Embed Size (px)
Citation preview

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 1/246
Signali i sistemi u komunikacijama
D- emal KolonicOstoja Cenic
Banjaluka, 2002

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 2/246
2

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 3/246
Sadrzaj
1 Uvod 1
2 Signali kao fizicki nosioci informacija 72.1 Klasifikacija signala . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Klasifikacija signala u zavisnosti od prirode skupova nadkojim su definisani signali, kao funkcija, i njegov argument(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2 Klasifikacija signala prema stepenu njihove neodred-enosti 92.1.3 Klasifikacija signala prema frekvencijskom opsegu u kojem
signal ima relativno znacajne komponente . . . . . . . . . 102.2 Izbor nacina predstavljanja signala . . . . . . . . . . . . . . . . . 112.3 Pregled znacajnijih skupova ortogonalnih
funkcija koji su prisutni kod obrade i prenosa signala . . . . . . . 182.3.1 Fourier-ov skup ortogonalnih funkcija . . . . . . . . . . . 18
2.3.2 Walshov skup ortogonalnih funkcija . . . . . . . . . . . . 182.3.3 Haarov skup ortogonalnih funkcija . . . . . . . . . . . . . 202.3.4 Karhuen–Loeveov razvoj . . . . . . . . . . . . . . . . . . . 20
3 Fourierova analiza signala 273.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . . . . . 273.2 Spektralna analiza deterministickih signala . . . . . . . . . . . . 27
3.2.1 Spektar periodicnih signala . . . . . . . . . . . . . . . . . 273.2.2 Korelacija periodicnih signala . . . . . . . . . . . . . . . . 353.2.3 Raspodjela snage signala po pojedinim frekvencijskim opsez-
ima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2.4 Spektar aperiodicnih signala . . . . . . . . . . . . . . . . 453.2.5 Korelacija aperiodicnih signala . . . . . . . . . . . . . . . 55
3.2.6 Spektri nekih aperiodicnih signala . . . . . . . . . . . . . 573.2.7 Komentar o povezanosti trajanja impulsnih signala i frekven-
cijskog opsega . . . . . . . . . . . . . . . . . . . . . . . . . 643.2.8 Pojam trenutnog spektra . . . . . . . . . . . . . . . . . . 66
3.3 Analiza slucajnih signala . . . . . . . . . . . . . . . . . . . . . . . 673.3.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . 673.3.2 Pojam statistickog ansambla . . . . . . . . . . . . . . . . 67
i

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 4/246
ii SADRZAJ
3.3.3 Opis ansambla u jednoj ili vise tacaka . . . . . . . . . . . 68
3.3.4 Pojam stacionarnosti slucajnog procesa . . . . . . . . . . 703.3.5 Usrednjavanje po ansamblu – statisticke srednje vrijednosti 713.3.6 Srednje vrijednosti po vremenu . . . . . . . . . . . . . . . 743.3.7 Pregled znacajnijih osobina autokorelacione funkcije . . . 743.3.8 Transformacija gustine vjerovatnoce . . . . . . . . . . . . 773.3.9 Pojam spektralne gustine sange
– Wiener-Khinchinova teorema – . . . . . . . . . . . . . . 823.3.10 Pojam analitickog signala . . . . . . . . . . . . . . . . . . 97
4 Digitalizacija kontinualnog signala 1014.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . . . . . 1014.2 Diskretizacija signala u vremenskom domenu . . . . . . . . . . . 102
4.2.1 Teorema odmjeravanja . . . . . . . . . . . . . . . . . . . . 102
4.2.2 Pregled nekih postupaka odmjeravanja . . . . . . . . . . . 1044.2.3 Diskretizacija signala u amplitudskom domenu
–Kvantovanje signala– . . . . . . . . . . . . . . . . . . . . 1124.2.4 Osnovni parametri kvantizera . . . . . . . . . . . . . . . . 1144.2.5 Srednja snaga i spektralne karakteristike greske kvanto-
vanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1154.3 Kodovanje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5 Osnovni parametri prenosnog sistema 1295.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . . . . . 1295.2 Pregled znacajnijih svojstava sistema . . . . . . . . . . . . . . . . 130
5.2.1 Linearnost . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.2.2 Vremenska invarijantnost . . . . . . . . . . . . . . . . . . 1325.2.3 Stabilnost . . . . . . . . . . . . . . . . . . . . . . . . . . . 1335.2.4 Kauzalnost . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.3 Odziv sistema (konvolucioni integral) . . . . . . . . . . . . . . . . 1345.3.1 Odziv na odskocnu i impulsnu pobudu . . . . . . . . . . . 1345.3.2 Odziv sistema za proizvoljni pobudni signal . . . . . . . . 136
5.4 Transfer funkcija sistema . . . . . . . . . . . . . . . . . . . . . . . 1415.4.1 Definisanje transfer funkcije . . . . . . . . . . . . . . . . . 1415.4.2 Uslovi idealnog i idealizovanog prenosa . . . . . . . . . . . 148
5.5 Vrste izoblicenja . . . . . . . . . . . . . . . . . . . . . . . . . . . 1495.5.1 Idealizovani niskopropusni sistem . . . . . . . . . . . . . . 1505.5.2 Uticaj monotono promjenljive amplitudske karakteristike
niskopropusnog sistema . . . . . . . . . . . . . . . . . . . 1565.5.3 Uticaj talasanja u amplitudskoj karakteristici niskopro-
pusnog sistema . . . . . . . . . . . . . . . . . . . . . . . . 1565.5.4 Idealizovani uskopojasni sistem . . . . . . . . . . . . . . . 1605.5.5 Ekivvalentni niskopropusni sistem . . . . . . . . . . . . . 1625.5.6 Povezanost realnog i imaginarnog dijela transfer funkcije
kod kauzalnih sistema . . . . . . . . . . . . . . . . . . . . 1645.5.7 Osvrt na nelinearne sisteme . . . . . . . . . . . . . . . . . 166

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 5/246
SADRZAJ iii
6 Prenos signala u osnovnom (NF) opsegu 169
6.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . . . . . 1696.2 Odred-ivanje spektralne gustine snage digitalnog signala kod sinhronogprenosa u osnovnom opsegu . . . . . . . . . . . . . . . . . . . . . 173
6.3 Komparativni osvrt na analizirane digitalne linijske signale . . . 1896.4 Intersimbolska interferencija . . . . . . . . . . . . . . . . . . . . . 193
6.4.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . 1936.4.2 Uticaj konacnog frekvencijskog opsega - Nyquistova brz-
ina penosa . . . . . . . . . . . . . . . . . . . . . . . . . . . 1946.4.3 Optimalna odjela transfer funkcije s obzirom na sum . . . 1996.4.4 Ocjena interferencije kod prenosa kroz realne kanale . . . 2006.4.5 Osvrt na izacunavanje vjerovatnoce greske . . . . . . . . . 2036.4.6 Ekvalizacija . . . . . . . . . . . . . . . . . . . . . . . . . . 2056.4.7 Sistemi sa kontrolisanom interferencijom . . . . . . . . . . 212
6.5 Teorija odlucivanja i njena primjena u optimalnoj detekciji signala2146.5.1 Uvodna razmatranja . . . . . . . . . . . . . . . . . . . . . 2146.5.2 Bayesov kriterijum odlucivanja . . . . . . . . . . . . . . . 2186.5.3 Neuman-Pearsonov kriterijum odlucivanja . . . . . . . . . 2246.5.4 Optimalni korelacioni prijemnik . . . . . . . . . . . . . . . 2296.5.5 Prilagod-eni filtar u prijemniku . . . . . . . . . . . . . . . 237

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 6/246
iv SADRZAJ

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 7/246
Glava 1
Uvod
Danas se pojam ”sistem”koristi u brojnim oblastima covjekove djelatnosti.Tako se teorija sistema ucvrstila kao fundamentalna teorija za opisivanje signalai sistema u informatici koja obuhvata obradu i prenos informacija. Saznanja uteoriji sistema igraju takod-e vaznu ulogu u mjernoj i regulacionoj tehnici, kaosto cemo kasnije vidjeti, i u organizovanju drustvenih zajednica. Kako strozi- ja teorija sistema nije moguca bez upotrebe matematickih pristupa, mi cemotakod-e ovdje koristiti matematicki model sistema kao skupa (matematickih)relacija koje opisuju odnos sistema sa njegovom okolinom. Uticaj okoline nasistem opisuje se preko ulaza, a uticaj sistema na okolinu pomocu izlaza sis-tema. Matematicke relacije modela zapravo povezuju izlaze sa ulazima mod-ela sistema. Jasno je da model aproksimativno odrazava posmatrani sistem.
Jednostavni modeli se odlikuju matematickom jednostavnoscu i mogucnoscu el-egantnog rjesavanja postavljenih zadataka, ali za uzvrat, redovno sa manjomtacnoscu odrazavaju stvarno ponasanje sistema i obrnuto. Stoga je usvojenimodel najcesce rezultat inzenjerskog kompromisa izmed-u tacnosti aproksimacijesistema i matematicke slozenosti modela.
Modeli sistema mogu da imaju jedan ili vise ulaza i izlaza. Na slici 1 prikazan je sistem sa blokom koji ima jedan ulaz x (ili s1) i jedan izlaz y (ili s2). Ulaznisignal, kao pubudu, i izlazni signal, kao odziv, mozemo najcesce posmatrati kaorealne vremenske funkcije.
x(t)
(s1(t))
y(t)
(s2(t))
Slika 1.1: Model sistema sa jednim ulazom i jednim izlazom
Klasican pristup u matemetickom opisivanju sistema je koriscenje diferenci- jalnih i diferentnih jednacina koje mogu da budu linearne ili nelinearne, zatimstacionarne ili nestacionarne itd.
1

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 8/246
2 GLAVA 1. UVOD
U uslovima punovaznosti modela na bazi linearnih diferencijalnih jednacina
imamoan(t)y(n)(t) + an−1(t)y(n−1)(t) + · · · + a1y(t) + a0y(t) =
= bm(t)x(m)(t) + bm−1x(m−1)(t) + · · · + b1(t)x(t) + b0(t)x(t)
(1.1)
gdje je t kontinualna vremenska varijabla. Ako se sistem posmatra u diskretnimvremenskim trenucima, onda vrijedi odgovarajuce linearne diferentne jednacine
ni=1
ai(t)y(t − ti) =
mj=0
bj (t)x(t − tj ) (1.2)
Pod redom sistema sa jednim izlazom podrazumjeva se red diferencijalne jedna-
cine koja ga opisuje odnosno najvisi izvod ulaza. To znaci da (1.1) odgovarasistemu n–tog reda.Ako koeficijenti a i b u (1.1), odnosno (1.2) zavise od vremena, onda jeposmatrani sistem nestacionaran i sama njegova analiza je vrlo slozena.Ukoliko se radi o konstantnim koeficijentima a i b u (1.1) i (1.2), onda jesistem stacionaran, ili drugim rijecima vremenski invarijantan.Ako kod stacionarnog sistema pobuda x(t) daje odziv y(t), onda pobuda x(t−τ )obezbjed-uje odziv y(t − τ ) za sve vrijednosti x(t) i τ .
Linearne diferencijalne odnosno diferentne jednacine (1.1) i (1.2) opisuju lin-earan sistem cija je fundamentalna osobina mogucnost tzv. superpozicije. Toznaci, ako dvije razlicite funkcije predstavljaju rjesenja linearne diferencijalne jednacine nekog sistema, onda ce i njihova linearna kombinacija biti rjesenje
posmatrane jednacine.Konkretnije, ako je y1(t) odziv sistema cija je pobuda x1(t), a y2(t) odgo-varajuci odziv za pobudu x2(t), onda cemo za linearnu kombinaciju pobudax(t) = α1x1(t) + α2x2(t) imati odziv y(t) = α1y1(t) + α2y2(t).Nelinearni sistemi se ne mogu opisati generalnom diferencijalnom jednacinomkonacnog reda koja bi predstavljala univerzalni model za sve moguce nelinearnesisteme.
Uocimo takod-e da jednacina (1.1) odgovara tzv. sistemu sa koncen-trisanim parametrima. Veliki bro j sistema u telekomunikacijama kao sto sustandardni filtri, pojacavaci, ispravljaci itd. spadaju u klasu elektricnih kola sakoncentrisanim parametrima, sto znaci da su njihove kapacitivnosti, otpornostii induktivnosti koncentrisane u odred-enim tackama sistema pomocu odred-enihkondenzatora, otpornika i kalemova.Tipicni sistemi kod kojih pomenuta svojstva ili parametri (otpornost, induk-tivnost, kapacitivnost itd.) nisu koncentrisani su vodovi pomocu kojih se ost-varuje propagacija elektromagnetskih talasa. Njih opisujemo koristeci parci- jalne diferencijalne jednacine. Kao sto je poznato, fenomen prostiranja talasase javlja kod onih vodova cija je duzina veca od desetine talasne duzine, adebljina provodnika i njihovo med-usobno rastojanje mnogo manja od talasneduzine posmatranog signala.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 9/246
3
U analizi sistema cesto se koriste i pojmovi trenutni sistemi (bez memo-
rije) i dinamicki sistemi (sa memorijom). Ponekad se koriste odgovarajucialternativni nazivi: bezinercioni ili inercioni sistemi.Kod trenutnih sistema trenutni odziv zavisi samo od pobude u istom datomtrenutku. Takav slucaj je kod mreza formiranih samo od otpornika. Ako odzivsistema zavisi od proslosti pobude, onda se radi o dinamickom sistemu koji imamemoriju. Tipican primjer su mreze u kojima su pored otpornika prisutni ikondenzatori ili kalemovi.
Fizicki realizibilan sistem, ili kauzalni sistem, odlikuje se nultim odzi-vom za t < 0, ako je pocetak djelovanja pobude definisan trenutkom t = 0.
U okviru ovog uvodnog pregleda osnovnih pojmova, umjesno je pomenuti dase umjesto jednacina (1.1) i (1.2) za opis sistema koristi i tzv. normalni oblik jednacina sistema.
Za sistem n–tog reda (1.1) normalni oblik jednacina sistema cini skup od n
diferencijalnih jednacina prvog reda koji definise n promjenljivih stanja sistema.Vrijednost promjenljivih stanja u datom trenutku definise odgovarajuce sta-
nje sistema u tom trenutku. Sam odziv sistema moze se predstaviti kao kombi-nacija promjenljivih stanja i pobude.Izbor stanja za dati sistem nije jednistven, ali nije ni proizvoljan u uslovimapostavljenih ogranicenja.
Za sistem n–tog reda promjenjivu stanja mozemo oznaciti sa y1(t), y2(t),. . . , yn(t).Ako sistem ima jedan ulaz x(t), onda imamo
y1(t) = a11(t)y(t) + a12(t)y2(t) + · · · + a1n(t)yn(t) + b1(t)x(t)
y2(t) = a21(t)y(t) + a22(t)y2(t) +
· · ·+ a2n(t)yn(t) + b2(t)x(t)
y3(t) = a31(t)y(t) + a32(t)y2(t) + · · · + a3n(t)yn(t) + b3(t)x(t)
...
yn(t) = an1(t)y(t) + an2(t)y2(t) + · · · + ann(t)yn(t) + bn(t)x(t)
(1.3)
Ako postoji samo jedan izlaz y0(t), onda on ima oblik
y0(t) = c1(t)y1(t) + c2(t)y2(t) + · · · + cn(t)yn(t) + d(t)x(t)
Dati model (1.3) ekvivalentan je obliku (1.1), ali pruza vise pogodnosti za pri-mjenu matricne notacije, numerickog rjesavanja problema pomocu racunara kaoi kod uopstavanja na sisteme sa vise ulaza i izlaza.
Primjer 1.1. Na slici 1.2 prikazana je jedna uopstena blok-sema sistema.Zadatak sistema moze da bude prenos govorne, video, podataka ili neke drugevrste poruke. Izvorna informacija moze da bude i rezultat osmatranja nekog procesa ili objekta a na odredistu se koristi za donosenje odred -enih odluka.Izvorni interfejs, odnosno konvertor, vrsi preslikavanje izvorne informacije u signal s1(t) kao njen materijalni reprezent. U cilju uspjesnosti prenosa signala obicno se uvode brojni postupci njegove obrade.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 10/246
4 GLAVA 1. UVOD
Izvornainformacija
Izvornikonvertor
Prenosnisistem
Prijemnirekonvertor
Korisnik informacija
Smetnje
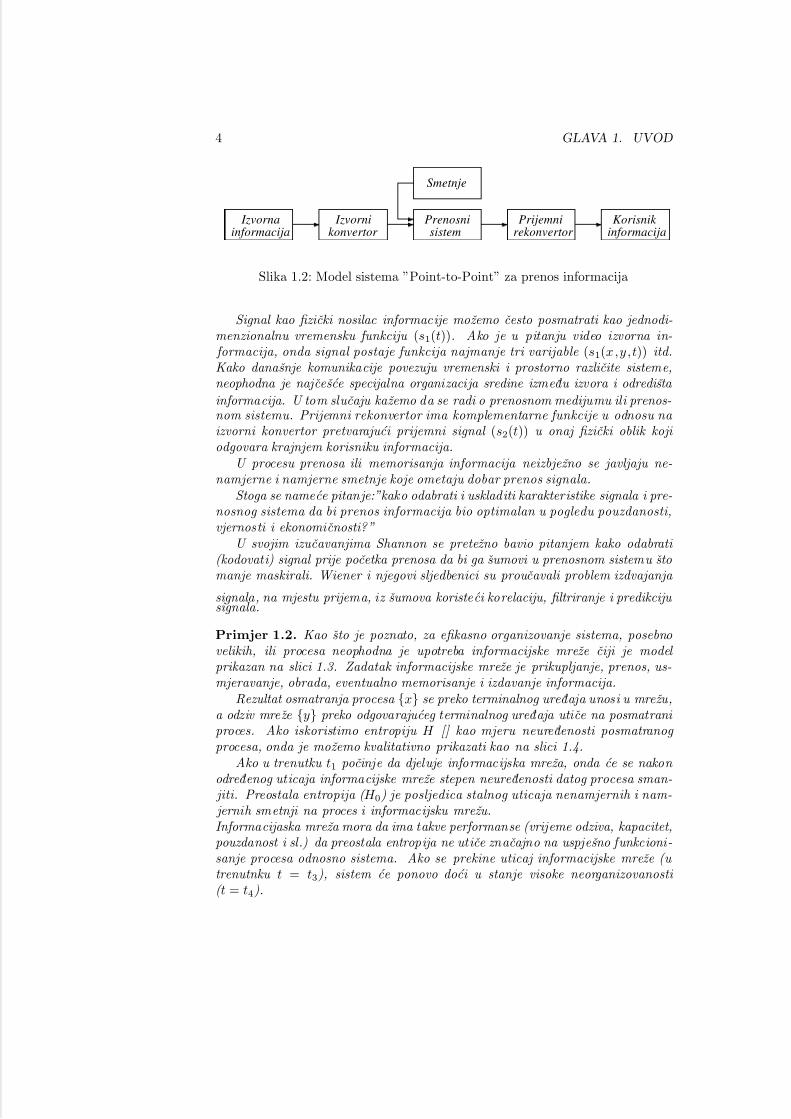
Slika 1.2: Model sistema ”Point-to-Point” za prenos informacija
Signal kao fizicki nosilac informacije mozemo cesto posmatrati kao jednodi-menzionalnu vremensku funkciju (s1(t)). Ako je u pitanju video izvorna in- formacija, onda signal postaje funkcija najmanje tri varijable (s1(x,y,t)) itd.Kako danasnje komunikacije povezuju vremenski i prostorno razlicite sisteme,neophodna je najcesce specijalna organizacija sredine izmed -u izvora i odredista
informacija. U tom slucaju kazemo da se radi o prenosnom medijumu ili prenos-nom sistemu. Prijemni rekonvertor ima komplementarne funkcije u odnosu na izvorni konvertor pretvarajuci prijemni signal (s2(t)) u onaj fizicki oblik koji odgovara krajnjem korisniku informacija.
U procesu prenosa ili memorisanja informacija neizbjezno se javljaju ne-namjerne i namjerne smetnje koje ometaju dobar prenos signala.
Stoga se namece pitanje:”kako odabrati i uskladiti karakteristike signala i pre-nosnog sistema da bi prenos informacija bio optimalan u pogledu pouzdanosti,vjernosti i ekonomicnosti?”
U svojim izucavanjima Shannon se pretezno bavio pitanjem kako odabrati (kodovati) signal prije pocetka prenosa da bi ga sumovi u prenosnom sistemu stomanje maskirali. Wiener i njegovi sljedbenici su proucavali problem izdvajanja
signala, na mjestu prijema, iz sumova koristeci korelaciju, filtriranje i predikciju signala.
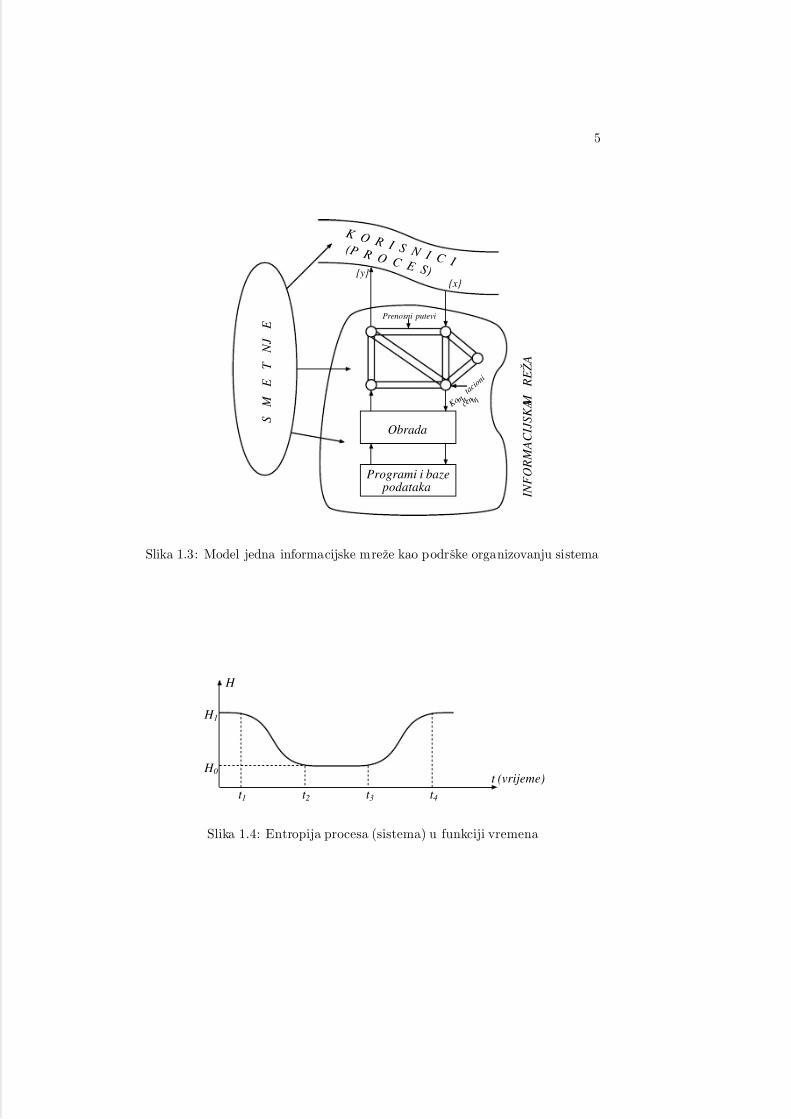
Primjer 1.2. Kao sto je poznato, za efikasno organizovanje sistema, posebnovelikih, ili procesa neophodna je upotreba informacijske mreze ciji je model prikazan na slici 1.3. Zadatak informacijske mreze je prikupljanje, prenos, us-mjeravanje, obrada, eventualno memorisanje i izdavanje informacija.
Rezultat osmatranja procesa x se preko terminalnog ured -aja unosi u mrezu,a odziv mreze y preko odgovarajuceg terminalnog ured -aja utice na posmatrani proces. Ako iskoristimo entropiju H [] kao mjeru neured -enosti posmatranog procesa, onda je mozemo kvalitativno prikazati kao na slici 1.4.
Ako u trenutku t1 pocinje da djeluje informacijska mreza, onda ce se nakon odred -enog uticaja informacijske mreze stepen neured -enosti datog procesa sman- jiti. Preostala entropija ( H 0) je posljedica stalnog uticaja nenamjernih i nam- jernih smetnji na proces i informacijsku mrezu.Informacijaska mreza mora da ima takve performanse (vrijeme odziva, kapacitet,pouzdanost i sl.) da preostala entropija ne utice znacajno na uspjesno funkcioni-sanje procesa odnosno sistema. Ako se prekine uticaj informacijske mreze (u trenutnku t = t3), sistem ce ponovo doci u stanje visoke neorganizovanosti ( t = t4).
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 11/246
5
S
M
E
T
N J
E
Programi i baze podataka
Obrada
I N F O R M A C I J S K A M
R E Ž A
K O R I S N I C I ( P R O C E S )
Prenosni putevi
K o m u
t a c i o
n i
c e n t r i
yx
Slika 1.3: Model jedna informacijske mreze kao podrske organizovanju sistema
t (vrijeme)
H
H 1
H 0
t 1 t 2 t 3 t 4
Slika 1.4: Entropija procesa (sistema) u funkciji vremena

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 12/246
6 GLAVA 1. UVOD
S obzirom na znacaj informacija za egzistenciju organizovanih sistema, po-
sveticemo posebnu paznju signalima kao fizickim nosiocima informacija.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 13/246
Glava 2
Signali kao fizicki nosioci
informacijaSignal, kao fizicki nosilac informacije, mozemo posmatrati kao tacku u fun-
kcionalnom prostoru – prostoru signala. Obicno ga opisujemo kao (jednodi-menzionalnu) realnu vremensku funkciju s(t) ili kao funkciju zavisnu od visenezavisnih varijabli s(x,y,t) kao sto je, na primjer, slucaj kod video signala i sl.
U pocetnom dijelu ove analize signala izlozicemo prvo nekoliko mogucih pris-tupa u klasifikaciji signala.
2.1 Klasifikacija signala2.1.1 Klasifikacija signala u zavisnosti od prirode skupova
nad kojim su definisani signali, kao funkcija, i njegovargument (t).
• Kontinualni signali s(t)Ne ulazeci u stroge matematicke definicije, mozemo reci da su kod kon-tinualnih signala funkcija (s) i argument (t) definisani nad beskonacnimneprebrojivim skupovima koji su obicno podskupovi skupa realnih brojeva(R). Kao ilustracija dat je jedan primjer kontinualnog signala na slici 2.1,gdje ordinata odgovara trenutnoj amplitudi (napon, struja, pritisak, tem-peratura i sl), a apscisa tekucoj kontinualnoj vremenskoj varijabli signala.
• Vremenski diskretni signaliTakav signal po svojim trenutnim amplitudama pripada beskonacnomneprebrojivom skupu, a argument na jvise prebrojivom t ∈ Z, s ∈ R (slika2.2).
7

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 14/246
8 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
t
s(t)
Slika 2.1: Graficka ilustracija kontinualnog signala
t
s(t)
∆t ∆t ∆t ∆t ∆t ∆t ∆t
Slika 2.2: Vremenski diskretan signal
• Kvantovani ili amplitudski diskretni, signaliU ovom slucaju signal kao funkcija definisan je na najvise prebrojivomskupu (s ∈ Z), a argument t pripada neprebrojivom skupu realnih brojeva(t ∈ R) (slika 2.3)
t
s(t)
∆s∆s
∆s
Slika 2.3: Amplitudski diskretni (kvantovani) signal
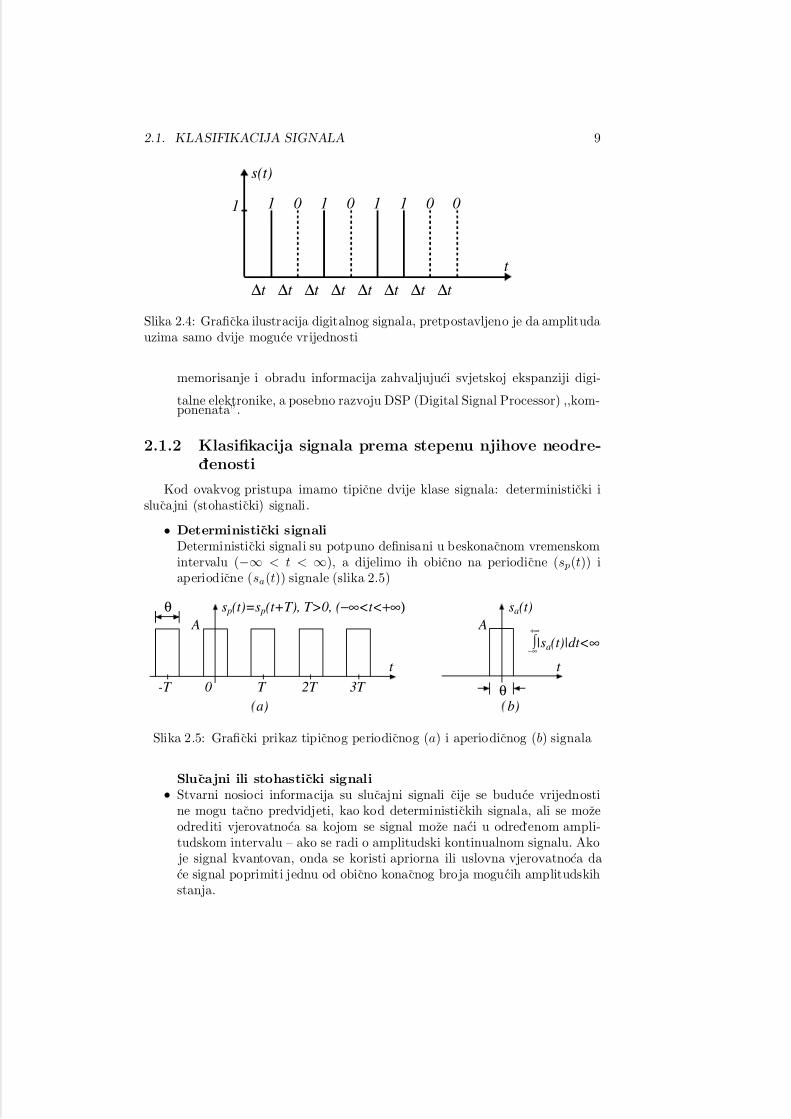
• Digitalni signali ili signali diskretni u vremenskom i amplitu-dskom domenuKod digitalnih signala izvrsena je diskretizacija u vremenskom i ampli-tudskom domenu pa argument i funkcija pripadaju najvise prebrojivimskupovima (t ∈ Z, s ∈ Z). To znaci da digitalni signal mozemo posma-trati kao vremensku sekvencu brojeva (cifara) (slika 2.4).Digitalni signali su danas od prvenstvenog znacaja kod sistema za prenos,
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 15/246
2.1. KLASIFIKACIJA SIGNALA 9
t
s(t)
∆t ∆t ∆t ∆t ∆t ∆t ∆t ∆t
1 1 0 1 0 1 1 0 0
Slika 2.4: Graficka ilustracija digitalnog signala, pretpostavljeno je da amplitudauzima samo dvije moguce vrijednosti
memorisanje i obradu informacija zahvaljujuci svjetskoj ekspanziji digi-
talne elektronike, a posebno razvoju DSP (Digital Signal Processor) ,,kom-ponenata”.
2.1.2 Klasifikacija signala prema stepenu njihove neodre-d-enosti
Kod ovakvog pristupa imamo tipicne dvije klase signala: deterministicki islucajni (stohasticki) signali.
• Deterministicki signaliDeterministicki signali su potpuno definisani u beskonacnom vremenskomintervalu (−∞ < t < ∞), a dijelimo ih obicno na periodicne (s p(t)) iaperiodicne (sa(t)) signale (slika 2.5)
t
s p(t)=s p(t+T), T>0, (−∞<t<+∞) A
T 2T 3T -T 0
θ
t
sa(t)
A
a) b)θ
∫ |sa(t)|dt<∞−∞
+∞
Slika 2.5: Graficki prikaz tipicnog periodicnog (a) i aperiodicnog (b) signala
•Slucajni ili stohasticki signaliStvarni nosioci informacija su slucajni signali cije se buduce vrijednostine mogu tacno predvidjeti, kao kod deterministickih signala, ali se mozeodrediti vjerovatnoca sa kojom se signal moze naci u odred-enom ampli-tudskom intervalu – ako se radi o amplitudski kontinualnom signalu. Ako je signal kvantovan, onda se koristi apriorna ili uslovna vjerovatnoca dace signal poprimiti jednu od obicno konacnog broja mogucih amplitudskihstanja.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 16/246
10 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
U praksi se susrecemo i sa pojmom kvaziperiodicnih signala, na primjer,
kod zvucnih segmenata govornog signala ili kod digitalnih sinhronih sis-tema (radara i sl.), gdje imamo relativno dug interval u kojem se ponavljatipican elementarnih signal.
Kako su deterministicki signali laksi za analizu, oni su takod-e predmetproucavanja jer u to j oblasti stecena saznanja iskoristiva su i kod rada saslucajnim signalima.
2.1.3 Klasifikacija signala prema frekvencijskom opsegu ukojem signal ima relativno znacajne komponente
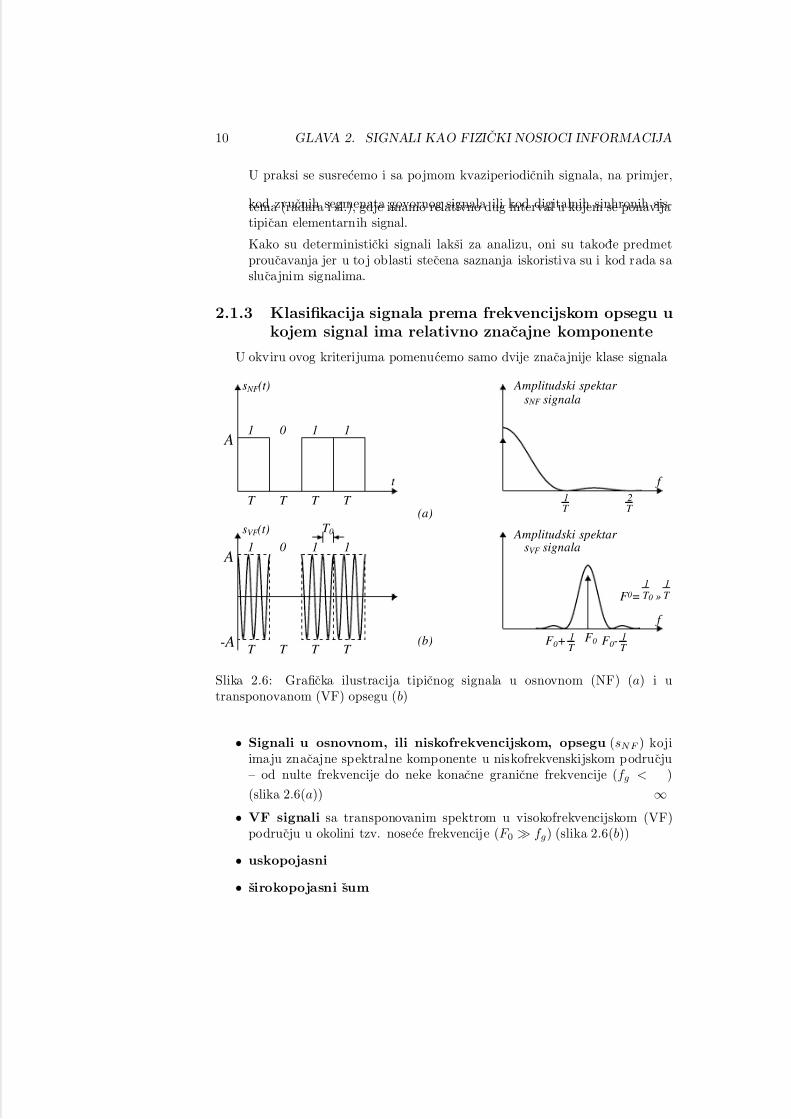
U okviru ovog kriterijuma pomenucemo samo dvije znacajnije klase signala
t
T T T T
sVF (t)
1 0 1 1 A
-A
T 0
t
s NF (t)
A
T T T T
1 0 1 1
f
F 0 F 0-1T
F 0+1T
F 0=1T 0 »
1T
Amplitudski spektar sVF signala
Amplitudski spektar s NF signala
f
1T
2T (a)
(b)
Slika 2.6: Graficka ilustracija tipicnog signala u osnovnom (NF) (a) i utransponovanom (VF) opsegu (b)
• Signali u osnovnom, ili niskofrekvencijskom, opsegu (sN F ) kojiimaju znacajne spektralne komponente u niskofrekvenskijskom podrucju– od nulte frekvencije do neke konacne granicne frekvencije (f g <
∞)
(slika 2.6(a))
• VF signali sa transponovanim spektrom u visokofrekvencijskom (VF)podrucju u okolini tzv. nosece frekvencije (F 0 f g) (slika 2.6(b))
• uskopojasni
• sirokopojasni sum

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 17/246
2.2. IZBOR NACINA PREDSTAVLJANJA SIGNALA 11
2.2 Izbor nacina predstavljanja signala
Kao sto je vec pomenuto, signal posmatramo kao tacku u tzv. funkcionalnomprostoru – PROSTORU SIGNALA. Postavlja se pitanje kakav prostor trebaodabrati da bi predstavljanje (model) signala bilo efikasno?
U cilju ekonomicne obrade, prenosa ili memorisanja signala pokazalo se vrloefikasnim prikazivanje signala u prostoru cije koordinate cine skup ortogonalnihfunkcija.Stoga cemo se podsjetiti kada za neki skup realnih funkcija f 0(t), f 1(t), . . . kazemo da je ortogonalan na intervalu [t0, t0 + T ].Naime, skup realnih kontinualnih (kvadratno integrabilnih) funkcija f 0, f 1, f 2, . . . je ortogonalan na intervalu [t0, t0 + T ], trajanja T, ako vrijedi
T
f n(t)f m(t)dt = 0, m
= n
c > 0, m = n (2.1)
gdje je c konacna realna pozitivna konstanta.Ako je c = 1, onda se radi o tzv. ortonormiranom skupu. U prostoru sa ko-ordinatama definisanim sa (2.1) pridruzujemo kvadratno integrabilnom signalus(t), na datom intervalu, red
s(t) ∼∞
n=0
anf n(t), (2.2)
gdje je
an =1
c T
s(t)f n(t)dt =1
c (s, f n) (2.3)
koeficijent an (n = 0, 1, . . . ) datog razvoja (2.2) odgovara projekciji signala s nan–tu koordinatu u datom prostoru. Ovo je u formuli (2.3) oznaceno sa (·, ·), aodgovara skalarnom proizvodu. Samo odred-ivanje koeficijenata an je jednos-tavno zahvaljujuci ortogonalnosti (2.1) posmatranog skupa funckija f n. Red(2.2) sa koeficijentima odred-enim prema (2.3) naziva se generalisani Furijeovred signala s(t), a koeficijenti an generalisani Furijeovi koeficijenti signala s(t)s obzirom na ortogonalni sistem f n(t).Sada se postavlja prakticno pitanje da li red (2.2) konvergira u datom intervalui ako konvergira da li mu je zbir s(t)? Jasno je da se dati signal mora podvrciizvjesnim ogranicenjima da bi se dobio odgovor na ovo pitanje. Za praksusu od posebnog znacaja oni skupovi ortogonalnih funkcija koji omogucavajuaproksimaciju signala s(t) sa proizvoljnom tacnoscu u ”srednjem” (ili jos visetj. ”uniformno”).Takve pogodnosti nam pruzaju zatvoreni odnosno kompletni (potpuni) skupoviortogonalnih funkcija.Podsjetimo se da za skup ortogonalnih funkcija za koje vazi
T
f 2n(t)dt < ∞,(n = 0, 1, . . . ) kazemo da je kompletan (potpun) ako je ispunjen uslov da, osim

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 18/246
12 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
signala (funkcije) koji je identicki jednak 0 (nuli), ne postoji signal s(t) takav
da vazi T
s2(t)dt < ∞ i T
s(t)f n(t)dt = 0, n = 0, 1, . . . (2.4)
Posmatrani skup ortogonalnih funkcija f n(t) je zatvoren ako za bilo koiji posegmentima kontinualan signal s(t) za koji vazi
T
s2(t)dt < ∞
i proizvoljno malo ε > 0, postoji N i konacan razvo j
s(t) =N −1
n=0
an
f n
(t) (2.5)
tako da vrijedi T
[s(t) − s(t)]2 dt < ε. (2.6)
Pod odred-enim uslovima, koji su prakticno uvijek ispunjeni, iz zatvorenostiskupa ortogonalnih funkcija f n(t) za svaki signal s(t) iz nekog skupa signalaslijedi i njegova potpunost (kompletnost) i obrnuto.Uocimo da razvojem signala (2.2) pomocu skupa ortogonalnih funkcija pred-stavljamo signal s(t) sa beskonacnim ali prebrojivim skupom a0, a1, . . . . Nabazi odgovarajuceg skupa koeficijenata an i datog skupa ortogonalnih funkcija
f
nvrsimo rekonstrukciju signala s(t) prema (2.2).
Nadalje, ako je skup f n kompletan, odnosno zatvoren, onda je predstavljanjesignala moguce izvesti pomocu konacnog broja koeficijenataa0, a1, . . . , aN −1 uz odred-enu tacnost.Jasno je da u tom slucaju samo aproksimativno mozemo obnoviti (rekonstru-isati) signal s(t) uz unaprijed definisanu gresku (ε) koju mozemo zadrzavati udozvoljenim granicama tolerancije sistema izborom odgovarajuce duzine razvoja(N ).
Primjer 2.1. L2(T ) prostor signala.Ovdje se ogranicavamo na klasu signala s(t) koji u toku konacnog intervala trajanja T (digitski interval) imaju konacnu energiju E s (na jednoomskom ot-porniku) tj.
s(t) = 0 za t < 0 i t > T i
T 0
s2(t)dt = E s < ∞. (P.2.1.1)
Za takve kvadratno integrabilne funkcije kazemo da pripadaju tzv L2(T ) pros-toru.Definisacemo sada unutrasnji proizvod (Inner Product) (s1(t), s2(t)) signala s1(t)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 19/246
2.2. IZBOR NACINA PREDSTAVLJANJA SIGNALA 13
i s2(t) koji smo koristili u (2.3).
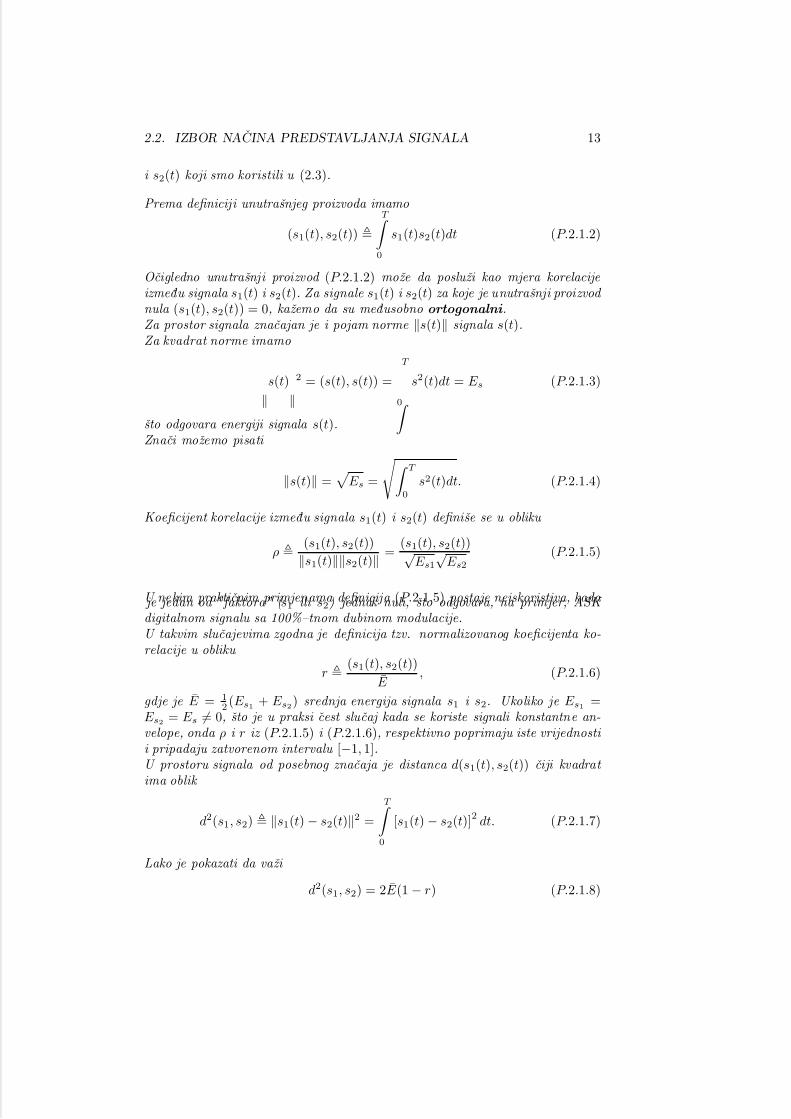
Prema definiciji unutrasnjeg proizvoda imamo
(s1(t), s2(t)) T
0
s1(t)s2(t)dt (P.2.1.2)
Ocigledno unutrasnji proizvod (P.2.1.2) moze da posluzi kao mjera korelacijeizmed -u signala s1(t) i s2(t). Za signale s1(t) i s2(t) za koje je unutrasnji proizvod nula (s1(t), s2(t)) = 0, kazemo da su med -usobno ortogonalni .Za prostor signala znacajan je i pojam norme s(t) signala s(t).Za kvadrat norme imamo
s(t)
2 = (s(t), s(t)) =
T
0
s2(t)dt = E s (P.2.1.3)
sto odgovara energiji signala s(t).Znaci mozemo pisati
s(t) =
E s =
T
0
s2(t)dt. (P.2.1.4)
Koeficijent korelacije izmed -u signala s1(t) i s2(t) definise se u obliku
ρ (s1(t), s2(t))
s1(t)s2(t) =(s1(t), s2(t))√
E s1
√E s2
(P.2.1.5)
U nekim prakticnim primjenama definicija (P.2.1.5) postaje neiskoristiva, kada je jedan od ”faktora” ( s1 ili s2) jednak nuli, sto odgovara, na primjer, ASK digitalnom signalu sa 100%–tnom dubinom modulacije.U takvim slucajevima zgodna je definicija tzv. normalizovanog koeficijenta ko-relacije u obliku
r (s1(t), s2(t))
E , (P.2.1.6)
gdje je E = 12
(E s1 + E s2) srednja energija signala s1 i s2. Ukoliko je E s1 =E s2 = E s = 0, sto je u praksi cest slucaj kada se koriste signali konstantne an-velope, onda ρ i r iz (P.2.1.5) i (P.2.1.6), respektivno poprimaju iste vrijednosti i pripadaju zatvorenom intervalu [−1, 1].U prostoru signala od posebnog znacaja je distanca d(s1(t), s2(t)) ciji kvadrat ima oblik
d2(s1, s2) s1(t) − s2(t)2 =
T 0
[s1(t) − s2(t)]2 dt. (P.2.1.7)
Lako je pokazati da vazi
d2(s1, s2) = 2E (1 − r) (P.2.1.8)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 20/246
14 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
Ako signali s1 i s2 imaju podjednake energije (E s1 = E s2 = E s), kao u slucaju
PSK i FSK digitalnih signala, onda imamo
d(s1, s2) =
2E s(1 − ρ) =
2E s(1 − r). (P.2.1.9)
Ne upustajuci se ovdje u konkretne modele prenosnih sistema kao i odgovarajucu stroziju analiticku analizu, intuitivno mozemo zakljuciti da ce dati sistem biti robustniji na sum u medijumu (prenosnom ili memorijskom) ako je energija pojedinih fizickih nosilaca informacija s1(t), s2(t), . . . veca i ako je njihova med -usobna korelacija manja. Samu energiju signala mozemo povecati poveca-njem nivoa (amplitude) signala, sto je ograniceno tehnoloskim mogucnostima i mogucom interferencijom sa drugim sistemima i povecanjem trajanja T elemen-tarnog signala sto bi smanjilo brzinu prenosa informacija koju diktira izvorni koder.
Inzenjerima preostaje izbor takvog skupa, s1(t), s2(t), . . . , fizickih nosilaca in- formacija da med -usobna korelacija signala bude sto manja.
Relacije (P.2.1.8) i (P.2.1.9) pokazuju da distanca preuzima na sebe cjeloku-pni znacaj koji imaju energija signala i njihove med -usobne korelacije.U uslovima koriscenja binarnog skupa digitalnih signala s1(t), s2(t) i jednakenjihove vjerovatnoce pojavljivanja, maksimalna distanca d(s1, s2) obezbjed -uje i minimalnu vjerovatnocu greske izazvanu u prenosnom ili memorijskom sistemu.Ako ρ odnosno r poprime minimalnu vrijednost (−1), onda imamo, u uslovi-ma njihovih jednakih energija, maksimalnu distancu izmed -u posmatranih signala s1(t) i s2(t) tj.:
dmax(s1, s2) = 2
E s, E s1 = E s2 = E s,
sto odgovara tzv. antipodskim signalima (na primjer 2PSK digitalni signal).Ako signal moze da poprimi i vise od dva stanja (PSK i dr.), onda je potrebnoobratiti posebnu paznju na minimalnu distancu dmin
i=j(si(t), sj (t)), koja daje gornju
granicu vjerovatnoce greske.
Primjer 2.2. Posmatracemo 2–PSK (Phase Shift Keying) binarni digitalni sig-nal koji odgovara informacionom sadrzaju bez memorije sa p(1) = p(0) = 1
2.
Koristicemo korespodenciju
”0” −→ s1(t) =
2E
T cos2πf 0t, 0 ≤ t ≤ T,
”1”−→
s0(t) =−
s1(t)(P.2.2.1)
gdje su T bitski interval, a E energija fizickih nosilaca ( s1 i s0) ”jedinica”i ”nula”.Lako je pokazati da odgovarajuci parametri ρ i r ( P.2.1.5 i P.2.1.6) poprimaju vrijednost -1 sto ukazuje da postupak definisan sa ( P.2.2.1) ima atribut najboljeg binarnog digitalnog signala sa aspekta vjerovatnoce greske ( d2 psk = 2
√E s).
Posmatrajmo sada 2-FSK (Frequency Shift Keying) binarni digitalni signal gdje

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 21/246
2.2. IZBOR NACINA PREDSTAVLJANJA SIGNALA 15
imamo korespodenciju
”1” −→ s1(t) = 2E
T cos2πf 1t, 0 ≤ t ≤ T,
”0” −→ s0(t) =
2E
T cos2πf 0t
(P.2.2.2)
Koristeci definicije ( P.2.1.5) i ( P.2.1.6) lako se dobija
ρ = r =sin2π(f 1 − f 0)T
2π(f 1 − f 0)T =
sin2π f T
2π f T (P.2.2.3)
gdje se pretpostavlja da vazi (f 1 + f 0)T ∈ Z i f = f 1 − f 0. Ocigledno signali
∆ fT
ρ=r
1
1
12
34
32
- 12 - 2
3π
Slika 2.7: P.2.2.1
s1(t) i s0(t) postaju ortogonalni ( ρ = r = 0) ako je ispunjen uslov
∆f T =
±1
2
,
±1,
±3
2
,
±2, . . .
odnosno
∆f T =n
2( n cijeli broj razlicit od nule)
To znaci da postoji beskonacan skup mogucih med -usobno ortogonalnih parova
signala s1(t) i s0(t). Slucaj, kada je ∆f T = (f 1 − f 0)T =f 1 − f 0
vb=
1
2, gdje
je vb =1
T
bit
sodgovara minimalnoj razlici nosecih frekvencija f 1 i f 0, a da pri
tom zadrzimo osobinu med -usobne ortogonalnosti signala s1(t) i s0(t).To je popularni postupak poznat pod nazivom MSK (Minimum Shift Keying).Kako kod MSK signala distanca ima vrijednost
dMS K (s1, s0) = √2E < d2P SK (s1, s0) = 2√E,
on je inferioran u odnosu na 2PSK postupak sa aspekta uticaja suma u prenos-nom ili memorijskom sistemu. Slika P.2.2.1 pokazuje da u okviru 2-FSK digi-talnih signala postoji bolji postupak u odnosu na MSK sa aspekta vjerovatnocegreske ( ∆f T = 0.75, ρ = r = − 2
3π ), ali u tom slucaju imamo povecane zahtjeveu pogledu kapaciteta prenosnog sistema, odnosno potrebnog propusnog opsega.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 22/246
16 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
Primjer 2.3. Distanca izmed -u signala u n–dimenzionalnom linearnom vek-
torskom prostoru.Ako poruku odnosno signal, kao element konacnog skupa mogucih poruka, prikazemou n–dimenzionalnom linearnom vektorskom prostoru V n koji je definisan nad poljem Galoa ( GF ( pk)) karakteristike pk, gdje je p prost broj, k prirodan broj i gdje se koristi operacija sabiranja po modulu p, oznacena sa ( ⊕ p), onda za poruke, odnosno odgovarajuce vektore
A, B ∈ V n (A = (a1, a2, . . . , an), B = (b1, b2 . . . , bn))
definisemo distancu na sljedeci nacin
d(A, B) =
n
i=1
ai ⊕ bi, (P.2.3.1)
gdje je sabiranje po modulu p definisano u obliku
a ⊕ b =
a + b za a + b < p
a + b − p za a + b ≥ pa, b ∈ 0, 1, . . . , p − 1
Uvedena definicija (P.2.3.1) od posebnog je znacaja u teoriji zastitnog kodovanja.Za p = 2 distanca (P.2.3.1) prelazi u poznatu Hamming-ovu distancu.
Primjer 2.4. Uticaj distance izmed -u signala u prostoru odlucivanja na struk-turu prijemnika U ovom primjeru cemo ilustrovati jedan jednostavan pristup u odred -ivanju struk-ture optimalnog prijemnika koristeci distancu u prostoru odlucivanja izlaznog signala nakon uticaja aditivnog suma u prenosnom sistemu na ulazni binarni
digitalni signal s1(t), s0t.
"0"→s0(t)
"1"→s1(t)
ilin(t)
x(t)=
s1(t)+n(t)→moguća hipoteza H 1
s0(t)+n(t)→moguća hipoteza H 0
Prenosni sistem
Slika 2.8: Uprosceni model prenosa elementarnog binarnog informacionogsadrzaja bez memorije
U uslovima uspostavljene bitske sinhronizacije, jednakih apriornih vjerovatnoca hipoteza H 1 i H 0 ( p(H 0) = p(H 0) = 1
2), jednakih cijena kostanja gresaka prve
p(1/0) i druge vrste p(0/1), prijemnik na bazi izlaznog signala x(t) i poznatih lokalno generisanih nosilaca s1(t), s0(t) poredi distance u prostoru odlucivanja prijemnog signala
d(x(t), s0(t))H 1H 0
d(x(t), s0(t)) (P.2.3.1)
i usvaja jednu od hipoteza ( H 1 ili H 0). U odjeljku 6.5 su detaljno izlozeni osnovi odgovarajuce teorije.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 23/246
2.2. IZBOR NACINA PREDSTAVLJANJA SIGNALA 17
Relaciju (P.2.3.1) mozemo pisati u obliku
T
0
[x(t) − s1(t)]2 dtH 1H 0
T
0
[x(t) − s0(t)]2 dt (P.2.3.2)
sto je ekvivalentno proceduri odlucivanja T
0
x(t)s1(t)dtH 1H 0
T
0
x(t)s0(t)dt (P.2.3.3)
koja definise optimalni korelacioni prijemnik sa lokalno generisanim fizickim nosiocima s1(t) i s0(t).Prethodnu relaciju mozemo takod -e modifikovati u oblik
T
0
x(t)s1(t)dt − T
0
x(t)s0(t)dt H 1H 0
0 (P.2.3.4)
sto odgovara optimalnom korelacionom prijemniku u uslovima jednakih apri-ornih vjerovatnoca pojedinih hipoteza p(H 1) = p(H 0) = p(1) = p(0) i jednakih cijena kostanja gresaka prve i druge vrste (slika (P.2.3.2)).
∫ ()dt
∫ ()dt
x(t)Prenosnisistem s0(t)
s1(t)+
−
Prag odlučivanja
Amplitudskikomparator
A.K.
H 1ili
H 0
Slika 2.9: Struktura optimalnog korelacionog prijemnika proistekla na bazi de-tekcije minimalne distance izmed-u prijemnog signala i mogucih signalnih tacakaiz sklupa s1, s0 u prostoru odlucivanja
Srednja vjerovatnoca greske moze se izraziti u obliku
pε = p(0) p(1/0) + p(1) p(0/1) = p(H 0) p(H 1/H 0) + p(H 1) p(H 0/H 1).
Prethodne rezultate lako je prosiriti i na slucaj koristenja m–arnog digitalnog signala (m > 2) koji je posebno atraktivan kod kvalitetnih prenosnih sistema gdje treba koristiti mogucnost povecanja brzine prenosa informacija.
Pomenimo da se kod projektovanja telekomunikacionih mreza po svojojprirodi namece Euklidova distanca ili, ako se radi o mrezama u urbanim sredi-nama, onda se najcesce koristi tzv ”city block” distanca
d(A, B) =2
i=1
|xAi − xB
i |

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 24/246
18 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
gdje su A = (xA1 , xA
2 ) i B = (xB1 , xB
2 ).
Kod digitalne obrade govornog signala (njegove analize i sinteze) popularna jeItakurina distanca itd.[]Na kraju ovog uvodnog osvrta na nacin predstavljanja signala, kao fizickih
nosioca informacija, pomenimo da, popularno govoreci, prostor u kojem je sig-nal definisan pomocu vektora nazivamo vektorski ili Euklidov prostor, a kada jedefinisan pomocu elementarnih signala, nazivamo funkcijski ili Hilbertov pros-tor.
2.3 Pregled znacajnijih skupova ortogonalnihfunkcija koji su prisutni kod obrade i pre-nosa signala
Opisivanje signala pomocu razvoja oblika (2.2) na bazi skupa ortogonalnihfunkcija f n prisutan je u praksi i teoriji posmatrane oblasti. Zahvaljujucipojavi kalema i kondenzatora u elektrotehnici, zatim dijelom talasnoj prirodisvjetlosti Furijeov razvoj ima, bar za starije generacije inzenjera, i svoju fizickui prakticnu interpretaciju. Stoga cemo ovaj pregled poceti sa Furijeovim skupomortogonalnih funkcija.
2.3.1 Fourier-ov skup ortogonalnih funkcija
Furijeov skup ortogonalnih funkcija ima oblik
1, cos ω1t, sin ω1t, cos2ω1t, sin2ω1t, cos3ω1t, sin3ω1t , . . .
kojem odgovara varijanta skupa u kompleksnom obliku
ejnω1t
, n ∈ Z
gdje je T = 2πω1
osnovna vremenska perioda signala. Na slici 2.10 dat je i grafickiprikaz nekoliko prvih elemenata Furijeovog skupa ortogonalnih funkcija.Odgovarajuci razvoj oblika (2.2) poznat je pod nazivom trigonometrijskog redakoji je uz odred-ena ogranicenja za signal, a koja su prakticno ispunjena, konver-gentan u srednjem (i uniformno). Posebna odlika funkcija iz Furijeovog skupa jenjihova invarijantnost u odnosu na operacije diferenciranja (d()/dt) i integracije(
()dt).
2.3.2 Walshov skup ortogonalnih funkcija
Matematicar Rademacher je 1922. godine predlozio nekompletan ortogo-nalan skup funkcija.[]
Rademacher-ova funkcija indeksa m rad(m, t) je niz pravougaonih impulsa sa2m−1 perioda u poluotvorenom normalizovanom intervalu [0, 1) koji poprimajuvrijednosti +1 ili −1. Jedini izuzetak je rad(0, t) koja odgovara jedinicnom
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 25/246
2.3. PREGLED ZNACAJNIJIH SKUPOVA ORTOGONALNIH... 19
t
1
-1
T
cos2ω1t
t
1
-1
T
cosω1t
t
1
-1
T
sin2ω1t
t
1
-1
T
sinω1t
t 1
T
ω1=2π f 1= 2πT
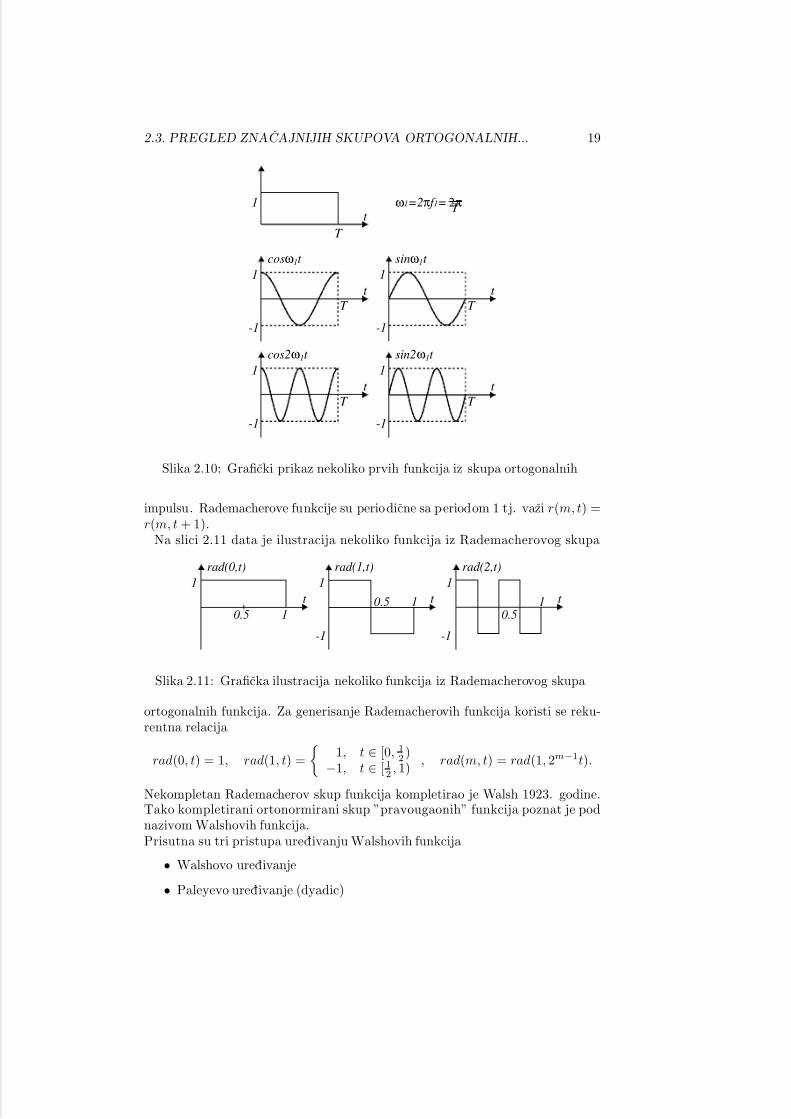
Slika 2.10: Graficki prikaz nekoliko prvih funkcija iz skupa ortogonalnih
impulsu. Rademacherove funkcije su periodicne sa periodom 1 tj. vazi r(m, t) =r(m, t + 1).
Na slici 2.11 data je ilustracija nekoliko funkcija iz Rademacherovog skupa
1
t
rad(0,t)
10.5
t
1
-1
rad(1,t)
10.5 t
rad(2,t)
1
-1
10.5
Slika 2.11: Graficka ilustracija nekoliko funkcija iz Rademacherovog skupa
ortogonalnih funkcija. Za generisanje Rademacherovih funkcija koristi se reku-rentna relacija
rad(0, t) = 1, rad(1, t) =
1, t ∈ [0, 1
2)
−1, t ∈ [ 12
, 1), rad(m, t) = rad(1, 2m−1t).
Nekompletan Rademacherov skup funkcija kompletirao je Walsh 1923. godine.Tako kompletirani ortonormirani skup ”pravougaonih” funkcija poznat je podnazivom Walshovih funkcija.Prisutna su tri pristupa ured-ivanju Walshovih funkcija
• Walshovo ured-ivanje
• Paleyevo ured-ivanje (dyadic)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 26/246
20 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
• Prirodno ili Hadamardovo ured-enje
Na slici 2.12 dato je nekoliko prvih funkcija Walshovog skupa ortogonalnihfunkcija.
t t
t t
1
-1
1
-1
1
-1
1
-1
walw(1,t) walw(3,t)
walw(0,t) walw(2,t)
1 1
1 10.5
0.5
0.5
Slika 2.12: Graficka ilustracija nekoliko iz Walshovog skupa funkcija
2.3.3 Haarov skup ortogonalnih funkcija
Mad-arski matematicar Haar je jos daleke 1910. godine predlozio ortonormi-ran i kompletan skup funkcija h(n,m,t0. Rekurentna relacija za generisanje
har(n,m,t) ima oblik:
har(0, 0, t) = 1, t ∈ [0, 1)
har(r,m,t) =
2r2 ,
m − 1
2r≤ t <
m − 12
2r
2−r2 ,
m − 12
2r≤ t <
m
2r
0, za ostalo t ∈ [0, 1)
gdje je 0 ≤ r < log2 N , a N red vektora u slucaju diskretne transformacije.Na slici 2.3.4 prikazano je nekoliko Haarovih funkcija.
2.3.4 Karhuen–Loeveov razvoj
Konacno cemo pomenuti Karhunen–Loeveov razvo j gdje se kao skup ortogo-nalnih funkcija koriste sopstvene (vlastite) funkcije izvedene na bazi korelacionihfunkcija R(τ, t) procesa kojem pripada dati signal.Za datu korelacionu funkciju R(τ, t) sopstvena vrijednost λi i sopstvena funkcija
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 27/246
2.3. PREGLED ZNACAJNIJIH SKUPOVA ORTOGONALNIH... 21
t t
t t
1
-1
1
-1
1 1
-1
1
1
1
1
0.5
0.5
0.5
0.5
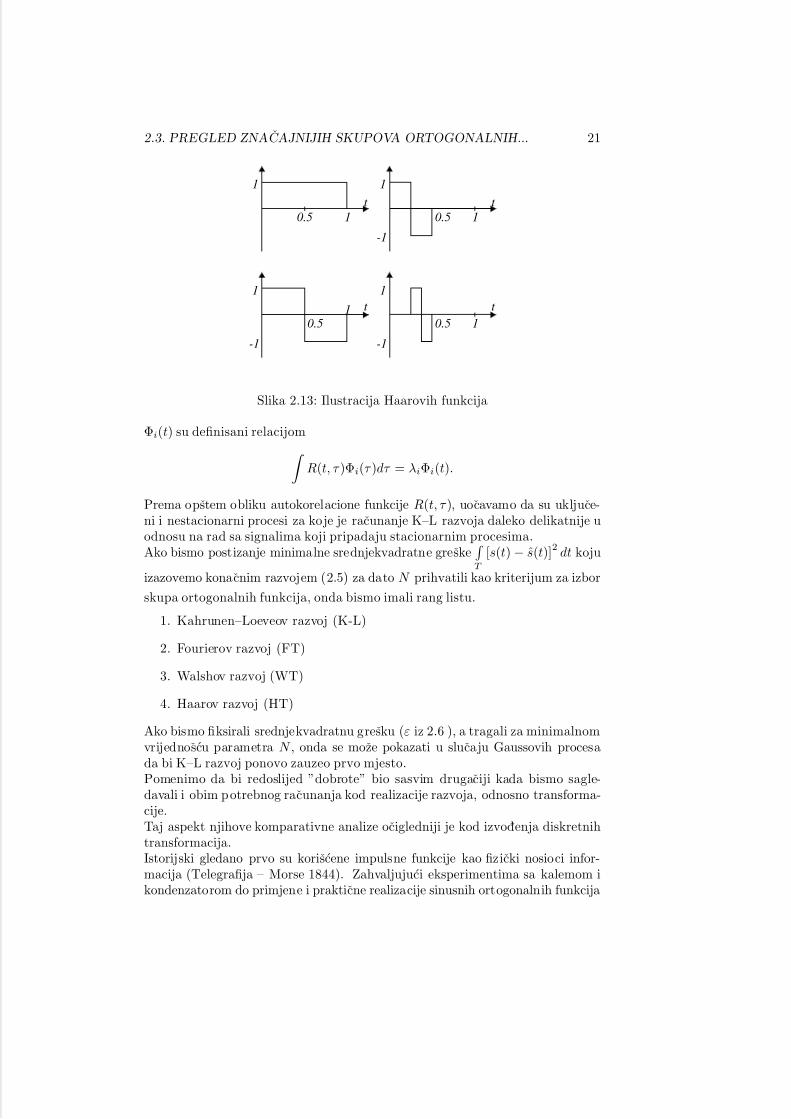
Slika 2.13: Ilustracija Haarovih funkcija
Φi(t) su definisani relacijom R(t, τ )Φi(τ )dτ = λiΦi(t).
Prema opstem obliku autokorelacione funkcije R(t, τ ), uocavamo da su ukljuce-ni i nestacionarni procesi za koje je racunanje K–L razvoja daleko delikatnije uodnosu na rad sa signalima koji pripadaju stacionarnim procesima.Ako bismo postizanje minimalne srednjekvadratne greske
T
[s(t) − s(t)]2 dt koju
izazovemo konacnim razvojem (2.5) za dato N prihvatili kao kriterijum za izbor
skupa ortogonalnih funkcija, onda bismo imali rang listu.
1. Kahrunen–Loeveov razvoj (K-L)
2. Fourierov razvoj (FT)
3. Walshov razvoj (WT)
4. Haarov razvoj (HT)
Ako bismo fiksirali srednjekvadratnu gresku (ε iz 2.6 ), a tragali za minimalnomvrijednoscu parametra N , onda se moze pokazati u slucaju Gaussovih procesada bi K–L razvoj ponovo zauzeo prvo mjesto.Pomenimo da bi redoslijed ”dobrote” bio sasvim drugaciji kada bismo sagle-davali i obim p otrebnog racunanja kod realizacije razvoja, odnosno transforma-cije.Taj aspekt njihove komparativne analize ocigledniji je kod izvod-enja diskretnihtransformacija.Istorijski gledano prvo su koriscene impulsne funkcije kao fizicki nosioci infor-macija (Telegrafija – Morse 1844). Zahvaljujuci eksperimentima sa kalemom ikondenzatorom do primjene i prakticne realizacije sinusnih ortogonalnih funkcija
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 28/246
22 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
dolazi tek pocetkom 20–tog vijeka. Tokom prve polovine 20–tog vijeka izrad-eni
su vec citavi sistemi, a posebno filtri, zasnovani na harmonijskoj analizi ili,drugacije receno primjeni Fourierovog razvoja odnosno Fourierove transforma-cije.U eri danasnje ekspanzije digitalnih sistema na bazi integrisanih sklopova, im-pulsne ortogonalne funkcije ponovo postaju predmet intenzivnog proucavanja iprimjene.Pocetkom osamdesetih godina dvadesetog stoljeca izrad-en je jedan primopreda- jni sistem baziran na koriscenju impulsnih ortogonalnih funkcija. U takvimuslovima kod prenosa kroz nelinearne sisteme ne dolazi do generisanja ”klir–komponenata”(komponenata cije su ucestanosti linearne kombinacije ucestanostiulaznog signala), sto je karakteristicno za sisteme bazirane na Fourier–ovoj filo-zofiji. Med-utim, prednost impulsnih ortogonalnih funkcija se umanjuje kodprenosa kroz linearne sisteme jer se tada javljaju izoblicenja. To znaci, ako
zelimo da siroko otvorimo vrata impulsnim ortogonalnim funkcijama, ondabismo morali eliminisati linearne prenosne sisteme, ili prici hibridnim sistemimauz mogucnost prelaska jednog nacina predstavljanja signala u drugi i obrnuto,u zavisnosti od toga kakav je karakter datog prenosnog sistema – linearan ilinelinearan.Danas smo takod-e svjedoci da se pored klasicnih transformacija (FT, WT,HT, itd.), zahvaljujuci nivou danasnje tehnologije, sve vise u digitalnoj obradii prenosu signala koriste odgovarajuce diskretne transformacije (DFT, DWT,DHT, itd.).
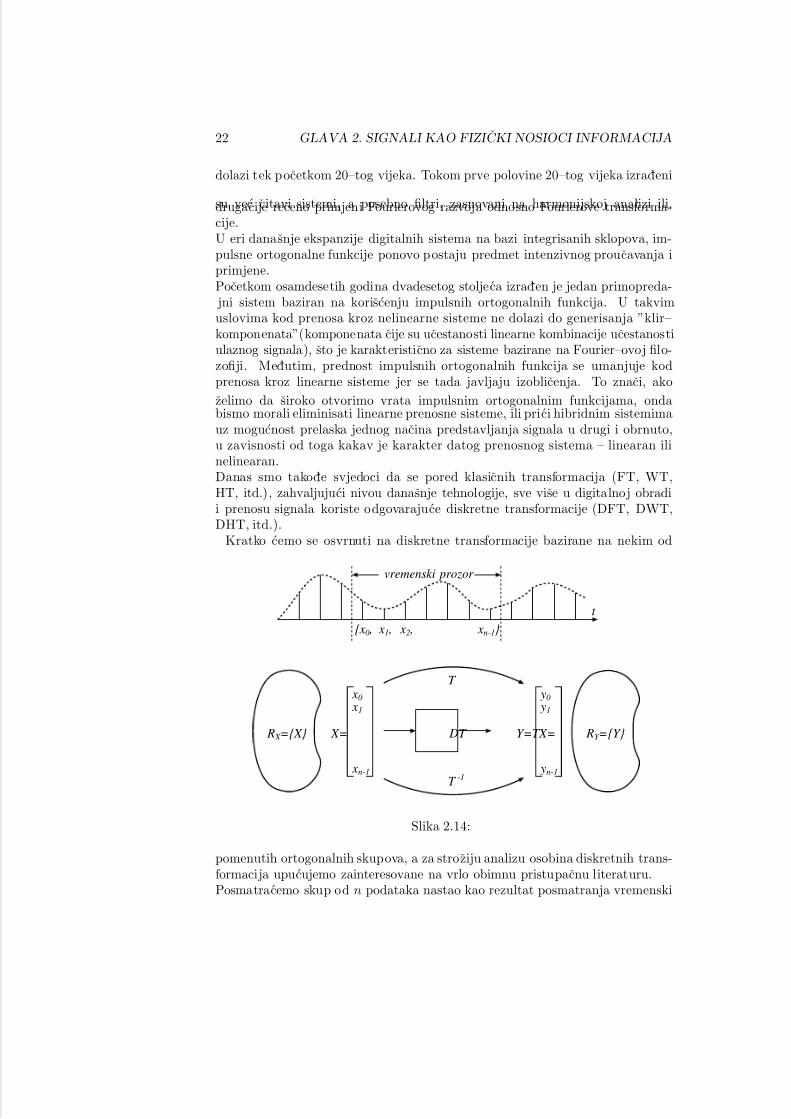
Kratko cemo se osvrnuti na diskretne transformacije bazirane na nekim od
RY =Y R X =X X=
x0
x1
xn-1
DT Y=TX=
y0
y1
yn-1
T -1
T
t
x0 , x1 , x2 , xn-1
vremenski prozor
Slika 2.14:
pomenutih ortogonalnih skupova, a za stroziju analizu osobina diskretnih trans-formacija upucujemo zainteresovane na vrlo obimnu pristupacnu literaturu.Posmatracemo skup od n podataka nastao kao rezultat posmatranja vremenski

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 29/246
2.3. PREGLED ZNACAJNIJIH SKUPOVA ORTOGONALNIH... 23
diskretnog signala kroz ”prozor”konacnog trajanja (sl.2.3.5).
Y = T · X =
y0
y1
...yn−1
(2.7)
Dobijenu n–torku mozemo da uredimo kao vektor kolonu X. Koristeci matricutransformacije T, prostor izvornih podataka, RX , preslikavamo u novi prostorRY .Vec smo pomenuli potrebu koriscenja razvoja odnosno transformacije pomocuskupa ortogonalnih funkcija. To znaci da je T ortogonalna matrica za koju vaziT−1 = Tt, gdje t oznacava operaciju transponovanja matrice. Stoga direktnojtransformaciji prostora (Rx
→RY ) prema (2.3.1) odgovara inverzna
X = T−1Y = TtY (2.8)
Kod transformacije
x0, x1, . . . , xm−1, . . . , xn−1 → y0, y1, . . . , ym−1, . . . , yn−1prema (2.3.1) originalnu n–torku preslikavamo u Y n–torku. Pri takvom pos-tupku transformacije pokusavamo da izvornu informaciju koncentrisemo na sto je moguce manji broj m izlaznih komponenata (m < n).Na bazi izlazne n–torke y0, y1, . . . , ym−1, . . . , yn−1 mozemo po potrebi pot-puno korektno obnoviti originalnu n–torku prema (2.3.2). Med-utim, u cilju tzv.”kompresije podataka”obicno usvajamo samo m (m < n) komponenata izlaznen–torke. Zahvaljujuci uvijek prisutnoj redundansi u originalnom prostoru RX ,
obicno je m n a da pri tom unesena greska nije znacajna sa aspekta krajn- jeg korisnika. Strogo uzevsi na bazi m izlaznih ”najznacajnijih” komponenatamozemo samo aproksimativno (X) obnoviti originalnu n–torku (X). Nastalasrednjekvadratna greska ε2 iznosi
ε2 = (X − X)t(X − X) = X − X2 (2.9)
Za usvojeni stepen kompresije, odnosno usvojeni parametar m, minimalnu gre-sku (2.3.3) obezbjed-uje linearna ortogonalna transformacija K–L T, zatim dolazisuboptimalna DFT pa DWT i konacno DHT.Kao ilustracija prilozena je matrica transformacije DFT (T F ) u slucaju da jen = 8.
T F =1
n
w0 w0 w0 w0 w0 w0 w0 w0
w0 w1 w2 w3 w4 w5 w6 w7
w0 w2 w4 w6 w0 w2 w4 w6
w0 w3 w6 w1 w4 w7 w2 w5
w0 w4 w0 w4 w0 w4 w0 w4
w0 w5 w2 w7 w4 w1 w6 w3
w0 w6 w4 w2 w0 w6 w4 w2
w0 w7 w6 w5 w4 w3 w2 w1
, w = e−
2πjn mod n, n = 8

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 30/246
24 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
U slucaju diskretne Walshove trasnformacije imamo
T W =1
n
1 1 1 1 1 1 1 11 1 1 1 −1 −1 −1 −11 1 −1 −1 −1 −1 1 11 1 −1 −1 1 1 −1 −11 −1 −1 1 1 −1 −1 11 −1 −1 1 −1 1 1 −11 −1 1 −1 −1 1 −1 11 −1 1 −1 1 −1 1 −1
Uocimo da vrijednost elemenata pojedinih vrsta matrice T W mozemo dobitiuzimanjem n ekvidistantnih odmjeraka Walshovih funkcija u toku jedne periode(sl.2.3.3). Kod DFT i DWT se lako moze uociti razlika u vrsti potrebnih ope-racija kod njihove realizacije. Kod DFT imamo operacije mnozenja i sabiranja
kompleksnih brojeva a kod DWT imamo samo operacije jednostavnog sabiranjai oduzimanja komponenata ulaznih vektora.Zajednicko im je obiljezje da svaka komponenta izlaznog vektora zavisi od svihkomponenata odgovarajuceg ulaznog vektora. Stoga takve transformacije isticusamo integralna svojstva ulaznog procesa koji opisuju originalni uzorci X.U slucaju diskretne Haar–ove transformacije (DHT) matricu T H mozemo lakodobiti odmjeravanjem odgovarajucih Haar-ovih funkcija (sl.2.3.4)
T H =
1 1 1 1 1 1 1 11 1 1 1 −1 −1 −1 −1√2
√2
√2
√2 0 0 0 0
0 0 0 0√
2√
2√
2√
2
−2
−2 0 0 0 0 0 0
0 0 −2 −2 0 0 0 00 0 0 0 −2 −2 0 00 0 0 0 0 0 −2 −2
Prema obliku matrice T H uocavamo da DHT moze da se koristi kada treba is-ticati lokalna obiljezja u uzorcima ulaznih podataka.Naime, kod DHT samo prve dvije komponente izlaznog vektora zavise od svihkomponenata ulaznog vektora, dok ostale komponente izlaznog vektora zavisesamo od odred-enog broja komponenata ulaznog vektora. Iz tih razloga DHTpokazuje dobre rezultate u analizi elektrokardiograma (EKG – mjera elektricneaktivnosti srca) odnosno ”PQRST” kompleksa.Sumiracemo na kraju ovog kratkog pregleda diskretnih transformacija obimpotrebnih racunskih operacija kod njihove realizacije.
Kod DFT imamo n2 operacija mnozenja kompleksnih brojeva. Tako obimanracunarski posao skracen je zahvaljujuci algoritmu koji su sezdesetih godinapredlozili Cooley i Tukey a koji je poznat pod nazivom brze Fourierove trans-formacije FFT (Fast Fourier Transformation). FFT zahtijeva n log2 n operacijamnozenja, pa je faktor redukcije u odnosu na DFT
n2
n log2 n=
n
log2 n≈ 100|za n=1024

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 31/246
2.3. PREGLED ZNACAJNIJIH SKUPOVA ORTOGONALNIH... 25
Kod DWT imamo n2 operacija sabiranja ili oduzimanja, a algoritam brze trans-
formacije FWT smanjuje broj sabiranja i oduzimanja na vrijednost n log2 n.Konacno, kod brze Haarove transformacije (FHT) imamo samo 2(n-1) operacijasabiranja ili oduzimanja.
S obzirom na delikatnost rada sa K-L-T u realnom vremenu, F-T, odnosnoDF-T, kao suboptimalna dozivjela je najmasovniju primjenu. Poznate su njojbliske ortogonalne transformacije HARTLEYeva i DISKRETNA KOSINUSNATRANSFORMACIJA (DCT) koje za razliku od DFT, cija je kernel funkcijakompleksna, imaju realne kernel funkcije kod kojih transformacije imaju pot-puno isti oblik kao i odgovarajuce njihove inverzne transformacije. U nasemslucaju to su ”cas”i ”cos”. To je od posebnog znacaja za implementaciju jer isto hardversko–softversko rjesenje zadovoljava obe relacije. DCT se mozeracunati pomocu FFT algoritma a i preko posebnog optimalnog FDCT algo-ritma. DCT je gotovo optimalna transformacija za autoregresivne (AR( p)) pro-
cese, a posebno AR(1) gdje je izrazevna velika korelacija izmed-u sukcesivnihvrijednosti vremenski diskretnog signala.Tipicna je primjena DCT u obradi video signala gdje je prisutna velika pros-torna korelacija, posebno pri kodovanju med-uokvira. Isto tako uobicajena jekombinacija DCT i DPCM (Differential Pulse Code Modulation) za kodovanjeunutar okvira.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 32/246
26 GLAVA 2. SIGNALI KAO FIZI CKI NOSIOCI INFORMACIJA
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 33/246
Glava 3
Fourierova analiza signala
3.1 Uvodna razmatranja
Zahvaljujuci istorijskom putu razvoja elektrotehnike u drugoj polovini pro-slog i prvoj polovini ovog vijeka Fourierova analiza signala je stekla cvrstuprakticnu interpretaciju, a u mnogim ozbiljnim udzbenicima i monopol za pred-stavljanje signala preko razvoja (2.2) na bazi Fourierovih ortogonalnih funkcija(odjeljak 2.3.1). Med-utim, u vecini slucajeva dekompozicija signala na bazirazvoja (2.2) je formalne prirode i izbor skupa ortogonalnih funkcija je u neposred-noj zavisnosti od prirode posmatranog procesa i postavljenih ciljeva sa aspektaobrade, memorisanja ili prenosa signala.Kako su postojeci sistemi utemeljeni na filozofiji Fourierovog pristupa, mi cemo
ovdje dati kraci pregled Fourierove analize signala pocevsi od spektralne analizedeterministickog signala.
3.2 Spektralna analiza deterministickih signala
3.2.1 Spektar periodicnih signala
U prirodi i praksi ima mnogo pojava koje se opisuju periodicnim funkcijamaodnosno signalima. Podsjetimo se da za svaki signal s(t) kazemo da je periodicanako je zadovoljena jednakost
s(t) = s(t + T ), (T > 0), −∞ < t < ∞. (3.1)
Najmanja vrijednost za T , koja zadovoljava (3.1), naziva se osnovnom ili prim-itivnom periodom signala s(t). Mi cemo koristiti jednostavno naziv ”perioda”signala. Njena reciprocna vrijednost definise osnovnu frekvenciju (f 1) signala
f 1 =1
T [Hz]
27

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 34/246
28 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
odnosno osnovnu kruznu ucestanost (ω1)
ω1 = 2πf 1 =2π
T
rad
s
Da bismo mogli signal predstaviti Fourierovim redom dovoljno je prema Dirich-letovoj teoremi da u intervalu duzine jedne periode (npr. −T
2≤ t ≤ T
2) zado-
voljava sljedece uslove:
1. Jednoznacnost
2. Konacan broj prekida prve vrste
3. Konacan broj ekstremuma
4. Apsolutna integrabilnost T
|s(t)|dt < ∞
U tackama prekida t = t0 Fourierov red signala s(t) konvergira vrijednosti
1
2[s(t0 − 0) + s(t0 + 0)].
Prakticno prisutni signali redovno ispunjavaju prethodne uslove, a umjestouslova 4. u inzenjersko j praksi najcesce primjenjujemo konacnost srednje snagesignala
1T T s2(t)dt = P s < ∞
(na jednoomskom otporniku).Kako je Fourierov skup ortogonalnih funkcija
1, cos ω1t, sin ω1t, cos2ω1t, sin2ω1t , . . .
kompletan i zatvoren, signal s(t), koji zadovoljava postavljena ogranicenja,mozemo zamjeniti konvergentnim redom
s(t) = s0 +
∞n=1
sn cos(nω1t + ϕn) (3.2)
ili
s(t) = s0 +∞
n=1
sn sin(nω1t + ϕn) (3.2.a)
Kao sto smo vec ukazali, razvijanje signala u red moguce je izvrsiti pomocumnogih drugih kompletnih skupova ortogonalnih funkcija, a ne samo pomocusinusa i kosinusa.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 35/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 29
Ako se Fourierov red (3.2) uredi posebnim grupisanjem sinusnih (neparnih) i
kosinusnih (parnih) clanova, onda dobijamo
s(t) = s0 +∞
n=1
an cos nω1t +∞
n=1
bn sin nω1t (3.3)
gdje su
an = sn cos ϕn; bn = −sn sin ϕn; sn =
a2n + b2
n; tan ϕn = − bn
an. (3.4)
Uocimo da su sn amplituda, ϕn faza n–tog harmonika signala.Koristeci ortogonalnost (2.1) datog skupa funkcija, onda na bazi (2.3) lakoracunamo koeficijente razvoja (3.3)
an
=2
T T
s(t)cos nω1
tdt (3.5)
bn =2
T
T
s(t)sin nω1tdt (3.6)
s0 =a0
2=
1
T
T
s(t)dt (3.7)
Oblici redova (3.2) i (3.3) jos se vise pojednostavljuju ako je signal s(t) parnaili neparna vremenska funkcija [].
Primjer 3.1. Kako sve komponente signala s(t) u razvoju (3.2), izuzev istosm- jerne komponente s0, imaju isti oblik, ilustrovacemo cesto prisutne postupke u
prikazivanju elementarnog signala s(t) = S cos(ω1t + ϕ1) (3.8)
koji se moze pisati kao realni dio kompleksne funkcije
s(t) = ReSej(ω1t+ϕ1) (3.9)
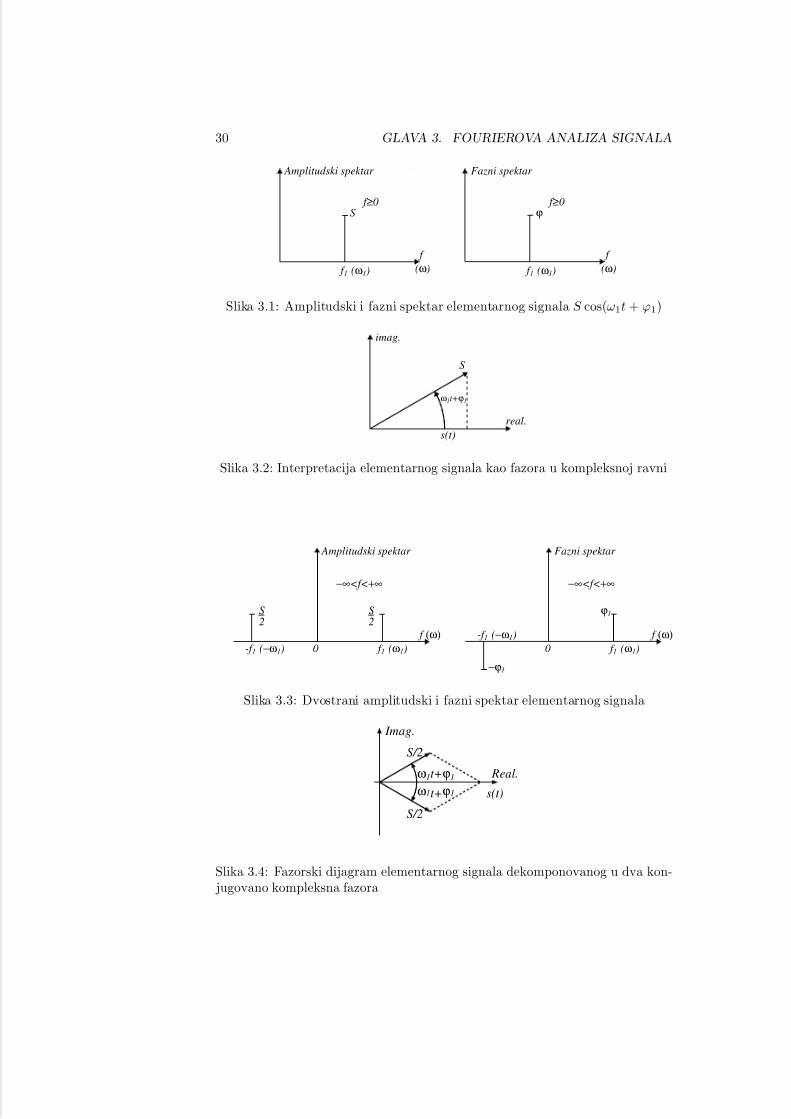
Na slici 3.1 prikazan je amplitudski i fazni spektar elementarnog signala (3.7),a na slici 3.2 data je njegova interpretacija u kompleksnoj ravni.
Datom obliku signala (3.7) odgovara jednostrani (fizicki) spektar (sl.3.1) koji egzistira samo za nenegativne frekvencije ( f ≥ 0).Signal (3.7) formalno mozemo pisati i u obliku
s(t) = S 2
ej(ω1t+ϕ1) + S 2
e−j(ω1t+ϕ1) (3.10)
kojem odgovara dvostrani (matematicki) spektar na slici 3.3, a odgovarajuci fa-zorski dijagram dat je na slici 3.4.
Uocimo da je dvostrani amplitudski spektar parna, a fazni spektar neparna funkcija frekvencije, odnosno ucestanosti.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 36/246
30 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
S
f
Amplitudski spektar
f 1 (ω1)
f≥0
(ω)
ϕ
f
Fazni spektar
f 1 (ω1)
f≥0
(ω)
Slika 3.1: Amplitudski i fazni spektar elementarnog signala S cos(ω1t + ϕ1)
s(t)
real.
imag.
S
ω1t+ϕ1
Slika 3.2: Interpretacija elementarnog signala kao fazora u kompleksnoj ravni
f (ω)
Amplitudski spektar
f 1 (ω1)0-f 1 (−ω1)
−∞<f<+∞
S2
S2
f (ω)
Fazni spektar
f 1 (ω1)0
-f 1 (−ω1)
−∞<f<+∞
ϕ1
−ϕ1
Slika 3.3: Dvostrani amplitudski i fazni spektar elementarnog signala
Real.
Imag.
ω1t+ϕ1
ω1t+ϕ1 s(t)
S/2
S/2
Slika 3.4: Fazorski dijagram elementarnog signala dekomponovanog u dva kon- jugovano kompleksna fazora

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 37/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 31
Fizički spektar periodičnog signala
f
f ≥0
f 1 2f 1 3f 1
Sn
S0
S1 S2
S3
Slika 3.5: Graficki prikaz fizickog (jednostranog) amplitudskog spektra peri-odicnog signala
Prethodni primjer mozemo uopstiti i definisati fizicki spektar periodicnog
signala.Pod pojmom fizickog (jednostranog) amplitudskog spektra periodicnih signala podrazumijevamo skup amplituda pojedinih harmonika sn iz razvoja (3.2)prikazanih u funkciji frekvencije (f ) ili ucestanosti (ω) (sl.3.5).
Na slican nacin se definise jednostrani fazni spektar (ϕn). Zakljucujemo dau spektru periodicnog signala imamo egzistenciju frekvencijskih komponenatana najvise prebrojivom skupu frekvencija (na osnovnoj frekvenciji f 1, a zatimeventualno na nultoj frekvenciji i multiplima osnovne frekvencije nf 1, gdje jen prirodan broj veci od 1). Stoga kazemo da je spektar periodicnog signalarijedak, ili linijski, a komponente, koje egzistiraju, imaju konacne amplitude.Fourierov red u kompleksnom obliku dobijamo ako uvedemo i pojam negativnefrekvencije i smjenu
c0 =1
2a0 = s0, cn =
1
2(an − jbn), c−n =
1
2(an + jbn) = c∗n (n = 0) (3.11)
koja red (3.3) preslikava u kompleksni oblik
s(t) =+∞
n=−∞cnejnω1t (3.12)
gdje koeficijente cn (n = 0, ±1, ±2, . . . ) racunamo iz relacije
cn =1
T
T
s(t)e−jnω1tdt (3.13)
U takvim uslovima za matematicki amplitudski spektar |cn| prema (3.10)imamo
c0 = s0 =1
2a0 |cn| = |c−n| =
1
2
a2
n + b2n =
1
2sn, n = 1, 2, . . . (3.14)
sto je ilustrovano na slici (3.6).

