Embed Size (px)
Citation preview
3Senzori dodira i blizine
Senzori dodira se tipično koriste na automatski upravljanim vozilima (AVGs) i mobilnim robotima kako bi izbegli potencijalni sudar sa preprekom iz okoline. Kao što ime kaže, proces detektovanja uključuje direktan fizički kontakt između senzora i objekta od interesa. Senzori blizine, u drugu ruku, su bezkontaktni sklopovi koji pružaju napredniji način upozorenja prisustva nekog objekta u blizini senzora.
3.1 Senzori dodira
Postoje različite tehnologije i izvedbe senzora za dodir koje se mogu podeliti kao:
• Direktno kontaktni
• Magnetski
• Piezoelektrični
• Kapacitivni
• Fotoelektrični
• Magnetnootporni
• Piezootporni
• Ultrazvučni
Inače, postoje mnogo različitih načina kako se gore navedeni senzori mogu izvesti direktno u primeni. Gledano sa aspekta mobilnih robota, možemo da ih podelimo u tri osnovne grupe:
1) Osećajni senzori dodira tj. antene, 2) Senzori dodira u vidu branika, 3) Raspodeljeni senzori po površini
3.1.1 Osećajni senzori dodira
Moje prvo iskustvo sa osećajnim senzorima dodira je bilo u vezi sa CRAWLER I robotom pretstavljenim u poglavlju 1. Detektovanje dodira je jedini praktičan način dostupan u tom vremenu (1966), zbog postojećih ograničenja kako u tehnologiji tako i u budžetu, kako bih mogao da dobijem povratnu informaciju o potencijalnom sudaru. Prva implementacija se sastojala iz žica za gitaru kratke dužine oko koje je postojala omča. Savijanje žice prilikom fizičkog kontakta prouzrokovale bi kontakt sa omčom.

Slika 3.1. Senzor dodira koji je bio raspoređen u četri ćoška CRAWLER robota.
Kao i kod CRAWLER robota, ROBART I se oslanjao na senzor dodira za detekciju sudara. Pipak za dodir napravljen od žice za gitaru je nešto mehanični poboljšan (slika 3.2) da bi se mogao postaviti na ivicu vozila. Napravljen je od cilindra kroz koji je provučen pipak. Bilo kakvo ječe savijanje pipka bi prouzrokovalo njegov kontakt sa gornjom ivicom cilindra i time bi se zatvorilo strujno kolo. Dodatni senzori korišćeni na ROBART I robotu su objašnjeni kasnije u delu 3.1.2.
Slika 3.2. Pipak za dodir upotrebljen na ROBART I robotu.
Posmatrajući senzorske pipke određenih insekata, aktivni pipak je jedna zanimljiva varijanta senzora za dodir koji objedinjuje nekakvu strategiju mehaničkog pretraživanja kako bi dobili produženu pokrivenost. S obzirom da se pasivni pipci, koji su gore opisani, zasnivaju na relativnom pokretu između robotske platforme i objekta (prepreke), aktivni pipci se nezavisno okreću pomoću njihovog aktuatora. Kaneko (1994) je opisao takav sistem koji koristi rotacioni aktuator kako bi manipulisao sa fleksibilnim pipkom (antenom) u horizontalnoj ravni (slika 3.3).
Slika 3.3. U ovoj konfiguraciji aktivne antene, tačka pravog kontakta duž fleksibilnog pipka može biti određena merenjem vrednosti rotacije za ugao θ posle inicijalnog kontakta, odgovarajućeg prouzrokovanog savijanja.
3.1.2 Senzori dodira u vidu branika
Jedna od najlakših izvedbi ovakvih senzora, klasičan u AGV aplikacijama, sadrži fleksibilnu metalnu ploču, pričvršćenu sa jedne strane i savijene spolja kako bi formirala zaštitni branik ispred vozila. Drugi kraj ploče

ima jedan stepen slobode u svom kretanju tako da bilo koji dolazni pritisak na ploču prouzrokuje slobodnu stranu da se pomeri bočno dalje od pričvršćene ivice, pretstavljajući da smo naišli na prepreku. Ovaj koncept je sličan u mnogim pogledima sa prethodno objašnjenom žicom-petljom senzorom koji je bio korišćen na CRAWLER robotu, ali sa povećanom vertikalnom sigurnošću (neki branici ovog tipa su 18 inči visoki).
Rowan (1988) opisuje jedan alternativni instrumentacioni metod u kome mala povratnoreflektivna meta postavljen na zadnju stranu fleksibilne metalne ploče, neposredno od piezoelektričnog izvora. Piezoelektrični izvor je postavljen na prednju stranu robota i gleda napred. Ako se branik savije fizičkim kontaktom sa preprekom, povratan reflektor se pomera bočno dalje od detektora, prekidajući snop. Još jedna izvedba na ovu temu uključuje korišćenje mehura u praznini između branika i prednjeg dela vozila. Svaki naredni pritisak prouzrokuje povećanje pritiska vazduha u mehuru, pokretajući prekidač koji zaustavlja dalje kretanje.
Na prednji deo ROBART I robota je postavljeno mnoštvo zaštita kako bi se na vreme mogla dobiti povratna informacija da je naišao na nekakvu prepreku (slika 3.4). Kao dodatno, sve prednje ivice su zaštićene zglobnim delovima od aluminiuma, koji bi aktivirali mikroprekidače pri mogućem kontaktu. Fleksibilni najlon produžetci vire sa raznih strana baze kako bi osigurali zadnje točkove. Treba uočiti i vertikalnu orijentaciju pipaka za dodir koji su objašnjeni u prethodnom poglavlju.
Slika 3.4. ROBART I je generalno bio opremljen sa branicima osetljivim na dodir i pipcima za detekciju sudara.
Oslanjajući se više na sonar i detektor blizine za izbegavanje sudara, ROBART II koristi samo dva senzora za dodir, napravljenih kao kružni branici postavljenih oko baze robota. Svaki branik se sastoji iz više pokretnih plastičnih traka smeštenih na fiksnim pozicijama. Serije mikroprekidača su postavljene iza ovih traka kako bi se neki od prekidača aktivirali pomeranjem trake. Kada branik dođe u kontakt sa drugom površinom, slobodna traka se pritisne i aktivira odgovarajući mikroprekidač. Time imamo geometrijsku informaciju, tj. poziciju na kojoj tački robota je doslo do sudara. Ovakvim rešenjem možemo softverski da napravimo bolju strategiju da se prepreka inteligentno zaobiđe

Slika 3.5. Branik osetljiv na dodir sa ROBART II robota je dizajniran da se aktiviraju serije mikroprekidača kada se lokalno pritisne, čime bi dobili geometrijsku poziciju tačke na koju je izvršen pritisak.
Najznačajnija komponenta ovog dizajna branika pretstavlja deo ugla, napravljen sa krajevima koji zasečeni pod određenim uglom da bi se fizički uparili sa pokretnim trakama koje su raspoređene po pravoj liniji. Kada ugao dođe u kontakt sa drugom površinom, on bi pritisnuo traku i aktivirao mikroprekidače koji se nalaze najbliže uglu. Ova konstrukcija ujedno dozvoljava bočno kretanje traka.
Slika 3.6. Branik osetljiv na dodir korišćen je na LabMate robotu. Koristio je provodnu penu koja je bila odvojena od fleksibilnog metala izolacionom mrežom.
Transition Research Corporation (TRC), Danbury, CN, pretstavili su prednji i zadnji branik njihove LabMate baze (slika 3.6). Metodologija detektovanja je zatvoreni kontakt, ali je implementacija nešto elegantnija od mnoštva elektromehaničkih mikroprekidača korišćenih na ROBART II. Svaki branik je višeslojno sastavljen i pričvršćen pomoću fleksibilnih metalnih ploča za bazu. Sloj provodne pene je postavljen sa strane metalne ploče, električno i mehanički izolovani plastičnom mrežom koja se nalazi

