Embed Size (px)
Citation preview

This article was downloaded by: [University of Tasmania]On: 12 November 2014, At: 23:10Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of General SystemsPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/ggen20
RELATIVE UNCERTAINTY AND EVIDENCE SETS: ACONSTRUCTIVIST FRAMEWORKLUIS MATEUS ROCHA aa Department of Systems Science and Industrial Engineering , Thomas J. Watson School ofEngineering and Applied Science, State University of New York at Binghamton , Binghamton,New York, 13902, U.S.A. E-mail:Published online: 25 Jun 2007.
To cite this article: LUIS MATEUS ROCHA (1997) RELATIVE UNCERTAINTY AND EVIDENCE SETS: A CONSTRUCTIVIST FRAMEWORK,International Journal of General Systems, 26:1-2, 35-61, DOI: 10.1080/03081079708945168
To link to this article: http://dx.doi.org/10.1080/03081079708945168
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

In!. J. 17mrralSyrumr. Vol. 26(1-2). pp. 35-61 Rcprinls available directly fmm !he printer ~olocopying permilled by lieenw only
Q 1997 OPA IOvcrres\ Publishers Associalion) Arnrtcrhm B. V. Pvblirhcd in lllc N~lhcrlvldr under liccnv by
Gordon and B m x h Scicncc Publirhrn Rinlcd in Malayria
RELATIVE UNCERTAINTY AND EVIDENCE SETS: A CONSTRUCTIVIST FRAMEWORK
LUIS MATEUS ROCHA
Department of Systems Science and Industrial Engineering, Tl~omas J. Watson School of Engineering and Applied Science,
State University ($New York at Birlghamton, Binghamron, New York 13902, U.S.A. *
(Received January 1, 1996)
Several measures of uncertainty, in its various forms of nonspecificity, conflict, and fuzziness. valid both in finite and infinite domains are investigated. It is argued that dimensionless measures. relating uncenainty situations lo the information content of their resoective universal sets. can canture uncenaintv efficienllv both in finite and infi- ~~~~ ~
nite domains. These measures are also considered more intuitive. To establish them, a niore general approach to uncenainty measures is developed. After this, the utilization of these measures is exemplified in the measurement of the uncenainty content of evidence sets. These interval-based set structures, defined through evidence theory. are shown to possess ideal characteristics for the modeling of human cognitive categorization processes, within a constructivist framework.
INDEX TERMS: Uncertainty, uncertainty in infinite domains, interval based fuzzy sets, evidence theory, constructivism, cognitive categorization
1. INTRODUCTION
Two aspects of George Klir's vast array of research achievements have influenced me greatly: his work on the measurement of uncertainty-based information [Klir and Folger, 1987; Klir, 19931, and his constructivist approach to general systems theory [Klir, 19911. My own research is tightly tied to George Klir's very important contributions to these areas. For that reason, I present here some developments in the measurement of uncertainty based infor- mation, relevant for a constructivist model of human cognitive categorization processes.
In the first part of the paper (sections 3 to S ) , measures of uncertainty, for both countable and uncountable domains, are developed in the context of evidence theory. In particular, measures of nonspecificity are defined starting with a very general framework based on monotone functions and classic measure theory. This framework is shown to lead to a coherent methodology for measuring nonspecificity in countable, uncountable, and hybrid domains established as a combination (cross-product) of the two. It is defended that this fran~ework should be built around the notion of relative uncerminp, that is, when the uncertainty content of some situation is related to the information conrent of the universal set on which the situation is defined. Relative uncertainty measures are dimensionless, since they are defined as information ratios.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

36 L. M. ROCHA
In section 6 evidence sets are summarized with a brief overview of interval based set structures. Evidence sets are shown to capture the main forms of uncertainty recognized in generalized information theory. The uncertainty content of evidence sets is described with the measures of uncertainty defined in sections 3 through 5 , which establish a three dimen- sional uncertainty space. Finally, in section 7, evidence sets are discussed as set structures capable of explicitly modeling subjective, contextual dependencies of cognitive and lin- guistic categories, thus offering a mathematical tool for a constructivist approach to approximate reasoning.
2. MATHEMATICAL BACKGROUND
Let X denote a nonempty u~liversal set under consideration. Let P ( X ) denote the power set of X. An element of X represents a possible value for a variable x. X can be counrable or utrcout~tcrble. The term continuous domain is often used to refer to the latter case. However, since continuity is a notion applicable to functions not sets, I will use the term "uncount- able set" to refer to those sets with uncountably many elements. An uncountable set is by definition an infinite set, a countable set can be both finite or infinite.
2.1. Meusures
Let JL be an extended real valued measure on Y ( X ) : p: P ( X ) 4 [0, w]. p i s countably addi- tive for any numerable disjoint sequence ( A , } of sets in Y ( X ) :
also, 3 A C_ X such that p ( A ) < m and ~ ( 0 ) = 0. From the additivity requirement ( I ) the following tnonoronicity condition is obtained: p(A) 5 p(B), when A C B. The monotonic- ity further implies that: max K(A X ) = p ( X ) , and min p(A X ) = @ ) = 0.
Since P ( X ) is closed to the intersection of its elements, and since p is additive and monotone, it is also counlob/y subaddirive for any sequence ( A ; ) of sets in 9 ( X ) such that A = U".. ,-I I .
A ~~or~c~rlclitive tneusure (or fuzzy measure) is defined by the same boundary conditions and condition of monotonicity, but the additivity requirement is relaxed to one of continu- ity. See Wang and Klir [I9921 for details unnecessary for the purposes of this paper.
2.2. Detnpster-Sllc~fer Theory of Evidence
2.2.1. Hosic P r o b a b i l i ~ Assignment Evidence theory, or Denlpster-Shafer Theory (DST) [Sharer, 19761, is defined in terms of the set function m referred to as the basic probabiliry e~ss ig~~tne t~ t : tn: P ( X ) + 10, I], such that m ( 0 ) = 0 and
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 37
m(A) denotes the proportion of all availableevidence which supports the claim that A E P(X) accura~ely represents the prospective value of our variable x. Further, nt(A) qualifies A alone, it does not imply any additional claims regarding other subsets of X, including subsets of A or the complement of A.
2.2.2. Belief cmd Plausibility DST is based on a pair of nonadditive measures: belief (Bel) and plarisibiliry (PI). These measures observe axioms of supenzddirivir)~ and sub- additivity respectively [for more details see Wang and Klir, 19921. Given a basic proba- bility assignment m, Bel and PI are determined for all A E 9(X) by the equations:
(3). (4). and (5) imply that belief and plausibility are dual measures related by:
PI(A) = I - Bel(AC) (6)
for all A E 9(X), whereAC represents the complement ofA in X. It is also true that Bel(A) 5 PI(A) for all A E 9(X). Notice that [Shafer, 1976, page 381, "rn(A) measures the belief one comnlits exactly to A, not the total belief that one commits toA." Bel(A), the total belief com- mitted to A, is instead given by the sum of all the values of tn for all subsets of A (4).
2.2.3. Focnl Elements and Bodies of Evidence Any set A E P(X) with m(A) > 0 is called a focal elernenr. A body of evidence is defined by the pair (3, m), where yrepresents the set of all focal elements in X, and m the associated basic probability assignnient. F i s ass~irned to befinire, that is, there is a finite number of focal element:; in a body of evi- dence, even if the universal set X is infinite. This is an important consideration which is uti- lized throughout the paper. Kramosil [I9951 has developed a more conlplete extension of DST to infinite domains which considers cases where the set of all focal elements in X, F , is infinite. Since the applications I have in mind both in reliable computation [Rocha er al., 19961, and cognitive categorization [Rocha, 1994, 1995b, 1995dl require only a finite number of focal elements, I will not consider extensions of DST such as those of Kramosil.
The set of all bodies of evidence is denoted by 3. Total ignorcrnce is expressed in DST by m(X) = 1 and rn(A) = 0 for all A # X. F~i l l Certainty is expressed by m((x]) = I for one particular element of X, and rn(A) = 0 for all A # (x) .
2.2.4. Joint Bodies of Evidence Since we will be dealing with measures of uncertainty in the remaining of this paper, we further need to understand properties of bodies of evi- dence defined on the Cartesian product of two sets: Z = X X Y. That is, bodies of evidence defined by joint basic probability assignn~ent functions: In: 9 ( X X Y) --t [O, I], obeying equation (3) above, where X and Y denote sets defining the domain 01' two distinct vari- ables. The focal elements are binary relations, R, defined on Z. The prc,jecrions of R on X and Yare given, respectively, by the sets:
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

