Embed Size (px)
Citation preview

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
STATIKA VOZILA I OSOVINSKA OPTEREĆENJA
OSOVINSKA OPTEREĆENJA NA HORIZONTALNOJ PODLOZI
hT G A
lP lZGP GZ
G
l
A
Poznato je: G, lP, lZOdrediti: GP, GZ
lP + lZ = l

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
STATIKA VOZILA I OSOVINSKA OPTEREĆENJA
OSOVINSKA OPTEREĆENJA NA HORIZONTALNOJ PODLOZI
hT G A
lP lZGP GZ
G
l
A
ΣMA = 0 ⇒ GP·l = G·lZ
ΣZi = 0 ⇒ GP + GZ = G
lP + lZ = l
Gl
lG Z
P ⋅=
Gl
lG P
Z ⋅=
lG
Gl PZ ⋅=
lG
Gl ZP ⋅=
P
Z
Z
P
GG
ll
=

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
STATIKA VOZILA I OSOVINSKA OPTEREĆENJA
OSOVINSKA OPTEREĆENJA NA HORIZONTALNOJ PODLOZI
hT G A
lP lZGP GZ
G
l
A
Težina vozila se “raspoređuje” na dva osloncaUobičajeno: zadavanje procentualneraspodele opterećenja napred / nazadDalje se za poznato G i l lako izračunavaju GP i GZ, odnosno lP i lZ
Primer: RASPORED TEŽINE NAPRED / NAZAD = 52% / 48%

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
STATIKA VOZILA I OSOVINSKA OPTEREĆENJA
OSOVINSKA OPTEREĆENJA NA HORIZONTALNOJ PODLOZI
Za jedno vozilo izmereno je:
• GP = 750 daN
• GZ = 630 daN
• l = 2500 mm
Odrediti: lP, lZDefinisati procentualnu raspodelu opterećenja napred/nazad

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
STATIKA VOZILA I OSOVINSKA OPTEREĆENJA
OSOVINSKA OPTEREĆENJA NA HORIZONTALNOJ PODLOZI
Rešenje:
G = GP + GZ = 750 + 630 = 1380 daN
lG
Gl ZP ⋅= = (630/1380)⋅2500 = 1141 mm
Kontrola:
lG
Gl PZ ⋅=
G
= (750/1380)⋅2500 = 1359 mm
Kontrola:
1141 + 1359 = 2500
Procentualna raspodela napred / nazad:
GP/G = 750/1380 ≈ 0,54 ⇒ 54% NAPRED
Gz/G = 630/1380 ≈ 0,46 ⇒ 46% NAZAD
1141/2500 ≈ 0,46 = lP/l
1359/2500 ≈ 0,54 = lZ/l

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
• Reakcije podloge?
GT
• Efekti delovanja G?
RZ?
G
G = ...

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
hT
G G
α
α
xz
lPlZ
GP
GZ
G
lA
α
Napomena:x- osa – pravac kretanja vozila (“horizontalni pravac”)z- osa - pravac upravan na pravac kretanja (“vertikalni pravac”)
Pojmovi “vertikalni” i “horizontalni” – važe za KS vezan za vozilo!(ako se ne naglasi drugačije)

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
hT
G G
α
α
xz
lPlZ
GP
GZ
G
lA
α
Poznato je: G, lP, lZ, hTOdrediti: GP, GZUporediti sa situacijom na horizontalnoj podlozi.
Napomena: vozilo je u mirovanju; dejstvo sile G⋅sinα u x-pravcu se podrazumeva da je uravnoteženo na neki odgovarajući način (sile kočenja i sl.); ovo ne razmatramo pa nije ni označeno na skici!

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
hT
GP G
ΣMA = 0 ⇒ GP·l = G·cosα· lZ – G·sinα·hT
ΣZi = 0 ⇒ GP + GZ = G·cosα
α
αlP
lZ
GP
GZ
G
lA
ΣZi = 0 ⇒ GP + GZ = G·cosα
Gl
lG Z
P ⋅=
Gll
G PZ ⋅=
α = 0:
sinαGl
hcosαG
ll
G TZP ⋅⋅−⋅⋅=
sinαGl
hcosαG
ll
G TPZ ⋅⋅+⋅⋅=
α

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
DINAMIČKI UTICAJI NA OSOVINSKA OPTEREĆENJA
•UBRZANJE, KOČENJE – PRERASPODELA USLED INERCIJALNE SILE
•AERODINAMIČKE SILE IZDIZANJA
O tome kasnije...

