
Linearna Algebra - Predavanja
Vladimir Pavlovic
January 9, 2013

2

Sadrzaj
I Operacije. Pojam vektorskih prostora 5
I.1 Literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
I.2 Funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
I.3 Operacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
I.4 Geometrijski vektori . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
I.5 Definicija vektorskih prostora . . . . . . . . . . . . . . . . . . . . . . 21
I.6 Linearna kombinacija konacnog sistemavektora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
II Osnovni pojmovi i cinjenice 37
II.1 Podprostor vektorskog prostora . . . . . . . . . . . . . . . . . . . . . 37
II.2 Potpuni sistemi i skupovi vektora . . . . . . . . . . . . . . . . . . . . 44
II.3 Linearno (ne)zavisne n-torke vektora . . . . . . . . . . . . . . . . . . 47
II.4 Linearno (ne)zavisni skupovi vektora . . . . . . . . . . . . . . . . . . 50
II.5 Bazni skup, baza, dimenzija . . . . . . . . . . . . . . . . . . . . . . . 61
II.6 Sume podprostora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
II.7 Linearna preslikavanja . . . . . . . . . . . . . . . . . . . . . . . . . . 79
II.8 Kako shvatiti pojam izomorfnih prostora . . . . . . . . . . . . . . . . 88
II.9 Tri ocigledna i jedan vazan izomorfizam . . . . . . . . . . . . . . . . . 91
II.10 Osnovna tvrdenja o linearnim preslikavanjima . . . . . . . . . . . . . 95
II.11 Kad za f ∈ End(V) vazi Ker(f)⊕ Im(f) = V ? . . . . . . . . . . . . . 102
II.12 Projekcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
II.13 Linearna preslikavanja iz Km u Kn . . . . . . . . . . . . . . . . . . . 105
II.14 Matrica linearnog preslikavanja . . . . . . . . . . . . . . . . . . . . . 109
II.15 Mnozenje matrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
II.16 Dva primera: rotacija i osna simetrija . . . . . . . . . . . . . . . . . . 124
II.17 Matrica linearnog preslikavanja ipromena baze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
II.18 Jedinicna matrica. Regularne matrice . . . . . . . . . . . . . . . . . . 137
II.19 Hom (Km×1,Kn×1), Hom (K1×n,K1×m)i mnozenje matrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
II.20 Linearna forma funkcionele u datoj bazi . . . . . . . . . . . . . . . . 144
3

4 SADRZAJ
II.21 Algebarski dual vektorskog prostora.Dualne baze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
II.22 Kanonski izomorfizam k.d.v. prostorasa drugim dualom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
II.23 Rang matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
IIISistemi linearnih jednacina. Determinanta 167III.1 Sistemi linearnih jednacina:
definicija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167III.2 Sistemi linearnih jednacina i linearna preslikavanja . . . . . . . . . . . 169III.3 Resivost sistema linearnih jednacina
i rang matrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171III.4 GJ- oblik matrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173III.5 Permutacije, inverzije . . . . . . . . . . . . . . . . . . . . . . . . . . . 187III.6 n-linearna preslikavanja . . . . . . . . . . . . . . . . . . . . . . . . . . 188III.7 Definicija determinante . . . . . . . . . . . . . . . . . . . . . . . . . . 195III.8 Osnovne osobine determinanti . . . . . . . . . . . . . . . . . . . . . . 198III.9 Determinanta i rang matrica . . . . . . . . . . . . . . . . . . . . . . . 205III.10Determinanta i inverzna matrica . . . . . . . . . . . . . . . . . . . . . 206III.11Determinanta i sistemi linearnih
jednacina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
IV Struktura linearnog operatora 209IV.1 Sopstvene vrednosti/vektori linearnog operatora . . . . . . . . . . . . 209IV.2 Teorema Cayley-Hamilton-a . . . . . . . . . . . . . . . . . . . . . . 212IV.3 Minimalni polinom . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214IV.4 Jordan-ova normalna forma . . . . . . . . . . . . . . . . . . . . . . . 215
V Realan i kompleksan skalarni proizvod 225

Deo I
Operacije. Definicija realnih ikompleksnih vektorskih prostora
I.1 Literatura
Kao udzbenik koristicemo knjigu
Linearna algebra i analiticka geometrija,drugo, ispravljeno i dopunjeno izdanje.
Autor: Ljubisa Kocinac
Radimo samo Glave 1,2,6 i ako stignemo 4.
5

6 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
I.2 Funkcije
〈a, b〉 :df={{a}, {a, b}
}– primaran ureden par. Vazi
ako je bilo a 6= a0 bilo b 6= b0 onda 〈a, b〉 6= 〈a0, b0〉
f je funkcija definisana na skupu X sa vrednostima u skupu Y , ili f je funkcija
iz skupa X u skup Y skraceno zapisujemo sa
f : X → Y
X := {u, v, w}, gde u 6= v 6= w 6= u; Y := {a, b, c, d}
Slika I.2.1.
Po svojoj prirodi funkcije su specijalne vrste skupova primarnih uredenihparova.
f := {〈u, d〉, 〈v, b〉, 〈w, b〉}f(u) = d, f(v) = b, f(w) = b.
{〈u, a〉, 〈v, b〉, 〈u, c〉, 〈w, d〉} nije funkcija ako a 6= c.
Ako Y1 := {a, b, d}, Y2 := {b, c, d} onda je tacno f : X → Y1 i f : X → Y2. Sdruge strane f : X → {a, b, c} nije tacno.
Dom(f) = X – domen funkcije f
Im(f) = {d, b} – imidz funkcije f ili skup slika funkcije f
{〈u, a〉, 〈w, b〉} – ovo nije funkcija (definisana) na skupu X ali jeste funkcija naskupu X0 := {u, w}.
f � X0 = {〈u, d〉, 〈w, b〉} – restrikcija funkcije f na skup X0.
I.2. FUNKCIJE 7
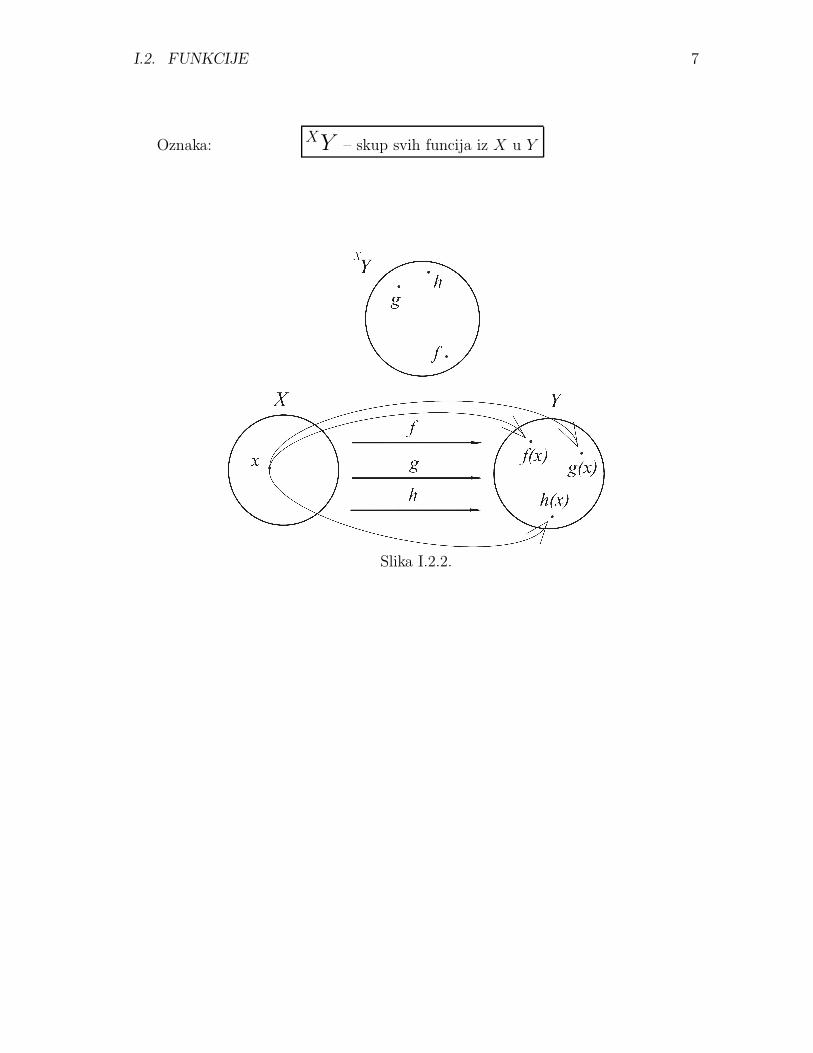
Oznaka:XY – skup svih funcija iz X u Y
Slika I.2.2.

8 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Primer Definisimo funkciju f : R → Z tako da je za x ∈ R f(x) najveci ceo broj rza koji vazi r ≤ x.
Imamo f ∈ RZ kao i f ∈ RR. Takode je f(−3.7) = −4, f(9) = 9, f(14/3) = 4.
f = {. . . , 〈−3.7,−4〉, 〈9, 9〉, 〈14/3, 4〉, . . .} – beskonacan skup
f :
(· · · −3.7 9 14/3 · · ·· · · −4 9 4 · · ·
)
Primer Definisimo funkciju g : R → R sa g(x) = 2x3− 5x2 +x+11, za x ∈ R. Ovoje primer jedne polinomske funkcije.
Imamo g(0) = 11, g(−1) = 3.
g = {. . . , 〈0, 11〉, 〈−1, 3〉, . . .} = {〈x, 2x3 − 5x2 + x+ 11〉 : x ∈ R} – beskonacanskup
g :
(· · · 0 −1 · · ·· · · 11 3 · · ·
)
Neki specijalni slucajevi
(1) (Uredene n-torke) Funkciju h : {1, 2, 3} → {p, q, r, s} definisanu sa
h :
(1 2 3p p q
)
zapisujemo jednostavnije sa h = (p, p, q).
Funkciju t : {1, 2, 3} → {p, q, r, s} definisanu sa
t :
(1 2 3r q s
)
zapisujemo jednostavnije sa t = (r, q, s).
Dakle ako je domen funkcije skup {1, . . . , n} za neko n ∈ N onda umesto
g :
(1 · · · n
g(1) · · · g(n)
)
pisemo samo g = (g(1), . . . , g(n)) ili g = (g1, . . . , gn), i
za funkciju g kazemo da je uredena n-torka . Specijalno za n = 2 funkcije (a1, a2)nazivamo uredenim parovima (bez onog “primaran”). Za gi kazemo da je i-ta kom-
ponenta n-torke (g1, . . . , gn). Obratimo paznju:
(x, y) =
{
〈1, x〉, 〈2, y〉}

I.2. FUNKCIJE 9
Ako su dati skupovi A1, . . . , An onda sa sa A1×· · ·×An oznacavamo skup svih n-
torki q = (q1, . . . , qn) takvih da je qi ∈ Ai za i = 1, n (dakle g : {1, , . . . , n} →n⋃
i=1
Ai);
A1 × · · · × An nazivamo Descartes-ov proizvod skupova A1, . . . , An tim redom.Ako je specijalno A1 = · · · = An = X onda se ovaj Descartes-ov proizvod svodi
na skup {1,...,n}X kog krace oznacavamo sa Xn . Za Xn kazemo da je skup svih
n-torki elemenata skupa X ili n-ti Descartes-ov stepen skupa X. Recimo C3 jeskup svih (uredenih) trojki kompleksnih brojeva i (3,−2i, 7 + 4i) ∈ C
3.
(2) (Matrice) Imamo
{1, 2, 3} × {1, 2} = {(1, 1), (1, 2), (2, 1), (2, 2), (3, 1), (3, 2)}Funkciju T : {1, 2, 3} × {1, 2} → C datu sa
T :
((1, 1) (1, 2) (2, 1) (2, 2) (3, 1) (3, 2)8 5− i −1 3i 0 −7
)
zapisujemo preglednije tablicom
T :
1 2
123
8 5− i
−1 3i0 −7
ili jos krace sa
T =
8 5− i
−1 3i0 −7
Imamo T (1, 1) = T ((1, 1)) = 8, T (3, 2) = −7.
Dakle ako je za neko n,m ∈ N domen funkcije skup {1, . . . , n}×{1, . . . , m} ondaumesto
P :
((1, 1) · · · (1, m) · · · (n, 1) · · · (n,m)
P (1, 1) · · · P (1, m) · · · P (n, 1) · · · P (n,m)
)
jednostavno pisemo
P =
P (1, 1) · · · P (1, m)...
.........
...P (n, 1) · · · P (n,m)
odnosno
P =
P1,1 · · · P1,m...
.........
...Pn,1 · · · Pn,m

10 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
a za funkciju P kazemo da je
matrica formata n puta m
i to sa vrednostima u skupu X ako je Im(P ) ⊆ X (tj. P (i, j) ∈ X za svako i = 1, n
i j = 1, m). Ako je (i, j) ∈ {1, . . . , n} × {1, . . . , m} onda za P (i, j) kazemo da stoji
na mestu (i, j) u matrici P .
Skup svih matrica formata n puta m i to sa vrednostima u skupu X oznacavamo
sa Xn×m . Kvadratna matrica reda n ∈ N jeste matrica formata n puta n.
• Ilustracija Gore definisana funkcija T je matrica formata 3 puta 2 sa vrednostimau C (ili nad C kako se jos kaze). Na mestu (1, 2) u matrici T stoji 5 − i. ImamoT ∈ C
n×m kao i
U :=
−907
∈ Z3×1 ⊆ R
3×1, U3,1 = U(3, 1) = 7
iV :=
[4 −5
√3]∈ R
1×3 ⊆ C2×3, V1,3 = V (1, 3) =
√3
•
Ako su i ∈ {1, . . . , n} i j ∈ {1, . . . , m} onda za matricu
P•,j :df=
P1,j...
Pn,j
∈ Xn×1
kazemo da je j-ta kolona matrice P a za matricu
Pi,• :df=[Pi,1 · · · Pi,m
]∈ X1×m
kazemo da je i-ta vrsta matrice P .

I.3. OPERACIJE 11
I.3 Operacije
Slika I.3.3.
Za funkciju f : X × Y → Z kazemo da je
mesovita operacija izmedu elemenata skupa X i elemenata skupa Y
sa vrednostima u skupu Z
Uobicajeno je da se izabere neki simbol tipa “◦” (ili “?”, “∗”, “·”, “+”, “⊕” i slicno)i da se govori “operacija ◦” a umesto “f(x, y)” za x ∈ X i y ∈ Y pise “x ◦ y”.
Primer Neka je funkcija f : N×P(N) → P(N) definisana sa f(k, A) :df= A∩{1, . . . , k}
za k ∈ N i A ⊆ N; dogovorimo se da umesto f(k, A) pisemo k ◦ A.
Imamo 7 ◦ 2N = {2, 4, 6} i 11 ◦ {2, 5, 10, 31} = {2, 5, 10}. Ovakva funkcija f ,odnosno “◦” je primer mesovite operacije izmedu elemenata skupa N i elemenata
skupa P(N). 2

12 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Slika I.3.4.
Ako je specijalno X = Y = Z =: A onda je zapravo f : A × A → A i u ovomslucaju kazemo da je f operacija na skupu A .
Slika I.3.5.
Operacija ◦ na skupu A je asocijativna ako za svako x, y, z ∈ A vazi
(x ◦ y) ◦ z = x ◦ (y ◦ z)

I.3. OPERACIJE 13
Primer Neka je funkcija g : R×R → R definisana sa g(x, y) :df= |x− y| za x, y ∈ R;
umesto g(x, y) pisimo x ∗ y. ∗ je operacija na skupu R.
Operacija ∗ je komutativna : x ∗ y = |x − y| = |y − x| = y ∗ x vazi za svakox, y ∈ R.
Operacija ∗ nije asocijativna : postoje a, b, c ∈ R tako da a ∗ (b ∗ c) 6= (a ∗ b) ∗ c(recimo imamo 2 ∗ (5 ∗ 11) = 2 ∗ 6 = 4 i (2 ∗ 5) ∗ 11 = 3 ∗ 11 = 8). Dodusex ∗ (x ∗ x) = (x ∗ x) ∗ x vazi za svako x ∈ R (jer je operacija komutativna). 2
Ako nijeX = Y = Z onda u opstem slucaju nema smisla govoriti o asocijativnostimesovite operacije f : X × Y → Z (jer npr. moze da se desi da je a ∗ b ∈ Z \X zaneke a ∈ X, b ∈ Y pa “(a ∗ b) ∗ c”, tj. “f(a ∗ b, c)”, za c ∈ Y nista ne oznacava).
Primer Neka je X := P(N) i neka su ·, ∗ i ⊕ operacije na skupu X definisane sa
A ·B :df= A ∩ B, A ∗B :
df= A ∪ B i A⊕ B :
df= A4B za A,B ⊆ N.
Da li postoji neko M ∈ X tako da je A ∗M = M ∗ A = A za svako A ∈ X?
A ∗ ? = ? ∗ A = A
↑trazimo jedan fiksiran element M koji god A
ovde da stoji!
e1 := N je neutralni element za operaciju “·” :
A · e1 = A ∩ N = A i e1 · A = N ∩ A = A za svako A ∈ X.
e2 := ∅ je neutralni element za operaciju ∗:
A ∗ e2 = A ∪ ∅ = A i e2 ∗ A = ∅ ∪ A = A za svako A ∈ X.
∅ je takode neutralni element i za operaciju ⊕.
• Pitanje 1 Da li postoji jos neki neutralni element za ·, ∗ ili za ⊕?
Odgovor:
n1 = n1 ∗ n2 = n2
•

14 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
• Pitanje 2 Za koje A ∈ X postoji neko S ∈ X tako da je A ⊕ S = S ⊕ A =e2 = ∅ = “neutral za ⊕”? Za koje A ∈ X postoji neko S ∈ X tako da jeA · S = S · A = e1 = N = “neutral za ·”? Za koje A ∈ X postoji neko S ∈ X takoda je A ∗ S = S ∗ A = e2 = ∅ = “neutral za ∗”?
A ∗ 2A = 2A ∗ A = “neutral”
•
Imamo ∅ = A⊕ S = A4S akko je S = A. Dakle svaki element skupa X je
invertibilan u odnosu na operaciju ⊕
Imamo N = A · S = A ∩ S akko A = S = N. Dakle samo neutral e1 = N jeinvertibilan u odnosu na operaciju “·”.
Imamo ∅ = A ∗ S = A ∪ S akko A = S = ∅. Dakle samo neutral e2 = N jeinvertibilan u odnosu na operaciju ∗.
Pitanje 3 Imamo A ⊕ A = e2 = ∅ za svako A ∈ X. Da li (i za koje A ∈ X)postoji jos neko S 6= A tako da je A⊕ S = e2? •
Ukoliko je doticna operacija asocijativna (a ova ⊕ jeste takva) onda za svaki
invertibilan element postoji tacno jedan inverzni (suprotni) element : ako je
l ◦ x = x ◦ d = e = “neutral za operaciju ◦”, onda imamo
l = l ◦ e = l ◦ (x ◦ d) = (l ◦ x) ◦ d = e ◦ d = d
2
Primer Neka je ◦ operacija na skupu X := N definisana sa n ◦m :df= min{n,m} za
n,m ∈ N.
Za svako n ∈ N postoji neko k(n) ∈ N tako da je n◦k(n) = k(n)◦n = n. Recimon ◦ (n+1) = (n+1) ◦n = n. Za k(n) mozemo (a i moramo) uzeti bilo koji prirodanbroj veci ili jednak n.
Ali ne postoji jedan fiksiran m0 ∈ N tako da za svako n ∈ N vazi
n ◦m0 = m0 ◦ n = n

I.3. OPERACIJE 15
Dakle ne postoji neutral za operaciju ◦. 2
Primer Neka je ◦ operacija na skupu X := {1, 2, 3, 4} definisana sa n ◦ m :df=
min{n,m} za n,m ∈ X, a ⊕ operacija na skupu Z definisana sa k ⊕ l :df= k − l za
k, l ∈ Z.
◦ je komutativna i asocijativna operacija i ima neutralni element – to je e := 4.Operacija ⊕ nije ni komutativna ni asocijativna. Ne postoji neutralni element zaoperaciju ⊕: kad bi neki s ∈ Z bio neutral za ⊕ onda bi moralo biti 1 = s⊕1 = s−1i 2 = s⊕ 2 = s− 2, tj. i s = 2 i s = 4, sto je nemoguce.
Za operaciju ⊕ termin invertibilan element dakle nema smisla. Element n ∈ Xje inveribilan u odnosu na operaciju ◦ ako postoji neko x ∈ X tako da je n ◦x = 10,tj. min{n, x} = 10, a ovo je moguce akko je n = x = 10; dakle jedino je neutral 10invertibilan u odnosu na ◦. 2
Primer Neka je X := {1, 2, 3, 4} i S := XX = X4 = skup funkcija iz X u X. Naskupu S definisemo operaciju ◦ tako da je za f, g : X → X funkcija f ◦ g ∈ Sklasicna kompozicija funkcija f i g, tj. funkcija f ◦ g : X → X je odredena sa(f ◦ g)(x) = f(g(x)) za svako x ∈ X.
Dobro je poznato da je operacija ◦ asocijativna. Naime ako je f : A → B,g : B → C i h : C → D onda imamo
(
(f ◦ g) ◦ h)
(a) =
(
f ◦ g)(h(a)
)= f(g(h(a)))
(
f ◦ (g ◦ h))
(a) = f
(
(g ◦ h)(a))
= f(g(h(a)))
za svako a ∈ A.
Operacija ◦ nije komutativna jer na primer za f := (2, 3, 1, 4) i g := (2, 1, 3, 4)vazi (f ◦ g)(1) = f(g(1)) = f(2) = 3 i (g ◦ f)(1) = g(f(1)) = g(2) = 1, pa jef ◦ g 6= g ◦ f (recimo zbog (f ◦ g)(1) 6= (g ◦ f)(1)).
(Identicka) funkcija idX (definisana sa idX(x) = x za svako x ∈ X) je neutralnielement za ◦. Element skupa S je invertibilan u odnosu na ◦ akko je bijekcija (tj.funkcija f : X → X koja je 1 − 1 i na; za ovakve funkcije se koristi jos i terminpermutacija skupa X). 2

16 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Asocijativnost i raspored zagrada
Neka je ◦ operacija na skupu X. Ako su x1, x2, x3, x4, x5, x6 ∈ X da li je(
x1 ◦ (x2 ◦ x3)
)
◦(
(x4 ◦ x5) ◦ x6
)
i
(x1 ◦ x2) ◦(
(x3 ◦ x4) ◦ (x5 ◦ x6)
)
jedan te isti element skupa X ili ne? Drugim recima, da li “rezultat racunanja u”x1 ◦x2 ◦x3 ◦x4 ◦x5 ◦x6 zavisi od “rasporeda zagrada”? Ako zavisi onda ne mozemokoristiti zapis “x1 ◦x2 ◦x3 ◦x4 ◦x5 ◦x6” da oznacimo jedan konkretan element skupaX.
Ako je operacija ◦ asocijativna rezultat racunanja NE ZAVISI od rasporedazagrada. Rigorozan dokaz ove cinjenice necemo davati (videcete jedan u okvirupredmeta Uvod u Algebarske Strukture); ovde cemo prezentovati samo jedan “poluin-tuitivan” rezon pomocu kog mozemo shvatiti zasto je to tako.
Dakle pretpostavimo da je ◦ asocijativna operacija. Za n ∈ N i x1, . . . , xn ∈ X
definisimo K(x1) :df= x1 i ako n ≥ 2 K(x1, . . . , xn, xn+1) :
df= K(x1, . . . , xn) ◦ xn+1 (ovo
je primer jedne rekurzivne definicije).
K(x1, . . . , xn) = ( · · · ((x1 ◦ x2) ◦ x3) · · · · · · · · · · · · ) ◦ xn
Na primer imamo K(a, b) = a ◦ b i K(a, b, c, d) = ((a ◦ b) ◦ c) ◦ d. Pokazimoindukcijom po n ∈ N da:
za svako m ∈ N tako da m ≤ n kako kog “postavljali zagrade u x1 ◦ · · · ◦ xm”rezultat je uvek K(x1, . . . , xm).
Ako je n = 1 ili n = 2 jasno je da je ovo tacno. Neka tvrdenje vazi za neko n ≥ 2i neka su dati x1, . . . , xn+1 ∈ X.
“Postavimo na proizvoljan nacin zagrade u x1 ◦ · · · ◦ xn+1” i oznacimo “rezultatodreden tim rasporedom zagrada” sa S.
S =
(
x1 ◦ · · · ◦ xi0
)
︸ ︷︷ ︸
A
◦(
xi0+1 ◦ · · · ◦ xn+1
)
︸ ︷︷ ︸
B
Tada za neko i0 ∈ {1, . . . , n} imamo
S = A ◦B

I.3. OPERACIJE 17
gde je A rezultat odreden isvesnim rasporedom zagrada u x1 ◦ · · · ◦ xi0 i B rezultatodreden izvesnim rasporedom zagrada u xi0+1 ◦ · · · ◦ xn+1.
Prema indukcijskoj hipotezi je A = K(x1, . . . , xi0) i B = K(xi0+1, . . . , xn+1)(obzirom da je i0 ≤ n i (n+ 1)− i0 ≤ n).
Neka je najpre i0 ≤ n. ◦ je asocijativna operacija te je
S = A ◦(
K(xi0+1, . . . , xn) ◦ xn+1
)
=
(
A ◦K(xi0+1, . . . , xn)
)
◦ xn+1
Kako je A ◦ K(xi0+1, . . . , xn) = K(x1, . . . , xn) (takode prema indukcijskoj hipotezi)to sledi S = K(x1, . . . , xn) ◦ xn+1 = K(x1, . . . , xn+1).
Neka je sada i0 = n + 1. Imamo S = A ◦ xn+1 = K(x1, . . . , xn) ◦ xn+1 =K(x1, . . . , xn+1). Ovim je “dokaz” priveden kraju.
Konvencija Ako je operacija ◦ asocijativna i x1, . . . , xn ∈ X onda je dakle sax1 ◦ · · · ◦ xn jednoznacno (nedvosmileno) odreden jedan element skupa X; u ovomslucaju cemo koristiti ovakav (kraci) zapis u kome nema zagrada. 2
Asocijativnost, komutativnost i redosled elemenata u x1◦· · ·◦xn
Neka je ◦ asocijativna operacija na skupu X. Ako su x1, x2, x3, x4 ∈ X da li jex1 ◦ x2 ◦ x3 ◦ x4 i x3 ◦ x2 ◦ x4 ◦ x1 jedan te isti element skupa X ili ne?
Ako je operacija ◦ komutativna “rezultat racunanja” NE ZAVISI od redosledaelemenata u x1 ◦ · · · ◦ xn. Ovo pokazujemo indukcijom po n ∈ N, n ≥ 2. Za n = 2tvrdenje se svodi na x1 ◦ x2 = x2 ◦ x1, a ovo po pretpostavci vazi.
Neka je sada tvrdenje tacno za neko n ≥ 2 i neka su dati x1, . . . , xn+1 ∈ X. Nekasu i1, . . . , in+1 takvi da je {i1, . . . , in+1} = {1, . . . , n+ 1}.
Ako je i1 6= 1 onda je ili
xi1 ◦· · ·◦xin+1 = u◦x1◦v = (u◦x1)◦v = (x1◦u)◦v = x1◦(u◦v) = x1◦xj2 ◦· · ·◦xjn+1
za neke j2, . . . , jn+1 takve da je {j2, . . . , jn+1} = {2, . . . , n+ 1}, ili jexi1 ◦ · · · ◦ xin+1 = u ◦ x1 = u ◦ x1 = x1 ◦ u = x1 ◦ xj2 ◦ · · · ◦ xjn+1
za neke j2, . . . , jn+1 takve da je {j2, . . . , jn+1} = {2, . . . , n+ 1}.
U svakom slucaju je xi1◦· · ·◦xin+1 = x1◦(xj2◦· · ·◦xjn+1) za neke j2, . . . , jn+1 takveda je {j2, . . . , jn+1} = {2, . . . , n + 1}. Po indukcijskoj hipotezi je xj2 ◦ · · · ◦ xjn+1 =x2 ◦ · · · ◦ xn+1 pa sledi
xi1 ◦ · · · ◦ xin+1 = x1 ◦ (xj2 ◦ · · · ◦ xjn+1) = x1 ◦ x2 ◦ · · · ◦ xn+1

18 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
§Neka je S neprazan skup. Pod
sistemom elemenata skupa X sa skupom indekasa S
ili indeksiranim skupom S, podrazumevamo jednostavno bilo koju funkciju x : S →X i da je oznacimo koristimo neki od zapisa “(xs : s ∈ S)” i/ili “(x) : xs, s ∈ S”;konacan sistem je zapravo sistem kod koga je skup S konacan – recimo uredenen-torke su konacni sistemi.
Neka je (as : s ∈ S) konacan sistem elemenata skupa X (dakle ovde je as ∈ Xza svako s ∈ S) i neka je “+” asocijativna i komutativna operacija na skupu X.Neka je n ∈ N broj elemenata skupa S. Proizvoljno “indeksirajmo” elemente skupaS tako da je S = {r1, . . . , rn} za neke r1, . . . , rn (gde naravno ri 6= rj ⇐ i 6= j zai, j = 1, n). Drugim recima uocimo neku bijekciju r : {1, . . . , n} → X.
Elementn∑
i=1
ari = ar1 + · · ·+ arn
skupa X oznacavamo sa∑
s∈S
as
Ova definicija je korektna jer “rezultat racunanja”, kako smo vec videli, ne zavisi odporetka elemenata skupa S koji izaberemo.
§
I.4 Geometrijski vektori
Na slici ispod ureden par tacaka (A,B) je “istog tipa kao” ureden par (A1, B1):

I.4. GEOMETRIJSKI VEKTORI 19
Slika I.4.6.
Takode, ureden par tacaka (T, T ) je “istog tipa kao” ureden par (S, S).
Slika I.4.7.
Skup
x :=
{
. . . , (A,B), . . . , (D,E), . . . , (G,H), . . . , (I, J), . . .
}
=−→AB =
−−→DE =
−−→GH =
−→IJ
nazivamo geometrijski vektor odreden uredenim parom tacaka (A,B) , a to je isto
sto i geometrijski vektor odreden uredenim parom tacaka (D,E), odnosno geometri-jski vektor odreden uredenim parom tacaka (G,H) itd. (preciznu definiciju ovogpojma necemo dati). Imamo (A,B) ∈ x, {(D,E), (I, J)} ⊆ x. Treba dakle pravitirazliku izmedu pojma ureden par tacaka i pojma geometrijski vektor (koji po svojojprirodi predstavlja odreden skup uredenih parova tacaka).
Imamo
y :=−−→BC =
−→EF =
−−→KL =
−−→MN =
{
. . . , (B,C), . . . , (E, F ), . . . , (K,L), . . . , (M,N), . . .
}
Klasicno sabiranje geometrijskih vektora se definise tako da je{
. . . , (A,B), . . . , (D,E), . . . , (G,H), . . .
}
+
{
. . . , (B,C), . . . , (E, F ), . . . , (K,L), . . .
}
=
{
. . . , (A,C), . . . , (D,F ), . . . , (O,P ), . . . , (Q,R), . . .
}
odnosno preciznije
x+ y =−→AB +
−−→BC =
−→AC

20 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Poznato je da je (klasicno) sabiranje geometrijskih vektora komutativna i aso-cijativna operacija.
Slika I.4.8.
Postoji neutral i to je geometrijski vektor
−→0 :=
{
. . . , (A,A), . . . , (G,G), . . . , (R,R), . . . ,
}
=−−→DD =
−→UU
Citaocu je poznato kako se definise mesovita operacija mnozenja geometrijskih vek-
tora realnim brojevima; npr. imamo −2−−→XY =
−−→XW =
−−−→X1X2, 2
−−→XZ =
−−→XW i
3−−→Y X =
−−→YW :

I.5. DEFINICIJA VEKTORSKIH PROSTORA 21
Slika I.4.9.
Poznato je da za geometrijske vektore u, v i α ∈ R vazi α(u+ v) = αu+ αv:
Slika I.4.10.
Poznato je da za proizvoljan geometrijski vektor u i brojeve α, β ∈ R vazi
(α + β)u = αu+ βu kao i α(βu) = (αβ)u.
I.5 Definicija vektorskih prostora
Da “napravimo” realan vektorski prostor potrebne su nam dve “stvari”:
– jedan skup V i neka komutativna i asocijativna operacija ⊕ na skupu V za kojupostoji neutralni element i u odnosu na koju je svaki element invertibilan i– neka mesovita operacija f : R × V → V – dogovorimo se da za α ∈ R i u ∈ Vumesto f(α, u) pisemo α ◦ u – tako da su zadovoljeni sledeci uslovi:
(V1) 1 ◦ u = u za svako u ∈ V ;
(V2) α ◦ (u⊕ v) = (α ◦ u)⊕ (α ◦ v) za svako α ∈ R i u, v ∈ V ;
(V3) (α + β) ◦ u = (α ◦ u)⊕ (β ◦ u) za svako α, β ∈ R i u ∈ V ;
(V4) α ◦ (β ◦ u) = (αβ) ◦ u za svako α, β ∈ R i u ∈ V .
U tom slucaju za uredenu trojku V := (V,⊕, ◦) (= (skup V , operacija ⊕,mesovita
operacija ◦)) kazemo da je
realan vektorski prostor
ili

22 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
vektorski prostor nad R;
za elemente skupa V kazemo da su vektori vektorskog prostora V. Operaciju ⊕ nazi-vamo sabiranje vektora u prostoru V.
Pojam
kompleksan vektorski prostor
ili
vektorski prostor nad C
se definise na potpuno isti nacin samo sto je sada ◦ : C×V → V mesovita operacijakoja za svaki kompleksan broj α ∈ C i u ∈ V kao rezultat daje neko α ◦ u ∈ V .
Primer Geometrijski vektoriAko je V skup svih geometrijskih vektora, u ⊕ v je klasican zbir geometrijskih
vektora u i v a α ◦ u klasican proizvod geometrijskog vektora u i realnog broja αonda je (V,⊕, ◦) je realan vektorski prostor. 2
Konvencija Fraza “V = (V,⊕, ◦) je vektorski prostor nad K” znacice zapravo daje K = R ili K = C a V vektorski prostor nad K, i sluzice da se formulisu definicijei formulisu i/ili dokazuju teoreme simultano i za realne i za kompleksne vektorskeprostore. Ukoliko je u datom razmatranju od sustinskog znacaja cinjenica da jeposmatrani vektorski prostor realan, odnosno kompleksan onda cemo umesto “K”pisati bas “R” odnosno “C”. 2
Tvrdenje I.5.1 Za svako n ∈ N i α, α1, . . . , αn ∈ K, u, u1, . . . , un ∈ V vazi:(a) α ◦ (u1 ⊕ · · · ⊕ un) = (α ◦ u1)⊕ · · · ⊕ (α ◦ un) i(b) (α1 + · · ·+ αn) ◦ u = (α1 ◦ u)⊕ · · · ⊕ (αn ◦ u).
Dokaz (a) Indukcijom po n: α◦(u1⊕· · ·⊕un⊕un+1) = α◦((u1⊕· · ·⊕un)⊕un+1
) (1)=
(
α ◦ (u1 ⊕ · · · ⊕ un)
)
⊕ (α ◦ un+1)(2)=
(
(α ◦ u1) ⊕ · · · ⊕ (α ◦ un)
)
⊕ (α ◦ un+1) =
(α◦u1)⊕· · ·⊕(α◦un)⊕(α◦un+1), gde se (1) pravda osobinom (V2) a (2) indukcijskomhipotezom.
(b) Indukcijom po n: (α1+ · · ·+αn+αn+1) ◦u =((α1+ · · ·+αn)+αn+1
)◦u =
(
(α1 + · · · + αn) ◦ u
)
⊕ (αn+1 ◦ u) =
(
(α1 ◦ u) ⊕ · · · ⊕ (αn ◦ u)
)
⊕ (αn+1 ◦ u) =
(α1 ◦ u)⊕ · · · ⊕ (αn ◦ u)⊕ ◦(αn+1u). 2

I.5. DEFINICIJA VEKTORSKIH PROSTORA 23
Konvencija Ako je V := (V,⊕, ◦) vektorski prostor nad K onda je za α ∈ K iu ∈ V umesto α ◦ u ekonomicnije i uobicajeno da se pise α−→u , gde ova strelica
ima funkciju da ukaze na to da je u element skupa V svih vektora (vektorskog)prostora V. Takode je uobicajeno da se pise jednostavno −→x + −→y umesto −→x ⊕ −→y ,gde ponovo ove strelice govore da se radi o elementima skupa V a da je ovo “+”zapravo operacija sabiranja vektora “⊕”; zapis x + y (bez strelica) porucuje da jex, y ∈ K i da je “+” zaista klasicno sabiranje brojeva.
Za elemente skupa K (dakle realne ili kompleksne brojeve) se kaze da su skalari
prostora V a za mesovitu operaciju ◦ da je mnozenje vektora skalarom. 2
Ako neutralni element operacije ⊕ oznacimo sa 0 i ako je u ∈ V proizvoljno ondapo pretpostavci postoji tacno jedan suprotni (u odnosu na operaciju ⊕) elementelementa u; ako izaberemo recimo oznaku u da oznacimo suprotni element elementa
u onda dakle imamo v ⊕ v = 0 (odnosno −→v + −→v =−→0 prema nasoj konvenciji) za
svako v ∈ V . Uz ovakve oznake imamo da vazi naredni stav.
Tvrdenje I.5.2 Za svako α ∈ K i x ∈ V vazi:(a) 0−→x =
−→0 ;
(b) α−→0 =
−→0 ;
(c) α−→x =−→0 moze da vazi samo ako α = 0 ili x = 0;
(d) (−α)−→x = α−→x i (−1)−→x = −→x .
Dokaz (a) Imamo 1−→x = x pa je −→x +0−→x = 1−→x +0−→x = (1+0)−→x = 1−→x = −→x , gdesmo iskoristili (V3). Iz
−→x + 0−→x = −→xsada sledi
−→x +(−→x + 0−→x
)= −→x +−→x
tj.(−→x +−→x
)+ 0−→x =
−→0 odnosno 0−→x =
−→0 + 0−→x =
−→0 .
(b) Imamo
α−→0 = α
(−→0 +
−→0)= α
−→0 + α
−→0
gde smo iskoristili (V2). Odavde je
α−→0 +α
−→0 = α
−→0 + α
−→0 +α
−→0
tj. −→0 = α
−→0 +
−→0

24 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
odnosno−→0 = α
−→0 .
(c) Ako je α 6= 0 onda iz α−→x =−→0 sledi
1
α
(α−→x
)=
1
α
−→0 , pa sada prema (b) i
(V4) mora biti
(1
α· α)
−→x =−→0 , tj. −→x = 1−→x =
−→0 .
(d) Imamo−→0 = 0−→x =
(α + (−α)
)−→x = α−→x + (−α)−→x , pa je (−α)−→x = α−→x ;specijalno za α = 1 odavde zbog (V1) sledi (−1)−→x = −→x . 2
Za neutral 0 se kaze da je
nula vektor vektorskog prostora V
Konvencija Uobicajeno je da se pise −−→x umesto −→x za suprotni vektor (tj. suprotnielement) vektora −→x ∈ V . Uz ovu konvenciju moze da se shvati da zapis “−3−→x ” pred-stavlja suprotni vektor vektora 3−→x ali i da predstavlja rezultat (−3) ◦ −→x mnozenjavektora −→x skalarom (brojem) −3. Na osnovu Tvrdenja I.5.2 ova dva vektora se
poklapaju pa zapravo nema dvosmislenosti u tom zapisu. Takode, −→a − −→b se
koristi kao skracenica za −→a + (−−→b ) = −→a +
−→b .
U skladu sa ovim je recimo
2−→x − 5−→y = 2−→x + (−5−→y ) = 2−→x + 5 ◦ −→x = 2−→x + (−5) ◦ −→y
i
2−→x −−→y = 2−→x + (−−→y ) = 2−→x +−→y = 2−→x + (−1) ◦ −→y
i (skoro) po pravilu cemo koristiti ove prve (najjednostavnije) zapise. 2
• Ilustracija Neka
−→u := −→x − 3−→y +−→z−→v := 2−→y − −→z + 3−→r−→w := 3−→z − 5−→r +
−→t

I.5. DEFINICIJA VEKTORSKIH PROSTORA 25
Imamo
4−→u + 5−→v + 3−→w = 4(−→x − 3−→y +−→z ) + 5(2−→y −−→z + 3−→r ) + 3(3−→z − 5−→r +−→t )
(1)=
(
4−→x + 4(−3−→y ) + 4−→z)
+(
5(2−→y ) + 5(−−→z ) + 4(3−→r ))
+(
3(3−→z ) + 3(−5−→r ) + 3−→t
)
=
(2)= (4−→x − 12−→y + 4−→z ) + (10−→y − 5−→z + 15−→r ) + (9−→z − 15−→r + 3
−→t )
(3)= 4−→x + (−12−→y + 10−→y ) + (4−→z − 5−→z + 9−→z ) + (15−→r − 15−→r ) + 3
−→t
(4)= 4−→x − 2−→y + 8−→z + 3
−→t
Argumentacija za gornje jednakosti:(1): na osnovu (V2) tj. α ◦ (u⊕ v) = (α ◦ u)⊕ (α ◦ v), odnosno
α ◦ (u1 ⊕ · · · ⊕ un) = (α ◦ u1)⊕ · · · ⊕ (α ◦ un)
(sto se moze pokazati indukcijom po n ∈ N);
(2): na osnovu (V4) tj. α ◦ (β ◦ u) = (αβ) ◦ u;
(3): zbog komutativnosti operacije ⊕;
(4): na osnovu (V3) tj. (α + β) ◦ u = (α ◦ u)⊕ (β ◦ u), odnosno(α1 + · · ·+ αn) ◦ u = (α1 ◦ u)⊕ · · · ⊕ (αn ◦ u)
•
Jedan veoma opst primer
Neka je K = R i K = C i X neprazan skup. Na skupu XK definisemo operaciju“⊕” koju cemo zvati
standardno sabiranje funkcija
na sledeci nacin: ako su f, g : X → K onda je funkcija f ⊕ g : X → K odredena sa
(f ⊕ g)(x) :df= f(x) + g(x)
za svako x ∈ X. Definisemo i mesovitu operaciju ◦ : K×XK → X
K koju cemo zvati

26 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
standardno mnozenje funkcija realnim, odnosno kompleksnim brojem
na sledeci nacin: za f : X → K i α ∈ K funkcija α ◦ f : X → K odredena je sa
(α ◦ f)(x) :df= αf(x)
za svako x ∈ X.
Slika I.5.11.
Slika I.5.12.

I.5. DEFINICIJA VEKTORSKIH PROSTORA 27
Lako se proverava da je(XK,⊕, ◦
)vektorski prostor nad K. Vektori ovog
prostora su funkcije iz X u K, a skalari ovog prostora su realni ili kompleksnibrojevi. Ovo je
vektorski prostor svih funkcija iz X u K
Uverimo se u to da ovo jeste vektorski prostor.
Imamo(
f ⊕ (g ⊕ h)
)
(x) = f(x) +
(
g ⊕ h
)
(x) = f(x) +(g(x) + h(x)
)
i (
(f ⊕ g)⊕ h
)
(x) =
(
f ⊕ g
)
(x) + h(x) =(f(x) + g(x)
)+ h(x)
za svako x ∈ X. Dakle f ⊕ (g ⊕ h) = (f ⊕ g) ⊕ h. Slicno se proverava da je if ⊕ g = g ⊕ f .Neutral za operaciju ⊕ postoji i to je konstantna nula funkcija o : X → K data sao(x) = 0 za svako x ∈ X. Zaista
(
f ⊕ o
)
(x) = f(x) + o(x) = f(x) + 0 = f(x)
za svako x ∈ X. Ako f : X → K onda je funkcija g : X → K definisana sag(x) = −f(x) za svako x ∈ X, suprotni element od f u odnosu na operaciju ⊕.Zaista (
f ⊕ g
)
(x) = f(x) + g(x) = f(x) +(−f(x)
)= 0 = o(x)
za svako x ∈ X, pa je f ⊕ g = o.
Proveravamo osobinu (V1):(
1 ◦ f)
(x) = 1 · f(x) = f(x)
za svako x ∈ X pa je 1 ◦ f = f .
Proveravamo osobinu (V2):(
α ◦ (f ⊕ g)
)
(x) = α ·(
f ⊕ g
)
(x) = α ·(f(x) + g(x)
)i
(
(α ◦ f)⊕ (α ◦ g))
(x) =
(
α ◦ f)
(x) +
(
α ◦ g)
(x) = α · f(x) + α · g(x)

28 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
za svako x ∈ X pa je α(f ⊕ g) = (α ◦ f)⊕ (α ◦ g).
Proveravamo osobinu (V3):
(
(α + β) ◦ f)
(x) = (α + β) · f(x) i(
(α ◦ f)⊕ (β ◦ f))
(x) =
(
α ◦ f)
(x) +
(
β ◦ f)
(x) = α · f(x) + β · g(x)
za svako x ∈ X pa je (α + β) ◦ f = (α ◦ f)⊕ (β ◦ f).
Proveravamo osobinu (V4):
(
α ◦ (β ◦ f))
(x) = α ·(
β ◦ f)
(x) = α ·(β · f(x)
)i
(
(α · β) ◦ f)
(x) = (α · β) · f(x)
za svako x ∈ X pa je α ◦ (β ◦ f) = (α · β) ◦ f .
• Ilustracija Neka su f, g, h, q ∈ RR definisane sa
f(x) :df= sin2 x, g(x) :
df= cos2 x, h(x) :
df= 1 i q(x) :
df= cos 2x
za svako x ∈ R. Vazi f ⊕ g = h: zaista ako je x ∈ R onda imamo
(f ⊕ g)(x) = f(x) + g(x) = sin2 x+ cos2 x = 1 = h(x)
pa je (f ⊕ g)(x) = h(x) za svako x ∈ R, tj. f ⊕ g i g su jedna te ista funkcija.Vazi f =
(12◦ h)⊕(−1
2◦ q): zaista ako je x ∈ R onda imamo
((1
2◦ h)
⊕(
−1
2◦ q))
(x) =
(1
2◦ h)
(x) +
(
−1
2◦ q)
(x) =
=1
2h(x) +
(
−1
2
)
q(x) =1
2· 1− 1
2· cos 2x =
1− cos 2x
2= sin2 x = f(x)
pa funkcije(12◦ h)⊕(−1
2◦ q)i f “isto slikaju” svako x ∈ R.
Podsetimo se da umesto zapisa koriscenog gore mozemo pisati (prema jednoj
ranijoj konvenciji) jednostavno 12
−→h − 1
2−→q =
−→f . •
Dva specijalna slucaja

I.5. DEFINICIJA VEKTORSKIH PROSTORA 29
(1) Prostori n-torki Kn: Rn i Cn
Ako je n ∈ N i X = {1, . . . , n} onda specijalno dobijamo prostore (Rn,⊕, ◦) i(Cn,⊕, ◦). Prvi je realan a drugi kompleksan vektorski prostor.
• Ilustracija Za
a := (−2, 1, 3, 5) =
(1 2 3 4
−2 1 3 5
)
∈ R4
i
b := (−3, 0, 4, 7) =
(1 2 3 4
−3 0 4 7
)
∈ R4
imamo
−3−→a + 2−→b = −3(−2, 1, 3, 5) + 2(−3, 0, 4, 7) =
−3
(1 2 3 4
−2 1 3 5
)
+ 2
(1 2 3 4
−3 0 4 7
)
=
(1 2 3 4
(−3) · (−2) (−3) · 1 (−3) · 3 (−3) · 5
)
+
(1 2 3 4
2 · (−3) 2 · 0 2 · 4 2 · 7
)
=
(1 2 3 46 −3 −9 −15
)
+
(1 2 3 4
−6 0 8 14
)
=
(1 2 3 4
6− 6 −3 + 0 −9 + 8 −15 + 14
)
=
=
(1 2 3 40 −3 −1 −1
)
= (0,−3,−1,−1)
•
Sabiranje n-torki brojeva izgleda ovako
(a1, . . . , ai, . . . , an) + (b1, . . . , bi, . . . , bn) = (a1 + b1, . . . , ai + bi, . . . , an + bn)
Mnozenje n-torki brojeva brojevima izgleda ovako
α(a1, . . . , ai, . . . , an) = (αa1, . . . , αai , . . . , αan)

30 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Nula vektor ovog prostora jeste n-torka (0, . . . , 0︸ ︷︷ ︸
n puta
), tj. a =(ai : i = 1, n
)gde je
ai = 0 za svako i = 1, n.
Konvencija Za K ∈ {R,C} uobicajeno je da se pod “vektorski prostor Kn” po-drazumeva ne sam skup Kn vec zapravo gore definisan vektorski prostor svih n-torkibrojeva iz K. Ukoliko se posmatra neki drugi prostor sa istim skupom vektora to seonda posebno naglasi. 2
(2) Prostori matrica Kn×m: Rn×m i Cn×m
Ako je n,m ∈ N i X = {1, . . . , n}×{1, . . . , m} onda specijalno dobijamo prostore(Rn×m,⊕, ◦) i (Cn×m,⊕, ◦). Prvi je realan a drugi kompleksan vektorski prostor.
• Ilustracija Za
A =
8 5− i
−1 3i0 −7
∈ C3×2
i
B =
5 3− i
1 2i−2 −4
∈ C3×2
imamo
2−→A − 3
−→B = 2
8 5− i
−1 3i0 −7
− 3
5 3− i
1 2i−2 −4
=
= 2 ·
1 2
123
8 5− i
−1 3i0 −7
+ (−3) ·
1 2
123
5 3− i
1 2i−2 −4
=
1 2
123
2 · 8 2 · (5− i)2 · (−1) 2 · 3i2 · 0 2 · (−7)
+
1 2
123
(−3) · 5 (−3) · (3− i)(−3) · 1 (−3) · 2i
(−3) · (−2) (−3) · (−4)
=
1 2
123
16 10− 2i−2 6i0 −14
+
1 2
123
−15 −9 + 3i−3 −6i6 12
=
I.5. DEFINICIJA VEKTORSKIH PROSTORA 31
1 2
123
1 1 + i
−5 56 −2
=
1 1 + i
−5 06 −2
•
Sabiranje matrica izgleda ovako
a1,1 · · · a1,j · · · a1,m...
.........
............
...ai,1 · · · ai,j · · · ai,m...
.........
............
...an,1 · · · an,j · · · an,m
+
b1,1 · · · b1,j · · · b1,m...
.........
............
...bi,1 · · · bi,j · · · bi,m...
.........
............
...bn,1 · · · bn,j · · · bn,m
=
=
a1,1 + b1,1 · · · a1,j + b1,j · · · a1,m + b1,m...
.........
............
...ai,1 + bi,1 · · · ai,j + bi,j · · · ai,m + bi,m
............
............
...an,1 + bn,1 · · · an,j + bn,j · · · an,m + bn,m
Mnozenje matrica brojevima izgleda ovako
α ·
a1,1 · · · a1,j · · · a1,m...
.........
............
...ai,1 · · · ai,j · · · ai,m...
.........
............
...an,1 · · · an,j · · · an,m
=
α · a1,1 · · · α · a1,j · · · α · a1,m...
.........
............
...α · ai,1 · · · α · ai,j · · · α · ai,m
............
............
...α · an,1 · · · α · an,j · · · α · an,m
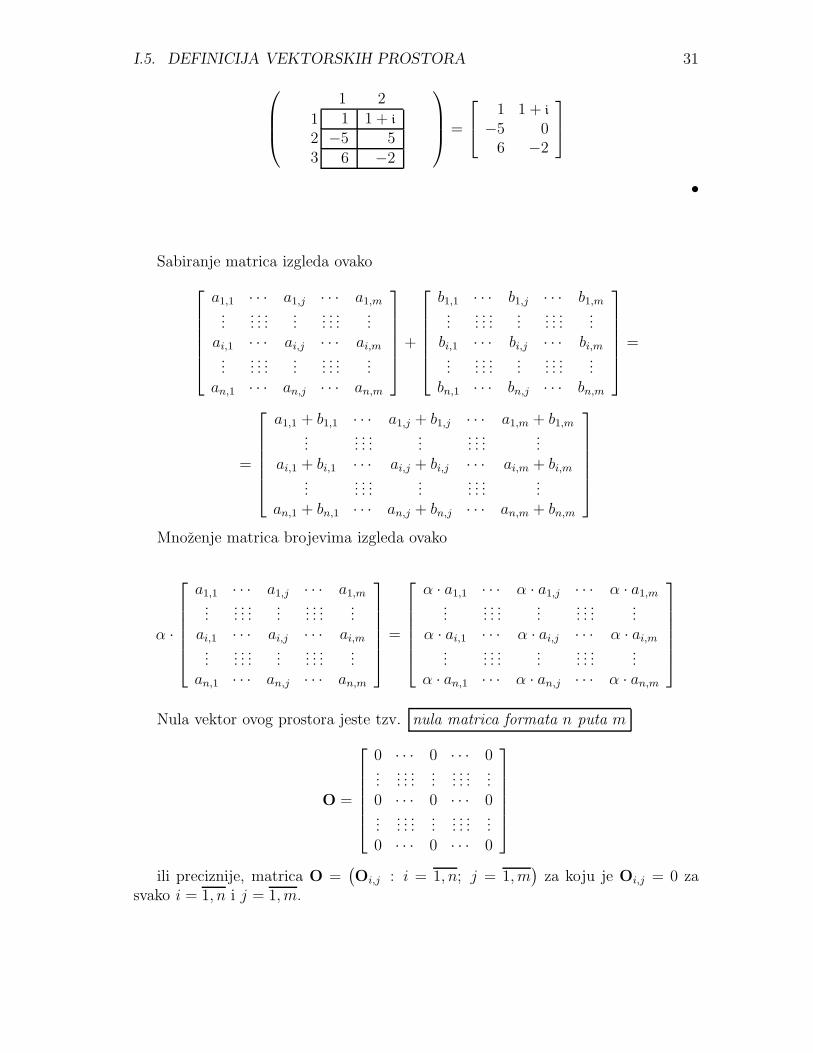
Nula vektor ovog prostora jeste tzv. nula matrica formata n puta m
O =
0 · · · 0 · · · 0...
.........
............
...0 · · · 0 · · · 0...
.........
............
...0 · · · 0 · · · 0
ili preciznije, matrica O =(Oi,j : i = 1, n; j = 1, m
)za koju je Oi,j = 0 za
svako i = 1, n i j = 1, m.

