Embed Size (px)
Citation preview

Chapter 2
Microphones and loudspeakers
2.1 Microphones
2.1.1 Denition
Microphones are electroacoustic transducers which transform acoustic vibra-tions into electrical signals.
2.1.2 Principles
The displacement of the diaphragm (a membrane or a ribbon) in a soundpressure eld results in the modication of an electrical variable of the circuitconnected to this diaphragm:
• in carbon microphones (used in old telephone handsets), an electricalresistance was varied;
• in electrostatic microphones, the capacitance of a capacitor having thediaphragm as one of the electrodes is varied;
• in crystal microphones, piezoelectric eects create an electric voltage;
• in electrodynamic microphones, the displacement in a magnetic eld ofa coil tied to the diaphragm creates a voltage called the electromotiveforce (EMF).
In each case, the modication of the electrical variable results in an out-put voltage, which we consider as an audio signal.
1

2.1.3 Microphones' properties
The sensitivity is expressed in decibels (dB) and is dened by:
S(dB) = 20 log10
(e
p
)
In this denition, we see the ratio of the RMS output voltage e (volts)created by the microphone to the RMS acoustic pressure p (pascals)on the membrane.
Example: A microphone with a sensitivity S = −50 dB outputs avoltage of 10 mV (RMS) for a 104 dB sound pressure level. Indeed:
104 dB = 20 log10
(p
2.10−5
)⇒ p = 3, 17 Pa
−50 dB = 20 log10
(10−2
3.17
)
The frequency response : the sensitivity of the microphone is expressedas a function of the frequency. The (useful) bandwith of the micro-phone is the frequency range within which the variations of the sensi-tivity are limited to (for example) ±3 dB.
The directivity (diagram) : is expressed by the variation of the sensitiv-ity as a function of the angle of incidence of the sound wave on the mem-brane. Three typical directivities are omni-directional, bi-directionaland (ultra-)directional. Among directional microphones are the car-dioid ones, but also sub-, super- and hyper- cardioid microphones.
Electrical impedance : often expressed at 1kHz, it is the impedance seenby the amplier connected at the output of the microphone. Thisimpedance can range from 10 Ω to 100 kΩ.
Only electrostatic microphones will be described in this course. Their oper-ation is based on the modication of the capacitance of a condenser whosethe rst electrode is in a xed position and the second one (the membrane)is moved by the acoustic vibrations in the sound eld.
There are two main types of electrostatic microphones:
2

Figure 2.1: Condenser electrostatic microphone. English translations:"borne de sortie" = output pin, "contre-électrode" = back electrode,"isolant" = insulator, "grille de protection" = protection grid.
• the condenser microphones (dielectric = air) use an external powersupply to provide the dc polarizing voltage (see gure 2.1) ;
• the electret microphones (dielectric = prepolarized material) have aninternal permanent polarizing voltage.
2.1.4 Condenser microphones with an external polarizing
voltage : basic equations and frequency response
In gure 2.2, E0 is the external dc polarizing voltage applied to the condenser.The output resistance R0 has a very high value (' 1 GΩ).
There exists an electrostatic force of attraction between the condenser'selectrodes, given by:
Fe =ε0AV
2
2(d−X)2
A is the surface of an electrode, ε0 is the permittivity of the air and Xis the displacement of the diaphragm (measured from its equilibrium posi-tion, when there's no sound and no polarisation voltage E0). V and d are(respectively) the voltage across the electrodes and the equilibrium distancebetween them.
If we consider the action of E0 alone (static conditions: no sound pressureon the diaphragm), the membrane moves to the position X = X0 which
3

