-
53
2. O STABILNOSTI STANJA MEHANIKOG SISTEMA
Matematiki modeli uvek predstavljaju idealizaciju razmatranog
sistema jer je
nemogue sagledati i opisati u potpunosti sve njegove
karakteristike koje mogu
da utiu na njegovo stanje 1)
. Usled toga, stvarna kretanja uvek odstupaju od
konanih jednaina koje se dobijaju kao teorijska reenja. Ukoliko
su ta
odstupanja zanemarljiva ili u zadovoljavajuim granicama smatra
se da teorijska
reenja praktino mogu da predstavljaju stvarno kretanje. Meutim,
u nekim
sluajevima kretanje koje je odreeno teorijski dobijenim reenjima
nije mogue
realizovati. Na primer, za neke sisteme, mogu da budu ispunjeni
uslovi
ravnotee, ali je nije mogue praktino i ostvariti. U tom smislu,
stanje sistema,
opisano matematikim modelom, moe biti stabilno ili nestabilno.
Konana
reenja diferencijalnih jednaina ili uslovi ravnotee ne daju
neposredan odgovor
na pitanje da li je stanje sistema, opisano datim matematikim
modelom,
stabilno ili nestabilno. Zbog toga, za ispitivanje stabilnosti,
u razmatranje se
uvodi poremeeno stanje. Na taj nain se otkriva uticaj parametara
sistema na
stabilnost stanja, to daje mogunost da se njihovim biranjem
sistem ponaa
stabilno ili nestabilno, po elji. Time je teorija stabilnosti
usko povezana sa
teorijom diferencijalnih jednaina. Iako se teorija stabilnosti
zaela u mehanici,
ona danas ima optiji znaaj i primenjiva je na sve procese koje
determinie
poetno stanje i iji matematiki modeli predstavljaju
diferencijalne jednaine
istog tipa (dinamiki sistemi).
2.1. Osnovne postavke problema
2.1.1. Neporemeeno i poremeeno kretanje. Poremeaji.
Neka je stanje holonomnog mehanikog sistema odreeno
Lagranovim
promenljivim ),,1( , nqq , tako da je kretanje sistema opisano
Lagranovim diferencijalnim jednainama druge vrste:
).,,1( nQq
T
q
T
dt
d
(2.1.1)
Za neko uoeno poetno stanje:
),,1,( ;;000
nqqt (2.1.2)
reavanjem jednaina (2.1.1), dobijaju se jednaine stanja
sistema:
),1,( ),,;( ),,,;(000000
nqqttqqqqttqq . (2.1.3)
Ova reenja predstavljaju neporemeeno stanje (neporemeeno
kretanje)
sistema.
1)
Zbog toga pojmovi realna mehanika, realni modeli i sl. nemaju
smisla.
-
54
Ako se u istom poetnom trenutku 0
t uvedu u razmatranje drugi poetni uslovi:
),,1,( ;;000
nqqt (2.1.4)
reavanjem jednaina (2.1.1) dobijaju se jednaine stanja:
),,1,( ),,;( ),,,;(000000
nqqttqqqqttqq (2.1.5)
koje predstavljaju poremeeno stanje (poremeeno kretanje) sistema
u odnosu
na, prethodno razmatrano, neporemeeno stanje. U daljem
izlaganju, za
jednaine (2.1.3) neporemeenog i jednaine (2.1.5) poremeenog
kretanja
koristie se krae oznake:
);( ),( tqqtqq ).,1,( )( ),( ntqqtqq (2.1.6)
Razlike:
, ),1,( (t))()( ),()()( ntqtq ttqtq (2.1.7)
nazivaju se poremeaji, a njihove vrednosti u poetnom
trenutku:
),1,( )( ,)(0000
ntt , (2.1.8)
nazivaju se poetni poremeaji.
Prema tome, ako se zna neporemeeno stanje, proizvoljno poremeeno
stanje
dobija se uvoenjem poremeaja. Poremeaji predstavljaju
odstupanja
poremeenog stanja od neporemeenog, pa jednaine neporemeenog
kretanja, u
tom smislu, imaju oblik:
),1,( ,0)( ,0)( ntt . (2.1.9)
q
)(tM
)(tM
0
M
0
M
O q
sl. 5
-
55
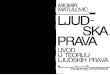
Na sl. 5 prikazane su trajektorije poremeenog i neporemeenog
stanja u
dvodimenzionom prostoru koordinata stanja qq , sistema sa jednim
stepenom slobode. Neporemeena trajektorija predstavljena je punom
linijom i kretanje
reprezentativne take M po njoj karakterie promenu neporemeenog
stanja.
Taka 0
M predstavlja poetno stanje sistema u nekom uoenom poetnom
trenutku 0
t . Ako se u istom poetnom trenutku uvede u razmatranje neko
drugo
poetno stanje 0
M (poremeeno poetno stanje), stanje sistema bie
poremeeno u odnosu na neporemeeno i za 0
tt . Kretanje reprezentativne
take M po odgovarajuoj trajektoriji (isprekidana linija)
karakterie promenu
poremeenog stanja. Uvoenjem poremeaja (2.1.7) u odnosu na
neporemeeno
stanje, o poremeenom stanju sistema moe se suditi na osnovu
ponaanja
poremeaja. U tom cilju pogodno je koristiti prostor poremeaja u
kome
poremeaji , predstavljaju koordinate reprezentativne take. Pri
tome,
neporemeeno kretanje (2.1.9) predstavljeno je jednom takom
koordinatnim
poetkom.
0
P
P
O
sl. 6
Na sl. 6 neporemeeno kretanje prikazano je koordinatnim poetkom
O , a
poremeeno kretanje krivom putanjom take P pri emu su
poremeaji
koordinate vektora poloaja OP .
Ako se za poremeaje uvedu oznake:
ni
ixi
,
, )2,,1)(,,1( nmin , (2.1.10)
poremeeno kretanje u odnosu na neporemeeno odreeno je, u
prostoru
poremeaja, n2 dimenzionim vektorom x
-
56
nxxx 221T ,,, x . (2.1.11)
Kada se kretanje sistema razmatra u faznom prostoru u
Hamiltonovim
(kanonskim) promenljivim
pq , , poremeeno kretanje odreeno je
promenljivim
pq , , tako da su poremeaji:
ni
i
pp
qqxi
,
, )2,,1)(,,1( nmin . (2.1.12)
Iako je ovde upotrebljena ista oznaka ix za poremeaje kao i u
(2.1.10), one
nemaju istu vrednost. Meutim, u oba sluaja one daju ekvivalentna
razmatranja
poremeenog kretanja.
