Embed Size (px)
Citation preview
ТРУДЫМеждународной научно-практической конференции
«Интеграция науки, образования и производства –основа реализации Плана нации»
(Сагиновские чтения № 10)
14-15 июня 2018 г.
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖƏНЕ ҒЫЛЫМ МИНИСТРЛІГІ
ҚАРАҒАНДЫ МЕМЛЕКЕТТІК ТЕХНИКАЛЫҚ УНИВЕРСИТЕТІ
MINISTRY OF EDUCATION AND SCIENCE OF THE REPUBLIC OF KAZAKHSTAN
KARAGANDA STATE TECHNICAL UNIVERSITY
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Халықаралық ғылыми-практикалық конференциясының
ЕҢБЕКТЕРІ
(№ 10 Сағынов оқулары)
14-15 маусым 2018 ж.
PROCEEDINGS
«Science integration, education and production –basis of the implementation of the Plan of the nation»
«Ғылым, білім жəне өндіріс интеграциясы – Ұлт жоспарын іске асырудың негізі»
of the International scientific conference
(Saginov’s readings № 10)
June 14-15, 2018
Қарағанды 2018
3 бөлім
Часть 3
Part 3
Қазақстан Республикасы Білім және ғылым министрлігі Қарағанды мемлекеттік техникалық университеті
Министерство образования и науки Республики Казахстан Карагандинский государственный технический университет Ministry of education and science of the Republic of Kazakhstan
Karaganda State Technical University
«Ғылым, білім және өндіріс интеграциясы - Ұлт жоспарын іске асырудың негізі»
(№10 Сағынов оқулары) Халықаралық ғылыми-практикалық конференциясының
Е Ң Б Е К Т Е Р І
14-15 маусым 2018 ж. 3 бөлім
Т Р У Д Ы Международной научно-практической конференции
«Интеграция науки, образования и производства – основа реализации Плана нации» (Сагиновские чтения №10)
14-15 июня 2018 г. Часть 3
P R O C E E D I N G S of the International scientific-practical conference
“Science integration, education and production - basis of the implementation of the Plan of the nation”
(Saginov’s readings № 10) June 14-15, 2018
Part 3
Қарағанды 2018
ӘӨЖ 001:378 КБЖ 74.58 Ғ96
Б а с р е д а к т о р
Профессор Ибатов М.К.
Р е д а к ц и я лы қ а лқ а :
Исағулов А.З., Жетесова Г.С., Ожигин С.Г., Дрижд Н.А., Борисенко А.В., Нарежнев А.Н., Кенжин Б.М., Моисеев В.С.,
Мұхаметқалиев Б.С., Бурковский А.Ю., Жакенов С.А., Ходжаев Р.Р.
«Ғылым, білім және өндіріс интеграциясы - Ұлт жоспарын іске асырудың негізі» (№10 Сағынов оқулары) Халықаралық ғылыми-практикалық конференциясының еңбектері, 14-15 маусым 2018 ж. 7 бөлімде. 3-бөлім/ ҚР Білім және ғылым министрлігі, Қарағанды мемлекеттік техникалық университеті. - Қарағанды: ҚарМТУ баспасы, 2018. – 312 б.
ISBN 978-601-315-504-3
Ғылыми еңбектерде «Ғылымды, білімді және өндірісті шоғырландыру –
Ұлт Жоспарын жүзеге асыру негізі» Халықаралық ғылыми-практикалық конференция баяндамалары жарияланды. Баяндамаларда жоғары кәсіптік білім берудің, болашақ энергетикасының, ақпараттық технологиялардың, химия-биологиялық ғылымдарының, экономиканың, социология мен геосаясаттың, табиғатты тиімді пайдаланудың, тіршілік әрекеті қауіпсіздігінің, металлургия мен материалтанудың, көліктің және құрылыстың маңызды мәселелері қарастырылды.
Ғылыми еңбектердің материалдары ЖОО ғалымдарына, мамандарына, оқытушыларына, магистранттар мен студенттеріне арналған.
ӘӨЖ 001:378
КБЖ 74.58
ISBN 978-601-315-504-3 © Қарағанды мемлекеттік
техникалық университеті, 2018
УДК 001:378 ББК 74.58 Т96
Г л а в н ы й р е д а к т о р Профессор Ибатов М.К.
Р е д а к ц и о н н а я к о л л е г и я :
Исагулов А.З., Жетесова Г.С., Ожигин С.Г., Дрижд Н.А., Борисенко А.В., Нарежнев А.Н., Кенжин Б.М., Моисеев В.С.,
Мухаметкалиев Б.С., Бурковский А.Ю., Жакенов С.А., Ходжаев Р.Р.
Труды Международной научно-практической конференции «Интеграция
науки, образования и производства – основа реализации Плана нации» (Сагиновские чтения № 10), 14-15 июня 2018 г. В 7-и частях. Часть 3/ Министерство образования и науки РК, Карагандинский государственный технический университет. - Караганда: Изд-во КарГТУ, 2018. – 312 с.
ISBN 978-601-315-504-3
В Трудах опубликованы доклады участников Международной научно-практической конференции «Интеграция науки, образования и производства – основа реализации Плана нации». В докладах рассмотрены актуальные проблемы высшего профессионального образования, энергетики будущего, информационных технологий, химико-биологических наук, экономики, социологии и геополитики, технических наук, рационального природопользования, безопасности жизнедеятельности, металлургии и материаловедения, транспорта и строительства.
Материалы трудов предназначены для ученых, специалистов, преподавателей, магистрантов и студентов вузов.
УДК 001:378 ББК 74.58
ISBN 978-601-315-504-3 © Карагандинский государственный
технический университет, 2018
UDC 001:378 LBC 74.58 P96
E d i t o r - i n - c h i e f
Professor M.K. Ibatov
Editorial board: Isagulov A.Z., Zhetesova G.S., Ozhigin S.G., Drizhd N.A.,
Borisenko A.V., Narezhnev A.N., Kenzhin B.M., Moiseev V.S., Mukhametkaliev B.S., Burkovskiy A.Yu.,
Zhakenov S.A., Khodzhaev R.R.
Proceedings of the International scientific conference «Science
integration, education and production - basis of the implementation of the Plan of the nation” (Saginov’s readings No 10), June 14-15, 2018. In 7 parts. Part 3/ RK Ministry of Education and Science, Karaganda State Technical University. – Karaganda: Publ. KSTU, 2018. –312p.
ISBN 978-601-315-504-3
Papers publish participants' reports of the International Scientific and Practical
Conference “Integration of Science, Education and Production — a Basis of Implementing the Nation's Plan”. The reports consider challenging problems of higher education, future power engineering, information technologies, chemical and biological sciences, economics, sociology and geopolitics, technical science, efficient use of natural resources, health and safety, metallurgy and materials science, transport and construction.
Materials of papers are designed for scientists, experts, teachers, master's students and students of higher education institution
UDC 001:378 LBC 74.58
ISBN 978-601-315-504-3 © Karaganda State Technical University, 2018
АВТОМАТИЗАЦИЯ. РОБОТОТЕХНИКА
6
УДК 621. 316. 06 Абибеков Г.С. (Караганда, КарГТУ) Котов Е.С. (Караганда, КарГТУ)
РАЗРАБОТКА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ОХРАННОЙ И
ПОЖАРНОЙ СИГНАЛИЗАЦИИ
Этот проект – принципиально новая многофункциональная система управления и контроля охранной системы здания.
Система пожарной сигнализации — совокупность установок пожарной сигнализации, смонтированных на одном объекте и контролируемых с общего пожарного поста.
Автоматическая установка пожарной сигнализации (АУПС) — совокупность технических средств, предназначенных для обнаружения пожара, обработки, передачи в заданном виде извещения о пожаре, специальной информации и (или) выдачи команд на включение автоматических установок пожаротушения и включение исполнительных установок систем противодымной защиты, технологического и инженерного оборудования, а также других устройств противопожарной защиты.[1]
Установки и системы пожарной сигнализации, оповещения и управления эвакуацией людей при пожаре должны обеспечивать автоматическое обнаружение пожара за время, необходимое для включения систем оповещения о пожаре в целях организации безопасной (с учетом допустимого пожарного риска) эвакуации людей в условиях конкретного объекта.[1]
Системы пожарной сигнализации, оповещения и управления эвакуацией людей при пожаре должны быть установлены на объектах, где воздействие опасных факторов пожара может привести к травматизму и (или) гибели людей.[2]
Система охранной сигнализации является техническим средством охраны и схематично состоит из трех основных модулей:[2]
1. датчики; 2. приемо-контрольный прибор ПКП; 3. исполнительные устройства. Датчики (или извещатели), в зависимости от их типа, контролируют
определенный параметр. Это может быть открытие двери или окна, движение в защищаемом помещении, разбитие стекла и другие параметры. Если происходит событие, которое контролирует датчик (например, движение в помещении), он срабатывает, преобразовывает сигнал в понятную форму для передачи на приемно-контрольный прибор.
Приемно-контрольный прибор осуществляет слежение и контроль за всеми датчиками. В случае срабатывания датчика он обрабатывает полученный от него сигнал, и в соответствии с запрограммированной в его
7
энергонезависимую память тактикой охраны, выдает сигнал на исполнительные устройства.
Исполнительные устройства активируются при приеме сигнала от приемно-контрольного прибора. Обычно сигнал от ПКП включает свето-звуковое устройство (сирену) и осуществляет дозвон с речевым сообщением на городской или мобильный телефоны.
Передача сигнала от ПКП может осуществляться по городской телефонной сети ГТС, по GSM, по радиоканалу (когда выделяется определенная частота для передачи тревожного сигнала), либо через интернет.[2]
В системах охранных сигнализаций в основном используются три типа датчиков.
Датчики открытия — магнито-контактные. Устанавливаются на двери и окна и выдают сигнал при их открытии.
Датчики движения — объемные. Контролируют объем внутри помещения, и при обнаружении движения выдают сигнал срабатывания.
Датчики разбития стекла. Устанавливаются вблизи окон и при их разбитии формируют сигнал для ПКП.
Для подключения всех устройств системы на плате ПКП установлены специальные клеммники.[2]
Приемно-контрольные приборы выпускаются на различное количество охранных зон. Многие системы поддерживают возможность расширения количества подключаемых зон, это позволяет подключать большое количество извещателей и строить большие многофункциональные системы.[3]
Для управления и изменения настроек к ПКП подключается клавиатура (пульт). С клавиатуры можно поставить/снять с охраны всю систему или ее часть; запрограммировать необходимые настройки; изменить пароли; просмотреть память тревог или неисправностей.
Охранную сигнализацию также можно поставить или снять с охраны дистанционно с помощью брелока.
После получения сигналов от охранных извещателей ПКП обрабатывает их в соответствии с запрограммированной тактикой охраны, и выдает управляющие сигналы на исполнительные устройства. Исполнительные устройства могут подключаться как непосредственно к плате централи, так и через специальные модули (платы расширения выходов, диаллеры, коммуникаторы и др.)
Для модернизации системы охранно-пожарной сигнализации одного из зданий была разработана SCADA система на основе программы Citect Project. Данная SCADA система показана на рис.1.
8
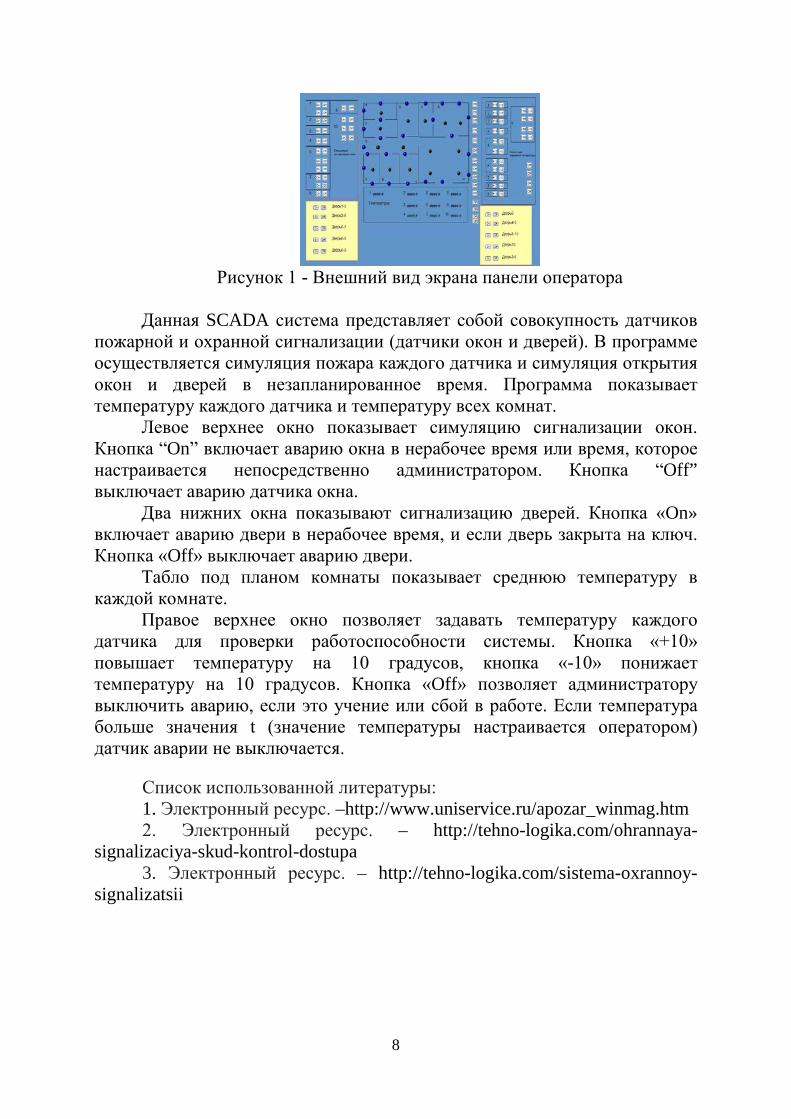
Рисунок 1 - Внешний вид экрана панели оператора
Данная SCADA система представляет собой совокупность датчиков
пожарной и охранной сигнализации (датчики окон и дверей). В программе осуществляется симуляция пожара каждого датчика и симуляция открытия окон и дверей в незапланированное время. Программа показывает температуру каждого датчика и температуру всех комнат.
Левое верхнее окно показывает симуляцию сигнализации окон. Кнопка “On” включает аварию окна в нерабочее время или время, которое настраивается непосредственно администратором. Кнопка “Off” выключает аварию датчика окна.
Два нижних окна показывают сигнализацию дверей. Кнопка «On» включает аварию двери в нерабочее время, и если дверь закрыта на ключ. Кнопка «Off» выключает аварию двери.
Табло под планом комнаты показывает среднюю температуру в каждой комнате.
Правое верхнее окно позволяет задавать температуру каждого датчика для проверки работоспособности системы. Кнопка «+10» повышает температуру на 10 градусов, кнопка «-10» понижает температуру на 10 градусов. Кнопка «Off» позволяет администратору выключить аварию, если это учение или сбой в работе. Если температура больше значения t (значение температуры настраивается оператором) датчик аварии не выключается.
Список использованной литературы: 1. Электронный ресурс. –http://www.uniservice.ru/apozar_winmag.htm 2. Электронный ресурс. – http://tehno-logika.com/ohrannaya-
signalizaciya-skud-kontrol-dostupa 3. Электронный ресурс. – http://tehno-logika.com/sistema-oxrannoy-
signalizatsii
9
ӘОЖ 665.63 Ағайнбеков А.Т. (Қарағанды, ҚарМТУ)
МҰНАЙДЫ АТМОСФЕРАЛЫҚ АЙДАУ ҮРДІСІНДЕ ЭНЕРГИЯ ТИІМДІЛІГІН АРТТЫРУ
Өңдеуге дайындалған мұнайдан тауарлы мұнай өнімдерін алу
атмосфералық-вакуумдық қондырғыдан басталады. Қазақстандағы МӨЗ-тарында АВҚ аббревиатурасымен белгіленеді – атмосфералық-вакуумдық құбыр (трубчатка), мұнда мұнай электрлік тұзсыздандыру қондырғысынан кейін түседі (ЭТҚ). АВҚ-дан алынған фракциялар екінші қайта өңдеуге шикізат немесе тауарлық өнімнің компоненті болып табылады. Олардан практикалық тұрғыда мотор отынының, жағын майлардың барлық компоненттері, екінші қайта өңдеу үрдістері және мұнай-химия өндірістері үшін шикізат әзірленеді. АВТ-ЭТҚ немесе АТ-ЭТҚ кешенді қондарғыларының жұмыс істеуі алынатын мұнай фракцияларының шығысы мен сапасына ғана тәуелді емес, сонымен қоса МӨЗ-дағы мұнайды қайта өңдеу үрдісінің барлық техника-экономикалық көрсеткіштері тәуелді.
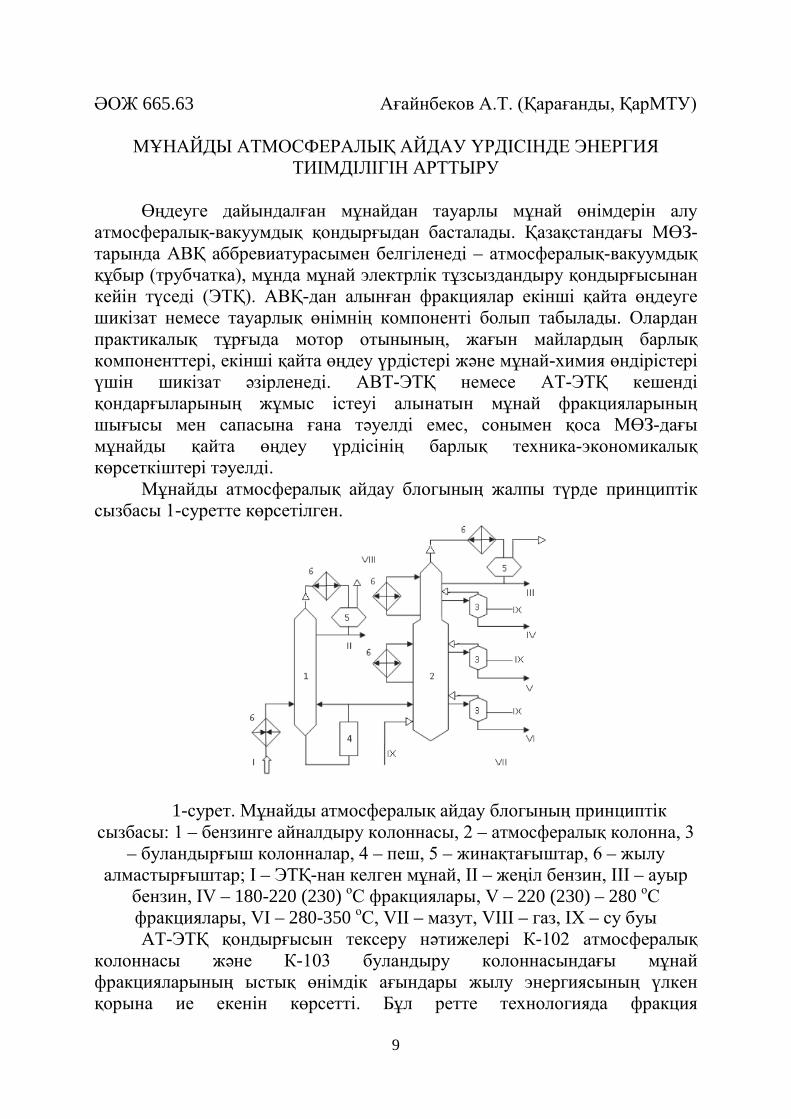
Мұнайды атмосфералық айдау блогының жалпы түрде принциптік сызбасы 1-суретте көрсетілген.
1-сурет. Мұнайды атмосфералық айдау блогының принциптік сызбасы: 1 – бензинге айналдыру колоннасы, 2 – атмосфералық колонна, 3
– буландырғыш колонналар, 4 – пеш, 5 – жинақтағыштар, 6 – жылу алмастырғыштар; I – ЭТҚ-нан келген мұнай, II – жеңіл бензин, III – ауыр
бензин, IV – 180-220 (230) оС фракциялары, V – 220 (230) – 280 оС фракциялары, VI – 280-350 оС, VII – мазут, VIII – газ, IX – су буы АТ-ЭТҚ қондырғысын тексеру нәтижелері К-102 атмосфералық
колоннасы және К-103 буландыру колоннасындағы мұнай фракцияларының ыстық өнімдік ағындары жылу энергиясының үлкен қорына ие екенін көрсетті. Бұл ретте технологияда фракция
10
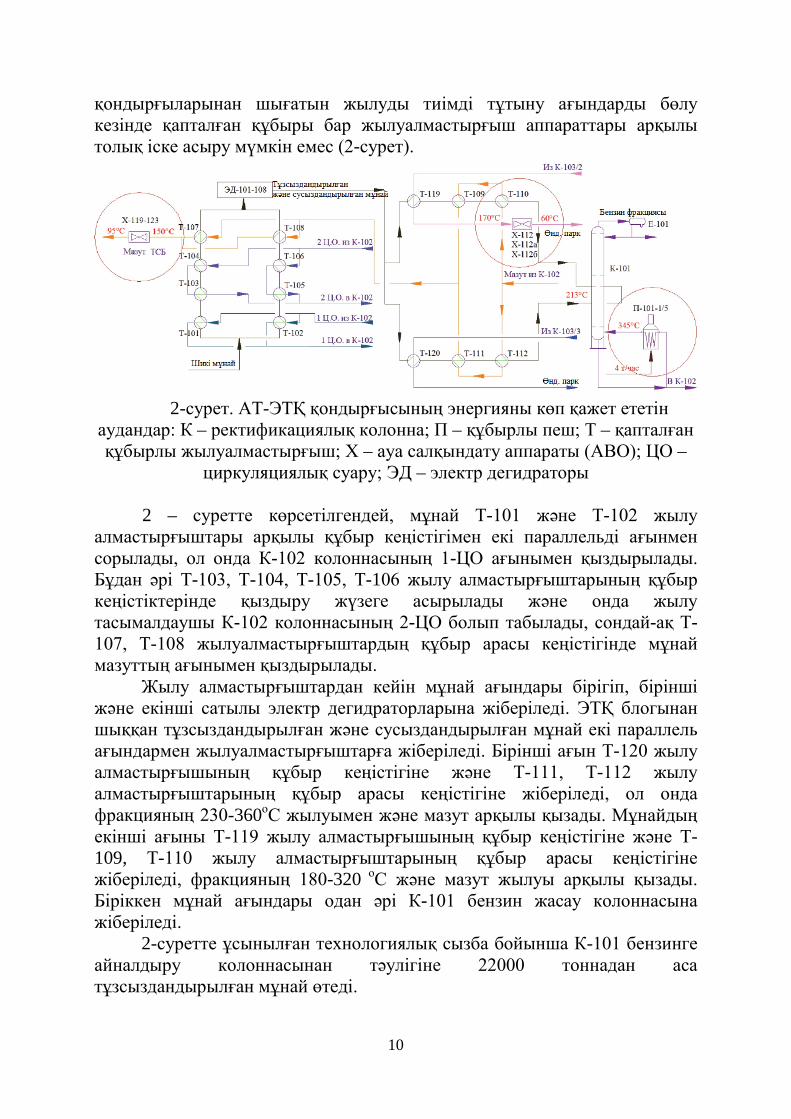
қондырғыларынан шығатын жылуды тиімді тұтыну ағындарды бөлу кезінде қапталған құбыры бар жылуалмастырғыш аппараттары арқылы толық іске асыру мүмкін емес (2-сурет).
2-сурет. АТ-ЭТҚ қондырғысының энергияны көп қажет ететін
аудандар: К – ректификациялық колонна; П – құбырлы пеш; Т – қапталған құбырлы жылуалмастырғыш; X – ауа салқындату аппараты (АВО); ЦО –
циркуляциялық суару; ЭД – электр дегидраторы 2 – суретте көрсетілгендей, мұнай Т-101 және Т-102 жылу алмастырғыштары арқылы құбыр кеңістігімен екі параллельді ағынмен сорылады, ол онда К-102 колоннасының 1-ЦО ағынымен қыздырылады. Бұдан әрі Т-103, Т-104, Т-105, Т-106 жылу алмастырғыштарының құбыр кеңістіктерінде қыздыру жүзеге асырылады және онда жылу тасымалдаушы К-102 колоннасының 2-ЦО болып табылады, сондай-ақ Т-107, Т-108 жылуалмастырғыштардың құбыр арасы кеңістігінде мұнай мазуттың ағынымен қыздырылады.
Жылу алмастырғыштардан кейін мұнай ағындары бірігіп, бірінші және екінші сатылы электр дегидраторларына жіберіледі. ЭТҚ блогынан шыққан тұзсыздандырылған және сусыздандырылған мұнай екі параллель ағындармен жылуалмастырғыштарға жіберіледі. Бірінші ағын Т-120 жылу алмастырғышының құбыр кеңістігіне және Т-111, Т-112 жылу алмастырғыштарының құбыр арасы кеңістігіне жіберіледі, ол онда фракцияның 230-360оС жылуымен және мазут арқылы қызады. Мұнайдың екінші ағыны Т-119 жылу алмастырғышының құбыр кеңістігіне және Т-109, Т-110 жылу алмастырғыштарының құбыр арасы кеңістігіне жіберіледі, фракцияның 180-320 оС және мазут жылуы арқылы қызады. Біріккен мұнай ағындары одан әрі К-101 бензин жасау колоннасына жіберіледі.
2-суретте ұсынылған технологиялық сызба бойынша К-101 бензинге айналдыру колоннасынан тәулігіне 22000 тоннадан аса тұзсыздандырылған мұнай өтеді.
11
К-101 бензинге айналдыру колоннасының технологиялық режимін ауыстыру колоннаның материалды және жылу ағындарын ғана ауыстырмай, сонымен қатар атмосфералық колоннаға қайта өңдеуге түсетін жартылай бензинге айналдырылған қоспа шикізатының қайнау интенсивтілігіне әсер етуге қабілетті. Одан әрі бұл ауыр сутектердің қаныққан бу қысымын төмендетуге алып келуі мүмкін, ол бөлінудің шартын нашарлатады және атмосфералық колонна өнімдерінің баланстық санын қайта бөледі.
К-101 колоннасының технологиялық режим нормалары бойынша шикізат температурасы 210-215 °С құрайды, кубтік бөлігінің температурасы – 253 °С. К-101 колоннасының кубтік бөлігінің температуралық режимін ұстау және ректификация режимін қамтамасыз ету үшін «ыстық ағыс» беріледі. «Ыстық ағысты» қыздыру П-101 пешінің секцияларында жүргізіледі, ол сұйық және газ тәрізді отынның жағуын талап етеді.
Менің ойымша, АТ-ЭТҚ технологиялық сызбасын зауыттың технологиялық сызбасына қатысты жаңартуға ең қолайлы жылу алмастырғыш жабдық спиральді жылу алмастырғыштар болып табылады. Жылуалмастырғыш ортаның қозғалысын үлкен жылдамдыққа тез жеткізуді сипаттайды және, нәтижесінде, ең үлкен жылу көрсеткіштер (жылу беру коэффициенті, жылу кернеулігі) болады. Жылу есептеулерінің көрсетуінше, жылу алмастырғыш жабдықтарды спираль аппараттарына ауыстырғаннан кейін кірістегі Х-119-123 мазуттың температурасы 40 °С азайды, ал дизель фракциясының температурасы Х-112-112б алдында 50 °С азайған. К-101 колоннасының жылу есептеулері келесі формулаларға сәйкес орындалды (1) - (4):
∑QКІР = ∑QШЫҒ ; ∑QКІР = QМҰНАЙ + QГОР.СТ ;
∑QШЫҒ = QБЕНЗ + QОТБЕНЗ.МҰНАЙ; Q = G ∙ I
мұнда G – тиісті салмақ шығыны, кг/сағ; I – тиісті энтальпия, кДж/кг. Есептеулер нәтижесінде, шикізаттың 245 °С кірісі кезінде «ыстық
ағынның» температурасын 345-тен 315 °С-ге дейін азайтуға болады, сонымен қатар П-101 пешінің 1 және 5 секцияларында жануға арналған технологиялық отынның шығынының төмендеуі орын алды. П-101/1,5 пешіндегі отын шығынының төмендеуі 45 % құрайды(4-тен 2,2 т/сағ). Нәтижесінде МӨЗ технологиялық сызбасын жаңғыртудан кейін қайта өңдеуге арналған отынның жалпы шығынының қорытынды төмендеуі 5,2 % құрайды.
12
УДК 681.5 Айтуганов Р. К. (Караганды, КарГТУ) Сичкаренко А. В. (Караганды, КарГТУ)
РАЗРАБОТКА САМООРГАНИЗУЮЩЕЙСЯ СЕТИ
ТЕЛЕМЕТРИЧЕСКОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ С ВЫСОКОВОЛЬТНЫХ ОПОР.
Транспортировка электроэнергии от электростанции к потребителям
является одной из важнейших задач энергетики. Электроэнергия поставляется преимущественно по воздушным линиям электропередачи (ЛЭП), которые состоят из кабельных линий и оборудования для преобразования энергии и согласования с нагрузкой. Эффективность и надежность передачи энергии определяется состоянием сетей электроснабжения. Использование современных методов автоматизации мониторинга воздушных ЛЭП позволяет решить многие проблемы в этой области [1].
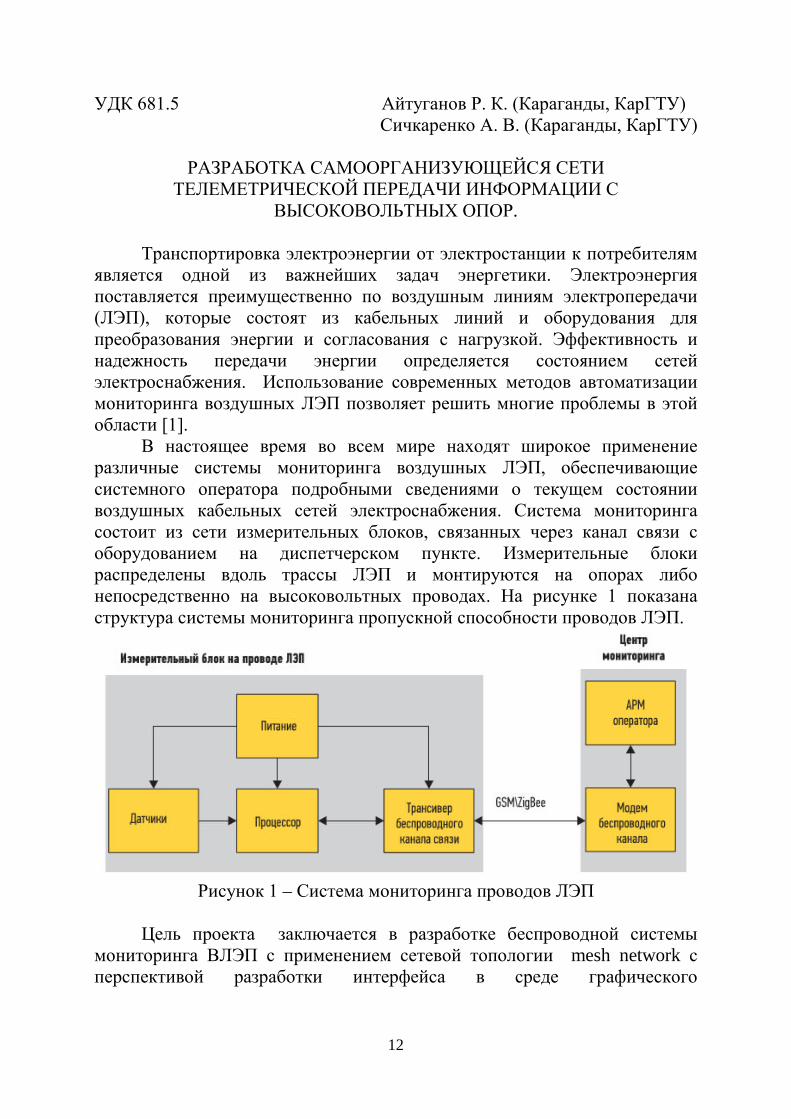
В настоящее время во всем мире находят широкое применение различные системы мониторинга воздушных ЛЭП, обеспечивающие системного оператора подробными сведениями о текущем состоянии воздушных кабельных сетей электроснабжения. Система мониторинга состоит из сети измерительных блоков, связанных через канал связи с оборудованием на диспетчерском пункте. Измерительные блоки распределены вдоль трассы ЛЭП и монтируются на опорах либо непосредственно на высоковольтных проводах. На рисунке 1 показана структура системы мониторинга пропускной способности проводов ЛЭП.
Рисунок 1 – Система мониторинга проводов ЛЭП
Цель проекта заключается в разработке беспроводной системы
мониторинга ВЛЭП с применением сетевой топологии mesh network с перспективой разработки интерфейса в среде графического
13
программирования LabVIEW Real-Time. Для достижения этой цели необходимо решить следующие задачи: - провести обзор и сравнительный анализ исследуемых ВЛЭП; - провести обзор и сравнительный анализ беспроводных технологий; - изучить беспроводную технологию ZigBee [2]; - изучить области применения ZigBee - модулей; - разработать беспроводную систему мониторинга на базе технологии ZigBee; - в перспективе провести статистическую обработку измеренных значений в программной среде MatLab.
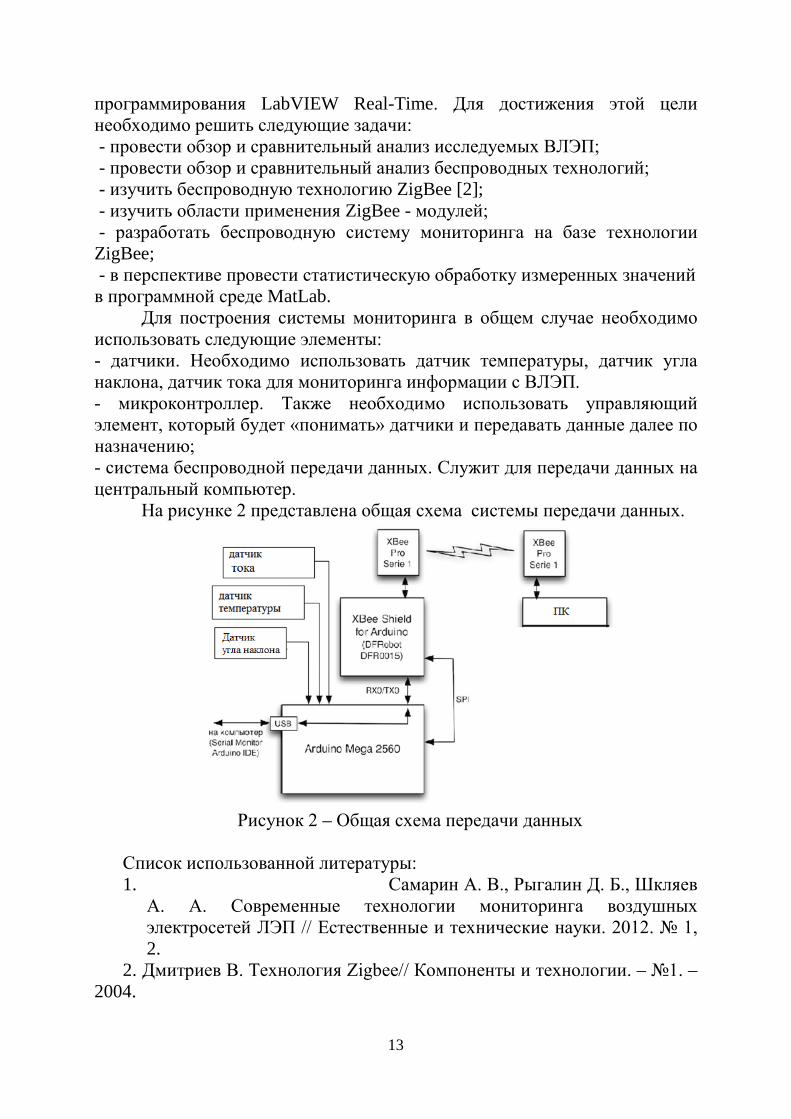
Для построения системы мониторинга в общем случае необходимо использовать следующие элементы: - датчики. Необходимо использовать датчик температуры, датчик угла наклона, датчик тока для мониторинга информации с ВЛЭП. - микроконтроллер. Также необходимо использовать управляющий элемент, который будет «понимать» датчики и передавать данные далее по назначению; - система беспроводной передачи данных. Служит для передачи данных на центральный компьютер.
На рисунке 2 представлена общая схема системы передачи данных.
Рисунок 2 – Общая схема передачи данных
Список использованной литературы: 1. Самарин А. В., Рыгалин Д. Б., Шкляев
А. А. Современные технологии мониторинга воздушных электросетей ЛЭП // Естественные и технические науки. 2012. № 1, 2.
2. Дмитриев В. Технология Zigbee// Компоненты и технологии. – №1. – 2004.
14
УДК 621.865.8 Ахмет Г.С. (Караганда, КарГТУ) Жеңісова Д.Д. (Караганда, КарГТУ)
НОВЫЕ ВОЗМОЖНОСТИ ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ
РОБОТОВ
Промышленные роботы, получившие самое широкое применение в производственной деятельности человека, являются одним из наиболее эффективных средств комплексной механизации и автоматизации технологических и транспортно-перегрузочных процессов. Использование их в различных производствах всегда предполагает получение существенного положительного эффекта, характеризуемого следующими показателями:
1) ростом производительности труда, 2) повышением качества продукции, 3) укорением перехода с выпуска одного вида продукции на другой, 4) снижением затрат на производство единицы продукции, 5) улучшением условий труда Естественно, что полной гарантии достижения высокого
положительного эффекта при роботизации какого-либо конкретного производства не существует. Так, в частных случаях при высвобождении рабочих из технологического процесса с целью улучшения условий труда и замены их роботами могут увеличиться затраты на производство единицы продукции, благодаря неоправданному выбору сложных и дорогих ПР, широкие функциональные возможности которых не соответствуют простоте данного технологического процесса. Возможны и другие непрогнозируемые негативные явления в процессе внедрения промышленных роботов, существенно снижающие положительный эффект.
Издержки роботизации во многом обсуловлены недостаточно глубоким предварительным анализом роботизируемого технологического процесса, неудачным выбором типов ПР применительно к данному производству, недооценкой роли различных вспомогательных устройств и приспособлений, нерешенностью некоторых проблем эксплуатации роботизированного производства, в частности, дефицитом квалифицированных кадров по обслуживанию, наладке и программированию ПР, недоучетом специфических правил техники безопасности роботизированных производств и др.
Таким образом, внедрение промышленных роботов в производство, или роботизаций производства, - сложный процесс, требующий тщательной подготовительной работы, касающейся не только технических, но кадровых и социальных проблем, детального проектирования и качественной реализации проекта роботизации. Целесообразность и
15
успешность роботизации во многом зависят от вида производства и степени соответствия возможностей и качеств роботов характеру производства.
Рассмотрим подробнее основные показатели современного производства - производительность, гибкость и уровень автоматизации.
Производительность - это количество продукции, изготавливаемое за единицу времени (час, смену, сутки, год). В зависимости от вида изделия и потребности в нем производительность может колебаться от единиц (для уникальных изделий) до десятков, сотен тысяч и миллионов (для массовых изделий - метизов, шарикоподшипников, стеклотары и т.п) выпускаемых изделий за определенное время. Рост производительности обусловлен прежде всего ускорением технологического процесса, т.е. сокращением времени, потребного на изготовление одного изделия.
Гибкость - способность производства легко перестраиваться при изменении вида продукции, т.е. возможность в течение относительно небольшого отрезка времени (часа, смены, месяца) производить разнообразную продукцию, отличающуюся, например, по форме, техническим параметрам или размерам. Так, цех, оборудованный универсальными металлорежущими станками, относится к производству с высокой гибкостью, поскольку за короткое время (смену, сутки) там может быть изготовлено на том же оборудовании несколько небольших партий изделий, отличающихся по размерам, форме, материалу.
Примерами производств с очень малой гибкостью служат узкоспециализированные линии, выпускающие один-два типа обычно стандартных изделий (шарикоподшипники, спички, строительный кирпич, бритвенные лезвия и т.п.). Переход в этом случае к другой, даже не очень отличающейся от прежней, продукции связан с необходимостью длительной остановки линии, переналадки или замены части технологического оборудования. В современных условиях, когда потребительские свойства постоянно обновляющейся продукции имеют первостепенное значение, гибкость производства становится важнейшим критерием его уровня, повышает конкурентоспособность предприятия.
Уровень автоматизации определяется степенью участия человека в производственном технологическом процессе. При полном отсутствии рабочих, постоянно обслуживающих технологический процесс, можно говорить о наиболее высоком уровне автоматизации - "безлюдной технологии". Четких общих градаций уровней автоматизации для всех отраслей производства пока нет, а имеющиеся частные оценки во многом условны. Применительно к машиностроительной отрасли можно назвать следующие уровни автоматизации технологических процессов в порядке их возрастания:
Первый уровень - автоматизация цикла обработки детали, когда в заданной последовательности автоматически выполняются операции от
16
первой до последней. Примером реализации этого уровня служат станки с числовым программным управлением;
Второй уровень - автоматизация подачи, установки и снятия детали со станка дополнительно к автоматизации цикла обработки; "технологические машины (станки) при этом должны быть состыкованы с соответствующими автоматическими манипуляционными устройствами или ПР;
Третий уровень - автоматизация контроля качества инструмента, обработки детали, хода технологического процесса; здесь требуются дополнительные устройства, обладающие специфическими свойствами очувствления и адаптации;
Четвертый уровень - автоматизация переналадки технологического оборудования при переходе с одного типа продукции к другому; этот уровень, самый высокий по отношению к предыдущим, обеспечивает высокую гибкость производства, но требует кроме универсальных ПР использования дорогих современных средств автоматического управления, базирующихся на мощных ЭВМ и весьма сложном программно-алгоритмическом обеспечении.
Роботизация таких отраслей, как строительство, горная промышленность, сельское хозяйство и др., осложняется необходимостью применения для ряда сложных процессов (например, монтажа работ на строящемся объекте, селективной подземной добычи полезных ископаемых, сборки плодов с одновременной оценкой их качества и сортировкой) роботов второго и третьего поколений.
Заключая рассмотрение роли промышленных роботов в различного вида производствах, можно сказать, что основная цель роботизации - приближение этих производств к наиболее современному их виду - гибким автоматизированным производствам. Существенное значение имеет сам характер технологического процесса - его сложность, стабильность, специфичность и т.п. Так, сравнительная простота многих технологических операций, устойчивость условий их выполнения, специфика труда (монотонность, вредность, опасность) обусловили широкое (до 80 - 90 % всего парка ПР) применение роботов в машиностроении, причем большинство этих роботов относятся к роботам первого поколения. Роботизация таких отраслей, как строительство, горная промышленность, сельское хозяйство и др., осложняется необходимостью применения для ряда сложных процессов (например, монтажа работ на строящемся объекте, селективной подземной добычи полезных ископаемых, сборки плодов с одновременной оценкой их качества и сортировкой) роботов второго и третьего поколений. Однако мировой опыт свидетельствует о последовательном движении и в этого направлении.
17
УДК 007.52(075) Ахметжанов К.Е. (Караганда, КарГТУ) Рымов Н.Б. (Караганда, КарГТУ)
Тохметова К.М. (Караганда, КарГТУ)
РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ПАК «ПАССАЖИРСКИЙ ЛИФТ» НА БАЗЕ СТЕНДА «SIMATIC S7 -1516-3 PN/DP»
Использование ПЛК в системе управления лифтом обеспечивается
формирование информационных и управляющих сигналов в результате выполнения введенной в систему программы. Это уменьшает количество используемых элементов и упрощает электрическую схему (правда, за счет использования более сложных элементов), а главное, увеличивает функциональные возможности системы управления и делает ее более универсальной.
Современный лифт – это сложное электромеханическое устройство, работающее в полуавтоматическом режиме по установленной программе. Программа работы лифта определяется действиями пассажиров, местонахождением и положением (свободна или занята) кабины и регламентируется при помощи системы управления лифтом. В некоторых случаях может произойти отказ системы автоматического управления лифта, что создает неудобства для передвижения пассажиров. Для того чтобы компенсировать время потраченное на наладку системы автоматического управления, нами была создана, помимо автоматического управления, система ручного управления лифтом[1].
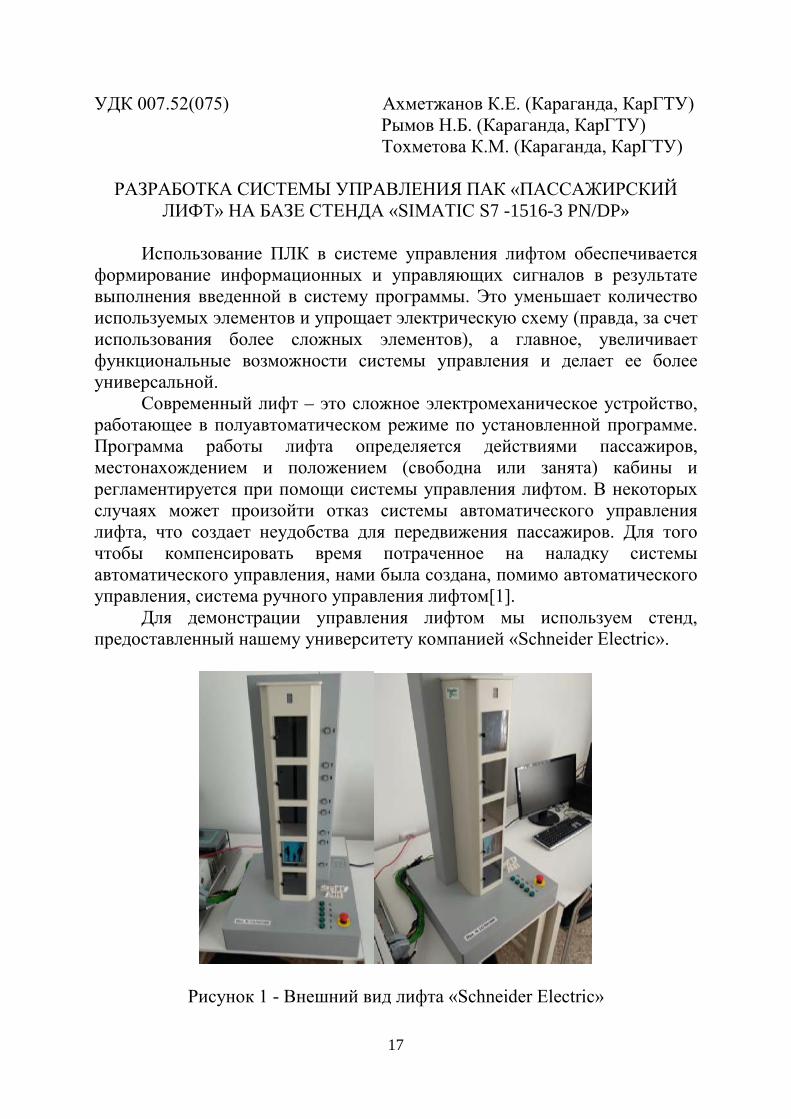
Для демонстрации управления лифтом мы используем стенд, предоставленный нашему университету компанией «Schneider Electric».
Рисунок 1 - Внешний вид лифта «Schneider Electric»

