Embed Size (px)
Citation preview

BAB II. DASAR TEORI
2.1. Bumdle Adjustment
Prinsip Bundle adjustment adalah menghubungkan secara langsung sistem
koordinat foto ke sistem koordinat peta/tanah tanpa melalui tahap orientasi relatif
dan absolut. Secara metematis, persamaan Bundle adjustment dapat diekspresikan
sebagai persamaan transformasi conform 3D.
Persamaan 2.1. Persamaan Bundle adjustment
a : Posisi titik p dalam system koordinat peta
k : faktor skala
A : Posisi pusat proyeksi kamera (Prespectif Center)
M : Posisi titik p dalam sisitem koordinat foto
Prinsip bundle adalah menggunakan inverse persamaan di atas yang
dimodifikasi untuk menunjukan koordinat foto dan merupakan fungsi dari
koordinat peta, sebagaimana ditunjukan oleh persamaan berikut :
Pada persamaan tersebut, jika baris ke-1 dan baris ke-2 dibagi dengan
baris ke-3 maka akan diperoleh persamaan kesegarisan (collinear equation).
Persamaan kesegarisan menunjukan bahwa posisi sebuah titik di permukaan bumi,
di foto, dan di pusat proyeksi kamera terletak pada satu garis lurus. Persamaan
kesegarisan tersebut mengandung 6 parameter yang belum diketahui (ω, φ, κ, Xo,
Yo, Zo) dan merupakan persamaan non linear, sehingga perlu dilenearkan dengan
menggunakan deret Taylor.
2.2. Centroid
3

2.2.1 Stiker (Retro reflectif Target)
Prinsip Australis menggunakan warna sasaran dalam bentuk
grayscale untuk mengenal pasti ukur lilit sasaran dalam pixsel. Grayscale
menggunakan nilai dari 0 hingga 256 yaitu warna kelabu. Setiap pixel
yang berada dalam bentuk ini mempunyai nilai kecerahan bermula dari
nilai 0 (hitam) ke 255 (putih). prinsip ini untuk mengenalpasti sasaran
adalah berdasarkan perbesaran nilai grayscale antara sasaran dengan
warna latarbelakangnya. Bahan retro-reflektif selalu digunakan dalam
kerjakerja fotogrametri kerana bahan ini dapat memantulkan cahaya lebih
terang dari latarbelakangnya. Secara teorinya bahan ini boleh
memantulkan cahaya 2000 kali lebih terang dari bahan putih yang
bernyala (Clarke & Wang, 1998). Gambar 1.a menunjukkan sasaran yang
menggunakan bahan retro-reflektif dimana Gambar 1.b menunjukkan
sasaran yang menggunakan kertas putih biasa
Gambar 2.1a. Sasaran dari retro-reflektif Gambar 2.1b Sasaran dari kertas
2.2.2 Centroid (Titik Tengah)
1. Defenisi Centroid
Secara umum centroid adalah pusat masa suatu objak. Dalam
fotogrametri terutama pada close-range fotogrmetri menggunakan retro
reflektif target sebagai sasaran, centroid dapat didefinisikan sebagai titik
tengah dari retro reflektif target yang dipasang pada objek yang diteliti.
(Clark et al, 1993)
Gambar 2.2 Centroid jika diperbesar
4

Target yang terekam pada gambar yang dihasilkan dari pemotretan
setelah diperbesar tidak hanya terdiri dari satu pixel saja melainkan banyak
pixel dan target tidak memmiliki tepi yang jelas biasanya tepinya halus
dan sedikit blur. Oleh karena itu, titik tengah dari target harus berupa
koordinat atau posisi yang dapat ditentukan dengan metode centriod.
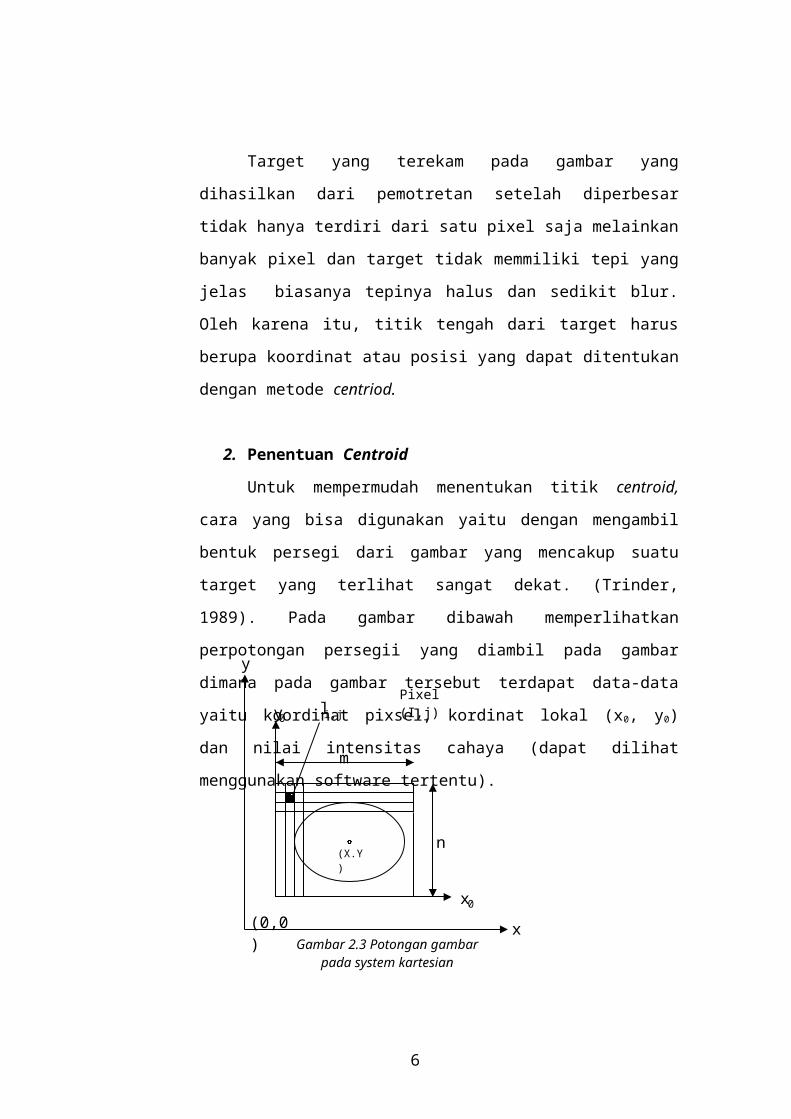
2. Penentuan Centroid
Untuk mempermudah menentukan titik centroid, cara yang bisa
digunakan yaitu dengan mengambil bentuk persegi dari gambar yang
mencakup suatu target yang terlihat sangat dekat. (Trinder, 1989). Pada
gambar dibawah memperlihatkan perpotongan persegii yang diambil pada
gambar dimana pada gambar tersebut terdapat data-data yaitu koordinat
pixsel, kordinat lokal (x0, y0) dan nilai intensitas cahaya (dapat dilihat
menggunakan software tertentu).
