Embed Size (px)
Citation preview
MODELAGEM E CONTROLE DE CORPO COMPLETO USANDO QUATÉRNIOSDUAIS PARA UM MANIPULADOR MÓVEL
Fredy Rolando Salazar-Sangucho∗, Bruno Vilhena Adorno∗
∗Programa de Pós-Graduação em Engenharia Elétrica - Universidade Federal de Minas GeraisAv. Antônio Carlos 6627, Belo Horizonte, MG 31270-010 Brasil
[email protected], [email protected]
Resumo— Este trabalho visa implementar uma técnica de modelagem e controle de corpo completo para um
manipulador móvel composto por um robô manipulador acoplado a um robô móvel não holonômico de tração
diferencial. Esta técnica baseia-se na álgebra de quatérnios duais para encontrar os modelos cinemáticos direto
e diferencial da cadeia serialmente acoplada. Além disso, um controlador cinemático — no qual a referência
é dada pelo quatérnio dual representando a pose do efetuador — produz o movimento do robô e utiliza o
Jacobiano do corpo completo para gerar simultaneamente o sinal de controle de todos os graus de liberdade.
Esta implementação é avaliada por meio de experimentos que demostram a validade da técnica de modelagem e
controle de corpo completo.
Palavras-chave— Modelagem e controle de corpo completo, manipulador móvel, quatérnios duais, modelo
cinemático direto, modelo cinemático diferencial, controlador cinemático.
1 Introdução
Nos últimos anos muitas pesquisas envolvendo ro-bótica têm se concentrado em trabalhos que ca-racterizam a chamada robótica de assistência. Defato, recentemente houve um aumento considerá-vel no desenvolvimento de robôs móveis e huma-noides capazes de interagir com humanos e tam-bém capazes de ajudar pessoas que possuem ne-cessidades especiais, como pessoas muito idosas ouque tenham algum tipo de deficiência (Mast et al.,2012). Robôs assistentes têm ganhado bastanterelevância nos cenários ou ambientes que envol-vem o contato com humanos (Kemp et al., 2007)e dessa maneira muitos trabalhos recentes visammelhorar esses tipos de robôs. Por exemplo, al-guns trabalhos levam em consideração a imple-mentação de uma aparência antropomórfica (Spe-xard et al., 2007), enquanto outros se focam nocontrole simultâneo de vários graus de liberdade(Nishiwaki et al., 2005; Gienger et al., 2006; Sentis& Khatib, 2006; Nagasaka et al., 2010; Dietrichet al., 2011; Dalibard et al., 2013; Saab et al.,2013), manipulação cooperativa (Adorno et al.,2014) e interação humano-robô tanto no nível fí-sico (De Santis et al., 2008) quanto no cognitivo(Breazeal, 2003). Nessa perspectiva, espera-se queem um futuro próximo robôs e humanos compar-tilhem espaços comuns e trabalhem de forma co-operativa.
Com o objetivo de fazer com que os robôs in-terajam com os humanos de forma mais natural, édesejável que os movimentos dos robôs sejam flui-dos e que envolvam a estrutura completa do robô.Diferentes trabalhos nesta área foram desenvolvi-dos e aplicados em manipuladores móveis e robôshumanoides. Nishiwaki et al. (2005) propuseramum método de controle de corpo inteiro realizandomovimentos que mantêm a pose e o equilíbrio au-tomaticamente. Este método foi aplicado ao robôhumanoide H7 das Indústrias Kawada em par-
ceria com a Universidade de Tokyo. Sentis &Khatib (2006) apresentam uma estrutura de con-trole de corpo inteiro que utiliza o modelo dinâ-mico do robô e que leva em consideração múl-tiplas tarefas com diferentes prioridades de exe-cução, permitindo assim controlar múltiplas tare-fas enquanto as limitações físicas e cinemáticas dorobô são respeitadas. Basicamente três níveis deprioridade são utilizados e referem-se às limita-ções físicas do robô, à execução de tarefas e aocontrole da postura do robô. Este controle foiaplicado ao robô humanoide ASIMO da Honda.Gienger et al. (2006) apresentam um algoritmode movimento de corpo inteiro para permitir in-tervalos de deslocamento no espaço de trabalho.Analogamente ao movimento no espaço nulo pro-posto inicialmente por Liegeois (1977), os interva-los de deslocamento são explorados para satisfazersimultaneamente uma ou várias funções de custoe este algoritmo foi avaliado no robô humanoideASIMO. Nagasaka et al. (2010) propõem uma es-trutura de controle para um robô composto pordois manipuladores e uma base móvel. Este podecoordenar todas as forças conjuntas para alcan-çar diversos objetivos de movimento, como posi-ção, velocidade, aceleração, força e impedância emqualquer parte do corpo. Adorno (2011) apresen-tou um método de controle cinemático, que é umaextensão do Espaço Dual de Cooperação (EDC)proposto por Adorno et al. (2010), e que leva emconsideração o movimento do corpo inteiro paraa realização de manipulações bimanuais realiza-das por um robô composto por uma base móvelnão holonômica, um dorso com um grau de liber-dade e dois braços. A manipulação é descrita emtermos de duas variáveis: a variável relativa, querepresenta a relação entre as poses dos dois efe-tuadores (garras) do robô, e a variável absoluta,que representa a pose do objeto que está sendomanipulado. A ideia de sistemas cinemáticos aco-plados serialmente, os quais são representados por
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1544

quatérnios duais, foi introduzida a fim de descre-ver as variáveis absolutas em termos de todos osgraus de liberdade que estão presentes no sistemacinemático completo. Este método foi avaliadomediante simulação. Park, H. Andy Lee (2013)propuseram um método de controle de equilíbriode robôs humanoides baseada no EDC. O métodofornece uma maneira eficiente para a estabilizaçãodo corpo inteiro por meio da modificação da posi-ção horizontal da cintura gerada pelo movimentocoordenado de ambas as pernas. Este método ba-seado no EDC prevê a possibilidade de gerar umagrande biblioteca de movimentos de corpo inteiropara robôs humanoides e foi validado por meio desimulações, que incluem casos que mostraram umrobô humanoide HOAP-2 andando em um terrenoplano e subindo escadas. Dietrich et al. (2011)apresentam um controlador de corpo inteiro base-ado na impedância mecânica do sistema para for-necer uma interface entre o espaço da tarefa (doinglês task-space) e algoritmos de planejamentode nível superior. Ao utilizar uma única matrizJacobiana para todo o sistema, exceto para asmãos, um comportamento sincronizado é alcan-çado. Este controlador foi avaliado no humanoidemóvel Justin. Dalibard et al. (2013) propuseramum método geral para o planejamento de movi-mentos de corpo inteiro que facilita uma marchalivre de colisão em robôs humanoides. Este algo-ritmo de planejamento considera modelos exatosdo robô e seu ambiente e é usado para resolverproblemas de navegação e manipulação. O mé-todo foi aplicado em um robô humanoide HRP-2.
