Embed Size (px)
Citation preview

ABSTRAK
ANALISIS PENGARUH PERUBAHAN REAKTANSI SALURAN
TERHADAP TRANSIENT STABILITY OF MULTI-MACHINE DENGAN
METODE RUNGE-KUTTA FEHLBERG
Oleh
PETRUS PRASETYO
Keandalan sistem tenaga listrik dalam menjaga dan mempertahankan kontinuitas
distribusi tenaga listrik, berkaitan dengan kestabilannya dalam menjaga
synchronism generator ketika terjadi gangguan. Studi stabilitas transien (transient
stability) berhubungan dengan gangguan-gangguan besar seperti surja hubung,
hubung singkat, lepasnya beban atau lepasnya generator. Gangguan-gangguan ini
sangat mempengaruhi sistem secara keseluruhan karenanya perlu adanya studi
transient stability.
Ada berbagai metode yang digunakan dalam analisis kestabilan diantaranya
adalah metode Runge-Kutta Fehlberg. Metode ini merupakan salah satu metode
Time Domain Simulation (TDS) yang digunakan pada penelitian ini karena
mampu meningkatkan akurasi dalam penyelesaian persamaan ayunan (swing-
equation) sistem multimesin IEEE 9 bus.
Penelitian ini bertujuan untuk mempelajari dan menganalisis pengaruh perubahan
reaktansi saluran terhadap transient stability dengan menerapkan gangguan
lepasnya beban dan gangguan 3 fasa simetris yang terjadi pada salah satu saluran.
Hasil simulasi menunjukkan kompensasi seri saluran dan penambahan jumlah
saluran transmisi mampu menurunkan reaktansi saluran sehingga meningkatkan
stabilitas sistem tenaga listrik. Selanjutnya, diperoleh Critical Clearing Time
(CCT) dengan gangguan 3 fasa simetris adalah 0.19-0.20s. Dengan kompensasi
30%, 50% dan 70% diperoleh CCT berturut-turut 0.20-0.21s, 0.21-0.22s dan 0.22-
0.23s. Ketika penambahan jumlah saluran, diperoleh CCT sebesar 0.21-0.22s.
Sedangkan lokasi gangguan hilangnya beban memberikan ayunan sudut rotor
generator terdekat menjadi lebih besar dibandingkan dengan generator yang
berada jauh dari lokasi terjadinya lepas beban.
Kata kunci: Keandalan, Transient Stability, Runge-Kutta Fehlberg, Time Domain
Simulation (TDS), Critical Clearing Time (CCT), sistem IEEE 9 bus.

ABSTRACT
ANALYSIS THE INFLUENCE OF LINE REACTANCE
CHANGING TO TRANSIENT STABILITY OF MULTI-MACHINE USING
RUNGE-KUTTA FEHLBERG METHOD
By
PETRUS PRASETYO
The reliability of power system energy in maintaining the continuity of electricity
distribution is related to its power system stability on keeping and maintaining the
synchronism of generators when the disturbances occur.
Transient stability is related to large disturbances such as lighting, short circuit,
loss of loads or loss of generations. These disturbances influence the whole
system, so study of transient stability is needed.
There are some methods that have been used in stability analysis, one of them is
Runge-Kutta Fehlberg method. This method is one of Time Domain Simulation
(TDS) method which is used in this research to increase the accuration of solving
the swing equation of IEEE 9 buses system.
The purpose of this research is to study and investigate the influence of line
reactance changing to transient stability by applying loss of loads and 3 phase
fault at one of transmission lines
The results show that addition of line series compensation and parallel lines
transmission were able to decrease line reactances, so the stability of power
system was improved. Furthermore, the critical clearing time (CCT) was reached
on 0.19-0.20s while 3 phase fault was applied on transmission line. By series
compensation: 30%, 50% and 70%, CCT was reached on 0.20-0.21s, 0.21-0.22s
and 0.22-0.23s. Whereas, by applying the parallel lines reached the CCT on 0.21-
0.22s. In addition, the closest generator to the loss of loads disturbance has higher
rotor angle swing than the generator located far away from the disturbance.
Key words: Reliability, Transient Stability, Runge-Kutta Fehlberg, Time Domain
Simulation(TDS), Critical Clearing Time(CCT), IEEE 9 buses system.

ANALISIS PENGARUH PERUBAHAN REAKTANSI
SALURAN TERHADAP TRANSIENT STABILITY OF MULTI-
MACHINE DENGAN METODE RUNGE-KUTTA FEHLBERG
(Skripsi)
Oleh
PETRUS PRASETYO
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2016

ANALISIS PENGARUH PERUBAHAN REAKTANSI SALURAN TERHADAP TRANSIENT STABILITY OF MULTI-MACHINE DENGAN METODE RUNGE-KUTTA FEHLBERG
Oleh
Petrus Prasetyo
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
BANDAR LAMPUNG 2016




RIWAYAT HIDUP
Penulis merupakan buah hati ke-lima dari delapan
bersaudara. Penulis dilahirkan dari pasangan Bapak Simon
Kuwat Santoso (Alm) dan Ibu Suminah di Jatimulyo,
Kabupaten Lampung Selatan pada tanggal 17 September
1990.
Penulis memulai pendidikan formal di SDN 5 Jatimulyo,
Lampung Selatan pada tahun 2002-2003, kemudian
melanjutkan pendidikan di SMP Pangudi Luhur Tanjung Senang, Bandar
Lampung pada tahun 2003-2006. Setelah itu, penulis menyelesaikan sekolah
menengah atas di SMAN 5 Sukarame, Bandar Lampung pada tahun 2006-2009
dan diterima sebagai mahasiswa di Jurusan Teknik Elektro Universitas Lampung
pada tahun 2011 melalui jalur Penerimaan Mahasiswa Perluasan Akses
Pendidikan (PMPAP).
Selama menjadi mahasiswa, penulis aktif di Organisasi Himpunan Mahasiswa
Teknik Elektro sebagai anggota Departemen Pendidikan dan Pengkaderan pada
periode 2012-2013 dan Kepala Divisi Ekonomi di Departemen Sosial dan
Ekonomi pada periode 2013-2014. Penulis juga pernah menjadi Asisten Mata
Kuliah dan Asisten Praktikum di Laboratorium Teknik Pengukuran Besaran
Elektrik Jurusan Teknik Elektro pada tahun 2012-2014.
Penulis telah melaksanakan Kerja Praktik (KP) di PT. Energy Management
Indonesia (EMI) selama satu bulan dan menyelesaikannya dengan menulis sebuah
laporan yang berjudul: “Tata Udara dan Cahaya Sebagai Bagian Audit Energi
Gedung A Fakultas Tenik Universitas Lampung”.

“Diberkatilah orang yang mengandalkan Tuhan
yang menaruh harapannya pada Tuhan”.
(Yeremia 17:7)
First, think.
Second, believe. Third, dream.
And finally, dare.
~Walt Disney~
“Pikiranmu menentukan hidupmu, so
think wisely”. (Peter)

Kupersembahkan Skripsi ini untuk: Ayahanda dan Ibunda Tercinta,
Simon Kuwat Santoso (Alm) &
Suminah yang telah menjadi motivasi, inspirasi dan teladan hidup serta yang tiada henti memberikan doamu
untukku,
Keluargaku
atas dukungan dan semangat kalian semua,
Elevengineer Yang telah menjadi keluarga baruku.

SANWACANA
Puji syukur penulis panjatkan kepada Tuhan Yesus Kristus atas segala hikmat,
anugerah, pertolongan dan kasih karunia-Nya yang selalu dilimpahkan kepada
penulis. Sehingga penulis dapat mengerjakan dan menyelesaikan Laporan Tugas
Akhir yang berjudul “Analisis Pengaruh Perubahan Reaktansi Saluran Terhadap
Transient Stability of Multimachine dengan Metode Runge-Kutta Fehlberg”.
Laporan Tugas Akhir ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Jurusan Teknik Elektro Fakultas Teknik Universitas
Lampung.
Selama menempuh pendidikan dan penyelesaian Tugas Akhir ini, penulis
mendapatkan bantuan pemikiran serta dorongan moril dari berbagai pihak. Oleh
karena itu pada kesempatan ini, penulis ingin mengucapkan terima kasih kepada :
1. Bapak Prof. Suharno, M.S, M.Sc, Ph.D. selaku Dekan Fakultas Teknik.
2. Bapak Dr. Ing. Ardian Ulvan, S.T., M.Sc. selaku Ketua Jurusan Teknik
Elektro.
3. Bapak Dr. Herman Halomoan Sinaga, S.T., M.T. selaku Sekretaris Jurusan
Teknik Elektro.
4. Ibu Dr. Eng. Dikpride Despa, S.T., M.T. sebagai Pembimbing Utama, yang
telah meluangkan waktunya untuk memberi arahan, bimbingan, saran, nasihat
serta kritikan yang bersifat membangun dalam pengerjaan Tugas Akhir ini.

5. Bapak Herri Gusmedi S.T., M.T. selaku Pembimbing Kedua, yang telah
meluangkan waktunya untuk memberi arahan, bimbingan, saran, nasihat serta
kritikan yang bersifat membangun dalam pengerjaan Tugas Akhir ini.
6. Bapak Dr. Eng. Lukmanul Hakim, S.T., M.Sc. selaku Penguji Utama, yang
telah memberikan masukan, nasihat, saran serta kritikan yang bersifat
membangun dalam Tugas Akhir ini.
7. Seluruh Dosen Jurusan Teknik Elektro Universitas Lampung, atas pengajaran
dan bimbingannya yang telah diberikan kepada penulis selama menjadi
mahasiswa Teknik Elekto Universitas Lampung.
8. Mbak Ning, Mbak Dian, Mas Daryono dan seluruh jajarannya atas semua
bantuannya dalam menyelesaikan urusan administrasi di Jurusan Teknik
Elektro Universitas Lampung.
9. Kedua orang tua penulis, Bpk. Simon Kuwat Santoso (Alm) dan Ibu Suminah
yang sangat penulis banggakan karena telah mendidik, mengajarkan banyak
hal dan menjadi teladan serta motivasi hidup kepada penulis.
10. Mbak Inggar Rumekti dan Bang Natal Sitorus sekeluarga, Mas Elly Manuel,
Mas Saul Yuliono, Mas Lukas Pranoto, Adek Kiyat Korintus, Adek K. Meyas
C, dan si bungsu Jeremiaty M.C. yang telah memberikan motivasi, kasih
sayang, dukungan moral dan financial selama penulis menyelesaikan
pendidikan.
11. Keluarga besar “Elevengineer 2011” dan teman berbagi cerita: Yeremia
Luhur, Frian Daniel, Richard Manuel, Febry Ramos Sinaga, Rani Kusuma
Dewi, Fanny Simatupang, Eliza Hara, Yunita, Ocik, Jul, Nurhayati, Alin,
Annida, Yoga Putra, Deden H, Reza Naufal, dan Bang M. Cahyadi, S.T.

12. Teman seperjuangan “Vina Aprilia”, sebagai teman senasib dan
sepenanggungan yang selalu berjuang bersama dalam mengerjakan Tugas
Akhir ini dan menjadi pendengar setia dalam segala bentuk curahan hati di
kehidupan sehari-hari.
13. Semua rekan asisten Laboratorium Teknik Pengukuran Besaran Elektrik
(PBE), Kak Eko Susanto, S.T., Bang Jumanto S, S.T., Ayu, S.T, Anwar
Solihin, S.T., Derry Ferdiansyah, S.T., Ahmad Surya A, S.T., Muthmainah,
S.T., Kiki Apriliya, Oka Kurniawan, S.T., Adek-adek 2013 (Ikrom, Rasyid,
Riza, Citra, Ubaidah, Yona, Niken, Nurul), Teknisi (Mas Makmur Santosa)
beserta staff Laboratorium PBE yang selalu memberi motivasi dalam
pengerjaan Tugas Akhir ini, terimakasih untuk doa dan dukungannya.
14. Teman-teman seperjuangan konsentrasi SEE (Adit jawa, Apriwan Rizki,
Habib, Rejani, S.T., Fikri, Andi, Edi, Alex, S.T., Hajri, Najib, Mariyo,
Andreas, Gusmau Rado P, S.T. dan kawan-kawan SIE dan SKI tidak dapat
disebutkan satu per satu)
15. Rosdiana Matcik dan keluarga, Helen B.S dan Elsye S yang telah memberikan
motivasi, doa dan dukungan kepada penulis dalam pengerjaan Tugas Akhir
ini.
16. Semua pihak yang tidak dapat disebutkan satu per satu yang telah membantu
serta mendukung penulis dari awal kuliah sampai dengan terselesaikannya
Tugas Akhir ini.
17. Almamater tercinta, atas kisah hidup yang penulis dapatkan semasa kuliah.

Akhir kata, Penulis menyadari bahwa Tugas Akhir ini masih jauh dari
kesempurnaan dan semoga Tugas Akhir ini dapat bermanfaat bagi kita semua.
Tuhan memberkati!
Bandar Lampung, Maret 2016
Penulis,
Petrus Prasetyo

DAFTAR ISI
Halaman
ABSTRAK ........................................................................................................ i
DAFTAR ISI ..................................................................................................... xiv
DAFTAR GAMBAR ........................................................................................ xvi
DAFTAR TABEL DAN GRAFIK ..................................................................... xix
BAB I. PENDAHULUAN
1.1. Latar Belakang dan Masalah ............................................................... 1
1.2. Tujuan ................................................................................................... 3
1.3. Manfaat Penelitian ............................................................................... 3
1.4. Rumusan Masalah ................................................................................ 4
1.5. Batasan Masalah ................................................................................... 5
1.6. Sistematika Penulisan .......................................................................... 5
BAB II. TINJAUAN PUSTAKA
2.1. Stabilitas Sistem Tenaga (Power System Stability) ............................. 7
2.2. Rotor Angle Stability ............................................................................ 8
2.3. Frequency Stability .............................................................................. 10
2.4. Voltage Stability ................................................................................... 11
2.5. Teknik Analisa dalam Kestabilan Transien .......................................... 12
2.6. Studi Kestabilan Transien ..................................................................... 13
2.7. Persamaan Ayunan (Swing Equation) .................................................. 15
2.8. CCT (Critical Clearing Time) .............................................................. 20
2.9. Stabilitas Peralihan (Transient) Mesin Majemuk (Multimachine) ....... 21
2.10. Reduksi Matriks (Kron Reduction) ..................................................... 24
2.11. Sistem Per Unit ................................................................................... 26
2.12. Runge-Kutta Fehlberg ........................................................................ 27
2.13. Pengurangan Reaktansi Saluran Transmisi ........................................ 27
2.13.1. Kompensasi Seri ..................................................................... 28
2.13.2. Penambahan Jumlah Saluran Transmisi ................................. 29
2.14. Sistem Tenaga Listrik IEEE 9 Bus ..................................................... 29
BAB III. METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian .............................................................. 31

xv
3.2. Alat dan Bahan ..................................................................................... 31
3.3. Tahap Pembuatan Tugas Akhir ............................................................ 32
3.4. Diagram Alir Penelitian ........................................................................ 34
BAB IV. HASIL DAN PEMBAHASAN
4.1. Pemodelan Sistem Tenaga Listrik IEEE 9 Bus .................................... 38
4.2. Pengambilan Data ................................................................................. 39
4.3. Pengolahan Data ................................................................................... 39
4.4. Perhitungan Initial Value Sebagai Kondisi Steady State ...................... 41
4.5. Pengujian Program Simulasi ................................................................ 42
4.6. Kurva Ayunan Sistem IEEE 9 Bus dengan Metode RK Fehlberg ....... 46
4.6.1. Sebelum Pemberian Kompensasi Saluran ................................... 46
4.6.2. Pengaruh Penambahan Kompensasi Saluran Terhadap
Kestabilan Sistem ........................................................................ 49
4.6.3. Pengaruh Penambahan Jumlah Saluran Terhadap Kestabilan
Sistem .......................................................................................... 62
4.6.4. Pengaruh Lepasnya Beban Terhadap Kestabilan Sistem ............ 66
4.7. Kestabilan Sistem IEEE 9 Bus ............................................................. 68
4.8. Pengaruh Perubahan Inersia (H) ........................................................... 70
4.9. Grafik Hubungan Delta Vs Omega ...................................................... 74
BAB V SIMPULAN DAN SARAN
5.1. Simpulan .............................................................................................. 77
5.2. Saran .................................................................................................... 78
DAFTAR PUSTAKA
LAMPIRAN

