Embed Size (px)
Citation preview

SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional
II Encontro Mineiro de Modelagem Computacional
Juiz De Fora, MG, 28-30 de Maio De 2014
MODELO NÃO LINEAR DE UM ROBÔ MANIPULADOR DE DOIS GRAUS
DE LIBERDADE
José Antonio Riul, Paulo Henrique de Miranda Montenegro, Virgílio Mendonça da Costa e
Silva
[email protected], [email protected], [email protected]
Universidade Federal da Paraíba, Centro de Tecnologia, Departamento de Engenharia Mecânica,
Cidade Universitária, CEP 58.059-900 - João Pessoa - PB
Resumo. O objetivo desse trabalho é a modelagem de dois elos de um robô manipulador de dois
graus de liberdade planar usando técnica não linear. O robô manipulador é composto pelo elo 1
rotacional e pelo elo 2 prismático. O elo 1 rotacional é um perfil U em alumínio acionado por um
motor-redutor de corrente contínua e o elo 2 prismático é um cilindro pneumático de dupla ação e
haste passante fixado no interior do perfil U e é acionado por uma válvula eletropneumática
proporcional. Modelos dinâmicos desses sistemas normalmente são obtidos usando-se as leis da
física, nos elos 1 e 2 do robô, e são não lineares. A escolha de modelos lineares ou não lineares
implica em um aumento considerado na complexidade de um modelo, porém existem regimes
dinâmicos que não podem ser representados por modelos lineares; nesses casos, o uso de modelos
não lineares é o mais recomendado. Neste trabalho, um modelo não linear NARX é obtido,
considerando o acoplamento dinâmico entre os elos do robô; e os parâmetros do robô manipulador
são identificados, através do algoritmo Least Mean Squares (LMS), com base nas excitações e
respostas dos elos do robô. Finalizando, são apresentados resultados obtidos através do modelo
gerado.
Palavras-chave: Robótica, Identificação não linear

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
1 INTRODUÇÃO
O presente trabalho tem como objetivo o modelamento de um robô manipulador de dois
graus de liberdade (2 gdl) como mostrado na Fig. 1. O modelo matemático de um sistema
pode ser obtido através das leis da física, conhecido como modelo caixa branca ou por técnica
de modelagem (ou identificação) caixa preta ou modelagem empírica (Aguirre, 2000), que
depende de dados reais do sistema. Na identificação caixa preta, são gerados modelos lineares
e não lineares (Aguirre, 2000; Isermann et al.,1992), que podem ser usados para projeto e
implementação de controladores adaptativos. Os modelos podem ser obtidos em tempo real
ou não, de forma não recursiva (não-iterativa) e recursiva (iterativa) (Coelho e Coelho, 2004)
e os obtidos de forma recursiva, representam de forma satisfatória a dinâmica do sistema,
visto que esta é avaliada para cada instante de tempo, em função do tempo de amostragem
utilizado. Os modelos caixa branca, quando utilizados em projetos de controladores, exigem
uma quantidade elevada de cálculos, por apresentarem funções de transferência de ordens
iguais ou superiores a três, o que torna necessário o uso de máquinas de grande porte, tendo
em vista o esforço computacional requerido (Koivo e Guo, 1983; Shih e Tseng, 1995). Na
utilização de modelos caixa preta, suas estruturas são definidas a priori, e com isto, a escolha
de modelos de primeira ou segunda ordem, que representam bem os sistemas reais, e que
requerem baixo esforço computacional, são empregados (Coelho e Coelho, 2004).
Neste trabalho, será obtido um modelo caixa-preta, não linear, NARX, através do
algoritmo Least Mean Squares (LMS). Na identificação dos parâmetros dos elos 1 e 2 do robô
sob análise, é considerado o acoplamento dinâmico entre os elos. Finalizando, são
apresentados resultados mostrando o desempenho obtido para os dois elos do robô, diante do
modelo obtido.
2 DESCRIÇÃO DO SISTEMA
O robô manipulador sob análise é composto pelo elo 1 rotacional e pelo elo 2 prismático.
O elo 1 rotacional é um perfil U em alumínio (5) e é acionado por um moto-redutor de
corrente contínua (2). O elo 2 prismático é um cilindro pneumático (6), que fica fixo no
interior do perfil U e é acionado por uma válvula eletropneumática proporcional (8),
conforme mostrado em corte na Fig. 1. Um potenciômetro (3), acionado pelas engrenagens
(4) é utilizado para medir a posição angular do perfil U e uma régua potenciométrica (7) para
medir a posição da haste do cilindro pneumático. Um computador PC e uma placa de entrada
e saída de dados são usados para excitar o moto-redutor de corrente contínua e a válvula
eletropneumática proporcional e captar os sinais medidos pelo potenciômetro e pela régua
potenciométrica. No computador utiliza-se o programa computacional LabView para
determinação do modelo do robô manipulador. Com esta configuração o movimento do robô
ocorre num plano; e o sistema tem duas entradas e duas saídas, o que o caracteriza como um
sistema de dois graus de liberdade (2 gdl). A Figura 2 mostra uma fotografia do sistema.

