Embed Size (px)
Citation preview

Systèmes dynamiques asservis
F. Pépin
I. INTRODUCTION A L'AUTOMATIQUE
II. QUELQUES RAPPELS
III. PERFORMANCES DES SYSTEMES ASSERVIS
IV. CORRECTION DES SYSTEMES ASSERVIS
ANNEXE 1 : DEMONSTRATION DE LA REGLE DU REVERS
ANNEXE 2 : CARACTERISTIQUES D'UN SYSTEME DU SECOND ORDRE


TABLE DES MATIERES
I. INTRODUCTION A L'AUTOMATIQUE............................................................................3
I.1. BUT DE L'AUTOMATIQUE..............................................................................................3
I.2. DEFINITION DU BOUCLAGE..........................................................................................4
I.3. REGULATION ET ASSERVISSEMENTS. ........................................................................4
I.4. STRUCTURE D'UN SYSTEME ASSERVI.........................................................................5
I.5. PERFORMANCES DES SYSTEMES ASSERVIS. .............................................................6
II. QUELQUES RAPPELS............................................................................................................9
II.1. NOTIONS DE SYSTEMES DYNAMIQUES....................................................................9
II.1.1. Définitions et propriétés.............................................................................................9
II.1.2. Représentation des systèmes linéaires, continus et invariants. ..........................10
II.1.3. Signaux d'essais typiques.........................................................................................11
II.2. SYSTEMES BOUCLES......................................................................................................15
II.2.1. Mise en équation. ......................................................................................................16
II.2.2. Stabilité des systèmes bouclés. ................................................................................18
II.2.3. Abaque de Black. .......................................................................................................26
III. PERFORMANCES DES SYSTEMES ASSERVIS.........................................................29
III.1. DEGRE DE STABILITE. .................................................................................................29
III.2. PRECISION ......................................................................................................................31
III.2.1. Entrée en échelon - perturbation nulle : erreur statique. ...................................33
III.2.2. Entrée en rampe - perturbation nulle : erreur de traînage.................................34
III.2.3. Entrée sinusoïdale - perturbation nulle. ...............................................................34
III.2.4. Perturbation en échelon - entrée nulle. .................................................................35
III.2.5. Précision dynamique. ..............................................................................................36
III.2.6 Conclusion. ................................................................................................................37
III.3. RAPIDITE.........................................................................................................................37
IV. CORRECTION DES SYSTEMES ASSERVIS...............................................................43
IV.1. ROLE DES CORRECTEURS. .........................................................................................43
IV.1.1. Correction série. .......................................................................................................44
IV.1.2. Correction parallèle. ................................................................................................46
IV.1.3. Correction par anticipation. ...................................................................................46
IV.2 CORRECTEUR PROPORTIONNEL. ............................................................................48
IV.3. CORRECTEUR PROPORTIONNELLE ET INTEGRALE. ........................................48
Table des matières
2
IV.4. CORRECTEUR A RETARD DE PHASE. .....................................................................50
V.5. CORRECTEUR PROPORTIONNEL ET DERIVE. .......................................................52
IV.6. CORRECTEUR A AVANCE DE PHASE.....................................................................54
IV.7. CORRECTEUR P.I.D. .....................................................................................................58
IV.7.1. Réponse fréquentielle du correcteur P.I.D. ..........................................................58
IV.7.2. Réalisation.................................................................................................................59
IV.7.3. Action du correcteur P.I.D. .........................................................................................60
ANNEXE 1 : DEMONSTRATION DE LA REGLE DU REVERS........................................63
ANNEXE 2 : CARACTERISTIQUES D'UN SYSTEME DU SECOND ORDRE...............67

Chapitre I
INTRODUCTION A L'AUTOMATIQUE
I.1. BUT DE L'AUTOMATIQUE.
Réaliser un "système automatique", c'est effectuer une ou plusieurs opérations sans
l'intervention de l'homme.
Exemples :
- machines à laver automatique
- pilotage automatique d'avion.
Les systèmes automatiques permettent :
- de réaliser les opérations trop complexes, pénibles ou délicates et ne pouvant être
confiées à l'homme (atterrissage d'un engin spatial sur la lune, ...)
- de substituer la machine à l'homme dans des opérations trop répétitives ou dénuées
d'intérêt (boite de vitesse automatique, appareillage électro-ménager, ...).
Notons que ces systèmes copient le plus souvent le comportement de l'homme dans les
trois phases essentielles de son travail :
- 1er phase : observation
- 2ième phase : réflexion
- 3ième phase : action
puis retour à la première phase.
Exemple : remplir une cuve à une hauteur donnée d'eau.
Les trois phases sont alors :
- observation du niveau d'eau actuel dans la cuve,
- comparaison avec le niveau souhaité,
- action sur le robinet (ouverture, fermeture),
puis retour à la phase d'observation.
Ce retour constitue l'une des notions fondamentales de l'automatique. On dit encore que
l'on a réalisé un bouclage.

Introduction à l'automatique
4 F. Pépin
I.2. DEFINITION DU BOUCLAGE.
Un bouclage apparaît chaque fois qu'au cours d'une opération, un système prend en
compte l'observation de son état pour le modifier.
Exemples de systèmes bouclés :
- automobile + conducteur réalisant l'opération de conduite sur route (système non
automatique)
- régulation de la température d'une enceinte thermique (système automatique).
Un bouclage est nécessaire dans les opérations où :
- la précision mise en jeu est importante. On remarque ici que la précision de
l'opération dépend essentiellement de la précision de l'observation.
- des perturbations interviennent en cours d'opération, modifiant ainsi l'état du
système. Exemple : ouverture de la porte d'un four thermostaté entraînant une déperdition
de chaleur, et donc une baisse de température que l'on compense en augmentant la
puissance du chauffage.
Ces deux nécessités peuvent naturellement coexister dans certaines opérations.
I.3. REGULATION ET ASSERVISSEMENTS.
Parmi les systèmes automatiques, on distingue :
- les systèmes programmés et séquentiels, où l'automatisation porte sur un nombre fini
d'opérations prédéterminées dans leur déroulement.
Exemple : machine à laver, ascenseur.
- les régulations, lorsque la tâche à réaliser consiste à maintenir une ou plusieurs
grandeurs physiques à des valeurs fixées.
Exemple : régulation de température d'un four, régulation de vitesse
- les asservissements, lorsque la tâche à réaliser consiste à faire suivre une loi non fixée
à l'avance à une ou plusieurs grandeurs physiques.
Exemple : direction asservie d'une voiture.
Remarque : les asservissements font souvent intervenir des organes mécaniques. On parle
dans ce cas de "servomécanismes".

Introduction à l'automatique
5 F. Pépin
I.4. STRUCTURE D'UN SYSTEME ASSERVI.
Un système asservi est un système bouclé. La structure générale est alors la suivante :
Réflexion
Informationconcernant
la tâche à
réaliser
Action
Effet del'action
Observations
Exemple : régulation automatique du niveau d'eau dans une cuve avec fuite.
eau
vanne
L'ouverture ou la fermeture de la vanne est commandée par la position relative du
flotteur.
Le fonctionnement de cette régulation peut être décrit par le schéma général suivant :
Chaîne directe
(ou d'action)
Chaîne de retour
(ou d'observation)
Entrée
Comparaison
Sortie+-
L'entrée représente le niveau d'eau désiré. La sortie est le niveau d'eau réel. L'action se
fait après comparaison des niveaux désiré et réel.
On représente habituellement ce schéma appelé "schéma fonctionnel" ou "schéma bloc"
de la manière suivante :
Introduction à l'automatique
6 F. Pépin
Entrée Sortie+
-Consigne
Erreur
EcartCorrecteur Actionneur
Système
dynamique
Capteur
Perturbations
Régulateur
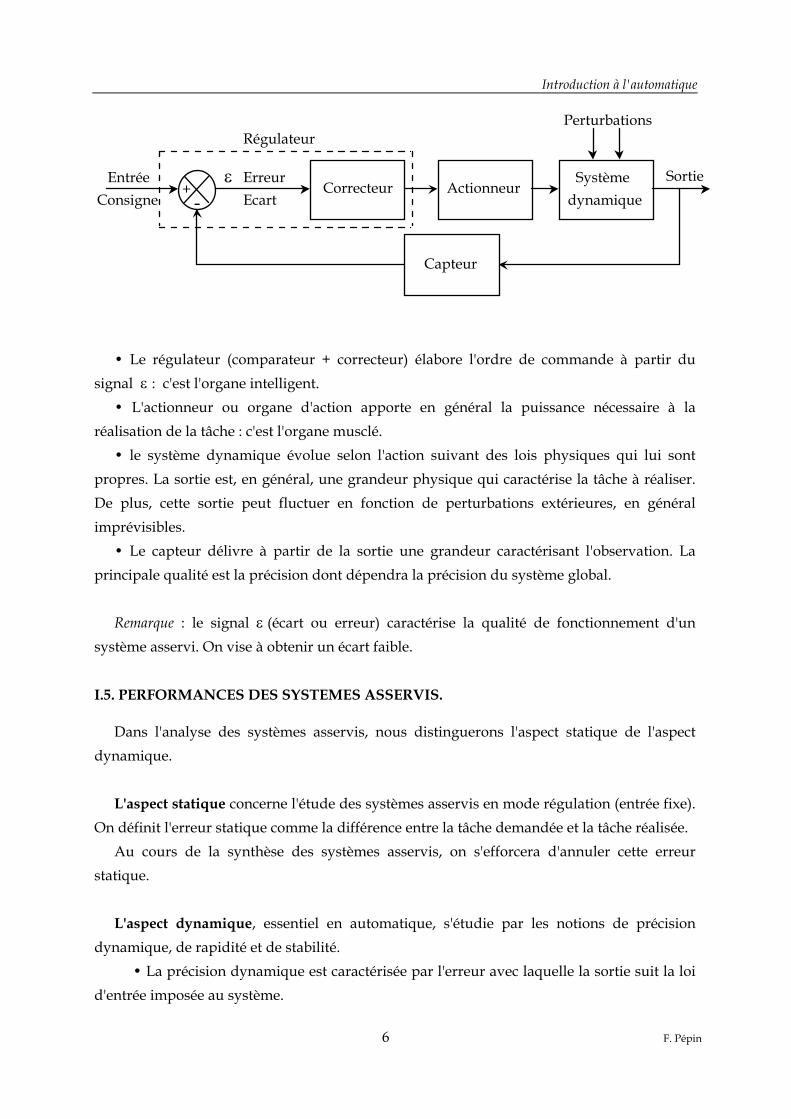
• Le régulateur (comparateur + correcteur) élabore l'ordre de commande à partir du
signal : c'est l'organe intelligent.
• L'actionneur ou organe d'action apporte en général la puissance nécessaire à la
réalisation de la tâche : c'est l'organe musclé.
• le système dynamique évolue selon l'action suivant des lois physiques qui lui sont
propres. La sortie est, en général, une grandeur physique qui caractérise la tâche à réaliser.
De plus, cette sortie peut fluctuer en fonction de perturbations extérieures, en général
imprévisibles.
• Le capteur délivre à partir de la sortie une grandeur caractérisant l'observation. La
principale qualité est la précision dont dépendra la précision du système global.
Remarque : le signal (écart ou erreur) caractérise la qualité de fonctionnement d'un
système asservi. On vise à obtenir un écart faible.
I.5. PERFORMANCES DES SYSTEMES ASSERVIS.
Dans l'analyse des systèmes asservis, nous distinguerons l'aspect statique de l'aspect
dynamique.
L'aspect statique concerne l'étude des systèmes asservis en mode régulation (entrée fixe).
On définit l'erreur statique comme la différence entre la tâche demandée et la tâche réalisée.
Au cours de la synthèse des systèmes asservis, on s'efforcera d'annuler cette erreur
statique.
L'aspect dynamique, essentiel en automatique, s'étudie par les notions de précision
dynamique, de rapidité et de stabilité.
• La précision dynamique est caractérisée par l'erreur avec laquelle la sortie suit la loi
d'entrée imposée au système.

Introduction à l'automatique
7 F. Pépin
+-
(t)e(t) s(t)
t
e(t)
s(t)
(t)
• La rapidité est caractérisée par le temps que met le système à réagir à une variation
brusque de la grandeur d'entrée (temps de réponse). Cette notion est fortement liée à la
précision dynamique (plus un système est "rapide" plus il est précis).
tt
s(t) s(t)
Sytème lent Système rapide
• La stabilité. La présence d'un bouclage risque d'introduire une divergence ou une
oscillation de la sortie. Ce comportement est intolérable pour une système asservi. On
s'efforcera au cours de la synthèse d'éviter ce risque en se définissant une "marge" de
stabilité.
Exemple : un système asservi présentant une marge de stabilité suffisante sera caractérisé
par une réponse, à une variation brusque d'entrée (réponse indicielle), convenablement
amortie.
tt
s(t) s(t)Système instable Système stable
Ces trois aspects dynamiques sont étroitement liés.
On cherchera à rendre compatible la rapidité ou précision dynamique et un bon
amortissement au cours de la synthèse des correcteurs.