Figure 2.2: Electrical circuit of the condenser microphone. English transla-tions: "électrode mobile" = moving electrode, "électrode xe" = motionlesselectrode.
4

corresponds to the equality of the electrostatic force of attraction and theelastic force KMX0 created by the membrane' stiness (KM ):
Fe = KMX0
Under dynamic conditions (additional action of the sound pressure p(t)on the diaphragm), the displacement of the diaphragm obeys the followingdierential equation:
mMd2x
dt2+RM
dx
dt+KM (X0 + x) = Ap+ Fe(V,X)
in which mM is the mass of the membrane, RM is its mechanical resis-tance and KM its stiness. The displacement x is the (small) increase of X0
due to the pressure on the membrane (X = X0 + x).In the previous equation, x, p, V and X depend on time.
The electrostatic force Fe(V,X) can be linearised if we consider that xand v (= V − E0) are very small quantities, compared to X0 and E0 :
mMd2x
dt2+RM
dx
dt+KM (X0 + x) = Ap+ Fe(E0, X0) +Kbv +K0x (2.1)
where
Kb =E0ε0A
(d−X0)2=
E0C0
d−X0and K0 =
E02ε0A
(d−X0)3
One must now nd a relation between the voltage v and the displacementx. Consider that the electric charge appearing on the condenser's electrodesis expressed by:
q = CV =ε0A(E0 + v)
d−X0 − x= C0E0 + C0v +
C0E0x
d−X0+ second order terms
Therefore, the electric current is given by the rst-order (time) derivativeof the electric charge q:
i = C0dv
dt+Kb
dx
dt
The second order terms are again neglected.
5

Open-circuit sensitivity
One can derive the open-circuit sensitivity of the condenser microphone
(S = 20log(vrmsprms
)) from the previous equations. Without any load impedance,
the output voltage is V = E0 + v: see gure 2.2. The d.c. component E0 ofthis voltage is blocked by the decoupling capacitor Cc, which gives only v atthe output of the microphone circuit.
With this in mind, we will now re-use the previous equation giving theelectric current, but we will rst express this equation in the frequency do-main (for sinusoidal signals). Introducing the complex symbols x et v, suchthat:
x(t) = <xejωt
the previous equation gives (since i = vR0):
v
R0= jωC0v + jωKbx
As the resistance R0 has a very high value, the current i = vR0
can beneglected in the previous equation, except at very low frequencies, whichgives:
jωC0v + jωKbx = 0
We then include this relation into equation (2.1), and we obtain (againin the frequency domain):
−ω2mMx+ jωRMx+ (KM −K0)x+K2b
C0x = Ap
In the previous equation, we have taken into account the forces' equilib-rium under static conditions:
Fe(E0, X0) = KMX0
An additional simplication arises if the constants K0 and Kb are devel-oped:
−ω2mMx+ jωRMx+KMx = Ap
Finally, the open-circuit sensitivity of the condenser microphone is thefollowing:
6

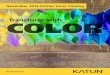
Figure 2.3: Typical frequency response of a condenser microphone, for twodierent values of the mechanical resistance RM (sensitivity in dB vs fre-quency).
S(dB) = 20 logvrmsprms
= 20 log|v||p|
= 20 log
AE0
(d−X0)
√(ω2mM − 1
CM
)2+ ω2RM
in which CM is the compliance (or the inverse of the stiness KM ).
Figure 2.3 illustrates the frequency response corresponding to this equa-tion.
The resonance frequency is given by f0 = 12π√mMCM
. At this particular
frequency, there's a peak in the frequency response which corresponds tothe upper limit of the useful bandwith. Therefore, there's a clear interest topush this resonance frequency as far as possible, towards the high frequencies.How can this be obtained ? Mainly by using a very light membrane, made ofnickel, aluminium or a thin sheet of Mylar covered by a thin metallic layer.
Another approach would be to decrease the diaphragm's compliance CM ,but this would also decrease the sensitivity in the useful bandwith:
S0 = 20 log
(AE0CMd−X0
)
7

