Embed Size (px)
Citation preview
BAB 4 Sinyal dan Sistem di Domain
IV-1
Bab 4: Sinyal dan Sistem di Domain Frekuensi
1 Konsep Spektrum Frekuensi Suatu Sinyal dapat didekomposisi menjadi komponen-komponen sinusoidal (atau eksponensial kompleks). Dengan dekomposisi semacam itu, sebuah sinyal dikatakan direpresentasikan dalam Domain Frekuensi.
Pada sinyal periodik, dekomposisi menjadi komponen sinusoidal disebut Deret Fourier. Sedangkan pada sinyal aperiodik (finite energy) disebut sebagai Transformasi Fourier. Transformasi Fourier dan Deret Fourier adalah alat matematis yang sangat penting dalam analisis dan desain sistem LTI.
Dengan melakukan analisis frekuensi, kita dapat melihat representasi matematis komponen-komponen frekuensi yang terkandung dalam suatu sinyal. Rangkaian frekuensi yang terkandung dalam sinyal tersebut disebut spectrum.
1.1 Frekuensi Sinyal Kontinue Periodik
Tujuan Belajar 1
Peserta dapat menghitung spektrum (deret Fourier) dari sinyal kontinu yang periodik.
Representasi matematis dasar dari sinyal periodik adalah Deret Fourier, yang merupakan penjumlahan berbobot linear (linear weighted sum) dari sinyal sinusoidal atau eksponensial kompleks.
Kombinasi linear dari eksponensial kompleks harmonis dalam bentuk
∑∞
−∞==
k
tkFjk
oectx π2)( adalah sinyal periodik dengan periode fundamental: o
p TT
1= .
Oleh karena itu, kita dapat berpikir bahwa sinyal eksponensial { tkFj oe π2 k = …, -2, -1, 0, 1, 2, …} adalah “building block” dasar, yang darinya kita dapat mengkonstruksi sinyal periodik dengan berbagai tipe dengan memilih frekuensi fundamental dan koefisen-koenfisien {ck}. Fo menentukan periode fundamental dari x(t) dan koefisien {ck} menentukan bentuk dari gelombang (waveform).
Bila diberikan sinyal periodik x(t) dengan periode Tp. Kita dapat merepresentasikan sinyal tersebut dengan suatu deret yang disebut Deret Fourier, dimana frekuensi fundamental Fo dipilih timbal balik dengan periode Tp. Untuk menentukan ekpresi dari koefisen-koenfisien {ck}, kita pertama-tama harus mengalikan kedua sisi dengan eksponensial kompleks ltFj oe π2− , dimana l adalah integer, dan kemudian mengintegrasikan kedua sisi pada satu periode, dari to ke to+Tp. Akan kita dapatkan :

BAB 4 Sinyal dan Sistem di Domain
IV-2
dtecedtetxpo
o
oo
po
o
o
Tt
t k
tkFjk
tlFjTt
t
tlFj ∫ ∑∫+ ∞
−∞=
−+
−
= πππ 222)(
( )( ) ( ) oopoo
o
poopo
o
o
tlkFjTtlkFj
t
Tt
k o
tlkFj
k
Tt
t
tlkFj
kk
ee
lk
lkFje
cdtec
−+−
+∞
−∞=
−+−∞
−∞=
=
≠↓
−= ∑∫∑
ππ
ππ
π
22
)(2)(2
karena
bila 0
)(2
tapi bila k=l
p
Tt
t o
po Tt
Tttdt
po
o
=+
=∫+
Jadi pl
k
Tt
t
tlkFjk Tcdtec
po
o
o =∑ ∫∞
−∞=
+− )(2π
Karena to adalah sembarang, maka integral dapat dievaluasi dalm setiap interval Tp. Konsekuensinya, integral untuk koefisien Deret Fourier dapat ditulis sebagai
∫ −=p
o
T
tkFj
pk dtetx
Tc π2)(
1
Tujuan Belajar 2
Peserta mengerti konvergensi deret Fourier melalui kondisi Dirichlet.
Hal penting yang muncul dalam merepresentasikan sinyal periodik dalam Deret Fourier adalah apakah deret tersebut konvergen untuk x(t) pada setiap nilai t, yaitu bila sinyal
x(t) dan representasi Deret Fourier-nya ∑∞
−∞=k
tkFjk
oec π2 adalah sama untuk setiap nilai t.
Kondisi Dirichlet menjamin bahwa deret tersebut akan sama dengan x(t), kecuali pada nilai t dimana x(t) diskontinyu.
Kondisi Dirichlet adalah :
1. Sinyal x(t) memiliki discontinuitas dalam setiap perioda dalam jumlah yang terbatas.
2. Sinyal x(t) mengandung maxima dan minima dalam suatu perioda dalam jumlah yang terbatas.
3. Sinyal x(t) dapat diintegralkan secara absolut dalam sembarang periode,

BAB 4 Sinyal dan Sistem di Domain
IV-3
∫ ∞<pT
dttx |)(|
Sebagai kesimpulan, bila sinyal x(t) adalah periodik dan memenuhi Kondisi Dirichlet, maka sinyal tersebut dapat direpresentasikan sebagai Deret Fourier
∑∞
−∞=
=k
tkFjk
oectx π2)( dimana ∫ −=p
o
T
tkFj
pk dtetx
Tc π2)(
1
Tujuan Belajar 3
Peserta dapat menghitung variant dari deret Fourier dalam bentuk cos dan sin.
Secara umum, Ck adalah bilangan kompleks. Lebih jauh lagi, bila sinyal periodik tersebut adalah, maka Ck dan C-k adalah complex conjugate.
kjkk ecc θ||=
kjkk ecc θ−
− = ||
maka :
( )kk jjkkk eeccc θθ −
− +=+ ||
kkc θcos||2=
Sehingga Deret Fourier dapat direpresentaskan dalam bentuk :
∑∞
=++=
1)2cos(2)(
kkoo tkFctx θπ
dimana co adalah real ketika x(t) adalah real.
Persamaan tersebut dapat jabarkan menjadi :
kokoko tkFtkFtkF θπθπθπ sin2sincos2cos)2cos( −=+
Sehingga kita dapat merepresentasikan Deret Fourier dalam bentuk :
∑∞
=−+=
1)2sin2cos()(
kokoko tkFbtkFaatx ππ
dimana a0 = co
ak = 2|ck|cosθk bk = 2|ck|sinθk

BAB 4 Sinyal dan Sistem di Domain
IV-4
Tujuan Belajar 4
Peserta dapat menghitung Power Density Spectrum atau Power Spectrum dari sinyal kontinu yang periodik, dalam term domain waktu maupun domain Fourier (Parseval’s relation).
Suatu sinyal periodik memiliki energi tak terhingga (infinite) dan daya rata-rata yang terhingga (finite), yang diberikan sebagai
∫=
pTpx dttx
TP 2|)(|
1
Kita ingat bahwa *xxx = , maka :
∫=
pTpx dttxtx
TP )(*)(
1
∫ ∑∞
−∞=
−=
p
o
T k
kFjk
ptdtectx
Tπ2*)(
1
k
k T
tkFj
pk
c
dtetxT
c
p
o
↑
= ∑ ∫
∞
−∞=
−
)(1 2* π
∑∞
−∞==
kkc 2||
Ini disebut Parseval's Relation, yang dihitung dalam term ck.
Tujuan Belajar 5
Peserta dapat memplot spektrum secara alternatif berbetuk power spectrum maupun magnitude dan fasa.
Kita dapat melihat bahwa x(t) adalah deret dari harmonic :
...... 222
21
21
222 ++++++ −
−−
−tFojFotjFotjtFoj eCeCCoeCeC ππππ
Daya rata-rata pada masing-masing komponen frekuensi adalah :
Px = 2|| kc
BAB 4 Sinyal dan Sistem di Domain
IV-5
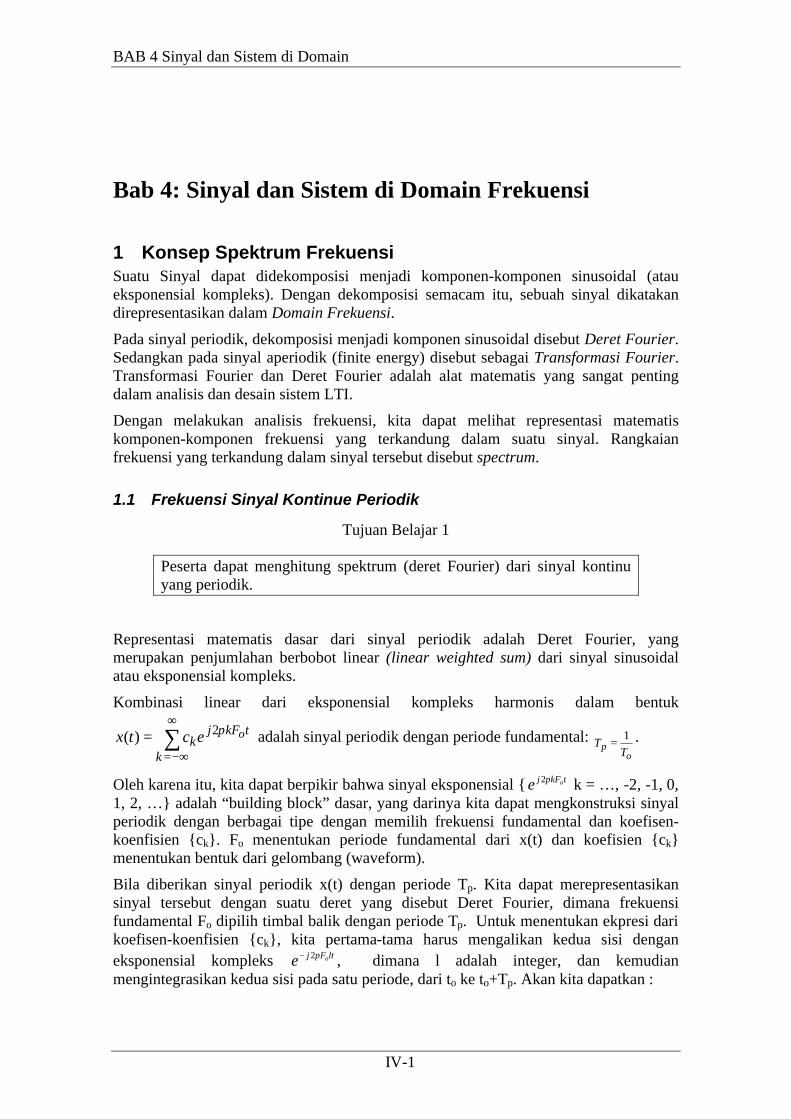
Bila kita memplot 2|| kc sebagai fungsi dari frekuensi kF0, k= …-2,-1,0,1,2, … , maka dapat dibuat suatu diagram yang disebut Power Density Spectrum, yang menggambarkan bagaimana daya dari sinyal periodik didistribusikan diantara komponen-komponen frekuensi.
power density spectrumIckI
2
......0 Fo 2Fo 3Fo 4Fo 5Fo
Frekuensi,F-Fo-2Fo-3Fo-4Fo-5Fo
Gambar 1. |ck|2 adalah daya dari komponen pada frekuensi kFo
Karena daya pada sinyal periodik ada hanya pada nilai diskrit frekuensi (F= … -2F0, -F0, 0, F0,2F0 …), makanya sinyal tersebut dikatakan memiliki line spectrum. Spasi diantara garis spectral yang bersebelahan adalah sebanding dengan periode fundamental Tp.
Sebagai alternatif dari memplot Power Density Spectrum, kita dapat memplot Magnitude Spectrum { || kc } dan Phase spectrum { || kθ } sebagai fungsi dari frekuensi.
Koefisien Detet Fourier yang merupakan bilangan kompleks dapat direpresentasikan sebagai :
kjkk ecc θ||=
dimana kk c/_=θ
Power Density Spectrum adalah kuadrat dari Magnitude Spectrum, jadi tidak mengandung info θk. Bila sinyal periodik adalah x(t) real, maka koefisien deret Fourier-nya memenuhi kondisi
c-k =ck* sehingga |ck|2 = |ck
*|2
Oleh karena itu, power spectrum adalah fungsi symetric/even dari frekuensi. Kondisi ini berrati pula bahwa Magnitude spectrum adalah fungsi symetric/even dan Phase spectrum adalah fungsi ganjil. Sebagai konsekuensi dari adanya simetri tersebut, spektrum dari fungsi real cukup dispesifikasi pada frekuensi positif saja.
∑ ∑∞
=
∞
=++=+=
1 1
2221222 )(||2
k kkkokox baacCP

