Embed Size (px)
Citation preview

ANÁLISE E DOCUMENTAÇÃO DE UM MANIPULADOR PNEUMÁTICO COM CINCO GRAUS DE LIBERDADE
Mauricio Moura Elarrat
Projeto de Graduação apresentado ao Curso de
Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Prof. Vitor Ferreira Romano
Rio de Janeiro
Fevereiro de 2015


ii
Elarrat, Mauricio Moura
Análise e documentação de um manipulador
pneumático com cinco graus de liberdade/ Mauricio Moura
Elarrat. – Rio de Janeiro: UFRJ/ Escola Politécnica, 2015.
viii, 60 p.:il; 29.7 cm.
Orientador: Vitor Ferreira Romano
Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2015.
Referências Bibliográficas: p. 53-54.
1. Manipulador. 2. Robótica. I. Romano, Vitor Ferreira.
II. Universidade Federal do Rio de janeiro, UFRJ, Curso de
Engenharia Mecânica. III. Análise e documentação de um
manipulador pneumático com cinco graus de liberdade.

iii
DEDICATÓRIA
Dedico o presente trabalho a toda minha família e a todos os amigos que
sempre estiveram comigo durante a minha graduação na UFRJ. Nesta instituição pude
aprender muito sobre engenharia e sobre a vida de um modo geral.

iv
AGRADECIMENTO
Primeiramente devo agradecer a Deus por tudo que pude conquistar. Devo
agradecer também aos meus pais Mauricio Elarrat e Lucia Fernanda Moura Elarrat
pela educação e amor concedidos, assim como ao meu irmão Rodrigo Moura Elarrat
pelo eterno apoio e à minha namorada Daniela Martins Costa, por ser uma fonte de
carinho inesgotável.
Agradeço também ao professor Vitor Ferreira Romano pela orientação e pelas
inúmeras oportunidades de aprendizado viabilizadas aos alunos. A empresa Missler
também ajudou no trabalho ao disponibilizar a licença do software TopSolid que não
havia no LEPAC como o MatLab.
v
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
ANÁLISE E DOCUMENTAÇÃO DE UM MANÍPULADOR PNEUMÁTICO COM CINCO
GRAUS DE LIBERDADE
Mauricio Moura Elarrat
Fevereiro/2015
Orientador: Vitor Ferreira Romano
Curso: Engenharia Mecânica
O presente trabalho consistiu na análise de um manipulador pneumático de
cinco graus de liberdade, projetado no Laboratório de Robótica (LabRob) da
Universidade Federal do Rio de Janeiro. Sua documentação encontrava-se quase
completamente perdida. O trabalho almeja viabilizar a restauração da documentação
do manipulador visando assim fins didáticos.
O projeto foi dividido da seguinte forma: documentação, modelagem, análise e
simulação. Sendo também realizada a desmontagem, limpeza e remontagem do
manipulador em questão.
Foi utilizado nesse projeto o programa TopSolid para a modelagem e o
software MatLab para a simulação.
.Palavras-chave: Robô, Parâmetros DH, Desenho Técnico, Modelagem.
vi
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Engineer.
DOCUMENTATION AND ANALYSIS OF A PNEUMATIC MANIPULATOR
WITH FIVE DEGREES OF FREEDOM
Mauricio Moura Elarrat
February, 2015
Advisor: Vitor Ferreira Romano
Course: Mechanical Engineering
The present work is the analysis of a pneumatic manipulator with five degrees
of freedom, designed in the Robotics Laboratory (LabRob) of the Federal University of
Rio de Janeiro. Its documentation was almost completely lost. The work aims to
facilitate the restoration of this documentation for educational purposes.
The project was divided as follows: documentation, modeling, analysis and
simulation.
The programs that have been used in this project were TopSolid for modeling
and MatLab for simulation.
Keywords: Robot, DH Parameters, Technical drawing, Modeling

vii
SUMÁRIO
Dedicatória ........................................................................................................ iii
Agradecimento ................................................................................................. iv
Lista de Figuras ................................................................................................. x
Lista de Tabelas ............................................................................................... xii
1. INTRODUÇÃO ........................................................................................ 1
1.1. Objetivos ................................................................................................. 1
1.2. Organização ............................................................................................ 1
2. ASPECTOS GERAIS ............................................................................... 3
2.1. Máquina ................................................................................................... 3
2.2. Robô ........................................................................................................ 3
2.2.1. Breve histórico sobre robôs .................................................................. 5
2.2.2. Robótica industrial ................................................................................ 6
2.2.3. Partes de um manipulador mecânico ................................................... 8
2.2.3.1. Efetuadores ...................................................................................... 8
2.2.3.2. Elos .................................................................................................. 8
2.2.3.3. Juntas ............................................................................................... 8
2.2.3.4. Sistema de transmissão ................................................................... 9
2.2.3.5. Atuadores ......................................................................................... 9
2.2.4.2. Válvulas de comando ..................................................................... 10
3. DESENVOLVIMENTO DO TRABALHO ................................................. 11
3.1. Histórico ................................................................................................ 11
3.2. Etapas Desenvolvidas ........................................................................... 14
3.2.1. Análise ............................................................................................... 15
3.2.2. Desmontagem .................................................................................... 16
3.2.3. Limpeza ............................................................................................. 21
3.2.4. Remontagem ..................................................................................... 21
viii
4. DOCUMENTAÇÃO ................................................................................ 22
4.1. Medição ................................................................................................. 22
4.2. Desenho Técnico ................................................................................... 22
4.3. Modelagem CAD (3D) ........................................................................... 25
4.3.1. Conjunto montado: ............................................................................. 25
4.3.2. Garra e braço 1 .................................................................................. 27
4.3.3. Braço 2 .............................................................................................. 29
4.3.4. Braço 3: ............................................................................................. 30
4.4. Projeto - Nova Peça ............................................................................... 31
5. MODELAGEM ....................................................................................... 32
5.1. Sistema de Referência .......................................................................... 32
5.2. Transformação de Coordenadas ........................................................... 33
6. ANÁLISE DO MOVIMENTO .................................................................. 35
6.1. Parâmetros de Denavit-Hartenberg ....................................................... 36
6.2. Esquema Simplificado e Sistemas de Coordenadas de Referência ....... 41
6.3. Tabela DH ............................................................................................. 42
6.4. Modelagem MatLab ............................................................................... 43
7. ANÁLISE DOS ESFORÇOS .................................................................. 45
7.1. Propriedades ......................................................................................... 45
7.2. Forças ................................................................................................... 45
7.3. Momentos .............................................................................................. 46
8. ESPECIFICAÇÃO DO CILINDRO PNEUMÁTICO ................................. 48
9. CONCLUSÃO ........................................................................................ 51
9.1. Resultados ............................................................................................ 51
9.2. Trabalhos Futuros ................................................................................. 51
10. REFERÊNCIAS ..................................................................................... 53
ANEXO I – Simulação ..................................................................................... 55
ANEXO II – Cálculo da matriz de transformação ............................................. 56

ix
ANEXO III – Desenhos .................................................................................... 58

x
LISTA DE FIGURAS
Figura 1: Robô desenvolvido no LabRob-UFRJ. ................................................ 3
Figura 2: Partes do Robô................................................................................... 4
Figura 3: Robô em aplicação de soldagem contínua ......................................... 6
Figura 4: Manipulador pneumático antes da desmontagem ............................. 11
Figura 5: Suprimento de ar comprimido do laboratório .................................... 12
Figura 6: Válvulas direcionais .......................................................................... 13
Figura 7: Etapas desenvolvidas ....................................................................... 14
Figura 8: Definição das partes do manipulador ................................................ 15
Figura 9: Desmontagem da garra .................................................................... 16
Figura 10: Representação da peça faltante ..................................................... 18
Figura 11: Garra e Braço 1 .............................................................................. 19
Figura 12: Braço 2 e Junta1 ............................................................................ 20
Figura 13: Manipulador remontado .................................................................. 21
Figura 15: Desenho técnico original da garra. ................................................. 23
Figura 16: Detalhamento de uma peça ............................................................ 24
Figura 17: Montagem – Manipulador Pneumático ........................................... 26
Figura 18: Submontagem – Garra e Braço 1 ................................................... 27
Figura 19: Exemplo de vista explodida do braço 1 com a garra e a junta 1 ..... 28
Figura 20: Submontagem – Braço 2 ................................................................ 29
Figura 21: Submontagem – Braço 3 ................................................................ 30
Figura 22: Peça projetada ............................................................................... 31
Figura 23: Sistema de referência ..................................................................... 32
Figura 24: Representação da transformação de coordenadas ........................ 33
Figura 25: Representação do sistema de coordenadas de um robô ................ 33
Figura 26: Gráfico Velocidade X Tempo .......................................................... 35

xi
Figura 27: Elo i ................................................................................................ 36
Figura 28: Junta de rotação ............................................................................. 38
Figura 29: Esquema simplificado ..................................................................... 41
Figura 30: Posição A ....................................................................................... 43
Figura 31: Posição B ....................................................................................... 44
Figura 32: Pistão pneumático recomendado ................................................... 50

xii
LISTA DE TABELAS
Tabela 1: Exemplo de lista de material da garra, braço 1 e junta 1 .................. 17
Tabela 2: Parâmetros DH ................................................................................ 42
Tabela 3: Fatores de correção de força ........................................................... 48
Tabela 4: Desenhos ........................................................................................ 60

1
1. INTRODUÇÃO
Este projeto final tem como escopo o completo estudo de um robô
desenvolvido nos anos 1990 no Laboratório de Robótica (LabRob) atualmente
inoperante, como 1ª etapa de um planejamento visando a sua recuperação e
atualização tecnológica para que ele possa voltar a operar.
1.1. Objetivos
Este projeto visa à completa documentação de um manipulador pneumático
através de programa comercial de CAD/CAE TopSolid assim como a análise e a
parametrização, com o auxilio do programa comercial de computação simbólica
MatLab, visando uma posterior simulação dos seus movimentos.
1.2. Organização
Este primeiro capítulo do projeto final apresenta o escopo desse trabalho assim
como os objetivos a serem alcançados no final deste, a descrição de como a
monografia está organizada e na ultima seção do capitulo a motivação do projeto.
O capítulo dois deste trabalho é uma introdução ao mundo da robótica e
descreve os componentes inerentes a um robô assim como trás um histórico resumido
do seu desenvolvimento.
No terceiro capítulo é descrito como se fez a modelagem do manipulador para
as simulações dos capítulos seguintes.
O capítulo 4 traz o histórico do robô construído no LabRob e objeto de estudo
dessa monografia, além de trazer as etapas desenvolvidas nesse projeto.
No quinto capítulo foi detalhado como se foi gerada a documentação do
manipulador.
Logo além, no sexto capítulo consta a análise dos parâmetros DH do
manipulador com a respectiva modelagem.

2
No sétimo capítulo são introduzidos os passos da análise estática do robô, e no
capítulo seguinte, as etapas para a seleção dos cilindros adequados.
Por fim, o nono capítulo contém as conclusões do trabalho, bem como as
possibilidades de trabalhos futuros nesse manipulador.

3
2. ASPECTOS GERAIS
Antes de se definir robótica necessitaremos de uma descrição dos
equipamentos intrinsecamente necessários a um robô assim como o histórico de como
se deu o desenvolvimento deles ao longo da história.
2.1. Máquina
O desenvolvimento de uma civilização é fortemente baseado em um avanço
tecnológico continuo que possibilita um incremento da qualidade de vida dos seres
humanos assim como a diminuição da sua carga de trabalho.
As máquinas tem sido as grandes responsáveis por esse desenvolvimento
atualmente. Pode-se definir máquinas como sendo dispositivos constituídos de
mecanismos e atuadores com o objetivo de realizar determinada tarefa.
2.2. Robô
O robô pode ser considerado como uma máquina autônoma, isto é, que
dispensa a participação do ser humano para o seu controle.
Figura 1: Robô desenvolvido no LabRob-UFRJ.

4
É composto essencialmente de manipulador mecânico, unidade de comando e
unidade de potência (figuras 2).
Figura 2: Partes do Robô
O manipulador mecânico refere-se principalmente ao aspecto mecânico e
estrutural do robô.
A unidade de controle é responsável pelo gerenciamento e monitoração dos
parâmetros operacionais requeridos para realizar as tarefas do robô.
A unidade de potência é responsável pelo fornecimento de potência necessária
à movimentação dos atuadores.

5
2.2.1. Breve histórico sobre robôs
Alguns projetos da antiguidade podem ser considerados como robôs, pois são
sistemas autônomos por exercerem suas tarefas sem o auxilio da força humana.
Há 2.300 anos, Aristóteles imaginava: "Se cada ferramenta pudesse executar
por conta própria a sua própria função, se, por exemplo, as agulhas dos tecelões
tecessem sozinhas, o chefe da oficina não precisaria mais de ajuda, nem o senhor de
escravos".
Já em meados do século XX Isaac Asimov publicou o livro “Eu, Robô” que
apresentou as 3 Leis da Robótica, como condição de coexistência dos robôs com os
seres humanos, como prevenção de qualquer perigo que a inteligência artificial
pudesse representar à humanidade. São elas:
• 1ª lei: Um robô não pode ferir um ser humano ou, por inação, permitir que um ser
humano sofra algum mal.
• 2ª lei: Um robô deve obedecer às ordens que lhe sejam dadas por seres humanos,
exceto nos casos em que tais ordens contrariem a Primeira Lei.
• 3ª lei: Um robô deve proteger sua própria existência, desde que tal proteção não
entre em conflito com a Primeira e Segunda Leis.
Mais tarde, no livro “Os Robôs do Amanhecer” , viria a instituir uma quarta lei: a
'Lei Zero':
• 'Lei Zero': Um robô não pode fazer mal à humanidade e nem, por inação, permitir
que ela sofra algum mal.
Logo após a segunda guerra mundial muitos estudos foram responsáveis pelo
desenvolvimento da tecnológica de robôs industriais que já havia sido iniciada antes
porém ainda engatinhava.

6
2.2.2. Robótica industrial
Uma definição de robótica industrial é apresentada pela norma ISO
(International Organization for Standardization) 10218, como sendo: "uma máquina
manipuladora com vários graus de liberdade controlada automaticamente,
reprogramável, multifuncional, que pode ter base fixa ou móvel para utilização em
aplicações de automação industrial". [1]
Algumas das aplicações mais usadas para os robôs industriais são:
• Pintura;
• Soldagem;
• Montagem;
• Movimentação;
• Inspeção;
• Acabamento;
• Corte.
Figura 3: Robô em aplicação de soldagem contínua
7
Existem diversas configurações de robôs, que segundo a Federação
Internacional de Robótica (IFR), podem ser classificadas em:
• Robô de coordenadas cartesianas: Este tipo de robô possui três juntas
prismáticas, resultando num movimento composto de três translações,
cujos eixos de movimento são coincidentes com um sistema de
coordenadas de referência cartesiano;
• Robô de coordenadas cilíndricas: Nesta configuração, os eixos de
movimento podem ser descritos no sistema de coordenadas de
referência cilíndrica;
• Robô de coordenadas esféricas: Neste tipo de robô os eixos de
movimento formam um sistema de coordenadas de referência polar,
através de uma junta prismática e duas de rotação, compondo
movimentos de translação e duas rotações;
• Robô SCARA: É um robô que apresenta duas juntas de rotação
dispostas em paralelo para se ter movimento num plano e uma junta
prismática perpendicular a este plano, apresentando portanto uma
translação e duas rotações;
• Robô Antropomórfico: Nesta configuração, existem ao menos três
juntas de rotação. O eixo de movimento da junta de rotação da base é
ortogonal às outras duas juntas de rotação que são simétricas entre si;
• Robô paralelo: Este robô apresenta configuração tipo plataforma e
mecanismos em forma de cadeia cinemática fechada.
Os robôs industriais também podem ser classificados em 3 níveis de gerações
tecnológicas (IFR):
• A primeira geração é a dos robôs denominados de sequência fixa, os
quais uma vez programados podem repetir uma sequência de

8
operações e para realizar uma operação diferente devem ser
reprogramados.
• Os robôs de segunda geração possuem recursos computacionais e
sensores que permitem ao robô agir em um ambiente parcialmente
estruturado, calculando em tempo real os parâmetros de controle para
realização dos movimentos.
• A terceira geração de robôs apresenta inteligência suficiente para se
conectar com outros robôs e máquinas, armazenar programas e se
comunicar com outros sistemas computacionais. [1]
2.2.3. Partes de um manipulador mecânico
2.2.3.1. Efetuadores
As informações indicadas nos catálogos relacionam-se essencialmente à
extremidade terminal do manipulador mecânico, ou seja, ao último elo. Portanto, torna-
se necessária a inclusão de um componente capaz de promover a interação entre a
extremidade terminal do manipulador mecânico e o objeto a ser trabalhado. Este
componente é o efetuador. [2]
Os efetuadores podem ser divididos em dois grandes tipos: as ferramentas
especiais e as garras mecânicas.
2.2.3.2. Elos
Estrutura que define a relação entre duas juntas do manipulador. Os elos
apresentam algum grau de flexibilidade quando submetidos a esforços. A estrutura do
manipulador deve ser projetada para apresentar elevada rigidez.
2.2.3.3. Juntas
São as articulações do manipulador que permitem a ligação entre os elos. O
número de juntas é igual ao número de graus de liberdade. As juntas mais utilizadas
em um robô são as de rotação e as de translação.

9
2.2.3.4. Sistema de transmissão
São os componentes mecânicos responsáveis por transmitir a potência
mecânica proveniente dos atuadores.
2.2.3.5. Atuadores
São componentes conversores de uma dada fonte de potência em potência
mecânica. Possibilitam a movimentação dos elos dos robôs através da transmissão de
forças e/ou torques nas juntas, bem como velocidades lineares e/ou angulares.
Em geral podem ser motores elétricos, motores pneumáticos, motores
hidráulicos, cilindros hidráulicos e cilindros pneumáticos.
2.2.4. Partes de um manipulador pneumático
2.2.4.1. Atuadores pneumáticos lineares
Os atuadores pneumáticos lineares, também conhecidos por cilindros ou
pistões pneumáticos, são na verdade elementos de trabalho, pois são os elementos
que transformam a energia do ar comprimido em trabalho mecânico através de
movimentos lineares e/ou giratórios.
Os cilindros pneumáticos, construídos nas mais diversas formas e tamanhos,
são os mais comuns e os mais utilizados nas instalações de automação pneumáticas
e se dividem em dois grupos principais.
• De simples ação, que realizam trabalho em uma direção, possuindo uma
única conexão de ar, sendo que o retorno à posição inicial pode se dar por ação de
mola ou de outra força externa.
• De dupla ação ou duplo efeito, quando realizam trabalho em ambas as
direções de avanço e de retorno, possuindo duas conexões de ar.
Os cilindros de simples ação realizam trabalho em uma só direção do curso,
podendo ser do tipo haste avançada quando ele “puxa” a carga ou de haste recuada

10
quando ele “empurra” a carga. O consumo de ar é menor que os de dupla ação, uma
vez que o retorno se dá por ação de uma mola ou de uma força externa.
2.2.4.2. Válvulas de comando
São todas as válvulas que, ao receberem um impulso pneumático, mecânico,
ou elétrico, permitem que haja fluxo de ar pressurizado para alimentar determinado
elemento. Também são válvulas de comando, as que permitem controlar o fluxo do ar
para os diversos elementos do sistema, mediante ajuste mecânico ou elétrico, as que
permitem o fluxo em apenas um sentido, os elementos lógicos, as controladoras de
pressão e as temporizadas.
Utilizada na automação de sistemas discretos, pode ser usada em aplicações
leves, pesadas e exigentes. Estes motores básicos podem ser combinados
com engrenagens planetárias, dentadas ou sem fim para ganhar em regime de
revolução e momento torsor desejado. Pode ser utilizado para acionamento de cilindro
ou de outra válvula.
As válvulas de controle direcional têm como principal função permitir ou não a
passagem de um determinado fluxo de ar comprimido, influenciando a sua direção
fechando ou mudando as passagens internas de suas conexões.
11
3. DESENVOLVIMENTO DO TRABALHO
O trabalho de projeto final foi realizado em um manipulador mecânico que pode
ser classificado como:
• Tipo pneumático de base fixa;
• 5 graus de liberdade;
• Com duas posições definidas por atuador (movimento discreto);
• Controle por modo teleoperado ou robótico;
• Garra tipo dedo rígido com 1 grau de liberdade.
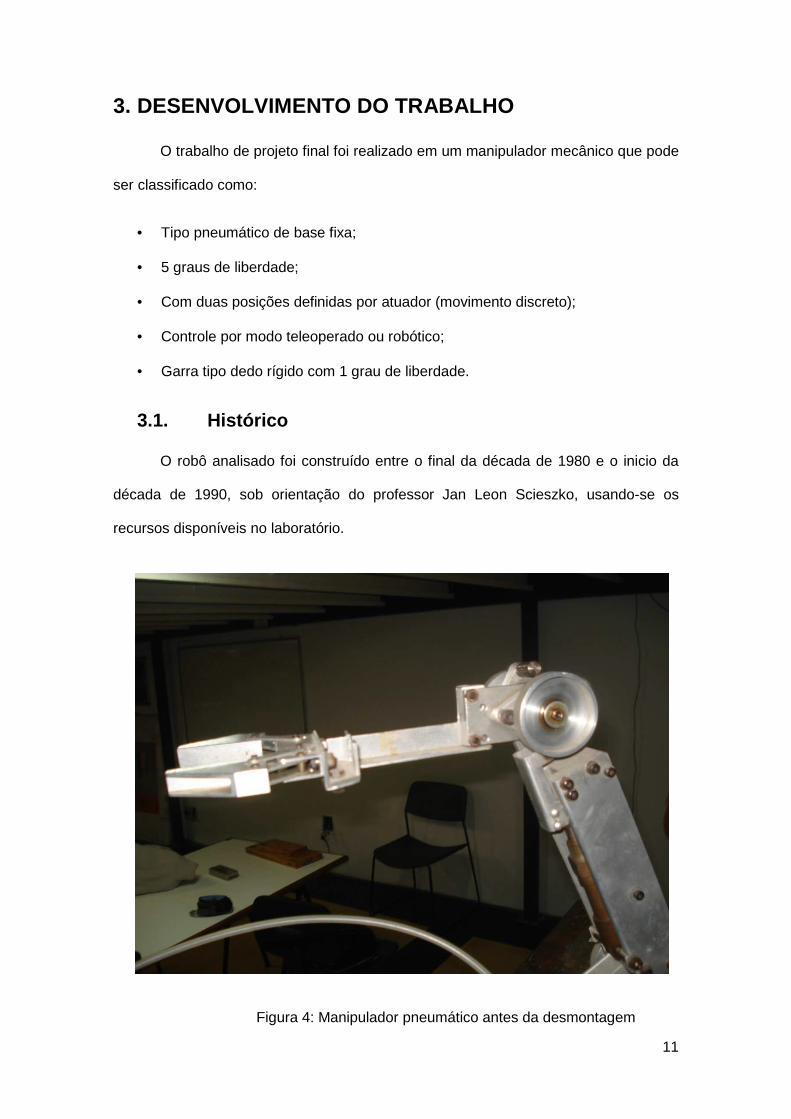
3.1. Histórico
O robô analisado foi construído entre o final da década de 1980 e o inicio da
década de 1990, sob orientação do professor Jan Leon Scieszko, usando-se os
recursos disponíveis no laboratório.
Figura 4: Manipulador pneumático antes da desmontagem

12
Após muitos anos de funcionamento, esse manipulador deveria passar por uma
completa reestruturação para que pudesse voltar a operar, porém grande parte da sua
documentação foi perdida.
O manipulador pneumático encontra-se inoperante e os cilindros e válvulas
estão obsoletos. Os batentes são os responsáveis por limitar a movimentação dos
cilindros pois não se tem nenhum sensor e mecanismo de controle para ter-se uma
confirmação de que se conseguiu chegar na posição desejada.
Figura 5: Suprimento de ar comprimido do laboratório
Pelo fato de toda a parte mecânica do robô ainda encontrar-se funcional,
poder-se-ia usar novamente o suprimento de ar do LabRob para operá-lo, precisando-
se apenas alguns ajustes e possíveis melhoramentos no manipulador que serão
descritos no decorrer do presente trabalho.