Todos os trabalhos supracitados apresentamtécnicas que permitem integrar movimentos simul-tâneos de subsistemas que compõem um corpointeiro por meio do controle de todos os grausde liberdade disponíveis do robô. Essas técnicassão particularmente úteis para a geração de movi-mento de sistemas altamente redundantes, comohumanoides e manipuladores móveis.
A contribuição principal deste artigo consistena implementação da técnica de modelagem econtrole de corpo completo proposta por Adorno(2011). Esta técnica baseia-se na álgebra de qua-térnios duais para encontrar o modelo cinemáticodireto e o modelo cinemático diferencial direto dacadeia serialmente acoplada, que neste trabalhoé composta por um manipulador acoplado a umrobô móvel não holonômico. Além disso, um con-trolador cinemático — no qual a referência é dadapelo quatérnio dual representando a pose do efe-tuador — produz o movimento do robô e utiliza oJacobiano do corpo completo para gerar simulta-neamente o sinal de controle de todos os graus deliberdade.
O artigo está organizado da seguinte forma:na seção 2 é feita uma revisão de quatérnios duaise seu uso na representação de movimentos rígidos;a seção 3 apresenta os modelos cinemáticos direto
e diferencial direto do robô manipulador, da basemóvel não holonômica e do sistema serialmenteacoplado que representa o corpo completo do ma-nipulador móvel; na seção 4 apresenta-se uma re-visão do controle cinemático usado para gerar omovimento simultâneo de todos os graus de liber-dade do corpo completo; na seção 5 apresenta-seos resultados dos experimentos realizados com ummanipulador móvel real e, por último, a seção 6encerra o artigo com as discussões finais e conclu-sões.
2 Fundamentos matemáticos
Os quatérnios duais fornecem uma forma conve-niente para representações de sistemas robóticos.Entre as vantagens do uso dos quatérnios duaispode-se ressaltar a representação compacta e di-reta de movimentos rígidos e transformações ho-mogêneas. Mais especificamente, eles descrevemsimultaneamente posições e orientações usandoapenas oito parâmetros e desempenham o mesmopapel das matrizes de transformação homogêneas,onde o movimento rígido completo é descrito porum único objeto matemático. (Adorno, 2011).
Os quatérnios foram introduzidos por Hamil-ton no século XIX, e podem ser considerados comouma extensão dos números complexos, onde astrês componentes imaginárias ı, , k (também cha-madas unidades quaterniônicas) são usadas e pos-suem as seguintes propriedades (Kuipers, 2002):
ı2 =
2 = k2 = ık = −1
O quatérnio h inclui uma componente real euma componente imaginária envolvendo as trêsunidades imaginárias, ou seja, h = a+bı+c+dk,onde a, b, c, d ∈ R. Uma rotação r, com-posta pelo ângulo de rotação φ em torno do eixon = nx ı + ny + nz k, é dada pelo quatérnio uni-tário r = cos (φ/2) + sin (φ/2)n. Uma translaçãop é representada por um quatérnio puro, ou seja,um quatérnio cuja parte real é igual a zero. Logo,p = px ı+ py + pz k.
O quatérnio dual unitário x = r + ε (1/2)prrepresenta um movimento rígido composto poruma translação p seguida de uma rotação r, ondeε é uma unidade dual de Clifford que obedeceε 6= 0 e ε
2 = 0 (Selig, 2005). Assim, x repre-senta a pose de um corpo rígido no espaço dosquatérnios duais unitários.
O operador vec realiza o mapeamento injetorvec : H −→ R
8, ou seja, vecx = [x1.....x8]T , onde
x = x1+x2 ı+x3+x4k+ε
(
x5 + x6 ı+ x7+ x8k
)
e H representa o conjunto dos quatérnios duais.Os operadores de Hamilton são as matrizes
+
H (·) e−
H (·) que satisfazem (Adorno, 2011):
vec(
xy)
=+
H (x) vecy =−
H(
y)
vecx.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1545

3 Modelos cinemáticos direto ediferencial direto para o corpo
completo
Podemos considerar vários sistemas que podem serdescritos por movimentos rígidos, por exemplo:robôs manipuladores, bases móveis, robôs voado-res, etc.