BAB 4 Sinyal dan Sistem di Domain
IV-6
Tujuan Belajar 6
Peserta dapat menghitung spektrum dari deret pulsa rektangular waktu kontinu.
Bagaimana menentukan Deret Fourier dan Power Density Spectrum dari pulsa rectangular train?
Gambar 2. Pulsa rectangular train.
Untuk menyelesaikannya, pertama-tama kita lihat bahwa x(t) adalah periodik dengan periode dasar Tp ⇒ Fo = 1/Tp, jadi kita bisa menggunakan deret Fourier. Selain itu, x(t) adalah sinyal genap sehingga x(t) = x(-t), maka kita dapat memilih interval integrasi dari -Tp/2 s.d. Tp/2
Untuk k=0, kita dapatkan :
pp
T
Tp TA
AAdtT
dttxT
Cop
p
τ
τ
ττ
τ
====−−−
∫∫2/
2/2/
2/
2/
2/
1)(
1
Untuk k tidak sama dengan nol, kita dapatkan :
2/
2/22/
2/
)(22
1
τ
τπτ
τ
ππ −−
−
−== ∫
o
ktFj
p
tkFj
pk kFj
eTA
dtAeT
co
o
2j
sin
2
jxjx
tkFjtkFj
pok
eex
jee
TkFA
coo
−
−
−=
↓
−=⇒
ππ
π
maka :
)sin( τππ o
pok kF
TkFA
c = k = ±1, ±2, …
BAB 4 Sinyal dan Sistem di Domain
IV-7
karena Φ=Φ
Φcsin
sin , maka
( ) sinc)sin(
τπτ
τπτπτ
opo
o
pk kF
TA
kFkF
TA
c ==
↓ ∅k
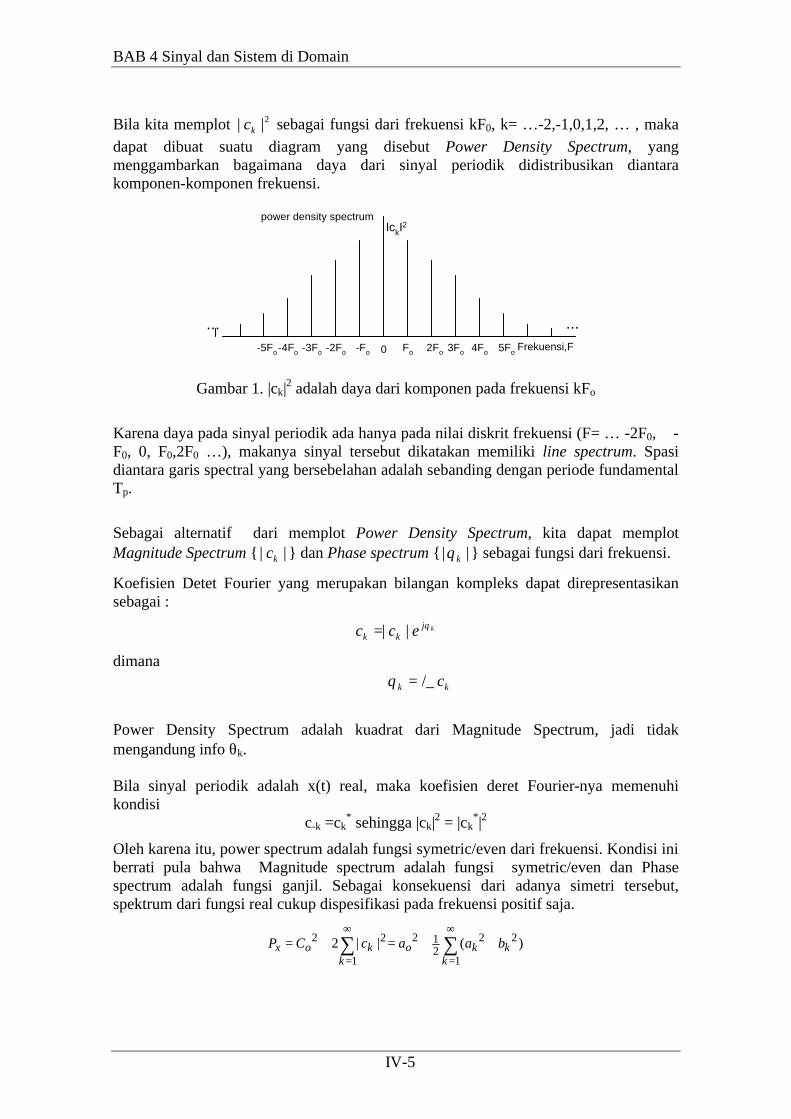
∅k bernilai diskrit karena Fo dan τ fixed bergantung k . Tapi bila ∅ kontinu
sinc ∅
- decays to zero as |∅| → 0 - bernilai nol pada ∅ = mπ, m = ±1, ±2, …
-20 -15 -10 -5 0 5 10 15 20-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Gambar 3. Fungsi sinc.
Script Matlab 1
» clear » x=-5*pi:0.001:5*pi; » y=sinc(x); » plot(x,y);
Jadi ∅k adalah sample dari ∅ pada posisi (πFoτ)k. Jadi ck adalah sample dari sin∅ pada posisi tersebut dengan amplitudo terskala sebesar Aτ/Tp
Ctt. Karena x(t) even → ck real → fase spectrum
BAB 4 Sinyal dan Sistem di Domain
IV-8
0 →ck positive π → ck negative
kjkk ecc θ||= → jadi plot saja ck tanpa perlu phase dan
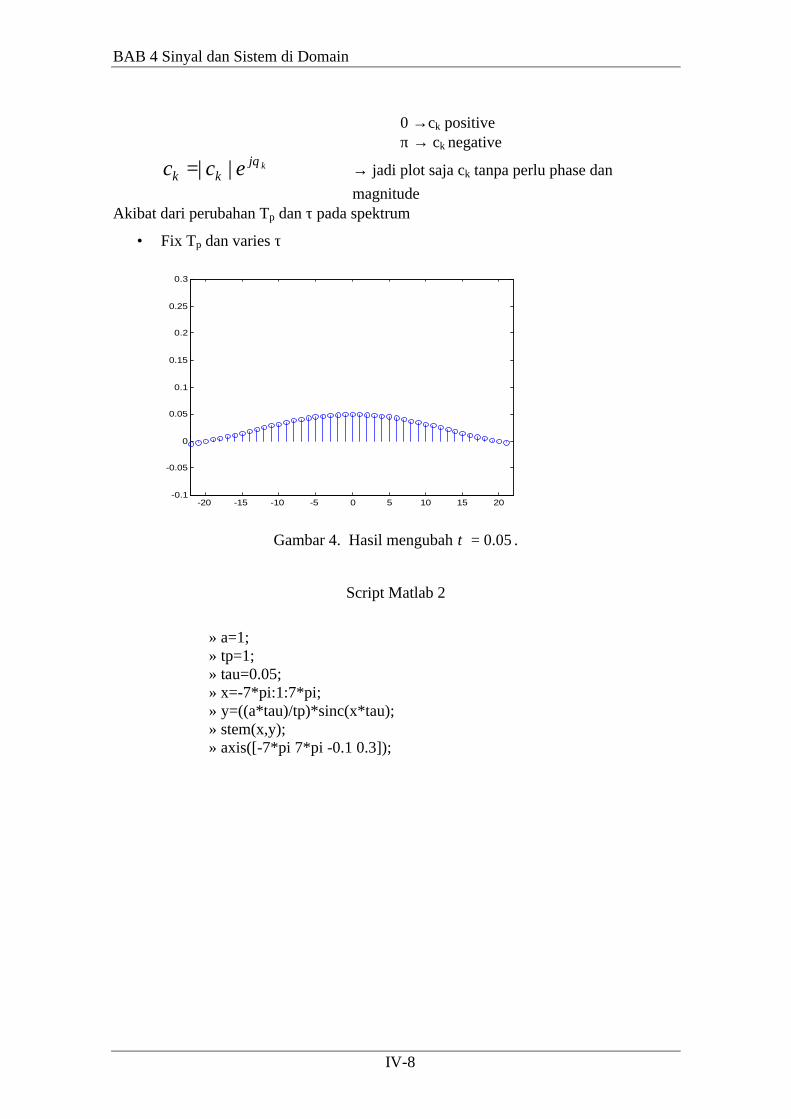
magnitude Akibat dari perubahan Tp dan τ pada spektrum
• Fix Tp dan varies τ
-20 -15 -10 -5 0 5 10 15 20-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Gambar 4. Hasil mengubah 05.0=τ .
Script Matlab 2
» a=1; » tp=1; » tau=0.05; » x=-7*pi:1:7*pi; » y=((a*tau)/tp)*sinc(x*tau); » stem(x,y); » axis([-7*pi 7*pi -0.1 0.3]);
BAB 4 Sinyal dan Sistem di Domain
IV-9
-20 -15 -10 -5 0 5 10 15 20-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
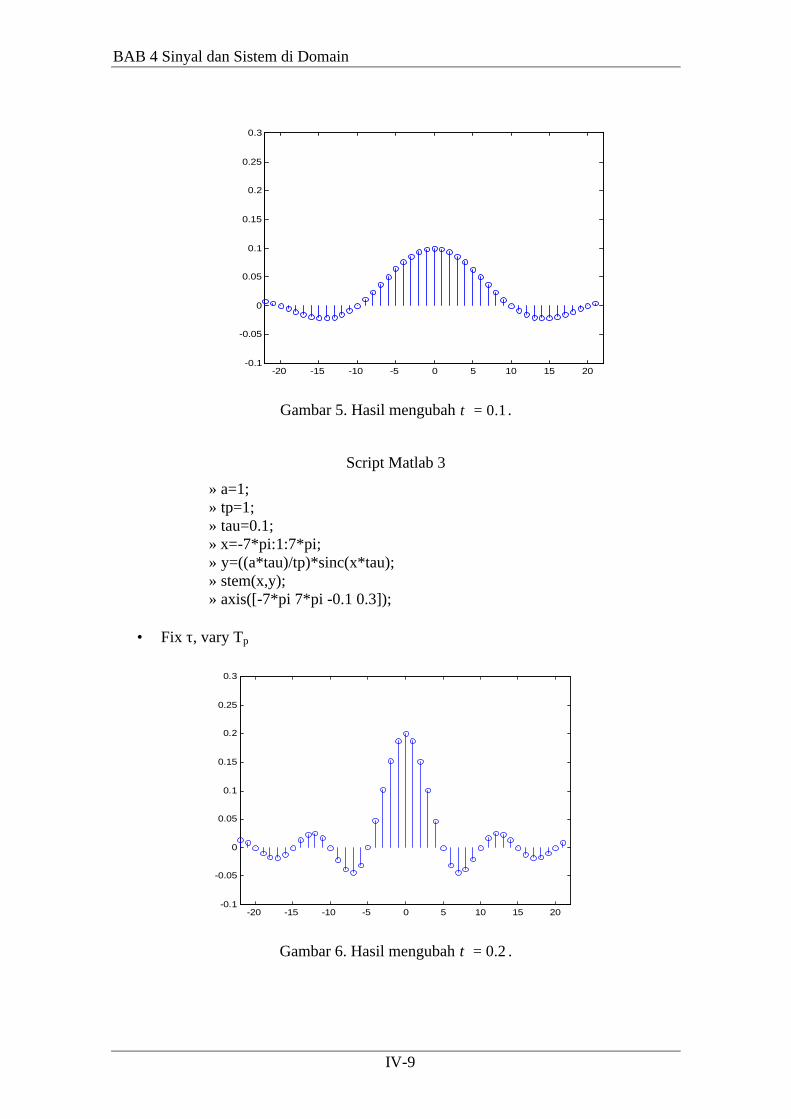
Gambar 5. Hasil mengubah 1.0=τ .
Script Matlab 3
» a=1; » tp=1; » tau=0.1; » x=-7*pi:1:7*pi; » y=((a*tau)/tp)*sinc(x*tau); » stem(x,y); » axis([-7*pi 7*pi -0.1 0.3]);
• Fix τ, vary Tp
-20 -15 -10 -5 0 5 10 15 20-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Gambar 6. Hasil mengubah 2.0=τ .

BAB 4 Sinyal dan Sistem di Domain
IV-10
Script Matlab 4
» a=1; » tp=1; » tau=0.2; » x=-7*pi:1:7*pi; » y=((a*tau)/tp)*sinc(x*tau); » stem(x,y); » axis([-7*pi 7*pi -0.1 0.3]);
Perhatikan, bila k≠0 dan sin(πkFoτ), ck = 0 Padahal pada kFo tertentu
(π(kFo)τ = mπ, m= ±1, ±2, …) ⇒ sin πkFoτ = 0 ⇒ ini terjadi pada kFo = m/τ
Contoh : Bila Fo = 4 Hz dan τ=0.2Tp, (τ = 0.2/4=0.1/2) ck = 0 pada kFo = m.2/0.1 = 20m → kFo = ±20, ±40, ±60, … → pada k = ±5, ±10, ±15, … PDF:
=
=
)(sin
0,
||2
2
2
2
τπτ
τ
op
pk
kFcTA
kTA
c
1.2 Frekuensi Sinyal Kontinu Aperiodik
Tujuan Belajar 7
Peserta dapat menghitung spektrum (X(F)) dari sinyal kontinu yang aperiodik, serta mengerti hubungannya dengan kasus periodik.
Pada sinyal kontinyu periodik, kita melihat bahwa sinyal memiliki spektra garis dengan spasi yang sebanding dengan frekuensi fundamental. Bila periodenya dibuat menjadi tak terhingga (menjadi sinyal aperiodik), maka lebar spasi akan nol dan spectrum-nya menjadi kontinyu.

BAB 4 Sinyal dan Sistem di Domain
IV-11
Gambar 7. Sinyal aperiodik dengan durasi terbatas dapat digunakan untuk membuat sinyal periodik.
Bila kita mengamati sinyal aperiodik dengan durasi finit pada gambar (a) diatas, maka kita dapat menyusun suatu sinyal periodik xp(t) dengan perioda Tp, seperti pada gambar (b).
Jelas, xp(t) = x(t) dengan Tp tak terhingga, yaitu )()( lim txtx pTp ∞→
= .
Representasi Deret Fourier untuk sinyal periodik adalah :
∑= tkFjkp
okctx )(2)( π Fo =1/Tp
dimana
dtetxT
c tkFjT
Tp
pk
o
p
p
)(22/
2/
)(1 π−
−∫=
dtetxT
c tkFj
pk
o )(2)(1 π−
∞
∞−∫=
Kini kita definisikan suatu fungsi, Tranformasi Fourier X(F) dari x(t), sebagai :
∫∞
∞−
−= dtetxFX Ftj π2)()(
X(F) adalah fungsi dengan variable kontinyu F. Koefisien Fourier dapat diekspresikan dengan term X(F) sebagai :
)()()(1
ooooop
k kFXFkFXFkFXT
c ===
maka :
kpp
o cTTk
XkFX =
=)(

