Embed Size (px)
Citation preview
Video Based Gait Analysis in Biometric person
authentication
Jani Rönkkönen
Gait in general
Shortly gait means the walking style of a person
Gait signature of each person is unique and thus can be used as a biometric
To form a gait signature many different components like cadence or frequency of walking can be used
Most common way of receiving gait information is by video cameras (others for example radar, pressure mat or motion sensors)
Current status
Quite a lot of published articles in recent yearsResearch is still mostly basic researchNo commercial solutions yet for authentication
purposes (May be some medical applications)Most promising areas are medical and surveillance
applicationsGeorgia Institute of Technology is developing a
method for recognizing people among crowd and estimate it could be commercialised in five years

Advantages
Can be used with low resolution video sequences
Target do not necessarily need to know about the surveillance
Sequences can be taken from long distance
Non intrusive
Gait is not very easily conceivable biometric (although can be altered purposely)
Disadvantages
The uniqueness of a persons gait signature is not proven with large datasets
Not yet clear which components of gait signature are most useful
A lot of data usually means high computational cost
Gait may be changed purposely
Conditions may affect the gait signature more than differences between subjects
Conditions
Walking speed• Affects cadence, stride lenght, frequency, pose
and hand swingsWalking surface• If surface is not smooth and obstacle free gait
pattern will no longer be repeatable an periodicPhysical Conditions• For example pregnancy, drunkness, fatigue or
physical injury

Conditions
Carrying a load• Carrying a load affects both the gait dynamics
and physical borders of a person
Clothes• Clothes alter the borders of a person and may
hide some movement (a dress for example)• footwear affect the gait dynamics (rubber boots vs
high heels)

Camera conditions
Camera angle• The gait pattern is very different if looked from
different anglesLightning conditions• Shadows cause error in border or silhouette
extractionContrast between clothing and backround• Too small contrast makes it harder to extract
borders or sihouette
History
G. Johansson used small light bulbs attached to a person to generate 2D motion patterns in 1973
He found out that people could recognize these to represent human movement
Later it was discovered that humans could also recognize the gender of the walker or even their friends identity from these patterns
A conclusion was drawn that gait could be used as a biometric
UMD database
University of Maryland (UMD) database• First dataset
– 25 persons and 4 camera angles• Second dataset
– 55 persons and 2 camera angles

CMU database
Carnegie Mellon University (CMU) database• 25 persons and 6 camera angles• Slow, fast and inclined walking style • A walk holding a ball
USF and USH databases
University of South Florida (USF) database• 71 persons and 2 camera angles• 2 different shoetypes and walking surfaces
(concrete and grass)• Walk holding a briefcaseUniversity of Southampton (USH) database• 28 persons and 1 camera angle• Uniform green backround to help extract clean
silhouettes

Features
Gait signature includes numerous components and even more features can be derived from these
Not yet clear which features are most usefulfor authentication purposes
Why not just simply use all there is?

Why not all features?
• Would be computationally costly, need much storage space and need complex algorithms
• Conditions affect different features differently– Some are more robust to changes
• Using more features may decrease performance– Bad ones only add unwanted noise
• All features are not always available

Methods
Another question is how to use our feature(s) of choice for authentication?
Typically there is three main steps in a gait recognition algorithm:
• Extracting the subject from the frames of video sequence (eg. silhouette)
• Extracting and modifying the wanted features (eg. PCA to simplify the data)
• Classification based on extracted features and somekind of decision (eg. KNN-classifier)

