Embed Size (px)
Citation preview

Berührungslose Distanzmessung
ein Technologieüberblick
Diplomarbeit Sommer 1996im Auftrag der RayTec Systems AG Chur
am Neu Technikum Buchs
ExaminatorenA.Bodmer
J.Jütz
Diplomanden Stefan GächterKapfstrasse 4b
9436 Balgach
Maurus TschirkyHanfländerweg 16
8880 Walenstadt

Inhaltsverzeichnis
1 Einführung
1.1 Absicht des Technologieüberblickes1.1.1 Technologieüberblick über die Distanzmessung im Nahbereich1.1.2 Überblick über bestehende Sensoren auf dem Markt
2 Technologieüberblick über die Distanzmessung
2.1 Benutzte Formelzeichen und Abkürzungen
2.2 Die verschiedenen Technologien2.2.1 Massewellen
Ultraschall2.2.2 Elektromagnetische Wellen
Mikrowelle / MillimeterwelleLicht
2.2.3 Zusammenfassung der einzelnen Wellenarten
2.3 Allgemeine Einflüsse auf Genauigkeit und Auflösung2.3.1 Genauigkeit2.3.2 Einfluss der Anzahl Messungen
2.4 Die verschiedenen Messverfahren2.4.1 Geometrische Messverfahren2.4.2 Triangulation
PrinzipEindeutigkeitAuflösung / Genauigkeit
2.4.3 Tangens-VerfahrenPrinzipEindeutigkeitAuflösung / Genauigkeit
2.4.4 Laufzeit-Messverfahren2.4.5 Impuls-Laufzeitmessung
PrinzipEindeutigkeitAuflösung / Genauigkeit
2.4.6 Phasen-LaufzeitmessungPrinzipEindeutigkeitAuflösung / Genauigkeit

2.4.7 Hybrid-ModulationsverfahrenPrinzipEindeutigkeitAuflösung / Genauigkeit
2.4.8 InterferometriePrinzipEindeutigkeitAuflösung / Genauigkeit
2.5 Vergleich der verschiedenen Messverfahren2.5.1 Geometrische Messverfahren
Triangulation versus Tangens-Verfahren2.5.2 Laufzeit-Messverfahren
Impuls versus Phasen-LaufzeitmessungHybrid-Modulation versus Phasen-LaufzeitmessungInterferometrie
2.6 Wahl des geeigneten Messverfahrens
3 Marktüberblick
3.1 Sinn und Zweck des Marktüberblicks3.1.1 Informationsquellen3.1.2 Erstellen eines Verzeichnisses
3.2 Übersicht und Aufbau des Verzeichnisses3.2.1 Aufnahmekriterien3.2.2 Erwartungen und Umfang
3.3 Folgerungen3.3.1 Abdeckung durch momentanes Angebot3.3.2 Ergebnisse des Überblicks
A Literaturverzeichnis
B Überblick berührungslose Distanzmessung
C Verzeichnis Marktüberblick

1Einführung
Als Teil der Diplomarbeit Berührungslose Distanzmessung nimmt der Technologieüberblick eine gewichtige Stellung ein.
Folgende Überlegungen haben uns dazu gebracht, ihn als eigenständigen Part zu verfassen:
· Ein separater Technologieüberblick kann auch losgelöst von dieser Diplomarbeit durchaus Verwendung finden.
· Falls unsere Arbeiten weitergeführt oder verwendet werden, soll der Technologieüberblick der Handlichkeit nicht im Wege stehen.
1.1Absicht des Technologieüberblickes
1.1.1Technologieüberblick über die Distanzmessung im Nahbereich
Der Überblick beschränkt sich auf die Möglichkeiten in einem Distanz-bereich bis 100m, den wir als Nahbereich bezeichnen.
In diesem umfassenden Kapitel werden vorab die einzelnen Technolo-gien behandelt. Die grundsätzlichen Erläuterungen zur Verwendung von Massewellen einerseits und dem Gebrauch von elektromagnetischen Wellen andererseits werden erklärt. Die einzelnen Verfahren werden aus-schliesslich für die Verwendung von Licht vorgestellt. Ein anschliessen-der Quervergleich der Verfahren lässt uns auf die für uns relevante Lö-sung schliessen, mit welcher wir die Forderung von Abschnitt 3.3 (Berührungslose Distanzmessung - mit dem Laserrichtpositioniersystem LRP5) erreichen wollen.

1.1.2Überblick über bestehende Sensoren auf dem Markt
Der Marktüberblick soll aufzeigen, wie sich das Angebot im Nahbereich aufgliedert. Nicht zuletzt wird daraus auch ersichtlich, mit welcher Tech-nologie und mit welchem Messprinzip bestimmte Forderungen in der Praxis erfüllt werden. Die kurze Untersuchung lässt auch Schlüsse dar-über zu, ob und in welchem Bereich sich Nischen befinden. Ein kleines Verzeichnis im Anhang C dient zur Orientierung.

2Technologieüberblick über die
Distanzmessung
In diesem Kapitel geht es darum, die verschiedenen Möglichkeiten der berührungslosen Distanzmessung zu ordnen und vorzustellen. Dabei sol-len im ersten Teil die möglichen Medien nähergebracht werden, und in einem zweiten Teil werden die wichtigsten Messverfahren erläutert.
Das grundlegende Problem bei der berührungslosen Distanzmessung ist die Erfassung einer Dimension, ohne diese direkt mit einer Referenz-grösse, zum Beispiel einem Massstab, vergleichen zu können. Eine ge-eignete Lösung bietet uns die Wellenfunktion. Nach [8] wird sie folgen-dermassen definiert: „Die Welle ist eine in Raum und Zeit periodische Erscheinung, bei der ein Energietransport ohne gleichzeitigen Massetransport stattfindet.“ Für unsere Zwecke kann die Welle als Informationsträger für direkte oder, bei Reflexion, für indirekte Si-gnalübertragung genützt werden.
2.1Benutzte Formelzeichen und Abkürzungen
s Genauigkeit
s Genauigkeit des Mittelwertes
a [rad] Abbildungswinkel
j [rad] Phasenverschiebung
g [rad] Öffnungswinkel
q [rad] Ablenkwinkel

J [°C] Lufttemperatur
l, l1, l2 [m] Wellenlänge
lph [m] Phasenwellenlänge
DF [Hz] Frequenzhub
sn [V] Genauigkeit des Signals,Effektivwert des Signalrauschens
sr [m] Genauigkeit der Distanz
st [s] Genauigkeit der Zeit
DT [s] Periodendauer
B [m] eine Kathete des Objekt-Dreiecks
Bs [Hz] Bandbreite des Empfängersystems
c0 [ms-1] Lichtgeschwindigkeit im Vakuum
c [ms-1] Ausbreitungsgeschwindigkeit des Schalls
cph [ms-1] Phasengeschwindigkeit
cgr [ms-1] Gruppengeschwindigkeit
d [m] die zu messende Distanz
D [m] Aperturdurchmesser
f [Hz] Frequenz
fm [Hz] Modulationsfrequenz
fp [Hz] Pulsrepetitionsfrequenz
h [m] eine Kathete des Bild-Dreiecks
H [%] Luftfeuchtigkeit

I, I0 [Wm-2] Intensität des Signals
m, m1, m2 Anzahl Wellenlängen
n Anzahl unabhängiger Messungen
nph Phasenbrechwert
p [hPa] Luftdruck
SNR Signal-Rausch-Verhältnis der Effektivwerte
t [s] Zeit
Ti [s] Messzeit bzw. Zeit zur Bildung des Mittelwertes
tr [s] Anstiegszeit des Signals
u [V] Signal als Spannung
x [m] Gegenkathete beim Tangens-Verfahren
x’ [m] Längsposition auf dem Empfänger
z [m] Tiefenschärfe
E Empfänger
L Linse
O Objekt
R Referenz
S Sender
St Strahlteiler