Quando utilizado para representar o modelocinemático direto de um robô manipulador, o qua-térnio dual x é uma função da posição angulardas juntas do robô, ou seja, x = f (θ), onde θ éo vetor n-dimensional que representa as juntas dorobô e f é a função que faz o mapeamento entre oespaço toroidal das juntas e o quatérnio dual querepresenta a pose do efetuador do robô (Adorno,2011).De maneira geral, o modelo cinemático diferen-cial do robô manipulador é dado por vec x = Jθ,onde J é a matriz Jacobiana analítica que podeser encontrada algebricamente (Adorno, 2011).
Quando utilizado para representar o modelocinemático direto de uma base móvel, o quatérniodual x é uma função das coordenadas cartesianas(x, y) e do ângulo φ da base móvel. Dessa formax = f (x, y, φ) (Adorno, 2011).
Os modelos cinemáticos diretos e diferenciaisdo robô manipulador e da base móvel são dife-rentes e cada um é descrito por funções do tipoxi = f
i(θi), com i = {0, 1}, que correspondem
à base móvel e ao manipulador, respectivamente.Como estes sistemas são acoplados serialmente, al-terações no estado de sistemas cinemáticos ante-riores causam variações em todo o resto da cadeiacinemática. Consequentemente, a variação do úl-timo sistema na cadeia será uma função da varia-ção de todos os sistemas anteriores.
3.1 Modelo cinemático do robô manipulador
O robô manipulador usado neste trabalho é oAX18 Smart Robot Arm (CrustCrawler Robotics,Arizona, USA) que tem cinco graus de liberdadee um efetuador final.
Para se obter o modelo cinemático do robômanipulador usa-se uma abordagem já bem esta-belecida que consiste em usar os parâmetros deDenavit-Hartenberg (DH). Os quatro parâmetrosDH são associados a uma convenção padrão queestabelece a relação entre dois elos sucessivos den-tro de uma cadeia cinemática serial. Utilizando-se a representação em quatérnios duais, primei-ramente aplica-se uma rotação θi em torno doeixo z (i.e., rθi = cos (θi/2) + sin (θi/2) k), se-guida de uma translação di ao longo do eixo z
(i.e., pdi
= 1 + ε (di/2) k), de uma translação ai
ao longo do eixo x (i.e., pai
= 1 + ε (ai/2) ı) e,finalmente, de uma rotação αi em torno do eixo x
(i.e., rαi= cos (αi/2) + sin (αi/2) ı). A transfor-
Tabela 1: Parâmetros D-H do manipulador robó-tico AX18 (Lana et al., 2013).
Elo d (m) θ (rad) a (m) α (rad)
L1 0.167 0 0 −π/2L2 0 0 0.159 0L3 0 −π/2 0 −π/2V ∗ 0.0815 0 0.02225 0L4 0.041 −π/2 0 −π/2L5 0 0 0 0
V ∗Elo virtual: Este não representa uma ligação física do robô
L1
L2
L3L4
L5
Gripper
z4
y4
x4
y2
x2
z2 y3
x3
z3
y5
x5
z5
yEF
xEF
zEF
y1
x1
z1
Figura 1: Sistemas de referência atribuídos aorobô manipulador AX18, a fim de obter os pa-râmetros DH (Lana et al., 2013).
mação entre dois elos é dada por (Adorno, 2011)
xLi= rθipdi
pairαi
, (1)
Dado um robô específico, xLié função de θi para
uma junta rotativa e função de di para uma juntaprismática, pois o restante dos parâmetros sãoconstantes. No caso específico do robô manipu-lador usado neste trabalho, os parâmetros DH sãoapresentados na tabela 1. O efetuador é represen-tado pelo quatérnio dual
xG = rG +1
2εpGrG, (2)
onde pG = −0.17k e rG = cos (π/4) − sin (π/4) k(Lana et al., 2013). Usando (1), (2) e os parâme-tros DH da tabela 1, o modelo cinemático diretoé dado por
xE = f (θbraco) = xL1xL2
xL3xV xL4
xL5xG,
(3)onde θbraco é o vetor contendo as variáveis dasjuntas do robô.
O modelo cinemático diferencial direto podeser encontrado por meio da derivada da equa-ção (3), ou seja, vec xE = Jbracoθbraco, onde amatriz Jacobiana Jbraco ∈ R
8×5 é obtida algebri-camente utilizando-se a metodologia proposta porAdorno (2011).
3.2 Modelo cinemático da base móvel não-holonômica
Neste trabalho, utiliza-se uma base móvel não-holonômica iRobot Create™ que tem três graus
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1546

de liberdade. Este robô tem o modelo cinemáticode um uniciclo, ou seja, possui duas rodas comacionamento independente acopladas a um eixocomum e uma roda livre.
Para se obter o modelo cinemático da basemóvel não-holonômica primeiro considera-se umabase móvel holonômica. Esta pode ser parame-trizada por θxyφ = [x, y, φ]
T , onde x, y são ascoordenadas cartesianas e φ é o ângulo da basecom respeito a um sistema de coordenadas iner-cial. Usando a representação em quatérnios du-ais proposta por Adorno (2011), a posição noplano é pbase = ıx + y, a orientação é rbase =
cos (φ/2) + k sin (φ/2), de forma que o quatérniodual unitário resultante é dado por
xbase = rbase + ε
1
2pbaserbase. (4)
Expandindo-se a equação (4), obtém-se
xbase = cos
(
φ
2
)
+ k sin
(
φ
2
)
+ ε1
2
[
ı
(
x cos
(
φ
2
)
+ y sin
(
φ
2
))
+
(
−x sin
(
φ
2
)
+ y cos
(
φ
2
))]
.