Introduction à l'automatique
8 F. Pépin

Chapitre II
QUELQUES RAPPELS
II.1. NOTIONS DE SYSTEMES DYNAMIQUES.
II.1.1. Définitions et propriétés.
Un système dynamique est un ensemble d'éléments liés entre eux dans le but de réaliser
une tâche donnée. Ce dispositif soumis, aux lois physiques, est caractérisé par des grandeurs
de deux types : les entrées et les sorties :
Système
dynamiquee(t) s(t)
Les entrées sont des grandeurs de commande du système ou encore des signaux parasites
appelés perturbations.
Les sorties permettent de juger de la qualité de la tâche remplie.
Les entrées et sorties peuvent être multiples (systèmes multivariables) ; mais,
généralement, une seule de ces grandeurs nous intéresse : c'est l'entrée et la sortie principale.
Les autres entrées sont alors considérées comme des perturbations ; il ne faut pas les
considérer comme négligeables car elles peuvent intervenir dans la réponse du système.
Pour l'étude de ces entrées secondaires, on peut les considérer comme des entrées
principales et calculer leur réponse.
e (t) s (t)Système
Perturbations

Rappels
10 F. Pepin
• Système continu : un système est dit continu, par opposition à un système discret,
lorsque les grandeurs le caractérisant délivrent une information à tout instant. La plupart
des systèmes physiques, du point de vue macroscopique, sont continus.
• Système linéaire : un système est dit linéaire s'il répond au principe de superposition :
e1
s1
e2
s2
e1
1
e2
2 s
1
1s
2
2
• Système invariant : un système est dit invariant s'il obéit à la loi suivante :
e (t) s (t) e (t - ) s (t - )
Un système qui ne vieillit pas est invariant.
En pratique nous nous ramènerons au cas continu linéaire et invariant par des
hypothèses simplificatrices le plus souvent justifiées.
Exemple : le pendule
P
m
r
Jd2
dt2+ P r sin = 0
Linéarisation de l'équation pendulaire pour les petits mouvements autour de
l'origine = 0 :
Jd2
dt2+ P r = 0
II.1.2. Représentation des systèmes linéaires, continus et invariants.
Pour réaliser une commande automatique, il est nécessaire d'établir la relation entre
l'entrée (grandeur de commande) et la sortie (grandeur d'observation).
e (t) s (t)Système

Rappels
11 F. Pepin
Par application des lois physiques, un système linéaire, continu et invariant est
représenté par une équation différentielle linéaire à coefficients constants :
i=0
nai
di s
dti=
j=0
mbi
dj s
dtj
ai , bj : coefficients constants
n : ordre du système, avec m n
Par application de la transformée de Laplace et en supposant les conditions initiales
nulles, on obtient la transmittance, ou fonction de transfert :
E(p) S(p)H(p)
H(p) =S(p)E(p) =
bm pm + . . . + b1 p + b0
an pn + . . . + a1 p + a0
II.1.3. Signaux d'essais typiques.
Lors de l'étude d'un système linéaire, on cherche à connaître son équation différentielle
ou sa fonction de transfert de façon à prévoir ces performances et, éventuellement, modifier
certains paramètres pour obtenir ce que l'on désire. Or, il n'est pas toujours possible de
calculer analytiquement cette équation. On soumet alors ce système à des entrées
particulières, dont la philosophie est de contenir le maximum d'informations. De plus, la
réponse du système à certaines de ces entrées permettent de déterminer les performances
statiques et dynamiques du système.
• L'échelon :
Echelon unité t < 0 w(t) = 0
t > 0 w(t) = 1
Echelon d'amplitude E : e(t) = E . w(t) E(p) =Ep
E
e(t)
t0

Rappels
12 F. Pepin
La réponse d'un système à un échelon est appelée réponse indicielle. Elle permet, par
l'observation de son régime transitoire, d'étudier la rapidité du système et la précision
statique par son régime permanent.
• L'impulsion : c'est une fonction de durée extrêmement brève, mais d'amplitude
suffisante pour qu'elle ait un effet notable.
e(t) = A . (t) (t) est l'impulsion unité, ou impulsion de Dirac.
E(p) = A
A
e(t)
t0
1
La réponse impulsionnelle est la réponse à cette entrée :
(t) h (t)Système
Pour étudier ce que représente la réponse impulsionnelle, calculons la réponse à une
entrée quelconque :
e (t) s (t)
Système
t t
Découpons e(t) par une suite d'impulsions de largeur :
e (t)
t
e(n)
et appelons h(t) la réponse du système à une impulsion de largeur et de hauteur 1/
(surface unité). La nième impulsion appliquée au système conduit à sortie
e(n ) h(t - n )
A l'instant t=n , la sortie du système est approchée par la somme des réponses partielles
relatives aux n impulsions appliquées entre t=0 et t=n (système causal):

Rappels
13 F. Pepin
s(t) = k=0
n e(k ) h(t - k )
Lorsque tend vers 0, l'impulsion de largeur et de hauteur placée à l'origine tend
vers l'impulsion de Dirac. La réponse h(t) tend alors vers la réponse impulsionnelle h(t). On
obtient pour s(t) :
s(t) =
0
t
e( ) h(t - ) d = h(t) * e(t)
c'est à dire le produit de convolution de h(t) et de e(t).
Donc S(p) = H(p) . E(p)
Autrement dit, H(p) est la transformée de Laplace de la réponse impulsionnelle h(t).
• La rampe : e(t) = a . t . w(t) E(p) =a
p2
e(t)
t0
Pente = a
La réponse à une rampe permet d'étudier l'erreur de traînage d'un système.
Remarques : réponse impulsionnelle = dérivée de la réponse indicielle
réponse indicielle = dérivée de la réponse à une rampe.
• Analyse harmonique : c'est l'étude de la réponse du système à une entrée sinusoïdale
en régime permanent.
e(t) = EM cos ( t + )
Par extension, on définit l'entrée complexe :
e(t) = EM . e j ( t + = EM e j e jt = E (je jt
On associe donc à e(t) une grandeur complexe E (j, et à s(t) la grandeur S (j :
S (j = SM e j

Rappels
14 F. Pepin
La fonction de transfert H (j est alors :
H (j=S (j
E (j =
SM
EMe j()
et à partir de l'équation différentielle :
H (jbm (jm + . . . + b1 j + b0
an (jn + . . . + a1 j + a0
L'analyse de la fonction )jω(H est effectuée par l'étude de son module et de sa phase en
fonction de la fréquence ou pulsation ω , au travers de trois diagrammes :
- diagramme de Bode : tracé du gain G = 20.Log )jω(H et de la phase ))jω(HArg(
sur deux graphiques séparés.
Exemple : H (j) =K
j ( 1 + j )avec K > 1
G
1
20 Log K
pente : -20 dB/décade
pente : -40 dB/Décade3 dB
-90°
-180°
- diagramme de Nyquist : c'est le tracé de H (j) dans le plan complexe.
R
I
- K

Rappels
15 F. Pepin
L'asymptote verticale est déterminée en calculant la partie réelle de H (j) lorsque
tend vers 0 :
H (j) = - jK
1 - j
1 + 2 2
Partie réelle ( H (j) ) = -K
1 + 2 2 - K lorsque 0
- diagramme de Black : c'est le tracé du gain et de la phase sur le même graphique. Son
intérêt sera évident dans l'étude des systèmes asservis, par l'intermédiaire de l'abaque de
Black.
G
-90°
-180°20LogK - 3dB
II.2. SYSTEMES BOUCLES.
Un système bouclé est un système à retour permettant un contrôle du signal de sortie.
Précisons cette notion au moyen d'un exemple : soit une pièce chauffée par
l'intermédiaire d'un radiateur électrique commandé par une tension :
Radiateur SalleT0 T
T0 est la température désirée, alors que T est la température obtenue. Si une perturbation
intervient dans ce système composé du radiateur et de la salle, comme par exemple
l'ouverture d'une fenêtre, la température T sera modifiée et le restera tant que l'on agit pas
sur la commande du radiateur. Pour éviter cela, il faudrait contrôler la température de la

Rappels
16 F. Pepin
pièce en permanence et agir en conséquence sur la commande du radiateur. Il suffit pour
cela de prendre pour commande la grandeur T0-T:
Radiateur SalleT0 T- T
T0-T est fabriqué par un comparateur soustracteur :
Radiateur SalleT 0 T- T
+-
T0
On obtient ainsi un système à retour.
Ce type de système bouclé, dont le rôle est d'asservir une grandeur de sortie sur une
grandeur d'entrée, est appelé système asservi. Ce n'est pas la seule utilisation du bouclage ;
on trouve ce type de schéma dans les amplificateurs, les oscillateurs, ..., le rôle du retour
étant très diverse.
On appelle système bouclé tout système pouvant se mettre sous la forme du schéma
fonctionnel suivant :
Système 1+-
Système 2
e(t) s(t)
II.2.1. Mise en équation.
Dans ce qui suit, on supposera que les systèmes composant le système bouclé sont
linéaires.
• Notations :
Le système bouclé à étudier est :
+-
E(p) (p)H(p)
K(p)
S(p)
E (p)r
Rappels
17 F. Pepin
Signal d'entrée : E(p)
Signal de sortie : S(p)
signal de retour : Er(p)
Comparateur soustracteur : il a pour rôle de fabriquer E(p) - Er(p). On peut
aussi trouver des comparateurs additionneurs.
Signal d'erreur : (p)
Chaîne directe : elle a pour fonction de transfert H(p)
Chaîne de retour : elle a pour fonction de transfert K(p).
• Fonction de transfert en boucle fermée:
notée H'(p) =S(p)E(p) ; c'est la fonction de transfert du système bouclé.
On aS(p)E(p) =
H(p).(p)E(p) =
H(p) (E(p) - Er(p))
E(p) = H(p) ( 1 -K(p) S(p)
E(p) )
d'où :
H'(p) =H(p)
1 + K(p) H(p)
Pour un additionneur, on obtient H'(p) =H(p)
1 - K(p) H(p)
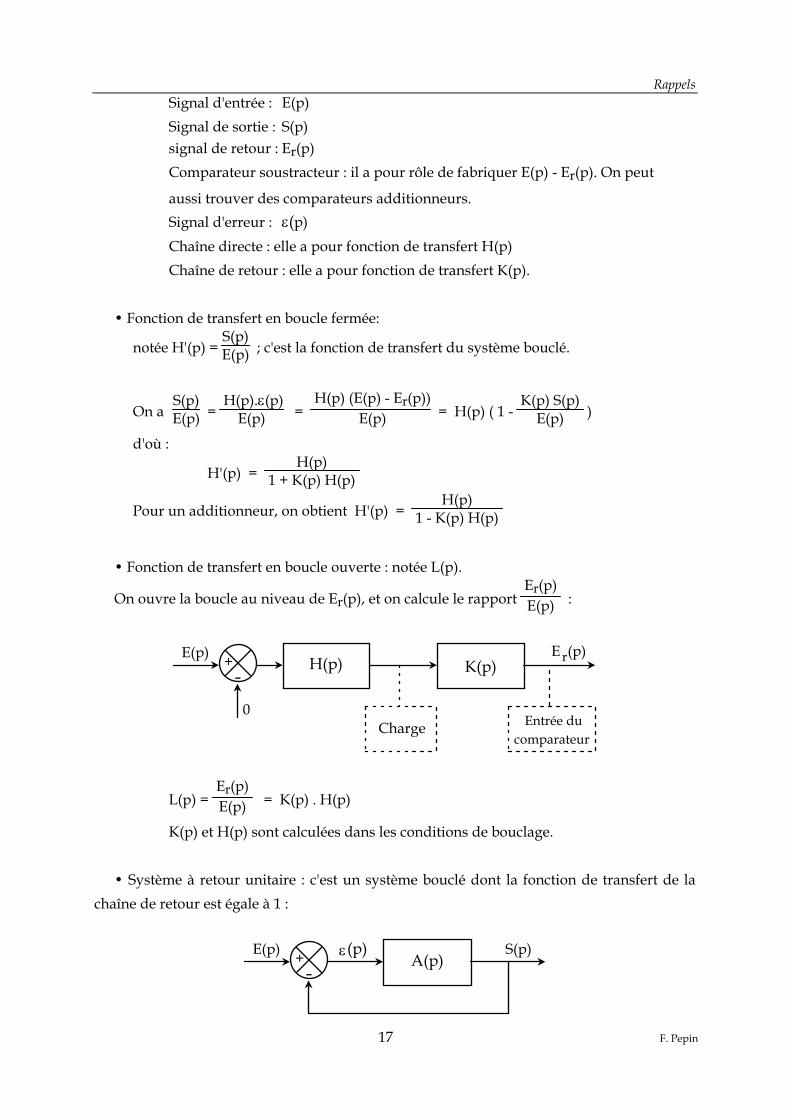
• Fonction de transfert en boucle ouverte : notée L(p).
On ouvre la boucle au niveau de Er(p), et on calcule le rapportEr(p)
E(p) :
+-
E(p)H(p) K(p)
E (p)r
0
ChargeEntrée du
comparateur
L(p) =Er(p)
E(p) = K(p) . H(p)
K(p) et H(p) sont calculées dans les conditions de bouclage.
• Système à retour unitaire : c'est un système bouclé dont la fonction de transfert de la
chaîne de retour est égale à 1 :
+-
E(p) (p)A(p)
S(p)

