Embed Size (px)
Citation preview

UNIVERZITET U BEOGRADU
FAKULTET ORGANIZACIONIH NAUKA
-DIPLOMSKI RAD-
URAVLJANJE MOBILNIM OBJEKTOM POMOĆU GPS-a
MENTOR: STUDENT:
prof.dr Božidar Radenković Slavica Damjanović 41/03
Beograd, 2008.

Fakultet organizacionih nauka
1. Uvod...............................................................................................................................42. GPS i princip rada GPS-a...............................................................................................5
2.1 Navigacija i upravljanje...........................................................................................52.2 Razvoj GPS-a...........................................................................................................72.3 Režim rada GPS-a....................................................................................................72.4 Konfiguracija GPS Sistema.....................................................................................8
2.4.1 Navigacijski sateliti..........................................................................................82.4.2 Zemaljski komandno-merni kompleks...........................................................102.4.3 Korisnički segment.........................................................................................12
2.5 GPS Servisi............................................................................................................152.5.1 SPS (Standard Positioning Service)...............................................................162.5.2 PPS (Precise Positioning Service)..................................................................16
2.6 Određivanje pozicije..............................................................................................162.7 Izvori grešaka.........................................................................................................182.8 Primena GPS-a.......................................................................................................21
2.8.1 Vojna primena................................................................................................212.8.2 Automobili......................................................................................................212.8.3 Avijacija.........................................................................................................222.8.4 Pomorstvo.......................................................................................................222.8.5 Mobilna satelitska komunikacija....................................................................222.8.6 Služba za hitne slučajeve i lociranje...............................................................22
3. Sistem Navstar..............................................................................................................233.1 Navigacijski prijemnici korisnika sistema Navstar...............................................233.2 Diferencijalno radio-navigacijski sistem Navstar..................................................253.3 Ostali sistemi za satelitsko pozicioniranje.............................................................27
4. Integracija GPS-a i INS-a.............................................................................................284.1 Osnovni principi sistema automatskog upravljanja...............................................284.2 Ocena kvaliteta ponašanja sistema i kriterijuma za sintezu...................................294.3 Upravljanje pomoću GPS-a i INS-a......................................................................304.4 Osnovni koncepti inercijalne navigacije................................................................324.5 Integracija INS/GPS..............................................................................................33
4.5.1 Model integracije GPS i INS..........................................................................354.6 Proširen Kalmanov filter........................................................................................364.7 UKF bazirani na INS/GPS navigacionim sistemima.............................................36
4.7.1 UKF algoritam................................................................................................385. Primeri korišćenja GPS-a i INS-a................................................................................38
5.1 Primeri sistema upravljanja mobilnim objektom preko GPS-a.............................385.1.1 Pokretljivost i nezavisonost............................................................................395.1.2 Kalman filtar...................................................................................................395.1.3 Algoritam DGPS............................................................................................415.1.4 Navigacija mašine..........................................................................................425.1.5 Procena putanje..............................................................................................435.1.6 Rezultati primene...........................................................................................445.1.7 Zaključak primene..........................................................................................48
5.2 Program OziExplorer.............................................................................................485.2.1 Ućitavanje mape u program...........................................................................485.2.2 Učitavanje tačaka u mapu, dodavanje i podešavanje obeležja mape.............505.2.3 Upisivanje i slanje podatak iz GPS-a.............................................................545.2.4 Rad sa putanjama, kontrola putanje i NMEA simulator................................55
2

Fakultet organizacionih nauka
5.2.5 Spajanja mapa.................................................................................................595.3 Primer INS-a..........................................................................................................60
5.3.1 Izvođenje jednačina prostora stanja...............................................................605.3.2 Korišćenje CSMP-a u dobijanju rezultata......................................................65
6. Zaključak......................................................................................................................687. Literatura:.....................................................................................................................69
3

Fakultet organizacionih nauka
1. Uvod
U prvom poglavlju definisani su osnovni pojmovi neophodni za razumevanje upravljanja i navigacije uz pomoć GPS-a. Opisuje se istorijski razvoj GPS-a, aktivni i pasivni režimi rada u kojima se sistem može koristiti, kontrolni, zemaljski i kosmički segmenti GPS-a. Izložen je raspored satelita, prikaz kontrolnih stanica i njihova uloga i detaljno je objašnjen princip rada GPS prijemnika. Karakteristike GPS servisa (Standard Positioning Service i Precise Positioning Service) objašnjene su u ovom poglavlju. Izvori grešaka zbog promene atmosferskog stanja, uticaja jonosfere, vlažnosti vazduha, greške sata satelita, relativističkih efekata, višestrukog odbijanja signala su predstavljeni u ovom poglavlju. Pobrojani su primeri primene GPS-a u avijaciji, drumskom saobraćaju, pomorstvu, vojnoj primeni...
U drugom poglavlju izvršena je podela GPS prijemnika prema složenosti konstrukcije i tačnosti. Tačnost određivanja pozicije civilnih korisnika može se povećati primenom diferencijalne varijante sistema Navstar. Dat je pregled ostalih sistema za satelitsko pozicioniranje a to su Glonass i Galileo.
Uočeno je da krupni nedostaci GPS-a mogu se ublažiti integracijom sa inercijalno-navigacijskim sistemom (INS). U trećem poglavlju prikazano je upravljanje uz pomoć integrisanih INS/GPS sistema povezanih sa Kalmanovim filtrom u otvorenoj i zatvorenoj petlji. Govori se o osnovnim senzorima (akcelerometri i žiroskopi) koji su sastavni deo INS-a. Integracijom ova dva sistema navigacije ublažavaju se nedostaci svakog pojedinačnog a ističu prednosti. Karakteristike ova dva sistema kao, model integracije i povezivanje GPS-a sa INS-om korišćenjem proširenog Kalmanov-og Filtra je predstavljeno u ovom poglavlju. Ovde je prezentovan Unsenced Kalman Filtar i njegove prednosti u odnosu na običan Kalman-ov Filtar.
U četvrtom poglavlju je dat primer upravljanja objektom gde se povratna sprega zatvara pomoću GPS-a. Detaljno je opisana primena algoritma Kalmanovog filtriranja i diferencijalnog GPS-a u procesu smanjenja greške. Izloženi su eksperimentalni rezultati koji su prezentovani na konferenciji u Izmiru, Turska, maj 2007. godine. U ovom poglavlju je predstavljen program OziExplorer koji se koristi za obrađivanje podataka učitanih iz GPS uređaja. Takođe je prikazan autopilot, kao primer INS-a, i prevođenje prostora stanja iz kompleksnog domena u vremenski uz pomoć metode pomoćne promenljive. Rezultati simulacije su prikazani u programu CSMP.
4

Fakultet organizacionih nauka
2. GPS i princip rada GPS-a
2.1 Navigacija i upravljanje
Sa tehničke tačke gledišta, svetska navigacija je pre hiljadu godina korišćena isključivo da definiše način upravljanja brodom do željene lokacije. Iako je to imalo značaja i za ljude na zemlji, sva istraživanja u navigacionom domenu su bila orijentisana na pomorske aplikacije. Nakon pronalaska prve letilice, u svetu se navigacija koristi za aeronautiku i otvara vrata razvoju novih sistema.
U poslednjem veku, vrsta dostupnih navigacionih senzora je zadržala doseg navigacije na skupim aplikacijama. Istraživanje i razvoj su bili posvećeni vojnim aplikacijama pre nego što su delimično predstavljeni u civilnim aplikacijama. Poslednjih 30 godina se primetio značajan napredak u senzornim tehnologijama i performansama procesora sa progresom u domenu poluprovodnika vodeći ka pojavi mikroprocesora. Ova dostignuća, kombinovana sa smanjenjem troškova, su otvorila vrata novim aplikacijama, posebno na zemljinom polju. Potencijalni broj novih korisnika je veliki i istraživanja su danas takođe usmerena u razvitak sistema za nevojnu aplikaciju.
Navigacija vozila je prva komercijalna meta za nisko troškovne navigacione sisteme. Danas, postojanje senzora takođe dopušta ponudu ovakvih navigacionih sistema pojedincima: da pruži informaciju o poziciji i mogućnost upravljanja.Navigacija se generalno definise kao upravljanje objektom ili osobom od trenutne lokacije do željene tačke. Objekat je obično mašina (brod, avion, auto...).
Sa funkcionalne tačke gledišta, navigacija se sastoji iz dva odvojena zadatka: lokalizacija upravljanje
,,Lokalizacija je postupak određivanja pozicije objekta u unapred definisanom referentnom sistemu. Ovo se može izvesti na različite načine.”[6],,Upravljanje je deo navigacije koji uzajamno deluje sa pokretačkim delom (drajverom) mašine (broda, automobila, aviona...) ili sa pešacima.”[6] Ovo uključuje različite aspekte:
proračun putanje kojom se kreće od trenutne tačke do željene tačke. Algoritmi iz ovog domena su sada jednostavni i poznati. Oni omogućavaju korisniku da izabere između različitih opcija: najkraći ili najbrži put, tačke od značaja. Ovaj zadatak iziskuje dostupnost geografskih informacija kao što su put, zgrada, značajne tačke, adrese, benzinska stanica...
komunikacija sa drajverom: ako je drajver čovek onda se koriste različiti vektori komunikacije. U ovim navigacionim sistemima koristi se sledeće: glas, mape simboličkih reprezentacija. Kada se upravljanje objektom vrši automatskim putem (procesor ili motori) tada se upravljačka informacija šalje odmah motoru.
Da bi se preciznije objasnila lokalizaciju i upravljanje sledeći pojmovi mogu se dodati kako bi se upotpunila definicija navigacije:
5

Fakultet organizacionih nauka
Realno vreme. Aspekti realnog vremena se dobijaju odmah iz upravljanja. Za interakciju sa drajverom je očigledno da informacija pozicije mora biti izračunata u realnom vremenu kako bi omogućila efikasno upravljanje.
GIS (geographic information system) je takođe važan element koji je strogo povezan sa upravljanjem. Ova komponenta se ne koristi samo za pokazivanje informacija na mapi. Georeferencijalna informacija puteva i ciljeva je neophodna za upravljanje. GIS omogućava uključivanje mnogih drugih tipova informacije kao što su tačke od značaja. GIS se takođe vrlo često koristi kao pokazivač reference.
Principi navigacije se mogu primeniti u različitim vrstama mašina ili pomeranju objekata. Aplikacije moderne navigacione tehnologije su mnogo češće čak iako personalna navigacija već postoji pomoću magnetnih kompasa i mapa. Ipak korišćenje ovih instrumenata nije jednostavno i elektronska navigacija ima veliki interes za veliki broj ljudi sa različitim profilima.
Kosmička navigacija je noviji metod navigacije pokretnih objekata, koja počinje da se razvija sa pojavom prvih veštačkih Zemljinih satelita 1957.godine. Satelitski radio-navigacijski sistemi prve generacije, nastali početkom 60-tih godina, pokazali su se kao veoma tačni i pouzdani za vođenje brodova, sto je pružilo priliku da se procene njihove mogućnosti za navigaciju vazduhoplovnih i pokretnih objekata na zemlji, za određjivanje parametara kretanja kosmičkih letilica, za sisteme navođenja kao i za topogeodezijska merenja i geološke radove. Ako se zna pozicija i brzina pomeranja letelice u odnosu na nekoliko navigacijskih satelita (čije su pozicije i brzine pomeranja u odnosu na površinu Zemlje poznati), može se odrediti pozicija i brzina te letelice u odnosu na površinu Zemlje.
Prema tome, ako su poznati zakoni kretanja navigacijskih satelita u koordinatnom sistemu vezanom za Zemlju onda se određivanjem tekućih koordinata letelice u odnosu na satelite može odrediti tekuća pozicija letelice iznad Zemlje (na primer, njene geografske koordinate i visina) i njena brzina.
Navigacijski sateliti omogućavaju navigaciju letelica sa velikom tačnošću u svakoj tački na Zemlji u svako doba dana i godine. U sisteme druge generacije spada navigacioni sistem za merenje vremena i koordinata Navstar (Navigation System using Timing and Ranging) koji se naziva i GPS (Global Position System). Satelitski radio navigacioni sistemi druge generacije predstavljaju mrežne sisteme neprekidnog dejstva, koji obezbeđuju određivanje bitnih parametara vektora stanja objekta (korisnika). Nedostaci prve generacije se otklanjaju sistemima druge generacije, tako da se mogu koristiti za određivanje tačne pozicije kako nepokretnih, tako i pokretnih objekata u toku neprekidnog vremena i praktično trenutno.
Početkom 80-tih počeo je razvoj ovih sistema u Vojnim vazduhoplovnim snagama SAD, a zatim je objedinjen program Navstar-GPS nastavljen pod zajedničkom upravom vojnih pomorskih snaga, kopnene vojske, pomorske pešadije, obalske straže, Kartografske uprave Ministarstva odbrane SAD a takođe NATO-a i Australije.
6

Fakultet organizacionih nauka
2.2 Razvoj GPS-a
Razvoj GPS-a odvijao se u tri faze. U prvoj fazi, početkom 70-tih godina, izrađeno je nekoliko satelita, eksperimentalna zemaljska kontrolna stanica i prijemnici korisnika. U decembru 1978.godine u prostoru oko Zemlje bila su četiri satelita, što je omogućilo merenje triju koordinata i brzine kretanja korisnika. U 1979.godini počela je druga faza razvoja i ispitivanja operativnih satelita, zemaljskih kontrolnih stanica i prijemnika korisnika. Treća faza od 1985.godine, obuhvatila je potpuni razvoj i proizvodnju ovih sistema, tako da je lansiranjem prvih satelita 1989.godine počelo razvijanje eksploatacionog sistema, a 1994.godine je bilo obezbeđeno globalno određivanje planarnih koordinata korisnika.
U Zalivskom ratu 1991.godine, oružane snage SAD koristile su navigacijske podatke. Artiljerija je koristila tačne GPS podatke koji su omogućavali brzo i tačno određivanje koordinata sopstvenih vatrenih položaja. Vazduhoplovstvo je koristilo podatke sa GPS prijemnika za navođenje raketa na ciljeve u dubini protivnikove teritorije.
Za nanošenje udara po važnim objektima su korišćene krilate rakete kod kojih je sistem navođenja bio korigovan GPS-om na početnom i srednjem delu leta. Koordinate objekata uvodile su se u navigacioni sistem rakete pred lansiranje a u toku leta su se korigovale po podacima dodatnog izviđanja. Rakete su dovođene u zadatu tačku s kružnom verovatnom greškom od 15 metara. GPS se ne koristi samo u vojne svrhe već i u međunarodnom vazduhoplovnom, pomorskom i drumskom saobraćaju, policiji i mnogim drugim privrednim i neprivrednim oblastima. Poslednje dve godine standardnu opremu većine putničkih vozila čine i GPS prijemnici. U poslednje vreme razmatra se primena GPS za automatsko vođenje vazduhoplova na sletanje bez vizuelnog kantakta pilota sa pistom.
Prijemom i obradom podataka sa satelita obezbeđuju se sledeći parametri leta: trenutna pozicija u geocentričnim pravouglim koordinatama (x,y,z) ili geografska širina i dužina, brzina leta, kurs, pravac i brzina vetra, kao i ugao zanošenja. U GPS prijemnicima mogu se memorisati informacije o aerodromima, određenim tačkama na vazdušnom putu, poletno-sletnim stazama...
2.3 Režim rada GPS-a
U najpoznatijim satelitskim radio navigacionim sistemima koristi se pasivni režim rada. Osnovni navigacioni parametar-pseudodaljina, određuje se korelacionim metodom neprekidnog faznog kodiranog signala sa satelita. Sem toga u sistemu Navstar određuje se i delta-daljina. Ukoliko se određivanje koordinata letelice vrši metodom merenja daljine, onda se može koristiti i pasivni (bez upita) i aktivni ( pitanje-odgovor sa upitom) režim rada uređaja na letelici. Aktivni sistem merenja daljine imaju ograničenu propusnu sposobnost odgovarača sa satelita, ali se pri tome koordinate određuju bez sistemskih grešaka. Kod pasivnih sistema merenja daljine koordinate letelice se određuju sa slučajnim i sistematskim greškama, izazvanih odstupanjem vremena na satelitima i letelicama zbog nestabilnosti etalonskih generatora. Vreme na letelicama sinhronizuje se s vremenom na
7

Fakultet organizacionih nauka
satelitima u procesu navigacionih merenja. Pri pasivnom načinu rada postoji neograničena propusna sposobnost sistema i skriveni rad korisnik-letelica.
Sistem Navstar je namenjen za globalno pasivno navigaciono-vremensko obezbeđivanje svih vojnih i civilnih korisnika (u i na vodi, na zemlji i u vazduhu). Nezavisan je od vremenskih uslova, zaštićen od smetnji i vrlo tačan. U sistemu Navstar koristi se pseudodaljinski metod određivanja pozicije korisnika i pseudoradijalno-brzinski metod određivanja njegovog vektora brzine. Radio-navigacioni sistem “Navstar” se sastoji iz mreže navigacijskih vestačkih zemljinih satelita, zemaljskih komandno-mernih stanica i radio-navigacionih korisničkih prijemnika.
Satelit emituje složeni niz bita 1 ili 0. U prijemniku se generiše taj isti niz bita, sinhrono sa signalom emitovanim sa satelita. Prijemnik računa korelaciju prijemnog i svog niza. Korelacija je kada se dva niza bita pomnože, i dobijeni biti u proizvodu se saberu. Ako se nizovi ne poklapaju, dobijeni bit se malo zakasni pa se postupak ponovi.
2.4 Konfiguracija GPS Sistema
Na slici 1 je predstavljen GPS sistem koji se sastoji od tri odvojena segmenta a to su: svemirski segment (sateliti), kontrolni segment (zemaljske stanice) i korisnički segment (GPS prijemnici).
Slika 1 Segmenti GPS sistema
2.4.1 Navigacijski sateliti
Sa 12 satelita sistema Navstar 1986.godine bila je omogućena dvodimenzionalna navigacija (određivanje geografske širine i dužine korisnika), a sa 18 satelita 1988.godine-trodimenzionalna navigacija (širina, dužina i visina ). Pri tome su korisnici mogli da određuju svoju poziciju sa tačnošću od 5 do 15 m i brzinu sa tačnošću od 0.05 do 0.15 m/s, kao i da vrše sinhronizaciju svog vremenskog
8

Fakultet organizacionih nauka
etalona do 5-15 ns, što za više od reda veličine prelazi tačnost radio-navigacijskih sistema Tranzit, Loran-C i Omega.
Da bi se obezbedila neprekidna 24 časovna trodimenzionalna navigacija, koristeći samo merenja pseudodaljina po otvorenom kanalu (za civilne svrhe), 1994.godine povećan je broj satelita sistema Navstar na 24. Ova satelitska mreža obezbeđuje istovremensku vidljivost od 6 do 11 satelita pod uglom koji nije manji od 5 stepeni iznad horizonta za sve korisnike locirane bilo gde na zemlji i u bilo kom trenutku, kao što je pokazano na slici 2.
Slika 2 Pozicioniranje satelita oko zemlje
Sistem Navstar danas sadrži 24 radna satelita i 3 rezervna satelita koji su raspoređeni u šest popularnih, skoro kružnih orbita (po četiri satelita u svakoj) sa nagibom putanje i=55 stepeni prema ekvatoru i međusobnim razmakom orbita od 60 stepeni po geografskoj dužini. Sateliti se nalaze na visini od 20183 km, a obleću Zemlju sa periodom približno jednakim 12h. Takav raspored satelita omogućava korisnicima sistema da u svakoj tački na Zemlji u svakom trenutku primaju signale sa četiri do 11 satelita. Na slici 3 je dat raspored satelita.
Slika 3 Prikaz 24 satelita oko planete
Radio-navigacijski prijemnik korisnika automatski bira četiri optimalno raspoređena satelita i meri četiri pseudodaljine i četiri pseudoradijalne brzine, na osnovu kojih
9

