Embed Size (px)
Citation preview

Cours 02 - Systèmes linéaires continus et invariants Page 1/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
Systèmes linéaires continus et invariants
1) INTRODUCTION : LES TROIS TYPES DE SYSTÈMES AUTOMATISÉS ..................... 5
11) LES SYSTÈMES LOGIQUES COMBINATOIRES ........................................................................... 5
12) LES SYSTÈMES LOGIQUES SÉQUENTIELS ............................................................................... 5
13) LES SYSTÈMES CONTINUS .................................................................................................... 5
2) PERFORMANCES DES SYSTÈMES CONTINUS .......................................................... 6
21) LA PRÉCISION, CARACTÉRISÉE PAR L’ERREUR STATIQUE OU L’ERREUR DE POURSUITE ............. 6
22) LA RAPIDITÉ, CARACTÉRISÉE PAR LE TEMPS DE RÉPONSE ...................................................... 6
23) LA STABILITÉ, CARACTÉRISÉE PAR LE NOMBRE DE DÉPASSEMENTS ET/OU LA VALEUR DU
PREMIER DÉPASSEMENT ............................................................................................................ 7
24) ANALYSE D'UN SYSTÈME CONTINU ........................................................................................ 7 1
ère phase : observation des critères tels qu’erreur, temps de réponse, dépassements… 7
2ème
phase : conclusion sur les performances telles que précision, rapidité et stabilité. ... 7
3) MODÉLISATION DES SLCI ............................................................................................ 8
31) CONSIGNE, RÉPONSE ET MODÈLE ......................................................................................... 8
32) LIMITES D’ÉTUDE : SYSTÈMES LINÉAIRES, CONTINUS ET INVARIANTS ...................................... 9
33) RÉSOLUTION DE L’ÉQUATION DIFFÉRENTIELLE : LA TRANSFORMÉE DE LAPLACE ..................... 10
331) Techniques de résolution de l’équation différentielle ............................................................. 10
332) Définition mathématique de la transformée de Laplace ........................................................ 10
333) Fonctions causales ................................................................................................................ 10
334) Propriétés de la transformée de Laplace ............................................................................... 10 Linéarité ............................................................................................................................ 10 Dérivation 1
ère ................................................................................................................... 10
Dérivation 2nd
.................................................................................................................... 10 Intégration ......................................................................................................................... 10 Multiplication d’une fonction par une fonction ................................................................... 10 Théorème de la valeur initiale ........................................................................................... 10 Théorème de la valeur finale ............................................................................................ 10
335) Transformées usuelles de fonctions causales ....................................................................... 10
336) Détermination de la Transformée de Laplace inverse ........................................................... 11 1) Mettre l’ordre du polynôme du numérateur inférieur à celui du dénominateur ............ 11 2) Rechercher les racines du dénominateur ..................................................................... 11 3) Factoriser le dénominateur ........................................................................................... 11 4) Décomposer S(p) en éléments simples ....................................................................... 11 5) Identifier des transformées usuelles ............................................................................. 11
34) REPRÉSENTATION DES SLCI PAR FONCTION DE TRANSFERT ................................................ 12
341) Existence de la fonction de transfert si les conditions initiales sont nulles ............................ 12
342) Forme canonique : gain statique, ordre et classe, pôles et zéros ......................................... 12
35) REPRÉSENTATION DES SLCI PAR SCHÉMA-BLOC ................................................................. 13

Cours 02 - Systèmes linéaires continus et invariants Page 2/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
4) SLCI ASSERVIS ........................................................................................................... 13
41) INSUFFISANCE DES SYSTÈMES EN BOUCLE OUVERTE (BO) ................................................... 13
42) LES SLCI ASSERVIS OU EN BOUCLE FERMÉE (BF) ............................................................... 14
421) Systèmes asservis régulateurs et systèmes asservis suiveurs ............................................. 14
422) Différentes fonctions réalisées par un système asservi ........................................................ 14 Traduire la consigne en un signal utilisable par la commande Utilisation d’interfaces H/M.................................................................................................................................... 14 Produire une image de la sortie Utilisation de capteurs .............................................. 14 Comparer l'image de la consigne à l'image de la sortie Utilisation de comparateurs . 14 Corriger et amplifier le signal de commande pour améliorer les performances (précision-rapidité-stabilité) Utilisation de correcteurs + amplificateurs ....................................... 14
423) Représentation par schéma-bloc d’un système asservi élémentaire .................................... 14 Notions de chaîne directe, chaîne de retour, comparateur, erreur et image de l’erreur .. 14
43) SIMPLIFICATIONS DE SCHÉMAS-BLOCS ÉLÉMENTAIRES ......................................................... 15
431) Fonction de Transfert de blocs en série ................................................................................ 15
432) Fonction de Transfert de blocs en parallèle ........................................................................... 15
433) Fonction de Transfert de blocs en Boucle Fermée : FTBF .................................................... 15
434) Fonctions de Transfert de systèmes à n entrées, principe de superposition ........................ 16
44) SIMPLIFICATIONS DE SCHÉMAS-BLOCS AVEC BOUCLES IMBRIQUÉES ...................................... 17
45) DÉTERMINATION DE L’ERREUR STATIQUE OU DE L’ERREUR DE POURSUITE ............................. 18
451) Fonction de Transfert de systèmes en Boucle Ouverte : FTBO ............................................ 18
452) Détermination de l'erreur statique ou de l’erreur de pousuite à partir de la fonction de
transfert du système ( )
( )( )
S pH p
E p (lorsque celle-ci est déjà connue) ........................................ 18
453) Détermination de l'erreur statique ou de l’erreur de pousuite à partir de la fonction de
transfert en Boucle Ouverte (lorsque ( )
( )( )
S pH p
E p n’est pas connue) ....................................... 18

Cours 02 - Systèmes linéaires continus et invariants Page 3/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
5) COMPORTEMENT TEMPOREL DE SLCI PARTICULIERS (ÉTUDE DU RÉGIME TRANSITOIRE). ................................................................................................................ 19
51) SOLLICITATIONS TEST PERMETTANT D’ÉVALUER LES PERFORMANCES ................................... 19
Impulsion de Dirac (t) ................................................................................................................... 19
Échelon a.u(t) ................................................................................................................................. 19
Rampe a.t.u(t) ................................................................................................................................ 19
Remarque : "réponse indicielle = réponse à un échelon lorsque l'amplitude a vaut 1". ................ 19
52) COMPORTEMENT TEMPOREL DES SYSTÈMES PROPORTIONNELS (OU DE GAIN PUR) : K. .......... 20
521) Définition. ............................................................................................................................... 20 K : gain statique du système (sans unité si e(t) et s(t) de même nature) ......................... 20
522) Réponse à un échelon Ec.u(t). .............................................................................................. 20
53) COMPORTEMENT TEMPOREL DES SYSTÈMES DÉRIVATEURS : K.P. ......................................... 20
531) Définition. ............................................................................................................................... 20
K : gain statique du système (en 1s si e(t) et s(t) de même nature) .............................. 20
532) Réponse à une rampe a.t.u(t). ............................................................................................... 20
54) COMPORTEMENT TEMPOREL DES SYSTÈMES INTÉGRATEURS : K/P. ....................................... 20
541) Définition. ............................................................................................................................... 20 K : gain statique du système (en s si e(t) et s(t) de même nature) ................................... 20
542) Réponse à un échelon Ec.u(t). .............................................................................................. 20
55) COMPORTEMENT TEMPOREL DES SYSTÈMES DU 1ER ORDRE :
1 .
K
p .................................... 21
551) Définition. ............................................................................................................................... 21 K : gain statique du système (sans unité si e(t) et s(t) de même nature) ......................... 21 : constante de temps (en s) ............................................................................................ 21
552) Réponse à une impulsion a.(t). ............................................................................................ 21 Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +). ..................... 21
553) Réponse à un échelon Ec.u(t). .............................................................................................. 22 Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +). ..................... 22 Temps de réponse à 5% (défini toujours pour une entrée en échelon) ........................... 22 Bilan. ................................................................................................................................. 22
554) Réponse à une rampe a.t.u(t). ............................................................................................... 23 Caractéristiques de cette réponse (tangente à l’origine, asymptote en +). ................... 23