Da bi se moglo govoriti o meri odstupanja poremeenog kretanja
od
neporemeenog, prostor poremeaja )2( nmRm treba normirati. Za
konanodimenzione prostore sve norme su ekvivalentne. Neke od
normi vektora
koje se najee koriste su:
i
mi
m
i
im
i
i xxx
111
2 max , ,)(21
xxx . (2.1.13)
2.1.2. Jednaine poremeenog kretanja
Neka je kretanje mehanikog sistema opisano Lagranovim jednainama
druge
vrste. Za razmatranje poremeenog stanja pogodno je koristiti
kontravarijantne
jednaine (videti npr. (1.8.42)) koje se mogu dovesti na
oblik:
),1,( );;( nqqtFq . (2.1.14)
Za date poetne uslove 00,0 ,qqt iz ovih jednaina dobijaju se
jednaine
neporemeenog stanja:
),1,( )( ),( ntqqtqq . (2.1.15)
Poremeeno kretanje zadovoljava sistem Lagranovih jednaina:
),1,( );;( nqqtFq . (2.1.16)
Uvoenjem poremeaja (2.1.7), promenljive poremeenog stanja mogu
da se,
izraze na sledei nain:
qqqq , , (2.1.17)
tako da jednaine (2.1.16) dobijaju oblik:
-
57
).;;( qqtFq (2.1.18)
S obzirom na (2.1.17) i (2.1.14) dobija se:
, );;();;( qqtFqqtF ),,1( n . (2.1.19)
Kada se poznato neporemeeno stanje dato jednainama (2.1.15)
uvrsti u ove
jednaine, one dobijaju oblik:
).,1,( ),;( , ntf (2.1.20)
Ovaj sistem od n2 diferencijalnih jednaina prvog reda
predstavlja
diferencijalne jednaine poremeenog stanja (kretanja)
sistema1)
.
Ovde treba primetiti da se vreme javlja eksplicitno u ovim
jednainama i u
sluaju kada ono ne figurie eksplicitno u jednainama (2.1.14). Do
toga dolazi
posle unoenja poznatih funkcija (2.1.15) u jednaine
(2.1.19).
Na slian nain, ako je kretanje sistema zadato u Hamiltonovom
obliku:
),1,( ),;(~
, npqtQq
Hp
p
Hq
, (2.1.21)
za date poetne uslove
000,, pqt dobijaju se jednaine neporemeenog kretanja:
),1,( )( ),( ntpptqq
. (2.1.22)
Uvoenjem poremeaja
, poremeeno kretanje je:
),,1,( , nppqq
(2.1.23)
tako da Hamiltonove jednaine (2.1.21) za poremeeno kretanje
dobijaju oblik:
).;;(~
);;(
);;(
pqtQpqtHq
p
pqtHp
q
(2.1.24)
Kada se od ovih jednaina oduzmu odgovarajue jednaine (2.1.21) i
kada se
uzme u obzir da su funkcije (2.1.22) poznate, dobijaju se
diferencijalne
jednaine poremeenog kretanja:
1)
Ovaj naziv nije u potpunosti taan, ali se kao takav koristi u
literaturi to e se
praktikovati i u ovom tekstu. Tanije jednaine (2.1.20) su
jednaine poremeaja, a
jednaine poremeenog kretanja su (2.1.16).
-
58
),,1( ),;( ),,;( ntt
, (2.1.25)
gde su:
).;();;( pqtHp
pqtHp
,
).,;(~
);;(~
).;();;( pqtQpqtQpqtHq
pqtHq
Prema tome, jednaine (2.1.20) i (2.1.25) pripadaju jednoj optoj
klasi
diferencijalnih jednaina prvog reda:
),1,( ),,,;( 21 mixxxtXx mii . (2.1.26)
U razmatranim mehanikim sistemima veliine ix predstavljaju
poremeaje
stanja (videti (2.1.10),(2.1.12)). Uvoenjem vektora poremeaja x
(2.1.11) i
vektorske funkcije ),( xX t jednaine (2.1.26) mogu da se piu
simboliki u
obliku
),( xXx t . (2.1.27)
Konana reenja diferencijalnih jednaina (2.1.26), odnosno
(2.1.27), za neke
poetne poremeaje 00
,xt ,
)( ),1,( )( tmitxx ii xx , (2.1.28)
predstavljaju jednaine poremeenog kretanja u prostoru poremeaja
mR , a
trivijalna reenja istih diferencijalnih jednaina:
),1,( 0)( mitxi 0x )(t , (2.1.29)
predstavljaju jednaine neporemeenog kretanja.
Oblik jednaina (2.1.26), odnosno (2.1.27), ima optiji znaaj.
Osim kretanja
mehanikih sistema jednainama takvog oblika mogu da budu opisani
i drugi
procesi tako da je teorija stabilnosti matematika teorija
primenjiva na razne
sisteme (u tehnici, tehnologiji, ekonomiji itd.) koji imaju
zajedniki naziv
dinamiki sistemi.
2.1.3. Definicije stabilnosti
U savremenoj literaturi o teoriji stabilnosti, kao osnova, najee
se
upotrebljavaju Ljapunovljeve definicije stabilnosti. Ovde e biti
navedene samo
neke od njih.
-
59
Definicija 1.
Neporemeeno kretanje 0x je stabilno ako, za proizvoljno 0 i
proizvoljno
ot , postoji 0),(
0 t tako da, za svako poremeeno kretanje )(txx koje
ispunjava uslov )(0
tx , vai )(tx za 0
tt .
Ova definicija vai za sve norme x vektora poremeaja,
ekvivalentne u
razmatranom konanodimenzionom prostoru (videti npr. (2.1.13)).
Treba
napomenuti da se u literaturi ova definicija stabilnosti moe
sresti i u neto
izmenjenom obliku, ali smisao je isti.
Na sl.7 , na primeru sistema sa jednim stepenom slobode,
ilustrativana je
geometrijski definicija 1. stabilnosti neporemeenog kretanja
.0,0 21 xx
Definicija 2.
Neporemeeno kretanje 0x je asimptotski stabilno ako, za
proizvoljno 0
t ,
postoji 0)(0t tako da, za svako poremeeno kretanje )(txx za koje
je
)(0
tx , vai 0x
)(lim tt
.
Treba napomenuti da asimptotski stabilni sistemi predstavljaju
uu klasu
stabilnih sistema jer su uslovi definicije 2. obuhvaeni uslovima
definicije 1.
Na sl.8 ilustrovana je definicija 2. o asimptotskoj stabilnosti
neporemeenog
kretanja .0,0 21 xx
2x 2x
1x
sl. 7 sl. 8
Pored ovih definicija postoje i druge koje se odnose na neke ue
klase sistema
koje, u ovom kratkom izlaganju, nee biti razmatrane.
Neporemeeno kretanje je nestabilno ako nije stabilno.
-
60
Navedene definicije su neizmenjene i za sluaj kada se ispituje
stabilnost stanja
ravnotee. U tom sluaju, izraz neporemeeno kretanje, treba
zameniti izrazom
stanje ravnotee.
2.2. Metode ispitivanja stabilnosti kretanja
Prethodno navedene definicije upuuju na ispitivanje stabilnosti
analizom
reenja jednaina poremeenog kretanja, na emu je zasnovan i tzv.
prvi
metod. Meutim, poto takav metod uglavnom podrazumeva i
prethodno
reavanje diferencijalnih jednaina premeenog kretanja, to
najee
predstavlja nepremostive tekoe, njegova primena je ograniena na
dosta uske
klase sistema.