xvi
DAFTAR GAMBAR
Halaman
Gambar 2.1 Klasifikasi Stabilitas Sistem Tenaga ............................................ 8
Gambar 2.2 Aliran daya mekanik dan elektrik dalam sebuah mesin Sinkron . 15
Gambar 2.3 Grafik terhadap t untuk sistem stable dan unstable .................... 19
Gambar 2.4 Tipe kurva ayunan untuk generator .............................................. 19
Gambar 2.5 Karakteristik ............................................................................... 20
Gambar 2.6 Sistem Tenaga Listrik IEEE 9 Bus ............................................... 30
Gambar 3.1. Diagram Alir Penyelesaian Kurva Ayunan ................................. 35
Gambar 3.2. Diagram Alir Penyusunan Laporan Penelitian ............................ 36
Gambar 4.1. Sistem Tenaga Listrik IEEE 9 Bus .............................................. 38
Gambar 4.2. Waktu pemutusan gangguan saat 0.20 detik ............................... 43
Gambar 4.3. Waktu pemutusan gangguan saat 0.21 detik ............................... 43
Gambar 4.4. Waktu pemutusan gangguan saat 0.20 detik ............................... 44
Gambar 4.5. Waktu pemutusan gangguan saat 0.21 detik ............................... 44
Gambar 4.6. Kurva ayunan dengan waktu pemutusan gangguan 0.18 detik ... 47
Gambar 4.7. Kurva ayunan dengan waktu pemutusan gangguan 0.19 detik ... 47
Gambar 4.8. Kurva ayunan dengan waktu pemutusan gangguan 0.20 detik ... 48
Gambar 4.9. Kurva ayunan dengan penambahan kompensasi 20% saat
pemutusan gangguan 0.19 detik ................................................ 49
Gambar 4.10. Kurva ayunan dengan penambahan kompensasi 20% saat

xvii
pemutusan gangguan 0.20 detik ................................................ 50
Gambar 4.11.Kurva ayunan dengan penambahan kompensasi 30% saat
pemutusan gangguan 0.20 detik ................................................. 51
Gambar 4.12.Kurva ayunan dengan penambahan kompensasi 30% saat
pemutusan gangguan 0.21 detik ................................................. 52
Gambar 4.13.Kurva ayunan dengan penambahan kompensasi 40% saat
pemutusan gangguan 0.20 detik ................................................. 52
Gambar 4.14.Kurva ayunan dengan penambahan kompensasi 40% saat
pemutusan gangguan 0.21 detik ................................................. 53
Gambar 4.15.Kurva ayunan dengan penambahan kompensasi 50% saat
pemutusan gangguan 0.21 detik. ................................................ 54
Gambar 4.16. Kurva ayunan dengan penambahan kompensasi 50% saat
pemutusan gangguan 0.22 detik ................................................ 55
Gambar 4.17. Kurva ayunan dengan penambahan kompensasi 60% saat
pemutusan gangguan 0.21 detik ................................................. 55
Gambar 4.18. Kurva ayunan dengan penambahan kompensasi 60% saat
pemutusan gangguan 0.22 detik ................................................. 56
Gambar 4.19. Kurva ayunan dengan penambahan kompensasi 70% saat
pemutusan gangguan 0.22 detik ................................................. 57
Gambar 4.20. Kurva ayunan dengan penambahan kompensasi 70% saat
pemutusan gangguan 0.23 detik ................................................. 58
Gambar 4.21a.Kurva Ayunan Ketika Kompensasi 20-40 % dengan Waktu
Pemutusan 0.19 detik ............................................................... 60
Gambar 4.21b.Kurva Ayunan Ketika Kompensasi 50-70 % dengan Waktu

xviii
Pemutusan 0.19 detik ............................................................... 61
Gambar 4.22. Rangkaian Sistem IEEE 9 Bus dengan Konfigurasi
Jaringan Baru ............................................................................ 63
Gambar 4.23.Kurva Ayunan Penambahan Saluran Saat Pemutusan
Gangguan 0.21 detik .................................................................. 64
Gambar 4.24. Kurva Ayunan Penambahan Saluran Saat Pemutusan
Gangguan 0.22 detik .................................................................. 64
Gambar 4.25. Perbedaan Swing Curve Sebelum dan Setelah Dilakukan
Penambahan Saluran Saat Pemutusan Gangguan 0.19 detik ..... 65
Gambar 4.26. Kurva Ayunan Gangguan Lepas Beban .................................... 66
Gambar 4.27.Kurva Ayunan Pengujian 1. ....................................................... 72
Gambar 4.28.Kurva Ayunan Pengujian 2 ........................................................ 72
Gambar 4.29.Kurva Ayunan Pengujian 3. ....................................................... 73
Gambar 4.30.Kurva Ayunan Pengujian 4. ....................................................... 73
Gambar 4.31.Trajectory gangguan 3 fasa saluran 8-9 kondisi stabil ............... 75
Gambar 4.32.Trajectory gangguan 3 fasa saluran 8-9 kondisi tidak stabil ...... 75

DAFTAR TABEL DAN GRAFIK
Halaman
Tabel 4.1. Perbandingan Hasil Pengujian Kompensasi Saluran ...................... 59
Tabel 4.2. Data Saluran yang Ditambahkan pada Sistem IEEE 9 Bus ............ 63
Tabel 4.3. Perbandingan Sudut Rotor Ayunan Pertama Maksimum
Sebelum dan Setelah Penambahan Saluran Saat Waktu Pemutusan
0.19s ................................................................................................ 66
Tabel 4.4. Data Pengujian Hilangnya Beban ................................................... 67
Tabel 4.5. Perbandingan Jenis Pengujian terhadap Waktu Pemutusan
Kritis Gangguan .............................................................................. 69
Tabel 4.6. Pengujian Perubahan Inersia H ....................................................... 71
Grafik 4.1. Perbandingan Perubahan Maksimum dengan Penambahan
Kompensasi Saluran pada First Swing Ketika Waktu Pemutusan
Gangguan (t=0.19 detik) ............................................................... 62
Grafik 4.2. Hubungan antara H terhadap CCT ................................................ 74
BAB I
PENDAHULUAN
1.1. Latar Belakang dan Masalah
Sistem tenaga listrik (power system energy) terdiri dari 3 komponen utama, yaitu:
sistem pembangkit, transmisi dan distribusi tenaga listrik. Ketiga komponen
tersebut harus selalu terjaga keandalannya. Sistem tenaga listrik dapat dikatakan
andal jika sistem tersebut mampu menjaga dan mempertahankan kontinuitas
pendistribusian tenaga listrik kepada konsumen dari berbagai gangguan
(disturbances).
Keandalan dalam sistem tenaga listrik (STL) berkaitan dengan kestabilan sistem
tersebut. Sehingga dalam perencanaan, pengembangan maupun pengoperasian
sistem tenaga listrik yang andal, sangat berhubungan dengan kemampuan suatu
sistem tenaga listrik untuk beroperasi dalam keadaan normal kembali setelah
mengalami gangguan.
Menurut Das D (2006) dan R Murty (2007), studi kestabilan sistem tenaga listrik
dibagi menjadi 3, yaitu: steady state stability, dinamic stability dan transient
stability. Steady state stability merupakan kemampuan sistem tenaga listrik untuk
kembali pada kondisi sinkron setelah terjadi gangguan-gangguan kecil (small
disturbances) dan perluasan dari studi steady state stability adalah dinamic
stability. Sedangkan transient stability/kestabilan peralihan merupakan

2
kemampuan sistem tenaga listrik untuk mempertahankan keserempakan generator
(synchronism of generators) ketika terjadi gangguan-gangguan besar seperti
adanya pemberian beban secara tiba-tiba, hilangnya beban yang besar, lepasnya
generator, gangguan pada saluran transmisi maupun akibat surja hubung.
Apabila gangguan besar pada kestabilan peralihan ini tidak dilakukan tindakan
antisipatif maka dapat mengakibatkan pemadaman total (blackout) dalam operasi
sistem tenaga listrik. Oleh karena itu perlu adanya studi mengenai kestabilan
peralihan dan peningkatan stabilitas peralihan ini.
Studi kestabilan peralihan berkaitan dengan CCT (Critical Clearing Time). CCT
merupakan waktu pemutusan kritis yang diperlukan oleh sistem/generator untuk
dapat tetap mempertahankan synchronism atau kestabilannya.
Permasalahan kestabilan peralihan juga berhubungan dengan reaktansi saluran
transmisi. Pengurangan reaktansi saluran transmisi mampu meningkatkan
stabilitas peralihan dengan menaikkan transfer daya[4]. Metode tambahan yang
digunakan untuk mengurangi reaktansi jaringan adalah dengan menambahkan
kompensator kapasitor seri pada saluran transmisi serta menambah jumlah saluran
transmisi.
Penelitian ini adalah analisis pengaruh pemasangan kompensator kapasitor seri
dan penambahan jumlah saluran transmisi terhadap kestabilan peralihan pada
sistem tenaga listrik multimesin (sistem IEEE 9 bus).
Pemodelan matematis sistem tenaga listrik dengan gangguan besar (large
disturbances)/transien adalah dalam bentuk persamaan non-linier. Sehingga
penyelesaian numerik dari persamaan ini menggunakan penyelesaian secara
integrasi. Pemilihan metode Runge-Kutta Fehlberg sebagai metode penyelesaian

3
numerik dari persamaan ayunan (swing equation) guna mendapatkan dan
meningkatkan akurasi kurva ayunan (swing curve) dalam penyelesaian persamaan
non-linier ini.
1.2. Tujuan
Adapun tujuan dari penelitian ini adalah :
1. Mempelajari transient stability mesin majemuk (multimachine) dan
mengetahui kurva ayunan (swing curve) untuk menggambarkan stabilitas/
synchronism pada masing-masing generator dengan menggunakan metode
Runge-Kutta Fehlberg.
2. Mengetahui dan mendapatkan waktu pemutusan kritis gangguan pada sistem
IEEE 9 bus dengan pemberian gangguan 3 fasa simetris dan hilangnya beban
secara tiba-tiba.
3. Mengetahui pengaruh pemasangan kompensator kapasitor seri dan
penambahan jumlah saluran transmisi terhadap stabilitas peralihan pada
sistem IEEE 9 bus.
1.3. Manfaat Penelitian
Adapun manfaat yang diharapkan dari penelitian ini adalah :
1. Mendapatkan kurva ayunan (swing curve) untuk masing-masing
generator/mesin.
2. Mendapatkan waktu pemutusan kritis gangguan (Critical Clearing Time-
CCT) dari sistem tenaga listrik yang akan berguna untuk perancangan sistem
proteksi.

4
3. Mendapatkan pengaruh perubahan reaktansi saluran transmisi dengan
menambah pemasangan kompensator kapasitor seri dan jumlah saluran
transmisi terhadap stabilitas peralihan sistem tenaga listrik.
4. Dapat mengetahui karakteristik stabilitas sistem dari beberapa gangguan
peralihan yang dapat digunakan sebagai pertimbangan dalam perencanaan
pembangunan pembangkit listrik baru.
1.4. Rumusan Masalah
Penentuan kestabilan peralihan sistem multimesin dapat dilihat dengan mengamati
keserempakan (synchronism) mesin pada kurva ayunan (swing curve), yaitu
dengan menentukan waktu pemutusan kritis gangguan (Critical Clearing Time).
Reaktansi saluran transmisi sangat mempengaruhi stabilitas peralihan dalam
sistem tenaga listrik. Pemasangan kompensator kapasitor seri/pemberian
kompensasi serta penambahan jumlah saluran transmisi diharapkan mampu
mengurangi reaktansi saluran dan membantu meningkatkan stabilitas peralihan
sistem tersebut.
Pada penelitian dapat diketahui pengaruh pemasangan kompensator kapasitor seri
dan penambahan jumlah saluran transmisi terhadap stabilitas peralihan dengan
menentukan waktu pemutusan kritis gangguan. Analisis stabilitas peralihan
dengan pemasangan kompensator kapasitor seri dan penambahan jumlah saluran
transmisi akan menerapkan gangguan 3 fasa simetris pada salah satu saluran
transmisi dan hilangnya beban secara tiba-tiba.
Analisis dilakukan dengan mengamati waktu terlama yang dibutuhkan oleh mesin
sinkron untuk dapat mempertahankan keserempakannya (synchronism).

5
1.5. Batasan Masalah
Adapun batasan masalah dalam penelitian ini adalah sebagai berikut :
1. Sistem tenaga listrik multi mesin yang digunakan adalah sistem IEEE 9 bus
dengan 3 buah mesin/generator.
2. Penentuan waktu pemutusan kritis (critical clearing time) dengan variasi
gangguan besar pada sistem tenaga listrik IEEE 9 bus.
3. Gangguan besar yang diujikan pada penelitian ini adalah hilangnya beban
secara tiba-tiba dan gangguan 3 fasa simetris pada saluran transmisi 8-9 dekat
dengan bus 9.
4. Metode numerik yang digunakan untuk penyelesaian swing equation adalah
metode Runge-Kutta Fehlberg.
5. Tidak membahas aliran daya pada sistem IEEE 9 bus.
1.6. Sistematika Penulisan
Sistematika dalam penulisan penelitian ini adalah sebagai berikut :
BAB I PENDAHULUAN
Pendahuluan ini berisi latar belakang dan masalah, tujuan penelitian, manfaat
penelitian, rumusan masalah, metode penelitian dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Tinjauan pustaka ini menjelaskan dan memaparkan uraian umum mengenai materi
terkait dengan studi kestabilan transien (transient stability) yang meliputi:
kestabilan sistem tenaga listrik, swing equation, swing curve dan metode numerik
Runge-Kutta Fehlberg.

6
BAB III METODOLOGI PENELITIAN
Bab ini berisi mengenai langkah-langkah dan persiapan dalam pelaksanaan
penelitian, yaitu waktu dan tempat penelitian, alat dan bahan, tahapan penelitian
dan diagram alir penelitian.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi mengenai hasil penelitian dan pembahasan yang meliputi pengujian
program simulasi, hasil simulasi swing curve sistem IEEE 9 bus dengan
menerapkan gangguan 3 fasa simetris pada saluran 8-9 dekat bus 9, pelepasan
beban, pemberian kompensasi dan penambahan jumlah saluran. Berikutnya
membahas hal-hal yang menjadi tujuan dalam penelitian ini.
BAB V SIMPULAN DAN SARAN
Bab ini memuat kesimpulan dan saran mengenai hasil penelitian yang telah
dilakukan.