između. Spolja je branik zeštićen sa gumom. Bilo koji značajan udar u njega prouzrokovao bi deformaciju provodne pene i napravio kontakt sa metalnom pločom.
Cybermotion K2A-Navmaster dizajn prikazan je na slici 3.7. On koristi merne trake koje su postavljene na pomoćne ruke kako bi registrovale potencijalni sudar. Mali problem koji se ovde javlja je slučajno pogrešno aktiviranje prilikom inercije i kretanja po neravnom terenu. Kada se ispravno podesi za odgovarajuću podlogu po kojoj će se robot kretati, koncept radi veoma dobro sa minimalnim problemima. Korišćenje odvojenog levog i desnog senzora dozvoljava nam ograničen stepen geometrijske pozicije tačke udara.
Slike 3.7. Senzor dodira korišćen na Cybermotion K2A Navmaster robotu je konfigurisan da se aktivira na levoj i desnoj pomoćnoj ruci.
3.1.3 Površinski raspodeljeni nizovi
Sve više se javlja trend (sa strane razvoja) da se koriste zatvoreni nizovi osetljivi na dodir koji proizvode dvodimanzionalni oblik kontakta sa objektom. Sa prednošću da možemo da odredimo tačku napada, mnoge od ovih strategija ujedno obezbeđuju i određivanje intenziteta sile. Prve primene su uključivale prilično mali niz pravougaonog oblika koji su imali primenu kod industrijskih robota.
Skoro su se pojavili interesi u razvoju senzora niza, poput kože koji bi bio korišćen u potpuno spoljno pokrivanje veštačke ruke ili mobilnog vozila. Grahn (1992) opisuje senzor u vidu niza osetljiv na dodir proizveden od strane Bonneville Scientific, Salt Lake City, UT, koji koristi redove ultrazvučnih predajnika i prijemnika za merenje debljine gumene podloge. Svaki element senzorskog niza šalje ultrazvučni impuls koji se reflektuje od spoljene površine gume i vraća u senzor. Time merimo dužinu pređenog puta impulsa tj. debljinu. Kontakt sa nekim spoljnim objektom prouzrokuje sabijanje gume i redukuje vreme očitavanja impulsa. Trenutni senzorski niz koji sadrži 256 elemenata (Model 200-16 X 16A) je krute ravne strukture koji sadrži keramičku podlogu.

Merritt Systems, Inc., (MSI) Merritt Island, FL, je razvio kontinualne fleksibilne nizovne senzore za dodir i temperaturu. Cilj je proizvesti materijal poput ljudske kože koji sadrži nizovne temperaturne i dodirne senzore, koji mogu da se iseku na tačno određeni oblik kako bi se mogli navući na veštačku ruku ili nekakvu automatsku platformu. Kompanija je razvila metode za postavljanje ultrasoničnih i infracrvenih senzora za blizinu na fleksibilnom materijalu uključujući mrežu za napajanje i protok podataka. Do 1022 pametnih senzora mogu konfigurisati u jednoj senzor-koži (Wing 1995). Koža se može proizvoljno postaviti oko robota (PM, 1995).
3.2 Senzori blizine
Senzori blizine, koji se koriste da bi se odredilo prisustvo nekakvog objekta, su razvijeni kako bi se produžio radijus detektovanja koji smo mogli imati pri direktnom kontaktu. Skoriji napredak u tehnologiji su značajno poboljšali performanse i pouzdanost, a time i povećanje mogućih primena. Kao rezultat, mnoge industrijske izvedbe koje su pre koristile mehaničke prekidače mogu da se zamene sa raznim alternativnim bezkontaktnim uređajima za potrebe detektovanja objekta u blizini. Postoje više tipova ovakvih senzora koji se međusobno razlikuju po svojim specifičnim osobinama:
• Magnetni
• Induktivni
• Ultrazvučni
• Mikrotalasni
• Optički
• Kapacitivni
Njihove pouzdane karakteristike pri radu čine ih primenljive u teškim i nepogodnim uslovima, dok obezbeđuju visoku brzinu odziva i dug period rada. Instrumenti mogu biti dizajnirani da izdrže razne šokove i vibracije, neki i sile do 30,000 Gs i pritisak blizu 20,000 psi (Hall, 1984). Ovi uređaju su bitni kada treba detektovati objekte koji se kreću velikom brzinom, kada bi izvedbom fizičkog kontakta moglo doći do oštećenja, ili kada je potrebano napraviti razliku da li je određeni materijal metalan ili ne.
3.2.1 Magnetni senzori blizine
Magnetni senzori blizine obuhvataju magnetne prekidače, uređaje koji rade na principu Holovog efekta i megnetnootporne senzore.
Magnetski prekidač:
Najprostija forma magnetnog senzora za blizinu pretstavlja magnetni prekidač, koji je šematski prikazan na slici 3.8. Sastoji se od dve tanke feromagnetne šipke koje mogu lako da se saviju i koje su pričvršćene sa različitih strana. Hermetički su zatvorene u staklenu cev i postavljene tako da se preklapaju ali da se ne dodiruju. Kada se ovakav prekidač izloži nekakvom spoljnom magnetnom polju, dolazi se do spajanja ove dve šipke i time smo ostvarili fizički kontakt a samim tim i električni.

Slika 3.8. Gore prikazani hermetički zatvoren magnetni prekidač je pretstavljen sa otvorenim kontaktima. Ispunjen je nepokretnim gasom zbog korozije.
Mogu da se jave određeni problemi sa ovim tipom senzora, kao što su oscilovanje kontakata i vibracije čitave strukture.
Slika 3.9. Fotografija zadnjih prilaznih vrata na ROBART II robotu, pokazuje lokaciju (gornji spoljašnji ugao) magnetnog prekidača za zatvaranje vrata (levo), koji se aktivira sa stalnim magnetom (desno).
Dostupan u dva različita osnovna stanja, otvoren i zatvoren, ovaj jeftin i robustan prekidač se najviše koristi prilikom detektovanja otvaranja vrata, prozora ili slično, tj. u bezbednosnim svrhama. Ovakav tip prekidača je postavljen na ROBART II robota kako bi pratio status zadnjih prilaznih vrata što je prikazano na slici 3.9.
Senzori na principu Holovog efekta:
Holov efekt je otkrio E.H. Hall 1879. godine. Hol je primetio veoma mali napon koji se generiše u poprečnom pravcu u odnosu na struju koja prolazi kroz taj provodnik, u prisustvu stalnog magnetnog polja (slika 3.10), u skladu sa formulom:
tIBR
V hh =
gde je:
Vh = Holov napon
Rh = Holov kojeficient u zavisnosti od materijala
I = struja u amperima
B = gustina magnetnog fluksa

t = debljina elementa u santimetrima
Slika 3.10. 1879. godine, E.H. Hall je otkrio mali poprečni napon koji je generisan na provodniku kroz koji protiče struja u prisustvu stalnog magnetnog polja, fenomen poznat pod imanom Holov efekt.
Sve dok se poluprovodnička tehnologija nije dovoljno razvila, ova pojava se nije mogla primeniti u praktične svrhe. Iako tako, prve siliciumske implementacije imale su razne nedostatke kao što su razne mane koje su usporile opšte prihvatanje, visoka cena izrade, temperaturna nestabilnost i druge stvari. Napredak u tehnologiji (naprimer monolitni dizajn, novi materijali i interna temperaturna kompenzacija) su znatno poboljšali stabilnost i osetljivost. Sa 100 mA strujom koja protiče kroz iridijum arsenid (InAs), dobijamo izlazni napon od oko 60 mV pri gustini fluksa od 10 kGauss. Veliki broj primena u automobilskoj industriji pomogle su da se dodatno razvije tehnologija. Potencijalne primene u robotici bile bi očitavanje pozicije, brzine, magnetni kompas, itd.
Linearna zavisnost izlaznog napona od intenziteta magnetnog polja je bitna osobina koja doprinosi dodatnoj popularnosti senzora zasnovanog na Holovom efektu. Da bi se poboljšala stabilnost, ovi linearni senzori se pakuju zajedno sa naponskim regulatorom i izlaznim pojačavačem, kao što je prikazano na slici 3.11. Izlazni napon Vo varira oko nulte vrednosti ravnotežne pozicije (uobičajno polovina napona napajanja Vcc) sa intenzitetom i pravcem kompenzacije određene snagom polja i polartetom, respektivno. (Treba primetiti da bilo koje oscilovanje polja dodatno utiče da se intenzitet napona menja). Frekventni odziv za preko 100 kHz se lako postiže.
Slika 3.11. Linearni sensor koji radi na pricipu Holovog efekta. U sebi objedinjuje naponski regulator i stabilni DC izlazni pojačavač u vezi sa Holovim elementom prikazanim prethodno na slici 3.10.
Dopunu sa Šmit-trigerovim detektorom praga provođenja i odgovarajućom izlaznom pobudom transformišemo linearni Holov senzor u digitalni Holov prekidač. Najviše komercijalno dostupnih rešenja koriste tranzistor kao pobudu. Vrednost detektovanja se podešava na nominalnu vrednost i kada se pređe ovaj prag, izlaz se prebacuje u uključeno stanje. Glavna prednost ovakvog dizajna je

