Embed Size (px)
Citation preview

KINEMATIKA HMOTNÉHO BODU (HB)
1. Polohový vektor, rýchlosť, zrýchlenie HB
Pohyb – zmena polohy telesa vzhľadom na iné teleso.
Hmotný bod (HB) – myslený objekt (model), ktorý z hľadiska vzájomného pôsobenia s inými
objektmi má vlastnosti reálneho telesa, pričom jeho rozmery sú zanedbateľné.
Poloha HB – v pravouhlej súradnej sústave – určená súradnicami x, y, z.
Polohový vektor – 𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧�⃗⃗�,
ak sa mení poloha s časom t - 𝑟 = 𝑥(𝑡)𝑖 + 𝑦(𝑡)𝑗 + 𝑧(𝑡)�⃗⃗�.
Vektory 𝑖, 𝑗, �⃗⃗� sú jednotkové vektory ležiace na súradných osiach x, y, z s počiatkom v bode 0
a sú súhlasne orientované s kladným smerom osí.
Veľkosť polohového vektora – |𝑟| = 𝑟 = √𝑥2 + 𝑦2 + 𝑧2 .
Okrem pravouhlého súradnicového systému môžeme na určenie polohy hmotného bodu
použiť tiež systém sférických súradníc r, , alebo aj súradníc valcových , , z (Voľba
systému je daná geometriou problému, ktorý máme riešiť).
Sférické súradnice:
𝑥 = 𝑟 ∙ sin𝜗 ∙ cos𝜑, 𝑦 = 𝑟 ∙ sin𝜗 ∙ sin𝜑, 𝑧 = 𝑟 ∙ cos𝜗,
pričom r0, ), 0, 2, 0, .
Valcové súradnice:
𝑥 = 𝑟 ∙ cos𝜑, 𝑦 = 𝑟 ∙ sin𝜑, 𝑧 = 𝑧,
0
𝑧�⃗⃗�
𝑖 𝑗
𝑥𝑖
z
𝑦𝑗
x
�⃗⃗�
y
𝑟
A

pričom r0, ), 0, 2, z (-, ).
Trajektória – sled polôh, ktoré HB v priestore postupne zaujíma.
Dráha (s) – dĺžka trajektórie.
Hmotný bod môže prejsť jednu a tú istú dráhu za rôzny čas. Aby sme z tohto hľadiska
jednotlivé pohyby navzájom rozlíšili a kvantitatívne hodnotili, zavádzame fyzikálne veličiny
rýchlosť a zrýchlenie.
Nech sa hmotný bod pohybuje po nejakej dráhe tak, že v čase t1 je v mieste A1 a jeho
polohový vektor je 𝑟1⃗⃗⃗ ⃗ . Za čas ∆𝑡 = (𝑡2 − 𝑡1) prejde hmotný bod dráhu s, takže v čase t2 sa
nachádza v mieste A2 a jeho polohový vektor je 𝑟2⃗⃗⃗⃗ .
Priemerná (stredná) rýchlosť – 𝑣s =∆𝑠
∆𝑡 ,
je veličina, ktorá sa číselne rovná dráhe, ktorú hmotný bod prešiel v priemere za
jednotku času.
Ak označíme ∆𝑟 = 𝑟2⃗⃗⃗⃗ − 𝑟1⃗⃗⃗ ⃗ a uvažujeme čoraz menšiu vzdialenosť |∆𝑟| = |𝑟2⃗⃗⃗⃗ − 𝑟1⃗⃗⃗ ⃗| medzi
bodmi A1 a A2, a zároveň časový interval ∆𝑡 sa skracuje, potom hovoríme o okamžitej
rýchlosti: �⃗� = lim∆𝑡→0∆𝑟
∆𝑡=
𝑑𝑟
𝑑𝑡 .
𝑟
z
x
y x
y
z z
A
0
A1
A2 𝑟1⃗⃗⃗ ⃗
𝑟2⃗⃗⃗⃗
∆𝑟
∆𝑠
0
𝑣s⃗⃗⃗⃗

Okamžitá rýchlosť je prvou deriváciou polohového vektora v bode A1 podľa času.
Rýchlosť má smer dotyčnice k dráhe pohybu v danom bode.
Pre t0 platí |∆𝑟| = 𝑑𝑠 a preto veľkosť vektora okamžitej rýchlosti môžeme vyjadriť
nasledovne:
𝑣 = |�⃗�| = |𝑑𝑟
𝑑𝑡| =
|𝑑𝑟|
𝑑𝑡=
𝑑𝑠
𝑑𝑡.