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 38/246
32 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Sn
f
f ≥0
f 1 2f 1 3f 10
c3c2
c1c0
c-1c-2
c-3
f
f ≥ 0
0 f 1 2f 1 3f 1
S
nc0 c1 c2 c3
c−1c−2c−3
Slika 3.6: Dvostrani (matematicki) amplitudski spektar p eriodicnog signala
f
ϕn
3f 12f 1 f 1
(ϕn=-ϕ-n)
ϕ3ϕ2
ϕ1
-f 1-2f 1-3f 1
ϕ-1
ϕ-2ϕ-3
ϕn
(ϕn = −ϕ−n)
f f 1 2f 1 3f 1
−f 1−2f 1−3f 1ϕ1
ϕ2 ϕ3
ϕ−1
ϕ−2ϕ−3
Slika 3.7: Fazni spektar periodicnog signala u slucaju prosirenja spektra nanegativne frekvencije
Uocimo da je matematicki amplitudski spektar signala parna funkcija frekve-
ncije. Kako je prema (3.4) i (3.10)
cn =1
2snejϕn i c−n =
1
2s−jϕn
n , ϕn = −arctgbn
an
onda je odgovarajuci fazni spektar neparna funkcija frekvencije (sl.3.7), sto jevec i nagovjestio primjer 3.1.
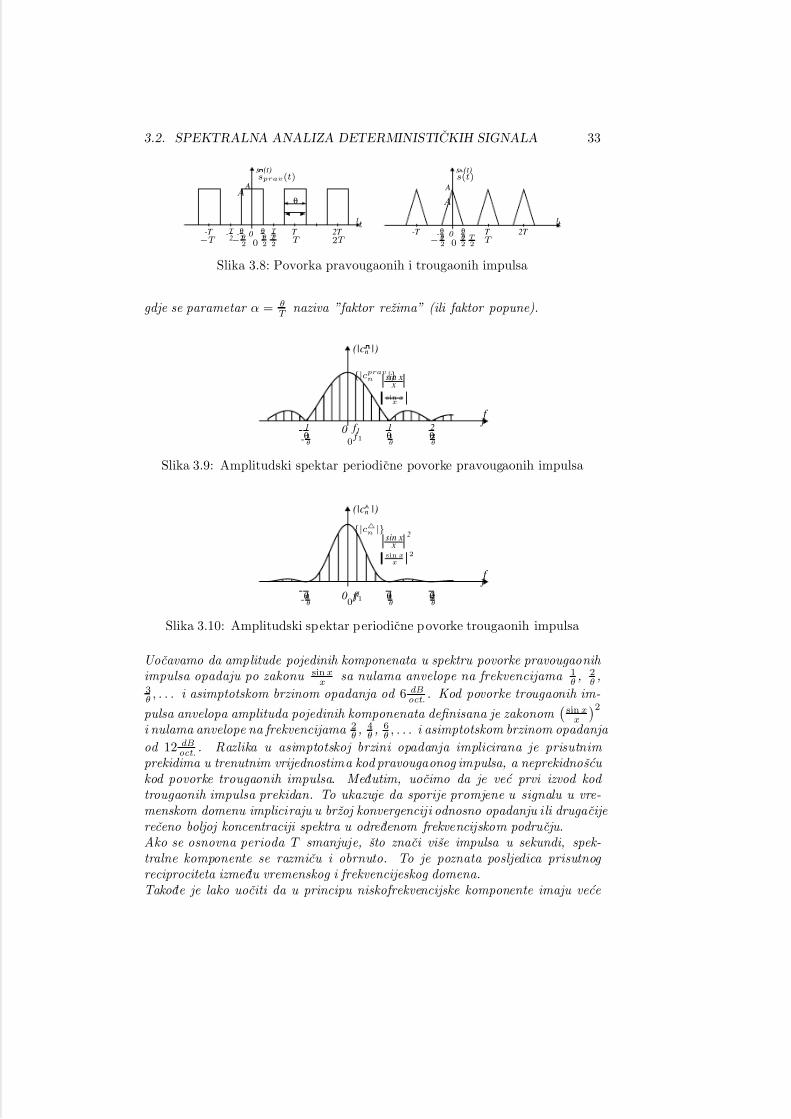
Kako se u tehnici prenosa informacija, mjernoj tehnici, zatim radarskojtehnici i dr. cesto koriste i generisu pravougaoni i trougaoni impulsi, posma-tracemo primjer periodicne povorke pravougaonih i trougaonih impulsa.
Primjer 3.2. Neka su dati periodicni signali s(t) i s(t), ciji su vremenski oblici prikazani na slici 3.8 i 3.9. Osnovna frekvencija oba signala iznosi f 1 = 1
T .
Saglasno relaciji (3.12) kompleksni (dvostrani) spektri posmatrana dva signala dati su izrazima
cn = αAsin nαπ
nαπ, n = 0, ±1, ±2, . . . (3.15)
cn = αA
2
sin nαπ/2
nαπ/2
2
, n = 0, ±1, ±2, . . . (3.16)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 39/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 33
t
θ
s (t)
A
T 2T -T θ
2-θ2
T 2
-T 2
0
t
s (t)
A
T 2T -T θ
2-θ2
0
sprav(t)
A
0θ2− θ
2T 2 T 2T −T
t
E'A
0θ2− θ
2T 2 T
s(t)
t
Slika 3.8: Povorka pravougaonih i trougaonih impulsa
gdje se parametar α = θT naziva ”faktor rezima” (ili faktor popune).
f
(|cn |)
1θ
2θ
1θ
0 f 1
sin x x
|cpravn |
f
0f 1 1
θ2θ- 1θ
sin xx
Slika 3.9: Amplitudski spektar periodicne povorke pravougaonih impulsa
f
(|cn |)
1θ 2θ1θ 0 f 1
sin x x
2|cn |
f
0f 1 1
θ2θ- 1θ
sin xx
2
Slika 3.10: Amplitudski spektar periodicne p ovorke trougaonih impulsa
Uocavamo da amplitude pojedinih komponenata u spektru povorke pravougaonih impulsa opadaju po zakonu sin x
xsa nulama anvelope na frekvencijama 1
θ, 2
θ,
3θ , . . . i asimptotskom brzinom opadanja od 6 dB
oct.. Kod povorke trougaonih im-
pulsa anvelopa amplituda pojedinih komponenata definisana je zakonom
sin xx
2
i nulama anvelope na frekvencijama 2θ
, 4θ
, 6θ , . . . i asimptotskom brzinom opadanja
od 12 dBoct.
. Razlika u asimptotskoj brzini opadanja implicirana je prisutnim prekidima u trenutnim vrijednostima kod pravougaonog impulsa, a neprekidnoscu kod povorke trougaonih impulsa. Med -utim, uocimo da je vec prvi izvod kod trougaonih impulsa prekidan. To ukazuje da sporije promjene u signalu u vre-menskom domenu impliciraju u brzoj konvergenciji odnosno opadanju ili drugacijereceno boljoj koncentraciji spektra u odred -enom frekvencijskom podrucju.Ako se osnovna perioda T smanjuje, sto znaci vise impulsa u sekundi, spek-tralne komponente se razmicu i obrnuto. To je poznata posljedica prisutnog reciprociteta izmed -u vremenskog i frekvencijeskog domena.Takod -e je lako uociti da u principu niskofrekvencijske komponente imaju vece

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 40/246
34 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
amplitude od visokofrekvencijskih komponenata. Isto tako, ako se trajanje ele-
mentarnog impulsa ( θ) smanjuje, onda se znacajnije komponente pojavljuju u sve visem frekvencijskom podrucju.Koristeci resultat (3.14) Fourierov razvoj za povorku pravougaonih impulsa poprima oblik
s?(t) = αA+∞
n=−∞
sin nαπ
nαπejnωit = αA + 2αA
+∞n=1
sin nαπ
nαπcos nω1t (3.17)
Ukoliko trajanje elementarnog impulsa na sl.3.8 smanjujemo, θ → 0, a am-plitudu povecavamo, A → ∞, zadrzavajuci konstantnu povrsinu elementarnog impulsa ( Aθ = 1) i perod ponavljanja T = konst, onda dobijamo periodicnu povorku Dirac-ovih impulsa 1 δ p(t), sl.3.11.
δP(t)=Σδ(t-nT)
t
T T T T T T
t
δ p(t) =
δ(t − nT )
Slika 3.11: Vremenska povorka Dirakovih impulsa
ciji razvoj ima oblik
δ p(t) =1
T
+∞n=−∞
e±jnω1t =1
T +
2
T
+∞n=1
cos nω1t, (3.18)
a dvostrani amplitudski spektar postaje uniforman sl.3.12
f
0 f 1=1T
2T
3T
1T
-1T
f 1 = 1
T
t2
T 3
T 0- 1
T
1
T
Slika 3.12: Dvostrani amplitudski spektar povorke Dirakovih impulsa
Ako koristimo rezultat (3.16), onda mozemo dobiti odgovarajuci Fourierov razvoj
1O Dirac-ovim impulsima bice vise govora kasnije

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 41/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 35
za povorku trougaonih impulsa
s??(t) = αA
2
+∞n=−∞
sin nαπ/2
nαπ/2
2
ejnω1t =
=αA
2+ αA
+∞n=1
sin nαπ/2
nαπ/2
2
cos nω1t (3.19)
Na slican nacin moze se izvrsiti analiza povorke trapeznih, ”kosinusnih”, ”ko-sionus kvadrat” ili Gausovih impulsa itd []
Vec smo naznacili da Dirichletova teorema daje dovoljne uslove za konver-genciju odgovarajuceg Fourierovog reda. Naime, moze se pokazati da Fourierovred obezbjed-uje uniformnu aproksimaciju kao i aproksimaciju u srednjem. To
znaci da od svih trigonometrijskih polinoma n–tog reda najbolju aproksimacijuu srednjem obezbjed-uje razvoj ciji su koeficijenti zapravo Fourierovi koeficijenti(3.4), (3.5) i (3.6). Takva analiza nas dovodi do jednog spedijalnog rezultatapoznatog pod nazivom Parsevalove teoreme koja se svodi na relaciju
1
T
T
s2(t)dt = s20 +
1
2
+∞n=1
(a2n + b2
n) = s20 +
1
2
+∞n=1
s2n =
+∞n=−∞
|cn|2, (3.20)
a koja iskazuje da je srednja vrijednost kvadrata signala (ili srednja snaga na jednoomskom otporniku) jednaka zbiru kvadrata apsolutnih vrijednosti koefici- jenata Fourierovog reda (ili zbiru snaga pojedinih komponenata) i da ne zavisiod faza pojedinih harmonika.
3.2.2 Korelacija periodicnih signala
U analizi signala cesto koristimo posebnu vremensku karakteristiku - ko-relaciju.Ako dva periodicna signala s1(t) i s2(t) imaju istu osnovnu frekvenciju f 1, amed-u njima postoji vremenski pomjeraj od τ sekundi, onda je njihova ”med-ukorelacija”u domenu vremena data relacijom
R12(τ ) =1
T
T 2
− T 2
s1(t)s2(t + τ )dt, (3.21)
ili
R21(τ ) =1
T
T 2
− T 2
s2(t)s1(t + τ )dt. (3.22)
Kao sto vidimo za realizaciju med-ukorelacije potrebno je izvrsiti
• pomjeraj jednog od dva signala ciju med-ukorelaciju racunamo,
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 42/246
36 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
• mnozenje pomjerenog signala sa drugim,
• usrednjavanje (integraciju) dobijenog proizvoda u okviru jedne periode
Relacije (3.21) i (3.22) ponekad prikazujemo u skracenoj notaciji
R12(τ ) = s1(t)s2(t + τ ) (3.21’)
R21(τ ) = s2(t)s1(t + τ ) (3.22’)
Nasu dalju analizu nastavicemo koristeci Fourierov red u kompleksnom obliku(3.11) i (3.12). Na taj nacin (3.19) mozemo pisati u obliku
R12(τ ) =1
T
T
s1(t)+∞
n=−∞c2nejnω1(t+τ )dt
ili zamjenjujuci redoslijed integracije i sumiranja dobijamo
R12(τ ) =+∞
n=−∞c2n
1
T
T
s1(t)ejnω1tdt
odakle je lako uociti da rezultat integracije odgovara konjugovano kompleksnomkoeficijentu Fourierovog reda za signal s1(t), tj.
R12(τ ) =
c∗1nc2nejnω1τ (3.23)
Uvodeci novi kompleksni koeficijent
φ12
n= c∗1nc2n, (3.24)
relacija (3.23)prelazi u konacan oblik
R12(τ ) =+∞
n=−∞φ
12nejnω1τ (3.25)
koji odgovara Fourierovom redu u kompleksnom obliku za med-ukorelacionufunkciju R12(τ ). Odgovarajuce koeficijente φ
12n= c∗1nc2n racunamo prema
poznatoj proceduri (3.12)
φ12n
=1
T
T
R12(τ )e−jnω1τ dτ. (3.26)
Izrazi (3.25) i (3.26) predstavljaju par Fourierovih transformacija i formulisupoznatu ”korelacionu teoremu” za periodicne signale.Lako je uociti da vrijedi φ
21n= c∗2nc1n = φ∗
12n.
Kada se signal korelise samim sobom, s1(t) = s2(t) = s(t), onda prethodni izrazi(3.21) i (3.22) poprimaju oblike
R(τ ) =1
T
T
s(t)s(t + τ )dt = s(t)s(t + τ ). (3.27)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 43/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 37
τ
d
n× T
()dt
E
s(t)
R(τ )
Slika 3.13: Blok sema autokorelatora periodicnog signala
To je zapravo autokorelaciona funkcija, ili krace autokorelacija, periodicnog sig-nala s(t). Uvedena definicija za autokorelaciju vrijedi za −∞ < τ < +∞, apostupak njene realizacije prikazan je na slici 3.13Za τ = 0 izraz (3.27) prelazi u oblik
R(0) =1
T
T
s2(t)dt = s2(t) (3.28)
To znaci da je autokorelacija za nulti pomak (τ = 0) jednaka srednjoj snaziperiodicnog signala na jednoomskoj otpornosti.U datim uslovima (s1 = s2 = s) izrazi (3.25) i (3.26) prelaze u oblike
R(τ ) =+∞
n=−∞|cn|2ejnω1τ =
+∞n=−∞
φnejnω1τ (3.29)
φn = cnc∗n = |cn|2 =1
T
T
R(τ )e−jnω1τ dτ (3.30)
Par Fourierovih transformacija (3.29) i (3.30) formulise ”autokorelacionu teo-remu” za periodicne signale. Posto |cn|2 = φn odgovara spektralnoj snazi peri-odicnog signala, to teorema o autokorelaciji tvrdi da je moguce odrediti spek-tralnu snagu signala kada je poznata njegova autokorelaciona funkcija (3.29) iobrnuto (3.30). Kao sto se vidi iz (3.30), spektralna snaga φn ne zavisi odfaznog spektra. Drugacije receno, autokorelacija ”brise” informaciju o fazamaspektralnih komponenata signala arg cn.Ako u jednakosti (3.29) koristimo specijalni slucaj τ = 0 onda dobijamo
R(0) =1
T
T
s2(t)dt =+∞
n=−∞|cn|2 = s2
0 +1
2
+∞n=1
s2n =
∞n=−∞
φn (3.31)
sto odgovara vec pomenutoj Parsevalovoj teoremi (3.20).Sada cemo ukazati na jednu univerzalnu osobinu autokorelacione funkcije kojavrijedi za periodicne, aperiodicne i slucajne signale.Naime, autokorelacija je parna funkcija vremenskog pomaka τ . Dokazimo to.Iz definicije autokorelacione funkcije (3.27) imamo
R(−τ ) =1
2
T /2
−T /2
s(t)s(t − τ )dt.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 44/246
38 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Uz smjenu u = t − τ imamo
R(−τ ) =1
T
T /2−τ
−T /2−τ
s(u)s(u + τ )du.
Posto se radi o periodicnim funkcijama, onda je i R(τ ) periodicna funkcija isteperiodicnosti pa vazi
R(−τ ) =1
T
T /2
−T /2
s(u)s(u + τ )du = R(τ ) Q.E.D2
Kako je autokorelacija parna funkcija, onda u blok semi autokorelatora na sl.3.13nakon kasnjenja signala za τ sekundi umjesto s(t+τ ) mozemo pisati s(t−τ ), τ ≥0, a par transformacija (3.25) i (3.26) prelazi u par ”kosinusnih” transformacija
[ ].
Primjer 3.3. Odredimo autokorelacionu funkciju signala
s(t) = A sin(ω1t + ψ), −∞ < t < +∞, sl.3.15
Koristeci (3.27) lako je dobiti odgovarajucu autokorelaciju
t
s(t)=Asin(ω1t+ψ )
0ψ
ω1
s(t) = A sin(ω1t + ψ)
0 tψω1
Slika 3.14:
R(τ ) =1
T
T /2
−T /2
A2 sin(ω1t + ψ)sin[ω1(t + τ ) + ψ] dt =
=A2
2cos ω1τ =
A2
4ejnω1τ +
A2
4e−jnω1τ (3.32)
koja je prikazana na sl.3.15
Prema dobijenom rezultatu za autokorelacionu funkciju (sl.3.15) uocavamogubitak informacije o fazi signala sa sl.3.14.Na slici 3.16 prikazani su amplitudski spektri, jednostrani i dvostrani, i spek-tralna snaga datog signala.
2lat. Quod Erat Demonstrandum - Ono sto je trebalo dokazati

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 45/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 39
R(τ) A2
2
0
τ
T
Slika 3.15:
f
f 1
f
f 1
f
f 1-f 1 -f 1
Sn cn1 Φn
A A2
A2
A2
2 A2
2
f 1
S nA
f f 1-f 1
cn1
A2
A2
f f 1-f 1
Φn
A2
2
A2
2
f
Slika 3.16: Graficki prikaz spektra signala A sin(ω1t + ψ) (a) jednostranog, (b)dvostranog i spektralne snage (c)
Primjer 3.4. Za tzv. kvadratnu povorku pravougaonih impulsa, gdje je pauza jednaka trajanju elementarnog impulsa (sl.3.16) odredicemo analiticki izraz za odgovarajucu autokorelacionu funkciju.
t
s(t)
A1
θ1 θ1
θ1=T
2
, α1=θ1
T
= 1
2
(faktor režima)
ω1=2π f 1=2πT
= πθ1
θ1 = T 2
, α1 = θ1T
= 1
2(faktor rezima)
ω1 = 2πf 1 = 2πT
= πθ1
Slika 3.17: Kvadratna povorka pravougaonih impulsa (α = 1/2)
Koristeci Fourierov razvoj za povorku pravougaonih impulsa (3.17) lako sedobija
s(t) =A1
2+
2A1
π
cos ω1(t − θ1
2) − 1
3cos3ω1(t − θ1
2+ . . .
=
=A1
2+
2A1
πsin ω1t +
2A1
3πsin3ω1t + . . .

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 46/246
40 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
S obzirom na ortogonalnost clanova Fourierovog skupa funkcija imamo
R(τ ) = s(t)s(t + τ ) = A21
4+ 2A21
π2cos ω1τ + 1
32cos3ω1τ + . . .
Poredeci dobijeni izraz za autokorelacionu funkciju R(τ ) sa razvojem povorketrougaonih impulsa (3.19), uocavamo da autokorelaciona funkcija date povorkepravougaonih impulsa odgovara povorci trougaonih impulsa iste periode T , tra-
janja elementarnog trougaonog impulsa θ = 2θ1, amplitude A21
2, koja odgovara
srednjoj snazi datog signala i faktora rezima α = θT = 2θ1
T = 1 sl.3.18.Identicne rezultate mozemo dobiti koristeci korelator sto je ilustrovano na sl.3.19.
τ
R(τ)
A1
2
2
θ=2θ1
Slika 3.18: Autokorelaciona funkcija povorke pravougaonih impulsa sa sl.3.17
t
t
t
A1
A1
s(t)
s(t-τ)
s(t)s(t-τ)
θ1 θ1 θ1 θ1 θ1
τ
A12
A12(θ1-τ)
θ1-τ
Slika 3.19: Graficka ilustracija racunanja autokorelacione funkcije
Kako prema slici 3.19 integral produkta funkcija s1(t)s2(t+ τ ) iznosi A21(θ1 −τ ),
onda autokorelacija R(τ ) prema definiciji (3.24) ima oblik
R(τ ) =A2
1(θ1 − |τ |)T
=A2
1
2θ1(θ − |τ |) =
A21
2
1 − |τ |
θ1
, |τ | ≤ θ1
sto odgovara povorci trougaonih impulsa jedinicnog faktora rezima sa sl.3.18.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 47/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 41
3.2.3 Raspodjela snage signala po pojedinim frekvenci-
jskim opsezima
Teorijski gledano periodicni signali sadrze spektralne komponente u beskona-cno sirokom frekvencijskom opsegu. Nazalost, prenosni sistemi, koji nam stojena raspolaganju, nisu takvog kvaliteta da imaju beskonacno siroke frekvencijskeopsege.Obicno prenosni sistem moze da prenosi signal samo u odred-enom konacnomfrekvencijskom opsegu. Iz tih razloga moramo ispitati relativni znacaj poje-dinih frekvencijskih podopsega signala. Za ocekivati je da odred-ene frekven-cijske komponente mozemo da odbacimo bez znacajnog narusavanja vijernostireprodukcije na mjestu prijema informacija. Interesantno je dati graficku ilus-traciju raspodjele kvadrata amplituda pojedinih harmonika periodicnog signalau funkciji kruzne ucestanosti signala (sl.3.20).
ω
Sn2
S12
S22
S32
ω1
ω1
ω2 ω3
S 2n
S 21
S 22
S 32
ω
ω1 2ω1 3ω1
ω1
Slika 3.20: 3.21
Prema Parsevalovoj teoremi (3.20) srednja snaga signala na jednoomskom potrosacuiznosi
P s = s2(t) =1
T
T
s2(t)dt =+∞
n=−∞|cn|2 = s2
0 +1
2
+∞n=1
s2n (3.33)
Ako faktor rezima α poprima male vrijednosti, α2 jos manje, sto znaci da je spek-tar relativno gust, onda srednju snagu signala (3.33) aproksimativno mozemopisati u obliku
P s ≈ 1
2ω1
s2
nω1 → 1
2ω1
∞ 0
S 2(ω)dω (3.34)
gdje smo relativno gust spektar, mada diskretan, zamijenili sa njegovom an-velopom kao kontinualnom funkcijom ucestanosti (sn → S (ω)).Ako prethodni pristup primjenimo na signal povorke pravougaonih impulsa

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 48/246
42 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
((3.15) i (3.17)), onda imamo
sn = 2αAsin nπα
nπα= 2
θ
T A
sin n 2πT θ 1
2
n 2πT θ 1
2
=
= 2θ
T A
sin nω1θ2
nω1θ2
→ S (ω) =2Aθ
T
sin ω θ2
ω θ2
nω1=ω
U tom slucaju izraz za srednju snagu (3.34) p oprima oblik
P s =1
2ω1
4A2θ2
T 2
∞ 0
sin ω θ
2
ω θ2
dω (3.35)
Ako zelimo da racunamo snagu koju sadrze komponente u opsegu od 0 do ωk,onda imamo
P s,ωk=
1
2ω1
4A2θ2
T 2
ωk 0
sin ω θ
2
ω θ2
2
dω (3.36)
Prethodni rezultat mozemo pojednostaviti u obliku
P s,ωk = k
θ2 ωk
0 sin x
x 2
dx, (3.37)
gdje je k = A2 α
π.
Ako gornju granicnu ucestanost (ωk) definisemo prema nulama u anvelopi spek-tra signala (sl.3.10), onda imamo
P s1,ωk= 2πθ
= k
π 0
sin x
x
2
dx
P s2,ωk= 4πθ
= k
2π
0 sin x
x 2
dx
P s3,ωk= 6πθ
= k
6π 0
sin x
x
2
dx
P s,ωk=∞ = k
∞ 0
sin x
x
2
dx
(3.38)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 49/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 43
Koristeci parcijalnu integraciju i granice integrala (3.38) dobijamo
P s,ωk= 2πθ
= kSi(2π)
P s,ωk= 4πθ
= kSi(4π)
P s,ωk= 6πθ
= kSi(6π)
P s,ωk=∞ = kSi(∞)
(3.39)
gdje smo uveli pojam ”sinusnog” integrala
Si(x) =
x 0
sin t
tdt. (3.40)
Prakticno vazan je relativni odnos snaga
P s1P s
=Si(2π)
Si(∞)=
1418
π/2= 0.904, (90.4%)
P s2P s
=Si(2π)
Si(∞)= 0.95, (95%)
itd.
(3.41)
Dobijeni rezultati (3.41) ukazuju da je kod povorke pravougaonih impulsa od 0do f = 1
θ [Hz] (”prva nula”) sadrzano 90.4% od ukupne snage signala. Akoprosirimo opseg do 2
θ [Hz] (druga nula u anvelopi), onda bilans snage popravl-
jamo za dodatnih 4.6% itd.Ako postavimo problem odred-ivanja potrebnog propusnog opsega za prenos90% od ukupne snage signala, onda se numerickom integracijom moze doci dorezultata za granicnu frekvenciju
∆f =0.81
θ
koji je poznat kao tzv. ”kriterijum energije”.Kao sto se vidi, koriscenjem ”kriterijuma energije” smanjili smo snagu za 0.4%u odnosu na kriterijum ”prve nule”, ali smo istovremeno smanjili potreban pro-pusni opseg za skoro petinu – tacnije 19%.Dobijeni povoljan rezultat je posljedica cinjenice da su amplitude spektralnihkomponenata oko frekvencije 1
θ
(nula u spektru) sasvim male pa relativno velikopomjeranje granicne frekvencije od ∆f = 1
θ do ∆f = 0.81θ nije izazvalo znacajne
energetske gubitke (0.4%).Ako bismo slicnu analizu proveli za povorku trougaonih impulsa, onda bismodosli do rezultata da je u opsegu od 0 do 2
θ [Hz] (prva nula sl.3.11) 99% odukupne snage signala.Bolja koncentracija snage kod trougaonog formata signala u relativno sirokompodrucju ( 2
θ⇒ 99%) u odnosu na povorku pravougaonih impulsa ( 2
θ⇒ 95%)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 50/246
44 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
posljedica je njegovog kontinuiteta po trenutnim vrijednostima (sl.3.8 i sl.3.9).
Za prenos 90% od ukupne srednje snage signala povorke trougaonih impulsapotreban je propusni opseg od 0.84θ itd.
Prosirujuci prethodnu analizu bilansa snage i za druge formate signala (”kosi-nusne”, ”kosinus kvadrat” itd) mozemo formulisati opsti zakljucak:POTREBAN PROPUSNI OPSEG (B) ZA PRENOS IMPULSNIH SIGNALAOBRNUTO JE SRAZMJERAN TRAJANJU (θ) ELEMENTARNOG SIGNALA,tj.
B =k
θ, (3.42)
gdje konstanta k zavisi od oblika elementarnog signala i postavljenih zahtjeva u
pogledu kvaliteta prijemnog signala.
Zadatak 3.1. Povorka pravougaonih naizmjenicnih impulsa.Posmatrajmo signal s(t) koji se dobije mnozenjem pravougaonih impulsa (sl.3.8) funkcijom cos(ω0t), gdje trajanje elementarnog pravougaonog impulsa (θ) zado-voljava nejednakost θ 2π
ω0(sl.3.22).
t
s(t)
A
-A
T
θ
T 2
T 2
θ
2
θ
2
T 0=2π
ω0= 1
f 0
T 2
-T 2
θ2
- θ2
T 0 = 2πω0
= 1
f 0
Slika 3.21: Povorka pravougaonih naizmjenicnih impulsa
Definisimo sada analiticke izraze za signal s(t) u toku jedne njegove periode ( T ).
s(t) =
0, −
T
2 ≤ t < −θ
2
A cos ω0t, −θ2
≤ t ≤ θ2
0, θ2
< t ≤ T 2
(3.43)
Spektar posmatranog signala, odnosno koeficijente razvoja (3.11), dobijamo nje-
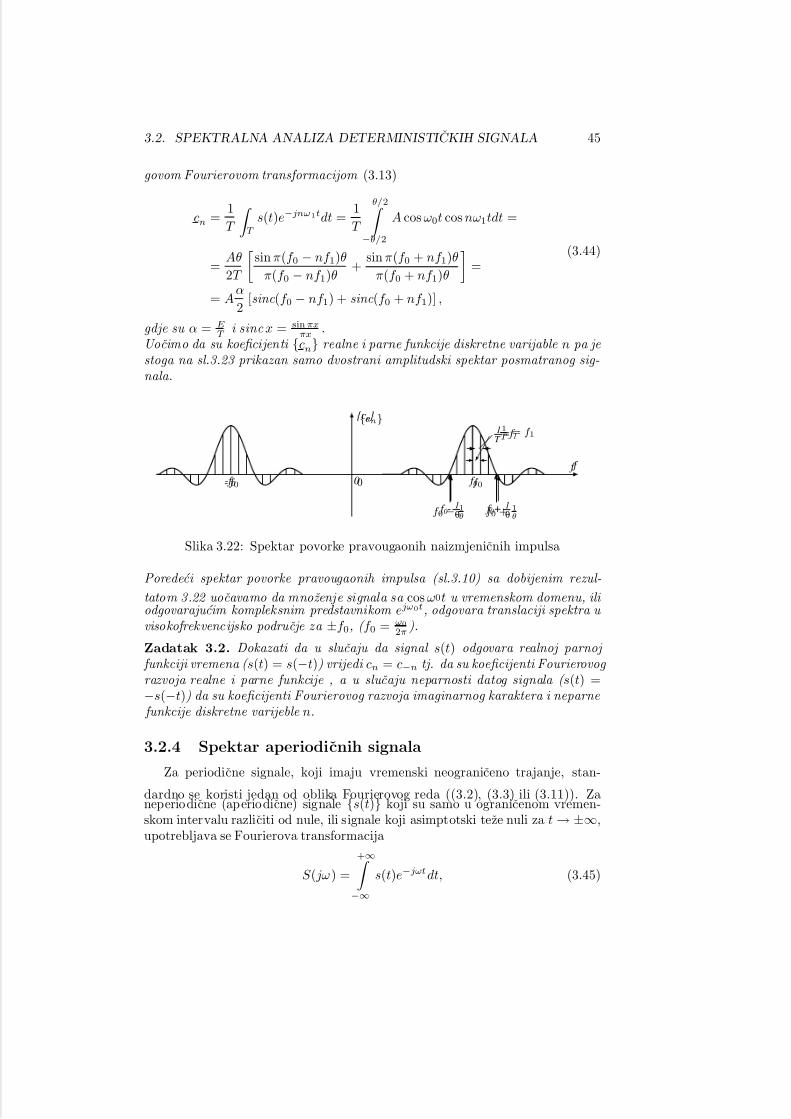
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 51/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 45
govom Fourierovom transformacijom (3.13)
cn =1
T
T
s(t)e−jnω1tdt =1
T
θ/2 −θ/2
A cos ω0t cos nω1tdt =
=Aθ
2T
sin π(f 0 − nf 1)θ
π(f 0 − nf 1)θ+
sin π(f 0 + nf 1)θ
π(f 0 + nf 1)θ
=
= Aα
2[sinc(f 0 − nf 1) + sinc(f 0 + nf 1)] ,
(3.44)
gdje su α = ET i sinc x = sin πx
πx .Uocimo da su koeficijenti cn realne i parne funkcije diskretne varijable n pa jestoga na sl.3.23 prikazan samo dvostrani amplitudski spektar posmatranog sig-nala.
f
cn
0 f 0-f 0
1T
=f 1
f 0- 1θ
f 0+ 1θ
f 0-f 0 0
f 0 + 1
θ
T
f 0 −1
θ
T
cn
f
1
T = f 1E '
Slika 3.22: Spektar povorke pravougaonih naizmjenicnih impulsa
Poredeci spektar povorke pravougaonih impulsa (sl.3.10) sa dobijenim rezul-
tatom 3.22 uocavamo da mnozenje signala sa cos ω0t u vremenskom domenu, ili odgovarajucim kompleksnim predstavnikom ejω0t, odgovara translaciji spektra u visokofrekvencijsko podrucje za ±f 0, ( f 0 = ω0
2π ).
Zadatak 3.2. Dokazati da u slucaju da signal s(t) odgovara realnoj parnoj funkciji vremena ( s(t) = s(−t)) vrijedi cn = c−n tj. da su koeficijenti Fourierovog razvoja realne i parne funkcije , a u slucaju neparnosti datog signala ( s(t) =−s(−t)) da su koeficijenti Fourierovog razvoja imaginarnog karaktera i neparne funkcije diskretne varijeble n.
3.2.4 Spektar aperiodicnih signala
Za periodicne signale, koji imaju vremenski neograniceno trajanje, stan-
dardno se koristi jedan od oblika Fourierovog reda ((3.2), (3.3) ili (3.11)). Zaneperiodicne (aperiodicne) signale s(t) koji su samo u ogranicenom vremen-skom intervalu razliciti od nule, ili signale koji asimptotski teze nuli za t → ±∞,upotrebljava se Fourierova transformacija
S ( jω) =
+∞ −∞
s(t)e−jωt dt, (3.45)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 52/246
46 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
kojoj odgovara inverzna Fourierova transformacija
s(t) =1
2πj
+∞ −∞
S ( jω)ejωt d( jω). (3.46)
Spektralna karakteristika S ( jω) je u opstem slucaju kompleksna velicina i kon-tinualna je funkcija kruzne uvcestanosti ω. Ako je s(t) realna vremenska funkcija,sto najcesce pretpostavljamo, onda je konjugovana kompleksna vrijednost spek-tralne karakteristike
S ∗( jω) =
+∞ −∞
s(t)ejωt dt = S (− jω) (3.47)
Ako je signal s(t) parna vremenska funkcija, onda je lako utvrditi da je spek-
tralna karakteristika (Fourierova transformacija) signala realna funkcija kruzneucestanosti ω, pa cemo je tada jednostavno obiljezavati sa S (ω). Par transfor-macija (3.46) i (3.47) cesto se prikazuje u obliku
S ( jf ) =
+∞ −∞
s(t)e−j2πf tdt (3.48)
s(t) =
+∞ −∞
S ( jf )ej2πf tdf (3.49)
jer se frekvencija f u Hertzima cesce koristi kod inzenjera elektrotehnike uodnosu na kruznu ucestanost
rads i jer je simetrija vremena i frekvencije u
(3.48) i (3.49) ociglednija. Za spektralnu karakteristiku, kada to ne bude stvar-alo konfuziju kod citalaca a u cilju jednostavnijeg pisanja, koristicemo takod-eoznake S ( jf ) odnosno S (f ). Koriscenje Fourierove transformacije S ( jω) prema(3.46) ima prednst kod utvrd-ivanja povezanosti Fourierove i Laplaceove trans-formacije.Naglasimo da bi istovremeno koriscenje notacije S ( jω), odnosno S (ω), i S ( jf ),odnosno S (f ), za dati signal s(t) bilo nekorektno jer se tu onda radi o skali-ranju frekvencijske ose. U takvim situacijama kompromis se moze naci akoS ( jω ) nadomjestimo sa S ( j2πf ), a S (ω) sa S (2πf ), nakon cega se grafickopredstavljanje spektra moze neposredno prikazati u funkciji frekvencije f .Pomenimo dovoljne uslove egzistencije Fourierove transformacije (3.46)
•Signal s(t) je jednoznacan sa konacnim brojem ekstremuma i konacnim
brojem prekida (diskontinuiteta) u bilo kojem konacnom vremenskom in-tervalu.
• Signal s(t) je apsolutno integrabilan
+∞ −∞
|s(t)|dt < ∞ (3.50)
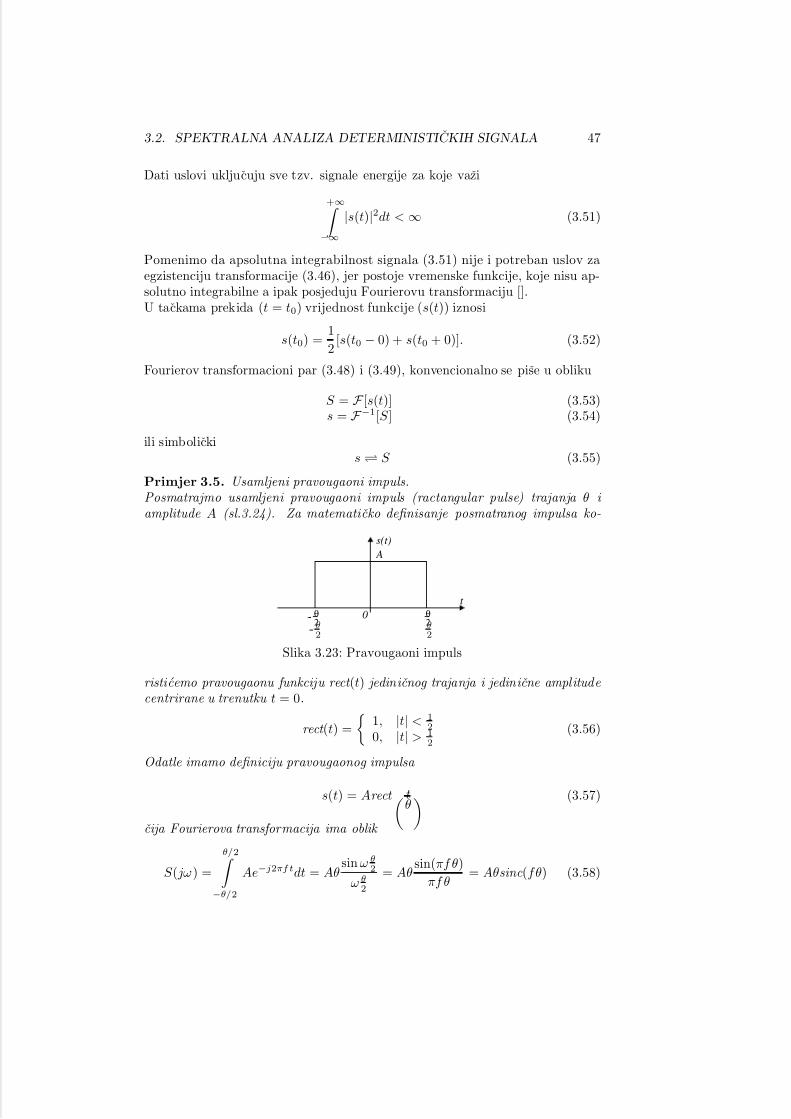
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 53/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 47
Dati uslovi ukljucuju sve tzv. signale energije za koje vazi
+∞ −∞
|s(t)|2dt < ∞ (3.51)
Pomenimo da apsolutna integrabilnost signala (3.51) nije i potreban uslov zaegzistenciju transformacije (3.46), jer postoje vremenske funkcije, koje nisu ap-solutno integrabilne a ipak posjeduju Fourierovu transformaciju [].U tackama prekida (t = t0) vrijednost funkcije (s(t)) iznosi
s(t0) =1
2[s(t0 − 0) + s(t0 + 0)]. (3.52)
Fourierov transformacioni par (3.48) i (3.49), konvencionalno se pise u obliku
S = F [s(t)] (3.53)s = F −1[S ] (3.54)
ili simbolickis S (3.55)
Primjer 3.5. Usamljeni pravougaoni impuls.Posmatrajmo usamljeni pravougaoni impuls (ractangular pulse) trajanja θ i amplitude A (sl.3.24). Za matematicko definisanje posmatranog impulsa ko-
t
s(t)
A
θ
2
θ
20
θ2
- θ2
Slika 3.23: Pravougaoni impuls
risticemo pravougaonu funkciju rect (t) jedinicnog trajanja i jedinicne amplitudecentrirane u trenutku t = 0.
rect (t) =
1, |t| < 1
20, |t| > 1
2
(3.56)
Odatle imamo definiciju pravougaonog impulsa
s(t) = Arect tθ (3.57)
cija Fourierova transformacija ima oblik
S ( jω) =
θ/2 −θ/2
Ae−j2πf tdt = Aθsin ω θ
2
ω θ2
= Aθsin(πf θ)
πf θ= Aθsinc(f θ) (3.58)
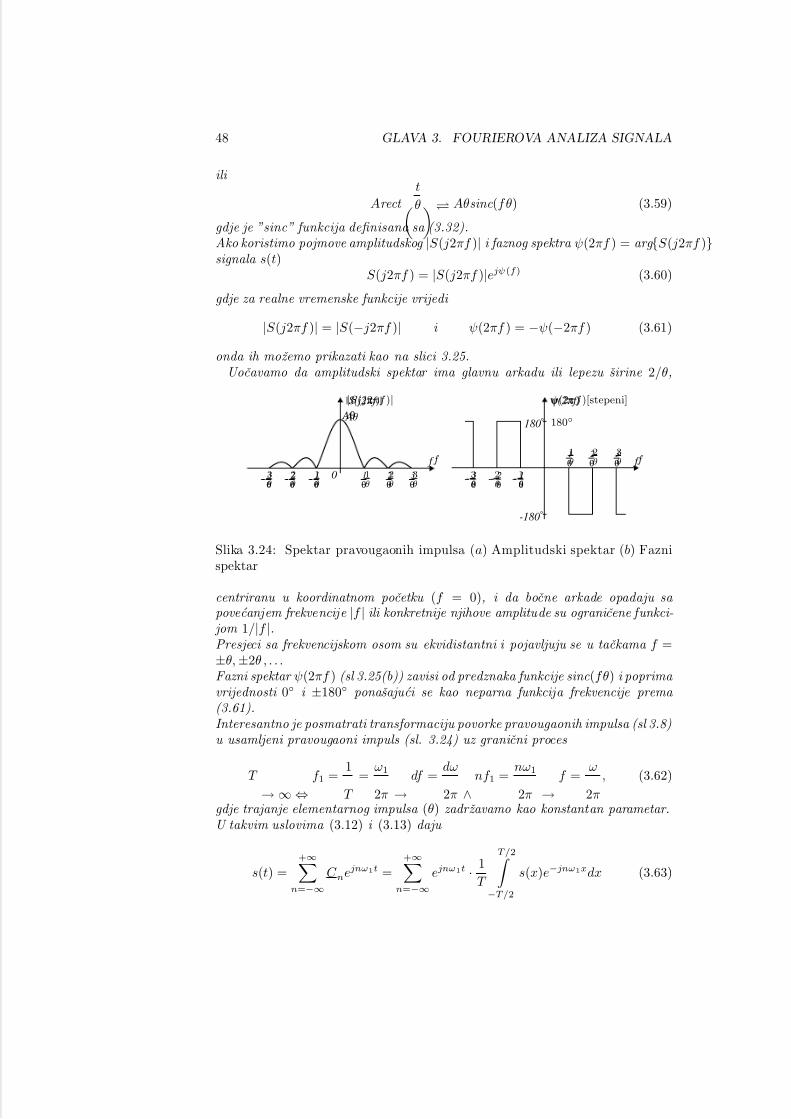
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 54/246
48 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
ili
Arect t
θ Aθsinc(f θ) (3.59)
gdje je ”sinc” funkcija definisana sa (3.32).Ako koristimo pojmove amplitudskog |S ( j2πf )| i faznog spektra ψ(2πf ) = arg S ( j2πf )signala s(t)
S ( j2πf ) = |S ( j2πf )|ejψ(f ) (3.60)
gdje za realne vremenske funkcije vrijedi
|S ( j2πf )| = |S (− j2πf )| i ψ(2πf ) = −ψ(−2πf ) (3.61)
onda ih mozemo prikazati kao na slici 3.25.Uocavamo da amplitudski spektar ima glavnu arkadu ili lepezu sirine 2/θ,
f
|S(j2π f)|
Aθ
1θ
2θ
3θ
01θ
2θ
3θ
f
ψ (2π f)
180°
-180°
1θ
2θ
3θ
1θ
2θ
3θ f
ψ(2πf )[stepeni]
180
1θ
2θ
3θ
- 1θ- 2
θ- 3θ
|S ( j2πf )|
f
1θ
2θ
3θ- 1
θ- 2θ- 3
θ
Aθ
Slika 3.24: Spektar pravougaonih impulsa (a) Amplitudski spektar (b) Faznispektar
centriranu u koordinatnom pocetku (f = 0), i da bocne arkade opadaju sa povecanjem frekvencije |f | ili konkretnije njihove amplitude su ogranicene funkci- jom 1/|f |.Presjeci sa frekvencijskom osom su ekvidistantni i pojavljuju se u tackama f =±θ, ±2θ , . . .Fazni spektar ψ(2πf ) (sl 3.25(b)) zavisi od predznaka funkcije sinc(f θ) i poprima vrijednosti 0 i ±180 ponasajuci se kao neparna funkcija frekvencije prema (3.61).Interesantno je posmatrati transformaciju povorke pravougaonih impulsa (sl 3.8)u usamljeni pravougaoni impuls (sl. 3.24) uz granicni proces
T
→ ∞ ⇔f 1 =
1
T
=ω1
2π →df =
dω
2π ∧nf 1 =
nω1
2π →f =
ω
2π
, (3.62)
gdje trajanje elementarnog impulsa (θ) zadrzavamo kao konstantan parametar.U takvim uslovima (3.12) i (3.13) daju
s(t) =+∞
n=−∞C nejnω1t =
+∞n=−∞
ejnω1t · 1
T
T /2 −T /2
s(x)e−jnω1xdx (3.63)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 55/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 49
gdje smo u izrazu (3.63), koji odgovara (3.12) umjesto promjenljive t uveli var-
ijablu x da bi se lakse pratio redosljed operacija. Uz uvedeni granicni prelaz imamo odgovarajuce rezultate
cn =1
T
T /2 −T /2
s(x)e−jnω1xdx → dω
2π
+∞ −∞
s(x)e−jωx dx =dω
2πS ( jω ) = df S ( jω ),
(3.64)gdje je S ( jω) definisano sa (3.46). To znaci da konacni oblik za (3.63) nakon uvedenog granicnog prelaza ( T → ∞ ⇔ f 1 = 1
T → 0)(3.62) glasi
s(t) =1
2π
+∞ −∞
ejωt dω
+∞ −∞
s(x)e−jωx dx ili
s(t) =1
2π
+∞ −∞
S ( jω)ejωt dω i S ( jω) =
+∞ −∞
s(t)e−jωt dt
(3.65)
sto odgovara Fourierovom transformacionom paru (3.45) i (3.46).Koristeci rezultat za matematicki spektar povorke pravougaonih impulsa (3.15)
cn = αAsin nαπ
nαπ,
uz uvedeni granicni prelaz, imamo
cn =Aθ
2π ·2π
T ·sin n 2π
T θ2
2πT θ2 −−−−−−−−−→T →∞⇔f 1→0
Aθ
2π
dωsin ω θ
2
ωθ2
= Aθdf sin πθf
πθf
(3.66)
sto odgovara opstem rezultatu (3.64).To znaci da je kompleksna amplituda sinusoidalnih komponenata periodicnog signala (C n) u procesu posmatranog granicnog prelaza (3.62) dozivjela transfor-maciju
C n −−−−−−−−−→T →∞⇔f 1→0
dA = df S ( jω) (3.67)
ili konkretno
C n −→ dA = dfAθsin πθf
πθf = dfAθsinc(θf ) (3.68)
Relacije (3.67) i (3.68) ukazuju na sustinske razlike u spektru periodicnih i ape-riodicnih signala.
Naime, spektar aperiodicnih signala je gust (kontinualan), gdje u jednom konacnom frekvencijskom opsegu egzistira neprebrojivo mnogo spektralnih komponenata cijeamplitude |dA|, zbog konacne energije signala (3.51), poprimaju infinitezimalnevrijednosti.Stoga je razumljivo da se kod aperiodicnih signala umjesto spektra
dA =dω
2πS ( jω) = df S ( jω) (3.69)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 56/246
50 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
uvodi pojam spektralne gustine S ( jω), ili gustina kompleksnih amplituda po
ucestanosti, koju cemo kratko nazivati spektralnom karakteristikom aperiodicnog signala.Iz (3.69) imamo
S ( jω) =dAdf
=
+∞ −∞
s(t)e−jωt dt
sto odgovara izrazu (3.46). Za posmatrani konkretni primjer iz (3.68) imamoS ( jω) = dA
df = Aθsinc(θf ) sto odgovara neposredno dobijenom rezultatu (3.58).
Spektralnu karakteristiku S ( jω) = |S ( jω)|ejψ(ω) mozemo prikazati u alter-nativnom obliku rastavljajuci je na realni dio
S ( jω) = A(ω) − jB (ω), (3.70)
gdje je ”spektralna gustina amplituda” data relacijom
|S ( jω)| =
A2(ω) + B(ω), (3.71)
a fazni spektar
ψ(ω) = arctg
−B(ω)
A(ω)
(3.72)
kako je prema definiciji ukupna energija signala jdnaka integralu njegove snage,onda na otporu od jednog oma imamo
E =
+∞ −∞
s2(t)dt. (3.73)
Koristeci inverznu transformaciju (3.47), prethodni izraz mozemo pisati u obliku
E =
+∞ −∞
s(t)
1
2π
+∞ −∞
S ( jω)ejωt dω
dt,
sto nakon promjene redoslijeda integracije poprima oblik
E =1
2π
+∞ −∞
S ( jω)
+∞ −∞
s(t)e−j(−ωt)dt
dω =
=1
2π
+∞
−∞
S ( jω)S (− jω)dω =
=1
2π
+∞ −∞
S ( jω)S ∗( jω)dω =
=1
2π
+∞ −∞
|S ( jω)|2dω =
+∞ −∞
|S ( j2πf )|2df.
(3.73.a)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 57/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 51
Kako je spektralna gustina energije |S ( jω)|2, za realne vremenske funkcije s(t),
realna, nenegativna i parna funkcija frekvencije mozemo konacno pisati
E =1
2π
+∞ −∞
|S ( jω)|2dω =1
π
+∞ 0
|S ( jω)|2dω = 2
+∞ 0
|S ( j2πf )|2df (3.73.b)
Relacija (3.73) formulise poznatu Parsevalovu teoremu o energiji aperiodicnihsignala koja pokazuje da se energija signala (3.73) moze odrediti i pomocukvadrata modula spektralne karakteristike |S ( jω)|2.S obzirom na rezultate (3.73) ponekad se posebno uvodi pojam kontinualnogspektra energije, ili drugacije receno spektralna gustina energije,
|S ( j2πf )
|2 = Φ(2πf )
i kontinualnog spektra snage 1θ |S ( j2πf )|2 gdje θ definise vremensko trajanje
signala [ ].Posmatrajmo nadalje vremenski ogranicen signal s(t) na intervalu trajanja T 0(0 ≤ t ≤ T 0) i primjenimo za njega Fourierov red. Jasno je da izvan datog inter-vala ne vrijede izracunati koeficijenti Fourierovog reda. Primjenjujuci Fourierovred na dati signal pretpostavljeno je ponavljanje aperiodicnog signala s periodomT 0. Time je kontinualni spektar S ( j2πf ) nadomjesten diskretnim spektrom srazmakom izmed-u susjednih komponenata po frekvencijskoj osi ∆f = 1/T 0.Prema (3.12) i (3.48) imamo
cn =1
T 0 T 0
s(t)e−jn2π∆ft dt =1
T 0S ( jn2π∆f ), (3.74)
ili
S ( jn2π∆f ) = T 0cn (3.75)
Ako se vremenski interval udvostruci T 0 = 2T 0, ∆f = ∆f /2, relativna raspod- jela amplituda ostace nepromjenjena. Spektralne linije tom prilikom se zgusnjavaju(dva puta), a njihove amplitude umanjuju se dva puta prema (3.74).Analogan zakljucak vrijedi za n–struko prosirenje posmatranog vremenskog in-terlava.Kada se vrse mjerenja, na raspolaganju je uvijek samo segment signala tra janja∆t pa je pri spektralno j analizi nepotrebno koristiti filtre uzeg propusnog opsegaod ∆f = 1/∆t koji definise frekvencijsku rezoluciju u datim uslovima mjerenja.
Da bi se, bar teoretski, mogao odrediti spektar aperiodicnog vremenski neograni-cenog signala s(t) ”elasticno” se prosiruje Fourierova transformacija i na signalekoji zadovoljavaju uslov
limT →∞
1
T
T /2 −T /2
|s(t)|2dt < ∞ (3.76)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 58/246
52 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
cime su ukljuceni signali konacne srednje snage. Na taj nacin su i periodicni vre-
menski neograniceni signali, koji imaju konacnu srednju snagu, ”stekli pravo”na koriscenje Fourierove transformacije. Iz tih razloga se u literaturi ponekadinterpretacija linijskog sp ektra periodicnih signala vrsi pomocu Fourierove trans-formacije, stim da se koristi poznata Diracova delta funkcija (ili Diracov impuls)definisana jednacinom
f (t) =
0 za f = 0∞ za f = 0
, (3.77)
Za koju takod-e vazi:
+∞ −∞
δ(f )df = 1, (3.78)
δ(f − f 0) =
+∞
−∞e±j2π(f −f 0)tdt, (3.79)
i
+∞ −∞
S (f )δ(f − f 0)df = S (f 0). (3.80)
Da bismo ukazali na svrsishodnost koriscenja delta funkcije, odredicemo spek-tar signala koji sadrzi samo istosmjernu komponentu (s(t) = A, −∞ < t < ∞),a koji zadovoljava uslov (3.76) (ali ne (3.50) i (3.51)). Kako perioda signalanije odred-ena, ne moze se koristiti Fourierov red. S obzirom da je signal vre-menski neogranicen i za t → ±∞ ne tezi nuli, onda nema kontinualan spektar.
Med-utim, upotrebom delta-funkcije i (3.46) dobija se
S ( jω ) =
+∞ −∞
Ae−jωt dt =
+∞ −∞
Ae−j2πf tdt = Aδ(f ) = A2πδ(ω) (3.81)
gdje vazi relacija δ(f ) = 2πδ(ω), ω = 2πf , za dobijeni spektar istosmjernekomponente (3.81) jednostavno cemo pisati S (f ) = Aδ(f ) (sl.3.25)Prosirujuci prethodno uvedeni pristup, signal (iz primjera 3.1, ϕ1 = 0) s(t) =A cos ω1t, −∞ < t < ∞, koji ima beskonacno trajanje, umjesto interpolacijeamplitudskog spektra date na sl.3.3(a) ima spektar oblika
S (f ) =A
2
+∞
−∞
ejω1t + e−jω1t e−jωt dt =
=A
2
+∞ −∞
e−j(ω−ω1)tdt +A
2
+∞ −∞
e−j(ω+ω1)tdt =
=A
2δ(f − f 1) +
A
2δ(f + f 1) = Aπδ(ω − ω1) + Aπδ(ω + ω1)
(3.82)
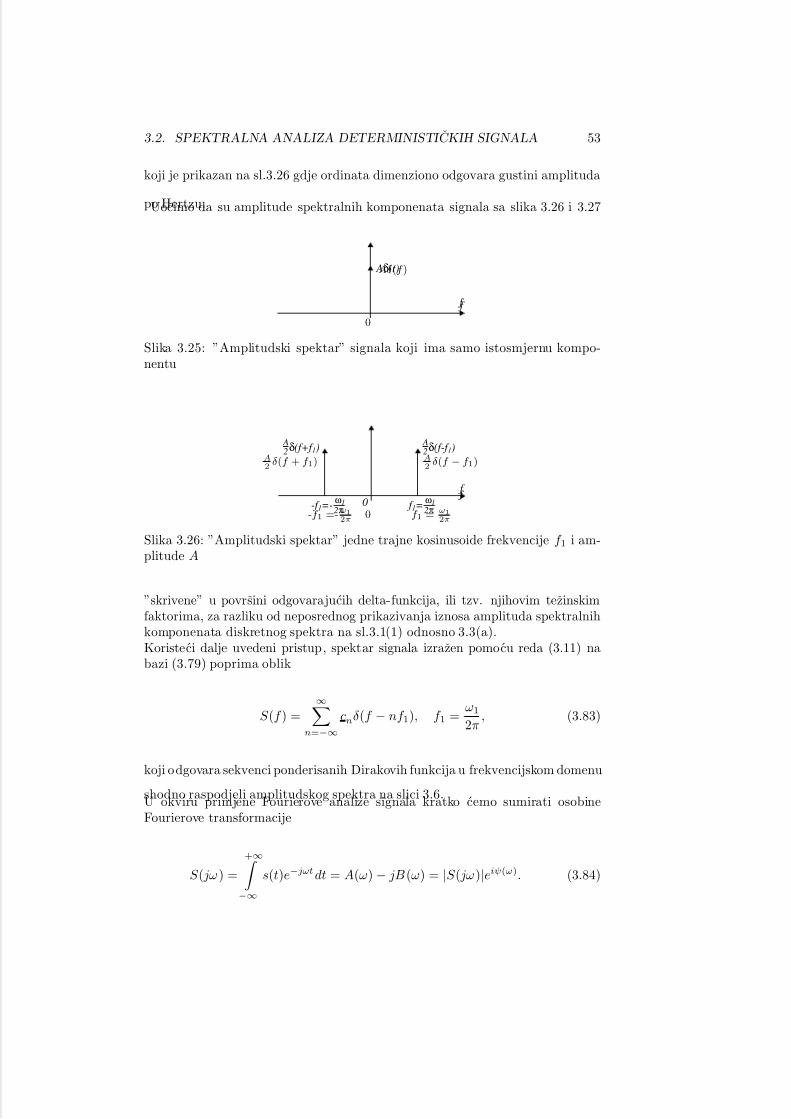
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 59/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 53
koji je prikazan na sl.3.26 gdje ordinata dimenziono odgovara gustini amplituda
po Hertzu.Uocimo da su amplitude spektralnih komponenata signala sa slika 3.26 i 3.27
f
Aδ(t)
0
Aδ(f )
f
Slika 3.25: ”Amplitudski spektar” signala koji ima samo istosmjernu kompo-nentu
f
A2δ(f-f 1)
A2δ(f+f 1)
0 f 1=ω1
2π-f 1=-
ω1
2π 0
f
A2
δ(f − f 1)A2
δ(f + f 1)
f 1 = ω12π-f 1 =-ω1
2π
Slika 3.26: ”Amplitudski spektar” jedne trajne kosinusoide frekvencije f 1 i am-plitude A
”skrivene” u povrsini odgovarajucih delta-funkcija, ili tzv. njihovim tezinskimfaktorima, za razliku od neposrednog prikazivanja iznosa amplituda spektralnihkomponenata diskretnog spektra na sl.3.1(1) odnosno 3.3(a).Koristeci dalje uvedeni pristup, spektar signala izrazen pomocu reda (3.11) nabazi (3.79) poprima oblik
S (f ) =∞
n=−∞cnδ(f − nf 1), f 1 =
ω1
2π, (3.83)
koji odgovara sekvenci ponderisanih Dirakovih funkcija u frekvencijskom domenu
shodno raspodjeli amplitudskog spektra na slici 3.6.U okviru primjene Fourierove analize signala kratko cemo sumirati osobineFourierove transformacije
S ( jω ) =
+∞ −∞
s(t)e−jωt dt = A(ω) − jB(ω) = |S ( jω)|eiψ(ω). (3.84)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 60/246
54 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
realnih vremenskih funkcija, odnosno signala.
Lako je pokazati da vrijedi
A(ω) = A(−ω) =+∞ −∞
s(t) cos(ωt)dt, (3.85)
B(ω) = −B(−ω) =+∞ −∞
s(t) sin(ωt)dt, (3.86)
|S ( jω)| = |S (− jω )| =
A2(ω) + B2(ω), (3.87)
ψ(ω) = −ψ(−ω) = −arctgB(ω)
A(ω). (3.88)
Nadalje cemo koristiti uvedenu notaciju u (3.55)
s(t) S ( jω), s1(t) S 1( jω), s2(t) S 2( jω)
Linearnost Fourierove transformacije
α1s2(t) + α2s2(t) α1S 1( jω) + α2S 2( jω) (3.89)
gdje su α1, α2 konstante.dualnost:
S ( jt) 2πs(−ω), (s(t) S ( jω)), (3.90)
vremensko pomjeranje signala:
s(t − t0) S ( jω )e−jωt (3.91)
pomjeranje u vrekvencijskom domenu:
S ( jω − jω1) s(t)ejω1t (3.92)
Diferenciranje u vremenskom domenu:
dns(t)
dtn= s(n)(t) ( jω)nS ( jω) (3.93)
Diferenciranje u frekvencijskom domenu:
dnS ( jω)
dωn= S (n)( jω) (− jt)ns(t) (3.94)
Vremensko skaliranje:
s(at) 1
|a|S
jω
a
, a = 0 (3.95)
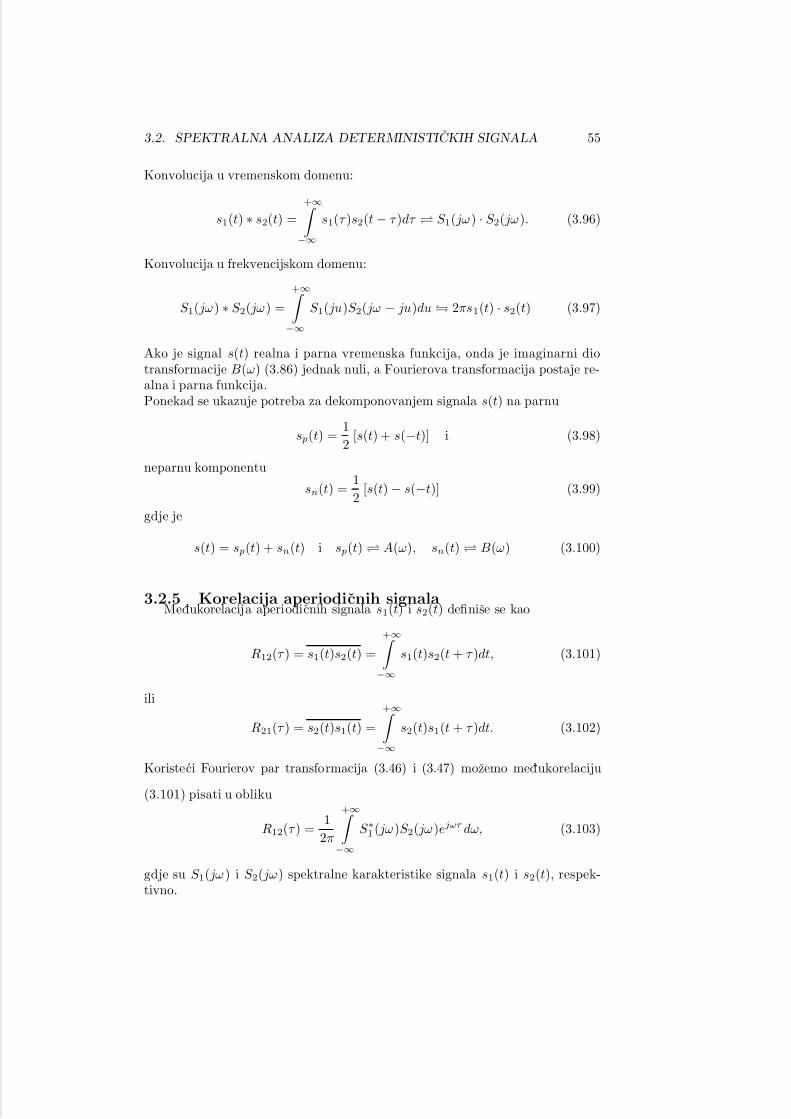
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 61/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 55
Konvolucija u vremenskom domenu:
s1(t) ∗ s2(t) =
+∞ −∞
s1(τ )s2(t − τ )dτ S 1( jω) · S 2( jω). (3.96)
Konvolucija u frekvencijskom domenu:
S 1( jω) ∗ S 2( jω) =
+∞ −∞
S 1( ju)S 2( jω − ju)du 2πs1(t) · s2(t) (3.97)
Ako je signal s(t) realna i parna vremenska funkcija, onda je imaginarni diotransformacije B(ω) (3.86) jednak nuli, a Fourierova transformacija postaje re-alna i parna funkcija.Ponekad se ukazuje potreba za dekomponovanjem signala s(t) na parnu
s p(t) =1
2[s(t) + s(−t)] i (3.98)
neparnu komponentu
sn(t) =1
2[s(t) − s(−t)] (3.99)
gdje je
s(t) = s p(t) + sn(t) i s p(t) A(ω), sn(t) B(ω) (3.100)
3.2.5 Korelacija aperiodicnih signalaMed-ukorelacija aperiodicnih signala s1(t) i s2(t) definise se kao
R12(τ ) = s1(t)s2(t) =
+∞ −∞
s1(t)s2(t + τ )dt, (3.101)
ili
R21(τ ) = s2(t)s1(t) =
+∞ −∞
s2(t)s1(t + τ )dt. (3.102)
Koristeci Fourierov par transformacija (3.46) i (3.47) mozemo med-ukorelaciju
(3.101) pisati u obliku
R12(τ ) =1
2π
+∞ −∞
S ∗1 ( jω)S 2( jω)ejωτ dω, (3.103)
gdje su S 1( jω ) i S 2( jω) spektralne karakteristike signala s1(t) i s2(t), respek-tivno.
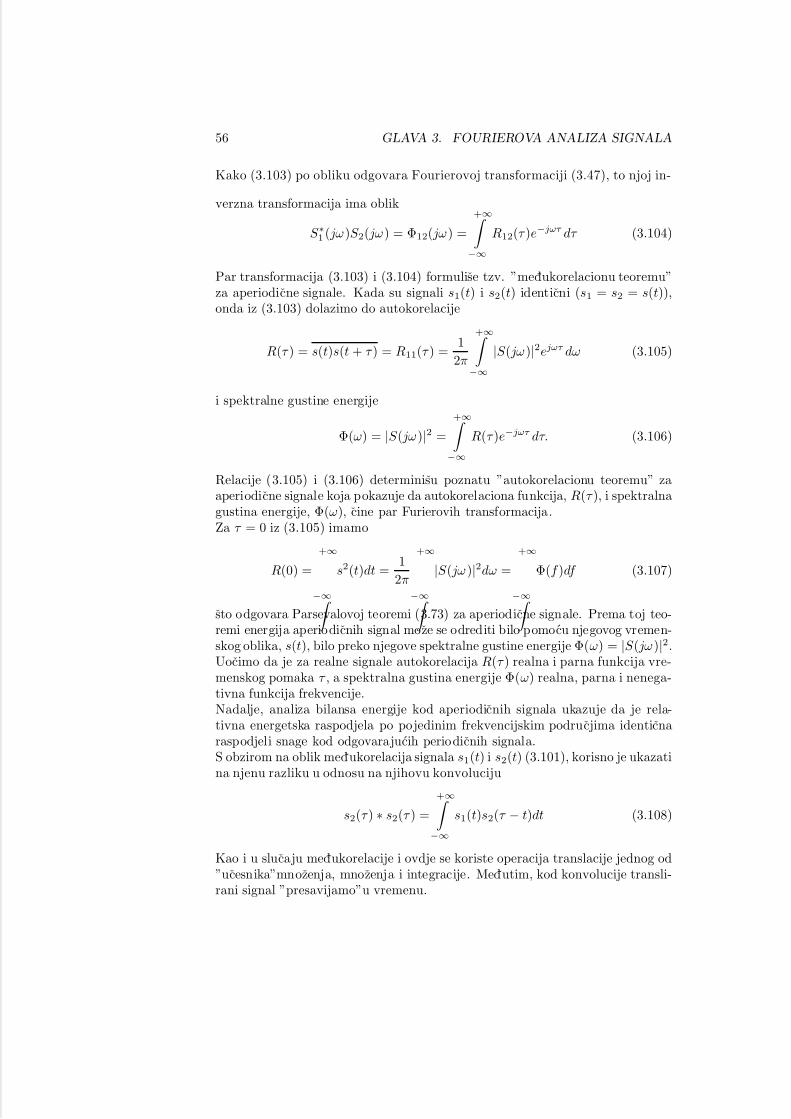
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 62/246
56 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Kako (3.103) po obliku odgovara Fourierovoj transformaciji (3.47), to njoj in-
verzna transformacija ima oblik
S ∗1 ( jω)S 2( jω) = Φ12( jω) =
+∞ −∞
R12(τ )e−jωτ dτ (3.104)
Par transformacija (3.103) i (3.104) formulise tzv. ”med-ukorelacionu teoremu”za aperiodicne signale. Kada su signali s1(t) i s2(t) identicni (s1 = s2 = s(t)),onda iz (3.103) dolazimo do autokorelacije
R(τ ) = s(t)s(t + τ ) = R11(τ ) =1
2π
+∞ −∞
|S ( jω)|2ejωτ dω (3.105)
i spektralne gustine energije
Φ(ω) = |S ( jω)|2 =
+∞ −∞
R(τ )e−jωτ dτ. (3.106)
Relacije (3.105) i (3.106) determinisu poznatu ”autokorelacionu teoremu” zaaperiodicne signale koja pokazuje da autokorelaciona funkcija, R(τ ), i spektralnagustina energije, Φ(ω), cine par Furierovih transformacija.Za τ = 0 iz (3.105) imamo
R(0) =
+∞
−∞
s2(t)dt =1
2π
+∞
−∞
|S ( jω )|2dω =
+∞
−∞
Φ(f )df (3.107)
sto odgovara Parsevalovoj teoremi (3.73) za aperiodicne signale. Prema toj teo-remi energija aperiodicnih signal moze se odrediti bilo pomocu njegovog vremen-skog oblika, s(t), bilo preko njegove spektralne gustine energije Φ(ω) = |S ( jω)|2.Uocimo da je za realne signale autokorelacija R(τ ) realna i parna funkcija vre-menskog pomaka τ , a spektralna gustina energije Φ(ω) realna, parna i nenega-tivna funkcija frekvencije.Nadalje, analiza bilansa energije kod aperiodicnih signala ukazuje da je rela-tivna energetska raspodjela po pojedinim frekvencijskim podrucjima identicnaraspodjeli snage kod odgovarajucih periodicnih signala.S obzirom na oblik med-ukorelacija signala s1(t) i s2(t) (3.101), korisno je ukazatina njenu razliku u odnosu na njihovu konvoluciju
s2(τ ) ∗ s2(τ ) =
+∞ −∞
s1(t)s2(τ − t)dt (3.108)
Kao i u slucaju med-ukorelacije i ovdje se koriste operacija translacije jednog od”ucesnika”mnozenja, mnozenja i integracije. Med-utim, kod konvolucije transli-rani signal ”presavijamo”u vremenu.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 63/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 57
Moze se pokazati da su postupci konvolucije i korelacije ekvivalentni samo u
slucaju kada je signal koji se ne translira parna funkcija vremena.Naime,
R12(τ ) =
+∞ −∞
s1(t)s2(t + τ )dt =
+∞ −∞
s1(−t)s2(τ − t)dt =
=
+∞ −∞
s1(t)s2(τ − t)dt
sto je ekvivalentno konvoluciji (3.108).Ako izmed-u signala s1(t) i s2(t) ne postoji korelacija, onda vrijedi
R12(τ ) = R21(τ ) = s1(t) · s2(t)
sto znaci da je njihova med-ukorelaciona funkcija u takvim uslovima jeddnakaproduktu srednjih vrijednosti (istosmjernih komponenata) ucesnika u med-uko-relaciji (s1 i s2).Lako je pokazati da je autokorelacija signala s(t), koji odgovara sumi dva signalas1(t) i s2(t), jednaka
Rs(τ ) = s(t)s(t + τ ) =
= s1(t)s1(t + τ ) + s2(t)s2(t + τ ) + s1(t)s2(t + τ ) + s2(t)s1(t + τ ).
Ako izmed-u signala s1(t) i s2(t) ne postoji korelacija i ako bar jedan od signala
(s1 ili s2) nema istosmjernu komponentu, onda vrijedi jednakost
Rs(τ ) = Rs1(τ ) + Rs2(τ )
koja za τ = 0 prelazi u oblik
Rs(0) = Rs1(0) + Rs2(0)
sto odgovara uslovu za nekoherentnost signala s1(t) i s2(t) [ ].Takod-e se lako moze dokazati da su signali s1(t) i s2(t), koji nemaju ni jednezajednicke spektralne komponente (u frekvencijskom podrucju), nekoherentnis1(t)s2(t + τ ) = s2(t)s1(t + τ ) = 0, dok obrnuto ne vazi.Naime, nekoherentni signali mogu imati zajednicke spektralne komponente (istefrekvencije), ali da su, na primjer, zbog razlicitih faznih stavova u kvadraturi(kao sin ω0t i cos ω0t).
3.2.6 Spektri nekih aperiodicnih signala
U ovom odjeljku posveticemo paznju tipicnim aperiodicnim signalima koji uteorijskoj i prakticnoj analizi signala imaju poseban znacaj, Prvo cemo posma-trati vec analizirani pravougaoni impuls sa sl.3.23 ciji je spektar dat na sl.3.24.
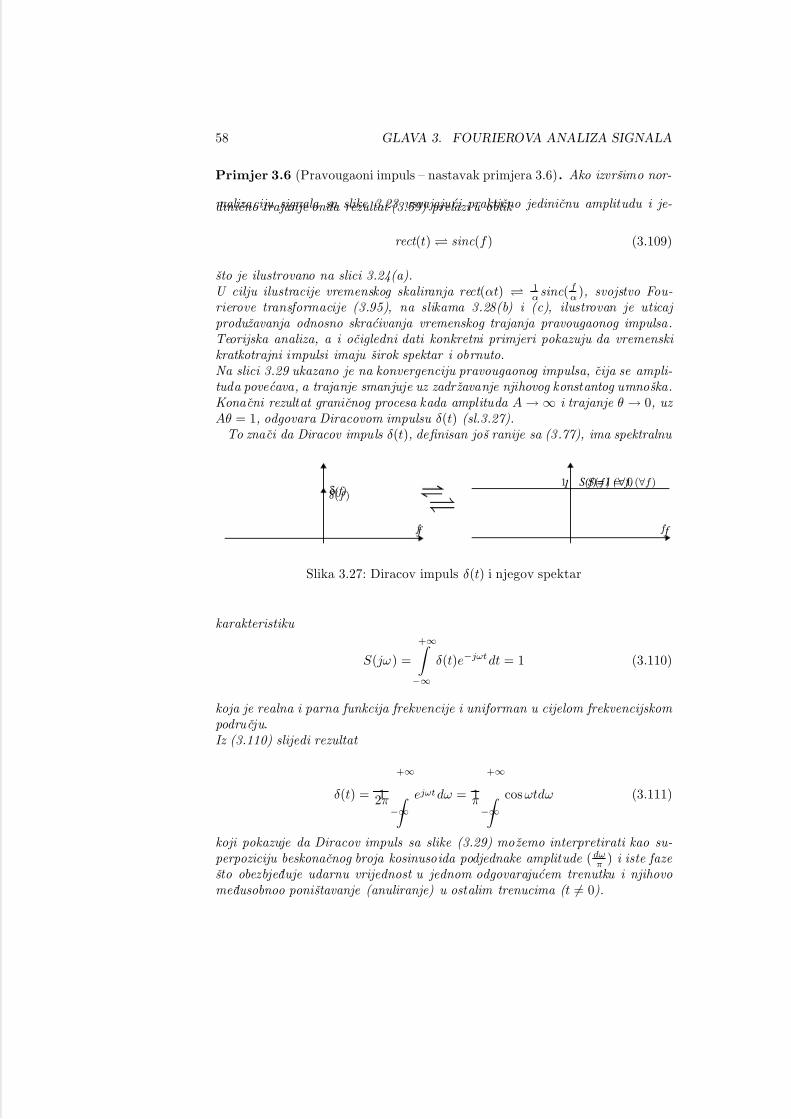
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 64/246
58 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Primjer 3.6 (Pravougaoni impuls – nastavak primjera 3.6). Ako izvrsimo nor-
malizaciju signala sa slike 3.23 usvajajuci prakticno jedinicnu amplitudu i je-dinicno trajanje onda rezultat (3.59) prelazi u oblik
rect (t) sinc(f ) (3.109)
sto je ilustrovano na slici 3.24(a).U cilju ilustracije vremenskog skaliranja rect (αt) 1
α sinc( f α ), svojstvo Fou-
rierove transformacije (3.95), na slikama 3.28(b) i (c), ilustrovan je uticaj produzavanja odnosno skracivanja vremenskog trajanja pravougaonog impulsa.Teorijska analiza, a i ocigledni dati konkretni primjeri pokazuju da vremenski kratkotrajni impulsi imaju sirok spektar i obrnuto.Na slici 3.29 ukazano je na konvergenciju pravougaonog impulsa, cija se ampli-tuda povecava, a trajanje smanjuje uz zadrzavanje njihovog konstantog umnoska.Konacni rezultat granicnog procesa kada amplituda A → ∞ i trajanje θ → 0, uz Aθ = 1, odgovara Diracovom impulsu δ(t) (sl.3.27).
To znaci da Diracov impuls δ(t), definisan jos ranije sa (3.77), ima spektralnu
f
δ(f)
f
1 S(f)=1 (∀ f)
Slika 3.27: Diracov impuls δ(t) i njegov spektar
δ(f )
f
S (f ) = 1 (∀f )
f
1
karakteristiku
S ( jω) =
+∞ −∞
δ(t)e−jωt dt = 1 (3.110)
koja je realna i parna funkcija frekvencije i uniforman u cijelom frekvencijskom podrucju.Iz (3.110) slijedi rezultat
δ(t) = 12π
+∞ −∞
ejωt dω = 1π
+∞ −∞
cos ωtdω (3.111)
koji pokazuje da Diracov impuls sa slike (3.29) mozemo interpretirati kao su-perpoziciju beskonacnog broja kosinusoida podjednake amplitude ( dω
π ) i iste fazesto obezbjed -uje udarnu vrijednost u jednom odgovarajucem trenutku i njihovomed -usobnoo ponistavanje (anuliranje) u ostalim trenucima ( t = 0).
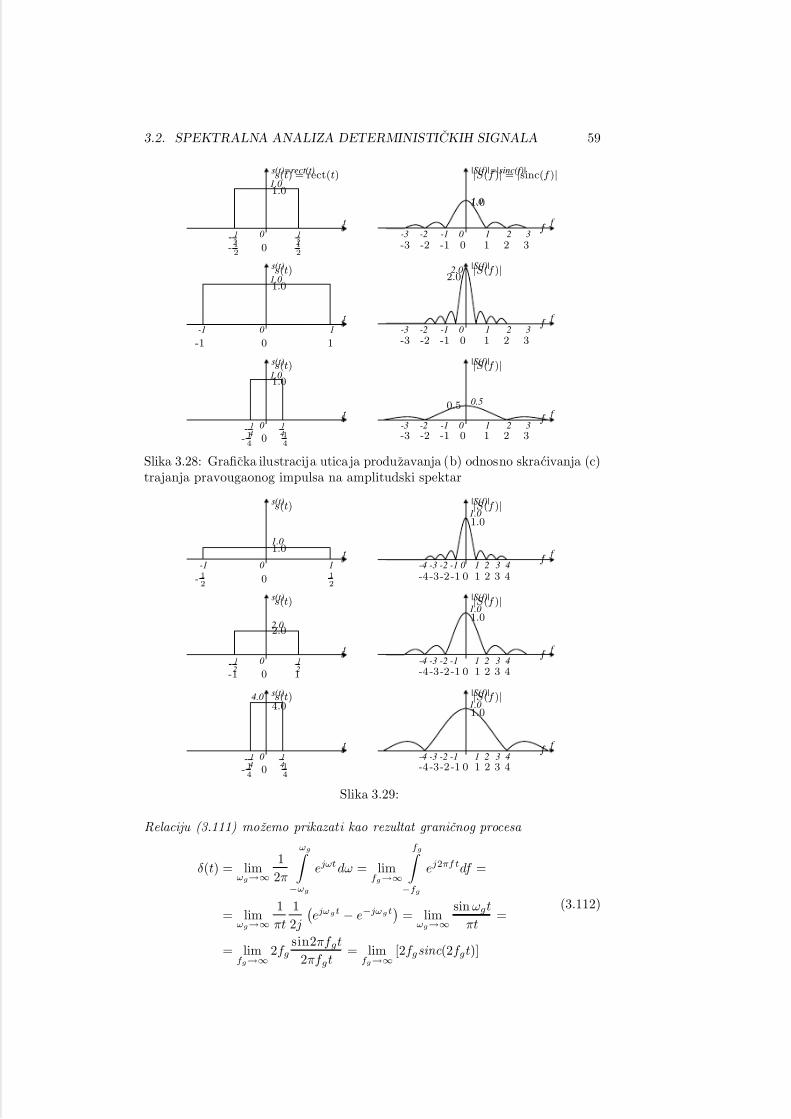
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 65/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 59
t
s(t)=rect(t)
1.0
0 12
12
t
s(t)
1.0
0-1 1
t
s(t)
1.0
0 14
14
|S(f)|=|sinc(f)|
f
f
f
1 2 3-1-2-3
1.0
0
1 2 3-1-2-3 0
2.0 |S(f)|
1 2 3-1-2-3 0
0.5
|S(f)|
t
s(t) = rect(t)
1.0
0 1
2- 12
f
|S (f )| = |sinc(f )|
1.0
1 2 30-1-2-3
t
s(t)
1.0
0 1-1
f
|S (f )|2.0
1 2 30-1-2-3
t
s(t)
1.0
0 1
4- 14
f
|S (f )|
0.5
1 2 30-1-2-3
Slika 3.28: Graficka ilustracija utica ja produzavanja (b) odnosno skracivanja (c)trajanja pravougaonog impulsa na amplitudski spektar
s(t)
s(t)
s(t)
t
t
t
1.0
0
0
0
2.0
4.0
14
14
12
12
-1 1
f
f
f
|S(f)|
|S(f)|
|S(f)|
1.0
1.0
1.0
0-4 -3 -2 -1 1 2 3 4
-4 -3 -2 -1 1 2 3 4
-4 -3 -2 -1 1 2 3 4
t
s(t)
1.0
0 1
2- 12
f
|S (f )|
1.0
1 2 3 40-1-2-3-4
t
s(t)
2.0
0 1-1
f
|S (f )|
1.0
1 2 3 40-1-2-3-4
t
s(t)4.0
0 1
4- 14
f
|S (f )|
1.0
1 2 3 40-1-2-3-4
Slika 3.29:
Relaciju (3.111) mozemo prikazati kao rezultat granicnog procesa
δ(t) = limωg→∞
1
2π
ωg −ωg
ejωt dω = limf g→∞
f g −f g
ej2πf tdf =
= limωg→∞
1
πt
1
2 j
ejωgt − e−jωgt
= lim
ωg→∞sin ωgt
πt=
= limf g→∞
2f gsin2πf gt
2πf gt= lim
f g→∞[2f g sinc(2f gt)]
(3.112)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 66/246
60 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Fourierov transformacioni par rect
ω
ωg = rect
f
f g i 2f g sinc(2f gt), na kojem
je vrsen granicni proces, prikazan je na slici 3.29. Pomenimo da interpretacija
ω
S (ω)
1
ωg−ωg
f
S (f)
1
f g-f g
ω(f)
2f gsinc(2f gt)
ωg
π =2f g
πωg
2πωg
⇔
12f g
1 f g
Slika 3.30:
0 ωg-ωg
S prav(ω)
1
ω
⇔
0 f g-f g
S prav(f )
1
f
2f gsinc(2f gt)
πωg
2πωg
ω
( 12fg
) ( 1fg
)
(f )
ωgπ = 2 f g
Diracovog imipulsa pomocu granicnog procesa (3.101) nije jedina i da se u lit-eraturi navodi veliki broj funkcija sa pomenutim granicnim svojstvom.Tako, na primjer, vrijedi
δ(t) = limε→0
1√πε
e−t2
ε itd. (3.113)
Primjer 3.7 (Signum i odskocna (Hevisajdova) funkcija). Na slici 3.30(a)prikazana je signum funkcija
sgn t =
−1 za t < 01 za t > 0
(3.114)
t
sgn(t)
1
-1
ω
B(ω)
1
-1
sgn t
t
B(ω)
ω
Slika 3.31: Signum funkcija u vremenskom domenu (a) i njena ”Fourierovatransformacija”(b)
Moze se pokazati da vrijedi
sgn (t) S ( jω ) =2
jω= j
−2
ω(3.115)
odnosno, ako koristimo oblik S ( jω) = A(ω) − jB (ω), onda imamo A(ω) = 0 i B(ω) = 2
ω, pa je zbog neparnosti sgn (t) funkcije njena Fourierova transforma-
cija cisto imaginarna (sl.3.32).

