-
ELEKTRONIČKA NAVIGACIJAUVOD U NAVIGACIJU
-
Temeljni pojmovi
• Elektronika je područje elektrotehnike koja proučava i koristi
sustave čiji se rad temelji na kontroli protoka elektrona i drugih
nositelja električnog naboja. To su primjerice elektronički
elementi kao: tranzistor, dioda, elektronska cijev i sl.
Povezivanjem više elektronskih elemenata zajedno nastaju
elektronički sklopovi
• Elektrika je vezana uz električni naboj na koji djeluje
električno polje. Postoje dvije vrste naboja, pozitivni vezani uz
atomsku jezgru i negativni vezani uz elektron
-
Ionizacija
• Ionizacija je proces pretvaranja električkih neutralnih atoma
ili molekula u električki nabijene čestice gubljenjem ili
dobivanjem elektrona
• To se najčešće događa sudaranjem s dovoljno brzim električki
nabijenim česticama (ionima, elektronima, alfa – česticama)
• Ionizacija uzrokuje elektromagnetsko zračenje dovoljno velike
energije, UV, rendgensko, gama zračenje, kozmičko zračenje
• Ionizacija može izazvati trenje između tvari, tako nastaje
električki naboj oblaka
-
Atmosfera
• Sloj plinova koji okružuje zemlju• Sadrži oko 78% dušika i oko
21% kisika, dok su količine ostalih plinova neznatne ili
u tragovima.• Atmosfera apsorbira ultra ljubičasto Sunčevo
zračenje i smanjuje temperaturne
ekstreme između dana i noći• Atmosfera ne završava naglo nego
postupno postaje rjeđa i postupno nestaje u
svemiru• Kao granica atmosfere uzima se visina od 100 – 120 km
iznad površine Zemlje
-
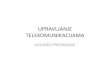
Podjela atmosfere
• TROPOSFERA – srednji pojas 10 – 12 km• STRATOSFERA – 10 - 50
km• MEZOSFERA – 50 – 85 (100)km• TERMOSFERA – 90 – 500 km•
EGZOSFERA – 800 – 3000 km
• Troposfera je najdonji i najgušći sloj atmosfere u kojem se
dešavaju sve vremenske pojave. U ovom sloju temperatura opada sa
visinom. Sadrži puno vodene pare
-
• Stratosfera ( 10-50 km) sadrži ozon, u nižim slojevima
temperatura je stalna, a višim slojevima raste
• Mezosfera (50-85 km) - sloj u kojem dolazi do pada
temperature• Ionosfera (70- 1200 km) - sadrži ione (električki
nabijene čestice)• Egzosfera (800 – 3000 km) - prijelazno područje
prema vakuumu• Geokorona se nalazi iznad atmosfere na visini od oko
100000 km, pretežno se
sastoji od iona vodika. Iznad egzosfere nalazi se Magnetosfera•
Heliosfera je praktički balon vruće magnetske plazme koji nastaje
djelovanjem
Sunčevog vjetra u Sunčevom sustavu. To nas štiti od štetnog
svemirskog kozmičkog zračenja. Heliopauza je granica Heliosfere
gdje se Sunčev vjetar zaustavlja djelovanjem međuzvijezdane
tvari
• Astenosfera je područje Zemlje koje se proteže između 100 i
200 km odnosno do 400 km ispod površine Zemlje, to je tzv. „meka
zona” u gornjem plaštu, a neposredno ispod litosfere
-
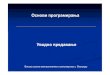
Poprečni presjek unutrašnjosti Zemlje
- od 0 do 40 km – kora , - od- 40 do 400 kmgornji plaštod 400 do
650 km – prijelazna zona izmeđugornjeg i donjeg plaštaod 650 do
2700 km – donji plaštod 2700 – 2890 km – tzv. “D” sloj
- Od 2890 do 5150 km – vanjska jezgraod 5150 do 6371 km –
unutarnja jezgra
-
Mohorovičićev diskontinuitet, granica između Zemljine kore i
plašta
-
Poprečni presjek unutrašnjosti Zemlje
-
Pregled atmosferskih slojeva po visini
-
Elektronička navigacija
• Pod pojmom elektronička navigacija podrazumijevaju se sredstva
i metode vođenja broda korištenjem elektro-magnetskih valova
• To je najmlađi dio navigacije• Elektronička navigacija
potvrdila je svoju neprocjenjivu vrijednost i u miru i u ratu,
a daljnji razvoj je usmjeren ka povećanju točnosti i
pouzdanosti, te povećanju stupnja automatizacije
• Naziv elektronička navigacija je zamijenio raniji termin
radio-navigacija pod kojim se podrazumijevalo korištenje
elektromagnetskih valova za određivanje pozicije broda
-
Podjela elektroničke navigacije
• Elektronička navigacija kao dio navigacije može se podijeliti
na sljedeće grane:• Radio-navigacija• Radarska navigacija•
Hiperbolična navigacija• Inercijalna navigacija• Satelitska
navigacija• Podvodno-akustička navigacija
• Ova podjela je izvršena prema vremenu pojave pojedine grane a
ne prema vremenu otkrivanja principa rada. Ova je podjela uvjetna
jer je moguće koristiti i druge kriterije za podjelu
-
Sredstva i oprema
• Za rješavanje zadataka navigacije koristi se velik broj
elektronskih sredstava konstruiranih i izrađenih na različitim
tehničkim i geometrijskim principima
• Sva elektronička navigacijska sredstva, uređaji i sistemi mogu
se podijeliti prema:• Geometrijskom principu određivanja
navigacijskog parametra• Tehničkom principu mjerenja navigacijskog
parametra• Dometu rada• Mjestu razmještaja elemenata sustava
-
Podjela prema geometrijskom principu određivanja navigacijskog
parametra
• Azimutalni (kutomjerni) kod kojih se mjeri azimut (kut) na
izvor zračenja elektromagnetske energije (radio-goniometar,
radio-far i dr.)
• Daljinomjerni (distancijski), kod kojih se mjeri udaljenost
ili promjena udaljenosti od izvora zračenja do objekta (dubinomjer,
radio-daljinomjer, laserski daljinomjer, radio-brzinomjer i
dr.)
• Hiperbolični, kod kojih se mjeri razlika udaljenosti od dvije
stanice na kopnu ili u svemiru (Decca, Loran, Omega, Transit i
dr.)
• Radijalno-brzinski, kod kojih se mjeri brzina približavanja
(ili udaljenost) izvora zračenja osmatraču
• Kombinirani, koji omogućavaju mjerenje dvaju parametara
(radar)
-
Prema principu rada elektronička navigacija se dijeli na:
• Amplitudna (radio-goniometar)• Fazna (Decca, Omega)• Impulsna
(Loran-A, radar, dubinomjer)• Frekventna (GPS)• Kombinirana (Loran
C)
-
Po dometu rada elektronička navigacijska sredstva se dijele
na:
• Globalna (prekriva čitavu površinu Zemlje)• Velikog dometa
(300-2500 M)• Srednjeg dometa (100-300 M)• Malog dometa (do 100
M)
-
Prema mjestu razmještaja elemenata sustava dijele se na:
• Kopneni• Svemirski (predajnici na satelitima)• Podmorski
(predajnici smješteni na dnu mora)
-
Povijesni razvoj elektroničke navigacije
• 1921. – goniometrijska antena za otkrivanje položaja
neprijatelja• 1935. – konstruiran prvi radar• 1937. – Amerikanci
testirali prvi radar na brodu• 1945. – radar se počinje koristiti u
komercijalne svrhe• Nakon pedesetih godina razvijaju se autonomni
sistemi inercijalne navigacije• 1964. – razvijen satelitski sistem
„Transit”• 1988. – razvijen GPS „Navstar”• 2010. – razvijen sustav
GLONASS• 2016. – operativan sustav Galileo
-
Žiroskop• -Žiroskop - dinamičko simetrično tijelo proizvoljnog
oblika koje rotira velikom brzinom oko osi simetrije i ovješen
tako da os rotacije može slobodno mijenjati svoj pravac u
prostoru- Os rotacije zvrka naziva se glavna os, a druge dvije osi,
koje leže u ekvatorskoj ravnini zvrka i međusobno su okomite,
nazivaju se ekvatorske osi
• Žiroskop u kardanskom Žiroskop u kardanskom ovjesuovjesu sa
tri stupnja sa 3 stupnja slobode : slobode : zadržava pravac
glavne
osi u prostoru nepromijenjen :
• Ako je težište žiroskopa u presjecištu triju osi, takav je
žiroskop uravnotežen (sile mase i reakcija ovjesa su
uravnotežene)
• Inercija - svojstvo žiroskopa da os rotacije zadržava
nepromijenjen pravac u prostoru nezavisno od rotacije Zemlje oko
svoje osi i da se opire bilo kojoj sili koja nastoji da promijeni
pravac glavne osi
• Kinetički moment zvrka: I- moment inercije, Ω-kutna brzina
rotacije zvrka
-
Žiroskop – kardanski sustav
-
Zvrk
-
Žiroskop – tri stupnja slobode
• Moment inercije
• Kutna brzina rotacije• Precesija - svojstvo žiroskopa da se
glavna os zvrka ne kreće u pravcu djelovanja
vanjske sile, već u pravcu koji je za 90° otklonjen od smjera
rotacije zvrka.• Kutna brzina precesije (ωp) proporcionalna je
veličini momenta vanjske sile MF, a
obrnuto proporcionalna kinetičkom momentu H• Ω – kutna brzina
rotacije zvrka
• Precesija prestaje u trenutku prestanka djelovanja vanjske
sile.