Untuk mendapatkan koordinat centroid yang mencapai ketelitian
tinggi dan dapat memenuhi bentuk Gaussian tidaklah muda, karena
5
Keterangan :(i,j) = Koordinat pixel(xo,yo) = Koordinat lokal(X,Y) = Koordinat Pendekatanm = Garis yang mewakili jumlah pixel pada sumbu xn = Garis yang mewakili jumlah pixel pada sumbu y
Gambar 2.3 Potongan gambar pada system kartesian
(X.Y)
y
x
0
0
y
x
n
m
(0,0)
li,jPixel (I,j)
terdapat beberapa faktor yang mempengaruhi kurangnya ketelitian antara
lain:
1. Ada nois yang biasanya terjadi kerana sedikitnya jumlah foto
pada target.
2. Gelombang elektromagnetik yang dapat mereduksi arus gelap
setiap 80C. Oleh karena itu dengan pendingin dapat
mengurangi noise ini.
3. Metode perhitungan yang digunakan tidak tepat.
3. Metode penentuan Centroid
Pada dasarnya ada beberapa metode penentuan centroid yang
digunakan antara lain:
1. Avirange of perimeter, Metode ini sangat sederhana yaitu
dengan merata-ratakan koordinat garis keliling target pada
gambar yang direferensikan dari hasil praproses thereshold.
2. Binary Centroid, Pada metode ini semua menggunakan
intensitas cahaya dan direferensikan dari hasil praproses
tereshold.
3. Grai Scale Centrodi, Metode ini hampir sama dengan metode
Binary Centroid tetapi tanpa batasan thereshold dan tidak
menggunakan nilai intensitas cahaya.
4. Squared Grey Scale Centoid, Metode ini hampir sama dengan
metode Grai Scale Centroid tetapi menggunakan nilai
intensitas cahaya yang dikuadratkan.
2.3. Closed form untuk EO (Exterior Oriented)
2.3.1. Orientasi Dalam
Orentasi dalam pada hakekatnya adalah merekonstruksi berkas sinar
dari foto udara seperti pada saat foto tersebut diambil oleh kamera. Berkas
sinar yang berpasangan tersebut disimulasikan dengan memproyeksikan
6

pasangan foto positifnya menggunakan proyektor yang digunakan diatur
sesuai dengan karakteristik kamera yang dipakai dalam pemotretan.
2.3.2. Orientasi Relatif
Dua berkas sinar yang sepadan/berpasangan dari proyektor kiri dan
kanan dipertemukan melalui orientasi relatif. Bila minimal 5 pasang sinar
dapat dipertemukan, maka seluruh pasangan sinar dari kedua berkas akan
saling berpotongan membentuk model 3D fiktif. Pada instrumen restitusi
analog yang dilakukan adalah menghilangkan paralaks y di 6 titik standard
(minimal 5 titik + 1 titik untuk checking).
Hasil model 3D yang terbentuk masih mempunyai kedudukan relatif
dengan sistem koordinat sebarang. Oleh sebab itu proses ini disebut sebagai
orientasi relatif. Dengan cara digital, orientasi relatif dapat menggunakan
syarat kesegarisan antara titik pada foto, titik pusat proyeksi dan titik tersebut
di tanah (colinearity condition) atau syarat kesebidangan (coplanarity)
Orientasi Relatif adalah merupakan proses mencari hubungan posisi
relatif antara perpotogan sinar yang diperoleh foto kiri dan dan foto kanan
yang biasanya disebut model stereo, proses ini dapat diperoleh secara analitis
dengan mentransformasikan sistem koordinat foto ke sistem koordinat model.