32 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Konvencija Za K ∈ {R,C} uobicajeno je da se pod “vektorski prostor Kn×m” po-drazumeva ne sam skup Kn×m vec zapravo gore definisan vektorski prostor matrica.Ukoliko se posmatra neki drugi prostor sa istim skupom vektora to se onda posebnonaglasi. 2
2
I.6 Linearna kombinacija konacnog sistema
vektora
Za uredenu n-torku (u1, . . . , un) cemo koristiti i termin sistem duzine n a da jeoznacimo koristicemo ravnopravno i sledece zapise
“(ui : i = 1, n
)”, “(u) : ui, i = 1, n ” ili “(u) : u1, . . . , un”
Prazan skup nazivacemo drugacije i sistem duzine 0 ili prazan sistem.
Definicija I.6.1 Neka je V vektorski prostor nad K i n ∈ N. Pod
linearnom kombinacijom
n-torke vektora x(xi : i = 1, n
)prostora V sa n-torkom skalara
(αi : i = 1, n
)po-
drazumevamo vektor
α1−→x1 + · · · + αn
−→xn =
n∑
i=1
αi−→xi
i za njega koristimo oznaku bα1, . . . , αncx
Dakle bα1, . . . , αncx :df=
n∑
i=1
αi−→xi .
2
Zapazanje I.6.2 Ako su u1, . . . , un, v1, . . . , vn, α, β ∈ K onda je
α · bu1, . . . , uncx + β · bv1, . . . , vncx = bαu1 + βv1, . . . , αun + βvncxZaista, ovo je jednostavno drugi nacin da se zapise
α−→a + β−→b = α
n∑
i=1
ui−→xi + β
n∑
i=1
vi−→xi =
n∑
i=1
(αui + βvi)−→xi

I.6. LINEARNA KOMBINACIJA KONACNOG SISTEMA VEKTORA 33
2
Terminologija Fraza
“vektor −→v je linearna kombinacija sistema vektora(xi : i = 1, n
)”
znacice:
“postoji neki sistem skalara(αi : i = 1, n
)tako da je −→v =
n∑
i=1
αi−→xi”
tj. tako da je vektor −→v linearna kombinacija sistema vektora(xi : i = 1, n
)sa
sistemom skalara(αi : i = 1, n
).
Isto ce znaciti i fraze poput “vektor −→v se moze prikazati (predstaviti) kao lin-
earna kombinacija sistema vektora(xi : i = 1, n
)”. 2
Primer Vektor (−1, 1) ∈ R2 je linearna kombinacija sistema vektora
(x) : −→x1 = (1,−5), −→x2 = (−1, 3)
Zaista: 2−→x1 + 3−→x2 = 2(1,−5) + 3(−1, 3) = (−1, 1). 2
Terminologija Za vektor v kazemo da je “linearna kombinacija vektora skupa M”ako postoji sistem
(xi : i = 1, n
)vektora skupa M (tj. takav da je −→xi ∈ M za svako
i = 1, n) tako da je vektor v linearna kombinacija sistema vektora(xi : i = 1, n
).
2
Primer I.6.3 Sta, u realnom vektorskom prostoru V :=(RR,⊕, ◦
)svih funkcija iz
R u R, predstavljaju linearne kombinacije funkcija iz skupa M := {fn : n ∈ N0},gde je fn ∈ RR definisana sa fn(x) :
df= xn za svako x ∈ R (recimo f0(x) = x0 = 1)?
Neka je k ∈ N, n1, n2, . . . , nk ∈ N0 i αi ∈ R za i = 1, k. Imamo(
α1
−→fn1 + · · ·+αi
−→fni
+ · · ·+αk
−→fnk
)
(x) = α1fn1(x)+ · · ·+αifni(x)+ · · ·+αkfnk
(x) =
α1xn1 + · · ·+ αix
ni + · · ·+ αkxnk = a0 + a1x + · · ·+ ajx
j + · · ·+ amxm
za m := nk, i odgovarajuce aj ∈ R, j = 1, k. Dakle linearne kombinacije vektoraskupa M su polinomske funkcije. 2
Definicija I.6.4 Neka je M neprazan skup vektora vektorskog prostora V. Skup
LV(M) = L(M) :df= {v ∈ V : v je linearna kombinacija vektora skupa M}
nazivamo
34 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
lineal nad skupom M .
Takode definisemo da je L(∅) :df= {0}. 2
Jasno M ⊆ L(M) : ako −→x ∈ M onda −→x = 1 · −→x ∈ L(M).
Takode, uvek vazi 0 ∈ L(M) : ako je M = ∅ onda je 0 ∈ {0} = L(M) a ako je
M 6= ∅ onda mozemo uociti neko x ∈ M pa imamo−→0 = 0−→x ∈ L(M).
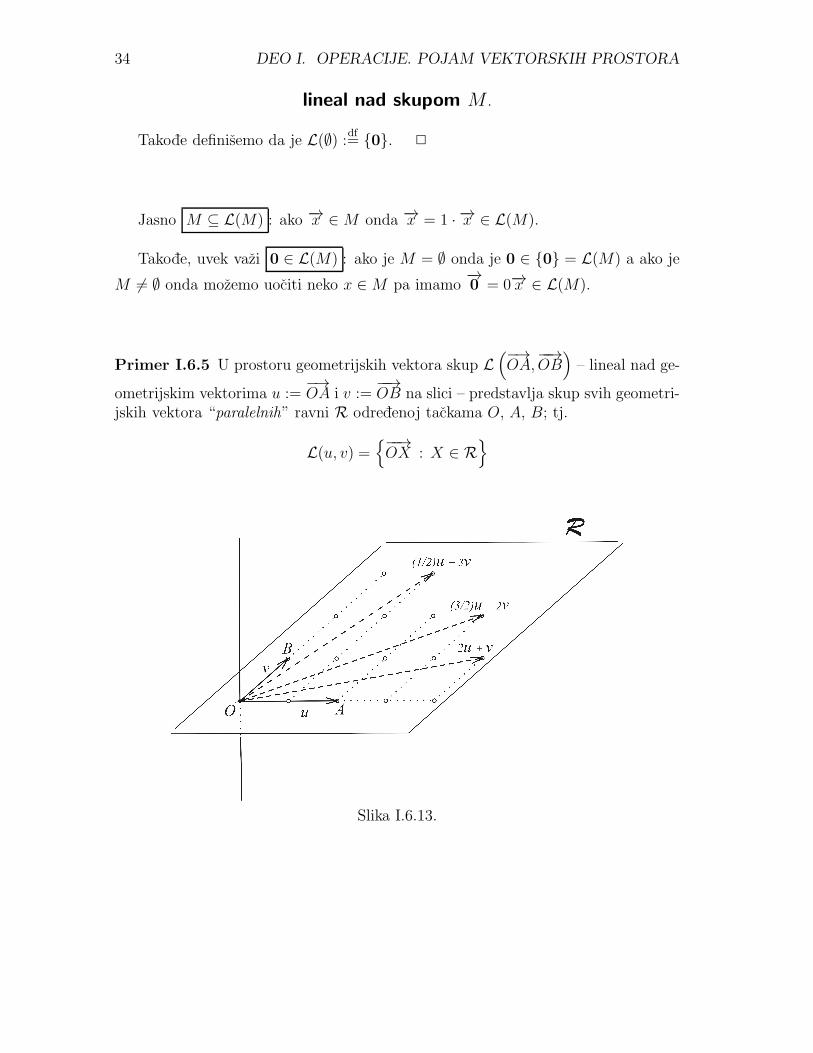
Primer I.6.5 U prostoru geometrijskih vektora skup L(−→OA,
−−→OB)
– lineal nad ge-
ometrijskim vektorima u :=−→OA i v :=
−−→OB na slici – predstavlja skup svih geometri-
jskih vektora “paralelnih” ravni R odredenoj tackama O, A, B; tj.
L(u, v) ={−−→OX : X ∈ R
}
Slika I.6.13.

I.6. LINEARNA KOMBINACIJA KONACNOG SISTEMA VEKTORA 35
Slika I.6.14.
Imamo−−→OD /∈ L(u, v) i −−−→O1C1 =
−→OC = u+ 2v ∈ L(u, v).
Skup L(−→AB)
– lineal nad geometrijskim vektorom u :=−→AB na slici – predstavlja
skup svih geometrijskih vektora “paralelnih” sa pravom p odredenom tackama A,B; tj.
L(u) ={−−→AX : X ∈ p
}
Slika I.6.15.
Na primer imamo−−→CD = 2u ∈ L(u), −→EF = 1/2u ∈ L(u), −−→GH = −2u ∈ L(u),−→
IJ /∈ L(u). 2

36 DEO I. OPERACIJE. POJAM VEKTORSKIH PROSTORA
Primer I.6.6 U realnom vektorskom prostoru V :=(RR,⊕, ◦
)svih funkcija iz R u
R, neka je Mk := {fi : i = 1, k} za k ∈ N, gde je fi ∈ RR definisana sa fi(x) :df= xn
za svako x ∈ R.L(Mk) je skup svih polinomskih funkcija stepena ne veceg od k. 2
Zapazanje I.6.7 Primetimo da ako je M proizvoljan skup vektora prostora V ondavazi:
– ako −→x ,−→y ∈ L(M) onda −→x +−→y ∈ L(M);– ako −→x ∈ L(M) i λ ∈ K onda λ−→x ∈ L(M).Zaista, ako jeM neprazan i ako je −→x ,−→y ∈ L(M) onda postoje vektori a1, . . . , an,
b1, . . . , bm ∈ M i skalari α1, . . . , αn, β1, . . . , βm ∈ K tako da je
−→x = α1−→a1 + · · ·+ αn
−→an i −→y = β1
−→b1 + · · ·+ βm
−→bm
pa je zato
−→x +−→y = α1−→a1 + · · ·+ αn
−→an + β1
−→b1 + · · ·+ βm
−→bm ∈ L(M)
a takode je i
λ−→x = λ(α1−→a1 + · · ·+ αn
−→an) = (λα1)−→a1 + · · ·+ (λαn)
−→an ∈ L(M)
za svako λ ∈ K.Ako je M = ∅ onda tvrdenje sledi iz
−→0 +
−→0 =
−→0 i α · −→0 =
−→0 za svako α ∈ K.
2

Deo II
Osnovni pojmovi i cinjenice
II.1 Podprostor vektorskog prostora
Neka je P ⊆ V neprazan skup vektora nekog vektorskog prostora V := (V,⊕, ◦)nad K ∈ {R,C}.
Neka su ⊕′ := ⊕ � (P × P ) i ◦′ := ◦ � (K× P ) odgovarajuce restrikcije operacija⊕ i ◦; preciznije:
⊕′ : P × P → V i
x⊕′ y = x⊕ y za svako x, y ∈ P
◦′ : K× P → V i
α ◦′ x = α ◦ x za svako x ∈ P i α ∈ K.
Pitanje Da li je P := (P,⊕′, ◦′) vektorski prostor nad K?
Potreban uslov za ovo jeste– da ⊕′ bude operacija na skupu P , tj. ⊕′ : P × P → P i– da ◦′ bude mesovita operacija sa vrednostima u skupu P , tj. ◦′ : K× P → P .
Ako za neke x0, y0 ∈ P imamo da je x0 ⊕ y0 ∈ V \ P onda ⊕′ uopste nije nioperacija na skupu P (jer “rezultat nije uvek u P”):
37

38 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.1.1.
Ako za neke x0 ∈ P i α ∈ K imamo da je α ◦ x0 ∈ V \ P onda ◦′ uopste nije nimesovita operacija sa vrednostima u skupu P (jer “rezultat nije uvek u P”):
Slika II.1.2.
Dakle da bi trojka P = (P,⊕′, ◦′) uopste imala sanse da bude vektorski prostor(nad K) potrebno je da vaze sledeca dva uslova:
(P1) ako x, y ∈ P onda −→x +−→y ∈ P(P2) ako x ∈ P i α ∈ K onda α−→x ∈ P .

II.1. PODPROSTOR VEKTORSKOG PROSTORA 39
Primer Neka je V :=(NR,⊕, ◦
)vektorski prostor svih funkcija iz N u R – tj.
vektorski prostor svih nizova realnih brojeva.
Neka su a, b ∈ NR. Ako su vektori a i b oba “odredenog tipa”, odnosno oba imaju
odredenu osobinu (recimo oba niza su takva da su im svi clanovi nenegativni, ili obasu aritmeticki nizovi) mogu se postaviti pitanja:
(1) da li je i njihov zbir −→a +−→b niz tog istog tipa?
(2) ako je α ∈ R da li je i vektor α−→a niz tog istog tipa?
Ako su oba niza aritmeticka onda je takav i njihov zbir. Zaista neka postojeδ1, δ2 ∈ R tako da je
an+1 − an = δ1 i bn+1 − bn = δ2
za svako n ∈ N. Stavimo −→c := −→a +−→b . Tada je
cn = c(n) = (−→a +−→b )(n) = a(n) + b(n) = an + bn
tj. cn = an + bn za svako n ∈ N; zato imamo
cn+1 − cn = (an+1 + bn+1)− (an + bn) = δ1 + δ2
za svako n ∈ N.
Ako je a aritmeticki niz i α ∈ R proizvoljno onda je i α−→a aritmeticki niz: zaista,ako je θ ∈ R takvo da je
an+1 − an = θ
za svako n ∈ N, onda imamo
(α−→a )n+1 − (α−→a )n = αan+1 − αan = αθ
za svako n ∈ N.
Dakle ako sa P oznacimo skup svih aritmetickih nizova realnih brojeva, tj.
P :={a ∈ N
R : postoji r ∈ R tako da za svako n ∈ N vazi an+1 − an = r}
onda skup vektora P ⊆ NR naseg vektorskog prostora V zadovoljava uslove (P1) i(P2).

40 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.1.3.
Pitanje Sta je sa osobinom “svaki clan niza je nenegativan”? •
2
Lako je videti da su uslovi (P1) i (P2) i dovoljni da P bude vektorski prostor.Zaista, ako su oni zadovoljeni onda imamo:
– (x⊕′ y)⊕′ z = (x⊕ y)⊕ z = x⊕ (y ⊕ z) = x⊕′ (y ⊕′ z);– x⊕′ y = x⊕ y = y ⊕ x = y ⊕′ x
– 1 ◦′ x = 1 ◦ x = x
– α ◦′ (x⊕′ y) = α ◦ (x⊕ y) = (α ◦ x)⊕ (α ◦ y) = (α ◦′ x)⊕′ (α ◦′ y);– (α+ β) ◦′ x = (α + β) ◦ x = (α ◦ x)⊕ (β ◦ x) = (α ◦′ x)⊕′ (β ◦′ x);– α ◦′ (β ◦′ x) = α ◦ (β ◦ x) = (αβ) ◦ x = (αβ) ◦′ x
za svako x, y, z ∈ P i α, β ∈ K.
Dalje, kako je po pretpostavci P neprazan mozemo izabrati neko p0 ∈ P ; premaTvrdenju I.5.2 je
−p0 = (−1) ◦ p0 ∈ P – zbog (P2)
pa je
0 = p0 ⊕ (−p0) ∈ P – zbog (P1)

II.1. PODPROSTOR VEKTORSKOG PROSTORA 41
Otuda operacija ⊕′ ima neutral:
x⊕′ 0 = x⊕ 0 = x
za svako x ∈ P . Zbog
p ∈ P ⇒ −p = (−1) ◦ p ∈ P (prema (P1))
svaki element skupa P je invertibilan u odnosu na operaciju ⊕′:
p⊕′ (−p) = p⊕ (−p) = 0
za svako p ∈ P .
Dakle P = (P,⊕′, ◦′) je vektorski prostor (nad K) akko vaze uslovi (P1) i (P2) .
Definicija II.1.1 Za neprazan podskup P ⊆ V kazemo da je
podprostor vektorskog prostora V
ako zadovoljava naredna dva uslova:
(P1) ako x, y ∈ P onda −→x +−→y ∈ P
(P2) ako x ∈ P i α ∈ K onda α−→x ∈ P .
i tu cinjenicu cemo oznacavati sa
Pv
⊆ V
U tom slucaju ako stavimo ⊕′ := ⊕ � (P × P ) i ◦′ := ◦ � (K × P ) imamo da jeP := (P,⊕′, ◦′) vektorski prostor nad K, i za P kazemo da je
vektorski prostor odreden podprostorom P vektorskog prostora V
2
Zapazanje II.1.2 Neka je K ∈ {R,C} i neka su V := (V,⊕, ◦) i V1 := (V1,⊕1, ◦1)vektorski prostori nad K (dakle oba nad R ili oba nad C).
V1 je vektorski prostor odreden nekim podprostorom vektorskog prostora V akkovaze naredna dva uslova:
– V1 ⊆ V– za svako x, y ∈ V1 i α ∈ K je x ⊕1 y = x ⊕ y i α ◦1 x = α ◦ x (tj. ⊕1 i ◦1 su
odgovarajuce restrikcije operacija ⊕ i ◦). 2

42 DEO II. OSNOVNI POJMOVI I CINJENICE
Konvencija Neka je Pv
⊆ V. Cesto se pod “podprostor P” podrazumeva zapravo
“vektorski prostor odreden podprostorom Pv
⊆ V”. 2
Primer Ako je V proizvoljan vektorski prostor onda su {0} i sam V podprostori odV. Za njih kazemo da su trivijalni podprostori. Za {0} kazemo da je nula podprostor.2
Primer II.1.3 Prostori PolR i PolCOznacimo sa PolR skup svih polinomskih funkcija iz R u R. Ako je V1 :=
(RR,⊕, ◦
)realan vektorski prostor svih funkcija iz R u R onda skup PolR zadovo-
ljava uslove (P1) i (P2) (sa PolR umesto P ). (Realan) vektorski prostor odredenpodprostorom PolR prostora V1 nazivamo
vektorski prostor svih polinomskih funkcija iz R u R
Oznacimo sa PolC skup svih polinomskih funkcija iz C u C. Ako je V2 :=(CC,⊕, ◦
)kompleksan vektorski prostor svih funkcija iz C u C onda skup PolC
zadovoljava uslove (P1) i (P2). (Kompleksan) vektorski prostor odreden podpro-storom PolC prostora V2 nazivamo
vektorski prostor svih polinomskih funkcija iz C u C
2
Primer II.1.4 Prostori Poln,R i Poln,CZa n ∈ N0 oznacimo sa Poln,R skup svih polinomskih funkcija iz R u R stepena
ne veceg od n. Ako je V1 :=(RR,⊕, ◦
)realan vektorski prostor svih funkcija iz R
u R onda skup Poln,R zadovoljava uslove (P1) i (P2) . (Realan) vektorski prostorodreden podprostorom Poln,R prostora V1 nazivamo
vektorski prostor svih polinomskih funkcija iz R u R
stepena ne veceg od n
Za n ∈ N0 oznacimo sa Poln,C skup svih polinomskih funkcija iz C u C stepenane veceg od n. Ako je V2 :=
(CC,⊕, ◦
)kompleksan vektorski prostor svih funkcija
iz C u C onda skup Poln,C zadovoljava uslove (P1) i (P2). (Kompleksan) vektorskiprostor odreden podprostorom Poln,C prostora V2 nazivamo
vektorski prostor svih polinomskih funkcija iz C u C
stepena ne veceg od n

II.1. PODPROSTOR VEKTORSKOG PROSTORA 43
2
Tvrdenje II.1.5 Neka je V vektorski prostor nad K. Ako je M proizvoljan skupvektora onda je L(M) podprostor od V. Ako je P podprostor onda je P = L(P ).Specijalno:
– svaki podprostor je oblika L(X) za neki skup vektora X;– za svaki skup vektora M ⊆ V vazi L
(L(M)
)= L(M).
Dokaz. Vec znamo da L(M) zadovoljava uslove (P1) i (P2) (Zapazanje I.6.7).Neka je P podprostor od V. Obzirom da X ⊆ L(X) vazi za svaki skup vektora
X bio on podprostor ili ne, dovoljno je da pokazemo da vazi L(P ) ⊆ P . Pokazimoindukcijom po n ∈ N da vazi:
ako su x1, . . . , xn ∈ P i α1, . . . , αn ∈ K onda je α1−→x1 + · · ·+ αn
−→xn ∈ P
Za n = 1 ovo tvrdenje se svodi na uslov (P2) koji po pretpostavci vazi. Pre-tpostavimo da tvrdenje vazi za neko n ∈ N i neka su x1, . . . , xn+1 ∈ P i α1, . . . , αn+1 ∈K. Imamo
α1−→x1 + · · ·+ αn+1
−−→xn+1 =−→u + αn+1
−−→xn+1
gde je −→u := α1−→x1 + · · ·+ αn
−→xn. Prema indukcijskoj hipotezi je −→u ∈ P a zbog (P2)je αn+1
−−→xn+1 ∈ P , pa na osnovu (P1) sledi −→u + αn+1−−→xn+1 ∈ P .
Ovim smo pokazali da je P = L(P ). Specijalno svaki podprostor P je oblikaL(X) – recimo mozemo uzeti X = P . 2
Tvrdenje II.1.6 Ako su Ps za s ∈ S podprostori onda je i⋂
s∈S
Ps podprostor. Za
proizvoljan skup vektora M ⊆ V vazi:
L(M) =⋂{
Pv
⊆ V : M ⊆ P}
tj. L(M) je upravo skup svih onih vektora koji su zajednicki za sve podprostorekoji sadrze skup M .
Dokaz Da skup⋂
s∈S
Ps zadovoljava uslove (P1) i (P2) proverava se neposredno.
Da je
L(M) ⊆⋂{
Pv
⊆ V : M ⊆ P}
sledi iz toga sto za Pv
⊆ V inkluzija M ⊆ P povlaci L(M) ⊆ L(P ) = P , a
L(M) ⊇⋂{
Pv
⊆ V : M ⊆ P}
sledi iz cinjenice da je L(M) ∈{
Pv
⊆ V : M ⊆ P}
. 2

44 DEO II. OSNOVNI POJMOVI I CINJENICE
II.2 Potpuni sistemi i skupovi vektora
Za uredenu n-torku(xi : i = 1, n
)kazemo da je injektivna ako vazi i 6= j ⇒ ai 6= aj
za svako i, j = 1, n, tj. ako su a1, . . . , an medusobno razliciti.
Zapazanje II.2.1 (i) Neka je n ∈ N i (x1, . . . , xn) (konacan) sistem vektora pro-stora V. Tada vazi:
vektor je linearna kombinacija sistema vektora (x1, . . . , xn)
akko je on
linearna kombinacija vektora skupa {x1, . . . , xn}
Zaista, neka je v ∈ V linearna kombinacija vektora skupa {x1, . . . , xn}, tj. nekapostoje m ∈ N, m-torka vektora (a1, . . . , am) skupa {x1, . . . , xn} i m-torka skalara(λ1, . . . , λm) tako da je
−→v =m∑
i=1
λi−→ai
Ako je k ∈ N broj elemenata skupa {a1, . . . , am} onda, obzirom da je
{a1, . . . , am} ⊆ {x1, . . . , xn}
postoje prirodni brojevi s1 < · · · < sk tako da je
{a1, . . . , am} = {xs1 , . . . xsk} i pritom vazi i 6= j ⇒ si 6= sj
za svako i, j = 1, k. Zato je
−→v =
m∑
j=1
λj−→aj =
=
∑
j=1,maj=xs1
λj
· −→xs1 + · · ·+
∑
j=1,maj=xsk
λj
· −→xsk +∑
i=1,ni/∈{s1,...,sk}
0 · −→xi
tj. −→v =n∑
i=1
αi−→xi gde je stavljeno:
αsr =∑
j=1,maj=xsr
λj, za r = 1, k, odnosno

II.2. POTPUNI SISTEMI I SKUPOVI VEKTORA 45
αi = 0 ako je i ∈ {1, . . . , n} takvo da i 6= sr za svako r = 1, k.
(ii) Odavde specijalno sledi da je
L(
{x1, . . . , xn})
=
{n∑
i=1
αi−→xi : αi ∈ K, i = 1, n
}
(iii) Ako su x ∈ V i ∅ 6= S ⊆ V takvi da je x ∈ L(S) onda postoji n ∈ N takoda je x linearna kombinacija neke injektivne n-torke
(ai : i = 1, n
)∈ Sn vektora
skupa S.
Zaista, to da je x ∈ L(S) po definiciji znaci da postoji neko k ∈ N tako da je
x linearna kombinacija nekog sistema vektora (b1, . . . , bk) ∈ Sk skupa S
(obzirom da je S 6= ∅). Ako skup {b1, . . . , bk} ima n ∈ N elemenata onda za nekuinjektivnu n-torku (a1, . . . , an) imamo
{b1, . . . , bk} = {a1, . . . , an}Dakle
x je linearna kombinacija vektora skupa {a1, . . . , an}pa je prema delu pod (i)
x linearna kombinacija (injektivne) n-torke (a1, . . . , an).
2
Definicija II.2.2 (i) Za skup vektora M ⊆ V vektorskog prostora V = (V,⊕, ◦)kazemo da je
potpun skup vektora
ako za svaki vektor v prostora V postoje k ∈ N,
vektori x1, . . . , xk ∈ M i skalari α1, . . . , αk ∈ K
tako da je
−→v =
k∑
i=1
αi−→xi
Drugim recima, skup vektora M je potpun ako je svaki vektor prostora V li-nearna kombinacija vektora tog skupa.
(ii) Za konacan sistem vektora(xi : i = 1, n
)kazemo da je

46 DEO II. OSNOVNI POJMOVI I CINJENICE
potpun sistem vektora
ako je skup{xi : i = 1, n
}potpun skup vektora. Prazan sistem je po definiciji
potpun sistem svakog nula vektorskog prostora (tj. {0}). 2
Zapazanje II.2.3 Dakle skup vektora M je potpun akko je L(M) = V . Kombi-nujuci ovo sa Zapazanjem II.2.1 mozemo zakljuciti da vazi:
konacan sistem vektora(xi : i = 1, n
)je potpun
akko je
skup vektora{xi : i = 1, n
}potpun
akko
za svaki vektor v postoje αi ∈ K za i = 1, n tako da je −→v =
n∑
i=1
αi−→xi
akko vazi
V =
{n∑
i=1
αi−→xi : αi ∈ K, i = 1, n
}
2
Primer Skup V svih vektora je potpun skup vektora. 2
Primer II.2.4 Za i ∈ N0 neka su fi : R → R definisane sa fi(x) :df= xi za x ∈ R.
U prostoru PolR iz Primera II.1.3 skup {fi : i ∈ N0} je potpun skup vektora(videti Primer I.6.3).
U prostoru Poln,R iz Primera II.1.3 skup {fi : i = 0, n} je potpun skup vektora(videti Primer I.6.6). 2
Definicija II.2.5 Za vektorski prostor kazemo da je
konacnodimenzionalan
ako postoji neki konacan potpun skup vektora tog prostora. 2

II.3. LINEARNO (NE)ZAVISNE N -TORKE VEKTORA 47
Primer II.2.6 Neka je NR vektorski prostor svih realnih nizova. Znamo da je skupsvih V aritmetickih nizova podprostor od NR. Neka su nizovi a1 i a2 definisani sa
a1(n) = 1
ia2(n) = n− 1
za svako n ∈ N (neformalno: a1 = (1, 1, 1, 1, 1, . . . ), a2 = (0, 1, 2, 3, 4, . . . )). Imamoa1, a2 ∈ V (oba ova niza su aritmeticka).
Sistem vektora a = (a1, a2) prostora V je potpun. Zaista, ako je niz x aritmetickionda postoje θ, d ∈ R tako da je
xn = r + (n− 1)d
za svako n ∈ N, pa je
x(n) = r · a1(n) + d · a2(n) = (r−→a1 + d−→a2)(n)
tj. −→x = r−→a1 + d−→a2 .Zakljucujemo da je prostor svih realnih aritmetickih nizova konacnodimenzionalan.
2
Primer Prostor svih polinomskih funkcija iz K u K stepena ne veceg od n (gde jeK ∈ {R,C} i n ∈ N) nije konacnodimenzionalan. Zaista ako su p1, . . . , pm ∈ Poln,K,α1, . . . , αm ∈ K i ako je k ∈ N0 najveci od stepena datih polinomskih funkcija, ondaje α1
−→p1 + · · ·αm−→pm neka polinomska funkcija stepena najvise k; zato se nijedna
polinomska funkcija stepena k + 1 ne moze predstaviti kao linearna kombinacijavektora iz skupa {p1, . . . , pm}. 2
II.3 Linearno (ne)zavisne n-torke vektora
Neka su x1, x2 i x3 vektori nekog vektorskog prostora V nad K. (tj. neka je(x1, x2, x3) konacan sistem vektora tog prostora).
Pitanje 1Da li postoje α1, α2, α3 ∈ K (tj. da li postoji sistem skalara (α1, α2, α3))tako da je
α1−→x1 + α2
−→x2 + α3−→x3 =
−→0
Trivijalno da: dovoljno je uzeti α1 = α2 = α3 = 0.
Pitanje 2 Da li postoje α1, α2, α3 ∈ K koji nisu svi jednaki nuli (tj. takvi danije α1 = α2 = α3 = 0) tako da je

48 DEO II. OSNOVNI POJMOVI I CINJENICE
α1−→x1 + α2
−→x2 + α3−→x3 =
−→0
Primer II.3.1 U prostoru R3 neka je dat sistem vektora
(a) : a1 = (1, 1, 1), a2 = (1, 2, 2), a3 = (3, 2, 5)
Ako za neke α1, α2, α3 ∈ R vazi
3∑
i=1
αi−→ai = α1(1, 1, 1) + α2(1, 2, 2) + α3(3, 2, 5) = (0, 0, 0)
tj.(α1 + α2 + 3α3, α1 + 2α2 + 2α3, α1 + 2α2 + 5α3) = (0, 0, 0)
onda mora biti
α1 +α2 +3α3 = 0α1 +2α2 +2α3 = 0α1 +2α2 +5α3 = 0
odnosno
α1 + α2 + 3α3 = 0(α1 + 2α2 + 2α3)− (α1 + α2 + 3α3) = 0(α1 + 2α2 + 5α3)− (α1 + α2 + 3α3) = 0
tj.
α1 +α2 +3α3 = 0α2 −α3 = 0α2 +2α3 = 0
odnosno
α1 + α2 + 3α3 = 0α2 − α3 = 0
(α2 + 2α3)− (α2 − α3) = 0
tj.
α1 +α2 +3α3 = 0α2 −α3 = 0
3α3 = 0
pa mora biti α3 = 0 te i α2 = α3 = 0 kao i α1 = −α1 − 3α3 = 0. 2

II.3. LINEARNO (NE)ZAVISNE N -TORKE VEKTORA 49
Definicija II.3.2 Ako je n ∈ N onda za n-torku vektora(xi : i = 1, n
)vektorskog
prostora V nad K kazemo da je
linearno nezavisna
ako je jedina n-torka skalara(αi : i = 1, n
)za koji vazi
n∑
i=1
αi−→xi =
−→0 jeste tzv.
trivijalna n-torka skalara, tj. ona data sa αi = 0 za svako i = 1, n.Na ovaj nacin smo dakle definisali pojam linearno nezavisnog sistema vektora
duzine n ∈ N. Sistem vektora duzine 0, tj. prazan skup, je po definiciji linearnonezavisan.
Za n-torku vektora(xi : i = 1, n
)kazemo da je
linearno zavisna
ukoliko nije linearno nezavisna. 2
Tvrdenje II.3.3 Sistem vektora(xi : i = 1, n
)je linearno nezavisan akko je ispunjen
sledeci uslov:ako su
(αi : i = 1, n
)∈ Kn i
(βi : i = 1, n
)∈ Kn razlicite n-torke skalara (tj.
za neko i0 ∈ {1, . . . , n} je αi0 6= βi0) onda je
n∑
i=1
αi−→xi 6=
n∑
i=1
βi−→xi
Dokaz Neka je doticni sistem vektora linearno nezavisan i neka je i0 ∈ {1, . . . , n}takvo da je αi0 6= βi0. Tada je αi0 − βi0 6= 0 pa je
(αi − βi : i = 1, n
)netrivijalan
sistem skalara; otuda mora biti
n∑
i=1
(αi − βi)−→xi 6=
−→0
tj.n∑
i=1
αi−→xi 6=
n∑
i=1
βi−→xi
Pretpostavimo sada da je dati uslov ispunjen. Ako je(λi : i = 1, n
)∈ Kn trivi-
jalna n-torka, tj. λi = 0 za svako i = 1, n, i ako je(αi : i = 1, n
)∈ Kn proizvoljna
netrivijalna n-torka, onda je αi0 6= λi0 za neko i0 ∈ {1, . . . , n} te imamo
n∑
i=1
αi−→xi 6=
n∑
i=1
λi−→xi =
−→0
2

50 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.3.4 Ako je n-torka vektora(xi : i = 1, n
)linearno nezavisna onda
mora biti i 6= j ⇒ xi 6= xj za i, j = 1, n (tj. vektori x1, . . . , xn su medusobno
razliciti) a takode je i −→xi 6=−→0 za svako i = 1, n.
Dokaz Kad bi postojali neki i, j ∈ {1, . . . , n} takvi da je i 6= j i xi = xj onda biimali
1 · −→xi + (−1) · −→xj =−→0
tj. vektor−→0 bi bio linearna kombinacija n-torke vektora
(xi : i = 1, n
)sa netri-
vijalnom n-torkom skalara definisanom sa αi = 1, αj = −1 i αk = 0 za k ∈{1, . . . , n} \ {i, j}, a ovo je prema nasoj pretpostavci nemoguce.
Gde smo ovde iskoristili cinjenicu da je i 6= j? Da je bilo i = j onda nebismo mogli da definisemo
(αi : i = 1, n
)onako kako gore stoji jer bi tada imali
1 = αi = αj = −1.
Kad bi za neko i0 ∈ {1, . . . , n} bilo −→xi0 =−→0 onda bi za netrivijalnu n-torku
skalara definisanu sa
αi =
{1, ako i = i00, ako i 6= i0
vazilon∑
i=1
αi−→xi = 1 · −→0 =
−→0 , pa bi dati sistem vektora bio linearno zavisan. 2
II.4 Linearno (ne)zavisni skupovi vektora
Pitanje 1 Ako je M ⊆ V neprazan skup vektora da li od mozemo napraviti li-nearno zavisan sistem od vektora skupa M , preciznije da li postoji neko n ∈ N ix1, . . . , xn ∈ M tako da je n-torka (x1, . . . , xn) linearno zavisna?
Trivijalno da: kako jeM 6= ∅mozemo izabrati neko u ∈ M ; svaki sistem (x1, x2, . . . , xn)vektora skupa M kod kog je x1 = x2 = u prema Tvrdenju II.3.4 mora biti linearnozavisan.
Pitanje 2 Da li postoji neko n ∈ N i medusobno razliciti vektori x1, . . . , xn ∈ Mtako da je n-torka (x1, . . . , xn) linearno zavisna?
Definicija II.4.1 Za neprazan skup M ⊆ V vektora kazemo da je
linearno nezavisan skup
ako je svaka injektivna n-torka vektora tog skupa linearno nezavisan sistem, tj.ako vazi:

II.4. LINEARNO (NE)ZAVISNI SKUPOVI VEKTORA 51
ako su n ∈ N, α1, . . . , αn ∈ N i x1, . . . , xn ∈ M tako da i 6= j ⇒ xi 6= xj zai, j = 1, n,
onda je uvek
n∑
i=1
αi−→xi 6=
−→0 osim ako je αi = 0 za svako i = 1, n.
Prazan skup je po definiciji linearno nezavisan. Za skup M ⊆ V vektorakazemo da je
linearno zavisan skup
ukoliko nije linearno nezavisan. 2
Primetimo da iz ove definicije sledi da je svaki linearno zavisan skup M ⊆ Vneprazan. Evo jedne preformulacije pojma “linearno zavisan skup”:
skup vektora M ⊆ V je linearno zavisan akko postoji n ∈ N, vektori x1, . . . , xn ∈M i skalari α1, . . . , αn ∈ K tako da vaze sledeca tri uslova:
(1) i 6= j ⇒ xi 6= xj za i, j = 1, n;
(2) za neko i0 ∈ {1, . . . , n} je αi0 6= 0;
(3)
n∑
i=1
αi−→xi =
−→0 .
Za konacne sisteme veza izmedu linearne nezavisnosti skupova i linearne neza-visnosti sistema data je narednim tvrdenjem.
Tvrdenje II.4.2 Sistem vektora(xi : i = 1, n
)je linearno nezavisan akko su zado-
voljena sledeca dva uslova:
(1) i 6= j ⇒ xi 6= xj za i, j = 1, n (tj. vektori x1, . . . , xn su medusobnorazliciti)
(2) skup {x1, . . . , xn} vektora je linearno nezavisan.
Drugim recima
sistem vektora(xi : i = 1, n
)je linearno nezavisan
akko je
{x1, . . . , xn} linearno nezavisan skup vektora sa tacno n elemenata
Dokaz Ako vaze (1) i (2) onda je(xi : i = 1, n
)injektivna n-torka, pa prema
Definiciji II.4.1 ona mora biti linearno nezavisan sistem.

52 DEO II. OSNOVNI POJMOVI I CINJENICE
Pretpostavimo sada da je(xi : i = 1, n
)je linearno nezavisan sistem. Da (1)
vazi vec znamo (Tvrdenje II.3.4). Pokazimo da vazi i (2).Neka je m ∈ N i
(ai : i = 1, m
)injektivna m-torka tako da je
{a1, . . . , am} ⊆ {x1, . . . , xn}
Neka je(λi : i = 1, m
)takva n-torka skalara da vazi
λ1−→a1 + . . . + λj
−→aj + . . . + λm−→am =
−→0
i pokazimo da mora biti λj = 0 za svako j = 1, m.Postoje s1, . . . , sm ∈ {1, . . . , n} tako da je
a1 . . . aj . . . am|| . . . || . . . ||xs1 . . . xsj . . . xsm
tj. aj = xsj za j = 1, m. Kako je i 6= j ⇒ ai 6= aj to je
i 6= j ⇒ si 6= sj
za i, j = 1, m. Zbog toga je to je sistem skalara(αi : i = 1, n
)korektno definisan
uslovima:
λ1 . . . λj . . . λm
|| . . . || . . . ||αs1 . . . αsj . . . αsm
iαi = 0 ako je i ∈ {1, . . . , n} \ {s1, . . . , sm}
Pritom vazi
−→0 = αs1
−→xs1 + . . . + αsj−→xsj + . . . + αsm
−→xsm +∑
i∈{1,...,n}\{s1,...,sm}
0 · −→xi =−→0
tj.n∑
i=1
αi−→xi =
−→0
Obzirom da je(xi : i = 1, n
)linearno nezavisan sistem, ovo znaci da je zapravo
αi = 0 za svako i = 1, n. Specijalno imamo λj = αsj = 0 za svako j = 1, m. 2
Tvrdenje II.4.3 Skup vektora M je linearno zavisan akko postoji neko x ∈ Mtako da je x ∈ L
(M \ {x}
).

II.4. LINEARNO (NE)ZAVISNI SKUPOVI VEKTORA 53
Dokaz Pretpostavimo najpre da je skup M linearno zavisan. Tada postojen ∈ N, vektori x1, . . . , xn ∈ M i skalari α1, . . . , αn ∈ K takvi da je i 6= j ⇒ xi 6= xj
za svako i, j = 1, n, i tako da za neko i0 ∈ {1, . . . , n} vazi αi0 6= 0, i tako da je
n∑
i=1
αi−→xi =
−→0 (II.1)
Ako je n = 1 onda (II.1) postaje αi0−→xi0 =
−→0 pa zbog αi0 6= 0 sledi da je
xi0 = 0 ∈ L(M \ {xi0}
).
Ako je n ≥ 2 onda iz (II.1) sledi
−→xi0 =∑
i=1,ni6=i0
(−αi
αi0
)
−→xi (II.2)
Zbog i 6= j ⇒ xi 6= xj vazi{xi : i ∈ {1, . . . , n} \ {i0}
}⊆ M \ {xi0} pa iz (II.2)
sada zakljucujemo da je xi0 ∈ L(M \ {xi0}
).
Da pokazemo obrat pretpostavimo sada da postoji neko z ∈ M tako da je
z ∈ L(M \ {z}
)
Ako je M = {z} onda sledi da je z ∈ L(∅) = {0}, tj. 0 = z ∈ M pa je sistem(duzine 1) (x) : x1 = 0 prema Tvrdenju II.3.4 linearno zavisan (naravno injektivan)sistem vektora skupa M , sto znaci da je M linearno zavisan skup vektora.
Ako je M \ {z} 6= ∅ onda je z linearna kombinacija vektora skupa M \ {z} pa jeprema Zapazanju II.2.1 pod (iii) vektor z i linearna kombinacija neke injektivnek-torke (y1, . . . , yk) elemenata skupa M \ {z}, tj. postoji neko k ∈ N i
postoje y1, . . . , yk ∈ M \ {z} takvi da i 6= j ⇒ yi 6= yj za svako i, j = 1, k,
i postoje β1, . . . , βk ∈ K tako da je
−→z =
k∑
i=1
βi−→yi
odnosno
1 · −→z + (−β1)−→y1 + · · ·+ (−βk)
−→yk = 0

54 DEO II. OSNOVNI POJMOVI I CINJENICE
Ako stavimoa1 a2 a3 . . . ak+1
|| || || . . . ||z y1 y2 . . . yk
odnosno a1 = z i ai = yi−1 za i = 2, k + 1, onda je zbog
a1 = z /∈ {y1, . . . , yk} = {a2, . . . , ak+1}sistem vektora (a) : a1, . . . , ak+1 injektivan.
Ako stavimoγ1 γ2 γ3 . . . γk+1
|| || || . . . ||1 −β1 −β2 . . . −βk
odnosno γ1 = 1 i γi = −βi−1 za i = 2, k + 1 onda je sistem skalara (γ1, . . . , γk+1)netrivijalan i vazi
γ1−→a1 + γ2
−→a2 + · · ·+ γk+1−−→ak+1 = 0
Jasno a1, a2, . . . , ak+1 ∈ M te smo ovim pokazali da je skup M linearno zavisan.2
Tvrdenje II.4.4 Neka je n ∈ N, n ≥ 2. Sistem vektora(xi : i = 1, n
)∈ V n je
linearno zavisan akko vazi neki od naredna dva uslova:– x1 = 0 ili– postoji i ∈ {2, . . . , n} tako da je xi ∈ L
({x1, . . . , xi−1}
).
Dokaz Pretpostavimo najpre da je sistem(xi : i = 1, n
)linearno zavisan i neka
je x 6= 0. Tada je sistem duzine 1(xi : i = 1, 1
)je linearno nezavisan.
Neka je k ∈ {1, . . . , n} najveci brojtakav da je sistem
(xi : i = 1, k
)linearno nezavisan.
Mora biti k < n jer bi inace(xi : i = 1, n
)bio linearno nezavisan suprotno nasoj
pretpostavci. Dakle k + 1 ∈ {1, . . . , n} pa je xk+1 definisan. Prema izboru broja ksistem
(xi : i = 1, k + 1
)je linearno zavisan, tj. postoje αi ∈ K za i = 1, k + 1 tako
da jeα1
−→x1 + . . . + αk−→xk + αk+1
−−→xk+1 =−→0 (II.3)
pri cemu postoji neko i0 ∈ {1, . . . , k + 1} takvo da je αi0 6= 0. Kad bi bilo αk+1 = 0
imali bik∑
i=1
αi−→xi =
−→0 i αi0 6= 0 pri cemu je i0 ∈ {1, . . . , k}, a ovo je nemoguce jer
je(xi : i = 1, k
)linearno nezavisan sistem. Dakle αk+1 6= 0 pa sada iz (II.3) sledi
−−→xk+1 =k∑
i=1
( −αi
αk+1
)
−→xi

II.4. LINEARNO (NE)ZAVISNI SKUPOVI VEKTORA 55
i pokazali smo sta treba.
Obrat tvrdenja sledi iz Tvrdenja II.4.2 i iz cinjenice da je
m∑
j=1
λj−→xj =
−−−→xm+1
ekvivalentno sa
(−1) · −−−→xm+1 +
m∑
j=1
λi−→xj =
−→0
2
Tvrdenje II.4.5 Ako je N ⊆ V linearno nezavisan skup vektora i x ∈ V \ L(N)onda je i N ∪ {x} linearno nezavisan skup.
Dokaz U slucaju da je N = ∅ tvrdenje se proverava neposredno. Dakle neka jeN 6= ∅.
Pretpostavimo da je N ∪ {x} linearno zavisan skup. Tada za neko n ∈ N, gden ≥ 2 (zasto?), postoji neka injektivna n-torka
(ai : i = 1, n
)∈(N ∪ {x}
)n
vektora skupa N ∪ {x} i neka n-torka skalara(αi : i = 1, n
)∈ Kn tako da je
n∑
i=1
αi−→ai =
−→0
i tako da za neko i0 ∈ {1, . . . , n} vazi αi0 6= 0 .
Kad bi bilo ai ∈ N za svako i = 1, n onda bi ovo znacilo da je N linearno zavisan,te zato mora da
postoji i1 ∈ {1, . . . , n} tako da je ai1 = x.
Dakle
α1−→a1 + . . . + αi1−1
−−→ai1−1 + αi1−→x + αi1+1
−−→ai1+1 + . . . + αn−→an =
−→0 (II.4)
Iz injektivnosti n-torke(ai : i = 1, n
)imamo da je
a1, . . . , ai1−1, ai1+1, . . . , an ∈(N ∪ {x}
)\ {x} ⊆ N .
Iz pretpostavke da je αi1 = 0 bi zbog (II.4) imali
α1−→a1 + . . . + αi1−1
−−→ai1−1 + αi1+1−−→ai1+1 + . . . + αn
−→an =−→0

56 DEO II. OSNOVNI POJMOVI I CINJENICE
pri cemu je i0 ∈ {1, . . . , n} \ {i1} i αi0 6= 0i vazi a1, . . . , ai1−1, ai1+1, . . . , an ∈ N ,
pa bi ponovo sledilo da je N linearno zavisan skup. Dakle mora biti αi1 6= 0. Otudase (II.4) sada moze zapisati kao
−→x =∑
i=1,ni6=i1
(−αi
αi1
)
−→ai =−→0
tj. x ∈ L(N), suprotno polaznoj pretpostavci. 2
Lema II.4.6 Neka je M ⊆ V , n ∈ N,(ai : i = 1, n
)∈ Mn injektivna n-torka
vektora skupa M ,(αi : i = 1, n
)∈ Kn n-torka skalara i neka je
x :=n∑
i=1
αi−→ai .
Ako je i0 ∈ {1, . . . , n} takvo da je αi0 6= 0 onda vazi
L(M) = L((M \ {ai0}
)∪ {x}
)
Dokaz Stavimo M0 := {x} ∪(M \ {ai0}
). Zbog αi0 6= 0 imamo
ai0 =1
αi0
−→x +∑
i=1,ni6=i0
(−αi
αi0
)
−→ai
Kako vazi i 6= i0 ⇒ ai 6= ai0 za i = 1, n to je
u :=∑
i=1,ni6=i0
(−αi
αi0
)
−→ai ∈ L(M \ {ai0}
)⊆ L(M0)
Zato je ai0 =1
αi0
−→x +−→u ∈ L(M0∪L(M0)
)= L
(L(M0)
)= L(M0) pa najzad imamo
L(M) = L((M \ {ai0}
)∪ {ai0}
)
⊆ L(M0 ∪ L(M0)
)= L
(L(M0)
)= L(M0) ⊆
⊆ L(M ∪ L(M)
)= L
(L(M)
)= L(M)
tj. L(M0) = L(M). 2

II.4. LINEARNO (NE)ZAVISNI SKUPOVI VEKTORA 57
Tvrdenje II.4.7 Neka je N ⊆ V konacan linearno nezavisan skup sa tacno
n ∈ N vektora, i P ⊆ V konacan skup sa tacno m ∈ N vektora. Ako je N ⊆ L(P )
onda mora biti n ≤ m .
Slika II.4.4.
Dokaz Skup brojeva j ∈ N0 takvih da postoje neki N0 ⊆ N i P0 ⊆ P oba sa potacno j elemenata a tako da vazi
L(
(P \ P0) ∪N0
)
= L(P )
je neprazan jer je 0 takav broj: L((P \ ∅) ∪ ∅
)= L(P ). Neka je k ∈ N0 najveci
takav broj. Jasno k ≤ min{n,m}. Pokazimo da je k = n cime bismo dokaz tvrdenjapriveli kraju.