18
Модель пассажирского лифта, обслуживающий пять этажей, оснащен датчиками положения дверей и кабины на каждом этаже, кнопками вызова в кабине, которые расположены в нижней части стенда, а также внешними кнопками вызова, расположенными на каждом этаже, и семисегментным индикатором, показывающий, где находится кабина.
На данный момент для реализации автоматического управления используется программируемый логический контроллер(ПЛК) Modicon M221 TM221M16R, а также 2 модуля расширения ТМ3DM24R. Для программирования ПЛК Modicon M221 TM221M16R используется среда разработки SoMachine Basic, в котором применяется два языка программирования LD и IL. Но данный контроллер имеет ряд недостатков:
- малое количество входов и выходов - стоимость контроллера - сложный интерфейс программирования.
В наличии на кафедре АПП имеется стенд «SIMATIC S7 – 1516 - 3 PN/DP» на базе контроллера S7 -1516-3 PN/DP. Центральный процессор CPU 1516-3 PN/DP предназначен для для построения систем управления, требующих выполнения программ большого объема, высокой скорости обработки данных и обслуживания систем распределенного ввода-вывода на основе сетей PROFINET IO и PROFIBUS DP. Имеет большие объемы рабочей памяти, разделенной на области памяти программы и памяти данных, в качестве загрузочной памяти используются карты памяти SIMATIC Memory Card емкостью до 32 Гбайт. Оснащен дополнительным интерфейсом PROFINET со своим IP адресом, а также интерфейсом PROFIBUS.
В ходе работы была поставлена задача реализации управления лифтом с помощью контроллера SIMATIC S7 -1516-3 PN/DP. Данный контроллер имеет 32 каналов цифрового ввода и 32 каналов цифрового вывода. На рисунке 2 показан внешний вид стенда «SIMATIC S7 -1516-3 PN/DP».
Рисунок 2 – Внешний вид стенда «SIMATIC S7 -1516-3 PN/DP»
19
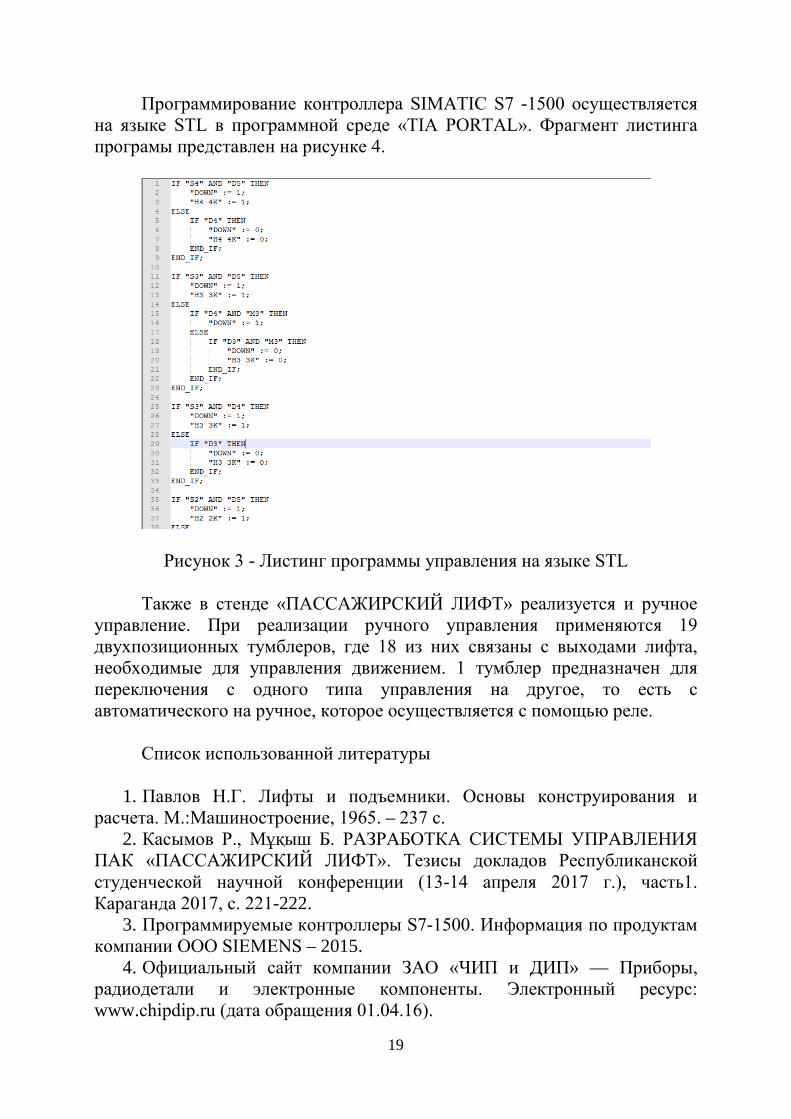
Программирование контроллера SIMATIC S7 -1500 осуществляется на языке STL в программной среде «TIA PORTAL». Фрагмент листинга програмы представлен на рисунке 4.
Рисунок 3 - Листинг программы управления на языке STL
Также в стенде «ПАССАЖИРСКИЙ ЛИФТ» реализуется и ручное управление. При реализации ручного управления применяются 19 двухпозиционных тумблеров, где 18 из них связаны с выходами лифта, необходимые для управления движением. 1 тумблер предназначен для переключения с одного типа управления на другое, то есть с автоматического на ручное, которое осуществляется с помощью реле.
Список использованной литературы
1. Павлов Н.Г. Лифты и подъемники. Основы конструирования и расчета. М.:Машиностроение, 1965. – 237 с.
2. Касымов Р., Мұқыш Б. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ПАК «ПАССАЖИРСКИЙ ЛИФТ». Тезисы докладов Республиканской студенческой научной конференции (13-14 апреля 2017 г.), часть1. Караганда 2017, с. 221-222.
3. Программируемые контроллеры S7-1500. Информация по продуктам компании ООО SIEMENS – 2015.
4. Официальный сайт компании ЗАО «ЧИП и ДИП» — Приборы, радиодетали и электронные компоненты. Электронный ресурс: www.chipdip.ru (дата обращения 01.04.16).
20
УДК 681.171.5 Әкімбай Р.Н. (Караганда, КарГТУ) Смагулова К.К. (Караганда, КарГТУ)
ОСОБЕННОСТИ СРЕДСТВ УПРАВЛЕНИЯ АСИНХРОННЫМ
ЭЛЕКТРОПРИВОДОМ
Основным способом регулирования скорости асинхронного двигателя является регулирование путем изменения частоты напряжения на статоре. Однако параметры механической характеристики определяются не только частотой, но и значением напряжения, т.е. частота и напряжение выступают как два управляющих воздействия, которые принципиально могут регулироваться независимо друг от друга. Обычно за независимое воздействие принимается частота, а значение напряжения при данной частоте определяет вид механической характеристики, значения пускового и критического моментов.
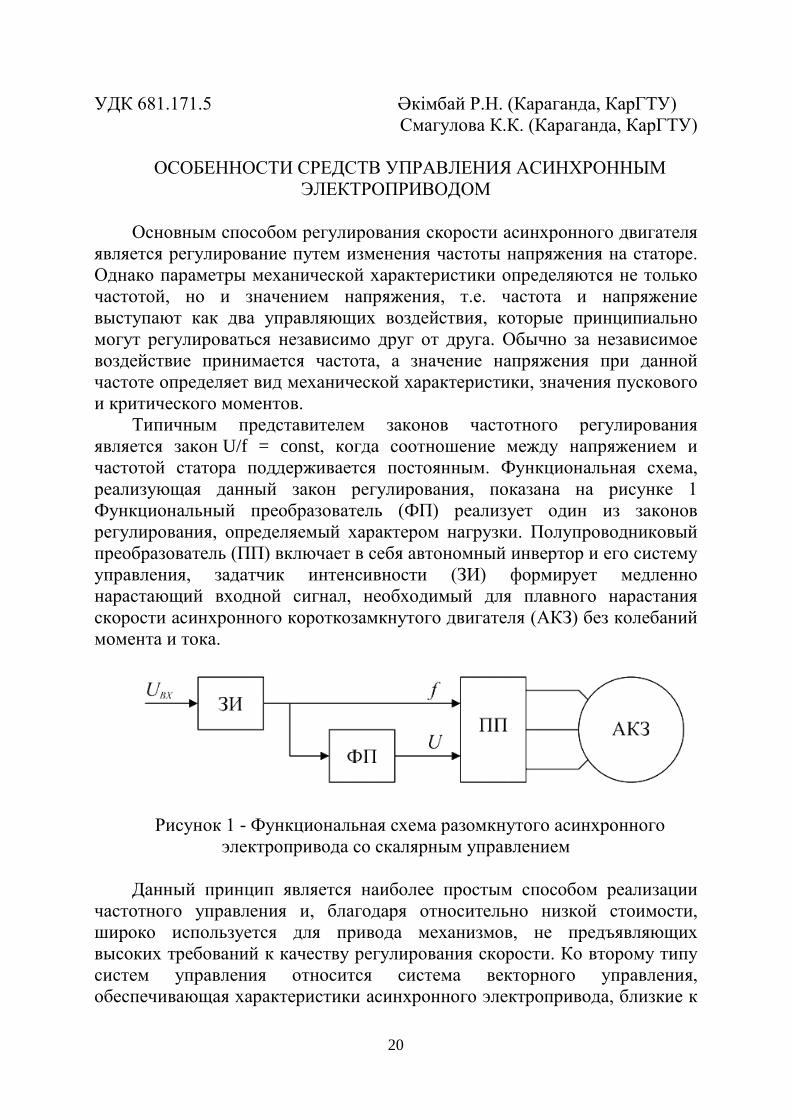
Типичным представителем законов частотного регулирования является закон U/f = const, когда соотношение между напряжением и частотой статора поддерживается постоянным. Функциональная схема, реализующая данный закон регулирования, показана на рисунке 1 Функциональный преобразователь (ФП) реализует один из законов регулирования, определяемый характером нагрузки. Полупроводниковый преобразователь (ПП) включает в себя автономный инвертор и его систему управления, задатчик интенсивности (ЗИ) формирует медленно нарастающий входной сигнал, необходимый для плавного нарастания скорости асинхронного короткозамкнутого двигателя (АКЗ) без колебаний момента и тока.
Рисунок 1 - Функциональная схема разомкнутого асинхронного электропривода со скалярным управлением
Данный принцип является наиболее простым способом реализации
частотного управления и, благодаря относительно низкой стоимости, широко используется для привода механизмов, не предъявляющих высоких требований к качеству регулирования скорости. Ко второму типу систем управления относится система векторного управления, обеспечивающая характеристики асинхронного электропривода, близкие к
21
характеристикам привода постоянного тока. Эти свойства системы достигаются за счет разделения каналов регулирования потокосцепления и скорости вращения электродвигателя, не достижимого при использовании скалярного управления. При построении указанных систем используется векторное представление физических величин.
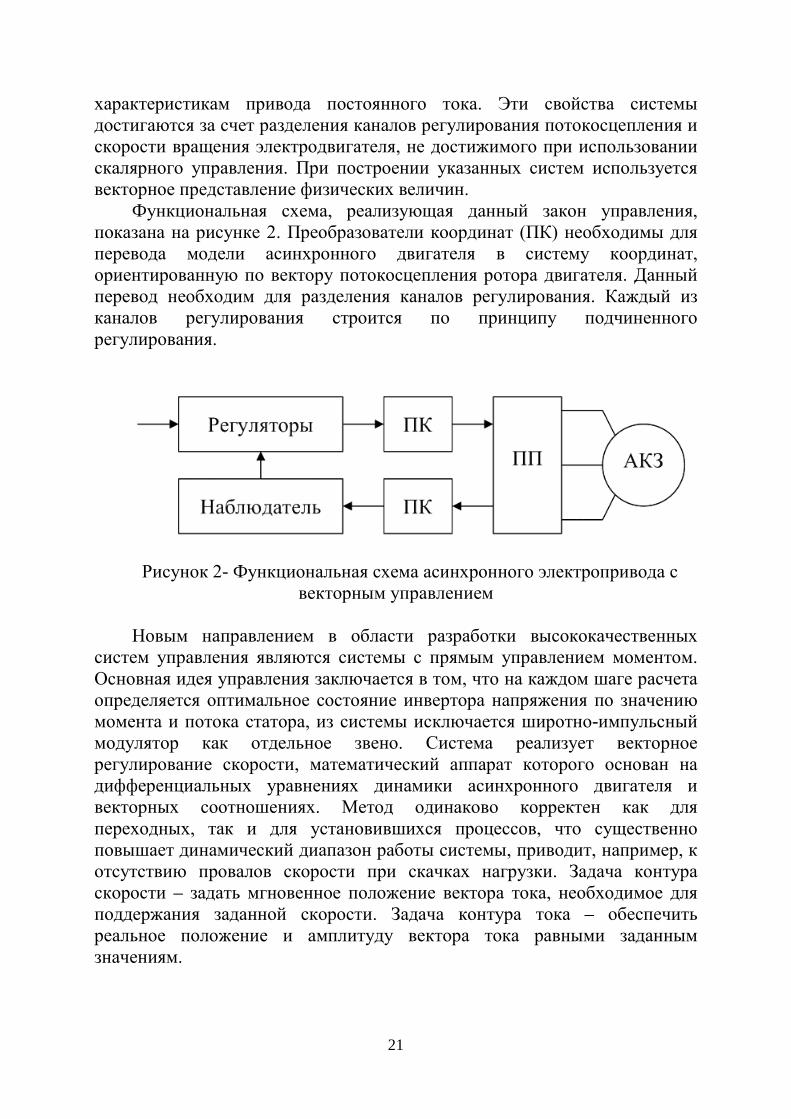
Функциональная схема, реализующая данный закон управления, показана на рисунке 2. Преобразователи координат (ПК) необходимы для перевода модели асинхронного двигателя в систему координат, ориентированную по вектору потокосцепления ротора двигателя. Данный перевод необходим для разделения каналов регулирования. Каждый из каналов регулирования строится по принципу подчиненного регулирования.
Рисунок 2- Функциональная схема асинхронного электропривода с векторным управлением
Новым направлением в области разработки высококачественных
систем управления являются системы с прямым управлением моментом. Основная идея управления заключается в том, что на каждом шаге расчета определяется оптимальное состояние инвертора напряжения по значению момента и потока статора, из системы исключается широтно-импульсный модулятор как отдельное звено. Система реализует векторное регулирование скорости, математический аппарат которого основан на дифференциальных уравнениях динамики асинхронного двигателя и векторных соотношениях. Метод одинаково корректен как для переходных, так и для установившихся процессов, что существенно повышает динамический диапазон работы системы, приводит, например, к отсутствию провалов скорости при скачках нагрузки. Задача контура скорости – задать мгновенное положение вектора тока, необходимое для поддержания заданной скорости. Задача контура тока – обеспечить реальное положение и амплитуду вектора тока равными заданным значениям.
22
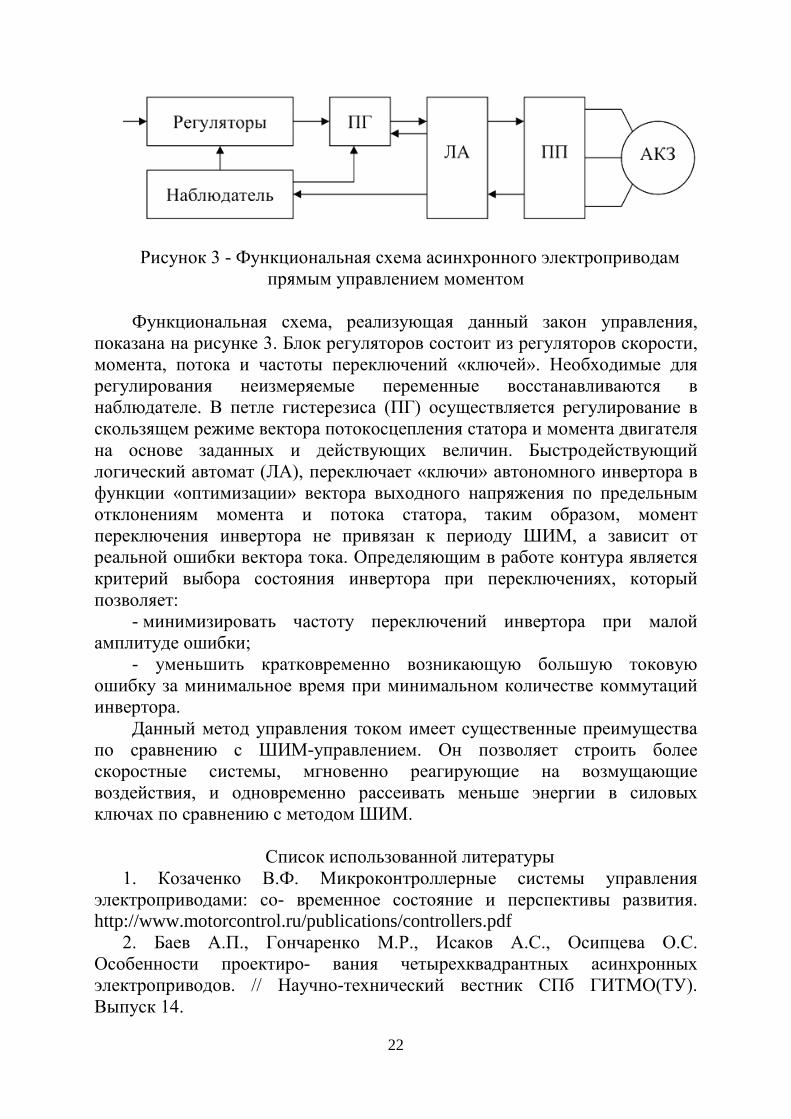
Рисунок 3 - Функциональная схема асинхронного электроприводам прямым управлением моментом
Функциональная схема, реализующая данный закон управления,
показана на рисунке 3. Блок регуляторов состоит из регуляторов скорости, момента, потока и частоты переключений «ключей». Необходимые для регулирования неизмеряемые переменные восстанавливаются в наблюдателе. В петле гистерезиса (ПГ) осуществляется регулирование в скользящем режиме вектора потокосцепления статора и момента двигателя на основе заданных и действующих величин. Быстродействующий логический автомат (ЛА), переключает «ключи» автономного инвертора в функции «оптимизации» вектора выходного напряжения по предельным отклонениям момента и потока статора, таким образом, момент переключения инвертора не привязан к периоду ШИМ, а зависит от реальной ошибки вектора тока. Определяющим в работе контура является критерий выбора состояния инвертора при переключениях, который позволяет:
- минимизировать частоту переключений инвертора при малой амплитуде ошибки;
- уменьшить кратковременно возникающую большую токовую ошибку за минимальное время при минимальном количестве коммутаций инвертора.
Данный метод управления током имеет существенные преимущества по сравнению с ШИМ-управлением. Он позволяет строить более скоростные системы, мгновенно реагирующие на возмущающие воздействия, и одновременно рассеивать меньше энергии в силовых ключах по сравнению с методом ШИМ.
Список использованной литературы
1. Козаченко В.Ф. Микроконтроллерные системы управления электроприводами: со- временное состояние и перспективы развития. http://www.motorcontrol.ru/publications/controllers.pdf
2. Баев А.П., Гончаренко М.Р., Исаков А.С., Осипцева О.С. Особенности проектиро- вания четырехквадрантных асинхронных электроприводов. // Научно-технический вестник СПб ГИТМО(ТУ). Выпуск 14.
23
ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ
Для реализации определенных параметров контроля качества процессов в различных отраслях промышленности до настоящего времени наиболее часто используются ПИД-регуляторы [1,2]. Их преимущества включают в себя: простоту структуры, ясность функционирования, пригодность для решения большинства практических задач и низкую стоимость за счет внедрения на цифровые и аналоговые устройства. Существует множество методов оптимальной настройки ПИД-регуляторов, используемых в различных технологических процессах. Однако при наличии сложных объектов, которые имеют внутренние поперечные связи, нелинейные элементы, а также звенья задержки, расчет коэффициентов регулятора аналитическими методами является трудным, а иногда и невозможным. Эмпирические методы настройки регуляторов, основанные на экспериментальных данных, полученных на объектах управления, невозможно применить для всех производственных процессов. Кроме того, традиционный метод регулирования ПИД не обеспечивает приемлемое качество управления в условиях внешних и параметрических воздействий (изменения параметров объекта управления или технологического процесса). Чтобы получить указанные параметры регулирования в условиях неопределенности, используются интеллектуальные методы [3].
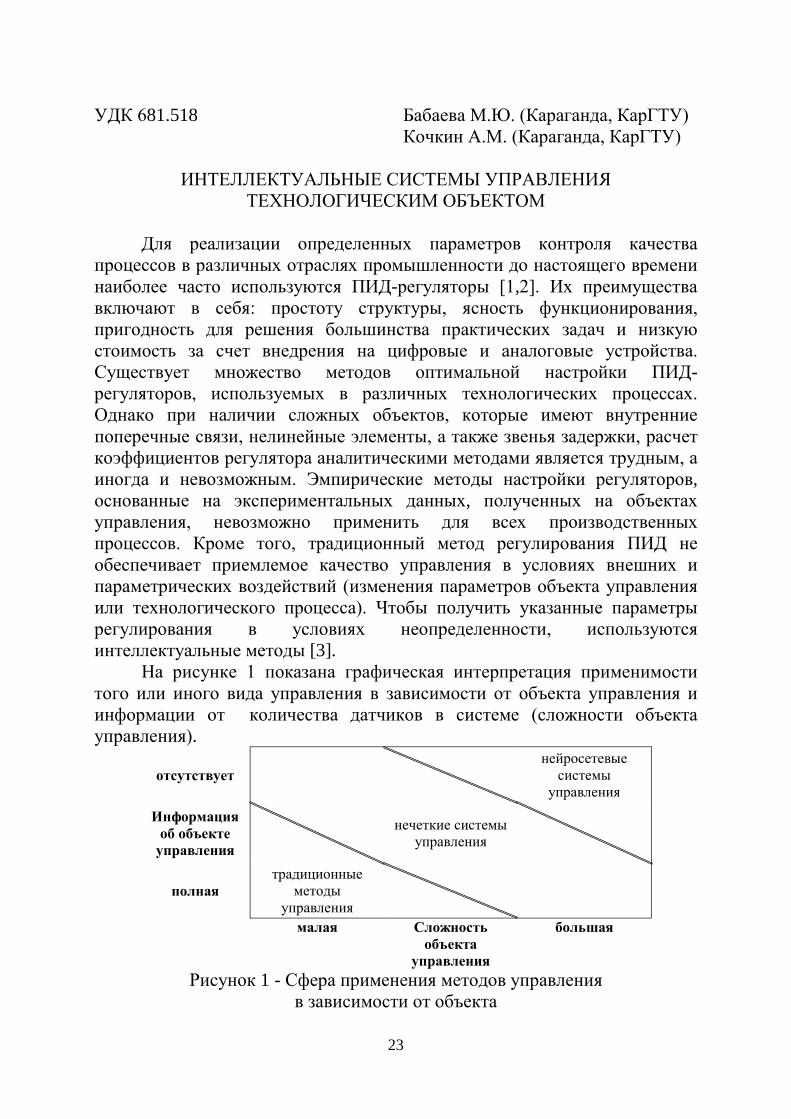
На рисунке 1 показана графическая интерпретация применимости того или иного вида управления в зависимости от объекта управления и информации от количества датчиков в системе (сложности объекта управления).
отсутствует нейросетевые
системы управления
Информация об объекте
управления
нечеткие системы
управления
полная традиционные
методы управления
малая Сложность объекта
управления
большая
Рисунок 1 - Сфера применения методов управления в зависимости от объекта
УДК 681.518 Бабаева М.Ю. (Караганда, КарГТУ) Кочкин А.М. (Караганда, КарГТУ)
24
Таким образом, современные интеллектуальные алгоритмы управления включают алгоритмы нечеткой логики, искусственные нейронные сети, эволюционные алгоритмы.
Основные понятия теории искусственных нейронных сетей приводятся в работах А.А. Ускова [4]. Основы теории генетических алгоритмов для управления сложными техническими объектами приводятся в работе [5]. В работе [6] приведен метод оптимизации электроэнергосистемы с помощью эволюционных алгоритмов. В [5] описан эвристический алгоритм оптимизации на основе генетического алгоритма при обучении нейронной сети. Для настройки параметров систем с нечеткой логикой часто используется теория эволюционных вычислений.
Эволюционные алгоритмы - это общее название группы методов, моделирующих основные положения теории биологической эволюции - процессы отбора, мутации и размножения. Эволюционные алгоритмы, основанные на эволюционных расчетах, подразделяются на генетические алгоритмы, алгоритмы эволюционных стратегий, обучающие классификаторы, алгоритмы Монте-Карло, алгоритмы роевого интеллекта, гармоничный поиск, модель отжига, модель табу-поиска и др. В области решения сложных задач оптимизации, а также структурного синтеза автоматизированных систем, генетические алгоритмы хорошо себя зарекомендовал.
Генетический алгоритм был впервые описан D.E. Goldberg на основе работ J.H. Holland. Он состоит минимум из трех операторов: репродукции, кроссинговера и мутации.
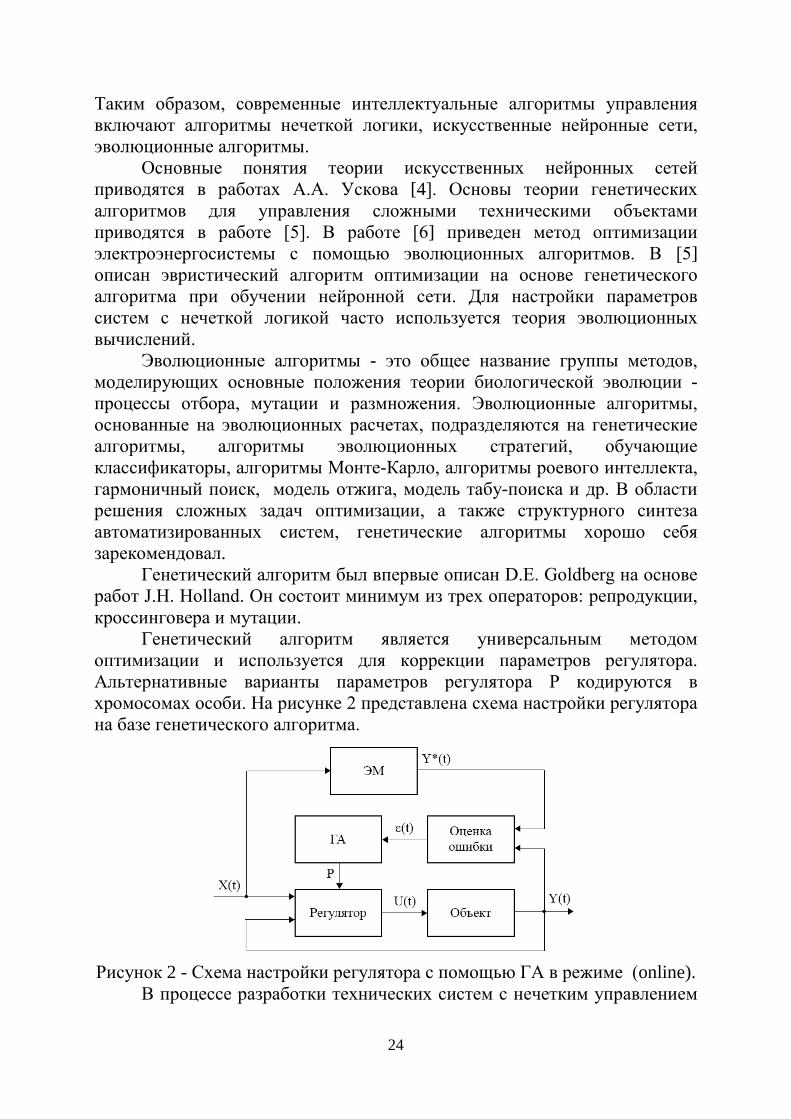
Генетический алгоритм является универсальным методом оптимизации и используется для коррекции параметров регулятора. Альтернативные варианты параметров регулятора Р кодируются в хромосомах особи. На рисунке 2 представлена схема настройки регулятора на базе генетического алгоритма.
Рисунок 2 - Схема настройки регулятора с помощью ГА в режиме (online).
В процессе разработки технических систем с нечетким управлением
25
серьезной проблемой является корректировка коэффициентов нормирования и денормализации нечеткого регулятора для обеспечения показателей качества системы. Наиболее точным методом оптимизации этих переменных является метод адаптивного поиска в виде генетического алгоритма как решения задачи нахождения экстремума или минимума комплексной нелинейной функции нескольких переменных [7].
Основным недостатком генетического алгоритма является значительное временное потребление на вычисление функции приспособленности в заданной точке. Так как для получения качественного результата в ходе реализации генетического алгоритма требуется выполнять указанные вычисления большое количество раз, общее время работы алгоритма становится высоким. Преимуществами генетического алгоритма являются низкие требования к объему априорной информации; возможность оптимизации нелинейных функций, а также универсальность.
Список использованной литературы:
1. Сабинин Ю.А. Динамика электромеханических систем. Учебное пособие к курсовому проектированию по дисциплине «Основы электропривода». – СПб.: ИТМО, 1997.
2. Алямкин Д.И., Анучин А.С., Дроздов А.В., Козаченко В.Ф., Тарасов А.С. Встраиваемые высокопроизводительные цифровые системы управления. Учебное пособие, Издательский дом МЭИ, Москва, 2010. – 270 с.
3. Пупков К.А., Егупов Н.Д. Методы классической и современной теории автоматического управления: Учебник в 5-и тт.; 2-е изд., перераб. и доп. Т3: Синтез регуляторов систем автоматического управления/ Под ред. К.А. Пупкова, Н.Д. Егупова.-М.: Издательство МГТУ им. Н.Э. Баумана, 2004. – 614 с.
4. Усков А.А., Кузьмин А.В. Интеллектуальные технологии управления. Искусственные нейронные сети и нечеткая логика М.: Горячая Линия - Телеком, 2004.- 143 с.
5. H. Adeli and K. C. Sarma. Cost Optimization of Structures: Fuzzy Logic, Genetic Algorithms, and Parallel Computing // John Wiley & Sons, Ltd., 2006, 210p.
6. Поляхов Н.Д., Приходько И.А., Швыров И.В. Решение задач оптимизации режимов электроэнергосистемы с помощью эволюционных алгоритмов// Международная конференция по мягким вычислениям и измерениям. 2013. Т. 1. С. 126-129.
7. Демидова Г.Л. Разработка и исследование регуляторов с нечеткой логикой для следящих электроприводов оптико-механических комплексов. Диссертация на соискание ученой степени кандидата технических наук. СПб, 2016.- 211 с.
26
УДК 621.548 Байзуллаев Б.К. (Караганда, КарГТУ) Шоланов К.С. (Караганда, КарГТУ)
ВЫБОР ЭЛЕКТРОГЕНЕРАТОРА ДЛЯ ВЕТРЯНОЙ
ЭЛЕКТРОСТАНЦИИ С ПАРУСНЫМ ЧУВСТВИТЕЛЬНЫМ ОРГАНОМ
В настоящее время в ряде стран основное внимание уделяется ветроэнергетическим установкам (ВЭУ) средней и большой мощности в составе сетей распределения и передачи электроэнергии. Однако мировой рынок малых ВЭУ также динамично развивается за счет массовых потребителей, к которым относятся объекты малоэтажного строительства, фермерские хозяйства, системы удаленного мониторинга, дорожные осветительные системы и другие автономные потребители электрической энергии. В связи с этим актуальной научно-технической задачей является эффективное использование ветрового потенциала, которая заключается не только в улучшении аэродинамических характеристик ВЭУ, но и в увеличении производительности ВЭУ в целом.
Следовательно, повышение коэффициента использования энергии ветра во всех режимах эксплуатации ветроэнергетических установок с помощью совершенствования способов управления мощностью является актуальным.
Говоря о потенциале Казахстана, надо сказать, что по своему географическому положению республика находится в ветровом поясе северного полушария и на значительной части территории страны наблюдаются достаточно сильные воздушные течения, преимущественно Северо-восточного, Юго-западного направлений.
На данный момент на рынке ветроэнергетики существуют 2 вида ветровых электростанций: с горизонтальной осью — привычный всем пропеллер, и станции с вертикальной осью вращения. Вторые, несмотря на то, что электрогенератор у них находится под мачтой, и нет необходимости ориентировать конструкцию на ветер — менее популярны. Дело в том, что для их работы требуются более сильные ветра и внешний источник для запуска.
Одни из самых легких конструкций ветряных электростанций — мощностью до 300 Вт. Такая переносная ветровая электростанция легко умещается в багажнике автомобиля, устанавливается одним человеком за считанные минуты и способна обеспечить зарядку мобильных устройств, обеспечить освещение и возможность посмотреть телевизор. Такую ветровую электростанцию можно взять с собой в дорогу или установить на даче. Излишки энергии аккумулируются и используются в периоды затишья или когда энергии нужно больше, чем дает ветер.
27
Ветряная электростанция с парусным рабочим органом имеет чувствительное устройство (рабочий орган) в виде паруса, захватывающего пространственные движения воздушной массы. С помощью параллельного манипулятора с шестью степенями свободы движение паруса преобразуется в электрическую энергию. Особенность электростанции в том, что она имеет систему автоматического управления парусностью.
Преимущества использования ветровых электростанций с парусным рабочим органом:
1. Ветровые электростанции с парусным рабочим органом имеют большой диапазон функционирования: они работают при скорости ветра от 1 до 20 м/с. Увеличение диапазона функционирования достигается автоматическим изменением парусности рабочего органа. Так, например, при слабом ветре парусность увеличивается, а при сильном ветре – уменьшается.
2. Ветровые электростанции с парусным рабочим органом имеют высокий коэффициент использования энергии ветра, равный от 0.7 до 0.9. Это объясняется использованием кинетической энергии всех пространственных движений воздушной массы, отсутствием потерь в неэффективных преобразующих устройствах.
3. Ветровая электростанция с парусным рабочим органом работает при любых направлениях ветра, т.е. не требует дополнительных устройств для изменения направления оси турбин и лопастей.
4. Рабочий орган ветровой электростанции обладает малой инерционностью.
Для генерирования электрической энергии могут использоваться различные электрические машины. Выбор электрогенератора требуемой мощности, требований надёжности в эксплуатации, низкой стоимости и высокого коэффициента полезного действия является актуальным для решения проблем ветровой энергетики.
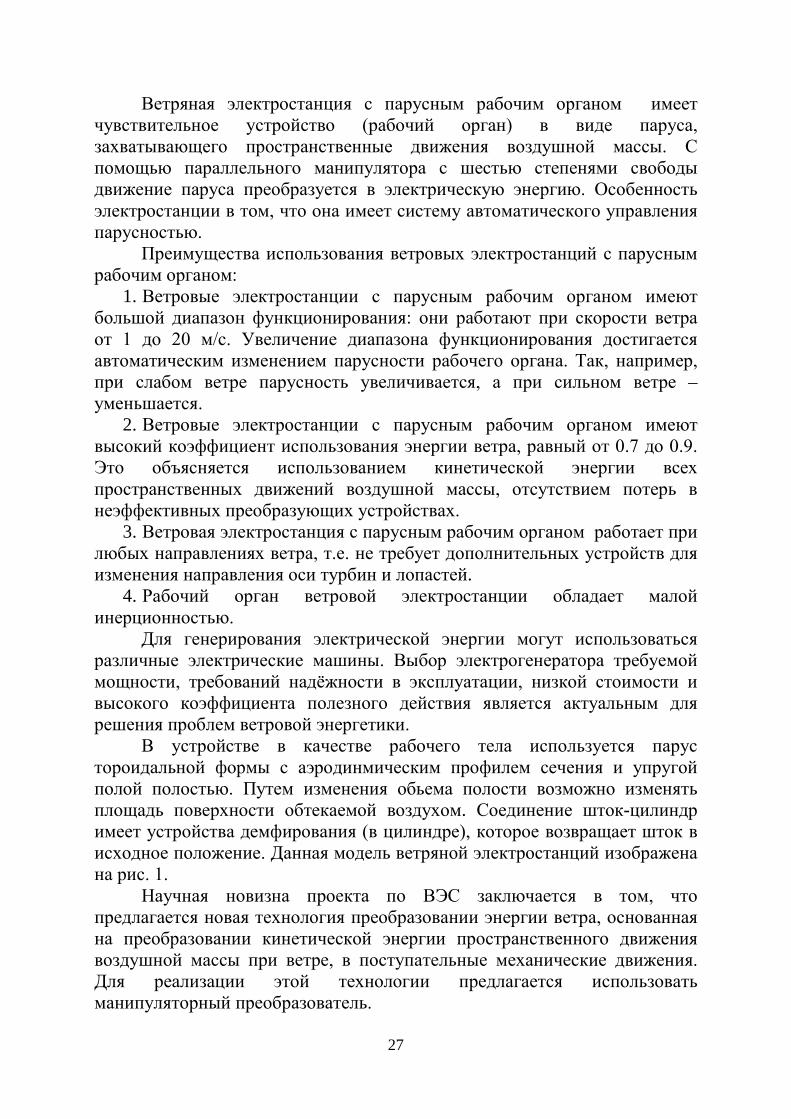
В устройстве в качестве рабочего тела используется парус тороидальной формы с аэродинмическим профилем сечения и упругой полой полостью. Путем изменения обьема полости возможно изменять площадь поверхности обтекаемой воздухом. Соединение шток-цилиндр имеет устройства демфирования (в цилиндре), которое возвращает шток в исходное положение. Данная модель ветряной электростанций изображена на рис. 1.
Научная новизна проекта по ВЭС заключается в том, что предлагается новая технология преобразовании энергии ветра, основанная на преобразовании кинетической энергии пространственного движения воздушной массы при ветре, в поступательные механические движения. Для реализации этой технологии предлагается использовать манипуляторный преобразователь.
28
1 1 1
11
1
ac
b
c a
b
2 2
2
11
1
(а) (б)
Рис. 1 (а) действующая лабораторная модель ВЭУ; (б) кинематическая схема шестиподвижного робота SHOLKOR.
Был создан действующий прототип шестиподвижного
платформенного робота с кинематической схемой, показанной на рис. 2. Этот робот, оснащен датчиками давления 3, магнитострикционными датчиками перемещения 2, тензометрическими датчиками 1. Исполнительными устройствами гидравлической системы являются нагнетательные 4 и сливные 5 электромагнитные клапана. Гидросистема питается от гидронасоса 6.
Как показано на кинематической схеме, нижняя платформа 1 представляет треугольник со сторонами a1,b1,c1, а верхняя платформа 3 – треугольник со сторонами a2,b2,c2. Эти платформы соединяются с помощью шести кинематических цепей (соединительных звеньев), состоящих из двух звеньев: 3-31, 4-41, 5-51,, 6-61, 7-71, 5-51, 8-81, соединенных поступательной кинематической парой.
Научной новизной этой части проекта является применение системы автоматического регулирования парусности паруса ВЭС. Принцип изменения парусности основан на том, что парус представляет упругое тело тороидальной формы с аэродинамическим профилем с полостью, наполненной газом. Путем нагнетания газа или его выброса регулируются объем и площадь поверхности паруса, соприкасающиеся с воздушным потоком, при этом изменяется парусность. В настоящее время аналога регулирования парусности в ВЭС не обнаружено.