Rappels
18 F. Pepin
La fonction de transfert en boucle fermée d'un tel système estA(p)
1 + A(p) .
Note : soit un système bouclé à retour unitaire, comment modifier son schéma fonctionnel
pour obtenir un système à retour unitaire ? Il faut pour cela considérer la fonction de
transfert en boucle fermée :
H'(p) =H(p)
1 + K(p) H(p) =K(p) H(p)
1 + K(p) H(p) .1
K(p)
Donc :
+-
E(p)K(p).H(p)
S(p)1
K(p)
On remarque que la fonction de transfert en boucle ouverte du système à retour non
unitaire ( K(p).H(p) ) est égale à la fonction de transfert en boucle ouverte du système à
retour unitaire correspondant. C'est pourquoi nous appellerons KH(p) la fonction de
transfert en boucle ouverte d'un système bouclé quelconque.
II.2.2. Stabilité des systèmes bouclés.
L'étude de la stabilité d'un système bouclé revient à déterminer le signe de la partie réelle
des pôles de la fonction de transfert en boucle fermée. Le système sera stable s'il ne possède
pas de pôles à partie réelle positive.
On dispose pour cette étude de trois méthodes :
- critère de Routh : il faut pour cela connaître analytiquement la fonction de transfert
en boucle fermée ; c'est un critère algébrique.
- critères algébriques : connaissant la fonction de transfert en boucle ouverte
graphiquement (par exemple par un relevé expérimentale de son diagramme de Nyquist),
on peut alors appliquer soit la règle du revers, soit le critère de Nyquist.
Critère de Routh : ce critère est général, il permet de savoir si les racines d'une équation
algébrique du type
Bn pn + Bn-1 pn-1 + . . . + B1 p + B0 = 0
ont leur partie réelle négative, sans avoir pour cela à résoudre l'équation.
Pour les systèmes bouclés, il convient de prendre le dénominateur de la fonction de
transfert en boucle fermée.
Il faut Bn > 0 ; on forme le tableau suivant :

Rappels
19 F. Pepin
pn Bn Bn-2 Bn-4 . . .
pn-1 Bn-1 Bn-3 Bn-5 . . .
pn-2
Bn-1.Bn-2 - Bn.Bn-3
Bn-1
Bn-1.Bn-2 - Bn.Bn-3
Bn-1
. . .
pn-3 .Bn-3 - Bn-1.
. . .
p0
- Si tous les coefficients de la première colonne sont positifs, l'équation ne possède que
des racines à partie réelle négative.
- Si il y a k changements de signe dans cette colonne, l'équation possède k racines à
partie réelle positive.
- Si tous les coefficients d'une ligne sont nuls, l'équation possède des racines
imaginaires pures. On poursuit en écrivant à la place de la ligne en question les coefficients
du polynôme dérivé par rapport à p d'un polynôme auxiliaire dont les coefficients sont les
termes de la dernière ligne non nulle. Les racines à partie réelle nulle sont les zéros du
polynôme auxiliaire.
Critères graphiques :
Soit H', fonction de transfert en boucle fermée.
H' =H
1 + K H
Posons H =AB et K =
CD A, B, C, D étant des polynômes en p.
On a alors H' =AD
AC + BD
L'étude des pôles de H' revient donc à étudier les zéros de AC+BD, ou les zéros de 1+KH
puisque
1+KH =BD + AC
BD
Les critères graphiques ont pour rôle de déterminer le signe des zéros de 1+KH à partir
du diagramme de Nyquist de KH, qui est la fonction de transfert en boucle ouverte.
• Règle du revers : La démonstration de cette règle se trouve en annexe.
La démonstration de base sur l'étude de la position de 1+KH par rapport à 0 lorsque p
décrit le demi-axe imaginaire positif (p = j). Or, étudier 1+KH par rapport à 0 revient à
étudier KH par rapport à -1 ; KH étant alors donné par son diagramme de Nyquist. Le point
-1 est appelé point critique.

Rappels
20 F. Pepin
Enoncé de la règle du revers : un système sera stable si, en parcourant le lieu de Nyquist
de la fonction de transfert en boucle ouverte dans le sens croissant des fréquences, on laisse
le point critique à gauche.
R
I
-1
instable
stable
Remarque : il se peut que, dans certains cas de figures pour KH, la règle du revers ne
permette pas de conclure pour la stabilité du système bouclé. Il faudra alors utiliser le critère
de Nyquist.
Règle du revers dans le plan de Black : considérons une fréquence 1 pour laquelle
KH(j) = 1 :
R
I
-1
Pour que le système soit stable, il faut que l'argument de KH(j) à cette fréquence soient
compris en 0 et -180°. Cela donne dans le plan de Black :
G
-180°
Point critique

Rappels
21 F. Pepin
L'énoncé de la règle du revers dans le plan de Black est donc le même que dans le plan de
Nyquist, en remplaçant gauche par droite.
• Critère de Nyquist.
Ce critère va permettre de compter le nombre de pôles de H' à partie réelle positive.
- Pôles de H' = zéros de 1+KH : l'étude du signe des zéros de 1+KH va permettre d'en
déduire la stabilité en boucle fermée.
- Pôles de KH = pôles de 1+KH : le critère de Nyquist permet aussi de déterminer le
nombre de pôles de 1+KH à partie réelle positive, donc d'étudier la stabilité du système en
boucle ouverte (de fonction de transfert KH).
La forme générale de 1+KH est :
1+KH = k(p - z1) (p - z2) . . .
(p - p1) (p - p2) . . .
L'étude graphique de 1+KH en fonction de p s'effectue dans le plan complexe : à chaque
point de p correspond un point de 1+K(p)H(p). Donc, à un chemin donné de p on peut
associer un chemin de 1+K(p)H(p). De plus, un chemin fermé de p implique un chemin
fermé de 1+KH :
R
I
p
R
I
1+KH
Ces deux chemins sont bien sûr orientés.
On va maintenant déterminer le nombre de tours qu'effectue 1+KH autour de l'origine en
fonction de la position des zéros et des pôles de 1+KH par rapport au chemin décrit par p.
On a :
Arg(1+KH) = Arg(p - z1) + Arg(p - z2) + . . . - Arg(p - p1) - Arg(p - p2) - . . .
Considérons séparément chaque terme : soit la fonction G(p) = p - z1, et un chemin donné
pour p. On doit envisager deux cas :
- le zéro z1 est à l'intérieur du chemin :

Rappels
22 F. Pepin
R
I
p
z1
On a p - z1 = p - z1 e j donc Arg(p - z1) = .
Lorsque p parcourt de chemin entier, varie de 2 ; donc p - z1 tournera une fois autour
de l'origine, et ceci dans le même sens que p.
- le zéro est à l'extérieur :
R
I
p
z1
On voit aisément que p - z1 n'entourera pas l'origine.
Pour les pôles, le résultat est identique, sauf que dans le cas où le pôle est à l'intérieur du
contour, p - p1 tournera une fois autour de l'origine dans un sens opposé à celui de p.
Etendons maintenant ces résultats à 1+KH.
- Soit N le nombre de tours qu'effectue 1+KH autour de l'origine ; N est un nombre
signé, le signe indiquant le sens de parcours de 1+KH par rapport à celui de p (un nombre
négatif indique un sens opposé).
- Soient Z et P le nombre de zéros et de pôles de 1+KH à l'intérieur du contour décrit
par p.
Il est facile d'établir que N = Z - P
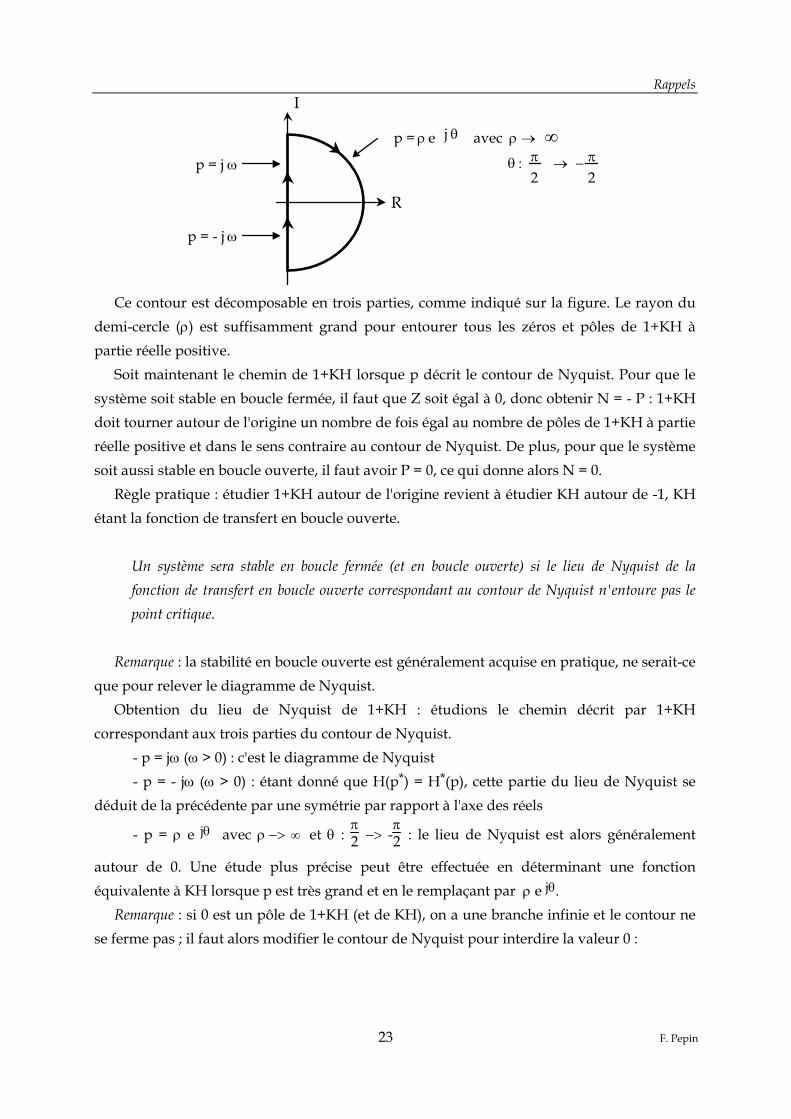
Il reste maintenant à trouver un chemin ou contour pour p adapté à notre problème
d'étude de la stabilité des systèmes bouclés : il faut compter le nombre de zéros et pôles de
1+KH à partie réelle positive, donc entourer tous ces zéros et pôles. C'est le contour de
Nyquist :
Rappels
23 F. Pepin
R
I
p = j
p = - j
p = e j avec
2
2
Ce contour est décomposable en trois parties, comme indiqué sur la figure. Le rayon du
demi-cercle () est suffisamment grand pour entourer tous les zéros et pôles de 1+KH à
partie réelle positive.
Soit maintenant le chemin de 1+KH lorsque p décrit le contour de Nyquist. Pour que le
système soit stable en boucle fermée, il faut que Z soit égal à 0, donc obtenir N = - P : 1+KH
doit tourner autour de l'origine un nombre de fois égal au nombre de pôles de 1+KH à partie
réelle positive et dans le sens contraire au contour de Nyquist. De plus, pour que le système
soit aussi stable en boucle ouverte, il faut avoir P = 0, ce qui donne alors N = 0.
Règle pratique : étudier 1+KH autour de l'origine revient à étudier KH autour de -1, KH
étant la fonction de transfert en boucle ouverte.
Un système sera stable en boucle fermée (et en boucle ouverte) si le lieu de Nyquist de la
fonction de transfert en boucle ouverte correspondant au contour de Nyquist n'entoure pas le
point critique.
Remarque : la stabilité en boucle ouverte est généralement acquise en pratique, ne serait-ce
que pour relever le diagramme de Nyquist.
Obtention du lieu de Nyquist de 1+KH : étudions le chemin décrit par 1+KH
correspondant aux trois parties du contour de Nyquist.
- p = j ( > 0) : c'est le diagramme de Nyquist
- p = - j ( > 0) : étant donné que H(p*) = H*(p), cette partie du lieu de Nyquist se
déduit de la précédente par une symétrie par rapport à l'axe des réels
- p = e j avec et :2 -
2 : le lieu de Nyquist est alors généralement
autour de 0. Une étude plus précise peut être effectuée en déterminant une fonction
équivalente à KH lorsque p est très grand et en le remplaçant par e j.
Remarque : si 0 est un pôle de 1+KH (et de KH), on a une branche infinie et le contour ne
se ferme pas ; il faut alors modifier le contour de Nyquist pour interdire la valeur 0 :