mogućnost Holovog prekidača da promeni magnetni polaritet. Kada bi smo prineli južni pol stalnog magneta, aktivirali bi uređaj. Prinošenjem severnog pola, čak i pri direktnom kontaktu, nebi imalo nikakvog efekta na prekidačku funkciju zato što pojačani izlazni napon pada sve više u odnosu na Šmit-trigerov prag. Vremenski odziv menjanja stanja je veoma mali, reda 400 ns.
Magnetnootporni senzori:
Za neravnomerne materijale, vrednost merenih osobina zavisi od pravca kojim ih merimo, za razliku od ravnomernih materijala kod kojih je ćemo za bilo koji pravac dobiti istu merenu vrednost. Neravnomernost može da zavisi od oblika materijala, da li je kristalne strukture ili ima unutrašnje deformacije. Na primer, pravac magnetizacije u feromagnetskom kristalu bi bio orijentisan kao osi koja se zove “laka“ osa.
Menjanje ovog pravca magnetizacije (koje je povezano sa pravcem protoka struje) u provodnom materijalu pomoću nekakvog spoljnog magnetnog polja Hy, rezultovalo bi menjanje specifične otpornosti ρ materijala, fenomen poznat pod nazivom magnetnootporni efekt. Na primer, rotiranjem magnetskog polja materijala od tankog filma, koji spada u neravnomerne materijale, za 90 stepeni prouzrokuje maksimalnu promenu u specifičnoj otpornosti 2 do 3 procenta. Veza između specifične otpornosti i ugla θ između pravca magnećenja i pravca toka struje je dato formulom:
ρ = ρ0 + ∆ρmax cos2θ
gde je:
ρ = specifična otpornost
ρ0 = izotropna specifična otpornost
∆ρmax = maksimalna moguća promena specifične otpornosti
Θ = ugao između magnećenja i pravca protoka struje
Na slici 3.12A je prikazana permalojna traka u prisustvu poprečnog polja Hy i osnovni pravac magnećenja. Slika 3.12B pretstavlja karakteristiku trake. Kako se polje Hy povećava, povećava se i specifična otpornost do tačke saturacije, kada je ugao θ jednak 90 stepeni, posle koje nije mogući dalji rast.
Slika 3.12. Permalojna traka sa osnovnim pravcima magnećenja M0 prikazana je pod A. Pod B je prikazana prenosna karakteristika.

Ako je razmagnetisano i neravnomerno polje koje teži da se izjednači magnećenje u pravcu protoka struje označeno sa H0, onda važi:
0
sinHH y=θ
i za Hy < H0 važi:
−∆+= 2
0
2
max 10HH yρρρ
dok je ρ = ρ0 za uslove saturacije kada je Hy > H0.
Najveći problem sa ovom vezom je njegova nelinearnost. Kwiatkowski i Tumanski (1986) sagledali su različite načine premagnetizovanja magnetnootporni sklop da bi linearno radilo u konačnom opsegu (Hy mnogo manje od H0). Najpoznatiji metod je “berberin-pol” konfiguracija, gde se zlatna ili aluminiumska traka fiksira na vrh svake permalojne trake pod uglom od 45 stepeni. Bolja provodnost zlata (ili aluminiuma) direktno je u vezi sa rotacijom pravca struje u permaloju za 45 stepeni kako je prikazano na slici 3.13A. Snimljeni efekt je prikazan na slici 3.13B, gde je prikazano kako se ρ povećava linearno sa Hy, za male vrednosti Hy koje je povezano sa H0. Komplementarna “berber-pol” konfiguracija, u kome su trake orijentisane -45 stepeni, rezultije linearnim smanjenjem ρ sa povećanjem Hy. U bilo kom slučaju, merenje promene specifične otpornosti ∆ρ prouzrokuje pouzdan i tačan način za detektovanje veoma malih promena u određenom magnetnom polju duž specifičnih osa.
Slika 3.13. “Berber-pol” konfiguracija rotira pravac toka struje za 45 stepeni (A) postižući linearan odnos (B) između specifične otpornosti ρ i magnetnog polja Hy.
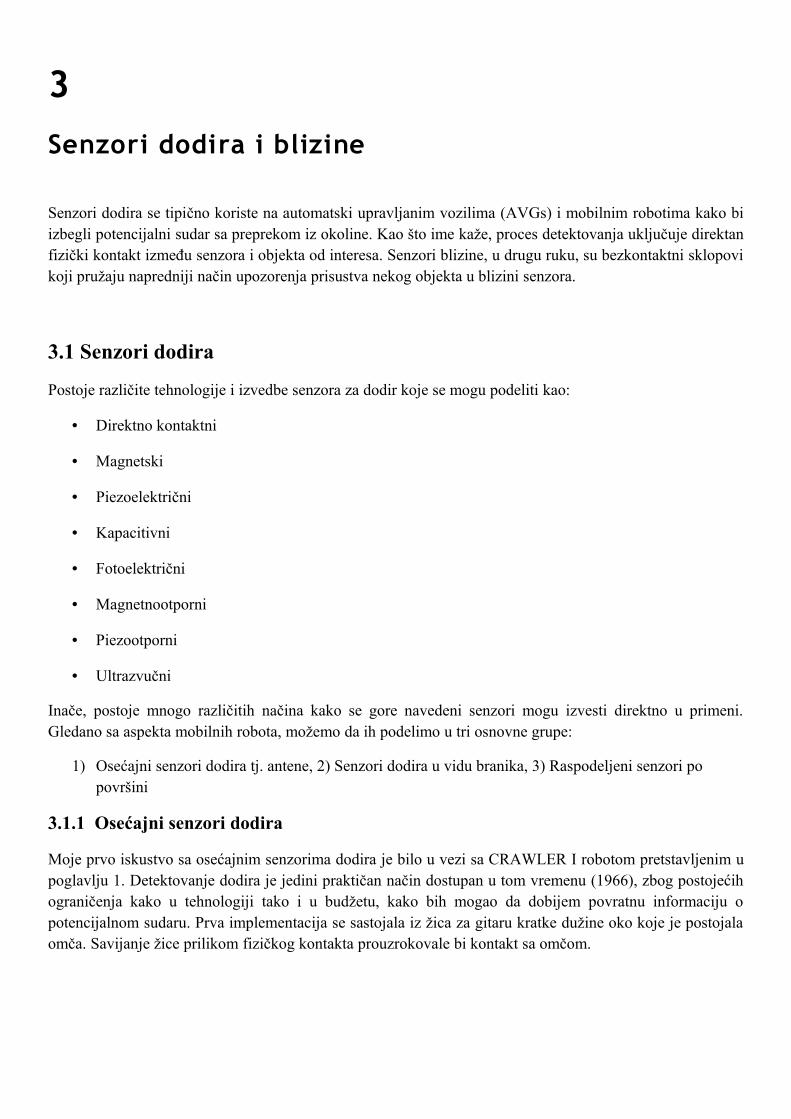
Tipičan neravnomeran magnetnootporan (AMR) sensor je konstruisan od četri permalojne trake, svake postavljene na silikonsku osnovu poput rastera i povezane kao na slici 3.14 formirajući Vitstonov most. Dijagonalno različiti elementi u mostu su napajani tako da za jedan par ρ povećava sa Hy, dok se za drugi par ρ smanjuje. Ova konfiguracija komplementarnog mosta služi da eliminiše uobičajne efekte izotropne varijacije kao što je temperature, dok efektivno dobijamo duplo bolju osetljivost.
Slika 3.14. Četri raster podloge, sačinjene od permalojnih traka, su povezane sa Vitstonovim mostom u tipičnom neravnomernom magnetnootpornom (AMR) senzoru.
Drugi problem koji se javlja kod magnetnootpornih senzora je zbog bistabilne prirode internog pravca magnećenja. Preferirano magnećenje se pruža duž osa permalojnih traka snažnog magnetnog polja prilikom procesa izrade. Kombinacija ove neravnomerne structure i geometrijske konfiguracije čini da pravac magnećenja teži da se ispravi sa podužnom osom trake, i prilikom izostanka bilo kakvog spoljnog polja. Ovo poravnanje po osi može da postoji u dva moguća pravca, 180 stepeni odvojeno.
Izlaganju snažnom spoljnom magnetnom polju koje je suprotno od internog magnetnog polja može da prouzrokuje promenu internog magnećenja traka i veliku promenu karakeristike senzora (slika 3.15). Zato se koristi pomoćno polje Hx, koje se mora uspostaviti podužno sa trakom kako bi se obezbedio željeni interni pravac magnećenja. Ova pojava promene internog magnećenja može se iskoristiti i u dobre svrhe, kao što je magnetootporan kompas.
Jedan od načina kako obezbediti pomoćno magnetno polje je korišćenje malog permanentnog magneta ili kalema. Jačina zračenja kalema je podešena kako bi se dobila željena osetljivost i linearnost (pogledati ponovo sliku 3.13) ali ispod tačke saturacije na krivoj kako bi se izbeglo odsecanje. Slika 3.16 prikazuje primer AMR senzora razvijenog od strane Space Electronics, Inc., San Diego, CA, koje sadrži interni solenoid, pakovano u 14-pinsko keramičko DIP pakovanje. Magnetnootporni element u MicroMag MMS101 je smešten između dva tanka filma od permaloja koji pojačavaju prijemno polje za faktor 20, dok simuoltano štite i redukuju ortogonalne komponente. Ove specifikacije se nalaze u tabli 3.1.