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 67/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 61
Kao posredan dokaz za korektnost usvojenog reslutata (3.115) potrazicemo in-
verznu transformaciju desne strane relacije (3.115)
s(t) =1
2π
+∞ −∞
2
jωejωt dω =
1
jπ
+∞ −∞
cos ωt
ωdω +
1
π
+∞ −∞
sin ωt
ωdω (3.116)
Kako je cos ωtω
neparna funkcija ucestanosti, prvi clan desne strane jednakosti
(3.116) jednak je nuli, a drugi clan zbog parnosti funkcije sin ωtω
mozemo pisati u obliku
s(t) =2
π
+∞ 0
sin ωt
ωdω (3.117)
U matematici se preko teorije ostataka (rezidijuma) lako dobija poznati rezultat
+∞ 0
sin ax
xdx =
π2 , za a > 00 za a = 0
−π2
, za a < 0(3.118)
Ako (3.118) primjenimo na nas problem racunanja (3.117), onda mozemo pisati
s(t) =2
π
+∞ 0
sin ωt
ωdω =
1 za t > 00 za t = 0
−1 za t < 0(3.119)
sto odgovara funkciji (sgn t) iz (3.114).”Razlika”u tacki t = 0 je posljedica konvergencije Fourierovog reda odnosnointegrala u prekidnim tackama posmatrane funkcije (3.52).Hevisajdova (odskocna) funkcija u(t) prikazana je na slici 3.3.3. Ocigledno je
t
1
t=0
u(t)=
1, t>0
0, t<0
ω
A(ω) ,B(ω)
1ω
=B(ω)1
t = 0
u(t) =
1 t > 00 , t < 0
t
A(ω), B(ω)
1
ω = B(ω)
ω
©
Slika 3.32: Odskocna funkcija u(t) (a) i komponente A(ω) i B(ω) njene trans-formacije S ( jω) = A(ω) − jB(ω) (b)
veza izmed -u odskocne i sgn (t) funkcije
u(t) =1
2sgn (t) +
1
2⇔ sgn (t) = 2u(t) − 1. (3.120)
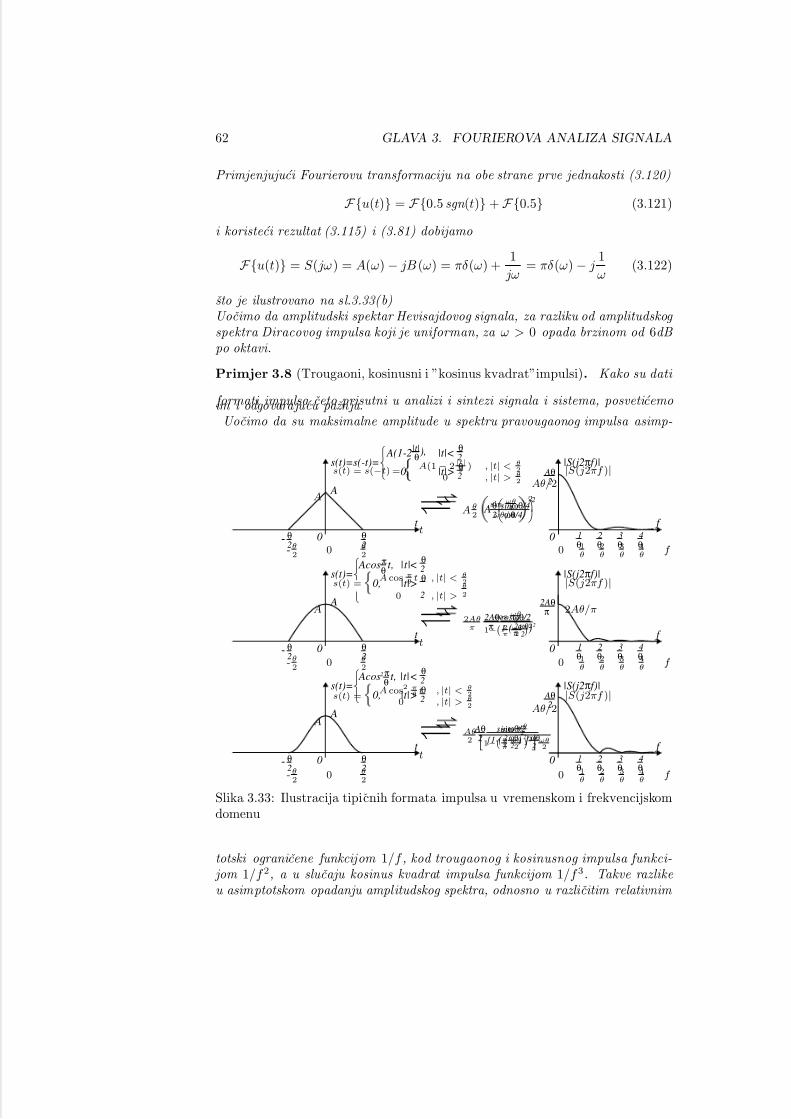
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 68/246
62 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Primjenjujuci Fourierovu transformaciju na obe strane prve jednakosti (3.120)
Fu(t) = F0.5 sgn (t) + F0.5 (3.121)
i koristeci rezultat (3.115) i (3.81) dobijamo
Fu(t) = S ( jω) = A(ω) − jB (ω) = πδ(ω) +1
jω= πδ(ω) − j
1
ω(3.122)
sto je ilustrovano na sl.3.33(b)Uocimo da amplitudski spektar Hevisajdovog signala, za razliku od amplitudskog spektra Diracovog impulsa koji je uniforman, za ω > 0 opada brzinom od 6dB po oktavi.
Primjer 3.8 (Trougaoni, kosinusni i ”kosinus kvadrat”impulsi). Kako su dati
formati impulsa ceto prisutni u analizi i sintezi signala i sistema, posveticemoim i odgovarajucu paznju.Uocimo da su maksimalne amplitude u spektru pravougaonog impulsa asimp-
t
s(t)=s(-t)=
A(1-2|t|θ), |t|<
θ2
0, |t|>θ2
f
|S(j2π f)| Aθ
2 A
θ2
θ2
0
Aθ2
sinωθ /4ωθ /4
2
t
s(t)=
Acosπθ t, |t|<θ2
0, |t|>θ
2
f
|S(j2π f)|
2Aθπ
A
θ2
θ2
0
2Aθπ
cosωθ /21-( 2
πωθ2
)2
t
s(t)=
Acos2πθ t, |t|<
θ2
0, |t|>θ2
f
|S(j2π f)| Aθ
2 A
θ2
θ2
0
Aθ2
sinωθ /2[1-( 2
πωθ2
) ] ωθ2
2
0 1θ
2θ
3θ
4θ
0 1θ
2θ
3θ
4θ
0 1θ
2θ
3θ
4θ
Slika 3.33: Ilustracija tipicnih formata impulsa u vremenskom i frekvencijskomdomenu
0
s(t) = s(−t) =
A(1 − 2|t|
θ ) , |t| < θ2
0 , |t| > θ2
A
t
- θ2
θ2
A θ2
sinωθ4
ωθ/4
2
0 1
θ2
θ3
θ4
θ f
|S ( j2πf )|Aθ/2
0
s(t) =
A cos πθ t , |t| < θ
2
0 , |t| >θ2
A
t
- θ2
θ2
2Aθπ
cosωθ2
1−( 2πωθ2 )2
0 1
θ2
θ3
θ4
θ f
|S ( j2πf )|
2Aθ/π
0
s(t) =
A cos2 πθ t , |t| < θ
2
0 , |t| > θ2
A
t
- θ2
θ2
Aθ2
sinωθ2
h
1−( 2πωθ2 )2
i
ωθ2
0 1
θ2
θ3
θ4
θ f
|S ( j2πf )|Aθ/2
totski ogranicene funkcijom 1/f , kod trougaonog i kosinusnog impulsa funkci- jom 1/f 2, a u slucaju kosinus kvadrat impulsa funkcijom 1/f 3. Takve razlikeu asimptotskom opadanju amplitudskog spektra, odnosno u razlicitim relativnim

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 69/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 63
koncentracijama energije signala, pojedinih formata posljedica su diskontinuiteta
po trenutnim vrijednostima kod pravougaonog impulsa (sl.3.24). Kod trougaonog i kosinusnog impulsa ne postoje skokovi u amplitudi ali je prekidna ”tek”prva derivacija – koja je kod kosinus kvadrat impulsa neprekidna (kontinualna) itd.
Primjer 3.9 (Spektar zvonastog (Gausovog impulsa)). Zvonasti impuls, vrloslican kosinus impulsu drugog stepena, prikazan je na slici 3.35(a).
Koristeci definisani Fourierov recept imamo
t
A
A/ ε
s(t)=Ae−βt 2 ,-∞<t<+∞
θ
ω
A√πe-ω2
4β
a) b)(β>0)
t
A
A/e
s(t) = Ae−βt2
,−∞ < y < +∞(β > 0)
E' θa)
ω
A√
πe−ω2
4β
b)
Slika 3.34: Gausov impuls u vremenskom (a) i frekvencijskom domenu (b)
Fs(t) = FAe−βt2 =
+∞ −∞
Ae−βt2e−jωt dt =
=
+∞ −∞
Ae−β
t − jω
2β
2+ ω2
4β2
dt = Ae
− ω2
4β2
+∞ −∞
e−x2
dx,
gdje je x = t − jω2β√β .
Sada cemo se osvrnuti na problem rjesavanja integrala I 1 =+∞ −∞
e−x2
dx koji
takod -e mozemo formalno pisati u obliku I 2 =+∞ −∞
e−y2dy. Kako je
I 1 · I 2 = I 2 =
+∞ −∞
e−(x2+y2)dxdy.
Ako pred -emo na polarne koordinate gdje vazi dxdy = ρdρdϕ, x = ρ cos ϕ i y = ρ sin ϕ, onda dobijamo
I 2 =
+∞ 0
2π 0
e−ρ2ρdρdϕ = 2π1
2
+∞ 0
e−ρ2d(ρ2) = π ili
I =√
π =
+∞ −∞
e−x2
dx.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 70/246
64 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Koristeci prethodni rezultat konacno dobijamo
Fs(t) = FAe−βt2 = A√
πe−ω2
4β
sto je graficki i ilustrovano na slici 3.34(b).Mada posmatrani impuls ima beskonacno trajanje u vremenskom i frekvenci- jskom domenu!, cesto se definise trajanje θ prema slici 3.34(a), odakle dobijamoθ = 2/
√3.
Jedna od fundamentalnih osobina Fourierove transformacije ukazuje da signal s(t) konacnog trajanja posjeduje spektralne komponente nenulte amplitude u beskonacno sirokom frekvencijskom opsegu. Isto tako signal cije su spektralnekomponente locirane u konacnom frekvencijskom opsegu ima neograniceno vre-mensko trajanje.
Takva korespodencija izmed -u vremena i frekvencije ponekad dovodi do zabludeda signalu koji ima beskonacno trajanje, kao na primjer zvonasti impuls, odgo-vara spektar konacnog frekvencijskog opsega. Jasno je da takve hipoteze obara posmatrani zvonasti impuls koji teorijski ima beskonacno trajanje u vremen-skom i frekvencijskom domenu a u oba domena se povinava istom zakonu e−x2
,x < +∞
3.2.7 Komentar o povezanosti trajanja impulsnih signalai frekvencijskog opsega
Mada smo o zavisnosti potrebnog propusnog opsega (B) od trajanja elemen-
tarnog signala (θ) vec govorili (3.29) ovdje cemo na kraju pregleda znacajnijihimpulsnih formata pokusati dati generalni zakljucak. Ponovo cemo posma-trati pravougaoni impuls s(t) = Arect( t
θ ) sa sl.3.24 i njegovu transformaciju
S ( jω ) = Aθ sin ωθ/2ωθ/2
= Aθsinc(f θ) prema (3.58), a koji su ponovo prikazani na
slici 3.35.Mada se spektralne komponente posmatranog signala protezu teorijski u
s(t)
t
A
θ
2
θ
2
0
S(jω)=A(ω)
ω
Aθ
2π
θ
4π
θ
6π
θ
2π
θ
4π
θ
6π
θ0
t
A
s(t)
- θ2
θ2
0
ω
Aθ
S ( jω) = A(ω)
2πθ
4πθ- 2πθ- 4πθ
Slika 3.35:
beskonacno sirokom frekvencijskom podrucju, prakticno se moramo pomiriti sakonacnom maksimalnom granicnom frekvencijom (ili sirinom opsega) prenosnihsistema.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 71/246
3.2. SPEKTRALNA ANALIZA DETERMINISTI CKIH SIGNALA 65
Propusni opseg B [Hz] (ili 2πB rads ) definisacemo prema jednakosti
2πB =1
S (0)
+∞ −∞
S ( jω)dω (3.123)
sto znaci da je povrsina ispod funkcije S ( jω) jednaka povrsini pravougaonikakoji ima stranice 2πB i S (0).Iz (3.123) i (3.58) imamo
B =1
2πS (0)
+∞ −∞
Aθsin ωθ/2
ωθ/2dω =
= 1π
+∞ 0
sin ωθ/2ωθ/2
2θ dωθ
2 = 1
π· 2
θ· π
2= 1
θ,
(3.124)
odakle dobijamo produkt trajanja impulsa (θ) i propusnog opsega B
B · θ = 1 (3.125)
To znaci da nezavisno od odabrane sirine impulsa (njegovog vremenskog tra- janja) njen produkt sa odgovarajucom sirinom propusnog opsega (B) ostajekonstantan.Kao sto smo ranije utvrdili, smanjivanje trajanja signala dva puta impliciraprosirivanje opsega dva puta i obrnuto (sl.3.28 i 3.29) sto proistice iz svojstvaFourierove transformacije o skaliranju (3.95) (s(at) 1
|a|S ( jω/a), a
= 0).
Kao sto prethodni primjer pokazuje, vremenska funkcija konacnog trajanja imaspektar u beskonacno sirokom opsegu. Obrnuto, signalu sa konacnim propus-nim opsegom odgovara vremenski neogranicena funkcija.Sama vrijednost produkta Bθ zavisi od predpostavljenih kriterijuma i zahtijeva???. Ako se posmatra normalizovani signal (jedinicne energije)
+∞ −∞
s2(t)dt = 1 (3.126)
i ako definisemo relacije
θ +∞ −∞
t2s2(t)dt, 2πB +∞ −∞
ω2|S ( jω)|2dω, (3.127)
onda se moze pokazati da vrijedi nejednakost
θB ≥ 1
2√
2π(3.128)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 72/246
66 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Moze se takod-e pokazati da nejednakost (3.128) prelazi u jednakost ako signal
ima oblik s(t) = Ae−βt2 , β > 0
sto znaci da Gaussov impuls u datom smislu ima najmanji moguci produkt vre-menskog i frekvencijskog ”tra janja”. Uocimo da definicija (3.127) pretpostavljaegzistenciju datih integrala. Med-utim, za signal sa slike 3.35 integral kojidefinise sirinu opsega ne konvergira.
Zadatak 3.3. Za signal s2(t) odrediti i graficki prikazati spektralnu karak-teristiku ako je za aperiodican signal s(t) poznata Fourierova transformacija
Fs(t) = S 0rect
ω2ωg
, gdje je S 0 konstanta.
3.2.8 Pojam trenutnog spektra
Racunanje spektralne karakteristike prema (3.46) proceduri pretpostavljapoznavanje signala u beskonacnom vremenskom intervalu −∞ < t < ∞. Med-utim,ako je signal s(t) rezultat osmatranja nekog realnog fizickog procesa i koji sagle-davamo kroz vremenski prozor (time window function) u proslost trajanja T uodnosu na aktuelni trenutak t, onda mozemo definisati tzv. trenutni spek-tar kao spektar segmenta procesa duzine T koji neposredno prethodi datomtrenutku t
S ( jω,t) =
t t−T
s(τ )e−jωτ dτ (3.129)
Ako su, na primjer, davno prosle vrijednosti signala od manjeg znacaja od vrijed-nosti iz bliske proslosti, onda se vrsi ponderisanje signala posebnom tezinskom
funkcijom h(t) koja obicno odgovara odzivu fizicki realizibilnih sistema pa (3.129)poprima oblik
S ( jω,t) =
t −∞
h(t − τ )s(τ )e−jωτ dτ (3.130)
Trenutni spektar (3.129) je specijalni slucaj opstijeg rezultata (3.130) i odgovaraprimjeni pravougaone prozorske funkcije trajanja T . U teoriji i praksi poznatesu i druge brojne prozorske funkcije (Hamming, Hann itd.)Ako tezinska funkcija h(t) odgovara odskocnoj funkciji (sl.3.3) onda iz (3.130)imamo specijalni slucaj
S ( jω,t) =
t
−∞
s(τ )e−jωτ
dτ (3.131)
koji neki autori nazivaju tekucim spektrom signala [ ]. Naglasimo da efikasnostnase procjene spektra signala na osnovu posmatranja samo njegovog segmentatrajanja T zavisi ne samo od oblika prozorske funkcije nego prvenstveno i odnjegovog trajanja (T ) kao sto je vec ranije pomenuto, reciprocna vrijednosttrajanja ∆f = 1/T determinise frekvencijsku rezoluciju datog mjernog sistema.
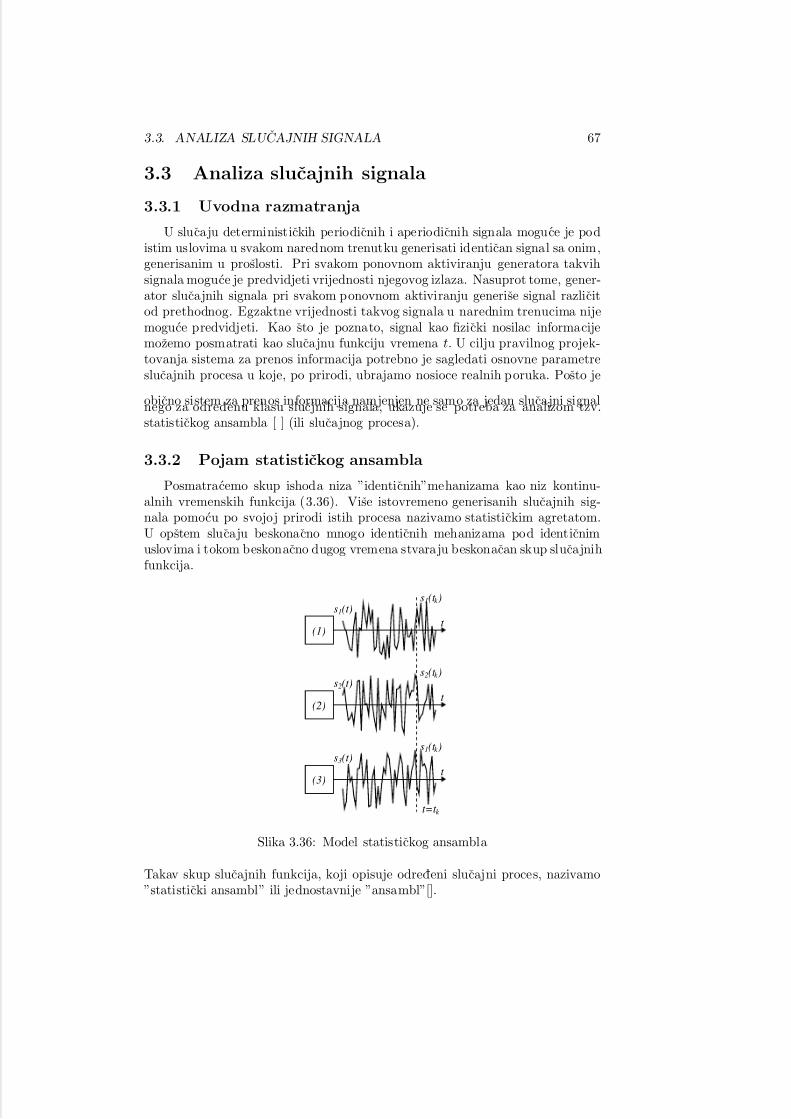
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 73/246
3.3. ANALIZA SLU CAJNIH SIGNALA 67
3.3 Analiza slucajnih signala
3.3.1 Uvodna razmatranja
U slucaju deterministickih periodicnih i aperiodicnih signala moguce je podistim uslovima u svakom narednom trenutku generisati identican signal sa onim,generisanim u proslosti. Pri svakom ponovnom aktiviranju generatora takvihsignala moguce je predvidjeti vrijednosti njegovog izlaza. Nasuprot tome, gener-ator slucajnih signala pri svakom ponovnom aktiviranju generise signal razlicitod prethodnog. Egzaktne vrijednosti takvog signala u narednim trenucima nijemoguce predvidjeti. Kao sto je poznato, signal kao fizicki nosilac informacijemozemo posmatrati kao slucajnu funkciju vremena t. U cilju pravilnog projek-tovanja sistema za prenos informacija potrebno je sagledati osnovne parametreslucajnih procesa u koje, po prirodi, ubrajamo nosioce realnih poruka. Posto je
obicno sistem za prenos informacija namjenjen ne samo za jedan slucajni signalnego za odred-enu klasu slucjnih signala, ukazuje se potreba za analizom tzv.statistickog ansambla [ ] (ili slucajnog procesa).
3.3.2 Pojam statistickog ansambla
Posmatracemo skup ishoda niza ”identicnih”mehanizama kao niz kontinu-alnih vremenskih funkcija (3.36). Vise istovremeno generisanih slucajnih sig-nala pomocu po svojoj prirodi istih procesa nazivamo statistickim agretatom.U opstem slucaju beskonacno mnogo identicnih mehanizama pod identicnimuslovima i tokom beskonacno dugog vremena stvaraju beskonacan skup slucajnihfunkcija.
(3)
(2)
(1)
t
t
t
t=t k
s3(t)
s2(t)
s1(t)
s1(t )k
s2(t )k
s1(t )k
Slika 3.36: Model statistickog ansambla
Takav skup slucajnih funkcija, koji opisuje odred-eni slucajni proces, nazivamo”statisticki ansambl” ili jednostavnije ”ansambl”[].
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 74/246
68 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Statisticki ansambl oznacavamo sa grckim slovima ξ(t) (ili η(t)) ili jednos-
tavno sa X (t), (ili Y (t) itd.), a za clanove ansambla, pojedinu realizaciju, ko-risticemo oznake s(t) ili x(t). Ako se posebno ne naglasi, pretpostavljacemo danjihove trenutne vrijednosti pripadaju kontinualnom amplitudskom intervalu(−∞, +∞), odnosno neprebrojivom skupu amplitudskih stanja.Ako fiksiramo trenutak t = tk, onda i–ta realizacija ima konkretnu vrijednost
si(tk) = x(i)k . To je ujedno i jedna od mogucih vrijednosti slucajne varijable
X (tk) = X k, −∞ < X k < +∞ (3.132)
gdje je
X k ∈ . . . , x(1)k , x
(2)k , x
(3)k , . . . , , x
(i)k , . . . .
3.3.3 Opis ansambla u jednoj ili vise tacaka
Posmatrajmo slucajnu varijablu (3.132) vezanu za jedan odred-eni trenutak(t = tk).Jednodimenzionalnu funkciju raspodjele F 1(xk; tk) definisemo kao vjerovatnocuda slucajna varijabla X (tk) = X k bude manja od nekog amplitudskog nivoa xk
tj.:F 1(xk; tk) = pX k < xk (3.133)
Ako jednodimenzionalna funkcija raspodjele ima parcijalni izvod po x, onda seizvod
f 1(xk; tk) =∂F 1(xk; tk)
∂xk(3.134)
zove jednodimenzionalna funkcija gustine vjerovatnoce (raspodjele) slucajnog
procesa.Ako se radi o tzv. stacionarnim slucajnim procesima, onda uvedene funkcije(3.133) i (3.134) ne zavise od vremenskog trenutka tk pa tada imamo
F 1(x) = pX < x (3.133)
i f 1(x) =∂F 1(x)
∂x(3.134)
Podsjetimo se na opstepoznate osobine funkcije raspodjele:
1. F (−∞) = 0, F (+∞) = 1,
2. F (x2) ≥ F (x1) za x2 > x1,tj. funkcija raspodjele je neopadajuca funkcija,
3. vjerovatnoca da X poprimi vrijednost izmed-u nivoa a i b iznosi
p(a ≤ X < b) = F (b) − F (a),
Korektnost prethodne relacije lako je potvrditi ako se dogad-aj X < bposmatra kao zbir dva nespojiva dogad-aja
X < a i a ≤ X < b ili

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 75/246
3.3. ANALIZA SLU CAJNIH SIGNALA 69
pX < b = pX < a, ili a ≤ X < b = pX < a + pa ≤ X < bodakle konacno dobijamo
pa ≤ X < b = pX < b − pX < a = F 1(b) − F 1(a).
Funkcija gustine vjerovatnoce kao nenegativna funkcija zadovoljava jednakost +∞
−∞f 1(x)dx = 1
dok je
pa ≤ X ≤ b =
b
a
f 1(x)dx.
Ako se radi o diskretnoj slucajnoj varijabli X koja je definisana na najviseprebrojivom skupu mogucih amplitudskih stanja, onda je opisujemo skupomparova X i, pi = pX i ili jednostavnije
X =
x1 x2 . . . xn
p1 p2 . . . pn
, gdje vazi
i
pi = 1.
Odgovarajuca funkcija raspodjele ima oblik
F 1(x) = pX < x =
Xi<x
pX = xi =
Xi<x
pi.
U praksi je obicno funkcija raspodjele F (x) neprekidne (kontinualne) slucajnevarijeble X i sama neprekidna, dok kod diskretnih slucajnih varijabli ima tipicne
skokovite promjene (osta juci i dalje neopada juca funkcija).Naglasimo da je zanemarivo mala vjerovatnoca da ce kontinualna slucajna vari- jabla X poprimiti tacno odred-enu vrijednosti (c) pa je stoga prakticno nevaznoda li amplitudski interval definisemo kao otvoren, zatvoren ili poluotvoren.Znaci, ukoliko je slucajna velicina X neprekidna, onda vrijedi
pX = c = 0,
pa ≤ X ≤ b = pa ≤ X < b = pa < X < b = F (b) − F (a).
Uocimo da se u literaturi ponekad prvo definise funkcija gustine vjerovatnocef 1(xk; tk) preko vjerovatnoce da odgovarajuca slucajna varijabla X k bude uinfinitezimalnom amplitudskom intervalu (xk, xk + dxk) tj.:
pxk < X k < xk + dxk; t = tk = f 1(xk; tk)dxk, [], (3.135)
a zatim, ako je ona integrabilna, definise se funkcija raspodjele
F 1(xk; tk) =
xk −∞
f 1(x; tk)dx. (3.136)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 76/246
70 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Da bismo opisali proces X (t) u n razlicitih trenutaka t1, . . . , tn, uvodimo vjerovatnocu
da se slucajni proces X (t) nalazi ispod nivoa x1, . . . , xn: pX (t1) < x1; X (t2) < x2; . . . ; X (tn) < xn; = F n(x1, x2, . . . , xn; t1, t2, . . . , tn)
(3.137)i nazivamo je n–dimenzionalna (integralna) funkcija raspodjele slucajnog procesa.Na ovaj nacin smo uveli funkciju raspodjele za sve moguce konacne kolekcijesluca jnih velicina
X (t1), . . . , X (tn); t1, . . . , tn ∈ T.
Ako F n(x1, . . . , xn) ima parcijalni izvod
∂ nF n(x1, . . . , xn; t1, . . . , tn)
∂x1 . . . ∂ xn= f n(x1, . . . , xn; t1, . . . , tn), (3.138)
onda se on naziva n–dimenzionalna (zdruzena) gustina vjerovatnoce slucajnogprocesa.Niz funkcija
F 1(x1; t1), F 2(x1, x2; t1, t2), . . . , F n(x1, x2, . . . , xn; t1, t2, . . . tn)
ilif 1(x1; t1), f 2(x1, x2; t1, t2), . . . , f n(x1, x2, . . . , xn; t1, t2, . . . tn)
ukazuje na ljestvicu po kojo j, kada se dizemo dobijamo sve vise i vise informa-cija o slucajnom procesu.Med-utim, koristenje konacno–dimenzionalnih raspodjela ne omogucava da sematematicki strogo izuce sve realizacije u cjelini, njihova neprekidnost, deriv-abilnost itd. Matemeticka teorija slucajnih procesa izgrad-uje se na osnovama
teorije mjere u funkcionalnim prostorima [ ]. Med-utim, u prakticnim primje-nama n–dimenzionalne raspodjele se prihvataju kao vrlo visok nivo znanja o
slucajnim procesima.
3.3.4 Pojam stacionarnosti slucajnog procesa
Ako n–dimenzionalna funkcija gustine vjerovatnoce f n(x1, . . . , xn; t1, . . . , tn)zavisi od n−1 trenutka, za bilo koju vrijednost prirodnog broja n, onda kazemoda je proces strogo, u uzem smislu, stacionaran. Ako je prethodni uslov ispunjenza n = 1 i n = 2, onda kazemo da je stacionaran u sirem smislu. To znaci da uslucaju stacionarnih procase jednodimenzionalna funkcija gustine vjerovatnocenije vremenska funkcija
f 1(x1; t1) = f 1(x1),
a dvodimenzionalna funkcija gustine vjerovatnocef 2(x1, x2; t1, t2) zavisi samo od jedne vremenske varijable τ = t2 − t1 pa je tada pisemo u obliku f 2(x1, x2; τ ).Potrebno je pomenuti da se u indeksu definisanih funkcija ( F i f ) ponekad unosei odgovarajuce slucajne varijable da bi se ukazalo na odgovarajucu pripadnostdatih funkcija. To se posebno koristi kod rada sa vise razlicitih slucajnih procesa.Takod-e se za oznacavanje slucajnih procesa X (t) i Y (t) cesto koriste simboligrckog alfabeta ξ(t), η(t) itd.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 77/246
3.3. ANALIZA SLU CAJNIH SIGNALA 71
3.3.5 Usrednjavanje po ansamblu – statisticke srednje vri-
jednostiKonacne rezultate usrednjavanja izvodicemo redovno u uslovima prisutne
stacionarnosti posmatranih procesa. Za kontinualnu slucajnu varijablu X , zakoju je definisana funkcija f (X ), imamo
E f (X ) = f (X ) =
+∞ −∞
f (x)f 1(x)dx, (3.139)
gdje smo sa E (od engl. Expected ) oznacili srednju vrijednost ili matematickoocekivanje (nadu) argumenta u viticastoj zagradi. Cesto cemo koristiti i horizon-talnu crticu iznad funkcije koju usrednjavamo. Definicija (3.139) pretpostavlja
egzistenciju odgovarajuceg integrala. Ako se radi o diskretnoj slucajnoj vari- jabli, onda (3.139) prelazi u oblik
E f (X ) = f (X ) =
i
f (xi) p(xi), (3.139)
gdje p(xi) = pi odgovara vjerovatnoci da ce slucajna varijabla X poprimitivrijednosti xi.Na slican nacin se definise srednja vrijednost funkcije dvije ili vise slucajnihpromjenljivih istog ili razlicitih slucajnih procesa.Tako, ako imamo definisanu zdruzenu gustinu vjerovatnoce f XY (x, y) i funkcijuf (X, Y ), onda njenu srednju vrijednost po ansamblu racunamo prema
E f (X, Y ) = f (X, Y ) =
+∞
−∞f (x, y)f XY (x, y)dxdy, (3.140)
ili u slucaju diskretnih slucajnih procesa
f (X, Y ) =
i
j
f (xi, yj ) pXY (xi, yj). (3.140)
Za nas je od posebnog interesa tzv. ”prvi moment”(f (x) = x) ili matematickanada slucajnog procesa X ili jos jednostavnije srednja vrijednost po ansamblu
mX = E X (t) = X (t) =
+∞
−∞
xf 1(x; t)dx (3.141)
koja u slucaju stacionarnosti procesa prelazi u oblik
mX =
+∞ −∞
xf 1(x)dx. (3.141)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 78/246
72 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Ako se radi o diskretnoj slucajnoj varijabli, onda imamo
mX = i
xi p(xi) (3.141)
d-rugi moment”ili srednjekvadratnu vrijednost (f (X ) = X 2) racunamo premarelaciji
X 2 = E X 2 =
+∞ −∞
x2f 1(x)dx (3.142)
sto zapravo odgovara srednjoj snazi (P X ) posmatranog procesa na jednoomskomotporniku.Drugi centralni moment σ2
X poznat pod nazivom varijanse [] ili disperzije DX =σ2
X [], gdje se kvadratni korjen iz varijanse , σX , naziva standardna devijacija,racunamo prema relaciji
DX = σ2X = (X − X )2 = X 2 − X
2= X 2 − m2
X (3.143)
Ocigledno varijansu mozemo prihvatiti kao mjeru prosjecne fluktuacije slucajnevarijable oko njene srednje vrijednosti (m).Ako imamo dva procesa X i Y , onda je interesantna njihova ”korelacija” ili boljereceno med-ukorelacija
RXY = XY = E XY (3.144)
ili u slucaju posmatranja dvije slucajne varijable X (t1) i X (t2) istog slucajnogprocesa mozemo definisati autokorelaciju
RX1X2(t1, t2) = X (t1)X (t2) = X 1X 2 =+∞+∞ −∞−∞
x1x2f X1X2(x1, x2; t1, t2)dx1dx2
koja za stacionaran proces ima oblik
RX1X2(t1, t2) = RX (τ ) =
+∞ −∞
x1x2f X1X2(x1, x2; τ )dx1dx2 =
=
+∞ −∞
x1x2f 2(x1, x2; τ )dx1dx2,
(3.145)
gdje smo sa f X1X2(x1, x2) = f 2(x1, x2) oznacili zdruzenu (dvodimenzionalnu)funkciju gustine vjerovatnoce slucajnih varijabli X 1 = X (t1) i X 2 = X (t2), arazliku trenutaka t2 − t1 sa τ .Za diskretne stacionarne procese autokorelaciona funkcija (3.145) poprima oblik
RX1X2(τ ) = RX (τ ) =
i
j
x1ix2j p(x1i, x2j ; τ ) (3.145)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 79/246
3.3. ANALIZA SLU CAJNIH SIGNALA 73
gdje p(x1ix2j ; τ ) odgovara vjerovatnoci da ce slucajna varijabla X 1 u trenutku
t1 = t poprimiti vrijednost x1i i nakon τ sekundi u trenutku t2 = t + τ poprimitivrijednost x2j .Ponekad se koristi i centrirana autokorelacija [] ili autokovarijansa u obliku
X (t1) − X (t1)
X (t2) − X (t2)
t2=t1+τ =
= (X 1 − mX )(X 2 − mX ) = RX (τ ) − m2X
(3.146)
Ako med-ukorelaciju (3.144) slucajnih varijabli X i Y koje pripada ju razlicitimprocesima centriramo”, onda dolazimo do tzv. kovarijanse K XY od X i Y
K XY = (X − mX )(Y − mY ). (3.147)
Uocimo da u slucaju statisticki nezavisnih slucajnih procesa (X (t) i Y (t)) med-u-
korelacija (3.144) prelazi u oblik RXY = XY = X · Y , a u slucaju da bar jedanod posmatranih procesa ima nultu srednju vrijednost, onda se prethodni rezultatsvodi na jednakost
RXY = XY = X · Y = 0
sto ukazuje na njihovu med-usobnu ortogonalnost koja odgovara ranije uvedenompojmu nekoherentnosti signala.Postavlja juci se pragmaticno prema konacnom nasem cilju, ovdje smo posvetilipaznju samo karakteristicnim konstanim parametrima slucajnih procesa koji suza nas od posebnog interesa, a za siri uvid u teoriju vjerovatnoce i statistikecitaoca upucujemo na obimnu pristupacnu literaturu kojo j je ta oblast mate-matike od prvenstvenog znacaja.Stoga cemo u okviru ovog odjeljka jos samo pomenuti tzv. karakteristicnu
funkciju gustine vjerovatnoce sume statisticki nezavisnih slucajnih varijabli.Zapravo, prema definiciji, karakteristicna funkcija K od kontinualne slucajnevarijable odgovara Fourierovoj transformaciji funkcije gustine vjerovatnoce (saznakom ”+” umjesto ”−” u eksponentu)
K( jω) +∞ −∞
f X (x)ejωx dx = E ejωX (3.148)
kako prema Schwartzovoj nejednakosti vazi
+∞ −∞
f X (x)ejωx dx
≤
+∞ −∞
f X (x)dx = 1,
slijedi da karakteristicna funkcija uvijek egzistira. Ako je data karakteristicnafunkcija K( jω), onda se odgovara juca gustina vjerovatnoce f X (x) izracunava iz jednakosti
f X (x) =1
2π
+∞ −∞
K( jω)e−jωx dω (3.149)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 80/246
74 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
3.3.6 Srednje vrijednosti po vremenu
U prakticnim uslovima mozemo reci da je statisticki ansambl jedna vjestackatvorevina i da imamo na raspolaganju samo pojedine uzorke (realizacije) ansam-bla i to u konacnom vremenskom intervalu. To znaci da u praksi mozemo daregistrujemo neke pojedinacne clanove ansambla u vremenu i na osnovu togada pokusamo da odgonetnemo kakve su osobine statistickog ansambla u cjelinia koristeci usrednjavanje po vremenu.Interesantno je postaviti pitanje: u kakvom su med-usobnom odnosu srednje vri- jednosti po vremenu i ansamblu?Posto clanovi ansambla poticu iz izvora identicne prirode, moze se ocekivati dace, tokom dovoljno dugog vremena svaki clan ansambla proci podjednako cestokroz moguca amplitudska stanja u skladu s principom statisticke regularnosti[].
Potrazimo prvo srednju vrijednost jednog clana ansambla x(t) po vremenu
x(t) limT →∞
1
2T
T −T
x(t)dt (3.150)
gdje izlomljena linija iznad x(t) oznacava usrednjavanje p o vremenu. Srednjek-vadratna vrijednost, ili srednja snaga, signal x(t) ima oblik
x2(t) limT →∞
1
2T
T −T
x2(t)dt = P X , (3.151)
a autokorelaciona funkcija clana ansambla x(t)
R(τ ) = x(t)x(t + τ ) limT →∞
1
2T
T −T
x(t)x(t + τ )dt. (3.152)
Kada su u pitanju tzv. ergodski procesi [], koji cine jedan podskup stacionarnihprocesa, onda su rezultati usrednjavanja po ansamblu: matematicko ocekivanje(3.141), srednjekvadratna vrijednost (3.142), autokorelacija (3.145) itd. identicniodgovarajucim rezultatima usrednjavanja po vremenu (3.150), (3.151) i (3.152),respektivno. Tada se kaze da je ansambl ergodican u pogledu srednje vrijednosti,autokorelacije,...
3.3.7 Pregled znacajnijih osobina autokorelacione funkcije
Kako autokorelaciona funkcijau u analizi signala i sistema za prenos infor-macija igra vaznu ulogu, poblize cemo se upoznati sa njenim znacajnijim osobi-nama.Analizu cemo provesti na bazi vremenske autokorelacione funkcije (3.152), arezultati ce vaziti i za statisticke autokorelacione funkcije ukoliko je slucajni

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 81/246
3.3. ANALIZA SLU CAJNIH SIGNALA 75
proces realan i stacionaran u sirem smislu [].
Oznacimo sa s(t) jednu realizaciju slucajnog procesa i definisimo njenu autoko-relacionu funkciju prema (3.152)
R(τ ) = limT →∞
1
2T
T −T
s(t)s(t + τ )dt (3.153)
Prvo cemo dokazati da je autokorelaciona funkcija parna funkcija pomaka τ .Iz (3.153) mozemo pisati
R(−τ ) = limT →∞
1
2T
T −
T
s(t)s(t − τ )dt
odakle smjenom t − τ = u dobijamo
R(−τ ) = limT →∞
1
2T
T −τ −T −τ
s(u)s(u + τ )du (3.154)
Kako je vremenski prozor integracije u (3.154) ostao nepromjenjen po svomtrajanju u odnosu na (3.153), onda za bilo koju konacnu vrijednost τ i T → ∞mozemo pisati
R(
−τ ) = lim
T →∞
1
2T
T
−T
s(u)s(u + τ )du =
= limT →∞
1
2T
T −T
s(t)s(t + τ )dt = R(τ ) Q.E.D.
(3.155)
Za τ = 0 autokorelacija odgovara srednjoj snazi slucajnog procesa na jednoom-skom otporniku, jer je prema (3.153)
R(0) = limT →∞
1
2T
T −T
s2(t)dt = s2(t) (3.156)
Kada je srednja vrijednost (3.150) uzoraka slucajnog procesa jednaka nuli (s(t) =0), onda statisticka veza izmed-u s(t) i s(t + τ ) opada s porastom τ , pa vrijedi
limτ →±∞R(τ ) = 0, s(t) = 0, (3.157)
za procjenu prakticnog trajanja autokorelacije moze se koristiti grafo-analitickipristup prikazan na slici 3.37
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 82/246
76 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
R(0)
R( )τ
τ τ
τ
kor kor
Slika 3.37: Odred-ivanje ”trajanja”autokorelacije
Parametar tkor racunamo iz jednakosti povrsina
R(0) · 2τ kor =
+∞ −∞
|R(τ )dτ,
odakle konacno dobijamo
τ kor =1
R(0)
+∞ 0
|R(τ )|dτ (3.158)
To znaci da τ kor odgovara aproksimativnoj procjeni trajanja vremenskog in-tervala unutar kojeg postoji znacajna korelacija trenutnih vrijednosti slucajnogprocesa.Na dalje, R(0) je maksimalna vrijednost autokorelacione funkcije. Da bismo tajstav dokazali, pretpostavicemo da u slucajnom procesu nisu prisutne periodicnekomponente. Tada vrijedi
lim 12T
T −T
[s(t) ± s(t + τ )]2 dt > 0 za τ = 0 (3.159)
Rasvija juci (3.159) lako se dobija R(0) ± R(τ ) > 0, τ = 0, sto znaci
R(0) > |R(τ )|, τ = 0, Q.E.D. (3.160)
ili rijecima da je vrijednost autokorelacione funkcije za τ = 0 veca od apsolutnevrijednosti autokorelacione funkcije za bilo koje τ = 0Konacno, dokazacemo da je autokorelaciona funkcija svuda neprekidna ako jeneprekidan u koordinatnom pocetku (τ = 0). U tom cilju posmatracemo izraz
[R(τ )
−R(τ
±ε)]
2= lim
1
2T
T
−T
s(t) [s(t + τ )
−s(t + τ
±ε] dt
2
, (3.161)
gdje je ε pozitivan prirastaj vremena (ε > 0).Koristeci Schwartzovu nejednakost iz (3.161) mozemo dobiti
[R(τ ) − R(τ ± ε)]2 ≤ lim
1
2T
T −T
s2(t)dt · 1
2T
T −T
[s(t + τ ) − s(t + τ ± ε)]2 dt
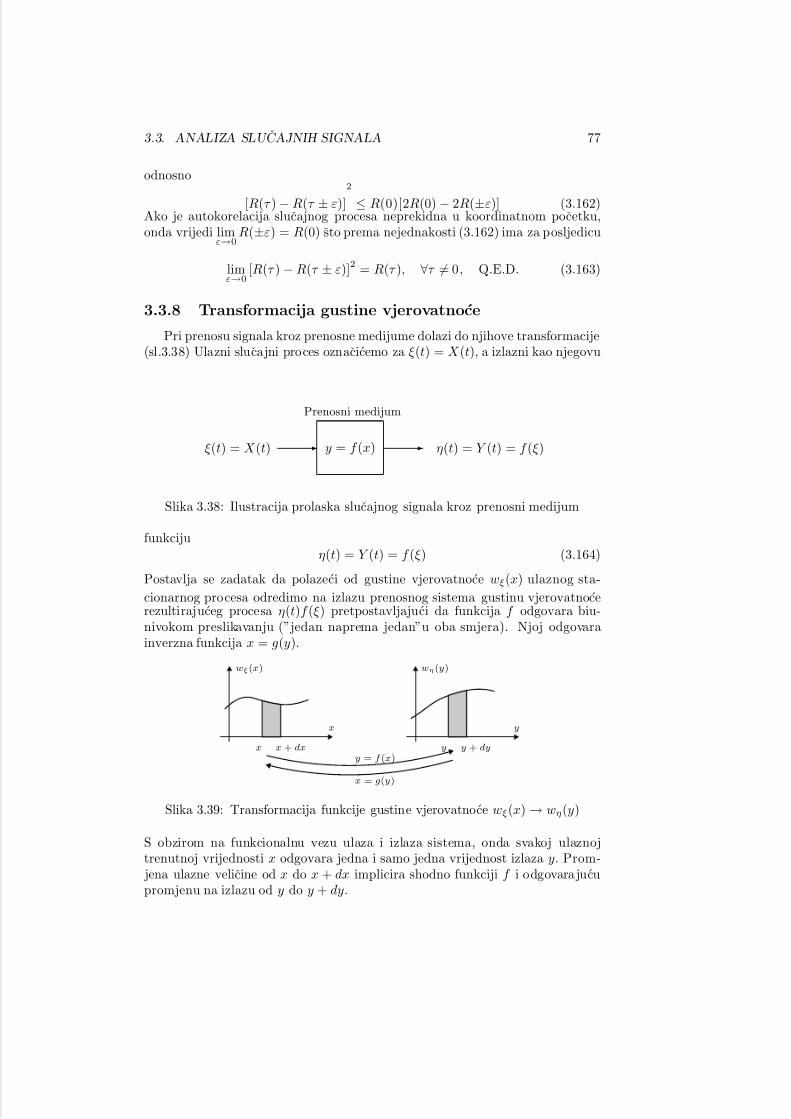
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 83/246
3.3. ANALIZA SLU CAJNIH SIGNALA 77
odnosno
[R(τ ) − R(τ ± ε)]
2
≤ R(0)[2R(0) − 2R(±ε)] (3.162)Ako je autokorelacija slucajnog procesa neprekidna u koordinatnom pocetku,onda vrijedi lim
ε→0R(±ε) = R(0) sto prema nejednakosti (3.162) ima za posljedicu
limε→0
[R(τ ) − R(τ ± ε)]2 = R(τ ), ∀τ = 0, Q.E.D. (3.163)
3.3.8 Transformacija gustine vjerovatnoce
Pri prenosu signala kroz prenosne medijume dolazi do njihove transformacije(sl.3.38) Ulazni slucajni proces oznacicemo za ξ(t) = X (t), a izlazni kao njegovu
ξ(t) = X (t) E y = f (x) E η(t) = Y (t) = f (ξ)
Prenosni medijum
Slika 3.38: Ilustracija prolaska slucajnog signala kroz prenosni medijum
funkciju
η(t) = Y (t) = f (ξ) (3.164)
Postavlja se zadatak da polazeci od gustine vjerovatnoce wξ(x) ulaznog sta-
cionarnog procesa odredimo na izlazu prenosnog sistema gustinu vjerovatnocerezultirajuceg procesa η(t)f (ξ) pretpostavljajuci da funkcija f odgovara biu-nivokom preslikavanju (”jedan naprema jedan”u oba smjera). Njoj odgovarainverzna funkcija x = g(y).
x x + dx
x
wξ(x)
y y + dy
y
wη(y)
y = f (x)
x = g(y)
Slika 3.39: Transformacija funkcije gustine vjerovatnoce wξ(x) → wη(y)
S obzirom na funkcionalnu vezu ulaza i izlaza sistema, onda svakoj ulaznojtrenutnoj vrijednosti x odgovara jedna i samo jedna vrijednost izlaza y. Prom- jena ulazne velicine od x do x + dx implicira shodno funkciji f i odgovara jucupromjenu na izlazu od y do y + dy.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 84/246
78 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
To znaci da je vjerovatnoca da ce ulazna slucajna varijabla biti u amplitudskom
intervalu od x do x + dx jednaka vjerovatnoci pojavljivanja izlazne slucajnevarijable u opsegu od y do y + dy, ili prema interepretaciji gustine vjerovatoce(3.135) imamo
p(x < ξ < x + dx) = f ξ(x)dx = p(y < η < y + dy) = f η(y)dy (3.165)
Iz relacije (3.165) neposredno dobijamo
f η(y) =f ξ(x) dy
dx
=f ξ(x)
|f (x)|
x=g(y)
(3.166)
gdje uzimamo apsolutnu vrijednost
dydx
= |f (x)| da bismo obezbjedili neneg-
ativnost funkcije gustine vjerovatnoce. Ukoliko funkcija f ne odgovara biuni-vokom preslikavanju, onda je potrebno uvoditi dopunska ogranicenja uz relaciju(3.166).
Primjer 3.10. Za Gaussov proces nulte srednje vrijednosti i varijanse σ2x koji
pobud -uje sistem, ciji je izlaz linearna funkcija ulaza ( η = aξ + b, a = 0),odredicemo gustinu vjerovatnoce izlaznog procesa (sl.3.40).
ξ E y = ax + b E η = aξ + b,
a = 0.x = y−b
a
0
x
wξ(x) 1√ 2πσx
e−x2/2σ2x
t
x(t)
t
y(t)
y
wη(y)
Slika 3.40: Prenos Gaussovog procesa kroz linearni sistem y = ax + b
Koristeci rezultat (3.166) lako nalazimo gustinu vjerovatnoce izlaznog procesa
wξ(y) =1√
2πσx|a|ey−b
2(aσx)2 , a = 0
koja pokazuje da pri prolasku Gaussovog procesa kroz linearni sistem on ostaje
Gaussovog karaktera uz eventualnu izmjenu varijanse σ2y = a2σ2x i srednje vri- jednosti ( η = b, ξ = 0) (sl.3.41)
Zadatak 3.4. Analizirati prolazak Gaussovog signala iz prethodnog primjera kroz sistem koji odgovara jednostranom i dvostranom ispravljacu.
Na pocetku ovog odjeljka razmatrali smo transformaciju jednodimenzion-alne (proste) gustine vjerovatnoce stacionarnog procesa. Slican princip moze se

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 85/246
3.3. ANALIZA SLU CAJNIH SIGNALA 79
koristiti kod transformacije gustine vjerovatnoce od dvije ili vise slucajno prom-
jenljivih. Stoga cemo posmatrati skup od N slucajno promjenljivih ξ1, ξ2, . . . , ξN cija je zdruzena vjerovatnoca f ξ1...ξN (x1, . . . , xN ) poznata. Neka se trazi zdruzenafunkcija gustina vjerovatnoce wη1...ηN (y1, . . . , yn) od N novih slucajno prom- jenljivih η1, . . . , ηN koje su definisane kao jednoznacne funkcije izvornih prom- jenljivih
η1 = f 1(ξ1, ξ2, . . . , ξN )
η2 = f 2(ξ1, ξ2, . . . , ξN )
...
ηN = f N (ξ1, ξ2, . . . , ξN )
Pretpostavljamo, na dalje, da se izvorne stohasticke varijable mogu takod-e izraz-iti kao jednoznacne funkcije novih promjenljivih
ξ1 = g1(η1, η2, . . . , ηN )
ξ2 = g2(η1, η2, . . . , ηN )
...
ξN = gN (η1, η2, . . . , ηN )
To znaci da svakoj tacki originalnog faznog prostora dogad-aja (ξ1, ξ2, . . . , ξN )
odgovara jedna i samo jedna tacka (η1, η2, . . . , ηN ) u novom faznom prostorudogad-aja. Drugim rijecima, skup dogad-aja u elementarnom ulaznom volumenudx1dx2 . . . d xN jednoznacno se preslikava u skup dogad-aja u odgovarajucemizlaznom volumenu dy1dy2 . . . d yN i obrnuto. Prema definiciji N –dimenzionalnegustine vjerovatnoce imamo
f ξ1ξ2...ξN (x1, x2, . . . , xN )dx1dx2 . . . d xN =
= f η1η2...ηN (y1, y2, . . . , yN )dy1dy2 . . . d yN (3.167)
Kako je u matematici poznato da vrijedi
dx1dx2 . . . d xN = Jdy1dy2 . . . d yN ,
gdje vrijednost Jakobijana (J ) definise determinanta matrice
J =
∂g1
∂y1. . .
∂gN
∂y1...
. . ....
∂g1
∂yN . . .
∂gN
∂yN
,
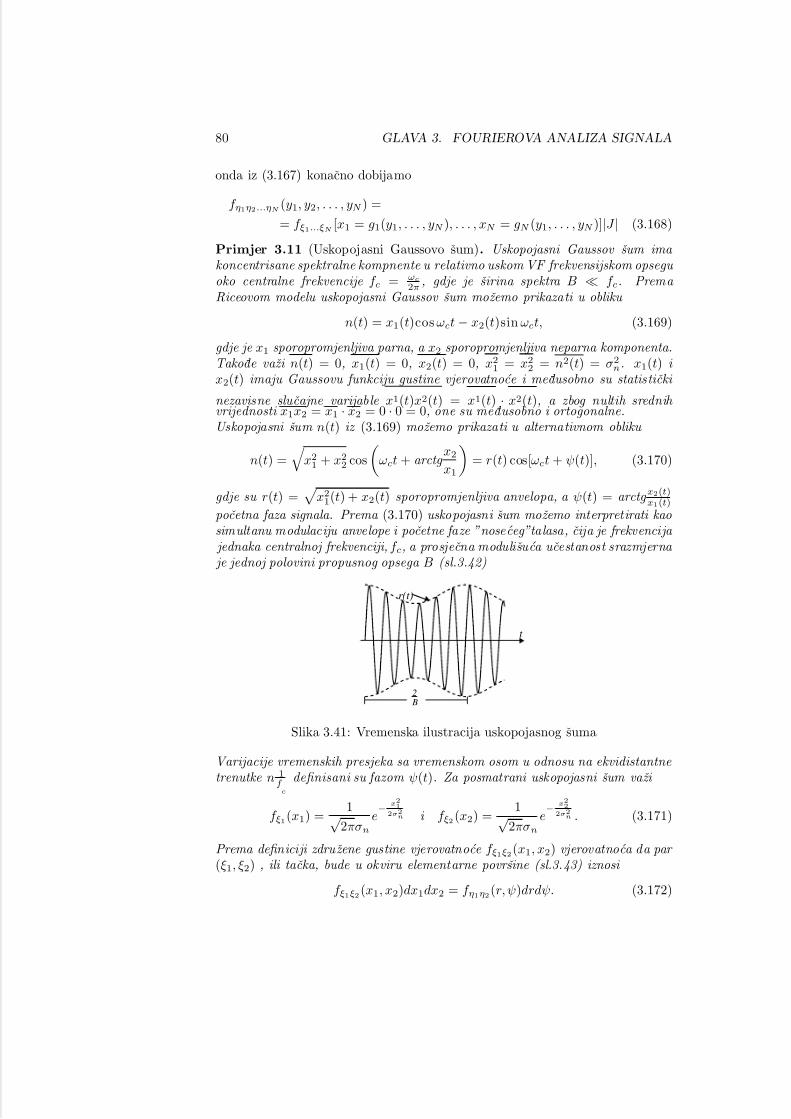
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 86/246
80 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
onda iz (3.167) konacno dobijamo
f η1η2...ηN (y1, y2, . . . , yN ) =
= f ξ1...ξN [x1 = g1(y1, . . . , yN ), . . . , xN = gN (y1, . . . , yN )]|J | (3.168)
Primjer 3.11 (Uskopojasni Gaussovo sum). Uskopojasni Gaussov sum ima koncentrisane spektralne kompnente u relativno uskom VF frekvensijskom opsegu oko centralne frekvencije f c = ωc
2π, gdje je sirina spektra B f c. Prema
Riceovom modelu uskopojasni Gaussov sum mozemo prikazati u obliku
n(t) = x1(t)cos ωct − x2(t)sin ωct, (3.169)
gdje je x1 sporopromjenljiva parna, a x2 sporopromjenljiva neparna komponenta.Takod -e vazi n(t) = 0, x1(t) = 0, x2(t) = 0, x2
1 = x22 = n2(t) = σ2
n. x1(t) i x2(t) imaju Gaussovu funkciju gustine vjerovatnoce i med -usobno su statisticki
nezavisne slucajne varijable x1(t)x2(t) = x1(t) · x2(t), a zbog nultih srednih vrijednosti x1x2 = x1 · x2 = 0 · 0 = 0, one su med -usobno i ortogonalne.Uskopojasni sum n(t) iz (3.169) mozemo prikazati u alternativnom obliku
n(t) =
x21 + x2
2 cos
ωct + arctg
x2
x1
= r(t) cos[ωct + ψ(t)], (3.170)
gdje su r(t) =
x21(t) + x2(t) sporopromjenljiva anvelopa, a ψ(t) = arctg x2(t)
x1(t)
pocetna faza signala. Prema (3.170) uskopojasni sum mozemo interpretirati kaosimultanu modulaciju anvelope i pocetne faze ”noseceg”talasa, cija je frekvencija jednaka centralnoj frekvenciji, f c, a prosjecna modulisuca ucestanost srazmjerna je jednoj polovini propusnog opsega B (sl.3.42)
r(t)
t
2 B
Slika 3.41: Vremenska ilustracija uskopojasnog suma
Varijacije vremenskih presjeka sa vremenskom osom u odnosu na ekvidistantnetrenutke n 1
f c
definisani su fazom ψ(t). Za posmatrani uskopojasni sum vazi
f ξ1(x1) =1√
2πσn
e− x21
2σ2n i f ξ2(x2) =1√
2πσn
e− x22
2σ2n . (3.171)
Prema definiciji zdruzene gustine vjerovatnoce f ξ1ξ2(x1, x2) vjerovatnoca da par (ξ1, ξ2) , ili tacka, bude u okviru elementarne povrsine (sl.3.43) iznosi
f ξ1ξ2(x1, x2)dx1dx2 = f η1η2(r, ψ)drdψ. (3.172)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 87/246
3.3. ANALIZA SLU CAJNIH SIGNALA 81
ξ1
ξ2
x1 x1 + dx1
dx1
dx2
x2
x2 + dx2
x2
x1 r =q
x21 + x2
2
ϕ = arctgx2x1
x1 = r cos ϕ
x2
1= r sin ϕ
Slika 3.42: Ilustracija preslikavanja ulaznih slucajnih varijabli ξ1, ξ2 u izlazneη1, η2
Kako su ξ1 i ξ2 med -usobno nezavisne slucajne variajble takod -e vrijedi
f ξ1ξ2(x1, x2) = f ξ1(x1)
·f ξ2/ξ1(x2/x1) = f ξ1(x1)
·f ξ2(x2) =
1
2πσ2
n
e−x21+x
22
2σ2n
(3.173)Uocimo da posmatrana transformacija zapravo odgovara preslikavanju Decartesovog (x1, x2)–koordinatnog sistema, gdje je elementarna povrsina jednaka dx1dx2 u polarni (r, ψ) gdje vazi
dx1dx2 = rdrdψ (3.174)
Kombinujuci rezultate (3.172), (3.173) i (3.174) konacno dobijamo
f η1η2(r, ψ) =1
2π
r
σ2n
e− r2
2σ2n , (3.175)
odakle mozemo lako izracunati gustinu vjerovatnoce trenutne vrijednosti anve-lope uskopojasnog suma
f η1(r) =2π
0
f η1η2(rψ)dψ =r
σ2n
e− r2
2σ2n (3.176)
To je tzv. Rayleigheva funkcija gustine vjerovatnoce koja je prikazana na sl.3.43.(a)
rσn
f η1(r)
1 1.25
0.570.606
0 2π
ψ
f η2(ψ)
12π
Slika 3.43: Funkcija gustine vjerovatnoce: (a)–anvelope i (b)–faze uskopojasnogsuma
Lako se mogu izracunati srednja vrijednost anvelope
r =
+∞ 0
r2f ξ1(r)dr = σn ·
π
2= 1, 25σn,

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 88/246
82 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
njena srednja kvadratna vrijednost
r2 =
+∞ 0
r2f η1(r)dr = 2σ2n
i varijansa σ2
r = r2 − (r)2 = 0.43σ2n.
Gustinu vjerovatnoce raspodjele faze ψ takod -e dobijamo iz (3.173)
f η2(ψ) =
∞ 0
f η1η2(r, ψ)dr =1
2π
∞ 0
e− r2
2σ2n d
r2
2σ2n
=
1
2π, 0 ≤ ψ ≤ 2π
(3.177)
Uocavamo da je faza uskopojasnog suma uniformno raspodjeljena u intervalu (0, 2π) (sl.3.43(b)).
3.3.9 Pojam spektralne gustine sange– Wiener-Khinchinova teorema –
Kao sto smo vidjeli u odjeljku 3.2.4, za deterministicki aperiodicni signals(t) koristili smo Fourierovu transformaciju S ( jω) = Fs(t)
S ( jω =
+∞ −∞
s(t)e−jωt dt (3.178)
uz uslov apsolutne integrabilnosti datog signala
+∞ −∞
|s(t)|dt < ∞ (3.179)
Neposredna primjena takve transformacije kod slucajnog procesa nije moguca.Razlog tome je prije svega problem same egzistencije Fourierove transformacije jer obicno uslov (3.179) nije zadovoljen. Pored toga, prakticno je tesko anal-iticki formulisati talasne oblike slucajnih signala. Zatim, pojedine realizacijeslucajnog procesa se med-usobno razlikuju pa bi i Fourierove transformacije po- jedinih realizacija procesa bile med-usobno razlicite.
Iz tih razloga se na p oseban nacin pristupa procjeni spektralnih karakteristikaslucajnog procesa.Posmatrajmo jednu realizaciju slucajog procesa s(t). Ocigledno odgovarajucaenergija na jednoomskom otoprniku
limT →∞
T −T
s2(t)dt
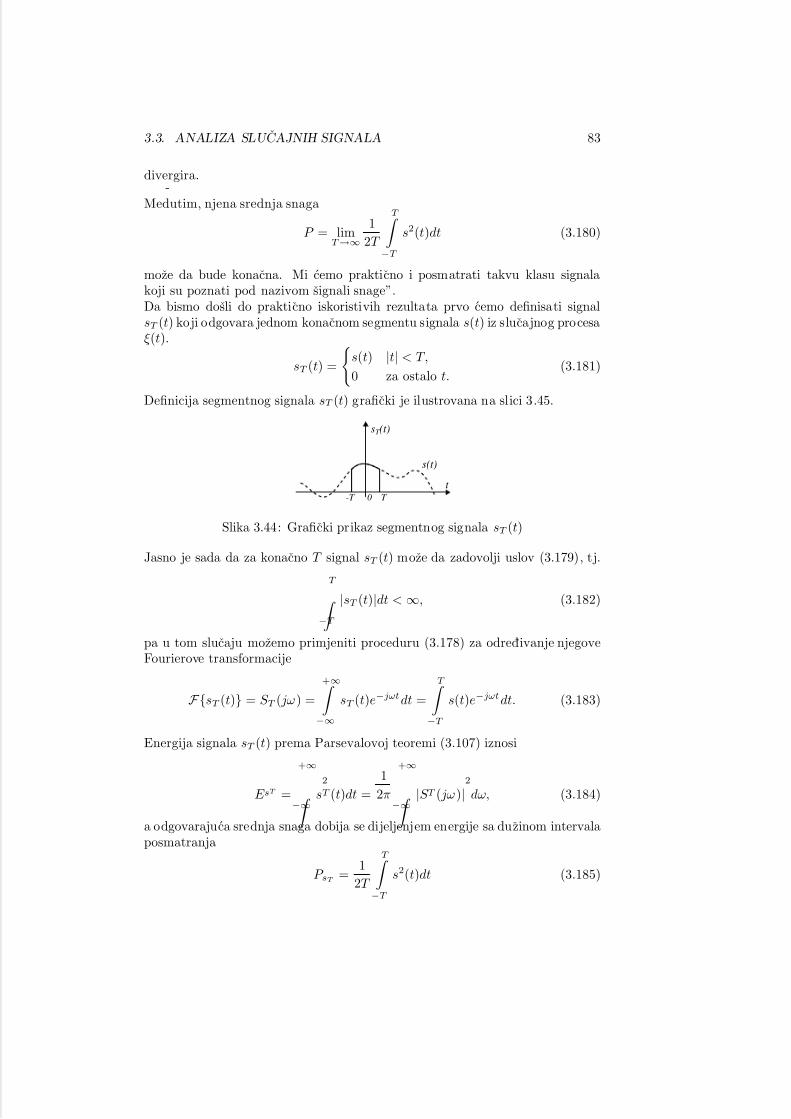
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 89/246
3.3. ANALIZA SLU CAJNIH SIGNALA 83
divergira.
Med-utim, njena srednja snaga
P = limT →∞
1
2T
T −T
s2(t)dt (3.180)
moze da bude konacna. Mi cemo prakticno i posmatrati takvu klasu signalakoji su poznati pod nazivom signali snage”.Da bismo dosli do prakticno iskoristivih rezultata prvo cemo definisati signalsT (t) koji odgovara jednom konacnom segmentu signala s(t) iz slucajnog procesaξ(t).
sT (t) =
s(t) |t| < T,
0 za ostalo t.(3.181)
Definicija segmentnog signala sT (t) graficki je ilustrovana na slici 3.45.
t
sT (t)
s(t)
-T 0 T
Slika 3.44: Graficki prikaz segmentnog signala sT (t)
Jasno je sada da za konacno T signal sT (t) moze da zadovolji uslov (3.179), tj.
T −T
|sT (t)|dt < ∞, (3.182)
pa u tom slucaju mozemo primjeniti proceduru (3.178) za odred-ivanje njegoveFourierove transformacije
FsT (t) = S T ( jω) =
+∞ −∞
sT (t)e−jωt dt =
T −T
s(t)e−jωt dt. (3.183)
Energija signala sT (t) prema Parsevalovoj teoremi (3.107) iznosi
E sT =
+∞
−∞
s2
T (t)dt =
1
2π
+∞
−∞
|S T ( jω)|2
dω, (3.184)
a odgovarajuca srednja snaga dobija se dijeljenjem energije sa duzinom intervalaposmatranja
P sT =1
2T
T −T
s2(t)dt (3.185)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 90/246
84 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Ako trajanje intervala posmatranja signala s(t) povecavamo (T → ∞), onda
koristeci (3.184) i (3.185) mozemo dobiti srednju snagu signala s(t)
P s = limT →∞
P sT = limT →∞
1
2T
T −T
s2(t)dt = limT →∞
1
2T
1
2π
+∞ −∞
|S T ( jω)|2dω
ili
P s =1
2π
+∞ −∞
lim|S t( jω)|2
2T dω [W ]. (3.186)
Kako P s predstavlja srednju snagu signala s(t), onda ocigledno limT →∞
|ST (jω)|2T
odgovara spektralnoj gustini snage [ W Hz ]. Oznacimo spektralnu gustinu snage sa
Φs(ω).Sada imamo
Ψs(ω) = limT →∞
|S T ( jω)|2T
i (3.187)
P s =1
2π
+∞ −∞
Φs(ω)dω =
+∞ −∞
Φs(2πf )df (3.188)
Iz (3.187) moze se lako uociti nenegativnost i parnost spektralne gustine snageΦs(ω), a relacija (3.188) pokazuje da srednja snaga signala s(t) numericki odgo-vara povrsini koju ogranicavaju spektralna gustina snage Φs i frekvencijska ko-
ordinata.Spektralna gustina snage Φs (3.187) i srednja snaga P s (3.188) odgovarajusamo jednoj realizaciji s1(t), s2(t), . . . itd. i ako ih usrednjimo (po ansamblu),dobicemo spektralnu gustinu snage posmatranog slucajnog procesa
Φξ(ω) = E Φs(ω) = Φs(ω) = limT →∞
|S T ( jω)|2
2T (3.189)
Odgovarajuca ocekivana srednja snaga posmatranog slucajnog procesa iznosi
P ξ =1
2π
+∞
−∞
Φξ(ω)dω = 2
∞
0
Φξ(2πf )df. (3.190)
Uocimo da ako sve realizacije . . . , s1, s2, s3, . . . imaju istu spektralnu gustinusnage Φs1 = Φs2 = · · · = Φs i podjednaku srednju snagu P s1 = P s2 = · · · = P s,onda i dati slucajni proces ima spektralnu gustinu snage Φξ = Φs i srednju snaguP ξ = Φs. Na slici 3.45 prikazan je primjer jednog NF (a) i jednog uskopojasnogVF (b) slucajnog procesaUvedena spektralna gustina snage zapravo ima samo svoj matematicki, ali ne i
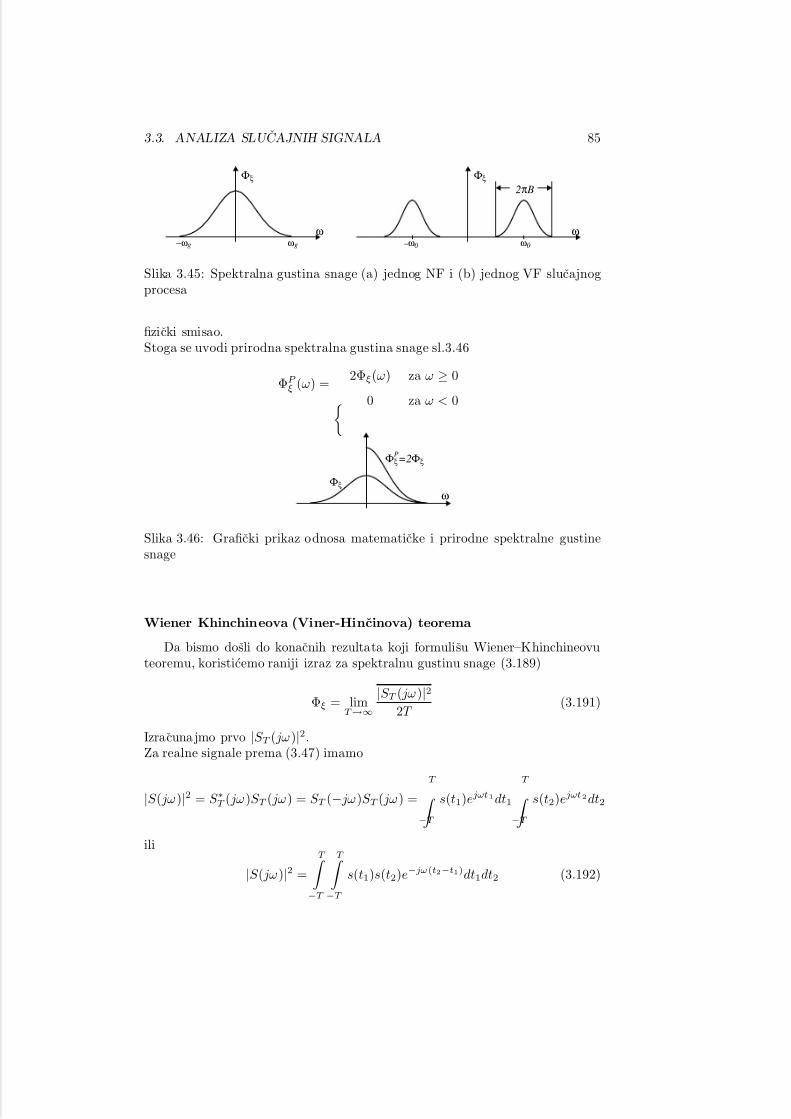
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 91/246
3.3. ANALIZA SLU CAJNIH SIGNALA 85
ω
Φξ
ωg−ωg
ω
Φξ
−ω0 ω0
2π B
Slika 3.45: Spektralna gustina snage (a) jednog NF i (b) jednog VF slucajnogprocesa
fizicki smisao.Stoga se uvodi prirodna spektralna gustina snage sl.3.46
ΦP ξ (ω) =
2Φξ(ω) za ω ≥ 0
0 za ω < 0
ω
Φξ
ΦξP=2Φξ
Slika 3.46: Graficki prikaz odnosa matematicke i prirodne spektralne gustinesnage
Wiener Khinchineova (Viner-Hincinova) teorema
Da bismo dosli do konacnih rezultata koji formulisu Wiener–Khinchineovuteoremu, koristicemo raniji izraz za spektralnu gustinu snage (3.189)
Φξ = limT →∞
|S T ( jω)|2
2T (3.191)
Izracuna jmo prvo |S T ( jω)|2.Za realne signale prema (3.47) imamo
|S ( jω)|2 = S ∗T ( jω)S T ( jω) = S T (− jω)S T ( jω) =
T −T
s(t1)ejωt1dt1
T −T
s(t2)ejωt2dt2
ili
|S ( jω)|2 =
T −T
T −T
s(t1)s(t2)e−jω(t2−t1)dt1dt2 (3.192)
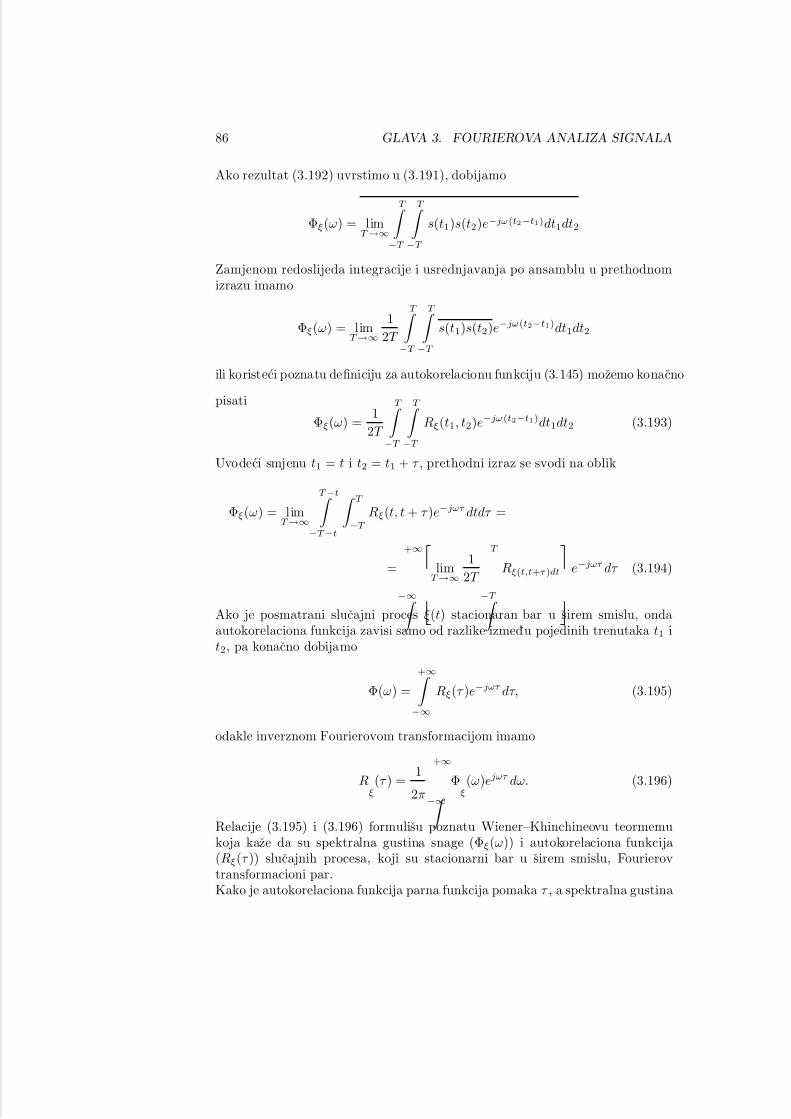
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 92/246
86 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Ako rezultat (3.192) uvrstimo u (3.191), dobijamo
Φξ(ω) = limT →∞
T −T
T −T
s(t1)s(t2)e−jω(t2−t1)dt1dt2
Zamjenom redoslijeda integracije i usrednjavanja po ansamblu u prethodnomizrazu imamo
Φξ(ω) = limT →∞
1
2T
T −T
T −T
s(t1)s(t2)e−jω(t2−t1)dt1dt2
ili koristeci poznatu definiciju za autokorelacionu funkciju (3.145) mozemo konacno
pisati
Φξ(ω) =1
2T
T −T
T −T
Rξ(t1, t2)e−jω(t2−t1)dt1dt2 (3.193)
Uvodeci smjenu t1 = t i t2 = t1 + τ , prethodni izraz se svodi na oblik
Φξ(ω) = limT →∞
T −t −T −t
T
−T
Rξ(t, t + τ )e−jωτ dtdτ =
=
+∞
−∞
limT →∞
1
2T
T
−T
Rξ(t,t+τ )dt
e−jωτ dτ (3.194)
Ako je posmatrani slucajni proces ξ(t) stacionaran bar u sirem smislu, ondaautokorelaciona funkcija zavisi samo od razlike izmed-u pojedinih trenutaka t1 it2, pa konacno dobijamo
Φ(ω) =
+∞ −∞
Rξ(τ )e−jωτ dτ, (3.195)
odakle inverznom Fourierovom transformacijom imamo
Rξ
(τ ) =1
2π
+∞
−∞Φ
ξ(ω)ejωτ dω. (3.196)
Relacije (3.195) i (3.196) formulisu poznatu Wiener–Khinchineovu teormemukoja kaze da su spektralna gustina snage (Φξ(ω)) i autokorelaciona funkcija(Rξ(τ )) slucajnih procesa, koji su stacionarni bar u sirem smislu, Fourierovtransformacioni par.Kako je autokorelaciona funkcija parna funkcija pomaka τ , a spektralna gustina

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 93/246
3.3. ANALIZA SLU CAJNIH SIGNALA 87
snage nenegativna i parna funkcija frekvencije, onda par relacija (3.195) i (3.196)
mozemo prikazati i u obliku para kosinusnih transformacija.U nastavku ovog odjeljka posvecenog slucajnim signalima analiziracemmo neko-liko primjera slucajnih procesa.
Primjer 3.12 (Ansambl sinusoida sa slucajnom pocetnom fazom).Jednostavan primjer slucajnog procesa je ansambl sinusoida sa slucajnom pocetnom fazom. Svaki clan takvog ansambla moze se pisati u obliku
s(t) = S 0 sin(ω0t + ψ)
gdje su A0 i ω0 = 2π/T 0 konstante ansambla, a ψ uniformno raspored -ena faza u intervalu [0, 2π].
wψ = 1
2π 0 ≤ ψ ≤ 2π
0 za ostalo ψ
Na slici 3.48 prikazano je nekoliko realizacija posmatranog slucajnog procesa.
0 2π
ψ
1
2π
wψ
Slika 3.47: Graficki prikaz gustine vjerovatnoce raspodjele pocetne faze ψ ansam-bla sinusoida
Odredicemo prvo srednju vrijednost i autokorelacionu funkciju usrednjavanjem
t A0cos ω0t+ψ 0( )
s0(t)
t A0cosω0t
s2(t)
T 0
t A0sinω0t
s1(t)
T 0
Slika 3.48: Graficka ilustracija generatora ansambla sinusoida

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 94/246
88 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
po ansamblu. Koristeci (3.139) imamo
ξ = s(t) =1
2π
wπ 0
A0 sin(ω0t + ψ)dψ
R(τ ) = s(t)s(t + τ ) = A0 sin(ω0t + ψ)A0 sin[ω0(t + τ ) + ψ] =
= A20 cos ω0τ sin2(ω0t + ψ)
1/2
+ A20 sin ω0τ sin(ω0t + ψ) cos(ω0t + ψ)
0
ili konacno R(τ ) =A20
2cos ω
0τ sto potvrd -uje parnost autokorelacije i njeno
obiljezje da brise informaciju o fazi signala. Posto srednja vrijednost ne zavisi od vremena, a autokorelacija zavisi od samo jedne vremenske varijable, dobijeni rezultati ukazuju na stacionarnost posmatranog procesa u sirem smislu.Izdvojimo sada jednu realizaciju posmatranog procesa, sa odred -enom pocetnom fazom ψ0, A0 sin(ω0t + ψ0), gdje su A0, ω0 i ψ0 konstante i odredimo srednju vrijednost i autokorelacionu funkciju prema (3.150) i (3.152), respektivno.
s(t) = lim
T →∞1
2T
T −T
A0 sin(ω0t + ψ0)dt = 0
R(τ ) = s(t)s(t + τ ) = limT →∞
1
2T
T −T
A0 sin(ω0t + ψ0)A0 sin[ω0(t + τ ) + ψ0]dt =
=A2
0
2cos ω0τ
Kako su rezultati za vrijednosti i autokorelacione funkcije identicni, bilo da vrsimo usrednjavanje po ansamblu ili vremenu, onda smo utvrdili i parcijalnu ergodicnost ansambla sinusoida sa aspekta njegove srednje vrijednosti i autoko-relacione funkcije.Na osnovu Wiener–Khinchineove teoreme odgovarajuca spektralna gustina snageima oblik
Φ(ω) = FR(τ ) = FA20
2cos ω0τ = FA2
0
4ejω0τ +
A20
4e−jω0τ =
=A2
0
2πδ(ω − ω0) +
A20
2πδ(ω + ω0) =
A20
4δ(f − f 0) +
A20
4δ(f + f 0)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 95/246
3.3. ANALIZA SLU CAJNIH SIGNALA 89
Srednja snaga posmatranog procesa iznosi
P = [A0 sin(ω0t + ψ)]2 =
2π 0
1
2πA2
0 sin2(ω0t + ψ)dψ =
= limT →∞
1
2T
T −T
A20 sin2(ω0t + ψ)dψ =
= R(0) =1
2π
+∞ −∞
Φ(ω)dω =
+∞ −∞
Φ(2πf )df =A2
0
2, (R p = 1Ω)
Primjer 3.13 (Bijeli sum).
U literaturi se slucajni proces sa uniformnim spektrom u vrlo sirokom frekvenci- jskom opsegu naziva ”bijeli sum”(white noise) po analogiji s bijelom svjetloscu koja u vid ljivom dijelu spektra ima prakticno uniformnu i kontinualnu spektralnu gustinu snage.Teorijski konstantna spektralna gustina snage bijelog suma prikazana je na slici 3.49(a).
0
Φn(ω) = N 02
, −∞ < ω < +∞
ω
N 02
0
N 02
δ(τ )
Rn(τ )
τ
Slika 3.49: Bijeli sum
Na osnovu Wiener–Khinchineove teoreme i jednacine (3.196) slijedi
Rn(τ ) =1
2π
+∞ −∞
Φn(ω)ejωτ dω =N 02
δ(τ ), −∞ < τ < ∞, (3.197)
sto je ilustrovano na slici 3.49(b). Dobijeni rezultat pokazuje da su kod bijelog suma tranutne vrijednosti potpuno nekorelisane, ma kako one vremenski bilebliske ( τ = 0), pa se za bijeli sum kaze da je apsolutno slucajni proces.Ocigledno srednja snaga bijelog suma iznosi
P n = Rn(0) =1
2π
+∞ −∞
N 02
dω → ∞
sto znaci da bijeli sum predstavlja samo jedan zgodan matematicki model apso-lutno slucajnog procesa. U praksi svi signali, pa i sumovi, imaju neuniformnespektre ciji intenzitet brze ili sporije opada s porastom frekvencije. Tako se, na
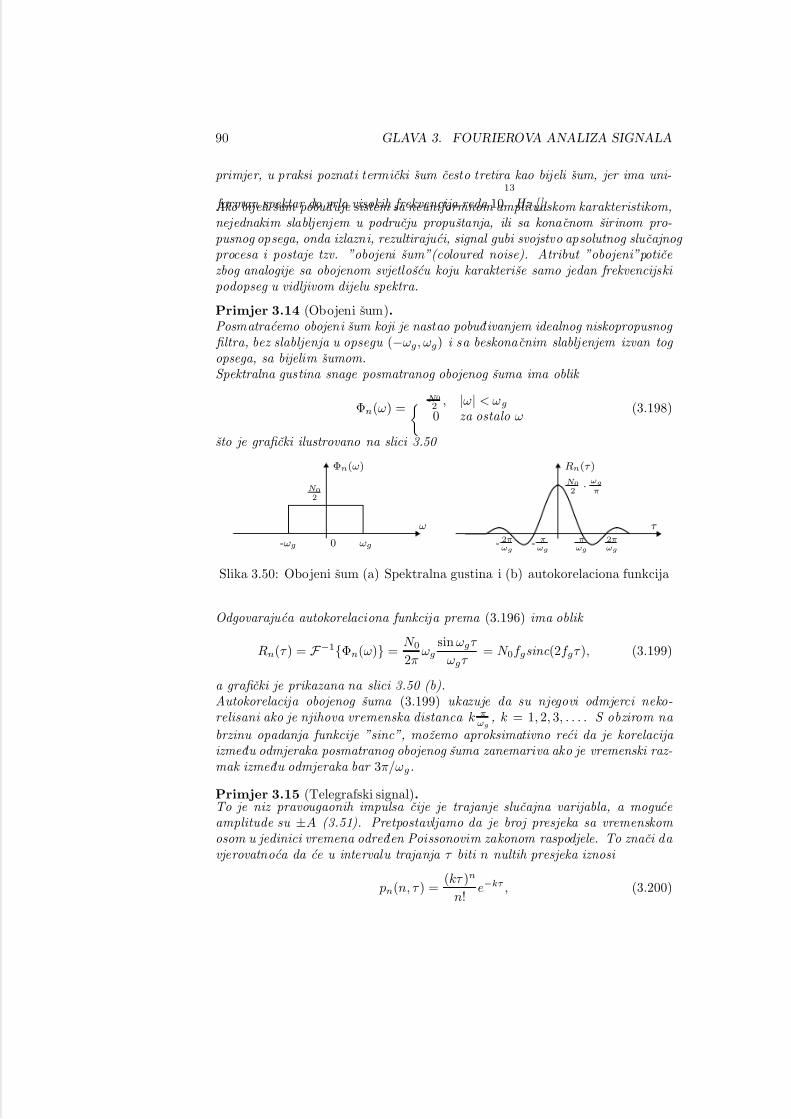
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 96/246
90 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
primjer, u praksi poznati termicki sum cesto tretira kao bijeli sum, jer ima uni-
forman spektar do vrlo visokih frekvencija reda 10
13
Hz [].Ako bijeli sum pobud -uje sistem sa neuniformnom amplitudskom karakteristikom,nejednakim slabljenjem u podrucju propustanja, ili sa konacnom sirinom pro-pusnog opsega, onda izlazni, rezultirajuci, signal gubi svojstvo apsolutnog slucajnog procesa i postaje tzv. ”obojeni sum”(coloured noise). Atribut ”obojeni”poticezbog analogije sa obojenom svjetloscu koju karakterise samo jedan frekvencijski podopseg u vidljivom dijelu spektra.
Primjer 3.14 (Obojeni sum).Posmatracemo obojeni sum koji je nastao pobud -ivanjem idealnog niskopropusnog filtra, bez slabljenja u opsegu (−ωg, ωg) i sa beskonacnim slabljenjem izvan tog opsega, sa bijelim sumom.Spektralna gustina snage posmatranog obojenog suma ima oblik
Φn(ω) = N 0
2 , |ω| < ωg
0 za ostalo ω(3.198)
sto je graficki ilustrovano na slici 3.50
Slika 3.50: Obojeni sum (a) Spektralna gustina i (b) autokorelaciona funkcija
ω
0 ωg-ωg
Φn(ω)
N 02
Rn(τ )
N 02
·ωgπ
τ πωg
2πωg
- πωg
- 2πωg
Odgovarajuca autokorelaciona funkcija prema (3.196) ima oblik
Rn(τ ) = F −1Φn(ω) =N 02π
ωgsin ωgτ
ωgτ = N 0f gsinc(2f gτ ), (3.199)
a graficki je prikazana na slici 3.50 (b).Autokorelacija obojenog suma (3.199) ukazuje da su njegovi odmjerci neko-relisani ako je njihova vremenska distanca k π
ωg, k = 1, 2, 3, . . . . S obzirom na
brzinu opadanja funkcije ”sinc”, mozemo aproksimativno reci da je korelacija izmed -u odmjeraka posmatranog obojenog suma zanemariva ako je vremenski raz-mak izmed -u odmjeraka bar 3π/ωg.
Primjer 3.15 (Telegrafski signal).To je niz pravougaonih impulsa cije je trajanje slucajna varijabla, a moguceamplitude su ±A (3.51). Pretpostavljamo da je broj presjeka sa vremenskom osom u jedinici vremena odred -en Poissonovim zakonom raspodjele. To znaci da vjerovatnoca da ce u intervalu trajanja τ biti n nultih presjeka iznosi
pn(n, τ ) =(kτ )n
n!e−kτ , (3.200)
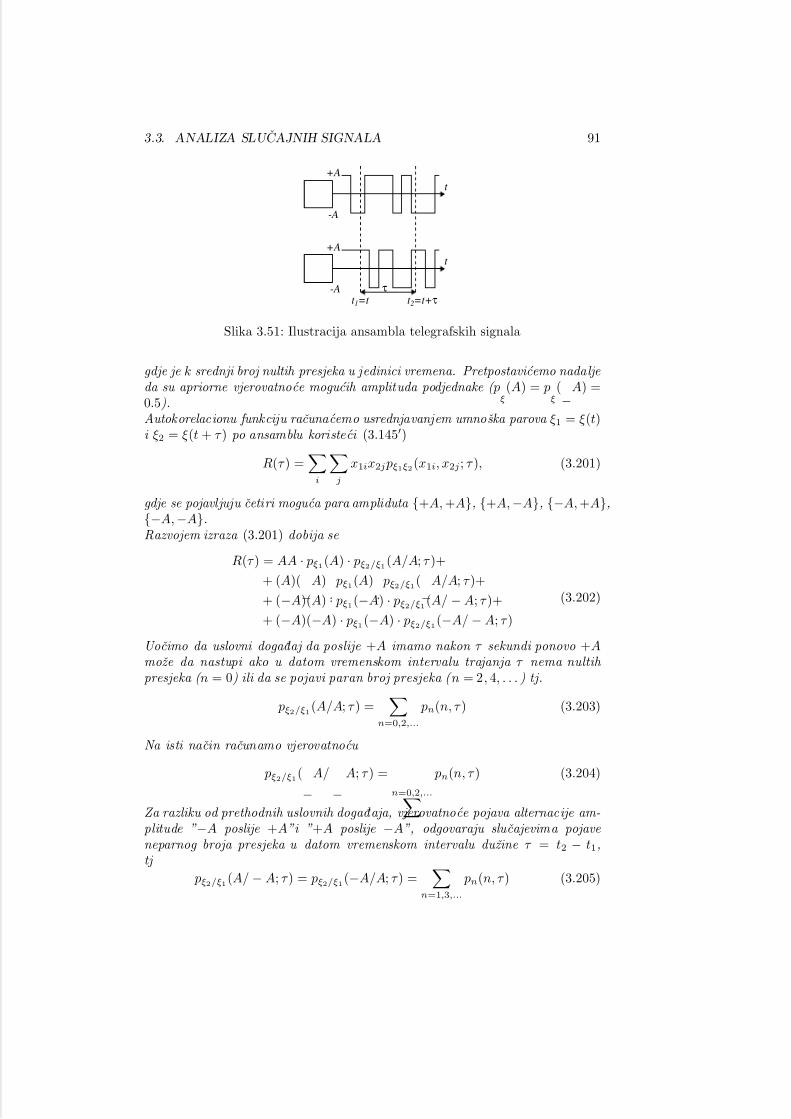
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 97/246
3.3. ANALIZA SLU CAJNIH SIGNALA 91
t
t
+A
-A
+A
-A
t 1=t t 2=t+τ
τ
Slika 3.51: Ilustracija ansambla telegrafskih signala
gdje je k srednji broj nultih presjeka u jedinici vremena. Pretpostavicemo nadaljeda su apriorne vjerovatnoce mogucih amplituda podjednake ( p
ξ(A) = p
ξ(−
A) =0.5).Autokorelacionu funkciju racunacemo usrednjavanjem umnoska parova ξ1 = ξ(t)i ξ2 = ξ(t + τ ) po ansamblu koristeci (3.145)
R(τ ) =
i
j
x1ix2j pξ1ξ2(x1i, x2j; τ ), (3.201)
gdje se pojavljuju cetiri moguca para ampliduta +A, +A, +A, −A, −A, +A,−A, −A.Razvojem izraza (3.201) dobija se
R(τ ) = AA · pξ1(A) · pξ2/ξ1(A/A; τ )+
+ (A)(
−A)
· pξ1(A)
· pξ2/ξ1(
−A/A; τ )+
+ (−A)(A) · pξ1(−A) · pξ2/ξ1(A/ − A; τ )+
+ (−A)(−A) · pξ1(−A) · pξ2/ξ1(−A/ − A; τ )
(3.202)
Uocimo da uslovni dogad -aj da poslije +A imamo nakon τ sekundi ponovo +Amoze da nastupi ako u datom vremenskom intervalu trajanja τ nema nultih presjeka ( n = 0) ili da se pojavi paran broj presjeka ( n = 2, 4, . . . ) tj.
pξ2/ξ1(A/A; τ ) =
n=0,2,...
pn(n, τ ) (3.203)
Na isti nacin racunamo vjerovatnocu
pξ2/ξ1(
−A/
−A; τ ) = n=0,2,...
pn(n, τ ) (3.204)
Za razliku od prethodnih uslovnih dogad -aja, vjerovatnoce pojava alternacije am-plitude ”−A poslije +A”i ”+A poslije −A”, odgovaraju slucajevima pojaveneparnog broja presjeka u datom vremenskom intervalu duzine τ = t2 − t1,tj
pξ2/ξ1(A/ − A; τ ) = pξ2/ξ1(−A/A; τ ) =
n=1,3,...
pn(n, τ ) (3.205)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 98/246
92 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Uvrstavajuci rezultate (3.203), (3.204) i (3.205) u (3.202) dobijamo
R(τ ) = A2 0,2,4,...
(kτ )n
n!e−kτ +
1,3,5,...
(kτ )n
n!e−kτ =
= A2e−kτ
1 − kτ
1!+
(kτ )2
2!− (kτ )3
3!
= A2e−kτ e−kτ = A2e−2kτ
Kako je autokorelacija parna funkcija vremenskog pomaka τ , konacno mozemopisati
R(τ ) = A2e−2k|τ | (3.206)
Koristeci Wiener–Khinchineovu teoremu (3.195) lako mozemo odrediti odgo-varajucu spektralnu gustinu snage
Φ(ω) =
+∞ −∞
A2e−2k|τ |e−jωτ dτ =
=
0 −∞
A2e2kτ −jωτ dτ +
+∞ 0
A2e−2kτ −jωτ dτ =
= 2A2 2k
ω2 + (2k)2
(3.207)
Dobijeni rezultati za autokorelaciju R(τ ) i spektralnu gustinu snage prikazani su na slici 3.52
0
τ
A2
R(τ )
A2
/k
Φ(ω)
ω
2k = ωg-2k
A2
2k
Slika 3.52: Autokorelacija (a) i spektralna gustina snage (b) telegrafskog signala
Ako granicnu frekvenciju f g =ωg
2π definisemo sirinom opsega kada spektralna gustina snage opadne za 3 dB u odnosu na vrsnu vrijednost Φ(0) = A2/k, onda dobijamo
f g =ωg
2π=
k
π(3.208)
To znaci da veci prosjecan broj presjeka sa vremenskom osom implicira u povecanoj sirini frekvencijskog opsega.Srednja snaga posmatranog procesa iznosi
P = R(0) =
+∞ −∞
Φ(2πf )df = (A)2 pξ(A) + (−A)2 pξ(−A) = A2.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 99/246
3.3. ANALIZA SLU CAJNIH SIGNALA 93
Primjer 3.16 (Bipolarni binarni digitalni signal).
Bipolarni binarni digitalni signal cesto se koristi kod singronog prenosa infor-macionog sadrzaja binarnog izvora informacija. U literaturi je poznat i pod nazivom binitni signal []. Pretpostavicemo da digitski odnosno bitski interval iznosi T , pa je odgovarajuca bitska brzina V b = 1/T [bit/s].Na slici 3.53 data je ilustracija jedne realizacije posmatranog slucajnog procesa.
t
s(t)
0 1 0 1 1 0 1
-T 0 T 2T 3T 4T 5T 6T
+A
-A τ
Slika 3.53: Ilustracija jedne realizacije bipolarnog binarnog digitalnog signala
Pretpostavicemo da je odgovarajuci binarni izvor, koji generise informacioni sadrzaj . . . , an−1, an, . . . an+1, . . . , an ∈ 0, 1, bez memorije i da su apriornevjerovatnoce ”jedinica”i ”nula”podjednake ( p(1) = p(0)).To znaci da posmatrani binarni signal predstavlja povorku bipolarnih impulsa trajanja T i vjerovatnoca pojavljivanja amplituda ±A jednakih 0.5. U svakom narednom intervalu trajanja T binarni signal ce jednako vjerovatno imati am-plitudu +A odnosno −A.Ako sa x
1i( i =
±1) oznacimo moguce amplitude istog signala u trenutku t = t
1,
a sa x2j ( j = ±1) moguce amplitude istog signala u trenutku t2 = t1 + τ , tada se autokorelaciona funkcija moze odrediti koristenjem relacije (3.145)
R(τ ) = ξ(t1) · ξ(t2) =
j
i
x1ix2j pξ1ξ2(x1i, x2j ; τ ) =
= (+A)(+A) pξ1ξ2(x1 = +A, x2 = +A; τ )+
+ (+A)(−A) pξ1ξ2(x1 = +A, x2 = −A; τ )+
+ (−A)(+A) pξ1ξ2(x1 = −A, x2 = +A; τ )+
+ (−A)(−A) pξ1ξ2(x1 = −A, x2 = −A; τ )
Kako za vjerovatnocu zdruzenog dogad -aja imamo
pξ1ξ2(x1i, x2j ; τ ) = pξ1(x1i) · pξ2/ξ1(x2j /x1i; τ ),
onda izraz za autokorelaciju mozemo pojednostaviti
R(τ ) =A2
2[ p(x2 = A/x1 = A; τ ) − p(x2 = −A/x1 = A; τ )−
− p(x2 = A/x1 = −A; τ ) + p(x2 = −A/x1 = −A; τ )] =
= A2 [ p(x2 = A/x1 = A; τ ) − p(x2 = A/x1 = −A; τ )]