Rappels
24 F. Pepin
R
I
p = re j avec r
2
2
0
Exemple : soit la fonction de transfert en boucle ouverte suivante :
KH(p) =K
p ( 1 + p )K > 0
Diagramme de Nyquist :
R
I
- K
Déterminons maintenant le lieu de Nyquist correspondant au contour de Nyquist :
• p = j (>0) :
R
I
- K

Rappels
25 F. Pepin
• p = e j et :2 -
2π
KH(p) K
p2 =K
1
p2 e j 2 module : tend vers 0
argument : -
Donc :
R
I
R
I
p 1+KH
Il reste maintenant à étudier ce qui se passe lorsque p est au environ de l'origine.
Soit p = r ej, avec r 0 et : -2
2
KH(p) Kp =
Kr e j : c'est un demi-cercle de rayon
1r , donc très grand et orienté
dans le sens opposé au petit cercle décrit par p (à condition que K soit positif). On obtient
alors :

Rappels
26 F. Pepin
R
I
-1
K > 0
STABLE
R
I
-1
K < 0
INSTABLE
Remarque : l'étude de KH lorsque p décrit le demi-cercle infini n'a aucun intérêt
puisqu'elle ne modifie pas les conditions de stabilité.
II.2.3. Abaque de Black.
Cet abaque permet de déterminer le gain et la phase de la fonction de transfert en boucle
fermée à partir du diagramme de Black de la fonction de transfert en boucle ouverte pour un
système à retour unitaire. Il est donc construit dans le plan de Black et donnent les courbes
d'isomodule et d'isophase da la transmittanceK (j) H (j)
1 + K (j) H (j)
Ces courbes sont appelées contours de Black:

Rappels
27 F. Pepin
On porte sur l'abaque la réponse harmonique de la boucle ouverte dans les axes
classiques (module en dB, phase) paramètrée en . On obtient par simple lecture sur les
contours de Black module et phase deK (j) H (j)
1 + K (j) H (j), point par point en fonction de .
Dans le cas d'un système bouclé à retour non unitaire, la fonction de transfert en boucle
fermée s'obtient par multiplication par1
K (j)

Rappels
28 F. Pepin

CHAPITRE III
PERFORMANCES DES SYSTEMES ASSERVIS
III.1. DEGRE DE STABILITE.
Dans le chapitre précédent, nous avons distinguer les systèmes stables des systèmes
instables. En pratique, un système strictement stable n'est pas satisfaisant. En effet, si le lieu
de Nyquist de la boucle ouverte d'un système stable en boucle fermée est "trop voisin" du
point critique, sa réponse sera très mal amortie.
Les notions de marge de phase et marge de gain interdisent un voisinage immédiat du
point -1.
Marge de gain (Gm) : soit la pulsation 1 pour laquelle Arg KH (j) = - . La marge de
gain représente le gain qu'il faut rajouter au système pour le rendre instable :
Gm = - 20 Log KH (j1)
Marge de phase (m) : soit 2 / 20 Log KH (j) = 0 dB
m = + Arg KH (j2)
• Dans le plan complexe :
R
I
-1
m
X
KH(j)

Performances d'un système asservi
30 F. Pépin
Le point N (1) est défini par l'intersection du lieu de Nyquist de KH (j) avec le demi-
axe réel négatif.
Le point M (2) est défini par l'intersection du lieu de Nyquist de KH (j) avec le cercle
centré à l'origine de rayon unité.
La marge de phase est l'angle orienté ( ON , OM ).
La marge de gain, exprimée en dB, est Gm = 20 Log1X où X = ON .
• Dans le plan de Black :
G
point
critique m
Gm
• Sur les diagrammes de Bode :
G
0
-180°
m
Gm
Relation entre degré de stabilité et amortissement de la réponse indicielle :
Soit le système suivant, à retour unitaire :

Performances d'un système asservi
31 F. Pépin
+-
K
p ( 1 + p )
E(p) S(p)
La fonction de transfert en boucle fermée H'(p) =S(p)E(p) est :
H'(p) =K
p (1+p) + K=
1
1 +1K p +
K p2
En boucle fermée ce système se comporte comme un système du second ordre. On peut
alors essayer d'établir une relation entre le coefficient d'amortissement (ou le dépassement)
et la marge de phase du système.
On a
2
0=
1K
1
02 =
K
L'allure de la courbe donnant le coefficient d'amortissement en fonction de la marge de
phase est :
m
10° 20° 30° 40° 50° 60° 70°
1
En particulier, une marge de phase de 65° est nécessaire pour avoir un amortissement =
0.7 ; une marge de phase de 45° conduit à = 0.42, soit un dépassement de 22%.
Dans le cas général, on ne peut pas établir de relation aussi directe entre le dépassement
en réponse indicielle et la marge de phase. Toutefois, retenons qu'une marge de phase de 45°
à 50° conduit dans la plupart des cas à un dépassement de l'ordre de 20% dans le cas où le
retour K(p) est réel.
III.2. PRECISION
On a vu que le rôle d'un système asservi est de faire suivre à la sortie s une loi déterminée
en général par l'entrée. La qualité d'un tel système se jugera non seulement par sa stabilité,
mais aussi par la précision avec laquelle la loi est suivie.
La forme générale d'un système asservi est :

Performances d'un système asservi
32 F. Pépin
Chaînedirecte
+-
Capteur
e(t) s(t)(t)
e (t)r
L'étude de la précision d'un système asservi passe par le calcul de (t) en fonction de
l'entrée, ou d'éventuelles perturbations. En effet, er(t) étant l'image de la grandeur de sortie
(fabriqué par le capteur) et homogène à la grandeur d'entrée, (t) = e(t) - er(t) permet de
calculer la différence entre l'objectif à atteindre et l'objectif effectivement atteint. De plus,
cette différence est calculée en fonction du signal d'entrée appliqué au système, ce qui donne
plusieurs types d'erreurs (erreur statique, erreur de traînage,..).
Soit la structure suivante d'un système asservi, où apparaît une entrée de perturbation
par l'intermédiaire d'un additionneur :
+-
E(p) S(p)
E (p)r
(p)+
+
B(p)
H (p)1
H (p)2
K(p)
avec H(p) = H1(p) H2(p) fonction de transfert de la chaîne directe.
En vertu du principe de superposition :
(p) = e(p) + b(p) oùe(p)
E(p) =1
1 + H1(p) H2 (p) K(p)
etb(p)
B(p) = -H2(p) K(p)
1 + H1(p) H2(p) K(p)
Ces expressions se calculent simplement en envisageant les deux cas suivants :

Performances d'un système asservi
33 F. Pépin
• e 0 et b = 0
+-
E(p) (p)
K(p) H (p) H (p)1 2
• b 0 et e = 0
+-
B(p) (p)
H (p)1
K(p) H (p)2
-
-
Les erreurs e(t) et b(t) comportent une partie transitoire et une partie permanente.
- L'erreur transitoire est l'erreur en réponse à des variations de e(t) ou b(t). Cette erreur
caractérise ce que l'on appelle la précision dynamique.
- L'erreur permanente est l'erreur subsistant lorsque le temps tend vers l'infini, en
réponse à des signaux e(t) ou b(t) canoniques (échelon, rampe, signal sinusoïdal). L'erreur en
réponse à des échelons caractérise la précision statique.
Lors de la synthèse des systèmes asservis, on cherche à limiter ces erreurs à des valeurs
maximales fixées par le cahier des charges.
III.2.1. Entrée en échelon - perturbation nulle : erreur statique.
e(p) =1
1 + H(p) K(p) E(p) avec E(p) =E0
p
Le théorème de la valeur finale mous permet d'écrire :
p =0t
Lim
e(t) =0p
Lim
p e(p) =
pp0pLim
Prenons K(p) H(p) =k
p
1 + b1 p + . . .
1 + a1 p + . . .
avec = 0 ou 1 ou 2 ...
ce qui donne :

Performances d'un système asservi
34 F. Pépin
• = 0 p = E01
1 + k
• = 1 p = 0
• = 2 p = 0 . . .
Conclusion :
• Un système possédant au moins une intégration dans la chaîne directe présente une
erreur statique nulle, c'est à dire une erreur statique nulle en réponse à un échelon d'entrée.
• Si le système est de classe 0 ( = 0), l'erreur statique est inversement proportionnelle
au gain statique k. On a donc intérêt, en ce qui concerne la précision statique, a avoir un gain
statique élevé ; mais il est évident que la stabilité sera alors d'autant moins bonne : c'est le
classique compromis précision - stabilité.
III.2.2. Entrée en rampe - perturbation nulle : erreur de traînage:
e(p) =1
1 + H(p) K(p) E(p) avec E(p) =V0
p2
L'erreur de traînage est :
t =0t
Lim
e(t) =0p
Lim
p e(p) =
ppp
V0
0pLim
donc :
• = 0 t
• = 1 t =V0
k
• = 2 t = 0 . . .
La chaîne directe doit donc comporter au moins deux intégrations pour annuler cette
erreur. Dans le cas où la chaîne directe ne comporte qu'une seule intégration, l'erreur de
traînage est d'autant plus faible que k est grand.
III.2.3. Entrée sinusoïdale - perturbation nulle.
e(t) = E0 sin 0 t
e(t) est en régime permanent un signal sinusoïdal de module e tel que

Performances d'un système asservi
35 F. Pépin
e=
jj
Si 0 est dans la bande passante de la boucle ouverte, K(j0) H(j0) >> 1, d'où :
e=
jj
L'amplitude de l'erreur est inversement proportionnelle au gain de la boucle ouverte à la
pulsation 0.
Afin d'obtenir une précision de recopie donnée (par exemple 1% à 0 = 1 rd/s) il est
nécessaire que le gain en boucle ouverte à la pulsation 0 soit supérieur ou égal à 1/ (40 dB
à 0 = 1 rd/s pour l'exemple précité).
0
20Log(1/ )
0 dB
K(j ) H(j )
G
III.2.4. Perturbation en échelon - entrée nulle.
b(p)
B(p) = -H2(p) K(p)
1 + H1(p) H2(p) K(p)
B(p) =B0
p b(p) = -B0
p
H2(p) K(p)
1 + H1(p) H2(p) K(p)
L'erreur permanente est alors :
b( ) =0p
Lim
- B0K(p) H2(p)
1 + K(p) H1(p) H2(p)
On pourra vérifier les propositions suivantes :
• Aucune intégration dans la chaîne directe : b( ) 0
• Si une intégration dans H2, et aucune dans H1 : b( ) 0
• Si une intégration dans H1 : b( ) 0

