Embed Size (px)
Citation preview
Open Systems in Classical Mechanics
Adam YassineAdvisor: Dr. John Baez
University of California, Riverside
November 4, 2017

Table of Contents
1 Spans in Classical Mechanics
2 The categories Symp and SympSurj
3 The Hamiltonian
4 Main Result
Table of Contents
1 Spans in Classical Mechanics
2 The categories Symp and SympSurj
3 The Hamiltonian
4 Main Result
Table of Contents
1 Spans in Classical Mechanics
2 The categories Symp and SympSurj
3 The Hamiltonian
4 Main Result

Table of Contents
1 Spans in Classical Mechanics
2 The categories Symp and SympSurj
3 The Hamiltonian
4 Main Result
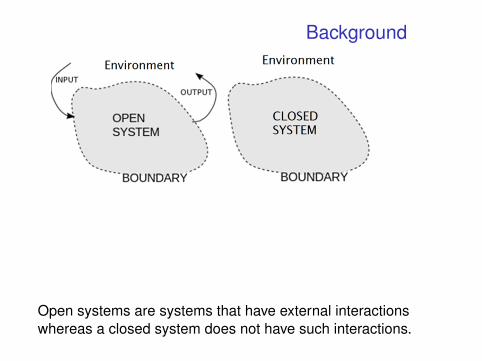
Background
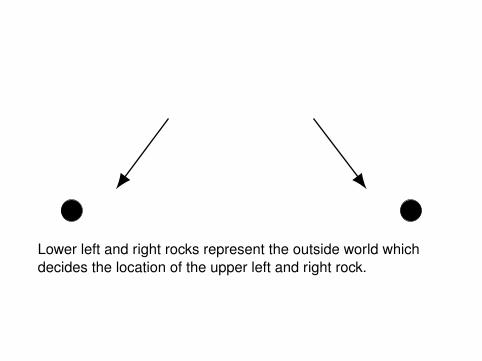
Open systems are systems that have external interactionswhereas a closed system does not have such interactions.

Physicists like to study closed systems as well as be able towrite Hamiltonians and equations of motion.
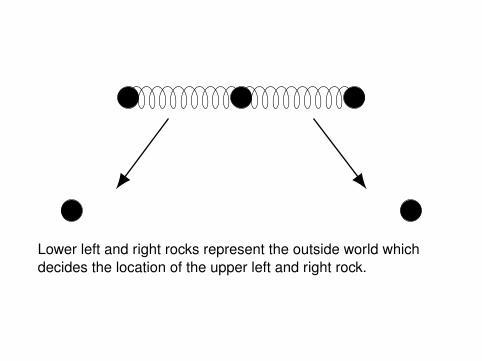
We can study open systems where the “outside world” decidesthe location of the left and right rocks, which affects the positionof the middle rock.

Physicists like to study closed systems as well as be able towrite Hamiltonians and equations of motion.
We can study open systems where the “outside world” decidesthe location of the left and right rocks, which affects the positionof the middle rock.
Lower left and right rocks represent the outside world whichdecides the location of the upper left and right rock.
Lower left and right rocks represent the outside world whichdecides the location of the upper left and right rock.
Lower left and right rocks represent the outside world whichdecides the location of the upper left and right rock.
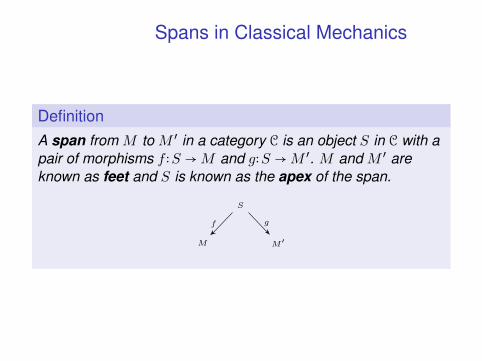
Spans in Classical Mechanics
DefinitionA span from M to M ′ in a category C is an object S in C with apair of morphisms f ∶S →M and g∶S →M ′. M and M ′ areknown as feet and S is known as the apex of the span.
M M ′
S
gf
RemarkThe advantage of spans is that we can build bigger systems byby “gluing” together smaller systems.
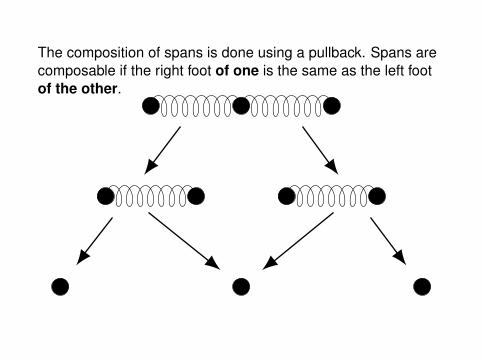
The composition of spans is done using a pullback. Spans arecomposable if the right foot of one is the same as the left footof the other.