To increase the sensitivity S0, one can increase the polarizing voltageE0 (typical value: 200 V)or decrease the distance d between the electrodes(typical value: 20 µm).
The main eect of the mechanical resistance RM is to damp the reso-nance peak in the frequency response. By increasing its value, it is thereforepossible to enlarge the useful bandwith, without changing the resonance fre-quency (see gure 2.3). The mechanical resistance can in fact be increasedby the acoustic resistance of small holes (resistance to air ow) perforatedin the back plate of the capacitor: see gure 2.1.
Beyond the resonance frequency, the sensitivity decreases by 12 dB peroctave (−20 logω2).
2.1.5 Electret microphones
Electrets are prepolarized materials having an internal permanent electro-static charge (ex.: polytetrauoroethylene).
They can be used in electrostatic microphones to get rid of the externalpolarizing voltage.
Two possible congurations:
• either the capacitor (xed) backplate is coated with the electret mate-rial;
• or the metallic membrane itself is coated with the electret.
The properties (frequency response, ...) of electret microphones are verysimilar to those provided by the condenser microphone described before. Theinternal polarizing voltage E0 can be as high as 100 V.
However, an electret microphone needs a small dc power supply (5 to 9V),often provided by batteries. This is required to operate the pre-amplicationof the output voltage.
Due to their small size, electret microphones are well suited for compactapplications:
• "Tie-clip" microphones for speech reinforcement in conferences;
• microphones for mobile phones;
• head-worn microphones for singers in a stage performance.
The last ones generally have special directional characteristics (cardioidor hypercardioid, see next section).
8

Figure 2.4: Pressure gradient microphone: bypass of the diaphragm anddenition of the (acoustic) path "2d". English translations: "membranedu microphone" = microphone's membrane, "direction de propagation" =direction of propagation.
2.1.6 Directional microphones
In pressure-gradient microphones, the acoustic pressure is active on both
sides of the diaphragm (gure 2.4).However, the value of the acoustic pressure is dierent at both sides,
because the sound wave must travel the additional equivalent distance 2d(the (acoustic) path) between the front and the back sides. Let's call p1 thepressure on the front and p2 the pressure on the back side.
The dierence between p1 and p2 therefore depends more on the phasesof the acoustic pressures than on their amplitude.
Consider such a microphone located at point A in a sound eld. Theangle of incidence of the sound wave on the diaphragm is θ (g. 2.5).
The path is maximum if the direction of propagation is perpendicular tothe membrane (θ = 0) and minimum if θ = 90. In the following, we assumethat the acoustic path in the case of non-perpendicular incidence is 2d cos θ.If we apply this model to equation (1.1) of the rst chapter, then:
9

Figure 2.5: Bypass of the diaphragm in a pressure gradient microphone inthe case of non-perpendicular incidence. English translations: see previousgure.
10

Figure 2.6: Directivity of the pressure gradient microphone in cos θ (gure-eight microphone)
p1 = PM cos (ωt− kxA + kd cos θ)
p2 = PM cos (ωt− kxA − kd cos θ)
where xA is the coordinate of point A along the direction of propagation andPM is the amplitude of the acoustic pressure which is assumed unchangedwhen passing from the front to the back side of the diaphragm.
The resulting force on the diaphragm is proportional to the dierence be-tween the acoustic pressures applied to both sides, and therefore to sin (kd cos θ).
• if kd is small, sin (kd cos θ) ' kd cos θ, and the directivity of the micro-phone follows a spatial distribution in cos θ at all frequencies, whichgives two lobes of directivity shown in g. 2.6.
• if kd is greater than (about) 0.3, the directivity depends on frequency(through k). Additional side lobes are created in the directivity dia-gram and their number increases with frequency.
11

Pressure gradient microphone are usually designed to operate in their bi-directional mode (kd < 0.3): they are often called gure-eight microphones,with reference to the particular shape of their directivity diagram.
An example of application of the pressure gradient microphone is therecording of an interview in a TV or a radio studio, when both people arefacing each other and the microphones' lobes are oriented towards the in-terviewer and the interviewee, respectively. Possible noise sources generatedby technical equipments are therefore not recorded if they are situated alongthe direction θ = 90/270.
12