Cours 02 - Systèmes linéaires continus et invariants Page 4/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
56) COMPORTEMENT TEMPOREL DES SYSTÈMES DU 2ÈME ORDRE :
2
20 0
2 11 . .
K
zp p
................. 24
561) Définition. ............................................................................................................................... 24 K : gain statique du système (sans unité si e(t) et s(t) de même nature) ......................... 24
0 (notée parfois n) : pulsation propre non amortie >0 pulsation du système s’il n’était pas amortie (en rad/s) .............................................................................................................. 24 z (noté parfois m ou ) : facteur d’amortissement >0 (sans unité) ................................... 24
562) Réponse à une impulsion (t). ............................................................................................... 24 Détermination de l’allure de la réponse. ........................................................................... 24
563) Réponse à une rampe a.t.u(t). ............................................................................................... 24
564) Réponse à un échelon Ec.u(t). .............................................................................................. 25 Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +). ..................... 25 Détermination de l’allure de la réponse. ........................................................................... 25 Temps de réponse. ........................................................................................................... 26 Temps de réponse réduit tr5%.0. ..................................................................................... 26 Dépassement absolu Dk et dépassement relatif Dk% (cas z<1). ....................................... 26 Notions de pulsation amortie a et de pseudo-période Ta (cas z<1). ............................... 28 Temps tk lorsque les dépassements s’effectuent : s'(tk)=0 (cas z<1). .............................. 28 Temps tj lorsque s(tj)=K.Ec (cas z<1). .............................................................................. 28 Expression des dépassements relatifs Dk% si l’abaque n’est pas donné (cas z<1). ........ 28
565) Autre forme de la fonction de transfert d’un 2ème
ordre apériodique : )p.1)(p.1(
K
21 ......... 29
Réponse à un échelon dans le cas général. .................................................................... 29 Réponse à un échelon dans le cas où une constante de temps est négligeable devant l’autre (c'est-à-dire qu’une racine est négligeable devant l’autre). ................................... 29
57) IDENTIFICATION À UN MODÈLE (À L’AIDE D’UN GRAPHIQUE TEMPOREL). .................................. 30
571) Modéliser pour prévoir le comportement. .............................................................................. 30
572) Expérimenter pour pouvoir identifier. ..................................................................................... 30
573) Choix du modèle : 1er
ou 2ème
ordre ? .................................................................................... 30
574) Identification à un modèle du 1er
ordre : p.1
K
pE
pS
....................................................... 30
Le gain statique K est obtenu à partir du relevé de la valeur finale .................................. 30 La constante de temps est obtenue à partir du relevé du temps mis pour atteindre
0,63.K.Ec (t=) .................................................................................................................. 30
575) Identification à un modèle du 2ème
ordre apériodique (z>1) :
1 2(1 . )(1 . )
S p K
p pE p
..... 31
Le gain statique K est obtenu à partir du relevé de la valeur finale .................................. 31 Les 2 constantes de temps sont obtenues en utilisant une méthode approchée à partir du tracé de la tangente au point d’inflexion. .......................................................................... 31
576) Identification à un modèle du 2ème ordre oscillant (0<z<1) :
2
20 0
2 11
S p K
zE pp p
.... 31
Le gain statique K est obtenu à partir du relevé de la valeur finale. ................................. 31 Le facteur d’amortissement est obtenu à partir du relevé du 1
er dépassement. .............. 31
La pulsation propre est obtenue à partir du relevé de la pseudo-période ou du temps de réponse. ............................................................................................................................ 31
577) Identification à une somme de fonctions de transfert connues. ............................................ 32

Cours 02 - Systèmes linéaires continus et invariants Page 5/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
1) Introduction : les trois types de systèmes automatisés Un système automatisé est un système qui réalise, de manière autonome, des opérations du processus de transformation de la matière d’œuvre. L’intervention de l’homme est alors limitée à la programmation, la mise en marche et les réglages de certains paramètres.
Un système automatisé est utilisé pour réaliser des tâches :
trop complexes ou dangereuses pour l'homme ;
répétitives et pénibles.
Parmi les systèmes automatisés, on distingue :
11) Les systèmes logiques combinatoires
La grandeur de sortie du système est élaborée à partir d’une combinaison des grandeurs
d’entrées.
12) Les systèmes logiques séquentiels
La grandeur de sortie du système est élaborée à partir d’une combinaison des grandeurs d’entrée, mais prend également en compte la chronologie des événements et l’état précédent du système.
13) Les systèmes continus
Les grandeurs d’entrée et de sortie évoluent de manière continue en fonction du temps.
Centre d‘usinage de précision
Robot d’inspection du cœur d’une centrale nucléaire
Robot soudeur « Robots guides » du complexe financier Santander de Madrid
Digicode
Feu tricolore
Four

Cours 02 - Systèmes linéaires continus et invariants Page 6/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
2) Performances des systèmes continus Afin de répondre aux mieux aux besoins de l’utilisateur, un système continu doit présenter des performances (précision, rapidité, stabilité) les plus proches possibles de celles définies dans le cahier des charges.
Pour vérifier ces performances et déterminer les réglages permettant de les optimiser, on utilise différents critères (erreur, temps de réponse, dépassement).
21) La précision, caractérisée par l’erreur statique ou l’erreur de poursuite
On définit l’erreur ou écart à l’instant t notée er(t) par:
( ): ( ):
( ) ( ) ( )r
e t entrée et s t sortie
e t e t s t
La précision est alors caractérisée en régime permanent par :
( ) ( ) ( )re e s
On parlera d’erreur statique (ou erreur de position), l’erreur en régime permanent pour une entrée en échelon.
On parlera d’erreur de poursuite (ou erreur de suivi), l’erreur en régime permanent pour une entrée en rampe.
erreur de position :
erreur de poursuite :
22) La rapidité, caractérisée par le temps de réponse
La rapidité est caractérisée généralement par le temps de réponse à 5% noté tr5%.
Le temps de réponse à 5% est le temps mis par la sortie pour atteindre la valeur finale à ± 5%. Attention ! Ce n’est pas le temps mis pour atteindre la valeur souhaitée (consigne) à ± 5%, mais bien la valeur finale. Ainsi, lors d’une étude de rapidité, il faut faire abstraction de l’entrée ! Le temps de réponse à 5% est atteint lorsque la sortie rentre dans le « tube des 5% » et n’en sort plus ! Le temps de réponse à 5% peut être déterminé uniquement pour une entrée en échelon.
Système sans dépassement :
Système avec dépassement :

Cours 02 - Systèmes linéaires continus et invariants Page 7/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
23) La stabilité, caractérisée par le nombre de dépassements et/ou la valeur du premier dépassement
La stabilité est caractérisée généralement par le nombre de dépassements et/ou la valeur du premier dépassement
(le plus critique), noté D1
par rapport à la valeur finale.
On définit le dépassement absolu d’ordre k par :
( ) ( )k kD s t s
On définit le dépassement relatif par :
%( )
kk
DD
s
.
Attention ! Ce ne sont pas les dépassements par rapport à la valeur souhaitée (consigne), mais bien par rapport à la valeur finale. Ainsi, lors d’une étude de stabilité, il faut faire abstraction de l’entrée !
Pour certains systèmes, il est impératif qu’il n’y ait aucun dépassement. Exemple : le robot trieur de saucisse.
Système avec dépassement :
24) Analyse d'un système continu
Une analyse comportera 2 étapes :
1ère phase : observation des critères tels qu’erreur, temps de réponse, dépassements… 2ème phase : conclusion sur les performances telles que précision, rapidité et stabilité.
NB : On ne dira jamais que le temps de réponse est rapide, ou que l’erreur est précise… Les critères s’évaluent par des chiffres qui peuvent être plus faibles ou plus grands que d’autres…
Étudier les systèmes continus, c’est essayer d’améliorer ces différentes caractéristiques.

Cours 02 - Systèmes linéaires continus et invariants Page 8/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
3) Modélisation des SLCI
31) Consigne, réponse et modèle
Pour répondre correctement au besoin pour lequel il à été conçu, un système doit « produire » une réponse (sortie) qui respecte au mieux la consigne (entrée). Exemple : Étuve thermique
Ces deux grandeurs sont liées entre elles par une loi physique, traduite par une équation mathématique plus ou moins complexe, qui est le modèle du système :
On parlera de modèle de connaissance lorsque le modèle est théorique et de modèle de comportement lorsque ce dernier est déterminé expérimentalement. Étant donné que le modèle traduit la relation entre l’entrée et la sortie, la connaissance de deux d’entre eux doit permettre la détermination du troisième.
L’étude des systèmes continus peut donc conduire à rencontrer 3 types de problèmes :
Bien qu’ils soient peu traités en CPGE, les problèmes de commande sont les plus proches de la réalité industrielle : « comment commander le système pour qu’il se comporte comme prévu ? » Dans les problèmes de prédiction, on cherchera à mettre en évidence les performances des systèmes : précision, rapidité, stabilité… Les modèles théoriques de connaissance, issus des lois de la physique, ne sont jamais parfaits. En effet, pour les élaborer, on est souvent amené à faire des approximations ou à négliger certains phénomènes.