A derivada no tempo de xbase fornece a rela-ção entre a derivada do quatérnio dual e os parâ-metros do robô móvel holonômico, isto é,
vec xbase = Jholθxyφ (5)
onde Jhol = (aij) ∈ R8×3 e todos os elementos
aij são iguais a zero, com exceção dos elementosseguintes:
a13 = −a62 = a71 = −
1
2sin (φ/2)
a43 = a61 = a72 =1
2cos (φ/2)
a63 =1
4[−x sin (φ/2) + y cos (φ/2)]
a73 =1
4[−x sin (φ/2)− y cos (φ/2)] .
A equação (5) não leva em consideração asrestrições holonômicas da base móvel. A relaçãoa seguir deve ser usada para impor as restriçõesnão-holonômicas (Adorno, 2011):
θxyφ =
r2cosφ r
2cosφ
r2sinφ r
2sinφ
r2b
−r2b
︸ ︷︷ ︸
Jrestricoes
[
ωr
ωl
]
,
︸ ︷︷ ︸
θrodas
(6)
onde ωr e ωl são as velocidades angulares da rodadireita e esquerda respectivamente, r é o raio dasrodas e b é a distância entre elas. Substituindo aequação (6) em (5) podemos obter a equação dacinemática diferencial direta da base móvel nãoholonômica:
vec xbase = JholJrestricoesθrodas = Jnholθrodas.
Figura 2: Manipulador móvel utilizado neste tra-balho.
3.3 Representação do modelo cinemático serial-mente acoplado
Seja um robô manipulador serial fixado no topo deuma base móvel não-holonômica, como ilustradona figura 2. A configuração do efetuador final emrelação a um sistema global de referência será umafunção tanto da posição das articulações do robômanipulador e a configuração da base móvel.
Frequentemente, as diferentes partes de umsistema robótico complexo são modelados separa-damente. Por exemplo, na modelagem de um robôhumanoide, pode-se dividí-lo em pernas, tronco,braços e cabeça, sendo cada parte consideradacomo um subsistema. Depois que cada subsistemaé modelado separadamente, o objetivo é encontraro modelo completo considerando-se a interação detodos os subsistemas individuais (Adorno, 2011).O mesmo princípio é aplicável ao caso de um ma-nipulador móvel.
A seguir será apresentada uma metodologiasistemática e direta, proposta por Adorno (2011),a fim de se obter modelos cinemáticos da cadeiacinemática completa a partir de sistemas serial-mente acoplados. No caso do robô manipuladorfixado na parte superior de uma base móvel, estaintegração irá permitir a descrição do manipula-dor móvel como uma entidade única. Além disso,mesmo se mais sistemas sejam adicionados em sé-rie, estes podem ser adicionados à descrição finalde maneira bem direta utilizando-se a mesma me-todologia.
Dado um sistema cinemático serial, este écomposto por um conjunto de k subsistemas aco-plados, cada um descrito pelas transformações rí-gidas x1,x2,...,xk. Acoplando esses subsistemasserialmente, tem-se que x
0k = x
01x
12 · · ·x
k−1k , onde
xii+1 representa a pose do (i + 1)-ésimo subsis-
tema com respeito ao i-ésimo subsistema. Dessamaneira, x
0k corresponde à transformação do úl-
timo sistema Fk com respeito ao sistema base F0
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1547

e a derivada primeira é dada por (Adorno, 2011)
vec x0k =
k−1∑
i=0
+
H(
x0i
)−
H(
xi+1k
)
vec xii+1, (7)
onde+
H(
xii
)
=−
H(
xii
)
= I8.Usando a equação (7), o modelo cinemático
diferencial do manipulador móvel completo é facil-mente obtido, pois a base móvel e o manipuladorestão ligados serialmente. Mais especificamente,vec x0
E = Jx0
EΘ, onde ΘT =
[
θTbraco θ
Trodas
]
e
θbraco refere-se às velocidades das juntas do robômanipulador e θrodas corresponde às velocidadesdas rodas da base móvel não holonômica.
A equação (7) pode ser reescrita em funçãodos Jacobianos do manipulador e da base mó-vel. Mais especificamente, considera-se o caso emque k subsistemas estão serialmente acoplados.Como cada subsistema intermediário tem um mo-delo cinemático diferencial dado por vec xi
i+1 =
Jxii+1
θi+1, logo
vec x0k =
k−1∑
i=0
+
H(
x0i
)−
H(
xi+1i
)
vec xii+1
=k−1∑
i=0
Li+1θi+1, (8)
com Li+1 =+
H(
x0i
)−
H(
xi+1i
)
Jxii+1
.
Analisando-se a equação (8), nota-se que asmatrizes Li+1 compõem o Jacobiano do sistemacompleto, ou seja, Jx0
k=[
L1 · · · Lk
]
e
Θ=[
θT1 · · · θ
Tk
]T. Consequentemente,
vec x0k=Jx0
kΘ.
Considerando o manipulador móvel da fi-gura 2 composto por dois subsistemas (i.e., robômanipulador e base móvel), logo k = 2 e as ma-trizes L1 e L2 são dadas pela equação (8) e mos-tradas na tabela 2.
