Embed Size (px)
Citation preview
VISOKOŠOLSKI STROKOVNI ŠTUDIJ
Elektrotehnika
POROČILO
Čas opravljanja
Mentor v GD
Študent
Vpisna številka
E-pošta
Telefon
VISOKOŠOLSKI STROKOVNI ŠTUDIJ
Elektrotehnika – Avtomatika in Robotika
ILO PRAKTIČNEGA IZOBRAŽEVANJAv
Podjetju ETRA, Celje
od 7.5.2012 do 6.7.2012
Iztok Konrad
Aleš Razboršek
E1016468
051-243-215
NEGA IZOBRAŽEVANJA
ii
PREDSTAVITEV PODJETJA
iii
PREDSTAVITEV PODJETJA
iv
KAZALO 1 UVOD ............................................................................................................................ 1
2 PREDSTAVITEV PODJETJA ETRA d.o.o. ................................................................. 2
2.1 Dejavnosti podjetja ................................................................................................. 3
2.1.1 Avtomatizacija in pogonski sistemi ................................................................. 3
3 OPIS PRAKTIČNEGA IZOBRAŽEVANJA ................................................................ 5
3.1 Pomoč pri delu transportne linije 1 v Leku - Ljubljana .......................................... 7
3.2 Opis dezinfekcijske linije 1 ..................................................................................... 7
3.3 Princip delovanja induktivnega senzorja ............................................................... 9
3.4 Elementi električnih inštalacij .............................................................................. 10
3.4.1 Tripolni inštalacijski odklopnik ..................................................................... 11
3.4.2 Enopolni inštalacijski odklopnik ................................................................... 11
3.4.3 Kontaktor ....................................................................................................... 11
3.4.4 Vtičnica .......................................................................................................... 12
3.4.5 Zaščitni rele ................................................................................................... 13
3.4.6 Rele ................................................................................................................ 15
3.4.7 Vrstne sponke ................................................................................................ 15
3.4.8 Napajalnik iz 220/24 V DC ........................................................................... 16
3.4.9 Krmilnik Simens in razširitveni modul ......................................................... 17
3.4.10 Kanali ............................................................................................................ 18
3.4.11 Letev .............................................................................................................. 19
3.4.12 Priklop žic v kablu ......................................................................................... 19
4 ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA S POMOČJO MIKROKRMILNIKA PIC18F4520 IN OSTALO PERIFERIJIO ..................................... 20
4.1 Zagon zvezda - trikot ............................................................................................ 20
4.2 Vezava zvezda ...................................................................................................... 21
4.2.1 Fazni tok v vezavi zvezda (If,Y) ..................................................................... 21
4.2.2 Dovodni tok v vezavi zvezda (IY) .................................................................. 21
4.3 Vezava trikot ......................................................................................................... 22
4.3.1 Fazni tok v vezavi trikot (If,D) ........................................................................ 22
4.3.2 Dovodni tok v vezavi trikot (ID) .................................................................... 22
4.4 Priklop asinhronskega motorja ............................................................................. 24
PREDSTAVITEV PODJETJA
v
4.5 Časovni potek delovanja ....................................................................................... 25
4.6 Mikrokrmilnik ....................................................................................................... 26
4.7 Razvojna plošča .................................................................................................... 28
4.8 Napajalnik ............................................................................................................. 30
4.8.1 Toroidni transformator: ................................................................................. 30
4.8.2 Elektrolitski kondenzator: ............................................................................. 31
4.8.3 Stabilizator: .................................................................................................... 31
4.9 Programiranje mikrokrmilnika PIC18F4520 ........................................................ 32
5 ANALIZATOR ............................................................................................................ 37
6 IZRAČUNI ZA 3 FAZNI ASINHRONSKI MOTOR ................................................. 46
7 SKLEP IN ZAKLJUČEK ............................................................................................ 49
8 PRILOGE ..................................................................................................................... 50
8.1 8.1 Programska koda ............................................................................................. 50
PREDSTAVITEV PODJETJA
vi
KAZALO SLIK Slika 2.1: Logotip podjetja Etra d.o.o. ................................................................................... 2
Slika 3.1: Nalepka TN-S sistema ........................................................................................... 5
Slika 3.2: TN-S sistem ........................................................................................................... 5
Slika 3.3: Nalepka TN-C (ničenje) ........................................................................................ 6
Slika 3.4: TN-C sistem prikaz vtičnice in 3 faznega porabnika ............................................ 6
Slika 3.5: Dezinfekcijska linija 1 ........................................................................................... 7
Slika 3.6: Paleta, ki se nahaja na valjčnem transportu 4 v prezračevalni komori ................. 8
Slika 3.7: Valjčni transport 1 ................................................................................................. 8
Slika 3.8: Valjčni transport 2 ................................................................................................. 8
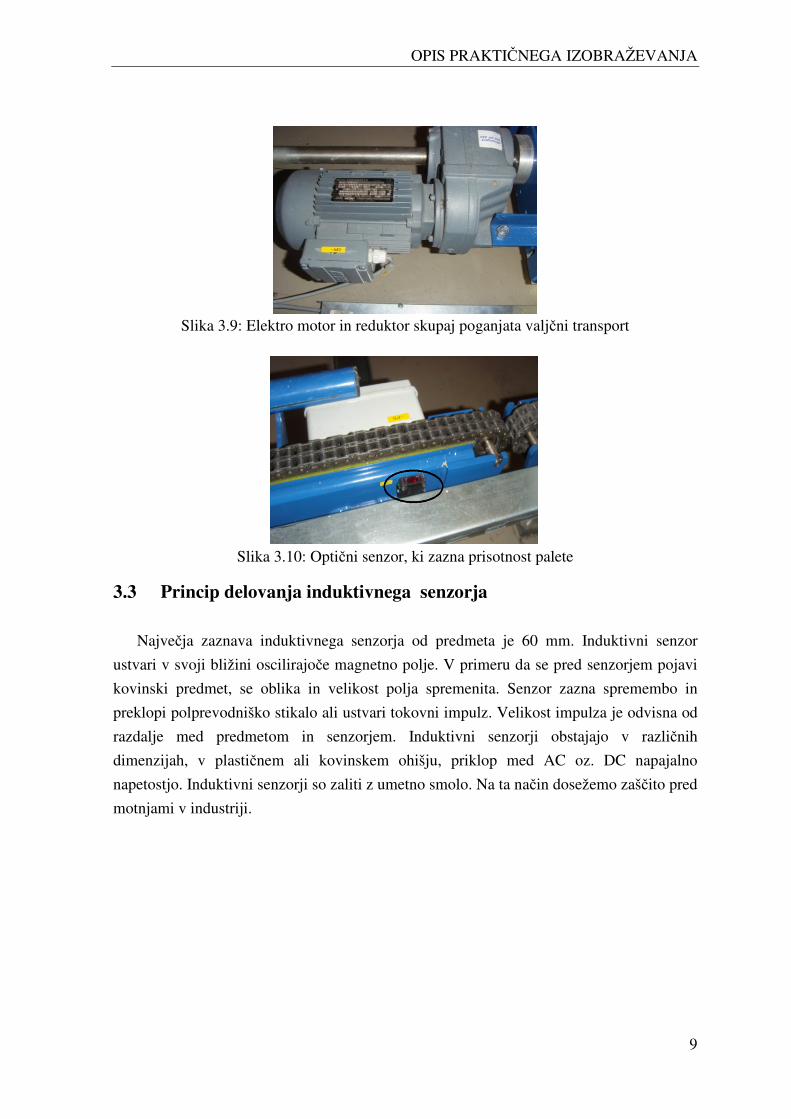
Slika 3.9: Elektro motor in reduktor skupaj poganjata valjčni transport ............................... 9
Slika 3.10: Optični senzor, ki zazna prisotnost palete ........................................................... 9
Slika 3.11: Induktivni senzor ............................................................................................... 10
Slika 3.12: Izgradnja električne omare za transportno linijo za Lek Ljubljana ................... 10
Slika 3.13: Tripolni inštalacijski odklopnik ........................................................................ 11
Slika 3.14: Enopolni inštalacijski odklopnik ....................................................................... 11
Slika 3.15: Kontaktor ........................................................................................................... 11
Slika 3.16: Priklopni kontakti kontaktorja ........................................................................... 12
Slika 3.17: Vtičnica ............................................................................................................. 12
Slika 3.18: Vtičnica v sistemu ničenje, vtičnica v sistemu z FID - stikalom ..................... 12
Slika 3.19: Tipka za izklop v sili ......................................................................................... 13
Slika 3.20: Načrt zasilni izklop tipkala ................................................................................ 13
Slika 3.21: Zaščitni rele ....................................................................................................... 14
Slika 3.22: Načrt zasilnega izklopa modula ........................................................................ 14
Slika 3.23: Simbol releja ..................................................................................................... 15
Slika 3.24: Rele ................................................................................................................... 15
Slika 3.25: Vrstne sponke .................................................................................................... 16
Slika 3.26: Simbol napajalnika ............................................................................................ 16
Slika 3.27: Napajalnik - G1 ................................................................................................. 16
Slika 3.28: Krmilnik Simens Simatic S7-1200 .................................................................... 17
Slika 3.29: Postavitev krmilnika in razširitvenega modula ................................................. 18
Slika 3.30: Krmilnik Simens Simatic S7-1200 in razširitveni modul ................................. 18
Slika 3.31: Kanal za kable ................................................................................................... 18
Slika 3.32: Letev .................................................................................................................. 19
Slika 3.33: Tri-fazni kabel ................................................................................................... 19
Slika 3.34:Analogni signalni kabel ...................................................................................... 19
PREDSTAVITEV PODJETJA
vii
Slika 4.1: Tri fazni AS. motor, sklopka, zavora .................................................................. 20
Slika 4.2: Trifazni sistem vezan v zvezdo ........................................................................... 21
Slika 4.3: Navitje vezano v zvezdo ..................................................................................... 21
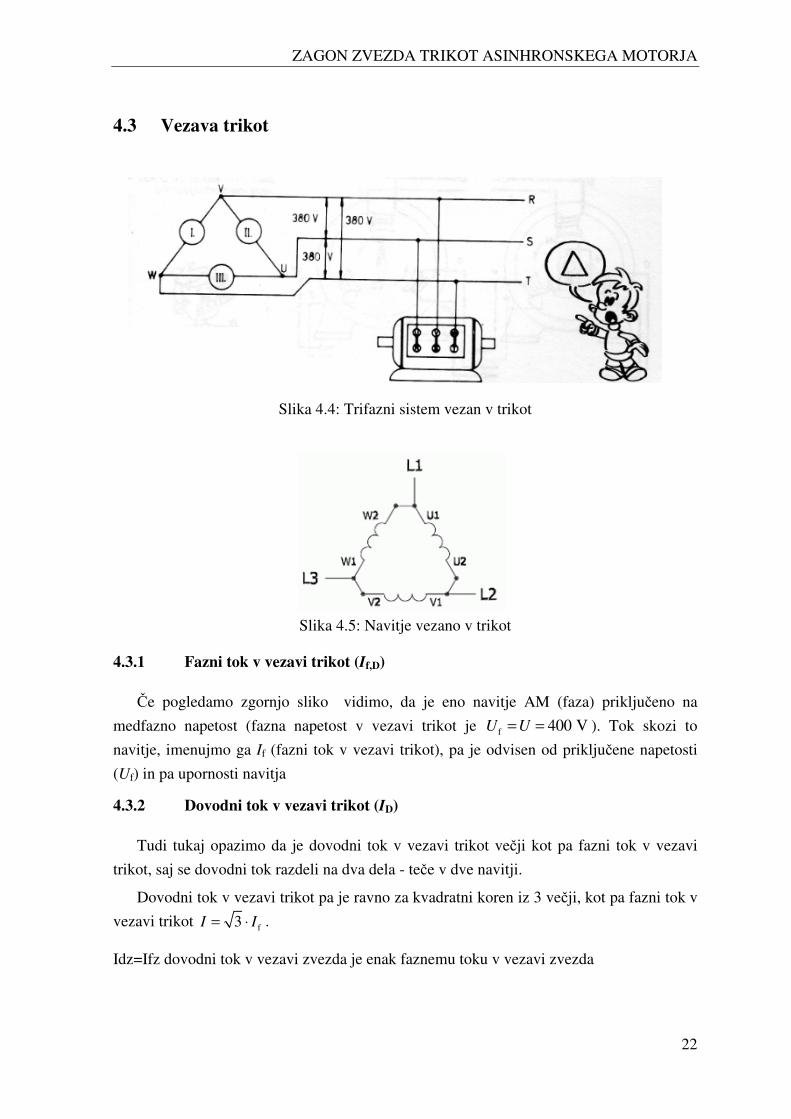
Slika 4.4: Trifazni sistem vezan v trikot .............................................................................. 22
Slika 4.5: Navitje vezano v trikot ........................................................................................ 22
Slika 4.6: Menjava smeri motorja........................................................................................ 23
Slika 4.7: Priključne sponke AS. motorja............................................................................ 24
Slika 4.8: Priklop v vezavo zvezda ...................................................................................... 24
Slika 4.9: Priklop v vezavo trikot ........................................................................................ 25
Slika 4.10: Časovni potek delovanja ................................................................................... 25
Slika 4.11: PIC18F4520 ...................................................................................................... 26
Slika 4.12: PIC18F4520 na podnožju .................................................................................. 27
Slika 4.13: Shema K-CPU verzija 3 .................................................................................... 28
Slika 4.14: Tiskano vezje K-CPU verzija 3 ......................................................................... 28
Slika 4.15: Spajkanje 1 ........................................................................................................ 29
Slika 4.16: Spajkanje 2 ........................................................................................................ 29
Slika 4.17: Vstavljanje diod ................................................................................................ 29
Slika 4.18: Napajalnik v fazi sestave ................................................................................... 30
Slika 4.19: Stabilizator ........................................................................................................ 31
Slika 4.20: Končan napajalnik 24V ..................................................................................... 31
Slika 4.21: PIC C Compiler na namizju .............................................................................. 32
Slika 4.22: Pisanje programa v CCS C compilerju ............................................................. 32
Slika 4.23: Programator US-Burn, USB_1.11_a2 ............................................................... 33
Slika 4.24: Razvojna ploščo K-CPU verzija 3 .................................................................... 34
Slika 4.25: Relejski izhodi ................................................................................................... 34
Slika 4.26: Tranzistorski izhodi, relejski izhodi, kontaktorski izhodi ................................. 35
Slika 4.27: Kontaktorja zvezda, trikot ................................................................................. 35
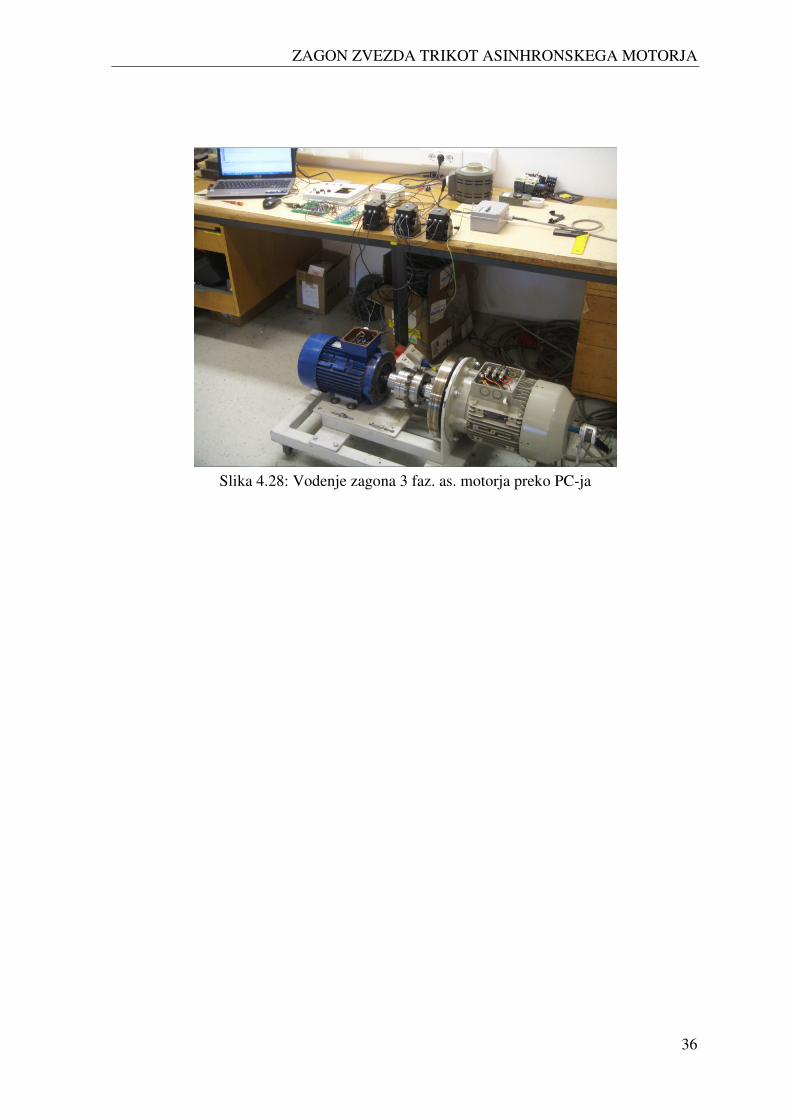
Slika 4.28: Vodenje zagona 3 faz. as. motorja preko PC-ja ................................................ 36
Slika 5.1: Notranjost analizatorja ........................................................................................ 37
Slika 5.2: Analizator ............................................................................................................ 37
Slika 5.3: Obdelava signala ................................................................................................. 38
Slika 5.4: Vezava tokovnika in napetostnika....................................................................... 38
Slika 5.5: Tok ...................................................................................................................... 39
Slika 5.6: Fazna napetost ..................................................................................................... 39
Slika 5.7: Medfazna napetost............................................................................................... 40
Slika 5.8: Delovna moč ....................................................................................................... 40
Slika 5.9: Jalova moč ........................................................................................................... 41
PREDSTAVITEV PODJETJA
viii
Slika 5.10: Navidezna moč .................................................................................................. 41
Slika 5.11: Moči skupaj (P,Q,S) .......................................................................................... 42
Slika 5.12: Frekvenca .......................................................................................................... 42
Slika 5.13: Fazni diagram .................................................................................................... 43
Slika 5.14: Graf toka ............................................................................................................ 43
Slika 5.15: Graf napetosti .................................................................................................... 44
Slika 5.16: Graf moči .......................................................................................................... 44
Slika 5.17: Graf cos(fi) ........................................................................................................ 45
Slika 5.18: Analizator v dejanskem procesu ....................................................................... 45
Slika 6.1: Ploščica s podatki ................................................................................................ 46
Slika 8.1:Nastavitve parametrov 1....................................................................................... 53
Slika 8.2:Nastavitev parametrov 2....................................................................................... 53
KAZALO TABEL Tabela 1:zvezda, trikot ........................................................................................................ 20

1
1 UVOD
Ko so minila predavanja na Fakulteti za elektrotehniko, računalništvo in informatiko v
Mariboru sem začel opravljati obvezno prakso. Prakso sem opravljal v podjetju Etra d.o.o.
