Embed Size (px)
Citation preview

10 – 1
10. Merenje sile i naprezanja
Sile i naprezanja mere se veoma često jer su važni mehanički parametri sistema, koji se koriste u
procesima upravljanja ili pak mogu biti indikatori nepredviđenih oštećenja i najava budućih ozbiljnijih
kvarova, koji ukazuju na životni vek sistema.
10.1. Deformacije čvrstih tela pod dejstvom sile
Dejstvom sile intenziteta F na čvrsto telo nastaje naprezanje. Mehanički napon je definisan količnikom
sile i površine na koju deluje ta sila i po dimenziji je jednak pritisku (Pa):
S
F~ (10.1)
Relativno izduženje tela, koje je posledica naprezanja, naziva se dilatacija i za telo dužine l koje se
deformiše za Δl ono iznosi:
l
l (10.2)
Dilatacija može biti pozitivna, kada se telo izdužuje, ili negativna, kada telo trpi sabijanje. Veličina
dilatacije (deformacije) zavisi od sile koja deluje na telo, ali i od elastičnih svojstava materijala od koga
je telo napravljeno. Prirodno, sva tela se suprotstavljaju delovanju spoljašnjih sila zahvaljujući
međumolekularnim silama u materijalu. Ako je naprezanje malo, a međumolekularne sile jake, tada će,
prirodno, dilatacija biti mala (deformacija tela će biti mala u odnosu na njegovu ukupnu dimenziju).
Nakon prestanka naprezanja, molekuli u telu će imati tendenciju da povrate svoj pređašnji raspored i
telo će povratiti svoje originalne dimenzije. Ovakva pojava se naziva elastična deformacija. Ukoliko se
sila povećava, u jednom trenutku međumolekularne sile više neće moći kompenzovati i ravnomerno
rasporediti delovanje naprezanja po zapremini tela, pa će se neke od veza između molekula nepovratno
raskinuti. Tada će, nakon prestanka delovanja spoljašnjih sila, dimenzije tela ostaće trajno promenjene,
i molekuli neće zauzeti svoje prvobitne relativne položaje. Drugim rečima, telo će ostati trajno
deformisano. Takva pojava se naziva plastična deformacija tela.
Plastične deformacije su najčešće neželjene pojave u industrijskim procesima, osim ako se ne radi o
objektu proizvodnje, kada je plastična deformacija upravo željeni (ciljani) ishod delovanja
odgovarajućih sila (npr. oblikovanje šasije automobila u presi). Međutim, kada se analizira dejstvo sila
i momenata na pokretne i nepokretne delove radnih mašina ili konstrukcija koje trpe naprezanje tokom
svog rada, onda je osnovni zadatak upravljanja proizvodnjom upravo sprečavanje trajnih deformacija
(oštećenja) tih delova.
Za sve elastične deformacije važi Hukov (engl. Hooke) zakon, koji kaže da je jačina sile potrebne za
izazivanje deformacije Δl, proporcionalna toj dilataciji:
lkF (10.3)
Konstanta proporcionalnost k zavisi od geometrije (dimenzija) tela i svojstava materijala od koga je telo
načinjeno. Ako je S površina poprečnog preseka tela, a l njegova dužina može se usvojiti da je
El
Sk (10.4)

10. Merenje sile i naprezanja
10 – 2
gde je E tzv. Jangov1 moduo elastičnosti. Dakle, veza između elastičnih svojstava materijala, naprezanja
i deformacije data je preko modula elastičnosti E. Nešto češća definicija, data je izrazom 10.5, koji
povezuje naprezanje i dilataciju.
E
(10.5)
Jangov modul elastičnosti je ujedno i mera čvrstoće materijala i njegove sposobnosti da se delovanjem
međumolekularnih sila suprotstavi spoljašnjim naprezanjima. Najčvršći materijal poznat čoveku je
karbin – linijski acetilenski ugljenik (C≡C−)n, kod koga atomi ugljenika formiraju dugačke lance (linije)
naizmeničnih trostrukih i jednostrukih kovalentnih veza. Vrednosti Jangovog modula elastičnost nekih
materijala od značaja za tehnološke procese date su u tabeli 10.1.