.
Vektor rýchlosti možno zapísať v zložkovom tvare:
�⃗� =𝑑𝑟
𝑑𝑡=
𝑑
𝑑𝑡(𝑥𝑖 + 𝑦𝑗 + 𝑧�⃗⃗�) =
𝑑𝑥
𝑑𝑡𝑖 +
𝑑𝑦
𝑑𝑡𝑗 +
𝑑𝑧
𝑑𝑡�⃗⃗� = 𝑣𝑥𝑖 + 𝑣𝑦𝑗 + 𝑣𝑧 �⃗⃗�.
Pre príslušné zložky (súradnice) vektora rýchlosti platí:
𝑣𝑥 =𝑑𝑥
𝑑𝑡, 𝑣𝑦 =
𝑑𝑦
𝑑𝑡, 𝑣𝑧 =
𝑑𝑧
𝑑𝑡.
Veľkosť vektora rýchlosti vypočítame:
|�⃗�| = 𝑣 = √𝑣𝑥2 + 𝑣𝑦
2 + 𝑣𝑧2.
Smer vektora rýchlosti možno tiež charakterizovať uhlami , , , ktoré zviera vektor
rýchlosti so súradnými osami x, y, z: cos = vx /v, cos = vy /v, cos = vz /v.
Hlavnou jednotkou rýchlosti v SI sústave je ms-1
.
Na kvantifikovanie zmeny rýchlosti v čase definujeme veličinu – zrýchlenie.
Priemerné (stredné) zrýchlenie – 𝑎s⃗⃗ ⃗⃗ =∆�⃗⃗�
∆𝑡 ,
Okamžité zrýchlenie - �⃗� = lim∆𝑡→0∆�⃗⃗�
∆𝑡=
𝑑�⃗⃗�
𝑑𝑡=
𝑑2𝑟
(𝑑𝑡)2 .
Pre zložky vektora �⃗� platí - �⃗� =𝑑�⃗⃗�
𝑑𝑡=
𝑑𝑣𝑥
𝑑𝑡𝑖 +
𝑑𝑣𝑦
𝑑𝑡𝑗 +
𝑑𝑣𝑧
𝑑𝑡�⃗⃗� =
𝑑2𝑥
(𝑑𝑡)2 𝑖 +𝑑2𝑦
(𝑑𝑡)2 𝑗 +𝑑2𝑧
(𝑑𝑡)2 �⃗⃗� .
Porovnaním zložiek pri jednotlivých jednotkových vektoroch dostaneme:
𝑎𝑥 =𝑑𝑣𝑥
𝑑𝑡=
𝑑2𝑥
(𝑑𝑡)2, 𝑎𝑦 =𝑑𝑣𝑦
𝑑𝑡=
𝑑2𝑦
(𝑑𝑡)2, 𝑎𝑧 =𝑑𝑣𝑧
𝑑𝑡=
𝑑2𝑧
(𝑑𝑡)2.
�⃗� = 𝑎𝑥𝑖 + 𝑎𝑦𝑗 + 𝑎𝑧 �⃗⃗�.
Pre veľkosť a smer vektora zrýchlenia platí to isté, čo pre rýchlosť:
𝑎 = |�⃗�| = √𝑎𝑥2 + 𝑎𝑦
2 + 𝑎𝑧2,
cos = ax /a, cos = ay /a, cos = az /a.

2. Krivočiary pohyb
Vektor okamžitého zrýchlenia �⃗� v danom bode A dráhy rozložíme do dvoch zložiek a to do
smeru dotyčnice k dráhe, ktoré nazývame tangenciálne zrýchlenie 𝒂𝝉⃗⃗⃗⃗⃗, a do smeru do stredu
krivosti dráhy, ktoré nazývame normálové alebo dostredivé zrýchlenie 𝒂𝒏⃗⃗ ⃗⃗ ⃗.
Platí: �⃗� = 𝑎𝜏⃗⃗⃗⃗⃗ + 𝑎𝑛⃗⃗ ⃗⃗⃗ ,
pre veľkosť platí: 𝑎 = √𝑎𝜏2 + 𝑎𝑛
2 ,
pre uhol , t.j uhol medzi výsledným zrýchlením a tangenciálnym zrýchlením platí:
𝑡𝑔 𝛼 =𝑎𝑛
𝑎𝜏.