Fakultet organizacionih nauka
određuje svoju poziciju i vektor brzine, a takođe tačno određuje razliku etalona vremena i frekvencije u satelitu u odnosu na sistemsko vreme i referentnu frekvenciju etalona u zemaljskim stanicama.
Sateliti sistema Navstar odvajaju se od Zemlje pomoću raketa nosača, a zatim izvode na potrebnu orbitu pomoću motora sa čvrstim gorivom. Opremu svakog satelita čini nekoliko podsistema: orijentacije u procesu izvođenja i na samoj orbiti, telemetrije (za prijem komandi i retranslaciju signala zemaljskog upravljačkog kompleksa), formiranje i translaciju navigacijskih informacija, termoregulacije i elektronapajanja.
Pri izvođenju na orbitu i prevođenju u rezervu, stabilizacija satelita se izvodi njegovim rotiranjem oko uzdužne ose. Na orbiti se vrši aktivna stabilizacija satelita pomoću reaktivnih motora sa tečnim gorivom (hidrazin). Orijentacija satelita u prostoru radi održavanja antena usmerenih prema Zemlji izvodi se pomoću IC davača u sastavu uređaja satelita. Telemetrijski podsistem je, ustvari, radio-kanal prenosa podataka o stanju uređaja u satelitu u zemaljsko komandno merni komleks, kao i radio kanal za prenos podataka sa upravljačkog sistema o parametrima njihovih orbita (eferemidima), njihovoj prognozi za bliže periode a takođe i realnim vrednostima i prognozi odstupanja sata satelita. Za tačno određivanje pozicije satelita koristi se sistem retranslacije upitnih signala sa komandno-mernog kompleksa. Pomoću njih se meri rastojanje Zemlje od satelita, a sa nekoliko takvih merenja određuju se i parametri orbite. U radio-kanalu podataka primenjuju se konusne i spiralno-konusne antene.
2.4.2 Zemaljski komandno-merni kompleks
„Zemaljski kompleks zajedno sa satelitskim centrom upravljanja Vojnih vazduhoplovnih snaga SAD i Centrom naoružanja vojnih pomorskih snaga obezbeđuje:
telemetrijsku kontrolu rada uređaja u navigacijskim satelitima i upravljanje njihovim radom;
formiranje sistemskog vremena i njegovu sinhronizaciju sa univerzalnim koordinatnim vremenom;
izvođenje trajektorijalnih merenja satelita radi određivanja parametara njihovih orbita i merenja satelitskog vremena i frekvencija radi određivanja odstupanja sata vremena i etalona frekvencije na satelitima od sistemskog vremena i referentne frekvencije;
prognoziranje kretanja satelita i odstupanje vremena i frekvencije, proračun njihovih tekućih efemerida, za svaki satelit posebno;
formiranje masiva službenih informacija i prenos navigacijskih podataka u računar satelita radi modulisanja radio-navigacijskih signala sa njima“. [1]
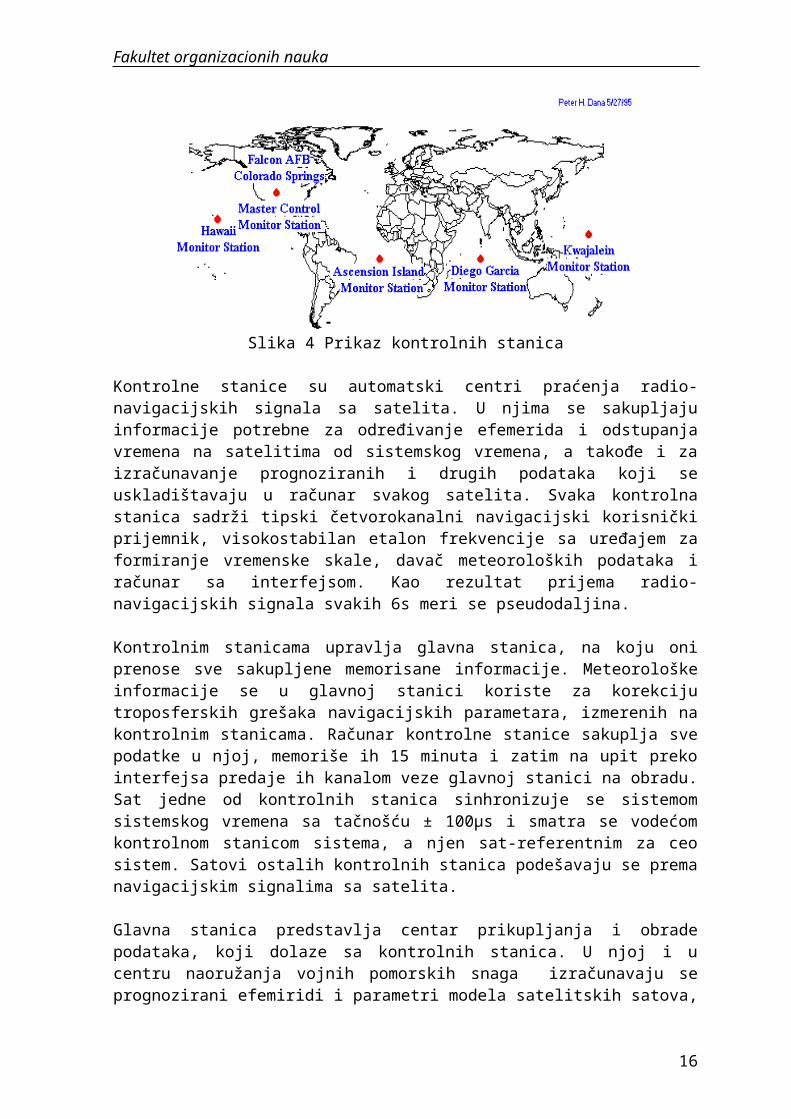
Zemaljski komandno merni kompleks obuhvata: glavnu (vodeću) stanicu za upravljanje i prenos podataka lociranu u
vazduhoplovnoj bazi Falkon u Kolorado Springsu; pet kontrolnih stanica raspoređenih širom sveta(u Kolorado Springsu, u
Kvajalinu, Dijego Garsiji, Ascension Islandu i na Havajskim ostrvima-Vahiva), kako bi se istovremeno pratila cela satelitska mreža Navstar i omogućio prenos orbitanih informacija glavnoj kontrolnoj stanici;
10

Fakultet organizacionih nauka
stranicu upravljanja i prenosa podataka u Vanderberg u Kaliforniji; rezervne kontrolne stanice u državi Men, na Sejšelskim ostrvima i u zoni
Panamskog kanala.Na slici 4 su predstavljene pomenute kontrolne stanice.
Slika 4 Prikaz kontrolnih stanica
Kontrolne stanice su automatski centri praćenja radio-navigacijskih signala sa satelita. U njima se sakupljaju informacije potrebne za određivanje efemerida i odstupanja vremena na satelitima od sistemskog vremena, a takođe i za izračunavanje prognoziranih i drugih podataka koji se uskladištavaju u računar svakog satelita. Svaka kontrolna stanica sadrži tipski četvorokanalni navigacijski korisnički prijemnik, visokostabilan etalon frekvencije sa uređajem za formiranje vremenske skale, davač meteoroloških podataka i računar sa interfejsom. Kao rezultat prijema radio-navigacijskih signala svakih 6s meri se pseudodaljina.
Kontrolnim stanicama upravlja glavna stanica, na koju oni prenose sve sakupljene memorisane informacije. Meteorološke informacije se u glavnoj stanici koriste za korekciju troposferskih grešaka navigacijskih parametara, izmerenih na kontrolnim stanicama. Računar kontrolne stanice sakuplja sve podatke u njoj, memoriše ih 15 minuta i zatim na upit preko interfejsa predaje ih kanalom veze glavnoj stanici na obradu. Sat jedne od kontrolnih stanica sinhronizuje se sistemom sistemskog vremena sa tačnošću ± 100µs i smatra se vodećom kontrolnom stanicom sistema, a njen sat-referentnim za ceo sistem. Satovi ostalih kontrolnih stanica podešavaju se prema navigacijskim signalima sa satelita.
Glavna stanica predstavlja centar prikupljanja i obrade podataka, koji dolaze sa kontrolnih stanica. U njoj i u centru naoružanja vojnih pomorskih snaga izračunavaju se prognozirani efemiridi i parametri modela satelitskih satova, a takođe i drugi navigacijski podaci, memorisani u računaru navigacijskih satelita.
Navigacijski podaci za svaki satelit, dobijeni u glavnoj stanici, dospevaju preko kanala veze u stranicu upravljanja i prenosa podataka. Odavde se oni preko komandnog radio kanala predaju odgovarajućim satelitima, gde se uskladištavaju u memoriju računara.
11

Fakultet organizacionih nauka
Osnovna stanica memorisanja podataka ulazi u sastav glavne stanice, a kao rezerva koristi se odgovarajuća stanica satelitskog centra upravljanja vojnim vazduhoplovnim snagama. Za vreme predaje podataka satelitima, prekida se prikupljanje informacija od strane kontrolnih stanica. One se tada koriste za kontrolu pravilnosti podataka, uskladišteni u memoriju računara satelita, dekodiranjem telemetrijskih informacija iz kadra primarnih navigacijskih signala. Proces prenosa podataka na satelite kontroliše glavna upravljačka stanica, koja analizira telemetrijske podatke i proverava predaju navigacijskih poruka sa satelita ka korisnicima.
2.4.3 Korisnički segment
Korisnički segment čini GPS prijemnik koji prima signale sa više satelita i na osnovu njihove različite propagacije na mestu prijema, uz poznavanje tačne lokacije satelita i tačnog vremena, je u stanju da proračuna svoju poziciju u tri dimenzije kao i brzinu prijemnika. Većina GPS prijemnika ove operacije obavlja automatski, u realnom vremenu i često ih predstavlja vizuelno na ekranu ili u vidu govorne poruke. Prijemnik omogućuje i vojnu i civilnu upotrebu, sa skoro neograničenim brojem aplikacija koje se mogu koristiti na kopnu, moru, vazduhu. Tipični GPS prijemnici su prikazani na slici 5.
Slika 5 Tipični GPS Prijemnici
Na slici 5 je prikazan ručni GPS prijemnik (PLGR) za navigaciju i pozicioniranje (levo) i precizni geodetski GPS prijemnik (desno). GPS prijemnici mogu imati u sastavu komponentu koja prima diferencijalne signale. Diferencijalni signal se dobija preko standardnog RS-232 porta ili preko interne antene. Od 2006. godine čak i jeftini prijemnici uključuju i prijemnike za oblasne sisteme augmentacije.
Augmentacija su metode za poboljšanje preciznosti koje se oslanjaju na informacije dobijene od drugih izvora, osim GPS satelita, a koje se takođe koriste u proračunu pozicije. Postoji više takvih sistema i uglavnom se razlikuju prema tome kako GPS senzor prima ove informacije.
Neki sistemi emituju informacije o faktorima koji unose grešku, npr grešku časovnika, grešku pozicije satelita, grešku koju unosi jonosfera. Drugi sistemi pružaju informaciju o tome kolika je bila greška u prošlosti, a treći pružaju dodatne navigacione informacije koje se mogu koristiti u proračunu pozicije. Oblasni sistemi
12

Fakultet organizacionih nauka
augmentacije u vazduhoplovstvu su WAAS (eng. Wide Area Augmentation System), odnosno augmentacioni sistem široke oblasti i LAAS (eng. Local Area Augmentation System), odnosno lokalni augmentacioni sistem. Oba sistema u svoj rad uključuju i metode diferencijalnog GPS-a, a pošto se primenjuju u vazduhoplovstvu zadovoljavaju dodatne kriterijume koji se odnose na bezbednost.Neki GSP prijemnici komuniciraju sa drugim uređajima preko serijskih interfejsa kao što su USB ili Bluetooth, koristeći standardne protokole. NMEA 0183 i NMEA 2000 su široko rasprostranjeni protokoli. Iako su zaštićeni protokoli, objavljeno je dovoljno javnih dokumenata koji ih opisuju da se mogu koristiti bez kršenja autorskih prava. Postoje i drugi protokoli, kao SiRF i MTK.
GPS prijemnik je prost merni uređaj koji sluša emisiju od svih dvanaest satelita koji mogu biti u hemisferi u kojoj se prijemnik nalazi, i uzima najjači signal sa pozicije na kojoj se nalazi. Na osnovu primljenog signala i njegove različite propagacije na mestu prijema, uz poznavanje tačne lokacije satelita i tačnog vremena, prijemnik je u stanju da proračuna svoju poziciju u 3 dimenzije (X,Y,Z). Princip rada je sledeći: GPS prijemnik proračunava udaljenost između prijemne antene i satelita na taj način što vrši precizno merenje vremena koje je potrebno kodnom signalu da sa satelita stigne do prijemne antene. Da bi prijemnik precizno odredio ovo vreme potrebno je da postoji sinhronizacija atomskog časovnika na satelitu i prijemniku. Oni se sinhronizuju tako da u isto vreme generišu iste kodove. Tada prijemnik po prijemu signala treba samo da proveri kada je i sam generisao isti kod. Vreme između je vreme potrebno GPS signalu da pređe udaljenost između satelita i prijemne antene. Na osnovu njega on određuje svoju poziciju na zemlji u 3 dimenzije.
Slika 6 Blok šema GPS prijemnika
Na slici 6 prikazana je blok šema GPS prijemnika. On se sastoji od antene, radio prijemnika, A/D konvertora sa digitalnim procesorom, ulazno-izlaznim interfejsom i
napajanjem.
Antena GPS prijemnika prima signale sa satelita po dve frekvencije iz L-opsega frekvencija (L1-1575.42MHz i L2-1227.6MHz). Što je vidni ugao antene manji to je slabljenje signala veće dok na uglu od 0 stepeni antena nema prijem. Prilikom
13

Fakultet organizacionih nauka
udaljavanja antene od prijemnika dolazi do pojave slabljenja antenskog kabla a to se kompenzuje ugrađivanjem pojačavača. U slučaju da se radi o L1-C\A kodu propusni opseg je 2.046MHz.
Radio prijemnik prima signale sa svih satelita simultano. Tokom prenosa se na signal superponira signal šuma pa se primljeni signali prvo propuštaju kroz pasivni filtar propusnik opsega, male selektivnosti, da se signal malo pročisti od šuma. Nakon filtra dolazi pojačavač koji pojačava koristan signal. Radiofrekventni signal se potom translira na međufrekventnu vrednost gde međufrekventni pojačavač obavlja pojačanje signala i njegovu filtraciju do potrebnog nivoa za rad A/D konvertora.
Digitalna Obrada Signala
GPS prijemnici vrše A/D konverziju na nivou međufrekventnog signala a onda se tako dobijeni digitalni signal obrađuje. Osetljivost prijemnika na kvantizacioni šum se smanjuje postupkom semplovanja iznad Niquist-ovog kriterijuma, a to smanjuje potreban broj bita pri A/D konverziji. Digitalna obrada signala se sastoji od više paralelno vezanih kanalskih korelatora, koji prate istovremeno i signal i kod, do maksimalnog broja kanala. Noviji prijemnici sadrže od 8 do 12 korelatora. Korelator čine jedna fazna i jedna kvadraturna komponenta korelacije. Svaki kanal ima petlju (PLL) koja istovremeno prati kod i nosioc signala, pruža mogućnost faznih i kodnih merenja i izdvaja navigacionu poruku iz primljenog signala. Svaki kanal ima mogućnost da obavi merenje tri komponente: pseudorastojanje, promenu pseudorastojanja i integrisano merenje Doplerovog pomeraja po svakom kanalu. Sva merenja i demodulisani podaci se prosleđuju navigacionom porukom.
Navigacioni Procesor
Prijemnik u toku svog rada mora da vrši komplikovane matematičke operacije da bi izračunao svoju poziciju i brzinu pa mu je zato neophodan procesor koji upravlja radom celog prijemnika. Procesor upravlja radom i sinhronizacijom kanalskih korelatora i prati signal obavljajući korekciju podataka. Neki prijemnici u sebi sadrže i integrisane funkcije kanalske obrade i izračunavanja pozicije. Veliki broj procesora vrši izračunavanje pozicije na osnovu frekvencije od 1Hz, a kod nekih je ova frekvencija veća od 5Hz. Pošto sva ova merenja opterećuju procesor, a to se ogleda u većoj potrošnji, prijemnci malih dimenzija vrše proračun svoje pozicije na svakih 2-15 sekundi. Svi podaci do kojih je došao procesor se prosleđuju izlaznoj jedinici.
Ulazno-izlazna Jedinica
Ovaj deo praktično predstavlja interfejs koji objedinjuje opciju upravljanja navigacionim funkcijama prijemnika i funkciju prikazivanja dobijenih podataka korisniku. Čine ga ekran i tastatura kao i eksterni ulazi i izlazi.
Princip funkcionisanja GPS prijemnika
Princip funkcionisanja GPS prijemnika zavisi pre svega od modela. Zajedničko za sve modele GPS prijemnika jeste to da po njihovom uključenju prvo počinju sa
14

Fakultet organizacionih nauka
traženjem i sinhronizacijom prijemnika na dolazeće satelitske signale. Brzina kojom će prijemnik proračunati svoju poziciju pre svega zavisi od količine podataka kojom satelit raspolaže (što više podataka procesor poseduje to će i pre odrediti svoju poziciju). Prijemnik će najbrže odrediti svoju poziciju ako raspolaže podacima o trenutno vidljivim satelitima. Zbog toga prijemnik u memoriji mora da sadrži sveže podatke o almanahu svih satelita i približni podatak o svojoj lokaciji kao i približno vreme. Almanah podaci sadrže osnovne informacije o satelitima kao što su: informacije o koordinatama satelita odnosno njihove lokacije, nose informaciju o statusu satelita (da li je ispravan ili je pokvaren) i mnoge druge podatke. U suštini, pre nego što prijemnik počne sa GPS navigacijom, potrebno je da poseduje ove podatke. Ako GPS prijemnik nema ništa u memoriji on kreće sa postupkom traženja satelitskih signala. Ako uspe da se sinhronizuje prijemnik izračunava koji su sateliti vidljivi. Zbog specifične prostorne konfiguracije satelita (sateliti su prostorno udaljeni za 60 stepeni) u svakom trenutku su vidljiva bar 4 satelita. Zatim odabira one satelite koji imaju najmanju vrednost greške i tada počinje sa postupkom traženja signala. Sinhronizacija prijemnika i satelita traje oko 30 sekundi. U slučaju da prijemnik ne uspe da ostvari brzu sinhronizaciju sa satelitom on počinje sa inicijalnim podešavanjem prijemnika. Sada njegov procesor počinje da traži signale satelita po svim mogućim PRN sekvencama, odnosno za svih 1023 stanja. Ovo može da traje veoma dugo sve dok prijemnik ne primi signale sa barem 4 satelita i onda na osnovu njih, odnosno na osnovu vremena njihove propagacije od satelita do prijemnika proračunava svoju poziciju u 3 dimenzije, brzinu i tačno vreme.
Primena GPS Prijemnika
U početku GPS prijemnici su korišćeni samo od strane specijalnih struktura društva (vojske, milicije) ali se sa smanjivanjem cene i povećanjem preciznosti njihova upotreba proširila na sve faktore društva. Osnovne prednosti zbog kojih su GPS prijemnici postali tako popularni su: 24-časovni servis širom sveta, vema tačna trodimenziona lokaciona informacija (omogućava čitanje geografske dužine, širine i visine), ekstremno tačnu informaciju brzine i vremena, zajednički sistem koji se lako prevodi u bilo koji lokalni sistem, kontinualnu informaciju u realnom vremenu, pristupačnost neograničenom broju korisnika širom sveta. GPS prijemnici se koriste za različita merenja terena, u geodeziji, gde se zbog nepristupačnosti terena ne može koristiti druga oprema. Najmasovnija primena GPS prijemnika je pomaganje u navigaciji brodovima, avionima i velikom broju novijh vozila. Danas GPS prijemnike sve više koriste pojedinci za različite vidove relaksacije. Većina ekspedicija kao osnovni vid navigacije koristi GPS prijemnike. Razna takmičenja koja se održavaju u svetu kao što su: reliji, trke jahtama, takmičenja u paraglajdingu ne mogu se zamisliti bez upotrebe GPS prijemnika. Ukratko korišnjenje GPS prijemnika je postao trend u celom svetu.
2.5 GPS Servisi
GPS sistem obezbeđuje dva tipa servisa a to su: SPS (Standard Positioning Service) i PPS (Precise Positioning Service). SPS je namenjen civilnim primenama a PPS koristi vojska. Osnovna razlika između ova dva servisa je u preciznosti podataka koje obezbeđuju.
15
Fakultet organizacionih nauka
2.5.1 SPS (Standard Positioning Service)
SPS je servis za pozicioniranje koga je ministarstvo odbrane autorizovalo za potrebe civilnih struktura društva. Ovaj servis se sastoji od C\A-koda i navigacione poruke koja se prenosi signalom frekvencije L1-1575.42MHz. SPS ne koristi signal L2 kao ni P(Y)-kod po signalu L1. Servis SPS daje preciznost pozicioniranja od 100m u horizontalnoj, 156m u vertikalnoj ravni i vremensku preciznost od 340ns u odnosu na UTC. Ministarstvo odbrane ima mogućnost povećanja stepena tačnosti SPS u slučaju narušavanja nacionalne bezbednosti ili u slučaju ratnog stanja. Ovo povećanje stepena tačnosti SPS sistema se naziva “Selective Availability” i označava se sa S\A.
2.5.2 PPS (Precise Positioning Service)
PPS je daleko precizniji servis za satelitsko pozicioniranje od SPS sistema i njega mogu da koristi samo autorizovani korisnici. Razvijen je isključivo za vojne potrebe. Autorizaciju za ovaj sistem dodeljuje isključivo ministarstvo odbrane. On obezbeđuje preciznost pozicioniranja od 22m u horizontalnoj ravni i 27.7m u vertikalnoj ravni dok je vreme dato sa preciznošću od 200ns u odnosu na UTC. Ovaj sistem ima dve zaštite a to su: S\A-Selective Availability i Anti-Spoofing(A-S) odnosno kriptovanje. S\A se koristi za zaštitu GPS pozicije, brzine i tačnosti vremena od neautorizovanih korisnika, po principu ometanja satelitskih signala ubacivanjem signala greške u njih. Anti-Spoofing(S-A) je kriptovanje P koda u Y kod da bi se predupredio eventualni prijem signala koje emituje neprijateljska strana i koji mogu ličiti na GPS signale. A-S se koristi da se odbiju neautorizovani korisnici koji zele da pristupe vojnom P kodu. Autorizovani korisnici imaju specijalni ključ pomoću koga pristupaju ovom sistemu. PPS prijemnici mogu koristiti P(Y)-kod ili C\A-kod, a mogu i oba. SPS prijemnici nisu zaštićeni od spoofinga jer koriste C\A kod u odnosu na PPS prijemnike koji su zaštićeni od spoofinga.
2.6 Određivanje pozicije
Koordinate se računaju prema Svetskom geodetskom sistemu koordinata WGS84. Da bi se sračunala pozicija, GPS prijemnik treba da zna precizno vreme. Sateliti su opremljeni izuzetno preciznim atomskim satovima. Prijemnici imaju ugrađene satove bazirane na kristalnim oscilatorima koji se neprestano ažuriraju koristeći signale sa satelita.
Prijemnik identifikuje signal sa svakog satelita uz pomoć koda, onda meri vremensko kašnjenje signala za svaki satelit. Da bi ovo uspeo, prijemnik proizvodi identičnu sekvencu koristeci isti koreni broj kao i satelit. Koreni broj je broj pomoću kojeg je satelit generisao pseudo-nasumični kod. Upoređivanjem dve sekvence, prijemnik meri kašnjenje i računa udaljenost satelita. Ovaj rezultat se zove pseudo-udaljenost. Pseudo je zbog toga što je u ovom računanju pretpostavljeno da je interni časovnik prijemnika tačan, ali on sadrži izvesnu nepreciznost.
Osnovni signal koji svaki GPS satelit emituje se dobija modulacijom signala nosioca L1 i kombinacije dva digitalna signala. Digitalni signal niže frekvencije
16

