Embed Size (px)
Citation preview

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 1/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 1 de 15
Unidad Temática IVDinámica de los sistemas.
Introducción.
En esta Unidad extenderemos a los sistemas de puntos materiales algunosconceptos que desarrollamos en la Dinámica del Punto, particularmente las leyes deconservación, y algunos conceptos nuevos como ser centro de gravedad y centro demasa, momento angular, y colisiones entre partículas.
Momento de una fuerza respecto de un punto
Se define al momento→
τ de una fuerza→
F con respecto a
un punto O, como el producto vectorial del vector posición→
r delpunto de aplicación de la fuerza con respecto al punto O, por la
fuerza→
F
→→→×= F r τ (1)
⇒ el valor o módulo es )sen(θ τ F r = .
El momento de una fuerza es una magnitud vectorial. Es un vector axial cuyosentido se determina por la regla del tirabuzón, y su signo por la convenciónestablecida para el giro de las agujas del reloj: positivo si el efecto de giro es en el
sentido antihorario, y negativo en caso contrario.
Si consideramos un eje perpendicular a la hoja que pasa porO, el valor del módulo del momento con respecto al eje es igual al
producto del módulo de la fuerza por la longitud del segmento deperpendicular que une la recta de acción de la fuerza con el eje
d F senr F == )(θ τ (2)
Centro de Gravedad y Centro de Masa

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 2/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 2 de 15
Definiremos primero el centro de masa de un sistema formado por N partículas
de masas N i m i ,...,2,1, =
Definición: La posición del centro de masa de un sistema formado por Npartículas se define como
∑
∑
=
=
→
→=
N
i i
N
i i i
mc
m
r m
r
1
1 (3)
donde →i r es la posición de la i-ésima partícula, de masa i m , y la suma se extiende
a todas las partículas que componen el sistema. Si las componentes del vector→
cmr
son ( )cmcmcm z ,y , x y las del vector→
i r son ( )i i i z ,y , x , podemos escribir:
Componentes del Vector→
cmr
Si el sistema es un continuo de masa total M, y no está formado por partículas
∫→→
= dmr M
r cm1
(4)
∫∫∫ ==
= dmz M z ,dmy M y ,dm x M x cmcmcm
111
La densidad es dV dmdV / dm ρ=⇒=ρ y las coordenadas del centro
de masa se calculan con
∫∫∫ ρ=ρ=
ρ= dV z M
z ,dV y M
y ,dV x M
x cmcmcm111
===
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=N
i
i
N
i
i i
cmN
i
i
N
i
i i
cmN
i
i
N
i
i i
cm
m
z m
z
m
y m
y
m
x m
x
1
1
1
1
1
1 ,,

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 3/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 3 de 15
Ejemplo: Encontrar el centro de masa de una varilla de longitud L, de seccióntransversal A y masa M, de densidad uniforme.
L A
M
V
M ==ρ
dx AdV =
22
1111
0
2
000
L x L
dx x L
dx AL A
M x M
dV x M
x
LLLL
cm ====ρ= ∫∫∫
Centro de gravedad
El centro de gravedad de un sistema de partículas es el punto en que puedeconsiderarse que actúa el peso total del mismo, y sus coordenadas están dadas por
(5) Componentes
del vector→
cg r
Si g puedeconsiderarse constante, puede sacarse factor común y cancelarse, coincidiendo elcentro de gravedad con el centro de masa. (Se verifica para cuerpos en la superficiede la tierra). En cuerpos planos se puede determinar experimentalmente
suspendiendo el cuerpo en dos posiciones. El punto de intersección de las dosverticales determina la posición del centro de gravedad.
