Embed Size (px)
Citation preview
Zasady zachowaniaZasady zachowania
•• Pęd i moment pędu Pęd i moment pędu•• Praca, moc, energia Praca, moc, energia•• Ruch pod działaniem sił Ruch pod działaniem sił
zachowawczychzachowawczych•• Pęd i energia przy Pęd i energia przy
prędkościach bliskichprędkościach bliskichprędkości światłaprędkości światła
Pęd i moment pęduPęd i moment pędu
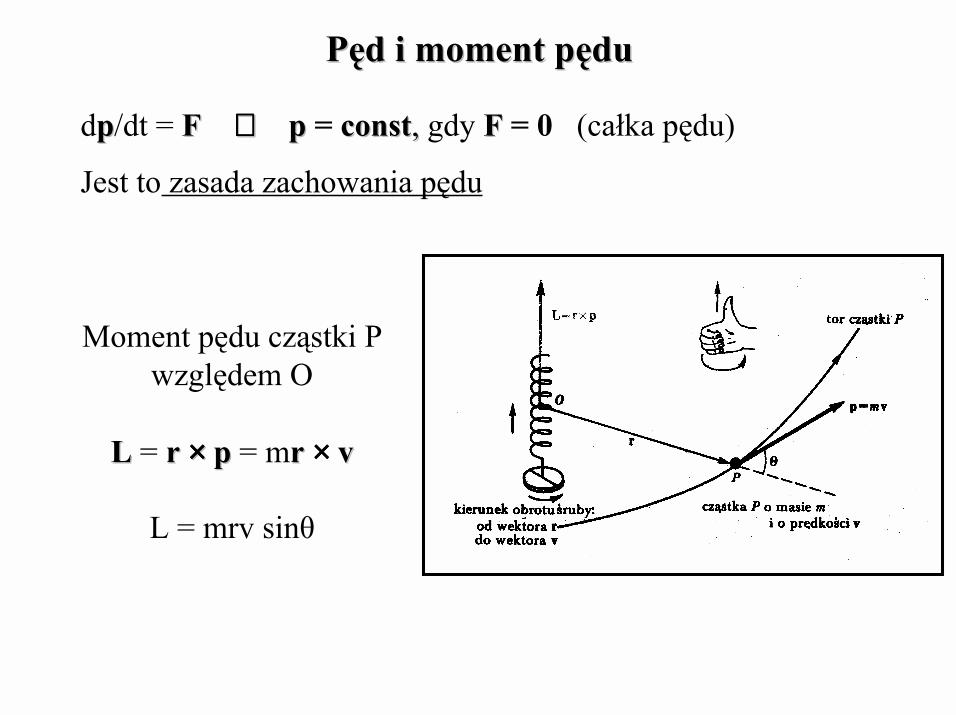
dpp/dt = F F ⇒⇒⇒⇒⇒⇒⇒⇒ pp = constconst, , gdy F F = 0 (całka pędu)
Jest to zasada zachowania pędu
Moment pędu cząstki Pwzględem O
LL = r r ×××××××× pp = mrr ×××× vv
L = mrv sinθ
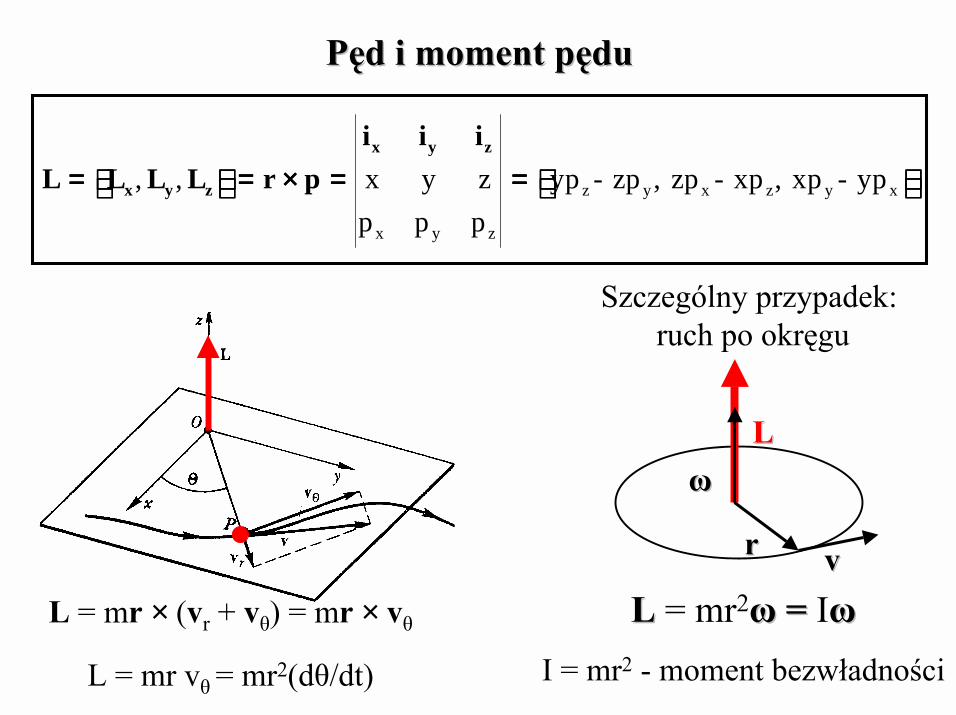
z y x z y x
x y z
, , x y z yp - zp , zp - xp , xp - ypp p p
= = × = == = × = == = × = == = × = = x y z
x y z
i i iL L L L r p
Szczególny przypadek: ruch po okręgu
LLωω
vvrr
Pęd i moment pęduPęd i moment pędu
LL = mr2ωω = = IωωI = mr2 - moment bezwładności
L = mr × (vr + vθ) = mr × vθ
L = mr vθ = mr2(dθ/dt)
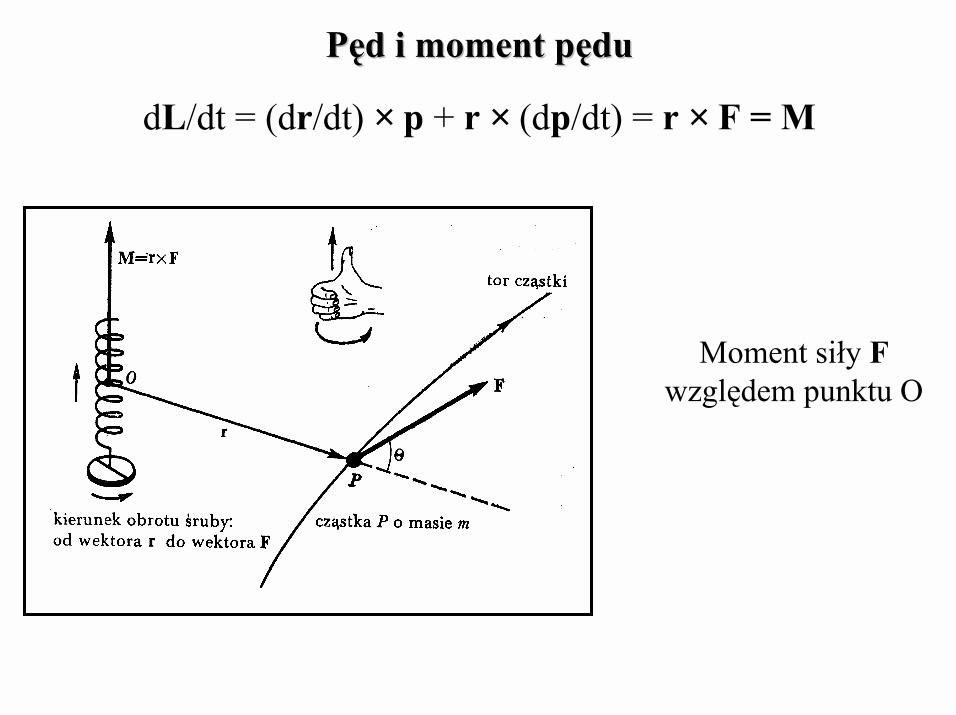
dL/dt = (dr/dt) × p + r × (dp/dt) = r × F = M
Moment siły Fwzględem punktu O
Pęd i moment pęduPęd i moment pędu
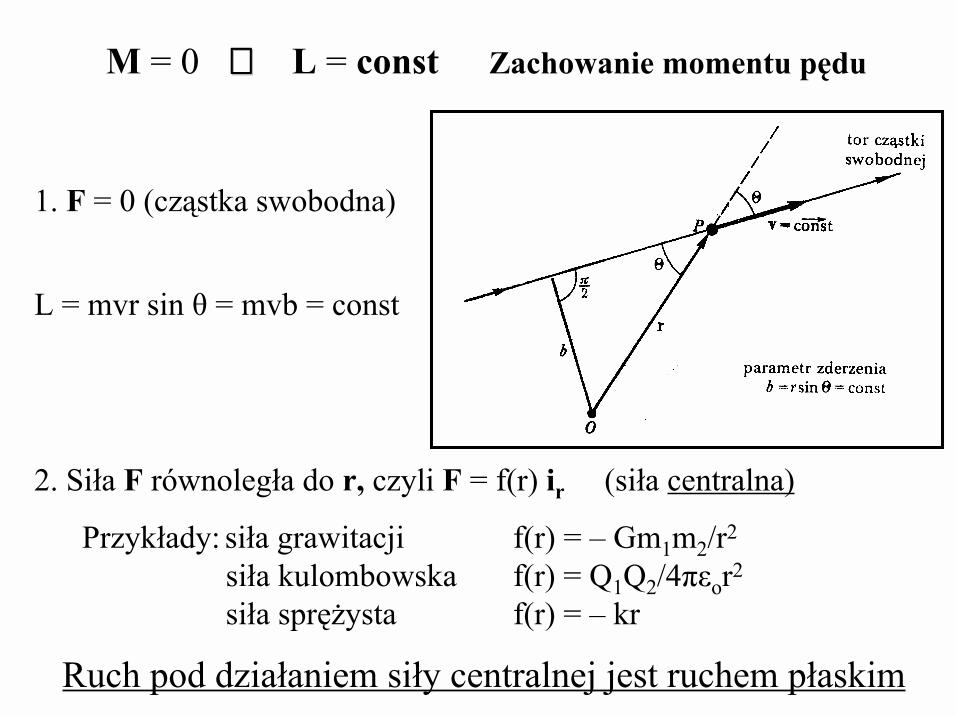
M = 0 ⇒⇒⇒⇒⇒⇒⇒⇒ L = const Zachowanie momentu pędu
1. F = 0 (cząstka swobodna)
L = mvr sin θ = mvb = const
2. Siła F równoległa do r, czyli F = f(r) ir (siła centralna)
Przykłady: siła grawitacji f(r) = – Gm1m2/r2
siła kulombowska f(r) = Q1Q2/4πεor2
siła sprężysta f(r) = – kr
Ruch pod działaniem siły centralnej jest ruchem płaskim
Prędkość polowaPrędkość polowa
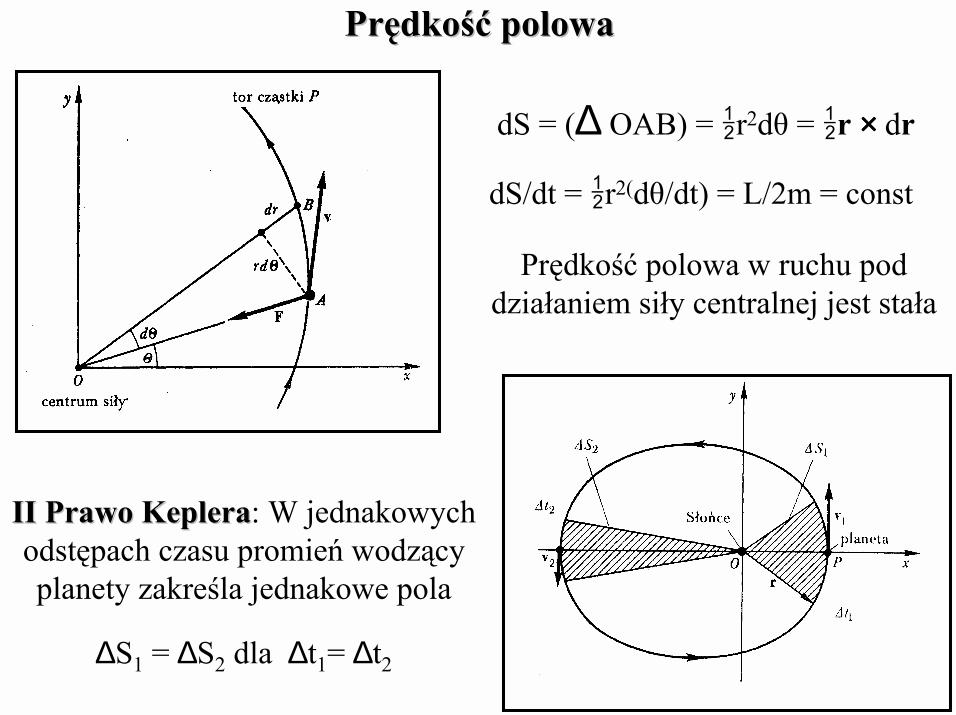
dS = (∆ OAB) = !r2dθ = !r ×××× dr
dS/dt = !r2(dθ/dt) = L/2m = const
Prędkość polowa w ruchu poddziałaniem siły centralnej jest stała
II PrawoII Prawo Keplera Keplera: W jednakowychodstępach czasu promień wodzącyplanety zakreśla jednakowe pola