13
Abaixo está a foto das válvulas direcionais usadas desse manipulador. Como
os cilindros e as mangueiras, estas também estão obsoletas. Não foi escopo deste
projeto um desenho em CAD desse conjunto.
Figura 6: Válvulas direcionais
O robô analisado neste projeto possui movimentos discretos porque tem duas
posições definidas em que se tem o controle da vazão usando a perda de carga
através de um parafuso.
14
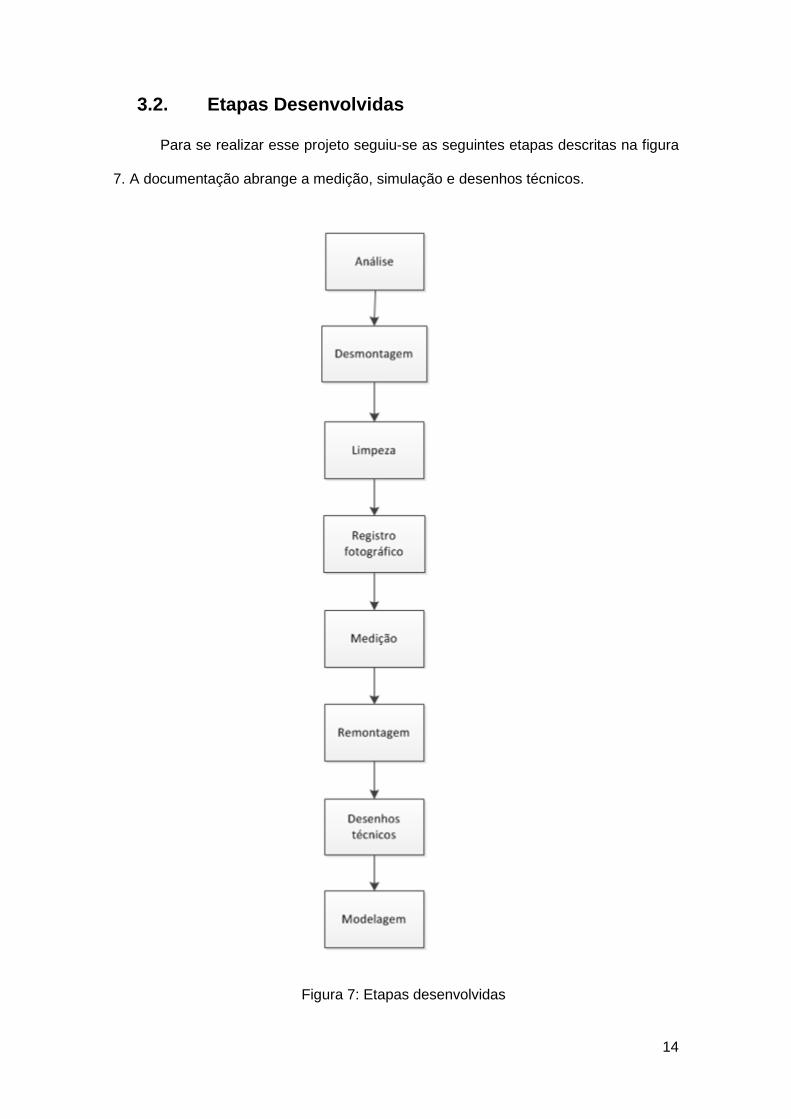
3.2. Etapas Desenvolvidas
Para se realizar esse projeto seguiu-se as seguintes etapas descritas na figura
7. A documentação abrange a medição, simulação e desenhos técnicos.
Figura 7: Etapas desenvolvidas
15
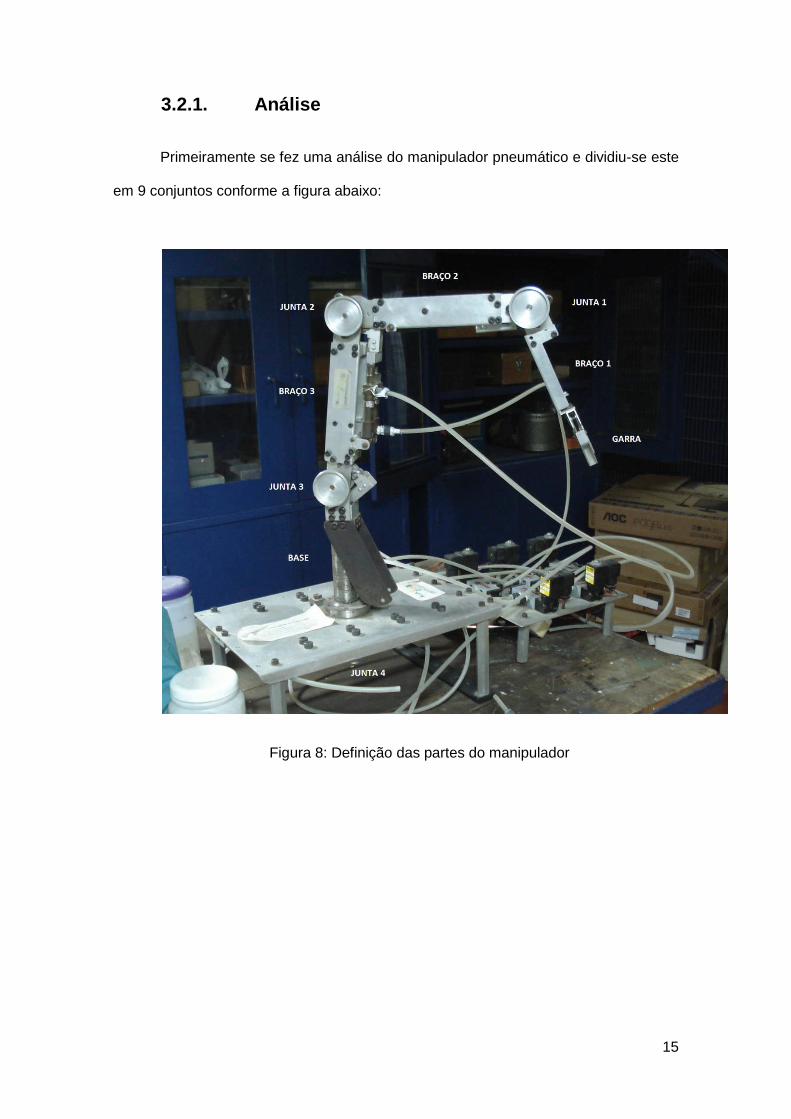
3.2.1. Análise
Primeiramente se fez uma análise do manipulador pneumático e dividiu-se este
em 9 conjuntos conforme a figura abaixo:
Figura 8: Definição das partes do manipulador
16
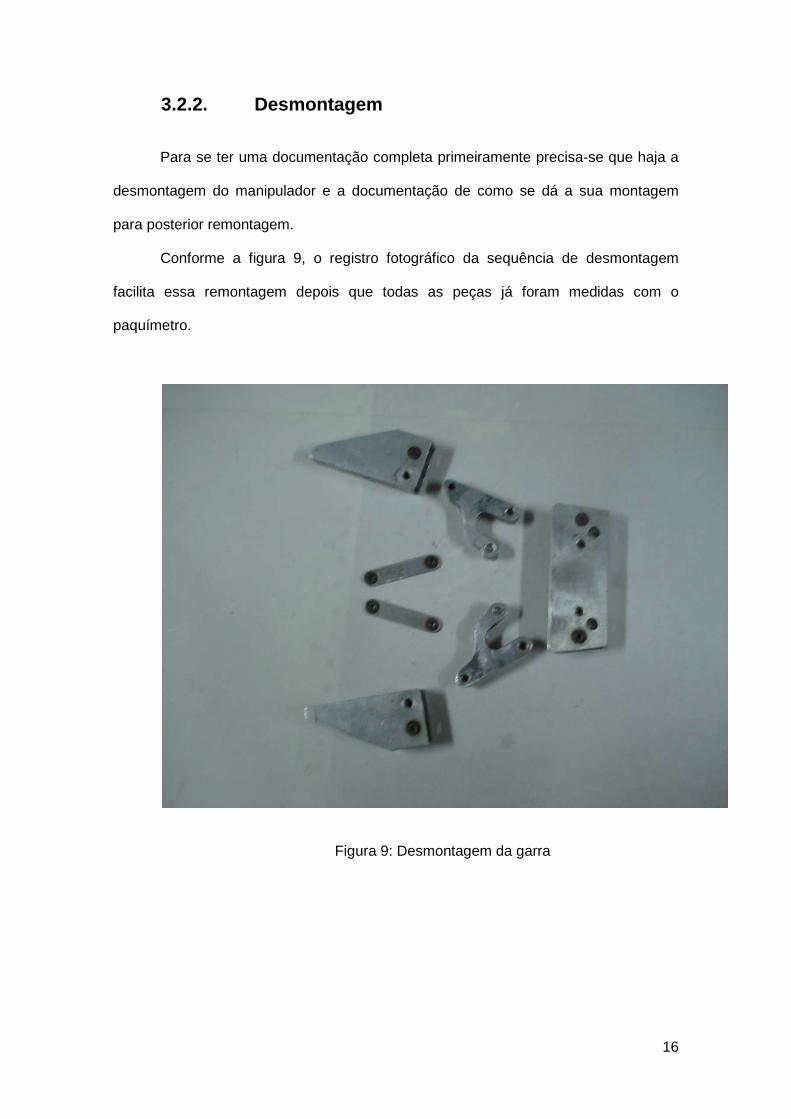
3.2.2. Desmontagem
Para se ter uma documentação completa primeiramente precisa-se que haja a
desmontagem do manipulador e a documentação de como se dá a sua montagem
para posterior remontagem.
Conforme a figura 9, o registro fotográfico da sequência de desmontagem
facilita essa remontagem depois que todas as peças já foram medidas com o
paquímetro.
Figura 9: Desmontagem da garra

17
Durante essa fase pode-se denominar cada peça e colocar numa tabela a sua
quantidade e material:
O resumo de todos os itens usados em certo conjunto de um projeto é
denominado lista de material.
Tabela 1: Exemplo de lista de material da garra, braço 1 e junta 1

18
Com a análise das peças durante a desmontagem, percebeu-se que falta uma
peça na garra, desenhada abaixo na figura 10.
Figura 10: Representação da peça faltante
19
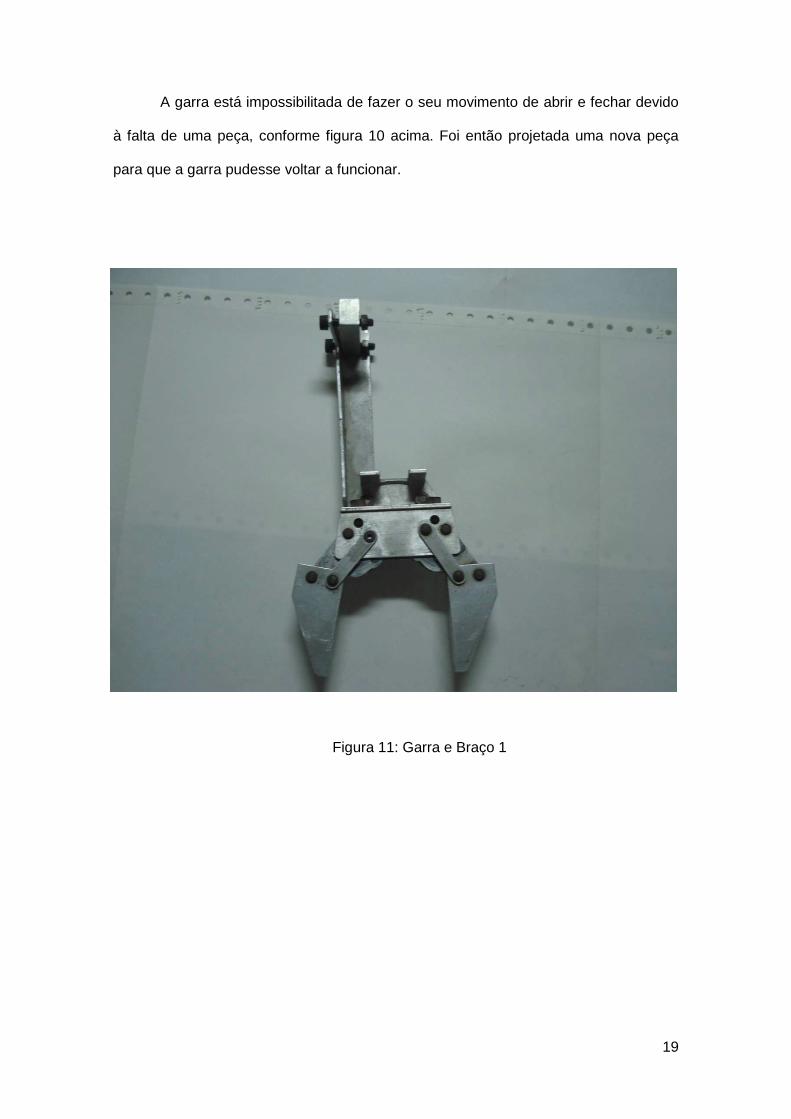
A garra está impossibilitada de fazer o seu movimento de abrir e fechar devido
à falta de uma peça, conforme figura 10 acima. Foi então projetada uma nova peça
para que a garra pudesse voltar a funcionar.
Figura 11: Garra e Braço 1

20
Abaixo está uma foto do conjunto definido como braço 1 que é ligado a garra
através da junta 1 e ligado ao braço 2 através da junta 2:
Figura 12: Braço 2 e Junta1
Na direita da figura observar-se o batente usado para se ter o controle do
movimento do robô.

21
3.2.3. Limpeza
Para se registrar as peças através de fotografias foi realizada uma limpeza de
cada peça para posteriormente se fazer a medição e remontagem.
3.2.4. Remontagem
Após toda a medição das peças foi montado o manipulador pneumático
novamente seguindo as orientações do registro fotográfico.
Figura 13: Manipulador remontado

22
4. DOCUMENTAÇÃO
4.1. Medição
Para as medições das dimensões das peças foi usado um paquímetro com
uma resolução de 0.05 mm, sendo suficiente para realizar as medições das cotas das
peças nesse trabalho.
4.2. Desenho Técnico
Tal forma de representação gráfica é utilizada como base
do projeto na arquitetura, no design e na engenharia. O desenho técnico é a
ferramenta necessária para a interpretação e representação de um projeto, por ser o
meio de comunicação entre a equipe de criação e a de fabricação (ou de construção);
nesse contexto ele pode ser interpretado como a linguagem gráfica que representa as
formas, dimensões e posicionamento de objetos e suas relações com o meio.
A partir de medições realizadas nas peças com paquímetros pode se realizar
desenhos técnicos e também com o único desenho técnico existente, mostrado na
figura abaixo, pode-se ter toda a documentação do manipulador presente no anexo III.
Foram respeitados os códigos criados para os desenhos de conjuntos e peças
para um melhor registro da associação das peças na documentação.

23
Figura 14: Desenho técnico original da garra.

24
A figura 16 mostra o detalhamento da peça nova que foi projetada para o
manipulador.
Figura 15: Detalhamento de uma peça
No anexo III está detalhado todos os desenhos de conjuntos e peças que foram
desenhados em CAD.
25
4.3. Modelagem CAD (3D)
Desenho Assistido por computador (DAC) ou CAD (do inglês: computer aided
design) é o nome genérico de sistemas computacionais (software) utilizados
pela engenharia, geologia, geografia, arquitetura, e design para facilitar o projeto e
desenho técnicos. No caso do design, este pode estar ligado especificamente a todas
as suas vertentes (produtos como vestuário, eletroeletrônicos, automobilísticos, etc.),
de modo que os jargões de cada especialidade são incorporados na interface de cada
programa.
Alguns dos conjuntos mostrados nas fotos da seção anterior serão mostrados
abaixo como exemplos de um desenho em CAD e para serem usados nos capítulos
seguintes.
4.3.1. Conjunto montado:
O projeto se iniciou com o estudo e desenho das peças do manipulador em
softwares de CAD, visando assim restabelecer a documentação do robô.

26
Figura 16: Montagem – Manipulador Pneumático
27
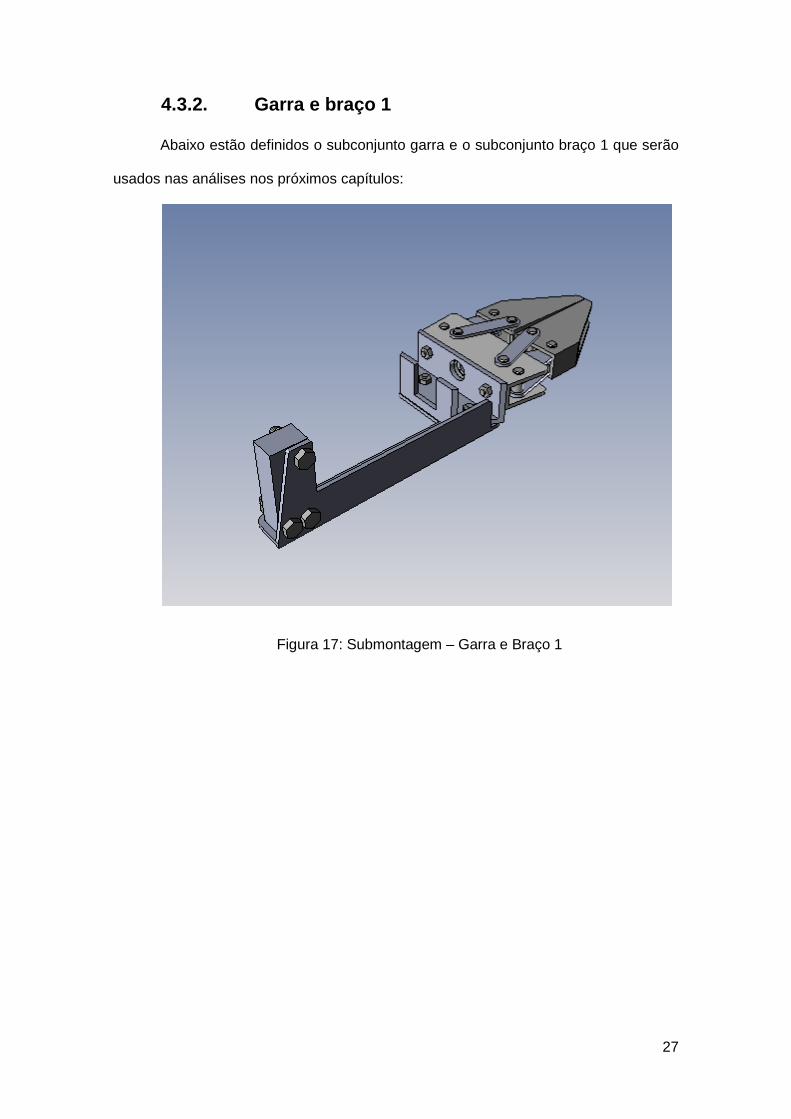
4.3.2. Garra e braço 1
Abaixo estão definidos o subconjunto garra e o subconjunto braço 1 que serão
usados nas análises nos próximos capítulos:
Figura 17: Submontagem – Garra e Braço 1

28
Figura 18: Exemplo de vista explodida do braço 1 com a garra e a junta 1

29
4.3.3. Braço 2
Abaixo está o conjunto braço 2, mostrado na foto na figura 20 com a junta 1,
desenhado em CAD:
Figura 19: Submontagem – Braço 2
30
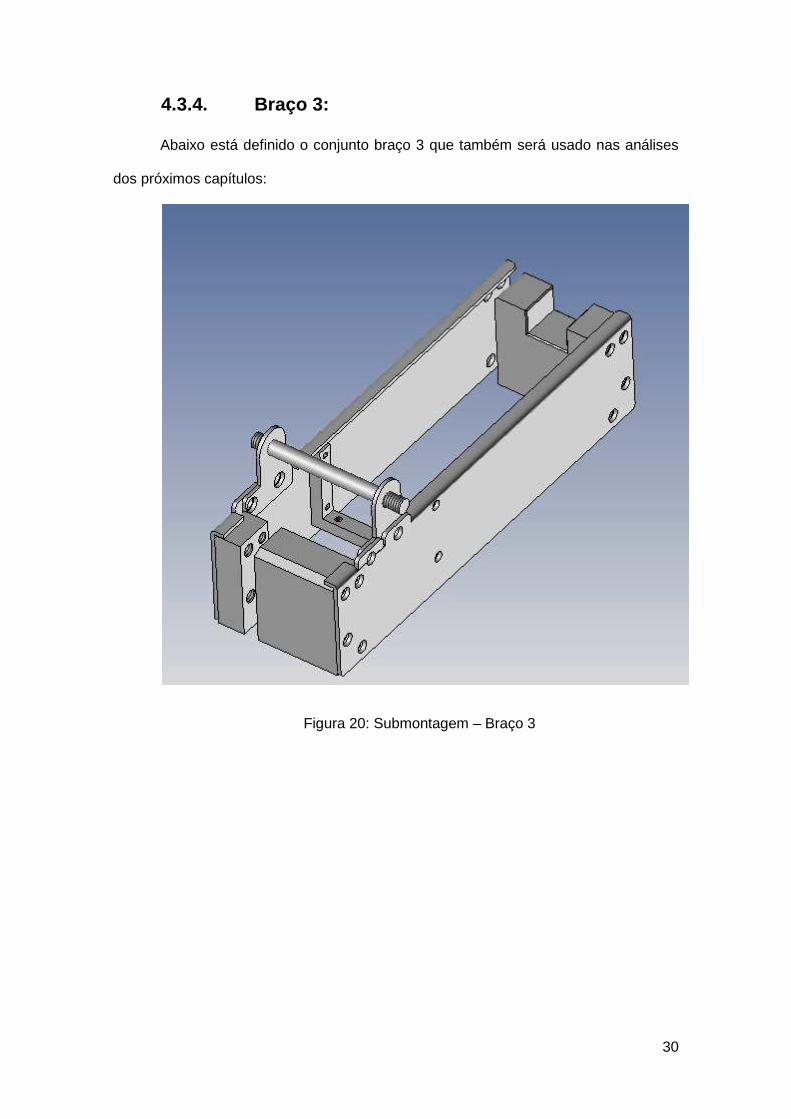
4.3.4. Braço 3:
Abaixo está definido o conjunto braço 3 que também será usado nas análises
dos próximos capítulos:
Figura 20: Submontagem – Braço 3

31
4.4. Projeto - Nova Peça
A peça da garra que não foi encontrada provavelmente quebrou então ela foi
reprojetada e desenhada em CAD com adoçamentos para não haver concentração de
tensões como provavelmente havia na peça anterior.
Figura 21: Peça projetada
Com a fabricação dessa peça do robô e tendo mangueiras novamente
disponíveis assim como o sistema de controle renovado poder-se-ia usar o suprimento
do laboratório para obter ar comprido e assim movimentar o manipulador novamente.