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
Figura 1. Esquema do robô manipulador de 2 gdl
Figura 2. Fotografia do robô manipulador de 2 gdl
3 IDENTIFICAÇÃO NÃO LINEAR DO ROBÔ MANIPULADOR
A identificação de sistemas é uma área do conhecimento que estuda técnicas alternativas
de modelagem matemática (Isermann, 1980; Aström e Wittenmark, 1995; Rúbio e Sanchez,
1996; Behar e Iranzo, 2003; Coelho e Coelho, 2004). Uma das características dessas técnicas
é que pouco ou nenhum conhecimento prévio do sistema é necessário e, consequentemente,
tais métodos são referidos como modelagem (ou identificação) caixa preta ou modelagem
empírica (Aguirre et al., 2007).

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
Modelos matemáticos não lineares de sistemas, podem ser obtidos utilizando-se o modelo
NARX (Aguirre, 2000). O modelo paramétrico NARX mostrado na Eq. (1), é apropriado
para estimação de parâmetros tendo como base os sinais de entrada e saída de um sistema
SISO.
1
,
, 1,
0 0 , 1 1
( ) ( ...., ) ( ) ( ) + u
m
n n p ml m
p m p m i i ss
m p n n i i p
k c n n k n u k n c
(1)
onde:
1 1
,
, 1 1
.............u u
m m
n n n n
n n n n
(2)
m – grau de não linearidade do modelo do sistema;
n e nu – ordem do modelo;
css – nível DC (offset).
Expandindo a Eq. (1), com um polinômio de grau de não linearidade m = 2, considerando
css = 0, obtém-se a Eq. (3).
1 1 1 2
1 2 1 2
1,0 1 1 0,1 1 1 2,0 1 2 1 2
1 1
1,1 1 2 1 2 0,2 1 2 1 2
( ) ( ) ( ) ( ) ( ) ( , ) ( ) ( )
+ ( , ) ( ) ( ) ( , ) ( ) ( )
u
u u u
n n n n
n n n n
n n n n
n n n n
k c n y k n c n u k n c n n y k n y k n
c n n y k n u k n c n n u k n u k n
(3)
A Equação (3) desenvolvida para n = 2 , nu= 1 e com os coeficientes ci,j renomeados, é
mostrada conforme a Eq. (4), para um sistema SISO.
2
1 2 3 4 5 6 7 8 9
2
2
( 1)
( 2)
( 1)
( 1)
( ) [ c c c c c c c c ] ( 1) ( 2)
( 2)
( 1) ( 1)
( 2) ( 1)
( 1)
k
k
u k
k
k c k k
k
k u k
k u k
u k
(4)
Como o robô manipulador sob análise é de 2 gdl, o acoplamento dinâmico entre seus elos 1 e
2, deve ser considerado, e para tal consideração, a Eq. (4) é reescrita na forma matricial,