BAB 4 Sinyal dan Sistem di Domain
IV-12
Dengan demikian dapat dikatakan bahwa koefisien ck adalah sampling dari X(F), yang diambil pada setiap kelipatan Fo dan diskala sebesar Fo (dikalikan dengan 1/ Tp). Dengan mensubstitusikan ck diperoleh :
tkFj
k ppp
oeTk
xT
tx π21)( ∑
∞
−∞=
=
Untuk mencari x(t) dari X(F) maka didefiniskan :
)()( lim txtx p
Tp ∞→
= Fo= ∆F= 1/Tp
sehingga :
∑∞
−∞=
∆ ∆∆=k
Ftkjp FeFkXtx π2)()( k∆F → F
Jelas bahwa pada Tp mendekati tak terhingga, xp(t) tereduksi menjadi x(t), juga F∆ menjadi differensial dF dan k F∆ menjadi variabel frekuensi kontinyu F. Maka
diperoleh :
∫∞
∞−∞→
== )()()( 2lim txdFeFXtx Ftjp
Tp
π
Dapat disimpulkan, untuk sinyal kontinyu aperiodik, berlaku :
∫∞
∞−
= dFeFXtx Ftj π2)()(
dan
∫∞
∞−
−= dtetxFX Ftj π2)()(
Tujuan Belajar 8
Peserta dapat menghitung Power Density Spectrum atau Power Spectrum dari sinyal kontinu yang periodik, dalam term domain waktu maupun domain Fourier (Parseval’s relation).
Bila x(t) adalah sinyal energi berhingga dengan tranformasi Fourier X(f), maka energinya dapat diekpresikan sebagai:
∫∞
∞−
= dttXEx2|)(|
bila diekspresikan dalam X(F) persamaannya menjadi :
BAB 4 Sinyal dan Sistem di Domain
IV-13
∫∞
∞−
= dFFX 2|)(|
Ini adalah Parseval’s Relation untuk sinyal aperiodik energi berhingga dan mengekspresikan prinsip konservasi energi dalam domain waktu dan frekuensi.
Sedangkan kuantitas Sxx(F) = 2|)(| FX merepresentasikan distribusi energi dari sinyal sebagai fungsi frekuensi. Oleh karena itu Sxx(F) disebut Energy Density Spectrum dari x(t). Intergral dari Sxx(F) sepanjang semua frekuensi menghasilkan total energi dari sinyal tersebut.
Tujuan Belajar 9
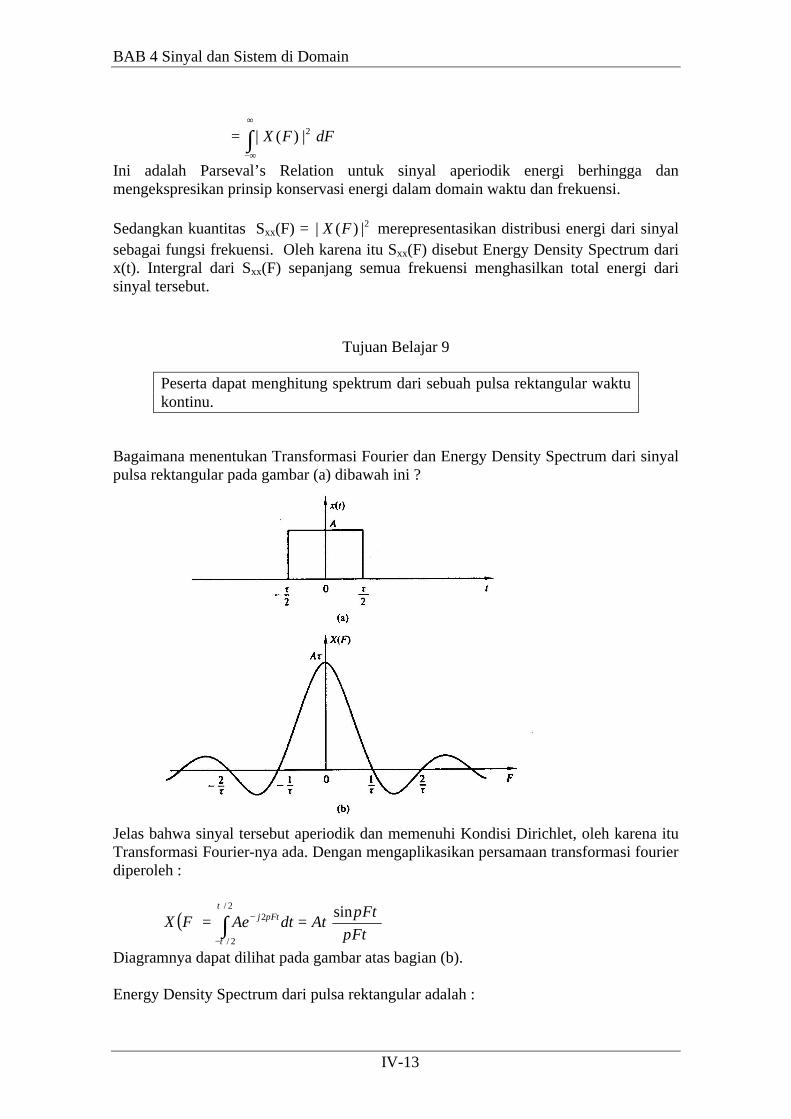
Peserta dapat menghitung spektrum dari sebuah pulsa rektangular waktu kontinu.
Bagaimana menentukan Transformasi Fourier dan Energy Density Spectrum dari sinyal pulsa rektangular pada gambar (a) dibawah ini ?
Jelas bahwa sinyal tersebut aperiodik dan memenuhi Kondisi Dirichlet, oleh karena itu Transformasi Fourier-nya ada. Dengan mengaplikasikan persamaan transformasi fourier diperoleh :
( )τπ
τπτ
τ
τ
π
FF
AdtAeFX Ftj sin2/
2/
2 == ∫−
−
Diagramnya dapat dilihat pada gambar atas bagian (b).
Energy Density Spectrum dari pulsa rektangular adalah :
BAB 4 Sinyal dan Sistem di Domain
IV-14
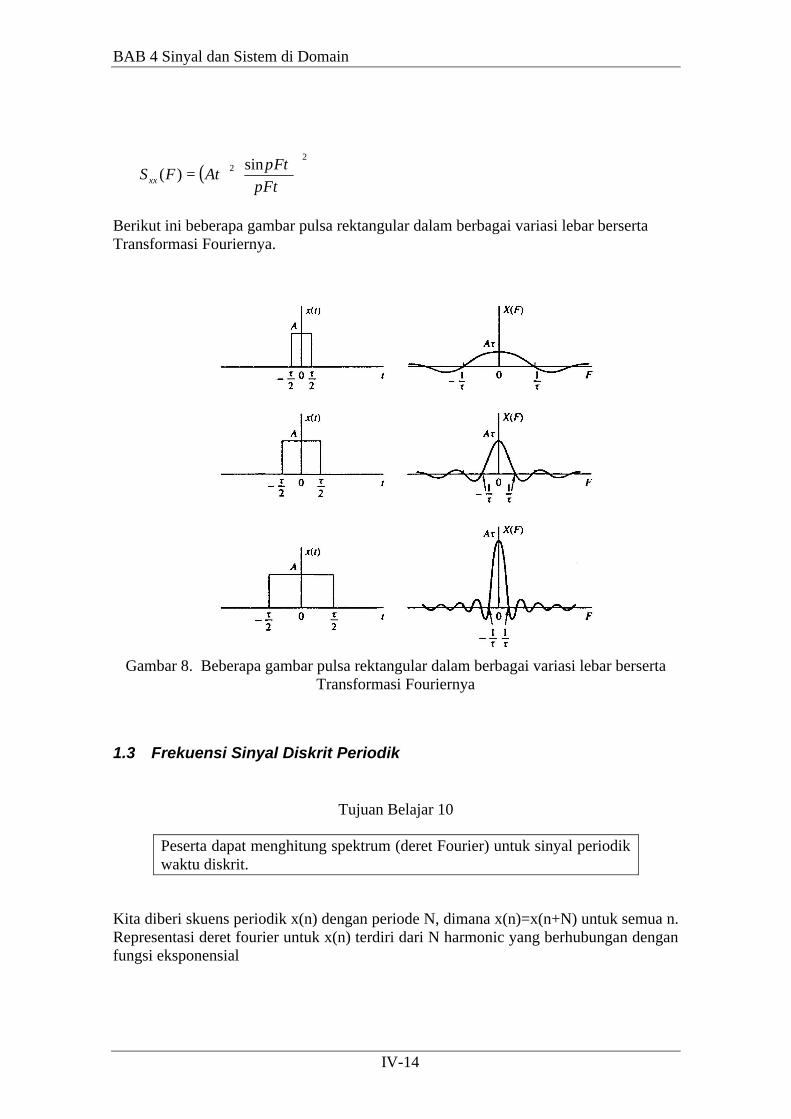
( )2
2 sin)(
=
τπτπ
τF
FAFS xx
Berikut ini beberapa gambar pulsa rektangular dalam berbagai variasi lebar berserta Transformasi Fouriernya.
Gambar 8. Beberapa gambar pulsa rektangular dalam berbagai variasi lebar berserta
Transformasi Fouriernya
1.3 Frekuensi Sinyal Diskrit Periodik
Tujuan Belajar 10
Peserta dapat menghitung spektrum (deret Fourier) untuk sinyal periodik waktu diskrit.
Kita diberi skuens periodik x(n) dengan periode N, dimana x(n)=x(n+N) untuk semua n. Representasi deret fourier untuk x(n) terdiri dari N harmonic yang berhubungan dengan fungsi eksponensial
BAB 4 Sinyal dan Sistem di Domain
IV-15
nNk
j
k es
=π2
k = 0, 1, …, N-1
dan diekspresikan sebagai
∑−
=
=1
0
)(N
kkk scnx
dimana {ck} adalah koefisien-koefisien dalam representasi deret. Bagaimana mencari ck ?
factor scaling
, *
↓
= Gsxc kk
∑ ∑∑−
=
−
=
−
=
−
−
==1
0
1
0
1
0
)(22),(
N
n
N
n
N
k
Nn
lkj
k
nnk
jecenx
ππ
±±=−
=
↓
∑ ∑−
=
−
=
−
,else NN,,lN ,k
ecN
k
N
n
Nn
l)p(kj
k
020
1
0
1
0
2
Sehingga diperoleh :
1 1
0
2
∑−
=
−=
N
n
nnk
pj
k x(n)eN
c
Maka untuk sinya diskrit periodik :
( ) ( )Nnxnx
nSecnxN
kk
nNk
j
k
+=↓
== ∑−
=
relately harmonical
)()(1
0
2π
Ingat :
∑−
=
≠−
−=
=1
0 1,1
11,N
n
Nn
aa
aaN
a
maka ±±=
=∑−
=
otherwiseNNkN
eN
n
nk
jn
,02,,0,1
0
2π

BAB 4 Sinyal dan Sistem di Domain
IV-16
( )nj
nNk
j
k
N
n
Nknjk
keens
nx
enxN
c
ωπ
π
==
↓
=
−
=
−∑
2
1
0
/2
)(
pada fasadan amplitudo
)(1
∑
∑−
=
−
−
=
+−
+
==
=
1
0
2
1
0
)(2
)(1
)(1
N
nk
nNk
j
N
n
Nn
Nkj
Nk
CenxN
enxN
C
π
π
karena
∑ −
n
Nn
kjnj eenxN
ππ 22)(1
Berikut ini beberapa contoh pencarian spectrum untuk sinyal diskrit periodik:
a. nnx π2cos)( =
b. nnx3
cos)(π
=
c. )4()( += nxnx , x(n) = {1, 1, 0, 0} Jawab :
a. 2
12 =→= oo fπω → non periodic
b. fo = 1/6 → x(n) periodic N = 6
( )
( )
021
21
21
21
62
cosingat
5,...,1,0 61
432
51
6/26/2
5
0
6/2
====
==→
+==
==
−
=
−∑
cccc
cc
een
nx
kenxc
o
njnj
n
knjk
ππ
π
π
Spectrum
f
21

BAB 4 Sinyal dan Sistem di Domain
IV-17
c. ∑=
−=
3
0
42
)(41
n
nk
j
k enxCπ
+=
− kje 4
21
41 π
, k = 0, 1, 2, 3, …
+=→
−21
41 k
j
k eCπ
Co = 1/2 C1 = 1/4(1-j) C2 = 0 C3 = 1/4(1+j)
Tujuan Belajar 11
Peserta dapat menghitung power density spectrum dalam term domain waktu maupun domain Fourier (Parseval’s relation).
Daya rata-rata dari sinyal waktu-diskrit periodik dengan periode N didefiniskan sebagai:
∑ ∑−
=
−
=
==1
0
1
0
22 |||)(|1 N
n
N
kkx cnx
NP
Skuens 2|| kc untuk k=0,1,…,N-1 adalah distribusi daya sebagai fungsi frekuensi dan disebut Power Density Spectrum dari sinyal periodik. Energi dari skuens x(n) pada satu perioda
∑ ∑−
=
−
=
==1
0
1
0
22 |||)(|N
n
N
kkN cNnxE
Sebagai contoh, bagaimana mencari deret Fourier dan PDS dari sinyal waktu-diskrit kontinyu square-wave dibawah ini?
Dengan mengaplikasikan persamaan analisis, diperoleh :
2kc
k N-1 2 1

BAB 4 Sinyal dan Sistem di Domain
IV-18
10 ,1
)(1 1
0
21
0
/2 ,...N-kAeN
enxN
CL
n
nNk
jN
n
Nknjk === ∑∑
−
=
−−
=
− ππ
( )
NkNkL
e
ee
NA
kLNA
neNA
Ck
NLkj
L
nNkj
NkLjNk
j
/sin/sin
11
0,
/)1(2
1
0/2
/2
2
πππ
π
π
π
−−
−
=−
−
=
↓
−−
==
= ∑
Power Density Spectrum dari sinyal tersebut adalah :
= 22
2
2
sinsin
|
pk/NpkL/N
NA
NAL
|Ck
1.4 Frekuensi Sinyal Diskrit Aperiodik
Tujuan Belajar 12
Peserta dapat menghitung spektrum ( ( )ωX ) untuk sinyal aperiodik waktu diskrit.
Tranformasi Fourier untuk sinyal waktu-diskrit energi berhingga x(n) didefinisikan sebagai :
integer )2()(
,)()( *
=+=↓
== ∑∞
−∞=
−
kkXX
sxenxXn
nj
πωω
ω ω
Cari x(n) → ssxnx ∑= *,)(
Mari kita mengevaluasi skeuens x(n) dari X(ω). Pertama-tama kita kalikan kedua sisi dengan ejωn dan mengintegralkannya dalam interval (-π,π).

BAB 4 Sinyal dan Sistem di Domain
IV-19
∑
∫ ∑∫
−=
−
∞→
−
−∞
−∞=−
=
↓
=
N
Nn
njN
NN
njnj
n
nj
enxX
X
deenxdeX
ω
π
π
ωωπ
π
ω
ω
ω
ωωω
)()(
)(
)()(
lim
Dengan asumsi konvergen
( )mx
nm
denxdenxn n
nmjnmj
π
π
ωωπ
π
π
π
ωω
2
0 ,0 ,2
)()( )()(
= =
=
↓
== ∫ ∑ ∑ ∫−
∞
−∞=
∞
−∞= −
−−−
maka didapat : ∫−
=π
π
ω ωωπ
deXnx nj)(21
)(
Maka untuk sinyal waktu-diskrit aperiodik berlaku :
∑∞
−∞=
−=n
njenxX ωω )()(
∑∞
−∞=
+− ==+n
nkj XenxkX )()()2( )2( ωπω πω
∫−
=π
π
ω ωωπ
deXnx nj)(21
)(
Tujuan Belajar 13
Peserta dapat menghitung spektrum dari sebuah pulsa rektangular waktu diskrit.
Bagaimana menghitung spektrum dari sebuah pulsa rektangular waktu diskrit dibawah ini ?
BAB 4 Sinyal dan Sistem di Domain
IV-20
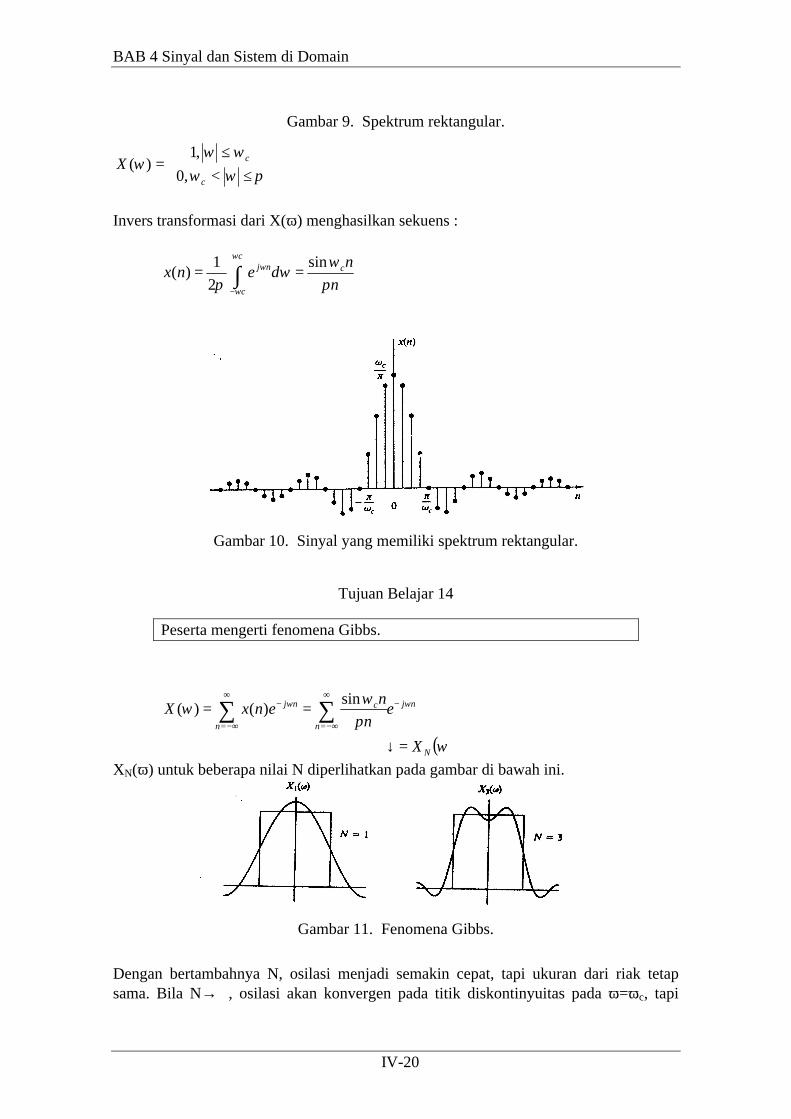
Gambar 9. Spektrum rektangular.
≤<≤
=πωω
ωωω
c
cX,0
,1)(
Invers transformasi dari X(ω) menghasilkan sekuens :
∫−
==c
c
cnj
nn
denxω
ω
ω
πω
ωπ
sin21
)(
Gambar 10. Sinyal yang memiliki spektrum rektangular.
Tujuan Belajar 14
Peserta mengerti fenomena Gibbs.
( )ω
πω
ω ωω
N
nj
n n
cnj
X
en
nenxX
sin)()(
=↓
== −∞
−∞=
∞
−∞=
−∑ ∑
XN(ω) untuk beberapa nilai N diperlihatkan pada gambar di bawah ini.
Gambar 11. Fenomena Gibbs.
Dengan bertambahnya N, osilasi menjadi semakin cepat, tapi ukuran dari riak tetap sama. Bila N→∝, osilasi akan konvergen pada titik diskontinyuitas pada ω=ωc, tapi