BAB II
TINJAUAN PUSTAKA
2.1. Stabilitas Sistem Tenaga (Power System Stability)
Dalam sistem tenaga listrik (STL) terdiri dari 3 komponen utama yang harus
dijaga keandalannya, yaitu: sistem pembangkit, sistem transmisi dan sistem
distribusi[1],[2].
Keandalan (reliability), kualitas (quality) dan stabilitas (stability) adalah hal
terpenting yang harus dipenuhi dalam suatu sistem tenaga listrik yang baik.
Reliability merupakan kemampuan suatu sistem tenaga listrik untuk menyalurkan
energi listrik secara kontinyu. Quality merupakan kemampuan suatu sistem tenaga
listrik untuk menghasilkan besaran listrik (tegangan, frekuensi) yang sesuai
dengan standart yang telah ditetapkan. Sedangkan sistem tenaga listrik yang
mampu mengembalikan keadaan sistem pada kondisi kerja/operasi normal setelah
mengalami suatu gangguan merupakan suatu sistem tenaga yang dikatakan stabil.
Sistem yang tidak stabil (instability) yaitu kondisi sistem tenaga listrik dimana
mesin/generator sinkron kehilangan keserempakannya akibat satu atau lebih
generator lepas karena terjadi gangguan. Kondisi ini juga dapat dikatakan sebagai
kondisi out of step [26].
Permasalahan stabilitas berfokus pada perilaku dari mesin/generator sinkron
setelah mengalami gangguan. Stabilitas sistem tenaga diklasifikasikan menjadi 3
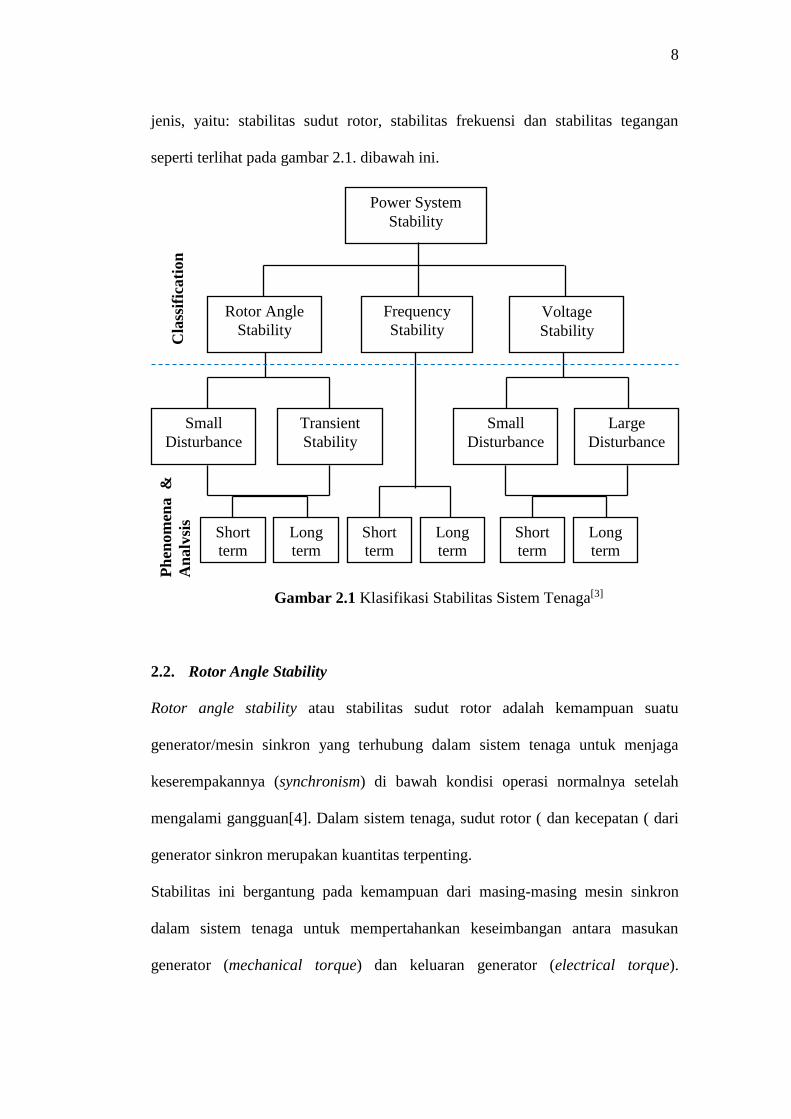
8
jenis, yaitu: stabilitas sudut rotor, stabilitas frekuensi dan stabilitas tegangan
seperti terlihat pada gambar 2.1. dibawah ini.
Gambar 2.1 Klasifikasi Stabilitas Sistem Tenaga[3]
2.2. Rotor Angle Stability
Rotor angle stability atau stabilitas sudut rotor adalah kemampuan suatu
generator/mesin sinkron yang terhubung dalam sistem tenaga untuk menjaga
keserempakannya (synchronism) di bawah kondisi operasi normalnya setelah
mengalami gangguan[4]. Dalam sistem tenaga, sudut rotor ( dan kecepatan ( dari
generator sinkron merupakan kuantitas terpenting.
Stabilitas ini bergantung pada kemampuan dari masing-masing mesin sinkron
dalam sistem tenaga untuk mempertahankan keseimbangan antara masukan
generator (mechanical torque) dan keluaran generator (electrical torque).
Small
Disturbance
Transient
Stability
Small
Disturbance
Large
Disturbance
Short
term
Long
term
Short
term
Long
term
Short
term
Long
term
Power System
Stability
Rotor Angle
Stability
Frequency
Stability
Voltage
Stability
Cla
ssif
icati
on
P
hen
om
ena &
An
aly
sis
9
Perubahan dalam electrical torque pada sebuah mesin sinkron mengikuti sebuah
gangguan yang dapat dibagi ke dalam 2 komponen. Kedua komponen ini yaitu
synchronous torque dan electrical torque yang biasa digunakan untuk studi
kestabilan[5].
................................................2.1)
........................................................... 2.2)
Pada persamaan 2.1 dan 2.2, bentuk berhubungan dengan synchronizing torque
dan menentukan perubahan putaran dalam fasa dengan gangguan sudut rotor .
Sedangkan bentuk mewakili damping torque , yang menentukan perubahan
torque dalam fasa dengan selisih kecepatan. Oleh karena itu, dan berhubungan
dengan koefisien synchronizing torque dan koefisien damping torque. Untuk
semua mesin/generator sinkron dalam sistem tenaga, stabilitas sudut rotor
bergantung pada kedua komponen tersebut.
Fenomena dan analisis dalam stabilitas sudut rotor dibagi kedalam 2 bentuk,
yakni: small disturbance dan transient stability.
Small disturbance rotor angle stability mengacu pada kejadian gangguan-
gangguan kecil seperti perubahan pada beban. Sedangkan transient stability
mengacu pada kejadian dengan gangguan-gangguan besar seperti: gangguan
hubung singkat (short circuit) pada saluran transmisi, penambahan beban secara
tiba-tiba, lepasnya generator dari sistem maupun terjadinya kehilangan beban.
Sebuah mesin sinkron memiliki 2 rangkaian penting, yaitu: rangkaian medan
(terdapat pada rotor) dan rangkaian jangkar (armature) yang terdapat pada stator.
Kumparan medan disuplai oleh sumber DC. Putaran medan magnet dari
kumparan medan menginduksikan tegangan AC ketika rotor digerakan oleh

10
sebuah prime mover (turbin). Frekuensi dari tegangan induksi ini bergantung pada
kecepatan rotor dan jumlah kutub dari mesin. Frekuensi tegangan listrik dan
kecepatan sinkron dari mekanik rotor adalah 50 Hz (di Indonesia dan beberapa
negara lainnya).
Ketika 2 atau lebih mesin sinkron yang ter-interkoneksi, arus dan tegangan stator
harus memiliki frekuensi yang sama dan kecepatan mekanik rotor dari masing-
masing mesin adalah sinkron pada frekuensi ini[24].
2.3. Frequency Stability
Stabilitas frekuensi berkaitan dengan kemampuan sistem tenaga untuk menjaga
frekuensi sistem setelah terjadi ketidakseimbangan antara daya aktif (P)
pembangkitan dan beban akibat gangguan sistem[3]. Frekuensi merupakan
indikator balance atau unbalance antara pembangkitan dan pemakaian (beban).
Dalam operasi normal, frekuensi harus mendekati nilai nominalnya (50±5% Hz
untuk STL di Indonesia).
Jika pemakaian energi listrik lebih besar dibandingkan dengan pembangkitannya,
energi putar yang tersimpan dalam mesin sinkron akan digunakan untuk menjaga
keseimbangan antara pembangkitan dan pemakaian. Sehingga kecepatan putaran
dari generator akan berkurang dan mengakibatkan penurunan frekuensi.
Salah satu hal yang mengakibatkan ketidakstabilan frekuensi adalah kehilangan
pembangkitan atau beban. Dengan kehilangan pembangkitan atau beban ini maka
akan terjadi ketidakseimbangan antara pembangkitan (generation) dan
pembebanan (load).

11
2.4. Voltage Stability
Stabilitas tegangan merupakan kemampuan dari sistem tenaga untuk
mempertahankan keadaan tegangan dalam keadaan tetap (tegangan nominal di
Indonesia adalah 220±10% V) pada semua bus di bawah kondisi operasi normal
dan setelah terjadinya gangguan. Stabilitas tegangan bergantung pada
keseimbangan antara daya aktif (P) dan daya reaktif (Q) antara pembangkitan dan
beban. Ketidakstabilan tegangan terjadi ketika suatu gangguan meningkatkan
permintaan daya reaktif (Q) yang melebihi kapasitas pembangkitan daya reaktif
(Q) dari generator[6].
Fenomena stabilitas tegangan diklasifikasikan menjadi gangguan kecil dan
gangguan besar.
Permasalahan dan studi kestabilan sistem tenaga dapat digolongkan menjadi 3
jenis berdasarkan sifat dan besar gangguannya, yaitu[7]:
1. Kestabilan Keadaan Tunak (Steady State Stability)
2. Kestabilan Dinamis (Dynamic Stability)
3. Kestabilan Peralihan (Transient Stability)
Steady state stability berhubungan dengan respon dari sebuah mesin sinkron untuk
menaikkan beban secara bertahap/berangsur-angsur (gradually). Kestabilan ini
berfokus pada penentuan batas atas dari pembebanan mesin sebelum mesin
kehilangan keserempakan (synchronism), yaitu dengan menaikkan pembebanan
secara bertahap.
Dynamic stability berkaitan dengan respon sistem tenaga terhadap gangguan-
gangguan kecil yang terjadi dengan menghasilkan osilasi. Sistem dikatakan stabil
secara dinamik jika osilasi-osilasi ini tidak melebihi amplitudonya dan hilang

12
secara cepat. Jika osilasi terus berlanjut pada amplitudo maka sistem tidak stabil
secara dinamik.
Transient stability berhubungan dengan respon sistem tenaga terhadap gangguan-
gangguan besar yang menyebabkan perubahan-perubahan cukup besar pada
kecepatan rotor, sudut daya, dan transfer daya. Transient stability merupakan
fenomena yang cepat yang biasanya dalam beberapa detik[8].
2.5. Teknik Analisa dalam Kestabilan Transien
Dalam permasalahan kestabilan transien (transient stability) terdapat beberapa
teknik/pendekatan dalam studi analisa kestabilan transien. Teknik/pendekatan
dalam analisis kestabilan transien tersebut adalah[20]
a) Time Domain Simulation
Time Domain Simulation merupakan metode tidak langsung (indirect), dinamakan
demikian karena penyelesaian persamaan non-linier dari pemodelan sistem tenaga
listrik diselesaikan menggunakan teknik step-by-step dari integrasi numerik.
Beberapa metode integrasi numerik yang umum digunakan dalam penyelesaian
persamaan non-linier adalah Euler, Runge-Kutta (orde 2, 4, 5), dll. Penyelesaian
ini mempertimbangkan kondisi jaringan selama gangguan (faulted) dan kondisi
setelah gangguan dihilangkan (post-fault).
b) Direct Method
Direct Methode atau metode langsung, dinamakan demikian karena pada analisa
kestabilan transien tidak menyelesaikan persamaan non-linier dari pemodelan
sistem tenaga listrik. Metode ini berdasarkan pada fungsi energi (energy function).

13
Beberapa metode direct method adalah EAC (Equal Area Criterion), Extended
EAC, dll.
2.6. Studi Kestabilan Transien
Studi kestabilan transien (transient stability) adalah studi mengenai kestabilan
pada sistem tenaga listrik yang berorientasi pada gangguan-gangguan besar yakni
gangguan-gangguan yang akan menyebabkan sistem akan kehilangan
sinkronisasi/keserempakan jika upaya penanganan/tindakan tidak segera
diberikan. Penelitian atau studi terkait permasalahan kestabilan transien telah lama
dilakukan dan beberapa diantaranya dalam “Sistem Tenaga Listrik” oleh Cekmas
Cekdin (2007)[15]. Studi kestabilan transien multi mesin yang diambil adalah 2
buah generator yang terhubung dengan sebuah infinite bus. Dalam studinya,
penyelesaian persamaan ayunan sistem menggunakan metode numerik Runge-
Kutta Orde 4. Perhitungan daya elektrik (Pei) sistem untuk masing-masing
generator dan proses reduksi matriks Y-bus (prefault, faulted dan postfault) masih
dihitung secara manual, sehingga tingkat error atau kesalahan dalam perhitungan
masih mungkin terjadi.
Selanjutnya, Rifai Rahman Hasan (2009), mengenai “Analisis Pengaruh
Pemasangan Kompensator Kapasitor Seri Terhadap Stabilitas Sistem”. Tujuan
dari penelitiannya adalah mengetahui pengaruh pemasangan kompensator
kapasitor seri terhadap kestabilan sistem tenaga listrik. Simulasi yang dilakukan
menggunakan metode Runge-Kutta Orde 5 sebagai metode numerik penyelesaian
persamaan ayunan[10].

14
Pada tahun 2012, Surya Atmaja melakukan penelitian “Perhitungan Critical
Clearing Time dengan Menggunakan Time Domain Simulation”. Pada
penelitiannya membahas cara menghitung Critical Clearing Time (CCT)
menggunakan program MATLAB dengan menerapkan penyelesaian numerik
menggunakan metode Runge-Kutta Orde 4[22].
Selanjutnya, Heru Dibyo Laksono (2012), “Sudi Stabilitas Peralihan Multimesin
Pada Sistem Tenaga Listrik Dengan Metode Euler (Studi Kasus: PT.PLN P3B
Sumatera)”. Dalam studinya, penyelesaian langkah demi langkah dari persamaan
ayunan sistem tenaga listrik P3B Sumatera menggunakan metode Euler[23].
Metode Euler ini merupakan salah satu metode yang biasa digunakan dalam
penyelesaian numerik untuk persamaan non-linier. Metode ini mengembangkan
turunan pertama dari deret Taylor. Jika dibandingkan dengan metode Runge-Kutta
orde 2 dan RK 4, metode Runge-Kutta memiliki ketelitian yang lebih besar dalam
akurasi penyelesaian permasalahan numerik. Semakin tinggi orde pada metode
Runge-Kutta maka semakin tinggi pula tingkat keakurasian dalam penyelesaian
kurva ayunan, hal ini dikarenakan langkah demi langkah (integrasi) pada setiap
orde juga bertambah.
Penelitian ini mengembangkan studi kestabilan[15] sehingga perhitungan daya
elektrik (Pei) untuk masing-masing generator dan proses reduksi matrik Y-bus
tidak lagi dihitung secara manual melainkan dihitung secara komputerisasi dalam
program m-file pada MATLAB yang dirancang. Selain itu, pemilihan metode
Runge-Kutta Fehlberg pada penelitian ini diharapkan mampu meningkatkan
keakurasian dalam penyelesaian persamaan ayunan sistem IEEE 9 bus karena
memiliki orde yang lebih tinggi dibandingkan dengan RK 5[10] ataupun RK 4.

15
2.7. Persamaan Ayunan (Swing Equation)
Hubungan antara sisi elektrik dan mekanik dari mesin sinkron diberikan dengan
persamaan dinamis untuk acceleration atau deceleration dari gabungan prime
mover (turbin)-mesin sinkron. Hal inilah yang dinamakan dengan persamaan
ayunan[9]. Dengan kata lain, persamaan ayunan merupakan persamaan yang
mengatur putaran/gerakan rotor pada mesin sinkron yang berdasarkan pada
prinsip dasar dalam dinamika, yang menyatakan bahwa momen putar percepatan
(accelerating torque) adalah perkalian dari momen kelembaman J(moment of
inertia) rotor dengan percepatan sudutnya [10]. Kecepatan dan aliran dari daya
mekanik dan elektrik pada sebuah mesin sinkron ditunjukan pada gambar 2.2 di
bawah ini.
(a) Generator (b) Motor
Gambar 2.2 Aliran daya mekanik dan elektrik dalam sebuah mesin sinkron[7]
Pengaturan persamaan diferensial dinamis rotor dapat dituliskan sebagai
berikut[7],[10],[11].
............................. 2.3)
dengan
ωs
Pm
Motor
Tm
Ts
Pe
ωs
Pm
Generato
r
Tm
Te Pe

16
= Momen kelembaman total dari masa rotor ( kg.m2)
= Pergeseran sudut rotor (angular displacement) terhadap sumbu yang diam
(rad)
= Momen putar percepatan bersih (Nm)
= Momen putar mekanis atau poros (penggerak) yang diberikan oleh
penggerak mula dikurangi dengan momen putar perlambatan yang
disebabkan oleh rugi-rugi perputaran (Nm), bernilai negatif untuk motor.
= Momen putar elektris/elektromagnetis (Nm), bernilai negatif untuk motor.
Jika generator sinkron membangkitkan torsi elektromagnetik dalam keadaan
berputar pada kecepatan sinkron (ωsm) maka
Ketika terjadi gangguan maka akan menghasilkan percepatan (accelerating) ()
atau perlambatan (decelerating) ().
Berdasarkan pada persamaan 2.3 yaitu diukur terhadap sumbu yang diam maka
untuk mendapatkan pengukuran posisi sudut rotor terhadap sumbu yang berputar
terhadap kecepatan sinkron dapat dituliskan dengan persamaan berikut.
..............................2.4)
( adalah adalah pergeseran angular rotor atau biasa disebut dengan sudut
putaran/sudut daya pergeseran sudut rotor terhadap sumbu yang berputar dengan
kecepatan sinkron dalam radian).
Untuk mendapatkan persamaan kecepatan putaran rotor () maka persamaan 2.4
dapat diturunkan terhadap waktu menjadi
..............................2.5)