Slika 3.15. Prenosna funkcija za standardni magnetnootporni senzor (puna linija) sa magnećenjem orijentisanim u +X pravcu, i za senzor kod koga je došlo do inverzije internog magnećenja (isprekidana linija).
1988. godine francuski fizičar po imenu Dr. Albert Fert sa Univerziteta u Parizu uspeo je u pokušaju da pojača magnetootporni efekt pomoću više tankih slojeva magnetootpornih materijala. Uvakvi sklopovi sa velikom magnetomotpornošću, GMR kako se danas zovu, pobuđuje mnogo veći magnetootporan efekt nego što je bio slučaj kod AMR senzora, rezultujući izlazni signal 3 do 20 puta veći. Važno je napomenuti da su oni linearni na skoro celom svom operacionom rangu, da kod njih ne dolazi do menjanja internog magnećenja usled spoljnjeg polja stoga, kao što je slučaj kod AMR senzora. Stoga ne zahtevaju dodatnu zaštitu.
Slika 3.16. The Space Electronic, Inc. MicroMag MMS101 monolitni AMR senzor.
Tabela 3.1. Specifikacija za MicroMag MMS101 AMR senzor.

Velična osnovnog signala je za dva reda intenziteta veća nego kod senzora koji radi na po principu Holovog efekta, i zahteva manje dodatnog polja za maksimalan izlaz. Brown (1994) je naveo tri najznačajnije prednost GMR senzora u odnosu na sklop sa Holovim elementom pri nameni pozicioniranja:
• Povećan prostor između senzora i magneta
• Povećana tolerancija visoke temperature (> 200 stepena C)
• Velika temperaturna stabilnost
GMR senzori se prave pomoću više slojeva magnetnog materijala, spojenih, između kojih se naizmenično nalaze slojevi nemagnetno provodnog materijala. Princip rada je baziran na činjenici da provodni elektroni mogu imati dva različita spin stanja, i njihova spin polarizacija (ili spin stanje) u magnetnom materijalu je odrađeno pravcem kojim je materijal magnećen. Električna provodnost materijala je direktno proporcionalna slobodnoj putanji provodnih elektrona, dato formulom:
mvlnq 2
=σ
gde je:
• σ = provodnost materijala
• n = broj provodnih elektrona
• q = naelektisanje elektrona
• l = dužina slobodne putanje elektrona u materijalu
• m = masa elektrona
• prosečna brzina elektrona u materijalu
GMR senzori menjaju svoju provodnost menjanjem slobodne putanje provodnih elektrona u spojevima, čemu je uzrok dodato magnetno polje. Da bi postigli ovaj elekt, naizmenični magnetni slojevi u GMR senzoru se magnetišu (prilikom proizvodnje) po antiparalelnom rasporedu, i zbog toga se njihovi provodni elektroni spin polarišu u suprotnim pravcima (posrednik koji je ubačen između svaka dva sloja, nemagnetno provodan materijal, služi da ih razdvoji). Provodni elektroni, koji pokušavaju da pređu granicu između slojeva sa različitom spin polarizacijom, imaju veliku verovatnoću da budu razdvojeni na mestu spoja, što rezultuje relativno kratku slobodnu putanju a samim tim i provodnost. Prisustvo nekakvog spoljnog magnetnog polja teži da rotira antiparalelne ose magnećenja naizmeničnih slojeva u suprotnom pravcu prema zajedničkim ortogonalnim osama. Provodni elektroni teže da pređu višeslojni kanal, povećavajući dužinu svoje slobodne putanje.

Primer komercijalno dostupnog GMR senzora je NVS5B50 GMR most senzor, proivedenog od strane Nonvolatile Electronics (NVE), Eden Prairie, MN. Ovaj NVE senzor sadrži četri 4.7K GMR otpornika postavljenih u Vitstonov most kao što je prikazano na slici 3.17A. Dva otpornika su zaštićena od spoljnog magnetnog polja sa debelim magnetnim materijalom, dok su druga dva smeštena u prostor oko kog se koncentriše fluks kao što je prikazano na slici 3.17B. Najvećom promenom otpornosti dva aktivna otpornika dobijamo izlaz koji pretstavlja 5% napona napajanja, upoređujući sa manje od 1% za slična AMR rešenja. NVS5B50 pruža linearni izlaz u rasponu od 0 do ± 35 Gausa i dostupno je u 8-pin pakovanju kako SMD komponenta.
Slika 3.17. Ekvivalentno kolo (A) i šematski prikaz (B) za Nonvolatile Electronics, Inc., NVS5B50 GMR most senzor koji poseduje prostor za koncentrisanje fluksa u 8-pin pakovanju kao SMD komponenta.
Jedna od opštih primena AMR i GMR senzora u robotici je viđena u tačnom računanju enkodera sa točkom, prikazanog na slici 3.18. Ostale upotrebe mogu biti elektronski kompac, merenje ugla i pozicije, detekcija struje i generalno merenja u magnetnom polju.
Slika 3.18. Sistem za navigaciju vozila koristi AMR senzore kao elektronski kompas i diferencijalni brojač na točkovima.
3.2.2 Induktivni senzori blizine
Induktivni prekidački senzori blizine se najviše koriste u industriji za detekciju magnetnih i nemagnetnih metalnih objekata (naprimer čelika, bakra, mesinga, aluminiuma) na kratkoj udaljenosti. Male cilindrične izvedbe u prečniku 4mm su bile dostupne više od jedne decenije. Zbog svoje važne osobine da detektuju kroz nemetalne materijale, ovi senzori mogu da budu na bilo kakav način zatvoreni, dozvoljavajući im da