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
conforme a Eq. (5), em função das excitações dos elos 1 e 2; u1(k) e u2(k) e das respostas;
1 2( ) e ( ) k k ; e do vetor de medidas ( )k . O estimador usa o mesmo vetor de medidas na
obtenção das respostas estimadas dos elos do robô.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 181
2 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
c c c c c c c c c c c c c c c c ( ) .
( ) c c c c c c c c c c c c c c c c
c ck
k c c
1
1
1
2
1
1 1
2
1
1 1
1 1
2
1
2
2
2
2
2
2 2
2
2
2 2
( 1)
( 2)
( 1)
( 1)
( 1) ( 2)
( 2)
( 1) ( 1)
( 2) ( 1)
( 1)
( 1)
( 2)
( 1)
( 1)
( 1) ( 2)
( 2)
( 1) (
k
k
u k
k
k k
k
k u k
k u k
u k
k
k
u k
k
k k
k
k u k
2 2
2
2
1)
( 2) ( 1)
( 1)
k u k
u k
(5)
Da Equação (5) tem-se o vetor de parâmetros dado pela Eq. (6) e o vetor de medidas dado
pela Eq. (7). Na Equação (6) o tempo discreto k dos parâmetros ci foi omitido.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
c c c c c c c c c c c c c c c c ( )
c c c c c c c c c c c c c c c c
c ck
c c
(6)
2 2
1 1 1 1 1 1 1
2
1 1 1 1 1 2 2
2 2
2 2 2 2 2 2 2
( ) [ ( 1) ( 2) ( 1) ( 1) ( 1) ( 2) ( 2)
( 1) ( 1) ( 2) ( 1) ( 1) ( 1) ( 2)
( 1) ( 1) ( 1) ( 2) ( 2) ( 1)
T k k k u k k k k k
k u k k u k u k k k
u k k k k k k u
2
2 2 2
( 1)
( 2) ( 1) ( 1)]
k
k u k u k
(7)
onde:
Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
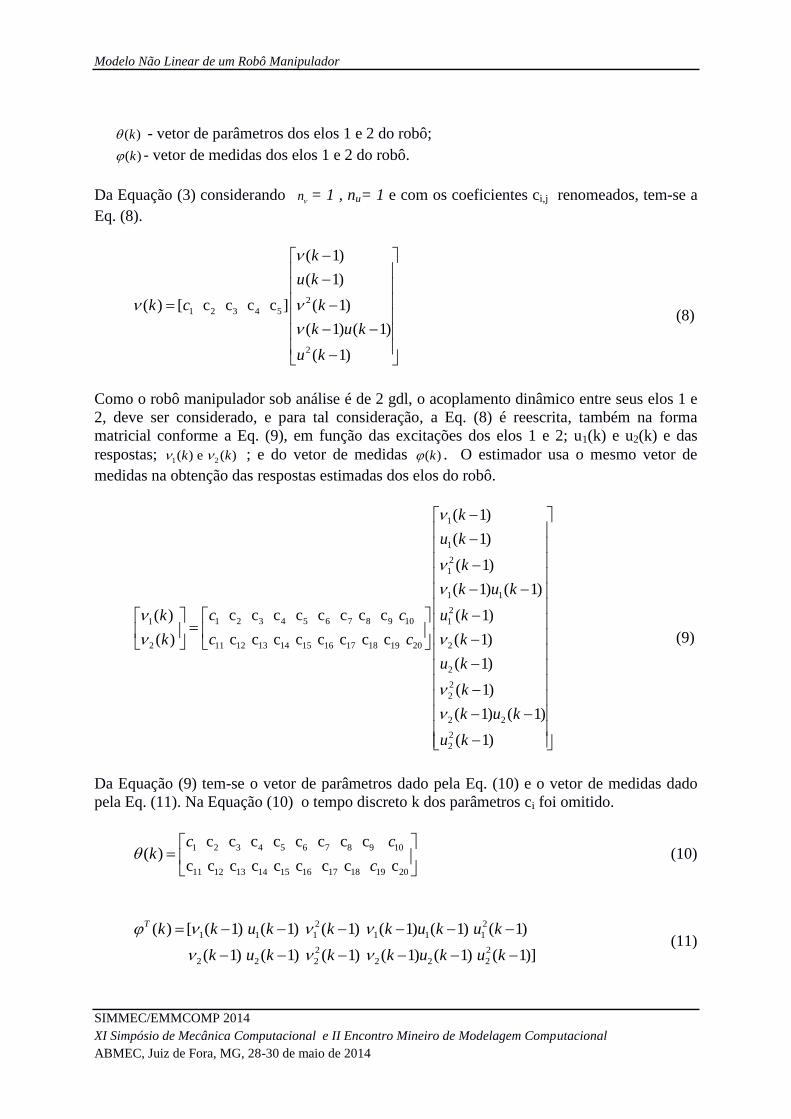
( )k - vetor de parâmetros dos elos 1 e 2 do robô;
( )k - vetor de medidas dos elos 1 e 2 do robô.
Da Equação (3) considerando n = 1 , nu= 1 e com os coeficientes ci,j renomeados, tem-se a
Eq. (8).
2
1 2 3 4 5
2
( 1)
( 1)
( ) [ c c c c ] ( 1)
( 1) ( 1)
( 1)
k
u k
k c k
k u k
u k
(8)
Como o robô manipulador sob análise é de 2 gdl, o acoplamento dinâmico entre seus elos 1 e
2, deve ser considerado, e para tal consideração, a Eq. (8) é reescrita, também na forma
matricial conforme a Eq. (9), em função das excitações dos elos 1 e 2; u1(k) e u2(k) e das
respostas; 1 2( ) e ( ) k k ; e do vetor de medidas ( )k . O estimador usa o mesmo vetor de
medidas na obtenção das respostas estimadas dos elos do robô.
1
1
2
1
1 1
2
1 2 3 4 5 6 7 8 9 101 1
2 11 12 13 14 15 16 17 18 19 20 2
2
2
2
2 2
2
2
( 1)
( 1)
( 1)
( 1) ( 1)
c c c c c c c c ( ) ( 1)
( ) c c c c c c c c ( 1)
( 1)
( 1)
( 1) ( 1)
( 1)
k
u k
k
k u k
c ck u k
k c c k
u k
k
k u k
u k
(9)
Da Equação (9) tem-se o vetor de parâmetros dado pela Eq. (10) e o vetor de medidas dado
pela Eq. (11). Na Equação (10) o tempo discreto k dos parâmetros ci foi omitido.
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
c c c c c c c c ( )
c c c c c c c c c
c ck
c
(10)
2 2
1 1 1 1 1 1
2 2
2 2 2 2 2 2
( ) [ ( 1) ( 1) ( 1) ( 1) ( 1) ( 1)
( 1) ( 1) ( 1) ( 1) ( 1) ( 1)]
T k k u k k k u k u k
k u k k k u k u k
(11)