32
5. MODELAGEM
O manipulador pneumático objeto de estudo deste projeto foi modelado como
um robô de cadeia cinemática aberta.
Um robô com cadeia cinemática aberta pode ser considerado como composto
de n+1 membros (Incluindo a base, que é sempre o membro 0), conectados por n
juntas. Os corpos são numerados de 0 a n, a partir da base. As juntas são numeradas
de 1 a n, sendo que a junta i conecta o membro i ao membro i-1. A i-esima variável de
junta é denotada por qi, e pode ser um deslocamento angular ou um deslocamento
linear.
5.1. Sistema de Referência
Os referenciais são usados para registrar as posições e orientações de
determinado ponto de um robô.
Figura 22: Sistema de referência
33
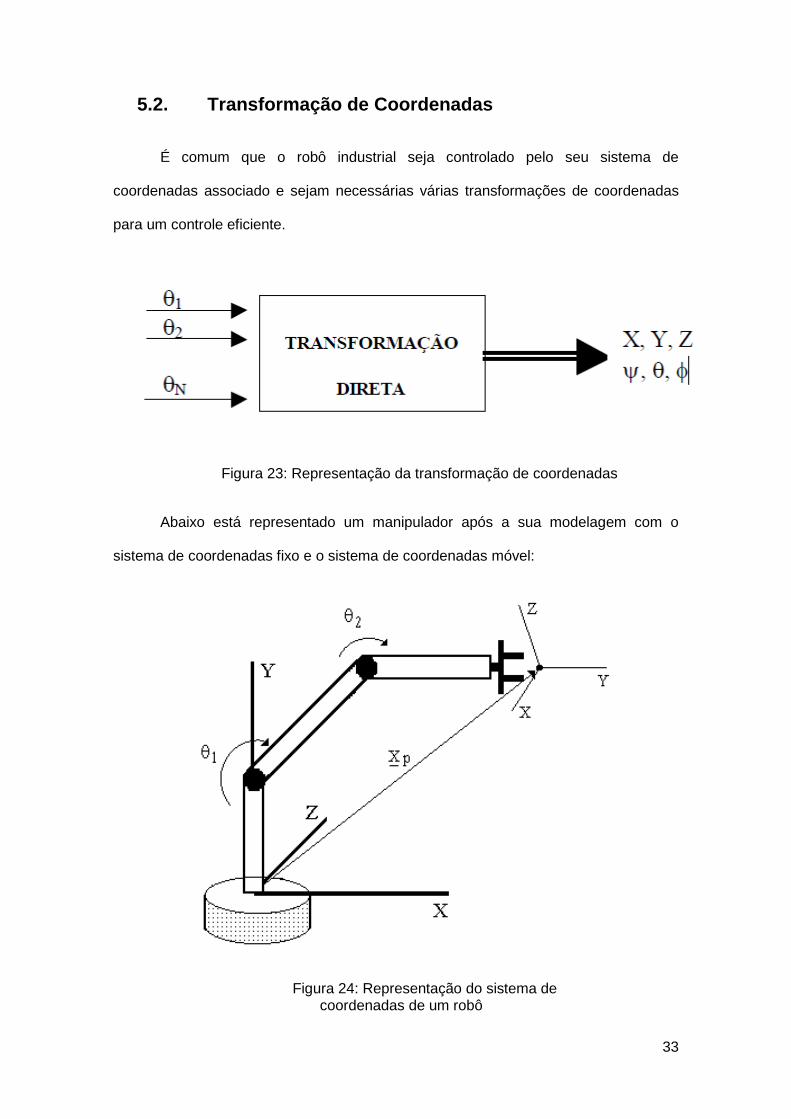
5.2. Transformação de Coordenadas
É comum que o robô industrial seja controlado pelo seu sistema de
coordenadas associado e sejam necessárias várias transformações de coordenadas
para um controle eficiente.
Figura 23: Representação da transformação de coordenadas
Abaixo está representado um manipulador após a sua modelagem com o
sistema de coordenadas fixo e o sistema de coordenadas móvel:
Figura 24: Representação do sistema de coordenadas de um robô

34
Para as análises aqui necessárias pode-se considerar o sistema de
coordenadas fixo como sendo inercial. [7]

35
6. ANÁLISE DO MOVIMENTO
O movimento do manipulador aqui analisado neste projeto final é feito através
de acionamento discreto, com acelerações e desacelerações bruscas, limitadas por
batentes de final de curso.
Estimando-se a aceleração como sendo de 1 m/s², a velocidade máxima que
se alcança no movimento da haste do cilindro será no instante imediatamente anterior
ao contato com o batente.
Figura 25: Gráfico Velocidade X Tempo
Na figura 26 tem-se a representação do movimento da haste do cilindro quando
ela é acionada e depois quando se encontra com o batente de fim de curso que limita
o seu movimento.
v
t

36
6.1. Parâmetros de Denavit-Hartenberg
São os quatro parâmetros associados a uma convenção particular para ligar os
referentes eixos em um manipulador.
Denavit e Hartenberg criaram em 1955 um método sistemático representado
por uma matriz de transformação homogênea 4 x 4, capaz de descrever as relações
de translação e rotação entre elos (elos) adjacentes. [1]
Nesse método, cada elo é associado a um sistema de coordenadas local, fixo
relativamente ao elo. Deste modo, através de transformações sequenciais, os
deslocamentos locais dos elos adjacentes da cadeia cinemática expressos por
coordenadas locais, podem ser transformados em termos de coordenadas da base,
compondo assim o sistema de referência inercial.
Descrição de um elo (link)
Um elo rígido mantém uma relação fixa entre as juntas adjacentes do próprio
elo.
Figura 26: Elo i
No elo i são caracterizadas duas dimensões: a distância normal ai e o ângulo
αi, formado pelos eixos das juntas em um plano perpendicular a Ai. Esses parâmetros
são denominados:
37
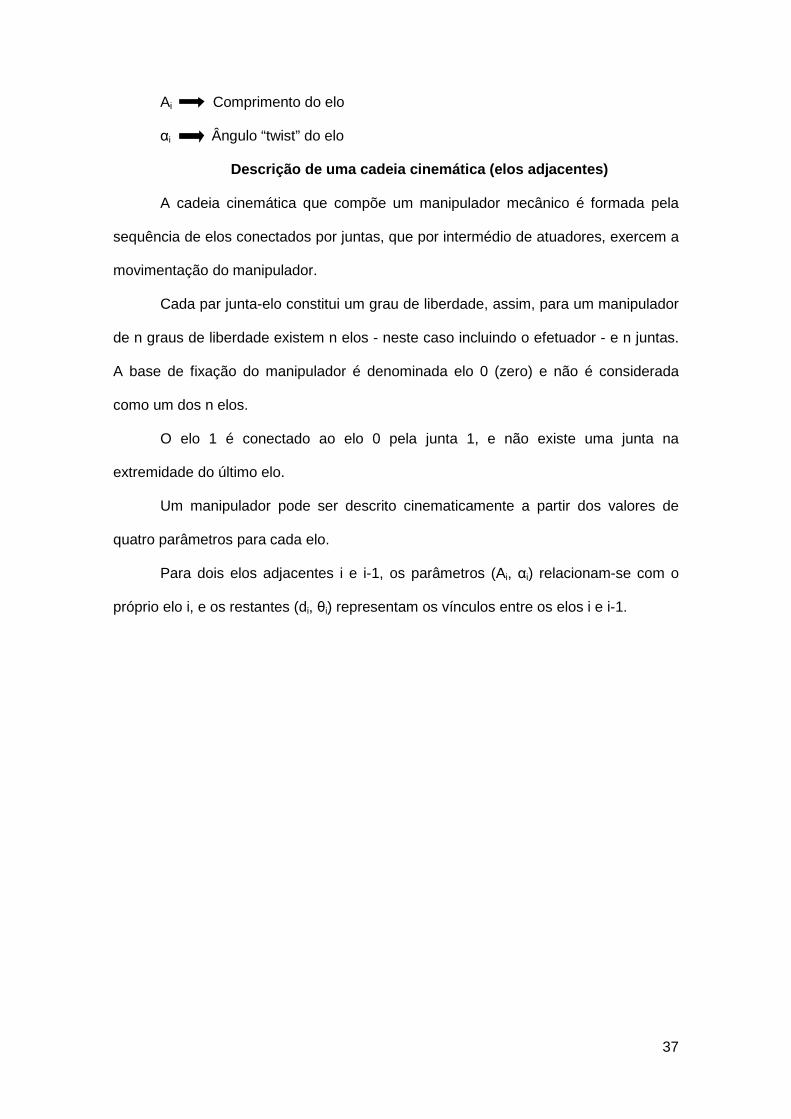
Ai Comprimento do elo
αi Ângulo “twist” do elo
Descrição de uma cadeia cinemática (elos adjacentes )
A cadeia cinemática que compõe um manipulador mecânico é formada pela
sequência de elos conectados por juntas, que por intermédio de atuadores, exercem a
movimentação do manipulador.
Cada par junta-elo constitui um grau de liberdade, assim, para um manipulador
de n graus de liberdade existem n elos - neste caso incluindo o efetuador - e n juntas.
A base de fixação do manipulador é denominada elo 0 (zero) e não é considerada
como um dos n elos.
O elo 1 é conectado ao elo 0 pela junta 1, e não existe uma junta na
extremidade do último elo.
Um manipulador pode ser descrito cinematicamente a partir dos valores de
quatro parâmetros para cada elo.
Para dois elos adjacentes i e i-1, os parâmetros (Ai, αi) relacionam-se com o
próprio elo i, e os restantes (di, θi) representam os vínculos entre os elos i e i-1.

38
Figura 27: Junta de rotação
Os sistemas de referência da base do manipulador {x0, y0, z0} e do efetuador
{xn, yn, zn} não são considerados na regra de formação geral da cadeia cinemática em
termos de orientação.
A localização dos sistemas de referência fixos a cada elo i {xi, yi, zi}, para i = 1,
2, 3... n-1 têm as seguintes regras:
1. Os eixos zi-1 localizam-se ao longo dos eixos de movimentação da i-ésima
junta.
2. Os eixos xi são normais a zi-1, sendo orientados no sentido da normal entre
os eixos zi-1 e zi, ou da junta i à junta i+1.
3. Os eixos yi são obtidos pelo produto vetorial zi × xi .
Através destas regras pode-se observar que:
• A escolha do sistema de referência original (base inercial) é livre e pode
ser colocada em qualquer parte da base de suporte, enquanto que a
direção de z0 deverá ser a do eixo de movimento da primeira junta.

39
• O último sistema de referência (n-ésimo) pode ser colocado em
qualquer parte do elemento terminal, enquanto que o eixo xn permanece
normal ao eixo zn-1.
Convenção dos Parâmetros de Denavit-Hartenberg
A evolução no tempo das coordenadas das juntas de um robô representa o
modelo cinemático de um sistema articulado no espaço tridimensional. A notação D-H
é uma ferramenta utilizada para sintetizar a descrição cinemática de sistemas
mecânicos articulados com n graus de liberdade e dependerá dos parâmetros
associados a cada elo i (ai, αi, di, θi).
Estes parâmetros são definidos da seguinte forma:
Comprimento do elo i: ai distância de zi-1 a zi, medida ao longo de xi
Ângulo de torção do elo i: αi ângulo entre zi-1 e zi ao longo de xi
Distância entre elos adjacentes: di distância entre xi-1 e xi, medida ao longo de zi-1
Ângulo entre elos adjacentes: θi ângulo entre xi-1 e xi, medido em zi-1
Para cada junta, três destes parâmetros são constantes, variando somente θi
no caso de juntas rotacionais (R) e di para prismáticas (P), estes parâmetros são
denominados de variáveis de junta.
Obtenção da matriz de transformação homogênea de um elo
Uma vez que o sistema de coordenadas D-H tenha sido definido, uma matriz
de transformação homogênea i−1Ti pode ser facilmente desenvolvida relacionando o
sistema de referência {i} ao sistema de referência {i-1}, através das seguintes
operações sucessivas.

1. Rotação de θi em z
a xi-1:
Rot (θi,z).
2. Translação de di
Trans (0,0,d i).
3. Translação de ai ao longo de x
sistemas de referência i-1 e i, assim como os eixos x
4. Rotação de ai em x
O produto desta sequência de operação fornece a matriz de transformação
homogênea desejada.
No caso de uma junta de rotação (
em zi-1, promovendo o deslocamento angular de x
ao longo de zi-1, para deslocar o eixo xi em relação a x
3. Translação de ai ao longo de xi, a fim de deslocar linearmente as
1 e i, assim como os eixos xi-1 e xi: Trans (a i,0,0)
em xi para deslocar zi-1 em relação a zi: Rot (a i
O produto desta sequência de operação fornece a matriz de transformação
o caso de uma junta de rotação (θi variável), tem-se:
40
, promovendo o deslocamento angular de xi em relação
, para deslocar o eixo xi em relação a xi-1:
, a fim de deslocar linearmente as origens dos
,0,0).
, x).
O produto desta sequência de operação fornece a matriz de transformação

6.2. Esquema S
de Referência
Aplicando os conceitos narrados na seção anterior foi
mostrando a representação do m
Esquema S implificado e Sistemas de Coordenadas
de Referência
Aplicando os conceitos narrados na seção anterior foi gerada a
a representação do manipulador segundo suas juntas:
Figura 28: Esquema simplificado
41
e Sistemas de Coordenadas
gerada a figura abaixo

42
6.3. Tabela DH
O robô pneumático estudado nesse projeto têm cinco graus de liberdade porém
como o efeito do abrir e fechar da garra é causado por uma junta do tipo prismática, foi
analisado o manipulador como se tivesse 4 graus de liberdade conforme tabela
abaixo:
Elo ai[m] αi [rad] di[m] θi 1 0 π/2 0.12 θ1(variável) 2 0.2 0 0 θ2(variável) 3 0.25 0 0 θ3(variável) 4 0.15 0 0 θ4(variável)
Tabela 2: Parâmetros DH

43
6.4. Modelagem MatLab
Junto com os parâmetros de DH pode-se usar a ferramenta Matlab para se
gerar a figura 30. Essa figura é a representação do manipulador em uma dada
posição de captura A feita com o auxílio do software Robotic toolbox usado no
MATLAB. Não foi escopo desse trabalho fazer uma análise cinemática completa do
manipulador.
Figura 29: Posição A
O comando utilizado para gerar a figura acima encontra-se no anexo I deste
trabalho.
44
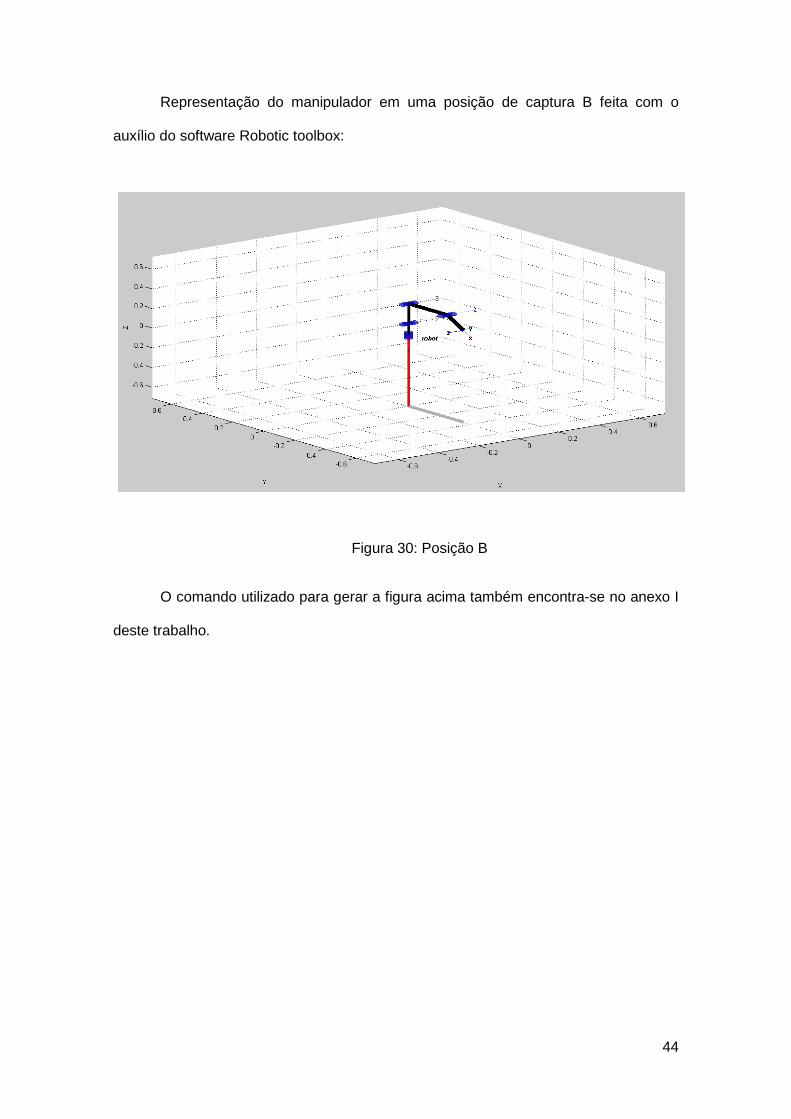
Representação do manipulador em uma posição de captura B feita com o
auxílio do software Robotic toolbox:
Figura 30: Posição B
O comando utilizado para gerar a figura acima também encontra-se no anexo I
deste trabalho.

45
7. ANÁLISE DOS ESFORÇOS
Neste capítulo, será calculado o valor da força necessária para a manipulação
de uma determinada carga definida como máxima para o uso deste manipulador.
Inicialmente, serão apresentadas as propriedades de cada conjunto e depois os
cálculos referentes às forças.
Na concepção da análise, foi levado em consideração um cenário de caso
crítico, no qual a carga manipulada é a máxima estipulada no projeto, supostamente,
0.5 kg, e a garra e o braço 1 se encontram alinhados na horizontal com o braço 2
totalmente na vertical.
7.1. Propriedades
Com as funções disponibilizadas pelo TopSolid pode-se descobrir o volume
das peças e assim obter-se a massa de cada conjunto. Para esse estudo as
dimensões dos mecanismos foram simplificadas e foi assumido o material todo como
sendo alumínio 1050 com massa especifica conforme.
7.2. Forças
Com o estabelecimento de uma posição crítica, desconsiderando a aceleração
e estimando as massas de cada peça pode-se agora calcular a força necessária para
manter o conjunto 1 na horizontal. Abaixo segue a nomenclatura usada nessa seção:
�� = �������� ��1
������ = ������������
������� = �������� ���1
����ç�� = ���������ç1
� = ������çã���!"��"��� #� = #����� ��1
Considerando a aceleração gravitacional como sendo igual a:

46
� = 9.81 ��'
O valor padrão para a aceleração gravitacional que é suficiente para cálculos
em estática.
Sendo a massa da Garra somada à das juntas 1 e 2 e à dos braço 1 e 2 igual a
massa do subconjunto 1:
�� = ������ +������� +������' +����ç�� +����ç�' = 1.0*� (1)
Com isso podemos calcular o peso desse conjunto como sendo:
#� = ��� = 1.010 = 10+ (2)
Somado ao peso do objeto que se deseja levantar de 0.5 kg: ��,-.�� = 0.5*� #�,-.�� = ��,-.��� = 0.510 = 5+ (3)
Obtemos o peso total: #����0 = #�,-.�� + #� = 5 + 10 = 15+ (4)
7.3. Momentos
Pelo fato do braço de alavanca da força do pistão ser localizada próxima da
metade da do peso do subconjunto 1 situado no centro de massa pode se considerar:
�' = �1' (5)
A expressão abaixo informa que o somatório dos momentos em relação à junta
2 tem de ser igual a 0:
ΣMJ' = 0 (6)
Sendo: #��� − 6��' = 0 (7)
Portanto: #��� − 6� �1' = 0 (8)
Tem-se que a força do pistão pneumático tem de ser próxima ao dobro do peso
do subconjunto 1:
6� = 2#� (9)
47
Portanto, a força requerida do pistão para elevar o subconjunto 1 com um
objeto de até 0.5 kg seria de, pelo menos:
6� = 21.5 = 30+
48
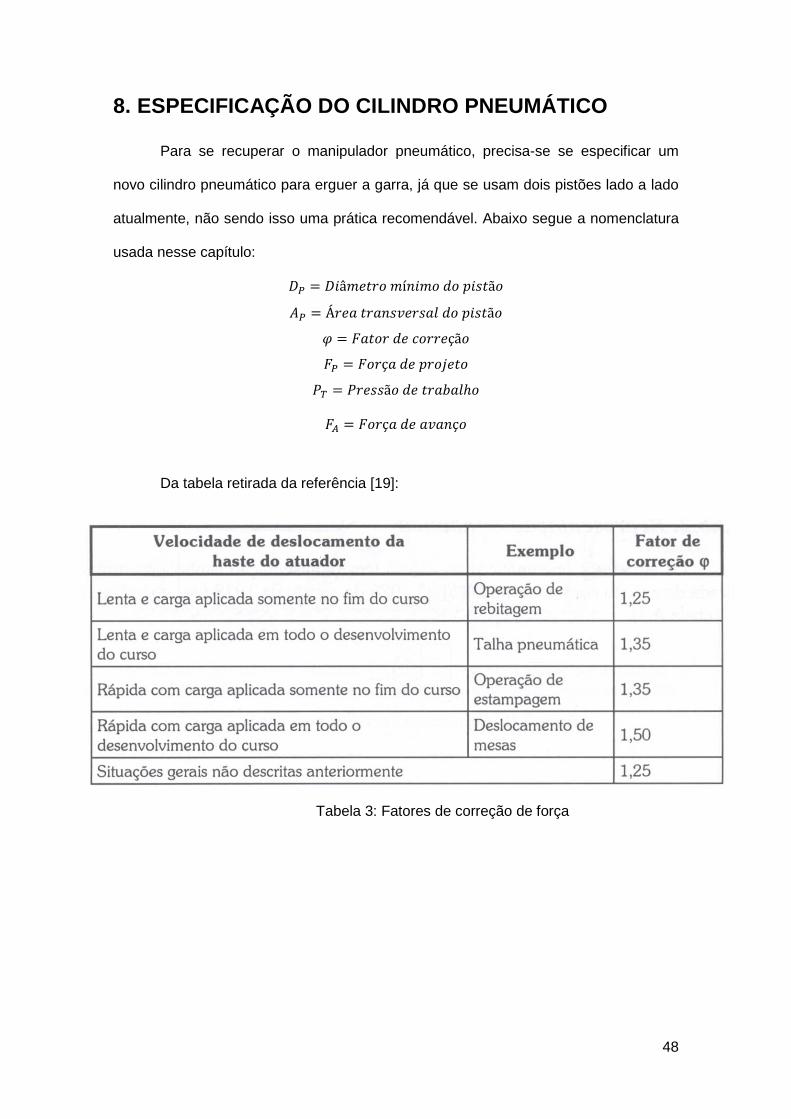
8. ESPECIFICAÇÃO DO CILINDRO PNEUMÁTICO
Para se recuperar o manipulador pneumático, precisa-se se especificar um
novo cilindro pneumático para erguer a garra, já que se usam dois pistões lado a lado
atualmente, não sendo isso uma prática recomendável. Abaixo segue a nomenclatura
usada nesse capítulo:
9: = 9"â�����í�"��="��ã �: = Á��������!������="��ã ? = 6��������çã 6: = 6�ç���=���� #@ = #����ã��������ℎ
6B = 6�ç����!��ç
Da tabela retirada da referência [19]:
Tabela 3: Fatores de correção de força

