Embed Size (px)
Citation preview

1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Bendungan adalah suatu bangunan penampung air yang dibentuk dari berbagai
batuan dan tanah. Air yang dibendung akan digunakan untuk pemenuhan kebutuhan
masyarakat antara lain dijadikan pembangkit tenaga listrik (PLTA), penyediaan air
bersih, tempat rekreasi, pengendali banjir, dan sebagainya. Salah satu bendungan
yang ada di Propinsi Daerah Istimewa Yogyakarta adalah Waduk Sermo dan telah
dioperasikan sejak tahun 1996. Waduk ini terletak di wilayah Desa Hargowilis,
Kokap Kabupaten Kulon Progo, Provinsi Yogyakarta, Indonesia. Lokasi Bendungan
Sermo meliputi wilayah Sungai Progo, Sesar Opak, Kabupaten Kulon Progo.
Wilayah cakupan Waduk Sermo berada pada 110 ° 1 ' sampai 110° 16' Bujur Timur
dan 7° 38' sampai dengan 7° 59' Lintang Selatan. Waduk Sermo merupakan salah
satu objek wisata di Kabupaten Kulonprogo, yang diresmikan oleh Presiden Soeharto
pada tanggal 20 November 1996 dengan membendung Sungai Ngrancah. Sejak saat
itu Waduk Sermo menjadi sumber air utama bagi pertanian di daerah sekitarnya.
Luas genangan air Waduk Sermo menurut Pemkab Kulon Progo adalah kurang lebih
157 Ha dengan kondisi air yang masih jernih serta bentuknya berkelok-kelok. Waduk
ini dapat menampung air 25 juta meter kubik dan dibangun selama dua tahun delapan
bulan (Anonim, 2013).
Waduk Sermo memiliki berbagai macam fungsi dan sangat bermanfaat bagi
masyarakat. Fungsi utamanya adalah sebagai penampung air yang disalurkan PDAM
untuk air bersih, irigasi atau pengairan, serta pencegah banjir. Adanya jalan lingkar
aspal sepanjang 21 km menjadikan waduk ini berfungsi juga sebagai tempat olah
raga (Anonim, 2008). Konstruksi waduk berukuran lebar atas 8m, lebar bawah 250
m, panjang 190 m, dan tinggi 56 m (Balai Pengelola Sumber Daya Air dan Sungai
Provinsi DIY, 1997).
Seperti diketahui bahwa tubuh waduk akan mengalami tekanan dari efek
tekanan air waduk serta penurunan material tanah. Akibat gaya tekanan ini maka
tubuh waduk kemungkinan akan dapat mengalami deformasi atau pergeseran baik itu
2
ke arah horisontal maupun ke arah vertikal. Deformasi yang cukup besar akan
mengakibatkan banyak kerugian seperti terjadinya keretakan pada struktur bangunan
waduk, longsor, kerugian finansial dan bahkan korban jiwa.
Bendungan memiliki peranan yang cukup penting bagi kehidupan masyarakat,
maka diperlukan suatu bentuk pemeliharaan dan perawatan yang memadai guna
menghindari kerusakan pada bendungan tersebut. Salah satu bentuk pemeliharaan
dan perawatan tersebut salah satunya adalah dengan melakukan pemantauan
deformasi pada tubuh bendungan. Deformasi mungkin disebabkan oleh gempa bumi,
retakan, pergeseran lempeng, level air tinggi - rendah, rembesan atau kebocoran.
Prinsip pemantauan deformasi dengan pendekatan geodetik menggunakan
metode triangulaterasi memakai Total Station dan waktu pengamatan minimal dua
epok, yaitu dengan menempatkan beberapa titik kontrol di beberapa lokasi yang
dipilih disekitar Waduk Sermo secara periodik untuk ditentukan koordinatnya secara
teliti. Dengan mempelajari pola dan besar perubahan koordinat dari titik-titik kontrol
tersebut berdasarkan survei yang satu ke survei berikutnya, maka karakteristik
deformasi bendungan akan dapat dihitung dan dipelajari lebih lanjut.
Penelitian ini merupakan kelanjutan dari penelitian sebelumnya. Diawali pada
tahun 2010 yang telah dibangun kerangka kontrol untuk keperluan pemantauan titik
pantau dan sekaligus dilakukan pemantauan pergeseran titik pantau di tubuh Waduk
Sermo dengan menggunakan metode radial (Yulaikhah dan Parseno, 2010). Namun
hasil ketelitian koordinat yang diperoleh kurang teliti dan perubahan koordinat yang
terjadi tidak memiliki pola tertentu, sehingga belum bisa disimpulkan bahwa
perubahan koordinat yang terjadi disebabkan oleh adanya deformasi. Pada tahun
2012 dilakukan penelitian untuk menganalisis kestabilan jaring kerangka kontrol
deformasi, namun ada beberapa kendala, antara lain ada beberapa titik kontrol yang
tidak saling terlihat dan ada titik yang hilang, oleh karena itu penelitian difokuskan
pada pengembangan jaring titik kontrol.
Penelitian pengembangan jaring titik kontrol telah dilakukan, sehingga pada
penelitian ini dilanjutkan dengan melakukan pemantauan kerangka kontrol dan
melakukan analisis kestabilan jaring kerangka kontrol berdasarkan data tahun 2012
dan 2013.