Podľa obr. vyjadríme: 𝑎𝜏⃗⃗⃗⃗⃗ = 𝑎𝜏 ∙ 𝜏, 𝑎𝑛⃗⃗ ⃗⃗⃗ = −𝑎𝑛 ∙ �⃗�, kde 𝜏 a �⃗� sú jednotkové vektory
v príslušných smeroch, ktorých smer sa ale pohybom hmotného bodu mení.
Platí �⃗� = 𝑣 ∙ 𝜏, potom pre zrýchlenie dostaneme:
�⃗� =𝑑�⃗⃗�
𝑑𝑡=
𝑑(𝑣∙�⃗⃗�)
𝑑𝑡=
𝑑𝑣
𝑑𝑡𝜏 + 𝑣
𝑑�⃗⃗�
𝑑𝑡.
Zložka spadajúca do smeru vektora 𝜏 je tangenciálne zrýchlenie 𝒂𝝉⃗⃗⃗⃗⃗:
𝑎𝜏⃗⃗⃗⃗⃗ =𝑑𝑣
𝑑𝑡𝜏, 𝑎𝜏 =
𝑑𝑣
𝑑𝑡 .
0
�⃗�
�⃗�
𝜏
𝑎𝑛⃗⃗ ⃗⃗⃗
�⃗�
A
𝑎𝜏⃗⃗⃗⃗⃗
𝜏´
𝜏 d
A1
d
s
A1
A2
𝜏
𝜏´
ds
0

Časová zmena jednotkového vektora �⃗⃗� :
1. platí: 𝜏 ∙ 𝜏 = 1 → 𝑑(𝜏 ∙ 𝜏) = 2𝜏 ∙ 𝑑𝜏 = 0 → 𝜏 ⊥ 𝑑𝜏, pretože ani 𝜏 ani 𝑑𝜏 ≠ 0.
Zároveň platí: vektor 𝑑𝜏 je orientovaný proti vektoru �⃗�,
2. pre veľkosť vektora 𝑑𝜏 platí: |𝑑𝜏| = |𝜏| ∙ 𝑑𝛼 = 1 ∙ 𝑑𝛼,
3. platí: 𝑑𝑠 = 𝑟 ∙ 𝑑𝛼.
Porovnaním oboch výrazov dostaneme: |𝑑𝜏| =𝑑𝑠
𝑟 .
Potom: 𝑎𝑛⃗⃗ ⃗⃗⃗ = 𝑣𝑑�⃗⃗�
𝑑𝑡= 𝑣 (
𝑑𝑠
𝑟) . (
1
𝑑𝑡) . (−�⃗�) = −
𝑣2
𝑟. �⃗�, keďže
𝑑𝑠
𝑑𝑡= 𝑣.
Normálové zrýchlenie : 𝒂𝒏⃗⃗ ⃗⃗ ⃗ = −𝒗𝟐
𝒓. �⃗⃗⃗� , 𝒂𝒏 =
𝒗𝟐
𝒓 .
Z príslušných vzťahov pre 𝑎𝜏⃗⃗⃗⃗⃗ a 𝑎𝑛⃗⃗ ⃗⃗⃗ → tangenciálne zrýchlenie spôsobuje zmenu veľkosti
rýchlosti a normálové zrýchlenie spôsobuje zmenu smeru rýchlosti. Hlavnou jednotkou pre
zrýchlenie je ms-2
.
3. Uhlové veličiny:
používajú sa pri hodnotení krivočiareho pohybu: uhol �⃗⃗�, uhlová rýchlosť �⃗⃗⃗� a uhlové
zrýchlenie �⃗�.
Uhol je vektor, ktorého veľkosť je daná veľkosťou uhla a je orientovaný na tú stranu, z ktorej
sa utváranie uhla javí proti pohybu hodinových ručičiek (v smere jednotkového vektora �⃗⃗�):
𝑑�⃗⃗� = 𝑑𝜑. �⃗⃗�.
Vektor okamžitej uhlovej rýchlosti (uhlová rýchlosť): �⃗⃗⃗� =𝑑�⃗⃗⃗�
𝑑𝑡,
orientácia: smer vektora �⃗⃗�,
jednotka: rad.s-1
(s-1
)
Vektor uhlového zrýchlenia (uhlové zrýchlenie): �⃗� =𝑑�⃗⃗⃗⃗�
𝑑𝑡=
𝑑2�⃗⃗⃗�
(𝑑𝑡)2,
orientácia: smer vektora �⃗⃗�,
jednotka: rad.s-2
(s-2
).