17
Sedangkan untuk mendapatkan persamaan percepatan rotornya maka persamaan
2.5 dapat diturunkan kembali terhadap waktu menjadi
..............................2.6)
Dengan substitusi persamaan 2.6 ke dalam persamaan 2.3 akan didapatkan
..............................2.7)
Selanjutnya dengan mengalikan persamaan 2.7 dengan akan menghasilkan
..............................2.8)
Karena daya adalah sama dengan perkalian kecepatan putar dan torsi (momen
putar) maka persamaan 2.8 dapat ditulis kembali dengan bentuk persamaan daya
..............................2.9)
dengan
adalah masukan daya mekanik (MW)
adalah keluaran daya elektrik (MW)
Rugi-rugi tembaga stator diabaikan.
Dimana adalah momen sudut rotor yang dapat dinyatakan dengan M (disebut
juga konstanta inersia[7]). Masa putar memiliki hubungan dengan energi kinetik
yang dituliskan pada persamaan berikut.
..............................2.10)
Persamaan ayunan dalam hubungannya dengan momen sudut adalah
..............................2.11)
Apabila p adalah jumlah kutub dari generator sinkron, maka sudut daya listrik
dalam hubungannya dengan sudut daya mekanik adalah sebagai berikut.
Persamaan ayunan dalam hubungan dengan sudut daya elektrik adalah

18
..............................2.12)
Jika nilai M pada persamaan 2.10 disubstitusikan ke dalam persamaan 2.12 akan
diperoleh
..............................2.13)
Selanjutnya membagi persamaan 2.13 dengan Sbase (SB) maka akan menghasilkan
..............................2.14)
Akan diperoleh persamaan 2.15 ketika mensubstitusikan ke dalam persamaan
2.14.
..............................2.15)
Kecepatan putar elektrik dalam hubungannya dengan kecepatan putar mekanik
adalah , sehingga persamaan 2.15 menjadi
..............................2.16)
Dengan mensubstitusikan ke dalam persamaan 2.16 akan diperoleh
..............................2.17)
Persamaan 2.16 atau 2.17 dinamakan dengan persamaan ayunan (swing
equation)[7],[11],[12],[13] yang merupakan persamaan dasar yang mengatur
dinamika (gerak) perputaran mesin sinkron dalam studi kestabilan. Persamaan ini
menggambarkan dinamis rotor untuk sebuah mesin sinkron (generating/
motoring). Ini adalah persamaan diferensial orde kedua dimana damping
(proportional to ) tidak ada karena asumsi dari rugi-rugi mesin. Apabila
persamaan ayunan tersebut diselesaikan maka akan diperoleh rumusan sebagai
fungsi waktu (t). Grafik penyelesaian persamaan ini dinamakan dengan kurva
ayunan (swing curve) mesin. Grafik tersebut dapat dilihat pada gambar 2.3 dan
2.4 dibawah ini.

19
Gambar 2.3 Grafik terhadap t untuk sistem stable dan unstable[8]
Gambar 2.4 Tipe kurva ayunan untuk generator[14]
2.8. CCT (Critical Clearing Time)
Critical Clearing Time atau waktu pemutusan kritis adalah waktu kritis yang
dibutuhkan mesin sinkron untuk menjaga/mempertahankan kondisi mesin tetap
dalam keserempakan (synchronism).
Pada sistem SMIB (Single Machine Infinite Bus) atau 2 mesin dengan infinite bus,
penentuan kestabilan dapat dilakukan menggunakan metode langsung (direct
methode) yaitu dengan EEA (Equal Area Criterion)/kriteria luas sama. Dengan
metode EEA ini akan diperoleh sudut rotor kritis () yang akan menentukan luas
First swing
Second swing
Back swing Steady state
reached
An
gle
(el
ectr
ica
l d
egre
es)
Time (s)

20
A1 (daerah acceleration) sama dengan A2 (daerah deceleration). Pada gambar 2.5
berikut menggambarkan karakteristik kurva .
Gambar 2.5 Karakteristik [8]
Penentuan kriteria A1 = A2 menggunakan persamaan berikut,
Dengan diperolehnya maka CCT dapat ditentukan karena CCT adalah waktu
yang dibutuhkan oleh sistem ketika sudut rotor kritis diperoleh.
Sedangkan pada analisis kestabilan mesin majemuk (multimachine), penentuan
CCT diperoleh dari kurva ayunan (swing curve). Kurva ayunan merupakan
hubungan antara sudut rotor dan waktu. Penentuan CCT mempertimbangkan
kondisi sistem selama gangguan (faulted) dan setelah gangguan dihilangkan
(postfault).

21
Pada penelitian ini, CCT diperoleh dengan melihat kestabilan kurva ayunan
stabil/tidak stabil. Kestabilan ini ditentukan oleh nilai ω (kecepatan sudut rotor
dalam rad/s) dari penyelesaian numerik Runge-Kutta Fehlberg. Ketika pada
ayunan pertama (first swing) diperoleh maka sistem dikatakan stabil (stable).
Namun sebaliknya, jika maka sistem dikatakan tidak stabil (unstable).
2.9. Stabilitas Peralihan (Transient) Mesin Majemuk (Multimachine)
Studi stabilitas peralihan (transient) melibatkan pada gangguan-gangguan besar,
sehingga pemodelan persamaan matematis dari sistem tersebut adalah persamaan
non-linier. Oleh karena itu, penyelesaian dari permasalahan studi ini
menggunakan penyelesaian secara integrasi. Studi stabilitas peralihan (transient)
biasanya hanya menganalisis pada ayunan pertama (first swing) yaitu pada detik
pertama. Hal ini dikarenakan penerapan asumsi-asumsi yang digunakan pada studi
stabilitas peralihan. Jika pada detik pertama sistem masih mempertahankan
keserempakan (synchronism) setelah mengalami gangguan besar, maka sistem
dikatakan stabil. Sedangkan analisis multiswing memerlukan waktu studi yang
lebih lama karena sistem kontrol pada unit pembangkitan diperhitungkan. Sistem
kontrol ini akan mempengaruhi tampilan dinamik dari pembangkit selama
pengembangan waktu[11].
Studi stabilitas mesin majemuk (multimachine) klasik umumnya menerapkan
gangguan 3 fasa simetris. Pemilihan gangguan 3 fasa simetris diambil menjadi
salah satu variasi gangguan peralihan (transient) karena gangguan ini memberikan
pengaruh yang besar terhadap sistem tenaga listrik. Arus gangguan yang
diakibatkan oleh gangguan 3 fasa simetris ini adalah yang paling besar

22
dibandingkan dengan arus gangguan 1 atau 2 fasa. Oleh karena itu, analisis
stabilitas peralihan (transient) mesin majemuk memperhitungkan gangguan yang
lebih berdampak besar terhadap sistem tenaga listrik.
Analisis kestabilan pada sistem mesin majemuk akan lebih kompleks dan rumit
dibandingkan dengan analisis kestabilan pada sistem SMIB (Single Machine
Infinite Bus). Sehingga beberapa asumsi digunakan dalam analisis ini untuk
mengurangi kerumitan tersebut. Berikut ini adalah beberapa asumsi yang
digunakan [7],[10],[11],[15]:
a) Merepresentasikan setiap mesin sinkron sebagai sumber tegangan konstan
disamping reaktansi peralihan (transient) sumbu langsung dengan
mengabaikan efek saliensi/kutub tonjol dan mengasumsikannya sebagai fluks
bocor yang konstan.
b) Mengansumsikan daya masukan Pm dan aksi governor selalu konstan selama
simulasi.
c) Mengubah semua beban yang terhubung menjadi admitansi ke ground dan
dianggap konstan.
d) Mengabaikan redaman (damping) atau daya asinkron.
Berikut ini adalah langkah-langkah yang digunakan dalam analisis kestabilan
peralihan (transient):
1. Menyelesaikan aliran daya (load flow) dari sistem IEEE 9 bus, untuk
mendapatkan magnitude dan sudut fasa tegangan (Vi) pada masing-masing
bus.
2. Menghitung arus mesin (Ii) sebelum terjadi gangguan dengan persamaan:

23
..............................2.18)
Dengan
m adalah jumlah generator
Vi adalah tegangan terminal generator ke-i pada hasil penyelesaian aliran daya
Pi adalah daya aktif generator pada hasil penyelesaian aliran daya
Qi adalah daya reaktif generator pada hasil penyelesaian aliran daya
3. Menghitung sumber tegangan disamping reaktansi peralihan dengan
persamaan:
..............................2.19)
4. Dari perhitungan akan diperoleh sudut fasa tegangan pada generator, sudut
fasa ini akan dijadikan inisial awal untuk sedangkan untuk inisial awal
kecepatan rotor adalah .
5. Menghitung admitansi ekivalen semua beban berdasarkan persamaan berikut.
..............................2.20)
Dengan
VL adalah magnitude tegangan bus pada hasil penyelesaian aliran daya
PL adalah daya aktif beban
QL adalah daya reaktif beban
6. Selanjutnya, menghitung matriks Ybus (matriks n x n) pada kondisi sebelum
gangguan (prefault), selama gangguan (faulted) dan setelah gangguan
dihilangkan (postfault).
7. Mereduksi matriks Ybus menggunakan Kron’s reduction, yaitu:
..............................2.21)

24
8. Menghitung persamaan daya elektrik untuk masing-masing generator
berdasarkan matriks reduksi yang telah diperoleh menggunakan persamaan
berikut.
..............................2.22)
9. Kemudian menyelesaikan persamaan non-linier dari kurva ayunan (swing
curve) menggunakan metode Runge-Kutta Fehlberg dan persamaan:
..............................2.23)
2.10. Reduksi Matriks (Kron Reduction)
Dalam studi stabilitas multi mesin (m-buah generator dan n-bus) membutuhkan
penyederhanaan/pengurangan pada matriks Y-bus sistem tenaga, sehingga
analisis kestabilan sistem dapat dilakukan. Sebuah sistem tenaga dengan m buah
mesin/generator yang saling terinterkoneksi dan memiliki n buah bus akan
memiliki matriks Y-bus yang berukuran n x n. Penyederhanaan matriks n x n
dilakukan dengan menggunakan Kron’s reduction dan akan menjadi matriks yang
berukuran m x m (sesuai dengan jumlah generator). Berikut ini adalah proses
reduksi matriks n x n menjadi m x m[14].
..............................2.24)
Dimana,
merupakan vektor arus injeksi pada bus
merupakan vektor tegangan yang diukur dari titik referensi
Elemen diagonal dari matriks admitansi bus adalah total admitansi yang
terhubung pada bus tersebut. Elemen diagonal ini bertanda negatif sedangkan
elemen matriks admitansi lainnya adalah positif. Dalam menghilangkan bus

25
beban, matriks admitansi harus dipartisi. Tidak ada arus yang masuk atau
meninggalkan bus beban. Arus dalam baris ke n adalah nol. Arus generator
dinyatakan dengan vektor dan tegangan generator dan beban dinyatakan dalam
dan . Sehingga akan diperoleh,
Atau dapat dituliskan dalam persamaan matematis
..........................2.25)
..........................2.26)
Dari persamaan 2.25 dapat diperoleh
..........................2.27)
Selanjutnya substitusikan persamaan 2.27 ke dalam persamaan 2.26, maka akan
diperoleh :
..............................2.28)
Matriks Y-bus reduksi
..............................2.29)
..............................2.30)
adalah matriks admitansi reduksi dengan dimensi m x m (m adalah jumlah
generator)[15],[16],[17],[18].
2.11. Sistem Per Unit[25]
Analisis jaringan sistem tenaga listrik dilakukan dengan menggunakan besaran
tegangan, ampere, ohm, dan voltampere. Untuk membuat analisis ini menjadi

26
lebih mudah maka perhitungan analisis jaringan menggunakan satuan perhitungan
sistem per unit (pu), yang dinyatakan sebagai pecahan desimal dari suatu nilai
dasar yang dipilih/ rasio nilai asli dengan nilai dasarnya. Umumnya, dasar kVA
atau MVA dan dasar tegangan dalam kV adalah nilai yang dipilih untuk
spesifikasi nilai dasar.
..........................................................2.31)
..........................................................2.32)
...............................................2.33)
Sistem per unit ini diperlukan dalam perhitungan analisis kestabilan transient.
Selain untuk mempermudahkan perhitungan, sistem per unit ini diperlukan untuk
penyelesaian persamaan ayunan (swing equation) dalam persamaan 2.17.
2.12. Runge-Kutta Fehlberg[19]
Metode Runge Kutta Fehlberg untuk pertama kalinya diperkenalkan oleh E.
Fehlberg pada tahun 1970.
Rumusan umum dari metode Runge Kutta Fehlberg ini adalah sebagai berikut :
........2.34)
Dimana :
.................................................................................................2.35)
...........................................................................2.36)
..........................................................2.37)
..............................2.38)
.....................2.39)
.....2.40)

27
2.13. Pengurangan Reaktansi Saluran Transmisi
Kestabilan suatu sistem tenaga sangat dipengaruhi oleh jenis dan lokasi terjadinya
gangguan. Dalam permasalahan sistem SMIB (Single Machine Infinite Bus)
peningkatan stabilitas dapat dilakukan dengan menaikkan konstanta inersia (H),
namun metode ini tidak dapat diberlakukan dalam praktiknya karena alasan
ekonomis dan alasan lambatnya respon dari kecepatan governor [7].
Dalam upaya meningkatkan stabilitas peralihan (improving transient stability),
beberapa metode yang disarankan adalah [7],
a) Menaikkan tegangan sistem (menggunakan AVR).
b) Menggunakan sistem eksitasi dengan kecepatan tinggi.
c) Mengurangi reaktansi transfer sistem.
d) Menggunakan breaker berkecepatan tinggi.
Pengurangan reaktansi transfer adalah metode praktis yang penting dalam
meningkatkan batas stabilitas. Pengurangan reaktansi saluran dapat dilakukan
dengan mengurangi jarak konduktor dan menaikkan diameter konduktor. Namun
metode yang efektif dan ekonomis adalah dengan kompensasi reaktansi saluran
transmisi yaitu dengan pemasangan kapasitor seri. Selain itu, penambahan jumlah
saluran transmisi juga mampu mengurangi reaktansi transfer.
2.13.1. Kompensasi Seri
Pemasangan kapasitor seri dalam saluran transmisi memberikan kontrol yang
efektif terhadap reaktansi saluran, dengan demikian menaikkan limit daya statis
atau menaikkan stabilitas sistem.
....................................... 2.41)