BAB 4 Sinyal dan Sistem di Domain
IV-21
amplitudonya tidak menuju nol. Oleh karena itu, XN(ω) konvergeb menuju X(ω) dalam sense mean-square.
Kelakuan osilatoris dari aproksimasi XN(ω) menuju funsi X(ω) pada titik diskontinyuitas dari X(ω) disebut Fenomena Gibbs.
Tujuan Belajar 15
Peserta dapat menghitung energy density spectrum dalam term domain waktu maupun domain Fourier (Parseval’s relation).
Relasi energi antara x(n) dan X(ω) adalah :
∑ ∫∞
−∞= −
==n
x dXnxE ωωπ
π
π
22 |)(|21
|)(|
Ini adalah Relasi Paserval untuk sinyal waktu-diskrit aperiodik dengan energi berhingga. Spektrum X(ω), secara umum, adalah bilangan kompleks dan dapat dituliskan sebagai : )(|)(|)( ωθωω jeXX = Sebagaimana dalam sinyal kontinyu, kuantitas 2|)(|)( ωω XSxx = merepresentasikan distribusi energi sebagai fungi frekuensi, dan disebut sebagai Energy Density Spectrum dari x(n). Untuk x(n) real maka berlaku simetri, dimana
ωω ()( XX =− dan )()( ωω XX −∠=−∠ demikian juga:
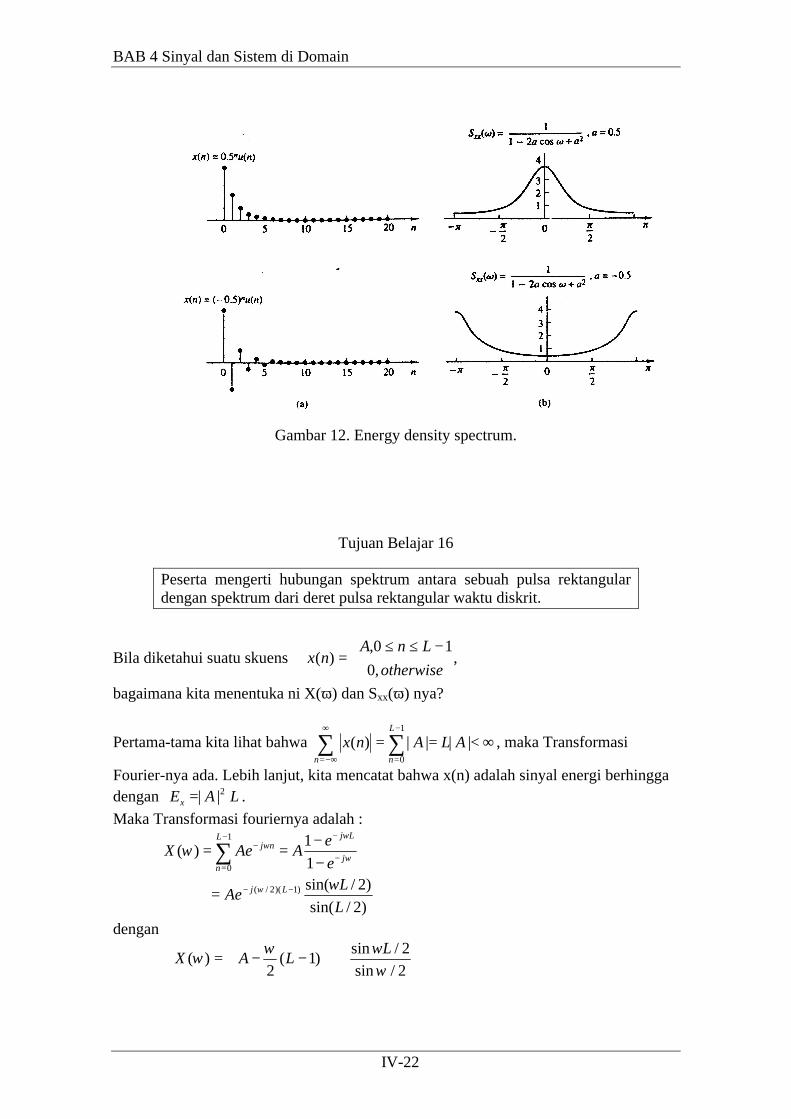
)()( ωω −= xxxx SS . Sebagai contoh, untuk mencari Sxx(ω) dari sinyal x(n) = anu(n) -1<|a| < 1 Maka kita mengaplikasikan transformasi fourier
( )∑ ∑∞
=
∞
=
−− ==0 0
)(n n
jnjn naeeaX ωωω
bila |a| < 1 → ωω jaeX −−
=1
1)(
Maka Energy Density Spectrum-nya adalah
( )( )ωωωωω jjxx aeaeXXS
−−== − 11
1)()()( *
2cos211
aa +−=
ω
BAB 4 Sinyal dan Sistem di Domain
IV-22
Gambar 12. Energy density spectrum.
Tujuan Belajar 16
Peserta mengerti hubungan spektrum antara sebuah pulsa rektangular dengan spektrum dari deret pulsa rektangular waktu diskrit.
Bila diketahui suatu skuens −≤≤
=otherwise
LnAnx
,010,
)( ,
bagaimana kita menentuka ni X(ω) dan Sxx(ω) nya?
Pertama-tama kita lihat bahwa ∑ ∑∞
−∞=
−
=
∞<==n
L
n
ALAnx1
0
||||)( , maka Transformasi
Fourier-nya ada. Lebih lanjut, kita mencatat bahwa x(n) adalah sinyal energi berhingga dengan LAEx
2||= . Maka Transformasi fouriernya adalah :
∑−
=−
−−
−−
==1
0 11
)(L
nj
Ljnj
ee
AAeX ω
ωωω
)2/sin()2/sin()1)(2/(
LL
Ae Lj ωω −−=
dengan
2/sin2/sin
)1(2
)(ωωω
ωL
LAX ∠+−−∠=∠

BAB 4 Sinyal dan Sistem di Domain
IV-23
Gambar 13. Spektrum pulsa rektangular.
Perhatikan bahwa kNckN
X =
π2
k=0,1,….,N-1
2 Ekstensi Transformasi Fourier
2.1 Hubungan Spektrum dengan Transformasi z
Tujuan Belajar 17
Peserta mengerti hubungan transformasi Fourier dengan z.
Transformasi Z untuk skuens x(n) didefinisikan sebagai
∑∞
−∞=
−=n
nznxzX )()( ROC : r2 < |z| <r1
Marilah kita menuliskan variable kompleks z dalam bentuk z = rejω. Maka diperoleh :
[ ]∑∞
−∞=
−−=
=n
njnrez
ernxzX jω
ω )()(
⇒ Fourier Transform dari x(n)r-n

BAB 4 Sinyal dan Sistem di Domain
IV-24
Perlu dicatat bahwa, Transformasi Fourier ada bila ∑∞
−∞=
∞<=n
x nxE 2|)(|
Z transform exist bila ∑∞
−∞=
− ∞<n
nrnx |)(|
- anu(n), |a| > 1 → ada daerah Z-transform exist, FT tidak
- n
nnx c
πωsin
)( = , ada daerah FT exist Z-transform tidak
Keduaya exist bila |z| = 1 ∈ ROC
2.2 Konsep Cepstrum
Tujuan Belajar 18
Peserta dapat menghitung Cepstrum dari sinyal.
Untuk skuens {x(n)} yang mempunyai transformasi-Z X(z), diasumsikan bahwa
{x(n)} adalah skuens stabil sehingga X(z) konvergen pada unit circle. Cepstrum kompleks dari dari skuens {x(n)} didefinisikan sebagai skuens {cx(n)} yang merupakan invers tranformasi-Z dari Cx(z), dimana
{ } { }
( ) ( )
1;10
: ROC ln
)()(
21
21
><<
<<
=
↔
rr
rzr
zCzX
ncnx
x
x
bb
Dalam ROC tersebut, Cx(z) dapat direpresentasikan dengan Deret Laurent :
∑∞
−∞=
−==n
nxx znczXzC )()(ln)(
dimana
∫ −=c
nx dzzzX
jnc 1)(ln
21
)(π
Secara Transformasi Fourier, bila |z| = 1∈ ROC, maka :
∑∞
−∞=
−==n
njxx encXC ωωω )()(ln)(

BAB 4 Sinyal dan Sistem di Domain
IV-25
dimana {cx(n)} adalah skuens yang diperoleh dari invers tranformasi fourier dari X(ω), yaitu
∫−
=π
π
ω ωωπ
deXnc njx )(ln
21
)(
Dalam ekpresi magnitude dan fasa,
)(|)(|)( ωθωω jeXX = maka
)(|)(|ln)(ln ωθωω jXX += Dengan melakukan substitusi, kita peroleh Cepstrum Kompleks dalam bentuk :
[ ]∫∞
∞−
+= ωωθωπ
ω dejXnc njx )(|)(|
21
)(
2.3 Transformasi Fourier pada Sinyal dengan Pole di Unit-Circle
Tujuan Belajar 19
Peserta dapat mengekstensi transformasi Fourier agar dapat mencakup sinyal dengan pole pada unit circle.
Transformasi Fourier terdefinisi bila ( ) 1=zzX , sayangnya bila ada pole pada |z| = 1
maka Transformasi Fourier tidak eksis.
Skuens semacam itu misalnya skuens unit step yang mempunyai transformasi-Z :
111
)( −−=
zzX
atau skuens x(n)=(cos ωon)u(n) yang mempunyai transformasi-Z :
21
1
cos21cos1
)( −−
−
+−−
=zz
zzX
o
o
ωω
Untuk skuens semacam itu, kita dapat mengizinkan Transformasi Fourier untuk mengandung impuls pada frekuensi tertentu yang berkorespondensi dengan dengan lokasi pole dari X(z) yang terletak pada unit circle. Maka digunakan impulse δ(ω), yaitu sinyal dengan magnitude ∞, infinite angle, zero width dan unit area. Jadi "abaikan" titik-titik pole.
Kita lihat beberapa contoh skuens berikut dengan mengevaluasi Transformasi-Z-nya pada unit circle.
*Bagaimana menentukan Transformasi Fourier untuk sinyal step ?
11
1)()()(
1 −=
−=→=
− zz
zzXnunx

BAB 4 Sinyal dan Sistem di Domain
IV-26
→ pole di z = 1
( ) jjjjj
j
j
j
zeee
ee
ezXX
221||
.1)()(
222ωωω
ω
ω
ω
ω−=
−=
−==
kecuali z=1 atau ω=0
( )
( ) ( )ωπδωπω
πωωω
πωω
==
≠== −
1 ,2 di
2
2sin2
1
2sin2
2
2
Xk
kej
e jj
*Bagaimana menentukan Transformasi Fourier untuk sinyal x(n) = (-1)nu(n) ?
πjezz
zzX =−=→
+= 1
1)(2
↓ pole untuk ω ≠ 2π(k+1/2)
( ) 221||2
.11)(
22
2
ωω
ω
ω
ω
ωjj
j
j
j
zee
ee
ez
zX
−=+
=+
=+
=
2
2cos21 ω
ω
je=
*Bagaimana menentukan Transformasi Fourier untuk sinyal x(n) = cos ωonu(n) ?
21
1
cos21cos1
)( −−
−
+−−
=zz
zzX
o
o
ωω
( )( )oo jjo
j
eee
X ωωωω
ω ωω +−−
−
−−−
= (( 11cos1
)( ω ≠ ± ωo + 2πk
2.4 Teorema Sampling
Tujuan Belajar 20
Peserta dapat memahami teorema sampling dalam kontek domain frekuensi (hubungan antara ( )FX dengan ( )ωX ), termasuk konsep aliasing, dan interpolasi.
Bagianakah hubungan antara X(F) dengan X(ω) ? Xa(t) xa(nT) = x(n) Sampling

