Embed Size (px)
DESCRIPTION
Improving the Capacity of Tire Normal Force via Variable Stiffness and Damping Suspension System
Citation preview

Available online at www.sciencedirect.com
Journal
www.elsevier.com/locate/jterra
Journal of Terramechanics 50 (2013) 121–132
ofTerramechanics
Improving the capacity of tire normal force via variable stiffnessand damping suspension system
Yanhai Xu a,b,⇑, Mehdi Ahmadian b
a School of Automobile and Transportation Engineering, Xi Hua University, Chengdu, PR Chinab Center for Vehicle Systems and Safety, Virginia Polytechnic Institute and State University, VA, USA
Received 19 January 2012; received in revised form 3 February 2013; accepted 15 March 2013Available online 22 April 2013
Abstract
Tire normal force of a vehicle equipped with a variable stiffness and damping (VSVD) suspension system is studied via numericalsimulation in this paper. The main purpose of the paper is to illustrate the effects of VSVD suspension system on the capacity of tirenormal force. Firstly, a modified suspension system and its variable stiffness and damping characteristics are presented based on a con-ventional suspension system. With the application of adjustable suspension system in vehicle, the effects of equivalent stiffness of suspen-sion system on vehicle performance are analyzed by the term of load transfer at tires when cornering. By using a reference model, asimple on/off control strategy is developed to improve normal forces at tires and a fuzzy control strategy to model Direct Yaw momentControl (DYC) based on yaw rate is also developed to show the required longitudinal force. Finally, numerical simulations are carriedout to demonstrate the important role of VSVD in improving tire normal force and then ameliorating vehicle lateral stability. It is shownfrom the results that the normal force at tires can be increased through the application of VSVD suspension system. It also indicates thatDYC would be much efficient when implementing this system.� 2013 ISTVS. Published by Elsevier Ltd. All rights reserved.
Keywords: Tire normal force; Vehicle lateral stability; Variable stiffness and damping
1. Introduction
Vehicle stability includes the holding ability between tireand road and anti-rollover ability. Nowadays, more andmore vehicles are liable to lose stability because of theincreasing running speed or emergency turning. In fact,due to the height of the centre of gravity, SUVs are liableto roll over and many strategies and devices are developedto prevent them from rolling motion. Vehicle lateral stabil-ity means vehicle’s motion cannot keep in the track as thedemand of driver’s steering action. This is induced by thechange of force generated by contact patch between tireand road. If the amount of resultant force in longitudinal
0022-4898/$36.00 � 2013 ISTVS. Published by Elsevier Ltd. All rights reserve
http://dx.doi.org/10.1016/j.jterra.2013.03.003
⇑ Corresponding author at: School of Automobile and TransportationEngineering, Xi Hua University, P.R.China. Tel.: +1 862887720534.
E-mail addresses: [email protected], [email protected] (Y. Xu).
and lateral directions has a margin to its saturation, vehiclecan keep its track as intention.
In emergency turn, a larger lateral force is needed thanduring a normal turn. In this case, lateral forces at oneor two tires would be saturated. But the other tires havepotential and have margins to be saturated. It indicatesthat vehicle stability can be improved by coordinating theforces acting at different tires. The effective way is to redis-tribute or share the forces at tires rationally. From tirecharacteristics, longitudinal force usually has a margin toits saturation, even when lateral forces are close to satura-tion. Under such conditions, redistributing or sharing lon-gitudinal tire forces is an effective method to affect vehiclelateral motion. The obvious evidence of vehicle lateral sta-bility is the difference of actual track and demanded one.The phenomenon is depicted by understeer (US) or over-steer (OS). The target of DYC directly controls yawmoment by generating differential longitudinal forces on
d.

122 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
left and right tires, especially the tire on one side of thevehicle. This adjustment will give a corrective moment tothe vehicle and compensate the yaw motion and keep vehi-cle’s actual track to driver’s intended direction.
Although adjusting the forces between longitudinal andlateral directions to improve vehicle lateral stability iswidely used in automobile engineering, it is noticed thatdirect yaw moment control obviously relies on tire longitu-dinal force and it strongly depends on tire vertical load androad conditions which are very sensitive to vehicle motions.In negotiating a curve, normal forces at tires are alwayschanged and have to be transferred from inside to outsidetires. The amounts depend on driver’s steering action anddynamic parameters of the vehicle. If the amount of loadtransfer is large enough, it would cause the adjustmentbetween longitudinal and lateral forces false.
At the same time, many intelligent suspension systemssuch as semi-active and active suspension systems aredeveloped for the purpose of ride comfort and handlingperformances. Because suspension system plays a vital rolein normal forces at tires, it can be used to adjust theamounts of normal forces and improve the potential ofnormal forces. Actually, because the parameters of conven-tional suspension system cannot be changed, it cannot beused for further control of normal forces. But semi-activeor active suspension systems are capable to change theirparameters such as stiffness and damping coefficient.
Another attention is that most studies use a linear tiremodel with nominal cornering stiffness. Due to tire satura-tion property, tire forces are no longer linearly propor-tional to slip angles when lateral acceleration is large. Onthe other side, the change of tire normal load such as loadtransfer from inside to outside tires also affects tirecharacteristics.
The purpose of the paper is to develop a variable stiff-ness and damping suspension system and implement it toincrease the capacity of tire normal force and then improvevehicle lateral stability. The layout of the paper is follow-ing. A brief literature review is presented in Section 2. Sec-tion 3 demonstrates the principle and the characteristics ofthe developed VSVD suspension system. In Section 4, theeffects of suspension system stiffness on load transfer ornormal force at tires are analyzed in detail. A control strat-egy is given in the following Section 5. Finally, a simulationplant with 10 DOFs and nonlinear tire model are listed fornumerical simulations. The validation of the proposedVSVD suspension system is illustrated and evaluated bysimulation results and detail analysis in Section 6.