Fakultet organizacionih nauka
sadrži navigacionu poruku koja se iznova emituje na svakih 12.5 minuta. Navigaciona poruka je složene strukture i sastoji se od „almanaha“ koji sadrži neobrađene podatke o vremenu atomskog časovnika, zajedno sa informacijom o statusu satelita. Drugi tip podataka u sastavu navigacione poruke je „efemeris“ koji sadrži podatke o orbiti satelita koje omogućavaju prijemniku da izračuna poziciju satelita. Digitalni signal više frekvencije sadrži pseudoslučajni kod i zove se C/A kod. To je sekvenca dugačka 1023 bita koja se ponavlja svake milisekunde. Svaki satelit ima svoju jedinstvenu sekvencu, javno objavljenu, po kojoj se može identifikovati na jednom kanalu prijemnika. GPS sateliti takođe emituju i P-kod ili precizni kod koji je takođe pseudoslučajni kod, ali su njegova frekvencija i digitalna sekvenca koja se ponavlja drugačije nego kod C/A koda. Njegova sekvenca ponavljanja traje jednu nedeljno. Ovaj signal se modulira sa signalom nosiocem L2, koristi se za vojne svrhe, ne objavljuje se javno i procesira se dodatno, tj šifrira se i dešifrira. Na slici 7 je prikazano vremensko kašnjenje signala sa satelita i signala koji generiše GPS prijemnik.
Frekvencije signala nosioca su: L1 (1575.42 MHz): nosioc za kombinaciju navigacione poruke, C/A koda i
P-koda L2 (1227.60 MHz): nosioc za P-kod, plus novi L2C kod Blok IIR-M
generacije i novijih satelita L3 (1381.05 MHz): nosioc korišćen za vojni program detekcije lansiranja
projektila i nuklearnih detonacija L4 (1379.913 MHz): nosioc koji se razmatra za dodatne jonosferske
ispravke L5 (1176.45 MHz): nosioc predložen za dodatne primene, prva primena se
prognozira na satelitima koji će bii lansirani 2008. godine
Slika 7 Vremensko kašnjenje signala
Podatak o poziciji u orbiti koji se nalazi u navigacionoj poruci, koristi se za precizno određivanje pozicije satelita. Poznata udaljenost i pozicija satelita navode da se prijemnik “nalazi” na zamišljenoj sferi sa centrom u tom satelitu (onom sa kojeg je izmereno kašnjenje) i prečnikom jednakim udaljenosti satelita, kao što je prikazano na slici 8.
Slika 8 Prikaz mogućeg mesta prijemnika na osnovu merenja sa jednog satelita
17

Fakultet organizacionih nauka
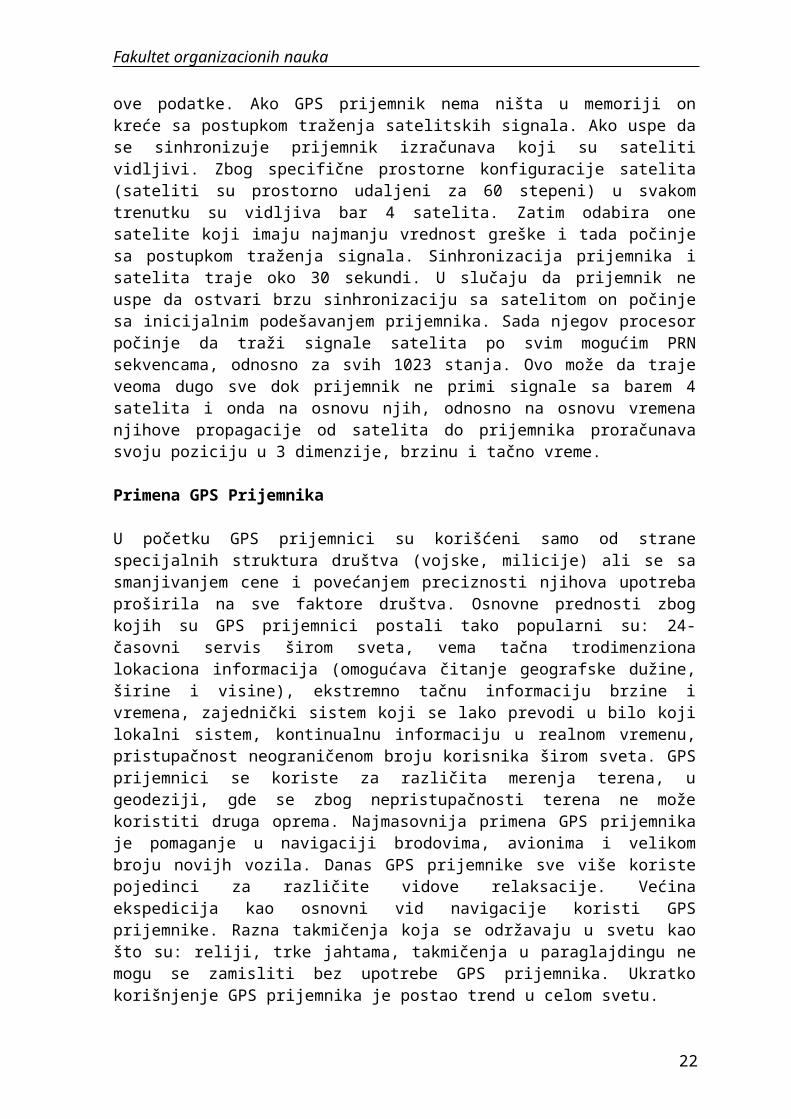
Na slikama 9 i 10 je prikazana moguća pozicija prijemnika posle obrađenih podataka primljenih sa 2 odnosno 3 satelita, respektivno.
Kada se ovo merenje izvrši odjednom sa četiri satelita, presek četiri zamišljene sfere određuje poziciju prijemnika.
Slika 9 Prikaz mogućeg mesta prijemnika na osnovu merenja sa dva satelita
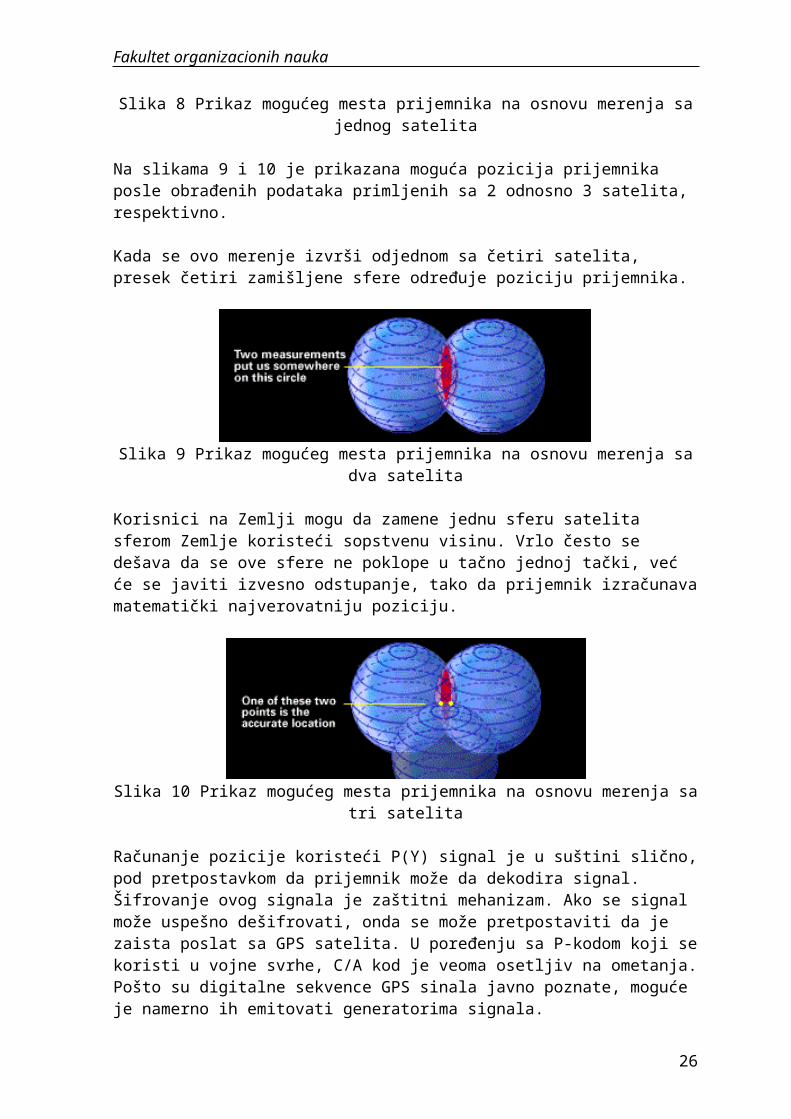
Korisnici na Zemlji mogu da zamene jednu sferu satelita sferom Zemlje koristeći sopstvenu visinu. Vrlo često se dešava da se ove sfere ne poklope u tačno jednoj tački, već će se javiti izvesno odstupanje, tako da prijemnik izračunava matematički najverovatniju poziciju.
Slika 10 Prikaz mogućeg mesta prijemnika na osnovu merenja sa tri satelita
Računanje pozicije koristeći P(Y) signal je u suštini slično, pod pretpostavkom da prijemnik može da dekodira signal. Šifrovanje ovog signala je zaštitni mehanizam. Ako se signal može uspešno dešifrovati, onda se može pretpostaviti da je zaista poslat sa GPS satelita. U poređenju sa P-kodom koji se koristi u vojne svrhe, C/A kod je veoma osetljiv na ometanja. Pošto su digitalne sekvence GPS sinala javno poznate, moguće je namerno ih emitovati generatorima signala.
2.7 Izvori grešaka
Greške satelitskog radio-navigacionog sistema dele se na tri grupe: Greške formiranja radio-navigacionih parametara, izazvane sinhronizacije
satova nestabilnošću etalona frekvencija satelita, uticajem relativističkih efekata, anomalijama prostiranja radio talasa usled uticaja jonosfere i troposfere, višestrukim refleksijama i uzajamnim smetnjama pri istovremenom radu nekoliko satelita.
Greške formiranja efemeridne informacije navigacijskih satelita, uslovljene instrumentalnim greškama u uređajima zemaljskih stanica trajektornih merenja, netačnošću njihovog koordinatnog privezivanja uticajem
18

Fakultet organizacionih nauka
geometrijskog faktora (određen rasporedom ovih stanica u odnosu na navigacijski satelit).
Greške navigacijskih merenja, uslovljene odstupanjem etalona sata korisničkog prijemnika, instrumentalnim greškama radio-navigacijskog uređaja letelica i autonomnih navigacijskih davača visine, kursa i putne brzine, konačnim tačnostima rešavanja navigacijskih jednačina računarom korisnika, a takođe i uticajem geometrijskog faktora.
Na konačnu grešku rezultata utiče međusobna pozicija satelita i prijemnika. Ako su je ugao, u čijem temenu se nalazi prijemnik a sateliti se nalaze na kracima tog ugla mali, takav položaj je nepovoljan i odstupanje po jednoj osi je veliko a po drugoj malo. Ako je ovaj ugao veliki odstupanje po osama je približno isto, što je ilustrovani na slici 11.
Slika 11 Greška kod dobro i loše pozicioniranih satelita
Promena atmosfreskog stanja utiče na promenu brzine GPS signala kako oni prolaze kroz Zemljinu atmosferu i jonosferu. Ispravljanje ovih grešaka je bitan izazov u poboljšanju preciznosti određivanja pozicije. Ovi uticaji su najmanji kada se satelit nalazi tačno iznad prijemnika, a najveći kako se satelit bliži horizontu jer tada signal putuje najduže. Kada se jednom sazna približna lokacija, mogu se korisiti matematički modeli u proceni i nadoknadi ovih grešaka. Atmosfera ima uticaja na prostiranje radio talasa, posebno jonosfera i troposfera. Vlažnost u troposferi utiče na prostiranje radio talasa, nezavisno od njihove frekvencije, što može da unese grešku do 0.5m. Promene u vlažnosti su brze i ova greška je mala, ali teška za korekciju.
Jonosferski uticaj se sporo menja i on je prosečan tokom dužeg vremena. Uticaj u nekoj određenoj geografskoj zoni može se lako odrediti poređenjem podataka iz GPS prijemnika i poznatih podataka o toj lokaciji. Ova ispravka je ista i za ostale prijemnike u istom području. Nekoliko sistema šalje ove informacije preko radija ili drugog linka i omogućavaju da prijemnici koji rade samo sa L1 signalom primene ovu korekciju. Jonosferski podaci se šalju sa satelita koji koristi GPS frekvenciju i specijalni pseudo-nasumični broj tako da su dovoljni samo jedna antena i jedan prijemnik da bi se došlo do ovih podataka. Uticaj jonosfere na prostiranje talasa je veći i unosi grešku do 5 m. Jonosfera utiče na propagaciju radio talasa u zavisnosti od frekvencije zračenja i dužine puta koju talasi prolaze kroz nju. Zato se u militarnoj upotrebi P-kod modulira na L1 i L2 frekvenciji. Obradom signala se ustanovi razlika u kašnjenju signala modulisanog sa L1 i signala modulisanog sa L2 i na osnovu toga izračuna uticaj jonosfere. Novi sateliti, Blok IIR-M generacije zato imaju L2C kod modulisan na frekvenciju L2, da bi se isti metod detekcije jonosferskog efekta i njegove korekcije mogao upotrebiti i na civilnim prijemnicima.
19

Fakultet organizacionih nauka
Drugi način detekcije i korekcije ove greške se sastoji u prijemu GPS signala na poznatim pozicijama na Zemlji. Poređenjem pozicije dobijene obradom GPS signala i stvarne pozicije se otkriva koliku grešku unosi jonosfera i proračunavaju podaci o trenutnim karakteristikama jonosfere na toj lokaciji. Na lokacijama bliskim tom stacionarnom prijemniku je greška koju unosi jonosfera slična i prijemnici u okolini mogu da naprave korekciju ako su im ti podaci poznati.
Vlažnost vazduha izaziva promenljiva kašnjenja. Ovaj uticaj je prilično lokalizovan i menja se brže od jonosferkih uticaja, što otežava nadoknadu greške. Visina takođe izaziva promenljiva kašnjenja pošto signal putuje kroz razređeniji vazduh na većim visinama. Pošto prijemnici mere direktno visinu, ova greška se lako ispravlja.
Greške sata satelita nastaju usled stalnih pomeraja vremena atomskih satova satelita u odnosu na sistemsko vreme u zemaljskim stanicama. Ova odstupanja, iako veoma stabilnih atomskih satova satelita, mogu dostići i 976 ms u toku od 24h. Zato se jednom dnevno sa Zemlje šalje signal korekcije sata satelita, na osnovu kojeg se formira model sa koeficijentima korekcije sata. Ovi koeficijenti se emituju u navigacijskoj poruci i koriste u prijemniku korisnika. Nekorigovane greške, koje se odnose samo na devijaciju sata, veoma su male i dovode do greške u merenju rastojanja do satelita reda 30 cm. Pored ovih sporopromenljivih grešaka osnovnog oscilatora, postoje i relativni pomeraji sata.
Greške usled relativističkih faktora ispoljavaju se u obliku ekvivalentnog povećanja frekvencije etalona satelita u odnosu na frekvenciju etalona zemaljskog centra sistema, a koje nastaje usled razlike gravitacionih potencijala i razlike brzine kretanja satelita ili letelice. Fredvard Vinterberg (Freidwardt Winterberg) je predvideo 1955, da kada se posmatra sa Zemljinog referentnog okvira, sat na satelitu izgleda kao da radi nesto brže nego sat na Zemljinoj površini.
Za GPS satelite ova razlika je 38 milisekundi po danu. Zbog ovoga, standardna frekfencija na satelitu pre lansiranja je pomerena, što rezultuje da sat radi nešto sporije na Zemlji, na frekfenciji od 10.22999999543 MHz umesto 10.23 MHz, sa razlikom od -4.465 delova u 1010. Atomski satovi na satelitima su precizno podešeni, čime se primenjuje teorija relativiteta u stvarnom životu.
Uticaj odbijanja signala Radio signali se mogu odbijati od raznih objekata kao što su zgrade, zidovi kanjona, čvrsta podloga... i time prouzrokovati nepreciznost. Nekoliko tehnika je razvijeno za otkrivanje i ispravljanje ovih grešaka. Za veliko kašnjenje sam prijemnik može prepoznati signal koji je stigao usled odbijanja i automatski ga odbaciti. Da bi se prepoznao signal sa kraćim kašnjenjem usled odbijanja mora se koristiti specijalizovana antena. Obijanja sa kratkim zakašnjenjem su teža za filtriranje pošto je efekat skoro nepromenjen kao kod standardnih promena atmosferskog kašnjenja.
Uticaj odbijanja je manje ozbiljan kod pokretnih vozila. Kada se GPS antena pomera, signal sa odbijanjem mnogo odstupa od signala bez odbijanja pa ga prijemnici lako detektuju i odbacuju, a prihvataju samo validne signale.
20

Fakultet organizacionih nauka
Greške prostiranja radio talasa nastaju usled promena fizičkih parametara troposfere ( od 0 do 100km) i jonosfere( 100 do 1000km) u vremenu i prostoru. Ove promene dovode do refrakcije (iskrivljavanja) i smanjenja brzine prostiranja radio-navigacionih signala, pri čemu može doći i do njihove refleksije i interferencije.
Greške usled višestrukih refleksija signala nastaju kao rezultat prijema datog signala iz nekoliko pravaca zbog refleksije radio talasa od nadletane površine, naročito pri letu nad morem. Te refleksije, čija snaga može biti uporediva sa snagom direktnog signala, formiraju na ulazu navigacijskog prijemnika rezultujuci signal. Kašnjenje i frekvencija tog signala ne odgovara kašnjenju i frekvenciji direktnog signala. Greške su relativno male i reda su od 0,1 do 2,7 m.
Greške usled interferencije nastaju zbog uzajamnog uticaja signala sa navigacijskih satelita, kao i signala sa predajnika sistema osmatranja i veze i drugih izvora smetnji, koji upadaju u propusne opsege radio-navigacionih uređaja korisnika.
Greške zbog grupnog kašnjenja nastaju zbog kašnjenja pri obradi signala u uređajima satelita. Dozvoljeno grupno kašnjenje je 1m.
Greške usled nesavršenosti prijemnika korisnika izazvane su uglavnom šumom prijemnika, diskretizacijom signala i nedovoljnom tačnošću računara.
2.8 Primena GPS-a
2.8.1 Vojna primena
GPS omogućava precizno upravljanje različitim oružijem uključujući krstareće rakete i pametne rakete na daljinsko upravljanje. Sateliti su takođe opremljeni detektorima za nuklearne detonacije, što predstavlja glavnu komponentu Sistema za detektovanje nuklearnih detonacija u SAD. S namerom da spreči neadekvatno korišćenje GPS-a vlada Sjedinjenih Američkih Država kontroliše izvoz prijemnika za civilnu upotrebu. Proizvodjači u Sjedinjenim Američkim Državama ne mogu uopšte da izvoze prijemnike u koliko prijemnici ne poseduju ograničenja u brzini i visini sa koje može da pošalje informacije o poziciji i brzini. Zvanično ograničenje brzine je 515 m/sec dok nijedna GPS jedinica ne funkcioniše na visini od 18 km i više. GPS se još koristi za precino dobavljanje vojnih sirovina i namirnica.
2.8.2 Automobili
Automobili mogu biti opremljeni GPS prijemnicima još u fabrici u procesu izrade ili naknadno. GPS u ovom slučaju služi za prikazivanje mape kretanja, informacija o lokaciji, brzini, pravcu, obližnjim ulicama i orijentirima. GPS se može koristiti i kao sigurnosni uređaj za otkrivanje i praćenje ukradenih automobila. Slika 12 prikazuje primenu GPS-a na kopnu, vazduhu i vodi.
21
Fakultet organizacionih nauka
Slika 12 Primena GPS na određivanje koordinata automobila
2.8.3 Avijacija
Vazduhoplovni navigacioni sistemi obično služe za prikazivanje “mape kretanja” i često su povezani sa automatskim pilotom za navigaciju. Vazduhoplovni GPS prijemnici koriste tehnologiju kao sto je WAAS ili LAAS radi veće preciznosti prilikom operacija sletanja i prizemljenja. Ručni vazduhoplovni GPS prijemnici se koriste u manjim privatnim avionima. Kompjuteri instalirani u mnogim jedrilicama takodje koriste GPS radi izračunavanja brzine vetra i pronalaženje puteva ka alternativnim aerodromima i planinskim stazama.
2.8.4 Pomorstvo
Brodovi i čamci mogu posedovati GPS za navigaciju u bilo kom svetskom jezeru, moru ili okeanu. Pomorske GPS jedinice imaju funkcije korisne u kriznim situacijama tokom plovidbe, kao sto je “čovek u moru” ili takozvana MOB funkcija kojom se odmah odredjuje lokacija na kojoj se putnik koji je upao u more nalazi, što pomaže u akcijama spasavanja.
2.8.5 Mobilna satelitska komunikacija
Sistemi sa satelitskom komunikacijom koriste usmeravajuću antenu (poznatiju pod nazovom satelitski tanjir) usmerenu ka satelitu. Antena na pokretnim brodovima ili vozovima mora biti usmerena na osnovu svog trenutnog položaja. Savremeni kontroleri na antenama poseduju GPS prijemnik da bi došli do ovih informacija
2.8.6 Služba za hitne slučajeve i lociranje
GPS se može koristiti za lociranje mobilnih telefona u hitnim slučajevima. Mogućnost lociranja mobilnih telefona je u SAD bila zahtevana od strane zakonodavstva službe za hitne slućajeve. Međutim do septembra 2006. godine takav sistem nije postavljen u svim delovima zemlje. GPS manje zavisi od telekomunikacione mreže nego od radio lokacije za kompatibilne telefone. Ugrađeni GPS smanjuje zahtev za strujom mobilnog telefona i povećava preciznost u određivanju lokacije. Geografska lokacija telefona može se koristiti za pružanje usluga baziranih na lokaciji uključujući reklamiranje i ostale informacije vezane za specifičnost lokacije.
22