BAB 4 Sinyal dan Sistem di Domain
IV-27
• xa(t) adalah sinyal aperiodik dengan energi berhingga, maka spektrumnya dapat ditunjukkan oleh relasi Tranformasi Fourier :
dtetxFX Ftjaa
π2)()( −∞
∞−∫=
dFeFXtx Ftjaa
π2)()( ∫∞
∞−
=
• Sedangkan spktrum untuk sinyal diskrit x(n) dapat ditunjukkan oleh relasi
Tranformasi Fourier :
∑∞
−∞=
−=n
njenxX ωω )()( atau ∑∞
−∞=
−=n
njenxfX /2)()( π
skuens x(n) dapat dikembalikan sebagai :
∫∫−−
==2/1
2/1
2)()(21
)( dfefXdeXnx fnjnj ππ
π
ω ωωπ
∫∫∞
∞−−
=== dFeFxnTxnxdfefX FnTjaa
fnj ππ 22/1
2/1
2 )()()()(
Ingat bahwa dFF
dfFF
fss
1=→= , maka :
( )∫ ∫
−
∞
∞−
=
2/1
2/1
22)(
1dFeFXdFe
FF
XF
sFF
sFF nj
a
nj
ss
ππ
( )∑ ∫∞
−∞=
+
−
=k
Fk
Fk
nj
a
s
s
sFF
dFefX)(
)(
221
21
)(π
∑ ∫∞
−∞= −
−=k
F
F
nj
sa
s
s
sFF
dFekFFX2/
2/
2)(
π
∫ ∑−
−=2/
2/
2)(
s
s
sFF
F
F k
nj
sa dFekFFXπ
Disimpulkan bahwa :
∑∞
−∞=
−=
ksas
s
kFFXFFF
X )(
atau
[ ]∑∞
−∞=
−=k
sas FKfXFfX )()( **)
Berikut ini gambar sampling dari suatu sinyal analog pita terbatas dan aliasaing dari komponen spectral.
BAB 4 Sinyal dan Sistem di Domain
IV-28
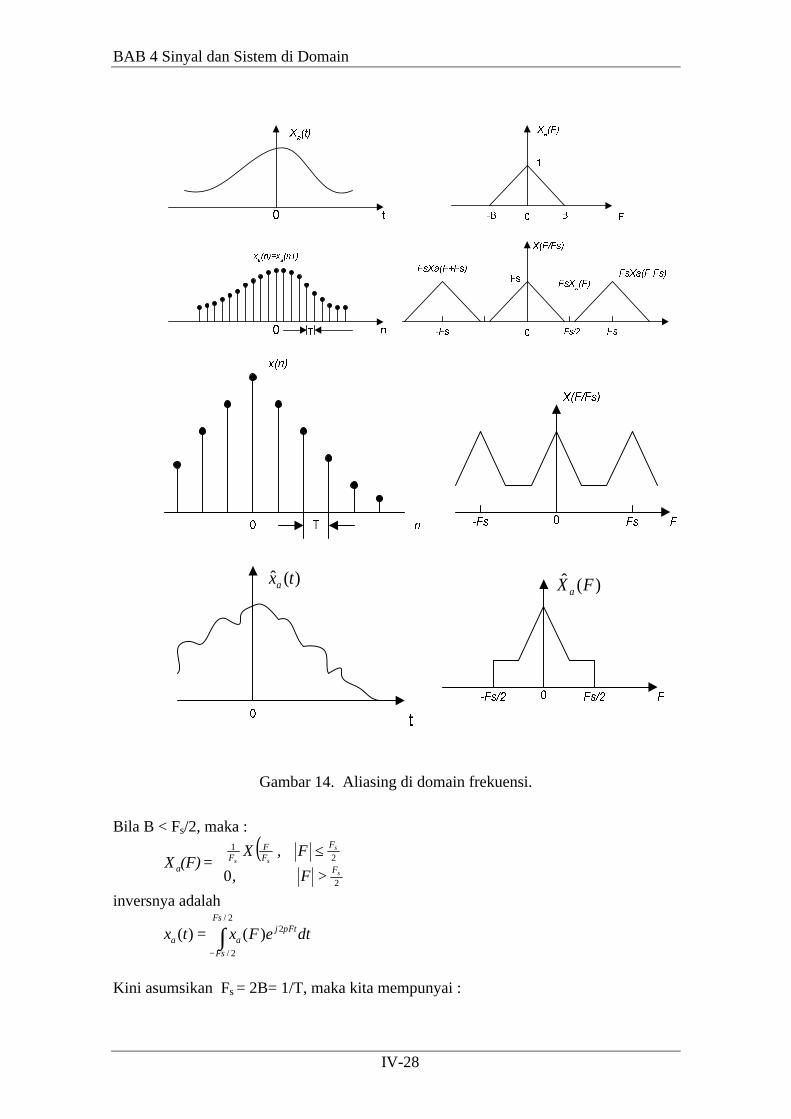
)(ˆ txa )(ˆ FX a
Gambar 14. Aliasing di domain frekuensi.
Bila B < Fs/2, maka :
( )
>
≤=
2
21
0
s
s
ssF
FFF
Fa F,
F,X(F)X
inversnya adalah
∫−
=2/
2/
2)()(Fs
Fs
Ftjaa dteFxtx π
Kini asumsikan Fs = 2B= 1/T, maka kita mempunyai :

BAB 4 Sinyal dan Sistem di Domain
IV-29
[ ]∫ ∑−
−=2/
2/
22)(1
)(Fs
Fs
Ftjnj
sa dFeenx
Ftx Fs
F ππ
∑ ∫∞
−∞= −
−=n
Fs
Fs
tFj
s
dFenxF
Fsn
2/
2/
)(2)(1 π
( )
( )nTtg
nTtT
nTxn
a
−↓
−∑
∞
−∞=
sinc)(π
dimana )2(sincsinc)( BttT
tg ππ
=
=
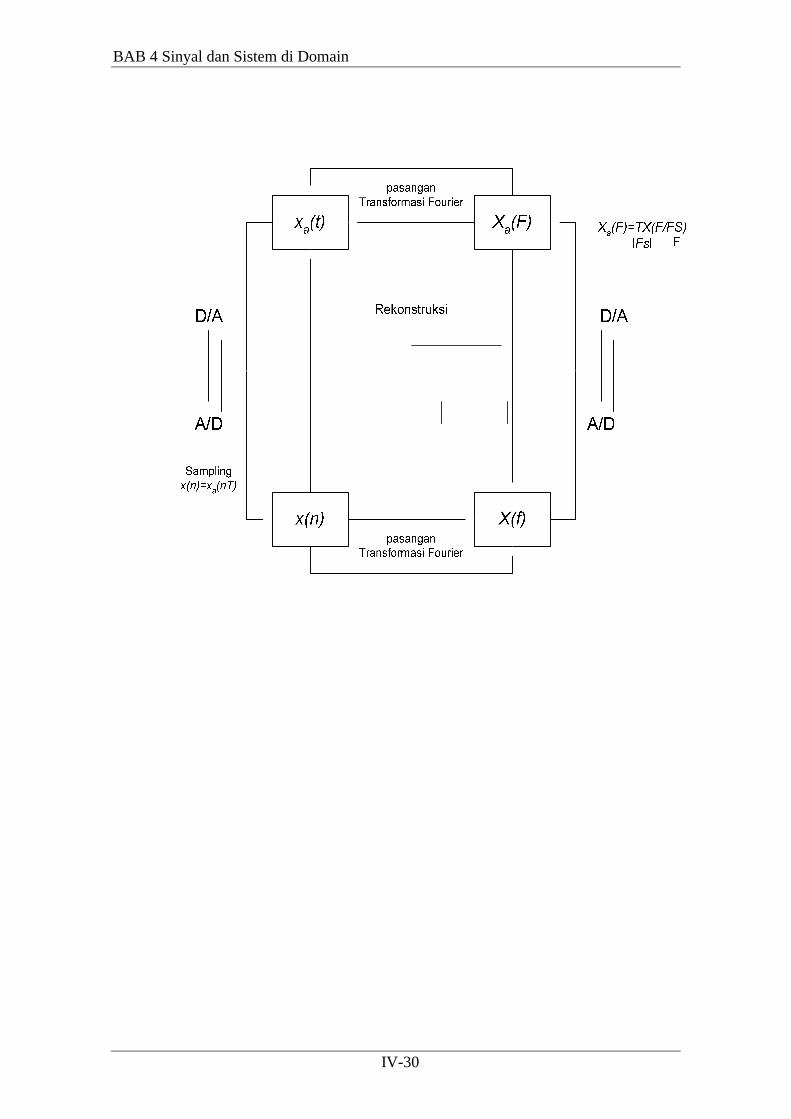
Persamaan diatas yang digunakan untuk merekonstruksi sinyal analog dari sampelnya disebut sebagai formula interpolasi ideal. Teorema Sampling : Suatu sinyal waktu-kontinyu pita terbatas, dengan frekuensi tertinggi (bandwidth) B Hz, dapat direkonstruksi secara unik dari samplenya yang memiliki sampling rate Fs ≥ 2B sampel per detik. Relasi antara variabel frekuensi F dan f dapat dilihat pada gambar dibawah ini.
Gambar 15. Gambar dibawah ini menunjukkan relasi untuk sinyal sampel pada domain
waktu dan domain frekuensi.
BAB 4 Sinyal dan Sistem di Domain
IV-30
≤
∫−∞
∞
= dfefXnx fnj π2)()(
∑∞
−∞=
−=n
fnjenxfX π2)()(
∑∞
−∞=
−=k
sqs FkfXFfX )()(
∫∞
∞−
−= dtetxFX Ftjaa
π2)()(
∑∞
−∞= −−
=n
a TnTtTnTt
nxtx/)(
/)(sin)()(
ππ
∫∞
∞−
= dFeFXtx Ftjaa
π2)()(
Gambar 16. Peta spektrum dari sinyal kontinue dan diskrit hasil samplingnya.
Sekarang marilah kita melihat contoh soal berikut.
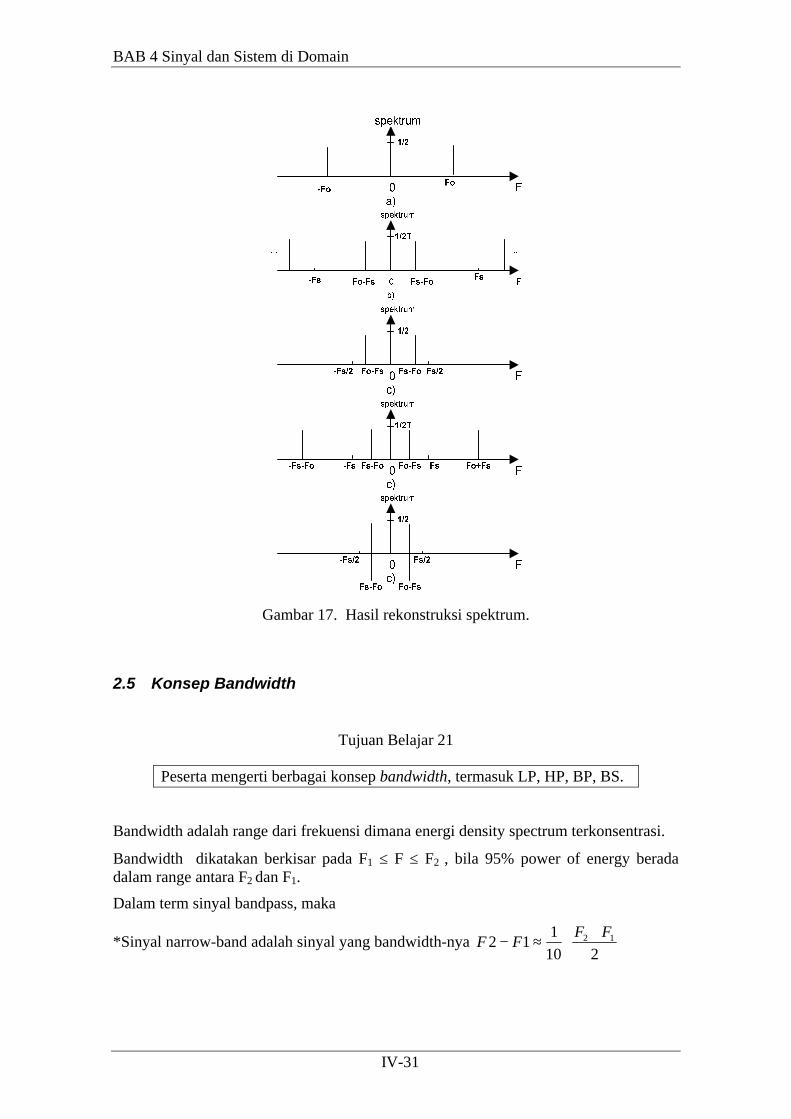
Jika diberikan sinyal waktu-kontinyu tFtx oa π2cos)( = , dengan sampling Fs, Fs/2 < Fo <Fs , maka rekonstruksi spektrum Xa(F) dapat digambar :
BAB 4 Sinyal dan Sistem di Domain
IV-31
Gambar 17. Hasil rekonstruksi spektrum.
2.5 Konsep Bandwidth
Tujuan Belajar 21
Peserta mengerti berbagai konsep bandwidth, termasuk LP, HP, BP, BS.
Bandwidth adalah range dari frekuensi dimana energi density spectrum terkonsentrasi.
Bandwidth dikatakan berkisar pada F1 ≤ F ≤ F2 , bila 95% power of energy berada dalam range antara F2 dan F1.
Dalam term sinyal bandpass, maka
*Sinyal narrow-band adalah sinyal yang bandwidth-nya
+
≈−210
112 12 FF
FF
BAB 4 Sinyal dan Sistem di Domain
IV-32
*Sinyal wide-band adalah sinyal yang bandwidth-nya yang lebih besar dari sinyal narrow-band.
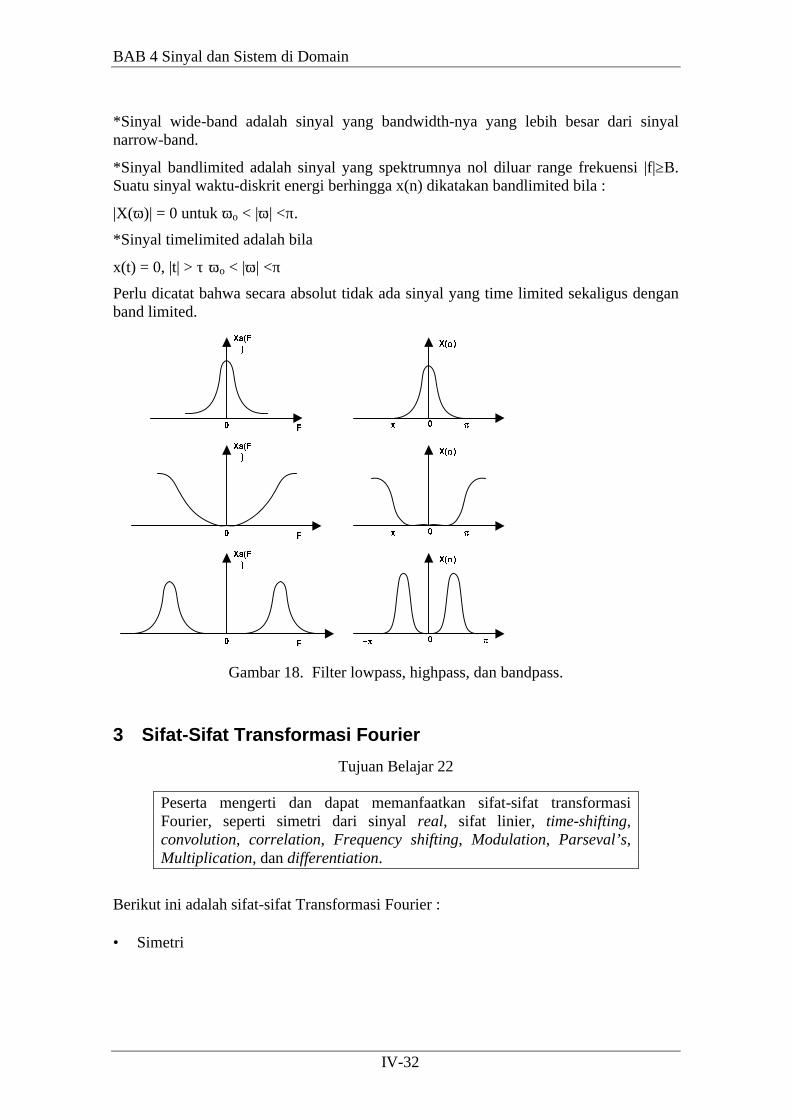
*Sinyal bandlimited adalah sinyal yang spektrumnya nol diluar range frekuensi |f|≥B. Suatu sinyal waktu-diskrit energi berhingga x(n) dikatakan bandlimited bila :
|X(ω)| = 0 untuk ωo < |ω| <π.
*Sinyal timelimited adalah bila
x(t) = 0, |t| > τ ωo < |ω| <π
Perlu dicatat bahwa secara absolut tidak ada sinyal yang time limited sekaligus dengan band limited.
Gambar 18. Filter lowpass, highpass, dan bandpass.
3 Sifat-Sifat Transformasi Fourier
Tujuan Belajar 22
Peserta mengerti dan dapat memanfaatkan sifat-sifat transformasi Fourier, seperti simetri dari sinyal real, sifat linier, time-shifting, convolution, correlation, Frequency shifting, Modulation, Parseval’s, Multiplication, dan differentiation.
Berikut ini adalah sifat-sifat Transformasi Fourier : • Simetri

BAB 4 Sinyal dan Sistem di Domain
IV-33
Gambar 19. Hubungan simetris.
• Linear
( ) ( )∑ ∑→ ωαα iiii Xnx Sebagai contoh :
( )( )
( )
( )
≥<
=
<≥
=
<=
−
0n 00n
0n 00n
X cari
1a
2
1
n
n
anx
anx
anxn
ω
Diperoleh :
∑ ∑∞
−∞=
∞
=
−− ==n n
njnnj eaenxX0
1 )()( ωωω
( )∑∞
=−
−
−==
0 11
nj
nj
aeae ω
ω
( )∑∑∞
=
−−
−∞=
− ==1
1
2 )(k
Kj
n
njn aeeaX ωωω
( )∑∞
= −==
0 1kj
jKjj
aeae
aeae ω
ωωω
maka akan menghasilkan :

BAB 4 Sinyal dan Sistem di Domain
IV-34
2
2
cos211
111
)(aa
ae
aeae
X j
j
j +−−
=−
+−
= − ωω ω
ω
ω
• Time Shifting dan Time reversal
( ) ( )
( ) ( )ωωω XXe
-n xn-k x
kj
−
↓↓
• Konvolusi )()()()( 2121 ωω XXnxnx ↔∗
Sebagai contoh, hitunglah konvolusi dari x1(n) * x2(n) Dimana
{ }↑
==
1,1,1)(21 nx(n)x
Maka : ( ) ( ) ωωω cos2121 +== XX
⇒ X(ω) = (1 + cos ω)2 = 1 + 4 cos ω + cos 2ω = 3 + 2(ejω + e -jω) + (ej2ω + e -j2ω)
{ }
↑
=
5,4,3,2,1 x(n)
• Korelasi
∑∞
−∞=−=
kxx nkxkxnr )()()( 2121
)()()( 2121ωωω XXS xx =⇔
)()( ωxxxx Slr ↔ Auto-Korelasi
• Frequency Shifting
)()( onj Xnxe o ωωω −↔
• Modulation
[ ])()(cos)(21
ooo XXnnx ωωωωω −++↔
Repersentasi grafis dari terorema modulasi dapat dilihat pada gambar berikut.