V okviru dvomesečnega obveznega praktičnega izobraževanja sem, se trudil pridobiti
čim več praktičnih izkušen in znanj. V poročilu praktičnega izobraževanja sem najprej
predstavil podjetje, njegov nastanek, razvoj in s čim se ukvarja.
Delo, ki sem ga opravljal:
Na začetku sem se seznanil z vezavo električnih omar in branjem načrta. Ta sklop je
zajemal krmilni in močnostni del. Sledila so dela v Leku v Ljubljani. Prisoten sem bil pri
transportni liniji,ki je namenjena avtomatskemu transportu palet skozi vzorčevalni komoro
1. Delo sem nadaljeval v servisni delavnici. Tam sem izdelal manjšo omarico za preizkus
naprav, katera je postala pomoč serviserjem na terenu. Matjaž je videl, da sem vztrajen
človek in mi je podaril svojo nedokončano K-CPU razvojno ploščo, ki jo je razvila Etra
d.o.o.Spoznal sem programski paket PIC C Compiler, v kateremu sem programiral v C
jeziku. V nadaljevanju sem naredil svoj prvi industrijski projekt zagon zvezda, trikot
asinhronskega motorja s pomočjo mikrokrmilnika (PIC 18F4520- čip).
Naučil sem se izvajanje A/D pretvorbe in naredil mini projekt krmiljenje izhodnih enot
(LCD - display, ventilator) mikrokrmilnika s pomočjo temperaturnega senzorja LM35
Skozi vso obvezno praktično izobraževanje sem pokazal zanimanje.
2
2 PREDSTAVITEV PODJETJA ETRA d.o.o.
Začetki segajo v leto 1994 z dvema zaposlenima. Danes ima podjetje Etra d.o.o. več
kot 50 zaposlenih z obsežnimi in odločno podkovanimi specializiranimi znanji ter
praktičnimi izkušnjami somed vodilnimi v Sloveniji na področju industrijske
avtomatizacije,procesnega krmiljenja in elektromotornih pogonov. S stalnim
izobraževanjem in izpopolnjevanjem, analiziranjem zaključenih izvedenihprojektov, tesno
sodelovanje z dobavitelji strojne in programske opreme, s podrobnim sledenjem,
analiziranjem in nadgrajevanjem vzdrževanih sistemov ter na koncu tudi s pridobivanjem
novih izobraženih kadrov tako podjetje ostaja stalno v stiku z najnovejšimi znanji in
tehnologijami na našem področju. Tako pod eno streho združuje praktična in specializirana
znanja s filozofijo visoke kvalitete storitev ter zanesljive strojne in programske opreme. V
letih uspešnega delovanja je podjetje pridobili ekskluzivno zastopništvo za R&M(pasivna
oprema za računalniška, informacijska in telekomunikacijska omrežja), TEDOM
kogeneracijske sisteme, Ideal Industries (Merilne naprave za elektrotehniko) in ostala
zastopništva za prodajo in integracijo: ELCA, Cisco, Microsoft, Siemens in ostali.
Slika 2.1: Logotip podjetja Etra d.o.o.
PREDSTAVITEV PODJETJA
3
2.1 Dejavnosti podjetja
2.1.1 Avtomatizacija in pogonski sistemi
S pomočjo sodobnih znanj, izkušenj in sodobnih tehnologij projektirajo in izvajamo
celovite rešitve za učinkovitejše industrijske procese, ki zraven mnogih ostalih prednosti
poskrbijo za optimizacijo, pohitritev, povečanje zanesljivosti in zmanjšanje nenapovedanih
prekinitev ter s tem zmanjšanje posrednih in neposrednih stroškov obratovanja.
Pri izvajanju projektov avtomatizacije industrijskih procesov nudijo storitve celotnega
življenjskega obratovanja sistema, kar poleg izvedbe in postavitve zajema tudi
vzdrževanje, nadgradnje in kasnejše prilagajanje sistemov.
Pri projektiranju in postavitvi sistemov za avtomatizacijo uporabljajo profesionalne
rešitve Siemens, ki zagotavljajo brezhibno delovanje in dolgo življenjsko dobo: SIMATIC,
SIMOTION, SICOMP... ter računalniško in strežniško opremo Fujitsu Siemens. Za
medsebojne povezave oziroma pasivno telekomunikacijsko opremo uporabljamo
visokokvalitetne produkte R&M.
2.1.1.1 Avtomatizacija
• industrijski sistemi za avtomatizacijo,
• procesno vodenje in krmiljenje,
• industrijska omrežja Ethernet,
• pozicionirni sistemi,
• industrijski računalniški in mikroračunalniški sistemi,
• senzorski, merilni in procesni sistemi.
2.1.1.2 Pogonska tehnika
• izmenični in enosmerni elektromotorni pogoni,
• koračni elektromotorni pogoni,
• krmilni sistemi pogonske tehnike,
• frekvenčni in enosmerni regulatorji,
• inženiring.
2.1.1.3 Nizkonapetostna stikalna tehnika in elektroinstalacije
• stikalne in zaščitne naprave,
• ločilniki, odklopniki in glavna stikala,

PREDSTAVITEV PODJETJA
4
• elektroinštalacijske razdelilne in zbirne omare,
• varnostni brezprekinitveni sistemi (UPS).
2.1.1.4 Industrijska elektronika
• prigradnje in nadgradnje daljinskih komand (dvigala, transportni sistemi, tekoči
trakovi),
• projektiranje in izvedba industrijske elektronike pri pogonskih, varilnih, montažnih,
obdelovalnih in ostalih strojnih sistemih,
• vzdrževanje sistemov industrijske elektronike,
• krmilja in varovalni sistemi proizvodnih in pogonskih sklopov.
5
3 OPIS PRAKTIČNEGA IZOBRAŽEVANJA
Na začetku sem se seznanil z vezavo električnih omar. Pri vezavi električnih omar je
pomembno, da poznamo funkcijo elementa in da pravilno po načrtu povežemo žice na
določene kontakte. Kadar imamo malo omarico in veliko elementov je bolje, da uporabimo
večjo, če je le to mogoče, zaradi lažje vezave. Za priklop napajanja lahko uporabimo
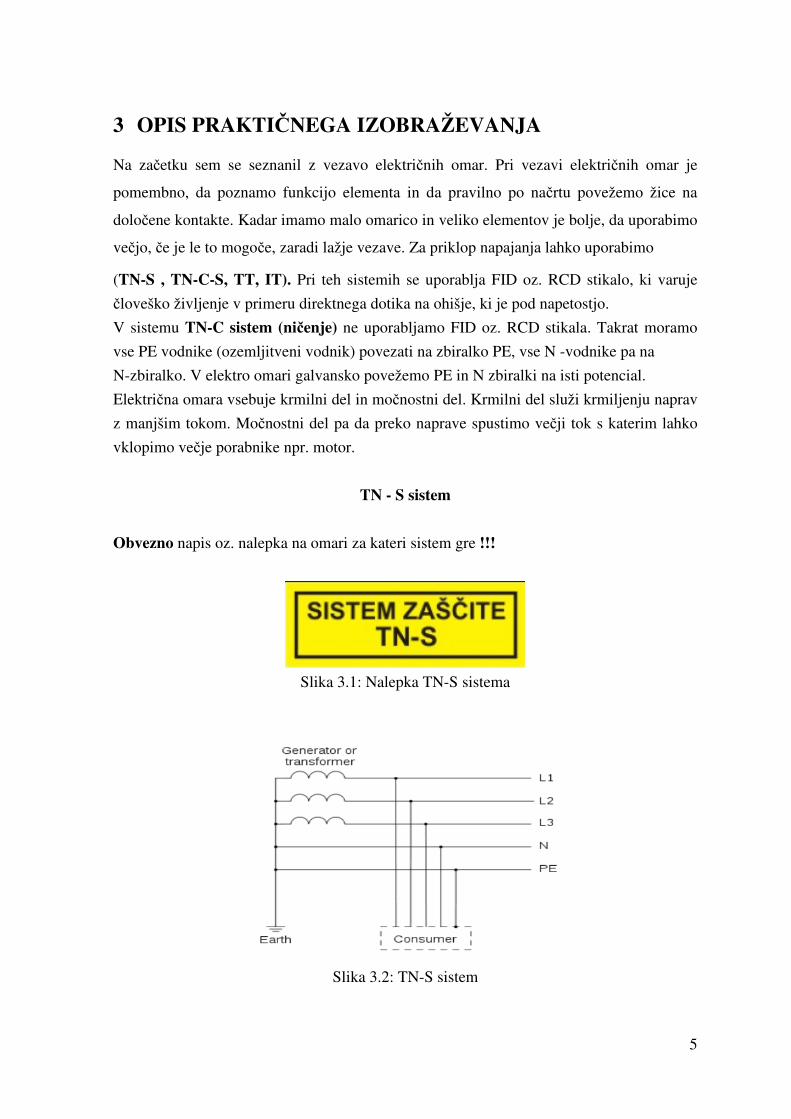
(TN-S , TN-C-S, TT, IT). Pri teh sistemih se uporablja FID oz. RCD stikalo, ki varuje
človeško življenje v primeru direktnega dotika na ohišje, ki je pod napetostjo.
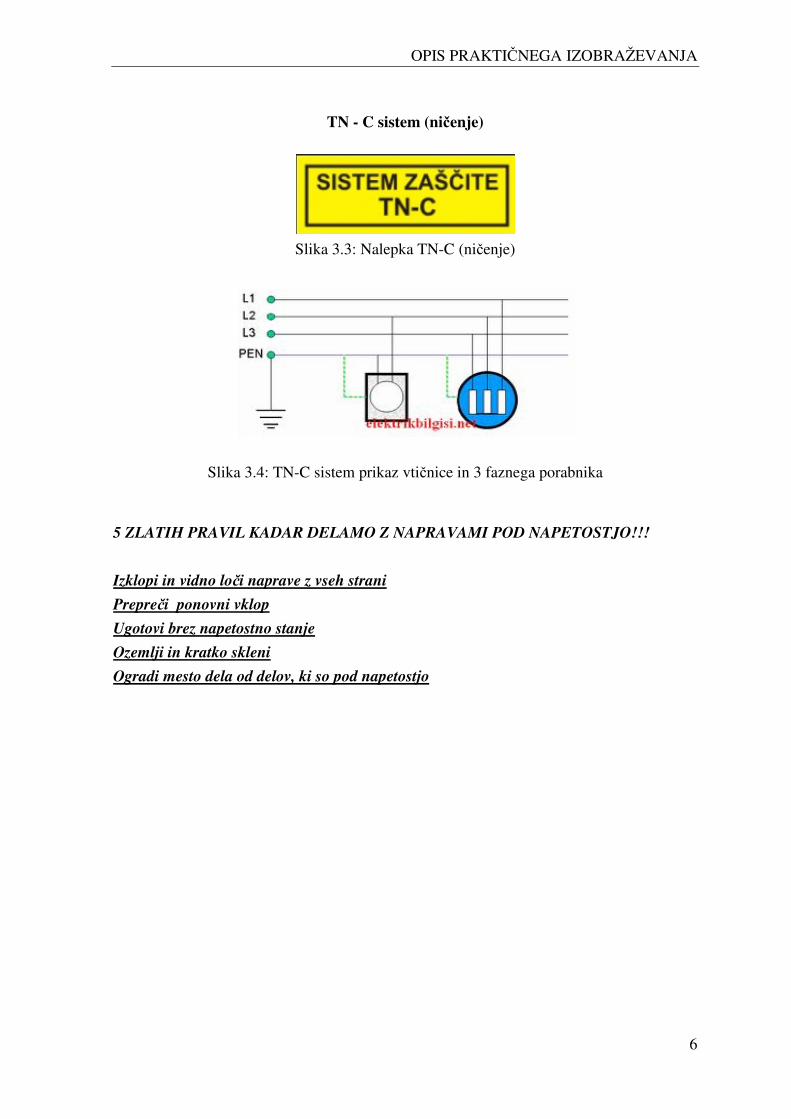
V sistemu TN-C sistem (ničenje) ne uporabljamo FID oz. RCD stikala. Takrat moramo
vse PE vodnike (ozemljitveni vodnik) povezati na zbiralko PE, vse N -vodnike pa na
N-zbiralko. V elektro omari galvansko povežemo PE in N zbiralki na isti potencial.
Električna omara vsebuje krmilni del in močnostni del. Krmilni del služi krmiljenju naprav
z manjšim tokom. Močnostni del pa da preko naprave spustimo večji tok s katerim lahko
vklopimo večje porabnike npr. motor.
TN - S sistem
Obvezno napis oz. nalepka na omari za kateri sistem gre !!!
Slika 3.1: Nalepka TN-S sistema
Slika 3.2: TN-S sistem
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
6
TN - C sistem (ničenje)
Slika 3.3: Nalepka TN-C (ničenje)
Slika 3.4: TN-C sistem prikaz vtičnice in 3 faznega porabnika
5 ZLATIH PRAVIL KADAR DELAMO Z NAPRAVAMI POD NAPETOSTJO!!!
Izklopi in vidno loči naprave z vseh strani
Prepreči ponovni vklop
Ugotovi brez napetostno stanje
Ozemlji in kratko skleni
Ogradi mesto dela od delov, ki so pod napetostjo

OPIS PRAKTIČNEGA IZOBRAŽEVANJA
7
3.1 Pomoč pri delu transportne linije 1 v Leku- Ljubljana
Transportna linija je sestavljena iz posameznih transporterjev.
Slika 3.5: Dezinfekcijska linija 1
3.2 Opis dezinfekcijske linije 1
Viličar naloži paleto na KF 101, ki je vstopno mesto na linijo 1. Senzor zazna
prisotnost palete in jo pod pogojem, da je le to mesto prosto odpelje na transporter KF 102
in KF103. Paleta prispe do prezračevalne komore 1. Odprejo se vrata 1 in paleta se nahaja
v prezračevalni komori. Vrata 1 in varata 2 se zaprejo, sledi prezračevanje. V nadaljevanju
se vrata 2 odpro in paleta potuje v vzorčno komoro.
V vzorčni komori se nahaja človek, ki jemlje vzorce. Po končanju pritisne na tipko, da
javi sistemu da je končano vzorčenje. Paleta prispe do prezračevalne komore 2, kjer se
odpro vrata 3.
V prezračevalni komori 2 se nahaja paleta, vrata 3 se zaprejo in aktivira se
prezračevanje. Vrata 4 se odprejo,zaprejo in paleta potuje po valjčnem transportu 6 do
dvižnega transporta. Tam se paleta dvigne na malo višji nivo in nadaljuje preko verižnega
transporta na izstopno mesto, kjer viličar naloži paleto na kateri se nahaja zaboji.
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
8
Slika 3.6: Paleta, ki se nahaja na valjčnem transportu 4 v prezračevalni komori
Slika 3.7: Valjčni transport 1
Slika 3.8: Valjčni transport 2
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
9
Slika 3.9: Elektro motor in reduktor skupaj poganjata valjčni transport
Slika 3.10: Optični senzor, ki zazna prisotnost palete
3.3 Princip delovanja induktivnega senzorja
Največja zaznava induktivnega senzorja od predmeta je 60 mm. Induktivni senzor
ustvari v svoji bližini oscilirajoče magnetno polje. V primeru da se pred senzorjem pojavi
kovinski predmet, se oblika in velikost polja spremenita. Senzor zazna spremembo in
preklopi polprevodniško stikalo ali ustvari tokovni impulz. Velikost impulza je odvisna od
razdalje med predmetom in senzorjem. Induktivni senzorji obstajajo v različnih
dimenzijah, v plastičnem ali kovinskem ohišju, priklop med AC oz. DC napajalno
napetostjo. Induktivni senzorji so zaliti z umetno smolo. Na ta način dosežemo zaščito pred
motnjami v industriji.