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
A identificação tipo caixa preta é utilizada no modelamento não linear dos elos do robô
manipulador sob análise, através do algoritmo Least Mean Squares (LMS), na forma
matricial, dado pela Eq. (12) (Coelho e Coelho, 2004; Aguirre, 2000).
ˆ ˆ(k 1) (k) (k 1) (k 1) (k 1) (12)
onde:
T(k 1)
1
1 (k 1) (k 1)
(13)
(k 1) - ganho do estimador;
ˆ(k 1) (k 1) (k 1) - erro de previsão;
ˆ(k 1) - vetor de saída estimado
A qualidade do modelo recursivo estimado pode ser verificada utilizando várias técnicas,
dentre elas para se investigar a magnitude do índice de desempenho tem-se o somatório do
erro quadrático (SEQ), dado pela Eq. (14), e o coeficiente de correlação múltipla (R²), dado
pela Eq. (15) (Coelho e Coelho, 2004). Quanto menor for o valor do somatório do erro
quadrático (SEQ), melhor é o modelo e se coeficiente de correlação múltipla (R²) pertencer ao
intervalo; 20,9 R 1,0 indica que o modelo estimado é satisfatório.
N
2
k 1i i i
ˆSEQ (k) (k)
(14)
N2
i i
k 1
N2
i i
k 1
2i
R 1
ˆ(k) (k)
(k)
(15)
onde:
ˆ (k) - saída estimada do sistema;
N – número de amostras da experimentação;
- média das N amostras da experimentação;
i = 1, 2 – elos 1 e 2 do robô.
Quando o valor de R² é igual a unidade, indica uma exata adequação do modelo para os dados
medidos do processo e para R² entre 0,9 e 1,0; o modelo pode ser considerado suficiente para
muitas aplicações práticas. Quanto mais baixo o valor do SEQ para o conjunto de dados,
melhor o modelo.
Os modelos matemáticos não lineares dos elos do robô manipulador em estudo são
obtidos através da identificação paramétrica. Os dados que compõem o vetor de medidas, são
as excitações enviadas do computador para o motor CC e para a válvula eletropneumática