Directional microphones
Contrary to bidirectional microphones, directional microphones have a(unique) main lobe of sensitivity.
A directional microphone can be obtained by a pressure and a pressuregradient microphones connected in series. Except at very high frequencies,the pressure microphone is omnidirectional (constant directivity): therefore,the output voltage produced by both microphones connected in series is:
e(θ) = ep + e∆p cos θ = ep(1 + α cos θ)
where ep is the output voltage of the pressure microphone and e∆p is theoutput voltage of the pressure gradient microphone, under perpendicularincidence. The factor α is the ratio of the sensitivities of both microphonesunder perpendicular incidence.
By modifying α, one can obtain dierent directivity diagrams (gure 2.7).In particular, a cardioid microphone is obtained with α = 1.
It is of course possible to realize directional microphones with a muchnarrow (selective) sensitivity lobe than cardioid microphones. These can becalled ultra-directional microphones: they will not be studied in this course.
2.2 Loudspeakers
2.2.1 Denition
Loudspeakers are electroacoustic transducers that transform (electrical) au-dio signals into acoustic waves.
2.2.2 Principles of operation
The electrical audio signal is amplied at the necessary energy level to con-trol the displacement of a membrane (diaphragm), which itself induces thedisplacement of the neighbouring air mass and creates acoustic vibrations.
Ideally, the acoustic pressure wave created by the membrane should be aperfect reproduction of the audio signal (high delity). In practice however,dierences can be observed between both time evolutions, particularly forthe electrodynamic loudspeakers which are used in most applications.
In this course, only the loudspeakers in which the diaphragm is directlyacting on the air mass are studied. Some loudspeakers use horns to providea better coupling between the diaphragm and the air load, but they will notbe described here.
13

Figure 2.7: Some directivity diagrams which can be realized by varyingthe factor α in directional microphones. From left to right and top down:subcardioid, cardioid, super- and hyper- cardioid.
14

Figure 2.8: Frequency response of a loudspeaker. English translation: "Fre-quence" = frequency.
2.2.3 Loudspeakers' properties
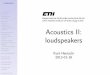
Frequency response : sound pressure level (SPL) in free eld as a func-tion of the frequency of the (constant amplitude) input audio signal(gure 2.8). The SPL is generally measured at 1 m distance fromthe membrane, in the axial direction (perpendicular to the diaphragm,passing through its center).
Directivity coecient : ratio of the rms pressure measured in a specicdirection to the rms pressure measured at the same distance in theaxial direction. This ratio generally depends on frequency f . Symbol: Qp(f, α), where α is the angle between the specic direction and theaxial direction. The directivity diagram (gure 2.9) gives the value of20 log10 (Qp(f, α)) versus the angle α (with f as a parmeter).
Electrical impedance : average value of the input electrical impedance,measured in the useful bandwith and specied by the manufacturer.For electrodynamic loudspeakers, it is somewhat higher than the d.c.input resistance.
Electrical rated power Pn : maximum input power (watts) specied by
15

Figure 2.9: Directivity diagram of a loudspeaker in the horizontal plane, at2000 Hz and 8000Hz .
the manufacturer, which still gives rise to high delity in the reproduc-tion of audio signals (speech, music, ...).
Eciency : ratio of the radiated acoustic power to the electrical inputpower, expressed in percents.
2.2.4 Electrodynamic loudspeakers
This is the most common type of loudspeakers for hi- applications. Theyare most often used by groups of two or three items in an enclosure in orderto cover the widest possible frequency interval.
It is indeed dicult to cover the whole audio bandwith with only oneloudspeaker, as it will be seen later.
Figure 2.10 shows a sectional view of the electrodynamic loudspeaker.The following elements can be seen on this gure:
1. permanent magnet.
2. moving coil traversed by the electric current (the amplied audio sig-nal).
3. the spider : an elastic suspension supporting the coil and connectingit to the rigid chassis or basket. It only allows for the axial movementof the coil (from left to right on gure 2.10).
16

Figure 2.10: Sectional view of the electrodynamic loudspeaker (see text forthe description of the numbered items).
17

Figure 2.11: Electrical model of the electrodynamic loudspeaker. Englishtranslation: "amplicateur audio" = audio amplier.
4. the membrane (diaphragm or cone), which is connected to the coil. Thecone has a light weight (in paper or aluminium) in order to attenuateinertial eects and the aperture of the cone is chosen to increase itsstiness (aperture of 100 to 130 degrees).
5. the metallic chassis or basket.
6. the surround elastic suspension.
2.2.4.1 Basic equations
Figure 2.11 shows the electrical model of the loudspeaker: RE and LE arethe moving coil resistance (about 5 Ω) and inductance, respectively. Theinduced voltage eind created by the coil's movement in the magnetic eld isgiven by:
e = Bldx
dt
where B is the magnetic induction, l is the length of the coil's wire andx = dx
dt is the velocity of the coil in the gap of the permanent magnet.
18

