Embed Size (px)
Citation preview
CONTRIBUIÇÃO AO ESTUDO DE FLAMBAGEM EM DUTOS RÍGIDOS
SUBMARINOS CONDUZINDO FLUIDOS AQUECIDOS
André Luiz Lupinacci Massa
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA
CIVIL.
Aprovada por:
____________________________________________ Prof. José Luis Drummond Alves, D.Sc.
____________________________________________ Prof. Nelson Szilard Galgoul, Dr.-Ing.
____________________________________________ Dr. Luis Volnei Sudati Sagrilo, D.Sc.
____________________________________________ Dr. Adilson Carvalho Benjamin, D.Sc.
RIO DE JANEIRO, RJ – BRASIL. MARÇO DE 2003

ii
MASSA, ANDRÉ LUIZ LUPINACCI
Contribuição ao Estudo de Flambagem em Dutos
Rígidos Submarinos Conduzindo Fluidos Aquecidos
[Rio de Janeiro] 2003
VIII, 96 p. 29,7cm (COPPE/UFRJ, M.Sc.,
Engenharia Civil, 2003)
Tese - Universidade Federal do Rio de Janeiro,
COPPE
1. Flambagem em Dutos Rígidos Submarinos
2. Instabilidade
3. Elementos Finitos
I.COPPE/UFRJ II. Título (série)

iii
Dedico este trabalho, pelo apoio e paciência durante a minha ausência, à minha querida esposa Geórgia e ao meu filho Hugo.

iv
Agradecimentos
Ao Prof. José Luis Drummond Alves, pela amizade, compreensão, apoio e pela orientação.
Ao Prof. Nelson Szilard Galgoul, pelo grande incentivo e por ter contribuído com a
realização deste trabalho, permitindo o uso do sistema SACS e da infra-estrutura de sua
empresa.
Ao Engo Geraldo Filizola, por ter, na época em que trabalhava subordinado a ele,
incentivado e permitido que eu pudesse fazer este curso.
Aos meus queridos pais Eney e Sonia, pelo constante apoio e dedicação, através dos quais
construíram uma família sólida e filhos que os amam.
Aos amigos da SUPORTE, pelo incentivo, contribuição e pela paciência que tiveram
comigo durante a realização deste trabalho. Em particular ao Engo Eduardo Decnop, pelo
auxílio na elaboração do modelo no Programa ANSYS, ao Engo Marcello Varela, pelas
dicas no Visual Basic e a Enga Cláudia A. Claro, pelas dicas durante a elaboração do
trabalho e revisão do texto.
Aos colegas do EEPTM/PIM, pelo grande apoio despendido e pelo material de pesquisa
fornecido.
Ao Engo e amigo Maurício Barros, pelo companheirismo e pela oportunidade que me foi
por ele dada de conhecer a área de projetos em dutos submarinos.

v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários para a
obtenção do grau de Mestre em Ciências (M.Sc.)
CONTRIBUIÇÃO AO ESTUDO DE FLAMBAGEM EM DUTOS RÍGIDOS
SUBMARINOS CONDUZINDO FLUIDOS AQUECIDOS
André Luiz Lupinacci Massa
Março/2003
Orientador: José Luis Drummond Alves Programa: Engenharia Civil
Este trabalho trata do fenômeno de flambagem por levantamento, que pode ocorrer
em dutos rígidos submarinos enterrados ou semi-enterrados, transportando fluidos
aquecidos.
O fenômeno em apreço ocorre por instabilidade do equilíbrio, resultante da
expansão axial que tem o duto, ao ser aquecido pelo produto transportado. O duto se
levanta devido à impossibilidade de flambar lateralmente, tendo em vista a contenção
lateral decorrente do enterramento.
Um programa em elementos finitos de barra foi desenvolvido, servindo como
ferramenta numérica, que pudesse ser utilizada para a avaliação da influência dos principais
parâmetros geométricos e de solo.
A partir deste software foi desenvolvido um procedimento gráfico, para a resolução
do problema em questão.

vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the requirements
for the degree of Master of Science (M.Sc.)
CONTRIBUTION TO THE BUCKLING STUDY IN SUBMARINE PIPELINES
TRANSPORTING HOT FLUIDS
André Luiz Lupinacci Massa
March/2003
Advisor: José Luis Drummond Alves Department: Civil Engineering
This work deals with the upheaval buckling problem, which is likely to take place in
buried and semi-buried rigid pipelines transporting hot fluids.
The phenomenum, which is being evaluated, occurs due to lateral instability,
resulting from an axial expansion of the pipe, when it is heated by the material being
transported. The pipe is lifted from it’s vertical supports because of it’s impossibility to
buckle sideways, since it is laterally supported by the soil.
A finite element program, based on a beam element, was developed in order to
produce a numerical testing tool, which could be used to evaluate the influence of the main
geometric and soil parameters.
Based on this software a graphical solution for the problem at stack was developed.

vii
ÍNDICE
CAPÍTULO 1 ........................................................................................................................ 1
INTRODUÇÃO .................................................................................................................... 1
1.1 MOTIVAÇÃO .................................................................................................................. 1
1.2 OBJETIVO E ESCOPO ...................................................................................................... 2
1.3 ORGANIZAÇÃO DO TEXTO.............................................................................................. 3
CAPÍTULO 2 ........................................................................................................................ 5
PROJETO DE DUTOS RÍGIDOS SUBMARINOS ......................................................... 5
2.1 INTRODUÇÃO ................................................................................................................. 5
2.2 DEFINIÇÃO DA DIRETRIZ DE UM DUTO ........................................................................... 6
2.3 DIMENSIONAMENTO MECÂNICO .................................................................................... 9
2.4 ANÁLISE DO COLAPSO LOCAL E GLOBAL DO DUTO....................................................... 9
2.5 VERIFICAÇÃO DA ESTABILIDADE................................................................................. 10
2.6 DIMENSIONAMENTO DA PROTEÇÃO CATÓDICA ........................................................... 11
2.7 PROJETO DE CHEGADA NA PRAIA (SHORE APPROACH) ................................................ 12
2.8 ANÁLISE DE LANÇAMENTO.......................................................................................... 14
2.9 PROJETO DE CRUZAMENTOS E CALÇAMENTOS ............................................................ 19
2.10 PROJETO DOS ELEMENTOS DE INTERLIGAÇÃO (TIE-INS) ............................................ 21
2.11 PROJETO DOS RISERS ................................................................................................. 23
2.12 PROJETO DE ENTERRAMENTO E PROTEÇÃO MECÂNICA ............................................. 28
2.13 PRÉ-COMISSIONAMENTO E TESTE HIDROSTÁTICO..................................................... 28
CAPÍTULO 3 ...................................................................................................................... 30
DESCRIÇÃO E ANÁLISE DO PROBLEMA................................................................. 30
3.1 INTRODUÇÃO ............................................................................................................... 30
3.2 CONSIDERAÇÕES SOBRE O SOLO .................................................................................. 30
3.3 DESCRIÇÃO DO FENÔMENO.......................................................................................... 37
3.4 ANÁLISE DO PROBLEMA .............................................................................................. 39

viii
CAPÍTULO 4 ...................................................................................................................... 47
DESCRIÇÃO DO PROGRAMA UPDUT ....................................................................... 47
4.1 INTRODUÇÃO ............................................................................................................... 47
4.2 ENTRADA DE DADOS DO PROGRAMA........................................................................... 49
4.3 PROCESSAMENTO DOS DADOS E ANÁLISE DO PROBLEMA............................................ 54
4.4 RESULTADOS OBTIDOS PELO PROGRAMA ..................................................................... 68
CAPÍTULO 5 ...................................................................................................................... 70
EXEMPLOS COMPARATIVOS ..................................................................................... 70
5.1 INTRODUÇÃO ............................................................................................................... 70
5.2 EXEMPLO 1 - CARGA CRÍTICA DE FLAMBAGEM DE UMA COLUNA BI-ENGASTADA ........ 70
5.3 EXEMPLO 2 - COMPARAÇÃO COM O PROGRAMA SACS ............................................... 72
5.4 EXEMPLO 3 - COMPARAÇÃO COM O PROGRAMA PCUB ............................................... 77
5.5 EXEMPLO 4 - COMPARAÇÃO COM O PROGRAMA ANSYS ............................................ 81
CAPÍTULO 6 ...................................................................................................................... 85
APLICAÇÃO DO PROGRAMA...................................................................................... 85
6.1 INTRODUÇÃO ............................................................................................................... 85
6.2 DESCRIÇÃO DO PROBLEMA .......................................................................................... 85
6.3 ANÁLISE DOS DADOS E RESULTADOS OBTIDOS ........................................................... 86
CAPÍTULO 7 ...................................................................................................................... 93
CONCLUSÕES E SUGESTÕES ...................................................................................... 93
7.1 SÍNTESE ....................................................................................................................... 93
7.2 CONCLUSÕES ............................................................................................................... 93
7.3 SUGESTÕES PARA TRABALHOS FUTUROS...................................................................... 94

1
Capítulo 1
Introdução
1.1 Motivação
As últimas décadas marcaram, no Brasil, uma busca desenfreada pela auto-
suficiência na produção de óleo e gás. Tal busca tem tido sucesso, principalmente, na
extração de produtos brutos na área da plataforma continental, comumente denominada
área offshore.
Em virtude disso, a instalação de dutos rígidos submarinos, como estruturas
responsáveis pelo escoamento de matéria-prima entre o poço (origem do produto bruto) e o
continente, bem como a interligação entre plataformas produtoras, teve uma grande
demanda. Infelizmente, contudo, o desenvolvimento de novas tecnologias na elaboração de
projeto de dutos rígidos submarinos veio, também, como resultado de alguns insucessos,
que ocorreram tanto na fase de instalação quanto na fase posterior de operação destes dutos.
Dentre tais insucessos, dois fatos marcaram fortemente a lembrança dos cariocas, o
primeiro ocorrido no ano 1997 e o segundo no ano de 2000, onde a ruptura de um duto no
interior da Baía de Guanabara causou, principalmente no segundo acidente, um grande
derramamento de óleo próximo à Ilha de Paquetá, com sérios danos para a ecologia.
No primeiro acidente em 1997, não havia motivo para supor que o duto, instalado
há muitos anos, não estaria adequadamente dimensionado, entretanto, os vários ciclos de
operação ao qual o duto fora submetido geraram progressivamente imperfeições
geométricas fazendo com que o mesmo sofresse um levantamento, fenômeno que a
literatura internacional já batizara de upheaval buckling Uma vez exposto e com sua
proteção catódica comprometida, a parede do duto foi corroída causando assim o
vazamento de óleo.
2
No segundo acidente em 2000, em função de reparos resultantes dos problemas
causados pelo primeiro acidente, o duto iniciou uma movimentação lateral em forma de
uma serpente até o instante em que a parede de aço não resistiu e entrou em colapso. Este
fenômeno é conhecido na literatura pelo nome de lateral buckling ou snaking.
É desnecessário dizer que o cuidado em relação a esses fenômenos passou a fazer
parte do escopo de projeto de todos os novos dutos, bem como da verificação preventiva de
todos os existentes.
O presente trabalho é, igualmente, motivado pela necessidade não só de se conhecer
melhor o fenômeno em apreço, mas também de se desenvolver ferramentas práticas para o
estudo do mesmo no dia a dia do projeto.
1.2 Objetivo e Escopo
O objetivo deste trabalho é fornecer uma visão geral do fenômeno de flambagem por
variação de temperatura em dutos rígidos submarinos enterrados ou semi-enterrados que
transportam fluidos aquecidos. É enfatizado o lado prático do dimensionamento destes
dutos, através da elaboração de gráficos que correlacionem as imperfeições em sua
geometria geradas durante a instalação sobre o leito marinho irregular, bem como pela
variação da profundidade de enterramento.
Com este intuito, é feita a implementação de um programa em elementos finitos de
barra como ferramenta numérica, auxiliar na determinação do comportamento do duto, na
medida em que este se dilata, como resultado do aumento de temperatura, acompanhando-o
até que se levante por efeito de instabilidade do equilíbrio.
O mesmo software é utilizado para a elaboração dos gráficos de correlação citados
acima. Estes têm por finalidade representar o comportamento da estrutura em função da

3
variação de alguns parâmetros críticos do problema, tais como: temperatura, profundidade
de enterramento, etc....
É importante ressaltar que o estudo do fenômeno distingue, normalmente, entre dutos
enterrados (aqueles impedidos pelo solo de flambar lateralmente e que o fazem, portanto,
por levantamento) e dutos que repousam na superfície livre do solo (estes últimos flambam
lateralmente ao ser vencido o atrito do terreno). Neste trabalho serão considerados apenas
os casos em que o duto encontra-se enterrado, não sendo estudados os efeitos de
flambagem lateral do mesmo (snaking).
1.3 Organização do Texto
Neste item, uma breve descrição do conteúdo de cada capítulo é feita de forma a
facilitar a leitura do texto.
O capítulo 2 fornece uma visão geral das etapas de projeto de um duto rígido
submarino, descrevendo de forma resumida, para o leitor não familiarizado com o assunto,
os passos necessários para o seu dimensionamento e sua instalação.
O capítulo 3 traz uma descrição detalhada do problema, bem como da metodologia de
análise proposta para o problema. São apresentadas as condições sob as quais o fenômeno
pode ocorrer e ainda estudos realizados por terceiros propondo soluções para o problema.
Dentre vários outros, cita-se as seguintes referências: KERR [1,2], HOBBS [3,4],
TVERGAARD & NEEDLEMAN [5], PALMER, ELLINAS, RICHARDS & GUIJT [6],
SCHAMINÈE, ZORN & SCHOTMAN [7] no início dos anos 90 e mais recentemente
PALMER [8] em 1994. Este capítulo aborda, ainda, os tipos de solos considerados na
análise do problema.
O capítulo 4 fornece uma descrição do programa empregado como ferramenta
numérica de análise do fenômeno, apresentando a formulação do elemento finito adotado,

4
as condições de contorno aplicadas ao problema, as considerações de carga empregadas, o
método adotado como solução do problema e o critério de convergência adotado.
O capítulo 5 apresenta exemplos numéricos obtidos para alguns casos estudados
ilustrando comparações destes exemplos com resultados numéricos de programas
internacionalmente reconhecidos como forma de validar a metodologia empregada na
solução do problema.
O capítulo 6 pretende descrever a aplicabilidade do programa como ferramenta
prática na verificação do fenômeno de flambagem e na sua prevenção, através da
determinação de gráficos, os quais correlacionam as várias imperfeições para cada altura de
terra aplicada com a força axial resultante, para o tipo de solo estudado, contrastando-os
com as condições de temperatura e pressão atuantes no duto durante a sua operação.
Finalmente, o capítulo 7 fornece uma síntese das principais considerações abordadas
no presente trabalho, onde algumas conclusões são expostas. Também são apresentadas,
neste capítulo, algumas sugestões para pesquisas ou trabalhos futuros.
5
Capítulo 2
Projeto de Dutos Rígidos Submarinos
2.1 Introdução O projeto de um duto rígido submarino engloba diversas etapas de
dimensionamento, dentre as quais destacam-se as seguintes:
• definição da diretriz do duto;
• dimensionamento mecânico;
• análise do colapso local e global do duto;
• verificação da estabilidade;
• dimensionamento da proteção catódica;
• projeto de chegada na praia (shore approach);
• análise de lançamento;
• projeto de cruzamentos e calçamentos;
• projeto dos elementos de interligação (tie-ins);
• projeto dos risers;
• projeto de enterramento e proteção mecânica;
• teste hidrostático e comissionamento.
Referências sobre estas etapas podem ser encontradas em CLARO [9], DnV OS-
F101 [10] e BSI BS 8010 [11].
Uma descrição resumida de cada uma dessas etapas é fornecida a seguir:

6
2.2 Definição da Diretriz de um Duto
A diretriz de um duto submarino é definida, basicamente, em função das
características do solo marinho, da extensão dos vãos livres decorrentes da geometria
acidentada e dos obstáculos existentes no leito marinho, tais como: dutos instalados
anteriormente, sucata, etc… e conforme recomendação de normas específicas para este fim,
como: DnV OS-F101 [10] ou BSI BS 8010 [11].
O início da definição da diretriz de um duto se dá através da definição dos dois
pontos que este deve interligar. Os pontos inicial e final da linha (target points) devem ser
determinados após estudo por parte da embarcação responsável pela instalação. A partir do
perfil do solo marinho, obtido por sonar na região, é proposto um traçado inicial, o qual é
otimizado, iterativamente, levando-se em conta o vão livre máximo admissível e a
minimização do número de cruzamentos com obstáculos, visto que estes tornam o
empreendimento economicamente mais caro.
A partir das características do duto (diâmetro, espessura, revestimentos, etc...),
calcula-se o vão máximo admissível da linha proposto pela norma DnV OS-F101 [10], que
norteará todo o projeto. Ressalta-se, porém, que as características do solo influenciam a
diretriz da linha, tanto no que diz respeito à correção de vãos livres, como em relação à
integridade do duto durante o lançamento do mesmo. Além disso, outros parâmetros, tais
como eventuais interferências existentes no fundo do mar, limitações de raio mínimo, etc…
são combinados, chegando-se a um traçado final da linha.
Como pode ser visto, as diversas atividades não são independentes. A prática de
projeto se constitui não só num processo iterativo, mas, também, numa forte interação das
diversas etapas do mesmo.

7
A Figura 2.2a mostra o traçado típico em planta de um duto submarino, ligando um
manifold a uma plataforma fixa. Ressalta-se nesta Figura 2.2a a existência, na região, do
cruzamento do oleoduto com um cabo elétrico previamente existente no campo e que deve
ser protegido. A proteção do cabo e o isolamento elétrico de ambas as linhas foram feitos,
neste caso, a título de exemplo, através da instalação de mantas de proteção.