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 100/246
94 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Ako je |τ | > T , onda su trenuci t = t1 i t = t2 = t1 + τ u razlicitim bitskim
intervalima i odgovarajuce vrijednosti x1 i x2 su nezavisne, sto znaci
p(x2 = A/x1 = A; τ ) = p(x2 = +A) = p(x2 = A/x1 = −A; τ ) = p(x2 = −A) =1
2
Otuda je autokorelaciona funkcija R(τ ) za |τ | > T , u datim uslovima, jednaka nuli ( R(τ ) = 0).U slucaju kada je |τ | < T , velicina p(x2 = A/x1 = −A) odgovara vjerovatnoci da se x1 i x2 nalaze u razlicitim susjednim bitskim intervalima (dogad -aj A) i da su istovremeno amplitude u tim intervalima razlicite (dogad -aj B). Data dva dogad -aja ( A i B) su med -usobno nezavisna. Ako je τ = 0, onda je ocigledno da je vjerovatnoca da x1 i x2 budu u razlicitim bitskim intervalima jednaka nuli.Med -utim, ako je τ = ±T , onda su x1 i x2 unutar dva razlicita susjedna bitska intervala.
Isto tako, ukoliko je 0 < τ < T , vjerovatnoca da x1 i x2 budu u dva razlicita intervala linearno raste sa pomakom τ i iznosi τ /T .Na dalje vjerovatnoca da signal u susjednim bitskim intervalima ima razlicitepredznake iznosi 1/2.Otuda imamo
p(x2 = +A/x1 = −A; τ ) =1
2· |τ |
T =
|τ |2T
|τ | ≤ T
Kako je p(x2 = +A/x1 = +A; τ ) = 1 − p(x2 = −A/x1 = A; τ , onda autoko-relacija poprima oblik
R(τ ) = A2[1 − p(x2 = −A/x1 = A; τ ) − p(x2 = +A/x1 = −A; τ )].
Takod -e je vjerovatnoca p(x2 = −A/x1 = A; τ ) – da binarni signal promijeni polaritet +A na −A jednaka vjerovatnoci p(x2 = +A/x1 = −A; τ ) – da signal promijeni polaritet −A na +A. Stoga konacno imamo
R(τ ) =
A2(1 − |τ |
T ) |τ | < T 0 |τ | > T
(3.209)
Sada mozemo odrediti i odgovarajucu spektralnu gustinu snage
Φ(ω) = FR(τ ) = A2T
sin ωT /2
ωT /2
= A2T sinc2(f T ). (3.210)
Autokorelaciona funkcija R(τ ) i spektralna gustina snage prikazani su na slici 3.54Kao sto se vidi iz autokorelacione funkcije, srednja snaga posmatranog procesa iznosi
P = R(0) = ξ2 = (+A)2 pξ(+A) + (−A)2 pξ(−A) = A2, (3.211)
a srednja vrijednost
ξ(t) = (+A) pξ(+A) + (−A) pξ(−A) = A[ p(1) − p(0)] (3.212)
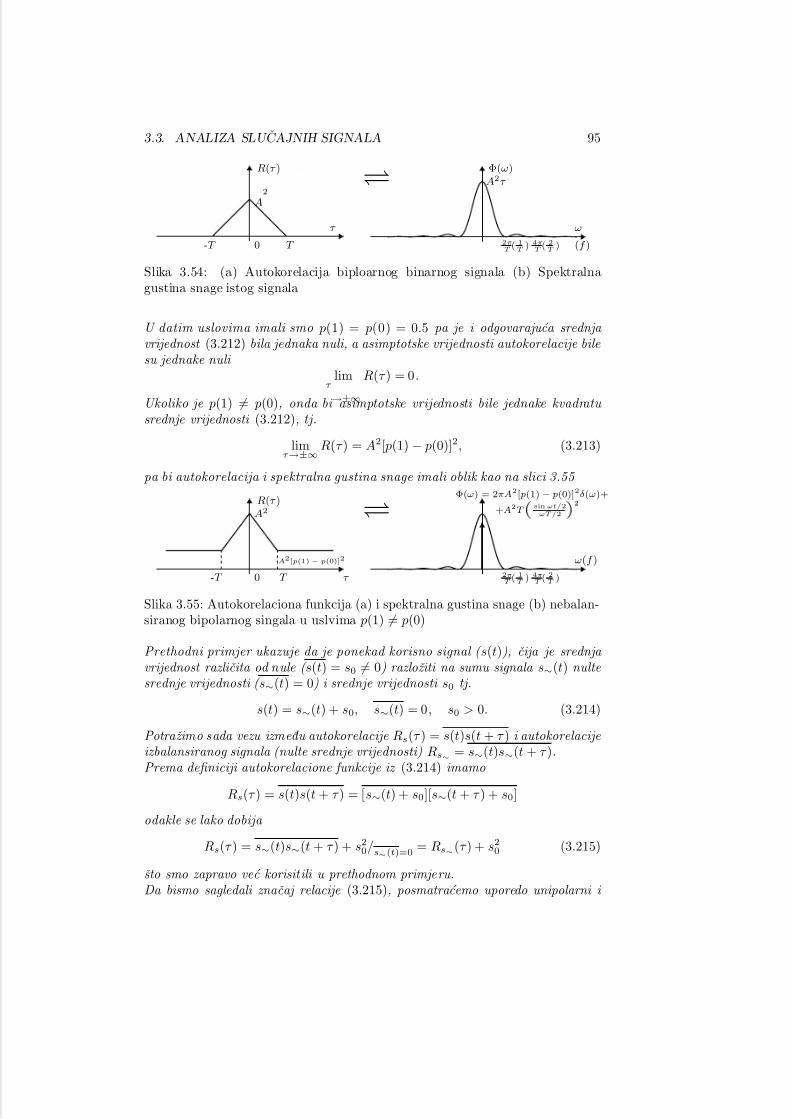
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 101/246
3.3. ANALIZA SLU CAJNIH SIGNALA 95
τ
R(τ )
A2
-T T 0
ω
(f )
Φ(ω)A2τ
2πT (
1T )
4πT (
2T )
Slika 3.54: (a) Autokorelacija biploarnog binarnog signala (b) Spektralnagustina snage istog signala
U datim uslovima imali smo p(1) = p(0) = 0.5 pa je i odgovarajuca srednja vrijednost (3.212) bila jednaka nuli, a asimptotske vrijednosti autokorelacije bilesu jednake nuli
limτ
→±∞
R(τ ) = 0.
Ukoliko je p(1) = p(0), onda bi asimptotske vrijednosti bile jednake kvadratu srednje vrijednosti (3.212), tj.
limτ →±∞ R(τ ) = A2[ p(1) − p(0)]2, (3.213)
pa bi autokorelacija i spektralna gustina snage imali oblik kao na slici 3.55
τ
R(τ )A2
A2[p(1)− p(0)]2
-T T 0
ω(f )
Φ(ω) = 2πA2[ p(1)− p(0)]2δ(ω)+
+A2T
sinωt/2ωT/2
2
2πT (
1T )
4πT (
2T )
Slika 3.55: Autokorelaciona funkcija (a) i spektralna gustina snage (b) nebalan-siranog bipolarnog singala u uslvima p(1) = p(0)
Prethodni primjer ukazuje da je ponekad korisno signal ( s(t)), cija je srednja vrijednost razlicita od nule ( s(t) = s0 = 0) razloziti na sumu signala s∼(t) nultesrednje vrijednosti ( s∼(t) = 0) i srednje vrijednosti s0 tj.
s(t) = s∼(t) + s0, s∼(t) = 0, s0 > 0. (3.214)
Potrazimo sada vezu izmed -u autokorelacije Rs(τ ) = s(t)s(t + τ ) i autokorelacijeizbalansiranog signala (nulte srednje vrijednosti) Rs∼ = s∼(t)s∼(t + τ ).Prema definiciji autokorelacione funkcije iz (3.214) imamo
Rs(τ ) = s(t)s(t + τ ) = [s∼(t) + s0][s∼(t + τ ) + s0]
odakle se lako dobija
Rs(τ ) = s∼(t)s∼(t + τ ) + s20/s∼(t)=0
= Rs∼(τ ) + s20 (3.215)
sto smo zapravo vec korisitili u prethodnom primjeru.Da bismo sagledali znacaj relacije (3.215), posmatracemo uporedo unipolarni i

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 102/246
96 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
bipolarni binarni digitalni signal za isti binarni informacioni sadrzaj . . . , an−1, an, an+1, . . . ,
an ∈ 0, 1 u uslovima jednakih apriornih vjerovatnoca ”jedinica” i ”nula” sl.3.56
t su(t)
t sb(t)
0
A
A
-A
a(n) 0 1 0 1 1 0 1
Slika 3.56: Uporedni prikaz unipolarnog (a) i bipolarnog izbalansiranog binarnogsignala (b) za isti informacioni sadrzaj
Sa slike 3.56 ocigledna je veza izmed -u unipolarnog signala su(t) i odgovarajuceg bipolarnog sb(t)
su(t) =1
2[sb(t) + A] =
1
2sb(t) +
1
2A (3.216)
koristeci prethodni komentar o dekompoziciji signala na komponentu nulte sred-
nje vrijednosti ( 12
sb(t) = 0) i jednu srednju (istosmjernu) komponentu ( su(t) =12 A), mozemo pisati
Ru(τ ) =14
Rb(τ ) +14
A2 (3.217)
gdje je Rb(τ ) data na slici 3.54(a).Odgovarajuca spektralna gustina snage unipolarnog signala iznosi
Φu(ω) = FRu(τ ) =1
4Φb(ω) +
A2π
2δ(ω) =
A2T
4
sin ωT /2
ωT /2
2
+A2π
2δ(ω)
Na slici 3.57 i graficki su prikazane autokorelacija Ru(τ ) i spektralna gustina snage unipolarnog binarnog signala.
τ
R(τ )A2/2
A2/4
-T T 0
ω(f )
Φu(ω)
A2T /4
2πT (
1T )
4πT (
2T )
Slika 3.57: Autokorelaciona funkcija (a) i spektralna gustina snage (b) unipo-larnog binarnog digitalnog signala

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 103/246
3.3. ANALIZA SLU CAJNIH SIGNALA 97
Zakljucimo da je srednja vrijednost su(t)
su(t) = (+A) p(+A) + 0 p(0) =12
A (3.218)
i srednja snaga
s2u(t) = (+A)2 p(+A) + (0)2 p(0) =
A2
2(3.219)
Kako srednje vrijednosti i srednjekvadratne vrijednosti kod bipolarnog ( (3.212),(3.211)) i unipolarnog signala ( (3.218), (3.219)) ne zavise od vremena, oni pri-padaju sa tog aspekta stacionarnim procesima. Zapravo u literaturi su prethodna dva formata binarnog digitalnog signala poznati i pod nazivom ”NRZ”(Non Return Zero) formati. Tako, na primjer, kod unipolarnog ”RZ”formata sred-nja statisticka vrijednost zavisi od vremena pa takav proces gubi atribut sta-
cionarnosti sa aspekta srednje vrijednosti po ansamblu [].
3.3.10 Pojam analitickog signala
U sistemima za prenos informacija u tzv. transponovanom (VF) podrucjukoriste se cesto uskopo jasni signali cija je snaga koncentrisana u relativno uskomfrekvencijskom opsegu u okolini centralne frekvencije f c = ωc
2π . Takve signalemozemo opisati realnom vremenskom funkcijom oblika
x(t) = r(t)cos(ωct + ψ(t)), (3.220)
gdje se r(t) i ψ(t) relativno sporo mijenjaju sa vremenom.Koristeci fazorsku interpretaciju signala (sl.3.2), signal s(t) mozemo (posma-
trati) shvatiti kao realni dio kompleksne funkcije s(t), tj.
x(t) = Res(t) = Rer(t)ej[ωct+jψ(t)], (3.221)
sto je prikazano na slici 3.58. Funkciju s(t) nazivamo analitickim signalom, kod
x(t)
r ( t )
ω c t + ψ (
t ) y(t)
Slika 3.58: Prikaz analitickog signala u kompleksnoj ravni
kojeg se za razliku od fazora u klasicnom smislu ovisno o vremenu mijenjajuapsolutna vrijednost i brzina rotacije. Obicno se nalazimo pred problemomodred-ivanja kompleksne funkcije
s(t) = x(t) + jy (t) (3.222)
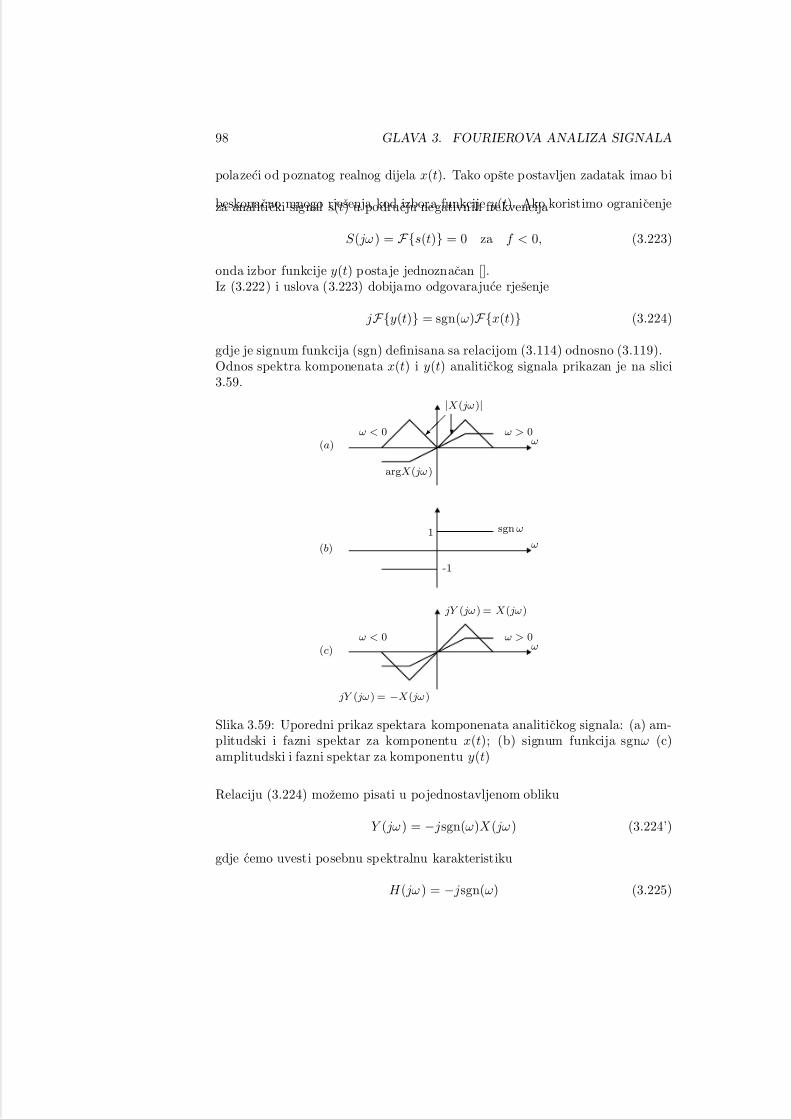
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 104/246
98 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
polazeci od poznatog realnog dijela x(t). Tako opste postavljen zadatak imao bi
beskonacno mnogo rjesenja kod izbora funkcije y(t). Ako koristimo ogranicenjeza analiticki signal s(t) u podrucju negativnih frekvencija
S ( jω ) = Fs(t) = 0 za f < 0, (3.223)
onda izbor funkcije y(t) postaje jednoznacan [].Iz (3.222) i uslova (3.223) dobijamo odgovarajuce rjesenje
jFy(t) = sgn(ω)Fx(t) (3.224)
gdje je signum funkcija (sgn) definisana sa relacijom (3.114) odnosno (3.119).Odnos spektra komponenata x(t) i y(t) analitickog signala prikazan je na slici3.59.
(a)ω < 0 ω > 0
ω
argX( jω)
|X( jω)|
© c
ω(b)
1
-1
sgn ω
(c)ω < 0 ω > 0
ω
jY ( jω) = −X( jω)
jY ( jω) = X( jω)
Slika 3.59: Uporedni prikaz spektara komponenata analitickog signala: (a) am-plitudski i fazni spektar za komponentu x(t); (b) signum funkcija sgnω (c)amplitudski i fazni spektar za komponentu y(t)
Relaciju (3.224) mozemo pisati u pojednostavljenom obliku
Y ( jω) = − jsgn(ω)X ( jω) (3.224’)
gdje cemo uvesti posebnu spektralnu karakteristiku
H ( jω ) = − jsgn(ω) (3.225)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 105/246
3.3. ANALIZA SLU CAJNIH SIGNALA 99
Koristeci (3.115) imamo
Fsgn(t) =
+∞ −∞
sgn(t)e−jωt dt =2
jω
sto znaci da takod-e vrijedi
+∞ −∞
sgn(ω)e−jωt dω =2
jt(3.226)
Ako na lijevoj strani jednakosti (3.226) ω zamijenimo sa −ω, onda (3.226) prelaziu oblik
+∞
−∞−sgn(ω)ejωt dω = 2
jt(3.227)
Potrazimo sada inverznu Fourierovu transformaciju od sp ektralne karakteristike(3.225)
h(t) = F −1H ( jω) =1
2π
+∞ −∞
− jsgn(ω)ejωt dω
koja na bazi rezultata (3.227) poprima konacan oblik
h(t) =1
2π ·
2
jt
=1
πt
(3.228)
Kako je prema (3.224’) i (3.225) Y ( jω ) = H ( jω)X ( jω), onda koristeci (3.96) uvremenskom domenu imamo odgovarajuci rezultat
y(t) = h(t) ∗ x(t) =1
πt∗ x(t) =
1
π
+∞ −∞
x(τ )
t − τ dτ =
1
π
+∞ −∞
x(t − τ )
τ dτ (3.229)
Konacni rezultat za komponentu y(t) ukazuje da je ona zapravo Hilbertovatransformacija komponente x(t) [], tj.
y(t) = H
x(t)
=
1
πt ∗x(t) = x(t) (3.230)
To znaci da analiticki signal s(t) = x(t) + jx(t) ima trenutnu amplitudu |s(t)| = x(t)2 + x(t)2 i trenutnu fazu arctg x(t)
x(t).
Interesantno je uociti da dvostruka uzastopna primjena Hilbertove transforma-cije na signal x(t) daje rezultat
ˆx(t) = −x(t) (3.231)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 106/246
100 GLAVA 3. FOURIEROVA ANALIZA SIGNALA
Lako je takod-e dobiti rezultate
ˆcosωct = sin ωct, (3.232)
ˆsinωct = − cos ωct (3.233)
Kako je apsolutna vrijednost faktora u (3.224’) jednaka jedinici
|H ( jω) = | − jsgn(ω)| = |sgn(ω)e−j π2 | = 1,
onda on utice samo na fazni spektar, pa su stoga autokorelacione funkcije kom-ponenata x(t) i y(t) = x(t) podjednake
Rx(t) = x(t)x(t + τ ) = Rx(t) = x(t)x(t + τ ) (3.234)
To nadalje povlaci i identicnost njihovih spektralnih gustina snage
Φx(t)(ω) = Φx(t)(ω) (3.234’)
Preuzecemo iz literature [] jos neke znacajnije rezultate bez upustanja u njihovdokaz.Tako se moze pokazati da u slucaju stacionarnih procesa vrijedi
Rxx(τ ) = x(t)x(t + τ ) = Rx(τ ), (3.235)
Rxx(τ ) = x(t)x(t + τ ) = −R(τ ). (3.236)
Eksplicitnije mozemo reci da su med-ukorelacione funkcije Rxx i Rxx neparnefunkcije vremenskog pomaka τ
Rxx(τ ) = −Rxx(−τ ) i Rxx(τ ) = −Rxx(−τ ) (3.237)
Kako su med-ukorelacione funkcije neparne vremenske funkcije, onda vrijedi
Rxx(0) = Rxx(0) = 0 (3.238)
sto znaci da su signali x(t) i x(t) med-usobno nekoherentni, a u statistickomsmislu mozemo reci statisticki nezavisni.Na kra ju ovog osvrta na pojam analitickog signala pomenimo jedan elementarnianaliticki signal
s(t) = ejωct = cos ωct + j sin ωct (3.239)
gdje su ocigledno
x(t) = cos ωcty(t) = x(t) = ˆcosωct = sin ωct.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 107/246
Glava 4
Digitalizacija kontinualnog
signala
4.1 Uvodna razmatranja
Kao sto smo u uvodnom odjeljku naglasili, ako su argument i signal kaofunkcija vremena definisani nad neprebrojivim skupovima, onda se radi o kon-tinualnom signalu.Ako trenutna vrijednost signala pripada neprebrojivom skupu amplitudskih vri- jednosti samo u diskretnim trenucima vremena, a jednaka je nuli u ostalim vre-menskim intervalima, onda kazemo da je signal (s(t)) kontinualan po trenutnim
vrijednostima a diskretan po vremenu.Slicno tome, ako se signal mijenja kontinualno po vremenu ali mu trenutnevrijednosti pripadaju diskretnom, na jvise prebro jivom skupu amplitudskih vri- jednosti, onda kazemo da je signal diskretan po trenutnim vrijednostima, akontinualan po vremenu.Konacno ako je signal diskretan u vremenskom (odmjeren) i amplitudskom(kvantovan) domenu, onda je on zapravo digitalizovan i mozemo ga predstavitikroz vremenski niz cifara, tj. d-igita”.Diskretni signali imaju posebno, istaknuto mjesto pri obradi i prenosu informa-cija.Realizacija digitalne obrade kontinualnog signala odvija se kroz tri faze. Prvafaza je konverzija kontinualnog signala u diskretni oblik. Druga faza je obradatako9 dobijenog diskretnog signala. Treca faza je rekonstrukcija kontinualnogsignala iz diskretne povorke.Pored toga, u bliskoj perspektivi je stvaranje jedinstvene integrisane digitalnemreze preko koje ce sevrsiti prenos informacija kako za diskretne tako i za kon-tinualne izvore informacija.Naime, u praksi pod odred-enim uslovima, konacnee gornje granicne frekven-cije u spektru kontinualnog signala i konacne rezolucije korisnika informacijamozemo da uspostavimo vezu izmed-u kontinualnih i diskretnih (digitalnih) sig-
101

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 108/246
102 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
nala.
Naglasimo da je ovdje kljucni problem adekvatno predstavljanje kontinualnogsignala pomocu diskretnog signala.Zakljucimo ovo uvodno razmatranje da su za digitalizaciju kontinualnog signalapotrebne i dovoljne dvije operacije obrade signala:
(a) Diskretizacija signala u vremenskom domenu, ili drugim rijecima, odmjer-avanje signala u ekvidistantnim trenucima
(b) Diskretizacija signala u amplitudskom domenu, ili kako cesto kazemo kvan-tovanje signala.
Redoslijed datih operacija u principu nije bitan.Rasmotricemo prvo problem diskretizacije kontinualnog signala u vremenskomdomenu.
4.2 Diskretizacija signala u vremenskom domenu
4.2.1 Teorema odmjeravanja
U teorijskim uslovima, kada je spektar signala neograniceno sirok, sustinskarazlika izmed-u kontinualnog i po vremenu diskretnog signala zaista postoji.Med-utim, u praksi postoji konacna gornja granicna frekvencija f g koja je uslovl- jena prirodom samog signala, odnosno transfer funkcijom prenosnog sistema.Mi cemo nadalje za postupak diskretizacije u vremenskom domenu koristiti ter-min ”odmjeravanje”mada su u nama dostupnoj literaturi prisutni i drugi termini
”odabiranje”[], uzorkovanje itd.Kada se radi o odmjeravanju signala u vremenskom domenu onda je potrebnoi dovoljno da razmotrimo teoremu odmjeravanja (Shannonova ili Koteljnikovateorema). Veci poznavaoci matematike moci ce lako da uoce da je teorema odm- jeravanja specijalan slucaj jedne Cauchyeve teoreme definisane jos u 19-tomvijeku. Posebna zasluga Shannona je njegova potica jna stvaralacka primjenateorijskih rezultata u oblasti obrade i prenosa signala.Formulisacemo kratko teoremu odmjeravanja u vremenskom domenu:”Ako se kontinualni signal trenutno odmjerava u ekvidistantnim vremenskimintervalima (T 0) brzinom (f 0) koja je jednaka ili veca od dvostruke na jvisefrekvencije (f g) u spektru datog kontinualnog signala, onda odmjerci sadrzecjelokupnu informaciju o odmjeravanom kontinualnom signalu”.To znaci da interval odmjeravanja mora biti
T 0 =1
f 0≤ 1
2f g=
π
ωg(4.1)
a frekvencija odmjeravanja
f 0 =1
T 0≥ 2f g =
ωg
π(4.2)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 109/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 103
Osvrnucemo se na matematicki dokaz teoreme.
Neka je s(t) proizvoljna funkcija vremena cija spektralna karakteristika S ( jω) =Fs(t) zadovoljava uslov
S ( jω ) =
+∞ −∞
s(t)e−jωt dt =
= 0 , za |ω| ≤ ωg
= 0 , za |ω| > ωg(4.3)
odakle imemo
s(t) =1
2π
+∞ −∞
S ( jω )ejωt dω =1
2π
ωg −ωg
S ( jω)ejωt dω. (4.4)
Kako spektralna karakteristika S ( jω) prakticno uvijek zadovoljava Dirichletoveuslove u konacnom opsegu [−ωg, ωg] onda joj mozemo pridruziti Fourierov redpo ucestanosti
S ( jω) =+∞
n=−∞cne
jn πωg ω (4.5)
Ako iskoristimo uslov (4.1), koji pretpostavlja teorema, onda modifikovana spek-tralna karakteristika (4.5) poprima oblik
S ( jω) =+∞
n=−∞cnejnT 0ω (4.6)
Mada relacije (4.5) i (4.6) odgovaraju periodicnom ponavljanju spektralne karak-teristike S ( jω) duz ose ucestanosti sa ”periodom”2ωg, korektnu rekonstrukcijukontinualnog signala s(t) mozemo postici na bazi samo jedne periode spektralnekarakteristike od −ωg do +ωg kako to i nalazu relacije (4.3) i (4.4)
s(t) =1
2π
ωg −ωg
S ( jω)ejωt dω =1
2π
+ωg −ωg
cnejnT 0ω
ejωt dω. (4.7)
Nakon zamjene redoslijeda integracije i sumiranja u (4.7) lako je dobiti
s(t) =ωg
π
+∞
n=−∞
cn
sin ωg(t + nT 0)
ωg(t + nT 0). (4.8)
Da bismo odredili znacenje koeficijenata cn, uputno je izvrsiti kvantovanjevremena iizracunati vrijednost lijeve i desne strane jednakosti (4.8) u trenucimat = −kT 0, k ∈ Z. Na ta j nacin iz (4.8) imamo
s(−kT 0) =ωg
π
+∞n=−∞
cn
sin ωg(n − k)T 0ωg (n − k)T 0
. (4.9)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 110/246
104 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
Kako jesin ωg(n
−k)T 0
ωg (n − k)T 0 =sin π(n
−k)
π(n − k) = 1 za k = n0 za k = n ,
onda beskonacni red na desnoj strani jednakosti (4.9) ima samo jedan nenulticlan kada je k = n, tj.
s(−nT 0) =ωg
πcn ili cn =
π
ωgs(−nT 0) (4.10)
Uvrstavanjem dobijene vrijednosti za koeficijent cn iz (4.10) u (4.8) i smjenomn sa −n konacno dobijamo
s(t) =+∞
n=−∞s(nT 0)
sin ωg(t − nT 0)
ωg(t − nT 0)Q.E.D. (4.11)
Prema konacnom rezultatu (4.11) uspjeli smo da odredimo kontinualnu funkcijuvremena s(t), ∀t ∈ R, pomocu odmjeraka date kontinualne funkcije u trenucimat = nT 0 uz jedini uslov T 0 = 1
f 0= π
ωg= 1
2f g, cime je dokaz teoreme zavrsen.
Zadrzacemo se jos na dobijenom rezultatu (4.11) i u cilju njegovog dodatnogkomentarisanja prikazacemo ga u razvijenom obliku
s(t) = · · · + s(0)sin ωgt
ωgt+ s(T 0)
sin ωg(t − T 0)
ωg (t − T 0)+ s(2T 0)
sin ωg(t − 2T 0)
ωg (t − 2T 0)+ . . .
(4.12)Iz (4.11) i (4.12) uocavamo da u okviru rekonstrukcije kontinualnog signala s(t)na bazi skupa njegovih diskretnih vrijednosti . . . , s(0), s(T 0), s(2T 0), . . . svakiodmjerak s(nT 0) mnozimo sa tezinskom, ili interpolacionom, funkcijom
si[ωg(t − nT 0)] =sin ωg(t − nT 0)
ωg(t − nT 0)(4.13)
koja je u trenutku t = nT 0 jednaka jedinici, a u trenucima t = kT 0, k = n kojiodgovaraju drugim odmjercima, jednaka nuli.Tezinska funkcija (4.13) odred-uje zonu oko trenutka nT 0 u kojoj dominira uticajodmjerka s(nT 0), umanjujuci njegov uticaj kako se udaljavamo lijevo i desno odtrenutka nT 0 i iskljucujuci potpuno njegov uticaj na ostale odmjerke signalas(kT 0), k = n.Graficka ilustracija (4.12) i ulaoga tezinskih funkcija (4.13) dati su na slici 4.1Svaka komponenta desne strane jednakosti (4.12) u odred-enom trenutku odm- jeravanja identicna je odgovarajucoj trenutno j vrijednosti kontinualnog signala
a vrijednostisignala izmed
-
u odmjeraka popunjavaju, vrse interpolaciju, tezinskefunkcije (4.13). Pomenimo da idealni interpolator (4.13) odgovara nekauzalnomsistemu ???? [].
4.2.2 Pregled nekih postupaka odmjeravanja
Odmjeravanjem kontinualnog signala mjerimo njegove trenutne vrijednostiu tacno definisanim vremvalima. Teorijski, trajanje odmjeraka je sasvim kratko,

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 111/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 105
s(t) =P
s(nT 0)sinωg(t−nT 0)ωg(t−nT 0)
s(0)
s(T 0)
s(2T 0)
-T 0 0 T 0 2T 0 3T 0
s(0)sinωgt
ωgt
T
s(T 0)sinωg(t−T 0)ωg(t−T 0)
T
s(2T 0)sinωg(t−2T 0)
ωg(t−2T 0)
e e
e e ut
s(t)
0 T 0 2T 0
s(0)
s(T 0)
s(2T 0)
Slika 4.1: Graficka ilustracija rezultata (4.11)
t
T 0
θ0
Slika 4.2: Ilustracija prakticno odmjerenog signala
ali kod realnih odmjeraka trajanje je konacno (4.2)Ako je ”interval odmjeravanja”(T 0) konstantan, kazemo da vrsimo uniformnoodmjeravanje. Danas se uglavnom primjenjuje uniformno odmjeravanje, madase u buducnosti moze ocekivati i primjena neuniformnog odmjeravanja.U prakticnim sistemima faktor rezima odmjeravanja α0 = θ0/T 0 poprima vri- jednost manje od 10−3. Sto je faktor rezima manji, to je veci ”prazan”vremenskiinterval u koji se mogu utiskivati odmjerci drugih signala i time povecati bro jvremenski multipleksiranih kanala. Ali, kao sto cemo kasnije vidjeti, smanji-
vanje vrijednosti faktora rezima smanjuje snagu odmjeraka, pa se smanjuje iodnos signal-vsum ri rekonstrukciji kontinualnog signala.Prvo cemo posvetiti paznju prakticnom, ili kako ponekad kazemo prirodnom,nacinu odmjeravanja koje je ilustrovano na slici 4.3.Realizacija prirodnog odmjeravanja moze se postici uotrebom elektronskog prekidacakoji je kratko spojena u intervalu trajanja θ0, a otvoren T 0 − θ0, a ritam nje-govog rada definisan je frekvencijom odmjeravanja f 0 ≥ 2f g, gdje je f g granicnafrekvencija u spektru ulaznog kontinualnog signala (4.3).Postupak na sl.4.3 datog odmjeravanja mo[z]emo matematicki shvatiti kao mnozenjeulaznog kontinualnog signala s(t) i funkcije odmjeravanja (ili prekidacke funkcije)s0(t), tj.:
sP AM (t) = s(t) · s0(t) (4.14)
U indeksu odmjerenog signala koristimo skracenicu ”PAM”jer rezultat odmjer-avanja odgovara impulsnoj amplitudskoj modulaciji (Pulse Amplitude Modula-tion).Produktu ulaznog kontinualnog signala s(t) i funkcije odmjeravanja s0(t) prema(3.97) odgovara konvolucija u frekvencijskom domenu
S P AM ( jω )FsP AM (t) =1
2πFs(t) ∗ F s0(t). (4.15)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 112/246
106 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
s(t)
t
f ≥2f g
sPAM (t)=s(t)s0(t)
t
s0(t)
t S=F s(t)
(f)
(-f )g (f )g ω
−ωg ωg
F s (t)=?PAM
A0θ0
τ0 τ0 τ0
ω
−2ω0
ω
−ω0 ω0 2ω0
S0(ω)=F s (t)=?θ
Slika 4.3: Ilustracija prirodnog postupka odmjeravanja kontinualnog signala s(t)pomocu prekidacke funkcije s0(t)
Za funkciju odmjeravanja s0(t) sa slike 4.3 prema (3.16) mozemo pisati
s0(t) = α0A0
+∞n=−∞
sin nα0π
nα0π, α0 =
θ0
T 0, ω0 =
2π
T 0= 2πf 0. (4.16)
Ako prosirimo koristenje Fourierove transformacije i na periodicne signale prema(3.83), onda funkciji odmjeravanja (4.16) odgovara spektralna karektiristika
S 0(ω) Fs0(t) =
+∞ −∞
α0A0
+∞n=−∞
sin nα0π
nα0πejnω0te−jωt dt
Koja nakon izmjene redoslijeda sumiranja i integracije poprima oblik
S 0(omega) = α0A0
+∞n=−∞
sin nα0π
nα0π
+∞ −∞
e−j(ω−nω0)tdt (4.17)
Koristeci definiciju Diracovog impulsa u vremenskom domenu
δ(t) =1
2π
+∞ −∞
e±j2πf tdω =
+∞ −∞
e±j2πf tdf
i domen ucestanosti
δ(ω) = 12π
+
∞ −∞
e±jωt dt,
(4.17) poprima pojednostavljen oblik
S 0(ω) = 2πα0A0
+∞n=−∞
sin nα0π
nα0πδ(ω − nω0). (4.18)
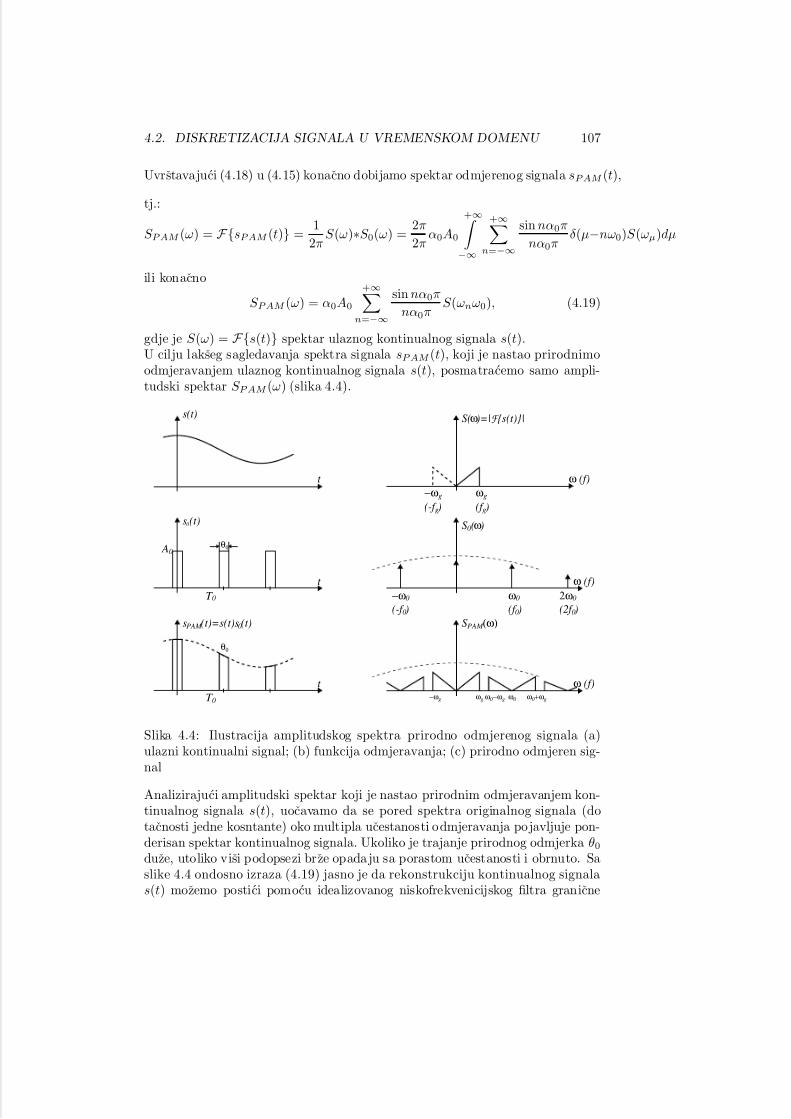
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 113/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 107
Uvrstavajuci (4.18) u (4.15) konacno dobijamo spektar odmjerenog signala sP AM (t),
tj.:
S P AM (ω) = FsP AM (t) =1
2πS (ω)∗S 0(ω) =
2π
2πα0A0
+∞ −∞
+∞n=−∞
sin nα0π
nα0πδ(µ−nω0)S (ωµ)dµ
ili konacno
S P AM (ω) = α0A0
+∞n=−∞
sin nα0π
nα0πS (ωnω0), (4.19)
gdje je S (ω) = Fs(t) spektar ulaznog kontinualnog signala s(t).U cilju lakseg sagledavanja spektra signala sP AM (t), koji je nastao prirodnimoodmjeravanjem ulaznog kontinualnog signala s(t), posmatracemo samo ampli-tudski spektar S P AM (ω) (slika 4.4).
t
s(t)
ω (f)
S( )=|F s(t)|ω
ωg−ωg
(-f )g (f )gs (t)0
t
A0
T 0
θ0
ω (f)
S0( )ω
−ω0 ω0 2ω0
(-f )0 (f )0 (2f )0s (t)=s(t)s (t)PAM 0
t
T 0
θ0
SPAM (ω)
ω (f)ωg−ωg ω0−ωg ω0 ω0+ωg
Slika 4.4: Ilustracija amplitudskog spektra prirodno odmjerenog signala (a)ulazni kontinualni signal; (b) funkcija odmjeravanja; (c) prirodno odmjeren sig-nal
Analizirajuci amplitudski spektar koji je nastao prirodnim odmjeravanjem kon-tinualnog signala s(t), uocavamo da se pored spektra originalnog signala (dotacnosti jedne kosntante) oko multipla ucestanosti odmjeravanja pojavljuje pon-derisan spektar kontinualnog signala. Ukoliko je trajanje prirodnog odmjerka θ0
duze, utoliko visi podopsezi brze opada ju sa porastom ucestanosti i obrnuto. Saslike 4.4 ondosno izraza (4.19) jasno je da rekonstrukciju kontinualnog signalas(t) mozemo postici pomocu idealizovanog niskofrekvenicijskog filtra granicne

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 114/246
108 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
ucestanosti ωg uz eventualno dodatno pojacanje signala 1/α0A0 puta. Ako
prekidac sa sl.4.3 ne unosi slabljenje u toku trajanja (θ0) kratkog spoja, onda je A0 = 1 pa odgovarajuce potrebno pojacanje iznosi 1/α0 puta (slika 4.5).
sPAM (t) 1/ α0s(t)
0÷ωg
Slika 4.5: Ilustracija rekontstrukcije kontinualnog signala s(t) iz prirodno odm- jerenog signala sP AM (t)
Prethodna analiza ukazuje da iz odmjerenog signala sP AM (t), gdje je f 0 ≥ 2f g <∞, mozemo izvrsiti potpuno korektnu rekonostrukciju kontinualnog signala s(t).koliko u postupku odmjeravanja nije usvojena dovoljno visoka frekvencija odm-
jeravanja kako to propisuje teorema odmjeravanja (4.2), onda dolazi do prekla-panja na jvisih komponenata u spektru kontinualnog signala i komponenata na- jnizeg donjeg bocnog opsega (slika 4.6).
SPAM (ω)
ω (f)ωg ω0 ω0+ωgω0−ωg
Slika 4.6: Ilustracija uticaja izbora nedovoljno visoke frekvencije odabiranja
U slucaju izbor nedovoljno visoke frekvencije odmjeravanja (sl.4.6) dolazi do
tzv. efekta ”aliasinga”i nemogucnosti korektne rekonstrukcije originalnog sig-nala.Posmatracemo sada jedan primjer odmjeravanja signala cija je donja granicnafrekvencija veca od 0.
Primjer 4.1. Za signal primarne FDM B grupe (od 60 kHz do 108 kHz) nacrtati kvalitativni spektar nakon odmjeravanja sa frekvencijom f 0 = 112 kHZ.
Prethodni primjer ukazuje da u slucaju kada je donja granicna frekvencijakontinualnog signala veca od 0 Hz mozemo koristiti pod odred-enim uslovimafrekvenciju odmjeravanja i manju od dvostruke najvise frekvencije u spektrukontinualnog signala. Naime, ako sa f i oznacimo donju, a sa f 2 gornju granicnufrekvenciju u spektru kontinualnog signala, onda frekvenciju odmjeravanja f 0
mozemo odrediti iz jednakostif 0 = 2f 2/k (4.20)
gdje je k najveci cijeli broj sadrzan u kolicniku f 2/(f 2−f 1), ili krace k =
f 2f 2−f 1
.
Na taj nacin usvojena frekvencija odmjeravanja garantuje mogucnost korkt-nerekonstrukcije kontinualnog signala iz odmjerenog ali uz upotrebu filtra pro-pusnika opsega [].
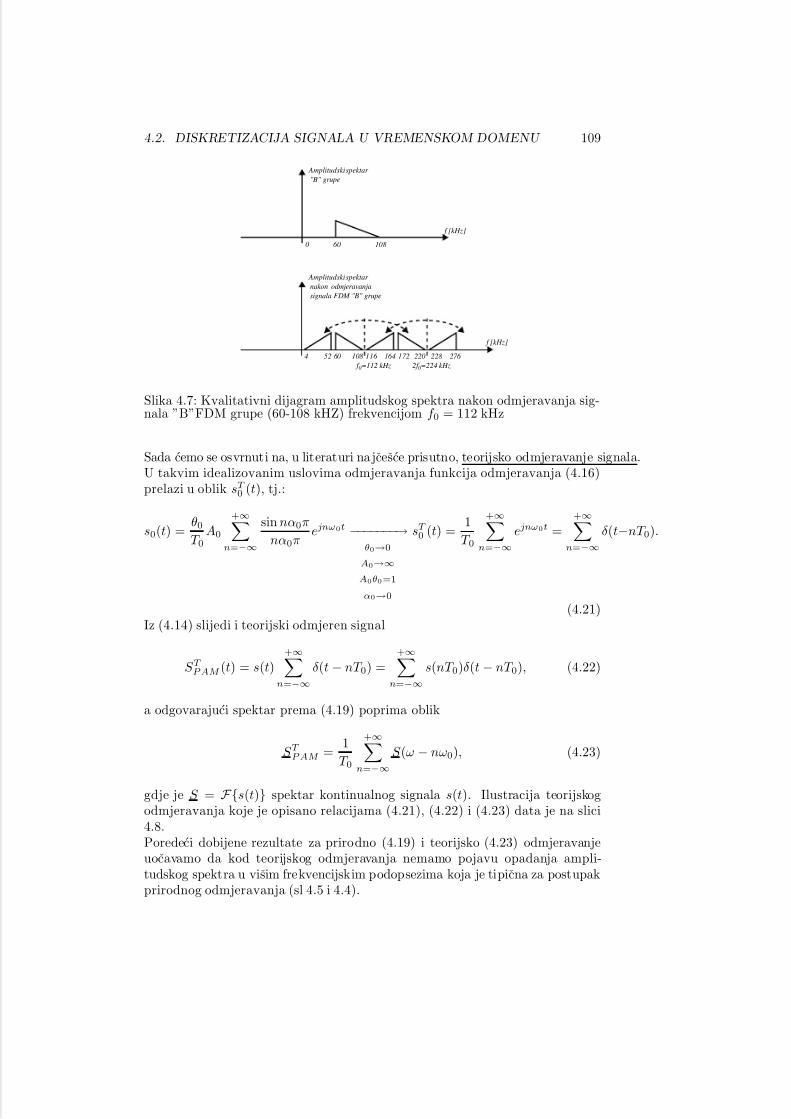
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 115/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 109
f [kHz]
Amplitudski spektar
"B" grupe
0 60 108
4 52 60 108 116 164 172 220 228 276
f 0=112 kHz 2f 0=224 kHz
f [kHz]
Amplitudski spektar
nakon odmjeravanja
signala FDM "B" grupe
Slika 4.7: Kvalitativni dijagram amplitudskog spektra nakon odmjeravanja sig-nala ”B”FDM grupe (60-108 kHZ) frekvencijom f 0 = 112 kHz
Sada cemo se osvrnuti na, u literaturi na jcesce prisutno, teorijsko odmjeravanje signala.U takvim idealizovanim uslovima odmjeravanja funkcija odmjeravanja (4.16)prelazi u oblik sT
0 (t), tj.:
s0(t) =θ0
T 0A0
+∞n=−∞
sin nα0π
nα0πejnω0t −−−−−−−→
θ0→0
A0→∞A0θ0=1
α0→0
sT 0 (t) =
1
T 0
+∞n=−∞
ejnω0t =+∞
n=−∞δ(t−nT 0).
(4.21)Iz (4.14) slijedi i teorijski odmjeren signal
S T P AM (t) = s(t)
+∞n=−∞
δ(t − nT 0) =+∞
n=−∞s(nT 0)δ(t − nT 0), (4.22)
a odgovarajuci spektar prema (4.19) poprima oblik
S T P AM =
1
T 0
+∞n=−∞
S (ω − nω0), (4.23)
gdje je S = Fs(t) spektar kontinualnog signala s(t). Ilustracija teorijskogodmjeravanja koje je opisano relacijama (4.21), (4.22) i (4.23) data je na slici4.8.Poredeci dobijene rezultate za prirodno (4.19) i teorijsko (4.23) odmjeravanjeuocavamo da kod teorijskog odmjeravanja nemamo pojavu opadanja ampli-tudskog spektra u visim frekvencijskim podopsezima koja je tipicna za postupakprirodnog odmjeravanja (sl 4.5 i 4.4).
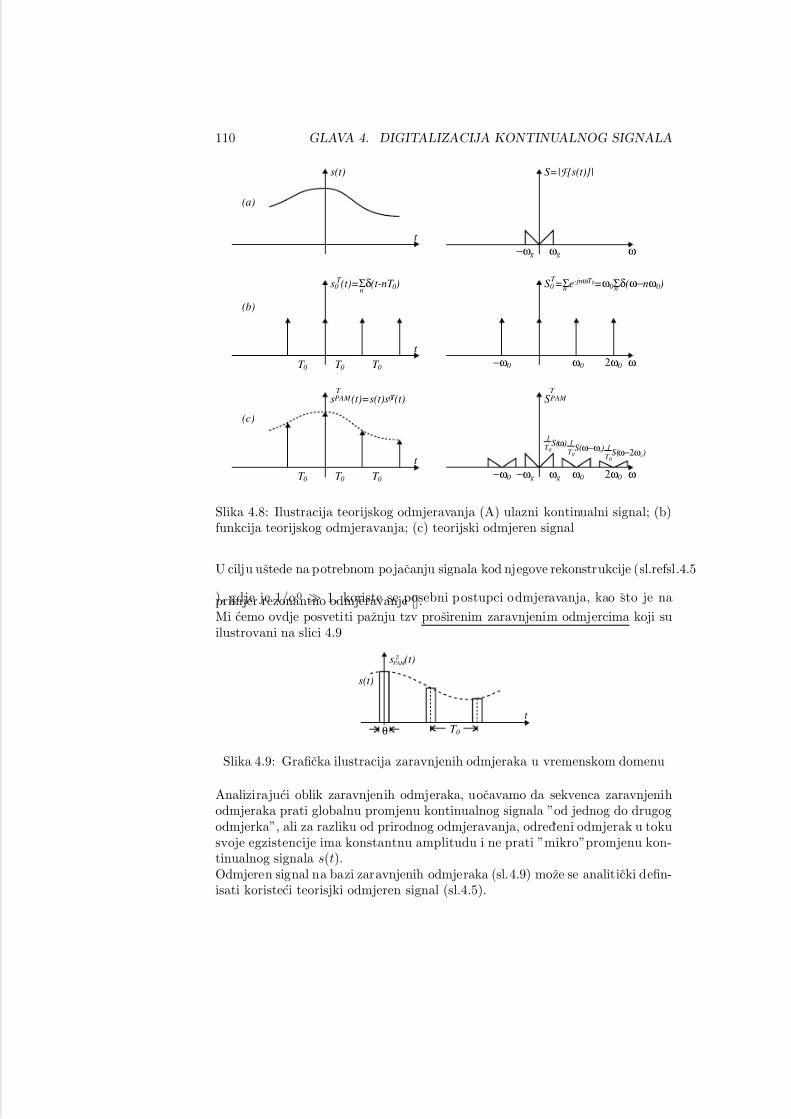
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 116/246
110 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
t
s(t)
(a)
ωωg−ωg
S=|F s(t)|
t
s0T (t)=Σδ(t-nT )0
n
(b)
T T T 0 0 0ω2ω0ω0−ω0
S0T =Σe-jnωT 0=ω0Σδ(ω−nω0)n n
t
sPAM T
(t)=s(t)s0T (t)
(c)
T T T 0 0 0ω
ST PAM
2ω0ω0ωg−ω0 −ωg
1
T 0S( )ω 1
T 0S( )ω−ω
01
T 0S( )ω−2ω
0
Slika 4.8: Ilustracija teorijskog odmjeravanja (A) ulazni kontinualni signal; (b)funkcija teorijskog odmjeravanja; (c) teorijski odmjeren signal
U cilju ustede na potrebnom pojacanju signala kod njegove rekonstrukcije (sl.refsl.4.5
), gdje je 1/α0 1, koriste se posebni postupci odmjeravanja, kao sto je naprimjer rezonantno odmjeravanje [].Mi cemo ovdje posvetiti paznju tzv prosirenim zaravnjenim odmjercima koji suilustrovani na slici 4.9
t
s(t)
s Z PAM (t)
T 0θ
Slika 4.9: Graficka ilustracija zaravnjenih odmjeraka u vremenskom domenu
Analizirajuci oblik zaravnjenih odmjeraka, uocavamo da sekvenca zaravnjenihodmjeraka prati globalnu promjenu kontinualnog signala ”od jednog do drugogodmjerka”, ali za razliku od prirodnog odmjeravanja, odred-eni odmjerak u tokusvoje egzistencije ima konstantnu amplitudu i ne prati ”mikro”promjenu kon-tinualnog signala s(t).Odmjeren signal na bazi zaravnjenih odmjeraka (sl.4.9) moze se analiticki defin-isati koristeci teorisjki odmjeren signal (sl.4.5).
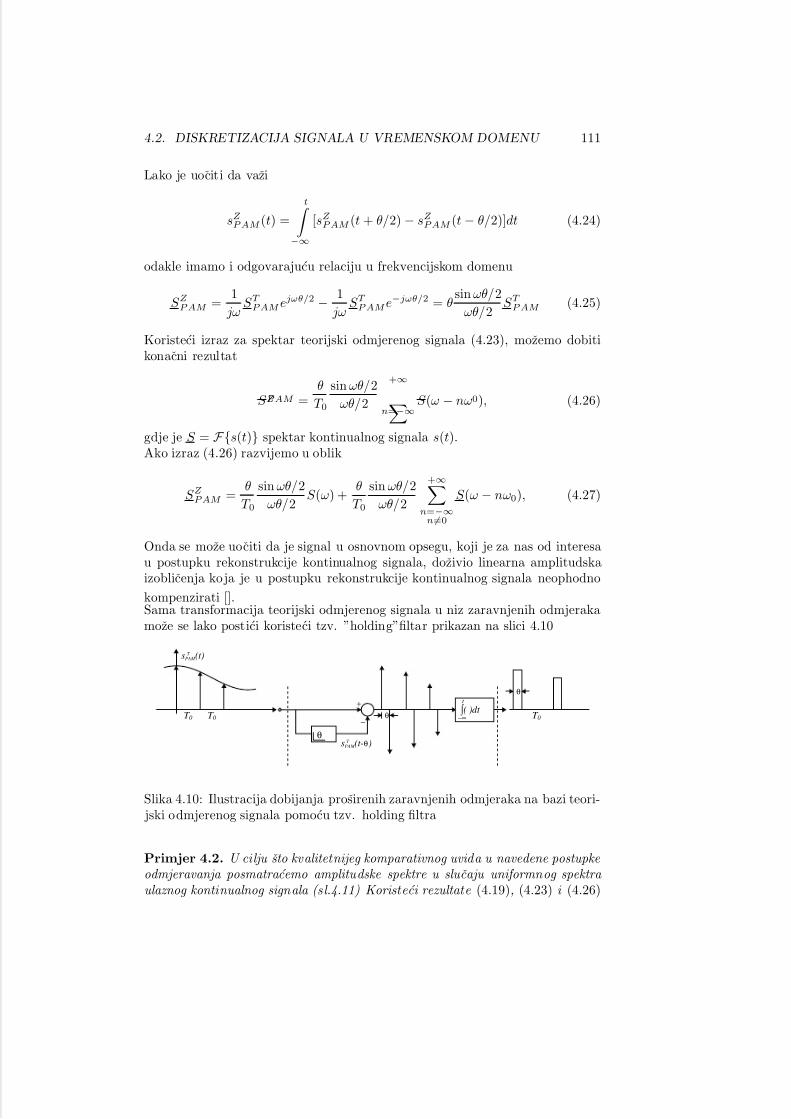
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 117/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 111
Lako je uociti da vazi
sZP AM (t) =
t −∞
[sZP AM (t + θ/2) − sZ
P AM (t − θ/2)]dt (4.24)
odakle imamo i odgovarajucu relaciju u frekvencijskom domenu
S ZP AM =1
jωS T
P AM ejωθ/2 − 1
jωS T
P AM e−jωθ/2 = θ
sin ωθ/2
ωθ/2S T
P AM (4.25)
Koristeci izraz za spektar teorijski odmjerenog signala (4.23), mozemo dobitikonacni rezultat
S ZP AM =θ
T 0
sin ωθ/2
ωθ/2
+∞n=−∞
S (ω − nω0), (4.26)
gdje je S = Fs(t) spektar kontinualnog signala s(t).Ako izraz (4.26) razvijemo u oblik
S ZP AM =θ
T 0
sin ωθ/2
ωθ/2S (ω) +
θ
T 0
sin ωθ/2
ωθ/2
+∞n=−∞
n=0
S (ω − nω0), (4.27)
Onda se moze uociti da je signal u osnovnom opsegu, koji je za nas od interesau postupku rekonstrukcije kontinualnog signala, dozivio linearna amplitudskaizoblicenja koja je u postupku rekonstrukcije kontinualnog signala neophodno
kompenzirati [].Sama transformacija teorijski odmjerenog signala u niz zaravnjenih odmjerakamoze se lako postici koristeci tzv. ”holding”filtar prikazan na slici 4.10
T 0 T 0
sPAM T (t)
θsPAM
T (t- )θ
+
−θ ∫ ( )dt
−∞
t
θ
T 0
Slika 4.10: Ilustracija dobijanja prosirenih zaravnjenih odmjeraka na bazi teori- jski odmjerenog signala pomocu tzv. holding filtra
Primjer 4.2. U cilju sto kvalitetnijeg komparativnog uvida u navedene postupkeodmjeravanja posmatracemo amplitudske spektre u slucaju uniformnog spektra ulaznog kontinualnog signala (sl.4.11) Koristeci rezultate (4.19), (4.23) i (4.26)
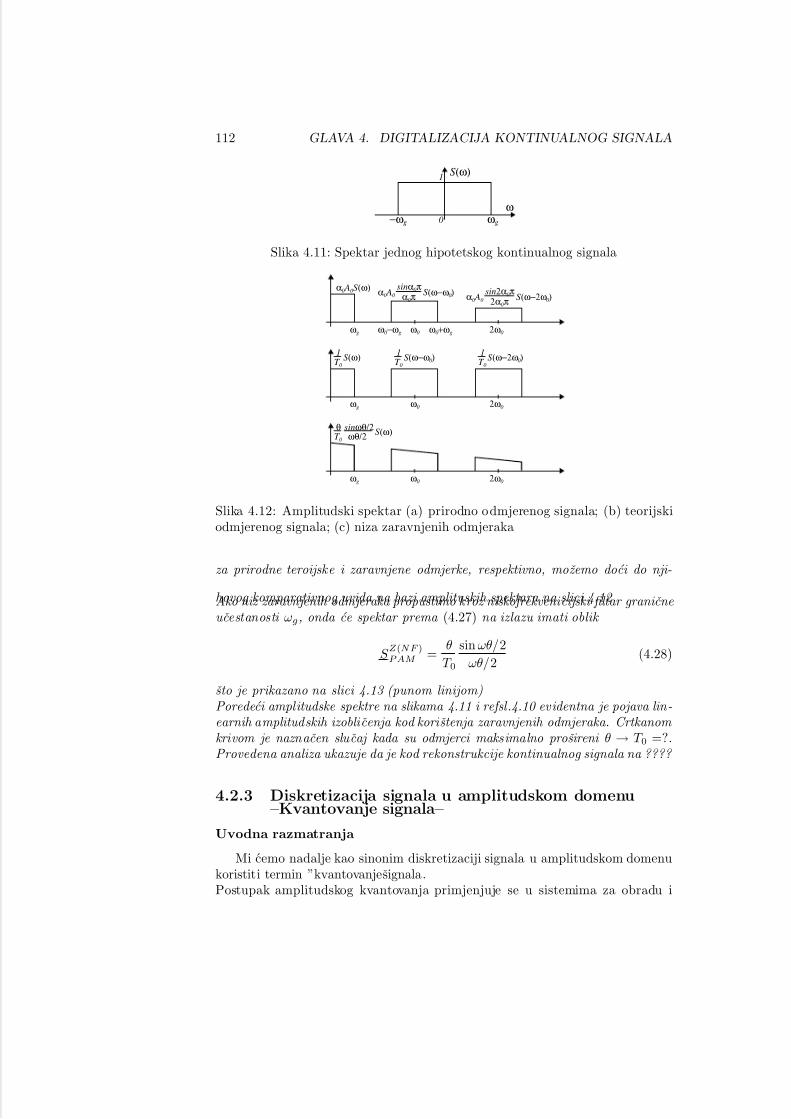
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 118/246
112 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
ωg−ωg
ω
S(ω)1
0
Slika 4.11: Spektar jednog hipotetskog kontinualnog signala
ωg ω0ω0−ωg ω0+ωg 2ω0
α0 A0S(ω)α0 A0
sinα0π
α0πS(ω−ω )0 α0 A0
sin2α0π
2α0πS(ω−2ω )0
ωg ω0 2ω0
1T 0
S(ω)1T 0
S(ω−ω )01T 0
S(ω−2ω )0
ωg ω0 2ω0
θT 0
sinωθ/2ωθ/2
S(ω)
Slika 4.12: Amplitudski spektar (a) prirodno odmjerenog signala; (b) teorijskiodmjerenog signala; (c) niza zaravnjenih odmjeraka
za prirodne teroijske i zaravnjene odmjerke, respektivno, mozemo doci do nji-
hovog komparativnog uvida na bazi amplituskih spektara na slici 4.12 Ako niz zaravnjenih odmjeraka propustimo kroz niskofrekvenicijski filtar granicneucestanosti ωg, onda ce spektar prema (4.27) na izlazu imati oblik
S Z(N F )P AM =
θ
T 0
sin ωθ/2
ωθ/2(4.28)
sto je prikazano na slici 4.13 (punom linijom)Poredeci amplitudske spektre na slikama 4.11 i refsl.4.10 evidentna je pojava lin-earnih amplitudskih izoblicenja kod koristenja zaravnjenih odmjeraka. Crtkanom krivom je naznacen slucaj kada su odmjerci maksimalno prosireni θ → T 0 =?.Provedena analiza ukazuje da je kod rekonstrukcije kontinualnog signala na ????
4.2.3 Diskretizacija signala u amplitudskom domenu–Kvantovanje signala–
Uvodna razmatranja
Mi cemo nadalje kao sinonim diskretizaciji signala u amplitudskom domenukoristiti termin ”kvantovanjesignala.Postupak amplitudskog kvantovanja primjenjuje se u sistemima za obradu i
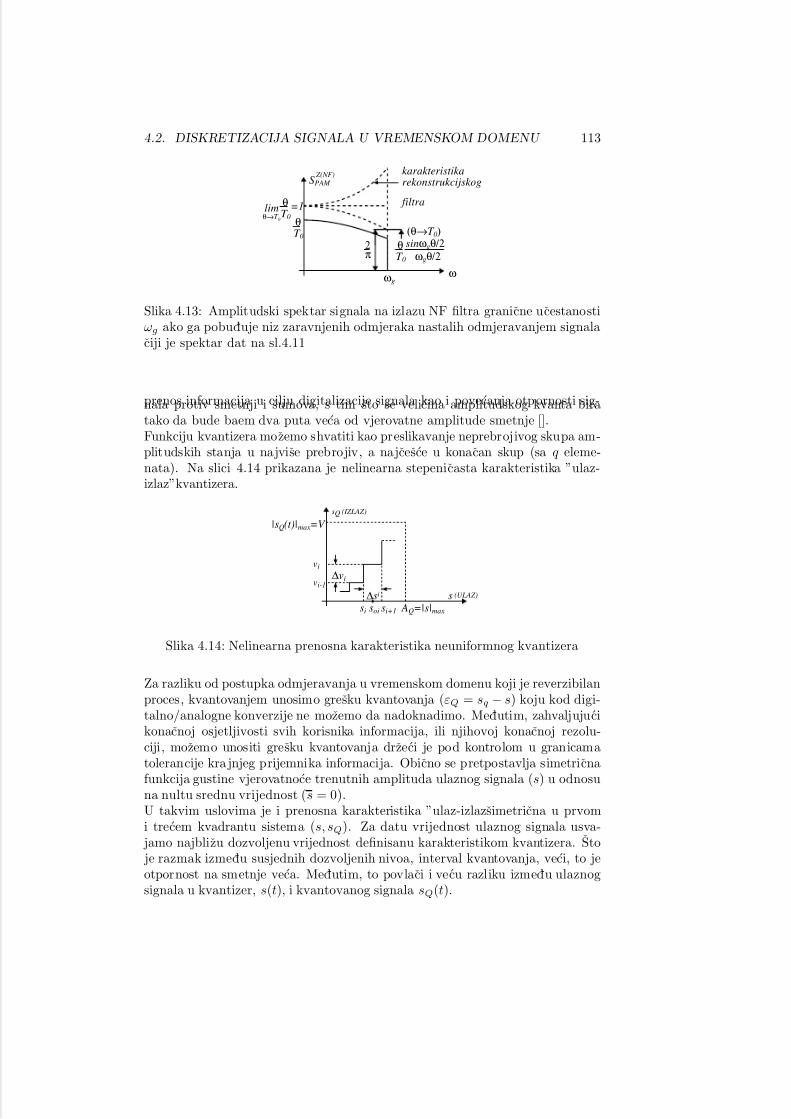
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 119/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 113
ω
(θ→T 0)θT 0
SPAM Z(NF)
2π
θT 0
sinωgθ/2
ωgθ/2
ωg
limθT 0=1
θ→T 0
karakteristikarekonstrukcijskog
filtra
Slika 4.13: Amplitudski spektar signala na izlazu NF filtra granicne ucestanostiωg ako ga pobud-uje niz zaravnjenih odmjeraka nastalih odmjeravanjem signalaciji je spektar dat na sl.4.11
prenos informacija u cilju digitalizacije signala kao i povecanja otpornosti sig-nala protiv smetnji i sumova, s tim sto se velicina amplitudskog kvanta biratako da bude baem dva puta veca od vjerovatne amplitude smetnje [].Funkciju kvantizera mozemo shvatiti kao preslikavanje neprebrojivog skupa am-plitudskih stanja u najvise prebrojiv, a najcesce u konacan skup (sa q eleme-nata). Na slici 4.14 prikazana je nelinearna stepenicasta karakteristika ”ulaz-izlaz”kvantizera.
s (ULAZ)
sQ (IZLAZ)
AQ=|s|maxsi soi si+1
vi-1
vi
∆si
∆vi
|sQ(t)|max=V
Slika 4.14: Nelinearna prenosna karakteristika neuniformnog kvantizera
Za razliku od postupka odmjeravanja u vremenskom domenu koji je reverzibilanproces, kvantovanjem unosimo gresku kvantovanja (εQ = sq − s) koju kod digi-talno/analogne konverzije ne mozemo da nadoknadimo. Med-utim, zahvaljujucikonacnoj osjetljivosti svih korisnika informacija, ili njihovoj konacnoj rezolu-ciji, mozemo unositi gresku kvantovanja drzeci je pod kontrolom u granicamatolerancije kra jnjeg prijemnika informacija. Obicno se pretpostavlja simetricnafunkcija gustine vjerovatnoce trenutnih amplituda ulaznog signala (s) u odnosuna nultu srednu vrijednost (s = 0).U takvim uslovima je i prenosna karakteristika ”ulaz-izlazsimetricna u prvomi trecem kvadrantu sistema (s, sQ). Za datu vrijednost ulaznog signala usva- jamo najblizu dozvoljenu vrijednost definisanu karakteristikom kvantizera. Sto je razmak izmed-u susjednih dozvoljenih nivoa, interval kvantovanja, veci, to jeotpornost na smetnje veca. Med-utim, to povlaci i vecu razliku izmed-u ulaznogsignala u kvantizer, s(t), i kvantovanog signala sQ(t).

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 120/246
114 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
4.2.4 Osnovni parametri kvantizera
Vjerovatni opseg trenutnih vrijednosti pobudnog signala (s) podijelicemo naq zona, gdje sirina zone definise velicinu amplitudskog kvanta
∆si = si+1 − si (i = 0, 1, . . . , q − 1)
Svakom amplitudskom kvantu ∆si jednoznacno odgovara nivo kvantovanja vi
koji ne mora obavezno da bude unutar i–te zone. Razlika izmed-u dva susjednanivoa kvanotvanja naziva se interval kvantovanja
∆vi = vi − vi−1, i = 1, 2, . . . , q − 1
Amplitudski opseg simetricnog kvantizera odred-en je dvostrukim iznosomamplitude s = AQ, a amplitudski opseg kvantovanog signala odred-en je dvostrukomvrijednoscu V . Amplitudski opseg kvantizera (−AQ, AQ) u opstem slucajunije identican amplitudskom opsegu kvantovanog signala (
−V, V ). U praksi
se najcesce usvaja da amplitudski kvant bude jednak intervalu kvantovanja(∆si = ∆vi), a u cilju minimizacije unesene greske kvantovanja nivo kvanto-vanog signala vi (sl.4.14) odgovara aritmetickoj sredini amplitudskog opsega[si, si+1), pa u tom slucaju vrijedi
AQ = V +1
2(∆s)q−1.
Ako ulazni signal premasi amplitudski opseg kvantizera (−AQ, AQ), onda imamogresku preopterecenja
εQP =
V s, s > AQ
0, −AQ ≤ s ≤ AQ
−V
−s, s <
−AQ
Ako je kvantizer dobro projektovan, onda je vjerovatnoca pojave greske pre-opterecenja neznatna.Ako je funkcija gustine vjerovatnoce raspodjele trenutnih amplituda ulaznogsignala unutara amplitudskog opsega kvantizera uniformna, onda je opravdanaupotreba uniformnog kvantizera ∆si = ∆s, (∀i). Na slici 4.15 ilustrovan jepostupak uniformnog kvantovanja jednog kontinualnog signala s(t).Ulazni signal, s(t), crtkana krivulja, tokom vremena prolzi kroz zone razlicitihamplitudskih kvanta. Granice zona naznacene su izprekidanim horizontalnimlinijama. Dok se ulazni signal nalazi unutar iste zone, na izlazu kvantizeraodrzava se konstantni nivo koji obicno odgovara srednjo j aritmetickoj vrijed-nosti odgovarajucih granica zone. U trenutku kada ulazni signal prelazi u zonususjednog kvanta, na izlazu kvantizera nivo se skokoviti mijenja i uzima vri-
jednost sljedeceg dozvoljenog nivoa. Kvantovani signal ima oblik stepenicastefunkcije ako je ulazni signal kontinualnog oblika.Greska kvantovanja iznosi
εQ = sQ − s (4.29)
Tako nastalu gresku nazivamo cesto i sum kvantovanja jer se njen vremenske ispektralne karakteristike cine bliskom sumu kao slucajnom procesu..Takod-e je jasno da vazi |εQ|max < 1
2∆smax.
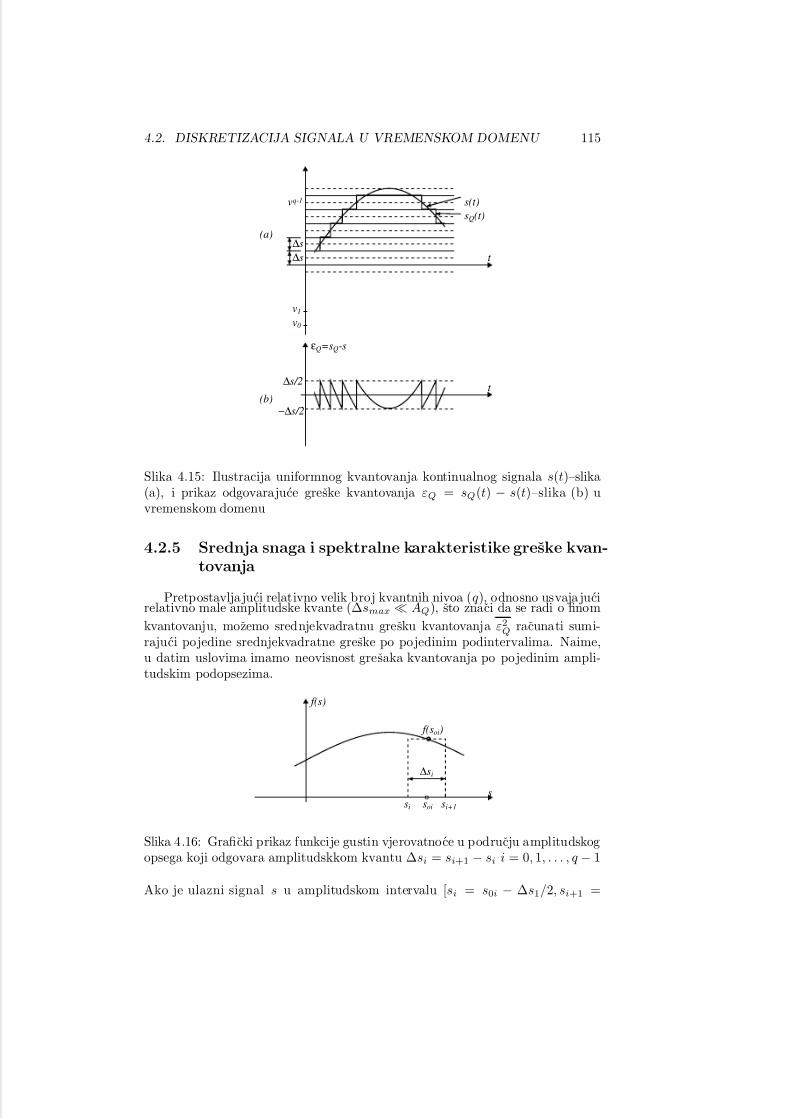
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 121/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 115
t
t
s(t)
sQ(t)
vq-1
v0
v1
∆s
∆s
∆s/2
−∆s/2
εQ=sQ-s
(b)
(a)
Slika 4.15: Ilustracija uniformnog kvantovanja kontinualnog signala s(t)–slika(a), i prikaz odgovarajuce greske kvantovanja εQ = sQ(t) − s(t)–slika (b) uvremenskom domenu
4.2.5 Srednja snaga i spektralne karakteristike greske kvan-tovanja
Pretpostavlja juci relativno velik broj kvantnih nivoa (q), odnosno usvaja jucirelativno male amplitudske kvante (∆smax AQ), sto znaci da se radi o finom
kvantovanju, mozemo srednjekvadratnu gresku kvantovanja ε2Q racunati sumi-
rajuci pojedine srednjekvadratne greske po pojedinim podintervalima. Naime,u datim uslovima imamo neovisnost gresaka kvantovanja po pojedinim ampli-tudskim podopsezima.
s
f(s)
si si+1soi
f(soi)
∆si
Slika 4.16: Graficki prikaz funkcije gustin vjerovatnoce u podrucju amplitudskogopsega koji odgovara amplitudskkom kvantu ∆si = si+1 − si i = 0, 1, . . . , q − 1
Ako je ulazni signal s u amplitudskom intervalu [si = s0i − ∆s1/2, si+1 =

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 122/246
116 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
s0i + ∆s1/2) (slike 4.14 i 4.16), onda je kvantovani signal sQ = vi, gdje vi u
opstem slucaju ne mora p o svojoj vrijednosti biti iz opsega [si, si+1). Med-utim,najcesce, u cilju minimizacije srednjekvadratne greske kvantovanja vrijednost
vi jednaka je s0i = 12
(si + si+1), tj. aritmetickoj sredini granica posmatranogpodopsega [si, si+1).Pri tome ucinjena greska kvantovanja iznosi
εQi = s0i − s s ∈ [si, si+1). (4.30)
Odgovarajucu srednje kvadratnu gresku lako mozemo izracunati
ε2Qi =
s0i+∆si/2 s0i−∆si/2
(s − s0i)2f (s)ds, (4.31)
gdje je f (s) funkcija gustine vjerovatnoce ulasnog signala s. Pretpostavlja jucimalu promjenu funkcije f (s) u intervalu od si do si+1, mozemo je fiksirati nasredisnju vrijednost f (s0i sto pojednostavljuje izraz (4.31)
ε2Qi = f (s0i)
s∈[si,si+1)
(s − s0i)2d(s − s0i) = f (s0i)∆s3
i
12(4.32)
Kako u pretpostavljenim uslovima vazi
si+1 s1
f (s)ds ≈ f (s0i)∆si = p(sq = s0i) = p(∆si0,
onda (4.32) prelazi u oblik
ε2Qi =
∆s2i
12f (s0i)∆si =
∆s2i
12p(∆si). (4.33)
Srednje kvadratna greska kvantovanja u cijelokupnom amplitudskom opseguiznosi
ε2Q = P Q =
i
ε2Qi =
1
12
i
∆s2i p(∆si) =
∆s2i
12. (4.34)
U slucaju uniformnog kvantovanja, ∆si = ∆s, ∀i, imamo poznati rezultat
P Q = ε2Q =
∆s2
12
. (4.35)
Posto smo dosli do jednog inzenjerski znacajnog rezultata (4.35), osvrnucemose i na autokorelacionu funkciju i spektralnu gustinu sage greske kvantovanja.Posmatracemo simetricni uniformni kvantizer za koji vazi ∆si = ∆vi = ∆s.Ako se ulazni signal u kvantizer u trenutku t1 nalazi u amplitudskom ospegu
2n − 1
2∆s ≤ s(t1) <
2n + 1
2∆s,
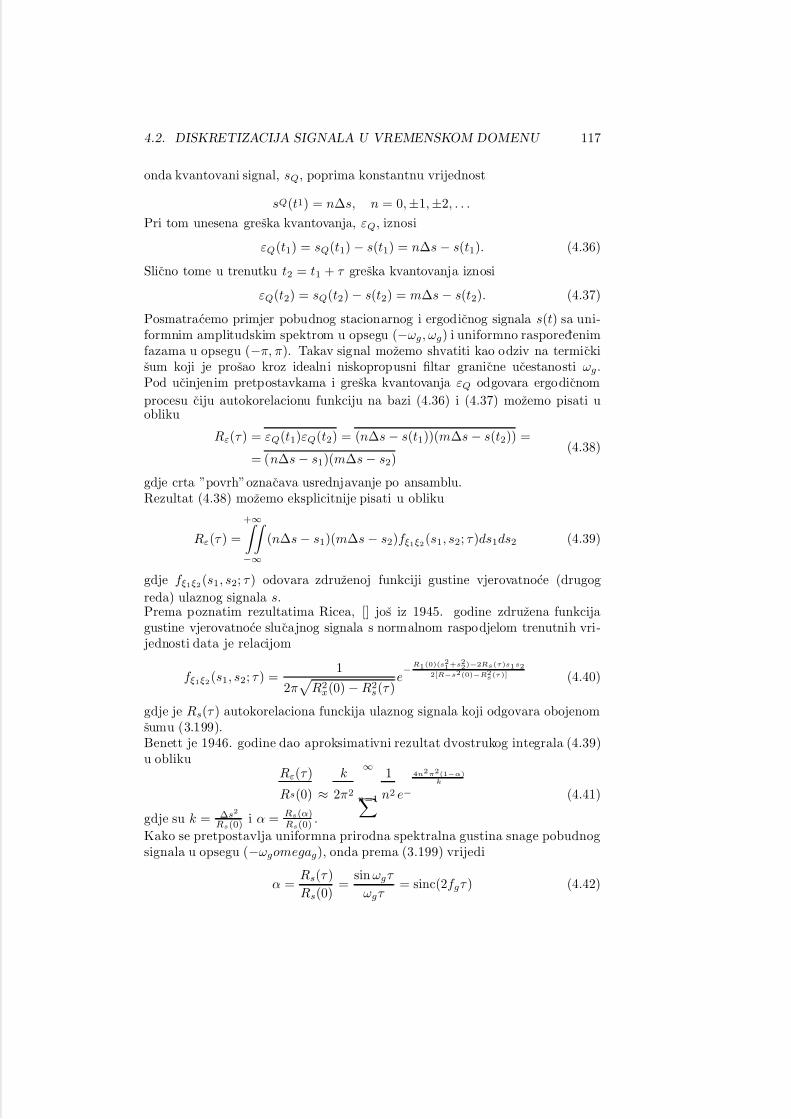
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 123/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 117
onda kvantovani signal, sQ, poprima konstantnu vrijednost
sQ(t1) = n∆s, n = 0, ±1, ±2, . . .
Pri tom unesena greska kvantovanja, εQ, iznosi
εQ(t1) = sQ(t1) − s(t1) = n∆s − s(t1). (4.36)
Slicno tome u trenutku t2 = t1 + τ greska kvantovanja iznosi
εQ(t2) = sQ(t2) − s(t2) = m∆s − s(t2). (4.37)
Posmatracemo primjer pobudnog stacionarnog i ergodicnog signala s(t) sa uni-formnim amplitudskim spektrom u opsegu (−ωg, ωg) i uniformno raspored-enimfazama u opsegu (−π, π). Takav signal mozemo shvatiti kao odziv na termickisum koji je prosao kroz idealni niskopropusni filtar granicne ucestanosti ωg.Pod ucinjenim pretpostavkama i greska kvantovanja εQ odgovara ergodicnom
procesu ciju autokorelacionu funkciju na bazi (4.36) i (4.37) mozemo pisati uobliku
Rε(τ ) = εQ(t1)εQ(t2) = (n∆s − s(t1))(m∆s − s(t2)) =
= (n∆s − s1)(m∆s − s2)(4.38)
gdje crta ”povrh”oznacava usrednjavanje po ansamblu.Rezultat (4.38) mozemo eksplicitnije pisati u obliku
Rε(τ ) =
+∞ −∞
(n∆s − s1)(m∆s − s2)f ξ1ξ2(s1, s2; τ )ds1ds2 (4.39)
gdje f ξ1ξ2(s1, s2; τ ) odovara zdruzenoj funkciji gustine vjerovatnoce (drugog
reda) ulaznog signala s.Prema poznatim rezultatima Ricea, [] jos iz 1945. godine zdruzena funkcijagustine vjerovatnoce slucajnog signala s normalnom raspodjelom trenutnih vri- jednosti data je relacijom
f ξ1ξ2(s1, s2; τ ) =1
2π
R2x(0) − R2
s (τ )e−R1(0)(s
21+s
22)−2Rs(τ)s1s2
2[R−s2(0)−R2s(τ)] (4.40)
gdje je Rs(τ ) autokorelaciona funckija ulaznog signala koji odgovara obojenomsumu (3.199).Benett je 1946. godine dao aproksimativni rezultat dvostrukog integrala (4.39)u obliku
Rε(τ )
Rs(0) ≈k
2π2
∞
n=1
1
n2 e−4n2π2(1−α)
k
(4.41)
gdje su k = ∆s2
Rs(0)i α = Rs(α)
Rs(0).
Kako se pretpostavlja uniformna prirodna spektralna gustina snage pobudnogsignala u opsegu (−ωgomegag), onda prema (3.199) vrijedi
α =Rs(τ )
Rs(0)=
sin ωg τ
ωgτ = sinc(2f gτ ) (4.42)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 124/246
118 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
Ako usvojimo AQ = 4σs = 4
Rs(0), odnosno q =
2AQ
∆s = 2n ond za korak
kvantovanja imamo
∆s =2AQ
q=
2 · 4σs
2nili
k =∆s2
Rs(0)=
22 · 42 · σ2s
22nσ2s
=1
4n−3
(4.43)
Na taj nacin mozemo dobiti normalizovanu autokorelacionu funkciju greskekvantovanja (4.11) u funkciji normirane autokorelacione funkcije ulaznog sig-nala. Analiza autokorelacione funkcije greske kvantovanja Rε ukazuje da imaostar maksimum za τ = 0(⇔ x = 1) i da brzo opada kada |τ −0| raste u uslovimavelikog broja nivoa (q ≥ 128).Prethodna analiza ukazuje da autokorelacionu funkciju greske kvantovanja kod
relativno velikog broja nivoa (q), odnosno relativno malog koraka kvantovanja(∆s) u odnosu na standardnu devijaciju σs =
Rs(0) = seff , mozemo aproksi-
mativno usvojiti uobliku Dirakove funkcije.Koristeci Wiener–Khinchineovu teoremu na bazi autokorelacione funkcije greskekvantovanja (4.41) mozemo odrediti prirodnu spektralnu gustinu snage
ΦεQ = 4
∞ 0
RεQ(τ )cos2πfτdτ ≈ k
2π3
3k
2π
∞n=1
1
n3e−
3kγ2
8n2π2 (4.44)
gdje je γ = f f g
= ωωg
normirana frekvencija.
Analizirajuci frekvencijsku zavisnost spektralne gustine snage greske kvanto-vanja (sl.4.17) uocavamo da ona u relativno sirokom opsegu (0, 40f
g) pa i sire
za q 128, zadrzava konstantan nivo.
ΦεQ
10-5
10-6
10-7
0 40 80 120 160
q=64
q=128
q=256 f
f g
Slika 4.17: Prirodna spektralna gustina snage greske kvantovanja
Stoga je kod realizacije tzv. ”finog”kvantovanja, kada je q relativno velikoodnosno ∆s relativno malo, greska kvantovanja bliska bijelom sumu pa u tomslucaju greskukvantovanja sa punim pravom nazivamo sumom kvantovanja.Posto smo izvrsili diskretizaciju signala u vremenskom i amplitudskom domenu,mi smo zapravo izvrsili i njegovu digitalizaciju i kontinualni signal, s(t), prikazalikao sekvencu cifara odnosno d-igita”na bazi q–arnog skupa mogucih ampli-tudskih stanja.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 125/246
4.2. DISKRETIZACIJA SIGNALA U VREMENSKOM DOMENU 119
U cilju jednostavnije realizacije sistema za memorisanje ili prenos informacija,
a posebno zbog povecanja otpornosti na sum medijuma, listu od q mogucih el-emenata preslikavamo u m–arnu listu [], gdje je obicno m q, a najcesce jem = 2.Prethodnu tvrdnju cemo potkrijepiti jednim primjerom gdje cemo analizirativjerovatnocu greske u prijemniku informacija u zavisnosti od broja mogucihamplitudskih stanja digitalnog signala.
Primjer 4.3 (Analiza uticaja broja mogucih amplitudskih stanja (m) na vjerovatnocugreske na odredistu informacija).Posmatracemo model medijuma sa aditivnim Gaussovim sumom ( n(t)) nultesrednje vrijednosti ( n = 0) i varijanse σ2
n (sl.refsl.4.15)
A1
A2
Ai-1
Ai
Ai+1
Am-1
Am
s1 s2=s1+n
n(t) Ai-1
Ai
Ai+1
0
n
f n= 1
√2πσn
e-
n2
2σn2
∆a
p(Ai)=1/m (∀i)
Slika 4.18: Model sistema za analizu uticajabroja mogucih amplitudskih stanja(m) signala u prisustvu aditivnog Gaussovog suma na vjerovatnocu greske kodprijemnika informacija
Prvo cemo odrediti vjerovatnoce korektnog prijema pojedinih amplitudskih stanja.Ocigledno za 2 ≤ i ≤ m − 1 vrijedi
p(Ai/Ai) = p(Ai − ∆a/2 ≤ s2 = Ai + n(t) < ai + ∆a/2) =
= p(|n(t)| < ∆a/2) =
−∆a/2∆a/2f ndn = 2
∆a/2 0
f ndn.
Za najnizi i najvisi amplitudski nivo imamo
p(A1/A1) = p(−∞ < n < ∆a/2) =
∆a/2
−∞
f ndn i
p(Am/Am) = p(−∆a/2 < n < ∞) =
+∞ −∆a/2
f ndn
Pretpostavljajuci podjednaku apriornu vjerovatnocu pojedinih amplitudskih stanja,