Moreover, the combined action of the coil's current i(t) and the magneticinduction B creates the force F = Bli that moves the coil and the diaphragmin a direction perpendicular to the radial magnetic eld.
The following equations only describe the loudspeaker's operation at lowfrequencies, for which it can be assumed that the cone acts like a circularpiston of mass mM (membrane + coil + suspensions) and radius (a).
At medium and high frequencies, the vibration modes of the membraneare more complicated and the simple model of the piston is not accurateenough .
We further assume that the piston is placed in an innite bae, i.e. arigid plate with a hole in its center having the same circular shape and radiusa than the piston. Its role is to impede the acoustic wave emitted by thecone to the rear direction to interfere with the wave emitted to the front.As these waves are emitted "out-of-phase" (a compression on one side of the
diaphragm corresponds to a decompression on the opposite side), radiationscan be eliminated at low frequencies if no bae is present.
Enclosing the loudspeaker in a box is another (more practical) way ofimpeding these interferences between front and rear emitted waves.
In the case of an innite bae, the air load in contact with the cone canbe modelled by a mechanical impedance:
Zair =πρ0a
4ω2
c+ j
16ρ0a3ω
3ka 1
Note: ρ0 = 1.2 kg/m3 is the air density and c is the speed of sound.
A mechanical impedance is in fact used in a mechanical model to rep-resent a reaction force, opposed to the movement and proportional to thevelocity. In this case, the air load opposes to the coil's movement a forcegiven by F = Zairx.
If a circular piston is placed in an innite bae, it can be shown that theacoustic pressure produced in the axial direction at the distance of r meterscan be expressed by (if r a) :
p(r, t) = <(jωρ0a
2
2rxej(ωt−kr)
)r a
Let's now consider the basic equations. The movement of the cone obeysthe following equation (expressed in the frequency domain):
19

jωx
(mM +
16ρ0a3
3
)+
(RM +
πρ0a4ω2
c
)x+
x
jωCM= Bli
Bli = Bleg − eindZes
= BlegZes− (Bl)2 x
Zes
where RM and CM are the mechanical resistance and compliance, re-spectively, whereas Zes is the static electrical impedance of the coil(Zg +RE + jωLE). The compliance CM models the elastic eect of the cone andits suspensions.
Note that the air load has been modelled by an inductance term (equiv-alent mass) and a resistance term, in the mechanical equation.
Some simplications to these basic equations can be operated. For exam-ple at low frequencies, the static electrical impedance can be approximatedby its real part, the resistance Res . Therefore, if the rst term of the pre-vious equation is simply written ZMT x, then the acoustic pressure at 1mdistance becomes:
prms =ωρ0a
2
2
Bl (eg,rms)
Res| (Bl)2
Res+ ZMT |
a 1 m
The frequency response in free eld is (by denition) the acoustic pressureproduced at 1 m distance in the axial direction vs frequency, for a constantvalue of the input voltage eg,rms. The previous equation therefore clearlyshows the existence of a resonance frequency f0 which corresponds to thecancellation of the imaginary part of ZMT :
f0 =1
2π
√(mM + 16ρ0a3
3
)CM
At frequencies below the resonance, the cone's movement is predomi-nantly ruled by the compliance. The value of the acoustic pressure is there-fore proportional to the square of the frequency (ω2), i.e. an increase of12 dB per octave.
At greater frequencies (beyond the resonance), the equivalent mass is pre-dominant and would impose a constant response as a function of frequency.However, one must recall that the impedance of the air load has a real partwhich is proportional to ω2: this would rather impose a 6 dB per octave
20