Tabela 2: Matrizes L1 e L2 que compõem o Ja-cobiano completo do robô.
i Li+1
+
H(
x0i
)−
H(
xi+1E
)
Jxii+1
θi+1
0 L1 I8
−
H(
x1E
)
Jnhol θrodas
1 L2
+
H(
x01
)
I8 Jbraco θbraco
4 Controle cinemático de corpo completo
A lei discreta de controle cinemático usada paracontrolar a cinemática e gerar o movimento dorobô é dada por
Θ [t] = Θ [t− 1] + J†
x0
kK vec (xd − xm) , (9)
onde Θ [t] é a configuração do sistema completo(posição angular das juntas do manipulador e dasrodas da base móvel) no t-ésimo instante discretode tempo, K ∈ R
8×8 é uma matriz positiva defi-nida, e xd e xm são os valores desejado e medidoda pose do efetuador, respectivamente. A matriz
J†
x0
k, J
Tx0
k
(
Jx0
kJ
Tx0
k+ λ
2I
)−1
é a inversa amor-
tecida da matriz Jacobiana Jx0
k∈ R
8×7 do sis-tema completo (Chiaverini, 1997) e λ é o fator deamortecimento. A inversa amortecida é uma me-todologia bastante conhecida adotada para evitarsingularidades cinemáticas. Basicamente o obje-tivo do controlador é fazer com que a pose atualxm do efetuador convirja para a pose desejada xd,ou seja (xd − xm) → 0 para t → ∞. É importanteressaltar que, como a referência do controlador édada por quatérnios duais, a posição e orientaçãodo efetuador são controladas simultaneamente demaneira acoplada. Uma desvantagem deste con-trolador é o fato dele não levar em consideração adinâmica do robô. Dessa maneira, ele possui bomdesempenho apenas para acelerações moderadas euma rigidez estrutural adequada do robô.
5 Resultados
Os métodos apresentados nas seções 3 e 4 foramvalidados mediante experimentos em um manipu-lador móvel real, mostrado na figura 2. O al-goritmo foi implementado no software Matlab®
em conjunto com a biblioteca DQ_Robotics To-olbox,1 a biblioteca de interface com o robô mani-pulador AX18 desenvolvida por Lana et al. (2013)e a biblioteca de interface com o robô iRobot Cre-ate disponibilizada pelo próprio fabricante.
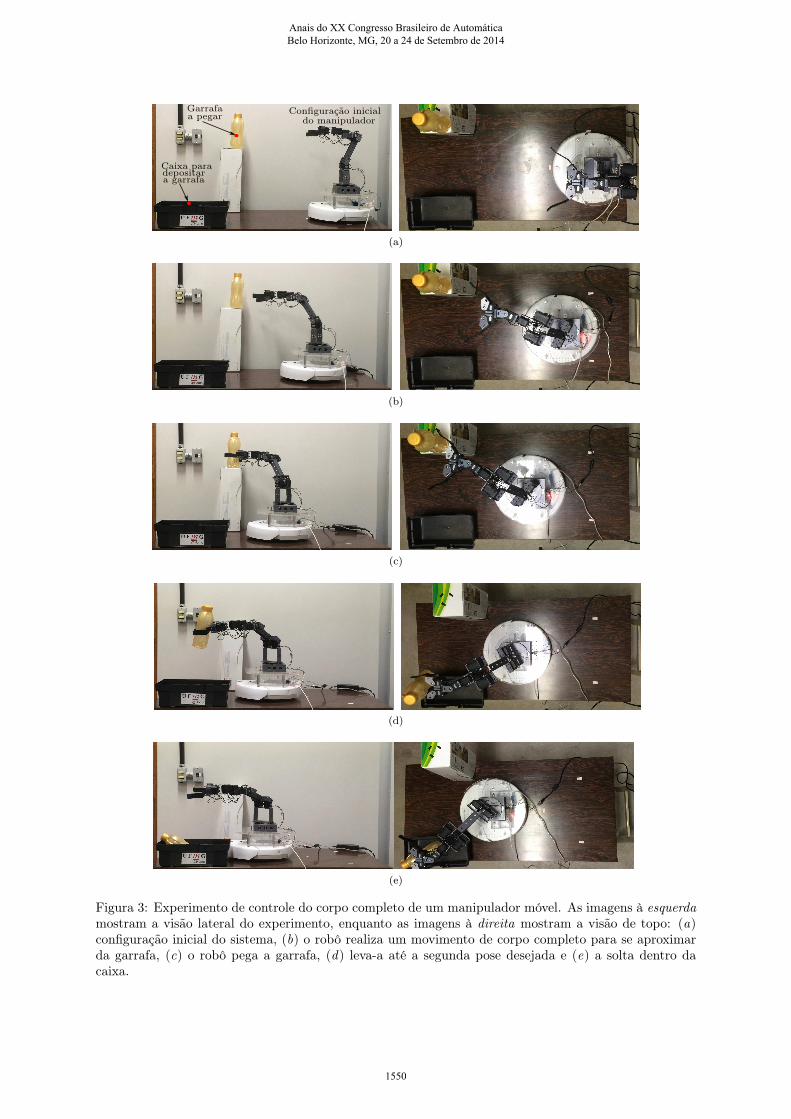
A tarefa do robô foi definida em duas sub-tarefas da seguinte maneira: 1) Dada a confi-guração inicial do manipulador móvel mostradana figura 3a, o objetivo é pegar uma garrafa queestá inicialmente fora do alcance do manipuladore 2) Em seguida levá-la e colocá-la dentro de umacaixa. Tanto a pose da garrafa (pose desejada 1)quanto a da caixa