-
Precesija žiroskopa• Precesija žiroskopa oko horizontalne osi :
Precesija žiroskopa oko vertikalne osi :
T – vanjska sila P – precesija žiroskopa T – vanjska sila P –
precesija žiroskopa
• Precesija žiroskopa prestaje u trenutku prestanka djelovanja
vanjske sile.
-
Žiroskopski moment (R)
• - Do precesije dolazi samo ako žiroskop stvara reakciju koja
se izjednačava s vanjskom silom. Ta sila reakcije koja se protivi
kretanju žiroskopa u pravcu djelovanja sile zove se žiroskopska
reakcija, a moment te sile je žiroskopski moment ( MF – moment
vanjske sile , R – žiroskopski moment , Ω – kutna brzina rotacije
zvrka , ωp – kutna brzina precesije).
• - Vektor žiroskopskog momenta R uvijek je usmjeren tako da
nastoji sjediniti vektor kinetičkog momenta H s vektorom kutne
brzine precesije ωp ili vektor kutne brzine s vektorom ωp. To znači
da je vektor R usmjeren u stranu s koje se vektor H okreće prema
vektoru ωp po najkraćem putu u smjeru suprotnom od smjera kretanja
kazaljke na satu, odnosno pol žiroskopa se uvijek kreće najkraćim
putem prema polu vanjske sile (pol sile je kraj vektora momenta
vanjske sile oko koje vanjska sila nastoji okrenuti žiroskop
suprotno od kretanja kazaljke na satu).
-
Žiroskopski moment (R)
• Žiroskopski moment omogućava određivanje :- pravca
precesijskog kretanja u odnosu na smjer rotacije žiroskopa i smjer
djelovanja vanjske sile ,- smjera djelovanja vanjske sile da bi
precesija imala željeni smjer u odnosu na okretanje žiroskopa ,-
smjera okretanja žiroskopa u odnosu na smjer vanjske sile i željenu
precesiju osi žiroskopa.- Žiroskop može poslužiti za održavanje
pravca kretanja pod uvjetom da se stalno korigira kretanje glavne
osi žiroskopa izazvano dnevnom rotacijom Zemlje . Korekcija je
moguća djelovanjem momenta vanjske sile na horizontalnu i
vertikalnu os kako bi glavna os žiroskopa precesirala oko
vertikalne i horizontalne osi u suprotnu stranu od prividnog
kretanja Zemlje. Ovakav žiroskop se naziva direkcijski žiroskop ili
zvrk.
-
Precesija žiroskopa
-
Precesija žiroskopa s utegom
-
Žiroskop – temeljni princip rada • Vektor kutne brzine rotacije
Zemlje uvijek je usmjeren u pravcu zemaljskog Sjevernog pola.
Za
nekog motritelja na Zemlji u točki A kutna brzina rotacije
Zemlje može se rastaviti na dvije komponente:
•
Kutna brzina rotacije Zemlje (ωo) :
Horizontalna komponenta (ωo1) - pokazuje stalnu rotaciju
horizonta i to tako da se istočna strana horizonta spušta a zapadna
podiže. Najveća kutna brzina rotacije horizonta je na ekvatoru, dok
na polovima nema nagiba horizontaVertikalna komponenta ( ωo2) -
pokazuje rotaciju ravnine meridijana, i to tako da se sjeverni kraj
meridijana kreće ka zapadu a južni ka istoku (na južnoj hemisferi
obrnuto). Na ekvatoru ravnina meridijana ne rotira oko vertikalne
osi. Na polovima je kutna brzina rotacije meridijana najvećaNa
nekoj geografskoj širini (ϕ) rotirati će i ravnina meridijana i
ravnina horizonta , a kutna brzina te rotacije ovisi o (ϕ) .
-
Žiroskop – princip rada
• Budući da os rotacije žiroskopa ne mijenja svoj pravac u
prostoru ako na nju ne djeluje vanjska sila , to će os žiroskopa
zbog rotacije Zemlje samo prividno mijenjati svoj pravac . To
prividno kretanje može se prikazati u horizontskom sfernom
koordinatnom sustavu :
-
Žiroskop – princip rada • Ako je glavna os žiroskopa otklonjena
od pravca meridijana za kut α i od horizonta za kut β , ta dva kuta
u
astronomskoj navigaciji odgovaraju azimutu (ω) i visini (v)
nebeskog tijela (S) prema kojem je usmjerena os žiroskopa. Zbog
dnevne rotacije Zemlje oko rotacijske osi prividno se kreće nebesko
tijelo (S) , što se očituje promjenom visine i azimuta. Os
žiroskopa ne mijenja položaj u prostoru , odnosnopol žiroskopa
stalno je usmjeren u pravcu tog nebeskog tijela, ali će pokazivati
prividno kretanje isto kao i nebesko tijelo , mijenjati će se
vrijednosti kuta α i β .
• Vrijednosti kutova α i β mogu se izračunati pomoću formula
sferne trigonometrije za izračun azimuta i visine u astronomskoj
navigaciji : sinv = sinβ = sinϕsinδ + cosϕcosδcosscosω = cosα =
(sinδ-sinϕsinv)/(cosϕcosv) = (sinδ-sinϕsinβ)/(cosϕcosβ)δ –
deklinacija nebeskog tijela , s – mjesni satni kut nebeskog
tijelaPromjena kuta otklona osi žiroskopa od meridijana (Δα) zbog
rotacije Zemlje može se izraziti jednadžbom za promjenu azimuta
nebeskog tijela za jednu minutu : Δα = 15’ (sinϕ – cosϕ tgβ cosα) =
ΔωPromjena kuta nagiba glavne osi žiroskopa od horizontalne ravnine
(Δβ) može se izraziti formulom za promjenu visine nebeskog tijela u
jednoj minuti:Δβ = 15’ cosϕ sinα = ΔvPromjena kuta nagiba Δβ u
jednoj minuti najveća je na ekvatoru i raste povećanjem kuta
otklona glavne osi žiroskopa iz meridijana (α). Promjena kuta
otklona Δα najveća je na polu.