rade u kontaminiranim i teškim uslovima, ili čak potopljenim u fluid. Dobar frekvencijiski odziv može da se dobije do 10 KHz.
Induktivni senzori blizine generišu oscilatorno RF polje (naprimer od 100 KHz do 1 MHz) oko kalema u kome se nalazi feritno jezgro. Kada metalni objekt uđe u definisano polje sa prednje strane senzora, vrtložne struje se indukuju po površini tog objekta. Ove vrtložne struje prouzrokuju drugo magnetno polje koje utiče na polje senzora puneći njegov oscilator. Efektivna impedansa kalema senzora se menja rezultujući promenu oscilatorne frekvencije (ili amplitude) koja se projektuje na izlaz koji je sada proporcionalan udaljenosti između senzora i mete.
Blok dijagram tipičnog induktivnog senzora za blizinu je prikazan na slici 3.19A. Oscilator se sastoji od aktivnog dela (tranzostora ili IC-a) i senzorske sonde u vidu kalema. Ekvivalentno kolo (3.19B) koje pretstavlja ovu konfiguraciju je pretstavio Carr (1987), gde je kalem označen sa Lp, povezan u seriji sa otpornikom Rp. Provodnik koji povezuje kalem i aktivni element je pretstavljen kao kapacitivnost C.
Prilikom ulaska provodne mete u polje, otporna komponenta Rp dominira, povećavaju se gubitci i puni se oscilator. Kako razmak postaje sve manji, amplituda oscilatornog izlaza nastavlja da pada do tačke kada oscilacije prestaju da budu neprigušene. Ovaj efekt se naziva ECKO, za ovaj tip konfiguracije. Prostori manji od ove granice (tipično oko 0.005 inch do 0.02 inch) pretstavlja region za koji analogni izlaz nije dostupan.
Slika 3.19. (A) Blok dijagram tipičnog induktivnog senzora blizine ECKO tipa i (B) ekvivalentno oscilatorno kolo.
Praćenje izlazne amplitude oscilatornog kola sa internom detekcijom praga (slika 3.19A) stvara prekidački induktivni senzor blizine sa digitalnim uključen/isključen izlazom (slika 3.20). Kako se metalni objekt približava senzoru, oscilatorni izlazni napon pada kao što je prikazano, konačno ispod aktivirajućeg nivoa gde se stanje na komparatoru prebacuje sa isključenog u uključeno stanje. Povećavanjem razdaljine, napon ponovo raste i izlaz se prebacuje u isključeno stanje. Postoji i histerezis koji služi da poveća stabilnost rada prilikom detektovanja praga. Tipična vrednost histerezisa (u smislu rastojanja) se kreće od 3 do 20 procenta maksimalne efektivne razdaljine.

Slika 3.20. Histerezis eliminiše izlaznu nestabilnost prilikom približavanja i udaljavanja objekta.
Efektivno maksimalno rastojanje pri kome se objekt može detektovati srazmerno je prečniku internog kalema i zavisi od materijala objekta, veličine i oblika. Industrijski standardni objekt (za koje vrednosti je definisano nominalno rastojanje) je kvadrat stranice 1mm izrađen od mekog gvožđa. Za gvozdene metale, povećanje debljine objekta prouzrokuje zanemarljive efekte. Materijali sa većom provodnošću i nemagnetnim osobinama kao što su bakar i aluminium rezultuju sa manjim rastojanjem detekcije kao što je prikazano u tabeli 3.2. Za takve metale, veći radijus detektovanja može da se dobije sa pomoću oblika tanke folije. Ovaj fenomen se naziva efekt folije.
Tabela 3.2. Nominalna rastojanja detektovanja za materijale koji nisu meko gvožđe moraju se podesiti korišćenjem dole navedenih faktora.
Postoje dva osnovna tipa induktivnih senzora za blizinu: 1) oklopljeni (slika 3.21A) i 2) neoklopljeni (slika 3.21B). Ako je nezaštićeni tip postavljen na metalnu površinu, blizina te površine bi dovela do zasićenja senzora i nemogućnosti rada. Ovaj problem rešavamo sa oklopljenim senzorom koji sadrži koaksijalni meralni prsten koji je postavljen oko jezgra. Stoga smo omogućili detekciju spreda i zanemarili smetnje sa boka. Ovim smo uneli i restrikciju da oklopljeni senzori mogu da detektuju duplo manju razdaljinu od nezaštićenih rešenja.
Moguća je pojava međusobne interferencije između dva induktivnia senzora blizine koji rade na istoj frekvenciji i kada su bočno postavljeni na razdaljini manjoj od dve dužine prečnika senzora. Ova interferenija se obično manifestuje kao nestabilno pulsiranje izlaznog signala, ili redukovanje efektivnog

dometa. Polovina preporučenog 2d bočnog razmaka je dovoljno da se eliminiše međusobna interferencija u slučaju oklopljenih senzora. Kada bi ih postavili tako da jedan senzor gleda drugi, ovu minimalnu razdaljinu bi trebalo povećati dva puta.
Slika 3.21. Oklopljeni induktivni senzor (A) može se upakovati u metal bez gubitka performansi, dok neoklopljena izvedba (B) se mora postaviti na nemetalnu površinu.
Dok većina standardnih induktivnih senzora blizine rade na ECKO principu i detektuju bilo koji materijal od metala, nekada se koriste i druge izvedbe kada je potrebno razlikovati različite tipove metala. Micro Switch Division Honeywell korporacije nudi RF induktivni ECKO serijski senzor koji detektuje samo gvožđe, sa 10% do 15% smanjenim nominalnim radijusom upoređujući ga sa senzorom za sve metale. Zbog svoje odabrane mete i eksterno ograničenog radijusa detektovanja, induktivni senzori generalno imaju slabu primenu u mobilnim automatskim sistemima u svrhe spoljnog detektovanja objekta, osim kada je u pitanju specifičan slučaj.
Slika 3.22. Ova automatska mašina za čišćenje koristi induktivni senzor blizine kako bi održao kontakt između ruke koja čisti i brotskog korita.
Jedan od takvih primera je veliki industrijski čistač razvijen od strane Barnes and Reineke, Chicago, IL, koji čisti spoljni trup broda (slika 3.22). Tri analogna induktivna senzora se koriste za detektovanje prisustva čeličnog brotskog korita na rastojanju od 0 inča do 1.75 inča, kontrolišući servomehanizam koji ostvaruje zadovoljavajući kontakt između čistača i brotskog korita.