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
proporcional; 1 2u ( ), u ( )k i k i , e as respostas obtidas, que são a posição angular do perfil
U (elo 1) e a posição linear da haste do cilindro pneumático (elo 2);
1 2( ) ( ), ( ) x( )k i k i k i k i , onde i representa instantes anteriores a k. Tais dados,
excitação (entrada) no elo 1 e excitação (entrada) no elo 2, são gerados no computador e
enviados ao motor CC e à válvula eletropneumática proporcional, através da placa de entrada
e saída de dados; a saída real (resposta) do elo 1 medida pelo potenciômetro e a saída real
(resposta) do elo 2 medida pela régua potenciométrica, são captadas pela placa de entrada e
saída de dados. Na experimentação foram usadas 1349 amostras para cada entrada (excitação)
e para cada saída (resposta real). Com a solução da Eq. (12), obtêm-se os parâmetros
estimados ˆ( )k do robô manipulador, com os quais são obtidas as respostas estimadas.
Na solução da Eq. (12), considerou-se: ν un = 2 , n 1 , para os dois elos, conforme Eq. (5) e
ν un = 1 , n 1 , conforme Eq. (9), que representam modelos de grau de não linearidade m = 2,
com atrasos de transporte d para os dois elos variando de 0 à 2, conforme Tabela 1.
Tabela 1. Pré-estruturas dos elos 1 e 2 do robô
Elo Ordem do
Modelo
( n )
Ordem do
Modelo
(nu)
Atraso de
Transporte
(d)
1 2 1 0
2 2 1 0
1 2 1 1
2 2 1 1
1 2 1 2
2 2 1 2
1 1 1 0
2 1 1 0
1 1 1 1
2 1 1 1
1 1 1 2
2 1 1 2
Com a adequação da Eq. (5) e da Eq. (9), para atender a Tabela 1, que leva em consideração o
atraso de transporte d para cada elo do robô, os parâmetros dos elos 1 e 2, são obtidos através
da solução da Eq. (12) e as saídas estimadas 1 2ˆˆ ˆ ˆ(k) (k) e (k) x(k) são obtidas pela
Eq. (16).
ˆˆ (k) (k) (k) (16)
onde:
1ˆˆ (k) (k) - posição angular estimada do elo 1 do robô;
2ˆ ˆ(k) x(k) - posição linear estimada do elo 2 do robô;

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
4 RESULTADOS OBTIDOS PARA OS ELOS DO ROBÔ
Os resultados apresentados nas Figuras 3 à 6 e na Tabela 2, são parte dos testes
realizados. A Figura 3 mostra a entrada, a saída real e a saída estimada do elo 1 do robô,
considerando o modelo não linear de grau de não linearidade m = 2. O modelo que originou a
saída estimada do elo 1 desta figura é o melhor modelo deste elo conforme mostra os índices
de desempenho em negritos na Tab. 2.
0 200 400 600 800 1000 1200 14000
0.5
1
1.5
2
2.5
3
3.5
4
Amostras do elo 1
Entr
ada e
saíd
as r
eal e e
stim
ada d
o e
lo 1
(V
olts)
Entrada no elo 1
Saída real do elo 1
Saída estimada do elo 1
Figura 3. Entrada e saídas real e estimada do elo 1 do robô (modelo não linear NARX, de grau de não
linearidade m = 2, com 1 1 ν1 u1 1 ν2 u2 2n = 2, n , d = 1, n = 2, n e d = 0 ).
A Figura 4 mostra a entrada, a saída real e a saída estimada do elo 1 do robô, considerando o
modelo não linear de grau de não linearidade m = 2, para o conjunto de amostras variando de
50 à 500. Esta figura é uma ampliação da Fig. (3), no intervalo de 50 à 500 amostras.
Observa-se que a saída estimada está bem próxima da saída real, o que confirma que o
modelo obtido para o elo 1 o representa satisfatoriamente.