-
Žiroskop – princip rada
• Glavna os žiroskopa na ekvatoru u meridijanu (α = 0°) i u
horizontu (β = 0°) , neće pokazivati prividno kretanje niti oko
horizontalne osi niti oko vertikalne osi ( Δα = 0°, Δβ = 0° , ωo1 =
ωo , ωo2 = 0 ) :
-
Žiroskop – princip rada
• Na ekvatoru glavna os žiroskopa u horizontu (β = 0°) i u
smjeru E-W (α = 90°) , prividno će se okretati oko horizontalne osi
(Δβ = 15’/min) , dok oko vertikalne osi nema kretanja ( Δλ = 0° ,
ωo1 = ωo , ωo2 = 0 ):
-
Žiroskop – princip rada• Glavna os žiroskopa na polu u horizontu
(β = 0°) i u proizvoljnom pravcu rotira samo oko
vertikalne osi ( Δα = 15’/min) , promijeni početni pravac za
360° tijekom jednog zvjezdanog dana ( Δβ = 0°, ω= 0 , ωo2 = ωo )
:
-
Žiroskop – princip rada • Na polu glavna os žiroskopa u
vertikalnom položaju (β = 90°) neće pokazivati nagib oko
horizontalne osi , dok se promjene oko vertikalne osi ne
primjećuju jer se ona poklapa s osi rotacije Zemlje ( Δβ = 0°, ωo1
= 0 , ωo2 = ωo ) :
-
Žiroskop – princip rada
• Na određenoj geografskoj širini (ϕ) glavna os žiroskopa u
horizontu (β = 0°) i u početnom položaju E-W (α=90°) mijenja svoj
položaj i u odnosu na horizontalnu i vertikalnu os , odnosno
pokazuje prividno kretanje kao i nebesko tijelo u koje je os
žiroskopa bila usmjerena – nebesko tijelo je u tom trenutku bilo u
točki izlaza – ( Δα > 0°, Δβ > 0°, ωo1 > 0 , ωo2 > 0
)
-
Žiroskop – princip rada
• Na određenoj geografskoj širini (ϕ) glavna os žiroskopa u
horizontu (β = 0°) i u meridijanu (α = 0°) također pokazuje
prividno kretanje oko obje ravnine (meridijana i horizonta) (Δα
>0° , Δβ >0° , ωo1 >0 , ωo2 >0 ). U tom slučaju na
sjevernoj hemisferi os žiroskopa izbija prema E i podiže se u
odnosu na ravninu horizonta , na južnoj hemisferi je obrnuto :
-
Žiroskop – princip rada• Glavna os žiroskopa na određenoj
geografskoj širini (ϕ) postavljena je paralelno sa osi rotacije
Zemlje ( α = 0°, β = ϕ ) , odnosno nagib osi žiroskopa u odnosu
na ravninu horizonta jednak je geografskoj širini (β = ϕ) , os
žiroskopa neće pokazivati prividno kretanje jer je Δβ=0° i Δα =0° ,
ωo1 >o , ωo2 > 0 . Ovo je specijalan slučaj kada bi žiroskop
mogao poslužiti kao kompas. Da bi žiroskop postao žiro-kompas mora
postojati usmjeravajući moment koji će os žiroskopa održavati u
pravcu žiro-kompasnog meridijana.
-
Pretvaranje žiroskopa u žiro-kompas
• Tri su osnovna načina pretvaranja žiroskop u žiro-kompas. Sva
tri načina koriste rotaciju Zemlje oko rotacijske osi za stvaranje
usmjeravajućeg momenta koji dovodi i zadržava glavnu os
žiro-kompasa u ravnini žiro-kompasnog meridijana. - Prvi način
stvaranja usmjeravajućeg momenta je spuštanje težišta žiroskopa iz
točke ovjesa po vertikalnoj osi za određenu veličinu OG = a. Čim se
os x podigne za neki kut β , stvorit će se moment sile teže P : MP
= P a sin β. Kad je početni kut α = 0° i kut β = 0° , os žiroskopa
je u pravcu meridijana.
-
Pretvaranje žiroskopa u žiro-kompas• - Drugi način stvaranja
usmjeravajućeg momenta postiže se dodavanjem žiroskopu spojenih
posuda s tekućinom (najčešće živa) postavljenih simetrično u
odnosu na žiroskop u produžecima x osi. U horizontalnom položaju x
osi težište čitavog sustava (žiroskop i spojene posude) poklapa se
s točkom ovjesa. Pri zakretanju horizonta za kut β dio tekućine iz
podignute posude se prelijeva u posudu na suprotnoj strani , čime
se težište sustava premješta u točku G , čime je stvoren moment
sile teže P (MP) u odnosu na os y. Kad je početni kut α = 0° i kut
β = 0° , os žiroskopa je u pravcu meridijana.
-
Pretvaranje žiroskopa u žiro-kompas
• - Treći način pretvaranja žiroskopa u žiro-kompas postiže se
električnim korektorima. Žiroskop sa tri stupnja slobode ima
električni indikator nagiba (1) na osi y s kojeg se pri nagibu
horizonta uzima električni signal proporcionalan nagibu β -otklon
od horizonta. Nakon pojačanja taj signal se vodi na davač momenta
(2) koji izaziva precesiju oko vertikalne osi (3) , pa os rotacije
žiroskopa dolazi u pravac meridijana (x). Kad je početni kut α = 0°
i kut β = 0° , os žiroskopa je u pravcu žiro-kompasnog meridijana
(x).
-
Postavljanje osi zvrka u meridijan
-
Vrijeme stabilizacije zvrka
-
Optički žiroskop – Sagnacov efekt
-
Sagnacov efekt - 1913. god.
-
Prstenasti laserski žiroskop- RLG - Ring Laser gyroscop
-
Optički žiroskopi – FOG – Fiber Optics Gyroscopes• SM (Single
Mode) - Svjetlovod ima jezgru promjera puno manjeg nego što je
plašt, radna valna
duljina zrake svijetla usporediva s promjerom jezgre te nema
rasprostiranja više zraka. Svjetlost se propagira s jednog kraja
svjetlovoda na drugi samo putem jedne zrake koja se giba centralnom
osi.
-
Žirokompas s optičkim nitima
-
Pogreške žirokompasa
• Devijacija žirokompasa je kut otklona glavne osi žiro-kompasa
od meridijana pravog. Ona je pozitivna kada je glavna os
žiro-kompasa (osjetilnog elementa) otklonjena od meridijana prema
istoku, a negativna kada je glavna os otklonjena prema zapadu
• Devijacija žiro-kompasa je rezultanta zbroja pogreške vožnje,
pogreške geografske širine, balističke pogreške i svih ostalih
pogrešaka
• Pogreška vožnje nastaje zbog kretanja platforme odnosno broda
na kojoj je instaliran žiro-kompas. Glavna os osjetilnog elementa
žiro-kompasa postavlja se uvijek okomito na smjer djelovanja
rezultantne vanjske sile. Da nema kretanja broda glavna os bi se
postavila okomito, na smjer rotacije Zemlje, a zbog kretanja broda
postavlja se okomito na rezultantu kretanja broda i rotacije
Zemlje. Veličina komponente Zemljine rotacije W-E oko osi u nekoj
točki na površini Zemlje ovisi o ekvatorskoj linearnoj brzini
rotacije i geografskoj širini. Linearna brzina rotacije neke točke
na zemaljskom ekvatoru iznosi W-E = 900 čv , a na nekoj geografskoj
širini iznosi : W-E = 900 cosϕ .
-
Pogreška vožnje (δž1)
-
Pogreška vožnje (δž1)
• Pogreška vožnje je negativna za kursove u I i IV navigacijskom
kvadrantu , a pozitivna za kursove u II i III navigacijskom
kvadrantu.
• U kursu 90° ili 270° smjer kretanja broda je isti (ili se
razlikuje za 180°) kao i smjer rotacije Zemlje oko osi, pa nema
pogreške vožnje.
• Pogreška vožnje je najveća u kursu 0° i 180° , posebice u
visokim geografskim širinama i pri vožnji velikom brzinom (25 čv
,…).
• Pogreška vožnje se u žiro-kompasa ispravlja korektorom .