Ak sú vektory �⃗⃗⃗� a �⃗� súhlasne orientované zrýchlené otáčanie, ak sú tieto dva vektory
orientované proti sebe spomalené otáčanie.
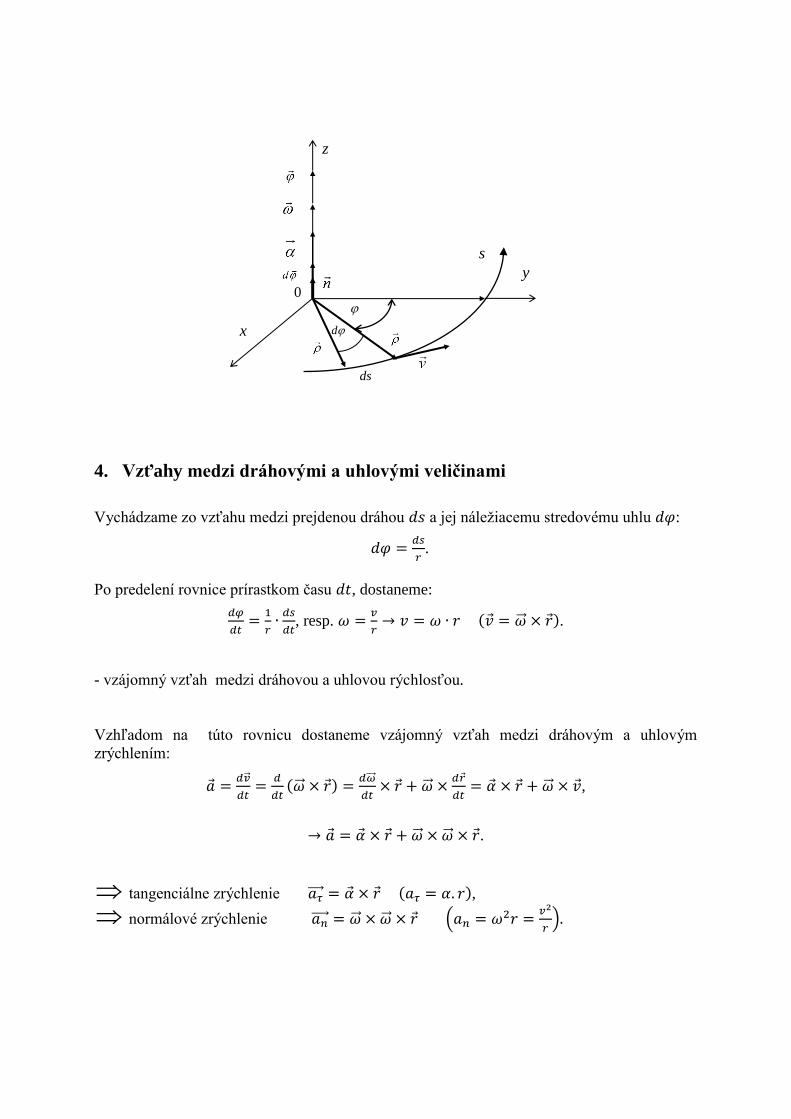
4. Vzťahy medzi dráhovými a uhlovými veličinami
Vychádzame zo vzťahu medzi prejdenou dráhou 𝑑𝑠 a jej náležiacemu stredovému uhlu 𝑑𝜑:
𝑑𝜑 =𝑑𝑠
𝑟.
Po predelení rovnice prírastkom času 𝑑𝑡, dostaneme:
𝑑𝜑
𝑑𝑡=
1
𝑟∙
𝑑𝑠
𝑑𝑡, resp. 𝜔 =
𝑣
𝑟→ 𝑣 = 𝜔 ∙ 𝑟 (�⃗� = �⃗⃗⃗� × 𝑟).
- vzájomný vzťah medzi dráhovou a uhlovou rýchlosťou.