58 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.4.5.
Neka je, suprotno onom sto treba pokazati, k < n. Neka su N0 ⊆ N i P0 ⊆ Poba sa po tacno k elemenata a tako da vazi
L(
(P \ P0) ∪N0
)
= L(P )
Tada je moguce izabrati neko x ∈ N \N0 6= ∅.Ako je k = m onda sledi P0 = P te je x ∈ N ⊆ L(P ) = L
((P \ P0) ∪ N0
)=
L(∅ ∪N0) = L(N0) ⊆ L(N \ {x}
), tj. N je linearno zavisan skup (videti Tvrdenje
II.4.3), suprotno nasoj pretpostavci.Dakle mora biti k < m pa je P \ P0 neprazan skup sa tacno l := m − k ∈ N
elemenata.

II.4. LINEARNO (NE)ZAVISNI SKUPOVI VEKTORA 59
Slika II.4.6.
Neka su prirodan broj s ≥ l i injektivna s-torka (z1, . . . , zl, . . . , zs) vektora takvida je
P \ P0 = {z1, . . . , zl} i (P \ P0) ∪N0 = {z1, . . . , zl, . . . , zs}Ako s > l onda je {zl+1, . . . , zs} ⊆ N0, jer {zl+1, . . . , zs} ∩ (P \ P0) = ∅.
Kako je x ∈ N ⊆ L(P ) = L((P \P0)∪N0
)to postoje βi ∈ K za i = 1, s tako da
je
−→x =
s∑
i=1
βi−→zi (II.5)
Pretpostavimo najpre da je βi = 0 za svako i = 1, l. Ako je s = l (a ovo ce bititako specijalno kad je k = 0 i konsekventno N0 = ∅) onda (II.5) povlaci da je x = 0;no kako je x ∈ N a N linearno nezavisan skup to mora biti x 6= 0 (videti TvrdenjaII.3.4 i II.4.2) – kontradikcija. Dakle zakljucujemo da u ovom slucaju vazi s > l pase zato (II.5) svodi na
−→x =s∑
i=l+1
βi−→zi
Kako je {zl+1, . . . , zs} ⊆ N0 to ovo znaci da je x ∈ L(N0) ⊆ L(N \ {x}
), pa sledi da
je N linearno zavisan skup – kontradikcija.Dakle zakljucili smo da mora da
postoji neko i0 ∈ {1, . . . , l} tako da je βi0 6= 0.
Ako stavimo S := (P \ P0) ∪N0, na osnovu Leme II.4.6 sada sledi
L(S) = L((S \ {zi0}) ∪ {x}
)
Imamo
S \ {zi0} =
[
P \(P0 ∪ {zi0}
)]
∪(N0 \ {zi0}
)
pa ako stavimo P1 := P0 ∪ {zi0} i N1 := N0 ∪ {x} imamo
(S \ {zi0}) ∪ {x} ⊆ (P \ P1) ∪N1
odakle je
L(S) = L((S \ {zi0}) ∪ {x}
)⊆ L
(
(P \ P1) ∪N1
)
Zato je L(P ) = L(S) ⊆ L(
(P \ P1) ∪N1
)
⊆ L(P ∪N) ⊆ L(L(P )
)= L(P ), tj.
L(
(P \ P1) ∪N1
)
= L(P ) (II.6)
Kako je zi0 ∈ P \ P0 a P0 ima k elemenata to je P1 = P0 ∪ {zi0} podskup od P sak + 1 elemenata; kako je x ∈ N \ N0 a N0 ima k elemenata to je N1 = N0 ∪ {x}podskup od N sa k + 1 elemenata. No sada (II.6) protivureci izboru broja k. 2

60 DEO II. OSNOVNI POJMOVI I CINJENICE
Posledica II.4.8 Ako su konacni skupovi S1, S2 ⊆ V oba linearno nezavisni i po-tpuni, onda imaju isti broj elemenata.
Dokaz Ovo sledi iz S1 ⊆ V = L(S2) , S2 ⊆ V = L(S1) i Tvrdenja II.4.7. 2
Posledica II.4.9 Ako je V konacnodimenzionalan onda je takav i svaki njegov po-dprostor (preciznije – vektorski prostor odreden datim podprostorom).
Dokaz Neka je {0} 6= Pv
⊆ V i P vektorski prostor odreden podprostorom P .
Postoji konacan skup B ⊆ V vektora sa n ∈ N elemenata tako da je V = L(B) .
Slika II.4.7.
Reci
“a =(ai : i = 1, k
)je linearno nezavisan sistem vektora prostora P”
znaci isto sto i reci
“ai ∈ P za svako i = 1, k i a =(ai : i = 1, k
)je linearno nezavisan sistem vektora
prostora V”.
Zato je k ≤ n za svaki takav sistem. Otuda postoji k0 ∈ N tako da je
k0 = max{k ∈ N :
(ai : i = 1, k
)je linearno nezavisan sistem vektora iz P
}
Postoji linearno nezavisan sistem(ai : i = 1, k0
)vektora iz P . Tvrdimo da za
N :={ai : i = 1, k0
}vazi L(N) = P . N je linearno nezavisan skup prostora P i
ima k0 elemenata (videti Tvrdenje II.4.2). Kad bi postojalo neko x ∈ P \L(N) ondabi skup N ∪ {x} bio linearno nezavisan skup vektora prostora P (videti TvrdenjeII.4.5) sa k0+1 elemenata, te bi sistem (a1, . . . , ak0, x) bio linearno nezavisan sistemvektora iz P ; no kako je ovaj sistem duzine k0 + 1 ovo protivureci izboru broja k0.2

II.5. BAZNI SKUP, BAZA, DIMENZIJA 61
II.5 Bazni skup, baza, dimenzija
Definicija II.5.1 Potpun i linearno nezavizan skup vektora nazivamo
bazni skup vektorskog prostora V
2
Tvrdenje II.5.2 Neka je S ⊆ V konacan potpun skup i N ⊆ S linearno nezavisanskup sa n ∈ N0 elemenata tako da je
n = max {card(M) : M ⊆ S i M je linearno nezavisan}
tj. N je linearno nezavisan podskup od S sa najvecim mogucim brojem elemenata.Tada je i N potpun.
Dokaz Pod datim uslovima mora biti S ⊆ L(N): kad bi postojao neki x ∈S \ L(N) onda bi N ∪ {x} bio linearno nezavisan (prema Tvrdenju II.4.5) podskupod S sa n + 1 elemenata, sto protivureci izboru broja n. Dakle
V = L(S) ⊆ L(L(N)
)= L(N) ⊆ V
tj. N je potpun skup. 2
Teorema II.5.3 Neka je V k.d.v. prostor. Tada– svi linearno nezavisni skupovi su konacni;– postoji skup koji je istovremeno i potpun i linearno nezavisan, tj. postoji bazni
skup prostora V;
– svi bazni skupovi imaju isti broj elemenata i ovaj broj oznacavamo sa dim(V)i nazivamo
dimenzija
konacnodimenzionalnog vektorskog prostora V.
Dokaz Teorema je direkna posledica Tvrdenja II.4.7 i II.5.2 i Posledice II.4.8.2
Zapazanje II.5.4 Primetimo da je ∅ bazni skup nula prostora V = {0}, te i da jedimenzija nula prostora jednaka 0:
dim({0})= 0
2

62 DEO II. OSNOVNI POJMOVI I CINJENICE
Konvencija Ako je V konacnodimenzionalan vektorski prostor, Pv
⊆ V i P vektorskiprostor odreden podprostorom P , onda je prema Posledici II.4.9 i P konacnodimenzi-onalan, te je definisano dim(P) ∈ N; za dim(P) ∈ N kazemo i da je dimenzija
podprostora Pv
⊆ V i pisemo dimV(P ) = dim(P ) = dim(P). 2
Definicija II.5.5 Pod
bazom vektorskog prostora V
podrazumevamo svaki sistem(as : s ∈ S
)vektora za koji vaze sledeca dva uslova:
– s1 6= s2 ⇒ as1 6= as2 za svako s1, s2 ∈ S– skup
{as : s ∈ S
}je bazni (tj. istovremeno i potpun i linearno nezavisan)
skup datog vektorskog prostora. 2
Drugim recima, baza je sistem vektora koji se ovako dobija: fiksiramo neki bazniskup vektora M ⊆ V i neku bijekciju a : S → M ;
(as : s ∈ S
)je baza.
Nas ce skoro iskljucivo interesovati baze kod kojih je S = {1, . . . , n} za nekon ∈ N, tj. baze oblika
(ai : i = 1, n
), obzirom da se Linearna Algebra bavi
konacnodimenzionalnim vektorskim prostorima.
§Cinjenica da je neki sistem oblika
(xi : i = 1, n
)baza prostora moze da se iskaze
i na sledeca dva ekvivalentna nacina:
Tvrdenje II.5.6 Sistem(xi : i = 1, n
)je baza prostora
akko je skup{xi : i = 1, n
}bazni skup prostora sa n elemenata.
2
Odavde vidimo da ako je(ai : i = 1, n
)baza prostora onda je n = dim(V) .
Tvrdenje II.5.7 Sistem(xi : i = 1, n
)je baza prostora
akko je on istovremeno
i linearno nezavisan i potpun sistem vektora.

II.5. BAZNI SKUP, BAZA, DIMENZIJA 63
2
§
Definicija II.5.8 Neka je n ∈ N, neka je n-torka(ai : i = 1, n
)baza prostora
V i x ∈ V . Kako je sistem(ai : i = 1, n
)potpun to postoji n-torka skalara
(αi(x) : i = 1, n
)∈ Kn tako da je
x =n∑
i=1
αi(x)−→ai
a kako je sistem(ai : i = 1, n
)linearno nezavisan to je
(αi(x) : i = 1, n
)jedi-
nstvena n-torka skalara za koju ovo vazi; za i ∈ {1, . . . , n} skalar αi(x) nazivamo
i-ta koordinata vektora x u odnosu na bazu(ai : i = 1, n
)
Ako je v ∈{ai : i = 1, n
}onda postoji
tacno jedno i0 ∈ {1, . . . , n} tako da je ai0 = v
(jer je ova n-torka injektivna kao linearno nezavisna).
Za αi0(x) kazemo da je
koordinata vektora x u odnosu na bazu(ai : i = 1, n
)
pri vektoru v
2
Zapazanje II.5.9 Neka su a =(ai : i = 1, n
)i b =
(bi : i = 1, n
)baze prostora
tako da je{ai : i = 1, n
}={bi : i = 1, n
}=: M (tj. obe se dobijaju tako sto
se elementi jednog te istog baznog skupa sa n elemenata poredaju u po injektivnun-torku). Ako su x ∈ V i v ∈ M proizvoljni onda se koordinata vektora x u odnosuna bazu a pri vektoru v poklapa sa koordinatom vektora x u odnosu na bazu bpri vektoru v.
Zaista, neka je x =
n∑
k=1
αk−→ak =
n∑
k=1
βk
−→bk . Ako su p, q ∈ {1, . . . , n} takvi da
je ap = bq = v treba zapravo pokazati da je αp = βq. Postoje i1, . . . , in takvi da(a1, . . . , an) = (bi1 , . . . , bin). Imamo
x =
n∑
k=1
βk
−→bk =
n∑
k=1
βik
−→bik =
n∑
k=1
βik−→ak =
n∑
k=1
αk−→ak

64 DEO II. OSNOVNI POJMOVI I CINJENICE
iz cega sledi βik = αk za svako k = 1, n, obzirom da je sistem a linearno nezavisan.Kako je bq = v = ap = bip , to iz injektivnosti n-torke b sledi da je q = ip, pa je zatoβq = βip = αp.
Ovo zapazanje nam omogucava da govorimo i o koordinati vektora x u odnosuna bazni skup M pri vektoru v ∈ M . 2
Primer II.5.10 Neka je n ∈ N. Za i = 1, n neka je ei ∈ Kn definisano sa
ei(j) =
{0, ako j 6= i1, ako j = i
tj. ei = (0, . . . , 0︸ ︷︷ ︸
i−1 puta
, 1, 0, . . . , 0︸ ︷︷ ︸
n−i puta
) odnosno
e1 = (1, 0, 0, 0, . . . , 0, 0, 0)e2 = (0, 1, 0, 0, . . . , 0, 0, 0)e3 = (0, 0, 1, 0, . . . , 0, 0, 0)
...en = (0, 0, 0, 0, . . . , 0, 0, 1)
U vektorskom prostoru Kn svih uredenih n-torki brojeva iz K imamo:
n∑
i=1
αi−→ei = α1 · (1, 0, 0, 0, . . . 0, 0, 0) +
α2 · (0, 1, 0, 0, . . . 0, 0, 0) +α3 · (0, 0, 1, 0, . . . 0, 0, 0) +
......
......
......
......
αn−1 · (0, 0, 0, 0, . . . 0, 1, 0) +αn · (0, 0, 0, 0, . . . 0, 0, 1)
= (α1, 0, 0, 0, . . . 0, 0, 0) +(0, α2, 0, 0, . . . 0, 0, 0) +(0, 0, α3, 0, . . . 0, 0, 0) +...
......
......
......
...(0, 0, 0, 0, . . . 0, αn−1, 0) +(0, 0, 0, 0, . . . 0, 0, αn)
= (α1, α2, α3, α4, . . . αn−2, αn−1, αn)
Odavde se lako vidi da je(ei : i = 1, n
)potpun i linearno nezavisan sistem, tj.
baza prostora Kn, te i da je dim(V) = n. Ovu bazu nazivamo
standardna baza prostora Kn

II.5. BAZNI SKUP, BAZA, DIMENZIJA 65
Primetimo da je i-ta koordinata n-torke (α1, α2, α3, . . . , αn−1, αn) u odnosu naovu bazu upravo αi – dakle isto sto i i-ta komponenta te n-torke. 2
Primer II.5.11 Neka je V := (C3,⊕, ◦) kompleksan vektorski prostor uredenihtrojki kompleksnih brojeva i neka je ◦′ := ◦ �
(R × C3
)odgovarajua restrikcija
mesovite operacije ◦. Tada je
VR :=(C
3,⊕, ◦′)
realan vektorski prostor, i za njega kazemo da je R-modifikacija kompleksnog vek-
torskog prostora V.
Opstije, ako je W1 := (W,⊕, ◦) kompleksan vektorski prostor i ◦′ := ◦ �
(R × W ) onda je W2 := (W,⊕, ◦′) realan vektorski prostor; za W2 kazemo da
je R-modifikacija kompleksnog prostora W1.
Vratimo se sada nasem konkretnom primeru, tj. R-modifikaciji VR kompleksnogprostora V = (C3,⊕, ◦). Neka je e =
(ei : i = 1, 3
)standardna baza kompleksnog
prostora V iz Primera II.5.10. Sistem e je linearno nezavisan sistem vektora prostoraVR jer je on linearno nezavisan sistem vektora prostora V i jer je α ◦′ −→x = α ◦−→x zasvako x ∈ Cn i svaki realan broj α ∈ R. No ovaj sistem nije vise baza prostora VR
jer nije potpun sistem vektora ovog prostora. Zaista, dok u prostoru V imamo
i−→e1 = i(1, 0, 0) = (i, 0, 0)
u prostoru VR nema mnozenja vektora kompleksnim brojem i – ovo nije skalar ovogprostora. Skalari ovog prostora su realni brojevi a imamo
α−→e1 + β−→e2 + γ−→e3 = α(1, 0, 0) + β(0, 1, 0) + γ(0, 0, 1) = (α, β, γ) 6= (i, 0, 0)
za svako α, β, γ ∈ R.S druge strane lako se proverava da sistem
((1, 0, 0), (0, 1, 0), (0, 0, 1), (i, 0, 0), (0, i, 0), (0, 0, i)
)
jeste baza prostora VR:
p(1, 0, 0)+x(0, 1, 0)+u(0, 0, 1)+q(i, 0, 0)+y(0, i, 0)+v(0, 0, i) = (p+qi, x+yi, u+vi)
Citaocu se prepusta da ovo razmatranje generalizuje posmatrajuci R-modifikacijuprostora svih kompleksnih n-torki gde je n ∈ N proizvoljno. 2
Primer II.5.12 Za i0, j0 = 1, 3 neka je matrica Ei0,j0 ∈ K3×3 definisana sa
Ei0,j0(i, j) =
{0, ako (i, j) 6= (i0, j0)1, ako (i, j) = (i0, j0)

66 DEO II. OSNOVNI POJMOVI I CINJENICE
za i, j = 1, 3.U prostoru K3×3 sada imamo
∑
i,j=1,3
ai,j−→Ei,j = a1,1
1 0 00 0 00 0 0
+a1,2
0 1 00 0 00 0 0
+a1,3
0 0 10 0 00 0 0
+
a2,1
0 0 01 0 00 0 0
+a2,2
0 0 00 1 00 0 0
+a2,3
0 0 00 0 10 0 0
+
a3,1
0 0 00 0 01 0 0
+a3,2
0 0 00 0 00 1 0
+a3,3
0 0 00 0 00 0 1
=
a1,1 0 00 0 00 0 0
+
0 a1,2 00 0 00 0 0
+
0 0 a1,30 0 00 0 0
+
0 0 0a2,1 0 00 0 0
+
0 0 00 a2,2 00 0 0
+
0 0 00 0 a2,30 0 0
+
0 0 00 0 0a3,1 0 0
+
0 0 00 0 00 a3,2 0
+
0 0 00 0 00 0 a3,3
=
=
a1,1 a1,2 a1,3a2,1 a2,2 a2,3a3,1 a3,2 a3,3
Odavde se lako vidi da je{E1,1, E1,2, E1,3, E2,1, E2,2, E2,3, E3,1, E3,2, E3,3
}potpun
i linearno nezavisan skup sa 9 elemenata, te i da je dim(K3×3
)= 3 · 3 = 9. Sistem
E :=(E1,1, E1,2, E1,3, E2,1, E2,2, E2,3, E3,1, E3,2, E3,3
)
je baza prostora K3×3. Imamo
A :=
1 −5 9−3 0 72 2 −1
= b1, −5, 9, −3, 0, 7, 2 , 2, −1cE
Tako je recimo koordinata matrice A u odnosu na bazu E pri vektoru E2,3 jednaka7, a pri vektoru E1,2 jednaka −5.

II.5. BAZNI SKUP, BAZA, DIMENZIJA 67
Slicno, ako su n,m ∈ N i ako su za i0 = 1, n i j0 = 1, m matrice Ei0,j0 ∈ Kn×m
definisane sa
Ei0,j0(i, j) =
{0, ako (i, j) 6= (i0, j0)1, ako (i, j) = (i0, j0)
za i = 1, n i j = 1, m, odnosno
Ei0,j0 =
O(i0−1)×(j0−1)
00...00
i0−1 O(i0−1)×(m−j0)
0 0 . . . 0 0︸ ︷︷ ︸
j0−1
1 0 0 . . . 0 0︸ ︷︷ ︸
m−j0
O(n−i0)×(j0−1)
00...00
n−i0 O(n−i0)×(m−j0)
onda je skupM :=
{Ei,j : i = 1, n, j = 1, m
}
potpun i linearno nezavisan i ima n ·m elemenata. Zato je sistem
(E1,1, . . . , E1,m;E2,1, . . . , E2,m; . . . . . . . . . ;En,1, . . . , En,m
)
baza prostora Kn×m i ovu bazu nazivamo
standardna baza prostora Kn×m
Primer II.5.13 Neka je K ∈ {R,C}, n ∈ N i za i ∈ 1, n neka su si : K → K
definisane sa si(x) :df= xi za x ∈ K.
Sistem(si : i = 0, n
)funkcija je baza prostora Poln,K. Zaista, ako je v ∈ Poln,K
dato sa v(x) = a0 + a1x+ · · ·+ anxn (gde dozvoljavamo i da je an = 0) onda je
v = ba0, a1, . . . , ancs
jerv(x) = a0s0(x) + a1s1(x) + · · ·+ ansn(x)

68 DEO II. OSNOVNI POJMOVI I CINJENICE
za svako x ∈ K pa je sistem potpun, a ako su αi ∈ K za i = 1, n takvi da je
n∑
i=1
αi−→sn
nula vektor ovog prostora - konstantna nula funkcija – onda je
(n∑
i=1
αi−→sn)
(x) = 0
za svako x ∈ K, odnosno
α0 + α1x + α2x2 + · · ·+ αnx
n = 0
za svako x ∈ K, odakle se vidi da mora biti αi = 0 za i = 1, n; dakle sistem je ilinearno nezavisan.
Ovu bazu nazivamo
standardna baza prostora Poln,K
Specijalno dim (Poln,K) = n. Standardna baza je specificna po tome sto se koo-rdinate vektora – date polinomske funkcije – u odnosu na nju poklapaju sa koefici-jentima te polinomske funkcije. 2
Primer II.5.14 Ako je u prostoru V geometrijskih vektora (a, b, c) proizvoljna tro-jka nekomplanarnih vektora, onda je ona potpun sistem vektora ovog prostora:
−→u = λ1−→a + λ2
−→b + λ3
−→c
Slika II.5.8.
Znamo da niti lineal nad bilo kojim jednim geometrijskim vektorom niti nad bilokoja dva geometrijska vektora nije jednak V (videti Primer I.6.5). S druge straneprema Tvrdenju II.5.2 svaki potpun skup vektora ima podskup koji je bazni skup.Otuda zakljucujemo da (a, b, c) mora biti baza. Dakle dim(V) = 3. 2

II.6. SUME PODPROSTORA 69
Tvrdenje II.5.15 Neka je V k.d.v. prostor. Ako je (a1, . . . , an) linearno nezavisansistem koji nije potpun, onda postoje k ∈ N i k-torka (b1, . . . , bk) ∈ V k vektora takoda je (a1, . . . , an, b1, . . . , bk) baza.
Dokaz Pretpostavimo suprotno, tj. neka postoji neko n ∈ N takvo da za nekilinearno nezavisan sistem (a1, . . . , an) koji nije potpun vazi da nijedan sistem vektorakoji je oblika (a1, . . . , an, b1, . . . , bk) nije baza; svaki takav broj n zadovoljava n ≤dimV ∈ N pa zato postoji i najveci takav broj, oznacimo ga sa n0.
Neka je a = (a1, . . . , an0) linearno nezavisan sistem koji nije potpun a takav danijedan sistem vektora koji je oblika (a1, . . . , an0, b1, . . . , bk) nije baza. Dakle moguceje izabrati neko x ∈ V \ L
({a1, . . . , an0}
). Kako je a linearno nezavisan sistem to
odavde sledi da je skup {a1, . . . , an0, x} linearno nezavisan (videti Tvrdenje II.4.5)i ima tacno n elemenata, tj. sistem (a1, . . . , an0, x) je linearno nezavisan. Zbogucinjene pretpostavke o sistemu (a1, . . . , an0) sistem (a1, . . . , an0 , x) ne moze bitipotpun (jer bi tad bio baza) a iz istog razloga ne moze postojati nijedna baza oblika(a1, . . . , an0, x, b1, . . . , bk). No sistem (a1, . . . , an0 , x) je duzine n0+1, sto protivureciizboru broja n0. 2
Posledica II.5.16 Ako je V k.d.v. prostor i Pv
⊆ V, pri cemu je P 6= V , onda jedim(P ) < dim(V). 2
Tvrdenje II.5.17 Neka je V konacnodimenzionalan prostor, n := dim(V) ∈ N ia =
(ai : i = 1, n
)sistem duzine (upravo) n. Ako je a bilo linearno nezavisan bilo
potpun, onda je a baza.
Dokaz Ako je a linearno nezavisan sistem a nije potpun onda bi na osnovuTvrdenja II.5.15 postojali k ∈ N i (b1, . . . , bk) ∈ V k tako da je (a1, . . . , an, b1, . . . , bk)baza; no ova bi baza bila duzine n+ k a n+ k > n = dim(V), sto je nemoguce.
Pretpostavimo sada da je a potpun sistem i stavimo A :={ai : i = 1, n
}. Tada
je S konacan potpun skup. Neka je N ⊆ A linearno nezavisan skup sa najvecimbrojem elemenata. Prema Tvrdenju II.5.2 N mora biti potpun skup, te je stoga ibazni skup pa mu je n broj elemenata. Isti broj elemenata ima i njegov nadskup Apa je N = A. Dakle A je bazni skup sa n elemenata a ovo znaci da je a baza (videtiTvrdenje II.5.6). 2
II.6 Sume podprostora
Za neprazne skupove vektora A,B ⊆ V vektorskog prostora V definisemo
A+B :df= {−→x +−→y : x ∈ A, y ∈ B}
iα · A :
df= {α−→x : x ∈ A}

70 DEO II. OSNOVNI POJMOVI I CINJENICE
za α ∈ K. Ovako definisana operacija + na skupu P(V ) \ {∅} je asocijativna ikomutativna, sto se lako proverava, a ima i neutral – to je singlton {0}.
Jednostavnom indukcijom pokazuje se da je
A1 + · · ·+ Ak ={−→x1 + · · ·+−→xk : xi ∈ Pi, i = 1, k
}
Tvrdenje II.6.1 Ako je P1, . . . , Pk
v
⊆ V onda je i P1 + · · ·+ Pk
v
⊆ V.
Dokaz Neka je u, v ∈ P1 + · · ·+ Pk i α ∈ K. Tada postoje xi, yi ∈ Pi za i = 1, k
tako da je u =k∑
i=1
xi i v =k∑
i=1
yi. Imamo
u+ v =k∑
i=1
xi +k∑
i=1
yi =k∑
i=1
(xi + yi) ∈ P1 + · · ·+ Pk
jer je xi + yi ∈ Pi za svako i = 1, k, obzirom da je Pi
v
⊆ V. Slicno je
α−→u = αk∑
i=1
xi =k∑
i=1
α−→xi ∈ P1 + · · ·+ Pk
jer je αi−→xi ∈ Pi za svako i = 1, k, obzirom da je Pi
v
⊆ V. 2
Podprostor P1 + · · ·+ Pk
v
⊆ V nazivamo suma k-torka podprostora (P1, . . . , Pk).
Definicija II.6.2 Za uredenu k-torku podprostora (P1, . . . , Pk) kazemo da ima di-
rektnu sumu ili da joj je suma direktna ako vazik∑
i=1
xi 6= 0 kad god je xi ∈ Pi za
i = 1, k tako da za neko i0 ∈ {1, . . . , k} vazi xi0 6= 0.
Zapis Q = P1 ⊕ · · · ⊕ Pk znacice:
Q = P1 + · · ·+ Pk i (P1, . . . , Pk) ima direktnu sumu
Tvrdenje II.6.3 Neka je P1, . . . , Pk
v
⊆ V. Sledeci uslovi su ekvivalentni:(1) (P1, . . . , Pk) ima direktnu sumu;(2) ako su xi, yi ∈ Pi za i = 1, k tako da je xi0 6= yi0 za neko i0 ∈ {1, . . . , k},
onda je
k∑
i=1
xi 6=k∑
i=1
yi;
(3) Za svako i0 ∈ {1, . . . , k} vazi Pi0 ∩∑
i=1,ki6=i0
Pi = {0}.

II.6. SUME PODPROSTORA 71
Dokaz (1) ⇒ (2): ako su xi, yi ∈ Pi za i = 1, k tako da je xi0 6= yi0 za nekoi0 ∈ {1, . . . , k}. Definisimo
zi = xi − yi
za i = 1, k. Za svako i = 1, k vazi zi ∈ Pi jer Pi
v
⊆ V. Pritom je zi0 6= 0. Prema (1)sada sledi da je onda imamo
k∑
i=1
zi 6= 0
tj.
0 6=k∑
i=1
(xi − yi) =k∑
i=1
xi =k∑
i=1
yi
odnosnok∑
i=1
xi 6=k∑
i=1
yi.
(2) ⇒ (3): Neka su i0 ∈ {1, . . . , k} i a ∈ Pi0 ∩∑
i=1,ki6=i0
Pi ⊇ {0} proizvoljni. Tada je
a =∑
i=1,ki6=i0
zi (II.7)
za neke zi ∈ Pi za i = 1, k, i 6= i0. Definisimo sistem
xi :df= 0 za i = 1, k, i 6= i0 i xi0 :
df= a,
i sistem
yi :df= zi za i = 1, k, i 6= i0 i yi0 :
df= 0.
Prema II.7 imamok∑
i=1
xi = a =
k∑
i=1
yi
Pritom je xi, yi ∈ Pi za i = 1, k. (2) sada povlaci da je xi = yi za svako i = 1, k,specijalno a = xi0 = yi0 = 0.
(3) ⇒ (1): Neka su xi ∈ Pi za i = 1, k tako da za neko i0 ∈ {1, . . . , k} vazi
xi0 6= 0. Kad bi bilok∑
i=1
xi = 0 onda bi imali
Pi0 3 xi0 =∑
i=1,ki6=i0
(−xi) ∈∑
i=1,ki6=i0
Pi
tj. 0 6= xi0 ∈ Pi0 ∩∑
i=1,ki6=i0
Pi, sto bi protivurecilo uslovu (3). 2
Kao specijalan slucaj prethodnog tvrdenja imamo da ako je P,Qv
⊆ V onda

72 DEO II. OSNOVNI POJMOVI I CINJENICE
suma para podprostora (P,Q) je direktna akko je P ∩Q = {0}
Primer U prostoru RR neka je
P1 :={f ∈ R
R : f je parna funkcija}
i P2 :={f ∈ R
R : f je neparna funkcija}
Jednostavno je videti da je P1, P2
v
⊆ RR. Suma para podprostora (P1, P2) je direktna
jer ako je f ∈ P1∩P2 onda za svako x ∈ R vazi f(−x) = f(x) = −f(x), tj. f(x) = 0,pa je f konstantna nula funkcija. Dakle P1 ∩ P2 = {0}. 2
Tvrdenje II.6.4 U k.d.v.p. V neka je P1, . . . , Pk
v
⊆ V. Za i = 1, k stavimo ni :=dim(Pi). Za svako i = 1, k neka je sistem (ai1, . . . , a
ini) baza vektorskog prostora
odredenog sa Pi. Tada je suma k-torke (P1, . . . , Pk) direktna akko je (n1+ · · ·+nk)-torka
(a11, . . . , a1n1, a21, . . . , a
2n2, . . . . . . , ak1, . . . , a
knk)
baza podprostora P1 + · · ·+ Pk.
Slika II.6.9.
Dokaz Pretpostavimo najpre da je doticni sistem baza podprostora P1 + · · ·+Pk. Da pokazemo da (P1, . . . , Pk) ima direktnu sumu neka su xi ∈ Pi za i = 1, k

II.6. SUME PODPROSTORA 73
proizvoljni. Za svako i = 1, k postoje αi1, . . . , α
ini
∈ K tako je xi =
ni∑
j=1
αija
ij, jer je
(ai1, . . . , aini) potpun sistem za Pi. Imamo
k∑
i=1
xi =
n1∑
j=1
α1ja
1j +
n2∑
j=1
α2ja
2j +
...nk∑
j=1
αkja
kj
(II.8)
Ako jek∑
i=1
xi = 0 onda, obzirom da je
(a11, . . . , a1n1, a21, . . . , a
2n2, . . . . . . , ak1, . . . , a
knk)
linearno nezavisan sistem, iz (II.8) sledi da je αij = 0 za svako i = 1, k i svako
j = 1, ni, te je xi = 0.
Pretpostavimo sada da (P1, . . . , Pk) ima direktnu sumu i neka su αij ∈ K za svako
i = 1, k i j = 1, ni. Imamo
v :=
n1∑
j=1
α1ja
1j +
n2∑
j=1
α2ja
2j +
...nk∑
j=1
αkja
kj = p1 + p2 · · ·+ pk
(II.9)
gde smo stavili pi :df=
ni∑
j=1
αija
ij. Iz Pi
v
⊆ V sledi da je pi ∈ Pi. Zato, obzirom da
(P1, . . . , Pk) ima direktnu sumu, ako je v = 0 onda sledi da je pi = 0 za svako i = 1, k.
Dakle ako je i = 1, k proizvoljno imamo
ni∑
j=1
αija
ij = 0, pa kako je (ai1, . . . , a
ini)
linearno nezavisan sistem, to ovo moze da vazi samo ako je αij = 0 za svako j = 1, ni.
2

74 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.6.5 U k.d.v.p. V neka je P1, . . . , Pk
v
⊆ V. Suma k-torke (P1, . . . , Pk)
je direktna akko vazi dim(P1 + · · ·+ Pk) =k∑
i=1
dim(Pi).
Dokaz Za svako i = 1, k stavimo ni := dim(Pi) i uocimo po bazu (ai1, . . . , aini)
podprostora Pi. Sistem
a := (a11, . . . , a1n1, a21, . . . , a
2n2, . . . . . . , ak1, . . . , a
knk) ∈ (P1 + · · ·+ Pk)
n1+···+nk
je potpun za podprostor P1 + · · · + Pk. Zaista ako je x ∈ P1 + · · · + Pk onda jex = x1 + · · ·+ xk za neke xi ∈ Pi za i = 1, k, pa je
x =
k∑
i=1
xi =
k∑
i=1
(
α1i
−→ai1 + · · ·+ αni
i
−→aini
)
∈ L({aij : i = 1, k, j = 1, ni
})
za neke αji ∈ K za i = 1, k, j = 1, ni. Zato sada na osnovu Tvrdenja II.5.17 imamo
da je
a baza za P1 + · · ·+ Pk akko je dim(P1 + · · ·+ Pk) =k∑
i=1
ni.
No prema Tvrdenju II.6.4 imamo da je
a baza za P1 + · · ·+ Pk akko je suma k-torke (P1, . . . , Pk) direktna.
2
Tvrdenje II.6.6 U k.d.v.p. V neka je Pv
⊆ V. Tada postoji bar jedno Qv
⊆ V takoda je V = P ⊕Q.
Dokaz Ako je P = V onda mozemo (i moramo) uzeti Q = {0}; ako je P = {0}onda mozemo (i moramo) uzeti Q = V . Ukoliko se ne radi ni o jednom od ova dvaslucaja onda ovo direktno sledi iz Tvrdenja II.5.15 i II.6.4. 2
Definicija II.6.7 Neka je Pv
⊆ V. Svaki podprostor za koji vazi P ⊕Q = V nazivase
direktna dopuna podprostora P (u odnosu na prostor V)
2

II.6. SUME PODPROSTORA 75
Primer Transponovana matrica matrice A = [ai,j]n×m ∈ Kn×m jeste matrica B =
[bi,j]m×n ∈ Km×n definisana sa bi,j = aj,i za svako i = 1, m, j = 1, n; oznacavamo je
sa AT . Na primer imamo
a x pb y qc z r
T
=
a b cx y zp q r
Za kvadratnu matricu A = [ai,j]n×n ∈ Kn×n reda n ∈ N kazemo da je
simetricna matrica
ako vazi ai,j = aj,i za svako i, j = 1, n. Dakle A je simetricna akko vazi A = AT .
Za kvadratnu matricu A = [ai,j]n×n ∈ Kn×n reda n ∈ N kazemo da je
antisimetricna matrica
ili kososimetricna matrica, ako vazi ai,j = −aj,i za svako i, j = 1, n. Dakle A je
antisimetricna akko vazi A = −AT .
Primetimo da svaka antisimetricna matrica “ima sve nule na glavnoj dijagonali”,tj. da vazi ai,i = 0 za svako i = 1, n: ovo je zbog ai,i = −ai,i.
a u vu b wv w b
− simetricna matrica
0 −u −vu 0 −wv w 0
− antisimetricna matrica
a1,1 + a1,12
a1,2 + a2,12
a1,3 + a3,12
a2,1 + a1,22
a2,2 + a2,22
a2,3 + a3,22
a3,1 + a1,32
a3,2 + a2,32
a3,3 + a3,32
︸ ︷︷ ︸
1
2
(M +MT
)
+
a1,1 − a1,12
a1,2 − a2,12
a1,3 − a3,12
a2,1 − a1,22
a2,2 − a2,22
a2,3 − a3,22
a3,1 − a1,32
a3,2 − a2,32
a3,3 − a3,32
︸ ︷︷ ︸
1
2
(M −MT
)
=

76 DEO II. OSNOVNI POJMOVI I CINJENICE
=
a1,1 a1,2 a1,3a2,1 a2,2 a2,3a3,1 a3,2 a3,3
︸ ︷︷ ︸
M
Za proizvoljnu kvadratnu matricu A = [ai,j]n×n ∈ Kn×n matrica A + AT je
simetricna a matrica A − AT je antisimetricna, sto se direktno proverava; zato
je1
2
(A+ AT
)simetricna a matrica
1
2
(A− AT
)antisimetricna. i pritom vazi
A =1
2
(A+ AT
)+
1
2
(A− AT
)∈ Sim + Ant
gde je Sim ⊆ Kn×n skup svih simetricnih matrica reda n, a Ant ⊆ Kn×n skup svihantisimetricnih matrica reda n.
Ovo znaci da je Kn×n = Sim + Ant. Proveravimo da zapravo vazi
Kn×n = Sim ⊕ Ant
Zaista, neka je [ui,j]n×n ∈ Sim, [vi,j]n×n ∈ Ant tako da [ui,j]n×n + [vi,j]n×n =[wi,j]n×n, gde je wi,j = 0 za svako i, j = 1, n. Fiksirajmo i0, j0 ∈ {1, . . . , n}. Tada jeui0,j0 + vi0,j0 = 0 kao i uj0,i0 + vj0,i0 = 0, pri cemu uj0,i0 = ui0,j0 i vj0,i0 = −vi0 ,j0, teje zapravo
ui0,j0 + vi0,j0 = 0 i ui0,j0 − vi0,j0 = 0
odnosno ui0,j0 = vi0,j0 = 0. 2
Primer Neka je k ∈ N. U prostoru(NR,⊕, ◦
)svih nizova realnih brojeva za skupove
P := {(ai : i ∈ N) : ai = 0 za svako i > k}
i
Q :={(ai : i ∈ N) : ai = 0 za svako i = 1, k
}
vazi P,Qv
⊆ V kao i NR = P ⊕Q.

II.6. SUME PODPROSTORA 77
...
...
0
0
0
ak
ak−1
...
a3
a2
a1
+
...
...
ak+3
ak+2
ak+1
0
0
...
0
0
0
=
...
...
ak+3
ak+2
ak+1
ak
ak−1
...
a3
a2
a1
p + q = a
2
Tvrdenje II.6.8 Neka je P1, P2
v
⊆ V, Q0 := P1 ∩ P2 i neka su Q1
v
⊆ P1 i Q2
v
⊆ P2
takvi da je
Q1 ⊕Q0 = P1 i Q0 ⊕Q2 = P2
Tada je suma trojke podprostora (Q1, Q0, Q2) direktna, i pritom je
Q1 ⊕Q0 ⊕Q2 = P1 + P2

78 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.6.10.
Dokaz Da pokazemo da trojka (Q1, Q0, Q2) ima direktnu sumu koristicemo seTvrdenjem II.6.3 pod (3). Imamo
Q2 ∩ (Q1 +Q0) = Q2 ∩ P1 = (Q2 ∩ P2) ∩ P1 = Q2 ∩ (P2 ∩ P1) = Q2 ∩Q0 = {0}
i analogno
Q1 ∩ (Q0 +Q2) = Q1 ∩ P2 = (Q1 ∩ P1) ∩ P2 = Q1 ∩ (P1 ∩ P2) = Q1 ∩Q0 = {0}
Preostaje da pokazemo da jeQ0∩(Q1+Q2) = {0}. Neka je q0 ∈ Q0∩(Q1+Q2) = {0}proizvoljno. Tada postoje q1 ∈ Q1 i q2 ∈ Q2 tako da je
q0 = q1 + q2
ImamoP1 3 q0 − q1 = q2 ∈ P2
jer q0 ∈ Q0 ⊆ P1, q1 ∈ Q1 ⊆ P1 i P1
v
⊆ V, pa je
q2 = q0 − q1 ∈ P1 ∩ P2 = Q0
Otuda slediQ0 3 q0 − q2 = q1 ∈ Q1
pa je zapravoq0 − q2 = q1 ∈ Q0 ∩Q1 = {0}
odnosno q0 − q2 = 0 pa imamo
Q0 3 q0 = q2 ∈ Q2

II.7. LINEARNA PRESLIKAVANJA 79
tj. q0 = q2 ∈ Q0 ∩Q2 = {0}, iliti q0 = 0.
Imamo Q0 +Q0 = Q0 jer je Q0
v
⊆ V pa je zato
P1 + P2 = (Q1 +Q0) + (Q0 +Q2) = Q1 + (Q0 +Q0) +Q2 = Q1 +Q0 +Q2
2
Tvrdenje II.6.9 Neka je P1, P2
v
⊆ V. Ako je V konacnodimenzionalan ondavazi
dim(P1 + P2) = dim(P1) + dim(P2)− dim(P1 ∩ P2)
Dokaz Stavimo Q0 := P1 ∩ P2. Primenjujuci Tvrdenje II.6.6 na podprostore
P1 i P2 zakljucujemo da postoje Q1
v
⊆ P1 i Q2
v
⊆ P2 takvi da je Q1 ⊕Q0 = P1 i
Q0 ⊕Q2 = P2 . Neka je ni := dim(Qi) za i ∈ {0, 1, 2}. Prema Tvrdenju II.6.8 suma
trojke (Q1, Q0, Q2) je direktna pa je takva i suma para (Q1, Q0) kao i para (Q0, Q2);takode znamo da je P1 + P2 = Q1 +Q0 +Q2. Sada prema Tvrdenju II.6.5 imamo
dim(P1+P2) = dim(Q1 +Q0 +Q2) = dim(Q1)+dim(Q0)+dim(Q2) = n1+n0 +n2
dim(P1) = dim(Q1) + dim(Q0) = n1 + n0
dim(P2) = dim(Q0) + dim(Q2) = n0 + n1
kao i dim(P1 ∩ P2) = dim(Q0) = n0 odakle direktno sledi zeljena jednakost. 2
II.7 Linearna preslikavanja
Primer Neka je f : R2 → R3 definisano sa
f(x, y) = f((x, y)
):df= (x− y, 2x+ 3y,−7x+ 5y)
Neka su a1 := (x1, y1), a2 = (x2, y2) ∈ R2 i α1, α2 ∈ R proizvoljni. Imamo
f(α1
−→a1 + α2−→a2)= f
(α1(x1, y1) + α2(x2, y2)
)= f(α1x1 + α2x2, α1y1 + α2y2) =
((α1x1 + α2x2) − (α1y1 + α2y2),2(α1x1 + α2x2) + 3(α1y1 + α2y2),
−7(α1x1 + α2x2) + 5(α1y1 + α2y2))
=(
α1(x1 − y1) + α2(x2 − y2),
α1(2x1 + 3y1) + α2(2x2 + 3y2),
α1(−7x1 + 5y1) + α2(−7x2 + 5y2)
)
=

80 DEO II. OSNOVNI POJMOVI I CINJENICE
(
α1(x1 − y1), α1(2x1 + 3y1), α1(−7x1 + 5y1))
+
(α2(x2 − y2), α2(2x2 + 3y2), α2(−7x2 + 5y2)
)
=
α1
(x1 − y1, 2x1 + 3y1,−7x1 + 5y1
)+ α2
(x2 − y2, 2x2 + 3y2,−7x2 + 5y2
)=
α1 · f(a1) + α2 · f(a2)Dakle preslikavanje f zadovoljava
f(α1
−→a1 + α2−→a2)= α1 · f(a1) + α2 · f(a2)
2
Primer II.7.1 Neka je P,Qv
⊆ V pri cemu je P ⊕ Q = V . Tada za svako x ∈ Vpostoji tacno jedan par (px, qx) ∈ P × Q tako da je x = px + qx; zbog toga je
definisano preslikavanje projP,Q : V → P gde projP,Q(x) :df= px za x ∈ V . Za projP,Q
kazemo da je
projekcija na podprostor P paralelno podprostoru Q
Pokazimo da za svako α, β ∈ K i x, y ∈ V vazi
projP,Q(α−→x + β−→y
)= α · projP,Q (−→x ) + β · projP,Q (−→y )
Za neke p1, p2, p ∈ P i q1, q2, q ∈ Q imamo x = p1 + q1, y = p2 + q2. Prema definicijije projP,Q(x) = p1 i projP,Q(y) = p2. Imamo
α−→x + β−→y = α(−→p1 +−→q1 ) + β(−→p2 +−→q2 ) = (α−→p1 + β−→p2) + (α−→q1 + β−→q2 )
pri cemu je α−→p1 +β−→p2 ∈ P i α−→q1 +β−→q2 ∈ Q jer je p1, p2, p ∈ P , Pv
⊆ P i q1, q2, q ∈ Q,
Qv
⊆ Q. Zato je prema definiciji preslikavanja projP,Q
projP,Q(α−→x + β−→y
)= α−→p1 + β−→p2 = α · projP,Q (−→x ) + β · projP,Q (−→y )
2
Primer II.7.2 Neka je n ∈ N i a =(ai : i = 1, n
)sistem vektora prostora V.
Definisimo preslikavanje LKa : Kn → V sa
LKa((x1, . . . , xn)
):df=
n∑
i=1
xi−→ai = bx1, . . . , xnca
i pokazimo da za svako α, β ∈ K i x = (x1, . . . , xn), y = (y1, . . . , yn) ∈ Kn vazi
LKa(α−→x + β−→y
)= α · LKa (−→x ) + β · LKa (
−→y )

II.7. LINEARNA PRESLIKAVANJA 81
Imamo LKa(x) =
n∑
i=1
xi−→ai i LKa(y) =
n∑
i=1
yi−→ai pa je
α · LKa (−→x ) + β · LKa (−→y ) =n∑
i=1
(αxi)−→ai +
n∑
i=1
(βyi)−→ai =
n∑
i=1
(αxi + βyi)−→ai
No takode je i
LKa(α−→x + β−→y
)= LKa
((αx1 + βy1, . . . , αxn + βyn)
)=
n∑
i=1
(αxi + βyi)−→ai
2
Definicija II.7.3 Neka je K ∈ {R,C} i neka su V i W vektorski prostori oba nadK (dakle oba realna ili oba kompleksna). Za preslikavanje f : V → W kazemo da je
linearno preslikavanje iz prostora V u prostor W
ako vazi
f (α−→x + β−→y ) = α · f (−→x ) + β · f (−→y )
za svako x, y ∈ V i α, β ∈ K. Skup svih linearnih preslikavanja iz V u W oznacavamosa Hom(V,W). 2
Zapazanje II.7.4 Primetimo da ako je f linearno preslikavanje iz prostora V uprostor W onda je
f(01) = 02
tj. nula vektor (prostora V) mora da se slika u nula vektor (prostora W). Ovo je
tako iz razloga sto f(01) = f(
0 · −→01 + 0 · −→01
)
= 0f(01) + 0f(01) = 02. 2
Primer Dakle u Primeru II.7.1 je projP,Q ∈ Hom(V, P ), a u Primeru II.7.2 je LKa ∈Hom(Kn,V). Uzgred primetimo da smo ovde pisali “Hom(V, P )” a ne “Hom(V,P)”,
gde je P vektorski prostor odreden podprostorom Pv
⊆ V; ovo je u skladu sa jednomranije uvedenom konvencijom. 2
Zapazanje II.7.5 Neka je Pv
⊆ V i Qv
⊆ W i f ∈ Hom(V,W). Ako je f⇀P ⊆ Qonda je f � P ∈ Hom(P,Q). Drugim recima restrikcija linearnog preslikavanja jelinearno preslikavanje.