28
Dimana:
adalah reaktansi saluran total yang baru (ohm)
adalah reaktansi saluran (ohm)
adalah reaktansi kapasitor (ohm)
Pemasangan kapasitor seri akan mengurangi voltage drop yang besarnya adalah
I2X. Reaktansi (X) akan bernilai positif jika induktif dan akan bernilai negatif jika
kapasitif. Karena reaktansi induktif dan kapasitif akan saling mengurangi maka
voltage drop pada saluran transmisi juga akan berkurang.
Salah satu yang perlu diperhatikan dengan kompensasi seri adalah derajat
kompensasi. Perbandingan antara besarnya reaktansi kapasitif (XC) dengan
reaktansi total (X) menyatakan persentase dari kompensasi (degree of
compensation) yang dapat dituliskan dalam bentuk berikut ini.
Untuk besarnya persentase kompensasi dianjurkan sebesar 25% – 75%.
2.13.2. Penambahan Jumlah Saluran Transmisi
Penambahan jumlah saluran transmisi merupakan metode efektif lainnya yang
dapat digunakan untuk mengurangi besarnya reaktansi saluran. Sebagaimana telah
diketahui bahwa nilai reaktansi total dari suatu rangkaian paralel (Xtotal) dengan
jumlah n saluran paralel adalah
.............................2.42)
Sehingga dengan bertambahnya jumlah saluran paralel pada transmisi maka nilai
reaktansi (X) sistem akan berkurang.
29
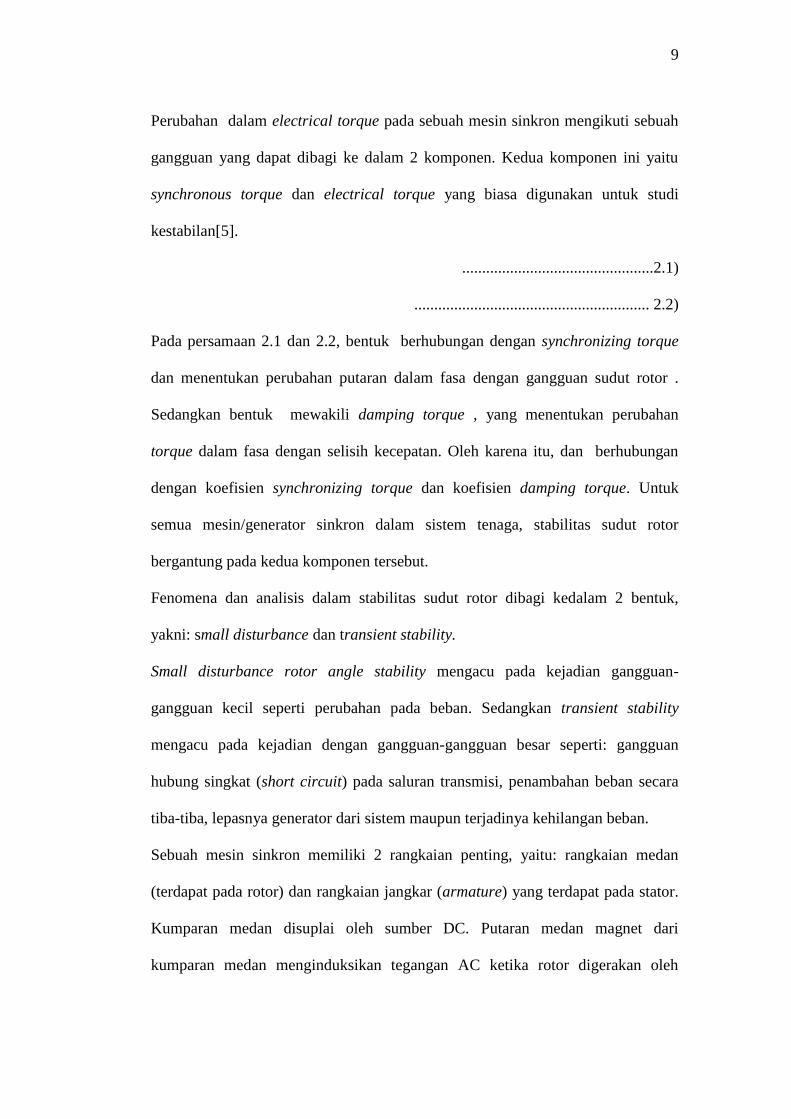
2.14. Sistem Tenaga Listrik IEEE 9 Bus
Studi kasus yang diambil sebagai studi dan analisis permasalahan kestabilan
peralihan (transient stability) untuk sistem mesin majemuk (multimachine) adalah
sistem IEEE 9 bus dengan 3 buah mesin/generator. Gambar 2.6 di bawah ini
adalah single line diagram untuk sistem IEEE 9 bus. Data sistem IEEE 9 bus
seperti: transmission data, machine data, load data dan generation data dapat
dilihat pada lampiran 1.
Gambar 2.6 Sistem Tenaga Listrik IEEE 9 Bus[21]
G
G
G
2
7
5
1
4
6
8
9
3
Loa
d C
Loa
d B
Loa
d A

30

BAB III
METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Penelitian ini dilakukan di Laboratorium terpadu jurusan Teknik Elektro, Fakultas
Teknik, Universitas Lampung. Penelitian ini dilaksanakan pada bulan Juni 2015
dan diselesaikan pada bulan Desember 2015.
3.2. Alat dan Bahan
Adapun alat dan bahan yang digunakan pada penelitian ini adalah sebagai berikut:
1. Data Sekunder Sistem IEEE 9 Bus
Data sekunder sistem IEEE 9 bus dengan tiga buah mesin (generator) yang
digunakan dalam penelitian ini meliputi:
a) Data Generator
Data generator yang digunakan dalam penelitian ini adalah data
pembangkitan masing-masing generator (P dan Q), konstanta inersia
generator (H), dan reaktansi transien .
b) Data Transformator
32
Data transformator yang digunakan dalam penelitian ini adalah data
reaktansi transformator (XT).
c) Data Saluran Transmisi
Data saluran transmisi yang digunakan dalam penelitian ini adalah data
resistansi saluran (R) dan reaktansi saluran (X) serta data suseptansi
(Y Shunt ).
d) Data Beban Terhubung
Data beban terhubung yang digunakan dalam penelitian ini adalah berupa
data daya aktif (P) dan daya reaktif (Q).
e) Data Load Flow (aliran daya) Sistem
Data aliran daya yang digunakan dalam penelitian ini berupa data
tegangan pada masing-masing bus.
2. Hardware (Personal Computer/Laptop)
Jenis hardware yang digunakan sebagai perangkat keras pendukung penelitian
ini adalah laptop ACER type ASPIRE 4752 Intel CoreTM i3-2350M.
3. Software
Jenis software (perangkat lunak) yang digunakan sebagai pendukung
penelitian ini adalah software MATLAB R2011a.
3.3. Tahap Pembuatan Tugas Akhir
Dalam penyusunan dan pengerjaan tugas akhir ini akan melalui beberapa tahapan
sebagai berikut:

33
1. Studi Literatur
Pada tahap studi literatur ini dimaksudkan untuk mempelajari berbagai sumber
referensi (buku, jurnal dan internet) untuk mendapatkan pemahaman dan data
pendukung yang berkaitan dengan analisis stabilitas transien mesin majemuk
(multimachine).
2. Perancangan dan Pembuatan Perangkat Simulasi
Dalam tahapan ini dimaksudkan untuk merancang dan membuat program
simulasi dan penyelesaian dari kurva ayunan (swing curve) pada software
MATLAB R2011a. Program ini meliputi pembentukan matriks admitansi dan
matriks reduksi (prefault, faulted dan postfault) yang akan digunakan untuk
menentukan persamaan daya elektrik mesin. Selanjutnya, persamaan daya ini
akan digunakan untuk pembuatan program simulasi penyelesaian kurva
ayunan mesin.
3. Pengambilan Data
Pada tahap ini dimaksudkan untuk mengambil data dari program simulasi
yang dibuat. Data yang diambil berupa data kurva ayunan dengan variasi CCT
(critical clearing time), gangguan saluran transmisi 3 fasa simetris, serta
penambahan dan hilangnya beban secara tiba-tiba.
4. Analisis dan Pembahasan
Pada tahap ini akan dilakukan analisis dan pembahasan mengenai perolehan
data hasil pengujian yang dilakukan.
34
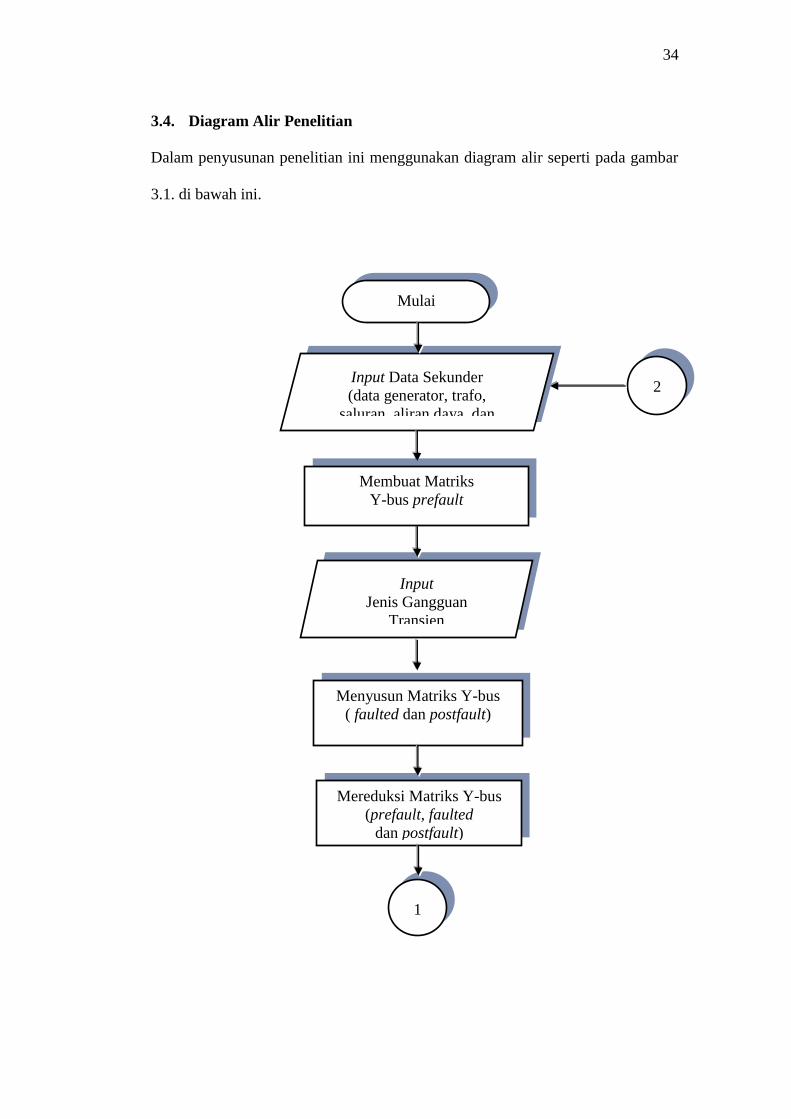
3.4. Diagram Alir Penelitian
Dalam penyusunan penelitian ini menggunakan diagram alir seperti pada gambar
3.1. di bawah ini.
Menyusun Matriks Y-bus
( faulted dan postfault)
Mereduksi Matriks Y-bus
(prefault, faulted
dan postfault)
2
Mulai
Input Data Sekunder
(data generator, trafo,
saluran, aliran daya, dan
beban)
Input
Jenis Gangguan
Transien
Membuat Matriks
Y-bus prefault
1

35
Gambar 3.1 Diagram Alir Penyelesaian Kurva Ayunan
Membuat Persamaan
Daya Elektrik (Pei)
Membuat Persamaan Ayunan
(Swing Curve)
Input CCT
Gangguan
Lain
Selesai
2
NO
YES
Menampilkan
Kurva Ayunan
1
36
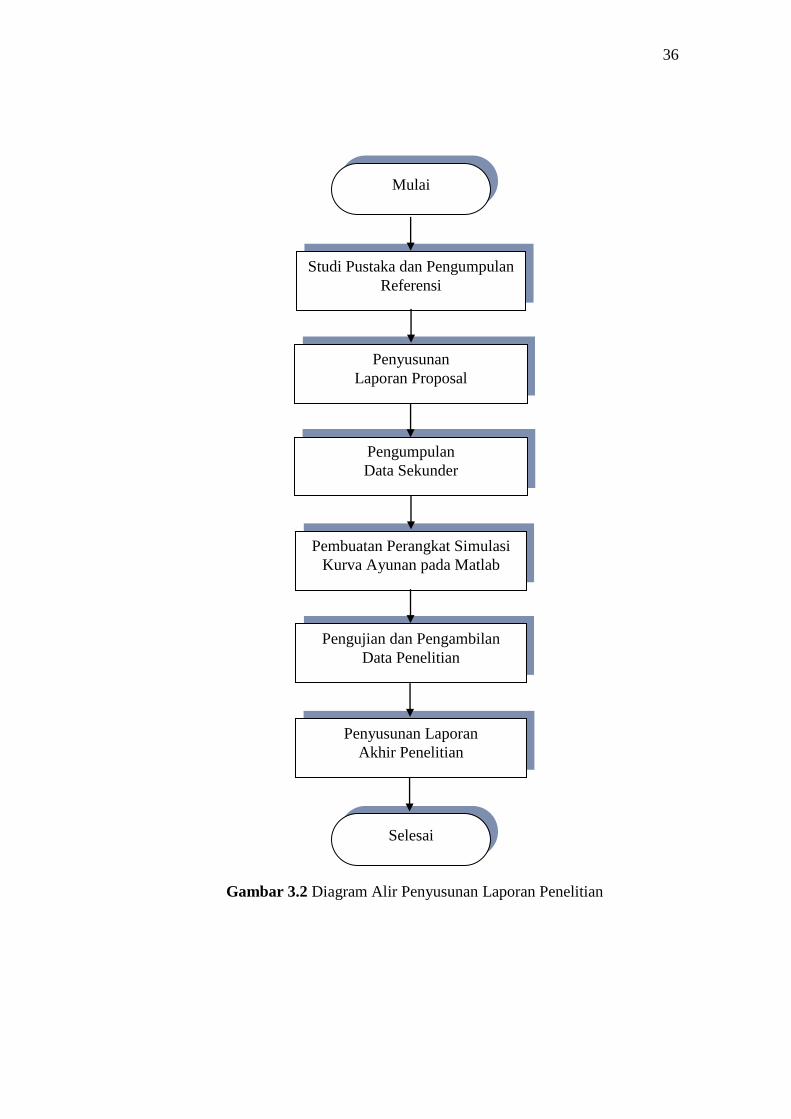
Gambar 3.2 Diagram Alir Penyusunan Laporan Penelitian
Mulai
Studi Pustaka dan Pengumpulan
Referensi
Penyusunan
Laporan Proposal
Pengumpulan
Data Sekunder
Pembuatan Perangkat Simulasi
Kurva Ayunan pada Matlab
Pengujian dan Pengambilan
Data Penelitian
Penyusunan Laporan
Akhir Penelitian
Selesai

BAB IV
HASIL DAN PEMBAHASAN
Perilaku atau perubahan sudut rotor pada mesin/generator diamati dengan
melakukan pengujian melalui perubahan reaktansi saluran dan variasi gangguan
besar (transient stability). Perubahan reaktansi saluran yang dilakukan yaitu
dengan menerapkan pemberian kompensasi saluran/pemasangan kompensator
kapasitor seri dan penambahan jumlah saluran transmisi. Untuk variasi gangguan
besar yang diterapkan adalah gangguan 3 fasa simetris pada salah satu saluran dan
pelepasan beban. Perubahan reaktansi saluran dan variasi dari jenis gangguan
besar ini dilakukan untuk melihat pengaruh yang terjadi pada sudut rotor dan
pengaruhnya terhadap waktu pemutusan kritis gangguan (Critical Clearing Time)
yang diperlukan oleh sistem tenaga agar tetap dapat mempertahankan kestabilan
sistem secara transien. Analisis ini dilakukan dengan membuat program m-file
pada software MATLAB, yaitu program simulasi penyelesaian numerik dari
persamaan ayunan masing-masing mesin/generator.
Metode penyelesaian numerik yang digunakan pada penelitian ini adalah metode
Runge-Kutta Fehlberg. Metode ini dipilih dengan tujuan untuk meningkatkan
akurasi dari penentuan parameter yang akan ditentukan, yakni sudut rotor dan
kecepatan sudut rotor (ω).

38
4.1. Pemodelan Sistem Tenaga Listrik IEEE 9 Bus[21]
Model sistem tenaga listrik (STL) multi mesin yang diujikan dalam studi stabilitas
transien ini adalah sistem multi mesin IEEE 9 bus dengan 3 buah mesin. Gambar
4.1 di bawah ini adalah model STL yang digunakan dalam pengujian.
Gambar 4.1. Sistem Tenaga Listrik IEEE 9 Bus
Dari sistem tenaga listrik IEEE 9 bus ini ditentukan lokasi terjadinya gangguan,
yaitu pada saluran 8-9 dekat bus 9. Pemilihan lokasi gangguan ini bertujuan hanya
untuk mengambil salah satu contoh gangguan 3 fasa simetris yang akan dianalisis.
Untuk data saluran, pembangkitan, pembebanan dan data aliran daya dapat dilihat
pada lampiran 1.

39
4.2. Pengambilan Data
Pengambilan data dilakukan dengan menggunakan software MATLAB (m-file)
yaitu program penyelesaian persamaan ayunan dari masing-masing generator
yang telah dirancang pada MATLAB. Perancangan program m-file ini dengan
mengolah data sekunder sistem tenaga listrik model IEEE 9 Bus. Data-data
sekunder tersebut adalah berupa:
a) Data Generator
Data generator meliputi reaktansi peralihan (X’d) dan konstanta inersia (H).
b) Data Saluran (line)
Data saluran meliputi resistansi (R), reaktansi (Xl) dan suseptansi (B/2).
c) Data Pembebanan (load)
Data pembebanan meliputi daya aktif (P) dan reaktif (Q) yang terhubung
dengan sistem.
d) Data Load Flow IEEE 9 Bus
Data load flow sistem IEEE 9 bus yang diperlukan adalah data pembangkitan
generator (P dan Q) serta data tegangan bus.
Data sekunder pada sistem IEEE 9 bus dapat dilihat pada lampiran 1.
4.3. Pengolahan Data
Pengolahan data sekunder untuk analisis kestabilan peralihan (transient stability)
dilakukan dengan membuat penyelesaian persamaan ayunan pada software
MATLAB (m-file). Pada analisis kestabilan peralihan (transient stability) sistem
tenaga listrik mempertimbangkan 3 kondisi, yaitu kondisi sebelum gangguan (pre-

40
fault), selama gangguan (faulted) dan setelah gangguan dihilangkan (post-fault).
Adapun tahapan dalam penyelesaian persamaan ayunan adalah
a) Penyusunan Matriks Y-bus
Penyusunan matriks Y-bus dilakukan untuk ketiga kondisi (prefault, faulted dan
postfault).
b) Penyederhanaan Matriks Y-bus Menggunakan Kron’s Reduction
Setelah matriks Y-bus untuk ketiga kondisi telah tersusun, maka selanjutnya
adalah dengan menyederhanakan matriks tersebut menggunakan metode Kron.
Penyederhanaan ini dilakukan dengan tujuan agar complexity dari kestabilan
peralihan dapat dikurangi dan analisis dapat dilakukan. Sehingga dengan
menerapkan metode Kron’s Reduction pada persamaan 2.30, matriks Y-bus yang
berukuran 9x9 akan menjadi matriks yang berukuran 3x3 (sesuai dengan jumlah
generator/mesin).
c) Penyelesaian Persamaan Ayunan
Penyelesaian persamaan ayunan (swing equation) pada persamaan 2.17 secara
integrasi diperoleh data berupa sudut rotor dalam derajat dan kecepatan sudut
rotor (ω) dalam rad/s.
d) Plotting Swing Curve
Untuk mendapatkan kurva ayunan (swing curve) yaitu dengan mem-plot sudut
rotor terhadap waktu (t).
Proses tahapan penyelesaian persamaan ayunan dapat dilihat pada lampiran 2.