Sistem koordinat model adalah sistem koordinat tiga dimensi yang
diperoleh jika sebuah foto (foto kiri) diorientasikan relatif terhadap foto
lainnya (foto kanan) yang mempunyai pertampalan. Orientasi ini disebut
sebagai orientasi relatif (Gambar 2.4). Pada tahap ini foto sudah terbentuk
bidang epipolar atau model stereo tetapi belum terikat pada satu sistem
koordinat tanah. Model matematis yang umum digunakan untuk melakukan
orientasi relatif adalah persamaan koplanar, dengan determinan sama dengan
nol (Koneckny, 2003):
Persamaan 2.1. Persamaan Koplanar
Dimana:
7

dalam hal ini:
bx, by, bz :
R’ :
R” :
F :
Translasi posisi pusat proyeksi foto sepanjang sumbu x, y, z foto kanan terhadap
foto kiri
Matrik rotasi untuk foto kiri
Matrik rotasi untuk foto kanan
Panjang fokus kamera
Untuk memperoleh persamaan pengamatan, maka perlu dilakukan
linearisasi persamaan tersebut menggunakan deret Taylor dengan melakukan
deferensial terhadap parameter posisi dan orientasi untuk foto kanan (y0”, z0”,
ω”, φ”, κ”). Untuk parameter posisi x0” tidak diturunkan karena dapat diset
sembarang (basis foto) dan foto kiri dapat diset tegak (xo = yo = zo = ω = φ =
κ = 0), sehingga persamaan (Persamaan 2.1) menjadi:
2.4. Resection
8
p’
f
01
x’
y’
Z Y
bx
p”x”
y”3”
by
bz02
k3’
p(x,y,z)
X
Gambar 2.4. Orientasi relatif foto kanan terhadap foto kiri

Resection adalah penentuan posisi gambar dan orientasi parameter yang
berkaitan dengan sistem koordinat objek. Dalam kasus sederhana koordinat
parameter untuk objek pusat dapat dilihat secara tiga dimensi yang
menggambarakan orientasi sistem koordinat objek yang berkaitan dengan
sistem koordinat gambar. Resection juga termasuk determinasi posisi dan
orientasi parameter secara tidak langsung, sebagai contoh, penentuan koefisien
dari penggabungan gambar polynomial untuk menentukan posisi dan orientasi
waktu yang berkaitan dengan bermacam-macam sensor atau bentuk parameter
proyeksi.
Satu persoalan yang mendasar dalam fotogrametri ialah teknik
resection, ini merupakan obyek yang pertama harus dipelajari dalam
fotogrametri. Ada banyak persamaan untuk menyelesaikan permasalahan
resection, untuk mengoptimalkan keadaan gambar yang berbeda berlaku
aturan syarat perhitungan dan spesifikasi ketelitian. sebagai contoh, solusi
untuk mengatasi kedua bagian bentuk yang telah dibuat. Sebagaian bentuk
biasanya lebih cepat, karena memiliki syarat perhitungan yang lebih sedikit,
dan keuntungannya dapat diperkirakan lebih awal untuk parameter bagian
luar. Oleh karena itu biasa digunakan untuk aplikasi komputer dan harus
dijalankan dengan bantuan operator untuk proses input dan editing. Akan
tetapi, solusi yang paling akurat memerlukan pengamatan dan teknik least
squares, untuk obyek yang tidak bisa menerapkan metode penutup.
Meskipun ini tampak ganjil, pada umumnya parameter gambar ini
tidak digunakan. Karena produk akhir koordinat titik objek, dan parameter
gambar dapat diubah secara sederhana. Hitungan posisi gambar mungkin tidak
mendekati posisi sebenarnya, terkait dengan pergantian yang bersifat proyeksi,
sebagai pengganti untuk kesalahan sistematik dengan merubah orientsi
parameter. Sebagai contoh, sebelum distorsi lensa radial dikoreksi atau
pembiasan sinar pada foto vertikal, tiap persil diganti atau berubah karena
dihitung dengan tinggi terbang. Biasanya ini tidak penting, kecuali bila GPS
atau informasi yang berhubungan dengan pelayaran dapat digunakan secara
bebas untuk memperkirakan posisi dari gambar. Sedikitnya tiga titik kendali
9

noncoliniear dibutuhkan untuk recection bagian kerangka gambar, asumsi
bahwa interior orentasi dikenal, akan tetapi, sekalipun cukup informasi yang
tersedia, ada penataan geometris yang dapat mengakibatkan unsolvable atau
bagian yang tidak stabil. Jika titik kendali dan semua sudut pandang terletak
dengan permukaan silinder, bagian resection akan menjadi tidak stabil atau
bahkan tidak jelas.
Dengan mengetahui orientasi, informasi geometris dapat di lihat
seperti garis lurus atau lingkaran, juga termasuk bagian resection. persamaan
gambar geometri ditambahkan dalam persamaan collinearity dan menentuka
jumlah persamaan least square. jumlah minimum titik kendali atau informasi
geografis kadang-kadang di perlukan.
Metode standar resection untuk fotogrametri aplikasinya didasarkan
pada persamaan collinearity dan dapat dilihat sebagai objek khusus yang
menghalangi penyesuaian, dengan hanya satu gambar dan tidak mempunyai
titik kontrol. Ada enam titik yang tidak dikenal, yang tiga merupakan posisi
koordinat pusat, dan yang tiga lagi adalah parameter orientasi, dan berada
pada sudut lainnya. pengamatan ukuran gambar titik koordinat, dua persamaan
collinieary dipakai pada setiap titik gambar dengan titik kendali yang
menghasilkan enam persamaan dengan mempertimbangkan bagian parameter
yang bebeda, yang tidak di kenal. Jika titik tambahan tersedia, bagian least
square dapat memperoleh hasil yang lebih baik dan pemeriksaan ukuran titik.
Persamaam collinearity harus lineare dan perkiraan awal harus melengkapi
parameter.
