Embed Size (px)
Citation preview

Numerički upravljane mašine i roboti – Vežbe
POGONSKI SISTEMI KOD CNC MAŠINA ALATKI
o
Tahogenerat r
Glavna osovina
Obradak
Sto
Kom. signal
Enkoder
Poziciona povratna sprega
po brzini
Povr. sprega
Mašinski elementi
Izlazi
Ulazi
^itač trake Drugi uređaji
Servo motor Servo uređaj
NC
PLC
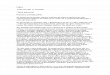
Slika 1. Shematski prikaz CNC mašine alatke
Kod numerički upravljanih mašina alatki postoje tri glavne grupe elemenata: a) upravljački elementi i elektronika b) električni pogoni (elektromehanički pogon) c) mehanički elementi (stolovi, klizači, nosači alata, ...)
Osnovna uloga pogona je da izazove takvo kretanje upravljanih delova mašine alatke
koje će biti što bliže željenom kretanju koje odgovara komandama CNC sistema. Pogonski sistemi imaju i svojevrsnu ulogu pretvarača jednog vida energije u drugi
(npr. električna u mehaničku). Pogonski sistem ujedno predstavlja vezu između druge dve glavne grupe elemenata
numerički upravljane mašine alatke. Naime, on povezuje mehaničke elemente mašine sa upravljačkom jedinicom.
Razlikujemo nekoliko mogućih kombinacija pogonskih sistema koji se mogu koristiti kod numerički upravljanih mašina alatki. To su:
- električni - elektromehanički - hidraulički - pneumatski - hidropneumatski - elektrohidraulični
1

Numerički upravljane mašine i roboti – Vežbe
Ovde se razmatra samo slučaj električnih odnosno elektromehaničkih pogonskih sistema.
Osnovni predstavnik električnih pogonskih sistema su elektromotori koje još nazivamo izvršnim organima upravljanja.
Koriste se razne vrste motora. Najzastupljeniji motora kod numerički upravljanih mašina alatki su:
- DC motori ili motori jednosmerne struje - AC motori ili motori naimenične struje - step motori ili koračni motori - linearni motori (za specijalne namene) Pri tome treba imati u vidu da se step motori i linearni motori koriste kod sistema
upravljanja bez povratne sprege. Naravno, kada se govori o AC/DC motorima poznato je da oni imaju veliki broj
različitih tipova i varijanti.
2

Numerički upravljane mašine i roboti – Vežbe
Izbor motora - projektni zadatak 1. Definisanje glavnog i pomoćnog kretanja
Kretanje delova NUMA možemo podeliti na glavno i pomoćno. Glavno kretanje najčešće izvodi obradak ili alat. Ovo kretanje je u našem slučaju rotaciono kretanje glavnog vretena. Dimenzije i brzinu obrtanja glavnog vretena smo definisali u prethodnim koracima izrade projektnog zadatka. Od podataka za glavno kretanje imamo: Snaga pogonskog motora (kW) P=9 Maksimalni moment glavnog vretena (Nm) T=56 Stepen iskorišćenja sistema za prenos glavnog kretanja η=0.95 Oblast regulisanja broja obrta (o/min) n=25-5000
Pomoćno kretanje biće linearno kretanje nosača alata u pravcu X i Z ose. Za ovo kretanje smo definisali Max. pomeranje nosača alata po X / Z osi 160/350 Brzina u brzom hodu po X / Z osi 20/30 2. Izbor motora glavnog kretanja
Za pogon glavnog kretanja koriste se motori jednosmerne struje i motori naizmenične struje. Danas se u praksi uglavnom koriste motori naizmenične struje koji su svojom cenom, kvalitetom i fleksibilnošću prestigli DC motore. Zbog toga će se ovde razmatrati algoritam izbora motora naizmenične struje za glavno kretanje struga. Za ovaj projektni zadatak se koriste motori proizvođača Siemens i odgovarajući Manual's sa tehničkim podacima o motorima je dostupan svim studentima na sajtu Mašinskog fakulteta.
Definišemo osnovne karakteristke motora: nmax (mehanička granična brzina) - maksimalna dopuštena brzina definisana
mehaničkim delovima. Ne sme se preći. n1(kontinualna maksimalna brzina) - maksimalna dozvoljena kontinualna
brzina u bilo kom radnom ciklusu. S1 (Kontinualni operacija) - Operacija sa konstantnim opterećenjem S6 (Prekidna operacija) - Operacija sa prekidnim opterećenjem. Maksimalni moment se na zadatoj brzini može aproksimativno izračunati
Grafik pokazuje odnos snage i momenta u odnosu na brzinu.
3