2. Literature review
There exists many literature on research of vehicle lat-eral stability. Most of them focus on the development ofactive safety systems such as DYC and the efficiency of thissystems. In a emergency turning maneuver where tireforces are approaching saturation or physical limit of roadadhesion, vehicle sideslip angle grows and yaw rate can no
longer track the demand. So, yaw rate and sideslip angleare found out to represent the quality of vehicle lateralmotion [1]. With these dynamic parameters, the followingis to derive control law. It is shown that the controller ismuch effective without excessively large external yawmoment [2]. Another type of control strategy to improvelateral stability is active front wheel steering. In [3], itclaimed to provide robust relaxation of sideslip angle whilemaintaining vehicle yaw stability. In severe turning situa-tion, it is not easy to determine how much longitudinaland lateral forces are required for each tire in order toobtain target lateral force and yaw moment. This is becauseof the interaction between vehicle’s lateral and longitudinaldynamics. In [4], it investigates the effectiveness of weight-ing coefficients adaptation in simultaneous optimum distri-bution of lateral and longitudinal tire forces forimprovement of vehicle handling and stability.
In vibration research, variable stiffness and dampingsystem is one of the focuses because it is much effectiveto isolate vibration [5,6]. Although it is easy and direct tocontrol in mathematic models, it is hard to realize by usingconventional devices. Semi-active suspension is used inautomobile engineering with a continuous variable damperby adjusting valve opening to change its orifice passagearea [7]. In [8], the vibration isolation performance hasbeen investigated for a vehicle system supported on a dam-per controlled variable spring stiffness suspension system.With the development of intelligent suspension system,many smart materials are used to obtain the performanceof variable damping [9–11]. Variable damping devices havebeen created using magnetorheological elastomers (MREs)[12]. At the same time, variable stiffness concepts have beenwidely studied for a variety of vibration control applica-tions. Literature [13] proposes a Voigot element to achievevariable spring stiffness by using variable damper alongwith springs connected in series. In addition, a MR fluidbased variable stiffness damper is developed and its appli-cation is analyzed in vibration suppression in [4]. BecauseMR fluids can rapidly modify their flow characteristics inresponse to magnetic field, they can be used to createsemi-active dampers to enhance vibration control in vehiclesuspensions [14].
Tire behavior plays an important role in vehicledynamics. For simplicity and effectiveness, semi-empiricaltire models are widely used in vehicle simulation modelsto predict forces between tire and road. In severe turning,vehicle dynamic performance becomes nonlinear and theforce generated between tire and road begins to be satu-rated. Fortunately, there are many tire models with theability to predict the forces with nonlinearity. Magic For-mula tire model is one of semi-empirical tire models whichdescribes tire behavior quite accurately with a set ofparameters [15]. The difficulty is the set of parametersapplied in the model. A new method based on genetictechniques is used to determine these parameters withvalidity [16]. Another is Dugoff’s tire model based onthe friction ellipse idea [17].

Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132 123
In general, although there are many advancedresearches on vehicle lateral stability, many of them paytheir attentions on control strategies with different controltheories. But the point is how to share forces between frontand rear axles or forces in normal and lateral directions.The efficiency of DYC depends mostly on longitudinalforces at outside tire of front axle in OS or at inside tireof rear axle in US based on the principle of DYC. But forceat inside tire of rear axle will be saturated or approachphysical limit when in severe cornering maneuver becausetire load at inside tire is transferred to outside. This leavesa challenge to improve vehicle lateral stability withoutenough normal forces in such case and the key is how tocoordinate the performance of intelligent suspension sys-tem and the performance of vehicle lateral stability. There-fore, it is a part of integrated chassis control in vehicledynamics. Another item is the effects of normal force onthe cornering behavior of tire, especially, the corneringcoefficients. In this case, it need a much accurate tire modelto account for the influence of normal force change becauseconventional linear cornering stiffness cannot be used todescribe the nonlinear characteristics of tire when it runsin a severe turning.
3. Suspension system with variable stiffness and damping
Systems with variable characteristics are developed toisolate or alleviate vibration because of the uncertaintiesof excitation such as the action of road profile on tires inmany literatures. The simple idea to develop a system withvariable characteristics is to change the stiffness or damp-ing coefficient of the system directly. This variable stiffnessor damping systems are widely used in automobile engi-neering. The typical systems with variable stiffness ordamping are semi-active or active suspension systems. Inthe paper, the main purpose of using variable stiffnessand damping (VSVD) suspension system is not to mitigateexcitation on ride comfort but to improve the capacity oftire normal force and then ameliorate vehicle lateralstability.
k2
zs(t)
ms
k1
c
zr(t)
zu(t)
Fig. 1. Suspension system model.
In order to illustrate the basic performance of variablestiffness and damping suspension system, a system with sin-gle degree of freedom is given in Fig. 1. In the model, thesuspension system consists of a set of parallel spring anddamper in upper part and a spring located in lower partwhich is in series with the upper set. The set of parallelspring and damper can be treated as conventional suspen-sion system such as a suspension strut. The lower springthat is in series with the upper set is an additional one.The aim of using the additional one is to obtain a suspen-sion system with variable stiffness performance. So the sus-pension system is a simple modification of a conventionalsuspension system.