The composition of spans is done using a pullback. Spans arecomposable if the right foot of one is the same as the left footof the other.

The composition of spans is done using a pullback. Spans arecomposable if the right foot of one is the same as the left footof the other.
The composition of spans is done using a pullback. Spans arecomposable if the right foot of one is the same as the left footof the other.
Using the framework of category theory, we formalize theheuristic principles that physicists employ in constructing theHamiltonians for classical systems as sums of Hamiltonians ofsubsystems.

Definition (Poisson Manifold)
A Poisson manifold is a manifold M endowed with a {⋅, ⋅} suchthat for any f, g, h ∈ C∞(M) and a, b ∈ R with ordinarymultiplication of functions, the following hold:
1 Antisymmetry {f, g} = −{g, f}
2 Bilinearity
{f, ag + bh} = a{f, g} + b{f, h}
3 Jacobi Identity
{f,{g, h}} + {{g, h}, f} + {h,{f, g}} = 0.
4 Leibniz Law
{fg, h} = {f, h}g + f{g, h}
Definition (Poisson Manifold)
A Poisson manifold is a manifold M endowed with a {⋅, ⋅} suchthat for any f, g, h ∈ C∞(M) and a, b ∈ R with ordinarymultiplication of functions, the following hold:
1 Antisymmetry {f, g} = −{g, f}2 Bilinearity
{f, ag + bh} = a{f, g} + b{f, h}
3 Jacobi Identity
{f,{g, h}} + {{g, h}, f} + {h,{f, g}} = 0.
4 Leibniz Law
{fg, h} = {f, h}g + f{g, h}
Definition (Poisson Manifold)
A Poisson manifold is a manifold M endowed with a {⋅, ⋅} suchthat for any f, g, h ∈ C∞(M) and a, b ∈ R with ordinarymultiplication of functions, the following hold:
1 Antisymmetry {f, g} = −{g, f}2 Bilinearity
{f, ag + bh} = a{f, g} + b{f, h}
3 Jacobi Identity
{f,{g, h}} + {{g, h}, f} + {h,{f, g}} = 0.
4 Leibniz Law
{fg, h} = {f, h}g + f{g, h}

Definition (Poisson Manifold)
A Poisson manifold is a manifold M endowed with a {⋅, ⋅} suchthat for any f, g, h ∈ C∞(M) and a, b ∈ R with ordinarymultiplication of functions, the following hold:
1 Antisymmetry {f, g} = −{g, f}2 Bilinearity
{f, ag + bh} = a{f, g} + b{f, h}
3 Jacobi Identity
{f,{g, h}} + {{g, h}, f} + {h,{f, g}} = 0.
4 Leibniz Law
{fg, h} = {f, h}g + f{g, h}

Symplectic Manifold
Definition (Symplectic Manifold)
A Poisson manifold of even dimension M equipped with aclosed nondegenerate 2−form ω satisfying {f, g} = ω(vf , vg)where vf is the vector field with vf(h) = {h, f} is a symplecticmanifold.
Example
Let R2n have standard coordinates (x1, ...xn, y1, ...yn), the2−form
ω =n
∑i=1
dxi ∧ dyi
is closed and nondegenerate.