-
Pogreška geografske širine (δž2)
• Pogreška geografske širine (δž2)- nastaje zbog otklona
sjevernog kraja x osi zvrka prema istoku i njenog nagiba iznad
horizonta na sjevernoj hemisferi (na južnoj hemisferi obrnuto). Ovu
pogrešku uzrokuje stalna rotacija ravnine meridijana kutnom brzinom
(ωo sinϕ) i ravnine horizonta (ωo cosϕ) kao i tehnički parametri
osjetilnog elementa.
-
Pogreška geografske širine (δž2)
• - Na ekvatoru su meridijani paralelni i x os zvrka zadržava
pravac meridijana nepromijenjenim. Prema zemaljskim polovima
meridijani konvergiraju , a zbog ustrajnosti x os zvrka nastoji
zadržati raniji pravac. - Rotiranjem Zemlje uzdiže se sjeverni kraj
x osi zvrka iznad horizonta kutnom brzinom (ωo cosϕsinα)- α- kut
otklona x osi od ravnine meridijana . To stvara moment oko
horizontalne osi koji proizvodi precesiranje osi osjetilnog
elementa žirokompasa oko vertikalne osi ( prema meridijanu) istom
kutnom brzinom kojom x os izbija prema E – istoku uslijed rotiranja
ravnine meridijana (ω sinϕ sinε)- ε – kut otklona x osi od
horizonta. - Tako su kutne brzine precesije x osi zvrka prema
meridijanu i prema horizontu izjednačene : ωo sinϕ sinε = ω0 cosϕ
sinα . Budući da su kutovi ε i α , mali može se aproksimirati :
sinε = ε sin1° , sinα = α sin1° , odnosno ε sinϕ = α cosϕ . Kut ε
određen je konstrukcijom osjetilnog elementa . Rješavajući izraz ε
sinϕ = α cosϕ , za veličinu kuta α dobiva se : α= ε (sinϕ/cosϕ) = ε
tgϕ. Član ε u dobivenom izrazu naziva se pogreška gušenja i ovisi o
izvedbi osjetilnog elementa žiro-kompasa. -- Promjenjivi član tgϕ
predstavlja pogrešku geografske širine koja je velika u blizini
zemaljskih polova , a na polovima je beskonačna (tg
90°=beskonačno). Kod žiro-kompasa s jednim zvrkom uobičajeno je da
se oba faktora u prethodnom izrazu nazivaju pogreškom geografske
širine , pa je
δž2 = α = ε tgϕ- Pogreška geografske širine ispravlja se
električnim korektorom – uvođenjem signala proporcionalno s tgϕ
.
-
Balistička pogreška (δž3)
- Balistička pogreška (δž3) – javlja se pri naglim promjenama
brzine i kursa broda kao posljedica ubrzanja inercijalnih sila koje
se pri tome javljaju. Ubrzanja stvaraju dodatne momente na
osjetilni element žiro-kompasa ili na tekućinu prigušivača koji
izazivaju otklon x osi žiro-kompasa iz meridijana.
-
Balistička pogreška (δž3)
• Balistička pogreška nastala djelovanjem sile inercije na
težište osjetilnog elementa naziva se balistička devijacija prvog
reda (δI), a djelovanje sile inercije na tekućinu za prigušivanje
stvara balističku grešku drugog reda (δII). Prilikom promjene kursa
ili brzine broda javlja se ubrzanje koje stvara zakretni moment
uslijed čega dolazi do precesije x osi zvrka (balistička
precesija). X-os zvrka otkloni se iz meridijana za kut δ. Veličina
tog kuta = balistička devijacija prvog reda ( δI) može se odrediti
pomoću sljedeće jednadžbe :
• δI = ( δž1 – δž1’) ( cosϕ/cosϕk – 1 ) , δž1 – pogreška vožnje
za brzinu na početku manevra , δž1’ – pogreška vožnje za brzinu na
kraju manevra , ϕk – geografska širina za koju je proračunat period
neprigušenih oscilacija osjetilnog elementa (T). Kao posljedica
balističke precesije nastaje balistička devijacija prvog reda
(δI).
-
Balistička pogreška (δž3)
• Balistička devijacija drugog reda (δII) – nastaje djelovanjem
sile inercije tekućine u prigušivaču. Moment inercije izazvan
viškom tekućine u jednoj posudi uzrokuje suprotnu precesiju
izazvanu silom inercije koja djeluje na težište osjetilnog
elementa- ova precesija smanjuje balističku precesiju prvog
reda.
• Prilikom manevra promjene kursa ili brzine broda , pretjecanje
tekućine iz jedne u drugu posudu prigušivača je sporo , pa se
najveća devijacija javlja nakon 10-15 minuta poslije manevra.
Balistička devijacija drugog reda može se izračunati po sljedećoj
jednadžbi: δII = - ( δž1 – δž1’) k , k – koeficijent koji ovisi o
tehničkoj izvedbi osjetilnog elementa , a obično ima veličinu
0,5.
• Balistička pogreška (δž3) - izračunava se na sljedeći način :
δž3 = (δI) + (δII).
-
Kvadrantalna devijacija (δž4)
• - Kvadrantalna devijacija (δž4) - javlja se pri valjanju broda
kada se težište osjetilnog elementa periodično pomiče od vertikale
broda prema istoku i zapadu, uslijed čega se javlja određeni moment
koji izaziva precesiju osi zvrka.
• - Kvadrantalna devijacija ima maksimalnu vrijednost u
kursovima NE, NW, SE i SW, a devijacije nema u kursovima N, E, S i
W. Veličina ove devijacije zavisi od perioda oscilacija osjetilnog
elementa , amplitude premještanja težišta osjetilnog elementa ,
perioda i kursa valjanja broda i od stabilizacije osjetilnog
elementa oko sve tri osi.
• - Smanjenje ove devijacije postiže se povećanjem dinamičkog
momenta inercije o sve tri osi kompasa (kompenzacijski utezi
žiro-kompasa “Sperry” ) , primjenom dvaju zvrkova (žiro-kompas
“Anschutz”), prigušivačima ljuljanja i posrtanja kod žiro-kompasa
“Sperry” i montiranjem žiro-kompasa što bliže težištu broda.
• - Ova vrsta pogreške je za praksu zanemarivo male
veličine.
-
Pogreška instalacije žiro-kompasa (δž5)
• Pogreška instalacije žiro-kompasa (Koeficijent A°) -
pojavljuje se onda kada pramčanica kompasa ne leži u uzdužnici
broda ili nije paralelna s uzdužnicom broda. Ova se pogreška
ispravlja zakretanjem stalka kompasa ili pramčanice. Određuje se
kada je brod vezan u luci, kada treba sinkronizirati i sve
ponavljače žiro-kompasa.
• Ukupna pogreška žiro-kompasa (δž) jednaka je zbroju svih
pojedinačnih pogrešaka :
δž = δž1 + δž2 + δž3 + δž4 + δž5
-
Žiro-kompasi “Sperry”• Žiro-kompas ima sljedeće elemente :
maticu , kompasne ponavljače i izvor električnog napajanja.
Sastavni dijelovi žiro-kompasa “Sperry MARK XVIII” :
• 1 – matica u gornjem stalku (2) koji je pločom (3) odijeljen
od donjeg stalka (4)
• U stalku su motor-generator (5) na posebnim ležajevima (6) ,
kontrolni panel (7) ,
• pojačalo i radio-filter (8) . Stalak ima poklopac (9) i
vratašca (10) za pristup svim
• dijelovima matice , osvjetljenje (11) i otvore za ventilaciju
(12).
• Matica žiro-kompasa “Sperry Mark XVIII” sastoji se od : -
osjetilnog , - balističkog , - pratećeg - nosećeg elementa.
-
Osjetilni element žiro-kompasa “Sperry Mark XVIII”• Osjetilni
element ovješen je u pratećem elementu sa 9 niti - (1) ,
tako da se može slobodno okretati oko vertikalne osi. Žiroskop
jerotor trofaznog asinhronog motora i rotira brzinom od 10000
o/min.