∆S1 = ∆S2 dla ∆t1= ∆t2
Praca, moc, energiaPraca, moc, energia
rF
Ftθ
dr
O
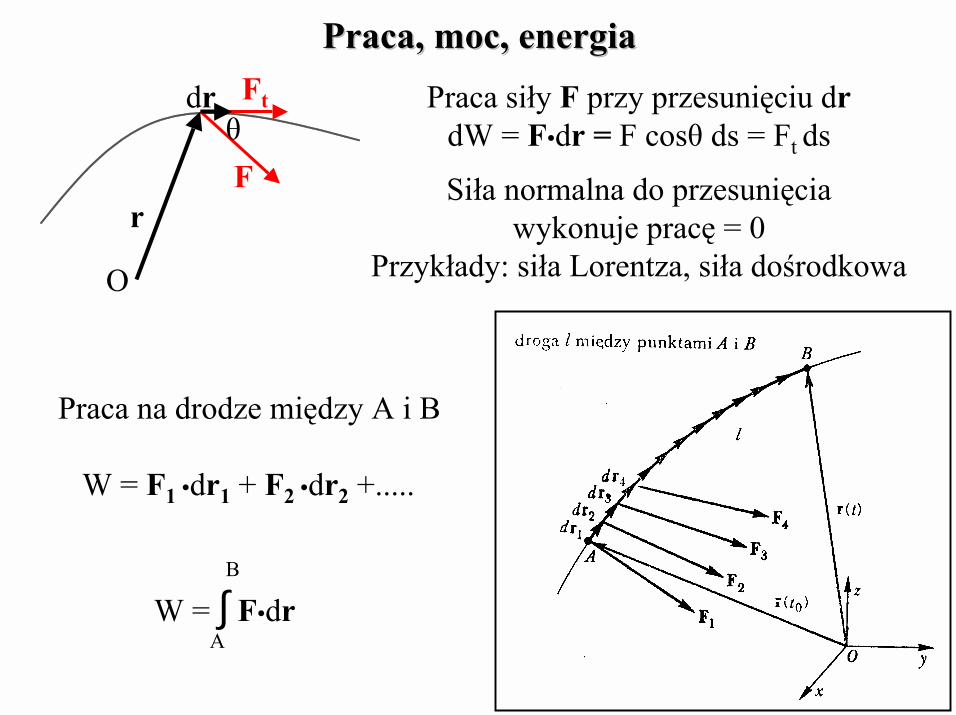
Praca siły F przy przesunięciu drdW = F•dr = F cosθ ds = Ft ds
Siła normalna do przesunięciawykonuje pracę = 0
Przykłady: siła Lorentza, siła dośrodkowa
Praca na drodze między A i B
W = F1 •dr1 + F2 •dr2 +.....
W = ∫ F•drA
B
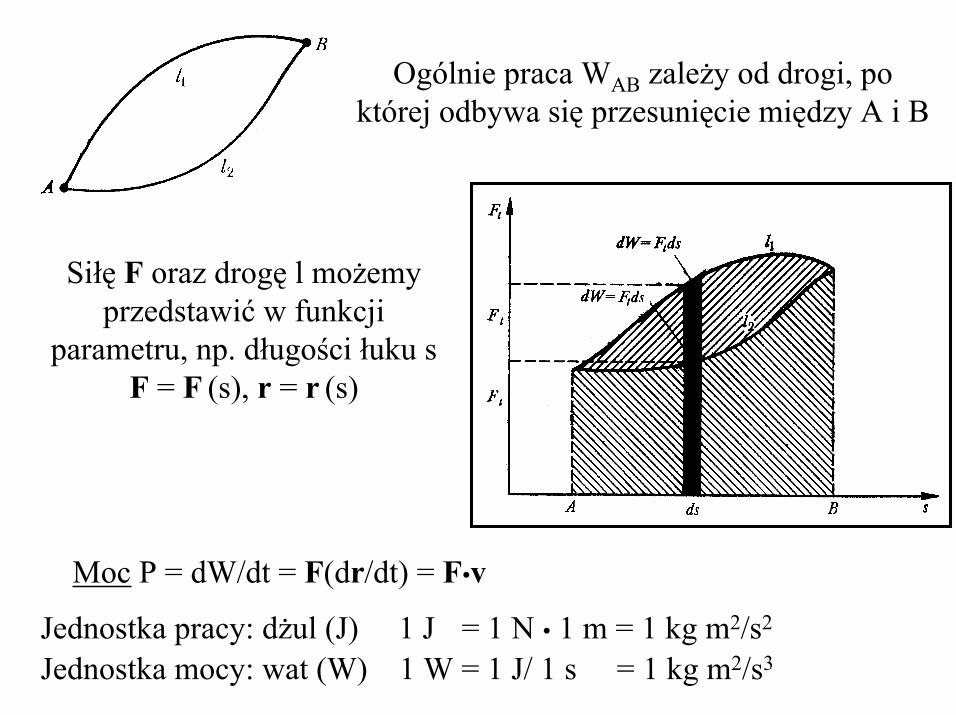
Ogólnie praca WAB zależy od drogi, poktórej odbywa się przesunięcie między A i B
Siłę F oraz drogę l możemyprzedstawić w funkcji
parametru, np. długości łuku sF = F (s), r = r (s)
Moc P = dW/dt = F(dr/dt) = F•v
Jednostka pracy: dżul (J) 1 J = 1 N • 1 m = 1 kg m2/s2
Jednostka mocy: wat (W) 1 W = 1 J/ 1 s = 1 kg m2/s3
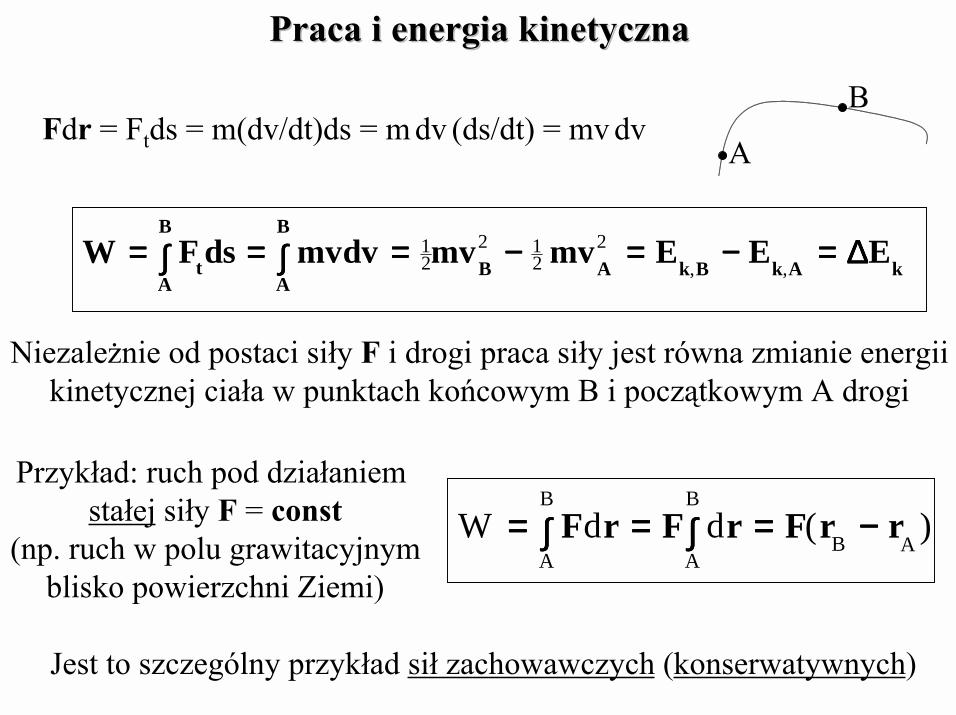
Praca i energia kinetycznaPraca i energia kinetyczna
Fdr = Ftds = m(dv/dt)ds = m dv (ds/dt) = mv dv
2 21 12 2 , ,
B B
t B A k B k A kA A
W F ds mvdv mv mv E E E= = = − = − = ∆= = = − = − = ∆= = = − = − = ∆= = = − = − = ∆∫ ∫∫ ∫∫ ∫∫ ∫
A
B
Niezależnie od postaci siły F i drogi praca siły jest równa zmianie energiikinetycznej ciała w punktach końcowym B i początkowym A drogi
Przykład: ruch pod działaniem stałej siły F = const
(np. ruch w polu grawitacyjnymblisko powierzchni Ziemi)
B B
B AA A
W d d ( )F r F r F r r= = = −= = = −= = = −= = = −∫ ∫∫ ∫∫ ∫∫ ∫
Jest to szczególny przykład sił zachowawczych (konserwatywnych)
Siły zachowawcze i energia potencjalnaSiły zachowawcze i energia potencjalna
B
p,Bp,AA
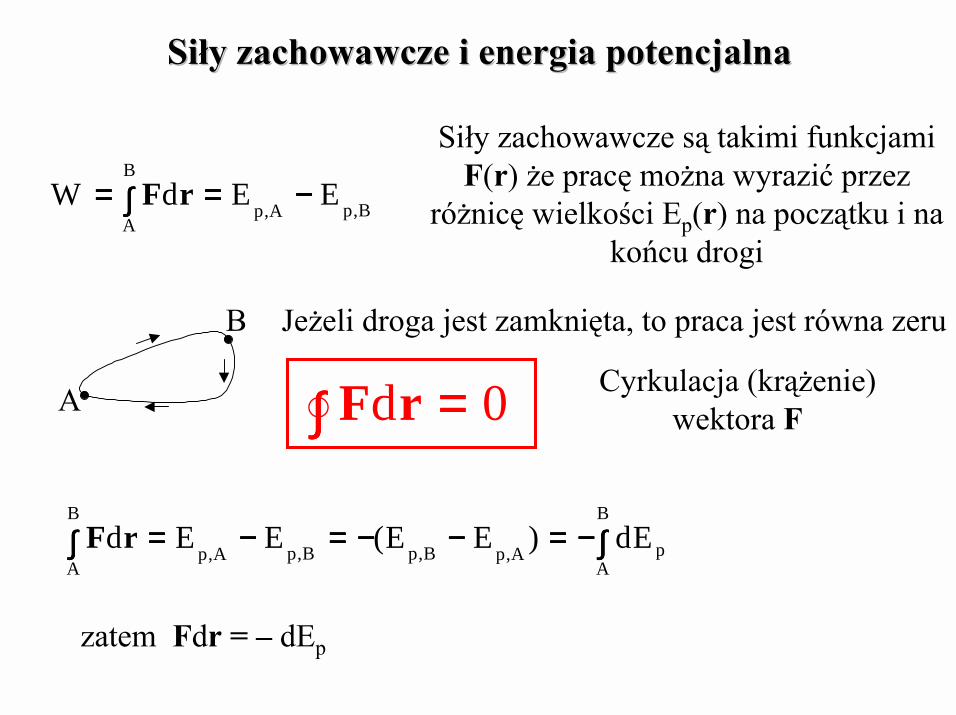
W d E EF r= = −= = −= = −= = −∫∫∫∫
Siły zachowawcze są takimi funkcjamiF(r) że pracę można wyrazić przez
różnicę wielkości Ep(r) na początku i nakońcu drogi
A
B Jeżeli droga jest zamknięta, to praca jest równa zeru
d 0F r ====∫∫∫∫!Cyrkulacja (krążenie)
wektora F
B B
pp,B p,Bp,A p,AA A