Performances d'un système asservi
36 F. Pépin
Conclusion : un système comportant au moins une intégration dans la chaîne directe en
amont du point d'application de la perturbation (c'est à dire dans H1), présente une erreur
statique nulle en réponse à un échelon de perturbation.
III.2.5. Précision dynamique.
t
e(t)
s(t)
(t)d
Pour un signal d'entrée quelconque, l'expression de l'erreur dynamique est excessivement
complexe. Cependant, s'il existe une limitation des signaux d'entrée en vitesse et en
accélération, il est possible d'obtenir une condition caractérisant la précision exigée
(méthode de la "sinusoïde équivalente").
Le signal d'entrée est alors défini par :
v vM
M
Parmi les signaux satisfaisant ces conditions, le signal sinusoïdal est de loin le plus
simple.
Soit e(t) = E0 sin 0t un tel signal.
La vitesse maximale de ce signal est donnée par vM = E0 0 et l'accélération maximale
par M = E0 02.
Ces deux équations définissent un signal qui doit être recopié avec une erreur inférieure à
dmax.
On a E0 =vM
2
M2 et 0 =MvM
d'où la condition (voir III.2.3) :
M
M
v
γjj
dmax
vM2
M
ou
K(j) H(j)M
M
v
γω
vM
2
M dmax
Notons que dans certains cas cette condition peut être insuffisante.
Performances d'un système asservi
37 F. Pépin
III.2.6 Conclusion.
D'une manière générale, les erreurs décroissent lorsque le gain de la boucle ouverte
augmente, c'est à dire lorsque la bande passante du système augmente.
III.3. RAPIDITE.
Un système asservi doit répondre rapidement aux variations de la consigne (poursuite)
et effacer rapidement les perturbations (régulation). On cherche donc à obtenir un système
rapide (temps de réponse faible), sans trop de dépassement.
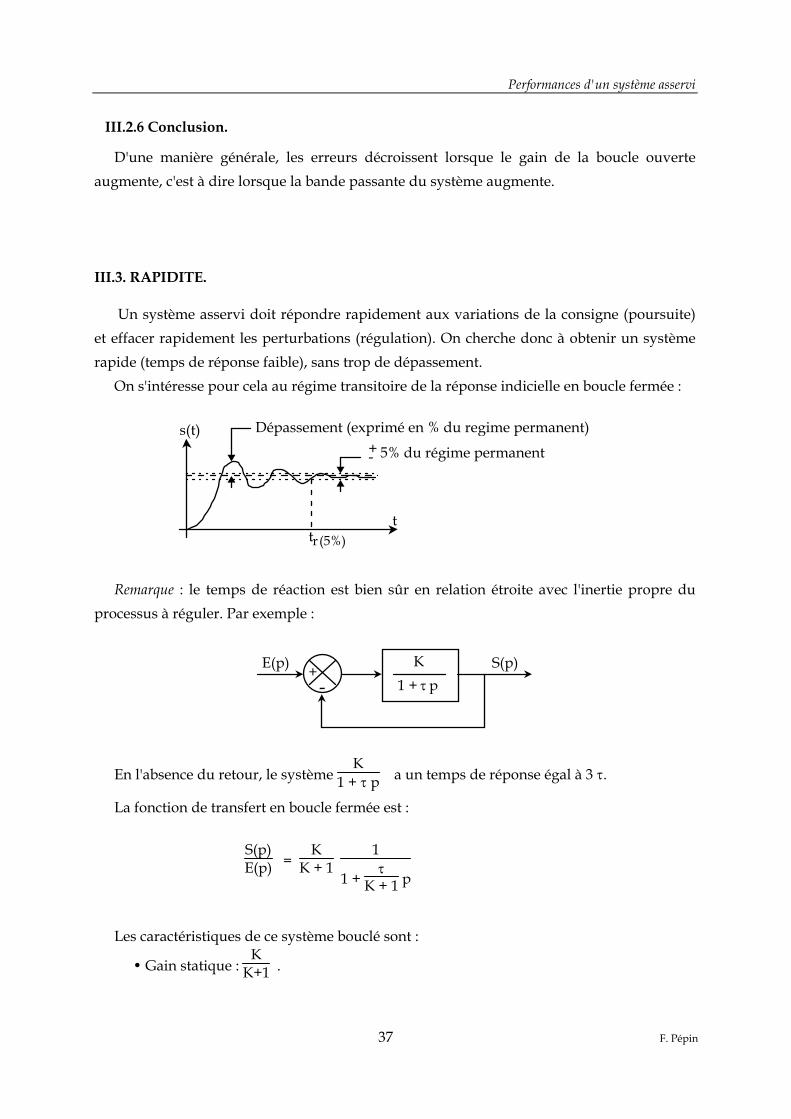
On s'intéresse pour cela au régime transitoire de la réponse indicielle en boucle fermée :
t
s(t)
tr(5%)
+- 5% du régime permanent
Dépassement (exprimé en % du regime permanent)
Remarque : le temps de réaction est bien sûr en relation étroite avec l'inertie propre du
processus à réguler. Par exemple :
+-
K
1 + p
E(p) S(p)
En l'absence du retour, le systèmeK
1 + pa un temps de réponse égal à 3 .
La fonction de transfert en boucle fermée est :
S(p)E(p) =
KK + 1
1
1 +
K + 1 p
Les caractéristiques de ce système bouclé sont :
• Gain statique :K
K+1 .

Performances d'un système asservi
38 F. Pépin
Cette valeur tend vers 1 lorsque K tend vers l'infini ; autrement dit, l'erreur statique
(p =E0
K + 1 ) est d'autant plus faible que le gain K est grand.
• Constante de temps (système du premier ordre) :
K + 1
Le temps de réponse a diminué (K > 1) par rapport au système seul sans bouclage.
Une valeur très grande pour K ne sera cependant pas possible, d'une part à cause de la
stabilité, et d'autre part pour éviter une saturation des amplificateurs de la chaîne directe.
Dans le cas où le cahier des charges impose des caractéristiques temporelles (temps de
réponse, dépassement), il peut être utile de les exprimer en "terme fréquentiel" (facteur de
résonance, pulsation de résonance, bande passante) afin de concevoir le correcteur (chapitre
IV) nécessaire pour remplir ce cahier des charges. C'est par l'intermédiaire de la notion de
second ordre équivalent que l'on peut effectuer un lien entre caractéristiques temporelles et
fréquentielles, grâce à l'existence de pôles dominants.
• Pôles dominants : on considère les pôles de la fonction de transfert en boucle fermée
d'un système asservi. Par exemple, pour un système du troisième ordre :
I
R
- a- b (a > 0 b > 0)
p1
p2
p3
Par décomposition en éléments simples (p1 et p2 d'une part, et p3 d'autre part), la
réponse impulsionnelle d'un tel système peut être vue comme la somme des deux réponses
suivantes :
t
t1
b
1
a
pôles p et p1 2
pôle p3

Performances d'un système asservi
39 F. Pépin
L'influence du pôle p3 est rapidement éliminée, et seule reste la réponse due aux pôles p1
et p2, qui sont alors les pôles dominants. Il est simple d'établir que les pôles dominants sont
les pôles les plus proches de l'axe imaginaire.
• Second ordre équivalent : l'objectif de cette méthode est d'approcher le comportement
du système bouclé par un second ordre, déterminé par l'intermédiaire de la fonction de
transfert en boucle ouverte tracée dans le plan de Black à partir de l'abaque de Black.
Soient les deux fonctions de transfert en boucle ouverte suivantes :
G
G
-180° -90° -90°-180°
KH(j) KH(j)
1
2
A partir de l'abaque de Black, plus précisément grâce aux intersections de KH() avec les
courbes d'isogain, on en déduit la forme du gain de la fonction de transfert en boucle
fermée. Un tracé complet n'est pas nécessaire : on ne détermine que le gain statique et les
caractéristiques de la résonance (pulsation et facteur de résonance) et, éventuellement, la
bande passante à -3dB.
20 log H'(j)
12
r
R BP0
-3 dB
20 log H'(j)
rR
BP0
-3 dB
r : pulsation de résonance (point tangent à la courbe d'isogain maximale)
R (dB) : facteur de résonance = 20 log H'(jr) - 20 log H'(0)
BP : bande passante,dont la définition peut être différente de l'électronique.
A partir de ces données, on peut déterminer le second ordre équivalent, plus précisément
les caractéristiques de ce second ordre (pulsation propre et coefficient d'amortissement) :
H'(j) =H0
1 + 2 j0
+ (j0
)2

Performances d'un système asservi
40 F. Pépin
avec R = 20 log1
2 1 - 2
r = 0 1 - 2 2
Ces deux caractéristiques permettent alors de déterminer les performances temporelles
du système bouclé, c'est à dire le temps de réponse et le dépassement :
temps de réponse
0 tDépassemen
Les caractéristiques d'un système du second ordre sont rappelées dans l'annexe 2.
Exemple : soit la fonction de transfert en boucle ouverte suivante :
G
-90°-180°
KH(j)
3.6 dB
r
15.2 dB
= 0.29 rd/s
Le gain statique en boucle fermée est égale à -1.4 dB :
20 log KH(0) = 15,2 dB KH(0) = 5.75 20 log H'(0) = -1.4 dB
donc :
R = 1.4 + 3.6 = 5 dB
r = 0.29 rd/s
On en déduit que :
= 0.294
0 = 0.32 rd/s
Par l'intermédiaire des courbes ou des relations données en annexe 2, les caractéristiques
de la réponse indicielle de ce système bouclé sont :
D = 37 %
tr 5% = 31.2 s

Performances d'un système asservi
41 F. Pépin
Remarque : on peut aussi bien sûr obtenir une réponse indicielle sans dépassement, dans
le cas où le pôle dominant est réel.
Note : la courbe donnant le produit tr en fonction de nous montre que, pour un
coefficient d'amortissement fixé, plus est grand et plus le système est rapide. Autrement
dit, puisque la bande passante est en relation avec la pulsation propre, un système est
d'autant plus rapide que la bande passante est grande.
Cette notion de second ordre équivalent ne permet d'obtenir qu'un ordre de grandeur des
caractéristiques temporelles ; tout dépend bien sûr de la configuration des pôles de la
fonction de transfert en boucle fermée, plus précisément de la prépondérance des pôles
dominants devant les autres pôles.

Performances d'un système asservi
42 F. Pépin
CHAPITRE IV
CORRECTION DES SYSTEMES ASSERVIS
IV.1. ROLE DES CORRECTEURS.
Rappelons que pour obtenir :
- une bonne précision, il faut :
- en statique, avoir une ou plusieurs intégrations dans la chaîne directe ;
- en dynamique, avoir un gain élevé pour certaines pulsations, c'est à dire
une large bande passante.
- un bon degré de stabilité, il faut :
- que le gain soit le plus faible possible en boucle ouverte d'où une faible
bande passante ;
- que le déphasage soit faible d'où le minimum d'intégrateurs possible.
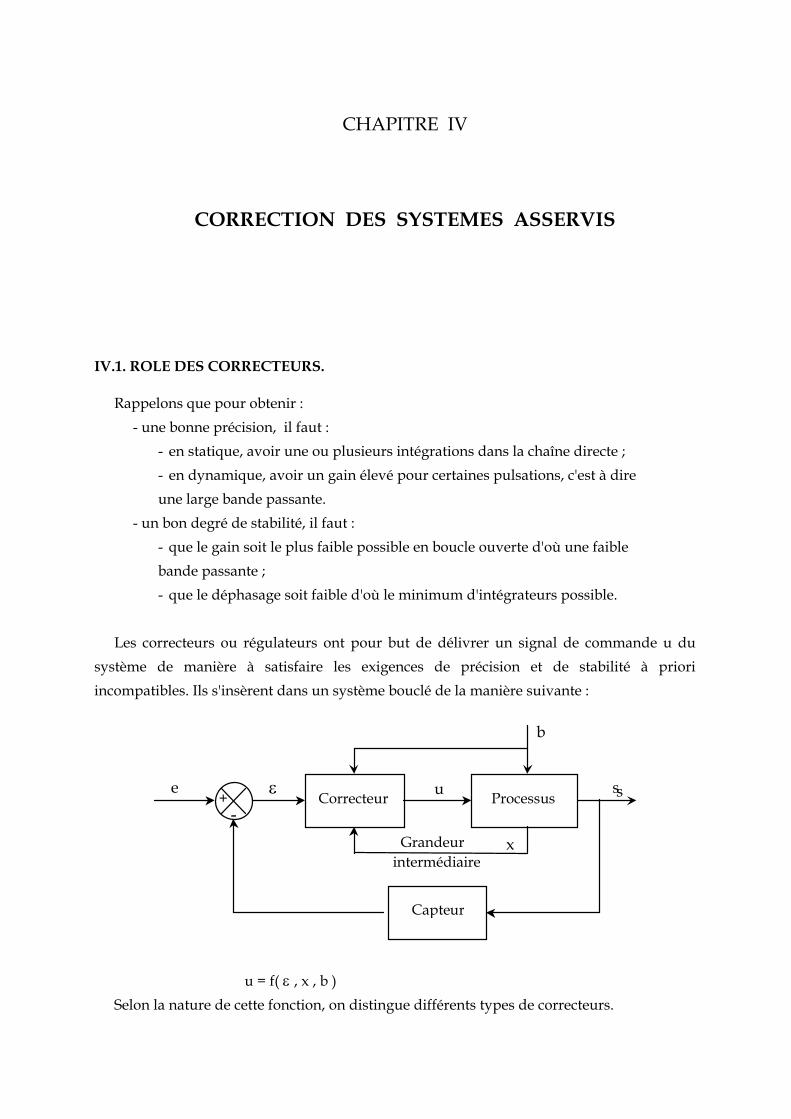
Les correcteurs ou régulateurs ont pour but de délivrer un signal de commande u du
système de manière à satisfaire les exigences de précision et de stabilité à priori
incompatibles. Ils s'insèrent dans un système bouclé de la manière suivante :
+-
Correcteur Processus
ue
Grandeur
intermédiaire
b
s
Capteur
s
x
u = f( , x , b )
Selon la nature de cette fonction, on distingue différents types de correcteurs.