2.2Die verschiedenen Technologien
Zur berührungslosen Distanzmessung können zwei verschiedene Wel-lenarten verwendet werden, die Massewelle oder die elektromagnetische Welle.
2.2.1Massewellen
In diesem Abschnitt werden die Eigenschaften der Schallwellen im Zu-sammenhang mit der Distanzmessung betrachtet. Die Schallwelle wird hier dem Oberbegriff Massewelle zugeordnet, da eine Druckausbreitung, die einer örtlichen Masseverdichtung entspricht, in einem Raum ohne Materie nicht möglich ist.
1Ultraschall
nach [6] [9] [14]
In der Messtechnik wird Ultraschall im Frequenzbereich 20kHz bis in den MHz-Bereich [9] verwendet, wobei die hohen Schallfrequenzen in der Luft stärker gedämpft werden als die niederen. Die klassische Dämpfungsursache ist die Reibung. Hier muss jedoch die molekulare Schallabsorptioni berücksichtigt werden, da sie einen stärkeren Einfluss ausübt. So beträgt die Abnahme der Schallamplitude in der Luft 12% auf 5mm bei einer Frequenz von 1MHz [14]. Weiter erfährt ein Ultraschallsi-gnal erhebliche Richtungsänderungen durch Brechung, Beugung und Re-flexion, da die Atmosphäre meistens inhomogen istii. Dies macht es schwierig, ein Signal zu bündeln (zur Zeit erreichbarer Öffnungswinkel 10° [16]). Eine starke Bündelung würde jedoch eine zielgerichtete Refle-xion ermöglichen und die Eindeutigkeit einer Messung erhöhen.
Der Einfluss, der oben angesprochenen Inhomogenität der Atmosphäre kann abgeschätzt werden. Der Fehler der Schallaufzeit und somit auch derjenige der Messung wird nach [9] folgendermassen angegeben:
i nach [14]„Diese lässt sich bei mehratomigen Gasen folgendermassen beschreiben: Wird einem Molekül Energie zugeführt, so kommt diese nicht alleine der Translation, also der Schallausbreitung zugute, sondern auch der Drehung. Die inneren Freiheitsgrade der Rotation werden angeregt. Erst nach einer gewissen Zeit, der Relaxationszeit, stellt sich ein Gleichgewicht zwischen Translations-, Rotations- und Schwingungsenergie ein.“
ii nach [6]Dieses Verhalten beruht unter anderem auf folgendem Zusammenhang: „Je höher die Frequenz ist, desto gradliniger breiten sich die Ultraschallschwingungen aus und verhalten sich wie Lichtstrahlen. Es gilt [...] das aus der Optik hergeleitete Reflexions- und Brechungsgesetz.“

· Lufttemperatur ±0.17%/KBezogen auf 20°C Lufttemperatur ändert sich die Schallgeschwindigkeit bei etwa 40°C um +3.5%.
· Luftfeuchte Die Schallgeschwindigkeit nimmt zwischen trockener und feuchtigkeitsgesättigter Luft um höchstens 2% zu.
· Luftdruck Übliche atmosphärische Schwankungen (±5%) beeinflussen die Schallgeschwindigkeit um
etwa ±0.6%.Bei hohem Vakuum und Überdruck ist keine Schallausbreitung möglich.
· Luftströmung Unter den üblichen Umweltbedingungen sind Abweichungen in der Schallgeschwindigkeit ohne nennenswerte Bedeutung (bei Windgeschwindigkeiten ab 50km/h sind jedoch Änderungen von Geschwindigkeit und Richtung um mehr als 3% nicht auszuschliessen).
2.2.2Elektromagnetische Wellen
Die klassische Physik ermöglicht über die Maxwellschen Gleichungen die Beschreibung der Ausbreitung einer elektromagnetischen Welle im Raum. Dabei ist die Variation an möglichen Frequenzen unersättlich. Ein Teil dieses Spektrums wird für die Distanzmessung verwendet und kann nach der Wellenlänge ungefähr in folgende Bereiche eingeteilt werden: Mikrowelle (10 bis 1cm), Millimeterwellen (10 bis 1mm ), infrarotes Licht (10 bis 1mm) und sichtbares Licht (0.8 bis 0.4mm). Signale mit noch kürzeren Wellenlängen, ultraviolette Strahlung und darunter, können nur begrenzt eingesetzt werden, da die Strahlung entweder stark von der Atmosphäre oder vom Objekt absorbiert wird. Wie die Dämpfung für den verwendeten Frequenzbereich aussieht, zeigt Abbildung 2.1.

Abbildung 2.1: Dämpfung durch atmosphärische Gase, Regen und Nebel. Quelle [2 ii)]
Die atmosphärischen Einflüsse wie Regen und Nebel kommen erst bei weiten Distanzen zum Tragen. Für den Nahbereichiii in geschützter Um-gebung sind diese Störungen demnach von geringerer Bedeutung. Die Abbildung zeigt aber deutlich, dass für bestimmte Frequenzen die Gasab-sorptioniv auch bei kurzen Distanzen nicht vernachlässigbar ist.
Die Bündelung der Wellen kann als weiteres Kriterium herangezogen werden. So eignet sich das Beugungsgesetz am Loch, um den Öffnungs-winkel abzuschätzen. Ist dieser bekannt, kann damit die Strahlaus-dehnung in einer bestimmten Distanz berechnet werden. Wird als Begrenzung der Strahlausdehnung das erste Minimum des Beugungsmusters angenommenv, so kann folgende Beziehung für den Öffnungswinkel g aufgestellt werden [2 i)]vi:
iii Mit Nahbereich wird hier ein Bereich bis 100m definiert.
iv Für diesen Effekt kann die gleiche Erklärung herangezogen werden wie bei der Schallabsorption. Die angeregten Moleküle (hier spielt die Bewegungsrichtung keine Rolle) entziehen der elektromagnetischen Welle ähnlich einem Schwingkreis Energie, die zur Weiterausbreitung notwendig wäre.
v Wird als Definition der Strahlausdehnung das erste Minimum des Beugungsmuster am Loch verwendet, so befindet sich innerhalb dieser Begrenzung 84% der Energie des Signals.
vi Der Faktor 2.44 kommt zustande, weil hier der Öffnungswinkel dem doppelten Beugungswinkel am Loch entspricht.

gl
2 44.D
(2
Es ist ersichtlich, dass mit kürzerer Wellenlänge l bei gleichbleibendem Öffnungsdurchmesser D die Strahlausdehnung kleiner wird. Um maximale Bündelung zu erreichen, wird daher eine minimale Wellenlänge gewählt.
1Mikrowelle / Millimeterwelle
nach [13 i)] [13 ii)]
Die Bezeichnung der Wellen mag verwirrend sein, da, entgegen ihrem Namen, die Mikrowelle im cm-Bereich liegt und somit auch die längere Wellenlänge besitzt als die Millimeterwelle.
Die Verwendung von Millimeterwellen zur Distanzmessung hat sich ge-genüber den Mikrowellen ausgeweitet, seit höhere Frequenzen technolo-gisch kein Problem mehr darstellen. Der Vorteil einer kürzeren Wellen-länge liegt darin, dass eine kleinere Beugung und somit eine bessere Ge-radlinigkeit und laterale Auflösung erzielt werden können. Dazu kommt eine mögliche Vergrösserung der Modulationsbandbreite oder eine Ver-minderung der Impulsbreite, welche die Genauigkeit steigernvii.
Wie aus Abbildung 2.1 ersichtlich ist, muss die Frequenz in einem soge-nannten elektromagnetischen Wellenfenster liegen, einem Bereich mit relativ geringer Absorption, um die Verluste klein zu haltenviii. Diese Fre-quenzen sind von Land zu Land unterschiedlich normiert. Ein Frequenz-band im Mikrowellen-Bereich, welches in Industrie, Wissenschaft und Medizin (ISM - Band [13 ii)]) verwendet werden darf, liegt bei 24GHz.
2Licht
Heute werden ausschliesslich Laser und LED als Lichtquellen verwendet. Wenn nur eine monochromatische Lichtquelle benötigt wird, genügt eine LED. Ist jedoch zusätzlich Kohärenzix gefordert, was bei der
vii Siehe auch Abschnitt 2.3.1 (Genauigkeit)
viii Was die Dämpfung betrifft, wäre eine Frequenz im Mikrowellenbereich am geeignetsten. Aus den oben diskutierten Gründen werden jedoch kürzere Wellenlängen bevorzugt.
ix Nach [15]„Kohärent ist das Licht, wenn sein elektromagnetisches Strahlungsfeld durch einen unendlich ausgedehnten Sinuswellenzug [...] dargestellt werden kann. Amplitude und Phase sollen hierbei konstant sein. Man unterscheidet eine zeitliche und eine räumliche Kohärenz. Vereinfacht ausgedrückt erfordert die zeitliche Kohärenz einen fortlaufenden Wellenzug mit konstanter Phase. Die räumliche Kohärenz verlangt, dass alle aus der Lichtquelle kommenden Wellen räumlich gleichgerichtet sind.

