Embed Size (px)
Citation preview

LEGO MINDSTORMS Simulink Support Package
Development of Educational Contents for Control Engineering
Using LEGO MINDSTORMS and Simulink Support Package
∗M. Kawata (National Institute of Technology, Maizuru College)
Abstract– This paper discusses the development of a rotary inverted pendulum using the new LEGOMINESTORMS EV3 for control engineering education. We use Power Functions XL motor with GlideWheel-M (rotary encoder) instead of EV3 motors, and we use GlideWheel-M for detection of a pendulum angle.As a software in order to implement Simulink model, we use “ Simulink Support Package for LEGO MIND-STORMS EV3 Hardware ” which is provided free of charge. We verify whether it is possible to use ourproposed inverted pendulum in order to study the basis of control system analysis/design.
Key Words: LEGO MINDSTORMS, Simulink support package, Inverted pendulum, Education
1
LEGO MINDSTORMS LEGO MIT
LEGO
1) PBL
LEGO MINDSTORMS NXT
LEGO
2)–4) NXTLEGO Power Functions
Table 1: NXT and EV3 intelligent brick
NXT EV3
Main processor ARM7 48MHz ARM9 300MHzOperating system Proprietary Linux-based
Main memory 256KB flash64KB RAM
16MB flash64MB RAM
Motor ports 3 (with encoders) 4 (with encoders)
Sensor ports 4 4USB communication 12 Mbit/s 480 Mbit/s
USB host —Wi-Fi dongle,Ethernet adaptor,USB storage
SD card — Micro SD card(up to 32 GB)
Communication USB, BluetoothUSB, Bluetooth,Wi-Fi (Ethernet)
User interface 4 Buttons6 Buttons withbacklight
5),6)
PID( )
5),6)
MATLAB Simulink Support Package(MathWorks ) Simulink
NXT
LEGOMINDSTORMS EV3
2 LEGO MINDSTORMS Simulink
Support Package
2.1 LEGO MINDSTORMS
2.1.1
LEGO MINDSTORMS
NXT EV3Table 1
NXT OSOS (starting) (shutting down)
Simulink Support PackageSimulink
( 1)
OFF EV3OS Linux OS
30 [s] 50 [s]Simulink ON
MATLAB
for i = 1:5
set_param(’hoge’, ’SimulationCommand’, ’start’)
pause(10)
end
( 1) SimulinkSimulink
SimulinkScope, Display ToWorkspace MATLAB
1D07-1第57回自動制御連合講演会2014年11月10日ー12日 群馬伊香保 ホテル天坊
14PR0002/14/0000-0598 ¥400 © 2014 SICE598

Simulink hoge.slx
NXT Simulink SupportPackage 3
EV3USB
microSD( ) NXT
A∼C 3 EV3 A∼D4 ( )
NXT, EV3 1∼ 4 4
NXT, EV3 USB Bluetooth( 2)
EV3USB Wi-Fi ( )
Ethernet ( ) LAN( 3)
2.1.2
NXT
• 2
• 1
• 1
• 1
EV3
• 2
• 1
• 1
• 1
EV3NXT
( 4)
2.1.3
Fig. 1 (a) NXT EV3
NXT
• NXT 3
EV3
• EV3 L 2
• EV3 M 1
1180 A, B
Simulink Support PackageA, B 2 1360 1 [deg]
NXT EV3 L
EV3 M
(3.1 )
( 2) Bluetooth Bluetooth
( 3) LAN Wi-Fi Ethernet
( 4)
EV3
L servo motor
EV3
M servo motor
NXT
servo motor
(a) LEGO MINDSTORMS
PF
XL motor
PF
L motor
PF
M motor
PF
E motor
(b) LEGO Power Functions
Fig. 1: LEGO motors
PF XL motor GlideWheel-M(rotary encoder)
Servo motor
Fig. 2: PF XL motor with GlideWheel-M
3.1Fig. 1 (b) LEGO Power Functions
(PF E/M/L/XL )DC