Correction
44 F. Pépin
IV.1.1. Correction série.
Ce type de correcteur est inséré dans la chaîne directe en série avec le processus, et
délivre un signal de commande
u(t) = f ((t))
+-
(p)C(p) H(p)
U(p)E(p) S(p)
K(p)
La loi de commande la plus simple est la loi en "tout ou rien" :
si > 0 u maximum
si < 0 u = 0
comme la commande thermostatique d'un appareil de chauffage, mais une telle commande
ne donne pas un régulateur linéaire.
Le rôle de ce correcteur est donc d'établir une grandeur de commande u en fonction du
signal d'erreur pour atteindre les performances désirées. Il le fait en corrigeant le lieu de
transfert de la boucle ouverte pour obtenir un lieu de transfert corrigé, idéalement placé
dans le plan de Black afin que la boucle fermée ait les caractéristiques voulues.
On ne s'intéressera pour l'instant qu'à la commande analogique. Le correcteur analogique
est un filtre construit généralement à l'aide d'amplificateurs opérationnels. Un prochain
chapitre sera consacré à la commande numérique.
Une construction simple de ce correcteur, ou plus précisément la détermination de sa
fonction de transfert C(p), pourrait être la suivante : par l'intermédiaire du cahier des
charges, on se fixe H'(p) fonction de transfert de la boucle fermée.
Puisque
H'(p) =C(p) H(p)
1 + C(p) K(p) H(p)
on en déduit que
C(p) =H'(p)
H(p) ( 1 - K(p) H'(p))
Une tel calcul n'aboutit cependant pas forcément à une fonction de transfert
physiquement réalisable.
On distingue trois fonctions principales :
• action proportionnelle, notée P :
u(t) = Kp (t) U(p) = Kp (p)

Correction
45 F. Pépin
Cette commande peut être vue comme une amélioration de la commande en tout ou rien,
avec comme principe de réduire le signal de commande lorsque l'on se rapproche du
résultat à atteindre.
Dans le cas où le gain Kp est grand, on obtient une commande énergique, avec cependant
un risque de dépassement, voir d'oscillations, et aussi de saturation des amplificateurs. Si le
gain Kp est trop faible, la commande est molle et lente, avec aucune efficacité.
• action intégrale, notée I :
u(t) =1Ti (t)dt U(p) =
1Ti p (p)
Sans intégration, il y a une erreur résiduelle (erreur statique). L'intégration permet
d'obtenir un signal de commande différent de zéro lorsque la grandeur de sortie a atteint la
consigne.
Dans le d'une correction proportionnelle et pour une variation importante de la consigne,
u = Kp est immédiatement saturé. Il peut être avantageux de fournir une commande
progressive, adaptée à l'inertie du système. En considérant la grandeur de retour nulle, on
obtient :e
t
t
u
1Ti
Si Ti est trop petit, on a un démarrage trop brutal. Si, par contre, Ti est trop grand, le
signal u(t) varie trop lentement, avec comme conséquence une augmentation du temps de
réponse.
• action dérivée, notée D :
u(t) = Tdd((t))
dt U(p) = Td p (p)
Prenons un asservissement de température, avec T la température de sortie et Tc la
température de consigne. Si T < Tc, il faut chauffer ; mais il y a lieu de prendre une décision
différente selon que T soit en train d'augmenter ou de diminuer. Dans le premier cas, il faut
réduire la commande pour éviter le plus possible un éventuel dépassement. Par contre, dans
le deuxième cas, il faut au contraire chauffer encore plus, donc augmenter le signal de
commande. Un tel comportement est réalisé par la commande suivante :
u(t) = K ( (t) + Tdd(t)
dt )

Correction
46 F. Pépin
Un correcteur série réalise plus ou moins parfaitement des combinaisons de ces trois
actions.
Notons que ce type de correcteur agit à la fois sur la précision statique, sur la précision
dynamique ou rapidité, et sur la stabilité. En première approximation :
- l'action I annule l'erreur statique,
- l'action P augmente la rapidité,
- l'action D tend à stabiliser le système.
IV.1.2. Correction parallèle.
Ce type de correcteur se greffe en parallèle sur un élément de la chaîne directe.
u = f1 () + f2 (x)
+-
H (p)
ue
Capteur
x1 H (p)2+
-
C(p)
H (p)3s
H1 caractérise f1() et peut être un correcteur série. f2(x) caractérise l'action de la
correction parallèle où x est une grandeur intermédiaire entre la commande et la sortie.
Souvent x =dsdt et on parle alors de correction tachymétrique.
Notons que ce correcteur agit essentiellement sur la stabilité et la rapidité, et non sur
l'erreur statique (ce correcteur ne peut pas introduire d'intégration).
IV.1.3. Correction par anticipation.
L'objectif d'un tel correcteur est de compenser les perturbations.
Correction
47 F. Pépin
+-
H (p)
e
Capteur
1 H (p)2+
C(p)
H (p)3s+
++
b
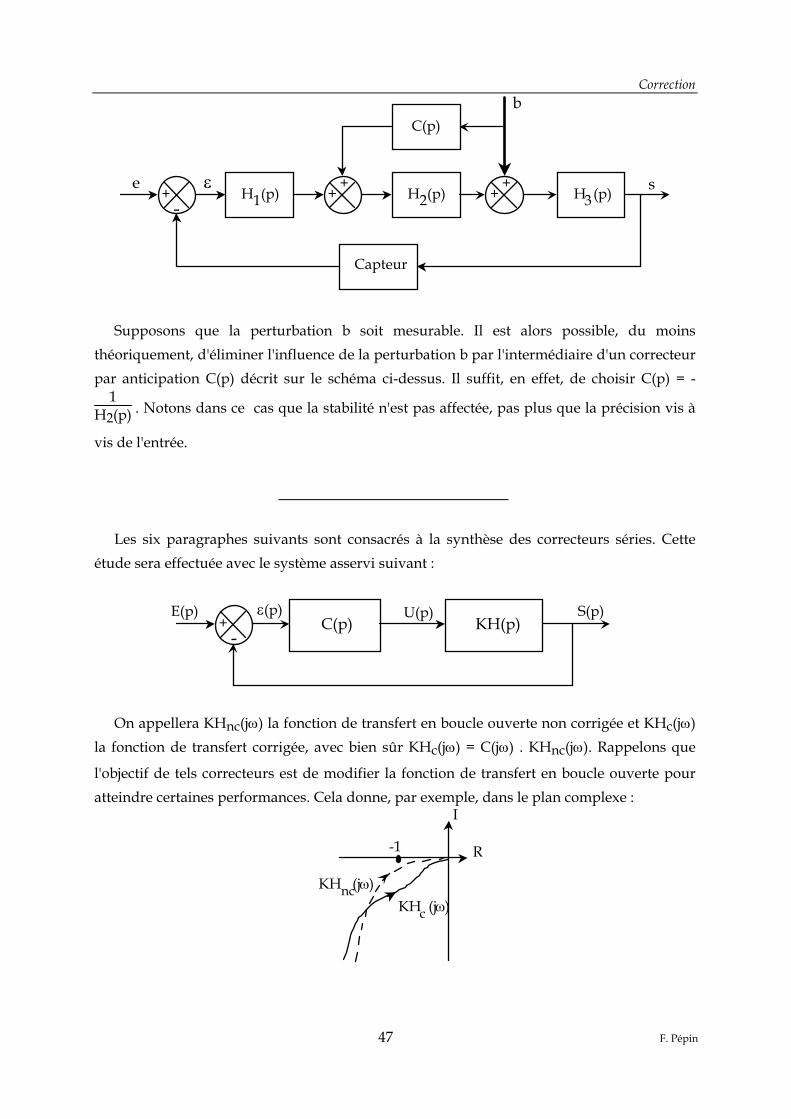
Supposons que la perturbation b soit mesurable. Il est alors possible, du moins
théoriquement, d'éliminer l'influence de la perturbation b par l'intermédiaire d'un correcteur
par anticipation C(p) décrit sur le schéma ci-dessus. Il suffit, en effet, de choisir C(p) = -1
H2(p) . Notons dans ce cas que la stabilité n'est pas affectée, pas plus que la précision vis à
vis de l'entrée.
Les six paragraphes suivants sont consacrés à la synthèse des correcteurs séries. Cette
étude sera effectuée avec le système asservi suivant :
+-
(p)C(p) KH(p)
U(p)E(p) S(p)
On appellera KHnc(j) la fonction de transfert en boucle ouverte non corrigée et KHc(j)
la fonction de transfert corrigée, avec bien sûr KHc(j) = C(j) . KHnc(j). Rappelons que
l'objectif de tels correcteurs est de modifier la fonction de transfert en boucle ouverte pour
atteindre certaines performances. Cela donne, par exemple, dans le plan complexe :I
R-1
KH (j)c
KH (j)nc
Correction
48 F. Pépin
La conception des correcteurs est une affaire d'expérience et de compromis, pouvant
revêtir des formes variées conduisant à des solutions diverses.
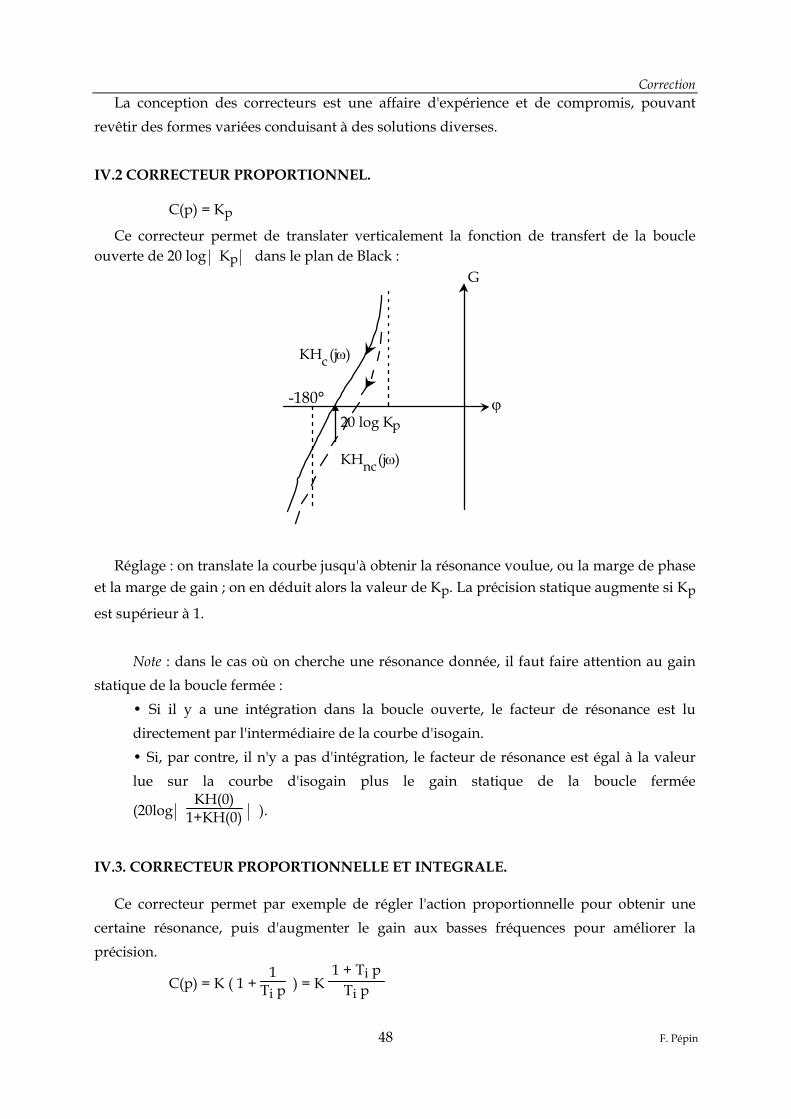
IV.2 CORRECTEUR PROPORTIONNEL.
C(p) = Kp
Ce correcteur permet de translater verticalement la fonction de transfert de la boucle
ouverte de 20 log Kp dans le plan de Black :
G
-180°
KH (j)nc
KH (j)c
20 log Kp
Réglage : on translate la courbe jusqu'à obtenir la résonance voulue, ou la marge de phase
et la marge de gain ; on en déduit alors la valeur de Kp. La précision statique augmente si Kp
est supérieur à 1.
Note : dans le cas où on cherche une résonance donnée, il faut faire attention au gain
statique de la boucle fermée :
• Si il y a une intégration dans la boucle ouverte, le facteur de résonance est lu
directement par l'intermédiaire de la courbe d'isogain.
• Si, par contre, il n'y a pas d'intégration, le facteur de résonance est égal à la valeur
lue sur la courbe d'isogain plus le gain statique de la boucle fermée
(20logKH(0)
1+KH(0) ).
IV.3. CORRECTEUR PROPORTIONNELLE ET INTEGRALE.
Ce correcteur permet par exemple de régler l'action proportionnelle pour obtenir une
certaine résonance, puis d'augmenter le gain aux basses fréquences pour améliorer la
précision.
C(p) = K ( 1 +1
Ti p ) = K1 + Ti p
Ti p