Interferometrie der Fall ist, so muss auf den Laser zurückgegriffen werden.
Die extreme Kurzwelligkeit des Lichts ermöglicht eine hohe Messauflö-sung. Zusätzlich kommt noch eine sehr gute Geradlinigkeit hinzu, was eine zielgerichtete Messung auf kleine Objekte ermöglicht. Dabei sind Objekte, bei genügend Reflexion, in der Grössenordnung der Strahlaus-dehnung erfassbar.
Die Wellenlänge in der Luft hängt von verschiedenen Umwelteinflüssen ab, welche jedoch viel geringer als bei Ultraschall sind. Dabei stösst man in der Literatur auf verschiedene Formeln für die Berechnung des Phasenbrechwertesx, über den die Wellenlängenänderung berechnet werden kann. Es folgen die Werte für das Verhältnis von Dl zu l nach [12]:
· Lufttemperatur +0.910-6DJ [K]
· Luftfeuchte +0.0110-6DH [%]
· Luftdruck -0.310-6Dp [hPa]
Es gelten hier die Normalbedingungen, das heisst bei J = 20°C, p = 1013hPa und H = 50%.
2.2.3Zusammenfassung der einzelnen Wellenarten
nach [13 i)] [13 ii)] [16]
Die Wahl des Mediums und der Frequenz hängt von der geforderten Ge-nauigkeit und somit auch von den Kosten ab.
Wird keine starke Bündelung benötigt und bleibt die Messdistanz unter ca. 10m - es gibt bereits Sensoren, die bis 30m mit Ultraschall messen - , so ist Ultraschall gut geeignet. Die geringe Schallaufzeit von rund 300m/s kann gerade bei der Laufzeitmessung ausgenützt werden. Da die Genau-igkeit der Zeitmessung direkt ins Messergebnis eingeht, sind die Anforderungen bei Licht um einiges grösser, damit noch ein vernünftiges Resultat erzielt werden kannxi. Negativ wirkt sich hingegen die grosse
Daraus ergibt sich die extreme Bündelungsfähigkeit des Laserlichts. Kohärentes Licht ist immer monochromatisch - die Umkehrung gilt nicht - und es ist stets interferenzfähig, dagegen ist monochromatisches Licht nur bedingt interferenzfähig.“
x siehe auch Abschnitt 2.4.4 (Laufzeit-Messverfahren)
xi Soll die Auflösung 1cm betragen, so muss bei Licht eine Zeitdifferenz (hin und zurück) von mindestens 66ps erfasst werden können, bei Ultraschall hingegen

Temperaturabhängigkeit der Laufzeit aus. Um eine möglichst gute Messgenauigkeit zu erreichen (10m, 1..2% [16]), ist daher eine Temperaturkompensation notwendig. Abgesehen davon können kostengünstige Sensoren entwickelt werden, weil dieses Technologiegebiet gut erforscht ist.
Die noch mässig entwickelte Technologie der Distanzmesstechnik mit Mikro- oder Millimeterwellen erlaubt noch keine hohen Anforderungen an die Messgenauigkeit. Zur Zeit ist eine Genauigkeit von 1% auf 30m [16] erreichbar. Ein weiteres Problem kann der grosse Öffnungswinkel darstellen, der je nach Antenne von 5 bis 20° [16] reicht. Trotz dieser Mängel bietet die Mikro- und Millimeterwellen einen grossen Vorteil, wenn Extrembedingungen vorherrschen, bei denen Ultraschall und Licht nicht mehr eingesetzt werden können. So sind Messungen noch bei Mediumstemperaturen über 1000°C [17], bei Drücken bis 64bar [17] und bei staubiger und nebliger Umgebung möglich. Die Abbildung 2.2 verdeutlicht dies auch für atmosphärische Einflüsse am Beispiel Dämpfung.
Abbildung 2.2: Dämpfung der mm - Welle gegenüber Lichtwellen für eine 1.4km lange Test-strecke Quelle [13 i)]
Lichtwellen werden dann eingesetzt, wenn eine Distanz zielgerichtet er-fasst werden muss. Es lässt sich mit einer Optik zusätzlich eine feine Bündelung und eine optimale Ausrichtung auf das Objekt erreichen. Es kann aber auch eine Abbildung eines reflektierten Signals vorgenommen werden. Diese Möglichkeit besteht bei den anderen Wellenlängen nur rudimentär. Zu berücksichtigen ist jedoch, dass die optischen Elemente, auch wenn sie in Massen produziert werden, das Messverfahren teuerxii machen.
genügt ein Zeitdifferenz von 66ms.
xii nach J.JützWenn in der Elektronik eine Komponente 1.-Fr. kostet, so kostet in der Optik ein entsprechend gelagertes Produkt 100.-Fr.

Anlässlich der Besprechung der Millimeterwelle wurde schon erwähnt, dass mit kurzer Wellenlänge eine hohe Auflösung und Genauigkeit erzielt werden kann. Besonders deutlich wird dies bei der Interferometrie, die eine Auflösung im m-Bereich erreicht.
Aus den oben erwähnten Gründen kann heute mit der Distanzmessung mittels Lichtwellen ein riesiger Bereich an Längen abgedeckt werden, vom Relief auf einer Münze bis zur Entfernung Erde Mond.
2.3Allgemeine Einflüsse auf Genauigkeit und Auflösung
Es gibt physikalische Einflüsse, die der Messtechnik eine obere Grenze für die Genauigkeitxiii und Auflösungxiv vorgeben. Trotzdem kann durch die geeignete Wahl von Messparametern die Genauigkeit gesteigert werden. In Abschnitt 5.1 und 5.2 (Berührungslose Distanzmessung - mit dem Laserrichtpositioniersystem LRP5) ist dieser Sachverhalt, zwar nicht im gleichen Zusammenhang, ausführlicher beschrieben. Im folgenden wird nur auf einzelne Aspekte eingegangen.
2.3.1Genauigkeit
nach [1 ii)]
Die Genauigkeit einer Zeitmessung wird durch die Eindeutigkeit des Signalpegels bestimmt. Nun ist es einmal so, dass einem empfangenen Signal immer ein Rauschen (ein zufälliger Fehler) überlagert ist, daher ist es nicht möglich, einen absoluten Zeitpunkt zu bestimmen. Mit folgender Beziehung kann jedoch die minimal erreichbare Genauigkeit st
berechnet werden.
ss
tn
dudt
(2-)
Die Ableitung des Signals nach der Zeit du/dt, die ungefähr dem Verhältnis der Signalamplitude zur Anstiegszeit entspricht, muss möglichst gross, und das Signalrauschen sn muss möglichst klein sein, xiii nach [6] [7]
Besitzt ein zufälliger Fehler eine Streuung, die der Normalverteilung entspricht, so kann als Kenngrösse die Standardabweichung s berechnet werden. Die Genauigkeit wird nun willkürlich definiert, indem sie der Standardabweichung gleichgesetzt wird. Somit liegen die Messwerte mit einer Wahrscheinlichkeit von 68% innerhalb den Grenzen ±1s
xiv nach [6]Die Auflösung ist die erforderliche Änderung der Eingangsgrösse, um eine festgelegte Änderung der Ausgangsgrösse zu bewirken.

um die Abweichung der Zeitbestimmung st zu minimieren. Je grösser also die Frequenz, oder je kleiner die Pulsbreite eines Signals ist, desto genauere Messergebnisse können erreicht werden.
2.3.2Einfluss der Anzahl Messungen
nach [6] [7]
Die Unsicherheit einer Einzelmessung kann durch mehrere gemittelte Messungen reduziert werden. Dieser Mittelwert s ist immer noch eine Zufallsgrösse, die ursprüngliche Standardabweichung einer Einzelmes-sung s wird jedoch um den Wurzelausdruck n verkleinert. Das bedeu-tet, dass sich mit zunehmender Anzahl unabhängiger Messungen n der Mittelwert immer mehr dem Erwartungswert annähert. Die Formel [6] für die Standardabweichung des Mittelwertes von n Einzelmessungen ist:
ss
n
(2-)
Die Standardabweichung wird hier gleichbedeutend mit dem Begriff der Genauigkeit verwendet.
2.4Die verschiedenen Messverfahren
Es sollen im folgenden die verschiedenen technischen Möglichkeiten dis-kutiert werden. Die theoretischen Herleitungen wurden anhand der Eigenschaften von Lichtwellen durchgeführt. Dies geschah deshalb, da die notwendige Literatur uns zum Teil nur für diese Wellenart zur Verfügung stand. Die Beziehungen sind aber so grundlegend gehalten, dass sie als unabhängig von der Wellenart betrachtet werden können, sofern das Messverfahren mit der entsprechenden Technologie überhaupt realisierbar ist.
Leider kann die Besprechung der möglichen Messverfahren nicht als vollständig angesehen werden. Es fehlte uns schlicht die Zeit, um die einzelnen Verfahren intensiver zu studieren. So haben wir uns für die aus unserer Sicht wichtigsten Messverfahren beschränkt. Wer sich für weitere Möglichkeiten interessiert, sei auf den im Anhang B erstellten stichwortartigen Überblick verwiesen.
Die folgende Tabelle zeigt die möglichen Kombinationen zwischen den verschiedenen Wellenarten und den möglichen Messverfahren, die in diesem Kapitel behandelt werden.