Vzhľadom na túto rovnicu dostaneme vzájomný vzťah medzi dráhovým a uhlovým
zrýchlením:
�⃗� =𝑑�⃗⃗�
𝑑𝑡=
𝑑
𝑑𝑡(�⃗⃗⃗� × 𝑟) =
𝑑�⃗⃗⃗⃗�
𝑑𝑡× 𝑟 + �⃗⃗⃗� ×
𝑑𝑟
𝑑𝑡= �⃗� × 𝑟 + �⃗⃗⃗� × �⃗�,
→ �⃗� = �⃗� × 𝑟 + �⃗⃗⃗� × �⃗⃗⃗� × 𝑟.
tangenciálne zrýchlenie 𝑎𝜏⃗⃗⃗⃗⃗ = �⃗� × 𝑟 (𝑎𝜏 = 𝛼. 𝑟),
normálové zrýchlenie 𝑎𝑛⃗⃗ ⃗⃗⃗ = �⃗⃗⃗� × �⃗⃗⃗� × 𝑟 (𝑎𝑛 = 𝜔2𝑟 =𝑣2
𝑟).
d
ds
0
s
y
x
z

5. Niektoré jednoduché typy pohybov
Podľa trajektórie priamočiare (dráha je priamka),
krivočiare (dráha je krivka).
Podľa rýchlosti rovnomerné (veľkosť rýchlosti sa nemení),
nerovnomerné (veľkosť rýchlosti sa s časom mení).
5.1 Priamočiare pohyby
Vektor rýchlosti �⃗� a vektor zrýchlenia �⃗� ležia na spoločnej vektorovej priamke. Preto
na vyjadrenie pohybu nám postačia skalárne rovnice.
𝑣 =𝑑𝑠
𝑑𝑡, 𝑎 =
𝑑𝑣
𝑑𝑡=
𝑑2𝑠
(𝑑𝑡)2
→ 𝑣 = 𝑣0 + ∫ 𝑎(𝑡)𝑑𝑡𝑡1
𝑡0, 𝑠 = 𝑠0 + ∫ 𝑣(𝑡)𝑑𝑡
𝑡1
𝑡0
(𝑣0 – počiatočná rýchlosť, 𝑠0 – počiatočná poloha v čase 𝑡0 = 0)
rovnomerný priamočiary pohyb
𝑎 = 0 → 𝑣 = konšt. → 𝑠 = ∫ 𝑣𝑑𝑡 = 𝑣𝑡 + 𝑠0
rovnomerne zrýchlený (spomalený) priamočiary pohyb
𝑎 = 𝑘𝑜𝑛š𝑡. ≠ 0
→ 𝑣 = 𝑣0 + ∫ 𝑎𝑑𝑡𝑡
0= 𝑣0 + 𝑎𝑡
→ 𝑠 = 𝑠0 + ∫ 𝑣𝑑𝑡𝑡
0= 𝑠0 + ∫ (𝑣0 + 𝑎𝑡 )𝑑𝑡
𝑡
0= 𝑠0 + 𝑣0𝑡 +
𝑎𝑡2
2
Ak 𝑎 > 0 - rovnomerne zrýchlený pohyb
𝑣 = 𝑣0 + 𝑎𝑡 𝑠 = 𝑠0 + 𝑣0𝑡 +𝑎𝑡2
2,
𝑎 < 0 - rovnomerne spomalený pohyb
𝑣 = 𝑣0 − |𝑎|𝑡 𝑠 = 𝑠0 + 𝑣0𝑡 −|𝑎|𝑡2
2.
nerovnomerne zrýchlený priamočiary pohyb
𝑎 ≠ 𝑘𝑜𝑛š𝑡. → 𝑣 = 𝑣0 + ∫ 𝑎(𝑡)𝑑𝑡𝑡1
𝑡0, 𝑠 = 𝑠0 + ∫ 𝑣(𝑡)𝑑𝑡
𝑡1
𝑡0

Špeciálne priamočiare pohyby - priamočiare pohyby s tiažovým zrýchlením
- pohyb s konštantným zrýchlením a = tiažovému zrýchleniu g (g = 9,81 ms-2
).
A) voľný pád: 𝑣0 = 0, 𝑎 = 𝑔 = 9,81 ms-2
V bode A: 𝑣𝑦⃗⃗⃗⃗⃗ = −𝑔𝑡𝑗, 𝑦 = ℎ −1
2𝑔𝑡2,
dráha a veľkosť rýchlosti: 𝑣 = 𝑔𝑡, 𝑠 =1
2𝑔𝑡2,
čas dopadu, rýchlosť dopadu vypočítame z podmienky 𝑦 = 0.
B) zvislý vrh nadol: 𝑣0 ≠ 0, 𝑎 = 𝑔 = 9,81 ms-2,
- pohyb zvisle nadol s počiatočnou rýchlosťou v0,
- v bode A:
rýchlosť: vy⃗⃗ ⃗⃗ = −(𝑣0 + gt)j⃗ , vy = 𝑣0 + gt ,
súradnica: y = h −1
2gt2 − 𝑣0𝑡,
prejdená dráha: s =1
2gt2 + 𝑣0𝑡.