3
I.2. Rumusan Masalah
Adapun rumusan masalah dari penelitian ini adalah sebagai berikut :
1. Berapa besar pergeseran horisontal serta ketelitiannya dari titik-titik
kontrol Waduk Sermo berdasarkan hasil pengukuran terestris pada epok
2012 dan 2013 jika dilakukan dengan menggunakan hitung perataan
parameter berbobot?
2. Apakah besar pergeseran horisontal yang terjadi selama 1 tahun dari
titik-titik kontrol Waduk Sermo berdasarkan perhitungan deformasi
antara epok 2012 dan 2013 menggunakan hitung perataan parameter
berbobot signifikan secara statistik?
1.3. Pembatasan Masalah
Beberapa hal yang dijadikan sebagai pembatasan masalah dalam penelitian ini
adalah sebagai berikut :
1. Akuisi data dilakukan dengan menggunakan alat ukur Total Station
Nikon DTM 322 menggunakan metode triangulaterasi.
2. Analisis pergeseran titik-titik kontrol hanya sebatas pada pergeseran
horisontal atau pada posisi koordinat 2D (X,Y).
3. Metode hitungan yang digunakan untuk estimasi nilai koordinat 2D
adalah hitung kuadrat terkecil metode parameter berbobot.
4. Kerangka dasar yang digunakan untuk pemantauan deformasi
menggunakan kerangka dasar relatif.
5. Analisis deformasi dilakukan dengan melakukan hitungan beda absis dan
ordinat dari data pengamatan untuk setiap kala pengukuran, pengujian
kesebangunan jaringan, dan pengujian pergesaran titik-titik kontrol.
1.4. Tujuan Penelitian
Tujuan dari penelitian ini meliputi :
1. Mengetahui besar pergeseran horisontal setiap titik-titik kontrol di sekitar
Waduk Sermo antara tahun 2012 – 2013.
4
2. Mengevaluasi besar pergeseran horisontal yang terjadi menggunakan uji
kesebangunan jaring, untuk melihat apakah pergeseran yang terjadi
disebabkan oleh pergeseran titik.
1.5. Manfaat Penelitian
Pelaksanaan penelitian ini diharapkan dapat memberikan manfaat, antara lain :
1. Untuk bidang akademik, yaitu diharapkan dapat dijadikan pertimbangan
dalam melakukan pengukuran survei deformasi dan pengolahan analisis
pergeseran horisontal.
2. Manfaat lainnya adalah untuk bidang konservasi, yaitu yang diharapkan
dari penelitian ini adalah dengan diketahuinya besar pergeseran horisontal
di sekitar Waduk Sermo, maka dapat digunakan untuk melakukan
pengawasan terhadap titik pantau dalam studi deformasi dan dapat
digunakan untuk melakukan pemantauan dan pemeliharaan Waduk Sermo
kedepannya sebagai antisipasi dampak negatif dan kerugian yang
mungkin terjadi.
1.6. Tinjauan Pustaka
Setiap struktur bangunan yang dibuat di permukaan tanah akan mengalami
pergeseran atau perubahan baik itu ke arah horisontal maupun ke arah vertikal.
Pergeseran tersebut dapat disebabkan oleh beberapa faktor, antara lain oleh suatu
gaya eksternal/gaya dari luar sistem bangunan dan juga gaya internal/gaya dari
dalam bangunan itu sendiri. Contoh gaya eksternal adalah aktivitas gerakan kulit
bumi, sedangkan contoh dari gaya internal adalah berat massa struktur bangunan itu
sendiri (Widjajanti, 2001).
Waduk Sermo pada perencanaanya dapat berumur 50 tahun guna menampung
air sungai (irigasi), sekarang ini kondisinya mengalami penurunan kapasitas yang
disebabkan adanya penumpukan sedimen tanah. Faktor fisiografis yang
menyebabkan erosi tanah permukaan menjadi sumber terbesar sedimentasi daerah
aliran sungai seperti, air hujan, naik-turunya permukaan air, drainase, iklim, dan
topografi kawasan. Faktor sosial yaitu adanya aktifitas masyarakat seperti,
5
pengolahan tanah, penebangan pohon di daerah tangkapan air (catchment area) baik
hutan rakyat, perhutani, pertanian tumpang sari pada tanah di tepi genangan.
Pengaruh dari beberapa faktor di atas dapat merugikan dan menghilangkan peran
serta fungsi dari waduk.
Tanah yang tersebar pada tepian waduk dengan tipe longsoran di antaranya
longsoran batuan (rock slide), gerakan tanah (soil creep), longsoran tanah (land
slide), longsoran masa tanah (debris slide), runtuhan batu/masa tanah (rock/debris
fall) dan longsoran lumpur (slump slide). Melihat permasalahan di atas, untuk
pemeliharaan Waduk Sermo perlu dilakukan penelitian tentang pergeseran pada
kawasan Waduk Sermo.
Adapun beberapa penelitian yang terkait dengan pergeseran horisontal
diantaranya adalah Yulaikhah dan Parseno (2010) telah membangun kerangka
kontrol untuk keperluan pemantauan titik pantau dan sekaligus dilakukan
pemantauan pergeseran titik pantau di tubuh bendungan dengan menggunakan
metode radial. Namun ketelitian koordinat yang dihasilkan masih kurang teliti dan
perubahan koordinat yang terjadi tidak memiliki pola tertentu.
Hendrawan (2010) yang melakukan analisis pergeseran Waduk Sermo
menggunakan data yang diperoleh langsung dari pengukuran tubuh bendungan (main
dam) berupa data jarak datar, jarak miring, dan sudut horisontal masing-masing titik
kontrol bendungan. Metode yang digunakan adalah metode radial. Pengukuran
dilakukan dalam 2 epok pengamatan yaitu epok pertama yang dilakukan pada
tanggal 15 Mei 2010 dan pengukuran epok dua pada tanggal 16 September 2010.
Metode hitungan yang digunakan adalah metode hitung kuadrat terkecil dengan
pendekatan parameter. Proses analisis dilakukan melalui uji statistik yaitu uji blunder
atau data snooping dan uji pergeseran titik obyek. Dari hasil penelitian diperoleh
hasil bahwa titik pantau secara statistik dan numeris mengalami pergeseran. Hasil
analisis pergeseran titik ditunjukkan bahwa semua titik pantau mengalami
pergeseran.
Prayoga (2011) dalam penelitiannya mengkaji tentang deformasi horisontal
bendungan Sermo yang berupa analisis pergeseran horisontal pada tubuh Waduk
Sermo yang dilakukan dengan pendekatan geodesi berdasarkan data pengamatan
tahun 2010 dan data tahun 2011. Dari hasil penelitian tersebut diperoleh perubahan
6
koordinat yang terjadi tidak memiliki pola tertentu. Kesimpulan secara keseluruhan
titik kontrol tidak mengalami pergeseran.
Yulaikhah dan Parseno (2011) dalam penelitiannya melakukan pengukuran
titik pantau kembali dengan menggunakan metode radial dan pemotongan. Namun
demikian dari hasil kedua pengukuran tersebut ketelitian koordinat yang diperoleh
tidak teliti, sehingga belum bisa disimpulkan bahwa perubahan koordinat yang
terjadi benar-benar karena adanya deformasi. Perubahan koordinat yang terjadi tidak
memiliki pola tertentu. Salah satu kemungkinan disebabkan oleh asumsi yang
digunakan bahwa kerangka kontrol yang digunakan adalah tetap atau tidak bergeser,
sehingga kesimpulannya perlu dilakukan analisis pergeseran titik kontrol deformasi
pada Waduk Sermo. Selanjutnya pada penelitian yang penulis lakukan adalah
melakukan evaluasi yang menganggap bahwa adanya pergeseran pada titik
kontrolnya.
Yulaikhah dan Parseno (2012) telah melakukan penelitian dengan tujuan untuk
menganalisis kestabilan jaring kerangka kontrol deformasi yang selanjutnya titik
kontrol ini digunakan sebagai ikatan untuk pemantauan pergeseran titik-titik pantau.
Namun beberapa kendala ditemui di lapangan diantaranya beberapa titik kontrol
yang ada tidak saling terlihat bahkan telah hilang, sehingga penelitian lebih
difokuskan pada pengembangan jaring titik kontrol. Karena penelitian sebelumnya
hanya difokuskan pada pengembangan jaring titik kontrol, maka untuk penelitian
saat ini perlu dilakukan analisis kestabilan atau kesebangunan jaring berdasarkan
data pengamatan tahun 2012 dan 2013.
Yulaikhah dan Ruli (2013) pada penelitiannya melakukan pemantauan titik –
titik kontrol di sekitar Waduk Sermo menggunakan metode pengukuran
triangulaterasi. Hasil dari pemantauan tersebut adalah data jarak horisontal dan sudut
horisontal. Tujuan dari penlitian ini adalah menganalisis besar dan arah pergeseran
horisontal berdasarkan data ukuran tahun 2012 dan 2013 dengan metode hitung
perataan minimum constraint. Hasil dari analisis tersebut adalah telah terjadi
pergeseran horisontal pada semua titik kontrol, namun masih perlu data pendukung
yang lain untuk penelitian tersebut, agar hasilnya realistis . Pada penelitian tersebut
kerangka dasar yang digunakan adalah kerangka dasar absolut, sedangkan untuk
penelitian saat ini menggunakan kerangka dasar relatif dengan metode hitung

7
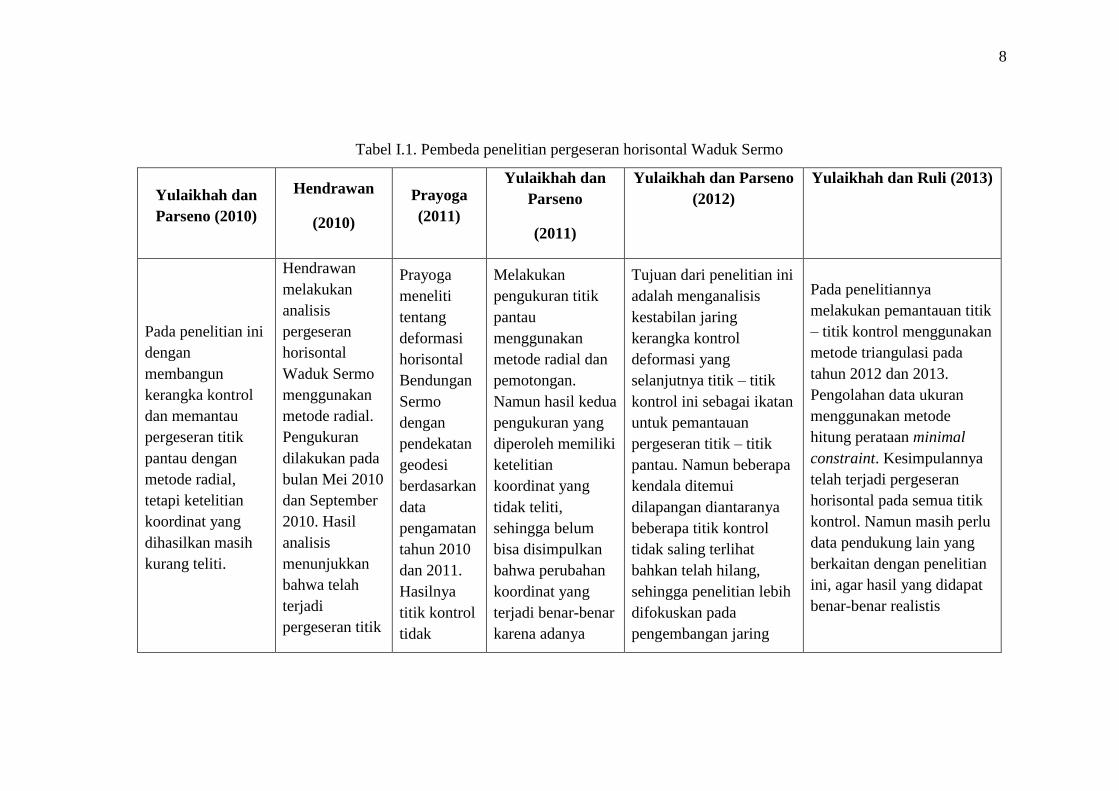
perataan parameter berbobot. Perbedaan penelitian ini dengan penelitian sebelumnya
ditunjukkan seperti pada Tabel I.1.
Berdasarkan studi pustaka yang telah dilakukan, maka pada penelitian ini
dilakukan perhitungan estimasi koordinat 2D titik-titik kontrol dengan menggunakan
hitung kudrat terkecil metode parameter berbobot. Hitung kuadrat terkecil
menyatakan bahwa jumlah kuadrat koreksi pengamatan adalah minimum dan
perataan dilakukan terhadap ukuran yang dipengaruhi kesalahan acak. Oleh karena
itu perlu dilakukan tahap pengujian untuk memeriksa ada tidaknya pengaruh
kesalahan tak acak terhadap data pengamatan. Apabila telah lolos uji, maka estimasi
koordinat 2D dan ketelitiannya dapat digunakan untuk analisis pergeseran horisontal.
Analisis yang dilakukan menggunakan uji kesebangunan jaring dan uji pergeseran
titik menggunakan derajat kepercayaan 95 %, untuk mengetahui apakah pergeseran
titik yang terjadi benar disebabkan karena deformasi.
8
Tabel I.1. Pembeda penelitian pergeseran horisontal Waduk Sermo
Yulaikhah dan
Parseno (2010)
Hendrawan
(2010)
Prayoga
(2011)
Yulaikhah dan
Parseno
(2011)
Yulaikhah dan Parseno
(2012)
Yulaikhah dan Ruli (2013)
Pada penelitian ini
dengan
membangun
kerangka kontrol
dan memantau
pergeseran titik
pantau dengan
metode radial,
tetapi ketelitian
koordinat yang
dihasilkan masih
kurang teliti.
Hendrawan
melakukan
analisis
pergeseran
horisontal
Waduk Sermo
menggunakan
metode radial.
Pengukuran
dilakukan pada
bulan Mei 2010
dan September
2010. Hasil
analisis
menunjukkan
bahwa telah
terjadi
pergeseran titik
Prayoga
meneliti
tentang
deformasi
horisontal
Bendungan
Sermo
dengan
pendekatan
geodesi
berdasarkan
data
pengamatan
tahun 2010
dan 2011.
Hasilnya
titik kontrol
tidak
Melakukan
pengukuran titik
pantau
menggunakan
metode radial dan
pemotongan.
Namun hasil kedua
pengukuran yang
diperoleh memiliki
ketelitian
koordinat yang
tidak teliti,
sehingga belum
bisa disimpulkan
bahwa perubahan
koordinat yang
terjadi benar-benar
karena adanya
Tujuan dari penelitian ini
adalah menganalisis
kestabilan jaring
kerangka kontrol
deformasi yang
selanjutnya titik – titik
kontrol ini sebagai ikatan
untuk pemantauan
pergeseran titik – titik
pantau. Namun beberapa
kendala ditemui
dilapangan diantaranya
beberapa titik kontrol
tidak saling terlihat
bahkan telah hilang,
sehingga penelitian lebih
difokuskan pada
pengembangan jaring
Pada penelitiannya
melakukan pemantauan titik
– titik kontrol menggunakan
metode triangulasi pada
tahun 2012 dan 2013.
Pengolahan data ukuran
menggunakan metode
hitung perataan minimal
constraint. Kesimpulannya
telah terjadi pergeseran
horisontal pada semua titik
kontrol. Namun masih perlu
data pendukung lain yang
berkaitan dengan penelitian
ini, agar hasil yang didapat
benar-benar realistis