The width of outer contour
The basic biometric is the width of the outer contour of binarized silhouette of a walking person
• Retains physical structure and swings of the limbs during walking
• The pose information is lost• Smoothed and down sampled width vectors are
used directly• Also a velocity profile is extrated by calculating
the difference of subsequent vidth vectors
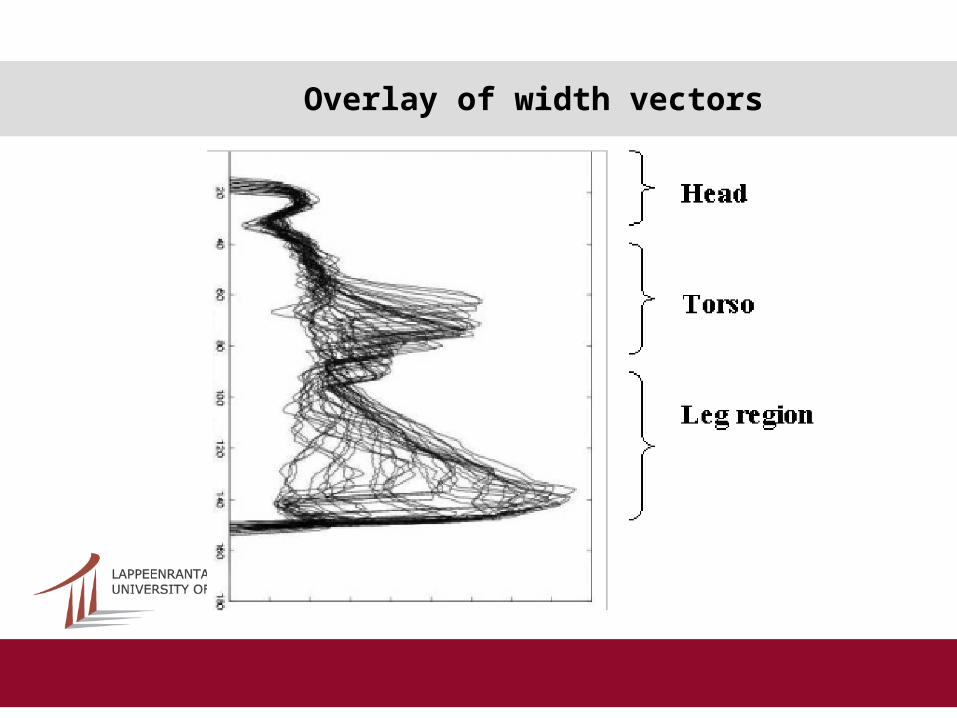
Overlay of width vectors