38 L . M. ROCHA
From these we can calculate the marginal basic probability assignments, mx and my, from the joint basic probability assignment rn:
Two bodies of evidence (5. mx) and (TY, my) are noninteractive if and only if V A E Tx and V B E Ty
and rn(R) = 0 for all R # A X B. Noninteractive joint bodies of evidence can be completely recuperated from their projected marginal bodies of evidence: R = Rx X Ry. In general we have instead: R c Rx X R,.'
2.2.5. lr~clu.sion Following Dubois and Prade [1986, 19871, we can also consider the idea of inclusion in DST. Given two bodies of evidence (TI , m,) and (T2, m,) on X, ( 7 , . m,) c (T2, m,) if and only if:
(i) V A E T I , 3 B E T2, such that A B, (ii) V B E T2, 3 A E 7,. such that A c B,
(iii) 3 w: 9 ( X X X) -t 10, I], with w(A, B) = 0 VA 4 TIT,, or B 4 T2, such that VA c X, ml(A) = xBlAG8 w(A,B), VB C X, m2(B) = xAIAGB w(A,B)
The notion of uncertainty is very relevant to any discussion of the modeling of linguistic1 mental abilities. From Zadeh's [I97 1, 1975, 19781 approximate reasoning to probabilistic
- -
and cven evidential reasoning [Schuni, 19941, uncertainty is more and more recognized as a very important issue in cognitive science and artificial intelligence with respect to the problems of knowledge representation and the modeling of reasoning'abilities [Shafer and Pearl, 19901. Engineers of knowledge based systems can no longer be solely concerned with issues of linguistic or cognitive rel~resentation, they must describe "reasoning" pro- cedures which enable an artificial system to answer queries. In many artificial intelligence systems, the choice of the next step in a reasoning procedure is based upon the measure- ment of the system's current uncertainty state [Nakamura and Iwai, 1982; Medina-Martins atid Rocha 1992, 19941. 'Thus, we need to collect an array of effective uncertainty measures in ordcr to improve current models of knowledge representation.
George Klir [1993; Klir and Yuan, 19951 classifies uncertainty into two main forms: arr~bigrrit)~ andfirzzirtess. Ambiguity is further divided into the categories of nonspecificity
"To visualize this, consider ao " L shaped focal element o f X X Y, its projections Rx and R, will be the same as those 01'3 foci11 clenicnt given by a reclangle with the same width and length as the L-shaped one. The recran- gle clearly conlail~s the "L"-shaped focal elcmenl.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 39
and c ~ n f l i c t . ~ Webster [Random House Webster's Dictionary, 19911 defines ambiguity as: I. doubtfulness or uncertainty of meaning or intention: to speak with ambiguity. 2. the con- dition of admitting more than one meaning. Mathematically ambiguity is identified with the existence of one-to-many relations, that is, when several alternatives exist for the same question or proposition. DST provides an ideal framework for the study of ambiguity, as it enlarges the scope of traditional probability theory, and it can be interpreted in terms of other uncertainty theories [Resconi, et al., 19931. As measures of ambiguity, we are looking for functions of the form:f: 93 + [0, m), where 3 is the set of bodies of evidence defined on X. In section 4 measures of absolute and relative nonspecificity, for countable and uncount- able domains, are developed. In section 5, measures of conflict are discussed.
Notice that the measures of ambiguity f, or more generally measures of uncertainty based information [Klir, 19931, are not classical measures as defined in section 2.1. The former are functions defined on bodies of evidence, while the latter are set functions with the axioms of section 2.1. Indeed, even though sharing the same term 'measure', they refer to quite distinct mathematical concepts. Classical measures are associated with the defini- tion of metric spaces and topologies, while uncertainty measures are defined to capture amounts of information in uncertain situations. In this paper, the uncertainty framework chosen is the Dempster-Shafer theory of evidence, thus, uncertainty measures are defined on bodies of evidence. In other words, measures of uncertainty require first and foremost a mathematical framework for uncertainty, while measure theory is based on set theory alone. Furthermore, as it will be discussed in the following sections, measures of uncer- tainty are often required to follow an axiom of additivity quite distinct from the additivity requirement of a classical measure. The two should not to be confused since they refer to different mathematical concepts that unfortunately share the same names.
Fuzziness is usually identified with lack of sharp distinctions; other synonyms of the word fuzzy include: blurred, indistinct, unclear, vague, ill-defined, out offocus, nor clear, indefinite; shadowy, dim, obscure; misty, hazy, murky, foggy; confused [Random House Webster's Dictionary, 19911. Fuzzy sets are usually used to formalize this kind of uncer- tainty. The elements of a fuzzy set are in it included according to a membership degree between 0 and 1. In Fuzzy Logic terms, the truth value of a proposition, now a possibility value, ranges between 0 and 1. There are several ways of measuring fuzziness [Klir, 19931, but the most modem approaches define a measure of fuzziness as the lack of distinction between a set and its complement [Yager, 1979, 19801. "Indeed, it is precisely the lack of distinction between sets and their complements that distinguishes fuzzy sets from crisp sets. The less a set differs from its complement, the fuzzier i t is." [Klir, 1993, page 2981 In other words, the more something is and is not, at the same time, the fuzzier it is. As truth is substituted for possibility, we find that what is possible to a degree, is also not possible to the inverse degree-in the limit, when something is possible and not possible to the same degree ( ' 1 2 ) we have paradox.' In section 6, after discussion of fuzzy sets, interval-valued fuzzy sets, and evidence sets, measures of fuzziness will be analyzed.
'Klir uses the term discord instead of conflict, since a more accurate measure of this type of uncertainty, called discurd [Klir and Ramer, 19901, extended an earlier measure called cortflicr proposed by Yeager [1983]. In this paper, I refer to this type of uncertainty as conflict, since I find it a more intuitive term. I :Lm not identifying con- flict wilh any particular measure.
'This applies to possibility as the truth-values of fuzzy sets, not to normalized possibility distributions in the current interpretations of possibility theoly [de Cooman er a[., 19951.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

L. M. ROCHA
Nonspecificity is identified with unspecified distinctions between several alternatives, that is, when several alternatives exist which are equally possible. It depends on the quantity of alternatives for the value or outcome of a particular proposition, event, variable, etc. Thus, to measure this kind of uncertainty, we need some measure of the "size" of the set of the severul alternative values for a variablex. The "size" of several alternatives can be defined as a nonnegative, extended real valued set function: p: Y ( X ) -t [0, w]. For intuitive rea- sons, it is desired that the "size" of a set of alternatives A, which contains a set of alterna- tives B plus some other elements, be larger than the "size" of 5. Thus, p must be monotone: A C_ B d p ( A ) 5 p ( B ) , for all A, B C X. We further want that p ( A ) < for some A X, that is, there will be at least one subset of X whose "size" is not infinite so that p possesses at least some minimal discriminative power over P ( X ) . The set of all functions with the properties of p is denoted by !U1.
A monotone set function p will yield an intuitive measurement of the "size" of the sev- eral alternatives in an uncertain situation. However, in the context of DST, uncertain situ- ations are described by bodies of evidence. Therefore, a measure of nonspecificity in DST should be a function NSp: 93 X YJ1 + [0, w ) which takes into account the "size" of each focal element A, weighted by the respective probability assignment value m(A):
DEFINITION I . Let f be a function defined on bodies of evidence of X , f : 93 -+ [O, w ) . f is monoro~te iff f ( m , ) 5 f (m2), whenever ( T I , m l ) C_ (T2, m2) . ( T I , m l ) and (y2, m2) represent bodies of evidence defined on X.4
PROPOSITION I. Function NSp is monotone as a function on 8.
Proof Dubois and Prade [I9871 have shown that for any positive set-function A such that if A C_ B 3 A(A) 5 A(B), then
Since p in (8) is a monotone positive set function, the above implication holds. If we substitute A for p it follows that:
(TI, m l ) L (3. md N S I ) ( ~ I , P ) 5 NSpOn2, p )
Monotonicity alone is clearly not enough for what we desire of measures of nonspecificity. Traditionally, measures of uncertainty observe other properties such as additivity and sub- additivity.
-
41nclusion in DST was discussed in section 2.2.5
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 4 1
DEFINITION 2. Let f be a function defined on the set of all bodies 01'evidence.f: ?& + [0, a). Let ln be an arbitrary joint basic probability assignment defined. on P ( X X Y), and m,, my be the associated marginal basic probability assignments. J'is subadditive iff f(m) s f (mx) + f ( m ~ ) .
DEFINITION 3. Given the same conditions as in definition 2, except that m is now based on noninteractive bodies of evidence. f is additive iff f(m) = f(mx) + fi:mY).
PROI~OSITION 2. NSp(m, px y) as defined in (8). is additive if and only if there exist monotone functions px and py E defined on sets X, and Y, which satisfy:
when R = Rx X Ry (noninteractive bodies of evidence), where Rx and R, are the projections of R on X and Y respectively as defined in section 2.2.4, and we have either:
for all cases (R C R, X Ry).
Proof Additivity is defined for noninteractive bodies of evidence. Utilizing (7), (9a), and (3) we reach:
N S P ( ~ . P X ~ Y ) = 2 m(R). PX,Y(R) = RCXXY
= C 2 mx(A). my(B). px(A) + ACX BCY
2 2 ~ ~ ~ x ( A ) . ~ Y ( B ) . ~ Y ( B ) = ACX BCY
= 2 mx(A). PX(A). 2 mY(B) + A C X BC Y
The reverse implication is true if (9b) or (9c) is also satisfied. If we m~~ltiply N S / J ( ~ ~ , h) and NSp(m, py) by the unitary quantities given by (3) defined on sets Y and X respectively, and arrange the terms in the same manner above, we conclude that P;~(A) + py(B) must equal pxx y(A X B), only if (9b) or (9c), if we are to recover NSp(m, pxxY). since H,aibi = Zia;cj 3 bj = ci, iff Vj, either b, - c; 2 0 orb, - c, 5 0
LEMMA 1. Let Rx (RY) represent the projection of the elements R of 2: = X X Yon X (Y). mx (my) is the marginal basic probability assignments defined on X (Y). m is the joint basic probability assignment on Z. Then the following equations holds:
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