Drugi metod ili direktni Ljapunovljev metod zasniva se na
analizi jednaina
poremeenog kretanja, bez njihovog prethodnog reavanja,
razmatranjem
ponaanja posebno izabrabne funkcije na proizvoljnom poremeenom
kretanju.
U ovom tekstu bie izloeni samo osnovni stavovi ovog metoda.
2.2.1 Direktni Ljapunovljev metod
Centralno mesto u ovom metodu ima Ljapunovljeva funkcija );( xtV
definisana i
neprekidna na otvorenoj oblasti normiranog m dimenzionog
prostora
poremeaja mR , pri emu oblast obuhvata koordinatni poetak O .
Posebno se razmatra funkcija pozitivno definitna na oblasti ,
tj.:
(2.2.1)
Za ispitivanje stabilnosti neporemeenog stanja 0x koristi se
ponaanje
izabrane Ljapunovljeve funkcije u okolini neporemeenog stanja
(tanije: du
poremeajne trajektorije). Izvod Ljapunovljeve funkcije po
vremenu du
poremeajne trajektorije (odnosno, izvod u smislu jednaina
(2.1.26) ili (2.1.27))
daje osnovne karakteristike njenog ponaanja. Naime, u tom sluaju
je
t
VxtX
x
VV i
i
);( , (2.2.2)
odnosno
t
VVgradV
X, ,
gde je sa oznaen generalisani skalarni proizvod dva
vektora1)
.
Teorema 1.Neporemeeno kretanje 0x je stabilno, ako postoji
pozitivno
definitna funkcija ),( xtV takva da je njen izvod po vremenu, na
poremeenom
1)
Skalarni proizvod vektora a i b je abbaabbaTT,,
0x
0x
xx
,0);(
,0);(
tVtV
-
61
kretanju (u smislu jednaine )),,( xXx t nepozitivna funkcija
0),( xtV . (2.2.3)
Dokaz.
Ako postoji pozitivno definitna funkcija ),( xtV uvek moe da se
nae pozitivno
definitna funkcija )(xW , takva da je
.0),()( , ),,()(0 000xxx tVWtVW (2.2.4)
Ako se u otvorenoj oblasti uoi hiperpersfera
S , poluprenika sa centrom
u koordinatnom poetku, koja ograniava oblast
K :
, : , :
xx KS (2.2.5)
tada na njoj postoji taka x u kojoj funkcija )(xW dostie svoj
infimum W
0)()(inf
WWWS
xxx
. (2.2.6)
Nekom utvrenom trenutku 0
t odgovara pozitivno definitna funkcija ),(0
xtV ,
tako da uvek moe da se nae oblast
K
K : ,),( 0 tx (2.2.7)
u kojoj je
WtV ),(0
x . (2.2.8)
Prema tome, za proizvoljno poremeeno kretanje )(tx (reenje
jednaine
(2.1.27)) koje u trenutku 0
t zapoinje iz oblasti
K (2.2.7), vai
WtVt ),( ,)(000
xx . (2.2.9)
S obzirom na pretpostavku (2.2.3) pozitivno definitna fznkcija
),( xtV je
opadajua tako da je
000 ),(),( ttWtVtV xx . (2.2.10)
Ovim je pokazano da poremeeno kretanje koje polazi iz
oblasti
K ne izlazi iz
-
62
oblasti
K ime su ispunjeni uslovi dati u definiciji 1. o stabilnosti
neporemeenog kretanja. Time je teorema 1. dokazana.
Teorema 2.
Neporemeeno kretanje 0x je asimptotski stabilno ako postoji
pozitivno
definitna funkcija ),( xtV sa beskonano malom granicom kad 0x ,
takva da
je njen izvod po vremenu, u smislu jednaina poremeenog kretanja,
negativno
definitna funkcija.
Dokaz.
Uslovi ove teoreme sadrani su u uslovima teoreme 1. tako da je
neporemeeno
kretanje 0x stabilno. Da bi bilo i asimptotski stabilno, prema
definiciji 2. o
asimptotskoj stabilnosti, ostaje da se dokae da je, ako postoji
,0
zadovoljeno
0xx
)(lim ,)(t
0tt . (2.2.11)
S obzirom na pretpostavku o negativnoj definitnosti funkcije
))(,( ttV x
0x
0x ,0),(
,0),(
tVtV
, (2.2.12)
pozitivno definitna funkcija ))(,( ttV x je monotono opadajua.
Pored toga, poto
funkcija V ima beskonanu malu granicu kad 0x , moe da se pokae
(ovde
e dokaz biti izostavljen) da je, za proizvoljno )(0
tx ,
0))(,(lim
ttVt
x , (2.2.13)
odakle, zbog definitnosti funkcije, sledi
0x
)(lim tt
(2.2.14)
Ovim bi teorema o asimptotskoj stabilnosti neporemeenog kretanja
0x )(t
bila dokazana.
U dosadanjem izlaganju razmatrana je skalarna Ljapunovljeva
funkcija opteg
tipa. U nekim sluajevima ispitivanja stabilnosti ravnotee ili
neporemeenog
kretanja, kada su odgovarajue diferencijalne jednaine poremeenog
kretanja
autonomne (vreme t ne figurie eksplicitno), Ljapunovljeve
funkcije ne zavise
eksplicitno od vremena. Meutim, i u ovom sluaju navedene teoreme
ostaju
neizmenjene i nije ih potrebno posebno formulisati. Dovoljno je
samo umesto
funkcije ),( xtV razmatrati funkciju ).(xV
-
63
Treba istai da se u navedenim teoremama dokazuje samo dovoljnost
njihovih
uslova.Pored navedenih teorema postoje i druge koje se odnose na
ispitivanje
stabilnosti i nestabilnosti neporemeenog kretanja, koje u ovom,
inae skuenom
tekstu, nee biti razmatrane.
Direktni Ljapunovljev metod kojim se ispituje stabilnost
neporemeenog
kretanja, kao osnovni problem, ima odreivanje Ljapunovljeve
funkcije. Iako se
dobar deo istraivanja odnosi na pitanje egzistencije
Ljapunovljeve funkcije ne
postoji neki opti metod koji bi upuivao na njihovo nalaenje zbog
ega se
prilikom reavanje ovog problema panja posveuje posebnim
sluajevima.
2.3. Stabilnost ravnotee mehanikog sistema
2.3.1. Poloaj ravnotee. Stanje ravnotee.
U konfiguracionom prostoru poloaj mehanikog sistema je
odreen
generalisanim koordinatama q ( n,...,1 ), gde je n broj stepena
slobode
sistema. Poloaj ravnotee je takav poloaj u kome e sistem
mirovati (biti u
stanju ravnotee) sve vreme, ako se u njemu nalazio u nekom
trenutku 0
t i ako su
tada sve njegove brzine bile jednake nuli. Ako je sistem izloen
delovanju
generalisanih sila nn qqqqQ ,...,;,..., 11
),,1( n , uslovi ravnotee mehanikog sistema su:
00,...,0;,...,1 nqqQ
( n,...,1 ). (2.3.1)
Sve koordinate qq koje zadovoljavaju ovaj sistem jednaina
odreuju
mogue poloaje ravnotee mehanikog sistema u konfiguracionom
prostoru.