The governing equations of the suspension system canbe depicted as
ms€zs þ c_zs þ kzs ¼ c_zr þ kzr ð1Þk1ðzr � zuÞ ¼ k2ðzs � zrÞ þ cð_zs � _zrÞ ð2Þwhere ms is sprung mass of the system. zu(t), zr(t) and zs(t)are the displacement of unsprung mass, the reference dis-placement and the response of sprung mass, respectively.k1 and k2 define the stiffnesses of the upper and lowersprings as shown in Fig. 1. c is the damping coefficient ofthe damper in the upper part.
The transfer function of the system can be written basedon governing equations of the suspension system as
HðxÞs�u ¼k1 � k2
1ðk1þk2Þ
ðk1þk2Þ2þc2x2þ i k2
1c
ðk1þk2Þ2þc2x2x
k1 � k1ðk1þk2Þðk1þk2Þ2þc2x2
� msx2 þ ik2
1c
ðk1þk2Þ2þc2x2x
ð3Þ
in which x is the circular frequency of excitation.When comparing the transfer function in Fig. 2 with the
one in Fig. 1, it can be drawn that the model shown inFig. 2 is the equivalent model in Fig. 1. Therefore, theequivalent stiffness and damping coefficient can beexpressed as
k0 ¼ k1 �k2
1ðk1 þ k2Þðk1 þ k2Þ2 þ c2x2
ð4Þ
c0 ¼ k21c
ðk1 þ k2Þ2 þ c2x2ð5Þ
zs(t)
ms
k'(c) c'(c)
zu(t)
Fig. 2. Equivalent model.

circular frequency / *2π rad/s damping coefficient / *103Ns/m
equi
vale
nt s
tiffn
ess
/ *10
3 N/m
Fig. 3. Equivalent stiffness along with circular frequency and damping coefficient.
circular frequency / *2π rad/s damping coefficient / *103Ns/m
Fig. 4. Equivalent damping coefficient along with circular frequency and damping coefficient.
124 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
Eqs. (4) and (5) give evidence that the equivalent stiff-ness and damping coefficient are variable along with thechange of circular frequency, the stiffnesses of springsand damping coefficient. Since the change of spring stiff-ness is difficult and complicated, the most important pointis that the equivalent stiffness and damping coefficient canbe controlled by the change of the damping coefficient c ofthe only damper in the system. It is much easier and moreviable to change damping coefficient of the system than thechange of spring stiffness. Based on this, a simple suspen-sion system with the ability of variable stiffness and damp-ing is constructed through modifying a conventionalsuspension system.
If the damping coefficient c is large enough, the equiva-lent stiffness of the system k
0will be k1 and the equivalent
damping coefficient of the system will be zero. If the damp-ing coefficient c tends to zero, the equivalent stiffness of thesystem k
0will be the value of the springs k1 and k2 in series.
The equivalent of stiffness of the system can vary in therange expressed in the following:
k1k2
k1 þ k2
6 k0 6 k1 ð6Þ
Figs. 3 and 4 present the equivalent stiffness and damp-ing coefficient of the system along with the change of circu-lar frequency and damping coefficient c. The original
damping coefficient of the only damper is 2546 Ns/m.The stiffness of the upper spring is 45286 N/m and the stiff-ness of the lower spring is eight times of the upper one’s.These parameters will be used in further simulation study.
Since the characteristics of the modified suspension sys-tem can be varied with the damping coefficient, the perfor-mance of vehicle such as tire normal force and lateralstability will be improved according to the change of thesecharacteristics. The key point is the control of the dampingcoefficient. The way to change the damping coefficient willbe extended in Section 6.
4. Effects of variable stiffness and damping suspension system
on tire load transfer
Vehicle performance is tightly connected with its subsys-tems as well as driver’s demands. Among these subsystems,suspension system is one of the important subsystems.When cornering, especially severe turning, load transferfrom inside to outside tires caused by lateral accelerationis large enough to impair vehicle characteristics. In general,the relationship of side force and normal force can bedepicted as linear. But it is not suitable with the linear rela-tionship because there is no margin and tends to be satu-rated in emergency maneuver. Along with this, normal

l lf
lr
tf
tr
hg
hs
FY
ϕ
k1,c1
k2,c2
k3,c3
k4,c4
Fy1
Fy2
Fy3
Fy4
hf
hr
sr
sf
Fig. 5. Force balance of vehicle when turning.
ms*ay*lf /l
h r
tr
sr
ΔWr ΔWr
ΔNr ΔNr
Fy3 Fy4
Fig. 6. Load transfer at tires of rear suspension system (rear view).
Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132 125
forces at inside tires are sharply lowered and they probablycan no longer provide needed side force. All of these willharm vehicle lateral stability because of the shortage ofholding ability. In this phenomenon, vehicle cannot keepits track and US or OS is induced. Moreover, althoughactive control system such as DYC will intervene, it canhardly keep the vehicle in its corrective track. This willbe extended in Section 5.
To demonstrate load transfer from inside to outside tiresin case of turning, force balance when cornering is given inFig. 5. When assuming a steady state maneuver of turningleft, sprung mass will roll around rolling axis with a rollingangle in counter clockwise (front view) under certain lateralacceleration. The resistance moment will generate via thedeformation of suspension system in which the inside isrebounded and the outside is compressed. The momentbalance around the rolling axis can be written as
ðkuf þ kurÞu ¼ msayhs þ msghsu ð7Þwhere kuf and kur are the equivalent rolling stiffnesses offront and rear suspension systems, respectively. u is therolling angle. ms is the sprung mass. ay is the lateral accel-eration. hs is the distance from the center of sprung mass tothe rolling axis.
By rewriting Eq. (7), the rolling angle under the steadystate cornering is
u ¼ msayhs
kuf þ kur � msghsð8Þ
It is shown from Eq. (8) that the rolling angle can beaffected by the equivalent rolling stiffnesses of the suspen-sion system. The stiffer the suspension system, the less therolling angle will be.