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
10
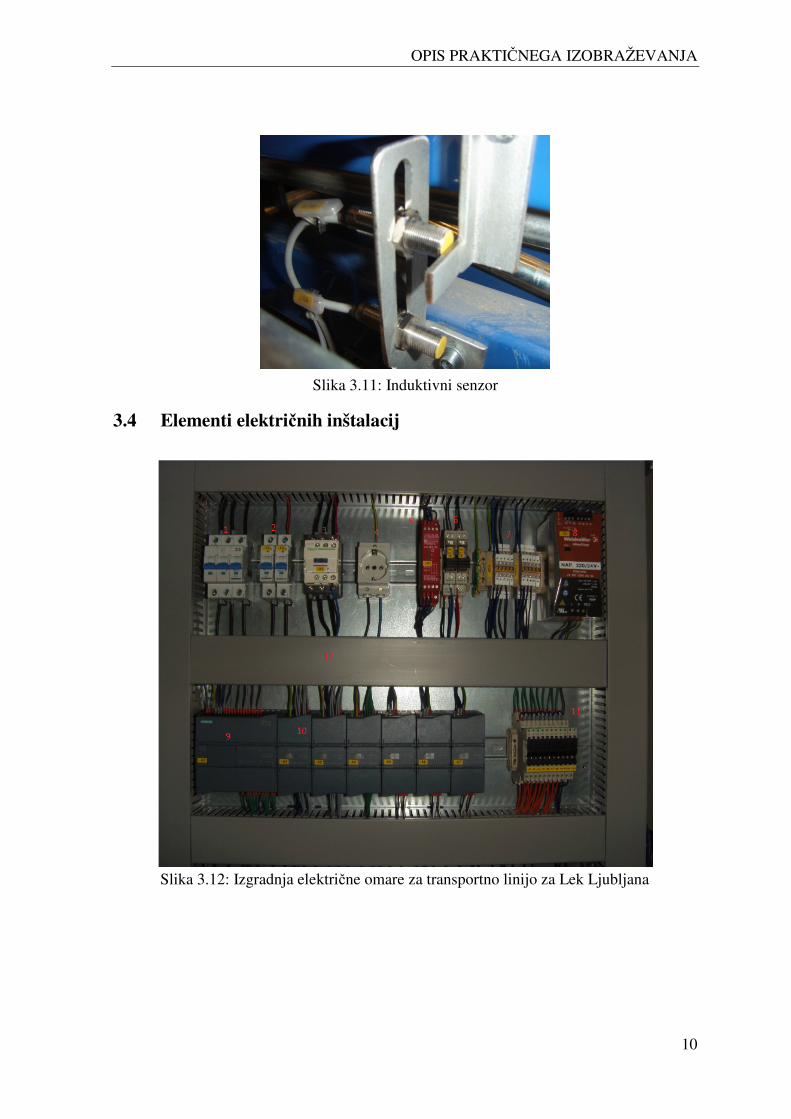
Slika 3.11: Induktivni senzor
3.4 Elementi električnih inštalacij
Slika 3.12: Izgradnja električne omare za transportno linijo za Lek Ljubljana

OPIS PRAKTIČNEGA IZOBRAŽEVANJA
11
3.4.1 Tripolni inštalacijski odklopnik
Slika 3.13: Tripolni inštalacijski odklopnik
3.4.2 Enopolni inštalacijski odklopnik
Slika 3.14: Enopolni inštalacijski odklopnik
3.4.3 Kontaktor
Slika 3.15: Kontaktor
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
12
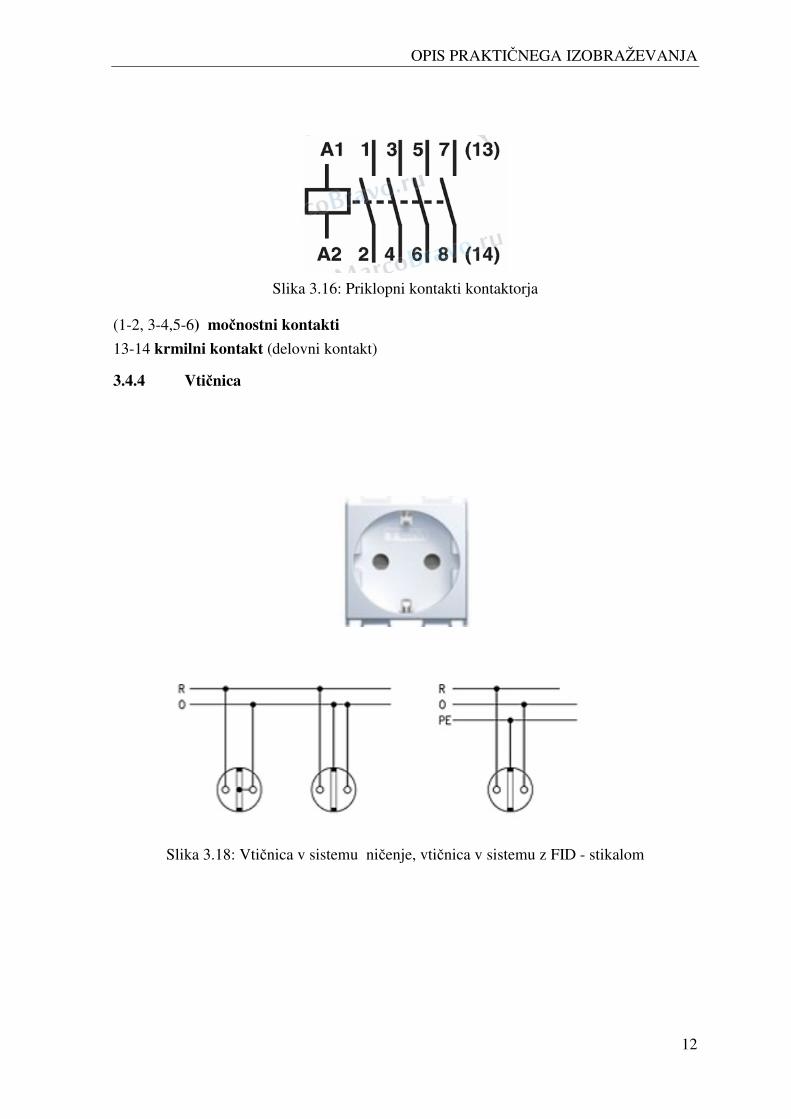
Slika 3.16: Priklopni kontakti kontaktorja
(1-2, 3-4,5-6) močnostni kontakti
13-14 krmilni kontakt (delovni kontakt)
3.4.4 Vtičnica
Slika 3.17: Vtičnica
Slika 3.18: Vtičnica v sistemu ničenje, vtičnica v sistemu z FID - stikalom
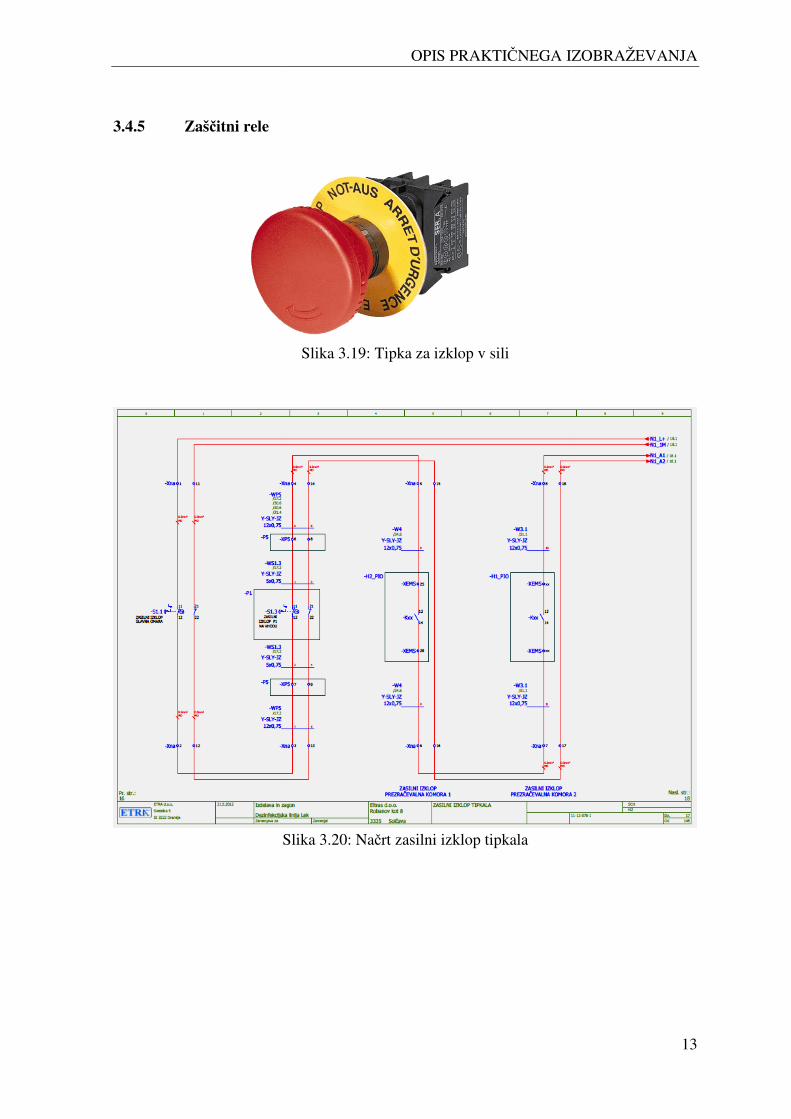
3.4.5 Zaščitni rele
Slika
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
Slika 3.19: Tipka za izklop v sili
Slika 3.20: Načrt zasilni izklop tipkala
NEGA IZOBRAŽEVANJA
13
Slika
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
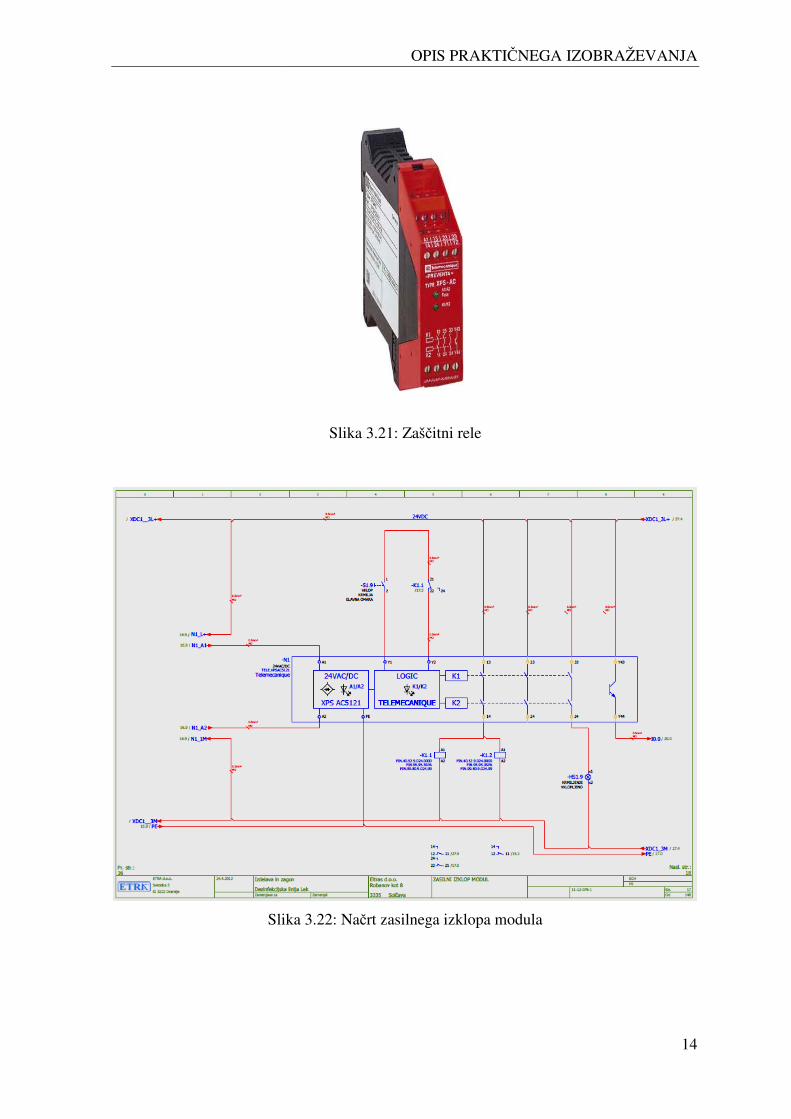
Slika 3.21: Zaščitni rele
Slika 3.22: Načrt zasilnega izklopa modula
NEGA IZOBRAŽEVANJA
14

OPIS PRAKTIČNEGA IZOBRAŽEVANJA
15
3.4.6 Rele
Slika 3.23: Simbol releja
Slika 3.24: Rele
3.4.7 Vrstne sponke
Vrstne sponke se uporabljajo v električnih povezavah med dvema fleksibilnima ali
negibljivima vodnikoma. Na voljo sta dve vrsti priklopa: vijačni ali brezvijačni priklop
vrstnih sponk. Dodatna oprema je za oba tipa enaka. Povezovalni mostički za povezavo
več sponk do širine 8 mm. Sponke so na voljo v različnih izvedbah: za mostično
povezavo, za zaščitne vodnike, L, N, PE (faza, ničla, zemlja), prekinitvena funkcija, za
senzorje ali aktuatorje, merilne sponke.
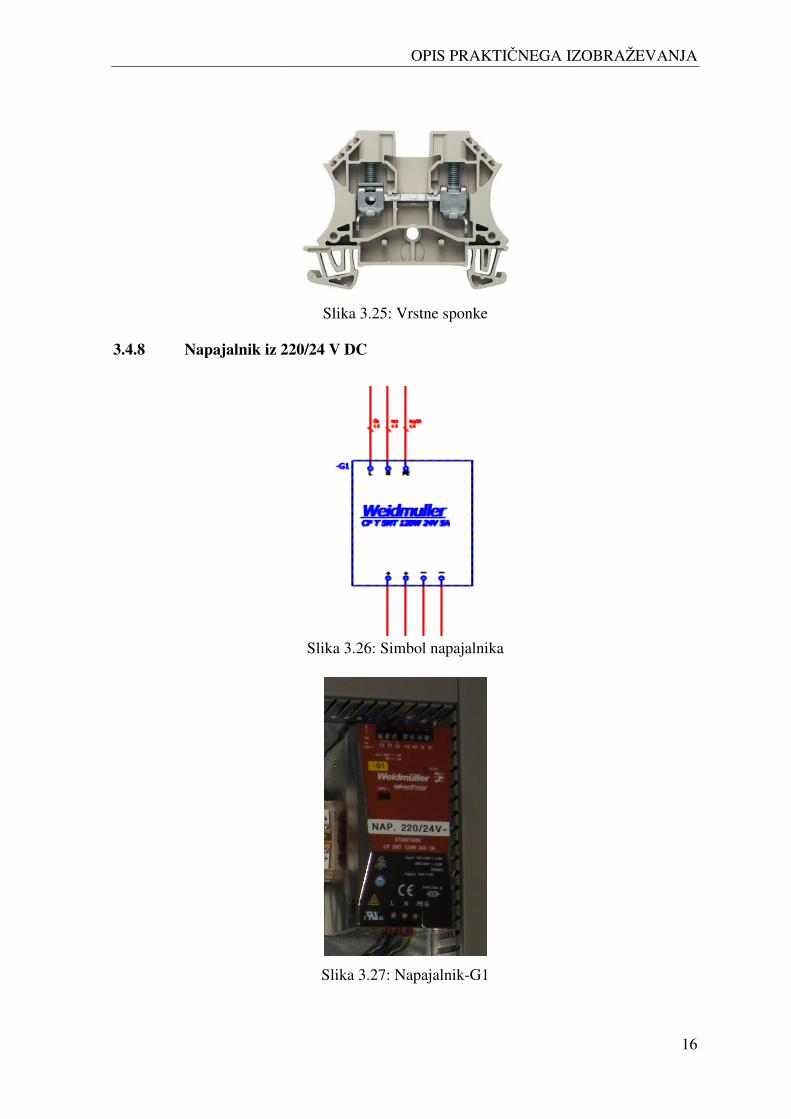
3.4.8 Napajalnik iz 220/24 V DC
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
Slika 3.25: Vrstne sponke
Napajalnik iz 220/24 V DC
Slika 3.26: Simbol napajalnika
Slika 3.27: Napajalnik-G1
NEGA IZOBRAŽEVANJA
16
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
17
Na vhod napajalnika pripeljemo izmenično napetost AC. S pomočjo transformatorja to
napetost zmanjšamo na 24V AC. Sledi usmerjanje 24 AC napetosti v 24 DC napetost s
pomočjo usmernika. Zaradi boljše konstantne napetosti dodamo kondenzatorje in
stabilizator.
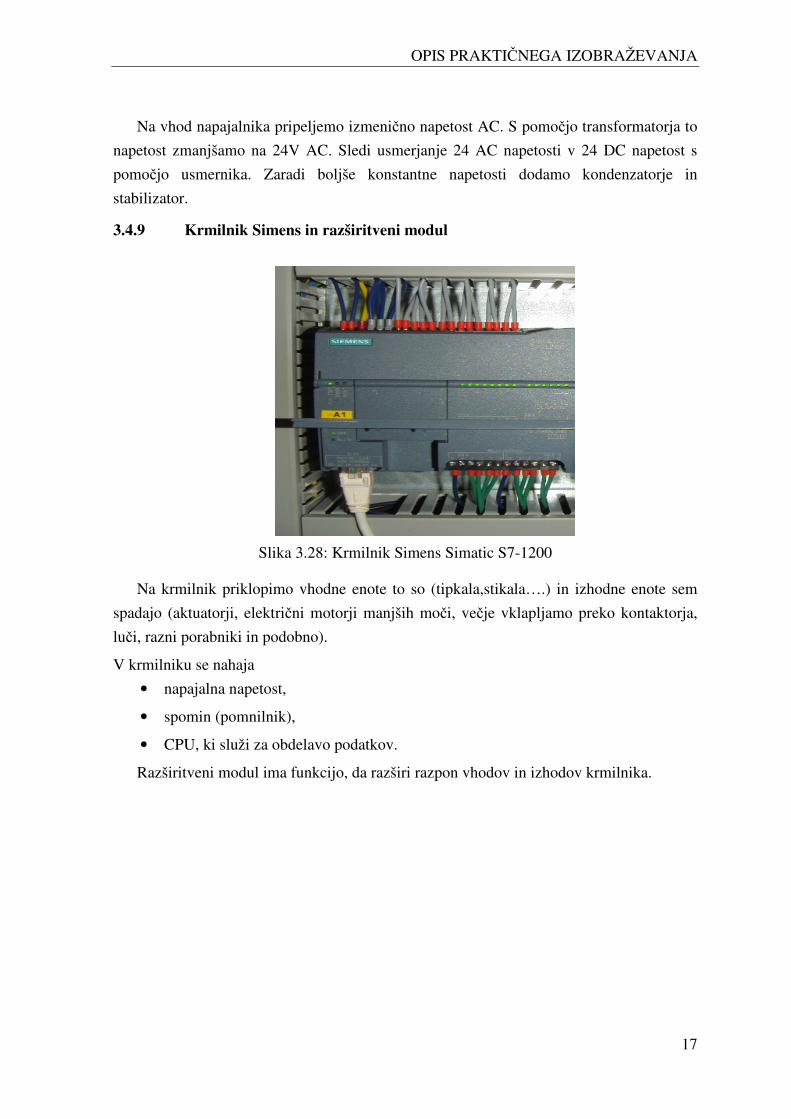
3.4.9 Krmilnik Simens in razširitveni modul
Slika 3.28: Krmilnik Simens Simatic S7-1200
Na krmilnik priklopimo vhodne enote to so (tipkala,stikala….) in izhodne enote sem
spadajo (aktuatorji, električni motorji manjših moči, večje vklapljamo preko kontaktorja,
luči, razni porabniki in podobno).
V krmilniku se nahaja
• napajalna napetost,
• spomin (pomnilnik),
• CPU, ki služi za obdelavo podatkov.
Razširitveni modul ima funkcijo, da razširi razpon vhodov in izhodov krmilnika.