Tabela 10.1. Približne vrednosti Jangovog modula elastičnosti za neke materijale
Materijal Guma polipropilen drvo beton Mg staklo Al bronza mesing
E (GPa) 0,05 1,7 11 30 45 65 69 100 105
Materijal Ti Cu Fe čelik Mo Si-karbid Os dijamant karbin
E (GPa) 110 117 190 200 330 420 550 1100 32100
10.2. Merenje sile i naprezanja pomoću otpornih senzora
Za merenje dilatacije koriste se specijalni otpornici napravljeni od provodnog meandra, koji se zovu
merne trake (slika 10.1).
Slika 10.1. Izgled merne trake
Ovi otpornici lepe se na tela koja trpe naprezanja i, zahvaljujući specijalnim smolama za obezbeđivanje
kvalitetnog naleganje, trake su izlože gotovo identičnoj dilataciji kao i samo telo. Pod dejstvom sile,
merna traka se isteže ili sabija, čime se menjaju njena dužina i poprečni presek. Time se utiče na
otpornost u skladu sa relacijom:
S
lR (10.6)
U opštem slučaju, za proizvoljan otpornik bilo bi veoma teško odrediti u kakvoj srazmeri se menjaju l i
S u gornjem izrazu, kada na taj otpornik deluje sila. Međutim, savremeni tehnološki procesi
omogućavaju proizvodnju mernih traka kod kojih postoji stalna (konstantna) srazmernost između
dilatacije i promene otpornosti, koja se naziva konstanta merne trake:
RR
ll
RRK
/
/
/
(10.7)
1 Modul je dobio ime po britanskom naučniku iz XIX veka Tomasu Jangu (Thomas Young). Međutim, sam koncept dat
izrazom 12.3 razvijen je još 1727 godine od strane švajcarskog fizičara i matematičara Leonarda Ojlera (Leonhard Euler), a
prve eksperimente na bazi ovog koncepta sproveo je italijanski naučnik Đordano Rikati (Giordano Riccati) 1782. godine,
nekih 25 godina pre Jangovog rada.

10. Merenje sile i naprezanja
10 – 3
Vrednost konstante K dobija se merenjem na završetku procesa proizvodnje. Za većinu materijala koji
se koriste za izradu mernih traka vrednost ove konstante je 2.
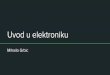
S obzirom da je dilatacija merne trake mala, a samim tim i promena njene otpornosti, primena U/I
metode bila bi neadekvatna, jer bi sadržala neprihvatljivo veliku grešku merenja. Da bi se mogle meriti
male promene otpornosti pogodnije je vezati mernu taku merni most, a potom meriti napon merne
dijagonale mosta. Za veoma mala naprezanja i napon merene dijagonale je mali, pa ga je pre dovođenja
na instrument, nekada potrebno dodatno pojačati kolom sa operacionim pojačavačem, kao na slici 10.2.
Slika 10.2. Vezivanje jedne merne trake i tri stalna otpornika u merni most
Merenje se obavlja tako što se most dovodi u ravnotežu kada je traka nenapregnuta (kada nema
dilatacije). Da bi se to ostvarilo, stalni otpornici u granama mosta moraju imati jednaku otpornost kao
i nenapregnuta merna traka (npr. R). Prilikom delovanja sile i dilatacije merne trake, otpornost merne
trake će se promeniti za neku vrednost ΔR i most će se razdesiti. Napon merne dijagonale biće dat
izrazom:
KU
R
RU
R
RR
RU
RRR
RRRRUU NN
NNm44
21
1
422
2
(10.8)
Dakle, mostovi za merenje sile pomoću mernih traka uvek su neuravnoteženi, a sila se izračunava na
osnovu merenja napona merne dijagonale. U izrazu 10.8 namerno je izostavljena vrednost naponskog
pojačanja A pojačavača sa slike 10.2, koji je ionako opcion, zbog upotrebe tog izraza u kasnijim
izračunavanjima.
U procesu proizvodnje, merne trake se često prave u parovima ili četvorkama, ponekad u već unapred
određenim međusobnim geometrijskim položajima, koji odgovaraju njihovoj primeni. Ako su na
raspolaganju dve identične merene trake, one se mogu izložiti delovanju istog naprezanja i vezati u
naspramne grane mosta radi pojačanja napona merne dijagonale, kao na slici 10.3.