d E E (E E ) dEF r = − = − − = −= − = − − = −= − = − − = −= − = − − = −∫ ∫∫ ∫∫ ∫∫ ∫
zatem Fdr = – dEp
p p px y z
p p pp p
E E EF ;F ;F
x y zE E E
grad E Ex y z
x y z
x y z
x y z
F i i i
i i i
∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂= − = − = −= − = − = −= − = − = −= − = − = −
∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂ = − + + = − = −∇= − + + = − = −∇= − + + = − = −∇= − + + = − = −∇ ∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂
∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∇ = + +∇ = + +∇ = + +∇ = + +∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂
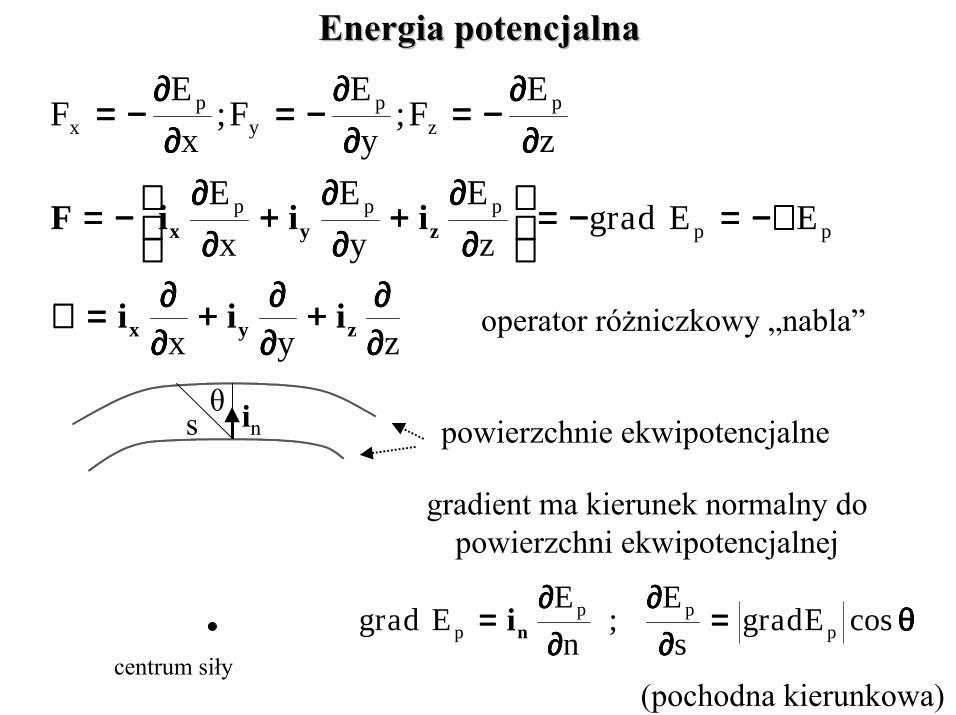
Energia potencjalnaEnergia potencjalna
operator różniczkowy „nabla”
θ in powierzchnie ekwipotencjalnes
centrum siły
gradient ma kierunek normalny dopowierzchni ekwipotencjalnej
p pp p
E Egrad E ; gradE cos
n sni∂ ∂∂ ∂∂ ∂∂ ∂
= = θ= = θ= = θ= = θ∂ ∂∂ ∂∂ ∂∂ ∂
(pochodna kierunkowa)
Zasada zachowania energiiZasada zachowania energii
(((( )))) (((( ))))
B
k,B p,Bk,A p,AA
p pk kB A
W d E -E E -E
E +E E +E E const
F r= = == = == = == = =∫∫∫∫
= = == = == = == = =
energiacałkowita
p
212p
EF kr
rE krdr kr C
∂∂∂∂= − = −= − = −= − = −= − = −
∂∂∂∂= = += = += = += = +∫∫∫∫
Przykład 1: siła sprężysta
p2 2k kdr kF= ; E = +Cr r r
= −= −= −= −∫∫∫∫Przykład 2:
(((( ))))p 2GMm GMm GMm h GMm GMmE 1 hhR+h R R R RR(1+ )R
= − = − ≈ − − = − += − = − ≈ − − = − += − = − ≈ − − = − += − = − ≈ − − = − +
k = – GMm siła grawitacyjna
const mgh
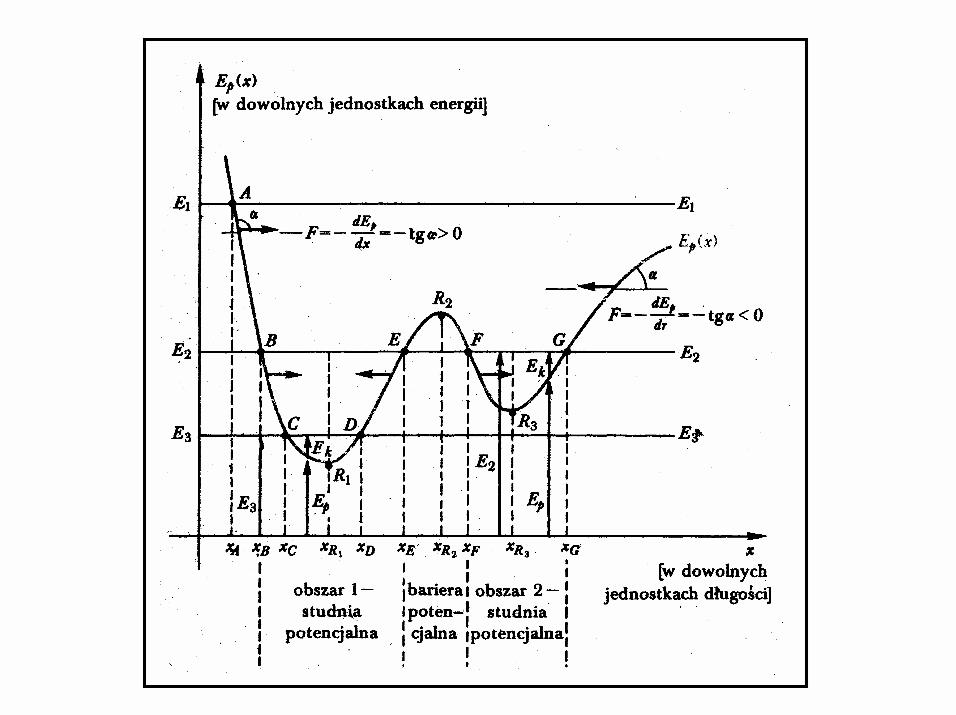
Wykorzystanie zasady zachowania energiiWykorzystanie zasady zachowania energiido rozwiązywania zagadnień ruchudo rozwiązywania zagadnień ruchu
Przykład: Ruch prostoliniowy pod działaniem zachowawczej siły FMamy Ep = Ep(x)
(((( ))))(((( ))))(((( ))))
(((( ))))(((( ))))