Symplectic Manifold
Definition (Symplectic Manifold)
A Poisson manifold of even dimension M equipped with aclosed nondegenerate 2−form ω satisfying {f, g} = ω(vf , vg)where vf is the vector field with vf(h) = {h, f} is a symplecticmanifold.
Example
Let R2n have standard coordinates (x1, ...xn, y1, ...yn), the2−form
ω =n
∑i=1
dxi ∧ dyi
is closed and nondegenerate.
Definition (Poisson map)
Let (M,{⋅, ⋅}M) and (N,{⋅, ⋅}N) be Poisson manifolds. We saythat a map
Φ∶M → N
is a Poisson map if, for any f, g ∈ C∞(N)
{f, g}N ○Φ = {f ○Φ, g ○Φ}M .
DefinitionThe category of whose objects are symplectic manifolds andmorphisms are Poisson maps is called Symp.
DefinitionTha subcategory SympSurj of Symp has symplecticmanifolds as objects and morphisms are surjective Poissonmaps.
DefinitionThe category of whose objects are symplectic manifolds andmorphisms are Poisson maps is called Symp.
DefinitionTha subcategory SympSurj of Symp has symplecticmanifolds as objects and morphisms are surjective Poissonmaps.
Theorem (A.Y.)
The morphisms of SympSurj are pullbackable in Symp.
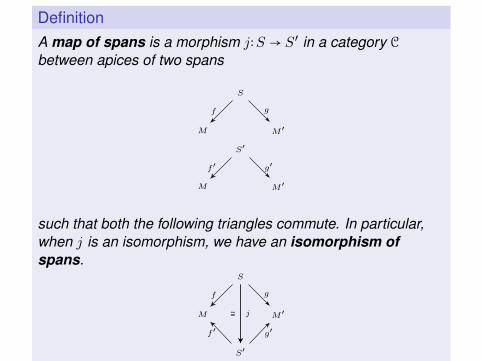
DefinitionA map of spans is a morphism j∶S → S′ in a category C
between apices of two spans
M M ′
S
gf
M M ′
S′
g′f ′
such that both the following triangles commute. In particular,when j is an isomorphism, we have an isomorphism ofspans.
M M ′
S
S′
gf
g′f ′
≅ j
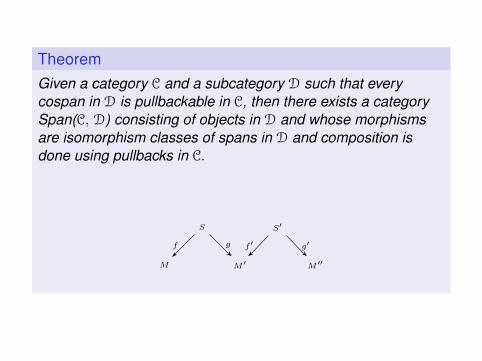
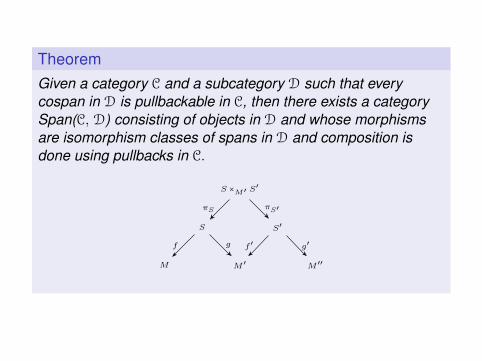
TheoremGiven a category C and a subcategory D such that everycospan in D is pullbackable in C, then there exists a categorySpan(C, D) consisting of objects in D and whose morphismsare isomorphism classes of spans in D and composition isdone using pullbacks in C.
M M ′
M ′′
S
S′
S ×M′ S′
f g
f ′ g′
πS′πS
TheoremGiven a category C and a subcategory D such that everycospan in D is pullbackable in C, then there exists a categorySpan(C, D) consisting of objects in D and whose morphismsare isomorphism classes of spans in D and composition isdone using pullbacks in C.
M M ′
M ′′
S
S′
S ×M′ S′
f g
f ′ g′
πS′πS
TheoremGiven a category C and a subcategory D such that everycospan in D is pullbackable in C, then there exists a categorySpan(C, D) consisting of objects in D and whose morphismsare isomorphism classes of spans in D and composition isdone using pullbacks in C.
M M ′ M ′′
S S′
S ×M′ S′
f g f ′ g′
πS′πS
TheoremGiven a category C and a subcategory D such that everycospan in D is pullbackable in C, then there exists a categorySpan(C, D) consisting of objects in D and whose morphismsare isomorphism classes of spans in D and composition isdone using pullbacks in C.
M M ′ M ′′
S S′
S ×M′ S′
f g f ′ g′
πS′πS