Slika 10.3. Vezivanje para mernih traka u merni most
Odziv mosta biće dva puta veći i iznosiće:
mV
R
UN
R R
A Um
RMT = R + ΔR
R
UN
RMT1 = R + ΔR
Um
RMT2 = R + ΔR
R

10. Merenje sile i naprezanja
10 – 4
KU
R
RU
R
RR
RU
R
R
R
R
R
RRU
RR
RRRUU
NN
NNNm
22
21
1
2
21
21
4
2
2222
22
(10.9)
Kada se merna traka izloži poprečnom naprezanju, u smeru normalnom na dužu stranu merne trake,
javlja se poprečna dilatacija εpop. Ovu pojavu je izučavao francuski naučnik Poason (Siméon Denis
Poisson) i koeficijent srazmere između poprečne i podužne dilatacije nosi njegovo ime. Označava se
grčkim slovom μ i za veliku većinu metala i njihovih legura, ova konstanta iznosi –0,3.
podpodpop 3,0 (10.10)
Na dilataciju mernih traka, osim naprezanja, mogu uticati i druge veličine koje nisu predmet merenja
(uticajne veličine), kao što su temperatura, vlažnost i pritisak okolnog vazduha. Zato se promena
otpornosti, koja je posledica ovakve dilatacije, mora uzeti o obzir i eliminisati prilikom merenja sile. Za
potrebe eliminacije dejstva uticajnih veličina koristi se tzv. „slepa merna traka“. To je traka identičnih
karakteristika, koja je izložena istim klimatskim uslovima kao i traka pomoću koje se obavlja merenje.
Jedina razlike je u tome što slepa merna traka nije izložena dejstvu sile, pa je diferencijalnim merenjem
moguće zaključiti koji deo dilatacije trake je posledica delovanja isključivo merene sile. Moguć način
njenog lepljenja i vezivanja u merni most dati su na slici 10.4.
Slika 10.4. Lepljenje slepe merne trake i njeno vezivanje u merni most
Ako je promena otpornosti merne trake usled delovanja sile F označena sa ΔRF, a promena usled svih
ostalih uticajnih veličina sa ΔRostalo, onda će, u primeru sa slike 10.4, napon merne dijagonale iznositi:
KU
R
RU
R
RRR
RU
RRRRRRR
RRRRRRRUU
NFN
ostaloF
FN
ostaloostaloF
ostaloostaloFNm
44
2
21
1
4
)(
(10.11)
U najopštijem slučaju, kada se u most vežu četiri promenljiva otpornika koji se menjaju oko iste
(ravnotežne vrednosti otpornosti R), napon merne dijagonale će iznositi:
43214321
44
K
U
R
RRRRUU NN
m (10.12)
R
UN
RMT akt = R +
ΔRF + ΔRostalo
Um
RMT slepo =
R + ΔRostalo
R
F
aktivna
merna
traka
slepa
merna
traka

10. Merenje sile i naprezanja
10 – 5
Tačna veza između naprezanja i sile koja deluje na čvrsto telo, samo je približno data relacijom 10.1.
Stvarna zavisnost ova dva parametra je funkcija geometrije problema, odnosno dimenzija tela,
relativnog položaja tela i vektora sile, kao i položaja napadne tačke sile. Zato će u narednim delovima
ovog poglavlja biti analizirane neki od najčešćih problema iz statike na kojima će detaljno biti izvedena
zavisnost između otpornosti merne trake, odnosno napona merne dijagonale mosta sa mernim trakama
od intenziteta i pravca sila i momenata koji deluju na telo.