8
Figura 2.2a - Exemplo típico de um traçado em planta com exemplo de proteção para
isolamento entre linhas
Mantas de proteção
"Target area"
Oleoduto de 22"
Cabo elétrico previamente instalado
"Spool" de fechamento
"Manifold"
Plataforma fixa
"Target area"
"Spool" de fechame
N.V.
Azimute da diretriz 8,4o
E 3
5380
0
E 3
5400
0
N 7525400
N 7525300
N 7525200
N 7525100

9
2.3 Dimensionamento Mecânico
Nesta fase são definidas as características do aço e as condições geométricas a
serem empregadas na fabricação do duto. A escolha do aço leva em conta parâmetros como
a corrosividade do fluido transportado, a temperatura de projeto, a soldabilidade do
material, a compatibilidade química entre o metal base e o eletrodo utilizado, além da
compatibilidade com todos os outros componentes da linha, etc… Várias são as referências
disponíveis na determinação destas características, tais como: API 5L [12], DnV OS-F101
[10], BSI BS 8010 [11], entre outras. Uma vez definido o material a ser empregado, são
feitas verificações estruturais para o dimensionamento de espessuras e limites de
escoamento que o duto deverá possuir, de forma a atender às condições de instalação, teste
e operação. De modo geral este dimensionamento segue as recomendações de [10]. Dentre
as condições normalmente consideradas para o dimensionamento, estão a pressão interna e
externa, relativas tanto à fase de operação, como à fase de teste para comprovação da
estanqueidade. Também é verificada, neste item, a propagação de falhas devido ao colapso
hidrostático. É durante a instalação que o duto está mais sujeito à propagação do colapso,
uma vez que nesta fase o duto encontra-se sujeito às máximas tensões de flexão, além da
pressão externa. Segundo [10], para a fase de operação da linha, é suficiente que a pressão
de colapso seja 1,3 vezes maior do que a pressão externa. É comum, durante o projeto,
adotar-se uma redução de espessura do duto para se levar em conta o eventual desgaste do
material devido à corrosão, mesmo tendo sido o aço e o projeto de proteção catódica
definidos no sentido de se evitar a ocorrência da corrosão.
2.4 Análise do Colapso Local e Global do Duto
A análise ao colapso local e global de um duto submarino diz respeito às
verificações necessárias, de modo a garantir a integridade estrutural do duto submarino
durante sua vida útil, sem o surgimento de amassamentos ou deformações excessivas
resultantes da pressão interna ou da temperatura do fluido que o mesmo conduz. Esta etapa
do dimensionamento está intrinsecamente ligada ao dimensionamento mecânico do duto e

10
aos estudos de estabilidade e enterramento do mesmo. É nesta etapa que são avaliados os
fenômenos de upheaval e lateral buckling, associados às condições geométricas e de
escoamento do fluido. Referências podem ser encontradas em [10].
2.5 Verificação da Estabilidade
Nesta etapa define-se a estabilidade, tanto vertical como horizontal do duto no leito
marinho. Por estabilidade vertical entende-se a capacidade do duto de manter-se na posição
como instalado, levando-se em conta, tanto as condições de apoio do solo marinho, quanto
às condições de carga, como peso e empuxo, nas diversas etapas do sistema de escoamento.
Da mesma forma, a estabilidade horizontal de um duto submarino traduz sua capacidade de
manter-se dentro de seu traçado, guardadas as devidas tolerâncias de acomodação da linha e
considerando-se, além das características do duto, as condições ambientais de carga lateral
no local e a resistência ao atrito do solo. É nesta fase que se determina a espessura do
revestimento de concreto para prover peso adicional, de modo a garantir a estabilidade e/ou
a adoção do enterramento do duto, caso necessário. Ressalta-se que, nesta etapa do projeto,
já são conhecidas as características geométricas e mecânicas do duto, bem como as
propriedades do fluido, sendo, portanto, possível definir-se o máximo vão entre apoios,
tanto no que diz respeito a tensões flexo-axiais, como em relação a vibrações induzidas por
geração de vórtices. Referências para esta etapa do projeto podem ser encontradas nas
normas DnV OS-F101 [10] e BSI BS 8010 [11], as quais recomendam que o fator
segurança mínimo para a estabilidade lateral do duto devido às forças de corrente e onda
seja igual a 1,1 quando os parâmetros de solo não são totalmente confiáveis além de valores
mínimos para espessuras de concreto e resistência.

11
2.6 Dimensionamento da Proteção Catódica
Nesta fase são determinados a forma, a quantidade e o tipo de anodos de sacrifício
necessários à preservação da integridade do duto durante toda a sua vida útil, em
complementação ao revestimento anticorrosivo adotado para isolar a superfície externa do
duto da água do mar. O aço é formado por vários elementos e, por não ser um material puro
como o ouro, em contato com um meio que sirva de eletrólito, tende à formação de células
de corrosão, com uma parte anódica e outra catódica. A proteção catódica consiste em se
colocar em contato com o material que se quer proteger, um outro de maior
eletronegatividade (mais anódico), fazendo com que este seja corroído antes do aço. Como
um anodo de sacrifício é efetivo para uma determinada área de aço a se proteger, faz parte
do projeto de proteção catódica, o cálculo da área de aço exposta ao eletrólito, para a
estimativa da massa de material anódico necessária à proteção durante toda a vida útil da
estrutura. São considerados nesta etapa dados como: a corrosividade do meio, o material do
duto, a salinidade e temperatura da água do mar, o material do anodo, bem como a
assiduidade das inspeções, etc...
Em geral, no caso dos dutos submarinos, os anodos empregados são em formato de
braçadeira, permitindo uma melhor conformação ao elemento a ser protegido.
Outra forma de proteção catódica empregada em dutos submarinos é aquela
realizada por corrente impressa, que é aquela que utiliza uma força eletromotriz,
proveniente de uma força externa de corrente contínua (gerador), de forma a imprimir a
corrente necessária à proteção da estrutura considerada. Esta opção tem sido pouco
utilizada, contudo, visto que envolve o uso de retificadores, em geral de silício, ou baterias
solares como fonte de força, além dos anodos e cabos de interligação que já estão presentes
na solução de proteção por anodos de alumínio ou zinco. Resumindo, é pouco prática.

12
Referências sobre o dimensionamento da proteção podem ser encontradas em [10],
a qual referencia a norma DnV RP B401[13], específica para este fim, e na norma BSI BS
8010 [11].
2.7 Projeto de Chegada na Praia (Shore Approach)
Esta etapa trata da chegada ou aproximação até a praia de um duto, conhecida pelos
especialistas como shore approach. A chegada do duto até a praia, em geral, pode ser
realizada através de dois métodos mencionados a seguir:
• arraste do duto para a praia;
• furo direcional.
Referências desta etapa podem ser encontradas em [10] e [11].
No arraste para a praia, a instalação é feita através de barcaça típica para instalação de
dutos rígidos e de uma base fixa posicionada em terra, normalmente denominada de base
guincho, a qual serve para realizar o puxamento do duto a partir da embarcação instaladora
em direção à praia, utilizando-se adicionalmente a ajuda de embarcações de pequeno calado
no auxílio da transferência dos cabos e acessórios entre a embarcação instaladora e a base
guincho. Uma vez conectado o cabo de puxamento, prossegue-se com o arraste do duto,
onde a base guincho recolhe o cabo conectado ao duto enquanto a embarcação instaladora
produz ou lança o duto. Na maioria das vezes em que esta metodologia é empregada, bóias
de alívio são adotadas com objetivo de aliviar o peso submerso do duto, facilitando o
puxamento por parte da base guincho durante a instalação do mesmo.
Consta do projeto de arraste a definição de um procedimento para toda a operação,
bem como o detalhamento de todos os itens a serem utilizados durante a instalação, tais
como: cabos, poitas, embarcações, etc... É usual, neste caso, fazer-se o enterramento do

13
duto na região de arrebentação das ondas, visando evitar a vibração que estas podem
produzir no mesmo.
O segundo método de instalação empregado próximo à praia trata da execução de
um furo direcional através das camadas de solo existentes e do posterior puxamento da
linha pelo interior deste furo executado. Neste tipo de instalação, uma máquina típica para a
realização de furos é posicionada em terra tendo no lado marítimo o apoio de uma balsa de
pequenas operações ou de uma balsa de instalação de dutos rígidos. A operação é
relativamente simples: a máquina executa o furo direcional através da passagem de
alargadores até se atingir o diâmetro necessário e, em seguida, efetua-se o puxamento da
linha, o qual ocorre, em geral, de mar para terra. De forma a reduzir o atrito entre a parede
do furo e o duto e garantir uma certa estabilidade durante a execução do alargamento, o
interior do furo é preenchido com lama bentonítica. A Figura 2.7a ilustra a execução de um
furo direcional em um duto rígido submarino.
O objetivo maior deste último método é garantir a estabilidade do duto quanto ao
estado de mar sempre agressivo nesta região próxima à praia. Este método garante que não
haverá por parte do duto nenhuma instabilidade por ação de ondas e correntes. Entretanto,
pode tornar suscetível o surgimento de pontos de engastamento que, aliados às
imperfeições e curvaturas impostas no traçado do duto durante sua instalação, podem
conduzir ao surgimento de efeitos de segunda ordem, ocasionando, assim, um colapso
global do mesmo.
De forma idêntica ao primeiro método, para garantir o sucesso da instalação, um
procedimento deve ser elaborado para toda a operação, bem como o detalhamento de todos
os itens a serem empregados neste serviço. Neste estudo, todas as considerações acerca do
surgimento de efeitos de segunda ordem devem ser estudadas, no sentido de se minimizar
as imperfeições, permitindo um traçado suave.

14
Figura 2.7a - Chegada de praia utilizando metodologia por furo direcional segundo [10]
2.8 Análise de Lançamento
A análise de lançamento de um duto visa assegurar a integridade do duto durante
sua instalação, a partir de uma embarcação equipada para esta finalidade. Todas as
situações passíveis de acontecer durante a instalação do duto devem ser simuladas e
analisadas. Estas incluem não só o lançamento propriamente dito, mas também a
inicialização e a finalização da operação, além de eventuais abandonos e recuperações que
se seguem a acidentes.
Dentre os diversos métodos de instalação de dutos pela superfície, os mais
empregados atualmente são o método S-Lay, o método J-Lay e o método Reel-Lay, cujas
referências podem ser encontradas na DnV OS-F101 [10].
15
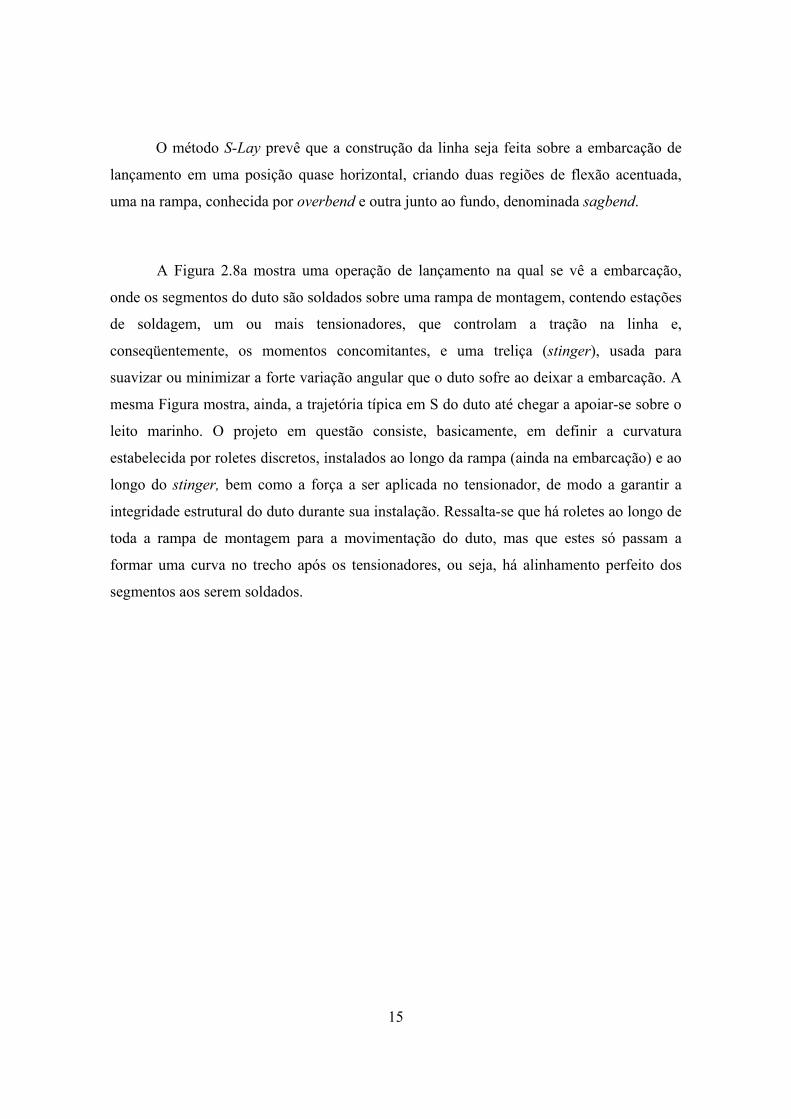
O método S-Lay prevê que a construção da linha seja feita sobre a embarcação de
lançamento em uma posição quase horizontal, criando duas regiões de flexão acentuada,
uma na rampa, conhecida por overbend e outra junto ao fundo, denominada sagbend.
A Figura 2.8a mostra uma operação de lançamento na qual se vê a embarcação,
onde os segmentos do duto são soldados sobre uma rampa de montagem, contendo estações
de soldagem, um ou mais tensionadores, que controlam a tração na linha e,
conseqüentemente, os momentos concomitantes, e uma treliça (stinger), usada para
suavizar ou minimizar a forte variação angular que o duto sofre ao deixar a embarcação. A
mesma Figura mostra, ainda, a trajetória típica em S do duto até chegar a apoiar-se sobre o
leito marinho. O projeto em questão consiste, basicamente, em definir a curvatura
estabelecida por roletes discretos, instalados ao longo da rampa (ainda na embarcação) e ao
longo do stinger, bem como a força a ser aplicada no tensionador, de modo a garantir a
integridade estrutural do duto durante sua instalação. Ressalta-se que há roletes ao longo de
toda a rampa de montagem para a movimentação do duto, mas que estes só passam a
formar uma curva no trecho após os tensionadores, ou seja, há alinhamento perfeito dos
segmentos aos serem soldados.

16
Figura 2.8a - Análise de lançamento - Método S-Lay
Devem ser estudados, ainda nesta fase de projeto, os casos particulares de
inicialização e finalização do lançamento, bem como eventuais etapas de abandono de
emergência ou recuperação do duto em função de condições ambientais severas ou
acidentes, conforme preconizado em [10].
No início da operação de lançamento é necessário que a extremidade livre do
duto esteja presa a um ponto fixo, dimensionado para resistir à tração imposta à linha,
evitando, assim, que a mesma sofra a severa flexão que seria causada por um balanço
simples. Normalmente, este ponto fixo é representado por âncoras, pernas de plataformas
ou embarcações com posicionamento dinâmico (DP).
vão livre
ancoragem Stinger ou rampa de lançamento
tensionador
estações de soldagem
overbend
Sagbend

17
Ao final do lançamento, o mesmo problema ocorre, sendo aqui adotado o
procedimento inverso, qual seja, um cabo é conectado à extremidade do duto e a um
guincho na embarcação, mantendo-o tracionado até que este repouse sobre o leito marinho.
O método J-Lay é similar ao método S-Lay, apenas a rampa de lançamento é
construída em posição quase vertical, não havendo, nesta situação, a região de overbend.
Por este motivo, este método foi desenvolvido primordialmente para águas profundas. A
Figura 2.8b ilustra um lançamento utilizando o método J-Lay.
Figura 2.8b - Operação de lançamento - Método J-Lay
No método Reel-Lay a linha é fabricada em terra e estocada em rolos de
grande diâmetro no convés da embarcação para transporte e instalação. Neste caso, a
grande limitação diz respeito ao diâmetro máximo do duto, que pode ser estocado desta
forma. Este método tem sido utilizado para diâmetros de até 16 polegadas. Além disso, há
que se considerar a impossibilidade da adoção de revestimento de concreto nestes dutos,
vão livre
ancoragem Ângulo de lançamento próximo ao vertical
Sagbend

18
uma vez que o concreto não resistiria à curvatura imposta pela estocagem. A única
vantagem deste método, em relação aos outros, é a grande velocidade de instalação. A
Figura 2.8c ilustra um lançamento utilizando o método Reel-Lay.
Figura 2.8c - Operação de lançamento - Método Reel-Lay
Além dos métodos de instalação pela superfície, existem ainda os métodos
de instalação por arraste, onde o duto, construído em terra, é provido de flutuadores e
arrastado próximo à superfície ou próximo ao fundo por rebocadores, conforme sejam as
condições locais.
O projeto do lançamento também define a janela de operação adequada para
a instalação do duto. Esta definição é elaborada com base na avaliação dos efeitos dos
movimentos da embarcação sobre a linha durante o lançamento. Tais efeitos impõem uma
parcela dinâmica sobre as tensões às quais o duto está sujeito durante o lançamento, cujo
resultado final deve ser mantido dentro dos limites de segurança para a estrutura.
vão livre
ancoragem
Sagbend

19
É também parte integrante do projeto de lançamento do duto, o dimensionamento de
todos os acessórios eventualmente acoplados às extremidades da linha, tais como: flanges
cegos, cabeças de início de lançamento, cabeças de teste hidrostático, cabeças de
recebimento de pigs (elementos normalmente de borracha, que se movem sob pressão pelo
interior do duto para limpeza, desobstrução ou para verificações dimensionais do mesmo),
etc... Estes acessórios nada mais são do que terminações tubulares especiais acopladas à
extremidade da linha por meio de ligações flangeadas.
O início e o abandono final da linha em sua posição alvo é, algumas vezes,
dificultado pela existência de obstáculos produzidos por outras linhas anteriormente
instaladas. Uma prática comum nestes casos é iniciar ou terminar a operação de lançamento
longe da posição alvo e trazer a extremidade da linha para a posição desejada, através de
um deslocamento lateral pelo fundo do mar. O dimensionamento destas operações também
faz parte do projeto de lançamento do duto.
2.9 Projeto de Cruzamentos e Calçamentos
Esta etapa prevê a suportação, não só para a redução de grandes vãos livres
resultantes da irregularidade do perfil de fundo, mas também para apoio da tubulação e
isolamento elétrico nas regiões onde, inevitavelmente, há um cruzamento entre os dutos.
Conforme recomendado em [13], o isolamento elétrico se faz necessário para evitar-se
interferências entre os sistemas de proteção catódica das linhas. Dutos existentes são
protegidos através de sacos de areia, mantas, conforme ilustrado na Figura 2.9a, que
posteriormente são preenchidas com injeção de nata de cimento, ou dispositivos mecânicos,
conforme indicado nas Figuras 2.9b e 2.9c, para que não ocorra qualquer contato entre as
linhas que se cruzam. Em geral os suportes mecânicos são mais adequados para o uso em
águas profundas, uma vez que, nestes casos, torna-se dispendioso o uso e o
dimensionamento de mangueiras para injeção, tendo em vista as grandes pressões
hidrostáticas. Há, ainda, o caso do uso de suportes formados por blocos de concreto, os
quais são instalados antes mesmo do lançamento da linha, para o alinhamento dos flanges

20
nos pontos de conexão com os spools. O dimensionamento destes deve prever uma
tolerância lateral devido aos freqüentes erros na trajetória de lançamento em relação à
diretriz teórica da linha projetada preconizada nas normas DnV OS-F101 [10] e BSI BS
8010 [11]. Além disso, são parte integrante desta etapa do projeto os estudos geotécnicos
associados aos vários tipos de suportes.
Figura 2.9a - Mantas para proteção
Situação final das mantas de proteção
Instalação das mantas de proteção Duto existente

21
Figura 2.9b - Suportação da linha com sacos de areia
Figura 2.9c - Suportação da linha com dispositivo mecânico
2.10 Projeto dos Elementos de Interligação (Tie-ins)
O projeto dos elementos de interligação dos dutos submarinos é calcado na análise
de flexibilidade da linha e na verificação de interferências com outras estruturas
submarinas. Os elementos de interligação, normalmente conhecidos pelo nome de spool,
nada mais são do que trechos de tubulações retos ou adequadamente curvados, inseridos

22
nas ligações entrem a linha e os pontos fixos, onde serão conectados. Os casos mais
comuns são linhas que se conectam com plataformas fixas ou com manifolds submarinos,
que são estruturas, também fixas, mas submersas no fundo do mar. É comum também a
utilização dos spools próximos a regiões de desvios da linha. A análise de flexibilidade
consiste, basicamente, na definição da geometria das curvas do spool, uma vez que este é
dimensionado para absorver os deslocamentos devidos à expansão da linha causada pelos
efeitos da variação de temperatura e pressão da mesma. É comum que, para o lançamento
dos trechos do duto, se conheça as duas coordenadas pretendidas para os pontos extremos
da linha. Estes pontos são normalmente denominados target points, ou pontos alvo e é
admitida uma tolerância de aproximação do extremo do duto a partir do target nas duas
direções (longitudinal e transversal ao duto), formando o que se chama de target area.
Normalmente o alvo é definido durante o projeto da diretriz da linha, próximo ao local de
conexão, de modo a se conseguir instalar a curva de ligação (spool) com o ponto fixo, seja
ele a plataforma fixa, o manifold, ou simplesmente um desvio da linha. A maioria das
conexões com pontos fixos, tais como jaquetas, manifolds, etc…, são feitas, modernamente,
através de ligações flangeadas. Na Figura 2.10a observa-se um trecho de duto instalado na
face da plataforma fixa, ao qual se dá o nome de riser (a prática consagrou muitos termos
originalmente de língua inglesa). O riser é fixado à estrutura da plataforma através de
braçadeiras, normalmente antes da instalação do spool e serve, como diz o nome, para
elevar o produto (óleo ou gás) através do duto no fundo do mar até o convés da plataforma.
O riser será mencionado no item seguinte. Sendo assim, o spool tem por finalidade ligar a
extremidade do duto lançado no fundo do mar, a um ponto fixo, sendo capaz de absorver os
deslocamentos impostos à linha por variações de temperatura, causadas pelo fato do
produto transportado ser normalmente bem mais quente que a água que o envolve, e pela
elevada pressão interna do duto, usual em estruturas deste tipo. É necessário, portanto, que
se realize uma análise de flexibilidade do conjunto linha- spool-ponto fixo, a qual consiste,
basicamente, na definição da geometria das curvas do spool, uma vez que este é
dimensionado para absorver os deslocamentos já citados.
Finalmente, cabe ressaltar que os spools podem vir a ser trechos de tubulação bem
grandes, cuja instalação deve ser cuidadosamente analisada e planejada.