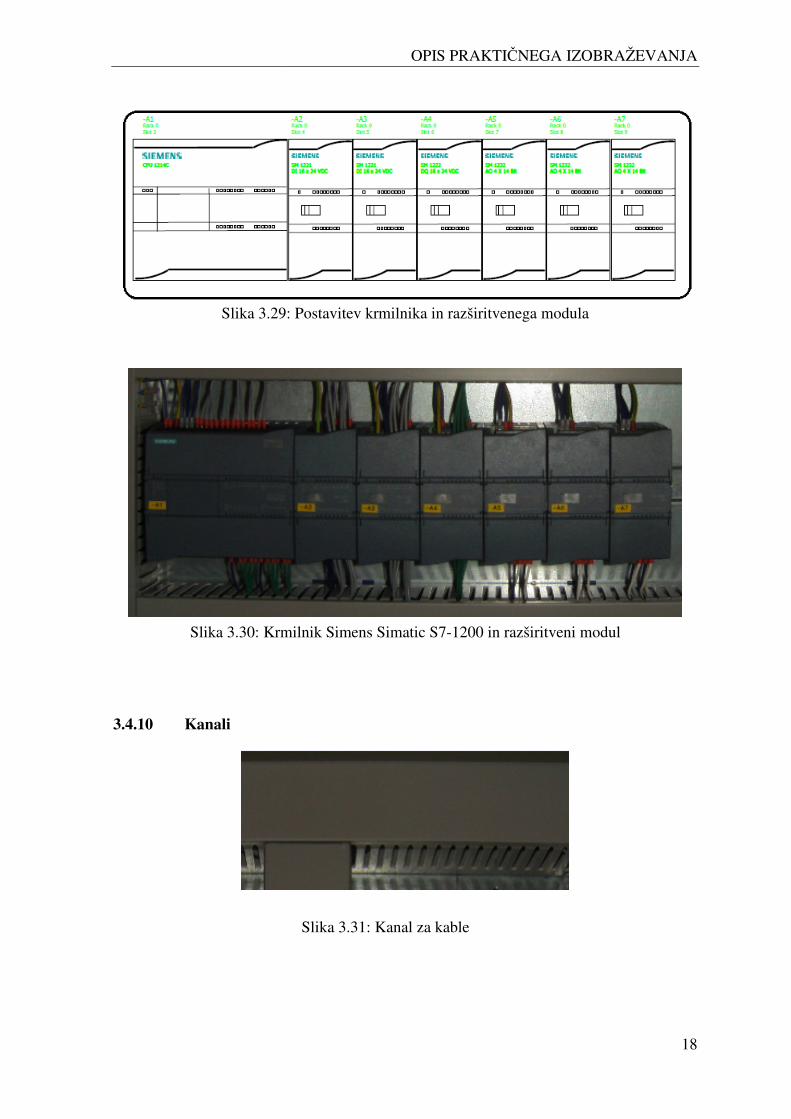
Slika 3.29
Slika 3.30: Krmilnik Simens Simatic S7
3.4.10 Kanali
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
29: Postavitev krmilnika in razširitvenega modula
: Krmilnik Simens Simatic S7-1200 in razširitveni
Slika 3.31: Kanal za kable
NEGA IZOBRAŽEVANJA
18
razširitvenega modula
i modul
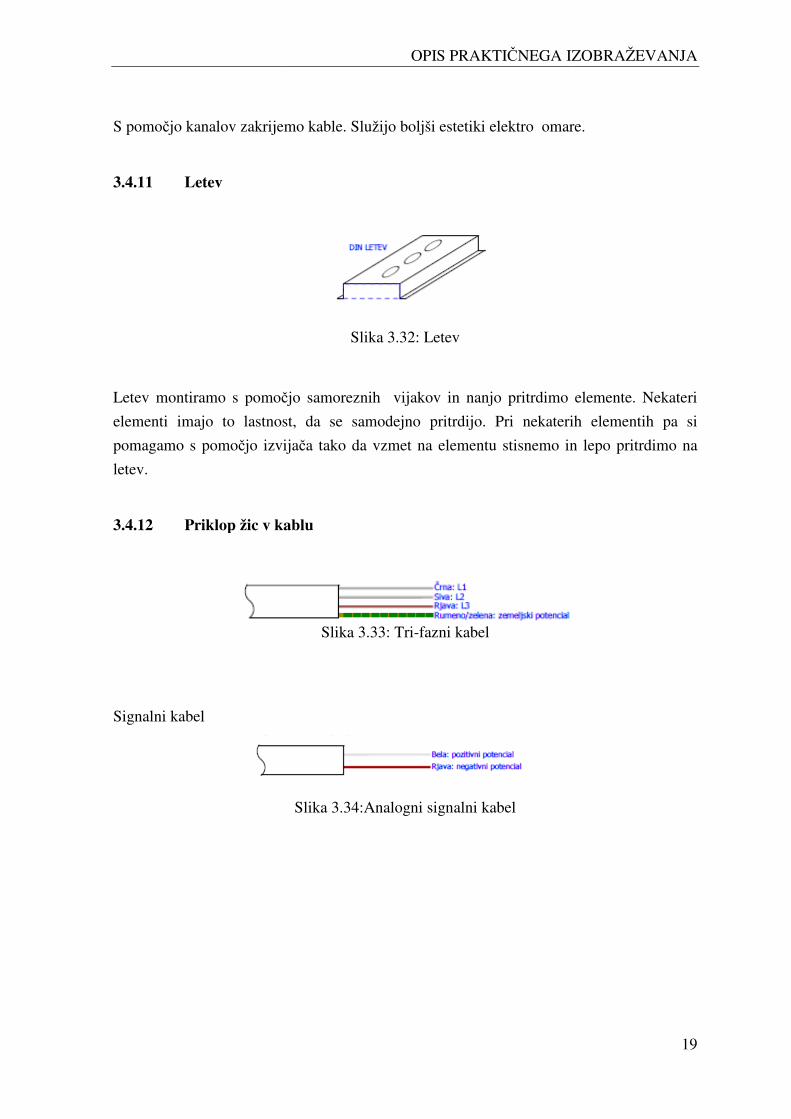
S pomočjo kanalov zakrijemo kable. Služijo boljši estetiki elektro omare.
3.4.11 Letev
Letev montiramo s pomočjo samoreznih vijakov in nanjo pritrdimo elemente. Nekateri
elementi imajo to lastnost, da se samodejno pritrdijo. Pri nekaterih elementih pa si
pomagamo s pomočjo izvija
letev.
3.4.12 Priklop žic v kablu
Signalni kabel
OPIS PRAKTIČNEGA IZOBRAŽEVANJA
kanalov zakrijemo kable. Služijo boljši estetiki elektro omare.
Slika 3.32: Letev
Letev montiramo s pomočjo samoreznih vijakov in nanjo pritrdimo elemente. Nekateri
lastnost, da se samodejno pritrdijo. Pri nekaterih elementih pa si
jo izvijača tako da vzmet na elementu stisnemo in lepo pritrdimo na
Priklop žic v kablu
Slika 3.33: Tri-fazni kabel
Slika 3.34:Analogni signalni kabel
NEGA IZOBRAŽEVANJA
19
kanalov zakrijemo kable. Služijo boljši estetiki elektro omare.
jo samoreznih vijakov in nanjo pritrdimo elemente. Nekateri
lastnost, da se samodejno pritrdijo. Pri nekaterih elementih pa si
a tako da vzmet na elementu stisnemo in lepo pritrdimo na
20
4 ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA S POMOČJO MIKROKRMILNIKA PIC18F4520 IN OSTALO PERIFERIJIO
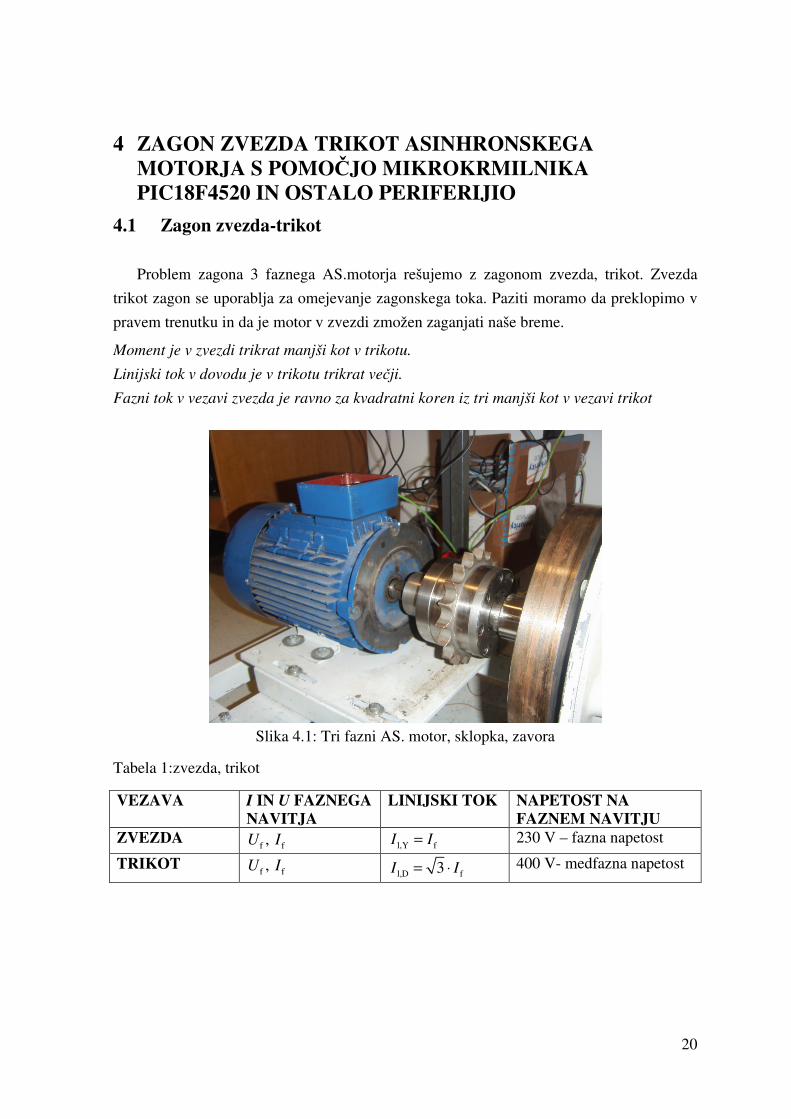
4.1 Zagon zvezda-trikot
Problem zagona 3 faznega AS.motorja rešujemo z zagonom zvezda, trikot. Zvezda
trikot zagon se uporablja za omejevanje zagonskega toka. Paziti moramo da preklopimo v
pravem trenutku in da je motor v zvezdi zmožen zaganjati naše breme.
Moment je v zvezdi trikrat manjši kot v trikotu.
Linijski tok v dovodu je v trikotu trikrat večji.
Fazni tok v vezavi zvezda je ravno za kvadratni koren iz tri manjši kot v vezavi trikot
Slika 4.1: Tri fazni AS. motor, sklopka, zavora
Tabela 1:zvezda, trikot
VEZAVA I IN U FAZNEGA NAVITJA
LINIJSKI TOK NAPETOST NA FAZNEM NAVITJU
ZVEZDA f f, U I l,Y fI I= 230 V – fazna napetost
TRIKOT f f, U I
l,D f3I I= ⋅ 400 V- medfazna napetost
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
21
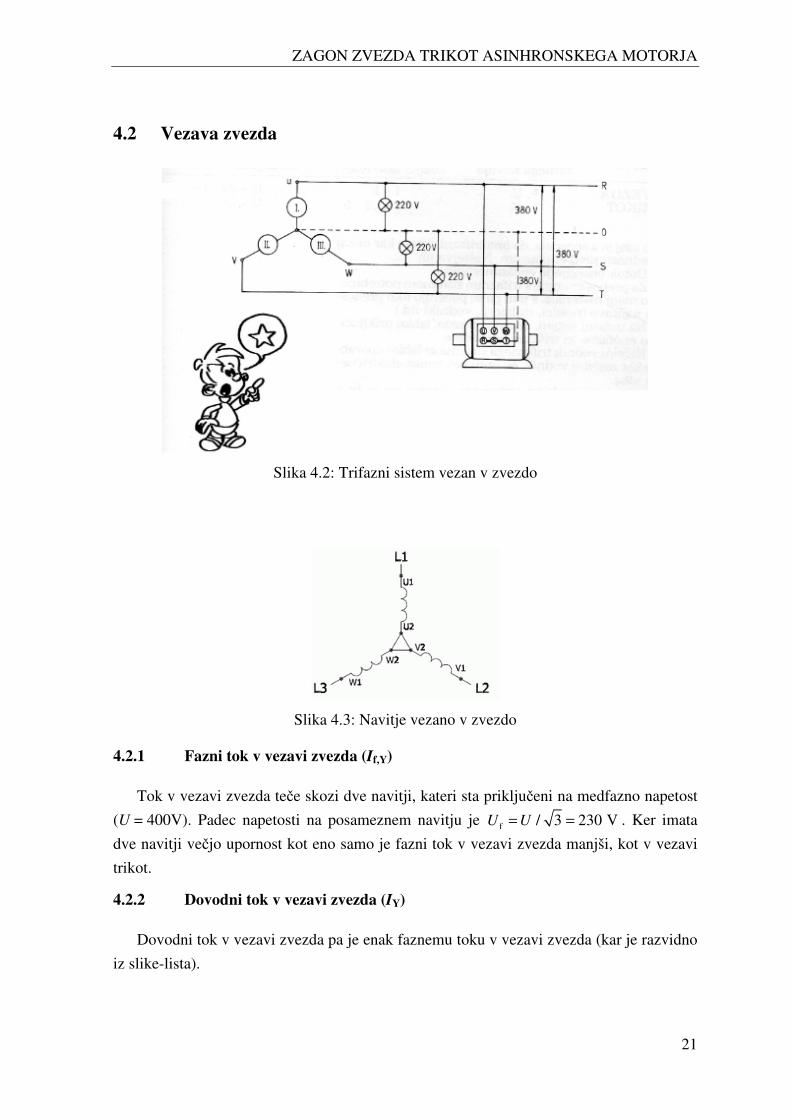
4.2 Vezava zvezda
Slika 4.2: Trifazni sistem vezan v zvezdo
Slika 4.3: Navitje vezano v zvezdo
4.2.1 Fazni tok v vezavi zvezda (If,Y)
Tok v vezavi zvezda teče skozi dve navitji, kateri sta priključeni na medfazno napetost
(U = 400V). Padec napetosti na posameznem navitju je f / 3 230 VU U= = . Ker imata
dve navitji večjo upornost kot eno samo je fazni tok v vezavi zvezda manjši, kot v vezavi
trikot.
4.2.2 Dovodni tok v vezavi zvezda (IY)
Dovodni tok v vezavi zvezda pa je enak faznemu toku v vezavi zvezda (kar je razvidno
iz slike-lista).
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
22
4.3 Vezava trikot
Slika 4.4: Trifazni sistem vezan v trikot
Slika 4.5: Navitje vezano v trikot
4.3.1 Fazni tok v vezavi trikot (If,D)
Če pogledamo zgornjo sliko vidimo, da je eno navitje AM (faza) priključeno na
medfazno napetost (fazna napetost v vezavi trikot je f 400 VU U= = ). Tok skozi to
navitje, imenujmo ga If (fazni tok v vezavi trikot), pa je odvisen od priključene napetosti
(Uf) in pa upornosti navitja
4.3.2 Dovodni tok v vezavi trikot (ID)
Tudi tukaj opazimo da je dovodni tok v vezavi trikot večji kot pa fazni tok v vezavi
trikot, saj se dovodni tok razdeli na dva dela - teče v dve navitji.
Dovodni tok v vezavi trikot pa je ravno za kvadratni koren iz 3 večji, kot pa fazni tok v
vezavi trikot f3I I= ⋅ .
Idz=Ifz dovodni tok v vezavi zvezda je enak faznemu toku v vezavi zvezda
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
23
, f,D3l D
I I= ⋅ dovodni tok v vezavi trikot je za kvadratni koren iz 3 večji kot fazni tok v
vezavi trikot , f,Y3
f DI I= ⋅ fazni tok v vezavi trikot je za kvadratni koren večji kot v vezavi zvezda
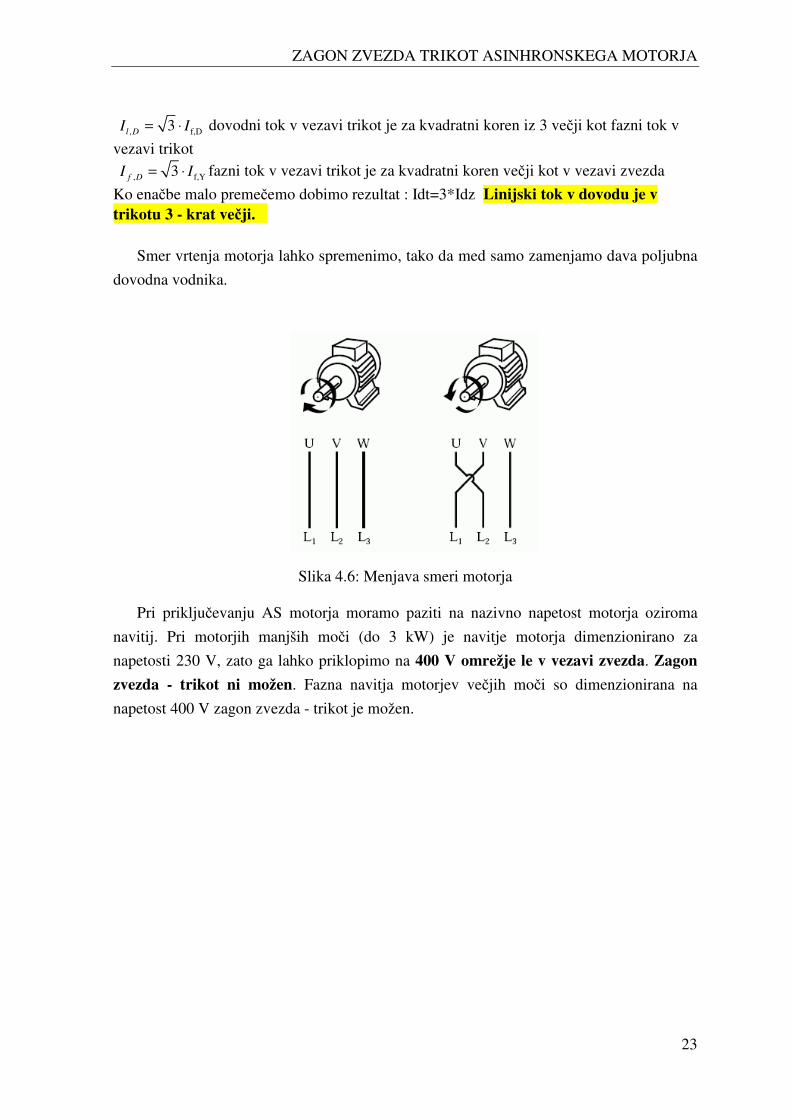
Ko enačbe malo premečemo dobimo rezultat : Idt=3*Idz Linijski tok v dovodu je v trikotu 3 - krat večji.