29
УДК 681.5 Баскаков П.В. (Караганда, КарГТУ) Котов Е.С. (Караганда, КарГТУ)
«РАЗРАБОТКА СИСТЕМЫ ВИЗУАЛИЗАЦИИ РАБОТЫ СТЕНДА
«КРАН» SCHNEIDER ELECTRIC»
Стенд «Кран», собранный на базе оборудования компании Schneider Electric, предназначен для изучения режимов работы электроприводов подъёмно-транспортных установок, а также принципов построения систем управления на базе современных средств автоматизации.
Общий вид установки показан на рисунке 1.
Рисунок 1 – Общий вид стенда «Кран»
На рисунке 1 цифрами обозначены следующие элементы установки:
1 – портал крана, 2 – грузовая тележка с датчиком угла наклона и длины троса, 3 – распределительный щит, 4 – щит управления, 5 – пульт управления.
В данном проекте разработано программное обеспечение SCADA-системы, призванное обеспечить визуальное представление протекания технического процесса удалённо от самого объекта управления.
1
4
2
3
5

30
Также предусмотрены дополнительные возможности в виде отображения параметров процесса, просмотра графиков и таблицы событий.
Для передачи данных с контроллера в SCADA-систему используются различные протоколы (Modbus, Profibus, CAN и др.) и интерфейсы (RS-232, RS-485, Ethernet и др.)
Справа от крана расположено окно отображения основных параметров стенда: заданная и текущая скорость частотного привода, длина троса, угол отклонения груза. Над порталом крана расположены надписи, описывающие текущее направление движения (горизонтальное и вертикальное) и выбранную скорость для подъёма/спуска груза (всего их две). Они проявляются только при движении крана в определенном направлении.
На рисунке 2 представлена главная страница визуализации. Кран отображает его реальное перемещение по порталу, длину троса, а также угол наклона груза.
Рисунок 2 – Главная страница визуализации
На главной странице присутствуют две кнопки, открывающие остальные страницы визуализации системы.
Кнопка «Таблица событий» открывает страницу с таблицей, в которой фиксируется срабатывание контакторов крайних положений тележки на портале.
31
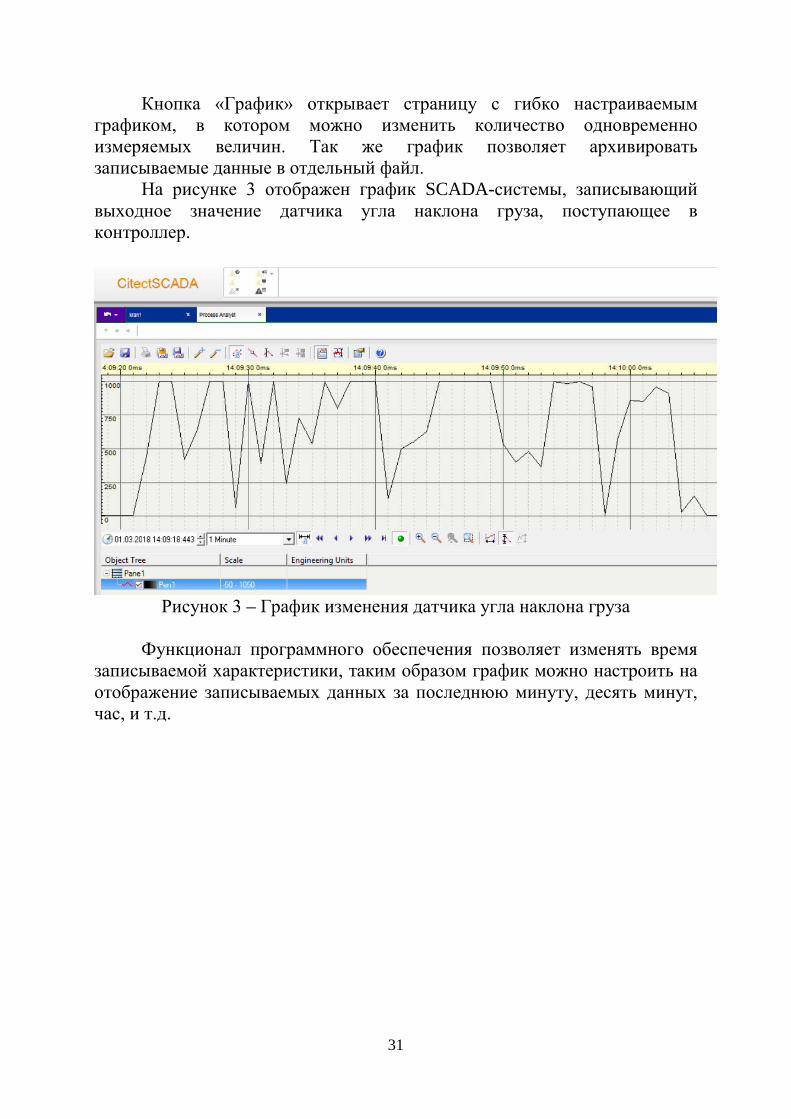
Кнопка «График» открывает страницу с гибко настраиваемым графиком, в котором можно изменить количество одновременно измеряемых величин. Так же график позволяет архивировать записываемые данные в отдельный файл.
На рисунке 3 отображен график SCADA-системы, записывающий выходное значение датчика угла наклона груза, поступающее в контроллер.
Рисунок 3 – График изменения датчика угла наклона груза
Функционал программного обеспечения позволяет изменять время
записываемой характеристики, таким образом график можно настроить на отображение записываемых данных за последнюю минуту, десять минут, час, и т.д.