C) zvislý vrh nahor: 𝑣0 ≠ 0, 𝑎 = 𝑔 = 9,81 ms-2,
- rovnomerne spomalený priamočiary pohyb,
bod A
rýchlosť: vy⃗⃗ ⃗⃗ = (𝑣0 − gt)j⃗ , vy = 𝑣0 − gt ,
prejdená dráha: 𝑠 = 𝑦 = 𝑣0𝑡 −1
2gt2.
bod B – maximálna dosiahnutá výška
z podmienky 𝑣 = 0 vypočítame čas dosiahnutia
maximálnej výšky a dosiahnutú maximálnu výšku
𝑡 =𝑣0
𝑔 , ℎ =
1
2.
𝑣02
𝑔.
y
y
h
v0 = 0
s
𝑣y⃗⃗ ⃗⃗
A
0
A
B
𝑣y⃗⃗ ⃗⃗
𝑣0⃗⃗⃗⃗⃗ 𝑦 = 𝑠
ℎmax
0
𝑦

5.2 Krivočiare pohyby
Pohyb po kružnici
HB opisuje dráhu tvaru kružnice o polomere 𝑅 = |𝑟|. Stredom kružnice kolmo k jej rovine
prechádza tzv. os otáčania (rotácie).
Platí: 𝑑𝜑 =𝑑𝑠
𝑟, 𝜔 =
𝑑𝜑
𝑑𝑡, 𝛼 =
𝑑𝜔
𝑑𝑡 → 𝜔 = 𝜔0 + ∫ 𝛼𝑑𝑡
𝑡
0, 𝜑 = 𝜑0 + ∫ 𝜔(𝑡)𝑑𝑡
𝑡
0.
Rovnomerný pohyb po kružnici 𝛼 = 0, 𝜔 = konšt.
→ 𝜑 = 𝜑0 + ∫ 𝜔𝑑𝑡𝑡
0= 𝜑0 + 𝜔𝑡.
𝜑0 - integračná konštanta (počiatočný uhol).
obvodová rýchlosť (𝑣 = 𝜔𝑟) je konštantná 𝑇 = konšt. (T - perióda pohybu – čas
jedného obehu)
𝑇 =𝑠
𝑣=
2𝜋𝑅
𝑣=
2𝜋
𝜔
frekvencia kruhového pohybu 𝑓 =1
𝑇=
𝜔
2𝜋
- ak 𝑡 > 𝑇 (t - celkový čas pohybu) HB vykoná určitý počet otáčok N:
𝑁 =𝜑
2𝜋= ∫ 𝑓𝑑𝑡
𝑡2
𝑡1
→ 𝑎𝜏 = 0, 𝑎𝑛 =𝑣2
𝑅= 𝜔2𝑅 → 𝑎 = 𝑎𝑛
Nerovnomerný pohyb po kružnici
A) Rovnomerne zrýchlený pohyb po kružnici 𝛼 = konšt. ≠ 0
- ak 𝛼 > 0 (𝛼 < 0) - rovnomerne zrýchlený (spomalený) pohyb po kružnici,
→ 𝜔 = 𝜔0 + ∫ 𝛼𝑑𝑡𝑡
0= 𝜔0 + 𝛼𝑡,
→ 𝜑 = ∫ 𝜔𝑑𝑡𝑡
0= ∫ (𝜔0 + 𝛼𝑡)𝑑𝑡
𝑡
0= 𝜑0 + 𝜔0𝑡 +
1
2𝛼𝑡2.
Počet otáčok do zastavenia: 𝑁 =𝜑
2𝜋 .
→ 𝑎𝜏 = 𝛼𝑅 = 𝑘𝑜𝑛š𝑡. ≠ 0, 𝑎𝑛 =𝑣2
𝑅= 𝜔2𝑅,
→ �⃗� = 𝑎𝜏⃗⃗⃗⃗⃗ + 𝑎𝑛⃗⃗ ⃗⃗⃗, 𝑎 = √𝑎𝜏2 + 𝑎𝑛
2.

B) Nerovnomerne zrýchlený pohyb po kružnici 𝛼 ≠ konšt.