Meskipun resection adalah prosedur fotogrametri yang mendasar, ini
jarang di gunakan kecuali langkah pertama untuk perkiraan penyesuaian
berkas. Aplikasi fotogrametri mayoritas meliputi foto wilayah yang lebih luas
dan menyediakan ukuran streo, orientasi diantara foto-foto sangat teliti dan
memetakan banyak objek tetap diantara streomodel. bagian resection peka
terhadap keselahan informasi, dan dapat mengontrol bagian-bagian yang tidak
tetap diantara foto-foto.
10

2.5. Intersection
Mikahail et al. (2001) mengkaji bahwa intersection mengacu kepada
determinasi titik pada object space, dengan perpotongan garis dari dua foto
atau lebih. Metode yang digunakan adalah persamaan garis lurus tidak linier
(Persamaan 2.3) dengan dua persamaan untuk setiap foto. Jika terdapat dua
foto maka akan ada empat persamaan yang terdiri dari tiga persamaan yang
tidak diketahui dan titik koordinat object space yang diperoleh. Terdapat satu
derajat kebebasan dan satu persamaan garis lurus dimana persamaan tersebut
dapat dipecahkan dengan menggunakan metode least square. Dengan
menambahkan beberapa foto maka akan meningkatkan jumlah dari derajat
kebebasan dan meningkatkan penyelesaian persamaan tersebut.
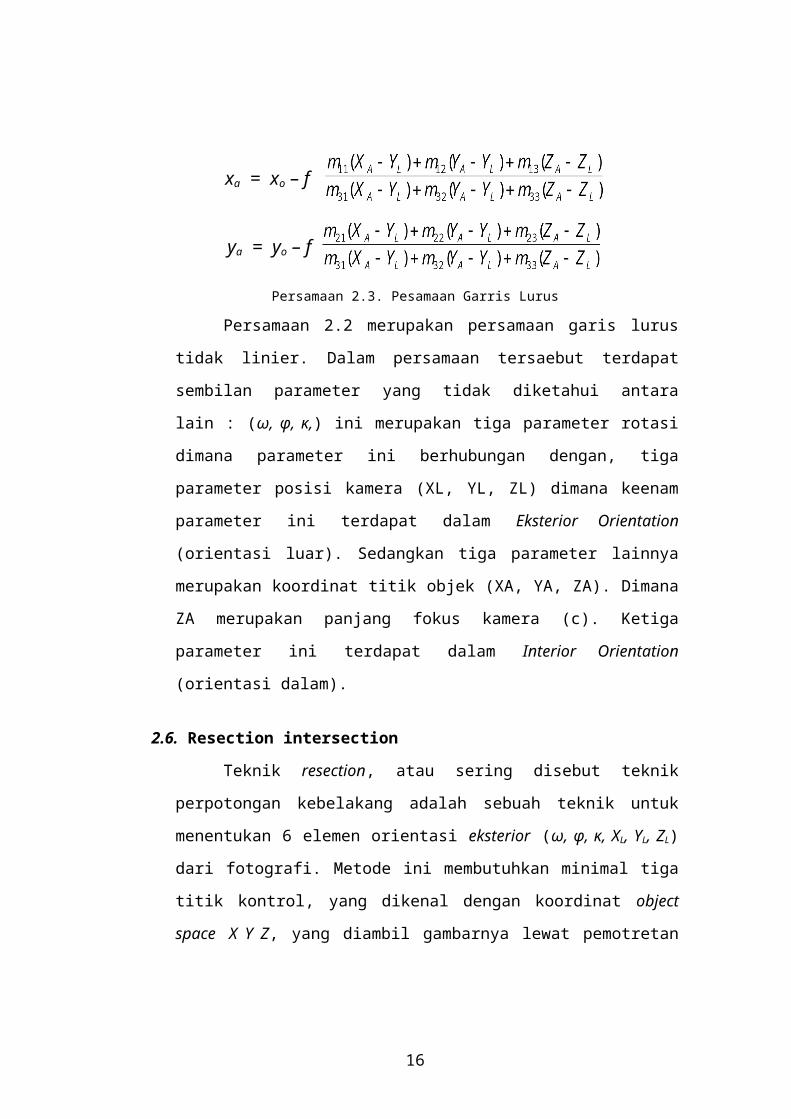
xa = xo – f
ya = yo – f
Persamaan 2.3. Pesamaan Garris Lurus
Persamaan 2.2 merupakan persamaan garis lurus tidak linier. Dalam
persamaan tersaebut terdapat sembilan parameter yang tidak diketahui antara
lain : (ω, φ, κ,) ini merupakan tiga parameter rotasi dimana parameter ini
berhubungan dengan, tiga parameter posisi kamera (XL, YL, ZL) dimana
keenam parameter ini terdapat dalam Eksterior Orientation (orientasi luar).
Sedangkan tiga parameter lainnya merupakan koordinat titik objek (XA, YA,
ZA). Dimana ZA merupakan panjang fokus kamera (c). Ketiga parameter ini
terdapat dalam Interior Orientation (orientasi dalam).