Fig. 2 mindsen-sors.com GlideWheel-M( 5)
GlideWheel-M1 180 A, B
21 [deg]
2.2 Simulink Support Package
2.2.1
LEGO MINDSTORMSNXT/EV3
C ROBOTC
• NXT/EV3
• ROBOTC
MATLAB/SimulinkWindows R2012a
( 5) TechShare (http://store.techshare.jp/)ROBO Product (http://www.roboproduct.com/)
599

( )Simulink Support Pack-
age R2014aArduino (Uno/Nano/Mega2560 7) Due)
LEGO MINDSTORMS (NXT 5) EV3) Bea-gleBoard, Gumstix Overo, PandaBoard, RaspberryPi, Samsung GALAXY Android
Simulink
2.2.2 Simulink Support Package for LEGOMINDSTORMS NXT Hardware
NXT Simulink Support Package R2012bFig. 3
LEGOHiTechnic (
)
✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
Bluetooth
✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
NXTBluetooth
COM5)
Fig. 4 PI–D ( PID) Simulink hoge NXT.slx
“ ”“ ode1 (Euler) ” ( ) “
( ) ” 0.01( 6)
• Simulink Encoder int32double
Simulink Data Type Conversion
double ( )
• Simulink Encoder “ Sampletime ” 0.1
0.01
• MATLAB
0 [s] 1∼ 2[s]
2.2.3 Simulink Support Package for LEGOMINDSTORMS EV3 Hardware
EV3 Simulink Support Package R2014a(R2013b
)✿✿✿✿
USB✿✿✿✿✿✿✿✿✿✿✿✿✿
Bluetooth✿✿✿✿✿✿✿✿✿✿✿✿✿✿
✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
Wi-Fi✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
Ethernet✿✿✿✿
✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
LAN✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿✿
MAT-LAB
Windows/ /
( )( ) MATLAB
( 6) 10 [ms]
LEGO MINDSTORMS NXT
Copyright 2011-2013 The MathWorks, Inc.
Freq
Vol
LEGO
Speaker
Port A
LEGO
Motor
Line 1
LEGO
LCD
Mailbox 1
Data
Size
LEGO
Receive via Bluetooth(R) Connection
Port 1
X
Y
Z
LEGO
Acceleration Sensor
LEGO
Timer
Port 1
LEGO
Gyro Sensor
Port 1
LEGO
Sound Sensor
Mailbox 1
LEGO
Send via Bluetooth(R) Connection
Port A
LEGO
Encoder
Port 1
R
G
B
LEGO
Color Sensor
Port 1
LEGO
Ultrasonic Sensor
LEGO
Battery
LEGO
Button
Port 1
LEGO
Touch Sensor
Port 1
LEGO
Light Sensor
Port 1
LEGO
Compass Sensor
Port 1
LEGORed
Blue
IR Receiver Sensor
Examples forLEGO MINDSTORMS
NXT
[Examples]
Port 1
Lat
Lon
LEGO
GPS Sensor
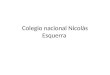
Fig. 3: Simulink Support Package for LEGO MIND-STORMS NXT Hardware (R2014a)
In1 Out1
Subsystem
(Motor)
In1
In2
Out1
Subsystem
(PI-D Controller)
Step
Clock
t
To Workspace
y
To Workspace1
Scope
Line 1
LEGO
LCD
(a) hoge NXT.slx
Port A
LEGO
Encoder
Port A
LEGO
Motor
Saturation
double
Data Type Conversion
1
In1
1
Out1
(b) Subsystem (Motor)
1
In1
1
Out1
2
In2
kP
Gain
kI
Gain1
1s
Integrator
du/dt
Derivative
1
0.025s+1
Transfer Fcn
kD
Gain2
(c) Subsystem (PI-D Controller)
Fig. 4: Example of Simulink model (NXT Hardware)
Fig. 6 PI–D Simulinkhoge EV3.slx
Subsystem (PI-D Controller) Fig. 6 (c)NXT
GlideWheel-M SimulinkEncoder Encoder “ Resetmode ” No reset GlideWheel-M No reset
600

LEGO MINDSTORMS EV3
Copyright 2013 The MathWorks, Inc.