Along with the deformation of inside and outside sus-pension system for generating resistance moment, loadtransfer from inside to outside tires happens. Generally,sprung mass can be broken into two parts, one for frontsuspension and the other for rear suspension. Then, centrif-ugal force would be divided into front and rear suspensionsystems according to the distances from the center of grav-ity to front and rear axles. This force balance of rear sus-
pension system is shown in Fig. 6. Due to thedisplacements in inside and outside suspension systems,reaction forces of the displacements are initial load trans-fer. It is distinct that the amounts of reaction forces aredetermined by lateral acceleration and relative physicalparameters of vehicle and the quantity of the rolling angleis affected by the equivalent stiffness in vertical besides lat-eral acceleration and the other parameters. The initial loadtransfer can be expressed as
DN f sf ¼ kuf u ð9ÞDN rsr ¼ kuru ð10Þin which DNf and DNr are the initial load transfer in frontand rear, respectively. sf and sr are the distances of frontand rear suspension mountings, respectively.
The initial load transfer can be shifted to inside and out-side tires in terms of the geometry of suspension system.Load transfer at inside and outside tires are the following
DW f tf ¼ hf msaylr=lþ DN f sf ð11ÞDW rtr ¼ hrmsaylf =lþ DNrsr ð12Þ
In which hf and hr are the distances of front and rearrolling axis to road. tf and tr are the track widths of frontand rear.
The above equations can be rewritten according to loadtransfer as
DW f ¼msay
tf
hs
1þ kur=kuf � msghs=kufþ lr
lhf
� �ð13Þ
DW r ¼msay
tr
hs
1þ kuf=kur � msghs=Kurþ lf
lhr
� �ð14Þ
Load transfer from inside to outside tires can be calcu-lated using the above equations. But the importance is thatthe amount of load transfer is affected by the equivalentrolling stiffnesses of front and rear suspension systems. Inother words, the normal stiffness of suspension systemplays a dominant role in load transfer at tires. So it givesthe fundamentals to improve tire normal force capacity

126 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
when using semi-active or active suspension systems suchas the mentioned suspension system with the performanceof variable stiffness and damping.
5. Control strategy
In terms of the difference of the actual track and thedesired track, the loss of vehicle lateral stability can be clas-sified into two distinct situations, US and OS. When onlylateral forces are considered, US is caused by lateral forcein front axle approaching to physical limit or saturationand OS is caused by lateral force in rear axle approachingto physical limit. In order to satisfy driver’s steering action,a corrective moment is added to vehicle and then the actualtrack of vehicle can be approximated to the desired one.The realization of corrective moment is differential brakingin related tires. According to the fundamentals of DYC,the effective tire to exert additional braking force is theinside tire of rear axle in the case of US and the effectivetire is the outside tire of front axle in the case of OS asshown in Fig. 7.
Actually, the resultant force of longitudinal and lateralforces cannot be larger than physical limit or saturationwhich is controlled by friction ellipse. So whether the addi-tional braking forces at tires can be obtained dependsstrongly on the redistribution of longitudinal and lateralforces.
On the other hand, it is a useful way to change physicallimit or saturation of tires such as increasing the potentialof normal force at tires. In the case of US, it needs to usethe inside tire of rear axle to generate additional longitudi-nal or braking force. But the physical limit is lowered dueto load transfer to outside tire. It puts an obstacle to thefurther use of control strategy of DYC. In the case ofOS, the assigned tire is the outside one of front axle. Thenormal force of the tire is increased in the situation. So itis capable to generate additional braking force. Based on
with DYC
without DYC
Desired track
Desired track
Understeer track
Oversteer track
Corrective moment
Corrective moment
US
OS
Fig. 7. Diagram of US and OS.
this analysis, the key is the normal force at inside tire ofrear axle.
The change of normal force at the tire is connected tothe performance of suspension system as mentioned in Sec-tion 4. With the implementation of variable stiffness anddamping suspension system, the rear tires can supply theneeded normal forces and strengthen the use of DYC.
By implementing the VSVD the change in normal forceson the tires can be minimized with a simple on/off controlstrategy which is presented in this paper. The lateral stabil-ity of the vehicle can then be subsequently be improvedwith the integration of the DYC and VSVD. The flowchartof control strategy is shown in Fig. 8. There are two partsin the flowchart. The lower part is related to the on/off con-trol of VSVD suspension system. The upper part is a simplefuzzy control for DYC. There are three vehicle models inFig. 8. Desired vehicle model is used to obtain desired vehi-cle dynamic parameters such as yaw rate for DYC control.Actual vehicle model A is to simulate vehicle status underthe control of DYC. Actual vehicle model B is used to sim-ulate vehicle status under the on/off control of VSVD. Anadditional vehicle model is used to simulate vehicle statuswithout any control. So we can compare these simulationresults on normal forces at tires.
A fuzzy control for DYC is used to keep actual trackclose to desired one. The basic parameters of DYC areyaw rate and sideslip angle. In this paper, only yaw rateis selected to obtain the additional or corrective momentto make actual track close to desired one. The inputs ofthe fuzzy control is the error of yaw rate Dxr and the rateof the error D _xr. The desired yaw rate is computed by a lin-ear vehicle model with 2 DOFs. The output is the requiredcorrective moment DMz. According to DYC, the correctivemoment is done by differential longitudinal or brakingforces in inside tire of rear axle or outside tire of front axle.In the paper, the corrective moment is converted to a brak-ing force through a braking model and the braking force isexerted to the assigned tires in vehicle model. At the sametime, the physical limit of tire or the resultant force at thetires are not considered in the application of correctivemoment generated by fuzzy control. But the maximum lon-gitudinal or braking force is assumed to be 1000 N.