212 p
12
p
12
p
dxE m E (x) constansdt
dx 2 E E xdt m
dx2 E E xm
= + == + == + == + =
= −= −= −= −
−−−− ∫∫
x0
x
= dt = t
t
0
Jeżeli znamy Ep(x), to stąd znajdujemy związek między x i t
Przypadek F = constans; dEp = – Fdx ⇒ Ep = – Fx
(((( )))) 2
1 dx t2 E Fxm
2 2 2E Fx E tmF F
1 F 2Ex t t2 m m
====++++
+ − =+ − =+ − =+ − =
= += += += +
∫x
0
a v0
{E = mv2/2 + Fx; stąd E = mv02/2 jeśli x = 0 dla t = 0}
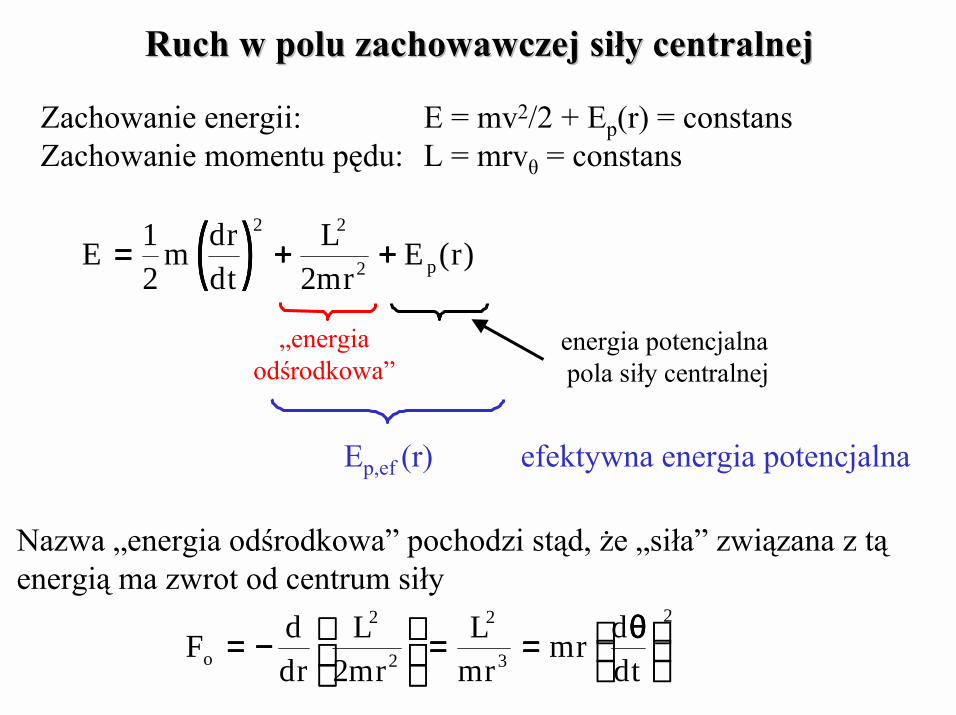
Ruch w polu zachowawczej siły centralnejRuch w polu zachowawczej siły centralnej
Zachowanie energii: E = mv2/2 + Ep(r) = constansZachowanie momentu pędu: L = mrvθ = constans
(((( )))) 22
p21 dr LE m E (r)2 dt 2mr
= + += + += + += + +
Ep,ef (r) efektywna energia potencjalna
„energiaodśrodkowa”
energia potencjalna pola siły centralnej
Nazwa „energia odśrodkowa” pochodzi stąd, że „siła” związana z tąenergią ma zwrot od centrum siły
22 2
o 2 3d L L dF mrdr 2mr mr dt
θθθθ = − = == − = == − = == − = =
(((( ))))(((( ))))p,ef
dr 2 E E rdt m
= −= −= −= −
Można rozwiązać osobno zagadnienie „części radialnej” ruchu
∫ ∫(((( ))))(((( ))))p,ef
dr dt = t2 E E rm
====−−−−r0
r
0
t
Ruch w polu zachowawczej siły centralnejRuch w polu zachowawczej siły centralnej
⇒ r(t)
To równanie określa granicezmienności r podczas ruchu
Dwie możliwości: r ≥ rmin ruch nieskończony rmax≥ r ≥ rmin tor w obszarze ograniczonym
Ruch w polu zachowawczej siły centralnejRuch w polu zachowawczej siły centralnej
(((( ))))
(((( ))))
2
p,ef
2
p,ef
dr dr dt 2 mrE Ed dt d m L
Lmr dr constans
2 E Em
θ θ
θ
= = −= = −= = −= = −
= += += += +−−−−∫∫∫∫ Równanie toru we
współrzędnychbiegunowych
0
20
0
Ld dtmr
tθ
θ
θ θ θ− = =− = =− = =− = =∫ ∫∫ ∫∫ ∫∫ ∫„część kątowa” ruchuze związku L = mr2(dθ/dt)
Ruch w polu zachowawczej siły centralnejRuch w polu zachowawczej siły centralnej