Ultraschall Mikro- und Millimeterwelle
Licht
Triangulation nicht möglich nicht möglich *
Tangens-Verfahren nicht möglich nicht möglich *
Impuls-Laufzeitverfahren * * *
Phasen-Laufzeitverfahren * * *
Hybrid-Modulationsverfahren * * *
Interferometrie * xv nicht bekannt *
2.4.1Geometrische Messverfahren
Die bekanntesten Längenmessverfahren beruhen auf der geometrischen Messtechnik. In ihr finden die Lehrsätze der Goniometrie, die Strahlen-sätze und die grundlegenden Beziehungen der technischen Optik Anwen-dung.
2.4.2Triangulation
Sie scheint das älteste wissenschaftliche Messverfahren zu sein, wird sie doch angewendet, seit die Beziehungen in einem rechtwinkligen Dreieck bekannt sind.
1Prinzip
nach [1 i)] [3] [11]
Abbildung 2.3: Triangulation Quelle [3]
Die Distanzmessung beruht auf dem Vergleich von ähnlichen Dreiecken. Das eine Dreieck ist das Objekt-Dreieck, aufgespannt zwischen Objekt
xv nach [14] Die Distanz wird gemessen, indem durch Variation der Frequenz eine stehende Welle erzeugt wird.

und Linse, das andere ist das Bild-Dreieck, aufgespannt zwischen Linse und Empfänger. Eine Linse wird zur Abbildung des auf dem Objekt diffusxvi reflektierenden Signals benötigt, damit sich Ein- und Ausfall-winkel unterscheiden. Nur so kann eine Tiefenauflösung erzielt werden. Zusätzlich wird der Empfänger um einen bestimmten Winkel gedreht. Damit soll die Scheimpflug-Bedingung berücksichtigt werden. Diese be-sagt, dass die beste Focussierung erzielt werden kann, wenn sich die Objekt-, Linsen- und Empfängerebene in einem Punkt schneiden. Daraus ergibt sich folgende Formel [3] :
DD
dB h
x
cos( )a1
(2-)
Offensichtlich ist, dass die Distanz umgekehrt proportional zur Messgrösse ist.
2Eindeutigkeit
Der Triangulation sind vordergründig keine Grenzen gesetzt. Die Anpas-sungsfähigkeit des Verfahrens an die zu messende Distanz (Skalierbarkeit) ist ein grosser Vorteil. Der Messbereich wird lediglich durch die Grösse des Empfängers begrenzt.
Ein Nachteil kann jedoch sein, dass das Verfahren auf relative Messungen beschränkt ist. Damit eine Distanz ermittelt werden kann, muss zuerst mit einer Referenzmessung der Nullpunkt bestimmt werden.
3Auflösung / Genauigkeit
nach [3]
Hier zeigt sich der Hauptnachteil der Triangulation. Es ist der quadrati-sche Zusammenhang zwischen der Tiefenauflösung der Distanz und der zu messenden Distanz bei einer konstanten Auflösung des Empfängers.
a
dB h
d x
cos( ) 2 (2-)
Durch die feste Anordnung von Linse und Empfänger ergibt sich am Rand des Empfängers eine Defocussierung. Daher ist die Tiefenschärfe z der Abbildung zusätzlich von der Auflösung abhängig. Die Beziehung [3] lautet folgendermassen:
xvi nach [6]Eine Reflexion ist ideal diffus, wenn das auftreffende Signal in alle Richtungen zurückgestrahlt wird.

lzx
2
4(2-)
2.4.3Tangens-Verfahrenxvii
Das Verfahren beruht zwar auf einem rechtwinkligen Dreieck. Es wird jedoch hier nicht zur Triangulation gezählt, da keine Abbildung notwendig ist.
1Prinzip
Abbildung 2.4: Tangens - Verfahren
Ein vom Sender ausgestrahltes Signal wird unter einem konstanten Winkel aufgeteilt. Mit einem Empfänger wird der Abstand zwischen den beiden auseinanderstrebenden Signalen ermittelt. Zur Messung der Distanz wird das rechtwinklige Dreieck ausgewertet, das sich zwischen Signalquelle und Empfänger aufspannt, und zwar folgendermassen:
D Dd x 1
tan( )q (2-)
Daher ist die Distanz Dd direkt proportional zum Abstand Dx der beiden Punkte.
2Eindeutigkeit
Die maximale Distanz, die mit diesem Verfahren gemessen werden kann, wird durch die Grösse des Empfängers bestimmt. Findet man den entsprechenden Sensor, so kann eine beliebige Distanz gemessen werden.
Wie auch bei der Triangulation kann mit dem Tangens-Verfahren nur relativ gemessen werden, daher ist ebenfalls eine Referenzmessung not-wendig.
3Auflösung / Genauigkeit
Die geforderte Genauigkeit der Distanzmessung geht direkt in die Ge-nauigkeitsanforderung des Empfängers ein, wie aus der Gleichung (2-7) ersichtlich ist. Für weite Distanzen ist daher eine hohe Auflösung des Empfängers notwendig. Demnach muss eine Abweichung von x =
xvii Eigener Terminus

1.5mm erfasst werden können, wenn eine Genauigkeit von d = 1cm verlangt wird (berechnet für einen Ablenkwinkel von q = 0.5’ , der für eine Distanz von 20m geeignet ist).
Die zunehmende Strahlausdehnung des Signals muss auch berücksichtigt werden, wenn eine bestimmte Auflösung angestrebt wird. Sie kann für kleine Strecken- und Öffnungswinkel folgendermassen abgeschätzt wer-den:
g
x d 2
(2-)
Dabei wurde angenommen, dass das Signal erst dann erneut erkennbar ist, wenn es sich um die Hälfte der Strahlausdehnung verschoben hat.
2.4.4Laufzeit-Messverfahren
Das Laufzeit-Messverfahren nutzt den Effekt aus, dass sich eine Welle bestimmter Frequenz f nur mit einer endlichen Geschwindigkeit c0 ausbreiten kann. Allgemein gilt [8]:
c f0 0 l oder c f l (2-)
Für elektromagnetische Wellen im Vakuum ist es die Lichtgeschwindig-keitxviii. Der Wert dieser Naturkonstante ist [8]:
c0 = 2.99792458 108 m/s
Für Ultraschall kann die Schallgeschwindigkeit bei Normalbedingungenxix genommen werden. Ein genauer Wert kann hier nicht angegeben werden, er wird jedoch in folgendem Bereich [8] liegen:
c = 344 m/s
Findet die Ausbreitung nicht im Vakuum oder unter Normalbedinungen statt, so verringert sich die Geschwindigkeit um einen Faktor, den Pha-senbrechwert nph. Die Ausbreitungsgeschwindigkeit cph ändert sich dann folgendermassen [8]:
cc
nphph
0 oder cc
nphph
(2-)
xviii Durch die Lichtgeschwindigkeit im Vakuum wird seit 1983 der Meter definiert.
xix die Normalbedingungen sind: J = 20°C, p = 1013hPa und H = 50%

Wird der Welle ein Signal aufgeprägt, so breitet sich das Wellenpaket des Signals nicht mehr mit der Phasengeschwindigkeit cph aus, sondern mit der Gruppengeschwindigkeit cgr
xx, für welche gilt [8]:
c cc
gr ph phph
ph l
l(2-)
Es ist ersichtlich, dass die Ausbreitungsgeschwindigkeit des Wellenpa-kets von der Wellenlänge abhängt (Dispersion). Daher wird ein Signal, das aus mehreren Wellenlängen besteht, was wiederum für alle Signal-formen ausser dem Sinus zutrifft, mit fortlaufender Ausbreitung „verschmiert“. In der Praxis wird die Gruppengeschwindigkeit jedoch nicht für jedes entsprechende Signal berechnet, vielmehr wird der Wert anhand einer Referenzstrecke gemessen.
2.4.5Impuls-Laufzeitmessung
(time-of-flight techniques, pulse modulation)
Diese stellt ein Verfahren dar, das auch in der Natur seine Anwendung gefunden hat, basiert doch der Orientierungssinn der Fledermaus ebenfalls auf dem Laufzeitverfahren (mittels Schallwellen).
1Prinzip
nach [1 i)] [1 ii)] [2 i)] [3]
Abbildung 2.5: Impuls-Laufzeitverfahren
Vom physikalischen Hintergrund her folgt das Impuls-Laufzeitverfahren einem einfachen Prinzip. Ein Impuls, der sich mit einer bekannten Ge-schwindigkeit ausbreitet, wird vom Sender abgegeben. Gleichzeitig mit
xx nach [18]Das folgende Beispiel soll den Unterschied zwischen Phasengeschwindigkeit und Gruppengeschwindigkeit verdeutlichen: Breiten sich zwei Wellen mit gleicher Geschwindigkeit aus, so interferieren sie miteinander. Die entstehenden Maxima und Minima breiten sich immer noch mit der gleichen Geschwindigkeit, der sogenannten Phasengeschwindigkeit, aus. Unterscheidet sich jedoch die Geschwindigkeit der beiden Wellen, so breiten sich die Maxima und Minima nicht mehr mit der gleichen Geschwindigkeit der einzelnen Wellen aus, sondern mit der Gruppengeschwindigkeit.