49
Podemos obter o fator de correção para a aplicação em questão:
? = 1.25
Considerando a pressão de trabalhando como sendo geralmente igual a:
#@ = 6 *�D�' = 588*#� = 588000#�
Podemos calcular o diâmetro do pistão através da fórmula da área transversal
dele:
�: = EFGHI (10)
Desenvolvendo o cálculo com a separação do diâmetro de um lado da equação
abaixo:
9: = 2JBGE (11)
A partir da fórmula da pressão de trabalho, equação 12:
#@ = KLBG (12)
Obtém-se a área transversal do pistão:
�: = KL:M (13)
Substituindo essa equação 12 na equação 10 tem-se:
9: = 2J KLE:M (14)
E substituindo também a força de avanço pela força de projeto com o fator de
correção:
9: = 2JKGNE:M (15)
Da análise estática se estima a força de projeto como sendo igual ao peso do
conjunto mais o peso do objeto a ser levantado:
6: = #����0 = 30+
Portanto podemos calcular o diâmetro mínimo necessário ao pistão como
sendo:

50
9: = 2O 301.25P588000 = 9.01Q10RS�
Então, deve-se trocar os dois pistões intermediários atualmente usados no
manipulador por um com um diâmetro da haste de no mínimo 10 mm.
Usando essa informação em conjunto com a do curso necessário para essa
aplicação foi feita a seleção do cilindro abaixo através do catalogo da FESTO:
Com esse pistão da FESTO selecionado poderia-se recolocar o manipulador
para funcionar.
Figura 31: Pistão pneumático recomendado

51
9. CONCLUSÃO
9.1. Resultados
Com esse trabalho foi feito a desmontagem, medição e remontagem do
manipulador e gerado toda a sua documentação, com os desenhos das peças,
desenhos de montagem, desenhos com vistas explodidas e lista de material.
O manipulador pneumático encontrava-se em mau estado de conservação. Por
isso também foram feitas algumas análises para que se pudesse propor melhorias no
manipulador.
Foi proposto e desenhado uma nova peça para promover o movimento das
garras, pois a peça anterior que gerava o abrir e fechar das garras havia quebrado e
não foi encontrada para ser desenhada.
Posteriormente, foi especificado um novo cilindro pneumático para substituir os
dois que eram usados devido ao fato de não haver na época um com a capacidade
adequada para essa tarefa.
9.2. Trabalhos Futuros
Abaixo será descrito o que pode ser realizado em um novo trabalho e também
quais outras análises poderão ser feitas para se ter novas recomendações de
melhorias.
Para se conseguir que o manipulador pneumático funcione novamente é
preciso colocar componentes novos e repor o que está faltando no sistema, trocando
as válvulas e mangueiras.
A usinagem de uma nova peça para o abrir e fechar da garra também pode ser
feita. Além disso, uma análise de elementos finitos no manipulador é uma simulação
que agora poderia ser realizada usando os desenhos gerados.

52
Para um trabalho futuro poder-se-ia ainda também desenvolver uma unidade
de controle deste manipulador para que seja operada por computador, substituindo
assim a ação humana, tornando este manipulador um sistema robótico.

53
10. REFERÊNCIAS
[1] VITOR FERREIRA ROMANO, Apostila de Robótica, UFRJ-Poli / Engenharia
Mecânica, 2011.
[2] VITOR FERREIRA ROMANO, Robótica Industrial - Aplicação na Indústria
de Manufatura e de Processos. Editora Edgard Blücher Ltda., 2002.
[3] OGATA, Katsuhiko. Engenharia de Controle Moderno – Quarta Edição -
Editora LTC.
[4] ARMANDO CARLOS PINA FILHO, Desenho técnico para engenharia
mecânica. Universidade federal do Rio de Janeiro, 2011.
[5] ARMANDO CARLOS PINA FILHO, Apostila Sistemas projetivos, UFRJ-Poli
/ Engenharia Mecânica
[6] REINALDO DE FALCO, Apostila Compressores alternativos - UFRJ-Poli /
Engenharia Mecânica
[7] TENENBAUM, Roberto A.. Dinâmica aplicada – Terceira edição – Editora
Manole
[8] Associação Brasileira de Normas Técnicas NBR 10067 - Princípios gerais de
representação em desenho técnico. [S.l.: s.n.], 1995
[9] Associação Brasileira de Normas Técnicas NBR 10068 - Folha de desenho -
Leiaute e dimensões. [S.l.: s.n.], 1987
[10] Associação Brasileira de Normas Técnicas NBR 10126 - Cotagem em
desenho técnico. [S.l.: s.n.], 1987
[11] Associação Brasileira de Normas Técnicas. NBR 8196: Desenho Técnico:
emprego de escalas. [S.l.: s.n.], 1999.
[12] Associação Brasileira de Normas Técnicas NBR 8993 - Representação
convencional de partes roscadas em desenhos técnicos. [S.l.: s.n.], 1985
[13] Associação Brasileira de Normas Técnicas NBR13272 - Elaboração das listas
de itens. [S.l.: s.n.], 1999
[14] Associação Brasileira de Normas Técnicas NBR13273 - Referência a itens .
[S.l.: s.n.], 1999
[15] BUDYNAS, Richard G., NISBETT, J. Keith - Elementos de máquinas de
Shigley – Projeto de engenharia mecânica – Editora Mc Graw Hill – Oitava
edição
[16] COKER, Peter I., Robotic Toolbox for use with MATLA– Editora Csiro – Quinta
Edição

54
[17] CALLISTER, William D.. Ciência e engenharia de materiais uma introdução. –
Sétima edição – Editora LTC
[18] MERIAM, J. L., KRAIGE, L.G., Mecânica estática – Quinta edição – Editora
LTC
[19] FIALHO, ARIVELTO B. - Automação Pneumática – Projetos,
Dimensionamento e Análise de Circuitos – Editora Érica – Segunda Edição
[20] Catálogo FESTO:
http://www.festo.com/cms/pt-br_br/626.htm Visitado em 06/08/14
http://www.festo.com/cms/pt-br_br/628.htm Visitado em 01/02/15
[21] Catálogo HMPC:
http://www.hmpc.com.br/ Visitado em 10/01/15
[22] FLAVIO DE MARCO, Apostila de metrologia, UFRJ-Poli / Engenharia
Mecânica.
55
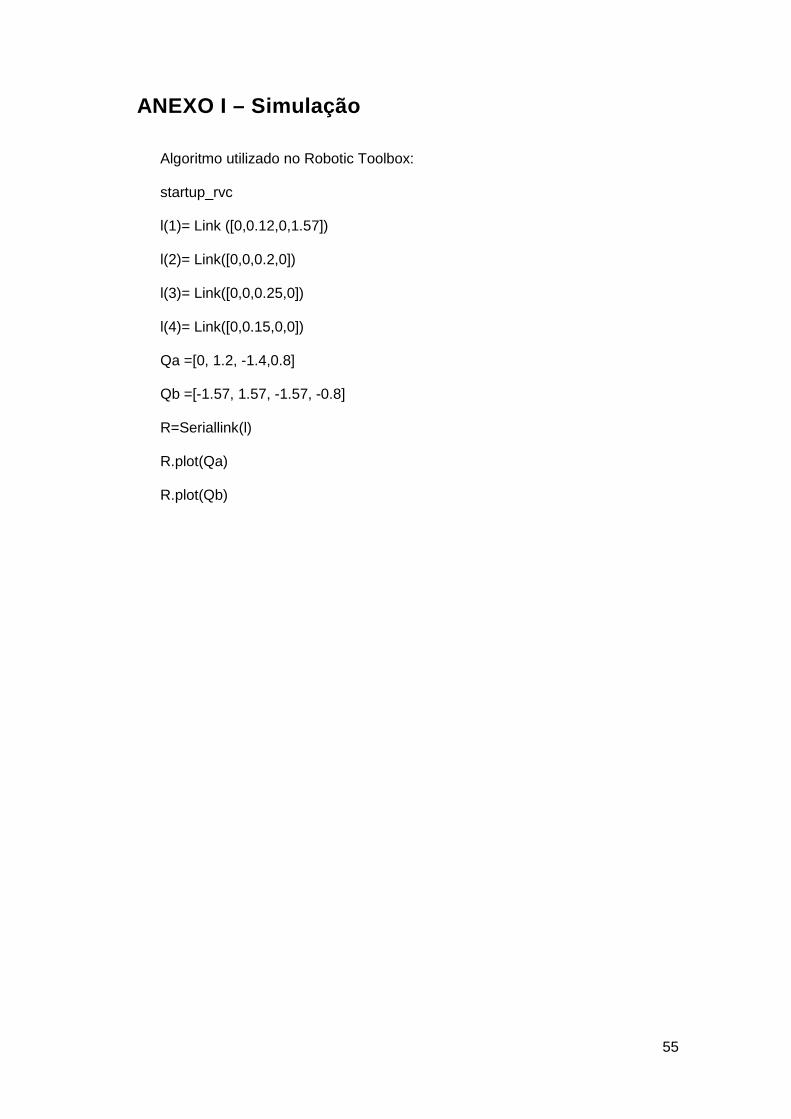
ANEXO I – Simulação
Algoritmo utilizado no Robotic Toolbox:
startup_rvc
l(1)= Link ([0,0.12,0,1.57])
l(2)= Link([0,0,0.2,0])
l(3)= Link([0,0,0.25,0])
l(4)= Link([0,0.15,0,0])
Qa =[0, 1.2, -1.4,0.8]
Qb =[-1.57, 1.57, -1.57, -0.8]
R=Seriallink(l)
R.plot(Qa)
R.plot(Qb)

56
ANEXO II – Cálculo da matriz de transformação
Com os valores da tabela 2, pode-se calcular a matriz de transformação
homogênea para cada elo:
T� = UV�W� 0 X��W� 0X��W� 0 −V�W� 00 1 0 0.120 0 0 1 Y
T' = UV�W' −X��W' 0 0.2V�W'X��W' V�W' 0 0.2X��W'0 0 1 00 0 0 1 Y
TS = UV�WS −X��WS 0 0.25V�WSX��WS V�WS 0 0.25X��WS0 0 1 00 0 0 1 Y
TI = UV�WI −X��WI 0 0X��WI V�WI 0 00 0 1 0.150 0 0 1 Y 0T4= 0T1
1T22T3
3T4
0T4=
UV�W� 0 X��W�X��W�0 01 −V�W�00 0 0000.121 Y UV�W' −X��W' 0X��W'0 V�W'0 010 0 0
0.2V�W'0.2X��W'01 Y UV�WS −X��WS 0X��WS0 V�WS0 010 0 0
0.25V�WS0.25X��WS01 Y UV�WI −X��WI 0X��WI0 V�WI0 010 0 0000.151 Y

57
= Z[\ ]\ ^\0 0 0 #\1 _I`I
X0 =
a−V(W4)[V(W1)X(W2)X(W3)– V(W1)V(W2)V(W3)] − X(W4)[V(W1)V(W2)X(W3) + V(W1)V(W3)X(W2)]−V(W4)[X(W1)X(W2)X(W3) − V(W2)V(W3)X(W1)] − X(W4)[V(W2)X(W1)X(W3) + V(W3)X(W1)X(W2)]V(W4)[V(W2)X(W3) + V(W3)X(W2)] + X(W4)[V(W2)V(W3) − X(W2)X(W3)] h
Y0 =
aX(W4)[V(W1)X(W2)X(W3) − V(W1)V(W2)V(W3)]– V(W4)[V(W1)V(W2)X(W3) + V(W1)V(W3)X(W2)]X(W4)[X(W1)X(W2)X(W3) − V(W2)V(W3)X(W1)] − V(W4)[V(W2)X(W1)X(W3) + V(W3)X(W1)X(W2)]V(W4)[V(W2)V(W3) − X(W2)X(W3)] − X(W4)[V(W2)X(W3) + V(W3)X(W2)] h
Z0 = i X(W1)−V(W1)0 j #\=
a [3X(W1)/20] + [(V(W1)V(W2))/5]–[V(W1)X(W2)X(W3))/4] + [(V(W1)V(W2)V(W3))/4][(V(W2)X(W1))/5]–[(3V(W1))/20]–[(X(W1) ∗ X(W2) ∗ X(W3))/4] + [(V(W2)V(W3)X(W1))/4][X(W2)/5] + [(V(W2)X(W3))/4] + [(V(W3)X(W2))/4] + [3/25] h

58
ANEXO III – Desenhos
Nesse anexo constam os desenhos de todas as submontagens do manipulador
enumeradas de forma facilitar a localização:
1. Garra
2. Braço 1
3. Junta 1
4. Braço 2
5. Junta 2
6. Braço 3
7. Junta 3
8. Base
9. Junta 4
59
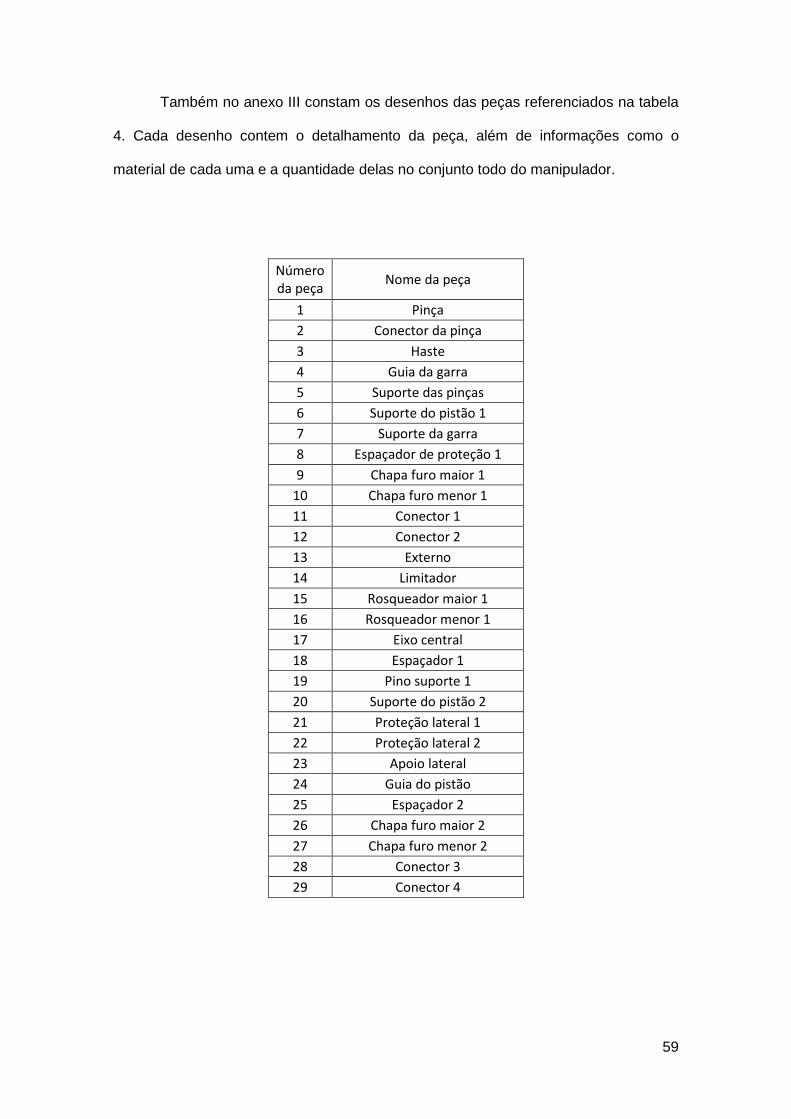
Também no anexo III constam os desenhos das peças referenciados na tabela
4. Cada desenho contem o detalhamento da peça, além de informações como o
material de cada uma e a quantidade delas no conjunto todo do manipulador.
Número
da peça Nome da peça
1 Pinça
2 Conector da pinça
3 Haste
4 Guia da garra
5 Suporte das pinças
6 Suporte do pistão 1
7 Suporte da garra
8 Espaçador de proteção 1
9 Chapa furo maior 1
10 Chapa furo menor 1
11 Conector 1
12 Conector 2
13 Externo
14 Limitador
15 Rosqueador maior 1
16 Rosqueador menor 1
17 Eixo central
18 Espaçador 1
19 Pino suporte 1
20 Suporte do pistão 2
21 Proteção lateral 1
22 Proteção lateral 2
23 Apoio lateral
24 Guia do pistão
25 Espaçador 2
26 Chapa furo maior 2
27 Chapa furo menor 2
28 Conector 3
29 Conector 4

60
Tabela 4: Desenhos
Por último, está incluído nesse anexo uma lista de material visando assim
facilitar uma possível remontagem do manipulador.
30 Suporte do pistão 3
31 Espaçador 3
32 Espaçador 4
33 Suporte lateral 1
34 Proteção lateral 3
35 Proteção lateral 4
36 Pino suporte 2
37 Espaçador 5
38 Suporte lateral 2
39 Suporte do pistão 4
40 Pilar
41 Calço 1
42 Contrapeso
43 Calço 2
44 Espaçador 6
45 Suporte inferior
46 Peso
47 Mesa
48 Torre
49 Acessório lateral
50 Guia
51 Base do manipulador
52 Chapa de apoio
53 Fixador do pistão
54 Espaçador de proteção 2
55 Batente inferior
56 Chapa furo menor 3
57 Rosqueador menor 3
58 Conector 5
59 Suporte do pistão 5
60 Conector 6

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:5
01-00-00
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0 Manipulador Pneumático 1 Alumínio 1050
1 Garra Alumínio 10501
2 Braço 1 1 Alumínio 1050
3
Braço 2
1 Alumínio 1050
Junta B
1 Alumínio 1050
Junta A
1 Alumínio 1050
4
5
6
7
1
1
Alumínio 1050
Alumínio 1050
Braço 3
Junta C
8
9
1
1
Alumínio 1050
Alumínio 1050
Base
Junta D
7
6
3
54
2
1
8
9

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-01
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0
Pinça
1 Alumínio 1050
1
Conector da pinça
Alumínio 10502
2
Haste
2 Alumínio 1050
3
Guia da garra
2 Alumínio 1050
4 Aço 10201
Garra
4
3
1
5
5 1Suporte das pinças Alumínio 1050
2

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-02
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0
Suporte da garra
1 Alumínio 1050
1
Suporte do pistão 1
Alumínio 10501
2
Espaçador de proteção 1
1 Alumínio 1050
3 1 Alumínio 1050
Braço 1
1
2
3
1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-03
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0
Chapa furo menor 1
1 Alumínio 1050
1 Chapa furo maior 1 Alumínio 10501
2
Rosqueador maior
1 Alumínio 1050
3 Conector 1 1 Alumínio 1050
Conector 2 1 Alumínio 1050
Rosqueador menor
1 Alumínio 1050
Limitador
Externo
1
1
Alumínio 1050
Alumínio 1050
Eixo central
Espaçador 1
1
1
Alumínio 1050
Alumínio 1050
Suporte do pistão 2
1 Alumínio 1050
4
5
6
7
8
9
10
11
Junta A
Alumínio 10501
8
11
2
1
6
3
4
5
7
9
10