9
mengalami
pergeseran.
deformasi. titik kontrol

10
1.7 Landasan Teori
I.7.1. Jaring Kontrol Horisontal
Jaring kontrol horisontal adalah sekumpulan dari beberapa titik kontrol
horisontal yang satu sama lainnya diikatkan dengan data ukuran jarak dan/atau sudut,
dan koordinatnya ditentukan dengan metode pengukuran/pengamatan tertentu dalam
suatu sistem referensi koordinat horisontal tertentu. Pengadaan jaring kontrol
horisontal ini dapat dilakukan dengan metode terestris, maupun extra-terestrial (SNI,
19-6724-2002).
Jaring kerangka kontrol horisontal memiliki tingkat ketelitian yang berbeda-
beda tergantung dari orde jaring kontrol horisontal tersebut. Orde jaringan adalah
atribut yang mengkarakterisasi tingkat ketelititan (akurasi) jaring, yaitu tingkat
kedekatan jaring tersebut terhadap titik kontrol yang sudah ada yang digunakan
sebagai referensi (BSN, 2002). Jaring kerangka horisontal dapat juga dipakai untuk
kerangka dasar pemantauan deformasi dan studi pergerakan massa tanah lainnya.
Pemilihan dan pemakaiannya ditentukan oleh banyak faktor, antara lain luas daerah
yang dipetakan, ketersediaan peralatan dan kemudahan perhitungan. Dalam
pengukuran jaring kontrol horisontal, ada berbagai metode yang dapat digunakan,
antara lain metode terestris dan extra-terestris. Bentuk jaring yang sering digunakan
yaitu poligon, triangulasi, trilaterasi, triangulaterasi, pemotongan ke muka, dan
pemotongan ke belakang (Basuki, 2006).
1.7.2. Metode Triangulaterasi
Metode triangulaterasi merupakan salah satu metode penentuan posisi dimana
titik – titik yang akan ditentukan posisinya terbentuk dalam suatu jaring segitiga atau
kombinasi dengan jaring kuadrilateral. Posisi titik ditentukan dengan melakukan
pengukuran jarak dan sudut pada setiap titik - titik pengamatan (Yulaikhah, 2013).
11
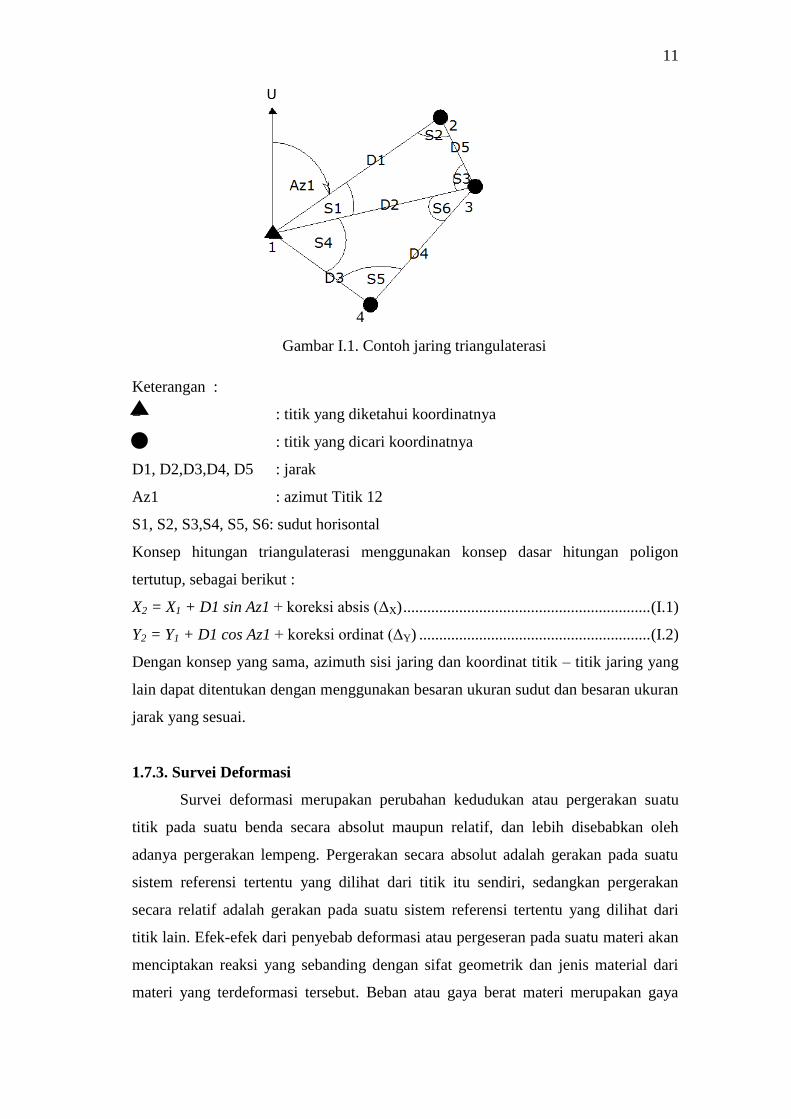
Gambar I.1. Contoh jaring triangulaterasi
Keterangan :
= : titik yang diketahui koordinatnya
= : titik yang dicari koordinatnya
D1, D2,D3,D4, D5 : jarak
Az1 : azimut Titik 12
S1, S2, S3,S4, S5, S6: sudut horisontal
Konsep hitungan triangulaterasi menggunakan konsep dasar hitungan poligon
tertutup, sebagai berikut :
X2 = X1 + D1 sin Az1 + koreksi absis (ΔX) .............................................................. (I.1)
Y2 = Y1 + D1 cos Az1 + koreksi ordinat (ΔY) .......................................................... (I.2)
Dengan konsep yang sama, azimuth sisi jaring dan koordinat titik – titik jaring yang
lain dapat ditentukan dengan menggunakan besaran ukuran sudut dan besaran ukuran
jarak yang sesuai.
1.7.3. Survei Deformasi
Survei deformasi merupakan perubahan kedudukan atau pergerakan suatu
titik pada suatu benda secara absolut maupun relatif, dan lebih disebabkan oleh
adanya pergerakan lempeng. Pergerakan secara absolut adalah gerakan pada suatu
sistem referensi tertentu yang dilihat dari titik itu sendiri, sedangkan pergerakan
secara relatif adalah gerakan pada suatu sistem referensi tertentu yang dilihat dari
titik lain. Efek-efek dari penyebab deformasi atau pergeseran pada suatu materi akan
menciptakan reaksi yang sebanding dengan sifat geometrik dan jenis material dari
materi yang terdeformasi tersebut. Beban atau gaya berat materi merupakan gaya
4
12
penyebab deformasi. Bekerjanya gaya berat pada suatu materi yang disertai pengaruh
gaya berat dari materi disekitarnya dalam suatu selang waktu akan mempengaruhi
bentuk geometri materi tersebut. Reaksi yang terjadi mempengaruhi posisi, bentuk,
dan dimensi materi yang terdeformasi. Analisis deformasi dari aspek geometri, perlu
menerapkan kerangka dasar. Perlu dilakukan kajian mengenai kerangka dasar yang
digunakan dalam melakukan analisis deformasi.
Analisis deformasi bertujuan untuk menentukan kuantifikasi pergeseran dan
parameter-parameter deformasi, yang mempunyai karakteristik dalam ruang dan
waktu. Penyelidikan deformasi pada suatu objek pengamatan biasanya dilakukan
berulang pada epok yang berbeda. Pengukuran pada masing-masing epok tersebut
kemudian dapat diratakan secara terpisah pada masing-masing epok maupun
perataan langsung dari dua epok. Berdasarkan hasil pengukuran berulang tersebut,
akan didapat perbedaan koordinat titik-titik kontrol (dalam hal ini pergeseran)
sehingga besar dan parameter-parameter deformasi dapat ditentukan (Widjajanti,
1997).
1.7.4. Kerangka Dasar Pemantauan Deformasi
Kerangka dasar yang dapat digunakan untuk keperluan analisis deformasi yaitu
kerangka dasar absolut dan kerangka dasar relatif. Deformasi dapat didefinisikan
perubahan bentuk kedudukan atau pergerakan suatu titik pada suatu benda secara
absolut maupun relatif. Strategi dalam pemilihan jenis kerangka dasar ini diperlukan
agar diperoleh nilai parameter-parameter deformasi yang benar. Pemilihan kerangka
dasar untuk monitoring deformasi penentuan stabilitas titik referensi merupakan
salah satu masalah utama. Mengikat semua posisi titik di atas permukaan bumi
mengalami pergerakan maka pada analisis kerangka dasar semua titik harus
diperlukan sebagai titik yang tidak stabil (Caspary, 1987). Kerangka ini digunakan
untuk menentukan besar perubahan yang terjadi terhadap suatu referensi yang sama
pada semua kala pengamatan. Terdapat dua jenis kerangka dasar yang digunakan
untuk melakukan analisis pergeseran, meliputi (Widjajanti, 2001) :