42 L. M . ROCHA
Proof
NSI)(~~X,PX) = 2 mx(A) .PX(A) = 2 Asx
A S X RIA=Rx = 2 2 ~ ( R ) . P x ( R x ) = 2 ~ll (R) .px(Rx)
R S X X Y
PROPOSITION 3. If NSl?(rll. &xY) is additive for noninteractive bodies of evidence, then if (9b) is satisfied it is subadditive for interactive ones.
Proof If NSp is additive then there exist monotone functions px, and py E YX defined on X and Y, respectively, which satisfy (9). Therefore, using lemma 1 and (9b) for the pro- jections of R on X and Y:
NSI)(I~IX.PX) + NSI)(~Y,PY) = 2 m(R) . [PX(RX) + PY (RY )I R G X X Y
2 2 ~ ( R ) . C L X X Y ( R ) = N S ~ ( ~ , P X ~ Y ) R S X X Y
4.2.1. Co~irltcrhle Doinciins When X is countable, a possible set function px is the Hartley 1 19281 measure:
where IAl denotes the cardinality of set A, which yields an intuitive value of zero for no uncertainty (unitary cardinality). Substituting (10) into NSIJ (8), we obtain the familiar measure of nonspecificity, N, that Dubois and Prade 119851 generalized from Higashi and Klir's 1 19831 U-uilcertriinty:
I t attains the value of 0 for full certainty, and log,l~I for total ignorance. As a special case of NSp (8), and since px satisfies (921) and (9b), N is monotone, additive, and subadditive. In addition, Ramer [I9871 showed that N is unique under a set of desirable axioms which include the three axioms above, plus others such as symmetry, branclzing, and norrnaliza- tioil (based on choosing bits as measurement units) [see also Klir, 1993 for more details].
All of these characteristics made this measure of nonspecificity the obvious choice for measuring nonspecificity in countable domains. However, its extension to uncountable, tlomains introduces a few problems that I shall investigate next. Before that though, notice that p , ~ given by (10) is not defined for the empty set, since 101 = 0. This is a technicality that can be avoided by rewriting (I 1 ) as a sum for all A C y [Klir, 19931, where is the set of focal elements, which does not include the empty set by definition.
4.2.2. Urzcourltohle. ~ornrrins' If the domain of p , Y, is uncountable, pY given by (10) clearly yields undesirable values. Only finite subsets B of Y will have py(B) < a, since the
' Note that the bodies of evidence considered here, and throughout the paper, have a finite number of focal ele- nients (see section 2.2.3).
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 43
cardinality of all other subsets of Y will be infinite. Therefore, all bodies of evidence defined on uncountable domains whose focal elements are not finite, will have infinite nonspecificity as defined by (I I). To improve this situation, a natural e.xtension of (lo) can be found by replacing cardinalities by lengths, or better, by a Lebesgue .measure A(B) of the subsets B of Y. In general we can use the symbol B (length of B) to denote the Lebesgue measure of B. The new py comes:
pg(B) = In (B), whenever B makes sense (12)
The natural logarithm is used instead of the logarithm of base 2, since the choice of the log- arithm of base 2 in (10) is motivated solely by the desire to employ bits as measurement units. In uncountable domains, the notion of bit is meaningless since we have an infinite universe of alternatives. Substituting (12) into NSp (8) we obtain:
NSp(tn,py) = N(m) = nl(B). In@) BEY
(13)
This measure of nonspecificity can also be seen to follow from Ramer's 1 19901 work on mea- suring information in infinite domains. Since py given by (12) satisfies (9) (with important limitations to be discussed below), we can say that N as defined in (1 3) is monotone, additive, and subadditive whenever py is defined and satisfies (9). Now, py in (12) must be a positive set function as previously req~i red ,~ thus it is only defined for subsets B of Y with Lebesgue measure A(B) 2 I . This can be avoided by defining it instead as: py (B) = In(l + B). However, clearly, this alternative definition does not satisfy (9a); therelbre, it would lead to a definition of nonspecificity without the desired axiomatic requiremenls.
Notice that if Y is the unit interval, an important domain for interval computation, we can redefine p as: p*,(B) = - In (B), a positive set function, though inversely mon~ton ic ,~ which satisfies (9a) and (9c). Substituting this expression into the general NSp (8) we obtain the reciprocal of N in (13): N* = -N, which is additive and subadditive for any focal element with positive Lebesgue measure. Because of its inverse nionotonicity, i t intu- itively measures the reciprocal of nonspecificity: specificily [Rocha et nl., 19961.
The measure of specificity for the unit interval N*, is clearly more effective than Nin (1 3) itself, since the latter is restricted to bodies of evidence with focal elements with Lebesgue measure greater or equal than one. Further, any infinite, uncountable, set can always be mapped onto the unit interval, which makes N* applicable to any infinite, uncountable doniain Y. However, p*y is not defined for countable subsets of Y, since the Lebesgue mea- sure of subsets B of Y with countably many elements is null. Thus, specificity is only defined for subsets of Y with uncountably niany elements. This leaves out any body of evidence con- taining a countable collection of singletons as a focal element, that is, any zero Lebesgue set. For instance, full certainty cannot be measured since it is defined by a body of evidence with a singleton as the only focal element.
4.2.3. Hybrid Domains Another point worth mentioning regarding this formulation of measures of nonspecificity has to do with the utilization of the set function p in different
Since we desire positive measures of information.
' p(A) 2 p(B) when A C 6.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

44 L. M. ROCHA
domains. Notice that in (9), p. must be defined differently for X X Y, X, and Y: the relevant universal sets necessary to define additivity and subadditivity. A function is a procedure to calculate a relation between two sets: a domain and a range. If the domain changes, so does the definition of the function. When we use the same function on different domains, it means that there exists a larger set U, containing all the different domains, where the func- tion is actually defined. For instance, we use the same expression (I 1) to measure the non- specificity N of bodies of evidence defined on countable sets X X Y, X, and Y based on the same function p. given by (10). In other words, we can calculate cardinalities in all those sets because they are countable. Cardinality is a measure that is defined for the set of all countable sets, therefore we can use the same procedure as we move from countable domain to countable domain.
In uncountable domains the situation changes since the Lebesgue measure on X X Y is different from the Lebesgue measure on X or Y. Basically, i t is an area for the first case, and a length for the second. Since all uncountable domains are a subset of Rn, the Lebesgue measure is there defined as a general procedure. This allows us to move from one uncountable domain to another and still be able to calculate the Lebesgue measure. However, we should be aware that unlike cardinality, the Lebesgue measure is calculated in a different way as we move from sets to the cross products of sets.
This caution becomes more relevant if we wish to measure the uncertainty of a body of evidence defined on X X Y, when X is countable, and Y is uncountable: hybrid domains. The nonspecificity measures N given by (1 1) or (13) (as well as the related specificity N*) cannot deal with such a case because they are committed to the cardinality or the Lebesgue measure of a set, respectively, for any domain they are applied to. However, the general measure of nonspecificity NSp (8) works for such a hybrid case. Furthermore, provided we deline pxXy using (9), where p . ~ and py are given, for instance, by (10) and (12) respec- tively, NSp will be additive and subadditive (propositions 2 and 3). Of course (12) carries the limitations discussed above for uncountable domains yet to be improved if we are to treat the information content of uncountable and hybrid domains effectively.
4.2.4. Absolrrle Nonsl>ecificiry: A Surnfnury The reason why I refer to N in (I I) and (1 3) as a measure of crbsolute nonspecificity, will become clearer in the next section with the introduction of relative nonspecificity. Basically, N measures the nonspecificity of bod- ies of evidence regardless of the amount of maximum uncertainty-based information pre- sent in their universal sets. A body of evidence will carry the same amount of nonspecificity whether i t is defined on X, or on some set U > X. In countable domains N's (I I) unit is the bit (I bit equals the uncertainty of 2 alternatives), while in uncountable domains N's (13) unit is associated with the natural number e: when the Lebesgue measure of the set of alternatives equals e , nonspecificity is unitary.
Let me now summarize the problems facing N defined by (I I) and (13):
i. (I I) is only defined for bodies of evidence with countable, non-empty, focal ele- ments defined on some universal set X.
ii. (13) is only defined for bodies of evidence with focal elements whose Lebesgue measure is greater than or equal to one, while the related specificity is defined only for focal elements with positive Lebesgue measure. This excludes singletons as focal elements.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 45
iii. Neither (I I) nor (13) alone can deal with hybrid domains defined as cross-products of countable and uncountable sets.
iv. The general measure (8), with p satisfying (9) can deal with hybrid domains and it is monotone, additive, and subadditive. Nonetheless, if p is based upon (10) and (12). NSp will be restricted in the same manner as (1 I ) or (13).
4.3. Relative Nonspecificity
The measures of nonspecificity obtained so far from the general NSp defined by (8). are based on a generic monotone set function p. 1 will now restrict p by making it a classic measure with properties (I) and (2) defined in section 2.1. Further, instead of (9) used in 4.2 for the measures of absolute nonspecificity, let i t satisfy the following restriction for domains defined by the Cartesian product of two sets X and Y:
when R = Rx X Ry (noninteractive bodies of evidence), where Rx and Ry are the projec- tions of R on X and Y respectively as defined in section 2.2.4, and we have:
for all cases (R C Rx X R,). If X is countable px (A) can be the cardinality of set A: pX(A) = I A ~ . If Y is uncountable, pr(B) can be the 1e11gth (Lebesgut: measure) of set R: p y (;B) = E.
PROPOSITION 4. If p in NSp(m, p ) given by (8) follows (14), then PSp satisfies the fol- lowing multiplicative property for noninteractive bodies of evidence (JG, mx) and (yy, 111~):
Proof
N S P ( ~ , C L X ~ Y ) = m(A x B) . pxxy(A X B) = AXBCXXY
= C mx(A). J ~ Y ( B ) . PX(A) .PY(B) = A X B C X X Y
= 2 mx(A). px(A) . C m y ( @ . py(R) = ACX RC Y
Utilizing (7) and (l4a).
NSp with p following (14) is thus monotone and observes multiplicative behavior for non- interactive bodies of evidence. In countable domains, with p(A) = IA(, it varies between I for full certainty, and 1x1 for total ignorance. In uncountable domains, with p(A) = A, NSp varies between 0 for full certainty, and X for total ignorance. However, even though it has a few intuitive properties which allow us to measure nonspecificity fairly well, i t lacks some other desirable axiomatic properties. To improve these, I will impose another restriction on p with implications for the modeling of nonspecificity discussed ahead.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