3.2.3 Kapacitivni senzori blizine
Kapacitivni senzori blizine su veoma slični sa prethodno opisanim induktivnim senzorima, osim što kapacitivni mogu pouzdano da detektuju dielektrične materijale. Efektivni za detekciju kako u kratkom dometu tako i do par inči, ovakvi senzori reaguju u promenama električne kapacitivnosti između njegove ploče i okruženja. Kako se neki objekt približava, menja se i geometrija i/ili dielektična karakteristika unutar oblasti detektovanja, prouzrokujući povećanje kapacitivnosti. Ova promena kapacitivnosti se moze detektovati na različite načine: 1) kao povećanje toka struje kroz ploču 2) iniciranjem oscilacija koje se javljaju u RC kolu ili 3) smanjenjem frekvencije oscilacija. Tipična industrijska primena uključuje detektovanja nivoa za različite materijale (naprimer tečnosti, zrnastog ili praškastog materijal) i detektovanje kroz nemetalna pakovanja.
Interesantna je spomenuti primenu ovih senzora u automatskom izbegavanju prepreka. Naziva se kapacitivni reflektor i razvijen je od strane NASA. Cilj je bio napraviti odgovarajuću presvlaku koja bi se koristila na robotskim rukama u industrijske i svemirske svrhe, sa mogućnošću da detektuju prisustvo čoveka do 12 inči udaljenosti. Da bi se dobila ovako velika udaljenost, potrebno je bilo postaviti senzorsku ploču na oko1 inč udaljenosti od uzemljene robotske ruke, što je prikazano na slici 3.23A. NASA je došla do boljeg rešenja, kojim bi se kontrolisalo rasipanje kapacitivnosti postavljajući reflektujuću površinu između strukture ruke i senzorske ploče kao što je prikazano na 3.23B.
U običajnom slučaju (bez reflektora) prikazanom na slici 3.23A, što je manja razdaljina, veća je kapacitivnost između senzorske ploče i robotske ruke, sa odgovarajućim smanjenjem polja projektovanog sa senzora u pravcu objekta. Dodatak u vidu reflektora omogućava da se linije polja senzora reflektuju dalje od robotske strukture, čime značajno povećavamo radijus mogućih interacija sa objektima iz okoline. Ekvivalentni efekt je postignut.
Slika 3.23. Linije električnog polja bez reflektora su prikazane na slici A, dok se korišćenjem reflektora pod B povećava radius detekcije.
3.2.4 Ultrazvučni senzori blizine
Svi prethodno opisani senzori blizine ispoljavali su prisustvo objekta direktnom promenom nekih električnih karakteristika i osobina (naprimer induktivnosti, kapacitivnosti, itd.). Ultrazvučni senzor blizine je primer reflektujućeg senzora koje reaguje na promene količine emitovane energije koja se vratila u detektor nakon što se odbilo od objekta od interesa. Tipični sistemi se sastoje od dva pretvarača (jedan koji šalje i drugi koji prima energiju). Emiter šalje longitudinalni talas u ultrazvučni region akustičnog spektra (tipično od 20 kHz do 200 kHz), koji ljudsko uho ne može da čuje. Odziv prijemnika je funkcija amplitude primljene energije.

Ultrazvučni senzori blizine su korisni na rastojanjima od par stopa za detekciju većine objekata, tečnih i čvrtih. Ako nekakav objekt uđe u akustično polje, reflektujuća energija stiže u prijemnik. Kao i u slučaju bilo kog reflektujućeg senzora, i kod ovog maksimalni radijus detektovanja zavisi ne samo od snage emitovanog signala, već i od sredine u koju se emituje, reflektivnosti i direktivnosti. Kada amplituda primljenog signala pređe dozvoljeni prag, menja se stanje na izlazu senzora koji pretstavlja detekciju objekta. Pojavom jeftinih mikrokontrolera, pojavili su se razni ultrazvučni sistemi za detekciju.
3.2.5 Mikrotalasni senzori blizine
Mikrotalasni senzori blizine rade na razdaljinama od 5 stopa do 150 stopa ili više, i veoma su slični gore opisanim ultrazvučnim, osim što je emituju elektromagnetnu energiju u mikrotalasnom regionu. Signal se šalje u etar i kada se od nekakav cilj odbije dovoljno energije, zraća se nazad i prima na prijemnom delu. Tada se izlaz ovog senzora prebacuje u uključeno stanje, čime pretstavlja da se obređeni objekt nalazi u blizini.
Jedno od alternativnih rešenja koristi samo jednu komponentu koja je ujedno predajnik i prijemnik i koje po principu Doplerovog efekta detektuje relativno kretanje objekta. Ovakva konfiguracija se klasifikuje kao detektor pokreta.
Slika 3.24. Mikrotalasni senzor blizine, za razliku od detektora pokreta, zahteva odvojeno predajnik i prijemnik.
AM Sensors mikrotalasni senzori blizine
AM Sensors, Inc., Salem, MA, nudi različite senzore za blizinu, pravac kretanja, pomeraj, nivo i brzinu koji pokrivaju razne industrijske potrebe. Njihov proizvod MSM10500 serije FMCW mikrotalasnih senzora pružaju mogućnost bezkontaktnog detektovanja metalnih i nemetalnih pokretnih objekata. Ovaj senzor nudi kontinualnu informaciju o razdaljini, detektovanje ulaska objekta u opseg i pravac kretanja. Senzor MSM10502 ima mogućnost detektovanja da li se objekt kreće prema ili van senzora i meri međusobnu razdaljinu tako što objekt prođe kroz tri udaljene kapije koje mogu biti podešene za bilo koju frakciju maksimalnog radijusa detektovanja od 50 stopa. Senzor je opremljen sa Gunn predajnom diodom, dve mikrotalasne mixer diode koje služe kao prijemnici i promenljive diode koja menja emitovanu frekvenciju. Izlaz oscilatora se fokusira antenom, u obliku horne, u snop, i bilo koji objekt da ga preseče se detektuje.
Senzor se sastoji još od napajanja, pojačavača, komparatora i mikrokontrolera kojeg pogoni oscilator i koji obrađuje primljene podatke kako bi smo dobili nama razumljivu informaciju. Iznos usrednjavanja signala za svako očitavanje može da se podesi tako da korisnik može da odredi između maksimalnog potiskivanja šuma i minimalnog vremenskog odziva izlaza. Regulisano napajanje omogućava modulu da radi sa širokim spektrom ulaznih napona kako bi smo maksimalno mogli da potisnemo šum. Kada je meta u dometu, odgovarajući izlaz će se uključiti i ostati u tom stanju dokle god je i objekt prisutan. Preciznost u