RemarkNow because pullbacks are unique up to isomorphism, weneed to take isomorphism classes of spans to obtain acategory.
Example
We can apply the theorem to the case C = Symp andD = SympSurj as well as using the fact that the composition ofsurjective Poisson maps is surjective Poisson, to get thatSpan(Symp, SympSurj) is a category.
DefinitionLet M be a symplectic manifold of dimension 2n. We define aHamiltonian to be a smooth function, H, with
H ∶M → R.

1 In physics, the Hamiltonian corresponds to the total energyof the system.
2 Often, the Hamiltonian is the sum of the kinetic energies ofthe all the particles,K, plus the potential energies of all theparticles,V in the system. H =K + V.
1 In physics, the Hamiltonian corresponds to the total energyof the system.
2 Often, the Hamiltonian is the sum of the kinetic energies ofthe all the particles,K, plus the potential energies of all theparticles,V in the system. H =K + V.
We are now ready to state the main result, which will allow usto study Hamiltonian mechanics using category theory.
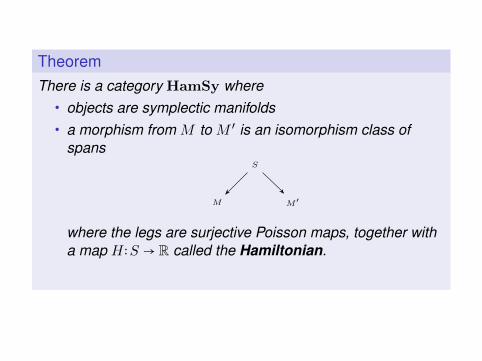
TheoremThere is a category HamSy where
• objects are symplectic manifolds• a morphism from M to M ′ is an isomorphism class of
spans
M M ′
S
where the legs are surjective Poisson maps, together witha map H ∶S → R called the Hamiltonian.
• we compose morphisms as follows:
TheoremThere is a category HamSy where
• objects are symplectic manifolds
• a morphism from M to M ′ is an isomorphism class ofspans
M M ′
S
where the legs are surjective Poisson maps, together witha map H ∶S → R called the Hamiltonian.
• we compose morphisms as follows:
TheoremThere is a category HamSy where
• objects are symplectic manifolds• a morphism from M to M ′ is an isomorphism class of
spans
M M ′
S
where the legs are surjective Poisson maps, together witha map H ∶S → R called the Hamiltonian.
• we compose morphisms as follows:

TheoremThere is a category HamSy where
• objects are symplectic manifolds• a morphism from M to M ′ is an isomorphism class of
spans
M M ′
S
where the legs are surjective Poisson maps, together witha map H ∶S → R called the Hamiltonian.
• we compose morphisms as follows:
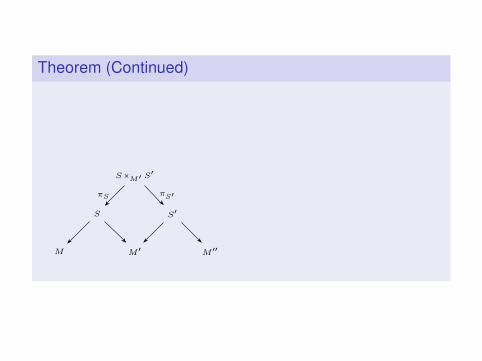
Theorem (Continued)
M M ′ M ′′
S S′
S ×M′ S′
R
πS′
H H′
H′′
πS
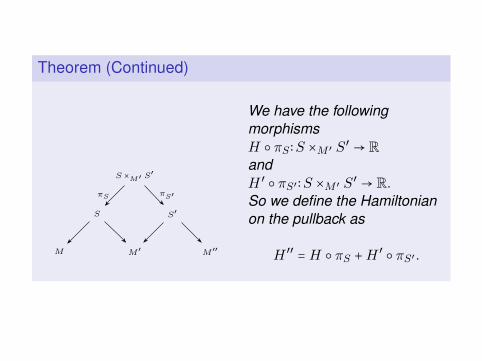
We have the followingmorphismsH ○ πS ∶S ×M ′ S′ → RandH ′ ○ πS′ ∶S ×M ′ S′ → R.So we define the Hamiltonianon the pullback as
H ′′ =H ○ πS +H ′ ○ πS′ .
Theorem (Continued)
M M ′ M ′′
S S′
S ×M′ S′
R
πS′
H H′
H′′
πS
We have the followingmorphismsH ○ πS ∶S ×M ′ S′ → RandH ′ ○ πS′ ∶S ×M ′ S′ → R.So we define the Hamiltonianon the pullback as
H ′′ =H ○ πS +H ′ ○ πS′ .