(((( ))))
max
min
2
p,ef
drmr 2 E EL m
r
r
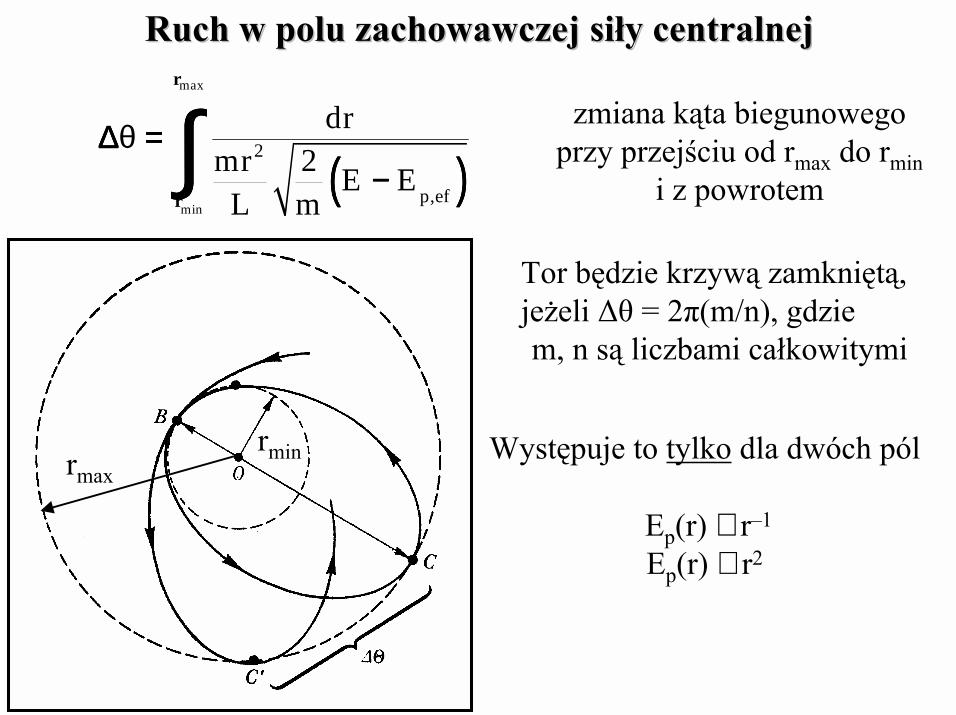
θ∆ =∆ =∆ =∆ =−−−−∫∫∫∫ zmiana kąta biegunowego
przy przejściu od rmax do rmini z powrotem
Tor będzie krzywą zamkniętą,jeżeli Δθ = 2π(m/n), gdziem, n są liczbami całkowitymi
Występuje to tylko dla dwóch pól
Ep(r) ∼ r–1
Ep(r) ∼ r2
rminrmax
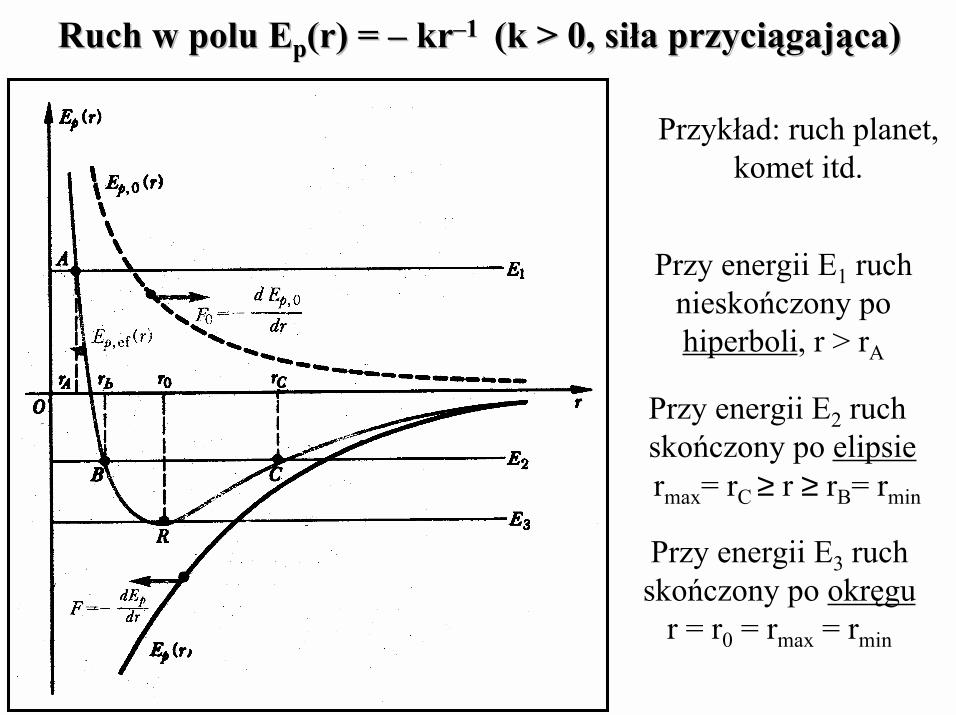
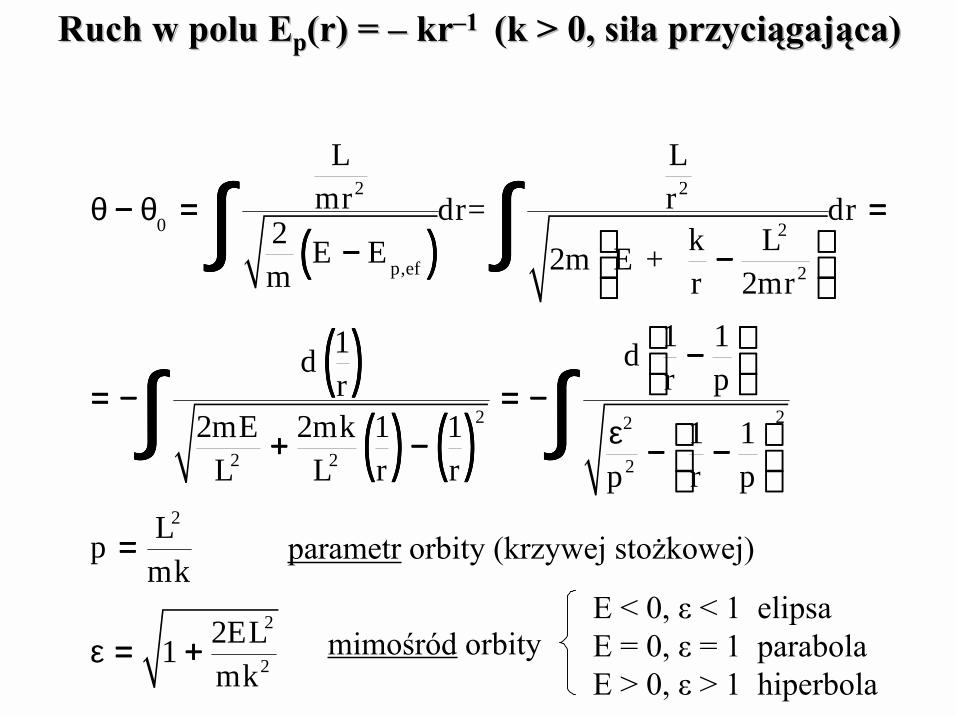
Ruch w poluRuch w polu E Epp(r) = – kr(r) = – kr–1 –1 (k > 0, siła przyciągająca)(k > 0, siła przyciągająca)
Przy energii E1 ruchnieskończony pohiperboli, r > rA
Przy energii E2 ruchskończony po elipsiermax= rC ≥ r ≥ rB= rmin
Przy energii E3 ruchskończony po okręgu
r = r0 = rmax = rmin
Przykład: ruch planet,komet itd.
(((( ))))
(((( ))))(((( )))) (((( ))))
2 2
0 2
p,ef 2
2 22
2 2 2
2
L Lmr rdr= dr
2 k LE E 2m E + m r 2mr
1 11 dd r pr2mE 2mk 1 1 1 1L L r r p r p
Lpmk
θ θ
ε
− = =− = =− = =− = = −−−− −−−−
−−−− = − = −= − = −= − = −= − = − + −+ −+ −+ − − −− −− −− −
====
∫ ∫∫ ∫∫ ∫∫ ∫
∫ ∫∫ ∫∫ ∫∫ ∫
Ruch w poluRuch w polu E Epp(r) = – kr(r) = – kr–1 –1 (k > 0, siła przyciągająca)(k > 0, siła przyciągająca)
2
22EL1mk
ε = += += += +
parametr orbity (krzywej stożkowej)
mimośród orbityE < 0, ε < 1 elipsaE = 0, ε = 1 parabolaE > 0, ε > 1 hiperbola
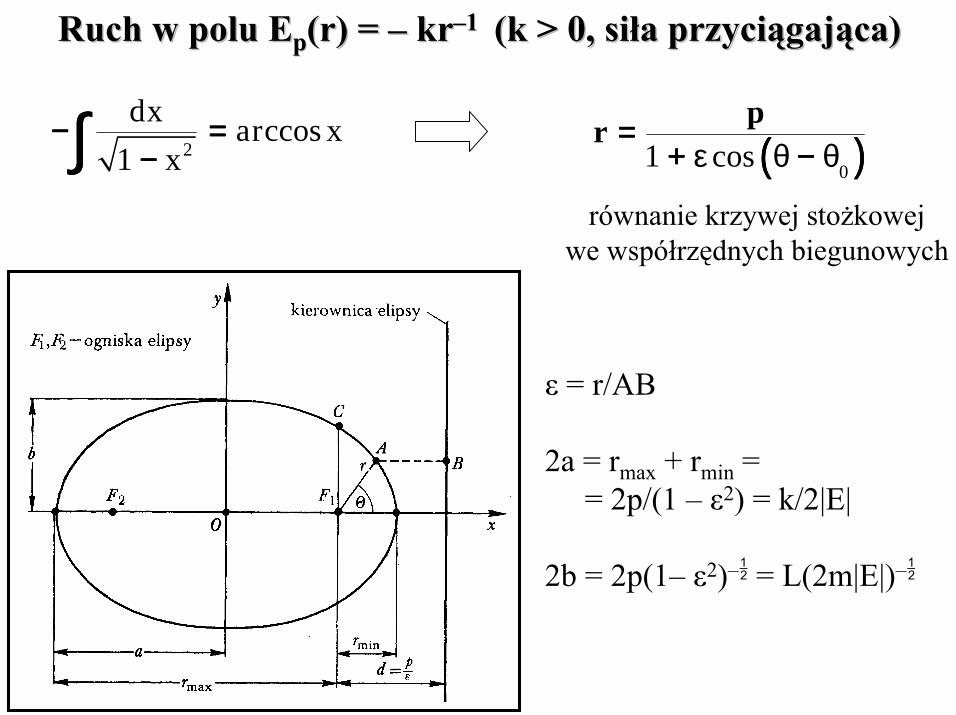
Ruch w polu ERuch w polu Epp(r) = – kr(r) = – kr–1 –1 (k > 0, siła przyciągająca)(k > 0, siła przyciągająca)
2
dx arccos x1 x
− =− =− =− =−−−−∫∫∫∫ (((( ))))01 cos
prε θ θ
====+ −+ −+ −+ −
równanie krzywej stożkowejwe współrzędnych biegunowych
ε = r/AB
2a = rmax + rmin = = 2p/(1 – ε2) = k/2|E|
2b = 2p(1– ε2)–! = L(2m|E|)–!
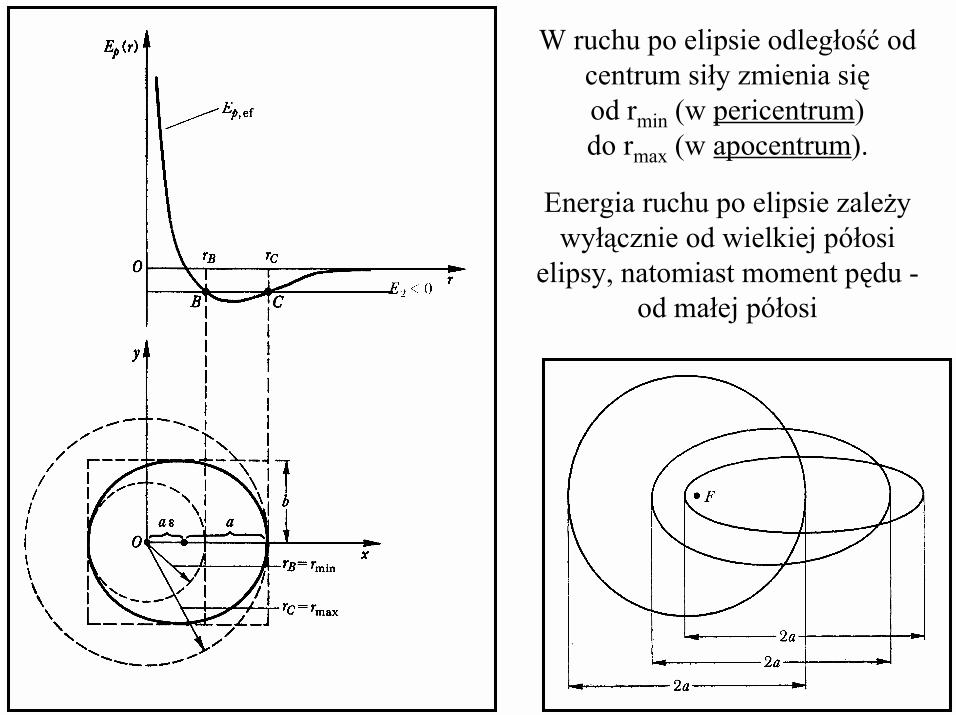
W ruchu po elipsie odległość odcentrum siły zmienia sięod rmin (w pericentrum)do rmax (w apocentrum).