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
50 100 150 200 250 300 350 400 450 500
0.5
1
1.5
2
2.5
3
Amostras do elo 1
Entr
ada e
saíd
as r
eal e e
stim
ada d
o e
lo 1
(V
olts)
Entrada no elo 1
Saída real do elo 1
Saída estimada do elo 1
Figura 4. Entrada e saídas real e estimada do elo 1 do robô (modelo não linear NARX, de grau de não
linearidade m = 2, com 1 1 ν1 u1 1 ν2 u2 2n = 2, n , d = 1, n = 2, n e d = 0 ), para o intervalo de 50 à
500 amostras
Na Figura 5 são mostradas a entrada, a saída real e a saída estimada do elo 2 do robô,
considerando o modelo não linear de grau de não linearidade m = 2. O modelo que originou a
saída estimada do elo 2 desta figura é o melhor modelo deste elo conforme mostra os índices
de desempenho em negritos na Tab. 2.

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
0 200 400 600 800 1000 1200 1400-3
-2
-1
0
1
2
3
4
Amostras do elo 2
Entr
ada e
saíd
as r
eal e e
stim
ada d
o e
lo 2
(V
olts)
Entrada no elo 2
Saída real do elo 2
Saída estimada do elo 2
Figura 5. Entrada e saídas real e estimada do elo 2 do robô (modelo não linear NARX, de grau de não
linearidade m = 2, com 1 1 ν1 u1 1 ν2 u2 2n = 2, n , d = 1, n = 2, n e d = 0 )
A Figura 6 mostra a entrada, a saída real e a saída estimada do elo 2 do robô, considerando o
modelo não linear de grau de não linearidade m = 2, para o conjunto de amostras variando de
60 à 150. Esta figura é uma ampliação da Fig. (5), no intervalo de 60 à 150 amostras.
Observa-se que a saída estimada está bem próxima da saída real, o que confirma que o
modelo obtido para o elo 2 o representa satisfatoriamente.

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
60 70 80 90 100 110 120 130 140 150
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Amostras do elo 2
Entr
ada e
saíd
as r
eal e e
stim
ada d
o e
lo 2
(V
olts)
Entrada no elo 2
Saída real do elo 2
Saída estimada do elo 2
Figura 6. Entrada e saídas real e estimada do elo 2 do robô (modelo não linear NARX, de grau de não
linearidade m = 2, com 1 1 ν1 u1 1 ν2 u2 2n = 2, n , d = 1, n = 2, n e d = 0 ), para o intervalo de 60 à
150 amostras
Na Tabela 2, são mostrados os índices de desempenho de um conjunto de modelos
NARX, para cada elo do robô, de grau de não linearidade m = 2. Esses índices de
desempenho são usados para validação de modelos obtidos por algoritmos recursivos. A
análise dos resultados na tabela é realizada para cada par de elos, tendo em vista que os
modelos foram obtidos considerando-se o acoplamento dinâmico entre os elos 1 e 2 do robô.
Observa-se que os melhores modelos foram os não lineares NARX, determinados usando-se
ν1 u1 1 ν2 u2 2n = 2, n 1, d = 1, n = 2, n 1 e d = 0 , destacados em negrito, dado os valores dos
índices de desempenho obtidos para esse conjunto. Os resultados mostram para esses
modelos, os melhores valores dos coeficientes de correlação múltipla e o menor valor do erro
quadrático para o elo 1, o que os tornam os melhores modelos, apesar do valor do erro
quadrático do elo 2 não ser o menor.