10.2.1. Merenje naprezanja konzole
Za elastičnu konzolu dimenzija b i h, čiji jedan kraj je fiksiran, a na drugi deluje sila F, kao na slici 10.5,
dilatacija na udaljenosti l od napadne tačke sile F, data je izrazom:
2
6
Ebh
Fl (10.13)
Slika 10.5. Dejstvo sile na konzolu
Na strani delovanja sile (gornja površina na slici 10.5), telo se isteže i ima pozitivnu dilataciju, dok se
sa suprotne strane (donja strana na slici 10.5), telo sabija i ima negativnu dilataciju. Za traku vezanu u
merni most sa tri stalna otpornika, odabrana tako da je most u ravnoteži kada je trake neopterećena, na
osnovu 10.8, dobija se da je napon merne dijagonale:
2
6
44 Ebh
FlK
UK
UU NN
m (10.14)
Ako su na raspolaganju četiri merne trake, one se mogu iskoristiti da se poveća odziv merne dijagonale
mosta 4 puta tako što će se dve trake izložiti istezanju, a dve sabijanju, kao na slici 10.6.
Slika 10.6. Merenje naprezanja konzole pomoću četiri merne trake.
F l
h
b
merna
traka
F
+ε
-ε
RMT2 = R + ΔR
UN
RMT1 = R + ΔR
Um
RMT4 = R + ΔR
RMT3 = R + ΔR
F
MT1 MT2
MT3 MT4

10. Merenje sile i naprezanja
10 – 6
Trake sa gornje strane konzole trpe istezanje, dok trake sa donje strane trpe sabijanje identično po
vrednosti, ali suprotnog znaka. Napon merne dijagonale tada je:
222
226
4
4
Ebh
FlKUKU
R
RU
R
RRU
RRRR
RRRRUU NNNNNm
(10.15)
Ne samo što je odziv veći u ovom slučaju, već izraz 10.15 nije približan nego tačan, pa je ovakvo
merenje uvek poželjnije.
10.2.2. Merenje naprezanja štapa
Ako je potrebno meriti naprezanje tela oblika štapa (npr. stub mosta ili nosač tereta oblika kvadra ili
cilindra), način lepljenja traka na telo i njihovo vezivanje u most biće kao na slici 10.7.
Slika 10.7. Način lepljenja mernih traka i njihovo vezivanje u most radi merenja dejstva aksijalne sile
na štap
Pod dejstvom aksijalne sile, sve spoljne površine trpe isto naprezanje. Zato nema smisla da se sve četiri
merne trake lepe podužno, već je potrebno zalepiti dve trake podužno, a dve poprečno. Podužne trake
će imati dilataciju ε, a poprečne –0,3ε. Uloga mernih traka koje su vezane poprečno je i eliminacija
greške uticajnih veličina, npr. temperaturnih dilatacija, s obzirom da ovde nije moguće primeniti slepu
mernu traku (ceo štap podjednako trpi temperaturno naprezanje).
Napon merne dijagonale mosta biće:
KU
KKKKU
R
RRRRUU NNN
m
6,24
3,03,044
4321 (10.16)
Ako je površina poprečnog preseka S, onda je veza između aksijalne sile F i napona merne dijagonale
mosta data izrazom 10.17.
ES
FK
UU N
m 6,24
(10.17)
10.2.4. Merenje torzije
Prilikom prenošenja obrtnog momenta sa pogonske mašine (motora) na radnu mašinu, neophodno je te
dve mašine povezati vratilom. Zbog toga što pogonska mašina deluje ubrzavajuće na jedan kraj vratila,
a pogonska mašina ga svojom inercijom koči, prilikom prenošenja obrtnog momenta, vratilo se uvrće
oko svoje ose i trpi deformaciju koja se zove torzija. Kod ove deformacije susedni poprečni preseci
RMT2 = R + ΔR2
UN
RMT1 = R + ΔR1
Um
RMT4 = R + ΔR4
RMT3 = R + ΔR3
F
MT1
MT3 MT4
MT2

10. Merenje sile i naprezanja
10 – 7
vratila se smiču jedan u odnosu na drugi. Smicanje zavisi od vrste materijala i opisuje ga koeficijent
smicanja G. Posledica smicanja ovih slojeva je dilatacija površine vratila koja se može meriti mernim
trakama. Neka je na vratilo kružnog poprečnog preseka, poluprečnika r, na koje deluje momenat M,
zalepljena merna traka dužine l pod uglom α u odnosu na osu vratila, kao na slici 10.8.
