Embed Size (px)
Citation preview

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 1/13
Squat prediction in muddy navigation areas
G. Delefortriea,n, M. Vantorre b, K. Eloot a,b, J. Verwilligen a, E. Lataire b
a Flanders Hydraulics Research, Berchemlei 115, 2140 Antwerp, Belgiumb Ghent University, Maritime Technology Division, Technologiepark 904, 9052 Ghent, Belgium
a r t i c l e i n f o
Article history:
Received 5 May 2010
Accepted 22 August 2010
Editor-in-Chief: A.I. IncecikAvailable online 15 September 2010
Keywords:
Mud
Sinkage
Trim
Mathematical model
a b s t r a c t
Common squat prediction formulae to assess the navigation safety usually do not take into account the
bottom condition. Nevertheless, the presence of a fluid mud layer is not an uncommon condition in
confined areas where accurate squat predictions are necessary. From 2001 to 2004 an extensive
experimental research program was carried out to measure the manoeuvring behaviour of deep drafted
vessels in muddy areas. A part of the program focused on the undulations of the water–mud interface
and their relationship to the ship’s squat. Mostly the sinkage of the ship is damped due to the presence
of the mud layer, but a larger trim can occur due to the water–mud interface undulations. This article
presents a mathematical model to predict the squat in muddy navigation areas.
& 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Squat, defined as the sinkage and trim of vessels due to their
own forward speed, is of particular importance in shallow water
areas. Small under keel clearances cause large return currents
which lead to important sinkages and higher risks of bottomtouching as already mentioned by Constantine (1960).
In shallow navigation areas the presence of a soft fluid mud
layer on the bottom is not exceptional, but its effect is mostly
neglected in the formulation of squat. As a consequence pilots and
scientists may disagree on the safety of navigation. Mostly pilots
have to rely on the high frequency echo to determine the water
depth. As the latter detects the top of the mud layer and not the
solid (or nautical) bottom level, they may still be able to navigate
safely through a muddy navigation area, even in case the ship is
navigating at a zero (or even negative) under keel clearance
according to the echo sounder. In cases where common squat
formulae would predict grounding of a ship navigating in a
shallow fairway at a rather high speed, the presence of a mud
layer may prevent such grounding.Indeed a limited or even negative under keel clearance referred
to a mud layer does not necessarily lead to impracticable
manoeuvres as mentioned by Delefortrie et al. (2007). When
initially the ship has a small under keel clearance referred to the
mud layer, she may hit the mud layer due to squat. This mud,
having a larger density than water, will affect the buoyancy of the
ship and will probably smoothen the squat effect. However, to be
sure about the mud effect additional research had to be carried
out, because the literature offers very limited results on this topic.
2. State of the art
2.1. General research on squat
Scientific research on squat took off with Constantine (1960)
who discussed the different squat behaviour for subcritical,
critical and supercritical vessel speeds. In the subcritical domain
(F rho1) Tuck (1966) proved that for open water conditions of
constant depth the sinkage and trim of the vessel to be linear with
the parameter
g F rhð Þ ¼F 2rh
ffiffiffiffiffiffiffiffiffiffiffiffiffi1ÀF 2rhq
ð1Þ
In which F rh represents the depth related Froude number
F 2rh ¼V 2
ghð2Þ
This theory was later extended to dredged channels by Beck
et al. (1975). Naghdi and Rubin (1984) offer some reflections on
Tuck’s theory and introduce a new one. An analogous theory has
been developed by Cong and Hsiung (1991).
Ankudinov and Daggett (1996) however are pessimistic about
the complexity of numerical theories. For this reason, several
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/oceaneng
Ocean Engineering
0029-8018/$- see front matter & 2010 Elsevier Ltd. All rights reserved.
doi:10.1016/j.oceaneng.2010.08.003
n Corresponding author. Tel.: +32 3 224 69 62; fax: +32 3 224 60 36.
E-mail addresses: [email protected] (G. Delefortrie),
[email protected] (M. Vantorre), [email protected]
(K. Eloot), [email protected] (J. Verwilligen),
[email protected] (E. Lataire).
Ocean Engineering 37 (2010) 1464–1476

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 2/13
authors carried out experimental research as Dand (1972) and
Gourlay (2000) – who offers a solution for squat prediction with
random bottom conditions – to endorse their theories. Jiang and
Henn (2003) present a numerical method valid from subcritical to
supercritical speed. An overview of slender body methods is given
in Gourlay (2008).
More practical methods based on experimental research are
presented by Barrass (1979), however his results could not be
validated by Seren et al. (1983). Barrass (2004) gives an overview
of the work he performed on squat. More general overviews are
given by Dumas (1982); Blaauw and Van der Knaap (1983),
Millward (1990) and PIANC (1997) working group 30.
Interesting full scale measurements were carried out byAnkudinov et al. (2000), Stocks et al. (2004), Harting et al.
(2009) and Harting and Reinking (2002) among others.
Most discussions focus on ships sailing in open water or in
rectangular shaped canals without drift angle or propulsion. In
some cases the drift angle was considered, as by Von Bovet
(1985), Martin and Puls (1986), de Koning Gans and Boonstra
(2007) and Eloot et al. (2008).
2.2. Research on squat in muddy areas
The research on squat in muddy areas is a topic that has not
been tackled thoroughly. Only three research institutes carried
out experimental research focussing on the hydrodynamic forces.
The oldest results are presented by Sellmeijer and van Oortmerssen
(1983) who also registered undulations in the water mud
interface. The sinkage is less above mud in comparison with the
solid bottom condition and decreases with increasing layer
thickness. The mud density does not seem to have any effect.
Vantorre and Coen (1988) showed that three speed ranges can
be detected for the behaviour of the water mud interface:
At low speed a small sinkage near the fore body is detected,
which disappears amidships and turns into an elevation abaft;
At a certain speed value the sinkage at the entrance changes
suddenly into an elevation. The section at which the jump
occurs moves abaft with increasing speed;
If the speed increases more, the rising of the interface occurs
behind the stern. The amplitude of the elevation can exceed
the mud layer thickness several times.