Fakultet organizacionih nauka
3. Sistem Navstar
3.1 Navigacijski prijemnici korisnika sistema Navstar
Navigacijski prijemnik korisnika sistema Navstar omogućava: izbor od svih vidljivih satelita, samo radni deo mreže (seta); pretraživanje i praćenje radio-navigacijskih signala satelita, merenje
njihovog kašnjenja i Doplerovog pomeraja noseće frekvencije; selekciju i dekodovanje navigacijskih poruka, te i almanaha satelita; obradu mernih i efemeridnih informacija, proračun koordinata satelita u
trenutku navigacijskih merenja, određivanje koordinata i vektora brzine korisnika, a takođe odstupanja satelitskih satova i etalona frekvencije u odnosu na vreme i referentnu frekvenciju sistema;
izračunavanje i uklanjanje procenjenih grešaka iz svakog merenja; prikazivanje koordinata, brzine i vremena u numeričkom obliku sa periodom
ponavljanja od 10 do 50 puta u sekundi ( u zavisnosti od režima rada); transformaciju koordinata korisnika iz geocentričnog pravouglog u geodetski
koordinatni sistem i njihovo prikazivanje; kontrolu rada blokova i uređaja u celini.
Prijemnici sistema Navstar široko se koriste u oružanim snagama SAD i zemljama NATO. Pomoću njih se rešavaju zadaci koji zahtevaju veliku tačnost merenja koordinate i brzine letelica, kao što su:
let po maršuti pri prolasku iznad kontrolnih tačaka u zadato vreme; određivanje koordinata otkrivenih ciljeva; određivanje koordinata mesta po kojima je dejstvovala artiljerija, radi
korekcije artiljerijske vatre; dovođenje bezpilotnih letelica koje izvode vatrena dejstva, kao i pilotiranih
vazduhoplova u tačku dejstva po cilju poznatih koordinata; izbacivanje tereta (lekova, hrane, pošte, senzora)na tačno određenu
lokaciju; povratak na mesto određeno za sletanje.
Navigacijski prijemnici sistema Navstar izrađuju se u različitim varijantama koje se međusobno razlikuju po tačnosti i vrsti parametara koje mere, zaštiti od smetnji, gabaritima, ceni i sl. Korisnici tih prijemnika su sve vrste letelica (vojni i civilni vazduhoplovi, bezpilotne letelice, kosmički brodovi i sateliti, vođene rakete), sve vrste pomorskih i vojnih i civilnih sredstava, uključujući i podmornice, vojna i civilna kopnena transportna sredstva, vojnici, planinari, spasioci i sl.Tipičan komplet navigacijskog prijemnika korisnika sistema Navstar sastoji se iz adaptivne i neadaptivne antene, prijemnika, računara sa uskladištenim programima u njegovoj memoriji i upravljačko-pokazivačkog bloka. Obično se koristi neusmerena antena koja prima zračenje iz gornje polusfere. Antene se izvode u obliku konusne spirale ili fazirane antenske rešetke sa četiri dijagrama usmerenosti.
Neadaptivne antene se koriste u prenosnim prijemnicima, na manjim brodovima, helikopterima, bespilotnim letelicama, a u nizu slučajeva- na avionima taktičke avijacije zemalja NATO.
23

Fakultet organizacionih nauka
Adaptivne antene koriste se u sastavu uređaja na najsavremenijim letelicama i brodovima. Njihova specifičnost je mogućnost formiranja nule dijagrama usmerenosti u pravcu izvora smetnji. Veličina prijemnog korisnog signala sa satelita nalazi se na nivou toplotnih šumova prijemnika, tako da svaki signal koji je znatno veći od nivoa šuma može da se smatra smetnjom.
Na ulazu prijemnika korisnika nalazi se visokofrekventni predpojačavač, koji je konstruktivno izveden sa antenom, kako bi se primljeni signal odmah pojačao i na taj način izbeglo smanjenje odnosa signal/šum. Po pravilu, pri digitalnoj obradi signala svakog satelita vrši se praćenje njegove frekvencije i koda posebnim konturama. Za takvo praćenje potreban je specijalni kanal, te je pri istovremenoj ( paralelnoj) obradi signala sa četiri i više satelita potrebno minimalno isto toliko kanala.
Ponekad se, radi praćenja svih satelita koji se nalaze u zoni direktne vidljivosti, koriste prijemnici sa 8 i više kanala, ali koji su složeni i skupi. Za mnoge korisnike dovoljni su prijemnici sa malo kanala, s rednom i multipleksnom obradom signala.
Sukcesivna obrada se izvodi pomoću jednog-dva kanala i pretpostavlja zahvat i praćenje signala po frekvenciji za korisnike sa srednjim brzinama i ubrzanjima. Pri tome je za obradu signala sa jednog satelita potrebno 150-240ms, posle čega se kanal prebaci na signal sledećeg satelita. Da bi se smanjilo vreme prelaznih procesa koji nastaju pri zahvatu, propusni opseg kanala je širi nego pri paralelnoj obradi, što dovodi do smanjenja tačnosti merenja. Pretraživanje signala i potpuno sakupljanje podataka u jednom kanalu veoma je otežano, što zahteva uvođenje dodatnog kanala, koji obezbeđuje otkrivanje signala sledećeg satelita u zoni vidljivosti.
Multipleksna obrada takođe podrazumeva prijem signala s vremenskom raspodelom i može da se uvede u jednom i u nekoliko kanala. Prijemnik je sposoban da prati signale znatno većeg broja satelita nego što ima kanala, ali nastaju veliki gubici snage u poređenju sa paralelnom obradom.
Tip prijemnika odabira se prema taktično-tehničkim karakteristikama korisnika: na brzim i letelicama sa manevarskim sposobnostima postavljaju se prijemnici sa paralelnom obradom signala koji imaju 5 do 8, pa čak i 12 kanala, a na letelicama male brzine i koje ne manevrišu – dvokanalni i trokanalni s sukcesivnom ili multipleksnom obradom. Uređaji prvog tipa omogućavaju praćenje satelita pri manevrisanju sa velikim opterećenjem, koji su praćeni naglim promenama uglova viziranja satelita.
Saglasno taktičko-tehničkim zahtevima za radio-navigacijski sistem, u zoni direktne vidljivosti treba da se nalazi najmanje 5 satelita. Četiri satelita se prate, a peti je rezervni. Prijem signala sa petog je pri iznenadnom otkazu ili pri zaklanjanju pri mesnim predmetima (pri letu na malim visinama) jednog od ranije praćenih satelita. Poželjno je da svi sateliti imaju optimalnu poziciju: da uglovi nadvišenja nad horizontom budu veći od 30 stepeni, a pravci viziranja obrazuju prostorne uglove bliske 90 stepeni. Ako ovi uglovi nisu ispunjeni, pogoršava se tačnost merenja koordinata i brzine korisnika.
24

Fakultet organizacionih nauka
Prema složenosti konstrukcije i tačnosti navigacijski prijemnici sistema Navstar mogu se svrstati u tri varijante: X, Y i Z.
Prijemnik tipa X namenjen je za brzo i vrlo precizno određivanje navigacijsko-vremenskih parametara pri dejstvu kako prirodnih tako i organizovanih smetnji, pri istovremenom prijemu radio-navigacijskih signala sa četiri (i više) satelita. Komplet ovog uređaja čine adaptivna antenska rešetka, navigacijski prijemnik sa četiri visoko frekventnih modula i petokanalnim sklopom obrade signala, računar za izračunavanje navigacijskih parametara i upravljačko pokazivački blok. Zaštita od smetnji postiže se usmeravanjem četiri snopa avionske antene na četiri nezavisna navigacijska satelita.
Prijemnik tipa Y namenjen je za korisnika koji se kreću sa malom dinamikom, kao što su vojnici, kopnena transportna sredstva, tenkovi, osnovne klase brodova, podmornice. Koristi sukcesivno praćenje nosećih frekvencija signala sa četiri satelita, čime je omogućeno da se uprosti struktura prijemnika i smanji cena celog uređaja. U odnosu na prijemnik tipa X, prijemniku tipa Y je potrebno dva-tri puta više vremena za određivanje pozicije korisnika. Prijemnik tipa Y se sastoji iz antenskog bloka (antene, bloka upravljanja antenom i pretpojačavača), prijemnika procesora i upravljačko-pokazivačkog bloka.
Prijemnici tipa Z su najjeftiniji, te se i najšire koriste kao, na primer za vojna i civilna transportna sredstva na kopnu, vodi i u vazduhu.
3.2 Diferencijalno radio-navigacijski sistem Navstar
Veća tačnost određivanja pozicije korisnika može se dobiti merenjem sa višekanalnim GPS prijemnikom, dužim vremenom opažanja i naknadnom obradom dobijenih podataka, simultanim opažanjem sa više prijemnika, a takođe i diferencijalnim globalnim pozicionim sistemom (DGPS).
Tačnost određivanja pozicije civilnih korisnika može se povećati primenom diferencijalne varijante sistema Navstar. Diferencijalni režim rada realizuje se pomoću kontrolnih primopredajnih stanica, čiji su osnovni elementi: prijemnik radio-navigacijskih signala Navstar, koji radi sa topografski privezanom antenom; računar koji određuje koordinate prijemne stanice na osnovu primljenih radio-navigacijskih signala i izračunava diferencijalne popravke navigacijskih parametara upoređenjem izračunatih koordinata sa poznatim koordinatama kontrolne stanice; i predajnik pomoću kojeg se te popravke prenose na letelicu (korisniku). Diferencijalne popravke u realnom vremenu ili pri narednoj obradi koriste se u prijemniku letelice korisnika (koji se nalazi u zoni dejstva kontrolnih stanica) za korekciju ukupne sistemske greške radio-navigacijskog sistema Navstar, što omogućava njegovim korisnicima da poboljšaju sopstvene navigacijske parametre.
Na taj način mogu se smanjiti greške u određivanju pozicije i do 10 puta, tako što se u P kodu koordinate korisnika mogu odrediti sa tačnošću od 0,1 m, a u C/A kodu – sa oko 2,5 m. Korekcijom se eliminišu S/A greške, greške usled jonosferskog kašnjenja signala, troposferskog kašnjenja signala, greške efemeride, odnosno greške usled nepoznavanja tačne pozicije satelita i greške
25
Fakultet organizacionih nauka
usled netačnog nepoznavanja referentnog satelitskog vremena. Najbolji način prenosa popravki na letelice je preko satelita drugog navigacijskog ili dodatnog sistema kao retlanslatora signala sa kontrolnih stanica. U prvom slučaju popravke i adresa kontrolne stanice može da se pridoda korisnim (službenim) informacijama sa satelita.
Kako je brzina prenosa sistemskih grešaka, te i diferencijalnih popravki, za sistem Navstar (određena uglavnom brzinom odstupanja satelitskih satova), dovoljno mala, uvođenjem popravki u prijemnik korisnika ne zahteva složene sklopove i može da se izvede čak i ručno jedanput svakih 5 min, pomoću standardno –pokazivačkog bloka. Veliki broj korisničkih prijemnika ima mogućnost prijema korekcionih signala u formatu PTCM 104.
Mogu da se realizuju diferencijalni radio-navigacijski sistemi sa različitim korekcijama:
Radio-navigacijski sistem sa korekcijom pozicije. –Na kontrolnoj stanici periodično se mere diferencijalne popravke pozicije trodimenzionalne tačke u geocentričnom pravouglom (Δx, Δy, Δz) ili sfernom (Δφ, Δλ, ΔH) koordinatnom sistemu, koje se zatim predaju korisnicima sistema. Za realizaciju ove varijante potrebno je da se kontrolna stanica i svi korisnici koji se nalaze u zoni njenog opsluživanja, koriste jedan isti radni set navigacijskih satelita. Pri narušavanju ovog uslova brzo nastaje poremećaj, a ne kompenzacija sistemske greške određivanja pozicije korisnika.
Radio-navigacijski sistem sa korekcijom pseudodaljine ne zahteva da korisnici koriste isti set navigacijskih satelita koji koristi kontrolna stanica. Korisnici dobijaju diferencijalne popravke o pseudodaljini za sve vidljive navigacijske satelite sa kontrolne stanice. Greške određivanja pozicije u ovoj varijanti nastaju zato što kontrolna stanica i korisnici koriste za navigacijske parametre efemeridnu informaciju, formiranu u različitim vremenskim trenucima. Pri tome se promene pri promenljivih komponenata efemeridne informacije uračunavaju samo na kontrolnoj stanici, jer jeftini prijemnici tipa Z zbog odsustva posebnog informacionog kanala, ne mogu da obnavljaju ovu informaciju posle njenog regularnog uvođenja u toku 30-40 min.
Radio-navigacijski sistemi sa vremenskom korekcijom.- Dok prve dve varijante predstavljaju sisteme dalje navigacije s lokalnom korekcijom, dotle se u ovom navigacijskom sistemu realizuje sistem relevantne (bliže) navigacije, jer korisnici određuju svoju poziciju u odnosu na kontrolnu stanicu, a ne na satelite. To omogućava da se uprosti šema prijemnika korisnika i smanji broj korigovanih parametara radi dobijanja tačne pozicije.
Da bi se smanjila pozicija korisnika, potrebno je meriti vreme prijema koda daljine u tačkama korisnika i kontrolne stanice i kosinuse pravaca od kontrolne stanice prema satelitu (ili dužinu, širinu i visinu satelita).
Radi povećanja tačnosti satelitskih navigacijskih sistema GPS i GLONASS za civilne korisnike pri radu sa velikim prostranstvima, danas se razvija nekoliko satelitskih sistema za povećanje mogućnosti sredstava satelitske navigacije (SBAS), kao što su:
26

Fakultet organizacionih nauka
evropski globalni geocentrični navigacijski sistem (EGNOS), namenjen za prekrivanje zone određen Evropskom konferencijom civilnog vazduhoplovstva (ECAC);
američki sistem WAAS, koji bi pokrivao kontinentalni deo SAD; japanski sistem MSAS, za prekrivanje japanskih ostrva.
Optimalan raspored zemaljskih stanica i njihova lokacija određena sa velikom tačnošću, a takođe nezavisno praćenje sistema, omogućavaju da se vrše diferencijalne korekcije, što u znatnoj meri povećava tačnost civilnog kanala navigacijskih sistema. Tri satelita sa širokim zahvatom od nekoliko hiljada kilometara predaju preciznije informacije korisnicima i time poboljšavaju karakteristike signala navigacijskih sistema GPS (i GLONASS) u određenoj zoni koju opslužuju. Svaki korisnik koji se nalazi u toj zoni biće obavešten u realnom vremenu o kvalitetu signala tih navigacijskih satelita (sa vrlo malim vremenskim intervalom ranijeg obaveštavanja u granicama 6 s). Time se određuje siguran let i omogućava civilnim avionima na maršuti ili pri izlasku na sletanje potpuno oslanjanje na tačnost navigacijskog signala. Ovo je takođe važno i za brodove koji se nalaze u kritičnim pomorskim oblastima (pristaništima, najčešće korišćenim pomorskim linijama, moreuzima, reklamama itd.), za kopnena transportna sredstva (koja prevoze važne terete, policijska kola, specijalna vozila itd.), a i mnoge druge korisnike.
3.3 Ostali sistemi za satelitsko pozicioniranje
Konkurenciju GPS-u predstavlja ruski satelitski navigacioni sistem GLONASS i satelitski sistem Evropske svemirske agencije (ESA) pod nazivom Galileo. I drugi satelitski sistemi su u razmatranju i razvoju. Svaki satelitski sistem za navigaciju zahteva velika finansijska sredstva u koja spada i razvoj prijemnika i opreme koja će se na njemu zasnivati. Takođe povlači političke i vojne implikacije.
GLONASS (ruski: ГЛОбальная НАвигационная Спутниковая Система), doslovno: "globalni navigacijski satelitski sistem") je satelitski navigacijski sistem koji je započeo SSSR 1976. Po raspadu Sovjetskog Saveza, Rusija je preuzela projekat i on se trenutno nalazi u nadležnosti ruskih svemirskih snaga.
Sistem je zamišljen kao mreža od 24 geostacionarna satelita koji metodom trigonometrije definišu poziciju objekta na površini Zemlje i prijemniku šalju podatke o njegovoj poziciji.
GLONASS je završen tokom prve polovine devedesetih, no usled loše ekonomske situacije ubrzo posle završetka postao je gotovo nefunkcionalan. Ruska vlada je 2001. započela projekat modernizacije sistema u koji je uključena i Indijska vlada. GLONASS bi trebao da bude potpuno operativan tokom 2009.
Evropska Svemirska Agencija (ESA) (engl. European Space Agency (ESA)) je osnovana 1975. godine kao međuvladina organizacija posvećena istraživanju svemira sa trenutno 16 država članica. Sedište ESA-e je u Parizu, Francuska. ESA ima 1900 zaposlenih (ne računajući podizvovođaće i nacionalne svemirske agencije).
27

Fakultet organizacionih nauka
Galileo je globalni navigacioni satelitski sistem razvijen od strane Evropske svemirske agencije (ESA - European Space Agency). Nalazi se još u fazi testiranja, i za sada je samo jedan satelit lansiran u orbitu decembra 2005. Galileo će se sastojati od 30 satelita raspoređenih u orbiti Zemlje na visini od 23222 km, koji šalju radio signale na površinu zemlje. Galileo prijemnici na osnovu ovih radio signala mogu da odrede svoju tačnu poziciju - nadmorsku visinu, geografsku širinu i geografsku dužinu - na bilo kom mestu na planeti po svim vremenskim uslovima. Preciznost sistema meri se metrima, što je mnogo preciznije od konkurentskih sistema koji se trenutno nalaze u upotrebi: GPS-a i GLONASS-a. Galileo se nalazi pod civilnom kontrolom za razliku od ostalih sistema koji su pod nadležnošću vojske. Jedna od novih funkcija koju Galileo implementira je i mogućnost primanja signala od prijemnika sa zemlje, što je predviđeno za pozivanje službi pomoći i spasavanja.
4. Integracija GPS-a i INS-a
4.1 Osnovni principi sistema automatskog upravljanja
Klasična teorija upravljanja se zasniva na principu negativne povratne sprege.
Slika 13 Opšta šema sistema automatskog upravljanja
Svaki sistem se upravlja na osnovu informacije o odstupanju vrednosti izlaza sistema od referentne vrednosti koja se dovodi na ulaz sistema. Osnovni elementi sistema (prikazani na slici 13) su: ulaz (referentna vrednost), regulator (zakon upravljanja), dinamički sistem i pretvarač (senzor).
Referentna vrednost predstavlja veličinu koja se želi imati na izlazu sistema konvertovanu u veličinu koja je najjednostavnija za procesiranje (najčešće električne veličine struja, napon ili digitalna interpretacija ).
Regulator na osnovu greške (razlike između željene i ostvarene vrednosti) generiše pobudu za dinamički sistem.
Dinamičkim sistemom se upravlja, najčešće su to mašine, kotlovi, prevozna sredstva, projektili velikog dometa ... tj. svi uređaji čiji se parametri upravljanja menjaju u vremenu.
28