Movimiento del centro de masa
Si arrojamos una barra cilíndrica en tiro oblicuo, los puntos materiales que laconstituyen seguirán trayectorias complejas debido a la rotación de la barra, sinembargo, si de alguna manera siguiéramos la trayectoria del centro de masas
===
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=N
i
i
N
i
i i
i N
i
i
N
i
i i
i N
i
i
N
i
i i
cg
g m
g mz
z ,
g m
g my
y ,
g m
g m x
x
1
1
1
1
1
1
7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 4/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 4 de 15
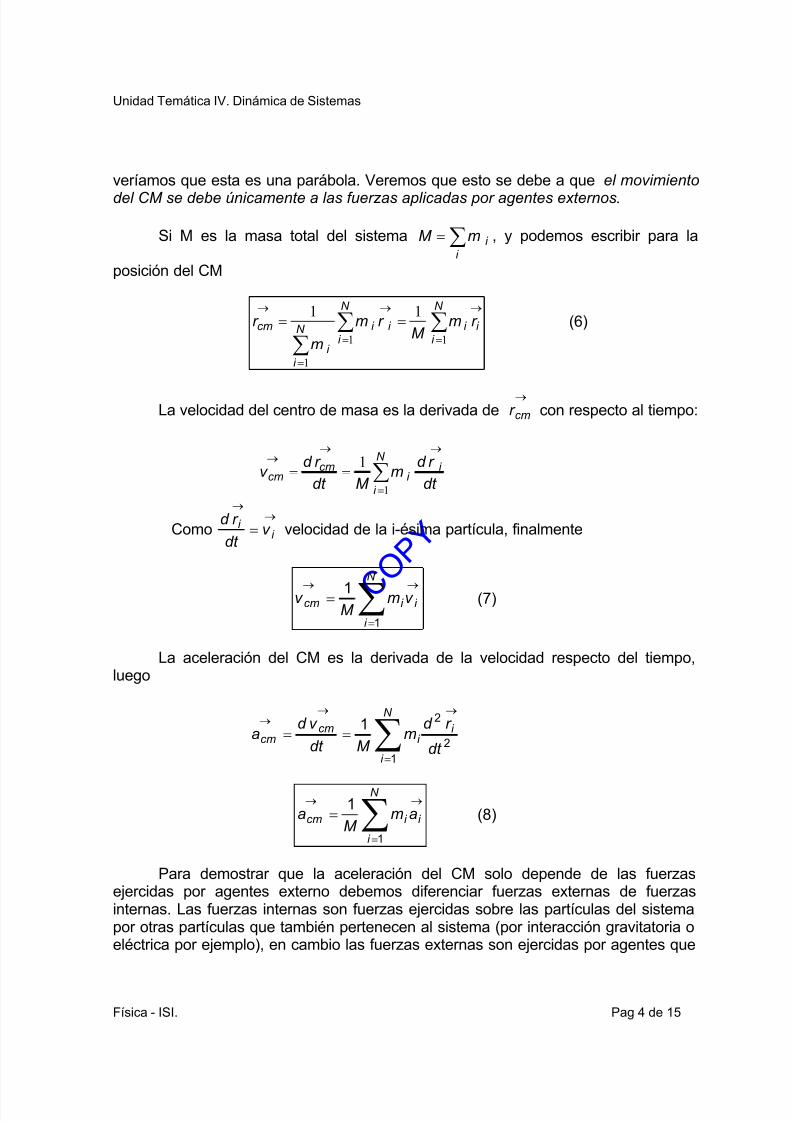
veríamos que esta es una parábola. Veremos que esto se debe a que el movimiento
del CM se debe únicamente a las fuerzas aplicadas por agentes externos.
Si M es la masa total del sistema ∑=i
i mM , y podemos escribir para la
posición del CM
∑∑∑ =
→
=
→
=
→==
N
i i i
N
i i i N
i i
cm r mM
r m
m
r 11
1
11 (6)
La velocidad del centro de masa es la derivada de→cmr con respecto al tiempo:
∑=
→→→
==N
i
i i
cmcm dt
r d m
M dt
r d v
1
1
Como→
→
= i i v
dt
r d velocidad de la i-ésima partícula, finalmente
∑=→→ =
N
i
i i cm v mM
v
1
1 (7)
La aceleración del CM es la derivada de la velocidad respecto del tiempo,luego
∑=
→→→
==
N
i
i i
cmcm
dt
r d m
M dt
v d a
1
2
21
∑=
→→=
N
i
i i cm amM
a
1
1 (8)
Para demostrar que la aceleración del CM solo depende de las fuerzasejercidas por agentes externo debemos diferenciar fuerzas externas de fuerzasinternas. Las fuerzas internas son fuerzas ejercidas sobre las partículas del sistemapor otras partículas que también pertenecen al sistema (por interacción gravitatoria oeléctrica por ejemplo), en cambio las fuerzas externas son ejercidas por agentes que

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 5/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 5 de 15
no pertenecen al sistema (interacción gravitatoria con una masa externa, por
ejemplo).7 cada una de ellas. Lo mismo entre todas y para todas las partículas del sistema.Para simplificar, consideraremos un sistema formado por tres partículas, y luegogeneralizaremos.