The latter occurs at a speed, which for inviscid fluids is given
by the theoretical expression
V crit ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi8
27 gh1 1À
r1
r2
ð1Àm1Þ3
s ð3Þ
m1 being the blockage of the ship in the water layer, meaning the
ratio of the ship’s immersed cross sectional area and the canal’s
cross section. Subscript 1 refers to the water layer, subscript 2 to
the mud layer.
Nomenclature
AEP expanded area ratio of propeller (–)
AR rudder area (m2)
ai regression coefficient, (i ¼0,1) (–)
B ship beam (m)
b mud type, Table 2 (–)
bi regression coefficient, (i ¼0,1,2) (–)c mud type, Table 2 (–)
C B block coefficient (–)
c i regression coefficient, (i ¼0,1,2) (–)
C S dimensionless sinkage, Eq. (4) (–)
C T dimensionless trim, Eq. (5) (–)
D 6000 TEU container ship model (–)
d mud type, Table 2 (–)
di regression coefficient, (i ¼0,r) (–)
DP propeller diameter (–)
E tanker model (–)
e mud type, Table 2 (–)
ei regression coefficient, (i ¼0,1) (–)
f mud type, Table 2 (–)
f 0 regression coefficient (–)F rh depth related Froude number, Eq. (2) (–)
g mud type, Table 2 (–)
g i regression coefficient, (i ¼0,h) (–)
h total depth (m) mud type, Table 2 (–)
h* hydrodynamically equivalent depth (m)
i0 regression coefficient (–)
i1 regression coefficient (–)
ji regression coefficient, (i ¼0, r) (–)
ki regression coefficient, (i ¼0, r) (–)
LPP ship length (m)
P propeller pitch (m)
p0 regression coefficient (–)
q0 regression coefficient (–)
S solid bottom condition (–)
si regression coefficient (i¼0,n) (–)
T ship draft (m)
TEU (number of) twenty feet equivalent unit containers (–)
T P thrust (N)
U 8000 TEU container ship model (–)
ukc under keel clearance (–)
V ship speed (m/s)V T propeller induced speed, Eq. (22) (m/s)
x longitudinal coordinate, positive towards the stern
(m)
z A sinkage aft (m)
z F sinkage fore (m)
a increase parameter, Eq. (31) (–)
g parameter, Eq. (1) (–)
z amplitude of rising (m)
zMAX maximal amplitude of rising (m)
m dynamic viscosity (Pa s)
mcrit critical dynamic viscosity (Pa s)
r density (kg/m3)
r* dimensionless density, Eq. (16) ( –)
P keel penetration parameter, Eq. (21) (–)
Ph keel penetration parameter, Eq. (14) (–)
F fluidization parameter (–)
Fij regression coefficient (i¼0,h) ( j ¼0,r) (–)
F0ij regression coefficient (i¼0,h) ( j ¼0,r) (–)
F00ij regression coefficient (i¼0,h) ( j ¼0,r) (–)
F00000 regression coefficient (–)
Subscripts
n propeller
1 related to water
2 related to mud
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1465

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 3/13
The sinkage of the vessel is related to these speed ranges, but
experimental results do not always follow the theory. At low
speeds the mud layer causes a very slight increase of sinkage
while at higher speed a sinkage decrease with mud layer is
observed together with an increase of trim.
Brossard et al. (1990) described that the sinkage is identical as
in the solid bottom condition when the ship’s keel does not
penetrate the mud layer. An effect is observed at negative under
keel clearances:
The rigidity of the mud has only a small effect;
The density gradient significantly affects the sinkage: the
higher the gradient, the smaller the sinkage. It is assumed that
the buoyancy is an important factor;
Adding currents leads to further reduction of the sinkage.
The trim of the vessel is only significantly affected by rigid
mud. In this case an increase of trim with increasing density
gradient was observed. The sign of the trim changes when
penetrating the mud.
Doctors et al. (1996) showed that for the ship hydrodynamics a
shallow water approach can serve as a quite reliable approxima-
tion for analyzing the case of a viscous lower layer, where themud viscosity can be interpreted as an effective reduction in the
total depth of the water.
In spite of these results, until now no sufficiently correct
models have been presented to predict the squat in muddy areas.
3. Experimental setup
3.1. Test facilities
The new squat formulae presented in this article are all
derived from experimental research carried out from 2001 until
2004 at the Towing Tank for Manoeuvres in Shallow Water—
cooperation Flanders Hydraulics Research, Ghent University. The
formulae are valid within the range of conditions covered by this
experimental research. The shallow water towing tank (88 m  7
m  0.5 m) is equipped with a planar motion carriage, a wave
generator and an auxiliary carriage for ship–ship interaction tests.
Thanks to computerized control and data-acquisition, the facil-
ities are operated in a fully automated manner. The carriage runs
24/7 without the need for permanent surveillance.
3.2. Ship models
Most runs in muddy navigation areas were carried out
with (Table 1) a 6000 TEU container carrier (D), which was the
design ship for the Belgian harbours at that time. The mathema-
tical model will be based on the measurements carried out with
this ship. Additional runs in a selection of conditions were carried
out with a scale model of a 8000 TEU container carrier (U ) and a
scale model of a tanker (E ) to assess the influence of the hull form,
see 4.4.
3.3. Bottom conditions
Mud was simulated by a mixture of two types of chlorinated
paraffin and petrol, so that both density and viscosity could be
controlled within certain ranges. For environmental reasons, the
tank was divided into three compartments: a test section, a
‘‘mud’’ reservoir and a water reservoir. Bottom and tank walls
were protected with a polyethylene coating. No viscosity or
density gradients were included.
The selected bottom conditions are represented in Table 2. The
density–viscosity combinations were based on measurements of
density and rheology profiles carried out in the outer harbour of
Zeebrugge, Belgium in 1997–1998. A mud layer configuration is
defined by two characters: a letter (b,y,h) denoting the material
characteristics and Figs. 1–3 re-presenting the layer thickness.