Nalazi se u kućištu u kojem se nalazi vakum zbog smanjenja
trenja i zagrijavanja Na kućištu je ventil za isisavanje zraka ,
dvije uljne komore (2)za podmazivanje ležajeva osi rotacije
žiroskopa, uljni ventili (3) , pokazivač za kontrolu razine ulja
(4) , sustav (5) za električno napajanje (6) , libela za kontrolu
horizontalnog položaja (7) , prozorčić za kontrolu smjera okretanja
zvrka i ležaj (8) za spoj balističkog elementa koji je za kut ε =
1,3° otklonjen od vertikalne osi prema E. Kućište leži unutar
vertikalnog prstena (9) osjetilnogelementa na ležajevima (10) ,
tako da se može slobodno okretati oko
horizontalne E-W osi. Vertikalni prsten ima na zapadnoj strani
kotvu (11) – (pločicu od magnetnog materijala) pratećeg
transformatora na nosaču (12) , kompenzacijske utege (13) na nosaču
(14) u x osi zvrka (za izjednačavanje momenta inercije oko N-S osi
radi smanjenja kvadrantalnedevijacije ,uteg (15) za
balansiranje,kočnicu kućišta (16) i dva vodeća osnaca
(17,18)- (dio osovine koji se oslanja na ležajeve) koji
onemogućavaju horizontalni pomak vertikalnog prstena. U gornjem
vodećem osnacu (18) ujedno završavaju noseće niti (1). Osjetilni
element je u biti žiroskop sa tristupnja slobode čiju precesiju oko
horizontalne i vertikalne osi stvaramoment balističkog
elementa.
-
Balistički element žiro-kompasa “Sperry Mark XVIII”
• Balistički element ( prigušivač oscilacija, upravljački
element) sastoji se od nosača u obliku košare s dvije posude
ispunjene živom (170 gr. žive).
• Obje posude sa živom su na istočnoj strani u odnosu na x os
zvrka , jedna (1) u pravcu N , a druga (2) u pravcu S. Posude su s
donje stranespojene cjevčicom (3) ,a s gornje strane cjevčicom (4)
većeg promjera za cirkulaciju zraka. Utezi (5) služe za
izjednačavanje težine oko horizontalne osi. Nosač sa svojim
osnacima (6) – (dio osovine koji se oslanja na ležajeve) , leži u
ležajevima vertikalnog prstena pratećeg elementa. Na nosaču su i
dva otvora (7) za balansiranje balističkog elementa.
• Balistički element je spojem nosača (8) vezan za ekscentrični
ležaj na osjetilnom elementu.
• Prelijevanje žive iz jedne u drugu posudu stvara usmjeravajući
moment koji stvara precesiju osjetilnog elementa.
-
Prateći element žiro-kompasa “Sperry Mark XVIII”
• Prateći element ima zadatak da nosi i prati bez trenja
osjetilni element. Prateći element sastoji se od : vertikalnog
prstena (1) , tuljka s kliznim prstenovima (2) preko kojih se
napaja osjetilni element , azimut-ploče (3) sa kosinus žlijebom (4)
, azimut-motora i ruže kompasa (5). Prateći element leži u nosećem
elementu na odrivnom ležaju (6) i nosi osjetilni element čije
noseće niti prolaze kroz tuljak (2) i završavaju iznad ruže kompasa
(7) , gdje se može podesiti visina osjetilnog elementa unutar
pratećeg prstena. Vodeći osnaci (dio osovine koji se oslanja o
ležajeve) osjetilnog elementa leže u ležajevima (8 i 9). Utezima za
balansiranje (10 i 11) izjednačavaju se težine vertikalnog
prstena.Kada kompas ne radi ili kada se tek upućuje u rad ,
vertikalni prsteniosjetilnog i pratećeg elementa su spojeni
kočnicom (12).Namotaji pratećeg transformatora (13) su nasuprot
kotve –(pločica od magnetnog materijala) transformatora na prstenu
osjetilnog elementa. Viljuška (14) mehanički zahvaća vertikalni
prsten osjetilnog elementa , ako je prateći sustav u kvaru. Prsten
pratećeg elementa nosi u ležajevima (15) balistički element.
-
Noseći element žiro-kompasa “Sperry Mark XVIII”
• Noseći element leži u kardanskom sustavu u gornjem dijelu
stalka žiro-kompasa i sadrži :- maticu (1), prsten pramčanice ,
azimut-motor ,korektore pogreške vožnje i geografske širine i
ostale pomoćne
dijelove sustava. Preko kliznih kontakata na nosećem i kliznih
prstenova na pratećem elementu električki se napaja osjetilni
element i prateći prsten. Poslije približno 5 minuta nakon
uključenja žiro-kompasa zvrkima potreban broj okretaja i stvara
moment količine kretanja zvrka (H) :
H = I Ω , I – moment inercije zvrka , Ω - kutna brzina zvrka ,
te glavna os zvrka počinje precesirati oko vertikalne i
horizontalne osi. Poslije određenog broja oscilacija –što ovisi o
početnom otklonu x osi od meridijana , x os osjetilnog elementa
usmjerena je u pravcu žiroskopskog meridijana. Svaki pomak x osi
osjetilnog elementa priprecesiranju oko vertikalne osi prati
prateći sustav i pravac žiroskopskog meridijana se može vidjeti na
ruži žiro-kompasa.Proces praćenja je kontinuiran tijekom smirivanja
x osi u pravcu meridijana i tijekom plovljenja , kada se na ruži
kompasa može očitati i najmanja promjena kursa broda.
-
Funkcioniranje pratećeg sustava “Sperry Mark XVIII”
• Kotva (pločica od magnetnog materijala) pratećeg
transformatora (na vertikalnom prstenu osjetilnog elementa) nalazi
se uvijek točno iznad srednjeg –primarnog – namotaja pratećeg
transformatora (1) –na vertikalnom prstenu pratećeg elementa.
Primarni namotaj je naponski povezan s jednim namotajem
azimut-motora . U srednjem položaju kotve se u dva sekundarna
namotaja pratećeg transformatora induciraju naponski signali (
jednaki po veličini ali suprotni pofazi- pa je izlazni napon jednak
nuli – oba dva sekundarna namotaja (sekundara) spojena su na isti
izlaz.
-
Funkcioniranje pratećeg sustava “Sperry Mark XVIII”• Kada se
kotva(1) zbog precesije osjetilnog elementa pomakne u jednu stranu
, indukcija će biti veća u
onom sekundarnom namotaju (sekundaru) koji je pokriven kotvom –
jer je tu manji otpor za magnetske silnice. Veličina tog
induciranog napona ovisit će o veličini pomaka kotve , a polaritet
–faza ovisi o strani otklona kotve. Naponski signal sa izlaza
sekundara se vodi preko višestupanjskogpojačala (2) na drugi
namotaj azimut-motora . Azimut-motor (3) je dvofazni – montiran na
nosećem elementu , a njegova osovina je zupčanikom vezana za
azimut-ploču. Ovisno o fazi pojačanog signala sa sekundarnog
namotaja pratećeg transformatora , rotor azimut-motora će preko
azimut-ploče zakrenuti vertikalni prsten pratećeg elementa , a time
će i kotvu pratećeg transformatora dovesti u srednji položaj u
odnosu na sekundarne namotaje ( na njihovom izlazu će ponovno
inducirani napon biti jednak nuli). Promjenjiva faza azimut-motora
je tada ponovno bez napona. Ovisno o fazi induciranog napona ,
azimut-motor zakreće azimut-ploču na jednu ili na drugu stranu.
Ovaj proces odvija se kontinuirano za vrijeme precesiranja
osjetilnog elementa : napon promjenjive faze izaziva zakretanje
azimut-motora na jednu ili na drugu stranu i za najmanji pomak
kotve pretećegtransformatora. Svaki zakret azimut-motora opaža se i
na ruži žiro-kompasa , koja se zakreće zajedno s azimut-pločom.