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 126/246
120 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
onda vjerovatnoca korektnog prijema bilo kojeg amplitudskog stanja iznosi
pk =
mi=1
p(Ai) p(Ai/Ai) =1
m
mi=1
p(Ai/Ai) =1
m
1 + (m − 1)
∆a/2 −∆a/2
f ndn
ili konacno
pk =1
m
1 + 2(m − 1)
∆a/2 0
f ndn
=
=1
m
1 + 2(m − 1)
∆a/2
0
e−
n√ 2σn
2
d
n√2σn
=
=1
m
1 + 2(m − 1)1
π
a2√ 2σn
0
e−t2dt
Uvodeci pojam komplementarne funkcije greske
erfc(x) =1
π
∞ x
e−t2dt[],
koja monotono opada sa porastom argumenta x (sl.4.16),
t x
erfc(x)
1√πe
-t 2
Slika 4.19: Graficka ilustracija komplementarne funkcije greske
onda vjerovatnocu greske P ε = 1 − P k mozemo prikazati u konacnom obliku
P ε = 1 − P k =2(m − 1)
merfc
∆a
2√
2σn
(4.45)
Ako usvojimo amplitudski opseg ulaznog skupamogucih amplitudskih stanja (
−AQ, AQ),
onda u slucaju konstantne distance izmed -u susjednih amplitudskih nivoa ( ∆a)imamo
∆a =2AQ
m. (4.46)
Uz rezultat (4.46) vjerovatnoca greske (4.45) poprima oblik
P ε =2(m − 1)
merfc
AQ√2mσn
. (4.47)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 127/246
4.3. KODOVANJE 121
Kako faktor 2(m−1)m monotono raste, a argument AQ√
2mσnmonotono opada sa po-
rastom broja nivoa m, 2 ≤ m < ∞, onda mozemo analiticki potvrditi intuitivnoocekivani zakljucak da vjerovatnoca greske raste sa povecanjem broja nivoa modnosno sa smanjivanjem distance izmed -u susjednih amplitudskih nivoa u datom mogucem amplitudskom opsegu (−AQ, AQ).Stecena iskustva i znanja ukazuju na potrebud a se nakon diskretizacije signala u vremenskom i amplitudskom domenu, gdje je obicno q 1, uvodi transformacija q–arne u m–arnu kodnu osnovu ( m q). Data transformacija kodne osnove secesto naziva ”kodovanjem”. Digitalizacija signala na bazi diskretizacije u vre-menskom domenu (odmjeravanje), zatim diskretizacije u amplitudskom domenu (kvantovanje) i konacno pomenutog ”kodovanja”odgovara poznatoj PCM (PulseCode Modulation) A/D konverziji kontinualnog signala koju je patentirao josdaleke 1938. godine Alec Reeves [].
4.3 Kodovanje
U sistemima za obradu i prenos informacija postupak kodovanja najcescesusrecemo kao etapu u transformaciji analognog kontinualnog signala u prakticnoprihvatljiv digitalni oblik. Uobicajena je u takvim transformacijama signalanakod odmjeravanja u vremenskom i kvantovanja u amplitudskom domenu sig-nala primjena kodovanja (sl.4.20)
KODER
Z i , i=0,1,...,q-1
Z=z1 ,z2 ,...,zk
k ≤q
X i , i=0,1,...,q-1
X=x1 ,x2 ,...,xm
m≤q
Slika 4.20: Model kodera
U takvom slucaju postupak kodovanja mozemo shvatiti kao transformaciju jednekodne osnove (k–te) u drugu (m–arnu).Pored uloge transformatora kodne osnove koder ponekad koristimo u cilju prom- jene zakona kodovanja uz eventualno zadrzavanje iste kodne osnove na ulazu iizlazu kodera. Pricnip kodovanja se svodi na to da se, prema nekoj unapri- jed utvrd-enoj konvenciji, svakom od dozvoljenih nizova s liste ulaznih simbolaz1, z2, . . . zk dodjeljuje jedan niz sa izlazne liste x1, x2, . . . xm [].U tehnici digitalne obrade i prenosa informacija najcesce se koriste uniformnikodovi kod kojih je duzina svakog ”bloka”konstantna za datu listu. Fiksirani
niz (”blok”) simbola kodne liste naziva se ”kodna rijec”.Prvo cemo se pozabaviti tehnikom uniformnog blok kodovanja. Neka ulaznalista Z sadrzi k razlicitih digita odnosno cifara Z = z1, z2, . . . zk.Niz od ”lsimbola sa ulazne liste cini jedan blok koji predstavlja kodnu rijec Z i(i = 0, . . . , q − 1). U tom slucaju broj dozvoljenih kodni8h rijeci je manji ili jednak od broja varijacija s ponavljanjem l–te klase od k razlicitih simbola.
q ≤ kl (4.48)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 128/246
122 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
Vrednovanje pojedinih digita ukonacnom nizu od l simbola zavisi od usvojene
osnove brojnog sistema (kao i samog koncepta). Za ulaznu kodnu listu (sl.4.20)osnova brojnog sistema jednaka je broju razliCitih simbola, k, pa se numerickavrijednost kodne rijeci Z i moze, pored ostalih, predstaviti ”prirodnimzakonomkodovanja
Z i l
r=1
z(i)r kl−r, i = 0, 1, . . . , q − 1 (4.49)
gdje je z(i)r digit definisan kao element skupa 0, 1, . . . , k − 1. Pretpostavicemo
da izlazna kodna lista sadrzi m razlicitih simbola X = x1, x2, . . . , xm i da je duzina izlaznih kodnih rijeci n izolovanih kodnih simbola.Da bi kodovanje imalo smisla mora da postoji korespodencija ”1–1”(one–to–one)izmed-u kodnih rijeci Z i na ulazu i kodnih rijeci xi na izlazu kodera (nesingu-larnost koda []). tj.
Z i ⇔ X i i = 0, 1, . . . , q − 1
To znaci da analogno relaciji (4.48) takod-e vazi
mn ≥ q. (4.50)
Numericku vrijednost kodne rijeci izrazicemo pomocu prirodnog m–arnog koda
X i n
j=1
x(i)j mn−j , i = 0, 1, . . . , q − 1, (4.51)
gdje je x(i)j = 0, 1, . . . , m − 1.
Polazeci od uslova nesingularnosti izmed-u (4.49) i (4.51) mozemo uspostavitirelaciju
Z i l
r=1
z(i)r kl−r ⇔ X i
nj=1
x(i)j mn−1, i = 0, 1, . . . , q − 1 (4.52)
U tabeli 4.1 ilustrovan je postupak preslikavanja dekadne (k = 10) u binarnulistu (m = 2) u slucaju daje q = 16.Primjer 4.2 ukazao je na cesto prisutan motiv smanjivanja osnove koda u ciljupovecanja pouzdanosti i jednostavnosti sistema.Tako, na primjer, ako je q = 1024 potrebno je svaki odmjerak u dekadnom sis-temu kodovati sa 4 digita, a u binarnom sa 8 bita. Kod dekadnog sistema svakidigit bi poprimao jedno od 10 mogucih amplitudskih stanja pa bi odgovarajucikoder bio vrlo slozen, a regeneracija signala umedijumu sa smetnjama nepouz-dana. Prelaskom na niz]u vrijednost osnove brojnog sistema ove nepogodnostise ublazavaju. Kod binarnog koda elektronska logicka kola su vrlo jednostavnaa regeneracija binarnih informacionih nosilaca relativno pouzdana [].Osvrnucemo se sada na mogucnost transformacije zakona kodovanja uz zadrza-vanje iste kodne osnove.Posmatracemo transformaciju prirodnog binarnog koda u binarni reflekotovani

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 129/246
4.3. KODOVANJE 123
Prirodni dikodni brojevi (q = 16) Prirodni binarni brojevi (q = 10)i Z
iX
i0 00 00001 01 00012 02 00103 03 00114 04 01005 05 01016 06 01107 07 01118 08 10009 09 1001
10 10 101011 11 1011
12 12 110013 13 110114 14 111015 15 1111
Tabela 4.1:
kod koji je predlozio Gray.Za Grayov kod imamo
X i 1
j=n
(−1)c+1x(i)j (2j − 1), i = 0, 1, . . . , q − 1, (4.53)
gdje je c redni broj binarne jedinice (slijeva u desno) u datoj kodnoj rijeci, a
x(i)j ∈ 0, 1.
Kako k = m = 2, onda imamo odgovarajucu relaciju
Z i
z(i)r 2l−r ⇔ X i
1j=n
(−1)c+1x(i)j (2j − 1), z(i)
r , x(i)j ∈ 0, 1 (4.54)
Za slucaj da je q = 16 u tabeli 4.2 ilustrovana je odgovarajuca korespodencijakodnih rijeci prema (4.54)U slucju kodovanja signala sa parnom funkcijom gustine vjerovatnoce zgodna je
upotreba tzv. simetricnog”binarnog koda [] itd.Kod konvencionalnog PCM kodera imamo k = q i obicno m = 2 pa odgovara juciA/D konvertor ima blok semu prikazanu na slici 4.21Na istoj slici je ilustrovan postupak PCM–A/D konverzije za konkretnu vri- jednost q = 8, odakle prema (4.50) dobijamo duzinu kodnih rijeci n = 3 kaonajmanji prirodan broj koji zadovoljava nejednakost
2n ≥ q. (4.55)
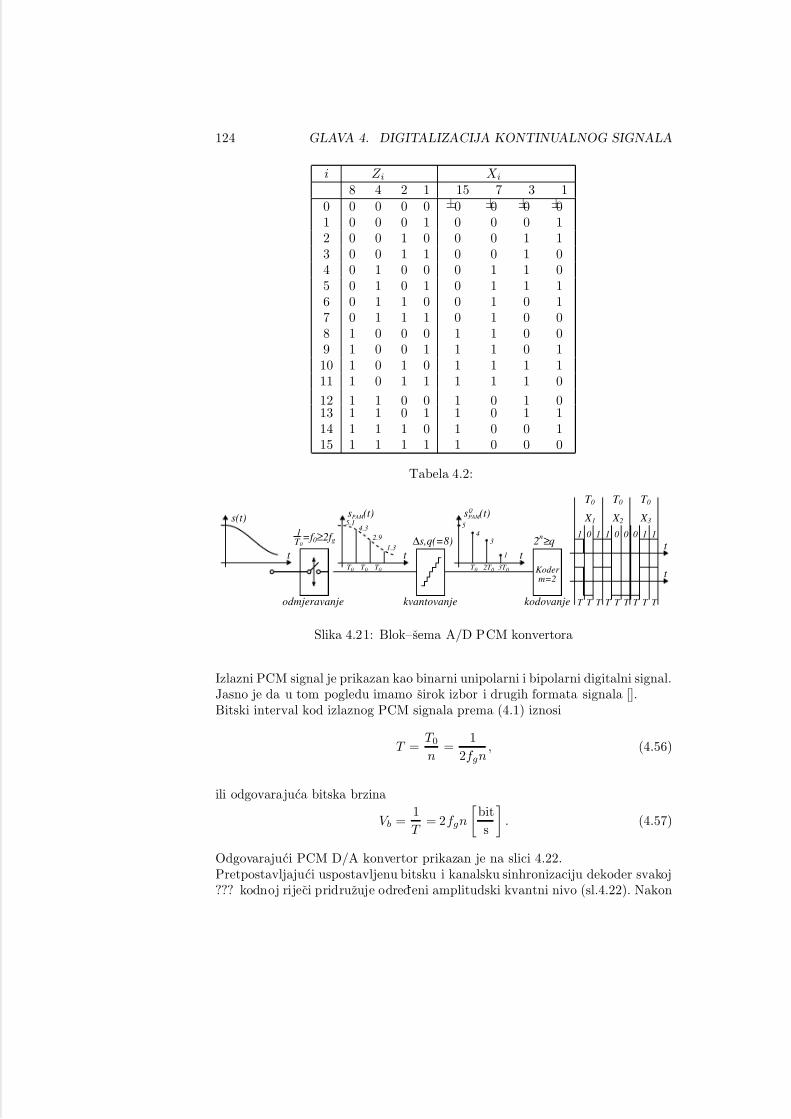
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 130/246
124 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
i Z i X i8 4 2 1
±15
±7
±3
±1
0 0 0 0 0 0 0 0 01 0 0 0 1 0 0 0 12 0 0 1 0 0 0 1 13 0 0 1 1 0 0 1 04 0 1 0 0 0 1 1 05 0 1 0 1 0 1 1 16 0 1 1 0 0 1 0 17 0 1 1 1 0 1 0 08 1 0 0 0 1 1 0 09 1 0 0 1 1 1 0 1
10 1 0 1 0 1 1 1 111 1 0 1 1 1 1 1 0
12 1 1 0 0 1 0 1 013 1 1 0 1 1 0 1 114 1 1 1 0 1 0 0 115 1 1 1 1 1 0 0 0
Tabela 4.2:
s(t)
t
odmjeravanje
1T 0
=f 0≥2f g
t
sPAM (t)
T 0 T 0 T 0
5.14.3
2.9
1.3
kvantovanje
∆s,q(=8)
t
sPAM (t)Q
5
43
1
T 0 2T 0 3T 0 Koder m=2
2n≥q
kodovanje
T 0 T 0 T 0
X 1 X 2 X 3
1 0 1 1 0 0 0 1 1
T T T T T T T T T
t
t
Slika 4.21: Blok–sema A/D PCM konvertora
Izlazni PCM signal je prikazan kao binarni unipolarni i bipolarni digitalni signal.Jasno je da u tom pogledu imamo sirok izbor i drugih formata signala [].Bitski interval kod izlaznog PCM signala prema (4.1) iznosi
T =T 0n
=1
2f gn, (4.56)
ili odgovarajuca bitska brzina
V b =1
T = 2f gn
bit
s
. (4.57)
Odgovarajuci PCM D/A konvertor prikazan je na slici 4.22.Pretpostavljajuci uspostavljenu bitsku i kanalsku sinhronizaciju dekoder svakoj??? kodnoj rijeci pridruzuje odred-eni amplitudski kvantni nivo (sl.4.22). Nakon

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 131/246
4.3. KODOVANJE 125
1 0 1 1 0 0 0 1 1
T 0 T 0 T 0
T Dekoder
t
54
3
1
T 0T 0T 0
0−ωg
1α0
sQ(t)=s(t)+εQ(t)
Slika 4.22: Blok–sema PCM D/A konvertora
niskogrekvencijskog filtriranja i eventualnog pojacanja kvantovanog signala do-bijamo kontinualni signal sQ(t) koji se u odnosu na kontinualni izvorni signals(t) (sl.4.18) razlikuje za unesenu gresku kvantovanja εQ(t) tj.
sQ(t) = s(t) + εQ(t). (4.58)
Kvalitet reprodukcije kontinualnog signala ”objektivno”mjerimo pomocu odnosasignal–sum kvanotvanja ili krace SN RQ (Signal Noise Ratio) u obliku
SN RQ[dB] = 10 logP sP Q
= 10 logs2
ε2Q
. (4.59)
U cilju utvrd-ivanja zavisnosti odnosa signal–sum kvantovanja od parametaraA/D konvertora posmatracemo neke konkretne primjere digializacije signala.
Primjer 4.4 (Uniformno kvantovanje Gaussovog procesa).Posmatracemo signal nulte srednje vrijednosti ( s = 0), koji pripada stacionarnom
Gaussovom procesu cija prosta funkcija gustine vjerovatnoce ima oblik
f (s) =1√
2πσs
e−s2
2σs , (4.60)
gdje je varijansa σ2s = (s − s)2 = s2 − (s)2 = s2/s=0 = P s u datim uslovima
jednaka srednjoj snazi datog signala. Lako je utvrditi da aproksimativno vrijedi
p(|s| < σs) = 0.68 p(|s| < 2σs) = 0.954 p(|s| < 3σs) = 0.997 itd.
sto znaci da prakticno amplitudski opseg kvantizera mozemo definisati kao am-
plitudski interval (−4σs, 4σ2).To znaci da amplitudski kvant ∆s iznosi
∆s =8σs
q=
8σ2
2n(4.61)
gdje su q broj kvantnih nivoa kvantizera, a n duzina kodnih rijeci definisana relacijom (4.54).

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 132/246
126 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
Koristeci izraz za srednju snagu suma kvantovanja (4.35) i rezultat (4.61) lako
se dobija SN RQ = 10 log
P sP Q
= 10logs2
ε2Q
= 6n − 7.2 (4.62)
Naglasimo da dobijeni rezultat pretpostavlja koriscenje relativno velikog broja kvantnih nivoa u amplitudskom opsegu (−4σs, 4σs) cime sticemo pravo na koriscenjeranije opstih dobijenih rezultata za srednju snagu greske kvantovanja (4.34) i (4.35).
Primjer 4.5 (Uniformno kvantovanje sinusnog signala).
s(t) = As sin2πf st
U okviru ovog primjera imamo amplitudski opseg kvantizera [
−As, As], gdje je
srednja snaga posmatranog kontinualnog signala P s = A2s/2, a srednja snaga greske kvantovanja P Q = ε2
Q = 112
∆s2 = 112
2As
2n
2.
Konacno imamo
SN RQ = 10logP sP Q
= 6n + 10 log3
2[dB] (4.63)
Rezultate (4.62) i (4.63) formulisacemo kao opste poznati rezultat da osnossignal–sum kvantovanja”mozemo pisati u obliku
SN RQ = 10 logP sP Q
= 6n + c, (4.64)
gdje je n duzina kodnih rijeci u PCM koderu, a konstanta c zavisi od prirodeposmatranog signala kji digitalizujemo.Rezultat (4.64) ukazuje da 1 bit u kodnoj rijeci ima ”tezinu 6dB u odnosusignal–sum kvantovanja [].To znaci da kvalitet rekonstruisanog signala nakon A/D odnosno D/A konverzijemozemo da kontrolisemo odgovarajucim izborom duzine kodnih rijeci (n) sto,sa druge strane, prema (4.57) ima neposredan uticaj na potreban kapacitetmemorijskog ili prenosnog medijuma.Strozija analiza greske kvantovanja (ε2
Q) u rekonstruisanom signalu (4.58) mozeumanjiti i povecanom frekvencijom odmjeravanja (f 0) u odnosu na minimalnopotrebnu (2f g) koju propisuje teorema odmjeravanja []. U tom slucaju srednjasnaga greske kvantovanja (4.35) poprima oblik
P Q = ∆s2
122f ggo
(4.65)
To je slucaj tzv. preodmjeravanja signala (oversampling).
Primjer 4.6 (Jednobitsko kodovanje procesa sa uniformnom funkcijom gustinevjerovatnoce raspodjele trenutnih amplituda (sl.4.23)). S obzirom da se u ovom slucaju radi o grubom kvantovanju signala sa samo q = 21 = 2 nivoa, ukazacemo
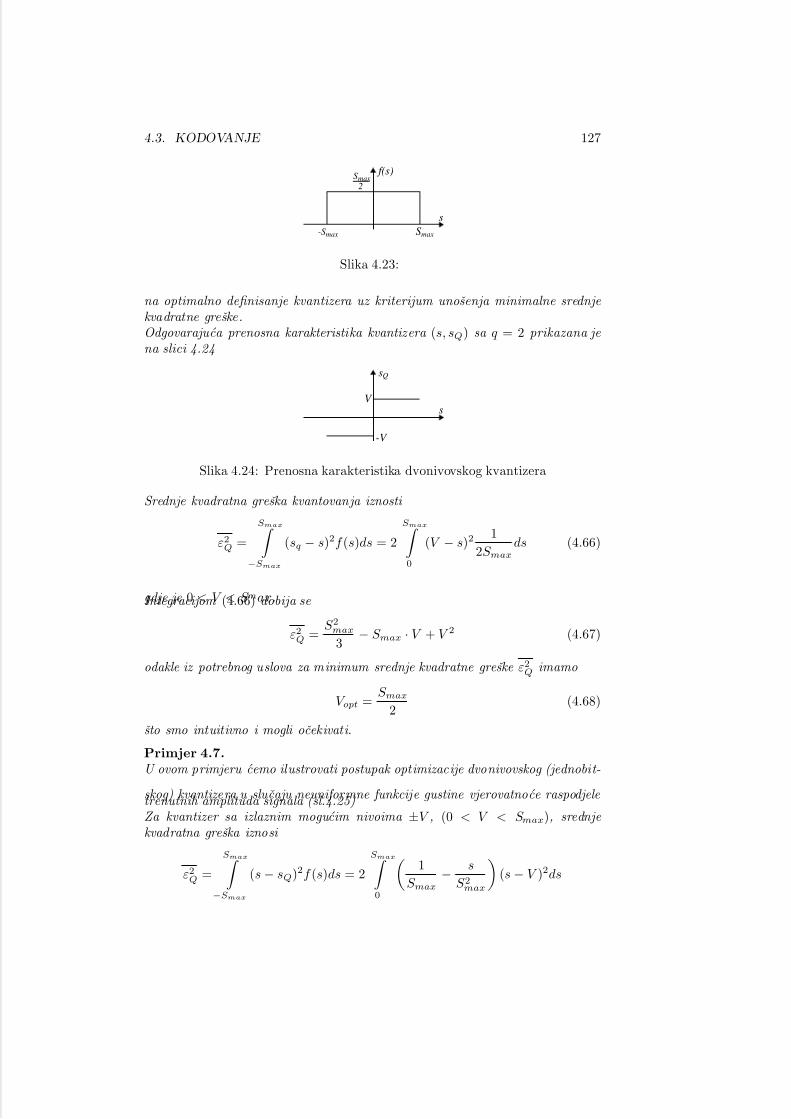
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 133/246
4.3. KODOVANJE 127
s
f(s)Smax2
-Smax Smax
Slika 4.23:
na optimalno definisanje kvantizera uz kriterijum unosenja minimalne srednjekvadratne greske.Odgovarajuca prenosna karakteristika kvantizera (s, sQ) sa q = 2 prikazana jena slici 4.24
s
sQ
V
-V
Slika 4.24: Prenosna karakteristika dvonivovskog kvantizera
Srednje kvadratna greska kvantovanja iznosti
ε2Q =
Smax −Smax
(sq − s)2f (s)ds = 2
Smax 0
(V − s)2 1
2S maxds (4.66)
gdje je 0 < V < S max.Integracijom (4.66) dobija se
ε2Q =
S 2max
3− S max · V + V 2 (4.67)
odakle iz potrebnog uslova za minimum srednje kvadratne greske ε2Q imamo
V opt =S max
2(4.68)
sto smo intuitivno i mogli ocekivati.
Primjer 4.7.U ovom primjeru cemo ilustrovati postupak optimizacije dvonivovskog (jednobit-
skog) kvantizera u slucaju neuniformne funkcije gustine vjerovatnoce raspodjeletrenutnih amplituda signala (sl.4.25)Za kvantizer sa izlaznim mogucim nivoima ±V , (0 < V < S max), srednjekvadratna greska iznosi
ε2Q =
Smax −Smax
(s − sQ)2f (s)ds = 2
Smax 0
1
S max− s
S 2max
(s − V )2ds
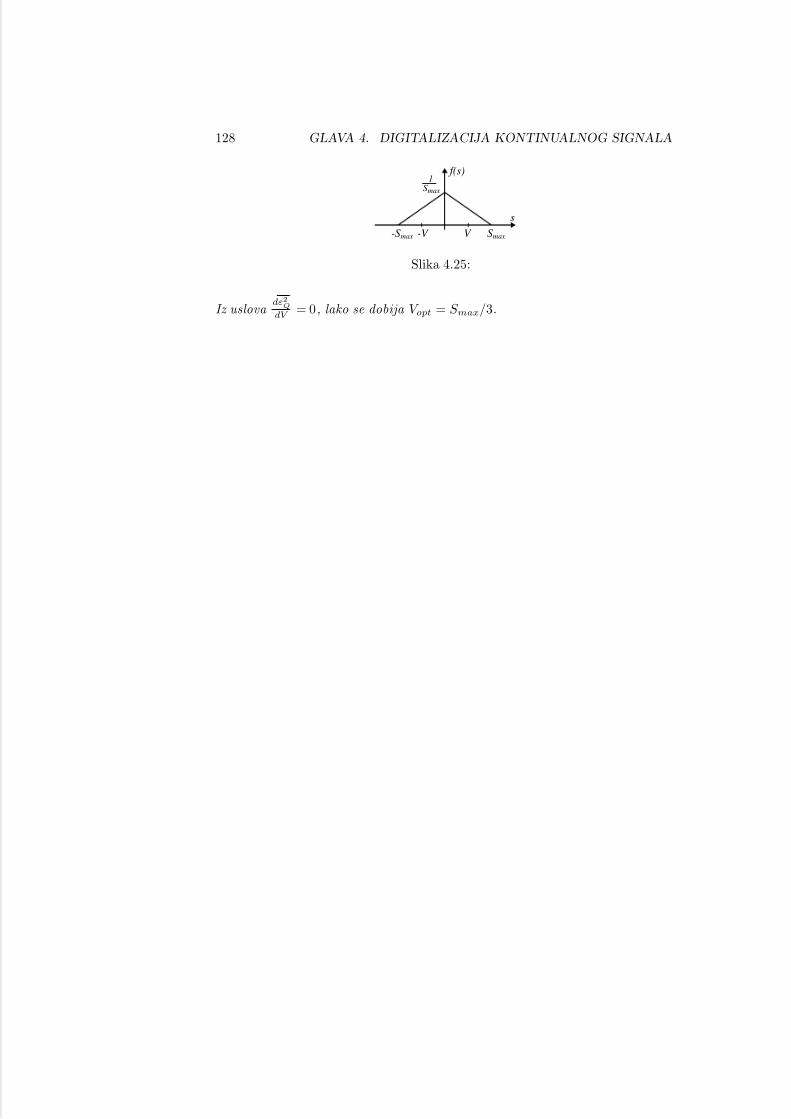
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 134/246
128 GLAVA 4. DIGITALIZACIJA KONTINUALNOG SIGNALA
s
f(s)
-Smax -V V Smax
1Smax
Slika 4.25:
Iz uslova dε2QdV = 0, lako se dobija V opt = S max/3.
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 135/246
Glava 5
Osnovni parametri
prenosnog sistema
5.1 Uvodna razmatranja
Nakon uvod-enja elementarnih pojmova i parametara kod signala, kao fizickihnosilaca informacija, potrebno je takod-e posvetiti paznju prenosnim sistemimau zelji da se sto vise sagleda ju uzroci koji ometa ju dobar prenos signala.Stoga se namece pitanje: kako odabrati i uskladiti karakteristike signala i prenosnogsistema da bi prenos informacija bio optimalan u pogledu pouzdanosti, vjernostii ekonomicnosti? Odmah se moramo osloboditi iluzija o izgradnji savrsenog sis-
tema u kojem izmed-u otrpemnog i prijemnog signala ne bi bilo nikakve razlike.Znaci, izoblicenja signala pri prenosu su neizbjezna. Danas se usmjeravaju na-pori ka stvaranju takvog sistema u kojem se izoblicenja primljenog signala mogukontrolisati tako da budu unutar dozvoljenih granica.Da bi se sistemi mogli proucavati na jedinstven nacin, bez obzira na slozenostnjihove unutrasnje strukture, Kupfmuller [] je med-u prvima predlozio da se anal-iza prenosnih sistema svede na analizunjihovih transfer funkcija. To je oznacilovazan korak ka rjesavanju osnovnih problema u sistemima za prenos informacija.Uocimo da umjesto naziva transfer funkcija (H ), u literaturi nalazimo sinonime:prenosna funkcija ili funkcija prenosa, zatim kompleksni prenosni faktor [] itd.Mi smo u uvodnom poglavlju na slici 1 uveli model sistema sa jednim ulazomi jednim izlazom, gdje ulazni signal (s1(t) ili x(t)) kao pobudu i izlazni signal(s2(t) ili y(t)) kao odziv posmatramo kao realne vremenske funkcije.Dati model moze se neposredno primjeniti na cetvoropole, ili mreze sa dva pris-tupa, gdje ulazni signal moze da odgovara struji ili naponu na ulazu cetvoropolai slicno tome izlazni signal mozemo posmatrati kao struju ili napon na izlazucetvoropola. Jasno je da posmatrani signali kao vremenske funkcije mogu imatii druga fizicka znacenja kao, na primjer, vremenska promjena pritiska, temper-ature, intenziteta svjetlosti itd. U opstem slucaju transfer funkcijasistema kaokompleksna velicina H varira u funkciji ucestanosti ω, sto je najcesci slucaj,
129

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 136/246
130 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
trenutne amplitude signala s, vremena t itd.
H = f (ω,s,t) [] (5.1)
5.2 Pregled znacajnijih svojstava sistema
U ovom odjeljku sumiracemo najznacajnija svojstva sistema koja su odprakticno posebnog znacaja.Ovdje cemo se ograniciti na sisteme sa jednim ulaznim signalom x(t) i jednimizlaznim signalom y(t) koristeci simbolicki model sistema prikazan na slici 5.1
Sistem x(t) y(t)
(ulazni signal) (izlazni signal)
Pobuda Odziv
Slika 5.1: Simbolicki model jednog sistema
Odnos izmed-u ulaznog i izlaznog signala, kji obezbjed-uje sistem, definisacemopomocu operatora preslikavanja
y(t) = T x(t) (5.2)
5.2.1 Linearnost
Oznacimo sa y1(t) odziv sistema koji odgovara ulaznom signalu x1(t)
y1(t) = T
x1(t)
(5.3)
Ako multipliciramo ulazni signal sa konstantnim faktorom α1, x1(t) = α1x(t),onda u slucaju linearnog sistema odgovarajuci odziv glasi
y1(t) = T x(t) = α1y1(t) (5.4)
Ako ulazni signal ima oblik
x(t) = α1x1(t) + α2x2(t),
onda odgovarajuci odziv linearnog sistema ima oblik
y(t) = T x(t) = α1T x1(t) + α2x2(t) = α1y1(t) + α2y2(t), (5.5)
gdje su α1 i α2 konstante.Linearnost sistema definisana relacijom (5.5) ilustrovana je graficki na slici 5.2Jasno je da se definicija (5.5) moze uopstiti i na slucaj kada ulazni signal ima ivise od dvije komponente
T
n
i=1
αixi
=
ni=1
αiT xi(t) (5.6)
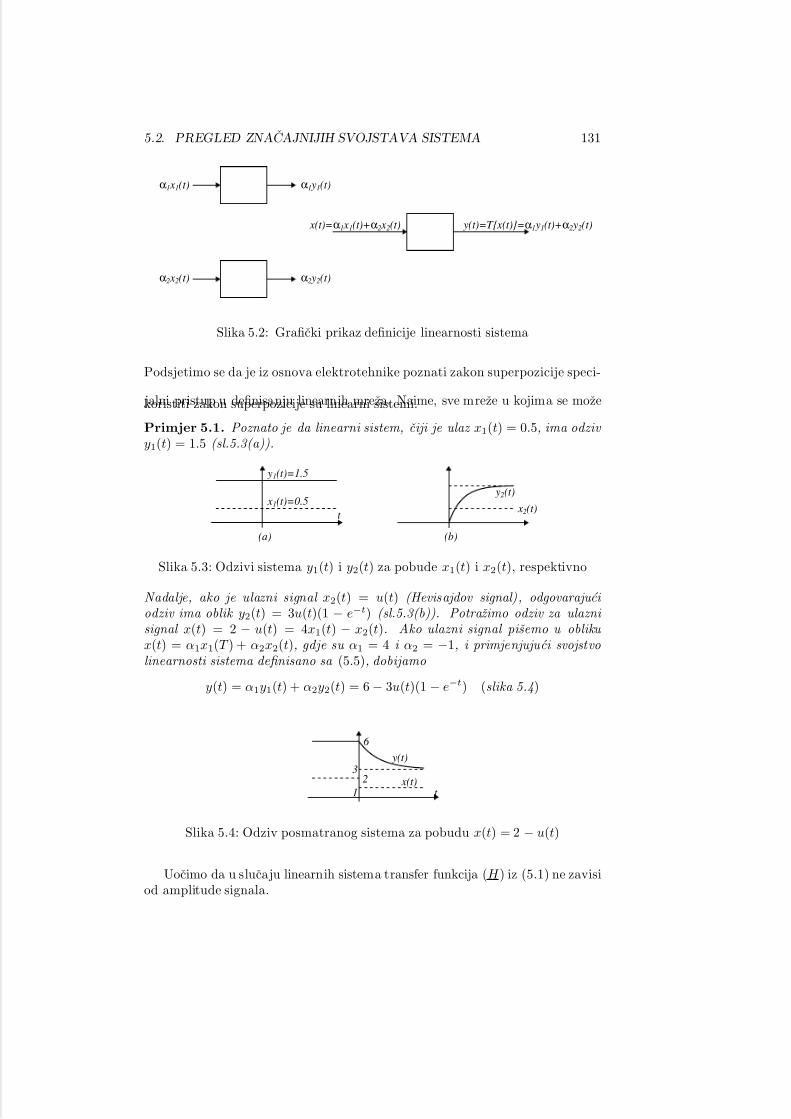
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 137/246
5.2. PREGLED ZNACAJNIJIH SVOJSTAVA SISTEMA 131
α2 x2(t)
α1 x1(t)
α2 y2(t)
α1 y1(t)
x(t)=α1 x1(t)+α2 x2(t) y(t)=Tx(t)=α1 y1(t)+α2 y2(t)
Slika 5.2: Graficki prikaz definicije linearnosti sistema
Podsjetimo se da je iz osnova elektrotehnike poznati zakon superpozicije speci-
jalni pristup u definisanju linearnih mreza. Naime, sve mreze u kojima se mozekoristiti zakon superpozicije su linearni sistemi.
Primjer 5.1. Poznato je da linearni sistem, ciji je ulaz x1(t) = 0.5, ima odziv y1(t) = 1.5 (sl.5.3(a)).
t
(a)
x1(t)=0.5
y1(t)=1.5
(b)
x2(t)
y2(t)
Slika 5.3: Odzivi sistema y1(t) i y2(t) za pobude x1(t) i x2(t), respektivno
Nadalje, ako je ulazni signal x2(t) = u(t) (Hevisajdov signal), odgovarajuci odziv ima oblik y2(t) = 3u(t)(1 − e−t) (sl.5.3(b)). Potrazimo odziv za ulazni signal x(t) = 2 − u(t) = 4x1(t) − x2(t). Ako ulazni signal pisemo u obliku x(t) = α1x1(T ) + α2x2(t), gdje su α1 = 4 i α2 = −1, i primjenjujuci svojstvolinearnosti sistema definisano sa (5.5), dobijamo
y(t) = α1y1(t) + α2y2(t) = 6 − 3u(t)(1 − e−t) (slika 5.4)
t x(t)
y(t)
1
23
6
Slika 5.4: Odziv posmatranog sistema za pobudu x(t) = 2 − u(t)
Uocimo da u slucaju linearnih sistema transfer funkcija (H ) iz (5.1) ne zavisiod amplitude signala.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 138/246
132 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Tako elektricne mreze, koje su sastavljene od otpornika, zavojnica i kondenza-
tora, predstavljaju linearne sisteme ukoliko elektricne karakteristike pomenutihelemenata (otpornost, intuktivnost i kapacitivnost respektivno) ne zavise odnapona i struje. U takvim linearnim sistemima svi naponi i struje su linearnoproporcionalni elektromotornim silama.
5.2.2 Vremenska invarijantnost
Za objasnjenje pojma vremenske invarijantnosti sistema koristicemo sliku5.5. Na gornjem crtezu slike 5.5 za specijalni ulazni signal x(t) dat je odgo-
varajuci odziv y(t). Ulazni signal x(t) za isti posmatrani sistem (donji crtez
slike 5.5) je zakasnjen za t0 u odnosu na x(t), tj.
x(t) = x(t − t0).
Ako je sistem vremenski invarijantan, onda odziv y(t) = T x(t) = T x(t−t0)mora biti identican vremenski pomjerenom odzivu y(t) za t0, tj.
T x(t − t0) = y(t − t0) (5.7)
t
x(t)
t
x=x(t-t 0)
t 0
∼
t
t
y(t)
y(t)=y(t-t 0)∼
t 0
Slika 5.5: Ilustracija vremenske invarijantnosti sistema
Primjer 5.2. Neka je za jedan vremenski invarijantan sistem, cija je pobuda x(t) = cos ωt, poznat odziv y(t) = 0.5cos(ωt − π/3). Potrazicemo odziv sistema
y(t) za ulazni signal
x(t) = sin ωt.
Kako je
x(t) = sin ωt = cos
ωt − π
2
= cos ω
t − π
2ω
, t0 =
π
2ω,
onda prema (5.7) imamo
y(t) = y(t − t0) = 0.5cos
ω
tπ
2ω
− π
3
= 0.5cos
ωt − 5π
6
.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 139/246
5.2. PREGLED ZNACAJNIJIH SVOJSTAVA SISTEMA 133
Primjetimo da kod vremenski invarijantnih sistema koeficijenti a i b u
diferencijalnoj jednacini, koja definise sistem (), ne zavise od vremena pa seponekad takvi sistemi nazivaju kao sistemi sa konstantnim parametrima (koefi-cijentima).Transfer funkcija (H ) iz (5.1) kod vremenski invarijantnih sistema ne zavisi odvremenske varijable t.Velik bro j komunikacionih sistema po svojoj prirodi odgovara linearnim mrezamasa konstantnim parametrima. To znaci da se radi o linearnim vremenski invar-ijantnim sistemima, kada njihova transfer funkcija ne zavisi ni od vremenea niod amplitude signala, vec samo od ucestanosti
H = f (ω) (5.8)
U kasnijim razmatranjima mi cemo razmatrati samo linearne vremenski invari-
jantne sisteme.
5.2.3 Stabilnost
Za sistem kazemo da je stabilan ako za proizvoljnu i ogranicenu pobudu(|x(t) < M < ∞) imamo takod-e ogranicen odziv u bilo kom trenutnku t.Matematicki imamo
|x(t) < M < ∞ ⇒ |y(t)| = |T x(t)| < N < ∞ (∀t) (5.9)
Primjer 5.3 (Stabilan sistem).Neka je odnos izmed -u x(t) i y(t) definisan relacijom
y(t) = 2x(t − 1)
Lako je iz |x(t)| < M < ∞ dobiti |y(t)| < 2M = N < ∞ sto prema (5.9) znaci da se zaista radi o stabilnom sistemu.
Primjer 5.4 (Nestabilan sistem).Neka sistem za specijalnu pobudu x(t) = ku(t) ima odziv y(t) = u(t)(1 − et).Ako t → ∞, vazi |y(t) → ∞, sto znaci da ne postoji konacna konstanta N za koju vazi |y(t)| < N < ∞ za bilo koju vrijednost t, bez obzira na ogranicenjeulaza |x(t)| < M < ∞ (∀t).U praksi se naravno ne dozvoljava nekontrolisan porast odziva sto bi imalo za posljedicu pojavu velikih izoblicenja. Ponekad sistem moze da napusti linearnoradno podrucje ali uz uvedena ogranicenja odziva.
5.2.4 Kauzalnost
Svaki fizicki realizibilan sistem ima svojstvo kauzalnosti. To znaci da odzivmoze da se pojavi tek posto je djelovala pobuda na ulazu sistema. Matematickito mozemo izraziti u obliku:
Ako je x(t) = 0 za t < t0, onda slijedi y(t) = T x(t) = 0 za t < t0 (5.10)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 140/246
134 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
t
x(t)
t
y(t)
Slika 5.6: Ilustracija kauzalnog sistema
Na slici 5.6 ilustrovan je jedan kauzalni sistemKod nekauzalnog sistema odziv se moze pojaviti prije pocetka djelovanja pobude.Moze se postaviti pitanje opravdanosti razmatranja pojma kauzalnosti kadasamo kauzalni sistemi imaju fizicki smisao. Razlog lezi u tome da kod brojnihteorijskih razmatranja zanemarivanje uslova kauzalnosti obezbjed-uje posebno
jednostavne uslove analize, a prakticno se dobijaju rezultati bliski stvarnim.Tipican primjer takvog sistema je ”idealni propusnik”. Konacno je potrebnopomenuti da se pojam kauzalnosti odnosi samo na ”vremenske sisteme”gdje susignali, kao fizicki nosioci informacija, vremenske funkcije. Tako, na primjer,kod video signala gdje raspodjela osvjetljenosti zavisi od pozicije tacke na slicipojam kauzalnosti gubi svoj smisao.
5.3 Odziv sistema (konvolucioni integral)
5.3.1 Odziv na odskocnu i impulsnu pobudu
Neka je ulazni signal jednog sistema definisan u obliku odskocne funkcije
x(t) = u(t) (sl.3.30). Odgovarajuci odziv sistema oznacicemo sa y(t) = g(t).Prema relaciji (5.2) imamog(t) = T u(t) (5.11)
Na slici 5.7 dat je odziv jednostavnog RC –kola na odskocnu pobudu (gornjaslika).Ako usvojimo RC = 1, onda vrijedi
g(t) = u(t)(1 − e−t) =
0 za t < 0
1 − e−t za t > 0(5.12)
Rezultat (5.12) lako je dobiti ako se koristi jednakost koja proistice iz dinamickeravnoteze za posmatrano RC –kolo
x(t) = Ri(t) + y(t),
gdje je i(t) = C dy(t)
dt.
Pretpostavlja juci da kondenzator nije imao pocetnog nabo ja i da vazi RC = 1,onda dobijamo diferencijalnu jednacinu sistema
y(t) + y(t) = x(t).
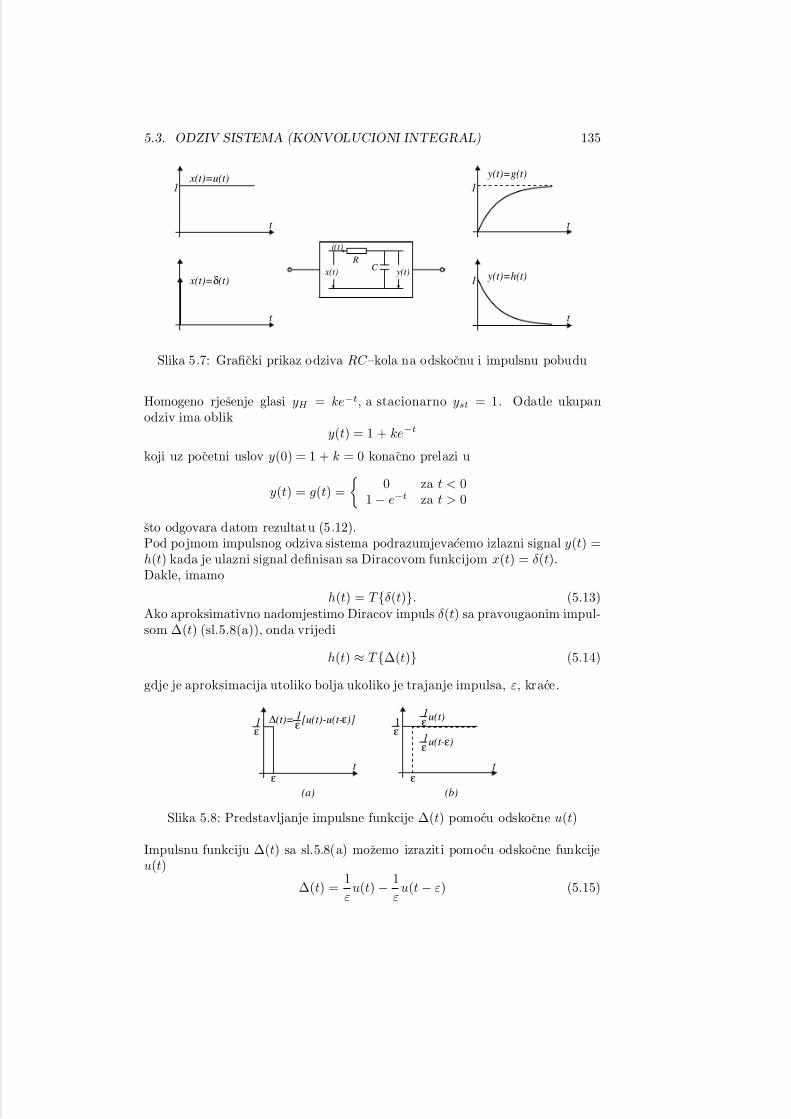
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 141/246
5.3. ODZIV SISTEMA (KONVOLUCIONI INTEGRAL) 135
t
t
t
t
x(t)=δ(t)
x(t)=u(t)1 1
1 y(t)=h(t)
y(t)=g(t)
RC
i(t)
y(t) x(t)
Slika 5.7: Graficki prikaz odziva RC –kola na odskocnu i impulsnu pobudu
Homogeno rjesenje glasi yH = ke−t, a stacionarno yst = 1. Odatle ukupanodziv ima oblik
y(t) = 1 + ke−t
koji uz pocetni uslov y(0) = 1 + k = 0 konacno prelazi u
y(t) = g(t) =
0 za t < 0
1 − e−t za t > 0
sto odgovara datom rezultatu (5.12).Pod pojmom impulsnog odziva sistema podrazumjevacemo izlazni signal y(t) =h(t) kada je ulazni signal definisan sa Diracovom funkcijom x(t) = δ(t).Dakle, imamo
h(t) = T δ(t). (5.13)Ako aproksimativno nadomjestimo Diracov impuls δ(t) sa pravougaonim impul-som ∆(t) (sl.5.8(a)), onda vrijedi
h(t) ≈ T ∆(t) (5.14)
gdje je aproksimacija utoliko bolja ukoliko je trajanje impulsa, ε, krace.
ε
(a) (b)
t
1ε
∆(t)= 1ε
[u(t)-u(t-ε)]
t ε
1ε
1ε
u(t)
1ε
u(t-ε)
Slika 5.8: Predstavljanje impulsne funkcije ∆(t) pomocu odskocne u(t)
Impulsnu funkciju ∆(t) sa sl.5.8(a) mozemo izraziti pomocu odskocne funkcijeu(t)
∆(t) =1
εu(t) − 1
εu(t − ε) (5.15)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 142/246
136 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Koristeci svojstvo linearnosti sistema (5.5), mozemo pisati
h(t) ≈ T ∆(t) = T 1ε
u(t) − 1ε
u(t − ε) = 1ε
T u(t) − 1ε
T u(t − ε) (5.16)
Prema (5.11) imamo T u(t) = g(t), a koristeci vremensku invarijantnostsis-tema (5.7) takod-e vrijedi T u(t − a) = g(t − ε).Dakle, iz (5.16) dobijamo
h(t) ≈ g(t) − g(t − ε)
ε≈ dg(t)
dt(5.17)
U granicnom sluca ju vazi
limε→0
∆(t) = δ(t) =du(t)
dt⇒ h(t) =
dg(t)
dt(5.18)
sto znaci da je impulsni odziv sistema jednak devijaciji odziva na odskocnufunkciju.Koristeci dobijeni rezultat (5.18) , za dobijeni odziv g(t) iz (5.12) imamo iodgovarajuci impulsni odziv
h(t) =d
dt
u(t)(1 − e−t)
= δ(t)(1−e−t)+u(t)e−t =
0 za t < 0
e−t za t > 0(5.19)
sto je graficki prikazano na donjem crtezu slike 5.8. Impulsni odziv sistema jeod posebnog znacaja, a moze se pokazati da koristeci poznati impulsni odzivsistema mozemo odrediti odziv datog sistema za proizvoljni pobudni signal [].
5.3.2 Odziv sistema za proizvoljni pobudni signalOdredicemo odziv linearnog vremenski invarijantnog sistema y(t) za proizvoljni
pobudni signal x(t) na jedan relativno kratak i pregledan nacin koristeci prven-stvensvojstvo selektivnosti Diracovog impulsa (3.80) u obliku.
x(t) =
+∞ −∞
x(τ )δ(t − τ )dτ (5.20)
Nadomjestimo li sada δ(t) sa pravougaonim impulsom ∆(t) sa sl.5.8, onda za(5.20) imamo aproksimaciju
x(t) ≈
+∞
−∞
x(τ )∆(t − τ )dτ (5.21)
Za ulazni signal sistema (5.21), imamo i odgovarajucu aproksimaciju odzivay(t) = T x(t)
y(t) ≈ T
+∞ −∞
x(τ )∆(t − τ )dτ
(5.22)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 143/246
5.3. ODZIV SISTEMA (KONVOLUCIONI INTEGRAL) 137
Ako izvrsimo diskretizaciju vremenske varijable τ u (5.22) sa korakom ∆τ , onda
integral u (5.22) mozemo priblizno izracunati koristeci sumu
y(t) ≈ T
n
x(n∆t)∆(t − n∆τ )∆τ
(5.23)
Ako prethodnu sumu razvijemo, imamo
y(t) ≈ T · · · + x(−2∆τ )∆τ ∆(t + 2τ ) + x(−∆τ )∆τ ∆(t + τ )+
+x(0)∆τ ∆(t) + x(∆τ )∆τ ∆(t − τ ) + x(2∆τ )∆τ ∆(t − 2τ ) + . . . (5.24)
Za racunanje vrijednosti izraza (5.24) za poznatu funkciju x(t) i datu vrijednostt, moramo usvojiti korak disktetizacije ∆τ koji neposredno utice na tacnostdobijenog rezultata. Jasno je da manja vrijednost koraka ∆τ obezbjed-uje ko-rektniji rezultat. Koeficijenti oblika x(−2∆τ )∆τ , x(−∆τ )∆τ , x(0)∆τ itd. u(5.23) poprimaju konkretne vrijednosti tako da (5.24) mozemo pisati u obliku
y(t) ≈ T · · · + k−1∆(t + ∆τ ) + k0∆(t) + k1∆(t − ∆τ ) + . . . (5.25)
gdje koeficijenti kn = x(n∆τ )∆τ zavise od ulaznog signala i ozbora koraka ∆τ .Koristeci svojstvo linearnosti sistema (5.6), izraz (5.25) mozemo pisati u obliku
y(t) ≈· · · + k−1T ∆(t + ∆τ ) + k0T ∆(t) + k1T ∆(t − ∆τ ) =
=
n
knT ∆(t − n∆τ )
ili uvrstavajuci ponovo vrijednost koeficijenata
y(t) ≈
n
x(n∆τ )T ∆(t − n∆τ )∆τ (5.26)
Kako je prema (5.14) T ∆(t) ≈ h(t), impulsni odziv sistema, onda u uslovimarada sa vremenski invarijantnim sistemima imamo
T ∆(t − n∆τ ) ≈ h(t − n∆τ ) (5.27)
Ako rezultat (5.27) uvrstimo u (5.26), dobija se
y(t)
≈ n
x(n∆τ )h(t
−n∆τ )∆τ (5.28)
U granicnom slucaju, kada ∆τ → 0, dobijamo odziv sistema u obliku tzv.konvolucionog integrala
y(t) =
+∞ −∞
x(τ )h(t − τ )dτ [] (5.29)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 144/246
138 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Lako je pokazati da rezultat (5.29) mozemo prikazati u njegovom alternativnom
ekvivalentnom obliku
y(t) =
+∞ −∞
h(τ )x(t − τ )dτ (5.30)
sto znaci da za op eraciju konvolucije vrijedi zakon komutativnosti, tj.
y(t) =
+∞ −∞
x(τ )h(t−τ )dτ =
+∞ −∞
h(τ )x(t−τ )dτ = x(t)∗h(t) = h(t)∗x(t), (5.31)
gdje smo znak ∗ koristili kao simbol za operaciju konvolucije nad datim funkci- jama x(t) i h(t).
Primjer 5.5.U ovom primjeru ilustrovacemo postupak racunanja odziva sistema, ako je poz-nat odziv na odskocnu funkciju (gornji crtez sl.5.9)
t
x(t)
A2
θ2>θ1
t
x(t)=u(t)
1
x(t) y(y)
t
θ1
A1
g(t)=y(t)
?
Slika 5.9: Ilustracija odred-ivanja odziva sistema u slucaju poznatog odziva naodskocnu funkciju
Racunanje odziva na signal x(t) u obliku pravougaonog impulsa amplitude A2 i trajanja θ2 (donji crtez sl.5.9) moze postici na dva nacina.Prvo cemo dati ulazni signal s(t) predstaviti kao linearnu funkciju odskocne funkcije u(t) i pomjerene odsko ˇ Cne funkcije u(t − θ2)
x(t) = A2[u(t) − u(t − θ2)] (5.32)
Linearni vremenski invarijantan sistem za pobudu ku(t−t0) daje odziv kg(t−t0),odnosno za ulazni signal x(t) oblika definisanog sa (5.32) imamo odgovarajuci odziv
y(t) = A2g(t) − A2g(t − θ2). (5.33)
koji je prikazan na slici 5.10.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 145/246
5.3. ODZIV SISTEMA (KONVOLUCIONI INTEGRAL) 139
t
A1 A2
y(t)
A2g(t)
A2g(t-θ2)
θ1 θ2 θ1+θ2
y(t)
Slika 5.10: Graficki prikaz odziva (5.33) za pobudu definisanu relacijom (5.32)
Za racunanje odziva sistema na bazi konvolucionog integrala (5.31) neophodno je prvo prema (5.18) odrediti impulsni odziv
h(t) =dg(t)
dt.
Diferencirajuci odziv sistema g(t), koji je ilnearna vremenska funkcija po seg-mentima, dobija se impulsni odziv sistema prema slici 5.11.
t
h(t)
θ1
A1
θ1
Slika 5.11: Impulsni odziv sistema sa sl.5.9
Posto smo izracunali impulsni odziv h(t), mozemo da primjenimo konvolucioni integral (5.31)
y(t) =
+∞ −∞
x(τ )h(t − τ )dτ = x ∗ h (5.34)
U cilju efikasnog uvida u postupak racunanja konvolucije (5.34), ilustovan jerelativni odnos faktora podintegralne fukcije u (5.34) u intervalima t < 0, 0 <t < θ1, θ1 < t < θ2, θ2 < t < θ1 + θ2 i t > θ1 + θ2 (slika 5.12)
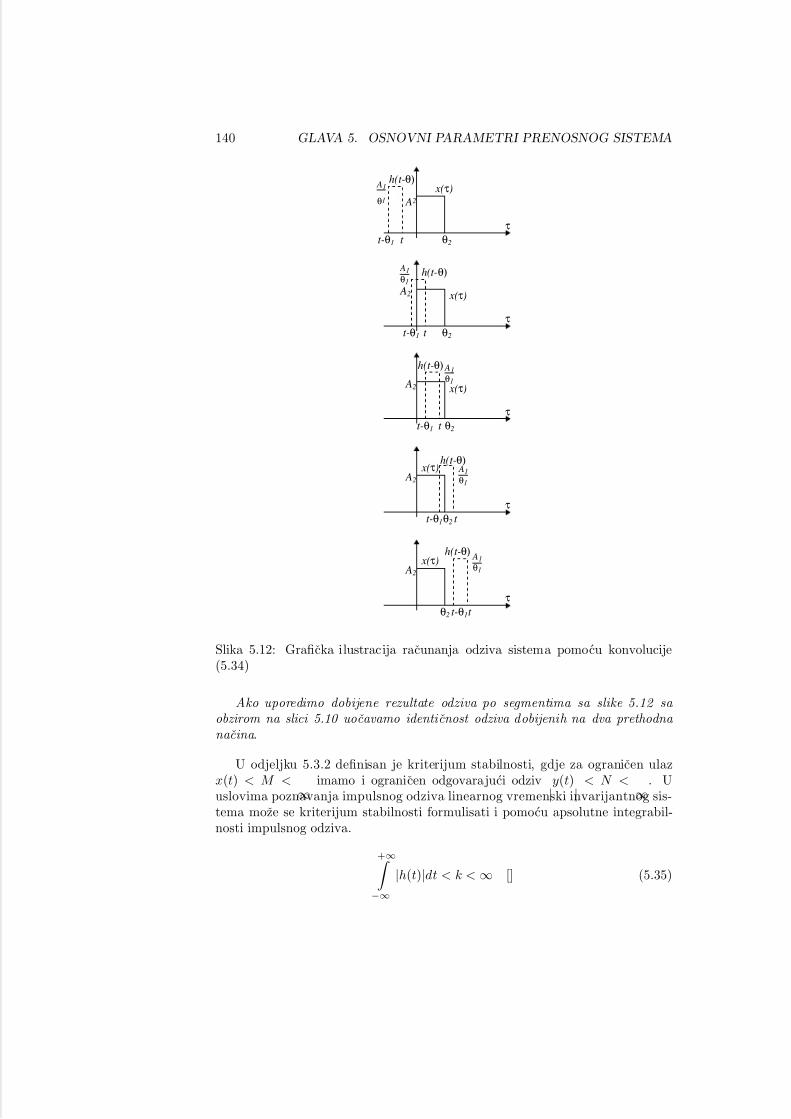
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 146/246
140 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
τ
x(τ)
A2
θ2t-θ1 t
h(t-θ) A1
θ1
τ
x(τ) A2
θ2t-θ1 t
h(t-θ) A1
θ1
τ
x(τ) A2
θ2t-θ1 t
h(t-θ) A1
θ1
τ
x(τ) A2
θ2t-θ1 t
h(t-θ) A1
θ1
τ
x(τ) A2
θ2 t-θ1t
h(t-θ) A1
θ1
Slika 5.12: Graficka ilustracija racunanja odziva sistema pomocu konvolucije(5.34)
Ako uporedimo dobijene rezultate odziva po segmentima sa slike 5.12 sa obzirom na slici 5.10 uocavamo identicnost odziva dobijenih na dva prethodna nacina.
U odjeljku 5.3.2 definisan je kriterijum stabilnosti, gdje za ogranicen ulazx(t) < M <
∞imamo i ogranicen odgovarajuci odziv
|y(t)
|< N <
∞. U
uslovima poznavanja impulsnog odziva linearnog vremenski invarijantnog sis-tema moze se kriterijum stabilnosti formulisati i pomocu apsolutne integrabil-nosti impulsnog odziva.
+∞ −∞
|h(t)|dt < k < ∞ [] (5.35)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 147/246
5.4. TRANSFER FUNKCIJA SISTEMA 141
Isto tako kauzalnost sistema definisana sa (5.10) svodi se na uslov
h(t) = 0 za t < 0 (5.36)
Uz uslov (5.36) konvolucioni integral (5.31) poprima specijalni oblik
y(t) =
∞ 0
h(τ )x(t − τ )dτ =
t −∞
h(t − τ )x(τ )dτ (5.37)
Interesantno je posvetiti pzznju odzivu y(t) koji je prikazan pomocu integrala
sa granicama od −∞ do t ( t−∞(·)dτ ). Iskoristicemo pri tom impulsni odziv
h(t) integratorskog RC kola sa slike 5.8. Faktor podintegralne funkcije iz (5.37)h(t
−τ ), t > 0, prikazan je na slici 5.13.
τ
τ-t
h(t-τ)
Slika 5.13: Pomjereni i ”presavijeni”impulsni odziv integratorskog RC kola sasl.5.8
Prema rezultatu y(t) =
t
−∞ h(t−τ )x(τ )dτ uocavamo zavisnost trenutne vrijed-nosti izlaznog signala (u trenutku t) od ulaznog signala, vremenski posmatrano,od pamtivijeka (t = −∞) do zakljucno datog trenutka (t). Stepen uticajaproslosti pobude na trenutni odziv determinise impulsni odziv koji ponderiseproslost pobudnog signala. U datom primjeru trenutne vrijednosti pobude izbliske proslosti imaju znacajan uticaj na trenutni odziv, dok vrijednosti iz dalekeproslosti pobude imaju umanjen uticaj na trenutnu vrijednost odziva. Iz tih ra-zloga ponekad impulsni odziv sistema nazivamo i tezinskom funkcijom.
5.4 Transfer funkcija sistema
5.4.1 Definisanje transfer funkcije
U literaturi su prisutni formalno razliciti, ali med-usobno sustinski ekviva-lentni, pristupi u definisanju transfer funkcije sistema []. Mi cemo ovdje defini-ciju bazirati na vec uvedenom po jmu impulsnog odziva (5.13) i konvolucionogintegrala (5.31).Pretpostavicemo da ulazni signal sistema ima oblik elementarnog analitickogsignala oblika (3.227), tj.:
x(t) = ejωt (5.38)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 148/246
142 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Odziv sistema racunamo koristeci konvolucioni integral (5.31)
y(t) = x(t) ∗ h(t) = h(t) ∗ x(t) =
+∞ −∞
x(t − τ )h(τ )dτ,
ili za pobudu oblika (5.38) imamo
y(t) =
+∞ −∞
ejω(t−τ )h(τ )dτ = ejωt
+∞ −∞
h(τ )e−jωτ dτ. (5.39)
Integral na desno strani jednakosti (5.39), cija vrijednost zavisi od ucestanostiω = 2πf , odgovara transfer funkciji sistema
H =
+∞
−∞h(τ )e−jωτ dτ =
+∞
−∞h(t)e−jωt dt. (5.40)
Jednakost (5.39) pokazuje da linearni vremenski infarijantan sistem za komplek-snu pobudu x(t) = ejωt ima odziv y(t) = H (ω)x(t). Dobijeni rezultat pruzamogucnost definicije transfer funkcije
H (ω) =y(t)
x(t)
x(t)=ejωt
(5.41)
Kako za stabilne sisteme vazi apsolutna integrabilnost impulsnog odziva (5.35),onda integralna transformacija (5.40) egzistira. Moze se takod-e pokazati da za
poznatu transfer funkciju H egzistira njena inverzna transformacija
h(t) =1
2π
+∞ −∞
H (ω)ejωt dω [] (5.42)
Pomenucemo i jednu neposrednu definiciju transfer funkcije. Ako sa X (ω) iY (ω) oznacimo spektralne karakteristike deterministickih signala na ulazu iizlazu sistema, onda transfer funkcija posmatranog sistema iznosi
H (ω) X (ω)
Y (ω)[], (5.43)
ili ekvivalentno tome
Y (ω) = X (ω)H (ω) (5.44)Uocimo da rezultati (5.31), (5.40), (5.42), (5.43) i (5.44) u potpunosti odrazavajuranije utvrd-ene osobine Fourierove transformacije (3.96).Zakljucimo da impulsni odziv i transfer funkcija cine par Fourierovih trans-formacija i da sadrze isti nivo znanja o linearnim sistemima. Sistemi sa istimimpulsnim odzivom ili istom transfer funkcijom, nezavisno od njihove unutrasnjestrukture i nacina realizacije, za iste pobudne signale daju iste odzive.
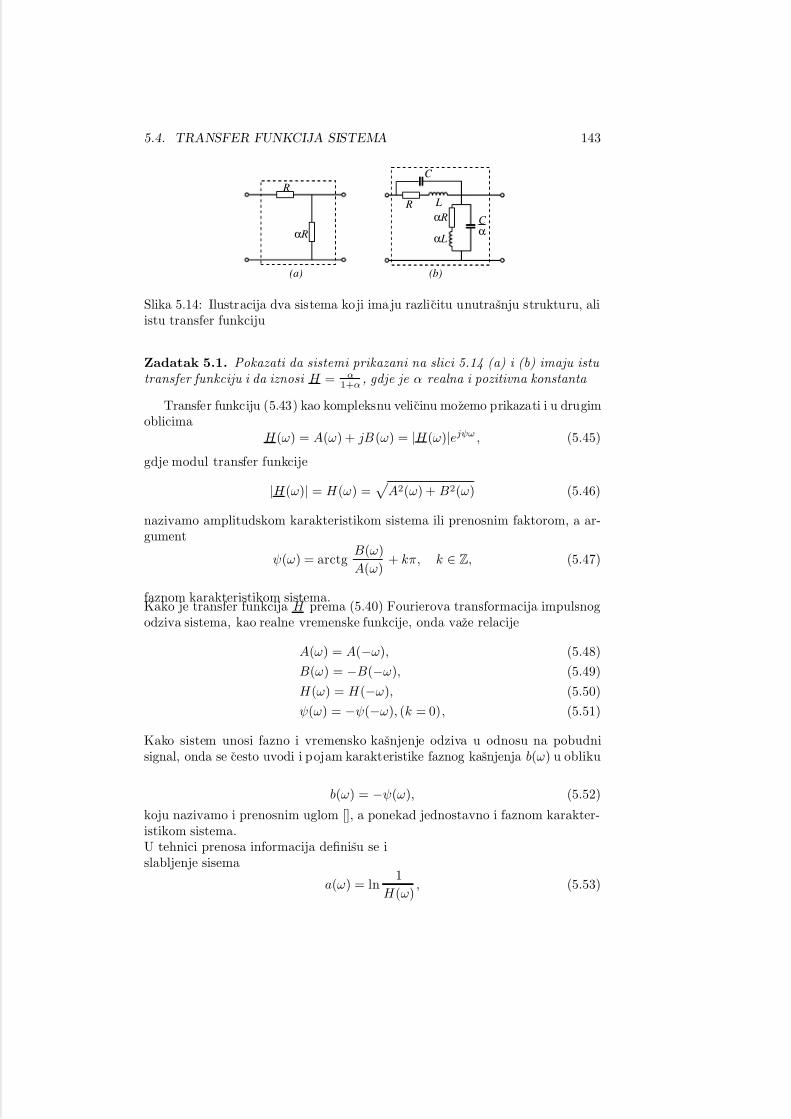
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 149/246
5.4. TRANSFER FUNKCIJA SISTEMA 143
R
α R
C
R L
α R
α L
C α
(a) (b)
Slika 5.14: Ilustracija dva sistema koji ima ju razlicitu unutrasnju strukturu, aliistu transfer funkciju
Zadatak 5.1. Pokazati da sistemi prikazani na slici 5.14 (a) i (b) imaju istu transfer funkciju i da iznosi H = α
1+α , gdje je α realna i pozitivna konstanta
Transfer funkciju (5.43) kao kompleksnu velicinu mozemo prikazati i u drugimoblicima
H (ω) = A(ω) + jB(ω) = |H (ω)|ejψω , (5.45)
gdje modul transfer funkcije
|H (ω)| = H (ω) =
A2(ω) + B2(ω) (5.46)
nazivamo amplitudskom karakteristikom sistema ili prenosnim faktorom, a ar-gument
ψ(ω) = arctgB(ω)
A(ω)+ kπ, k ∈ Z, (5.47)
faznom karakteristikom sistema.Kako je transfer funkcija H prema (5.40) Fourierova transformacija impulsnogodziva sistema, kao realne vremenske funkcije, onda vaze relacije
A(ω) = A(−ω), (5.48)
B(ω) = −B(−ω), (5.49)
H (ω) = H (−ω), (5.50)
ψ(ω) = −ψ(−ω), (k = 0), (5.51)
Kako sistem unosi fazno i vremensko kasnjenje odziva u odnosu na pobudnisignal, onda se cesto uvodi i pojam karakteristike faznog kasnjenja b(ω) u obliku
b(ω) = −ψ(ω), (5.52)
koju nazivamo i prenosnim uglom [], a ponekad jednostavno i faznom karakter-istikom sistema.U tehnici prenosa informacija definisu se islabljenje sisema
a(ω) = ln1
H (ω), (5.53)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 150/246
144 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
vrijeme prenosa faze
t p =b(ω)
ω , (5.54)
i vrijeme prenosa grupe
tg =db(ω)
dω. (5.55)
Na taj nacin transfer funkciju H mozemo pisati i u obliku
H (ω) = e−[a(ω)+jb(ω)] = H (ω)e−b(ω) (5.56)
Koristeci prethodne rezultate moze se dati kratak rezime o nacinu odred-ivanjaodziva sistema y(t), za poznat ulazni signal x(t) i definisan sistem pomocuimpulsnog odziva h(t), odnosno transfer funkcije H (ω) (sl.5.15)
x(t) y(t)=x(t)*h(t)
y(t)= 12π ∫ X(ω)H(ω)e jωt d ω
−∞
+∞
X(ω) H(ω) Y(ω)× =
F F -1
h(t),H(ω)
Slika 5.15: Ilustracija odred-ivanja idzova sistema
Na bazi konvolucionog integrala (5.31) izlazni signal odred-ujemo zadrzava jucise u svim fazama racunanja u vremenskom domenu
y(t) =
+∞
−∞
x(τ )h(t − τ )dτ =
+∞
−∞
h(τ )x(t − τ )dτ (5.57)
Ako koristimo transfer funkciju sistema, onda prvo prelazimo iz vremenskog
domena u frekvencijski (x(t)F −→ X (ω)), zatim vrsimo multiplikaciju u frekven-
cijskom domenu (X (ω)H (ω) = Y (ω)) i konacno inverznom Fourierovom trans-formacijom dobijamo izlazni siglan u vremenskom domenu
y(t) =1
2π
+∞ −∞
X (ω)H (ω)ejωt dω =1
2π
+∞ −∞
X (ω)H (ω)ej[ωt−b(ω)]dω (5.58)
Postavlja se logicno pitanje: koji je pristup primamljiviji (5.57) ili (5.58) uodred-ivanju izlaznog signala?Do pojave a zatim i masovne u potrebe brze Fourierove transformacije (FFT- Fast Fourier Transformation), racunanje izlaznog signala p omocu konvolucije(5.57) bilo je jednostavnije i popularnije. Danas, u eri dominacije i izvjesne per-spektive digitalnih sistema na bazi savremenih DSP (Digital Signal Processor)komponenata, postupak racunanja izlaznog signala na bazi relacije (5.56) imaznatne prednosti.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 151/246
5.4. TRANSFER FUNKCIJA SISTEMA 145
Ponekad se mozemo naci i pred ovakvim zadatkom: Poznati su oblici x(t) i y(t)
a potrebno je odrediti prenosni sistem da bi prijemni signal y(t) zadovoljio ko-risnika sistema. U tom slucaju odred-ujemo spektralne karakteristike otpremnogi prijemnog signala preko Fourierovih transformacija. Zatim racunamo transferfunkciju kao kolicnik odgovarajucih spektralnih karakteristika (5.43). Konacno,ako se tako odred-ena transfer funkcija moze fizicki realizovati, vrzimo sintezutrazenog prenosnog sistema. Potrebno je uociti da je rjesavanje postavljenogzadatka jednostavnije za deterministicke signale – dok fizicki nosioci stvarnihinformacija odgovaraju slucajnim signalima.
Primjer 5.6. Za integratorsko RC kolo (sl.5.16) odredicemo transfer funkciju.
x(t) y(t)u2(t)u1(t) R C
Slika 5.16: Odred-ivanje transfer funkcije integratorskog RC kola
Za dati sistem ranije smo odredili odgovarajuci impulsni odziv (sl.5.7). Akoulazni signal x(t) odgovara ulaznom naponu (u1(t)), a izlazni signal y(t) izlaznom naponu (u2(t)), onda je lako dobiti transfer funkciju
H (ω) =1
jωC
R + 1
jωC
=1
1 + jRωC =
=1
1 + (RωC )2e−j[arctg RωC +kπ], k ∈ Z.
(5.59)
Amplitudska karakteristika iznosi
H (ω) =1
1 + (RωC )2, sl.5.17(a)
slabljenje
a(ω) = ln(
1 + (RωC )2), sl.5.17(b)
i prenosni ugao
b(ω) = arctg RωC,k = 0, sl.5.17(c).
Prema karakteru amplitudske karakteristike odnosno slabljenja posmatranog RC kola, takav sistem mozemo posmatrati kao tzv. nisko propusni prenosni sistem.
Primjer 5.7. Odredicemo transfer funkciju za sistem prikazan na slici 5.18.
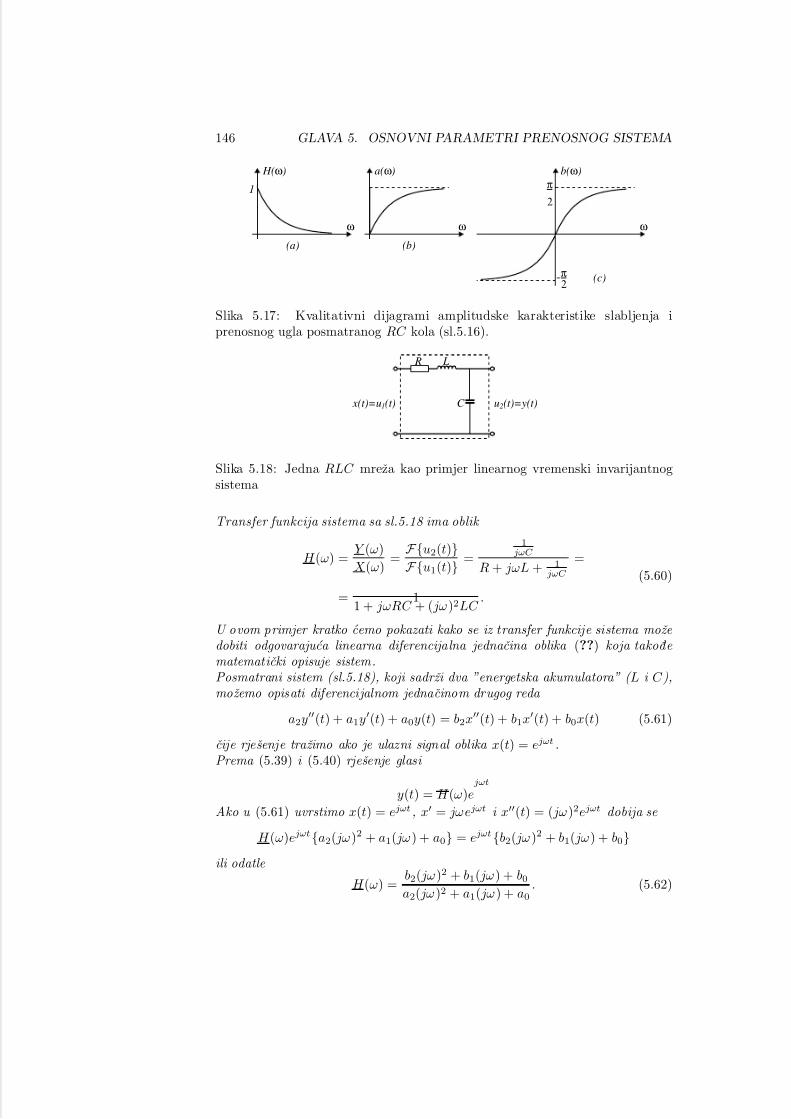
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 152/246
146 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
ω ω ω
1
H(ω) a(ω) b(ω)
π
2
π
2
(a) (b)
(c)
Slika 5.17: Kvalitativni dijagrami amplitudske karakteristike slabljenja iprenosnog ugla posmatranog RC kola (sl.5.16).
R L
C x(t)=u1(t) u2(t)=y(t)
Slika 5.18: Jedna RLC mreza kao primjer linearnog vremenski invarijantnogsistema
Transfer funkcija sistema sa sl.5.18 ima oblik
H (ω) =Y (ω)
X (ω)=
Fu2(t)Fu1(t) =
1jωC
R + jωL + 1jωC
=
= 11 + jωRC + ( jω)2LC
.
(5.60)
U ovom primjer kratko cemo pokazati kako se iz transfer funkcije sistema mozedobiti odgovarajuca linearna diferencijalna jednacina oblika (??) koja takod -ematematicki opisuje sistem.Posmatrani sistem (sl.5.18), koji sadrzi dva ”energetska akumulatora” ( L i C ),mozemo opisati diferencijalnom jednacinom drugog reda
a2y(t) + a1y(t) + a0y(t) = b2x(t) + b1x(t) + b0x(t) (5.61)
cije rjesenje trazimo ako je ulazni signal oblika x(t) = ejωt .Prema (5.39) i (5.40) rjesenje glasi
y(t) = H (ω)ejωt
Ako u (5.61) uvrstimo x(t) = ejωt , x = jωejωt i x(t) = ( jω)2ejωt dobija se
H (ω)ejωta2( jω)2 + a1( jω) + a0 = ejωt b2( jω )2 + b1( jω) + b0ili odatle
H (ω) =b2( jω)2 + b1( jω) + b0
a2( jω)2 + a1( jω) + a0. (5.62)
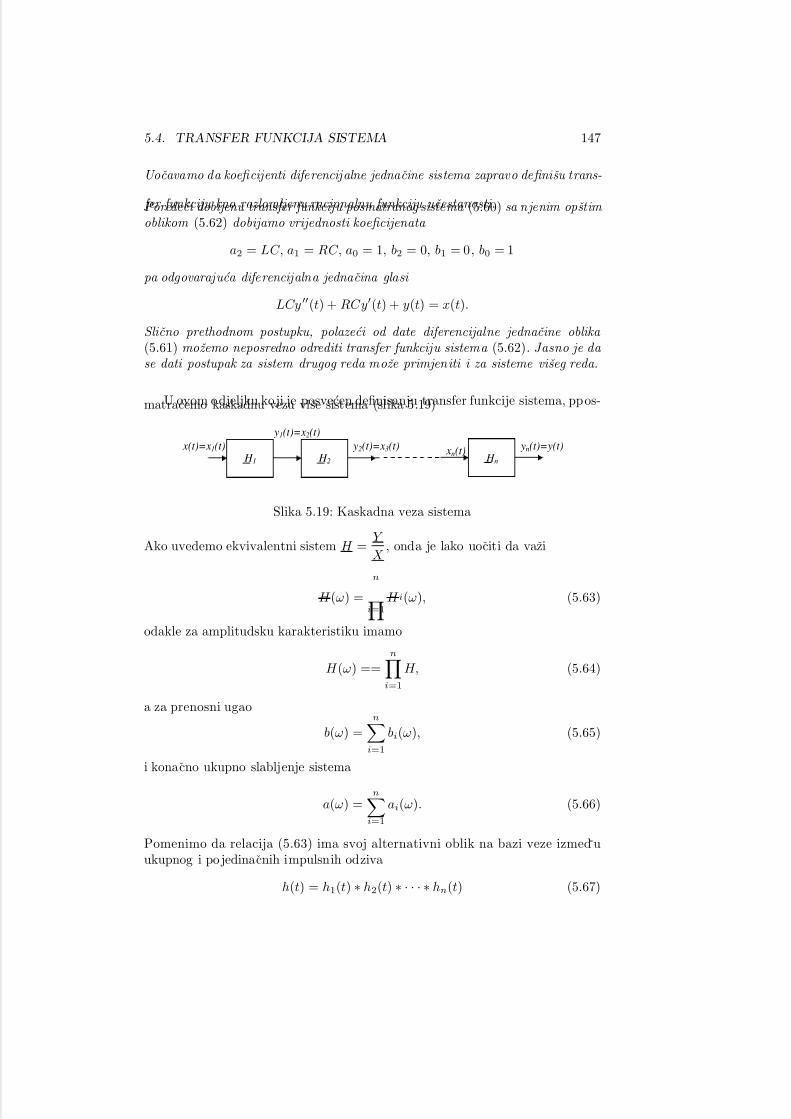
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 153/246
5.4. TRANSFER FUNKCIJA SISTEMA 147
Uocavamo da koeficijenti diferencijalne jednacine sistema zapravo definisu trans-
fer funkciju kao razlomljenu racionalnu funkciju ucestanosti.Poredeci dobijenu transfer funkciju posmatranog sistema (5.60) sa njenim opstim oblikom (5.62) dobijamo vrijednosti koeficijenata
a2 = LC, a1 = RC, a0 = 1, b2 = 0, b1 = 0, b0 = 1
pa odgovarajuca diferencijalna jednacina glasi
LCy (t) + RCy(t) + y(t) = x(t).
Slicno prethodnom postupku, polazeci od date diferencijalne jednacine oblika (5.61) mozemo neposredno odrediti transfer funkciju sistema (5.62). Jasno je da se dati postupak za sistem drugog reda moze primjeniti i za sisteme viseg reda.
U ovom odjeljku koji je posvecen definisanju transfer funkcije sistema, ppos-matracemo kaskadnu vezu vise sistema (slika 5.19)
x(t)=x1(t)
y1(t)=x2(t)
y2(t)=x3(t) xn(t)yn(t)=y(t)
H 1 H 2 H n
Slika 5.19: Kaskadna veza sistema
Ako uvedemo ekvivalentni sistem H =Y
X , onda je lako uociti da vazi
H (ω) =
ni=1
H i(ω), (5.63)
odakle za amplitudsku karakteristiku imamo
H (ω) ==n
i=1
H, (5.64)
a za prenosni ugao
b(ω) =n
i=1
bi(ω), (5.65)
i konacno ukupno slabljenje sistema
a(ω) =n
i=1
ai(ω). (5.66)
Pomenimo da relacija (5.63) ima svoj alternativni oblik na bazi veze izmed-uukupnog i po jedinacnih impulsnih odziva
h(t) = h1(t) ∗ h2(t) ∗ · · · ∗ hn(t) (5.67)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 154/246
148 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
5.4.2 Uslovi idealnog i idealizovanog prenosa
Kada se sistem odnosi na prenosni sistem namjenjen za prenos informacijaodnosno signala, umjesto termina pobudni signal i odziv koristicemo cesce ot-premni i prijemni signal, a odgovarajuce oznake su s1(t) i s2(t), respektivno(sl.5.20)
S1(ω)=F s1(t) S2(ω)=F s2(t)
s1(t) s2(t) H(ω),h(t)
Slika 5.20: Model jednog prenosnog sistema
Idealni prenos moze se difinisati opstim uslovom
s2(t) = s1(t) ⇔ S 2(ω) = S 1(ω). (5.68)
Ako primjenimo dati uslov na (5.58), dobijamo
H (ω) = 1 (5.69)
b(ω) = 0 (5.70)
U uslovima fizickog prenosa, uslov (5.69) moze se dosta dobro odrzavati uodred-enom frekvencijskom opsegu od interesa zahvaljujuci ubacivanju korek-tora, koje u savremenim digitalnim sistemima nazivamo ekvalizatorima.Drugi uslov idealnog prenosa (5.70) je fizicki neostvarljiv zbog konacne brzineprostiranja elektromagnetskih talasa.Idealizovan prenos signala definisacemo uslovima da signal na izlazu sistemamoze vremenski da kasni za t = t0 > 0 u odnosu na ulazni signal uz mogucnostpromjene razmjere amplituda i potpuno ocuvanje oblika ulaznog signala. Matematickiimamo
s2(t) = H 0s1(t − t0) (5.71)
gdje su H 0 i t0 konstante.Ako uslov (5.71) primjenimo na (5.58) dobijamo
H (ω) = H 0 (5.72)
i
b(ω) = ωt0 ⇔ t p =b(ω)
ω = tg =db(ω)
dω = t0 (5.73)
Pomenucemo neke prakticne sisteme koji priblizno zadovoljavaju uslove ideali-zovanog prenosa:
• Sve elektricne mreze sastavljene od proizvoljnih kombinacija ”cisto” ter-mogenih otpora.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 155/246
5.5. VRSTE IZOBLI CENJA 149
ω
H(ω)
H 0 ω t0
Slika 5.21: Graficki prikaz amplitudske i fazne karakteristike idealizovanogprenosnog sistema
• Homogeni prenosni vodovi zanemarljivih gubitaka koji su zakljuceni svo- jom karakteristicnom impedansom. U tom slucaju transfer funkcija imaoblik
H = e−ω√
LC , H (ω) = 1, b(ω) = ω√
LC
• Homogieni vodovi sa gubicima, ako su im ukupni otpor R i odvod Gnezavisni od frekvencije, a ispunjavaju uslov
R
L=
G
C
tako da je H (ω) = e−√
RG i b(ω) = ω√
LC
• Mreza kombinovana od otpornika, zavojnica i kondenzatora cija se djelo-vanja uzajamno kompenzuju (sl.5.14(b)) itd.
5.5 Vrste izoblicenjaU idealizovanom prenosnomsistemu koji je definisan uslovima (5.71), (5.72) i
(5.73) ne postoji izoblicenje signala. Med-utim, vecina fizickih prenosnih sistemastvara manja ili veca izoblicenja signala. To matematicki znaci da amplitudskakarakteristika |H | i vrijeme prenosa faze b/ω u fizickim sistemima nisu konstantenego variraju u funkciji ucestanosti ω (sto je na jcesci slucaj), u funkciji ampli-tude signala s, vremena t itd. sto je nagovjesteno vec u uvodnom razmatranjusa relacijom (5.1)
H = f (ω,s,t). (5.74)
Pomenucemo samo tipicna izoblicenja ko ja unose prenosni sistemi
•Linearna izoblicenja se ogledaju u zavisnosti transfer funkcije od ucestanosti
H = f (ω), (5.75)
gdje se mogu pojaviti slucajevi iskljucivo linearnih amplitudskihizoblicenjakoja su matematicki formulisana relacijom
|H | = f 1(ω) ib
ω= const, (5.76)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 156/246
150 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
iskljucivo linearnih faznih izoblicenja formulisanih relacijom
bω
= f 2(ω) i |H | = const, (5.77)
i konacno istovremeno kombinovnih linearnih amplitudskih i faznih izoblicenja
|H | = f 1(ω) ib
ω= f 2(ω) (5.78)
• Nelinearna izoblicenja su posljedica zavisnosti transfer funkcije od ampli-tude ulaznog signala
H = f 3(s1) (5.79)
• Ako je sistem vremenski varijantan, sto znaci da se ne radi o sistemu sakonstantnim koeficijentima u (1.1), onda mogu nastati vremenska ampli-
tudska izoblicenja |H | = f 4(t) i vremenska fazna izoblicenja b = f 5(t) []itd.
Interesantno je pomenuti da covjekovo uho, kao krajnji korisnih informacija,u velikoj mjeri tolerise fazna izoblicenja, dok je vrlo osjetljivo na nelinearnaizoblicenja.Kod prenosa televizijskog signala od presudnog su znacaja linearna izoblicenja.Zapravo mozemo opstije reci da u digitalnim sistemima linearna izoblicenjaugrozavaju sinhronizam takvih sistema pa se redovno koriste korekcioni sistemiza kompenzaciju linearnih izoblicenja. Takve korektore nazivamo ekvalizatorima[].
5.5.1 Idealizovani niskopropusni sistemIdealizovani niskopropusni sistem definisan je transfer funkcijom
H (ω) =
H 0e−jωto za |ω| < ωg, t0 > 0, H 0 > 0
0 za |ω| > ωg(5.80)
kojoj odgovaraju amplitudska i fazna karakteristika na slici (5.22)
ω
H(ω) H 0
ωg−ωg
b(ω)=ωt 0
Slika 5.22: Amplitudska i fazna karakteristika idealizovanog niskopropusnogsistema
Posmatra juci cjelokupno frekvencijsko podrucje, 0 < f < ∞, posmatrani sis-tem unosi linearna amplitudska izoblicenja. Med-utim, ako su spektralne kom-ponente ulaznog signala locirane u frekvencijskom podrucju od nule do granicne

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 157/246
5.5. VRSTE IZOBLI CENJA 151
frekvencije (f g =ωg
2π ), onda imamo uslove idealizovanog prenosa bez linearnih
amplitudskih i faznih izoblicenja.Analizu uticaja redukcije spektralnih komponenata iznad granicne frekvencijeprovesce o koristeci ulazne signale dfinisane odskocnom i impulsnom funkcijom.Ako usvojimo
s1(t) = δ(t) =1
2π
+∞ −∞
ejωt dω =1
π
+∞ 0
cos ωtdω, (5.81)
onda izlazni signal s2(t) odgovara impulsnom odzivu h(t) posmatranog ideali-zovanog niskopropusnog sistema
s2(t) = h(t) =1
2π
+∞
−∞
H (ω)ejωt dω =H 02π
+ωg
−ωg
ejω(t−t0)dω =H 0π ωg
sin ωg(t−
t0)
ωg(t − t0)
(5.82)Na slici (5.23) prikazan je izlazni signal (5.82) koji je simetrican u odnosu natrenutak t = t0 i u njemu poprima vrsnu vrijednost s2(t0) = H 0
ωg
π
t
t 0
s2(t)=h(t) H 0ωg
π
π
ωg
π
ωg
Slika 5.23: Impulsni odziv idealizovanog niskopropusnog sistema
Ocigledno je da idealizovani niskopropusni sistem ne pripada klasi kauzalnihsistema. Med-utim, u slucaju velike vrijednosti parametra t0 (t π
ωg), impulsni
odziv ima zanemarive vrijednosti u opodrucju t < 0, pa je idealizovani niskopro-pusni sistem tada dobar matematicki model za realne niskopropusni sisteme.Polazeci od poznatog impulsnog odziva sistema (5.82) lako mozemo odreditiizlazni signal u slucaju pobude sistema signalom s1(t) = u(t).Koristeci konvolucioni integral (5.31) imamo
s2(t) = g(t) = u(t)∗
h(t) =
t
−∞h(τ )dτ =
t
−∞
H 0
πωg
sin[ωg(τ − t0)]
ωg(τ − t0)dτ
Uvodeci smjenu v = ωg (τ − t0) prethodni izraz se svodi na oblik
g(t) =H 0π
ωg(t−t0) −∞
sin v
vdv =
H 0π
0 −∞
sin v
vdv +
H 0π
ωg(t−t0) 0
sin v
vdv (5.83)
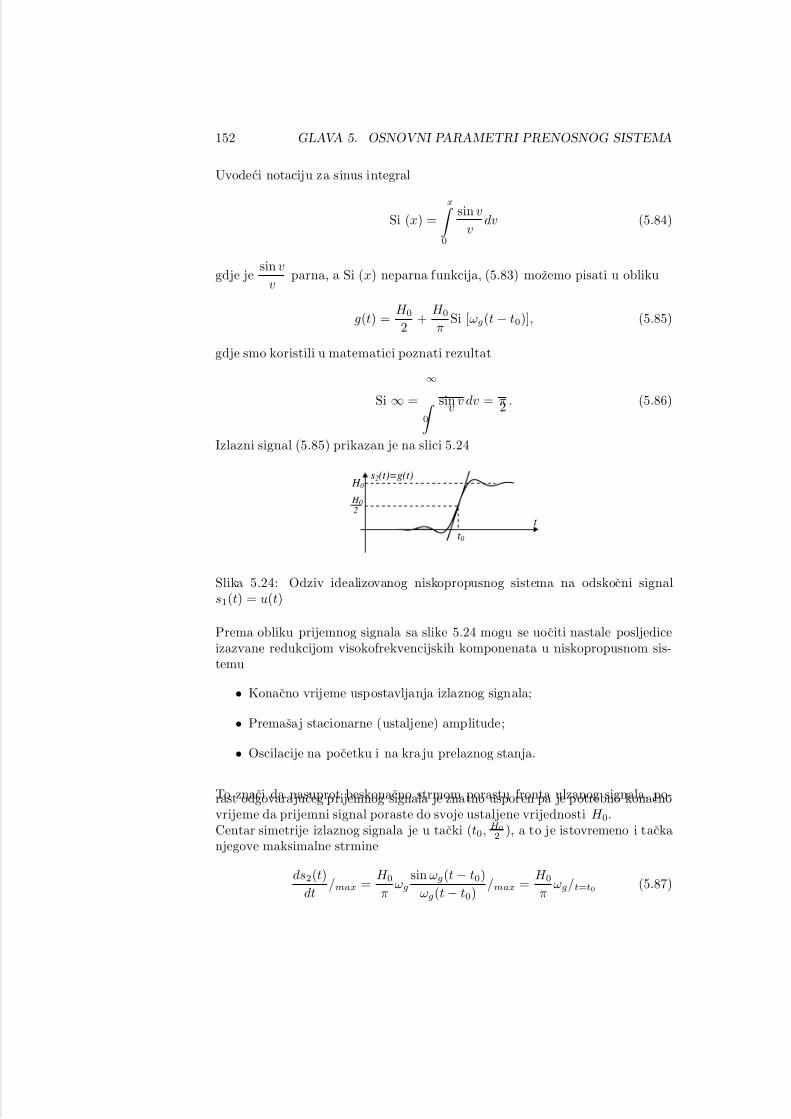
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 158/246
152 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Uvodeci notaciju za sinus integral
Si (x) =
x 0
sin v
vdv (5.84)
gdje jesin v
vparna, a Si (x) neparna funkcija, (5.83) mozemo pisati u obliku
g(t) =H 02
+H 0π
Si [ωg(t − t0)], (5.85)
gdje smo koristili u matematici poznati rezultat
Si ∞ =
∞ 0
sin vv
dv = π2
. (5.86)
Izlazni signal (5.85) prikazan je na slici 5.24
t
t 0
s2(t)=g(t) H 0
H 02
Slika 5.24: Odziv idealizovanog niskopropusnog sistema na odskocni signals1(t) = u(t)
Prema obliku prijemnog signala sa slike 5.24 mogu se uociti nastale posljediceizazvane redukcijom visokofrekvencijskih komponenata u niskopropusnom sis-temu
• Konacno vrijeme uspostavljanja izlaznog signala;
• Premasaj stacionarne (ustaljene) amplitude;
• Oscilacije na pocetku i na kra ju prelaznog stanja.
To znaci da nasuprot beskonacno strmom porastu fronta ulzanog signala, po-rast odgovarajuceg prijemnog signala je znatno usporen pa je potrebno konacnovrijeme da prijemni signal poraste do svoje ustaljene vrijednosti H 0.Centar simetrije izlaznog signala je u tacki (t0, H 0
2 ), a to je istovremeno i tackanjegove maksimalne strmine
ds2(t)
dt/max =
H 0π
ωgsin ωg(t − t0)
ωg(t − t0)/max =
H 0π
ωg/t=t0 (5.87)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 159/246
5.5. VRSTE IZOBLI CENJA 153
Ako vrijeme uspostavljanja signala (T usp) definisemo kao projekciju segmenta
tangente izmed-u dvije horizontalne asimptote na vremensku osu, a koja jepostavljena u tacki maksimuma strmine (t = t0), onda se lako moze dobiti
T usp =π
ωg=
1
2f g[] (5.88)
Znaci, vrijeme uspostavljanja (ili porasta) prijemnog signala zavisi od granicnefrekvencije niskopropusnog sistema i ono je obrnuto proporcionalno toj frekven-ciji.
Pojava premasaja u izlaznom signalu moze se objasniti nepostojanjem visihfrekvencija u spektru prijemnog signala koje bi inace kompenzovale (ponistile)i premasaj i talasanje izlaznog signala.
Odziv na odskocni signal g(t) (5.24) cesto se aproksimativno prikazuje pomocufunkcije g(t) koja je linearna po segmentima (5.25).
t
g(t)
α
t 0
T usp
H 0
H 02
tgα= H 0T usp
= H 0πωg
Slika 5.25: Aproksimativno predstavljanje odziva na odskocni signal
Ako je ulazni signal definisan kao pravougaoni impuls trajanja θ i amplitude A
s1(t) = Arect t
−0.5
θ = Au(t) − Au(t − θ), (5.89)
onda izlazni signal niskopropusnog sistema lako mozemo dobiti koristeci lin-earnost sistema (5.5) i dobijeni rezultat (5.85), tj.:
s2(t) =AH 0
2+
AH 0π
Si [ωg(t − t0)] −
AH 02
+AH 0
πSi [ωg(t − t0 − θ)]
ili konacno
s2(t) =AH 0
πSi [ωg(t − t0)] − Si [ωg(t − t0 − θ)] . (5.90)
Izvrsena superpozicija ulaznog i izlaznog signala pokazuje da sistem n isti nacinutice na prednju i zadnju ivicu ulaznog pravougaonog impulsa (5.26)Dobijeni rezultati (5.88) i (5.90) ukazuju da u uslovima konacne sirine pro-pusnog opsega sistema postoji mogucnost eliminisanja premasaja u izlaznomsignalu pogodinim odabiranjem odnosa izmed-u granicne frekvencije sistema (f g)i trajanja impulsa θ.
Na slici 5.27 dati su kvalitativni dijagrami za izlazni signal niskopropusnogsistema za razlicite granicne frekvencije sistema i datu sirinu (θ) ulaznog im-pulsa.
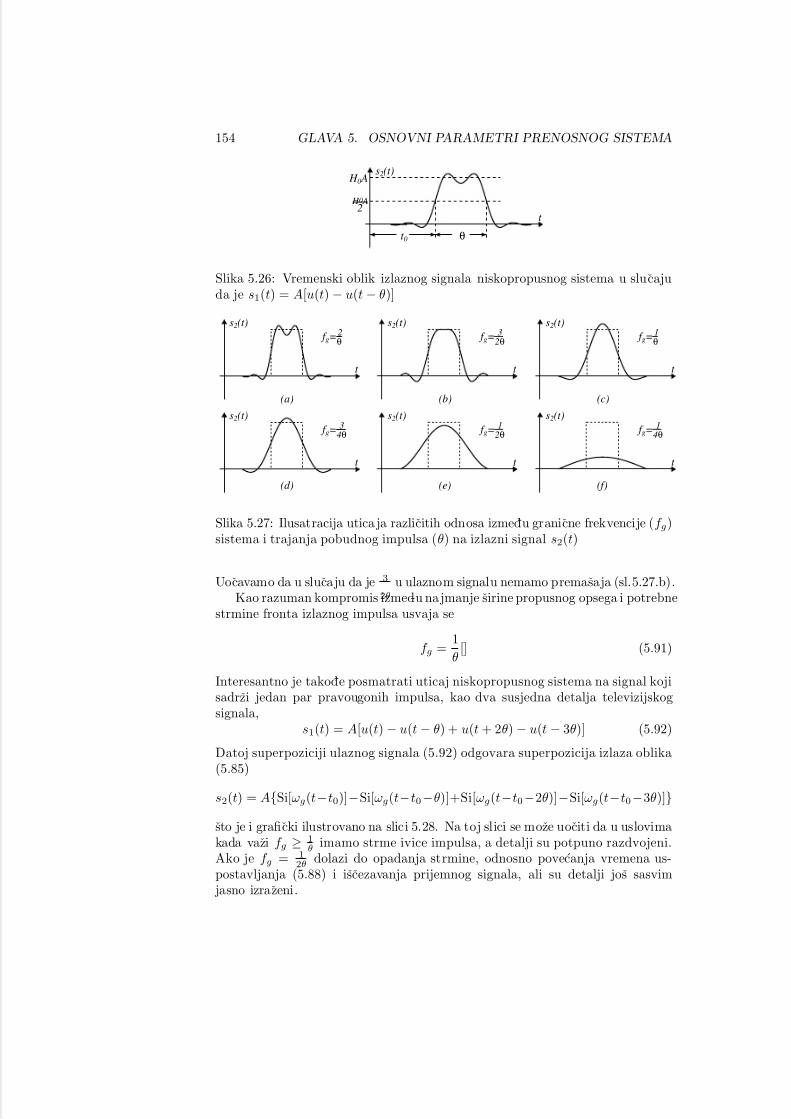
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 160/246
154 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
t
s2(t) H 0 A
H 0 A2
θt 0
Slika 5.26: Vremenski oblik izlaznog signala niskopropusnog sistema u slucajuda je s1(t) = A[u(t) − u(t − θ)]
t
t
t
t
t
t
s2(t)
s2(t)
s2(t)
s2(t)
s2(t)
s2(t)
(a) (b) (c)
(d) (e) (f)
f g= 2θ
f g= 34θ
f g= 32θ
f g= 12θ
f g= 1θ
f g= 14θ
Slika 5.27: Ilusatracija utica ja razlicitih odnosa izmed-u granicne frekvencije (f g)sistema i trajanja pobudnog impulsa (θ) na izlazni signal s2(t)
Uocavamo da u slucaju da je 3
2θ
u ulaznom signalu nemamo premasaja (sl.5.27.b).Kao razuman kompromis izmed-u na jmanje sirine propusnog opsega i potrebne
strmine fronta izlaznog impulsa usvaja se
f g =1
θ[] (5.91)
Interesantno je takod-e posmatrati uticaj niskopropusnog sistema na signal kojisadrzi jedan par pravougonih impulsa, kao dva susjedna detalja televizijskogsignala,
s1(t) = A[u(t) − u(t − θ) + u(t + 2θ) − u(t − 3θ)] (5.92)
Datoj superpoziciji ulaznog signala (5.92) odgovara superpozicija izlaza oblika(5.85)
s2(t) = ASi[ωg(t−t0)]−Si[ωg(t−t0−θ)]+Si[ωg(t−t0−2θ)]−Si[ωg(t−t0−3θ)]
sto je i graficki ilustrovano na slici 5.28. Na toj slici se moze uociti da u uslovimakada vazi f g ≥ 1
θ imamo strme ivice impulsa, a detalji su potpuno razdvojeni.Ako je f g = 1
2θ dolazi do opadanja strmine, odnosno povecanja vremena us-postavljanja (5.88) i iscezavanja prijemnog signala, ali su detalji jos sasvim jasno izrazeni.
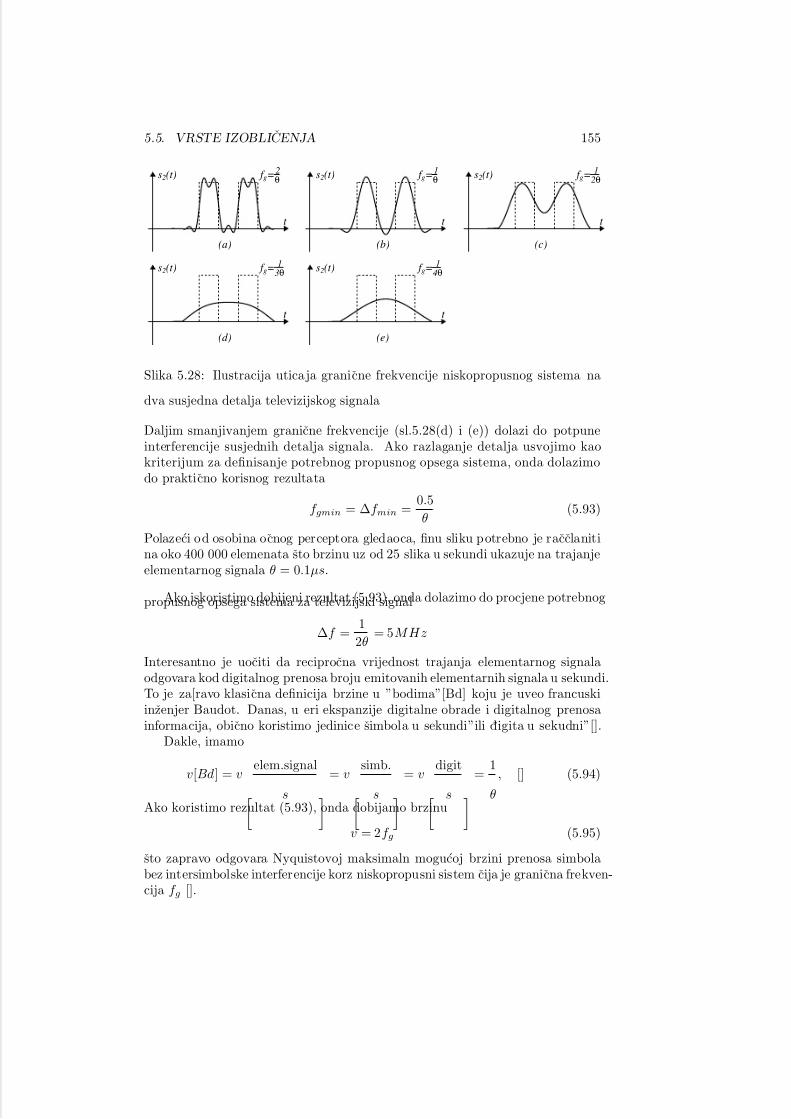
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 161/246
5.5. VRSTE IZOBLI CENJA 155
t t
t t t
s2(t) s2(t)
s2(t) s2(t) s2(t)
(a) (b) (c)
(d) (e)
f g=2θ
f g=1θ
f g= 12θ
f g= 13θ
f g= 14θ
Slika 5.28: Ilustracija uticaja granicne frekvencije niskopropusnog sistema na
dva susjedna detalja televizijskog signala
Daljim smanjivanjem granicne frekvencije (sl.5.28(d) i (e)) dolazi do potpuneinterferencije susjednih detalja signala. Ako razlaganje detalja usvojimo kaokriterijum za definisanje potrebnog propusnog opsega sistema, onda dolazimodo prakticno korisnog rezultata
f gmin = ∆f min =0.5
θ(5.93)
Polazeci od osobina ocnog perceptora gledaoca, finu sliku potrebno je racclanitina oko 400 000 elemenata sto brzinu uz od 25 slika u sekundi ukazuje na trajanjeelementarnog signala θ = 0.1µs.
Ako iskoristimo dobijeni rezultat (5.93), onda dolazimo do procjene potrebnogpropusnog opsega sistema za televizijski signal
∆f =1
2θ= 5MHz
Interesantno je uociti da reciprocna vrijednost trajanja elementarnog signalaodgovara kod digitalnog prenosa broju emitovanih elementarnih signala u sekundi.To je za[ravo klasicna definicija brzine u ”bodima”[Bd] koju je uveo francuskiinzenjer Baudot. Danas, u eri ekspanzije digitalne obrade i digitalnog prenosainformacija, obicno koristimo jedinice simbola u sekundi”ili d-igita u sekudni”[].
Dakle, imamo
v[Bd] = v elem.signal
s = v simb.
s = v digit
s =1
θ
, [] (5.94)
Ako koristimo rezultat (5.93), onda dobijamo brzinu
v = 2f g (5.95)
sto zapravo odgovara Nyquistovoj maksimaln mogucoj brzini prenosa simbolabez intersimbolske interferencije korz niskopropusni sistem cija je granicna frekven-cija f g [].