Fakultet organizacionih nauka
Pretvarači služe da se veličina sa izlaza konvertuje u pogodnu veličinu za dalje procesiranje (istu veličinu kao i referentna vrednost). Pomoću pretvarača se zatvara kolo povratne sprege.
„Za linearne sisteme se najčešće realizuju zakoni upravljanja u formi PID regulatora (proporcionalno, integralno, diferencijalno).[[2.]. Pošto se u praksi jako dobro pokazao, PID regulator se koristi i kod sistema koji nisu linearni a mogu se linerizovati (aproksimirati linearnim sistemima). Ulaz u PID regulator je funkcija greške čijim se procesiranjem generiše izlaz regulatora tj. upravljačka pobuda za sistem.
Elementi PID regulatora su proporcionalni, integralni, diferencijalni. Proporcionalno i diferencijalno dejstva poboljšavaju prelazni režim sistema dok integralno dejstvo obezbeđuje nultu grešku u stacionarnom stanju (astatizam).
Polazni kriterijum koji mora zadovoljiti svaki sistem je da bude stabilan. Ako je to zadovoljeno mora se obezbediti zadovoljavajuće ponašanje u stacionarnom stanju a tek onda se može optimizovati prelazni režim (vreme odziva, preskok, oscilacije...)
4.2 Ocena kvaliteta ponašanja sistema i kriterijuma za sintezu
Ocena kvaliteta ponašanja sistema automatskog upravljanja u krajnjoj liniji se svodi na određivanje greške između neke unapred zadate vrednosti (referentnog ulaza sistema) i stvarne vrednosti upravljane promenljive. Poznavanje ove greške u svakom trenutku dalo bi potpunu informaciju o svojstvima posmatranog sistema upravljanja.
S obzirom na raznolikost zakona promene ulaza sistema, koja se u normalnom režimu rada može pojaviti, ovakav prilaz, zasnovan na određivanju trenutnih vrednosti greške, sa gledišta praktične primene je nepodesan. Zbog toga se radije vrši procena relevantnih karakteristika sistema na bazi njegovih svojstava koji se manifestuju na pobudi sistema tipičnim ulaznim signalima. U tom slučaju se kvalitet ponašanja ili performansa sistema određuje na osnovu kriterijuma kvaliteta ponašanja ili indeksa performanse. Predlaže se više tipova indeksa performanse, a svi se oni mogu svrstati u četiri grupe.
U prvu grupu spadaju kriterijumi za ocenu tačnosti rada sistema u stacionarnom režimu. Zapravo, oni služe za određivanje signala greške u ustaljenom režimu rada sistema.
Drugoj grupi pripadaju kriterijumi koji određuju pretek stabilnosti sistema, tj. oni služe kao mera za procenu koliko se sistem nalazi daleko od granice stabilnosti.
Treća grupa kriterijuma služi za ocenu brzine dejstva sistema. Pod tim se podrazumeva brzina reagovanja sistema na pobudu različitim ulaznim signalima i poremećajima.
29

Fakultet organizacionih nauka
Dok prva grupa služi za karakterizaciju stacionarnog režima rada, kriterijumi druge i treće grupe karakterišu relevantna svojstva prelaznog režima sistema. Poslednju, četvrtu grupu kriterijuma čine integralni indeksi performanse sistema koje u sebi sveobuhvatno sadrže bitne karakteristike prelaznog režima sistema. Obično ovi kriterijumi imaju oblik integrala u kojima podintegralna funkcija ima za argument signal greške sistema.
Krajnji cilj sinteze sistema upravljanja sastoji se u izboru strukture i određivanju vrednosti podesivih parametara sistema tako da sistem dobije unapred zadate karakteristike u pogledu prelaznog i stacionarnog režima rada. Zahteva se da sistem bude dovoljno tačan, da mu brzina reagovanja na pobudu određenim ulaznim signalom bude što veća, da sistem što vernije reprodukuje na svom izlazu određeni ulazni signal, da što manje reaguje na šum ili odgovarajući tip poremećaja itd. Prema tome, prvi i neophodan korak ka postizanju cilja sinteze sistema mora biti prevođenje zadatih tehničkih zahteva na jezik brojnih vrednosti kriterijuma kvaliteta ponašanja sistema, sa kojima se dalje može matematički operisati u toku projektovanja sistema. Veličine čije brojne vrednosti daju informacije o bitnim karakteristikama sistema mogu se matematički formulisati na više načina, već prema tome kojom metodom se želi vršiti analiza ili sinteza sistema. Ako se sinteza vrši metodom frekventnog domena, tada se tehnički zahtevi prevode na jezik brojnih vrednosti parametara koji karakterisu frekventni odziv sistema, tj. kada je na njegov ulaz doveden prostoperiodični signal. S druge strane, sinteza sistema pomoću metoda u vremenskom domenu ima za pretpostavku da su tehnički zahtevi u pogledu kvaliteta ponašanja sistema izraženi u vidu brojnih vrednosti parametara koji određuju oblik odziva sistema na neki tipičan ulazni signal-najčešće signal tipa odskočne funkcije. Budući da poznavanje funkcije spregnutog prenosa od referentnog ulaza do upravljane promenljive daje mogućnost određivanja (pomoću inverzne Laplasove transformacije), odziva upravljane promenljive na dati ulazni signal, jasno je da specifikacija oblika odziva zapravo znači zadavanje lokacije polova i nula funkcije spregnutog prenosa. Stoga se jedna klasa metoda sinteze sistema automatskog upravljanja u vremenskom domenu zasniva na podešavanju položaja polova i nula ove funkcije.
4.3 Upravljanje pomoću GPS-a i INS-a
Radio-navigacijski prijemnici satelitskih navigacijskih signala mogu da se koriste u sprezi sa drugim navigacijskim sistemima. Time se mogu neutralisati nedostaci satelitskog radio-navigacijskog sistema, kao što su nedovoljan integritet sistema (dobijanje pogrešnih informacija od satelita u intervalu koji može da traje i do dva sata), degradacija performansi (koja nastaje ako prijemnik ne vidi četiri satelita u povoljnoj geometrijskoj konfiguraciji, a da bi to detektovao potrebno mu je do 42 minuta), spora degradacija sistemskih performansi.
Integracijom satelitskog radio-navigacijskog satelita sa inercijalno-navigacijskim sistemom (INS) povećava se zaštita od smetnji poboljšavanjem odnosa signal-šum, kao i nastavljanjem kontinualnog dobijanja navigacijskih podataka sa INS-a i pri gubljenju signala sa radio-navigacijskog prijemnika. Integracija ova dva sistema može da se izvede preko Kalmanovog filtra u otvorenoj petlji (na slici 14.a), pri čemu nije moguće vršiti korekciju tačnosti iNS-a, i u zatvorenoj petlji (slika 14.b).
30

Fakultet organizacionih nauka
Na Kalmanov filtar se sa GPS prijemnika dovode izmereni parametri velike tačnosti, kao što su pseudodaljina, razlika pseudodaljina i takt. Kalmanov filtar vrši estimaciju grešaka, obnavljajući vektor stanja grešaka jednom u sekundi. Procenjene greške se vode na INS i u prijemnike estimacije vremena. Procenjene vrednosti tekuće pozicije, brzine, visine i vremena dovode se na upravljački sistem letelice pri autonomnom vođenju, ili na sistem daljinskog vođenja letelica na zemlji. Ove izlazne veličine dolaze i na pomoćni prijemnik integrisanog GPS/INS sistema, odakle se u obliku estimiranih vrednosti pseudodaljine, brzine i ubrzanja, pseudodaljine koriste u GPS prijemniku za kontrolu koda generatora i koda nosećih oscilacija.
Satelitski radio-navigacijski sistemi mogu da se kombinuju sa radio-navigacijskim sistemima dalje navigacije radi otklanjanja njihovih sistematskih grešaka, koje zavise uglavnom od uslova prostiranja radio-talasa. Isto tako, zajedničkim korišćenjem ovih sistema stvara se kombinovani sistem jedinstvene mreže referentnih radio-navigacijskih tačaka, čime se proširuje radna zona postojećih stanica dalje navigacije i optimizuje njihova geometrija. Zajedničko korišćenje ovih sistema moguće je i radi kompleksne obrade merenih parametara dobijenih sa oba sistema s ciljem da se dobiju tačni navigacijski parametri. Raketa bi trebalo da se kreće unapred zadatom putanjom ali usled nepredviđenih spoljnih uticaja dolazi do odstupanja putanje od programirane. Do poremećaja dolazi zbog vetra, odnosno strujanja vazduha, ekscentriciteta potiska, tolerancija u izradi rakete… Ti poremećaji su nemerljivi i zbog toga je potrebno upravljanje. Rakete se kreću mnogo većom brzinom tako da se mora koristiti pored GPS-a i neki sistem upravljanja zasnovan na merenju inercijalnih sila. S obzirom da su poremećaji nemerljivi koristi se sistem automatskog regulisanja. Ulaz ovog sistema je unapred programirana putanja rakete. Poremećaji dovode do odstupanja rakete od zadate putanje pa je potrebno izvršiti kompenzaciju. Autopilot ima zadatak da raketu “vrati” u zadatu putanju. Ulaz autopilota je signal koji dobija od žiroskopa i akcelerometara. Izlaz je informacija izvršnom organu kada i kako da deluje na aerodinamičke upravljačke površine, koje imaju zadatak da ponište uticaj poremećaja i tako raketu dovedu do ravnotežnog položaja koji je programirana putanja.
Aerodinamičke upravljačke površine se najčešće nalaze na zadnjem delu rakete, čijim otklonom (pomeranjem) dolazi do formiranja aerodinamičke sile koja na kraku dejstva stvara aerodinamički moment koji vrši zaokretanje rakete oko centra mase i tako je dovodi u novi ugaoni položaj. Ovakav inercijalni sistem upravljanja ima lošu osobinu da u sistemu postoji akumulacija greške. Da bi se akumulacija greške otklonila rakete u sebi imaju GPS prijemnike koji u određenim vremenskim trenucima daju poziciju rakete, na taj način izbegava akumulaciju greške.
31

Fakultet organizacionih nauka
INS
Kalmanov filtar
GPS prijemnik
INS
Kalmanov filtar
GPS prijemnik
Slika 14 Integrisani INS i GPS prijemnika a) sa Kalmanovim filtrom u otvorenoj petlji b) sa Kalmanovim filtrom u zatvorenoj petlji
4.4 Osnovni koncepti inercijalne navigacije
Svaki objekat koji se slobodno kreće u svemiru ima «šest stepeni slobode» ili načina na koji se kreće. Postoje tri linearna stepena slobode (x,y,z) koji određuju poziciju i tri rotaciona stepena slobode koja određuju položaj. Ako se znaju ove šest varijable, onda se zna gde se nalazi objekat i na kojem putu je pozicioniran, što je važna stvar prilikom upravljanja. Takođe može se saznati kako se pomera u vremenu i kojom brzinom. Inercijalni sistem INS je način na koji se spoznaju ove varijable. Korišćenjem akcelerometra i žiroskopa (koji mere rotacionu brzinu) ispituje se kretanje i rotiranje rakete u svemiru. Pomoću senzora i mikrokontrolera se može izračunati pozicija i brzina.
“Inercija je sklonost tela da podrži konstantnu translatornu i rotacionu brzinu, iako je ometeno od strane sila ili obrtnog momenta, respektivno (Prvi Njutnov zakon).“[6.]Inercijalni sistem reference je referentni sistem u kome važi prvi Njutnov zakon. Inercijalni sistemi reference ne mogu biti ni rotirajući ni ubrzani.Inercijalni senzori mere stepen rotacije i ubrzanja, pri čemu su obe varijable vektorske veličine:
Žiroskopi su senzori za merenje rotacije: brzinski žiroskop koji meri ugaonu brzinu, i pozicioni žiroskop koji meri ugao rotacije.
Akcelerometri su senzori za merenje ubrzanja. Ipak, akcelerometri ne mogu da mere gravitaciono ubrzanje. Zbog toga, akcelerometri u slobodnom padu (ili u orbiti) nemaju otkriveni ulaz.
Ulazne veličine inercijalnog senzora definišu koje se vektorske komponente mere. Postoje i senzori koji mere više od jedne komponente.
32

Fakultet organizacionih nauka
Inercijalna navigacija koristi žiroskope i akcelerometre da proceni poziciju, brzinu, položaj vozila koje može biti svemirska letelica, projektil, raketa, površinski brod, podmornica ili zemaljsko vozilo. Inercijalni navigacioni sistem se sastoji iz:
Inercijalne jedinice merenja (IMU) ili inercijalne referencijalne jedinice (IRU) uključujući klaster senzora: akcelerometri (dva ili vise, ali obično tri) i žiroskope (tri ili više, ali obično tri). Ovi senzori su na visini čvrsto postavljeni, na jednostavnoj osnovi kako bi zadržali istu relativnu orijentaciju.
Navigacioni kompjuteri (jedan ili više) računaju gravitaciono ubrzanje (koje se ne računa od strane akcelerometra) i dvostruko integriraju ubrzanje kako bi utvrdili procenjenu poziciju mašine.
Doslovno, postoji na hiljade dizajna za žiroskope i akcelerometre. Nisu svi oni korišćeni za inercijalnu navigaciju. Na primer, žiroskopi se koriste za upravljanje (držanje pravca) i za stabilizaciju brodova, raketa, kamera i dvogleda itd. Senzori akcelerometra se takođe koriste za merenje gravitacije, seizmičkih signala, izravnjanje i merenje vibracije.
Žiroskopi koji se koriste kao merač položaja u inercijalnim navigacionim sistemima, oni se takođe zovu i inercijalna vrsta. Postoji mnogo tipova dizajna žiroskopa, kao što su moment impulsa, rotirajući multisenzor, laserski žiroskop, itd. Greške modela žiroskopa su primarno korišćene za dve svrhe: predviđanje performanse okarakterisane kao funkcija parametara dizajna žiroskopa i kompenzacije izlaznih grešaka.
Pozicija sa INS zahteva integraciju koja poštuje vreme ubrzanja i brzine pod uglom, izmereni šum se akumulira u dugačkim vremenskim intervalima. GPS greške se ne akumuliraju , ali u kratkim trenutcima, one su relativno veće i merenja imaju slabiju rezoluciju. INS je autonoman sistem, očekuje postavljanje zahteva, i ne traži eksternu podršku.
4.5 Integracija INS/GPS
Zaslužno komplementarnosti prirode oba sistema, integracija GPS/INS je postala široko korišćena u svrhe pozicioniranja, posebno za pokretne mapirane sisteme. Ovi integrisani sistemi se koriste za različite platforme, kao što su letelice, prizemne mašine, sateliti, itd. Nekoliko sistema su se razvila širom sveta.
Jeftin GPS prijemnik može da da kao izlaz poziciju letelice i brzinu u odnosu na zemlju. Merenja će biti ometena šumom i biće vršena sa frekvencijom od 1Hz. Takođe, GPS signal je podložan ometanju. Ipak, merenja pozicije i brzine se ne pomeraju tokom dužeg perioda vremena.
IMU (Inertial Measurement Unit), jedinica koja vrši inercijalna merenja može da da na izlazu ugaonu brzinu i ubrzanje koji mogu biti integraljeni pomoću INS-a kako bi dali poziciju, brzinu, i položaj. IMU merenja mogu biti ometana šumom, skalom faktora i rezultati variraju sa temperaturom. Integracijom IMU mera sa INS algoritmom, greška će se akumulirati, voditi ka značajnom pomeraju u poziciji i
33
Fakultet organizacionih nauka
izlaznoj brzini. Jedna prednost IMU je da može da bude odabrana pri visokim brzinama, i zbog toga je sposobna da hvata brzu dinamiku letelice.
Glavne prednosti inercijalne navigacije su: Autonoman je i ne zasniva se na eksternim pomagalima ili na vremenskim
uslovima. On je operativan u tunelima ili ispod vode kao i na bilo kojem drugom mestu.
On je inherentno odgovarajući za integrisanu navigaciju upravljanje i kontrolu mašine. Inercijalna jedinica meri izvore varijabli koje treba da budu kontrolisane (npr pozicija, brzina i ubrzanje).
Imun je na zastoj. Ne prima detektovanja emitovana radijacijom i ne zahteva eksternu antenu koja može da se detektuje od strane radara.
Nedostaci INS: Standardna greska se povećava tokom vremena Veličina i težina INS sistema se smanjuje razvojem novih generacija
uređaja. Raniji INS sistemi su bili teški od desetina do stotina kilograma. Kasnijie, integracijom sa GPS-om je bio težak nekoliko kilograma. Razvitak mikro elektromehaničkih senzora su određeni za sisteme veličine izražene u gramima.
Veliki troškovi: Troškovi akvizicije koji mogu biti veći nego GPS prijemnici. Troškovi izvođenja, uključujući ljudske akcije i vreme koje je potrebno
za inicijalzaciju pozicije i položaja. Vreme koje je potrebno za inicijalizaciju INS položaja sa podešavanjem žirokompasa se meri minutima. Vreme podešavanja GPS-a se meri u sekundama.
Troškovi održavanja. Elektromehanički avijacioni sistemi imaju tendenciju da stvore visoki nivo greške i troškove popravke nego potpuni elektronski avionski sistemi.
Prednosti i nedostaci GPS i INS sistema se dopunjavaju, i najbolja procena pozicije letelice, brzine i položaja mogu biti određeni kombinovanjem GPS i INS merenja koristeći neku od GPS/INS integracije.
Karakteristike INS-a su: velika tačnost određivanja pozicije brzine u kratkom vremenskom
intervalu određivanje prave informacije položaja tačnost se smanjuje tokom vremena visoka tačnost merenja izlaznih veličina autonomnost ne zavisi od spoljašnjeg signala osetljiv na gravitaciju
Karakteristike DGPS su: velika preciznost položaja i brzine u dugom vremenskom intervalu u informaciji o položaju postoji veliki šum uniformna raspodela greške nezavisne u vremenu nisko odmeravanje izlaznih brzina nije autonoman
34

Fakultet organizacionih nauka
zavisi od signala i može da ispadne iz sinhronizacije nije osetljiv na gravitaciju
Integracijom ova dva načina sistema navigacije se ublažavaju nedostaci svakog pojedinačnog a ističu prednosti.
Koristi od INS/DGPS integracije su: precizno određivanje položaja i tačno određivanje brzine visoka ocena podataka navigacioni izlazi tokom GPS izlaza određivanje kružne greške i korekcija greške određivanje vektora gravitacije
4.5.1 Model integracije GPS i INS
Tipovi integracije se mogu kategorisati prema proširenju u kome podaci iz svake komponente se dodaju u drugim funkcijama. Prvo je spajanje sistema i zavisnost od mehanizama ili arhitekture sistema. Druga kategorizacija parametara je metod kombinovanja ili fuzija (spajanje ili rastvaranje) podataka kako bi se odredila dobijena pozicija koordinata.
Mehanizacija sistema je generalno razumljiva na dva načina, čvsto spajanje i labavo spajanje; nijedno spajanje ne implicira povratnu spregu podataka iz jednog instrumenta ka drugom u svrhu dokazivanja svojih performansi. Čvrsto povezani senzori se tretiraju kao da pripadaju jedinstvenom sistemu i proizvode komplementarne tipove podataka. Ti dobijeni podaci se proizvode simultano i optimalno, i koriste se da ojačaju funkciju individualnih komponenti senzora tamo gde je to moguće. U labavom spajanju, obrađeni podaci iz jednog instrumenta su povezani spregom kako bi dokazali korisnost drugih performansi, ali svaki instrument i dalje ima njegov sopstveni algoritam za obradu podataka.
Povratna sprega INS-a ka GPS prijemnicima omogućava tačnost predviđanja GPS pseudodaljine i faze u sledećoj epohi koje dozvoljavaju manju pojasnu širinu prijemnika u visoko dinamičnom okruženju sa posledicom povećanja tačnosti. Obrnuto, inercijalna navigacija može koristiti procene Kalmanovog filtra na osnovu GPS merenja za ažuriranje greške akumulirane tokom vremena u inercijalnim senzorima.
Postoje dve osnovne kategorije algoritama za procesiranje a to su centralizovani i decentralizovani. U centralizovanom procesiranju, izvorni senzori podataka su kombinovani tako da optimalno koriste centralni procesor kako bi dobili poziciju. Ova vrsta procesiranja je obično povezana sa čvrsto integrisanim sistemom. Decentralizovano procesiranje je sekvencijalno približavanje procesiranju gde procesori individualnih sistema omogućavaju soluciju koja se potom kombinuje sa različitim stepenom optimalnosti od strane glavnog procesora. U osnovi, ako statistika propagacije greške je tačno optimalna decentralizovani i centralizovani metodi mogu da dobiju identične solucije. U nekim slučajevima, kao što je detekcija gubitka sistema, izolacija, tačnost i relativno jednostavno izračunavanje čini decentralizovan pristup mnogo omiljenijim. Centralizovani pristup omogućava
35

Fakultet organizacionih nauka
najbolje performanse u navigacionim odlukama kao snažan model Kalmanovog filtra.
4.6 Proširen Kalmanov filter
EKF (Extended Kalman Filter) je filter koji prihvata nelinearne dinamike, s toga, kao dodatak INS algoritmu je neophodan. Navigacioni filter je direktno sposoban da donose izlaze pozicije, brzine i položaja letelice. To takođe može da da kao izlaz izfiltriranu procenu inercijalnih merenja za visoke performanse mašine prilikom upravljanja aplikacijama.
Na slici 15 je prikazan blok dijagram integrisanog GPS i INS sistema za navigaciju. Indirektna povratna sprega je realizovana preko Kalmanovog filtra, gde se greška stanja procenjuje indirektno. Na osnovu merenja žiroskopa i akcelerometra je dobijena referentna trajektorija. Procenjena stanja su korišćena da se u proširenom Kalmanovom filtru koriguje referentna trajektorija. Postoje dve varijante navigacionih filtara a to su apsolutni navigacioni filter i relativni navigacioni filter.
Slika 15 Blok dijagram GPS/INS koji koristi proširen Kalmanov filter
4.7 UKF bazirani na INS/GPS navigacionim sistemima
Visoke performanse kupovne opreme i visoka cena vojnog sistema, danas ima sve veću tražnju za preciznošću i pouzdanošću navigacionih performansi. Od navigacionog sistema se traži da dostigne, preciznu navigacionu informaciju. Sistem ne bi trebalo da bude ograničen od strane vremenskih uslova i trebalo bi da radi preko celog dana. Sistem ne mora da se zasniva na eksternim informacijama. Stroga nezavisnost i stroga tolerancija greške i redudanse je takođe cilj istraživanja sistema. Sa dostignućima modernih tehnologija, danas postoji nova navigaciona oprema. Mnogi istraživači su fokusirali svoju pažnju na to
36