46 L. M. ROCHA
DEI:INITION 4. Let p be a classical measure on P(X) taking values on the unit interval: p : 9 (X) lo, I I.
In other words, p , as a measure, follows (I) and (2), is further restricted by (14). and it ~ ~ i c l r l . ~ ~~rr l~res 5 1 .
PROPOSITION 5. NSp(m, p ) given by (8). with p following definition 4, and restricted by (14). is subadditive.
Proof Functions pxxy, px, and pydefined on X X Y, X, and Y respectively satisfy (14). Using lernrna I,
Since the sum of two numbers in the unit interval is always larger or equal than their prod- uct, then: px(RX) + py(Ry) 2 &&) . py(Ry). Therefore, using (14b):
2 rrl(R). ~ x ( R x ) . WY(RY) 2 C frl(R). ~ x x y ( R ) = NSp(m,p) REXXY REXXY
'Thus NSp(mX) + NSp(rny) 2 NSp(rn).
'Thus, NSp given by (8), with p following definition 4, and restricted by (14) is monotone, subadditive, and observes a multiplicative property for noninteractive bodies of evidence.
4.3.1. Countrrhle Domains When Xis countable, an obvious choice for the measure is the cardinality of a set divided by the cardinality of the universal set:
Substituting (16) into NSp (8) we obtain a measure of nonspecificity IN given by:
The maximum value i t attains for total ignorance is I, and the minimum for full certainty is 0. I t is defined for all subsets of X, including the empty set. It is clearly symmetrical in the sense that bodies of evidence with the same distribution of evidential weights, applied to focal elements of equal cardinality, will yield the same value of nonspecificity. I t is monotone, subadditive, and multiplicative for noninteractive bodies of evidence, for all A E P(X) (propositions 1.5, and 4 respectively). It is a ratio, thus it is unitless.'
"Mensure (17) is in some ways similar to Yager's [1982, 19831 specificily. However. Yager's measure deals witli the intuitive inverse of nonspecificity, but in absolute terms. Even though it is reslricted to the unit inlerval. tlie specificity content of a body of evidence is independelit on the size of its universal set.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 47
4.3.2. Uncountable, Domains When Y is uncountable, the measure p can be the Lebesgue measure, or length in the case of a one dimensional domain, of a set divided by the Lebesgue measure of the universal set:
This measure can only be applied to universal sets Y with finite Lebesgue measure greater than zero. Substituting (18) into NSp (8) we obtain a measure of nonspecificity for uncountable. domains:
The maximum value it attains for total ignorance is I, and the minimum for full certainty is 0. It is defined for all subsets B of Y, including zero Lebesgue sets, and the empty set. It is also symmetrical, though in this case symmetry has to be defined in terms of the Lebesgue measure not cardinality. It is monotone, subadditive, and multiplicative for non- interactive bodies of evidence, for all B E 9 ( Y ) . It is unitless.
4.3.3. Hybrid Domains IN given by (17) and (19) cannot deal with hybrid domains because they are committed to specific measures px (16) and py (18) respectively. However, the general expression NSp (8) can measure domains defined as the cross- product of countable and uncountable sets, provided we use restriction (14) to define the joint measure pxXy, and, for instance, define p, with (16), and p, with (18). all fol- lowing definition 4. Such a measure is monotone, multiplicative, subadditive, and symmetrical.
4.3.4. Relative Nonspecificiry: Index of Nonspecificity The measure of nonspeci- ficity IN(m) for countable and uncountable domains, given by (17) and (19) respectively, can be seen as an index of nonspecificiry. It accounts nonspecificity by relating it to the maximum information present in the universal set (measured by the n:spective p): rela- rive nonspecificity. This is in many ways a more intuitive way to measure nonspecificity than utilizing absolute measures such as N (I I) and (13). When we measure the non- specificity of a body of evidence in absolute terms, say in bits as yielded by (1 I ) , we know how many options we have: 1 bit, 2 options. Nonetheless, 2 options out of I0 pos- sible options do not quite mean the same thing as 2 options out of 100. The first case clearly represents a more (relative) uncertain situation. Measures such as IN offer this kind of relative to the universal set measurement of nonspecificity, which might be more intuitive in practical situations such as reliable computation [Rocha et 01.. 19961. Further, IN (19) is clearly much more effective than N (13) in measuring nonspecificity in infinite, uncountable, domains. It is defined for any kind of focal element on infinite, uncount- able, domains, including zero Lebesgue sets; (13) cannot treat those. Within this frame- work, the general measure NSp (8) can be used to deal with hybrid domains effectively as discussed above. Relative nonspecificity, with its unitless measures, offers intuitively a more coherent framework to measure uncertainty in countable and uncountable domains.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