dem Aussenden wird die Zeitmessung gestartet. Dies kann dadurch ge-schehen, dass ein Teil des Impulses als Startsignal direkt auf den Empfänger umgeleitet wird. Der am Messobjekt reflektierte Impuls wird vom Empfänger detektiert und stoppt dadurch die Zeitmessung. Somit lässt sich die Distanz Dd [3] folgendermassen berechnen:
D Ddc
tgr 2 (2-)
Es ist ersichtlich, dass die Distanz Dd eine lineare Funktion der Laufzeit Dt ist.
2Eindeutigkeit
nach [1 ii)]
Da die Genauigkeit durch Mittelung einer Anzahl Messungen steigt, wird der Impuls mit einer bestimmten Frequenz fp wiederholt ausgesendet. Dabei bestimmt die Zeit zwischen zwei Impulsen die maximale Messdistanz, die noch ein eindeutiges Resultat zulässt. Es muss daher für die zu messende Distanz gelten:
dc
fgr
p
21
(2-)
3Auflösung / Genauigkeit
nach [1 ii)] [3]
Bei der Zeitmessung liegt die Grenze des derzeit Erreichbaren [3] bei etwa Dt = 10ps, was einer Distanz von Dd = 1.5mm entspricht. Dies zeigt, dass die Tiefenauflösung, bedingt durch die konstante Ausbreitungsgeschwindigkeit des Lichts, direkt von der Zeitauflösung bestimmt wird. Deshalb kann die Laufzeitmessung auch nicht einer gegebenen Distanz angepasst werden.
Eine weitere Grenze wird dem Verfahren durch das Signal-Rausch-Verhältnis des Empfängers gesetzt. Wenn angenommen wird, dass die Zeitmessung durch Überschreiten eines Schwellwertes ausgelöst wird und die übrigen Zeitmessfehler, etwa die Genauigkeit des Schwellwertes, vernachlässigt werden, so kann mit folgender Formel [1 ii)] die Genauigkeit näherungsweise berechnet werden:
s rgr rc t
SNR n
2 (2-)

Die notwendige Anzahl unabhängiger Messungen hängt wie folgt [1 ii)] ab von der Pulsrepetitionsfrequenz und der Messdauer, also der Zeit, die verstreicht, um den Mittelwert zu bilden:
n f Tp i (2-)
2.4.6Phasen-Laufzeitmessung
(AM-cw modulation)
1Prinzip
nach [1 i)] [1 ii)] [2 i)] [4]
Abbildung 2.6: Phasen-Laufzeitverfahren
Wenn die Amplitude eines fortwährend ausgesandten Trägersignals mit einer festen Frequenz moduliert wird, dann kann die Distanz bis zum Objekt durch den Vergleich der Phase zwischen dem reflektierten und dem weiterhin ausgesandten Signal ermittelt werden. Dabei ist die Phasenverschiebung des amplitudenmodulierten Signalsxxi direkt proportional zur Distanz. Die Formel [4] dafür lautet folgendermassen:
D Ddc
fgr
m
21
2 j (2-)
2Eindeutigkeit
nach [4] [11]
Aus der Formel zur Berechnung der Genauigkeit, siehe Abschnitt unten, ist ersichtlich, dass diese um so besser wird, je grösser die Modulations-frequenz ist. Für eine gegebene Distanz geht dabei jedoch die Eindeutig-keit verloren, da die Phase nur modulo 360° und nicht absolut gemessen werden kann. Somit muss für die zu messende Distanz folgendes gelten, damit die Phasenverschiebung kleiner als 360° bleibt:
xxi Die Amplitudenmodulation wird hier auf die Intensität angewandt, ebensogut könnte auch die Polarisationsrichtung dazu herangezogen werden.

dc
fgr
m
12
(2-)
Um doch in einem gewissen Bereich absolut messen zu können, wird mit mehreren verschiedenen Frequenzen moduliert. Für kurze Distanzen (d < 5km) [11] genügen zwei Frequenzen, die sich nur um Zehnerpotenzen unterscheiden. Mit der einen wird die Grobdistanz abgeschätzt und mit der anderen wird die gewünschte Auflösung erreicht. Eine theoretische Erläuterung wird im Abschnitt Interferometrie gegeben.
3Auflösung / Genauigkeit
nach [1 ii)] [3]
Die Auflösung des Phasenmessers bestimmt weitgehend die Auflösung der Distanzmessung. Zur Zeit [3] ist eine Phasenmessung auf etwa Dj = 0.1° genau möglich, was einer Distanz von etwa Dd = 0.08mm (fm = 500MHz) entspricht.
Auch hier hat das Signal-Rausch-Verhältnis des Empfängers einen Ein-fluss auf die Auflösung. Die Formel [1 ii)] für die Genauigkeit ist sinn-gemäss die des Puls-Laufzeitverfahrens:
s
rgr
m
c
f SNR n
4(2-)
Die Anzahl der unabhängigen Messungen n hängt wieder von zwei Fak-toren ab. Einfluss haben die Bandbreite des Empfängers Bs und die Messdauer Ti. Die Bandbreite des Empfängers bestimmt die zeitliche Ab-hängigkeit der Messung, daher können die Einzelmessungen nicht mehr als unabhängig voneinander betrachtet werden. Mit folgender Vereinfa-chung [1 ii)] kann die Anzahl Messungen trotzdem genügend genau ab-geschätzt werden.
n B Ts i (2-)
Mit dem Phasenmesser können jedoch Störungen mit einer anderen Pha-senlage als diejenige des Nutzsignals nicht erkannt werden. Dabei genügen schon relativ kleine Störamplituden, um einen erkennbaren Fehler zu verursachen. Diese Fehler können nur mit einer anderen Modulationsart verringert werden.

2.4.7Hybrid-Modulationsverfahren
(chirp techniques, FM-cw modulation)
Eine Möglichkeit, um die Probleme der Phasenmessung zu umgehen, ist, die Modulationsfrequenz kontinuierlich zu verändern.
Dieses Verfahren hat vor allem in der Radartechnik Anwendung gefunden, da zusätzlich zu der Distanz auch die Geschwindigkeit gemessen werden kann. Während bei Mikro- und Millimeterwellen diese Technik schon länger verwendet wird, ist sie bei elektrooptischen Systemen erst im Kommen.
1 Prinzip
nach [1 i)] [5] [13 ii)] [19]
Abbildung 2.7: Hybrid - Modulation Quelle [13 ii)]
Der Träger wird mit einem Chirp-Signal moduliert. Der Chirp ist ein Si-gnal, dessen Frequenz linear mit der Zeit ändert. Es findet also gleichzeitig eine Amplituden- und Frequenzmodulation statt. Vergleicht man nun die momentane Frequenz zwischen dem reflektierten und dem weiterhin ausgesandten Signal, so kann daraus die Distanz Dd ermittelt werden:
DDD
Ddc T
Ffgr
2 (2-)
2Eindeutigkeit
Die Eindeutigkeit stellt kein Problem mehr dar, da sich der Bereich weit grösser definieren lässt als die zu messende Distanz. Wie gross sie sein darf, hängt von dem Verhältnis Periodendauer DT zu Frequenzhub DF ab.
Wenn die Periodendauer als Referenzgrösse genommen wird, muss für die Distanz folgendes gelten:
dc
Tgr 2
D (2-)

Zusätzlich kann mit dem Frequenzhub DF die Genauigkeit der Distanz-messung angepasst werden.
3Auflösung / Genauigkeit
Das Extrahieren der Distanzinformation aus den Signalen ist hier nicht mehr so einfach, wie etwa beim Phasen-Laufzeitverfahren. Da es sich bei der Messgrösse um eine Frequenz handelt, wird zur Auswertung häufig das Spektrum betrachtet. Die Genauigkeit ist daher durch die Wahl des DSP vorgegeben. Es kann aber gesagt werden, dass sie in der gleichen Grössenordnung wie bei der Phasen-Laufzeitmessung liegt. Auf diese Weise ist in [19] ein System aufgeführt, das eine Auflösung besser als 10-4 erreicht. (Bei einer Distanz von 100m sind das einige Millimeter.)
Was das Signal-Rausch-Verhältnis angeht, so sei auf die Probleme beim Puls-Laufzeit- und Phasen-Laufzeitverfahren verwiesen.
2.4.8Interferometrie
(interferometric techniques)
Der Effekt einer faszinierend schillernden Oberfläche einer Seifenblase hat auch Anwendung in der Messtechnik gefunden.
1Prinzipxxii
nach [1 i)] [10] [11]
Abbildung 2.8: Interferometrie
Bei der Interferometrie werden die gleichen Überlegungen angestellt wie bei der Phasen-Laufzeitmessung. Der Unterschied jedoch ist, dass hier die Wellenlänge des Trägersignals verwendet wird, die etwa um den Faktor 106 kleiner ist als bei üblicherweise verwendeten Modulationsfrquenzen. Dies hat auch eine andere Betrachtungsweise zur Folge.
xxii Hier wird das einfachste Verfahren, jenes nach Michelson, erklärt.