Fakultet organizacionih nauka
od kada je kombinacija GPS I INS komplementarna i veoma dobro povezana, to je postala ``zlatna kombinacija``. Ovo ima veliku primenu u istraživačkim radovima i igra važnu ulogu u vojsci i građanstvu. Ova vrsta kombinacije je bazirana na informaciono fuzionoj tehnologiji. U integrisanoj navigaciji koriste se multisenzori informaciono fuzionih sistema, Kalman Filter je najuspešniji informaciono fuzioni raspoloživi metod. Adaptivna tehnologija Kalmanovog filtra može da unapredi robusnost (jačinu) sistema na kraju.
Tradicionalni integrisani navigacioni filter usvaja Extended Kalman Fiter (EKF) algoritam. Teško je ustanoviti grešku korišćenjem Extended Kalman Filter algoritma. Potrebno je računanje Jakobijanove matrice i performanse filtra su nestabilne ako je postavljena parcijalna linearizacija nije zadovoljena. U cilju otklanjanja ovih nedostataka, naučnici na Oksfordu su razvili UKF (Unsencted Kalman Filter) algoritam. UKF je vrsta filter metode koja se primenjuje direktno na nelinearne sisteme. Razlika izmedju Extended Kalman Filter-a i UKF-a je da UKF ne mora da koristi Jakobijanovu matricu za linearizaciju prostora stanja i izmeri reprezentativne modele. Ovo izbegava sistemski model greške proizveden prekidnom funkcija visokog reda i može biti precizan kao i funkcije drugog reda čak i više od funkcija drugog reda. Zbog toga to može da doprinese navigacionoj tačnosti integracionih navigacionih sistema.
UKF predstavlja takozvani robusnu transformaciju. U procesu rekurzije, postoji više podesivih parametara u poređenju sa EKF-om. Zbog toga je jednostavno za ispravljanje grešaka. Sličnost između UKF i EKF je da oba algoritma sve prenose kroz sekvencijalnu procenu do srednje vrednosti stanja i kovarijanse, ovo ponavljanje koraka strukturnog toka procesa takođe se sastoji od rasporeda srednje vrednosti i kovarijanse i ažuriranja merenja.
U Kalmanovom filtrirajućem procesu, kada sistem dođe do nepromenjenog stanja, glavna matrica sistema ce doći do minimalne vrednosti. Ipak rezidual sistema će porasti brzo kada se sistem slomi, glavna matrica sistema je mala i ne može da reguliše stanje brzo. Zbog toga Kalmanov filter nema bržu mogućnost traženja kada u sistemu nastupi iznenadna greška. Glavni razlog problema je što glavna matrica sitema ne može da podesi na vreme skladnost sa efektom filtriranja i rezidualnom greškom sistema. S toga, procenjena greška filtra ne može da prati stanje sistema precizno. Uz poštovanje implementacije algoritma, UKF se izvršava ubedljivo bolje nego tradicionalni EKF.
Bez obzira na to, neparcijano uzorkovanje dovodi do veće procenjene greške kada je sistem visokih dimenzija. Takođe UKF ima isti problem kao EKF u praćenju. Zbog toga, u aplikacijama praćenja, teoretske analize UKF performansi filtriranja, neophodno je potvrditi u simulacijama i eksperimentima.
4.7.1 UKF algoritam
UKF algoritam je vrsta nove nelinearne, filtrirajuće metode predložena od strane Juliear u Uhlman 1995. godine. Za linearne sisteme, UKF ima iste performanse kao i EKF. Ali, UKF ima bolje performanse za nelinearne sisteme. Ne zahteva
37

Fakultet organizacionih nauka
linearizaciju jednačina prostora stanja i jednačine Jakobijanove matrice. S tim, grešaka funkcija višeg reda, koje se produkuje u procesu linearizacie, su smanjene. Glavna ideja algoritma se predstavlja na ovaj način. Prvo, se izabere grupa tačaka uzoraka koji mogu da prikažu srednju vrednost i varijansu prostora stanja. Zatim transformacija ovih uzorkovanih tačaka preko nelinarizacije. Tačke uzorkovanja rasipanja su bliske srednjoj vrednosti i varijansi sa preko dva reda preciznosti nakon transformacije.
Pre nego sto sistem može da krene pogrešnim putem, Kalman filter se pokreće stalno i njegova glavna matrica je veoma mala. Ako sistem krene pogrešnim putem onda filter ne može da prati stanje efektivno. Čak šta više, kada nesigurnost modela je ozbiljna, performanse sistema će postati loše i čak mogu da divergiraju. Zbog toga, je bolje koristiti jaki Kalman filter kako bi utvrdili mogućnost praćenja filtra.
Jaki Kalmanov filter je otkriven od strane Zhou Dong-hua 1991. godine i ranije je implementiran u algoritmu. U poređenju sa jednostavnim filtrom, jaki Kalmanov filtar ima dosta prednosti. Ima jaku robusnost za nepovezane parametre modela i slabu osetljivost na šum i inicijalne vrednosti statičnih karakteristika. Čak šta više, ima veoma jaku mogućnost praćenja do stanja katastrofe i može da zadrži ovu mogućnost dok filter ide u stabilno stanje.
5. Primeri korišćenja GPS-a i INS-a
5.1 Primeri sistema upravljanja mobilnim objektom preko GPS-a
Upravljanje i navigacija vozilom bez posade su važni problemi u upravljanju autonomnih robota. Ako robot treba da donese odluku, da izvede posao koji se očekuje od njega, prvo što treba da zna je u kojem se stanju radne okoline nalazi.
Na primer, ljudi koriste svoje oči i mozak za povratnu informaciju iz okoline u kojoj se nalaze, kako bi odlučili šta je sledeće što će uraditi. U zavisnosti od zadataka oni ce izvršiti ono što se očekuje od njih. Nervi su odgovorni za opažanje i stvaranje slike na mrežnjači oka i onda šalju informacije mozgu za procesiranje. Nakon toga, mozak procenjuje kako će se ponašati u takvoj situaciji, i šalje komande preko nerva određenom delu tela.
Takođe, ako se od robota, bilo pokretnog ili ne, zahteva da dostigne misiju, on mora da ima povratnu spregu iz stvarnosti. Za ovu svrhu, roboti koriste neka sredstva za opažanje kako bi bili svesni trenutne situacije, oni mogu da uključe silu, radijaciju, temperaturu, kosinu (nagib), ubrzanje, brzinu ili poziciju. Ako se u sistemu postavlja pitanje kojim se treba izboriti sa navigacionim zahtevima, ovi povratni podaci trebalo bi da uključe poziciju motora, brzinu i ubrzanje. Ukoliko je potrebno odrediti tačnu poziciju robota, prvo se treba izmeriti u stvarnom vremenu a potom nekim narednim procesima obrađivati takve podatke kako bi se izbegli nedostaci (greške) prilikom merenja, koji uvek postoje u izmerenim informacijama. Nakon ovoga, robotu se može reći sigurna procena o trenutnoj poziciji koji se mogu koristiti u svrhe navigacije.
38
Fakultet organizacionih nauka
Kalmanov filtar je alat koji se koristi za izdvajanje veličina koje se procenjuju. Filter se prvo razvio i uspešno primenjivao u svemirskoj navigaciji. On radi dobro u praksi i daje optimalne zaključke bilo kojih filtrirajućih problema vodeći se prema kriterijumu krajnjeg cilja. U mnogim ugrađenim kontrolnim sistemima i posebno u sistemima automatskog upravljanja koji se aproksimiraju kao linearni sistemi, Klamanov filtar je široko korišćen zbog njegove optimalne prirode i relativno lakog koncepta. Ipak, sve dok osnovne ideje Kalmanovog filtriranja mogu raditi u realnom vremenu, sistemi koji imaju više od tri stanja zahtevaju veliki budžet za pokušaje izračunavanja jer su jednačine filtra predstavljene matričnom algebrom.
5.1.1 Pokretljivost i nezavisonost
Mobilnost robota pokazuje koliko slobodno oni mogu da se kreću okolo u cilju izvođenja svojih zadataka. Ukoliko su pokretni roboti upotpunosti vođeni od strane udaljenog kontrolora, oni su zavisni jer izvršavanje komandi koje se primaju od čoveka je jedino što se može očekivati od ovakvog robota. Polu-autonomni robot je bilo koji robot koji može da se kreće kroz svoje okruženje ili može da bude upravljan od strane ljudskog kontrolora. U zavisnosti od opasnosti ili hitnosti zadataka, roboti mogu da imaju potpunu komandu ili da je prepuste ljudskom biću. U slučaju potpune autonomije, nema eksternih vođenja ili interakcije sa čovekom koja je potrebna potpuno autonomnim pokretnim robotima, oko spoznaje njihovog okruženja i njihovog kretanja, inteligentne sposobnosti i akcije.
5.1.2 Kalman filtar
R. E. Kalman (1960) je pronašao drugačiji način formulisanja filtrirajućih problema koristeći metode svemirskog stanja. “Kalmanove tehnologije su bile viđene kao praktični zaključci većine problema koji su prvenstveno bile neuspešno razmatrane sa Wiener-ovim metodama.»[3] Posebno inženjeri u polju navigacije su spoznali prednosti i praktične koristi Kalmanovog filtra.
Teoretski, Kalmanov filter je optimalni proračun za linearno kvadratne probleme, koji problem proračuna za trenutno stanje linearnih dinamičkih sistema koji su remećeni šumom, koristeći merenja koja su linearno povezana sa stanjem, ali poremećena zbog šuma. Očigledno se može videti da postoje dva izvora šuma koji postoje u linearnim dinamičkim sistemima. Oni se nazivaju šum procesa i šum nastao zbog merenja i u većini aplikacija je pretpostavljeno da su nekorelisani. Rezultujući procenilac je statistički optimalan sa poštovanjem bilo koje kvadratne funkcije procenjene greškom.Kalman je dosta korišćen u navigacijskim aplikacijama još od 1960. godine, tehnika je i dalje popularna zahvaljujući naprednim doprinosima autonomno vođenim sistemima. Specijalno, napredak u satelitskim navigacionim sistemima, praktično GPS-u, je učinio Kalmanov filtar podesnim alatom za primenu u navigacijskim problemima.Slede razlozi:
Dinamike su obično linearne (ili mogu biti linearizovane sa dovoljnom tačnošću)
Informacije merenja mogu da se selektuju iz višestrukih navigacionih izvora
39
Fakultet organizacionih nauka
Merenja moraju da se procesiraju uglavnom u realnom vremenu zbog toga mora biti prisutno efikasno procesiranje podataka
Algoritmi za obradu podataka moraju biti optimalni (ili barem približno optimalni) i moraju da vode ka odlučenom kriterijumu.
Ovaj deo objašnjava GPS i navigaciju pokretnog robota, prenosnog sredstva bez posade i određivanje geografskih koordinata površine. Tehnike Kalmanovog filtriranja korišćene su za dobijanje ispravnih mera iz GPS primljenih podataka u kojima postoji šum, i rezultata koji pokazuju procenu tačnosti uzeći u obzir šum i date diferencijalno korektovane mere u zavisnosti od eksperimentalnih rezultata. Cilj koji se želi postići je napraviti mapu površine po kojoj se kreće mašina i proceniti koordinate mape i geografske dužine i geografske širine na najoptimalniji način (ovo robote čini potpuno-automatizovanim).
Kao što se zna, uz pomoć GPS uređaja može se odrediti tačna visina, širina i dužina objekta. Ipak, informacije pozicije, koje su obezbeđene od strane komercijalne GPS jedinice su izložene šumovima koji uzrokuju greške u merenjima. Postoje mnogi izvori grešaka koji degradiraju tačnost pozicije izračunate od strane GPS prijemnika. Naredna tabela pokazuje izvore grešaka i njihove vrednosti.
Izvor EfekatJonosferski uticaj ± 5 metara
Greške prolaznih objekata ± 2.5 metra
Greške u satu satelita ± 2 metraPoremećaj odbijanja signala ± 1 metarTopografski efekti ± 0.5 metaraNumeričke greške ± 1 metar i manje
Tabela 1 - Izvori grešaka i efekat njohovog uticaja u metrima
He, Wang, Phain & Yu su 2002.godine razmatrali aplikacije GPS-a bazirane na navigacionim sistemima na različitim poljima. Od SA (selective availability error) degradacija je bila ugašena od strane U.S. Government u junu 2000. godine, standardne GPS mere tačnosti su porasle na 30 metara. Kao rezultat, ovaj dokaz je promenio građanske aplikacije GPS-a, primarno za uopštene zadatke navigacije, čak i pomoć svakodnevnog (jeftinog) GPS prijemnika. Ipak, uprkos poništavanju SA degradacije, nivo greške je još uvek oko 8-10 metara, koji čini posao preciznosti navigacije mašine skoro nemogućim. Zbog toga, u mnogim alikacijama, kao dopuna korišćenju GPS-a, DGPS servis je korišćen i/ili inercionalni navigacioni sistem (INS) je povezan sa postojećom navigacionom aparaturom kako bi se prevazišle ove nepogodnosti. Dakle, ispravan domet i brzina merenja mogu biti dostignute do nekog stepena.
Ponomaryov, Pogrebnyak, Rivera & Garcia 2000.godine su koristili samo DGPS za dokaz tačnosti u GPS poziciji i brzini, i onda su prezentovali modifikovan Kalmanov filter za DGPS, kako bi poboljšali procenu pozicije i brzine. Njihovi rezultati istraživanja su pokazali da sa takvom alikacijom njihove pozicione greške su oko 5 metara.
40

Fakultet organizacionih nauka
Ovaj deo objašnjava GPS i navigaciju pokretnog robota, prenosnog sredstva bez posade. GPS je korišćen u implementaciji sa dva obična nisko budžetna GPS prijemnika, za upravljanje mašinom. Kao DGPS tehnologija, jedan od ovih nisko budžetnih prijemnika je stacioniran na geografskoj tački, čija pozicija koordinata bila poznata ranije. Ovaj prijemnik je korišćen kao referentna stanica i kompjuter stalno računa ovu referentnu poziciju greške GPS stanice, i onda se koristi da se isprave pozicije podataka pokretnog prijemnika. S toga, ovaj neprirodan DGPS model se ne prihvata kao perfektan ili bez šuma, zato što postoji greška u vrednostima visine i širine, oko 4-5 metara. Koristi se kao dodatak tehnike Kalmanovog filtriranja za predviđanje optimalnog stanja mašine iz GPS prijemnika podataka, koji je generisan šumom.
5.1.3 Algoritam DGPS
Diferencijalni GPS (DGPS) metod je korišćen za povećane tačnosti merenja GPS sistema. Koristeći tehniku, tačnost GPS podataka može porasti sa 15-20 metara na 10-20 centimetara. Ipak, DGPS prijemnici su dosta skuplji kada ih poredimo sa svakidašnjim GPS prijemnicima.
DGPS je dualni GPS metod koji omogućava korišćenje fiksne GPS stanice i mobilne GPS stanice. Greške istaknute u tabeli 1 su relevantne za sve prijemnike u lokalnoj oblasti i DGPS koncept upotrebljava ovaj alat koristeći GPS stanice već pomenute. Ove osnovne stanice su smeštene na precizno istraženo mesto i deluju kao referentne tačke za kretajući GPS. On prima signal sa satelita kao i svaki drugi GPS, i kada je spoznata informacija pozicije on određuje domet greške tako što diferencira izračunate i odmerene domete. Nakon ovoga se greške šalju drugim prijemnicima na površini kao radio signali tako da oni mogu da isprave njihova merenja i dobiju bolju procenu pozicije. Kako je DGPS sistem za merenje skup (korisnik treba da plati za DGPS signale), algoritamski metod koristi dva nisko budžetna GPS prijemnika kao DGPS prijemnik (slika 16).
Slika 16 DGPS referencijalna stanica
Jedan od ovih prijemnika je smešten na lokaciji čije koordinate su precizno određene, i prihvaćen je kao referentna stanica. Drugi prijemnik je prihvaćen kao pokretni GPS, izvan bazne stanice, ali u okolini lokalne površine 200 metara. Greške GPS satelita su za bilo koji prijemnik koji je u radijusu od 200 kilometara iste, tako da oni koriste iste satelite.
Referencijalni GPS prijemnik prima signale sa satelita i šalje informacije o pozicijama kompjuteru, gde devijacija stvarne širine i visine se računa neprekidno i
41

Fakultet organizacionih nauka
online. Kompjuter onda koristi devijaciju stvarne pozicije kako bi ispravio druge signale koji uključuju informaciju pozicije pokretnog prijemnika i to se opet postavlja od strane RF komunikacione antene smeštene u stanici mobilnog GPS-a. Ovaj proces se obavlja svake sekunde. Dakle, kompjuter koristi greške referentne stanice da ispravi poziciju pokretnog prijemnika, to nam pokazuje DGPS algoritam.
Korišćenje nove, algoritamske diferencijalne GPS tehnike, postiže se navigacija mašine ka željenoj širini i visini koje su sračunate od same mašine (kao rezultat potpune autonomije).
Ovaj DGPS model nije prihvaćen kao perfektan i bez šuma zato što još uvek pravi grešku oko 3-4 metara. Tehnike Kalmanovog filtra su korišćene da odrede optimalno stanje mašine iz GPS prijemljenika podataka koji generiše šum. Sa ovim tehnikama, su omogućena dostignuće u tačnosti GPS podataka koji imaju šum. Slika 17 pokazuje osnovni algoritma DGPS metode.
Slika 17 Osnovni algoritam DGPS
5.1.4 Navigacija mašine
Kontrolni algoritam mašine se sastoji iz: Pokretljivosti: Mašina se pomera i šalje svoju poziciju, geografsku širinu i
visinu, kompjuteru preko RF modema. Podatke mašina meri svake sekunde i šalje. Ovi podaci su izmereni u kompjuteru koristeći specifikacije greške referencijalne GPS stanice.
Kalmanovo ažuriranje: Ažuriranje diferencijalno izmerenih pozicija se bazira na algoritmu Kalmanovog filtra. U kontrolnim aplikacijama, ove izfiltrirane pozicije se koriste za navigaciju mašine.
Kontrolna akcija: Svakih 5 sekundi, pozicija mašine se upoređuje sa željenom pozicijom i njenom izračunatom devijacijom željenog kretanja. S tim preko jednostavnog proporcionalnog kontrolora mašina se vozi do željene pozicije (željene geografske dužine i širine).
5.1.5 Procena putanje
42

Fakultet organizacionih nauka
Jedna od dve GPS jedinice je smeštena u tački reference, slika 17, i korišćena za određivanje greške, dok je druga locirana na mobilnoj mašini. Kao što je pomenuto kod algoritma DGPS, može se predpostaviti da dve GPS antene primaju signale sa istih satelita, i podatak se distribuira sa istom vrstom šuma. Zbog toga, DGPS algoritam je korišćen za određivanje pozicije mašine, koji će kasnije biti korišćeni u Klamanovom filtru u cilju smanjenja greške u centimetrima uz poštovanje stvarnih koordinata zemlje. Mašina je testirana na parking zemljištu u cilju navigacije blizu referentne tačke (udaljenost do referentne tačke je najviše 40 metara), i ometene su sa istim šumom.
Od mašine se zahteva da stigne do prethodno određene lokacije. Pozicija ove prethodno određene lokacije je označena sa GPS vrednostima (širina i dužina). Devijacija mašine od željene tačke i neophodnog ugla za koji treba da se okrene, su izračunati od strane kompjutera i rezultujuće komande se transmituju u cilju postizanja pozicije. Jednostavni P (proporcionalni) konroler je izvršen u svrhu rotiranja i vožnje vozila od jedne tačke do druge. Svakih pet sekundi, kontroler saznaje razliku između željenih koordinata i tekućih koordinata i onda određuje svoju akciju. Za većinu aplikacija, performanse mašine su zadovoljavajuće tako da u najgorem slučaju konačna greška je 2-3 metra. Mora se ugraditi da algoritam prestaje sa radom kada je greška manja od 1 metar; s tim greška od jednog metra uvek postoji u konačnom delu kontrolne akcije. Možemo da pretpostavimo da ako konačna greška je 2 metra, onda GPS greške merenja se mogu prihvatiti da su oko 1 metar.
Za mašinu se pretpostavlja da je uspešna kada njena dostignuća željene geografske širine i visine su manja od 1 metra. To je zadovoljeno kada se zna da su izmerene koordinate ustvari zemljine koordinate, i nakon njihove diferencijalne korekcije rezidualna greška je oko 1-2 metra. Kontrolni algoritam je programiran u Visual Basic-u 6.0, i kontrolna akcija je povezana sa mašinom preko RF komunikacije. Ista antena se koristi za slanje mobilnih signala GPS prijemnika od mašine do kompjutera, sa slanjem podatka od 4800 bita u sekundi. Slika 18 pokazuje šematsko upravljanje mašine.
Mašina putuje kroz određenu trajektoriju sa konstantnom brzinom i vrše se neprekidna merenja sa GPS jedinicom na njihovoj ploči, zatim transmituje ovu informaciju ka kompjuteru pomoću RF komunikacije. Kompjuter pokreće izolovan Kalmanov filter algoritam u cilju da se dobije tačna specifikacija širine i visine proputovane površine. Korekcije algoritma DGPS su takođe korišćene, kao odstupanja u GPS signalima kada oni nisu tačni.
Mašina se kreće kroz poznatu trajektoriju čija visina i širina nisu poznate. Kompjuter pokreće Klamanov filter algoritam da izračuna tačnu odrednicu konture kojom putuje mašina.
43