41
4.4. Perhitungan Initial Value Sebagai Kondisi Steady State
Dalam studi transient stability mesin majemuk, kondisi steady state sebelum
terjadi gangguan diperlukan untuk menentukan initial value (nilai awal) dalam
penyelesaian persamaan ayunan sistem. Perhitungan initial value ini
menggunakan data sekunder sistem IEEE 9 bus seperti data load flow, reaktansi
peralihan generator, dan data beban. Berikut ini adalah perhitungan initial value
sistem IEEE 9 bus.
1) Arus yang mengalir ke jala-jala dihitung dengan persamaan 2.18 dan
perhitungannya adalah sebagai berikut.
adalah arus yang mengalir dari generator 2 sedangkan adalah arus yang
mengalir dari generator 3.
2) Perhitungan tegangan peralihan internal masing-masing generator
menggunakan persaamaan 2.19 adalah sebagai berikut.

42
adalah tegangan peralihan internal dari generator 2 sedangkan adalah tegangan
peralihan internal dari generator 3.
Dari perhitungan di atas diperoleh initial value untuk sudut rotor dan kecepatan
sudut rotor dalam keadaan steady state adalah 0= 19,7510 dan 0 0= 13,2020 dan 0=
(0 adalah sudut rotor generator 2 pada kondisi awal sedangkan 0 adalah sudut rotor
generator 3 pada kondisi awal). ω adalah kecepatan sudut rotor generator.
4.5. Pengujian Program Simulasi
Sebelum analisis kestabilan transien pada sistem IEEE 9 bus dilakukan
menggunakan program simulasi dengan metode Runge-Kutta Fehlberg, program
simulasi ini diujikan pada salah satu kasus pada referensi[15]. Sistem tenaga
listrik yang diujikan pada referensi adalah sistem mesin majemuk dengan 2 buah
mesin yang terhubung dengan infinite bus.
Berikut ini adalah hasil pengujian program simulasi untuk kurva ayunan pada
referensi dimana simulasi menggunakan metode Runge-Kutta orde 4 dan metode
Runge-Kutta Fehlberg (salah satu metode numerik yang diusulkan untuk
penyelesaian persamaan ayunan).
1. Kurva Ayunan pada Referensi Menggunakan Runge-Kutta Orde 4
Adapun hasil simulasi kurva ayunan sistem pada referensi adalah sebagai
berikut.

Gambar 4.2. Waktu Pemutusan
Gangguan saat 0.20 detik
Gambar 4.3. Waktu Pemutusan
Gangguan saat 0.21 detik
Gambar 4.2 memperlihatkan kurva ayunan 2 buah mesin pada referensi yang
diujikan. Kurva ayunan tersebut menunjukkan sistem yang masih dalam
keadaan sinkron/stabil pada saat pemutusan gangguan selama 0.20 detik.
Gambar 4.3 adalah hasil simulasi pengujian referensi menggunakan RK 4
yang menggambarkan sistem yang kehilangan sinkronisasi/tidak stabil.
Ketidakstabilan ini terjadi karena waktu pemutusan gangguan melebihi waktu
pemutusan kritisnya yaitu selama 0.21 detik. Penyelesaian persamaan ayunan
dari sistem ini menggunakan metode RK 4.
2. Kurva Ayunan pada Referensi Menggunakan Runge-Kutta Fehlberg
Berikut ini adalah hasil simulasi penyelesaian persamaan ayunan meng-
gunakan metode Runge-Kutta Fehlberg pada referensi.

44
Gambar 4.4. Waktu pemutusan gangguan saat 0.20 detik
Gambar 4.4 merupakan hasil simulasi penyelesaian persamaan ayunan pada
referensi menggunakan metode Runge-Kutta Fehlberg. Kurva ayunan kedua
generator tersebut dalam keadaan stabil ketika gangguan dihilangkan saat
0.20 detik. Selanjutnya, ketika gangguan sistem dilakukan pemutusan saat
0.21 detik, generator 1 mengalami kenaikkan sudut rotor sampai tidak
terbatas. Hal ini mengakibatkan generator 1 lepas dari sistem dan sistem
menjadi tidak stabil. Kurva ayunan untuk pemutusan gangguan saat 0.21
detik dapat dilihat pada gambar 4.5 di bawah ini.
Gambar 4.5. Waktu pemutusan gangguan saat 0.21 detik

45
Dari hasil pengujian program simulasi RK orde 4 dan RK Fehlberg menunjukkan
bahwa sistem masih dalam keadaan sinkron ketika gangguan dihilangkan saat
0.20 detik. Ini mengindikasikan bahwa sistem masih dikatakan stabil secara
transien. Namun sebaliknya, ketika gangguan dihilangkan saat 0.21 detik, kurva
ayunan menunjukkan salah satu mesin/generator mengalami out of step (hilang
langkah/lepas dari sistem) sehingga sistem dikatakan tidak stabil.
Dari kedua metode tersebut diperoleh waktu pemutusan kritis gangguan (critical
clearing time) berada pada 0.20 – 0.21 detik. Dengan perolehan nilai waktu
pemutusan kritis yang sama, maka hal ini mengindikasikan bahwa penyelesaian
kurva ayunan menggunakan RK Fehlberg dapat dipertanggungjawabkan sebagai
metode penyelesaian numerik dari persamaan ayunan sistem tenaga listrik.
Berikut ini adalah perbedaan hasil penyelesaian persamaan ayunan menggunakan
metode RK orde 4 dan RK Fehlberg.
Runge-Kutta RK 4: t Delta 1 Delta 2 Omega 1 Omega 2
Runge-Kutta Fehlberg:
46
Peningkatan orde dalam Runge-Kutta sebagai pemilihan metode penyelesaian
persamaan ayunan sistem tenaga listrik mampu meningkatkan akurasi dalam
penyelesaian numerik.
4.6. Kurva Ayunan Sistem IEEE 9 Bus dengan Metode RK Fehlberg
Analisa kestabilan peralihan (transient stability) sistem IEEE 9 bus menerapkan
generator 1 sebagai infinite bus (Generator Slack). Pemilihan generator 1 sebagai
slack atau infinite bus ini adalah karena generator 1 memiliki kapasitas
pembangkitan paling besar diantara generator lainnya. Dengan kapasitas
pembangkitan terbesar ini, generator 1 dianggap mampu mempertahankan
operasinya ketika terjadi gangguan dibandingkan generator 2 dan 3. Sehingga
dalam studi kestabilan transient sistem IEEE 9 bus ini hanya akan mem-plot
kurva ayunan generator 2 dan 3 untuk mewakili kestabilan transient sistem.
4.6.1. Sebelum Pemberian Kompensasi Saluran
Berikut ini adalah kurva ayunan (swing curve) untuk sistem IEEE 9 bus dengan
menerapkan gangguan besar 3 fasa simetris yang terjadi di saluran 8-9 dekat
dengan bus 9.

47
Gambar 4.6. Kurva ayunan dengan waktu pemutusan gangguan 0.18 detik
Gambar 4.7. Kurva ayunan dengan waktu pemutusan gangguan 0.19 detik
Gambar 4.6 dan 4.7 adalah kurva ayunan generator 2 dan 3 yang masih
menunjukkan keserempakkan/sinkron, hal ini terlihat dari tetap berayunnya kedua
generator. Meskipun demikian, lamanya waktu pemutusan gangguan memberikan
pengaruh yang signifikan terhadap besarnya ayunan (sudut rotor) generator.
Gambar 4.6 merupakan hasil simulasi kurva ayunan ketika gangguan dihilangkan
pada waktu 0.18 detik. Waktu pemutusan gangguan ini memberikan ayunan sudut
rotor generator 3 sebesar 106.660 dan generator 2 sebesar 69.760. Sedangkan
gambar 4.7 memberikan ayunan sudut rotor generator 3 sebesar 131.690 dan

48
generator 2 sebesar 77.230 ketika gangguan dihilangkan pada waktu 0.19 detik.
Perbedaan lamanya waktu pemutusan gangguan mengakibatkan ayunan sudut
rotor kedua generator bertambah besar.
Selanjutnya, gambar 4.8 dibawah ini menggambarkan kondisi sistem yang telah
kehilangan sinkronisasi (unstable). Penambahan sudut rotor generator 3 menjadi
tidak terbatas dan tidak dapat kembali berayun ketika gangguan dihilangkan
melebihi waktu 0.20 detik. Terjadinya penambahan sudut rotor yang tidak terbatas
ini menyebabkan generator 3 out of step (hilang sinkronisasi dari sistem) dan
mengakibatkan sistem menjadi tidak stabil. Sedangkan untuk generator 2 masih
tetap dalam keadaan stabil (stable), ini terlihat dari kurva ayunan generator 2 yang
masih berayun.
Gambar 4.8. Kurva ayunan dengan waktu pemutusan gangguan 0.20 detik
Hilangnya keserempakkan generator 3 dari sistem dapat terjadi karena waktu
pemutusan gangguan melebihi waktu pemutusan kritisnya (CCT) yaitu pada 0.19
detik. Selain itu, hal lain yang mempengaruhi hilang sinkronisasi adalah lokasi
terjadinya gangguan. Pada sistem yang diujikan ini, gangguan terjadi di saluran

49
8-9 dekat bus 9 dimana bus 9 adalah bus yang berada paling dekat dengan
generator 3. Sehingga generator 3 yang mengalami gangguan paling berat
dibandingkan generator lainnya.
4.6.2. Pengaruh Penambahan Kompensasi Saluran Terhadap Kestabilan
Sistem
Berikut ini adalah hasil simulasi kurva ayunan generator 2 dan 3 dari sistem IEEE
9 bus ketika menerapkan penambahan kompensasi saluran. Gangguan besar yang
diterapkan dalam simulasi ini adalah gangguan 3 fasa simetris yang terjadi pada
saluran 8-9 dekat bus 9.
1. Kurva Ayunan dengan Penambahan Kompensasi Saluran 20 %
Gambar 4.9. Kurva ayunan dengan penambahan kompensasi 20% saat
pemutusan gangguan 0.19 detik
Hasil simulasi gambar 4.9 menunjukkan kondisi sistem yang stabil ketika
pemutusan gangguan dilakukan saat 0.19 detik dengan penambahan
kompensasi saluran sebesar 20%. Meskipun penambahan kompensasi
saluran 20% tidak memberikan pengaruh terhadap waktu pemutusan kritis

50
gangguan, namun pemberian kompensasi ini memberikan perubahan ayunan
sudut rotor generator. Ayunan sudut rotor kedua generator menjadi lebih
smooth dan lebih kecil dibandingkan sebelum dilakukan pemberian
kompensasi (gambar 4.7).
Ketika pemutusan gangguan dilakukan saat 0.20 detik, generator 3
mengalami out of step sehingga sistem menjadi tidak stabil seperti pada
gambar 4.10 berikut.
Gambar 4.10. Kurva ayunan dengan penambahan kompensasi 20% saat
pemutusan gangguan 0.20 detik
Sehingga waktu pemutusan kritis gangguan dari sistem IEEE 9 bus dengan
penambahan kompensasi saluran sebesar 20% adalah 0.19 – 0.20 detik.
2. Kurva Ayunan dengan Penambahan Kompensasi Saluran 30 %
Penambahan kompensasi saluran sebesar 30% memberikan perubahan
terhadap waktu pemutusan kritis gangguan. Perubahan ini yaitu kenaikkan
pada waktu pemutusan kritis gangguan sebesar 0.01 detik. Gambar 4.11 di

51
bawah ini adalah hasil simulasi kurva ayunan dengan waktu pemutusan 0.20
detik dan menggambarkan sistem yang masih stabil.
Gambar 4.11. Kurva ayunan dengan penambahan kompensasi 30% saat
pemutusan gangguan 0.20 detik
Dan apabila pemutusan gangguan dilakukan lebih dari 0.21 detik maka
generator 3 mengalami kenaikkan sudut rotor hingga tak terbatas yang
mengakibatkan generator 3 out of step dan sistem menjadi tidak stabil.
Simulasi kurva ayunan untuk waktu pemutusan gangguan saat 0.21 detik
ditunjukkan pada gambar 4.12 berikut.

52
Gambar 4.12. Kurva ayunan dengan penambahan kompensasi 30% saat
pemutusan gangguan 0.21 detik
3. Kurva Ayunan dengan Penambahan Kompensasi Saluran 40 %
Pengujian penambahan kompensasi saluran 40% memberikan pengaruh yang
sama terhadap ayunan sudut rotor generator. Pengaruh tersebut adalah
penurunan terhadap besarnya ayunan sudut rotor generator. Kedua generator
masih dalam keadaan stabil ketika gangguan dihilangkan pada saat 0.20 detik
seperti pada gambar 4.13 berikut.
Gambar 4.13. Kurva ayunan dengan penambahan kompensasi 40% saat
pemutusan gangguan 0.20 detik
Ketika gangguan sistem dihilangkan saat 0.21 detik atau lebih, sistem menjadi
tidak stabil karena generator 3 mengalami out of step. Gambar 4.14
menggambarkan sistem yang tidak stabil dengan waktu pemutusan gangguan
saat 0.21 detik.

53
Gambar 4.14. Kurva ayunan dengan penambahan kompensasi 40% saat
pemutusan gangguan 0.21 detik
Penambahan kompensasi 40% tidak meningkatkan waktu pemutusan kritis
gangguan namun penambahan kompensasi ini memberikan penurunan
terhadap ayunan sudut rotor terhadap kedua generator. Sehingga waktu
pemutusan kritis gangguan dengan kompensasi saluran 40% adalah 0.20 –
0.21 detik.
4. Kurva Ayunan dengan Penambahan Kompensasi Saluran 50%
Pengujian dengan penambahan kompensasi saluran sebesar 50% memberikan
pengaruh yang signifikan terhadap waktu pemutusan kritis gangguan maupun
terhadap penurunan sudut rotor generator pada kurva ayunan.
Ketika gangguan dihilangkan saat 0.21 detik, ayunan sudut rotor untuk kedua
generator masih tetap berayun. Artinya, kedua generator masih dapat
mempertahankan keserempakkannya/sinkron. Gambar 4.15 berikut ini adalah
ayunan sudut rotor untuk kedua generator dengan pemutusan gangguan saat
0.21 detik.

54
Gambar 4.15. Kurva ayunan dengan penambahan kompensasi 50% saat
pemutusan gangguan 0.21 detik
Selanjutnya, saat pemutusan gangguan dilakukan pada waktu lebih dari 0.21
detik, sistem menjadi tidak stabil dan generator 3 kehilangan keserempakkan
karena penambahan sudut rotor yang tak terbatas. Dan gambar 4.16 berikut ini
mewakili dari keadaan tersebut.
Gambar 4.16. Kurva ayunan dengan penambahan kompensasi 50% saat
pemutusan gangguan 0.22 detik

55
5. Kurva Ayunan dengan Penambahan Kompensasi Saluran 60%
Selanjutnya, pengujian dengan penambahan kompensasi saluran sebesar 60%
memberikan hasil simulasi kurva ayunan dalam keadaan stabil ketika
gangguan dihilangkan saat 0.21 detik seperti pada gambar 4.17 berikut.
Gambar 4.17. Kurva ayunan dengan penambahan kompensasi 60% saat
pemutusan gangguan 0.21 detik
Walaupun waktu pemutusan kritis gangguan tidak meningkat, namun ayunan
sudut rotor untuk masing-masing generator mengalami penurunan dari
sebelumnya. Ketika gangguan dihilangkan saat 0.22 detik atau lebih, sistem
menjadi tidak stabil seperti ditunjukkan pada gambar 4.18 berikut.