Prema tome, ako u konfiguracionom prostoru postoji poloaj
ravnotee sistema,
odreen koordinatama ,q stanje ravnotee sistema je odreeno
jednainama:
),,1( ,0,0
nttqqq . (2.3.2)
Jednaine (2.3.1) predstavljaju statike uslove ravnotee i na
osnovu njih ne mogu da se donesu nikakvi zakljuci o stabilnosti
poloaja ravnotee. Kao ilustracija, moe da poslui jednostavan primer
ravnotee kugle
teine G
. Na sl.9 prikazana su tri sluaja ravnotenog poloaja kugle
na vezi. Veze su: a) unutranja povr sfere, b) spoljanja povr
sfere, c) horizontalna ravan.
a) b) c)
G
N
N
N
-
64
sl. 9
Iako u sva tri sluaja statiki uslovi ravnotee imaju identian
oblik
0 NG
,
oni se sutinski razlikuju. U sluajevima a) i b) ravnoteni
poloaji su izolovani,
a u sluaju c) postoji mnogostrukost poloaja ravnotee (u svakoj
taki
horizontalne ravni kugla moe da ima ravnoteni poloaj). Ako se, u
sluaju a)
kugli saopti neki proizvoljno mali poremeaj ona e se kretati u
okolini
poloaja ravnotee, tako da se, saglasno Ljapunovljevoj definiciji
stabilnosti, taj
poloaj ravnotee moe smatrati stabilnim. U sluaju b) praktino je
nemogue
kuglu postaviti u ravnoteni poloaj, a ako bi to bilo i mogue pri
najmanjem
poremeaju kugla e se po sferi udaljavati od ravnotenog poloaja
tako da je taj
poloaj nestabilan. Za sluaj c), praktino je mogue realizovati
ravnoteni
poloaj kugle u svakoj taki na povri, ali takva ravnotea nije
stabilna. Na
primer, ako se u stanju ravnotee sreditu kugle saopti neka
proizvoljno mala
konana brzina ona e se, ne menjajui smer kretanja, stalno
udaljavati od
ravnotenog poloaja.
Ovom jednostavnom ilustracijom pokazuje se da se, o stabilnosti
poloaja
ravnotee, moe zakljuivati samo na osnovu ponaanja sistema u
njegovoj
okolini.
Ako se zbog jednostavnosti, ne ugroavajui optost, poetak
koordinatnog
sistema generalisanih koordinata postavi u ravnoteni poloaj ( 0q
)
jednaine (2.3.2) stanja ravnotee dobijaju oblik:
),,1( ,0,00
nttqq . (2.3.3)
Remeenjem stanja ravnotee sistem se dovodi u stanje kretanja,
odreenog
promenljivim veliinama-poremeajima: ).(),( tqtq jj Ponaanje
sistema u
poremeenom stanju zavisi od toga da li je poloaj ravnotee
stabilan ili ne, pa je
prirodno da se o stabilnosti poloaja ravnotee sistema sudi na
osnovu njegovog
poremeenog stanja. U tom smislu, Ljapunovljeve definicije
stabilnosti kretanja
(odeljak 2.1.3) mogu da se koriste i kao definicije stabilnosti
stanja ravnotee.
Poloaj ravnotee, u kome je stanje ravnotee sistema stabilno,
naziva se poloaj
stabilne ravnotee.
Uvoenjem Hamiltonovih promenljivih
pq , , stanje ravnotee (2.3.3)
skleronomnog sistema moe da se ekvivalentno izrazi u obliku:
),1,( ,0 ,00
nttpq
. (2.3.4)
Ako se poremeti stanje ravnotee, sistem se dovodi u stanje
kretanja opisano jednainama:
-
65
),,1,( ~
, nQq
Hp
p
Hq
(2.3.5)
gde su: ),( pqH Hamiltonova funkcija skleronomnog sistema, a
),(~
pqQ
generalisane nekonzervativne sile. Poto su, u ovom sluaju,
promenljive
pq , poremeaji, diferencijalne jednaine (2.3.5) predstavljaju
jednaine
poremeenog kretanja sistema u odnosu na stanje ravnotee
0)(,0)( tptq
.
U optem sluaju, u stanju ravnotee skleronomnog mehanikog sistema
ispunjeni su potrebni uslovi:
).,1,( 0~
0 nQq
Q
(2.3.6)
2.3.2. Stabilnost ravnotee konzervativnog mehanikog sistema.
Lagranova
(Leen Dirihleova) teorema.
Konzervativni mehaniki sistem je skleronoman i izloen iskljuivo
delovanju
konzervativnih sila (potencijalne sile ija potencijalna energija
ne zavisi
eksplicitno od vremena). U tom sluaju, potrebni uslovi ravnotee
(2.3.6), zbog
odsustva nekonzervativnih sila, dobijaju oblik:
),,,1( 0 nq
(2.3.7)
pa se ispitivanje stabilnosti ravnotee svodi na razmatranje
potencijalne enegije
mehanikog sistema. Ako su poznate koordinate poloaja ravnotee,
one
zadovoljavaju jednaine (2.3.7). U protivnom, ako poloaj ravnotee
nije poznat,
reavanjem algebarskih jednaina (2.3.7), dobijena realna reenja
odreuju
koordinate moguih poloaja ravnotee, iju stabilnost treba
ispitati.
Uslovi ravnotee (2.3.7) konzervativnog sistema istovremeno
predstavljaju
potrebne uslove ekstremuma potencijalne energije. Da bi poloaj
ravnotee bio
izolovan uslovi (2.3.7) treba da predstavljaju potrebne uslove
izolovanog
ekstremuma, usled ega potencijalna energija treba da zavisi od
svih nezavisnih
koordinata q , tj.
,),,( 1 Cqqf n (2.3.8)
gde je C proizvoljna aditivna konstanta. Ako je poznat poloaj
ravnotee
koordinatni sistem moe da se izabere tako da se njegov
koordinatni poetak
),1,( 0 nq postavi u poloaj ravnotee. Za proizvoljnu konstantu C
pogodno je izabrati takvu vrednost, da je potencijalna energija u
poloaju
ravnotee jednaka nuli, tj.
-
66
)0,,0(0)0,,0( fC . (2.3.9)
Prema tome, generalisane koordinate q predstavljaju odstupanja
sistema od
poloaja ravnotee, a potencijalna energija funkciju generalisanih
koordinata
),,( 1 nqq (2.3.10)
koja u poloaju ravnotee ima ekstremum jednak nuli.
Jedan od prvih poznatih kriterijuma stabilnosti poloaja ravnotee
predstavlja
Torielijev1)
princip, prema kome e poloaj ravnotee sistema tela u polju
tee
biti stabilan ako u njemu teite tog sistema zauzima najnii mogui
poloaj.