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-04
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0 Braço 2 1 Alumínio 1050
1
Suporte lateral 1
Alumínio 10501
2
Proteção lateral 1
1 Alumínio 1050
3
Guia do pistão
2 Alumínio 1050
Espaçador 4
1 Alumínio 1050
Proteção lateral 2
1 Alumínio 1050
4
5
6
7
1
1
Alumínio 1050
Alumínio 1050
Espaçador 2
Espaçador 3
2
1
7
4
3
6
5
1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-05
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
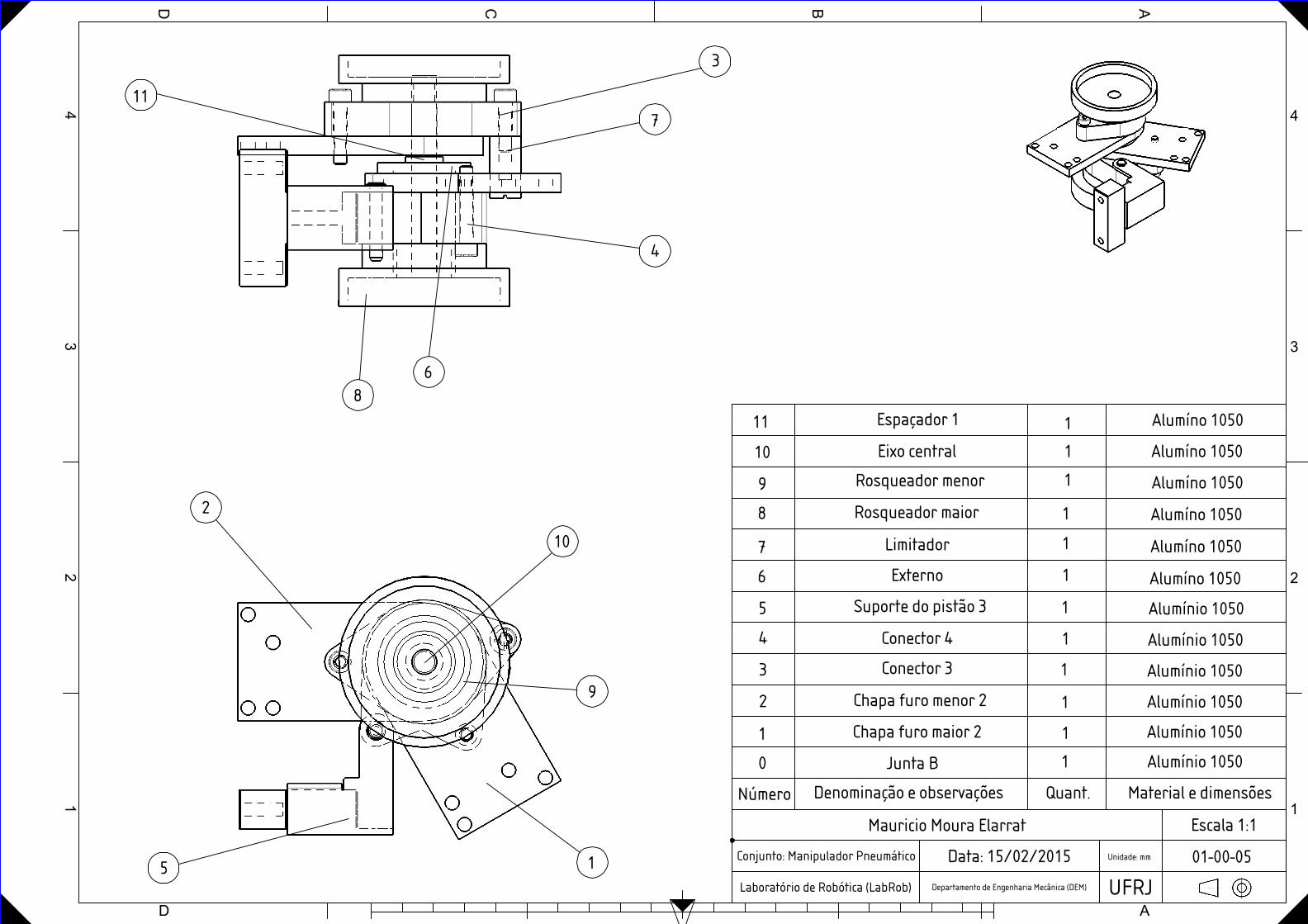
0 Junta B 1 Alumínio 1050
1 Chapa furo maior 2 Alumínio 10501
2 Chapa furo menor 2 1 Alumínio 1050
3 Conector 3 1 Alumínio 1050
Conector 4 1 Alumínio 1050
Suporte do pistão 3 1 Alumínio 1050
4
5
6
7
8
9
10
11
1
1
1
1
1
1
Alumíno 1050
Alumíno 1050
Alumíno 1050
Alumíno 1050
Alumíno 1050
Alumíno 1050
Externo
Limitador
Rosqueador maior
Rosqueador menor
Eixo central
Espaçador 1
5
7
9
8
10
6
3
4
2
1
11
1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-06
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
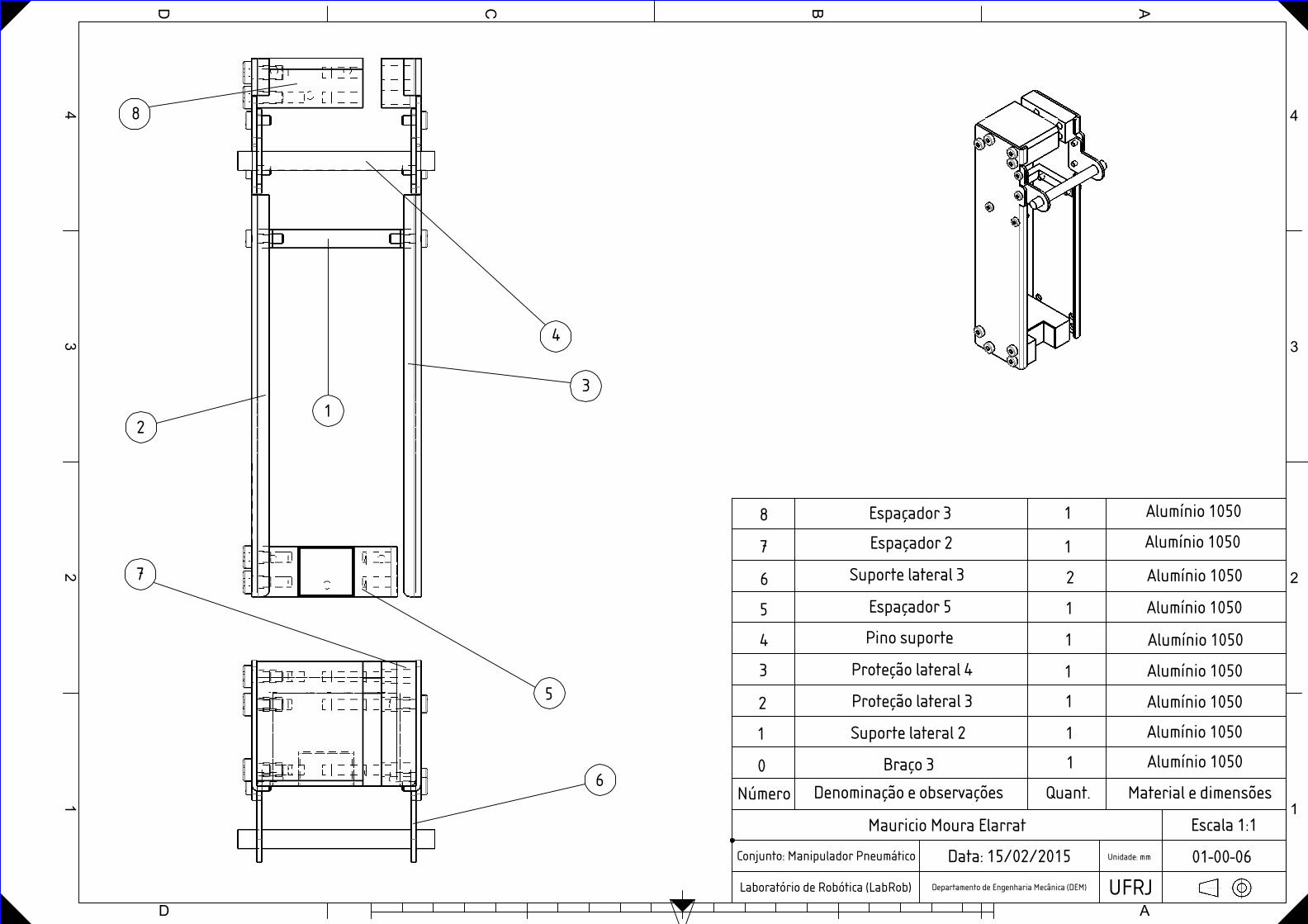
0 Braço 3 1 Alumínio 1050
1 Suporte lateral 2 Alumínio 10501
2 Proteção lateral 3 1 Alumínio 1050
3
Pino suporte
1 Alumínio 1050
Espaçador 5
1 Alumínio 1050
Proteção lateral 4
1 Alumínio 1050
4
5
6
7
8
2
1
1
Alumínio 1050
Alumínio 1050
Alumínio 1050
Suporte lateral 3
Espaçador 2
Espaçador 3
3
2
5
4
1
8
6
7

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-07
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0
Chapa furo menor 3
1 Alumínio 1050
1
Chapa furo maior 2
Alumínio 10501
2
Rosqueador maior
1 Alumínio 1050
3
Conector 4
1 Alumínio 1050
Suporte do pistão 4
Junta C
Conector 5
Externo
Limitador
Rosqueador menor
Espaçador 1
Eixo central
4
5
6
7
8
9
11
10
1
1
1
1
1
1
1
1
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 10501
3
7
10
6
5
11
2
8
4
9

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:3
01-00-08
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
0
Calço 1
1 Alumínio 1050
1 Pilar Alumínio 10504
2
Peso 2
2 Chumbo
3 Peso 1 2 Chumbo
Calço 2 1 Chumbo
Mesa
1 Alumínio 1050
Suporte inferior
Espaçador 6
1
1
Chumbo
Alumínio 1050
Torre
Aba lateral
1
1
Alumínio 1050
Alumínio 1050
Guia
2 Chumbo
4
5
6
7
8
9
10
11
Base
Alumínio 10501
12
13
14
15
16 1
1
1
1
1 Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Chapa 1
Chapa 2
Fixador
Espaçador de proteção 2
Batente
1
2
3
4
5
6
7
8
910
11
12
13
14
15
16
1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-00-09
Número Denominação e observações Quant. Material e dimensões
Unidade: mm
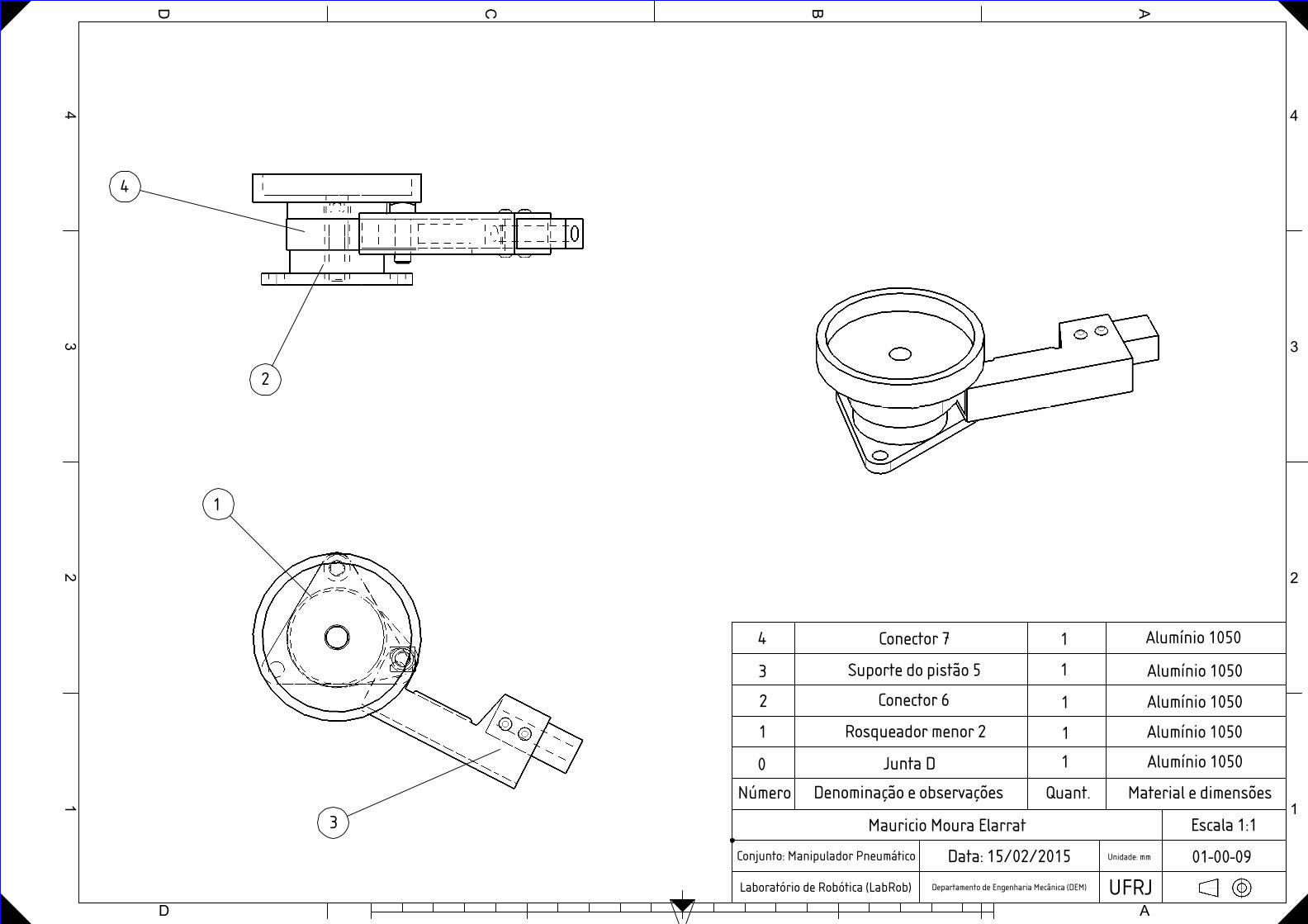
0
Rosqueador menor 2
1 Alumínio 1050
1
Conector 6
Alumínio 10501
2
Suporte do pistão 5
1 Alumínio 1050
3
Conector 7
1 Alumínio 1050
4 Alumínio 10501
Junta D
1
3
2
4

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 2:1
01-01-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Garra

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 2:1
01-02-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Braço 1

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:2
01-03-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Junta A
1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 2:1
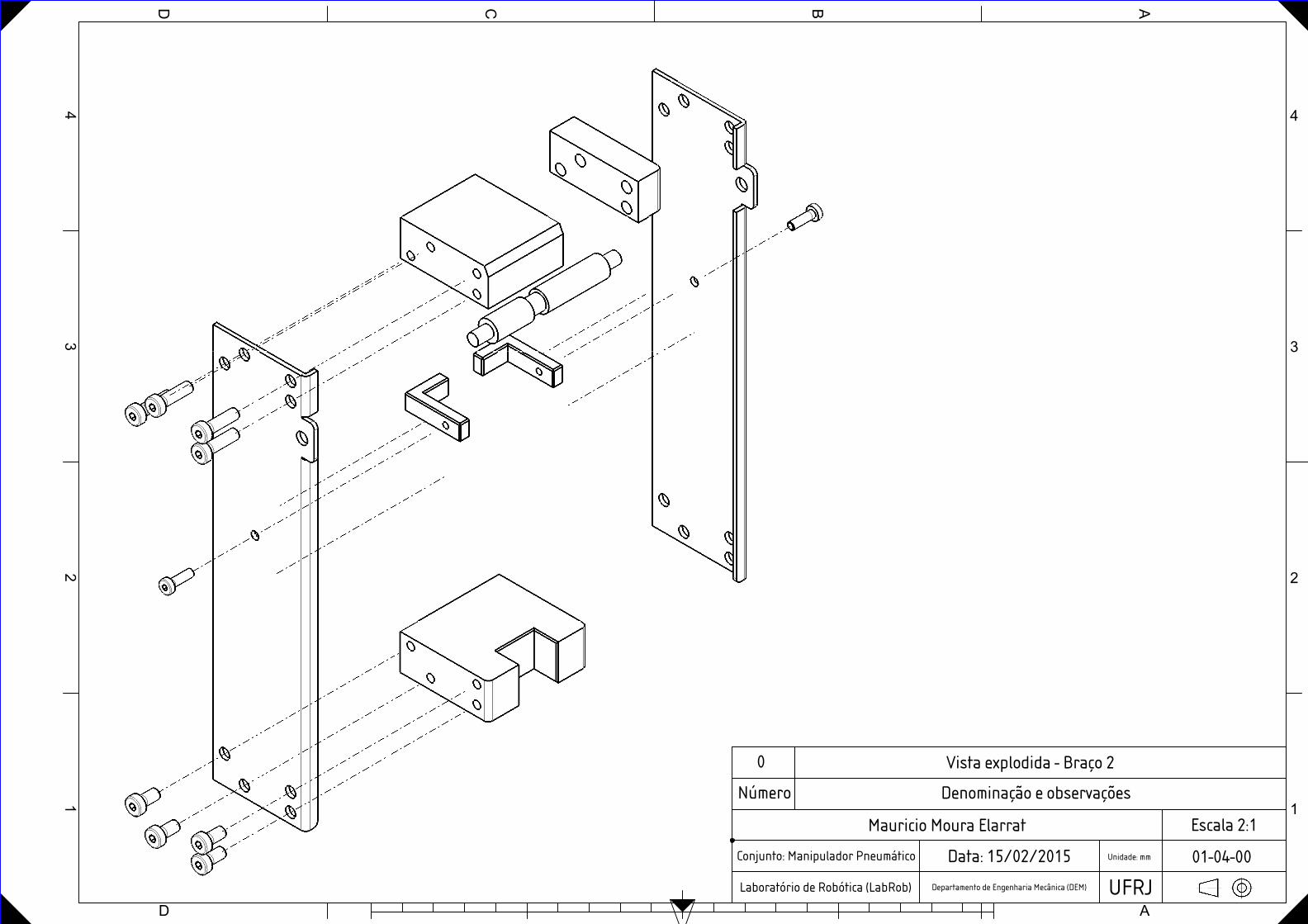
01-04-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Braço 2

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:2
01-05-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Junta B

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-06-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Braço 3

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-07-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Junta C

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:3
01-08-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Base

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
Data: 15/02/2015
Mauricio Moura Elarrat
Conjunto: Manipulador Pneumático
Escala 1:1
01-09-00
Número Denominação e observações
Unidade: mm
0 Vista explodida - Junta D

1
12
2
3
3
4
4
ABCD
2
18Ø42 X
R3
R1 13
6
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-01-01
Quant.Denominação e observaçõesPeça Material e dimensões
1 2 Alumínio 1050Pinça
1
2
7
26
55
1332

1
12
2
3
3
4
4
ABCD
R10R62
256
8 11
R3
Ø43 X
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-01-02
Quant.Denominação e observaçõesPeça Material e dimensões
2 2 Alumínio 1050Conector da garra
2
R4
4
R4
9
4
30
27
R4
15
Ø22 X2
1
12
2
3
3
4
4
ABCD
30
Ø42 X
1
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-01-03
Quant.Denominação e observaçõesPeça Material e dimensões
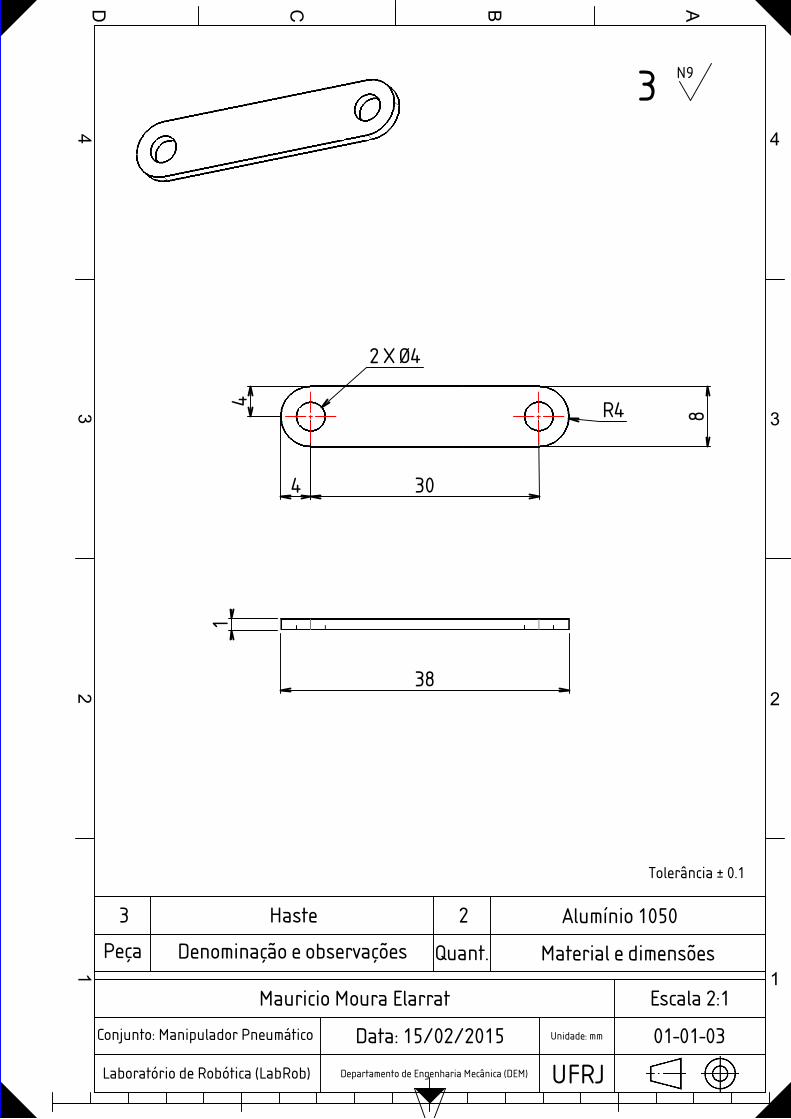
3 2 Alumínio 1050Haste
3
388
4
R4
4

1
12
2
3
3
4
4
ABCD
27
8
5Ø4
20
R2
R24
124
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-01-04
Quant.Denominação e observaçõesPeça Material e dimensões
4 1 Aço 1020Guia da garra
4
R1
4
5
13
1
1
12
2
3
3
4
4
ABCD
26
R3
Ø44 X
Ø52 X
13
2Ø5Ø10
60
11
10 21
12
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-01-05
Quant.Denominação e observaçõesPeça Material e dimensões
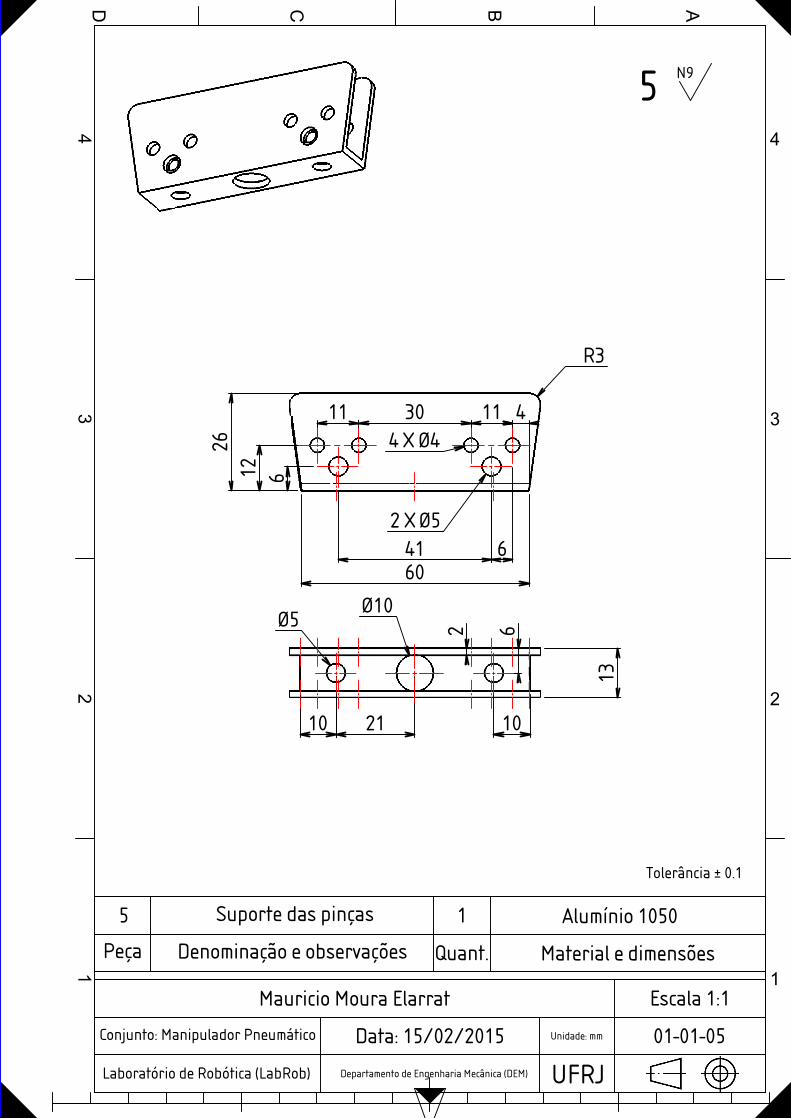
5 1 Alumínio 1050Suporte das pinças
5
6
10
11
6
41
4
6
30

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-02-01
Quant.Denominação e observaçõesPeça Material e dimensões
6 1 Alumínio 1050Suporte da garra
6
60
22
2
2
Ø42 X 149
14
2337
1115
Ø10
Ø32 X9
15
25
21

1
12
2
3
3
4
4
ABCD
6
2
Ø52 X
Ø53 X
23
113
120R2
R5
R1
R1
8R1
8
30
32
8
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-02-02
Quant.Denominação e observaçõesPeça Material e dimensões
7 1 Alumínio 1050Suporte do pistão 1
7
6
R1
15
R3
28
13
92
21
53
10
7
90

1
12
2
3
3
4
4
ABCD
1611
40
Ø54 X
21
8
30
4
5
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-02-03
Quant.Denominação e observaçõesPeça Material e dimensões
8 1 Alumínio 1050Espaçador de proteção 1
8