13
1. Kerangka Dasar Absolut
Suatu kerangka dimana titik-titik kontrol yang digunakan sebagai titik
referensi terletak di luar area obyek pengamatan deformasi yang posisinya dianggap
stabil (Gambar I.2).
Gambar I.2. Kerangka dasar absolut
(modifikasi Yulaikhah dan Parseno, 2010)
Pada kerangka dasar absolut, analisis deformasi bertujuan untuk menentukan
perpindahan titik obyek relatif terhadap titik referensi. Pada kerangka dasar absolut,
analisis deformasi bertujuan untuk menentukan perpindahan titik obyek relatif
terhadap titik referensi. Tahapan analisis deformasi pada kerangka dasar absolut
adalah sebagai berikut (Widjajanti, 2001) :
a. Pemilihan titik-titik referensi dan mengeliminasi titik - titik yang tidak
stabil.
b. Pemilihan titik – titik obyek untuk pergeseran titik tunggal, mengabaikan
titik – titik lain atau permodelan pergerakannya.
c. Perancangan model deformasi menyangkut pergerakan dan deformasi
benda kaku yang menjadi obyek.
d. Pengujian model deformasi melalui uji statistik.
2. Kerangka Dasar Relatif
Suatu kerangka dimana titik-titik kontrol yang digunakan sebagai titik referensi
terletak di dalam area pengamatan deformasi, sehingga posisinya dianggap tidak
stabil atau mengalami pergeseran. Pada kerangka dasar relatif, analisis deformasi
dilakukan untuk menentukan pergeseran relatif antara kedua blok. Pada kerangka
Area terdeformasi
Area tidak terdeformasi
14
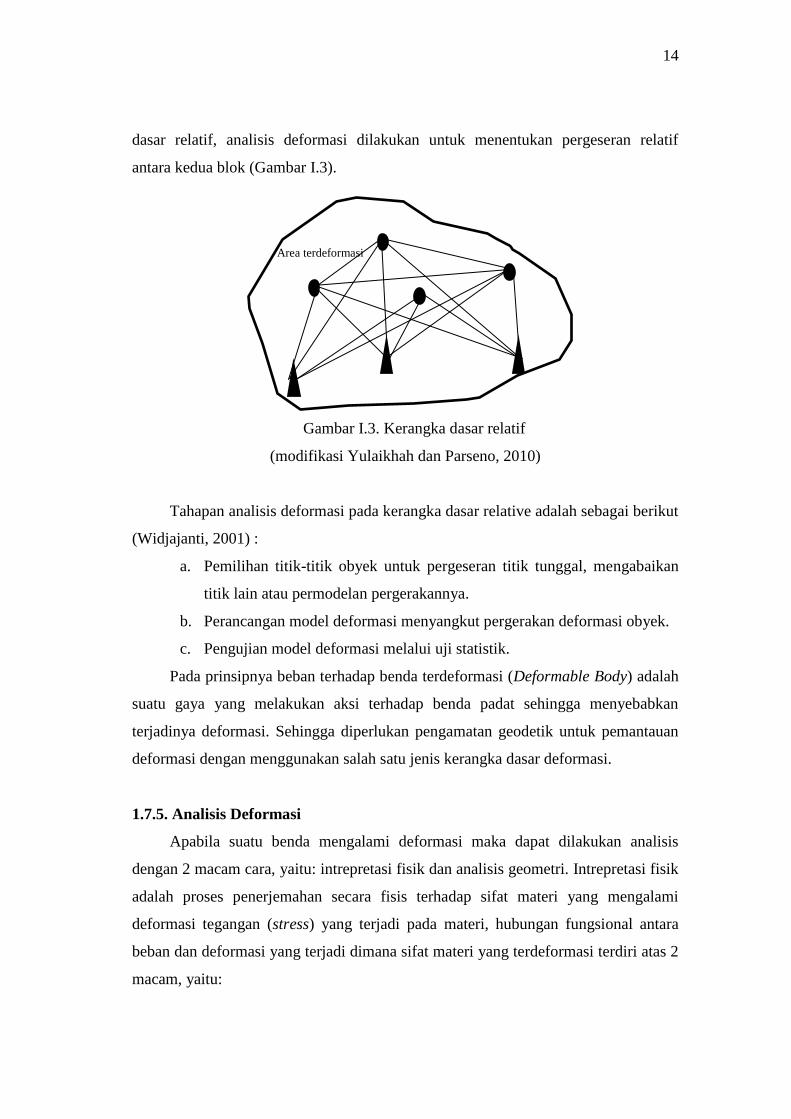
dasar relatif, analisis deformasi dilakukan untuk menentukan pergeseran relatif
antara kedua blok (Gambar I.3).
Gambar I.3. Kerangka dasar relatif
(modifikasi Yulaikhah dan Parseno, 2010)
Tahapan analisis deformasi pada kerangka dasar relative adalah sebagai berikut
(Widjajanti, 2001) :
a. Pemilihan titik-titik obyek untuk pergeseran titik tunggal, mengabaikan
titik lain atau permodelan pergerakannya.
b. Perancangan model deformasi menyangkut pergerakan deformasi obyek.
c. Pengujian model deformasi melalui uji statistik.
Pada prinsipnya beban terhadap benda terdeformasi (Deformable Body) adalah
suatu gaya yang melakukan aksi terhadap benda padat sehingga menyebabkan
terjadinya deformasi. Sehingga diperlukan pengamatan geodetik untuk pemantauan
deformasi dengan menggunakan salah satu jenis kerangka dasar deformasi.
1.7.5. Analisis Deformasi
Apabila suatu benda mengalami deformasi maka dapat dilakukan analisis
dengan 2 macam cara, yaitu: intrepretasi fisik dan analisis geometri. Intrepretasi fisik
adalah proses penerjemahan secara fisis terhadap sifat materi yang mengalami
deformasi tegangan (stress) yang terjadi pada materi, hubungan fungsional antara
beban dan deformasi yang terjadi dimana sifat materi yang terdeformasi terdiri atas 2
macam, yaitu:
Area terdeformasi