Smer vrtenja motorja lahko spremenimo, tako da med samo zamenjamo dava poljubna
dovodna vodnika.
Slika 4.6: Menjava smeri motorja
Pri priključevanju AS motorja moramo paziti na nazivno napetost motorja oziroma
navitij. Pri motorjih manjših moči (do 3 kW) je navitje motorja dimenzionirano za
napetosti 230 V, zato ga lahko priklopimo na 400 V omrežje le v vezavi zvezda. Zagon
zvezda - trikot ni možen. Fazna navitja motorjev večjih moči so dimenzionirana na
napetost 400 V zagon zvezda - trikot je možen.
4.4 Priklop asinhronskega motorja
Slika
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
Priklop asinhronskega motorja
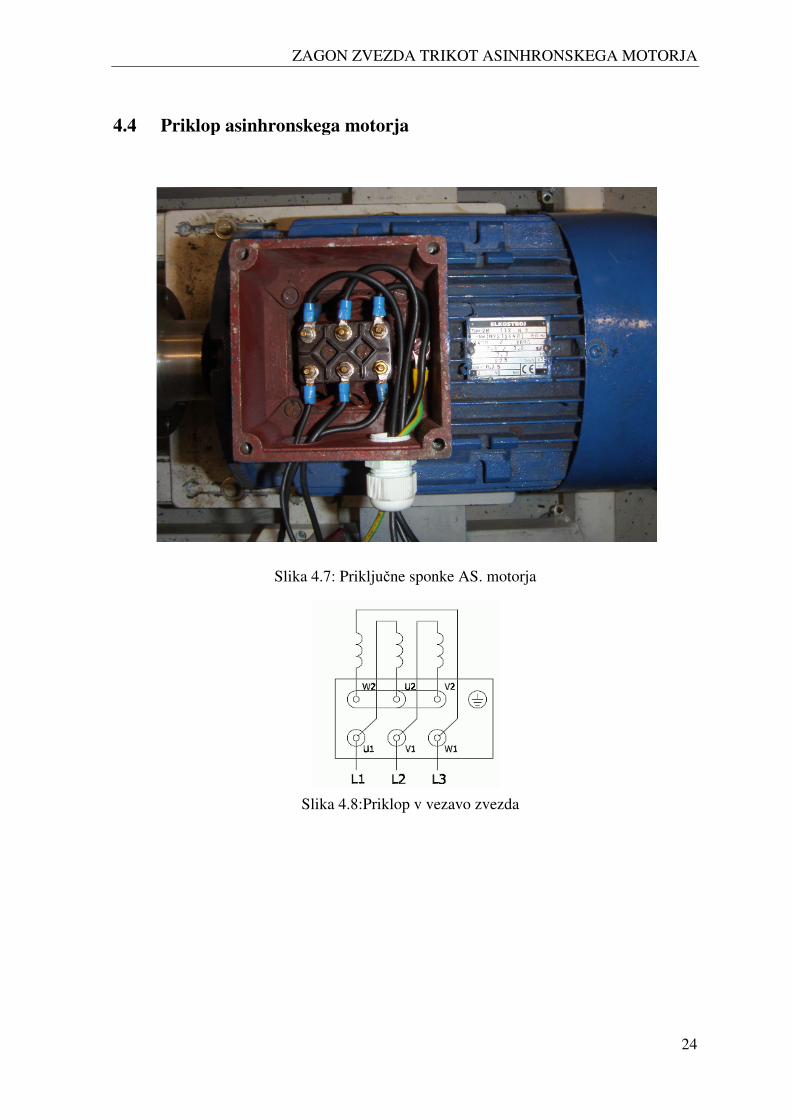
Slika 4.7: Priključne sponke AS. motorja
Slika 4.8:Priklop v vezavo zvezda
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
24
4.5 Časovni potek delovanja
t 1 - nastavljiv čas delovanja
t 2 - pavza med preklopom ~ 0,4 s
Najprej se vklopi mrežni in zvezda kontaktor. Motor deluje v zvezda režimu.
V nadaljevanju se izklopi zvezdni kontaktor in po dolo
kontaktor je ves čas vklopljen saj predstavlja napajanje.
Nastavljiv čas delovanja v zvezda vezavi lahko spreminjamo. Odvisno je od mo
Pri motorjih večjih moči je ta
Edina pomanjkljivost zagona zvezda, trikot na
moramo izvesti v dveh stopnjah.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
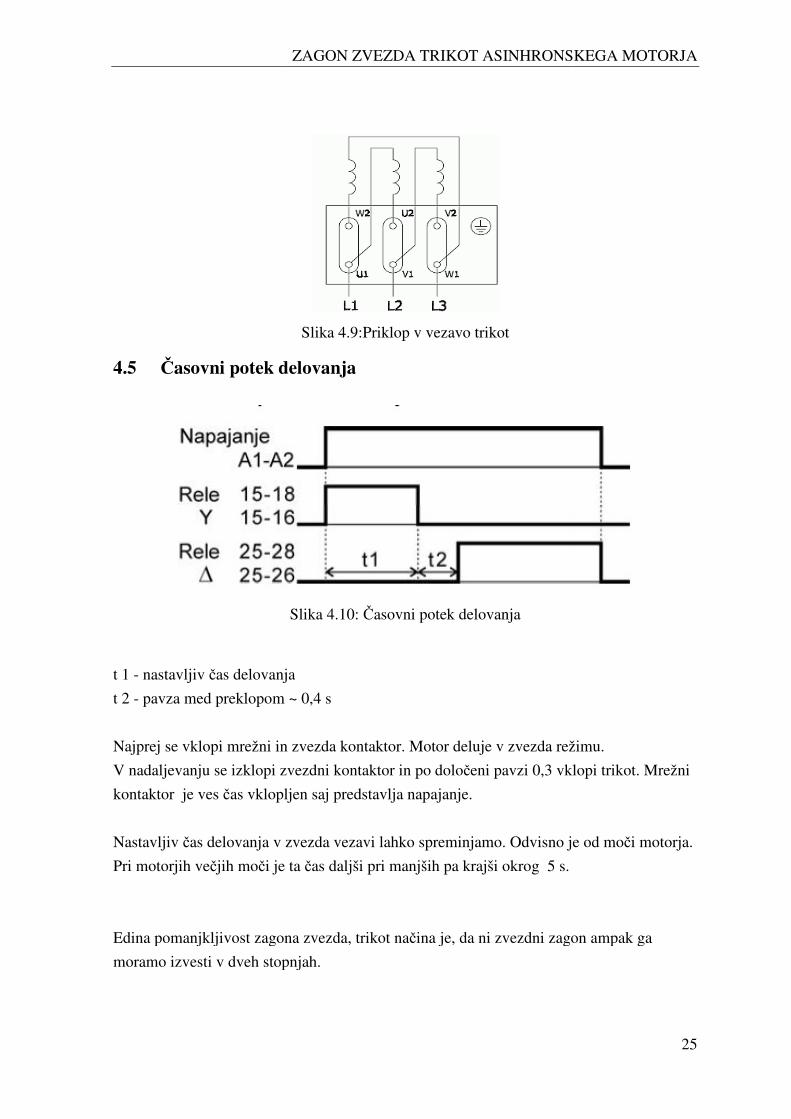
Slika 4.9:Priklop v vezavo trikot
asovni potek delovanja
Slika 4.10: Časovni potek delovanja
as delovanja
pavza med preklopom ~ 0,4 s
Najprej se vklopi mrežni in zvezda kontaktor. Motor deluje v zvezda režimu.
V nadaljevanju se izklopi zvezdni kontaktor in po določeni pavzi 0,3 vklopi trikot. Mrežni
as vklopljen saj predstavlja napajanje.
as delovanja v zvezda vezavi lahko spreminjamo. Odvisno je od mo
či je ta čas daljši pri manjših pa krajši okrog 5 s.
Edina pomanjkljivost zagona zvezda, trikot načina je, da ni zvezdni zagon ampak ga
moramo izvesti v dveh stopnjah.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
25
Najprej se vklopi mrežni in zvezda kontaktor. Motor deluje v zvezda režimu.
i pavzi 0,3 vklopi trikot. Mrežni
as delovanja v zvezda vezavi lahko spreminjamo. Odvisno je od moči motorja.
da ni zvezdni zagon ampak ga
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
26
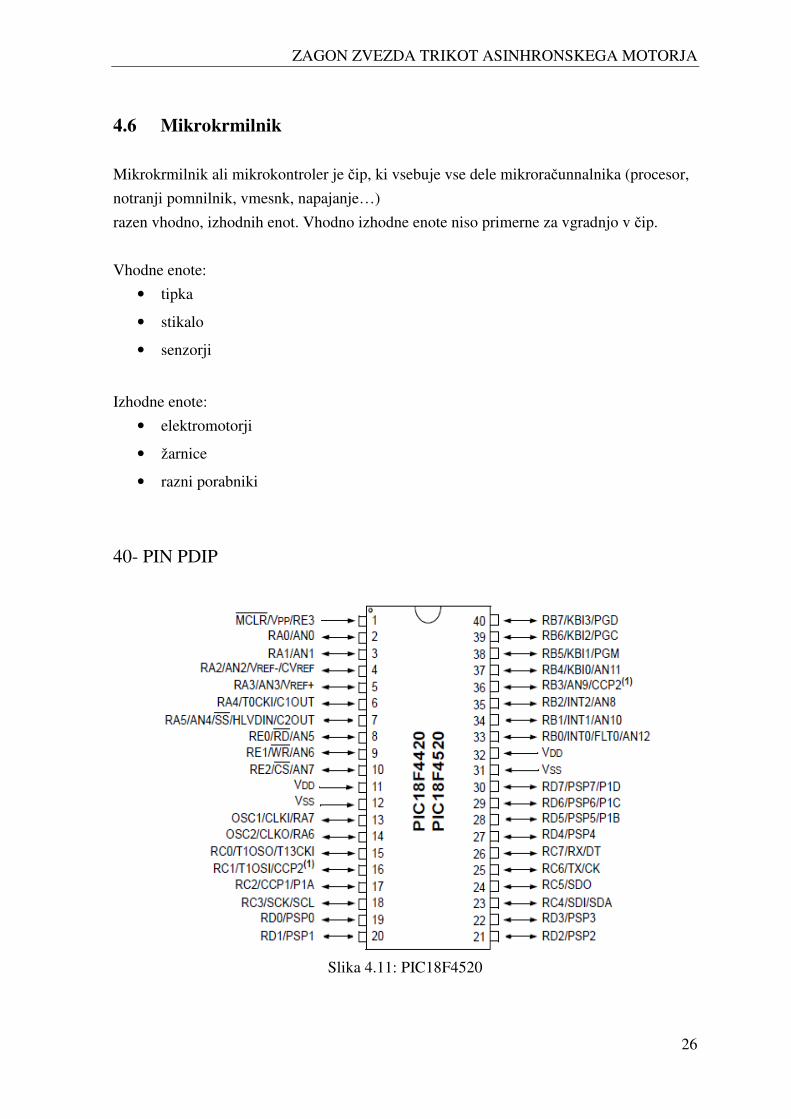
4.6 Mikrokrmilnik
Mikrokrmilnik ali mikrokontroler je čip, ki vsebuje vse dele mikroračunnalnika (procesor,
notranji pomnilnik, vmesnk, napajanje…)
razen vhodno, izhodnih enot. Vhodno izhodne enote niso primerne za vgradnjo v čip.
Vhodne enote:
• tipka
• stikalo
• senzorji
Izhodne enote:
• elektromotorji
• žarnice
• razni porabniki
40- PIN PDIP
Slika 4.11: PIC18F4520

ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
27
Slika 4.12: PIC18F4520 na podnožju
Mikrokrmilnike srečamo v modernih napravah. Na primer v mobilnem telefonu,
mikrovalovni pečici, televiziji, v DVD-predvajalniku, pralnem in pomivalnem stroju,
sodobni avtomobili, osebni računalniki.
Razlog za to je univerzalna uporaba in cena.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
28
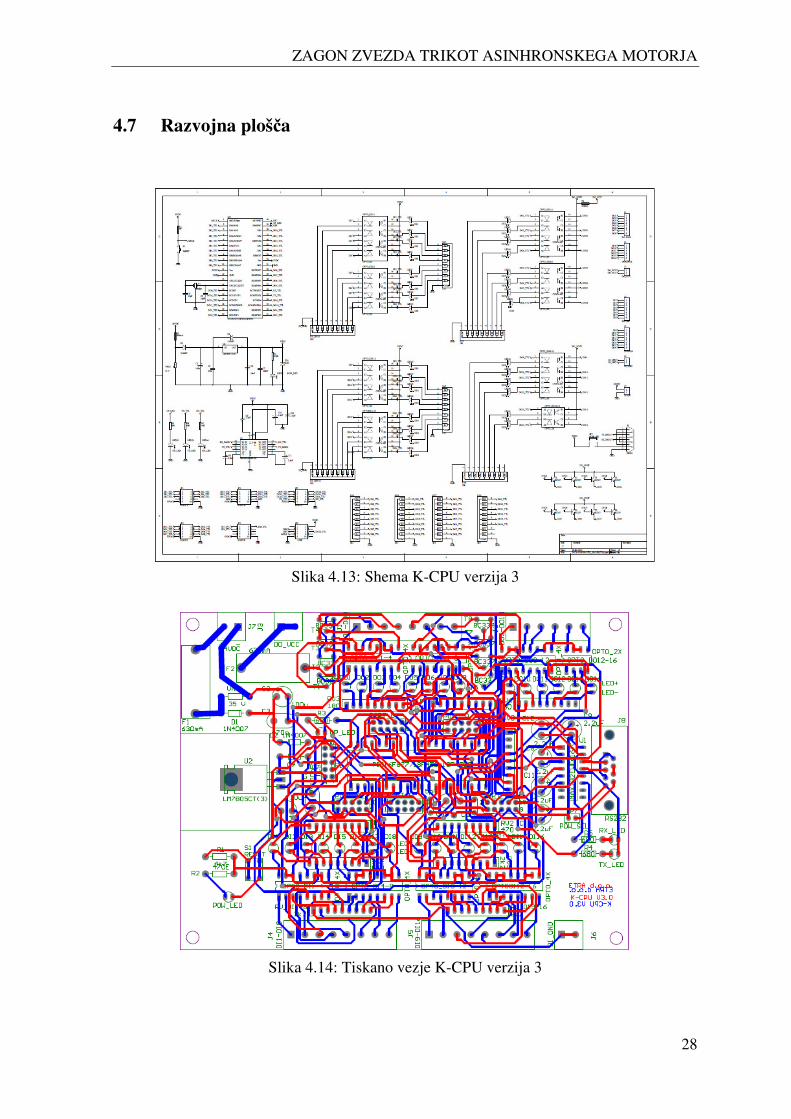
4.7 Razvojna plošča
Slika 4.13: Shema K-CPU verzija 3
Slika 4.14: Tiskano vezje K-CPU verzija 3
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
29
Dodajanje elementov v nedokončano razvojno ploščo
Slika 4.15: Spajkanje 1
Slika 4.16: Spajkanje 2
Slika 4.17: Vstavljanje diod
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
30
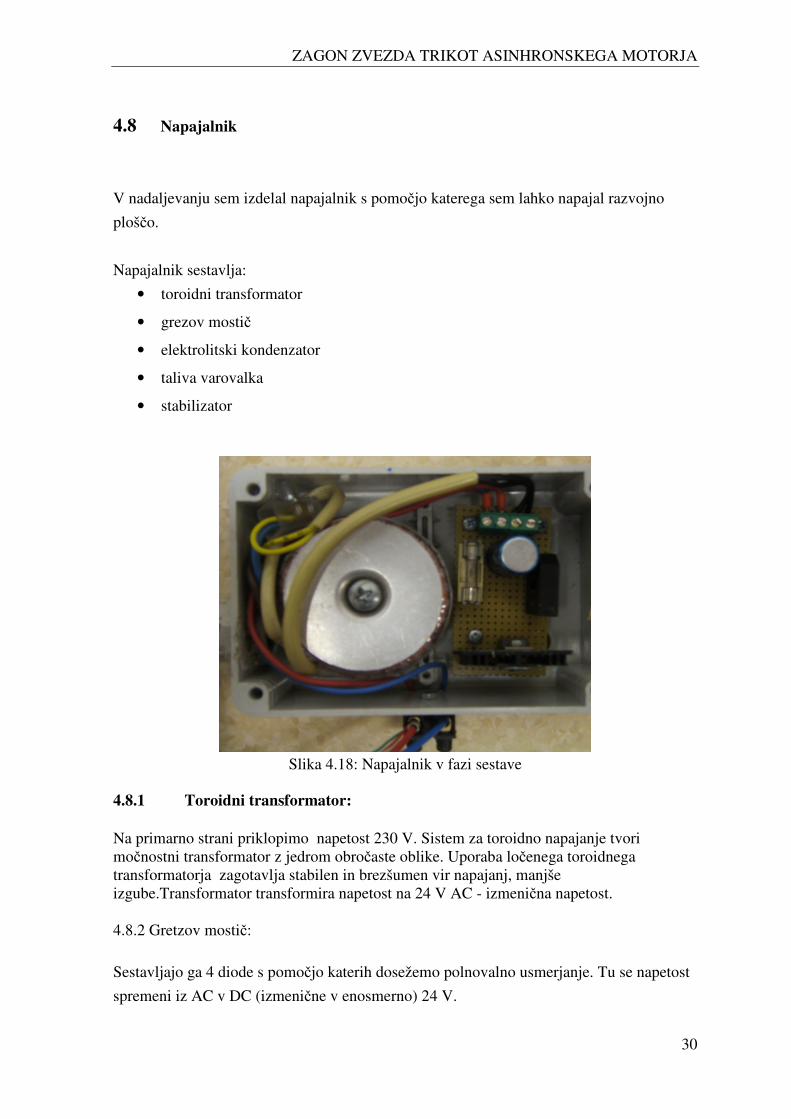
4.8 Napajalnik
V nadaljevanju sem izdelal napajalnik s pomočjo katerega sem lahko napajal razvojno
ploščo.
Napajalnik sestavlja:
• toroidni transformator
• grezov mostič
• elektrolitski kondenzator
• taliva varovalka
• stabilizator
Slika 4.18: Napajalnik v fazi sestave
4.8.1 Toroidni transformator:
Na primarno strani priklopimo napetost 230 V. Sistem za toroidno napajanje tvori močnostni transformator z jedrom obročaste oblike. Uporaba ločenega toroidnega transformatorja zagotavlja stabilen in brezšumen vir napajanj, manjše izgube.Transformator transformira napetost na 24 V AC - izmenična napetost.