23
Figura 2.10a - Ligação típica de um duto rígido ao riser instalado em uma plataforma fixa através de spool
2.11 Projeto dos Risers
O projeto do riser normalmente é feito em conjunto com o do tie-in que o conecta à
plataforma. Os risers trazem o conteúdo do duto desde o fundo do mar até o convés da
plataforma ou vice-versa. O dimensionamento destes risers contempla a definição dos
riser
spool
duto
target area
24
sistemas de fixação na plataforma, sob o ponto de vista estrutural e da verificação dos vãos
entre estes suportes, de forma a resistir às ações ambientais e à geração de vórtices.
De uma forma geral modela-se a condição de contorno do duto na extremidade
próxima à plataforma (riser + spool), avaliando-se o riser quanto aos pontos de fixação na
mesma, e verificando-se sua resistência aos esforços ambientais de onda, corrente,
temperatura e pressão, incluindo efeitos de fadiga. Desta forma é avaliada a sua
contribuição na flexibilidade do spool, que o conecta à linha, além de sua resistência aos
esforços.
Nesta análise também são obtidas as reações necessárias ao dimensionamento das
braçadeiras que conectarão o riser à estrutura da plataforma. A definição do número de
pontos de apoio do riser na plataforma, bem como de sua distribuição ao longo de seu
comprimento, é obtida, também, da avaliação prévia dos efeitos da geração de vórtices
causados, tanto pela corrente, como pelas ondas.
Além disso, faz parte também do projeto do riser a verificação de todas as fases
pertinentes à sua instalação, tais como o içamento, transporte e a transferência do riser para
a face da jaqueta. Normalmente os risers já são previstos no projeto da jaqueta e muitas
vezes são previamente instalados. Quando novos risers são adicionados à plataforma já em
operação, estes são instalados em braçadeiras previamente conectadas à face da jaqueta
através do auxílio de guindastes. Para lâminas d'água maiores, em que o manuseio do riser
torna-se complicado, é usual, após o seu transporte até a plataforma, que este seja deixado
no fundo do mar, em local próximo à plataforma para a recuperação pela embarcação de
instalação e prosseguimento da operação. Com o objetivo de se assegurar a estabilidade do
riser no fundo, este é completamente alagado para a espera da embarcação de recuperação.
Durante a recuperação, é feita a verticalização do riser por meio da retirada gradativa da
água contida, quando este encontra-se inundado, através de mangueiras conectadas às
válvulas do flange cego no topo do riser. Uma vez verticalizado o riser, a embarcação de

25
recuperação faz a sua transferência até a face da jaqueta, posicionando-se de forma
adequada à operação no que diz respeito às condições ambientais. A operação de
transferência do riser à plataforma é feita através da utilização de guinchos, poitas e cabos
instalados no convés da plataforma e à mesa da base da jaqueta, conforme ilustrado nas
Figuras 2.11a e 2.11b.
A viabilidade de toda a operação de instalação do riser é parte integrante do projeto,
devendo ser estudada cada solicitação estrutural à qual o riser é submetido. Além disso,
durante esta etapa do projeto é que são definidas as cargas máximas esperadas nos cabos,
tornando possível a definição de guindastes, guinchos, cabos, patescas e todos os outros
acessórios de instalação.
26
Figura 2.11a - Transferência de um riser na face de uma jaqueta

27
Figura 2.11b - Aproximação de um riser na face de uma jaqueta

28
2.12 Projeto de Enterramento e Proteção Mecânica
Esta etapa visa preservar a integridade do duto em regiões, ao longo de seu traçado,
onde outras atividades, tais como a queda de objetos, pescaria, ancoragem de barcos, etc…,
possam causar danos à mesma. Em geral evita-se a passagem das linhas em áreas de risco;
entretanto, a proteção do duto pode ser obtida através de um ou mais dos itens, que se
seguem:
• revestimento de concreto;
• enterramento;
• cobertura (de areia ou colchões preenchidos posteriormente com nata de cimento,
preparado especificamente para este fim, etc…).
Além disso, os vãos livres da linha devem ser analisados ao longo de todo o duto.
Os vãos críticos, relacionados à flexão e às vibrações por geração de vórtices devido à
corrente, devem ser definidos e todos os vãos, que excederem o comprimento crítico
estudado, devem ser apoiados ou enterrados. Portanto, o enterramento do duto também se
faz visando prover maior estabilidade do mesmo no fundo. O enterramento do duto também
pode ser avaliado nos casos em que o colapso por efeitos de temperatura (upheaval
buckling) pode ocorrer, garantindo um peso adicional ao duto, evitando, assim, a ocorrência
do fenômeno.
2.13 Pré-Comissionamento e Teste Hidrostático
O pré-comissionamento e teste hidrostático constam da definição das condições e
requisitos mínimos para desenvolvimento das atividades de pré-operação da linha.
Concluídas as etapas de instalação do duto e interligação com a plataforma ou outras
estruturas submarinas, deverá ser realizado o pré-comissionamento do duto através da
verificação de sua integridade estrutural contra o surgimento de amassamentos durante a

29
etapa de instalação através da passagem de pigs, bem como da limpeza e posterior retirada
ou enchimento com água do mesmo. Logo após esta fase, o duto é preenchido com água e é
realizado o teste hidrostático do mesmo, com o objetivo de se avaliar a estanqueidade do
conjunto, verificando possíveis pontos, normalmente nas ligações flangeadas, onde possa
ocorrer algum vazamento e, no caso de ocorrer algum, haver uma pronta substituição do
elemento com problema. Referências podem ser encontradas na DnV OS-F101 [10] e no
relato das experiências práticas realizadas em campo.

30
CAPÍTULO 3
Descrição e Análise do Problema
3.1 Introdução Este capítulo descreve o processo de flambagem nos dutos submarinos quando da
passagem de um fluido aquecido em seu interior, procurando apresentar os principais
enfoques relacionados à abordagem deste fenômeno.
Serão discutidos aspectos, até certo ponto distintos, sobre o comportamento do duto
pelo fato deste estar apoiado sobre solos coesivos e não-coesivos. Em seguida, será
apresentada uma descrição do fenômeno de flambagem e, finalmente, sua solução em
termos de análise, ressaltando formas distintas de ocorrência da instabilidade associada,
mas enfocando, principalmente, a que resulta no levantamento do duto do leito marinho.
3.2 Considerações sobre o solo
Durante a instalação de um duto submarino, por vezes, em função de algumas
dificuldades, tais como: obstáculos existentes, zona pesqueira, estabilidade do duto, etc...,
opta-se por enterrar a linha, garantindo-se, assim, o atendimento às exigências impostas no
projeto.
O enterramento de um duto é mais comumente realizado, hoje em dia, através de
uma das seguintes técnicas descritas abaixo e também conforme mencionado no capítulo 2:
• arado;
• jateamento;
• furo direcional.

31
No caso das duas primeiras técnicas, uma vala é aberta ao longo da rota do duto,
ficando a cargo da natureza, na maioria das vezes, o recobrimento do duto e o seu
enterramento propriamente dito. A primeira técnica consiste na raspagem do solo até a
profundidade desejada e posterior instalação e assentamento do duto na vala construída. A
segunda técnica determina, já com o duto posicionado sobre o leito marinho, a
desagregação ou fragmentação das partículas de solo através de jato d’água e remoção
destes sedimentos com o auxílio de um equipamento, cujo nome na língua inglesa, “air
lift”, continua a ser o mais empregado. Este cria, assim, um canal ao longo da rota do duto,
promovendo o seu enterramento.
A última técnica mencionada prevê a construção de um furo através da perfuração
do solo com brocas de diâmetros crescentes em uma direção prevista para a acomodação do
duto a ser instalado. Neste último caso, as profundidades atingidas são bem maiores em
comparação com as duas primeiras, mas os comprimentos são limitados pelo processo de
perfuração.
Uma vez enterrado, um duto aquecido pode sofrer o fenômeno de flambagem caso a
camada de solo que o cobre (admitida aqui por hipótese como a menos resistente) seja
insuficiente para resistir aos efeitos de segunda ordem impostos ao mesmo. Sendo assim, a
discussão sobre o tipo de solo e, conseqüentemente, sobre seus parâmetros de resistência
torna-se importante no estudo deste fenômeno.
Os solos podem, simplificadamente, ser classificados em dois grupos distintos:
Solos coesivos representados, notadamente, pelas argilas e solos não-coesivos
representados pelas areias.
Tanto em uma classificação quanto na outra, são os parâmetros de resistência que
definem a capacidade que o solo possui de suportar cargas e conservar sua estabilidade.
Neste estudo, esta resistência combina o cisalhamento do solo e a sua plastificação
localizada por compressão.

32
A Resistência ao Cisalhamento do Solo, segundo a teoria de Mohr-Coloumb, possui
duas componentes: a coesão e o atrito entre as partículas. Por atrito, ou atrito interno, de um
solo compreende-se não só o atrito físico entre as partículas, mas também o “atrito fictício”,
o qual provém do entrosamento de suas partículas. Este resulta da compressão dos grãos e
não do atrito propriamente dito.
Quanto à coesão, define-se também uma parcela aparente, resultante da pressão
capilar da água contida nos solos, agindo como uma pressão externa aplicada, e uma coesão
verdadeira, proveniente das forças eletroquímicas de atração das partículas.
Sendo assim, de modo geral, pode-se afirmar que a determinação da resistência ao
cisalhamento dos solos coesivos tem como principal dificuldade a definição de sua coesão,
cujos principais fatores, segundo CAPUTO [14], são:
• o estado de adensamento do solo;
• a sensibilidade da sua estrutura;
• as condições de drenagem;
• a velocidade de aplicação das cargas.
Já na determinação da resistência ao cisalhamento de solos não-coesivos, o principal
parâmetro a ser investigado é o ângulo de atrito interno do solo, cujos principais fatores de
influência, também conforme [14], são:
• a compacidade;
• a granulometria;
• a forma das partículas.
No presente trabalho foram previstos, para os solos ditos não-coesivos, três modelos
de comportamento distintos, ou seja, facultou-se ao usuário do programa desenvolvido, a
possibilidade de realizar as análises com formas distintas de considerar a carga e a
resistência ao cisalhamento do solo. Em todos os casos é possível variar, ainda, o ângulo de
atrito interno. Já para o solo coesivo foi considerado apenas um modelo de comportamento
do solo, no qual é possível variar os parâmetros de resistência do mesmo.

33
São discutidos a seguir, para os solos não-coesivos, os três modelos para a
resistência de cisalhamento considerados:
a) Duto enterrado em solo homogêneo
Para este caso, o solo foi considerado com peso específico igual ao original do local
antes da operação e a resistência ao cisalhamento do solo foi avaliada de acordo com a
formulação abaixo, apresentada na Figura 3.2a. Esta condição pressupõe que o solo foi
compactado ou que o tempo se encarregou de reconstituir seus parâmetros originais.
Figura 3.2a - Modelo de comportamento considerado para o solo homogêneo
A resistência ao cisalhamento do solo pode ser calculada através da seguinte
expressão:
Fcis = K γ (H+D/2)2 tanφ (3.2.1)
onde:
K: coeficiente de atrito do solo tomado como 0,8, de acordo com API RP 2A [15];
γ : peso submerso específico do solo, em kN/m3;
H: altura do enterramento, em m;
D: diâmetro externo do duto com revestimento, em m;
φ: ângulo de atrito interno do solo, em graus.
H
D
γHDFcis Fcis

34
b) Duto Enterrado em solo revolvido:
Para este caso, o peso específico do solo é inferior ao do solo original e a resistência
oferecida pelo solo constitui-se apenas do seu próprio peso, conforme apresentado na
Figura 3.2b.
Figura 3.2b - Modelo de comportamento usado para um solo revolvido
A contribuição do peso das vizinhanças está vinculada diretamente ao ângulo de
atrito interno do solo.
Nesse caso, a resistência ao cisalhamento foi desprezada e a resistência ao
deslocamento do duto é oferecida apenas pelo peso próprio do solo hachurado e definido
por:
F = γ A (peso total do solo aplicado ao duto) (3.2.2)
onde: γ : Peso submerso específico do solo, em kN/m3;
A: Área de solo a resistir, em m2.
H
D
γHD
35
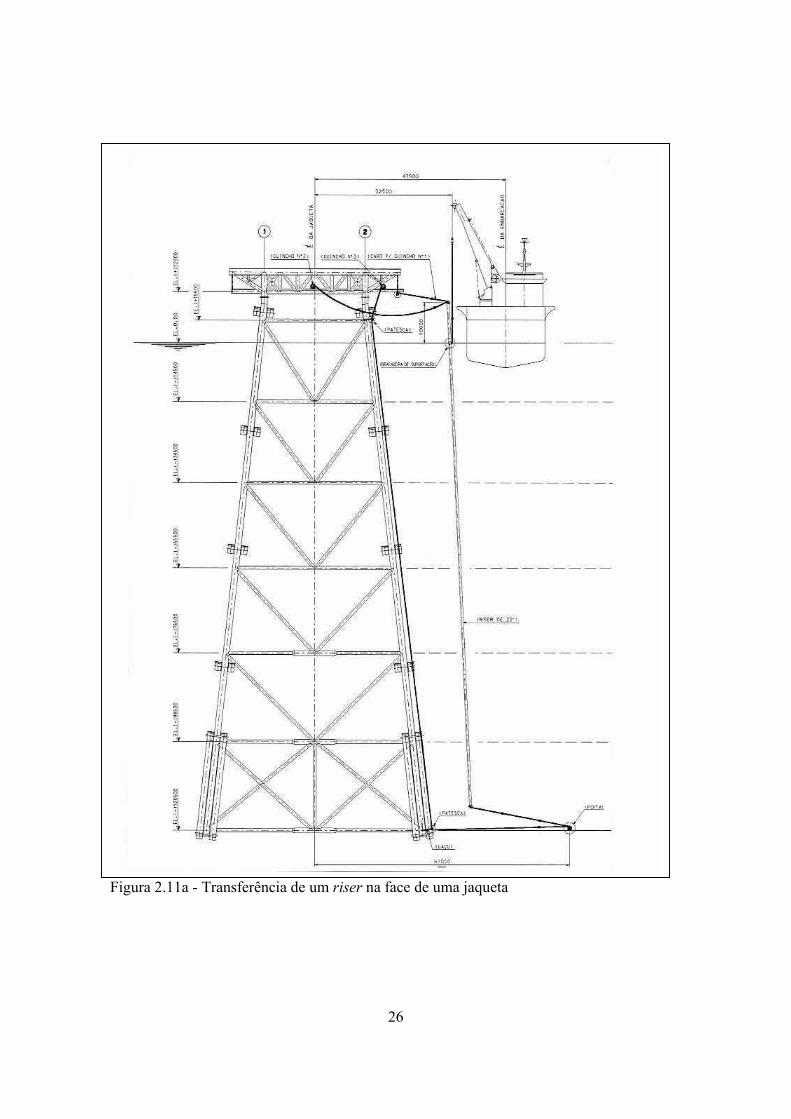
c) Duto Enterrado em Solo Recentemente Reconstituído:
Neste caso, o peso específico do solo também é inferior ao do solo original e a
resistência do solo foi considerada, conforme formulação abaixo e apresentado na Figura
3.2c.
Figura 3.2c - Modelo de comportamento utilizado para um solo recentemente reconstituído
Para esta situação, a resistência ao cisalhamento do solo pode ser calculada através
da seguinte expressão:
Fcis = K H2 γ (3.2.3)
onde: K: coeficiente de atrito do solo, com o valor de K sendo tomado igual a 0,15
conforme estudo proposto em [7];
γ : peso submerso específico do solo em kN/m3
H: altura do enterramento em m.
Uma única formulação foi considerada para o modelo de resistência dos solos
coesivos, conforme indicado a seguir:
H
D
γHDFcis Fcis

36
H
D
γHD HSu
d) Duto enterrado em solo coesivo (argila):
Neste caso, o peso específico do solo também é inferior ao do solo original e a
restrição de solo foi considerada, conforme formulação abaixo e apresentada na Figura
3.2d.
Figura 3.2d - Modelo de comportamento do solo utilizado para solos coesivos
Para esta situação, a resistência ao cisalhamento do solo pode ser calculada através
da seguinte expressão:
Fcis = 2HSu (3.2.4)
onde: H: altura do enterramento, em m;
Su: coesão ou resistência não-drenada do solo, em kN/m2.