Numerički upravljane mašine i roboti – Vežbe
Brzina i snaga induktivnih motora su limitirane termičkim i mehaničkim
razlozima (naponima u ležajevima i krajevima vratila). Izbor tipa konstrukcije
Tip konstrukcije se bira uzimajući u obzir vibracije motora, Cantileverovu silu i
aksijalna naprezanja. Biramo standardni tip konstrukcije.
Razlikujemo dva osnovna slučaja prilikom izbora odgovarajućeg motora.
Slučaj 1. Motor radi u kontinualnom režimu. Slučaj 2. Pogon je dimenzionisan saglasno periodičnom ciklusu opterećenja. Slučaj 1. Bira se takav motor čija je S1 snaga ista ili veća od zahtevanog izlaza pogonskog sistema. Korišćenjem dijagrama brzina-snaga, treba proveriti da li je snaga moguća za zahtevanu oblast mogućih brzina. Ako nije onda se mora izabrati veći motor. Slučaj 2. Pogon se dimenzioniše saglasno ciklusu opterećenja. Ako momenti za vreme opterećenja nisu poznati moment se može izračunati iz snage koristeći jednačinu
4

Numerički upravljane mašine i roboti – Vežbe
Ovaj moment koji motor mora da obezbedi, se sastoji iz momenta trenja, momenta opterećenja i momenta ubrzanja:
Moment ubrzanja se izračunava kao:
gde imamo ukupni moment inercije, opseg brzina i vreme ubrzanja.
Odgovarajući moment će biti
Motor biramo u zavisnosti od ovog momenta, perioda T i termičke konstante motora koja je zavisna od visine motora. Tako će biti:
5

Numerički upravljane mašine i roboti – Vežbe
Prikaz označavanja motora
Biramo između tri vrste AC indukcionih motora: 1PH2, 1PH4 i 1PH7. Za naš slučaj je P=9 kW a T=56 Nm. Biramo iz tabele 1-3 i za ovaj motor nalazimo brzina - moment karakteristiku.
6

Numerički upravljane mašine i roboti – Vežbe
7

Numerički upravljane mašine i roboti – Vežbe
8

Numerički upravljane mašine i roboti – Vežbe
3. Izbor motora za pomoćno kretanje
Što se tiče motora za pomoćno kretanje u upotrebi su sledeći tipovi motora: - AC servo motori - DC servo motori - step motori - linearni motori Najveću primenu imaju AC servomotori, pa će se ovde dati algoritam izbora ovog
tipa motora. Biramo između tri tipa AC servomotora: 1FT5, 1FT6 i 1FK6 Imamo pomoćno kretanje u pravcu dve ose X i Z. Posmatraćemo kretanje samo u
pravcu X ose. (U projektnom zadatku izvršiti izbor motora za obe ose) Izbor tipa konstrukcije
Ovde će takođe tip konstrukcije zavisiti od aksijalnih sila i od zahtevanog stepena zaštite. Različiti stepeni zaštite su dati u sledećoj tabeli.
9

Numerički upravljane mašine i roboti – Vežbe
Dok ova tabela prikazuje konstrukciju i opis primene odgovarajućeg stepena
zaštite motora, sledeća tabela nam daje podatke neophodne za izbor odgovarajućeg stepena zaštite. (U zavisnosti od prethodno definisanih mehaničkih elemenata sistema – u prethodnim delovima projektnog zadatka)
10

Numerički upravljane mašine i roboti – Vežbe
Hlađenje Raspoloživi opseg radne temperature se kreće od -15 do +40 stepeni. Imamo motore sa ventilacijom i bez ventlacije Motori bez ventilacije (u serijskom broju na 9-toj poziciji: A) koriste prirodnu konvekciju kao hlađenje pa moraju biti adekvatne konstrukcije da bi bilo garantovano rasipanje toplote. Motori sa ventilacijom (u serijskom broju na 9-toj poziciji: S) su dostupni za
Mehanički prenosnici (reduktori)
Ponekad postoji potreba da moment bude redukovan odnosno da se u tu svrhu između motora i našeg zavojnog vretena postavi odgovarajući prenosnik kao što je prikazano na slici. U tom slučaju se uzima u obzir i stepen redukcije kako bi se odredile karakteristke motora.
11

Numerički upravljane mašine i roboti – Vežbe
Tada će snaga na izlazu iz vretena biti
gde se moment motora izračunava iz obrasca
gde je
a dato je
12

Numerički upravljane mašine i roboti – Vežbe
Odgovarajući maksimalno dozvoljeni moment na izlazu iz pogonskog sistema će biti
a za S3 ciklus
Prikaz označavanja tipa motora
Za naš slučaj P motora je P=2.2 kW i n=3000 0/min pa biramo motor tipa 1FTA6 AC servomotor sa serijskim brojem .
13

Numerički upravljane mašine i roboti – Vežbe
Nalazimo odgovarajući dijagram zavisnosti momenta od brzine.
14

Numerički upravljane mašine i roboti – Vežbe
Napomena: U projektnom zadatku pored ovih dijagrama treba prikazati i tehnički crtež odgovarajućeg motora. Tehnički crteži se nalaze na kraju svakog poglavlja kataloga za odgovarajući tip motora.
15