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-01
Quant.Denominação e observaçõesPeça Material e dimensões
9 1 Alumínio 1050Chapa furo maior 1
9
M4
4
19
R19
Ø26
50
234
4
12
69
6
Ø53 X

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-02
Quant.Denominação e observaçõesPeça Material e dimensões
10 1 Alumínio 1050Chapa furo menor 1
10
74
M4
55
28
113
44
13
1938
Ø54 X
Ø8 R19
6
1
12
2
3
3
4
4
ABCD40
64
Ø62 X
Ø8
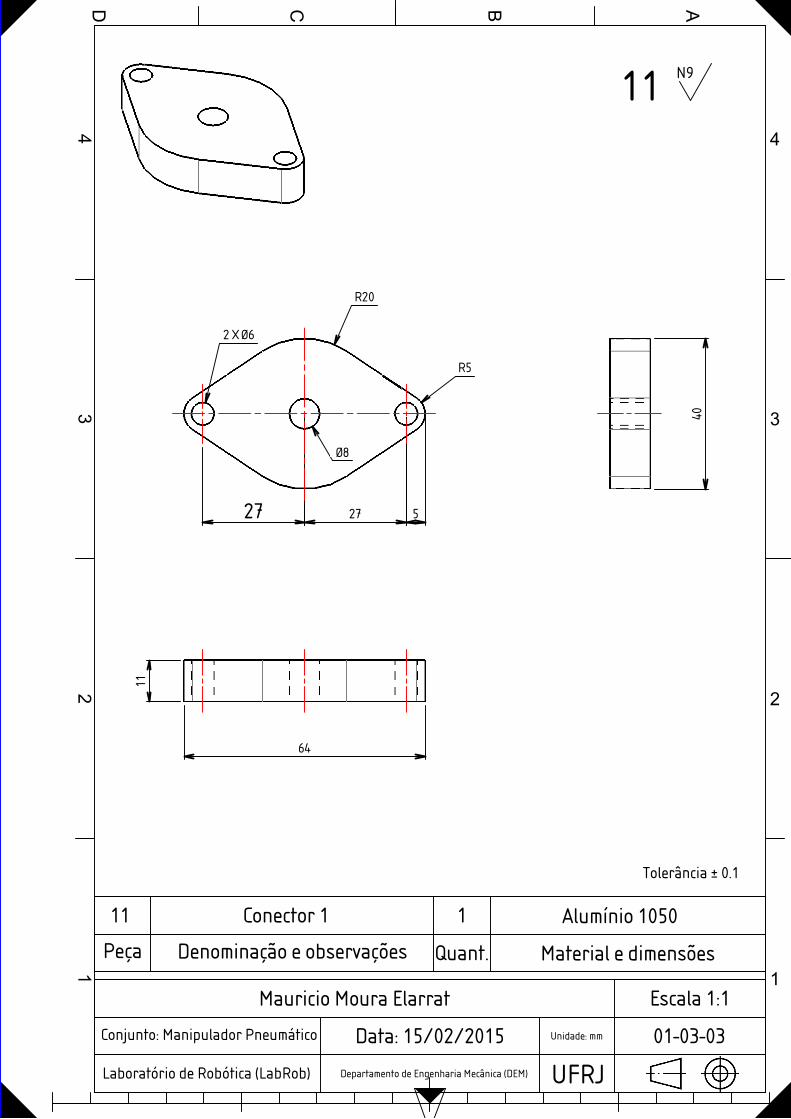
27 5
11
R20
R5
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-03
Quant.Denominação e observaçõesPeça Material e dimensões
11 1 Alumínio 1050Conector 1
11
27
1
12
2
3
3
4
4
ABCD
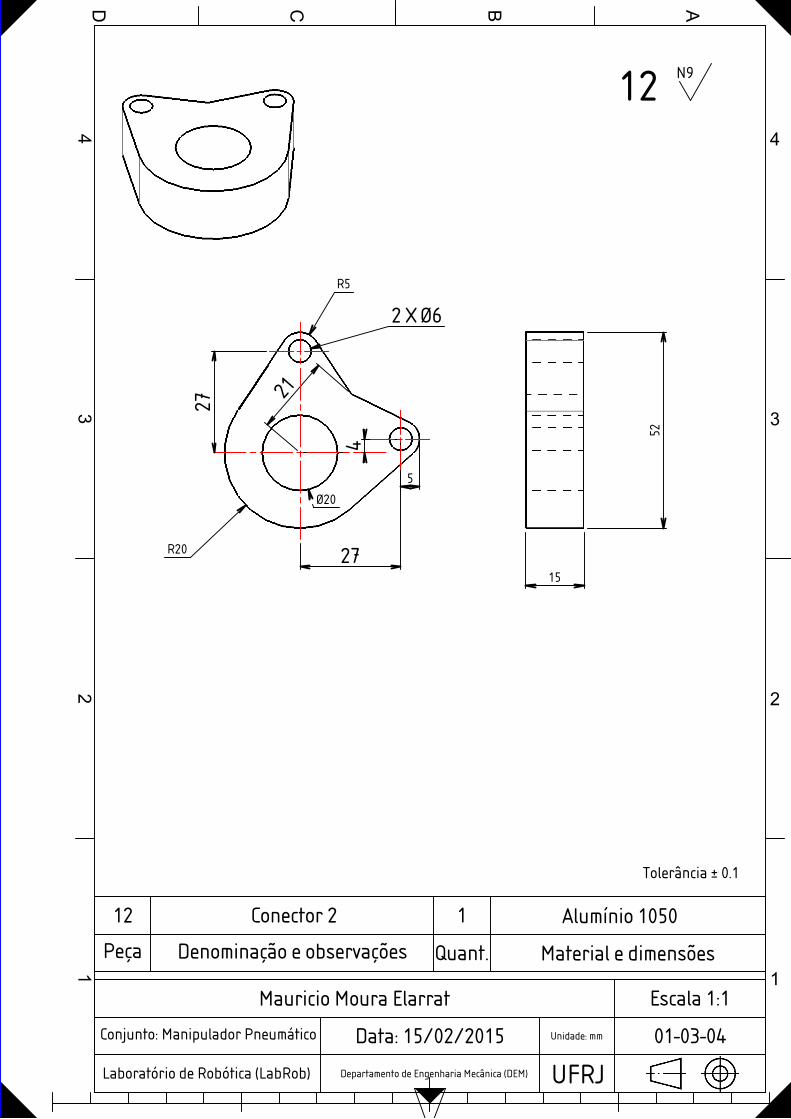
R5
R20
Ø20
5
15
52
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-04
Quant.Denominação e observaçõesPeça Material e dimensões
12 1 Alumínio 1050Conector 2
12
27
Ø62 X
4
21
27

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-05
Quant.Denominação e observaçõesPeça Material e dimensões
13 3 Alumínio 1050Externo
13
46
Ø30
Ø20
Ø816
12
Ø26
M20

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-06
Quant.Denominação e observaçõesPeça Material e dimensões
14 3 Alumínio 1050Limitador
14
M5 X 10
1
1
Ø10

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-07
Quant.Denominação e observaçõesPeça Material e dimensões
15 3 Alumínio 1050Rosqueador maior
15
Ø55
Ø49
Ø40 812
M20

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-08
Quant.Denominação e observaçõesPeça Material e dimensões
16 3 Alumínio 1050Rosqueador menor
16
Ø55
Ø49
Ø40
M8
96
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
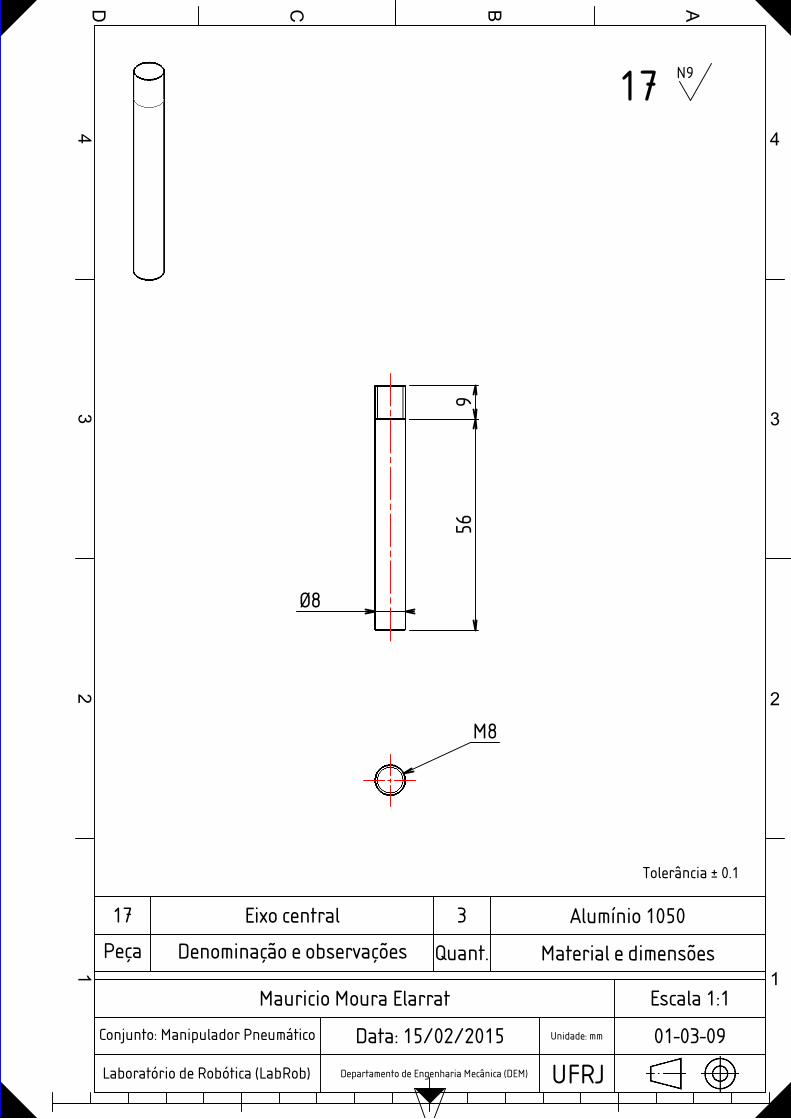
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-09
Quant.Denominação e observaçõesPeça Material e dimensões
17 3 Alumínio 1050Eixo central
17
M8
569
Ø8

1
12
2
3
3
4
4
ABCD
Ø8
Ø12
2
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 5:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-10
Quant.Denominação e observaçõesPeça Material e dimensões
18 3 Alumínio 1050Espaçador
18

1
12
2
3
3
4
4
ABCD
2036
R6
Ø518
67
25
2
2
1216
R2
67
20
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-03-11
Quant.Denominação e observaçõesPeça Material e dimensões
19 1 Alumínio 1050Suporte do pistão 2
19
2
9
2
M5 X 8

1
12
2
3
3
4
4
ABCD
R2
5
179
1617
Ø4
13
2
8
714
5
8R2
11Ø59 X
4
2
5
146
1
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-01
Quant.Denominação e observaçõesPeça Material e dimensões
20 1 Alumínio 1050Proteção lateral 1
20
19
106
5
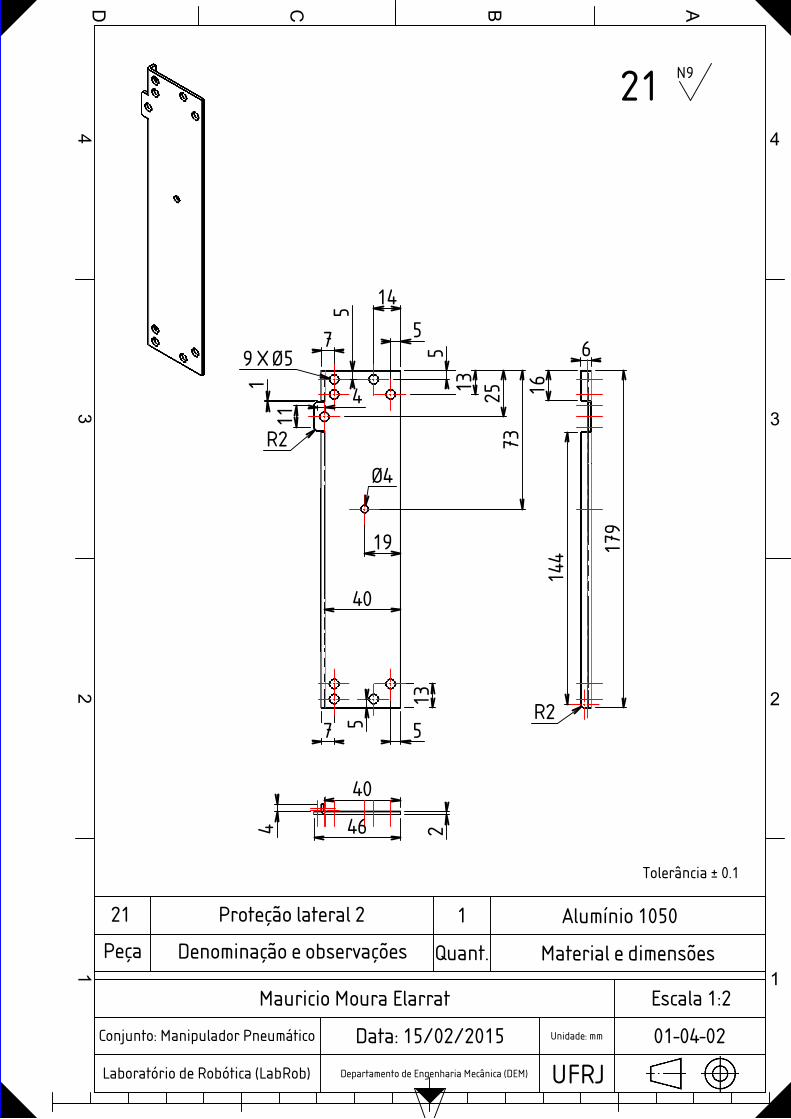
1
12
2
3
3
4
4
ABCD
24 46
40
R2
6
179
1614
4
1
Ø4
13
55
R2
4
11
557
14
7
19
73
40
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-02
Quant.Denominação e observaçõesPeça Material e dimensões
21 1 Alumínio 1050Proteção lateral 2
21
Ø59 X 5
13
25
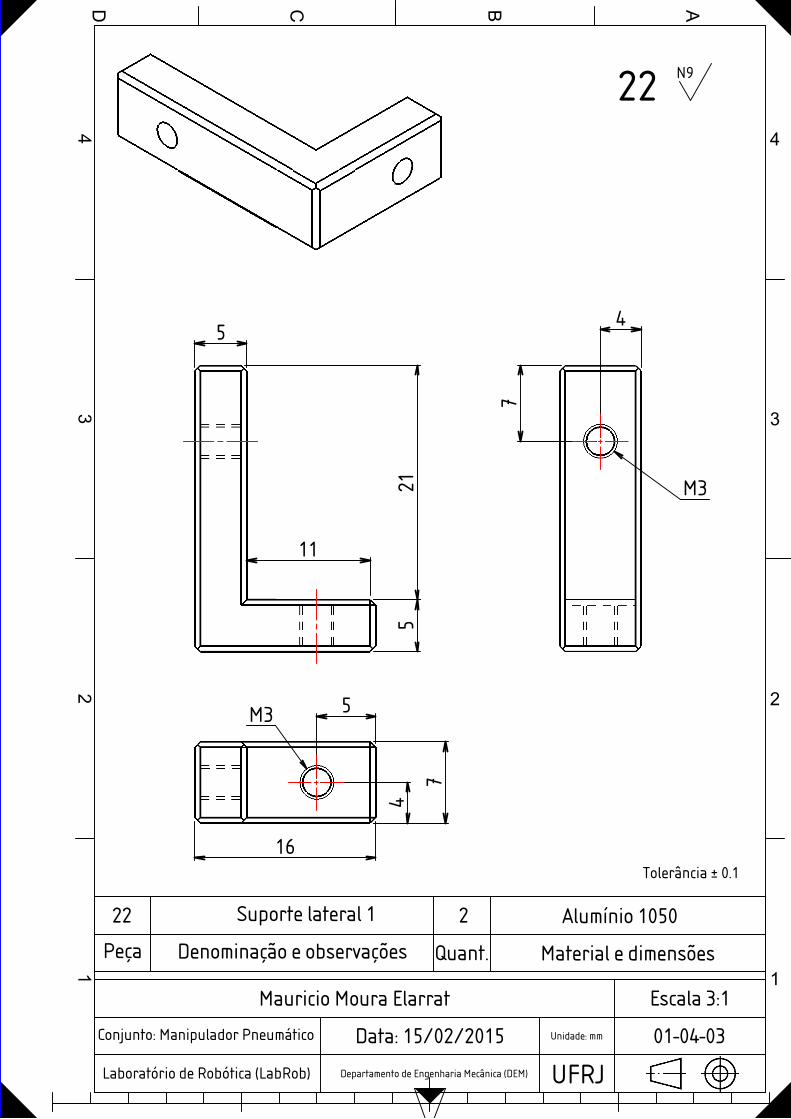
1
12
2
3
3
4
4
ABCD
7
16
521
5
7
4
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 3:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-03
Quant.Denominação e observaçõesPeça Material e dimensões
22 2 Alumínio 1050Suporte lateral 1
22
5
4
11
M3
M3
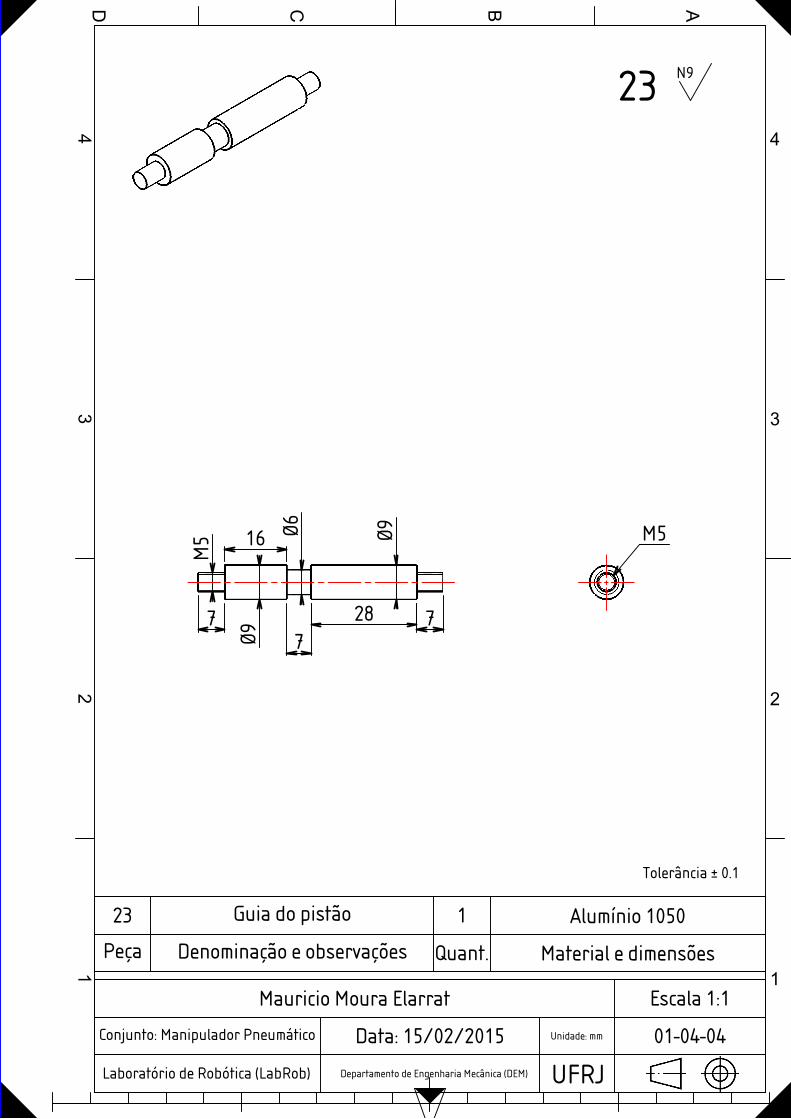
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-04
Quant.Denominação e observaçõesPeça Material e dimensões
23 1 Alumínio 1050Guia do pistão
23
Ø6
77
M5
7
16
28
Ø9
Ø9
M5
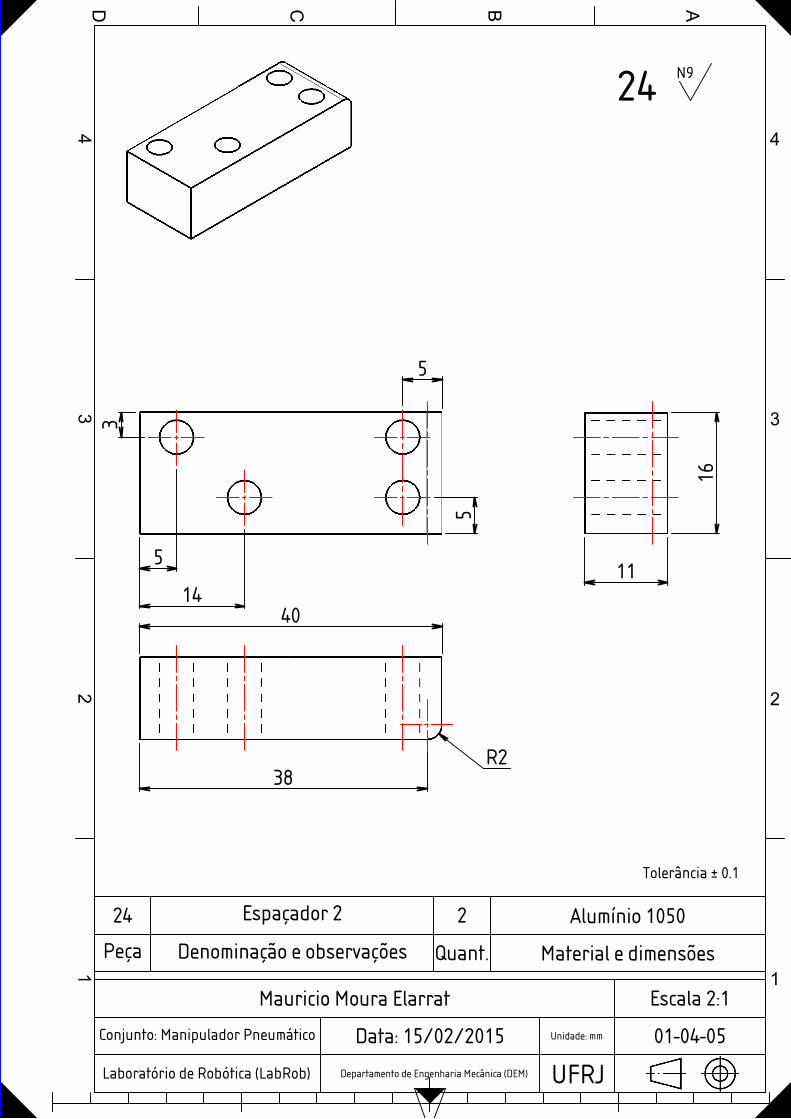
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-05
Quant.Denominação e observaçõesPeça Material e dimensões
24 2 Alumínio 1050Espaçador 2
24
38R2
16
11
40
3
5
5
14
5