Cours 02 - Systèmes linéaires continus et invariants Page 9/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
32) Limites d’étude : Systèmes Linéaires, Continus et Invariants
Nous nous limiterons à l’étude des systèmes pour lesquels les grandeurs d’entrée et de sortie évoluent de manière continue dans le temps.
Nous ferons l’hypothèse que le modèle, qui traduit la manière dont se comporte le système, est invariant, c'est-à-dire qu’il reste identique et valable à chaque instant.
Enfin, nous restreindrons nos études aux cas des systèmes linéaires (1)
, c'est-à-dire aux systèmes qui conservent à leur sortie toute combinaison linéaire des signaux d’entrée. Si à une entrée e1(t) correspond une sortie s1(t) et si à une entrée e2(t) correspond une sortie s2(t), alors à une entrée k1.e1(t) + k2.e2(t) correspond une sortie k1.s1(t) + k2.s2(t), avec k1 et k2 constantes.
Dans la réalité les phénomènes sont linéaires dans un certain domaine de variation. A l’extérieur de ce domaine, des phénomènes non linéaires, comme des saturations apparaissent.
Dans la grande majorité des cas, le modèle de connaissance du système est alors une équation différentielle à coefficients constants de la forme.
-1 -1
-1 1 0 -1 1 0-1 -1
( ): ( ):
... ( ) ... ( )n n m m
n n m mn n m m
e t entrée et s t sortie
d s d s ds d e d e dea a a a s t b b b b e t
dt dt dt dt dt dt
Les systèmes réels étudiés impliquent m n ; n est appelé ordre du système
Exemples de systèmes électriques.
Résistance Bobine Condensateur
( ) . ( )u t R i t ( )
( ) .di t
u t Ldt
1
( ) . ( ).u t i t dtC
u(t) : tension i(t) : intensité R : résistance L : inductance C : capacité
Il faut noter que ces relations simplifiées ne reflètent le comportement qu’en première approximation. Exemples de systèmes proportionnels : Dans certains cas, en général des constituants des systèmes, il existe simplement une relation de proportionnalité entre la sortie et l’entrée. Ce coefficient de proportionnalité sera appelé « gain » du constituant.
Lors de l’étude des Systèmes Linéaires Continus Invariants (SLCI), en particulier pour les problèmes de prédiction, on sera amené à manipuler et résoudre ces équations.
Même si les équations différentielles à coefficients constants (d’ordre 1 ou 2) figurent parmi les plus simples à appréhender, il est intéressant de disposer d’outils adaptés permettant d’effectuer rapidement et efficacement les études systématiques auxquelles nous allons être confrontés : le plus efficace dans les cas que nous étudierons est la transformation de Laplace.

Cours 02 - Systèmes linéaires continus et invariants Page 10/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
33) Résolution de l’équation différentielle : la transformée de Laplace
331) Techniques de résolution de l’équation différentielle
Technique de résolution classique. Technique utilisée par les automaticiens : elle repose sur les transformées de Laplace.
L’objectif est de résoudre un polynôme plutôt qu’une équa.dif.
332) Définition mathématique de la transformée de Laplace
La transformée de Laplace ( )F p de la fonction ( )f t , est : .( ) ( ) ( ) ( ). .L L p tf t f t F p f t e dt
333) Fonctions causales La cause précède l’effet. L’ingénieur a pour pratique d’étudier l’effet d’une cause qu’il situe à la date t=0.
En automatique, on utilisera donc la transformée de Laplace restreinte .
0
( ) ( ). .p tF p f t e dt
qui ne
s’applique qu’aux fonctions causales (c'est-à-dire aux fonctions f(t) telles que f(t) = 0 pour t<0).
Pour rendre une fonction mathématique f(t) (qui n’est pas nulle quand t<0) causale, on la multiplie par la fonction d’Heaviside u(t) : u(t) = 0 si t < 0 u(t) = 1 si t ≥ 0
334) Propriétés de la transformée de Laplace
Linéarité Dérivation 1ère Dérivation 2nd Intégration Multiplication d’une fonction
par une fonction
f(t) ( ) ( )f t g t ( )f t ( )f t 0
( ).tf x dx ( ). ( )f t g t
F(p) ( ) ( )F p G p . ( ) (0 )p F p f 2. ( ) . (0 ) (0 )p F p p f f ( )F p
p ( ). ( )F p G p
Exemple : 2
2
2
( ) ( )5 3 2 ( ) ( ) 5 ( ) 3 ( ) 2 ( ) ( )
Ld t d tt v t p p p p p V p
dtdt
Théorème de la valeur initiale
0(0 ) lim ( ) lim . ( ) lim . ( )L
t p pf f t p f t p F p
Théorème de la valeur finale
0 0( ) lim ( ) lim . ( ) lim . ( )L
t p pf f t p f t p F p
335) Transformées usuelles de fonctions causales
Nous ne chercherons pas à déterminer F(p) par la définition (car résoudre l’intégrale est aussi difficile que de résoudre l’équation différentielle du départ). Nous nous servirons de tableaux qu’il faudra connaître :
f(t) Impulsion de
Dirac ( )t 1 t .a te .. a tt e
. .cos( )a te t . .sin( )a te t
F(p) 1
1
p
2
1
p
1
p a
2
1
( )p a
2 2( )
p a
p a
2 2( )p a
Equation différentielle
avec second membre
s2(t) : réponse forcée
caractérisation du régime permanent
Equation
particulière
s1(t) : réponse libre
caractérisation du
régime transitoire
Equation différentielle
sans second membre
s(t)=s1(t)+s2(t)
Transformée
de Laplace
Équation différentielle avec second membre
avec s(t) et e(t)
Équation polynomiale en p
avec S(p) et E(p)
Solution S(p)
Solution s(t)
Domaine temporel en t Domaine de Laplace en p
Transformée
Inverse
où p est une variable
complexe Cette transformation permet de passer du domaine temporel en t au domaine de Laplace en p.

Cours 02 - Systèmes linéaires continus et invariants Page 11/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
336) Détermination de la Transformée de Laplace inverse
Pour déterminer la transformée de Laplace inverse de ( )S p , donc 1( ) ( )Ls t S p , il faut :
1) Mettre l’ordre du polynôme du numérateur inférieur à celui du dénominateur
' ' 11
' '
PolynômeA d ordre n PolynômeC d ordre n
PolynômeB d ordre n PolynômeB d ordre n
ex :
2 2
2 2 2
1 3 2 3 2 1 3 11
3 2 3 2 3 2
p p p p p
p p p p p p
2) Rechercher les racines du dénominateur
Ex : soit 2 3 4
0 1 2 3 4
2 3 4 50 1 2 3 4 5
. . . .S(p)
. . . . .p
p p p p
p p p p
3) Factoriser le dénominateur
Donc
2 3 40 1 2 3 4
2 2 25
. . . .S(p)
.(p-a ).(p-b) . (p-c) d
p p p p
4) Décomposer S(p) en éléments simples 2 3 4
0 1 2 3 4
2 2 2 2 2 25
. . . . .S(p)
.(p-a ).(p-b) .((p-c) d ) ( ) ( )
p p p p D p EA B C
p a p b p b p c d
Les constantes sont déterminées telles que :
A : multiplier S(p) par (p-a) et faire tendre p vers a 2 3 4
0 1 2 3 4
2 2 25
. . . .lim ( ). ( )
.( ) .(( ) )p a
a a a ap a S p A
a b a c d
C : multiplier S(p) par (p-b)2 et faire tendre p vers b
2 3 42 0 1 2 3 4
2 25
. . . .lim ( ) . ( )
.( ).(( ) )p b
b b b bp b S p C
b a b c d
B : multiplier S(p) par (p-b) et faire tendre p vers +
4
5
lim ( ). ( ) 0p
p b S p A B D
D et E : multiplier par (p-c)2+d
2 et faire tendre p vers c+j.d, puis identifier partie réelle et imaginaire
2 3 42 2 0 1 2 3 4
2.5
.( . ) .( . ) .( . ) .( . )lim ( ) . ( ) .( . )
.(( . ) ).(( . ) )p c j d
c j d c j d c j d c j dp c d S p D c j d E
c j d a c j d b
5) Identifier des transformées usuelles
A
p a,
B
p b et
2( )
C
p b sont identifiables immédiatement mais
2 2
.
( )
D p E
p c d
doit être mis sous la forme
de 2 2 2 2 2 2 2 2 2 2
. .( ) ( ). .. .
( ) ( ) ( ) ( ) ( )
D p E D p c p cD c E D c E dD
dp c d p c d p c d p c d p c d
On trouve en identifiant avec les transformées usuelles, la transformée inverse :
. . . . ..( ) . . . . . .cos( . ) . .sin( . ) . ( )a t b t b t c t c tD c E
s t Ae B e C t e D e d t e d t u td
On notera que quand t cette fonction converge si et seulement si a, b et c sont négatifs.
s(t) est donc stable si et seulement si les parties réelles des racines du dénominateur sont négatives.
Supposons que le dénominateur ait : - 1 racine réelle simple p = a - 1 racine réelle double p = b
- 2 racines complexes conjuguées simples p = c j .d