-
Funkcioniranje pratećeg sustava “Sperry Mark XVIII”• Kada je
osjetilni element u meridijanu i brod vozi nepromijenjenim kursom ,
kotva pratećeg
transformatora je u neutralnom položaju , pa azimut-motor i ruža
žiro-kompasa miruju. Ako brod mijenja kurs primjerice u desnu
stranu , u istom smjeru se zakrenuo i stalak matice , a time i
vertikalni prsten pratećeg elementa sa namotajima transformatora.
Jedino osjetilni element zadržava svoj pravac meridijana. Zakretom
namotaja transformatora kotva je zatvorila magnetski tok na jednom
namotaju sekundara. Naponski signal zakreta pokreće azimut-motor ,
koji će za isti kut zakrenuti prateći prsten u suprotnu (lijevu)
stranu , odnosno ruža žiro-kompasa će pokazati veći kurs. Okretanje
azimut-motora prestaje čim kotva transformatora ponovno dođe u
neutralni položaj.
-
Opće napomene o žiro-kompasima “Sperry”
• -Kardanski sustav drži maticu kompasa u horizontalnom položaju
prilikom valjanja broda do 60° i posrtanja broda do 20°. Sastoji se
od : Prsten kućišta s oprugama ublažava vibracije i štiti kompas od
udaraca. Stabilizacijski prsten sprečava nagnuće prstena kućišta po
azimutu. Kardanski prsten drži noseći element i ostale dijelove
matice i ima dva prigušivača : Hidraulični prigušivač posrtanja
ublažava osciliranje matice oko poprečne osi broda,
Elektromagnetski prigušivač –montiran na prstenu kućišta - ublažava
osciliranje matice oko uzdužne osi broda. Ostali dijelovi su:
regulator napona , automatska preklopna ploča – uključuje
automatsko rezervno napajanje u slučaju kvara na brodskoj osnovnoj
mreži , alarmni sustav – signalizira nestanak brodskog napona i
priključne ploče za ponavljač žiro-kompasa. -Kursograf - kompasni
ponavljač s mogućnošću grafičke registracije kursova i njihovim
promjena u realnom vremenu (neki imaju i mogućnost prikaza kuta
otklona kormila).- Žiro-kompas se uključuje 4 – 5 sati prije
isplovljenja broda. Postupak uključivanja : nakon uključivanja
osnovnog napajanja, uključi se motor-generator čime zvrk dobiva
napajanje. Nakon približno 4 -5 minuta kada zvrk dobije nominalan
broj okretaja , otkoči se matica i vertikalni prsten osjetilnog
elementa i uključi prateći sustav. Nakon najviše 3 sata oscilacije
glavne osi osjetilnog elementa prestaju i glavna os je u
žiroskopskom meridijanu . Ponavljači žiro-kompasa koji se nalaze na
krilima mosta uključuju se prije isplovljenja broda ,a nakon
sinkronizacije s matičnim žiro-kompasom. Postupak isključivanja
žiro-kompasa je obrnut.
-
Žiro-kompasi “Anschutz”
• To su tipični predstavnici žiro-kompasa s dva zvrka. Komplet
ovog tipa žiro-kompasa sadrži : maticu , kompasne ponavljače i
izvor napajanja.- Matica se sastoji od osjetilnog i pratećeg
elementa koji su zajedno uronjeni u kotao s tekućinom.- Kotao je u
valjkastom stalku u kojem se nalazi još i pojačalo pratećeg sustava
, kontrolna ploča i pomoćni dijelovi.-Osjetilni element oblika
kugle - (lebdeća kugla) – nosi dva žiroskopa , uljni prigušivač
oscilacija -(Framov tank) i zavojnicu za centriranje. Slika
prikazuje osjetilni element žiroskopa s dva zvrka :
-
Osjetilni element žiro-kompasa “Anschutz”
• - Osjetilni element oblika kugle (lebdeća kugla) ima dva
žiroskopa, uljni prigušivač oscilacija i zavojnicu za
centriranje.
• - Zvrkovi su trofazni asinkroni motori s rešetkastom kotvom (
3 x 110V , 333 Hz) i rotiraju brzinom od 20000 o/min. Zvrkovi su
međusobno spojeni antiparalelogramom tako da mogu precesirati oko
vertikalne osi samo u suprotnom smjeru, dok njihova precesija u
istom smjeru izaziva precesiju čitave kugle oko vertikalne osi.
Simetrala kuta između osi rotacije zvrkova usmjerava se u
žiroskopski meridijan (x).
-
Osjetilni element žiro-kompasa “Anschutz”
• Posuda u obliku kuglinog prstena simetrično je podijeljena na
8 komora s uljem što služi za prigušivanje oscilacija. Prsten je
postavljen iznad zvrkova , a komore su međusobno spojene tankim
cjevčicama za cirkulaciju ulja između njih. U donjem dijelu lebdeće
kugle je prstenasta zavojnica koja stvara izmjenično magnetsko
polje. To magnetsko polje inducira u pratećoj kugli struju čije
magnetsko polje stvara odbojnu silu između prateće ilebdeće kugle.
Odbojna sila poništava dio težine lebdeće kugle i stalno održava
njen simetričan položaj unutar prateće kugle . Vodik u tekućem
stanju unutar lebdeće kugle smanjuje trenje , predaje toplinu preko
plašta kugle na tekućinu i sprečava starenje ulja za podmazivanje
osi rotacije zvrkova.
-
Prateća i lebdeća kugla žiro-kompasa “Anschutz”• Plašt lebdeće
kugle izrađen je od mesinga i s vanjske strane je obložen bakelitom
, osim na
mjestima za dovod električnog napajanja – ona su presvučena su s
grafitom. Ta mjesta su : gornja (1’) i donja (2’) kalota, široki
ekvatorski prsten (3’) koji se proteže 180° i dva uska ekvatorska
prstena (3’’) koja se protežu manje od 180°. Kalote i ekvatorski
prsteni su električno vodljivi i preko njih se ostvaruje el.
napajanje zvrkova (4) , prstenaste zavojnice(5) i formira se
električni most za praćenje zakreta lebdeće kugle oko vertikalne
osi. Uzduž ekvatorskog kruga nalazi se skala u stupnjevima za
direktno očitavanje kursa broda s lebdeće kugle.
• P.P. – napajanje - lebdeća kuglaP.S. – napajanje - prateći
sustav 5 i 5’ – prstenaste zavojniceR1 i R2 - otpornici
-
Prateća i lebdeća kugla žiro-kompasa “Anschutz”• Prateća kugla
služi za praćenje zakreta lebdeće kugle.
Lebdeća kugla lebdi u tekućini unutar prateće kugle. Tekućina u
kojoj lebdi lebdeća kugla je mješavina destiliranevode, glicerina i
benzolove kiseline , a stvara uzgon lebdećojkugli (glicerin) i
provodi el. struju (benzolova kiselina) sodgovarajućih kalota (1,2)
i ekvatorskih prstena (3) na lebdećukuglu. Prateća kugla se sastoji
od dvije polukugle i prstena sa
staklenim segmentima. Ove dijelove spajaju tzv. paukove noge
koje dovode el. napajanje na prateću kuglu. Paukove noge mehanički
drže prateću kuglu , a vezane su za tuljak s kliznim prstenovima.
Četiri paukove noge dovode tri faze 110V -333Hzdvije paukove noge
međusobno su razmaknute za 180°završavaju sa dva kontakta W1 i W2
nasuprot krajeva širokog ekvatorskog prstena (3’) lebdeće kugle i
dio su pratećeg sustava(P.S.) , a sedma paukova noga kod nekih
kompasa služi za brzoprigušivanje oscilacija lebdeće kugle (P.P.).