1
12
2
3
3
4
4
ABCD
40
34
16
35
30
59
13
24
4
17
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-06
Quant.Denominação e observaçõesPeça Material e dimensões
25 2 Alumínio 1050Espaçador 3
25
6
29
12
M33 X X 10
M4.54 X X 10
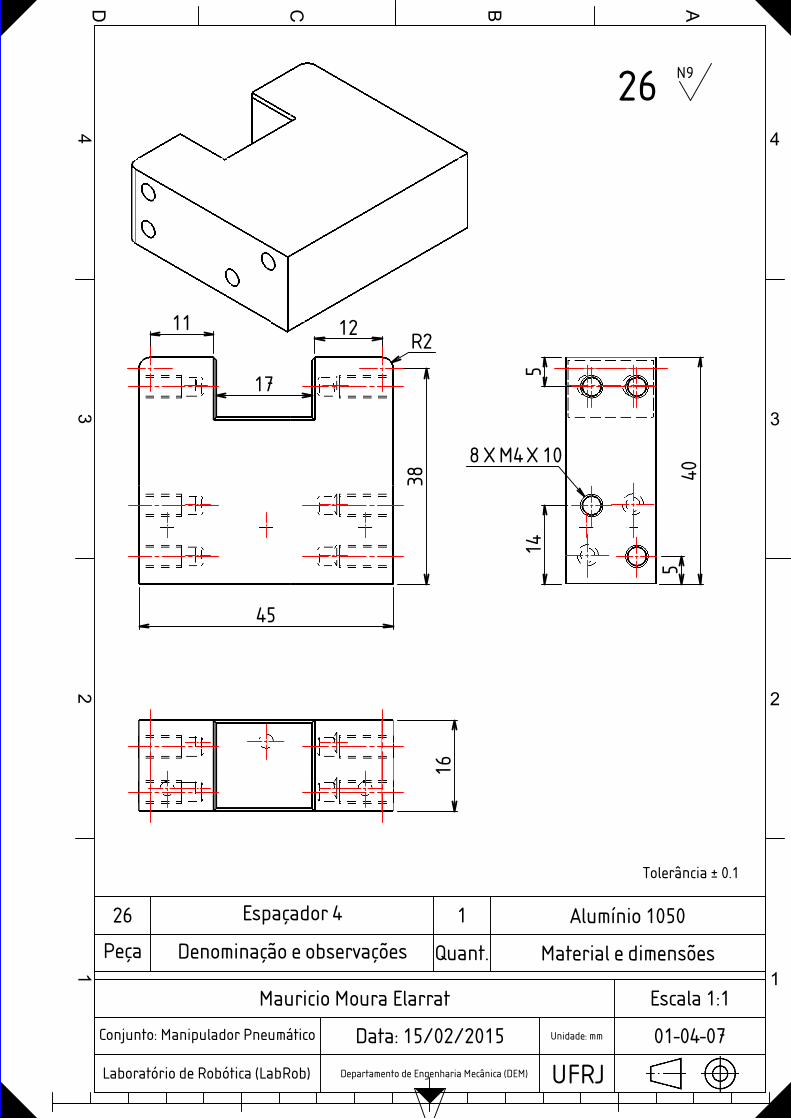
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-04-07
Quant.Denominação e observaçõesPeça Material e dimensões
26 1 Alumínio 1050Espaçador 4
26
M48 X X 10
40
45
17
R2
16
5
145
11 12
38
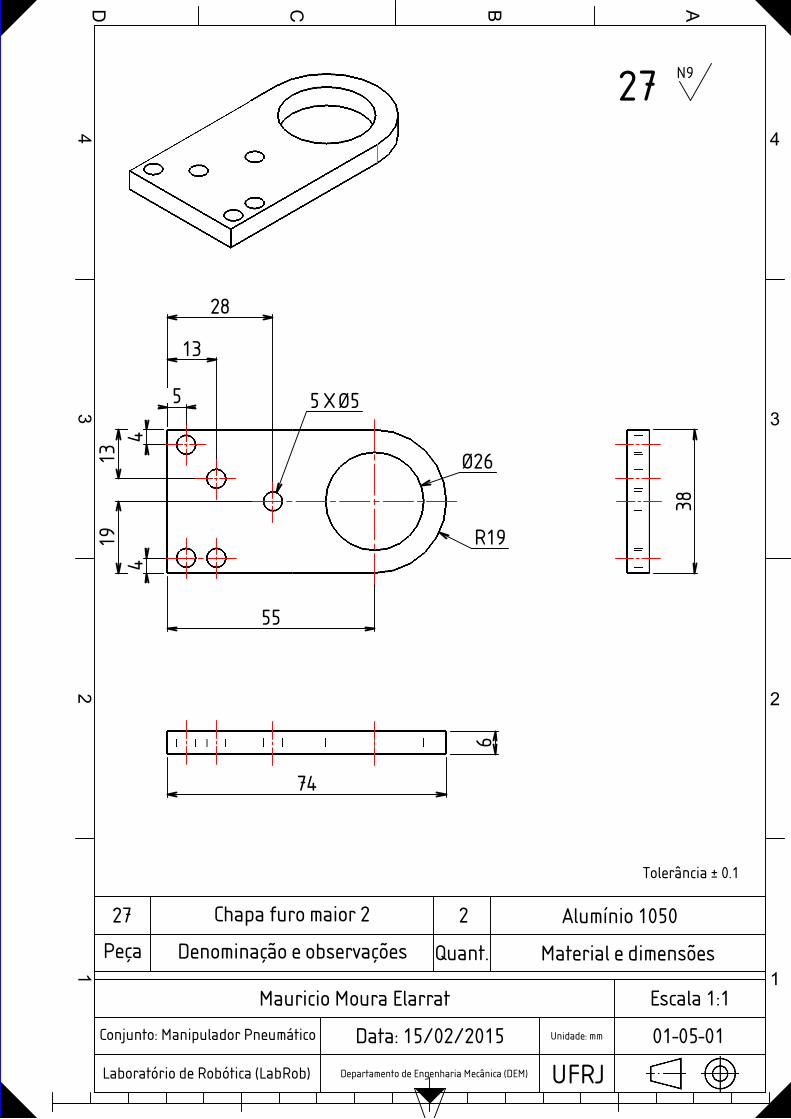
1
12
2
3
3
4
4
ABCD
74
38
6Ø26
R19
55
Ø55 X
13
28
5
44
1319
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-05-01
Quant.Denominação e observaçõesPeça Material e dimensões
27 2 Alumínio 1050Chapa furo maior 2
27

1
12
2
3
3
4
4
ABCD
79
38
6R19
Ø8
60
Ø55 X5
13
33
134
419
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-05-02
Quant.Denominação e observaçõesPeça Material e dimensões
28 1 Alumínio 1050Chapa furo menor 2
28

1
12
2
3
3
4
4
ABCD
63
40
R20
R5
R20
11
27
Ø8
Ø62 X
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-05-03
Quant.Denominação e observaçõesPeça Material e dimensões
29 1 Alumínio 1050Conector 3
29
26
22
7

1
12
2
3
3
4
4
ABCD
52
16
R20
Ø20
Ø62 X
R5
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-05-04
Quant.Denominação e observaçõesPeça Material e dimensões
30 2 Alumínio 1050Conector 4
30
24
11
2227

1
12
2
3
3
4
4
ABCD
4420
34
33
R6
12
15
4
2Ø5
4R1
1
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-05-05
Quant.Denominação e observaçõesPeça Material e dimensões
31 1 Alumínio 1050Suporte do pistão 3
31
6
6
6
17
3
2
25
M52 X X 10
6

1
12
2
3
3
4
4
ABCD
35
R1
51
Ø22 X
93
Ø22 X
6
41
5
910
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-01
Quant.Denominação e observaçõesPeça Material e dimensões
32 1 Alumínio 1050Suporte lateral 2
32
3

1
12
2
3
3
4
4
ABCD
2 2
42
45
173
1212
7R2
55
14
35
5
13 20
3611111
R2
Ø42 X
115
13
5 5 5R2
13
Ø510 X
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-02
Quant.Denominação e observaçõesPeça Material e dimensões
33 1 Alumínio 1050Proteção lateral 3
33
26
35
40
14
37

1
12
2
3
3
4
4
ABCD
2
2
45
40 4
173
R2
6
1212
7
1111 1
1
R25
13
58
5
358
7
16
2314
Ø42 X
5
13
5Ø510 X14
21
8
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-03
Quant.Denominação e observaçõesPeça Material e dimensões
34 1 Alumínio 1050Proteção lateral 4
34
5
215
26
3
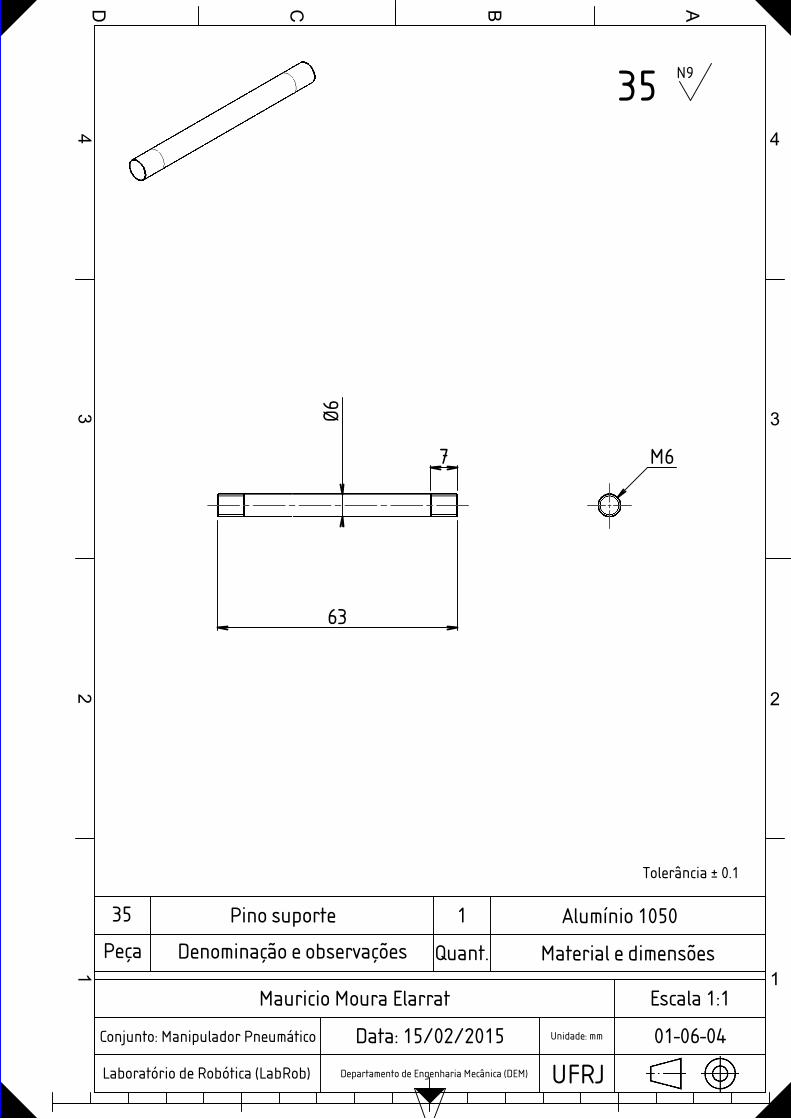
1
12
2
3
3
4
4
ABCD
63
7
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-04
Quant.Denominação e observaçõesPeça Material e dimensões
35 1 Alumínio 1050Pino suporte
35
Ø6
M6

1
12
2
3
3
4
4
ABCD
14
45
R2
40
Ø24 X 5
9
58
Ø23 X
44
5 5
16
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-05
Quant.Denominação e observaçõesPeça Material e dimensões
36 1 Alumínio 1050Espaçador 5
36
17
11
421
17
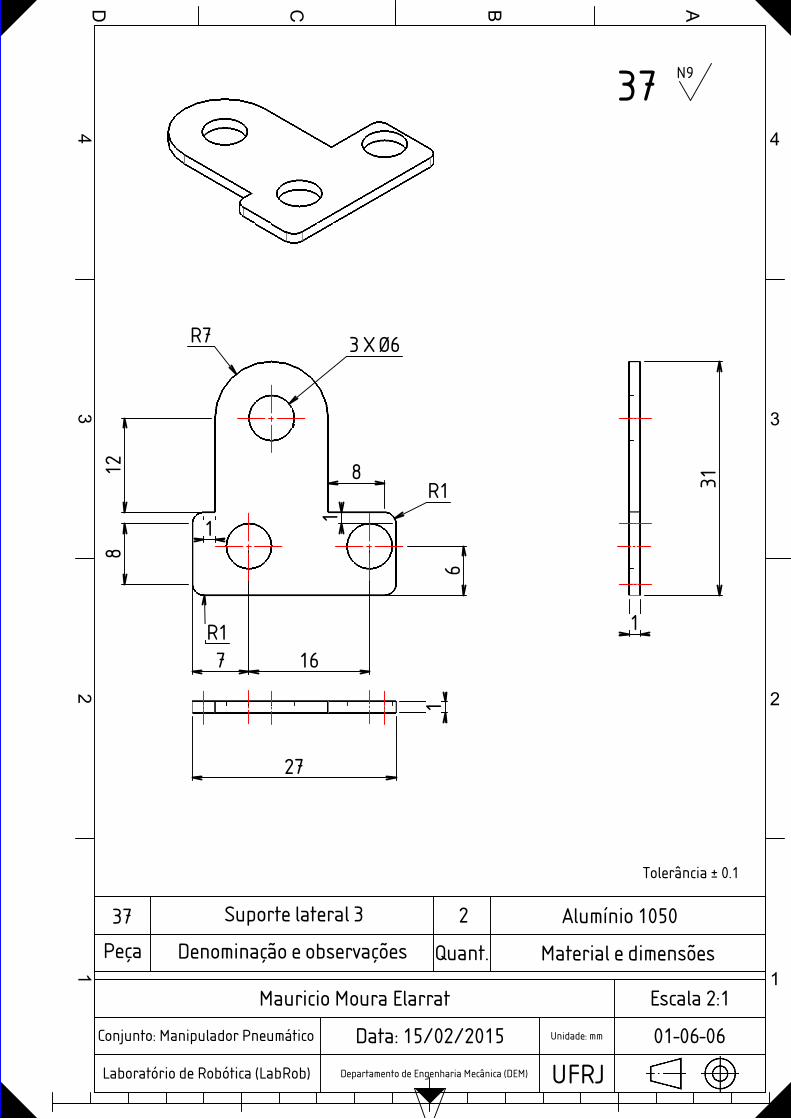
1
12
2
3
3
4
4
ABCD
31
27
812
1
8
R7 Ø63 X
16
1
1
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-06-06
Quant.Denominação e observaçõesPeça Material e dimensões
37 2 Alumínio 1050Suporte lateral 3
37
7
1
6
R1
R1

1
12
2
3
3
4
4
ABCD
435
R5Ø5
1
R1
R4 9
21
18
43 5
26 130,5
2 2
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-07-01
Quant.Denominação e observaçõesPeça Material e dimensões
38 1 Alumínio 1050Suporte do pistão 4
38
5
20
17
35
4
10
7
2
6 2
5
5
M7 X 15

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-07-02
Quant.Denominação e observaçõesPeça Material e dimensões
39 1 Alumínio 1050Conector 5
39
R20
R5
27
24
11
Ø42 X
Ø8 1211
22

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-07-03
Quant.Denominação e observaçõesPeça Material e dimensões
40 1 Alumínio 1050Chapa furo menor 3
40
74
38
6
55
6
16
28
R19
Ø8
Ø45 X
1111
8
M4

1
12
2
3
3
4
4
ABCD
150
199
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-01
Quant.Denominação e observaçõesPeça Material e dimensões
41 4 Alumínio 1050Pilar
41
M62 X X 10

1
12
2
3
3
4
4
ABCD
94
Ø12
Ø7
Ø10 X 7
Ø7
38
10
19
8
40
17
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-02
Quant.Denominação e observaçõesPeça Material e dimensões
42 2 ChumboCalço 1
42

1
12
2
3
3
4
4
ABCD
306
39
7
7
39
Ø98 X
35
914
111
190
267
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:4
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-03
Quant.Denominação e observaçõesPeça Material e dimensões
43 2 Aluminínio 1050Peso 1
43
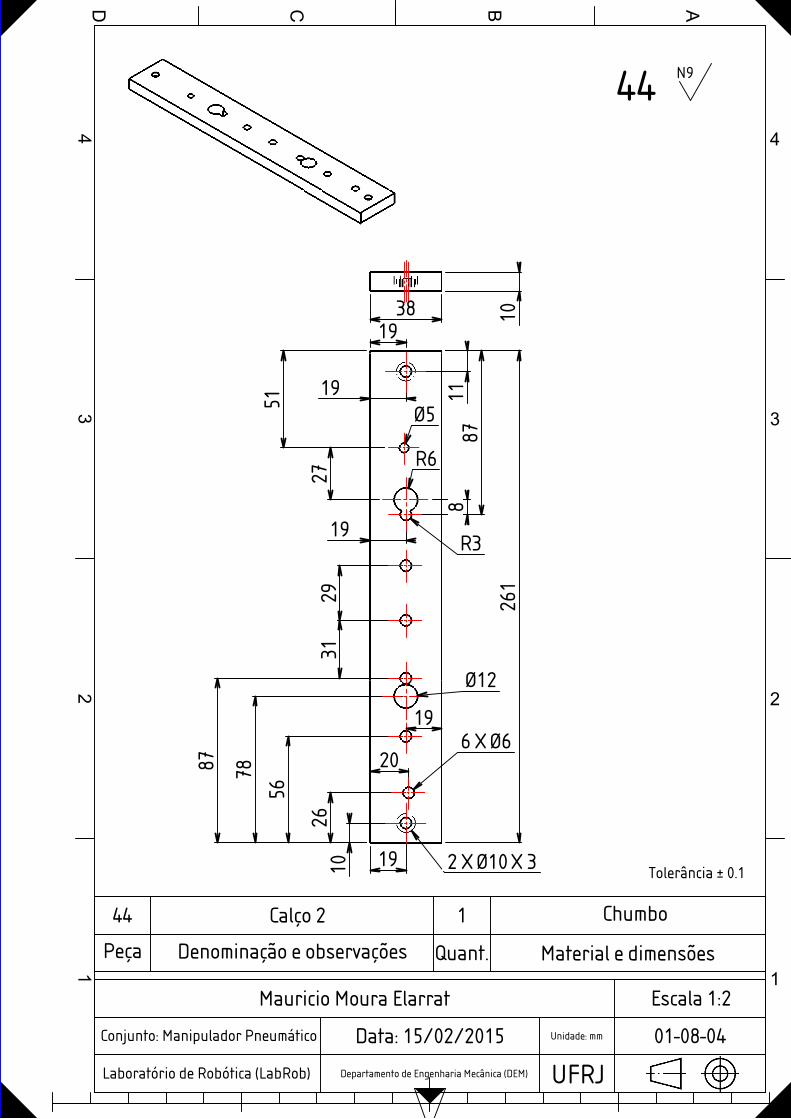
1
12
2
3
3
4
4
ABCD
261
Ø102 X X 3
Ø66 X
Ø12
20
19
R319
1038
87
19 11
191026
56
7887
3129
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-04
Quant.Denominação e observaçõesPeça Material e dimensões
44 1 ChumboCalço 2
44
27
8
19
51
R6
Ø5

1
12
2
3
3
4
4
ABCD
1002143
10
260
17
44
7
26
2
60
17
63
109
1470
128
31
1159
70
57
11
5
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:3
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-05
Quant.Denominação e observaçõesPeça Material e dimensões
45 1 Alumínio 1050Espaçador 6
45
7
Ø612 X

1
12
2
3
3
4
4
ABCD
R5
16
16
123
4
13
70129
Ø5
140152
8
Ø66 X
4
14
60
3
5
6
103
11
8
Ø7
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-06
Quant.Denominação e observaçõesPeça Material e dimensões
46 1 Alumínio 1050Suporte inferior
46
4
3