4.8.2 Gretzov mostič:
Sestavljajo ga 4 diode s pomočjo katerih dosežemo polnovalno usmerjanje. Tu se napetost
spremeni iz AC v DC (izmenične v enosmerno) 24 V.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
31
4.8.2 Elektrolitski kondenzator:
Kapaciteta je znašala 470 uF. Pazljiv sem moral biti glede polaritete kondenzatorja.
Funkcija kondenzatorja je da nam DC - napetost zgladi.
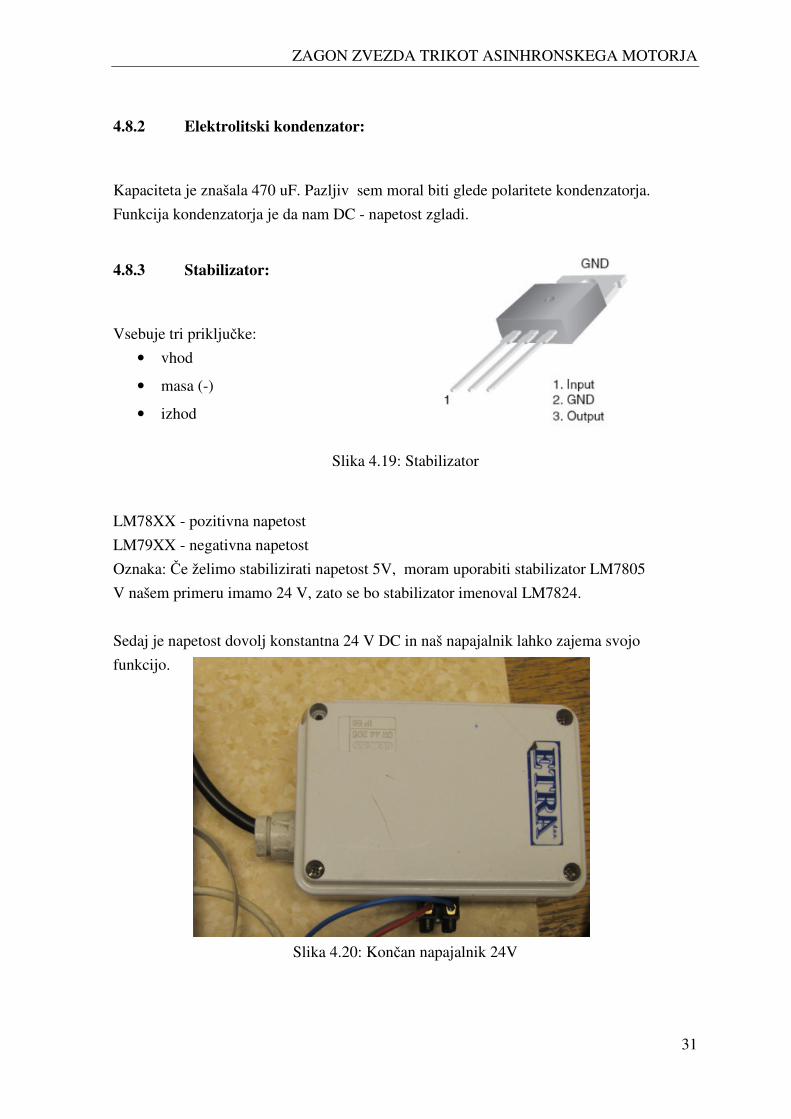
4.8.3 Stabilizator:
Vsebuje tri priključke:
• vhod
• masa (-)
• izhod
Slika 4.19: Stabilizator
LM78XX - pozitivna napetost
LM79XX - negativna napetost
Oznaka: Če želimo stabilizirati napetost 5V, moram uporabiti stabilizator LM7805
V našem primeru imamo 24 V, zato se bo stabilizator imenoval LM7824.
Sedaj je napetost dovolj konstantna 24 V DC in naš napajalnik lahko zajema svojo
funkcijo.
Slika 4.20: Končan napajalnik 24V
4.9 Programiranje mikrokrmilnika PIC18F4520
Slika
Po sestavitvi in testiranju vezja sem se lotil pisanja programa v programskem jeziku C. Programsko kodo sem pisal v programskem orodju CCS C compiler za zvezda, trikot zagon 3 faznega AS.motorja.
Slika 4
Program sem napisal v programskem jeziku C, ki je uporabniku bolj prijazen kot strojni
jezik. Naloga prevajalnika je, da program,ki je napisan v
prevede v program, ki ga bo razumel mikrokrmilnik. Prevajalnik spremeni *.C datoteko v
*.HEX datoteko
Program sem na mikrokrmilnik PIC18F4520 naložil s programatorjem US
USB_1.11a2.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
Programiranje mikrokrmilnika PIC18F4520
Slika 4.21: PIC C Compiler na namizju
Po sestavitvi in testiranju vezja sem se lotil pisanja programa v programskem jeziku C. Programsko kodo sem pisal v programskem orodju CCS C compiler za zvezda, trikot zagon 3 faznega AS.motorja.
4.22: Pisanje programa v CCS C compilerju
Program sem napisal v programskem jeziku C, ki je uporabniku bolj prijazen kot strojni
jezik. Naloga prevajalnika je, da program,ki je napisan v človeško razumljivem jez
prevede v program, ki ga bo razumel mikrokrmilnik. Prevajalnik spremeni *.C datoteko v
Program sem na mikrokrmilnik PIC18F4520 naložil s programatorjem US
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
32
Po sestavitvi in testiranju vezja sem se lotil pisanja programa v programskem jeziku C. Programsko kodo sem pisal v programskem orodju CCS C compiler za zvezda, trikot
Program sem napisal v programskem jeziku C, ki je uporabniku bolj prijazen kot strojni
loveško razumljivem jeziku
prevede v program, ki ga bo razumel mikrokrmilnik. Prevajalnik spremeni *.C datoteko v
Program sem na mikrokrmilnik PIC18F4520 naložil s programatorjem US- Burn,
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
33
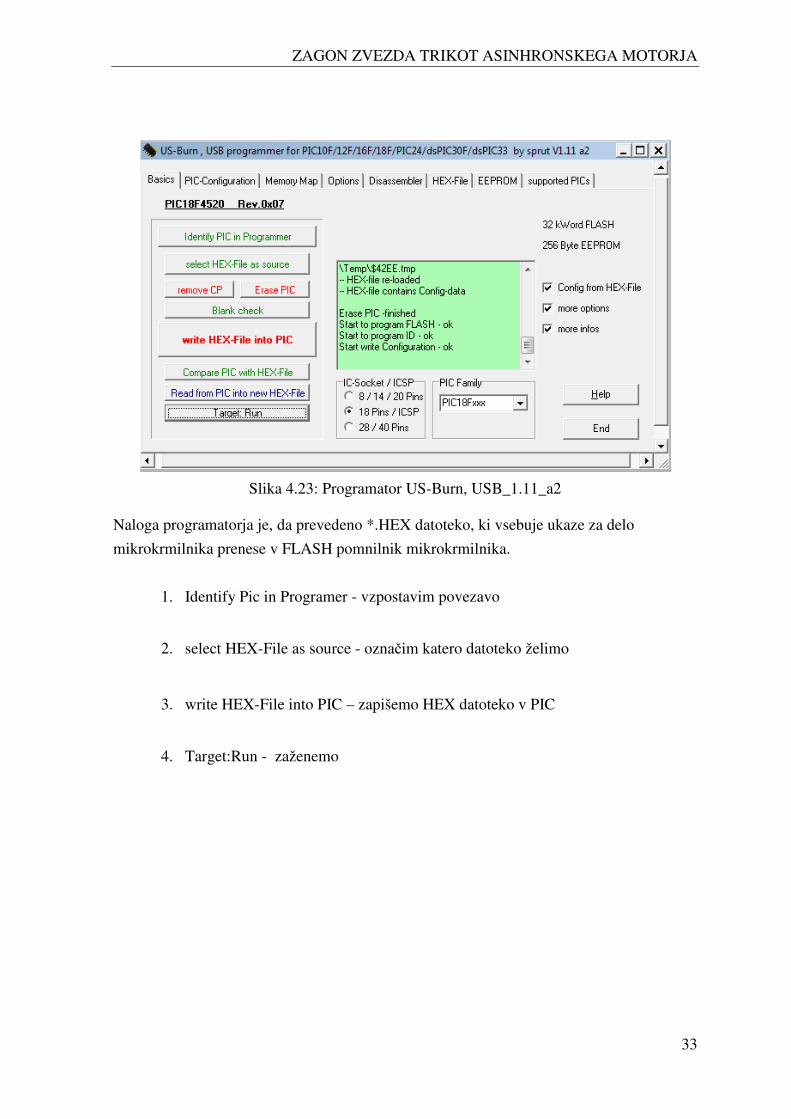
Slika 4.23: Programator US-Burn, USB_1.11_a2
Naloga programatorja je, da prevedeno *.HEX datoteko, ki vsebuje ukaze za delo
mikrokrmilnika prenese v FLASH pomnilnik mikrokrmilnika.
1. Identify Pic in Programer - vzpostavim povezavo
2. select HEX-File as source - označim katero datoteko želimo
3. write HEX-File into PIC – zapišemo HEX datoteko v PIC
4. Target:Run - zaženemo

Slika
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
Slika 4.24: Razvojna ploščo K-CPU verzija 3
Slika 4.25: Relejski izhodi
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
34
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
35
Slika 4.26: Tranzistorski izhodi, relejski izhodi, kontaktorski izhodi
Mikrokrmilnik krmili tranzistor. Tranzistor pošlje signal na tuljavo releja. Rele pa preko
močnostnih kontaktov krmili krmilni del kontaktorja.
Krmilni del:
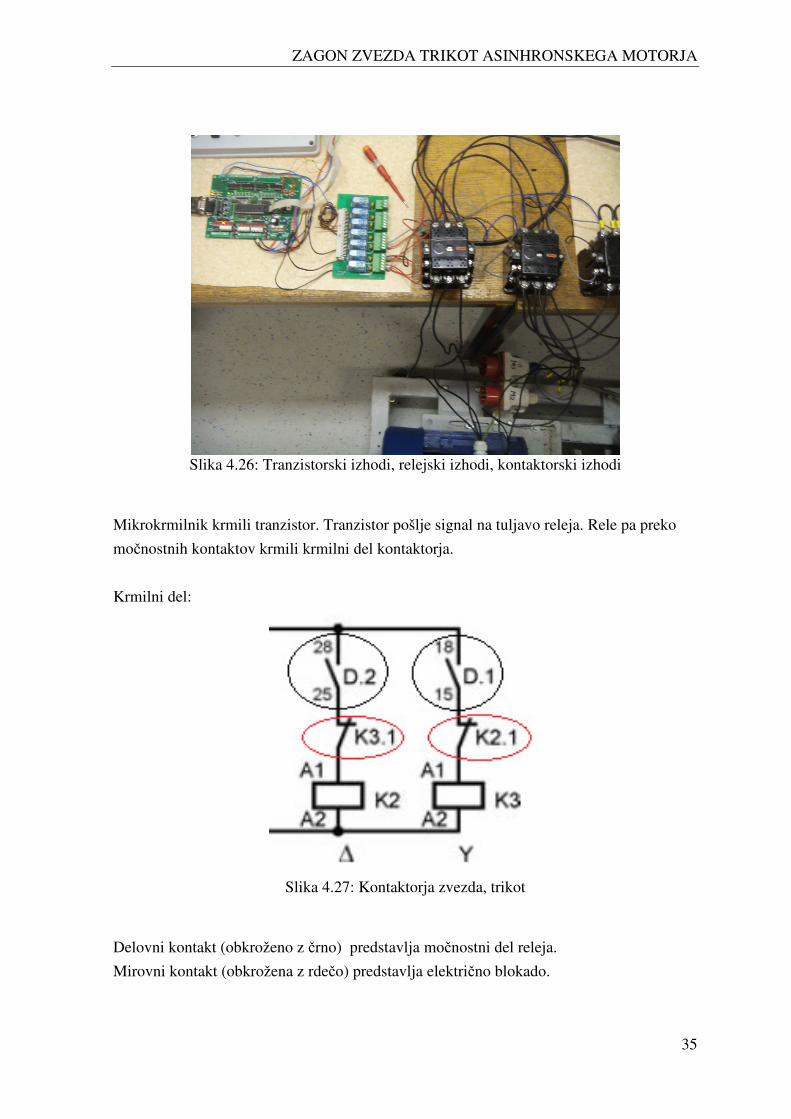
Slika 4.27: Kontaktorja zvezda, trikot
Delovni kontakt (obkroženo z črno) predstavlja močnostni del releja.
Mirovni kontakt (obkrožena z rdečo) predstavlja električno blokado.
ZAGON ZVEZDA TRIKOT ASINHRONSKEGA MOTORJA
36
Slika 4.28: Vodenje zagona 3 faz. as. motorja preko PC-ja
37
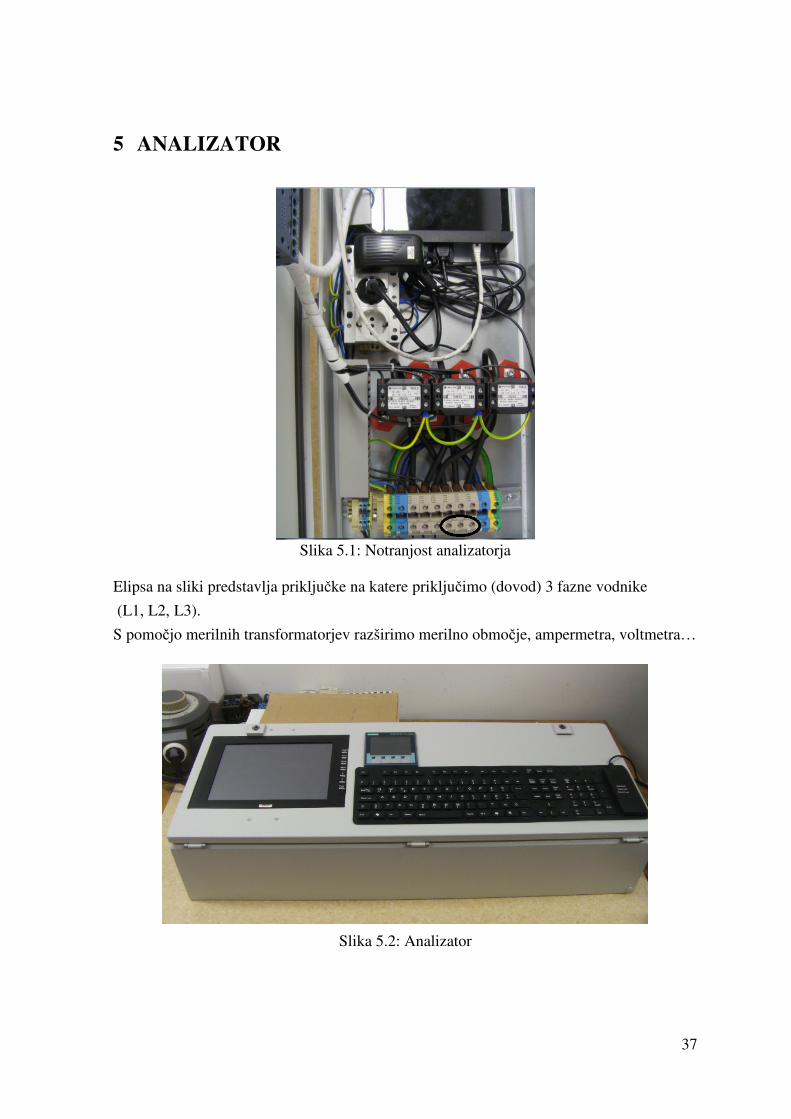
5 ANALIZATOR
Slika 5.1: Notranjost analizatorja
Elipsa na sliki predstavlja priključke na katere priključimo (dovod) 3 fazne vodnike
(L1, L2, L3).
S pomočjo merilnih transformatorjev razširimo merilno območje, ampermetra, voltmetra…
Slika 5.2: Analizator
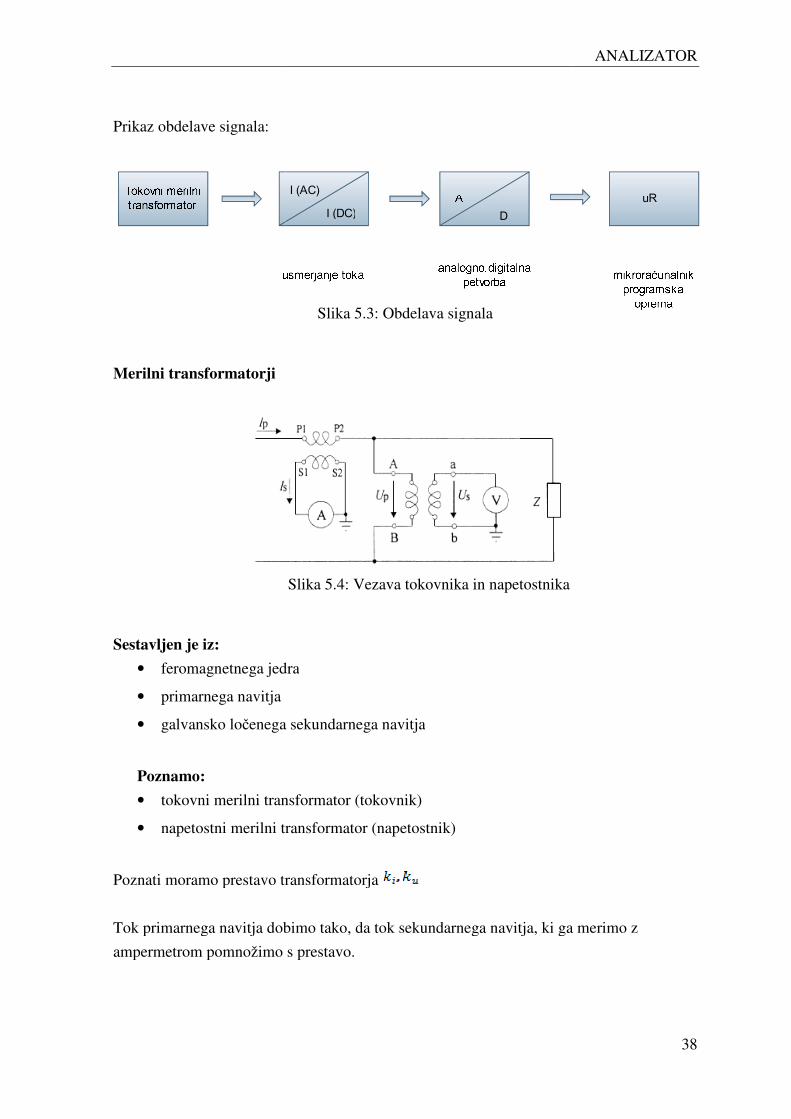
Prikaz obdelave signala:
Merilni transformatorji
Sestavljen je iz:
• feromagnetnega jedra
• primarnega navitja
• galvansko ločenega sekundarnega navitja
Poznamo:
• tokovni merilni transformator (tokovnik)
• napetostni merilni transformator
Poznati moramo prestavo transformatorja
Tok primarnega navitja dobimo tako, da tok sekundarnega navitja, ki ga merimo z
ampermetrom pomnožimo s prestavo.