Slika 10.8. Torzija vratila i lepljenje jedne merne trake radi merenja momenta M
Ugao uvrtanja zavisi od udaljenosti tačke od sredine vratila. U sredini vratila on je 0 rad, a najveći je na
kraju vratila (slika 10.9).
Slika 10.9. Uvrtanje vratila pod dejstvom suprotstavljenih momenata
Na mestu gde se nalazi merna traka ugao uvrtanja je
pGI
lM
2
cos
(10.18)
gde je Ip polarni momenat, koji je za kružni poprečni presek dat relacijom 10.19.
2
4rI p
(10.19)
Kada dođe do uvijanja, vratilo se isteže za dužinu kružnog luka rφ sa svake strane (slika 10.9), a merna
traka se izdužuje za veličinu koja je određena pravouglim trouglom prikazanim na slici 10.10.
r
M M
α
l
merna
traka
M M
rφ1 rφ2
L1 L2
na udaljenosti
L1
na udaljenosti
L2
r r rφ1 rφ2
α
rφ
rφ
l sinα
l cosα

10. Merenje sile i naprezanja
10 – 8
Slika 10.10. Dilatacija merne trake u odnosu na ugao uvrtanja vratila
Sa slike 10.10 sledi da je
22222sincos rllll (10.20)
odnosno
22222222 4sin4sincos2
2
rlrllllll
l
(10.21)
Skraćivanjem l2 sa obe strane jednakosti i deljenjem cele jednačine sa l2, dobija se
0
2
22
0
24
sin4
2
l
r
l
r
l
l
l
l
(10.22)
Ako je uvrtanje vratila malo, onda se članovi (Δl/l)2 i (4r2φ2)/l2 mogu zanemariti, pa se 10.22 svodi na
sin2
l
r
l
l
(10.23)
Kombinovanjem 10.23, 10.18 i 10.19 dobija se
2sincossin2sin
2
2
cos
2334
Gr
M
Gr
M
rG
lM
l
r
l
l
(10.24)
Sledi da je dilatacija merne trake upravo srazmerna momentu M, jer su sve ostale veličine u izraz 10.24
konstante. Da bi odziv bio što veći ugao lepljenja merne trake treba da bude ±45º, jer je tada sin2α = ±1.
Znak „+“ znači da traka zalepljena pod uglom od +45º trpi istezanje (pozitivna dilatacija), a znak „–“
znači da se merna traka sabija (negativna dilatacija).
Radi pojačanja odziva i eliminacije uticajnih veličina mogu se koristiti 4 merene trake zalepljene na
vratilo i raspoređene u most kao na slici 10.11. Trake koje trpe sabijanje treba staviti u one grane mosta
koje u izrazu 10.12 imaju negativan doprinos. Tako će se promena koji registruju te trake sabirati sa
ostalim promenama, pa će se povećati napon merne dijagonale mosta Um. Uticaji ostalih veličina čije
merenje nije od interesa (npr. temperatura) će se kompenzovati.
Slika 10.11. Lepljenje četiri merne trake na vratilo i njihov raspored u mernom mostu
Ukoliko na vratilo deluje sila koja teži da ga savije, ta sila će uticati na merne trake. Za takvu silu, vratilo
je konzola, a dilatacija konzole zavisi od udaljenosti napadne tačke sile od sredine merne trake (krak
sile), kao u izrazu 10.13. Ukoliko tu silu savijanja ne želimo da merimo, merne trake je potrebno tako
zalepiti da krak sile bude jednak za sve merne trake u mostu.
RMT2 = R + ΔR2
UN
RMT1 = R + ΔR1
Um
RMT4 = R – ΔR4
RMT3 = R – ΔR3
MT1
MT4
MT3
MT2
M M

10. Merenje sile i naprezanja
10 – 9
10.2.5. Merenje delovanja kombinovanog naprezanja na slobodno telo
Na telo u obliku štapa deluju dve sile suprotnih smerova koje teže da ga izduže i dva momenta suprotnih
smerova koji teže da ga saviju. Potrebno je tako zalepiti trake da se pomoću različitih mostova mogu
nezavisno meriti sile istezanja F i momenti uvijanja M. Način lepljenja mernih traka i njihov raspored u
most za merenje sile i most za merenje momenta dati su na slici 10.12.