Die Interferometrie kann auf die Tatsache zurückgeführt werden, dass das Interferenzmuster zweier verschiedenphasiger Wellen als Längenmassstab benützt werden kann.
Um zwischen dem ständig ausgesandten Signal und dem Referenzsignal die notwendige Kohärenz zu gewährleisten, wird die gleiche Signalquelle verwendet. Ein Teil des Signals wird zum Objekt gesendet und dort re-flektiert. Das zurückkommende Signal wird mit dem anderen Teil des Si-gnals verglichen, welches seinerseits eine bekannte Referenzstrecke durchlaufen hat. Die relative Verschiebung der beiden Signale wird mit der durch die Wellenlänge gegebenen Auflösung nach folgender Bezie-hung [11] gemessen.
Ddc
fmph
12
(2-)
Die Anzahl Wellenlängen m, die sich bei einer Verschiebung ergeben, kann deshalb gezählt werden, weil sich die Addition zweier Wellen in der Intensität folgendermassen ausdrückt [11]:
I I 0 1( cos( ))Dj (2-)
wobei
D Dj
4 f
cd
ph(2-)
Die starke Verwandtschaft mit der Phasen-Laufzeitmessung wird hier be-sonders deutlich. Die Intensität ändert sich zwischen 2I0 und 0, wenn sich die Phasenverschiebung zwischen 0 und bewegt. Aus diesem Zusammenhang heraus ergibt sich die Gleichung (2-22).
2Eindeutigkeit
nach [3][11]
Um absolut messen zu können, müssen auch bei diesem Verfahren mehrere verschiedene Frequenzen verwendet werden, da die Eindeutigkeit in gleicher Weise gegeben ist wie bei der Phasen-Laufzeitmessung. Dies schränkt die Skalierbarkeit entschieden ein. Sie liegt im mm-Bereich [3]. Eine Verbesserung wird erreicht, wenn zwei Wellenlängen benützt werden. Es lässt sich daraus eine neue, gedachte Wellenlänge berechnen, mit der eine grössere Distanz eindeutig gemessen werden kann.
Für zwei unterschiedliche Wellenlängen l1 und l2 gilt für die gleiche Distanz d folgendes:

2 1 1 d ml (2-)
2 2 2 d ml (2-)
Haben die Anzahl Wellenlängen m1 und m2 ein gemeinsames Vielfaches, so sind die beiden Wellen gleichphasig. Sie bilden eine neue, gedachte Wellenlänge. Durch Subtraktion der obigen Gleichungen erhält man eine neue Beziehung für die Distanz.
2 1 2
2 11 2
d m ml ll l
( ) (2-)
Verglichen mit der Gleichung (2-22) wird der Ausdruck für die gedachte Wellenlänge ersichtlich, mit der nun eine längere Distanz eindeutiger gemessen werden kann als mit beiden einzelnen Wellenlängen alleine. Sie werden so gewählt, dass m1-m2=1 ergibt. Dadurch wird das Resultat unmissverständlich.
3Auflösung / Genauigkeit
nach [11]
Die Messgenauigkeit eines Interferometers hängt ab von der Frequenzstabilität des Senders. Um diese zu erreichen, ist es notwendig, mechanische und thermische Störgrössen zu kompensieren.
Was die Genauigkeit bei der Auswertung des Interferenzsignals anbelangt, so ergeben sich die gleichen Kriterien wie bei der Phasen-Laufzeitmessung.
2.5Vergleich der verschiedenen Messverfahren
Der folgende Vergleich der verschiedenen Messverfahren wurde aus-schliesslich in bezug auf elektrooptische Systeme vorgenommen, da die dementsprechenden Informationsquellen zur Verfügung standen. Ein kleiner Einblick, wie sich ein System mit einer anderen Wellenart verhält, wurde schon im Abschnitt 2.2.3 (Zusammenfassung der einzelnen Wellenarten) gegeben.
2.5.1Geometrische Messverfahren
Allgemein sind die geometrischen Messverfahren sehr beliebt, wenn es um Distanzmessung im Bereich weniger cm bis m geht. Dies vor allem, weil sie vom Konzept her meistens einfach sind und daher einen schnellen Lösungsansatz darstellen. Es kann mit diesen Verfahren jedoch nicht absolut gemessen werden. Es zwängt sich daher immer eine Referenzmessung zur Nullpunktbestimmung auf.
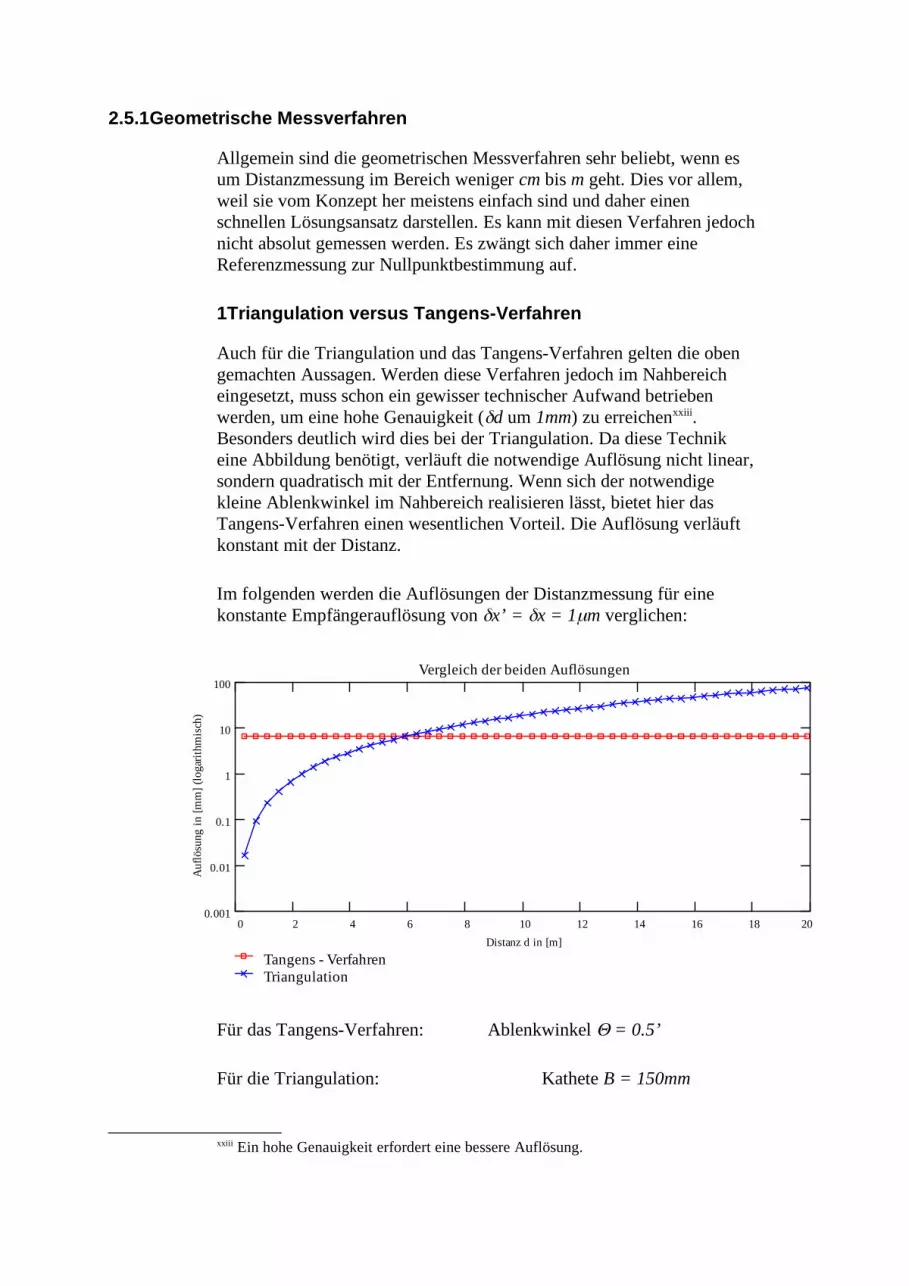
1Triangulation versus Tangens-Verfahren
Auch für die Triangulation und das Tangens-Verfahren gelten die oben gemachten Aussagen. Werden diese Verfahren jedoch im Nahbereich eingesetzt, muss schon ein gewisser technischer Aufwand betrieben werden, um eine hohe Genauigkeit (d um 1mm) zu erreichenxxiii. Besonders deutlich wird dies bei der Triangulation. Da diese Technik eine Abbildung benötigt, verläuft die notwendige Auflösung nicht linear, sondern quadratisch mit der Entfernung. Wenn sich der notwendige kleine Ablenkwinkel im Nahbereich realisieren lässt, bietet hier das Tangens-Verfahren einen wesentlichen Vorteil. Die Auflösung verläuft konstant mit der Distanz.
Im folgenden werden die Auflösungen der Distanzmessung für eine konstante Empfängerauflösung von x’ = x = 1mm verglichen:
0 2 4 6 8 10 12 14 16 18 200.001
0.01
0.1
1
10
100
Tangens - VerfahrenTriangulation
Vergleich der beiden Auflösungen
Distanz d in [m]
Auf
lösu
ng in
[mm
] (lo
garit
hmis
ch)
Für das Tangens-Verfahren: Ablenkwinkel Q = 0.5’
Für die Triangulation: Kathete B = 150mm
xxiii Ein hohe Genauigkeit erfordert eine bessere Auflösung.