BAB 4 Sinyal dan Sistem di Domain
IV-35
Gambar 20. Hasil modulasi.
• Parseval
∫∑−
∞
∞−
↔π
π
ωωωπ
dXXnxnx )()(21
)()( *21
*21
• Multiplication
∫−
−↔π
π
λλωλπ
dXXnxnx )()(21
)()( 2121
• Diferensiasi
ωω
ddX
jnnx)(
)( ↔
Tujuan Belajar 23
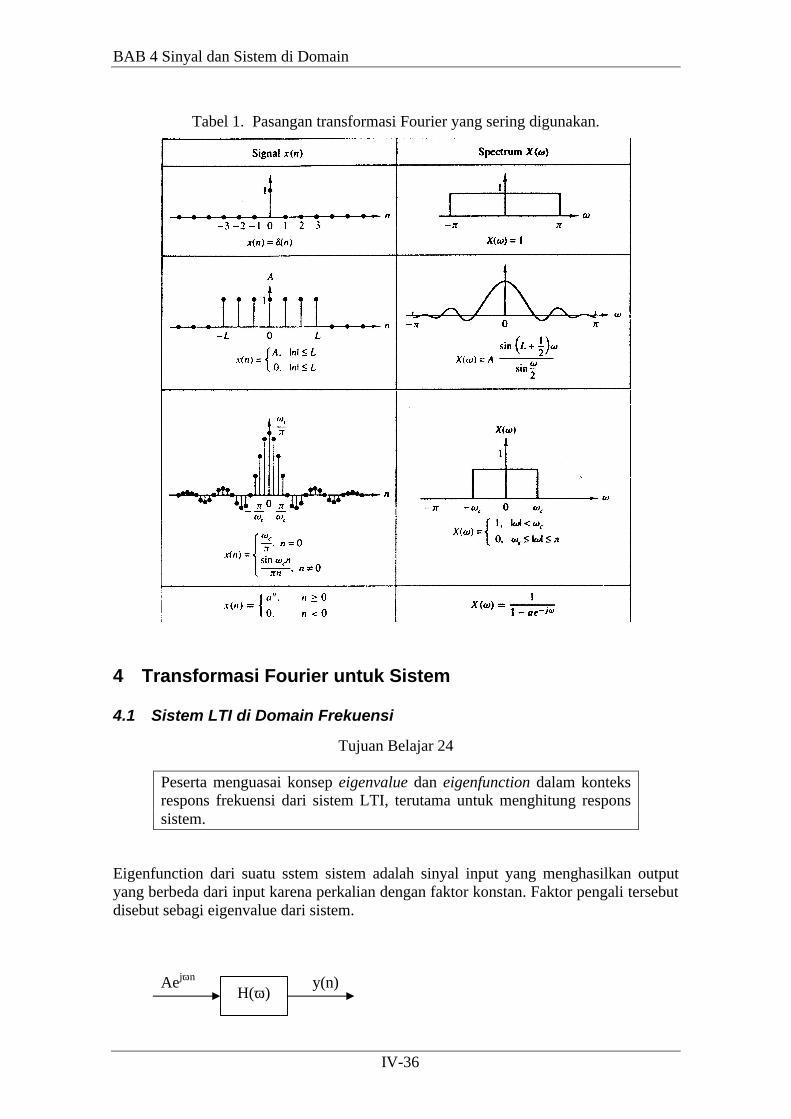
Peserta menguasai pasangan transformasi yang berguna seperti impuls, rektangular, dan fungsi sinc.
Tabel berikut memberikan pasangan Transformasi Fourier untuk sinyal waktu-diskrit aperiodik yang sering digunakan.
−π π
X(ω)
1
π/2−π/2 2π−2π ω
ω
ω
0
0 π−π/2 π/2
1Y1(ω)
0 π/2 π−π/2
−π
−π
1
1/2
Y2(ω) = X(ω-π)
BAB 4 Sinyal dan Sistem di Domain
IV-36
Tabel 1. Pasangan transformasi Fourier yang sering digunakan.
4 Transformasi Fourier untuk Sistem
4.1 Sistem LTI di Domain Frekuensi
Tujuan Belajar 24
Peserta menguasai konsep eigenvalue dan eigenfunction dalam konteks respons frekuensi dari sistem LTI, terutama untuk menghitung respons sistem.
Eigenfunction dari suatu sstem sistem adalah sinyal input yang menghasilkan output yang berbeda dari input karena perkalian dengan faktor konstan. Faktor pengali tersebut disebut sebagi eigenvalue dari sistem.
Aejωn y(n)
H(ω)
BAB 4 Sinyal dan Sistem di Domain
IV-37
∑∞
−∞=
−=k
knjAekhny )()()(
( )ω
ωω
H
eekhA nj
k
kj
)(
↓
= ∑
∞
−∞=
−
y(n) = AH(ω)ejωn
Maka H(ω) adalah eigen value
ejωn adalah eigen vector/ eigen function Sebagai contoh, tentukan output dari sistem dengan respon impuls ( ) )()( 2
1 nunh n= dan
input njAenx 2)(π
= . Kita cari )( 2
πH terlebih dahulu untuk kemudian mencari y(n), hasilnya : ( )
fasaer tergesamplitudo tergeser
52
)( 6.262
↑↑
= − onjAenyπ
Tujuan Belajar 25
Peserta dapat menghitung respons frekuensi (magnitude dan phase) dari sistem yuang diketahui h(n) nya, dan dapat memanfaatkannya untuk menghitung output dari sinyal complex exponential dan sinusoidal dengan durasi tak terhingga.
Secara umum kita dapat menulis : )()()( ωθωω jeHH =
↓ = ∠ H(ω)
( ) ( )ωω
ωωω
IR
k k
jHH
kkhjkcokhH
sin)()()(
+↓↓
−= ∑ ∑
−
+= )()(
tan22
1
)()( ωω
ωω R
I
HH
j
IR eHH

BAB 4 Sinyal dan Sistem di Domain
IV-38
dengan catatan HR(ω) = HR(-ω) HI(ω) = -HI(-ω) Sebagai contoh, tentukan magnitude dan fasa dari h(ω) sistem three-point moving averages. y(n) = 1/3 (x(n+1) + x(n) + x(n-1)) Karena
h(n) = {1/3, 1/3, 1/3} maka
( ) ( )( )ω
ωω ωω
R
jj
H
eeH
cos211)( 31
31
↑
+=++= −
( ) 0 )cos21()( 3
1 =+= ωωω IHH
)(
0)()(
)(tanωω
ωωθ
RR
I
HHH
==
Jadi untuk input Aejωn y(n) = A|H(ω)|ejθ(ω)ejωn = A|H(ω)|ej(ωn+θω)
- input Ae-jωn
njj eeHAny ωωθω −−−= )()()(
))( )(( ωθωω +−= njeHA
- input Acosωn ))(cos()()( ωθωω += nHAny
- input Asinωn
))(sin()()( ωθωω += nHAny |H(ω)| = magnitude response θ(ω) = phase response Sebagai contoh, tentukan respon dari sistem dengan input sinyal x(n) = 10 - 5sinπn/2 + 20 cos ωπn Frekuensi responsnya
ωω jeH −−
=2111
)(
- untuk 10 → ω = 0 → H(0) = 2
- untuk π/2 → ω = π/2 → ( ) ojj
ee
H 6.26
212 5
2
1
12
−−
=−
= ππ
- untuk π → ω = π → 32
11
)(21
=−
= − ππ jeH

BAB 4 Sinyal dan Sistem di Domain
IV-39
Maka :
( ) ∞<<∞+−−= n- cos340
6.26sin5
1020)( 2 nnny o ππ
[ ]∑ ∑= =
++=⇒+=L
iiii
L
iiii nHAnynAnx
1 111 )(cos)()()cos()( ωθφωωφω
4.2 Respons Steady State dan Transien
Tujuan Belajar 26
Peserta dapat menghitung respons steady state dan transien pada sinyal input sinusoidal, khususnya pada kasus sistem ( ) ( ) ( )nxnayny +−= 1 .
Bagaimanakah respons steady state dan respons transient pada sinyal sinusoidal? • bila x(n) diterapkan pada n = -∞ maka tidak ada transien • bila x(n) diterapkan pada n = 0 maka akan muncul transient Sebagai contoh, y(n) = ay(n-1) + x(n) dan x(n) diterapkan pada n = 0 maka
condition initial
0n )()1()(0
1
↓
≥−+−= ∑=
+n
k
kn knxayany
asumsikan x(n) = Aejωn n ≥ 0, diaplikasikan pada n=0, diperoleh :
∑=
−+ +−=n
k
knjkn eaAyany0
)(1 )1()( ω
transient decay to 1a karena
statesteady
0n 11
)1()1(1
1
→→<
↑
↑
≥−
+−
−−= −−
+−++
φ
ωω
ωω
ωnj
jnj
j
njnn e
aeA
eaeeAa
ya
Bila menyangkut input sinudoidal, apalagi bila |a| kecil, → transient sering diabaikan → SS penting
Bagaimanakah respons steady state terhadap sinyal periodik ?
10 )()(/21
0
, ..., N- kecnxNnxNknjN
kk ===+ ∑
−
=
π
let Nknjkk ecnx /2)( π= ← komponen
cari response
BAB 4 Sinyal dan Sistem di Domain
IV-40
→ ∑= )()( nxnx k
( )
( )N
k
npjNpk
kkk
H
eHc(n)H(? (?(n)y Nk
πω
ω 2
22
=
↓
==
( )ny dari seriesFourier
2)()( 2
→↓
== ∑ ∑
k
k k
njkk
d
eN
kHcnyny N
kππ
LTI mengubah amplitudo dan menggeser fasa, tetapi tidak mempengaruhi perioda N
Tujuan Belajar 27
Peserta dapat menghitung respons sistem pada sinyal input yang aperiodik.
Untuk menghitung respons terhadap sinyal aperiodik, pertama-tama marilah kita lihat teorema konvolusi : Y(ω) = H(ω) X(ω) Yang berarti pula :
Y(ω)| = |H(ω)||X(ω)| ∠Y(ω) = ∠X(ω) + ∠H(ω) → H(ω) filter → X(ωi) = 0 → y(ωi) = 0 sistem tidak menambah frekuensi.
Skuens output dapat ditentukan dari invers transformasi Fourier :
∫∞
∞−
= ωωπ
ω deYny j)(21
)(
↑ Tapi metode ini jarang digunakan karena kalah populer dibanding Z-transform. Dari pengkuadratan magnitude, kita memperoleh :
|Y(ω)|2 = |H(ω)|2|X(ω)|2
Syy(ω) = (H(ω))2 Sxx(ω)
4.3 Hubungan Dengan Fungsi Sistem
Tujuan Belajar 28
Peserta dapat menghitung ( )ωH dari ( )zH atau pole-zeronya.
Kita tahu bahwa bila fungsi sistem H(z) konvergen pada unit circle, maka kita mendapatkan respons frekuensi dari sistem dengan mengevaluasinya pada unit circle. Maka kita dapatkan