→ 𝜔 = 𝜔0 + ∫ 𝛼𝑑𝑡𝑡
0,
→ 𝜑 = ∫ 𝜔𝑑𝑡𝑡
0.
krivočiare pohyby s tiažovým zrýchlelním
A) vodorovný vrh
- pohyb zložený z dvoch priamočiarych pohybov:
- rovnomerný pohyb vo vodorovnom smere s rýchlosťou 𝑣0,
- voľný pád vo zvislom smere.
- okamžitá rýchlosť HB: �⃗� = 𝑣0𝑖 − 𝑔𝑡𝑗,
veľkosť rýchlosti 𝑣 = √𝑣02 + 𝑔2𝑡2 .
zložky vektora rýchlosti 𝑣𝑥 = 𝑣0, 𝑣𝑦(𝑡) = 𝑔𝑡,
- zložky polohového vektora 𝑟(𝑡) = 𝑥(𝑡)𝑖 + 𝑦(𝑡)𝑗: 𝑥(𝑡) = 𝑣0𝑡, 𝑦(𝑡) = ℎ −1
2𝑔𝑡2.
- uhol 𝛼 - tg𝛼 =𝑔𝑡
𝑣0 ,
- z podmienky dopadu HB (𝒚(𝑡) = 𝟎) čas dopadu 𝑡D, za ktorý teleso dopadne
na zemský povrch 𝑡D = √2ℎ
𝑔 ,
- miesto dopadu na osi 𝑥 - vodorovný dolet HB: 𝑥D = 𝑣0√2ℎ
𝑔 ,
- rýchlosť pri dopade: 𝑣 = √𝑣02 + 2𝑔ℎ .
B) šikmý vrh nahor
- pohyb HB vzhľadom na zemský povrch pod uhlom 𝛼,
- pohyb zložený z dvoch priamočiarych pohybov,
𝑥D
h
y
0 x
0v
A

- počiatočná rýchlosť 𝑣0⃗⃗⃗⃗⃗ sa rozkladá na zložky: 𝑣0𝑥 = 𝑣0cos𝛼, 𝑣0𝑦 = 𝑣0sin𝛼,
- zložený pohyb:
- rovnomerný pohyb rýchlosťou 𝑣0𝑥 vo vodorovnom smere,
- zvislý vrh nahor s počiatočnou rýchlosťou 𝑣0𝑦.
- zložky vektora rýchlosti �⃗�(𝑡) = 𝑣𝑥𝑖 + 𝑣𝑦(𝑡)𝑗 :
𝑣𝑥 = 𝑣0cos𝛼, 𝑣𝑦(𝑡) = 𝑣0sin𝛼 − 𝑔𝑡 .
- polohový vektor 𝑟(𝑡) = 𝑥(𝑡)𝑖 + 𝑦(𝑡)𝑗:
𝑥(𝑡) = 𝑣0t cos𝛼, 𝑦(𝑡) = 𝑣0t sin𝛼 −1
2𝑔𝑡2.
- veľkosť rýchlosti HB: 𝑣 = √(𝑣0cos𝛼)2 + (𝑣0sin𝛼 − 𝑔𝑡)2 .
- HB sa pohybuje po parabole.
- v bode A HB kulminuje vektor okamžitej rýchlosti je súhlasne rovnobežný s osou x
𝑣𝑦(𝑡) = 0 (v bode A) čas kulminácie 𝑡V =𝑣0sin𝛼
𝑔.
- po dosadení 𝑡V do rovnice pre 𝑦(𝑡) dostaneme:
- maximálnu výšku výstupu ℎV =(𝑣0sin𝛼)2
2𝑔,
- maximálny dolet 𝑥D po dosadení 2. 𝑡V do rovnice pre 𝑥(𝑡): 𝑥𝐷 =𝑣0
2𝑠𝑖𝑛2𝛼
𝑔.
- rýchlosť dopadu má rovnakú hodnotu ako rýchlosť vrhu.