37
3.3 Descrição do Fenômeno
De uma forma geral, o estudo de fenômenos de flambagem diz respeito a uma
coluna esbelta, solicitada axialmente por uma carga com pequena excentricidade e cuja
flecha, oriunda desta excentricidade e da carga aplicada, cresce progressivamente, em
função de efeitos de segunda ordem, até que haja a ruína da seção mais solicitada.
No presente caso, tem-se como foco do problema um duto submarino, conduzindo
em seu interior um fluido, cuja temperatura de operação é superior àquela ambiente na qual
o duto foi instalado. Nesta situação, haverá uma tendência de dilatação axial do duto, que
será impedida pelo atrito entre o duto e o solo, resultando, então, no surgimento de uma
força axial de compressão. Como o solo marinho é irregular, a geometria também irregular
do eixo do duto faz surgir excentricidades desta força em relação ao referido eixo, que
resultam em momentos de segunda ordem. Estes, por sua vez, produzem deslocamentos
laterais do duto, comprimindo o solo (admitido aqui, por hipótese, como aquele menos
resistente), que, ao ser vencido, resulta na flambagem do duto. Este fenômeno pode ocorrer
em duas situações distintas descritas a seguir:
a) Duto Não-Enterrado - Neste caso, o fenômeno principia pelo levantamento do
duto, até que ocorra o anulamento do atrito lateral, ocorrido o descolamento do
fundo, tornando a direção lateral menos resistente que a vertical, gerando, em
conseqüência disso, uma flexão lateral no duto. A partir deste ponto o duto
apresenta uma configuração sinuosa, que recebeu em ingles o nome de
“snaking” (serpenteamento);
b) Duto Enterrado - Neste caso, a direção vertical sempre será menos resistente,
uma vez que lateralmente haverá todo um maciço de solo impedindo os
movimentos do duto, fazendo com que o fenômeno resulte do fato do duto
vencer a resistência oferecida pelo terreno localizado acima ao mesmo. Do
ponto de vista prático de engenharia, o impedimento do problema consiste em
determinar que profundidade de enterramento deve ser considerada no projeto e

38
qual imperfeição máxima o duto pode ter, para que o levantamento do duto não
se dê.
No presente trabalho, todas as hipóteses e análises envolvidas consideram os casos
em que o duto encontra-se totalmente enterrado sob o solo marinho. A Figura 3.3a ilustra
de forma simples a ocorrência do fenômeno nos casos em que o duto submarino encontra-
se enterrado.
Figura 3.3a - Seqüência de lançamento, enterramento e flambagem por levantamento.
Duto lançado sobre o leito marinho
Duto em operação – Início do Fenômeno – Duto tenta vencer o cobrimento de terra
Upheaval buckling ocorre no duto

39
3.4 Análise do Problema
Neste item é realizada uma revisão bibliográfica, visando apresentar a metodologia
de análise do problema sob a ótica de terceiros, ressaltando, principalmente, os trabalhos
que já obtiveram reconhecimento internacional no meio offshore.
Para tanto, seja um duto de diâmetro D, espessura t e comprimento L, enterrado no
solo com um cobrimento de terra H. O duto possui uma configuração inicial não-retilínea
com uma flecha inicial δf. A Figura 3.4a apresenta estas condições iniciais.
Figura 3.4a - Condições inicias de um duto submarino enterrado
Para o duto com as condições descritas acima, aplica-se uma variação uniforme de
temperatura ∆t ao longo do mesmo, simulando a passagem de um fluido aquecido pelo seu
interior. Em tais condições, o duto tenderá a dilatar-se, mobilizando o solo a sua volta.
Assim sendo, a rigidez axial do duto, bem como o atrito resultante, oferecerão resistência à
expansão do mesmo. A condição de engastamento total (equilíbrio da força axial e de
atrito), pode ser expressa em termos da seguinte força axial:
W
N
L
δf
N
H

40
N0 = EAα ∆t (3.4.1)
onde: E: módulo de elasticidade longitudinal ou Módulo de Young A: área da seção do duto α: coeficiente de dilatação linear do aço
Além da temperatura e da força axial resultante, atua também sobre o duto o seu
peso próprio bem como o da camada de terra aplicada ao mesmo. Dessa forma tem-se um
carregamento q dado por:
W = wduto + ws (3.4.2)
onde: wduto: peso próprio submerso do duto; ws: peso devido ao cobrimento de terra.
Uma consulta às contribuições existentes na literatura mundial mostra, de uma
forma geral, dois tipos de abordagem do problema proposto, as quais são descritas a seguir:
• modelo sob base rígida;
• modelo sob base elástica.
3.4.1 Modelo sob Base Rígida
Esta hipótese admite que o duto, assentado sobre uma base rígida, é submetido à
ação de uma carga axial compressiva. Esta hipótese foi proposta, inicialmente, por KERR
[1,2] avaliando instabilidades verticais em trilhos aquecidos, quando da passagem dos
vagões de trens.
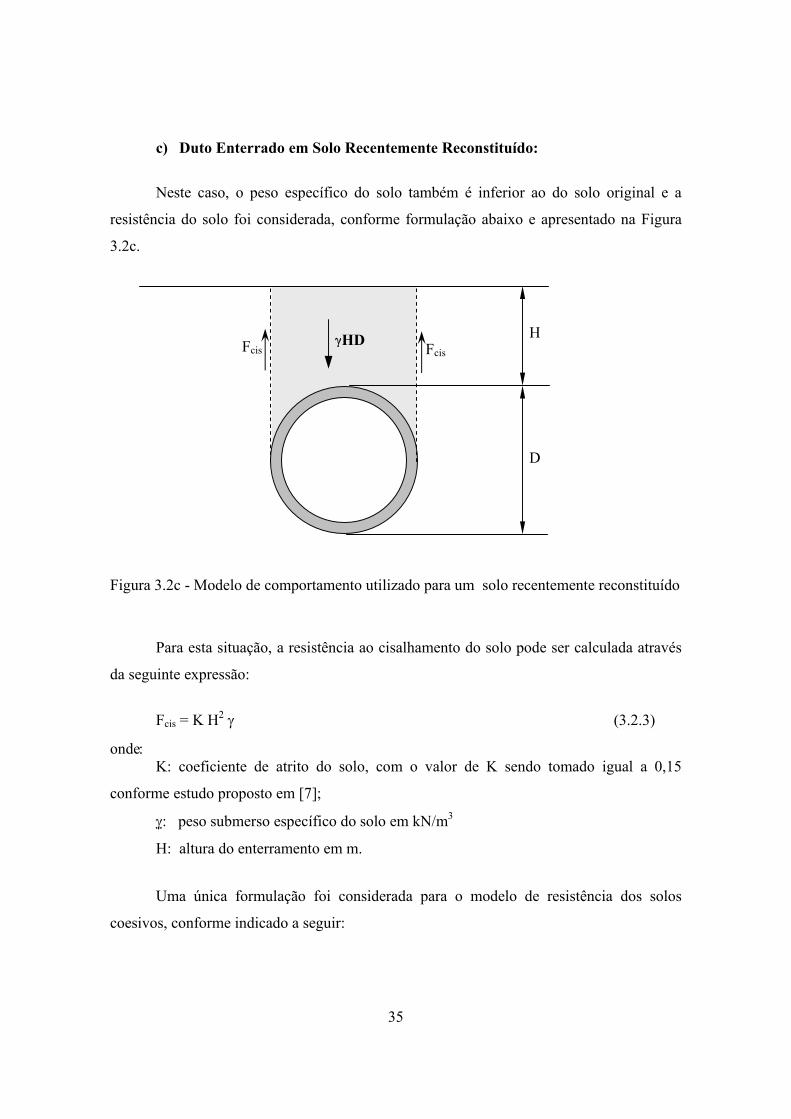
Considerando, portanto, uma peça com uma rigidez à flexão EI e peso próprio W,
submetido a uma força axial de compressão N, conforme a Figura 3.4b, e admitindo-se a
hipótese das pequenas deformações, pode-se verificar, para a configuração pós-flambagem,
que a equação que governa este problema é escrito da seguinte forma:
41
Figura 3.4b - Configuração adotada no modelo sob base rígida
Wdx
ydNdx
ydEI −=+2
2
4
4 (3.4.3)
Adotando também, como hipótese, uma flambagem simétrica, as condições de
contorno do problema podem ser escritas como:
(i) para x =0 y’ = 0
(ii) para x = ± L/2 y = , y’ = 0, y’’ = 0
É importante notar que as condições em (ii) denotam a necessidade da continuidade
do momento nos apoios e de momento igual a zero nos pontos onde a peça toca o solo.
A solução encontrada para estas condições de contorno impostas é igual a:
W
P
H
L
Y
XP
M P
S
S+dS
M+dM
P
W
dx

42
++−
−= 182
2cos
)cos( 2222
2
LkxkkLkx
NWEIy (3.4.4)
onde:
k2 = N/EI.
Esta solução satisfaz todas as condições acima, exceto y’’ = 0 para x = ± L/2. Para
que isto seja satisfeito, é necessário que tan(kL/2) seja igual a kL/2, admitindo a hipótese de
pequenas rotações. Isto significa a solução de uma série na qual as soluções são kL =
8,9868, 15,4504, ... A solução para a carga de flambagem Ncr corresponde à primeira
solução, ou seja, kL = 8,9868.
Substituindo a solução obtida para N na expressão que define k, obtém-se o valor da
carga crítica N em função do comprimento L, como:
2
76,80L
EINcr = (3.4.5)
Substituindo esta expressão na solução encontrada em (3.4.4), pode-se expressar a
carga crítica em termos da curvatura do duto, como:
HWEINcr 962,3= (3.4.6)
Finalmente, combinando as expressões (3.4.5) e (3.4.6), expressa-se o comprimento
L, como:
4514,4W
HEIL = (3.4.7)
Assim sendo, define-se o comprimento participante da flambagem como função do
peso atuante no duto e da curvatura à qual o mesmo está submetido.

43
A análise realizada acima parte da hipótese que a flambagem ocorreu ou encontra-se
no instante da ocorrência. Dessa forma, pode-se perceber que caso esta carga crítica
encontrada seja menor que a carga axial devido à temperatura, como mostra (3.4.1), a peça
flambará. Caso contrário, não haverá problema de flambagem quando a peça for aquecida.
A partir do exposto acima, pode-se utilizar a mesma solução desenvolvida e
conclusões obtidas para a análise de um duto submarino submetido a um fluido aquecido
imerso em um maciço de solo. Neste caso, tem-se, além do peso próprio submerso inerente
ao duto, o peso de terra aplicado ao mesmo, sendo W tomado como a soma destas parcelas
conforme (3.4.2).
A carga axial aplicada ao duto é a mesma determinada na expressão (3.4.1),
acrescida de uma parcela devido ao efeito de Poisson, aplicado à tensão circunferencial
proveniente da diferença das pressões interna e externa atuantes. A expressão da carga
axial, considerando essa parcela é apresentada a seguir:
tpDtEAN2
να −∆= (3.4.8)
onde: p representa a variação das pressões interna e externa atuantes no duto.
Alguns estudiosos consideram, além desta parcela, outra parcela referente ao efeito
de extremidade, devido à diferença entre as pressões interna e externa introduzidas como
compressão no duto. A expressão da carga axial atuante acrescida desta parcela seria dada
por:
42
22 DpDptEANπνπα +−∆= (3.4.9)
Essa última parcela estudada, conhecida pelo nome de “end cap”, na realidade
divide a opinião dos pesquisadores, havendo os que acham que ela não contribui para a
composição da carga axial. É importante ressaltar que a norma americana ASME B31.4
[16] não a considera.

44
3.4.2 Modelo sob Base Elástica
Nesta hipótese, considera-se a peça assentada em uma base elástica. Esta proposição
também foi estudada por KERR [1,2] a qual, para o mesmo trilho, manteve todas as
condições descritas anteriormente, porém com o solo não mais atuando de forma rígida e,
sim, desta feita, permitindo deslocamentos. Sendo assim, a equação que governa esta
proposição pode ser escrita como:
02
2
4
4=++ Ky
dxydN
dxydEI (3.4.10)
A Figura 3.4c mostra a configuração adotada para este modelo.
Figura 3.4c - Configuração adotada no modelo sob base elástica
A solução verificada para esta equação pode ser escrita como sendo:
=
LxAseny π2 (3.4.11)
M N
S
S+dS
M+dM
N
Ky
dx
W
N
2V
L
Y
XN

45
Ela representa a solução homogênea da equação diferencial acima, expressa em
função da amplitude A e do comprimento de onda L. Substituindo y na equação (3.4.8) e
observando que a curvatura adotada neste modelo é igual a duas vezes a amplitude adotada
no modelo sob base rígida, pode-se determinar o valor da carga crítica N como sendo:
( )( )
2
2
2
22 π
π LKL
EIN += (3.4.12)
A carga crítica de flambagem pode ser obtida a partir da definição do comprimento
L. Dessa forma, tem-se:
42KEIL π= (3.4.13)
e o valor da carga crítica Ncr é dado por:
KEINcr 2= (3.4.14)
Em ambas as hipóteses apresentadas, as peças são consideradas retilíneas, o que, na
prática, não representa a realidade.
TVERGAARD & NEEDLEMAN [5] propuseram uma modificação do modelo sob
base elástica, onde seria aplicada, inicialmente, uma imperfeição ao trilho de trem com uma
amplitude A0 e um comprimento L, considerando, também, a não-linearidade do solo. Este
modelo representa uma melhor aproximação para o estudo do fenômeno de flambagem de
dutos e foi tomado como ponto de partida na elaboração do programa UPDUT, o qual será
descrito no capítulo 4. Simplificadamente pode-se expressar a equação que governa esta
situação como sendo:
0)(2
2
4
4
4
4
0
0
=++
− − yy
y
Wdx
ydNdx
yddx
ydEI (3.4.15)
A expressão 0
4
4
ydxyd representa a quarta derivada da configuração inicial do perfil
com relação a x. A carga vertical aplicada à peça é uma função arbitrária com relação a y-
y0.

46
A solução apresentada para esta equação é a mesma verificada em (3.4.11) e, por
simplicidade, considerou-se a carga vertical distribuída ao longo da peça como sendo
aproximadamente senoidal. Dessa forma, pode-se reescrever a equação (3.4.15) como:
022)(2)(
2
0
4
0 =
+
−−
− LxsenWA
LNAA
LEI AA
πππ (3.4.16)
Rearranjando os termos e dividindo por (2πx/L), pode-se definir a carga N como:
2
02
)(
2)(20
−
+
= −
ππ L
AAAEI
LAWN AA (3.4.17)
Esta expressão (3.4.17) mostra o comportamento do valor da carga N em função das
condições geométricas iniciais da peça, do peso aplicado à estrutura e do comprimento
considerado para a flambagem. Perceber-se que o valor da carga N pode variar com o
comprimento de onda. TVERGAARD & NEEDLEMAN [5] assumiram que o
comprimento de flambagem é igual ao comprimento da imperfeição.
47
CAPÍTULO 4
Descrição do Programa UPDUT
4.1 Introdução
Este capítulo versa sobre a elaboração de um programa, baseado na utilização do
método dos elementos finitos, para a determinação de cargas críticas de flambagem em
dutos submarinos, apoiados sobre o fundo não reto, e submetidos a cargas oriundas de
aquecimento produzido pelo material transportado em seu interior.
A partir de informações fornecidas sobre o duto, tais como diâmetro, espessura,
relação entre flecha e o comprimento (imperfeição), cota de enterramento, dados do solo,
presentes na entrada de dados do programa, este é discretizado em elementos de barra e sua
geometria e carregamento atuante calculadas automaticamente pelo programa.
Com a intenção de reproduzir o engastamento decorrente do atrito longitudinal entre
o duto e o solo, o duto foi concebido com suas extremidades impedidas quanto a
translações e rotações nodais. O enterramento é simulado através da adoção de molas não-
lineares elasto-plásticas, representando a resistência ao cisalhamento do solo e também a
plastificação do mesmo. Admitiu-se a plastificação do solo por cisalhamento com uma
deformação de 2,5, segundo as recomendações da API RP 2A-WSD [15], as quais serão
discutidas no item 4.3.
A solução proposta aqui para o problema parte de uma técnica de análise
incremental-iterativa utilizando o método secante para a solução do problema não-linear.
São aplicados, inicialmente, os carregamentos de solo e peso próprio do duto e, depois,
acumuladas de forma incremental, as cargas de temperatura. A cada nível de carga é
procurado o equilíbrio de forma iterativa, cujo critério de convergência é feito através dos
deslocamentos e das forças.

48
A resolução do sistema de equações lineares é feita através da adoção do método de
Eliminação de Gauss, verificando-se, ao final de cada iteração, se a matriz permanece
positiva definida, determinando-se, desta forma, a carga para a qual o duto sofrerá o
colapso.
A Figura 4.1a apresenta um fluxograma simplificado dos passos realizados pelo
programa UPDUT para a solução do problema apresentado.
Figura 4.1a - Fluxograma simplificado de funcionamento do Programa UPDUT
Leitura dos Dados
Montagem da Geometria
Inicio do Ciclo Incremental
Inicio do Ciclo Iterativo
Introdução das Condições de Contorno Aplicação das Cargas na Estrutura
Instabilidade?
Converge?
Resolução do sistema
Verificação da Convergência
Fim do Ciclo Incremental
Fim do Programa
Não
SimNão
Sim
Armazenamento da carga do incremento
anterior
Impressão dos Esforços e Reações

49
4.2 Entrada de Dados do Programa
A entrada de dados do programa reúne as informações necessárias para a resolução
do problema proposto. A Figura 4.2a apresenta a tela fornecida pelo programa para a
entrada dos dados.
Figura 4.2a - Tela para a entrada de dados do programa
Como pode ser observada na Figura acima, a entrada de dados do programa é subdividida
em seis grupos apresentados a seguir:

50
4.2.1 Dados Geométricos do Duto (Geometrical Pipeline Data)
Neste grupo são fornecidos os dados geométricos para a elaboração do modelo
matemático. Os dados são apresentados a seguir:
• Length of Model - comprimento horizontal do duto a ser analisado.
O comprimento do modelo a ser considerado nas análises do problema em questão
deve ser cuidadosamente avaliado antes de se determinar o seu comportamento diante da
atuação das forças de compressão. Recomenda-se que seja realizado um estudo paramétrico
variando o comprimento do modelo com o intuito de se verificar o instante em que o
comprimento do modelo afeta os resultados a serem obtidos. A partir de considerações
feitas em alguns projetos de dutos, chegou-se a um valor mínimo recomendado entre 50 e
80 vezes o diâmetro do duto. É fácil perceber que esta faixa de valores não foge muito da
realidade quando comparadas às colunas de concreto armado onde os efeitos de segunda
ordem somente começam a ocorrer quando a esbeltez das colunas é superior a 40.
• Number of Elements - número de elementos nos quais será discretizado o modelo;
• Minimum Prop - imperfeição mínima a ser estudada, relativa ao comprimento do
modelo;
• Maximum Prop - imperfeição máxima a ser estudada relativa ao comprimento do
modelo
• Prop Step - valor do incremento dado à faixa de imperfeição informado nos dois
campos acima.
O programa permite acompanhar graficamente a geometria do modelo fornecido
para os vários valores de imperfeição solicitados, conforme ilustrado, para um caso
específico, na Figura 4.2b.