Lagran je ovaj princip uoptio za sluaj proizvoljnih
potencijalnih sila i u svom
delu Analitika mehanika (1788) formulisao teoremu koja
predstavlja kriterijum
stabilnosti poloaja ravnotee konzervativnog sistema. Meutim,
strogi dokaz
ove teoreme prvi je dao Leen Dirihle2)
, tako da se ova teorema u literaturi javlja
pod razliitim nazivima (najee: Lagranova teorema, Leen
Dirihleova
teorema, Lagran-Dirihleova teorema).
Lagranova (Leen Dirihleova) teorema.
Poloaj ravnotee konzervativnog sistema u kome potencijalna
energija ima
izolovani minimum, predstavlja poloaj stabilne ravnotee
sistema.
Dokaz.
Bez razmatranja naina na koji je Leen Dirihle dokazao ovu
teoremu, ovde e
biti iskoriena Ljapunovljeva teorema 1. (videti odeljak (2.2.1))
primenjena na
stabilnost ravnotenog stanja.
Hamiltonova funkcija skleronomnog sistema predstavlja ukupnu
mehaniku
energiju
).,,(2
1 1 nqqppaTH
(2.3.11)
Kada je sistem u stanju ravnotee )0,0(
pq , kinetika energija a, s
obzirom na (2.3.9), i potencijalna energija jednake su nuli,
usled ega je i
Hamiltonova funkcija u stanju ravnotee takoe jednaka nuli,
tj.
)0,,0;0,,0( H 0. (2.3.12)
Kada se poremeti stanje ravnotee i sistem dovede u stanje
kretanja, u okolini
poloaja ravnotee kinetika energija ima pozitivnu vrednost.
Potencijalna
energija takoe ima pozitivnu vrednost, jer u poloaju ravnotee
ima vrednost
jednaku nuli koja, prema pretpostavci u teoremi, predstavlja
izolovani minimum.
1)
Torricelli Evangelista, 1608-1647 2)
Dirichlet, Peter Gustav Lejeune, 1805-1859
-
67
Prema tome, ako se, u faznom prostoru na oblasti koja obuhvata
koordinatni
poetak (stanje ravnotee), Ljapunovljeva funkcija izabere u
obliku Hamiltonove
funkcije (2.3.11)
),,,(2
1 1 nqqppaV
(2.3.13)
ona predstavlja pozitivno definitnu funkciju,tj.:
0,0
0,0
,0
,0
pq
pq
VV . (2.3.14)
Jednaine poremeenog kretanja konzervativnog sistema su:
p
Hq
,
q
Hp
),,1( n (2.3.15)
i vai zakon konzervacije mehanike energije .0 hH Prema tome
izvod po
vremenu pozitivno definitne Ljapunovljeve funkcije (2.3.13) na
poremeenom
kretanju (u smislu jednaina (2.3.15)) je
0V , (2.3.16)
to predstavlja nepozitivnu funkciju, ime su ispunjeni uslovi
Ljapunovljeve
teoreme 1. o stabilnosti stanja ravnotee. Prema tome razmatrani
poloaj
ravnotee je stabilan. Lagranova (Leen Dirihleova) teorema je
dokazana.
Ova teorema daje samo dovoljan uslov stabilnosti ravnotee
konzervativnog
sistema jer ne daje mogunost da se sudi o tome, da li je
ravnotea stabilna ili
nestabilna ako potencijalna energija nema minimum u poloaju
ravnotee.
Meutim postoje teoreme (teoreme o nestabilnosti), koje ovde nisu
navedene, a
koje daju odgovor i na to pitanje i obezbeuju da se Leen
Dirihleova teorema
koristi kao kriterijum stabilnosti ravnotee konzervativnog
sistema. Za primenu
Leen Dirihleove teoreme je bitno da potencijalna energija
predstavlja analitiku
funkciju i da zavisi od svih generalisanih koordinata
sistema.
Prema tome, ispitivanje stabilnosti ravnotee sistema, svodi se
na ispitivanje
minimuma potencijalne energije.
Jednaine (2.3.7) predstavljaju potrebne uslove ekstremuma
potencijalne
energije. O karakteru tog ekstremuma moe da se sudi na osnovu
izvoda vieg
reda. Razvijanjem potencijalne energije u okolini poloaja
ravnotee 0q u
Tejlorov (Maklorenov) red dobija se
qq
qqq
qqq n
0
2
0
1
2
1)0,,0(),,( , (2.3.17)
-
68
gde je sa 0
oznaeno da je vrednost izraza u zagradi izraunata u poloaju
ravnotee. Pored toga, primenjena je konvencija o sabiranju po
istim indeksima.
Poto su, u poloaju ravnotee:
0 ,0)0,,0(0
q , (2.3.18)
potencijalna energija razvijena je u red (2.3.17) koji poinje sa
lanovima drugog reda. U dovoljno maloj okolini poloaja ravnotee, o
ponaanju potencijalne energije moe da se sudi na osnovu ponaanja
lanova drugog reda u (2.3.17), odnosno moe da se uzme da je
).,,1,( :su gde ,2
1
0
2
nqq
cqqc
(2.3.19)
Prema tome, ponaanje potencijalne energije u okolini poloaja
ravnotee,
odgovara ponaanju homogene kvadratne forme sa konstantnim
koeficijentima
c . Ako potencijalna energija ima minimum u poloaju ravnotee i
njena
aproksimacija (2.3.19) ima minimum u istom poloaju. Drugim
reima, ako je
poloaj ravnotee stabilan kvadratna forma (2.3.19) je pozitivno
definitna.
Prema poznatoj Silvesterovoj1)
teoremi, ova forma je pozitivno definitna, ako
njeni koeficijenti predstavljaju elemente matrice
cC , (2.3.20)
iji su glavni dijagonalni minori pozitivni, tj.:
.0 , ,0 ,0
21
22221
11211
2221
1211
2111
nnnn
n
n
n
ccc
ccc
ccc
cc
ccc
(2.3.21)
Ukoliko ovi uslovi nisu ispunjeni kvadratna forma nije pozitivno
definitna, pa ni
poloaj ravnotee nije stabilan. Meutim, u nekim sluajevima, moe
da se desi
da, pri razvoju potencijalne energije u red, ne postoje lanovi
drugog reda
).0(
c Tada minimum potencijalne energije moe da postoji samo ako
red
(2.3.17) poinje formom parnog reda, pa ispitivanje definitnosti
te forme
predstavlja ispitivanje stabilnosti poloaja ravnotee.
2.3.3. Uticaj giroskopskih i disipativnih sila na stabilnost
poloaja ravnotee
1)
Sylvester, James Joseph, 1814-1897.
-
69
Ako je stanje ravnotee konzervativnog mehanikog sistema 0,0 qq
ili,
u Hamiltonovim promenljivim, 0,0
pq , ono se nee promeniti ako je
sistem, pored datih konzervativnih sila, izloen i delovanju
giroskopskih sila:
),(
qQ ili )(
apQ , (2.3.22)
jer se one javljaju samo pri kretanju sistema. Postavlja se
pitanje kako one utiu
na stabilnost stanja ravnotee. Hamiltonove jednaine poremeenog
kretanja, u
tom sluaju, imaju oblik:
),1,( , nQq
Hp
p
Hq
. (2.3.23)
Ako se izabere Ljapunovljeva funkcija u obliku (2.3.13), njen
izvod po vremenu
du trajektorije poremeenog kretanja (u smislu jednaina (2.3.23))
predstavlja
izvod ukupne mehanike energije (Hamiltonove funkcije) tako da
je
,0 PV (2.3.24)
gde je P snaga giroskopskih sila. Prema tome, giroskopske sile
ne remete
stabilnost stanja ravnotee.