Results
UMD database• rank 1: 80% and rank 5: 91.2%• Velocity profile alone
– rank 1: 56% and rank 5: 83%CMU database• rank 1: over 95% and rank 5: 100%• Fast vs slow
– rank 1: 75% and rank 5: 87.5%
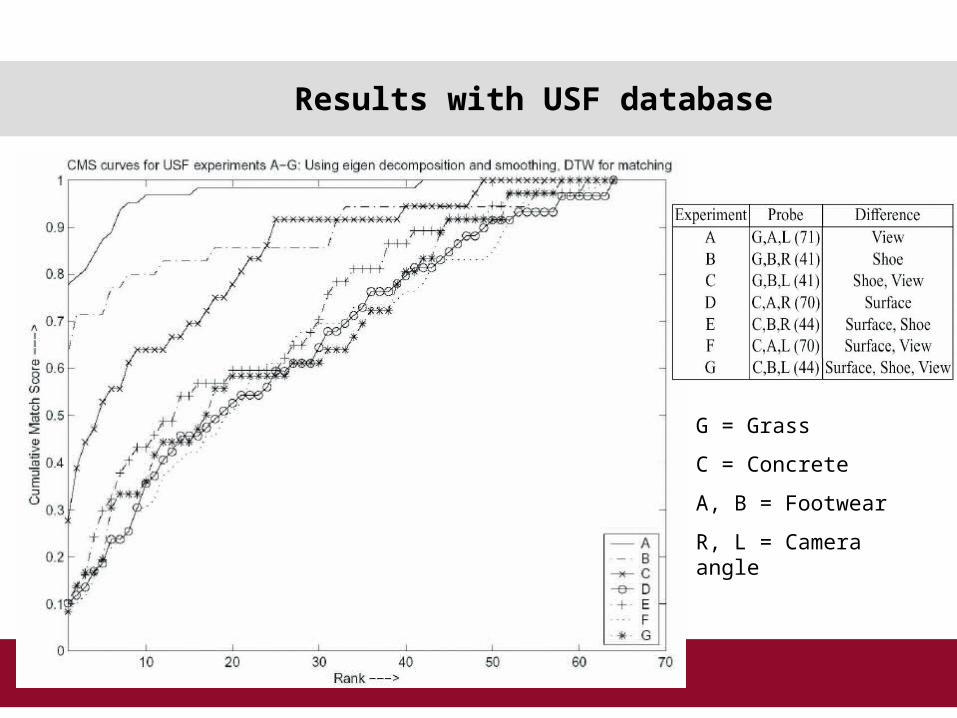
Results with USF database
G = Grass
C = Concrete
A, B = Footwear
R, L = Camera angle
Notes
Both structural and dynamical information is important fo recognition
Leg region is the most important
Difference in walking surface causes a lot of problems to the method
Walking speed is also an issue
Moments from silhouette
Silhouette is divided in 7 parts
For each part an ellipse is fitted
Features:• Centroid, Major axis, minor axis and Major axis
orientation• Height of the body• Another testset used gait spectral component
features received via fourier transform
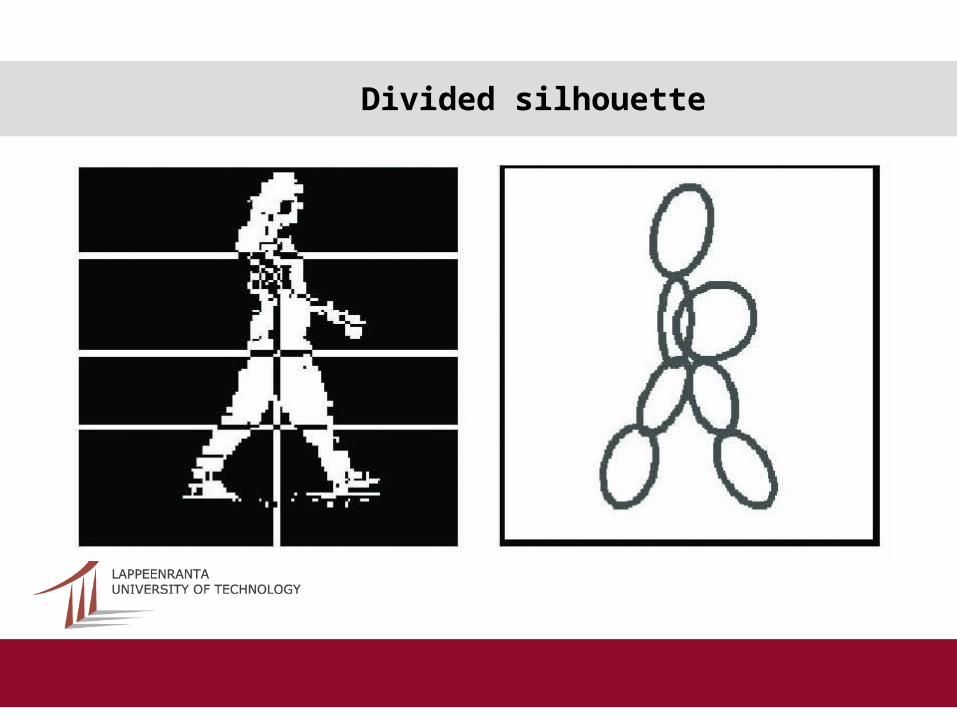
Divided silhouette
Results
Tested on dataset consisting of 24 persons • Sequences were taken in 4 different days• Sequences of one day were compared against
other days• Rank 1: 30% - 47% and rank 10%: 53%-94%
With spectral component features• Rank 1: 31% - 82% and rank 10%: 70%-97%
Results
Also tested with CMU database• Results were almost perfect (only one mistake)
Third case was gender identification• Support vector machines• Best results using second degree polynomial
kernel 94% correctness

Notes
Most errors caused by clothing changes
Spectral component features were more robust
If only sequences taken in a same day were compared, spectral component features were slightly worse
Notably good result of gender classification