na qual ela deve ser deposi-tada (pose desejada 2) foram escolhidas arbitra-riamente e são conhecidas a priori, sendo cons-tantes ao longo de todo o experimento. A confi-guração inicial do manipulador móvel também foiescolhida arbitrariamente, e assume-se que o sis-tema de coordenadas inercial global encontra-sealinhado com o sistema de coordenadas da basemóvel no instante t = 0. A matriz de ganhodo controlador cinemático foi escolhida empiri-camente como K = 0, 04I8 de maneira a ge-rar um comportamento suave, mas com tempode resposta rápido o suficiente para a execuçãoda tarefa. A sequência completa da manipulaçãoencontra-se na figura 3. É importante ressaltarque a manipulação fina de objetos está fora do
1http://dqrobotics.sourceforge.net/
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1548
0 5 10 15 20 25 30 35
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
roda direitaroda esquerda
junta 1
junta 2
junta 3
junta 4
junta 5
Iterações [t]
rad/s
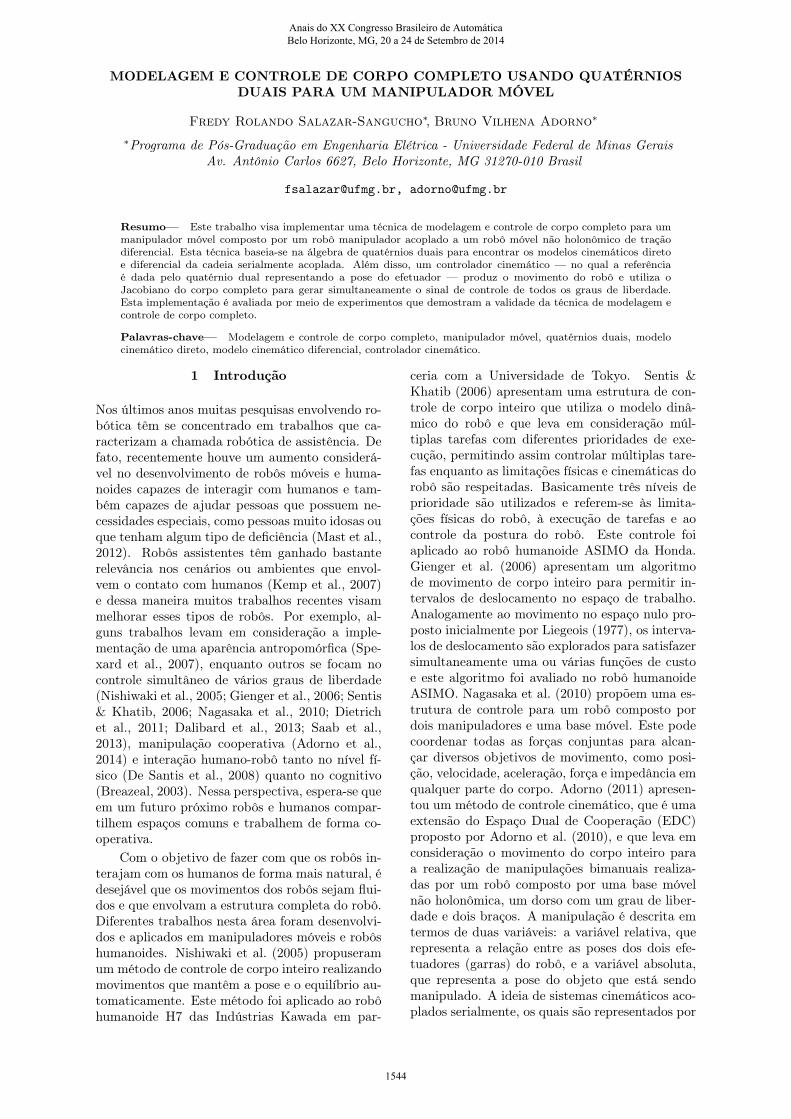
Figura 4: Atuação de todas as variáveis de con-trole do manipulador móvel.
escopo deste artigo, pois o efetuador do robô con-siste apenas em uma pinça. Porém, este efetuadoré suficiente para pegar uma garrafa comum.
É importante ressaltar que a referência parao controlador é apenas a pose desejada do efetu-ador. O controlador cinemático é responsável porgerar o sinal de controle para todos os graus de li-berdade simultaneamente, como mostra a figura 4.Este comportamento é desejável por simplificar adefinição da tarefa, pois o projetista não precisadefinir trajetórias separadamente para o braço epara a base móvel. Alternativamente, um sistemade mais alto nível, como um sistema de visão com-putacional, poderia estimar a pose da garrafa e en-tão definir a pose do efetuador desejada para quea manipulação ocorresse. Uma outra vantagemde se utilizar um algoritmo de controle de corpocompleto é que o movimento do robô tende a ficarmais natural e fluido, pois toda a cadeia cinemá-tica trabalha para a realização da tarefa. Alémdisso, como o sistema completo se torna altamenteredundante, formalismos de controle hierárquicode tarefas podem explorar essa redundância pararealizar tarefas secundárias no espaço nulo da ta-refa principal (Liegeois, 1977; Chiaverini, 1997).