51
Figura 4.2b - Visualização da geometria do modelo a ser analisada Neste grupo também é permitida a leitura de dados através do comando “Read Input Data”
4.2.2 Dados de Solo (Soil Data)
Neste grupo são fornecidos os dados de solo onde o duto será enterrado. Os dados
são apresentados a seguir:
• Friction Angle - ângulo de atrito dos solos não-coesivos;
• Cohesion - coesão do solo. Parâmetro de solo definido em solos coesivos tais
como argila;
• Specific Weight - peso específico submerso do solo considerado.
52
Além das informações acima, deve ser definido qual a situação de solo que deverá
ser aplicado ao problema para a determinação da resistência ao cisalhamento do mesmo, de
acordo com as considerações discutidas no capítulo 3, e na determinação das condições de
contorno a serem aplicadas, conforme será discutido mais adiante. São três as opções
consideradas pelo programa, todas já discutidas no capítulo 3:
• Homogeneous Soil - duto enterrado em um solo homogêneo;
• Loose Soil - duto enterrado em solo revolvido;
• Replaced Sol - duto enterrado em solo recentemente reconstituído;
Existe, ainda, a opção de se considerar o efeito de pressão exercida pelo duto no
solo através da opção Upward pressure deflection, que será discutida mais adiante.
4.2.3 Dados do Duto (Pipeline Data)
Neste grupo são informadas ao programa as características do duto, revestimentos e
resistência mecânica. Os dados são apresentados a seguir:
• Pipeline Steel Outside Diameter - diâmetro externo do duto considerado;
• Pipeline Thickness - espessura da parede do material do duto;
• Concrete Thickness - espessura do revestimento de concreto aplicado ao duto,
caso necessário;
• Concrete Specific Weight - peso específico do revestimento de concreto adotado;
• E Modulus - módulo de elasticidade ou Módulo de Young;
• Yield Strength - tensão de escoamento do material adotado no duto;
• Poisson’s Coefficient - coeficiente de Poisson do material.

53
4.2.4 Carregamento do Duto (Pipeline Loading Conditions)
Neste grupo são fornecidas as condições de carregamento impostas ao modelo, tais
como: temperatura e pressão de operação do duto e faixa de enterramento a ser estudada.
Os dados são apresentados a seguir:
• Minimum Trench Height - cota mínima de enterramento a ser considerado na
análise;
• Maximum Trench Height - cota máxima de enterramento a ser considerado na
análise;
• Trench Step - incremento na cota de enterramento a ser empregado.
Os três campos acima definem a faixa a ser considerada pelo programa no caso de
uma análise com várias hipóteses de enterramento possibilitando a verificação de valores
máximos ou mínimos de altura de terra na análise de uma determinada situação.
• Tension Force on Pipeline - tração residual existente no duto após a instalação;
• Design Pressure - pressão de projeto atuante no duto;
• Temperature Variation - variação de temperatura entre o interior e o exterior do
duto;
• Linear Expansion Coefficient - coeficiente de dilatação linear do material do duto.
O programa possui, ainda, duas opções a serem consideradas e descritas a seguir:
• Include Pressure - permite a inclusão ou não da pressão na determinação da força
axial de compressão efetiva ou da temperatura equivalente;
• Yield point - permite a avaliação do instante onde o duto atinge o escoamento do
material.

54
4.2.5 Dados do Fluido (Fluid Data)
Neste grupo apenas é fornecido o peso específico do fluido que percorrerá o duto
durante a operação.
4.2.6 Parâmetros de Controle (Control Parameters)
Neste último grupo são informados os parâmetros de convergência e outros
utilizados no processamento da estrutura. Os dados são apresentados a seguir:
• Number of Increments - número total de incrementos a serem considerados pelo
programa;
• Temperature Multiplier - fator multiplicador aplicado à temperatura de projeto na
análise do duto;
• Convergence Criteria - tolerância a ser atendida na verificação de convergência
em cada iteração;
• Maximum Number of Iterations - número máximo de iterações a ser considerado
na análise.
4.3 Processamento dos Dados e Análise do Problema
Concluído o fornecimento dos dados do duto, o programa poderá iniciar o
processamento dos dados e a análise do problema.
A solução do problema utiliza a formulação de elementos finitos e técnica de
solução incremental iterativa, tendo o método secante como método iterativo. Os itens a
seguir descrevem a metodologia empregada pelo programa na solução do problema
proposto. A Figura 4.3a ilustra a tela durante a análise e solução do sistema.

55
Figura 4.3a - Tela de acompanhamento da análise
4.3.1 Matrizes de Rigidez Elástica e Geométrica do Elemento Finito Proposto
Apesar da análise do problema ser bidimensional, foi implementado no programa
um elemento de pórtico tridimensional elástico tradicional, associado a uma matriz
geométrica utilizada por GALGOUL [17], a partir de uma formulação proposta por
TIMOSHENKO [18]. Embora o problema ali fosse outro, por tratar-se aqui de uma análise
similar a análises de flambagem em colunas, onde a configuração indeformada pode ser
empregada sem problemas, uma vez que os cálculos de deformação-deslocamento axial de
segunda ordem são providos pela energia de deformação, a qual se encontra na matriz
geométrica adotada. São apresentadas a seguir a descrição do elemento de pórtico espacial

56
adotado e a obtenção das matrizes de rigidez elástica e geométrica já discutidas em GERE-
WEAVER [19] e GALGOUL [17].
O método dos elementos finitos tem como ponto base a determinação do ponto
estacionário do funcional de energia com o qual é possível obter a configuração de
equilíbrio do sistema estrutural. Pode-se definir o funcional pela seguinte expressão:
π = ν + ω (4.3.1)
Onde:
ν : Energia Interna de Deformação dada por: ∫v
T dVσε21 (4.3.2)
ω : Trabalho das Cargas Externas dada por: ∫∫ −−S
ST
V
vT fufu dSdV (4.3.3)
O ponto estacionário do funcional é obtido tomando-se a primeira variação do
funcional, isto é:
δπ = δ ν + δ ω = 0 (4.3.4)
Aplicando o diferencial nas expressões (4.3.2) e (4.3.3) acima e substituindo em
(4.3.4), tem-se que:
δπ = ∫v
T dVδ σε ∫∫ −−S
ST
V
vT fufu dSδdVδ = 0 (4.3.5)
Esta expressão é a mesma que traduz o princípio dos trabalhos virtuais para uma
dada estrutura.
Na transformação do modelo matemático contínuo em um modelo numérico
discreto, o contínuo é dividido em um conjunto de elementos, conectados a um número
finito de pontos nodais ou nós. Para essa consideração, pode-se perfeitamente aplicar a
expressão da energia potencial total para cada elemento e obter a expressão final para o
sistema estrutural somando as contribuições de cada elemento. Dessa forma, tem-se que a
energia potencial total pode ser escrita como:

57
π = ∑e
eπ (4.3.6)
πe = νe + ωe (4.3.7)
A energia potencial total estacionária pode ser obtida, então, da seguinte forma:
δπ = ∑ +e
ee )( δϖδν = 0 (4.3.8)
onde:
δνe = ∫∫ +ee V
T
V
T dVδdVδ 0σεσε (4.3.9)
δωe = ∫∫ −−ee S
TT
V
TT fufu dSδdVδ (4.3.10)
Para um elemento de pórtico tridimensional de comprimento L e dois pontos nodais,
o sistema de referência e os graus de liberdade do elemento estão apresentados na Figura
4.3b.
Figura 4.3b - Sistema de referência e graus de liberdade do elemento de pórtico espacial
O campo de deslocamentos do elemento pode ser definido como u = Nue, onde N é
a matriz que contém as funções de interpolação ou funções de forma para cada um dos dois
nós do elemento.
iu1
u4 u3 u6
u2
u5
y
z
x
j
u8u7
u9
u11
u10
u12
58
Do mesmo modo, pode-se definir o campo de deformações do elemento com ε =
Bue onde B representa a matriz de deformação.
A expressão discretizada da energia potencial pode ser obtida a partir das deduções
das matrizes as quais relacionam deformações e deslocamentos, das relações constitutivas σ
= Dε e da expressão que define a energia interna de deformação, mencionada acima. Dessa
forma tem-se que:
πe = ∫ ∫ ∫ ∫−−+e e e eV V V S
sTTe
VTTe
TTee
TTe fNufNuBuDBuBu dSdVdVdV 02
1 σ (4.3.11)
Minimizando o funcional de energia com respeito aos deslocamentos nodais, tem-
se:
e
e
u∂∂π
= ∫ ∫ ∫ ∫−−+e e e eV V V S
STVTTe
T fNfNBDBuB dSdVdVdV 0σ = 0 (4.3.12)
Da primeira integral na expressão (4.3.12) acima, pode-se obter a matriz de rigidez
do elemento.
Kte = ∫eV
eT DBuB dV (4.3.13)
As integrais restantes fornecem o vetor de cargas nodais equivalentes do elemento.
Fte = ∫ ∫ ∫−−e e eV V S
STVTT fNfNB dSdVdV0σ (4.3.14)
Sendo assim, os valores não nulos das matrizes de rigidez elástica e geométrica do
elemento de pórtico espacial são dados a seguir a partir da expressão (4.3.13):

59
Ke =
−
−
−
−
−−
−
−
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LGJ
SimétricoLEI
LEI
LEA
zzzz
yyyy
yyy
zzz
zz
yy
y
z
4626
4626
12612
12612
46
46
12
12
23
22
323
323
2
2
3
3
(4.3.15)
Matriz de Rigidez Elástica do Elemento de Pórtico Espacial
Kg = P
−
−−
−
−−
−
152
101
30101
152
101
30101
05
610
15
65
610
16
50
152
101
152
101
05
65
60
LL
LL
LL
LL
L
L
SimétricoL
L
(4.3.16)
Matriz de Rigidez Geométrica do Elemento de Pórtico Espacial
A matriz de rigidez total do elemento é formada pela soma das matrizes elástica e
geométrica apresentadas acima. Dessa forma, tem-se que:
Kte = Ke + Kg (4.3.17)
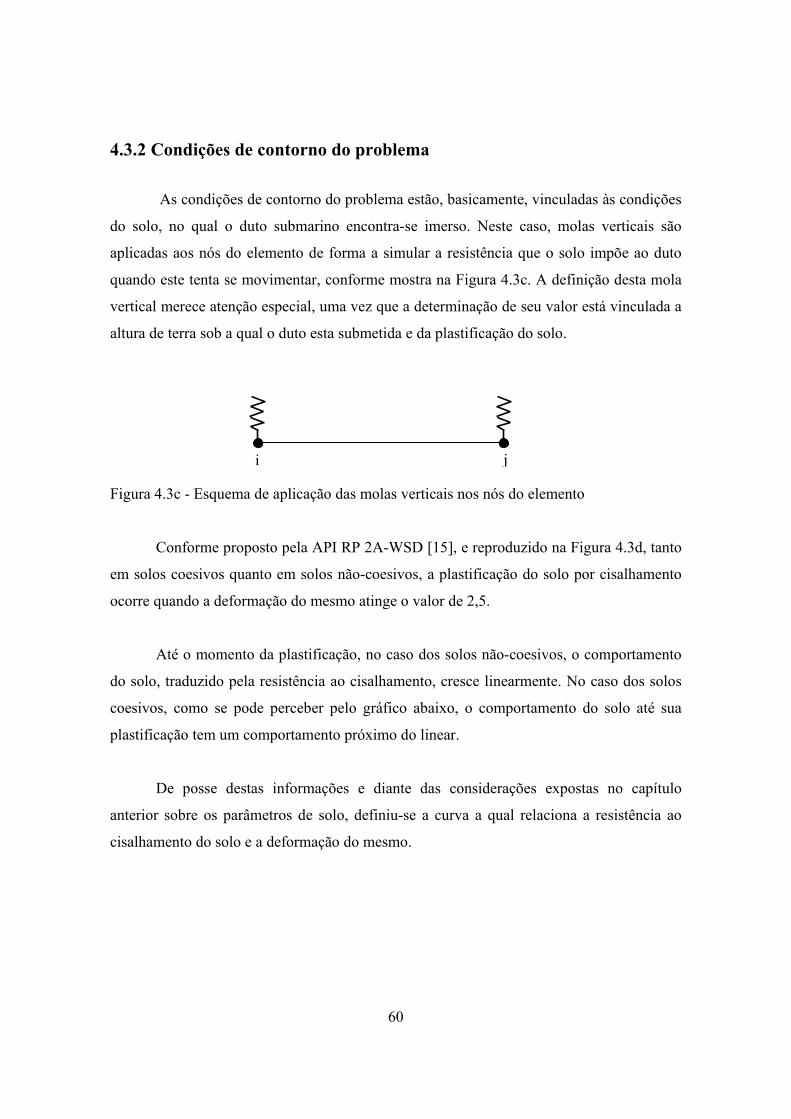
60
4.3.2 Condições de contorno do problema
As condições de contorno do problema estão, basicamente, vinculadas às condições
do solo, no qual o duto submarino encontra-se imerso. Neste caso, molas verticais são
aplicadas aos nós do elemento de forma a simular a resistência que o solo impõe ao duto
quando este tenta se movimentar, conforme mostra na Figura 4.3c. A definição desta mola
vertical merece atenção especial, uma vez que a determinação de seu valor está vinculada a
altura de terra sob a qual o duto esta submetida e da plastificação do solo.
Figura 4.3c - Esquema de aplicação das molas verticais nos nós do elemento
Conforme proposto pela API RP 2A-WSD [15], e reproduzido na Figura 4.3d, tanto
em solos coesivos quanto em solos não-coesivos, a plastificação do solo por cisalhamento
ocorre quando a deformação do mesmo atinge o valor de 2,5.
Até o momento da plastificação, no caso dos solos não-coesivos, o comportamento
do solo, traduzido pela resistência ao cisalhamento, cresce linearmente. No caso dos solos
coesivos, como se pode perceber pelo gráfico abaixo, o comportamento do solo até sua
plastificação tem um comportamento próximo do linear.
De posse destas informações e diante das considerações expostas no capítulo
anterior sobre os parâmetros de solo, definiu-se a curva a qual relaciona a resistência ao
cisalhamento do solo e a deformação do mesmo.
i j

61
Figura 4.3d - Gráfico de plastificação de solos proposto pela API RP 2A-WSD[15]
Onde:
Z: deslocamento local do duto em mm ou pol;
D: diâmetro do duto em mm ou pol;
t: atrito do solo mobilizado em kPa ou lb/ft2;
tmáx: máximo atrito do solo mobilizado em kPa ou lb/ft2;
tres: atrito residual do solo mobilizado em kPa ou lb/ft2.
0.2
0.4
1.0
0.8
0.6
0.01 0.02 0.03 0.04 0.050
0
0.01 0.02 0.03 0.04 0.050
Z/D
Z, Inches
t/tmáx
Range of tres for clays
Sand
Clay
tres = 0.7 tmáx
tres = 0.9 tmáx
tmáx = f
Clay: Sand:
Z/D t/tmáx Z, inch t/tmáx
0.00 0.00 0.00 0.000.0016 0.30 0.10 1.000.0031 0.50 8 1.000.0057 0.750.0080 0.900.0100 1.000.0200 0.70 to 0.90
8 0.70 to 0.90

62
A Figura 4.3e ilustra o gráfico utilizado na determinação da rigidez da mola imposta
ao modelo.
Figura 4.3e - Gráfico para determinação da rigidez da mola de cisalhamento
A rigidez K1 da mola de cisalhamento aplicada ao nó é determinada dividindo-se a
resistência ao cisalhamento pelo deslocamento promovido pelo duto no solo.
Matematicamente, tem-se que:
K1 = (Fcis/δ) Lelem (4.3.18)
Onde Fcis é determinado conforme apresentado no item 3.2 do capítulo 3.
Simplificadamente, uma vez que se admite válida a hipótese das pequenas
deformações, considerou-se como deformação do solo o próprio deslocamento do duto
devido à temperatura aplicada.
É importante perceber que o valor da rigidez desta mola vertical imposta ao modelo
varia conforme o deslocamento calculado pelo programa a cada incremento de carga
aplicado, isto é, a cada mudança de geometria, e que após a plastificação do solo sua
rigidez cai rapidamente. Nesse caso, tem-se um exemplo de não-linearidade física
representada pelo solo aplicado ao duto.
F(kN)
δ(mm) 2,5 2,5
Fcis
K1
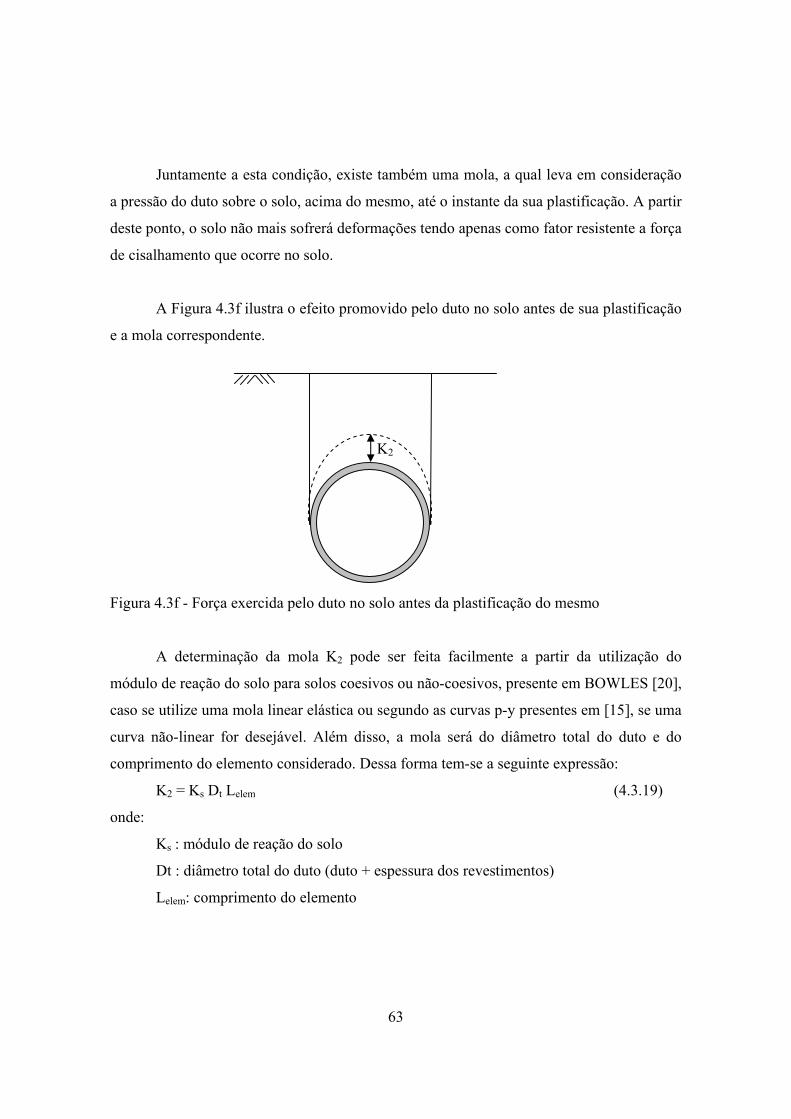
63
Juntamente a esta condição, existe também uma mola, a qual leva em consideração
a pressão do duto sobre o solo, acima do mesmo, até o instante da sua plastificação. A partir
deste ponto, o solo não mais sofrerá deformações tendo apenas como fator resistente a força
de cisalhamento que ocorre no solo.
A Figura 4.3f ilustra o efeito promovido pelo duto no solo antes de sua plastificação
e a mola correspondente.
Figura 4.3f - Força exercida pelo duto no solo antes da plastificação do mesmo
A determinação da mola K2 pode ser feita facilmente a partir da utilização do
módulo de reação do solo para solos coesivos ou não-coesivos, presente em BOWLES [20],
caso se utilize uma mola linear elástica ou segundo as curvas p-y presentes em [15], se uma
curva não-linear for desejável. Além disso, a mola será do diâmetro total do duto e do
comprimento do elemento considerado. Dessa forma tem-se a seguinte expressão:
K2 = Ks Dt Lelem (4.3.19)
onde:
Ks : módulo de reação do solo
Dt : diâmetro total do duto (duto + espessura dos revestimentos)
Lelem: comprimento do elemento
K2

64
A mola total aplicada ao modelo resulta da combinação destas duas situações de
mola obedecendo a seguinte expressão:
21
111KKK
+= (4.3.20)
No programa UPDUT foi considerada uma mola linear elástica com valores padrão
da rigidez K2. Foram considerados para o módulo de reação do solo (Ks) os valores de 4000
kN/m3 referente a uma areia fofa, imaginando a reposição do solo pelo mar após a abertura
da vala e acomodação do duto, e 2000kN/m3 para a argila ou solos coesivos.
Além da condição de contorno vertical imposta ao modelo, os nós das extremidades
são engastados simulando o impedimento gerado pelo solo contra o duto quando este tenta
se expandir pelo efeito de temperatura e por esta razão não há a necessidade da aplicação de
molas longitudinais ao modelo.
Existe também uma restrição lateral aplicada aos nós do modelo com o objetivo de
promover a contenção lateral provida pelo solo ao duto permitindo que o duto possa
deslocar-se apenas verticalmente.
4.3.3 Cargas aplicadas ao modelo estrutural
Definidas a geometria do modelo e as condições de contorno aplicadas ao mesmo,
resta definir o carregamento ao qual o duto é submetido.
Além do peso próprio inerente ao duto, existem duas outras condições de carga que
devem ser consideradas:
a) peso de terra;
b) variação de temperatura.