Kathete h = 35mm
Abbildungswinkel a = 0°
Diese Werte sind für eine Distanz d von 20m ausgelegt.
Die Grafik zeigt deutlich, dass die Triangulation ihre Stärke nur im Be-reich von mehreren mm ausspielen kann. Die angenehme Eigenschaft des Tangens-Verfahrens - die konstante Auflösung auch im oberen Messbe-reich - kann aber nur dann genützt werden, wenn ein Empfänger mit der notwendigen Auflösung und Genauigkeit zur Verfügung steht.
2.5.2Laufzeit-Messverfahren
Bei diesen Verfahren besteht durchgehend eine lineare Beziehung zwi-schen erfasster Grösse und Distanz. Das heisst, dass zumindest die Auflösung theoretisch über den ganzen Messbereich konstant verläuft. Sie wird aber schlussendlich durch die Auflösung und Genauigkeit der entsprechenden Messeinrichtungen bestimmt (Zeit-Spannungs-Wandler oder Phasendiskriminator). Dadurch können die Verfahren nur beschränkt der gegebenen Distanz angepasst werden. Dafür erlauben diese Verfahren ein absolutes Messen der Entfernung.
1Impuls versus Phasen-Laufzeitmessung
nach [1 ii)] [20] [21]
Puls-Laufzeitmessung Phasen-Laufzeitmessung
Eingangsleistung des Senders 5W 5mW
Empfängerbandbreite 500MHz 500Hz
SNR des Empfängers 15 15
Signalform Pulsanstiegszeit5ns
Modulationsfrequenz32MHz
Genauigkeit sr = 0.05m n1/2 sr = 0.05m n1/2
Diese Tabelle vergleicht die beiden Verfahren anhand typischer Kenndaten [20], falls für beide Systeme die gleiche Genauigkeit gefordert wird.

Wenn die Gleichungen (2-14) und (2-18) verglichen werden, so ist ersicht-lich, dass für das Impuls- wie für das Phasen-Laufzeitverfahren die gleiche Genauigkeit erreicht wird, wenn die Pulsanstiegszeit der Flanke im Nulldurchgang der Modulationsfrequenz entspricht. Demnach gilt für dieselben vorherrschenden Bedingungen (SNR, Anzahl Messungen) [20]:
tfr
m
12
(2-)
Dabei muss zusätzlich berücksichtigt werden, dass beide Systeme mit der gleichen optischen Leistung arbeiten. Der Impulsspitzenwert ist daher rund dreimal grösser, als die Amplitude der Modulationsfrequenz. Durch das bessere Signal-Rausch-Verhältnis kann daher mit dem Impuls-Laufzeitverfahren die längere Distanz gemessen werden. Für die Phasen-Laufzeitmessung muss eine Leistungssteigerung vorgenommen werden, um die gleiche Entfernung zu erreichen. Dem wird jedoch eine Grenze durch die bestehenden Industrienormen (Laserschutzklassen) gesetzt.
Bei der Impuls-Laufzeitmessung kann bereits mit einem einzelnen Impuls die Distanz eindeutig mit cm-Genauigkeit gemessen werden. Dies kann aber für kurze Distanzen - 1mm Messdistanz entspricht einer Laufzeit von 6.66ps - einen erheblichen technischen Aufwand bedeuten. Die Phasen-Laufzeitmessung gestaltet sich in diesem Punkt einfacher, obwohl Messungen mit zwei verschiedenen Frequenzen notwendig sind, um ein eindeutiges Ergebnis zu erlangen.
2Hybrid-Modulation versus Phasen-Laufzeitmessung
Die Hybrid-Modulation entstand zum einen aus dem Wunsch, ein Ver-fahren zu haben, welches die negativen Eigenschaften der Phasen-Laufzeitmessung behebt, zum anderen auch die Möglichkeit bietet, gleichzeitig die Geschwindigkeit eines Objekts zu messen. Auf den zweiten Punkt wird hier nicht eingegangen.
Die Signalerzeugung bei der Hybrid-Modulation erfordert einen erhebli-che Mehraufwand, verglichen mit der Phasen-Laufzeitmessung. Sie benötigt lediglich einen stabilen Sinus-Generator. Für die Erzeugung eines Chirp-Signals hingegen ist ein spannungskontrollierter Oszillator (VCO) mit hoher Linearität erforderlich, da dieser die Genauigkeit des Systems mitbestimmt. Es kommt die Schwierigkeit hinzu, dass die Frequenzen im MHz - Bereich liegen.
Das Problem bei der Phasen-Laufzeitmessung sind die unerwünschten Streuungen, die vor allem bei der Reflexion des Signals am Objekt auf-

tretenxxiv. Diese zwar kleinen Amplituden haben durch ihre Phasenver-schiebung (kann rund 1° erreichen) einen erheblichen Einfluss auf die Gesamtmessung. Wird jedoch, wie beim Chirp-Signal, ein breites Spektrum verwendet, treten diese Probleme nicht mehr auf.
Was die Reichweite anbelangt, so ist sie bei beiden Verfahren ähnlich gelagert. Daher besitzt die Hybrid-Modulation in diesem Punkt den glei-chen Nachteil gegenüber der Impuls-Laufzeitmessung.
3Interferometrie
Die hohe Genauigkeit, die mit der Interferometrie erreicht wird (m - Bereich), kann nur mit einem hohen technischen Aufwand realisiert wer-den. Weil Luftturbulenzen und die Aufweitung des Laserstrahls einen zu grossen Einfluss haben, sind diese Systeme für grössere Distanzen (Maximum bei ca. 50m) exorbitant teuer.
Massgebend für dieses Verfahren ist die Frequenzstabilität des Lasers. Sie kann durch verschiedene physikalische Effekte erreicht werden (Zeeman-Aufspaltung). Zusätzlich kommen die Umwelteinflüsse ins Spiel. Obwohl sie im ppm-Bereich liegen, ist eine Kompensation notwendig.
Es ist ersichtlich, das die hohe Messempfindlichkeit und die hohe Auflö-sung für die allgemeine Distanzmesstechnik im Nahbereich nicht ange-bracht ist.
2.6Wahl des geeigneten Messverfahrens
Da die Distanzmessung im System LRP5 integriert werden muss, war es naheliegend, eine Lösung zu suchen, welche die bestehenden Komponenten mit einbezieht. In diesem Sinn ist das Tangens-Verfahren die passendste Lösung. Das LRP5 besitzt schon eine konstante Strahlungsquelle (Sender bestehend aus einem Laser), die für die Strahl-aufteilung genützt werden kann. Weiter ist es möglich die Positionsmes-sung des LRPs (im Empfänger realisiert mit einem PSD) auszunützen. So muss lediglich noch eine zweite Positionsbestimmung des abgelenkten Strahls vorgenommen werden. Ob die geforderte Genauigkeit von ±4mm mit dem entsprechenden Aufwand machbar ist, wird sich zeigen (vgl. Abschnitt 2.2.5 (Berührungslose Distanzmessung - mit dem Laserrichtpositioniersystem LRP5)).
xxiv nach [2 i)]Unter anderem sind Speckle damit gemeint. Speckle entstehen, wenn eine rauhe Oberfläche mit kohärentem Licht bestrahlt wird. Die rauhe Oberfläche erzeugt streuende Signale mit zufällig verteilter Phase. Dadurch ergibt es konstruktive (helle Flecken) und destruktive (dunkle Flecken) Interferenzen.