Slika 10.12. Štap izložen kombinovanom delovanju sila i momenata
Merne trake trpe sledeće dilatacije
MF
MF
MF
MF
3,03,0
3,03,0
4
3
2
1
(10.25)
Da bi se merila samo sila, trake treba rasporediti u most kao na slici 10.12.a). Napon merne dijagonale
će biti
FN
MFMFMFMFN
Nm
KU
KU
KU
U
6,24
3,03,03,03,04
44321
(10.26)
Da bi se merio samo momenat, trake je potrebno rasporediti u most kao na slici 10.12.b). Tada će
mereni napon biti
MN
MFMFMFMFN
Nm
KU
KU
KU
U
6,24
3,03,03,03,04
43241
(10.27)
RMT2
UN
RMT1
Um
RMT4
RMT3
a)
RMT4
UN
RMT1
Um
RMT2
RMT3
b)
F
MT1 MT3
MT4 MT2
F
M M

10. Merenje sile i naprezanja
10 – 10
10.2.6. Merenje dejstva sile nepoznatog pravca i smera
Ponekad nisu poznati pravac i smer delovanja sile, već se samo poznaje njena napadna tačka. U takvim
situacijama sila se može razložiti na komponente duž sve tri prostorne ose (Fx, Fy i Fz) i može se meriti
svaka od tih komponenti nezavisno. Primer jednog takvog merenja dat je na slici 10.13, na kojoj je
prikazan noseći stub sa 12 mernih traka.
Slika 10.13. Noseći stub sa 12 mernih traka i silom nepoznatog pravca i smera
Na merne trake MT1 i MT2 npr. ne utiče komponenta Fy, jer se te trake nalaze na srednjoj liniji konzole
gledano samo u odnosu na tu komponentu, pa imaju nultu dilataciju (polovina trake trpi istezanje, a
polovina sabijanje i ukupna promena dužine jednaka je nuli). Slično, komponenta Fx ne utiče na
dilataciju mernih traka MT3 i MT4.
Dilatacije pojedinih traka su redom:
Ebh
F
hEb
lFF
Ebh
F
hEb
lFF
Ebh
FF
Ebh
lF
Ebh
FF
Ebh
lF
zy
x
zy
x
zy
x
zy
x
3,06
3,00
3,06
3,00
06
06
2
1
4
2
1
3
2
12
2
11
(10.28)
MT1
MT2
MT4
MT3
Fz
Fx
Fy
MT5 MT6
MT7 MT8
MT9
MT10
MT11
MT12
b
h
l1
l2

10. Merenje sile i naprezanja
10 – 11
Ebh
F
Ebh
lF
Ebh
F
Ebh
lF
Ebh
F
Ebh
lF
Ebh
F
Ebh
lF
zMy
x
zMy
x
zMy
x
zMy
x
2
28
2
27
2
26
2
25
6
6
6
6
(10.29)
Ebh
F
hEb
lF
Ebh
F
hEb
lF
Ebh
F
hEb
lF
Ebh
F
hEb
lF
zy
Mx
zy
Mx
zy
Mx
zy
Mx
2
2
12
2
2
11
2
2
10
2
2
9
6
6
6
6
(10.30)
Na merne trake MT5 do MT8 deluje momenat εMy koji stvara komponenta Fy, ali je njegova vrednost
nebitna, jer neće uticati na pokazivanje mosta. Isto tako, na merne trake MT9 do MT12 deluje momenat
εMx koji stvara sila Fx, ali će i on obiti poništen pravilnim vezivanjem mernih traka u most. Načini
vezivanja mernih traka u tri merna mosta prikazani su na slici 10.14.
Slika 10.14. Merni mostovi za merenje pojedinih komponenti rezultantne sile
Naponi mernih mostova će biti
2
28765
6
4 Ebh
lFKUK
UU x
NN
x (10.31)
hEb
lFKUK
UU
y
NN
y 2
2
1211109
6
4 (10.32)
Ebh
FKUK
UU z
NN
z 43214
(10.33)
Iz 10.31 do 10.33 mogu se odrediti pojedine komponente Fx, Fy i Fz, a intenzitet rezultantne sile biće:
222
zyx FFFF (10.34)
Interesantno je primetiti da odzivi mernih dijagonala mosta ne zavise od visine stuba, niti od udaljenosti
l1, na kojoj se lepe merne trake MT1 do MT4.