La aceleración del CM esta dada por laecuación
332211
3
1
amamamamaM i
i i cm ++==∑=
→
La aceleración de cada partícula se obtieneaplicando la segunda ley de Newton
i i I
i amF =∑→
++==
++==
++==
→→→→→
→→→→→
→→→→→
∑∑
∑
ext
ext
ext
F F F F am
F F F F am
F F F F am
33231333
22321222
11312111
Sumando miembro a miembro tenemos
+++
++
++
+=
→→→→→→→→→→
ext ext ext cm F F F F F F F F F aM 321323123211312
La tercera ley de Newton (Acción y Reacción) nos dice que: i j j i F F →→
−=
Explícitamente, referido a los pares que actúan en el sistema podemosescribir:

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 6/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 6 de 15
−=
−=
−=
→→
→→
→→
2332
3113
2112
F F
F F
F F
Además podemos escribir
total ext ext ext ext ext F F F F F →→→→→
==++ ∑321
Finalmente:
∑→→
= ext cm F aM (9)
La aceleración del centro de masa está determinada solo por las fuerzasexternas, y esto es válido, cualquiera sea el número de partículas.
Cantidad de movimiento de un sistema de partículas.
Definimos la cantidad de movimiento→ p de una partícula como
→→= v m p , y
escribimos la segunda ley de Newtondt
pd F
→→
=
Si el sistema tiene N partículas, la cantidad de movimiento o momento total es
∑∑=
→
=
→→==
N
i
i i
N
i
i v m pP
11
(10)
La cantidad de movimiento de un sistema sometido a fuerzas puede cambiar.La rapidez del cambio esta dada por:
dt
v md
dt
pd
dt
P d i i i
i i
=
=∑∑
→→→

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 7/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 7 de 15
Vimos que ∑=→→
=
N
i i i cm v mv M
1, o sea cmv M P
→→
= , por tanto
cmcm aM
dt
v d M
dt
P d →→→
==
Pero ∑→→
= ext cm F aM , por tanto ∑→
→
= ext F dt
P d (11)
La cantidad de movimiento total→P solo depende de las fuerzas externas.
La cantidad de movimiento individual de cada partícula puede cambiar tantopor la acción de las fuerzas internas como externas, pero el cambio de la cantidad de
movimiento total→P debido a las fuerzas internas es siempre cero, y solo se debe a
las fuerzas externas. Ahora, si la
⇒=⇒=
→→
∑00
dt
P d F ext CteP =
→ (12)
La cantidad de movimiento total se mantiene constante. Podemos resumir estodiciendo:
Cuando la fuerza externa resultante que actúa sobre el sistema es nula, la cantidadde movimiento total del sistema se conserva
Si para i t t = es i P P →→
= y para i f t t t >= es f P P →→
= y 0=∑→
ext F ,
entonces f i P P
→→
= .
Relación entre momento angular y momento de una fuerza
Definimos al momento angular→l de una partícula de cantidad de movimiento
→ p y posición
→r como el producto vectorial
→→→×= pr l . Derivando con respecto al
tiempo

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 8/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 8 de 15
dt pd r p
dt r d
dt ) pr ( d
dt l d
→→→
→→→→
×+×=×=
pero 0=×=×→→→
→
pv pdt
r d pues
→v y
→ p son colineales. Nos queda
∑→→
→→
→
×=×= F r dt
pd r
dt
l d , donde hemos utilizado la segunda ley
dt
pd F
→→=∑ .
∑
→→× F r es el momento total
∑
→τ que actúa sobre la partícula, luego
∑→
→
τ=dt
l d (13)
Momento angular de un sistema de partículas
El momento angular total de un sistema de partículas es la suma vectorial de
los momentos angulares individuales
∑=
→→→→→=+++=
N
i
i N l l ...l l L
1
21 (14) N partículas
entonces ∑∑∑ →→
→→
τ==
=
i
i
i
i
i
i dt
l d l
dt
d
dt
Ld
:
i
i ∑→τ suma de los momentos de fuerzas totales de todas las partículas que
constituyen el sistema. Cada→τ i tiene una componente debida a las fuerzas externas
y otra debida a la interacción entre partículas.