The situation of vehicle such as US and OS can beobtained by the difference of yaw rate from actual vehicleand desired vehicle model. Table 1 presents the driver’ssteering action where a left turn is defined as a steeringwheel input angle of the lager than zero.
It is shown from the table that the situation of the vehi-cle is US when the input angle of steering wheel times theerror of yaw rate between actual track and desired one isless than zero. In OS, the product of the input angle ofsteering wheel and the error of yaw rate is larger than zero.
The on/off control strategy to improve tire normal forceor increase the potential of normal force is given in Table 2.The numbers 1, 2, 3 and 4 mean left front, right front, leftrear and right rear tires, respectively. In situation of OS,additional braking force is generated in outside tire of front

Desired Vehicle Model
Actual Vehicle Model A
Actual Vehicle Model BOn/Off Control
VSVD Suspension System
DYC Control Driver's Demand
Math
Tire Model
Tire Model
δV δ ωrd
δ
δ
ωrΔωr
Δωr /Δt
Δωr
CiOn/Off
αi
αi
Fyi
Fyi
Fyi
Fyi
Fzi
Fzi
ΔMz
ΔMz
δ
Fig. 8. Flowchart of control strategy.
Table 1The situation of vehicle.
d xr and xrd Status d * Dxr
d > 0 xr > xrd OS >0xr < xrd US <0
d < 0 xr > xrd US <0xr < xrd OS >0
Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132 127
axle. Since normal force at outside tire is enough to providethe additional longitudinal force because of load transferfrom inside to outside, there is no control needed in thiscase. But in the case of US, the needed additional force isto be generated by inside tire. As demonstrated before,the inside tire cannot supply additional longitudinal forcebecause the lateral force is approaching to physical limitor saturation along with the lowering of normal force atthe tire. Then, the on/off control has to intervene andadjust the stiffness ratio of front and rear suspension sys-tems. This procedure is conducted by damping coefficientchange of the suspension system with variable stiffness
Table 2The on/off control strategy.
Status Product d The assigned tire
1 2 3 4
OS >0 >0 �<0 �
US <0 >0 �<0 �
and damping. Finally, the realization that changes thedamping coefficient of VSVD suspension system is throughMR damper, as described in the following section, with agiven current. The less the load transfer is, the more forcethe assigned tire can generate. The current to control thechange of MR damping force is not varied continuously.It is a step change to the given value under the control ofon/off switch.
In fact, we also can control the OS status through thestiffness ratio by using the characteristics of tires whichcan be affected by normal forces. So a combination ofDYC and stiffness ratio control can give a better controlto vehicle’s status. This is left to further research.
6. Simulation and analysis
The performance of improving the potential of normalforce at tire and strengthening vehicle lateral stability byusing variable stiffness and damping suspension system isevaluated through numerical simulations of vehicleresponse to a step steering wheel input. The simulation is
Axle Position Stiffness Approach On/off
F Outside Off
R Inside kuf/kur" c1, c2" On
slip angle /rad normal force /N
side
for
ce /N
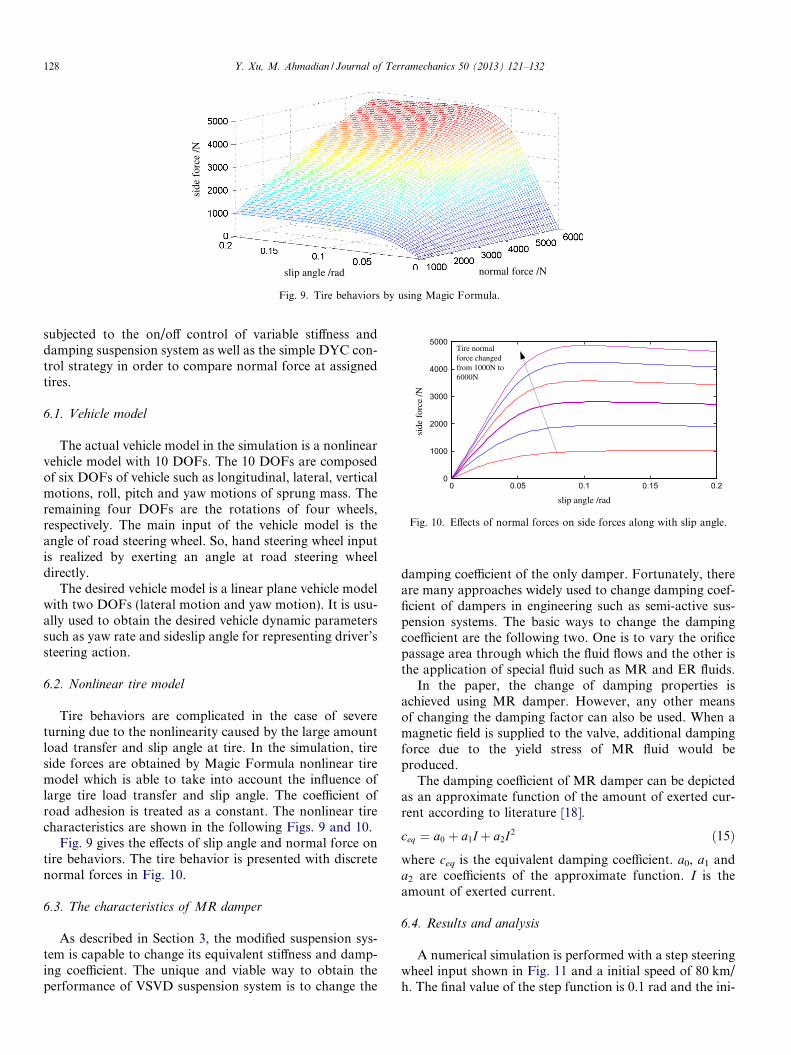
Fig. 9. Tire behaviors by using Magic Formula.