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
Odrediti apsolutnu i procentualnu promenu osovinskih opterećenja iz prethodnog slučaja ako se vozilo nalazi na uzbrdici pod uglom α = 10°.uzbrdici pod uglom α = 10°.
Visina težišta iznosi: hT = 550 mm
Koje podatke iz prethodnog zadatka koristimo a koje ne, i zašto?
Da li će zbir GP i GZ ostati jednak G ili ne, i zašto?

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
Rešenje:
sinαGl
hcosαG
ll
G TZP ⋅⋅−⋅⋅= =(1359/2500)⋅1380⋅cos10° -
(550/2500)⋅1380⋅sin10° = 686 daN
sinαGl
hcosαG
ll
G TPZ ⋅⋅+⋅⋅=
(550/2500)⋅1380⋅sin10° = 686 daN
=(1141/2500)⋅1380⋅cos10° + (550/2500)⋅1380⋅sin10° = 673 daN
Kontrola: GP + GZ = 686 + 673 = 1359 daN = G⋅cos10°, G = 1380 daN

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
Procentualna promena:
∆GP = 686 – 750 = - 64 daN ⇒ smanjenje za 8,5%
∆Gz = 673 – 630 = 43 daN ⇒ povećanje za 6,8%
Zašto ∆GP i ∆GZ nisu jednaki??
(Zašto se GP smanjilo više nego što se GZ povećalo?)
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
Izvesti izraze za određivanje vertikalnih reakcija vozila koje miruje na nizbrdici.

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
OSOVINSKA OPTEREĆENJA VOZILANA PODLOZI POD UZDUŽNIM NAGIBOM
Rešenje:
sinαGl
hcosαG
ll
G TZP ⋅⋅+⋅⋅= sinαG
lcosαG
lGP ⋅⋅+⋅⋅=
sinαGl
hcosαG
ll
G TPZ ⋅⋅−⋅⋅=

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
EKSPERIMENTALNO ODREĐIVANJEVISINE TEŽIŠTA VOZILA
lG
Gl PP ⋅=
lG
Gl ZZ ⋅=
lP
lZrSt
l
AΣMA = 0
H/l = tgα ⇒ α = ...
INFORMATIVNO
hTα
Z1
Z2
GH
a ba=lP⋅cosα +(hT-rSt)sinα
⇓hT = ...
ΣMA = 0
⇓
Z2·l⋅cosα = G·a
MERI SE: GP, GZ, Z2, l, HIZRAČUNAVA SE: α, lP, hT
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
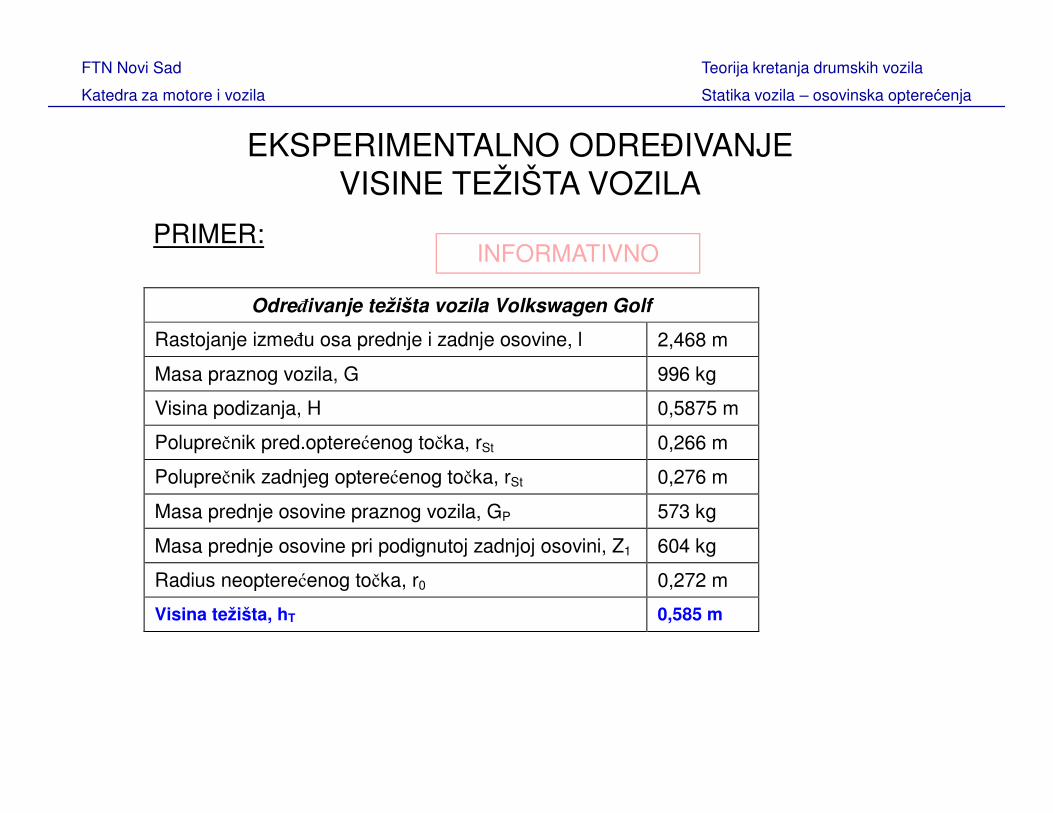
Određivanje težišta vozila Volkswagen Golf
Rastojanje između osa prednje i zadnje osovine, l 2,468 m
Masa praznog vozila, G 996 kg
Visina podizanja, H 0,5875 m
PRIMER:
EKSPERIMENTALNO ODREĐIVANJEVISINE TEŽIŠTA VOZILA
INFORMATIVNO
Visina podizanja, H 0,5875 m
Poluprečnik pred.opterećenog točka, rSt 0,266 m
Poluprečnik zadnjeg opterećenog točka, rSt 0,276 m
Masa prednje osovine praznog vozila, GP 573 kg
Masa prednje osovine pri podignutoj zadnjoj osovini, Z1 604 kg
Radius neopterećenog točka, r0 0,272 m
Visina težišta, hT 0,585 m