82 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.7.11.
2
Definicija II.7.6 Neka je V = (V,+, ·) vektorski prostor nad K i neka je X 6= ∅proizvoljan skup. Na skupu XV svih funkcija iz X u V definisimo operaciju ⊕ kojucemo zvati
standardno sabiranje funkcija iz X u V
na sledeci nacin: ako su f, g : X → V onda je funkcija f ⊕ g : X → V odredena sa
(f ⊕ g)(x) :df=
−−→f(x) +
−−→g(x)
za svako x ∈ X. Definisemo i mesovitu operaciju ◦ : K×XV → XV koju cemo zvati
standardno mnozenje funkcija iz X u V realnim, odnosno kompleksnim brojem
na sledeci nacin: za f : X → V i α ∈ K funkcija α ◦ f : X → V odredena je sa
(α ◦ f)(x) :df= α−−→f(x)
za svako x ∈ X.
Lako se proverava da je(XV,⊕, ◦
)vektorski prostor nad K. Njega cemo zvati
vektorski prostor svih funkcija iz X u V i skraceno oznacavati sa XV . 2

II.7. LINEARNA PRESLIKAVANJA 83
Tvrdenje II.7.7 Hom(V,W) je podprostor prostora VW svih funkcija iz V u W.
Dokaz Neka su f, g ∈ Hom(V,W) i α, β ∈ K. Treba pokazati da je i α ·f+β ·g ∈Hom(V,W). Dakle neka su u, v ∈ V i µ, ν ∈ K proizvoljni. Imamo(
αf + βg
)
(µ−→u + ν−→v ) = α · f(µ−→u + ν−→v
)+ β · g
(µ−→u + ν−→v
)=
α ·(µf(u) + νf(v)
)+ β ·
(µg(u) + νg(v)
)=
µ(αf(u) + βg(u)
)+ ν(αf(v) + βg(v)
)= µ
(
αf + βg
)
(u) + ν
(
α · f + β · g)
(v)
2
Slika II.7.12.
Konvencija Za vektorski prostor odreden podprostorom Hom(V,W) prostora VW
koristicemo istu oznaku “Hom(V,W)” kao i za sam skup Hom(V,W). Ovo je uskladu sa sa jednom ranijom konvencijom. Prostor Hom(V,W) nazivamo
vektorski prostor svih linearnih preslikavanja iz V u W
2
Definicija II.7.8 Neka je K ∈ {R,C}. (K,+, ·) je vektorski prostor nad K, gde je“+” uobicajeno sabiranje a “·” uobicajeno mnozenje brojeva. Ako je V vektorskiprostor nad K onda za linearno preslikavanje f ∈ Hom(V,K) kazemo da je
linearna funkcionela na prostoru V

84 DEO II. OSNOVNI POJMOVI I CINJENICE
Drugim recima, linearna funkcionela na V je svako preslikavanje f : V → K
(dakle f : V → R ili f : V → C) za koje vazi
f(α−→x + β−→y
)= αf
(−→x)+ βf
(−→y)
za svako α, β ∈ K i x, y ∈ V . 2
Definicija II.7.9 Vektorski prostor Hom(V,K) svih funkcionela na V nazivamo
dualni prostor vektorskog prostora V
ili algebarski dual prostora V i oznacavamo ga sa V ′.
Dakle V ′ = Hom(V,K)v
⊆ VK . 2
Tvrdenje II.7.10 Za f : V → W sledeci uslovi su ekvivalentni:
(1) f je linearno;
(2) f
(n∑
i=1
αi−→ai)
=
n∑
i=1
αif (−→ai ) za svako n ∈ N, a1, . . . , an ∈ V , α1, . . . , αn ∈ K;
(3) f zadovoljava sledeca dva uslova:
– preslikavanje f je aditivno, tj. vazi f(x + y) = f(x) + f(y) za svako x, y ∈ V ;
– preslikavanje f je homogeno, tj. vazi f (α−→x ) = α · f (−→x ) za svako x ∈ V iα ∈ K.
Dokaz (1)⇒(2): Indukcijom po n ∈ N. Baza indukcije:
f(α1
−→a1)= f
(α1
−→a1 + 0−→0)= α1f(a1) + 0f
(−→0)= α1f(a1)
Indukcijski korak:
f
(n+1∑
i=1
αi−→ai)
= f
(
1 ·n∑
i=1
αi−→ai + αn+1
−−→an+1
)
= 1·(
n∑
i=1
αif(−→ai)
)
+αn+1f(−−→an+1
)=
=
n+1∑
i=1
αif (−→ai )
(2)⇒(3): Aditivnost: f(x+y) = f(1−→x +1−→y
)= 1 ·f(x)+1 ·f(y) = f(x)+f(y).
Homogenost je samo specijalan slucaj uslova (2) za n = 1
(3)⇒(1): f(α−→x + β−→y
)= f
(α−→x
)+ f(β−→y
)= α · f(x) + β · f(y). 2
Tvrdenje II.7.11 Uvek je f(01) = 02. Linearno preslikavanje f je injektivno akkoje f↼{02} = {01}.

II.7. LINEARNA PRESLIKAVANJA 85
Dokaz Kako je f(01) = f(01 + 01) = f(01) + f(01) to sledi da je f(01) = 02.Dakle 01 ∈ f↼{02}, pa ako je f injektivno onda odavde direktno imamo da je u
tom slucaju f↼{02} = {01}.Neka sada vazi f↼{02} = {01}. Ako su x, y ∈ V tako da je f(x) = f(y) onda
imamo
02 = f(x)− f(y) = 1 · f(x) + (−1) · f(y) = f(1−→x + (−1)−→y
)= f(x− y)
tj.x− y ∈ f↼{02} = {01}
Znaci x− y = 01 odnosno x = y. Ovim smo pokazali da je f injektivno. 2
Definicija II.7.12 Za f ∈ Hom(V,W) skup
Ker(f) :df= f↼{02} =
{x ∈ V : f(x) = 02
}
nazivamo
jezgro linearnog preslikavanja f .
Dakle linearno preslikavanje je monomorfizam akko je Ker(f) = {01}. 2
Tvrdenje II.7.13 Ako je f ∈ Hom(V,W) onda Ker(f)v
⊆ V, Im(f)v
⊆ W.
Dokaz Ako je x, y ∈ Ker(f) i α, β ∈ K onda imamo
f(α−→x + β−→y
)= α · f
(−→x)+ β · f
(−→y)= α
−→02 + β
−→02 =
−→02
tj. α−→x + β−→y ∈ Ker(f).Ako su u, v ∈ Im(f) i α, β ∈ K onda je u = f(x) i v = f(y) za neke x, y ∈ V pa
je α−→u + β−→v = αf(x) + βf(y) = f(α−→x + β−→y
)∈ Im(f). 2
Primer Neka je f : NR → NR dato sa
f(a) = b gde bn =(an+2 − an+1
)−(an+1 − an
)za svako n ∈ N
ilitif(a1, a2, a3, a4, a5, . . . . . . ) =
((a3−a2)−(a2−a1), (a4−a3)−(a3−a2), (a5−a4)−(a4−a3), (a6−a5)−(a5−a4), . . . . . . . . .
)
Lako se proverava da je f linearno preslikavanje. Imamo

86 DEO II. OSNOVNI POJMOVI I CINJENICE
f(a) = 0, tj. an = 0 za svako n ∈ N,akko postoji neko δ ∈ R tako da je an+1 − an = δ za svako n ∈ R,
odnosno akko je niz a aritmeticki.
Dakle
Ker(f) je podprostor od NR koji se sastoji od svih aritmetickih nizova realnihbrojeva.
2
Primer Neka je f : R3 → R3 dato sa
f(x, y, z) :df= (0, 2y + z, y + 3z)
za (x, y, z) ∈ R.
Imamo
Ker(f) ={(x, y, z) ∈ R
3 : 2y + z = y + 3z = 0}={(α, 0, 0) ∈ R
3 : α ∈ R}
tj.
Ker(f) ={α(1, 0, 0) ∈ R
3 : α ∈ R}= L
({(1, 0, 0)
})
v
⊆ R3
ImamoIm(f) =
{(0, β, γ) : β, γ ∈ R
}
jer ako su β, γ ∈ R proizvoljni onda vazi
(0, β, γ) = (0, 2y + z, y + 3z) za y =3β − γ
5i z =
2γ − β
5.
Dakle
Im(f) ={β(0, 1, 0) + γ(0, 0, 1) : β, γ ∈ R
}= L
({(0, 1, 0), (0, 0, 1)
})
v
⊆ R3
2
To da za f ∈ Hom(V,W) vazi Ker(f)v
⊆ V i Im(f)v
⊆ W samo je specijalan slucajnarednog opstijeg tvrdenja.
Tvrdenje II.7.14 Ako je f ∈ Hom(V,W), i Pv
⊆ V, Qv
⊆ W onda vazi
f↼Q = {x ∈ V : f(x) ∈ Q}v
⊆ V
if⇀P = {f(x) : x ∈ P}
v
⊆ W

II.7. LINEARNA PRESLIKAVANJA 87
Dokaz Neka su x, y ∈ f↼Q i α, β ∈ K. Imamo
f(α−→x + β−→y
)= α · f
(−→x)+ β · f
(−→y)∈ Q
jer je f(x), f(y) ∈ Qv
⊆ W. Dakle α−→x + β−→y ∈ f↼Q.Neka je sada u, v ∈ f⇀P i α, β ∈ K. Postoje x, y ∈ P tako da je u = f(x) i
y = f(y). Imamo
α · f(−→x)+ βf
(−→y)= f
(α−→x + β−→y
)∈ f⇀P
jer je α−→x + β−→y ∈ P obzirom da x, y ∈ Pv
⊆ V. 2
Specijalno imamo
Ker(f) = f↼{02} i Im(f) = f⇀V ,
pri cemu je naravno
{02}v
⊆ W i Vv
⊆ V.
Definicija II.7.15 Bijekciju f : V → W koja je jos i linearno preslikavanje iz V uW kazemo da je izomorfizam vektorskih prostora, preciznije: izomorfizam iz V
u W. 2
Tvrdenje II.7.16 Ako je f : V → W izomorfizam vektorskih prostora V i W ondaje f−1 : W → V izomorfizam prostora W i V.
Dokaz Treba pokazati da je f−1 linearno preslikavanje. Neka su x, y ∈ W ,
α, β ∈ K i stavimo z := α · f−1(x) + β · f−1(y) ; imamo
f(z) = α · f(f−1(x)
)+ β · f
(f−1(y)
)= α−→x + β−→y
pa je z = f−1(α−→x + β−→y
). 2
Zapazanje II.7.17 Ako je f : V → W izomorfizam iz prostora V u prostor W i
Pv
⊆ V onda je
f � P : P → f⇀P
izomorfizam iz prostora P u prostor f⇀P
Dokaz Kako je f bijekcija iz V u W to je f � P bijekcija iz P u f⇀P . f jelinearno pa je i svaka njegova restrikcija linearno preslikavanje (Zapazanje II.7.5).2

88 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.7.18 Neka su dati prostori V, W i U. Ako su oba preslikavanja f :V → W i g : W → U linearna, tj. f ∈ Hom(V,W) i g ∈ Hom(W,U), onda je injihova kompozicija g ◦ f : V → W linearno preslikavanje, tj. g ◦ f ∈ Hom(V,U).Ako je f izomorfizam iz V u W a g izomorfizam iz W u U onda je g ◦ f izomorfizamiz V u U.
Dokaz Neka su x, y ∈ V i α, β ∈ K. Imamo
(g ◦ f)(α−→x + β−→y
)= g
(
f(α−→x + β−→y
))
= g
(
αf(−→x)+ βf
(−→y))
=
= αg
(
f(−→x))
+ βg
(
f(−→y))
= α · (g ◦ f)(x) + β · (g ◦ f)(y)
2
Definicija II.7.19 Kazemo da je prostor V (linearno) izomorfan sa prostorom W
ako postoji neki izomorfizam iz V u W. Na osnovu prethodnog tvrdenja V je izomor-fan sa W akko je W izomorfan sa V. Kaze se jednostavno i prostori V i W su
izomorfni. 2
II.8 Kako shvatiti pojam izomorfnih prostora
(1) Posmatrajmo operaciju ⊕ na skupu {a, b, c, d, e} datu sa
⊕ a b c d ea d a c e bb a b c d ec c c c c cd e d c b ae b e c a d
i operaciju ⊕′ na skupu {0, 1, 2, 3, 4} datu sa
⊕′ 0 1 2 3 40 0 0 0 0 01 0 1 2 3 42 0 2 4 1 33 0 3 1 4 24 0 4 3 2 1
Funkcija h : {a, b, c, d, e} → {0, 1, 2, 3, 4} data sa h :
(a b c d e3 1 0 4 2
)

II.8. KAKO SHVATITI POJAM IZOMORFNIH PROSTORA 89
Slika II.8.13.
je bijekcija i zadovoljava uslov
h(x⊕ y) = h(x)⊕′ h(y)
za svako x, y ∈ {a, b, c, d, e}.
Slika II.8.14.
(2) Neka je

90 DEO II. OSNOVNI POJMOVI I CINJENICE
V := (0; +∞) i x⊕ y :df= x · y, α ◦ x :
df= xα
za α, x, y ∈ R. Lako je proveriti da je V := (V,⊕, ◦) realan vektorski prostor. Naprimer imamo
α ◦ (x⊕ y) = α ◦ (xy) = (xy)α = xαyα = (α ◦ x)⊕ (α ◦ y)
α ◦(β ◦ x
)= α ◦ xβ =
(xβ)α
= xαβ = (αβ) ◦ x
Funkcija f : R → (0; +∞) definisana sa f(x) :df= ex za svako x ∈ R je bijekcija
i zadovoljava uslove
f(x + y) = f(x)⊕ f(y) i f(αz) = α ◦ f(z)
za svako x, y, z, α ∈ R:
f(x+ y) = ex+y = exey = f(x)⊕ f(y), f(αz) = eαz =(ez)α
= f(z)α = α ◦ f(z)
Slika II.8.15.
f je dakle (linearan) izomorfizam iz prostora (R,+, ·) u prostor V =((0; +∞),⊕, ◦
).
2

II.9. TRI OCIGLEDNA I JEDAN VAZAN IZOMORFIZAM 91
II.9 Tri ocigledna i jedan vazan izomorfizam
(1) Preslikavanje Usprn : Kn → Kn×1 definisano sa
Usprn
((x1, . . . , xn)
):df=
x1...xn
je izomorfizam prostora Kn i Kn×1:
Usprn
(α(x1, . . . , xn) + β(y1, . . . , yn)
)= (αx1 + βy1, . . . , αxn + βyn) =
αx1 + βy1...
αxn + βyn
= α
x1...xn
+ β
y1...yn
=
= α · Usprn((x1, . . . , xn) + β · Usprn
((y1, . . . , yn)
Ukratko, imamo
(x1, . . . , xn) (y1, . . . , yn)
Usprn ↓ Usprn ↓
x1...xn
y1...yn
kao i
(αx1 + βy1, . . . , αxn + βyn)
Usprn ↓
αx1 + βy1...
αxn + βyn
2

92 DEO II. OSNOVNI POJMOVI I CINJENICE
(2) Preslikavanje Zagrn : Kn → K1×n definisano sa
Zagrn
((x1, . . . , xn)
):df=[x1 . . . , xn
]
je izomorfizam prostora Kn i K1×n.
Imamo(x1, . . . , xn) 7→ [x1 . . . , xn
]
(y1, . . . , yn) 7→ [y1 . . . , yn]
kao i
(αx1 + βy1, . . . , αxn + βyn) 7→ [αx1 + βy1 . . . , αxn + βyn]
2
(3) Preslikavanje Transn,m : Kn×m → Km×n definisano sa
Transn,m(A) :df= AT
za svako A ∈ Kn×m je izomorfizam prostora Kn×m i Km×n.
Na primer Trans3,2 : K3×2 → K2×3 i imamo
Transn,m(αM + βN) =
µ
x py qz r
+ ν
a ub vc w
T
=
µx+ νa µp+ νuµy + νb µq + νvµz + νc µr + νw
T
=
[µx+ νa µy + νb µz + νcµp+ νu µq + νv µr + νw
]
αTransn,m(M) + βTransn,m(N) = µ
x py qz r
T
+ ν
a ub vc w
T
= µ
[x y zp q r
]
+ ν
[a b cu v w
]
=
[µx+ νa µy + νb µz + νcµp+ νu µq + νv µr + νw
]

II.9. TRI OCIGLEDNA I JEDAN VAZAN IZOMORFIZAM 93
Ukratko, imamo
x py qz r
a ub vc w
Trans3,2 ↓ Trans3,2 ↓[x y zp q r
] [a b cu v w
]
kao i
µx+ νa µp+ νuµy + νb µq + νvµz + νc µr + νw
Trans3,2 ↓[µx+ νa µy + νb µz + νcµp+ νu µq + νv µr + νw
]
Opsta jednakost glasi (αA+ βB)T = αAT + βBT kad god su matrice A i B
istog formata.Ovo bi trebalo da bude ocigledno a ako nije onda:
[
(αA+βB)T]
(i, j) =(αA+βB
)(j, i) = αA(j, i)+βB(j, i) = αAT(i, j)+βBT(i, j)
=
[
αAT + βBT
]
(i, j). 2
Tvrdenje II.9.1 LKa je injekcija akko je sistem a =(ai : i = 1, n
)linearno neza-
visan. LKa je preslikavanje na akko je sistem a =(ai : i = 1, n
)potpun. Ako je
sistem a =(ai : i = 1, n
)baza prostora V onda je LKa izomorfizam prostora Kn i
(n-dimenzionalnog) prostora V.
Ako je V k.d.v.p. i dim(V) = n ∈ N onda je prostor V izomorfan prostoru Kn

94 DEO II. OSNOVNI POJMOVI I CINJENICE
Dokaz Prvi deo je preformulacija Tvrdenja II.3.3 a drugi Zapazanja II.2.3. UPrimeru II.7.2 smo videli da je LKa linearno preslikavanje.
Ako je V k.d.v.p. i dim(V) = n ∈ N onda znamo da postoji neka n-torka vektora(ai : i = 1, n
)koja je baza prostora V, pa dakle postoji neki izomorfizam prostora
Kn i prostora V – to je npr. preslikavanje LKa. 2
Definicija II.9.2 Neka je V konacnodimenzionalan, dim(V) =: n ∈ N i neka jesistem a =
(ai : i = 1, n
)baza prostora V. Na osnovu Tvrdenja II.9.1 i II.7.16
preslikavanje Koorda :df= [LKa]
−1 je izomorfizam iz V u Kn. Dakle
Koorda : V → Kn
i
Koorda(v) = (α1, . . . , αn)
gde je αi i-ta koordinata vektora v u odnosu na bazu a za i = 1, n.
Slika II.9.16.
2

II.10. OSNOVNA TVRDENJA O LINEARNIM PRESLIKAVANJIMA 95
II.10 Osnovna tvrdenja o linearnim preslikavanjima
Terminologija Za f ∈ Hom(V,W) kazemo da je– monomorfizam ako je f injektivno preslikavanje– epimorfizam ako je f preslikavanje na skup W .
Dakle f je izomorfizam iz V u W akko je istovremeno i monomorfizam i epimo-rfizam. 2
Tvrdenje II.10.1 Neka je f ∈ Hom(V,W).
(a) Ako je sistem(ai : i = 1, n
)
linearno zavisan sistem vektora prostora V onda je i
(f(ai) : i = 1, n
)
linearno zavisan sistem vektora prostora W.
(b) f⇀(L(M)
)= L
(f⇀(M)
).
(c) Kad god je(ai : i = 1, n
)
potpun sistem vektora prostora V tada je i
(f(ai) : i = 1, n
)
potpun sistem vektora prostora Im(f).
(d) Ako je f monomorfizam onda kad god je
(ai : i = 1, n
)
linearno nezavisan sistem vektora prostora V tada je i
(f(ai) : i = 1, n
)
linearno nezavisan sistem vektora prostora W.

96 DEO II. OSNOVNI POJMOVI I CINJENICE
(e) Ako je f monomorfizam onda kad god je
(ai : i = 1, n
)
baza prostora V tada je i(f(ai) : i = 1, n
)
baza prostora Im(f).
Dokaz (a) Ako jek∑
i=1
αi−→ai =
−→01 i za neko i0 ∈ {1, . . . , k} je αi0 6= 0 onda je
02 = f(01) = f
(k∑
i=1
αi−→ai)
=
k∑
i=1
αif(−→ai)
daklek∑
i=1
αif(−→ai)= 02 i i0 ∈ {1, . . . , k}.
(b) Imamo
y ∈ f⇀(L(M)
)⇐⇒ ∃x ∈ L(M)
(
y = f(x)
)
⇐⇒
⇐⇒ ∃n ∈ N ∃v1, . . . , vn ∈ M ∃λ1, . . . , λn ∈ K
(
y = f
(n∑
i=1
λi−→vi))
⇐⇒ ∃n ∈ N ∃v1, . . . , vn ∈ M ∃λ1, . . . , λn ∈ K
(
y =n∑
i=1
λif(−→vi)
)
⇐⇒ ∃n ∈ N ∃w1, . . . , wn ∈ f⇀M ∃λ1, . . . , λn ∈ K
(
y =n∑
i=1
λi−→wi
)
⇐⇒ y ∈ L(f→(M)
).
(c) Ako je(ai : i = 1, n
)potpun sistem vektora prostora V onda imamo
Im(f) = f⇀V = f⇀L({ai : i = 1, n
})
= L({f(ai) : i = 1, n
})
gde smo koristili deo pod (b). Odavde vidimo da je(f(xi) : i = 1, n
)potpun sistem
vektora prostora Im(f).
(d) Pretpostavimo da je f monomorfizam, tj. pretpostavimo da je
Ker(f) = {01}

II.10. OSNOVNA TVRDENJA O LINEARNIM PRESLIKAVANJIMA 97
Neka je a =(ai : i = 1, n
)linearno nezavisan sistem vektora prostora V. Iz
n∑
i=1
αi · f(−→ai)= 02
sledi
f
(n∑
i=1
αi · −→ai)
= 02
tj.n∑
i=1
αi · −→ai ∈ Ker(f) = {01}
pa jen∑
i=1
αi · −→ai = 01
No kako je a linearno nezavisan sistem to ovo znaci da je jedino moguce da je αi = 0za svako i = 1, n.
(e) Sledi direktno iz (c) i (d). 2
Tvrdenje II.10.2 Neka je K ∈ {R,C} i neka su V i W vektorski prostori nad K.– Ako su oba prostora V i W konacnodimenzionalni i ako je dim(V) = dim(W)
onda je V izomorfan sa W.– Ako je V konacnodimenzionalan i ako je izomorfan sa W onda je i W konacno-
dimenzionalan i vazi dim(V) = dim(W).Dakle ako su V i W k.d.v. prostori nad K onda vazi:
V je izomorfan sa W akko je dim(V) = dim(W)
Dokaz Neka je najpre dim(V) = dim(W) =: n ∈ N. Na osnovu Tvrdenja II.9.1postoji neki
f ∈ Hom(V,Kn) izomorfizam iz V u Kn
kao i neki
g ∈ Hom(W,Kn) izomorfizam iz W u Kn.
Tada je
g−1 ◦ f ∈ Hom(V,W) izomorfizam iz V u W.
Pretpostavimo sada da postoji neki h ∈ Hom(V,W) izomorfizam iz V u W ipretpostavimo da je V konacnodimenzionalan. Ako je dim(V) =: n ∈ N i
(ai : i =
1, n)baza prostora V onda je na osnovu Tvrdenja II.10.1 pod (e) sistem
(f(ai) :
i = 1, n)baza prostora W = Im(f), te je i W konacnodimenzionalan i pritom je
dim(W) = n = dim(V). 2

98 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.10.3 Neka je f ∈ Hom(V,W). Ako je V k.d.v. prostor onda sutakvi i Ker(f) i Im(f) i
– ako su k, l ∈ V i ako je (a1, . . . , ak, b1, . . . , bl) baza za V tako da je (a1, . . . , ak)baza za Ker(f), onda je
(f(b1), . . . , f(bl)
)baza prostora Im(f);
– vazi
dim(Ker(f)
)+ dim
(Im(f)
)= dim(V)
Slika II.10.17.
Dokaz Neka je V k.d.v.p. Da je Ker(f) konacnodimenzionalan sledi iz Ker(f)v
⊆V. Da je Im(f) konacnodimenzionalan sledi iz Tvrdenja II.10.1 pod (c).
Neka su k, l ∈ V i neka je (a1, . . . , ak, b1, . . . , bl) baza za V tako da je (a1, . . . , ak)
baza za Ker(f). Da pokazemo da je Im(f) = L({f(b1), . . . , f(bl)
})
neka je
y ∈ Im(f)
proizvoljno. Tada postoji x ∈ V tako da je y = f(x). Kako je (a1, . . . , ak, b1, . . . , bl)
potpun sistem prostora V to je x = α1−→a1 + · · · +αk
−→ak +β1
−→b1 + · · · +βl
−→bl za neke

II.10. OSNOVNA TVRDENJA O LINEARNIM PRESLIKAVANJIMA 99
α1, . . . , αk, β1, . . . , βl ∈ K, te imamo
y = f(x) = f(α1−→a1 + · · · + αk
−→ak + β1
−→b1 + · · · + βl
−→bl )
= α1 · f(−→a1)+ · · · + αk · f
(−→ak)+ β1 · f
(−→b1)+ · · · + βl · f
(−→bl)
= α1−→02 + · · · + αk
−→02 + β1 · f
(−→b1)+ · · · + βl · f
(−→bl)
= β1 · f(−→b1)+ · · · + βl · f
(−→bl)∈ L
({f(b1), . . . , f(bl)
})
Neka su sada β1, . . . , βl ∈ K takvi da je
β1 · f(−→b1)+ · · · + βl · f
(−→bl)= 02
Imamof(β1
−→b1 + · · · + βl
−→bl ) = 02
tj.
β1
−→b1 + · · · + βl
−→bl ∈ Ker(f)
Kako je po pretpostavci Ker(f) = L({a1, . . . , ak
})
, postoje neki α1, . . . , αk ∈ K
tako da je
β1
−→b1 + · · · + βl
−→bl = α1
−→a1 + · · · + αk−→ak
tj.
−α1−→a1 − · · · − αk
−→ak + β1
−→b1 + · · · + βl
−→bl = 01
Sistem (a1, . . . , ak, b1, . . . , bl) je po pretpostavci linearno nezavisan pa odavde za-kljucujemo da je zapravo βj = 0 za svako j = 1, l (kao doduse i da je αi = 0 zasvako i = 1, k).
Ovim smo pokazali da je sistem(f(b1), . . . , f(bl)
)baza za Im(f).
Preostaje da pokazemo tzv. dimenzionu jednakost.
Slucaj 1. Ker(f) = {01}: U ovom slucaju je f monomorfizam. Ako je V = {01}jednakost je direktno proverava. Ako V nije nula prostor onda postoji neko n ∈ N ineka baza
(vi : i = 1, n
)za V. Prema Tvrdenju II.10.1 sistem
(f(vi) : i = 1, n
)je
baza za Im(f). Sada imamo dim(Ker(f)
)= 0 i dim
(Im(f)
)= n = dim(V).
Slucaj 2. Ker(f) = V : U ovom slucaju je f(x) = 02 za svako x ∈ V , tj. Im(f) =
{02}. Kako je dim(Im(f)
)= 0 to je i u ovom slucaju doticna jednakost tacna.
Slucaj 3. Ker(f) 6= {01} i Ker(f) 6= V : Zbog Ker(f) 6= {01} postoji neko k ∈ N ineka (a1, . . . , ak) baza za Ker(f). Kako je Ker(f) 6= V , to (a1, . . . , ak) nije potpunsistem vektora prostora V, pa kako je (a1, . . . , ak) linearno nezavisan sistem to naosnovu Tvrdenja II.5.15 postoje l ∈ N i sistem vektora (b1, . . . , bl) prostora V takoda je (a1, . . . , ak, b1, . . . , bl) baza za V. Znamo da je sistem
(f(b1), . . . , f(bl)
)baza za
Im(f). Sada direktno imamo dim(V) = k + l, dim(Ker(f)
)= k i dim
(Im(f)
)= l.
2

100 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.10.4 Neka je f ∈ Hom(V,W).(a) Ako je V k.d.v. prostor tada vazi:
f je monomorfizam akko je dim (Im(f)) = dim(V)
(b) Neka su i V i W k.d.v. prostori pri cemu je dim(V) = dim(W). Tada susledeca tri uslova ekvivalentna:
(1) f je monomorfizam(2) f je epimorfizam(3) f je izomorfizam. 2
Dokaz (a) Imamo:
f je monomorfizam akko je Ker(f) = {01}
tj.
akko dim(Ker(f)
)= 0
a ovo je ekvivalentno sa dim (Im(f)) = dim(V), zbog jednakosti
dim(Ker(f)
)+ dim
(Im(f)
)= dim(V)
(b) Ako je f monomorfizam onda je dim(Im(f)
)= dim(V) = dim(W). Dakle Im(f)
je podprostor k.d.v. prostora W iste dimenzije kao i W, te mora biti Im(f) = W naosnovu Posledice II.5.16, tj. f je preslikavanje na skup W . Zato je f izomorfizamiz V u W.
Ako je f epimorfizam onda je dim(Im(f)
)= dim(W) = dim(V), pa zakljucujemo
da je f monomorfizam. Dakle f je izomorfizam iz V u W. 2
Tvrdenje II.10.5 Neka je f ∈ Hom(V,W).
(i) Neka je Pv
⊆ V. Ako je restrikcija f0 := f � P injektivno preslikavanje (tj.monomorfizam iz P u W) onda je f0 : P → f⇀P izomorfizam iz P u f⇀P .
(ii) Neka je Qv
⊆ V proizvoljan podprostor i f0 := f � Q .
Ako vazi Ker(f)⊕Q = V onda je
f0 : Q → Im(f)
izomorfizam iz podprostora Q u podprostor Im(f).

II.10. OSNOVNA TVRDENJA O LINEARNIM PRESLIKAVANJIMA 101
Slika II.10.18.
Dokaz (i) f0 je po samoj definiciji skupa f⇀P preslikavanje na skup f⇀P .
(ii) Pokazimo najpre da je f⇀Q = Im(f). Neka je y ∈ Im(f). Tada je y = f(x)za neko x ∈ V . Iz Ker(f) +Q = V sledi da je x = a + q za neko a ∈ Ker(f) i nekoq ∈ Q. Dakle
y = f(x) = f(a+ q) = f(a) + f(q) =−→0 + f(q) = f(q) ∈ f⇀Q
Stavimo f0 := f � Q i pokazimo sada da je f0 monomorfizam iz Q u Im(f).
Pretpostavimo da su q1, q2 ∈ Q takvi da je f0(q1) = f0(q2). Imamo−→0 = f(q1) −
f(q2) = f(q1− q2), tj. q1− q2 ∈ Ker(f). No iz q1, q2 ∈ Qv
⊆ V sledi da je q1− q2 ∈ Q.Dakle q1 − q2 ∈ Ker(f)∩Q. Suma para podprostora (Ker(f), Q) je po pretpostavci
direktna, sto znaci da je Ker(f) ∩Q ={−→0}
. Otuda je q1 − q2 =−→0 , tj. q1 = q2.
Tvrdenje sada sledi iz dela pod (i). 2
Na kraju pokazimo jednakost
dim(Ker(f)
)+ dim
(Im(f)
)= dim(V)

102 DEO II. OSNOVNI POJMOVI I CINJENICE
(za k.d.v. prostor V) na jedan drugi nacin:
prema Tvrdenju II.6.6 postoji neko Qv
⊆ V tako da je Ker(f) ⊕ Q = V , pa jeprema Tvrdenju II.6.5 Ker(f)
)+ dim(Q) = dim(V); no Q i Im(f) su na osnovu
Tvrdenja II.10.5 izomorfni prostori, pa je dim(Q) = dim(Im(f)
).
II.11 Kad za f ∈ End(V) vazi Ker(f)⊕ Im(f) = V ?
Terminologija Linearno preslikavanje f ∈ Hom(V,V) iz V u V drugacije nazivamo
endomorfizam vektorskog prostora V
Pisemo skracemo End(V) = Hom(V,V). Govorimo o
vektorskom prostoru svih endomorfizama prostora V
2
Tvrdenje II.11.1 Za f ∈ End(V) sledeci uslovi su ekvivalentni:
(1) vazi Ker(f) + Im(f) = V
(2) vazi Im(f) = Im(f 2) (gde f 2 = f ◦ f)
Dokaz (1)⇒(2): Jasno
Im(f 2) ={f(f(x)) : x ∈ V
}⊆{f(y) : y ∈ V
}= Im(f)
te peostaje da pokazemo inkluziju Im(f) ⊆ Im(f 2).Neka je y ∈ Im(f) proizvoljno. Dakle y = f(x) za neko x ∈ V . Po pretpostavci
postoje a ∈ Ker(f) i b ∈ Im(f) tako da je x = a + b. Imamo b = f(b0) za nekob0 ∈ V . Sada je
y = f(x) = f(a) + f(b) = 0+ f(f(b0)) = f 2(b0) ∈ Im(f 2)
(2)⇒(1): Neka je x ∈ V proizvoljno. Iz f(x) ∈ Im(f) = Im(f 2) sledi daje f(x) = f 2(y) za neko y ∈ V . Dakle 0 = f(x) − f(f(y)) = f
(x − f(y)
), tj.
z := x− f(y) ∈ Ker(f), pa je x = z + f(y) ∈ Ker(f) + Im(f). 2
Tvrdenje II.11.2 ako je V konacnodimenzionalan onda su za f ∈ End(V)sledeci uslovi ekvivalentni:
(1) suma para podprostora(Ker(f), Im(f)
)je direktna
(2) vazi Ker(f) + Im(f) = V
(3) vazi Ker(f)⊕ Im(f) = V
(4) vazi Im(f) = Im(f 2).

II.12. PROJEKCIJE 103
Dokaz Na osnovu Tvrdenja II.11.1 dovoljno je pokazati da vazi (1) ⇐⇒ (2),obzirom da je po definiciji (3) ⇐⇒
((1) ∧ (2)
).
Na osnovu Tvdenja II.10.3 je
dim(Ker(f)
)+ dim
(Im(f)
)= dim(V) (II.10)
Zato je na osnovu Tvrdenja II.6.9 je
dim
(
Ker(f) + Im(f)
)
= dim(V)− dim
(
Ker(f) ∩ Im(f)
)
(II.11)
Suma para podprostora(Ker(f), Im(f)
)je direktna akko je Ker(f) ∩ Im(f) = {0},
tj. akko je
dim
(
Ker(f) ∩ Im(f)
)
= 0
Zbog (II.10) i (II.11) sada zakljucujemo:
suma para podprostora(Ker(f), Im(f)
)je direktna
akko vazi
dim
(
Ker(f) + Im(f)
)
= dim(V)
odnosno akko je Ker(f) + Im(f) podprostor konacnodimenzionalnog prostora V
iste dimenzije kao i sam V. A ovo ce prema Posledici II.5.16 vaziti akko Ker(f) +Im(f) = V . 2
II.12 Projekcije
Tvrdenje II.12.1 Ako su f ∈ End(V) i P,Qv
⊆ V takvi da je P +Q = V . Sledeciuslovi su ekvivalentni:
(1) P ⊕Q = V i f = projP,Q(2) vazi f(p) = p za svako p ∈ P i f(q) = 0 za svako q ∈ Q
Dokaz (1)⇒(2): Ako je p ∈ P onda iz p = p + 0, zbog p ∈ P i 0 ∈ Q, sledif(p) = projP,Q(p) = p. Ako je q ∈ Q onda iz q = 0 + q, zbog 0 ∈ P i q ∈ Q, sledif(q) = projP,Q(q) = 0.
(2)⇒(1): Neka je x ∈ P ∩ Q. Zbog x ∈ P mora biti f(x) = x a zbog x ∈ Qmora biti f(x) = 0, pa je x = 0 . Ovim smo pokazali da je P ∩ Q = {0}, tj. da jesuma podprostora P i Q direktna. Zbog pretpostavke P+Q = V je sada P⊕Q = Vpa je projP,Q : V → P definisano. Neka je x ∈ V proizvoljno. Postoje p ∈ P i q ∈ Qtako da je x = p+ q. Jasno projP,Q(x) = p. Zbog p ∈ P = Im(f) postoji neko z ∈ Vtako da je p = f(z). Sada imamo
f(x) = f(p) + f(q) = f(f(z)) + 0 = f 2(z) = f(z) = p = projP,Q(x)

104 DEO II. OSNOVNI POJMOVI I CINJENICE
2
Tvrdenje II.12.2 (a) Ako je P ⊕Q = V i f := projP,Q onda je
P = Im(f), Q = Ker(f) i f 2 = f .
(b) Ako je f ∈ End(V) takvo da f 2 = f onda je
Ker(f)⊕ Im(f) = V i f = projKer(f), Im(f)
Dokaz (a) Na osnovu Tvrdenja II.12.1 znamo da vazi f(p) = p za svako p ∈ Pi f(q) = 0 za svako q ∈ Q. Odavde direktno sledi da je Q ⊆ Ker(f). Da pokazemoobrnutu inkluziju neka je x ∈ Ker(f). Postoje p ∈ P i q ∈ Q tako da je x = p + q.Otuda imamo
0 = f(x) = f(p) + f(q) = p+ 0 = p
pa sledi da je x = 0+ q = q ∈ Q. Ovim smo pokazali da je Q = Ker(f).Ako je p ∈ P onda je p = f(p) ∈ Im(f). Zbog toga vazi P ⊆ Im(f). Da
pokazemo obrnutu inkluziju neka je y ∈ Im(f). Dakle y = f(x) za neko x ∈ V .Postoje p ∈ P i q ∈ Q tako da je x = p+ q. Otuda imamo
y = f(x) = f(p) + f(q) = p+ 0 = p ∈ P
Ovim smo pokazali da je P = Im(f).Najzad ako je x ∈ V onda postoje p ∈ P i q ∈ Q tako da je x = p + q pa je
f(x) = f(p)+f(q) = p+0 = p odakle dobijamo f 2(x) = f(f(x)) = f(p) = p = f(x).
(b) Kako f 2 = f specijalno povlaci da je Im(f) = Im(f 2) to sada na osnovuTvrdenja II.11.1 sledi da je Ker(f)+Im(f) = V . Stavimo Q := Ker(f) i P := Im(f).Imamo dakle P +Q = V . Ako je p ∈ P onda je p = f(x) za neko x ∈ V pa imamof(p) = f(f(x)) = f 2(x) = f(x) = p. Ako je q ∈ Q onda je f(q) = 0.
Na osnovu Tvrdenja II.12.1 je sada suma para (P,Q) direktna, pa je Ker(f) ⊕Im(f) = V , i jos imamo f = projP,Q = projKer(f), Im(f). 2
Zapazanje II.12.3 Neka je
R :={(P,Q) : P,Q
v
⊆ V i P ⊕Q = V}
iP :=
{f ∈ End(V) : f 2 = f
}
Definisimo preslikavanjeProj : R → P
saProj(P,Q) :
df= projP,Q
Iz Tvrdenja II.12.2 se sada direktno moze izvesti sledeci zakljucak:

II.13. LINEARNA PRESLIKAVANJA IZ KM U KN 105
preslikavanje Proj je bijekcija iz R u P
2
Primer Uslov Ker(f)⊕Im(f) = V kako smo videli jeste potreban ali nije dovoljanda vazi f 2 = f u sta se mozemo uveriti na sledecem primeru.
Neka je f : R3 → R3 dato sa
f(x, y, z) :df= (0, 2y + z, y + 3z)
za (x, y, z) ∈ R.
Imamo
Ker(f) ={(x, y, z) ∈ R
3 : 2y + z = y + 3z = 0}={(α, 0, 0) : α ∈ R
}
Imamo
Im(f) ={(0, β, γ) : β, γ ∈ R
}
jer ako su β, γ ∈ R proizvoljni onda vazi
(0, β, γ) = (0, 2y + z, y + 3z) za y =3β − γ
5i z =
2γ − β
5.
Vidimo da je Ker(f) ∩ Im(f) = {(0, 0, 0)} pa je Ker(f)⊕ Im(f) = R3.S druge strane imamo
f(0, 1, 0) = (0, 2, 1)
dok
f 2(0, 1, 0) = f(0, 2, 1) = (0, 5, 5)
2
II.13 Linearna preslikavanja iz Km u K
n
Utvrdimo najpre kako izgledaju linearne funkcionele na prostoru Km.
Tvrdenje II.13.1 Neka je (λ1, . . . , λm) ∈ Km proizvoljna m-torka brojeva i nekaje preslikavanje l : Km → K definisano sa
l(x1, . . . , xm) :df= λ1x1 + · · ·+ λmxm
za svako (x1, . . . , xm) ∈ Km. l je linearna funkcionela na Km. Pritom ako je(ej :
j = 1, m)standardna baza prostora K
m onda vazi λj = l(ej) za svako j = 1, m.

106 DEO II. OSNOVNI POJMOVI I CINJENICE
Dokaz Imamo
l
(
α(x1, . . . , xm) + β(y1, . . . , ym)
)
= l
(
(αx1 + βy1, . . . , αxm + βym)
)
= λ1(αx1 + βy1) + · · ·+ λm(αxm + βym)= α(λ1x1 + · · ·+ λmxm) + β(λ1y1 + · · ·+ λmym)= αl(x1, . . . , xm) + βl(y1, . . . , ym)
Da je λj = l(ej) za svako j = 1, m utvrduje se neposredno. 2
Tvrdenje II.13.2 Ako je l ∈ (Km) ′ linearna funkcionela na Km, (e) : ei, i = 1, mstandardna baza prostora Km i λj := l(ej) ∈ K za j = 1, m, onda vazi
l(x1, . . . , xm) = λ1x1 + · · ·+ λmxm
za svako (x1, . . . , xm) ∈ Km.
Dokaz Imamo
l(x1, . . . , xm) = l
(m∑
j=1
xj−→ej)
=m∑
j=1
xjl(−→ej)=
m∑
j=1
xjλj = λ1x1 + · · ·+ λmxm
2
Opisimo sada linearna preslikavanja iz Km u Kn.
Tvrdenje II.13.3 Neka je f : Km → Kn linearno preslikavanje, (e) : ei, i = 1, mstandardna baza prostora Km i neka su ai,j ∈ K za i = 1, n, j = 1, m takvi da jef(ej) = (a1,j, . . . , an,j). Tada vazi
f(x1, . . . , xm) =(
a1,1x1 + · · · + a1,jxj + · · · + a1,mxm,...
ai,1x1 + · · · + ai,jxj + · · · + ai,mxm,...
an,1x1 + · · · + an,jxj + · · · + an,mxm
)
Dokaz Imamo
f(x1, . . . , xm) =

II.13. LINEARNA PRESLIKAVANJA IZ KM U KN 107
f
(
x1 · (1, 0, 0, 0, . . . 0, 0, 0)+
x2 · (0, 1, 0, 0, . . . 0, 0, 0)+
x3 · (0, 0, 1, 0, . . . 0, 0, 0)+
......
......
... . . ....
......
xm−1 · (0, 0, 0, 0, . . . 0, 1, 0)+
xm · (0, 0, 0, 0, . . . 0, 0, 1)
)
= x1 · f(1, 0, 0, 0, . . . 0, 0, 0)+x2 · f(0, 1, 0, 0, . . . 0, 0, 0)+x3 · f(0, 0, 1, 0, . . . 0, 0, 0)+...
......
...... . . .
......
...xm−1 · f(0, 0, 0, 0, . . . 0, 1, 0)+xm · f(0, 0, 0, 0, . . . 0, 0, 1) =
x1 · (a1,1, a2,1, a3,1, a4,1, . . . an−2,1, an−1,1, an,1)+x2 · (a1,2, a2,2, a3,2, a4,2, . . . an−2,2, an−1,2, an,2)+x3 · (a1,3, a2,3, a3,3, a4,3, . . . an−2,3, an−1,3, an,3)+...
......
...... . . .
......
...xm−1 · (a1,m−1, a2,m−1, a3,m−1, a4,m−1, . . . an−2,m−1, an−1,m−1, an,m−1)+xm · (a1,m, a2,m, a3,m, a4,m, . . . an−2,m, an−1,m, an,m)
=(
a1,1x1 + · · · + a1,jxj + · · · + a1,mxm,...
ai,1x1 + · · · + ai,jxj + · · · + ai,mxm,...
an,1x1 + · · · + an,jxj + · · · + an,mxm
)
2
Tvrdenje II.13.4 Neka je V konacnodimenzionalan a W proizvoljan vektorski pro-stor, pri cemu su oba nad K (oba realna ili oba kompleksna), dim(V) =: m ∈ N ineka je f : V → W proizvoljno preslikavanje. Tada su sledeca dva uslova ekviva-lentna:
(1) f ∈ Hom(V,W), tj. f je linearno preslikavanje
(2) postoje k ∈ N, funkcionele l1, . . . , lk ∈ V′ i vektori b1, . . . , bk ∈ W tako da

108 DEO II. OSNOVNI POJMOVI I CINJENICE
vazi
f(v) = l1(v)−→b1 + · · · + lk(v)
−→bk =
k∑
j=1
lj(v)−→bj
za svako v ∈ V .
Dokaz (1)⇒(2): Neka je(aj : j = 1, m
)proizvoljna baza prostora V i neka je
za svako j = 1, m preslikavanje lj : V → K definisano tako da je za v ∈ V
broj lj(v) j-ta koordinata vektora v u odnosu na bazu a.
Ukratko, preslikavanja l1, . . . , lm su definisana sa(l1(v), . . . , lm(v)
)= Koorda(v). Za
svako j = 1, m preslikavanje lj je linearna funkcionela na V. Zaista, ako su u, v ∈ Vi α, β ∈ K onda imamo
α−→u + β−→v = αm∑
j=1
lj(u)−→aj + β
m∑
j=1
lj(v)−→aj =
m∑
j=1
(αlj(u) + βlj(v)
)−→aj
pa je lj(α−→u + β−→v
)= αlj(u) + βlj(v). Ako stavimo bj := f(aj) za j = 1, m onda
imamo
f(v) = f
(m∑
j=1
lj(v)−→aj)
=
m∑
j=1
lj(v)f(−→aj)= l1(v)
−→b1 + · · · + lm(v)
−→bm
(2)⇒(1): Neka su dati l1, . . . , lk ∈ V ′ i b1, . . . , bk ∈ W i neka je preslikavanjef : V → W definisano sa
f(v) = l1(v)−→b1 + · · · + lk(v)
−→bk =
k∑
j=1
lj(v)−→bj
za svako v ∈ V . Da pokazemo da je f ∈ Hom(V,W) neka su u, v ∈ V i α, β ∈ K.Imamo
f(α−→u + β−→v
)=
k∑
j=1
lj(α−→u + β−→v
)−→bj =
k∑
j=1
(αlj(u) + βlj(v)
)−→bj =
= α
k∑
j=1
lj(u)−→bj + β
k∑
j=1
lj(v)−→bj = αf(u) + βf(v)
2

II.14. MATRICA LINEARNOG PRESLIKAVANJA 109
Tvrdenje II.13.5 Neka su ai,j ∈ K za i = 1, n, j = 1, m proizvoljni i neka jef : Km → Kn preslikavanje definisano sa
f(x1, . . . , xm) =(
a1,1x1 + · · · + a1,jxj + · · · + a1,mxm,...
ai,1x1 + · · · + ai,jxj + · · · + ai,mxm,...
an,1x1 + · · · + an,jxj + · · · + an,mxm
)
Tada je f ∈ Hom (Km Kn) i pritom vazi (a1,j , . . . , an,j) = f(ej) za svako j = 1, m,gde je (e) : ej, j = 1, m standardna baza prostora Km.
Dokaz Neka je (s1, . . . , sn) standardna baza prostora Kn. Imamo
f(x1, . . . , xj, . . . , xm) =(a1,1x1 + · · ·+ a1,jxj + · · ·+ a1,mxm
)−→s1 +...
(ai,1x1 + · · ·+ ai,jxj + · · ·+ ai,mxm
)−→si +...
(an,1x1 + · · ·+ an,jxj + · · ·+ an,mxm
)−→sntj.
f(x1, . . . , xj, . . . , xm) = l1(x1, . . . , xj, . . . , xm)−→s1 +
...li(x1, . . . , xj, . . . , xm)
−→si +...
ln(x1, . . . , xj, . . . , xm)−→sn
gde su funkcije li : Km → K za i = 1, n definisane sa
li(x1, . . . , xj, . . . , xm) :df= ai,1x1 + · · ·+ ai,jxj + · · ·+ ai,mxm
Da je f ∈ Hom (Km,Kn) sada sledi iz Tvrdenja II.13.1 i II.13.4. Jednakosti
(a1,j, . . . , an,j) = f(ej)
za j = 1, m proveravaju se neposredno. 2
II.14 Matrica linearnog preslikavanja
Tvrdenje II.14.1 Neka je V konacnodimenzionalan aW proizvoljan vektorskiprostor. Neka je n := dim(V) ∈ N i neka je a = (a1, . . . , an) proizvoljna bazaprostora V.
Preslikavanje Vreda : Hom(V,W) → W n definisano sa
Vreda(f) :df=(f(a1), . . . f(an)
)
za f ∈ Hom(V,W), je bijektivno.