Tests carried out above a solid bottom are referred to as ‘‘ S ’’.The gross under keel clearance relative to the tank bottom was
varied between 7% and 32% of draft, yielding À12% to +21% ukc
relative to the mud–water interface. Throughout this paper, the
interface water–mud will be used as a reference for expressing
the under keel clearance, unless specified otherwise.
3.4. Test types
Stationary captive motion model tests were carried out in each
combination of mud layer and realistic under keel clearance at
different speeds, from 2 kn ahead to 10 kn ahead at least in steps
of 2 kn (full scale values).
Table 2
Bottom conditions and tested models.
Mud type Density (kg/m3) Dynamic viscosity (Pa s) Layer thickness
0.75 m ‘‘1’’ 1.50 m ‘‘2’’ 3.00 m ‘‘3’’
‘‘d’’ 1100 0.03 D/E D/E D/E/U
‘‘c’’ 1150 0.06 D D D
‘‘b’’ 1180 0.10 D D D
‘‘f’’ 1200 0.11 – D –
‘‘h’’ 1210 0.19 D/E D/E D
‘‘e’’ 1260 0.29 – D –
‘‘g’’ 1250 0.46 D/E D/E D/E
fresh water 1000 0.0010
sea water 1025 0.0012
‘‘S’’ solid bottom
Table 1
Ship models (even keel).
Model D U E
Scale 1/75 1/80 1/75
LPP (m) 289.8 331.8 286.8
B (m) 40.25 42.8 46.8
T (m) 13.50 14.54 15.5
C B 0.59 0.65 0.82
AR (m2) 60.96 83.13 98.34
# blades 5 6 5
DP (m) 8.145 8.46 7.73
P /DP (–) 0.97 1.00 0.65
AEP (–) 0.8 0.96 0.62
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1466

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 4/13
The propeller rate was varied at 6 kn ahead between À60% and
100% of the maximal propeller rate. Some runs were carried out
with a drift or rudder angle or with astern speeds, but these runs
will not be discussed in this article.
3.5. Measurements
The sinkage of the ship was measured at four positions on
the hull: starboard side fore and aft and portside fore and aft.
A positive trim angle is measured when the sinkage at the bow is
larger than at the stern.
As the literature already mentioned the occurrence of undula-
tions of the water mud interface measures were taken to register
them.
A device which follows the level of the mud layer ( mufo) and
one which follows the water level (wafo) are assembled on a
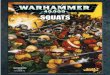
Fig. 2. Arrangement of the wave meters in the towing tank.
0
0.5
1
1.5
2
-1
dy = 0.28 B
dy = 1.30 B
dy = 2.32 B
(−)+ h2
h2
ζ
(−) LPP
x
-0.5 0 0.5 1 1.5 2
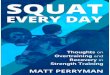
Fig. 3. Undulations of the interface at various lateral distances of the ship D. Mud
f 2, +3.9% ukc, F rh¼0.38, no propeller action. The ship is represented taking squat
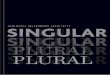
into account and sails to the left.Fig. 1. Positioning the tripods in the towing tank.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1467

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 5/13
tripod (see Fig. 1). In total three tripods were assembled in order
to register the undulations of the interface.
The mufo consists of a floater, which is resistant to the artificial
mud. The density of the floater is situated between the water and
the mud density. The position of the floater is therefore similar to
the amplitude of the interface. The floater is attached to a disk,
which reflects a laser beam. The variations of the laser beam are
measured 20 times per second and register the actual position of
the mud layer.The wafo is based upon the principles of the potentiometer.
A constant electric current is sent through a string which has a
homogeneous resistance. The voltage is therefore also constant.
A second electrode is a tube made of stainless steel. When the
water level in the tube changes a proportional change of voltage
will be measured.
Three tripods were placed in the towing tank as close as
possible to the passing ship. The lateral distance between the ship
and the mufos is as shown in Fig. 2.
Depending on the ship’s velocity the position of the interface
was measured 10–20 times per second. The tripods were placed in
the middle of the tank so that the position of the interface could
be measured before, while and after the ship was passing.
4. Observations
4.1. Undulations of the water mud interface
Fig. 3 gives an example of the measured undulations of the
water mud interface, which seem to behave as a Kelvin pattern.
The maximal amplitude closest to the ship is represented in Fig. 4.
The rising increases with increasing speed, but this increase is
limited once the undulations are behind the ship, see Fig. 5. This is
especially the case with low density mud layers (c, d).
When the vessel navigates above the mud layer the rising will
increase faster with the velocity when the density and viscosity of
the mud layer are closer to water. With thinner mud layers the
rising becomes only significant once the viscosity drops below a
certain critical value, which is located between 0.12 and 0.18 Pa s.
A significant undulation is always observed when the shipnavigates in contact with the mud layer, see Fig. 6. The rising is
mostly located amidships for higher density mud layers. For lower
density and viscosity the rising is located abaft, as shown in Fig. 7.
The transitory situation is a rising occurring in two phases.
0
0.25
0.5
0.75
1
0
Frh (-)
mud G mud H mud B mud C
mud D amidship aft
( − )
L P P x
0.1 0.2 0.3 0.4 0.5
Fig. 5. Longitudinal position, at which the rising is maximal, in function of ship
speed. Ship D. Thickness of the mud layer: 3 m full scale. No propeller or rudder
action. 9.8% under keel clearance referred to the water mud interface.
11.1
1.21.3
1.41.5
1.61.7
1.81.9
2
0
Frh (-)
mud F mud H mud B mud C mud D
( − )
h 2
M A X + h 2
0.1 0.2 0.3 0.4 0.5
Fig. 6. Maximal rising in function of ship speed. Ship D. Thickness of the mud
layer: 1.5 m full scale. No propeller or rudder action. À 1.1% under keel clearance
referred to the water mud interface.
-0.25
0
0.25
0.5
0.75
1
0
Frh (-)
mud F mud H mud B mud C
mud D amidship aft
( − )
L P P
x
0.1 0.2 0.3 0.4 0.5
Fig. 7. Longitudinal position, at which the rising is maximal, in function of ship
speed. Ship D. Thickness of the mud layer: 1.5 m full scale. No propeller or rudder
action. À1.1% under keel clearance referred to the water mud interface.