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 162/246
156 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
5.5.2 Uticaj monotono promjenljive amplitudske karak-
teristike niskopropusnog sistemaU ovom odjeljku kratko cemo izvrsiti analizu utica ja linearne promjene am-
plitudske karakteristike uniskopropusnom podrucju
H (ω) =
1 + αω, |ω| < ωg
0, |ω| > ωg,
b(ω) = ωt0
(5.96)
gdje parametar α moze biti pozitivan ili negativan broj.Ako pretpostavimo ulazni sigal oblika
s1
(t) = u(t) =1
2+
1
π
∞
0
sin ωt
ωdω,
onda se jednostavno moze dobiti izlazni signal
s2(t) =1
2+
1
πSi [ωg(t − t0)] +
2αωg
π
1
ωg(t − t0)sin2 ωg
2(t − t0)[] (5.97)
Prva dva clana u izlaznom signalu (5.97) odgovaraju izlaznom signalu ideali-zovanog niskopropusnog sistema (5.85). Treci clan u izrazu (5.97) posljedica je uticaja monotone linearne promjene u amplitudskoj karakteristici sistema(5.96). Ocigledno je da od predznaka faktora α zavisi da li ce prelazne oscilacije(premasaj i talasanje) biti pojacane ili oslabljene.
Mi cemo ovdje dati samo opsti zakljucak: da opadajuca amplitudska karak-teristika (α < 0) prigusuje oscilacije prelaznog stanja smanjujuci maksimalnustrminu signala i obrnuto [].
5.5.3 Uticaj talasanja u amplitudskoj karakteristici nisko-propusnog sistema
Posmatracemo niskopojasni sistem cija je transfer funkcija definisana relacijom
H (ω) =
H (ω)e−jωt0 |ω| < ωg
0 |ω| > ωg(5.98)
koja ukazuje na prisutna amplitudska izoblicenja (H (ω)= H 0), a odsustvo
linearnih faznih izoblicenja (b(ω) = ωt0).Inverznom Fourierovom transformacijom transfer funkcije (5.98), mozemo
dobiti odgovarajuci impulsni odziv
s2(t) = h(t)/s1(t)=δ(t) = F −1H (ω) =1
2π
ωg −ωg
H (ω)ejω(t−t0)dω (5.99)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 163/246
5.5. VRSTE IZOBLI CENJA 157
Kako je H (ω) = |H (ω)| = H (−ω), relaciju (5.99) mozemo pisati u pojednos-
tavljenom obliku
h(t) =1
2π
ωg −ωG
H (ω) cos[ω(t − t0)]dω (5.100)
Jednakost (5.100) ukazuje da vazi h(t0 + t) = h(t0 − t) sto znaci da je impulsniodziv simetricna vremenska funkcija u odnosu na trenutak t = t0 i da upravo utom trenutku ima apsolutni maksimum
|h(t)|max = h(t0) =1
2π
+ωg −ωg
H (ω)dω (5.101)
U slucaju idealizovanog niskopropusnog sistema (5.80) imamo h(T 0) = H 0ωg/π(sl.5.23).
U uslovima pobude posmatranog sistema sa signalom koji je definisan odskocnomvremenskom funkcijom (s1(t) = u(t)), izlazni signal ima oblik
s2(t) = g(t) =
t −∞
h(τ )dτ,
odakle za t = ∞ imamo stecionarnu vrijednost
g(∞)
+∞ −∞
h(τ )dτ = H (0) (5.102)
S obzirom na simetriju impulsnog odziva u odnosu na trenutak t = t0, funkcijag(t) upravo u taj tacki maksimalne strmine ima svoju tezinsku i prevojnu tackupa vazi
g(t0) =g(∞)
2=
H (0)
2i g(t0) = h(t0) (5.103)
Ako se zadrzimo na prethodno uvedenoj definiciji vremena uspostavljanja (T usp),onda specijalnom rezultatu (5.88) odgovcara opstija definicija
T usp
=2πH (0)
+ωg −ωg
H (ω)dω
(5.104)
Ako imamo idealizovani niskopropusni sistem (H (ω) = H 0, |ω| < ωg), (5.104)poprima vrijednost (5.88).
Za detaljniju analizu niskopropusnih sistema zgodnim se pokazao razvoj am-plitudske karakteristike u Fourierov red sa periodom 2ωg. Zapravo takvu analizu

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 164/246
158 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
odstupanja amplitudske i fazne karakteristike od njihovih idealizovanih karak-
teristika predlozio je Wheeler jos 1929. godine []. U uslovima pretpostavljenelinearne fazne karakteristike imamo
H (ω) = H (ω)e−jωt0 =+∞
k=−∞cke
−ω(t0− kπωg
), |ω| < ωg (5.105)
gdje je zbog parnosti amplitudske karakteristike (H (ω) = H (−ω))
c−k = ck =1
2ωg
ωg −ωg
H (ω)e−jkπω/ωgdω (5.106)
Oblik transfer funkcije (5.105) pokazuje da se posmatrani sistem moze posma-
trati preko superpozicije niza idealizovanih niskopropusnih sistema ciji ukupniodziv ima oblik
h(t) =+∞
k=−∞ck
sin[ωg(t − t0 + kπωg
)]
ωg(t − t0 + kπωg
)(5.107)
Konacni rezultat (5.107) pokazuje da pored tzv centralnog odziva c0sin ωg(t−t0)
ωg(t−t0),
koji je identican po obliku odzivu idealizovanog niskopropusnog sistema (5.82),svaki k–ti harmonik amplitudske karakteristike u ukupnom odzivu daje parsimetricnih odjeka istog oblika a pomjerenih za ±kπ
ωgu odnosu na trenutak
t = t0 (koji odgovara vremenu prenosa grupe odnosno faze). Sto je talasanjeamplitudske karakteristike brze odjeci su udaljeniji od centra odziva. Ukupanodziv ce se, dakle, razvuci, ali ce biti parno simetrican u odnosu na trenutak
t = t0.U slucaju pojave umjerenih linearnih faznih izoblicenja pojavljuju se an-
tisimetricni odjeci u odnosu na trenutak t = t0. To znaci da se pod uticajemlinearnih faznih izoblicenja izlazni signal takod-e siri, kao i pod uticajem linearni-hamplitudskih izoblicenja, ali se pojavljuje i asimetrija u njegovom vremenskomobliku [].
Primjer 5.8 (Kosinus–niskopropusni sistem). Transfer funkciju kosinus–niskopropusnog sistema definisacemo relacijom
H (ω) =
[cos2 π
ωg
ω2 ]e−jωt0 |ω| < ωg
0 |ω| > ωg(5.108)
pa ga zbog toga ponekad nazivamo i kosinuskvadrat sistemom [].U propusnom podrucju ( |ω| < ωg) amplitudsku karakteristiku mozemo pisati
u obliku
H (ω) =1
2
1 + cos
πω
ωg
=
1
2+
1
4e
j πωωg +
1
4e−j πω
ωg , (5.109)
odakle neposredno imamo vrijednosti koeficijenata odgovarajuceg Fourierovog reca c0 = 1
2, c1 = c−1 = 1
4.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 165/246
5.5. VRSTE IZOBLI CENJA 159
Trnasfer funkciju (5.108) prepisacemo u ekvivalentnom obliku
H (ω) = 1
2e−jωt0 + 1
4e−jω(t0− π
ωg) + 1
4e−jω(t0− π
ωg) |ω| < ωg
0 |ω| > ωg(5.110)
Odgovarajuca amplitudska i fazna karakteristika prikazane su na slici 5.29
ω
H(ω)1
−ωg ωg
b(ω)=ωt 0
Slika 5.29: Amplitudska i fazna karakteristika kasnjenja kosinus–niskopropusnogsistema
Inverznom Fourierovom transformacijom transfer funkcije H (ω) lako se mozedobiti odgovarajuci impulsni odziv
h(t) = FH (ω)ω
π
1
2
sin[ωg(t − t0)]
ωg(t − t0)+
+1
4
sin[ωg(t − t0 − π/ωg)]
ωg(t − t0 − π/ωg)+
1
4
sin[ωg (t − t0 + π/ωg )]
ωg(t − t0 + π/ωg)
(5.111)
koji mozemo prikazati i u sazetijem obliku
h(t) = ωg
2πsin ωg t/2
ωgt/2cos ωgt/2
ωgt/2, t = t − t0 (5.112)
Impulsnom odzivu u obliku 5.111 odgovara centralni odziv centriran u trenutku t = t0 i par simetricnih odjeka istog oblika i pomjerenih za ±π/ωg u odnosu na trenutak t = t0 (sl. 5.30(a)).
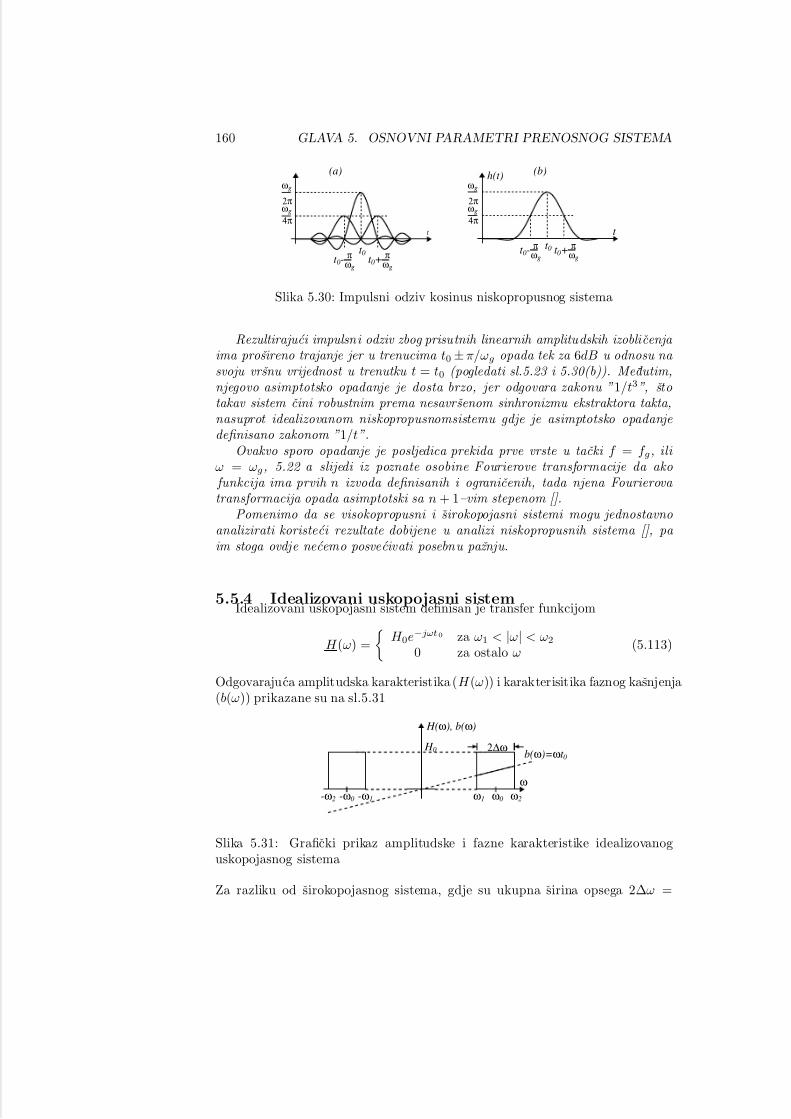
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 166/246
160 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
t 0t 0+ π
ωgt 0- π
ωg
t
ωg
2πωg
4π
t
h(t)ωg
2πωg
4π
t 0 t 0+ π
ωgt 0- π
ωg
(a) (b)
Slika 5.30: Impulsni odziv kosinus niskopropusnog sistema
Rezultirajuci impulsni odziv zbog prisutnih linearnih amplitudskih izoblicenja ima prosireno trajanje jer u trenucima t0 ± π/ωg opada tek za 6dB u odnosu na svoju vrsnu vrijednost u trenutku t = t0 (pogledati sl.5.23 i 5.30(b)). Med -utim,njegovo asimptotsko opadanje je dosta brzo, jer odgovara zakonu ”1/t3”, stotakav sistem cini robustnim prema nesavrsenom sinhronizmu ekstraktora takta,nasuprot idealizovanom niskopropusnomsistemu gdje je asimptotsko opadanjedefinisano zakonom ”1/t”.
Ovakvo sporo opadanje je posljedica prekida prve vrste u tacki f = f g, ili ω = ωg, 5.22 a slijedi iz poznate osobine Fourierove transformacije da ako funkcija ima prvih n izvoda definisanih i ogranicenih, tada njena Fourierova transformacija opada asimptotski sa n + 1–vim stepenom [].
Pomenimo da se visokopropusni i sirokopojasni sistemi mogu jednostavnoanalizirati koristeci rezultate dobijene u analizi niskopropusnih sistema [], pa im stoga ovdje necemo posvecivati posebnu paznju.
5.5.4 Idealizovani uskopojasni sistemIdealizovani uskopojasni sistem definisan je transfer funkcijom
H (ω) =
H 0e−jωt0 za ω1 < |ω| < ω2
0 za ostalo ω(5.113)
Odgovarajuca amplitudska karakteristika (H (ω)) i karakterisitika faznog kasnjenja(b(ω)) prikazane su na sl.5.31
ω
2∆ω
ω1 ω0 ω2-ω2 -ω0 -ω1
H 0
H(ω), b(ω)
b(ω)=ωt 0
Slika 5.31: Graficki prikaz amplitudske i fazne karakteristike idealizovanoguskopojasnog sistema
Za razliku od sirokopojasnog sistema, gdje su ukupna sirina opsega 2∆ω =

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 167/246
5.5. VRSTE IZOBLI CENJA 161
ω2 −ω1 i centralan ucestanost ω0 = (ω1 + ω2)/2 velicine istog reda, kod uskopo-
jasnog sistema zadovoljena je nejednakost2∆ω = 2πB ω0 = 2πf 0. (5.114)
Preptostavljajuci na ulazu sistema signal oblika
s1(t) = δ(t) =1
2π
+∞ −∞
ejωt dω =1
π
+∞ 0
cos ωtdω, (5.115)
a zatim koristeci definisanu transfer funkciju (5.113) mozemo odrediti prijemnisignal, odnosno impulsni odziv sistema,
s2(t) = h(t) =H 0π
2∆ωsin∆ω(t − t0)
∆ω(t
−t0)
cos ω0(t − t0) (5.116)
koji je prikazan na slici 5.32.
H 0π2∆ω
π
∆ω
π
∆ω
t
s2(t)=h(t)
t 0
Slika 5.32: Vremenski oblik impuslnog odziva idealizovanog uskopojasnog sis-tema
Prema dobijenim rezultatima anvelopa impulsnog odziva defnisana je sirinomopsega sistema, a brzina popune (f 0) odred-ena je centralnom frekvencijom sis-tema. Uocimo da maksimalna amplituda prijemnog signala nasta je u trenutku
t = t0 = db(ω)dω = tg, koji odgovara vremenu prenosa grupe, i da iznosi
s2(t)|max =H 0π
2∆ω (5.117)
Ako je ulazni signal definisan odskocnom funkcijom s1(t) = u(t), onda se uznejednakost (5.114) moze dobiti
s2(t) = g(t) =H 0π
2∆ω
ω0
sin∆ω(t−
t0)
∆ω(t − t0) sin ω0(t − t0) (5.118)
I ovaj rezultat pokazuje da u okolini vremena prenosa t = t0 nastaja oscilovanjeu prejemnom signalu sa frekvencijom f 0 = ω0/2π cija se anvelopa povinjavazakonu sin x/x i poprima maksimalnu vrijednost
H 0π
2∆ω
ω0
sin∆ω(t − t0)
∆ω(t − t0)|max =
H 0π
2∆ω
ω0|t=t0 (5.119)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 168/246
162 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Prema (5.117) i (5.119) vidimo da maksimalna vrijednost anvelope kod impul-
snog odziva zavisi od apsolutni sirine opsega, dok kod odziva na odskocni signalimamo neposrednu zavisnost maksimalne amplitude od relativne sirine opsegasistema. Pomenuta razlika je posljedica uniformnog spektra kod Dirakovog sig-nala, dok kod odskocnog signala imamo monotono opadajuci amplitudski spek-tar brzinom od 6dB/oct (pogledati sl.?? i 3.30)
5.5.5 Ekivvalentni niskopropusni sistem
Kada se translacija spektra signala iz NF u VF pdorucje vrsi na bazi linearnihmodulacionih postupaka, kao sto je amplitudska modulacija, onda je uvod-enjeekvivalentnog niskopropusnog sistema od posebnog znacaja. Postavljeni za-datak se lako moze razrijesiti prateci prenos signala od NF ka VF podrucju,zatim prenos kroz uskopojasni sistem i demodulator kao sto ilustruje sl.5.33.
- 2πθ
2πθ
ω
S1=F s1
cosΩ0t
Ω0 Ω0+2πθ
Ω0-2πθ
ω
s1(t)
θ
t t
H(ω)
Uskopojasni sistem2cosΩ0t
Idealizovaniniskopropusnisistem
s2(t)
t
A B C D E
NF VF VF+NF NF
Demodulator
Slika 5.33: Ilustracija sistema za prenos signala u transponovanog frekvenci- jskom podrucju
U polaznoj tacki sistema A signal s1(t) = sA(t) ima spektar lociran u niskofrekven-cijskom podrucju. Multipl8ikacijom sa tzv. nosecim signalom iz oscilatora do-bijamo
sB(t) = sA(t)cosΩ0t (5.120)
ciji je spektar
S B = FsB(t) =1
2S A(ω − Ω0) +
1
2S A(ω + Ω0) (5.121)
Signal u tacki C nakon prolaska VF signala sB(t) kroz uskopojasni sistem, cija je transfer funkcija H (ω), ima spektar
S C = H (ω)S B(ω) =
1
2 H (ω)[S A(ω − Ω0) + S A(ω + Ω0)] (5.122)
Koristeci lokalni oscilator, signal u tacki D poprima oblik
S D = S C (ω − Ω0) + S C (ω + Ω0) =1
2H (ω − Ω0)[S A(ω − 2Ω0) + S A(ω)]+
+1
2H (ω + Ω0)[S A(ω) + S A(ω + 2Ω0)]

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 169/246
5.5. VRSTE IZOBLI CENJA 163
ili konacno
S D = 12
[H (ω − Ω0) + H (ω + Ω0)]S A(ω)+
+1
2H (ω − Ω0)S A(ω − 2Ω0) +
1
2H (ω + Ω0)S A(ω + 2Ω0) (5.123)
Prema strukturi spektra u tacki D uocavamo da on sadrzi VF komponente loci-rane oko dvostruke frekvencije noseceg talasa (S A(ω ± 2Ω0)) i NF komponentu(S A(ω)) koja odgovara originalnom signalu.
Usklad-ujuci niskopropusni sistem sa spektrom NF komponente signala sD(t),i eliminisuci sada za nas parazitske VF komponente, izlazni signal poprima oblik
S E (ω) = S 2(ω) =1
2[H (ω − Ω0) + H (ω + Ω0)]S A(ω) (5.124)
koristeci konacni rezultat (5.124) mozemo definisati ekvivalentni niskopropusnisistem od tacke A do tacke E
H ek(ω) =S ES A
=S 2S 1
=1
2[H (ω + Ω0)H (ω − Ω0)] (5.125)
sto je graficki ilustrovano na slici 5.34
s1(t) s2(t)t
A E H ek (ω)
Slika 5.34: Ekvivalentni niskopropusni sistem
Pogodnosti uvod-enja ekvivalentnog niskopropusnog sistema ogledaju se u tomeda analizu prenosa VF signala kroz uskopojasni prenosni sistem, kao i postupkemodulacije i demodulacije, mozemo zamjeniti jednostavnom analizom prenosaanvelope VF signala kroz ekvivalentni NF sistem definisan relacijom (5.125).
Dublja analiza razmatranog problema pokazuje da se moze pojaviti simetricniili asimetricni prenos u zavisnosti od odnosa ucetanosti noseceg talasa (Ω0) icentralne ucestanosti uskopojasnog prenosnog sistema (ω0) [].
Zadatak 5.2. Definisati ekvivalentni niskopropusni sistem, ako je amplitudska karakteristika uskopojasnog sistema data na slici 5.35
ω
ω1 ω0 ω2
2∆ω H 0
Slika 5.35: Amplitudska karakteristika uskopojasnog prenosnog sistema
U cilju jednostavnije analize zanemariti faznu karakteristiku sistema i pret-postaviti da je ucestanost noseceg talasa Ω0 = ω0 + ε∆ω, |ε| ≤ 1, gdje je ω0
centralna ucestanost posmatranog sistema.
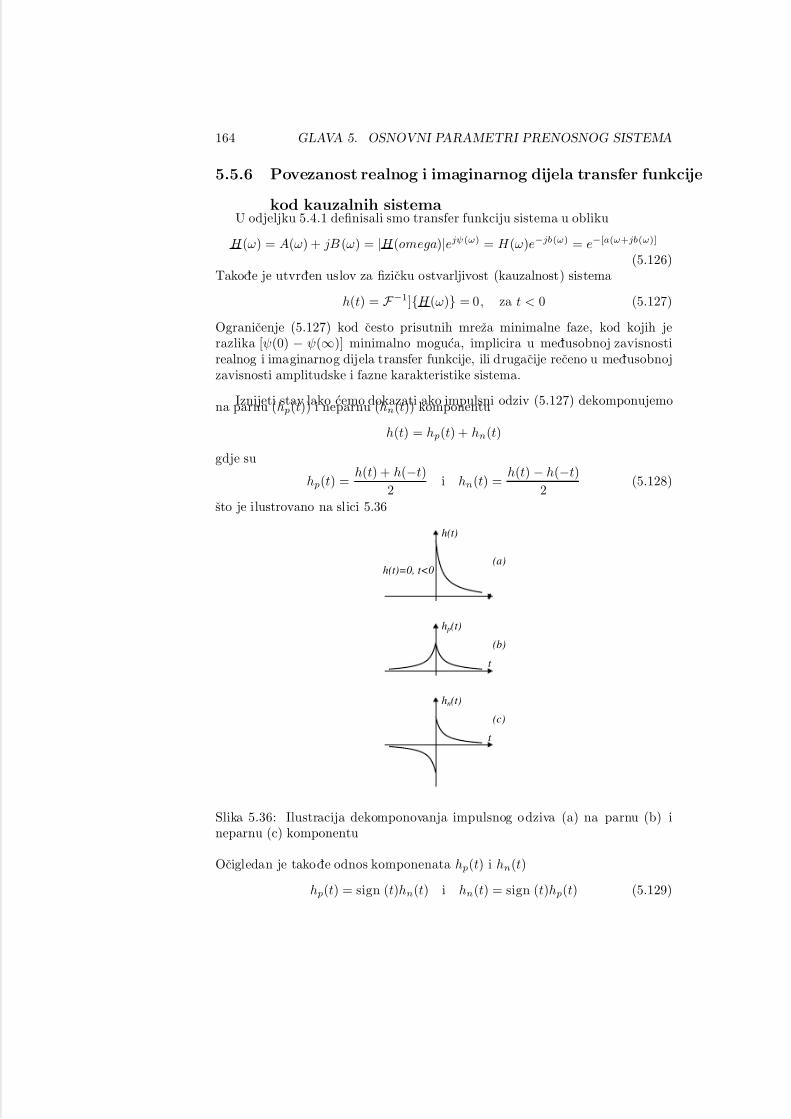
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 170/246
164 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
5.5.6 Povezanost realnog i imaginarnog dijela transfer funkcije
kod kauzalnih sistemaU odjeljku 5.4.1 definisali smo transfer funkciju sistema u obliku
H (ω) = A(ω) + jB (ω) = |H (omega)|ejψ(ω) = H (ω)e−jb(ω) = e−[a(ω+jb(ω)]
(5.126)Takod-e je utvrd-en uslov za fizicku ostvarljivost (kauzalnost) sistema
h(t) = F −1]H (ω) = 0, za t < 0 (5.127)
Ogranicenje (5.127) kod cesto prisutnih mreza minimalne faze, kod kojih jerazlika [ψ(0) − ψ(∞)] minimalno moguca, implicira u med-usobnoj zavisnostirealnog i imaginarnog dijela transfer funkcije, ili drugacije receno u med-usobnojzavisnosti amplitudske i fazne karakteristike sistema.
Iznijeti stav lako cemo dokazati ako impulsni odziv (5.127) dekomponujemona parnu (h p(t)) i neparnu (hn(t)) komponentu
h(t) = h p(t) + hn(t)
gdje su
h p(t) =h(t) + h(−t)
2i hn(t) =
h(t) − h(−t)
2(5.128)
sto je ilustrovano na slici 5.36
h(t)
h(t)=0, t<0
h p(t)
hn(t)
t
t
t
(a)
(b)
(c)
Slika 5.36: Ilustracija dekomponovanja impulsnog odziva (a) na parnu (b) ineparnu (c) komponentu
Ocigledan je takod-e odnos komponenata h p(t) i hn(t)
h p(t) = sign (t)hn(t) i hn(t) = sign (t)h p(t) (5.129)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 171/246
5.5. VRSTE IZOBLI CENJA 165
Kako su h(t), h p(t) i hn(t) realne vremenske funkcije onda zbog parnosti funkcije
h p(t) i neparnosti hn(t), vrijediA(ω) = Fh p(t) i jB (ω) = Fh(n(t) (5.130)
Relacije izmed-u komponenata h p(t) i hn(t) u vremenskom domenu definisanesa (5.129) odgovaraju i ekvivalentnim relacijama u frekvencijskom domenu
A(ω) =1
2π
2
jω∗ jB(ω) =
1
π
+∞ −∞
B(u)
ω − udu, (5.131)
B(ω) = − 1
π
+∞
−∞
A(u)
ω
−u
du. (5.132)
Rezultati (5.131) i (5.132) pokazuju da su komponente transfer funkcije A(ω)i B(ω) med-usobno povezane preko Hilbertove transformacije. Pomenimo da sekod izracunavanja nesvojstvenih integrala (5.131) i (5.132) uzima Cauchy–jevaglavna vrijednost.
Par Hilbertovih transformacija cesto se prikazuje u drugom ekvivalentnomparu transformacija koji povezuje amplitudsku karakteristiku, odnosno slabljenje,i faznu karakteristiku kasnjenja sistema
b(ω) =1
π
+∞ −∞
a(u)
u − ωdu (5.133)
a(ω) = ln1
H (ω)=
1
π
+∞ −∞
b(u)
ω − udu (5.134)
U literaturi je prisutan i drugaciji pristup u interpretaciji uslova (5.127) zafizicki ostvarljive sisteme. Tako se ponekad koristi dobro poznat Paley–Wienerovkriterijum koji kaze da potrebani dovoljan uslov da se moze realizovati sistemsa amplitudskom karakteristikom |H (ω)| = H (ω) glasi
+∞ −∞
| ln |H (ω)||1 + ω2
dω < ∞, [] (5.135)
gdje se takod-e pretpostavlja kvadratna integrabilnost amplitudske karakteristike
sistema+∞ −∞
|H (ω)|2dω < ∞.
Primjer 5.9. Prethodno razmatranje ilustrovacemo na primjeru jednog nisko-propusnog sistema cija je amplitudska karakteristika odnosno slabjenje dato na slici 5.37
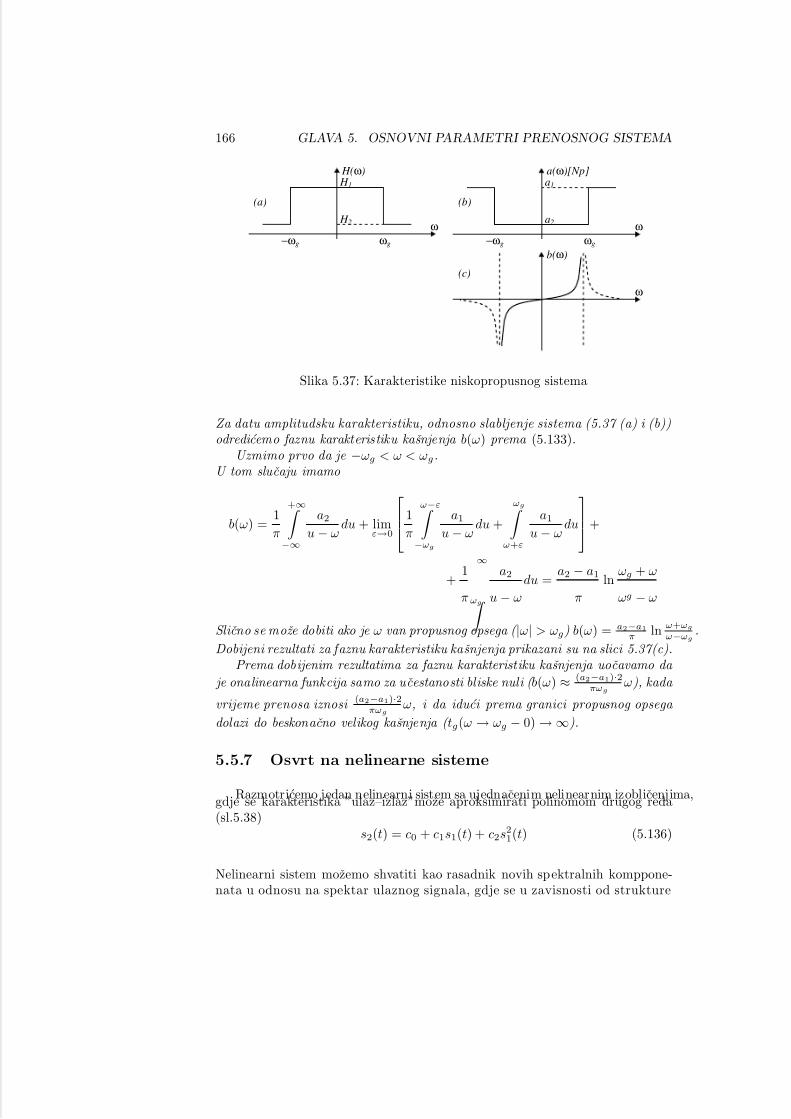
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 172/246
166 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
H 2
H 1
ω
H(ω)
−ωg ωg
(a)
a2
a1
ω
a(ω)[Np]
−ωg ωg
(b)
ω
b(ω)
(c)
Slika 5.37: Karakteristike niskopropusnog sistema
Za datu amplitudsku karakteristiku, odnosno slabljenje sistema (5.37 (a) i (b))odredicemo faznu karakteristiku kasnjenja b(ω) prema (5.133).
Uzmimo prvo da je −ωg < ω < ωg.U tom slucaju imamo
b(ω) =1
π
+∞ −∞
a2
u − ωdu + lim
ε→0
1
π
ω−ε −ωg
a1
u − ωdu +
ωg ω+ε
a1
u − ωdu
+
+1
π
∞
ωg
a2
u − ω
du =a2 − a1
π
lnωg + ω
ωg − ω
Slicno se moze dobiti ako je ω van propusnog opsega ( |ω| > ωg) b(ω) = a2−a1π ln
ω+ωg
ω−ωg.
Dobijeni rezultati za faznu karakteristiku kasnjenja prikazani su na slici 5.37(c).Prema dobijenim rezultatima za faznu karakteristiku kasnjenja uocavamo da
je onalinearna funkcija samo za ucestanosti bliske nuli ( b(ω) ≈ (a2−a1)·2πωg
ω), kada
vrijeme prenosa iznosi (a2−a1)·2πωg
ω, i da iduci prema granici propusnog opsega
dolazi do beskonacno velikog kasnjenja ( tg (ω → ωg − 0) → ∞).
5.5.7 Osvrt na nelinearne sisteme
Razmotricemo jedan nelinearni sistem sa ujednacenim nelinearnim izoblicenjima,gdje se karakteristika ”ulaz–izlaz”moze aproksimirati polinomom drugog reda(sl.5.38)
s2(t) = c0 + c1s1(t) + c2s21(t) (5.136)
Nelinearni sistem mozemo shvatiti kao rasadnik novih spektralnih komppone-nata u odnosu na spektar ulaznog signala, gdje se u zavisnosti od strukture
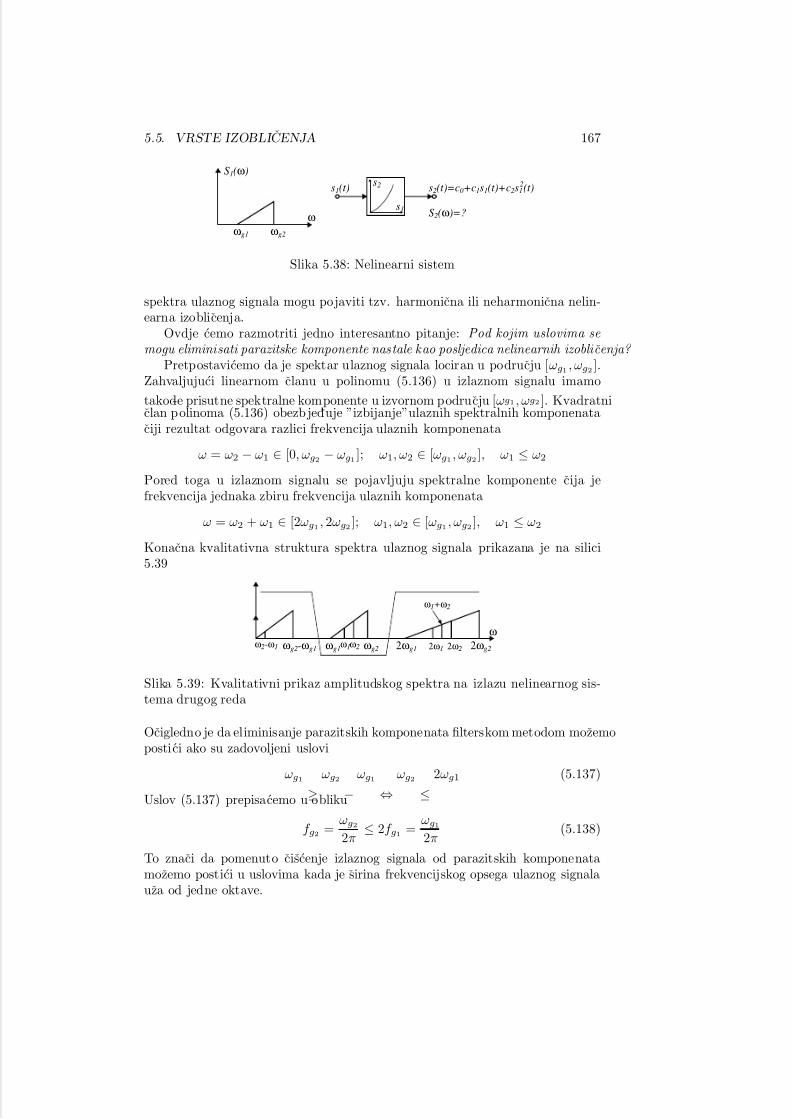
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 173/246
5.5. VRSTE IZOBLI CENJA 167
ωg1 ωg2
ω
S1(ω)
s1(t) s2(t)=c0+c1s1(t)+c2s12(t)
s2
s1 S2(ω)=?
Slika 5.38: Nelinearni sistem
spektra ulaznog signala mogu pojaviti tzv. harmonicna ili neharmonicna nelin-earna izoblicenja.
Ovdje cemo razmotriti jedno interesantno pitanje: Pod kojim uslovima semogu eliminisati parazitske komponente nastale kao posljedica nelinearnih izoblicenja?
Pretpostavicemo da je spektar ulaznog signala lociran u podrucju [ωg1 , ωg2 ].Zahvaljujuci linearnom clanu u polinomu (5.136) u izlaznom signalu imamo
takod-e prisutne spektralne komponente u izvornom podrucju [ωg1 , ωg2 ]. Kvadratniclan polinoma (5.136) obezb jed-uje ”izbijanje”ulaznih spektralnih komponenataciji rezultat odgovara razlici frekvencija ulaznih komponenata
ω = ω2 − ω1 ∈ [0, ωg2 − ωg1 ]; ω1, ω2 ∈ [ωg1 , ωg2 ], ω1 ≤ ω2
Pored toga u izlaznom signalu se pojavljuju spektralne komponente cija jefrekvencija jednaka zbiru frekvencija ulaznih komponenata
ω = ω2 + ω1 ∈ [2ωg1 , 2ωg2 ]; ω1, ω2 ∈ [ωg1 , ωg2 ], ω1 ≤ ω2
Konacna kvalitativna struktura spektra ulaznog signala prikazana je na silici5.39
ωg1 ωg2ω1ω2ωg2-ωg1
ω2-ω1 2ωg1 2ωg2
ω
2ω1 2ω2
ω1+ω2
Slika 5.39: Kvalitativni prikaz amplitudskog spektra na izlazu nelinearnog sis-tema drugog reda
Ocigledno je da eliminisanje parazitskih komponenata filterskom metodom mozemopostici ako su zadovoljeni uslovi
ωg1
≥ωg2
−ωg1
⇔ωg2
≤2ωg1 (5.137)
Uslov (5.137) prepisacemo u obliku
f g2 =ωg2
2π≤ 2f g1 =
ωg1
2π(5.138)
To znaci da pomenuto ciscenje izlaznog signala od parazitskih komponenatamozemo postici u uslovima kada je sirina frekvencijskog opsega ulaznog signalauza od jedne oktave.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 174/246
168 GLAVA 5. OSNOVNI PARAMETRI PRENOSNOG SISTEMA
Ako uslov (5.138) nije zadovoljen, onda mozemo pribjeci translaciji spektra
u vise frekvencijsko podrucje prije prenosa kroz nelinearni sistem.Interesantno je pomenuti da bi u slucaju polinom treceg stepena parazitskekomponente (ω2 ±ω1) upadale u originalno podrucje [ωg1 , ωg2 ] pa u tom slucajufilterskom metodom ne mozemo vrsiti ciscenje spektra signala bez obzira naodnos donje i gornje granicne frekvencije ulaznog signala.
U takvim uslovima linearnost sistema moze se povecati uvod-enjem nega-tivne povratne sprege ili pribjeci kombinaciji dva sistema cije bi se nelinearnosti”ponistavale”uz povecanu linearnost ekvivalentnog sistema (pojacavac u klasi”B”) itd.
Prethodno razmatranje odnosi se na sisteme gdje je pojava nelinearnostisistema stetna za njegovog kra jnjeg korisnika. Takav slucaj imamo kod projek-tovanja pojacavaca gdje se vrsi selekcija komponenata kod kojih je linearni clanpolinoma (5.136) dominantan. Med-utim, kod realizacije modulatora, mjesaca
, kompandora, umnozivaca frekvencije itd, nelinearnost prenosne karakteristikeupotrebljenih komponenata je pozeljna pa u tom slucaju kazemo da se radi o”namjernom izoblicenju.
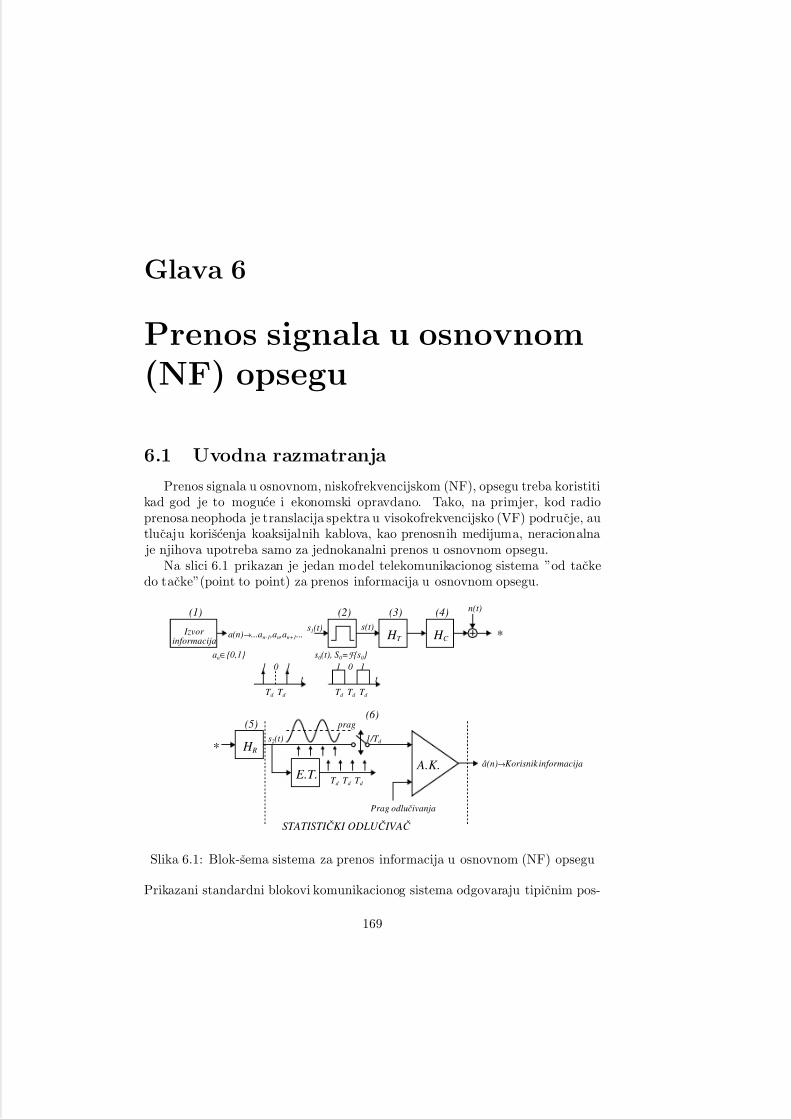
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 175/246
Glava 6
Prenos signala u osnovnom(NF) opsegu
6.1 Uvodna razmatranja
Prenos signala u osnovnom, niskofrekvencijskom (NF), opsegu treba koristitikad god je to moguce i ekonomski opravdano. Tako, na primjer, kod radioprenosa neophoda je translacija spektra u visokofrekvencijsko (VF) podrucje, autlucaju koriscenja koaksijalnih kablova, kao prenosnih medijuma, neracionalna je njihova upotreba samo za jednokanalni prenos u osnovnom opsegu.
Na slici 6.1 prikazan je jedan model telekomunikacionog sistema ”od tackedo tacke”(point to point) za prenos informacija u osnovnom opsegu.
Izvor informacija
a(n)→...an-1 ,an ,an+1...s1(t) s(t)
H T H C
H R
E.T.
(1) (2) (3) (4)
(5)
n(t)
s0(t), S0=F s0 an∈0,1
1 0 1
t
T d T d
1 0 1
t
T d T d T d
s2(t)
prag
1/T d
T d T d T d
A.K.
Prag odlučivanja
â(n)→Korisnik informacija
STATISTIČKI ODLUČIVAČ
(6)
*
*
Slika 6.1: Blok-sema sistema za prenos informacija u osnovnom (NF) opsegu
Prikazani standardni blokovi komunikacionog sistema odgovaraju tipicnim pos-
169

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 176/246
170 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
tupcima obrade signala na strani izvora odnosno korisnika informacija.Kratko
cemo se osvrnuti na pojedine blokove datog modela.1. Izvor informacija moze neposredno da odgovara izvoru digitalnog takta
(data) signala ili nekom izvornom kodere koji vrsi funkciju analogno/digitalnog(A/D) konvertora (P CM , ∆M i dr.)
2. Pomocu generatora elementarnih signala preslikavamo sekvencu elemenatainformacionog sadrzaja a(n) u digitalni linijski signal s(t). Pretpostavl- jamo da elementarni signal s0(t) ima trajanje ne duze od digitskog inter-vala T d, koji je rezervisan za svaki po jedinacni element an informacionogsadrza ja
3. Pomocu predajnog filtra H T vrsimo konacno uoblicavanje digitalnog sig-nala u cilju njegovog efikasnijeg prenosa do krajnjeg korisnika informacija.
4. Prenosni kanal u uzem smislu definisan je njegovom transfer funkcijomH C i prisutnim aditivnim sumom n(t).
5. Uloga prijemnog filtra H R je da u zajednici sa dobro odabranim formatomelementarnih signala S 0 = Fs0(t) i predajnim filtrom H T , za dati kanalu uzem smislu H C , sto je moguce vise potisne kanalni sum i izvrsi kom-penzaciju nastalih izoblicenja signala u toku prenosa.
6. Statisticki odlucivac, na bazi uspostavljene digitske singronizacije kojuobezbjed-uje ekstraktor takta (ET) i dobro odabranog praga odlucivanja,donosi odluke (odnosno vrsi rekonstrukciju informacionog sadrzaja) ko jeobezbjed-uju minimalan rizik za krajnjeg korisnika sistema.
Za informacioni sadrzaj a(n) pretpostavljamo da odgovara diskretnom izvorubez memorije, gdje slucajna varijabla an, koja odgovara n–tom digitskom inter-valu, poprima vrijednosti iz konacnog skupa l1, l2, . . . , lm.
Sistem prikazan na slici 6.1 odgovara sinhronom digitalnom prenosu gdje je za svaki simbol izvora rezervisan vremenski interval T d (digitski interval).Reciprocna vrijednost digitskog intervala odgovara digitskoj brzini
vd =1
T d
d
s
(6.1)
koja se lako moze preracunati u bitsku brzinu
vb = vdld m =
ld m
T d bit
s , (6.2)
gdje ld oznacava logaritam za bazu 2.Ako informacioni sadrzaj a(n) = . . . an−1, an, an+1, . . . preslikamo u ampli-
tudu elementarnih signala, onda ga formalno mozemo opisati signalom
s1(t) =
n
abδ(t − nT d), (6.3)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 177/246
6.1. UVODNA RAZMATRANJA 171
gdje tezinski faktori Diracovih impusa u odgovarajucim trenucima odgovaraju
pojedinim mogucim simbolima izvorne liste l1, l2, . . . , lm.Digitalni signal, s(t), na izlazu generatora elementarnih signala u slucajuusvojene sinhrone amplitudske modulacije mozemo pisati u obliku
s(t) = s1(t) ∗ s0(t) =
∞n=−∞
ans0(t − nT d). (6.4)
Uocimo da smo razlicite elemente informacionog sadrzaja mogli takod-e preslika-vati u razlicita trajanja ili polozaj elementarnih signala u okviru datog digitskogintervala zadrzavajuci njihovu amplitudu konstantnom.
U nasoj daljo j analizi prenosa u osnovnom opsegu pretposavicemo da infor-macioni sadrzaj odgovara stacionarnom i ergodicnom slucajnom procesu.
To znaci da su srednje vrijednosti informacionog sadrzaja po ansamblu i po
vremenu identicne
ma = E an = an =m
i=1
li p(an = li) = limN →∞
1
2N + 1
N n=−N
an (6.5)
Isto tako autokorelacionu funkcijuinformacionog sadrzaja mozemo racunati bilopo ansamblu ili po vremenu
Ra(k) = E anan+k = anan+k =
j
i
lilj p(an = li, an+k = j) =
= lim
n→∞
1
2N + 1
N
n=−N
anan+k (6.6)
Nadalje cemo usvojiti da statisticka zavisnost izmed-u slucajnih varijabli an ian+k opada sa povecanjem njihovog vremenskog razmaka. Analiticki to znaci
limk→∞
Ra(k) = Ra(∞) = m2a (6.7)
Interesantno je da, za razliku od informacionog sadrzaja koji je stacionarani ergodican, ansambl digitalnog linijekog signala (s(t)) u opstem slucaju nijeergodican pa cak ni stacionaran.
Posmatrajmo, na primjer, srednju vrijednost digitalnog signala, s(t), po vre-
menu. Oznacicemo sa
s(t).
s(t) = limN →∞
1
2NT d
NT d −NT d
s(t)dt = limN →∞
1
2N T d
N T d −N T d
ans0(t − nT d)dt
s(t) = limN →∞
2N + 1
2N T d
1
2N + 1
N n=−N
+∞ −∞
s0(t − nT d)dt =ma
T dFs0(t)ω=0
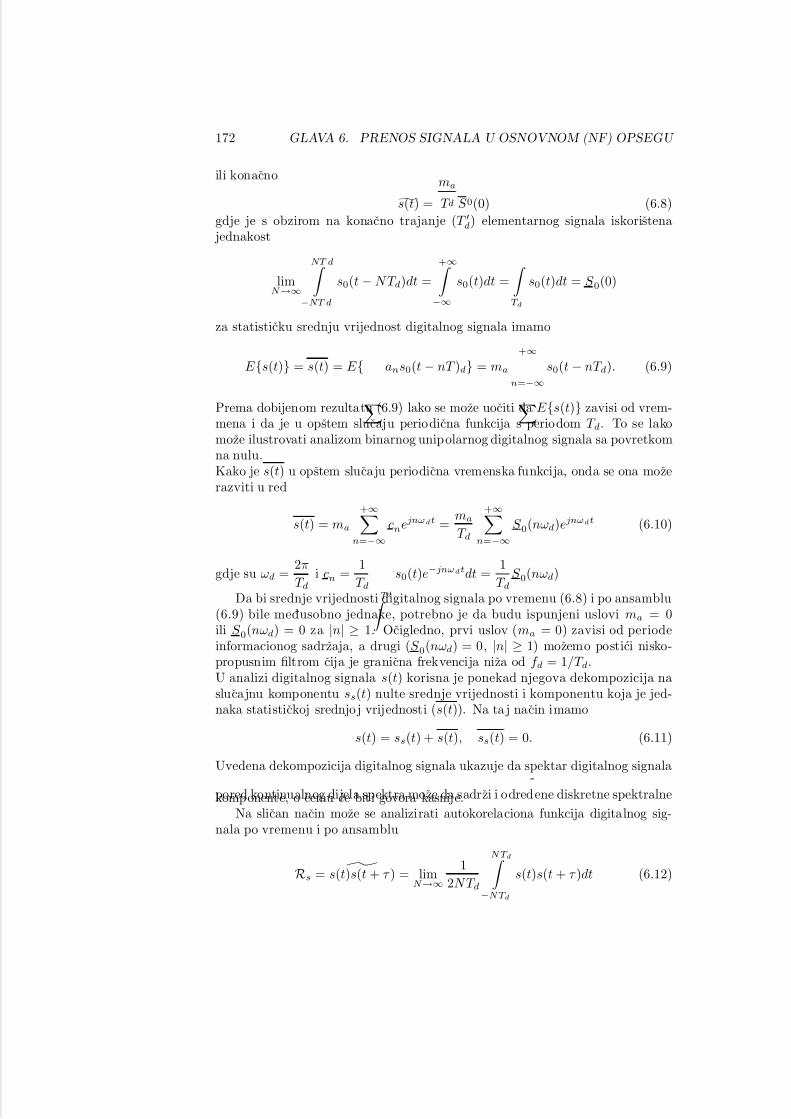
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 178/246
172 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
ili konacno
s(t) =
ma
T d S 0(0) (6.8)
gdje je s obzirom na konacno trajanje (T d) elementarnog signala iskoristena jednakost
limN →∞
NT d −NT d
s0(t − N T d)dt =
+∞ −∞
s0(t)dt =
T d
s0(t)dt = S 0(0)
za statisticku srednju vrijednost digitalnog signala imamo
E s(t) = s(t) = E
ans0(t − nT )d = ma
+∞
n=−∞s0(t − nT d). (6.9)
Prema dobijenom rezultatu (6.9) lako se moze uociti da E s(t) zavisi od vrem-mena i da je u opstem slucaju periodicna funkcija s periodom T d. To se lakomoze ilustrovati analizom binarnog unipolarnog digitalnog signala sa povretkomna nulu.Kako je s(t) u opstem slucaju periodicna vremenska funkcija, onda se ona mozerazviti u red
s(t) = ma
+∞n=−∞
cnejnωdt =ma
T d
+∞n=−∞
S 0(nωd)ejnωdt (6.10)
gdje su ωd =2π
T di cn =
1
T d T d
s0(t)e−jnωdtdt =1
T dS 0(nωd)
Da bi srednje vrijednosti digitalnog signala po vremenu (6.8) i po ansamblu(6.9) bile med-usobno jednake, potrebno je da budu ispunjeni uslovi ma = 0ili S 0(nωd) = 0 za |n| ≥ 1. Ocigledno, prvi uslov (ma = 0) zavisi od periodeinformacionog sadrzaja, a drugi (S 0(nωd) = 0, |n| ≥ 1) mozemo postici nisko-propusnim filtrom cija je granicna frekvencija niza od f d = 1/T d.U analizi digitalnog signala s(t) korisna je ponekad njegova dekompozicija naslucajnu komponentu ss(t) nulte srednje vrijednosti i komponentu koja je jed-naka statistickoj srednjo j vrijednosti (s(t)). Na ta j nacin imamo
s(t) = ss(t) + s(t), ss(t) = 0. (6.11)
Uvedena dekompozicija digitalnog signala ukazuje da spektar digitalnog signala
pored kontinualnog dijela spektra moze da sadrzi i odred
-
ene diskretne spektralnekomponente, o cemu ce biti govora kasnije.Na slican nacin moze se analizirati autokorelaciona funkcija digitalnog sig-
nala po vremenu i po ansamblu
Rs = s(t)s(t + τ ) = limN →∞
1
2N T d
N T d −N T d
s(t)s(t + τ )dt (6.12)
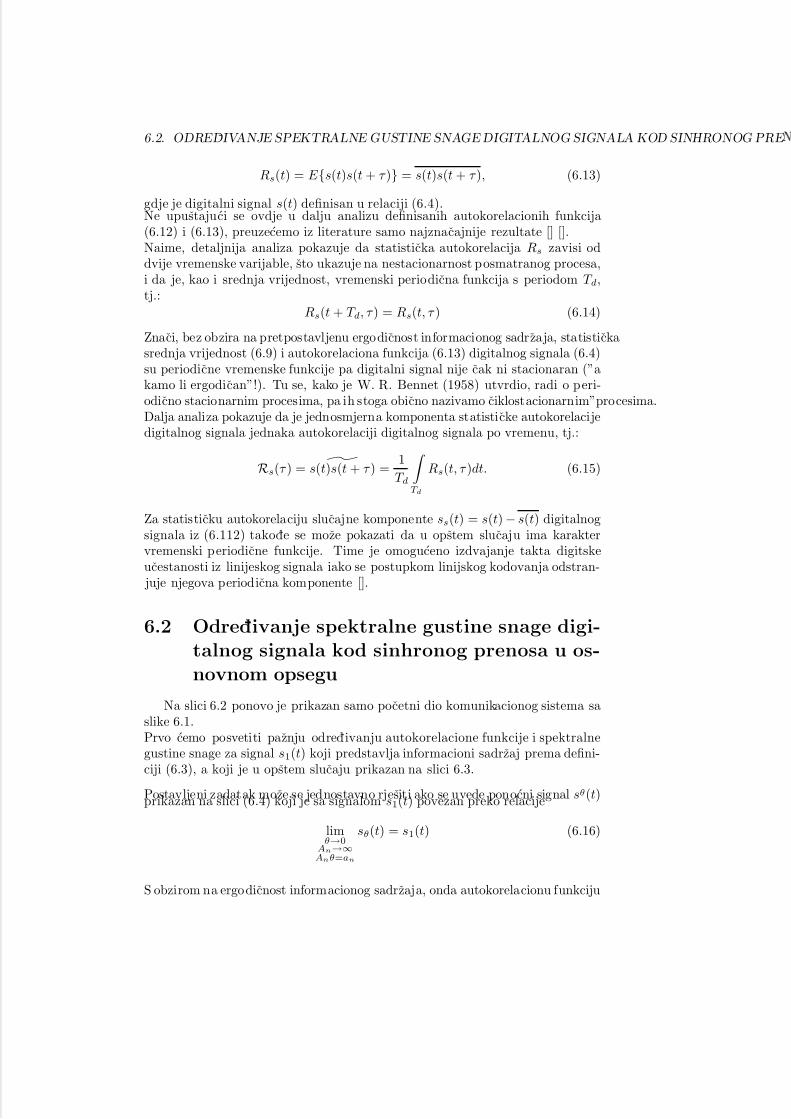
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 179/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
Rs(t) = E s(t)s(t + τ ) = s(t)s(t + τ ), (6.13)
gdje je digitalni signal s(t) definisan u relaciji (6.4).Ne upustajuci se ovdje u dalju analizu definisanih autokorelacionih funkcija(6.12) i (6.13), preuzecemo iz literature samo najznacajnije rezultate [] [].Naime, detaljnija analiza pokazuje da statisticka autokorelacija Rs zavisi oddvije vremenske varijable, sto ukazuje na nestacionarnost posmatranog procesa,i da je, kao i srednja vrijednost, vremenski periodicna funkcija s periodom T d,tj.:
Rs(t + T d, τ ) = Rs(t, τ ) (6.14)
Znaci, bez obzira na pretpostavljenu ergodicnost informacionog sadrzaja, statistickasrednja vrijednost (6.9) i autokorelaciona funkcija (6.13) digitalnog signala (6.4)su periodicne vremenske funkcije pa digitalni signal nije cak ni stacionaran (”akamo li ergodican”!). Tu se, kako je W. R. Bennet (1958) utvrdio, radi o peri-odicno stacionarnim procesima, pa ih stoga obicno nazivamo ciklostacionarnim”procesima.Dalja analiza pokazuje da je jednosmjerna komponenta statisticke autokorelacijedigitalnog signala jednaka autokorelaciji digitalnog signala po vremenu, tj.:
Rs(τ ) = s(t)s(t + τ ) =1
T d
T d
Rs(t, τ )dt. (6.15)
Za statisticku autokorelaciju slucajne komponente ss(t) = s(t) − s(t) digitalnogsignala iz (6.112) takod-e se moze pokazati da u opstem slucaju ima karaktervremenski periodicne funkcije. Time je omoguceno izdvajanje takta digitskeucestanosti iz linijeskog signala iako se postupkom linijskog kodovanja odstran- juje njegova periodicna komponente [].
6.2 Odred-ivanje spektralne gustine snage digi-talnog signala kod sinhronog prenosa u os-novnom opsegu
Na slici 6.2 ponovo je prikazan samo pocetni dio komunikacionog sistema saslike 6.1.Prvo cemo posvetiti paznju odred-ivanju autokorelacione funkcije i spektralnegustine snage za signal s1(t) koji predstavlja informacioni sadrzaj prema defini-ciji (6.3), a koji je u opstem slucaju prikazan na slici 6.3.
Postavljeni zadatak moze se jednostavno rjesiti ako se uvede ponocni signal sθ(t)prikazan na slici (6.4) koji je sa signalom s1(t) povezan preko relacije
limθ→0
An→∞Anθ=an
sθ(t) = s1(t) (6.16)
S obzirom na ergodicnost informacionog sadrzaja, onda autokorelacionu funkciju
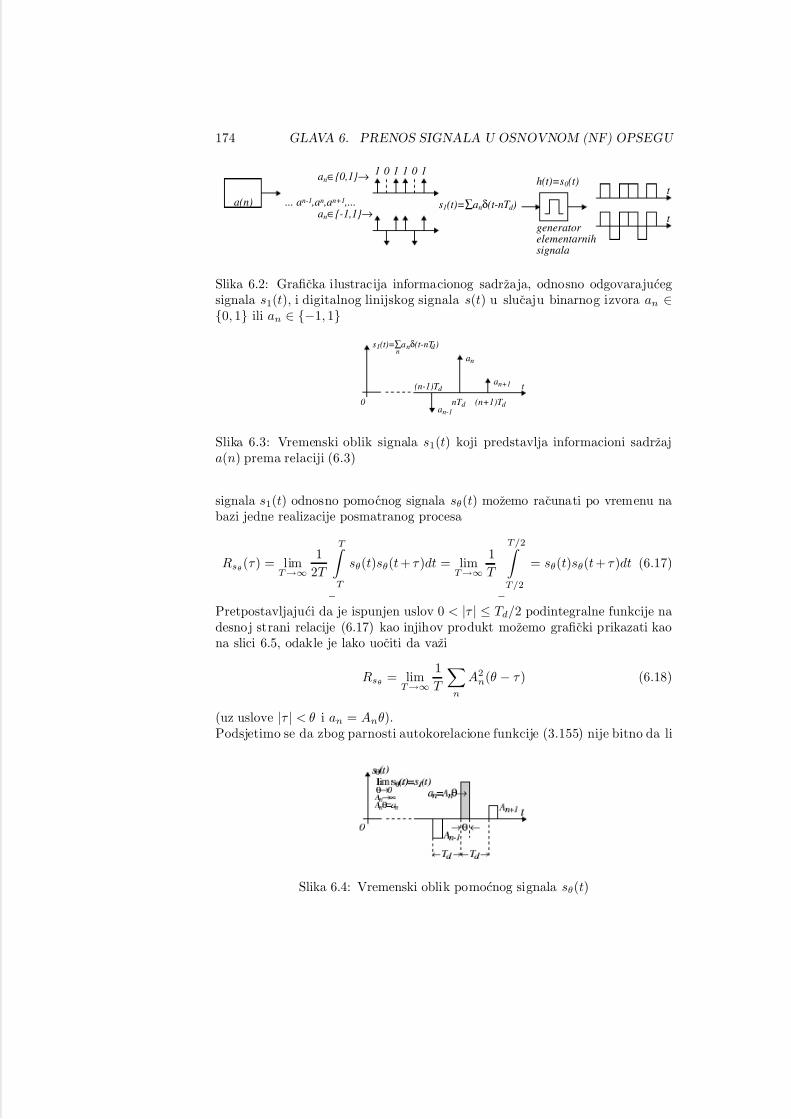
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 180/246
174 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
a(n) ... an-1 ,an ,an+1 ,...
an∈0,1→
an∈-1,1→
1 0 1 1 0 1
s1(t)=∑anδ(t-nT )d
h(t)=s0(t)
generator elementarnihsignala
t
t
Slika 6.2: Graficka ilustracija informacionog sadrzaja, odnosno odgovarajucegsignala s1(t), i digitalnog linijskog signala s(t) u slucaju binarnog izvora an ∈0, 1 ili an ∈ −1, 1
t
0
(n-1)T d
nT d (n+1)T d an-1
an
an+1
s1(t)=∑anδ(t-nT )d n
Slika 6.3: Vremenski oblik signala s1(t) koji predstavlja informacioni sadrzaja(n) prema relaciji (6.3)
signala s1(t) odnosno pomocnog signala sθ(t) mozemo racunati po vremenu nabazi jedne realizacije posmatranog procesa
Rsθ(τ ) = limT →∞
1
2T
T −
T
sθ(t)sθ(t + τ )dt = limT →∞
1
T
T /2 −
T /2
= sθ(t)sθ(t + τ )dt (6.17)
Pretpostavljajuci da je ispunjen uslov 0 < |τ | ≤ T d/2 podintegralne funkcije nadesnoj strani relacije (6.17) kao injihov produkt mozemo graficki prikazati kaona slici 6.5, odakle je lako uociti da vazi
Rsθ = limT →∞
1
T
n
A2n(θ − τ ) (6.18)
(uz uslove |τ | < θ i an = Anθ).Podsjetimo se da zbog parnosti autokorelacione funkcije (3.155) nije bitno da li
Slika 6.4: Vremenski oblik pomocnog signala sθ(t)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 181/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
t
t
t
sθ(t)sθ(t+ )τ
sθ(t+ )τ
sθ(t)
An-1
An
An+1
θ−|τ|
←→| |
An-1
An
An+1
| |
|τ|←→
| ||τ|
←→
An-12
An2
An+12
An2 ( - )θ | τ|
| |←→θ−|τ|
| |←→θ−|τ|
| |←→θ−|τ|
(a)
(b)
(c)
Slika 6.5: Graficka ilustracija podintegralne funkcije u izrazu (6.17) (c) kao injenih faktora (a) i (b)
je τ > 0 ili τ < 0 pa to nije eksplicitno ni naglaseno na slici 6.5Rezlutat (6.18) moze se modifikovati vrseci smjenu An = an/θ
Rsθ(τ ) = limT ∞
T dT
n
a2n
θT d
1 − τ
θ
(6.19)
Uocimo da je omjer T /T c jednak bro ju simbola, elemenata informacionog sadrzaja,koji je obuhvacen u intervalu posmatranja [
−T /2, T /2] pa izraz limT
→∞
T dT n a2
n
odgovara srednjekvadratnoj vrijednosti informacionog sadrzaja, odnosno nje-govoj autokorelacionoj funkciji za nulti pomak (τ = 0), tj.:
limT →∞
T dT
n
a2n = R(0) = R0 (6.20)
Koristeci (6.20) kao i osobinu parnosti autokorelacione funkcije, (6.19) mozemokonacno pisati u obliku
Rsθ(τ ) =R0
θT d
1 − |τ |
θ
, |τ | < θ, (6.21)
koji odgovara trougaonom impulsu trajanja 2θ i vrsne vrijednosti Rsθ (0) =
R0
θT d .Prosirimo sada vremenski pomak τ na podrucje (θ, T d − θ). Za |τ | ∈ (θ, T d − θ)susjedni impulsi iz sθ i sθ(t + τ ) nece se preklapati pa se moze pisati
Rsθ(τ ) = 0 za θ < |τ | < T d − θ (6.22)
za T d − θ < |tau| < T d pocinje preklapanje n–tog impulsa iz signala sθ(t) i(n + 1)–og impulsa iz sθ(t + τ ) signala sto je graficki ilustrovano na slici 6.6

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 182/246
176 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
t
An An
An+1
τT d
τ+θ−T d
Slika 6.6: Graficki prikaz relativnog odnosa n–tog impulsa signala sθ(t) i (n+1)–og impulsa θ(t + τ ) signala (n ∈ Z).
Prema slici 6.6 autokorelaciona funkcija 6.17 za T d − θ < |τ | < T d iznosi
Rsθ(τ ) = limT →∞
1
T
n
AnAn+1(τ + θ − T d),
ili kako su An = an/θ i An+1 = an+1/θ dobija se
Rsθ(τ ) = limT →∞
1
T
n
acan+1
θT d
1 − T d − |τ |
θ
(6.23)
U (6.23) se pojavljuje autokorelaciona funkcija informacionog sadrzaja za pomakτ = T d
limT →∞
T dT
n
anan+1 = R(T d) = R1
pa (6.23) poprima modifikovani oblik
Rsθ (τ ) =R
1θT d 1 + |
τ | −
T d
θ T d − θ < τ < T d (6.24)
Dobijeni med-urezultati (6.21), (6.22) i (6.24) graficki su sumirani na slici 6.7.
t
-T d -T d +θ -θ θ T d -θ T d
Rsθ(τ)
R0
θT d
R1
θT d
R1
θT d
0
Slika 6.7: Autokorelaciona funkcija pomocnog signala sθ(t) za |τ | < T d
Ako posmatramo interval T d < |τ | < T d +θ, onda n–ti i (n+1)–i impulsi pocinjuda se mimoilaze odnosno vrijeme njihove koincidencije poslije pomaka τ | = T dpocinje da se smanjuje kako to i pokazuje slika 6.8Lako se dobija
Rsθ (τ ) = limT →∞
1
T
n
AnAn+1(T d + θ − τ |)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 183/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
t
τT d +θ
T d +θ-|τ|
An+1
An
Slika 6.8: Graficki prikaz relativnog odnosa n–tog i (n + 1)–og impulsa za T d <|τ | < T d + θ
odakle se uz smjenu An = an/θ i An+1 = an+1/θ dobija
Rsθ(τ ) = limT →∞
T dT
n
anan+1
θT d
1 +
T d − |τ |θ
, T d < τ < T d + θ, (6.25)
kokristeci autokorelacionu funkciju informacionog sadrzaja R(τ = T d) = R1 =limT →∞ T d
T
n anan+1, (6.25) prelazi u konacni oblik
Rsθ (τ ) =R1
θT d
1 +
T d − |τ |θ
, T d < τ < T d + θ. (6.26)
Nastavlja juci sa povecanjem vremenskog pomaka τ dobijeni rezultati (6.21),(6.24) i (6.26) mogu se uopstiti u obliku
Rsθ(τ ) =
Rk
θT d
1 +
|τ | − kT dθ
, kT d − θ < |τ | < kT d
Rk
θT d
1 +
kT d − |τ |θ
, kT d < |τ | < kT d + θ,
(6.27)
gdje je Rk = R(τ = kT d) = anan+k = limT →∞ T dT n anan+k autokorelaciona
funkcija informacionog sadrzaja u diskretnim vremenskim tackama τ = kT d,k = 0, ±1, ±2, . . .Autokorelaciona funkcija (6.27) p omocnog signala sθ(t) graficki je prikazana naslici 6.9.
τ
Rsθ(τ)
R0
θT d R1
θT d
R1
θT d R2
θT d
R2
θT d R0
T d
R1
T d
-2T d -T d −θ θ T d 2T d T d −θ T d +θ
Slika 6.9: Autokorelacina funkcija pomocnog signala sθ(t)
Za dobijanje autokorelaciona funkcije signala s1(t) definisanog sa (6.3) potrebno je izvrsiti granicni prelaz (6.16) gdje θ → 0. U granicnom prelazu povrsinatrougaonih likova sa slike 6.9 osta je konstantna. Tako za povrsinu k–tog trouglaimamo
P ∆k =Rk
θT d
2θ
2=
Rk
T d.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 184/246
178 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
To znaci da autokorelaciona funkcija pomocnog signala sa slike prelazi u au-
tokorelacionu funkciju Rs1(t), θ → 0 kako je prikazana na slici 6.112
τ
Rs1(τ)
R0
T d R
1
T d
R1
T d R
2
T d
R2
T d
-2T d -T d 0 T d 2T d
Slika 6.10: Autokorelaciona funkcija signala definisanog sa (6.3)
Uocavamo kvaziperiodicnost autokorelacione funkcije signala s1(t) koja je posljed-ica sinhronog prenosa brzinom vd = 1/T d.Saglasno konacnim rezultatima, koji su dati na slici granicnim prelazom (θ
→0)
iz (6.27) se dobija
Rs1(τ ) =+∞
k=−∞
Rk
T dδ(τ − kT d) (6.28)
Koristeci Wiener–Khinchineovu teoremu spektralnu gustinu snage signala s1(t)mozemo jednostavno dobiti iz (6.28)
Φs1(ω) = FRs1(τ ) =
+∞ −∞
+∞k=−∞
Rk
T dδ(τ − kT d)e−jωτ dτ =
1
T d
+∞k=−∞
Rke−jωkT d
(6.29)Alternativni i ekvivalentni oblik rezultata (6.29) dobija se ako se koristi osobina
parnosti akutokorelacione funkcije
Φs1(ω) =1
T d
R0 + 2
∞k=1
Rk cos kωT d
(6.30)
U literaturi se dobijeni rezultat (6.29) cesto prikazuje u modifikovanom oblikuobliku koji bolje odrazava strukturu (prirodu) informacionog sadrzaja. [] [].Naime, ako usvojimo pretpostavku o nezavisnosti slucajnih varijabli an i an+k
kada k → ∞ (6.7), onda vrijedi
limR→∞
R(k) = limk→∞
Rk = limk→∞
anan+k = limk→∞
(an an+k) = m2a = R∞
U takvim uslovima (6.29) se moze pisati u obliku
Φs1(ω) =1
T d
(Rk + R∞ − R∞)e−jωkT d =
=1
T dR∞
+∞k=−∞
e−jωkT d +1
T d
+∞k=−∞
(Rk − R∞)e−jωkT d .