15
1. Plastik (kaku).
2. Elastik (lentur).
Analisis geometri lebih menekankan penentuan parameter deformasi dengan
jalan mentransformasikan perubahan posisi ke dalam bentuk parameter-parameter
deformasi meliputi translasi, rotasi dan regangan. Interpretasi fisik dapat dilakukan
dengan dua macam metode, yaitu: penentuan metode dan metode statistika.
Penentuan metode pada umumnya adalah metode deterministik. Metode
deterministik adalah metode operasional yang menggunakan informasi yang
berkaitan dengan beban, sifat-sifat materi, geometri benda dan hukum fisis yang
berlaku untuk tegangan - regangan (Stress - Strain). Sedangkan metode statistika
dinamakan juga metode analisis regresi yang menitikberatkan pembahasannya pada
analisis korelasi antara besaran deformasi antara besaran deformasi (displacement)
dan besaran beban (load) penyebab terjadinya deformasi.
Terkait dengan pergeseran titik, maka deformasi merupakan pergerakan suatu
titik pada suatu benda dimana titik terletak pada sistem referensi tertentu artinya titik
tersebut memiliki posisi dalam sistem koordinat tertentu. Induk dari deformasi adalah
dinamika bumi yang mengalami banyak perubahan yang diakibatkan kondisi yang
tidak stabil dari lempeng bumi.
Dinamika bumi terbagi menjadi 3 skala, yaitu: skala global, skala regional dan
skala lokal. Skala global mencakup gerakan antar benua, skala regional mencakup
gerakan antar pulau dan skala lokal mencakup gerakan tanah pada tempat tertentu
(Wahyuningtias, 1996). Pada skala lokal inilah terdapat studi analisis deformasi
terpadu. Untuk dapat memahami pengertian analisis deformasi terpadu diperlukan
pemahaman makna kata dari analisis, deformasi dan terpadu. Hal ini dikarenakan
pengertian analisis deformasi berbeda dengan pengertian analisis pengkajian suatu
obyek.
Analisis adalah penarikan suatu kesimpulan tentang karakteristik dari struktur
fenomena secara keseluruhan dari unsur-unsur atau komponen-komponen pembentuk
struktur tersebut. Deformasi adalah perubahan bentuk, posisi dan dimensi dari suatu
benda (Kuang, 1996). Berdasarkan definisi tersebut, deformasi dapat diartikan
sebagai perubahan kedudukan atau pergerakan suatu titik pada suatu benda secara
absolut maupun relatif (Ma’ruf, 2001).
16
Analisis deformasi adalah metodologi (hal-hal yang berkaitan metode) untuk
menentukan parameter-parameter deformasi. Ada 2 macam metode pendekatan
yaitu pendekatan geodetik dan pendekatan fisis. Ciri khas pendekatan geodetik
adalah penerapan konsep sebagai berikut:
1. Pendekatan stokastik.
2. Penentuan posisi.
3. Kerangka referensi, sistem referensi, kerangka koordinat dan sistem
koordinat.
4. Kerangka dasar horisontal dan vertikal dan bentuk geometri beserta
ukuran lebih.
Analisis geometrik untuk menentukan perubahan materi yang terdeformasi
diperlukan kerangka referensi. Kerangka ini digunakan untuk menentukan besar
perubahan yang terjadi terhadap suatu referensi yang sama pada semua kala
pengamatan. Penggunaan kerangka dasar relatif untuk keperluan analisis deformasi
khususnya analisis geometrik berkaitan dalam kerangka referensi (Caspary, 1987).
1.7.6. Hitung Perataan Kuadrat Terkecil (HKT)
Setiap pengukuran selalu dihinggapi kesalahan yang sifatnya acak. Oleh karena
itu dibutuhkan suatu metode yang dapat menentukan nilai parameter tertentu dengan
meminimalkan kesalahan acak. Hitung perataan adalah suatu cara untuk menentukan
nilai koreksi yang harus diberikan pada hasil pengukuran, sehingga hasil pengukuran
memenuhi syarat geometriknya (Wolf, 1980). Syarat geometrik merupakan suatu
kondisi yang harus dipenuhi dari hubungan suatu pengukuran dengan pengukuran
lainnya.
Hitung perataan kuadrat terkecil dapat dilakukan dengan berbagai cara, salah
satunya dengan metode parameter. Pada metode ini, nilai parameter yang akan
ditentukan memiliki hubungan linier, dan jika tidak linier, maka harus dilinierkan
dengan deret Taylor (Hadiman, 1991). Hubungan linier tersebut menunjukan bahwa
antara besaran pengukuran dengan parameter akan terbentuk model matematik
sebagai persamaan pengamatan. Jumlah persamaan pengamatan sama dengan jumlah
pengukuran yang dilakukan. Karakteristik dari hitung perataan yaitu jumlah
pengukuran atau pengamatan melebihi jumlah parameter yang akan ditentukan

17
nilainya, sehingga adanya ukuran lebih (Wolf, 1980). Syarat geometrik adalah suatu
kondisi yang wajib dipenuhi untuk hubungan suatu pengukuran geodetik.
Hitung perataan kuadrat terkecil dimaksudkan untuk mendapatkan harga
estimasi dari suatu parameter yang paling mendekati harga yang sebenarnya dengan
cara menentukan besaran yang tidak diketahui (parameter) dari sekumpulan data
ukuran yang mempunyai pengamatan lebih. Penyelesaian hitung kuadrat terkecil
dilakukan dengan mencari suatu nilai akhir yang unik dengan cara tertentu sehingga
jumlah kuadrat residualnya (VTPV) minimum, dan tidak mungkin ada nilai hasil
hitungan lain yang jumlah kuadrat residualnya (VTPV) lebih kecil. Prinsip hitung
perataan adalah VTPV = minimum (Hadiman, 1991).
Nilai parameter yang diperoleh dengan hitung perataan sebenarnya merupakan
nilai estimasi terhadap nilai benar atau representasi dari nilai terbaik. Dalam hitung
perataan terdapat ukuran yang melebihi parameter, sehingga terdapat derajat
kebebasan. Persamaan untuk menghitung derajat kebebasan (r) adalah :
r = n – u……………………………………………………………………(I.3)
Dalam hal ini :
n = jumlah pengukuran
u = jumlah parameter yang akan dicari
Besaran pengamatan merupakan fungsi dari parameter. Adapun model matematik
dari persamaan pengamatan adalah :
La = F(Xa)…….......................................................................... ……..(I.4)
F(Xa) = F(Xo+X)………………………………………………………...(I.5)
Nilai estimasi pengamatan adalah :
La = Lb+V…………………………………………………………….(I.6)
Lb + V = F(Xo+X)…………………………………………………. ……..(I.7)
Dalam hal ini,
La : nilai estimasi pengamatan
Xa : nilai estimasi parameter
Lb : nilai pengamatan
F : selisih nilai estimasi pengamatan dengan nilai pengamatan
V : residu / koreksi pengamatan
Xo : nilai pendekatan parameter

18
X : nilai koreksi parameter
Penyelesaian dilakukan dengan membuat n persamaan pengukuran berdasarkan
hubungan matematis antara besaran parameter dan besaran pengamatan. Dengan
demikian diperoleh hubungan fungsi seperti persamaan berikut (I. 8) :
………………………....(I.8)
Persamaan dalam bentuk fungsi residual (v) seperti persamaan berikut :
………………………...(I.9)
Fungsi residual pada persamaan I.9 dapat ditulis dalam bentuk matriks
(Hadiman, 1991) seperti persamaan (I. 10) :
V = A X + F ............................................................................................(I.10)
Dalam hal ini, elemen matriks untuk tiap-tiap persamaan (I. 10) yaitu :
V : vektor residual yang elemen matriksnya terdiri dari besaran-besaran
koreksi ukuran (v1, v2, ... , vn) dengan dimensi (n x 1),
A : matriks desain yang elemen matriksnya terdiri dari koefisien-koefisien
parameter (a1.1, a1.2, ... , an.u) dengan dimensi (n x u),
X : vektor parameter yang elemen matriksnya terdiri dari parameter yang
akan dicari nilainya (x1, x2, ... , xn) dengan dimensi (u x 1),
F : vektor sisa yang elemen matriksnya terdiri atas selisih dari tiap
konstanta persamaan linier (a1.0, a2.0, ... , an.0) dengan besaran ukuran (l1,
l2, ... , ln) yang bersesuaian dengan dimensi (n x 1).