Slika 5.3: Obdelava signala
Slika 5.4: Vezava tokovnika in napetostnika
feromagnetnega jedra
enega sekundarnega navitja
tokovni merilni transformator (tokovnik)
napetostni merilni transformator (napetostnik)
Poznati moramo prestavo transformatorja
Tok primarnega navitja dobimo tako, da tok sekundarnega navitja, ki ga merimo z
ampermetrom pomnožimo s prestavo.
I (AC)
I (DC) D
ANALIZATOR
38
Tok primarnega navitja dobimo tako, da tok sekundarnega navitja, ki ga merimo z
uR
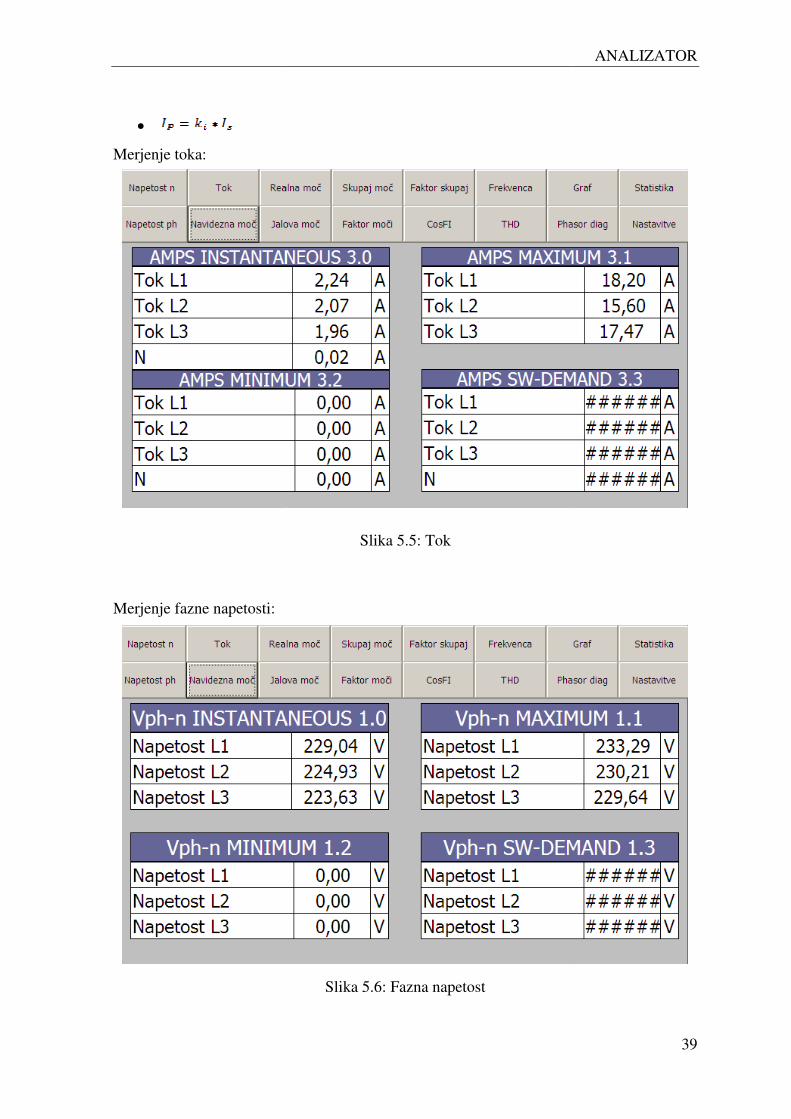
•
Merjenje toka:
Merjenje fazne napetosti:
Slika 5.5: Tok
Slika 5.6: Fazna napetost
ANALIZATOR
39
ANALIZATOR
40
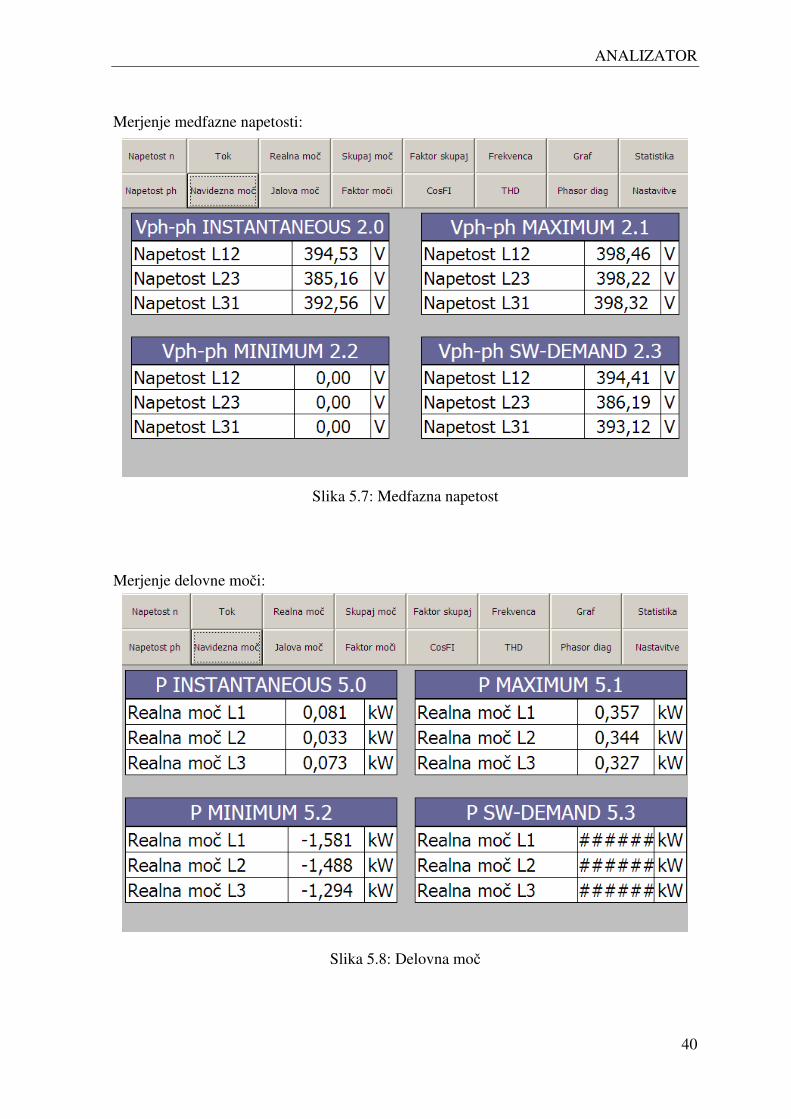
Merjenje medfazne napetosti:
Slika 5.7: Medfazna napetost
Merjenje delovne moči:
Slika 5.8: Delovna moč
ANALIZATOR
41
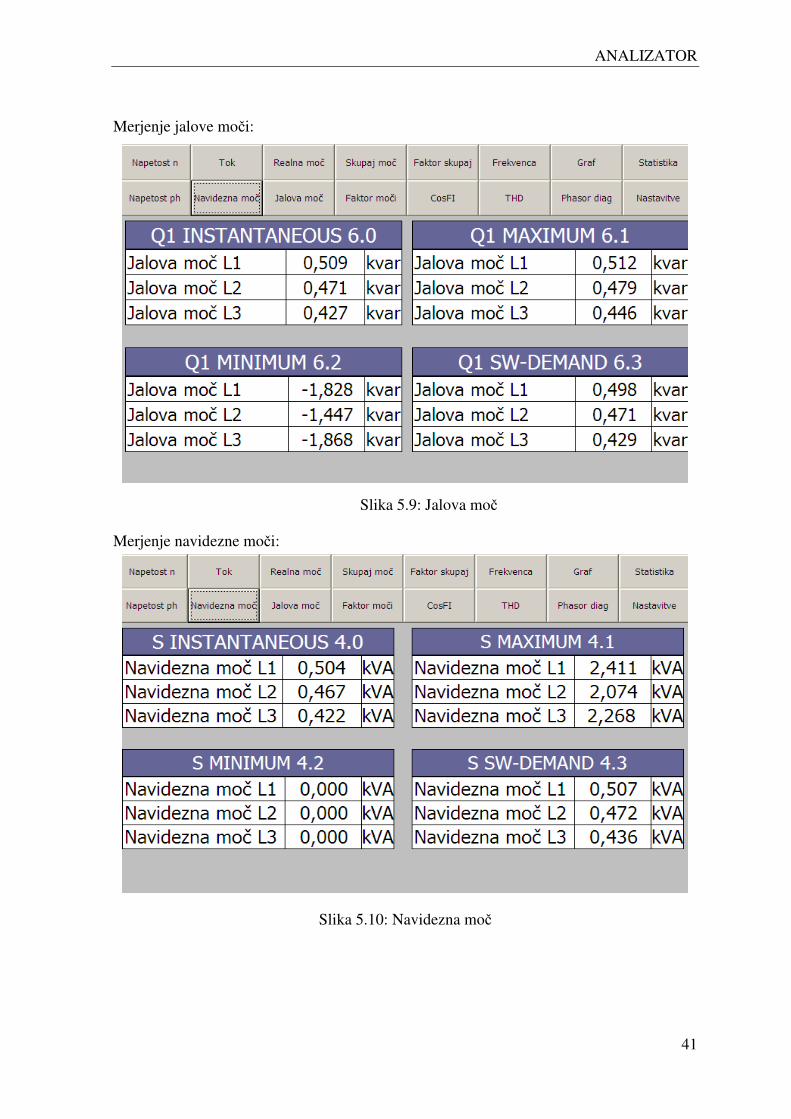
Merjenje jalove moči:
Slika 5.9: Jalova moč
Merjenje navidezne moči:
Slika 5.10: Navidezna moč
ANALIZATOR
42
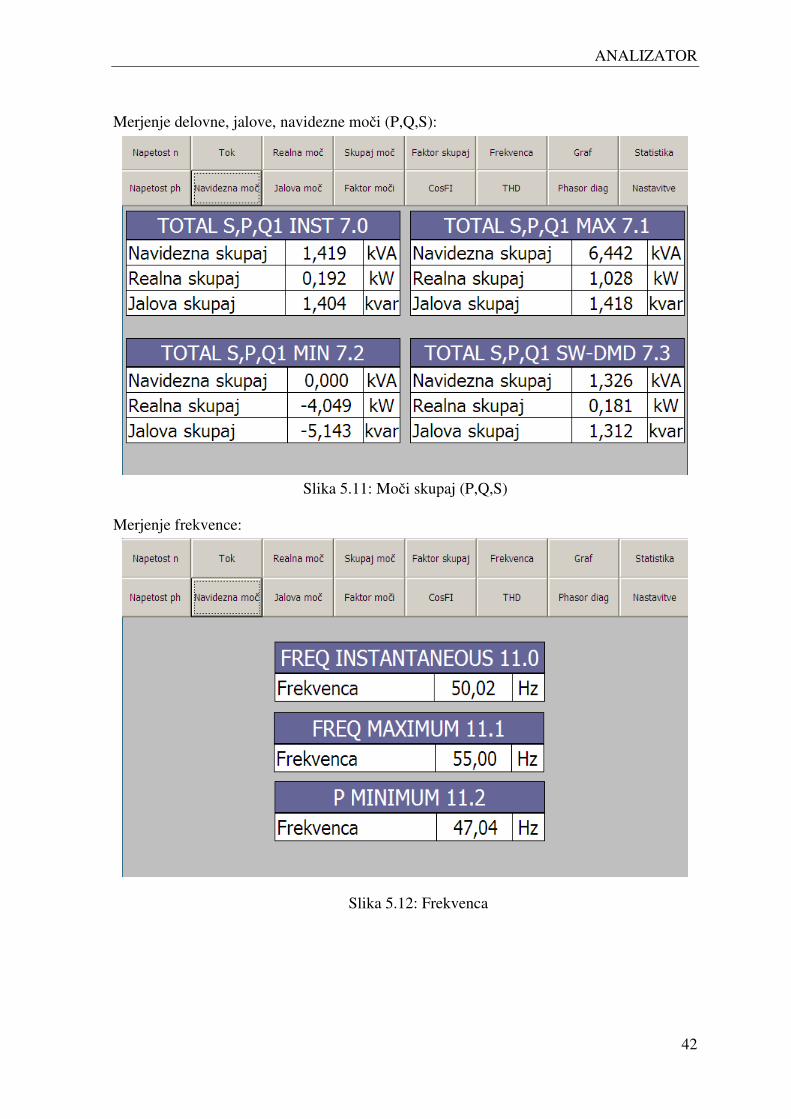
Merjenje delovne, jalove, navidezne moči (P,Q,S):
Slika 5.11: Moči skupaj (P,Q,S)
Merjenje frekvence:
Slika 5.12: Frekvenca
ANALIZATOR
43
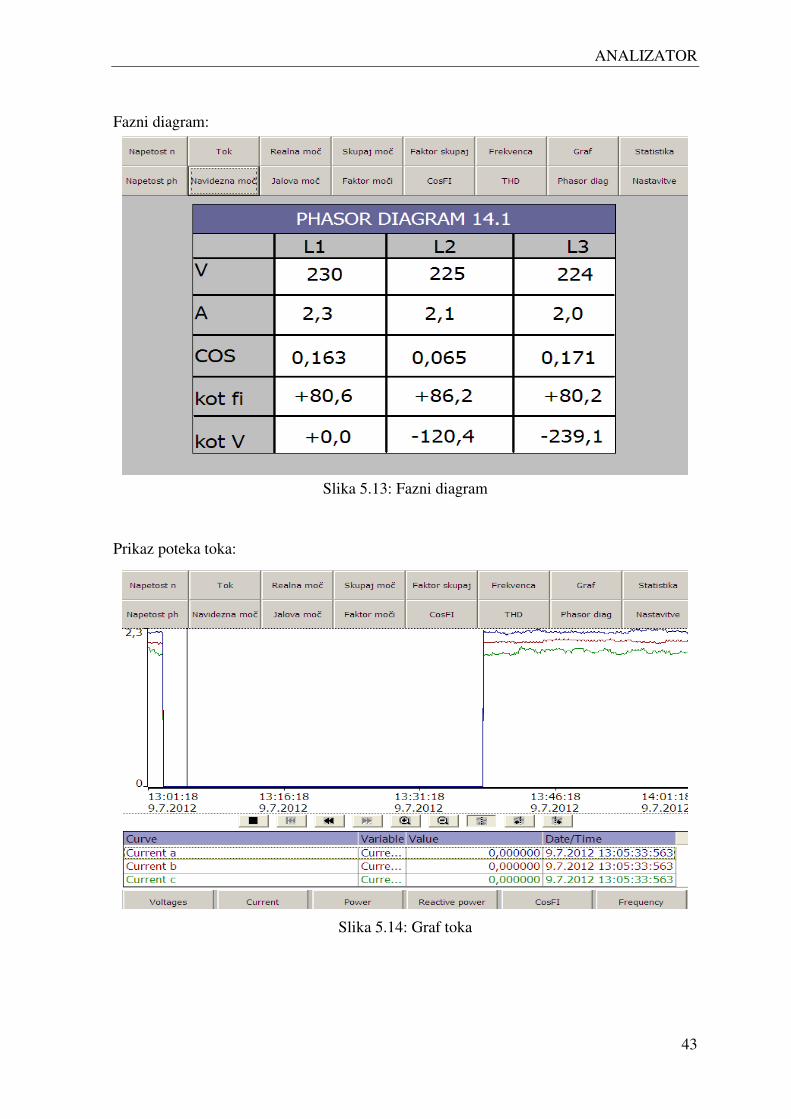
Fazni diagram:
Slika 5.13: Fazni diagram
Prikaz poteka toka:
Slika 5.14: Graf toka

ANALIZATOR
44
Prikaz poteka napetosti:
Slika 5.15: Graf napetosti
Prikaz poteka moči:
Slika 5.16: Graf moči
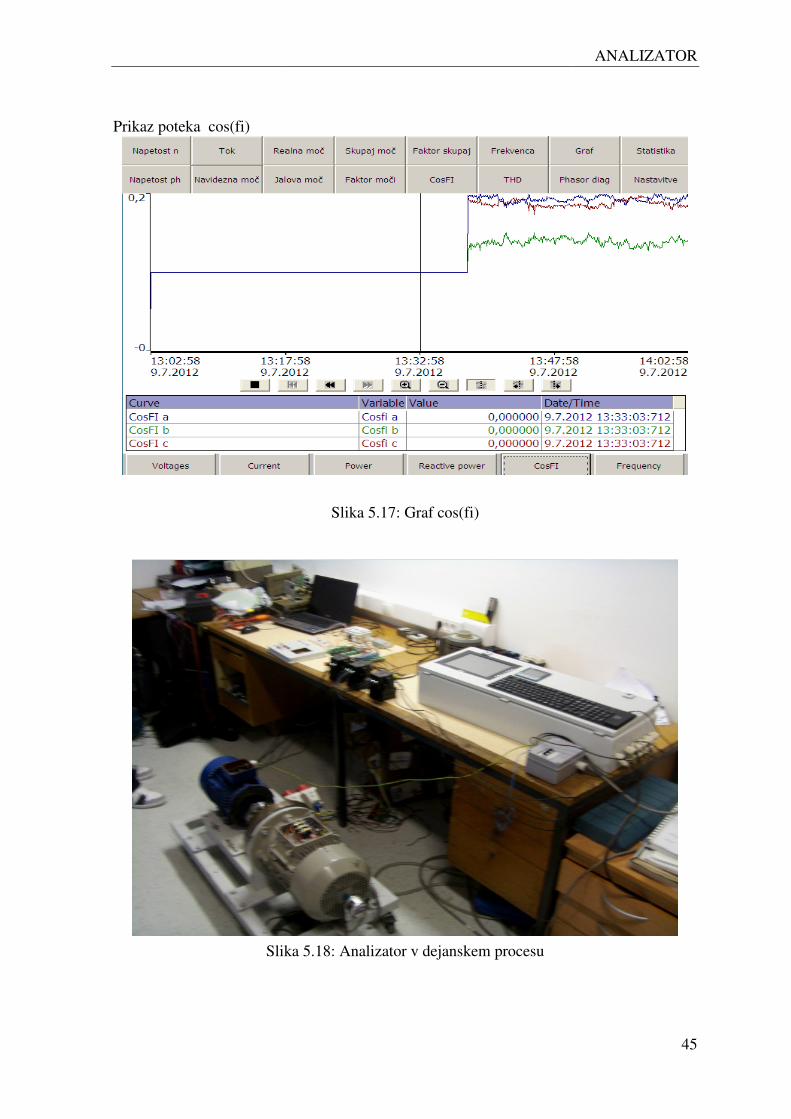
Prikaz poteka cos(fi)
Slika
Slika 5.17: Graf cos(fi)
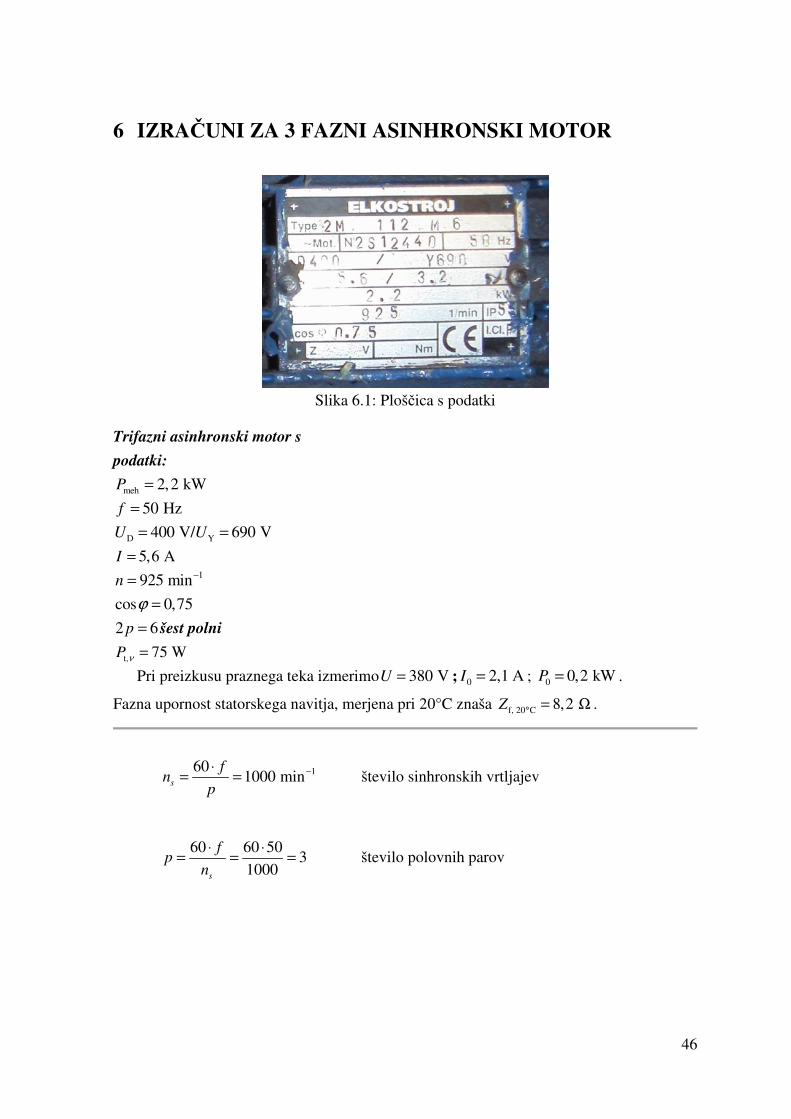
Slika 5.18: Analizator v dejanskem procesu
ANALIZATOR
45
46
6 IZRAČUNI ZA 3 FAZNI ASINHRONSKI MOTOR
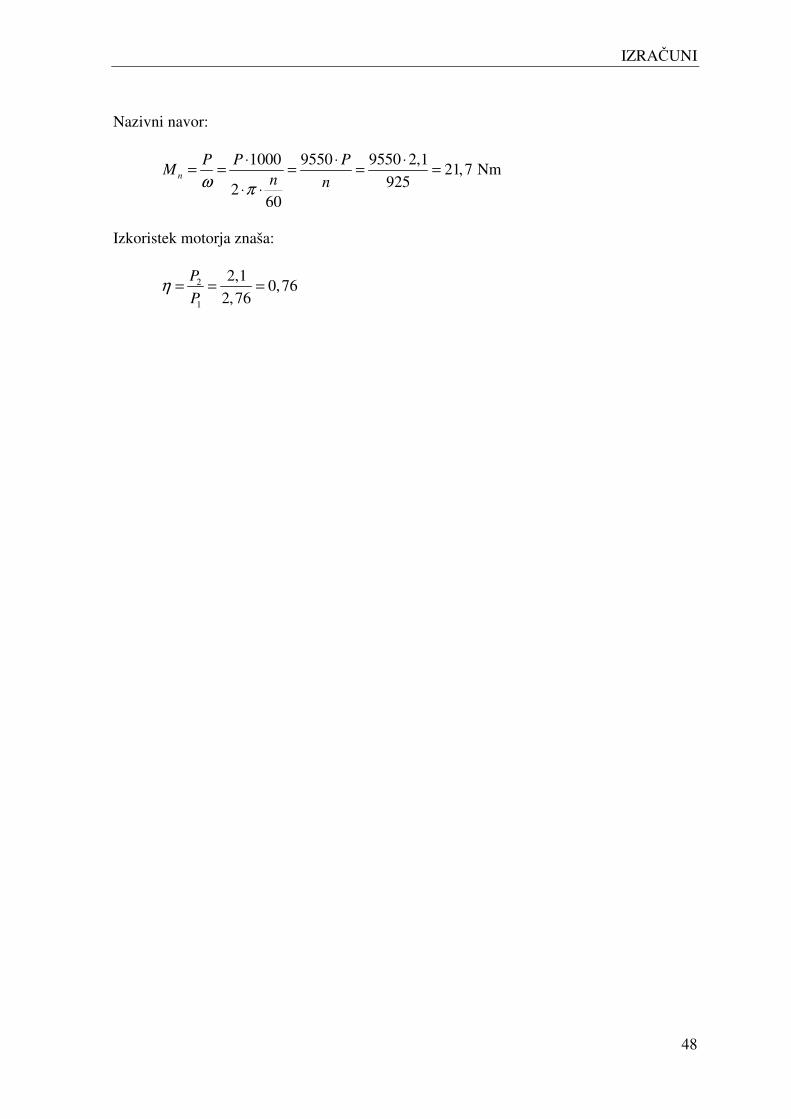
Slika 6.1: Ploščica s podatki
Trifazni asinhronski motor s
podatki:
meh 2,2 kWP =
50 Hzf = D Y400 V/ 690 VU U= =
5,6 AI = 1925 minn
−= cos 0,75ϕ = 2 6p = šest polni
t, 75 WP ν =
Pri preizkusu praznega teka izmerimo 380 VU = ; 0 2,1 AI = ; 0 0,2 kWP = .
Fazna upornost statorskega navitja, merjena pri 20°C znaša f, 20 C 8,2 Z ° = Ω .
1601000 mins
fn
p
−⋅= = število sinhronskih vrtljajev
60 60 50
31000
s
fp
n
⋅ ⋅= = = število polovnih parov

1000 925
1000s
s
n ns
n
− −= = =
Slip - koliko rotor zaostaja za vrtilnim magnetnim poljem .Zaostajanje števila vrtljajev rotorja za sinhronskimi vrtljaji. Sprejeta moč določimo s pomo
1 3 cos 3 380 5,6 0,75 2,76 kWn nP U I= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ =
V praznem teku se celotna dotekajostatorskem jedru in izgub trenja,
0 10 ,CU fe t vP P P P= + +
210 13 3 8,2 36 W
Cu of fP I R= ⋅ ⋅ = ⋅ ⋅ =
izgube v navitju statorja S pomočjo znanih podatkov lahko dolo
0 10 ,fe Cu t vP P P P= − − = − − =
= moč, ki se z magnetnim vrtilnim poljem prenaša iz statorja v rotor.
1 1vp Cu feP P P P= − −
Izgube v navitju statorja moramo prera
1 75 1 (1 ) 8, 2 1 0,0039 55 9,95 f hladnoR R Tα= ⋅ + ⋅ ∆ = ⋅ + ⋅ = Ω
21 1 753 3 9,95 312 W
Cu of fP I R= ⋅ ⋅ = ⋅ ⋅ =
1 1vp cu feP P P P= − − = − − =
Izgube v kratkostični kletki:0,075 2359 180 W
el vpP s P= ⋅ = ⋅ =
je mehanska moč motorja
2359 180 2,179 kWmeh vp el
P P P= − = − =
Oddano moč motorja pa dobimo,
2 1 1 ,Cu fe el t vP P P P P P= − − − − = − − − − =
1000 9250,075
1000
−= = = slip
koliko rotor zaostaja za vrtilnim magnetnim poljem . vrtljajev rotorja za sinhronskimi vrtljaji.
imo s pomočjo enačbe:
3 cos 3 380 5,6 0,75 2,76 kWϕ= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ =
V praznem teku se celotna dotekajoča moč porabi za pokrivanje izgub v navitju statorja, statorskem jedru in izgub trenja, ventilacije:
0 10 ,CU fe t vP P P P
22,1
3 3 8, 2 36 W3
= ⋅ ⋅ = ⋅ ⋅ =
jo znanih podatkov lahko določimo izgube v statorskem jedru.
0 10 , 200 36 75 89 Wfe Cu t v
P P P P= − − = − − =
, ki se z magnetnim vrtilnim poljem prenaša iz statorja v rotor.
Izgube v navitju statorja moramo preračunati na delovno temperaturo 75°C
( )(1 ) 8, 2 1 0,0039 55 9,95 R R Tα= ⋅ + ⋅ ∆ = ⋅ + ⋅ = Ω
25,6
3 3 9,95 312 W3
= ⋅ ⋅ = ⋅ ⋅ =
2760 312 89 2,359 kW= − − = − − =
čni kletki: 0,075 2359 180 W= ⋅ = ⋅ =