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA NAJVEĆE DOZVOLJENE MASE VOZILA
NAJVEĆA DOZVOLJENA (UKUPNA) MASA VOZILAZULLÄSSIGES GESAMTGEWICHTPERMISSIBLE TOTAL WEIGHT (GROSS WEIGHT)

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA NAJVEĆE DOZVOLJENE MASE VOZILA
NAJVEĆA DOZVOLJENA MASA VOZILA−−−− MASA PRAZNOG VOZILA
= NOSIVOST VOZILA
(CURB WEIGHT, LEERGEWICHT)
(PAYLOAD, NUTZLAST)

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
U eksploataciji ne sme doći do prekoračenja maksimalnih vrednosti osovinskih opterećenja deklarisanih od strane fabrike!
Kritično kod teretnih vozila: ugradnja hidraulične dizalice!
U praksi se provera ograničava na slučaj mirovanja na horizontalnoj podlozi.

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
lP0 = 1600 mmlZ0 = 2000 mmG0 = 8000 daN
GGPMAXPMAX = 6000 daN= 6000 daN
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJAPrimer: za kamion čiji su podaci zadati treba izračunati nosivost sa aspekta dozvoljenih osovinskih opterećenja GPMAX i GZMAX. Težina praznog kamiona je G0 a težina tereta je GTer.Nosivost kamiona predstavlja maksimalnu dopuštenu težinu tereta, GTer,MAX. PMAXPMAX
GGZMAXZMAX = 10000 daN= 10000 daN
llP0lZ0
lPrep
LL/2
GPGZ
G0GTer
L=4200 mmlPrep = 1300 mm
Gter,MAX = ?
A
težinu tereta, GTer,MAX.
GP, GZ – tekuće vrednostiGter = 0 ⇒ GP = GP0, GZ = GZ0
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
Princip:• Kada je kamion prazan, osovinske reakcije imaju početne minimalne vrednosti GP0 i GZ0.• Kada se kamion inicijalno optereti teretom težine GTer, vrednosti GP i GZ se povećavaju.• Daljim povećavanjem GTer, GP i GZ dalje rastu.• Ako stalno povećavamo GTer, u jednom momentu, jedna od osovinskih reakcija će dostići
svoju maksimalnu dozvoljenu vrednost. U opštem slučaju, ne znamo unapred koja.svoju maksimalnu dozvoljenu vrednost. U opštem slučaju, ne znamo unapred koja.• Kada je prva od osovina dostigla svoje maksimalno dozvoljeno opterećenje, moramo
prestati sa povećavanjem GTer inače ćemo osovinu preopteretiti, što nije dopušteno. Znači, ta vrednost GTer je GTer,MAX odnosno nosivost kamiona.
• Druga osovina je u tom momentu opterećenja težinom manjom od dopuštene.• Pošto u opštem slučaju ne znamo unapred koja osovina je merodavna za određivanje
nosivosti, moramo izračunati nosivost sa stanovišta dopuštenog opterećenja obe osovine pojedinačno, i kao merodavnu odabrati manju vrednost.