110 DEO II. OSNOVNI POJMOVI I CINJENICE
Dokaz Pokazimo najpre da je Vreda preslikavanje na skup W n . Neka je
w = (w1, . . . , wn) ∈ W n
proizvoljno. Definisimo f : V → W na sledeci nacin:
ako je x ∈ V onda, obzirom da je a baza, postoji jedinstvena n-torka (α1, . . . , αn) ∈Kn takva da je
x = bα1, . . . , αnca =n∑
i=1
αi−→ai
ili drugim recima (α1, . . . , αn) = Koorda(x) – videti Tvrdenje II.9.1 i DefinicijuII.9.2; definisimo
f(x) = bα1, . . . , αncw =n∑
i=1
αi−→wi ∈ W
ili drugim recima f(x) = LKw((α1, . . . , αn)
). (Sve ovo se jednostavno moglo skratiti
sa f := LKw ◦ Koorda, no ovo zapazanje nije nuzno za nas dokaz.)
Pokazimo da je f ∈ Hom(V,W) , tj. da je f linearno preslikavanje; tada bi imali
f ∈ Dom(Vreda) i Vreda(f) = w . Dakle, neka su α, β ∈ K i x, y ∈ V . Ako je
x =n∑
i=1
µi−→ai i y =
n∑
i=1
νi−→ai
onda je
α−→x + β−→y =
n∑
i=1
(αµi + βνi)−→ai = bαµ1 + βν1, . . . , αµn + βνnca
pa prema definiciji naseg preslikavanja f imamo
f(x) =
n∑
i=1
µi−→wi i f(y) =
n∑
i=1
νi−→wi
kao i
f(α−→x + β−→y
)=
n∑
i=1
(αµi + βνi)−→wi = α
n∑
i=1
µi−→wi + β
n∑
i=1
νi−→wi = α · f
(−→x)+ β · f
(−→y)
Pokazimo sada da je Vreda injektivno preslikavanje . Neka su f, g ∈ Hom(V,W)tako da je
Vreda(f) = Vreda(g)

II.14. MATRICA LINEARNOG PRESLIKAVANJA 111
tj. tako da je f(ai) = g(ai) za svako i = 1, n. Ako je x ∈ V i ako je x =
bα1, . . . , αnca onda imamo
f(x) =
n∑
i=1
αi · f(ai) =n∑
i=1
αi · g(ai) = g(x)
Kako je x ∈ V bilo proizvoljno ovim smo pokazali da je f = g. 2
Definicija II.14.2 Neka je V konacnodimenzionalan aW proizvoljan vektorskiprostor, n := dim(V) ∈ N i a = (a1, . . . , an) baza prostora V.
Preslikavanje inverzno bijekciji Vreda : Hom(V,W) → W n iz Tvrdenja II.14.1cemo oznacavati sa
Lineara :df=[Vreda
]−1
Drugim recima
Lineara : Wn → Hom(V,W)
i ako je b = (b1, . . . , bn) ∈ W n proizvoljna n-torka vektora prostora W onda je
Lineara(b) = Linear(a1 ,...,an)(b1, . . . , bn) ∈ Hom(V,W)
ono jedinstveno linearno preslikavanje f iz V u W za koje vazi
f(ai) = bi za svako i = 1, n
2
Definicija II.14.3 Neka je K ∈ {R,C}, neka su V i W k.d.v. prostori nad K,dim(V) =: m ∈ N, dim(W) =: n ∈ N, neka je
a = (a1, . . . , am) baza prostora V
a
b = (b1, . . . , bn) baza prostora W.
Definisemo preslikavanje
Ma,b : Hom(V,W) → Kn×m
tako da je za svako f ∈ Hom(V,W)
Ma,b(f) :df=
λ1,1 . . . λ1,j . . . λ1,m...
......
......
λi,1 . . . λi,j . . . λi,m...
......
......
λn,1 . . . λn,j . . . λn,m
∈ Kn×m

112 DEO II. OSNOVNI POJMOVI I CINJENICE
gde su λi,j ∈ K dati sa
f(aj) = bλ1,j, . . . , λn,jcb =n∑
i=1
λi,j
−→bi
za i = 1, n, j = 1, m. Za f ∈ Hom(V,W) matricu Ma,b(f), nazivamo
matrica linearnog preslikavanja f u odnosu na par baza (a, b)
ili u odnosu na baze a i b, tim redom. 2
Primer Neka je f : R2 → R2 definisano sa
f(x, y) :df= (−2x + 5y, 3x+ y)
za svako (x, y) ∈ R2. Znamo da je f ∈ End (R2).Lako se proverava da su sistemi
(a) : a1 = (1, 1), a2 = (−1, 1) i (b) : b1 = (41,−2), b2 = (24,−2)
baze prostora R2. Imamo
f(a1) = (3, 4) = 3−→b1 − 5
−→b2 = b3,−5cb
if(a2) = (7,−2) = −−→
b1 + 2−→b2 = b−1, 2cb
pa je
Ma,b(f) =
[3 −1
−5 2
]
2
Teorema II.14.4 Neka je K ∈ {R,C}, neka su V i W k.d.v. prostori nad K,dim(V) = m ∈ N, dim(W) = n ∈ N, neka je a = (a1, . . . , am) baza prostora V ab = (b1, . . . , bn) baza prostora W.
Preslikavanje Ma,b : Hom(V,W) → Kn×mje
izomorfizam prostora Hom(V,W) i Kn×m
drugim recima Ma,b je bijekcija izmedu doticnih skupova i pritom vazi
Ma,b (µ · f + ν · g) = µ ·Ma,b (f) + ν ·Ma,b (g)
za svako µ, ν ∈ K i f, g ∈ Hom(V,W).

II.14. MATRICA LINEARNOG PRESLIKAVANJA 113
Dokaz Pokazujemo da je Ma,b 1− 1 preslikavanje . Ako su f, g ∈ Hom(V,W)tako da
Ma,b(f) = Ma,b(g) = [λi,j]n×m ∈ Kn×m
onda za svako j = 1, m vazi
f(aj) = bλ1,j , . . . , λn,jcb = g(aj)
Dakle
Vreda(f) =(f(a1), . . . , f(am)
)=(g(a1), . . . , g(am)
)= Vreda(g)
pa prema Tvrdenju II.14.1 mora biti f = g.
Pokazimo sada da je Ma,b preslikavanje na skup Kn×m . Neka je
S = [si,j]n×m ∈ Kn×m
proizvoljno. Za j ∈ {1, . . . , m} stavimo
wj := bs1,j , . . . , sn,jcb
Kako je Vreda : Hom(V,W) → Wm preslikavanje na skup Wm (prema TvrdenjuII.14.1) to postoji neko f ∈ Hom(V,W) tako da je
(w1, . . . , wm) = Vreda(f) =(f(a1), . . . , f(am)
)
(ukratko f :df= Lineara(w1, . . . , wm)). Po konstrukciji je f(aj) = wj = bs1,j, . . . , sn,jcb
za svako j = 1, m pa je Ma,b(f) = S.
Da pokazemo linearnost preslikavanja T neka je
P := Ma,b (f) = [pi,j]n×m,Q := Ma,b (g) = [qi,j]n×m,R := Ma,b (µ · f + ν · g) = [ri,j]n×m
Za proizvoljno j ∈ {1, . . . , m} imamo
br1,j , . . . , rn,jcb =(µ · f + ν · g
)(aj) = µ · f(aj) + ν · g(aj) =
µ · bp1,j , . . . , pn,jcb + ν · bq1,j , . . . , qn,jcb = bµp1,j + νq1,j , . . . , µpn,j + νqn,jcba odavde sledi da je
ri,j = µpi,j + νqi,j
za svako i = 1, n. Dakle za svako j = 1, m i i = 1, n je R(i, j) = µ · P (i, j) + ν ·Q(i, j) =
(µ · P + ν · Q
)(i, j), pa je R = µ · P + ν · Q, tj. Ma,b (µ · f + ν · g) =
µ ·Ma,b (f) + ν ·Ma,b (g). 2

114 DEO II. OSNOVNI POJMOVI I CINJENICE
II.15 Mnozenje matrica
Tvrdenje II.15.1 Neka je K ∈ {R,C}, neka su V i W k.d.v. prostori nad K,dim(V) = m ∈ N, dim(W) = n ∈ N, neka je
a = (a1, . . . , am) baza prostora V
a
b = (b1, . . . , bn) baza prostora W,
i neka jef ∈ Hom(V,W)
Dalje neka je
Ma,b(f) =
λ1,1 . . . λ1,j . . . λ1,m...
......
......
λi,1 . . . λi,j . . . λi,m...
......
......
λn,1 . . . λn,j . . . λn,m
= [λi,j]n×m ∈ Kn×m
Ako je v ∈ V proizvoljan vektor i ako
v =m∑
j=1
xj−→aj = bx1, . . . , xmca i f(v) =
n∑
i=1
yi−→bi = by1, . . . , yncb
onda vazi
y1...yi...yn
= x1
λ1,1...
λi,1...
λn,1
+ · · · + xj
λ1,j...
λi,j...
λn,j
+ · · · + xm
λ1,m...
λi,m...
λn,m
odnosno
y1...yi...yn
=
λ1,1x1 + · · ·+ λ1,jxj + · · ·+ λ1,mxm...
λi,1x1 + · · ·+ λi,jxj + · · ·+ λi,mxm...
λn,1x1 + · · ·+ λn,jxj + · · ·+ λn,mxm
=
∑mj=1 λ1,jxj
...∑m
j=1 λi,jxj
...∑m
j=1 λn,jxj
(II.12)
Dokaz Imamo

II.15. MNOZENJE MATRICA 115
f(v) =
m∑
j=1
xjf(−→aj)= x1 ·
n∑
i=1
λi,1
−→bi + · · · +xj ·
n∑
i=1
λi,j
−→bi + · · · +xm ·
n∑
i=1
λi,m
−→bi =
n∑
i=1
(x1 · λi,1)−→bi + · · · +
n∑
i=1
(xj · λi,j)−→bi + · · · +
n∑
i=1
(xm · λi,m)−→bi =
n∑
i=1
(x1 · λi,1 + · · · + xj · λi,j + · · · + xm · λi,m
)−→bi =
= b x1 · λ1,1 + · · · + xj · λ1,j + · · · + xm · λ1,m,...
x1 · λi,1 + · · · + xj · λi,j + · · · + xm · λi,m,...
x1 · λn,1 + · · · + xj · λn,j + · · · + xm · λn,m cb2

116 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.15.2 Neka su dati k.d.v. prostori V, W i U i linearna preslikavanjaf ∈ Hom(V,W) i g ∈ Hom(W,U). Neka je dim(V) =: k, dim(W) =: m i dim(U) =:n. Neka je a baza prostora V, b baza prostora W i c baza prostora U.
Slika II.15.19.
Ako je
Mb,c(g) =
λ1,1 . . . λ1,j . . . λ1,m...
......
......
λi,1 . . . λi,j . . . λi,m...
......
......
λn,1 . . . λn,j . . . λn,m
= [λi,j]n×m ∈ Kn×m
i
Ma,b(f) =
x1,1 . . . x1,s . . . x1,k...
......
......
xj,1 . . . xj,s . . . xj,k...
......
......
xm,1 . . . xm,s . . . xm,k
= [xj,s]m×k ∈ Km×k
onda je
Ma,c(g ◦ f) = [yi,j]n×k ∈ Kn×k matrica cija je s-ta kolona za s = 1, k data sa:
y1,s...
yi,s...
yn,s
= x1,s
λ1,1...
λi,1...
λn,1
+ · · · + xj,s
λ1,j...
λi,j...
λn,j
+ · · · + xm,s
λ1,m...
λi,m...
λn,m

II.15. MNOZENJE MATRICA 117
odnosno
y1,s...
yi,s...
yn,s
=
λ1,1x1,s + · · ·+ λ1,jxj,s + · · ·+ λ1,mxm,s...
λi,1x1,s + · · ·+ λi,jxj,s + · · ·+ λi,mxm,s...
λn,1x1,s + · · ·+ λn,jxj,s + · · ·+ λn,mxm,s
=
∑mj=1 λ1,jxj,s
...∑m
j=1 λi,jxj,s
...∑m
j=1 λn,jxj,s
Dokaz Neka je s ∈ {1, . . . , k} proizvoljno. Stavimo vs := f(as). Po pretpostavcije vs = bx1,s, . . . , xj,s, . . . , xm,jca. Zato je prema Tvrdenju II.15.1 sada
g(vs) = b λ1,1x1,s + · · ·+ λ1,jxj,s + · · ·+ λ1,mxm,s,...
λi,1x1,s + · · ·+ λi,jxj,s + · · ·+ λi,mxm,s,...
λn,1x1,s + · · ·+ λn,jxj,s + · · ·+ λn,mxm,s, cc
Kako je g(vs) = g(f(as)
)= (g◦f)(as) to je prema Definiciji II.14.3 za svako s = 1, k
s-ta kolona matrice Ma,c(g ◦ f) data sa
λ1,1x1,s + · · ·+ λ1,jxj,s + · · ·+ λ1,mxm,s...
λi,1x1,s + · · ·+ λi,jxj,s + · · ·+ λi,mxm,s...
λn,1x1,s + · · ·+ λn,jxj,s + · · ·+ λn,mxm,s
2
Definicija II.15.3 Neka je L = [λi,j]n×m ∈ Kn×m i X = [xj,s]m×k ∈ Km×k.
Proizvod matrica L i X, tim redom, ili proizvod para matrica (L,X) jeste ma-
trica Y = [λi,j]n×k ∈ Kn×k cija je s-ta kolona za s = 1, k data sa
y1,s...
yi,s...
yn,s
=
λ1,1x1,s + · · ·+ λ1,jxj,s + · · ·+ λ1,mxm,s...
λi,1x1,s + · · ·+ λi,jxj,s + · · ·+ λi,mxm,s...
λn,1x1,s + · · ·+ λn,jxj,s + · · ·+ λn,mxm,s
=
∑mj=1 λ1,jxj,s
...∑m
j=1 λi,jxj,s
...∑m
j=1 λn,jxj,s
Proizvod matrica L i X oznacavamo jednostavno sa “L ·X” ili “LX”. 2

118 DEO II. OSNOVNI POJMOVI I CINJENICE
Zapazanje II.15.4 Dakle proizvod matrica A = [ai,j]n×m ∈ Kn×m i B = [bi,j]m×k ∈Km×k jeste matrica C = [ci,j]n×k ∈ Kn×k definisana sa
ci,j =m∑
r=1
ai,rbr,j = ai,1b1,j + · · ·+ ai,rbr,j + · · ·+ ai,mbm,j
za i = 1, n, j = 1, k :
.... . . ci,j . . .
...
=
......
......
...ai,1 . . . ai,r . . . ai,m...
......
......
·
. . . b1,j . . ....
......
. . . br,j . . ....
......
. . . bm,j . . .
2
Zapazanje II.15.5 Za svako n,m, k ∈ N definisana je po jedna mesovita ope-racija ∗ izmedu elemenata skupa Kn×m i elementa skupa Km×k sa vrednostima uskupu K
n×k tako da je za A = [ai,j]n×m ∈ Kn×m i B = [bi,j]m×k ∈ K
m×k matricaA ∗B ∈ Kn×k proizvod para (A,B). Zapravo korektnije bi bilo pisati ∗n,m,k umesto∗.
Ukoliko je n = m onda je ∗ = ∗n,n,n operacija na skupu Kn×n svih kvadratnih
matrica reda n. 2
Zapazanje II.15.6 Neka je A = [ai,j]n×m, B = [bi,j]m×k i AB =: C = [ci,j]n×k.
(i) Za svako i = 1, n i j = 1, k je
[ci,j]=[ai,1 . . . ai,r . . . ai,m
]·
b1,j...
br,j...
bm,j
ili
[ci,j]= Ai,•, ·B•,j za svako i = 1, n, j = 1, k.

II.15. MNOZENJE MATRICA 119
(ii) j-ta kolona matrice C upravo proizvod matrice A i j-te kolone matrice B,tim redom:
c1,j...ci,j...
cn,j
=
a1,1 . . . a1,r . . . a1,m...
......
......
ai,1 . . . ai,r . . . ai,m...
......
......
an,1 . . . an,r . . . an,m
·
b1,j...
br,j...
bm,j
= A ·
b1,j...
br,j...
bm,j
ili
C•,j = A ·B•,j za svako j = 1, k.
(iii) i-ta vrsta matrice C je upravo proizvod i-te vrste matrice A i matrice B,tim redom:
[ci,1 . . . ci,j . . . ci,k
]=[ai,1 . . . ai,j . . . ai,m
]·
b1,1 . . . b1,j . . . b1,k...
......
......
bi,1 . . . bi,j . . . bi,k...
......
......
bm,1 . . . bm,j . . . bm,k
=
=[ai,1 . . . ai,j . . . ai,m
]·B
ili
Ci,• = Ai,•, ·B za svako i = 1, n.
(iv) j-ta kolona C•,j je upravo linearna kombinacija sistema kolona
(A•,1, . . . , A•,r, . . . , A•,m)
matrice A sa sistemom skalara
(b1,j , . . . , br,j, . . . , bm,j)
Odnosno:

120 DEO II. OSNOVNI POJMOVI I CINJENICE
c1,j...ci,j...
cn,j
= b1,j
a1,1...
ai,1...
an,1
+ · · · + br,j
a1,r...
ai,r...
an,r
+ · · · + bm,j
a1,m...
ai,m...
an,m
ili
C•,j = b1,jA•,1 + . . . + br,jA•,r . . . + bm,jA•,m =m∑
r=1
br,jA•,r
Primetimo da je doticni sistem skalara dat j-tom kolonom matrice B:
B•,j =
b1,j...
br,j...
bm,j
Dakle
c1,j...ci,j...
cn,j
=
a1,1 . . . a1,r . . . a1,m...
......
......
ai,1 . . . ai,r . . . ai,m...
......
......
an,1 . . . an,r . . . an,m
·
b1,j...
br,j...
bm,j
(II.13)
= b1,j
a1,1...
ai,1...
an,1
+ · · · + br,j
a1,r...
ai,r...
an,r
+ · · · + bm,j
a1,m...
ai,m...
an,m
=
a1,1b1,j + · · ·+ a1,rbr,j + · · ·+ a1,mbm,j...
ai,1b1,j + · · ·+ ai,rbr,j + · · ·+ ai,mbm,j...
an,1b1,j + · · ·+ an,rbr,j + · · ·+ an,mbm,j
(v) i-ta vrsta Ci,• je upravo linearna kombinacija sistema vrsta

II.15. MNOZENJE MATRICA 121
(B1,•, . . . , Br,•, . . . , Bm,•)
matrice B sa sistemom skalara
(ai,1, . . . , ai,r, . . . , ai,m)
Odnosno:
[ci,1 . . . ci,j . . . ci,k
]=
ai,1[b1,1 . . . b1,j . . . b1,k
]+
...ai,r[br,1 . . . br,j . . . br,k
]+
...ai,m
[bm,1 . . . bm,j . . . bm,k
]
ili
Ci,• = ai,1B1,• + . . . + ai,rBr,• . . . + ai,mBm,• =
m∑
r=1
ai,rBr,•
Primetimo da je doticni sistem skalara dat i-tom vrstom matrice A:
Ai,• =[ai,1 . . . ai,j . . . ai,k
]
Dakle
[ci,1 . . . ci,j . . . ci,k
]=
[ai,1 . . . ai,j . . . ai,m
]·
b1,1 . . . b1,j . . . b1,k...
......
......
bi,1 . . . bi,j . . . bi,k...
......
......
bm,1 . . . bm,j . . . bm,k
=
ai,1[b1,1 . . . b1,j . . . b1,k
]+
...ai,r[br,1 . . . br,j . . . br,k
]+
...ai,m
[bm,1 . . . bm,j . . . bm,k
]
(II.14)
=
ai,1b1,1 +...
ai,rbr,1 +...
ai,mbm,1
, . . . . . . ,
ai,1b1,j +...
ai,rbr,j +...
ai,mbm,j
, . . . . . . ,
ai,1b1,k +...
ai,rbr,k +...
ai,mbm,k

122 DEO II. OSNOVNI POJMOVI I CINJENICE
2
Zapazanje II.15.7 (i) Jednakost (II.15.1) iz Tvrdenje II.15.1 se sada moze zapisatii ovako
y1...yi...yn
= Ma,b(f) ·
x1...xj...xm
(II.15)
ako f ∈ Hom(V,W), v = bx1, . . . , xmca ∈ V i f(v) = by1, . . . , yncb ∈ W .
(ii) Tvrdenje II.15.2 sada poprima sledeci oblik:Neka su dati k.d.v. prostori V, W i U i linearna preslikavanja f ∈ Hom(V,W) i
g ∈ Hom(W,U). Ako je a baza prostora V, b baza prostora W i c baza prostora U
onda vazi
Ma,c(g ◦ f) = Mb,c(g) ·Ma,b(f)
Slika II.15.20.
2
Tvrdenje II.15.8 Ako je A ∈ Kn4×n3, B ∈ Kn3×n2 i C ∈ Kn2×n1 onda vazi
(A ·B) · C = A · (B · C)

II.15. MNOZENJE MATRICA 123
Dokaz Neka je p baza prostora Kn1 , q baza prostora Kn2 , r baza prostora Kn3
i s baza prostora Kn4 (npr. mozemo uzeti standardne baze ovih prostora). Naosnovu Teoreme II.14.4 postoje f ∈ Hom(Kn1 ,Kn2), f ∈ Hom (Kn2 ,Kn3) i f ∈Hom (Kn3 ,Kn4) tako da je
C = Mp,q(f), B = Mq,r(g) i A = Mr,s(h)
Slika II.15.21.
Na osnovu Zapazanja II.15.7 pod (ii) znamo da je A · B = Mq,s(h ◦ g) pa je izistih razloga i (A ·B) · C = Mp,s
((h ◦ g) ◦ f
).
Slicno, znamo da je B ·C = Mp,r(g ◦ f) te i da je A · (B ·C) = Mp,s
(h ◦ (g ◦ f)
).
Ali (h ◦ g) ◦ f = h ◦ (g ◦ f) i dokaz je priveden kraju. 2
Napomena II.15.9 Ako su Ai ∈ Kni+1×ni za i = 1, k onda se lako proverava da sudefinisani svi proizvodi
A2 · A1,A3 · (A2 · A1),A4 · (A3 · (A2 · A1)),...An · (. . . A4 · (A3 · (A2 · A1)) . . . ).
kao i da kako god uopste rasporedili zagrade u “An ·An−1 · . . . ·A2 ·A1” za matricekoje se dobijaju uvek ce biti definisani njihovi proizvodi. Takode, razmatranje slicnoonom u vezi sa rasporedom zagrada kod asocijativnih operacija, pokazuje da i u ovomslucaju konacan rezultat nece zavisiti od polaznog rasporeda zagrada. 2
Tvrdenje II.15.10 Neka su dati k.d.v. prostori V1, . . . ,Vn+1 i linearna preslika-vanja f1 : V1 → V2, . . . , fn : Vn → Vn+1. Ako je ai baza prostora Vi za i = 1, n+ 1onda je
Ma1 ,an+1(fn+1 ◦ · · · ◦ f1) = Man,an+1(fn) ·Man−1 ,an(fn−1) · . . . ·Ma2 ,a3(f2) ·Ma1,a2(f1)
Dokaz Lagana indukcija po n ∈ N, imajuci u vidu Zapazanje II.15.7 pod (ii).2

124 DEO II. OSNOVNI POJMOVI I CINJENICE
II.16 Dva primera: rotacija i osna simetrija
Kroz ovaj odeljak fiksirana je neka ravan R.
Definisemo da je par (A,B) tacaka ravni R istog tipa kao i par (A1, B2) tacakaravni R kao sto smo to i ranije uradili.
Slika II.16.22.
Definisemo geometrijski vektor ravni R odreden parom (A,B) ∈ R2 kao skup
−→AB :
df={. . . , (A,B), (A1, B1), . . .
}
svih parova tacaka ravni R koj su istog tipa kao i (A,B). Definisemo i operacijusabiranja geometrijskih vektora kao i mesovitu operaciju mnozenja geometrijskihvektora realnim brojevima na isti nacin kao i pre. Skup svih geometrijskih vektoraravni R oznacimo sa G a ovako dobijen realan vektorski prostor sa G. Lako je videtida je
dim(G) = 2
Podsetimo se da za preslikavanje f : R → R kazemo da je
izometrijska transformacija
ili transformacija podudarnosti ako za svako A,B ∈ R vazi AB = f(A)f(B).
Veoma vazna osobina izometrijskih transformacija jeste cinjenica da vazi:
ako su (A,B) i (E, F ) istog tipa onda su i(f(A), f(B)
)i(f(E), f(F )
)istog tipa

II.16. DVA PRIMERA: ROTACIJA I OSNA SIMETRIJA 125
Slika II.16.23.
Slika II.16.24.

126 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.16.25.
Zato ako je x ={. . . , (A,B), (E, F ), . . .
}=
−→AB =
−→EF onda je
−−−−−−→f(A)f(B) =
−−−−−−→f(A)f(B) =
{. . . ,
(f(A), f(B)
),(f(E), f(F )
), . . .
}
pa nam ovo omogucava da (korektno) definisemo preslikavanje F : G → G tako daje
F(−→AB)
=−−−−−−→f(A)f(B)
Simbolicki predstavljeno:
x ={. . . . . . . . . . . . , ( A , B ), . . . . . . . . . . . .
}
↓ ↓f(A) f(B)
F (x) ={. . . . . . . . . . . . ,
(f(A), f(B)
), . . . . . . . . . . . .
}
Da su postojali parovi (A,B) i (E, F ) istog tipa takvi da parovi(f(A), f(B)
)
i(f(E), f(F )
)nisu istog tipa onda ne bismo znali da li da za x =
−→AB =
−→EF
definisemo F (x) =−−−−−−→f(A)f(B) ili F (x) =
−−−−−−→f(E)f(F ), obzirom da su ovo razliciti
geometrijski vektori:−−−−−−→f(A)f(B) 6= −−−−−−→
f(E)f(F ).

II.16. DVA PRIMERA: ROTACIJA I OSNA SIMETRIJA 127
Slika II.16.26.
Primer Translacija f : R → R za dati geometrijski vektor v je kao sto znamoizometrijska transformacija. Za nju vazi F = idG. Zaista, za svako A,B ∈ R par(f(A), f(B)
)je istog tipa kao par (A,B), pa je F
(−→AB)
=−−−−−−→f(A)f(B) =
−→AB. 2
Slika II.16.27.
Ako je f : R → R proizvoljna izometrijska transformacija onda za F : G → Gvazi
F (u + v) = F (u) + (v)

128 DEO II. OSNOVNI POJMOVI I CINJENICE
odnosno F je aditivno preslikavanje u odnosu na sabiranje geometrijskih vektora.
Zaista, neka je u =−→AB i v =
−−→BC. Tada je u+ v =
−→AC i
F (u) = F(−→AB)
=−−−−−−→f(A)f(B), F (v) = F
(−−→BC)
=−−−−−−→f(B)f(C) i F
(−→AC)
=−−−−−−→f(A)f(C)
pa imamo
F (u+ v) = F(−→AB +
−−→BC)
= F(−→AC)
=−−−−−−→f(A)f(C) =
−−−−−−→f(A)f(B) +
−−−−−−→f(B)f(C)
= F (u) + F (v)
Jednostavnim geometrijskim razmatranjem se moze pokazati da je F i homogenopreslikavanje u odnosu na mnozenje geometrijskih vektora realnim brojevima, tj. davazi
F (αu) = αF (u)
za svako u ∈ G i α ∈ R.
Ovo cemo ilustrovati na Slici II.16.28 u slucaju kad je α ∈ R pozitivan realan
broj. Neka je u =−→AB i C ∈ R takvo da je αu =
−→AC. Imamo AC = α · AB.
Slika II.16.28.
Zbog
AB + BC = AC
|| || ||
f(A)f(B) + f(B)f(C) = f(A)f(C)
zakljucujemo da je su f(A), f(B) i f(C) kolinearne tacke, da je tacka f(B)izmedu tacaka f(A) i f(C) kao i da vazi f(A)f(C) = α · f(A)f(B).
Slika II.16.29.

II.16. DVA PRIMERA: ROTACIJA I OSNA SIMETRIJA 129
Slika II.16.30.
Slika II.16.31.
pa odavde imamo
F (αu) = F(
α−→AB)
= F(−→AC)
=−−−−−−→f(A)f(C) = α
−−−−−−→f(A)f(B) = αF
(−→AB)
= αF (αu)
Zakljucujemo da ako je f : R → R proizvoljna izometrijska transformacija ondaje preslikavanje F : G → G linearno iz G u G, tj.
F ∈ End(G)
Primer II.16.1 Rotacija
Neka je O ∈ R i θ ∈ R proizvoljno. Poznato je da je rotacija f : R → R okotacke O za ugao od θ radijana izometrijska transformacija:

130 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.16.32.
zbog ∠X1OY1 = θ+ω = ∠XOY iX1O = XO, Y1O = Y O je4X1OY1∼= 4XOY ,
pa imamo X1Y1 = XY .
Otuda je RotO,θ :df= F ∈ End(G).
Nadimo matricu linearnog preslikavanja RotO,θ u odnosu na bazu v =(−→OA,
−−→OB)
na Slici II.16.33, gde je ∠AOB prav ugao i OA = OB = 1.
Slika II.16.33.
Neka je najpre θ ∈ (0; π/2).Stavimo A1 := f(A) i B1 := f(B). Imamo
RotO,θ
(−→OA)
=−−−−−−→f(O)f(A) =
−−→OA1 = cos θ · −→OA+ sin θ · −−→OB = bcos θ, sin θcv

II.16. DVA PRIMERA: ROTACIJA I OSNA SIMETRIJA 131
i slicno
RotO,θ
(−−→OB)
=−−−−−−→f(O)f(B) =
−−→OB1 = − sin θ · −→OA+ cos θ · −−→OB = b− sin θ, cos θcv
pa je
Mv,v (RotO,θ) =
[cos θ − sin θsin θ cos θ
]
(II.16)
Slicnim geometrijskim razmatranjem, razlikovanjem slucajeva θ ∈ (π, 2; π), θ ∈(π; 3π/2) i sl. dobicemo da je matrica preslikavanja RotO,θ u odnosu na bazu
v =(−→OA,
−−→OB)
i dalje data sa (II.16) kakav god da je θ ∈ R. Do tog zakljucka
mozemo doci i sledecim rezonom kako sledi.
Neka je najpre θ > 0. Postoji neko n ∈ N tako da jeθ
n∈ (0; π/2). Imamo
RotO,θ = RotO,θ/n ◦ . . . ◦ RotO,θ/n︸ ︷︷ ︸
n puta
Zato na osnovu Tvrdenja II.15.10 vazi
Mv,v (RotO,θ) = Mv,v
(RotO,θ/n
)· . . . ·Mv,v
(RotO,θ/n
)
︸ ︷︷ ︸
n puta
=
[
Mv,v
(RotO,θ/n
)]n
Kako je[cos u − sin usin u cos u
]
·[cos v − sin vsin v cos v
]
=
[(cos u cos v − sin u sin v) (− cos u sin v − sin u cos v)(sin u cos v + cos u sin v) (− sin u sin v + cos u cos v)
]
=
[cos(u+ v) − sin(u+ v)sin(u+ v) cos(u+ v)
]
Jednostavnom indukcijom po k ∈ N se pokazuje da vazi
[cos u − sin usin u cos u
]k
=
[cos(ku) − sin(ku)sin(ku) cos(ku)
]
Znamo da je
Mv,v
(RotO,θ/n
)=
[cos(θ/n) − sin(θ/n)sin(θ/n) cos(θ/n)
]

132 DEO II. OSNOVNI POJMOVI I CINJENICE
Otuda najzad imamo
Mv,v (RotO,θ) =
[cos(θ/n) − sin(θ/n)sin(θ/n) cos(θ/n)
]n
=
[cos θ − sin θsin θ cos θ
]
Neka je sada θ < 0. Izaberimo proizvoljno k ∈ N tako da je k2π+ θ > 0. Premaonom sto smo pokazali je
Mv,v (RotO,k2π+θ) =
[cos(k2π + θ) − sin(k2π + θ)sin(k2π + θ) cos(k2π + θ)
]
=
[cos θ − sin θsin θ cos θ
]
No s druge strane jasno je da RotO,k2π+θ = RotO,θ.
Tacka O i baza v =(−→OA,
−−→OB)
odreduju jedan, kako se to kaze, Descartes-ov
koordinatni sistem u ravni R.Ako tacka P ∈ R ima koordinate (x, y) u odnosu na ovaj koordinatni sistem, a
tacka f(P ) dobijena, dakle, rotacijom tacke P oko tacke O za ugao od θ radijanaima koordinate (x1, y1) onda imamo
Slika II.16.34.−→OP = x
−→OA+ y
−−→OB = bx, ycv i
RotO,θ
(−→OP)
=−−−−→Of(P ) = x1
−→OA+ y1
−−→OB = bx1, y1cv
pa na osnovu Tvrdenja II.15.1[x1
y1
]
=
[cos θ − sin θsin θ cos θ
]
·[xy
]
=
[x cos θ − y sin θx sin θ + y cos θ
]
tj.x1 =x cos θ − y sin θy1 =x sin θ + y cos θ
2
Primer II.16.2 Osna simetrija

II.17. MATRICA LINEARNOG PRESLIKAVANJA I PROMENA BAZE 133
II.17 Matrica linearnog preslikavanja i
promena baze
Definicija II.17.1 Neka su a = (a1, . . . , an) i b = (b1, . . . , bn) dve baze k.d.v. pros-tora V gde je (naravno) n := dim(V). Matricu
M(a via b) :df=
α1,1 . . . α1,j . . . α1,n...
......
......
αi,1 . . . αi,j . . . αi,n...
......
......
αn,1 . . . αn,j . . . αn,n
∈ Kn×n
gde su αi,j ∈ K dati sa aj = bα1,j , . . . , αn,jcb =n∑
i=1
αi,j
−→bi za i, j = 1, n, nazivamo
matrica promene baze koja odgovara paru baza (a, b)
2
Zapazanje II.17.2 Primetimo da je idV ∈ Hom(V,V) (tj. da je identicko preslika-vanje linearno) kao i da vazi
M(a via b) = Ma,b
(idV
)
2
Tvrdenje II.17.3 Neka je f ∈ Hom(V,W), gde su V i W k.d.v. prostori, neka sua i a′ baza prostora V a b i b′ baze prostora W. Tada vazi
Ma′ ,b′(f) = M(b via b′) ·Ma,b(f) ·M(a′ via a)
2
Slika II.17.35.

134 DEO II. OSNOVNI POJMOVI I CINJENICE
Dokaz Kako je f = idV ◦ f ◦ idV to prema Tvrdenju II.15.10 vazi
Ma′,b′(f) = Mb,b′ (idV ) ·Ma,b(f) ·Ma′,a (idV )
Sada se samo treba podsetiti Zapazanja II.17.2. 2
Tvrdenje II.17.4 Neka su a = (a1, . . . , an) i b = (b1, . . . , bn) dve baze k.d.v. pros-tora V gde je (naravno) n := dim(V). Ako je
v = bα1, . . . , αnca = bβ1, . . . , βncbonda vazi
β1...βi...βn
= M(a via b)
α1...αi...αn
Dokaz Ako stavimo f := idV onda je f ∈ End(V) = Hom(V,V), f(v) = v =bβ1, . . . , βncb i Ma,b(f) = M(a via b) pa na osnovu Zapazanja II.15.7 (iliti TvrdenjaII.15.1) imamo
β1...βi...βn
= Ma,b(f)
α1...αi...αn
↑ ↑
v = idV (v) = f(v) v
2
Tvrdenje II.17.5 (a)Neka su g, h ∈ Hom(V2,V3), p ∈ Hom(V1,V2), q ∈ Hom(V3,V4)i α, β ∈ K. Tada vazi
q ◦ (α · g + β · h) = α · (q ◦ g) + β · (q ◦ h)
kao i
(α · g + β · h) ◦ p = α · (g ◦ p) + β · (h ◦ p)
(b) Neka su B,C ∈ Kn×m, A ∈ Kk×n, D ∈ Km×l i α, β ∈ K. Tada vazi
A · (αB + βC) = αAB + βAC i (αB + βC) ·D = α(BD) + β(CD)

II.17. MATRICA LINEARNOG PRESLIKAVANJA I PROMENA BAZE 135
Dokaz (a) Za proizvoljno x ∈ V1 imamo(
q ◦ (α · g + β · h))
(x) = q
((α · g + β · h
)(x)
)
= q
(
α · g(x) + β · h(x))
(1)=
α · q(g(x)
)+β · q
(h(x)
)= α · (q ◦ g)(x)+β · (q ◦h)(x) =
(
α · (q ◦ g)+β · (q ◦h))
(x)
gde se (1) obrazlaze linearnoscu preslikavanja p. Slicno, za x ∈ V1 imamo(
(α · g + β · h) ◦ p)
(x) =
(
α · g + β · h)(
p(x)
)
= α · g(p(x)
)+ β · h
(p(x)
)=
α · (g ◦ p)(x) + β · (h ◦ p)(x) =(
α · (g ◦ p) + β · (h ◦ p))
(x)
(b) StavimoαB + βC =: P,AB =: Q,AC =: T,AP = A · (αB + βC) =: L iαQ+ βT = α(AB) + β(AC) =: G
Uz ocigledne oznake (npr. G = [gi,j]k×m) imamo da za svako i = 1, k i j = 1, m vazi
li,j =n∑
s=1
ai,sps,j =n∑
s=1
ai,s · (αbs,j + βcs,j) =n∑
s=1
(αai,sbs,j + βai,scs,j) =
α
n∑
s=1
ai,sbs,j + β
n∑
s=1
ai,scs,j = αqi,j + βti,j = gi,j
Ovim smo pokazali da je L = G, tj. A · (αB + βC) = α(AB) + β(AC). Preostalajednakost se moze pokazati na slican nacin. 2
Zapazanje II.17.6 Primetimo da iz Tvrdenja II.17.5 specijalno sledi da za g, h ∈Hom(V2,V3), P ∈ Kk×n, Q ∈ Kn×m i α ∈ K vazi
α(g ◦ f) = (α · g) ◦ f = g ◦ (α · f)
kao i
α(PQ) = (αP )Q = P · (αQ)
2
§Neka je (V,⊕, ·) vektorski prostor nad K i “◦” operacija na skupu V tako da
vazi:

136 DEO II. OSNOVNI POJMOVI I CINJENICE
q ◦ (α · g + β · h) = α · (q ◦ g) + β · (q ◦ h)kao i
(α · g + β · h) ◦ p = α · (g ◦ p) + β · (h ◦ p)za svako α, β ∈ K i g, h, p, q ∈ V .
Tada za uredenu cetvorku A := (V,⊕, ·, ◦) kazemo da je
linearna algebra nad K
Operaciju “◦: nazivamo mnozenje vektora u linearnoj algebri A. Za A kazemo daje asocijativna ukoliko je operacija ◦ asocijativna operacija. 2
Primer Neka je V vektorski prostor nad K. Ako je (End(V),⊕, ·) vektorski prostorsvih endomorfizama prostora V onda je A := (End(V),⊕, ·, ◦) asocijativna linearnaalgebra, gde je “f ◦ g” uobicajena kompozicija funkcija f i g. 2
Primer Ako je (Kn×n,⊕, ·) vektorski prostor svih kvadratnih matrica reda n ∈ N
onda je A := (Kn×n,⊕, ·, ∗) asocijativna linearna algebra, gde je “A ∗ B” proizvodmatrica A i B tim redom. 2
Primer Ako je (V,⊕, ·) vektorski prostor svih geometrijskih vektora onda je A :=
(V,⊕, ·,×) linearna algebra koje nije asocijativna, gde je “−→AB × −−→
CD” uobicajen
vektorski proizvod vektora−→AB i
−−→CD. 2
Slika II.17.36.

II.18. JEDINICNA MATRICA. REGULARNE MATRICE 137
§
Ako je A ∈ Kn×k i B ∈ Kk×m onda je AB ∈ Kn×m, a zbog BT ∈ Km×k,AT ∈ Kk×n proizvod para matrica
(BT, AT
)je definisan i vazi BTAT ∈ Km×n.
Kako je i (AB)T ∈ Km×n to su matrice (AB)T i BTAT istog formata pa ima smislapostaviti pitanje da li su jednake.
Tvrdenje II.17.7 Ako su A ∈ Kn×k i B ∈ Kk×m onda vazi (AB)T = BTAT.
Dokaz StavimoBT =: P,AT =: Q,AB =: L,(AB)T = LT =: R iBTAT = PQ =: G
Za proizvoljno i = 1, m i j = 1, n imamo
ri,j = lj,i =
k∑
s=1
aj,sbs,i =
k∑
s=1
qs,jpi,s =
k∑
s=1
pi,sqs,j = gi,j
Ovim smo pokazali da je R = G, tj. da je (AB)T = BTAT. 2
II.18 Jedinicna matrica. Regularne matrice
Neka je n ∈ N fiksirano kroz ovaj odeljak.Postavljamo pitanje da li operacija mnozenja matrica na skupu Kn×n svih kvadra-
tnih matrica reda n (videti Zapazanje II.15.5) ima neutralni element.Neka je matrica In = [ei,j]n×n ∈ Kn×n definisana sa ei,i = 1 za svako i = 1, n,
odnosno ei,j = 0 za sve i, j = 1, n takve da je i 6= j. Drugim recima E je onakvadratna matrica reda n cija je i-ta kolona za i = 1, n data sa:
00...00100...00
i

138 DEO II. OSNOVNI POJMOVI I CINJENICE
a i-ta vrsta sa
[
i︷ ︸︸ ︷
0, 0, . . . , 0, 0, 1, 0, 0, . . . , 0, 0]
odnosno na glavnoj dijagonali matrice In stoji broj 1 dok na svim ostalim mes-tima stoji broj 0.
Na primer
I2 =
[1 00 1
]
, I3 =
1 0 00 1 00 0 1
, I4 =
1 0 0 00 1 0 00 0 1 00 0 0 1
Neka je A = [ai,j]n×n ∈ Kn×n proizvoljno. Stavimo E := In, D := A · E iL := E · A. Tada imamo (videti Zapazanje II.15.6 pod (iv)):
D•,i = e1,iA•,1 + . . .+ ei−1,iA•,i−1 + ei,iA•,i + ei+1,iA•,i+1 + . . .+ en,iA•,n
= 0 ·A•,1 + . . .+ 0 · A•,i−1 + 1 · A•,i + 0 · A•,i+1 + . . .+ 0 · A•,n = A•,i
za svako i = 1, n. Dakle i-ta kolona matrice D se poklapa sa i-tom kolonom matriceA za svako i = 1, n, te je AE = D = A.
Slicno (videti Zapazanje II.15.6 pod (v)) imamo:
Li,• = ei,1A1,• + . . .+ ei,i−1Ai−1,• + ei,iAi,• + ei,i+1Ai+1,• + . . .+ ei,nAn,•
= 0 · A1,• + . . .+ 0 · Ai−1,• + 1 · Ai,• + 0 · Ai+1,• + . . .+ 0 · An,• = Ai,•
za svako i = 1, n. Dakle i-ta vrsta matrice L se poklapa sa i-tom vrstom matrice Aza svako i = 1, n, te je EA = D = A.
Ovim smo pokazali da vazi
A · In = In ·A = A
za svako A ∈ Kn×n za svako A ∈ Kn×n, tj. da je In neutralni element za operacijumnozenja matrica na skupu K
n×n.Matricu In cemo zvati
jedinicna matrica reda n
§Obzirom da operacija mnozenja matrica na skupu Kn×n ima neutral ima smisla
za datu matricu A ∈ Kn×n pitati se da li je ona invertibilna ili ne. Invertibilnematrice nazivamo regularnim matricama.
Dakle za kvadratnu matricu A ∈ Kn×n reda n kazemo da je

II.18. JEDINICNA MATRICA. REGULARNE MATRICE 139
regularna matrica
ako postoji neko B ∈ Kn×n tako da vazi
AB = BA = In
Kako je operacija mnozenja matrica asocijativna to za svaku regularnu matricuA ∈ Kn×n postoji tacno jedna matrica B ∈ Kn×n za koju vazi AB = BA = In, i za
nju koristimo oznaku A−1 i nazivamo je
inverzna matrica (regularne) matrice A
Da ponovimo ako je A ∈ Kn×n regularna onda imamo
AA−1 = A−1A = In
Matrice koje nisu regularne nazivamo
singularnim matricama
Primer II.18.1 Ako je matrica M =
[a bc d
]
∈ K2×2 takva da je ad − bc 6= 0
onda je M regularna. Zaista imamo
(
1
ad− bc
[d −b
−c a
])[a bc d
]
=
[1 00 1
]
= I2
i
[a bc d
](
1
ad− bc
[d −b
−c a
])
=
[1 00 1
]
= I2
Pritom je, kao sto vidimo
[a bc d
]−1
=1
ad− bc
[d −b
−c a
]
=
[d
ad−bc−b
ad−bc−c
ad−bca
ad−bc
]
2
Terminologija Termin
automorfizam prostora V
oznacava endomorfizam prostora V koji je izomorfizam iz V u V.Dakle f : V → V je automorfizam prostora V akko je f bijekcija i f ∈ End(V) =
Hom(V,V). 2

140 DEO II. OSNOVNI POJMOVI I CINJENICE
Tvrdenje II.18.2 Neka je V k.d.v. prostor nad K, dim(V) =: n ∈ N i nekasu a =
(ai : i = 1, n
)i b =
(bi : i = 1, n
)baze prostora V. Endomorfizam
f ∈ End(V) je automorfizam prostora V akko je matrica Ma,b(f) ∈ Kn×n regularna;u tom slucaju vazi
Ma,b(f)−1 = Mb,a
(f−1)
Dokaz Pretpostavimo najpre da je f ∈ End(V) automorfizam prostora V. Tadaje f−1 ∈ End(V) i vazi f ◦ f−1 = idV i f−1 ◦ f = idV . Zato je
Ma,b(f)Mb,a
(f−1)= Mb,b (idV ) = In
iMb,a
(f−1)Ma,b(f) = Ma,a (idV ) = In
odakle vidimo da je Ma,b(f) regularna matrica i pritom je
Ma,b(f)−1 = Mb,a
(f−1)
Pretpostavimo sada da je Ma,b(f) regularna matrica i neka je P ∈ Kn×n takvada je
Ma,b(f) · P = P ·Ma,b(f) = In
Na osnovu Tvrdenja II.14.4 postoji neko g ∈ End(V) tako da je P = Mb,a(g). Imamo
Mb,b(f ◦ g) = Ma,b(f)Mb,a(g) = In = Mb,b (idV )
pa prema Teoremi II.14.4 sledi da mora biti f ◦g = idV . Na slican nacin se zakljucujei da je g ◦ f = idV . 2
Tvrdenje II.18.3 Neka je V k.d.v. prostor nad K, dim(V) =: n ∈ N i neka sua =
(ai : i = 1, n
)i b =
(bi : i = 1, n
)baze prostora V. Matrice M(a via b) i
M(b via a) su regularne i vazi
M(a via b)−1 = M(b via a)
Dokaz Ovo sledi iz
M(a via b)M(b via a) = Ma,b (idV )Mb,a (idV ) = Mb,b (idV ◦ idV ) = Mb,b (idV ) = In
2
Tvrdenje II.18.4 Neka je V k.d.v. prostor nad K, dim(V) =: n ∈ N i neka jea =
(ai : i = 1, n
)baza prostora V. Za proizvoljno P = [pi,j]n×n ∈ Kn×n sledeci
uslovi su ekvivalentni:
(1) matrica P je regularna(2) postoji neka baza b =
(bi : i = 1, n
)prostora V tako da je P = M(a via b)
(3) postoji neka baza b =(bi : i = 1, n
)prostora V tako da je P = M(b via a)

II.18. JEDINICNA MATRICA. REGULARNE MATRICE 141
Dokaz Implikacije (2)⇒(1) i (3)⇒(1) su sadrzaj Tvrdenja II.18.3.
(1)⇒(3): Ako za j = 1, n stavimo
bj :=
n∑
i=1
pi,j−→ai (II.17)
onda na osnovu Tvrdenja II.14.1 postoji neko f ∈ End(V) tako da je f(aj) = bjza svako j = 1, n; drugim recima f = Linear(a1 ,...,an)(b1, . . . , bn) (videti Defini-ciju II.14.2). Iz (II.17) imamo P = Ma,a(f) pa kako je P regularna matrica toodavde prema Tvrdenju II.18.2 sledi da je f automorfizam prostora V. Obziromda je a baza za V to dalje na osnovu Tvrdenja II.10.1 pod (e) dobijamo da je i(f(ai) : i = 1, n
)=(bi : i = 1, n
)=: b baza za V. No sada (II.17) kaze da je
P = M(b via a).
(1)⇒(2): Kako je implikacija (1)⇒(3) vec pokazana a matrica P −1 regularnato postoji neka baza b =
(bi : i = 1, n
)prostora V tako da je P−1 = M(b via a) pa
je
P =(P−1
)−1= M(b via a)−1 = M(a via b)
prema Tvrdenju II.18.3. 2
Primer II.18.5 Nadimo M(a via b) ako su a i b baze prostora R2 date sa
(a) : a1 = (1, 5), a2 = (−2, 7)
(b) : b1 = (3, 7), b2 = (4,−1)
Neka je (e) : e1 = (1, 0), e2 = (0, 1) standardna baza prostora R2.Stavimo V := R2. Imamo
M(a via b) = Ma,b (idV) = Me,b (idV)Ma,e (idV)
Dalje imamo Ma,e (idV) =
[1 −25 7
]
kao i
Me,b (idV) = M(e via b) = M(b via e)−1 =
[3 47 −1
]−1
=1
31
[1 47 −3
]
i najzad (videti Primer II.18.1)
M(a via b) =
(1
31
[1 47 −3
])[1 −25 7
]
=1
31
([1 47 −3
] [1 −25 7
])
=1
31
[21 26−8 −35
]
=
[21/31 26/31−8/31 −35/31
]