č motorja 2359 180 2,179 kW= − = − =
pa dobimo, če od sprejete moči odštejemo vse izgube.
2 1 1 , 2760 312 89 180 75 2,1 kWCu fe el t v
P P P P P P= − − − − = − − − − =
IZRAČUNI
47
porabi za pokrivanje izgub v navitju statorja,
, ki se z magnetnim vrtilnim poljem prenaša iz statorja v rotor.
unati na delovno temperaturo 75°C
i odštejemo vse izgube.
2760 312 89 180 75 2,1 kW
IZRAČUNI
48
Nazivni navor:
1000 9550 9550 2,121,7 Nm
925260
n
P P PM
n nω π
⋅ ⋅ ⋅= = = = =
⋅ ⋅
Izkoristek motorja znaša:
2
1
2,10,76
2,76
P
Pη = = =
49
7 SKLEP IN ZAKLJUČEK
Opravljanje praktičnega izobraževanja je bila zame odlična izkušnja s katero sem dobil
ogromno novih izkušen, ki jih bom lahko v prihodnosti koristil. Pri vsakodnevnem delu
sem vsak dan spoznal nove zanimive stvari. Zelo sem užival, ko sem naredil svoj prvi
industrijski projekt zagon zvezda, trikot asinhronskega motorja s pomočjo mikrokrmilnika
PIC18F4520 in ostalo periferijo. Nadgradil sem svoje teoretično znanje saj sem moral
dobro razumeti princip delovanja določene naprave. Skozi vso praktično izobraževanje
sem imel željo da bi še povečal obseg znanja in mislim da mi je uspelo. Osebno mislim, da
bi bilo dobro da bi praktično izobraževanja trajalo dlje časa.
Zahvaljujem se podjetju Etra.d.o.o da so mi omogočili izvedbo praktičnega izobraževanja.
50
8 PRILOGE
8.1 8.1 Programska koda
#include <main.h>
//varibilne spremenljivke
int1 trenutno_stanje=0, staro_stanje=0, poz_fl=0, neg_fl=0;
int16 tmr_zvezda=0, tmr_trikot=0;
int1 vpis_timerjev=0;
int16 tmr_inputs=0;
#int_TIMER2 //prekinitev vsake 1ms
void TIMER2_isr(void)
if(tmr_inputs>0)tmr_inputs--;//začetek prekinitve 50ms
if(tmr_inputs==0)
trenutno_stanje=input(VKLOP);
if (trenutno_stanje==1 && staro_stanje==0 && poz_fl==0)
poz_fl=1;
vpis_timerjev=1;
staro_stanje=trenutno_stanje;
//pozitivni pulz
tmr_inputs=50;
staro_stanje=trenutno_stanje;
if (tmr_zvezda>0)tmr_zvezda--;
if (tmr_trikot>0)tmr_trikot--;
if (tmr_zvezda==1)output_LOW(ZVEZDA);printf("\r Zvezda == OFF");
if (tmr_trikot==1)output_high(TRIKOT);printf("\r trikot");
PRILOGE
51
#int_RDA //komunikacija, sprejemas byte preko rs232
void RDA_isr(void)
void main()
setup_adc_ports(AN0_TO_AN2|VSS_VDD);
setup_adc(ADC_CLOCK_INTERNAL|ADC_TAD_MUL_20);
setup_psp(PSP_DISABLED);
setup_spi(SPI_SS_DISABLED);
setup_wdt(WDT_OFF);
setup_timer_0(RTCC_INTERNAL);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_16,9,16);
setup_timer_3(T3_DISABLED|T3_DIV_BY_1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
enable_interrupts(INT_TIMER2);
enable_interrupts(INT_RDA);
enable_interrupts(GLOBAL);
//inicializacija začetna verdnost
output_low(MREZA);
output_low(ZVEZDA);
output_low(TRIKOT);
while(1)
if (tmr_zvezda>0)printf("\r tmr_zvezda:%lu",tmr_zvezda);
if (tmr_trikot>0)printf("\r tmr_trikot:%lu",tmr_trikot);
if (vpis_timerjev==1)
PRILOGE
52
tmr_zvezda=ZVEZDA_VKLOPLJENA;
tmr_trikot=TRIKOT_VKLOP;
vpis_timerjev=0;
printf("vpis_timerjev");
if (poz_fl==1 && tmr_zvezda>1)
output_high(MREZA);
output_high(ZVEZDA);
printf("\r zvedza");
if (input(IZKLOP)==1)
output_LOW(MREZA);
output_LOW(ZVEZDA);
output_LOW(TRIKOT);
tmr_zvezda=0;
tmr_trikot=0;
poz_fl=0;
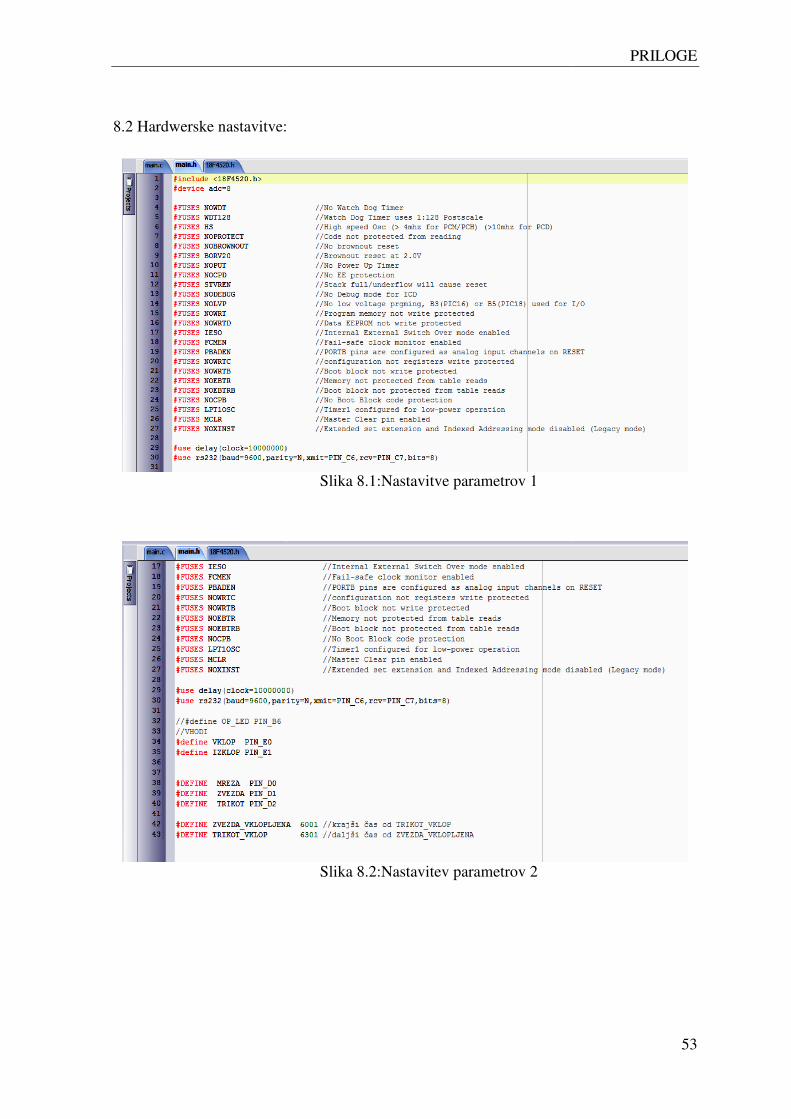
8.2 Hardwerske nastavitve:
nastavitve:
Slika 8.1:Nastavitve parametrov 1
Slika 8.2:Nastavitev parametrov 2
PRILOGE
53






![DIGITALNA OBRADA SLIKE - ETFBL · 2017. 5. 25. · 30 Slika 4. [11] Uklanjanje zamu ćenosti. S lijeva na desno: originalna slika, zamu ćena slika, slika nakon uklanjnanja zamu ćenosti](https://img.dokumen.tips/doc/110x75/5fd829f189004f1ce733b910/digitalna-obrada-slike-etfbl-2017-5-25-30-slika-4-11-uklanjanje-zamu-enosti.jpg)






![DIGITALNA OBRADA SLIKE GI Digitalna... · 2016. 4. 4. · 30 Slika 4. [11] Uklanjanje zamućenosti. S lijeva na desno: originalna slika, zamućena slika, slika nakon uklanjnanja zamućenosti](https://img.dokumen.tips/doc/110x75/5fe372474f73d75e62501071/digitalna-obrada-slike-gi-digitalna-2016-4-4-30-slika-4-11-uklanjanje.jpg)