Body shape and gait from silhouette
The periodic dimensional changes in silhouette width are used to locate the key frames
Key frames are compared to corresponding ones in training data
Four subsequent comparison scores are amalgated and used for classification

Extracting the key frames
Results
CMU database• Rank 1: at least 92%
Slow vs fast• rank 1: 76% and rank 10%: 92%
Second testset contained 25 persons with sequences taken in different days
• rank 1: 45% and rank 10%: 77%
Notes
The main reason for failures (according to the author) were conditions that affected the quality of the silhouette
• Lightning conditions• Clothes• Hairstyles
Stride length and cadence
The method makes following assumptions:• Walking velocity is constant• Persons walks a straight line for 10-15 seconds• Camera is calibrated with respect to the ground
plane• Frame rate is greater than twice the walking
frequency

Stride lenght and cadence
The key is the periodicity of human walk
The width of a sihouette is used to calculate the period
From period a number of steps can be calculated
Also the distance walked is measured• Stride = distance/steps• Cadence = steps/time
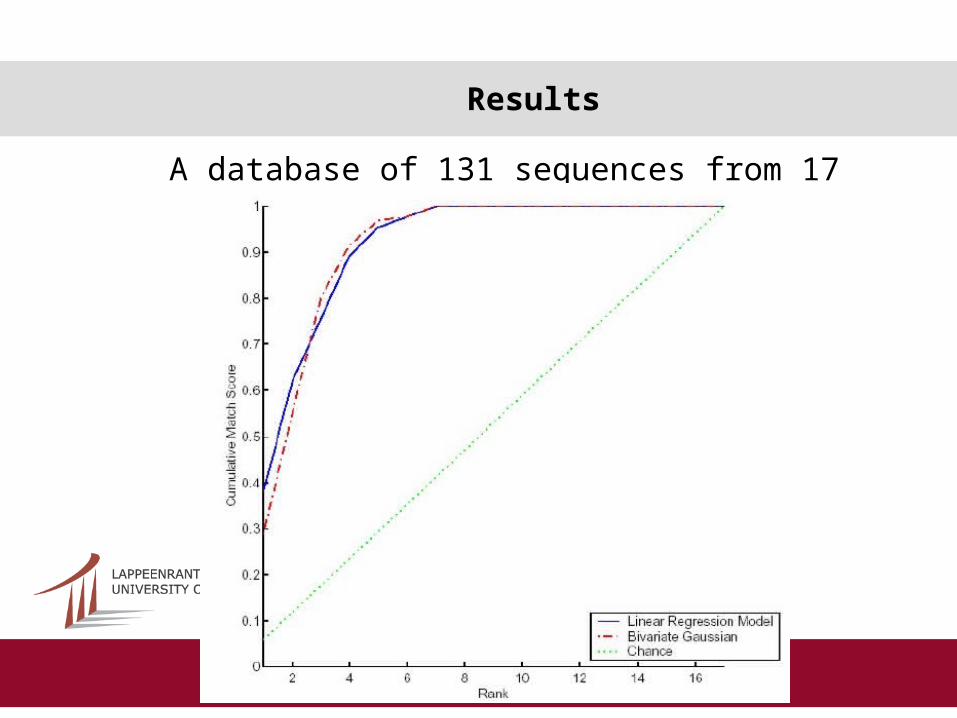
Results
A database of 131 sequences from 17 persons

Notes
The method (according to author) is robust to changes in:
• Lightning conditions• Clothing• Tracking error
Also it is in principle wiev invariant, but the method used to calculate the frequency works best with fronto parallel sequences

Similarity plots
A sequence of images of a walking person is mapped to a similarity plot (SP)

Similarity plots
Each pixel in SP is a result of substracting two blobs• SP has dark main diagonal, because comparing a
blob to itself results to zero• Is symmetric along main dianonal• Is periodic, because from key poses A and C and
B and D are close to each other
Results
A dataset of 44 images of 6 persons from one camera angle
• 90% accuracy with rank 1
The second dataset consisted of 400 sequences of 7 peoples from 8 camera angles and 7 different days
• 65% accuracy with rank 1