0 0.05 0.1 0.15 0.20
1000
2000
3000
4000
5000
slip angle /rad
side
for
ce /N
Tire normalforce changedfrom 1000N to6000N
Fig. 10. Effects of normal forces on side forces along with slip angle.
128 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
subjected to the on/off control of variable stiffness anddamping suspension system as well as the simple DYC con-trol strategy in order to compare normal force at assignedtires.
6.1. Vehicle model
The actual vehicle model in the simulation is a nonlinearvehicle model with 10 DOFs. The 10 DOFs are composedof six DOFs of vehicle such as longitudinal, lateral, verticalmotions, roll, pitch and yaw motions of sprung mass. Theremaining four DOFs are the rotations of four wheels,respectively. The main input of the vehicle model is theangle of road steering wheel. So, hand steering wheel inputis realized by exerting an angle at road steering wheeldirectly.
The desired vehicle model is a linear plane vehicle modelwith two DOFs (lateral motion and yaw motion). It is usu-ally used to obtain the desired vehicle dynamic parameterssuch as yaw rate and sideslip angle for representing driver’ssteering action.
6.2. Nonlinear tire model
Tire behaviors are complicated in the case of severeturning due to the nonlinearity caused by the large amountload transfer and slip angle at tire. In the simulation, tireside forces are obtained by Magic Formula nonlinear tiremodel which is able to take into account the influence oflarge tire load transfer and slip angle. The coefficient ofroad adhesion is treated as a constant. The nonlinear tirecharacteristics are shown in the following Figs. 9 and 10.
Fig. 9 gives the effects of slip angle and normal force ontire behaviors. The tire behavior is presented with discretenormal forces in Fig. 10.
6.3. The characteristics of MR damper
As described in Section 3, the modified suspension sys-tem is capable to change its equivalent stiffness and damp-ing coefficient. The unique and viable way to obtain theperformance of VSVD suspension system is to change the
damping coefficient of the only damper. Fortunately, thereare many approaches widely used to change damping coef-ficient of dampers in engineering such as semi-active sus-pension systems. The basic ways to change the dampingcoefficient are the following two. One is to vary the orificepassage area through which the fluid flows and the other isthe application of special fluid such as MR and ER fluids.
In the paper, the change of damping properties isachieved using MR damper. However, any other meansof changing the damping factor can also be used. When amagnetic field is supplied to the valve, additional dampingforce due to the yield stress of MR fluid would beproduced.
The damping coefficient of MR damper can be depictedas an approximate function of the amount of exerted cur-rent according to literature [18].
ceq ¼ a0 þ a1Iþ a2I2 ð15Þwhere ceq is the equivalent damping coefficient. a0, a1 anda2 are coefficients of the approximate function. I is theamount of exerted current.
6.4. Results and analysis
A numerical simulation is performed with a step steeringwheel input shown in Fig. 11 and a initial speed of 80 km/h. The final value of the step function is 0.1 rad and the ini-

0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
time /s
stee
ring
ang
le /r
ad
Fig. 11. Step steering wheel input.
0 1 2 3 4 5 670
75
80
85with DYCwith on/off control
time /s
long
itudi
nal s
peed
/km
/h
Fig. 13. Longitudinal speed.
Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132 129
tial time is set at 0.5 s in a total 6 s procedure. Because ofsimplicity, the step input is the angle of road steering wheel.
Vehicle’s tracks are presented in Fig. 12 with differentcontrol strategies. Red line shows desired track from linearvehicle model with two DOFs. The vehicle track with DYCcontrol is shown via dark green line. Blue line and purpleline show vehicle tracks with on/off control and withoutcontrol, respectively. It indicates that vehicle track withDYC control is close to desired track that represents thedemand of driver. With the corrective moment, the yawmotion of vehicle can be adjusted to the desired motion.But it is obtained without considering physical limit of tireor it is an ideal situation. By comparing the results of thefour tracks, the track under on/off control is not able toadjust yaw motion of vehicles because no additional longi-tudinal force is applied as DYC does. In fact, the intentionof the on/off control is not to adjust the yaw motion ofvehicle, but to improve normal force at tires and get amuch larger physical limit or saturation of tires. So it mustbe integrated with other control strategy such as DYC toimprove vehicle lateral stability. The track difference withand without the on/off control results in the change of tirenormal forces caused by the nonlinear tire characteristics.This will be explained in the analysis of Figs. 18 and 19.
Fig. 12 also gives the information of vehicle longitudinalmotion. Because braking force is exerted at an assignedtire, the longitudinal motion of vehicle is restrained bythe braking force. It is shown in the displacements in X
and Y directions. The track is shorter in X direction thanthose without longitudinal or braking force. This also can
0 20 40 60 80 100 120 1400
10
20
30
40
50
60desired trackwith DYCwith On/Off controlwithout control
disp
lace
men
t in
Y /m
displacement in X /m
Fig. 12. Comparison of tracks.
be found in Fig. 13 where the changes of longitudinalspeeds are presented. The speed represented by dark greenline is under DYC control and the other is under on/offcontrol. The speed with on/off control means that vehiclemotion is only subjected to variable stiffness and dampingsuspension systems and without braking force.
At the same time, it is obvious that the status of vehiclein the severe turning is US through the comparison of redline and purple line in Fig. 12. In this situation, the correc-tive moment has to be generated by longitudinal or brakingforce at inside tire of rear axle.