Freq
Vol
LEGO EV3
Speaker
Port 1
LEGO EV3
Touch Sensor
Port 1
LEGO EV3
Ultrasonic Sensor
Port 1
LEGO EV3
Gyro Sensor
Port 1
LEGO EV3
Color Sensor
Port A
LEGO EV3
Motor
Port A
LEGO EV3
Encoder
Up
LEGO EV3
Button
Line 1
LEGO EV3
Display
Port 1
LEGO EV3
Infrared Sensor
LEGO EV3
Status Light
Examples forLEGO MINDSTORMS
EV3
[Examples]
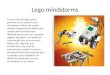
Fig. 5: Simulink Support Package for LEGO MIND-STORMS EV3 Hardware (R2014a)
In1 Out1
Subsystem
(Motor)
In1
In2
Out1
Subsystem
(PI-D Controller)
Step
Clock
t
To Workspace
y
To Workspace1
Scope
Line 1
LEGO EV3
Display
(a) hoge EV3.slx
Saturation
double
Data Type Conversion
1
In1
1
Out1Port A
LEGO EV3
Encoder
Port A
LEGO EV3
Motor
Clock
> 0
Switch
1
Constant1
0
Constant
int8
Data Type Conversion1
(b) Subsystem (Motor)
Fig. 6: Example of Simulink model (EV3 Hardware)
OFF“ Reset
mode ” Reset by external signal
Fig. 6 (b)Encoder 0
3
3.1
Fig. 1 (a) NXTEV3 L/M Fig. 1 (b) PFXL/L/M/E
GlideWheel-MLEGO 8)
LEGO (NXT, EV3)
Table 2: Comparison of LEGO motors (no load)
(a) NXT intelligent brickMotor Dead zone ymax [deg/s] α β
NXT |u(t)| ≤ 3 942 9.5 −12.6
EV3 L |u(t)| ≤ 4 977 9.8 −16.3
EV3 M |u(t)| ≤ 19 1,434 16.0 −133.4
PF XL |u(t)| ≤ 6 1,250 12.7 −33.9
PF L |u(t)| ≤ 12 2,142 23.6 −213.4
PF M |u(t)| ≤ 16 2,268 23.4 −101.4
PF E |u(t)| ≤ 4 4,298 43.7 −82.7
(b) EV3 intelligent brickMotor Dead zone ymax [deg/s] α β
NXT — 950 9.1 23.8
EV3 L — 974 9.4 21.1
EV3 M — 1,458 13.1 174.7
PF XL |u(t)| ≤ 3 1,250 12.3 8.5
PF L |u(t)| ≤ 6 2,087 21.7 −104.2
PF M |u(t)| ≤ 16 2,288 23.2 −89.0
PF E |u(t)| ≤ 2 4,234 41.7 74.9
1000
--100
Dead zone
1000
--100
(a) NXT intelligent brick (b) EV3 intelligent brick
Fig. 7: Motor velocity
u(t) = uc (uc 1 ∼ 100 )h = 0.01 [s] y(t) [deg]
Table 2ymax [deg/s] (uc = 100
)y∞ [deg/s] 1
y∞ = αuc + β (1)
α, β
NXT Table 2 (a)β
(Fig. 7 (a)) β NXT, EV3L PF XL/E
y(s) = P (s)u(s), P (s) =b
s(s + a)(2)
NXT, EV3 L
PF ENXT
PF XL
EV3 Table 2 (b)NXT ymax
601

Pendulum
Arm
GlideWheel-Mfor pendulum
PF XL motorwith
GlideWheel-M
NXT intelligentbrick
Pendulum
PF XL motorwith
GlideWheel-M