Fakultet organizacionih nauka
Slika 18 Generalna radna filozofija mašine navigacije i mapping algoritam
5.1.6 Rezultati primene
Rezultati se mogu videti kroz sledeće figure:
Slika 19 Netačna GPS merenja
Slika 20 Diferencijalno korigovane GPS mere
44

Fakultet organizacionih nauka
Slika 19 pokazuje GPS merenja zatvorenog polja koji su dati sa čvrsto glatkim linijama. Kako je pokazano u tabeli 1 sa izvorima grešaka, postoje uvek odstupanja u signalima, koja su prevaziđena algoritmom DGPS metodom. Nakon ovih diferencijalnih korekcija, odmerena trajektorija mašine postaje kao tačkasta linija na slici 20. Ova trajektorija je pokazana obuhvatnije na slici 21 ispod.
Slika 21 Diferencijalno korigovana trajektorija mašine
Dobit Kalmanovog filtriranja, kao optimalna procena ove trajektorije, naznačena je crticama na slici 22 sto je približno originalnoj putanji.
Slika 22 Procena Kalmanovog filtra diferentno ispravljenih GPS mera
Konvergencija greške Kalmanovog filtra procenjuje se u vremenu i prikazana je na slici 23.
45

Fakultet organizacionih nauka
Slika 23 Smanjenje procene greške
Slika 24 demonstrira upravljanje mašinom u koordinatama geografske širine. Iteracija je trajala 133 sekunde i na kraju kontrolne akcije, vozilo je 0.9331 metara udaljeno od željene geografske dužine. Oko četrdeset pete i devedesete sekunde mašina je dospela do objekta u širinskoj razdaljini; ipak kontrolni algoritam ne određuje dolično (kako treba) da je mašina otišla daleko od svojih željenih objekata u visinskoj razlici. Obe koordinate; nazvane širina i dužina, trebalo bi da osiguraju uslov da moraju biti manje od 1 m. Slika 30 pokazuje realizaciju filozofije upravljanja po kriterijumu dužine.
Rezultati Kalmanovog filtra
Vreme uzorkovanjaSlika 24 Koordinata širine željene lokacije i performanse filtra
Slika 25 pokazuje da na kraju kontrolnog algoritma (nakon 133 sekundi) dužinsko rastojanje do željene pozicije je izračunato kao 0.4019 metara. Zajedno i dužina i širina obezbeđuju uslov da moraju biti najmanje 1 metar udaljene od zahtevane lokacije na kraju 133 sekunde. Ovo trajanje i konačna razdaljina variraju od aplikacije do aplikacije; šta više algoritam uvek uspešno funkcioniše. Bliže istraživanje slika 25 i 26 pokazuje da puna linija predstavlja neispravne GPS podatke, linija sastavljena od crtica, su diferencijalno korigovani GPS podaci i
46

Fakultet organizacionih nauka
isprekidana (tačkasta) linija je izlaz iz Kalmanovog filtra trajektorije koja je sastavljena od crtica.
Rezultati Kalmanovog filtra
Vreme uzorkovanjaSlika 25 Koordinara dužine željene lokacije i performanse filtra
Slika 26 pokazuje Euklidovo rastojanje od mašine do željene lokacije tokom kontrolne akcije. Tačkasta linija pokazuje razdaljinu koja je sračunata prema neispravim vrednostima iz GPS, dok puna linija pokazuje distancu prema isfiltriranim vrednostima signala. Efikasnost DGPS-a i optimalnost filtriranja je očigledna. Neispravni podaci daju konačnu distancu od 11.049 metara; ipak, korektovani (ispravljeni) i isfiltrirani podaci dovode do rezultata od 1.0306 metara.
Euklidovo rastojanje od željene pozicije
Broj iteracijaSlika 26 Konačna razdaljina od željene tačke
47

Fakultet organizacionih nauka
5.1.7 Zaključak primene
Ovde je korišćen razvijen proces merenja koji koristi dve nisko budžetne GPS jedinice. Operacije Diferencijalnog GPS metoda su realizovane preko ova dva obična GPS prijemnika kroz algoritam. Jedna od ovih jedinica je smeštena u tačno izmerenoj geografskoj poziciji i to je uzeto kao referencijalna stanica za drugu pokretnu jedinicu. Dokazano je da primaju signale sa istih satelita, dakle usvajaju iste mere karakteristika šuma.
Čak šta više, procena je predložena za lokalizaciju robot mašine, koja se sastoji od posebnog Kalmanovog filtra i diferencijalno koriguje GPS podatke kao vektor posmatranja. Eksperimentom je pokazano da procenjivanjem konstantne trajektorije mašine, greška filtra kao izlaz konvergira vrlo brzo ka nivou 10-15 centimetara nakon prvih 25 sekundi; ipak, nakon 50 sekundi značajnost greške postaje oko 5-7 centimetara, zajedno u širini i visini koordinata. Ova greška izvodi se sa poštovanjem realnih Zemljinih koordinata, i ova predstava može se jasno videti na slici 23.
Rezultati korišćenja proporcionalnog kontrolora pokazuju da kada mašina pokušava do dođe do željene lokacije greška može biti najviše 1.5m uz poštovanje realnih zemljinih koordinata. Eksperiment je pokazao da procenjivanjem konstantnih koordinata lokacije, srednja greška ishoda filtra iznosi oko 10-20cm.
Eksperimenti dokazuju da integracija GPS tehnologije sa INS metodom može dovesti do korisnih rezultata u istraživanju u oblasti navigacije automatskih robota, zbog njihovih mogućnosti i komplementarne prirode. GPS signali mogu biti nepouzdani i/ili štetni zbog raznih razloga. Prevazilaženje ovih ograničenja, žiroskopi i akcelerometri mogu poslužiti kao pomoć GPS metodi da odredi poziciju mašine.
5.2 Program OziExplorer
Ozi Explorer je program koji nam omogućava da vidimo putanju po kojoj se kretao čovek koji je nosio GPS urađaj. Takođe, može se odrediti trenutna pozicija čoveka. Ovaj program radi samo u prisustvu GPS uređaja. Postoji grafička interpretacija puta, koja pomaže da se preglednije posmatra putanja kretanja.
5.2.1 Ućitavanje mape u program
Mapa u OziExplorer-u je slika koja je georeferencirana tako da OziExplorer može da koristi bilo koju poziciju piksela na mapi kako bi odredio pravu geografsku poziciju. Kada se ubaci mapa u OziExplorer, fajl mape sa ekstenzijom .map se kreira i sadrži podešene informacije i link ka mapi kako bi odredio pravu geografsku poziciju.
Map fajl sadrži najmanje ove informacije: Link ka slici mape
48

Fakultet organizacionih nauka
Datum mape Razmeru koja se koristi u mapi Podešene (geo referentne) informacije za mapu
Kada se želi koristiti Map u OziExplorer-u mora se prvo otvoriti Map fajl koji ima .map ekstenziju (na primer Beograd.map). OziExplorer onda čita iz Map fajla:
Ime mape iz .map fajla i otvara sliku. Pročita datum na mapi i projekciju mape. Pročita podešene informacije iz .map fajla i računa neophodne faktore za
konvertovanje koordinate izražene u pikselima mape u geografske koordinate.
Drugi metod kreiranja mape je importovanje mapa. Importovanjem ovih mapa čitaju se podešene informacije iz fajlova mapa i kreira OziExplorer Map fajl (sa ekstenzijom .map).
Otvaranje prezentacije mape
Pritiskom na Load dugme iz Tool Bar-a, izabere se Load Map from File iz Menu Option opcije. Treba izabrati bojanlog.map fajl iz otvorenog dijaloga fajla. Mapa bi trebalo da se prikaže nakon malo zakašnjenja dok se ne očita bitska mapa.
Podešavanje mape
Ukoliko se startuje sa mapom koja je već podešena, mapa se otvara selektovanjem Check Calibration of Map opcijom iz File Menu. Ako se startuje sa novom slikom mape i kreiraju podešavanja onda treba izabrati Load and Celibrate Map Image opciju iz File Menu. Pre nego što specificiraju podešene tačke na mapi postoje polja koja moraju biti uneta ili selektovana.
Map Name – U ovo polje se upisuje naziv mape, bilo koje ime je dozvoljeno. Ovo ime će biti prikazano na ekranu.
Map Datum – Ovo je veoma važan podatak ako se želi da mapa bude tačna. Mapa ili originalni dokument mape koji je skeniran iz nje trebalo bi da ima datum koji je oštampan negde, taj datum treba da se podesi u padajućem meniju. Ako je problem naći datum onda se može koristitii WGS84 datum, datum se može dodati i kasnije ako je potreban.
Mag Var – Unošenje Magnetic Variation je opciono, OziExplorer će izračunati varijaciju ukoliko se ne unese.
Map projection – Map projection može biti prava projekcija ili može biti Grid Coordinate System. Osnovno je da se Map projection (ili Grid System) unese tačno. Projekcija mape ili koordinatna mreža (grid system) mogu se odštampati na mapi ili na originalnom dokumentu mape iz koje je skenirana. OziExplorer podržava više od običnih projekcija mape. Ako se ne zna projekcija mape, za mape male površine podešavanje dužina/širina mogu dati pogodne rezultate, ipak to neće biti pogodno ako mapa ima svoju dužinu i širinu koje imaju primetne krive.
49

Fakultet organizacionih nauka
Ponekad korišćenje 7 ili više podešenih tačaka i uključivanje Polynomial celibration (u Options) može dati adekvatne rezultate.
Options - Dugme opcija omogućava pridodavanje putanje (staze) i drugih fajlova u mapu kao što su markiranje uglova.
Map View Button – Ovo omogućava aktiviranje Map View prozora.
Mape se nalaze u polju Map List. Slika 27 je primer kreirane mape grada Beograda. Fajlovi sa ekstenzijom .map se kreiraju tako da mapa može da se učita u neke druge verzije Oziexplorer-a.
Slika 27 Izgled mape grada Beograda
5.2.2 Učitavanje tačaka u mapu, dodavanje i podešavanje obeležja mape
Ukoliko se želi podesiti mapa potrebno je znati tačne koordinate 2 ili više tačaka na mapi. Samo korišćenje 2 tačke nije preporučljivo i treba uvek imati najmanje 3 tačke za računanje.
Klikom na tab nazvan Point5- vide se X i Y polja u kojima su brojevi, ovo su koordinate tačke na ekranu koja se nalazi na slici mape. Lat i Long (širina i dužina) polja u Degs&Mins sekciji takođe imaju vrednosti u njima, ovo su geografske koordinate u selektovanom datumu na mapi koji odgovara X,Y tačkama na mapi.
Kako se dobijaju ove vrednosti na mapi - Pomeranjem miša preko mape vidi se promena kursora na broj 1. Kada se unesu X,Y tačke onda se unese Lat, Long koordinate koje odgovaraju tim tačkama. Lat, Long koordinate mogu biti unete u
50

Fakultet organizacionih nauka
različitim formatima kao što su Deg, Min i Secs. Može se takođe uneti i Grid koordinate koje su bazirane na Grid System-u, ovo zavisi od izbora koji se napravi u Map Projection-u iznad. Isti metod se primenjuje za druge podešene tačke. Ovde se nastoji pretvaranje X,Y koordinata u geografske Lat, Long ili Grid koordinate. OziExplorer je u mogućnosti da sračuna matematičke jednačine i dozvoli da pozicije budu konvertovane iz x,y tačke u geografske koordinate i naravno inverzno.
Slika 28 Prikaz mape Beograda sa tačkom, prikazom njenih koordinata i svojstava
Slika 28 je prikaz mape Beograda koja pokazuje tačku 5. Kada se unesu sve tačke onda se pitisne Save Button kako bi se sačuvala podešavanja u .map fajl.
Na slici 29 je prozor Distance Between Waypoints na kome se prikazuje tačna razdaljina između dve tačke koja je izražena u kilometrima.
51

Fakultet organizacionih nauka
Slika 29 Slika Pokazuje izаčunatu razdaljinu između tačke 1 i tačke 2
Komentari na mapi se mogu takođe dodati korišćenjem dugmeta Map Comments. Postoje i drugi simboli na mapi, nazvani Map Features i do 250 se može dodati u mapu. Map Features mogu biti prikazani od strane korisničkih simbola ili kao plavi krugovi sa belim brojem (što je po unapred definisanim vrednostima).
Map Comments se koriste za pokazivanje tekstualne informacije, obično povezane sa detaljom na mapi, koji se želi videti u svakom trenutku. Komentari mape čuvaju tekst i mogu da imaju i bilo koju veličinu ili boju. Ako se želi promeniti map comment, desnim klikom na map comment izabere se opcija Properties. Prozor properties će se pojaviti, u njemu se nalazi tekst, veličina i boja koje mogu da se menjaju. Dvoklikom na komentar će se takođe otvoriti property prozor.
Map features se koristi kada se želi čuvanje više detalja o važnim obeležjima, kao što su površine za kampovanje, ostrva, i tako dalje. Map Features mogu biti putne tačke ako ima slobodnih putnih tačaka – ove putne tačke ne mogu da se menjaju od strane korisnika.
Da bi se doterale karakteristike mape, postupak sa properties se ponavlja koristeći desni klik i odabere se properties opcija, ili dvoklik mišem.
52

Fakultet organizacionih nauka
Putne tačke, događaji i putanja
Ako se želi postaviti neka tačka iz fajla, pritisne se Load Button na Tool Bar-u. Selektuje se Load Waypoints From File opciju iz menija. Selektuje se bojanlog.wpt fajl iz otvorenog fajl dijaloga. Tačke će biti prikazane na mapi.
Učitavanje događaja iz fajla
Događaji su objekti koji se koriste u Lowrance and Eagle GPS prijemnicima, oni imaju samo poziciju i simbol tako da su efikasni za memoriju. Kako oni ne mogu biti korišćeni u Garmin and Magellan GPS prijemnicima, oni se ipak mogu koristiti na mapi kako bi pokazali lokaciju interesantnih tačaka. Broj događaja specificiranih u OziExplorer-u, mogu biti postavljeni prema broju koji GPS prijemnik podržava. Za korisnike Garmin and Magellans, koji nemaju događaje, mogu se postaviti brojke događaja na primer 500 (max 1000) tako da se mogu koristiti događaji na mapi čak i u slučaju da ne mogu da se učitaju u GPS. Pritiskom na dugme Load Button na Tool Bar-u se vrši učitavanje dugmića. Selektuje se Load Events from File opcija na meniju. Korišćeni simboli će veoma zavisiti od selektovane konfiguracije GPS.
Učitavanje putanje iz fajla
Za Lowrance and Eagles putanja je poznata kao Plot Trail ali u ovom OziExplorer-u se zovu tracks. Pritisne se Load Button sa Tool Bar-a. Selektuje se Load Track from File opcija iz menija. Potom se selektujte bojanlog.plt fajl iz otvorenog fajl dijaloga. Ova putanja je napravljena na putovanju na kome se koristio GPS, to je download-ovano koristeći OziExplorer i sačuvano u bojanlog.plt fajl. Putanja će biti prikazana na mapi, boja i širina linije mogu biti konfigurisane koristeći track control.
Neki pojmovi i skraćenice
Map Object - putne tačke, događaji, putanje, mapni komentari i mapne karakteristike se ubrajaju u Map Object-e.
Symbol - Ikona korišćena za prikazivanje događaja, tačaka ili mapnih karakteristika.
Jednostavne akcije za sve mapne objekte
Pomeri se miš na vrh objekta, pointer se menja u prst i pravi se text box koji prikazuje neke detalje o objektu, ovo se ne omogućava Map Comment-ima. Pritiskom na Shift dugme i onda levi klik omogućava prevlačenje objekata na novu poziciju. Desnim klikom otvara se meni gde se može otvoriti object properties dijalog ili izbrisati objekat. Duplim klikom na Map Object otvara se properties prozor.
Dodavanje tačaka i događaja na mapu
Dodavanje tačaka se vrši pritiskom na Wpt dugme na Tool Bar-u. Izabere se pozicija na koju se želi postaviti tačka i levim klikom miša će se postaviti. Tačka se
53

Fakultet organizacionih nauka
dodaje po unapred definisanoj boji, stilu i simbolu koji su unapred postavljeni u configuration. Tačke se takođe mogu dodati ručno tako što se unosi pozicija direktno u formu, ovo je moguće uraditi koristeći waypoint list. Za dodavanje
grafičkog događaja pritisne se Evt dugme na Tool Bar-u. Levim klikom miša može se postaviti događaj na željeno mesto. Događaj se dodaje u unapred definisanoj boji, stilu i simbolu koji se takođe postavlja u configuration.
Dodavanje mapnih karakteristika i komentara
Za dodavanje mapne grafičke karakteristike pritisne se Mf dugme na Tool Bar-u.
Levim klikom miša će se postaviti mapna karakteristiku na željeno mesto. Za
dodavanje komentara pritisne se Mc dugme na Tool Bar-u. Mapne komentare i mapne karakteristike treba sačuvati.
Dugme za brzo čuvanje promena
Postoji set od 3 dugmeta koji se nalaze na desnoj strani tool bar-a. Oni se zovu Map, Waypoint, Event, Track and Route. Kada je tekst na dugmetu sive boje to znači da ne postoji fajl da se učita u memoriju i nacrta na mapu. Kada je tekst crne boje znači da postoji fajl za učitavanje ali je isti kao podaci u memoriji. Kada je tekst crvene boje znači da su podaci u memoriji bili promenjeni. Pritiskom na dugme će se odmah sačuvati fajl koristeći isto ime kao kad je fajl bilo učitan. Ako su podaci novi onda se mora uneti ime fajla.
Brisanje Map objekta
Brisanje map objekata se vrši pozicioniranjem miša na objekat i desnim klikom pokazaće se izbor i izabere se Delete opcija.
Menjanje svojstva bilo kog mapnog objekta
Desnim klikom na mapni objekat izabere se Properties opcija. Otvora se dijalog na kome se mogu menjati svojstva objekta. Ovako se mogu promeniti svojstva jednog objekta, ali ako se želi menjanje po unapred definisanim vrednostima svojstva za sve nove objekte koristi se configuration opcija sa File menija. Većina ovih svojstava je samo za izgled ekrana i ne može se prebaciti u GPS (npr boje).
5.2.3 Upisivanje i slanje podatak iz GPS-a
Pre nego što se uloduju podaci prvo mora da se podesi GPS i OziExplorer kako bi oni mogli da komuniciraju jedan sa drugim. Lowrance&Eagle GPS prijemnike treba podesiti kako bi se povezali sa postavkama koje su u GPS-u. Treba pogledati Upload/download BAUD brzinu, što veću moguću, i u GPS-u i u OziExplorer-u i druge parametre da bi povezali postavke u GPS-u.
54

Fakultet organizacionih nauka
Garmins normalno koristi Upload/download Baud od 9600 bez pariteta tako da treba voditi računa o tome. GPS interfejs mora se postaviti u Garmin mode (zove se GRMN/GRMN u starijim modelima) da bi učitao tačke. Parity none i 8 data bits za druga podešavanja.
Magellans GPS prijemnike mora podesiti kako bi se povezali sa postavkama koje su u GPS-u. Treba postaviti Upload/download BAUD rate isti i u GPS-u i u OziExplorer-u. Magellans takođe dozvoljava Baud rate od 19200 ali ovo ne radi uvek za starije modele (noviji modeli dozvoljavaju podešavanje od 115,000 i rade odlično pri ovoj brzini) ali najbolje je postaviti 9600. Potrebno je postavite i druge parametre kao što su parity none i 8 data bits.
Upisivanje podataka iz GPS-a
U OziExplorer-u u configuration opciji treba podesiti tip GPS-a koji se koristi. Za Lowrance&Eagle GPS i za Garmin uerđaje su instrukcije učitavanja tačaka iste. Ove instrukcije treba primeniti kako bi se dobili događaji iz GPS-a samo će se meni opcije promeniti. Na Lowrance meniju se selektuje Get Waypoints from GPS opcija. Javlja se upozorenje da će ove operacije izbrisati sve tekuće tačke na mapi. Pritiskom na dugme OK sve tačke će se prebaciti sa GPS-a. Ono što je vidljivo na mapi se automatski iscrta. Čak i ako se ne prikaže svaka tačka na mapi one se ipak zadržavaju u memoriji i sačuvaće se kada se sačuva fajl sa tačkama. Brisanje tačke ili događaja kojih nema na mapi, treba uraditi tako što se izabere iz View menija Waypoint List (ili Event List) opcija. Događaji ili tačke će se prikazati u tabelarnoj formi. Postoji i opcija za brisanje pojedinačne tačke (ili događaja) ili za brisanje svih tačaka (ili događaja) koji se ne pojavljuju na mapi.
Slanje podataka GPS-u
Za Lowrance&Eagle GPS, Garmin i Magelan GPS prijemnike instrukcije slanja podataka su iste. Ove instrukcije takođe treba primeniti pri slanju događaja ka GPS-u samo što će se meni opcije promeniti. Na Lowrance meniju selektuje se Send Waypoints to GPS opcija. Javiće se upozorenje da će ova operacija poslati sve tačke. Pritiskom na OK dugme sve tačke će biti poslate.
5.2.4 Rad sa putanjama, kontrola putanje i NMEA simulator
Na Load Menu selektuje se Load Track from File opcija, ako se postavi pitanje Clear the Track Points from Track 1 –odgovor treba da bude Yes, i nakon toga
se selektuje bojanlog.plt. Klikom na Track Control dugme na Tool Bar-u, kontrola putanje će se pojaviti i izgledaće slično ovoj slici 30.
55
Fakultet organizacionih nauka
Slika 30 Prikaz rada kontrolom putanje
Dugme određuje da li su putanje prikazane na mapi. Kliktanjem na dugme in i out primetiće se da je putanja nestala i da se opet pojavljuje. Niz dugmića na levoj strani pored brojeva od 1 do 10 su za učitavanje putanja u mapu i svojstva ovih putanja.
Selektovanjem track 2 mišem i pritiskom na dugme na Tool Bar-u (ili dvoklik na putanju) pojaviće se Track Property prozor koji je prikazan na slici 31.
Slika 31 Prikaz prozora sa svojstvima putanje
56
Fakultet organizacionih nauka
Pritiskom na Load dugme i selektovanjem fajla bojanlog.plt, putanja će se učitati i prikazati na mapi. Vidi se da putanje ima opis: crvenu boju i širina putanje je 2. Svojstva se mogu promeniti i kada se sačuva fajl koristeći Save dugme i biti dostupna kada se sledeći put učita mapa.
Kreiranje putanje
Na Map Menu izabere se Clear All Tracks from Map opcija i klikom na Yes dugme kada se postavi pitanje Clear the Track Points će se izbrisati tačke na
putanjama u memoriji. Selektovanjem Create Track Points dugmeta na Tool Bar-u, gde se klikne na mapi kreiraće se tačka putanje. Kontrolu putanje
obezbeđuje Track Control dugme na Tool Bar-u. Klikom bilo gde na mapi kreira se putanja sa tim tačkama. Broj tačaka i razdaljina se povećavaju u Track Control prozoru kako se dodaju nove tačke. Putanja ima boju i liniju određene širine, ovo je po unapred definisanim vrednostima i može biti podešeno u glavnim konfiguracijama.
Postoji set od 3 dugmeta u Track Control prozoru na Tool bar-u, oni se koriste za podešavanje načina na koji su tačke putanje predstavljene. Levo dugme isključuje tačke putanje i samo je predstavljena putanja. Dugme u sredini sa crvenom tačkicom omogućava korišćenje miša da nacrta kvadrat oko tačke na putanji. Sve tačke u okviru kvadrata se aktiviraju što dozvoljava da se sa svakom tačkom manipuliše, prevlače, briše ili ubacuje. Ovo se zove Aktivno podešavanje. Desno dugme je slično srednjem dugmetu ali sve tačke na putanji su aktivne.
Sa pokazivačem na aktivnu tačku putanje, držanjem shift dugmeta, može se prevlačiti tačka sa putanje držeći levi klik miša i pomerajući miša. Desnim klikom miša koji je pozicioniran na tačku putanje, će se prikazati meni opcija gde se može pronaći mapa, izbrisati tačka, izbrisati tačka i razdvojiti putanja, kreirati nova sekcija putanje.
Dugme za ubacivanje tačke na putanju na Tool Bar-u omogućava da se unese nova tačka na putanji. Tačka putanje mora biti crvena (aktivirana). Pritiskom na Insert Track Point dugme, pozicioniranjem miša na tačku putanje, držanjem Alt tipke i pritiskom na levi klik miša, nova tačka putanje će se kreirati. Ova tačka može da se prevuče u bilo koju drugu poziciju. Ovo novo kreiranje putanje može da se sačuva u fajl i da se ubaci u GPS ili zauvek da se zakači na mapu.
57