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 9/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 9 de 15
∑∑∑ →→→
τ+τ=τi
int i
ext i
i
La 0=τ∑ →
i
int y nos queda:
∑ →
→
τ=
i
ext dt
Ld (15)
Únicamente los momentos de las fuerzas externas pueden cambiar elmomento angular total del sistema.
Conservación del momento angular
Si ⇒=⇒=τ
→→
∑ 00dt
Ld
i
ext Ctel L
i
i ==∑→→
(16)
Si para i t t = es i LL→→
= y para i f t t t >= es f LL→→
= y 0=τ∑→
ext ,
entonces
f i LL→→
= Principio de conservación del momento angular
7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 10/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 10 de 15
Colisiones
La conservación de la cantidad de movimiento es un concepto particularmenteútil cuando se consideran colisiones. Una colisión es una interacción entre dos o másobjetos que tiene lugar en un intervalo corto de tiempo y en una región delimitada delespacio. Uno o varios objetos penetran en una región del espacio e interaccionanrápidamente dentro de ella, posteriormente uno o más objetos abandonan estaregión. Puede que las fuerzas de interacción entre los objetos sean grandes, pero novamos a examinarlas en detalle. Sólo vamos a considerar los objetos antes ydespués de la colisión y supondremos que durante el tiempo de la colisión, elimpulso debido a las fuerzas externas al sistema es despreciable y por tanto no
contribuye a la cantidad de movimiento del sistema. Como el efecto de las fuerzasexternas es despreciable, la cantidad de movimiento del sistema se conserva, y portanto la cantidad de movimiento del sistema es igual antes y después de la colisión.
Uno de nuestros objetivos al considerar las colisiones es ser capaces derelacionar las velocidades de los objetos antes y después de la colisión. Por ejemplo,en las colisiones atómicas se usan las velocidades de las partículas resultantes de lacolisión para estudiar la interacción entre las partículas incidentes. Imaginemos unacolisión en la que entran y salen dos partículas. Si conocemos las velocidades de laspartículas antes de la colisión y deseamos conocer las velocidades de las partículasdespués de la misma, la conservación de la cantidad de movimiento nos proporciona
una ecuación vectorial que relaciona las velocidades antes y después de la colisión.La conservación de la cantidad de movimiento, escrita para cada una de lascomponentes, proporciona tres ecuaciones, pero tenemos seis incógnitas (deseamosconocer las tres componentes de las velocidades de las dos partículas después de lacolisión). En estas condiciones el problema no tiene solución, ya que tenemos másincógnitas que ecuaciones. Este problema matemático subsistiría aunque la colisiónfuese en una dimensión, ya que la conservación de la cantidad de movimiento nos dauna ecuación y necesitamos conocer las velocidades de las dos partículas despuésde la colisión.
Por tanto, para resolver el problema se necesita más información. La energía
siempre se conserva, pero como la energía puede adoptar muchas formas, engeneral su consideración no es de gran ayuda. En algunas colisiones se conserva aenergía cinética, y estas colisiones se llaman elásticas. Por el contrario, lascolisiones en las que no se conserva la energía cinética se llaman inelásticas. A nivelatómico es frecuente que las colisiones sean elásticas, pero a nivel macroscópico lascolisiones siempre poseen cierto grado de inelasticidad, sin embargo, muchas deestas colisiones transforman tan poca energía cinética en otras formas le energíaque, dentro de la precisión con que se realizan las medidas, son consideradaselásticas. Este es el caso, por ejemplo, de la colisión entre dos bolas de acero quechocan a velocidades pequeñas.

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 11/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 11 de 15
Colisiones elásticas en una dimensión.
Consideraremos la colisión elástica en una dimensión que se muestra en laFigura 1, en la cual un objeto de masa m1 y velocidad inicial v 1i en la dirección xcolisiona con otro objeto de masa m2 y velocidad inicial v 2i sobre el eje x (parasimplificar la notación, hemos eliminado el subíndice x de las componentes de lavelocidad).
Después de la colisión, las componentes xde las velocidades son v 1f y v 21. La conservación de
la cantidad de movimiento nos da
f f iii vmvmvmvm 21112211 +=+ (1)
y la conservación de la energía cinética nosda
2
21
2
11
2
22
2
112
1
2
1
2
1
2
1 f f iii vmvmvmvm +=+ (2)
Las velocidades finales pueden obtenerse si se conocen las masas y lasvelocidades iniciales.