EV3 intelligentbrick
Arm
GlideWheel-Mfor pendulum
Wi-Fidongle
(a) NXT version5) (b) EV3 version
Fig. 8: LEGO rotary inverted pendulum
βFig. 7
(b) PF XLβ 0
EV3 Mβ ( )
3.2
GlideWheel-M ( 7)
3.1GlideWheel-M PF XLFig. 8 NXT EV3
90 GlideWheel-M GlideWheel-M
3
3.3
3.3.1
J2 = J2 + m2l22
θ1 = − aθ1 − asgnsgn θ1 + bv (3)
m2L1l2 cos θ2 · θ1 + J2θ2
= J2θ21 sin θ2 cos θ2 + m2gl2 sin θ2 − c2θ2 (4)
5) θ1 [rad]θ2 [rad] ( ) v
(−100 ∼ 100)L1 = 7.10×10−2 [m]
m2 = 4.00×10−3 [kg] l2 = 7.10×10−2
[m] g = 9.81 [m/s2]a, asgn, b
J2 [kg·m2]
( 7) GlideWheel-MTechShare
c2 [kg·m2/s]
3.3.2
(a) NXT
(3)asgnsgn θ1 (2)
u = v, y = θ1 P
u(s) = kPe(s), e(s) = r(s) − y(s) (5)
y rr y G(s) 2
G(s) =ω2
n1
s2 + 2ζ1ωn1s + ω2n1
,
{ω2
n1 = bkP
2ζ1ωn1 = a(6)
Amax
kP, r Amax
Tp ζ1, ωn1
a, b Fig. 9 (a)NXT a, b
NXTFig. 9
(a)
NXTasgnsgn θ1
M f1(t)p1 = Nf1(t) (7)
M f1(t) = Gf1(s)M1(t), Nf1(t) = Gf1(s)N1(t),
M1 =[−θ1 −sgnθ1 v
], p⊤
1 =[a asgn b
], N1 = θ1
( 8)
J = ‖M fs1p1 − Nfs1‖ (8)
p1
p1 = (M⊤
fs1M fs1)−1M⊤
fs1Nfs1 (9)
( )5) Gf1(s) =1/(1+Tf1s)
3 3t = t1, . . . , tk
M fs1 =
M f1(t1)
...M f1(tk)
, Nfs1 =
Nf1(t1)
...Nf1(tk)
0 0.2 0.4 0.6 0.8 10
30
60
t [s]
θ1(t)[deg]
ExperimentSimulation
0 0.2 0.4 0.6 0.8 10
30
60
t [s]
θ1(t)[deg]
ExperimentSimulation
(a) NXT version (b) EV3 version
Fig. 9: Arm parameter identification (2nd order lagsystem)
( 8) θ1 θ1 θ1
602

0 0.2 0.4 0.6 0.8 10
30
60
t [s]
θ1(t)[deg]
ExperimentNonlinearSimulation
Fig. 10: Arm parameter identification using NXTversion (least square method)
Table 3: Identification result of armNXT version EV3 version
Method 1 Method 2 Method 1
a 1.32 × 101 1.28 × 101 1.42 × 101
asgn 0 6.96 × 100 0
b 2.97 × 100 3.14 × 100 3.45 × 100
„
Method 1: identification based on 2nd lag system responseMethod 2: identification based on least square method
«
Fig. 10 asgnsgn θ1
NXT asgn
NXTTable 3
(b) EV3
Fig. 9 (b) EV3 2a, b
EV3
Fig. 9 (b)0
EV3
2
EV3Table 3
3.3.3
NXT EV3
(θ2 = φ2 + π)(4)
J2φ2 + c2φ2 + m2gl2 sinφ2 = 0 (10)
sin φ2 ≃ φ2 (10) 2
φ2 + 2ζ2ωn2φ2 + ω2n2φ2 = 0,
{ω2
n2 = c2/J2
2ζ2ωn2 = m2gl2/J2
(11)
Tλ
Ti λi T , λ
1 2 3 4 5 60
0.25