48
5. CONFLICT
Conflict is identified with disagreement between several alternatives. The word disagree- ment itnplies the existence of some distinctive criteria between the several alternatives. When it is possible to distinguish between the several alternatives for sonie event, proposi- tion, or variable values, we have conflict amongst alternatives. It depends on the strength of the several alternatives, not on the "size" of the sets of distinguishable alternatives. Conflict increases when the quantity of equally strong contending alternatives increases, and decreases otherwise.
5.1. Absolute Conflict
In probability theory, conflict is measured with the Shannon measure of entropy: H(m) = . - - x m((x])log2m({x)). In evidence theory, the probabilistic entropy is efficiently extended, on countable domains, to a measure of uncertainty named Strife [Klir and Ramer, 19901:
for all A, B E 9 (X) and a body of evidence ( y , m) defined on X. It measures the mean con- flict among evidential claims within each given body of evidence in bits. I t IS additive, and it becomes the Shannon entropy for probability measures [Klir, 19931. Its range is 10, log2nl, where n is the number of focal elements: n = 131. S(m) = 0 when m((x)) = I for some x of X, and S(m) = log, n when m(A) = I/n for all A E y, provided all focal ele- ments A are disjoint. Thus, strife increases as alternatives start loosing their distinctive strenglh and are qualified by a similar belief weight m.
The term IA fl BIIIAI in (20) above, even though utilizing the cardinality measure, is sim- ply expressing the degree ofsubsethood of set A in set B [Klir, 19931. Conflict in evidence theory does not depend on the "size" of the several focal elements A E 3, but on their strength, given by the basic probability assignment m, and on the degree of subsethood in one another. Therefore, since y i s finite by definition (section 2.2.3). as long as a suitable degree of subsethood is defined, the measure of strife given by (20) remains an adequate measure of conflict (in bits and with the same characteristics above), both for countable and for uncountable domains:
where SUB(A, B) denotes the subsethood of setA in set B of X. In countable domains its value is given by the ratio IA fl BI/!Al. In uncountable domains it is given by:
[ 0, otherwise
where A(A) represents the Lebesgue measure of set A.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 49
5.2. Relative Conflict
Strife given by (21) measures conflict in uncertain situations, described in DST, in absolute terms. That is, it is a measure of the mean conflict among evidential claims within each given body of evidence. As with the case of nonspecificity, we may be interested in a rela- tive measure of conflict, relating the amount of conflict present on a specific situation to the maximum conflict present in a given body of evidence with n focal elements:
IS is an index of conflict yielding a value in the unit interval. It attains the value 1 for maximum conflict, and 0 for no uncertainty. IS is not additive quite in the same sense as S, but it obeys the following proposition:
PROPOSITION 6. IS(m) given by (23) satisfies the following property for noninteractive bodies of evidence ( A , mx) and (TY, my):
IS(m) = w, . IS(mx) + w2 . IS(my), with w l + w2 = I (24)
where, m is the basic probability assignment of a body of evidence defined on Z = X X Y, and w, = lognxl(lognx + logny), and w2 = lognJ(lognx + lopy) ; n , and ny denote the number of focal elements in TX and Fy respectively.
The proof is quite trivial and follows from the fact that S is additive for noninteractive bodies of evidence.
Proposition 6 indicates that the index of conflict for a joint body of evidence defined on the Cartesian product of two sets, is a weighted sum of the indices of conflict of each mar- ginal body of evidence. The weights are a measure of the relative size of the marginal bodies of evidence, that is, the number of focal elements of each marginal body of evi- dence. The weighting is necessary to maintain the notion of index of conflict. For inter- active bodies of evidence, the equality in (24) is substituted by an inequality "S", which defines a kind of weighted subadditivity.
6. FUZZINESS, INTERVAL BASED SETS, AND 3-D UNCERTAINTY
6.1. Fuuy Sets and Interval Valued Fuzzy Sets
A crisp set entails no uncertainty whatsoever; if an element x of X is a member of a set A C X, then it will not be a member of its complement AC C X. A fuzzy set introduces fuzziness as the above law of contradiction is violated: x can both be a member (to a degree) of A and AC. A fuzzy set A is defined by a membership function A: X + [O,I]. Following Yeager's [1979, 19801 suggestion to measure fuzziness as the lack of dis- tinction between a set and its complement, we reach a measure of fuzziness of a set A given in absolute terms by [Klir and Yuan, 19951:
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

50 L. M. ROCHA
whose range is [O, IxI], or given in relative terms by the index of fuzziness:
If X is a uncountable domain, (25) and (26) can be trivially extended by converting the summation to an integral and the cardinality of X to the Lebesgue measure of X.
Fuzzy sets can be extended to iuterval valued fuzzy sets (IVFS), a case of probabilis- ric sets LHirota, 19811 and type 2 fuzzy sets [Zadeh, 19751. A probabilistic set A assigns to each element, x of X, a probability distribution defined on [0, I] describing its mem- bership: A: X + (10,1], P). P represents the set of all probability distributions on [O,I]. A type 2 fuzzy set assigns to each element x of X, a fuzzy set, defined on [0, I]: A: X + F([O, I I). F is the set of all possible fuzzy sets defined on [0, I]. However, we do not need a probabilistic/possibilistic representation to define an IVFS; all we need is to assign an interval of [0, I] to each element .r of X: A: X + 4([0, I]), where 4 represents the set of intervals in [0, I]. The greatest advantage of IVFS over probabilitylpossi- bilistic sets is their comparative simplicity: probability or possibility distributions need an extensive and precise amount of information that is usually not obtainable in relevant applications. Conversely, an IVFS does not require much more information than a fuzzy set, simply an upper and a lower limit to its interval of membership. Moreover, an IVFS offers a kind of uncertainty fuzzy sets cannot capture and which probabilistic and pos- sibilistic sets initially aimed at [Hirota, 19811. Basically, i t is not always possible to unequivocally specify a single membership value for some linguistic category we wish to model [Gorzalczany, 19871. as fuzzy sets demand.
IVFS offer, in addition to fuzziness, a nonspecific description of membership in a set; and they do so with very little infomiation requirements. An IVFS A, for each x in X, cap- tures two forms of uncertainty: fuzzir~ess (as in the case of fuzzy set) and nonspecificity. Fuzziness is absolutely specific; when we create a fuzzy set we have perfect knowledge of the degree to which a certain element x of X belongs to A. In contrast, when we create an IVFS we have nonspecific knowledge of the degree of membership; hence the util~zation of an interval to describe the membership of .r in A.
6.2. Evidence Sets
An alternative way to represent an IVFS A [Rocha, 19941 is to consider that for every ele- ment x of X, there is a body of evidence (7, m 3 defined on the set of all intervals of [O,I], 910, 1:1, with a single focal element given by the interval IX = [ l k , lI;,,] [O, I]. The basic probability assignment function m" assumes the value 1 for this single focal element, repre- senting our belief that the degree of membership of element x of X in A is (with all certainty) in the sub-interval I" of [0, I]. In other words, our judgement of the (nonspecific) degree of membership, I.', of x in set A indicates that we fully believe it is correct. Notice that the uni- versal set of the IVFS is X, but the universal set of the body of evidence is [0, I], denoted by Y from now on.
It is now clear that an IVFS is a very special case of a more general structure which I call eviderice set. An evidence set A of X, is defined by a membership function of the form:
A(x): X + 93[0,1]
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 51
where, %[0, I] is the set of all possible bodies of evidence (7, m x ) on 3(Y) = 9[0, I]. Such bodies of evidence are defined by a basic probability assignment ni" on 9(Y), for every x in X (focal elements must be intervals). Notice that Y = [(I, I] is an infinite, uncountable, set, while X can be countable or uncountable.
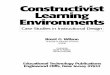
6.2.1. Consonant Evidence Sets An interesting case occurs when we restrict y.' to consonant bodies of evidence, that is, to a nested structure of interval focal elements: 1; 11 5 ... I," C [0, I]. In this instance we obtain a sort of graded and nes1:ed structure of sev- eral IVFS (Figure I), which, due to equations (4) and (5), leads to consonant belief and plausibility measures:
Instead of using a single interval with maximum degree of belief, to formalize the non- specificity of the degree of membership of element x of X in a set A, as is the case of IVFS, a consonant evidence set uses several nested intewals (three in the case of Figure I) with different degrees of belief, stating our graded evidence claims regarding the membership of element x of X in A.
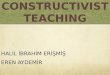
6.2.2. Non Consonant Evidence Sets When T is no longer restricted to consonant bodies of evidence, we obtain evidence sets that are a bit more "incoherent", that is, dis- joint intervals of membership exist for the same membership degree in an evidence set. In other words, the evidence we possess leads to a conflicting characterization of the mem- bership value of x . Figure 2 shows an example of a non-consonant evidence set.
6.2.3. 3-D Uncertainty A fuzzy set captures vagueness in a specific way; an IVFS introduces nonspecificity; a consonant evidence set introduces grades or shades of non- specificity; and finally, a nonconsonant evidence set introduces conflict as we have cases
Figure 1 Consonant Evidence Set with 3 focal elements.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