56
Gambar 4.18. Kurva ayunan dengan penambahan kompensasi 60% saat
pemutusan gangguan 0.22 detik
Ketidakstabilan gambar 4.18 terjadi karena generator 3 mengalami kenaikkan
sudut rotor sampai tak terbatas dan tidak dapat kembali berayun. Sehingga
waktu pemutusan kritis gangguan untuk penambahan kompensasi saluran
sebesar 60% adalah 0.21 – 0.22 detik.
6. Kurva Ayunan dengan Penambahan Kompensasi Saluran 70%
Berikut ini adalah hasil simulasi kurva ayunan untuk kompensasi sebesar
70%.
Gambar 4.19. Kurva ayunan dengan penambahan kompensasi 70% saat
pemutusan gangguan 0.22 detik

57
Gambar 4.19 menggambarkan sistem IEEE 9 bus dalam keadaan stabil saat
pemutusan gangguan dilakukan pada 0.22 detik. Waktu pemutusan gangguan
ini meningkat karena penambahan kompensasi saluran sebesar 70%.
Selanjutnya, jika gangguan dihilangkan pada waktu lebih dari 0.22 detik maka
sistem menjadi tidak stabil. Prilaku yang sama dialami oleh generator 3 karena
keterlambatan dalam menghilangkan gangguan, yaitu sudut rotornya
meningkat hingga tak terbatas dan tidak dapat kembali berayun sehingga
generator tersebut cenderung akan lepas dari sistem. Kurva ayunan tersebut
dapat dilihat pada gambar 4.20 berikut.
Gambar 4.20. Kurva ayunan dengan penambahan kompensasi 70% saat
pemutusan gangguan 0.23 detik
Sehingga waktu pemutusan kritis gangguan dengan pemberian kompensasi
saluran sebesar 70% adalah 0.22 – 0.23 detik.
Penambahan kompensasi kapasitor seri pada saluran ini memiliki tujuan untuk
mengurangi besarnya nilai reaktansi saluran (XL) yang selanjutnya mampu

58
meningkatkan transfer daya sistem tenaga listrik. Sebagaimana diketahui bahwa
pemasangan kompensator kapasitor seri pada saluran transmisi dapat menaikkan
transfer daya. Dengan bertambahnya transfer daya dalam sistem maka kestabilan
sistem tenaga listrik tersebut dapat meningkat.
Pemasangan kompensator kapasitor seri mampu mengurangi reaktansi saluran
sistem. Kompensator kapasitor seri akan memberikan reaktansi (XC) yang saling
berlawanan dengan reaktansi saluran (XL), sehingga reaktansi total dalam sistem
adalah hasil pengurangan XC terhadap XL. Dengan bertambah besar nilai XC maka
reaktansi saluran sistem akan mengalami penurunan. Namun selanjutnya perlu
dipertimbangkan efek resonansi yang ditimbulkan karena pemasangan kapasitor
seri ini.
Perubahan nilai reaktansi sistem sangat mempengaruhi kestabilan sistem. Dalam
kestabilan transien sistem tenaga listrik sangat berhubungan erat dengan waktu
pemutusan kritis/critical clearing time (CCT). Dimana CCT ini akan
mempengaruhi ayunan sudut rotor generator dalam kurva ayunan (swing curve).
Pengujian pemasangan kompensasi saluran ini dilakukan dengan memvariasikan
persentase kompensasi saluran. Kompensasi yang diujikan adalah sebesar 20%,
30%, 40%, 50%, 60% dan 70% sedangkan jenis gangguan yang diterapkan pada
sistem adalah gangguan 3 fasa simetris yang terjadi di saluran 8-9 dekat bus 9.
Jenis gangguan yang sama diujikan pada penelitian ini dengan tujuan untuk
melihat perbedaan yang terjadi pada kurva ayunan dan waktu pemutusan
gangguan kritis (CCT) sebelum dan setelah dilakukan penambahan kompensasi
saluran.

59
Hasil pengujian untuk kompensasi saluran 20%, 30%, 40%, 50%, 60% dan 70 %
dapat dirangkum dalam tabel 4.1 di bawah ini.
Tabel 4.1. Perbandingan Hasil Pengujian Kompensasi Saluran
Sudut Rotor
Generator
Persentase Kompensasi Saluran
20% 30% 40% 50% 60% 70%
2 70.4280 74.0970 70.8050 74.1080 70.2310 72.3710
3 109.9240 121.1330 113.2680 124.8670 116.2730 127.3730
CCT 0.19 s 0.20 s 0.20 s 0.21 s 0.21 s 0.22 s
*) adalah sudut rotor generator pada ayunan pertama (first swing)
Pada tabel 4.1 di atas menunjukkan adanya perubahan pada ayunan sudut rotor
generator 2 dan 3 akibat pemberian kompensasi saluran. Dimana ketika
penambahan kompensasi saluran dilakukan, ini memberikan kenaikkan pada
perbedaan sudut rotor generator 2 maupun generator 3. Kenaikkan ini terjadi
karena waktu pemutusan kritis gangguan (CCT) juga meningkat. Secara implisit,
penambahan kompensasi saluran akan memperbaiki stabilitas transien Sistem
Tenaga Listrik (STL), yaitu dengan meningkatnya kompensasi saluran akan
memperkecil ayunan pada swing curve. Selain itu, CCT juga akan meningkat
seiring dengan terjadinya penambahan kompensasi.
Untuk lebih jelasnya, CCT sistem dibuat konstan seiring dinaikkannya persentase
kompensasi saluran. Perbedaan perubahan ayunan sudut pada generator 2 dan
generator 3 dapat dilihat pada gambar 4.21a dan 4.21b di bawah ini.

60
Gambar 4.21a. Kurva Ayunan Ketika Kompensasi 20-40 % dengan Waktu
Pemutusan 0.19 detik

61
Gambar 4.21b. Kurva Ayunan Ketika Kompensasi 50-70 % dengan Waktu
Pemutusan 0.19 detik
Dalam pengujian penerapan kompensasi saluran ini memberikan pengaruh
terhadap ayunan sudut rotor generator. Hal ini terlihat dari perubahan ayunan
sudut rotor yang semakin mengecil ketika penambahan kompensasi saluran
dilakukan. Penurunan perbedaan sudut rotor generator yang terjadi berbanding
terbalik dengan waktu pemutusan kritis gangguannya. Secara grafis, hubungan
antara kompensasi saluran terhadap perbedaan perubahan sudut rotor generator
maksimum dapat dilihat pada grafik 4.1 berikut.
Grafik 4.1. Perbandingan Perubahan Maksimum dengan Penambahan
Kompensasi Saluran pada First Swing Ketika Waktu Pemutusan Gangguan
(t=0.19 detik)
4.6.3. Pengaruh Penambahan Jumlah Saluran Terhadap Kestabilan Sistem

62
Penambahan jumlah saluran bertujuan untuk mengurangi reaktansi saluran.
Saluran atau konduktor arus listrik yang dipasang/disusun secara paralel akan
memiliki nilai resistansi total (RT) dan reaktansi total (XT) yang semakin kecil.
Untuk melihat pengaruh penambahan jumlah saluran terhadap kestabilan sistem
tenaga listrik, maka perubahan konfigurasi jaringan (tambah saluran) sistem IEEE
9 bus dilakukan seperti ditunjukkan pada gambar 4.22 di bawah ini.
Gambar 4.22. Rangkaian Sistem IEEE 9 Bus dengan Konfigurasi Jaringan Baru
*) line yang berwarna merah adalah saluran transmisi yang ditambahkan
G
G
G
2
7
5
1
4
6
8
9
3
Load
C
Load
B
Load
A

63
Penambahan jumlah saluran mempengaruhi aliran daya (load flow) sistem tenaga
listrik. Load flow merupakan hal terpenting dalam studi kestabilan karena data
load flow ini akan menjadi nilai awal dalam analisa kestabilan sistem. Data load
flow sistem IEEE 9 bus dengan konfigurasi jaringan yang baru dapat dilihat pada
lampiran 1 sedangkan nilai resistansi, reaktansi, dan suseptansi saluran yang
ditambahkan adalah seperti pada tabel 4.2.
Tabel 4.2. Data Saluran yang Ditambahkan pada Sistem IEEE 9 Bus
Line Resistansi (R) (p.u) Reaktansi (X) (p.u) Suseptansi (B/2)
(p.u)
5-8 0.051 0.180 0.160
6-8 0.040 0.125 0.131
4-9 0.028 0.056 0.062
Simulasi kurva ayunan sistem IEEE 9 bus masih menerapkan gangguan 3 fasa
simetris pada saluran 8-9 dekat bus 9. Gangguan yang sama dipilih untuk melihat
perubahan yang terjadi pada waktu pemutusan kritis gangguan dan ayunan sudut
rotor generator. Berikut ini adalah hasil simulasi ayunan sudut rotor generator saat
kondisi stabil dan tidak stabil.

64
Gambar 4.23. Kurva Ayunan Penambahan Saluran Saat Pemutusan
Gangguan 0.21 detik
Gambar 4.24. Kurva Ayunan Penambahan Saluran Saat Pemutusan
Gangguan 0.22 detik
Penambahan jumlah saluran pada sistem tenaga listrik IEEE 9 bus mampu
menurunkan reaktansi saluran (XL). Perubahan reaktansi saluran pada sistem
tenaga listrik akan mempengaruhi kestabilan sistem tersebut (kestabilan transien)
secara keseluruhan. Hal ini dapat dilihat pada gambar 4.23 dan 4.24 yang
merupakan kurva ayunan sistem IEEE 9 bus saat penambahan jumlah saluran
dilakukan. Penambahan jumlah saluran ini mampu meningkatkan stabilitas sistem
tenaga listrik, peningkatan ini terlihat dari bertambahnya waktu pemutusan kritis
gangguan menjadi 0.21s-0.22s dimana sebelum dilakukan perubahan jaringan,
nilai waktu pemutusan kritis gangguannya adalah 0.19s-0.20s.
Gambar 4.25 adalah kurva ayunan saat pemutusan gangguan pada 0.19s yang
menggambarkan perbedaan ayunan antara kondisi sebelum dan setelah dilakukan
penambahan jumlah saluran (perubahan konfigurasi jaringan).

65
Gambar 4.25. Perbedaan Swing Curve Sebelum dan Setelah Dilakukan
Penambahan Saluran Saat pemutusan Gangguan 0.19 detik
Pada saat sebelum dilakukan penambahan jumlah saluran, sudut rotor generator 2
dan generator 3 memperlihatkan ayunan yang lebih besar dibandingkan dengan
ayunan sudut rotor saat dilakukan penambahan saluran. Dengan terjadinya
penurunan ayunan sudut rotor ini maka penambahan jumlah saluran dapat
memperbaiki kestabilan transien yaitu dengan menurunkan nilai reaktansi sistem
tersebut.
Besarnya perbedaan sudut rotor generator 2 dan 3 sebelum dan setelah
penambahan jumlah saluran dapat dilihat pada tabel perbandingan 4.3 berikut ini.
Tabel 4.3. Perbandingan Sudut Rotor Ayunan Pertama Maksimum Sebelum dan
Setelah Penambahan Saluran Saat Waktu Pemutusan 0.19s
Generator Sebelum Penambahan
Saluran
Setelah Penambahan
Saluran
2 72.2960 67.0650
3 112.9380 91.2290

66
4.6.4. Pengaruh Lepasnya Beban terhadap Kestabilan Sistem
1. Kurva Ayunan Gangguan Lepasnya Beban
Gambar 4.26. Kurva Ayunan Gangguan Lepas Beban
Kurva ayunan pada gambar 4.26 di atas adalah kurva ayunan sistem IEEE 9 bus
dengan pengujian terhadap gangguan lepasnya beban. Kurva ayunan yang berada
di atas adalah kurva ayunan untuk generator 2 sedangkan untuk generator 3
berada di bawah. Besarnya pengujian beban yang hilang diberikan pada tabel 4.4
berikut ini.
Tabel 4.4. Data Pengujian Hilangnya Beban
Load Daya Aktif (P)
(Mw)
Daya Reaktif (Q)
(MVar)
A 125 50
B 90 30
C 100 35
Dari gambar 4.26 kurva ayunan di atas memperlihatkan bahwa ketika pelepasan
beban dilakukan pada beban A mengakibatkan ayunan sudut rotor terbesar pada
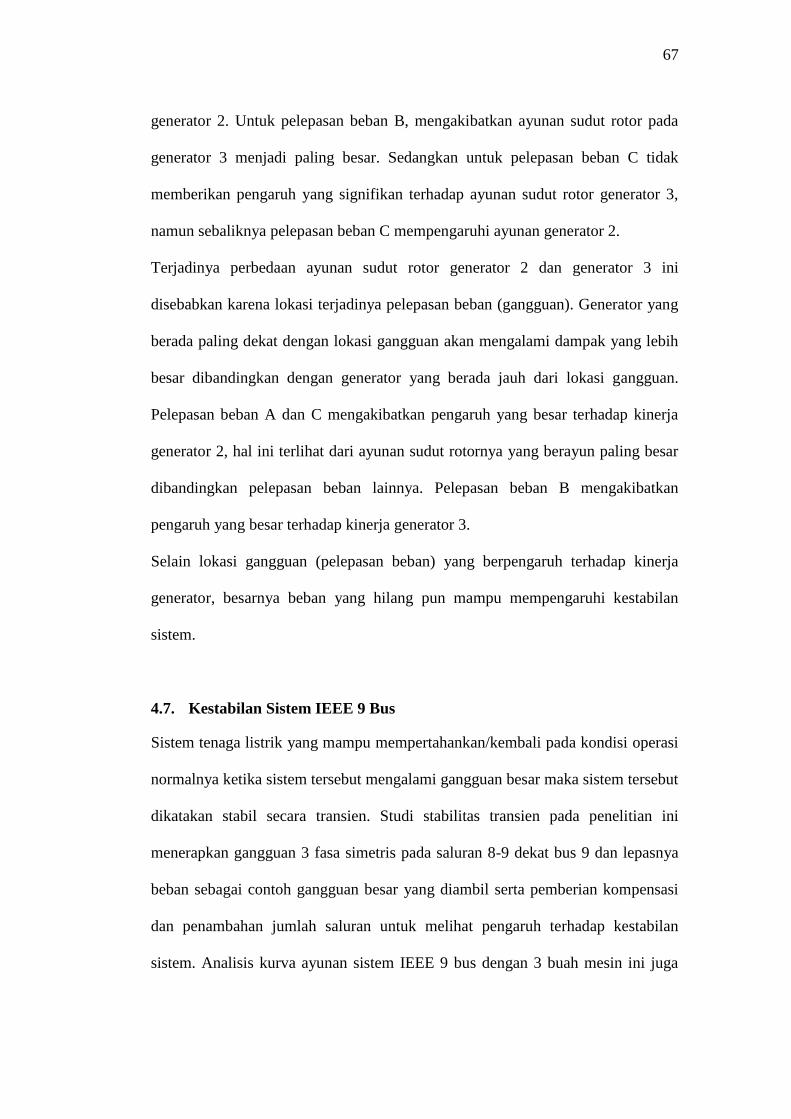
67
generator 2. Untuk pelepasan beban B, mengakibatkan ayunan sudut rotor pada
generator 3 menjadi paling besar. Sedangkan untuk pelepasan beban C tidak
memberikan pengaruh yang signifikan terhadap ayunan sudut rotor generator 3,
namun sebaliknya pelepasan beban C mempengaruhi ayunan generator 2.
Terjadinya perbedaan ayunan sudut rotor generator 2 dan generator 3 ini
disebabkan karena lokasi terjadinya pelepasan beban (gangguan). Generator yang
berada paling dekat dengan lokasi gangguan akan mengalami dampak yang lebih
besar dibandingkan dengan generator yang berada jauh dari lokasi gangguan.
Pelepasan beban A dan C mengakibatkan pengaruh yang besar terhadap kinerja
generator 2, hal ini terlihat dari ayunan sudut rotornya yang berayun paling besar
dibandingkan pelepasan beban lainnya. Pelepasan beban B mengakibatkan
pengaruh yang besar terhadap kinerja generator 3.
Selain lokasi gangguan (pelepasan beban) yang berpengaruh terhadap kinerja
generator, besarnya beban yang hilang pun mampu mempengaruhi kestabilan
sistem.
4.7. Kestabilan Sistem IEEE 9 Bus
Sistem tenaga listrik yang mampu mempertahankan/kembali pada kondisi operasi
normalnya ketika sistem tersebut mengalami gangguan besar maka sistem tersebut
dikatakan stabil secara transien. Studi stabilitas transien pada penelitian ini
menerapkan gangguan 3 fasa simetris pada saluran 8-9 dekat bus 9 dan lepasnya
beban sebagai contoh gangguan besar yang diambil serta pemberian kompensasi
dan penambahan jumlah saluran untuk melihat pengaruh terhadap kestabilan
sistem. Analisis kurva ayunan sistem IEEE 9 bus dengan 3 buah mesin ini juga