19
Matriks bobot pengukuran (P) akan dipakai dalam proses hitungan, maka
jumlah kuadrat residualnya (VTPV) dapat dicari dengan persamaan sebagai berikut :
VTPV = (AX + F)
T P (AX + F)
= (XTA
T + F
T) P (AX + F)
= XTA
TPAX + X
TA
TPF + F
TPAX + F
TPF…………………………(I.11)
Karena matriks (VTPV) berdimensi (1x1), maka X
TA
TPF = F
TPAX. Maka
persamaan (I. 11) akan menjadi persamaan (I. 12) :
VTPV = X
TA
TPAX + 2F
TPAX + F
TPF ……………………........................(I.12)
Agar nilai (VTPV) minimum maka turunan pertama (V
TPV) terhadap vektor
parameter (X) harus sama dengan nol dengan persamaan (I. 13) :
2XTA
TPA + 2F
TPA = 0
XTA
TPA + F
TPA = 0 ……………………………………………….(I.13)
Oleh karena P merupakan matriks diagonal maka PT=P, maka persamaan
(I.13) bila ditranspose akan menjadi ATPAX + A
TPF = 0
Dengan demikian diperoleh persamaan untuk menghitung nilai parameter
seperti pada persamaan (I. 14).
X = – (ATPA)
-1 A
TPF .................................................................................. (I.14)
Persamaan (I.14) digunakan untuk mencari matriks varian kovarian ( ) :
................................................................................ (I.15)
varian aposteori ...................................................................... (I.16)
Akar elemen-elemen diagonal matriks merupakan nilai ketelitian dari
tiap-tiap parameter yang bersesuaian.
Untuk memperoleh ketelitian estimasi residu didapat dari varian kovarian residu
sebagai berikut:
∑VV = ( P-1
– A(ATPA)
-1 A
T) …………………………………..........(I.17)
Akar elemen-elemen diagonal matriks ∑VV merupakan nilai ketelitian dari tiap-
tiap residu pengamatan yang bersesuaian. Ketelitian estimasi pengamatan terkoreksi
diperoleh dari varian kovarian estimasi pengamatan terkoreksi sebagai berikut:

20
∑La = A(ATPA)
-1 A
T ………………………………………….............(I.18)
Akar elemen-elemen diagonal matriks ∑La merupakan nilai ketelitian dari tiap-
tiap pengamatan terkoreksi yang bersesuaian.
1.7.7. Penerapan HKT Pada Kerangka Dasar Relatif
Pada kerangka dasar relatif titik-titik kontrol yang akan ditentukan besaran
pergeserannya, terletak di dalam area pengamatan deformasi yang tidak stabil.
Semua titik kontrol merupakan parameter, dan proses hitungannya menggunakan
jaring bebas. Pada pendekatan jaring bebas ini tidak ada titik yang dijadikan titik
referensi, maka dalam hitung perataannya tidak ada yang sebagai suatu konstanta.
Semua titik dalam jaringan tersebut diperlakukan sama dalam hitung perataannya
sebagai suatu parameter. Pada jaringan ini hanya mengandalkan data-data hasil
pengukuran geodetik yang dilakukan tanpa dipengaruhi data-data lain atau faktor
luar. Oleh karena itu pada jaring bebas ini terdapat kekurangan datum geodetiknya.
Penggunaan jaring bebas pada analisis pergeseran horisontal ini akan menjadi
kompleks, karena semua titik mengalami pergerakan relatif jadi tidak ada titik yang
dijadikan titik referensi. Jika jaring bebas digunakan pada analisis deformasi, maka
hasil pengukuran geodetik yang di dapat belum dalam suatu sistem koordinat dan
kerangka referensi (Widjajanti, 1997).
Hitung perataan jaring bebas menggunakan hitung perataan kuadrat terkecil
metode parameter. Persamaan (I.13) dalam hitung perataan metode parameter
digunakan untuk menghitung nilai parameter (X). Jika matriks (ATPA) dalam
persamaan ini merupakan matriks singular, maka (ATPA) tidak dapat diinverskan.
Hal ini menyebabkan persamaan (I.13) tidak mungkin diselesaikan, akibatnya nilai
parameter (X) tidak akan diperoleh. Salah satu solusi untuk menyelesaikan
permasalahan tersebut adalah dengan mendefinisikan unsur yang diketahui sebanyak
kekurangan rank.
Pada sistem koordinat dua dimensi (X, Y) terdapat kekurangan rank sebanyak
empat, sehingga diperlukan dua titik koordinat yang diketahui nilainya agar hitung

21
perataan dapat terselesaikan (Soeta’at, 1996). Salah satu solusi yang ditawarkan
untuk memecahkan kasus singularitas matriks pada jaring bebas adalah dengan
menetapkan titik koordinat sebagai ukuran yang lain (ukuran kedua), dan proses
perataannya menggunakan metode parameter berbobot. Pemakaian kerangka dasar
relatif dalam analisis pergeseran horisontal memang tepat, karena semua titik
mengalami pergeseran sehingga merupakan parameter.
1.7.8. Hitung Perataan Metode Parameter Berbobot
Metode parameter berbobot digunakan untuk kasus data pengamatan geodetik
yang terdapat informasi atau ukuran dari parameter yang dicari. Informasi atau
ukuran tersebut dijadikan sebagai ukuran kedua dengan memberikan bobot tertentu
terhadap parameter. Hitung perataan parameter berbobot ini akan mempunyai dua
kelompok pengukuran, yaitu untuk kelompok pertama terdiri dari data pengamatan
jarak dan sudut. Kelompok pengukuran kedua terdiri dari pengamatan koordinat dari
parameter yang dicari. Bentuk umum untuk metode parameter berbobot adalah
sebagai berikut (Soeta’at, 1996) :
L1a = F1(Xa)……………………………………………………………….(I.19)
L2a = F2(Xa)……………………………………………………………….(I.20)
Bentuk linier dari parameter berbobot adalah :
V1 = A1X + F1……………………………………………………………...(I.21)
V2 = A2X + F2……………………………………………………………...(I.22)
Persamaan matematis untuk perataan metode parameter ada dua kelompok
persamaan, yaitu persamaan untuk kelompok pertama terdiri dari persamaan jarak
dan persamaan sudut. Sedangkan untuk persamaan kelompok kedua yaitu persamaan
koordinat. Bentuk persamaan adalah sebagai berikut :
................................................................. (I.23)
............................................................. (I.24)
X1 + V1 = .................................................................................................. (I.25)
Y1 + V2 = ................................................................................................... (I.26)

22
Model stokastik ditunjukkan oleh matriks bobot P1 dan P2, dan dengan
pemilihan elemen P1 dan P2 yang tepat, akan bisa diperoleh solusi yang diinginkan.
Pada metode parameter berbobot, parameter yang diberi bobot besar pada matriks
P2, berarti parameter tersebut bisa dianggap fixed. Sebaliknya untuk bobot yang
kecil, parameter tersebut memiliki ketelitian yang rendah. Sehingga dengan
memberikan bobot P2 yang cocok akan dihasilkan solusi yang sesuai dengan
kenyataan yang diinginkan. Adapun isi dari matriks F2 adalah nilai pendekatan
koordinat dikurangi dengan nilai ukuran koordinat yang bersesuaian, sesuai
persamaan (I.22) di bawah ini :
F2 = X0 - XB ..................................................................................................(I.27)
Dengan demikian diperoleh persamaan untuk menghitung nilai parameter
seperti pada persamaan (I.23).
X = –(A1TP1A1 + A2
TP2A2)
-1 (A1
TP1F1 + A2
TP2F2) ...................................... (I.28)
Untuk mencari matriks varian kovarian ( ) :
......................................................... (I.29)
varian aposteori ....................................................................... (I.30)
VTPV = V1
TP1V1 + V2
TP2V2 ........................................................................ (I.31)
Akar elemen-elemen diagonal matriks merupakan nilai ketelitian dari
tiap-tiap parameter yang bersesuaian.
1.7.9. Linierisasi Persamaan Pengamatan
Persamaan non linier merupakan persamaan yang memiliki turunan kedua
tidak sama dengan nol, sebagai contohnya adalah pada pengamatan sudut dan jarak.
Pengamatan sudut dan jarak tersebut akan membentuk persamaan yang non linier.
Sehingga diperlukan linierisasi pada persamaan sudut dan jarak tersebut dengan deret
Taylor.

23
1.7.9.1. Linierisasi persamaan pangamatan sudut dengan deret Taylor.
Sudut merupakan selisih bacaan arah horisontal yang satu dengan bacaan arah
horisontal lainnya, yang terbentuk dari selisih azimuth di suatu titik seperti pada
gambar I.4. Adapun azimuth merupakan model fungsional dari koordinat 2D (X, Y).