L. M. ROCHA
'1
Figure 2 Non-consonant Evidence Set with 3 focal elements
where the degree to which an element is a member of a set is represented by disjoint subintervals of LO, 11 with different evidential strengths. The three forms of uncertainty ;Ire clearly present in human cognitive processes. Models of cognitive categories, if uti- lizing some sort of set structure, have to rely on mechanisms similar to evidence sets IRocha, 1994, 1995b, 19971. In section 7 I will come back to this issue. As exposed above, fuzzy sets and interval valued fuzzy sets offer only a limited representation of rec- ognized uncertainty forms, while evidence sets capture all of those. Thus, more than sim- ply measuring fuzziness, as approximate reasoning models do, models of uncertain reasoning based on evidence sets need to effectively measure all the three uncertainty fornls.
Recently, measures of total, combined. uncertainty have been proposed [Harmanec, and Klir, 19941. Such a total measure of uncertainty is a very important uncertainty mea- suring tool in its own right, however, in the modeling of uncertain reasoning processes, such as cognitive categorization, the three different uncertainty qualities should be mea- sured separately. Indeed, if one of the reasons to move approximate reasoning models from fuzzy sets to interval based set structures (such as IVFS and evidence sets), is to cap- ture more Ibrnms of uncertainty. it makes no sense to use a condensed uncertainty measure in the decision making actions of such models. Hence, we need a 3-tuple of measures of the 3 main kinds of uncertainty to aid us in the decision making steps of our uncertain rea- soning models. Each situation, each set, should be qualified in its uncertainty content with something like: (Ftczziness, Nonspecificiry, ConJict) [Rocha er al., 19961.
Fuzziness in F (25) and IF (26) was defined as the lack of distinction between a set and its complement. I t is fairly easy to extend the usual fuzzy set operations of complement, inter- section, and union to an IVFS framework [e.g. Gorzalczany, 19871 or, more generally, to
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 53
an evidence set framework [Rocha, 1994, 1995b, 1997; an equivalent formulation has also been proposed by Zhu and Lee, 19951. The interval valued membership function of ele- ments of X in an IVFS A is given by: A(x) = I' = [Ifnfi l~u,,] [O, I]. Its complement can be defined as the negation of the interval limits in reverse order: Ac(x) = (IX)' = [I - l;,,,,, I - lfn,]. The membership function of an evidence set A of X is given, for each x, by 11 inter- vals weighted by a basic probability assignment mX:
4 x 1 = [(If, m;), (I;, mi). . . . , (I,", m i ) ) (27)
The complement of an evidence set [Rocha, 19971, or the negation operator in interval valued evidential logic systems [Zhu and Lee, 19951, is defined as the complement of each of its interval focal elements with the preservation of their respective evidential strengths:
~ " ( x ) = [((I;)', m;), ((I?, mi). . . . . ( (13) m i ) ) (28)
Since the complen~entation of a set does not affect the Lebesgue measure of the interval focal elements, nor their evidential weight, the distinction, D, between an interval IX and its complement (I")', is defined as the absolute of the difference between their respective higher bounds:
Notice that all intervals symmetric to the middle point ( '12) of the membership space Y = [O, I], will be indistinguishable from their complement (D = 0) since the sum of their limits equals I.
The fuzziness of the membership of an element x of X in an evidence set A, is obtained by weighting the quantity D for each focal element with In', and subtracting i t from I to obtain the lack of distinction between its membership in the set and in its complement (such quantity is an index of local fuzziness):
The absolute measure of fuzziness for the whole evidence set A is:
whose range is [0, 1x11. An index of total relative fuzziness can be obtained by:
Notice that if X is uncountable, (31) and (32) can de adapted so that the sum becomes an integral, and the cardinality of X becomes the Lebesgue measure of X.
In addition to fuzziness, the membership of an element x of X in an evidence set A pos- sesses nonspecificity that can be measured by IN (19) derived in section 4.3.2. for
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

54 L. M. ROCHA
uncountable domains such as Y = [O, I]. This measure defines an index of local relative nonspecificity INx (Y = I):
An absolute measure of nonspecificity for the whole evidence set A is:
whose range is 10, /XI]. An index of total relative nonspecificity can be obtained by:
Again, if X is uncountable, (34) and (35) can de adapted so that the sum becomes an inte- gral, and the cardinality of X becomes the Lebesgue measure of X.
Conflict
In addition to fuzziness and nonspecificity, the membership of an element x of X in an evi- dence set A possesses conflict that can be measured by IS (23) derived in section 5.2. This measure defines an index of local relative conflict:
where S(m.') is the measure of strife (21) derived in 5.1, now defined on a body of evidence ( T , I ~ I . ' ) on Y = [0, I], where 7 is the set of focal elements I", and n is the number of such focal eletnents. An absolute measure of conflict for the whole evidence set A is:
whose range is [0, IXI]. An index of total relative conflict can be obtained by:
Once more, i f X is uncountable, (37) and (38) can de adapted so that the sum becomes an integral, and the cardinality of X becomes the Lebesgue measure of X.
The three fornis of uncertainty define a 3 dimensional uncertainty space for set stmc- turcs, where crisp sets occupy the origin, fuzzy sets the fuzziness axis, IVFS the fuzziness- nonspecificity plane, and evidence sets most of the rest of this space. Probabilistic sets occupy the conflict-fuzziness plane. Notice that evidence sets cannot occupy the conflict- nonspecificity plane. that is, if nonspecificity and conflict exist in evidence sets, then we so will fuzziness. If the measures of uncertainty used are the indices so far presented, the uncertainty content of evidence sets can be described in a unit cube (Fig. 3). We can cal- culate the uncertainty of each element x of X of an evidence set A (local uncertainties), and plot each element in this cube, in which case the uncertainty of an evidence set will be
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY A N D EVIDENCE SETS
1, 1) Maximum Uncertainty
Figure 3 3-D Uncertainly Unit Cube
described by a "cloud" of points in the uncertainty cube. The local uncertainty, U', will be defined by the following (fuzziness, nonspecificity, conflict) 3-tuple based on equations (30), (33), and (36) respectively:
Alternatively, we may calculate the total uncertainty indices for the set A, and plot it in this cube as a single point. Naturally, this point will be the center of mass of the cloud of local uncertainties. The total uncertainty, U, of an evidence set A will be defined by:
The uncertainty situation of the several set structures known is sumrnarized in Table 1.
Table 1 Uncertainty situation of different set structures
Crisp Sets 0 0 0 Fuzzy Sets [o . l l 0 0 IVFS [0.11 [o . l l 0 Evidence Sets [o,I] Io,l] [o,I]
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

56 L. M. ROCHA
7. EVIDENCE SETS: UNCERTAINTY AND BELIEF IN A CONSTRUCTIVIST FRAMEWORK
"Whenever I write in this essay 'degree of suppon' that given evidence provides for a proposition or the 'degrcc of belief that an individual accords the proposition. I picture in my mind an act of judgement. 1 do not pretend that there exists an objective relation between given evidence and a given proposition that deter- trii~ies a precise numerical degree of suppon." IShafer, 1976, page 211
Evidence sets establish an interval based set structure defined in terms of evidence theory. These set structures are able to describe all the recognizable forms of uncertainty in a gen- eral theory of information [Klir, 19911. Furthermore, they introduce the concept of mem- bership in a set as a set ofj~idgments of degrees of membership. In other words, by utilizing the Dempster-Shafer theory of evidence, we explicitly qualify degrees of membership with a belief-based, subjective, formal framework.
7.1. Fuzzy Objectivism
Fuzzy sets can model cognitive categories whose rules for membership are graded. This is obviously a step in the right direction, to model cognitive categories according to current theories in Psychology and Cognitive Science [Rosch, 19751. Nonetheless, i t is equally easy to show the limitations of fuzzy sets regarding complex concept combination [Osherson and Smith, 198 1 ; Smith and Osherson, 1984; Lakoff, 1987; Rocha 19941. IVFS solved some of the deficiencies of fuzzy sets as models of linguistic categories [Turksen, 1986; Gorzalczany, 1987; Atanassov, 19941, by introducing an extra level of uncertainty to their membership degrees: nonspecificity [Rocha, 19941. Nevertheless, as argued else- where in more detail [Rocha, 1995b, 19971, fuzzy sets and IVFS do not offer an explicit way of modeling the subjective aspects of cognitive categories, leading to what some crit- ics call fuzzy objectivis~n [Lakoff, 19871: the idea that fuzzy mental categories are assumed to reflect a world that is inherently fuzzy [Zadeh, 19651.
Even though this may be true of most of the research pursued by those utilizing fuzzy logic to model human reasoning, it is also not the whole story since the membership values of an element in a category, can be interpreted both as objective or subjective quant~fica- lions of categories [Rocha, 19971. In the context of systems theory, fuzzy sets are often used as models of human categories within a subjective, constructivist, framework [Medina-Martins and Rocha, 19921. Thus, fuzzy set theory does not demand that its mod- els be objective, it simply does not provide a mechanism to introduce an explicit account of subjective constraints in the modeling of linguistic and cognitive phenomena, as required by modern theories of cognitive categorization [Rosch, 1978; Lakoff, 19871.
7.2. Evolu~iot~ury Constructivism
By subjective constraints of cognitive categories, I mean generally what is known as the constructivist position in systems research [Klir, 1991; Von Glassersfeld, 1995; Maturana and Varela, 19871. Cognition is considered to be associated with self-sustained material systerns whose classification of an environment is not open-ended, but dependent on the self-organizing properties of its dynamics [von Foerster, 19771 or specific embodiment [Varela et ul., 19911, and developmental history [Piaget, 1971; Pask, 19751. Lakoff [1987],
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 57
in particular, has proposed a theory of cognitive categories that requires the abandonment of a pure representationalist understanding of cognition, and is dependent on the contextual constraints of a cognitive system's embodiment and development. This view lead to an anti-representationalist, subsymbolic, view of cognition which avoids altogether the repre- sentational links between cognitive categories and a cognitive system's environment.
I have argued elsewhere [Rocha, 1995~ . 1996; Henry and Rocha 19961 that this radical constructivism must be tamed under an evolutionary framework that requires a pragmatic dimension to categorical distinctions of an environment. In other wonis, any approach to cognitive categorization must account for the contextual constraints of material systems and their development, as well as the pragmatically representational constraints demanded by natural selection. The material, developmental, and evolutionary constraints entail a broader form of constructivism named evolutionary constructivism, which does not avoid the issue of representation.
Heylighen and Joslyn [I9921 have proposed a very similar notion named physical con- structivism which attempts to subsume dynamic, developmental, and evolutionary con- straints into a physical dimension. In any case, 1 feel that physicalism tends to reduce the influence of natural selection to laws of dynamics and complexity, stripping it off its prag- matic dimension, and thus preventing any discussion of functionality and representation. If physical constructivism merely demands that cognition be understood in terms of the phys- ical processes which manifest cognition, then it is no different than radical constructivism as proposed by Maturana [I9791 or von Glassersfeld [1995]. There is no room for the notion of representation in such a view of cognition: cognitive categories are nothing but the internal, subsymbolic, stabilities of the brain's dynamics (eigenbehavior in the language of second- order cybernetics [von Foerster, 1977; Rocha 1996]), much like the d:ynamic attractors of artificial neural networks.
Evolutionary constructivism accepts that cognition is constructed, that is, it is con- strained by its own dynamical embodiment and development, but this form of construc- tivism also acknowledges the pragmatic, functional, necessity of its representational dimension established through natural selection. In other words, it merely accepts the obvi- ous need for an evolutionary constraint of cognitive categories. Mental categories are cer- tainly constructed by brains, but if the classification power of such categories in a given environment is null, then the biological systems associated with such brains will most probably not survive in the environment they misclassify. This does not mean that cogni- tive categorization should be seen as open-ended. A given material system will only be able to classify certain aspects of its environment, those for which it can construct dynamic stabilities. But it must be able to classify them well enough in order to survive. An artifi- cial neural network will also not be able to solve any problem, and we will choose differ- ent kinds of networks, with different dynamics, to solve different problems. Thus, models of cognitive categorization need to include the contextual influence of dynamic, develop- mental, and pragmatic (evolutionary) constraints.
Radical constructivism, based as it is on the dynamic and developmental cybernetic explanations of cognition [Pask, 1975; Glanville, 19881, often seems to either explain away the notion of representation or avoid it altogether. The same trend takes place in Cognitive Science [Varela, er al., 19911. But we also do not have to pursue a naive realist avenue if we wish to study the notion of representation. It does not have to be seen as the unconstrained one-to-one mapping of real world categories to brain categories. Quite the
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