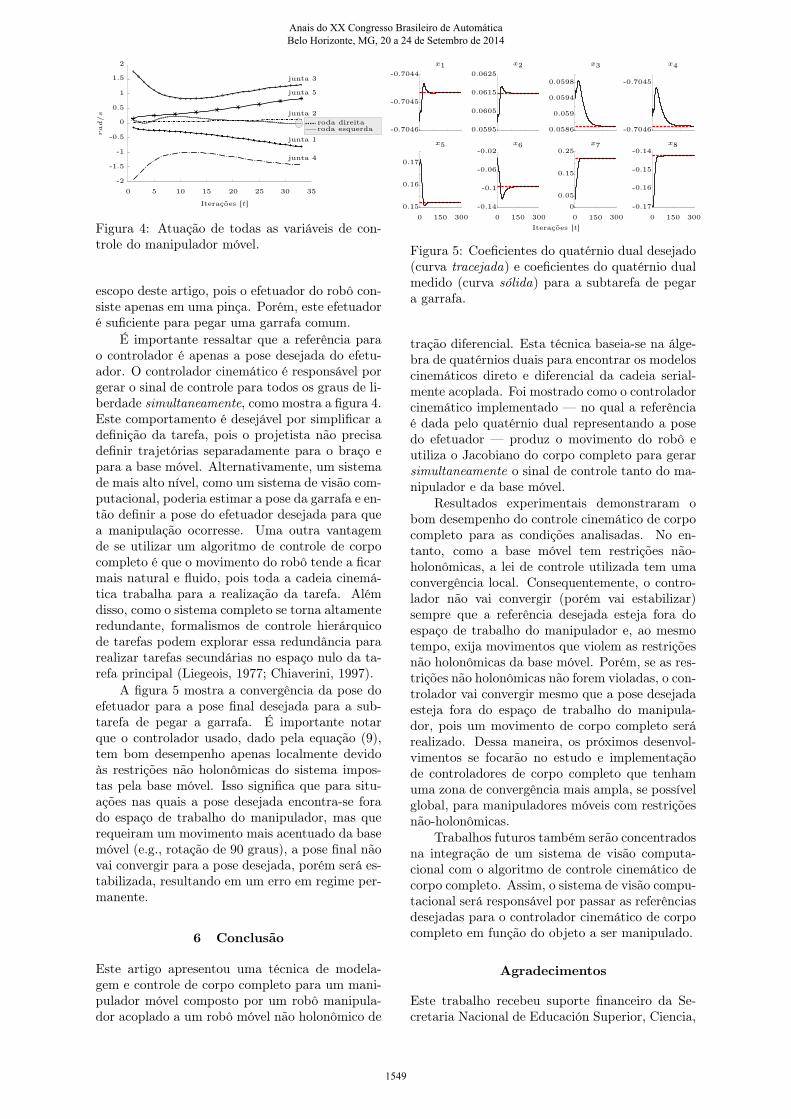
A figura 5 mostra a convergência da pose doefetuador para a pose final desejada para a sub-tarefa de pegar a garrafa. É importante notarque o controlador usado, dado pela equação (9),tem bom desempenho apenas localmente devidoàs restrições não holonômicas do sistema impos-tas pela base móvel. Isso significa que para situ-ações nas quais a pose desejada encontra-se forado espaço de trabalho do manipulador, mas querequeiram um movimento mais acentuado da basemóvel (e.g., rotação de 90 graus), a pose final nãovai convergir para a pose desejada, porém será es-tabilizada, resultando em um erro em regime per-manente.
6 Conclusão
Este artigo apresentou uma técnica de modela-gem e controle de corpo completo para um mani-pulador móvel composto por um robô manipula-dor acoplado a um robô móvel não holonômico de
x1
-0.7046
-0.7045
-0.7044
x2
0.0595
0.0605
0.0615
0.0625
x3
0.0586
0.059
0.0594
0.0598
x4
-0.7046
-0.7045
x5
0 150 300
0.15
0.16
0.17
x6
0 300
-0.14
-0.1
-0.06
-0.02x7
0 300
0
0.05
0.15
0.25x8
0 300
-0.17
-0.15
-0.14
150 150 150
-0.16
Iterações [t]
Figura 5: Coeficientes do quatérnio dual desejado(curva tracejada) e coeficientes do quatérnio dualmedido (curva sólida) para a subtarefa de pegara garrafa.
tração diferencial. Esta técnica baseia-se na álge-bra de quatérnios duais para encontrar os modeloscinemáticos direto e diferencial da cadeia serial-mente acoplada. Foi mostrado como o controladorcinemático implementado — no qual a referênciaé dada pelo quatérnio dual representando a posedo efetuador — produz o movimento do robô eutiliza o Jacobiano do corpo completo para gerarsimultaneamente o sinal de controle tanto do ma-nipulador e da base móvel.
Resultados experimentais demonstraram obom desempenho do controle cinemático de corpocompleto para as condições analisadas. No en-tanto, como a base móvel tem restrições não-holonômicas, a lei de controle utilizada tem umaconvergência local. Consequentemente, o contro-lador não vai convergir (porém vai estabilizar)sempre que a referência desejada esteja fora doespaço de trabalho do manipulador e, ao mesmotempo, exija movimentos que violem as restriçõesnão holonômicas da base móvel. Porém, se as res-trições não holonômicas não forem violadas, o con-trolador vai convergir mesmo que a pose desejadaesteja fora do espaço de trabalho do manipula-dor, pois um movimento de corpo completo serárealizado. Dessa maneira, os próximos desenvol-vimentos se focarão no estudo e implementaçãode controladores de corpo completo que tenhamuma zona de convergência mais ampla, se possívelglobal, para manipuladores móveis com restriçõesnão-holonômicas.
Trabalhos futuros também serão concentradosna integração de um sistema de visão computa-cional com o algoritmo de controle cinemático decorpo completo. Assim, o sistema de visão compu-tacional será responsável por passar as referênciasdesejadas para o controlador cinemático de corpocompleto em função do objeto a ser manipulado.
Agradecimentos
Este trabalho recebeu suporte financeiro da Se-cretaria Nacional de Educación Superior, Ciencia,
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1549
Garrafa
Caixa para
Configuração inicialdo manipuladora pegar
depositara garrafa
(a)
(b)
(c)
(d)
(e)
Figura 3: Experimento de controle do corpo completo de um manipulador móvel. As imagens à esquerdamostram a visão lateral do experimento, enquanto as imagens à direita mostram a visão de topo: (a)configuração inicial do sistema, (b) o robô realiza um movimento de corpo completo para se aproximarda garrafa, (c) o robô pega a garrafa, (d) leva-a até a segunda pose desejada e (e) a solta dentro dacaixa.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1550

Tecnología e Innovación (SENESCYT) do Equa-dor e das agências brasileiras CAPES, CNPq eFapemig.