1
1.2
1.4
1.6
1.8
2
2.2
-100%
propeller rate (-)
mud G mud H mud B mud C mud D
( − )
h 2
M A X + h 2
-50% 0% 50% 100%
Fig. 8. Maximal rising in function of the propeller rate. Ship D. Thickness of the
mud layer: 3 m full scale. No rudder action. Ship speed: 6 kn full scale. À12%
under keel clearance referred to the water mud interface.
1
1.1
1.2
1.3
1.41.5
1.6
1.7
1.8
1.9
2
0
Frh (-)
mud G mud H mud B mud C mud D
h 2
M A X +
h 2
( − )
0.1 0.2 0.3 0.4 0.5
Fig. 4. Maximal rising in function of ship speed. Ship D. Thickness of the mud
layer: 3 m full scale. No propeller or rudder action. 9.8% under keel clearance
referred to the water mud interface.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1468

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 6/13
Reversed propeller action in case of navigating ahead yields a
relatively large rising near the propeller, see Figs. 8 and 9. In this
case the pattern of the undulations is rather random.
The rising does not seem to start abaft the ship in the given
experimental speed range, although some experimental speeds
were higher than those predicted by Eq. (3). A possible explana-
tion is the higher viscosity of the mud layers in this experimental
program and the assumption of inviscid fluids in Eq. (3).
4.2. Sinkage
The mean sinkage as measured during the tests will be
represented dimensionless as C S
C s ¼ 100 z F þ z A
2LPP ð4Þ
The values z A and z F are positive downwards. Figs. 10 and 11
give an overview of the ship’s sinkage in function of the speed for
different bottom conditions. The following can be observed:
When the ship navigates above the mud layer the rising of the
interface is significantly larger for mud layers with a viscosity
below a critical viscosity. When the under keel clearance is
small, this can eventually result in contact between the vessel
and the mud layer. The mud will yield an increase of buoyancy,
which results in a decrease of the sinkage;
If the ship’s keel penetrates the mud layer, the large rising
amidships, which occurs for higher density mud layers, will cause
an increase of buoyancy. The sinkage will consequently be smaller.
The sinkage, for a same small under keel clearance referred to
the solid bottom, is always larger above a solid bottom than above
a muddy bottom. The same observations were made by Sellmeijer
and Van Oortmerssen (1983) and Vantorre and Coen (1988),
nevertheless the latter mentioned a slight increase of sinkage at
low speeds.
-0.25
0
0.25
0.5
0.75
-100%
propeller rate (-)
mud G mud H mud B mud C
mud D aft amidship
( −
)
L P P
x
-50% 0% 50% 100%
Fig. 9. Longitudinal position, at which the rising is maximal, in function of the propeller rate. Ship D. Thickness of the mud layer: 3 m full scale. No rudder action. Ship
speed: 6 kn full scale. À12.2% under keel clearance referred to the water mud interface.
0
0.02
0.04
0.06
0.080.1
0.12
0.14
0.16
0
Frh (-)
C S
( - )
solid mud F mud G mud H
mud B mud C mud D
0.1 0.2 0.3 0.4 0.5
Fig. 10. Sinkage in function of the ship speed. Ship D. Thickness of the mud layer:
1.5 m full scale. No propeller or rudder action. 3.9% under keel clearance referred
to the water mud interface.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0
Frh (-)
C S
( - )
solid mud F mud G mud Hmud E mud C mud D
0.1 0.2 0.3 0.4 0.5
Fig. 11. Sinkage in function of the ship speed. Ship D. Thickness of the mud layer:
1.5 m full scale. No propeller or rudder action. À 1.1% under keel clearance referred
to the water mud interface.
0
0.01
0.02
0.03
0.04
0.05
0.06
-100%
propeller rate (-)
mud G mud H mud B mud C mud D
C S
( - )
-50% 0% 50% 100%
Fig. 12. Sinkage in function of the propeller rate. Ship D. Thickness of the mud
layer: 3 m full scale. No rudder action. À12.2% under keel clearance referred to the
water mud interface.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1469

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 7/13
A working propeller generates an additional longitudinal speed
which changes the pressure balance and thus the squat of the
ship. As shown in Fig. 12 the additional sinkage is more or less
quadratic with the propeller rate.
4.3. Trim
As the sinkage is not constant along the ship’s hull, the ship
will be dynamically trimmed. For slender hulls this generallyresults in a larger sinkage at the stern, while full body ships
mostly have a larger sinkage at the bow. When the ship navigates
in a muddy area, the trim will be influenced as well and its
absolute value will usually increase, due to the extra asymmetry
in the buoyancy caused by the rising of the interface.
The dimensionless total trim C T as measured during the tests
C T ¼ 100 z F À z A
LPP ð5Þ
is represented for different navigation conditions in Figs. 13 and
14, where a negative trim means a larger sinkage abaft. It can be
stated that, in combination with the observations of the undula-
tions of the interface:
A rising will have the largest influence on the trim when it
takes place amidships. The influence will decrease when the
rising moves abaft;
The trim will be smaller when the top of the rising is wider;
In all cases a larger rising causes a larger asymmetry and thus a
larger trim. This is in accordance with the observations made
by Vantorre and Coen (1988).
A change of trim sign when penetrating the mud as reported
by Brossard et al. (1990) is not observed.
As for the sinkage propeller action influences the trimming of
the ship. Propeller action yields a larger dynamic trim, especiallywith propeller action astern, see Fig. 15. This coincides with the
effect of propeller action on the rising of the water mud interface
as shown in Fig. 9.
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0
solid mud F mud G mud Hmud E mud C mud D
C T
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 14. Trim in function of the ship speed. Ship D. Thickness of the mud layer:
1.5 m full scale. No propeller or rudder action. À1.1% under keel clearance referred
to the water mud interface.