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 185/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
Ako koristimo digitsku frekvenciju f d = 1/T d i identicnost R∞ = m2a, onda
prethodni rezultat prelazi u oblik
Φs1(ω) = f dm2a
+∞k=−∞
e−jωkT d + f d
+∞k=−∞
(Rk − R∞)e−jωkT d . (6.31)
Podsjetimo se da je za periodicnu povorku Dirakovih impulsa
n δ(t − nT 0) utrecem poglavlju dobijen rezultat (3.17)
+∞k=−∞
δ(t − nT d) =1
T d
+∞n=−∞
e±jnωdt ⇔ T d
n
δ(t − nT d) =
n
e±jnωdt.
Prethodni rezultat je ekvivalentan jednakosti
ωd+∞
k=−∞δ(ω − kωd) =
k=−∞e±jkωT d , ωd = 2π/T d = 2πf d, (6.32)
Uvrstavajuci rezultat (6.32) u (6.21) konacno se dobija
Φs1(ω) = 2π(maf d)2
k
δ(ω − kωd) + f d
k
(Rk − m2a)e−jωkT d . (6.33)
Struktura izraza za spektralnu gustinu snage (6.33) signala (s1(t)), koji pred-stavlja informacioni sadrzaj, ukazuje da jedan dio spektra u opstem slucaju imadiskretan karakter, prvio clan desne strane jednakosti (6.33), a drugi dio spek-tra, drugi clan iz (6.33), je kontinualan. Jasno je da takvo sagledavanje spektrasignala s1(t) nije ocigledno na bazi rezultata (6.29) i (6.30).
Posto smo odredili autokorelacionu funkciju Rs1(τ ) i spektralnu gistinu sna-gle Φs1(ω) za signal s1(t), moze se prici racunanju i odred-ivanju odgovarajucihkarakteristika digitalnog linijskog signala s(t) (6.4) koji nastaje na izlazu gen-eratora elementarnih signala (sl.6.1 i 6.2).Ulogu generatora elementarnih signala mozemo s obzirom na relacije (6.3) i (6.4)interpretirati kao ulogu linearnog sistema ciji je impulsni odziv s0(t), a transferfunkcija S 0(ω) = Fs0(t).U odjeljku 5.5.8 pokazali smo da je spektralna gustina snage slucajnog signalana izlazu linearnog sistema jednaka umnosku spektralne gustine snage ulaznogprocesa i kvadrata modula transfer funkcije datog linearnog sistema (??), ilikonkretno
Φs(ω) = Φs1(ω) = |S 0|2 (6.34)
Koristeci dobijeni rezultat (6.29) odnosno (6.33) iz (6.34) se dobija
Φs(ω) = |S 0| 1
T d
+∞k=−∞
Rke−jωkT d =
= |S 0|22π(maf d)2
k
δ(ω − kωd) + f d
k
(Rk − m2a)e−jωkT d (6.35)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 186/246
180 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Rezultat (6.35) pokazuje da je rezultirajuca spektralna gustina snage digitalnog
linijskog signala nastala kao posljedica zajednickog uticaja prirode informa-cionog sadrzaj, faktor u viticastoj zagradi, i oblika elementarnog signala s0(t) =F −1S 0.Slicno signalu informacionog sadrzaja (s1(t)), i kod digitalnog linijskog sig-nala (s(t)) u opstem slucaju imamo jednu komponentu diskretnog spektra,|S 0|22π(maf d)2
δ(ω−kωd) i komponentu kontinualnog spektra, f d
k(Rk−
m2a)e−jωkT d .
Primjer 6.1.Posmatracemo prvo diskretni binarni izvor bez memorije ciji informacioni sadrzaj a(n) odgovara sekvenci elemenata skupa 0, 1, tj. an ∈ 0, 1, n ∈ Z. Prema dobijenimi rezultatima (6.29), (6.33) i (6.35) neophodno je prvo odrediti autoko-relacionu funkciju posmatranog informacionog sadrzaja (Rk, k ∈ Z).
Autokorelacionu funkciju mozemo racunati na bazi jedne realizacije diskretnog procesa
Rk = limT →∞
T dT
n
anan+k = limN →∞
1
2N + 1
N n=−N
anan+k, (6.36)
gdje je u vremenskom intervalu trajanja T sadrzano 2N + 1 binarnih elemenata,ili vrse ´ Ci usrednjavanje po ansamblu
Rk = E anan+k = anan+k, an ∈ 0, 1. (6.37)
S obzirom na mogucnost izobra, koristicemo jednostavniji i elegantniji pristup(6.37).Ako je apriorna vjerovatnoca ”jedinice” p ( p(an = 1) = p) onda imamo za drugi
binarni element p(an = 0) = 1 − p.Izracunajmo prvo (6.37) za k = 0:
R0 = a2n = 12 p(1) + 00 p(0) = p
Za k = 0 imamo
Rk = anan+k =
i
j
lilj p(an = li, an+k = lj ), li, lj ∈ 0, 1.
Rk = 1 · 1 · p(an = 1, an+k = 1) + 1 · 0 · p(an = 1, an+k = 0)+
+ 0 · 1 · p(an = 0, an+k = 1) + 0 · 0· (an = 0, an+k = 0)
S obzirom da se raci o izvoru bez memorije, imamo
Rk = 1 · 1 · p(an = 1) p(an+k = 1) + 1 · 0 · p(an = 1) p(an+k = 0)++0 · 1 · p(an = 0) p(an+k = 1) + 0 · 0 · p(an = 0) p(an+k = 0)
ili konacno Rk = p2, k = 0.Sumirajuci prethodne rezultate
Rk =
p = p(1) za k = 0
p2 za k = 0(6.38)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 187/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
U slucaju podjednake apriorne vjerovatnoce jedinice i nule ( p(0) = p(1)) imamo
Rk =
12 za k = 0
14
za k = 0(6.38)
Prema (6.29) imamo
Φs1(ω) =1
T d
+∞k=−∞
Rke−jkωT d (6.39)
Uvrstavajuci dobijene rezultate za autokorelacionu funkciju (6.38) u (6.39) do-bija se
Φs1(ω) = 1T d
p + p2 +∞k=−∞
k=0
e−jkωT d = p(1)= p(0)= 1
2
1T d
12
+ 14
+∞k=−∞
k=0
e−jkωT dili
Φs1(ω) =1
4T d
1 +
+∞k=−∞
e−jkωT d
(6.40)
odakle koristeci identicnost (6.32) konacno dobijamo
Φs1(ω) =1
4T d
1 +
2π
T d
+∞k=−∞
δ(ω − kωd)
(6.41)
Ako za elementarni signal s0(t) odaberemo pravougaoni impuls trajanja T d i amplitude A (sl.6.2), onda imamo
S 0 = Fs0(t) = F = AT dsin ωT d/2
ωT d/2(6.42)
(6.42) odgovara tzv. NRZ (Non Return Zero) formatu.Uvrstavajuci dobijene rezultate (6.41) i (6.42) u (6.34) dobija se
Φs(ω) = (AT d)2
sin ωT d/2
ωT d/2
21
4T d
1 +
2π
T d
δ(ω − kωd)
(6.43)
Uzimajuci u obzir nule faktora |S 0|, koje se javljaju na ucestanostima ω = kωd,
k = ±1, ±2, . . . , (6.43) poprima konacan oblik
Φ(1)s (ω) =
A2π
2δ(ω) +
A2T d4
sin ωT d/2
ωT d/2
2
. (6.44)
Rezultat (6.44) je identican ranije dobijenom u primjeru 3.16.U prethodnom rezultatu upotrebljen je indeks (1) (gore desno) da bismo raz-likovali rezultate iz pojedinih primjera. Ukoliko za elementarni signal usvojimo

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 188/246
182 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
pravougoni impuls amplitude A i trajanja T d/2 (RZ - Return Zero - format),
onda imamoS 0 = Fso(t) = Fslika =
AT d2
sin ωT d/4
ωT d/4(6.45)
Uocimo da se nule u transfer funkciji S 0 pojavljuju na ucestanostima ω = kωd,k = ±2, ±4, ±6, . . . , pa odgovarajuca spektralna gustina snage digitalnog lini- jskog signala ima oblik
Φ(2)s (ω) = |S 0|2Φs1(ω) =
A2T d16
sin ωT d/2
ωT d/2
2
+
+A2π
8δ(ω) +
A2
2πδ(ω − ωd) +
A2
2 · 32πδ(ω − 3ωd) + . . . (6.46)
Dobijeni spektri za binarni unipolarni digitalni signal za NRZ i RZ format
prikazani su na slici 6.11. Kod NRZ formata nule u spektru elementarnog sig-nala izrsile su kompenzaciju diskretnih komponenata informacionog sadrzaja na ucestanostima ω = kωd, k = 0, dok su kod RZ formata procurile diskretnekomponente na ucestanostima ????.
0 ωd 2ωd 3ωd
ω
A2T d
4
Φs(1)(ω)
(a) (b)0 ωd 2ωd 3ωd 4ωd
ω
A2T d
16
Φs(2)(ω)
Slika 6.11: Spektralna gustina snage za binarni unipolarni digitalni signal (a):
za NRZ format; (b): za RZ format
Primjer 6.2. Zadrzacemo se na binarnom izvoru bez memorije kao u prethod-nom primjeru, ali sa bipolarnom listom −1, 1. Ako usvojimo p(an = 1) = podnosno p(an = −1) = 1 − p, onda se lako moze dobiti
ma = an =
i
li p(an = li) = 1 · p + (−1)(1 − p) = (2 p − 1)
R0 = an2 =
i
l2i p(an = li) = 12 p + (−1)2(1 − p) = 1
Rk = anan+k = 1 · 1 · p · p + 1 · (−1) · p · (1 − p) + (−1) · 1 · (1 − p) · p+
+ (−
1)·
(−
1)·
(1−
p)·
(1−
p) = m2a m
= 0
znaci, imamo
Rk =
1 za k = 0
(2 p − 1)2 za k = 0(6.47)
ili ako su elementi binarne liste jednako vjerovatni
Rk =
1 za k = 00 za k = 0
(6.48)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 189/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
Ako koristimo rezultat (6.48), onda se iz (6.29) dobija
Φs1(ω) =1
T d(6.49)
Ako elementarni signal s0(t) odgovara pravougaonom impulsu amplitude A i trajanja T d (NRZ-format), onda imamo
S 0 = Fs0(t) = AT dsin ωT d/2
ωT d/2(6.50)
Za dobijene rezultate (6.49) i (6.50) iz (6.34) se dobija
Φ(3)s (ω) = A2T d
sin ωT d/2
ωT d/2 , (6.51)
??????? U slucaju RZ formata imamo
S 0 =AT d
2
sin ωT d/4
ωT d/4
,
a spektralna gustina snage odgovarajuceg digitalnog signala poprima oblik
Φ(4)s (ω) =
A2T d4
sin ωT d/4
ωT d/4
2
(6.52)
Dobijeni spektri za binarni bipolarni digisignal (6.51) i (6.52) prikazani su na
slici 6.12.
0 ωd 2ωd 3ωd
ω
A2T d
Φs(3)(ω)
(a) (b)0 ωd 2ωd 3ωd 4ωd
ω
A2T d
4
Φs(4)(ω)
Slika 6.12: Spektralna gustina snage za binarni bipolarni digitalni signal (a): zaNRZ format; (b): za RZ format
Potrebno je uociti da su na slici 6.12 prikazani specijalni slucajevi spektra bi-narnog bipolarnog digitalnog signala kada su podjednake vjerovatnoce binarnih elemenata (+1) i (−1) a time i matematicko ocekivanje informacionog sadrzaja jednako nuli (ma = 0). U uslovima kada je p(an = 1) = p(an = 0) u spektu odgovarajucih digitalnih signala imali bismo i pojavu diskretnih komponenata.
Primjer 6.3 (AMI - digitalni linijski signal). Linearni pseudoternarni kodovi,kao i modifikovani pseudoternarni kodovi, cine znacajnu klasu vrlo prisutnih

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 190/246
184 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
linijskih kodova u kompunikacijama []. U okviru pomenute familije vrlo je pop-
ularan alternativno bipolarni ili krace AMI (Alternating Mark Inversion) kod.Ako pod -emo od binarnog izvora bez memorije (iz primjera 6.1)
a(n) −→··· 1011011001 · · · , an ∈ 0, 1,
onda se AMI kod dobija tako da binarna nula (02) ostaje ternarna nula (03),a binarne jedinice originalnog binarnog niza alternativno se predstavljaju sa ±13.Tako prethodnoj binarnoj sekvenci odgovara ternarna sekvenca · · ·+1, 0, −1, +1, 0, −1, +1, 0, 0, −1, . . .gdje je izostavljen indeks 3 koji oznacava ternarnulistu.Ako apriorne vjerovatnoce simbola originalne binarne sekvence oznacimo sa p(an = 12) = p i p(an = 02) = 1− p, onda za ternarnu listu imamo −13, 03, +13imamo
p(−13) = p(+13) =1
2 p i p(03) = p(02) = 1 − p. (6.53)
Specijalno, ako su simboli binarne liste jednako vjerovanti, onda vazi
p(−13) = p(+13) =1
4i p(03) =
1
2. (6.54)
Na slici 6.13 data je blok sema prekodera za dobijanje AMI koda iz binarnog izvora bez memorije
bn
bn∈0,1
cn
cn-1 D
cn=bn⊕cn-1
−
+
Σ an=cn-cn-1∈-1,0,+1
Slika 6.13: Ilustracija postupka generisanja AMI koda iz binarnog izvora bez
memorije
Za generisanje AMI koda neophodne su operacije sabiranja po modulu 2, ⊕, bez prenosa, obicna operacija sabiranja odnosno oduzimanja i operator kasnjenja (D) za jedan digitski interval T d.Ocigledno je da smo uvedenim prekodovanjem unijeli memoriju u AMI sekvencu koja se moze posmatrati kao Markovljev izvor prvog reda [] [].AMI kod, kao Markovljev izvor prvog reda, ima cetiri stanja prikazana na slici 6.14(a): s1 ≡ −1, s3 ≡ +1, s2 ≡ 0 iza -1 i s4 ≡ 0 iza +1. Na slici 6.14(b) data je struktura odgovarajuce tranzicione matrice, gdje je na mjestu (i, j) prelazna vjerovatnoca p(sj/si) = pij . Kako je
i pij = 1 i pij ≥ 0, onda tranziciona
matrica spada uklasu tzv. stohastickih matrica []. Kako su prelazne vjerovatnocekod AMI koda
p(s1/s1), p(s3/s3), p(s1/s2), p(s4/s2), p(s2/s4), p(s3/s4), p(s4/s1) i p(s2/s3)
jednake nuli one na slici 6.14(a) zbog preglednosti nisu ni naznacene.Isto tako vazi skup jednakosti
p(s1/s3) = p(s3/s1) = p(s2/s3) = p(s1/s4) = P i
p(s2/s2) = p(s4/s4) = p(s4/s3) = p(s2/s1) = Q = 1 − P.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 191/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
0
0 -1
+1S2
S4
S1
S3
p22
p12
p34
p44
p31 p13
p41
p23
p11 p12 p13 p14
p21 p22 p23 p24
p31 p32 p33 p34
p41 p42 p43 p44
S1 S2 S3 S4
S1
S2
S3
S4
(a) (b)
Slika 6.14: AMI kod interpretiran kao Markovljev izvor prvog reda (a) sa tranzi-cionom matricom (b)
Odredimo sada matematicko ocekivanje ma i autokorelacionu funkciju Rk,k ∈ Z, informacionog izvora kojio dgovara AMI kodu.Ako koristimo oznake i rezultate iz (6.52) i (6.54) dobija se
ma = (−1) · 1
2· p + 0 · (1 − p) + (+1) · 1
2· p = 0 (6.55)
Za k = 0 imamo
R0 = a2n = (−1)2 · 1
2· p + 02 · (1 − p) + (+1)2 · 1
2· p = p
U slucaju jednako vjerovatnih elemenata dobija se
R0 = 12
(6.56)
Za k = ±1 imamo R1 = anan+1 sto odgovara racunanju srednjeg umnoska susjednihi ternarnih simbola. Broj mogucih nenultih parova je ocigledno 2, i tou obliku ”(+1)(-1) ili ”(-1)(+1)”. Takvi ternarni parovi nastaju iz originalnog binarnog para (1,1) cija je vjerovatnoca pojavljivanja p2. To znaci da vazi
p(an = +1, an+1 = −1) = p(an = −1, an+1 = +1) =p2
2.
Znaci
R1 = (+1)(
−1)
p2
2
+ (
−1)(+1)
p2
2
=
− p2
sto u slucaju jednakovjerovatnih originalnih binarnih simbola prelazi u rezultat
R1 = −1
4(6.57)
Za |k| > 1 broj nenultih produkata anan+k koji nastaju iz originalnog bina-rnog para (1,1) iznosi 4: ”(+1,-1)”, ”(-1,+1)”, ”(-1,-1)”i ”(+1,+1)”, gdje je

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 192/246
186 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
vjerovantoca svakog datog ternarnog para p2
4.
Dakle
Rk =anan+k = (+1)(−1) p2
4+ (−1)(+1)
p2
4+ (6.58)
+ (−1)(−1) p2
4+ (+1)(+1)
p2
4. (6.59)
Koristeci dobijene rezultate (6.56), (6.57) i (6.58), onda se na osnovu opsteg rezultata (6.29) moze dobiti
Φs1(ω) =1
T d
1
2− 1
4e−jωT d − 1
4ejωT d
=
1
T dsin2 ωT d
2. (6.60)
Ako elementarni signal s0(t) odgovara pravougaonom impulsu amplitude A i trajanja T d (NRZ - format), onda odgovarajuci AMI digitalni linijski signal prema (6.34) i (6.60) ima oblik
Φ(5)s (ω) = A2T d
sin ωT d/2
ωT d/2
2
sin2(ωtd/2) (6.61)
U slucaju RZ-formata elementarnog signala s0(t), odgovarajuci AMI digitalni linijski signal poprima oblik
Φ(6)s (ω) =
A2T d4
sin ωT d/4
ωT d/4
2
sin2(ωtd/2) (6.62)
Uocimo da obe funkcije imaju nultu vrijednost na ucestanosti ω = 0, zatim na ucestanostima ω = kωd, sto je u svakom slucaju posljedica uticaja zajednickog faktora sin2(ωT d/2) odnosno priode informacionog sadrzaja koji odgovara AMI
kodu. Iz tih razloga kvalitativni dijagrami Φ(5)s i Φ
(6)s su globalno ”isti”pa se u
literaturi posebno i ne naglasava da li se kod AMI digitalnog linijskog signala radi o NRZ ili RZ formatu.
Primjer 6.4 (Mancester digitalni linijski signal). U cilju kasnije sto uspjesnijekomparativne analize proucenih digitalnih linijskih signala, definisacemo Manch-ester digitalni signal u vremenskom domenu uporedo sa prethodna tri formata (sl.6.15).S obzirom na med -usobni odnos spektralnih gustina snaga na izlazu i ulazu gen-eratora elementarnih signala, a koji je definisan relacijom (6.34), na slici 6.15 nije bilo neophodno voditi racuna o kauzalnosti posmatranog sistema, Naime, formalni izbor koordinatnog pocetka, t = 0 ne utice na konacne rezultate za spektralnu gustinu snage digitalnog linijskog signala.
(a) Niz izvornih elemenata binarnog skupa 0, 1
(b) Signal informacionog sadrzaja s1(t) =P
anδ(t − nT d), an ∈ 0, 1,
(c) Unipolarni binarni digitalni linijski signal NRZ-formata,
(d) Binarni unipolarni digitalni linijski signal RZ-formata,
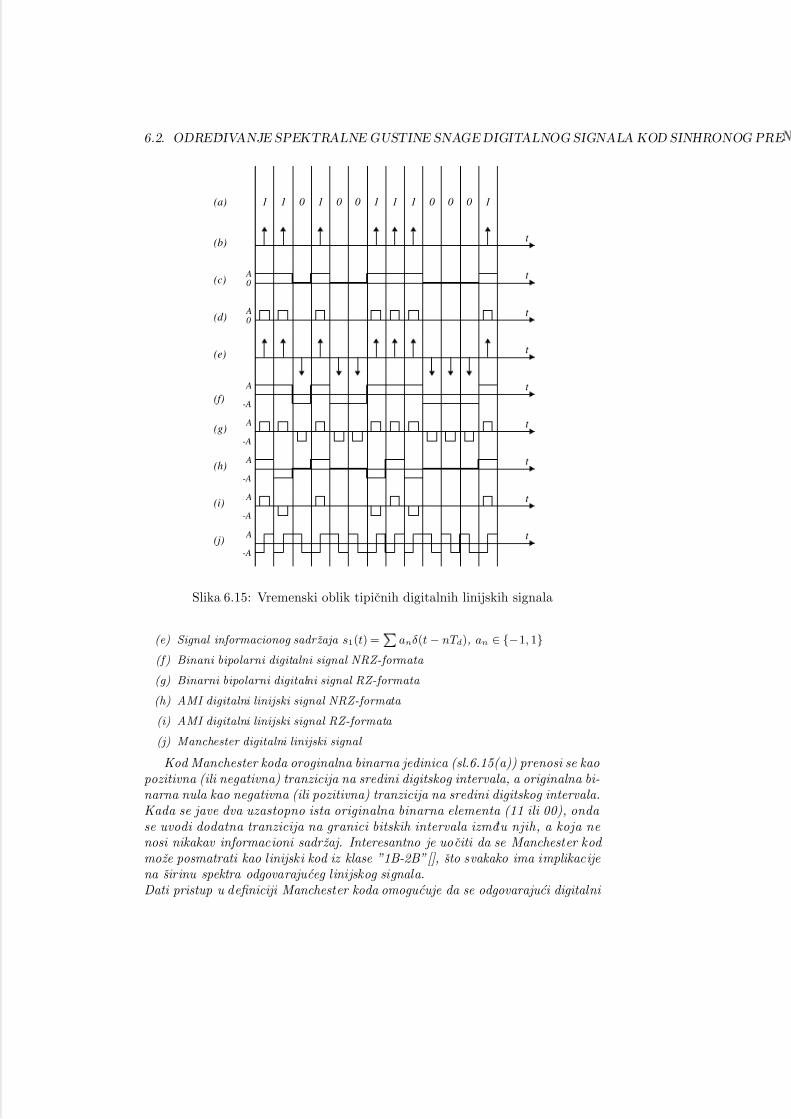
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 193/246
6.2. ODRED-IVANJE SPEKTRALNE GUSTINE SNAGE DIGITALNOG SIGNALA KOD SINHRONOG PRE
t
t
t
t
t
t
t
t
t
1 1 0 1 0 0 1 1 1 0 0 0 1(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(i)
(j)
A0
A0
A
-A
A
-A
A
-A
A
-A
A
-A
Slika 6.15: Vremenski oblik tipicnih digitalnih linijskih signala
(e) Signal informacionog sadrzaja s1(t) =P
anδ(t − nT d), an ∈ −1, 1
(f) Binani bipolarni digitalni signal NRZ-formata
(g) Binarni bipolarni digitalni signal RZ-formata
(h) AMI digitalni linijski signal NRZ-formata
(i) AMI digitalni linijski signal RZ-formata
(j) Manchester digitalni linijski signal
Kod Manchester koda oroginalna binarna jedinica (sl.6.15(a)) prenosi se kaopozitivna (ili negativna) tranzicija na sredini digitskog intervala, a originalna bi-narna nula kao negativna (ili pozitivna) tranzicija na sredini digitskog intervala.Kada se jave dva uzastopno ista originalna binarna elementa (11 ili 00), onda se uvodi dodatna tranzicija na granici bitskih intervala izmd -u njih, a koja nenosi nikakav informacioni sadrzaj. Interesantno je uociti da se Manchester kod moze posmatrati kao linijski kod iz klase ”1B-2B”[], sto svakako ima implikacijena sirinu spektra odgovarajuceg linijskog signala.Dati pristup u definiciji Manchester koda omogucuje da se odgovarajuci digitalni

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 194/246
188 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
linijski signal prikaze u obliku
s(7)(t) = sM (t) = ans0(t − nT d), an ∈ −1, 1, (6.63)
gdje elementarni signal s0(t) ima oblik prikazan na slici 6.16
t
s0(t)
A
-A
-T d 2
T d 2
Slika 6.16: Elementarni signal s0(t) kod generisanja Manchester digitalnog lini- jskog koda
Interesnatno je uociti da odgovarajuci informacioni sadrzaj mozemo predstaviti u obliku
s(7)1 (t) =
anδ(t − nT d), an ∈ −1, 1 (6.64)
sto odgovara signalu sa slike 6.15(e). To znaci da u slucaju jednako vjerovat-nih jedinica i nula u originalnoj binarnoj sekvenci mozemo preuzeti rezutat za Φs1(ω) definisan sa (6.49).Kako je
S 0 = Fs0(t) = F−|− =AT d
2
sin ωT d/4
ωT d/4
e−jωT d/4 − ejωT d/4
odnosno
|S 0|2 = A2T d
sin ωT d/4
ωT d/4
2
sin2 ωtd/,
onda se na osnovu (6.49) i (6.34) konacno dobija
Φ(7)s (ω) = Φ(M )
s (ω) = A2T d
sin ωT d/4
ωT d/4 2
sin2 ωT d/4 (6.65)
Uocimo da Manchester digitalni linijski signal prema (6.65) ima potisnut spektar na nultoj frekvenciji, kao i kod AMI koda, ali da mu se preostale nule javljaju tek na ucestanostima ω = 2ωd, 4ωd, . . . Takvo prosirivanje spektra, u odnosu na AMI digitalni signal, posljedica je prisutnih tranzicija u vremenskom domenu (sl.6.15(j)) koje, s druge strane, podrzavaju pouzdan rad ekstraktora takta u regeneratorima digitalnog signala [].
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 195/246
6.3. KOMPARATIVNI OSVRT NA ANALIZIRANE DIGITALNE LINIJSKE SIGNALE 189
6.3 Komparativni osvrt na analizirane digitalne
linijske signaleNa osnovu dobijenih rezultata (6.44), (6.46), (6.51), (6.52), (6.61), (6.62) i
(6.65) dat je uporedni graficki pregled spektara analiziranih digitalnih signal zapreno u osnovnom opsegu (6.17).Kao sto je poznato [], digitalni signal prije njegovog unosenja u prenosni medi- jum treba da se na pogodan nacin uoblici u cilju njegovog sto uspjesnijegprenosa.Pomenucemo ovdje kriterijume ko je bi dobro uoblicen digitalni signal trebao dazadovolji:
1- mogucnost ekstrakcije takta (digitska odnosno bitska sinhronizacija) u re-generatorima,
2- povoljna raspodjela spektra saglasno transfer funkciji sistema,
3- spektralna efikasnost i otpornost na kanalni sum,
4- mogucnost detekcije i eventualne korekcije kanalnih gresaka (daljinska kon-trola kvaliteta),
5- transparentnost.
1- Ekstrakcija digitskog takta predstavlja osnovu za sinhronizaciju digitalnihsistema (monokanalnih i visekanalnih). Ta se ekstrakcija obicno obavlja
na bazi prijemnog digitalnog signala koji nosi informacioni sadrzaj. Taj je postupak posebno jednostavan ako digitalni signa vec po svojoj prirodisadrzi diskretnu komponentu na frekvenciji f d1/T d (sl.6.17(b)). u real-nim uslovima, kada obicno prethodna pogodnost nije prisutna, pribje-gava se nizu nelinearnih i linearnih obrada prijemnog signala (kvadri-ranje, dvostruko ispravljanje, diferencijranje [], itd) u cilju obnavljanjaspektralne komponente na frekvenciji f d = 1/T d u regeneratoru. Takose dvostrukim ispravljanjem AMI digitalnog signala obnavlja spektralnakomponenta na digitskoj frekvenciji f d = 1/T d.
2- Usklad-enost spektra digitalnog signala i transfer funkcije prenosnog sis-tema.Kao sto je poznato, prenosni sistemi unose izrazito slabljenje na ucestanostiω = 0, kao i na ucestanostima koje su bliske nuli. Tome doprinoseprisutni transformatori i serijski vezani kondenzatori u prenosnicima. Utom pogledu unipolarni i bipolarni digitalni signali (NZ i RZ) (sl.6.17(a),(b), (c), (d)) ne mogu da se kvalifikuju kao povoljni digitalni linijski sig-nali. U okviru ovog kriterijma posebno povoljnu spektralnu raspodjelukomponenata imaju AMI i Manchester digitalni linijski signali (sl.6.17(e)i (f))

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 196/246
190 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
3- U pogledu efikasnog koriscenja raspolozivog frekvenicijskog opsega RZ bi-
narni digitalni signali (sl.6.17(b) i (d)) imaju izrazito nepovoljnu spek-tralnu raspodjelu komponenata. Ako uzmemo parametar efikasnog koriscenja
raspolozivog frekvencijskog opsega η[ bit/sHz ] = vb
f g, onda u slucaju binarnog
bipolarnog NRZ signala (sl.6.17(c)) imamo
η(3) =1
T d1
T d
= 1
bit/s
Hz
f g ≈ 1
T d. (6.66)
U tom pogledu je AMI digitalni signal, kao pripadnik pseudoternarnogkoda, efikasniji
η(5) = ηAMI =ld 3
T df g=
ld 3
T d1
T d
= ld 3 > 1
bit/s
Hz Ako efikasnost digitalnog linijskog signala shvatimo kao otpornost na kanalnisum, onda se moze dokazati superiornost binarnog bipolarnog NRZ for-mata (sl.6.17(c)) u odnosu na druge.Inferiornost pseudoternarnih digitalnih signala u odnosu na izvorne bina-rne digitalne signale u pogledu otpornosti na kanalni sum naznacena jevec rezultatima dobijenim u primjeru 4.2.
4- Mogucnost detekcije grasaka na prijemu a time i daljinske kontrole kvalitetaprenosa
Takve mogucnosti pruzaju kodovi sa ugrad-enom redundansom (memori- jom) kao sto su AMI, Manchester i dr. digitalni signali. Kod unipolarnih i
bipolarnih binarnih formata (sl. 6.17 (a), (b), (c) i (d)) takve mogucnostine postoje jer su kod njih dozvoljene sve sekvence, nezavisno od njihoveduzine, pa se na prijemu ne mogu analizom prijemnih sekvenci detektovatipogorsani uslovi prenosa.Ilustrovacemo mogucnost daljinske kontrole kvaliteta na bazi AMI digi-talnog linijskog signala detekcijom prekrsaja bipolarnosti na prijemu. Naslici 6.18 prikazan je detektor povede bipolarnosti u prijemnom signalu uslucaju koriscenja AMI digitalnog linijskog signala, a na slici 6.19 dati su ivremenski dijagami signala u pojedinim tackama detektora. takt na ulazu(T ) ”J − K ”flip-flopa odred-uje trenutak prenosa pobude (sa J i K ) na Qili Q po prestanku takt impulsa (sa ”kasnjenjem”).
Greske koje ne narusavaju alternativnu bipolarnost ne mozemo da otkri- jemo, ali njihova vjerovantoca je relativno mala. Ako dod-e do pogorsanihuslova prenosa sa velikom vjerovatnocom ce se javiti prekrsaji bipolarnosti(pozitivan impuls iza pozitivnog ili negativan iza negativnog) koje je premasl.6.18 i 6.19 lako detektovati. Ako broj prekrsaja nadmasi odred-enikriticni broj u odred-enom vremenskom intervalu, onda se alarmom na- javljuju nedozvoljeno pogorsani uslovi prenosa.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 197/246
6.3. KOMPARATIVNI OSVRT NA ANALIZIRANE DIGITALNE LINIJSKE SIGNALE 191
ωωd 2ωd 3ωd 4ωd
ω
ωd 2ωd 3ωd 4ωd
ω
ωd 2ωd 3ωd 4ωd
ω
ωd 2ωd 3ωd 4ωd
ω
ωd 2ωd 3ωd 4ωd
ω
ωd 2ωd 3ωd 4ωd
(a)
(b)
(c)
(d)
(e)
(f)
Φs(1)(ω)
Φs(2)(ω)
Φs(3)(ω)
Φs(4)(ω)
Φ AMI (ω)
Φ M (ω)
A2T d
4
A2T d
16
A2T d
A2T d
4
Slika 6.17: Uporedni pregled spektralnih gustina snaga digitalnih signala izprimjera 6.1, 6.2, 6.3 i 6.4.
5- Transparentnost signala omogucava uspjesan prenos bez obzira na vjerovatnocupojave jedinica i nula u izvornoj informaciionoj poruci. Tako velik brojuzastopnih ”pasivnih”nula moze da izazove nepouzdan rad ekstraktoratakta u regeneratorima. T tom pogledu AMI digitalni signal je inferio-ran u odnosu na digitalni signal zasnovan na Manchester kodu (sl.6.15
i 6.17) cija je dobrota posljedica prisutnih tranzicija u linijskom signalubez obzira na raspodjelu vjerovatnoca jedinica i nula u originalnom bina-rnom informacionom sadrzaju. Isto tako prisutne tranzicije u Manchestersignalu izazivaju prosirenje njegovog spektra u odnosu na AMI signal.
Podsjetimo se da su Amerikanci koristili AMI digitalni linijski signal usvom prvom T-1 (24-kanalnom) digitalnom sistemu. Kao sto smo vidjeliAMI linijski signal ispunjava skoro sve postavljene zahtjeve
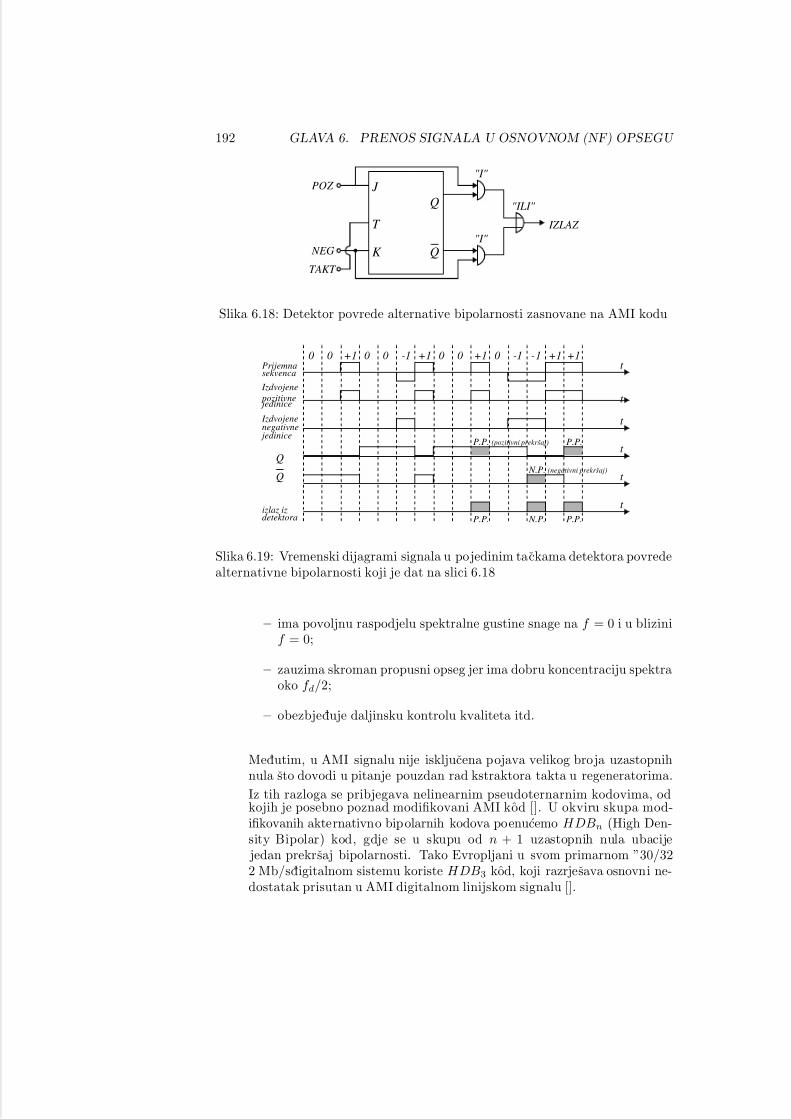
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 198/246
192 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
POZ
NEG
TAKT
J
T
K
Q
Q
"I"
"I"
"ILI"
IZLAZ
Slika 6.18: Detektor povrede alternative bipolarnosti zasnovane na AMI kodu
Prijemnasekvenca
Izdvojene
pozitivne jedinice
Izdvojenenegativne jedinice
Q
Q
izlaz izdetektora
P.P. (pozitivni prekršaj) P.P.
N.P. (negativni prekršaj)
P.P. N.P. P.P.
0 0 +1 0 0 -1 +1 0 0 +1 0 -1 -1 +1 +1
t
t
t
t
t
t
Slika 6.19: Vremenski dijagrami signala u pojedinim tackama detektora povredealternativne bipolarnosti koji je dat na slici 6.18
– ima povoljnu raspodjelu spektralne gustine snage na f = 0 i u blizinif = 0;
– zauzima skroman propusni opseg jer ima dobru koncentraciju spektraoko f d/2;
– obezbjed-uje daljinsku kontrolu kvaliteta itd.
Med-utim, u AMI signalu nije iskljucena pojava velikog broja uzastopnihnula sto dovodi u pitanje pouzdan rad kstraktora takta u regeneratorima.
Iz tih razloga se pribjegava nelinearnim pseudoternarnim kodovima, odkojih je posebno poznad modifikovani AMI kod []. U okviru skupa mod-ifikovanih akternativno bipolarnih kodova poenucemo HDBn (High Den-sity Bipolar) kod, gdje se u skupu od n + 1 uzastopnih nula ubacije jedan prekrsaj bipolarnosti. Tako Evropljani u svom primarnom ”30/322 Mb/sd-igitalnom sistemu koriste HDB3 kod, koji razrjesava osnovni ne-dostatak prisutan u AMI digitalnom linijskom signalu [].

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 199/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 193
6.4 Intersimbolska interferencija
6.4.1 Uvodna razmatranja
Vraticemo se ponovo na blok-semu sistema za prenos u osnovnom opsegu(sl.6.1) koristeci i dalje sinhronu impulsnu amplitudsku modulaciju.
Do eventualne greske u prijemniku moze da dod-e zahvaljujuci kombinovanomuticaju interferencije simbola, koja se javlja zbog neidealnih prenosnih karakter-istika sistema (amplitudske i fazne karakteristike), i prisutnog kanalnog suma.Mi cemo u cilju jednostavnije analize u ovom odjeljku posvtiti paznju prven-stveno interferenciji simbola zanemarujuci ukupnu transfer funkciju
H ( jω) = S 0( jω)H T ( jω)H c( jω)H R( jω), (6.67)
onda se odnos izmd-u signala s1(t) i s2(t) sa sl.6.1 moze svesti na jednostavanoblik (sl.6.20)
an →s1(t)=Σanδ(t-nT d )s2(t)=s*h
H (ω)
Slika 6.20: Uproscena blok-sema sisema za prenos u osnovnom opsegu
Odgovarajuci impulsni odziv sistema mozemo takod-e lako odrediti koristeci nje-govu vezu sa transfer funkcijom sistema
h(t) =1
2π
+∞
−∞
H ( jω )ejωt dω. (6.68)
Prijemni signal s2(t), na osnovu kojeg rekonstruisemo informacioni signal uprijemniku u uslovima kada je s1(t) =
anδ(t − nT d) poprima oblik
s2(t) = s1(t) ∗ h(t) =
n
anh(t − nT d). (6.69)
Ako se uzme u obzir i utica j prisutnog aditivnog suma, onda vrijedi
s2(t) =
n
anh(t − nT d) + nf (t), (6.70)
gdje je sa nf (t) oznacen filtrirani sum u prijemniku koji je nastao kao rezultatuticaja aditivnog kanalnog n(t) na ulazu u prijemni filtar H R (sl.6.1).
Za nas je od znacaja pitanje: kakva treba da bude ukupna transfer funkcija(6.67) (ili impulsni odziv (6.68)) da bismo postigli maksimalnu brzinu prenosauz sto je moguce manju interferencijiu simbola?
Ako se za dati kanal u uzem smislu H c( jω) odabee ukupna transfer funkcijaH ( jω) iz (6.67), koja minimizira interferenciju simbola, ona se moze na op-timalan nacin rastaviti izmed-u pedajnika, kanala i prijemnika da bi se kanalni
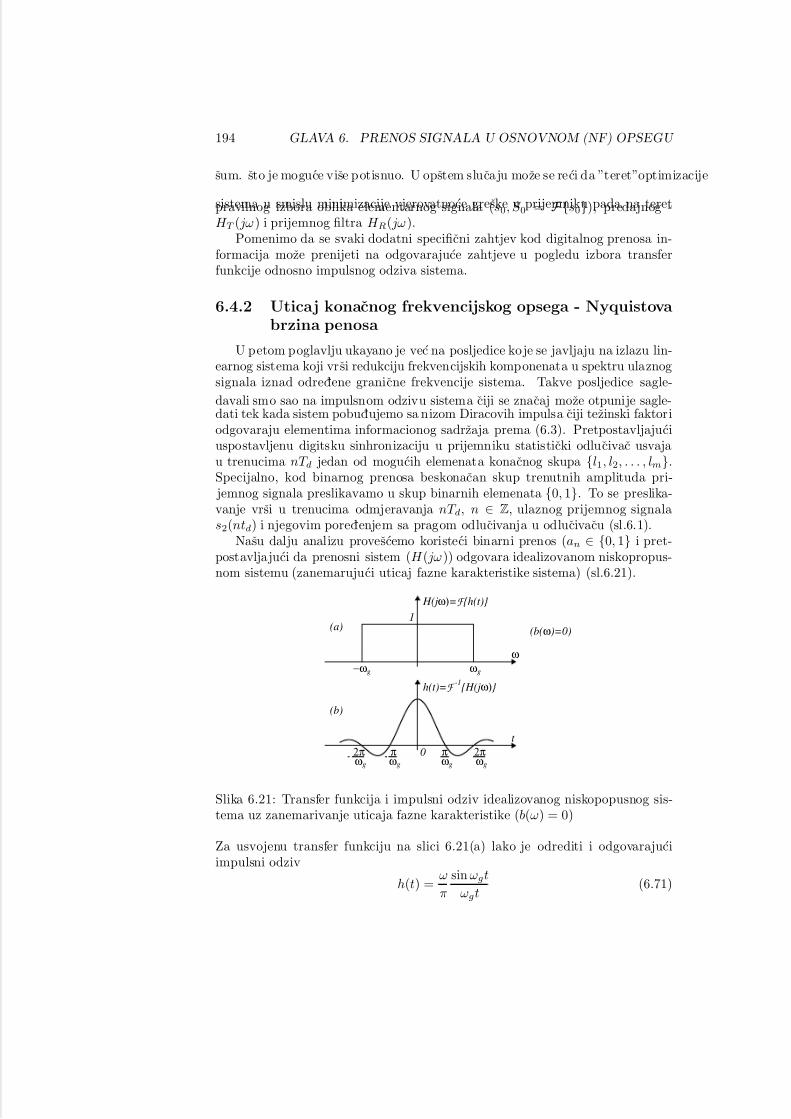
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 200/246
194 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
sum. sto je moguce vise potisnuo. U opstem slucaju moze se reci da ”teret”optimizacije
sistema u smislu minimizacije vjerovatnoce greske u prijemniku pada na teretpravilnog izbora oblika elementarnog signala (s0, S 0 = Fs0), predajnog -H T ( jω) i prijemnog filtra H R( jω).
Pomenimo da se svaki dodatni specificni zahtjev kod digitalnog prenosa in-formacija moze prenijeti na odgovarajuce zahtjeve u pogledu izbora transferfunkcije odnosno impulsnog odziva sistema.
6.4.2 Uticaj konacnog frekvencijskog opsega - Nyquistovabrzina penosa
U petom poglavlju ukayano je vec na posljedice koje se javljaju na izlazu lin-earnog sistema koji vrsi redukciju frekvencijskih komponenata u spektru ulaznogsignala iznad odred-ene granicne frekvencije sistema. Takve posljedice sagle-
davali smo sao na impulsnom odzivu sistema ciji se znacaj moze otpunije sagle-dati tek kada sistem pobud-ujemo sa nizom Diracovih impulsa ciji tezinski faktoriodgovaraju elementima informacionog sadrzaja prema (6.3). Pretpostavljajuciuspostavljenu digitsku sinhronizaciju u prijemniku statisticki odlucivac usvajau trenucima nT d jedan od mogucih elemenata konacnog skupa l1, l2, . . . , lm.Specijalno, kod binarnog prenosa beskonacan skup trenutnih amplituda pri- jemnog signala preslikavamo u skup binarnih elemenata 0, 1. To se preslika-vanje vrsi u trenucima odmjeravanja nT d, n ∈ Z, ulaznog prijemnog signalas2(ntd) i njegovim pored-enjem sa pragom odlucivanja u odlucivacu (sl.6.1).
Nasu dalju analizu provescemo koristeci binarni prenos (an ∈ 0, 1 i pret-postavljajuci da prenosni sistem (H ( jω)) odgovara idealizovanom niskopropus-nom sistemu (zanemarujuci uticaj fazne karakteristike sistema) (sl.6.21).
πωg
2πωg
t
πωg
2πωg
0
h(t)=F -1H(jω)
ω
1
−ωg ωg
H(jω)=F h(t)
(b(ω)=0)
(b)
(a)
Slika 6.21: Transfer funkcija i impulsni odziv idealizovanog niskopopusnog sis-tema uz zanemarivanje uticaja fazne karakteristike (b(ω) = 0)
Za usvojenu transfer funkciju na slici 6.21(a) lako je odrediti i odgovarajuciimpulsni odziv
h(t) =ω
π
sin ωgt
ωgt(6.71)
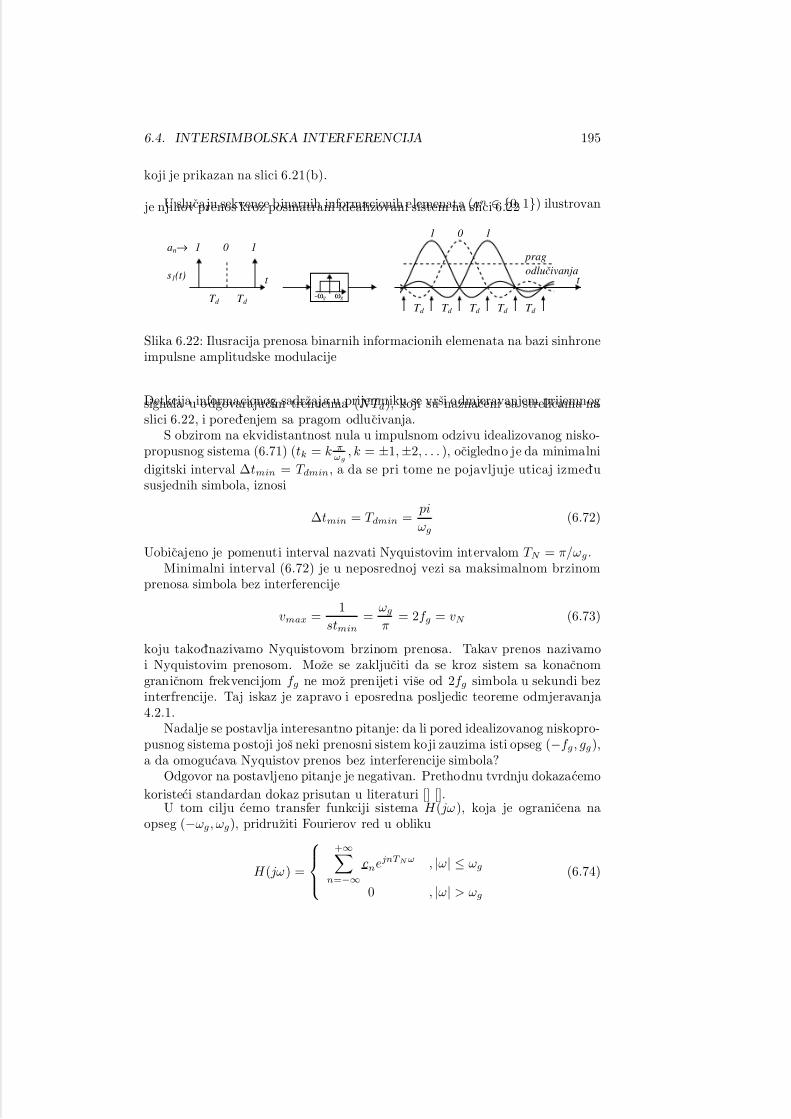
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 201/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 195
koji je prikazan na slici 6.21(b).
U slucaju sekvence binarnih informacionih elemenata (an ∈ 0, 1) ilustrovan je njihov prenos kroz posmatrani idealizovani sistem na slici 6.22
an→ 1 0 1
s1(t)
T d T d
t
-ωg ωg
1 0 1
prag
odlučivanjat
T d T d T d T d T d
Slika 6.22: Ilusracija prenosa binarnih informacionih elemenata na bazi sinhroneimpulsne amplitudske modulacije
Detkcija informacionog sadrzaja u prijemniku se vrsi odmjeravanjem prijemnogsignala u odgovarajucim trenucima (N T d), koji su naznaceni sa strelicama naslici 6.22, i pored-enjem sa pragom odlucivanja.
S obzirom na ekvidistantnost nula u impulsnom odzivu idealizovanog nisko-propusnog sistema (6.71) (tk = k π
ωg, k = ±1, ±2, . . . ), ocigledno je da minimalni
digitski interval ∆tmin = T dmin, a da se pri tome ne pojavljuje uticaj izmed-ususjednih simbola, iznosi
∆tmin = T dmin =pi
ωg(6.72)
Uobicajeno je pomenuti interval nazvati Nyquistovim intervalom T N = π/ωg.Minimalni interval (6.72) je u neposrednoj vezi sa maksimalnom brzinom
prenosa simbola bez interferencije
vmax =1
stmin=
ωg
π= 2f g = vN (6.73)
koju takod-nazivamo Nyquistovom brzinom prenosa. Takav prenos nazivamoi Nyquistovim prenosom. Moze se zakljuciti da se kroz sistem sa konacnomgranicnom frekvencijom f g ne moz prenijeti vise od 2f g simbola u sekundi bezinterfrencije. Taj iskaz je zapravo i eposredna posljedic teoreme odmjeravanja4.2.1.
Nadalje se postavlja interesantno pitanje: da li pored idealizovanog niskopro-pusnog sistema postoji jos neki prenosni sistem koji zauzima isti opseg (−f g, gg ),a da omogucava Nyquistov prenos bez interferencije simbola?
Odgovor na postavljeno pitanje je negativan. Prethodnu tvrdnju dokazacemo
koristeci standardan dokaz prisutan u literaturi [] [].U tom cilju cemo transfer funkciji sistema H ( jω), koja je ogranicena na
opseg (−ωg, ωg), pridruziti Fourierov red u obliku
H ( jω) =
+∞
n=−∞cnejnT Nω , |ω| ≤ ωg
0 , |ω| > ωg
(6.74)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 202/246
196 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
gdje je T N = 2π2ωg
= πωg
= 12f g
Nyquistov interval (6.72). Koeficijente cniz razvoja (6.74) nalazimo prema poznatoj relaciji iz teorije Fourierovih redova(3.12)
cn =1
2ωg
ωg −ωg
H ( jω)e−jnωT N dω (6.75)
S druge strane impulsni odziv sistema h(t) mozemo neposredno racunati polazeciod transfer funkcije sistema
h(t) =1
2π
+∞ −∞
H ( jω)ejωt dω =1
2π
ωg −ωg
H ( jω)ejωt dω (6.76)
Poredeci (6.75) i (6.76) lako je uociti da vazi
cn =2π
2ωgh(−nT N ) = T N h(−nT N ) (6.77)
Na osnovu rezultata (6.77), razvoj (6.74) poprima oblik
H ( jω) =
T N
+∞n=−∞
h(nT N )e−jT Nω, |ω| ≤ ωg
0, |ω| > ωg
(6.78)
gdje je izvrsena smjena n → −n.Isto tako na osnovu teoreme odmjeravanja i njenog konacnog rezultata (4.11)
moze se pisati
h(t) =+∞
n=−∞h(nT N )
sin ωg (t − nT N )
ωg(t − nT N )(6.79)
Prethodne dvije relacije ukazuju da se i impulsni odziv h(t) i odgovarajucatransfer funkcija mogu definisati pomocu trenutnih vrijednosti impulsnog odzivah(nT N ) u Nyquistovim intervalima koje na osnovu (6.76) iznose
h(nT N ) = hn =1
2π
ωg −ωg
H ( jω)jnωT N dω (6.80)
Nyquistov prenos bez interferencije definisan je uslovima
hn = 0, n = 0 (6.81)
gdje se obicno vrijednost impulsnog odziva ut renutku t = 0 narmalizuje na vri- jednost 1 (h(0) = h0 = 1). Ako iskoristimo kronekerov operator, onda Nyquistovprenos mozemo jednostavno definisati relacijom
hn = δn0 =
0, n = 01, n = 0
(6.82)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 203/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 197
Kako su koeficijenti Fourierovog razvoja cn u transfer funkciji (6.74) srazm-
jerni odmjercima impulsnog odziva h(nT N ) = hn, n ∈Z
, onda se uslovi defin-isani sa (6.82) preslikavaju na ekvivalentne uslove
H ( jω) =
T N , |ω| ≤ ωg
0, |ω| > ωg(6.83)
sto znaci da zaista samo idealizovani niskopropusni sistem, ogranicen na po-drucje (−ωg, ωg ), sa eventualno pridruzenom linearnom faznom karakteristikomomogucava Nyquistov prenos bez interfrencije.
Kako je idealizovani niskopropusni sistem cisto teorisjka, mada korisna, tvorevina,a njegova aproksimacija cesto skupa, postavlja se zadatak nalazenja prakticnijetransfer funcije koja omogucava prenos bez interferencije simbola. Taj se za-datak moze rijesiti ako transfer funkcija zauzima veci opseg ucestanosti odopsega (
−ω
g, ω
g) koji je dat u posmatranom idealizovanom slucaju.
Ako i dalje koristimo uslove Nyquistovog prenosa definisane sa (6.82), ondau opstem slucaju odmjerke impulsnog odziva mozemo racunati iz relacije
h(nT N ) = hn =1
2π
+∞ −∞
H ( jω)ejωnT N dω = δn0 (6.84)
Ako izvrsimo segmentaciju duz ose ucestanosti, na segmente sirine 2ωg, onda(6.84) mozemo pisati u obliku
h(nT N ) = hn =1
2π
+∞
k=
−∞
(2k+1)ωg
(2k−1)ωg
H ( jω)ejωnT N dω = δn0 (6.85)
Uvodeci smjenu ω → x = 2kωg, a zatim x → ω iz (6.85) se dobija
hn =1
2π
+∞k=−∞
ωg ωg
H [ j(ω + 2kωg)]ejωnT N dω = δn0, (6.86)
odakle nakon dozvoljene izmjene redoslijeda sumiranja i integracije dobijamo
hn =1
2π
+∞k=−∞
ωg ωg
H eq( jω)ejωnT N dω = δn0, (6.87)
gdje je uveden pojam ekvivalentne transfer funkcije
H eq =
+∞k=−∞ H [ j(ω + 2kωg)], |ω| ≤ ωg
0, |ω| > ωg(6.88)
Rezultati (6.87) i (6.88) pokazuju da svi sistemi, koji imaju istu ekvivalentnutransfer funkciju (6.88), imaju i iste odmjerke impulsnog odziva u Nyquistovimintervalima, pa su u tom smislu i ekvivalentni.
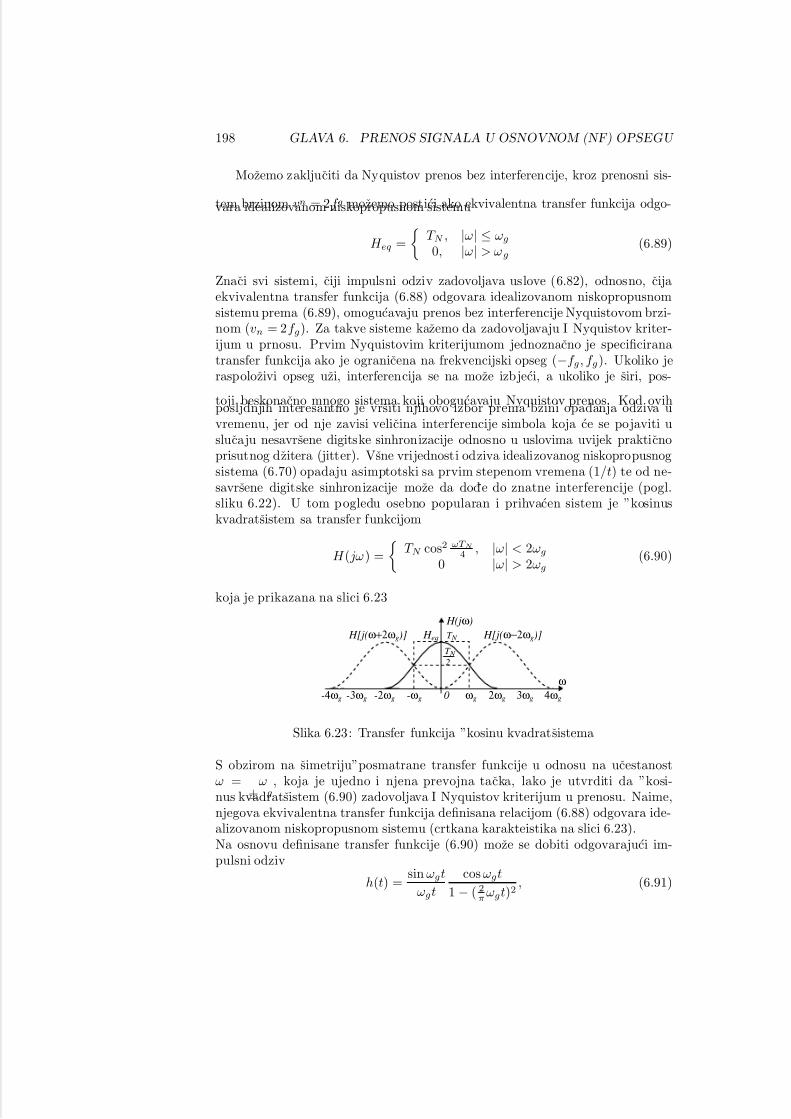
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 204/246
198 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Mozemo zakljuciti da Nyquistov prenos bez interferencije, kroz prenosni sis-
tem brzinom vn = 2f g mozemo postici ako ekvivalentna transfer funkcija odgo-vara idealizovanom niskopropusnom sistemu
H eq =
T N , |ω| ≤ ωg
0, |ω| > ωg(6.89)
Znaci svi sistemi, ciji impulsni odziv zadovoljava uslove (6.82), odnosno, cijaekvivalentna transfer funkcija (6.88) odgovara idealizovanom niskopropusnomsistemu prema (6.89), omogucavaju prenos bez interferencije Nyquistovom brzi-nom (vn = 2f g). Za takve sisteme kazemo da zadovoljavaju I Nyquistov kriter-ijum u prnosu. Prvim Nyquistovim kriterijumom jednoznacno je specificiranatransfer funkcija ako je ogranicena na frekvencijski opseg (−f g, f g ). Ukoliko jeraspolozivi opseg uzi, interferencija se na moze izbjeci, a ukoliko je siri, pos-
toji beskonacno mnogo sistema koji obogucavaju Nyquistov prenos. Kod ovihposljdnjih interesantno je vrsiti njihovo izbor prema bzini opadanja odziva uvremenu, jer od nje zavisi velicina interferencije simbola koja ce se pojaviti uslucaju nesavrsene digitske sinhronizacije odnosno u uslovima uvijek prakticnoprisutnog dzitera (jitter). Vsne vrijednosti odziva idealizovanog niskopropusnogsistema (6.70) opadaju asimptotski sa prvim stepenom vremena (1/t) te od ne-savrsene digitske sinhronizacije moze da dod-e do znatne interferencije (pogl.sliku 6.22). U tom pogledu osebno popularan i prihvacen sistem je ”kosinuskvadratsistem sa transfer funkcijom
H ( jω) =
T N cos2 ωT N
4, |ω| < 2ωg
0 |ω| > 2ωg(6.90)
koja je prikazana na slici 6.23
T N
2
T N
H(jω)
ω
ωg 2ωg 3ωg 4ωg-ωg-2ωg-3ωg-4ωg 0
H eq H[j(ω−2ωg)] H[j(ω+2ωg)]
Slika 6.23: Transfer funkcija ”kosinu kvadratsistema
S obzirom na simetriju”posmatrane transfer funkcije u odnosu na ucestanostω =
±ω
g, koja je ujedno i njena prevojna tacka, lako je utvrditi da ”kosi-
nus kvadratsistem (6.90) zadovoljava I Nyquistov kriterijum u prenosu. Naime,njegova ekvivalentna transfer funkcija definisana relacijom (6.88) odgovara ide-alizovanom niskopropusnom sistemu (crtkana karakteistika na slici 6.23).Na osnovu definisane transfer funkcije (6.90) moze se dobiti odgovarajuci im-pulsni odziv
h(t) =sin ωgt
ωgt
cos ωgt
1 − ( 2π ωgt)2
, (6.91)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 205/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 199
t
h(t)1
12
T N
2T N 3T N
22T N
T N =π
ωg=1
2f g
Slika 6.24: Impulsni odziv ”kosinus kvadratsistema
koji je prikazan na slici 6.24.Posto je transfer funkcija kontinualna ukljucujuci i njen drugi izvod (sl.6.24),odgovarajuci impulsni odziv, odnosno njegove vrsne vrijednosti, opadaju s trecimstepenom vremena. Ta osobina ”kosinus kvadratsistema pruza pogodnosti u
prakticnim uslovima rada kada imamo nesavrsenu digitsku sinhronizaciju. Kodposmatranog sistema impulsni odziv u trenucima ±T N /2 opada za 6dB u odnosuna vrsnu vrijednost h(0) = h0 = 1.U odnosu na impulsni odziv idealizovanog niskopropusnog sistema (sl.6.21)ovdje se pojavljuju i dodatne nule u trenucima ±2k+1
2T N , k = 0 (sl.6.24).
Za sisteme koji imaju pethodno pomenute dvije osobine kazemo da zadovol- javaju II Nyquistov kriterijum u prenosu.Sistemi specificirani u opsegu (−2f g, 2f f ) koji zadovoljavaju I i II Nyquistovkriterijum jednoznacno su odred-eni ”kosinus kvadratsistemom [].Pomenimo da ostoji i III Nyquistov kriterijum [] [], vezan za povrsinu ispododziva u odgovarajucem Nyquistovom intrvalu, ali kako nije od posebnog prakticnogznacaja, necemo mu ovdje posvecivati paznju.U zakljucnoj analizi ”kosinus kvadratsistema moze se konacno reci da je tosistem prihvacen kao optimalan s obzirom na niz njegovih korisnih osobina upogledu njegove obustnosti na nesavrsenost sinhronizma i pogodnosti koje pruzasa aspekta sinteze (realizacije) takvih sistema.
6.4.3 Optimalna odjela transfer funkcije s obzirom na sum
U uvodnom razmatanju vecje pomenuto da izborom ukupne transfer funkcije(6.67) sa aspekta minimizacije interferencije simbola ostaje sloboda njene raspod- jele izmed-u predajnika i prijemnika za dati kanal (H C ( jω )). Nase dalje razma-tranje provescemo uvodeci pojam komplementarne transfer funkcije s obziromna prijemni filtar H R( jω) = H ( jω)/H ( jω) koja nadopunjuje prijemni filtar do
ukupne transfer funkcije (6.67). Ako sa a2
= a2
n oznacimo srednjekvadratnuvrijednost informacionog sadrzaja, onda u uslovima prenosa simbola sa Nyquis-tovom brzinom vN = 1/T N srednja snaga korisnog signala na ulazu u prijemnifiltar iznosi
P s =a2
2πT N
+∞ −∞
|H R( jω)|2dω =a2
2πT N
+∞ −∞
H ( jω)
H R( jω)
2 dω. (6.92)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 206/246
200 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Snaga korisnog signala na izlazu prijemnog filtra definisana je ukupnom oda-
banom transfer funkcijom H ( jω) pa nacin njene raspodjele na pojedine faktoreiz (6.67) ne utice na snagu korisnog signala na izlazu prijemnog filtra. To znacida maksimiranje odnosa signal sum na izlazu prijemnog filtra mozemo izvrsitiminimizacijom snage suma.Ako sa ΦN (ω) oznacimo spektralnu gustinu snage suma (pogl. sl.6.1), onda naosnovu (??) lako mozemo izracunati srednju snagu suma na izlazu prijemnogfiltra
P N =1
2π
+∞ −∞
ΦN (ω)|H R( jω)|2dω (6.93)
To znaci da postavljeni zadatak rjesavamo minimizacijom snage suma (6.93) uzogranicenje (6.92), pa odgovarajuci funkcional ima oblik
F =1
2π
+∞ −∞
ΦN (ω)|H R( jω)|2 + λ
a2
T N
H ( jω)
hR( jω)
2 dω. (6.94)
Minimizacijom funkcionala (6.94) primjenom varijacionog racuna moze se dobitirezultat
|H R( jω)| =|H ( jω)|1/2|[ΦN (ω)]1/4
, [] (6.95)
odnosno
hR( jω) =H ( jω)[ΦN (ω)]1/4
|H ( jω)|1/2(6.96)
Uocimo da sa aspekta minimizacije snage suma fazne karakteristike podsistema
H R i H R mogu da budu proizvoljne, ali sa aspekta prenosa simbola bez njihovemed-usobne interfrencije one se moraju nadopunjavati do fazne karakteristikeukupne transfer funkcije sistema H ( jω ), koja proistice iz uzlova (6.88) i (6.89).
6.4.4 Ocjena interferencije kod prenosa kroz realne kanale
Ako sistem pobud-ujemo sa nizom Diracovih impulsa, ciji tezinski faktoriodgovaraju elementima informacionog sadrzaja
s1(t) =+∞
n=−∞anδ(t − nT d), (6.97)
onda signal na izlazu ima oblik
s2(t) =
anh(t − nT d) + nf (t), (6.98)
gdje je nf (t) sum u prijemniku koji je prodro kroz prijemni fitar H R.Zanemarujuci kasnjenje sistema, onda simbolu ak, koji je emitovan u trenutku
t = kT d, odgovara vrijednost izlaznog signala
s2(kT d) =
anh(kT d − nT d) + nf (kT d) (6.99)
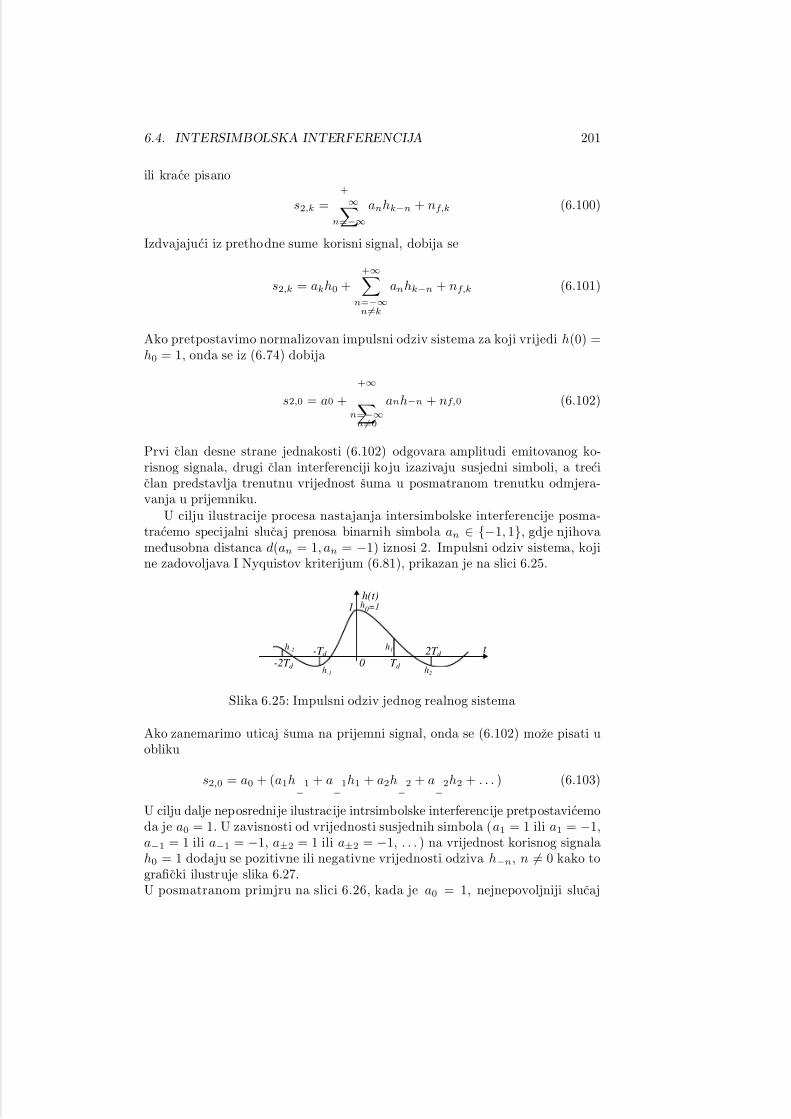
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 207/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 201
ili krace pisano
s2,k =+
∞n=−∞
anhk−n + nf,k (6.100)
Izdvajajuci iz prethodne sume korisni signal, dobija se
s2,k = akh0 ++∞
n=−∞n=k
anhk−n + nf,k (6.101)
Ako pretpostavimo normalizovan impulsni odziv sistema za koji vrijedi h(0) =h0 = 1, onda se iz (6.74) dobija
s2,0 = a0 +
+∞n=−∞
n=0
anh−n + nf,0 (6.102)
Prvi clan desne strane jednakosti (6.102) odgovara amplitudi emitovanog ko-risnog signala, drugi clan interferenciji koju izazivaju susjedni simboli, a treciclan predstavlja trenutnu vrijednost suma u posmatranom trenutku odmjera-vanja u prijemniku.
U cilju ilustracije procesa nastajanja intersimbolske interferencije posma-tracemo specijalni slucaj prenosa binarnih simbola an ∈ −1, 1, gdje njihovamed-usobna distanca d(an = 1, an = −1) iznosi 2. Impulsni odziv sistema, kojine zadovoljava I Nyquistov kriterijum (6.81), prikazan je na slici 6.25.
t
h(t)h
0=11
0 T d -2T d
-T d 2T d
h-1
h-2 h1
h2
Slika 6.25: Impulsni odziv jednog realnog sistema
Ako zanemarimo uticaj suma na prijemni signal, onda se (6.102) moze pisati uobliku
s2,0 = a0 + (a1h−
1 + a−
1h1 + a2h−
2 + a−
2h2 + . . . ) (6.103)
U cilju dalje neposrednije ilustracije intrsimbolske interferencije pretpostavicemoda je a0 = 1. U zavisnosti od vrijednosti susjednih simbola (a1 = 1 ili a1 = −1,a−1 = 1 ili a−1 = −1, a±2 = 1 ili a±2 = −1, . . . ) na vrijednost korisnog signalah0 = 1 dodaju se pozitivne ili negativne vrijednosti odziva h−n, n = 0 kako tograficki ilustruje slika 6.27.U posmatranom primjru na slici 6.26, kada je a0 = 1, nejnepovoljniji slucaj
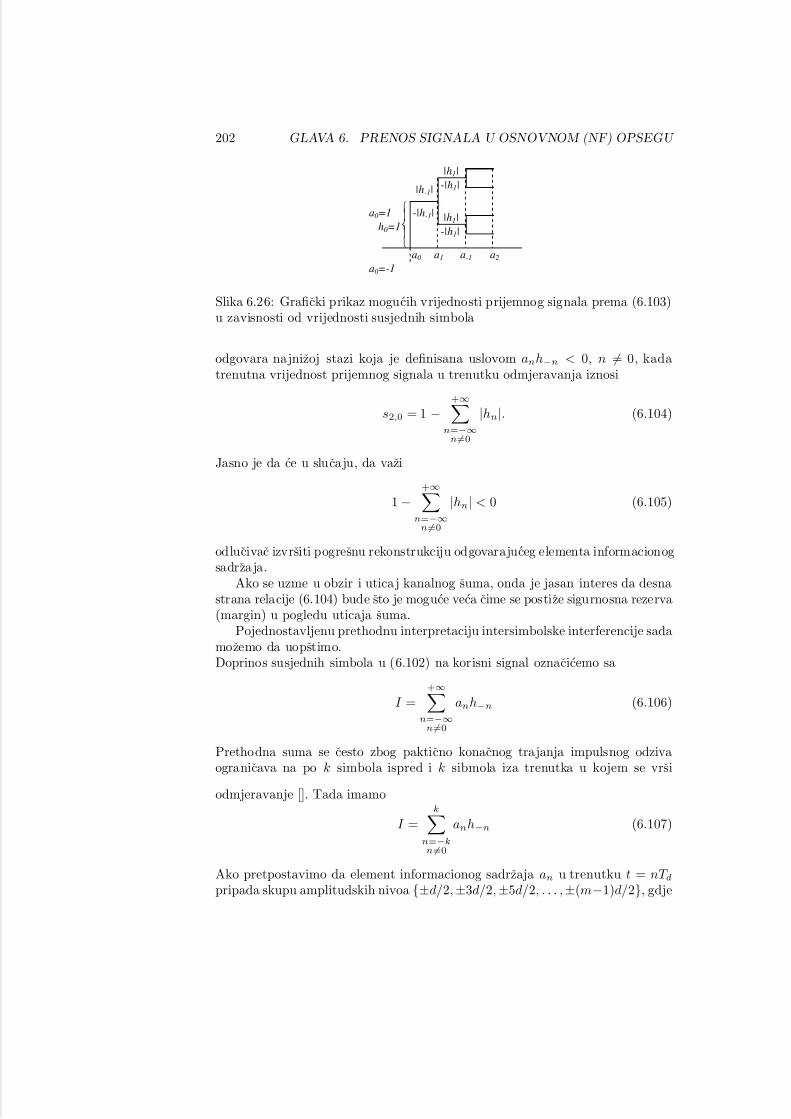
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 208/246
202 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
h0=1
a0=1
a0=-1
|h-1|
-|h-1|
|h1|
-|h1|
|h1|
-|h1|
a0 a1 a-1 a2
Slika 6.26: Graficki prikaz mogucih vrijednosti prijemnog signala prema (6.103)u zavisnosti od vrijednosti susjednih simbola
odgovara najnizoj stazi koja je definisana uslovom anh−n < 0, n = 0, kadatrenutna vrijednost prijemnog signala u trenutku odmjeravanja iznosi
s2,0 = 1 −+∞
n=−∞n=0
|hn|. (6.104)
Jasno je da ce u slucaju, da vazi
1 −+∞
n=−∞n=0
|hn| < 0 (6.105)
odlucivac izvrsiti pogresnu rekonstrukciju odgovarajuceg elementa informacionogsadrza ja.
Ako se uzme u obzir i utica j kanalnog suma, onda je jasan interes da desnastrana relacije (6.104) bude sto je moguce veca cime se postize sigurnosna rezerva(margin) u pogledu uticaja suma.
Pojednostavljenu prethodnu interpretaciju intersimbolske interferencije sadamozemo da uopstimo.Doprinos susjednih simbola u (6.102) na korisni signal oznacicemo sa
I =+∞
n=−∞n=0
anh−n (6.106)
Prethodna suma se cesto zbog pakticno konacnog trajanja impulsnog odzivaogranicava na po k simbola ispred i k sibmola iza trenutka u kojem se vrsi
odmjeravanje []. Tada imamo
I =k
n=−kn=0
anh−n (6.107)
Ako pretpostavimo da element informacionog sadrzaja an u trenutku t = nT dpripada skupu amplitudskih nivoa ±d/2, ±3d/2, ±5d/2, . . . ,±(m−1)d/2, gdje

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 209/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 203
je razmak izmed-u susjednih nivoa d, onda maksimalna vrijednost intersimbolske
interferencije (6.107) iznosi
I max = (m − 1)d
2
n=0
|hn| (6.108)
Ocigledno rezultat (6.108) odgovara najnepovoljnijoj sekvenci simbola. Fak-tor
n=0 |hn| na desnoj strani jednakosti (6.108) obicno nazivamo ”vrsnim
izoblicenjem impulsnog odziva”i oznacavamo ga sa
D =n=0
|hn| (6.109)
Uvedena velicina D iz (6.109) koristi se cesto kao kvantitativna mjera za ocjenu
interferencije koji unosi sistem zbog odstupanja njegovih prenosnih karakteris-tika od odgovarajucih karakteristika idealizovanih sistema (5.71).Pored kvantitativne mjere interferenicije definisane sa (6.109) u teoriji i praksiprenosa koristi se i tzv. ”efektivno izoblicenje impulsnog odziva”
D2eff =
n=0
h2n (6.110)
Za kvalitativnu ocjenu uticaja intersimbolske interferenicje simbola i prisutnogsuma u kanalu cesto se koristi ”otvor oka”koji se moze posmatrati na osciloskopu,gdje je brtzina vremenske baze jednaka brzini emitovanja simbola. Posma-tracemo jedanslucaj idealnog prenosa bez interferencije i suma, a zatim drugi
sa inteferencijom i sumom (sl.6.27).Na slici 6.28 izdvojen je i posebno prikazan otvor oka kod binarnog prenosa.Uocavamo da je oko potpuno otvoreno ako nema interferencije i suma. U slucajuinterferencije i suma otvor oka se smanjuje. Sirina srafiranog podrucja nasl.6.28 neosredni je indikator stepena interferencije simbola i disperzije prisutnogsuma. Jasno je da izbor trenutka odmjeravanja i praga odlucivanja treba pode-siti prema maksimalnom otvoru oka. Cisti dio oka od srafiranog podrucja dopraga odlucivanja cini sigurnosnu udaljenost (margin) koju mozemo shvatiti kaodatu rezervu protiv dodatnog uticaja suma i interferencije. Osjetljivost na ne-savrsenost bitske sinhronizacije moze se sagledati na osnovu strmine otvora okaiduci lijevo i desno od njegove sredine (trenutka odmjeravanja).
U sluca ju m–arnog prenosa (m > 2) dobija se (m−1) otvora oka, a potrebno je odabrati i (m
−1) pragova odlucivanja u trenutku odmjeravanja prijemnog
signala.
6.4.5 Osvrt na izacunavanje vjerovatnoce greske
Mada cemo u narednom odjeljku posvetiti paznju optimalnom iyboru pragaodlucivanja i izracunavanju odgovarajuce vjerovatnoce greske izazvane aditivnimsumom, ovdje cemo koristeci rezultat (6.102) uciniti osvrt na izracunavanje
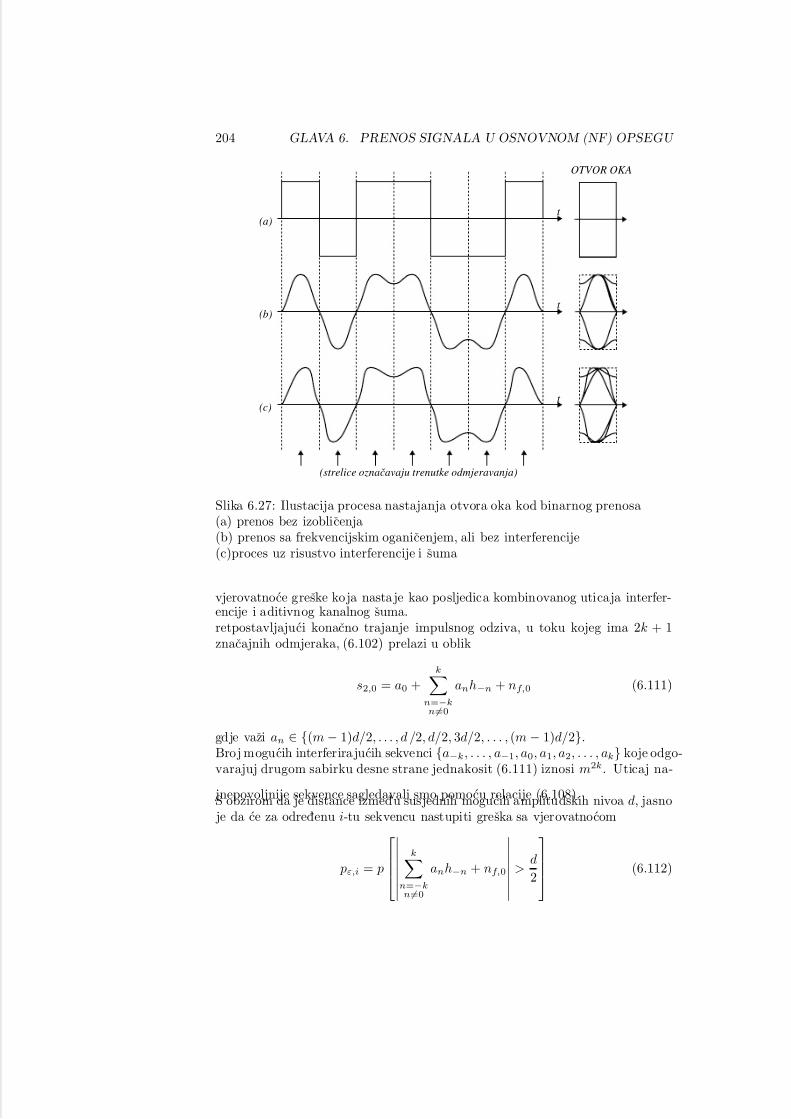
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 210/246
204 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
(a)
(b)
(c)
t
t
t
OTVOR OKA
(strelice označavaju trenutke odmjeravanja)
Slika 6.27: Ilustacija procesa nastajanja otvora oka kod binarnog prenosa(a) prenos bez izoblicenja(b) prenos sa frekvencijskim oganicenjem, ali bez interferencije(c)proces uz risustvo interferencije i suma
vjerovatnoce greske koja nasta je kao posljedica kombinovanog uticaja interfer-encije i aditivnog kanalnog suma.retpostavljajuci konacno trajanje impulsnog odziva, u toku kojeg ima 2k + 1znacajnih odmjeraka, (6.102) prelazi u oblik
s2,0 = a0 +k
n=−kn=0
anh−n + nf,0 (6.111)
gdje vazi an ∈ (m − 1)d/2, . . . , d /2, d/2, 3d/2, . . . , (m − 1)d/2.Broj mogucih interferira jucih sekvenci a−k, . . . , a−1, a0, a1, a2, . . . , ak koje odgo-varajuj drugom sabirku desne strane jednakosit (6.111) iznosi m2k. Uticaj na-
jnepovoljnije sekvence sagledavali smo pomocu relacije (6.108).S obzirom da je distance izmed-u susjednih mogucih amplitudskih nivoa d, jasno je da ce za odred-enu i-tu sekvencu nastupiti greska sa vjerovatnocom
pε,i = p
kn=−k
n=0
anh−n + nf,0
>d
2
(6.112)
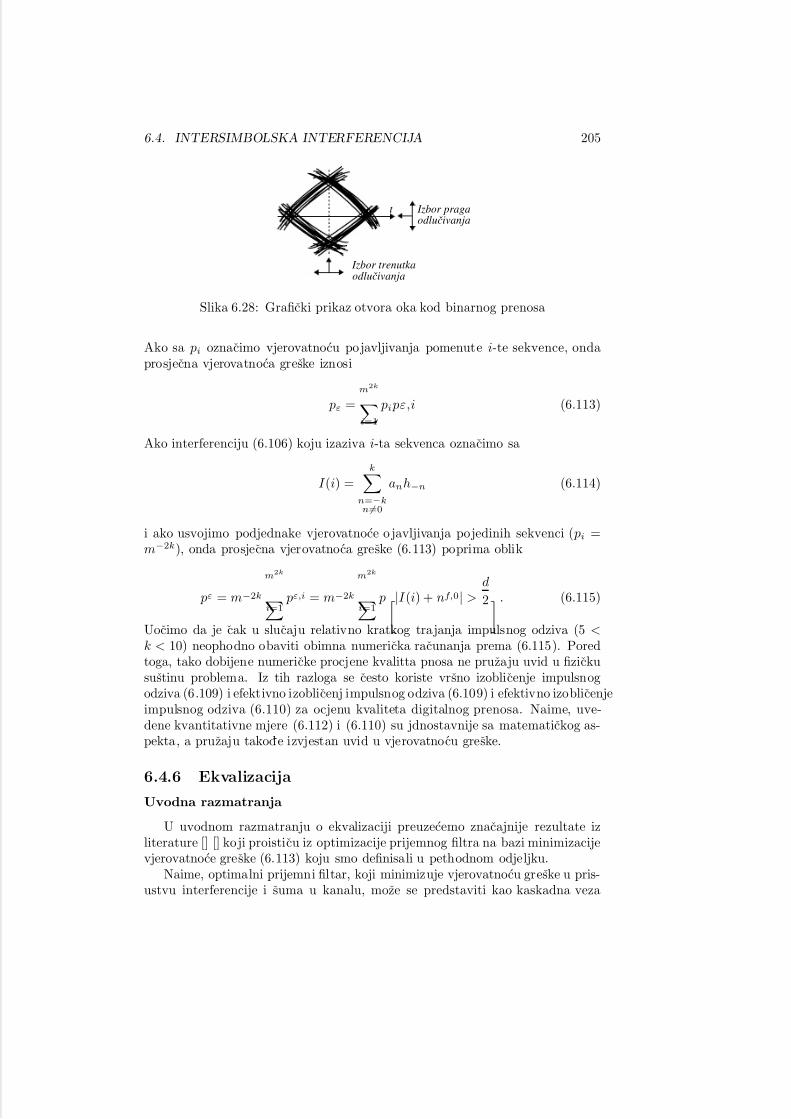
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 211/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 205
t Izbor pragaodlučivanja
Izbor trenutkaodlučivanja
Slika 6.28: Graficki prikaz otvora oka kod binarnog prenosa
Ako sa pi oznacimo vjerovatnocu pojavljivanja pomenute i-te sekvence, ondaprosjecna vjerovatnoca greske iznosi
pε =m2ki=1
pi pε,i (6.113)
Ako interferenciju (6.106) koju izaziva i-ta sekvenca oznacimo sa
I (i) =
kn=−k
n=0
anh−n (6.114)
i ako usvojimo podjednake vjerovatnoce o javljivanja pojedinih sekvenci ( pi =m−2k), onda prosjecna vjerovatnoca greske (6.113) poprima oblik
pε = m−2k
m2k
i=1
pε,i = m−2k
m2k
i=1
p |I (i) + nf,0| >d
2 . (6.115)
Uocimo da je cak u slucaju relativno kratkog trajanja impulsnog odziva (5 <k < 10) neophodno obaviti obimna numericka racunanja prema (6.115). Poredtoga, tako dobijene numericke procjene kvalitta pnosa ne pruzaju uvid u fizickusustinu problema. Iz tih razloga se cesto koriste vrsno izoblicenje impulsnogodziva (6.109) i efektivno izoblicenj impulsnog odziva (6.109) i efektivno izoblicenjeimpulsnog odziva (6.110) za ocjenu kvaliteta digitalnog prenosa. Naime, uve-dene kvantitativne mjere (6.112) i (6.110) su jdnostavnije sa matematickog as-pekta, a pruzaju takod-e izvjestan uvid u vjerovatnocu greske.
6.4.6 Ekvalizacija
Uvodna razmatranja
U uvodnom razmatranju o ekvalizaciji preuzecemo znacajnije rezultate izliterature [] [] koji proisticu iz optimizacije prijemnog filtra na bazi minimizacijevjerovatnoce greske (6.113) koju smo definisali u pethodnom odjeljku.
Naime, optimalni prijemni filtar, koji minimizuje vjerovatnocu greske u pris-ustvu interferencije i suma u kanalu, moze se predstaviti kao kaskadna veza

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 212/246
206 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
prilagod-enog (matched) filtra, ciji je zadatak potiskivanje kanalnog suma, i tzv.
transferzalnog filta ciji je zadatak minimizacija interferencije simbola. Ako seradi o visokom nivou suma u kanalu poput adarskog kanala, dominantan je uti-caj prilagod-enog filtra. U slucaju visokog odnosa signal-sum, presudan uticajna kvalitet prenosa ima interferencija simbola, te se u takvim uslovima prenosaoptimalni prijemni filtar svodi praktocno samo na transferzalni filtar []. Kako ceo prilagod-enom filtru u prijemniku biti vise govora u odjeljku koje je posvecenoprimjeni teorije odlucivanja u optimalnoj detekciji signala, ovdje cemo obatitinesto vise paznje transferzalnom filtru. Kao sto je vec nagovjesteno, transfer-zalnim filtrom vrsimo korekciju amplitudske i fazne karakteristike u cilju sto je moguce veceg priblizavanja Nyquistovim uslovima prenosa koji su definisanirelacijama (6.86), (6.88) i (6.89).
Transferzalni filtar kao ekvalizator
Kod vecine kanala koji se danas kriste za digitalni prenos, a posebno uracunarskim mrezama, odnos signal-sum je relativno velik, tako da tansferzalnifiltar pakticno ima ulogu optimalnog prijemnog filtra. Transfr funkcija trans-ferzalnog filtra definisana je izrazom
H RT ( jω) =
N n=−N
cne−jnωT N , [], (6.116)
gdje je Nyquistov interval T N definisan sa (6.72).Struktura transfer funkcije transferzalnog filtra ukazuje da se radi o jednos-tavnom nerekurzivnom filtru koji se moze realizovati pomocu linije za kasnjenj,
s koje se uzimaju izlazi u Nyquistovim intrvalima, a zatim mnoze odgovarajucimtezinskim faktorima cn (sl.6.29).
+
T N T N T N
ULAZ
IZLAZ
c-N c-N+1 c-N+2 c N
Slika 6.29: Stuktura transferzalnog filtra
Iz (6.116) lako je dobiti
H RT [ j(ω + 2ωg )] = H RT ( jω), T N = πωg
(6.117)
sto ukazuje da je transferzalni filtar periodican tj. da ima tansfer funkciju koja j periodicna funkcija ucestanosti s ”periodom”2ωg.Ukoliko koristimo simetricne koeficijente cn, tj.
c1 = c−1, c2 = c−2, . . . , cN = c−N , (6.118)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 213/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 207
onda (6.116) poprima oblik
H RT ( jω) = c0 + 2N
n=1
cn cos nωT N , (6.119)
sto znaci da u slucaju zadovoljavanja uslova (6.118) transferzalnim filtrom uticemosamo na amplitudsku karakteristiku prenosnog sistema. Drugim rijecima, akozelimo da uticemo na amplitudsku i faznu karakteristiku sistema, onda je neophodnoda postoji bar jedan par koeficijenata (ck, c−k) za koje vazi ck = c−k.Koristeci transfr funkciju transferzalnog filtra lako je izracunati i odgovarajuciimpulsni odziv
hRT =1
2π
+∞ −∞
H RT ( jω)ejωt dω =N
n=−N
cnδ(t − nT N ) (6.120)
Povezimo sada transferzalni filtar kaskadno sa prenosnim sistemom ko ji je defin-isan sa H ( jω) odnosno h(t) = F −1H ( jω) (sl.6.30).
H(j )ω H RT (j )ω
h(t)
t t
h (t)=h(t)*h (t)u RT
t
δ(t)
Slika 6.30: Kaskadna veza sistema i transferzalnog filtra
Lako se uvjeriti da se signal vremenski prosiruje pri prolasku kroz transferzalnifiltar.
Impulsni odziv kaskadne veze sa sl.6.30 iznosi
hn(t) = h(t) ∗ hRT (t) =N
n=−N
cnh(t − nT N ) (6.121)
u trenutku t = kT N imamo
hn(kT N ) =N
n=−N
cnh[(k − n)T N ] ili krace hn,k =N
n=−N
cnhk−n (6.122)
Ako pretpostavimo, na primjer, da odziv posmatranog sistema ima tri znacajnaodmjeka h−1, h0, h1, a tansferzalni filtar tri izvoda odnosno tezinska faktorac−1, c0, c1, onda se iz (6.122) moze lako dobiti
hn,−2 = c−1h1,
hn,−1 = c−1h0 + c0h1
hn,0 = c1h−1 + c0h0 + c−1h1
hn,1 = c1h0 + c0h1
hn,2 = c1h1
hn,k = 0 za |k| > 2

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 214/246
208 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Iz prethodnog primjera uocava se pomenuto vremensko prosirivanje rezulti-
rajuceg odziva.Jasno je da izborom koeficijenata transferzalnog filtra cn mozemo da uticemona odziv kaskadne veze u konacnom broju Nyquistovih intervala, te se inter-ferencija simbola u principu ne moze potpuno eliminisati sa filtrom konacneduzine. Povecavanjem broja koeficijenata (2N +1) interferencija se moze ucinitiproizvoljno malom. Med-utim, u praksi se sa relativno malim brojem koeficije-nata cn mogu postici zadovoljavajuci rezultati.
Posvetimo sada paznju optimizaciji transferzalnog filtra vrseci minimizacijuneke od mjera stepena interferencije u sistemu ((6.109) ili (6.110)).Oznacimo vrsno, odnosno efektivno, izoblicenje impulsnog odziva sistema sa
D poc = n=0
|hn| odnosno D2effpoc = n=0
h2n
Odgovarajuce velicine kaskadne veze sistema i transferalnog filtra prema (6.122)imaju oblik
D =k=0
|hn,k| =k=0
N
n=−N
cnhk−n
= f 1(c−n, . . . , cn) i (6.123)
D2eff = k=0
h2n,k = k=0
N
n=−N
cnhk
−n
2
= f 2(c
−n, . . . , cn) (6.124)
Optimizaciju transferzalnog filtra obicno vrsimo minimizacijom funkcije f 1(c−n, . . . , cn)iz (6.123) ili f 2(c−n, . . . , cn) iz (6.124) za dati broj koeficijenata (2N + 1). Znaciradi se o problemu pronalazenja najpovoljnijeg skupa koeficijenata cnN
n=−N
koji ce obezbijediti minimum mjere izoblicenja (6.123) ili (6.124). Osvrnucemose prvo na minimizaciju funkcije f 1 iz (6.123)
minV ARcnNn=−N
f 1(c−n, . . . , cn) = minV ARcnNn=−N
k=0
N n=−N
cnhk−n
(6.125)
Moze se pokazati da minimum (6.125) poostizemo ako se sa skupom od 2N +1 koeficijenata ci obezbjedi 2N nula u rezultirajucem impulsnom odzivu(6.122). U uslovima kada je pocetno vrsno izoblicenje (D poc) manje od h0 = 1,tj. kada je ”okosistema jos uvijek otvoreno (1 − D poc > 0), tada 2N nula odgo-vara prvim susjednim odmjercima desno i lijevo u odnosu na centralni odmjerakhn,0 = 1.Prethodni iskaz na osnovu (6.122) mozemo pisati u obliku sistema linearnih

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 215/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 209
jednacina:
hn,−N = 0 = c−N h0 + c−N +1h−1 + · · · + cN h−2N
hn,−N +1 = 0 = c−N h1 + c−N +1h0 + · · · + cN h−2N +1
......
hn,0 = 1 = c−N hN + c−N +1hN −1 + · · · + cN h−N
......
hn,N = 0 = c−N h2N + c−N +1h2N −1 + · · · + cN h0
koji se moze pisati u matricnoj formi
h0 h−1 . . . h−2N
h1 h0 . . . h−2N +1
......
. . ....
h2N h2N −1 . . . h0
c−n...
c0
...cN
=
0...1...0
(6.126)
Rezultirajuci postupak za odred-ivanje optimalnog skupa koeficijenata transfer-zalnog filtra na bazi minimizacije vrsnog izoblicenja (6.125) poznat je u literaturipod nazivom algoritma ”fosiranja nula”.
Primjer 6.5. U ovom primjeru ilustrovacemo primjenu postupka ”forsiranja nula”u optimizaciji transferzalnog filtra sa tri koeficijenta ako je impulsni odziv
definisan slikom 6.31
0.1
-0.2
0.1
1
h(t)
t
T N T N T N T N T N T N T N
Slika 6.31: Impulsni odziv jednog sistema
Odredimo prvo vrsno izoblicenje impulsnog odziva sistema prema (6.109)
D poc = 0.1 + 0.2 + 0.1 = 0.4
To znaci da je idealni otvor oka 40% zatvoren zbog interferencije susjednih sim-bola.Iz opste matricne jednakosti (6.126) dobija se konkertno 1 0.1 0
−0.2 1 0.10.1 0.2 1
c−1
c0
c1
=
010