Ako, osim konzervativnih sila, na sistem deluju disipativne sile
WQ
, koje se
javljaju samo pri kretanju sistema, poloaj ravnotee se ne menja
a jednaine
poremeenog kretanja imaju oblik:
).,1,( , nQq
Hp
p
Hq W
(2.3.25)
Ako se Ljapunovljeva funkcija opet izabere u obliku (2.3.13),
njen izvod po vremenu u smislu jednaina (2.3.25) je
0 WPV , (2.3.26)
gde je WP snaga disipativnih sila. Prema tome, disipativne sile
ne naruavaju
stabilnost poloaja ravnotee. Moglo bi se rei da je pojaavaju. U
sluaju
kad je du poremeene putanje u okolini poloaja ravnotee 0WP ,
stabilni
poloaj ravnotee postaje i asimptotski stabilan.
2.4. Stabilnost kretanja mehanikog sistema
U odeljku 2.1. pokazano je kako se poremeeno kretanje mehanikog
sistema
opisuje diferencijalnim jednainama (2.1.26) ili (2.1.27) u
prostoru poremeaja,
pri emu trivijalno reenje 0x )(t predstavlja neporemeeno
kretanje. Prema
tome, ispitivanje stabilnosti neporemeenog kretanja svodi se na
ispitivanje
stabilnosti nultog reenja jednaina:
-
70
),,;( 1 mii xxtXx ),,1( mi ili ),( xXx t . (2.4.1)
U prethodnom izlaganju razmatrana je stabilnost stanja
ravnotee
konzervativnog mehanikog sistema ije jednaine poremeenog
kretanja
pripadaju optoj klasi jednaina (2.4.1). Metod, koji je pri tome
korien, moe
da se na istovetan nain primeni i na ispitivanje stabilnosti
nekih stacionarnih
kretanja. Meutim, ispitivanje stabilnosti nekih optijih kretanja
veoma je
sloeno, tako da e u ovom kratkom izlaganju panja biti posveena
nekim
jednostavnijim sluajevima.
2.4.1. Stabilnost linearnih sistema.
Pojam linearni sistem koristi se u literaturi za sisteme iji su
procesi opisani
linearnim jednainama. Tako i mehaniki sistemi ije kretanje
opisuju
diferencijalne jednaine linearne po koordinatama i brzinama
pripadaju klasi
linearnih sistema. Tako, ako je neporemeeno kretanje holonomnog
mehanikog
sistema u konfiguracionom prostoru opisano Lagranovim jednainama
druge
vrste:
Q
qq
T
q
T
dt
d ~
),,1( n , (2.4.2)
ili, u faznom prostoru, Hamiltonovim jednainama:
),1,( ~
, nQq
Hp
p
Hq
, (2.4.3)
da bi te jednaine bile linearne, kinetika energija T i
potencijalna energija moraju da budu kvadratne forme generalisanih
brzina i
generalisanih koordinata, a nekonzervativne sile
Q~
linearne forme tih
veliina. Pri tome, koeficijenti tih formi mogu da budu samo
funkcije vremena i tada su linearne diferencijalne jednaine
neautonomne. Ako se ograniimo na skleronomne sisteme sa
stacionarnim potencijalom i na
nekonzervativne generalisane sile koje ne zavise eksplicitno od
vremena, svi
koeficijenti ovih formi:
dqdqbQcqcqqcqqaT ~
,2
1 ,
2
10 , (2.4.4)
su konstantni, a odgovarajue diferencijalne jednaine su
autonomne. U tom
sluaju, kovarijantne jednaine neporemeenog kretanja (2.4.2)
su:
),,,1( ncqbqcqa
(2.4.5)
-
71
gde su: cdccdc , . Mnoenjem metrikim tenzorom a
ove diferencijalne jednaine neporemeenog kretanja dobijaju
kontravarijantni
oblik:
cqbqcq ) , ,(
cacbabcac . (2.4.6)
Za date poetne uslove iz ovih jednaina dobijaju se konane
jednaine
neporemeenog kretanja. Ako se uvede u razmatranje poremeeno
stanje qq , , diferencijalne jednaine poremeenog kretanja su:
cqbqcq . (2.4.7)
Jednostavnim oduzimanjem jednaina (2.4.6) od jednaina (2.4.7) i
uvoenjem poremeaja (videti odeljak 2.1.2):
qqqq , , (2.4.8)
dobijaju se jednaine:
),,1,( , nbc
, (2.4.9)
koje predstavljaju diferencijalne jednaine poremeenog kretanja u
prostoru
poremeaja. Trivijalno reenje ovih jednaina 0)(,0)( tt su
jednaine
neporemeenog kretanja u prostoru poremeaja. Moe da se primeti da
su ove
jednaine autonomne, linearne i, za razliku od jednaina (2.4.6) i
(2.4.7),
homogene. Usled toga, zahtev za autonomnou jednaina (2.4.6) moe
da bude
manje strog. Naime, jednaine (2.4.9) e biti autonomne i kad su u
izrazima
(2.4.4) koeficijenti dcc i , 0 neke proizvoljne funkcije
vremena. Oni ne
figuriu u jednainama (2.4.9). Prema tome, stabilnost
neporemeenog kretanja
u n dimenzionom konfiguracionopm prostoru, opisanog
linearnim
jednainama (2.4.6), razmatra se kao stabilnost trivijalnog
reenja linearnih
homogenih jednaina (2.4.9) sa konstantnim koeficijentima u n2
dimenzionom
prostoru poremeaja.
Ako se, kao i u prethodnim sluajevima, uvedu oznake:
),2,,1,)(,1,,(
),( , ),,(
),( , ),,( ,
,0 ,
,
,
nmjin
njnibjni
njiji
ck
ni
ix ij
i
(2.4.10)
jednaine (2.4.9) mogu da se piu kao:
),2,,1,( nmjixkx jiji (2.4.11)
-
72
odnosno, u vektorskom obliku
Kxx , (2.4.12)
gde su:
bc
0 , Kx . (2.4.13)
(Sa
oznaen je Kronekerov simbol)
Partikularna reenja linearnih diferencijalnih jednaina (2.4.11),
odnosno
(2.4.12), trae se u obliku:
ttii emieux ux ),,1( , (2.4.14)
gde su iu proizvoljne konstante, elementi m dimenzionog vektora
u . Od
vrednosti skalara zavisi oblik partikularnog reenja koje, u ovom
sluaju,
karakterie ponaanje sistema u poremeenom stanju. Kada se ovo
partikularno
reenje uvrsti u jednaine (2.4.11) odnosno (2.4.12) dobija
se:
0uIK )( 0)( jiji
j uk , (2.4.15)
gde je sa I oznaena jedinina matrica.