Figure 2.12: Theoretical low frequency response of the electrodynamic loud-speaker.
Figure 2.13: Theoretical broadband frequency response of the electrody-namic loudspeaker.
decrease at very high frequencies. The theoretical frequency response of theloudspeaker therefore looks like the curve shown in gure 2.12.
Furthermore, one must also recall that the model previously describedis a low frequency model. At high frequencies, as already mentioned, themovement of the membrane becomes more intricate and the coil's inductanceLE is no longer negligible compared to the resistance Res. The complete(broadband) theoretical frequency response is given without demonstrationin gure 2.13.
2.2.4.2 Improvement of the frequency response
at low frequencies : the extension of the useful bandwidth towards lowfrequencies requires the decrease of the resonance frequency f0. Thisis obtained by increasing the diameter of the cone, since the total
21

mass and the equivalent mass of the air load are increased. Anotherbenecial eect is that the peak at the resonance frequency is dampedby the increase of the air load's equivalent resistance, which containsa factor proportional to a4.
A second method would be to increase the compliance CM (by releas-ing the stiness of the suspensions), but this would also result in theamplication of the coil's displacement which could partially leave themagnet's gap and create distorsions in the acoustic signal (in fact, theforce Bli would now depend on the position of the coil in the gap, intro-ducing non-linearities in the equations). Also, great displacements xof the cone could create elastic forces which are no longer proportionalto x.
Let's nally note that the enclosure (box) that usually contains theloudspeaker (rather than an innite bae) can also be designed toimprove the low frequency response, below the resonance.
at high frequencies : the method to extend the frequency response to-wards high frequencies is complementary to the previous one, i.e. in-creasing the resonance frequency. This can be obtained by decreasingthe diameter of the membrane and/or increasing the stiness.
The following question therefore arises: how is it possible to obtain a high
delity loudspeaker that practically will have a broad bandwith extendingto the very low, as well as to the very high frequencies ?
Usually, this is obtained by the combination of two or three loudspeakersin the same enclosure, each optimized for a particular frequency range:
a woofer : with a large diameter (typically 20 to 30 cm), covering the lowfrequency range,
a tweeter : with the smallest size (less than 10 cm), covering the highfrequency range,
a squawker : sometimes covering the medium frequencies.
In this loudspeakers' system, a special lters' network called the crossover
network is applied to the output of the power amplier. It is designed tosupply each loudspeaker of the enclosure with the most appropriate frequencycomponents of the audio signal.
22

2.2.4.3 Some other properties of the electrodynamic loudspeakers
The eciency (see denition) of these loudspeakers is relatively weak: nomore than some percents.
Their directivity becomes more selective as the product ωa increases. Fora given loudspeaker, the emission is quite omnidirectional at low frequenciesand it becomes more selective as the frequency increases (g. 2.9).
The electrical impedance of the electrodynamic loudspeaker depends onfrequency. Its d.c. value (at f = 0 Hz) equals RE . As the frequencyincreases, its value dramatically increases to reach a maximum at the res-onance frequency. Its value then rapidly decreases in the useful bandwithuntil it reaches a relatively constant value (Zmin) which is somewhat greaterthan the d.c. value RE (cf. exercise 2 and gure 2.16).
Finally, electrodynamic loudspeakers produce signicant distorsions inthe emitted acoustic signal. Their origin is to be found in:
• the non-linearities of the relation between the driving force, the mag-netic eld and the audio current,
• the non-linear behaviour of the suspensions' elasticity.
The amplitude of the distorsions generally increases with the power of theinput signal.
23

Figure 2.14: Total harmonic distorsion + noise (THD+N) of a loudspeakervs frequency.
2.3 Exercises
2.3.1 Exercise 1
A condenser microphone must have the following properties:
• a sensitivity of about -50dB (re. 1V/Pa) in its useful bandwith;
• a bandwith extending theoretically up to 20 kHz;
• the size of its diaphragm smaller than the wavelength, in the wholeuseful frequency interval;
• an external polarizing voltage of 200V;
• a distance between electrodes of 20µm.
The exercise consists in nding the diaphragm's parameters (surface,mass, thickness, stiness) such that the previous properties are reached.The diaphragm is built in aluminium (density 2700kg/m3).
It must also be checked that the amplitude of the diaphragm's displace-ments is less than the distance between electrodes, in the whole frequencyband and for sound pressure levels up to 120 dB.
24