68
menerapkan generator 1 (generator swing/slack) sebagai infinite bus. Sudut rotor
generator 1 dianggap tidak berubah/konstan selama pengujian ini. Sehingga
analisis kurva ayunan untuk generator 2 dan 3 dapat mewakili studi kestabilan
transien mesin majemuk (multimachine) model IEEE 9 bus ini.
Parameter-parameter awal seperti daya mekanis generator (Pm), tegangan bus
generator (V), daya generator (S), dan tegangan generator (Ea) didapatkan untuk
menentukan proses iterasi dalam perhitungan penyelesaian persamaan ayunan
(swing curve).
Studi stabilitas transien ini mengambil waktu simulasi selama 2 detik, hal ini
dilakukan karena dengan asumsi bahwa pengatur tegangan/automatic voltage
regulator (AVR) dan sistem kontrol masih belum bekerja. Sehingga studi
stabilitas transien cukup valid untuk menganalisa pada ayunan pertama (detik
pertama). Ketika pada detik ayunan pertama, sistem masih mampu
mempertahankan keserempakkannya maka sistem dinyatakan masih stabil secara
transien. Penyelesaian persamaan ayunan sistem tenaga listrik bertujuan untuk
memperoleh waktu pemutusan gangguan kritis agar sistem masih mampu bekerja
dalam sinkronisasi.
Perolehan pengujian waktu pemutusan kritis untuk gangguan 3 fasa simetris pada
saluran 8-9 dekat bus 9 dengan beberapa kondisi dapat dilihat dalam tabel 4.5
berikut.
Tabel 4.5. Perbandingan Jenis Pengujian terhadap Waktu Pemutusan Kritis
Gangguan
No Jenis Pengujian/Gangguan Waktu Pemutusan
(detik)
Kondisi
Sistem
1 3 fasa saluran 8-9 dekat bus 9 0.18 Stable
2 3 fasa saluran 8-9 dekat bus 9 0.19 Stable

69
3 3 fasa saluran 8-9 dekat bus 9 0.20 Unstable
4 Kompensasi Saluran 20 % * 0.19 Stable
5 Kompensasi Saluran 20 % * 0.20 Unstable
6 Kompensasi Saluran 30 % * 0.20 Stable
7 Kompensasi Saluran 30 % * 0.21 Unstable
8 Kompensasi Saluran 40 % * 0.20 Stable
9 Kompensasi Saluran 40 % * 0.21 Unstable
10 Kompensasi Saluran 50 % * 0.21 Stable
11 Kompensasi Saluran 50 % * 0.22 Unstable
12 Kompensasi Saluran 60 % * 0.21 Stable
13 Kompensasi Saluran 60 % * 0.22 Unstable
14 Kompensasi Saluran 70 % * 0.22 Stable
15 Kompensasi Saluran 70 % * 0.23 Unstable
16 Penambahan Jumlah Saluran 0.21 Stable
17 Penambahan Jumlah Saluran 0.22 Unstable
*) Gangguan yang diberikan 3 fasa simetris pada saluran 8-9 dekat bus 9
4.8. Pengaruh Perubahan Inersia H
Dalam studi kestabilan transien (transient stability) melibatkan parameter-
parameter listrik maupun generator untuk menyelesaikan permasalahan ini.
Permasalahan yang dimaksudkan adalah permasalahan penyelesaian persamaan
kurva ayunan (swing curve). Dan salah satu parameter yang diujikan dalam studi
ini adalah perubahan inersia H. Inersia H merupakan suatu konstanta yang
berhubungan dengan kelembaman pada suatu mesin dan didefinisikan sebagai
perbandingan antara daya kinetis yang disimpan dalam megajoule pada kecepatan
serempak dengan rating mesin dalam MVA atau MJ/MVA.
Pada persamaan ayunan (swing equation) 2.17, yaitu:
Dapat dituliskan kembali menjadi:

70
adalah diferensial kedua dari sudut rotor generator yang menghasilkan percepatan
sudut rotor pada suatu generator. Dari persamaan tersebut diperoleh bahwa
percepatan pada generator akan menurun ketika nilai inersia H ini bertambah.
Besarnya perubahan inersia H dalam peneltian ini dapat dilihat pada tabel 4.6 di
bawah ini.
Tabel 4.6. Pengujian Perubahan Inersia H
Pengujian 1 Pengujian 2 Pengujian 3 Pengujian 4
H1 23.64 23.64 23.64 23.64
H2 6.40 3.50 6.40 6.40
H3 3.01 3.01 3.50 4.00
CCT 0.19 s 0.17 s 0.20 s 0.21 s
Lepas G3 G2 G3 G3
Pengujian 1 merupakan kondisi awal sistem yang belum mengalami perubahan
inersia H. Pengujian 2 dilakukan untuk melihat pengaruh yang terjadi pada
generator 2, yaitu dengan menurunkan nilai inersia H pada generator 2. Dengan
pengurangan nilai inersia H pada generator 2 mengakibatkan generator 2
mengalami out of step dengan waktu pemutusan gangguan yang lebih cepat.
Untuk pengujian 3 dan 4, inersia generator 2 dibuat tetap sedangkan untuk
generator 3 dilakukan penambahan.

71
Meskipun penambahan inersia H pada generator 3 mengakibatkan generator 3
mengalami out of step ketika pemutusan gangguan melebihi CCT-nya, namun
waktu pemutusan gangguan menjadi lebih lama (meningkat). Dapat disimpulkan
bahwa terjadinya penambahan nilai inersia H generator maka limit stabilitas
sistem juga meningkat.
Kurva ayunan untuk pengujian perubahan inersia H dapat dilihat pada gambar
4.27, 4.28, 4.29 dan 4.30 berikut ini.
1) Pengujian 1
T=0.19s (Stable) T=0.20s (Unstable)
Gambar 4.27. Kurva Ayunan Pengujian 1
2) Pengujian 2
T=0.17s (Stable) T=0.18s (Unstable)
37
Gambar 4.28. Kurva Ayunan Pengujian 2

73
3) Pengujian 3
T=0.20s (Stable) T=0.21s
(Unstable)
Gambar 4.29. Kurva Ayunan Pengujian 3
4) Pengujian 4
T=0.21s (Stable) T=0.22s
(Unstable)
Gambar 4.30. Kurva Ayunan Pengujian 4
Dari pengujian ini memberikan informasi bahwa perubahan inersia H dapat
mempengaruhi kestabilan sistem. Pengaruh yang diberikan yaitu terhadap waktu
pemutusan kritis gangguan (CCT). Dimana penambahan inersia H mampu
74
menaikkan CCT sistem tersebut. Hubungan antara perubahan inersia H terhadap
waktu pemutusan kritisnya dapat dilihat pada grafik 4.2 di bawah ini.
Selain itu, besarnya H akan menentukan generator mana yang akan mengalami
out of step ketika pemutusan gangguan melebihi CCT sistem. Dan generator yang
memiliki H paling kecil yang akan mengalami out of step.
Grafik 4.2 Hubungan antara H terhadap CCT
4.9. Grafik Hubungan Delta terhadap Omega
Grafik hubungan antara delta terhadap omega akan menggambarkan trajectory
kritis sistem tenaga listrik. Trajectory kritis merupakan lintasan yang dimulai dari
titik Fault-on Trajectory pada CCT dan mencapai titik kritis dimana sistem
kehilangan sinkronisasi. Pada grafik ini dapat dilihat kondisi generator yang
masih stabil (mampu mempertahankan sinkronisasi) dan kondisi generator ketika
kehilangan keserempakkan (sinkronisasi)/tidak stabil. Gambar 4.31 adalah
gambar trajectory untuk sistem multi mesin 9 bus yang masih stabil/sinkron
dengan menerapkan gangguan 3 fasa pada saluran 8-9 dekat bus 9 saat waktu

75
pemutusan gangguan selama 0.18 detik dan 0.19 detik. Sedangkan untuk kondisi
sistem yang tidak stabil/kehilangan sinkronisasi pada saat pemutusan gangguan
selama 0.20 detik dapat dilihat pada gambar 4.32.
t=0.18 s t=0.19
s
Gambar 4.31. Trajectory gangguan 3 fasa saluran 8-9 kondisi stabil
t=0.20 s
Gambar 4.32. Trajectory gangguan 3 fasa saluran 8-9 kondisi tidak stabil
Gambar 4.31 menunjukkan keadaan kedua generator yang masih mampu
mempertahankan keserempakan (synchronism). Hal ini terlihat dari lintasan kedua
Faulted
Postfault

76
generator yang berupaya kembali ke titik pusat (merupakan titik kesetimbangan)
ketika gangguan dihilangkan dalam waktu 0.18 detik dan 0.19 detik. Namun
sebaliknya, ketika gangguan sistem dihilangkan dalam waktu 0.20 detik, generator
3 mengalami percepatan yang terus meningkat sampai tak berhingga. Hal ini
memungkinkan generator tidak dapat kembali pada titik setimbangnya dan
mengakibatkan generator 3 mengalami out of step (hilang keserempakkan/lepas
dari sistem) seperti pada gambar 4.32. Sehingga waktu 0.19 detik merupakan
waktu pemutusan kritis gangguan agar sistem tetap dalam keadaan sinkron/stabil.

BAB V
SIMPULAN DAN SARAN
5.1. Simpulan
Berdasarkan penelitian mengenai pengaruh perubahan reaktansi saluran terhadap
kestabilan transien dengan menggunakan metode Runge-Kutta Fehlberg yang
telah dilakukan, maka dapat diperoleh beberapa kesimpulan sebagai berikut:
1. Ketika gangguan 3 fasa simetris pada saluran 8-9 diterapkan, generator 3
kehilangan keserempakkan/out of step (unstable) saat pemutusan gangguan
saat 0.20 detik sedangkan ketika pemutusan gangguan dilakukan saat 0.19
detik kedua generator masih berayun. Hal ini menunjukkan sistem IEEE 9
bus masih dalam keserempakkan/stabil.
2. Waktu pemutusan kritis (CCT) sistem IEEE 9 bus dengan gangguan 3 fasa
simetris pada saluran 8-9 dekat bus 9 adalah 0.19-0.20 detik. Ketika
pemutusan gangguan dilakukan pada 0.20 detik, sistem menjadi tidak stabil.
Dengan meningkatnya waktu pemutusan gangguan, amplitude sudut rotor
dari kurva ayunan (swing curve) juga akan meningkat. Jika waktu
pemutusan gangguan telah melewati waktu pemutusan kritisnya maka
sistem menjadi out of step/hilang sinkronisasi.
3. Pemberian kompensasi pada saluran dapat memperbaiki kestabilan transien
sistem IEEE 9 bus secara signifikan. Kompensasi saluran ini menurunkan

78
reaktansi saluran yang selanjutnya meningkatkan batas waktu pemutusan
kritis gangguan. Dengan bertambahnya persentase kompensasi maka limit
waktu pemutusan gangguan juga bertambah. Sedangkan penambahan
jumlah saluran pada sistem tenaga listrik (STL) IEEE 9 bus mampu
memperkecil ayunan sudut rotor dengan menurunkan nilai reaktansi sistem
tersebut.
Selain itu, besarnya nilai konstanta inersia (H) pada generator sangat
berpengaruh terhadap kestabilan sistem. Generator yang memiliki nilai H
besar akan cenderung stabil ketika terjadi gangguan pada sistem. Namun
sebaliknya jika nilai H kecil maka generator tersebut akan cenderung
kehilangan sinkronisasi.
5.2. Saran
Adapun saran yang dapat diberikan terkait penelitian ini adalah sebagai berikut.
1. Studi stabilitas transien dapat menerapkan sistem kelistrikan yang real,
yaitu sistem kelistrikan Lampung (Sumbagsel).
DAFTAR PUSTAKA
[1] Zuhal. 1995. Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta:
PT Gramedia Pustaka Utama.
[2] Wijaya, Mochtar. 2001. Dasar-Dasar Mesin Listrik. Jakarta: Djambatan.
[3] Gomez, Antonio Exposito dkk. 2009. Electric Energy Systems Analysis
and Operation. New York: Taylor & Francis Group.
[4] P.Kundur. 1994. Power System Stability and Control. New York:
McGraw-Hill.
[5] Paul M, Anderson. 1997. Power System Control and Stability. USA: Iowa
State University Press.
[6] Despa, Dikpride. 2012. Stability Assessment and Stabilization of Wide
Area Interconnected Power System. Kyushu Institute of Technology:
Departement of Electrical and Electronic Engineering.
[7] Kothari, D.P & I J Nagrath. 2003. Modern Power System Analysis Third
Edition. New York: Tata McGraw-Hill.
[8] Das,Debapriya. 2006. Electrical Power Systems. New Delhi: New Age
International (P) Ltd.
[9] Murthy, P.S.R. 2007. Power System Analysis. India: BS Publications

89
[10] Rahman, Rifai Hasan. 2008. Analisis Pengaruh Pemasangan Kompensator
Seri Terhadap Stabilitas Sistem SMIB dan Sistem IEEE 14 Bus.Universitas
Diponegoro.
[11] Grainger, Jhon J & Stevenson, William. 1994. Power System Analysis.
Singapore: McGraw-Hill, Inc.
[12] D.Stevenson, William. 1983. Analisis Sistem Tenaga Listrik Edisi
Keempat. Jakarta: Erlangga.
[13] Saadat, Hadi. 1999. Power System Analysis. New York: McGraw-Hill.
[14] Weedy, B.M, Cory, B.J, Jenkins, N, Ekanayake, J.B, Strbac, G. Electric
Power Systems Fifth Edition.UK: WILEY.
[15] Cekdin, Cekmas. 2007. Sistem Tenaga Listrik-Contoh Soal dan
Penyelesaian Menggunakan Matlab. Yogyakarta: ANDI.
[16] Anderson, Paul M & Fouad, A.A. 1977. Power System Control and
Stability. The Iowa State University Press.
[17] Kamdar, Renuka dkk. 2014. Transient Stability Analysis and Enhancement
of IEEE-9 Bus System. Electrical & Computer Engineering: An
International Journal (ECIJ) Volume 3, Number 2, June 2014 India.
[18] Osorno, Bruno. 2003.Determination of Admittance and Impedance Bus
Matrices Using Linier Algebra and Matlab in Electric Power System.
California State University Northridge. Proceedings of the 2003 American
Society for Engineering Education Annual Conference & Exposition
Copyright 2003, American Society for Engineering Education.
[19] Chapra, Steven C & Canale, Raymond P. 1988. Numerical Methods for
Engineers Second Edition. Singapore: McGraw-Hill Book Co.

90
[20] Chan, Kee Han. 2002. Transient Analysis and Modelling of Multimachine
Systems with Power Electronics Controllers for Real-time Application.
University of Glasgow.
[21] Wang, Xi-Fan. 2008. Modern Power Systems Analysis. New York:
Springer.
[22] Surya Atmaja, Ardyono Priyadi dan Teguh Yuwono. Perhitungan Critical
Clearing Time dengan Menggunakan Metode Time Domain Simulation,
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Juni 2012.
[23] Dibyo, Heru Laksono. Studi Stabilitas Peralihan Multimesin Pada Sistem
Tenaga Listrik dengan Metode Euler (Studi Kasus: PT.PLN P3B Sumatra)
Vol. 19 No. 2 Oktober 2012.
[24] Al Marhoon, Hussain Hassan. 2011. A Practical Method For Power
Systems Transient Stability and Security. University of New Orleans
Theses and Disertations, paper 114.
[25] K Pal, Mrinal. 2007. Power System Stability. New Jersey: Edison.
[26] Despa, Dikpride. Application of Phasor Measurement Unit (PMU) Data
for Out-of-Step Detection-16th International Conference on Electrical
Engineering, July 11-14, 2010 Busan Korea.











![Skizofrenia, Gangguan Skizotipal Dan Gangguan Waham [Autosaved]](https://img.dokumen.tips/doc/110x75/577c784d1a28abe0548f7aa1/skizofrenia-gangguan-skizotipal-dan-gangguan-waham-autosaved.jpg)
