normalnim uslovima bi bila ±6 inči i može da se degradira ako se više objekata kreće u etru, ili ako meta ima slabu reflektivnost.
Tabela 3.3. Specifikacija AM Sensors MSM10500 i MSM10502 mikrotalasnih senzora blizine.
3.2.6 Optički senzori blizine
Optički (fotoelektrični) senzori koji se najviše koriste u industrijskim primenama mogu da se podele u tri grupe: 1) “suprotan režim“ 2) retroreflektivni i 3) difuzni (prve dve grupe nisu senzori blizine u striktnom terminološkom smislu). Efektivni dometi detektovanja se kreću od par inči do par stopa. Klasične primene u robotici su detektovanje poda, kao navigacione reference i za izbegavanje sudara. Zraci bliski infracrvenim se uglavnom koriste kako bi se redukovale smetnje prouzrokovane ambijentalnom svetlošću i dobio željeni odnos signal/šum. Vidljiva svetlost crvene talasne dužine se nekad koristi.
Stvarne performanse ovih senzora zavise od više faktora. Efektivna razdaljina delovanja je funkcija fizičkih karakteristika (naprimer veličine, oblika, refleksije i materijala) objekta koji treba detektovati, njegove brzine i pravca kretanja, dizajna senzora i kvaliteta i kvantiteta talasa koje smo poslali i koje smo primili. Ponovljivost detektovanja se zasniva na veličini objekta, menjanju ambijentalnih uslova, promeni u reflektivnosti i drugih karakteristika materijala od kojeg je izrađen objekt, kao i od stabilnosti samog elektronskog kola. Zbog svojih jedinstvenih operacionih karakteristika, za različite probleme se koriste i različiti tipovi ovih senzora.
“Suprotan režim“
Najčešće zvano “elektronsko oko“, prve od ovih izvedbi su primenjivane jos davne 1950-te godine, kao delovi brojača, automatskih vrata, numeratora i sigurnosnih sistema. Odvojeni predajni i prijemni elementi mogu fizički da se nalaze na bilo kojoj strani regiona od interesa. Predajnik emituje snop svetlosti (u skorijim rešenjima je to LED) koji je fokusiran ka fotosenzitivnom prijemniku (slika 3.25). Ako bi nekakav objekt prošao između njih, presekao bi svetlosni snop a samim tim signalizirao određeno prisustvo. Efektivni domet ovakvim rešenjem je moguć i do nekoliko stotina stopa.
Slika 3.25. Senzor u “suprotnom režimu“ radi po principu prolaska mete između predajnika i prijemnika (detektora prekida svetla).
Pored par specijalizovanih primena (kao što su naprimer optički enkoderi) ovaj tip senzora ima slabu primenu u mobilnim automatskim sistemima uglavnom zbog svoje geometrijske konfiguracije.
Retroreflektivni senzori
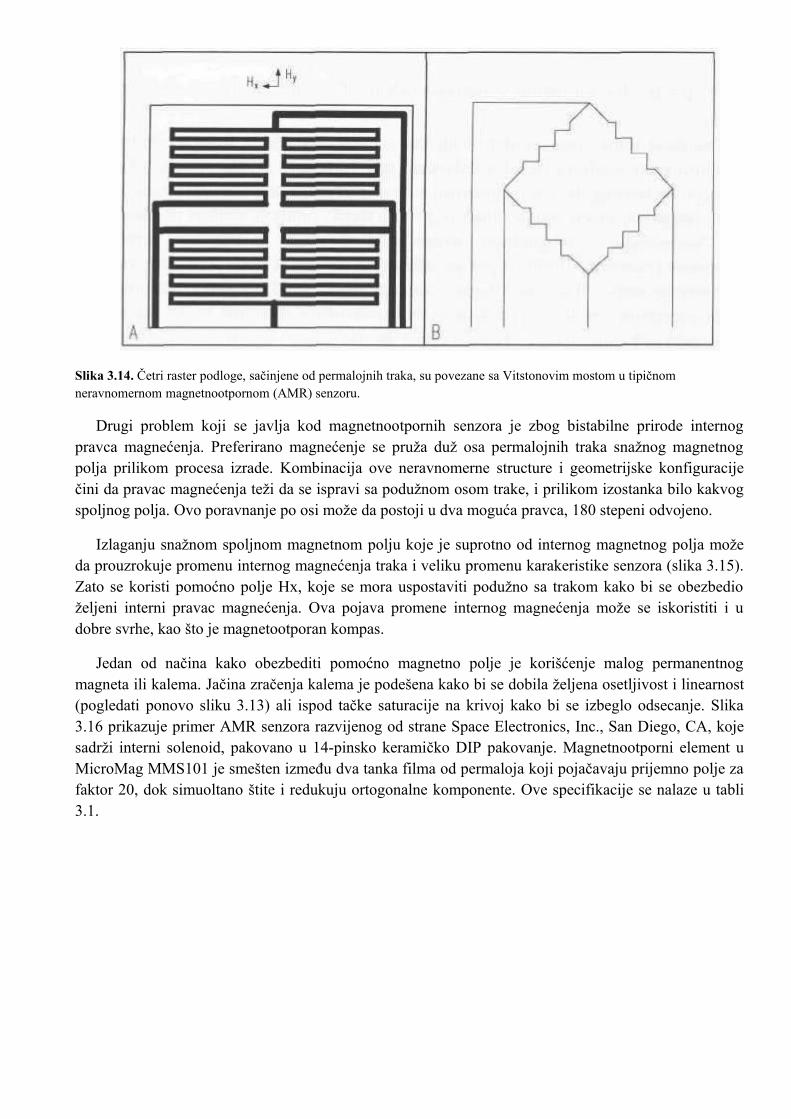
Ovaj tip senzora je nastao kao izvedba “Suprotan režim“ koncepta, koji koristi staklo za odbijanje emitovanih zraka sa predajnika i uspešno detektovanje na prijemniku. Predajnik i prijemnik se nalaze jedan ispod drugog. Retroreflektor u vidu prizme (slika 3.26) se koristi kao zamena za staklo kako bi se odseklo neophodno kritično poravnanje. Prizma ima tri jednake reflektivne površine i tri bočne hipotenuze. Kada svetlo uperimo u jednu od hipotenuza, svetlost se odbija po svim površinama i vraća nazad kroz hipotenuzu u izvor.
Slika 3.26. Retroreflektivna prizma se koristi kako bi se povećao efektivan domet i pojednostavilo poravnanje.
U mnogim fabričkim automatski scenarijima, objekt od interesa se detektuje kada se prekine svetlosni snop, mada neke primene zahtevaju postavljanje retroreflektora na objekt. Dobar retroreflektivni objekt će vratiti oko 3,000 puta više energije senzoru nego što bi vratio prazan beli papir.
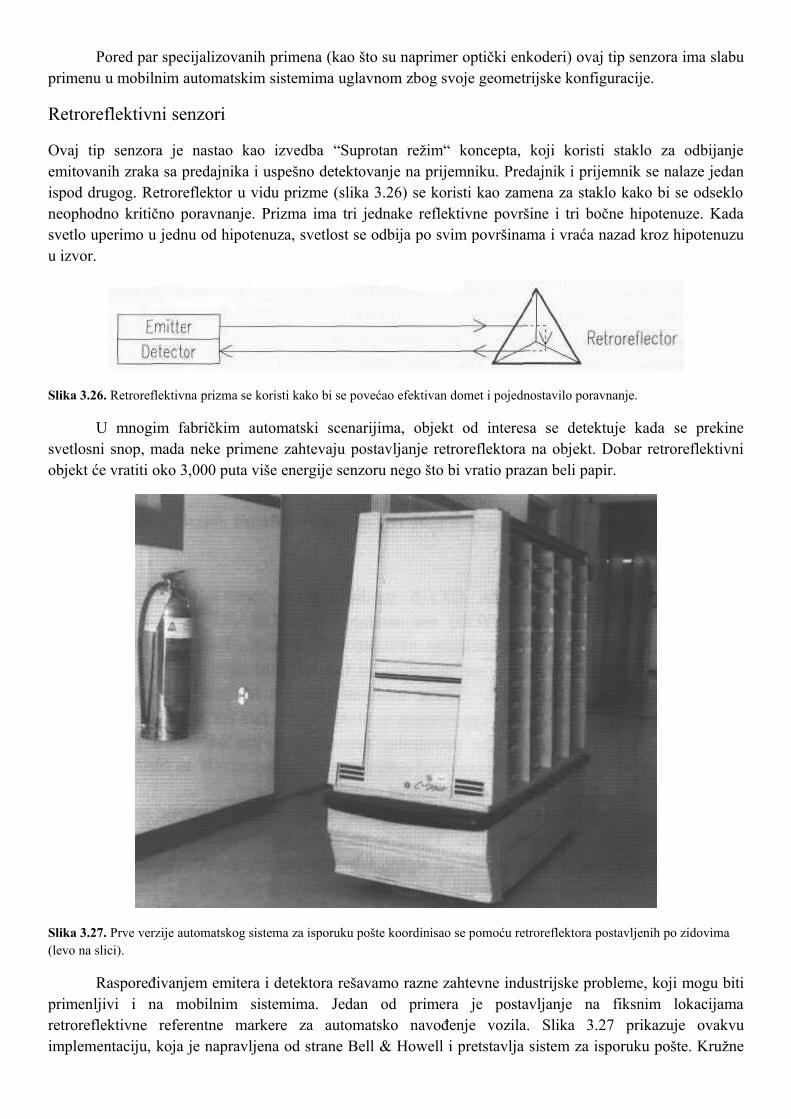
Slika 3.27. Prve verzije automatskog sistema za isporuku pošte koordinisao se pomoću retroreflektora postavljenih po zidovima (levo na slici).
Raspoređivanjem emitera i detektora rešavamo razne zahtevne industrijske probleme, koji mogu biti primenljivi i na mobilnim sistemima. Jedan od primera je postavljanje na fiksnim lokacijama retroreflektivne referentne markere za automatsko navođenje vozila. Slika 3.27 prikazuje ovakvu implementaciju, koja je napravljena od strane Bell & Howell i pretstavlja sistem za isporuku pošte. Kružne
retroreflektivne mete postavljene su na zid pored ulaza u kancelarije i služile su kako bi odredila putanja kojom bi platforma morala da se kreće i gde treba da se zaustavi. Nakon zaustavljanja, platforma bi se javljala određenim zvukom što znači da čeka da neko izađe i ubaci u njega poštu koja mora dalje da se šalje.
Difuzni senzori
Optički senzori blizine koji spadaju u difuznu kategoriju, rade na sličan način kao i retroreflektivni, osim što se talas odbija od površine samog objekta od interesa, za razliku od kooperativnog reflektora (slika 3.28). Ova osobina nam olakšava detektovanje raznih objekata.
Slika 3.28. Rad senzora blizine u difuznom režimu zasniva se na talasu odbijenom direktno od površine objekta
Tri Banner Multi-Beam CX1-6 infracrvena senzora blizine srednjeg dometa su postavljena na ROBART II, usmerenih napred u cilju izbegavanja prepreka. Dva dodatna (Mini-Beam model SM312D) su postavljeni na levoj i desnoj strani donjeg prednjeg panela. Ovi senzori su podešeni na maksimalni radius delovanja od oko 30 inči za CX1-6 i 15 inči za SM312D. Oni pružaju dodatnu zaštitu u kretanju robota i zajedno mogu raspoznati da li se nekakva prepreka nalazi direktno ispred, sa leve ili desne strane.
Postoje više naprednih stvari koje nose ovi senzori za razliku od ultrazvučnih. Ne postoji znatno vremensko kašnjenje odziva s obzirom da je u pitanju brzina svetlosti. Primera radi, za niz od 12 ultrazvučnih senzora potrebno je oko jedne sekunde da se prikupe svi podatci. Kao dodatna stvar, optične izvore možemo lako da usmerimo, kako bi izbegli interaciju sa susednim, i samim tim omogućava nam da uspešno koristimo više senzora istovremeno.
Konvergentni senzori
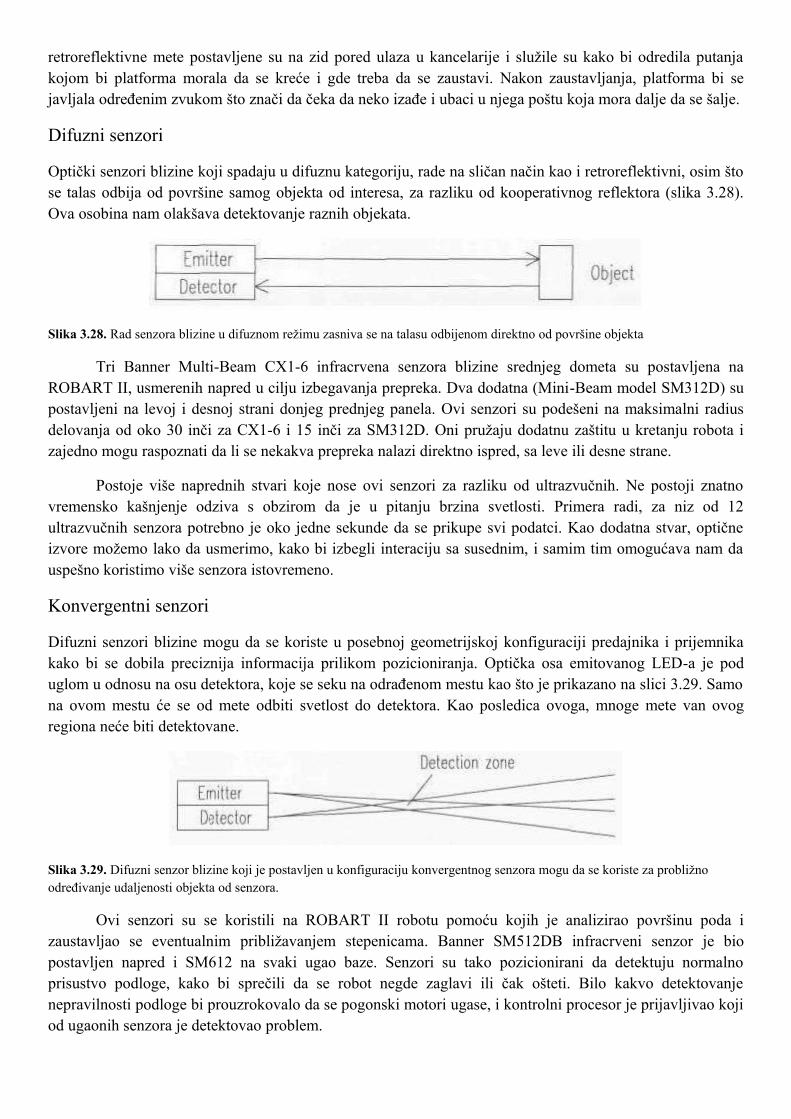
Difuzni senzori blizine mogu da se koriste u posebnoj geometrijskoj konfiguraciji predajnika i prijemnika kako bi se dobila preciznija informacija prilikom pozicioniranja. Optička osa emitovanog LED-a je pod uglom u odnosu na osu detektora, koje se seku na odrađenom mestu kao što je prikazano na slici 3.29. Samo na ovom mestu će se od mete odbiti svetlost do detektora. Kao posledica ovoga, mnoge mete van ovog regiona neće biti detektovane.
Slika 3.29. Difuzni senzor blizine koji je postavljen u konfiguraciju konvergentnog senzora mogu da se koriste za probližno određivanje udaljenosti objekta od senzora.
Ovi senzori su se koristili na ROBART II robotu pomoću kojih je analizirao površinu poda i zaustavljao se eventualnim približavanjem stepenicama. Banner SM512DB infracrveni senzor je bio postavljen napred i SM612 na svaki ugao baze. Senzori su tako pozicionirani da detektuju normalno prisustvo podloge, kako bi sprečili da se robot negde zaglavi ili čak ošteti. Bilo kakvo detektovanje nepravilnosti podloge bi prouzrokovalo da se pogonski motori ugase, i kontrolni procesor je prijavljivao koji od ugaonih senzora je detektovao problem.