Correction
49 F. Pépin
Les diagrammes de Bode de ce correcteur sont :
G
20 log K
1
T i
0°
-90°
Augmentation de la précision
Effet déstabilisant
Pour augmenter la précision statique, sans perturber la stabilité ni la rapidité, il faut
prendre1Ti
<< c avec c la pulsation pour laquelle la phase de KH(j)
est égale à -180°
Avec K=1, donc sans modification des performances dynamiques, on obtient dans le plan
complexe et dans le plan de Black :
G
-180°
KH (j)nc
KH (j)c
KH (j)c
KH (j)nc
c
c
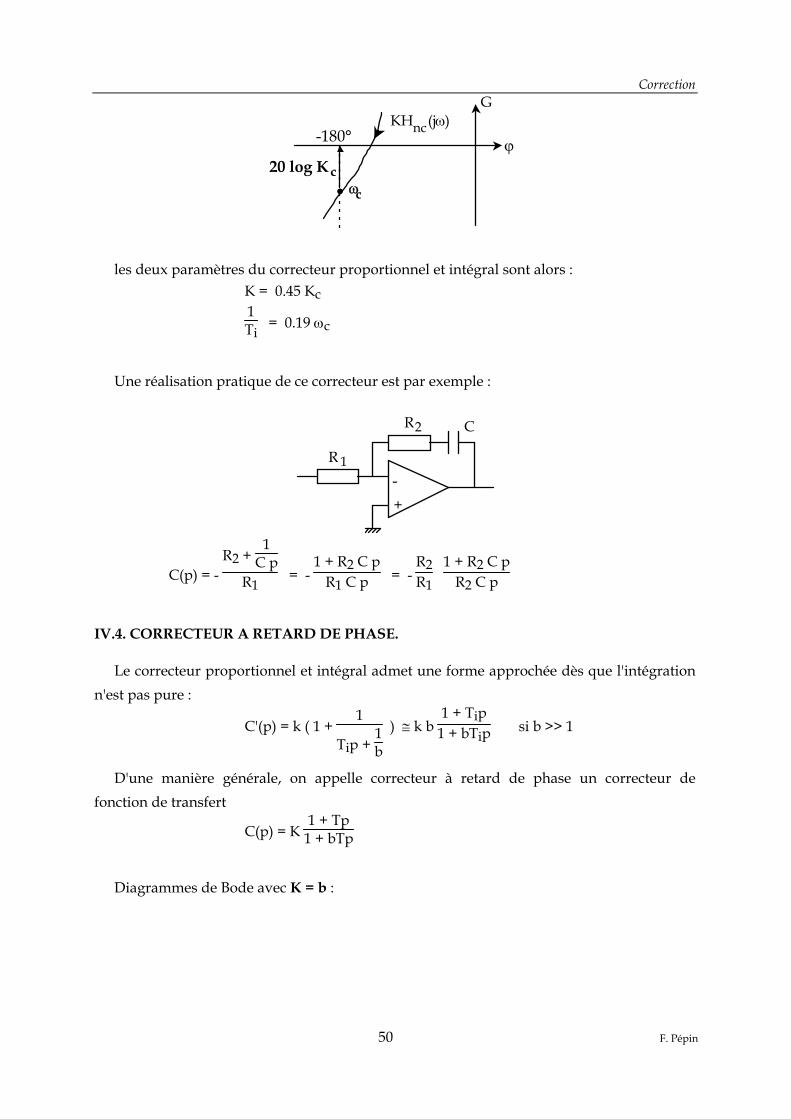
Réglage de Ziegler et Nichols : pour le système asservi sans correcteur, on mesure la
pulsation critique ainsi que le gain critique par un essai de "pompage" : on augmente le gain
jusqu'à une valeur critique Kc, et on relève la pulsation des oscillations c. Dans le plan de
Black, ces deux caractéristiques sont données par la figure suivante :
Correction
50 F. Pépin
G
-180°
c
20 log K c
KH (j)nc
les deux paramètres du correcteur proportionnel et intégral sont alors :
K = 0.45 Kc
1Ti
= 0.19 c
Une réalisation pratique de ce correcteur est par exemple :
-
+
R 1
R2 C
C(p) = -
R2 +1
C p
R1= -
1 + R2 C p
R1 C p = -R2
R1
1 + R2 C p
R2 C p
IV.4. CORRECTEUR A RETARD DE PHASE.
Le correcteur proportionnel et intégral admet une forme approchée dès que l'intégration
n'est pas pure :
C'(p) = k ( 1 +1
Tip +1b
) k b1 + Tip
1 + bTipsi b >> 1
D'une manière générale, on appelle correcteur à retard de phase un correcteur de
fonction de transfert
C(p) = K1 + Tp
1 + bTp
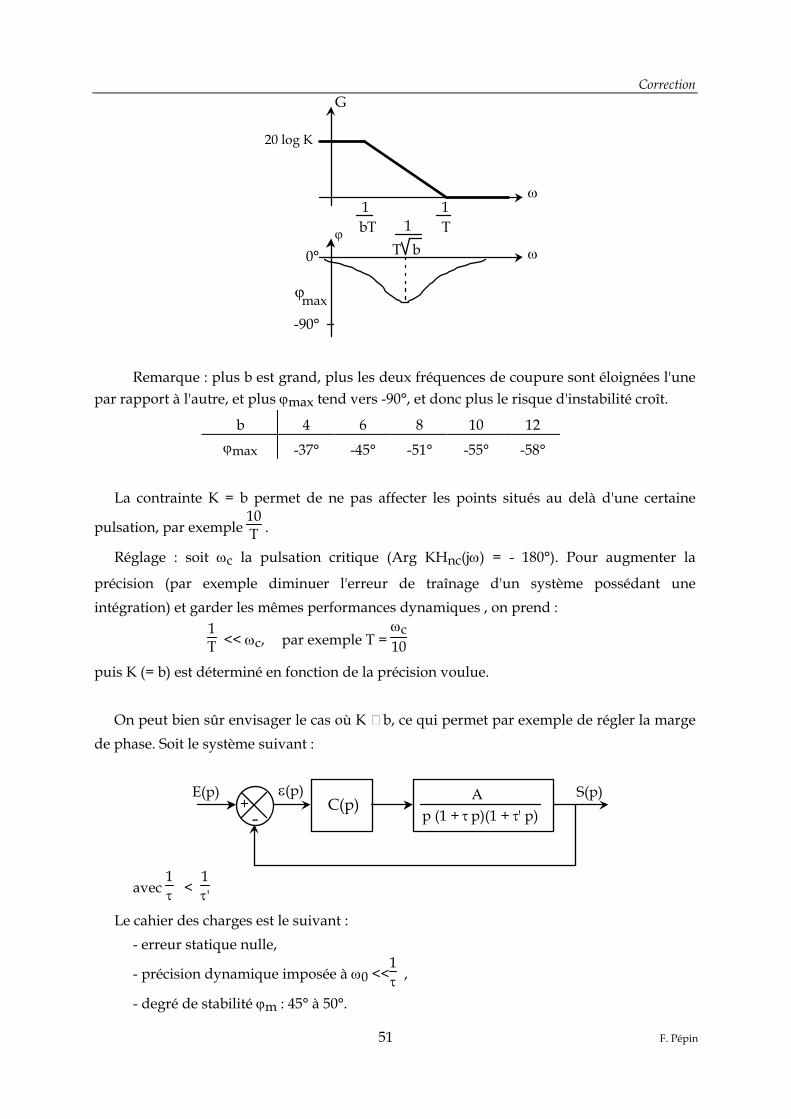
Diagrammes de Bode avec K = b :
Correction
51 F. Pépin
G
1
T
0°
-90°
1
bT 1
T b
max
20 log K
Remarque : plus b est grand, plus les deux fréquences de coupure sont éloignées l'une
par rapport à l'autre, et plus max tend vers -90°, et donc plus le risque d'instabilité croît.
b 4 6 8 10 12
max -37° -45° -51° -55° -58°
La contrainte K = b permet de ne pas affecter les points situés au delà d'une certaine
pulsation, par exemple10T .
Réglage : soit c la pulsation critique (Arg KHnc(j) = - 180°). Pour augmenter la
précision (par exemple diminuer l'erreur de traînage d'un système possédant une
intégration) et garder les mêmes performances dynamiques , on prend :
1T << c, par exemple T =
c
10
puis K (= b) est déterminé en fonction de la précision voulue.
On peut bien sûr envisager le cas où K b, ce qui permet par exemple de régler la marge
de phase. Soit le système suivant :
+-
(p)C(p)
E(p) S(p)A
p (1 + p)(1 + ' p)
avec1
<
1
'
Le cahier des charges est le suivant :
- erreur statique nulle,
- précision dynamique imposée à 0 <<1
,
- degré de stabilité m : 45° à 50°.

Correction
52 F. Pépin
La fonction de transfert de la chaîne directe possédant déjà une intégration, le premier
point du cahier des charges est assuré. Le deuxième point est obtenu en agissant sur le gain
à la pulsation 0, ce qui impose le paramètre K du correcteur, ainsi que la première
fréquence de coupure. Enfin, la marge de phase est réglée par l'intermédiaire de la deuxième
fréquence de coupure du correcteur. Ce dernier réglage n'est cependant pas immédiat à
cause du retard de phase introduit par le correcteur, sauf si1T << c.
0°
0 c
1
(-1)
(-2)
(-1)
(-2)
(-3)
1bT
1T
20logC(j)
20logKH (j)c
20logKH (j)nc
m
Arg(KH (j)nc
Arg(KH (j)c
IV.5. CORRECTEUR PROPORTIONNEL ET DERIVE.
C(p) = K ( 1 + Td p )
En pratique :
C(p) = K1 + Td p
1 + pavec
1
>>
1Td
pour que la pulsation de coupure
introduite par le dénominateur soit hors bande
passante du système.

Correction
53 F. Pépin
Diagrammes de Bode :
G
20 log K
1
Td
0°
90°
Effet négatif : augmentation
Effet positif : avancede phase
du gain en haute fréquence
= d
L'action de correcteur est meilleure autour de d, puisque l'avance de phase est de 45°,
alors que le gain n'a été que très légèrement modifié. On en déduit que1
Td= c, le gain
étant ensuite ajusté en fonction de la résonance désirée. Dans le plan de Black, cela donne :
G
KH (j)nc
KH (j)c
c
r
'r
sans le réglage du gain
Après le réglage du gain, la pulsation de résonance r' est plus grande que r ; la rapidité
du système asservi a donc été améliorée.

Correction
54 F. Pépin
IV.6. CORRECTEUR A AVANCE DE PHASE.
C(p) = K1 + a T p1 + T p avec a > 1
Diagrammes de Bode :
G
1
T
0°
90°
1
aT 1
T amax
K = 1
G
1
T
1
aT
K > 1
20logK
Note : calcul de max
C(j1
T a) =
1 + aj
1 +1
aj
=
(1 + aj)(1 -1
a)
1 +1a
=
2 + j( a -1
a)
1 +1a
donc max = Arctg(
a -1
a
2 = Arctg (a - 1
2 a)
ou max = Arcsina - 1a + 1
Ce correcteur permet de déformer le lieu de transfert de la boucle ouverte en vue
d'améliorer la stabilité et la rapidité. Il agit préférentiellement sur la zone située au environ
de la résonance :

Correction
55 F. Pépin
G
-180°
KH (j)nc
Zone de féquence affectée
par le correcteur
Pour diminuer le temps de réponse, il faut augmenter la bande passante, donc la
pulsation de résonance (à coefficient d'amortissement fixé). L'idée est d'augmenter la
phase à la pulsation r', puis de régler K pour obtenir la même résonance :
G
-180°
'r
Il n'existe cependant pas de méthode générale de réglage d'un tel correcteur. Voyons sur
un cas particulier les problèmes posés par ce réglage :
+-
(p)C(p)
E(p) S(p)A
p (1 + p)
La boucle ouverte du système non corrigé présente une intégration. Une action intégrale
n'est pas nécessaire. Supposons que l'on veuille diminuer le temps de réponse en boucle
fermée, ou bien améliorer la précision dynamique à la pulsation o <<1
. On est alors
amené à introduire un gain K (action proportionnelle) dans la chaîne :

Correction
56 F. Pépin
0°
0
m
20 logK A
p (1 + p)
ArgK A
p (1 + p)
On constate sur la construction ci-dessus que la marge de phase est insuffisante. Une
correction est alors nécessaire, correction à avance de phase par exemple :

Correction
57 F. Pépin
0°
0
20logC(j)
20logKH (j)c
mArg(KH (j)nc
Arg(KH (j)c
Arg C(j)
'c
On constate que le système en boucle ouverte sans correction ne déphase pas en deçà de -
180°. En conséquence, un correcteur à avance de phase choisi pour a = 6, s'il est
convenablement placé, peut apporter une avance de phase de 45°, suffisant à assurer un
degré de stabilité convenable au système. Il s'agit alors de couper l'axe 0 dB à la pulsation1
T a= c' où l'avance de phase du correcteur est maximale.
Dans le plan de Nyquist, cela donne :