0
ℎV
𝑥D
−𝑣0𝑦⃗⃗ ⃗⃗ ⃗⃗⃗
x
y
A
B
𝛽
𝑣0⃗⃗⃗⃗⃗
𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗ 𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗
𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗
𝑣0𝑦⃗⃗ ⃗⃗ ⃗⃗⃗
𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗
𝑣𝑦⃗⃗⃗⃗⃗
�⃗�
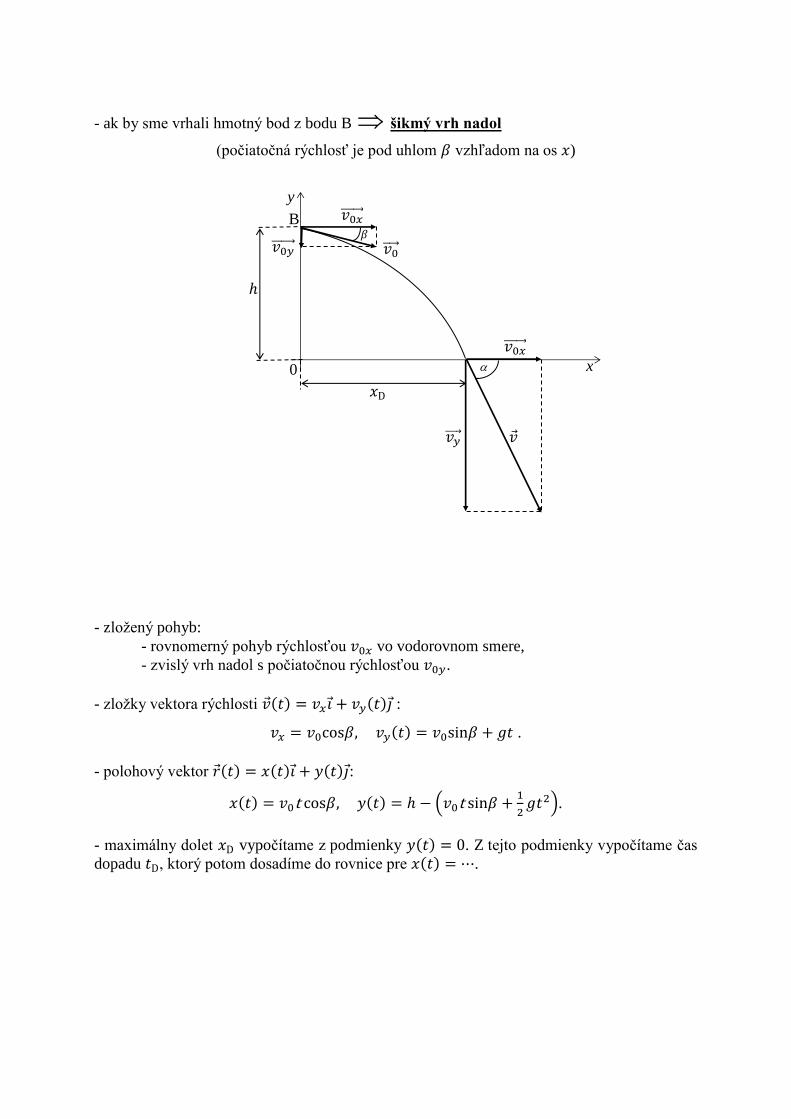
- ak by sme vrhali hmotný bod z bodu B šikmý vrh nadol
(počiatočná rýchlosť je pod uhlom 𝛽 vzhľadom na os 𝑥)
- zložený pohyb:
- rovnomerný pohyb rýchlosťou 𝑣0𝑥 vo vodorovnom smere,
- zvislý vrh nadol s počiatočnou rýchlosťou 𝑣0𝑦.
- zložky vektora rýchlosti �⃗�(𝑡) = 𝑣𝑥𝑖 + 𝑣𝑦(𝑡)𝑗 :
𝑣𝑥 = 𝑣0cos𝛽, 𝑣𝑦(𝑡) = 𝑣0sin𝛽 + 𝑔𝑡 .
- polohový vektor 𝑟(𝑡) = 𝑥(𝑡)𝑖 + 𝑦(𝑡)𝑗:
𝑥(𝑡) = 𝑣0t cos𝛽, 𝑦(𝑡) = ℎ − (𝑣0t sin𝛽 +1
2𝑔𝑡2).
- maximálny dolet 𝑥D vypočítame z podmienky 𝑦(𝑡) = 0. Z tejto podmienky vypočítame čas
dopadu 𝑡D, ktorý potom dosadíme do rovnice pre 𝑥(𝑡) = ⋯.
ℎ
𝑥D
0 x
y
𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗
𝑣𝑦⃗⃗⃗⃗⃗ �⃗�
𝛽
𝑣0⃗⃗⃗⃗⃗
𝑣0𝑥⃗⃗ ⃗⃗ ⃗⃗⃗ B
𝑣0𝑦⃗⃗ ⃗⃗ ⃗⃗⃗





