Referências
Adorno, B. V. (2011). Two-arm manipulation:from manipulators to enhanced human-robotcollaboration [Contribution à la manipulation àdeux bras : des manipulateurs à la collaborationhomme-robot]. PhD thesis.
Adorno, B. V., Bó, a. P. L., & Fraisse, P. (2014).Kinematic modeling and control for human-robot cooperation considering different interac-tion roles. Robotica, (February), 1–18.
Adorno, B. V., Fraisse, P., & Druon, S. (2010).Dual position control strategies using the co-operative dual task-space framework. In 2010IEEE/RSJ International Conference on Intelli-gent Robots and Systems (pp. 3955–3960). Tai-pei: IEEE.
Breazeal, C. (2003). Toward sociable robots. Ro-botics and Autonomous Systems, 42(3-4), 167–175.
Chiaverini, S. (1997). Singularity-robust task-priority redundancy resolution for real-time ki-nematic control of robot manipulators. IEEETransactions on Robotics and Automation,13(3).
Dalibard, S., El Khoury, A., Lamiraux, F.,Nakhaei, A., Taix, M., & Laumond, J.-P.(2013). Dynamic walking and whole-body mo-tion planning for humanoid robots: an integra-ted approach. The International Journal of Ro-botics Research, 32(9-10), 1089–1103.
De Santis, A., Siciliano, B., De Luca, A., & Bicchi,A. (2008). An atlas of physical human-robotinteraction. Mechanism and Machine Theory,43(3), 253–270.
Dietrich, a., Wimbock, T., & Albu-Schaffer, A.(2011). Dynamic whole-body mobile manipula-tion with a torque controlled humanoid robotvia impedance control laws. 2011 IEEE/RSJInternational Conference on Intelligent Robotsand Systems, (pp. 3199–3206).
Gienger, M., Janben, H., & Goerick, C. (2006).Exploiting Task Intervals for Whole Body Ro-bot Control. 2006 IEEE/RSJ InternationalConference on Intelligent Robots and Systems,(pp. 2484–2490).
Kemp, C., Edsinger, A., & Torres-Jara, E. (2007).Challenges for robot manipulation in humanenvironments [Grand Challenges of Robotics].IEEE Robotics & Automation Magazine, 14(1).
Kuipers, J. B. (2002). Quaternions and rotationsequences: A primer with applications to orbits,aerospace and virtual reality. Princeton Univer-sity Press.
Lana, E. P., Adorno, B. V., & Tierra-Criollo,C. J. (2013). Assistance Task Using a Mani-pulator Robot and User Kinematics Feedback.Simpósio Brasileiro de Automação Inteligente(SBAI), (pp. 1–6).
Liegeois, A. (1977). Automatic Supervisory Con-trol of the Configuration and Behavior of Multi-body Mechanisms. IEEE Transactions on Sys-tems, Man and Cybernetics, 7(12), 868–871.
Mast, M., Burmester, M., Kruger, K., Fatikow, S.,Arbeiter, G., Graf, B., Kronreif, G., Pigini, L.,Facal, D., & Qiu, R. (2012). User-Centered De-sign of a Dynamic-Autonomy Remote Interac-tion Concept for Manipulation-Capable Robotsto Assist Elderly People in the Home. Journalof Human-Robot Interaction, 1(1), 96–118.
Nagasaka, K., Kawanami, Y., Shimizu, S., Kito,T., Tsuboi, T., Miyamoto, A., Fukushima, T.,& Shimomura, H. (2010). Whole-body coope-rative force control for a two-armed and two-wheeled mobile robot using Generalized InverseDynamics and Idealized Joint Units. 2010 IEEEInternational Conference on Robotics and Au-tomation, (pp. 3377–3383).
Nishiwaki, K., Kagami, S., & Inoue, H. (2005).Object manipulation by hand using whole-bodymotion coordination. 2005 IEEE InternationalConference, (July), 1778–1783.
Park, H. Andy Lee, C. S. G. (2013). Cooperative-Dual-Task-Space-based whole-body motion ba-lancing for humanoid robots. 2013 IEEE Inter-national Conference on Robotics and Automa-tion, (pp. 4797–4802).
Saab, L., Ramos, O. E., Keith, F., Mansard, N.,Soueres, P., & Fourquet, J.-Y. (2013). Dyna-mic Whole-Body Motion Generation Under Ri-gid Contacts and Other Unilateral Constraints.IEEE Transactions on Robotics, 29(2), 346–362.
Selig, J. M. (2005). Geometric fundamentals ofrobotics. Springer-Verlag Inc.
Sentis, L. & Khatib, O. (2006). A whole-bodycontrol framework for humanoids operating inhuman environments. 2006 IEEE InternationalConference on Robotics and Automation, 2006.ICRA 2006., (May), 2641–2648.
Spexard, T., Hanheide, M., & Sagerer, G. (2007).Human-Oriented Interaction With an Anthro-pomorphic Robot. IEEE Transactions on Ro-botics, 23(5).
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
1551




























![Desenvolvimento de um Robô Manipulador Didático€¦ · iii FICHA CATALOGRÁFICA Wattyllas, Ferreira Dos Reis Desenvolvimento de um Robô Manipulador Didático, [Distrito Federal]](https://img.dokumen.tips/doc/110x75/5f272403552c5f4d3d3efb13/desenvolvimento-de-um-rob-manipulador-did-iii-ficha-catalogrfica-wattyllas.jpg)