică.
Vibraţii mecanice ale vehiculului, îngreunează procesul de diagnoză a defectelor motorului electric.Vibraţiile pot cauza o distribuţie neuniformă a întrefierului, implicit inductanţe variabile pentru maşina electrică. Din acest motiv forma de undă a curentului statoric devine zgomotoasă. Prin urmare, una dintre cele mai bune alternative este de monitorizare a motorului la viteză zero. Intervalele de timp de la pornirea motorului sau de mers la relanti de cele mai multe ori sunt suficiente pentru monitorizarea şi realizarea unei diagnoze corecte pentru motorul electric. Pe de altă parte utilizarea unor senzori de zgomot externi nu ar avea rezultate bune în timpul funcţionării motorului electric datorită vibraţiilor de natură mecanică care apar.
15

Fig 2.16 Sistem integrat pentru diagnoza defectelor unei HEV
1.4.2 Durata unui ciclu de testare pentru HEV
Durata unui ciclu a fost pentru prima dată stabilită pentru a valida un vehicul electric hibrid din punct de vedere al emisiilor şi a consumului de energie. Prima valoare aleasă de organizatia EPA (Environmental Protection Agency) din SUA a timpului de testare al unui motor a fost de 1300s, reglementată prin procedura de testare federală (FTP75). Tabelul 2.1 prezintă durata unui ciclu de testare pentru diverse regiuni geografice [L67].
Tabelul 2.1 Durata unui ciclu de test în diverse regiuni geografice
Regiunea Ciclul Timpul de mers în gol (%) Viteza medie [Km/h]Asia - Pacific 10-15 moduri 32,4 22,7
Europa NEDC 27,3 32,2USA – urban EPA - city 19,2 34
USA – autostrada EPA - hwy 0,7 77,6USA – extern EPA 7,5 77,2
Industrie Intreaga lume 20,6 51
Aşa cum se arată în figura 2.17, un ciclu de conducere este dominat de fenomene tranzitorii în cazul în care motorul funcţionează în condiţii necorespunzătoare. Astfel, în loc să se folosească diagnoza continuă a motorului se poate efectua acest lucru doar în cazul mersului la relanti.
16

Fig 2.17 Caracteristica de funcţionare a unui motor electric conform sistemului SUA - FTP75
1.4.3 Detectarea asimetriilor rotorice în timpul mersului la relanti a
maşinii electrice
Întreruperea barelor rotorice într-un motor asincron determină apariţia de armonici de curent de frecvenţă fs(1±2s) [L63],[L54]. În aplicaţii de monitorizare în timp real, o mare problemă o constitue detectarea acestor benzi laterale. De exemplu, deoarece forma de undă a curentului depinde de valoarea alunecării, rezultă că viteza rotorică trebuie să fie măsurată foarte precis. În caz contrar nu este posibil să se detecteze barele rotorice întrerupte din componenta fundamentală a curentului statoric măsurat. O soluţie alternativă ar putea-o constitui utilizarea unui filtru „trece bandă” aplicat curentului achiziţionat. Cu toate acestea, această soluţie nu se aplică sistemelor de acţionare cu viteză reglabilă din cauza schimbărilor dinamice ale frecvenţei statorului. O altă alternativă o constituie estimarea vitezei rotorice, ceea ce ar mări puţin precizia calculelor. Cu toate acestea, la funcţionarea cu viteză redusă algoritmi de estimare a vitezei nu furnizează informaţii foarte precise. Prin urmare, pentru a putea fi folosit algoritmul de detecţie a barelor rupte motorul ar trebui să funcţioneze la turaţie ridicată. O altă cerinţă, pentru aplicarea cu succes a acestei metode, o reprezintă funcţionarea motorului la cuplu constant.
Metoda propusă în continuare detectează existenţa barelor rupte din rotor, în timp rea, fără senzor de viteză şi fără alte componente suplimentare.
Diagnoza motorului este efectuată atunci când viteza motorului este zero, deci nu este nevoie ca viteza să fie măsurată sau estimată. Rotorul este blocat mecanic sau electric folosind discuri de frânare. Deoarece semnalul injectat pentru a testa asimetria rotorului este sub 10% din valoarea tensiunii nominale, cuplul generat în timpul testării este neglijabil. Astfel, testarea întreruperii uneia sau mai multor bare rotorice poate fi pusă în aplicare fără componente suplimentare.
Termenul fs(1+2s) este cauzat de vibraţiile de cuplu precum şi de cauze electromecanice ce ţin de interacţiunea dintre stator şi rotor. Prin urmare, în gama de frecvenţă joasă asimetria se observă ca fiind simetrică (fig 2.18).
17