Usually, dynamic parameters of vehicle stability controlare yaw rate and sideslip angle. The DYC control strategyused in the paper is a simple fuzzy control which only takesaccount of yaw rate. The inputs of control strategy are theerror of yaw rate and the change rate of the error. Theerror is the difference between yaw rates from actual vehiclemodel and desired vehicle model. This means that it is a sit-uation of US if the error is less than zero and it is OS statusif the error is larger than zero.
The error of yaw rate is given in Fig. 14 when in turningof the step input. The corrective moment of DYC control iscaused by braking force in assigned tire in terms of controlstrategy. The corrective moment is transferred to brakingforce with the application of a classic braking model. Inthe procedure, it composes of US and OS situations andthe control of DYC needs to adjust more tires such as out-side tire for OS and inside tire for US. In the paper, thelargest braking force is assumed to be 1000 N.
0 1 2 3 4 5 6-0.015
-0.01
-0.005
0
0.005
0.01
0.015
time /s
erro
r of
yaw
rat
e /r
ad/s
Fig. 14. Error of yaw rate.

0 1 2 3 4 5 6-1000
-500
0
500
brak
ing
forc
e /N
time /s
Fig. 15. Braking force at outside tire of front axle.
0 1 2 3 4 5 6-1000
-500
0
500
brak
ing
forc
e /N
time /s
Fig. 16. Braking force at inside tire of rear axle.
0 1 2 3 4 5 6-3000
-2000
-1000
0
1000
2000
3000
time /s
side
for
ce /N
the lower bound
the upper bound
Fig. 17. Side force at inside tire of rear axle and its bounds.
0 1 2 3 4 5 62000
2500
3000
3500
4000
4500with on/off controlwithout on/off control
norm
al f
orce
/N
time /s
Fig. 18. Normal force at inside tire of rear axle.
0 1 2 3 4 5 62000
2500
3000
3500
4000
4500
with on/off controlwithout on/off control
norm
al f
orce
/N
time /s
Fig. 19. Normal force at outside tire of rear axle.
130 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
The additional braking forces are presented in Figs. 15and 16. Braking force at outside tire of front axle is shownin Fig. 15 and braking force at inside tire of rear axle isshown in Fig. 16. Braking forces at these tires areresponded to the error of yaw rate in Fig. 14. In fact, thesituation of vehicle will become US in some extent becausetire side forces will decrease when longitudinal forceincreases. Therefore, the actual track under DSC shouldhave a larger difference to desired track than present shownin Fig. 12. In other words, the dark green line will be closeto the purple one. The reason is that the maximum longitu-dinal force is limited by tire normal force.
The main purpose of the paper is to enlarge the capacityof tire normal force through the application of VSVD sus-pension system and this will give a much effective use ofDYC. As mentioned before, the assigned tire to generateadditional braking force is the outside tire of front axlein situation of OS and the assigned tire is the inside tireof rear axle in US. It is also obvious that the potential ofnormal force at outside tire is large enough. So the controlof DYC can be efficient in this case. Unfortunately, it willno longer do well if the assigned tire is the inside one ofrear axle duo to large load transfer to outside.
Fig. 17 shows side force at inside tire of rear axle with itsupper and lower bounds under the control of DYC. Theside force is from the nonlinear tire model of Magic For-mula. The upper and lower bounds are set to 80% of tirenormal force. It also indicates that the force at the tire isapproaching to saturation and it cannot provide any addi-
tional longitudinal force. Actually, the maximum longitu-dinal force will be less than the assumed value 1000 N inprevious section.
The change of normal force at the inside tire is shown inFig. 18. It presents the decreasing procedure in the turning.Along with the decreasing, the tire can no longer giveenough additional braking force due to physical limit. Sothe efficiency of DYC must be deteriorated by thedecreased normal force. With the application of VSVD sus-pension system, the normal force at the tire in the sameprocedure is given by blue line. By comparing blue linewith purple line, the suspension system with VSVD behav-ior can adjust normal force and will ensure the validity ofDYC. The amount of increased normal fore is close to

0 1 2 3 4 5 60
500
1000
1500
without on/off controlwith on/off control
time /s
side
for
ce /N
Fig. 20. The side force at inside tire of rear axle.
0 1 2 3 4 5 60
5
10 x 104
0 1 2 3 4 5 60
5
10 x 104
dam
ping
coe
ffic
ient
/Ns/
m
time /s
front suspension system
rear suspension system
Fig. 22. The damping coefficients at front and rear suspension systems.
Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132 131
1200 N. The normal force at outside tire of rear axle isshown in Fig. 19. Normal force at the tire will be increaseddue to load transfer and it is changed with the use of on/offcontrol to VSVD suspension system. The decrease in thenormal force at the tire does not affect the status of the tirebecause it is not the assigned tire to generate the neededadditional force for corrective moment.
Fig. 18 describes the load transfer from inside to out-side. In on/off control, the amount of tire load transferfrom inside to outside tire is less than the situation withouton/off control. So, the total cornering stiffness of rear axleafter control is larger than the value before control. There-fore, the situation of vehicle tends to be US. This can beseen in Fig. 12 when comparing the track from on/off con-trol with the one without control. The difference of thetracks can be eliminated by using the tires that the perfor-mance of lateral stiffness is not affected by tire normalforce.
In order to illustrate the role of normal force on vehiclestability, Figs. 20 and 21 give the side forces at inside andoutside tires of rear axle with and without on/off control,respectively. It is shown from Figs. 20 and 21 that the sideforces are increasing under no on/off control. When com-paring Figs. 18 with 20, Fig. 18 shows the decreasing ofnormal force and Fig. 20 shows the increasing of side force.This indicates that the vehicle is in the situation of loss ofstability due to the approaching tire physical situationand can no longer supply additional longitudinal forcefor corrective moment as the requirement of DYC control.