142 DEO II. OSNOVNI POJMOVI I CINJENICE
2
Tvrdenje II.18.6 Ako je A ∈ Kn×n takva da za neko B ∈ Kn×n vazi AB = Inonda je A regularna matrica. Ako je A ∈ K
n×n takva da za neko B ∈ Kn×n vazi
BA = In onda je A regularna matrica.
Dokaz Pretpostavimo da vazi AB = In. Neka je u proizvoljna baza prostoraKn i neka su f, g ∈ End(Kn) takvi da je A = Mu,u(f) i B = Mu,u(g). Tadaje Mu,u(f ◦ g) = AB = In pa je f ◦ g = In. Odavde specijalno sledi da je fpreslikavanje na prostor Kn, a da je g injektivno preslikavanje, pa zakljucujemo dasu f i g zapravo automorfizmi. Otuda su A i B regularne matrice. 2
II.19 Hom(K
m×1,Kn×1), Hom
(K
1×n,K1×m)
i mnozenje matrica
(1) Hom (Km×1,Kn×1) Neka je f ∈ Hom(Km×1,Kn×1) i neka je
(s) : sj =
00...00100...00
j
, j = 1, m
standardna baza prostora Km×1.
Ako je A :=
α1...αj...
αm
∈ Km×1 proizvoljno onda (videti (II.13) u (iv) iz Zapazanja
II.15.6) imamo

II.19. HOM(KM×1,KN×1
), HOM
(K1×N ,K1×M
)I MNOZENJE MATRICA 143
f
(
α1...αj...
αm
)
= f
(m∑
j=1
αj−→sj)
=m∑
j=1
αjf(−→sj)=
= α1
q1,1...
qi,1...
qn,1
+ · · · + αj
q1,j...qi,j...
qn,j
+ · · · + αm
q1,m...
qi,m...
qn,m
=
q1,1 . . . q1,j . . . q1,m...
......
......
qi,1 . . . qi,j . . . qi,m...
......
......
qn,1 . . . qn,j . . . qn,m
·
α1...αj...
αm
= Qf ·
α1...αj...
αm
Dakle postoji neko Qf ∈ Kn×m tako da za svako A ∈ Km×1 vazi
f(A) = Qf · A
Obrnuto ako je M ∈ Kn×m proizvoljna matrica onda iz Tvrdenja II.17.5 pod (b)sledi da za preslikavanje gM : Km×1 → Kn×1 definisano sa
gM(A) = M · A
za A ∈ Km×1 vazi gM ∈ Hom (Km×1,Kn×1).
Ovim je skup Hom (Km×1,Kn×1) potpuno opisan.
(2) Hom (K1×n,K1×m) Neka je f ∈ Hom (K1×n,K1×m) i neka je
(s) : si =[
i︷ ︸︸ ︷
0, 0, . . . , 0, 0, 1, 0, 0, . . . , 0, 0], i = 1, n
standardna baza prostora K1×n.
Ako je A :=[α1 . . . αi . . . αn
]∈ K1×n proizvoljno onda (videti (II.14) u (v) iz
Zapazanja II.15.6) imamo

144 DEO II. OSNOVNI POJMOVI I CINJENICE
f
([α1 . . . αi . . . αn
])
= f
(n∑
i=1
αi−→si)
=n∑
i=1
αif(−→si)=
=
α1
[q1,1 . . . q1,j . . . q1,m
]+
...αi
[qi,1 . . . qi,j . . . qi,m
]+
...αn
[qn,1 . . . qn,j . . . qn,m
]
=[α1 . . . αi . . . αn
]·
q1,1 . . . q1,j . . . q1,m...
......
......
qi,1 . . . qi,j . . . qi,m...
......
......
qn,1 . . . qn,j . . . qn,m
=[α1 . . . αi . . . αn
]·Qf
Dakle postoji neko Qf ∈ Kn×m tako da za svako A ∈ K1×n vazi
f(A) = A ·Qf
Obrnuto ako je M ∈ Kn×m proizvoljna matrica onda iz Tvrdenja II.17.5 pod (b)sledi da za preslikavanje gM : K1×n → K1×m definisano sa
gM(A) = A ·M
za A ∈ K1×n vazi gM ∈ Hom (K1×n,K1×m).
Ovim je skup Hom (K1×n,K1×m) potpuno opisan.
II.20 Linearna forma funkcionele u datoj bazi
Definicija II.20.1 Linearnu funkcionelu na Kn drugacije nazivamo
linearna forma od n promenljivih
2
Iz Tvrdenja II.13.1 i II.13.2 direktno sledi da je preslikavanje l : Kn → K linearnaforma od n promenljivih akko postoje brojevi λ1, . . . , λn ∈ K tako da je
l(x1, . . . , xn) :df= λ1x1 + · · ·+ λnxn (II.18)
za svako (x1, . . . , xn) ∈ Kn – ovom cinjenicom se “pravda” onaj deo “od n promenlji-
vih”. Preciznije ako je (e) : ei, i = 1, m standardna baza prostora Kn onda imamo:

II.20. LINEARNA FORMA FUNKCIONELE U DATOJ BAZI 145
– ako je l : Kn → K linearna forma od n promenljivih i λi := l(ei) onda vazi(II.18),
– ako je preslikavanje l : Kn → K definisano sa (II.18) za neke λ1, . . . , λn ∈ K
onda je ono linearna forma od n promenljivih i za nju vazi λi = l(ei).
Za broj λj = f(ej) kazemo da je j-ti koeficijent linearne forme l ili koeficijentuz j-tu promenljivu.
Ponovimo ukratko kako se prva od ove dve cinjenice gore obrazlaze:
l(x1, . . . , xn) = l
(n∑
j=1
xj−→ej)
=
n∑
j=1
xjl(−→ej)=
n∑
j=1
xjλj = l(e1)x1 + · · ·+ l(en)xn
§Neka je n ∈ N, (e) : ei, i = 1, m standardna baza prostora Kn i i neka je
preslikavanje H : (Kn) ′ → Kn definisano sa
H(f) :df=(f(e1), . . . , f(em)
)
Da je H bijekcija znamo od ranije jer je (Kn) ′ = Hom (Kn,K) i H = Vrede(videti Tvrdenje II.14.1). No obzirom da je rezon jednostavan ponovimo zasto je Hbijekcija.
Ako je H(f) = H(g), tj. f(ei) = g(ei) za svako i = 1, n onda imamo
f(x1, . . . , xn) = f(e1)x1 + · · ·+ f(en)xn = g(e1)x1 + · · ·+ g(en)xn = g(x1, . . . , xn)
za svako (x1, . . . , xn) ∈ Kn, tj. f = g.
Ako je (λ1, . . . , λn) ∈ Kn proizvoljna n-torka brojeva definisimo preslikavanje
g : Kn → K sa g(x1, . . . , xn) :df= λ1x1 + · · ·+ λnxn za (x1, . . . , xn) ∈ Kn. Da je ovako
definisano preslikavanje g linearno sledi iz
g
(
α(x1, . . . , xn) + β(y1, . . . , yn)
)
= g
(
(αx1 + βy1, . . . , αxn + βyn)
)
=
λ1(αx1+βy1)+ · · ·+λn(αxn+βyn) = α(λ1x1+ · · ·+λnxn)+β(λ1y1+ · · ·+λnyn) =αg(x1, . . . , xn) + βg(y1, . . . , yn)

146 DEO II. OSNOVNI POJMOVI I CINJENICE
Direktnom proverom dobijamo λj = g(ej) za svako j = 1, m. Dakle g ∈ (K ′) iH(g) = (λ1, . . . , λn).
§
Neka je sada V proizvoljan k.d.v. prostor nad K, dim(V) =: n ∈ N i a =(aj :
j = 1, n)proizvoljna baza prostora V. K je jednodimenzionalan prostor i jedna baza
je (s) : s1 = 1 (dakle sistem duzine 1 ciji je jedini vektor broj 1) - standardna bazaovog prostora. Ako je f ∈ V ′ imamo
Ma,s(f) = [λ1 . . . λn]
gde je λj = f(aj) (jer f(aj) = f(aj) · 1) za j = 1, n. Ako je v = bx1, . . . , xnca ∈ V ,odnosno ako su brojevi xj koordinate vektora v ∈ V u bazi a onda prema TvrdenjuII.15.1 imamo da je
[f(v)
]= [λ1 . . . λn]
x1...xn
tj.
f(v) = λ1x1 + · · ·+ λnxn
odnosno
f(v) = f(a1)x1 + · · ·+ f(an)xn
Do ovog zakljucka mozemo doci i direktno:
f(v) = f
(n∑
j=1
xj−→aj)
=n∑
j=1
xjf(−→aj)=
n∑
j=1
xjf(aj) = f(a1)x1 + · · ·+ f(an)xn
Preslikavanje l : Kn → K definisano sa l(x1, . . . , xn) :df= λ1x1 + · · · + λnxn za
(x1, . . . , xn) ∈ Kn je linearna forma od n promenljivih i za nju kazemo da je
linearna forma funkcionele f u bazi a
a za njene koeficijente da su koeficijenti funkcionele f u bazi a.
Drugim recima za linearnu funkcionelu l : Kn → K kazemo da je linearna formafunkcionele f ∈ V
′, gde dim(V) = n, u bazi a ako za svaki vektor v ∈ V vazi

II.20. LINEARNA FORMA FUNKCIONELE U DATOJ BAZI 147
f(v) = l(x1, . . . , xn)
gde je v = bx1, . . . , xnca, tj. Koorda(v) = (x1, . . . , xn), odnosno ako su x1, . . . , xn
koordinate vektora v u bazi a.
Slika II.20.37.
Primer Posmatrajmo sledece dve baza prostora R3:
(r) : r1(x) = x2 + x+ 1, r2(x) = x + 1, r3(x) = 1(q) : q1(x) = x2 + 2x+ 3, q2(x) = x2 + 1, q3(x) = x2 − 1
i preslikavanje f : Pol2,R → R definisano sa f(p) = p(0). Ovo je linearna funkcionelana prostoru Pol2,R:
f(αp1 + βp2) = (αp1 + βp2)(0) = αp1(0) + βp2(0) = αf(p1) + βf(p2)
Dakle f ∈ (Pol2,R)′ je vektor dualnog prostora vektorskog prostora Pol2,R.
Da odredimo linearnu formu funkcionele f u bazi r izracunajmo najpre f(r1) =r1(0) = 1, f(r2) = r2(0) = 1, f(r3) = r3(0) = 1. Dakle linearna forma funkcionele fu bazi r jeste linearno preslikavanje l1 : R
2 → R dato sa
l1(x, y, z) = x + y + z
Da odredimo linearnu formu funkcionele f u bazi q izracunajmo najpre f(q1) =q1(0) = 3, f(q2) = q2(0) = 1, f(q3) = q3(0) = −1. Dakle linearna forma funkcionelef u bazi q jeste linearno preslikavanje l2 : R
2 → R dato sa
l2(x, y, z) = 3x+ y − z

148 DEO II. OSNOVNI POJMOVI I CINJENICE
Posmatrajmo vektor p ∈ Pol2,R dat sa p(x) = 2x2 + 6x + 6. Lako se proveravada je
−→p = 2−→r1 + 4−→r2 = b2, 4, 0cr kao i −→p = 3−→q1 − 2−→q2 +−→q3 = b3,−2, 1cq
Ako izracunamo l1(2, 4, 0) rezultat bi morao biti isti kao i kad izracunamo l2(3,−2, 1)– morali bi dobiti upravo broj f(p). Da se u ovo uverimo: f(p) = p(0) = 6,l1(2, 4, 0) = 2 + 4 = 6 i l2(3,−2, 1) = 3 · 3− 2− 1 = 6. 2
§
Neka je dim(V) = m, e standardna baza prostoraKm, a proizvoljna baza prostoraV i (s) : s1 = 1 standardna baza (duzine 1) jednodimenzionalnog prostora K. Akoje f ∈ V ′ a l : Km → K linearna forma funkcionele f u bazi a, onda veze izmedu f ,l, matrica linearnih preslikavanja f i l u odnosu na odgovarajuce baze i vrednostifunkcija f i l na baznim vektorima mozemo simbolicki prikazati na sledeci nacin:
Slika II.20.38.
II.21 Algebarski dual vektorskog prostora.
Dualne baze
Tvrdenje II.21.1 Ako jeV konacnodimenzionalan prostor onda je i V ′ konacnodime-nzionalan prostor i dim (V ′) = dim(V).

II.21. ALGEBARSKI DUAL VEKTORSKOG PROSTORA. DUALNE BAZE 149
Dokaz Neka je dim(V) =: m ∈ N. Na osnovu Teoreme II.14.4 prostor V ′ =Hom(V,K) je izomorfan sa prostorom K1×m. Zato je na osnovu Tvrdenja II.10.2 iV ′ konacnodimenzionalan i vazi dim (V ′) = dim (K1×m) = 1 · m = m = dim(V).2
§Neka je a =
(aj : j = 1, m
)proizvoljna baza prostora V. Za svako j = 1, m
definisimo preslikavanjelj : V → K
na sledeci nacin: za svako v ∈ V broj
lj(v) je j-ta koordinata vektora v u odnosu na bazu a .
Ukratko, preslikavanja l1, . . . , lm su definisana sa(l1(v), . . . , lm(v)
)= Koorda(v) .
Za svako j = 1, m preslikavanje lj je linearna funkcionela na V. Zaista, akosu u, v ∈ V i α, β ∈ K onda imamo
α−→u + β−→v = α
m∑
j=1
lj(u)−→aj + β
m∑
j=1
lj(v)−→aj =
m∑
j=1
(αlj(u) + βlj(v)
)−→aj
pa je lj(α−→u + β−→v
)= αlj(u) + βlj(v).
Pokazimo da je sistem l =(lj : j = 1, m
)jedna baza dualnog prostora V
′.
Neka je f ∈ V′proizvoljno. Za j = 1, m stavimo λj := f(aj). Ako je v =
bα1, . . . , αmca ∈ V onda je αj = lj(v) za j = 1, m i imamo
f(v) = f
(m∑
j=1
αj−→aj)
=m∑
j=1
αjf(aj) =m∑
j=1
αjλj =m∑
j=1
λjlj(v) =
( m∑
j=1
λj
−→lj
)
(v)
Dakle
f(v) =
( m∑
j=1
λj
−→lj
)
(v)
za svako v ∈ V pa je
f =
m∑
j=1
λj
−→lj
Ovim smo pokazali da je l =(lj : j = 1, m
)potpun sistem vektora prostora V
′te
kako je on duzine m = dim(V) = dim(V
′)to je na osnovu II.5.17 on zapravo baza
prostora V′.
Ovu bazu l nazivamo

150 DEO II. OSNOVNI POJMOVI I CINJENICE
baza prostora V′dualna bazi a prostora V
i za a kazemo da je
baza prostora V dualna bazi l prostora V′
Primer II.21.2 Sistem
(a) : a1 = (1, 1, 1), a2 = (1, 2, 2), a3 = (3, 2, 5)
iz Primera II.3.1 je baza prostora R3:
(α, β, γ) =6α+ β − 4γ
3(1, 1, 1)+
=−3α + 2β + γ
3(1, 2, 2)+
=−β + γ
3(3, 2, 5)
=6α+ β − 4γ
3−→a1 +
−3α + 2β + γ
3−→a2 +
−β + γ
3−→a3
Odavde vidimo da je baza prostora(R3)′
dualna bazi a je sistem (l) : l1, l2, l3funkcionela definisanih sa
l1(x1, x2, x3) :df=
6x1 + x2 − 4x3
3
l2(x1, x2, x3) :df=
−3x1 + 2x2 + x3
3
l3(x1, x2, x3) :df=
−x2 + x3
3
za (x1, x2, x3) ∈ R3. 2
Tvrdenje II.21.3 Neka je a =(aj : j = 1, m
)baza prostora V i l =
(lj : j =
1, m)baza prostora V
′. l je baza prostora V
′dualna bazi a akko vazi
lj(ai) =
{1 ako i = j,0 ako i 6= j
(II.19)
za svako i, j = 1, m; drugim recima ako za svako j = 1, m vazi
lj(a1) = 0, . . . . . . , lj(ai−1) = 0, lj(ai+1) = 0, . . . . . . , lj(am) = 0
dok lj(aj) = 1.

II.21. ALGEBARSKI DUAL VEKTORSKOG PROSTORA. DUALNE BAZE 151
Dokaz Pretpostavimo da je baza l dualna bazi a. Neka je j ∈ {1, . . . , m}proizvoljno. Ako je i ∈ {1, . . . , m} i i 6= j onda je
ai = 1−→ai + 0−→aj +∑
k=1,mk 6= i,j
0−→ak
te je j-ta koordinata vektora ai u bazi a jednaka 0, tj. lj(ai) = 0. S druge strane je
aj = 1−→aj +∑
k=1,mk 6= j
0−→ak
te je j-ta koordinata vektora aj u bazi a jednaka 1, tj. lj(aj) = 1.
Pretpostavimo sada da vazi (II.19) i neka je j ∈ {1, . . . , m} proizvoljno. Ako je
v =
m∑
i=1
αi−→ai onda imamo
lj(v) = lj
(m∑
i=1
αi−→ai)
=
m∑
i=1
αilj(ai) =
= α1lj(a1) + . . .+ αj−1lj(aj−1) + αjlj(aj) + αj+1lj(aj+1) + . . .+ αmlj(am) =
= αjlj(aj) = αj
a αj je upravo j-ta koordinata vektora v u bazi a. Dakle vidimo da je lj j-ti vektorbaze prostora V
′koja je dualna bazi a. 2
Primer II.21.4 Sistem f = (f1, f2) funkcionela na prostoru Pol1,R definisan sa
f1(p) :df= p(1), f2(p) :
df= p(−1)
je baza algebarskog duala prostora Pol1,R. Potrazimo bazu prostora Pol1,R dualnubazi f . Neka je q1(x) = a1x+ b1 i q2(x) = a2x + b2 za x ∈ R. Vazi
f1(q1) = 1f2(q1) = 0
if1(q2) = 0f2(q2) = 1
odnosnoa1 + b1 = 1b1 − a1 = 0
ia2 + b2 = 0b2 − a2 = 1

152 DEO II. OSNOVNI POJMOVI I CINJENICE
pa je a1 = b1 =1
2i a2 = −1
2, b2 =
1
2.
Dakle sistem
(q) : q1(x) =1
2x +
1
2, q2(x) = −1
2x+
1
2
je trazena dualna baza. 2
II.22 Kanonski izomorfizam k.d.v. prostora
sa drugim dualom
Neka je V k.d.v. prostor nad K.Za v ∈ V definisemo preslikavanje fv : V
′ → K sa
fv(l) :df= l(v)
za svako l ∈ V ′. Za svako v ∈ V imamo fv ∈ Hom(V ′,K), zaista ako su α, β ∈ K il1, l2 ∈ V ′ onda imamo:
fv(αl1 + βl2) = (αl1 + βl2)(v) = αl1(v) + βl2(v) = αfv(l1) + βfv(l2)
Dakle fv ∈ (V ′) ′ = V ′′ za svako v ∈ V . Definisimo
T : V → V′′
saT (v) :
df= fv
za svako v ∈ V . Pokazimo da je T ∈ Hom(V,V ′′). Za α, β ∈ K i u, v ∈ V imamo
T (αv + βu)(l) = fαv+βu(l) = l(αv + βu) = αl(v) + βl(u) = αfv(l) + βfu(l)
= αT (v)(l) + βT (u)(l) =(αT (v) + βT (u)
)(l)
za proizvoljno l ∈ V ′, pa je T (αv + βu) = αT (v) + βT (u).
Pokazimo da je T injekcija. Neka je v ∈ V tako da je T (v)(l) = 0 za svakol ∈ V ′. Imamo l(v) = 0 za svako l ∈ V ′. Pretpostavimo da je v 6= 0. Tada je sistem(x) : x1 = v duzine 1 linearno nezavisan.
Ako je dim(V) = 1 onda je x baza; u tom slucaju ako je (l) : l1 baza prostoraV ′ dualna bazi x onda imamo l1(v) = l1(x1) = 1 6= 0 – suprotno pretpostavci.
Ako je n := dim(V) > 1 onda postoji baza a = (a1, . . . , an) prostora V takva daje a1 = v (videti Tvrdenje II.5.15); ako je (l1, . . . , ln) baza prostora V ′ dualna bazia onda vazi l1(v) = l1(a1) = 1 6= 0 – suprotno pretpostavci.
Zakljucujemo da zapravo mora biti v = 0. Time smo pokazali da je Ker(T ) ={0}. Dakle T ∈ Hom(V,V ′′), T je monomorfizam i dim(V ′′) = dim(V ′) = dim(V)pa vidimo da je T izomorfizam iz V u V
′′. Za T kazemo da je

II.23. RANG MATRICE 153
kanonski izomorfizam
k.d.v. prostora V i njegovog drugog duala V ′′.Specijalno, iz prethodnog razmatranja sledi da za svako g ∈ V ′′ postoji, i to
tacno jedno, vg ∈ V tako da vazi g(l) = l(vg) za svako l ∈ V ′.
II.23 Rang matrice
Neka su dati n,m ∈ N i A = [ai,j]n×m ∈ Kn×m.
Prostor
Kol(A) :df= L
({A•,1, . . . , A•,m
})
v
⊆ Kn×1
nazivamo
prostor kolona matrice A
a njegovu dimenziju, tj. broj dim(Kol(A)
)
K-rang matrice A
i oznacavamo ga sa rangK(A); dakle
rangK(A) :df= dim
(Kol(A)
)
Slika II.23.39.

154 DEO II. OSNOVNI POJMOVI I CINJENICE
Prostor
Vrst(A) :df= L
({A1,•, . . . , An,•
})
v
⊆ K1×m
nazivamo
prostor vrsta matrice A
a njegovu dimenziju, tj. broj dim(Vrst(A)
)
V-rang matrice A
i oznacavamo ga sa rangV(A); dakle
rangV(A) :df= dim
(Vrst(A)
)
Slika II.23.40.

II.23. RANG MATRICE 155
Imamo
Kol(A) ={x1A•,1 + . . . + xjA•,j ++ . . . xmA•,m : x1, . . . , xm ∈ K
}
=
x1
a1,1...
ai,1...
an,1
+ · · · + xj
a1,j...
ai,j...
an,j
+ · · · + xm
a1,m...
ai,m...
an,m
: x1, . . . , xm ∈ K
=
x1a1,1 + · · ·+ xja1,j + · · ·+ xma1,m...
x1ai,1 + · · ·+ xjai,j + · · ·+ xmai,m...
x1an,1 + · · ·+ xjan,j + · · ·+ xman,m
: x1, . . . , xm ∈ K
=
a1,1 . . . a1,j . . . a1,m...
......
......
ai,1 . . . ai,j . . . ai,m...
......
......
an,1 . . . an,j . . . an,m
·
x1...xj...xm
: x1, . . . , xm ∈ K
=
A ·
x1...xj...xm
: x1, . . . , xm ∈ K
= Im(fA)
gde je fA ∈ Hom(K
m×1,Kn×1)dato sa
fA(X) :df= A ·X
za X ∈ Km×1. Dakle dobili smo da je
Kol(A) = Im(fA)
pa i da je
rangK(A) = dim(Im(fA)
)

156 DEO II. OSNOVNI POJMOVI I CINJENICE
Na potpuno isti nacin imamo
Vrst(A) ={y1A1,• + . . . + yiAi,• ++ . . . ynAn,• : y1, . . . , yn ∈ K
}
=
y1[a1,1 . . . a1,j . . . a1,m
]+
...yi[ai,1 . . . ai,j . . . ai,m
]+
...yn[an,1 . . . an,j . . . an,m
]
: y1, . . . , yn ∈ K
=
y1a1,1 +...
yiai,1 +...
ynan,1
. . .
y1a1,j +...
yiai,j +...
ynan,j
. . .
y1a1,m +...
yiai,m +...
ynan,m
: y1, . . . , yn ∈ K
=
[y1 . . . yi . . . yn
]·
a1,1 . . . a1,j . . . a1,m...
......
......
ai,1 . . . ai,j . . . ai,m...
......
......
an,1 . . . an,j . . . an,m
: y1, . . . , yn ∈ K
={[
y1 . . . yi . . . yn]A : y1, . . . , yn ∈ K
}= Im(gA)
gde je gA ∈ Hom(K1×n,K1×m
)dato sa
gA(X) :df= X · A
za X ∈ K1×n. Dakle dobili smo da je
Vrst(A) = Im(gA)
pa i da je
rangV(A) = dim(Im(gA)
)
§Ako je A nula matrica formata n×m onda je jasno da je rangK(A) = rangV(A) =
0. Pretpostavimo sada da A nije nula matrica formata n×m.
Neka je

II.23. RANG MATRICE 157
m0 ∈ {1, . . . , m} najveci broj takav da postoje prirodni brojevi1 ≤ j1 < · · · < jn0 ≤ m takvi da je sistem
(A•,j1, . . . , A•,jm0)
linearno nezavisna m0-torka vektora prostora Km×1
i neka je (A•,j1, . . . , A•,jm0) jedna linearno nezavisna m0-torka kolona matrice
A. Kako je (A•,1, . . . , A•,m) potpun sistem vektora prostora Kol(A), prema samojdefiniciji ovog prostora, to je na osnovu Tvrdenja II.5.2
sistem (A•,j1 , . . . , A•,jm0) baza prostora prostora Kol(A),
pa je m0 = rangK(A). Zakljucujemo da vazi:
rangK(A) je najveci broj k ∈ {1, . . . , m} takav da postoje prirodni brojevi
1 ≤ j1 < · · · < jk ≤ m takvi da je sistem kolona matrice A
(A•,j1 , . . . , A•,jk) linearno nezavisan.
Ako je s = 1, m proizvoljno onda je A•,s ∈ Kol(A) = L({A•,j1, . . . , A•,jm0
})pa
postoje neki λi,s ∈ K za i = 1, m0 tako da je
A•,s = λ1,sA•,j1 + · · ·+ λm0,sA•,jm0
tj. svaka kolona matrice A je linearna kombinacija baznog sistema kolona
(A•,j1, . . . , A•,jm0)
§Neka je
n0 ∈ {1, . . . , n} najveci broj takav da postoje prirodni brojevi1 ≤ i1 < · · · < in0 ≤ n takvi da je sistem
(Ai1,•, . . . , Ain0 ,•)
linearno nezavisan sistem vektora prostora K1×n
i neka je (Ai1,•, . . . , Ain0 ,•) jedna linearno nezavisna n0-torka vrsta matrice A.
Kako je (A1,•, . . . , An,•) potpun sistem vektora prostora Vrst(A), prema samojdefiniciji ovog prostora, to je na osnovu Tvrdenja II.5.2
sistem (Ai1,•, . . . , Ain0 ,•) baza prostora prostora Vrst(A),
pa je n0 = rangV(A). Zakljucujemo da vazi:
rangV(A) je najveci broj k ∈ {1, . . . , n} takav da postoje prirodni brojevi
1 ≤ i1 < · · · < ik ≤ n takvi da je sistem vrsta matrice A
(Ai1,•, . . . , Aik,•) linearno nezavisan.

158 DEO II. OSNOVNI POJMOVI I CINJENICE
Ako je s = 1, n proizvoljno onda je As,• ∈ Vrst(A) = L({Ai1,•, . . . , Ain0 ,•
})pa
postoje neki λs,j ∈ K za j = 1, n0 tako da je
As,• = λs,1Ai1,• + · · ·+ λs,n0Ain0 ,•
tj. svaka vrsta matrice A je linearna kombinacija baznog sistema vrsta
(Ai1,•, . . . , Ain0 ,•)
§
Tvrdenje II.23.1 Neka su n,m ∈ N i A ∈ Kn×m. Tada vazi
rangK(A) = rangV(A)
Dokaz (I deo) Pokazimo najpre da za svaku matricu A ∈ Kn×m vazi
rangV(A) ≤ rangK(A)
Ako je A nula matrica ovo sledi iz rangK(A) = 0 = rangV(A). Pretpostavimosada da A nije nula matrica. Tada je r := rangK(A) ∈ N.
Prema definiciji K-ranga postoje matrice-kolone P1, . . . , Pr ∈ Kn×1 i brojeviλs,j ∈ K za s = 1, r i j = 1, m tako da je
A•,j = λ1,jP1 + · · ·+ λr,jPr (II.20)
za svako j = 1, m.
Slika II.23.41.
Neka je B = [bi,s]n×r ∈ Kn×r definisana sa B•,s = Ps za s = 1, r, odnosno B jematrica cija je s-ta kolona upravo Ps za svako s = 1, r:

II.23. RANG MATRICE 159
B =[P1|P2| · · · |Pr−1|Pr
]
Stavimo L := [λs,j]r×m ∈ Kr×m. Iz (II.20) sada sledi
A = B · L(videti Zapazanje II.15.6 pod (iv))
Odavde imamo (videti Zapazanje II.15.6 pod (v)) da za svako i = 1, n vazi
Ai,• = bi,1L1,• + · · ·+ bi,rLr,• ∈ L({L1,•, . . . , Lr,•}
)=: S
v
⊆ K1×m
tj. {A1,•, . . . , An,•} ⊆ S.
Slika II.23.42.
Zato jeVrst(A) = L
({A1,•, . . . , An,•}
)⊆ S
pa imamo da je dim(Vrst(A)
)≤ dim(S) ≤ r odnosno
rangV(A) ≤ rangK(A)
(II deo) Pokazimo sada da za svaku matricu A ∈ Kn×m vazi
rangK(A) ≤ rangV(A)
Ako je A nula matrica ovo sledi iz rangK(A) = 0 = rangV(A). Pretpostavimosada da A nije nula matrica. Tada je r := rangV(A) ∈ N.
Prema definiciji V-ranga postoje matrice-vrste P1, . . . , Pr ∈ K1×m i brojevi λi,s ∈K za i = 1, n i s = 1, r tako da je
Ai,• = λi,1P1 + · · ·+ λi,rPr (II.21)
za svako i = 1, n.Neka je B = [bs,j]r×m ∈ Kr×m definisana sa Bs,• = Ps za s = 1, r, odnosno B je
matrica cija je s-ta vrsta upravo Ps za svako s = 1, r:

160 DEO II. OSNOVNI POJMOVI I CINJENICE
B =
P1
P2
...Pr−1
Pr
Stavimo L := [λi,s]n×r ∈ Kn×r. Iz (II.21) sada sledi
A = L ·B
(videti Zapazanje II.15.6 pod (v))Odavde imamo (videti Zapazanje II.15.6 pod (iv)) da za svako j = 1, m vazi
A•,j = b1,jL•,1 + · · ·+ br,jL•,r ∈ L({L•,1, . . . , L•,r}
)=: S
v
⊆ Kn×1
tj. {A•,1, . . . , A•,m} ⊆ S. Zato je
Kol(A) = L({A•,1, . . . , A•,m}
)⊆ S
pa imamo da je dim(Kol(A)
)≤ dim(S) ≤ r odnosno
rangK(A) ≤ rangV(A)
2
Definicija II.23.2 Neka su n,m ∈ N i A ∈ Kn×m. Broj
rangK(A) = rangV(A)
nazivamo
rang matrice A
Rang matrice A oznacavamo sa rang(A) . 2
§
Tvrdenje II.23.3 Neka su V i W k.d.v. prostori, m := dim(V) ∈ N, n :=dim(W) ∈ N i f ∈ Hom(V,W). Ako je a = (a1, . . . , am) proizvoljna baza pro-stora V a b = (b1, . . . , bn) proizvoljna baza prostora W onda vazi
rang(Ma,b(f)
)= dim
(Im(f)
)

II.23. RANG MATRICE 161
Dokaz Znamo da je (videti Odeljak II.9)
Koordb : W → Kn
izomorfizam iz prostora W u prostor Kn kao i da je
Usprn : Kn → Kn×1
izomorfizam iz prostora Kn u prostor Kn×1. Zato je
h := Usprn ◦ Koordb : W → Kn×1
izomorfizam iz prostora W u prostor Kn×1.
Dakle ako je w ∈ W i ako su y1, . . . , yn ∈ K takvi da je
w =
n∑
i=1
yi−→bi
onda je
h(w) =
y1...yi...yn

162 DEO II. OSNOVNI POJMOVI I CINJENICE
Slika II.23.43.
Neka je l : Km×1 → Kn×1 definisano sa
l
(
x1...xj...xm
)
:df= Ma,b(f) ·
x1...xj...xm
Znamo da je rang(Ma,b(f)
)= dim
(Im(l)
). Pokazimo da je
h⇀Im(f) = Im(l)
Odavde ce slediti da jeh � Im(f) : Im(f) → Im(l)

II.23. RANG MATRICE 163
izomorfizam iz prostora Im(f) u prostor Im(l) (videti Zapazanje II.7.17) te dakle ida je
dim(Im(f)
)= dim
(Im(l)
)= rang
(Ma,b(f)
)
i tvrdenje ce biti pokazano.
Pokazimo najpre da jeh⇀Im(f) ⊆ Im(l)
Neka je w ∈ Im(f) proizvoljno. Trreba pokazati da je h(w) ∈ Im(l). Postojiv ∈ V tako da je w = f(v). Neka su x1, . . . , xm ∈ K takvi da je
v =
m∑
j=1
xj−→aj
tj. neka je Koorda(v) = (x1, . . . , xm) ∈ Km. Neka je Koordb(w) = (y1, . . . , yn) ∈ Kn,tj. neka su y1, . . . , yn ∈ K takvi da je
w = f(v) =
n∑
i=1
yi−→bi
Na osnovu Zapazanja II.15.7 pod (i) imamo da je
y1...yi...yn
= Ma,b(f) ·
x1...xj...xm
= l
(
x1...xj...xm
)
No
h(w) =
y1...yi...yn
pa je
h(w) = l
(
x1...xj...xm
)
∈ Im(l)
Pokazimo sada da jeIm(l) ⊆ h⇀Im(f)

164 DEO II. OSNOVNI POJMOVI I CINJENICE
Neka je
y1...yi...yn
∈ Im(l)
proizvoljno. Postoji
x1...xj...xm
∈ Km×1
tako da je
l
(
x1...xj...xm
)
=
y1...yi...yn
Stavimo v :=
m∑
j=1
xj−→aj i w := f(v). Ako je Koordb(w) = (y′1, . . . , y
′n) ∈ K
n, tj.
w = f(v) =n∑
i=1
y′i−→bi
onda prema Zapazanju II.15.7 pod (i) imamo da je
y′1...y′i...y′n
= Ma,b(f) ·
x1...xj...xm
= l
(
x1...xj...xm
)
=
y1...yi...yn
odnosno y′i = yi za svako i = 1, n. Sada je
w =n∑
i=1
yi−→bi

II.23. RANG MATRICE 165
pa sledi da je
y1...yi...yn
= h(w) ∈ h⇀Im(f)
obzirom da je w = f(v) ∈ Im(f). 2
Tvrdenje II.23.4 Matrica A ∈ Kn×n je regularna akko vazi rang(A) = n.
Dokaz Neka je a proizvoljna baza prostora Kn i f ∈ End(Kn) tako da vaziA = Ma,a(f). Imamo:
rang(A) = n
akkodim
(Im(f)
)= n = dim
(K
n)
akkoIm(f) = K
n
akkof je automorfizam prostora K
n
akko je matrica A regularna. 2

166 DEO II. OSNOVNI POJMOVI I CINJENICE
Deo III
Sistemi linearnih jednacina.Determinanta
III.1 Sistemi linearnih jednacina:
definicija
Ako su dati ai,j ∈ K za i = 1, n i j = 1, m i b1, . . . , bn ∈ K zelimo da odgovorimo napitanje da li postoji neko (x1, . . . , xj, . . . , xm) ∈ Km tako da vazi
a1,1x1 + . . . + a1,jxj + . . . + a1,mxm = b1...
......
......
...ai,1x1 + . . . + ai,jxj + . . . + ai,mxm = bi
......
......
......
an,1x1 + . . . + an,jxj + . . . + an,mxm = bn
(III.1)
i ukoliko takve m-torke (x1, . . . , xj, . . . , xm) ∈ Km postoje, da nademo konkretanpostupak kako da generisemo sve takve m-torke.
Ureden par S := (A,B) gde je
A =
a1,1 . . . a1,j . . . a1,m...
......
......
ai,1 . . . ai,j . . . ai,m...
......
......
an,1 . . . an,j . . . an,m
∈ Kn×m
167

168 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
i
B =
b1...bi...bn
∈ Kn×1
nazivamo
sistem od n linearnih jednacina sa m nepoznatih.
Za matricu A kazemo da je matrica sistema S, za matricu-kolonu B kazemo da jekolona slobodnih clanova sistema S, a za matricu
∼
A :df= [A|B] =
a1,1 . . . a1,j . . . a1,m b1...
......
......
...ai,1 . . . ai,j . . . ai,m bi...
......
......
...an,1 . . . an,j . . . an,m bn
∈ Kn×(m+1)
da je prosirena matrica sistema S. Svaku m-torku (x1, . . . , xj, . . . , xm) ∈ Km zakoju vazi (III.1) nazivamo resenje sistema S. Definisemo i
Res(A,B) :df={
(x1, . . . , xm) : (x1, . . . , xm) je resenje sistema (A,B)}
⊆ Km×1
Obicaj je da se sistem S = (A,B) zadaje jednostavnim zapisom
(S) :
a1,1x1 + . . . + a1,jxj + . . . + a1,mxm = b1...
......
......
...ai,1x1 + . . . + ai,jxj + . . . + ai,mxm = bi
......
......
......
an,1x1 + . . . + an,jxj + . . . + an,mxm = bn
(III.2)
Za sistem (A,B) kazemo da je homogen ako je B = 0n×1, tj. ako je bi = 0 zasvako i = 1, n; pritom kazemo da je sistem Sh = (A,0n×1)
(Sh) :
a1,1x1 + . . . + a1,jxj + . . . + a1,mxm = 0...
......
......
...ai,1x1 + . . . + ai,jxj + . . . + ai,mxm = 0
......
......
......
an,1x1 + . . . + an,jxj + . . . + an,mxm = 0
(III.3)

III.2. SISTEMI LINEARNIH JEDNACINA I LINEARNA PRESLIKAVANJA169
homogen sistem pridruzen sistemu S = (A,B) datom sa (III.2). U nastavkucemo umesto (A,0n×1) pisati jednostavno (A,0), smatrajuci da se format doticnenula-matrice podrazumeva.
Sisteme kod kojih je n = m nazivamo kvadratnim.
III.2 Sistemi linearnih jednacina i linearna pre-
slikavanja
Matrici A ∈ Kn×m pridruzujemo preslikavanje fA : Km×1 → Kn×1 definisano sa
fA(x1, . . . , xm) =(
a1,1x1 + · · · + a1,jxj + · · · + a1,mxm,...
ai,1x1 + · · · + ai,jxj + · · · + ai,mxm,...
an,1x1 + · · · + an,jxj + · · · + an,mxm
)
Znamo da je fA ∈ Hom(Km,Kn) i jasno je da vazi
Res(A,B) = (fA)↼ {b}
gde naravno b = (b1, . . . , bi, . . . , bn) i
(fA)↼ {b} =
{
(x1, . . . , xj, . . . , xm) ∈ Km : fA(x1, . . . , xj, . . . , xm) = b
}
Otuda je specijalno
Res(A,0
)= Ker(fA)
v
⊆ Km
podprostor, tj. skup resenja homogenog sistema(A,0
)je podprostor od Km (u
sta se mozemo uveriti i direktnom proverom).Ako je en standardna baza prostora Kn×1, a em standardna baza prostora Km×1,
direktnom proverom se mozemo uveriti u to da vazi
Mem,en(fA) = A
§Konvencija Ako je dat prostor V za x ∈ V i H ⊆ V pisacemo x+H umesto
{x}+H. 2
Definicija III.2.1 Za skup S ⊆ V vektora prostora V kazemo da je linearna mno-
gostrukost prostora V ako postoje Uv
⊆ V i x ∈ V tako da je S = x + U ; u tomslucaju kazemo da je mnogostrukost S paralelna podprostoru U . 2

170 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Tvrdenje III.2.2 Neka je g ∈ Hom(V,W) i b ∈ W . Tada je ili g↼{b} = ∅ ili je
g↼{b} linearna mnogostrukost (prostora V) paralelna sa Ker(g)v
⊆ V, tj.
g↼{b} = x +Ker(g)
gde je x ∈ V proizvoljan vektor takav da je g(x) = b. 2
Posledica III.2.3 Ili sistem (III.2) nema resenja, tj. Res(A,B) = ∅, ili ako Res(A,B) 6=∅ onda je
Res(A,B) = x + Res (A,0)
gde jex ∈ Res(A,B)
proizvoljno resenje sistema (A,B), a (A,0) je homogen sistem pridruzen sistemu(A,B) (kao sto se i vidi).
Dokaz Ovo sledi iz Res(A,B) = (fA)↼ {b} i Res
(A,0
)= Ker(fA) na osnovu
Tvrdenja III.2.2. 2
Tvrdenje III.2.4 Neka je S ⊆ V linearna mnogostrukost prostora V i PS :={u− v : u, v ∈ S}.
(a) Vazi PS
v
⊆ V.
(b) Za svako x ∈ S vazi S = x+ PS.
(c) Ako je Uv
⊆ V i x ∈ V tako da je S = x + U onda mora biti U = PS i x ∈ S.
Dakle za svaku mnogostrukost S ⊆ V postoji tacno jedan podprostor – i to jeupravo PS – takav da je mnogostrukost S paralelna s njim; ako je V konacnodimenzio-
nalan definisemo dim(S) :df= dim(PS). 2
Tvrdenje III.2.5 Neka je dat kvadratni sistem (A,B), gde je A ∈ Kn×n. Sistem(A,B) ima jedinstveno resenje ako i samo ako je matrica A regularna.
Dokaz Ako je matrica A = Mem,en(fA) regularna onda je fA automorfizamprostora Kn te specijalno i preslikavanje na; otuda postoji jedinstveno x ∈ Kn
tako da je fA(x) = B. Dakle sistem ima jedinstveno resenje.Obrnuto, neka sistem ima jedinstveno resenje x ∈ Kn. Kako je skup resenja
oblika x + Ker(fA) to mora biti Ker(fA) = {0}, sto znaci da je preslikavanje fAmonomorfizam pa je stoga i automorfizam prostora Kn, tj. matrica A je regularna.2
§

III.3. RESIVOST SISTEMA LINEARNIH JEDNACINA I RANG MATRICA 171
Preslikavanje gA : Km×1 → Kn×1 definisano sa gA(X) :df= AX je linearno, tj.
gA ∈ Hom (Km×1,Kn×1) i jasno je da vazi
(x1, . . . , xj, . . . , xm) ∈ Res(A,B) ⇐⇒
AX = B ⇐⇒
A ·
x1...xj...xm
=
b1...bi...bn
⇐⇒
x1...xj...xm
∈ (gA)↼ {B}
Ako je m = n (dakle ako je sistem kvadratan) i ako je matrica A regularna, ondaje ono jedinstveno resenje (x1, . . . , xn) sistema dato sa Usprn(x1, . . . , xn) = A−1B.
III.3 Resivost sistema linearnih jednacina
i rang matrica
Sistem (III.2) ima resenja akko postoji neko (x1, . . . , xj, . . . , xm) ∈ Km tako da vazi
A ·
x1...xj...xm
=
b1...bi...bn
tj. tako da vaziB = x1A•,1 + · · ·+ xjA•,j + · · ·+ xmA•,m
Drugim recima sistem (III.2) ima resenja akko vaziB ∈ L({
A•,1, . . . , A•,j, . . . , A•,m
})
.
Dakle

172 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
sistem (III.2) ima resenja akko vazi B ∈ Kol(A).
Zakljucak Ako sistem (III.2) ima resenja onda vazi Kol( ∼
A)
= Kol(A), gde je∼
A= [A|B] prosirena matrica sistema. 2
Pretpostavimo sada da je Kol( ∼
A)
= Kol(A) =: P . Kako je
(A•,1, . . . , A•,j, . . . , A•,m
)
potpun sistem vektora prostora Pv
⊆ Kn×1 to postoje r ∈ {1, . . . , m} i prirodnibrojevi k1 < · · · < kr ≤ m takvi da je
(A•,k1 , . . . , A•,kr
)baza prostora P . Otuda
kako je B ∈ P to postoje α1, . . . , αr ∈ K tako da je
B = α1A•,k1 + · · ·+ αrA•,kr
pa jeB = x1A•,1 + . . . xjA•,j + · · ·+ xmA•,m
za xks = αs za s = 1, r odnosno xi = 0 za i ∈ {1, . . . , m} \ {k1, . . . , km}, sto znacida je (x1, . . . , xm) ∈ Res(A,B) 6= ∅.
Zakljucak Ako vazi Kol( ∼
A)
= Kol(A) onda sistem (III.2) ima resenja. 2
Time smo pokazali naredno tvrdenje.
Tvrdenje III.3.1 Sistem (III.2) ima resenja akko vazi Kol( ∼
A)
= Kol(A). 2
Kako je uvek Kol(A) ⊆ Kol
( ∼
A)
a radi se o podprostorima konacnodimenzionalnog
prostora Kn×1, to vazi
Kol
( ∼
A)
= Kol(A)
akko vazidim
(
Kol
( ∼
A))
= dim (Kol(A))
tj.
rang( ∼
A)
= rang(A)
Ovim smo pokazali prvi deo naredne teoreme.
Teorema III.3.2 Sistem (III.2) ima resenja akko vazi rang( ∼
A)
= rang(A). U tom
slucaju broj k := rang( ∼
A)
= rang(A) nazivamo rang sistema (A,B); pritom je
skup resenja (linearna mnogostrukost) dimenzije m − k, i sistem ima jedinstvenoresenje akko je k = m.