Fakultet organizacionih nauka
Slika 32 Izračunata površina
Slika 32 pokazuje način na koji se računa površina a to se radi tako što se spoje prva i početna tačka putanje i nakon toga računa površina obuhvaćena putanjom.
Pomeranje mape
OziExplorer ima mogućnost da prikaže tačnu poziciju na mapi prilikom putovanja. Moguće je ako postoji stalna povezanost sa GPS-om i ukoliko je ubeležena NMEA poruka od strane GPS-a prilikom predaje. Može se eksperimentisati sa Moving Map ako uključen OziExplorer ima NMEA Simulator. Simulator dozvoljava podešavanje direkcije putovanja i brzine i slanje ove poruke softveru baš kao što su se generisali u GPS-u. Na Moving Map meniju izabere se Moving map Control opcija i pokazaće se ovakav dijalog kao na slici 33.
Slika 33 Kontrola pomeranja mape
Ponovo na Moving map selektuje se NMEA Simulator opcija i prikazaće se dijalog simulatora kao na slici 34.
58

Fakultet organizacionih nauka
Slika 34 Dijalog simulatora
Na NMEA Simulator-u pritisne se Here dugme i pomeranjem mišem preko mape, primetićuje se da se kursor menja. Pozicioniranjem miša na neku tačku na mapi i pritiskom na levi klik miša, čuće se zvučni signal i kursor će se promeniti u normalan, ovo podešava početnu poziciju simulacije pomeranja mape. Na Moving
Map Control pritiskom na Start dugme počeće pomeranje mape na ekranu. Strelica (pointer) bi trebalo da se pojavi na ekranu na „Start“ poziciji. Strelica će istaći pravac putanje.
Na NMEA Simulator-u može se pritisnuti dugme na jednoj strani Bearing (deg-zeleni prozor) da bi se promenio pravac puta ili pritiskom na dugme sa druge strane na Speed (crveni prozor) da bi se promenila brzina. Dok se specificira brzina, strelica će se pomerati u pravcu putanje i mapa će se skrolovati.
5.2.5 Spajanja mapa
Spajanje mapa se obavlja uz pomoć programa Map Merge for OziExplorer. Ovo predstavlja mogućnost povezivanja selektovanih mapa i formiranje nove mape u projektu. Novokreirana mapa je mozaik mapa. Većina datuma, projekcija i image formata podržana u OziExplorer-u je takođe podržana i u ovom programu.
Koristi ovog softvera su:1) kreiranje nove mape na osnovu kolekcije mapa tako sto se spajaju u
mozaik napravljen od mapa2) selektovanje projekcije i skale (metara po pikselu) odredišne mape3) selektovanje mape za formiranje nove mape4) selektovanje regiona koji se koristi za kreiranje mape.
Sve izvorne mape moraju obavezno da imaju OziExplorer(.map) ekstenziju i sliku mape. Slike mapa ne mogu biti korišćene za kreiranje mapa ako nemaju .map fajl. Map fajlovi mogu se kreirati u OziExplorer-u korišćenjem opcije OziExplorer map calibration( ili map import).
Slike sopstveno kreirane mape, ozfx3 image format, može se jedino koristiti uz pomoć OziExplorer-a, OziExplorer3D i OziExplorer CE. Mape napravljene od strane Map Merge ne mogu biti sačuvane ni u jednom drugom formatu.
Ne postoji ograničenje koliko mapa može biti spojeno ili koliko velika mapa može da se kreira, osim vremena koje je potrebno za kreiranje.
59

Fakultet organizacionih nauka
5.3 Primer INS-a
Kao primer INS uzet je autopilot za raketu zemlja-zemlja. U simulaciji su zanemarivi neki elementi, na primer uzeto je da se raketa kreće konstantnom brzinom (660m/s), tj. da nema početno ubrzanje, takođe ni uticaj šuma nije razmatran.
Ulaz u autopilot je ugao skretanja u odnosu na neku referentnu osu a izlaz postignuti ugao skretanja. Veličina kojom upravlja autopilot propinjanja je normalno ubrzanje. Upravljana promenljiva je željeno normalno ubrzanje koje se na ulaz autopilota dovodi iz zakona vođenja (PID regulatora), a zadatak autoplota je da pomoću upravljačke promenljive (otklona upravljačkih krilaca) raketa ostvari željeno normalno ubrzanje.
Ugaona brzina pravca brzine i ugaona brzina rakete su procenjene veličine koje se dobijaju obradom veličina izmerenih pomoću žiroskopa i akcelerometara (INS). Konstrukcija rakete je takva da se merni instrumenti ne mogu staviti u centar mase rakete pa je potrebno izvršiti korekciju merenja koja je ostvarena granom od q preko diferencijatora i pojačavača.
5.3.1 Izvođenje jednačina prostora stanja
Pošto su u Matlab-u korišćeni blokovi sa zadatim funkcijama prenosa u kompleksnom domenu (po promenljivoj s), da bi se dobila šema u CSMP-u treba takve blokove prevesti u prostor stanja.
Da bi se dobio prostor stanja korišćena je metoda pomoćne promenljive. Metod pomoćne promeljive se sastoji od sledećih koraka:
1.KorakFunkcija prenosa se napiše u sledećem obliku,
, važno je da vodeći koeficijent u imeniocu
bude 1 što se lako dobija deljenjem celog razlomka vodećim koeficijentom imenioca ukoliko je različit od 1.
2.KorakU ovom koraku se koristi da je interpretacija izvoda u kompleksnom
domenu množenje sa promenljivom s. I imenilac i broilac funkcije prenosa pomnože se pomoćnom promenljivom Z(s), i dobijaju se sledeći identiteti:
3.Korak
Usvaja se da su koordinate stanja .
60

Fakultet organizacionih nauka
4.Korak Dobijaju se sledeće relacije:
Odakle se lako dobija slika 35 koja objašnjava postupak dobijanja prostora stanja:
Slika 35 Prostor stanja dobijen metodom pomoćne promenljive
Ulaz u aktuator mogu biti različite veličine zavisno od konstrukcije aktuatora a izlaz je ugao zakretanja krilaca. Funkcija prenosa u kompleksnom domenu je:
,
Gde je:- ugao zakretanja krilaca-u ulaz u aktuator.
Na osovu funkcije prenosa u kompleksnom domenu metodom pomoćne promenljive i uvođenjem još jedne koordinate stanja dobija se:
,
Gde je:-x1 dodatna koordinata stanja.
Blokom iza aktuatora modeluju se aerodnamičke osobine rakete, i osobine mernih instrumenata. Izlaz ovog bloka je procenjena ugaona brzina pravca brzine rakete oko horizontalne ose (y-ose). Funkcija prenosa ovog bloka je:
,
Gde je:- ugaona brzina pravca brzine oko horizontalne ose.
Da bi se koristila metoda pomoćne promenljive potrebno je funkciju prenosa pretstaviti u obliku konstanta plus prava racionalna funkcija (polinom u imeniocu je višeg reda od polinoma u broiocu). Tada se dobija:
,
61

Fakultet organizacionih nauka
Pošto je stepen polinoma u imeniocu 2 potrebno je uvesti još dve koordinate stanja. Analogno kao u slučaju aktuatora dobijaju se jednačine prostora stanja:
,
Gde su:- dodatne koordinate stanja.
Blok u povratnoj grani takođe modeluje aerodinamičke karakteristike rakete i osobine mernih uređaja i predstavlja zavisnost promene položaja same rakete (ugaone brzine) oko horizontalne ose i ugaone brzine pravca brzine. Funkcija prenosa je:
,
Gde je:-q ugaona brzina rakete oko horizontalne ose.
Posle uvođenja još dve koordinate stanja jednostavno se dobijaju jednačine prostora stanja:
,
Gde su:- dodatne koordinate stanja.
Grana koja je prikazana vertikalno na blok dijagramu (diferencijator i pojačanje), postoji zbog korekcije merenja jer akcelerometar fizički ne može da se stavi u centar mase rakete (kada bi to bilo moguće ova grana ne bi bila potrebna). Ovaj blok je „uvučen“ u prethodni, naime izveden je prostor stanja za funkciju prenosa od do gde je iskorišćena osobina da se diferenciranje u vremenskom domenu pretstavlja množenjem sa „s“ u kompleksnom domenu. Ovakvim zaključivanjem se lako dolazi do funkcije prenosa u kojoj su potrebne slične transformacije kao i u funkciji G2:
,
Gde je:- ugaono ubrzanje rakete oko horizontalne ose.
Slično kao i u slučaju prethodnih blokova izvode se jednačine prostora stanja:
,
Gde su:- dodatne promenljive stanja.
62

Fakultet organizacionih nauka
Ako se za dodatne promenljive stanja usvoje izlazi integratora onda se dobijaju odgovarajući blok dijagrammi:
-Aktuator predstavljen na slici 36.
Slika 36 Simulacioni blok dijagram aktuatora
Aerodinamika rakete predstavljena na slici 37.
Slika 37 Simulacioni blok dijagram prenosne funkcije
-Aerodinamika rakete predstavljena je na slici 38
Slika 38 Simulacioni blok dijagram prenosne funkcije
-Aerodinamika rakete predstavljena na slici 39
63
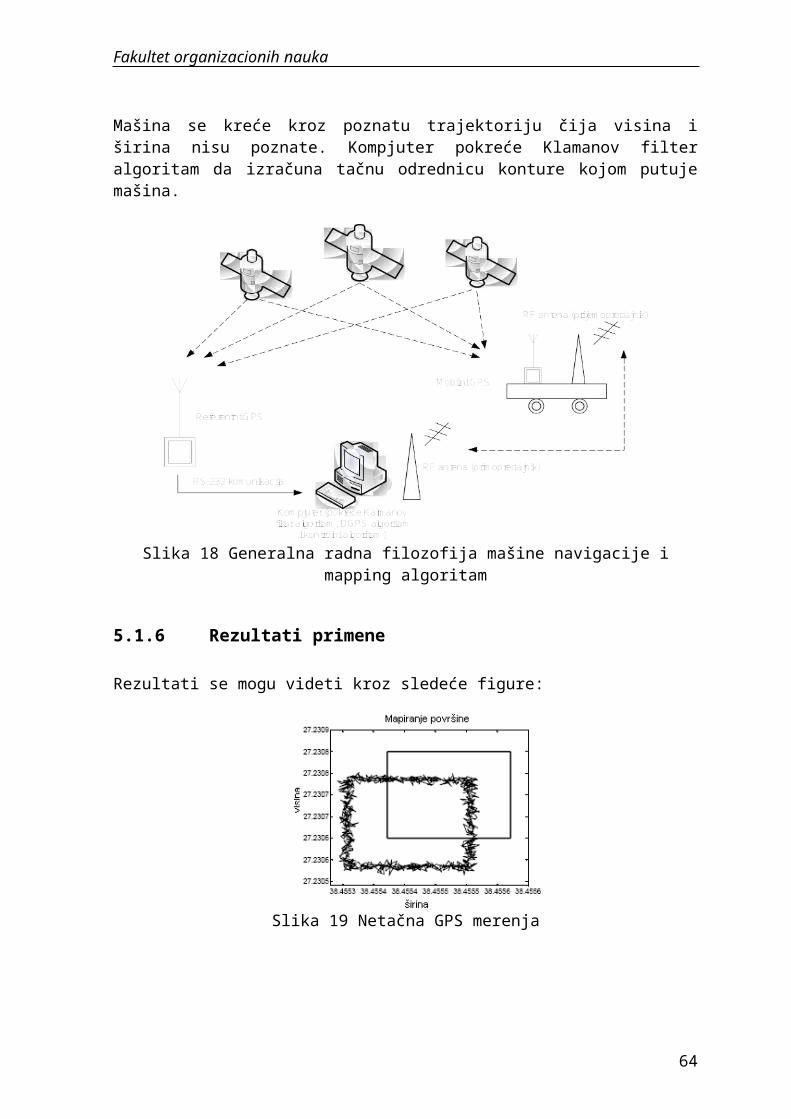
Fakultet organizacionih nauka
Slika 39 Simulacioni blok dijagram prenosne funkcije
Spajanjem simulacionih blok dijagrama kao što su spojeni blokovi na blok šemi autopilota uz uvođenje odgovarajućih pojačanja dobija se kompletan simulacioni blok dijagram autopilota koji je prikazan na slici 40.
Slika 40 Simulacioni blok dijagram kompletnog autopilota
Blok aktuator je pretstavljen blokovima 5,6; blok aerodinamika rakete blokovima(ugaona brzina pravca brzine/otklon krilaca) 7,8,9; blok aerodinamika rakete (ugaona brzina q/ugaona brzina pravca brzine) blokovima 10,11,12; a ovaj isti blok zajedno sa diferenciratorom blokovima 13,14,15,16.
64

Fakultet organizacionih nauka
5.3.2 Korišćenje CSMP-a u dobijanju rezultata
Greška cilja se relativno brzo popravlja sa izvesnim preskokom. Uvek ostaje mala greška međutim ona nije problematična kada se ima u vidu da je ona na većim daljinama praktično nemerljiva. Bitno je da raketa reaguje veoma brzo na velike greške ali ne osciluje već aperiodički sa izvesnim preskokom. Rezulatati simulacije dobijene u programskom jeziku CSMP su prikazani ispod.
Blok dijagram u CSMP-u je prikazan na slici 41.
Slika 41 Prikaz blokova u programu CSPM
65

Fakultet organizacionih nauka
Slika 42 Odziv autopilota na Hevisajdovu pobudu pri brzini 660m/s
Slika 42 predstavlja predstavlja ugao skretanja rakete pri brzini od 660m/s. Može se reći da ne postoji greška u stacionarnom stanju. Preskok je oko 15% što je odlično, vreme uspona je oko 0,095s dok je vreme smirenja oko 0.8s (svi rezultati su dobijeni očitavanjem sa snimljenih odziva).
Slika 43 Odziv autopilota na Hevisajdovu pobudu pri brzini 700m/s
66

Fakultet organizacionih nauka
Slika 43 predstavlja ugao skretanja rakete pri brzini od 700m/s. Na ovoj slici postoji greška u stacionarnom stanju. Brzinom većom od nominalne pokazuje se da sistem dolazi do stacionarnog stanja sa greškom od 0.1.
Slika 44 Odziv autopilota na Hevisajdovu pobudu pri brzini 600m/s
Slika 44 predstavlja ugao skretanja rakete pri brzini od 600m/s. Na ovoj slici postoji takođe greška u stacionarnom stanju. Brzinom manjom od nominalne pokazuje se da sistem dolazi do stacionarnog stanja sa greškom od 0.1.
Kada brzina odstupa od nominalne dolazi do greške u stacionarnom stanju. Kada je brzina manja od nominalne, raketa ne skreće za dovoljan ugao tj. dolazi do prebačaja i obrnuto kada se raketa kreće brzinom većom od nominalne dolazi do podbačaja u izlaznom uglu rakete. Da bi se koristio ovakav autopilot mora da postoji regulator brzine rakete koji će održavati da brzina bude konstantna i jednaka nominalnoj. Može se primetiti da u oba slučaja je greška proporcionalna odstupanju brzine od nominalne vrednosti.
67

Fakultet organizacionih nauka
6. Zaključak
Danas Zemlju obleće ogroman broj satelita, koji se prema nameni mogu podeliti u sledeće grupe: navigacijski, meteorološki, komunikacijski, geodetski, astronomski, istraživački i vojni. Poslednjih godina GPS prijemnici se ugrađuju u oružja velike preciznosti i velikog dometa, sredstva za vođenje i upravljanje tim oružjem, u sredstva za izviđanje i pokazivanje ciljeva. GPS prijemnicima opremaju se krstareće rakete i rakete taktičke namene, bespilotne letelice i svi pilotirani vazduhoplovi. Obezbeđuje se sigurno praćenje navigacijskih signala satelita i u uslovima intenzivnog ometanja. Zavisno od različitih potreba i zahteva razvijeni su i određeni metodi rada korisničkih prijemnika i obrade dobijenih GPS podataka, kao što su metod apsolutnog i metod relativnog pozicioniranja. Metodom apsolutnog pozicioniranja obezbeđuju se podaci o poziciji, brzini i vremenu u svakom trenutku u realnom vremenu.
Zahvaljujući performansama GPS-a i ubrzanom razvoju tehnika Kalman-ovog filtriranja, postignuta je realizacija preciznog upravljanja mobilnim objektom. Greška pozicije, u sistemu u kome je korišćen jednostavan proporcionalan zakon upravljanja, je manja od 2m. Eksperimentom je pokazano da procenjivanjem konstantne trajektorije mašine, greška filtra kao izlaz konvergira vrlo brzo ka nivou 10-15 centimetara nakon prvih 25 sekundi.
Jedan od načina za realizaciju preciznijeg upravljanja je uvođenje složenijeg zakona upravljanja, kao što je proporcionalno-integralni (PI) ili proporcionalno-integralno-diferencijalni (PID). Još jedan od načina povećanja tačnosti pozicioniranja predviđa se uvođenje novih frekvencija za civilne korisnike kao i podrazumevanje defanzivnih mera zaštite GPS-a od smetnji, povećanjem snage zračenja sa satelita, povećanjem broja satelita na 30, poboljšanjem performansi korisničkih prijemnika i drugo.
68

Fakultet organizacionih nauka
7. Literatura:
[1.]Tirnanić S., Bursać S., Satelitska radio-navigacija letelica, Vojnoizdavački zavod, Beograd 2001.
[2.]Stojić M., Sistemi automatskog upravljanja, Saobraćajni fakultet Univerziteta u Beogradu, Beograd, 1999.
[3.]E. UYAR, B. KARAHODA, O. ORAL, IFAC WORKSHOP TECHNOLOGY TRANSFER IN DEVELOPING COUNTRIES: AUTOMATION IN INFRASTRUCTURE CREATION – TT, Turska, 2007
[4.]http://www.colorado.edu/geography/gcraft/notes/gps/gps.html (poslednja promena 1. Maj 2000.)
[5.]Mohinder S Grewal, Lawrence R Weill, Angus P Andrews,Global Positioning Systems Inertial Navigation and Integration, Library of Congress, Canada, 2001.
[6.]GPS/INS Integration for Pedestrian Navigation, Vincent Gabaglio, Švajcarska, 2003
[7.] Ćuk D., Vođenje i upravljanje raketa, Mašinski faultet Univerziteta u Beogradu, 2000.
69









![Opsti Opis Talgo Voznih Garnitura[Konacna Verzija]](https://img.dokumen.tips/doc/110x75/577d29181a28ab4e1ea5f8bd/opsti-opis-talgo-voznih-garniturakonacna-verzija.jpg)



