24
Gambar I.4. Ilustrasi sudut horisontal dibentuk dari titik A, B, dan C
Model matematik pengamatan sudut pada gambar I. 4 adalah :
………………………………..……..(I.32)
Pada persamaan (I.32), nilai XA, YA, XB, YB, XC, dan YC adalah parameter, maka
persamaan (I.32) diturunkan terhadap masing-masing parameter adalah sebagai
berikut :
1. Turunan terhadap XA
………………………………………………....(I.33)
2. Turunan terhadap YA
………………………………………………....(I.34)
3. Turunan terhadap XB
…………………………..(I.35)
4. Turunan terhadap YB
…………………………..(I.36)
5. Turunan terhadap XC
………………………………………………....(I.37)
6. Turunan terhadap YC
U
αBC
αBA
β
X
Y
A
B C

25
………………………………………………....(I.38)
1.7.9.2. Linierisasi persamaan pangamatan jarak dengan deret Taylor.
Jarak merupakan selisih koordinat antara dua titik. Bentuk geometri dari pengukuran
jarak antara dua titik adalah seperti gambar I.5. Model matematis untuk bentuk
geometri jarak sesuai gambar I. 5 adalah sebagai berikut :
…………………………………………(I.39)
Gambar I.5. Ilustrasi jarak datar yang dibentuk dari titik 1 dan 2
Persamaan (I.39) diturunkan terhadap masing-masing parameter, yaitu X1, Y1, X2, Y2
adalah sebagai berikut :
1. Turunan terhadap X1
………………………………...……(I.40)
2. Turunan terhadap Y1
………………………………...…….(I.41)
3. Turunan terhadap X2
………………………….……………(I.42)
4. Turunan terhadap Y2
2 (X2, Y2)
((X2,Y2)
1 (X1,Y1) X
Y

26
…………………………………...…...(I.43)
1.7.10. Pemberian Bobot
Bobot pengamatan adalah perbandingan ketelitian antara suatu besaran
pengamatan relatif terhadap besaran pengamatan yang lain. Pemberian bobot
diberikan berbanding terbalik dengan nilai varian pengukuran (Mikhail dan Gracia,
1981).
Suatu besaran pengamatan yang diperoleh akan memiliki ketelitian yang
beragam, sehingga harus diberikan bobot, karena perbedaan ketelitian besaran-
besaran yang diamat tersebut perlu diperhitungkan adanya bobot dalam pengamatan
yang besarnya disesuaikan dengan ketelitian masing-masing pengukuran.
∑Lb-1
…………………………………………………………….……….(I.44)
Dalam hal ini :
P : bobot pengamatan,
: varian apriori,
∑Lb-1
: varian pengukuran.
Jika pengamatan tidak saling berkorelasi, maka bobot pengukuran merupakan matrik
diagonal.
∑Lb-1
=
Matrik bobot yang dapat dibentuk adalah seperti di bawah ini :
= matrik bobot.
27
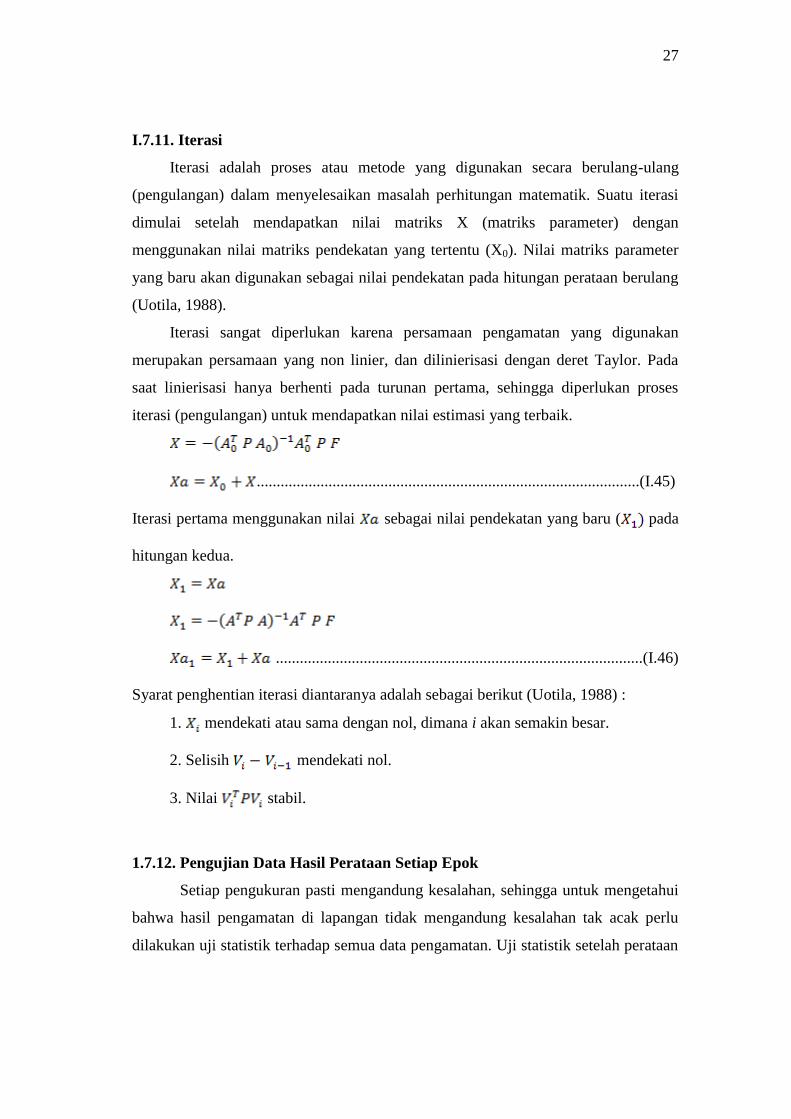
I.7.11. Iterasi
Iterasi adalah proses atau metode yang digunakan secara berulang-ulang
(pengulangan) dalam menyelesaikan masalah perhitungan matematik. Suatu iterasi
dimulai setelah mendapatkan nilai matriks X (matriks parameter) dengan
menggunakan nilai matriks pendekatan yang tertentu (X0). Nilai matriks parameter
yang baru akan digunakan sebagai nilai pendekatan pada hitungan perataan berulang
(Uotila, 1988).
Iterasi sangat diperlukan karena persamaan pengamatan yang digunakan
merupakan persamaan yang non linier, dan dilinierisasi dengan deret Taylor. Pada
saat linierisasi hanya berhenti pada turunan pertama, sehingga diperlukan proses
iterasi (pengulangan) untuk mendapatkan nilai estimasi yang terbaik.
................................................................................................(I.45)
Iterasi pertama menggunakan nilai sebagai nilai pendekatan yang baru ( pada
hitungan kedua.
............................................................................................(I.46)
Syarat penghentian iterasi diantaranya adalah sebagai berikut (Uotila, 1988) :
1. mendekati atau sama dengan nol, dimana i akan semakin besar.
2. Selisih mendekati nol.
3. Nilai stabil.
1.7.12. Pengujian Data Hasil Perataan Setiap Epok
Setiap pengukuran pasti mengandung kesalahan, sehingga untuk mengetahui
bahwa hasil pengamatan di lapangan tidak mengandung kesalahan tak acak perlu
dilakukan uji statistik terhadap semua data pengamatan. Uji statistik setelah perataan
28
ada dua yaitu, uji global dan uji statistik, yang menggunakan tingkat kepercayaan
tertentu terhadap data pengamatan yang diperoleh.
1.7.12.1. Uji global.
Uji global dilakukan setelah hitung perataan kuadrat terkecil dengan membandingkan
varian aposteori ( 2ˆo ) terhadap varian apriori ( 2
o ) dan digunakan untuk mengetahui
adanya kesalahan tak acak yang mempengaruhi data pengamatan. Pada uji global ini
bisa digunakan uji Fisher. Tahap pengujiannya adalah dengan meyusun hipotesis
sebagai berikut :
Ho : 22ˆoo ................................................................................................(I.47)
Ha : 22ˆoo ................................................................................................(I.48)
Hipotesis nol merupakan perumusan sementara yang akan diuji
kebenarannya. Sedangkan Ha merupakan hipotesis tandingan dari hipotesis nol.
Hipotesis nol ditolak apabila :
f
o
o F ,,12
2ˆ
........................................................................................(I.49)
Hipotesis nol diterima menyatakan bahwa hasil pengukuran tidak dipengaruhi
kesalahan tak acak sehingga mengikuti sebaran normal Gauss, oleh karena itu
penolakan hipotesis nol merupakan indikasi adanya kemungkinan bahwa pengukuran
dipengaruhi oleh kesalahan tak acak, maka kesalahan tersebut harus dicari
menggunakan uji snooping. Penolakan Ho dapat disebabkan karena (Soeta’at, 1996):
a. Model matematis yang salah.
b. Kesalahan dalam menghitung.
c. Ill condition system.
d. Penghapusan derajat tinggi.
e. Ketidaktepatan dalam menentukan varian apriori.
f. Adanya blunder pada data ukuran.