Za smanjenje
međufaznih struja čiji se tok zatvara kroz tekućinu , u odnosu
na električne struje koje prolaze kroz tanak sloj tekućine i koje
napajaju potrošače u lebdećoj kugli , koristi se veliki omski otpor
P.P. – napajanje lebdeća kuglatekućine koja sadrži vodu, glicerin i
benzolovu kiselinu. Prateća kugla P.S.- “ prateći sustav leži na
dva ležaja na poklopcu kotla i može se okretati oko vertikalne 5 i
5’ – prstenaste zavojnice
osi. Sustav praćenja realizira se pomoću tzv. Weatshtonova
mosta. R1 , R2 - otpornici
-
Prateća i lebdeća kugla žiro-kompasa “Anschutz- Weatshtonov
mostWeatshtonov most čine stalni omski otpori dvije polovice
prstenaste zavojnice (5 i 5’)i dva promjenjiva
otpora ( R1 i R2) . Promjenjivi otpori R1 i R2 su omski otpori
tekućina između kontakata W1 i W2 ( na pratećoj kugli) i krajeva
širokog ekvatorskog prstena na lebdećoj kugli. Weatshtonov most je
u ravnoteži kada su kontakti W1 i W2 simetrično postavljeni u
odnosu na krajeve ekvatorskog prstena, jer su otpori tekućine R1 i
R2 jednaki omskim otporima prstenaste zavojnice (5 i 5’). Kod
promjene kursa broda lebdeća kugla zadržava svoj položaj, a s
brodom se zakrene prateća kugla.U tom slučaju jedan od otpora (R1
ili R2) ostaje isti ( ne mijenja se razmak između W1 ili W2 i
ekvatorskog prstena ) , ali se drugi poveća zbog većeg razmaka
izmeđukontakata ( W2 ili W1) i ekvatorskog prstena. Nejednaki
otpori R1 i R2
izvode električni most iz ravnoteže i na izlazu mosta poteče
struja koja se nakon pojačanja dovodi na zakretnu fazu
azimut-motora (1). Azimut-motor je dvofazni :jedan namotaj (2) je
stalno pod naponom (110V -333Hz) , a drugi (1) je spojen na
izlaz električnog mosta. Sve dok traje neravnoteža mosta
azimut-motorpreko mehanizma trenja zakreće prateću kuglu i dovodi
je u položaj gdje su kontakti
W1 i W2 točno nasuprot krajeva ekvatorskog prstena. U tom
položaju nastaje ravnoteža električnog mosta i na njegovu izlazu ne
teče el. struja. Smjer okretanja azimut-motora ovisi o strani
električnog mosta na kojoj je nastala promjena otpora.
Azimut-motor ujedno zakreće i skalu ruže žiro-kompasa ,kao i
rotor sinkrodavača kursa (3) koji podatak o promjeni kursa broda
sinkrono prenosi na ponavljač žiro-kompasa (4).
Weatshtonov most : 5,5’- prstenaste zavojnice ; R1,R2 –
otpornici :
-
Shematski prikaz matice žiro-kompasa “Anschutz”
• Lebdeća (7) i prateća kugla (5) , nalaze se u kotlu s
tekućinom (3)a kotao je s gornje strane zatvoren s poklopcem.
Prateća kugla ima dva otvora koji omogućavaju cirkulaciju tekućine
iz kotla u kuglu iobratno. Paukove noge završavaju u tuljku s
kliznim prstenovima kojije mehanički spojen s žiro-kompasnom ružom
(1). Ruža ima dvije skale:jedna s podjelom od 0°-360° i drugom
podjelom od 0°-10° za fino očitavanje stupnjeva i desetih dijelova
stupnjeva. Na poklopcu kotla su azimut-motor (2) i sinkro-davač
kursa s prenosima, živin termometar ,termostat s 3 mikro-prekidača
, otvor za dolijevanje tekućine, sijalice za rasvjetu s
potenciometrom , stezaljke kablova za napajanjei ostali pomoćni
dijelovi. Ispod stalka je ekscentrični uteg (9) kojim sekotao
postavlja u horizontalan položaj u kardanskom sustavu (4).
-
Shematski prikaz matice žiro-kompasa “Anschutz”
• - Visina lebdeće kugle unutar prateće kugle određena je
težinom , gustoćom tekućine i jačinom magnetskog poljaprstenaste
zavojnice. Pri tome se promjenom temperaturemijenja samo gustoća
tekućine. Radna temperatura tekućine je 52°C (+/- 3°C) .
Temperatura se kontrolira termometrom ,a održava termostatom. U
početku rada tekućina se zagrijava s 3 grijača (6) , a kad
temperatura dostigne49°C , prvi mikroprekidač termostata isključuje
grijanje. Kad temperatura dostigne 52°C , drugi mikroprekidač
uključuje hlađenje ventilatorom (10). Ako temperatura i dalje
rastetreći mikroprekidač uključuje alarm pri temperaturi od 55°C.
Ako se temperatura tekućine ne može nikako smanjiti pri 60°C treba
isključiti kompas, pronaći i otkloniti kvar.
-
Shematski prikaz matice žiro-kompasa “Anschutz”• U stalku
kompasa nalaze pojačalo (8) i kontrolna
ploča (11). Pojačalo pojačava signal praćenja uz
mogućnostregulacije stupnja pojačanja. Preko ugrađenog
mikro-relejapromjenjiva faza azimut-motora se može direktno
napajati iz električnog mosta za slučaj kvara pojačala. Tada će
praćenje imati pogrešku do (+/- 3°) , a sa pojačalomta pogreška je
do (+/- 0,1°). Kontrolna ploča sadrži prekidač za uključivanje
sustava praćenja , tinjalicu za kontrolupotrošnje struje za
napajanje zvrkova i osigurače. Postolje stalka kompasa se učvršćuje
za palubu s mogućnošću zakreta oko vertikalne osi radi ispravljanja
stalne pogreške instalacije kompasa (koeficijent A°). Sa strane
stalka nalaze se tri otvora za pristup pojačalu , kontrolnoj ploči
i vizualnom motrenju visine lebdeće kugle unutar prateće kugle. Na
kompas “Anschutz” može se priključiti i do 12 ponavljača, a svaki
ponavljač ima mogućnost sinkronizacije s matičnim kompasom i
potenciometar za regulaciju osvjetljenja.
-
Anschutzova kugla i kompas
-
Žiro-magnetski kompasi• - Nedostatak većeg dijela žiro-kompasa
je dugo vrijeme potrebno za smirivanje glavne osi zvrka u
meridijanu (precesija glavne osi zvrka po elipsoidnoj krivulji
oko ravnotežnog položaja)- Magnetski kompas je uvijek spreman za
rad , međutim pri plovljenju u lošim hidro-meteorološkim uvjetima ,
pri jakom valjanju i posrtanju broda ruža magnetskog kompasa
postaje jeko nemirna i oscilira .- Otklanjanje nedostataka
žiro-kompasa i magnetskog kompasa postiže se objedinjavanjem
njihovih prednosti. Tako se dobiva žiro-magnetski kompas:-
Žiro-magnetski kompas koristi magnetski dio za pokazivanje
meridijana , a žiroskop služi za stabilizaciju pokazivanja kursa
broda. Magnetski kompas daje žiroskopu precesijski moment i
usmjerava njegovu os u meridijan. Uzevši u obzir sve potrebne
ispravke (korekcije) , žiroskop se postavlja u žiroskopski
(pravi)meridijan , stabilizira pokazivanje kursa i prenosi podatke
na ponavljače kompasa. Ako iz bilo kojeg razloga os žiroskopa
dobije otklon iz meridijana , signal pogreške s magnetskog kompasa
vraća os žiroskopa ponovno u meridijan.- Prilikom promjene kursa
broda os žiroskopa pokazuje brojčano isti kut promjene kursa kao i
magnetski dio , odnosno os žiroskopa zadržava pravac koji je
pokazivala i prije promjene kursa broda. Osnovni režim rada ovog
kompasa je žiro-magnetski režim – glavna os žiroskopa se usmjerava
u meridijan signalom s magnetskog kompasa.
-
Indukcijski kompas
• - indukcijski kompas objedinjuje karakteristike direkcijskog
žiroskopa i magnetskog kompasa s ciljem dobivanja točnog i
stabiliziranog pokazivanja pravca meridijana.