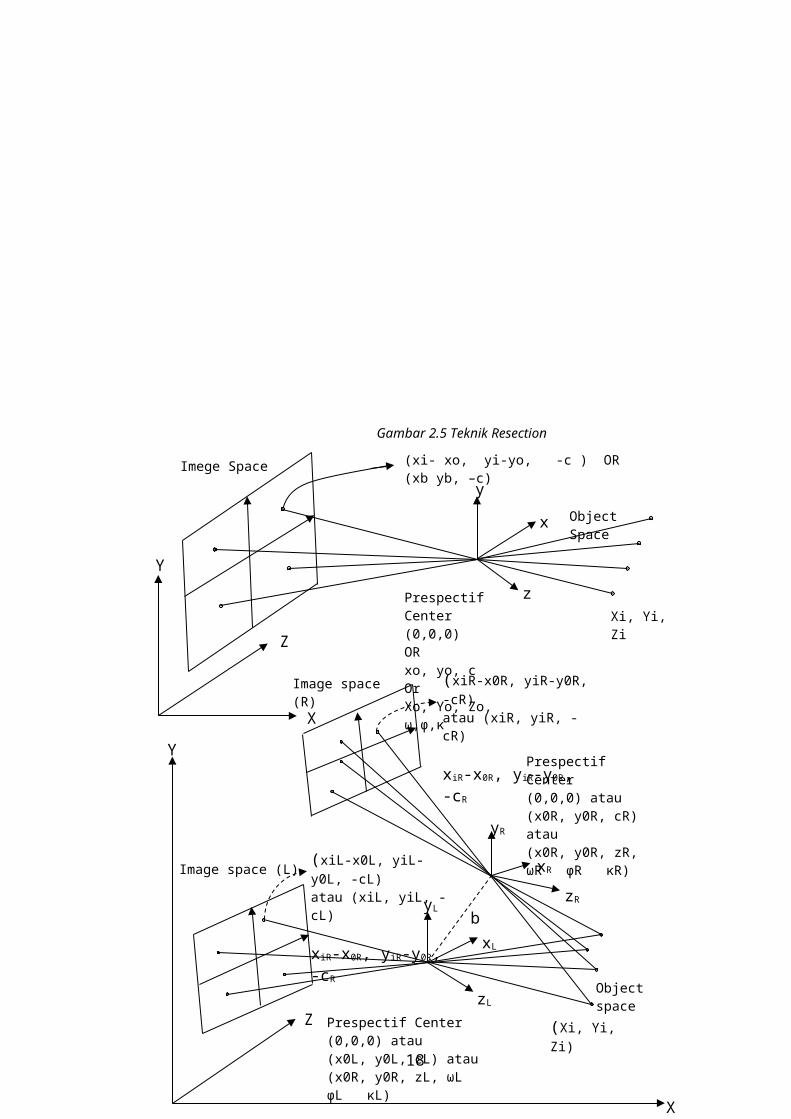
2.6. Resection intersection
Teknik resection, atau sering disebut teknik perpotongan kebelakang
adalah sebuah teknik untuk menentukan 6 elemen orientasi eksterior (ω, φ, κ,
XL, YL, ZL) dari fotografi. Metode ini membutuhkan minimal tiga titik kontrol,
yang dikenal dengan koordinat object space X Y Z, yang diambil gambarnya
lewat pemotretan sehingga dapat dihitung koordinat tanahnya (Gambar 2.5).
11

Intersection untuk dua gambar yang posisi dan sikapnya diketahui,
digunakan untuk menentukan koordinat (Xi, Yi, Zi) dari titik-titik yang
ditemukan pada kedua gambar secara simultan dengan menggunakan modal
stereovision (Gambar 2.6) Oleh karena itu, kombinasi yang tepat antara kedua
masalah ini menghasilkan navigasi dan pemetaan secara bersamaan. Chaplin,
1999.
Imege Space (xi- xo, yi-yo, -c ) OR (xb yb, –c)
Object Space
y
z
x
Prespectif Center(0,0,0)ORxo, yo, cOrXo, Yo, Zo, ω,φ,κ
Xi, Yi, Zi
X
Z
Y
12
(xiR-x0R, yiR-y0R, -cR) atau (xiR, yiR, -cR)
xiR-x0R, yiR-y0R, -cR
Prespectif Center(0,0,0) atau (x0R, y0R, cR) atau(x0R, y0R, zR, ωR φR κR)yR
xR
zR
Image space (R)
Image space (L)(xiL-x0L, yiL-y0L, -cL) atau (xiL, yiL, -cL)
xiR-x0R, yiR-y0R, -cRyL
xL
zL
Y
Z
X
Prespectif Center(0,0,0) atau (x0L, y0L, cL) atau(x0R, y0R, zL, ωL φL κL)
Object space
(Xi, Yi, Zi)
b
Gambar 2.5 Teknik Resection

Gambar 2.6 Teknik Intersection
2.6.1 Close-Range Photogrametry
Close-Range Fotogrammetri adalah suatu teknik mengumpulkan
ukuran benda didunia secara langsung dengan teliti dan hemat biaya, secara
langsung dari foto. Untuk memperoleh ukuran teliti dan data geometris benda
atau lingkup minat, untuk menyediakan informasi tentang ruang angkasa
untuk desain teknik, 3d memperagakan, dan lain-lain. Fotogrametri adalah
teknik untuk menentukan 3D geometri (lokasi, ukuran dan bentuk) obyek fisik
dengan mengukur dan menganalisis menggunakan foto 2D.