Cours 02 - Systèmes linéaires continus et invariants Page 12/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
34) Représentation des SLCI par fonction de transfert
341) Existence de la fonction de transfert si les conditions initiales sont nulles
On a vu précédemment que le modèle traduisant la relation entre l’entrée ( )e t et la sortie ( )s t d’un SLCI
était, dans la grande majorité des cas, une équation différentielle :
En appliquant la transformation de Laplace aux deux membres de cette équation et en considérant les conditions initiales nulles, on a :
1 0 1 0( ) ... ( ) ( ) ( ) ... ( ) ( )n m
n ma p S p a p S p a S p b p E p b p E p b E p
Soit : 1 0 1 0... ( ) ... ( )n m
n ma p a p a S p b p b p b E p
d’où : 1 0 0
1 0
0
...( )
( ) ...
mi
m im
nnin
i
b pb p b p bS p
E p a p a p aa p
Cette fraction rationnelle de deux polynômes de variable p est appelée fonction de transfert du système.
Elle est notée :
( )( )
( )
S pH p
E p
Remarque : La fonction de transfert existe seulement si les conditions initiales sont nulles.
Dans le cas contraire 0( ) ( ). ( ) ( )S p H p E p H p où 0 ( )H p est une fraction dépendante des conditions initiales.
342) Forme canonique : gain statique, ordre et classe, pôles et zéros
Si )p(H est une fonction de transfert alors :
- H(p) caractérise le système indépendamment de l’entrée appliquée, - les valeurs de p qui annulent le numérateur sont appelées zéros du système, - les valeurs de p qui annulent le dénominateur sont appelées pôles du système, - le degré n du polynôme du dénominateur est appelé ordre du système. - K est appelé le gain statique (il caractérise le régime permanent),
1 0
1 0
:" "
:" "
( )( ) ( )( )( ) :
( ) ( )( ) ( )
i
i
m m
n n
z zéros de la fonction de transfert
p pôles de la fonction de transfert
p z p z p zS pH p K K gain statique
E p p p p p p p
En mettant ( )H p sous forme canonique :
2
2
:( ) 1( )
:( ) 1
m
n
classe du systèmeS p K p p pH p
n ordre du systèmeE p p p p p
- représente la classe du système (nombre d’intégrations 1
p présentes dans le système).
Exemple :
22
2 3 5 23
3 51 . .
2 3. 5. 2 2 2( ) ( ) .
4 73. 4. 7. 3. 1 . .3 3
forme
canonique
p pp p
H p H pp p p p p p
: 5
: 2
2:
3
ordre
classe
gain statique

Cours 02 - Systèmes linéaires continus et invariants Page 13/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
35) Représentation des SLCI par schéma-bloc
La représentation externe d'un composant de la chaîne fonctionnelle du système peut être faite par un bloc représentant sa fonction de transfert :
4) SLCI asservis
41) Insuffisance des systèmes en boucle ouverte (BO)
Un système continu peut, dans une première approche, être représenté de la façon suivante : Un système non bouclé (ou en boucle ouverte) est un système qui ne contrôle pas la manière dont la consigne imposée en entrée a été respectée. Il ne prend pas en compte la réaction du système à une éventuelle cause externe qui pourrait modifier la relation entrée → sortie. Un événement extérieur (perturbation) peut alors modifier la sortie attendue du système. Exemples : Pour qu’un système réponde correctement aux besoins de l’utilisateur, il est important que la sortie ne varie pas quels que soient les phénomènes extérieurs qui pourraient la perturber.
SYSTEME
Perturbation
Entrée Sortie
Température du logement
Consigne de température
Chauffage d’immeuble
Fenêtre ouverte
Cap suivi Consigne de cap
Pilote de bateau
Vague, courant
avec S(p) = H(p).E(p)

Cours 02 - Systèmes linéaires continus et invariants Page 14/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
42) Les SLCI asservis ou en boucle fermée (BF)
421) Systèmes asservis régulateurs et systèmes asservis suiveurs
On parle d’un système régulateur lorsque l’on désire que la sortie prenne une valeur précise et égale à une consigne d’entrée fixe. Exemples de systèmes régulateurs : On parle d’un système suiveur lorsque l’on désire que la sortie suive une consigne d’entrée qui varie au cours du temps et dont l’évolution n’est pas toujours connue à l’avance. Exemples de systèmes suiveurs :
422) Différentes fonctions réalisées par un système asservi
Traduire la consigne en un signal utilisable par la commande Utilisation d’interfaces H/M
Produire une image de la sortie Utilisation de capteurs
Comparer l'image de la consigne à l'image de la sortie Utilisation de comparateurs
Corriger et amplifier le signal de commande pour améliorer les performances (précision-rapidité-stabilité) Utilisation de correcteurs + amplificateurs
423) Représentation par schéma-bloc d’un système asservi élémentaire
Notions de chaîne directe, chaîne de retour, comparateur, erreur et image de l’erreur La structure complète d’un système asservi peut se représenter par le schéma-bloc fonctionnel suivant.
( ) '( ) '( )t e t s t est l’image de l’erreur ( ) ( ) ( )re t e t s t
Ainsi, un système asservi tient compte de l’effet de sa commande (si la consigne a été respectée ou non). Pour pouvoir être comparé, les signaux qui arrivent au comparateur doivent être de même nature !
Étuve thermique Régulateur de niveau d’eau
Missile à tête chercheuse Segway
Le capteur mesure en permanence la grandeur de sortie du système (vitesse, position, température…). Cette image de la sortie est ensuite comparée à l’image de la consigne d’entrée issue de l’interface H/M, afin de permettre à la partie commande d’apporter les corrections nécessaires.

Cours 02 - Systèmes linéaires continus et invariants Page 15/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
43) Simplifications de schémas-blocs élémentaires
Les schémas-blocs ne sont pas toujours de structure simple. Des manipulations permettent de réduire leur complexité et ainsi de déterminer la fonction de transfert globale. En revanche leur simplification éloigne le modèle, de la réalité physique du système…
431) Fonction de Transfert de blocs en série
432) Fonction de Transfert de blocs en parallèle
433) Fonction de Transfert de blocs en Boucle Fermée : FTBF
Avec D(p) la fonction de transfert de la chaîne directe, R(p) la fonction de transfert de la chaîne de retour.
( ) ( ). ( )
( ) ( ). '( ) '( )
( ) ( ). '( ) ( ). ( )
( ). 1 ( ). ( ) ( ). '( )
S p D p p
S p D p E p S p
S p D p E p R p S p
S p R p D p D p E p
On obtient : ( ) ( )
( )'( ) 1 ( ). ( )
S p D pFTBF p
E p R p D p
Attention au signe dans le comparateur. Si :
NB : Ne pas confondre avec la simplification de blocs en
parallèle ci-dessus

Cours 02 - Systèmes linéaires continus et invariants Page 16/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
Exemple de simplification de blocs en série, en parallèle et en boucle fermée : On cherche à déterminer la fonction de transfert du système représenté par le schéma-bloc ci-dessous :
• Boucle fermée :
1( )
1
1
4
1
14
H p
p
p
p
• Blocs en série :
2
1 2( )
4 2
2
( 4)( 2)
H pp p
p p
• Blocs en parallèle :
3
2
2 1( )
( 4)( 2)
8 8
( 4)( 2)
H pp p p
p p
p p p
• Blocs en série :
2 2
2
8 8 2 2( 8 8)( )
( 4)( 2) ( 2) ( 4)( 2)
p p p pH p
p p p p p p p
Idéalement, il faudrait ensuite écrire cette fonction de transfert sous sa forme canonique !
434) Fonctions de Transfert de systèmes à n entrées, principe de superposition On suppose que toutes les entrées sont nulles sauf une. On calcule alors la sortie en fonction de cette 1
ère entrée.
On fait la même chose pour toutes les autres entrées. Puis, on détermine la sortie lorsque toutes les entrées sont présentes par le principe de superposition en additionnant toutes les réponses précédentes… (voir TD 04)
Exemple pour un système à 2 entrées :
E1(p) S(p)
? E2(p)
2
11 ( ) 0
( )( )
( )E p
S pH p
E p
1
22 ( ) 0
( )( )
( )E p
S pH p
E p
1 1( ) ( ). ( )S p H p E p
quand 2( ) 0E p
2 2( ) ( ). ( )S p H p E p
quand 1( ) 0E p
Avec les 2 entrées simultanément
Cours 02 - Systèmes linéaires continus et invariants Page 17/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
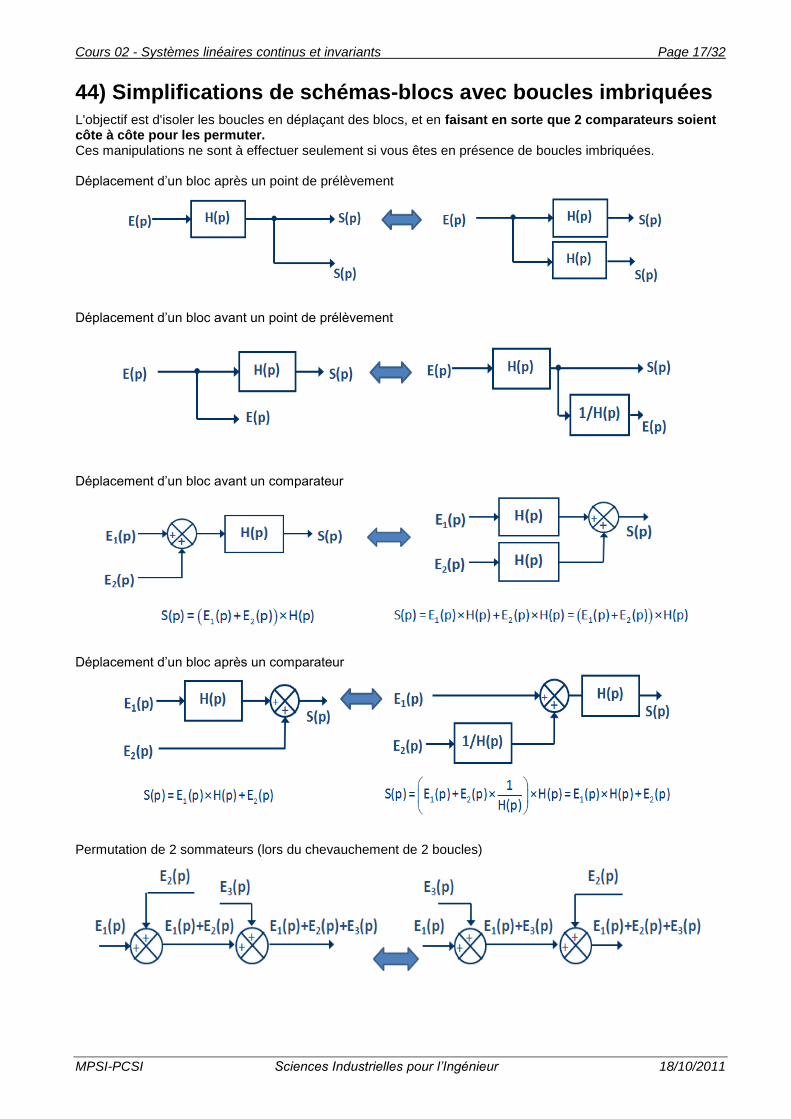
44) Simplifications de schémas-blocs avec boucles imbriquées
L'objectif est d'isoler les boucles en déplaçant des blocs, et en faisant en sorte que 2 comparateurs soient côte à côte pour les permuter. Ces manipulations ne sont à effectuer seulement si vous êtes en présence de boucles imbriquées. Déplacement d’un bloc après un point de prélèvement
Déplacement d’un bloc avant un point de prélèvement
Déplacement d’un bloc avant un comparateur
Déplacement d’un bloc après un comparateur
Permutation de 2 sommateurs (lors du chevauchement de 2 boucles)