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
lP0 = 1600 mmlZ0 = 2000 mmG0 = 8000 daN
GGPMAXPMAX = 6000 daN= 6000 daN
LL/2
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
PMAXPMAXGGZMAXZMAX = 10000 daN= 10000 daN
llP0lZ0
lPrepGPGZ
G0GTer
L=4200 mmlPrep = 1300 mm
Gter,MAX = ?
A
Postupak:• Određujemo GP i GZ u zavisnosti od ostalih veličina; u relacijama
figuriše i GTer• Iz ovih relacija određujemo obrnute – GTer u zavisnosti od GP odnosno GZ• U prvu relaciju stavljamo da je GP = GPMAX i izračunavamo Gter,MAX1• U drugu relaciju stavljamo da je GZ = GzMAX i izračunavamo Gter,MAX2• Određujemo koja je od dve vrednosti merodavna.

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
LL/2
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
TerPrep
00Z
P Gl
l2L/G
ll
G ⋅−
+⋅=
l2L/l −
llP0lZ0
lPrepGPGZ
G0GTer
ΣMA = 0 , ΣZi = 0 ⇒GP⋅l – G0⋅lZ0 – GTer⋅(L/2-lPrep) = 0GZ = G0 + GTer – GP
A
00G
ll
G 0ZP ⋅=
00G
ll
G 0PZ ⋅=
TerPrep
00P
Z Gl
l2L/1G
ll
G ⋅
−−+⋅=
B
Uočavamo:

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
TerPrep
00Z
P Gl
l2L/G
ll
G ⋅−
+⋅=
TerPrep
00P
Z Gl
l2L/1G
ll
G ⋅
−−+⋅=
⇒ GP = 4444,4 + 0,2⋅GTer (1)
⇒ GZ = 3555,6 + 0,8⋅GTer (2)
l = lP0 + lZ0 Za zadate podatke dobijamo:
Ter0Z ll
⇒ GZ = 3555,6 + 0,8⋅GTer (2)
Kontrola: (1) + (2) ⇒ GP + GZ = 8000 daN + GTer, za ∀ GTer �
(1) ⇒ GTer1 = 5⋅GP – 22222 daNDakle: ako hoćemo da nam GP bude toliko-i-toliko, treba da stavimo toliko-i-toliko tereta (GTer1)
(2) ⇒ GTer2 = 1,25⋅GZ – 4444,5 daNIli: ako hoćemo da nam GZ bude toliko-i-toliko, treba da stavimo toliko-i-toliko tereta (GTer2)
Uočavamo da se GZ mnogo više menja sa GTer nego GP, jer je težište tereta
mnogo bliže zadnjoj osovini!

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
(1) ⇒ GTer1 = 5⋅GP – 22222 daN
Stavljajući GP = GPMAX = 6000 daN dobijamo:
GTer1 = 7778 daN
(2) ⇒ GTer2 = 1,25⋅GZ – 4444,5 daN
Stavljajući GZ = GZMAX = 10000 daN dobijamo:
GTer2 = 8055 daN
Zaključak:
• Nosivost kamiona iznosi 7778 daN i za nju je merodavno opterećenje prednje osovine koje je za tu težinu tereta maksimalno dopušteno, odn. 6000 daN
• U slučaju da je opterećenje zadnje osovine maksimalno dozvoljeno (GTer = 8055 daN), prednja osovina je preopterećena!
Komentar:
• Dobijena razlika je mala i za praksu irelevantna, što znači da su parametri vozila u projektovanju pravilno odabrani (kapaciteti svih bitnih elemenata su približno jednako iskorišćeni). Može se usvojiti nosivost vozila od 8t.
• Isto tolika nosivost se dobija i na osnovu razlike između “bruto”-mase i mase praznog vozila, što takođe ukazuje da su parametri vozila pravilno usklađeni.

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
TerPrep
00Z
P Gl
l2L/G
ll
G ⋅−
+⋅= TerPrep
00P
Z Gl
l2L/1G
ll
G ⋅
−−+⋅=
SUPERPOZICIJA OPTEREĆENJA
00G
ll
G 0ZP ⋅=
00G
ll
G 0PZ ⋅=
Princip olakšava praktična izračunavanja – ne moramo određivati novi položaj težišta za vozilo + teret, dovoljno je na poznate osovinske reakcije praznog vozila dodati reakcije usled dejstva tereta
GP = GP0 + GP.Ter GZ = GZ0 + GZ.Ter

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Statika vozila – osovinska opterećenja
ODREĐIVANJE NOSIVOSTI TERETNOG VOZILASA ASPEKTA DOZVOLJENIH OSOVINSKIH OPTEREĆENJA
SUPERPOZICIJA ⇒
GP = GP0 + GPVoz + GPTerGP = GP0 + GPVoz + GPTer
GZ = GZ0 + GZVoz + GZTer
GPGZ
G0
GVozGTer
.;ItdGl
lG;G
ll
G.Voz
ZVozVozP0
0Z0P ⋅=⋅=