Pada teknik Close Range Fotogrammetry pengukuran terhadap suatu
objek dilakukan terhadap hasil perekaman dari beberapa alat sensor. Pada saat
sebuah foto diambil, berkas sinar dari objek akan menjalar menyerupai garis
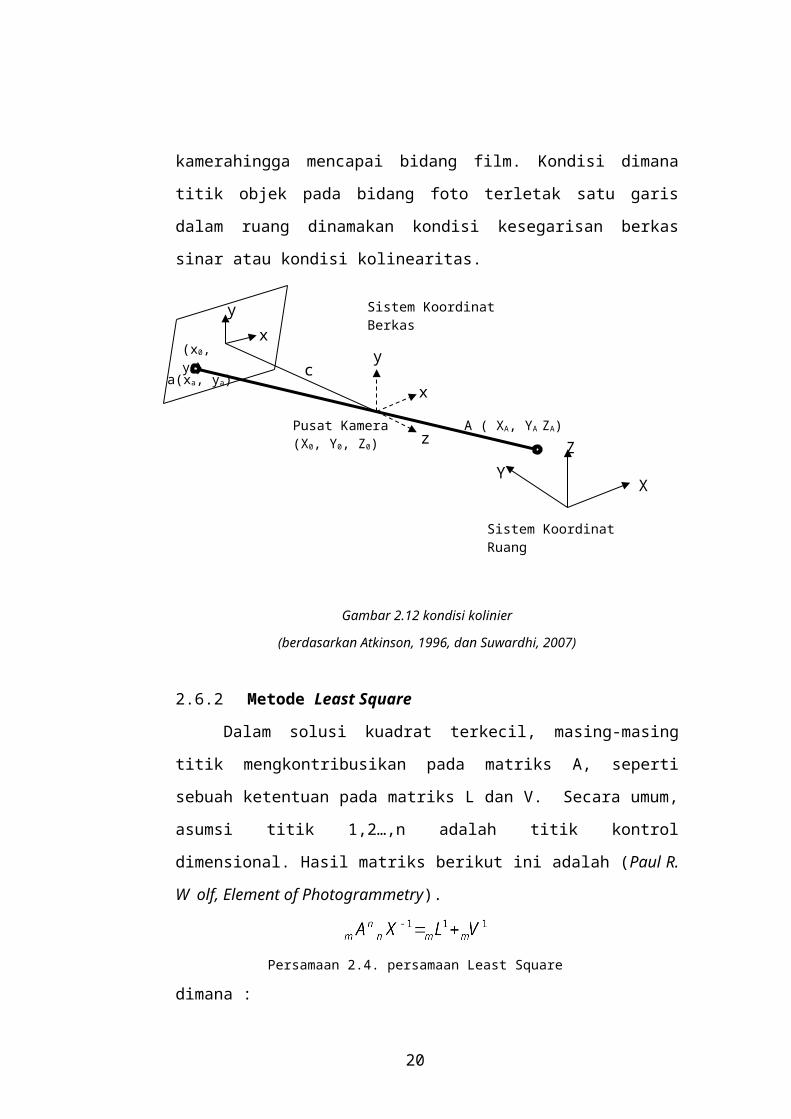
lurus menuju pusat lensa kamerahingga mencapai bidang film. Kondisi
dimana titik objek pada bidang foto terletak satu garis dalam ruang dinamakan
kondisi kesegarisan berkas sinar atau kondisi kolinearitas.
13
Sistem Koordinat Berkasy
x
a(xa, ya)
(x0, y0)
c
Pusat Kamera (X0, Y0, Z0)
y
x
zA ( XA, YA ZA)
Sistem Koordinat Ruang
Y
Z
X
Gambar 2.12 kondisi kolinier
(berdasarkan Atkinson, 1996, dan Suwardhi, 2007)
2.6.2 Metode Least Square
Dalam solusi kuadrat terkecil, masing-masing titik mengkontribusikan
pada matriks A, seperti sebuah ketentuan pada matriks L dan V. Secara
umum, asumsi titik 1,2…,n adalah titik kontrol dimensional. Hasil matriks
berikut ini adalah (Paul R. W olf, Element of
Photogrammetry).
Persamaan 2.4. persamaan Least Square
dimana :
Saat mempelajari representasi matrik berikut ini, akan ditekankan
bahwa persamaan normal diperoleh sebagai berikut :
Persamaan 2.5. Persamaan Normal Least Square
Pada persamaan diatas. Matrik dari koofisien persamaan normal dari
yang belum diketahui sebelum mengalikan kedua sisi dari persamaan 2.4
dengan . Dan menguranginya, hasilnya seperti dibawah ini.
14

Pada pengurangan diatas L adalah matrik identitas. Matrik X
mengandung nilai kemungkinan terbanyak untuk yang
belum diketahui, untuk itu digunakan matrik bobot untuk mencari
kemungkinan untuk nilai yang belum diketahui.
Persamaan 2.6. Persamaan Matriks Bobot
Dimana matrik W sebagai berikut :
Pada matriks W semua elemen diagonal bernilai 0. hal ini sesuai saat
observasi individu bersifat independent dan tak berkorelasi. Ini sering terjadi
pada kasus aplikasi fotogrametri.
Intersection mengacu kepada determinasi posisi titik pada ruang objek,
dengan silang bias gambar dari dua gambar atau lebih. Metode standar
aplikasi collinearity untuk (Persamaan 2.6), dengan dua persamaan untuk
setiap titik gambar. Jika terdapat dua gambar, total ada empat persamaan yang
terdiri dari tiga persamaan yang tidak dikenal, titik koordinat ruang objek yang
diperoleh. Ada satu derajat yang bebas, dan satuan persamaan linier dimana
dapat dipecahkan dengan metode least square, dengan menambahkan
beberapa foto, maka banyak derajat yang bebas dan dengan demikian akan
memperbaiki bagian yang rusak (Mikhail et al, 2001).