BAB 4 Sinyal dan Sistem di Domain
IV-41
( )
( )∏
∏
=
−
=
−
=
−
−== N
i
jk
M
k
jk
oez
ep
ezbzHH j
1
1
1
1)()(
ω
ω
ωω
dengan
( )
( )
=
−
−=
∏
∏
=
=*
*
1
*
1
*
* 1
1
1)(
zH
ep
ezbH N
k
jk
M
k
jo
ω
ω
ω
Jadi ωωωωωω jezzHzHHHHHH
=−=−== )()()()()()()( 1*2
Untuk menghitung H(ω) kita lakukan
( )
( )
( )
( )∏
∏
∏
∏
=
=−
=
−
=
−
=
−
−=
−
−== N
kk
j
M
kk
j
MNjoN
i
jk
M
k
jk
oez
pe
zeeb
ep
ezbzHH
k
k
j
1
1)(
1
1
1
1)()(
ω
ω
ω
ω
ω
ωω
)()( ωθω ω kj
kkj evze =−→
)()( ωφω ω jkk
j eupe =−→
maka )()...()()...(
)(1
1
ωωωω
ωN
Mo UU
VVbH =
∑ ∑= =
−+−+∠=∠M
i
N
iiio MNbH
1 1
)()()()( ωθωθωω
Gambar-gambar berikut merupakan intepretasi geometris dari kontribusi pole dan zero untuk Transformasi Fourier.
BAB 4 Sinyal dan Sistem di Domain
IV-42
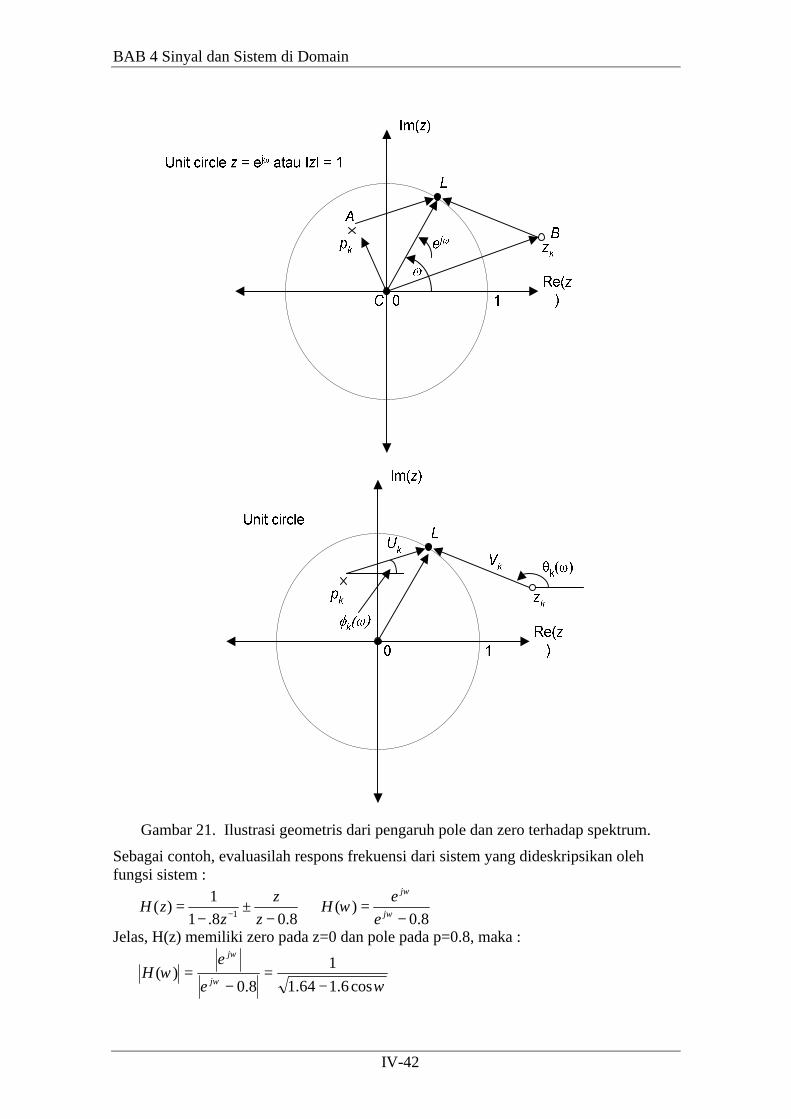
Gambar 21. Ilustrasi geometris dari pengaruh pole dan zero terhadap spektrum.
Sebagai contoh, evaluasilah respons frekuensi dari sistem yang dideskripsikan oleh fungsi sistem :
8.0)(
8.08.11
)( 1 −=⇒
−±
−= − ω
ω
ω j
j
ee
Hz
zz
zH
Jelas, H(z) memiliki zero pada z=0 dan pole pada p=0.8, maka :
ωω
ω
ω
cos6.164.11
8.0)(
−=
−=
j
j
e
eH
BAB 4 Sinyal dan Sistem di Domain
IV-43
dan
8.0cossin
tan)( 1
−−= −
ωω
ωωθ
dalam decible :
∑ ∑= =
−+=M
k
N
kkkdB
UVbH1 1
1010 )(10log20)(log20log20)( ωωω
5 Sistem LTI Sebagai Filter
5.1 Konsep Filter
Tujuan Belajar 29
Peserta memahami bahwa sistem LTI dapat dipandang sebagai filter, terutama dalam hal magnitude response nya.
Filter adalah divais yang menentukan apa yang dilewatkan dari input yang diberikan. Kelakuan fikter ditentukan oleh karakteristik respons frekuensi H(ω), yang bergantung pada parameter sistem. H(ω) berlaku sebagai weighting function atau spectral shaping function untuk komponen-komponen frekuensi yang berbeda dalam sinyal input. Dalah hal ini, setiap sistem LTI dapat dipandang sebagai filter frequency-shaping.
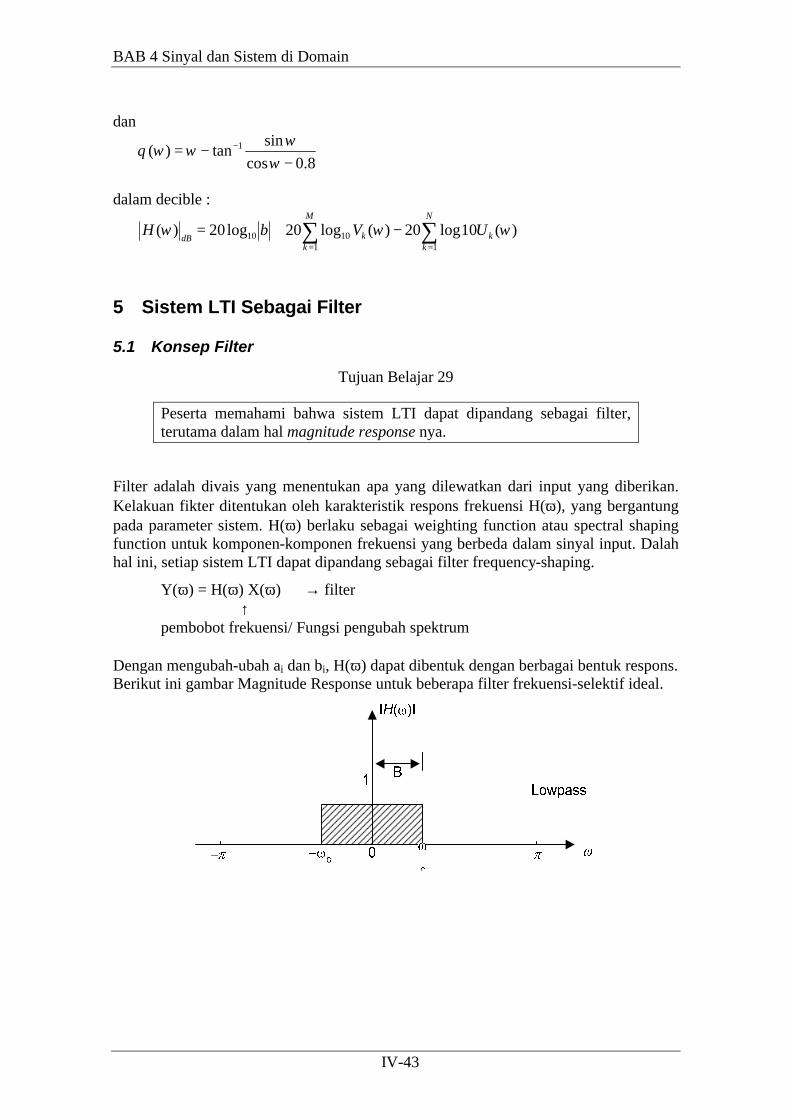
Y(ω) = H(ω) X(ω) → filter ↑ pembobot frekuensi/ Fungsi pengubah spektrum Dengan mengubah-ubah ai dan bi, H(ω) dapat dibentuk dengan berbagai bentuk respons. Berikut ini gambar Magnitude Response untuk beberapa filter frekuensi-selektif ideal.

BAB 4 Sinyal dan Sistem di Domain
IV-44
Gambar 22. Spektrum dari beberapa jenis filter.
Tujuan Belajar 30
Peserta mengerti konsep linear phase response, dan motivasinya.
Karakteristik lain dari filter ideal adalah respon fasa linear. Untuk mendemonstrasikannya, marilah kita lihat :

BAB 4 Sinyal dan Sistem di Domain
IV-45
<<
=−
otherwisece
Honj
,0,
)( 21 ωωωω
ω
C, no constants. Let X(ω) ada di [ω1,ω2] Output filter mempunyai spektrum
Y(ω) = X(ω)H(ω)= CX(ω)e-jωno ω1 < ω <ω2 Dari sifat Transformasi Fourier, diperoleh y(n) = Cx(n-no)
Jadi output dari sistem ini adalah sinyal aslinya yang tergeser fasa dan terskala. Kedua perubahan ini biasanya dapat ditoleransi apabila terjadi pada sinyal seutuhnya. Dengan demikian filter-filter ideal mempunyai karakteristik linear di daerah passband, θ(ω) = -ωno
delay : ωωθ
ωτd
dg
)()( −= → envelope delay/ group delay
→ τg(ω) adalah time delay dari komponen ω akibat filter. Pada kasus fasa linear,
τg(ω) = no → semua komponen mendapat delay yang sama, sehingga integritas sinyal terjaga.
Tujuan Belajar 31
Peserta mengetahui definisi filter ideal, dan mengapa tidak dapat di buat secara praktis.
Dari bagian sebelumnya, dapat kita simpulkan bahwa filter passband ideal memiliki karakteristik - magnitude yang konstan - fasa yang linear Sayang sekali, hal ini hanya ada di dunia matematis Sebagai contoh, filter lowpass ideal memiliki respons impuls
n
nnh c
ep ππωsin
)( = -∞ < n <∞
→ non causal, not absolutely summable → unstable → Dalam praktek, filter ini dijadikan pedoman ideal untuk proses aproksimasi
Kita akan melihat bagaimana filter-filter dapat dibuat berdasarkan penempatan pole dan zero. Prinsip utama : letakkan ke dekat unit circle. Frekuensi sekitar zero akan diredam, frekuensi sekitar pole akan diperkuat.

BAB 4 Sinyal dan Sistem di Domain
IV-46
Selanjutnya : - pole harus di dalam UC, zero bisa di mana saja - pole/zero komplex harus berbentuk conjugate pairs agar koefisien real
( )
( )∏
∏
∑
∑
=
−
=
−
=
−
=
−
−
−=
+= N
kk
M
kk
oN
k
kk
M
k
kk
zp
zzb
za
zbzH
1
1
1
1
0
0
1
1
1)(
bo dipilih agar |H(ωo)| = 1di pass, N ≥ M
Tujuan Belajar 32
Peserta dapat membuat filter (LP, HP, BP, BS) dengan menempatkan pole-zero pada posisi yang sesuai.
Dalam mendesain filter digital lowpass, - pole harus diletakkan dekat ω = 0 di dekat unit circle - zero harus diletakkan pada ω = π (high frequency)
Gambar 23. Contoh peletakan poles.
Sebagai contoh,
( ) ( )
( ) ?
azazH
0 ,1Hagar gain
11
1
1
11
==↑
−−= −
ωω
Tambah zero z = -1 → atenuasi frequency response
( ) 1
1
2 11
21
−
−
−+−
=azza
zH
→ highpass → folding the pole-zero position dengan cermin sumbu imaginer