-0.05-0.045
-0.04
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
-100%
propeller rate (-)
mud G mud H mud B mud C mud D
C T
( - )
-50% 0% 50% 100%
Fig. 15. Trim as a function of the propeller rate. Ship D. Thickness of the mud
layer: 3 m full scale. No rudder action. À12.2% under keel clearance referred to the
water mud interface.
1
1.2
1.4
1.6
1.8
2
0
Frh (-)
U, -12.2% ukc D, -12.2% ukc D, +10% ukc
U, +10% ukc E, -9.4% ukc E, -4.4% ukc
( − )
h 2
M A X +
h 2
0.1 0.2 0.3 0.4 0.5
Fig. 16. Maximal rising in function of ship speed and ship type. Thickness of the
mud layer D: 0.04 m model scale. No propeller or rudder action.
0
0.05
0.1
0.15
0.2
0.25
0
U, -12.2% ukc D, -12.2% ukc D, +10% ukc
U, +10% ukc E, -9.4% ukc E, -4.4% ukc
C S
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 17. Sinkage in function of the ship speed and ship type. Thickness of the mud
layer D: 0.04 m model scale. No propeller or rudder action.
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0
solid mud F mud G mud H
mud B mud C mud D
C T
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 13. Trim in function of the ship speed. Ship D. Thickness of the mud layer:
1.5 m full scale. No propeller or rudder action. 3.9% under keel clearance referred
to the water mud interface.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1470

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 8/13
4.4. Effect of the hull form
Fig. 16 shows the maximal rising of the interface for the three
ships above or in contact with the thickest mud layer D. For
both container carriers the trend is more or less the same, but for
the tanker the rising seems to reach a maximum at low speed. For
the fuller ship the rising tends to occur fore or amidships, an
increase of speed will cause a shift towards the stern of the ship,
but not necessarily an increase of amplitude.For a same Froude number the dimensionless sinkage will be
larger for the fuller ship, while both container carriers follow the
same trend, see Fig. 17. The same can be concluded for the trim,
Fig. 18, but the fuller ship has a larger bow sinkage.
5. Mathematical model
5.1. Definitions
A mathematical model will be built to predict the ship’s squat
when sailing straight ahead based on the measurements carried
out with the 6000 TEU container carrier. The effect of a rotating
propeller will be taken into account. According to Tuck (1966) themean sinkage of the vessel in the subcritical speed range can be
modelled as
C s ¼ s0gðF rhÞ ð6Þ
With s0 a coefficient to be derived from regression analysis. An
analogous relationship is valid for the vessel’s trim
C T ¼ t 0gðF rhÞ ð7Þ
This relationship is also valid in muddy navigation areas, even
when the ship is penetrating a highly viscous mud layer, as shown
in Fig. 19.
Eqs. (6) and (7) can consequently be used to predict the squat
in muddy areas. However some physical awareness is needed.
Tuck (1966) developed his expressions for an open shallow waterenvironment without any mud layer. The critical speed, which is
related to the return current, will certainly be affected by the
presence of a mud layer. Nonetheless Eqs. (6) and (7) will be used
as a starting point to develop new expressions.
5.2. Effect of the water depth
Instead of trying to find a new expression for the subcritical
speed in function of the muddy environmental conditions the
coefficients s0 and t 0 will be formulated as mud dependent
parameters. Furthermore even above a solid bottom some
discrepancies occur in function of the under keel clearance,e.g. Fig. 20.
To take account of very shallow water effects Eqs. (6) and (7)
should thus be reformulated as
C S ¼ a1T
hÀT þa0
gðF rhÞ ð8Þ
C t ¼ b2T
hÀT
2
þ b1T
hÀT þ b0
" #gðF rhÞ ð9Þ
5.3. The hydrodynamically equivalent depth
The effect of the presence of the mud layer can be modelled
with Eqs. (8) and (9) using a hydrodynamically equivalent depth
h* instead of the real depth h.
With h2 the thickness of the mud layer and h1 the height of the
upper lying water layer, the total depth can be written as
h ¼ h1 þh2 ð10Þ
The bottom material can vary from water over soft mud to
consolidated mud. If the mud has large viscosity and density
values, like sand or clay, the material will hardly move when a
ship passes by and its top can be considered as the actual seabed.
In this case the hydrodynamically equivalent depth h* is
h* ¼ h1 ð11Þ
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
T/(h-T) (-)
Linear trendQuadratic trend
s0
t0
s 0 ,
t 0 ( - )
2 4 6 8 10 12
Fig. 20. Regression coefficients s0 (6) and t 0 (7) in function of the under keel
clearance above a solid bottom. Ship D. No propeller or rudder action.
-0.06
-0.04
-0.02
0
0.02
0.040.06
0.08
0
U, -12.2% ukc D, -12.2% ukc D, +10% ukc
U, +10% ukc E, -9.4% ukc E, -4.4% ukc
C T
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 18. Trim in function of the ship speed and ship type. Thickness of the mud
layer D: 0.04 m model scale. No propeller or rudder action.
CS = 0.5942γ
R2 = 0.9826
CT = -0.1919γ
R2
= 0.9893
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0
C T , S
( - )
0.05 0.1 0.15 0.2 0.25
γ (-)
Fig. 19. Application of expressions (6) and (7). Ship D. Thickness of mud layer G:
3 m full scale. No propeller or rudder action. À 12.2% under keel clearance referred
to the water mud interface.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1471

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 9/13
On the other hand, if the material is very fluid the mud layer
cannot be considered as a solid bottom. In the limit condition of two
equivalent water layers, the hydrodynamically equivalent depth is
h* ¼ h1 þh2 ¼ h ð12Þ
For intermediate situations a parameter F can be defined, so
that
h* ¼ h1 þFh2rh ð13Þ
Particular values for the parameter F are 0 ( ¼ hard layer of
thickness h2) and 1 ( ¼watery layer of thickness h2), F represents
consequently the degree of watery behaviour of the bottom layer
and is therefore called the fluidization parameter.