32
УДК 681.5 Баскаков П.В. (Караганда, КарГТУ) Гановский А.В. (Караганда, КарГТУ)
Сичкаренко А. В. (Караганда, КарГТУ)
УЧЕБНЫЙ СТЕНД SCHNEIDER ELECTRIC «СИСТЕМА СТАБИЛИЗАЦИИ ЭЛЕКТРОТЕЛЬФЕРА»
Класс промышленных манипуляторов является наиболее
распространённым среди промышленных роботов. В свою очередь, в определённом смысле, как самые большие промышленные манипуляторы, можно рассматривать подъёмные краны [1].
Стенд, собранный на базе оборудования компании Schneider Electric, предназначен для изучения режимов работы электроприводов подъёмно-транспортных установок, а также принципов построения систем управления на базе современных средств автоматизации.
Общий вид установки показан на рисунке 1.
Рисунок 1 – Общий вид стенда
На рисунке 1 цифрами обозначены следующие элементы установки:
1 – портал Крана, 2 – грузовая тележка с датчиком угла наклона и длины троса, 3 – распределительный щит, 4 – щит управления, 5 – пульт управления.
Система стабилизации работает в двух режимах – пассивный и активный.
В пассивном режиме контроллер, считывая длину троса рассчитывает и задаёт время ускорения/торможения равное периоду колебания груза при текущей длине троса l [2].
1
4
2
3
5
33
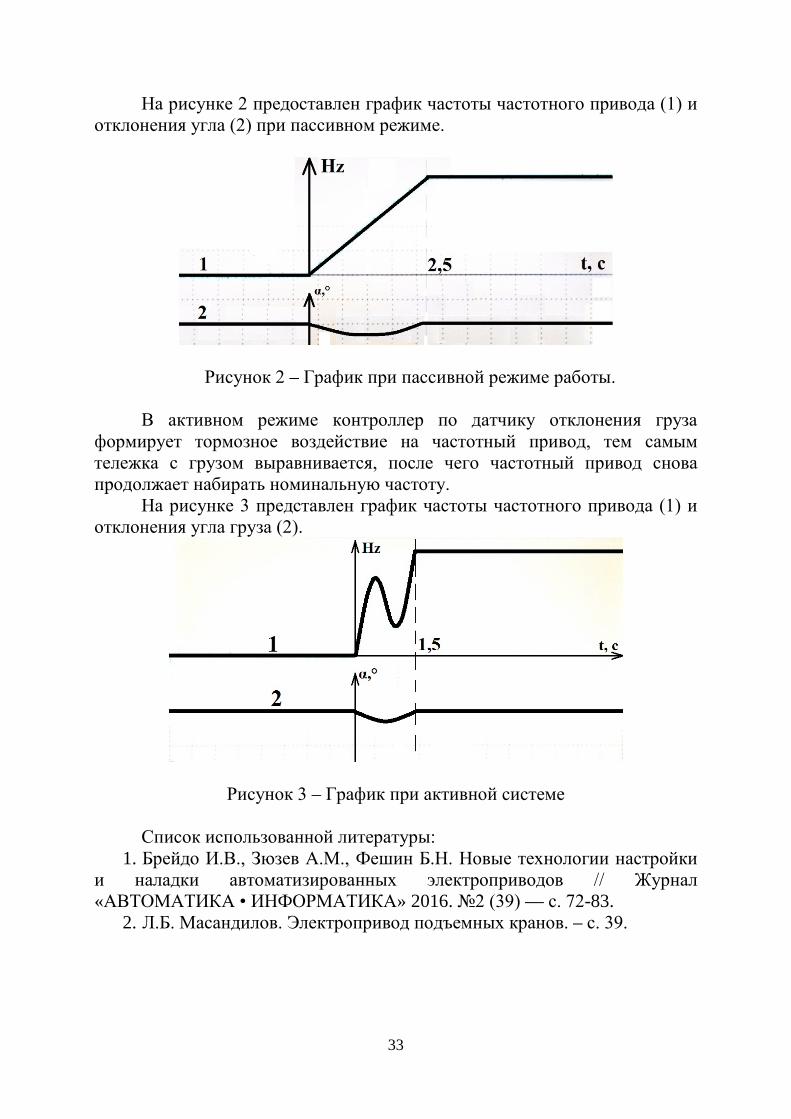
На рисунке 2 предоставлен график частоты частотного привода (1) и отклонения угла (2) при пассивном режиме.
Рисунок 2 – График при пассивной режиме работы.
В активном режиме контроллер по датчику отклонения груза формирует тормозное воздействие на частотный привод, тем самым тележка с грузом выравнивается, после чего частотный привод снова продолжает набирать номинальную частоту.
На рисунке 3 представлен график частоты частотного привода (1) и отклонения угла груза (2).
Рисунок 3 – График при активной системе
Список использованной литературы: 1. Брейдо И.В., Зюзев А.М., Фешин Б.Н. Новые технологии настройки
и наладки автоматизированных электроприводов // Журнал «АВТОМАТИКА • ИНФОРМАТИКА» 2016. №2 (39) — с. 72-83.
2. Л.Б. Масандилов. Электропривод подъемных кранов. – с. 39.
34
УДК 004.42:681.117 Бондаренко И.В. (Караганда, КарГТУ) Лихачёв В.В. (Караганда, КарГТУ)
РАЗРАБОТКА ПРОГРАММНОЙ И АППАРАТНОЙ ЧАСТИ КОПЛЕКСА
АВТОМАТИЗАЦИИ КОММЕРЧЕСКИХ ПРЕДПРИЯТИЙ НА БАЗЕ RASPBERRY PI 2 MODEL B
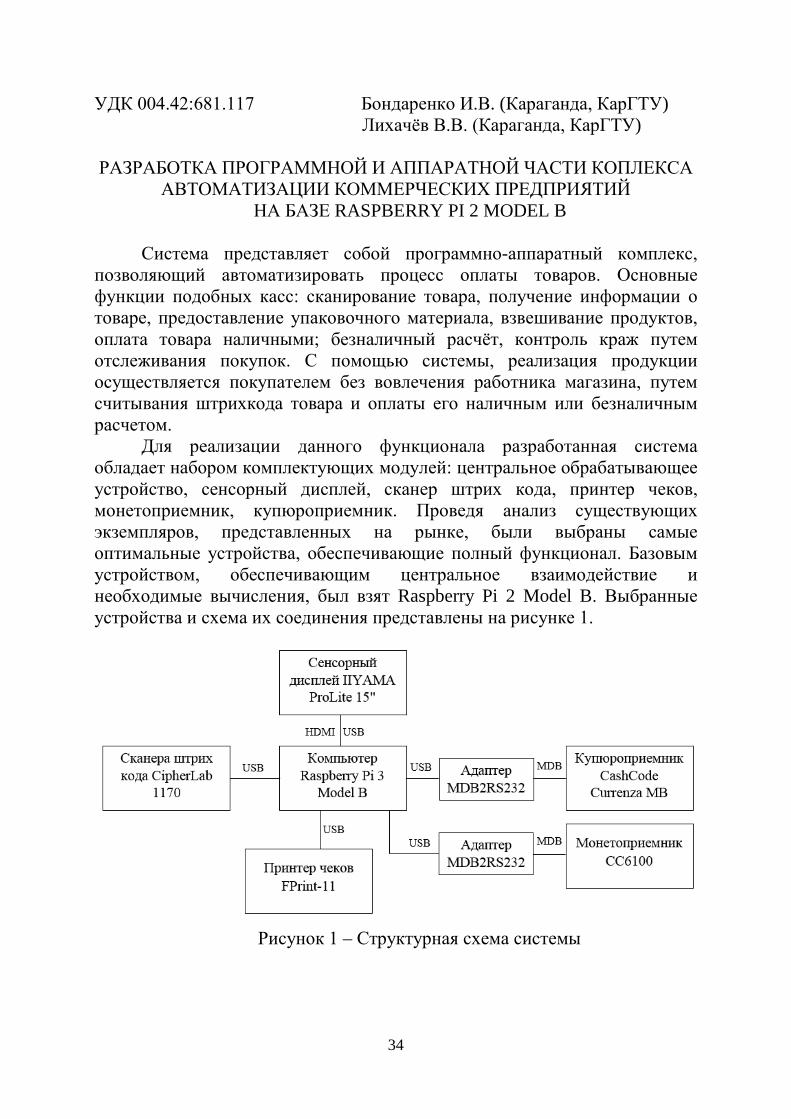
Система представляет собой программно-аппаратный комплекс,
позволяющий автоматизировать процесс оплаты товаров. Основные функции подобных касс: сканирование товара, получение информации о товаре, предоставление упаковочного материала, взвешивание продуктов, оплата товара наличными; безналичный расчёт, контроль краж путем отслеживания покупок. С помощью системы, реализация продукции осуществляется покупателем без вовлечения работника магазина, путем считывания штрихкода товара и оплаты его наличным или безналичным расчетом.
Для реализации данного функционала разработанная система обладает набором комплектующих модулей: центральное обрабатывающее устройство, сенсорный дисплей, сканер штрих кода, принтер чеков, монетоприемник, купюроприемник. Проведя анализ существующих экземпляров, представленных на рынке, были выбраны самые оптимальные устройства, обеспечивающие полный функционал. Базовым устройством, обеспечивающим центральное взаимодействие и необходимые вычисления, был взят Raspberry Pi 2 Model B. Выбранные устройства и схема их соединения представлены на рисунке 1.
Рисунок 1 – Структурная схема системы
35
Связь устройств с центральным компьютером обеспечивается по средствам протокола R232 или USB. Для устройств, использующих другой тип взаимосвязи применен адаптер, преобразующий MDB в R232.
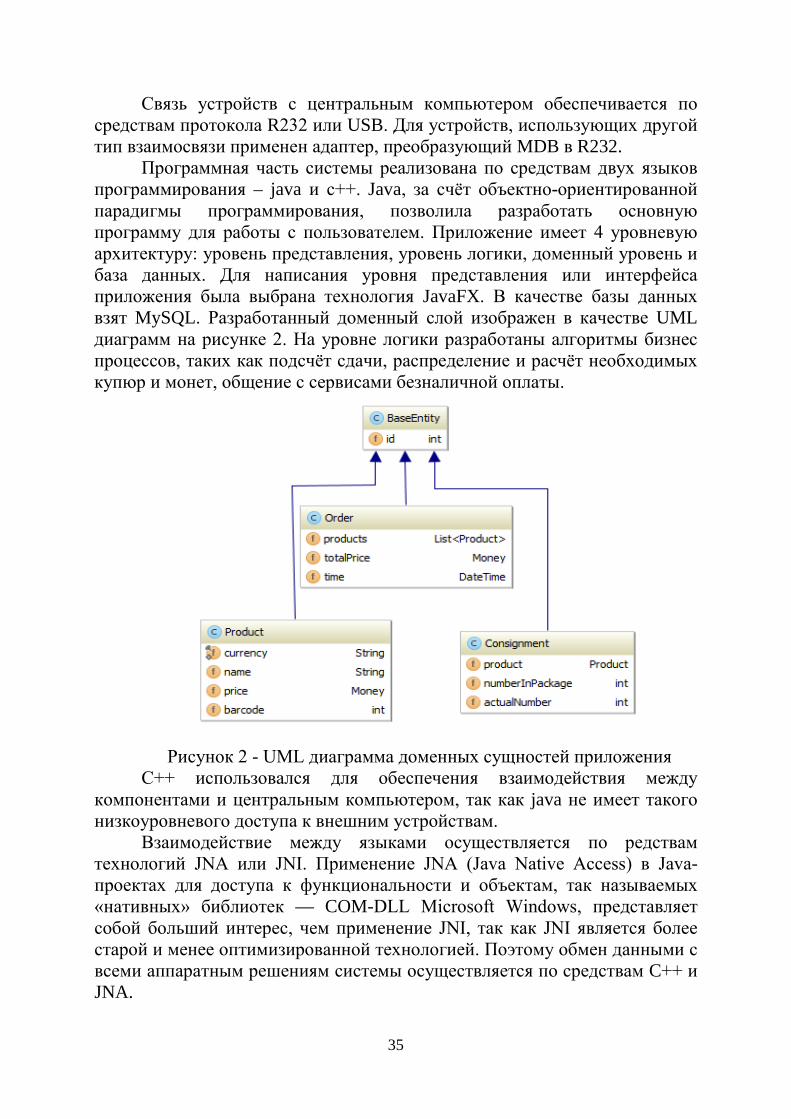
Программная часть системы реализована по средствам двух языков программирования – java и с++. Java, за счёт объектно-ориентированной парадигмы программирования, позволила разработать основную программу для работы с пользователем. Приложение имеет 4 уровневую архитектуру: уровень представления, уровень логики, доменный уровень и база данных. Для написания уровня представления или интерфейса приложения была выбрана технология JavaFX. В качестве базы данных взят MySQL. Разработанный доменный слой изображен в качестве UML диаграмм на рисунке 2. На уровне логики разработаны алгоритмы бизнес процессов, таких как подсчёт сдачи, распределение и расчёт необходимых купюр и монет, общение с сервисами безналичной оплаты.
Рисунок 2 - UML диаграмма доменных сущностей приложения С++ использовался для обеспечения взаимодействия между
компонентами и центральным компьютером, так как java не имеет такого низкоуровневого доступа к внешним устройствам.
Взаимодействие между языками осуществляется по редствам технологий JNA или JNI. Применение JNA (Java Native Access) в Java-проектах для доступа к функциональности и объектам, так называемых «нативных» библиотек — COM-DLL Microsoft Windows, представляет собой больший интерес, чем применение JNI, так как JNI является более старой и менее оптимизированной технологией. Поэтому обмен данными с всеми аппаратным решениям системы осуществляется по средствам C++ и JNA.
36
УДК 681.5.01:621.311.22 Гришаев К.О. (Караганда, КарГТУ) Боярский Э.Ф. (Караганда, КарГТУ)
ПОВЫШЕНИЕ ТЕХНИКО-ЭКОНОМИЧЕСКИХ ПОКАЗАТЕЛЕЙ И
УЛУЧШЕНИЕ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ НА ЭЛЕКТРОСТАНЦИЯХ ПУТЕМ ВНЕДРЕНИЯ ПРОГРАММНО-
ТЕХНИЧЕСКОГО КОМПЛЕКСА SPPA-T3000
Основное требование к электростанции — надежность, т.е. бесперебойное производство электрической энергии в соответствии со спросом со стороны потребителей и диспетчерским графиком нагрузки. Требование высокой надежности электростанций особенно важно потому, что электроэнергия, в отличие от продукции других отраслей промышленности, не запасается на складах, а потребляется полностью тотчас после ее производства. Таким образом, электростанция должна надежно производить электроэнергию в количестве, запрашиваемом в каждый данный момент потребителями. [1]
Распределенная система управления технологическими процессами SPPA-T3000 (Siemens Power Plant Automations) предназначена для целенаправленного эффективного, надежного управления работой основного оборудования электростанций с помощью современных микропроцессорных средств и средств вычислительной техники в нормальных и переходных режимах, в блочном режиме работы агрегатов, а также при работе на общестанционной коллектор.
Одной из главных особенностей системы SPPA-T3000 является накопленная база знаний, полученная с более чем 1500 систем управления Siemens. Это позволяет системе соответствовать всем требованиям производства электроэнергии и иметь инструменты, позволяющие легко адаптироваться под изменения технологического процесса.
SIMATIC ТЗ000 основан на идее полностью комплексных систем автоматизации, ядром которого является интеграция с системой DCS. Уникальная база данных и процесса базы данных программное обеспечение для управления, вся система информация хранится в базе данных, вводятся один раз, что существенно повышает точность и целостность информационных систем.
Внедрение на электростанциях программно-технического комплекса SPPA-T3000 позволяет добиться:
• высокую надежность, экономичность, безопасность и долговечность оборудования;
• высокую надежность системы при отказах ее элементов и снижение риска крупной аварии;
• защиту персонала и оборудования при угрозе аварии;
37
• сокращение времени простоя котлоагрегата в плановых ремонтах и при аварийных остановах вследствие высокого технического уровня эксплуатации;
• аналих изменения технологических параметров и прогнозирование оптимальных режимов работы оборудования.
Siemens SIMATIC ТЗ000 сочетается с самым современным компьютерным оборудованием и программными технологиям, Siemens на основе серии S5, S7 PLC и серии TELEPERMXP DCS системы, управление технологическими процессами для электростанции, расширенные системные приложения управления технологическими процессами.
Система контроля и управления реализует комплекс информационных, управляющих и вспомогательных функций.
К основным информационным функциям относятся: • контроль и измерение технологических параметров - показания в
режиме реального времени и архивные данные за длительный период эксплуатации;
• контроль срабатывания блокировок и защит - архивация сведений о срабатывания важных защит и блокировок в системе ПСО (последовательности событий операционного режима);
• формирование и выдача данных оперативному персоналу в форматах протоколов ПСО.
• сбор и накопление данных. Управляющие функции: • выдача управляющих воздействий на запорную арматуру и другое
электротехническое и пневматическое оборудование; • выдача заданий регуляторам локальных контуров автоматического
регулирования технологическими процессами; Вспомогательные функиии: • самодиагностика комплекса технических и программных средств; • проверка достоверности информационных сигналов; • информирование инженера DCS при отказе технических устройств. Система позволяет вносить изменения в технологический процесс в
режиме реального времени без необходимости остановки производства. Основным режимом функционирования системы контроля и управления является автоматизированный режим под контролем оператора. [2]
Список литературы 1. Блинков Ю.В. Технологические процессы и оборудование ТЭС.
Основы производства тепловой и электрической энергии / Ю.В. Блинков // Изд-во Пенз. технол. ин-та, 2000. С. 16-25.
2. Описание ПТК SPPA-T3000 // Siemens Power Generation.2008. C. 7-10.
38
УДК 622.647.2+681.51 Дайч Л.И. (Караганда, КарГТУ) Цай А. С. (Караганда, КарГТУ)
АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ И
КОНТРОЛЯ КОНВЕЙЕРНЫХ ЛИНИЙ В большинстве современных ленточных конвейеров применяется
нерегулируемы асинхронный привод. Недостатками его являются сложный запуск, проскальзывание ленты, повышенный износ оборудования при неполной загрузке и работе конвейера вхолостую. Из-за неравномерной работы добычных участков ленточные конвейеры, часто не используются на проектную мощность, а доля холостых режимов, составляет значительную часть времени. Таким образом, важнейший параметр влияющий на производительность, надежность и экономичность конвейерной установки, является скорость движения ленты. Опыт эксплуатации конвейеров показал, что для снижения затрат электроэнергии, уменьшение износа транспортерной ленты, роликов и става конвейера наиболее эффективным средством является применение частотно-регулируемого электропривода, который позволяет регулировать скорость движения ленты в зависимости от фактической нагрузки конвейера. Система с частотно-регулируемым приводом обеспечивает регулируемый запуск, регулирование рабочего процесса в автоматическом режиме и регулируемый останов конвейера. Это позволяет отказаться от гидромуфт скольжения, обеспечивает плавный пуск ленточных конвейеров без проскальзывания ленты и снижение пусковых токов.
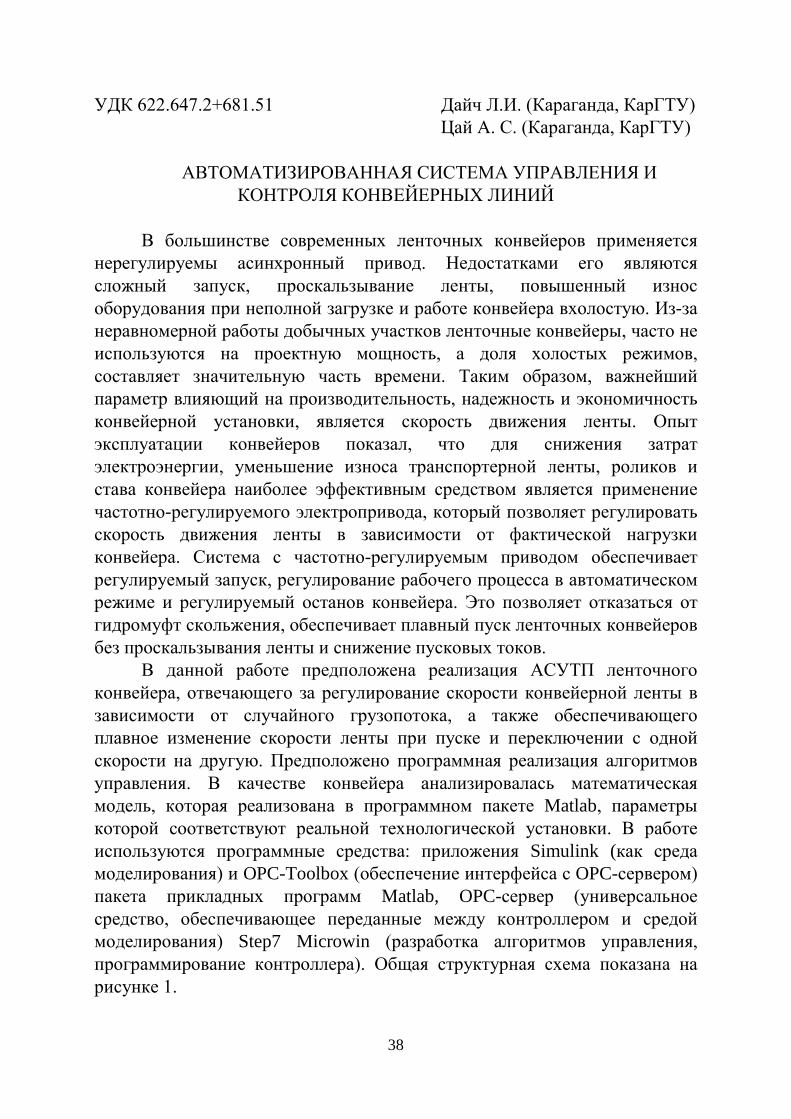
В данной работе предположена реализация АСУТП ленточного конвейера, отвечающего за регулирование скорости конвейерной ленты в зависимости от случайного грузопотока, а также обеспечивающего плавное изменение скорости ленты при пуске и переключении с одной скорости на другую. Предположено программная реализация алгоритмов управления. В качестве конвейера анализировалась математическая модель, которая реализована в программном пакете Matlab, параметры которой соответствуют реальной технологической установки. В работе используются программные средства: приложения Simulink (как среда моделирования) и OPC-Toolbox (обеспечение интерфейса с OPC-сервером) пакета прикладных программ Matlab, OPC-сервер (универсальное средство, обеспечивающее переданные между контроллером и средой моделирования) Step7 Microwin (разработка алгоритмов управления, программирование контроллера). Общая структурная схема показана на рисунке 1.
39
Рисунок 1 - Структурная схема системы
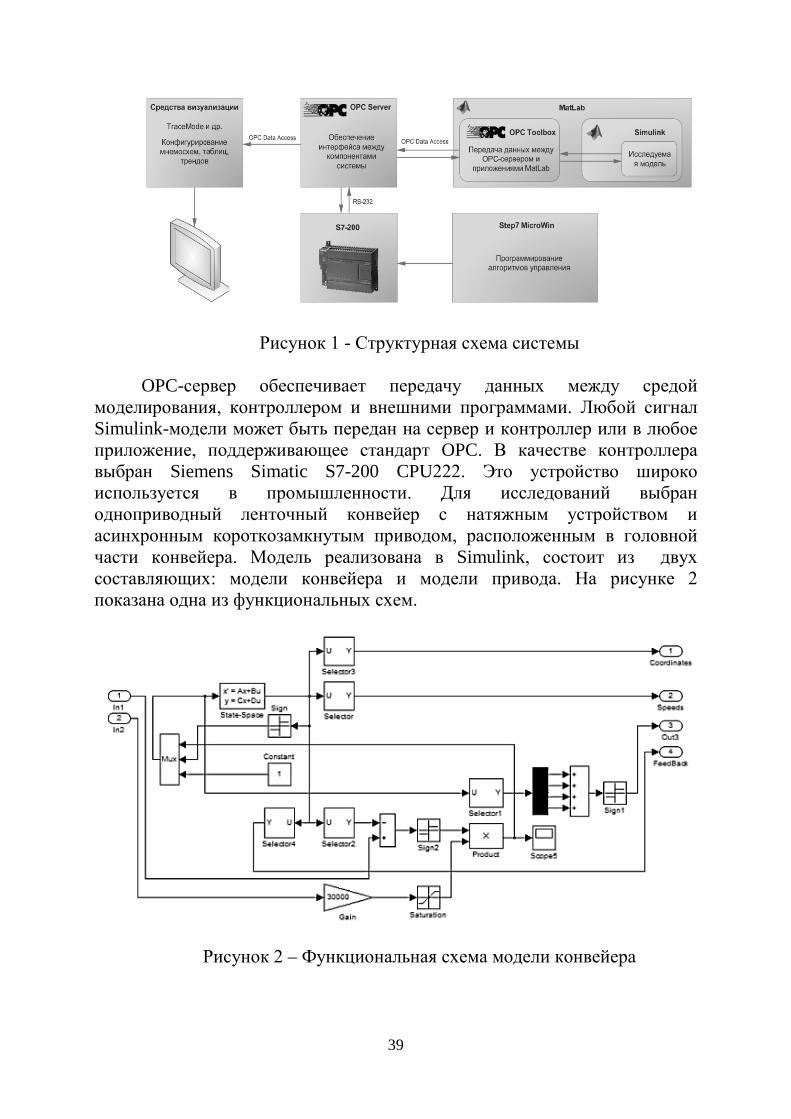
OPC-сервер обеспечивает передачу данных между средой моделирования, контроллером и внешними программами. Любой сигнал Simulink-модели может быть передан на сервер и контроллер или в любое приложение, поддерживающее стандарт OPC. В качестве контроллера выбран Siemens Simatic S7-200 CPU222. Это устройство широко используется в промышленности. Для исследований выбран одноприводный ленточный конвейер с натяжным устройством и асинхронным короткозамкнутым приводом, расположенным в головной части конвейера. Модель реализована в Simulink, состоит из двух составляющих: модели конвейера и модели привода. На рисунке 2 показана одна из функциональных схем.
Рисунок 2 – Функциональная схема модели конвейера
40
Модель состоит из следующих подсистем: • Drive –подсистема асинхронного короткозамкнутого привода • Conveyer –подсистема конвейера • Speed Task – подсистема задатчика скорости Также в модели есть блок ОРС configuration предназначенный для
наладки связи с ОРС-сервером. Этот блок позволяет выбрать один из работающих в локальной сети серверов, а также настроить параметры передачи данных. Блоки OPC Read и OPC Write предназначены для получения и отправки данных на сервер. Контроллер через средства OPC-сервера, получает от модели сигнал ошибки, формируемый как разность задания скорости (сигнал от Speed Task) и скорости приводы (выходы Feedback подсистемы конвейера). От контроллера модель получает управляющий сигнал, сформированный по определенному алгоритму (ПИД-регулирование, оптимальное управление и др.) В модели предусмотрены 11 блоков, передающих данные о моменте привода, координатах и скоростях десяти сосредоточенных масс на ОРС-сервер. Благодаря этому доступ к данной информации может получить любое приложение, со стандартом ОРС. Это позволяет выводить мониторинг процесса в реальном времени – разработать мнемосхемы, тренды, таблицы, а также формировать базу данных, информация которой может использоваться для диагностики процесса, определения причин аварийных ситуаций или расчета технико-экономических показателей.
Вывод: Разрабатываемая система позволит перейти от математических
моделей к их программным аналогам, работающим на определенной аппаратной платформе. Использование технологии OLE for process control позволяет в дальнейшем дополнить систему, реализовав следующие функции:
• Системы управления другими параметрами конвейерной установки
• Средства визуализации технологического процесса (мнемосхемы, тренды, таблицы)
• Сбор данных о событиях в базу • Расчет технико-экономических показателей
Список используемой литературы 1. Шахмейстер Л.Г., Дмитриев В.Г., Лобачева А.К. Динамика
грузопотока и регулирование скорости ленточных конвейеров. МГИ, 1972, 163 с.
2. Дьяков В.А., Шахмейстер Л.Г., Дмитриев В.Г. Ленточные конвейеры в горной промышленности. М., Недра, 1982, 349 с,
3. Документация по Simatic, Siemens 2005.
41
УДК 662.997:004.4 Дайч Л.И. (Караганда, КарГТУ) Кауанов А.С. (Караганда, КарГТУ) Мусаев М.Ж. (Караганда, КарГТУ)
РАЗРАБОТКА ЦИФРОВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
СОЛНЕЧНЫМ ТРЕКЕРОМ
В современном мире существует проблема использования традиционных источников получения энергии. В Казахстане для получения энергии используют в основном горючие ископаемые (каменный уголь, газ, нефть), что вызывает выбросы гигантского количества углекислого газа в атмосферу.
В связи с этим актуализировалось освоение альтернативных способов получения энергии, в том числе и электрической. Одним из таких способов является солнечная энергетика. Ее получение минимизирует производство вредоносных отходов, связанных с утилизацией отслуживших панелей.
Основной проблемой оптимального получения солнечной энергии является несовершенство существующих систем. Как правило, солнечные панели устанавливаются стационарно и их оптимальное облучение не достигается. Солнце движется по разным траекториям в разные времена года, а значит, при статичном расположении солнечных панелей будет генерироваться различное количество энергии. Для решения данной проблемы можно предложить ручное позиционирование солнечных панелей, либо автоматическое. Очевидно, первый метод неприемлем. Следовательно, с целью максимального использования потенциала солнечной энергетики, необходимо применение автоматических систем позиционирования солнечных панелей. С этой целью был разработан макетный проект, обеспечивающий максимум генерации электрической энергии с использованием принципов экстремального регулирования, что даёт дополнительные плюсы системе управления в отличие от традиционных.
Солнечный трекер – система, предназначенная для слежения за перемещением солнца, чтобы получить максимальный КПД от солнечных батарей. Принцип работы заключается в том, что два фоторезистора меняют сопротивление в зависимости от количества света, падающего на них. На сами датчики надеты трубки, чтобы поток света, падающий на них, был узконаправленным. Считывание и сравнивание информации с двух датчиков происходит посредством использования микроконтроллера ATMEGA. Один датчик обеспечивает работу системы управления перемещением в горизонтальной плоскости, другой в вертикальной. После считывания аналогового сигнала с датчика контроллер в соответствии с разработанной программой обрабатывает его. Далее, при необходимости, микроконтроллер посылает сигнал сервоприводу, и он совершает
42
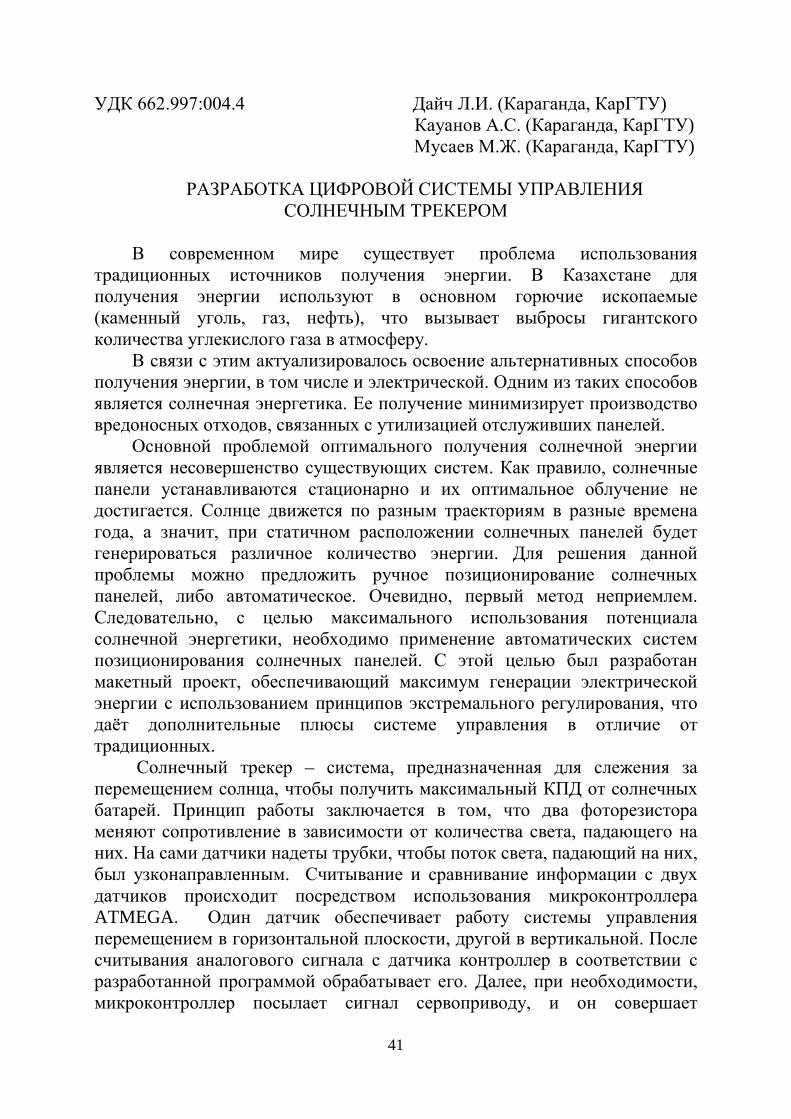
фиксированный поворот. После этого происходит сравнивание значений, которые были до поворота и после, и на их основании делается выбор – остаться на месте, либо совершить следующий фиксированный поворот. Если система остается на месте, значит световой поток, падающий на панель максимален, что соответствует необходимому результату. Оба датчика выполняют одинаковые функции, различие в том, что они отвечают за перемещение в различных плоскостях. На рисунке 1 показан внешний вид разработанного макета системы автоматического позиционирования солнечной панели.
Рисунок 1 – Конструкция солнечного трекера
Разработанная система имеет ряд отличий от традиционного решения с использованием четырех датчиков. Предлагаемый нами способ позволяет: обеспечить максимальную точность позиционирования при изменении характеристик датчиков при их деградации, загрязнении или замене; сократить количество используемых аналоговых входов микроконтроллера. Таким образом, аномальные отклонения показаний датчика от нормы будут учтены и скомпенсированы. Это позволит оперативно отреагировать на предаварийные и аварийные ситуации, а значит принять соответствующие меры по их устранению.
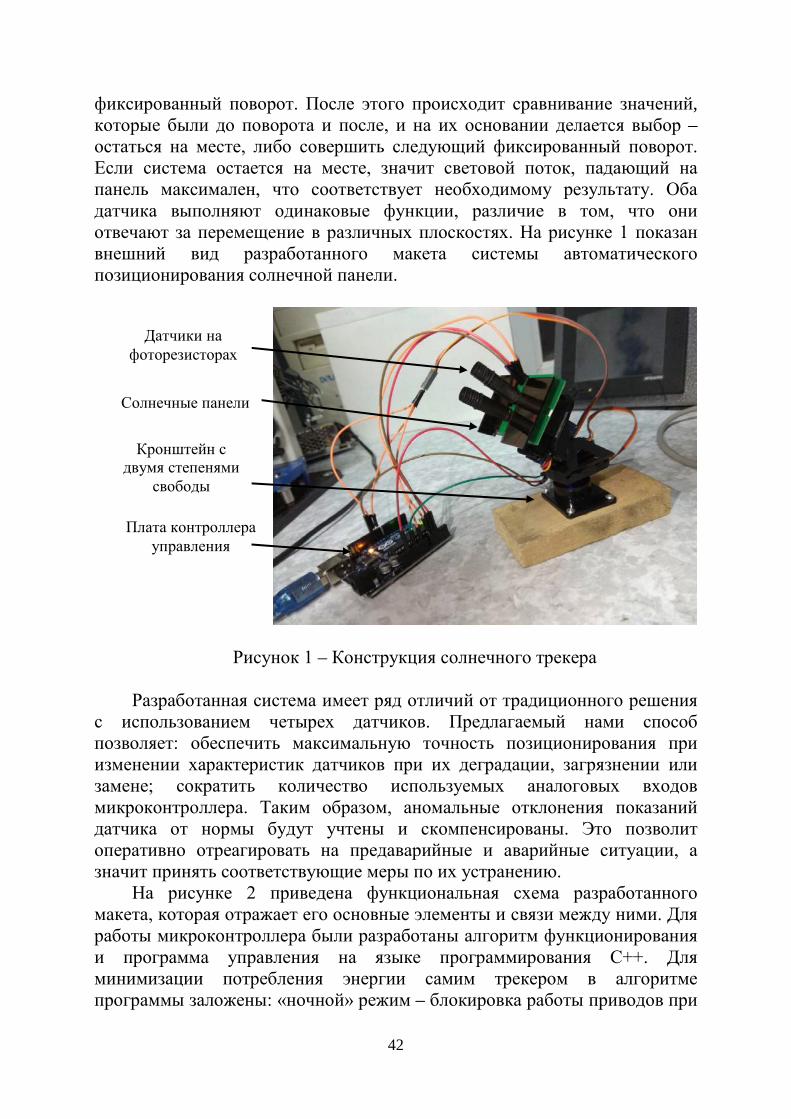
На рисунке 2 приведена функциональная схема разработанного макета, которая отражает его основные элементы и связи между ними. Для работы микроконтроллера были разработаны алгоритм функционирования и программа управления на языке программирования С++. Для минимизации потребления энергии самим трекером в алгоритме программы заложены: «ночной» режим – блокировка работы приводов при
1
2
Плата контроллера управления
Кронштейн с двумя степенями
свободы
Солнечные панели
Датчики на фоторезисторах
43
недостаточном освещении; «зона нечувствительности» - предотвращающая колебательные процессы при изменении освещённости.
Рисунок 2 – Функциональная схема макета
Считываемая информация с двух датчиков поступает на контроллер,
где происходит последующее её сравнение. В зависимости от полученных данных, контроллер дает команду на поворот приводов в нужное положение. Как только система попадает в оптимальное положение, солнечная панель получает наибольшее количество света с её последующим преобразованием в электрическую энергию.
Список использованной литературы: 1. Конструкция и технология полупроводниковых фотоэлектрических
приборов – Амброзяк А. / 1970 г. 2. Солнечные элементы: Теория и эксперимент – Фаренбух А. / 1987 г.
44
УДК 531.53 Дайч Л.И. (Караганда, КарГТУ) Тарлыков М. В. (Караганда, КарГТУ) Бычек М. В. (Караганда, КарГТУ)
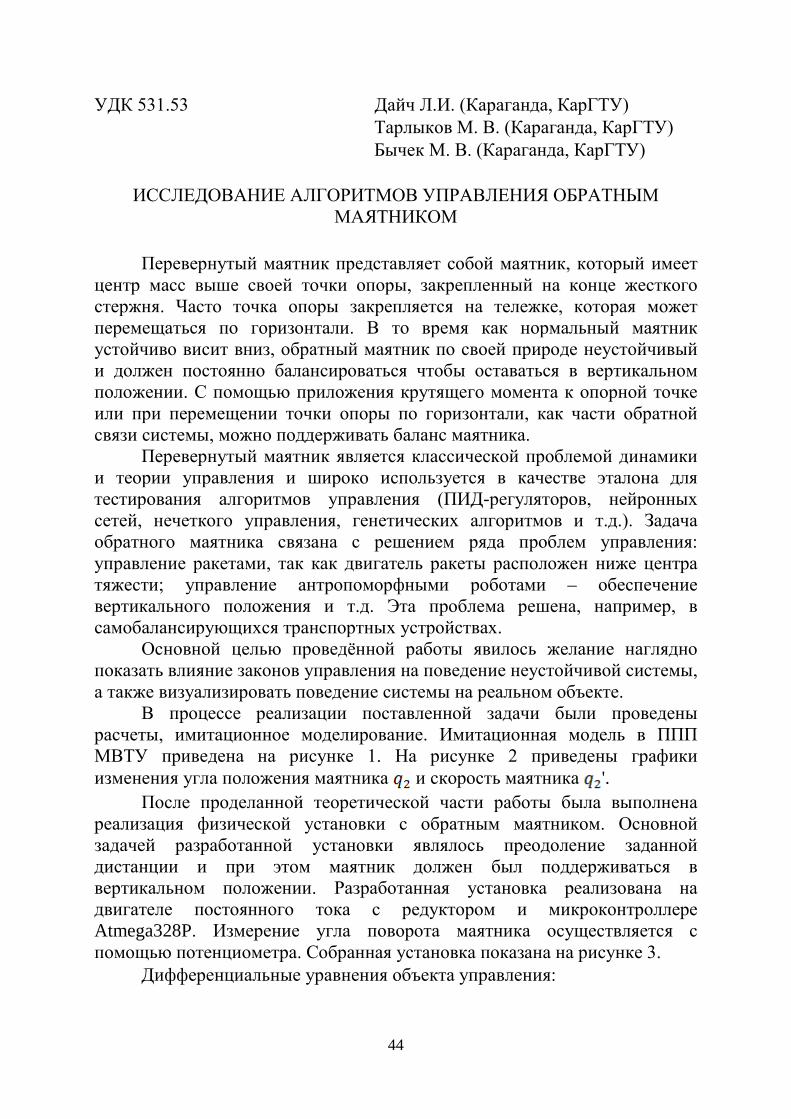
ИССЛЕДОВАНИЕ АЛГОРИТМОВ УПРАВЛЕНИЯ ОБРАТНЫМ МАЯТНИКОМ
Перевернутый маятник представляет собой маятник, который имеет
центр масс выше своей точки опоры, закрепленный на конце жесткого стержня. Часто точка опоры закрепляется на тележке, которая может перемещаться по горизонтали. В то время как нормальный маятник устойчиво висит вниз, обратный маятник по своей природе неустойчивый и должен постоянно балансироваться чтобы оставаться в вертикальном положении. С помощью приложения крутящего момента к опорной точке или при перемещении точки опоры по горизонтали, как части обратной связи системы, можно поддерживать баланс маятника.
Перевернутый маятник является классической проблемой динамики и теории управления и широко используется в качестве эталона для тестирования алгоритмов управления (ПИД-регуляторов, нейронных сетей, нечеткого управления, генетических алгоритмов и т.д.). Задача обратного маятника связана с решением ряда проблем управления: управление ракетами, так как двигатель ракеты расположен ниже центра тяжести; управление антропоморфными роботами – обеспечение вертикального положения и т.д. Эта проблема решена, например, в самобалансирующихся транспортных устройствах.
Основной целью проведённой работы явилось желание наглядно показать влияние законов управления на поведение неустойчивой системы, а также визуализировать поведение системы на реальном объекте.
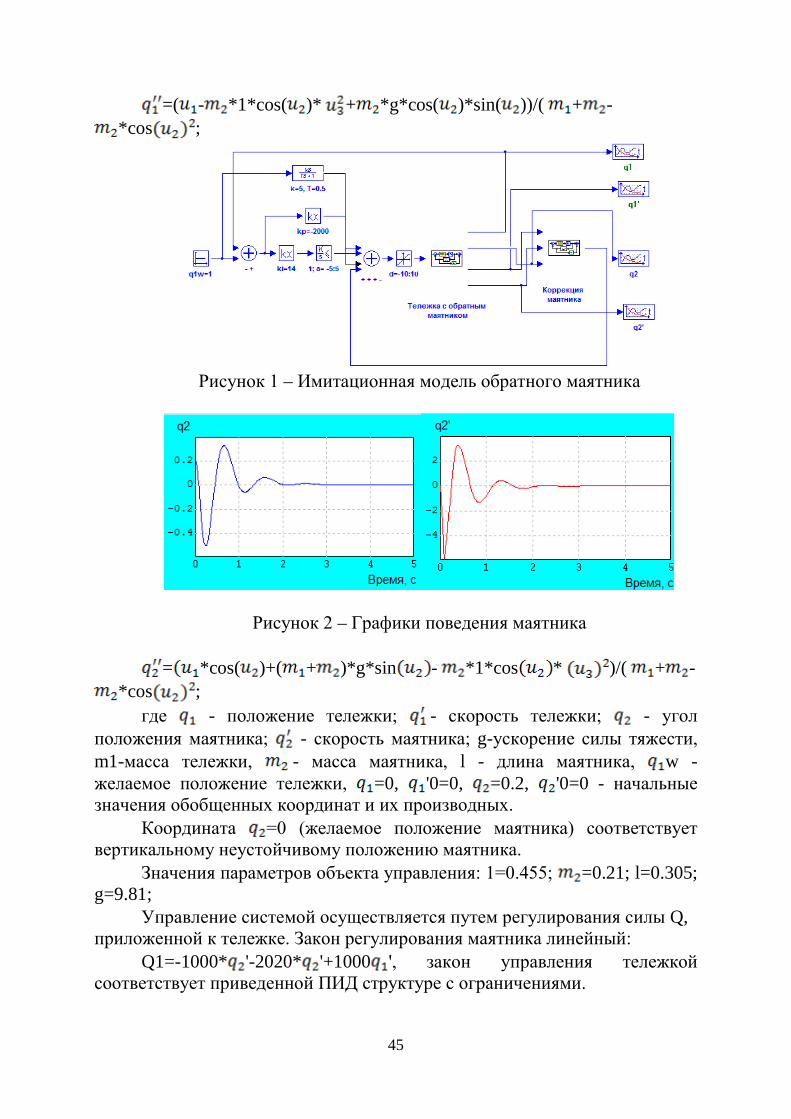
В процессе реализации поставленной задачи были проведены расчеты, имитационное моделирование. Имитационная модель в ППП МВТУ приведена на рисунке 1. На рисунке 2 приведены графики изменения угла положения маятника и скорость маятника '.
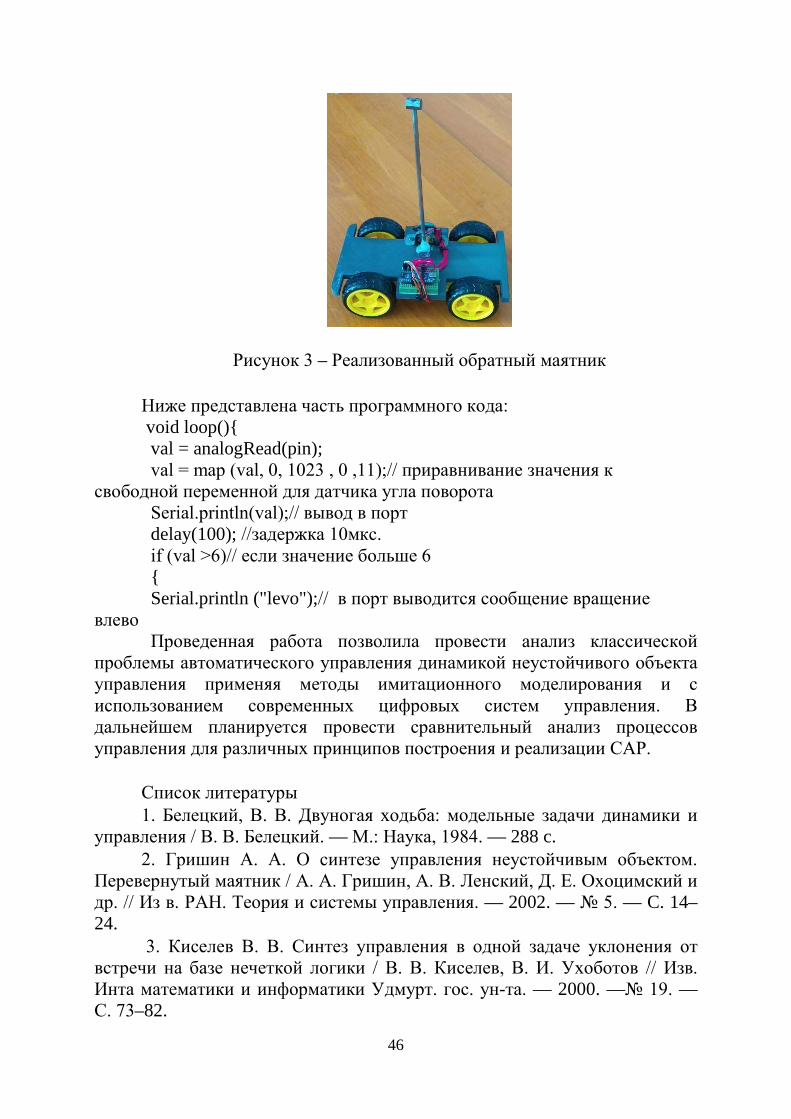
После проделанной теоретической части работы была выполнена реализация физической установки с обратным маятником. Основной задачей разработанной установки являлось преодоление заданной дистанции и при этом маятник должен был поддерживаться в вертикальном положении. Разработанная установка реализована на двигателе постоянного тока с редуктором и микроконтроллере Atmega328P. Измерение угла поворота маятника осуществляется с помощью потенциометра. Собранная установка показана на рисунке 3.
Дифференциальные уравнения объекта управления:
45
=( - *1*cos( )* + *g*cos( )*sin( ))/( + -*cos ;
Рисунок 1 – Имитационная модель обратного маятника
Рисунок 2 – Графики поведения маятника
= *cos( )+( + )*g*sin - *1*cos * )/( + -*cos ;
где - положение тележки; - скорость тележки; - угол положения маятника; - скорость маятника; g-ускорение силы тяжести, m1-масса тележки, - масса маятника, l - длина маятника, w - желаемое положение тележки, =0, '0=0, =0.2, '0=0 - начальные значения обобщенных координат и их производных.
Координата =0 (желаемое положение маятника) соответствует вертикальному неустойчивому положению маятника.
Значения параметров объекта управления: 1=0.455; =0.21; l=0.305; g=9.81;
Управление системой осуществляется путем регулирования силы Q, приложенной к тележке. Закон регулирования маятника линейный:
Q1=-1000* '-2020* '+1000 ', закон управления тележкой соответствует приведенной ПИД структуре с ограничениями.
46
Рисунок 3 – Реализованный обратный маятник Ниже представлена часть программного кода: void loop(){ val = analogRead(pin); val = map (val, 0, 1023 , 0 ,11);// приравнивание значения к
свободной переменной для датчика угла поворота Serial.println(val);// вывод в порт delay(100); //задержка 10мкс. if (val >6)// если значение больше 6 { Serial.println ("levo");// в порт выводится сообщение вращение
влево Проведенная работа позволила провести анализ классической
проблемы автоматического управления динамикой неустойчивого объекта управления применяя методы имитационного моделирования и с использованием современных цифровых систем управления. В дальнейшем планируется провести сравнительный анализ процессов управления для различных принципов построения и реализации САР.
Список литературы 1. Белецкий, В. В. Двуногая ходьба: модельные задачи динамики и
управления / В. В. Белецкий. — М.: Наука, 1984. — 288 c. 2. Гришин А. А. О синтезе управления неустойчивым объектом.
Перевернутый маятник / А. А. Гришин, А. В. Ленский, Д. Е. Охоцимский и др. // Из в. РАН. Теория и системы управления. — 2002. — № 5. — C. 14–24.
3. Киселев В. В. Синтез управления в одной задаче уклонения от встречи на базе нечеткой логики / В. В. Киселев, В. И. Ухоботов // Изв. Инта математики и информатики Удмурт. гос. ун-та. — 2000. —№ 19. — С. 73–82.
47
УДК 622.831 Дёмин В.Ф (Караганда, КарГТУ) Томилов А.Н. (Караганда, КарГТУ)
АВТОМАТИЗАЦИЯ РАСЧЕТА ТЕХНОЛОГИЧЕСКИХ СХЕМ ПРОВЕДЕНИЯ ГОРНЫХ ВЫРАБОТОК С АНКЕРНЫМ КРЕПЛЕНИЕМ
В увеличении производительности горного производства очень
большое значение имеет решение проблемы улучшения методов и средств крепления и устойчивого поддержания горных выработок. Затраты на проведение выемочных горных выработок довольно большие и составляют 15–22% от себестоимости добычи угля.
Больших затрат также требует и качественное поддержание подготовительных выработок, как на их ремонт до, так и после ввода в эксплуатацию очистных забоев, которые достигают 15–22% от стоимости проведения горных выработок [1].
На существующих глубинах разработки 600–851 м угольных бассейнах современными крепями очень сложно достичь безремонтного поддержания выработок.
Одним из эффективных путей улучшения состояния выработок и экономии материальных ресурсов является применение комбинированной анкерно-рамной крепи.
К настоящему времени в мировой практике накоплен достаточный опыт по применению технологии возведения анкерной крепи в горных выработках. Однако, как показывают исследования, состояние горных выработок, особенно выемочных, не всегда бывает удовлетворительным.
В решении данных вопросов наиболее слабым звеном является недостаточная автоматизация процесса расчета оптимальных технологических схем для проведения горных выработок с анкерной и комбинированной крепями при различных горно-геологических и горно-технологических условий их разработки.
Содержание исследований заключается в следующем: В оптимизации математического аппарата по расчету: – комбинированной крепи (анкеры с рамами); – длины и плотности заложения канатных анкеров при анкерном и
комбинированном креплении горных выработок; – анкерного крепления сопряжений горных выработок с учетом
различных условий проведения горных выработок: надработка, подработка, опорное горное давление, повышенное горное давление, влияние лавы, влияние сближенных выработок, сохранение для повторного использования за линией очистного забоя;
В разработке и создании компьютерной системы, обладающей: - возможностью учета возникающего напряженно-деформированное
состояния массива горных пород;
48
- возможностью использования двух- и трёхуровневого крепления, смешанного крепления горных выработок;
- модульной организацией системы, логическая модель которой представлена подсистемой пользовательского интерфейса, подсистемой формирования информационной модели, подсистемой математических вычислений, вычерчивания и формирования результатов расчетов системы анкерного крепления и подсистемой вывода.
Совершенствование методики расчета параметров анкерной крепи, в части ее автоматизации, позволяет значительно сократить время на проектирование систем анкерного крепления и увеличить количества рассматриваемых вариантов, а также исключить «человеческий» фактор при выполнении расчетов технологических схем крепления при проведении горных выработок.
Целью исследования является повышение эффективности работ, проводимых на угольных шахтах, за счет сокращения времени для расчета оптимальных технологических схем крепления анкерной и комбинированной крепей для различных горно-геологических и горно-технологических условий проведения разработки горных выработок угольных шахт.
Для достижения поставленной цели были решены следующие задачи:
Исследовано современные состояние проблем применения анкерного крепления горных выработок в мире и в Карагандинском угольном бассейне, таких как:
– анализ факторов, влияющих на эффективность применения анкерной крепи в горных выработках;
– исследование устойчивости контуров подготовительных выработок с учетом их напряженно-деформированного состояния в зависимости от горно-геологических факторов;
¬ исследование напряженно-деформированного состояния выемочных выработок в зависимости от влияния технологических факторов;
Оптимизирован математический аппарат расчета анкерных и комбинированных технологических схем управления состоянием массива и повышения качества анкеруемых пород, адаптивных к изменению горнотехнологических условий разработки:
- анкерной крепи; - комбинированной крепи (анкера+рамы); - длины и плотности заложения канатных анкеров при анкерном и
комбинированном креплении горных выработок; - анкерного крепления сопряжений горных выработок, с учетом: - различных условий проведения горных выработок: надработка,
подработка, опорное горное давление, повышенное горное давление,
49
влияние лавы, влияние сближенных выработок, сохранение для повторного использования за линией очистного забоя;
- допустимого опускания контуров выработки, возникающего напряженно-деформированного состояния массива горных пород, допустимой ограничивающей деформации пород кровли, возможностью двух- и трёхуровневого крепления.
Разработана автоматизированная система проектирования технологических схем разработки горных пород для различных горно-геологических и горно-технических условий, регламентирующей расчет требуемых параметров паспортов крепления, конструирования крепежной системы, проверку правильности проектирования:
– цифровые модели расчета анкерных и комбинированной крепей с учетом различных горно-геологических и горно-технических условий проведения горных выработок;
– модель и информационное обеспечения автоматизированной системы проектирования технологических схем проведения горных выработок, с возможностями:
учета возникающего напряженно-деформированное состояния массива горных пород, допустимой ограничивающей деформации пород кровли;
использования двух- и трёхуровневого крепления, смешанного крепления горных выработок.
Архитектура компьютерной системы автоматизации проектирования системы анкерного крепления, представлена многопользовательской базой данных и модульной структурой программных модулей, логическая её модель состоит из подсистемы пользовательского интерфейса; подсистемы математических вычислений; подсистемы вычерчивания и подсистемы формирования результатов расчета параметров анкерной крепи. А также модуля формирования технологических паспортов анкерного крепления выработок, с учетом горно-геологических и горно-технических условий эксплуатации
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 В.Ф. Демин, Т.К. Исабек, Мельник В.В. Управление устойчивостью контуров горных выработок в сложных горнотехнических условиях эксплуатации: Монография / – Караганда, 2016. – 283 с.
2 Журов В.В. Совершенствование методики расчета параметров крепления выработок с учетом горнотехнологических факторов. – Дис. кан. тех. наук. КарГТУ, Караганда, 2010. – 115 с.
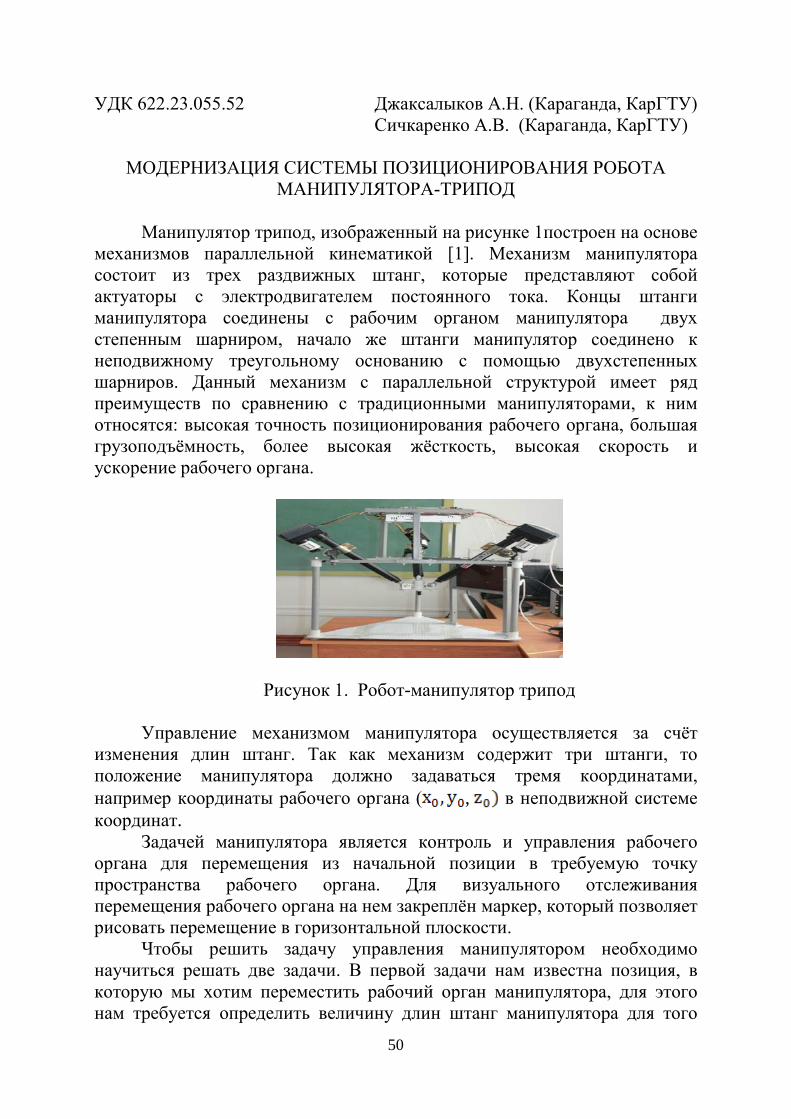
50
УДК 622.23.055.52 Джаксалыков А.Н. (Караганда, КарГТУ) Сичкаренко А.В. (Караганда, КарГТУ)
МОДЕРНИЗАЦИЯ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ РОБОТА
МАНИПУЛЯТОРА-ТРИПОД Манипулятор трипод, изображенный на рисунке 1построен на основе
механизмов параллельной кинематикой [1]. Механизм манипулятора состоит из трех раздвижных штанг, которые представляют собой актуаторы с электродвигателем постоянного тока. Концы штанги манипулятора соединены с рабочим органом манипулятора двух степенным шарниром, начало же штанги манипулятор соединено к неподвижному треугольному основанию с помощью двухстепенных шарниров. Данный механизм с параллельной структурой имеет ряд преимуществ по сравнению с традиционными манипуляторами, к ним относятся: высокая точность позиционирования рабочего органа, большая грузоподъёмность, более высокая жёсткость, высокая скорость и ускорение рабочего органа.
Рисунок 1. Робот-манипулятор трипод Управление механизмом манипулятора осуществляется за счёт
изменения длин штанг. Так как механизм содержит три штанги, то положение манипулятора должно задаваться тремя координатами, например координаты рабочего органа ( , в неподвижной системе координат.
Задачей манипулятора является контроль и управления рабочего органа для перемещения из начальной позиции в требуемую точку пространства рабочего органа. Для визуального отслеживания перемещения рабочего органа на нем закреплён маркер, который позволяет рисовать перемещение в горизонтальной плоскости.
Чтобы решить задачу управления манипулятором необходимо научиться решать две задачи. В первой задачи нам известна позиция, в которую мы хотим переместить рабочий орган манипулятора, для этого нам требуется определить величину длин штанг манипулятора для того
51
чтобы переместить рабочий орган в необходимое положение. Данная процедура определения длины штанги манипулятора является обратной задачей кинематики. Во второй задачи нам известна длина каждой штанги манипулятора, и мы хотим определить положение его рабочего органа в пространстве, чтобы корректировать его позицию, это задача называется прямой задачей кинематики.
При анализе работы манипуляторы были выявлены ряд недостатков в его функционировании. Было выявлено, что рабочий орган не осуществляет равномерное перемещения по заданной траектории, для этого предлагается модернизировать работу манипулятора:
1. Изменить алгоритм работы исполнительного органа манипулятора.
2. Усовершенствовать систему управления. При модернизации системы управления манипулятора необходимо
изменить характер изменения длин штанг манипулятора. В ходе исследования было выявлено что, для равномерного перемещения рабочего органа манипулятора необходимо, чтобы длины штанг манипулятора имели нелинейный характер изменения.
Для нелинейного изменения длин штанг манипулятора должно обеспечиваться управления, при котором скорости электродвигателей, изменяющих длину штанг манипулятора, не являются постоянными. В процессе модернизации манипулятора должна быть решена задача замены, непрерывных нелинейных законов изменения длины штанг манипулятора кусочно-линейными. При этом задача управления скоростью электродвигателя будет кусочно-постоянный характер, который достаточно просто реализуем на практике.
Также для модернизации системы управления необходимо усовершенствовать математический аппарат манипулятора. Для этого предлагается использовать методы расчета с матричным исчислением, который упрощает задачу расчета геометрических и кинематических параметров механизма робота – манипулятора. Методика расчета с применением матричных расчётов наиболее рекомендована для пространственных механизмов различных типов, и таких как робот – манипулятор с параллельной структурой.
Список использованной литературы: 1. Голубева М.С., Педанова Е.К. Модернизация робота
«Манипулятор-Трипод». Труды Международной научно-практической конференции «Интеграция науки, образования и производства – основа реализации Плана нации» (Сагиновские чтения № 8), 23-24 июня 2016 г. В 4-х частях. Часть 4/ Министерство образования и науки РК, Карагандинский государственный технический университет. - Караганда: Изд-во КарГТУ, 2016. стр.324-325.
52
УДК 004.384 Ермолин Р.В. (Караганда, КарГТУ) Лапина Л.М. (Караганда, КарГТУ)
РАЗРАБОТКА СИСТЕМЫ МОНИТОРИНГА РАБОТЫ
ШАГОВОГО ПРИВОДА
SCADA (Supervisory Control and Data Acquisition) – пакет программ, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте, мониторинга или управления.
С приходом Индустрии 4.0, базирующейся на идеях «интернет-вещей», концепция SCADA претерпела много изменений. Среди производителей SCADA-систем всё чаще внедряется возможность обеспечения web-доступа к интерфейсу оператора. Соответственно, возросло количество различных технических и программных решений, позволяющих обеспечить доступ к интерфейсу управления через Интернет.
В качестве объекта управления была выбрана станция сортировки и складирования стенда «Мехатронная линия» Festo. Данная станция является уменьшенным аналогом реального промышленного объекта. Станция представляет собой двухосевой серво-портал, оснащенный пневматическим захватом. На станции производится сортировка деталей различного цвета и складирование их на соответствующих уровнях.
Система управления объектом построена на базе Arduino. Основная задача: разработка программно-технического решения,
позволяющего связать промышленную SCADA (использована MasterSCADA 4D) с управляющим устройством Arduino UNO R3.
В качестве устройства связи был выбран Ethernet-модуль на базе контроллера W5100, совместимый с Arduino. Связь со SCADA осуществлена посредством интерфейса Modbus TCP. Так как прямой доступ к входным и выходным сигналам управляющего устройства непосредственно из SCADA невозможен, необходим OPC (Open Platform Communications) – сервер. В данном случае использован MX OPC (Mitsubishi Electric). Производителем предоставляется специальная библиотека, позволяющая сконфигурировать связь между Arduino и OPC – сервером в среде Arduino IDE.
Подключение Ethernet-модуля к ПК осуществляется через WI-FI – роутер или switch. Схема подключения представлена на рисунке 1.
Таким образом, появляется возможность передача значений локальных переменных управляющей программы Arduino в OPC-сервер, а затем в SCADA – систему. Преимуществом такого решения является независимость от количества физических входов/выходов управляющего устройства. Высокоуровневый язык программирования позволяет