2.3.2 Exercise 2
A loudspeaker is supplied with an input signal of 10 Vrms, whose frequen-cies belong to the useful bandwith of the loudspeaker. The electrical powerconsumption is 25 watts.
Answer the following questions:
• what is the input impedance ?
• what is the eciency of the loudspeaker and the acoustic power radi-ated to both sides of the cone ?
• what is the cone's displacement at the frequency of 500 Hz (RMS value)?
• what is the sound pressure level (dB) produced in the useful bandwithat 1m and 4m from the loudspeaker's diaphragm (axial direction) ?
Data:
• resonance frequency : 112 Hz;
• diameter of the cone : 16cm;
• moving mass (including the air load) : 0.022 kg;
• Bl = 10 teslas.m;
• input impedance measured at the resonance frequency = 29Ω.
2.3.3 Exercise 3
In a theatre, two identical electrodynamic loudspeakers are placed on thestage, as indicated on the gure 2.15. Both are mounted in an innitebae. One is supplied with an input signal whose central frequency is 200Hz (1Vrms) and the other with an input signal whose central frequency is300 Hz (1Vrms also). Both signals are considered as not correlated.
The loudspeakers' directivity coecient in the interesting frequency rangeis the following: Qβ = cosβ (β is the angle between the direction of interestand the axial direction).
The sound engineer places two gure-eight microphones at the same
position situated 3m away from the loudspeakers. These microphones areidentical and connected in series, one is oriented such that the direction of
25

Figure 2.15: Data for exercise 3. English translation: "Source perturbatrice"= noise source, disturbance.
26

maximum sensitivity points to the left loudspeaker. The other microphoneis oriented such as to attenuate (and possibly cancel) in the recorded signalthe inuence of a noise source situated as indicated on the gure 2.15.
What are:
• the (mechanical) resonance frequency of the loudspeakers;
• the sound pressure level produced by each loudspeaker at the micro-phones' position;
• the orientation of the second microphone such as to cancel the contri-bution of the noise source in the recorded signal;
• the rms value of the voltage produced by the two microphones con-nected in series.
Data:
• c=344 m/s
• ρ0 = 1.2kg/m3
• diameter of the loudspeakers' cone: 16cm;
• moving mass (for one loudspeaker): 0.022Kg;
• mechanical compliance of a loudspeaker: 8 10−5 m/N;
• mechanical resistance of a loudspeaker: 4 N.s/m;
• electrical resistance and inductance of a loudspeaker's coil: 8Ω and2mH;
• magnetic induction times length of the coil's wire: Bl = 10T.m;
• microphones' axial sensitivity: -70 dB, re. 1V/Pa.
27

2.3.4 Exercises' solutions
2.3.4.1 Exercise 1
• Surface of the diaphragm: 2.27cm2 (diameter = minimum wavelength'svalue: 17mm);
• Stiness = 718000N/m;
• Mass = 0.0455g (for a resonance frequency at 20 kHz);
• Diaphragm's thickness: 74µm.
The displacements' amplitude in a sound eld of 120 dB is approxi-mately 0.0063µm, and therefore signicantly less than the distance betweenelectrodes.
2.3.4.2 Exercise 2
Figure 2.11 shows that the input impedance of the loudspeaker is (neglectingthe output impedance of the amplier):
Zin =egi
= RE + jωLE +Bl
i
dx
dt(2.2)
Moreover, if ZMT is the total mechanical impedance, considering thatBli = ZMT
dxdt , the input impedance is written as the following:
Zin = RE + jωLE +(Bl)2
ZMT(2.3)
At low frequencies, the term jωLE can be neglected. Therefore, g-ure 2.16 shows the evolution of the input impedance vs frequency.
At f = 0Hz, the input impedance is real and equal to RE .At the resonance frequency (f0 = 112Hz), it is also real and reaches its
maximum value 29Ω.
In the useful bandwith (beyond f = 112Hz), the electrical dissipatedpower Win is:
Win = <(
1
Zin
)e2g,rms (2.4)
According to gure 2.16, the imaginary part of Zin is much lower thanthe real part in the useful bandwith. We can therefore approximate the realpart of 1
Zinby 1
RE. The previous equation therefore leads to RE = 4Ω.
28