Energia ruchu po elipsie zależywyłącznie od wielkiej półosi
elipsy, natomiast moment pędu -od małej półosi
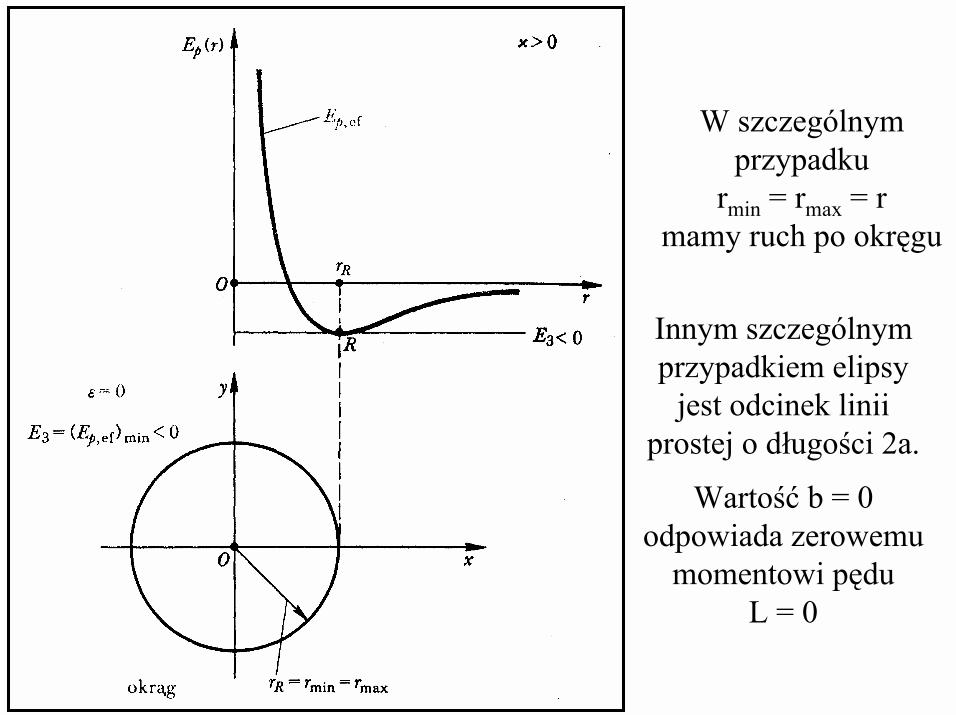
W szczególnymprzypadku
rmin = rmax = rmamy ruch po okręgu
Innym szczególnymprzypadkiem elipsy
jest odcinek liniiprostej o długości 2a.
Wartość b = 0odpowiada zerowemu
momentowi pęduL = 0
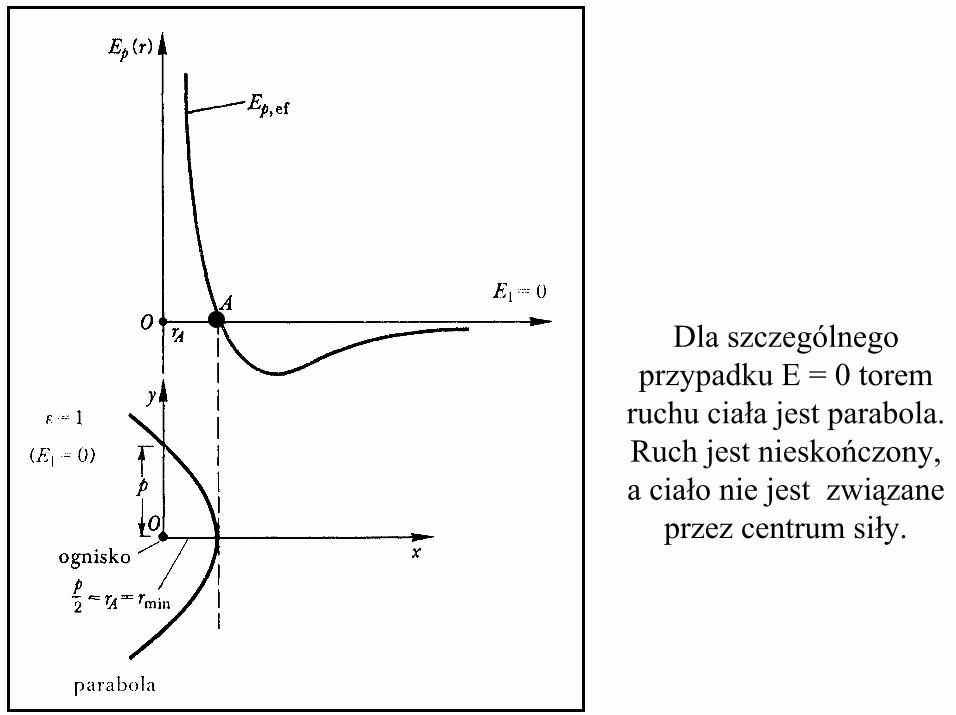
Dla szczególnegoprzypadku E = 0 torem
ruchu ciała jest parabola.Ruch jest nieskończony,a ciało nie jest związane
przez centrum siły.
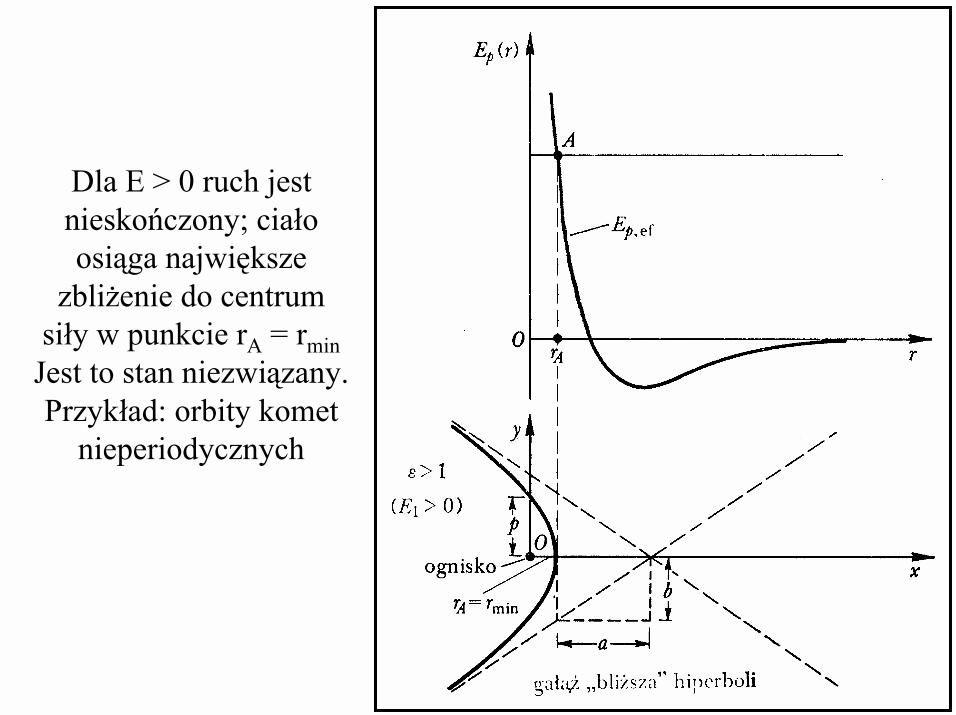
Dla E > 0 ruch jestnieskończony; ciałoosiąga największe
zbliżenie do centrumsiły w punkcie rA = rmin
Jest to stan niezwiązany.Przykład: orbity komet
nieperiodycznych
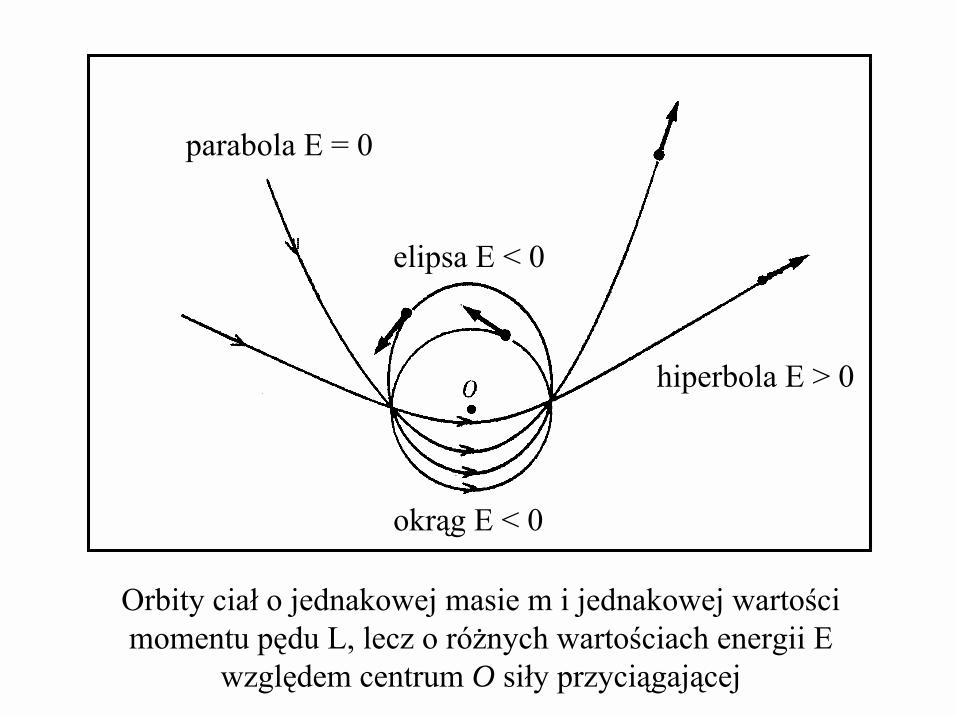
parabola E = 0
hiperbola E > 0
elipsa E < 0
okrąg E < 0
Orbity ciał o jednakowej masie m i jednakowej wartościmomentu pędu L, lecz o różnych wartościach energii E
względem centrum O siły przyciągającej
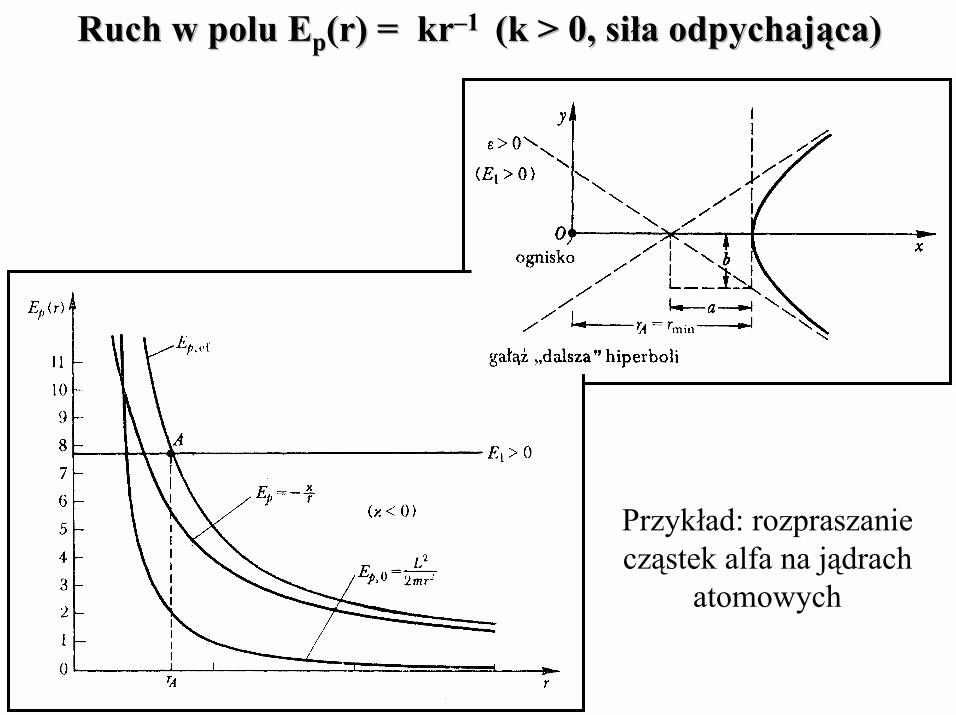
Ruch w poluRuch w polu E Epp(r) = kr(r) = kr–1 –1 (k > 0, siła odpychająca)(k > 0, siła odpychająca)
Przykład: rozpraszaniecząstek alfa na jądrach
atomowych
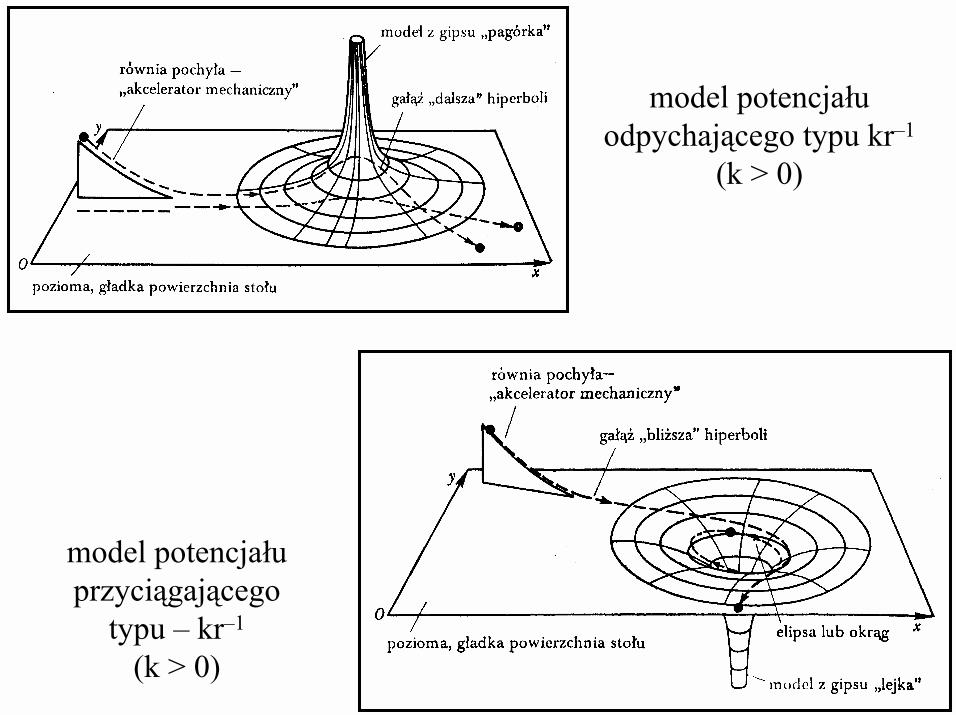
model potencjałuprzyciągającego
typu – kr–1
(k > 0)