Fig 2.18 Spectrul de frecvenţe radio pentru un motor ce are o bară rotorică întreruptăa) tastare în condiţii normaleb) testare la viteză rotorică 0
Deoarece alunecare este maximă atunci când rotorul este în regim staţionar, frecvenţele apărute sunt destul de depărtate una de cealaltă , după cum se observă din figura 2.20b. Într-adevăr, la viteză zero aceşti termeni ar trebui teoretic să dispară iar spectrul să fie curat, în comparaţie cu o încercare efectuată la turaţie nominală şi cuplu constant.
Metoda prezentată în continuare se bazează pe termenul fs(1-2s). La viteză zero, s=1 astfel că termenul fs(1-2s) este egal cu (-fs). O singură fază a sistemului analizat nu funcţionează pentru frecvenţe negative; de aceea vectorul celor trei curenţi de fază este transformat într-un spaţiu vectorial complex al curenţilor. Componenta monofazată a curentului analizat este insensibilă la direcţia de rotaţie a vectorului, de aceea vom găsi suprapunerea laterală stânga şi componenta fundamentală la frecvenţa de excitaţie. Pentru a calcula componenta laterală stânga şi componenta fundamentală, influienţa spaţiului vectorial, la frecvenţe reduse este examinată experimental.
În figurile 2.19 şi 2.20, este urmărită detectarea în timp real a întreruperii unei bare rotorice, atunci când motorul este oprit, rotorul este blocat, iar la borne îi este aplicată o tensiune joasă, astfel încât valoarea curentului să fie apropiată de cea nominală.
18

Fig 2.19 Frecvenţa normală lateral stânga pentru un motor normal obţinută de către DSP în timp real la blocarea rotorului (I=9A, U/f = 1, f=48Hz)
a) caracteristica magnitudine/ timp b) caracteristica magnitudine/frecvenţăPentru a verifica metoda propusă, s-au efectuat o serie de experimente, pentru diferite
raporturi U/f, valori diferite ale curenţilor de fază sau diferite frecvenţe. S-a observat căci în jurul valorii nominale a curentului de fază, motoarele sănătoase se pot distinge cu uşurinţă utilizând metoda propusă.
19

Fig 2.20 Frecvenţa normală lateral stânga pentru un motor defectobţinută de către DSP în timp real la blocarea rotorului (I=9A, U/f = 1, f=48Hz)
a) caracteristica magnitudine/ timp b) caracteristica magnitudine/frecvenţă
Un test similar se repetă pentru motoarele care au mai puţin de 10% bare rotorice întrerupte, iar rezultatele sunt prezentate în figura 2.21a şi 2.21b. Comparând figurile 2.20 şi 2.21 se observă că în aceleaşi condiţii de testare, magnitudinea a crescut cu 13 dB, ceea ce este destul de mult şi permite distingerea motoarelor defecte, de cele sănătoase
20

Fig 2.21 Frecvenţa normală lateral stânga pentru un motor defectobţinută de către DSP în timp real la la diverse frecvenţe (U/f = 0,5)
a) f=36Hz b) 48Hz c) f=60Hz d) 72Hz
În figura 2.22, mărimea curentului este testată pentru un raport U/f = 0,5. Rezultatele comparative sunt destul de promiţătoare. Se observă că diferenţa este destul de apropiată de cazul anterior, ceea ce confirmă corectitudinea metodei. Pentru implementarea metodei nu este nevoie de hardware extern, fiind suficiente câteva secunde de test înainte de pornirea motorului.
Acelaşi test este pus în aplicare în cazul în care raportul U/ f este 1.0 pentru diverse valori ale frecvenţei curentului de fază, pentru a observa influienţa curentului de magnetizare. Se observă că rezultatele sunt asemănătoare, rezultând astfel căci curentul de magnetizare are o influienţă foarte mică putând astfel să fie ignorat ca şi parametru de intrare în modelul de testare a întreruperii uneia sau mai multor bare rotorice ( fig 2.23).
21

Fig 2.22 Frecvenţa normală lateral stânga pentru un motor defectobţinută de către DSP în timp real la la diverse frecvenţe (U/f = 1,0)
a) f=36Hz b) 48Hz c) f=60Hz
22

Fig 2.23 Frecvenţa normală lateral stânga pentru un motor defectobţinută de către DSP în timp real (U/f = 1,0 , U/f = 0,5 si f=48Hz )
În concluzie, sistemul de monitorizare şi detectare a defectelor cauzate de nesimetriile rotorice dintr-un motor asincron ce echipează un vehicul electric hibridde, poate fi implementat cu uşurinţă utilizând tehnica descrisă mai sus. Principalele avantaje ale acestei metode le reprezintă lipsa senzorilor suplimentari şi a componentelor hardware. Soluţia propusă poate fi uşor extinsă la alte tipuri de defecte pentru monitorizarea completă a motorului electric.
23