Theorem (Continued)
M M ′ M ′′
S S′
S ×M′ S′
R
πS′
H H′
H′′
πS
We have the followingmorphismsH ○ πS ∶S ×M ′ S′ → RandH ′ ○ πS′ ∶S ×M ′ S′ → R.So we define the Hamiltonianon the pullback as
H ′′ =H ○ πS +H ′ ○ πS′ .

Theorem (Continued)
M M ′ M ′′
S S′
S ×M′ S′
R
πS′
H H′
H′′
πS
We have the followingmorphismsH ○ πS ∶S ×M ′ S′ → RandH ′ ○ πS′ ∶S ×M ′ S′ → R.So we define the Hamiltonianon the pullback as
H ′′ =H ○ πS +H ′ ○ πS′ .

Proof of Main Theorem
We use the theory of decorated cospans, developed in Fong’sthesis:
• B. Fong,The Algebra of Open and InterconnectedSystems, Ph.D. thesis, University of Oxford, 2016.
We adapt it to spans by working with the opposite categories.

References
V. I. Arnol’d, Mathematical Methods of Classical Mechanics, Springer Berlin (1989).
S. Awodey, Category Theory, Oxford University Press New York (2010).
J. C. Baez and J. Muniain, Gauge Fields, Knots and Gravity, World Scientific Singapore(1994).
J. Benabou, Introduction to bicategories, Reports of the Midwest Category Seminar,Singapore (Lecture Notes in Mathematics) 47, Springer Berlin Heidelberg, 1967.
A. Cannas da Silva and A. Weinstein, Geometric Models for Noncommutative Algebras(1998). Preprint, available at https://math.berkeley.edu/ alanw/Models.pdf
R. L. Fernandes and I. Marcut, Lectures on Poisson Geometry (2015). Preprint, available athttp://www.math.illinois.edu/ ruiloja/Math595/book.pdf
B. Fong, Decorated Cospans, Theory and Applications of Categories 30 available athttp://www.tac.mta.ca/tac/volumes/30/33/30-33.pdf
B. Fong, The Algebra of Open and Interconnected Systems, Ph.D. thesis, University ofOxford, 2016.

References
M. Gualtieri, Transversality (2008). Preprint, available athttp://www.math.toronto.edu/mgualt/MAT1300/MAT1300 2008-9.html
M. Hirsch, Differential Topology, Springer Berlin (1976).
J. Lee, Introduction to Smooth Manifolds, Springer Berlin (2015).
P. Libermann and C.-M. Marle, Symplectic Geometry and Analytical Mechanics, D. ReidelDordrecht (1987).
D. McDuff and D. Salamon, Introduction to Symplectic Topology, Oxford University PressNew York (1998).
A. Yassine, Open Systems in Classical Mechanics (2017). Preprint, available atarXiv:1710.11392.

![Data · No woman, no cry. - [11] (1998) avec Joan Baez comme Chanteur John Baez in concert Part 2 (1998) avec Joan Baez comme Guitariste The boxer. - [2] (1998) avec Joan Baez comme](https://img.dokumen.tips/doc/110x75/61000648f25f3f23857a540e/data-no-woman-no-cry-11-1998-avec-joan-baez-comme-chanteur-john-baez-in.jpg)