model potencjałuodpychającego typu kr–1
(k > 0)
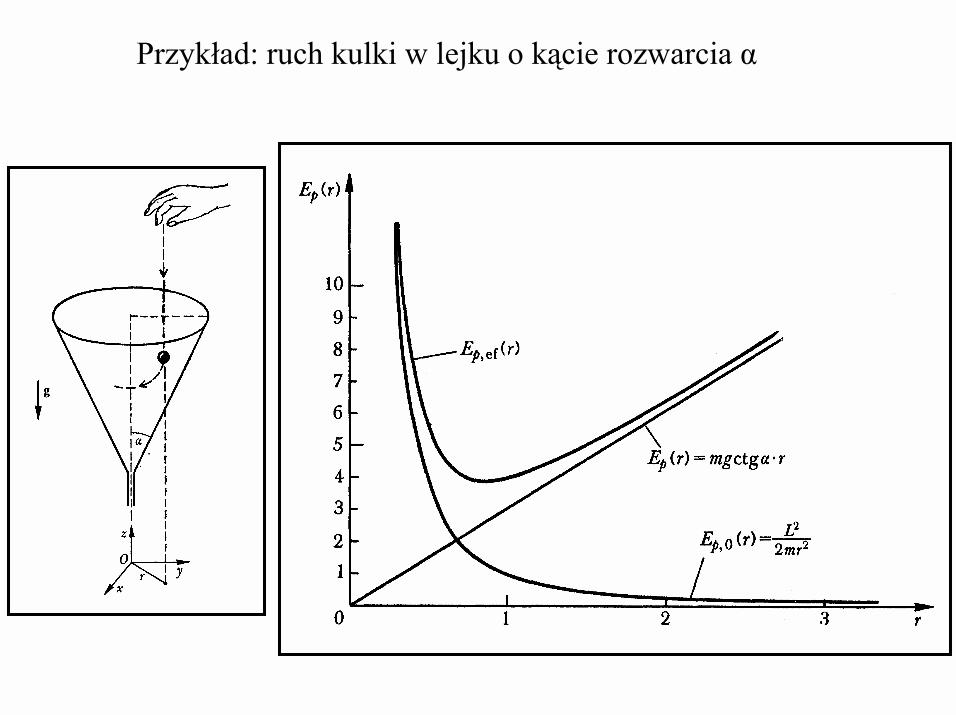
Przykład: ruch kulki w lejku o kącie rozwarcia α
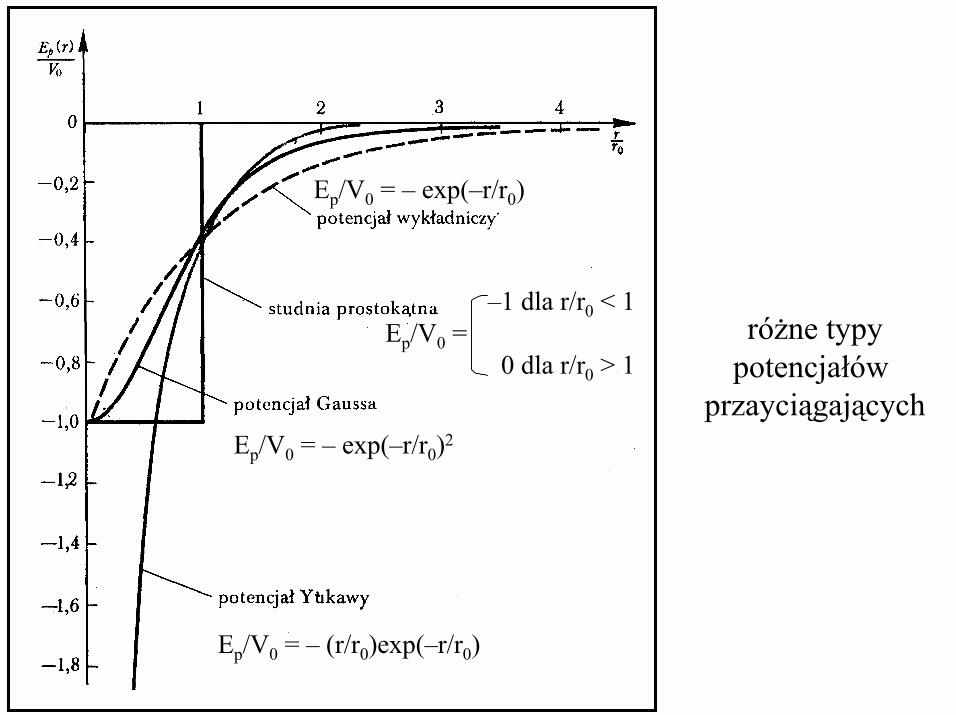
Ep/V0 = – (r/r0)exp(–r/r0)
Ep/V0 = – exp(–r/r0)2
Ep/V0 = – exp(–r/r0)
–1 dla r/r0 < 1Ep/V0 =
0 dla r/r0 > 1różne typy
potencjałów przayciągających
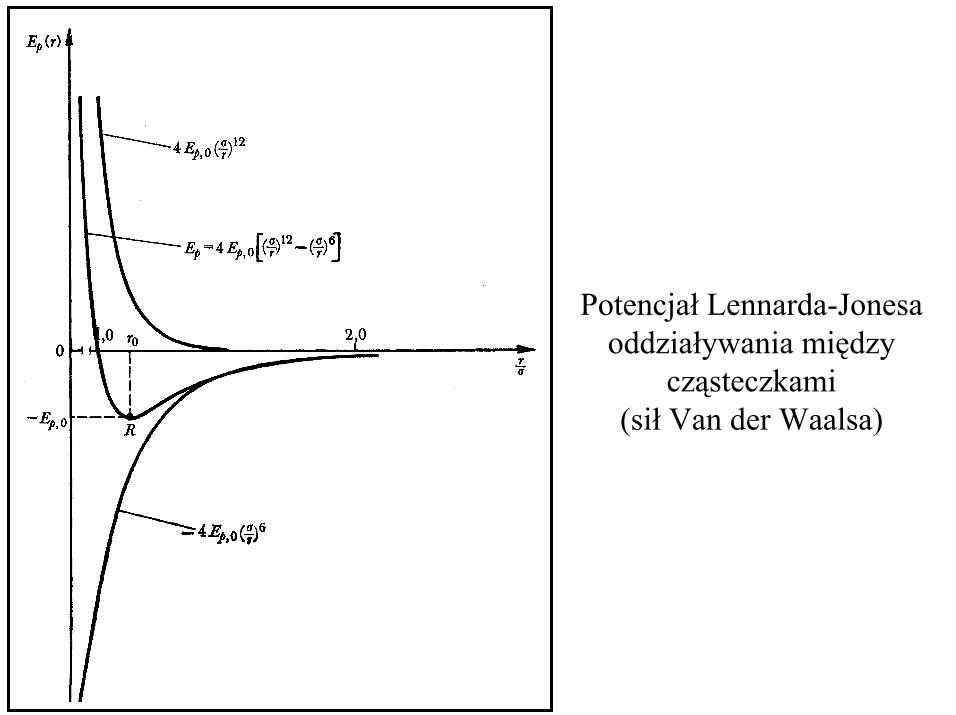
Potencjał Lennarda-Jonesaoddziaływania między
cząsteczkami(sił Van der Waalsa)
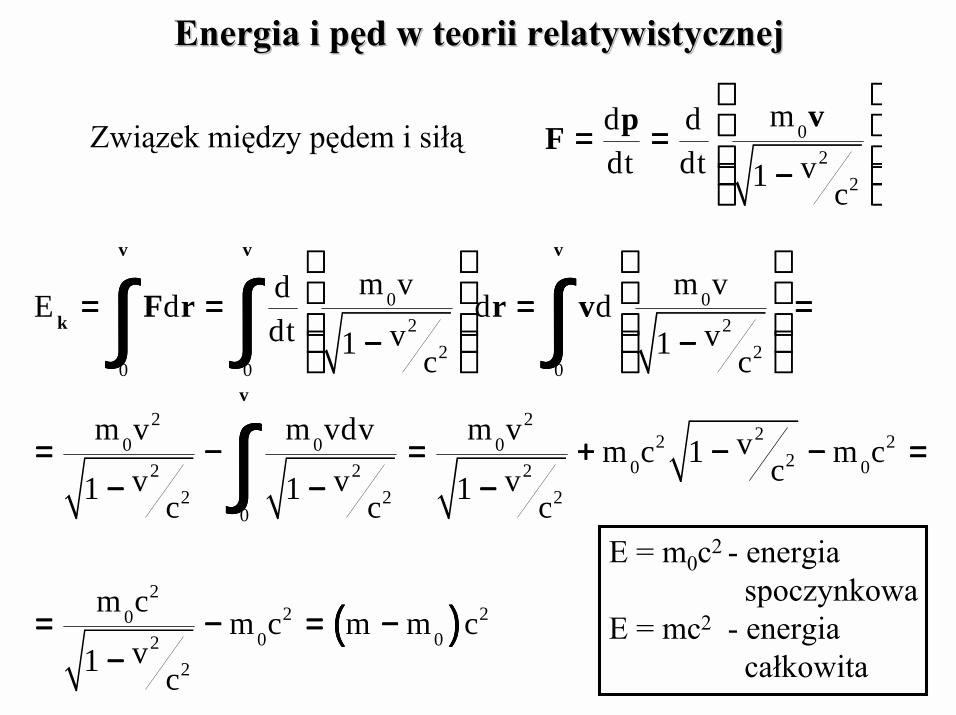
Energia i pęd w teorii relatywistycznejEnergia i pęd w teorii relatywistycznej
02
2
md ddt dt v1 c
vpF = == == == = −−−−
Związek między pędem i siłą
(((( ))))
0 02 2
2 20 0 0
2 222 20 0 0
20 02 2 22 2 2
0
22 20
0 022
m v m vdE d d ddt v v1 1c c
m v m vdv m v vm c 1 m ccv v v1 1 1c c c
m cm c m m c
v1 c
v v v
k
v
F r r v = = = == = = == = = == = = = − −− −− −− −
= − = + − − == − = + − − == − = + − − == − = + − − =− − −− − −− − −− − −
= − = −= − = −= − = −= − = −−−−−
∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫∫ ∫ ∫∫∫∫∫
E = m0c2 - energia spoczynkowa
E = mc2 - energia całkowita
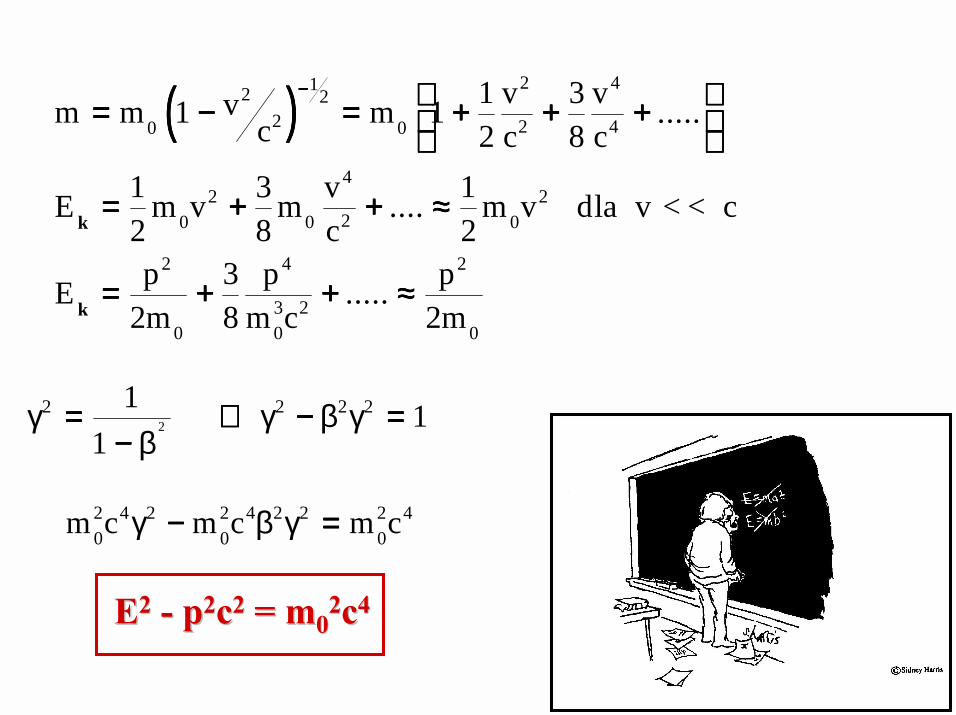
(((( ))))2 412 2
2 2 40 0
42 2
20 0 0
2 4 2
3 20 0 0
1 v 3 vvm m 1 m 1 .....c 2 c 8 c1 3 v 1E m v m .... m v dla v << c2 8 c 2p 3 p pE .....
2m 8 m c 2m