Correction
58 F. Pépin
I
R-1
KH (j)c
KH (j)nc
IV.7. CORRECTEUR P.I.D.
C(p) = K ( 1 + Td p +1
Ti p )
= K (1 + Ti p + Ti Td p2
Ti p )
Ti et Td règle respectivement l'action intégrale et dérivée.
En pratique, pour ne pas amplifier les hautes fréquences, on rajoute un filtre passe-bas de
pulsation de coupure très grande devant1
Tdpour que l'action dérivée soit toujours présente
:
C(p) = K ( 1 +1
Ti p +Td p
1 +Td
N p
) avec par exemple N = 10.
IV.7.1. Réponse fréquentielle du correcteur P.I.D.
Calculons les racines du numérateur de C(p), c'est à dire :
1 + Ti p + Ti Td p2 = 0
Il y a deux racines réelles si Ti > 4 Td, ou Td <Ti4 . Or, il est normal d'avoir
1Ti
<1
Tdpour
que l'action intégrale intervienne aux basses fréquences, et donc avant l'action dérivée. On
supposera donc une telle hypothèse vérifiée.
Les racines sont :
z1 =- Ti + Ti ( Ti - 4Td)
2 Ti Td=
-1 + 1 - 4Td
Ti
2 Td
z2 =- Ti - Ti ( Ti - 4Td)
2 Ti Td=
-1 - 1 - 4Td
Ti
2 Td
Le numérateur de C(p) s'écrira alors :
TiTd(p - z1) (p - z2)

Correction
59 F. Pépin
On peut donc définir les deux pulsations suivantes :
1 =
1 - 1 - 4Td
Ti
2 Td
2 =
1 + 1 - 4Td
Ti
2 Tdavec Td <
Ti4
De plus 1 2 =1
Ti Td, donc en appelant i =
1Ti
et d =1
Td, on en déduit que
12=id.
Diagrammes de Bode :
20logC(j)
0°
-90°
90°
Arg C(j)
i
1 2
d
K = 1
On note que C(j id ) = 1 (gain = 0 dB et argument = 0°) dans le cas où K=1. Cette
pulsation sera appelé par la suite la pulsation "pivot" p.
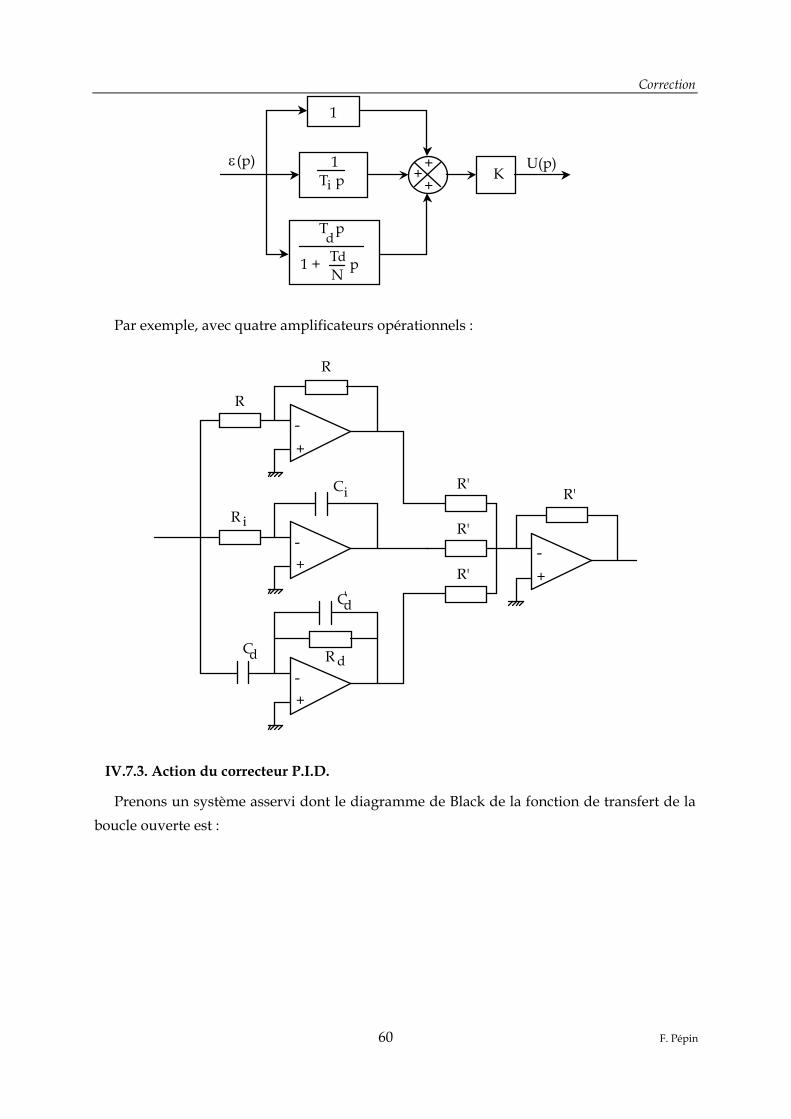
IV.7.2. Réalisation.
Le principe est donné par le schéma fonctionnel suivant :
Correction
60 F. Pépin
K++
T pd
1 + pTd
N
1
T pi
1
(p) U(p)
+
Par exemple, avec quatre amplificateurs opérationnels :
-
+
R
R
-
+
R i
C
-
+
R
C
-
+
R'
R'i
d
d'
Cd
R'
R'
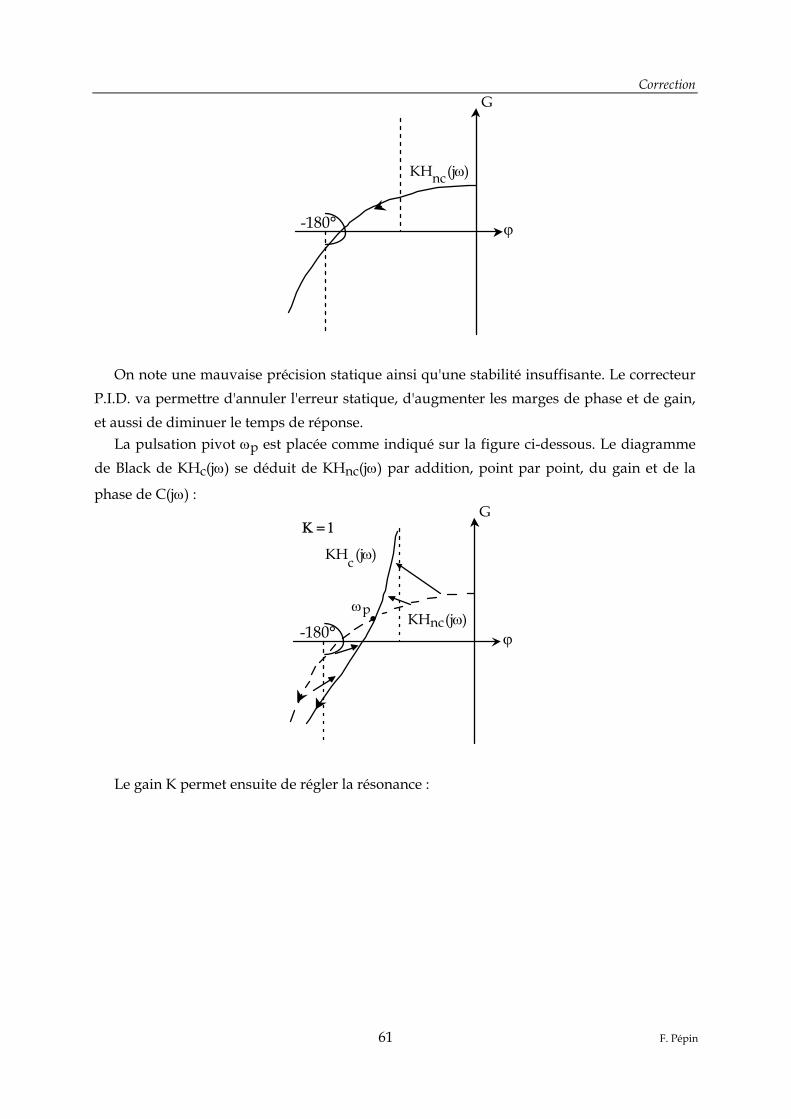
IV.7.3. Action du correcteur P.I.D.
Prenons un système asservi dont le diagramme de Black de la fonction de transfert de la
boucle ouverte est :
Correction
61 F. Pépin
G
-180°
KH (j)nc
On note une mauvaise précision statique ainsi qu'une stabilité insuffisante. Le correcteur
P.I.D. va permettre d'annuler l'erreur statique, d'augmenter les marges de phase et de gain,
et aussi de diminuer le temps de réponse.
La pulsation pivot p est placée comme indiqué sur la figure ci-dessous. Le diagramme
de Black de KHc(j) se déduit de KHnc(j) par addition, point par point, du gain et de la
phase de C(j) :
G
-180°KH (j)nc
KH (j)c
p
Le gain K permet ensuite de régler la résonance :

Correction
62 F. Pépin
G
-180°KH (j)nc
KH (j)c
Réglage de Ziegler et Nichols : connaissant Kc et Tc =2
c, les trois paramètres du
correcteur P.I.D. sont donnés par :
K = 0.6 Kc Ti = 0.5 Tc Td =Ti
4 = 0.125 Tc

ANNEXE 1
DEMONSTRATION DE LA REGLE DU REVERS
Notion de transformation conforme :
• Chemin : c'est une application t a , b (t) C
• Fonction à variable complexe : f : z f(z)
A tout point complexe, on associe son image par f dans le plan complexe.
• Appliquons cette fonction à un chemin : on obtient aussi un chemin
R
I
R
I
f o
• Transformation conforme : soient deux chemins 1 et 2 se coupant en un point z1,
dont leurs tangentes en ce point forment un angle . On dit que f est une transformation
conforme si f o 1 et f o 2 forment aussi un angle au point f(z1) :
R
I
1
2
R
I
1
2
f o
f o
Remarque : tout quotient de polynôme est une transformation conforme.

Correction
64 F. Pépin
Conséquence : si maintenant on prend une sorte de réseau maillé pour les chemins, on
obtient :
R
I
1234
a
b
c
d
R
I
1'
2'
3'
4'
a'
b'
c'd'
On remarque que si 1 voit 2 à gauche, 1'=f(1) voit aussi 2'=f(2) à gauche.
Application à l'étude le la stabilité d'un système bouclé :
Soit un zéro de 1+KH, donc un pôle de H'. Faisons décrire à p une droite passant par ce
zéro ; 1+KH passe alors par 0 :
R
I
Zérop
I
R
1+KH
Si maintenant p décrit un chemin donné par p=j, et si la partie réelle du zéro est
négative, le chemin correspondant à 1+KH est à droite du précédent (au contraire, si la
partie réelle du zéro est positive, le chemin sera à gauche) :
R
I
Zérop
I
R
1+KH
Conclusion : 1+KH ne possède pas de zéros à partie réelle positive si le chemin décrit par
1+KH lorsque p=j voit l'origine à gauche.

Correction
65 F. Pépin
Remarque : la règle du revers peut aussi se voir comme conséquence du critère de
Nyquist, qui est plus complet.

Correction
66 F. Pépin

ANNEXE 2
CARACTERISTIQUES D'UN SYSTEME DU SECOND ORDRE
H(p) =H0
1 + 2p
0+
p2
02
REPONSE INDICIELLE
Temps de montée tm =1
0 1 - 2( - Arccos )
Temps de réponse à n % ( < 0.7) tr =1
0 Log (
100n )
Temps de pic tpic =
0 1 - 2
Pseudo-période Tp =2
0 1 - 2
pseudo-pulsationp = 0 1 - 2
Dépassement D % = 100 exp(-
1 - 2)
Rapport de 2 maximas successifs D1
D2= exp (
2
1 - 2)

Annexe 2
68
Temps de réponse :
tr ω o
Dépassement :
Dn

Annexe 2
69
REPONSE FREQUENTIELLE
R
r
c
3 dB
G
Pulsation de résonance r = 0 1 - 2 2
Pulsation de coupure c = 0 1 - 22 + 1 + (1 - 22)2
Facteur de résonance RdB = 20 log1
2 1 - 2
Quelques valeurs :
tr o D % R
oR dB
0.1 30 73 0.99 14
0.15 20 62 0.98 10.5
0.2 14 53 0.96 8.1
0.25 11 44 0.94 6.3
0.3 10.1 37 0.91 4.8
0.35 7.9 31 0.87 3.6
0.4 7.7 25 0.82 2.7
0.45 5.4 21 0.77 1.9
0.5 5.3 16 0.71 1.2
0.55 5.3 12.6 0.63 0.7
0.6 5.2 9.5 0.53 0.3
0.65 5.0 6.8 0.39 0.1
0.7 3 4.6 0.14 0
0.75 3.1 2.84
0.8 3.4 1.52
0.85 3.7 0.63
0.9 4 0.15
0.95 4.1 0.01





