José A. Riul, Paulo H. M. Montenegro, Virgílio M. C. Silva
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
Tabela 2. Índices de desempenho dos elos 1 e 2 do robô manipulador
Elo Ordem do
Modelo
( n )
Ordem do
Modelo
(nu)
Atraso de
Transporte
(d)
Coeficiente
de
correlação
múltipla
(R²)
Somatório
do erro
quadrático
(SEQ)
1 2 1 0 0,97 16,2
2 2 1 0 0,98 56,7
1 2 1 1 0,97 14,8
2 2 1 1 0,98 59,4
1 2 1 2 0,97 17,5
2 2 1 2 0,98 59,4
1 2 1 1 0,98 10,8
2 2 1 0 0,98 58,0
1 1 1 0 0,95 31,1
2 1 1 0 0,98 54,0
1 1 1 1 0,95 28,3
2 1 1 1 0,98 59,4
1 1 1 2 0,94 32,4
2 1 1 2 0,98 63,4
5 CONCLUSÃO
Este trabalho apresentou a técnica de identificação não linear NARX, para dois elos de
um robô manipulador de dois graus de liberdade. A identificação foi realizada utilizando-se o
algoritmo LMS, considerando-se a dinâmica dos elos do robô acoplada. Vários modelos não
lineares foram testados, variando-se a ordem e o atraso de transporte para os dois elos e dos
resultados obtidos, os modelos não lineares de grau de não linearidade dois, que apresentaram
os melhores índices de desempenho, que validam modelos recursivos, foram os que
consideraram 1 1 1 2 2 22, 1, 1, 2, 1 0u un n d n n e d ; o que os tornam os mais
indicados para implementação em controladores adaptativos não lineares.
6 REFERÊNCIAS
Aguirre, L. A., 2000. Introdução à Identificação de Sistemas: Técnicas lineares e não-
lineares aplicadas a sistemas reais. Belo Horizonte, MG, Ed. UFMG.
Aguirre et al., L. A., Silva, A. P. A., Campos, M. F. M., AMARAL, W. C. A., 2007.
Enciclopédia de Automática. 1a ed. Vols. 1, 2 e 3. São Paulo: Ed. Blucher.
Åstrom, K. J., Wittenmark, B.,1995. Adaptative Control. 2ª ed., New York: Ed. Addison
Wesley Publishing Company, Inc.
Behar, A.A.; Iranzo, M.M., 2003. Identificacíon y Control Adaptativo. 1ª ed. Madri: Ed.
Prentice Hall.
Coelho, A.A.R., Coelho, L.S., 2004. Identificação de Sistemas Dinâmicos Lineares. 1ª ed.,
Florianópolis: Ed. Universidade Federal de Santa Catarina, 2004.

Modelo Não Linear de um Robô Manipulador
SIMMEC/EMMCOMP 2014
XI Simpósio de Mecânica Computacional e II Encontro Mineiro de Modelagem Computacional
ABMEC, Juiz de Fora, MG, 28-30 de maio de 2014
Isermann, R., Lachmann, K-H., Matko, D., 1992. Adaptative Control Systems. Ed. Prentice
Hall.
Isermann, R., 1980. Practical Aspects of Process Identification. Automática, Great Britain: v.
16, pp. 575-587.
Koivo, A. J., Guo, T., 1983. Adaptive Linear Controller for Robotic Manipulator. IEEE
Transactions on Automatic Control, v. AC-28, pp. 162-171.
Rúbio, F.R & Sánchez, M.J.L, 1996. Control Adaptativo y Robusto. Secretariado de
Publicaciones de la Universidad de Sevilla, Espanha.
Shih, M. C., Tseng, S. I., 1995. Identification and Position Control of a Servo Pneumático
Cylinder. Control Engineering Practice, v. 3, n. 9, pp. 1285-1290.











![Desenvolvimento de um Robô Manipulador Didático€¦ · iii FICHA CATALOGRÁFICA Wattyllas, Ferreira Dos Reis Desenvolvimento de um Robô Manipulador Didático, [Distrito Federal]](https://img.dokumen.tips/doc/110x75/5f272403552c5f4d3d3efb13/desenvolvimento-de-um-rob-manipulador-did-iii-ficha-catalogrfica-wattyllas.jpg)
