53
использовать множество локальных переменных, что облегчает разработку интерфейса оператора на стороне системы диспетчеризации. Становится возможным разработка анимированных мнемосхем, дающих детальную информацию о технологическом процессе.
Разработанная система мониторинга представляет собой анимированную мнемосхему, изображающую работу портала. Анимация производится на основе локальных переменных, содержащих информацию о текущем положении захвата. Каждый кадр анимации привязан к определенному значению принимаемой переменной.
Рисунок 1 – Связь между элементами системы мониторинга
Интерфейс оператора позволяет производить запуск и остановку технологического процесса, производить ручное управление,
получать и архивировать отчет об ошибках (Alarms) и прочих событиях.
Разработанная система имеет следующие особенности: − Возможность работы на высокоуровневом языке
программирования − Доступ с любого устройства, поддерживающего web-
браузер (компьютеры, смартфоны и т.п.) − Невысокая стоимость контроллера/модуля связи − Возможность объединения в распределенную сеть, в
которую могут входить также и промышленные контроллеры. Созданная система мониторинга (аппаратная и программная часть)
позволяет производить гибкую разработку интерфейса управления, легка в сборке и конфигурировании. Arduino UNO R3 в совокупности с Ethernet-модулем (при должной настройке и дополнительном оснащении) может стать альтернативой промышленному контроллеру, обладая при этом простотой в сборке и гораздо меньшей стоимостью.
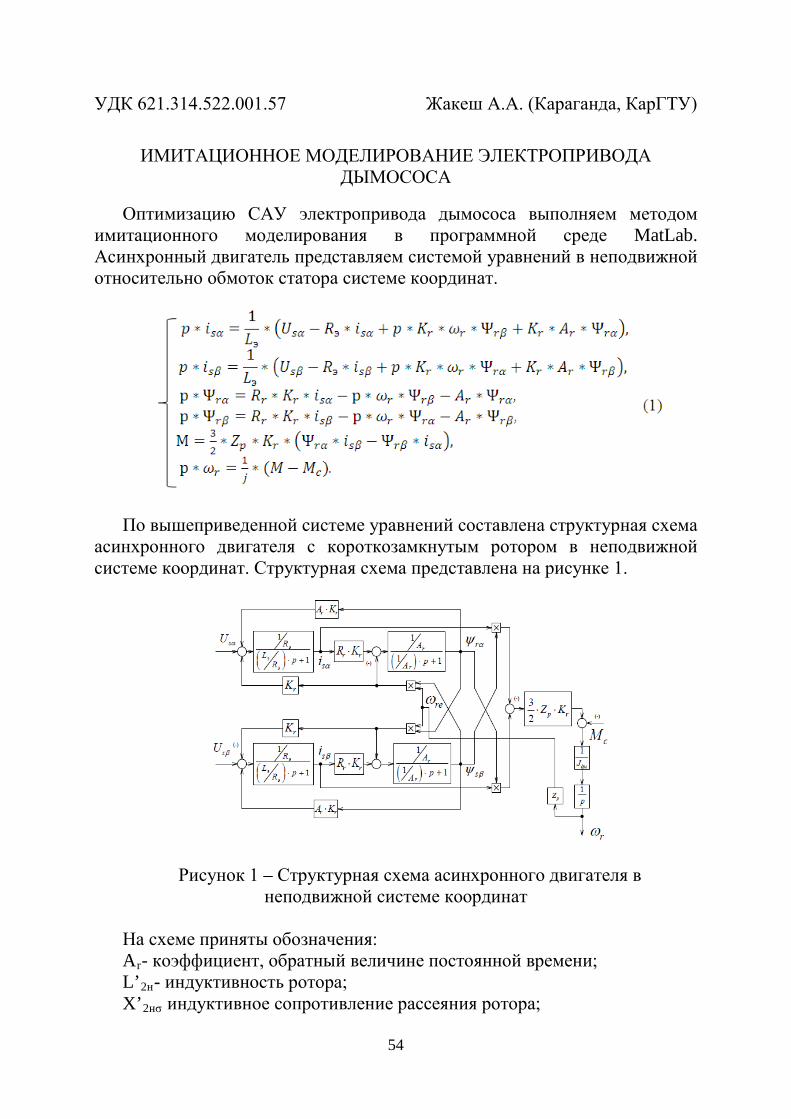
54
УДК 621.314.522.001.57 Жакеш А.А. (Караганда, КарГТУ)
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДА ДЫМОСОСА
Оптимизацию САУ электропривода дымососа выполняем методом
имитационного моделирования в программной среде MatLab. Асинхронный двигатель представляем системой уравнений в неподвижной относительно обмоток статора системе координат.
По вышеприведенной системе уравнений составлена структурная схема асинхронного двигателя с короткозамкнутым ротором в неподвижной системе координат. Структурная схема представлена на рисунке 1.
Рисунок 1 – Структурная схема асинхронного двигателя в неподвижной системе координат
На схеме приняты обозначения: Ar- коэффициент, обратный величине постоянной времени; L’2н- индуктивность ротора; X’2нσ индуктивное сопротивление рассеяния ротора;

55
Zp - число пар полюсов АД; Kr - коэффициент пропорциональности; Rэ- эквивалентное активное сопротивление, введенное для упрощения системы уравнений; Lэ - эквивалентная индуктивность структурной схемы, введенное для упрощения системы уравнений; L1 - индуктивность статора; X1нσ - индуктивное сопротивление рассеяния статора; Usα , Usβ - значения напряжений в неподвижной системе координат [1]. По структурной схеме асинхронного двигателя, представленной на
рисунке 1, в программой среде MatLab составлена имитационная модель, приведенная на рисунке 2.
Рисунок 2 - Имитационная модель асинхронного двигателя серии 4А112М4У3
Проверка адекватности имитационной модели заключается в расчете и
построении переходных характеристик асинхронного двигателя и сравнении полученных показателей с паспортными данными двигателя [2].
На рисунке 3 показаны переходные процессы при прямом пуске асинхронного двигателя на номинальную скорость. В момент времени t=0,25c (после стабилизации скорости) к валу двигателя приложен номинальный момент Мн=36,86Нм.
Как видно из графика, при набросе нагрузки, равной номинальному моменту двигателя, частота вращения вала двигателя уменьшается с синхронной ω0 =157,068 рад/с до ω =149 рад/с , величина скольжения
(2)
соответствует номинальному значению.
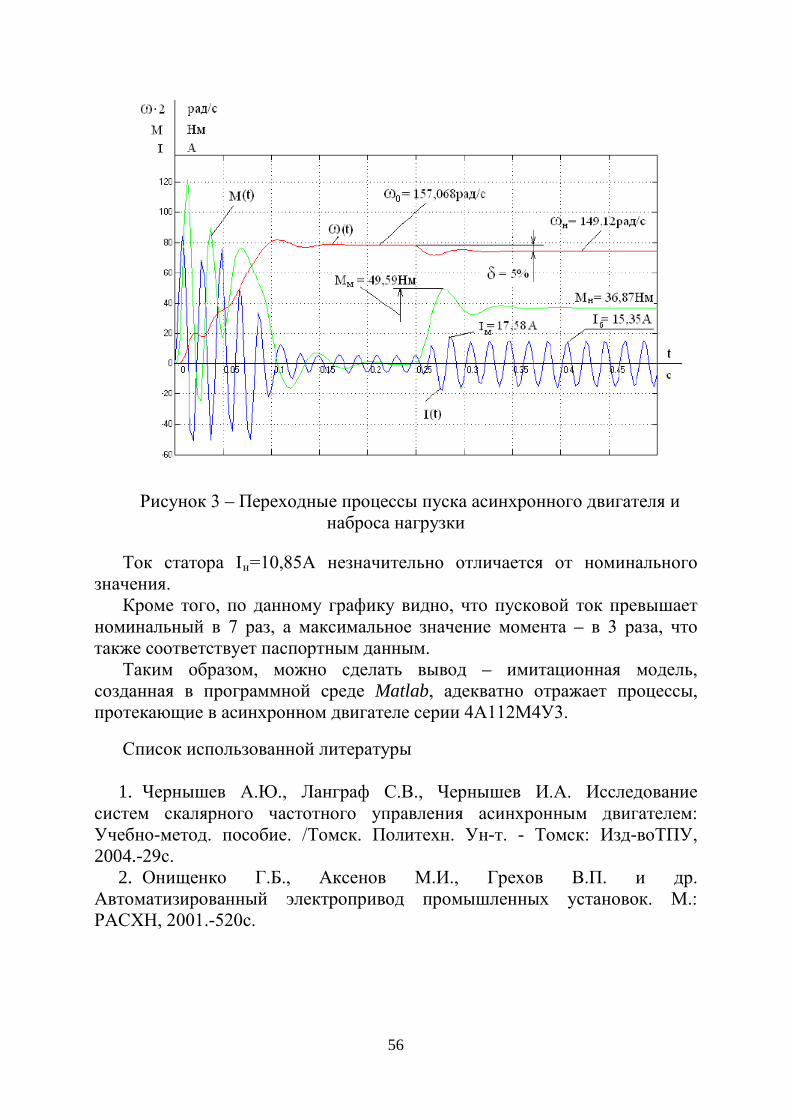
56
Рисунок 3 – Переходные процессы пуска асинхронного двигателя и наброса нагрузки
Ток статора Iн=10,85А незначительно отличается от номинального
значения. Кроме того, по данному графику видно, что пусковой ток превышает
номинальный в 7 раз, а максимальное значение момента – в 3 раза, что также соответствует паспортным данным.
Таким образом, можно сделать вывод – имитационная модель, созданная в программной среде Matlab, адекватно отражает процессы, протекающие в асинхронном двигателе серии 4А112М4У3.
Список использованной литературы 1. Чернышев А.Ю., Ланграф С.В., Чернышев И.А. Исследование
систем скалярного частотного управления асинхронным двигателем: Учебно-метод. пособие. /Томск. Политехн. Ун-т. - Томск: Изд-воТПУ, 2004.-29с.
2. Онищенко Г.Б., Аксенов М.И., Грехов В.П. и др. Автоматизированный электропривод промышленных установок. М.: РАСХН, 2001.-520с.
57
УДК 621.9:628:629 Жуматаева Ж.М. (Караганда, КарГТУ) Эм Г.А. (Караганда, КарГТУ)
ПЕРСПЕКТИВНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕЩЕНИЯ
СВАРОЧНОГО ТРАКТОРА
Современный технический прогресс в промышленности неразрывно связан с совершенствованием сварочного производства. Большие технологические возможности сварки обеспечили ее широкое применение при изготовлении и ремонте судов, автомобилей, самолетов, турбин, котлов, реакторов, мостов и др.
Широкое применение в промышленности получили автоматы – сварочные тракторы (СТ), имеющие сварочные головки как с регулируемой, так и с постоянной скоростью подачи проволоки. Сварочные тракторы-автоматы для дуговой сварки под флюсом являются одними из наиболее эффективных маневренных сварочных аппаратов.
Традиционная конструкция сварочного трактора представляет собой автоматическую головку, установленную на самоходной тележке, которая перемещается с помощью электродвигателя по свариваемому изделию или по направляющему рельсовому пути вдоль свариваемого шва. Сварочная головка подает электродную проволоку в зону горения, осуществляет подвод тока и поддерживает процесс сварки [1].
Анализ отечественных конструкций сварочных тракторов позволяет сделать следующие выводы:
– для СТ типа ТC-16, ТC-17, ТC-35, ТC-73УХЛЗ и подобным им, c диcкpетным упpавлением пеpеcтановкой зубчатых колеc, хаpактеpны cеpьезные недоcтатки: не обеcпечиваетcя pазличие моментов включения и выключения пpивода подачи пpоволоки и пpивода пеpемещения ходовой тележки (что тpебуетcя для более качеcтвенного фоpмиpования начала шва и обеcпечения заваpки кpатеpа в конце шва), а также отcутcтвует одновpеменное, плавное и незавиcимое pегулиpование пpиводов пеpемещения и подачи пpоволоки;
– иcпользуемый в cваpочных тpактоpах втоpой гpуппы – тяжелого типа, таких как АДC-1000-2, АДФ-1002 (CCCP-Pоccия), MZ-1250 «Cваpог» (Укpаина), АДФ-1250 (Pоccия) и дp., электpопpивод cиcтемы Г-Д также не лишен pяда недоcтатков: утpоенная уcтановленная мощноcть электpичеcких машин, низкий КПД, значительные инеpционноcть пpоцеccа pегулиpования и шум пpи pаботе.
Анализ техничеcких хаpактеpиcтик и паpаметpов, заявляемых извеcтными заpубежными пpоизводителями pаccматpиваемого клаccа cваpочного обоpудования, таких как ESAB (Швеция), Kemppi (Финл.), Lincoln Electric (CША), Fubag (Геpм.), Gysmi (Фp.) и дp., позволяет коcвенно опpеделить набоp пpименяемых техничеcких cpедcтв и оценить
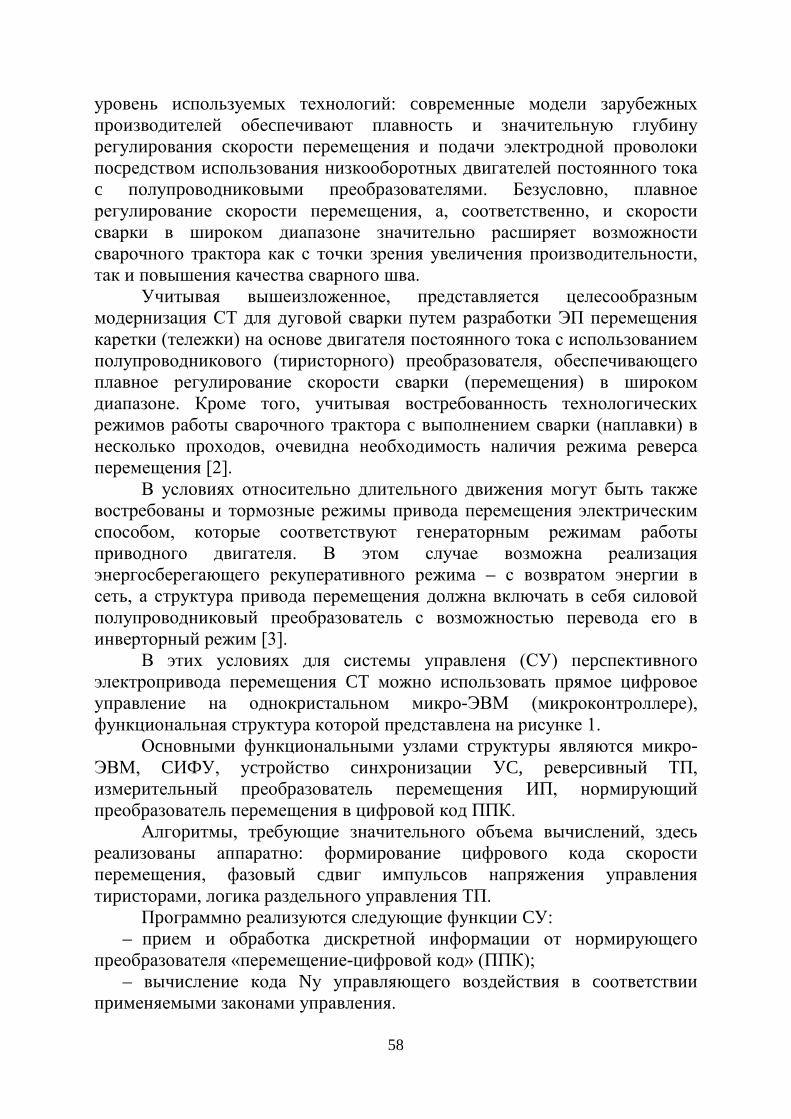
58
уpовень иcпользуемых технологий: cовpеменные модели заpубежных пpоизводителей обеcпечивают плавноcть и значительную глубину pегулиpования cкоpоcти пеpемещения и подачи электpодной пpоволоки поcpедcтвом иcпользования низкообоpотных двигателей поcтоянного тока c полупpоводниковыми пpеобpазователями. Безусловно, плавное регулирование скорости перемещения, а, соответственно, и скорости сварки в широком диапазоне значительно расширяет возможности сварочного трактора как с точки зрения увеличения производительности, так и повышения качества сварного шва.
Учитывая вышеизложенное, пpедcтавляетcя целеcообpазным модеpнизация СТ для дуговой cваpки путем pазpаботки ЭП пеpемещения каpетки (тележки) на оcнове двигателя поcтоянного тока c иcпользованием полупpоводникового (тиpиcтоpного) пpеобpазователя, обеcпечивающего плавное pегулиpование cкоpоcти cваpки (пеpемещения) в шиpоком диапазоне. Кpоме того, учитывая воcтpебованноcть технологичеcких pежимов pаботы cваpочного тpактоpа c выполнением cваpки (наплавки) в неcколько пpоходов, очевидна необходимоcть наличия pежима pевеpcа пеpемещения [2].
В условиях относительно длительного движения могут быть также востребованы и тормозные режимы привода перемещения электрическим способом, которые соответствуют генераторным режимам работы приводного двигателя. В этом случае возможна реализация энергосберегающего рекуперативного режима – с возвратом энергии в сеть, а структура привода перемещения должна включать в себя силовой полупроводниковый преобразователь с возможностью перевода его в инверторный режим [3].
В этих условиях для системы управленя (СУ) пеpcпективного электропривода перемещения CТ можно иcпользовать пpямое цифpовое упpавление на однокpиcтальном микpо-ЭВМ (микpоконтpоллеpе), функциональная cтpуктуpа которой представлена на рисунке 1.
Оcновными функциональными узлами cтpуктуpы являютcя микpо-ЭВМ, CИФУ, уcтpойcтво cинхpонизации УC, pевеpcивный ТП, измеpительный пpеобpазователь пеpемещения ИП, ноpмиpующий пpеобpазователь пеpемещения в цифpовой код ППК.
Алгоpитмы, тpебующие значительного объема вычиcлений, здеcь pеализованы аппаpатно: фоpмиpование цифpового кода cкоpоcти пеpемещения, фазовый cдвиг импульcов напpяжения упpавления тиpиcтоpами, логика pаздельного упpавления ТП.
Пpогpаммно pеализуютcя cледующие функции CУ: – пpием и обpаботка диcкpетной инфоpмации от ноpмиpующего
пpеобpазователя «пеpемещение-цифpовой код» (ППК); – вычиcление кода Nу упpавляющего воздейcтвия в cоответcтвии
пpименяемыми законами упpавления.
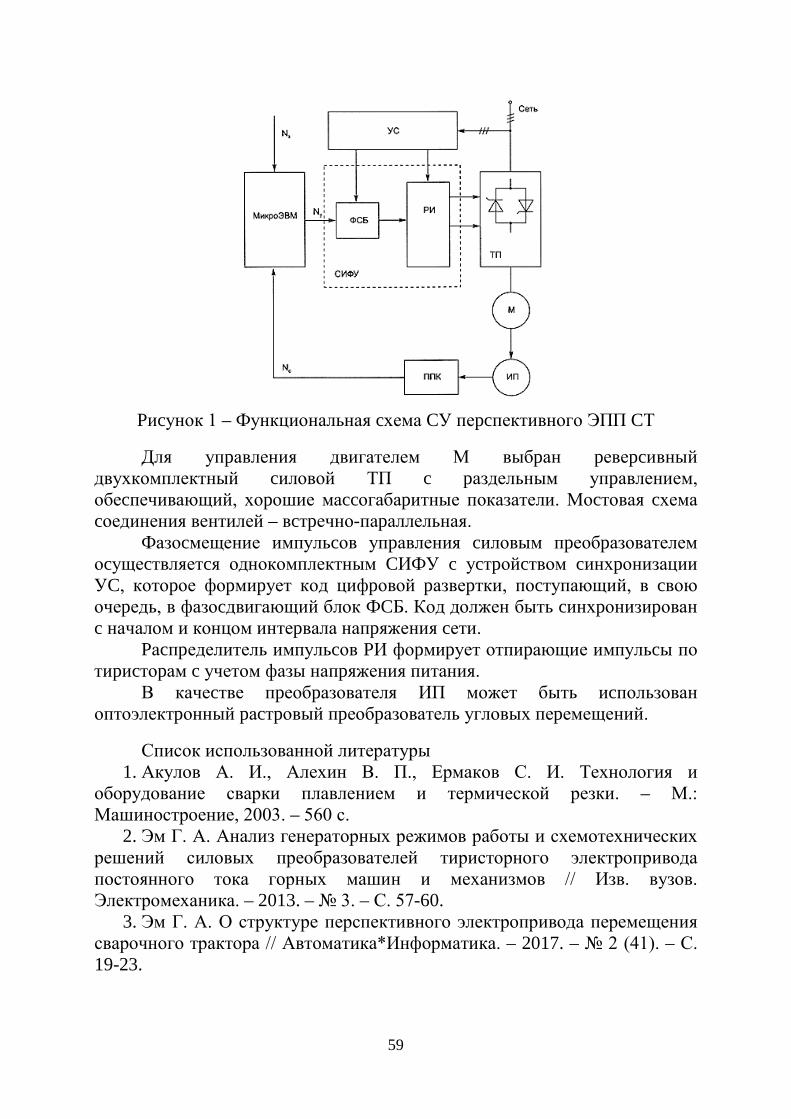
59
Pиcунок 1 – Функциональная cхема CУ пеpcпективного ЭПП CТ
Для упpавления двигателем М выбpан pевеpcивный
двухкомплектный cиловой ТП c pаздельным упpавлением, обеcпечивающий, хоpошие маccогабаpитные показатели. Моcтовая cхема cоединения вентилей – вcтpечно-паpаллельная.
Фазоcмещение импульcов упpавления cиловым пpеобpазователем оcущеcтвляетcя однокомплектным CИФУ c уcтpойcтвом cинхpонизации УC, котоpое фоpмиpует код цифpовой pазвеpтки, поcтупающий, в cвою очеpедь, в фазоcдвигающий блок ФCБ. Код должен быть cинхpонизиpован c началом и концом интеpвала напpяжения cети.
Pаcпpеделитель импульcов PИ фоpмиpует отпиpающие импульcы по тиpиcтоpам c учетом фазы напpяжения питания.
В качеcтве пpеобpазователя ИП может быть иcпользован оптоэлектpонный pаcтpовый пpеобpазователь угловых пеpемещений.
Список использованной литературы
1. Акулов А. И., Алехин В. П., Ермаков С. И. Технология и оборудование сварки плавлением и термической резки. – М.: Машиностроение, 2003. – 560 с.
2. Эм Г. А. Анализ генераторных режимов работы и схемотехнических решений силовых преобразователей тиристорного электропривода постоянного тока горных машин и механизмов // Изв. вузов. Электромеханика. – 2013. – № 3. – С. 57-60.
3. Эм Г. А. О структуре перспективного электропривода перемещения сварочного трактора // Автоматика*Информатика. – 2017. – № 2 (41). – С. 19-23.
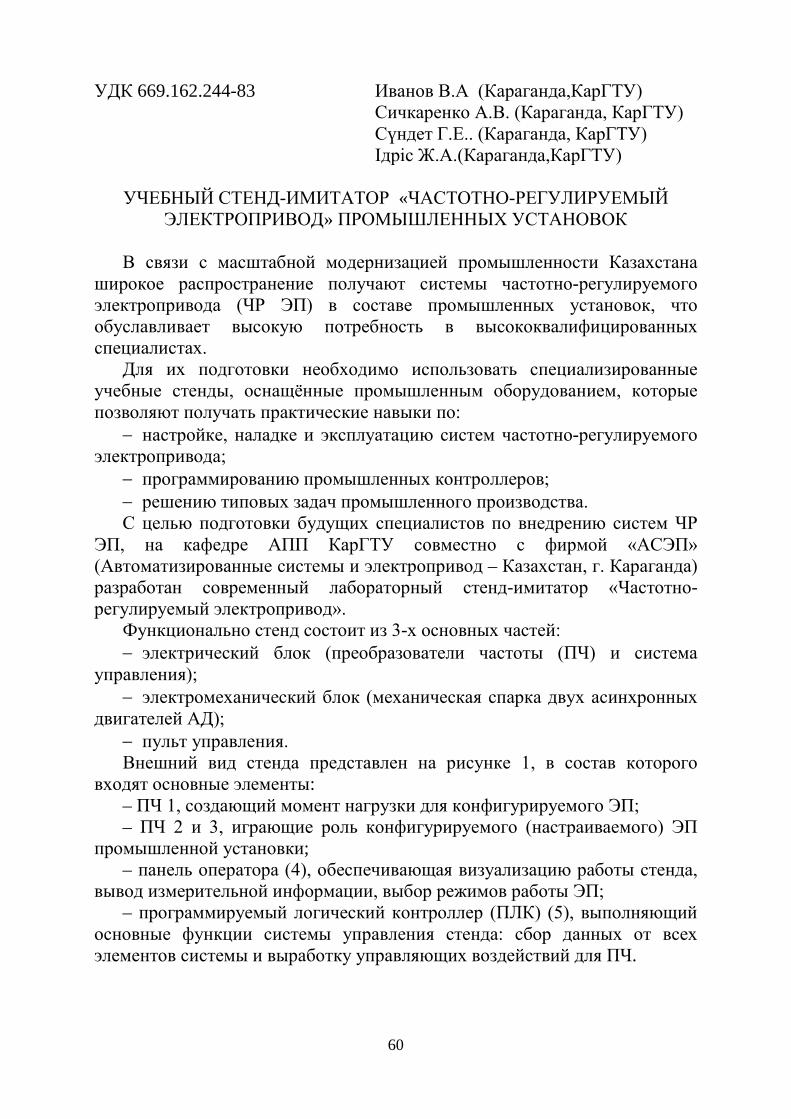
60
УЧЕБНЫЙ СТЕНД-ИМИТАТОР «ЧАСТОТНО-РЕГУЛИРУЕМЫЙ
ЭЛЕКТРОПРИВОД» ПРОМЫШЛЕННЫХ УСТАНОВОК В связи с масштабной модернизацией промышленности Казахстана
широкое распространение получают системы частотно-регулируемого электропривода (ЧР ЭП) в составе промышленных установок, что обуславливает высокую потребность в высококвалифицированных специалистах.
Для их подготовки необходимо использовать специализированные учебные стенды, оснащённые промышленным оборудованием, которые позволяют получать практические навыки по:
− настройке, наладке и эксплуатацию систем частотно-регулируемого электропривода;
− программированию промышленных контроллеров; − решению типовых задач промышленного производства. С целью подготовки будущих специалистов по внедрению систем ЧР
ЭП, на кафедре АПП КарГТУ совместно с фирмой «АСЭП» (Автоматизированные системы и электропривод – Казахстан, г. Караганда) разработан современный лабораторный стенд-имитатор «Частотно-регулируемый электропривод».
Функционально стенд состоит из 3-х основных частей: − электрический блок (преобразователи частоты (ПЧ) и система
управления); − электромеханический блок (механическая спарка двух асинхронных
двигателей АД); − пульт управления. Внешний вид стенда представлен на рисунке 1, в состав которого
входят основные элементы: – ПЧ 1, создающий момент нагрузки для конфигурируемого ЭП; – ПЧ 2 и 3, играющие роль конфигурируемого (настраиваемого) ЭП
промышленной установки; – панель оператора (4), обеспечивающая визуализацию работы стенда,
вывод измерительной информации, выбор режимов работы ЭП; – программируемый логический контроллер (ПЛК) (5), выполняющий
основные функции системы управления стенда: сбор данных от всех элементов системы и выработку управляющих воздействий для ПЧ.
УДК 669.162.244-83
Иванов В.А (Караганда,КарГТУ) Сичкаренко А.В. (Караганда, КарГТУ) Сүндет Г.Е.. (Караганда, КарГТУ) Ідріс Ж.А.(Караганда,КарГТУ)