MT10
UN
MT9
Uy
MT12
MT11
MT4
UN
MT3
Uz
MT2
MT1
MT6
UN
MT5
Ux
MT8
MT7

10. Merenje sile i naprezanja
10 – 12
10.3. Merenje sile i naprezanja pomoću piezoelektričnih senzora
Piezoelektricitet je električni naboj koji se akumulira u nekim čvrstim materijalima kada se ovi izlože
mehaničkom naprezanju. Piezoelektrični efekat predstavlja linearnu elektromehaničku interakciju
između mehaničkog i električnog stanja u kristalizovanom materijalu koji nema inverzionu simetriju.
Piezoelektrični efekat je reverzibilan proces u smislu da su materijali podložni direktnom efektu
(generisanje unutrašnjeg električnog naboja usled delovanja sile), takođe podložni i inverznom efektu
(primenom spoljašnjeg električnog polja dolazi do naprezanja i deformacije materijala).
Priroda piezoelektričnog efekta je tesno povezana sa pojavom električnih dipolnih momenata u čvrstim
telima. Dipoli mogu nastati kao posledica asimetričnog električnog okruženja u pojedinim tačkama
kristalne rešetke ili kao posledica veoma dugih polarnih molekula (posebno kod organskih
piezomaterijala). Dipoli u blizini drugih dipola imaju tendenciju da se međusobno poravnaju unutar
regiona koji se nazivaju Vajsovi domeni. Ti domeni su obično nasumično orijentisani, ali mogu biti
preusmereni u procesu koji se naziva polarizacija. Jačina piezoelektričnog efekta zavisi od sposobnosti
materijala da menja polarizaciju svojih dipola prilikom delovanja mehaničkog naprezanja. Time se utiče
na orijentaciju molekularnih dipolnih momenata. U zavisnosti od kristalne asimetrije, jačine naprezanja
i međusobne orijentacije pravaca naprezanja i unutrašnje polarizacije, može doći do jačeg ili slabijeg
piezoelektričnog efekta. Na primer, delovanjem sile od 2 kN (204 kg) na 1 cm3 kvarca, ako sila deluje
duž dobrog pravca, može se proizvesti piezonapon od 12500 V.
Piezoelektrični senzori mogu biti izuzetno malih dimenzija i ne zahtevaju spoljašnje izvore napajanja,
niti dodatna kola radi prilagođenja signala (npr. ne treba im merni most kao mernim trakama). Zato su
od velikog značaja za izradu savremenih minijaturnih senzora koji se ugrađuju u robotske sisteme,
prostetička pomagala i sl., gde se zahteva veoma velik opseg merenja naprezanja ili se, pak mora delovati
silama u širokom rasponu sa veoma visokom rezolucijom.
Napredak piezoelektrične tehnologije je direktno povezan sa izuzetno dobrim osobinama
piezomaterijala. Piezokristali imaju veoma visok Jangov moduo elastičnosti koji je uporediv sa
Jangovim modulom elastičnosti većine metala. Iako piezoelektrični senzori trpe stalne i značajne
dilatacije, nisu podložni smicanjima i plastičnim deformacijama. To ih čini veoma robusnim, mogu
trpeti mehanička opterećenja velikih učestanosti (ultrazvučne oscilacije) i imaju linearnost u izuzetno
širokom opsegu naprezanja. Dodatno, piezoelektrici nisu osetljivi na spoljašnje elektromagnetsko polje
i ometajuće izvore zračenja, pa omogućavaju merenja u veoma teškim industrijskim uslovima. Neki
materijali kao galijum-fosfat (GaPO4) ili kristali turmalina su izuzetno stabilni na visokim
temperaturama, pa omogućavaju izradu senzora sa opsegom radnih temperatura do 1000 ºC. Možda
najvažnija prednost piezoelektričnih senzora je njihova izuzetna osetljivost u veoma širokom opsegu.