65
Tanto o peso de terra quanto o peso submerso do duto são calculados
automaticamente pelo programa a partir das informações de altura de terra e das dimensões
do duto fornecidos na entrada de dados. Sua determinação está condicionada ao estado o
qual o solo se encontrará após o assentamento do duto, conforme discutido no item 3.2 do
capítulo anterior. Este carregamento, que atua como uma carga distribuída ao longo do
duto, é aplicado ao elemento sob a forma de forças nodais equivalentes, conforme ilustrado
na Figura 4.3g.
Figura 4.3g - Aplicação das forças equivalentes no elemento devido ao peso de terra no
sistema de referência local
Dessa forma, para um elemento de comprimento L, os valores para Fv, Fh e M
equivalentes no elemento serão dados por:
Fv = φcos2
qL ; Fh = φsenqL2
; M = φcos2
2qL
A variação de temperatura é aplicada à estrutura de forma incremental conforme os
parâmetros informados na entrada de dados, isto é, a cada passo de carga a temperatura vai
sendo aumentada ou incrementada. O programa, então, subdivide o valor inicial de
temperatura fornecido pelo número de passos de carga desejado, determina a força axial de
engastamento igual a EAα∆t em cada passo de carga e aplica para cada elemento as forças
nodais equivalentes provenientes. A Figura 4.3h ilustra a aplicação desta carga.
Z
X
Y
Carregamento q total
y
z x
i
jFvi
Fvj
Fhi
Fhj
Mi
Mj φ

66
Figura 4.4h - Aplicação das Forças equivalentes no elemento devido à temperatura no
sistema de referência local
onde tem-se que:
Fvi = 0 ; Fhi = EAα∆teq
4.3.4 Estratégia empregada na solução do problema
Vários são os métodos ou técnicas conhecidas para a resolução de sistemas não-
lineares. As técnicas mais conhecidas e utilizadas dizem respeito aos métodos iterativos
secante e tangente e os métodos incrementais.
No método secante admite-se uma rigidez equivalente tal que a carga aplicada ao
sistema corresponde a um deslocamento equivalente. Uma vez que a rigidez inicialmente
não é conhecida, sucessivas iterações são realizadas de forma a obtê-la, aplicando-se
sempre a carga total, obtendo-se a deformação correspondente.
O método tangente, diferentemente do método anterior, aplica apenas a diferença de
carga necessária para se compensar o desequilíbrio do sistema, verificando uma rigidez
compatível com o carregamento, o qual o sistema necessita. Dessa forma, a cada iteração,
Carregamento de Temperatura
y
z x
i
jFvi
Fvj
Fhi
Fhj
Z
X
Y
φ

67
vários deslocamentos são obtidos tendo como deslocamento total a soma desses parcelas.
Um exemplo deste método pode ser visto em COOK, MALKUS & PLESHA [21].
Outra técnica empregada diz respeito aos métodos incrementais, nas quais a carga é
dividida em passos onde se procura determinar a solução do problema através da análise de
carga passo, ao fim do qual a rigidez vai sendo atualizada, também conforme [21]. Sendo
assim, quanto maior o número de incrementos mais precisa será a solução final.
Finalmente, existe a técnica que alia o método iterativo ao método incremental.
Com isso, além da divisão da carga em várias parcelas incrementais, em cada parcela,
existe a técnica de iteração corrigindo a rigidez e determinando melhores resultados. Essa
técnica costuma ser a mais empregada por conduzir a soluções mais estáveis, no primeiro
caso, e promover resultados bem mais precisos, no segundo. Em [21] também podem ser
observados exemplos de aplicação deste método.
Por se tratar de um problema não-linear, em função da alteração da rigidez da
constante de mola e da matriz de rigidez geométrica do elemento, a estratégia empregada
na solução deste problema utiliza o método secante incremental-iterativo que, apesar de
resolver o sistema com um esforço computacional maior que o obtido com o método
tangente incremental-iterativo (maior número de iterações realizadas), mostrou resultados
satisfatórios, aliado a sua fácil implementação computacional.
O critério de convergência adotado para este processo iterativo apresentado acima é
verificado pelas expressões (4.3.20) e (4.3.21) abaixo, proposto em COOK, MALKUS &
PLESHA [21]:
∑∑∆
2
2
j
j
D
D ≤ εtol (4.3.20)
∑∑∆
2
2
j
j
F
F≤ εtol (4.3.21)

68
Ele representa a relação entre as normas euclidianas referentes ao incremento do
deslocamento e forças obtidos entre duas iterações consecutivas e o deslocamento da
estrutura obtido naquela iteração, onde: εtol é a tolerância para os deslocamentos e forças
calculados. O sistema converge quando as duas verificações são simultaneamente
atendidas.
4.4 Resultados obtidos pelo programa
Realizado o processamento dos dados, o programa terá gerado um arquivo onde são
apresentados os dados de entrada informados inicialmente ao programa e os resultados das
análises para cada situação estudada. A Figura 4.4a apresenta a tela com a listagem de
resultados obtidos.
Figura 4.4a - Listagens de resultados gerados pelo programa
A cada caso considerado, isto é, para cada valor de imperfeição e cota de
enterramento, o programa apresenta os resultados dos deslocamentos, rigidezes das molas,
e reações em cada nó, para cada incremento considerado, até o instante em que o duto

69
atinge o ponto de instabilidade. O ponto de instabilidade é verificado quando durante a
solução do sistema é encontrado um valor negativo na diagonal principal da matriz de
rigidez triangularizada.
O programa UPDUT também permite determinar através de uma simples
verificação de tensões combinadas (axiais e de flexão) o instante em que o duto atinge o
limite de escoamento do material. Caso esta opção tenha sido solicitada, o programa
informará através de uma mensagem em tempo de execução e na listagem em qual
incremento ocorre este ponto.
No caso de haver uma situação de não convergência durante o processo iterativo, o
programa assumirá este ponto como ponto de instabilidade.

70
CAPÍTULO 5
Exemplos Comparativos
5.1 Introdução
Este capítulo trata sobre a apresentação de exemplos comparativos entre os
resultados obtidos com o programa UPDUT, com a teoria conhecida, e com programas
internacionalmente reconhecidos, tais como: SACS [22], PCUB [23] e ANSYS [24].
5.2 Exemplo 1 - Carga Crítica de Flambagem de uma Coluna Bi-engastada
Neste primeiro exemplo foi estudada a obtenção da carga crítica de flambagem de
um duto reto com 50 metros de comprimento apresentado na Figura 5.2a. Trata-se da
determinação da carga crítica de Euler para uma viga reta bi-engastada. O duto foi
discretizado em 20 elementos e suas características mecânicas e parâmetros adotados na
solução do problema são apresentadas na Tabela 5.2a. O programa UPDUT gera peso
próprio automaticamente, de modo que foi necessário manipular alguns dados de entrada
para simular as reais condições do problema.
Figura 5.2a - Esquema do modelo considerado na análise
L = 50 metros
Pcrítico

71
DESCRIÇÃO VALORES Diâmetro externo do duto 16,0pol (406,4mm) Espessura do duto 0,540pol (13,72mm) Módulo de elasticidade longitudinal (E) 210000 Mpa Coeficiente de Poisson (υ) 0,3 Coeficiente de dilatação linear do aço (α) 0,12 x 10-4 ºC-1 Rigidez à flexão do duto (EI) 6,86 x 104 kNm2 Rigidez axial do duto (EA) 3,55 x 106 kN
Tabela 5.2a - Características mecânicas do duto analisado
A carga crítica de Euler para a estrutura acima é obtida conforme a expressão dada
abaixo:
Pcr = π2 EI / L2 (5.2.1)
onde:
L é o comprimento de flambagem da estrutura, a qual, no caso de estruturas bi-
engastadas, representa a metade do comprimento real da peça.
A determinação da temperatura associada ao valor da carga crítica, calculada na
expressão (5.2.1), pode ser facilmente feita a partir dos conceitos clássicos da resistência
dos materiais. Sendo assim, tem-se que:
Pcr = εEA = π2 EI / L2 (5.2.2)
ε = π2 I / AL2
Uma vez que ε = ∆L/L e que ∆L = αL ∆t
onde:
∆t é a variação uniforme de temperatura
Tem-se, finalmente, que a variação de temperatura no ponto de flambagem da
estrutura é:
∆t = π2 I / L2αΑ (5.2.3)

72
As expressões (5.2.1) e (5.2.3) conduzem aos valores de 1082,9kN para a carga
crítica de flambagem da peça e 25,40 ºC de temperatura associada.
Os dados utilizados na determinação da carga crítica foram introduzidos no
programa assumindo as seguintes condições:
• número de incrementos = 1000;
• número máximo de iterações = 100.
Carga Crítica UPDUT
(kN)
Carga Crítica Euler (kN)
Erro (%)
1082,52 1082,90 0,04 Tabela 5.2b - Comparação ente os resultados de carga crítica
A partir dos resultados apresentados na Tabela 5.2b, pode-se perceber que o valor
da carga crítica obtida pelo programa UPDUT atinge praticamente o mesmo resultado
encontrado na teoria com um erro de 0,04%. A temperatura obtida no instante da
flambagem é igual a 25,38ºC, praticamente a mesma obtida pelo estudo teórico.
5.3 Exemplo 2 - Comparação com o Programa SACS
Neste exemplo, considera-se um duto enterrado com uma imperfeição de formato
circular, com uma relação entre a flecha do arco e seu comprimento (δf/L) de 3%. O tipo de
solo adotado neste exemplo é uma areia. Nesse caso, admitiu-se que toda a parcela de solo
atua como carga aplicada ao duto, conforme item 3.2. do capítulo 3, com uma cota de
enterramento aplicada igual a 0,5 metro e uma densidade específica de 8,0kN/m3. A Figura
5.3a apresenta as características geométricas, condições de contorno e carregamento da
estrutura. As propriedades mecânicas são apresentadas na Tabela 5.3a. Cabe ressaltar que
em todas as análises realizadas, a rigidez axial e de flexão do duto não levam em conta a
camada de concreto aplicada. Normalmente admite-se, neste tipo de análise, que a presença
do concreto contribui apenas para o aumento do peso submerso e para a garantia de

73
estabilidade do duto no leito marinho, deixando toda a parte referente aos esforços axiais e
de momento para a seção de aço.
Figura 5.3a - Modelo considerado na análise
Conforme pode ser visto na Figura 5.3a, o duto foi discretizado em 20 elementos
com comprimento de cada elemento igual a aproximadamente 2,5 metros; os parâmetros
empregados na resolução solução do problema foram os seguintes:
(a) número de incrementos de carga = 100;
(b) critério de convergência = 10-5;
(c) variação temperatura máxima empregada = 70ºC.
DESCRIÇÃO VALORES Diâmetro externo do duto 16,0pol (406,4mm) Espessura do duto 0,562pol (14,28mm) Espessura de concreto aplicado ao duto 1,5pol (38,1mm) Densidade do concreto 21,97 kN/m3 Densidade do fluido 8,5 kN/m3 Módulo de elasticidade longitudinal (E) 200000 Mpa Coeficiente de Poisson (υ) 0,3 Coeficiente de dilatação linear do aço (α) 0,120 x 10-4 ºC-1 Rigidez à flexão do duto (EI) 7,11 x 104 kNm2 Rigidez axial do duto (EA) 3,69 x 106 kN
Tabela 5.3a - Características mecânicas do duto analisado
Para os dados apresentados na Tabela acima, esta mesma estrutura foi analisada
com o auxílio do sistema SACS, software comumente empregado na área offshore, através
L = 50 metros
δf
Wterra (kN/m)
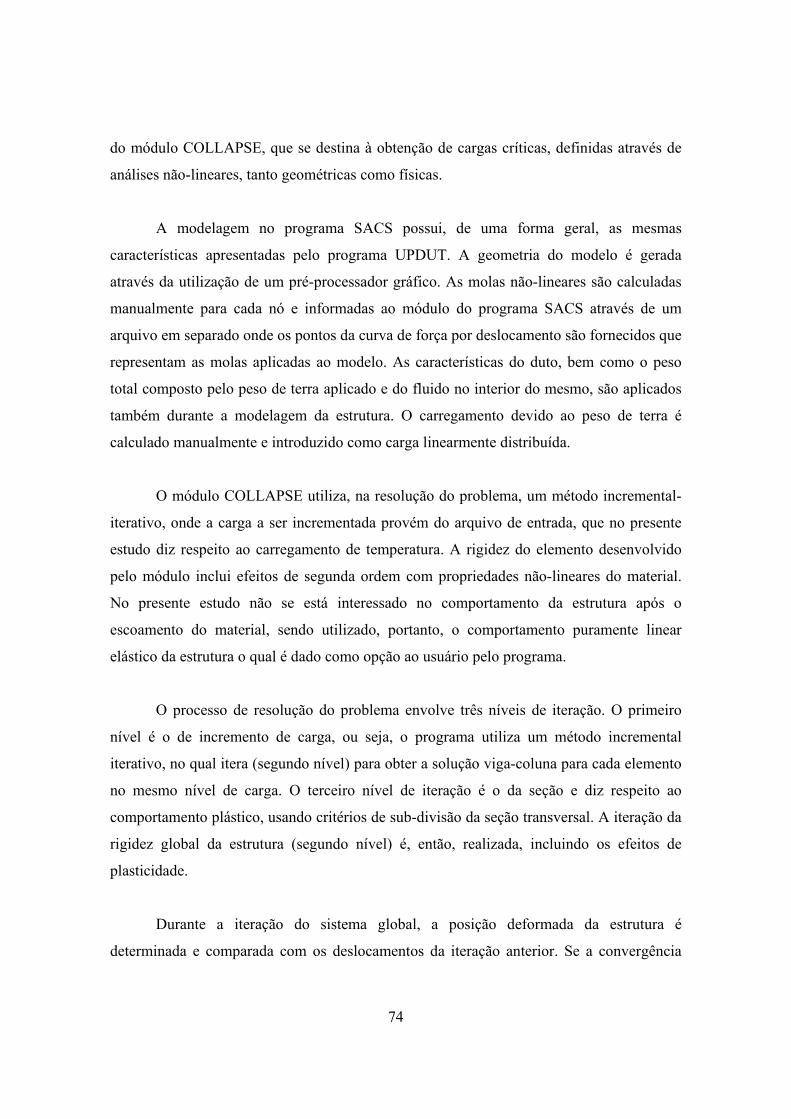
74
do módulo COLLAPSE, que se destina à obtenção de cargas críticas, definidas através de
análises não-lineares, tanto geométricas como físicas.
A modelagem no programa SACS possui, de uma forma geral, as mesmas
características apresentadas pelo programa UPDUT. A geometria do modelo é gerada
através da utilização de um pré-processador gráfico. As molas não-lineares são calculadas
manualmente para cada nó e informadas ao módulo do programa SACS através de um
arquivo em separado onde os pontos da curva de força por deslocamento são fornecidos que
representam as molas aplicadas ao modelo. As características do duto, bem como o peso
total composto pelo peso de terra aplicado e do fluido no interior do mesmo, são aplicados
também durante a modelagem da estrutura. O carregamento devido ao peso de terra é
calculado manualmente e introduzido como carga linearmente distribuída.
O módulo COLLAPSE utiliza, na resolução do problema, um método incremental-
iterativo, onde a carga a ser incrementada provém do arquivo de entrada, que no presente
estudo diz respeito ao carregamento de temperatura. A rigidez do elemento desenvolvido
pelo módulo inclui efeitos de segunda ordem com propriedades não-lineares do material.
No presente estudo não se está interessado no comportamento da estrutura após o
escoamento do material, sendo utilizado, portanto, o comportamento puramente linear
elástico da estrutura o qual é dado como opção ao usuário pelo programa.
O processo de resolução do problema envolve três níveis de iteração. O primeiro
nível é o de incremento de carga, ou seja, o programa utiliza um método incremental
iterativo, no qual itera (segundo nível) para obter a solução viga-coluna para cada elemento
no mesmo nível de carga. O terceiro nível de iteração é o da seção e diz respeito ao
comportamento plástico, usando critérios de sub-divisão da seção transversal. A iteração da
rigidez global da estrutura (segundo nível) é, então, realizada, incluindo os efeitos de
plasticidade.
Durante a iteração do sistema global, a posição deformada da estrutura é
determinada e comparada com os deslocamentos da iteração anterior. Se a convergência
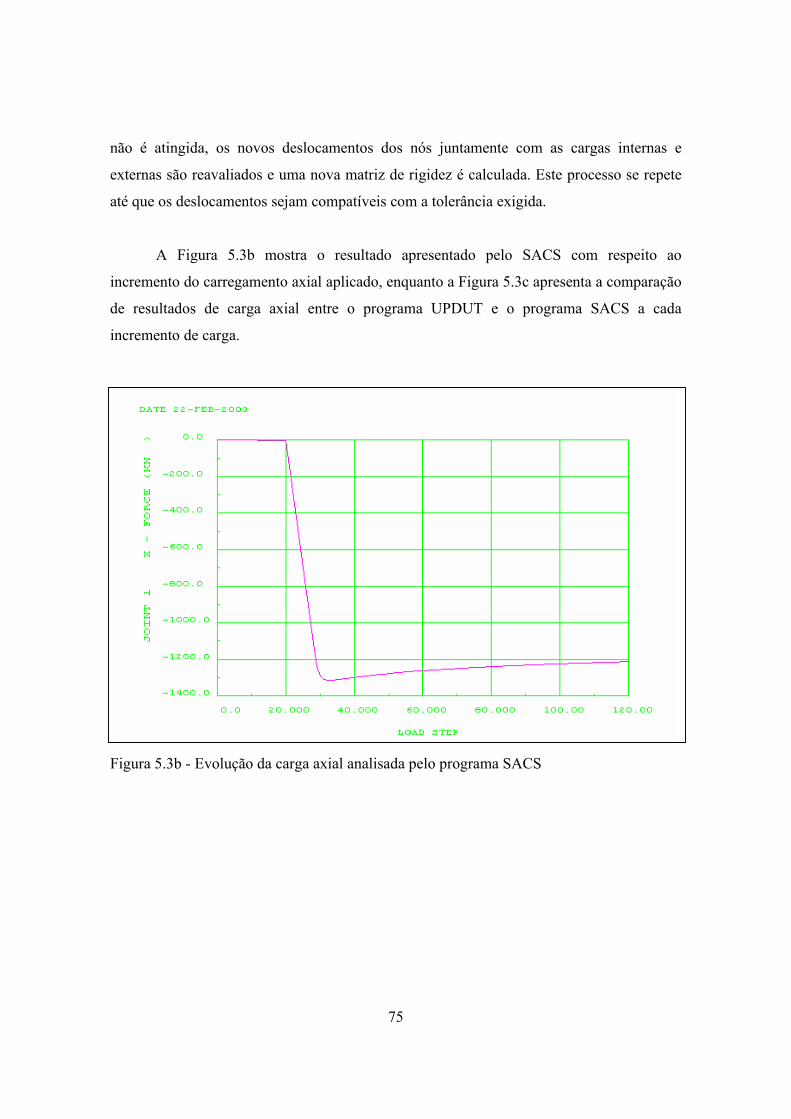
75
não é atingida, os novos deslocamentos dos nós juntamente com as cargas internas e
externas são reavaliados e uma nova matriz de rigidez é calculada. Este processo se repete
até que os deslocamentos sejam compatíveis com a tolerância exigida.
A Figura 5.3b mostra o resultado apresentado pelo SACS com respeito ao
incremento do carregamento axial aplicado, enquanto a Figura 5.3c apresenta a comparação
de resultados de carga axial entre o programa UPDUT e o programa SACS a cada
incremento de carga.
Figura 5.3b - Evolução da carga axial analisada pelo programa SACS