BAB 4 Sinyal dan Sistem di Domain
IV-47
( )11
12
1 1
3 −+−−
=−
azza
zH
Contoh lagi, LPF dengan 2 buah pole.
( )211)(
−−=
pz
bzH o
tentukan bo dan p agar H(ω) memenuhi : H(0) = 1 |H(π/4)|2 = 1/2 Jawabannya adalah, di ω = 0, diperoleh
22 )1(1
)1()0( pb
pb
H oo −=⇒=
−=
di ω = π/4, ( )22
41
)1(4 π
πjpe
pH
−−
−=
( ) ( )( ) 2
2
244
2
221
)1(sincos1
)1(
+−
−=
+−−
=p
jp
pjpp
pππ
sehingga
32.0
21)1(221
22
21
)1( 2222
4
=⇒
=+=−→=
+
−
−
p
ppppp
p
( )2132.01
46.0)(
−−=
zzH
Prinsip yang sama dapat diterapkan pada perancangan filter BP
Tujuan Belajar 33
Peserta dapat mengubah filter LP menjadi HP dengan memproses h(n).
Bagaimanakah mengubah filter LP menjadi filter HP ? Prototipe LPF memiliki respons impuls hLP(n), maka hLP(n) ↔ HLP(ω)
HLP(ω) = HLP(ω-π) = HLP(ω)|ω=ω-π
BAB 4 Sinyal dan Sistem di Domain
IV-48
Ctt.
Bila ∑ ∑= =
−+−−=N
k
M
kkk knxbknyany
1 0
)()()(
∑
∑
=
−
=
−
+=→ N
k
kjk
M
k
kjk
lp
ea
ebH
0
0
1)(
ω
ω
ω
∑
∑
=
−
=
−
−=
−+
−== N
k
kjk
k
M
k
kjk
k
LPlp
ea
ebkHH
1
0
)1(1
)()()(
ω
ω
πωωωω
∑∑==
−−+−−−=M
kk
kN
kk
k knxbknyany01
)()1()()1()(
5.2 Beberapa Filter Khusus
Tujuan Belajar 34
Peserta dapat mendesain dan membuat resonator digital.
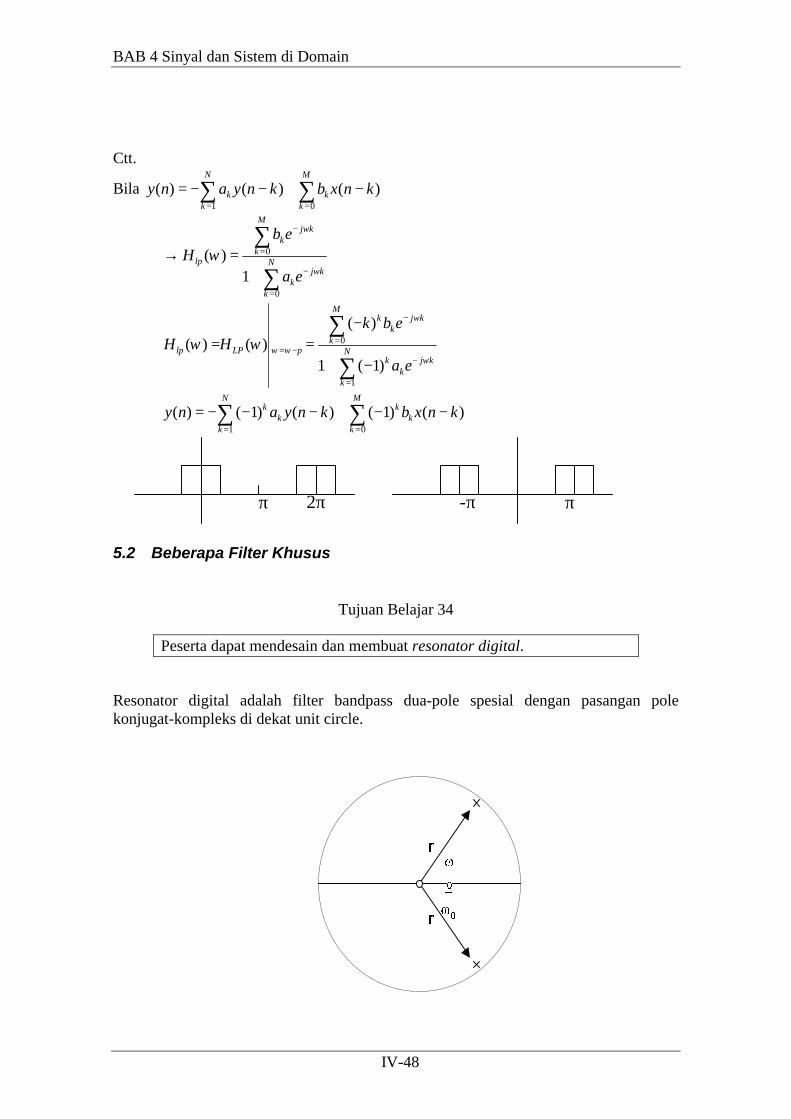
Resonator digital adalah filter bandpass dua-pole spesial dengan pasangan pole konjugat-kompleks di dekat unit circle.
2π π π -π
BAB 4 Sinyal dan Sistem di Domain
IV-49
Gambar 24. Penempatan pole untuk resonator digital.
Bisa pula ditambah 1-2 zeros. Misalnya di origin atau di z = ±1 to eliminate response di ω = 0 dan ω = π Untuk kasus zero di origin , maka
( )( ) 2211 )cos2(111)( 1 −−−− +−
=−−
= −zrzr
b
zrere
bzH
o
ojzj
o
oo ωωω
|H(ω)| berpuncak dekat ω = ωo, dan bo dipilih agar |H(ωo)| = 1
( )( ) ( )( )ooooo jo
jjjjo
o rerb
ereereb
H ωωωωωω 21111)( −−−− −−
=−−
=
( )
12cos211
)(2
=−+−
=o
oo
rrr
bH
ωω
( ) oo rrrb ω2cos211 2 −+−=→
21
21
)()()(
PP
UUb
H o
↓↓
=ωω
ω θ(ω) = 2ω -φ1(ω) - φ2(ω)
)cos(21)( 21 ωωω −−+= orrU
)cos(21)( 22 ωωω +−+= orrU
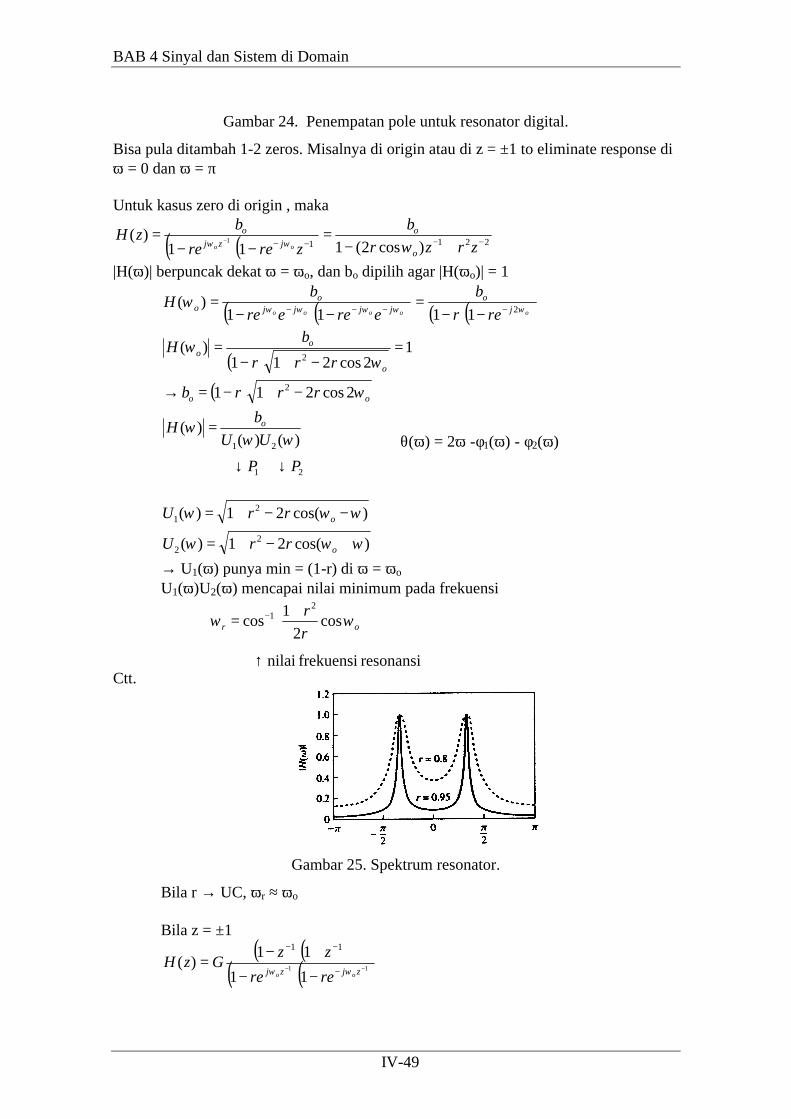
→ U1(ω) punya min = (1-r) di ω = ωo U1(ω)U2(ω) mencapai nilai minimum pada frekuensi
resonansi frekuensi nilai
cos2
1cos
21
↑
+= −
or rr
ωω
Ctt.
Gambar 25. Spektrum resonator.
Bila r → UC, ωr ≈ ωo
Bila z = ±1
( )( )
( )( )11
11
11)(
11
−− −
−−
−−
+−=
zjzj oo rere
zzGzH
ωω
BAB 4 Sinyal dan Sistem di Domain
IV-50
221
2
)cos2(11
−−
−
+−−
=zrzr
zG
oω
[ ][ ])()(
2
111
)( ωωωω
ω
ω −−−
−
−−−
=oo jj
j
o reree
bH
)()(
)()(
21 ωωω
ωUU
NbH o=
)2cos1(2)( ωω −=N
Tujuan Belajar 35
Peserta dapat mendesain dan membuat filter notch.
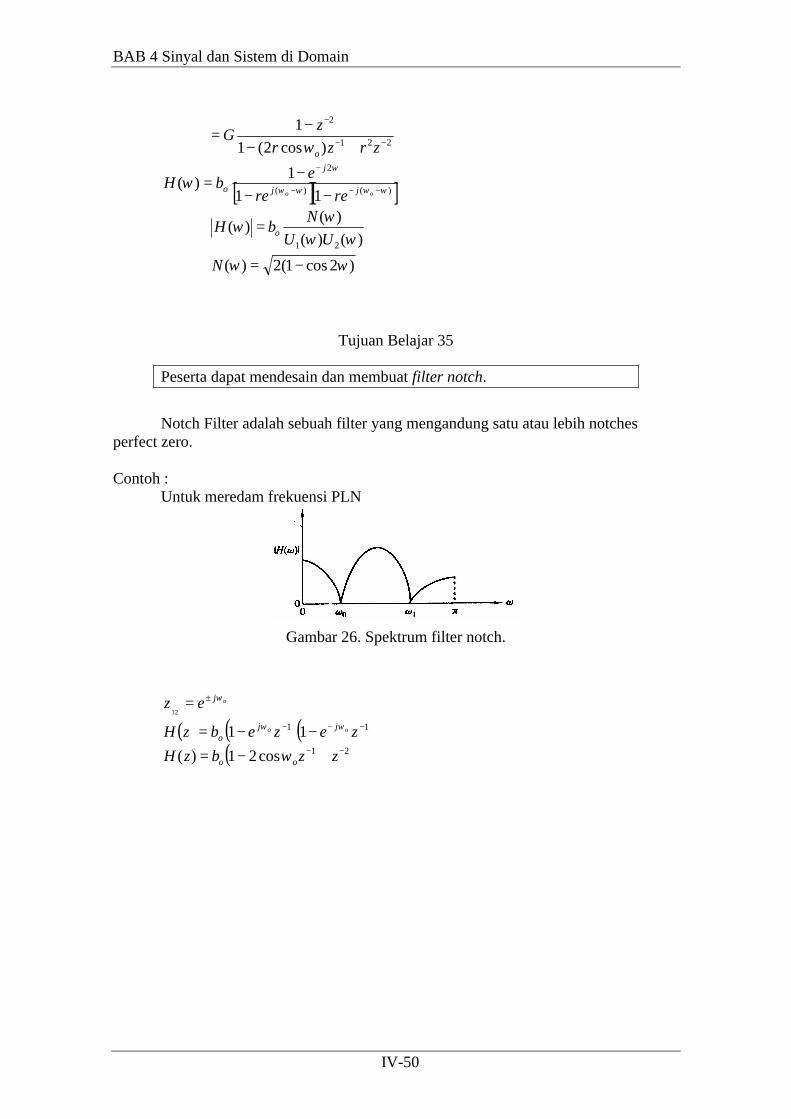
Notch Filter adalah sebuah filter yang mengandung satu atau lebih notches
perfect zero. Contoh : Untuk meredam frekuensi PLN
Gambar 26. Spektrum filter notch.
( ) ( )( )11 1112
−−−
±
−−=
=
zezebzH
ezoo
o
jjo
j
ωω
ω
( )21cos21)( −− +−= zzbzH oo ω

BAB 4 Sinyal dan Sistem di Domain
IV-51
Untuk menaikkan kinerja, kita bisa menambah pole P1,2 = re±jωo
221
21
cos21cos21
)( −−
−−
+−+−
=zrzr
zzbzH
o
oo ω
ω

BAB 4 Sinyal dan Sistem di Domain
IV-52
Tujuan Belajar 36
Peserta dapat mendesain dan membuat filter comb.
Comb Filter adalah - Ekstensi dari Notch Filter - Digunakan untuk membuang harmonics
∑=
−+
=M
k
knxM
ny0
)(1
1)(
FIR :
∑=
−
+=
M
k
kzM
zH01
1)(
[ ]
( )1
)1(
11
11
)( −
+−
−−
+=
zz
MzH
M
+
+=
−
2sin
21
sin
1)(
2
ω
ωω
ωM
Me
H
Mj
( )12
+= Mkj
ezπ
k = 1, 2, 3, …M
pole z = 1 di cancel zero z = 1 In general
∑=
−=M
k
kk zhzH
0
)(
∑=
−=→M
k
kkL LzhzH
0
)(
∑=
−=M
k
jkLL ekhH
0
)()( ωω

BAB 4 Sinyal dan Sistem di Domain
IV-53
Jadi bila H(z) punya zero pada frekuensi ωo, HL(z) punya zero di ωk = ωo + 2πk/L , k = 0, … L-1 Bila diterapkan di filter sebelumnya, maka
L
ML
L zz
MzH −
+−
−−
+=
11
11
)()1(
[ ] 2/
)2/sin(2/)1(sin
11
)( LMjL e
LML
MH ω
ωω
ω −++
=
)1(2
+=→ MLk
j
k ezπ
Tujuan Belajar 37
Peserta dapat mendesain dan membuat filter allpass yang tidak trivial.
Semua filter allpass didefinisikan sebagai sistem yang memiliki respon magnitude konstan untuk semua frekuensi. 1)( =ωH 0 ≤ ω ≤ π Contoh Trivial : H(z)= z-k
NN
NNN
N
zazazzazaa
zH −−
−+−−−
+++++++
=...1
...)( 1
1
11
11
Bila ∑=
−−− =→=
N
k
Nkk zA
zAzzHzazA
0
1
)()(
)()(
)(ωH
1
π2− ππ− π2 π25
2π5
4π5
6π5
8π
1a a
1
),( or ω
),( or ω−
),( 1or ω
),( 1or ω−
oω
BAB 4 Sinyal dan Sistem di Domain
IV-54
1)()()( 12 ===
−ω
ωjez
zHzHH
→ all pass bila zo is pole, zo
-1 is zero Secara umum:
( )( )( )( )∏ ∏
= =−−
−−
−
−
−−−−
−−
=R CN
k
N
k kk
kk
k
kap zz
zzzaz
zH1 1
1*1
*11
1
1
111)(
ββββ
α
NR ⇒ Real poles and zero NC ⇒ Complex conjugate pairs Agar stabil -1 < αk < 1 |βk| < 1 Ini digunakan untuk phase equalizer
Tujuan Belajar 38
Peserta dapat mendesain dan membuat digital sinusoidal oscillator.
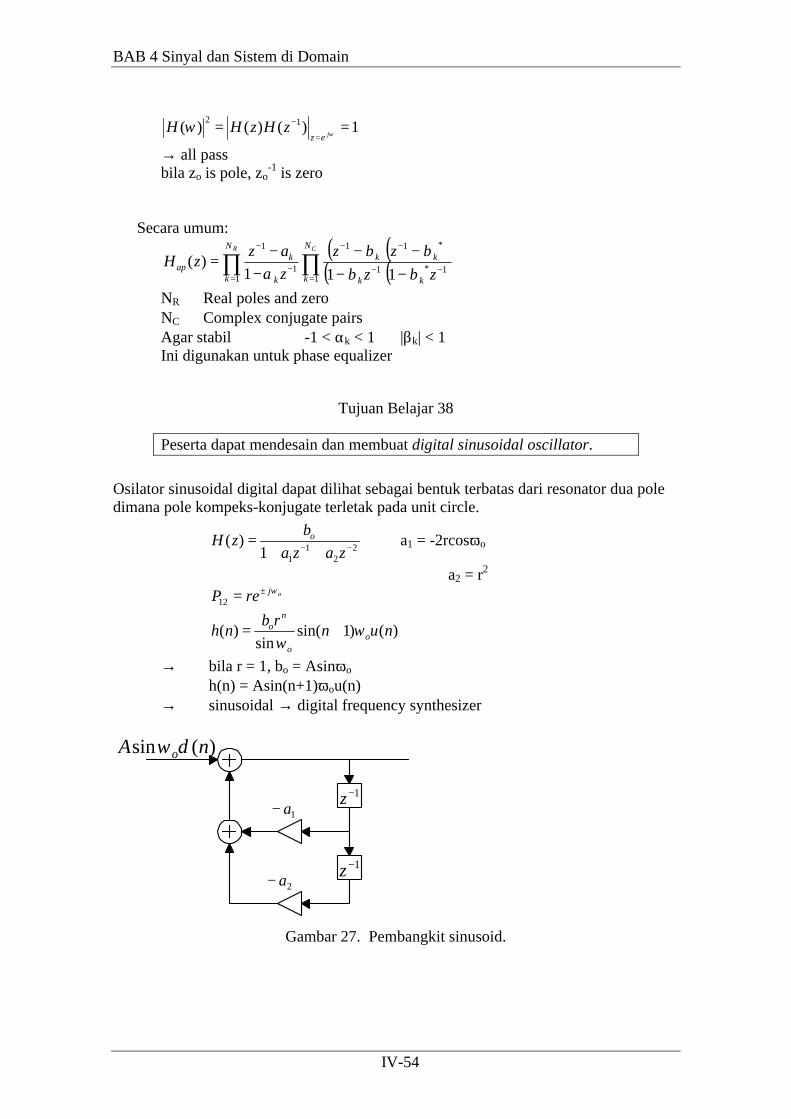
Osilator sinusoidal digital dapat dilihat sebagai bentuk terbatas dari resonator dua pole dimana pole kompeks-konjugate terletak pada unit circle.
22
111
)( −− ++=
zazab
zH o a1 = -2rcosωo
a2 = r2 ⇒ ojreP ω±=12
)()1sin(sin
)( nunrb
nh oo
no ωω
+=
→ bila r = 1, bo = Asinωo h(n) = Asin(n+1)ωou(n) → sinusoidal → digital frequency synthesizer
Gambar 27. Pembangkit sinusoid.
)(sin nA oδω
1a−
2a−
1−z
1−z

BAB 4 Sinyal dan Sistem di Domain
IV-55
( ) ( )( )( )( ) o
o
o
o
AyAy
Aynny
ωω
ωω
3sin22sin1
sin01sin
===
+=
Coupled form membangkitkan Asinωon A cosωon Cos(α+β) = cosαcosβ - sinαsinβ Sin(α+β) = sinαcosβ + cosαsinβ Didefinisikan α = nωo β = ωo yc(n) = cosnωou(n) = cos(ωo+(n-1)ωo)u(n) ys(n) = sin nωou(n) = sin(ωo+(n-1)ωo)u(n) )1()(sin)1()(cos)( −−−=→ nynyny sococ ωω )1()(cos)1()sin()( −+−= nynyny socos ωω
−−
−=
⇒
)1()1(
cossinsincos
)()(
nyny
nyny
s
c
oo
oo
s
c
ωωωω
initial condition yc(-1) = Acosωo ys(-1) = -Asinωo
Gambar 28. Pembangkit sinus dan cosinus.
6 Penutup Demikian telah dijelaskan konsep spektrum untuk sinyal dan sistem di domain frekusensi.
1−z
1−z
nny oc ωcos)( =
nny os ωsin)( =
oωcos
oωsin
oωsin−
oωcos