−−−− = − = + + += − = + + += − = + + += − = + + +
= + + ≈= + + ≈= + + ≈= + + ≈
= + + ≈= + + ≈= + + ≈= + + ≈
k
k
22 2 2 21 1
1γ γ β γ
β= ⇒ − == ⇒ − == ⇒ − == ⇒ − =
−−−−
2 4 2 2 4 2 2 2 40 0 0m c m c m cγ β γ− =− =− =− =
EE22 - p - p22cc22 = m = m0022cc44
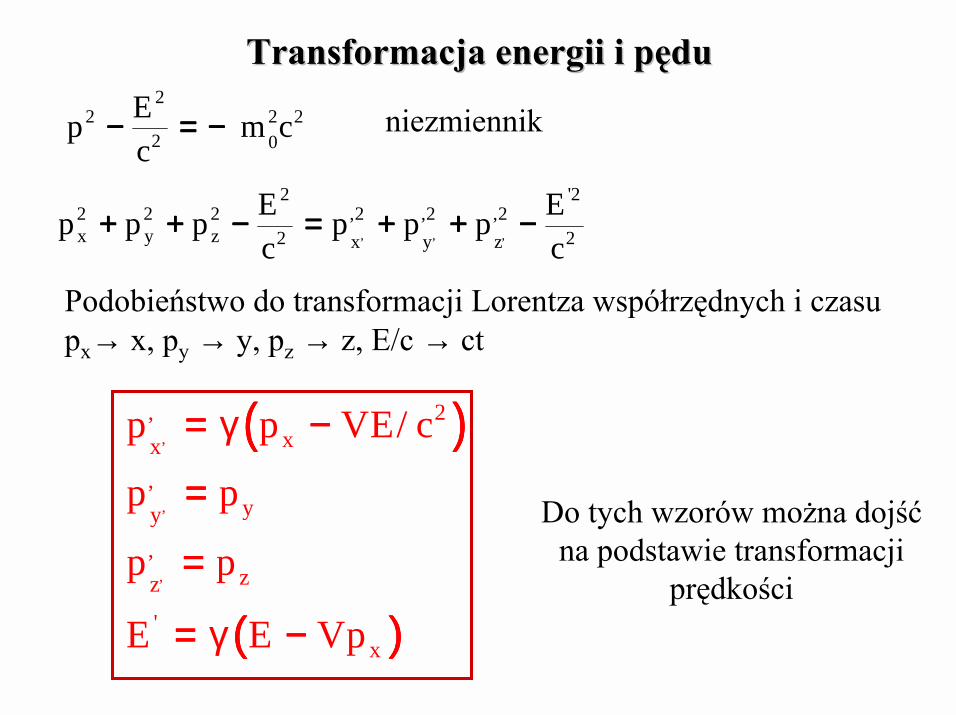
Transformacja energii i pęduTransformacja energii i pędu2
2 2 22 0
Ep m cc
− = −− = −− = −− = − niezmiennik
, , ,
2 '22 2 2 ,2 ,2 ,2x y z 2 2x y z
E Ep p p p p pc c
+ + − = + + −+ + − = + + −+ + − = + + −+ + − = + + −
Podobieństwo do transformacji Lorentza współrzędnych i czasupx→ x, py → y, pz → z, E/c → ct
(((( ))))
(((( ))))
,
,
,
, 2xx
,yy
,zz
'x
p p VE/c
p p
p p
E E Vp
γ
γ
= −= −= −= −
====
====
= −= −= −= −
Do tych wzorów można dojśćna podstawie transformacji
prędkości
E2 – p2c2 = m02c4Ze wzorów oraz p = γm0v można otrzymać
2 402
m cv c 1
E= −= −= −= −
2 4 2 40 0
2 2 4 20
m c m cdv dE dEv E m c E E E
= ≅= ≅= ≅= ≅−−−−
2 401
2 2
m clog v log c log 1
E
= + −= + −= + −= + −
Dla bardzo dużych energii E >> m0c2, zatem można nadawać ciałucoraz większą energię nie zwiększając praktycznie jego prędkości.
W podobny sposób można otrzymać2
2 2 20
dE p dpE m c + p p
====
i dla ultrawysokich energii dE/E ≅ dp/p
Dla cząstek o m0 = 0 (fotony) E = pc = hνczyli p = hν/c