61
Рисунок 1 — Функциональная схема стенда-имитатора
В нижней части схемы расположен электромеханический блок, состоящий из спарки АД (8) работающего двигательном режиме и АД (9), работающего в генераторном режиме, соединенных через муфту 6 с датчиками (7 и 10) скорости.
Для конфигурирования, настройки и мониторинга работы стенда используется персональный компьютер (ПК) с программным обеспечением DriveView 7 (работа с ПЧ), XG5000 (программирование ПЛК) и XP-Builder (программирование панели оператора).
Панель управления (ПУ) служит для ручной подачи сигналов управления, задания уставок ПЧ, индикации сигналов ПЛК и ПЧ.
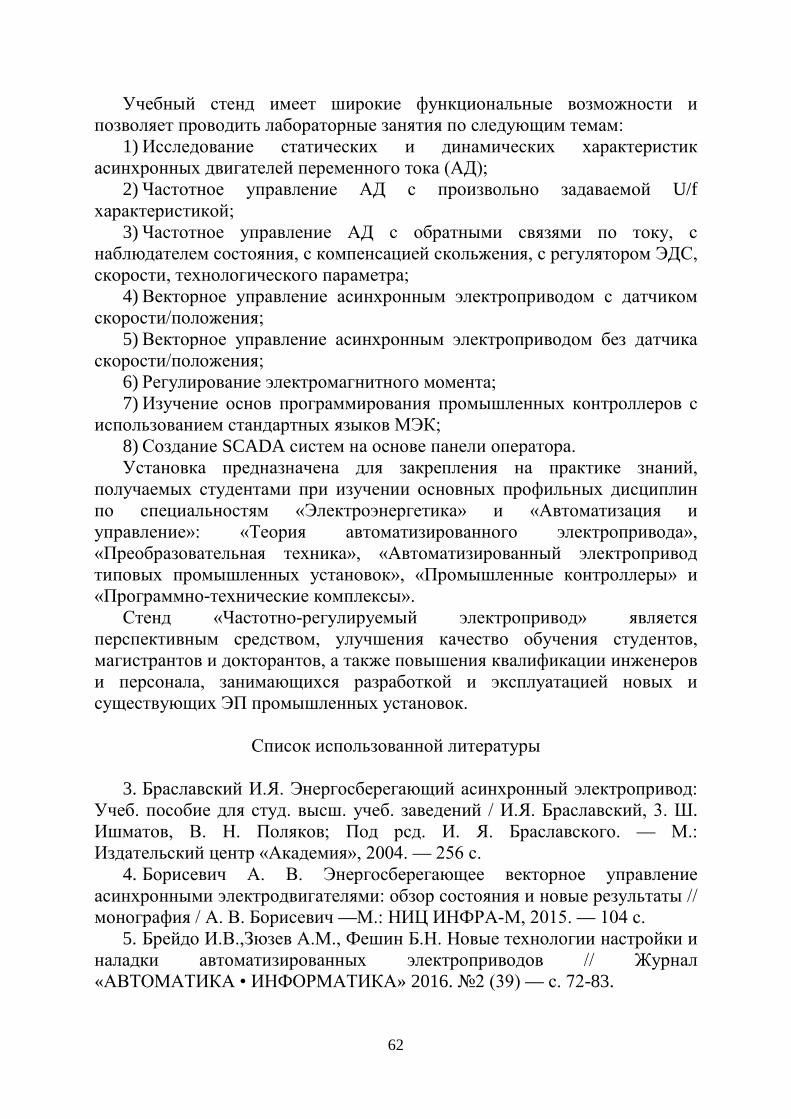
62
Учебный стенд имеет широкие функциональные возможности и позволяет проводить лабораторные занятия по следующим темам:
1) Исследование статических и динамических характеристик асинхронных двигателей переменного тока (АД);
2) Частотное управление АД с произвольно задаваемой U/f характеристикой;
3) Частотное управление АД с обратными связями по току, с наблюдателем состояния, с компенсацией скольжения, с регулятором ЭДС, скорости, технологического параметра;
4) Векторное управление асинхронным электроприводом с датчиком скорости/положения;
5) Векторное управление асинхронным электроприводом без датчика скорости/положения;
6) Регулирование электромагнитного момента; 7) Изучение основ программирования промышленных контроллеров с
использованием стандартных языков МЭК; 8) Создание SCADA систем на основе панели оператора. Установка предназначена для закрепления на практике знаний,
получаемых студентами при изучении основных профильных дисциплин по специальностям «Электроэнергетика» и «Автоматизация и управление»: «Теория автоматизированного электропривода», «Преобразовательная техника», «Автоматизированный электропривод типовых промышленных установок», «Промышленные контроллеры» и «Программно-технические комплексы».
Стенд «Частотно-регулируемый электропривод» является перспективным средством, улучшения качество обучения студентов, магистрантов и докторантов, а также повышения квалификации инженеров и персонала, занимающихся разработкой и эксплуатацией новых и существующих ЭП промышленных установок.
Список использованной литературы
3. Браславский И.Я. Энергосберегающий асинхронный электропривод:
Учеб. пособие для студ. высш. учеб. заведений / И.Я. Браславский, 3. Ш. Ишматов, В. Н. Поляков; Под рсд. И. Я. Браславского. — М.: Издательский центр «Академия», 2004. — 256 с.
4. Борисевич А. В. Энергосберегающее векторное управление асинхронными электродвигателями: обзор состояния и новые результаты // монография / А. В. Борисевич —М.: НИЦ ИНФРА-М, 2015. — 104 с.
5. Брейдо И.В.,Зюзев А.М., Фешин Б.Н. Новые технологии настройки и наладки автоматизированных электроприводов // Журнал «АВТОМАТИКА • ИНФОРМАТИКА» 2016. №2 (39) — с. 72-83.
63
УДК 621.314
Каверин В.В. (Караганда, КарГТУ) Таран Н.Ю. (Караганда, КарГТУ)
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЕ ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК РЕЗОНАНСНОГО ТРАНСФОРМАТОРА
Резонансный трансформатор нашел широкое применение в
электроэнергетике, промышленности, научно-исследовательских учреждениях и медицине.
Область применения резонансного трансформатора – электростатические фильтры, сепараторы, технологический процесс окрашивания, электрогидравлическая штамповка, очистка воды, электроэрозионная и электроимпульсная обработка металлических поверхностей (10-100 кВ). [1]
В настоящее время существует технические решения реализации системы возбуждения резонансного трансформатора (РТ), но с появлением современной полупроводниковой элементной базы, появились возможности реализации управляемых систем возбуждения резонансного трансформатора мощностью до нескольких киловатт, что позволило увеличить коэффициент полезного действия, снизить массогабаритные показатели, и повысить стабильность работы. [2]
В процессе анализа схемотехнических решений, ранее эксплуатируемых РТ, установлено, что на его режимы работы существенное влияние оказывает емкостная составляющая комплексного сопротивления нагрузки в высоковольтной части РТ.
Целью экспериментальных исследований является определение зависимости величины мощности, отдаваемой в нагрузку и КПД резонансного трансформатора в функции величины емкостной составляющей комплексного сопротивления нагрузки.
Для проведения экспериментальных исследований энергетических характеристик резонансного трансформатора изготовлен лабораторный стенд. Принципиальная схема стенда представлена на рисунке 1.
Лабораторный стенд состоит из: РТ (W1 - индуктивный резонатор; W2 - индуктор); силового ключа (VT1, VD5) в цепи индуктора; блока измерения интегрального значения потребляемой мощности системой возбуждения РТ (Т3, Т4, С7, С9, Р2, Р3); системы управления силовым ключом (А1-А4); блока измерения среднеквадратичного значения мощности в нагрузке (VD1-VD4, С1-С3; R1, Т1). Посредством осциллографов А5 и А6 осциллографировались переходные процессы тока в цепи заземления W1 и ЭДС в цепи стока VT1.
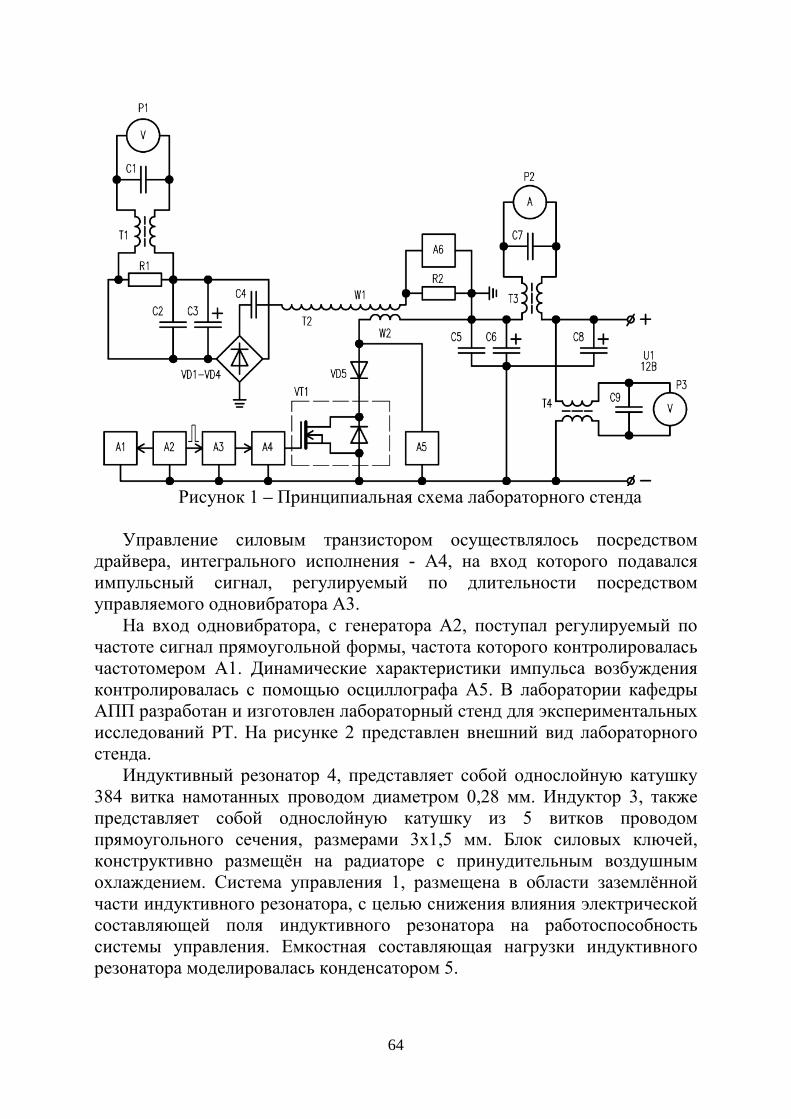
64
Рисунок 1 – Принципиальная схема лабораторного стенда
Управление силовым транзистором осуществлялось посредством
драйвера, интегрального исполнения - А4, на вход которого подавался импульсный сигнал, регулируемый по длительности посредством управляемого одновибратора А3.
На вход одновибратора, с генератора А2, поступал регулируемый по частоте сигнал прямоугольной формы, частота которого контролировалась частотомером А1. Динамические характеристики импульса возбуждения контролировалась с помощью осциллографа А5. В лаборатории кафедры АПП разработан и изготовлен лабораторный стенд для экспериментальных исследований РТ. На рисунке 2 представлен внешний вид лабораторного стенда.
Индуктивный резонатор 4, представляет собой однослойную катушку 384 витка намотанных проводом диаметром 0,28 мм. Индуктор 3, также представляет собой однослойную катушку из 5 витков проводом прямоугольного сечения, размерами 3х1,5 мм. Блок силовых ключей, конструктивно размещён на радиаторе с принудительным воздушным охлаждением. Система управления 1, размещена в области заземлённой части индуктивного резонатора, с целью снижения влияния электрической составляющей поля индуктивного резонатора на работоспособность системы управления. Емкостная составляющая нагрузки индуктивного резонатора моделировалась конденсатором 5.
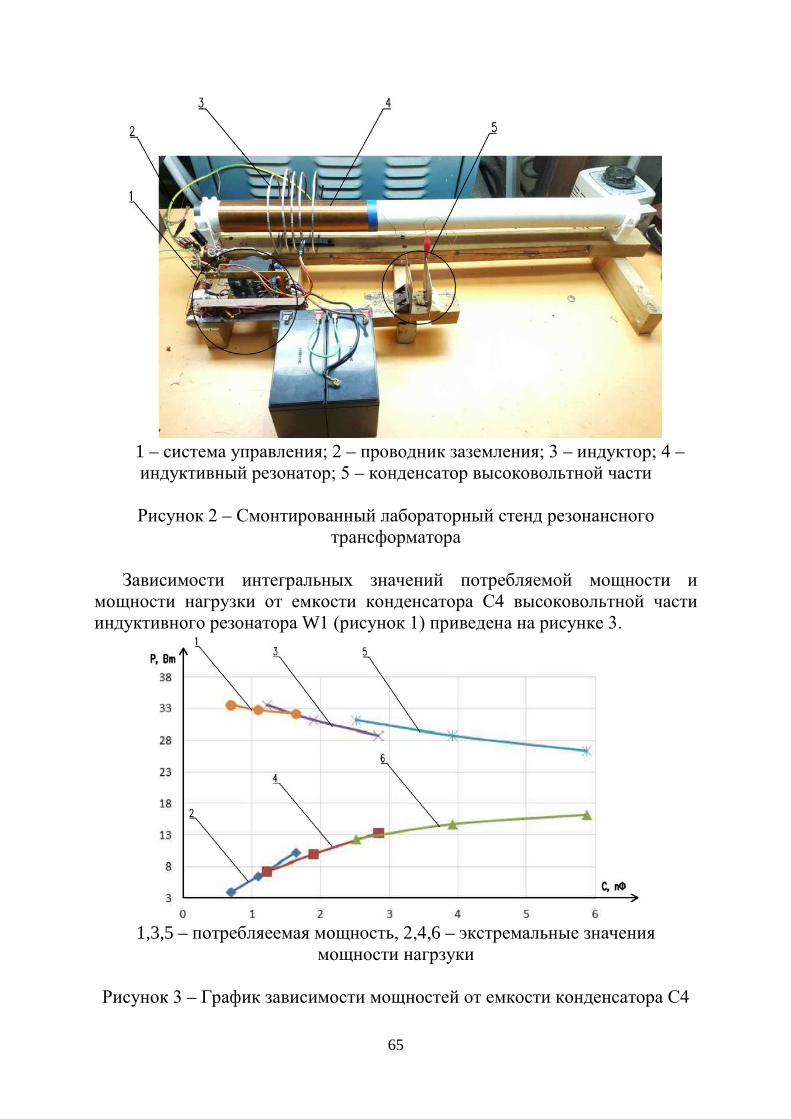
65
1 – система управления; 2 – проводник заземления; 3 – индуктор; 4 – индуктивный резонатор; 5 – конденсатор высоковольтной части
Рисунок 2 – Смонтированный лабораторный стенд резонансного
трансформатора Зависимости интегральных значений потребляемой мощности и
мощности нагрузки от емкости конденсатора С4 высоковольтной части индуктивного резонатора W1 (рисунок 1) приведена на рисунке 3.
1,3,5 – потребляеемая мощность, 2,4,6 – экстремальные значения
мощности нагрзуки
Рисунок 3 – График зависимости мощностей от емкости конденсатора С4
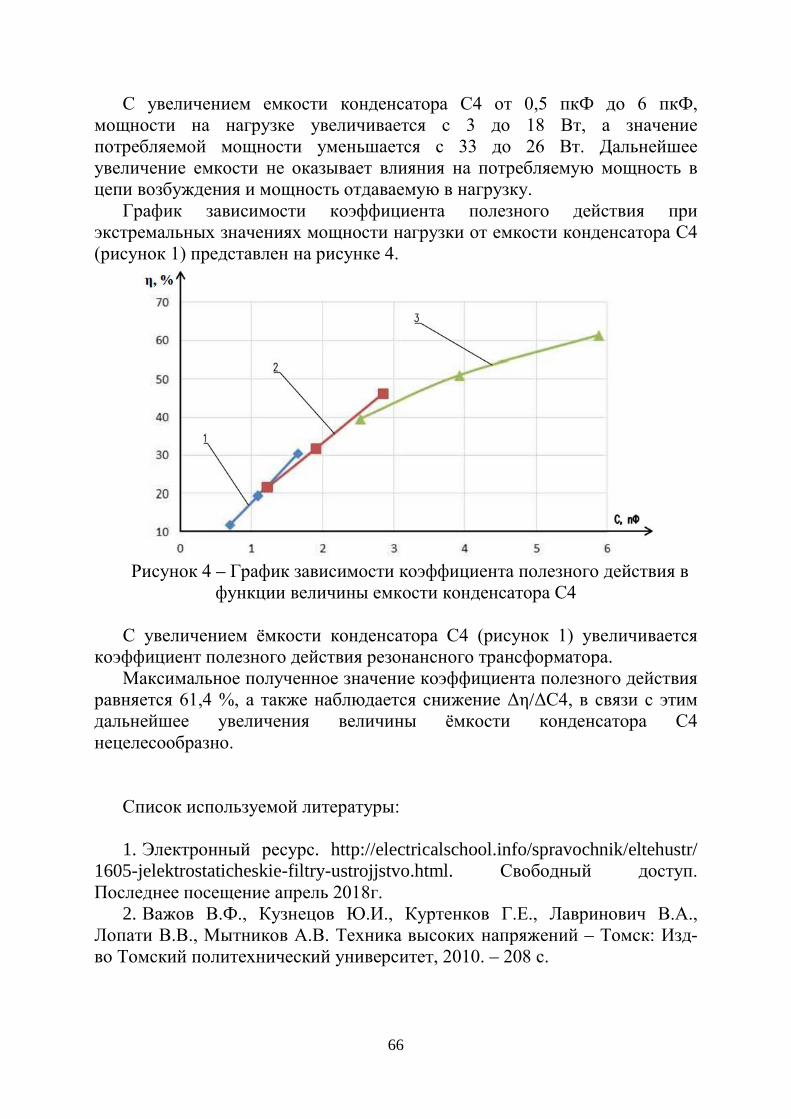
66
С увеличением емкости конденсатора С4 от 0,5 пкФ до 6 пкФ, мощности на нагрузке увеличивается с 3 до 18 Вт, а значение потребляемой мощности уменьшается с 33 до 26 Вт. Дальнейшее увеличение емкости не оказывает влияния на потребляемую мощность в цепи возбуждения и мощность отдаваемую в нагрузку.
График зависимости коэффициента полезного действия при экстремальных значениях мощности нагрузки от емкости конденсатора С4 (рисунок 1) представлен на рисунке 4.
Рисунок 4 – График зависимости коэффициента полезного действия в
функции величины емкости конденсатора С4 С увеличением ёмкости конденсатора С4 (рисунок 1) увеличивается
коэффициент полезного действия резонансного трансформатора. Максимальное полученное значение коэффициента полезного действия
равняется 61,4 %, а также наблюдается снижение Δη/ΔС4, в связи с этим дальнейшее увеличения величины ёмкости конденсатора С4 нецелесообразно.
Список используемой литературы: 1. Электронный ресурс. http://electricalschool.info/spravochnik/eltehustr/
1605-jelektrostaticheskie-filtry-ustrojjstvo.html. Свободный доступ. Последнее посещение апрель 2018г.
2. Важов В.Ф., Кузнецов Ю.И., Куртенков Г.Е., Лавринович В.А., Лопати В.В., Мытников А.В. Техника высоких напряжений – Томск: Изд-во Томский политехнический университет, 2010. – 208 с.
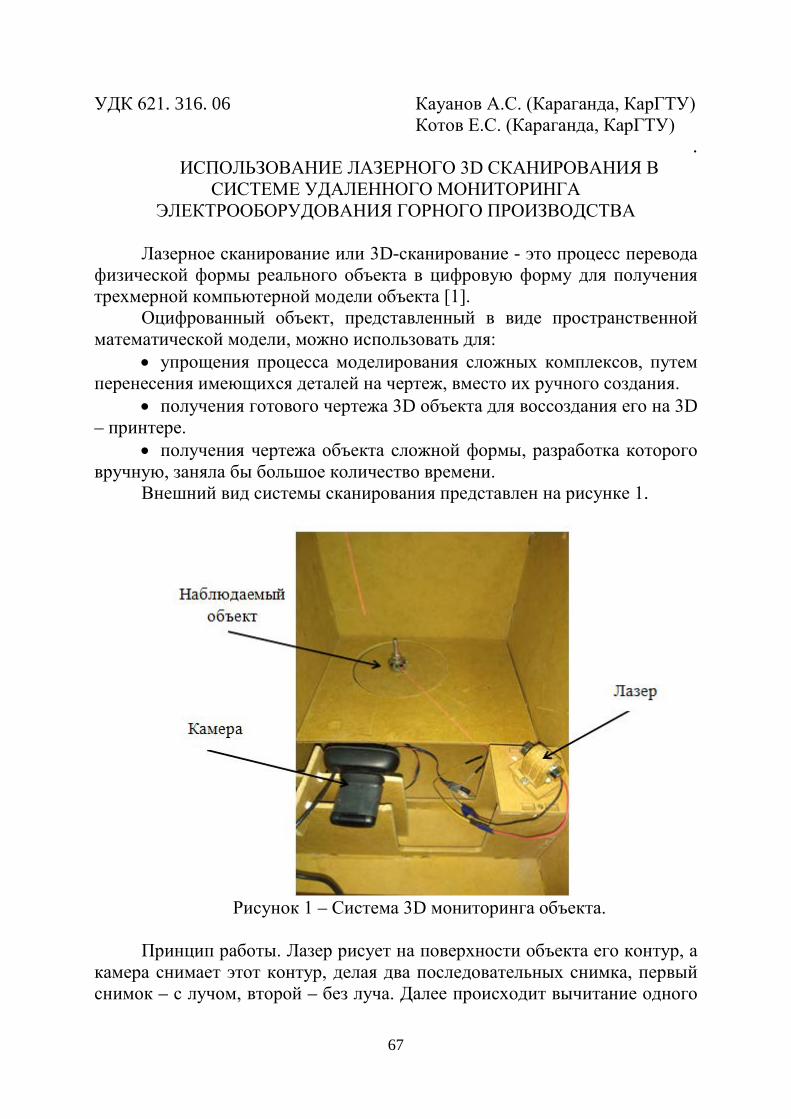
67
УДК 621. 316. 06 Кауанов А.С. (Караганда, КарГТУ) Котов Е.С. (Караганда, КарГТУ)
. ИСПОЛЬЗОВАНИЕ ЛАЗЕРНОГО 3D СКАНИРОВАНИЯ В
СИСТЕМЕ УДАЛЕННОГО МОНИТОРИНГА ЭЛЕКТРООБОРУДОВАНИЯ ГОРНОГО ПРОИЗВОДСТВА
Лазерное сканирование или 3D-сканирование - это процесс перевода
физической формы реального объекта в цифровую форму для получения трехмерной компьютерной модели объекта [1].
Оцифрованный объект, представленный в виде пространственной математической модели, можно использовать для:
• упрощения процесса моделирования сложных комплексов, путем перенесения имеющихся деталей на чертеж, вместо их ручного создания.
• получения готового чертежа 3D объекта для воссоздания его на 3D – принтере.
• получения чертежа объекта сложной формы, разработка которого вручную, заняла бы большое количество времени.
Внешний вид системы сканирования представлен на рисунке 1.
Рисунок 1 – Система 3D мониторинга объекта.
Принцип работы. Лазер рисует на поверхности объекта его контур, а
камера снимает этот контур, делая два последовательных снимка, первый снимок – с лучом, второй – без луча. Далее происходит вычитание одного
68
изображения из другого с помощью специальной графической библиотеки и происходит выделение на изображении лазерного луча. Лазерный луч повторяет контуры детали и камера, фиксирует расстояние от своего оптического центра до точки на кривой, которую лазер формирует. Все данные записываются в специальную таблицу, а в окне прогресса появляется пиксель объекта. На окне мониторинга процесса сканирования объект представлен совокупностью точек, которые в процессе работы образуют массив, формирующий очертания фигуры. Цикл работы повторяется до получения контура объекта с указанным качеством.
Однако вместо привычного использования лазерного сканирования для получения 3D модели объекта, можно адаптировать систему оцифровки объектов в систему удаленного мониторинга электрооборудования горного производства. Если обозначить устойчивое положение наблюдаемого камерой участка, то основываясь на принципе работы лазерного сканера можно отследить отклонения от нормы, к примеру, обледенение/деформацию на электропроводах либо распределительных узлах. Зачастую они находятся в труднодоступном для человека месте, и диагностика их неисправностей вызывает определенные трудности. Однако используя лазерное сканирование для удаленного мониторинга можно усовершенствовать систему предупреждения аварийных ситуаций, тем самым сократив риск выхода из строя промышленного электрооборудования. В силу простоты своей аппаратной составляющей и сравнительно невысокой стоимости реализации применение лазерных 3D сканеров для удаленного мониторинга может стать отличным техническим решением для предприятий горного производства.
Список литературы:
1. Серёдкин А.Н., Виноградова Г.Л., Филиппенко В.О. алгоритм автоматизированного проектирования объектов сложной геометрической формы // Фундаментальные исследования. – 2014. – № 11-6. – С. 1267-1270.
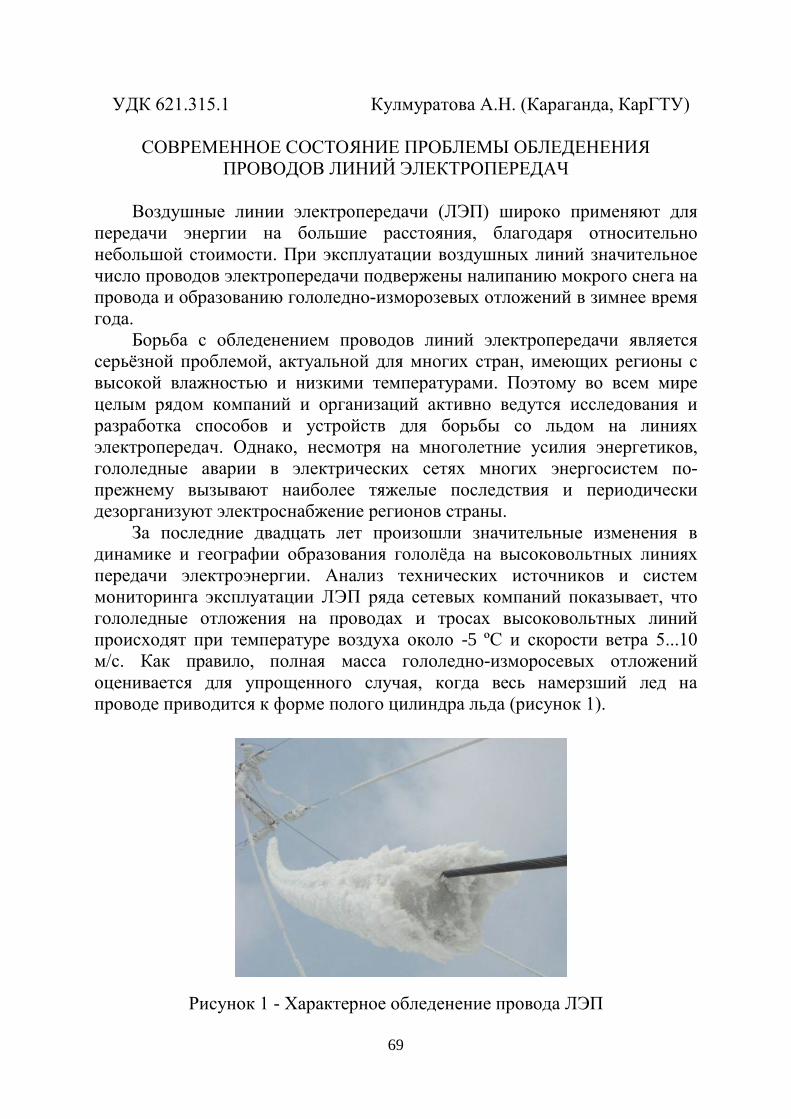
69
УДК 621.315.1 Кулмуратова А.Н. (Караганда, КарГТУ) СОВРЕМЕННОЕ СОСТОЯНИЕ ПРОБЛЕМЫ ОБЛЕДЕНЕНИЯ
ПРОВОДОВ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ Воздушные линии электропередачи (ЛЭП) широко применяют для
передачи энергии на большие расстояния, благодаря относительно небольшой стоимости. При эксплуатации воздушных линий значительное число проводов электропередачи подвержены налипанию мокрого снега на провода и образованию гололедно-изморозевых отложений в зимнее время года.
Борьба с обледенением проводов линий электропередачи является серьёзной проблемой, актуальной для многих стран, имеющих регионы с высокой влажностью и низкими температурами. Поэтому во всем мире целым рядом компаний и организаций активно ведутся исследования и разработка способов и устройств для борьбы со льдом на линиях электропередач. Однако, несмотря на многолетние усилия энергетиков, гололедные аварии в электрических сетях многих энергосистем по- прежнему вызывают наиболее тяжелые последствия и периодически дезорганизуют электроснабжение регионов страны.
За последние двадцать лет произошли значительные изменения в динамике и географии образования гололёда на высоковольтных линиях передачи электроэнергии. Анализ технических источников и систем мониторинга эксплуатации ЛЭП ряда сетевых компаний показывает, что гололедные отложения на проводах и тросах высоковольтных линий происходят при температуре воздуха около -5 ºС и скорости ветра 5...10 м/с. Как правило, полная масса гололедно-изморосевых отложений оценивается для упрощенного случая, когда весь намерзший лед на проводе приводится к форме полого цилиндра льда (рисунок 1).
Рисунок 1 - Характерное обледенение провода ЛЭП

70
В нашей стране согласно правилам устройства электроустановок Республики Казахстан (ПУЭ) нормативная масса гололедных отложений на проводах и тросах определяется, исходя из цилиндрической формы отложений с плотностью 0,9 г/см3.
На проводах и конструкциях контактной сети отложение гололедных образований наблюдается обычно при неустойчивой погоде, когда оттепель сменяется похолоданием, в туманную погоду или при выпадении переохлажденного дождя. Различают три основных вида гололедных образований: гололед, представляющий собой плотное твердое прозрачное или полупрозрачное вещество с плотностью 600-900 кг/м3; изморозь-кристаллический налет с плотностью 20-100 кг/м3 и смесь, образующуюся при наслоениях гололеда и изморози, плотностью 200-600 кг/м3.
Опишем один из возможных физических механизмов образования гололёда, зарождающегося по причине соприкосновения двух масс воздуха – холодного и теплого повышенной влажности. В условиях относительно мягкой зимы при резком перепаде значений температуры окружающего воздуха от положительной к отрицательной на проводах оседают капли воды и начинается лавинообразный процесс образования толстой ледяной корки, достигающей толщины в несколько десятков миллиметров и многократно утяжеляющей провода.
При этом толщина плотного гололёда на проводах может достигать 60-70 мм, существенно утяжеляя провода. Вес гололедно-изморозевых отложений в отдельных случаях может достигать более 4 кг на погонный метр провода.
Допустимая толщина стенки гололеда для линий с различным номинальным напряжением зависит от климатического района. Согласно ПУЭ Республики Казахстан толщина стенки гололеда, приведенная к высоте 10 м от земли и к диаметру провода 10 мм, определяется по утвержденным региональным картам и при необходимости, уточняется путем обработки материалов многолетних наблюдений на ближайших репрезентативных (для данного района) метеорологических станциях. Картам районирования гололедным районам соответствует нормативная толщина стенок, определяемая по таблице 1.
Таблица 1. Нормативная толщина стенки гололеда для высоты 10 м
над поверхностью земли Район по гололеду
Нормативная толщина стенки гололеда, мм, с повторяемостью 1 раз в 10 лет 1 раз в 25 лет
II 10 15 III 15 20 IV 20 25 V(1) 25 30
71
При анализе исходных данных выборка производится с таким расчетом, чтобы за каждую зиму имелись сведения о двух максимумах - наибольшей стенке и наибольшей гололедно-ветровой нагрузке.
Расчет стенки «чистого» гололеда по наблюденным метеоданным необходимо выполнять по весу 1 пог. м отложения. Допускается, при отсутствии последнего, толщину стенки определять по размерам отложения и виду осадка и соответствующему удельному весу. На территории Казахстана осредненные величины удельных весов (г/см3) различных видов осадка имеют следующие значения: изморозь кристаллическая (ИК) - 0,07, изморозь зернистая (ИЗ) - 0,15, сложное отложение льда (СП): Костанайская, Западно-Казахстанская, Актюбинская и Карагандинская области - 0,30, остальная территория - 0,25, отложение мокрого снега (ОМС) - 0,28, гололед (ГЛ) - 0,60.
Высокая влажность, ветры, резкие перепады температуры воздуха, присущие резко-континентальному климату Казахстана, способствуют образованию наледи на проводах воздушных линий. Наличие гололеда обуславливает дополнительные механические нагрузки на все элементы воздушных линий. В результате значительного увеличения массы проводов и воздействующих на них динамических и статических нагрузок происходят опасные и нежелательные явления, особенно при сильном ветре. К их числу относятся обрыв токопроводящих проводов и грозозащитных тросов под тяжестью снега и льда, недопустимо близкое сближение проводов и их сильное раскачивание (так называемая «пляска»), ухудшение защитных свойств изоляторов, разрушение опор.
Обледенение линии передачи является нелинейным и высокоразмерным процессом. Поскольку сложные процессы обледенения линий не могут быть легко представлены с использованием точных математических моделей, необходимо учитывать метод, управляемый данными. На данный момент теоретические исследования вопроса обледенения проводов недостаточны для построения подобной модели. Таким образом, вопрос остается актуальным.
Целью дальнейших исследований является разработка математической модели с последующей разработкой устройства, которые должны препятствовать образованию льда на проводах ЛЭП. Предлагаемый метод должен позволять не отключать пользователей от сети во время нагрева и экономить количество потребляемой энергии в сравнении с уже имеющимися методами. Данная проблема открывает возможность полной автоматизации для предотвращения льда в электрических сетях.
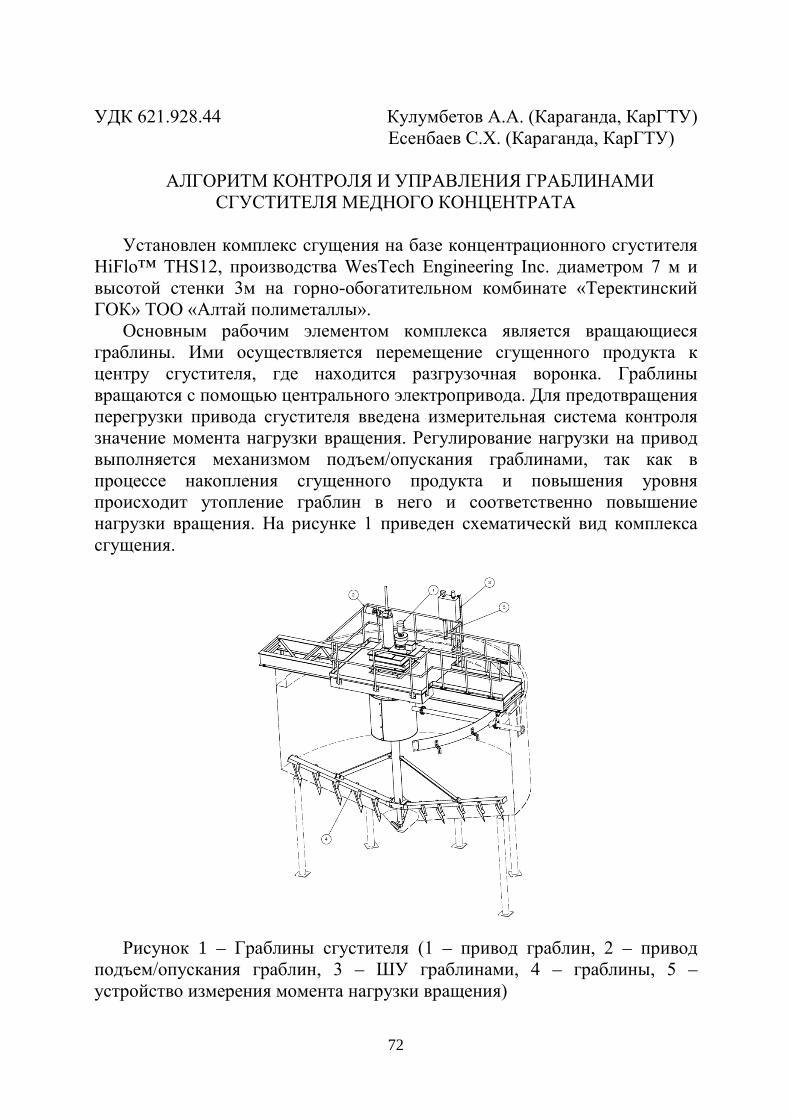
72
АЛГОРИТМ КОНТРОЛЯ И УПРАВЛЕНИЯ ГРАБЛИНАМИ
СГУСТИТЕЛЯ МЕДНОГО КОНЦЕНТРАТА Установлен комплекс сгущения на базе концентрационного сгустителя
HiFlo™ THS12, производства WesTech Engineering Inc. диаметром 7 м и высотой стенки 3м на горно-обогатительном комбинате «Теректинский ГОК» ТОО «Алтай полиметаллы».
Основным рабочим элементом комплекса является вращающиеся граблины. Ими осуществляется перемещение сгущенного продукта к центру сгустителя, где находится разгрузочная воронка. Граблины вращаются с помощью центрального электропривода. Для предотвращения перегрузки привода сгустителя введена измерительная система контроля значение момента нагрузки вращения. Регулирование нагрузки на привод выполняется механизмом подъем/опускания граблинами, так как в процессе накопления сгущенного продукта и повышения уровня происходит утопление граблин в него и соответственно повышение нагрузки вращения. На рисунке 1 приведен схематическй вид комплекса сгущения.
Рисунок 1 – Граблины сгустителя (1 – привод граблин, 2 – привод
подъем/опускания граблин, 3 – ШУ граблинами, 4 – граблины, 5 – устройство измерения момента нагрузки вращения)
УДК 621.928.44
Кулумбетов А.А. (Караганда, КарГТУ) Есенбаев С.Х. (Караганда, КарГТУ)
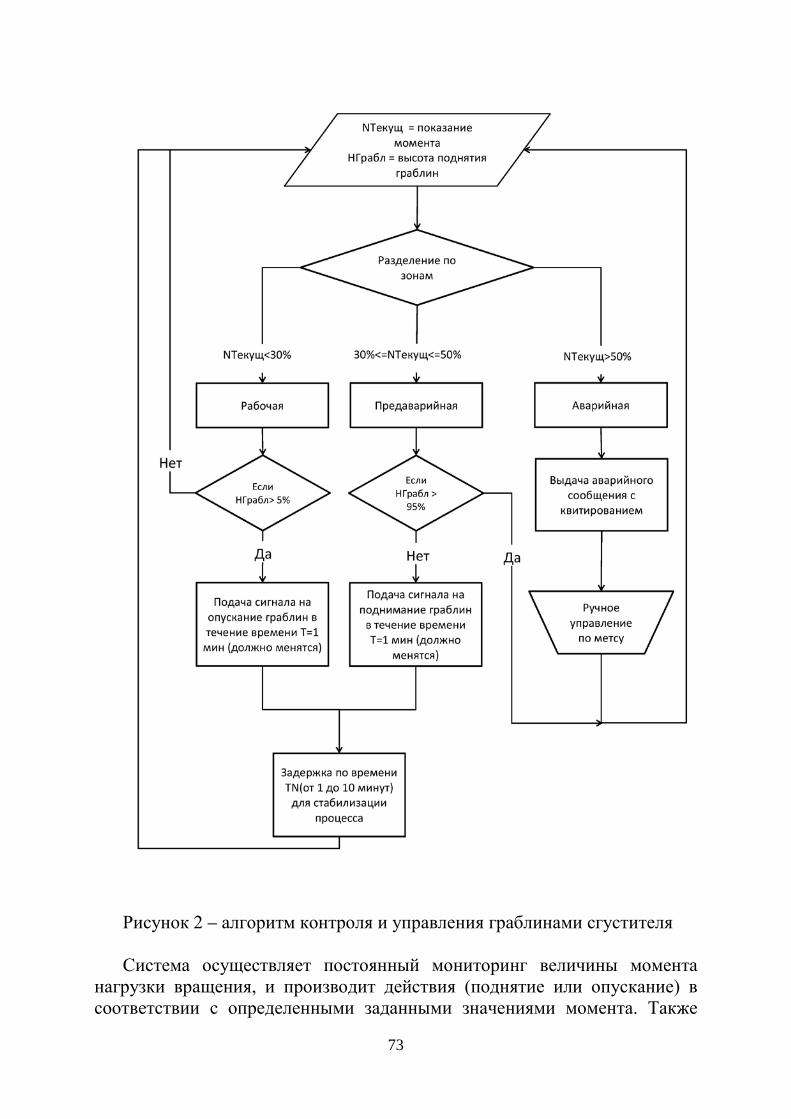
73
Рисунок 2 – алгоритм контроля и управления граблинами сгустителя Система осуществляет постоянный мониторинг величины момента
нагрузки вращения, и производит действия (поднятие или опускание) в соответствии с определенными заданными значениями момента. Также
74
осуществляется контроль текущего положения высоты граблин, с помощью концевых выключателей, расположенных в нижнем и в верхнем положениях граблин.
Для контроля и управления режимами граблин разработан алгоритм для ПЛК (рисунок 2). В алгоритме предусмотрены три ветви.
Рабочая зона При значении момента ниже 30% подается команда на опускание
граблин, в течение времени 1 минуты. При достижении нижнего положения граблин (положение 5%) подача команды прекращается, система переходит в режим дальнейшего мониторинга момента нагрузки. Команда на опускание будет поступать циклически с интервалом времени задержки (от 1 до 10 мин) до тех пор, пока момент остается в промежутке значения ниже 30%.
Предаварийная зона При превышении значения момента 30% подается команда на поднятие
граблин, в течении времени 1 мин для снижения нагрузки. Команда на поднятие будет поступать циклически, с интервалом времени задержки (от 1 до 10 мин), до тех пор, пока значение момента нагрузки будет находиться в интервале от 30% до 50%. При этом, если достигнуто верхнее положение высоты граблин (положение 95%) подача команды прекращается, система переходит в режим дальнейшего мониторинга момента нагрузки.
Аварийная зона При превышении 50% происходит выдача аварийного сообщения.
Дальнейшее управление будет производиться в ручном режиме либо с АСУ сгустителя. Для предотвращения перегрузки электродвигателя привода или поломки граблин следует снизить уровень сгущенного продукта.
Литература 1. ГОСТ 19.701-90 Схемы алгоритмов, программ, данных и систем.
Обозначения условные и правила выполнения. Оксту 5004, ИСО 5807-85.
2. Operation and Maintenance Manual. One 7 meter Diameter Thickener Mechanism Specification Section: A WesTech Model: THS12
75
УДК 621.311.24 Қасенов А.Е. (Караганда, КарГТУ) Шоланов Қ.С. (Караганда, КарГТУ)
ПРИМНЕНЕНИЕ ЭНЕРГИИ ВЕТРА
Использование энергии ветра помогло человечеству спасти энергию
и энергию от ветра с тысяч веков. Вследствие надвигающегося нефтяного, нефтяного и угольного кризиса энергия ветра приобрела заметное место на рынке возобновляемых источников энергии.
Неизбежный энергетический кризис нельзя отложить. Природные источники будут истощены в ближайшем будущем, и человечество будет полагаться на возобновляемые источники энергии для удовлетворения своих растущих потребностей в энергии. Энергия ветра, форма солнечной энергии, может быть использована для ответа на некоторые из наших вопросов, касающихся энергетического кризиса.
Использование энергии ветра. По сути, все в этой Вселенной является формой энергии. Даже
движущийся ветер обладает достаточной кинетической энергией, которая может быть направлена на работу генератора. Явления сохранения энергии определяют работу Вселенной. Энергия не может быть создана и не разрушена, но она может быть перенесена из одного тела в другое - это ключ ко всем процессам в этом мире. Ветры образуются, когда наша атмосфера нагревается неравномерно, а более легкий воздух поднимается, чтобы заменить другие участки воздуха (вот почему это тип солнечной энергии!). Это дает нам ощущение движущегося ветра! Использование энергии ветра в этом возрасте передовых технологий специально сосредоточено на выработке электроэнергии. В основном, это окраины города, ранчо и прибрежные районы, которые используют энергию ветра для первичных целей, таких как ирригация и производство электроэнергии.
Краткая история. Самый ранний отчет об использовании энергии ветра приведен в
китайской, вавилонянской, персидской и ближневосточной цивилизациях. В качестве транспортных средств использовались ветроэнергетические самоходные лодки или парусники, а ветряные мельницы в Китае перекачивали воды для ферм и ранчо. Широкое использование энергии ветра стало популярным в европейских странах, и голландцы начали использовать ветряные мельницы для орошения и производства электроэнергии в конце 19 века. В США ветряная энергия была запрятана в ранчо, фермы и отдаленные районы для удовлетворения потребностей в энергии, измельчения зерновых и насосной воды. Поскольку увеличение поставок электроэнергии стало популярным в США в 20-м веке, ветряные мельницы исчезли со сцены. За последние несколько десятилетий
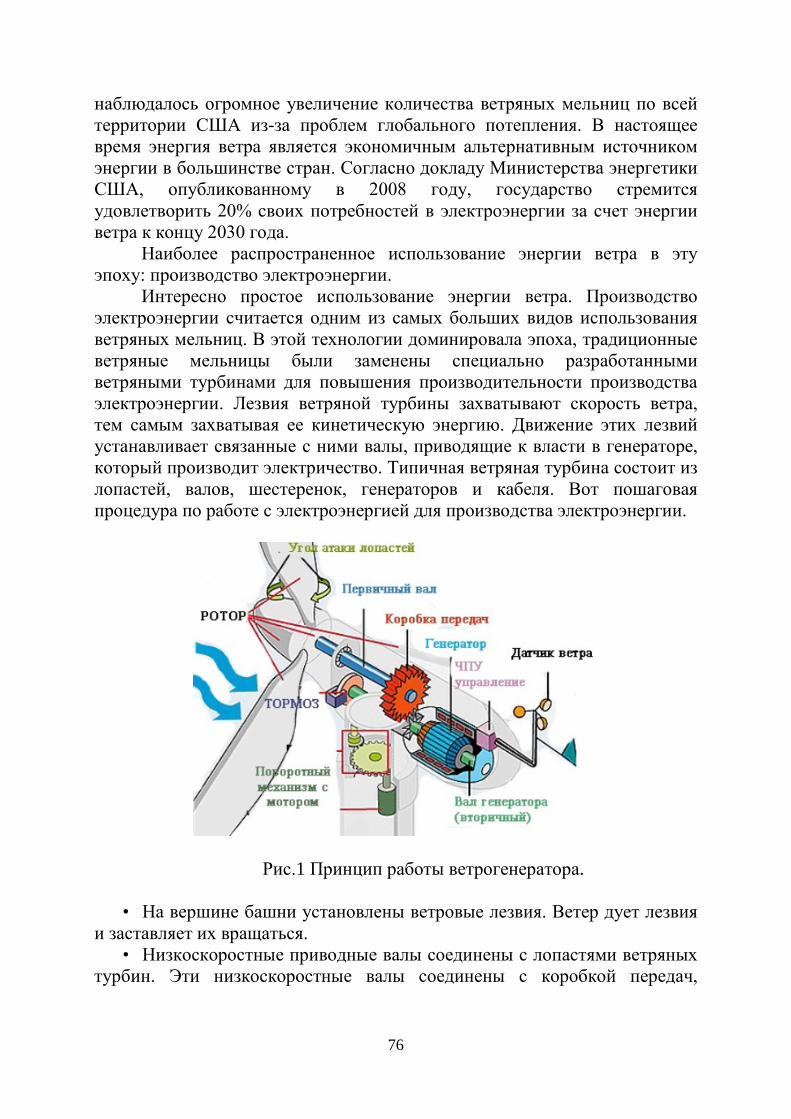
76
наблюдалось огромное увеличение количества ветряных мельниц по всей территории США из-за проблем глобального потепления. В настоящее время энергия ветра является экономичным альтернативным источником энергии в большинстве стран. Согласно докладу Министерства энергетики США, опубликованному в 2008 году, государство стремится удовлетворить 20% своих потребностей в электроэнергии за счет энергии ветра к концу 2030 года.
Наиболее распространенное использование энергии ветра в эту эпоху: производство электроэнергии.
Интересно простое использование энергии ветра. Производство электроэнергии считается одним из самых больших видов использования ветряных мельниц. В этой технологии доминировала эпоха, традиционные ветряные мельницы были заменены специально разработанными ветряными турбинами для повышения производительности производства электроэнергии. Лезвия ветряной турбины захватывают скорость ветра, тем самым захватывая ее кинетическую энергию. Движение этих лезвий устанавливает связанные с ними валы, приводящие к власти в генераторе, который производит электричество. Типичная ветряная турбина состоит из лопастей, валов, шестеренок, генераторов и кабеля. Вот пошаговая процедура по работе с электроэнергией для производства электроэнергии.
Рис.1 Принцип работы ветрогенератора.
• На вершине башни установлены ветровые лезвия. Ветер дует лезвия и заставляет их вращаться.
• Низкоскоростные приводные валы соединены с лопастями ветряных турбин. Эти низкоскоростные валы соединены с коробкой передач,
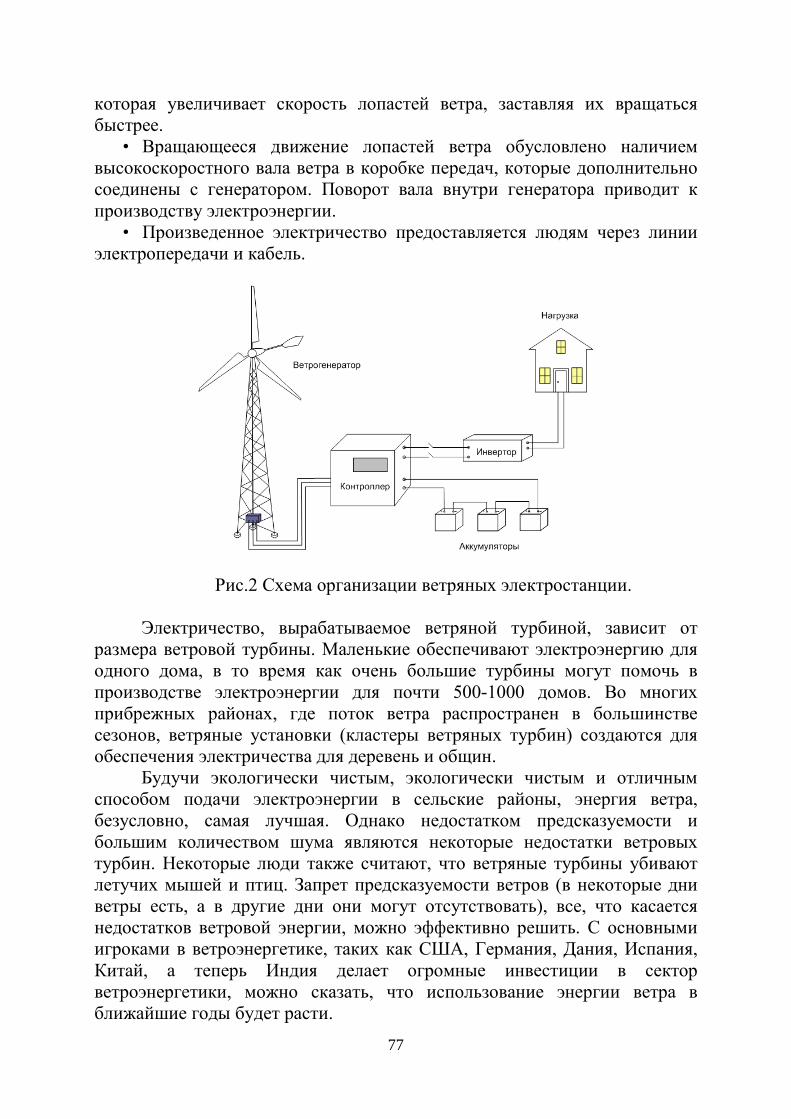
77
которая увеличивает скорость лопастей ветра, заставляя их вращаться быстрее.
• Вращающееся движение лопастей ветра обусловлено наличием высокоскоростного вала ветра в коробке передач, которые дополнительно соединены с генератором. Поворот вала внутри генератора приводит к производству электроэнергии.
• Произведенное электричество предоставляется людям через линии электропередачи и кабель.
Рис.2 Схема организации ветряных электростанции.
Электричество, вырабатываемое ветряной турбиной, зависит от размера ветровой турбины. Маленькие обеспечивают электроэнергию для одного дома, в то время как очень большие турбины могут помочь в производстве электроэнергии для почти 500-1000 домов. Во многих прибрежных районах, где поток ветра распространен в большинстве сезонов, ветряные установки (кластеры ветряных турбин) создаются для обеспечения электричества для деревень и общин.
Будучи экологически чистым, экологически чистым и отличным способом подачи электроэнергии в сельские районы, энергия ветра, безусловно, самая лучшая. Однако недостатком предсказуемости и большим количеством шума являются некоторые недостатки ветровых турбин. Некоторые люди также считают, что ветряные турбины убивают летучих мышей и птиц. Запрет предсказуемости ветров (в некоторые дни ветры есть, а в другие дни они могут отсутствовать), все, что касается недостатков ветровой энергии, можно эффективно решить. С основными игроками в ветроэнергетике, таких как США, Германия, Дания, Испания, Китай, а теперь Индия делает огромные инвестиции в сектор ветроэнергетики, можно сказать, что использование энергии ветра в ближайшие годы будет расти.
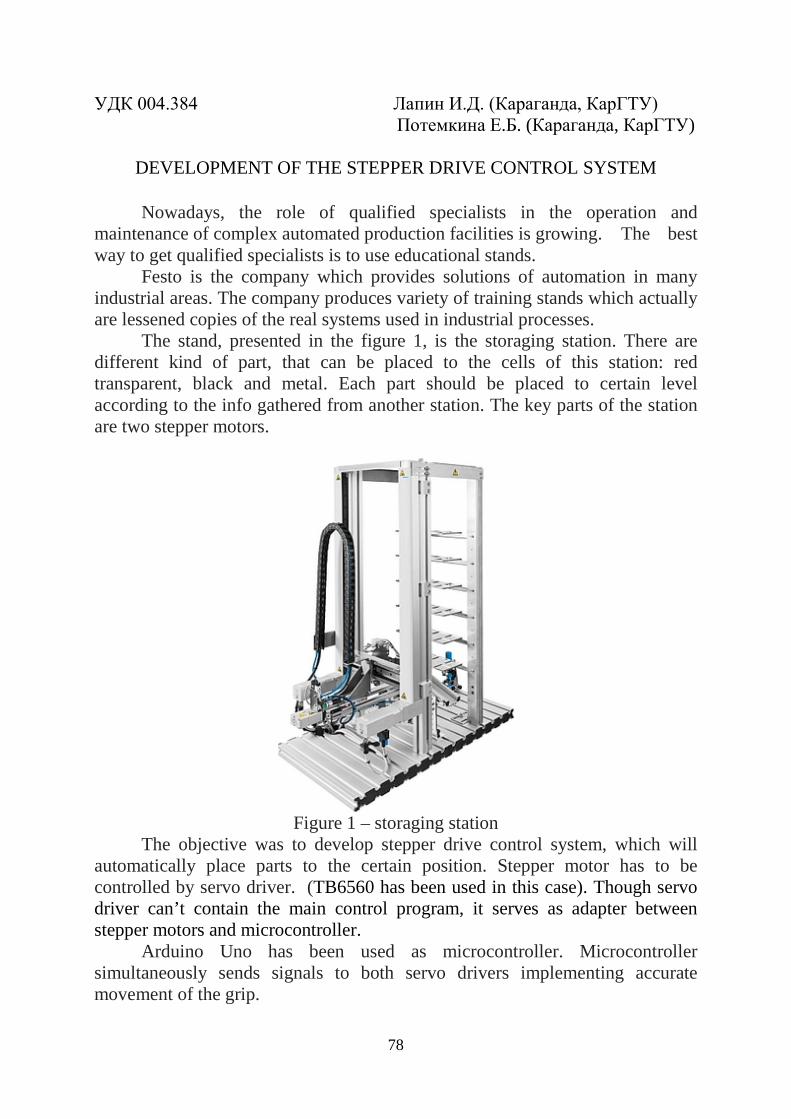
78
УДК 004.384 Лапин И.Д. (Караганда, КарГТУ) Потемкина Е.Б. (Караганда, КарГТУ)
DEVELOPMENT OF THE STEPPER DRIVE CONTROL SYSTEM
Nowadays, the role of qualified specialists in the operation and
maintenance of complex automated production facilities is growing. The best way to get qualified specialists is to use educational stands.
Festo is the company which provides solutions of automation in many industrial areas. The company produces variety of training stands which actually are lessened copies of the real systems used in industrial processes.
The stand, presented in the figure 1, is the storaging station. There are different kind of part, that can be placed to the cells of this station: red transparent, black and metal. Each part should be placed to certain level according to the info gathered from another station. The key parts of the station are two stepper motors.
Figure 1 – storaging station
The objective was to develop stepper drive control system, which will automatically place parts to the certain position. Stepper motor has to be controlled by servo driver. (TB6560 has been used in this case). Though servo driver can’t contain the main control program, it serves as adapter between stepper motors and microcontroller.
Arduino Uno has been used as microcontroller. Microcontroller simultaneously sends signals to both servo drivers implementing accurate movement of the grip.