Intuitively the fluidization parameter of the mud covering the
seabed depends on the following aspects:
the rheological properties (e.g. viscosity) of the mud: a
decrease of the latter means a more fluid mud layer and will
logically result in an increased fluidization parameter;
the under keel clearance referred to the mud–water interface:
the fluidization parameter increases when the ship’s keel is
located closer to the mud or penetrates the mud. In theseconditions the mud layer is stirred and will behave more fluidly.
The assumption the mud layer does not affect the critical
speed means that the parameter gwill always be expressed with h
instead of h*.
5.4. Effect of the mud layer
5.4.1. Without propulsion
The effect of the mud layer on the hydrodynamic force
balance could be modelled using the fluidization parameter.
Figs. 21 and 22 show the effect of using the same concept on the
regression coefficient s0. A reasonable agreement can be observed.
The hydrodynamic equivalent under keel clearances shown inFigs. 21 and 22 have been determined with a fluidization
parameter that takes into account the position of the ship’s keel
referred to the top of the mud, expressed by
Ph ¼T Àh1
h1ð14Þ
and the composition of the mud.
The following interpretations can be derived from Figs. 23 and 24:
When penetrating the mud the fluidization parameter is
significantly larger than 1, meaning that for an equal ship’s
speed the sinkage will be smaller due to the presence of the
mud. This can be related to the changed buoyancy, never-
theless a significant density effect cannot be observed. This is
in accordance with Sellmeijer and van Oortmerssen (1983).
On the other hand, if the keel does not penetrate the mud
layer, the sinkage will become larger compared to a solid
bottom and this for a same total depth. This is rather relative
as the sinkage will always be smaller for larger under keel
clearances above any bottom condition.
The decrease of the fluidization parameter with increasing
under keel clearance referred to the top of the mud layer is
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0
Solid h1 h2 h3
s 0 ( - )
T/(h*-T) (-)
2 4 6 8 10 12 14
Fig. 22. Regression coefficients s0 (6) in function of the hydrodynamic equivalent
under keel clearance above mud h. Ship D. No propeller or rudder action.
-1
-0.5
0
0.5
1
1.5
2
2.5
-0.2
3 m 1.5 m 0.75 m
Φ ( - )
Πh (-)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
Fig. 23. Fluidization parameter to determine the hydrodynamic equivalent under
keel clearance for sinkage prediction above mud layers of low viscosity. Ship D. No
propeller or rudder action.
-1
-0.5
0
0.5
1
1.5
2
2.5
-0.2
3 m 1.5 m 0.75 m
Φ ( -
)
Πh (-)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
Fig. 24. Fluidization parameter to determine the hydrodynamic equivalent under
keel clearance for sinkage prediction above mud layers of high viscosity. Ship D.
No propeller or rudder action.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
Solid b1 b2 b3
s 0 ( - )
T/(h*-T) (-)
2 4 6 8 10 12
Fig. 21. Regression coefficients s0 (6) in function of the hydrodynamic equivalent
under keel clearance above mud b. Ship D. No propeller or rudder action.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1472

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 10/13
more or less equal for all mud compositions. On the other
hand, the decrease will start at a larger under keel clearance
for mud layers having a low viscosity, which can be ascribed to
the buoyancy effect of the higher risings in these conditions.
The effect of the mud’s viscosity, as mentioned in 4.1, has thus
a significant influence on the sinkage of the ship. The fluidization
parameter can consequently be written as
F¼ c 1ðr*Þ½Ph þc 2ðmÞ� þc 0 ð15Þ
With r* the dimensionless density
r* ¼r2Àr1
r1
ð16Þ
In Eq. (15) the following restrictions have to be taken into
account:
PhZÀ0:15 ð17Þ
ðPhÀc 2Þr0 ð18Þ
m4mcrit : c 2 ¼ 0 ð19Þ
Eq. (17) states the fluidization parameter will not decrease
infinitely with increasing under keel clearance, while Eq. (18) allowsa constant fluidization parameter when the keel (almost) penetrates
the mud. The parameter c 2 takes into account the higher undulations
for mud layers having a viscosity below the critical one.
An analogous expression can be built for the trim of the vessel.
In this case the fluidization parameter can be written as
F¼ ðd0 þdrr*ÞPþF00 þFh0T
h2þr* F0rþFhr
T
h2
ð20Þ
which uses an alternative formulation for the position of the
ship’s keel referred to the mud layer
P¼T Àh1
h2ð21Þ
No restrictions apply to Eq. (20). Both Eqs. (15) and (20) are
valid within the experimental scope.
5.4.2. With propulsion
A working propeller generates an additional longitudinal speed
V T that can be estimated as a function of the thrust generated by
the propeller
V T ¼ signðT P Þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1:5T P
rpD2P
v uut ð22Þ
This additional speed changes the pressure distribution along
the ship’s hull and thus the squat. The factor 1.5 in Eq. (22) has
been determined experimentally for an under keel clearance of
26% above a solid bottom so that the total sinkage in this
condition can be written as
C s ¼ s0½gðV ,hÞ þgðV T ,hÞ� ¼ C S ðV ,hÞ þ C S ðV T ,hÞ ð23Þ
The effect of the under keel clearance on the thrust dependent
term needs however a new set of regression coefficients ei, see
Fig. 25
C S ðV T ,h*Þ ¼ e1T
h*ÀT þe0
gðV T ,hÞ
¼ sngðV T ,hÞ ð24Þ
The total sinkage, including propeller action is then
C S ¼ s0gðV ,hÞ þsngðV T ,hÞ ð25Þ
Also a new hydrodynamically equivalent depth is needed to
assess the influence of the thrust in muddy navigation areas. For
mud layers having a high viscosity the fluidization parameter
defining h* in Eq. (24) can be written simply as
F¼ f 0 ð26Þ
If the viscosity drops below the critical one, the fluidization
parameter changes to
F¼ g hPh þ g 0 ð27Þ
This fluidization parameter does not increase further once
PhZ0.05. Figs. 26 and 27 show the low density mud D as an
example.