Cours 02 - Systèmes linéaires continus et invariants Page 18/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
45) Détermination de l’erreur statique ou de l’erreur de poursuite
451) Fonction de Transfert de systèmes en Boucle Ouverte : FTBO
On appelle par abus de langage la fonction de transfert ci-dessous, fonction de transfert en boucle ouverte:
'( )( ) ( ). ( )
( )
S pFTBO p R p D p
p
NB : En SPÉ, l’étude de la FTBO nous renseignera sur la stabilité du système.
Attention, la FTBO n’est pas la fonction de transfert du système s’il était en boucle ouverte, c’est-à-dire s’il n’y avait pas de chaine de retour avec un capteur !
452) Détermination de l'erreur statique ou de l’erreur de pousuite à partir de la
fonction de transfert du système ( )
( )( )
S pH p
E p (lorsque celle-ci est déjà connue)
Pour cela on procède de la façon suivante :
Calculer ( )rE p , l’erreur dans le domaine de Laplace
( ) ( ) ( ) ( ) ( ) ( ) ( ) (1 ( ))rE p E p S p E p E p H p E p H p
Calculer ( )E p , la transformée de Laplace de l’entrée du système
0( )E
E pp
si 0( )e t E (échelon) ou 2
( )a
E pp
si ( )e t a t (rampe)
Calculer ( )re , l’erreur en régime permanent dans le domaine temporel
En utilisant le théorème de la valeur finale :
0 0
( ) lim ( ) lim ( ) lim ( ) (1 ( ))r r rt p p
e e t p E p p E p H p
Il ne faut pas hésiter à mettre (1 ( ))H p au même dénominateur lors du calcul de la limite.
453) Détermination de l'erreur statique ou de l’erreur de pousuite à partir de la
fonction de transfert en Boucle Ouverte (lorsque ( )
( )( )
S pH p
E p n’est pas connue)
Pour cela on procède de la façon suivante :
Calculer ( )p , l’image de l’erreur dans le domaine de Laplace
( ) '( ) '( )
( ) '( ) ( ). ( ). ( )
( ). 1 ( ). ( ) '( )
p E p S p
p E p D p R p p
p D p R p E p
donc
'( )( )
1 ( ). ( )
'( )( )
1 ( )
E pp
D p R p
ou
E pp
FTBO p
Avec ( ) ( ) ( )FTBO p D p R p Fonction de Transfert en Boucle Ouverte.
Calculer '( )E p , la transformée de Laplace de l’image de l’entrée du système
0'( )E
E pp
si 0'( )e t E (échelon) ou 2
'( )a
E pp
si '( )e t a t (rampe).
Calculer ( ) , l’image de l’erreur en régime permanent dans le domaine temporel
En utilisant le théorème de la valeur finale : 0
( ) lim ( ) lim ( )t p
t p p
En déduire ( )re , l’erreur dans le domaine temporel
En utilisant la relation de proportionnalité entre l’entrée, la sortie et leurs images en entrée du comparateur.
Attention : il y a souvent une confusion entre l’erreur ( )re t et son image en sortie du comparateur ( )t .
De même l’image de l’entrée est souvent appelée « entrée ».
Pour les signes, utiliser la même logique que
pour les signes de la FTBF

Cours 02 - Systèmes linéaires continus et invariants Page 19/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
5) Comportement temporel de SLCI particuliers (étude du régime
transitoire).
51) Sollicitations test permettant d’évaluer les performances
Dans le cas général, les sollicitations d’entrée ont une forme quelconque et inconnue, mais afin d’étudier les performances des systèmes (précision, rapidité, stabilité), on étudie leur réponse à des sollicitations (ou
entrées) types. Ces entrées seront causales, c’est à dire nulles pour t < 0.
Impulsion de Dirac (t) Échelon a.u(t) Rampe a.t.u(t)
( ) ( )e t t
t
0T
0
1
T
il s’agit d’une impulsion d’amplitude 01T ,
pendant une durée très brève 0T
( ) . ( )e t au t
t
a
( ) . . ( )e t a t u t
t
pour t < 0 : ( ) 0e t
pour 0 t T0 : 0( ) 1e t T
pour t > T0 : ( ) 0e t
pour t < 0 : ( ) 0e t
pour t 0 : ( )e t a
où a constante
pour t < 0 : ( ) 0e t
pour t 0 : ( ) .e t a t
où a constante
on note ( ) ( )e t t on note ( ) . ( )e t au t on note ( ) . . ( )e t a t u t
( ) 1L t . ( )L aa u t
p
2. . ( )L a
a t u tp
Remarque : "réponse indicielle = réponse à un échelon lorsque l'amplitude a vaut 1".

Cours 02 - Systèmes linéaires continus et invariants Page 20/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
52) Comportement temporel des systèmes proportionnels (ou de gain pur) : K.
521) Définition. Un système est dit à action proportionnelle ou de gain pur si sa fonction de transfert peut se mettre sous la forme :
( )( )
( )
S pH p K
E p
où
K : gain statique du système (sans unité si e(t) et s(t) de même nature)
522) Réponse à un échelon Ec.u(t).
( ) . ( )ce t E u t L
( ) cEE p
p
Ainsi ( ) ( ). ( ) . cES p H p E p K
p
La réponse temporelle a donc pour expression : ( ) . . ( )cs t K E u t
53) Comportement temporel des systèmes dérivateurs : K.p.
531) Définition. Un système est dit dérivateur si sa fonction de transfert peut se mettre sous la forme :
( )( ) .
( )
S pH p K p
E p
où K : gain statique du système (en 1s si e(t) et s(t) de même
nature)
532) Réponse à une rampe a.t.u(t).
e(t) a.t.u(t) L
2
aE(p)
p
Ainsi 2
.( ) ( ). ( ) . .
a a KS p H p E p K p
pp
La réponse temporelle a donc pour expression : ( ) . . ( )s t a K u t
54) Comportement temporel des systèmes intégrateurs : K/p.
541) Définition. Un système est dit intégrateur si sa fonction de transfert peut se mettre sous la forme :
( )
( )( )
S p KH p
E p p
où
K : gain statique du système (en s si e(t) et s(t) de même nature)
542) Réponse à un échelon Ec.u(t).
( ) . ( )ce t E u t L
( ) cEE p
p
Ainsi 2
.( ) ( ). ( ) . c cE K EK
S p H p E pp p p
La réponse temporelle a donc pour expression : ( ) . . . ( )cs t K E t u t
e(t)=Ec.u(t)
t
Sortie ou réponse s(t)
0
K.Ec
Représentation pour K < 1 :
e(t)=a.t.u(t)
t
Sortie ou réponse s(t)
0
a.K
e(t)=Ec.u(t)
t
Sortie ou réponse s(t) de pente K.Ec
0

Cours 02 - Systèmes linéaires continus et invariants Page 21/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
55) Comportement temporel des systèmes du 1er
ordre : 1 .
K
p
551) Définition. Un système est dit du 1
er ordre si sa fonction de transfert peut se mettre sous la forme :
( )
( )( ) 1 .
S p KH p
E p p
où
K : gain statique du système (sans unité si e(t) et s(t) de même nature)
: constante de temps (en s)
552) Réponse à une impulsion a.(t).
( ) . ( )e t a t L
( ) .1E p a et donc ( ) ( ). ( ) .1 .
KS p H p E p a
p
Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +).
Ordonnée en : 0 0
( ) lim ( ) lim . ( ) lim . ( ) 0Lt p p
s s t p s t pS p
d’où s( ) 0
e(t)= a.(t)
t
Sortie ou réponse s(t)
.a K
Tangente à l’origine
0
NB : Calcul à titre indicatif de la réponse temporelle.
.( ) .
1 . 1.
K a KS p a
pp
La réponse temporelle a donc pour expression : .
( ) . ( )
ta K
s t e u t
La tangente à l’origine coupe l’axe des
abscisses en t