Figure 2.16: Typical evolution of the input impedance (Ω) of the electro-dynamic loudspaker vs frequency (real and imaginary parts), according tothe low frequency electroacoustic model English translation: "Partie réelle,imaginaire" = real, imaginary part.
29

Figure 2.16 has been plotted with RMT (the real part of ZMT ) equal to4 N.s/m, such as to obtain at the resonance frequency:
Zin = RE +(Bl)2
RMT= 29Ω (2.5)
The mechanical compliance is given by:
CM =1
mM ∗ (2πf0)2= 9.18 10−5m/N (2.6)
The air load applies to the diaphragm's movement a force given by: F =Zair
dxdt . Therefore, the acoustic power radiated in the propagation medium
is:
Wrad = <(Zair)
(dx
dt
)2
rms=πρ0a
4ω2
c
(dx
dt
)2
rms(2.7)
In the useful frequency range, the rms value of the diaphram's velocityis determined by the total mass, including air load (cf. theory):(
dx
dt
)rms' Bl eg,rmsRE |jωmM |
=1140
ω(2.8)
Applying both previous equations leads to a radiated power Wrad =0.59W and a loudspeaker's eciency of 2.4 percents (since: Win = 25W ).
The rms value of the diaphragm's displacement at 500 Hz (in the usefulbandwith) is directly given by equation 2.8 if we divide by ω, i.e. 0.12mm.
Finally, the sound pressure level produced at r meters is given (in the
useful bandwith) by eq. 2.8 multiplied by(ωρ0a2
2r
)(cf. theory). This leads
to 4.4Pa at 1m (rms pressure, or 107 dB) and 1.1Pa (95dB) at 4m from theloudspeaker's cone.
2.3.4.3 Exercise 3
The resonance frequency:
f0 =1
2π
√(mM + 16ρ0a3
3
)CM
= 112Hz (2.9)
Frequencies 200Hz and 300Hz are therefore in the useful bandwith.
The sound pressure level at r meters from the loudspeaker is (cf. theory):
30

prms =ωρ0a
2
2r
Bl eg,rmsRE |ZMT |
(2.10)
If we assume that the mass term is predominant in the total mechan-ical impedance ZMT (which is the case beyond the resonance frequency),the angular frequency ω is cancelled in the numerator and the denominatorof 2.10, which gives 0.063Pa or 70dB at 3m, in the axial direction of theloudspeaker.
This pressure level must be corrected by the directivity coecient of theloudspeaker, i.e. 0.063 cos(56.4)=0.035Pa or 64.8dB.
Both loudspeakers together produce a rms acoustic pressure of√p2rms,1 + p2
rms,2
= 0.049Pa or 67.9dB (signals not correlated).
The acoustic pressure created by the noise source at the microphones'location is now called p(t). The voltage at the output of the connectedmicrophones is therefore:
e(t) = p(t) σ0(cosθ1 + cosθ2) (2.11)
• σ0 (V/Pa) is the axial sensitivity of each microphone. Its value is:3.16 10−4 V/Pa (-70dB re. 1V/Pa),
• θ1 is the angle between the direction of the noise source and the axial(reference) direction of microphone 1 (−78.6),
• θ2 is the same angle, but for microphone 2 (θ1 − α).
Note: Positive angles are counted clockwise.
The sum of both cosine functions in 2.11 must be zero, if the noise source'scontribution is to be cancelled, which gives α = 22.8.
Finally, the expression of the output voltage (microphone 1) due to bothloudspeakers (LS1 and LS2) is the following:
e1(t) = σ0 cos0pLS1(t) + σ0 cos112.8pLS2(t) (2.12)
The same holds for microphone 2:
e2(t) = σ0 cos22.8pLS1(t) + σ0 cos90pLS2(t) (2.13)
31

The total output voltage e1(t)+e2(t) includes the contributions of signalsemitted by LS1 (frequency range around 200 Hz) and signals emitted by LS2(around 300 Hz). Since both contributions are not correlated, the total rmsoutput voltage is:
erms,total = σ0
√((1 + cos22.8)prms,1)2 + ((cos112.8)prms,2)2 = 21.7µV
(2.14)
32