0 1 2 3 4 5 60
500
1000
1500
without on/off controlwith on/off control
time /s
side
for
ce /N
Fig. 21. The side force at outside tire of rear axle.
On the contrary, the changes of normal force and side forceare small under on/off control. So it is capable to provideadditional longitudinal force to generate correctivemoment in order to keep vehicle stable.
The on/off control on VSVD suspension system is real-ized by adjusting the damping coefficient of dampers in thesystem. The detail on/off control is discussed in Table 2 inprevious section. In terms of the on/off control strategy, thelarger the ratio of the stiffnesses between front suspensionsystem and rear suspension system is, the less load transferoccurs at the rear and vice versa. The damping coefficientsat front and rear suspension systems after adjustment arepresented in Fig. 22.
The change of damping coefficient in the system is car-ried out by the use of MR damper. The characteristic ofthe applied MR damper is demonstrated in related section.The range of current of the device is from 0 A to 2 A. Themaximum current is used by the on/off control to adjust thedamping coefficient of the system. The change of the cur-rent in MR device to adjust the dampers in front suspen-sion system in the procedure is close to the tendency asshown in Fig. 22.
7. Conclusions
The following conclusions can be drawn from the studyon tire normal force through the use of suspension systemwith variable stiffness and damping behavior.
(1) The effects of variable stiffness and damping suspen-sion system on improving normal force at tire areobvious. It is feasible and viable to get a much largerphysical limit or saturation of tire than the role ofconventional suspension system does.
(2) The realization of variable stiffness and damping sus-pension system can be achieved by modifying conven-tional suspension with a additional spring in series toit. The adjustment of variable stiffness and dampingbehavior is feasible by the use of MR damper becauseMR damper is capable to change damping coefficientrapidly.
(3) In conventional DYC strategy, it is hard to generatedenough additional braking force in severe turning dueto friction limit between tire and road. So combining

132 Y. Xu, M. Ahmadian / Journal of Terramechanics 50 (2013) 121–132
the on/off control of VSVD suspension system withDYC will present a useful approach for integratedchassis control.
References
[1] Haiping Du, Zhang Nong, Naghdy Fazel. Velocity-dependent robustcontrol for improving vehicle lateral dynamics. Transport Res Part C2011;19(3):454–68.
[2] Mirzaei M. A new strategy for minimum usage of external yawmoment in vehicle dynamic control system. Transport Res Part C2010;18:213–24.
[3] Zheng B, Anwar S. Yaw stability control of a steer-by-wire equippedvehicle via active front wheel steering. Mechatronics 2009;19:799–804.
[4] Mokhiamar Ossama, Abe Masato. How the four wheels should shareforces in an optimum cooperative chassis control. Control EngPractice 2006;14:295–304.
[5] Gonca V, Shvab J. Design of elastomeric shock absorbers withvariable stiffness. J Vibroeng 2010;12(3):347–54.
[6] Cronje Johan M, Stephan P, Theron Nico J. Development of avariable stiffness and damping runnable vibration isolator. J VibratControl 2005;11(3):381–96.
[7] Oh Se Kyung, Yoon Young Hwan, Krishna Ary Bachtiar. A study onthe performance characteristics of variable valve for reverse contin-uous damper. World Acad Sci, Eng Technol 2007;32:123–8.
[8] Ghosh MK, Dinavahi R. Vibration analysis of a vehicle systemsupported on a damper-controlled variable-spring-stiffness suspen-sion. Proc Inst Mech Eng, Part D: J Autom Eng 2005;219(5):607–19.
[9] Deng Hua-xia, Gong Xing-long. Application of magnetorheologicalelastomer to vibration absorber. Commun Nonlinear Sci NumerSimulat 2008;13:1938–47.
[10] Murakami Takahiro, Sakai Michiya, Nakano Masami. Damping andresponse characteristics of passive type MR damper. Int J ApplElectrom Mech 2010;33:911–7.
[11] Zhang XZ, Wang XY, Li WH. Variable stiffness and damping MRisolator. Journal of Physics: Conf Ser 2009;149:1–5.
[12] Winthrop MF, Baker WP, Cobb RG. A variable stiffness deviceselection and design tool for lightly damped structures. J SoundVibrat 2005;287:667–82.
[13] Liu Yanqing, Matsuhisa Hiroshi, Utsuno Hideo. Semi-active vibra-tion isolation system with variable stiffness and damping control. JSound Vibrat 2008;313:16–28.
[14] Batterbee DC, Sims ND. Hardware-in-the-loop simulation of mag-netorheological dampers for vehicle suspension systems. Proc InstMech Eng, Part I: J Syst Control Eng 2007;221(2):265–78.
[15] Moustapha Doumiati, Alessandro Victorino. A method to estimatethe lateral tire force and the sideslip angle of a vehicle: experimentalvalidation. In: 2010 American control conference Marriott water-front, Baltimore, MD, USA, June 30- July 02; 2010.
[16] Cabrera JA, Ortiz A, Carabias E. An alternative methods todetermine the magic tyre model parameters. Vehicle Syst Dyn2004;41(2):109–27.
[17] Eslamian M, Mirzaei M, Alizadeh G. Enhancement of vehicle lateralstability by non-linear optimal control of yaw dynamics. MechAerospace Eng J 2007;2(3):97–106.
[18] Xingyu Wang, Xinazhou Zhang. Variable stiffness and damping MRisolation system. In: 15th International congress on sound andvibration, Daejeon, Korea, 2008, July, 6–10; 2008.





