3Marktüberblick
3.1Sinn und Zweck des Marktüberblicks
Infolge der anhaltenden Automatisierung von Prozessen ist die Nachfrage für vielerlei Sensoren und Geber ungebrochen hoch. Mit dem Einzug von Qualitätsmanagment und -sicherung wird sich dieser Markt auch in Zukunft einer grossen Nachfrage erfreuen. Das Anwendungsgebiet dieser Überwacher ist beinahe unbegrenzt. Mit solchen Systemen wird das Ausrichten, Messen, Justieren, Positionieren Kalibrieren und Kontrollieren von diversen Objekten messtechnisch unterstützt.
Unsere Aufgabenstellung deckt dabei nur einen kleinen Teil in diesem Gefüge ab. Es ist nun sicherlich von Interesse, „unser“ Segment einmal genauer unter die Lupe zu nehmen.
3.1.1Informationsquellen
Es bieten sich für die Suche nach Informationen verschiedene Wege an. In unserem Fall haben wir uns in einschlägigen Zeitschriften, Messeführern und auch im Internet umgeschaut. Wir haben schlussendlich 52 Firmen - vorwiegend aus dem deutschsprachigen Raum - angeschrieben und über 30 verdankenswerte Antworten erhalten.
3.1.2Erstellen eines Verzeichnisses
Um Ordnung und Struktur in die Katalog-Flut zu bringen, haben wir uns entschieden, ein Verzeichnis der Hersteller und ihrer Produkte zu erstel-len. Dieses Verzeichnis befindet sich im Anhang.

3.2Übersicht und Aufbau des Verzeichnisses
3.2.1Aufnahmekriterien
Natürlich entsprechen nicht alle gesendeten Unterlagen und Produktepa-letten genau unseren Vorstellungen und wir haben uns dafür entschieden, nur die unserer Aufgabenstellung entsprechenden Produkte in das Ver-zeichnis aufzunehmen. Folgende Kriterien sind dafür zu erfüllen:
· Wegmessung als Grundeigenschaft
· Messbereich mindestens bis 5m
3.2.2Erwartungen und Umfang
Um der Forderung nach Übersichtlichkeit nachzukommen, haben wir nicht zu viele Details ins Verzeichnis aufgenommen. Die Angaben sollten jedoch genügen, um sich ein grobes Bild eines Produktes hinsichtlich dessen Leistungsfähigkeit, Technologie und Messprinzip. Leider haben wir nicht von allen ausgesuchten Produkten eine Preisangabe erhalten, was einen Preis/Leistungs-Vergleich natürlich erschwert.
Wir hoffen dennoch, dass das Verzeichnis bei einer allfälligen Evaluation eine kleine Hilfe bietet und haben zusätzlich immer die Originalkataloge in der Hinterhand.
3.3Folgerungen
Als wichtige Erkenntnis im Zuge eines Marküberblicks erscheint uns das Entdecken von Lücken bei der Abdeckung der Nachfrage. Es können hierfür natürlich wieder verschiedene Kriterien herangezogen werden, so zum Beispiel
· Preissegment
· Messbereich
· Genauigkeit
· Robustheit bezüglich den äusseren Bedingungen
Vorausschickend muss jedoch darauf hingewiesen werden, dass es sich bei diesem Überblick nicht um einen vollständigen Katalog handelt. Allfällige Tendenzen für die Verfügbarkeit von spezifischen Produkten können daraus aber trotzdem abgeleitet werden.

3.3.1Abdeckung durch momentanes Angebot
Um die Einteilung in Gruppen zu vereinfachen, haben wir den Nahbereich in 3 Sparten unterteilt:
· unterer Distanzbereich (bis 2m)
· mittlerer Distanzbereich (2m bis 50m)
· oberer Distanzbereich (50m und mehr)
Mit zunehmend grösserer Distanz stehen natürlich weniger Messverfahren zur Verfügung (siehe Kapitel 2). Somit ist im unteren Distanzbereich das Angebot am grössten, und zwar quer über alle Verfahren.
3.3.2Ergebnisse des Überblicks
Aus unseren kurzen Nachforschungen geht hervor, dass für sehr spezifi-sche Anwendungen eigentlich noch viel Potential in den unteren Preisre-gionen von ca. Fr. 5000.- und weniger bestünde. Für untere Distanzen gibt es zur Qualitätssicherung schon ein grosses Angebot von Systemen, welche aufgrund der hohen Stückzahlen schon recht preiswert sind.
Deutlich zu erkennen ist auch, dass die Systeme zunehmend „eingebettet“ sind. Software und Interfaces zu Rechnern gehören unbe-dingt zum Angebot.
In unserem Bereich, ±4mm auf 20m, sind wir nur auf zwei Produkte ge-stossen. Beide sind von der Leica AG in Heerbrugg und entsprechen dem Produkteprogramm Disto. Genauigkeiten von ±4mm scheinen im allge-meinen jedoch nicht dem Standard zu entsprechen. Bei den meisten von uns gefundenen Systemen für einen Bereich von ca. 20m liegt der Fehler im Bereich von Zentimetern. Es ist zu erwähnen, dass in diesem Genau-igkeitsbereich verschiedene Technologien eingesetzt werden, so z.B. Ultraschall, Mikrowellen und Laser. Für eine Genauigkeit im Millimeterbereich entscheidet man sich offensichtlich nur für Lasertechnologien. Die Bedingungen für den Aufbau des Systems (Senderseite bestehen lassen) stellen eine weitere, doch recht spezifische Anforderung dar. Es wäre nun durchaus möglich, einen Disto in unser System zu integrieren, doch für die reine Distanzmessung sind dessen Möglichkeiten viel zu umfassend.
Es bleibt uns also nichts anderes, als die Entwicklung eines eigenen Sy-stems in Angriff zu nehmen.

ALiteraturverzeichnis
[1] Selected Papers on Laser Distance MeasurementsEditors T.Bosch and M.LescureSPIE Milestone Series Volume MS 115, 1995
i) Optical three-dimensional sensing for machine visionT.C.Strand, 1985
ii) Comparison of contionuous wave and pulsed time-of-flightlaser rangefinding techniquesM.Koskinen, J.Kostamovaara, R.Myllylä, 1981
[2] The Infrared & Electro-Optical Systems HandbookVolume 6Active Electro-Optical SystemsEditor C.S.Fox, 1993
i) Laser RadarG.W.Kamerman
ii) Millimeter-Wave RadarE.L.Johansen
[3] Optische Sensoren zur AbstandsmessungK.Engelhardt, PSI Zürich, 1990
[4] Phasenlaufzeitmessung zur Distanz-, Profil- und FormmessungH.Höfler, H.WölfelschneiderFraunhofer-Institut für Phys. Messtechnik Freiburg, 1994

[5] Applied Laser Radar Technology IIEditor G.W.KamermanSPIE Volume 2472, 1995
A practical low-cost high-range-resolution ladarB.L.Stann, W.C.Ruff, and Z.G.Sztankay
[6] Handbuch der industriellen MesstechnikHerausgeber P.Profos, 2.Auflage 1978
[7] Wahrscheinlichkeitsrechnung und StatistikH.Schönholzer, Neu Technikum Buchs
[8] Taschenbuch der PhysikFormeln / Tabellen / ÜbersichtenHerausgeber H.Stöcker, 2.Auflage 1994
[9] Ultraschall-Sensoren Katalog Sensorik 3, Ausgabe 95/96Pepperl + Fuchs GmbH, Mannheim
[10] InterferometrieInstitut für Geodäsie und Photogrammetrie, Bericht Nr.12D.Schneider, ETH Zürich, 1975
[11] Technische Anwendung des LasersD.Rosenberger, Springer-Verlag 1975

[12] Digitale Längen- und WinkelmesstechnikPositionssysteme für den Maschinen- und GerätebauDie Bibliothek der Technik Band 34A.Ernst, verlag moderne technik, 4.Auflage 1995
[13] Microwave Journal, Euro-Global EditionVolume 39, No.5, May 1996
i) Special ReportRecent Development of mm-Wave Application in JapanY.Takimoto, M.Kotaki
ii) Application Note24GHz Microwave Close-Range Sensors for Industrial
Measurement ApplicationsB.Zimmermann, W.Wiesbeck, J.Kehrbeck
[14] Messung von Längen und Verschiebungen mit Ultraschall auf der Basis von Frequenzvariation und PhasenmessungDissertationW.Kästel, Technische Universität Berlin 1979
[15] Aufbau und Untersuchung eines berührungslos optisch arbeitenden Längenmessverfahrens für den Einsatz in der FertigungDissertationF.Ertl, Technische Hochschule Darmstadt 1978
[16] Methoden der EntfernungsmessungSensor Report 3/1995C.Kögel, G.Kegel
[17] Werbung zu Micropilot, einem Mikrowellen Füllstandmesser, von Endress + Hauser AG in Reinach.Polyscope 12/96

[18] Physical OpticsR.W.Wood, 1933, reprint Optical Society of America 1988
[19] 3D-Objektvermessung auf grössere EntfernungenRedaktion L.SchröterVDI Technologiezentrum physikalische Technologien 1995
[20] Theoretical Calculation of Diode Laser Ranging PerformanceAuszug aus einem Technologiebericht von MBB Space Division
[21] Laser DistanzmesserFunktionsprinzipProdukteinformation zu WILD DI3000 und WILD DIOR 3002LASE GmbH, D-46569 Hünxe

BÜberblick berührungslose Distanzmessung

CVerzeichnis Marktüberblick





