Persamaan 2.7. Persamaa Derajat kebebasan
Atau dengan pendekatan perhitungan intersection, harus dimulai dari
bagian nonlinier. Untuk setiap foto, dapat ditulis vektor satuan dari sudut
pandang pusat melalui titik kontrol tanah sebagai berikut (Mikhail et al, 2001):
15
Persamaan 2.8. Persamaan Vektor Satuan
Persamaan baris melalui sudut pandang pusat foto dan titik objek, oleh
karena itu (Mikhail et al, 2001) :
Persamaan 2.9. Persamaan Baris Pusat Gambar
Persamaan ini ditulis untuk setiap gambar, guna melengkapi empat
persamaan pada tiga persamaan yang tidak dikenal. Pengamatan ukuran
koordinat gambar di bagian intersection least square, memerlukan
penyesuaian least square untuk mengurangi jumlah foto yang bersifat square.
Bagian intersection memperkecil jumlah lain, seperti jarak tegak lurus
diantara bias, dapat melaksanakan, tetapi tafsiran statistik hasilnya belum
jelas. tidak ada informasi statistik berasosiasi dengan jarak diantara bias,
hanya degan ukuran gambar, yang secara langsung diamati.
2.7. Kalibirasi kamera
Untuk keperluan fotogrametri teliti, posisi tanda tepi, bersama-sama
dengan titik tengah foto, panjang fokus, dan distorsi lensa harus ditentukan
dengan cara kalibrasi kamera. Ada 2 jenis distorsi lensa, yaitu distorsi yang
bersifat radial dan tangensial. Umumnya distorsi yang cukup signifikan
pengaruhnya adalah distorsi radial (Δr) dan dimodelkan dengan persamaan
polinomial orde ganjil sebagai berikut (Cooper dan Robson, 1996)
Δr = k0r3 + k1r5 + k2r7
Persamaan 2.10 Persamaan Distorsi Radial
dalam hal ini:
Δr : distorsi radial
K0, k1, k2 : konstanta polinomial
r : jarak radial dari pusat proyeksi foto
16

Dalam fotogrametri, parameter tersebut disebut parameter orientasi
dalam (interior orientation) dan merupakan syarat utama untuk menghasilkan
foto yang akurat. Foto yang dipotret menggunakan kamera digital mempunyai
sistem koordinat pixel yang mempunyai origin di baris pertama dan kolom
pertama untuk setiap foto. Dalam sistem proyeksi sentral, origin terletak di
tengah foto, sehingga sistem koordinat piksel harus ditransformasi ke sistem
koordinat foto. Transformasi dari sistem koordinat piksel ke sistem koordinat
foto disebut sebagai orientasi dalam. Model matematis untuk orientasi dalam
adalah Affine 2D (Schenk, 2000), yang dapat dinyatakan dengan notasi
matrik:
Persamaan 2.11. Persamaan Orientasi Dalam
dalam hal ini:
x, y : Sistem koordinat foto
u, v : Sistem koordinat pixel
a1, …, a6 : Parameter transformasi
Parameter transformasi a1, …, a6 terlebih dahulu ditentukan dengan
menggunakan hasil pengukuran minimal 3 buah tanda tepi hasil kalibrasi
kamera dengan posisinya dalam sistem koordinat pixel. Jika diketahui 4 atau
lebih tanda tepi, maka dengan persamaan (2.10) dapat dilakukan estimasi
kuadrat terkecil untuk menentukan parameter transformasi.
2.7.1. Interior Orientation (orientasi dalam)
Dalam semua kasus, element dari orientasi dalam ( lokasi principle
point (xp, yp) dan principle distance (c) ) harus ditentukan. Parameter ini
menjelaskan posisi dari CCD sensor dengan akurat ke proyeksi pusat.
Sebagai bagian dari parameter tambahan, bukan elemen itu sendiri yang
ditentukan, tapi perubahan parameter tersebut (Δx, Δy, dan Δc):
Δxi = Δxp – Δc dan Δyi = Δyp – Δc
Di mana koordinat foto ditentukan sebagai berikut:
17
x = x – xp
y = y – yp
z = - c
Persamaan 2.12. Persamaan Koordinat Foto
2.7.2. Radial distortion (Distorsi radial)
Distorsi radial dimodelkan dengan persamaan polynomial:
Δxr = k1r3 + k2r5 + k3r7
Δyr = k1r3 + k2r5 + k3r7
Persamaan 2.13. Persamaan Distorsi Radial
Di mana istilah dari k1 merupakan koefisien dari distorsi radial dan r
adalah jarak radial:
r2 = x2 + y2
Persamaan 2.14. Persamaan Jarak radial
Distorsi radial untuk lensa wide angle seperti lensa yang digunakan
pada DMC yang kecil tetapi nyata. Bagaimanapun efek distorsi adalah sekitar
1 sampai 2 pixel di perbatasan CCD sensor. Dalam kaitannya dengan definisi
distorsi radial, ada korelasi besar antara koefisien distorsi itu sendiri k1 k2 k3
dan antara principle distance, k1c. Hubungan antara distorsi radial dengan
principle distance adalah yang diharapkan. Dalam kaitannya sesuai principle
distance dengan deviasi rata-rata akan dihitung menjadi minimum.
2.7.3. Decentring distortion (Distorsi tangesial)
Tidaklah mungkin mengurutkan elemen dari sistem lensa kolinier.
Kekurangan ini mengakibatkan distorsi tangensial. Distorsi ini diuraikan
seperti berikut:
Δxd = P1 (3x2 + y2) + 2P2xy
Δyd = 2P1xy + P2 (3y2 + x2)
Persamaan 2.15. Persamaan Distorsi tunggal
Di mana φ (pi) merupakan koefisien dari distorsi tangensial. Karena
kualitas system lensa yang tinggi kepentingan parameter ini sangatlah kecil.