Cours 02 - Systèmes linéaires continus et invariants Page 22/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
553) Réponse à un échelon Ec.u(t).
NB : Si l’amplitude Ec vaut 1, la réponse est appelée réponse indicielle.
( ) . ( )ce t E u t L
( ) cEE p
p et donc ( ) ( ). ( ) .
(1 . )
cEKS p H p E p
p p
Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +).
Ordonnée en : 0 0
( ) lim ( ) lim . ( ) lim . ( ) .L ct p p
s s t p s t pS p K E
d’où s( ) . cK E
Tangente à l’origine : y s(0 ) s'(0 ).(t 0 )
Or 2
0
.'(0 ) lim '( ) lim . '( ) lim . ( ) (0 ) lim ( )L c
t p p p
K Es s t p s t p pS p s p S p
NB : Calcul de la réponse temporelle pour pouvoir déterminer 2 valeurs particulières : 63% et 95% de s(+).
. . .? ?( ) .
1 1(1 . ) 1. .
c c c cE K E K E K EKS p
p p p pp pp p
(décomposition en éléments simples)
La réponse temporelle a donc pour expression : ( ) . . . . ( )
t
c cs t K E e K E u t
Représentation pour K < 1 :
s() :
pour t , 1
cs( ) ( 1).K.Ee
cs( ) 0,63.K.E
s( ) 63%.s( )
Temps de réponse à 5% (défini toujours pour une entrée en échelon)
On cherche 5%tr tel que
5%s(tr ) 95%.s( )
5%
. . . 0,95. .
tr
c c cK E e K E K E
5%
1 0,95
tr
e
5% ln0,05tr
donc 5% 3.tr
Bilan.
Le gain statique K caractérise le comportement du système en régime permanent : s( ) K. cE .
La constante de temps caractérise le comportement du système en régime transitoire (au bout
d’une fois la constante de temps, le système arrive à 63% de sa valeur finale) : s( ) 63%.s( ) .
Le temps de réponse à 5% caractérise la fin du régime transitoire : 5% 3.t .
La tangente à l’origine coupe l’asymptote finale
cy = K.E en t
e(t)=Ec.u(t)
t
Sortie ou réponse s(t)
Tangente à l’origine
0 3
K.Ec
0,95.K.Ec
0,63.K.Ec
d’où cK.Ey = .t

Cours 02 - Systèmes linéaires continus et invariants Page 23/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
554) Réponse à une rampe a.t.u(t).
e(t) a.t.u(t) L
2
aE(p)
p et donc
2( ) ( ). ( ) .
(1 . )
K aS p H p E p
p p
Caractéristiques de cette réponse (tangente à l’origine, asymptote en +).
Ordonnée en : 0 0
( ) lim ( ) lim . ( ) lim . ( )Lt p p
s s t p s t pS p
d’où s( )
Pente de la tangente à l’origine :
Or 2
0'(0 ) lim '( ) lim . '( ) lim . ( ) (0 ) lim ( ) 0L
t p p ps s t p s t p pS p s p S p
NB : Calcul de la réponse temporelle pour pouvoir réaliser une étude asymptotique en +.
2 2 22
. ? ? ? a.K. a.K -a.K.( ) .
1 1(1 . ) p p1 p pp p. .
K a a KS p
p p p p
(décomposition en éléments simples)
La réponse temporelle a donc pour expression :
t
s(t) a.K. .e a.K.t a.K. .u(t)
Étude asymptotique :
Lorsque t , s(t) a.K.t a.K.
L’asymptote est donc ( ) . ( )y t aK t
Cette asymptote a donc une pente a.K, et elle coupe l’axe des abscisses en t .
Représentation pour K < 1 : Remarques :
pour K<1 l’erreur entre l’entrée et la sortie augmente.
pour K=1 le système ne rejoint jamais la consigne, cependant sa variation est parallèle à l’entrée
retardée de une fois la constante de temps .
pour K>1 l’erreur entre l’entrée et la sortie diminue, s’annule, puis augmente.
e(t)=a.t.u(t)
t
Sortie ou réponse s(t)
0
Asymptote de pente a.K
Droite de pente a
Tangente à l’origine de pente nulle
La tangente à l’origine a donc une pente nulle
(droite horizontale)

Cours 02 - Systèmes linéaires continus et invariants Page 24/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
56) Comportement temporel des systèmes du 2ème
ordre : 2
20 0
2 11 . .
K
zp p
561) Définition. Un système est dit du 2
ème ordre si sa fonction de transfert peut se mettre sous la forme :
2
20 0
( )( )
2 1( )1 . .
S p KH p
zE pp p
où K : gain statique du système (sans unité si e(t) et s(t) de même nature)
0 (notée parfois n) : pulsation propre non amortie >0 pulsation du système s’il n’était pas amortie (en rad/s)
z (noté parfois m ou ) : facteur d’amortissement >0 (sans unité)
562) Réponse à une impulsion (t).
( ) ( )e t t L
( ) 1E p et donc 2
0
2 220 0
20 0
( ) ( ). ( ) .12 1 2 .1 . .
KKS p H p E p
z p z pp p
Détermination de l’allure de la réponse. Recherche des pôles de la fonction de transfert :
Discriminant : 2 2 2 2 20 0 04 4 4 ( 1)z z Trois cas seront à envisager.
z > 1
> 0
2 racines réelles simples
(a1 et a2)
1 2
1 2
( )A A
S pp a p a
1. 2.1 2( ) . . . ( )a t a ts t A e A e u t
Réponse non
oscillatoire z = 1
= 0
1 racine réelle double (b)
2
S(p)( )
B C
p b p b
. .( ) . . . . ( )b t b ts t B e C t e u t
z < 1
< 0
2 racines complexes conjuguées
(p = c j .d)
2 2
.S(p)
( )
D p E
p c d
. ..
( ) . .cos( . ) . .sin( . ) . ( )c t c tD c Es t D e d t e d t u t
d
Réponse oscillatoire
563) Réponse à une rampe a.t.u(t). L’étude exhaustive de la réponse à une rampe donne lieu à des calculs longs et fastidieux en fonction du facteur d’amortissement z. On retrouve cependant les résultats fondamentaux vus dans le cas du 1
er ordre,
c’est-à-dire que si le gain statique est unitaire, la limite, lorsque t tend vers l’infini, de la réponse reste parallèle à la consigne avec un retard (qui dépend de z et de w0). En fonction de z, la réponse présente des oscillations autour de cette asymptote.
Réponse à une impulsion d'un système du 2ème ordre
-0,2
0
0,2
0,4
0,6
0,8
0 2 4 6 8 10 12 14
t.w0
s(t)/K
z=0,3
z=0,5
z=0,69
z=1 z=2
z=4
e(t) Même Tangente à l’origine de pente
20K

Cours 02 - Systèmes linéaires continus et invariants Page 25/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
564) Réponse à un échelon Ec.u(t).
)t(u.E)t(e c L
p
E)p(E c et donc
p
E.
)p.z2p(
K
p
E.
)p.1
p.z2
1(
K)p(E).p(H)p(S c
200
2
20c
2
200
Caractéristiques de cette réponse (tangente à l’origine, ordonnée en +).
Ordonnée en : c0p0pt
KE)p(S.plim)t(s.plim)t(slim)(s L
d’où cEK)s(
Pente de la tangente à l’origine :
0)p(S.plim)0(s)p(pS.plim)t('s.plim)t('slim)0('s 2
ppp0tL
Détermination de l’allure de la réponse. En plus du pôle p=0, on recherche les autres pôles de la fonction de transfert :
Discriminant : )1z(44z4 220
20
20
2 Trois cas seront à envisager.
z > 1
> 0
2 racines réelles simples
(a1 et a2)
2
2
1
10
ap
A
ap
A
p
A)p(S
)t(u.e.Ae.AA)t(s t.2a
2t.1a
10 Réponse
non oscillatoire
z = 1
= 0
1 racine réelle double
(b)
2
0
)bp(
C
bp
B
p
AS(p)
)t(u.e.t.Ce.BA)t(s t.bt.b
0
z < 1
< 0
2 racines complexes conjuguées
(p = c j .d)
22
0
d)cp(
Ep.D
p
AS(p)
)t(u.)t.dsin(.e.
d
Ec.D)t.dcos(.e.DA)t(s t.ct.c
0
Réponse oscillatoire
0
K.Ec
0
Tangente à l’origine de pente
nulle
Réponse à un échelon d'un système du 2ème ordre
t
z=0,3
z=0,5 z=0,69
z=1
z=2
z=4
s(t) Bande des
+/- 5% D1
D2
Ta/2 Ta 3.Ta/2 2.Ta
Le régime établi ne dépend que du gain statique K.
z et 0 interviennent
seulement dans le régime transitoire.
La tangente à l’origine a donc une pente nulle (droite horizontale) (ce qui est différent
des systèmes du 1er
ordre)
Ta/4 (voir cours page 22)