Antes de pasar a considerar algunos casos especiales, vamos a obtener unarelación útil. Primero escribimos las ecuaciones (1) y (2) de la forma siguiente
)()( 222111 i f f i vvmvvm −=− (3)
y la conservación de la energía cinética nos da
)()( 2
2
2
22
2
1
2
11 i f f i vvmvvm −=− (4)
dividiendo la ecuación (4) por la (3) obtenemos
)()( 2211 i f f i vvvv +=+
)( 2121 f f ii vvvv −−=− (5)
Esta relación muestra que después de la colisión se invierte la velocidadrelativa entre los objetos pero se conserva su módulo.
7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 12/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 12 de 15
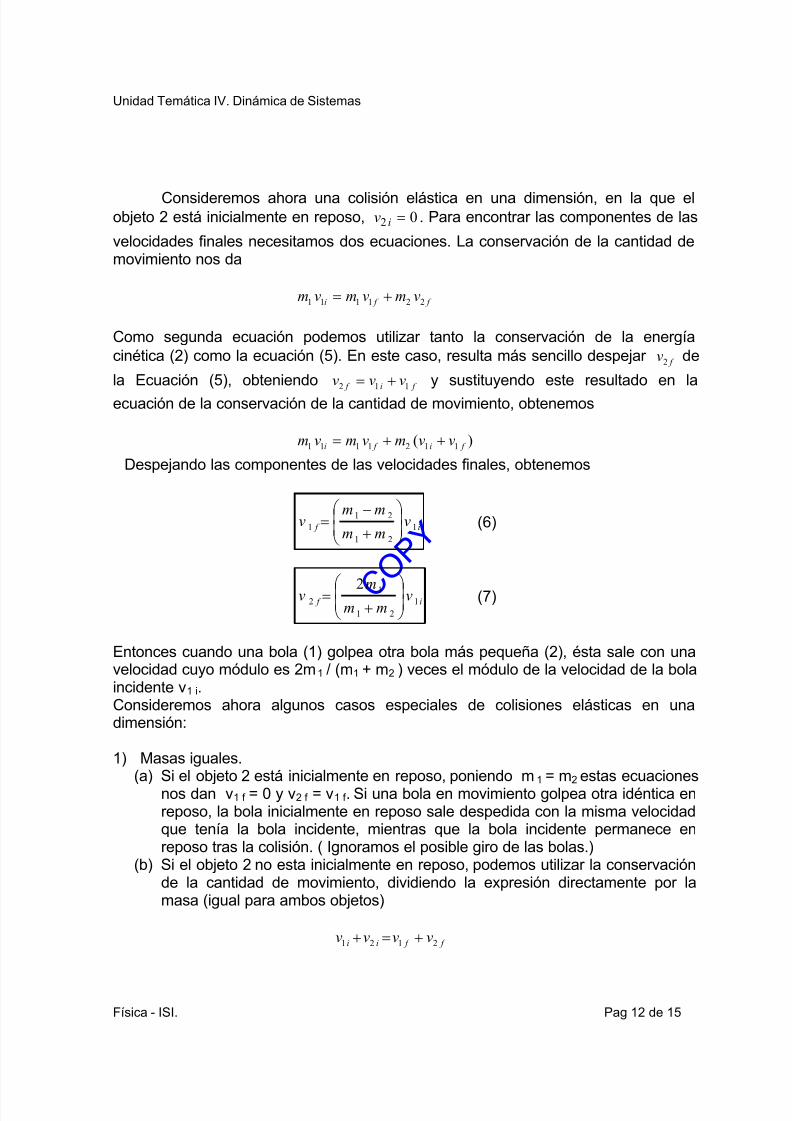
Consideremos ahora una colisión elástica en una dimensión, en la que elobjeto 2 está inicialmente en reposo, 02 =iv . Para encontrar las componentes de las
velocidades finales necesitamos dos ecuaciones. La conservación de la cantidad demovimiento nos da
f f i vmvmvm 221111 +=
Como segunda ecuación podemos utilizar tanto la conservación de la energía
cinética (2) como la ecuación (5). En este caso, resulta más sencillo despejar f v2
de
la Ecuación (5), obteniendo f i f vvv 112 += y sustituyendo este resultado en la
ecuación de la conservación de la cantidad de movimiento, obtenemos
)( 1121111 f i f i vvmvmvm ++=
Despejando las componentes de las velocidades finales, obtenemos
i f vmm
mmv 1
21
21
1
+
−= (6)
i f vmm
mv 1
21
12
2
+= (7)
Entonces cuando una bola (1) golpea otra bola más pequeña (2), ésta sale con unavelocidad cuyo módulo es 2m1 / (m1 + m2 ) veces el módulo de la velocidad de la bolaincidente v1 i.Consideremos ahora algunos casos especiales de colisiones elásticas en unadimensión:
1) Masas iguales.(a) Si el objeto 2 está inicialmente en reposo, poniendo m1 = m2 estas ecuaciones
nos dan v1 f = 0 y v2 f = v1 f . Si una bola en movimiento golpea otra idéntica enreposo, la bola inicialmente en reposo sale despedida con la misma velocidadque tenía la bola incidente, mientras que la bola incidente permanece enreposo tras la colisión. ( Ignoramos el posible giro de las bolas.)