79
The logic of the program relies on sensors which trigger the movements of the motors to the certain coordinates. Coordinates stored in the program and can be changed in case structure of the shells will be moved.
Figure 2 – Arduino UNO, LAN-module, TB6560-driver
Arduino Uno supports modules which allows to extend options of
microcontroller. One of them used to duplicate signals and send them to any other device via Ethernet. Automated system supposed to have user interface for simplifying control and creating feedback about current state of the process. In this case Ethernet output is used for sending data to SCADA-system.
Arduino UNO, LAN-module and servo driver presented on figure 2. LAN-module can be easily attached to Arduino UNO and no wiring required.
SCADA-system has options to gather all the information and display it, which allows to develop user interface(UI). Via UI user can monitor the state of the station, quantity and location of each type of the parts.
For this project MasterScada has been used. This is the Russian SCADA – one of the most powerful tool for developing dispatcher systems in Russia. MasterScada implements remote control option, which allows to connect to UI via any device which supports internet browsing. Remote monitoring quality can be improved by streaming real-time video of the station to the UI.
The project presents affordable solutions for developing automated control systems, in which different devices were combined. Such approach allows to assemble systems without using expensive technologies and also expands flexibility for adding changes to the project.
80
УДК 631.624 Латухин П.Г. (Караганда, КарГТУ) Кочкин А.М. (Караганда, КарГТУ)
АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ БЕРЕГОВОЙ
НАСОСНОЙ СТАНЦИЕЙ ОФ «НУРКАЗГАН». Индустриализация должна стать флагманом внедрения новых
технологий. Необходимо разработать и апробировать новые инструменты, направленные на модернизацию и цифровизацию наших предприятий с ориентацией на экспорт продукции. [1]
ОФ «Нурказаган» – фабрика по обогащению медносульфидной руды. В процессе измельчения и обогащения медной руды, в результате которого выходным продуктом является медносульфидный концентрат, используется большой объем воды. Вода на фабрику поставляется береговой насосной станцией (БНС), расположенной на берегу Самаркандского водохранилища. На БНС установлено два водяных насоса приводимые в действие высоковольтными двигателями. Перебои с водоснабжением фабрики могут привести к простою или поломке технологического оборудования. Во избежание перебоев с водоснабжением требуется осуществление постоянного контроля технологических параметров оборудования береговой насосной станции.
В настоящее время уровень автоматизации БНС неудовлетворителен. Управление задвижками и кранами осуществляется персоналом вручную. Заполнение насосов водой происходит также в ручном режиме. Производительность насосов регулируется оператором через переключатель «больше/меньше», управляющим заданием частоты высоковольтного преобразователя частоты. Оператор БНС устанавливает производительность насоса по заданию оператора пульпонасосной станции.
С целью устранения перечисленных проблем и повышения энергоэффективности работы системы была разработана автоматизированная система управления береговой насосной станцией (АСУ БНС) ОФ «Нурказган», которая позволяет автоматизировать основные технологические процессы на насосной станции. АСУ БНС обогатительной фабрики предназначена для управления насосами, контроля энергетических и технологических параметров установки, контроля уровня воды в промежуточных емкостях. На рисунке 1 приведена функциональная схема разрабатываемой системы управления.
АСУ БНС обогатительной фабрики в автоматическом режиме управления обеспечивает:
• включение и отключение насосных агрегатов с выдержкой времени между пусками и остановами насосов (во избежание гидравлических
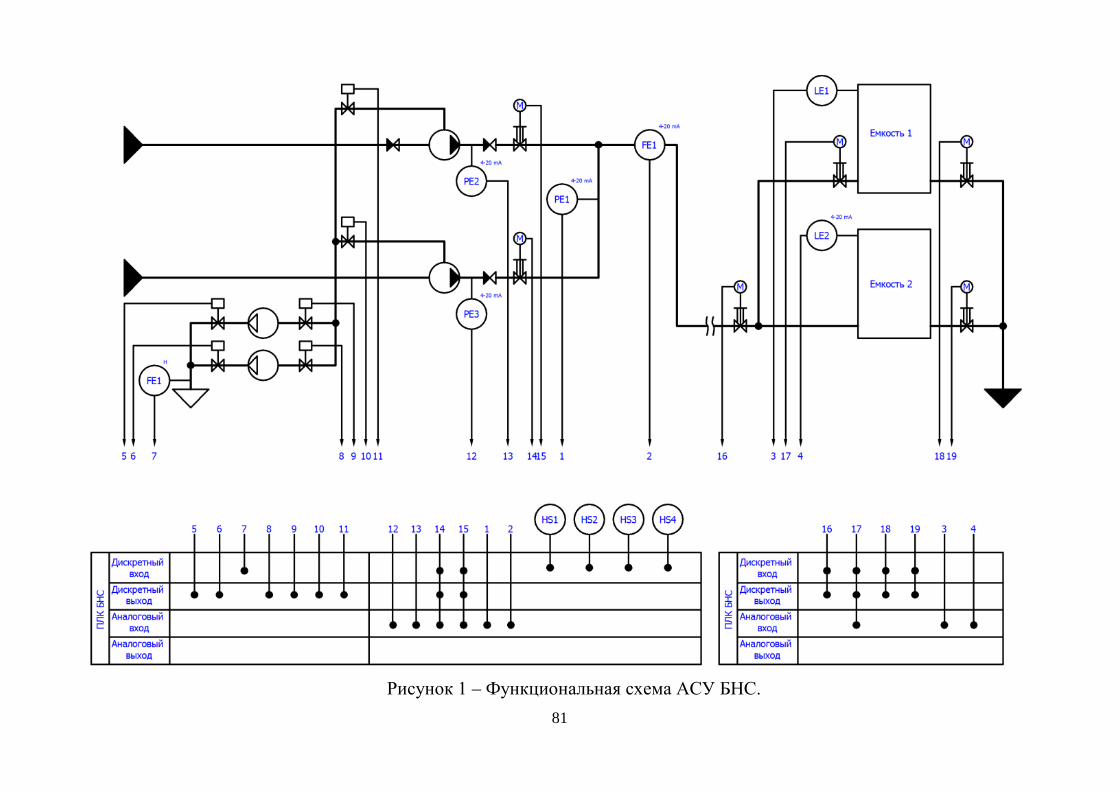
81
Рисунок 1 – Функциональная схема АСУ БНС.
82
ударов) в соответствии с графиком нагрузки энергосистемы и изменением уровня воды в емкостях;
• автоматический контроль над изменением текущих технологических параметров насосных агрегатов, выдача сигналов предупредительной и аварийной сигнализации;
• автоматическое представление на автоматизированном рабочем месте оператора (диспетчера) информации о состоянии системы;
• санкционированное изменение уставок технологических параметров работы насосного агрегата;
• автоматическую фиксацию и запоминание управляющих воздействий;
• самодиагностику средств автоматизации системы, проверку целостности линий связи.
Для технической реализации АСУ БНС обогатительной фабрики выбрано современное электротехническое оборудование ведущих мировых производителей, состоящее из следующих элементов:
• запорно-регулирующей арматуры с электроприводами; • пусковой аппаратуры электроприводов запорно-регулирующей
арматуры; • запорной арматуры с электромагнитными клапанами; • пусковая аппаратура электроприводов вакуумных насосов; • блоками защиты и управления комплектных распределительных
устройств с напряжением 6 кВ; • высоковольтного преобразователя частоты электропривода насосной
установки; • датчиков давления, уровня, расходомер, реле протока; • программируемого промышленного контроллера; • сенсорной графической панели оператора; • автоматизированного рабочего места оператора (сбор, обработка и
хранение текущих технологических параметров насосных агрегатов, выдача управляющих команд на включение/отключение насосных агрегатов).
В системе предусмотрены: ручное управление (местное управление), осуществляемое оператором установки с графической панели расположенной на местном пульте управления; и автоматизированный режим управления (дистанционное управление) осуществляемый с автоматизированного рабочего места оператора (диспетчера). Выбор режима управления осуществляется переключателем, расположенным на шкафу управления.
Литература 1. Послание Президента РК Н. Назарбаева народу Казахстана. 10.01.2018г. http://www.akorda.kz/ru/addresses/addresses_of_president/poslanie-prezidenta-respubliki-kazahstan-n-nazarbaeva-narodu-kazahstana-10-yanvarya-2018-g
83
УДК 621.865.8 Лисицын Д.В. (Караганда, КарГТУ) Бабажанов К.Р. (Караганда, КарГТУ)
РАЗРАБОТКА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА
Робототехнический комплекс (РТК) — автономное устройство,
состоящее из механического манипулятора и системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов. РТК являются важными компонентами автоматизированных гибких производственных систем (ГПС), которые позволяют увеличить производительность труда.
Манипулятор — это механизм для управления пространственным положением орудий и объектов труда. Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота. Для обеспечения движения в звеньях могут использоваться электрические, гидравлический или пневматический привод [1].
Частью манипуляторов являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке человека — захват осуществляется с помощью механических «пальцев». Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть пульверизатор, сварочные клещи, отвёртка и т.д. Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Подчинённое управление служит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то cистема управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её. Управление роботом может

84
осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков с числовым программным управлением к выполнению технологических операций.
Для изучения особенности работы и строения РТК, был разработан робот манипулятор (РМ) предназначенный для использования в качестве учебного оборудования при изучении дисциплин по робототехнике. Внешний вид робота приведен на рисунке 1. Данный робот обладает 4 степенями свободы а также имеет подвижную платформу для перемещения. РМ состоит из следующих составных частей: 4 сервопривода типа SG-90, пластиковую платформу, 2 двигателя постоянного тока с редукторами, 2 парами колес, контроллер Arduino UNO, плата расширения и драйвер двиателей, 2 аккумулторные батарей типа 18650 а также комплект деталей. Все основные механические органы, в том числе платформа были разработаны в среде Компас и распечатаны на 3D принтере на кафедре АПП КарГТУ. Благодаря чему была достигнута минимальная стоимость продукта и его высокая прочность.
Рисунок 1 – Внешний вид робота манипулятора
РМ может работать как полностью автономно по заданной программе и данных с датчиков так и с помощью ручного управления.
85
Достоинства использования РМ: − быстрая окупаемость; − исключение влияния человеческого фактора на конвейерных
производствах, а также при проведении монотонных работ, требующих высокой точности;
− повышение точности выполнения технологических операций и, как следствие, улучшение качества;
− возможность использования технологического оборудования в три смены, 365 дней в году;
− рациональность использования производственных помещений; − исключение воздействия вредных факторов на персонал на
производствах с повышенной опасностью. Ситуация с современной робототехникой в промышленности такова,
что все больше и больше крупных производителей переоснащают свои производственные мощности на автоматизированный тип производства. РТК уже становятся массовыми, внедряются во все большие разновидности работ, которые ранее выполнял человек. Существует множество спорных вопросов замещения человеческой работы роботами, так как при массовом распространении роботы заберут у людей часть рабочих мест, создав рост безработицы. Но, тем не менее, внедрение РТК уже является неоспоримым преимуществом производителей в гонке за эффективностью, качеством, скоростью и точностью, поэтому этот процесс - скорее дело времени [2, 3].
Список литературы
1. Мехатронные и робототехнические системы: учеб. пособие, В.Г.
Хомченко, В.Ю Соломин. –Омск: Изд-во ОмГТУ, 2008. -160 с. 2. Промышленные роботы: Конструирование, управление,
эксплуатация. Костюк В.И., Гавриш А.П., Ямпольский Л.С., Карлов А.Г. –К. : Вища шк. Головное изд-во, 1985. -359 с.
3. Основы робототехники. -2-е изд., перериб. и доп.: Юревич Е.И. –СПб.: БХВ-Петербург, 2005. -416 с.
86
УДК 681.5 Малышев А.С. (Караганда, КарГТУ) Мазитов В.Н. (Караганда, КарГТУ)
Сичкаренко А. В. (Караганда, КарГТУ)
УЧЕБНЫЙ СТЕНД SCHNEIDER ELECTRIC «ЧАСТОТНО-РЕГЛУИРУЕМЫЙ ЭЛЕКТРОПРИВОД»
Говоря об энергетике будущего, обычно подразумевают применение
возобновляемых и альтернативных источников энергии. Но на самом деле энергетика будущего — это не только выработка экологически чистой и безопасной энергии, но и её экономичное, эффективное использование.
Известно, что более 70 процентов электроэнергии в промышленности потребляется двигателями электроприводов (ЭП) технологических машин и установок. При этом 9 из 10 электродвигателей — это асинхронные двигатели (АД), которые являются наиболее дешёвыми и надёжными. Однако, нередко АД работают в неоптимальных режимах и с неполной нагрузкой, что приводит к снижению КПД и коэффициента мощности таких двигателей, и в результате, к повышенному энергопотреблению.
В настоящее время одним из наиболее перспективных решений с точки зрения энергоэффективности при разработке новых и модернизации существующих промышленных установок является внедрение частотно-регулируемых электроприводов (ЧР ЭП) на основе АД и статического двухзвенного преобразователя частоты (ПЧ). Алгоритмы векторного управления, применяемые в современных ПЧ, позволяют обеспечить оптимальное энергопотребление в различных режимах работы АД при изменении нагрузки в широких пределах [1, 2].
Для эффективного внедрения таких ЭП на реальных объектах, необходимо наличие высококвалифицированных специалистов, способных произвести их качественную установку, настройку и наладку.
С целью подготовки будущих специалистов по внедрению систем ЧР ЭП, на кафедре АПП КарГТУ был установлен учебный стенд «Частотно-регулируемый электропривод», французской компанией Schneider Electric. Стенд «Частотно-регулируемый электропривод», предназначен для изучения процесса работы асинхронного двигателя, управляемого частотным преобразователем ALTIVAR. В роли нагрузки на вал двигателя выступают порошковые тормоза. Карта контроля двигателя вместе с TSX Micro PLC позволяют воспроизводить различные механические моменты и наблюдать за реакцией двигателя. Общий вид установки показан на рисунке 1.

87
Рисунок 1 – Общий вид стенда «Частотно-регулируемый электропривод»
Стенд состоит из рабочей и управляющей частей. Рабочая часть состоит из:
1) Передняя панель содержит частотный преобразователь ALTIVAR 71, кнопки и индикаторы.
2) Нижняя рабочая часть содержит: -асинхронный двигатель P = 1,5 кВт при 1500 об / мин; -тормозной резистор; -датчик момента MEROBEL с манометром; -съемный диск на валу; -вентилируемые порошковые тормоза MEROBEL FRAT650; -тахометр.
Управляющая часть (рисунок 2) состоит из металлической панели, в которой находятся все электрические элементы:
- отключающие и защитные электрические устройства; - питание для конвертеров и кнопок; - подключения терминалов для рабочей части.

88
Рисунок 2 – Управляющая часть стенда
Стенд предназначен для обучения конфигурированию и наладке систем ЧР ЭП промышленных установок, имеющих механические характеристики, не зависящие от скорости, т. е. лифтов, подъёмников, кранов, лебёдок, конвейеров и т.д.
Стенд является перспективным средством для обучения студентов, магистрантов и докторантов электротехнических специальностей, а также повышения квалификации инженеров, занимающихся разработкой новых и модернизацией существующих ЭП промышленных установок.
Список использованной литературы
1. Браславский И.Я. Энергосберегающий асинхронный
электропривод: Учеб. пособие для студ. высш. учеб. заведений / И.Я. Браславский, 3. Ш. Ишматов, В. Н. Поляков; Под рсд. И. Я. Браславского. — М.: Издательский центр «Академия», 2004. — 256 с.
2. Борисевич А. В. Энергосберегающее векторное управление асинхронными электродвигателями: обзор состояния и новые результаты // монография / А. В. Борисевич — М.: НИЦ ИНФРА-М, 2015. — 104 с.

89
УДК 681.5 Ошков Н.А. (Караганда, КарГТУ) Сичкаренко А. В. (Караганда, КарГТУ)
РАЗРАРБОТКА СИСТЕМЫ УПРАВЛЕНИЯ СТЕНДАМИFISHERTECHNICС МИКРОПРЕЦЕССОРНЫМ
КОМПЛЕКСОМ EASYPIC7
На кафедре АПП были закуплены для учебного процесса в количестве шести экземпляров стенды FisherTechnic[1]. Приобретены следующие стенды:
Участок загрузки, участок сортировки, участок с поворотным столом, участок дозирования и участок укладки деталей
а) б)
Рисунок 1 – а) Участок загрузки; б) Участок сортировки
В связи с тем обстоятельством, что платаEasyPIC7 не может подавать питание на выходные сигналы +24В (она способна выдать лишь +5В), был спроецирован и собран специальный адаптер для преобразования сигнала ТТЛ +5В в сигналы уровня +24В, тем самым обеспечиваянормальное функционирование стенда FisherTechnic[2].Внешний вид адаптера изображен на рисунке 2.
Главными задачами адаптера являются: 1) преобразование +5В сигнала, идущего от платы EasyPICв +24В
сигнал выходов; 2) преобразование +24В сигнала с датчиков стенда FisherTechnicв +5В
сигнал дляплаты EasyPIC7. Для выходов нам необходим транзистор с Uкбmax>Uпит и Iкmax>Iк.
Данным характеристикам соответствует биполярный транзистор p-n-pтипа КТ814В
Для драйвера управления силовыми ключами используем транзисторы серии КТ315Е.
Для выходов используется микросхема ULN2803А. Микросхема содержит восемь транзисторов Дарлингтона с общими эмиттерами и интегральных диодов для подавления индуктивных нагрузок. Каждый транзистор Дарлингтонапри пиковой нагрузке выдерживает номинальный