• - kao osjetilni element indukcijski kompas koristi namotaje
detektora za stvaranje električnog signala (Zemaljsko magnetsko
polje) koji se mijenja s promjenom kursa broda , dok za istu svrhu
žiro-magnetski kompas koristi običan magnetski kompas. Žiroskop se
i ovdje koristi za stabilizaciju pokazivanja kursa broda.
-
Indukcijski kompas “Gyrosin”• Sastavni dijelovi “Gyrosin”
kompasa su :
- detektor (A) , sklop žiroskopa ( C ) , glavni pokazivač (B) ,
pojačalo (E,D ) , upravljački dio i izvor napajanja.
-
Indukcijski kompas “Gyrosin”• Detektor - se sastoji od pobudnog
i primarnog namotaja
i zavojnica za kompenzaciju. Prijemni namotaji registriraju
smjer horizontalne i vertikalne komponente Zemaljskogmagnetskog
polja u odnosu na kurs broda i stvaraju upravljački signal za
sinkronizaciju osi žiroskopa. Detektor se montira zajedno s
kućištem na vrh jarbola broda ili na neko drugo mjesto gdje je
utjecaj brodskog magnetskog polja najmanji a prijemni namotaj je u
kardanskom sustavu uvijek u horizontalnom položaju. Sklop žiroskopa
(C ) – služi za stabilizirano pokazivanje kursa broda , a pravac
glavne osi žiroskopa se sinkronizira upravljačkim signalima iz
detektora.
Glavni pokazivač (B )– se sinkronizira signalima iz sklopa
žiroskopa pomoću pratećeg sustava i prenosi podatke kursa na sve
ponavljače kompasa.
-
Princip rada indukcijskog kompasa “Gyrosin”
Upravljački signal iz prijemnog namotaja (1) detektora (A)
dolazi na statorske namotaje selsina (self-synchronising) prijema
podataka detektora (2) u glavnom pokazivaču (B) načijem rotorskom
namotaju se inducira određeni napon greške (3). Napon greške se
preko precesijskog pojačala (D) vodi na precesijski motor (4) u
sklopu žiroskopa (C ).Precesijskimotor stvara zakretni moment oko
horizontalne osi (y) , pa žiroskop precesira oko vertikalne osi
(V). Svaki zakret oko vertikalne osi se preko zupčanika (5)prenosi
na ružu (6) i rotor selsina predaje podataka žiroskopa(7).Rotor
selsina predaje inducira u statorskim namotajima napon(8) koji se
vodi na odgovarajuće statorske namotaje sinkroprijemnika podataka
žiroskopa (9) u glavnom pokazivaču (B). Novoinducirani napon (10) u
rotoru sinkroprijemnika podataka žiroskopa se preko pratećeg
pojačala (E ) vodi u azimut-motor(11). Azimut-motor zakreće
kazaljku kursa glavnog pokazivača (12) i rotore sinkroprijemnika
podataka žiroskopa (9) i detektora (2) koji leže na istoj osovini.
Sinkroprijemnik podataka žiroskopa (9) idetektora(2) su tako
podešeni da su im električni signali izlaza
jednaki nuli kada kazaljka (12) na glavnom pokazivaču pokazuje
kurs broda. U tom slučaju i ruža kompasa u sklopu žiroskopa
pokazuje kurs broda.
-
Princip rada indukcijskog kompasa “Gyrosin”
• Kada brod mijenja kurs , okreće se zajedno s kućištem sklopa
žiroskopa ( C ) i osovina na kojoj je ruža kompasa i rotor
sinkropredajnika podataka žiroskopa (7).Tako se mijenja položaj
rotora u odnosu na vlastiti stator i signal te nove podešenosti (8)
se vodi na stator sinkroprijemnika podataka žiroskopa (9) u glavnom
pokazivaču (B). Budući da se sada mijenja inducirani napon i u
odgovarajućem rotoru , to se promijenjeni napon (10) preko pojačala
( E ) vodi na azimut-motor (11)koji zakreće kazaljku kursa i rotore
sinkroprijemnika podataka žiroskopa (9) i detektora (10). Signal iz
detektora(koji se uvijek zakreće zajedno s brodom) je također
promijenjen (silnice horizontalne komponente Zemaljskog magnetskog
polja prolaze u ovom slučaju kroz primarni namotaj detektora pod
drugim kutom ) , i sadaodgovara novom kursu broda. Na taj način je
električna sinkronizacija između rotora i statora
sinkroprijemnikapodataka sačuvana , tj. ruža kompasa na glavnom
pokazivaču i sklopu žiroskopa pokazuje isti kurs koji upravo
odgovara signalu iz detektora.
-
Indukcijski kompas “Gyrosin” kao direkcijski žiroskop
Kada je indukcijski kompas “Gyrosin” u režimu direkcijskog
žiroskopa detektor (A) je isključen , a žiroskop se dovodi u
željeni položaj dugmetom za sinkronizaciju (15) mehaničkim putem.
Ako je poznat pravac meridijana (na osnovu poznatog azimuta
terestričkog objekta) , os rotacije žiroskopa se dovodi u meridijan
, pa će i u takvom režimu kompas pokazivati kurs žirokompasni.
Povremenom kontrolom moguće je odrediti otklon osi iz meridijana
ili drugog početnogpravca i na osnovi toga se ispravlja pokazivanje
kompasa. Dugmetom (15) se sinkronizira sklop žiroskopa s podacima
detektora (1) prilikom uključivanja indukcijskog kompasa.
Sinkronizacija po signalu detektora (1) je relativno spora oko
2°/min . Sinkronizacija mehaničkim načinom je puno brža. Točnost
pokazivanja kursa je ( +/- 1°) , a spremnost za rad je unutar 10
minuta.
-
Laserski kompas• Laserski kompas - nema rotirajućih dijelova i
nije osjetljiv na djelovanje vanjskih utjecaja.
Nedostatak – nepostojanje momenta koji bi ga usmjerio u pravac
meridijana - ne održava stabilan položaj osi u prostoru.
-
Laserski kompas – princip rada• Laserski kompas - senzor koji
vrlo precizno mjeri kutne brzine
objekta koji se kreće i u koji je ugrađen. Sastoji se od :
lasera (1) reflektorskog sustava ogledala(3) i foto-prijamnika
(4).Snop zraka lasera (1) udara u poluprozirno ogledalo (2) gdje se
dijeli na dva dijela : jedan dio prolazi kroz ogledalo , a drugi
dio se odbija od ogledala. Oba dijela se kreću kroz sustav ogledala
(3) , ali u suprotnim smjerovima. Ako nema zakreta čitavogsustava
oko osi O , obje svjetlosne zrake će istovremeno stići na ulaz
foto-prijemnika (4) , jer prelaze iste putove. Ako se sustav
zakrene oko osi O zajedno s objektom u koji je ugrađen , onda će
zraka koja putuje u smjeru zakreta preći duži put , a zraka koja
putuje u suprotnom smjeru od zakreta preći kraći put. U tom se
slučaju mijenja i frekvencija (Dopplerov efekt) zrake. Razliku
frekvencije (npr. za kutnu brzinu 10°/min , promjena frekvencije je
5,9 Hz pri zračenju lasera u vidljivom dijelu spektra ).To mjeri
foto-prijamnik (4)iz kojeg se izmjerena vrijednost vodi u
računalo.Računalo iz kutne brzine zakreta objekta izračunava kut
zakreta objekta.Da bi se dobio i smjer zakreta objekta potrebna su
dva foto-prijamnika na međusobnoj udaljenosti od (1/4)četvrtine
valne dužine laserskog zračenja , koji registriraju Dopplerov efekt
s pomakom faze od 90°.Laserski kompas je spreman za rad za 1-2
sekunde , a dnevna pogreška u mjerenju kuta zakreta objekta iznosi
od 5 – 6’’. Ako se pravac meridijana odredi i uvede u računalo,
laserski kompas će tada registrirati svaku promjenu kursa u
horizontalnoj ravnini.