The total trim taking account of propeller action can be written
accordingly
C T ¼ t 0gðV ,hÞ þt ngðV T ,hÞ ð28Þ
Fig. 25 shows the effect of the under keel clearance above a
solid bottom linearly expressed
C T ðV T ,h*Þ ¼ i1T
h*ÀT þi0 gðV T ,hÞ ð29Þ
As for the sinkage a new hydrodynamically equivalent depth is
needed to express the propeller effect in muddy areas
F¼ ð j0 þ jrr*ÞPþF000 þF0
h0
h2
T þr* F0
0rþF0hr
h2
T
ð30Þ
However this is only valid for propeller action ahead. Fig. 15
showed a larger longitudinal speed V T is needed to predict the
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0
Solid d1 d2 d3
s n
( - )
T/(h*-T) (-)
5 10 15 20 25
Fig. 26. Regression coefficients sn (25) in function of the hydrodynamic equivalent
under keel clearance above mud D. Ship D. Effect of propeller action.
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0
Linear trend
s n ,
t n ( - )
2 4 6 8 10 12
T/(h-T) (-)
Fig. 25. Regression coefficients sn (25) and t n (28) in function of the under keel
clearance above a solid bottom. Ship D. Effect of propeller action.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1473

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 11/13
effect of propeller action astern on the trim. For trim Eq. (22)
should be replaced by
V T ¼aUsignðT P Þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1:5T P
rpD2
s ð31Þ
With a¼1 for positive values of the propeller’s thrust. For an
astern rotating propeller the increase a depends on the under keel
clearance, see Fig. 28
T P o0 : a¼ k1T
h*ÀT þk0 ð32Þ
When Eq. (32) is used to correct V T , Eq. (29) can be used to
predict the trim for any propeller rate above a solid bottom,
see Fig. 29.
The correction coefficient a depends also on the composition
of the mud layer. The hydrodynamically equivalent depth in
Eq. (32) is a function of a fluidization parameter. For mud
layers below the critical viscosity this parameter can be
determined as
F0 ¼ p0PþF0 000 þ
h2
T
ðF0 0h0 þr*F00
hrÞ ð33Þ
-0.8
-0.6
-0.4-0.2
0
0.2
0.4
0.6
0.8
1
1.2
-0.2
Πh (-)
d1 d2 d3
Φ ( -
)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
Fig. 27. Fluidization parameter to determine the hydrodynamic equivalent under
keel clearance for sinkage prediction above the light mud layer D. Ship D. Effect of
propeller action.
-2.4
-2.2
-2
-1.8
-1.6
0
α ( - )
T/(h-T) (-)
2 4 6 8 10 12
Fig. 28. Increase of propeller induced longitudinal speed due to astern rotation.
Ship D. Influence of the under keel clearance above a solid bottom.
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0
26% ukc 15% ukc 10% ukc 32% ukc Linear trend
γ (VT) (-)
C T
( V T ) ( - )
0.2 0.4 0.6 0.8 1 1.2
Fig. 29. Evaluation of formula (29). Solid bottom condition, influence of propeller
action, both ahead and astern. Ship D.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
-0.05
C S m o d e l ( - )
CS measurement (-)
R2 = 0.9502
0.05 0.1 0.15 0.20
Fig. 30. Comparison between measured and modelled sinkage values: all runs.
Ship D.
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
-0.06
C T m o d e l
( - )
R2 = 0.9289
CT measurement (-)
-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01
Fig. 31. Comparison between measured and modelled trim values: all runs.
Ship D.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.160.18
0
measurement model
-60%
100%Increasing propeller rate C S
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 32. Comparison between measured and modelled sinkage values. 10% underkeel clearance above a solid bottom. Ship D. Runs with propeller action are
labelled.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1474

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 12/13
While more viscous mud layers can use a simpler expression
F0 ¼ q0PþF00000 ð34Þ
5.5. Results
The overall comparison between measured and modelled
values is shown in Figs. 30 and 31. Some outliers occur, but the
overall accuracy is fairly well.
Some spot checks in different conditions are shown in Figs. 32–35.
6. Conclusions and recommendations
For a same small under keel clearance referred to the solid
bottom the sinkage will be mostly smaller when a mud layer is
present. This is not always the case for the ship’s trim. The squat
of the ship can be related to the observed undulations of the water
mud interface, that become dominant once the viscosity of the
mud layer is below a critical one.
A mathematical model predicting fairly well the ship’s squatfor container carriers has been built taking into account the
bottom conditions and propeller action. Therefore, the principle of
a hydrodynamically equivalent depth has been used. For several
fluidization parameters a different formulation is needed depend-
ing on the viscous characteristics of the mud layers. This can be
linked to a critical viscosity as observed with the undulations of
the water mud interface. As this critical viscosity lies somewhere
between 0.11 and 0.19 Pa s a linear interpolation between the
formulae should be applied within this viscosity range.
Future efforts will be undertaken to include more parameters
(drift angle,y) in the mathematical model and to investigate how
the mud layer affects the critical speed regimes.
Acknowledgements
The data presented in this article were obtained during the
research project Determination of the nautical bottom in the
harbour of Zeebrugge: Nautical implications, which was carried
out co-operatively by Ghent University and Flanders Hydraulics,
commissioned by T.V. Noordzee & Kust (Ostend, Belgium) in the
frame of the optimisation of the maintenance dredging contract
for the harbour of Zeebrugge, financed by the Department
Maritime Access, a division of the Mobility and Public Works
department of the Flemish Government.
References
Ankudinov, V., Daggett, L., 1996. Squat predictions for manoeuvring applications.In: Proceedings of MARSIM 1996 (International Conference on MarineSimulation and Manoeuvrability), Copenhagen, Denmark, pp. 467–495.
Ankudinov, V., Daggett, L., Hewlett, J., Jakobsen, B. 2000. Prototype measurement of ship sinkage in confined water. In: Proceedings of MARSIM 2000 (InternationalConference on Marine Simulation and Manoeuvrability), Orlando, USA, p 233.
Barras, C., 1979. The phenomena of ship squat. International Shipbuilding Progress26, 44–47.
Barras, C. 2004. Thirty-two years of research into ship squat. Squat workshop 2004,Elsfleth, Germany, pp. 1–25.