Jednaine (2.4.15) ine sistem od nm 2 linearnih homogenih
algebarskih
jednaina za odreivanje nepoznatih konstanti iu . Da bi postojalo
netrivijalno
reenje ))(( 0x0u t potrebno je da je
0 0det IK ijijk . (2.4.16)
Ovo je karakteristina jednaina diferencijalnih jednaina
poremeenog kretanja
(2.4.11) ili (2.4.12).Reenja karakteristine jednaine su
karakteristini
brojevi (karakteristini koreni). Leva strana jednaine (2.4.16)
je polinom
m tog stepena po
01
2
2
1
10
mm
mmm AAAAA . (2.4.17)
Iz ove jednaine dobija se m karakteristinih korena ),,1( mkk
koji, s obzirom na (2.4.16), predstavljaju sopstvene vrednosti
matrice K . Svakoj
vrednosti k odgovara po jedan sopstveni vektor )(ku , odnosno po
jedno
partikularno reenje oblika (2.4.14):
),,1( )()(
mket
kkk ux . (2.4.18)
-
73
Ovde treba napomenuti da su svi sopstveni vektori )(ku meusobno
nezavisni1)
.
Opte reenje diferencijalnih jednaina je linearna kombinacija
partikularnih
reenja, tj:
,)(
11
)(
t
k
m
k
k
m
k
kkkeCC
uxx
(2.4.19)
gde su k
C proizvoljne konstante koje mogu da se odreuju na osnovu
poetnih
uslova. Naime, ako se uzme da je: 000
)( ,0 xx tt , dobija se:
.1
0)(
m
k
kkC xu (2.4.20)
U teoriji linearnih jednaina dokazuje se da, ako meu
karakteristinim
korenima k ima jednakih, opte reenje (2.4.19) ima sloeniji
oblik. Naime,
tada se umesto konstantnih sopstvenih vektora )(ku javljaju
vektorski polinomi
po vremenu: tt ko
kk )()()( )( uuu , tako da opte reenje ima oblik
.)(1
)(
tm
k
kkketC
ux (2.4.21)
S obzirom da su, u optem sluaju, karakteristini koreni
kompleksni brojevi:
),,1( mkikkk
, (2.4.22)
moe da se pie
.)sin)(cos(1
)(
m
k
kkk
t
ktitteC k
ux (2.4.23)
Ovaj oblik reenja omoguava da se na osnovu vrednosti
karakteristinih korena
ispita stabilnost neporemeenog kretanja 0x )(t i donesu sledei
zakljuci:
1. Ako su realni delovi svih karakteristinih korena nepozitivni
0(Re k
) k neporemeeno kretanje je:
- stabilno, ako karakteristinim korenima sa nultim realnim
delom
odgovaraju konstantni sopstveni vektori;
- nestabilno, ako karakteristinim korenima sa nultim realnim
delom
odgovaraju promenljivi sopstveni vektori.
1)
Dokaz o nezavisnosti sopstvenih vektora moe se nai u bilo kojem
kursu matrinog
rauna.
-
74
2. Ako svi karakteristini koreni imaju negativne realne delove
0(Re k
) k neporemeeno kretanje je asimptotski stabilno.
3. Ako makar jedan karakteristini koren ima pozitivan realan
deo
) 0(Re kk
neporemeeno kretenje je nestabilno.
Neposredna primena ovih zakljuaka zahtevala bi odreivanje
karakteristinih korena reavanjem karakteristine jednaine to
predstavlja poseban problem kod polinomskih jednaina vieg stepena.
Meutim, iz prethodnog razmatranja se vidi da je, za ispitivanje
stabilnosti, neophodan samo znak realnog dela karakteristinog
korena, pa se za tu svrhu koriste razne metode koje ne zahtevaju
izraunavanje karakteristinih brojeva. Ovde e biti korien metod
zasnovan na kriterijumu koji su ustanovio Raut (Routh E.J.) 1875.
god., a zatim, nezavisno od njega i u vidno izmenjenom obliku,
Hurvic (Hurwitz A.) 1895.god. Metod se zasniva na ispitivanju tzv.
Hurvicove matrice, formirane od koeficijenata polinoma
karakteristine jednaine (2.4.17) na sledei nain
mA
AAA
AAA
AA
000
0
0
00
345
123
01
H , (2.4.24)
pri emu je 00A . Za ispitivanje znaka realnog dela
karakteristnih korena
koriste se glavni dijagonalni minori (Hurvicove
determinante):
. , ,
0
, ,
345
123
01
3
23
01
211H
m
AAA
AAA
AA
AA
AAA (2.4.25)
Hurvicova teorema.
Da bi koreni jednaine (2.4.17) imali negativne realne delove
potrebno je i
dovoljno da su ispunjeni uslovi:
0 , ,0 ,021
m
. (2.4.26)
-
75
Ova teorema1)
ovde nee biti dokazivana. Poto uslovi (2.4.26) predstavljaju
kriterijum za ocenu negativnosti realnih delova karakteristinih
korena, s
obzirom na prethodno donesene zakljuke, Hurvicova teorema
predstavlja
kriterijum asimptotske stabilnosti neporemeenog kretanja
linearnog
sistema.
Ako je bar jedna od Hurvicovih determinanti negativna,
neporemeeno
kretanje je nestabilno.
U sluaju da su jedna ili vie Hurvicovih determinanti jednake
nuli
neporemeeno kretanje moe biti stabilno ali ne i asimptotski.
Stabilnost ili
nestabilnost, u ovom sluaju, dodatno se ispituje.
Kada je razmatrani sistem determinisan, odnosno kada su
koeficijenti
karakteristinog polinoma brojne vrednosti, Hurvicove
determinante se
jednostavno izraunavaju. Meutim, kada koeficijenti
karakteristinog polinoma
sadre neodreene parametre, nejednakosti (2.4.26) mogu da budu
veoma
glomazne, naroito kod sistema sa veim brojem stepena slobode n
kada karakteristini polinom ima stepen nm 2 . U tom sluaju, uslovi
(2.4.26) mogu
da se zamene donekle jednostavnijim uslovima. Naime, kao jedna
od posledica
uslova (2.4.26), dobija se da, za ,00A i svi ostali koeficijenti
karakteristinog
polinoma imaju pozitivnu vrednost:
),1,2,( 0 mkAk
. (2.4.27)
Iako ovih uslova ima m , oni su potrebni ali ne i dovoljni.
Njima treba dodati i
uslove:
,0 ,031
mm (2.4.28)
Uslovi (2.4.27) i (2.4.28) u potpunosti zamenjuju Hurvicove
uslove (2.4.26).
Jednostavniji su u tom smislu to je za njihovo korienje potrebno
izraunati
tek svaku drugu Hurvicovu determinantu. Poznati su pod nazivom
Lienar-
iparovi (Lienard, Chipart) uslovi.
Osvrnimo se ukratko na egzistenciju Ljapunovljeve funkcije za
linearne sisteme.