58 L. M. ROCHA
contrary, evolutionary constructivism demands the understanding of cognition and repre- sentation as emerging from several dimensions that are mutually constraining: dynamics, development, and pragmatics. The representational aspects of categories have to do with the cxistence of a pragmatic dimension. But representation is constrained by the dynamic and developmental dimensions, loosely referred to here as a subjective dimension, in so far as it identifies a dependency of cognition on its own materiality and development. Evolutionary Constructivism is a truly inclusive approach also with implications for evo- lutionary systems and artificial life [1995a, 1997c, 19961.
7.3. Evirletlce Sets anrl Evolutionary Construcrivisr~~
Evidence sets are proposed as ideal tools for modeling cognitive categories under this form of evolutionary constructivism. The interval membership values offer an objective, uncer- tain, representation of categories. That is, the numerical, unconstrained, interval valued membership in a categorylset models the representational aspects of categories. However, these intervals of membership are constrained by the basic probability assignment function from the DST of evidence. In other words, the membership value of an element in an evi- dence set is defined by interval membership values and an account of belief constraining this membership. I have identified the several weighted intervals of membership as the membership of an element in an evidence set according to a set of subjectively defined contexts [Rocha, 1994, 19971. That is, each focal element of membership is associated with a particular context. These contexts are understood as subjective in the way discussed above, that is, they may depend not only on higher level cognitive constraints, but also on material and developmental constraints.
Thus, evidence sets are mathematical set structures defined in two distinct levels: mem- bership and belief. Intervals define membership objectively, while the basic probability assignment function constrains membership within a belief based, subjective, framework. In addition, as shown in section 6, evidence sets capture all the main forms of uncertainty recognized in generalized information theory: fuzziness, nonspecificity, and conflict. Notice in particular that fuzzy sets and IVFS do not capture conflict. Conflict arises only when several intervals of membership are introduced with the belief weighting of the basic probability assignment function for each element of an evidence set. In this context, con- flict appears only when the subjective level is introduced.
7.4. Ut~certrrit~, Belief-Based, Recrsoning
If evidence sets are to be accepted as coherent set structures with important modeling char- acteristics for an extended theory of approximate reasoning, set-theoretic operators will have to be developed in order to manipulate them. Here only the operation of complement was lne~itioned since it was necessary to define a measure of fuzziness. In Rocha 11994, 19971 1 have presented a few other operators. Further, independently, Zhu and Lee, [ 19951 developed an interval based logic of belief similar to evidence sets. Their work focuses deeply on the definition of logic connectives applicable to evidence sets. To develop evi- dence sets further we need to establish sound rules and operations leading to a strong theory of uncertain, belief-based, reasoning. Therefore, all of the proposed operations and connec- tives must be evaluated on their applicability in coherent computational schemes, as well as
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 59
accepted theories of cognition and artificial intelligence. In other words, belief-based inter- val set structures, such as evidence sets, as models of categorization processes and human reasoning, must be evaluated within some larger uncertain reasoning framework.
7.5. Final Remarks
Many of these issues are dealt in more detail in Rochar1994, 1995b, 19971, Rocha et a/. [1996], Henry and Rocha [1996]. Here I wanted to stress the ability of evidence sets tocap- ture the main forms of uncertainty recognized in generalized information theory, and to define a systems theoretic, constructivist, approach to cognitive categorization and repre- sentation. I am grateful and indebted to George Klir's foundational work in both these areas, as it has influenced me profoundly.
ACKNOWLEDGMENTS
I wish to thank Manuel Cxdenas for his patience, help, and ideas, indispensable for some portions of this article, as well as the very helpful revisions offered by the editor and reviewers. 'Chis work was completed with the partial support of a scholarship (BD-527 1-95) awarded by the Programa PRAXIS XXI, Junta Nacional de Investiga~iio Cie~itifica e Tecnolbgica, Lisboa, Portugal.
REFERENCES
Atanassov. K. [1994], "Operators over interval valued intuitionistic fuzzy sets." F u u y Sers and Sysretns, 64. pp. 159-174.
de Cooman, G.. D. Ruan, and E. Kerre (Eds.) [1995], Foundariorls and Applications of t'ossibiliry Theory. World Scientific Press.
Dubois, D. and H. Prade [1985], "A note on measures of specificity for fuzzy sets." lnrernafior~al Jourr~al uj General Sysrems. 10. pp. 279-283.
Dubois, D. and H. Prade [1986]. "A set-theoretic view of belief functions: logical operations and approximations by fuzzy sets." lnrernarional Journalof General Systems. 12, pp. 193-226.
Dubois. D. and H. Prade (19871. "Properties of measures of information in evidence and possibility theories." F u z q Sers and Systems, 24. pp. 161-1 82.
Glanville, R. [1988], Objekre. Merve Verlag. Gorzalczany. M. B. (19871. "A method of inference in approximate reasoning based on interval-valued fuzzy
sets." F u u y Sers and Sysrems. 21, pp. 1-17. Harmanec, D. and G. Klir [1994], "Measuring total uncertainty in Dempster-Shafer theory: a novel approach."
Inrerr~ariot~al Journal of General Sysrems, 22, pp. 405-419. Hanley, R. [19281, "Transmission of Informations". The Bell Sysren~ Technical Journal. 7, pp. 535-563. Henry, C. and L. M. Rocha [1996], "Language theory: consensual selection of dynamics." Cybernerics and
Sysrems: An lnrernarional Journal. Vol. 27 pp. 541-553. Heylighen. F. and C. Joslyn [1992], "Physical constructivism." Principia Cybernerico Web. WWW document:
I~ttp:Npespmcl.vub.ac.be/physcons.html. Higushi, M. and G. Klir [1983], "Measures of uncertainty and information based on possibility distributions."
Inrernrrtional Journal of General Svsren~s, 9, pp. 43-58. Hirota, K. [1981], "Concepts of probabilistic sets." Fuzzy Sers and Sysrems. 5, pp. 3146. Klir, G. J. and T. Folger [19881. Fuzzy Sers, Uncenablry. and Inforn~arion. Prentice Hall. Klir. G. J. and A. Ramer [19901. "Uncertainly in the Demster-Shafer theory: a critical re-examination."
/nrernarional Journal of General Systems. 18. pp. 155-166. Klir, G. J. and Bo Yuan [19951. Fuzzy Sets and Fuzzy b g i c : Theory and Applicarions. Prentice Hall. Klir, George 1. [I99 I], Facets of Sysrems Science. Plenum Press. Klir, George J. (1991 b]. "Generalized Information Theory". Fr'lr:z? Sets and Sysrems, 40, pp. 127-142.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