Cours 02 - Systèmes linéaires continus et invariants Page 26/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
Temps de réponse. Le temps de réponse à 5 % (durée au-delà de laquelle la réponse s(t) reste comprise entre 0,95 et 1,05 fois
la réponse finale )(s ) varie suivant la valeur du facteur d’amortissement z :
si z<<1, l’amortissement est faible, les oscillations sont mal amorties, le temps de réponse est grand,
si z=0,69 le système présente un dépassement faible, égal à 5 %, avec le temps de réponse le plus faible,
si z=1 le système ne présente pas de dépassement au sens mathématique, il ne correspond pas au minimum absolu du temps de réponse, il s’agit cependant du système sans dépassement le plus rapide,
si z>>1 il n’y a pas de dépassement, mais le système est hyper amorti, donc le temps de réponse est grand.
Temps de réponse réduit tr5%.0. Il n’y a pas d’expression simple pour déterminer la valeur exacte de tr5%. Un abaque (voir ci-dessous) donne
la valeur du temps de réponse réduit, 0%5 .tr ,
en fonction du facteur d’amortissement z. NB : Le temps de réponse réduit n'a pas d'unité contrairement au temps de réponse…
2 valeurs à connaître :
pour 69,0z on a 3.tr 0%5
0%5
3tr
pour 1z on a 5.tr 0%5
0%5
5tr
On remarque que pour un facteur d’amortissement constant, le temps de réponse
réduit 0%5 .tr est constant.
Par conséquent, pour un même z, plus 0 ,
plus %5tr et donc plus le système est rapide.
Dépassement absolu Dk et dépassement relatif Dk% (cas z<1). On définit le dépassement absolu
d’ordre k par : )(s)t(sD kk
On définit le dépassement relatif
d’ordre k par : )(s
DD k
%k
.
Les dépassements relatifs ne dépendent que du facteur d’amortissement z. On utilise le plus souvent un abaque (voir ci-contre) pour les déterminer.
NB1 : %5100
505,0
NB2 : pour 69,0z , on remarque
un seul dépassement visible à l’œil c'est-à-dire >1% (qui vaut 5%).
NB3 : pour 82,0z , il existe des
dépassements mais qui ne sont pas visibles à l’œil (ils sont inférieurs à 1%).

Cours 02 - Systèmes linéaires continus et invariants Page 27/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
)t(u.e.e.KE
KE)t(s 21
t
2
t
121
cc
NB : Calcul à titre indicatif des 3 types de réponses temporelles (les résultats ne sont pas à connaître, la méthode oui…) Cas 1 : z>1, le dénominateur possède 3 racines réelles simples : le système est hyper amorti (réponse apériodique)
Notons ces 3 racines a0, a1 et a2. On a 0a0 et 01zz.a 202/1
Donc 2
2
1
10
21
c2
0
ap
A
ap
A
p
A
papap
EK)p(S
Avec c21
c2
00 KE
a.a
EKA
;
1
20
c2
0
121
c2
01
a.1z2
EK
aaa
EKA
et
2
20
c2
0
212
c2
02
a.1z2
EK
aaa
EKA
La réponse temporelle a donc pour expression : )t(u.a
e
a
e
1z2
.KEKE)t(s
1
t.1a
2
t.2a
2
0cc
En posant 1
11
a
et 2
21
a
où 1 et 2 sont des constantes de temps
Cas 2 : z=1, le dénominateur possède 1 racine réelle double et 1 racine réelle simple : réponse critique.
Notons ces 2 racines a0 et b. On a 0a0 et 0.zb 00
Donc
20
c0
0
cc
200
0
20
c2
0
p
EK
p
KE
p
KE
p
C
p
B
p
A
pp
EK)p(S
La réponse temporelle a pour expression : )t(u.e.t..KEe.KEKE)t(st.
0ct.
cc00
Cas 3 : z<1, le dénominateur possède 2 racines complexes conjuguées et 1 racine réelle simple : le système est oscillatoire (réponse pseudo-périodique).
Notons ces 3 racines a0, p1 et p2. On a 0a0 et
2
02/1 z1jz.p
Posons d.jcp 2/1 avec 0.zc et 2
0 z1.d (NB : 2
022 dc )
)p(S se décompose sous la forme : 22
0
22
c2
0
dc)(p
ED.p
p
A
dc)(pp.
EKS(p)
avec 22
c2
00
dc
EKA
;
22
c2
0
dc
EKD
;
22
c2
0
dc
c.EK2E
En remarquant que 22222222 d)cp(
d.
d
Ec.D
d)cp(
)cp(.D
d)cp(
Ec.D)cp.(D
d)cp(
Ep.D
La réponse dans le domaine temporel s’écrit donc : )t(u.e).t.dsin(.d
Ec.De).t.dcos(.DA)t(s t.ct.c
En réinjectant c, d, A0, D et E : )t(u.t.z1sine
z1
zt.z1cose1.KE)t(s 2
0t.z
2
20
t.zc
00
)t(u.t.z1sin.zt.z1cos.z1
z1
e1.KE)t(s 2
02
02
2
t.z
c
0
En posant zcos et 2z1sin et en utilisant bsin.acosbcos.asin)basin(
NB : pôles négatifs ou nul donc sortie stable (ne diverge pas)
(cf page 8)
NB : pôles négatifs ou nul donc sortie stable (ne diverge pas)
(cf page 8)
NB : partie réelle négative ou nulle donc sortie stable (ne diverge pas)
(cf page 8)
Rappel pour déterminer D et E (cf. page 8)
multiplier par (p-c)2+d
2
faire tendre p vers c+j.d
identifier les parties réelles et imaginaires

Cours 02 - Systèmes linéaires continus et invariants Page 28/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
La réponse temporelle s’écrit : )t(u.t.z1sin
z1
e1.KE)t(s 2
02
t.z
c
0
Notions de pulsation amortie a et de pseudo-période Ta (cas z<1).
La réponse présente des oscillations amorties dont la pulsation amortie (en rad/s) est 2
0a z1 et la
période, appelée pseudo-période (en s), est : 2
0a
az1
22T
.
NB : Ainsi 0 (notée parfois n ) (Pulsation propre non amortie d’un système du 2ème
ordre) est bien la
pulsation du système s’il n’était pas amortie (z=0).
Temps tk lorsque les dépassements s’effectuent : s'(tk)=0 (cas z<1).
Les dépassements sont donnés pour les instants kt tels que 0t's k . Soit en dérivant s(t) pour z<1 :
On a )t(u.t.z1cos.z1.
z1
et.z1sin.
z1
e.z.KE)t('s 2
02
02
t.z2
02
t.z
0c
00
)t(u.t.z1cos.z1t.z1sin.z.
z1
e..KE)t('s 2
022
02
t.z
0c
0
Donc 0t.z1cos.z1t.z1sin.z0t's 20
220
Soit en remplaçant z par cos et 2z1 par sin car zcos et
2z1sin (voir page précédente).
Et en utilisant bsin.acosbcos.asin)basin( , on obtient :
.kt.z10t.z1sin0t's 2
02
0
On trouve donc : 2
T.k.k
z1
.kt a
a20
k
avec k entier.
Temps tj lorsque s(tj)=K.Ec (cas z<1).
Ec.K)t(s 0t.z1sin 20
.jt.z1 2
0 .jt.a a
a
aaj
2
T.j.jt
Expression des dépassements relatifs Dk% si l’abaque n’est pas donné (cas z<1).
.ksin.
z1
e.KEKE
z1
.k.z1sin.
z1
e.KEKE)t(s
2
z1
.k.z
cc2
0
20
2
z1
.k.z
cck
22
0
0
En utilisant bsin.acosbcos.asin)basin( , on obtient : sin.)1(sin)..kcos(0.ksin k
Et en remplaçant 2z1 par sin car
2z1sin (voir page précédente).
On obtient 2z1
.k.z
kcck e.)1.(KEKE)t(s
Or cEK)s(
Donc 2z1
.k.z
kk%k e
)(s
)(s)t(s
)(s
DD
(qui ne dépend que du facteur d’amortissement z)
Ainsi les dépassements s'effectuent toutes les demi-périodes.
Rappel : relation entre fréquence f (ou N) –
période T – pulsation :
2T
1Nf
.
Ce qui nous permet d'affirmer que la durée entre t=0 et t=t1 n'est pas Ta/4. Par contre, la durée entre chaque tj est bien Ta/2.