0.5
0.75
1
i
TiandT
[s]
1 2 3 4 5 60
0.25
0.5
0.75
1
i
λiandλ
(a) Ti and T (b) λi and λ
0 1 2 3 4 5
−90
−45
0
45
90
t [s]
φ2(t)[deg]
ExperimentLinear Simulation
0 1 2 3 4 5
−90
−45
0
45
90
t [s]
φ2(t)[deg]
ExperimentNonlinear Simulation
(c) Linear simulation (d) Nonlinear simulation
Fig. 11: Pendulum parameter identification (2nd or-der lag system)
0 1 2 3 4 5
−90
−45
0
45
90
t [s]φ2(t)[deg]
ExperimentNonlinear Simulation
Fig. 12: Pendulum parameter identification (leastsquare method)
Table 4: Identification result of pendulum
Method 1 Method 2
J2 1.33 × 10−5 9.27 × 10−6
c2 1.58 × 10−5 1.33 × 10−5
„
Method 1: identification based on 2nd lag system responseMethod 2: identification based on least square method
«
ζ2, ωn2
J2, c25) Fig. 11
Fig. 11 (a), (b)Ti, λi
Fig. 11 (c), (d)sinφ2 ≃ φ2
sinφ2
NXT
M f2(t)p2 = Nf2(t) (12)
M f2(t) = Gf2(s)M2(t), Nf2(t) = Gf2(s)N2(t),
M2 =[φ2 φ2
], p⊤
2 =[J2 c2
], N2 = −m2gl2 sinφ2
sinφ25) Fig. 12
Table 4
603

3.3.4
(a) NXT
NXT asgnsgn θ1
v = u +asgn
bsgn θ1 (13)
(3)
θ1 = − aθ1 + bu (14)
cos θ2 ≃ 1, sin θ2 ≃ θ2
(4)
m2L1l2θ1 + J2θ2 = m2gl2θ2 − c2θ2 (15)
x =[x1 x2 x3 x4
]⊤ =
[θ1 θ2 θ1 θ2
]⊤ (16)
x = Ax + Bu (17)
(b) EV3
EV3 asgnsgn θ1
asgn = 0 u = v(14) NXT
(4) x
(16) (17)
3.4 ( )
(a) NXT
(17)
J =
∫∞
0
(x⊤Qx + Ru2
)dt (18)
u = Kx (19)
Q = diag{50, 2000, 0.01, 0.01
}, R = 1 K
h = 0.01[s]
ωi(s) =s
1 + Tisθi(s) (Ti = 0.06, i = 1, 2) (20)
1 ωi(t) = θi(t)
0 2 4 6 8−60
−30
0
30
60
t [s]
θ1(t)[deg]
withnonlinear
compensator
withoutnonlinear
compensator
0 2 4 6 8−10
−5
0
5
10
t [s]
θ2(t)[deg]
Fig. 13: State feedback control using NXT version(effectiveness of nonlinear compensator)
0 1 2 3 4 5 6−90
−45
0
45
90
t [s]
θ1(t)[deg]
0 1 2 3 4 5 0−20
−10
0
10
20
t [s]
θ2(t)[deg]
(a) NXT version
0 1 2 3 4 5 6−90
−45
0
45
90
t [s]
θ1(t)[deg]
0 1 2 3 4 5 0−20
−10
0
10
20
t [s]
θ2(t)[deg]
(b) EV3 version
Fig. 14: State feedback control (impression of im-pulse disturbance to pendulum at t = 3 [s])
(13) t =4 [s] v = u Fig. 13
(13)Fig. 14 (a)
t = 3 [s]
(b) EV3
NXT Q, R(17) (18)
(19)Fig. 14 (b) t = 3 [s]
NXT EV3
EV3
3.5
(a) NXT