Notes
The method is view dependent and performs best with fronto-parallel sequences
Changes in clothing and lightning affect performance
The author used binary blobs and gray level blobs with and without backround
• Best results with binary blobs, worst with gray level blobs with backround

Thigh and lower leg rotation
A sobel edge operator is used to obtain the leading edge of a walking person

The model
A model is then matched to the edge
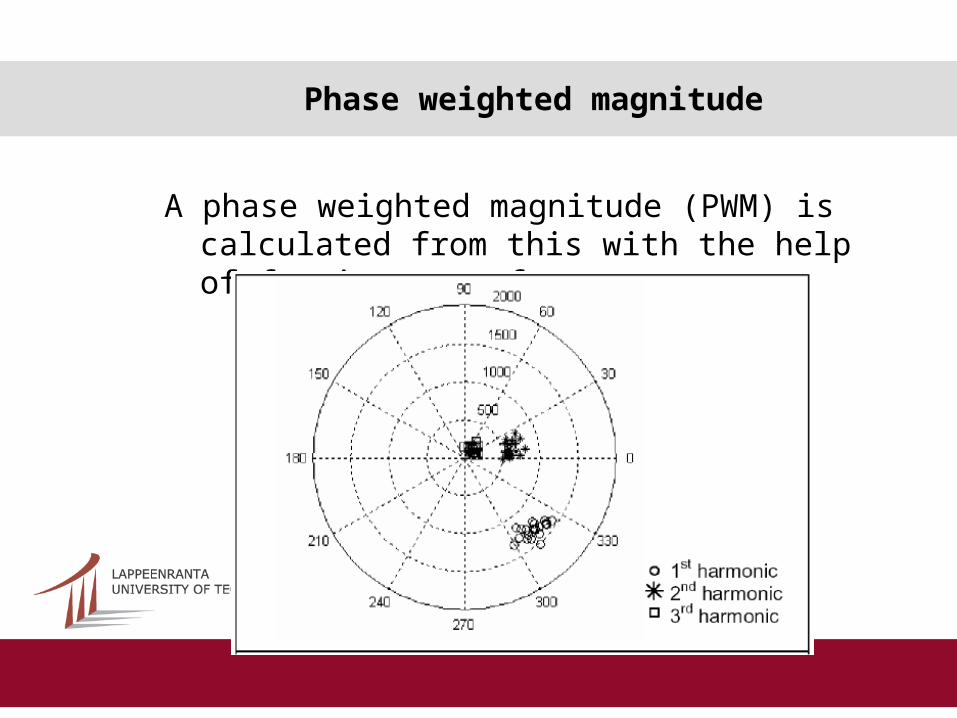
Phase weighted magnitude
A phase weighted magnitude (PWM) is calculated from this with the help of fourier transform

Results
A dataset of 20 persons walkin and running
In addition to clean edged images, 25% grey scale random noise were added and also classification was done by decreasing the resolution (from 130*190 pixels to 65*95 pixels)
Best results were achieved with clean edged running sequences rank 1: 91.7% and worst with noisy walking sequences 60.8%

Notes
Reducing resolution did not reduce performance dramatically
Adding noise reduced to worse results
The reson for running sequences having slightly better identification accuracy was according to author the fact that there is more differeces between humans running styles than walking styles

Conclusions
Rather good results of identification can already be acquired with small datasets and fixed conditions
More robust methods are needed to achieve better accuracy in more general setup
A question still remains if gait is unique enough with larger datasets




![Face and Voice Fusion for Human Recognition in Non-controlled … · 2018-08-29 · biometric recognition including fingerprints, face, voice, iris, hand and gait [3]. Every biometric](https://img.dokumen.tips/doc/110x75/5f42211f0300b86f963dac1e/face-and-voice-fusion-for-human-recognition-in-non-controlled-2018-08-29-biometric.jpg)
