76
Figura 5.3c - Comparação da carga axial entre o programa SACS e o programa UPDUT
Pode-se perceber, a partir dos resultados obtidos no gráfico da Figura 5.3c, que os
valores de carga axial obtidos a partir dos dois programas são praticamente idênticos, com
um erro máximo ligeiramente superior a 1% referido aos valores máximos de carga axial,
conforme mostra a Tabela 5.3b. É importante ressaltar que, no caso apresentado acima, o
programa UPDUT não identificou nenhum ponto de instabilidade do duto durante a análise.
A Tabela 5.3b apresenta os resultados para a carga máxima obtida pelos dois
programas e o erro equivalente obtido.
DESCRIÇÃO SACS UPDUT ERRO(%) CARGA AXIAL MÁXIMA 1316kN 1333kN 1,28
Tabela 5.3b - Comparação entre o programa SACS e o programa UPDUT
COMPARAÇÃO UPDUT X SACS
-1400
-1200
-1000
-800
-600
-400
-200
0
0 10 20 30 40 50 60 70 80
PASSO DE CARGA
FOR
ÇA
AXI
AL
(KN
)
UPDUTSACS

77
5.4 Exemplo 3 - Comparação com o Programa PCUB
Este outro exemplo apresenta uma comparação entre os resultados obtidos com o
programa UPDUT e com o programa PCUB [23], específico para este tipo de análise
desenvolvido em 1990 com base nos trabalhos realizados por [6, 7 e 8]. Neste caso, foi
utilizado um exemplo apresentado no manual do programa como problema proposto.
Seja, então, um duto submarino assente no leito marinho, cujas propriedades
mecânicas e dimensões são apresentadas na Tabela 5.4a. A geometria do modelo está
apresentada na Figura 5.4a.
DESCRIÇÃO VALORES Diâmetro Externo do duto 8,625pol (219,1mm) Espessura da parede do duto 0,472pol (12,0mm) Peso total submerso 0,265 kN/m Módulo de Elasticidade Longitudinal (E) 207000 Mpa Coeficiente de Poisson (υ) 0,3 Coeficiente de dilatação linear do aço (α) 0,110 x 10-4 ºC-1 Rigidez à Flexão do duto (EI) 8,68 x 103 kNm2 Rigidez Axial do duto (EA) 1,62 x 106 kN
Tabela 5.4a - Características mecânicas e dimensões do duto analisado
Figura 5.4a - Modelo considerado na análise comparativa
L = 62,331 metros
δf
Wterra (kN/m)

78
A imperfeição inicial considerada é igual 0,415m, num arco de círculo tendo,
portanto, uma imperfeição relativa de 0,66%.
O duto foi discretizado em 20 elementos com comprimento de cada elemento igual
a aproximadamente 2,5 metros.
O comprimento L do modelo utilizado foi o mesmo utilizado pelo manual do
programa PCUB [23] proposto por JU & KYRIAKIDES [25], o qual foi calculado a partir
da seguinte expressão:
Lf = (1152 . δf . EI / Wsub) 0.25 (5.4.1)
onde: δf = altura da imperfeição;
Wsub = peso total submerso do duto;
Lf = comprimento total do modelo a ser analisado
A Figura 5.4b ilustra o resultado da análise feita pelo programa PCUB relacionando
a temperatura com o deslocamento do duto.
Figura 5.4b - Resultado obtido pelo programa PCUB
RESULTADO DO PROGRAMA PCUB
0,001,002,003,004,005,006,007,008,009,00
10,0011,0012,0013,0014,0015,0016,0017,0018,00
0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
DESLOCAMENTOS (m)
TE
MPE
RA
TU
RA
(ºC
)
Programa PCUB

79
O resultado da Figura 5.4b mostra que na temperatura de 16,4ºC o duto torna-se
instável e, a partir deste ponto, começa a deslocar-se rapidamente. O ramo descendente só
pode ser obtido promovendo-se um alívio da temperatura ou da força axial equivalente.
Pode-se perceber também, através do mesmo gráfico, que o duto praticamente não sofre
nenhum deslocamento até o instante da instabilidade.
A partir dos dados fornecidos no manual do PCUB, o problema foi analisado com o
programa UPDUT, considerando as mesmas características apresentadas na Tabela 5.4a. O
modelo foi subdivido em 20 elementos, conforme ilustrado na Figura 5.4a, e não foi
aplicado ao duto nenhum peso adicional devido ao enterramento, uma vez que o duto está
apenas assentado no leito marinho. Os parâmetros de controle para a análise do modelo
foram os mesmos utilizados no item anterior, isto é, número de incrementos igual a 100,
tolerância para a convergência de 10-5, número máximo de iterações igual a 100.
A análise foi efetuada e o programa determinou o ponto de instabilidade ao atingir a
temperatura de 16,80ºC, com uma força axial equivalente de 298,7kN.
O resultado desta análise realizado com o programa UPDUT está apresentado na
Figura 5.4c, juntamente com o resultado obtido pelo programa PCUB.
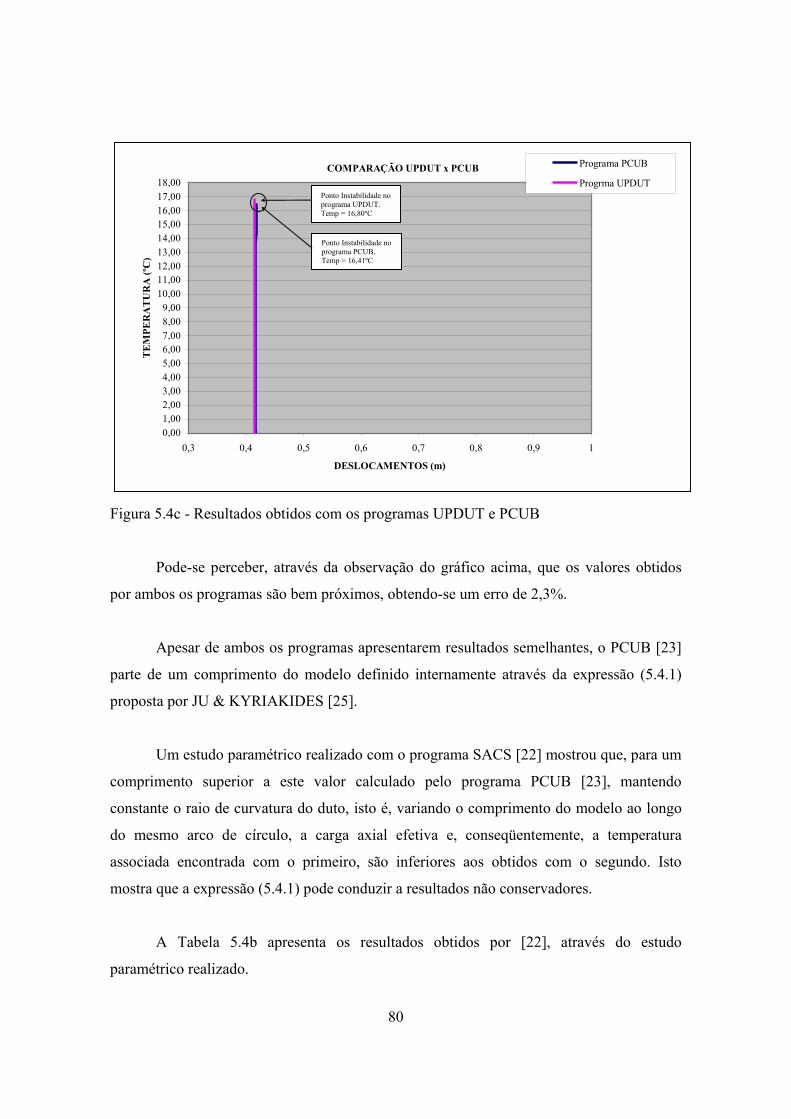
80
Figura 5.4c - Resultados obtidos com os programas UPDUT e PCUB
Pode-se perceber, através da observação do gráfico acima, que os valores obtidos
por ambos os programas são bem próximos, obtendo-se um erro de 2,3%.
Apesar de ambos os programas apresentarem resultados semelhantes, o PCUB [23]
parte de um comprimento do modelo definido internamente através da expressão (5.4.1)
proposta por JU & KYRIAKIDES [25].
Um estudo paramétrico realizado com o programa SACS [22] mostrou que, para um
comprimento superior a este valor calculado pelo programa PCUB [23], mantendo
constante o raio de curvatura do duto, isto é, variando o comprimento do modelo ao longo
do mesmo arco de círculo, a carga axial efetiva e, conseqüentemente, a temperatura
associada encontrada com o primeiro, são inferiores aos obtidos com o segundo. Isto
mostra que a expressão (5.4.1) pode conduzir a resultados não conservadores.
A Tabela 5.4b apresenta os resultados obtidos por [22], através do estudo
paramétrico realizado.
COMPARAÇÃO UPDUT x PCUB
0,001,002,003,004,005,006,007,008,009,00
10,0011,0012,0013,0014,0015,0016,0017,0018,00
0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
DESLOCAMENTOS (m)
TE
MPE
RA
TU
RA
(ºC
)
Programa PCUB
Progrma UPDUTPonto Instabilidade no programa UPDUT. Temp = 16,80ºC
Ponto Instabilidade no programa PCUB. Temp = 16,41ºC

81
DESCRIÇÃO SACS Comprimento modelo = 62,331m 300,3kN
Comprimento modelo = 80m 273,54kN Comprimento modelo = 100m 272,74kN
Tabela 5.4b - Estudo paramétrico realizado com os programas SACS e UPDUT
A Tabela 5.4b mostra que para um comprimento maior, os valores de caga axial são
menores que os obtidos com a expressão (5.4.1), o que comprova que os resultados de [23]
podem levar o usuário a resultados não conservadores.
Deve-se, portanto, antes de se iniciar a análise do duto, verificar, através de um
estudo paramétrico, o comprimento adequado a ser utilizado. Valores entre 50 e 80 vezes o
diâmetro podem ser sugeridos com base nos estudos realizados em colunas bi-engastadas,
já discutidas acima.
5.5 Exemplo 4 - Comparação com o Programa ANSYS
Outro exemplo foi realizado a partir do caso estudado no item 5.3 utilizando, dessa
vez, o software ANSYS [24] como ferramenta de comparação com os resultados obtidos
pelo programa UPDUT e, também como forma de confirmar os resultados obtidos acima,
com o programa SACS [22].
Sendo assim, seja um duto de comprimento L e diâmetro e espessuras de aço e
revestimento de concreto idênticos aos apresentados no item 5.3. Para estas condições, foi
elaborado um modelo idêntico através da utilização do programa ANSYS. O elemento
adotado na modelagem do duto foi um elemento finito de barra 3D adicionando uma não-
linearidade geométrica. As condições de contorno aplicadas ao modelo foram semelhantes
às aplicadas na modelagem com o programa SACS, isto é, as extremidades do modelo
foram restringidas em todos os graus de liberdade, ao longo do duto foi considerado um

82
impedindo lateral e na vertical foram considerando elementos do tipo GAP, simulando,
assim, sua condição de enterramento.
Os elementos tipo GAP fornecidos pelo programa ANSYS são, em geral, elementos
uniaxiais, os quais permitem trabalhar apenas à compressão ou apenas à tração. Dessa
forma, quando, por exemplo, o elemento GAP estiver definido para trabalhar somente à
tração, no caso de haver em algum momento uma força de compressão agindo neste
elemento, ele não responderá a esta força.
No presente caso, os elementos tipo GAP foram aplicados ao programa trabalhando
somente à compressão, simulando a presença do solo abaixo do duto enquanto que, na parte
superior do duto, a parcela de solo presente atua apenas como peso no duto, isto é, como
carregamento atuante. Dessa forma, na medida que a temperatura vai sendo incrementada,
o duto tenderá a levantar fazendo com que os elementos tipo GAP deixem de responder à
estrutura, uma vez que as forças de compressão, que inicialmente atuam no elemento
devido ao peso próprio e peso de terra, irão diminuir gradualmente, até deixarem de atuar.
O fato de se poder trabalhar com a não-linearidade geométrica aplicada ao duto
garante que haverá sempre uma atualização a cada iteração da matriz de rigidez total do
sistema, não havendo a necessidade de se promover uma atualização da geometria do duto.
Dessa forma, para os dados fornecidos no item 5.3, o duto foi analisado e o
resultado obtido pelo programa ANSYS está apresentado na Figura 5.5a:

83
Figura 5.5a - Resultado obtido com o programa ANSYS
Pode-se perceber, observando o gráfico, que o aspecto do resultado é bem
semelhante ao obtido pelo programa SACS no item 5.3 e, conseqüentemente, pelo
programa UPDUT. Os resultados entre o ANSYS e o programa UPDUT foram combinados
em um único gráfico, cujo resultado está apresentado na Figura 5.5b:

84
Figura 5.5b - Comparação da carga axial entre o programa ANSYS e o programa UPDUT
Observando o gráfico, percebe-se que os resultados entre os programas são
praticamente os mesmos, tanto no ramo ascendente quanto no descendente e mostra que a
metodologia adotada tanto pelo programa UPDUT quanto pelo programa SACS é
consistente.
COMPARAÇÃO UPDUT X ANSYS
-1400
-1200
-1000
-800
-600
-400
-200
0
0 10 20 30 40 50 60 70 80
PASSO DE CARGA
FOR
ÇA
AXI
AL
(KN
)
UPDUTANSYS

85
CAPÍTULO 6
Aplicação do Programa 6.1 Introdução
O presente capítulo tem por objetivo mostrar a aplicabilidade do programa na
determinação, em nível de projeto, de uma cota mínima de enterramento e da máxima
imperfeição permitida em um duto submarino em operação.
6.2 Descrição do Problema
Seja um duto submarino com 16 polegadas de diâmetro, revestido com concreto, o
qual será instalado em um solo arenoso, e para o qual estará previsto um enterramento não
apenas devido à temperatura, mas também por causa do trânsito de embarcações, onde o
calado dos mesmos pode causar danos irreparáveis ao duto, promovendo um acidente.
Pretende-se, numa etapa inicial de projeto, para as condições colocadas acima, definir qual,
ou quais cotas de enterramento o duto poderá atingir e qual ou que imperfeições
geométricas, referidas a uma distância de 100m, o mesmo poderá tolerar sem que haja
escoamento do material ou colapso global da estrutura.
Os dados básicos do duto submarino em questão são fornecidos na Tabela 6.2a:

86
DADOS DO DUTO DE 16pol Diâmetro externo 16pol (406,4mm) Espessura de parede 0,562pol (14,28mm) Variação de temperatura de projeto (ºC) 70 Pressão máxima de projeto 8,34Mpa Tensão de escoamento Fy = 358MPa Espessura do revestimento de concreto 1,5pol (38,1mm) Densidade do revestimento de concreto 2240kgf/m3 (21,97kN/m3) Tipo de solo Areia Ângulo de atrito do solo (Graus) 30 Peso específico submerso do solo (γsolo) 8kN/m3 Peso específico do fluido (γfluído) 8,5kN/m3
Tabela 6.2a - Dados do duto de 16pol
6.3 Análise dos Dados e Resultados Obtidos
Com base nas informações apresentadas no item acima, e com o auxílio do programa
UPDUT, o duto foi analisado com respeito aos pontos de instabilidade considerando as
seguintes situações:
• cota de enterramento variando entre 0m e 2m;
• imperfeição do duto variando entre 1m e 3m num comprimento de 100m;
• consideração do módulo de reação do solo.
Adicionalmente, foram estudadas três situações para o solo fornecido, já discutidas no
capítulo 3, as quais são reproduzidas a seguir:
• Caso 1 - duto enterrado em solo homogêneo;
• Caso 2 - duto enterrado em solo revolvido;
• Caso 3 - duto enterrado em solo recentemente reconstituído.
A primeira situação, em geral, ocorre quando se instala o duto sem que haja
alteração na estrutura do solo e corresponde a uma instalação do tipo furo direcional, já
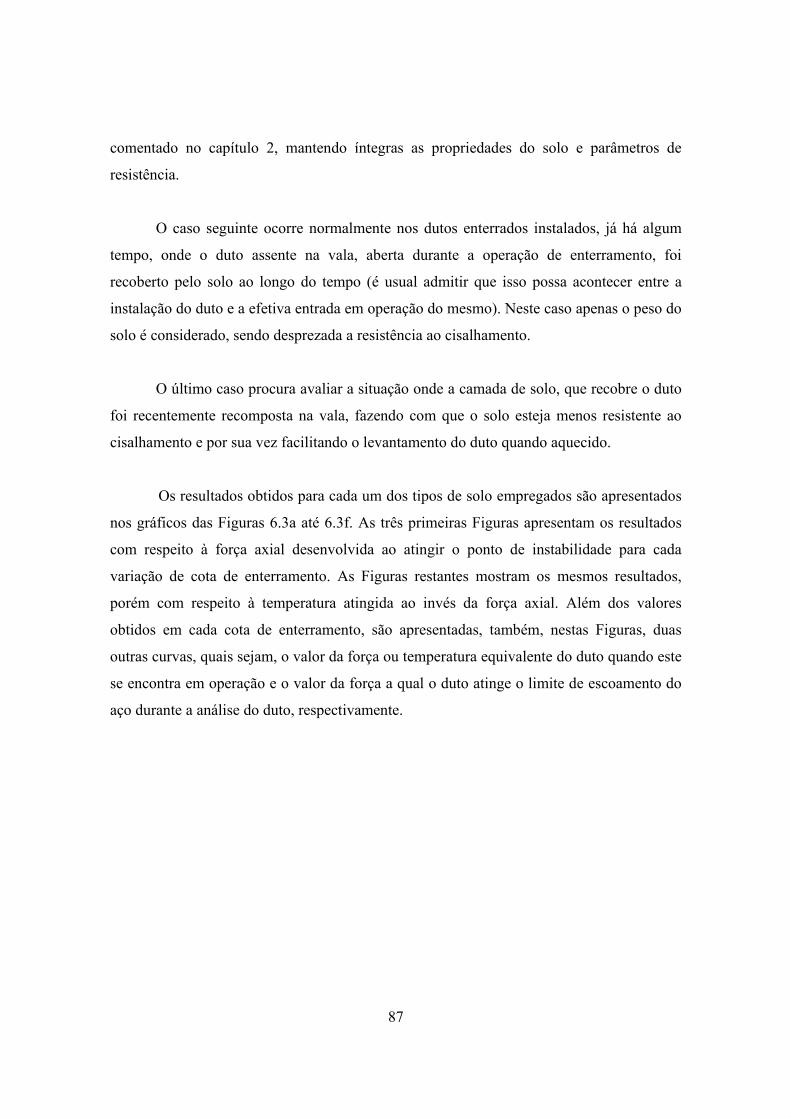
87
comentado no capítulo 2, mantendo íntegras as propriedades do solo e parâmetros de
resistência.
O caso seguinte ocorre normalmente nos dutos enterrados instalados, já há algum
tempo, onde o duto assente na vala, aberta durante a operação de enterramento, foi
recoberto pelo solo ao longo do tempo (é usual admitir que isso possa acontecer entre a
instalação do duto e a efetiva entrada em operação do mesmo). Neste caso apenas o peso do
solo é considerado, sendo desprezada a resistência ao cisalhamento.
O último caso procura avaliar a situação onde a camada de solo, que recobre o duto
foi recentemente recomposta na vala, fazendo com que o solo esteja menos resistente ao
cisalhamento e por sua vez facilitando o levantamento do duto quando aquecido.
Os resultados obtidos para cada um dos tipos de solo empregados são apresentados
nos gráficos das Figuras 6.3a até 6.3f. As três primeiras Figuras apresentam os resultados
com respeito à força axial desenvolvida ao atingir o ponto de instabilidade para cada
variação de cota de enterramento. As Figuras restantes mostram os mesmos resultados,
porém com respeito à temperatura atingida ao invés da força axial. Além dos valores
obtidos em cada cota de enterramento, são apresentadas, também, nestas Figuras, duas
outras curvas, quais sejam, o valor da força ou temperatura equivalente do duto quando este
se encontra em operação e o valor da força a qual o duto atinge o limite de escoamento do
aço durante a análise do duto, respectivamente.
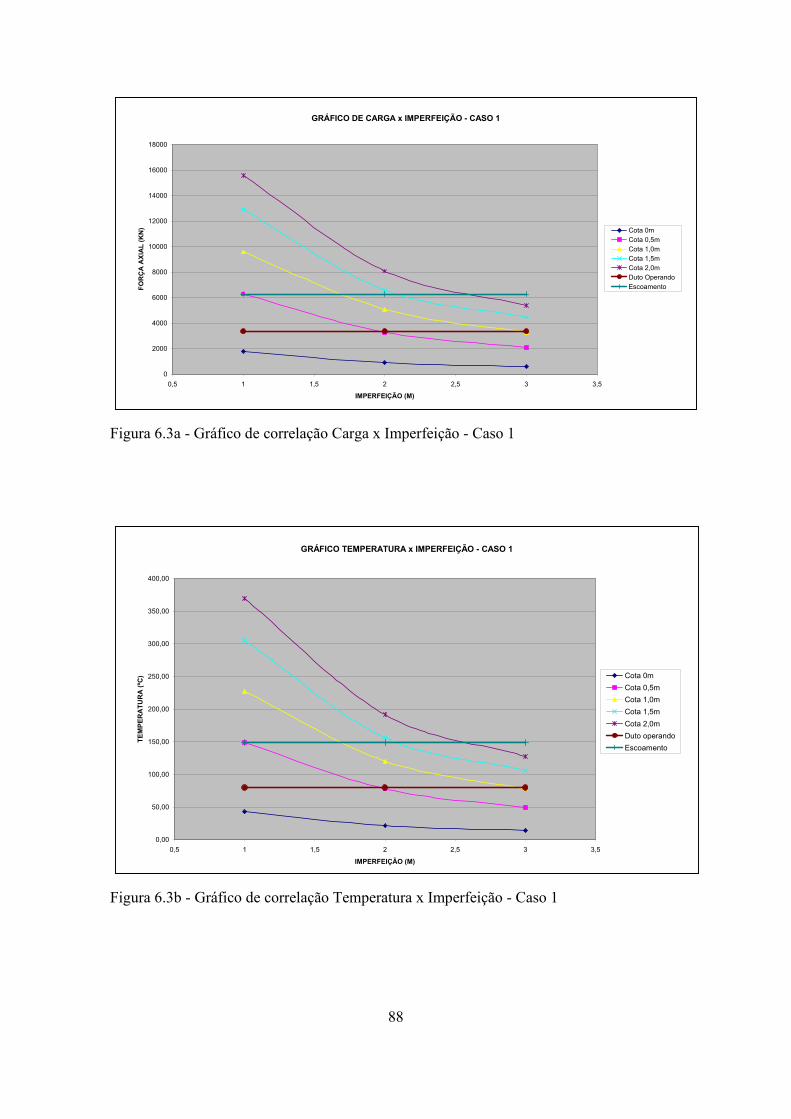
88
Figura 6.3a - Gráfico de correlação Carga x Imperfeição - Caso 1 Figura 6.3b - Gráfico de correlação Temperatura x Imperfeição - Caso 1
GRÁFICO DE CARGA x IMPERFEIÇÃO - CASO 1
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (M)
FOR
ÇA
AXI
AL
(KN
) Cota 0mCota 0,5mCota 1,0mCota 1,5mCota 2,0mDuto OperandoEscoamento
GRÁFICO TEMPERATURA x IMPERFEIÇÃO - CASO 1
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
400,00
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (M)
TEM
PER
ATU
RA
(ºC
) Cota 0mCota 0,5mCota 1,0mCota 1,5mCota 2,0mDuto operandoEscoamento

89
Figura 6.3c - Gráfico de correlação Carga x Imperfeição - Caso 2 Figura 6.3d - Gráfico de correlação Temperatura x Imperfeição - Caso 2
GRÁFICO CARGA x IMPERFEIÇÃO - CASO 2
0
5000
10000
15000
20000
25000
30000
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (m)
FOR
ÇA
AXI
AL
(KN
) Cota 0mCota 0,5mCota 1,0mCota 1,5mCota 2,0Duto operandoEscoamento
GRÁFICO TEMPERATURA x IMPERFEIÇÃO - CASO 2
0,00
100,00
200,00
300,00
400,00
500,00
600,00
700,00
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (M)
TEM
PER
ATU
RA
(ºC
) Cota 0mCota 0,5mCota 1mCota 1,5mCota 2,0mDuto operandoEscoamento

90
Figura 6.3e - Gráfico de correlação Carga x Imperfeição - Caso 3 Figura 6.3f - Gráfico de correlação Temperatura x Imperfeição - Caso 3
GRÁFICO CARGA x IMPERFEIÇÃO - CASO 3
0
2000
4000
6000
8000
10000
12000
14000
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (M)
FOR
ÇA
AXI
AL(
KN
) Cota 0mCota 0,5mCota 1,0mCota 1,5mCota 2,0mDuto operandoEscoamento
GRÁFICO TEMPERATURA x IMPERFEIÇÃO - CASO 3
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
0,5 1 1,5 2 2,5 3 3,5
IMPERFEIÇÃO (M)
TEM
PER
ATU
RA
(ºC
) Cota 0mCota 0,5mCota 1,0mCota 1,5mCota 2,0mDuto operandoEscoamento

91
Observando os gráficos de correlação acima, podem ser anotadas as seguintes observações:
1- o duto deverá ser obrigatoriamente enterrado após sua instalação, pois qualquer
imperfeição maior que 0,5m poderá causar colapso no duto durante sua operação;
2- os três casos mostram que a força axial produzida durante a operação do duto é
inferior à força de escoamento;
3- pode-se perceber claramente, observando os gráficos, que para a cota de
enterramento equivalente a 0,5m, são permitidas imperfeições do duto numa faixa
que varia entre 1,0m e 1,8m para o caso 1, 1,0m e 1,5m para o caso 2 e 1,0 e 1,4
para o caso 3;
4- caso sejam necessárias imperfeições maiores, a cota de enterramento deverá ser
observada, verificando sempre o escoamento do material.
Concluída esta etapa do projeto, onde foram definidas as possíveis soluções com
respeito às imperfeições e à cota de enterramento necessária, deverão ser verificadas as
condições nas quais o duto submarino encontra-se no leito marinho após o seu efetivo
lançamento.
No caso de uma instalação com um posterior enterramento da linha, a execução das
passadas para a abertura da vala onde o duto se assentará é controlada e, portanto, os
critérios de imperfeição máxima permitidos, estabelecidos em projeto, poderão ser
obedecidos conforme a necessidade de projeto.
Em casos onde o duto não sofrerá enterramento, além do estudo de projeto verificar,
através da análise em questão, que é possível a permanência do mesmo sem a necessidade
de enterrá-lo e identificar até que imperfeição máxima o duto deverá permanecer, uma
avaliação após a instalação deve ser realizada com o objetivo de corroborar ou retificar os
requisitos previstos durante o projeto.
Dentro dessa filosofia, seria necessário, após a instalação do duto, um levantamento
da sua posição em perfil de assentamento no solo, de forma a permitir a verificação das

92
imperfeições que se formaram durante a instalação, confirmando ou não os resultados
obtidos na fase de projeto e, no caso de não atendimento aos requisitos, aplicar medidas
retificadoras.
Uma outra situação interessante seria a verificação de instabilidade global por
aquecimento de um duto instalado em uma época remota, cujo produto transportado passará
a trabalhar com temperaturas mais elevadas. Neste caso, a partir do levantamento do perfil
de assentamento do duto, seriam observadas as máximas imperfeições atingidas e avaliadas
suas condições através do programa. Para tanto, seria extremamente interessante que o
programa de análise possuísse um módulo que obtivesse automaticamente a máxima
imperfeição no duto a partir de uma leitura do perfil de assentamento do mesmo no solo.

93
CAPÍTULO 7
Conclusões e Sugestões
7.1 Síntese
Este trabalho teve por finalidade apresentar o estado da arte referente ao
dimensionamento de dutos submarinos utilizados para transportar óleo aquecido, no que diz
respeito à flambagem por levantamento (upheaval buckling) a que tais dutos estão sujeitos.
7.2 Conclusões
Com base nos estudos teóricos apresentados foi desenvolvido um programa prático
específico, o qual foi comparado a um programa denominado PCUB [23], que é uma
espécie de padrão do mercado e que, por sua vez, foi testado à luz de resultados teóricos e
práticos que podem ser encontrados em [6, 7 e 8].
Tendo em vista a pequena disponibilidade de resultados do programa PCUB [23], o
UPDUT, nome dado ao programa aqui desenvolvido, foi comparado também a outros
programas reconhecidos pelo mercado, como: o ANSYS [24] e o SACS [23]. Em todos os
casos os resultados foram satisfatórios.
Embora o presente trabalho se limite a reproduzir métodos de cálculo desenvolvidos
por terceiros logrou-se, através disso, nacionalizar uma tecnologia que é vendida a um
preço elevado.
No presente trabalho estabeleceu-se um comprimento que consiste, em primeiro
lugar, determinar o tamanho adequado do modelo para, só depois, resolver o problema em
questão.

94
O programa padrão de mercado [23] usa, ao contrário, uma equação simples,
supostamente conservadora, para definir o tamanho do modelo, estabelecido sem qualquer
interferência do usuário.
Embora o PCUB [23] e o UPDUT analisem o problema obtendo os mesmos
resultados, logrou-se mostrar que a equação aproximada do primeiro, que define o tamanho
do modelo, nem sempre produz resultados conservadores.
Curiosamente, uma importante conclusão deste trabalho é no sentido de que o
programa padrão de mercado [23] não seja utilizado indiscriminadamente, porque nem
sempre conduz a bons resultados.
7.3 Sugestões para Trabalhos Futuros
Recomenda-se, para trabalhos futuros que o elemento espacial, já implementado no
programa, seja usado para resolver também o problema de flambagem lateral (snaking)
comum a dutos aquecidos, porém não travados lateralmente.
Também nessa linha, recomenda-se a implementação de uma rotina para avaliação
da estrutura após o escoamento do material no caso de não se ter atingido o ponto de
instabilidade, bem como do comportamento pós-crítico da estrutura uma vez alcançado o
ponto de instabilidade da mesma.

95
Referências Bibliográficas [1] KERR, A.D. “On the Stability of the railroad track in the vertical plane”, Rail
International, v. 5, pp. 131-142, 1974. [2] KERR, A.D. “On thermal buckling of straight railroad tracks and the effect of track
length on the track response”, Rail International, v. 9, pp. 759-768, 1979. [3] HOBBS, R.E. “Pipeline Buckling Caused by Axial Loads”, Journal of Construction
Steel Research, v. 1, n.2, pp. 2-10, 1981. [4] HOBBS, R.E. “In-service buckling of heated pipelines”, ASCE Journal of
Transportation Engineering, v. 110, n. TE2, pp. 175-189, 1984. [5] TVERGAARD, V. & NEEDLEMAN, A. “On localized thermal track buckling”,
International Journal of Mechanical Sciences, v. 23, pp. 577-587, 1981. [6] PALMER, A.C., ELLINAS, C. P., RICHARDS, D.M. & GUIJT, J. “Design Submarine
Pipelines against Upheaval Buckling”, Offshore Technology Conference, OTC 6335, Houston, Texas, USA, 1990.
[7] SCHAMINÉE, P.E.L., ZORN, N. F., & SCHOTMAN, G.J.M. “Soil Response for
Pipeline Upheaval Buckling analyses: Full-scale laboratory tests and modelling”, Offshore Technology Conference, OTC 6486, Houston, Texas, USA, 1990.
[8] PALMER, A.C. , CARR, M., MALTBY, T., MCSHANE, B., & INGRAM, J.,
“Upheaval Buckling: What we know, and what don’t we know?”, Offshore Technology Conference, Oslo, Noruega, 1994.
[9] CLARO, C.A., 2000, Análise Não-Linear de Estabilidade em Dutos Rígidos
Submarinos. Tese de M.Sc., CTC-TPC/UFF, Niterói, RJ, Brasil. [10] DnV OS-F101, Submarine Pipeline Systems. Hφvik, Det Norske Veritas, 2000. [11] BSI BS 8010, British Standard Code of Practice for Pipelines, British Standard
Committees, London, England, 1989. [12] API 5L, Specification for Line pipe, 42 ed., Washington, American Petroleum
Institute, July 2000. [13] DnV RP B401, Recommended Practice for Cathodic protection Design. Hφvik, Det
Norske Veritas, 1993.
[14] CAPUTO, H.P., Mecânica dos Solos e suas aplicações vol I. 4 ed., Rio de Janeiro, Livros Técnicos e Científicos, 1980.

96
[15] API RP 2A-WSD, Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms – Working Stress Design, 21 ed., Washington, American Petroleum Institute, December 2000.
[16] ASME B31.4, Pipeline Transportation Systems for Liquid Hydrocarbons and other
Liquids, ASME B31-4 1998 ed., New York, American National Standard, December 1998.
[17] GALGOUL, N.S., 1978, Beitrag zur Bemessung von schanken Stahlbetonstützen für
schiefe Biegung mit Achsdruck unter Kurzeit – und Dauerbelastung. Dr.-Ing Dissertation, Technischen Universität München, München, Deutschland.
[18] TIMOSHENKO, S.P. & GERE, J.M.,Theory of Elastic Stability. 2 ed. New York,
Mcgraw-Hill, 1961. [19] GERE, J.M. & WEAVER Jr., W., Análises de Estruturas Reticuladas. 1 ed., Rio de
Janeiro, Guanabara Dois, 1981. [20] BOWLES, J.E, Foundation Analysis and Design. 5 ed. Illinois, Mcgraw-Hill, 1996. [21] COOK, R.D, MALKUS, D.S. & PLESHA, M.E., Concepts and Applications of Finite
Element Analysis. 3 ed. Toronto, John Wiley & Sons, 1989. [22] SACS Release 5, Structural Analysis Computer System – Non-linear Analysis.
Louisiana, Engineering Dynamics Inc., 1998 [23] PCUB, Plus⋅One Upbuck II. Louisiana, 4.1.1a ed., Penspen, 1990. [24] ANSYS Release 6.1, ANSYS/ED Documentation., ANSYS Inc., 2002. [25] JU, G.T. & KYRIAKIDES, S. “Thermal Buckling of Offshore Pipelines”, Journal
Offshore Mechanics and Artic Engineering, n.110, pp. 355-364, 1988.





