ωi(t) = θi(t)
˙x = Ax + Bu − L(y − Cx
)(21)
x =[x1 x2 x3 x4
]⊤ x
y
y =[θ1 θ2
]⊤ = Cx, C =
[1 0 0 00 1 0 0
](22)
(21) x3
(13)
v = u +asgn
bsgn x3 (23)
x (19)
{˙x = Ax + By
u = Cx,
{A = A + BK + LC
B = −L, C = K(24)
604

0 2 4 6 8−60
−30
0
30
60
t [s]
θ1[deg]
withnonlinear
compensator
withoutnonlinear
compensator
0 2 4 6 8−10
−5
0
5
10
t [s]
θ2[deg]
Fig. 15: Observer based output feedback control us-ing NXT version (effectiveness of nonlinearcompensator)
(24)1
h = 0.01 [s]{
x[k + 1] = Adx[k] + Bdy[k]
u[k] = Cdx[k] + Ddy[k](25)
f [k] := f(kh) (k = 0, 1, 2, . . .)
K
L A+BK
−16± 8j, −4, −1.5 A + LC
5 K, L
t = 4 [s] (23) v = uFig. 15 Fig. 15
(23)NXT
t = 3 [s]Fig. 16 (a) θ1,
θ2 (20)
(b) EV3
EV3 NXT(23) v = u
NXTA+BK −16±8j, −4, −1.5 A+LC
5 K, L
(25)Fig. 16 (b) t = 3
[s] Fig. 16 (b)EV3
4
LEGO MINDSTORMSEV3Simulink Support Package
GlideWheel-MLEGO NXT EV3
NXT EV3 PF XLNXT
0 1 2 3 4 5 6−90
−45
0
45
t [s]
θ1andx1[deg]
θ1x1
0 1 2 3 4 5 6−10
0
10
20
t [s]
θ2andx2[deg]
θ2x2
0 1 2 3 4 5 6−600
−300
0
300
t [s]
θ1andx3[deg/s]
θ1x3
0 1 2 3 4 5 6−100
0
100
200
t [s]
θ2andx4[deg/s]
θ2x4
(a) NXT version
0 1 2 3 4 5 6−90
−45
0
45
t [s]
θ1andx1[deg]
θ1x1
0 1 2 3 4 5 6−10
0
10
20
t [s]
θ2andx2[deg]
θ2x2
0 1 2 3 4 5 6−600
−300
0
300
t [s]
θ1andx3[deg/s]
θ1x3
0 1 2 3 4 5 6−100
0
100
200
t [s]
θ2andx4[deg/s]
θ2x4
(b) EV3 version
Fig. 16: Observer based output feedback control(impression of impulse disturbance to pen-dulum at t = 3 [s])
EV3
EV3
1) Mindstorms Vol. 21,No. 5, pp. 517–559 (2006)
2) P. J. Gawthrop and E. W. McGookin: A LEGO-BasedControl Experiment, IEEE Control Systems Magazine,Vol. 24, No. 5, pp. 43–56 (2004)
3) NXTway (LEGO Segway) —LEGO Mind-storms NXT — 7 SICE
63–1–4 (2007)4) S. S. Prieto, T. A. Navarro, M. G. Plaza and O. R. Polo: A
Monoball Robot Based on LEGO Mindstorms, IEEE Con-trol Systems Magazine, Vol. 32, No. 2, pp. 71–83 (2012)
5) MATLAB/Simulink —PID— TechShare (2013)
6) LEGO MINDSTORMS NXT MATLAB/Simulink—
13 SICE 7D4–4(2013)
7) Arduino MATLAB !TechShare (2012)
8) Philo’s Home Page: http://www.philohome.com/motors/motorcomp.htm
605