Neka je dat linearni sistem sa konstantnim koeficijentima:
Kxx jij
i xkx (2.4.29)
i neka je postavljen zadatak da se odredi kvadratna forma
CxxT VxxcV ji
ij (2.4.30)
1)
U literaturi se esto sree pod nazivom Raut-Hurvicov kriterijum,
Raut-Hurvicovi
uslovi i sl......
-
76
iji je izvod po vremenu u smislu jednaina (2.4.29) jednak nekoj
zadatoj
kvadratnoj formi
, TBxx WxxbW jiij (2.4.31)
gde je data matrica B konstantna i simetrina. Treba odrediti
konstantnu i
simetrinu matricu C tako da je
. 0)( )( TTTTT xBCKCKxBxxxCKCKxWV (2.4.32)
Odavde je, za svako x ,
BCKCK T . (2.4.32)
Pokazuje se da matrica C predstavlja jedinstveno reenje ove
matrine
jednaine ako i samo ako su karakteristini brojevi matrice K
takvi da je
0 ji , (2.4.33)
za sve vrednosti ji i
1). Prema tome, ako svi karakteristini brojevi matrice K
imaju negativne realne delove, uslovi (2.4.33) su ispunjeni,
tako da postoji samo
jedna kvadratna forma (2.4.30) iji je izvod u smislu jednaina
(2.4.29) jednak
zadatoj formi (2.4.31). Ako se forma (2.4.31) zada kao negativno
definitna,
traena forma (2.4.30) je pozitivno definitna ime su ispunjeni
uslovi
Ljapunovljeve teoreme o asimptotskoj stabilnosti.
2.4.2. O ispitivanju stabilnosti nelinearnih sistema pomou
linearne
aproksimacije. U prethodnom razmatranju ustanovljen je algoritam
za ispitivanje stabilnosti
linearnih sistema, zasnovan uglavnom na Raut-Hurvicovim
uslovima. Ukazano
je i na uslove egzistencije Ljapunovljeve funkcije za linearne
sisteme. Ispitivanje
stabilnosti neporemeenog kretanja nelinearnih sistema je veoma
sloeno i bez
opteg kriterijuma egzistencije Ljapunovljeve funkcije. Ovde e
biti razmatrano
pitanje da li, u bilo kojoj meri, metod ispitivanja stabilnosti
linearnih sistema
moe da poslui za formiranje metoda ispitivanja stabilnosti
nelinearnih sistema.
Neka su jednainame poremeenog kretanja:
),( ),,1( ),,;( 1 xXx tmixxtXx mii , (2.4.34)
1)
Dokaz ovog stava moe se nai u knjizi Bellman R., Inttroduction
tu Matrix Analysis,
1960.
-
77
gde su ),,;( 1 mi xxtX nelinearne funkcije poremeaja ix i neka
su
0)0,,0;( tX i , odnosno 00X ),(t , tako da je neporemeeno
kretanje
0x )(t trivijalno reenje. Neka su desne strane jednaina (2.4.34)
analitine
funkcije tako da mogu da se razviju u Maklorenov red i predstave
u obliku:
),()(),( ),,1( );()();( xfxKxX tttmixtfxtkxtX ijiji ,
(2.4.35)
gde su );( xtf i odnosno ),( xf t nelinearni lanovi. U daljem
razmatranju
ograniiemo se na sisteme kod kojih je matrica K konstantna. U
tom sluaju jednaine (2.4.34) mogu da se predstave u sledeem
obliku:
),( ),,1( );( xfKxx tmixtfxkx ijiji . (2.4.36)
Jednaine:
Kxx ),,1( mixkx jiji , (2.4.37)
predstavljaju linearnu aproksimaciju jednaina (2.4.34) za one
sisteme u kojima su, pri razvoju u red, koeficijenti uz linearne
lanove konstantni. Dokaimo sledeu teoremu.
Teorema 1.
Ako je linearni sistem (2.4.37) asimptotski stabilan i ako
je
,0),(
lim x
xf
0x
t (2.4.38)
neporemeeno kretanje 0x )(t nelinearnog sistema (2.4.36) je
asimptotski
stabilno.
Dokaz
Neka su u izrazu (2.4.38) sa ),( i xfx t oznaene Euklidske
norme,tj:
21
2
1
T
1
2)( xxx
m
i
ix
Poto je, prema uslovima teoreme, linearni sistem (2.4.37)
asimptotski stabilan,
svi karakteristini brojevi matrice K imaju realne negativne
korene. Na kraju
prethodnog odeljka pokazano je da moe da se odredi pozitivno
definitna
kvadratna forma CxxTV iji je izvod po vremenu, u smislu jednaina
(2.4.37),
jednak datoj negativno definitnoj kvadratnoj formi W. Neka
je
-
78
2Txxx W , (2.4.39)
tada je
2x
LV , (2.4.40)
gde je sa L
V oznaeno da je izvod po vremenu raunat u smislu linearnih
jednaina (2.4.37). S obzirom na (2.4.32), matrica C je reenje
matrine
jednaine
ICKCK T , (2.4.41)
gde je I jedinina matrica. Ako se potrai izvod po vremenu, tako
odreene,
pozitivno definitne funkcije V u smislu jednaina (2.4.36) dobie
se
),(2),()grad( T2T
xCfxxxf ttVVVL
. (2.4.42)
Odavde se vidi da je
(2.4.43)
a s obzirom na uslov (2.4.38), za 0 postoji 0h , tako da, hx za
, vai
nejednakost
,),( xxf t ,
usled ega iz (2.4.42) sledi da je
0222 xCx V . (2.4.44)
Prema tome, s obzirom na (2.4.43) i (2.4.44) izvod pozitivno
definitne funkcije
V u smislu jednaina (2.4.36) je negativno definitna funkcija,
ime su
zadovoljeni uslovi Ljapunovljeve teoreme o asimptotskoj
stabilnosti
razmatranog nelinearnog sistema. Teorema je dokazana.
Navedimo, bez dokaza, sledeu teoremu.
Teorema 2.
Akou sistemu (2.4.37) postoji bar jedan karakteristini broj
matrice K sa pozitivnim realnim delom i ako je
,0),(
lim x
xf
0x
t (2.4.45)
,0)0,( tV
-
79
neporemeeno kretanje 0x )(t nelinearnog sistema (2.4.36) je
nestabilno.
Napomenimo da, ako )(xf ne zavisi eksplicitno od vremena, uslov
(2.4.45) u
teoremama 1. i 2. je trivijalno zadovoljen u nekoj dovoljno
maloj okolini
koordinatnog poetka.
Svi sluajevi ija se stabilnost razmatra metodom linearne
aproksimacije mogu
da se podele na dve grupe: kritine i nekritine. Sluajevi ija
stabilnost ili
nestabilnost moe da se ustanovi primenom teorema 1. ili 2.
spadaju u
nekritine. Sluajevi kod kojih nisu ispunjeni uslovi teorema 1. i
2. spadaju u
kritine i za ispitivanje stabilnosti moraju da se uzmu u obzir i
nelinearni
lanovi.