III.4. GJ- OBLIK MATRICA 173
Dokaz Neka je rang( ∼
A)
= rang(A) = k. Kako je k = rang(A) = dim(Im(fA)
)
to je dim(Ker(fA)
)= m − k. Skup resenja je oblika x + Ker(fA), pa je on lin-
earna mnogostrukost dimenzije m− k; skup resenja je jednoclan ako i samo ako jeKer(fA) = {0}, tj. akko je m = k. 2
III.4 (Redukovan) Gauss-Jordan-ov oblik matrica.
Elementarne matrice
Neka je data nenula matrica B = [bi,j]n×m ∈ Kn×m. Neka je k(B) ∈ N broj vrstamatrice B u kojima ne stoji 0 na svim mestima. Neka su
{i1(B), . . . , ik(B)(B)
}⊆ {1, . . . , n}
gde i1(B) < · · · < ik(B)(B), takvi da je za svako l = 1, k(B) postoji bar jednojl ∈ {1, . . . , m} za koje vazi bil(B), jl 6= 0; drugim recima i1(B), . . . , ik(B)(B) su redni
brojevi svih nenula vrsta matrice B. Za l = 1, k(B) neka je sl(B) ∈ {1, . . . , m}najmanji broj takav da vazi
bil(B), sl(B) 6= 0
Primer Ako
B :=
0 0 0 2 0 −1 40 0 0 0 0 0 00 0 -1 3 5 9 70 0 0 0 0 0 00 0 0 -3 0 8 20 5 0 0 1 0 3
onda je
k(B) = k = 4;i1(B) = i1 = 1, i2 = 3, i3 = 5 i i4 = 6;s1(B) = s1 = 4, s2 = 3, s3 = 4, s4 = 2.
Imamo
bi1,s1 = b1,4 = 2, bi2,s2 = b3,3 = −1, bi3,s3 = b5,4 = −3, bi4,s4 = b6,2 = 5.
2
Definicija III.4.1 Za matricu B = [bi,j]n×m ∈ Kn×m kazemo da je u

174 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Gauss-Jordan-ovom obliku,
ili GJ-obliku, ako je B nula matrica ili ako B nije nula matrica a vazi:
–(i1(B), . . . , ik(B)(B)
)=(1, . . . , k(B)
), tj. il(B) = l za svako l = 1, k(B) i
– sl1(B) < sl2(B) kad god je 1 ≤ l1 < l2 ≤ k(B). 2
Drugim recima za nenula matricu B = [bi,j]n×m ∈ Kn×m kazemo da je u GJ-obliku ako postoje k ∈ N i s1, . . . , sk ∈ {1, . . . , m} tako da je
s1 < · · · < sk
ako k ≥ 1, i tako da je
– ako s1 > 1 onda b1,j = 0 za svako 1 ≤ j < s1;ako k > 1 onda bl,j = 0 za svako 1 ≤ j < sl i 2 ≤ l ≤ k;
– bl,sl 6= 0 za svako 1 ≤ l ≤ k;
– bi,j = 0 za svako sk < i ≤ n i 1 ≤ j ≤ m, ako sk < n.
U ovom slucaju pisemo da je
B ∈ GJn,m(s1, . . . , sk)
“Vizuelno” ovo znaci da je matrica B oblika:

III.4. GJ- OBLIK MATRICA 175
Slika III.4.1.
gde se na svakoj od ovih “malih dijagonala” nalaze brojevi razliciti od 0.
Za nula matricu smatramo da je uvek u GJ-obliku.
Primer Ako
B :=
0 5 2 −8 6 1 2 0 3 110 0 0 -1 3 5 −2 9 7 −40 0 0 0 2 0 3 −1 4 20 0 0 0 0 0 0 -3 2 10 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0
onda je
k = 4;i1 = 1, i2 = 2, i3 = 3 i i4 = 4;s1 = 2, s2 = 4, s3 = 5, s4 = 8.
DakleB ∈ GJ6,10(2, 4, 5, 8)
2

176 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Da bi data nenula matrica B bila u GJ-obliku potrebno je postoji neko k ∈{1, . . . , n} tako da za svako i = 1, k na bar jednom mestu u i-toj vrsti ne stojibroj 0, dok ako je k > 1 onda za svako i = k + 1, n u i-toj vrsti na svim mestimastoji broj 0; ako za l = 1, k sa sl oznacimo najmanji broj j ∈ {1, . . . , m} takav da jebl,j 6= 0, onda je sada dovoljno da vazi s1 < · · · < sk da bi B bila u GJ-obliku.
Tvrdenje III.4.2 Neka je B ∈ GJn,m(s1, . . . , sk). Tada je sistem(B•,s1, . . . , B•,sk
)
kolona matrice B baza prostora Kol(B). Specijalno vazi k = rang(B).
Dokaz Pokazimo najpre da je sistem
(B{1,...,k},{s1}, . . . , B{1,...,k},{sk}
)
vektora prostora Kk×1 linearno nezavisan. Pretpostavimo suprotno. Zbog b1,s1 6= 0
je B{1,...,k},{s1} 6= 0k×1 pa sledi da je k ≥ 2 kao i da postoji neko i0 ∈ {2, . . . , k} takoda je
B{1,...,k},{si0}=
i0−1∑
l=1
λlB{1,...,k},{sl}
za neke λl ∈ K, l = 1, i0 − 1 (videti Tvrdenje II.4.4). No kako je bi0,sj = 0 za svako1 ≤ j < i0 (jer je sj < si0) to sada sledi da je bi0,si0 = 0, sto po pretpostavci nijetacno.
Odavde specijalno sledi i da je sistem kolona(B•,s1, . . . , B•,sk
)matrice B linearno
nezavisan. Zaista, izk∑
l=1
λlB•,sl = 0n×1
sledik∑
l=1
λlB{1,...,k},{sl} = 0k×1
pa i λl = 0 za svako l = 1, k, na osnovu ovog sto smo upravo pokazali.
Neka je sada j0 ∈ {1, . . . , m} proizvoljno. Sistem(B{1,...,k},{s1}, . . . , B{1,...,k},{sk}
)
je baza prostora Kk×1 jer je linearno nezavisan i duzine je k = dim(Kk×1). Otudapostoje λl ∈ K za l = 1, k tako da je
B{1,...,k},{j0} =
k∑
l=1
λlB{1,...,k},{sl} (III.4)

III.4. GJ- OBLIK MATRICA 177
Za proizvoljno k < i ≤ n imamo da je
bi,j0 =
k∑
l=1
λlbi,sl
jer je po pretpostavci bi,j = 0 za svako j = 1, m. Zato sada iz (III.4) sledi
B•,j0 =
k∑
l=1
λlB•,sl
Ovim smo pokazali da je sistem(B•,s1, . . . , B•,sk
)kolona matrice B baza prostora
Kol(B) pa je i k = rang(B). 2
Definicija III.4.3 Pod V-elementarnim transformacijama matrica podrazume-vamo:
– zamenu mesta dveju vrsta; matricu koja se dobija zamenom mesta i-te i j-tevrste matrice A = [ai,j]n×m oznacavacemo sa
A[
Vi ↔ Vj
]
– dodavanje vrste prethodno pomnozene nekim skalarom nekoj drugoj vrsti;matricu koja se dobija dodavanjem j-te vrste matrice A = [ai,j]n×m pomnozeneskalarom λ i-toj vrsti matrice A oznacavacemo sa
A[
λVj → Vi
]
– mnozenjem svih elemenata neke vrste jednim fiksiranim nenula skalarom;matricu koja se dobija mnozenjem i-te vrste matrice A = [ai,j]n×m skalarom λ 6= 0oznacavacemo sa
A[
λ → Vi
]
2
Definicija III.4.4 Pod K-elementarnim transformacijama matrica podrazume-vamo:
– zamenu mesta dveju kolona; matricu koja se dobija zamenom mesta i-te i j-tekolone matrice A = [ai,j]n×m oznacavacemo sa
A[
Ki ↔ Kj
]

178 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
– dodavanje kolone prethodno pomnozene nekim skalarom nekoj drugoj koloni;matricu koja se dobija dodavanjem j-te kolone matrice A = [ai,j]n×m pomnozeneskalarom λ i-toj koloni matrice A oznacavacemo sa
A[
λKj → Ki
]
– mnozenjem svih elemenata neke kolone jednim fiksiranim nenula skalarom;matricu koja se dobija mnozenjem i-te kolone matrice A = [ai,j]n×m skalarom λ 6= 0oznacavacemo sa
A[
λ → Ki
]
2
Zapazanje III.4.5 Neka su date matrice A,B ∈ Kn×m.
– Za svako i, j = 1, n vazi:
akko B = A[
Vi ↔ Vj
]
onda A = B[
Vi ↔ Vj
]
– Za svako i, j = 1, n gde j 6= i vazi:
ako B = A[
λVj → Vi
]
onda A = B[
(−λ)Vj → Vi
]
– Za svako i = 1, n i λ ∈ K \ {0} vazi:
ako B = A[
λ → Vi
]
onda A = B[
λ−1 → Vi
]
– Za svako i, j = 1, n vazi:
ako B = A[
Ki ↔ Kj
]
onda A = B[
Ki ↔ Kj
]
– Za svako i, j = 1, n gde j 6= i vazi:
ako B = A[
λKj → Ki
]
onda A = B[
(−λ)Kj → Ki
]
– Za svako i = 1, n i λ ∈ K \ {0} vazi:
ako B = A[
λ → Ki
]
onda A = B[
λ−1 → Ki
]
2

III.4. GJ- OBLIK MATRICA 179
Zapazanje III.4.6 Neka su date matrice A,B ∈ Kn×m i prirodni brojevi k ∈ N i1 ≤ j1 < · · · < jk ≤ m.
Za svako i, j = 1, n vazi:
ako B = A[
Vi ↔ Vj
]
onda B{1,...,n},{j1,...,jk} =(
A{1,...,n},{j1,...,jk}
)[
Vi ↔ Vj
]
Za svako i, j = 1, n gde j 6= i vazi:
ako B = A[
λVj → Vi
]
onda B{1,...,n},{j1,...,jk} = A{1,...,n},{j1,...,jk}
[
λVj → Vi
]
Za svako i = 1, n i λ ∈ K \ {0} vazi:
ako B = A[
λ → Vi
]
onda B{1,...,n},{j1,...,jk} = A{1,...,n},{j1,...,jk}
[
λ → Vi
]
2
Definicija III.4.7 Za A,B ∈ Kn×m pisemo
A ∼V B
ako postoje l ∈ N i C0, . . . , Cl ∈ Kn×m tako da je za i = 0, l − 1 matrica Ci+1 dobijena
od matrice Ci nekom V-elementarnom transformacijom, a tako da je C0 = A iCl = B.
Za A,B ∈ Kn×m pisemoA ∼K B
ako postoje l ∈ N i C0, . . . , Cl ∈ Kn×m tako da je za i = 0, l − 1 matrica Ci+1 dobijenaod matrice Ci nekom K-elementarnom transformacijom, a tako da je C0 = A iCl = B. 2
Zapazanje III.4.8 Neka su date matrice A,B,C ∈ Kn×m. Tada:
– ako A ∼V B onda i B ∼V A; ako A ∼K B onda i B ∼K A;
– ako A ∼V B i B ∼V C onda i A ∼V C; ako A ∼K B i B ∼K C onda i A ∼K C;
– A ∼V A i A ∼K A.
Ovo sledi direktno iz Definicije III.4.7 i Zapazanja III.4.5. 2
Zapazanje III.4.9 Neka su date matrice A,B ∈ Kn×m i prirodni brojevi k ∈ N i1 ≤ j1 < · · · < jk ≤ m.
Ako vazi A ∼V B onda vazi i A{1,...,n},{j1,...,jk} ∼V B{1,...,n},{j1,...,jk}
Ovo sledi direktno iz Zapazanja III.4.6. 2

180 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Tvrdenje III.4.10 (a) Ako je A ∼V B ili A ∼K B onda je
rang(A) = rang(B)
(b) Neka su dati sistemi (A1, B1) i (A2, B2) od n linearnih jednacina sa m nepo-znatih. Ako je [A1|B1] ∼V [A2|B2] onda je
Res(A1, B1) = Res(A2, B2)
Dokaz (a) Pokazujemo samo jedan specijalan slucaj tvrdenja.
Neka je B = A[
λVj → Vi
]
za neke i, j = 1, n, gde i 6= j. Za q ∈ {1, . . . , n} \ {i}imamo
Bq,• = Aq,• ∈ Vrst(A)
Takode jeBi,• = Ai,• + λAj,• ∈ Vrst(A)
Dakle{Bq,• : q = 1, n
}⊆ Vrst(A) pa sledi da je Vrst(B) ⊆ Vrst(A). Kako je
A = B[
(−λ)Vj → Vi
]
to isti argument pokazuje i da je Vrst(A) ⊆ Vrst(B).
(b) Pokazujemo samo jedan specijalan slucaj tvrdenja.
Neka je [A2|B2] = [A1|B1][
λVi0 → Vi
]
i neka je sistem [A1|B1] dat sa (III.2).
Ako je (ν1, . . . , νm) ∈ Km resenje sistema [A1|B1] onda iz (III.2) sledi
a1,1ν1+ . . . +a1,jνj+ . . . +a1,mνm = b1...
......
......
......
ai−1,1ν1+ . . . +ai−1,jνj+ . . . +ai−1,mνm = bi−1
(ai,1 + λai0,1
)ν1+ . . . +
(ai,j + λai0,j
)νj+ . . . +
(ai,m + λai0,m
)νm = bi + λbi0
ai+1,1ν1+ . . . +ai+1,jνj+ . . . +ai+1,mνm = bi+1...
......
......
......
an,1ν1+ . . . +an,jνj+ . . . +an,mνm = bn
tj. (ν1, . . . , νm) ∈ Res(A2, B2). Dakle Res(A1, B1) ⊆ Res(A2, B2).
Obzirom da je [A1|B1] = [A2|B2][
(−λ)Vi0 → Vi
]
to isti argument pokazuje da
je Res(A2, B2) ⊆ Res(A1, B1). 2
§
Zapazanje III.4.11 Za svaku matricu A ∈ Kn×m postoji matrica B ∈ Kn×m kojaje u GJ-obliku tako da je A ∼V B. Na vezbama cete raditi konkretan uobicajenalgoritam za dolazenje do jedne takve matrice B. 2

III.4. GJ- OBLIK MATRICA 181
Za nenula matricu B = [bi,j]n×m ∈ Kn×m kazemo da je u
redukovanom Gauss-Jordan-ovom obliku
ili redukovanom GJ-obliku ako postoje k ∈ N i s1, . . . , sk ∈ {1, . . . , m} tako da
s1 < · · · < sk ako k ≥ 1, a tako da je B ∈ GJn,m(s1, . . . , sk) i tako da vazi
– bi,sl = 0 za svako i = 1, sl − 1 i l = 2, k, ako k > 1, i
– bl,sl = 1 za svako l = 1, k.
U tom slucaju pisemo B ∈ GJredn,m(s1, . . . , sk).
Ako je(ej : j = 1, n
)standardna baza prostora Kn×1 onda je lako videti da vazi
B ∈ GJredn,m(s1, . . . , sk) ⇐⇒(
B ∈ GJn,m(s1, . . . , sk) ∧ B•,sl = el za svako l = 1, k)
Smatramo da je nula matrica u redukovanom GJ-obliku.
Primer Ako
B :=
0 0 0 1 7 0 −8 0 1 2 0 3 110 0 0 0 0 1 3 0 −2 9 0 −4 50 0 0 0 0 0 0 1 4 3 0 4 20 0 0 0 0 0 0 0 0 0 1 2 10 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0
onda je
k = 4;i1 = 1, i2 = 2, i3 = 3 i i4 = 4;s1 = 4, s2 = 6, s3 = 8, s4 = 11.
DakleB ∈ GJred6,13(4, 6, 8, 11)
2
Zapazanje III.4.12 Ako je B ∈ GJredn,m(s1, . . . , sk) i j0 ∈ {1, . . . , m} onda je:

182 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
– B{1,...,n},{1,...,j0} = 0n×j0 ako j0 < s1
– B{1,...,n},{1,...,j0} ∈ GJredn,j0(s1, . . . , sp) ako s1 ≤ j0, gde je p najveci l ∈ {1, . . . , k} za
koji vazi sl ≤ j0.
Dakle, ako je B u redukovanom GJ-obliku onda je i B{1,...,n},{1,...,j0} u redukovanomGJ-obliku. 2
Primer
x1
00000
x2
10000
x3
01000
x4
−48000
x5
31000
x6
00100
x7
11−4300
x8
00010
x9
1106
−10
∣∣∣∣∣∣∣∣∣∣
5−73
−20
x2 −4x4 +3x5 +11x7 +x9 = 5x3 +8x4 +x5 −4x7 +10x9 = −7
x6 +3x7 +6x9 = 3x8 −x9 = −2
x2 = 5 +4x4 −3x5 −11x7 −x9
x3 = −7 −8x4 −x5 +4x7 −10x9
x6 = 3 −3x7 −6x9
x8 = −2 +x9
2
Zapazanje III.4.13 Neka je dat sistem (III.2) takav da je prosirena matrica si-
stema∼
A= [A|B] u redukovanom GJ-obliku, i to [A|B] ∈ GJn,m(s1, . . . , sk). Tada:
– ako sk = m + 1 onda sistem (A,B) nema resenja;
– ako vazi sk ≤ m i k = m, sto je ekvivalentno sa tim da vazi sl = l za svakol = 1, k, onda je
(b1, . . . , bm)
jedinstveno resenje sistema (A,B);
– ako vazi sk ≤ m i k < m onda:

III.4. GJ- OBLIK MATRICA 183
neka je {1, . . . , m}\{s1, . . . , sk} = {d1, . . . , dm−k}; m-torka (x1, . . . , xm) je resenjesistema (A,B) akko se dobija tako sto se brojevi xd1 , . . . , xdm−k
∈ K izaberu proizvoljnoa onda se brojevi xs1 , . . . , xsk definisu sa
xsl = bl −m−k∑
j=1
al,djxdj
za l = 1, k 2
Teorema III.4.14 Za svaku matricu A ∈ Kn×m postoji tacno jedna matrica B ∈
Kn×m koja je u redukovanom GJ-obliku za koju vazi A ∼V B.
Dokaz Egzistencija bar jedne ovakve matrice B sledi veoma jednostavno izZapazanja III.4.11.
Pretpostavimo da je A ∼V B i A ∼V C, gde su i B i C u redukovanom GJ-obliku.Treba pokazati da je B = C. Pretpostavimo suprotno. Tada postoji bar jednoj ∈ {1, . . . , m} tako da je B•,j 6= C•,j; neka je q ∈ {1, . . . , m} najmanji takav broj j.
Matrice B1 := B{1,...,n},{1,...,q} i C1 := C{1,...,n},{1,...,q} su u redukovanom GJ-obliku.Takode vazi
A{1,...,n},{1,...,q} ∼V B1 i A{1,...,n},{1,...,q} ∼V C1
pa je B1 ∼V C1. Odavde specijalno imamo rang(B1) = rang(C1).Neka je
(ej : j = 1, n
)standardna baza prostora Kn×1.
Slucaj 1 q = 1: Zbog B1 6= C1 sledi da vazi
B1 = 0n×1 ∧ C1 = e1
iliB1 = e1 ∧ C1 = 0n×1
pa je rang(B1) 6= rang(C1) u svakom slucaju – kontradikcija.
Slucaj 2 q > 1: Stavimo D := B{1,...,n},{1,...,q−1} = C{1,...,n},{1,...,q−1}.
Slucaj 2.1 D = 0n×(q−1): Kako su i B1 i C1 u redukovanom GJ-obliku, a pritomje B1 6= C1, to mora biti
B1 =[0n×(q−1)
∣∣e1]∧ C1 = 0n×q
iliB1 = 0n×q ∧ C1 =
[0n×(q−1)
∣∣e1]

184 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
pa je rang(B1) 6= rang(C1) u svakom slucaju – kontradikcija.
Slucaj 2.2 D 6= 0n×(q−1): D je u redukovanom GJ-obliku pa postoji neko k ∈ N
i prirodni brojevi 1 ≤ s1 < · · · < sk ≤ q − 1 tako da je
D ∈ Gredn,q−1(s1, . . . , sk)
Kako je B1 u redukovanom GJ-obliku to mora biti
k < n i B1 ∈ Gredn,q(s1, . . . , sk, q)
ili
B1 ∈ Gredn,q(s1, . . . , sk)
Slicno mora biti
k < n i C1 ∈ Gredn,q(s1, . . . , sk, q)
ili
C1 ∈ Gredn,q(s1, . . . , sk)
Zbog rang(B1) = rang(C1) odavde (koristeci se Tvrdenjem III.4.2) zakljucujemo damora biti
(i) k < n i B1, C1 ∈ Gredn,q(s1, . . . , sk, q)
ili
(ii) B1, C1 ∈ Gredn,q(s1, . . . , sk)
Ako vazi (i) onda mora biti B•,q = ek+1 = C•,q – kontradikcija.
Neka sada vazi (ii). Na osnovu Tvrdenja III.4.2 postoje λ1, . . . , λk ∈ K tako da je
B•,q =k∑
l=1
λlB•,sl
Vidimo da je (x1, . . . , xq−1) ∈ Kq−1 definisano sa xsl = λl za l = 1, k i xj = 0 zaj ∈ {1, . . . , q − 1} \ {s1, . . . , sk} resenje sistema (D,B•,q). Kako je
[D∣∣B•,q
]= B1 ∼V C1 =
[D∣∣C•,q
]
to prema Tvrdenju III.4.10 pod (b) sada imamo
Res(D,C•,q) = Res(D,B•,q) 3 (x1, . . . , xq−1)

III.4. GJ- OBLIK MATRICA 185
odakle sledi
C•,q =k∑
l=1
λlC•,sl
No C•,sl = B•,sl za svako l = 1, k pa je
C•,q =
k∑
l=1
λlB•,sl = B•,q
sto nije moguce. 2
Definicija III.4.15 Za n ∈ N pod V-elementarnim matricama podrazumevamomatrice:
– EVn (i, j) :df= In
[
Vi ↔ Vj
]
za i, j = 1, n;
– EVn (i, j;λ) :df= In
[
λVj → Vi
]
za i, j = 1, n i j 6= i;
– EVn (i;λ) :df= In
[
λ ↔ Vi
]
za i = 1, n i λ ∈ K \ {0}. 2
Definicija III.4.16 Za n ∈ N pod K-elementarnim matricama podrazumevamomatrice:
– EKn (i, j) :df= In
[
Ki ↔ Kj
]
za i, j = 1, n;
– EKn (i, j;λ) :df= In
[
λKj → Ki
]
za i, j = 1, n i j 6= i;
– EKn (i;λ) :df= In
[
λ ↔ Ki
]
za i = 1, n i λ ∈ K \ {0}. 2
Zapazanje III.4.17 Neka su date matrice A,B ∈ Kn×m.
– Za svako i, j = 1, n vazi:
B = A[
Vi ↔ Vj
]
akko B = EVn (i, j) · A
– Za svako i, j = 1, n i j 6= i vazi:
B = A[
λVj → Vi
]
akko B = EVn (i, j;λ) · A

186 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
– Za svako i = 1, n i λ ∈ K \ {0} vazi:
B = A[
λ → Vi
]
akko B = EVn (i;λ) · A
– Za svako i, j = 1, n vazi:
B = A[
Ki ↔ Kj
]
akko B = A · EKn (i, j)
– Za svako i, j = 1, n i j 6= i vazi:
B = A[
λKj → Ki
]
akko B = A · EKn (i, j;λ)
– Za svako i = 1, n i λ ∈ K \ {0} vazi:
B = A[
λ → Ki
]
akko B = A · EKn (i;λ)
2
Zapazanje III.4.18 Elementarne matrice su regularne:
EVn (i, j) · EVn (i, j) = In
EVn (i, j;−λ) · EVn (i, j;λ) = In
EVn (i;λ−1) · EVn (i;λ) = In
EKn (i, j) · EKn (i, j) = In
EKn (i, j;−λ) · EKn (i, j;λ) = In
EKn (i;λ−1) · EKn (i;λ) = In
2
Zapazanje III.4.19 Ako su matrice A1, . . . , Ak ∈ Kn×n regularne onda je takva i
A1 · . . . · Ak i vazi(A1 · . . . · Ak)
−1 = (Ak)−1 · . . . · (A1)
−1
2
Teorema III.4.20 Za matricu A ∈ Kn×n sledeci uslovi su ekvivalentni:(1) A je regularna matrica.
(2) A je proizvod nekih V-elementarnih matrica iz Kn×n.

III.5. PERMUTACIJE, INVERZIJE 187
(3) A je proizvod nekih K-elementarnih matrica iz Kn×n.
(4) A je proizvod nekih matrica iz Kn×n svaka od kojih je bilo V-elementarna biloK-elementarna.
(5) A ∼V In.
(6) A ∼K In.
Dokaz Ako je A regularna onda prema Tvrdenju II.23.4 mora biti rang(A) = n;ako je A ∼V B i B ∈ GJredn,n(s1, . . . , sk) onda je k = rang(B) = rang(A) = n pa iz
1 ≤ s1 < · · · < sk ≤ n sledi da je sj = j za j = 1, n; obzirom da je B•,j = B•,sj = ejza j = 1, n, gde je
(ej : j = 1, n
)standardna baza prostora Kn×1, odavde dobijamo
da je zapravo B = In.Obrnuto, ako je A ∼V In onda je rang(A) = rang(B) = n pa je prema Tvrdenju
II.23.4 matrica A regularna. Ovim smo pokazali da je (1) ⇐⇒ (5) a na potpunoisti nacin zakljucujemo da je (1) ⇐⇒ (6).
(5) ⇒ (2): Ako je A ∼V In onda na osnovu Zapazanja III.4.17 postoje q ∈ N iV-elementarne matrice E1, . . . , Eq ∈ Kn×n takve da je E1 · . . . ·Eq ·A = In. MatriceE1, . . . , Eq su regularne (Zapazanje III.4.18) te odavde sada sledi
A = (Eq)−1 · . . . · (E1)
−1 · In = (Eq)−1 · . . . · (E1)
−1
Prema Zapazanju III.4.18 matrice (Eq)−1, . . . , (E1)
−1 su takode V-elementarne.
Na potpuno isti nacin se pokazuje (6) ⇒ (3).
Implikacije (2) ⇒ (4) i (3) ⇒ (4) su trivijalne.
(4) ⇒ (1) je direktna posledica Zapazanja III.4.18 i III.4.19. 2
III.5 Permutacije, inverzije
Neka je n ∈ N i p =
(1 . . . n
p(1) . . . p(n)
)
= (p1, . . . , pn) permutacija skupa {1, . . . , n}.Pod inverzijom permutacije p podrazumevamo svaki par (i, j) ∈ {1, . . . , n}2 takavda vazi
i < j i p(i) > p(j)
Sa inv(p) oznacavamo broj inverzija permutacije p i definisemo broj
sgn(p) :df= (−1)inv(p)
koji nazivamo znak permutacije p.

188 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Tvrdenje III.5.1 Za svako 1 ≤ i < j ≤ n i p ∈ Perm(n) su brojevi
inv(p1, . . . , pi−1, pj, pi+1, . . . , pj−1, pi, pj+1, . . . , pn)
iinv(p1, . . . , pi−1, pi, pi+1, . . . , pj−1, pj, pj+1, . . . , pn)
razlicite parnosti i u skladu s tim vazi
sgn(p1, . . . , pi−1, pj, pi+1, . . . , pj−1, pi, pj+1, . . . , pn)
= −sgn(p1, . . . , pi−1, pi, pi+1, . . . , pj−1, pj, pj+1, . . . , pn)
Tvrdenje III.5.2 (a) Preslikavanje T : Perm(n) → Perm(n) definisano sa
T (p) :df= p−1
je bijekcija.(b) sgn(p−1) = sgn(p). 2
III.6 n-linearna preslikavanja
Neka su V i W oba nad K. Za preslikavanje f : V n → W kazemo da je n-linearno preslikavanje nad prostorom V sa vrednostima u prostoru W ako za svakou1, . . . , un, x, y ∈ V , α ∈ K i svako j = 1, n vazi
(A)f(v1, . . . , vj−1, x+ y, vj+1, . . . , vn) =
= f(v1, . . . , vj−1, x, vj+1, . . . , vn) + f(v1, . . . , vj−1, y, vj+1, . . . , vn)
i
(H)f(v1, . . . , vj−1, αx, vj+1, . . . , vn) = αf(v1, . . . , vj−1, x, vj+1, . . . , vn)
Tvrdenje III.6.1 Ako je f : V n → W n linearno preslikavanje nad prostorom V
sa vrednostima u prostoru W, k1, . . . , kn ∈ N i ako stavimo
F := {1, . . . , k1} × · · · × {1, . . . , kj} × · · · × {1, . . . , kn}onda vazi
f
k1∑
i=1
λi,1vi,1, . . . ,
kj∑
i=1
λi,jvi,j, . . . ,kn∑
i=1
λi,nvi,n
=
=∑
s∈F
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · f(vs(1),1, . . . , vs(j),j, . . . , vs(n),n
)

III.6. N -LINEARNA PRESLIKAVANJA 189
Dokaz (I) Pokazimo najpre da vazi
f
(
u1, . . . , uj−1,
m∑
i=1
λivi, uj+1, . . . , un
)
=
m∑
i=1
λi · f (u1, . . . uj−1, vi, uj+1 . . . , un)
Ovo cemo uciniti indukcijom po m ∈ N. Za m = 1 ovo je upravo uslov (H).Pretpostavimo da gornja jednakost vazi za sume “duzine” m ∈ N. Imamo
f
(
u1, . . . , uj−1,
m+1∑
i=1
λivi, uj+1, . . . , un
)
=
f
(
u1, . . . , uj−1,
m∑
i=1
λivi, uj+1, . . . , un
)
+f (u1, . . . , uj−1, λm+1vm+1, uj+1, . . . , un) =
m∑
i=1
λi ·f (u1, . . . uj−1, vi, uj+1 . . . , un)+λm+1f (u1, . . . , uj−1, vm+1, uj+1, . . . , un) =
m+1∑
i=1
λi · f (u1, . . . uj−1, vi, uj+1 . . . , un)
(II) Pokazimo sada da za svako j = 1, n vazi
f
k1∑
i=1
λi,1vi,1, . . . ,
kj∑
i=1
λi,jvi,j, uj+1, uj+2, . . . , un
=
=∑
s∈Fj
λs(1),1 · . . . · λs(j),j · f(vs(1),1, . . . , vs(j),j, uj+1, uj+2, . . . , un
)
gdeFj := {1, . . . , k1} × · · · × {1, . . . , kj}
Ovo radimo indukcijom po j ∈ {1, . . . , n}. Za j = 1 ovo sledi iz dela (I). Pre-tpostavimo da je gornja jednakost tacna za neko j ∈ {1, . . . , n− 1}. Imamo
f
k1∑
i=1
λi,1vi,1, . . . ,
kj∑
i=1
λi,jvi,j ,
kj+1∑
i=1
λi,j+1vi,j+1 , , uj+2, . . . , un
=
kj+1∑
i=1
λi,j+1 · f
k1∑
i=1
λi,1vi,1, . . . ,
kj∑
i=1
λi,jvi,j , vi,j+1 , , uj+2, . . . , un
=
kj+1∑
i=1
λi,j+1 ·
∑
s∈Fj
λs(1),1 · . . . · λs(j),j · f(vs(1),1, . . . , vs(j),j, vi,j+1 , uj+2, . . . , un
)
=

190 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
kj+1∑
i=1
∑
s∈Fj
λs(1),1 · . . . · λs(j),j · λi,j+1 · f(vs(1),1, . . . , vs(j),j, vi,j+1 , uj+2, . . . , un
)=
kj+1∑
i=1
∑
q∈Gji
λq(1),1 ·. . .·λq(j),j ·λq(j+1),j+1 · f(vq(1),1, . . . , vq(j),j, vq(j+1),j+1 , uj+2, . . . , un
)=
∑
q∈⋃kj+1
i=1 Gji
λq(1),1·. . .·λq(j),j ·λq(j+1),j+1· f(vq(1),1, . . . , vq(j),j, vq(j+1),j+1 , uj+2, . . . , un
)=
∑
q∈Fj+1
λq(1),1 · . . . · λq(j),j · λq(j+1),j+1 · f(vq(1),1, . . . , vq(j),j, vq(j+1),j+1 , uj+2, . . . , un
)
gde smo za i ∈ {1, . . . , kj+1} stavili Gji =
{q ∈ Fj+1 : q(j + 1) = i
}, pa je jasno da
kj+1⋃
i=1
Gji = Fj+1. 2
Tvrdenje III.6.2 Neka je (a1, . . . , am) proizvoljna baza prostora V i neka su zasvako s ∈ {1, . . . , m}n dati vektori bs1,...,sn ∈ W prostora W. Neka je preslikavanjef : V n → W definisano sa
f(x1, . . . , xn) :df=
∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · bs1,...,sn
gde je xj =
m∑
i=1
λi,jai za svako j = 1, n.
f je n-linearno preslikavanje nad prostorom V sa vrednostima u prostoru W, ipritom vazi
f(as1, . . . , asj , . . . , asn) = bs1,...,sj ,...,sn
za svako s ∈ {1, . . . , m}n.
Dokaz Neka je xj =
m∑
i=1
λi,jai za svako j = 1, n, i neka je u =
m∑
i=1
νiai, v =
m∑
i=1
µiai i α ∈ K. Imamo u+ v =m∑
i=1
(νi + µi)ai i αu =m∑
i=1
(ανi)ai pa je
f(x1, . . . , xj0−1, u+ v, xj0+1, . . . , xn) =
∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j0−1),j0−1 · (νs(j0) + µs(j0)) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn =
∑
s∈{1,...,m}n
(
λs(1),1 · . . . · λs(j0−1),j0−1 · νs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn +

III.6. N -LINEARNA PRESLIKAVANJA 191
+λs(1),1 · . . . · λs(j0−1),j0−1 · µs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn
)
=
∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j0−1),j0−1 · νs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn +
∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j0−1),j0−1 · µs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn =
f(x1, . . . , xj0−1, u, xj0+1, . . . , xn) + f(x1, . . . , xj0−1, v, xj0+1, . . . , xn)
i slicnof(x1, . . . , xj0−1, αu, xj0+1, . . . , xn) =
∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j0−1),j0−1 ·(ανs(j0)
)· λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn =
∑
s∈{1,...,m}n
α · λs(1),1 · . . . · λs(j0−1),j0−1 · νs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn =
α∑
s∈{1,...,m}n
λs(1),1 · . . . · λs(j0−1),j0−1 · νs(j0) · λs(j0+1),j0+1 . . . · λs(n),n · bs1,...,sn =
αf(x1, . . . , xj0−1, u, xj0+1, . . . , xn)
2
Tvrdenje III.6.3 Neka je f n-linearno preslikavanje nad prostorom V sa vrednos-tima u prostoru W i (a1, . . . , am) proizvoljna baza prostora V. Ako vazi
f(as1, . . . , asi−1, asj , asi+1
, . . . , asj−1, asi, asj+1
, . . . , asn)
= −f(as1 , . . . , asi−1, asi, asi+1
, . . . , asj−1, asj , asj+1
, . . . , asn)
za svako s ∈ {1, . . . , m}n onda vazi
f(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vn)
= −f(v1, . . . , vi−1, vi, vi+1, . . . , vj−1, vj, vj+1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n.
Dokaz Neka je vj =
m∑
k=1
λk,jak za i = 1, n. Imamo
f(v1, . . . , vi0−1, vj0, vi0+1, . . . , vj0−1, vi0 , vj0+1, . . . , vn) =
f
(m∑
k=1
λk,1ak, . . . ,
m∑
k=1
λk,j0ak, . . . ,
m∑
k=1
λk,i0ak, . . .
m∑
k=1
λk,nak
)
=

192 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
=∑
s∈{1,...,m}n
λs(1),1·. . .·λs(i0−1),i0−1·λs(i0),j0·λs(i0+1),i0+1·. . .·λs(j0−1),j0−1·λs(j0),i0 ·λs(j0+1),j0+1·. . .·λs(n),n··f(as(1), . . . , as(i0−1), as(i0), as(i0+1), . . . , as(j0−1), as(j0), as(j0+1), . . . , as(n))
= −∑
s∈{1,...,m}n
λs(1),1·. . .·λs(i0−1),i0−1·λs(j0),i0 ·λs(i0+1),i0+1·. . .·λs(j0−1),j0−1·λs(i0),j0 ·λs(j0+1),j0+1·. . .·λs(n),n··f(as(1), . . . , as(i0−1), as(j0), as(i0+1), . . . , as(j0−1), as(i0), as(j0+1), . . . , as(n))
=
= −∑
s∈{1,...,m}n
λs′(1),1·. . .·λs′(i0−1),i0−1·λs′(i0),i0 ·λs′(i0+1),i0+1·. . .·λs′(j0−1),j0−1·λs′(j0),j0·λs′(j0+1),j0+1·. . .·λs′(n),n··f(as′(1), . . . , as′(i0−1), as′(i0), as′(i0+1), . . . , as′(j0−1), as′(j0), as′(j0+1), . . . , as′(n))
(∗)=
= −∑
q∈{1,...,m}n
λq(1),1·. . .·λq(i0−1),i0−1·λq(i0),i0·λq(i0+1),i0+1·. . .·λq(j0−1),j0−1·λq(j0),j0·λq(j0+1),j0+1·. . .·λq(n),n··f(aq(1), . . . , aq(i0−1), aq(i0), aq(i0+1), . . . , aq(j0−1), aq(j0), aq(j0+1), . . . , aq(n))
= −f(v1, . . . , vi0−1, vi0 , vi0+1, . . . , vj0−1, vj0, vj0+1, . . . , vn)
gde je za s ∈ {1, . . . , m}n n-torka s′ ∈ {1, . . . , m}n definisana sa
s′(k) = s(k) ako k ∈ {1, . . . , n} \ {i0, j0} i s′(i0) = s(j0), s′(j0) = s(i0)
Obrazlozenje za jednakost (∗):
preslikavanje T : {1, . . . , m}n → {1, . . . , m}n
definisano sa
T (s) :df= s′
je bijekcija (sto sledi recimo iz (s′)′ = s, tj. T (T (s)) = s). 2

III.6. N -LINEARNA PRESLIKAVANJA 193
Tvrdenje III.6.4 Neka su V i W vektorski prostori. Ako je g : V n → W preslika-vanje takvo da vazi
g(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vn)
= −g(v1, . . . , vi−1, vi, vi+1, . . . , vj−1, vj, vj+1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n i svako 1 ≤ i < j ≤ n. Tada vazi:
(a) g(vp(1), . . . , vp(n)) = sgn(p)g(v1, . . . , vj, . . . , vn)
za svako (v1, . . . , vn) ∈ V n i svako p ∈ Perm(n);
(b) g(v1, . . . , vn) = 0
za svaku n-torku v ∈ V n koja nije injektivna.
Ako je g usto i n-linearna funkcionela onda vazi i:
(c)
f
v1, . . . , vj0−1,
m∑
i=1i6=j0
λivi, vj0+1, . . . , vn
= 0
za svako (v1, . . . , vn) ∈ V n, (λ1, . . . , λn) ∈ Kn i j0 ∈ {1, . . . , n};
(d)
f
v1, . . . , vj0−1, vj0 +
m∑
i=1i6=j0
λivi, vj0+1, . . . , vn
= f (v1, . . . , vj0−1, vj0 , vj0+1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n, (λ1, . . . , λn) ∈ Kn i j0 ∈ {1, . . . , n}.

194 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Dokaz (a) Neka su (v1, . . . , vn) ∈ V n i p ∈ Perm(n) proizvoljni. Jasno jeda postoje k ∈ N i q0, . . . , qk ∈ Perm(n) takvi da je q0(i) = i za i = 1, n (tj.q0 = (1, . . . , j, . . . , n)), zatim qk = p i takvi da za svako l = 0, k − 1 vazi
ql+1 = (ql(1), . . . , ql(i0 − 1), ql(j0), ql(i0 + 1), . . . , ql(j0 − 1), ql(i0), ql(j0 + 1), . . . , ql(n))
za neke 1 ≤ i0 < j0 ≤ n.Tada su brojevi inv(ql) i inv(ql+1) razlicite parnosti za svako l = 0, k − 1. Kako
je inv(q0) = 0, odavde se jednostavnom indukcijom zakljucuje da je broj inv(ql) isteparnosti kao i broj l za svako l = 0, k − 1. Specijalno je
sgn(p) = sgn(qk) = (−1)inv(qk) = (−1)k
No prema ucinjenoj pretpostavci o preslikavanju g sada sledi
g(v1, . . . , vj, . . . , vn) = (−1)kg(vqk(1), . . . , vqk(n)) = sgn(p)g(vp(1), . . . , vp(n))
tj.g(vp(1), . . . , vp(n)) = sgn(p)g(v1, . . . , vj, . . . , vn)
Deo tvrdenja pod (b) sledi iz cinjenice da vazi
g(v1, . . . , vi−1, x, vi+1, . . . , vj−1, x, vj+1, . . . , vn) =
−g(v1, . . . , vi−1, x, vi+1, . . . , vj−1, x, vj+1, . . . , vn)
(c) Imamo
f
v1, . . . , vj0−1,
m∑
i=1i6=j0
λivi, vj0+1, . . . , vn
=
m∑
i=1i6=j0
λi ·f (v1, . . . vj0−1, vi, vj0+1 . . . , vn)
pa tvrdenje sledi iz dela pod (b).
(d) Imamo
f
v1, . . . , vj0−1, vj0 +
m∑
i=1i6=j0
λivi, vj0+1, . . . , vn
=
f (v1, . . . , vj0−1, vj0, vj0+1, . . . , vn) + f
v1, . . . , vj0−1,
m∑
i=1i6=j0
λivi, vj0+1, . . . , vn
pa tvrdenje sledi iz dela pod (c). 2

III.7. DEFINICIJA DETERMINANTE 195
III.7 Definicija determinante
Tvrdenje III.7.1 Neka je (a1, . . . , an) proizvoljna baza prostora V, gde je dakledim(V) = n.(a) Neka je preslikavanje f0 : V
n → K definisano sa
f0(x1, . . . , xn) :df=
∑
s∈Perm(n)
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · sgn(s)
gde je xj =
m∑
i=1
λi,jaj za svako i = 1, n.
f0 je n-linearno preslikavanje nad prostorom V sa vrednostima u K, koje jeantisimetricno po svakom paru indekasa, tj. vazi
f0(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vn)
= −f0(v1, . . . , vi−1, vi, vi+1, . . . , vj−1, vj, vj+1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n i svako 1 ≤ i < j ≤ n.
Pritom vazi f0(a1, . . . , aj, . . . , an) = 1.
(b) Ako je g : V n → K n-linearna funkcionela takva da vazi
g(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vn)
= −g(v1, . . . , vi−1, vi, vi+1, . . . , vj−1, vj, vj+1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n i svako 1 ≤ i < j ≤ n onda vazi
g(v1, . . . , vn) = Cf0(v1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n, gde je
C = g(a1, . . . , aj, . . . , an)
a f0 ona n-linearna funkcionela koja je definisana pod (a). 2
(c) Postoji tacno jedno n-linearno preslikavanje g nad prostorom V sa vrednostimauK, koje je antisimetricno po svakom paru indekasa i za koje vazi g(a1, . . . , aj, . . . , an) =1.
Dokaz (a) Ako za s ∈ {1, . . . , n}n uzmemo da je bs :df= 0 ako s nije permutacija,
odnosno bs :df= sgn(s) ako s ∈ Perm(n), lako je videti da je preslikavanje definisano
u Tvrdenju III.6.2 upravo ovo ovde definisano preslikavanje f0. Odatle sledi da jef0 n-linearno.

196 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Da je f0 antisimetricno sledi iz Tvrdenja III.6.3 i toga sto je
f(as1, . . . , asj , . . . , asn) = bs1,...,sj ,...,sn
za svako s ∈ {1, . . . , s}n, ako iskoristimo Tvrdenje III.5.1.
(b) Neka je vj =
n∑
i=1
λi,jai za svako j = 1, n.
g(v1, . . . , vj, . . . , vn) =
(n∑
i=1
λi,1ai, . . . ,
n∑
i=1
λi,jai, . . . ,
n∑
i=1
λi,nai
)
=
∑
s∈{1,...,n}n
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · g(as(1), . . . , as(j), . . . , as(n)) =
∑
s∈Perm(n)
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · g(as(1), . . . , as(j), . . . , as(n)) =
∑
s∈Perm(n)
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · sgn(s)g(a1, . . . , aj, . . . , an) =
C∑
s∈Perm(n)
λs(1),1 · . . . · λs(j),j · . . . · λs(n),n · sgn(s) =
Cf0(v1, . . . , vj, . . . , vn)
(c) Za proizvoljno takvo preslikavanje g prema (b) mora da vazi
g(v1, . . . , vn) = Cf0(v1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n, gde je
C = g(a1, . . . , aj, . . . , an) = 1
pa je zapravo
g(v1, . . . , vn) = f0(v1, . . . , vn)
za svako (v1, . . . , vn) ∈ V n
2
Definicija III.7.2 Neka je n ≥ 2. Sa
Detn :(K
n×1)n → K

III.7. DEFINICIJA DETERMINANTE 197
oznacavamo onu jedinstvenu n-linearnu funkcionelu nad prostorom Kn×1 za kojuvazi
Detn(v1, . . . , vi−1, vj, vi+1, . . . , vj−1, vi, vj+1, . . . , vn)
= −Detn(v1, . . . , vi−1, vi, vi+1, . . . , vj−1, vj, vj+1, . . . , vn)
za svako (v1, . . . , vn) ∈ Kn×1 i svako 1 ≤ i < j ≤ n, kao i
Det(e1, . . . , ej, . . . , en) = 1
gde je (e1, . . . , ej, . . . , en) standardna baza prostora Kn×1. Drugim recima, Detnje preslikavanje dato sa
Detn
a1,1...
ai,1...
an,1
, · · · ,
a1,j...
ai,j...
an,j
, · · · ,
a1,n...
ai,n...
an,n
=∑
p∈Perm(n)
sgn(p)·ap(1),1 . . . ap(j),j . . . ap(n),n
Definicija III.7.3 Neka je n ≥ 2. Sa
detn : Kn×n → K
oznacavamo preslikavanje definisano sa
detn(A) :df= Detn(A•,1, . . . , A•,j, . . . , A•,n)
Drugim recima, detn je preslikavanje dato sa
detn
a1,1 . . . a1,j . . . a1,n...
......
......
ai,1 . . . ai,j . . . ai,n...
......
......
an,1 . . . an,j . . . an,n
=∑
p∈Perm(n)
sgn(p) · ap(1),1 . . . ap(j),j . . . ap(n),n
za svako A = [ai,j]n×n ∈ Kn×n. Uobicajeno je da se koristi oznaka
detn ([ai,j]n×n) =
∣∣∣∣∣∣∣∣∣∣∣
a1,1 . . . a1,j . . . a1,n...
......
......
ai,1 . . . ai,j . . . ai,n...
......
......
an,1 . . . an,j . . . an,n
∣∣∣∣∣∣∣∣∣∣∣
Definisemo i det1 : K1×1 → K sa det1([x]1×1
):df= x. U svakom slucaju, ako je
n ∈ N preslikavanje detn nazivamo
determinanta reda n
Broj detn(A) nazivamo determinanta matrice A ∈ Kn×n. 2

198 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
III.8 Osnovne osobine determinanti
Tvrdenje III.8.1 det(AT) = det(A).
Dokaz Stavimo B := AT. Dakle bi,j = B(i, j) = aj,i za svako i, j = 1, n. Imamo
det(B) =∑
p∈Perm(n)
sgn(p) · bp(1),1 . . . bp(j),j . . . bp(n),n =
∑
p∈Perm(n)
sgn(p) · a1,p(1) . . . aj,p(j) . . . an,p(n) =
∑
p∈Perm(n)
sgn(p) · ap−1(p(1)),p(1) . . . ap−1(p(j)),p(j) . . . ap−1(p(n)),p(n) =
=∑
p∈Perm(n)
sgn(p) · ap−1(1),1 . . . ap−1(j),j . . . ap−1(n),n
=∑
p∈Perm(n)
sgn(p−1) · ap−1(1),1 . . . ap−1(j),j . . . ap−1(n),n
=∑
q∈Perm(n)
sgn(q) · aq(1),1 . . . aq(j),j . . . aq(n),n = det(A)
2
Tvrdenje III.8.2 Ako postoje 1 ≤ i < j ≤ n tako da je A•,i = A•,j onda jedet(A) = 0.
Ako postoje 1 ≤ i < j ≤ n tako da je Ai,• = Aj,• onda je det(A) = 0.
Dokaz Ovo sledi iz Tvrdenja III.6.4 pod (b) i Tvrdenja III.8.1. 2
Tvrdenje III.8.3 Neka je A ∈ Kn×n. Ako stavimo Kj = A•,j za j = 1, n ondavazi:
det
K1
∣∣∣∣∣. . .
∣∣∣∣∣Kj0−1
∣∣∣∣∣
m∑
i=1i6=j0
λiKi
∣∣∣∣∣Kj0+1
∣∣∣∣∣. . .
∣∣∣∣∣Kn
= 0
i
det
K1
∣∣∣∣∣. . .
∣∣∣∣∣Kj0−1
∣∣∣∣∣Kj0 +
m∑
i=1i6=j0
λiKi
∣∣∣∣∣Kj0+1
∣∣∣∣∣. . .
∣∣∣∣∣Kn
=
det([K1
∣∣. . .
∣∣Kj0−1
∣∣Kj0
∣∣Kj0+1
∣∣. . .
∣∣Kn
])
za svako (λ1, . . . , λn) ∈ Kn i j0 ∈ {1, . . . , n}.