Cours 02 - Systèmes linéaires continus et invariants Page 29/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
565) Autre forme de la fonction de transfert d’un 2ème ordre apériodique : )p.1)(p.1(
K
21
Lorsque z>1, il n'y a pas d'oscillation, le dénominateur possède alors 2 racines réelles. Il est alors préférable
d’écrire la fonction de transfert sous la forme : )p.1)(p.1(
K
pE
pS
21
Réponse à un échelon dans le cas général. Sa réponse à un échelon se trace plus facilement et plus précisément à l’aide des 2 constantes de temps et de la tangente au point d’inflexion :
Attention : On ne s’intéresse donc plus à z et 0 mais à
1 et 2 car dans ce cas 0 .
Réponse à un échelon dans le cas où une constante de temps est négligeable devant l’autre (c'est-à-dire qu’une racine est négligeable devant l’autre).
En prenant l’expression de s(t) de la page 21 et en faisant l’hypothèse que 21 :
)t(u.e.e.1.KE)t(s 21
t
21
2
t
21
1c
0 1
La réponse temporelle a donc pour expression : )t(u.e1.KE)t(s 2
t
c
qui est la réponse à un
échelon d’un système du 1er
ordre de gain statique K et de constante de temps 2 .
Par conséquent, si 21 , la réponse temporelle à un échelon d’un système du 2ème
ordre hyper amorti
modélisé par )p.1)(p.1(
K
21 est équivalente à la réponse temporelle à un échelon d’un système du 1
er
ordre modélisé par p.1
K
2.
Dès que l’on s’éloigne de l’instant initial, une exponentielle devient
négligeable devant l’autre…
s(t)
t
K.Ec
0
21 1
Cours 02 - Systèmes linéaires continus et invariants Page 30/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
Est-ce que la courbe expérimentale comporte
des oscillations ?
Est-ce que la tangente à l’origine comporte une pente
nulle ?
Choisir un modèle du 1
er ordre
Choisir un modèle du 2
ème ordre
apériodique z>1
non
oui
non
oui Choisir un modèle
du 2ème
ordre oscillant z<1
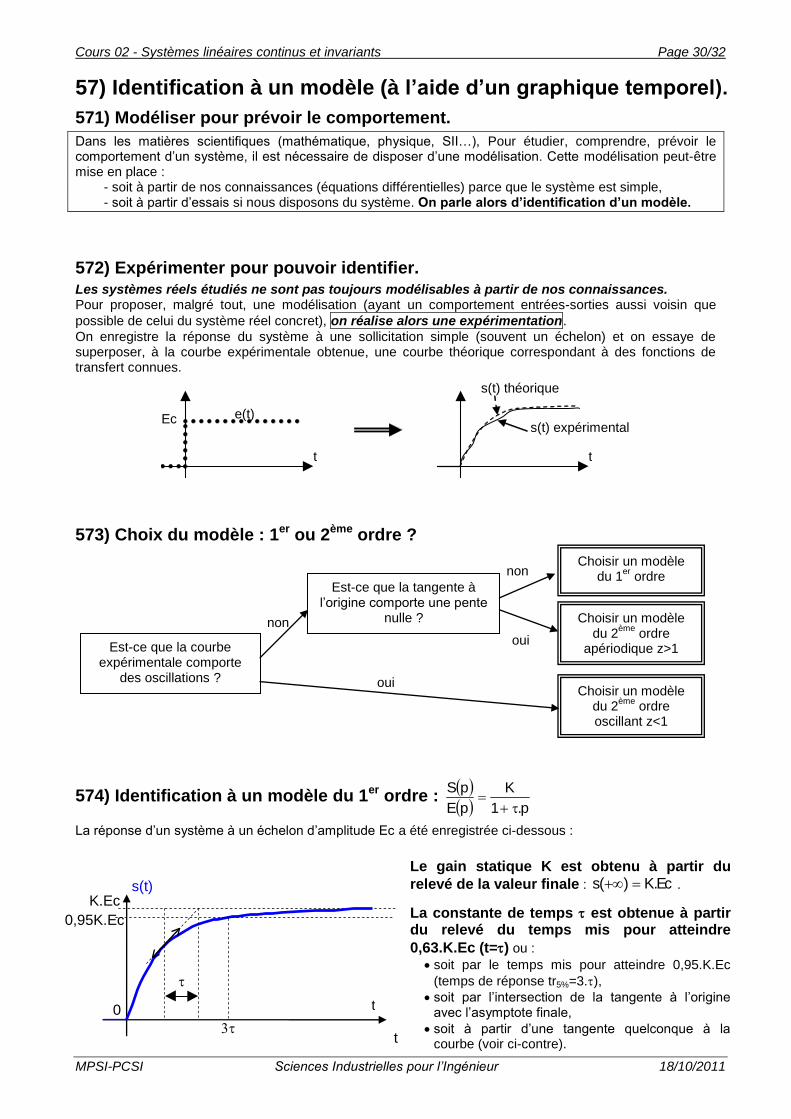
57) Identification à un modèle (à l’aide d’un graphique temporel).
571) Modéliser pour prévoir le comportement.
Dans les matières scientifiques (mathématique, physique, SII…), Pour étudier, comprendre, prévoir le comportement d’un système, il est nécessaire de disposer d’une modélisation. Cette modélisation peut-être mise en place :
- soit à partir de nos connaissances (équations différentielles) parce que le système est simple, - soit à partir d’essais si nous disposons du système. On parle alors d’identification d’un modèle.
572) Expérimenter pour pouvoir identifier.
Les systèmes réels étudiés ne sont pas toujours modélisables à partir de nos connaissances. Pour proposer, malgré tout, une modélisation (ayant un comportement entrées-sorties aussi voisin que
possible de celui du système réel concret), on réalise alors une expérimentation.
On enregistre la réponse du système à une sollicitation simple (souvent un échelon) et on essaye de superposer, à la courbe expérimentale obtenue, une courbe théorique correspondant à des fonctions de transfert connues.
e(t)
t
Ec
t
s(t) théorique
s(t) expérimental
573) Choix du modèle : 1er ou 2ème ordre ?
574) Identification à un modèle du 1er ordre : p.1
K
pE
pS
La réponse d’un système à un échelon d’amplitude Ec a été enregistrée ci-dessous :
Le gain statique K est obtenu à partir du
relevé de la valeur finale : Ec.K)(s .
La constante de temps est obtenue à partir du relevé du temps mis pour atteindre
0,63.K.Ec (t=) ou :
soit par le temps mis pour atteindre 0,95.K.Ec
(temps de réponse tr5%=3.),
soit par l’intersection de la tangente à l’origine avec l’asymptote finale,
soit à partir d’une tangente quelconque à la courbe (voir ci-contre).
s(t) K.Ec
0
0,95K.Ec
t
t

Cours 02 - Systèmes linéaires continus et invariants Page 31/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
575) Identification à un modèle du 2ème ordre apériodique (z>1) :
1 2(1 . )(1 . )
S p K
p pE p
La réponse d’un système à un échelon d’amplitude Ec a été enregistrée ci-contre. Nous constatons une réponse apériodique avec une pente à l’origine nulle et aucun dépassement.
Le gain statique K est obtenu à partir du
relevé de la valeur finale : Ec.K)(s .
Attention : On ne cherche pas z et 0 mais 1 et 2 car dans ce cas 0 .
Les 2 constantes de temps sont obtenues en utilisant une méthode approchée à partir du tracé de la tangente au point d’inflexion. Les intersections de cette tangente avec l’axe des abscisses et l’asymptote horizontale donnent 1 et 2.
576) Identification à un modèle du 2ème ordre oscillant (0<z<1) :
2
20 0
2 11
S p K
zE pp p
La réponse d’un système à un échelon d’amplitude Ec a été enregistrée ci-contre.
Le gain statique K est obtenu à partir du relevé de la valeur finale.
Ec.K)(s
Le facteur d’amortissement est obtenu à partir du relevé du 1er dépassement. On utilise alors :
soit la formule des dépassements relatifs : 2z1
.k.z
kk%k e
)(s
)(s)t(s
)(s
DD
On utilise cette formule pour identifier z à l’aide du 1er
dépassement (k=1) : 2z1
.z
%1 eD
2%1
222%1
2222%1
2%1
z1
.z
%1 Dln.zDln.z)z1.(Dln
z1
.zDlneD
2
On obtient :
2%12
2%1
Dln
Dlnz
avec
s
DD 1
%1 .
soit l’abaque des dépassements relatifs.
La pulsation propre est obtenue à partir du relevé de la pseudo-période ou du temps de réponse. On utilise alors :
soit la formule de la pseudo-période (à partir du relevé de Ta) : 2
0a
a
z1
22T
,
soit l’abaque du temps de réponse réduit (à partir du relevé de %5tr ).
s(t)
t
K.Ec
0
21 1
On peut vérifier que lorsque le 1
er dépassement vaut 5%,
alors z=0,69…
0
K.Ec
t
s(t) Bande des
+/- 5% D1
Ta/2 Ta 3.Ta/2 2.Ta Ta/4 (voir cours page 22)
tr5%

Cours 02 - Systèmes linéaires continus et invariants Page 32/32
MPSI-PCSI Sciences Industrielles pour l’Ingénieur 18/10/2011
577) Identification à une somme de fonctions de transfert connues.
A la vue de l’allure de la réponse indicielle constatée, on cherchera à décomposer la réponse indicielle observée en une somme de réponses typiques élémentaires. Exemple :
On peut remarquer que, pour t suffisamment grand, le système est intégrateur. La décomposition ci-dessus vient naturellement à l’esprit. D’où le modèle, ayant le même comportement que le système, est :
Après avoir identifié, il est nécessaire de tracer la réponse théorique pour vérifier qu’elle modélise correctement la réponse expérimentale…
= +
Réponse indicielle du système
Entrée e(t)
p
K
p.1
K 21
Sortie s(t)




















![Cours systèmes asservis [Mode de compatibilité]](https://img.dokumen.tips/doc/110x75/616a581211a7b741a3517837/cours-systmes-asservis-mode-de-compatibilit.jpg)