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 216/246
210 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
odakle slijedi c−1 = 0.09606, c0 = 0.9606, c1 = 0.2017. Kako je c1 = c−1,
datim transferzalnim filtrom vrsimo kompenzacijulinearnih amplitudskih i faznih izoblicenja koja unosi sistem.na osnovu definisanog transferzalnog filtra c−1, c0, c1, datog sistema (sl.6.31)i (6.122), moze se lako odrediti rezultirajuci impulsni odziv.
hn,−3 = 0, hn,−2 = −0.0096, hn,−1 = 0, hn,0 = 1, hn,1 = 0,
hn,2 = 0.0557, hn,3 = 0.02016, hn,k = 0, za |k| > 3.
Rezultirajuce minimalno vrsno izoblicenje impulsnog odziva nakon ugradnje trans- ferzalnog filtra sa tri koeficijenta iznosi D = 0.08546 ( 8.5%) sto je znacajnosmanjenje u odnosu na pocetno izoblicenje. Na taj nacin je stvorena povecana sigurnosna rezerva u slucaju eventualnog uticaja suma u kanalu.
Posvetimo sada paznju optimizaciji transferzalnog filtra na bazi minimizacije
efektivnog izoblicenja (6.124)
minV ARci
f 2(c−N , . . . , cN ) = minV ARci
k=0
N
n=−N
cnhk−n
2
(6.127)
Postavljeni zadatak moze se rijesiti na bazi Lagranzovog metoda neodred-enihkoeficijenata za odred-ivanje uslovnih (vezanih) ekstremuma funkcije u = f (x1, x2, . . . , xn)uz uslove ϕi(x1, x2, . . . , xn) = 0, i = 1, 2, . . . , m < n, ko ji se nazivaju jednacineveze, a koji se sastoji u uvod-enju pomocne funkcije
F (x1, x2, . . . , xn, λ1, λ2, . . . , λm) = f (x1, x2, . . . , xn) +
m
i=1
λiϕi(x1, x2, . . . , xn)
gdje se λ1, λ2, . . . , λm nazivaju neodred-eni Lagranzovi koeficijenti.Pomocu funkcije F potrebni islovi za uslovni ekstremum mogu se izraziti uobliku
∂F
∂xi= 0,
∂F
∂λj= 0; i = 1, 2, . . . , n; j = 1, 2, . . . , m .
Prethodni postupak potrebno je primjeniti za minimizaciju funkcije f 2(c−N , . . . , cN )iz (6.127) uz ogranicenje
hn,0 =N
n=−N
cnh−n = 1 odnosno ϕ(c−N , . . . , cN ) =N
n=−N
cnh−n − 1 = 0.
Konacni rezultati pokazuju da se minimizacija efektivnog izoblicenja D2eff =
f 2(c−N , . . . , cN ) postize kada je skup koeficijenata cn tako odabran da jemed-ukorelacija izmed-u signala greske, koji je jednak razlici dobijenih zeljenihvrijednosti ukupnog odziva u Nyquistovim intervalima, i signala na ulazu utransferzalni filtar jednaka nuli tj.:
εnhn−j = 0, j = −N , . . . , N
(εn = hu,n za n = 0 i ε0 = hu,0 − 1)(6.128)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 217/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 211
Uocimo da je signal greske εn za n = 0 jednak odmjercima izlaznog signala iz
transferzalnog filtra jer je pozeljno da odmjerci hu,n budu jdnaki nuli za sven = 0 izuzev odmjerka u trenutku t = 0.Sama minimizacija efektivne interferencije je algoritamski nesto slozenija u odnosuna minimizaciju vrsne interferencije, med-utim, pokazalo se da su rjesenja trans-ferzalnog filtra dobijena na bazi minimizacije efektivne interferencije vise ro-bustna na nesavrsenost sinhronizma u odnosu na rjesenja zasnovana na mini-mizaciji vrsne interferencije [].Sam prioritet koriscenja izmed-u prethodna dva algoritma optimizacije ekvaliza-tora zavisi od pocetnih uslova.
Podesavanje transferzalnog filtra moze da bude rucno i automatsko, Kodrucnog podesavanja prvo se poodesavaju koeficijenti c−1 i c1 na bazi posma-tranja otvora oka na osciloskopu u pijemniku, zatim se podesavaju c−2 i c2, paponovo c
−1 i c1. itd.
Kod prenosa podataka, narocito preko komutiranih veza, svaka komunikacijaostvaruje se prakticno drugim fizickim kanalom, te se mora vrsiti ekvalizacija utoku prenosa ili tzv. adaptivna ekvalizacija .Kod adaptivne ekvalizacije izbor koeficijenata vrsi se u iteracijama, Kod itera-tivnih metoda prisutan je poblem izbora prirastaja koji obezbjed-uje konvergen-ciju u dobijanju optimalnog skupa koeficijenata s obzirom na prisustvo suma uprijemnom signalu.Ovdje cemo se samo kratko osvrnuti na popularni tzv. gradijentni metodadaptivne ekvalizacije. U tom cilju definisacemo gradijent skalarne funkcijef 2(c−N , . . . , cN ) tj. efektivnog izoblicenja impulsnog odziva (6.124).
gradf 2(c−
N , . . . , cN ) =
N
n=−N
∂f 2
∂ci
−→ici (6.129)
Ako definisemo 2N + 1 dimenzionalni vektor koeficijenata transferzalnog filtrac(c−N , . . . , cN ), onda u l + 1-tom koraku podesavanja imamo
c(l + 1) = c(l) − αgradf 2[c−N (l), . . . , cN (l)],
ili svodeci podesavanje na pojedine koeficijente transferzalnog filtra imamo
an(l + 1) = cn(l) − α∂f 2∂cn
, n = −n , . . . , N (α > 0) (6.130)
Sam postupak adaptivne ekvalizacije prema (6.130) ocigledno zavisi od izb-ora velicine pozitivne konstante α. Njena velika vrijednost skracuje vrijemeadaptacije do moguceg optimuma (koji je u pogledu dobrote obrnuto srazmjeranvrijednosti α). Ukoliko je vrijednost parametra α manja, iterativna proceduradobijanja otimalnog skupa koeficijenata cn je dugotra jnija, ali je konacno do-bijeno rjesenje blize teorijskom optimalnom rjesenju.Automatska ekvalizacija transferzalnim filtrima je interesantno polj istrazivanj,a najnoviji razvoj komponenata u digitalnoj elektronici (DSP ) puza svaki dannove mogucnosti za iznalazenje prakticnih inzenjerskih rjesenja na tom polju.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 218/246
212 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Na kraju ovog odjeljka o transferzalnom filtru kao ekvalizatoru nije na odmet
pomenuti da transferzalni filtar ne moze da izvrsi ekvalizaciju sistema na onimfrekvencijama za koje je transfer funkcija sistema, koji zelimo da korigujemo, jednaka nuli.
6.4.7 Sistemi sa kontrolisanom interferencijom
Pincip rada sa kontrolisanom interferencijom objasnicemo koristeci sistemsa transfer funkcijom
H =
2T N cos ωT N
2, |ω| < ωg
0, |ω| > ωg(6.131)
koja je prikazana na slici 6.32(a).
−ωg ωg
ω
H
2T N
(a) (b)
t
T N
2T N
3T N
2
5T N
2-
T N
2-T N -
3T N
2
1
4/ πh(t)
Slika 6.32: Transfer funkcija (a) i impulsni odziv (b) jednog sistema sa kon-trolisanom interferencijom
Odgovarajuci impulsni odziv sistema moze se lako dobiti na osnovu definisanetransfer funkcije
h(t) = F −1H = 4π
cos ωgt1 − ( 2
π ωgt)2, (6.132)
koji je takod-e prikazan na slici 6.32.Prema dobijenom impulsnom odzivu posmatranog sistema ocigledno je da
se javlja interferencija izmed-u susjednih simbola ako se koristi Nyquistova brz-ina prenosa vN = 2f g. To se lako moze sagledati ako posmatramo odmjerkeimpulsnog odziva u Nyquistovim intervalima
hn = h(−T N
2+ nT N ) =
1 za n = 0, 10 za n = 0 i n = 1
(6.133)
Na slici 6.33 ilustrovan je prenos kroz dati sistem petpostavljajuci da informa-cioni sadrzaj na ulazu an
∈ −1, 1
nema memoriju. Sa strelicama su oznaceni
trenuci odmjeravanja prijemnog signala s2,k.
s2,k = ak + ak−1 =
±2 ako je ak = ak−1
0 ako je ak = ak−1 = −ak−1(6.134)
Prema oblicima ulaznog i izlaznog signala dati sistem vrsi preslikavanje origi-nalnog binarnog izvora bez memoije u tzv. pseudoternarni kod koji je poznat

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 219/246
6.4. INTERSIMBOLSKA INTERFERENCIJA 213
1 1 0 0 1
s1(t)=Σanδ(t-nT N ) s2(t)=Σanh(t-nT N )
"0"→-1"1"→+1
H
−ωg ωg
s2,k +2 0 -2 04/π
1
-4/π-1
t
T N T N T N T N T N T N
Slika 6.33: Ilustracija prenosa simbola sa interferencijom
pod nazivom duobinarnog koda. Relacija (6.134) ukazuje da se rekonstrukcijaoriginalnog informacionog sadrzaja u prijemniku moze vrsiti na sljedeci nacin:
- Ako je prijemni signal u trenutku odmjeravanja ±2, onda je trenutni elementinformacionog sadrzaja identican prethodnom, ili
- ako je prijemni signal u trenutku odmjeravanja jednak nuli, onda je trenutnielement informacinog sadrzaja komplementaran prethodnom.
S obzirom da se trenutna odluka oslanja na prethodnu zbog unesene interfer-encije izmed-u susjednih simbola, onda dolazi do propagacije grske u prijmniku.Naime, pojava greske u odred-enom trenutku izaziva komplementiranje dijelaoriginalne binarne sekvence koja slijedi iza nje (sve do pojave nove greske).Taj nedostatak obicno se rjesava uvod-enjem diferencijalnog kodovanja ”jedinice”uoriginalnoj binarnoj sekvenci (sl.6.35).
ak bk =ak ⊕bk-1
bk-1
z -1
Slika 6.34: Pekodovanje originalne binarne sekvence ak u drugu binarnuskvencu bk, gdje je bk = ak ⊕ bk−1 (⊕ operacija sabianja po modulu 2 bezpenosa). Na desnom dijelu slike (b) data je ilustracija rada prekodera
Kako za binarnu sekvencu bk na ulazu u sistem vazi
bk = ak ⊕ bk−1 (6.135)
gdje simbol ⊕ oznacava operaciju sabiranja po modulu 2 bez prenosa, ondavrijedi
ak = 0 ⇔ bk = bk−1
ak = 1 ⇔ bk = bk−1
(6.136)
(crtica povrh simbola oznacava njegovo logicko komplementiranje).Ako logickim vrijednostima ulaznih simbola ”0”i ”1”odgovaraju amplitude -1 i

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 220/246
214 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
+1, respektivno, onda na osnovu (6.134) i (6.136) mozemo definisati modifiko-
vani postupak rekonstrukcije informacionog sadrzaja u prijemniku:- Ako je s2,k = ±2, (bk = bk−1), onda je ak = 0 i
- ako je s2,k = 0, (bk = bk−1), onda je ak = 1
Na taj nacin smo obezbjedili da trenutno odlucivanje u prijemniku ne zavisiod ishoda prethodnih odlucivanja. Analizom sistema definisanog sa (6.131)pokazano je da se pomocu kontrolisane interferencije mogu postici odred-enikorisni efekti koji se ogledaju u povecanju brzine prenosa za dati propusni opseg.Med-utim, kako s ovdje radi o preslikavanju binarnog u ternarni skup, jasna jepovcana osjetljivost na kanalni sum. Ako zelimo da zadrzimo istu vjerovatnocugreske kao i u slucaju idealizovanog niskopropusnog sistema, uz Nyquistovubrzinu prenosa, onda je potrbno povecanje odnosa signal-sum za 2.1 dB.
Prethodni postupak koriscenja kontrolisane interferencije moze se uopstiti sasistemima koji izazivaju interferenciju u vecem , ali konacnom, broju tacaka.Tu se radi o tzv. ”PRS”(Partial Response Signalling) prenosu [].
6.5 Teorija odlucivanja i njena primjena u opti-malnoj detekciji signala
6.5.1 Uvodna razmatranja
Teorija odlucivanja nalazi svoju neposrednu primjenu kod odred-ivanja na- jboljeg metoda prijema signala u komunikacionoj i radarskoj tehnici, u metorologiji,
ekonomiji,, klasifikaciji i prpoznavanju uzoraka itd.Nas konacni zadatak u ovom odjeljku ce biti odred-ivanje optimalnog pragaodlucivanja u prijemniku, ili bilo kojem regeneratoru, u cilju rekonstrukcije in-formacionog sadrzaja (sl.6.1).U uvodnom razmatranju koristan je u svakom slucaju jedan opstiji pristup teorijiodlucivanja.
Pretpostavimo da se nalazimo pred zadatkom da na bazi osmatranja nekogprostora treba da usvojimo jednu hipotezu koja pripada konacnom skupu mogucihhipoteza. Neka je, nadalje, posmatrac kao rezultat osmatanja (ili mjerenja) do-bio skup podataka x1, x2, . . . , xnORG (sl.6.35).Dobijeni mjerni skup cini osnovu za usvajanje jedne od hipoteza (ili ob jekata).Skup od nORG podataka mozemo posmatrati kao slucajnu nORG-dimenzionalnuvarijablu (ili vektor)
X ORG =
x1
x2
...xnORG
(6.137)
Oznacicemo sa RXORG prostor definisan nad skupom X ORG mogucih sluca jnihvektora X ORG. Obicno se na osnovu originalnih mjernih podataka ne vrsi
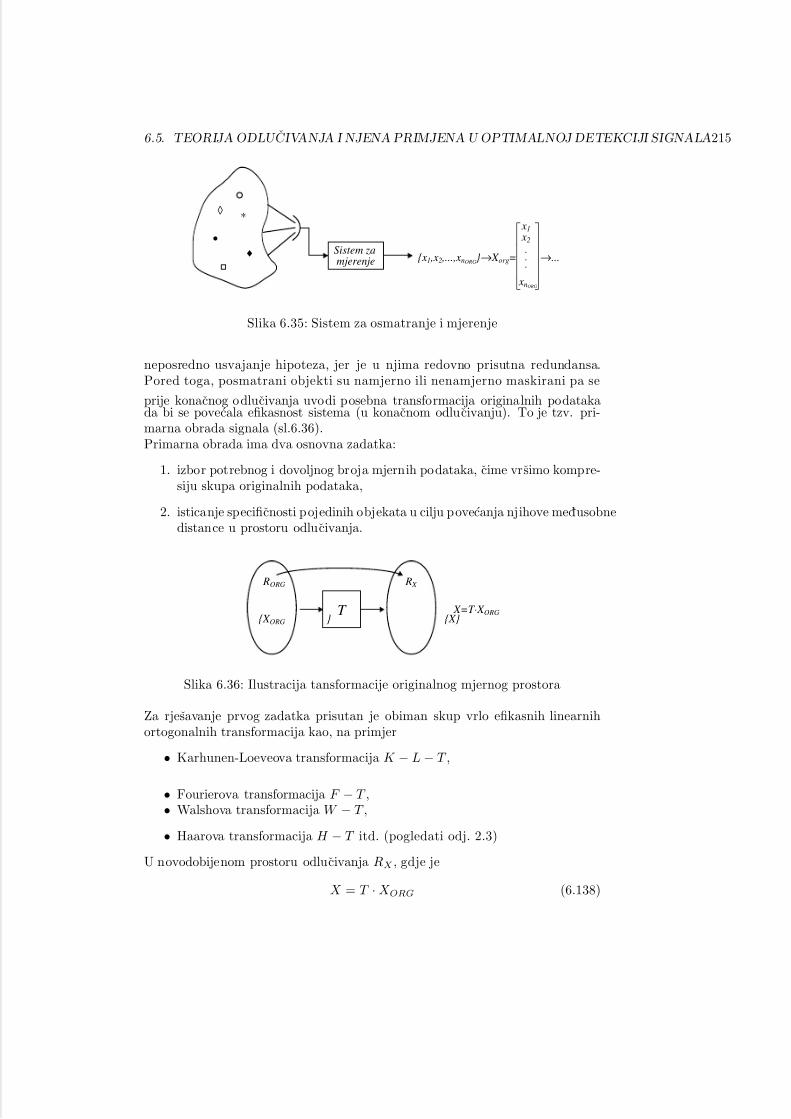
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 221/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA215
Sistem zamjerenje
◊
♦
∗
•
x1 ,x2 ,...,xnORG → X org=
x1
x2
xnORG
⋅⋅⋅
→...
Slika 6.35: Sistem za osmatranje i mjerenje
neposredno usvajanje hipoteza, jer je u njima redovno prisutna redundansa.Pored toga, posmatrani objekti su namjerno ili nenamjerno maskirani pa se
prije konacnog odlucivanja uvodi posebna transformacija originalnih podatakada bi se povecala efikasnost sistema (u konacnom odlucivanju). To je tzv. pri-marna obrada signala (sl.6.36).Primarna obrada ima dva osnovna zadatka:
1. izbor potrebnog i dovoljnog broja mjernih podataka, cime vrsimo kompre-siju skupa originalnih podataka,
2. isticanje specificnosti pojedinih objekata u cilju povecanja njihove med-usobnedistance u prostoru odlucivanja.
T
RORG R X
X ORG X X=T ⋅ X ORG
Slika 6.36: Ilustracija tansformacije originalnog mjernog prostora
Za rjesavanje prvog zadatka prisutan je obiman skup vrlo efikasnih linearnihortogonalnih transformacija kao, na primjer
• Karhunen-Loeveova transformacija K − L − T ,
• Fourierova transformacija F − T ,• Walshova transformacija W − T ,
• Haarova transformacija H − T itd. (pogledati odj. 2.3)
U novodobijenom prostoru odlucivanja RX , gdje je
X = T · X ORG (6.138)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 222/246
216 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
(T je ortogonalna matrica transformacije), obicno vrsimo redukciju broja kom-
ponenata vektora X usvaja juci relativno mali bro j (na jznacajnijih!) kompone-nata razvoja (6.138). Koliko komponenata? To zavisi od dozvojlene srednjekvadratne greske koju unosimo kompresijom podataka. Moze se pokazati daK − L − T obezbjed-uje miniimalnu srednju kvadratnu gresku za usvojeni brojkomponenata razvoja. Zatim dolaze F −T , W −T i H −T . Kako kod K −L−T ,F − T i W − T sve komponente rezultirajuceg vektora X zavise od svih kompo-nenata originalnog vektora, onda se one nazivaju itnegralnim transformacijama.Kod H −T vazi to pravilo samo za prve dvije izlazne komponente. Ostale izlaznekomponente zavise samo od pojedinih komponenata originalnog vektora. Iz tihrazloga H − T istice lokalne osobin u originalnim vektorima pa se pokazala kaoefikasna transformacija u analizi EKG-signala[].
Za rjesavanje drugog postavljenog zadatka u okviu primarne obrade cesto sekoriste transformacije na bazi rotacije kao sto je, na primjr, poznata diskrimi-
nantna analiza [] itd.Mada je iz relacije (6.138) jasno da vektor X ima isti broj komponenata kaoi originalni vektor X ORG, mi cemo nadalje prtpostaviti da je prostor odlucivanjaRX , definisan nad skupom mogucih vektora X , n-dimenzionalan, gdje je prakticnon nORG.Jednostavan uvod u teoriju odlucivanja na jlakse je postici petpostavlja juci samodvije moguce hipoteze H 0, H 1.Da je rezultat mjerenja i obrade uvijek isti i iznosi X 0, usvajali bismo hipotezuH 0. Ukoliko bi rezultat odgovarao vektoru X 1, onda bismo usvajali H 1. Med-utim,zbog pojave gresaka u mjerenju ili drugih nama cesto nepoznatih uticaja, rezul-tirajuci vektor X , kao sto j vec naglaseno, odgovara n-dimenzionalnoj slucajnojvarijabli sa gustinom vjerovatnoce
f 0(X ) = f (X/H 0) (6.139)
kada je hipoteza H 0 istinita i
f 1(X ) = f (X/H 1) (6.140)
ako je istinita hipoteza H 1.Uvedene funkcije (6.139) i (6.140) cesto nazivamo funkcijama izgleda (likelihoodfunctions).Testiranje hipoteza moze se izvesti peko podjele prostora RX na dva med-usobnodisjunktna potprostora R0 i 1. Drugacije receno, vrsimo particiju skupa RX napodskupove R0 i R1.Kod odabranog pristupa procedura odlucivanja svodi se na sljedece: ako se
dobijeni vektor X nalazi u potprostoru R0, usvajamo hipotezu H 0 i obrnuto.Otuda imamo funkciju odlucivanja
D(X ) = 0, ako je X ∈ R0
D(X ) = 1, ako je X ∈ R1(6.141)
Postoji ocigledno mnogo nacina podjele prostora odlucivanja RX na dva regiona.Postavlja se zadatak odred-ivanja takve funkcije odlucivanja koja je optimalna

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 223/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA217
u odred-enom smislu.
U uslovima egzistencije samo dvije hipoteze moguca su cetiri slucaja cije suvjerovatnoce: p(X ∈ R1/H 0) = p1,0 = pL, (6.142)
kada usvajamo hipotezu H 1, a istinita je hipoteza H 0. To je vjerovatnoca geskeprve vrste ili tzv. vjerovatnoca laznog alarma.
p(X ∈0 /H 1) = p0,1 = pk (6.143)
sto odgovara usvajanju hipoteze H 0 kada je istinita hipoteza H 1. To je vjerovatnocagreske druge vrste ili tzv. vjerovatnoca katastrofe.
p(X ∈ R0/H 0) = p(0, 0) (6.144)
odgovara vjerovatnoci pravilnog prihvatanja hipoteze H 0 i
p(X ∈ R1/H 1) = p1,1 (6.145)
odgovara vjerovatnoci pravilnog prihvatanja hipoteze H 1. Prthodno definisanevjerovantoc mozemo lako da odrdimo za usvojenu paticiju prostora RX na pot-prostore R1 i R0:
p1,0 =
R1
f 0(X )dX (6.146)
p1,0 =
R0
f 1(X )dX (6.147)
p1,0 = R0
f 0(X )dX = 1 − R1
f 0(X )dX (6.148)
p1,0 =
R1
f 1(X )dX = 1 −
R0
f 1(X )dX (6.149)
gdje je dX = dx1dx2 . . . d xn.Pri donosenju odluka znacajno je i poznavanje apriornih vjerovantoca pojavlji-vanja pojedinih hipoteza.U slucaju postojanja samo dvije moze se pisati
p(H 0) = i p(H 1) = 1 − p (6.150)
Ako se pri donosenju odluka uzimaju i cijene kostanja pojedinih odluka, onda je potrebno poznavati matricu kostanja
K =
K 0,0 K 0,1
K 1,0 K 1,1
, (6.151)
gdje je K i,j cijena kostanja usvajanja i-te hipoteze kada je istinita j-ta hipoteza(i, j ∈ 0, 1).
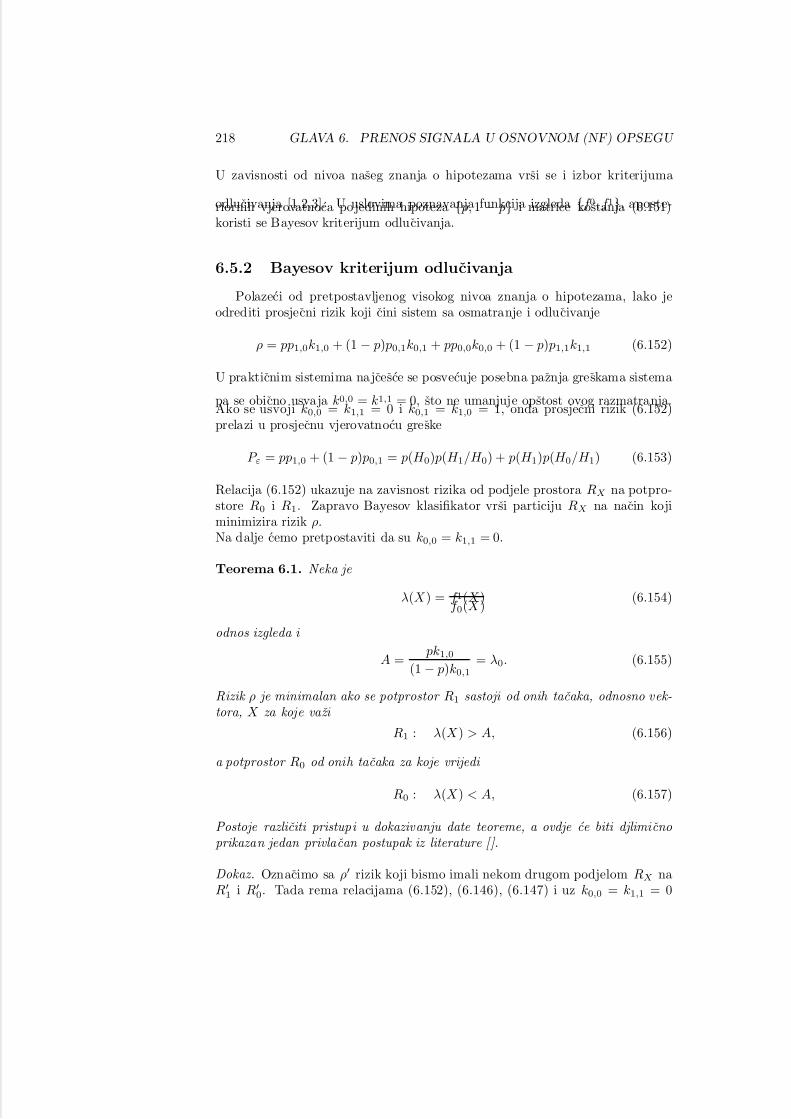
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 224/246
218 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
U zavisnosti od nivoa naseg znanja o hipotezama vrsi se i izbor kriterijuma
odlucivanja [1,2,3]. U uslovima poznavanja funkcija izgleda f 0, f 1, aposte-riornih vjerovatnoca pojedinih hipoteza p, 1 − p i matrice kostanja (6.151)koristi se Bayesov kriterijum odlucivanja.
6.5.2 Bayesov kriterijum odlucivanja
Polazeci od pretpostavljenog visokog nivoa znanja o hipotezama, lako jeodrediti prosjecni rizik koji cini sistem sa osmatranje i odlucivanje
ρ = pp1,0k1,0 + (1 − p) p0,1k0,1 + pp0,0k0,0 + (1 − p) p1,1k1,1 (6.152)
U prakticnim sistemima najcesce se posvecuje posebna paznja greskama sistema
pa se obicno usvaja k0,0 = k1,1 = 0, sto ne umanjuje opstost ovog razmatranja.Ako se usvoji k0,0 = k1,1 = 0 i k0,1 = k1,0 = 1, onda prosjecni rizik (6.152)prelazi u prosjecnu vjerovatnocu greske
P ε = pp1,0 + (1 − p) p0,1 = p(H 0) p(H 1/H 0) + p(H 1) p(H 0/H 1) (6.153)
Relacija (6.152) ukazuje na zavisnost rizika od podjele prostora RX na potpro-store R0 i R1. Zapravo Bayesov klasifikator vrsi particiju RX na nacin kojiminimizira rizik ρ.Na dalje cemo pretpostaviti da su k0,0 = k1,1 = 0.
Teorema 6.1. Neka je
λ(X ) = f 1(X )f 0(X )
(6.154)
odnos izgleda i
A =pk1,0
(1 − p)k0,1= λ0. (6.155)
Rizik ρ je minimalan ako se potprostor R1 sastoji od onih tacaka, odnosno vek-tora, X za koje vazi
R1 : λ(X ) > A, (6.156)
a potprostor R0 od onih tacaka za koje vrijedi
R0 : λ(X ) < A, (6.157)
Postoje razliciti pristupi u dokazivanju date teoreme, a ovdje ce biti djlimicnoprikazan jedan privlacan postupak iz literature [].
Dokaz. Oznacimo sa ρ rizik koji bismo imali nekom drugom podjelom RX naR
1 i R0. Tada rema relacijama (6.152), (6.146), (6.147) i uz k0,0 = k1,1 = 0
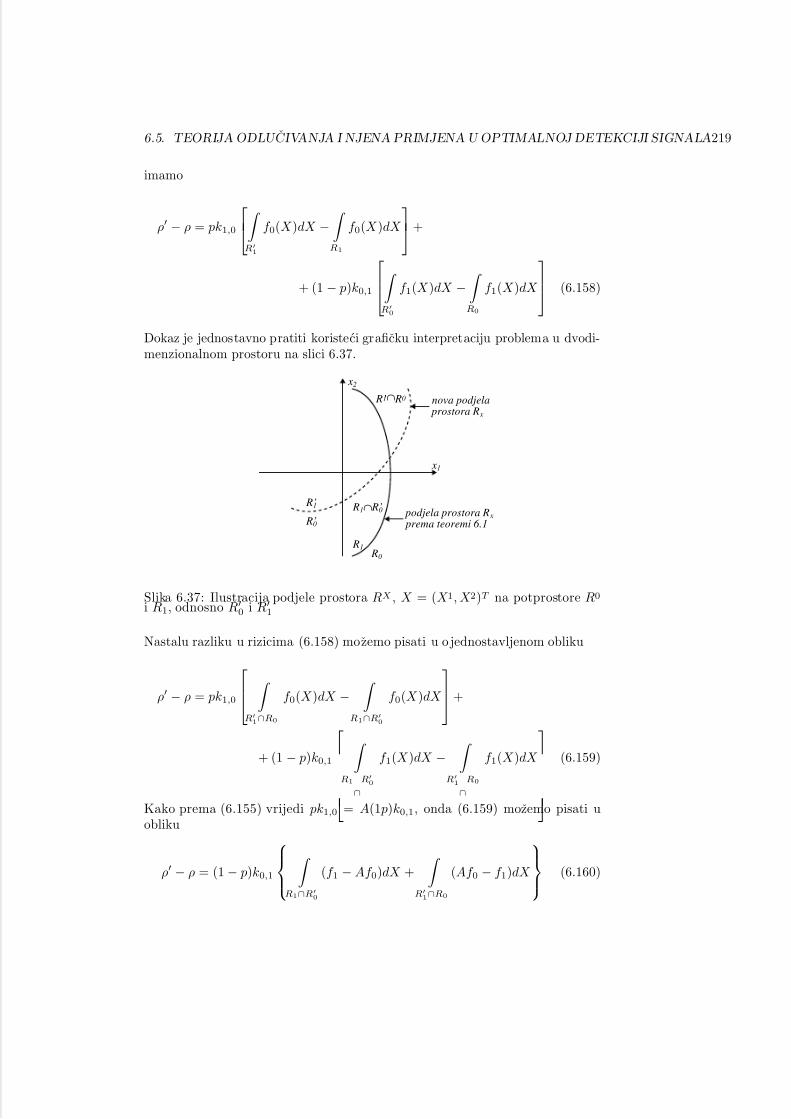
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 225/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA219
imamo
ρ − ρ = pk1,0
R1
f 0(X )dX −
R1
f 0(X )dX
+
+ (1 − p)k0,1
R0
f 1(X )dX −
R0
f 1(X )dX
(6.158)
Dokaz je jednostavno pratiti koristeci graficku interpretaciju problema u dvodi-menzionalnom prostoru na slici 6.37.
x1
x2
R1 R0
R’1
R’0
R’1∩ R0
R1∩ R’0
nova podjela prostora R x
podjela prostora R x
prema teoremi 6.1
Slika 6.37: Ilustracija podjele prostora RX , X = (X 1, X 2)T na potprostore R0
i R1, odnosno R0 i R
1
Nastalu razliku u rizicima (6.158) mozemo pisati u o jednostavljenom obliku
ρ − ρ = pk1,0
R1∩R0
f 0(X )dX −
R1∩R0
f 0(X )dX
+
+ (1 − p)k0,1
R1
∩R0
f 1(X )dX −
R1
∩R0
f 1(X )dX
(6.159)
Kako prema (6.155) vrijedi pk1,0 = A(1 p)k0,1, onda (6.159) mozemo pisati uobliku
ρ − ρ = (1 − p)k0,1
R1∩R0
(f 1 − Af 0)dX +
R1∩R0
(Af 0 − f 1)dX
(6.160)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 226/246
220 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Posto je prema teoremi 6.1 za X ∈ R1 λ(X ) ≥ A ⇔ f 1 − Af 0 ≥ 0, a za X ∈ R0
λ(X ) < A ⇔ Af 0 − f 1 > 0, onda su integrandi u (6.160) nenegativni ya bilokoje X ∈ RX .To znaci da vrijedi
ρ − ρ > 0 Q.E.D (Quod Erat Demonstrandum)
Prema tome, srednji rizik ρ definisan relacijom (6.153), uz pretpostavke(6.154), (6.155), (6.156) i (6.157) zaista je minimalan.Dobijene rezultate kratko cemo komentarisati.Za dati vektor X racuna se odnos izgleda λ(X ) = f 1(X )/f 0(X ) koji poredimosa pragom odlucivanja A = λ0 iz (6.155) u cilju usvajanja jedne od hipoteza
λ(X )H 1
H 0
λ0 = A (6.161)
Jednakost λ(X ) = A = λ0 definise hiperpovrsinu odlucivanja koja razdvajapotprostore R1 i R0. U prethodnim relacijama mi smo, u cilju izbjegavanjaeventualno neodred-enih situacija, ovrsinu odlucivanja pridruzili potprostoru R1,mada je u uslovima rada sa kontinualnim procesima zanemariva vjerovatnocada ce tacka X biti upravo na razdvojnoj povrsini.Kako je odnos izgleda (6.154) pripada intervalu (0, ∞), onda se relacija (6.164)zbog monotonosti logaritamske funkcije cesto prikazuje u ekvivalentnom oblikuu
log[λ(X )]H 1
H 0
log(λ0) = log(A) (6.162)
Dobijeni minimalni rizik
ρ = k01(1 − p)
R0
f 1(X )dX + k10 p
R1
f 0(X )dX, (6.163)
gdje su R0 i R1 definisani sa (6.157) i (6.156), respektivno, naziva se Bayesovrizik. U uslovima jednakosti k10 = k01 = 1 rizik (6.163) prelazi u minimalnuvjerovatnocu greske
ρ = P ε = (1 − p)
R0
f 1(X )dX + p
R1
f 0(X )dX (6.164)
koja je poznata pod nazivom Bayesove vjerovatnoce greske ili krace BER (BayesError Rate).Optimalnu particiju prostora RX prema teoremi 6.1 mozemo interpretirati
R1 : k0,1(1 − p)f 1(X ) ≥ k1,0 pf 0(X ) (6.165)
R0 : k0,1(1 − p)f 1(X ) < k1,0 pf 0(X ) (6.166)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 227/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA221
U tom slucaju minimalni Bayesov rizik (6.163) mozemo pisati u obliku
ρ = RX
min[k1,0 pf 0(X ), k0,1(1 − p)f 1(X )] dX (6.167)
ili minimalna vjerovatnoca greske
P ε =
RX
min[ pf 0(X ), (1 − p)f 1(X )] dX (6.168)
Optimalna particija prostora RX prema Bayesovom kriterijumu (6.165) i (6.166)u specijalnom slucaju, kada su cijene kostanja pojedinih gresaka podjednake(kij = c, i = j, gdje je c konstanta), definisana je relacijama
R1 : (1 − p)f 1(X ) ≥ pf 0(X ) (6.169)
R0 : (1 − p)f 1(X ) < pf 0(X ) (6.170)
U slucaju egzistencije N hipoteza H iN −1i=0 , gdje cemo apriornu vjerovatnocu
pojave i/te hipoteze oznaciti sa pi = p(H i), potprostor Ri(X ) koji odgovarahipotezi H i sadrzi one tacke prostora RX za koje vazi:
Ri(X ) : p(H i)f i(X ) = maxV AR(j)
p(H j)f j (X ) (6.171)
ili eksplicitnije
Ri(X ) : p(H i)f (X/H i) = maxV AR(j)
p(H j )f (X/H j)
(6.172)
To znaci da optimalni (Bayesov) odlucivac ya dati ulazni vektor podataka X usvaja hipotezu H i ako je zadovoljena relacija
p(H i)f (X/H i) = maxV AR(j)
p(H j)f (X/H j ) (6.173)
Podsjetimo se da je f i(X ) = f (X/H i) uslovna funkcija gustine vjerovatnocen-dim varijable X kada je istinita hipoteza H i.Koristeci poznato Bayesovo pravilo iz matematike
f (X ) p(H l/X ) = p(H l)f (X/H l) (6.174)
gdje je f (X ) funkcija gustine vjerovatnoce n-dimenzionalne varijable X , Bayesovopravilo odlucivanja (6.173) prelazi u ekvivalentni oblik
H i : f (X ) p(H i/X ) = maxV AR(j)
f (X ) p(H j /x) (6.175)
odakle konacno dobijamo
D(X ) = H i ako vazi p(H i/X ) = maxV AR(j)
p(H j /x) (6.176)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 228/246
222 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
To znaci da usvajamo hipotezu H i, za dati vektor X , ako je njna aposteriorna
vjerovatnoca p(H i/X ) veca ili jednaka od aposteriornih vjerovatnoca svih os-talih hipoteza.Dobijeno pravilo odlucivanja (6.176), kao sp ecijalni slucaj Baysovog odlucivaca,a koje je bazirano na maksimalnoj aposteriornoj vjerovatnoci hipoteza poznato je ppod nazivom MAP (od engl. naziva Maximum Aposterior Probability).Optimalni odlucivac se posebno pojednostavljuje u uslovima podjednakih apri-ornih vjerovatnoca pojedinih hipoteza ( p(H l) = 1/N, ∀l), pa samo u tom slucaju(6.173) odnosno (6.176) prelazi u oblik
D(X ) = H i ako vazi f (X/H i) = maxV AR(j)
f (X/H j ) (6.177)
Dobijeno pravilo odlucivanja (6.177)poznato je pod nazivom ML (MaximumLikelihood) odlucivaca. Ponovimo da ML odlucivac postaje ekvivalentan MAPodlucivacu samo u uslovima odjednakih vjeovatnoca pojedinih hipoteza.Posmatracemo primjer uproscenog vektorskog kanala.
Slika 6.38: Model vektorskog kanala
Pema MAP kriterijumu (6.176) imamo
D(Y ) = X i : p(X j)f (Y /X j ) = maxV AR(j) p(X j )f (Y /X j) ⇔⇔ max
V AR(j)f (Y ) p(X j/Y ) ⇔ max
V AR(j) p(X i/Y )
Ako se radi o Gaussovom kanalu, onda u slucaju odsustva korelacije izmed-ukomponenata vektora Y imamo
⇔ maxV AR(j)
p(X j ) p(Y /X j ) ⇔ maxV AR(j)
p(X j )
(2π)m2 σm
e1
2a2Y −Xj2
Gdje je σ2 varijansa suma.Koristeci monotonu logaritamsku funkciju dobija se
⇔ minV AR(j)Y − X j2 − 2σ2 ln p(X j ) (6.178)
Ocigledno minimum izraza (6.178) odred-n je minimalnom Euklidovom distan-com Y − X j, ali zavisi od apriorne vjerovatnoce p(X j) i varijanse Gaussovogsuma u kanalu.Ako je P (X j ) = konst. i sum stacionaran, optimalna detekcija se svodi na izboronog vektora X j koji je na jblizi susjed, po Euklidovoj mjeri, prijemnom vektoru

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 229/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA223
Y .
Posto vazi min Y − X j ⇔ max p(Y /X j ) onda, u datim uslovima, odlucivanjena bazi minimalne Euklidove distance odgovara M L detekciji. Specijalno, zaBSC kanale, ( p(0/1) = p(1/0) i p(0/0) = p(1/1)) X i Y su binarni vektoridimenzije m pa imamo
p(Y /X j ) = pdH(Y,Xj)(1 − p)m−dH(Y,Xj) (6.179)
gdje za p = p(0/1) = p(1/0) < 1/2 optimalnu detekciju vrsimo na bazi min-imalne Hammingove distance. Zakljucimo da primjena MAP detekcije u BSCkanalima zahtjeva minimizaciju Hammingove distance prema (6.179) kao i uzi-manje u obzir apriorne vjerovatnoce p(X j ) pojedinih originalnih poruka na ulazuu kanal kako to pokazuje sljedeci primjer.Prakticno se MAP detektor rijetko koristi ybog oskudnog poznavanja statistickih
osobina izvora informacija i izvora suma. Kada je vjerovatnoca greske mala( p(0/1) = p(1/0) 1), odnosno neznatan uticaj suma (σ2 malo!), dobitakMAP u odnosu na ML je naznatan. U teskim uslovima prenosa dobitak mozebiti znacajan kada se u (6.178) ukljuci procjna varijanse suma σ2.Jednostavno rjesenje, koje dobro aproksimira MAP detekciju u ovim slucajevima,zasniva se na izboru fiksne, ali dovoljno velike σ2, tako da je dobitak upravo ve-lik kod jako niskih odnosa signal-sum (S/N ).U cilju ilustracije primjene MAP i ML odlucivaca posmatracemo binarni simetricnikanal bez memorije (BSC) cija je kanalna matrica definisana u obliku
0.9 0.10.1 0.9
,
ili drugim rijecima, za koji vazi p(1/1) = p(0/0) = 0.9 i p(1/0) = p(0/1) = 0.1.Pretpostavicemo da na ulazu BSC imamo dvije poruke Π1 i Π2 cije su apriornevjerovatnoce
(a) p(Π1) = p(Π2) = 0.5(b) p(Π1) = 1 − p(Π2) = 0.99
i da koristimo jednostavan (ponavljajuci) zastitni kod
Π1 → 111Π2 → 000
Neka smo na izlazu BSC dobili kodnu rijec Y = (100). Lako je izracunatiuslovne vjerovatnoce
p(Y /Π1) = 0.9 · 0.1 · 0.1 = 0.009 p(Y /Π2) = 0.1 · 0.9 · 0.9 = 0.081
koristeci elemente kanalne matrice.
p(Y ) = p(Π1) · p(Y /Π1) + p(Π2) · p(Y /Π2) =
= 0.99 · 0.009 + 0.01 · 0.081 =
= 0.00891 + 0.00081 = 0.00972
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 230/246
224 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
p(Π1/Y ) =p(Π1) · p(Y /Π1)
p(Y )=
0.99 · 0.009
0.00972= 0.9167,
p(Π2/Y ) =p(Π2) · p(Y /Π2)
p(Y )=
0.01 · 0.081
0.00972= 0.0833.
U prvom skucaju (a) vazi p(Π2/Y ) > p(Π1/Y ) i p(Y /Π2) > p(Y /Π1) pa MAPi ML odlucivac donose istu odluku
D(Y = 100) = Π2.
U drugom slucaju vazi p(Π1/Y ) > p(Π2/Y ) pa prihvatamo odluku mjerodavni- jeg MAP odlucivaca
D(Y = 100) = Π1.
S obzirom da se ML odlucivac bazira na jednostavnijoj vecinskoj logici odlucivanja,odgovarajuci prijemnik je jednostavniji u odnosu na prijemnike zasnovane naMAP odlucivacu. Zakljucimo da je, znaci, u slucaju podjednakih apriornihvjerovatnoca ulaznih poruka u kanal za odlucivanje mjerodavan i ML algoritamza koji je dovoljno poznavati elemente kanalne matrice.
Ako nam nisu poznate ariorne vjerovatnoce po jedinih hipoteza, onda se pib- jegava koriscenju tzv. ”Mini-Max”kriterijuma [].Kratko cemo samo pomenuti da je odlucivac optimalan u smislu ”Mini-Max”kriterijuma,u uslovima egzistencije dvije hipoteze, kada su rizici izazvani greskom prve idruge vrste podjednaki [].Kako je u praksi, posebno u radarskoj tehnici, popularan Neuman-Pearsonovkriterijum odlucivanja, posveticemo mu posebnu paznju.
6.5.3 Neuman-Pearsonov kriterijum odlucivanja
Kada su nepoznate apriorne vjrovatnoce pojedinih hipoteza kao i cijenekostanja ogresnih odluka, onda se pribjegava koriscenju Neuman-Pearsonovogkriterijuma odlucivanja. Neuman-Pearsonovim kriterijumom postizemo mini-mizaciju vjerovatnoce greske druge vrste, odnosno vjerovatnoce katastrofe, p0,1 = pk za datu vjerovatnocu prve vrste p1,0 = pL koja odgovara vjerovatnoci laznogalarma.
Teorema 6.2. Neuman-Pearsonov kriterijum koji minimizira vjerovatnocu katas-trofe pk = p0,1 za datu vjerovatnocu laznog alarma je test odnosa izgleda λ(X ),definisanog sa (6.154), sa pragom A odred -enim jednacinom
∞ A
f λ0 (λ)dλ = pL = p1,0, (6.180)
gdje je f λ0 (λ) = f λ0 (λ/H 0) uslovna funkcija gustine vjerovatnoce od λ(X ) kada X odgovara hipotezi H 0

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 231/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA225
Dokaz. Kako se radi o odred-ivanju vezanog ekstremuma, moze se koristiti La-
grangeov pristup uvodeci Lagrangeov multiplikator γ . To znaci da se mini-mizacija vjerovatnoce pK = p0,1 za datu vjerovatnocu pL = p1,0 svodi na mini-mizaciju funkcije
p0,1 + γp1,0 =
R0
f 1(X )dX + γ
R1
f 0(X )dX (6.181)
koja poprima specijalni oblik Bayesovog srdnjeg rizika ρ kada vazi
p = p(H 0) =1
2, k1,0 = 2γ i k0,1 = 2, (k0,0 = k1,1 = 0), (6.182)
Prema teoremi 6.1 posmatrani srednji rizik je minimalan ako se odnos izgled
λ(X ) = f 1(X )/f 0(X ) testira u odnosu na prag (6.155) koji iznosi pk1,0/(1 − p)k0,1 = γ .Sljedeci korak je odred-ivanje Lagrangeovog multiplikatora uz pomoc jednacineogranicenja
p1,0 = pL =
R1
f 0(X )dX (6.183)
Kako je λ(X ) slucajna funkcija zavisna od slucajnog vekotra X , moze se defin-isati uslovna gustina vjerovatnoce f λ0 (λ) = f λ0 (λ/H 0).Prema Bayesovom kriterijumu vazi:
λ(X ) > γ kada je X ∈ R1 i λ(X ), γ za X ∈ R0
pa vjerovatnocu laznog alarma (6.183) mozemo pisati u obliku
p1,0 =
R1
f 0(X )dX =
∞ γ
f λ0 (λ)dλ (6.184)
Stavljajuci γ = A dobija s naposredno dokaz teoreme 6.2.
Uocimo da Neuman-Pearsonov odlucivac takod-e koristi testiranje odnosaizgleda sa odred-enim pragom, ali se razlikuje od Bayesovog odlucivaca samo ponacinu odred-ivanja vrijednosti praga odlucivanja.
Zakljucimo da se Neuman-Pearsonov kriterijum svodi na to da usvojimovjerovatnocu laznog alarma pL = p1,0 u zavisnosti od materijalnih mogucnostikorisnika sistema, a zatim za usvojenu vjerovatnocu pL minimiziramo vjerovatnocukatastrofe pk = p0,1.U slucaju jednodimenzionalnog prostora odlucivanja (n = 1) Neuman-Pearsonovkriterijum je trivijalan jer je tada zavisnost izmed-u pL i pk monotona, Med-utim,kod visestrukog osmatranja takvim kriterijumom moze se postici optimizacijaprijema.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 232/246
226 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Primjer 6.6. Posmatracemo binarni penos u osnovnom opsegu gdje ”jedinici”odgovara
impuls amplitud A1, a ”nuli”impuls amplitude A0. Petpostavicemo prisustvoaditivnog stacionarnog Gaussovog suma n(t) nulte srednje vrijednosti i vari- janse σ2
n.Prvo cemo odediti optimalni prag odlucivanja u prijemniku u smislu Bayesovog kriterijuma.Ako prijemni signal oznacimo sa x(t), onda u slucaju prenosa ”jedinice”imamo
x(t) = A1 + n(t) sto odgovara hipotezi H 1,
a kod prenosa ”nule”imamo
x(t) = A0 + n(t) sto odgovara hipotezi H 0.
U posmatranom modelu sistema lako mozemo odrediti funkcije izgleda
f 0(x) =1√
2πσn
e− (x−A0)
2
2σ2n i f 1(x) =1√
2πσn
e− (x−A1)
2
2σ2n
a zatim i odnos izgleda
λ(x) =f 1(x)
f 0(x)= e
− (x−A1)2
2σ2n+
(x−A0)2
2σ2n
koji poredimo sa granicnom vrijednoscu
λ0 =pk1,0
(1 − p)k0,1=
p(H 0)k1,0
p(H 1)k0,1
Optimalni prag odlucivanja xgr = xopt dobijamo kada je λ(x) = λ0, odakle sekonacno obija
xgr =A1 + A0
2+
σ2n
A1 − A0ln λ0 (6.185)
U specijalnim slucajvima, kadaje p(H 0)k1,0 = p(H 1)k0, 1 tj. λ0 = 1, prag odlucivanja (6.185) odgovara aritmetickoj sredini amplituda A1iA0 tj.:
xgr =A1 + A0
2(6.186)
Ako se radi o unipolarnom prenosu, A1 = 1 i A0 = 0, onda prag odlucivanja (6.186) u specijalnom slucaju iznosi
xgr =A
2 (6.187)
Pod istim uslovima, kada se koristi bipolarni prenos A1 = A i A0 = A, imamo
xgr = 0 (6.188)
Na slici 6.39 prikazana je podjela jednodimenzionalnog prostora amplituda pri- jemnog signala na potprostore R1 i R0.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 233/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA227
t
xgr
R0 R1
A0 A1
λ(x)<λ0⇔ x<xgr λ(x)>λ0⇔ x>xgr
f 1(x)p(H 1)k 01 f 0(x)p(H 0)k 10
Slika 6.39: Ilustracija particij jednodimenzionalngo prostora RX na R1 i R0
Dati primjer mozemo dalje prosiriti racuna juci odgovarajucu minimalnugresku P ε koristeci optimaln prgove odlucivanja (6.187) unipolarnog i (6.188)kod bipolarnog prenosa.Za unipolarni prenos vrijedi
f 1(x) =
1
√2πσn e−(x−A)2
2σ2
n i f 0(x) =
1
√2πσn e−x2
2σ2
n
Vjerovatnoca greske prv vrste iznosi
p1,0 = p(1/0) =1√
2πσn
∞ A/2
e− x2
2σ2n dx =1√π
∞ A
2√ 2σn
e−t2dt = erfc
A
2√
2σn
(6.189)
Na slican nacin nalazimo vjerovatnocu greske drug vrste p0,1 = A/2
−∞ f 1(x)dxsto je ilustrovano na slici 6.39.
t
f 0(x) f 1(x)
A A2
p10 p01
Slika 6.40: Ilustracija odred-ivanja vjerovatnoca grske prve i druge vrste kodunipolarnog binarnog prenosa
Ako su zadovoljeni uslovi p(1) = p(0) i k1,0 = k0,1, onda minimalna prosjecnavjerovatnoca iznosi
P ε = p(1) p(0/1) + p(0) p(1/0) = erfcA
2
√2σn (6.190)
Za bipolarni prenos pod istim uslovima lako se moze dobiti
P ε = erfc
A√2σn
(6.191)
Kako j srednja snaga kod unipolarnog signala jednaka P u = p(1)A2 + p(0)A2 =A2/2, a kod bipolarnog P B = A2, to znaci da za istu vjerovatnocu greske (6.190)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 234/246
228 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
i (6.191) srednja snaga unipolarnog signala treba da bude veca za 3dB u odnosu
na snagu bipolarnog signala.Primjer 6.7. U ovom primjeru ilustrovacemo princip primjene Neuman-Pearsonovog kriterijuma u prijemniku adarskog sistema gdje ukljucujemo dvije moguce hipoteze:
H 1 : u zoni osmatranja postoji cilj pa u prijemniku imamo reflektovani radiosignal ucestanosti i aditivni uskopojasni Gaussov sum:
s p(t) = A cosΩ0t + a(t)cosΩ0t − b(t)sinΩ0t =
=
(A + a(t))2 + b2(t)
r(t)
cos
Ω0t + arctg
b(t)
A + a(t)
gdje se koristi model uskopojasnog Gaussovog suma uveden u trecen poglavlju
(3.169). Funkcija gustine vjerovatnoce anvelope prijemnog signala r/1 = (A + a)2 + b2 prema Riceovim rezultatima ima oblik tzv. Riceove funkcije
gustine vjerovatnoce
f 1(r) =r
σ2n
e− r2+A2
2σ2n I 0( rAσ2n
) r ≥ 0
f 1(r) = 0 r < 0
gdje su σ2n − varijansa aditivnog suma
A − vrsna amplituda prijemnog radio signala
I 0 − Besselova funkcija prve vrste nultog reda.
H 0 : prijemni signal sadrzi samo aditivni Gaussov sum:
s p(t) = a(t)cosΩ0t − b(t)sinΩ0t
ili
s p(t) =
a2(t) + b2(t) r(t)
cos
Ω0t + arctg
b(t)
a(t)
Prema ranije dobijenom rezultatu (3.176) sada imamo poznatu Rayleighevu raspodjelu
f 1(r) =r
σ2n
e− r2
2σ2n ( rAσ2n
) r ≥ 0
f 1(r) = 0 r < 0
Dobijene funkcije izleda prikazane su na slici 6.41Za usvojenu vjrovatnocu laznog alarma
p(1/0) = pL(r0) =
∞ r0
f 0(r)dr =
∞ r0
e− r2
2σ2n d
r2
2σ2n
= e
− r202σ2n

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 235/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA229
r
f 0(r)
f 1(r)
r 0
p(0/1)=p L
p(1/0)=pK
Slika 6.41: Graficki prikaz funkcija izgleda f 0(r) i f 1(r), gdje je r0 pragodlucivanja iza detektora anvelope u prijemniku radarskog sistema
odnosno usvojeni prag odlucivanja
r0 = σn
ln
1
p2L
moze se odrediti i odgovarajuca vjerovatnoca katastrofe
p(0/1) = pk −r0
0
f 1(r)dr
sto znaci da u slucaju jednostrukog mjerenja u prijemniku Neuman-Pearsonov kriterijum ostaje trivijalan. Md -utim, u uslovima visestrukog mjerenja stvara semogucnost optimizacije sistema tj., minimizacije vjerovatnoce pk za dato pL.
6.5.4 Optimalni korelacioni prijemnik
Kao sto su dva prethodna primjera ukazala, opstu teoriju odlucivanja mozemoefikasno da koristimo u rjsavnju problema optimalnog prijema signala. Posma-tracemo sinhroni digitalni prenos informacija gdje prijemnik nakon uspostavl- jenog sinhronizma treba samo da utvrdi prisustvo (H 1) ili odsustvo (H 0) ko-risnog signala, ciji je oblik prijemnika poznat. To ukazuje na prednost digitalnihkomunikacija u odnosu na analogni prenos kod kojeg prijemnik treba da odredii oblik korisnog signala.Posmatracemo model sistema u kojem je prisutan aditivni Gaussov sum n(t)nulte srednje vrijednosti (n = 0) i varijanse σ2
n.Ako sa x(t) oznacimo prijemni signal, onda se u procsu detekcije binarnog sig-nala pojavljuju dvije hipoteze
H 0 : x(t) = s0(t) + n(t)
H 1 : x(t) = s1(t) + n(t), (6.192)
gdje su s1(t) i s0(t) fizicki nosioci binarne ”jedinice”i ”nule”, respektivno (sl.6.42)
Zadatak prijemnika je da na osnovu mjerenja prijemnog signala x(t), gdje jedanelementarni signal odgovara bitskom intervalu T , donese odluku o prisustvu sig-nala s1(t) ili s0(t) u prijemnom signalu (6.192).
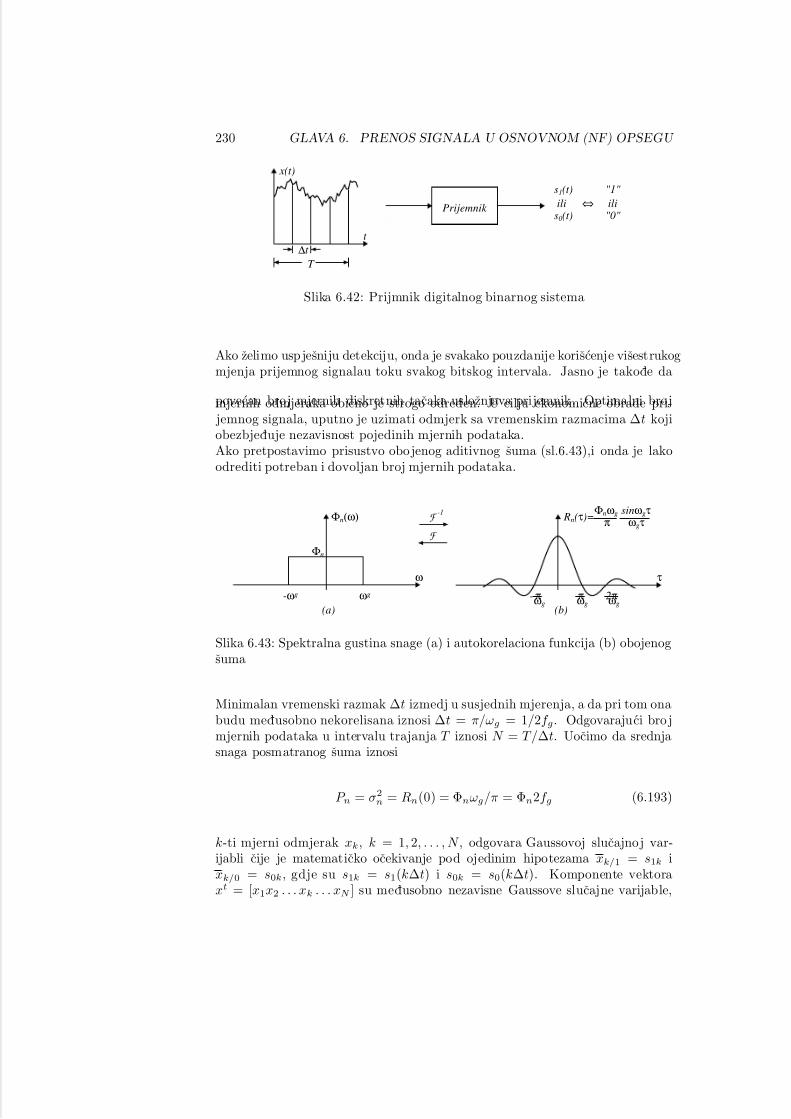
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 236/246
230 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
x(t)
t
Prijemnik
∆t
T
s1(t)
ilis0(t)
⇔
"1"
ili"0"
Slika 6.42: Prijmnik digitalnog binarnog sistema
Ako zelimo usp jesniju detekciju, onda je svakako pouzdanije koriscenje visestrukogmjenja prijemnog signalau toku svakog bitskog intervala. Jasno je takod-e da
povecan broj mjernih diskretnih tacaka usloznjava prijemnik. Optimalni brojmjernih odmjeraka obicno je strogo odred-en. U cilju ekonomicne obrade pri- jemnog signala, uputno je uzimati odmjerk sa vremenskim razmacima ∆t kojiobezbjed-uje nezavisnost pojedinih mjernih podataka.Ako pretpostavimo prisustvo obo jenog aditivnog suma (sl.6.43),i onda je lakoodrediti potreban i dovoljan broj mjernih podataka.
Φn(ω)
Φn
-ωg ωg
ω
(a) (b)
Rn(τ)=Φnωg
π
sinωgτ
ωgτF
-1
F
τ
πωg
2πωg
- πωg
Slika 6.43: Spektralna gustina snage (a) i autokorelaciona funkcija (b) obojenogsuma
Minimalan vremenski razmak ∆t izmedj u susjednih mjerenja, a da pri tom onabudu med-usobno nekorelisana iznosi ∆t = π/ωg = 1/2f g. Odgovarajuci bro jmjernih podataka u intervalu trajanja T iznosi N = T /∆t. Uocimo da srednjasnaga posmatranog suma iznosi
P n = σ2n = Rn(0) = Φnωg/π = Φn2f g (6.193)
k-ti mjerni odmjerak xk, k = 1, 2, . . . , N , odgovara Gaussovoj slucajnoj var-ijabli cije je matematicko ocekivanje pod ojedinim hipotezama xk/1 = s1k ixk/0 = s0k, gdje su s1k = s1(k∆t) i s0k = s0(k∆t). Komponente vektoraxt = [x1x2 . . . xk . . . xN ] su med-usobno nezavisne Gaussove slucajne varijable,
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 237/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA231
pa funkcije izgleda imaju oblik
f 1(X ) =1
(√
2πσn)N e−
NP
k=1(xk−s1k)2
2σ2n (6.194)
f 0(X ) =1
(√
2πσn)N e−
NP
k=1(xk−s0k)2
2σ2n (6.195)
Sada se moze lako izracunati odnos izgleda λ(X ) = f 1(X )/f 0(X ) odnosno nje-gov logaritam (6.162)
ln λ(X ) =
N
k=1
xks1k −N
k=1
xks0k +1
2
N
k=1
(s20k − s2
1k)
/σ2
n
H 1
H 0
log(λ0) ln λ0
(6.196)Racuna juci varijansu σ2
n iz (6.194) i uvrstavajuci u (6.196) dobija se
ln λ(X ) =
N
k=1
xks1k∆t −N
k=1
xks0k∆t +1
2
N k=1
(s20k − s2
1k)∆t
/σ2
n
H 1
H 0
log(λ0)Φn ln λ0
(6.197)Ako granicnu ucestanost povecavamo, onda u granicnom prelazu (ωg → ∞)obojeni sum prelazi u bijeli sum a razmak ∆t = π/ωg postaje infinitezimalan.U datom granicnom prelazu rezultat (6.197) postaje
ln λ(X ) = G =
T
0
x(t)s1(t)dt
−
T
0
x(t)s0(t)dt+1
2
T
0
(s20(t)
−s2
1(t))dtH 1
H 0
log(λ0)Φn ln λ0
(6.198)ili konacno
T 0
x(t)s1(t)dt −T
0
x(t)s0(t)dtH 1
H 0
log(λ0)Φn lnp(H 1)k10
p(H 0)k01− 1
2
T 0
(s20(t) − s2
1(t))dt
(6.199)Prethodna relacija ukayuje na strukturu optimalnog prijemnika koji je u litera-turi poynat pod nayivom optimalnog korelacionog prijemnika (sl.6.44).na ovaj nacin smo dosli do korelacionog prijemnka gdje je potrbno poznavati vre-menske intervale kada se pojavljuje korisni signal (dobra digitska sinhronizacija)kao i oblike fizickih nosilaca lemenata informacionog sadrzaja (s1(t), s0(t)) dabismo ih mogli lokalno generisati.Analiza dobijeno prijemnika pokazuje da se konacna detekcija (odlucivanje)bazira na pored-enju slicnosti”
x(t)si(t)dt, i = 0, 1, lokalno generisanih ele-
mentarnih signala si(t) (i = 1, 0) i prijemnog signala x(t), gdje prag odlucivanja(sodl) zavisi od apriornih vjerovatnoca pojedinih hipoteza, cijena kostanja oje-dinih gresaka, suma u kanalu i nacina izbora fizickih nosilaca s1(t) i s0(t).Uocimo da je ranije razmotreni korelacioni prijemnik (P.2.3.4) samo specijalni
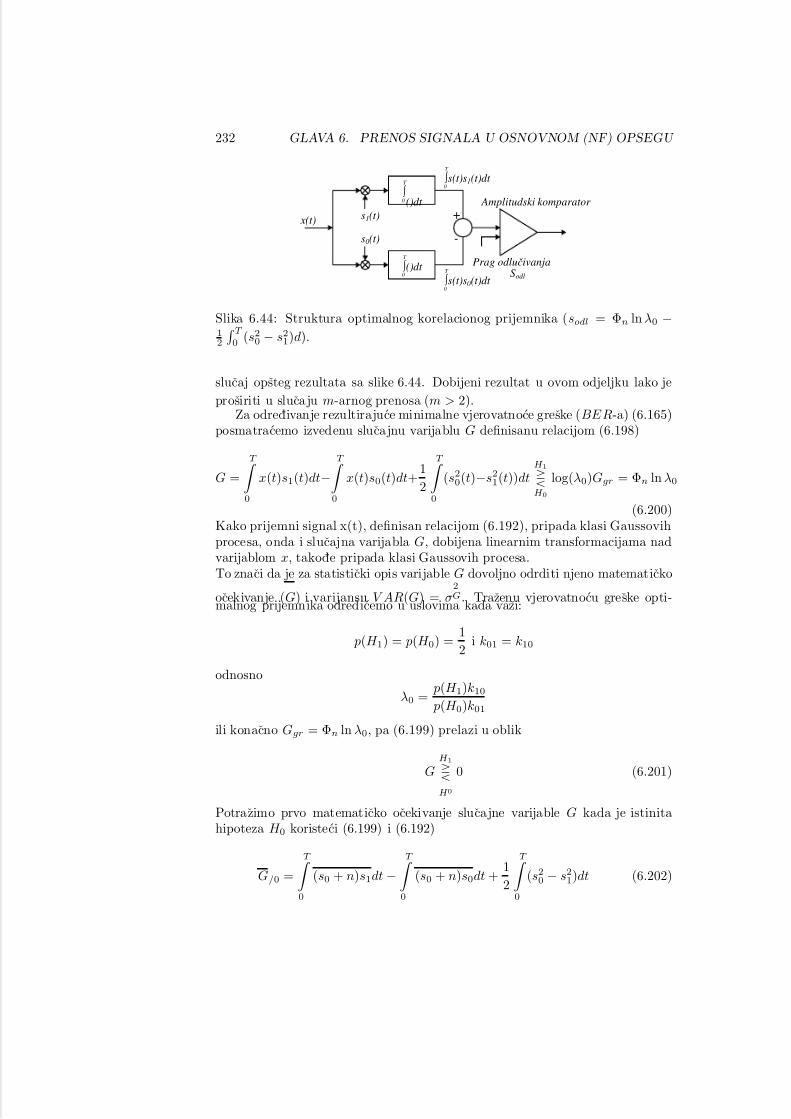
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 238/246
232 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
+
-
x(t) s1(t)
s0(t)
∫ ()dt 0
T
∫ ()dt 0
T
∫ s(t)s0(t)dt 0
T
∫ s(t)s1(t)dt 0
T
Prag odlučivanjaSodl
Amplitudski komparator
Slika 6.44: Struktura optimalnog korelacionog prijemnika (sodl = Φn ln λ0 −12
T
0(s2
0 − s21)d).
slucaj opsteg rezultata sa slike 6.44. Dobijeni rezultat u ovom odjeljku lako je
prosiriti u sluca ju m-arnog prenosa (m > 2).Za odred-ivanje rezultirajuce minimalne vjerovatnoce greske (BER-a) (6.165)
posmatracemo izvedenu slucajnu varijablu G definisanu relacijom (6.198)
G =
T 0
x(t)s1(t)dt−T
0
x(t)s0(t)dt+1
2
T 0
(s20(t)−s2
1(t))dtH 1
H 0
log(λ0)Ggr = Φn ln λ0
(6.200)Kako prijemni signal x(t), definisan relacijom (6.192), pripada klasi Gaussovihprocesa, onda i slucajna varijabla G, dobijena linearnim transformacijama nadvarijablom x, takod-e pripada klasi Gaussovih procesa.To znaci da je za statisticki opis varijable G dovoljno odrditi njeno matematicko
ocekivanje (G) i varijansu V AR(G) = σ2G. Trazenu vjerovatnocu greske opti-
malnog prijemnika odredicemo u uslovima kada vazi:
p(H 1) = p(H 0) =1
2i k01 = k10
odnosno
λ0 =p(H 1)k10
p(H 0)k01
ili konacno Ggr = Φn ln λ0, pa (6.199) prelazi u oblik
GH 1
H 0
0 (6.201)
Potrazimo prvo matematicko ocekivanje slucajne varijable G kada je istinitahipoteza H 0 koristeci (6.199) i (6.192)
G/0 =
T 0
(s0 + n)s1dt −T
0
(s0 + n)s0dt +1
2
T 0
(s20 − s2
1)dt (6.202)
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 239/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA233
gdj je izvrsena izmjena redoslijeda integracije i usrednjavanja uz pretpostavku
statisticke nezavisnosti korisnog signala i kanalnog suma.Iz (6.202) lako se dobija
G/0 =
T 0
s0(t)s1(t)dt − 1
2
T 0
(s20 + s2
1)dt (6.203)
Lako je utvrditi da vrijedi
G/1 = −G/0 =1
2
T 0
(s20 + s2
1)dt −T
0
s0(t)s1(t)dt (6.204)
Za odred-ivanje varijanse V AR(G) zgodno j prvo definisati autokovarijansu
Covar(G) = (G(t1) − G(t1))((t2) − G(t2))
gdje je t1 = tit2 = t + τ , odnosno t2 − t1 = τ .Na osnovu (6.199) i (6.203) dobija se
(G0 − G/0)/0 =
T 0
(s1 − s0)dt,
odakle se kovarijansa moze lako izracunati
Covarr(G) =
T 0
T 0
n(t1)[s1(t1) − s0(t1)]n(t2)[s1(t2) − s0(t2)]dt1dt2 (6.205)
Optimalni prijemnik sa sl.?? dobijen je u uslovima djlovanja aditivnog Gaussovogbijelog suma cija je autokorelaciona funkcija
n1(t)n2(t) = Φnδ(t2 − t1) = Φnδ(τ ).
Zahvaljujuci selektivnosti Diracove funkcije, autokovarijansa
Covarr(G)/0 =
T
0
T
0
Φnδ(t2 − t1)[s1(t1) − s0(t1)]n(t2)[s1(t2) − s0(t2)]dt1dt2
prelazi u varijansu
var(G)/0 = Covarr(G)/0 = Φn
T 0
[s1(t) − s0(t)]2dt. (6.206)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 240/246
234 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
Lako je pokazati da vrijedi
var(G)/1 = var(G)/0 = P hin
T 0
[s1(t) − s0(t)]2dt (6.207)
Ako uvedemo normalizovani koeficijent korelacije prema (P.2.1.6)
r =(s1(t), s0(t))
E ,
gdje je E = (E s1 + E s0)/2 srednja energija fizickih nosilaca s1(t) i s0(t), ondadobijene rezultata (6.203), (6.204), (6.206) i (6.207) mozemo prikazati u obliku
G/0 = −E (1 − r) = −G/1 i V AR(G)/0 = var(G)/1 = 2Φn(1 − r) (6.208)
Na osnovu dobijnih rezultata (6.208) mogu se konacno definisati funkcije izgleda
f 0(G) =1
4πΦnE (1 − r)e− [G+E(1−r)]2
4ΦnE(1−r) (6.209)
f 1(G) =1
4πΦnE (1 − r)e− [G−E(1−r)]2
4ΦnE(1−r) (6.210)
koje su prikazane na slici 6.45
t
f 1(G) f 0(G)
p(0/1) p(1/0)
Ggr =0 E(1-r) E(1+r)
Slika 6.45: Graficki prikaz funkcija izgleda f 0(G) i f 1(G) slucajne varijabledefinisane sa (6.198)
Vjerovatnocu greske
P ε = p(H 0) p(H 1/H 0) + p(H 1) p(H 0/H 1) =1
2
∞ 0
f 0(G)dG +1
2
0 −∞
f 1(G)dG
nakon uvrstavanja dobijenih rezultata (6.209) i (6.210) mozemo pisati u obliku
P ε = erfc
E (1 − r)
4Φn
, (6.211)
gdje je erfc (z) = 1√π
∞z
e−t2dt monotono opadajuca funkcija argumenta z.
Rezultat (6.211) ukazuje da je vjerovatnoca greske u prijemniku za dati kvalitet

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 241/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA235
kanala utoliko manja ukoliko je korelacija izmed-u fizickih nosilaca s1(t) i s0(t)
manja, a njihova srednja energija veca.Kako se u pogledu energije fizickih nosilaca srecemo sa prakticnim ogranicenjima,sto je u neposrednoj vezi sa nivoom signala i brzinom prenosa informacija, ondase performanse sistema poboljsavaju takvim izborom fizickih nosilaca informa-cionih elemenata koji obezbjed-uje sto je moguce manju njihovu med-usobnukorlaciju.Zajednicki uticaj parametara E i r na vjerovatnocu greske (6.211) mozemointerpretirati jedinstvenim parametrom ako iskoristimo distancu d(s1, s0) =
2E (1 − r) definisanu sa (P.2.1.7).
U tom slucaju (6.211) poprima oblik
P ε = erfc d(s1, s0)
√8Φn , (6.212)
koji ocigledno pokazuje da je vjerovatnoca greske u prijemniku monotono opadajucafunkcija od distance izmed-u signala s1(t) i s0(t) kao fizickih nosilaca informa-cionih elemenata iz skupa 0, 1.
Primjer 6.8. U ovom rimjeru cemo koristeci rezultat (6.211) komparativnoanalizirati binarnu amplitudsku-(ASK), binarnu frekvencijsku-(FSK) i binarnu faznu-(PSK), koje su ilustrovane na slici 6.46
T T T
1 0 1
t
t
t
(a)
(b)
(c)
(d)
Informacioni sadržaj
ASK
FSK
PSK
Slika 6.46: Vremenski prikaz ASK (a), FSK (b) i PSK (c) digitalnih signala zadati informacioni sadrzaj.

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 242/246
236 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
ASK: s1(t) = S cos ω0t, |t| < T /2
s1(t) = 0 za ostalo t, s0(t) = 0 (∀t)E ASK = 1
2
T 0
(s21 + s2
0)dt = 12
T S2
2=
S2ef
2T = E−0
2
rASK =
T 0
s1s0dt
E = 0.
Prema (6.211) dobija se
P ε = erfc
E 0
8Φn
(6.213)
FSK: s1(t) = S cos ω
(1)
0 t, |t| < T /2s1(t) = 0 za ostalo t,
s0(t) = S cos ω(0)0 t, |t| < T /2
s0(t) = 0 za ostalo t,
Ako se ω(1)0 i ω(1)
0 tako odaberu da vazi ω(1)0 − ω(1)
0 = kπT , gdje je k cijeli
broj razlicit od nule, onda su s1(t) i s0(t) med -usobnoortogonalni (r = 0),(Primjer P.2.2).Lako je dobiti E F SK = 2E ASK = E 0 pa na osnovu (6.211) imamo
P ε = erfc
E 0
4Φn
(6.214)
PSK: kako kod PSK signala vrijedi s1(t) = −s0(t), onda imamo E P SK =E F SK = E 0 i r = −1. Uocavamo da je kod binarne fazne modulacijepostignuta minimalna moguca vrijednost normalizovanog koeficijenta ko-relacije r.Opsti rezultat (6.211) u konkretnom slucaju daje
P εPSK = erfc
E 0
2Φn
(6.215)
Prma pojedinim rezultatima (6.212), (6.214) i (6.215) ocigledno vrijedi
P εPSK < P εFSK < P εASK (6.216)
sto je kvalitativno ilustrovano i na slici 6.47
Kod digitalnih postupaka prnosa uocava se kritican prag u odnosu signal-sum”ispod ko jeg se vjerovatnoca greske u prijemniku naglo povecava. Iz tih ra-zloga se duzina regeneratorske dionic tako projektuje da odnos signal-sum”budeiznad pomenutog kriticnog praga [].
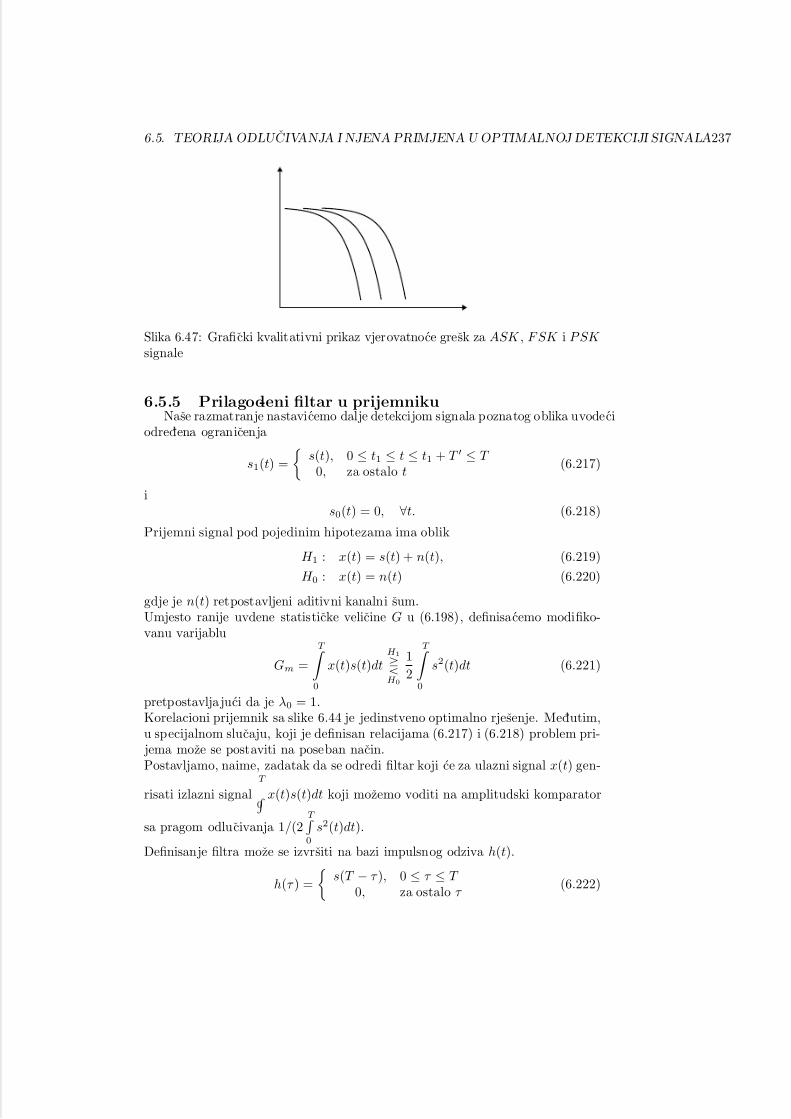
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 243/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA237
Slika 6.47: Graficki kvalitativni prikaz vjerovatnoce gresk za ASK , F SK i P SK signale
6.5.5 Prilagod-eni filtar u prijemnikuNase razmatranje nastavicemo dalje detekcijom signala poznatog oblika uvodeci
odred-ena ogranicenja
s1(t) =
s(t), 0 ≤ t1 ≤ t ≤ t1 + T ≤ T
0, za ostalo t(6.217)
is0(t) = 0, ∀t. (6.218)
Prijemni signal pod pojedinim hipotezama ima oblik
H 1 : x(t) = s(t) + n(t), (6.219)
H 0 : x(t) = n(t) (6.220)
gdje je n(t) retpostavljeni aditivni kanalni sum.Umjesto ranije uvdene statisticke velicine G u (6.198), definisacemo modifiko-vanu varijablu
Gm =
T 0
x(t)s(t)dtH 1
H 0
1
2
T 0
s2(t)dt (6.221)
pretpostavlja juci da je λ0 = 1.Korelacioni prijemnik sa slike 6.44 je jedinstveno optimalno rjesenje. Med-utim,u specijalnom slucaju, koji je definisan relacijama (6.217) i (6.218) problem pri- jema moze se postaviti na poseban nacin.Postavljamo, naime, zadatak da se odredi filtar koji ce za ulazni signal x(t) gen-
risati izlazni signal
T 0
x(t)s(t)dt koji mozemo voditi na amplitudski komparator
sa pragom odlucivanja 1/(2T 0
s2(t)dt).
Definisanje filtra moze se izvrsiti na bazi impulsnog odziva h(t).
h(τ ) =
s(T − τ ), 0 ≤ τ ≤ T
0, za ostalo τ (6.222)

5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 244/246
238 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
x(t)h(t)
y(t)=x(t)*h(t)
t=T A.K.
t t t
x h y
0 0 0T T 1 T T-T 1 T-T 1 T T-T 1
Prag odlučivanja
H 1ili
H 0
1 1 12 ∫ s 2(t)dt
0
T
Slika 6.48: Ilustracija rada prilagod-enog filtra u prijemniku
Izlazni signal y(t) mozemo izracunati koristeci konvoluciju ulaznog signal x(t)
i impulsnog odziva prijemnog filtra (sl.6.6). Koristeci definisani impulsni odziv(6.222) dobija se
y(t) =
+∞ −∞
h(τ )x(t−τ )dτ =
T 0
s(T −τ )x(t−τ )dτ =
T 0
s(z)x(t−T +z)dz (6.223)
Konacni razultat (6.223) ukazuje da izlazni signal y u trenutku t = T imavrijednost
y(T ) =
T 0
s(z)x(z)dz =
T 0
s(t)x(t)dt
koja je identicna velicini Gm definisanoj sa (6.221). To znaci da j potrbno
izlazni signal u trenutku t = T porediti sa pragom odlucivanja 12
T 0
s2(t)dt u
cilju usvajanja jedne od mogucih hipoteza.Ako je
s(t) =
1, 0 < t < T 1 < T 0, za ostalo t,
onda je prema definiciji (6.222)
h(t) =
1, T − T 1 < t < T 0, za ostalo t,
a odgovarajuci odziv ako ulazni signal odgovara signalu ”jedinice”s(t) prikazan je na slici 6.49Prijemni filtar ciji je impulsni odziv podesen (prilagod-en) korisnom signaluprema (6.222) poznat je u literaturi pod nazivom prilagod-enog filtra (Matchedfiltar).Ako pretostavimo na ulazu prilgod-enog filtra djelovanje korisnog signala s i adi-tivnog bijelog suma n, onda odgovarajuce komponente izlaznog signala zbog
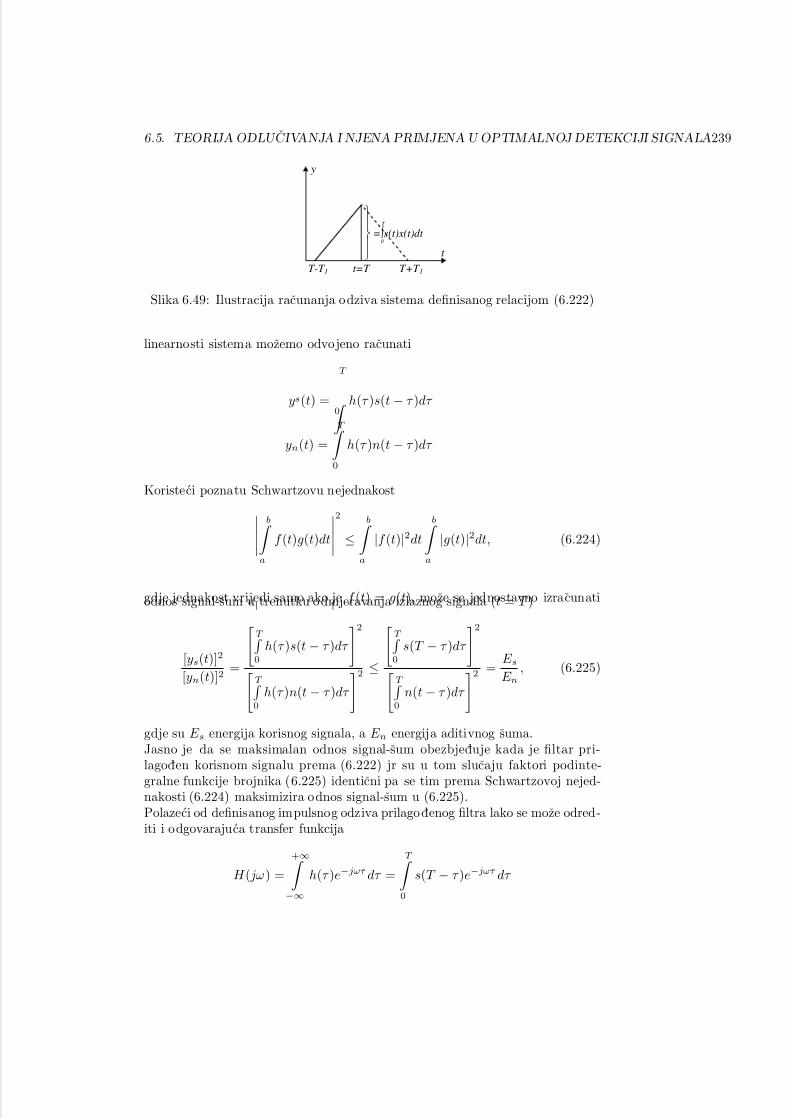
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 245/246
6.5. TEORIJA ODLU CIVANJA I NJENA PRIMJENA U OPTIMALNOJ DETEKCIJI SIGNALA239
t
y
T-T 1 t=T T+T 1
=∫ s(t)x(t)dt
0
T
Slika 6.49: Ilustracija racunanja odziva sistema definisanog relacijom (6.222)
linearnosti sistema mozemo odvojeno racunati
ys(t) =
T
0
h(τ )s(t − τ )dτ
yn(t) =
T 0
h(τ )n(t − τ )dτ
Koristeci poznatu Schwartzovu nejednakost
b a
f (t)g(t)dt
2
≤b
a
|f (t)|2dt
b a
|g(t)|2dt, (6.224)
gdje jednakost vrijedi samo ako je f (t) = g(t), moze se jednostavno izracunatiodnos signal-sum u trenutku odmjeravanja izlaznog signala (t = T )
[ys(t)]2
[yn(t)]2=
T 0
h(τ )s(t − τ )dτ
2
T 0
h(τ )n(t − τ )dτ
2≤
T 0
s(T − τ )dτ
2
T 0
n(t − τ )dτ
2 =E sE n
, (6.225)
gdje su E s energija korisnog signala, a E n energija aditivnog suma.Jasno je da se maksimalan odnos signal-sum obezbjed-uje kada je filtar pri-lagod-en korisnom signalu prema (6.222) jr su u tom slucaju faktori podinte-gralne funkcije brojnika (6.225) identicni pa se tim prema Schwartzovoj nejed-nakosti (6.224) maksimizira odnos signal-sum u (6.225).Polazeci od definisanog impulsnog odziva prilagod-enog filtra lako se moze odred-iti i odgovarajuca transfer funkcija
H ( jω) =
+∞ −∞
h(τ )e−jωτ dτ =
T 0
s(T − τ )e−jωτ dτ
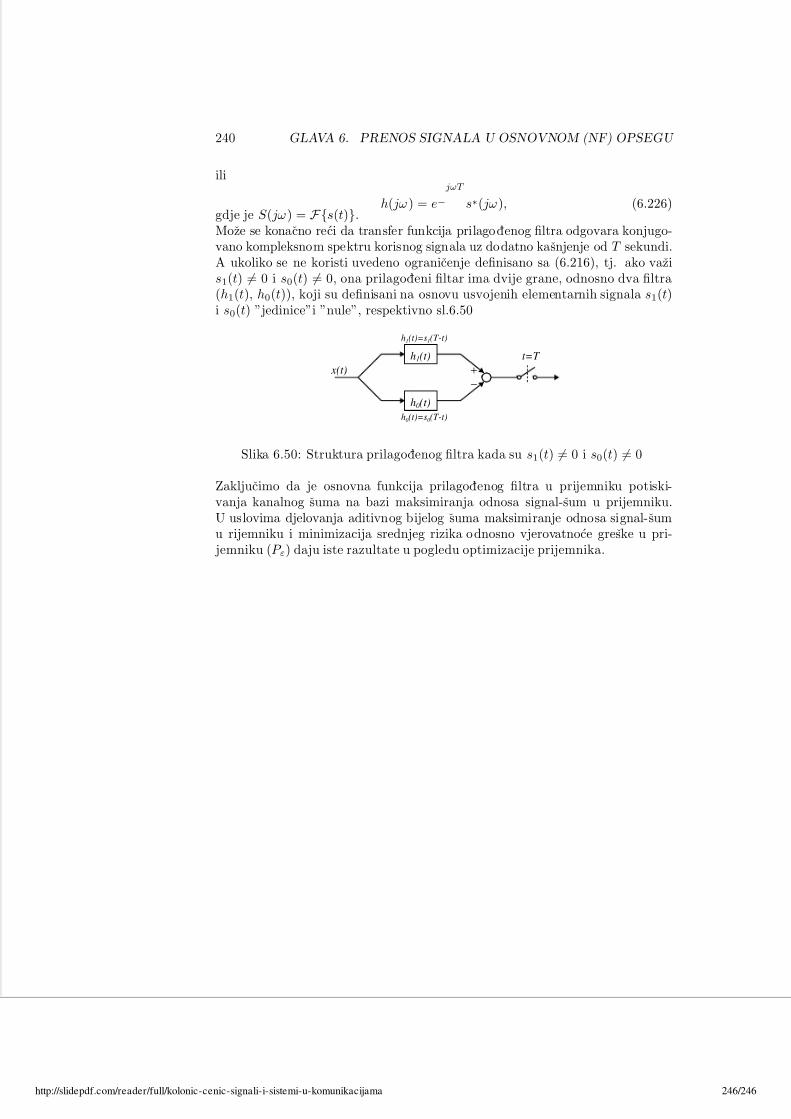
5/11/2018 Kolonic, Cenic - Signali i Sistemi u Komunikacijama - slidepdf.com
http://slidepdf.com/reader/full/kolonic-cenic-signali-i-sistemi-u-komunikacijama 246/246
240 GLAVA 6. PRENOS SIGNALA U OSNOVNOM (NF) OPSEGU
ili
h( jω ) = e−jωT
s∗( jω), (6.226)gdje je S ( jω) = Fs(t).Moze se konacno reci da transfer funkcija prilagod-enog filtra odgovara konjugo-vano kompleksnom spektru korisnog signala uz dodatno kasnjenje od T sekundi.A ukoliko se ne koristi uvedeno ogranicenje definisano sa (6.216), tj. ako vazis1(t) = 0 i s0(t) = 0, ona prilagod-eni filtar ima dvije grane, odnosno dva filtra(h1(t), h0(t)), koji su definisani na osnovu usvojenih elementarnih signala s1(t)i s0(t) ”jedinice”i ”nule”, respektivno sl.6.50
x(t)
h1(t)
h0(t)
t=T
h1(t)=s1(T-t)
h0(t)=s0(T-t)
+
−
Slika 6.50: Struktura prilagod-enog filtra kada su s1(t) = 0 i s0(t) = 0
Zakljucimo da je osnovna funkcija prilagod-enog filtra u prijemniku potiski-vanja kanalnog suma na bazi maksimiranja odnosa signal-sum u prijemniku.U uslovima djelovanja aditivnog bijelog suma maksimiranje odnosa signal-sumu rijemniku i minimizacija srednjeg rizika odnosno vjerovatnoce greske u pri- jemniku (P ε) daju iste razultate u pogledu optimizacije prijemnika.

![Radio talasi i prenos informacija (signali, modulacija) talasi i prenos informacija.pdf · Radio talasi i prenos informacija (signali, modulacija) [586.] Sta su signali? a) Signali](https://img.dokumen.tips/doc/110x75/5e0a0242f0ac9e00440613d8/radio-talasi-i-prenos-informacija-signali-modulacija-talasi-i-prenos-informacijapdf.jpg)



