L. M. ROCHA
Klir. George J. [1993]. "Developments in unceriainty-based information." In: Adva~rces in Computers. M . Yovils (Ed.). 36, pp. 255-332.
Kramosil. 1. [1995]. "Believeability and plausibility functions over infinite sets." Ir~ternotional Journol of Gcrrcrol S.vsrems. 23, pp. 173-198.
I-akoff. G. [ 19871. W~~nte~z, Fire. ond Dangerous Thi~tys: Wltot Categories Reveal about the Mind. University of Chicago Press.
Maturalla. H. and F. Varela 119871. The Tree of Knowledge: Tire Biological Roors of Huntan Understanding. New Science Libmry.
Moturana, H. [1979]. "Biology of language: the epistemology of reality." Psychology and Biology of Lunguage and Ti~orrght: E.s.soys in honor of Eric Lenncberg. Academic Press, pp. 27-63.
Medina-Manins. P.. L. Rocha, er a!. [1994]. "Metalogues: an essay on computers' psychology-from childhood to adulthood." In: Cybcmerics ond Systenrs 94. R. Trappl (Ed.). World Scientific Press, pp. 565-572.
Medinti-Manins. P. and L. Rocha [ 1992l. 'The in and the out: an evolutionary approach." In: Cybernetics and Sy.stear.s 92. R. Trappl (Ed.). World Scientific Press, pp. 68 1-689.
Nako~ilura. K. and S. lwai 119821. "A representation of analogical inference by fuzzy sets and its application to information retrieval systems." In: Fuzzy Ir~forn~oriorl arld Decisiorl Processes. Gupta and Sanchez (Eds.). North-liolland, pp. 373-386.
Osherson. D. and E. Sniith [1981]. "On the adequacy of prototype theory as a theory o f concepts." Cognition. 9. pp. 35-58,
Pask. Gordon [ 19751. Conver.rarior~. Cog~ririo~r, orrd Learning: A Cyberneric Thcoty and Methodology. Elsevier. Pitiget. J. [1971]. The Consrrucriorl ofReoliry ~II the Cl~ild. Ballantine Books. Kamer. A. [1987]. "Uniqueness of information measure in the theory of evidence." Fuzzy Sets and Systems, 24,
pp. 183-196. Kamcr. K. 119901, "Concepts of fuzzy information on continuous domains." International Journal of General
S?:srent.s. 17. pp. 241-248. R;inilom House. 119941, Webster's Elecrrorric Dicrionory and Tlresaurus. Wordperfect Corporation. Kesconi. G., G. Klir. U. St. Clair, and D. Harmanec 119931. "On the Integration of Uncertainty Theories."
I~trerrrotiwml Jounrnl Of U~~ceriainry. Frruine.ss arrd Kr~owledge-Based Systems. I(!), pp. 1-1 8. Kocha. Luis M. [1994]. "Cognitive categorization revisited: extending interval valued fuzzy sets as simula-
tion tools concept combination." In: Proc. of rhe 1994 Inr. Conferertce of NAFIPS/IFIS/NASA lEEE Press. pp. 400-404.
Roch;~, Luis M . [ 1995aJ. "Contextual genetic algorithms: evolving developmental rules." In: Advances in ArtiJici~rl Lifc. J. Moran, A. Moreno. J. J. Merelo, and P. Chacon (Eds.). Springer-Verlag, pp. 368-382.
Kocha, Luis M. 11995bl. "Interval based evidence sets." In: Proc. of ISUMA-NAFIPS'95 IEEE Press, pp. 624-629. Rocha. Luis M. 11995~1, "Selected self-organization: from eigenbehavior to descriptions." In: Evolurior~ory
Sysrenr.~. V~CIIIIN 1995. S. Salthe and G. Van de Vijver. M I T Press. (in press). Kochti. Luis M. 1 1 9961. "Eigenbehavior and symbols." Sysrems Research, 12(3) pp. 37 1-384. Kocha. I.. M. 119971. "Evidence Scts: Contractual Categories" In: Semiotics and Control Ed. M. Coombs Santa
I'e Instilute Series in the Sciences of Complexity. Addison-Wesley In Press. Koclin. I-. M.. V. Kreinovich, and K. B. Kearfott (19961, "Computing uncertainty in interval based sets." In:
A l~ /> l ico l i~ r t~ of lrtlewaI Corrr~m~oli~n.r. V. Kreinovich and K. B. Kearfott (Eds.). Kluwer, pp. 337-380. Rusch. E. 119751, "Cognitive represenvations of semantic categories." J. ofExperimentolP,~chology. 104, pp. 27-48. Kosclr. E. 119781. "Principles of cate.qorization." In: Co~nirio~z arrd Cate~orizariorl. E. Rosch and B. Lloyd (Eds.).
Iiillsdale. pp. 27-48. Scliunl. 1). A. 119941. Evide,rriol Furmdorions of Probabilistic Reasoning. John Wiley and Sons. Shaf'cr. G. 1 19761. A Mothernoricol Tlteon~ o f Evidence. Princeton Universitv Press. . . ,. , " Sliafcr. G. and J. Pearl (Eds.) [ 19901, Reodirtgs in Uncertairr Reason6lg. Morgan Kauffman. Sniith. E. tind I). Oshcrson [ 19841, "Conceptual combination with prolotype concepts." Cognitive Science, 8.
nn 717-761 r , ' ' . - .
Tutkcn. 13. I I9Xhl. "lnlcrval val~recl lurzy sets b a d an ~nor~nal forms." I.'rt:r, Sercand S)srent.$. 20. pp. 191-2 10. 'I'tirkzcri. I 3 I IOV41. "lntsn,al valued l u u v sct., and fuczv rlicahurc\ " In. I'ror o f rhe N~lFli'S/lFIS/NASA '94 . .
IEEE Press. pp. 317-321. Vti~.cl;i. I'. E. Tho~tipson, and E. Rosch [1991]. The EnibodiedMind: Cogrtitive Science nndHuman Erperience. MIT. vo~ i Gliiherfcld. E. [ 19951, Radical Cr)n.srrecri~,isnt: A Way of Knowing arrd Learning. The Falmer Press. von l'ocrstcr. Hcinz 1 1 9771. "Objects: tokens for (eigen-)behaviors." In: Homnlage a Jearl Pioget: Epistemologie
Gmtcriyrre cr Eqttilibrario,~. B. Inhelder, R. Cracia. and J. Voneche (Eds.). Delachaux et Niestel. Reprinted in von lherster L 198 I].
Wtirig. 2. and G. Klir 11992l. Ftrzzy Meosrrre Theory. Plenum Press. Yirgcr. K. K. [19791. "On the mcasurc of fuzziness and negation. Part I : membership in the unit interval."
I~rrcrrtorional Jorrrrral rf Gorcrol S?srem.s. 5. pp. 221-229.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014

UNCERTAINTY AND EVIDENCE SETS 6 1
Yager. R. R. [1980], "On the measure of fuzziness and negation: Pan 11: lattices.'' Infonnarion and Conrrol, 44. pp. 236-260.
Yager. R. R. [ 19821. "An introduction to applications of possibility theory." Human S:dsrems Manngemenr, 3, pp. 246-269.
Yager, R. R. 119831. "Entropy and specificity in a mathematical theory of evidence." lnrernarionol Jorrrnal of General Sysrenls, 9. pp. 249-260.
Zadeh, Lofti A. 119651, "Fuzzy Sets." In/onnarion and Control, 8 , pp. 338-353. Zadeh, Lofti A. [1971]. "Quantitative fuzzy semantics." I~ fom~ot ions Sciences. 3. pp. 159-176. Zadeh. Lofti A. [ 19751. "The concept of a linguistic variable and its application to approximate reasoning, 1, 11,
and 111." Irformation Sciences, 8, pp. 199-249, pp. 301-357, 9. pp. 43-80. Zadeh. Lofli A. (19781, "PRUF-a meaning representation language for natural languages." Inrert~atiorzol Jortrnul
(IJ'MUII-Machine Studies, 10. pp. 383-410. Zhu. Q. and E. S. Lee 119951. "Evidence theory in multivalued logic systems." lnrernolional Jorrrnal of lnrclliger~r
Sysrems, 10, pp. 185-1 99.
Luis Mateus Rocha is a Doctorate Candidate at the Deparrntenr ofSy.stem,s Scietlce and Indrrsrriol Enzineering, of Ihe % I . Warson School of Engineering and Applied Science or the Srare University of New York at Binghomrorr, where he works with George Kl i r and Howard Pattee. Born in Angola in 1966, he moved to Portugal in 1975. After graduating from a Licentiate Degree in Mechnnical Engineering and Control Systems in 1990 at I.S.T. in Lisbon. Portugal. he frequented the Msc, in Industrial Engineering at the Staffordshire University, England. He has published and edited several articles in the areas of Fuzzy Logic. Artificial Intelligence, Artificial Life, and Evolutionary Systems. He works on the utilization of formal tools such as Genetic Algorithms. Fuzzy Logic, Interval (:omputation. Evidence Theory, and Neural Networks in the development o f computational models of evo- lutionary systems with both self-organizing and evolutionary characteristics. He is interested in semiotic and evolutionary constructivist model:; of biological and cog-
nitive systems and its applications to complex systems. He has been the recipient of several scholarships by the European Union and the Portuguese Government, as well as several awards such as the best paper award for the 13th European Meeting on Cybernetics and Systems Research in 1996 and the Cordon Pask memorial award.
Dow
nloa
ded
by [
Uni
vers
ity o
f T
asm
ania
] at
23:
10 1
2 N
ovem
ber
2014