18

Pada umumnya parameter distorsi tangensial diuji bukan untuk kepentingan.
Lagipula ada ketergantungan antara parameter distorsi tangensial dan titik
utama, jadi suatu sisa distorsi akan diserap dari posisi titik pusat dan oleh
karena itu parameter distorsi tangensial biasanya dihilangkan pada perataan.
2.8. Object Oriented Programing (OOP) dengan C#
2.8.1. Sekilas tentang OOP
Pemrograman berorientasi objek (Object-oriented programming
disingkat OOP) merupakan paradigma pemrograman yang berorientasikan
kepada objek. Semua data dan fungsi di dalam paradigma ini dirangkum
dalam kelas-kelas atau objek-objek. Dibandingkan dengan logika
pemrograman terstruktur. Setiap objek dapat menerima pesan, memproses
data, dan mengirim pesan ke objek lainnya.
Model data berorientasi objek dikatakan dapat memberi fleksibilitas
yang lebih, kemudahan mengubah program, dan digunakan luas dalam teknik
perangkat lunak skala besar. OOP lebih mudah dipelajari bagi pemula
dibanding dengan pendekatan sebelumnya, dan pendekatan OOP lebih mudah
dikembangkan dan dirawat
2.8.2. Konsep pemrograman orientasi-objek menekankan
a. Kelas
Kelas adalah kumpulan atas definisi data dan fungsi-fungsi dalam
suatu unit untuk suatu tujuan tertentu. Sebagai contoh 'class of dog' adalah
suatu unit yang terdiri atas definisi-definisi data dan fungsi-fungsi yang
menunjuk pada berbagai macam perilaku/turunan dari anjing. Sebuah class
adalah dasar dari modularitas dan struktur dalam pemrograman berorientasi
object.
Sebuah class secara tipikal sebaiknya dapat dikenali oleh seorang non-
programmer sekalipun terkait dengan domain permasalahan yang ada, dan
kode yang terdapat dalam sebuah class (relatif) bersifat mandiri dan
19
independen (sebagaimana kode tersebut digunakan jika tidak menggunakan
OOP).
b. Objek
Objek adalah berfungsi merangkum data dan fungsi bersama menjadi
suatu unit dalam sebuah program komputer; objek merupakan dasar dari
modularitas dan struktur dalam sebuah program komputer berorientasi objek.
c. Abstraksi
Abstraksi adalah merupakan kemampuan sebuah program untuk
melewati aspek informasi yang diproses olehnya, yaitu kemampuan untuk
memfokus pada inti. Setiap objek dalam sistem berlaku sebagai model dari
"pelaku" abstrak yang dapat melakukan kerja, laporan dan perubahan
keadaannya, dan berkomunikasi dengan objek lainnya dalam sistem, tanpa
mengungkapkan bagaimana kelebihan ini diterapkan. Proses, fungsi atau
metode dapat juga dibuat abstrak, dan beberapa teknik digunakan untuk
mengembangkan sebuah pengabstrakan.
d. Enkapsulasi
Enkapsulasi berfungsi untuk memastikan pengguna sebuah objek
tidak dapat mengganti keadaan dalam dari sebuah objek dengan cara yang
tidak layak, hanya metode dalam objek tersebut yang diberi ijin untuk
mengakses keadaannya. Setiap objek mengakses interface yang menyebutkan
bagaimana objek lainnya dapat berinteraksi dengannya. Objek lainnya tidak
akan mengetahui dan tergantung kepada representasi dalam objek tersebut.
e. Polimorfisme
Polimorfisme melalui pengiriman pesan. Tidak bergantung kepada
pemanggilan subrutin, bahasa orientasi objek dapat mengirim pesan. Metode
tertentu yang berhubungan dengan sebuah pengiriman pesan tergantung
kepada objek tertentu di mana pesa tersebut dikirim. Contohnya, bila sebuah
burung menerima pesan "gerak cepat", dia akan menggerakan sayapnya dan
20
terbang. Bila seekor singa menerima pesan yang sama, dia akan
menggerakkan kakinya dan berlari. Keduanya menjawab sebuah pesan yang
sama, namun yang sesuai dengan kemampuan hewan tersebut. Ini disebut
polimorfisme karena sebuah variabel tungal dalam program dapat memegang
berbagai jenis objek yang berbeda selagi program berjalan, dan teks program
yang sama dapat memanggil beberapa metode yang berbeda di saat yang
berbeda dalam pemanggilan yang sama. Hal ini berlawanan dengan bahasa
fungsional yang mencapai polimorfisme melalui penggunaan fungsi kelas-
pertama.
f. Inheritas
Inheritas adalah pengatur polimorfisme dan enkapsulasi dengan
mengijinkan objek didefinisikan dan diciptakan dengan jenis khusus dari
objek yang sudah ada objek-objek ini dapat membagi (dan memperluas)
perilaku mereka tanpa haru mengimplementasi ulang perilaku tersebut (bahasa
berbasis-objek tidak selalu memiliki inheritas.)
Dengan menggunakan OOP maka dalam melakukan pemecahan suatu
masalah kita tidak melihat bagaimana cara menyelesaikan suatu masalah
tersebut (terstruktur) tetapi objek-objek apa yang dapat melakukan pemecahan
masalah tersebut.
21


