Ranih 1980-tih, Honeywell Visitronics, Englewood, CO, razvio je zanimljivi bezkontaktni merač blizine koji koristi konvergentni senzor da odredi relativno rastojanje a samim ti prisustvo ili odsustvo nekog objekta. HVS-300 senzor daljine je detektovao da li je se objekt nalazi odmah blizu senzora, u okruženju, daleko od senzora ili van radiusa. Imao je veliku tačnost na većem radiusu pod raznim promenljivim uslovima reflektivnosti i osvetljenja ambienta zato što je koristio šemu trijangulacije.
HVS-300 senzor se sastojao od para 820-nanometarkog infracrvenog LED izvora, duplog fotodetektora, usmerene optike i kontolnog logičkog kola. LED-ovi su emitovali svetlosne signale pod različitim uglovima kroz sočivo što je prikazano na slici 3.30. Ako bi se neki od izlaznih snopova pogodio objekt, deo energije bi se vratio kroz drugu stranu sočiva koje je fokusirano na detektor.
Za detektor su se koristile dve fotodiode postavljene jedna pored druge, podeljene procepom. U zavisnosti od udaljenosti objekta, refleksija bi padala na jedan fotodetektor (što bi pretstavljalo da se objekt nalazi blizu senzora) ili na drugi (što bi pretstavljalo da se objekt nalazi daleko od senzora) ili podjednako i na oba (što bi pretstavljalo da se objekt nalazi na granici ova dva regiona udaljenosti)
Slika 3.30. Honeywell HVS-300 senzor blizine koristi dva infracrvena predajnika da odredi da li se neki objekt nalazi u odgovarajućoj zoni.
Sa ne mogućnošću da razazna promenu u teksturi materijala ili boju, HVS-300 se dobro primenjivao za izbegavanje sudara kod mobilnih robota za sobne uslove, gde je maksimalni razdaljina detektovanja bila 30 inči.








![Sinteza zvuka temeljena na sudaru tijela u virtualnom ... · Slika 2.1: Graf valnog oblika u vremenskoj domeni [11] 3. Slika 2.2: Prikaz valnog oblika koji sadrži samo osnovnu frekvenciju](https://img.dokumen.tips/doc/110x75/5f06c3687e708231d4199cb0/sinteza-zvuka-temeljena-na-sudaru-tijela-u-virtualnom-slika-21-graf-valnog.jpg)