Odnos opsega i rezolucije merenja naprezanja kod piezoelektričnih senzora je 100.000.000. Poređenja
radi, taj odnos za induktivne senzore (koji su nelinearni) iznosi 2.000.000, za kapacitivne oko 750.000,
a za otporne, poput mernih traka, svega 50.000.
Najozbiljniji nedostatak piezoelektričnih senzora je ta što se ne mogu koristiti za statička merenja, isto
kao i induktivni, odnosno kapacitivni senzori. Statička sila daje fiksnu količinu naelektrisanja na
krajevima piezoelektričnog materijala. U realnim kolima, curenje struje kroz dielektrik uzrokuje stalan
gubitak elektrona i piezosenzor se brzo razelektriše, zbog čega mereni signal (piezonapon) ima
tendenciju opadanja i, konačno, nestajanja. Da bi se piezosenzori mogli uspešno koristiti naprezanje
mora imati ponovljiv karakter ili se merenje mora obaviti u izuzetno kratkom intervalu. Zato su
piezosenzori, za razliku od npr. mernih traka, pogodni samo za merenje dinamičkih naprezanja i
vibracija.
Piezoefekat se u kristalima može proizvesti na tri načina:
transferzalnim naprezanjem
longitudinalnim naprezanjem i
smicanjem

10. Merenje sile i naprezanja
10 – 13
10.3.1. Transferzalni piezoefekat
Kod transferzalnog efekta sila Fy deluje duž neutralne ose kristala (y) i stvara naelektrisanja duž pravca
normalnog na pravac delovanja sile (x). Količina naelektrisanja koja će se izdvojiti na krajevima kristala
zavisi od njegovih dimenzija. Ako je dimenzija po x osi a, a po z osi b, onda važi
b
aFdC yxyx (10.35)
gde je dxy odgovarajući piezoelektrični koeficijent određen svojstvima materijala.
10.3.2. Longitudinalni piezoefekat
Kod ovog efekta količina naelektrisanja je striktno proporcionalna primenjenoj sili Fx koja deluje duž x
ose na kojoj se naelektrisanje izdvaja, i nezavisno je od dimenzija i oblika senzora. Stavljanjem više
piezoelemenata mehanički na red, a električno u paralelu može se povećati količina naelektrisanja koju
daje senzor. Rezultujuće naelektrisanje je
nFdC xxxx (10.36)
gde su dxx – piezoelektrični koeficijent duž x ose, a n – broj elemenata koji su povezani na red.
10.3.3. Smicajni piezoefekat
Kod ovog efekta dolazi do smicanja slojeva kristala duž x ose, a količina naelektrisanja ponovo zavisi
samo od primenjene sile Fx. Za n elemenata povezanih mehanički na red, a električno u paralelu dobija
se
nFdC xxxx 2 (10.37)
Na osnovu gornje analize jasno je da transferzalni efekat daje najbolje mogućnosti za fina podešavanja
osetljivosti senzora na primenjenu silu, konstrukcijom senzora odgovarajućih dimenzija.
Primeri primene piezoelektričnih senzora na merenje sile su različiti touch screen ekrani savremenih
komunikacionih uređaja, specijalne rukavice ili čak kompletna 3D odela za realističnu animaciju u
filmskoj industriji itd. Na slici 10.15 prikazan je taktilni senzor za kažiprst koji treba da zameni touch
pad ili touch screen interfejse.
Slika 10.15 Primer taktilnog senzora projektovanog za vrh prsta, koji se može koristiti kao računarski
interfejs umesto npr. miša ili touch screen-a

10. Merenje sile i naprezanja
10 – 14
Primer primene piezosenzora u robotici prikazan je na slici 10.16. Robot ruka humanoidnog robota
pokreće se generisanjem sile stvorene pomoću snažnih piezo-aktuatora. Zahvaljujući inverznom
piezoefektu ova „ruka“ može istovremeno „osetiti“ tvrdoću predmeta sa kojim je u kontaktu i može
prilagoditi jačinu stiska radi bezbednijeg rukovanja objektom.
Slika 10.16. Ruka humanoidnog robota pokretana pomoću piezo-polimernih FET aktuatora