(b) Si el objeto 2 no esta inicialmente en reposo, podemos utilizar la conservaciónde la cantidad de movimiento, dividiendo la expresión directamente por lamasa (igual para ambos objetos)
f f ii vvvv 2121 +=+

7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 13/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 13 de 15
Sumando y restando esto de la Ecuación (5) obtenemos
f i vv 21 = y f i vv 12 =
En otras palabras, si las masa de los objetos son iguales, en una colisiónunidimensional, intercambian sus velocidades.
2) El objeto 2 está inicialmente en reposo y además m1 >> m2 . Introduciendo estascondiciones en las ecuaciones (6) y (7) obtenemos
ii f vvm
mv 11
1
1
1 =
≅
ii f vvm
mv 11
1
1
2 22
=
≅
La velocidad del objeto incidente de gran masa prácticamente no cambia, mientrasque la del objeto de masa pequeña sale despedido luego de la colisión con unavelocidad que es el doble de la incidente.
3) El objeto 2 está inicialmente en reposo y además m1 << m2 . Introduciendo estascondiciones en las ecuaciones (6) y (7) obtenemos
ii f vvm
mv 11
2
2
1 −=
−≅
02
1
2
1
2 ≅
≅ i f v
m
mv
Un objeto de gran masa relativa no es prácticamente perturbado, mientras queel objeto de masa pequeña rebota con una velocidad cuyo módulo es esencialmenteigual al de la que tenia antes de la colisión.
Si ambos objetos poseen velocidades no nulas, hay que resolver simultáneamentelas ecuaciones (1) y (2) para las dos velocidades finales desconocidas. Se obtiene eneste caso
ii f vmm
mv
mm
mmv 2
21
21
21
211
2
++
+−
= (8)
ii f vmm
mv
mm
mmv 1
21
12
21
122
2
++
+−
= (9)
7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 14/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 14 de 15
Colisiones inelásticas
Si la colisión no es elástica, en general resulta difícil calcular las velocidades finalesen función de las iniciales. La energía no se conserva. La cantidad de energíaperdida en el choque depende del grado de inelasticidad. Un caso especial que sepuede resolver es cuando el choque es completamente inelástico , que se producecuando los objetos que chocan permanecen unidos luego de la colisión. Para el caso