29
1.7.12.2. Uji snooping.
Uji snooping dilakukan jika dari hasil uji global, Ho ditolak. Hal ini menunjukkan
bahwa kemungkinan adanya kesalahan tak acak pada data pengamatan. Untuk
mengetahui letak kesalahan tak acak tersebut maka perlu dilakukan uji snooping. Uji
ini dilakukan pada setiap data pengamatan yang diperoleh. Tahap pengujiannya
adalah dengan menyusun hipotesis sebagai berikut :
Ho : hasil pengamatan tidak dipengaruhi kesalahan tak acak.
Ha : hasil pengamatan dipengaruhi kesalahan tak acak.
Ho diterima apabila memenuhi persamaan berikut :
2/1
,1,1 o
Fwi ............................................................................................(I.50)
Dalam hal ini,
iv
i
i
Vw
....................................................................................................(I.51)
vi : residu pengamatan ke – i.
Vi : simpangan baku residu ke – i.
Simpangan baku koreksi/residu pengamatan dapat diperoleh dengan mengakarkan
elemen diagonal matriks varian kovarian residu.
1.7.13. Model Persamaan Pergeseran Horisontal
Proses hitung kudrat terkecil yang dihasilkan adalah berupa data koordinat
2D (X dan Y) untuk setiap epok data kofaktor Qxx dan varian aposteori masing –
masing epok. Dari data – data tersebut akan dijadikan data masukan bagi analisis
pergeseran horisontal. Data koordinat dari epok tahun 2012 dan tahun 2013 akan
dibuat model hitungan pergeseran horisontalnya berupa besar pergeseran (d). Dalam
melakukan hitung analisis pergeseran horisontal adalah membentuk persamaan
pergeseran horisontal. Besar pergeseran adalah nilai beda dari koordinat 2D untuk
dua epok pengamatan.
dX = X2013 - X2012 ....................................................................................... (I.52)
dY = Y2013 - Y2012 ....................................................................................... (I.53)

30
Nilai pergeseran absis dan nilai pergeseran ordinat harus memiliki ketelitian,
yang ditunjukkan dengan besar simpangan baku pergesran absis dan besar
simpangan baku pergeseran ordinat. Proses perhitungan untuk mendapatkan
simpangan baku dari pergeseran absis dan simpangan baku dari pergeseran ordinat
adalah sebagai berikut :
= ......................................................................... (I.54)
= .......................................................................... (I.55)
Jarak pergeseran horisontal diperoleh dari rumus phythagoras dengan
melibatkan selisih absis dan selisih ordinat, yaitu seperti persamaan sebagai berikut :
d = .......................................................................................... (I.56)
sama halnya dengan simpangan baku pergeseran absis dan ordinat, pada pergeseran
horisontal pergeseran juga harus ditentukan nilai simpangan bakunya untuk melihat
ketelitian dari masing – masing nilai pergeseran horisontal. Adapun proses
perhitungan untuk mencari nilai simpangan baku pergeseran horisontal
menggunakan prinsip hitungan perambatan kesalahan acak adalah sebagai berikut :
σd2 = .......................................................... (I.57)
Setiap nilai koordinat yang dihasilkan pada setiap epok, memiliki kesalahan
sebesar V (residu), sehingga persamaan untuk melakukan analisis pergeseran
horisontal menjadi sebagai berikut ini :
dX = X2013 + VX 2013 – (X2012 + VX 2012) ....................................................... (I.58)
dY = Y2013 + VY 2013 – (Y2012 + VY 2012) ........................................................ (I.59)
Persamaan tersebut nantinya digunakan untuk melakukan analisis horisontal.
1.7.14. Analisis Pergeseran Horisontal
Perhitungan untuk pergeseran horisontal dari obyek pengamatan
menggunakan parameter pergeseran yang terjadi pada titik – titik kontrol yang
terdistribusi dalam jaringan pengamatan dengan uji statistik (Abidin, dkk. 2006). Uji
yang dilakukan pada tahap analisis pergeseran horisontal terdiri dari 2 uji yaitu uji
kesebangunan jaring dan uji pergeseran titik.

31
I.7.14.1. Uji kesebangunan jaring.
Pada tahap pengujian ini menggunakan uji global untuk mendeteksi ada tidaknya
perubahan bentuk jaring pada setiap epok. Dalam pengujian ini melibatkan seluruh
koordinat pada suatu jaringan pemantauan deformasi (Widjajanti, 1997).
Tahap pengujiannya adalah sebagai berikut :
1. Membentuk model hitungan (persamaan pergeseran horisontal)
berdasarkan pasangan titik pantau atau parameter deformasi dari kedua
epok.
Ud Vd + d = 0 ........................................................................................ (I.60)
Dalam hal ini :
Ud : matriks koefisien koreksi pengamatan,
d : vektor pergeseran titik pantau,
Vd : vektor koreksi pergeseran.
2. ...................................................................................................... Meng
hitung nilai korelat pergeseran K.
K = ( Ud Qd UdT )
-1 d ............................................................................. (I.61)
Q(j)
= -1(j)T )PAA(
Q(k)
= -1(k)T )PAA(
Q(j)
: matriks kofaktor parameter pada epoch pertama,
Q(k)
: matriks kofaktor parameter pada epoch kedua.
3. ...................................................................................................... Meng
hitung nilai koreksi pergeseran titik obyek Vd dan dV .
Vd = - Qd UdT K .................................................................................... (I.62)
dV = Qd-1
Vd .......................................................................................... (I.63)
4. ...................................................................................................... Meng
hitung varian nilai pergeseran.
Varian apriori pergeseran :2
σ̂σ̂σ
)k(2
0
)j(2
02
d0
+=
................................ (I.64)

32
Varian aposteori pergeseran :r
VQVσ̂
d
-1
d
T
d2
d0 = .................................... (I.65)
5. ...................................................................................................... Meny
usun hipotesis :
Ho : bentuk jaringan tidak mengalami perubahan ( 2
0dσ̂ = 2
odσ )
Ha : bentuk jaringan mengalami perubahan (2
odσ̂ > 2
odσ )
7. Menetapkan taraf uji ( 0α ).
8. Menentukan nilai batas rF ,,-1 0 dari tabel fungsi Fisher dengan argumen 0α
dan r (jumlah persamaan syarat).
9. Menguji hipotesis nol (Ho)
Hipotesis nol ditolak jika : r,,α-12
d0
2
d0
0F
σ
σ̂∞>
............................................ (I.66)
Jika Ho ditolak menunjukkan adanya pergeseran pada jaring pemantauan.
Sedangkan jika H0 diterima mengidentifikasikan bahwa pergeseran tidak terjadi
pada jaring pemantauan. Jika penolakan ini terjadi maka ada koordinat yang
mengalami pergeseran, maka perlu dilakukan uji pergeseran titik pantau untuk
menentukan dimana titik-titik kontrol yang mengalami pergeseran.
I.7.14.2. Uji pergeseran titik objek.
Uji pergeseran titik objek ini memiliki tujuan untuk mengetahui dimana titik-titik
objek yang telah mengalami pergeseran. Uji statistik ini dilakukan jika hasil uji
kesebangunan jaring ditolak. Dalam mendeteksi pergeseran pada setiap titik objek,
menggunakan prinsip data snooping yaitu dengan menguji koordinat masing-masing
titik objek (Widjajanti, 1997).
Tahap pengujiannya adalah sebagai berikut :
1. Menentukan hipotesis :
Ho :
Ha :
33
2. Menentukan taraf uji ( ).
3. Menetapkan nilai batas berdasarkan tabel fungsi Fisher dengan
argumen dan r (r = degree of freedom).
4. menghitung Wdi (baarda, 1967).
Dalam hal ini :
Nd = UdT
(Ud Qd UdT)-1
Ud…………………………………………....(I.67)
Wdi = …………………………………………………………...(I.68)
5. Menguji hipotesis nol (H0).
Hipotesis nol akan diterima jika :
…………………………………………………….....(I.69)
Jika Ho diterima, maka koordinat titik ke - i tidak mengalami pergeseran, sedangkan
jika Ho ditolak menunjukkan bahwa pada koordinat titik ke - i telah mengalami
pergeseran.
I.8. Hipotesis
Pada penelitian ini dilakukan pengukuran kerangka kontrol deformasi di sekitar
Waduk Sermo, Kabupaten Kulon Progo. Hipotesis yang dapat dikemukakan adalah :
1. Menunjukkan bahwa terdapat pergeseran nilai koordinat 2D yang terjadi
pada tahun 2012 dan tahun 2013. Pada penelitian sebelumnya (Yulaikhah
dan Ruli, 2013) menyebutkan bahwa besar pergeseseran yang terjadi antara
9 mm sampai 16 cm.
2. Berdasarkan lokasi dari Waduk Sermo yang terletak di daerah Sesar Opak
yang aktif. Besarnya pergeseran horisontal yang terjadi selama 1 tahun
menggunakan data dua epok yaitu tahun 2012 dan 2013 signifikan secara
statistik.

34
BAB II
PELAKSANAAN
II.1. Lokasi Penelitian
Penelitian ini dilakukan di sekitar Waduk Sermo, yang terletak di wilayah
Desa Hargowilis, Kecamatan Kokap, Kabupaten Kulon Progo, Provinsi Daerah
Istimewa Yogyakarta, Indonesia.