Beck, R., Newman, J., Tuck, E., 1975. Hydrodynamic forces on ships in dredgedchannels. Journal of Ship Research 19 (3), 166–171.
Blaauw, H., Van der Knaap, F., 1983. Prediction of squat of ships sailing in restrictedwater. In: Proceedings of the International Harbour Congress, pp. 81–93.
Brossard, C., Delouis, A., Galichon, P., Granboulan, J., Monadier, P., 1990. Navigabilityin channels subjectto siltation. In: Proceedings of the22nd International CoastalEngineering Conference, Delft, The Netherlands, pp. 3088–3101.
Cong, L., Hsiung, C., 1991. Computing wave resistance, wave profile and sinkageand trim of transom stern ships. Marine and Offshore Operations, 99–112.Constantine, T., 1960. On the movement of ships in restricted waterways. Journal
of Fluid Mechanics 9 (2), 247–257.Dand, I., 1972. On full form ships in shallow water: some methods for the
prediction of squat in subcritical flows. National Physical Laboratory, ShipDivision, Ship Report 160.
de KoningGans, H., Boonstra,H., 2007. Squateffects of very large containershipswithdrift in a harbor environment. In: Proceedings of the International Maritime-portTechnology and Development Conference, Singapore, pp. 613–620.
Delefortrie, G., Vantorre, M., Verzhbitskaya, E., Seynaeve, K., 2007. Evaluation of safety of navigation in muddy areas through real time manoeuvring simulation.
Journal of Waterway, Port, Coastal and Ocean Engineering 133 (2), 125–135.Doctors, L.J., Zilman, G., Miloh, T., 1996. The influence of a bottom mud layer on the
steady-state hydrodynamics of marine vehicles. In: Proceedings of the 21stSymposium on Naval Hydrodynamics, pp. 727 – 742.
Dumas, R., 1982. Le surenfoncement des navires du a leur mouvement. RevueTechnique du Service des Phares et Balises 53, 26–58 In French.
Eloot, K., Verwilligen, J., Vantorre, M., 2008. An overview of squat measurements
for container ships in restricted water. In: Varyani, K.S. (Ed.), International
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0
measurement model
-60%
100%
60%
C T ( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 33. Comparison between measured and modelled trim values. 10% under keel
clearance above a solid bottom. Ship D. Runs with propeller action are labelled.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0
measurement model
-60%
100%Increasing propeller rate
C S
( - )
Frh (-)
0.1 0.2 0.3 0.4 0.5
Fig. 34. Comparison between measured and modelled sinkage values. Ship D.
Thickness of the mud layer ‘‘c’’: 3 m full scale. À7.2% under keel clearance referred
to the water mud interface. Runs with propeller action are labelled.
-0.045
-0.04
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0
measurement model
-60%
100%
60%
C T
( - )
Frh
(-)
0.1 0.2 0.3 0.4 0.5
Fig. 35. Comparison between measured and modelled trim values. Ship D.
Thickness of the mud layer ‘‘c’’: 3 m full scale. À7.2% under keel clearance referred
to the water mud interface. Runs with propeller action are labelled.
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1475

8/6/2019 Delefortrie 2010 Squat Prediction in Muddy Navigation Areas
http://slidepdf.com/reader/full/delefortrie-2010-squat-prediction-in-muddy-navigation-areas 13/13
Conference on Safety and Operations in Canals and Waterways SOCW 2008,15–16 September 2008 Glasgow, UK, pp. 106–116.
Gourlay, T., 2000. Mathematical and computational techniques for predicting the squatof ships. Ph.D. thesis, University of Adelaide, Department of Applied Mathematics.
Gourlay, T., 2008. Slender-body methods for predicting ship squat. OceanEngineering 35 (2), 191–200.
Harting, A., Reinking, J., 2002. SHIPS: a new method for efficient full-scale shipsquat determination. In: Proceedings of the PIANC 30th InternationalNavigation Congress, Sydney, Australia, pp. 84–91.
Harting, A., Laupichler, A., Reinking, J., 2009. Considerations on the squat of unevenly trimmed ships. Ocean Engineering 36, 193–201.
Jiang, T., Henn, R., 2003. Numerical prediction of ship’s squat and trim in shallowwater. In: Proceedings of MARSIM 2003 (International Conference on MarineSimulation and Manoeuvrability), Kanazawa, Japan.
Martin, H., Puls, D., 1986. Vertical forces, trim moments and changes of draught and trim of ships in shallow water. Schiffbauforschung 25 (3),155–159.
Millward, A., 1990. A preliminary design method for the prediction of squat inshallow water. Marine Technology 27 (1), 10–19.
Naghdi, P., Rubin, M., 1984. On the squat of a ship. Journal of Ship Research 28 (2),107–117.
PIANC, 1997. Approach channels – A guide for design. Final report of the jointWorking Group PIANC and IAPH, in cooperation with IMPA and IALA.Supplement to PIANC Bulletin, No. 95, 108 p.
Sellmeijer, R., van Oortmerssen, G., 1983. The effect of mud on tanker manoeuvres.The Royal Institution of Naval Architects, Spring Meetings 1983, paper no. 7.
Seren, D., Ferguson, A., McGregor, R., 1983. Squat—an examination of two practicalprediction methods. The Naval Architect 5, 228–230.
Stocks, D., Daggett, L., Page, Y., 2004. Maximization of ship draft in the St.LawrenceSeaway. Squat workshop 2004, Elsfleth, Germany.
Tuck, E., 1966. Shallow water flow past slender bodies. Journal of Fluid Mechanics26 (1), 81–95.
Vantorre, M., Coen, I., 1988. On sinkage and trim of vessels navigating above amud layer. The Royal Society of Flemish Engineers, International HarbourCongress.
Von Bovet, G., 1985. Tiefgangs- un Trimmwinkelanderungen von Schiffen underBerucksichtigung endlicher Wassertiefe un Einflub auf die Steuerbarkeit.Schiffbauforschung 24 (1), 3–11 (in German).
G. Delefortrie et al. / Ocean Engineering 37 (2010) 1464–1476 1476