1
12
2
3
3
4
4
ABCD
100306
5
123
50 30
153
Ø20
Ø86 X
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:3
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-07
Quant.Denominação e observaçõesPeça Material e dimensões
47 1 ChumboPeso 2
47
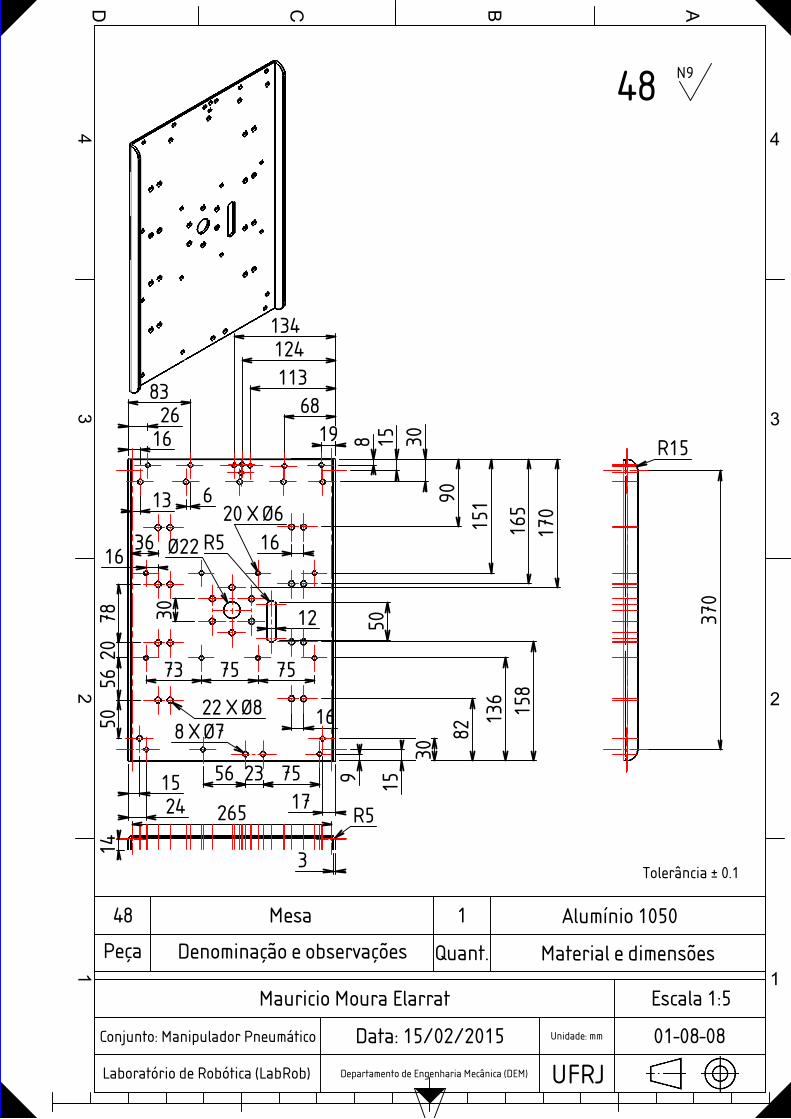
1
12
2
3
3
4
4
ABCD
3
R5
14
265
370
R15
24
7523
Ø822 X
13
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:5
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-08
Quant.Denominação e observaçõesPeça Material e dimensões
48 1 Alumínio 1050Mesa
48
36 R5
5083
19
68
113
124134
16
75
16
Ø620 X
Ø78 X
56 9 15
30
82
136
158
8 15 30
90
151
165
170
1626
6
15
Ø22
7820
30 12
16
7573
5650
17
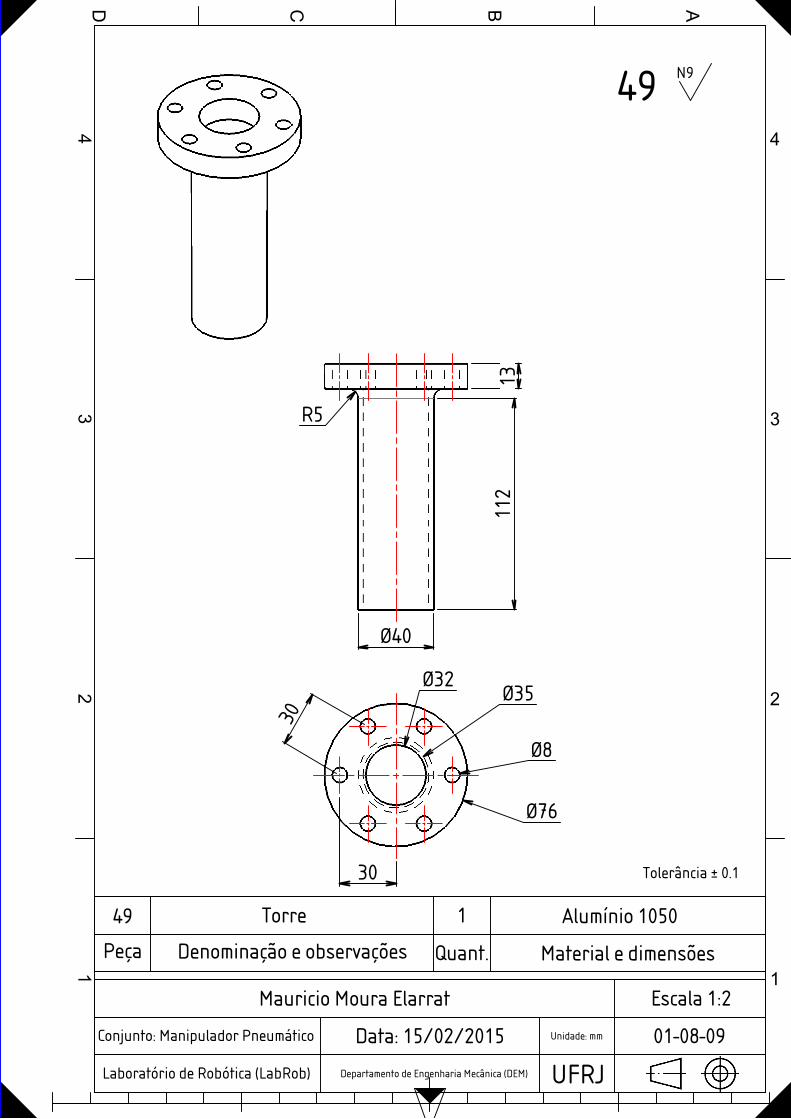
1
12
2
3
3
4
4
ABCD
Ø76
Ø8
112
R5
13
Ø40
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-09
Quant.Denominação e observaçõesPeça Material e dimensões
49 1 Alumínio 1050Torre
49
30
30
Ø35Ø32

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-10
Quant.Denominação e observaçõesPeça Material e dimensões
50 2 ChumboAba lateral
50
27
41
Ø3
5
13
R30 R5
Ø62 X
18
8
103 150
5
R10 12
124 150
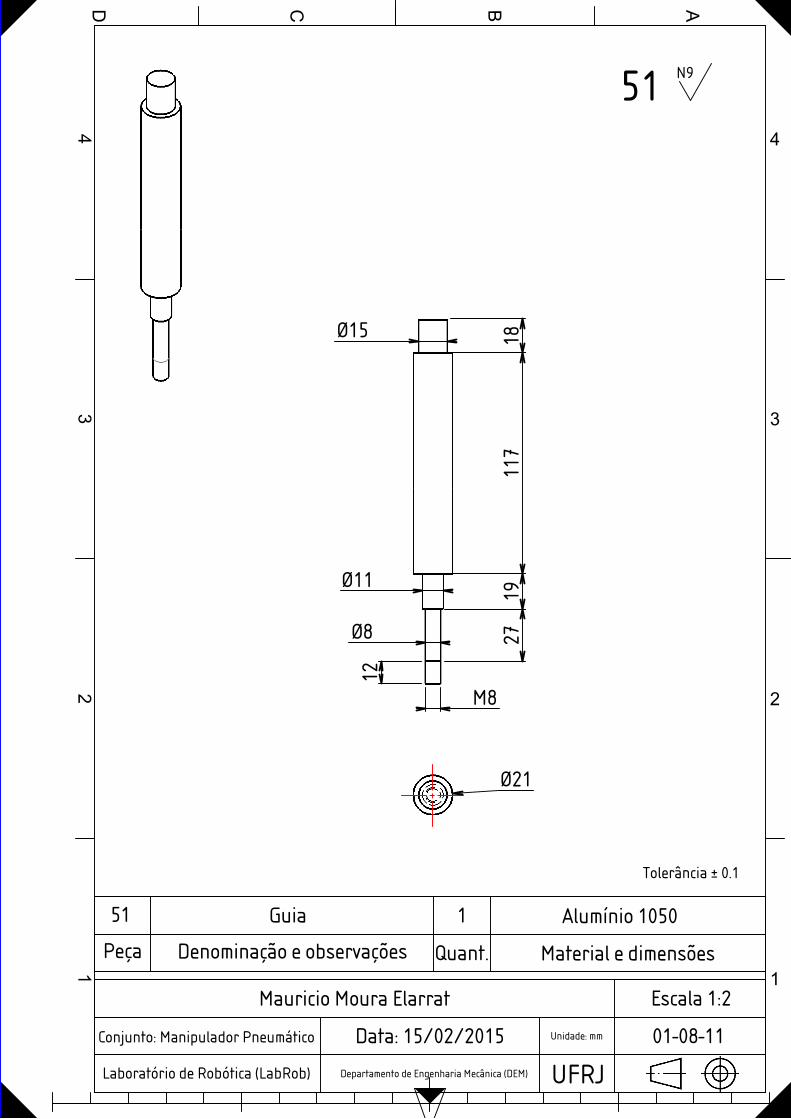
1
12
2
3
3
4
4
ABCD
Ø21
1927
117
18
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:2
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-11
Quant.Denominação e observaçõesPeça Material e dimensões
51 1 Alumínio 1050Guia
51
M8
Ø15
Ø11
Ø8
12

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-12
Quant.Denominação e observaçõesPeça Material e dimensões
52 1 Alumínio 1050Chapa 1
52
50
25
10
33
20
1750
842
8
42
Ø74 X
M44 X X 13
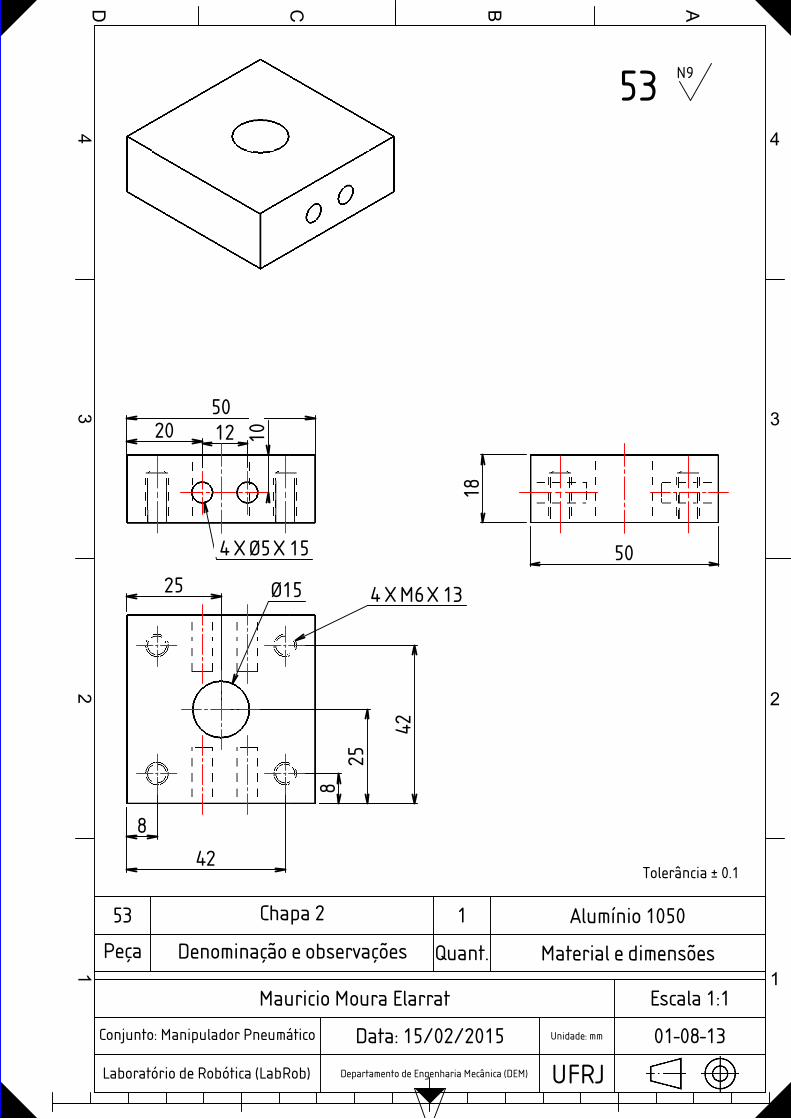
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-13
Quant.Denominação e observaçõesPeça Material e dimensões
53 1 Alumínio 1050Chapa 2
53
50
Ø1525
25
50
18
42
8
8
42
20 1012
M64 X X 13
Ø54 X X 15
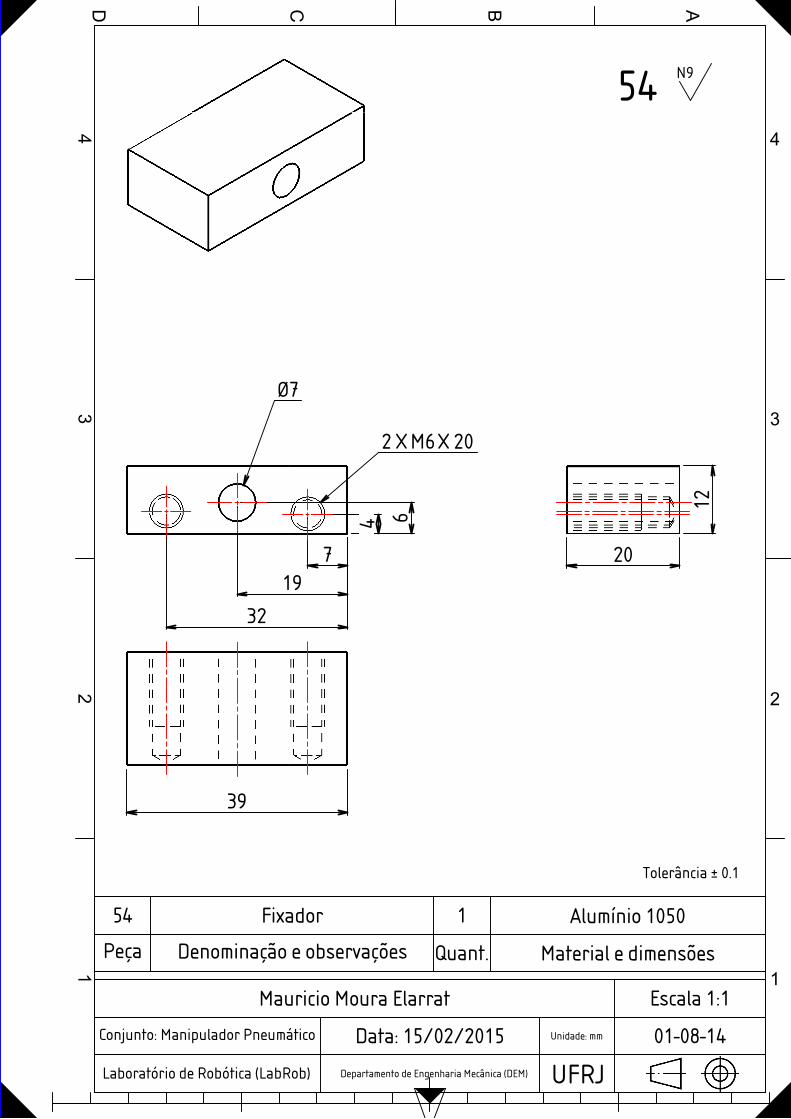
1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-14
Quant.Denominação e observaçõesPeça Material e dimensões
54 1 Alumínio 1050Fixador
54
20
39
12
Ø7
7
4 6
19
32
M62 X X 20

1
12
2
3
3
4
4
ABCD
20
Ø5
10
20
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-15
Quant.Denominação e observaçõesPeça Material e dimensões
55 1 Alumínio 1050Espaçador de proteção 2
55
10
10

1
12
2
3
3
4
4
ABCD
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-08-16
Quant.Denominação e observaçõesPeça Material e dimensões
56 1 Alumínio 1050Batente
56
5
5
20
10
10
10M3

1
12
2
3
3
4
4
ABCD
Ø54
Ø48
9 5
Ø32
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-09-01
Quant.Denominação e observaçõesPeça Material e dimensões
57 1 Alumínio 1050Rosqueador menor 2
57
M8

1
12
2
3
3
4
4
ABCD
R5
49
4
38
39
Ø8
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-09-02
Quant.Denominação e observaçõesPeça Material e dimensões
58 1 Alumínio 1050Conector 6
58
Ø30
22
19
Ø53 X
7

1
12
2
3
3
4
4
ABCD
26
24
10
56
2
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 1:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-09-03
Quant.Denominação e observaçõesPeça Material e dimensões
59 1 Alumínio 1050Suporte do pistão 5
59
2
5
5
Ø5
16
13
4
21
R1
1
135
6
12
5 7
9
Ø44 X
Ø5
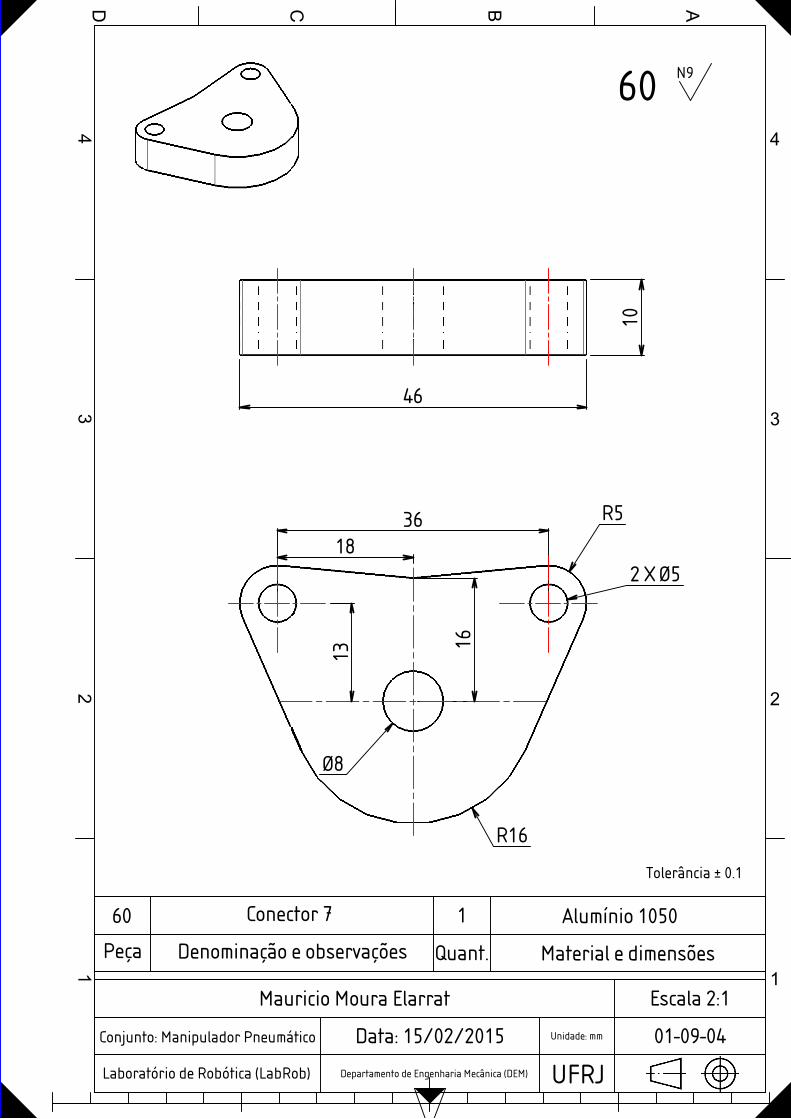
1
12
2
3
3
4
4
ABCD
46
R16
R536
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM) UFRJ
N9
Tolerância ± 0.1
Mauricio Moura Elarrat Escala 2:1
Conjunto: Manipulador Pneumático Data: 15/02/2015 Unidade: mm 01-09-04
Quant.Denominação e observaçõesPeça Material e dimensões
60 1 Alumínio 1050Conector 7
60
13
Ø52 X
Ø8
10
16
18

1
1
2
2
3
3
4
4
A
ABC
D
D
Laboratório de Robótica (LabRob) Departamento de Engenharia Mecânica (DEM)
Data: 15/02/2015Conjunto: Manipulador Pneumático
Lista de materiais - Conjunto Manipulador Pneumático
Nome Quant.
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 12 8
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 16 4
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 25 11
Hexagon Thin Nut (Chamfered) ISO 4035 - M4 3
Mesa 1
Suporte inferior 1
Guia 1
Torre 1
Chapa 1 1
Chapa 2 1
Needle Bearing without Inner Ring - 22 × 30 × 23 - RNA6903 2
Peso 2 1
Calço 2 1
Espaçador 6 1
Aba lateral 2
Batente 1
Calço 1 2
Espaçador de proteção 2 1
Fixador 1
Hexagon Socket Head Cap Screw ISO 4762 - M3 × 12 4
Hexagon Socket Head Cap Screw ISO 4762 - M6 × 12 3
Hexagon Socket Head Cap Screw ISO 4762 - M6 × 16 26
Hexagon Socket Head Cap Screw ISO 4762 - M6 × 25 6
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M3 x 10 2
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 8 4
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 14 4
Suporte lateral 2 1
Pino suporte 1
Proteção lateral 4 1
Espaçador 5 1
Proteção lateral 3 1
Suporte lateral 3 2
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M3 × 6 4
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M3 × 10 4
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 6 4
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 10 4
Rosqueador menor 3
Suporte do pistão 2 1
Eixo central 3
Rosqueador maior 3
Conector 4 2
Conector 3 1
31 Suporte do pistão 3 1
Hexagon Socket Head Cap Screw ISO 4762 - M4 × 16 1
Hexagon Socket Head Cap Screw ISO 4762 - M4 × 20 1
Hexagon Socket Head Cap Screw ISO 4762 - M4 × 25 1
Suporte do pistão 4 1
Chapa furo menor 3 1
Conector 5 1
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 18 2
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 25 1
Suporte do pistão 5 1
Rosqueador menor 2 1
Conector 6 1
Hexagon Socket Head Cap Screw NF E 25-125 - M5 × 20 1
Square Head Screw - Gr A NF E 25-117 - M5 × 16 1
Clevis Pin ISO 2341 - A - 3 × 18 10
Conector da pinça 2
Parallel Pin ISO 2338 - C - 3 × 10 2
Sintered Cylindrical Shaft Bearing ISO 2795 - 2 × 4 × 10 2
Sintered Cylindrical Shaft Bearing ISO 2795 - 4 x 6 x 6 2
Espaçador de proteção 1 1
Guia da garra 1
Haste 2
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M3 × 8 2
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 12 2
Hexagon Thin Nut (Chamfered) ISO 4035 - M3 2
Hexagon Thin Nut (Chamfered) ISO 4035 - M4 2
Pinça 2
Suporte da garra 1
Suporte das pinças 1
Suporte do pistão 1 1
Hexagon Socket Head Cap Screw ISO 4762 - M6 × 35 1
Hexagon Socket Head Cap Screw NF E 25-125 - M5 × 20 4
Peso 1 2
Pilar 4
Square Head Screw - Gr A NF E 25-116 - M3 × 30 1
Guia do pistão 1
Proteção lateral 1 1
Proteção lateral 2 1
Espaçador 2 2
Espaçador 3 2
Espaçador 4 1
Suporte lateral 1 2
Externo 3
Limitador 3
Chapa furo maior 1 1
Espacador 1 3
Conector 2 1
Conector 1 1
Clevis Pin ISO 2341 - A - 4 × 24 1
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 18 1
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 20 1
Hexagon Socket Head Cap Screw ISO 4762 - M6 × 30 4
Chapa furo menor 1 1
Conector 7 1
Mauricio Moura Elarrat
Código
Comercial
01-01-02
Comercial
Comercial
Comercial
01-02-03
01-01-04
01-01-03
Comercial
Comercial
Comercial
Comercial
01-01-01
01-02-01
01-01-05
01-02-02
Comercial
Comercial
Comercial
Comercial
01-08-09
01-08-11
01-08-12
01-08-13
Comercial
01-08-04
01-08-05
01-08-06
01-08-07
01-08-08
01-08-10
01-08-16
01-08-02
01-08-15
01-08-14
Comercial
Comercial
Comercial
Comercial
Comercial
Comercial
Comercial
Hexagon Thin Nut (Chamfered) ISO 4035 - M3 4 Comercial
Hexagon Thin Nut (Chamfered) ISO 4035 - M6 19 Comercial
01-08-03
01-08-01
Comercial
01-04-01
01-04-02
01-04-03
01-04-04
01-04-05
01-04-06
01-04-07
Comercial
Comercial
Comercial
01-06-01
01-06-02
01-06-03
01-06-04
01-06-05
01-06-06
Comercial
Comercial
Comercial
Comercial
01-03-08
01-03-11
01-03-09
01-03-07
01-03-05
01-03-06
01-03-02
01-03-01
01-03-10
01-03-02
01-03-03
Comercial
Comercial
Comercial
Hexagon Socket Head Cap Screw with Low Head DIN 7984 - M4 × 25 1 Comercial
Chapa furo menor 2 1 01-05-02
01-05-04
01-05-03
01-05-05
Comercial
Comercial
Comercial
01-07-01
01-07-03
01-07-02
Comercial
Comercial
01-09-03
01-09-04
01-09-01
01-09-02
Comercial
Comercial
Chapa furo maior 2 2 01-05-01
Nome do material
Aço
Alumínio 1050
Aço
Bronze
Bronze
Alumínio 1050
Aço
Alumínio 1050
Aço
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Chumbo
Alumínio 1050
Alumínio 1050
Chumbo
Alumínio 1050
Chumbo
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Aço
Aço
Aço
Aço
Aço
Aço
Chumbo
Alumínio 1050
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Alumínio 1050
Alumínio 1050
Alumínio 1050
Alumínio 1050
Aço
Aço
Lista de materiais
UFRJ





