III.8. OSNOVNE OSOBINE DETERMINANTI 199
Dokaz Ovo sledi direktno iz Tvrdenja III.6.4 pod (c) i (d). 2
Tvrdenje III.8.4 Neka je A ∈ Kn×n. Ako stavimo Vj = Aj,• za j = 1, n onda vazi:
det
(
V1
...
Vj0−1
m∑
i=1i6=j0
λiVi
Vj0+1
...
Vn
)
= 0
i
det
(
V1
...
Vj0−1
Vj0 +m∑
i=1i6=j0
λiVi
Vj0+1
...
Vn
)
= det
(
V1
...
Vj0−1
Vj0
Vj0+1
...
Vn
)
za svako (λ1, . . . , λn) ∈ Kn i j0 ∈ {1, . . . , n}.
Dokaz Ovo sledi direktno iz Tvrdenja III.8.3 i III.8.1. 2

200 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Definicija III.8.5 Za A ∈ Kn×n i i, j = 1, n definisimo
mnri,j(A) :df= detn−1
(A{1,...,n}\{i},{1,...,n}\{j}
)
Ovaj broj nazivamo minor matrice A koji odgovara mestu (i, j).
Definisemo ikofi,j(A) :
df= (−1)i+j
mnri,j(A)
Ovaj broj nazivamo kofaktor matrice A koji odgovara mestu (i, j). 2
Lema III.8.6 Neka je A = [ai,j]n×n ∈ Kn×n i i0, j0 ∈ {1, . . . , n} i neka je(ej : j =
1, n)standardna baza prostora K
n×1. Tada je
detn(A•,1| . . . |A•,j0−1|ei0|A•,j0+1| . . . |A•,n) = (−1)i0+j0mnri0,j0(A) = kof i0,j0(A)
tj.
detn
P
∣∣∣∣∣∣∣
0...0
∣∣∣∣∣∣∣
Q
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .ai0,1 . . . ai0,j0−1 1 ai0,j0+1 . . . ai0,n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
R
∣∣∣∣∣∣∣
0...0
∣∣∣∣∣∣∣
S
=
= (−1)i0+j0detn−1
P | Q−− −−R | S
gde je P := A{1,...,i0−1},{1,...,j0−1}, Q := A{1,...,i0−1},{j0+1,...,n}, R := A{i0+1,...,n},{1,...,j0−1}
i S := A{i0+1,...,n},{j0+1,...,n}.
Dokaz Imamo
detn(A•,1| . . . |A•,j0−1|ei0|A•,j0+1| . . . |A•,n) =
(−1)i0−1detn
ai0,1 . . . ai0,j0−1 1 ai0,j0+1 . . . ai0,n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
P
∣∣∣∣∣∣∣
0...0
∣∣∣∣∣∣∣
Q
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
R
∣∣∣∣∣∣∣
0...0
∣∣∣∣∣∣∣
S
=

III.8. OSNOVNE OSOBINE DETERMINANTI 201
= (−1)i0−1+j0−1detn (M) = (−1)i0+j0detn (M)
gde je
M = [mi,j]n×n =
1 ai0,1 . . . ai0,j0−1 ai0,j0+1 . . . ai0,n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0...0
∣∣∣∣∣∣∣
P
∣∣∣∣∣
Q
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0...0
∣∣∣∣∣∣∣
R
∣∣∣∣∣
S
Neka je
T = [ti,j](n−1)×(n−1) =
P | Q−− −−R | S
Dakle za 2 ≤ i, j ≤ n vazi mi,j = ti−1,j−1.Za svako q = (q1, . . . , qn−1) ∈ Perm(n − 1) definisimo q′ ∈ G := {p ∈ Perm(n) :
p(1) = 1} sa q′(1) = 1 i q′(i) = q(i− 1) + 1 za i = 2, n, tj.
q′ = (1, q1 + 1, q2 + 1, . . . , qn−1 + 1)
Lako se proverava da je preslikavanje
T : Perm(n− 1) → G
definisano sa T (q) = q′ za q ∈ Perm(n− 1), bijekcija.Imamo
detn(M) =∑
p∈Perm(n)
sgn(p) ·mp(1),1 ·mp(2),2 · . . . ·mp(n),n =
∑
p∈Perm(n)p(1)=1
sgn(p) ·mp(1),1 ·mp(2),2 · . . . ·mp(n),n =∑
p∈Perm(n)p(1)=1
sgn(p) ·mp(2),2 · . . . ·mp(n),n =
∑
p∈Perm(n)p(1)=1
sgn(p)·tp(2)−1,1 ·. . .·tp(n)−1,n−1 =∑
q∈Perm(n−1)
sgn(q′)·tq′(2)−1,1 ·. . .·tq′(n)−1,n−1 =
=∑
q∈Perm(q−1)
sgn(q) · tq(1),1 · . . . · tq(n−1),n−1 = detn−1(T )
2

202 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Tvrdenje III.8.7 (a) Za A ∈ Kn×n i svako j0 ∈ {1, . . . , n} vazi
detn(A) =
n∑
i=1
(−1)i+j0ai,j0 ·mnri,j0(A)
tj.
detn(A) =n∑
i=1
ai,j0 · kofi,j0(A)
(b) Za A ∈ Kn×n i svako i0 ∈ {1, . . . , n} vazi
detn(A) =n∑
j=1
(−1)i0+jai0,j ·mnri0,j(A)
tj.
detn(A) =
n∑
j=1
ai0,j · kofi0,j(A)
2
Dokaz (a) Koristeci Lemu III.8.6 imamo
detn(A) = detn
([
A•,1
∣∣∣. . .
∣∣∣A•,j0−1
∣∣∣
n∑
i=1
ai,j0ei
∣∣∣A•,j0+1
∣∣∣. . .
∣∣∣A•,n
])
=
=n∑
i=1
ai,j0detn([A•,1| . . . |A•,j0−1|ei|A•,j0+1| . . . |A•,n]
)=
=n∑
i=1
ai,j0(−1)i+j0mnri,j0(A)
(b) Neka je B = [bi,j]n×n = AT. Koristeci deo pod (a) imamo
detn(A) = detn(B) =
n∑
j=1
(−1)j+i0bj,i0 ·mnrj,i0(B)
Kako je
mnrj,i0(B) = detn−1
(B{1,...,n}\{j},{1,...,n}\{i0}
)= detn−1
((
B{1,...,n}\{j},{1,...,n}\{i0}
)T)
=

III.8. OSNOVNE OSOBINE DETERMINANTI 203
detn−1
((BT)
{1,...,n}\{i0},{1,...,n}\{j}
)
= mnri0,j(A)
to konacno dobijamo
detn(A) =
n∑
j=1
(−1)i0+jai0,j ·mnri0,j(A)
2
Tvrdenje III.8.8 (a) Za A ∈ Kn×n i svako j0, j1 ∈ {1, . . . , n}, gde j0 6= j1 vazi
n∑
i=1
ai,j0 · kofi,j1(A) = 0
(b) Za A ∈ Kn×n i svako i0, i1 ∈ {1, . . . , n}, gde i0 6= i1 vazi
n∑
j=1
ai0,j · kofi1,j(A) = 0
Dokaz (a) Neka je B = [bi,j]n×n definisana sa bi,j = ai,j za svako i = 1, n ij = 1, n, j 6= j1, i bi,j1 = ai,j0 za svako i = 1, n. Tada je kof i,j1(B) = kof i,j1(A) zasvako i = 1, n. Takode je B•,j1 = A•,j0 = B•,j0 pa je det(B) = 0. Otuda imamo
n∑
i=1
ai,j0 · kofi,j1(A) =n∑
i=1
bi,j1 · kofi,j1(B) = det(B) = 0
(b) Dokaz za ovo je analogan ovom gore. 2
Za A ∈ Kn×n definisemo tzv. adjungovanu matricu matrice A:
adj(A) :df= [bi,j]n×n, gde bi,j = kofj,i(A)
Tvrdenje III.8.9 Za svako A ∈ Kn×n vazi adj(A) ·A = A · adj(A) = det(A) · In.
Dokaz Neka je adj(A) = [bi,j]n×n i adj(A) · A = [mi,j]n×n. Za svako i = 1, n je
mi,i =
n∑
k=1
bi,kak,i =
n∑
k=1
ak,ikofk,i = det(A)
Ako su i, j = 1, n tako da je i 6= j onda imamo
mi,j =n∑
k=1
bi,kak,j =n∑
k=1
ak,jkofk,i = 0
Ovim smo pokazali da je adj(A) ·A = det(A) ·In. Jednakost A ·adj(A) = det(A) ·Inse pokazuje potpuno analogno. 2

204 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
Tvrdenje III.8.10 det(AB) = det(A)det(B).
Dokaz Definisimo preslikavanje f : (Kn×1)n → K sa
f(X1, . . . , Xn) :df= Detn(AX1, . . . , AXn)
za svako (X1, . . . , Xn) ∈ (Kn×1)n.
Pokazimo da je f n-linearno. Imamo
f(X1, . . . , Xi−1, U+V,Xi+1, . . . , Xn) = Detn(AX1, . . . , AXi−1, A(U+V ), AXi+1, . . . , AXn)
= Detn(AX1, . . . , AXi−1, AU + AV,AXi+1, . . . , AXn)
= Detn(AX1, . . . , AXi−1, AU,AXi+1, . . . , AXn)+Detn(AX1, . . . , AXi−1, AV, AXi+1, . . . , AXn)
= f(X1, . . . , Xi−1, U,Xi+1, . . . , Xn) + f(X1, . . . , Xi−1, V,Xi+1, . . . , Xn)
Takode imamo i
f(X1, . . . , Xi−1, λU,Xi+1, . . . , Xn) = Detn(AX1, . . . , AXi−1, A(λU), AXi+1, . . . , AXn)
= Detn(AX1, . . . , AXi−1, λAU,AXi+1, . . . , AXn)
= λDetn(AX1, . . . , AXi−1, AU,AXi+1, . . . , AXn) = λf(X1, . . . , Xi−1, U,Xi+1, . . . , Xn)
Pokazimo da je f antisimetricno. Za 1 ≤ i < j ≤ n imamo
f(X1, . . . , Xi−1, Xj, Xi+1, . . . , Xj−1, Xi, Xj+1, . . . , Xn) =
= Detn(AX1, . . . , AXi−1, AXj, AXi+1, . . . , AXj−1, AXi, AXj+1, . . . , AXn)
= −Detn(AX1, . . . , AXi−1, AXi, AXi+1, . . . , AXj−1, AXj, AXj+1, . . . , AXn)
= −f(X1, . . . , Xi−1, Xi, Xi+1, . . . , Xj−1, Xj, Xj+1, . . . , Xn)
Zato mora da vazi
f(X1, . . . , Xn) = f(e1, . . . , en) ·Detn(X1, . . . , Xn)
gde je (e1, . . . , en) standardna baza prostora Kn×1.Imamo f(e1, . . . , en) = Detn(Ae1, . . . , Aen) = Detn(A•,1, . . . , A•,n) = detn(A).Sada uzimajuci specijalno Xj = B•,j za j = 1, n dobijamo
f(B•,1, . . . , B•,n) = detn(A)Detn(B•,1, . . . , B•,n) = detn(A)detn(B)
No f(B•,1, . . . , B•,n) = Detn(AB•,1, . . . , AB•,n)= Detn((AB)•,1, . . . , (AB)•,n) = detn(AB).2

III.9. DETERMINANTA I RANG MATRICA 205
III.9 Determinanta i rang matrica
Neka je data A ∈ Kn×m. Ako je A = 0n×m definisemo rangD(A) = 0. Ako je A 6=0n×m onda postoji bar jedan broj k ∈ N takav da za neke skupove P ⊆ {1, . . . , n} iQ ⊆ {1, . . . , m}, oba sa po k elemenata, vazi detk(AP,Q) 6= 0; rangD(A) definisemokao najveci takav broj k.
Tvrdenje III.9.1 rangD(A) = rang(A).
Dokaz Kako ova jednakost ocigledno vazi ako je A = 0n×m pretpostavimo da jeA 6= 0n×m. Neka je rangD(A) =: k ∈ N. Neka su P = {p1, . . . , pk} ⊆ {1, . . . , n} iQ = {q1, . . . , qk} ⊆ {1, . . . , m} tako da je detk(AP,Q) 6= 0, i tako da je p1 < · · · < pki q1 < · · · < qk.
(1) Sistem(AP,{q1}, . . . , AS,{qk}
)vektora prostora Kk×1 je linearno nezavisan jer bi u
suprotnom na osnovu Tvrdenja III.8.3 vazilo detk(AP,Q) = 0. Samim tim je i sistem(A•,q1, . . . , A•,qk) vektora prostora K
n×1 je linearno nezavisan. Zato ce jednakostrangD(A) = rang(A) sada slediti ako pokazemo da je Aq ∈ L
({A•,q1, . . . , A•,qk}
)
za svako q ∈ {1, . . . , m}. Ovo je trivijalno tako ako k = m. Zato u nastavkupretpostavljamo da je k < m.
(2) Neka je q ∈ {1, . . . , m} \Q proizvoljno. Vazi dim(K
k×1)= k pa je prema delu
pod (1) sistem(AP,{q1}, . . . , AP,{qk}
)baza prostora Kk×1. Zato postoje α1, . . . , αk ∈
K tako da je
AP,{q} =
k∑
i=1
αiAP,{qi} (III.5)
Ako je k = n onda ovo znaci da je A•,q =
k∑
i=1
αiA•,qi i stvar je gotova. Pretpostavimo
sada da je k < n.Ako pokazemo da vazi
ap,q =k∑
i=1
αiap,qi
za svako p ∈ {1, . . . , n} \ P to ce zajedno sa (III.5) znaciti da je A•,q =k∑
i=1
αiA•,qi.
Neka je p ∈ {1, . . . , n} \P proizvoljno. Pretpostavimo da je pt < p < pt+1 i ql < q <ql+1 (u slucajevima kad je p < p1 ili pk < p ili q < q1 ili qk < q trazena jednakostse dobija na apsolutno identican nacin). Stavimo P1 := P ∪ {p} i Q1 := Q ∪ {q}.Imamo (prema definiciji broja rangD(A) = k)
0 = Detk+1
(AP1,{q1}, . . . , AP1,{ql}, AP1,{q}, AP1,{ql+1}, . . . , AP1,{qk}
)
= Detk+1
(
AP1,{q1}, . . . , AP1,{ql}, AP1,{q} +k∑
i=1
(−αi)AP1,{qi}, AP1,{ql+1}, . . . , AP1,{qk}
)

206 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA
= Detk+1
(
AP1,{q1}, . . . , AP1,{ql},
(
ap,q +k∑
i=1
(−αi)ap,qi
)
· et+1, AP1,{ql+1}, . . . , AP1,{qk}
)
gde je (e1, . . . , ek+1) standardna baza prostora K(k+1)×1. Dakle (koristeci razvoj po
l + 1-oj koloni) imamo da je
0 = (−1)t+1+l+1
(
ap,q +
k∑
i=1
(−αi)ap,qi
)
detk(AP,Q)
pa kako je detk(AP,Q) 6= 0 to odavde sledi ap,q =k∑
i=1
αiap,qi. 2
Tvrdenje III.9.2 Matrica A ∈ Kn×n je regularna ako i samo ako je detn(A) 6= 0.
Dokaz Ovo sledi direktno iz Tvrdenja II.23.4 i III.9.1. 2
III.10 Determinanta i inverzna matrica
Tvrdenje III.10.1 Matrica A ∈ Kn×n je regularna ako i samo ako vazi det(A) 6= 0i u tom slucaju je
A−1 =1
det(A)· adj(A)
Dokaz Da je A ∈ Kn×n regularna matrica ako i samo ako vazi det(A) 6= 0 vecznamo. Inace, ako je A regularna matrica onda za neko P ∈ Kn×n vazi AP = In pamora biti det(A)det(P ) = det(In) = 1 te i det(A) 6= 0.
Ako je det(A) 6= 0 onda iz adj(A) ·A = A ·adj(A) = det(A) ·In (Tvrdenje III.8.9)sledi da je (
1
det(A)· adj(A)
)
· A = A ·(
1
det(A)· adj(A)
)
= In
2
III.11 Determinanta i sistemi linearnih
jednacina
Neka je dat kvadratni sistem (A,B):
a1,1x1 + . . . + a1,jxj + . . . + a1,nxn = b1...
......
......
...ai,1x1 + . . . + ai,jxj + . . . + ai,nxn = bi
......
......
......
an,1x1 + . . . + an,jxj + . . . + an,nxn = bn
(III.6)

III.11. DETERMINANTA I SISTEMI LINEARNIH JEDNACINA 207
Za svako i = 1, n stavimo
∆i := Detn(A•,1, . . . , A•,i−1, B, A•,i+1, . . . , A•,n
)
tj. ∆i je determinanta matrice koja ima j-tu kolonu istu kao i matrica A za j 6= i,a i-ta kolona joj je kolona slobodnih clanova B datog sistema.
Tvrdenje III.11.1 Ako je (x1, . . . , xj, . . . , xn) ∈ Kn proizvoljno resenje sistema(A,B) onda vazi ∆i = xi · det(A) za svako i = 1, n.
Dokaz Imamo
∆i = Detn
(
A•,1, . . . , A•,i−1,n∑
j=1
xjA•,j , A•,i+1, . . . , A•,n
)
=n∑
j=1
xjDetn (A•,1, . . . , A•,i−1, A•,j, A•,i+1, . . . , A•,n)
= xiDetn (A•,1, . . . , A•,i−1, A•,i, A•,i+1, . . . , A•,n) = xi · det(A)
2
Zapazanje III.11.2 Ukoliko vazi det(A) = 0 a postoji neko i ∈ {1, . . . , n} tako daje ∆i 6= 0 onda sistem (III.6) nema resenja. 2
Tvrdenje III.11.3 Kvadratni sistem (III.6) ima jedinstveno resenje ako i samo ako
vazi det(A) 6= 0 i u tom slucaju ono je dato sa xi =∆i
det(A)za svako i = 1, n.
Dokaz Prvi deo tvrdenja sledi iz Tvrdenja III.2.5 i III.9.2. Preostali deo tvrdenjasledi iz Tvrdenja III.11.1. 2
Posledica III.11.4 Kvadratni homogen sistem (A, 0n×1) ima netrivijalno resenjeako i samo ako vazi det(A) = 0. 2

208 DEO III. SISTEMI LINEARNIH JEDNACINA. DETERMINANTA

Deo IV
Struktura linearnog operatora
IV.1 Sopstvene vrednosti/vektori linearnog ope-
ratora
Neka je f ∈ End(V), dim(V) = n. Da li postoji neka baza a = (a1, . . . , an) prostoraV takva da je
Ma,a(f) = In
Odgovor: jedino u slucaju da je f = idV .
Da li postoji neka baza a = (a1, . . . , an) prostora V takva da je matrica Ma,a(f)dijagonalna?
Ako postoji, kazemo da se (linearni) operator f moze dijagonalizirati. Dakleoperator f se moze dijagonalizirati ako i samo ako postoji neka baza (a1, . . . , an)koja se sastoji od (naravno nenula) vektora ai za koje vazi f(ai) = λi · ai za nekeλi ∈ K, i = 1, n.
§
Neka je a = (a1, . . . , an) proizvoljna baza prostora V. Za λ ∈ K kazemo daje sopstvena vrednost (linearnog) operatora f ∈ End(V) ako postoji neki vektorx 6= 0 takav da je f(x) = λx; u tom slucaju za svaki takav nenula vektor kazemoda je sopstveni vektor operatora f koji odgovara sopstvenoj vrednosti λ. Skupsvih sopstvenih vrednosti operatora f oznacavamo sa spek(f) i nazivamo spektar
operatora f . Vektor je sopstveni vektor operatora f ako je postoji neko λ ∈ spek(f)tako da je on sopstveni vektor operatora f koji odgovara sopstvenoj vrednosti λ.Drugim recima, vektor x ∈ V je sopstveni vektor operatora f ukoliko je x 6= 0 iukoliko postoji neko λ ∈ K tako da vazi f(x) = λx.
f(x) = λx ⇐⇒ f(x)+(−λ)id(x) = 0 ⇐⇒(f−λid
)(x) = 0 ⇐⇒ x ∈ Ker
(f−λid
)
209

210 DEO IV. STRUKTURA LINEARNOG OPERATORA
Ker(f − λid
)6= {0} ⇐⇒ f − λid nije injektivno
⇐⇒ f − λid nije automorfizam
⇐⇒ rang(
Ma,a
(f − λid
))
6= n
⇐⇒ det(
Ma,a
(f − λid
))
= 0
Ma,a
(f − λid
)= Ma,a(f)− λ ·Ma,a
(id)= Ma,a(f)− λIn
Dakle λ ∈ K je sopstvena vrednost operatora akko vazi
det(
Ma,a(f)− λIn
)
= 0
Za svako λ ∈ K vazi
det(
Ma,a(f)− λIn
)
= det(
Mb,b(f)− λIn
)
za svake dve baze a i b. Zaista, ako stavimo P := M(a via b) imamo M(b via a) =P−1 kao i Ma,a(f) = P−1Mb,b(f)P pa je zato
det(
Ma,a(f)−λIn
)
= det(
P−1Mb,b(f)P−λP−1InP)
= det(
P−1(Mb,b(f)−λIn
)P)
=
= det(P−1)det(
Mb,b(f)− λIn
)
det(P ) = det(
Mb,b(f)− λIn
)
jer je det(P−1)det(P ) = det(P−1P ) = det(In) = 1.
§Neka je A = [ai,j]n×n = Ma,a(f).Ako je v = bx1, . . . , xnca onda je v sopstveni vektor koji odgovara sopstvenoj
vrednosti λ ∈ K ako i samo ako vazi
(A− λIn
)·
x1...xi...xn
= 0n×1
i v 6= 0 tj. akko je (x1, . . . , xn) netrivijalno resenje homogenog sistema cija jematrica

IV.1. SOPSTVENE VREDNOSTI/VEKTORI LINEARNOG OPERATORA 211
A−λIn =
a1,1 − λ a1,2 a1,3 . . . a1,i . . . a1,j . . . a1,na2,1 a2,2 − λ a2,3 . . . a2,i . . . a2,j . . . a2,na3,1 a3,2 a3,3 − λ . . . a3,i . . . a3,j . . . a3,n...
...... . . .
... . . .... . . .
...ai−1,1 ai−1,2 ai−1,3 . . . ai−1,i . . . ai−1,j . . . ai−1,n
ai,1 ai,2 ai,3 . . . ai,i − λ . . . ai,j . . . ai,nai+1,1 ai+1,2 ai+1,3 . . . ai+1,i . . . ai+1,j . . . ai+1,n...
...... . . .
... . . .... . . .
...aj−1,1 aj−1,2 aj−1,3 . . . aj−1,i . . . aj−1,j . . . aj−1,n
aj,1 aj,2 aj,3 . . . aj,i . . . aj,j − λ . . . aj,naj+1,1 aj+1,2 aj+1,3 . . . aj+1,i . . . aj+1,j . . . aj+1,n
......
... . . .... . . .
... . . ....
an,1 an,2 an,3 . . . an,i . . . an,j . . . an,n − λ
Polinom
pf(λ) :df= det
(
Mb,b(f)− λIn
)
nazivamo karakteristicni polinom operatora f (kao sto smo to vec pokazali on nezavisi od toga u odnosu na koju bazu prostora formiramo matricu operatora f).
Za kvadratnu matricu P ∈ Kn×n polinom
q(t) :df= det(P − λIn)
nazivamo karakteristicni polinom matrice P .
§Neka je λ ∈ K sopstvena vrednost operatora f ∈ End(V) i p karakteristicni
polinom operatora f . Najveci broj k ∈ N takav da (x − λ)k|p (tj. visestrukostkorena λ polinoma p) nazivamo algebarski red sopstvene vrednosti λ operatora f .Za podprostor Ker(f − λ · id) kazemo da je sopstveni podprostor operatora f koji
odgovara sopstvenoj vrednosti λ; broj dim(
Ker(f −λ · id))
nazivamo geometrijski
red sopstvene vrednosti λ operatora f .
Tvrdenje IV.1.1 Geometrijski red sopstvene vrednosti je manji ili jednak od njenogalgebarskog reda.
Kako je λ sopstvena vrednost to je k := dim(
Ker(f − λ · id))
> 0. Fiksirajmo
neku bazu (a1, . . . , ak) prostora Ker(f − λ · id).

212 DEO IV. STRUKTURA LINEARNOG OPERATORA
Pretpostavimo najpre da je n := dim(V) > k. Neka su ai ∈ V za k < i ≤ ntakvi da je a = (a1, . . . , ak, . . . , an) baza prostora V. Stavimo A := Ma,a(f). Za
svako 1 ≤ i ≤ k vazi f(ai) =i−1∑
j=1
0 · aj + λai +n∑
j=i+1
0 · aj pa imamo
A =
[λIk Ok×(n−k)
O(n−k)×k B
]
za neko B ∈ K(n−k)×(n−k). Otuda imamo
det(A− xIn) =
∣∣∣∣
(λ− x)Ik Ok×(n−k)
O(n−k)×k B − xI(n−k)
∣∣∣∣
Uzastopnim razvojem po prvoj koloni dobijamo da je
det(A− xIn) = (λ− x)kdet(B − xI(n−k))
odakle neposredno sledi zeljeni zakljucak.
Ako je k = n onda je matrica operatora f u bazi (a1, . . . , an) upravo λIn pa jekarakteristicni polinom operatora f jednak (λ−x)n = (λ−x)k i ponovo dolazimo doistog zakljucka (pri cemu se u ovom slucaju geometrijski i algebarski red sopstvenevrednosi λ poklapaju medusobno i poklapaju sa dimenzijom prostora). 2
IV.2 Teorema Cayley-Hamilton-a
Za proizvoljno λ ∈ K imamo
adj(A− λIn) =
.... . . (ri,j,0 + ri,j,1λ+ · · ·+ ri,j,kλ
k + · · ·+ ri,j,n−1λn−1) . . .
...
=
=
.... . . ri,j,0 . . .
...
+
.... . . (ri,j,1λ) . . .
...
+ · · ·+
.... . . (ri,j,kλ
k) . . ....
+ . . .
· · ·+
.... . . (ri,j,n−1λ
n−1) . . ....
=
=
.... . . ri,j,0 . . .
...
+ λ
.... . . ri,j,1 . . .
...
+ · · ·+ λk
.... . . ri,j,k . . .
...
+ . . .

IV.2. TEOREMA CAYLEY-HAMILTON-A 213
· · ·+ λn−1
.... . . ri,j,n−1 . . .
...
=
= R0 + λR1 + · · ·+ λkRk + · · ·+ λn−1Rn−1
Dakle vazi
adj(A− λIn) = R0 + λR1 + · · ·+ λkRk + · · ·+ λn−1Rn−1
za svako λ ∈ K.
§
Neka su date matrice Ck = [ci,j,k]n×m ∈ Kn×m i Dk = [di,j,k]n×m ∈ K
n×m zak = 1, s. Ako za svako λ ∈ K vazi
C0 + λC1 + · · ·+ λkCk + · · ·+ λsCs = D0 + λD1 + · · ·+ λkDk + · · ·+ λsDs
Tada mora biti Ck = Dk za svako k = 1, s
§
Vazi
det(A− λIn) · In = (A− λIn) · adj(A− λIn)
za svako λ ∈ K.
Neka je det(A− λIn) · In = b0 + · · ·+ bkλk + · · ·+ bnλ
n karakteristicni polinom
matrice A. Znamo da je
adj(A− λIn) = R0 + λR1 + · · ·+ λkRk + · · ·+ λn−1Rn−1
Imamo
(A− λIn) · (R0 + λR1 + · · ·+ λkRk + · · ·+ λn−1Rn−1) =
= AR0 +λ(AR1) + . . . +λk(ARk) + . . . +λn−1(ARn−1)−λR0 − . . . −λkRk−1 − . . . −λn−1Rn−2 −λnRn−1 =
= AR0+λ(AR1−R0)+ · · ·+λk(ARk−Rk−1)+ · · ·+λn−1(ARn−1−Rn−2)−λnRn−1
= b0In + λ(b1In) + · · ·+ λk(bkIn) + · · ·+ λn−1(bn−1In) + λn(bnIn)

214 DEO IV. STRUKTURA LINEARNOG OPERATORA
Odavde sledi da je
b0In = AR0
A · \ (b1In) = AR1 − R0
A2 · \ (b2In) = AR2 − R1
......
......
Ak−1 · \ (bk−1In) = ARk−1 −Rk−2
Ak · \ (bkIn) = ARk −Rk−1
Ak+1 · \ (bk+1In) = ARk+1 −Rk
......
......
An−1 · \ (bn−1In) = ARn−1 − Rn−2
An · \ (bnIn) = −Rn−1
pa konacno dobijamo
b0 + b1A+ · · ·+ bkAk + · · ·+ bn−1A
n−1 + bnAn = 0n×n
Teorema IV.2.1 Ako je p karakteristicni polinom operatora f ∈ End(V) onda vazip(f) = 0 ∈ End(V). 2
IV.3 Minimalni polinom
Neka je f ∈ End(V) i neka je S skup svih nenula polinoma q sa koeficijentima iz K
takvih da je q(f) = 0 ∈ End(V). Skup S je neprazan, recimo karakteristicni polinomoperatora f pripada skupu S. Neka je k := min{st(p) : p ∈ S}. Drugim recimak ∈ N je takav broj da ne postoji nijedan nenula polinom r sa koeficijentima iz Kstepena manjeg od k koji anulira operator f , tj. takav da je r(f) = 0 ∈ End(V).
Neka je q ∈ S proizvoljan polinom takav da je st(q) = k. Ako je p ∈ S proizvoljanpolinom, onda mora da vazi q|p. Zaista, neka je p = qt + q0 gde je q 6= 0 ⇒st(q0) < st(q). Zbog q0(f) = p(f)− t(f)q(f) = 0 ∈ End(V) pretpostavka q0 6= 0 biprotivurecila izboru broja k. Dakle q0 = 0, tj. q|p.
Odavde specijalno sledi da postoji jedinstven monican polinom (tj. broj 1 muje najstariji koeficijent) m ∈ S takav da je st(m) = k: ako je q ∈ S takav da jest(q) = k i ako je c ∈ K \ {0} najstariji koeficijent polinoma q, onda za monicanpolinom q′ := 1
cq ∈ S vazi st(q′) = k – na ovaj nacin je utvrdena egzistencija ovakvog
polinoma; ako su m1, m2 ∈ S monicni polinomi takvi da je st(m1) = st(m2) = k,onda prema onom sto smo malopre pokazali mora biti m1|m2, pa obzirom da supolinomi m1 i m2 istog stepena sledi da je m2 = z ·m1 za neko z ∈ K, pri cemu iz1 = z · 1 (oba polinoma su monicna) sledi da je zapravo m1 = m2.

IV.4. JORDAN-OVA NORMALNA FORMA 215
Ovaj jedinstveni monican polinom m ∈ S takav da je st(m) = k nazivamominimalni polinom operatora f .
Zapazanje IV.3.1 Ako je v ∈ V sopstveni vektor operatora f ∈ End(V) kojiodgovara sopstvenoj vrednosti λ ∈ spek(f), i ako je p proizvoljan polinom sa koefi-cijentima iz K, onda vazi
p(f)(v) = p(λ) · vZaista, iz f(v) = λ ·v jednostavnom indukcijom po i ∈ N dobijamo da je f i(v) =
λi · v, pa je zato
(s∑
i=0
aifi
)
(v) =s∑
i=0
aifi(v) =
s∑
i=0
aiλi · v =
(s∑
i=0
aiλi
)
· v. 2
Tvrdenje IV.3.2 Ako je m minimalni polinom operatora f ∈ End(V) i λ ∈spek(f) proizvoljna sopstvena vrednost, onda vazi m(λ) = 0.
Dokaz Imamo 0 = m(f)(v) = m(λ) · v, pa kako je v 6= 0 zakljucujemo da morabiti m(λ) = 0. 2
Dakle ako jel∏
i=1
(λi − x)ki karakteristicni polinom operatora f ∈ End(V), gde
i 6= j ⇒ λi 6= λj i gde je 1 ≤ ki za i = 1, l, onda je mininalni polinom operatora f
oblika m(x) =l∏
i=1
(λi − x)k′i, gde je 1 ≤ k′
i ≤ ki za i = 1, l.
IV.4 Jordan-ova normalna forma
Prvi deo
(1)
Neka je V k.d.v.p. i g ∈ End(V). Stavimo
Ni := Ker(gi) = {x ∈ V : gi(x) = 0}
za i ∈ N0 (smatramo da je g0 = idV , te i da je N0 = {0}). Vazi
{0} = N0 ⊆ N1 ⊆ N2 ⊆ · · · ⊆ Ni ⊆ Ni+1 ⊆ . . .
Kad bi za svako i ∈ N bilo Ni ⊃ Ni+1 onda bi imali dim(Ni) < dim(Ni+1) <dim(V) ∈ N za svako i ∈ N, sto je nemoguce. Dakle postoji neko i ∈ N tako da vaziNi = Ni+1; indukcijom po j ≥ i + 1 pokazujemo da je Nj = Ni. Neka je Ni = Nj ineka je x ∈ Nj+1. Tada je 0 = gj+1(x) = gj(g(x)) pa je g(x) ∈ Nj = Ni te stoga i0 = gi(g(x)) = gi+1(x); dakle x ∈ Ni+1 = Ni. Ovim smo pokazali da je Nj+1 ⊆ Ni;kako zbog i ≤ j vazi Ni ⊆ Nj, to sledi da je Ni = Nj+1.

216 DEO IV. STRUKTURA LINEARNOG OPERATORA
(2)
Koristimo zapis g[A] = g⇀A. Neka je k ∈ N0 najmanji broj takav da vaziNk = Nk+1. U nastavku pretpostavljamo da je N1 6= {0}. Zato je k > 0. Premadelu pod (1) imamo
{0} ⊂ N1 ⊂ · · · ⊂ Ni ⊂ Ni+1 ⊂ · · · ⊂ Nk = Nj, za svako j ≥ k
U nastavku pretpostavljamo da vazi
∀x ∈ V ∃j ∈ N (gj(x) = 0)
drugim recima neka je V =⋃
j∈N
Nj. Tada imamo
{0} ⊂ N1 ⊂ · · · ⊂ Ni ⊂ Ni+1 ⊂ · · · ⊂ Nk = V
Imamo g[Nj+1] ⊆ Nj : zaista, ako je y ∈ Nj+1 onda imamo gj(g(y)) = gj+1(y) =
0, tj. g(y) ∈ Nj. Ovo vazi za svako j ≥ 0.
Zato sada imamo gj−1[
g[Nj+1]]
⊆ gj−1[Nj], tj. gj[Nj+1] ⊆ gj−1[Nj] . Ovo vazi
za svako j ≥ 1.Znaci vazi
{0} ⊆ gk−1[Nk] ⊆ · · · ⊆ gj[Nj+1] ⊆ gj−1[Nj] ⊆ . . . g2[N3] ⊆ g[N2] ⊆ N1
(3)
Neka su p ∈ N i si ∈ N za i = 1, p takvi da:
sp = k; s1 = 1; ako je 1 ≤ i < p onda je si+1 > si; vazi
gsi+1−1[Nsi+1] = gj−1[Nj] za svako p > i ≥ 1 i si+1 ≥ j > si,
gsi+1−1[Nsi+1] ⊂ gsi−1[Nsi] za svako p > i ≥ 2.
Kad bi bilo gk−1[Nk] = {0} imali bi Nk ⊆ Nk−1, tj. Nk = Nk−1, sto protivureciizboru broja k. Dakle imamo
{0} ⊂ gsp−1[Nsp] ⊂ · · · ⊂ gsi+1−1[Nsi+1] ⊂ gsi−1[Nsi ] ⊂ · · · ⊂ gs2−1[Ns2] ⊆ N1
Neka je mi := dim(
gsi−1[Nsi ])
za p ≥ i ≥ 1. Tada je
0 < mp < · · · < mi < · · · < m2 ≤ m1 = dim(N1)
Neka je (a1,1 . . . , amp,1) baza za gsp−1[Nsp] = gk−1[Nk]. Uzastopnom primenomTvrdenja II.5.15 konstruisimo sistem vektora (a1,1, . . . , am2,1) takav da je za svakop ≥ i ≥ 2 sistem (a1,1, . . . , ami,1) baza prostora gsi−1[Nsi ].

IV.4. JORDAN-OVA NORMALNA FORMA 217
Ako je gs2−1[Ns2 ] ⊂ N1 (tada je m2 < m1) neka je sistem (am2+1,1, . . . , am1,1)takav da je (a1,1, . . . , am1,1) baza prostora N1.
(4)
Zbog {al,1 : 1 ≤ l ≤ mp} ⊆ gsp−1[Nsp] postoje al,sp ∈ Nsp za 1 ≤ l ≤ mp tako daje gsp−1
(al,sp) = al,1.
Za svako p > i ≥ 2 vazi {al,1 : mi+1 < l ≤ mi} ⊆ gsi−1[Nsi] pa postoje al,si ∈ Nsi
za mi+1 < l ≤ mi tako da je gsi−1(al,si) = al,1.
a1,sp, . . . , amp,sp;
ami+1+1,si, . . . , ami,si
am3+1,s2, . . . , am2,s2
a1,1, . . . , amp,1; . . . ; ami+1+1,1, . . . , ami,1; . . . ; am3+1,1, . . . , am2,1; am2+1,1, . . . , am1,1
(5)
Za 1 < j < sp i 1 ≤ l ≤ mp definisimo rekurzivno al,j tako da je al,j = g(al,j+1).
Za svako p > i ≥ 2 definisimo rekurzivno al,j za 1 < j < si i mi+1 < j ≤ mi takoda je al,j = g(al,j+1).

218 DEO IV. STRUKTURA LINEARNOG OPERATORA
a1,sp, . . . , amp,sp;...
a1,j1, . . . , amp,j1;......
a1,si, . . . , amp,si; . . . ; ami+1+1,si, . . . , ami,si;...
...a1,j2, . . . , amp,j2; . . . ; ami+1+1,j2, . . . , ami,j2;
......
......
a1,s2, . . . , amp,s2; . . . ; ami+1+1,s2, . . . , ami,s2; . . . ; am3+1,s2, . . . , am2,s2;...
......
a1,j3, . . . , amp,j3; . . . ; ami+1+1,j3, . . . , ami,j3; . . . ; am3+1,j3, . . . , am2,j3;...
......
......
...a1,1, . . . , amp,1; . . . ; ami+1+1,1, . . . , ami,1; . . . ; am3+1,1, . . . , am2,1; am2+1,1, . . . , am1,1
Sistem (a1,1, . . . , am2,1) je linearno nezavisan. Ako je 1 ≤ j < s2 i ako je sistem(a1,j , . . . , am2,j) linearno nezavisan, onda je i sistem (a1,j+1, . . . , am2,j+1) linearnonezavisan, na osnovu Tvrdenja II.10.1 pod (a), jer je
(g(a1,j+1), . . . , g(am2,j+1)
)= (a1,j , . . . , am2,j)
Ako je 2 ≤ i < p i si ≤ j < si+1 i ako je sistem (a1,j, . . . , ami+1,j) linearno nezavisan,onda je i sistem (a1,j+1, . . . , ami+1,j+1) linearno nezavisan, na osnovu Tvrdenja II.10.1pod (a), jer je
(g(a1,j+1), . . . , g(ami+1,j+1)
)= (a1,j , . . . , ami+1,j)
Induktivnim rasudivanjem zakljucujemo sistem (a1,j, . . . , ami,j) linearno nezavisanza svako 1 ≤ j ≤ sp = k i svako 1 ≤ l ≤ si, gde je i ∈ {1, . . . , p} najmanji broj takavda je j ≤ si.
(6)
Neka je
I :=(
{1, . . . , m1} × {1})
∪p−1⋃
i=1
(
{1, . . . , mi+1} × {si + 1, . . . , si+1})
Pokazimo da je sistem(al,j : (l, j) ∈ I
)linearno nezavisan.

IV.4. JORDAN-OVA NORMALNA FORMA 219
Neka su λl,j ∈ K za (l, j) ∈ I takvi da je∑
(l,j)∈I
λl,jal,j = 0. Neka, suprotno onom
sto treba pokazati, vazi λl,j 6= 0 za neko (l, j) ∈ I. Neka je j0 ∈ {1, . . . , sp} najvecibroj takav da je λl,j0 6= 0 za neko l takvo da je (l, j0) ∈ I. Ako je j0 = 1 onda sledida je
m1∑
l=1
λl,1al,1 = 0
i λl,1 6= 0 za neko 1 ≤ l ≤ m1, sto znaci da je sistem (a1,1, . . . , am1,1) linearno zavisan,a to, kako smo vec utvrdili, nije tacno.
Dakle j0 > 1. Neka je i0 ∈ {2, . . . , p} najmanji broj takav da je j0 ≤ si0 . Daklesi0−1 < j0 ≤ si0 . Sada imamo
0 =
m1∑
l=1
λl,1al,1 +
i0−1∑
i=2
∑
1≤l≤misi−1<j≤si
λl,jal,j +∑
1≤l≤mi0si0−1<j≤j0
λl,jal,j
Ako je (l, j) ∈ I tako da je j < j0, onda je gj0−1(al,j) = 0. Otuda je
0 = gj0−1(0) =
mi0∑
l=1
λl,j0gj0−1(al,j0) =
mi0∑
l=1
λl,j0al,1
i pritom je λl,j0 6= 0 za neko 1 ≤ l ≤ mi0 , sto znaci da je sistem (a1,1, . . . , ami0,1),
a samim tim i sistem (a1,1, . . . , am1,1), linearno zavisan, a to, kako smo vec utvrdili,nije tacno.
(7)
Za j = 2, k stavimo hj := gj−1 ¯ Nj. Imamo hj ∈ End(Nj) kao i
Ker(hj) = {x ∈ Nj : gj−1(x) = 0} = Nj ∩Nj−1 = Nj−1
Takode je Im(hj) = gj−1[Nj]. Zbog dim(Nj) = dim (Im(hj)) + dim (Ker(hj)) sadaimamo
dim(Nj) = dim(Nj−1) + dim(gj−1[Nj]
)
Tvrdimo da je
dim(Nj) = |{(l, q) ∈ I : q ≤ j}|za svako j = 1, k.
Za j = 1 imamo
dim(N1) = |{(l, 1) : l = 1, m1}| = |{(l, q) ∈ I : q ≤ 1}|
jer je (a1,1, . . . , am1,1) baza za N1.

220 DEO IV. STRUKTURA LINEARNOG OPERATORA
Pretpostavimo sada da je tvrdenje tacno za j = j0, k > j0 ≥ 1, i neka jei0 ∈ {2, . . . , p} takvo da je si0 − 1 ≤ j0 < si0. Iz
dim(gj0[Nj0+1]
)= dim
(gsi0−1[Nsi0
])= mi0 = |{(l, j0 + 1) : l = 1, mi0}|
= |{(l, j0 + 1) : (l, j0 + 1) ∈ I}|i dim(Nj0+1) = dim(Nj0) + dim (gj0[Nj0+1]) sledi
dim(Nj0+1) = |{(l, q) ∈ I : q ≤ j0}|+ |{(l, j0 + 1) : (l, j0 + 1) ∈ I}|= |{(l, q) ∈ I : q ≤ j0 + 1}|
Iz ovog sto smo upravo dokazali specijalno sledi da je dim(Nk) = |{(l, j) ∈ I :j ≤ k}| = |I|, pa kako je sistem
(al,j : (l, j) ∈ I
)vektora prostora Nk = V linearno
nezavisan, zakljucujemo da je(al,j : (l, j) ∈ I
)baza prostora V.
(8)
Uz zadrzavanje dosadasnjih pretpostavki pretpostavimo sada jos i da je g =f − λ · id za neko f ∈ End(V).
Za 1 ≤ l ≤ m2 neka je ul =(al,1, . . . , al,si0
)ako je mi0+1 < l ≤ mi0 za neko
p− 1 ≥ i0 ≥ 2, odnosno neka je ul =(al,1, . . . , al,sp
)ako je 1 ≤ l ≤ mp.
Svaki od tih sistema je oblika v = (v1, . . . , vr) za neko r ≥ 2, tako da vazig(vi) = vi−1 za i = 2, r, odnosno g(v1) = 0; drugim recima f(vi) = λvi + vi−1 zai = 2, r, odnosno f(v1) = λv1. Odavde specijalno vidimo da je
f⇀L(v1, . . . , vr) ⊆ L(v1, . . . , vr)pa kako je v = (v1, . . . , vr) linearno nezavisan sistem, te dakle i baza prostoraL(v1, . . . , vr), mozemo govoriti o matrici restrikcije linearnog preslikavanja f u odnosuna bazu v; a ona izgleda ovako:
λ 1 0 0 00 λ 1 0 00 0 λ 1 0 00 0 0 λ 10 0 0 0 λ
. . .
λ 1 0 00 0 λ 1 0
0 0 λ 10 0 0 λ
∈ Kr×r
tj. rec je o matrici formata r puta r koja na glavnoj dijagonali ima uvek broj λ, dadodijagonali odmah iznad stoji svuda broj 1, a na svim preostalim mestima stojibroj 0; ovakvu matricu skraceno oznacavamo sa J(λ, r). Dakle
J(√5, 2) =
[ √5 1
0√5
]

IV.4. JORDAN-OVA NORMALNA FORMA 221
Definisemo i J(λ, 1) = [λ]1×1 ∈ K1×1.Matrice ovakvog oblika nazivamo Jordan-ovim blokovima.
(9)
Ako jem2 < m1 neka je ul = (al,1) sistem duzine 1 zam2 < l ≤ m1. Posmatrajmo
bazu a koja se dobija tako sto se vertikale sistema(al,j : (l, j) ∈ I
)poredaju
horizontalno s leva na desno, u redosledu od prve ka poslednjoj, i to tako da se usvakoj vertikali vektori ispisuju pocev od onog na dnu do onog na vrhu; preciznijeposmatrajmo sistem dobijen spajanjem gore definisanih sistema u1, u2, . . . , um1.
Kako je
V = L(u1)⊕ · · · ⊕ L(um1)
to matrica linearnog preslikavanja f u odnosu na bazu a izgleda ovako
Jord(λ; k1, . . . , km1) :df=
J(λ, k1) 0J(λ, k2)
. . .
0 J(λ, km1)
(IV.1)
tj. radi se o blok-dijagonalnoj matrici ciji su dijagonalni blokovi upravo Jordan-oviblokovi J(λ, k1), . . . , J(λ, km1). Primetimo da ako je m2 < m1 onda je J(λ, kl) =[λ]1×1 za svako m2 < l ≤ m1 te matrica operatora f izgleda ovako
J(λ, k1) 0J(λ, k2)
. . .
0 J(λ, km2)
O
O λIm1−m2
§
Drugi deo U prvom delu smo pretpostavili da je dat endomorfizam f ∈ End(V)prostora V takav da za neko λ ∈ K vazi
∀x ∈ V ∃j ∈ N((f − λ · id)j(x) = 0
)
Za vektor x ∈ V kazemo da je generalisano sopstveni ili g-sopstveni vektorendomorfizma f koji odgovara λ ∈ K ako je x 6= 0 i ako postoji neko j ∈ N takoda je (f − λ · id)j(x) = 0. Dakle u prvom delu smo pretpostavili da je f takavendomorfizam da postoji neko λ ∈ K takvo da je svaki nenula vektor g-sopstvenivektor koji odgovara λ.

222 DEO IV. STRUKTURA LINEARNOG OPERATORA
Neka je sada f ∈ End(W) proizvoljan endomorfizam kompleksnog vektorskogprostora W. Za svaku sopstvenu vrednost λ ∈ C operatora f neka je
G(λ, f) = {x ∈ V : postoji j ∈ N tako da je (f − λ · id)j(x) = 0}
Drugim recima elementi skupa G(λ, f) su svi g-sopstveni vektori koji odgovarajubroju λ i nula vektor, iliti
G(λ, f) =+∞⋃
j=1
Ker((f − λ · id)j
)
Neka je spek(f) = {λ1, . . . , λd}, gde i 6= j ⇒ λi 6= λj; ova pretpostavka i oveoznake vaze do kraja ovog odeljka. Za svako i = 1, d skup G(λi, f) je podprostor kaounija rastuceg (u odnosu na inkluziju) niza podprostora; uzimajuci V = G(λi, f) ig = f − λi · id u prvom delu vidimo su ispunjene pretpostavke koje su tamo bileucinjene, pa mozemo fiksirati neku bazu bi za G(λi, f) u odnosu na koju je matricarestrikcije operatora f na podprostor G(λi, f) oblika
Jord(λi; ki,1, . . . , ki,qi
)
datog sa (IV.1).
Tvrdenje IV.4.1 Vazi G(λ1, f)⊕ · · · ⊕G(λd, f) = W . 2
Pre nego sto dokazemo ovo tvrdenje, primetimo da iz njega direktno sledi daje matrica operatora f u odnosu na bazu dobijenu spajanjem baza b1, . . . , bd blok-dijagonalna oblika
Jord(λ1; k1,1, . . . , k1,q1
)0
Jord(λ2; k2,1, . . . , k2,q2
)
. . .
0 Jord(λd; kd,1, . . . , kd,qd
)
Za svaku bazu u odnosu na koju je matrica datog operatora ovog oblika kazemo daje Jordan-ova baza tog operatora.
Dokaz Tvrdenja IV.4.1
(1)
Najpre pokazimo da ako su p1, . . . , pn polinomi sa kompleksnim koeficijentimatakvi da ne postoji z ∈ C takvo da je p1(z) = · · · = pn(z) = 0 (tj. takvi da nemajunijedan zajednicki koren), onda postoje neki polinomi c1, . . . , cn (sa kompleksnimkoeficijentima) takvi da je c1p1 + · · ·+ cnpn = 1.
Neka je S skup svih polinoma oblika q1p1+ · · ·+qnpn za neke polinome q1, . . . , qn,i neka je r ∈ S takav polinom da je st(r) = min{st(l) : l ∈ S \ {0}}. Jasno r 6= 0.

IV.4. JORDAN-OVA NORMALNA FORMA 223
Ako je l ∈ S onda mora da vazi l = r · t za neki polinom t (tj. polinom r morada deli polinom l. Zaista, ako je l = r · t + r0 gde r0 6= 0 ⇒ st(r0) < st(r). Imamor0 = l + (−t) · r ∈ S, jer vazi
– u, v ∈ S ⇒ u+ v ∈ S i– ako je u proizvoljan polinom i v ∈ S onda je u · v ∈ S.Dakle r0 ∈ S, pa bi pretpostavka da je r0 6= 0 protivurecila izboru polinoma r.
Stoga je r0 = 0.
Kako je ocigledno pi ∈ S za svako i = 1, n, to je pi = r · ti za neke polinome ti,i = 1, n. Kad bi r bio nekonstantan, postojalo bi neko z ∈ C tako da je r(z) = 0;no tada bi imali i pi(z) = r(z)ti(z) = 0 za svako i = 1, n, pa bi polinomi p1, . . . , pnimali zajednicku nulu, suprotno pretpostavci. Dakle r je konstantan nenula polinom.
Takode je r = c′1p1 · · ·+c′npn za neke polinome c′1, . . . , c′n, pa deljenjem sa
1
rdobijamo
c1p1 + · · ·+ cnpn = 1, gde su ci :=c′irpolinomi (a ne proizvoljne racionalne funkcije)
jer je r konstantan nenula polinom.
(2)
Neka je dim(W) = n, q karakteristicni polinom operatora f i neka je
p(x) :df= (−1)nq(x) =
d∏
j=1
(x− λj)mj
Jasno p(f) = 0 ∈ End(W). Stavimo pi(x) :df=
d∏
j=1j 6=i
(x− λj)mj za i = 1, d.
Na osnovu dokazanog pod (1) postoje polinomi c1, . . . , cd tako da vazi
d∑
i=1
cipi = 1
Neka je y ∈ W proizvoljan vektor. Imamo
y = id(y) =
(d∑
i=1
ci(f)pi(f)
)
(y) =d∑
i=1
pi(f)(ci(f)(y))
Pritom za svako i = 1, d iz
(f−λi·id)mi
(
pi(f)(ci(f)(y)))
=(
(f−λi·id)mi◦pi(f))
(ci(f)(y)) = p(f)(ci(f)(y)) = 0
tj. pi(f)(ci(f)(y)) ∈ G(λi; f).
Ovim smo pokazali da je G(λ1, f)+ · · ·+G(λd, f) = W . Preostaje da pokazemoda ovi podprostori direktno sumiraju.

224 DEO IV. STRUKTURA LINEARNOG OPERATORA
(3)
Neka su yi ∈ G(λi, f) za i = 1, d, takvi da je y1 + · · ·+ yd = 0. Za svako i = 1, dneka je ki najmanji prirodan broj takav da je (f − λi · id)ki(yi) = 0. Pretpostavimo,suprotno onom sto treba pokazati, da postoji neko i0 ∈ {1, . . . , d} tako da je yi0 6= 0.Ovo znaci da je (f−λi0 ·id)ki0−1(yi0) =: zi0 sopstveni vektor operatora f koji odgovarasopstvenoj vrednosti λi0.
Imamo
0 =
(f − λi0 · id)ki0−1 ◦
d∏
j=1j 6=i0
(f − λj · id)kj
(y1 + · · ·+ yd) =
=
d∑
i=1i6=i0
(f − λi0 · id)ki0−1 ◦
d∏
j=1j 6=i0,i
(f − λj · id)kj
(
(f − λi · id)ki(yi))
+
+
d∏
j=1j 6=i0
(f − λj · id)kj
(zi0) = 0+ l(f)(zi0)
gde je l(x) :df=
d∏
j=1j 6=i0
(x− λj)kj . Kako je zi0 sopstveni vektor operatora f koji odgovara
sopstvenoj vrednosti λi0 to sada imamo
0 = l(λi0) · zi0 =
d∏
j=1j 6=i0
(λi0 − λj)kj
· zi0
pa kako je λj 6= λi0 to odavde sada sledi da je zi0 = 0, a ovo nije moguce jer je zi0sopstveni vektor.

Deo V
Realan i kompleksan skalarniproizvod
225
Recommended

