unidimensional solo existe una única velocidad final f v , que se puede calcular
empleando la conservación de la cantidad de movimiento:
f iii
vmmvmvm )(112211
+=+
)( 11
2211
mm
vmvmv
iii
f +
+=
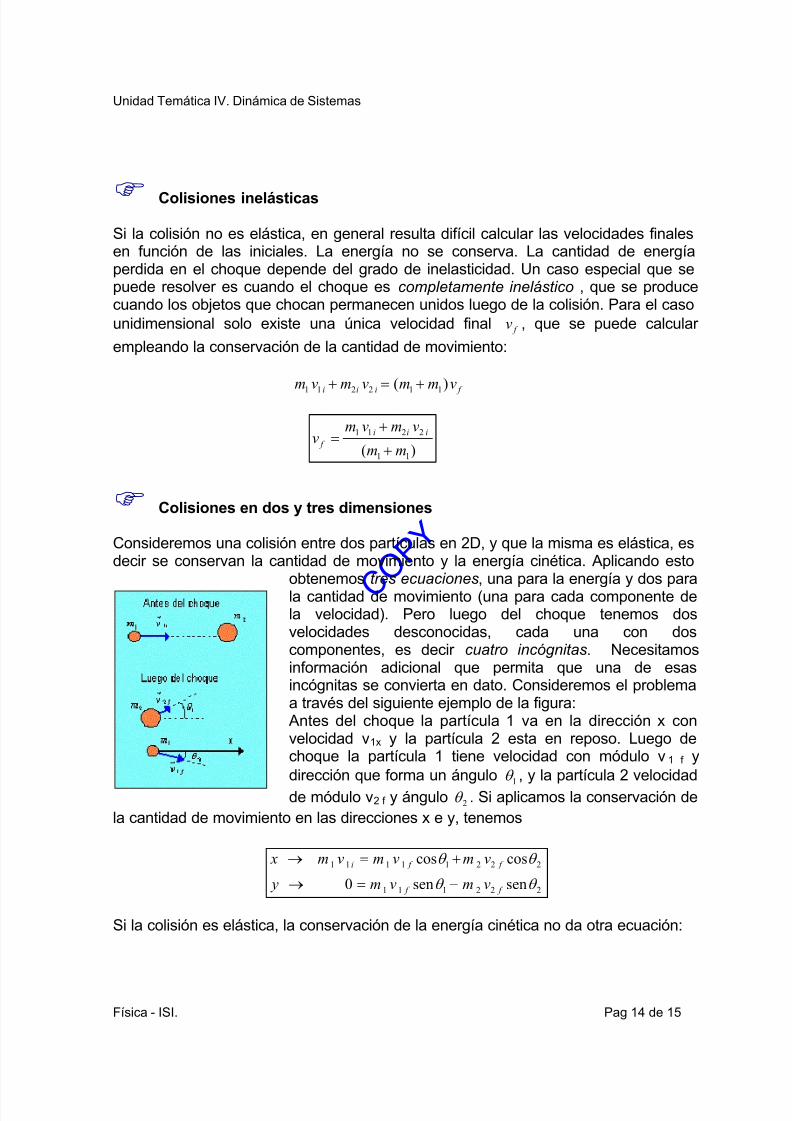
Colisiones en dos y tres dimensiones
Consideremos una colisión entre dos partículas en 2D, y que la misma es elástica, esdecir se conservan la cantidad de movimiento y la energía cinética. Aplicando esto
obtenemos tres ecuaciones, una para la energía y dos parala cantidad de movimiento (una para cada componente dela velocidad). Pero luego del choque tenemos dosvelocidades desconocidas, cada una con doscomponentes, es decir cuatro incógnitas. Necesitamosinformación adicional que permita que una de esasincógnitas se convierta en dato. Consideremos el problemaa través del siguiente ejemplo de la figura:
Antes del choque la partícula 1 va en la dirección x convelocidad v1x y la partícula 2 esta en reposo. Luego dechoque la partícula 1 tiene velocidad con módulo v1 f y
dirección que forma un ángulo1
θ , y la partícula 2 velocidad
de módulo v2 f y ángulo 2θ . Si aplicamos la conservación de
la cantidad de movimiento en las direcciones x e y, tenemos
222111
22211111
sensen0
coscos
θ θ
θ θ
f f
f f i
vmvm y
vmvmvm x
−=→
+=→
Si la colisión es elástica, la conservación de la energía cinética no da otra ecuación:
7/25/2019 Unidad Temática IV.pdf
http://slidepdf.com/reader/full/unidad-tematica-ivpdf 15/15
C O P Y
Unidad Temática IV. Dinámica de Sistemas
Física - ISI. Pag 15 de 15
2
22
2
11
2
11 2
1
2
1
2
1 f f i vmvmvm +=
Si conocemos el estado inicial del sistema ( m1, m 2 y v1 i ) necesitamos cuatro
ecuaciones para determinar el estado final especificado por )y,,( 2121 θ θ f f vv .
Necesitamos información adicional para resolver el sistema, además de las leyes deconservación. Una posibilidad es determinar experimentalmente la dirección de unade las partículas luego del choque, que es lo que se hace en el estudio de lascolisiones atómicas.
Bibliografía básica
Física Clásica y Moderna. Gettys, Keller y Skove. Curso de Física. COU. Peña Sainz y Garzo Pérez.