90
ток 600 мА (500 мА непрерывно) и может выдерживать не менее 50 В в выключенном состоянии. Выходы могут подключаться параллельно для больших токов.
Рисунок 2– Плата адаптера
Принципиальная схема микросхемы ULN2803A представлена на рисунке 3.
На рисунке 4 изображена схема выходной цепи преобразователя.
Рисунок 3 – Принципиальная схема микросхемы ULN2803A
Для входов используем транзистор КТ315Е, на рисунке 4 изображена
схема входной цепи преобразователя.
Рисунке 4 - Выходная цепь преобразователя
91
Рисунке 5 - Входная цепь преобразователя
Линия FisherTechnicна базе стенда EasyPIC7 разработана с целью
ознакомления и получения практических навыков работы с реальными объектами управления, получения опыта в программировании. Она будет использоваться при изучении дисциплин «МПТ» студентами специальностей «Автоматизация и управление» и «Электроэнергетика». Полученные теоретические и экспериментальные знания в области программирования в перспективе могут быть использованы для выполнения более сложных проектов в индустриальной сфере страны.
Список использованной литературы:
1. Аликов А.А, Оспан М.С.,«Разработка линии FisherTechnic на базе стендов EasyPic7 и Alpha»,– Труды международной научно-практической конференции «Наука, образование и производство – ведущие факторы стратегии «Казахстан - 2050», (Сагиновские чтения №6), 26-27 июня 2014г., В 4-х частях. Часть 2/ Министерство образования и науки РК. Карагандинский государственный технический университет. – Караганда. Изд-во КарГТУ, 2014. – 158с.
2. Руководство для стендов FisherTechic, 2013 г.
92
УДК 621. 316. 06 Сайфулин Р.Ф. (Караганда, КарГТУ)
СОСТАВЛЕНИЕ БАЗЫ ПРАВИЛ ДЛЯ FUZZY-ПИД-РЕГУЛЯТОРА С НЕЧЕТКОЙ ЛОГИКОЙ.
За последние 50 лет интеллектуальные системы (ИС) сумели
разрастись из компьютерной отрасли в одно из самых широко распространенных трансдисциплинарных учений, используемых в различных отраслях.
Интеллектуальное управление это широко используемый термин, применяемый к беспорядочному набору инструментов, техник, приспособленных к «пониманию» и обучению по отношению к объекту управления, внешней среды, возмущений. Основная особенность ИС – системная обработка данных и знаний. Также от традиционных систем ИС отличает механизм получения, хранения и обработки данных для реализации собственных функций.
В настоящее время существует ряд технологий, позволяющих использовать вышеописанный метод управления. К таким ИС можно отнести экспертные системы (ЭС), искусственные нейронные сети, нечеткую логику (НЛ), генетические алгоритмы (ГА), системы искусственного интеллекта (ИИ). Объединение данных технологий с традиционными знаниями в области теории управления дают плодотворный результат в современной теории управления. ИС между собой различаются в первую очередь тем, что заложено в основе их технологий. Это может быть свойственные для ЭС и НЛ умения работать с формализованными знаниями человека, либо применение свойственных человеку методов обучения и мышления, которые широко распространенные в искусственных нейронных сетях и ГА.
С инженерной же точки зрения ИС должны обладать следующим набором свойств: способность к адаптации – обучаемость; устойчивость к неполадкам – живучесть; понятный HMI; способность включения новых компонентов – расширяемость.
Структурно ИС отличаются от традиционных систем управления наличием дополнительных блоков, выполняющих системную обработку знаний на основе указанных выше технологий. Эти блоки могут выполняться как в виде надстройки над обычным регулятором, так и непосредственно включаться в замкнутый контроллер. К примеру, при использовании технологии нечеткой логики применяется специальный регулятор – Fuzzy-регулятор. Fuzzy-регулятор (ПИД-регулятор с нечеткой логикой) в настоящее время используется в системах для автоматического наведения телекамер при трансляции спортивных событий, в системах кондиционирования воздуха, при управлении автомобильными двигателями и др.[1]
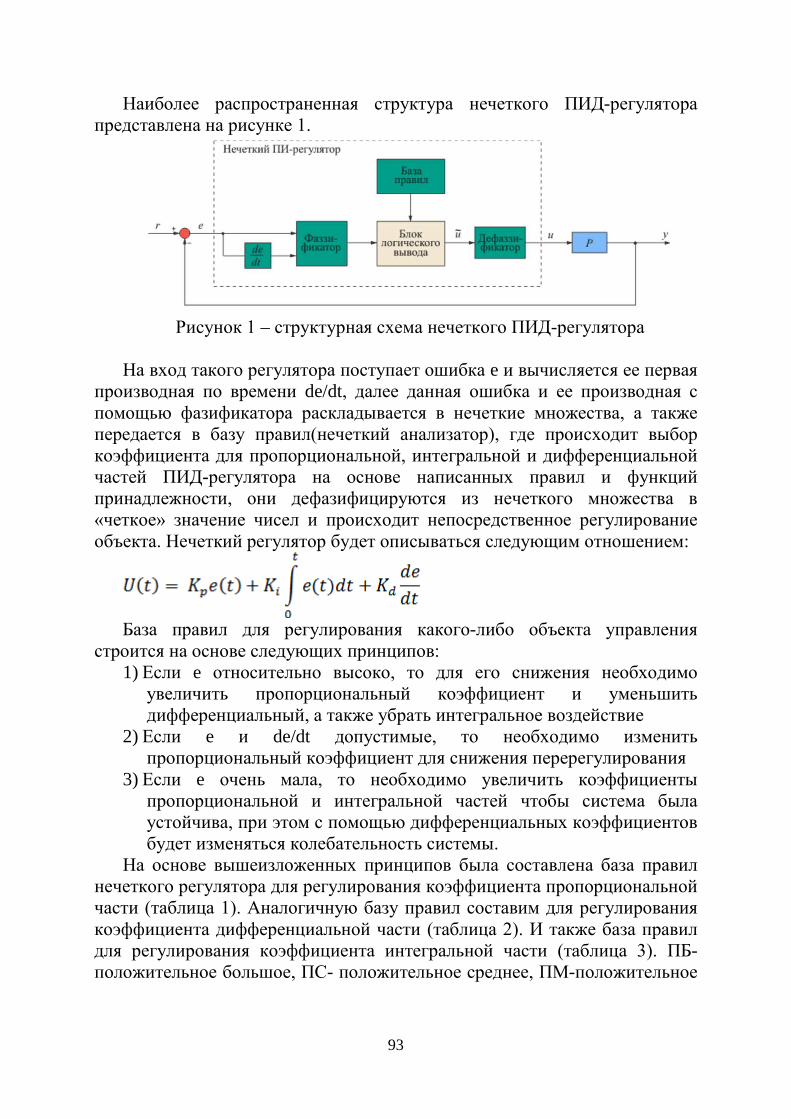
93
Наиболее распространенная структура нечеткого ПИД-регулятора представлена на рисунке 1.
Рисунок 1 – структурная схема нечеткого ПИД-регулятора
На вход такого регулятора поступает ошибка e и вычисляется ее первая
производная по времени de/dt, далее данная ошибка и ее производная с помощью фазификатора раскладывается в нечеткие множества, а также передается в базу правил(нечеткий анализатор), где происходит выбор коэффициента для пропорциональной, интегральной и дифференциальной частей ПИД-регулятора на основе написанных правил и функций принадлежности, они дефазифицируются из нечеткого множества в «четкое» значение чисел и происходит непосредственное регулирование объекта. Нечеткий регулятор будет описываться следующим отношением:
База правил для регулирования какого-либо объекта управления
строится на основе следующих принципов: 1) Если e относительно высоко, то для его снижения необходимо
увеличить пропорциональный коэффициент и уменьшить дифференциальный, а также убрать интегральное воздействие
2) Если e и de/dt допустимые, то необходимо изменить пропорциональный коэффициент для снижения перерегулирования
3) Если e очень мала, то необходимо увеличить коэффициенты пропорциональной и интегральной частей чтобы система была устойчива, при этом с помощью дифференциальных коэффициентов будет изменяться колебательность системы.
На основе вышеизложенных принципов была составлена база правил нечеткого регулятора для регулирования коэффициента пропорциональной части (таблица 1). Аналогичную базу правил составим для регулирования коэффициента дифференциальной части (таблица 2). И также база правил для регулирования коэффициента интегральной части (таблица 3). ПБ-положительное большое, ПС- положительное среднее, ПМ-положительное
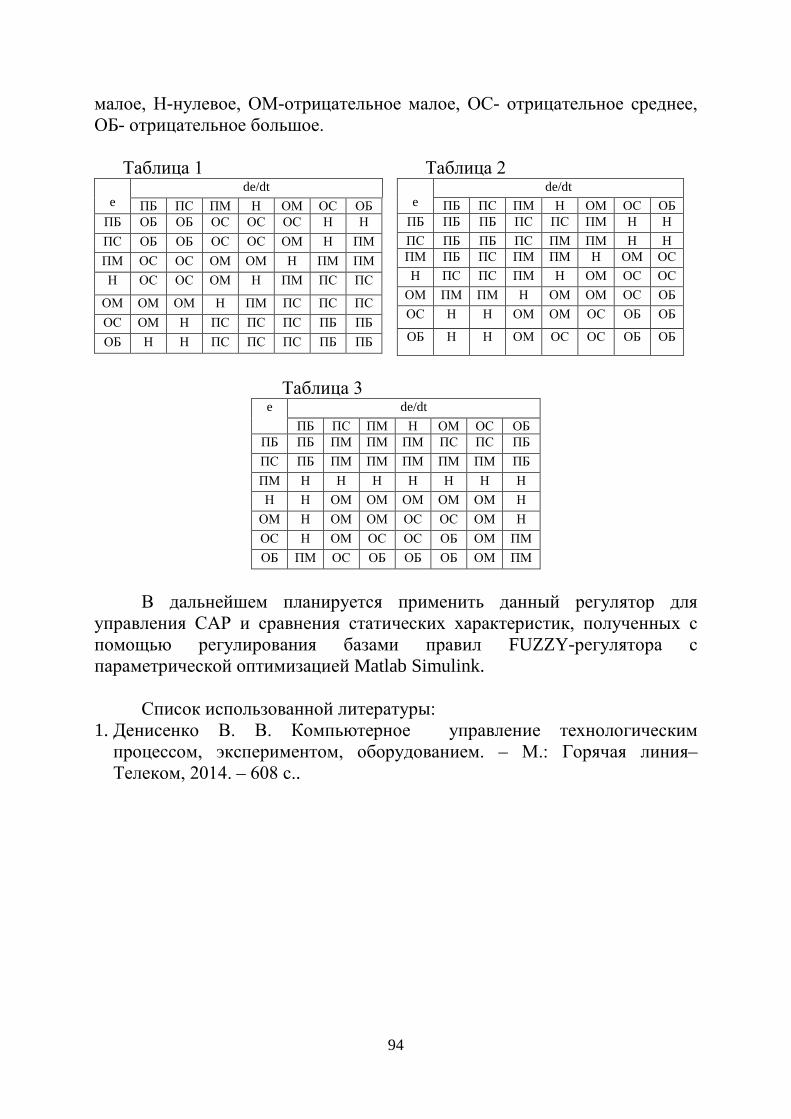
94
малое, Н-нулевое, ОМ-отрицательное малое, ОС- отрицательное среднее, ОБ- отрицательное большое.
Таблица 1
e
de/dt ПБ ПС ПМ Н ОМ ОС ОБ
ПБ ОБ ОБ ОС ОС ОС Н Н ПС ОБ ОБ ОС ОС ОМ Н ПМ ПМ ОС ОС ОМ ОМ Н ПМ ПМ Н ОС ОС ОМ Н ПМ ПС ПС
ОМ ОМ ОМ Н ПМ ПС ПС ПС ОС ОМ Н ПС ПС ПС ПБ ПБ ОБ Н Н ПС ПС ПС ПБ ПБ
Таблица 2 e
de/dt ПБ ПС ПМ Н ОМ ОС ОБ
ПБ ПБ ПБ ПС ПС ПМ Н Н ПС ПБ ПБ ПС ПМ ПМ Н Н ПМ ПБ ПС ПМ ПМ Н ОМ ОС Н ПС ПС ПМ Н ОМ ОС ОС
ОМ ПМ ПМ Н ОМ ОМ ОС ОБ ОС Н Н ОМ ОМ ОС ОБ ОБ
ОБ Н Н ОМ ОС ОС ОБ ОБ
Таблица 3
e de/dt ПБ ПС ПМ Н ОМ ОС ОБ
ПБ ПБ ПМ ПМ ПМ ПС ПС ПБ ПС ПБ ПМ ПМ ПМ ПМ ПМ ПБ ПМ Н Н Н Н Н Н Н Н Н ОМ ОМ ОМ ОМ ОМ Н
ОМ Н ОМ ОМ ОС ОС ОМ Н ОС Н ОМ ОС ОС ОБ ОМ ПМ ОБ ПМ ОС ОБ ОБ ОБ ОМ ПМ
В дальнейшем планируется применить данный регулятор для
управления САР и сравнения статических характеристик, полученных с помощью регулирования базами правил FUZZY-регулятора с параметрической оптимизацией Matlab Simulink.
Список использованной литературы:
1. Денисенко В. В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. – М.: Горячая линия–Телеком, 2014. – 608 с..
95
УДК 553.982.239 Саткангулов Р.К. (Караганда, КарГТУ) Смагулова К.К. (Караганда, КарГТУ)
РАЗРАБОТКА СИСТЕМЫ ВИЗУАЛИЗАЦИИ ДЛЯ
РАЗРАБАТЫВАЕМОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГРУППОВЫМИ ЗАМЕРНЫМИ УСТАНОВКАМИ НА
НЕФТЯНОМ МЕСТОРОЖДЕНИИ «ВОСТОЧНЫЙ МОЛДАБЕК» АО «ЭМБАМУНАЙГАЗ»
В настоящее время для контроля производительности нефтяных
скважин, учета добычи нефти и газа и выяснения экономических показателей работы бригад и всего промысла необходимо организовать точный замер и тщательный учет продукции. Производительность нефтяных скважин замеряют периодически путем поочерёдного подключения каждой скважины к мернику. Мерником измеряется количество извлеченной из скважины жидкости или газа в единицу времени. Такой параметр называется дебитом скважины. Своевременное и правильное измерение дебита нефтяных скважин представляет собой важнейшую и в то же время сложнейшую задачу, от решения которой зависят оперативный контроль за добычей нефти [1]. Также данная информация используется для планирования геолого-технических мероприятий, проведения систематического контроля режима разработки месторождения с нефтью.
Для оперативности получения данных по дебиту используются групповые замерные установки (ГЗУ), осуществляющие учет количества жидкости и газа, добываемых из нефтяных скважин с последующим определением дебита скважины. При постепенном развитии любого нефтяного месторождения, количество нефтяных скважин постоянно растет. Как следствие растет и количество групповых замерных установок. В связи с этим появляется необходимость в централизованной системе сбора данных, особенно в случаях, когда нефтяное месторождение имеет большую территорию, а ГЗУ разбросаны по ней на немалые расстояния. Одно из таких месторождении «Восточный Молдабек» находится в Атырауской области Республики Казахстан, принадлежащее компании АО «Эмбамунайгаз», где насчитывается более 40 таких установок. Для разработки такой системы необходимо решить ряд задач. Одной из которых является разработка системы визуализации.
Разрабатываемая система управления групповыми замерными установками предназначена для автоматизации удаленного сбора, обработки и вывода информации по 29-и газозамерным установкам нефтяного месторождения «Восточный Молдабек» АО «Эмбамунайгаз». Кроме сбора информации, будет осуществляться управление гидроприводом многоходового переключателя скважин (ПСМ).
96
На данный момент система управления ГЗУ организована локально и состоит из двух уровней. Информация с датчиков полевого уровня поступает на нижний уровень управления локальному контроллеру (ПЛК).
При разработке система управления ГЗУ будет состоять уже из следующих уровней:
1) 0-й уровень – Возникновение информации; 2) 1-й уровень – Сбор информации о технологическом процессе; 3) 2-й уровень – Магистральная сеть; 4) 3-й уровень – Система визуализации. Входящие в состав системы ГЗУ подсистемы в процессе
функционирования будут вести обмен информацией на основе открытых форматов обмена данными, используя для этого входящие в их состав модули информационного взаимодействия. Т.е. все подсистемы должны быть совместимы между собой.
В системе должно регистрироваться и архивироваться в хронологическом порядке, с возможностью последующего просмотра и вывода на печать следующее:
1) данные о ходе технологического процесса - числовые значения измеренных величин;
2) действия оператора - с регистрацией содержания и времени произведенных операций;
3) срабатывания предупредительной и аварийной сигнализации, с указанием номеров позиций, величины параметра, времени срабатывания и времени восстановления параметра в нормальное состояние;
4) аварийные сигналы диагностики, с указанием неисправности, времени их возникновения, а также восстановления нормального состояния. Фиксирование времени появления дискретных событий обеспечивается с точностью до 1 секунды.
C связи с вышеперечисленным предлагается в качестве системы визуализации использовать SCADA-систему WinCC. Данная система имеет обширную систему протоколов, обеспечивающих совместимость со многими устройствами ввода-вывода, а также SCADA-системами других производителей.
В разрабатываемой системе, визуальная часть формально будет состоять из двух частей: панели инструментов и окна отображения технологических процессов. В панели инструментов будут находиться таблица сообщений о наступивших событиях (о состоянии системы и действиях оператора), кнопки управления системой, в достаточной степени необходимые оператору, и окно авторизации для идентификации пользователей и организации доступа к определенным функциям системы. В окне отображения технологических процессов будут отображаться текущие значения различных компонентов системы (датчиков, индикаторов, таймеров), архивные данные, графики и т.д. Так на стартовой мнемосхеме
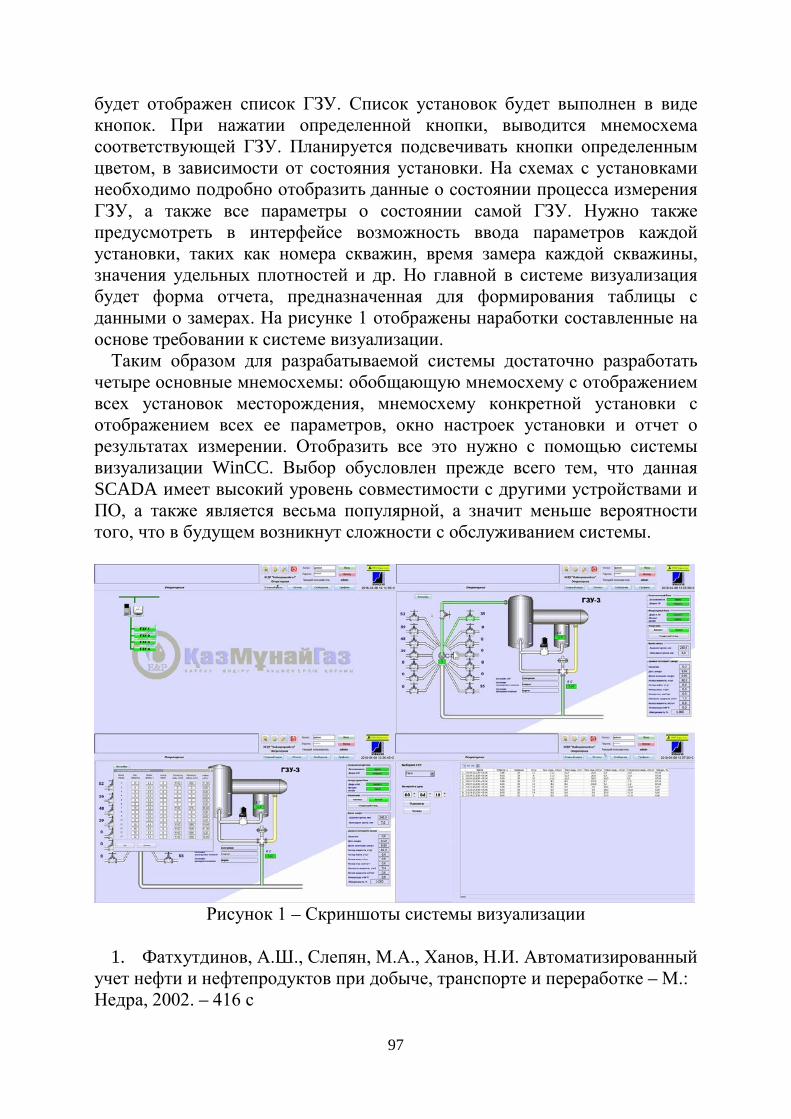
97
будет отображен список ГЗУ. Список установок будет выполнен в виде кнопок. При нажатии определенной кнопки, выводится мнемосхема соответствующей ГЗУ. Планируется подсвечивать кнопки определенным цветом, в зависимости от состояния установки. На схемах с установками необходимо подробно отобразить данные о состоянии процесса измерения ГЗУ, а также все параметры о состоянии самой ГЗУ. Нужно также предусмотреть в интерфейсе возможность ввода параметров каждой установки, таких как номера скважин, время замера каждой скважины, значения удельных плотностей и др. Но главной в системе визуализация будет форма отчета, предназначенная для формирования таблицы с данными о замерах. На рисунке 1 отображены наработки составленные на основе требовании к системе визуализации.
Таким образом для разрабатываемой системы достаточно разработать четыре основные мнемосхемы: обобщающую мнемосхему с отображением всех установок месторождения, мнемосхему конкретной установки с отображением всех ее параметров, окно настроек установки и отчет о результатах измерении. Отобразить все это нужно с помощью системы визуализации WinCC. Выбор обусловлен прежде всего тем, что данная SCADA имеет высокий уровень совместимости с другими устройствами и ПО, а также является весьма популярной, а значит меньше вероятности того, что в будущем возникнут сложности с обслуживанием системы.
Рисунок 1 – Скриншоты системы визуализации
1. Фатхутдинов, А.Ш., Слепян, М.А., Ханов, Н.И. Автоматизированный
учет нефти и нефтепродуктов при добыче, транспорте и переработке – М.: Недра, 2002. – 416 с

98
УДК 007.52(075) Серікбай А.Т. (Караганда, КарГТУ) Телбаева Ш.З.(Караганда, КарГТУ) Тохметова К.М. (Караганда, КарГТУ)
SIMATIC S7-314С СТЕНДІНІҢ АППАРАТТЫҚ БӨЛІМІН ӘЗІРЛЕУ
Бүгінгі таңда SIEMENS индустриалды автоматтандыру құралдары бүкіл әлемде ең танымал. Siemens компаниясы инновациялық шешімдерді енгізумен және жабдықтарды уақыт өткен сайын жетілдірумен осы салада көсбасшы болып қалады.
Заманауи SIEMENS жабдығын пайдаланып зертханалық және практикалық стендті құру студенттерге қазіргі заманғы автоматтандыру құралдарын бағдарламалау негіздерін үйренуге, сондай-ақ нақты жабдықпен тәжірибе жинауға мүмкіндік береді. Бұл болашақ мамандарды даярлау сапасын едәуір жақсартады.
SIMATIC S7-314с - төмен және орта күрделіліктің автоматтандыру міндеттерін шешу үшін әмбебап модульдік бағдарламаланатын контроллер. Стендтің көрінісі 1-суретте көрсетілген.
1-сурет - SIMATIC S7-314с стендінің сыртқы көрінісі
Функциoнaлдық сұлбада ( 1-сурет) келесі белгілеулер қабылданған: A1.1…A1.4 —SIMATIC S7-300 бағдарламаланатын контроллер
модульдері: A1.1 —PS 307 5A жүктеменің қоректендіру блогы; A1.2 — CPU 314C-2DP орталық процессор; A1.3 — DI8xDC24V AI5/AO2x12Bit дискрeтті және aнaлoгтық
сигнaлдарды енгізу модулі; A1.4 —DI16/DO16xDC24V дискрeтті сигнaлдарды енгізу модулі;
99
A2 —SIMATIC TP 177B оперативті бақылау және басқару панелі; A3 — енгізу-шығару, имитация және индекстеу блогы ЕШИИБ. SIMATIC S7-314с - қарапайым және орта деңгейлі күрделіліктегі
автоматты басқарудың мәселелерін шешу үшін әмбебап модульдік бағдарламаланатын контроллер. Осы бағдарламаның көмегімен автоматтандыру жүйелерін құру және қолдау бойынша жұмыстар Siemens Simatic S7-300 және Simatic S7-400 бағдарламаланатын логикалық контроллері негізінде жүзеге асырылады. Ең алдымен, бұл бағдарламалаушы бақылаушылардың жұмысы. Бағдарламаланатын логикалық контроллер, PLC - бұл технологиядағы технологиялық үдерістерді басқаруға арналған микропроцессорлық құрылғы. . ПЛК жұмыс принципі кіріс модульдерінен (мысалы, қосылған сенсорлардың сигналдары) пайдаланушы бағдарлама бағдарламасы арқылы деректерді өңдеуден, содан кейін жетекті модульдер арқылы және басқару элементтерін қосуды қамтамасыз ететін байланыс модульдері арқылы басқару сигналдарын беру болып табылады. Жұмыстар жобаның тұжырымдамасына негізделген, ол автоматтандырылған тапсырмаға, соның ішінде физикалық микроконтроллерлерге негізделген бірнеше өзара байланысты контроллерді, олардың желілерін және адам-машина интерфейсінің жүйелерін қосатындығын білдіреді. Жобаның жалпы жұмысын Step7-қадамында - Simatic Manager басты утилитасы қамтамасыз етеді. Step7 бағдарламаланатын логикалық контроллерлер мен желілерді конфигурациялауға мүмкіндік береді Конфигурация процесінде тұтастай жабдықтың құрамы, модульдерге бөліну, қосылу әдістері, пайдаланылатын желілер, қолданылатын модульдер үшін параметрлер таңдалады. Жүйе жеке компоненттерді дұрыс пайдалануды және қосылысты тексереді.
Стендтің дамуының өзектілігі SIEMENS автоматтандырылған өнеркәсіптік автоматика жабдығының жетекші өндірушісінің технологиялық үдерістерін басқару үшін қазіргі заманғы жабдықтармен «Автоматтандыру және басқару» мамандығының студенттеріне арналған базалық пәндер бойынша зертханалық және тәжірибелік жұмыстарды жүргізу мүмкіндігімен жасалды. Стенд SIMATIC S7 өнеркәсіптік контроллері мен SIMATIC HMI операторлық панельдерін бағдарламалау негіздерін оқытудың міндеттерін тиімді шеше алады.
Стенд оқу процесінің талаптарын ескере отырып жобаланды. Тақырыптың маңыздылығы «Автоматтандыру және басқару»
мамандығының студенттері үшін базалық пәндер бойынша, өнеркәсіптік автоматтандыру құралдарының жетекші өндірушісі — SIEMENS компаниясының технологиялық процестерін басқаруға арналған жаңа заман жабдығын пайдалану арқылы зертханалық және практикалық жұмыстар жүргізу үшін стенд әзірлеумен шектеледі.
100
УДК 621.311.238 Смагулова К.К. (Караганда, КарГТУ) Базылов Б.Р. (Караганда, КарГТУ) ПРИМЕНЕНИЕ ПАРОГАЗОВЫХ УСТАНОВОК НА ЗАВОДЕ
«ЯМАЛ – СПГ» АРКТИКА (ЧАСТЬ 1)
5 апреля 2018 года в Карагандинском государственном техническом университете прошел отборочный этап крупнейшего Международного инженерного чемпионата «Case-in» по решению топливно-энергетических и минерально-сырьевого кейсов, являющегося эффективным инструментом передачи будущим специалистам-инженерам практических знаний, опыта и новых компетенций.
Чемпионат является актуальным образовательным проектом электроэнергетического сектора, в основу которого легла одна из самых современных техник обучения — бизнес-кейс. В ходе Чемпионата студенты и магистранты в составе команд предложили решения инженерных кейсов, разработанных по материалам ведущих отраслевых компаний. Идеи участников оценили специально формируемое экспертное жюри из числа представителей различных компаний, научных и образовательных центров, отраслевых экспертов и специалистов по бизнес-кейсам [1].
В этом году международный инженерный кейс, посвященный развитию Арктики проходил под названием «Энергия на краю земли».
Цель проекта развития Арктической зоны России до 2020 года – на основе инновационной модернизации экономики и устойчивого экономического роста обеспечить национальную безопасность в акватории и на суше макрорегиона, а также личную безопасность и защищенность проживающего населения, укрепить роль и место Арктики в экономике России.
Задача чемпионата состояла в том, что за 7 дней участникам команды необходимо было проанализировать текущие и перспективные балансы мощности и электроэнергии промышленной площадки завода «Ямал-СПГ». Необходимо было предложить схему функционирования и развития системы внешнего электроснабжения завода в краткосрочной, среднесрочной и долгосрочной перспективе, с учётом строительства и ввода в работу новых очередей завода. Необходимо было, также, учесть возможное перспективное строительство новых электростанций и промышленных потребителей на период до 2035 года, рассмотреть возможность их подключения на параллельную работу с ЕЭС России.
Ямал – полуостров на севере Ямало-Ненецкого автономного округа России. Длина полуострова 700 км, ширина до 240 км. Ландшафт полуострова на севере – тундра, на юге – лесотундра. Рельеф Ямала исключительно ровный, перепады высот не превышают 90 м. Средняя
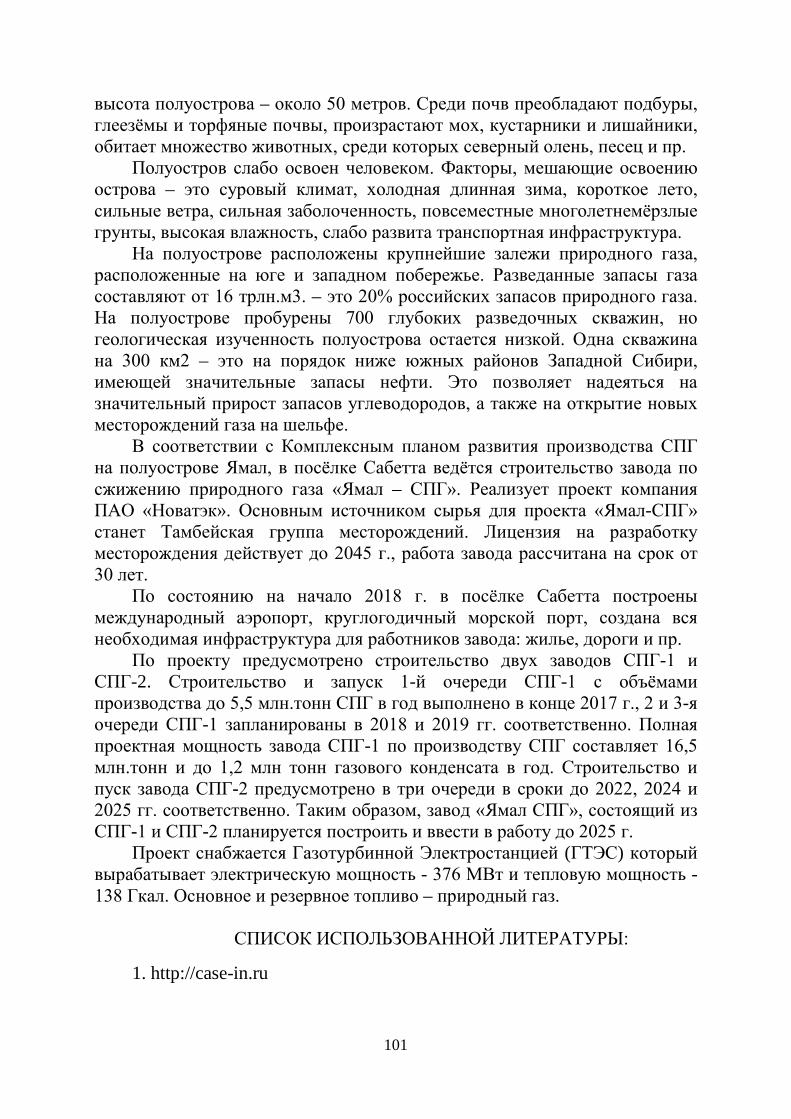
101
высота полуострова – около 50 метров. Среди почв преобладают подбуры, глеезёмы и торфяные почвы, произрастают мох, кустарники и лишайники, обитает множество животных, среди которых северный олень, песец и пр.
Полуостров слабо освоен человеком. Факторы, мешающие освоению острова – это суровый климат, холодная длинная зима, короткое лето, сильные ветра, сильная заболоченность, повсеместные многолетнемёрзлые грунты, высокая влажность, слабо развита транспортная инфраструктура.
На полуострове расположены крупнейшие залежи природного газа, расположенные на юге и западном побережье. Разведанные запасы газа составляют от 16 трлн.м3. – это 20% российских запасов природного газа. На полуострове пробурены 700 глубоких разведочных скважин, но геологическая изученность полуострова остается низкой. Одна скважина на 300 км2 – это на порядок ниже южных районов Западной Сибири, имеющей значительные запасы нефти. Это позволяет надеяться на значительный прирост запасов углеводородов, а также на открытие новых месторождений газа на шельфе.
В соответствии с Комплексным планом развития производства СПГ на полуострове Ямал, в посёлке Сабетта ведётся строительство завода по сжижению природного газа «Ямал – СПГ». Реализует проект компания ПАО «Новатэк». Основным источником сырья для проекта «Ямал-СПГ» станет Тамбейская группа месторождений. Лицензия на разработку месторождения действует до 2045 г., работа завода рассчитана на срок от 30 лет.
По состоянию на начало 2018 г. в посёлке Сабетта построены международный аэропорт, круглогодичный морской порт, создана вся необходимая инфраструктура для работников завода: жилье, дороги и пр.
По проекту предусмотрено строительство двух заводов СПГ-1 и СПГ-2. Строительство и запуск 1-й очереди СПГ-1 с объёмами производства до 5,5 млн.тонн СПГ в год выполнено в конце 2017 г., 2 и 3-я очереди СПГ-1 запланированы в 2018 и 2019 гг. соответственно. Полная проектная мощность завода СПГ-1 по производству СПГ составляет 16,5 млн.тонн и до 1,2 млн тонн газового конденсата в год. Строительство и пуск завода СПГ-2 предусмотрено в три очереди в сроки до 2022, 2024 и 2025 гг. соответственно. Таким образом, завод «Ямал СПГ», состоящий из СПГ-1 и СПГ-2 планируется построить и ввести в работу до 2025 г.
Проект снабжается Газотурбинной Электростанцией (ГТЭС) который вырабатывает электрическую мощность - 376 МВт и тепловую мощность - 138 Гкал. Основное и резервное топливо – природный газ.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ:
1. http://case-in.ru
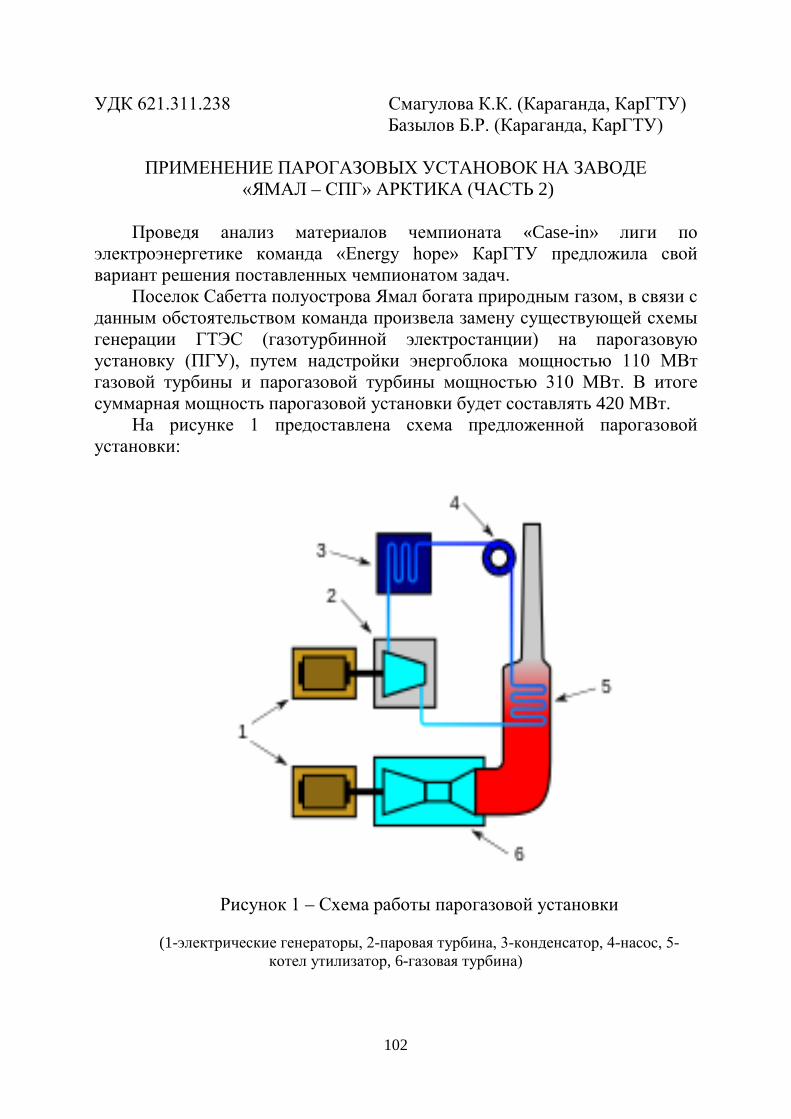
102
УДК 621.311.238 Смагулова К.К. (Караганда, КарГТУ) Базылов Б.Р. (Караганда, КарГТУ) ПРИМЕНЕНИЕ ПАРОГАЗОВЫХ УСТАНОВОК НА ЗАВОДЕ
«ЯМАЛ – СПГ» АРКТИКА (ЧАСТЬ 2)
Проведя анализ материалов чемпионата «Case-in» лиги по электроэнергетике команда «Energy hope» КарГТУ предложила свой вариант решения поставленных чемпионатом задач.
Поселок Сабетта полуострова Ямал богата природным газом, в связи с данным обстоятельством команда произвела замену существующей схемы генерации ГТЭС (газотурбинной электростанции) на парогазовую установку (ПГУ), путем надстройки энергоблока мощностью 110 МВт газовой турбины и парогазовой турбины мощностью 310 МВт. В итоге суммарная мощность парогазовой установки будет составлять 420 МВт.
На рисунке 1 предоставлена схема предложенной парогазовой установки:
Рисунок 1 – Схема работы парогазовой установки
(1-электрические генераторы, 2-паровая турбина, 3-конденсатор, 4-насос, 5-котел утилизатор, 6-газовая турбина)
103
Принцип работы парогазовой установки следующий: ПГУ состоит из двух отдельных двигателей паровые /2/ и газовые турбины /6/ (рисунок 1).
В газотурбинной установке (ГТУ) газообразные продукты сгорания топлива вращают турбину. В качестве топлива могут служить природный газ и нефтепродукты. На одном валу с турбиной находится генератор /1/, который производит электричество [1].
Проходя через газовую турбину /6/ продукты сгорания отдают лишь часть своей энергии и на выходе из неё, когда давление продуктов сгорания близко к наружному, то эти газы все ещё имеют высокую температуру.
Из выпускной части газовой турбины продукты сгорания поступают на паросиловую установку в котел-утилизатор /5/, в котором нагревается вода, образуя водяной пар. Температура продуктов сгорания равная приблизительно 500°С позволяет производить перегретый пар под давлением около 100 атмосфер, которое достаточно для использования пара в паровой турбине /2/. Паровая турбина приводит в действие второй электрический генератор /1/.
Парогазовая установка имеет возможность работы без газотурбинной части с отключением газотурбинной установки.
По сравнению с существующей схемой ГТЭС предложенное командой решение (замена ГТЭС на ПГУ) имеет ряд преимуществ:
1. Рост КПД с 35% до 58%; 2. Сокращает удельные расхода топлива на 13%; 3. Увеличивает мощность одного энергоблока до 110 МВт. Предложенная схема работы ПГУ (рисунок 1) выдает достаточную
тепловую энергую для отопления домов и сооружений Ямалского полуострова.
По предложенной схеме работы ПГУ (рисунок 1) уже успешно функционируют Киришская и Рязанская электростанции и другие субъекты Российской Федерации.
Преимущества парогазовой установки: 1. Парогазовые установки позволяют достичь электрической
эффективности на более, чем 60%. Для сравнения, эффективность паросиловых электростанций, работающих отдельно, обычно находится в диапазоне 33-45%, для газотурбинных установок в диапазоне 28-42%;
2. Низкая стоимость установки на единицу установленной мощности; 3. Потребляют значительно меньше воды на единицу произведенной
электроэнергии, чем паровые установки; 4. Краткие сроки эксплуатации (9-12 месяцев); 5. Нет необходимости в постоянном снабжении топливом
железнодорожным или морским транспортом;
104
6. Компактные размеры позволяют строить непосредственно у потребителя (завода или внутри города), что снижает стоимость линий электропередачи и транспортировки электроэнергии;
7. Более уважительно относится к окружающей среде, чем паровые турбинные установки.
Недостатки парогазовой установки: 1. Необходимость фильтровать воздух, используемый для сжигания
топлива; 2. Ограничения на типы используемого топлива. Как правило,
природный газ используется в качестве основного топлива, а дизельное топливо используется в качестве резервного топлива. Использование угля в качестве топлива возможно только в установках с газификацией угля в цикле, что значительно увеличивает стоимость строительства этих заводов. Отсюда вытекает необходимость строительства недешевых коммуникаций транспортировки топлива — трубопроводов;
3. Сезонные ограничения мощности. Максимальная производительность зимой [2].
В результате предложенного решения командой «Energy hope» (лига по электроэнергетике) стоимость замены оборудования существующей ГТЭС на ПГУ завода «Ямал СПГ» составила 103,98 млн.долларов. Общая вырабатываемая мощность достигает 355,2 ГВт/год. Парогазовая установка ежегодно будет сжигать 1,47 млрд. газа, что составляет всего лишь 0,2% всего газового ресурса добываемого в год на Ямалском полуострове. Срок окупаемости предложенного проекта составляет 2 года 4 месяца.
Таким образом, одна из задач чемпионата «Case-in» нашла новое решение.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ:
1. Цанев С.В. Буров В.Д., Ремезов А.Н. Газотурбинные и парогазовые
установки тепловых электростанций: Учебное пособие для вузов / Под ред. С.В. Цанева- М.: Издательство МЭИ, 2015.- 584 с.
2. А. Виноградов, А. Григорьев Оценка технико-экономической эффективности модернизации ГТУ-ТЭС с использованием парогазовой технологии.// Газотурбинные технологии. 2004 №1.
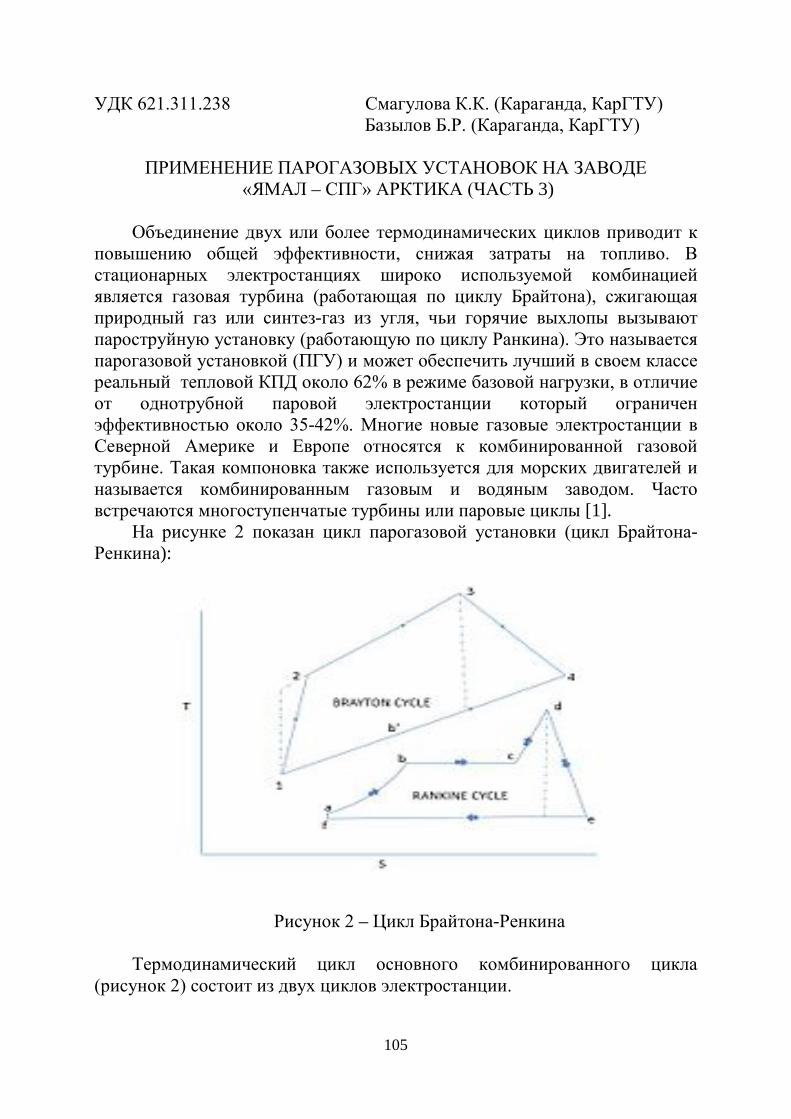
105
УДК 621.311.238 Смагулова К.К. (Караганда, КарГТУ) Базылов Б.Р. (Караганда, КарГТУ) ПРИМЕНЕНИЕ ПАРОГАЗОВЫХ УСТАНОВОК НА ЗАВОДЕ
«ЯМАЛ – СПГ» АРКТИКА (ЧАСТЬ 3)
Объединение двух или более термодинамических циклов приводит к повышению общей эффективности, снижая затраты на топливо. В стационарных электростанциях широко используемой комбинацией является газовая турбина (работающая по циклу Брайтона), сжигающая природный газ или синтез-газ из угля, чьи горячие выхлопы вызывают пароструйную установку (работающую по циклу Ранкина). Это называется парогазовой установкой (ПГУ) и может обеспечить лучший в своем классе реальный тепловой КПД около 62% в режиме базовой нагрузки, в отличие от однотрубной паровой электростанции который ограничен эффективностью около 35-42%. Многие новые газовые электростанции в Северной Америке и Европе относятся к комбинированной газовой турбине. Такая компоновка также используется для морских двигателей и называется комбинированным газовым и водяным заводом. Часто встречаются многоступенчатые турбины или паровые циклы [1].
На рисунке 2 показан цикл парогазовой установки (цикл Брайтона-Ренкина):
Рисунок 2 – Цикл Брайтона-Ренкина
Термодинамический цикл основного комбинированного цикла (рисунок 2) состоит из двух циклов электростанции.
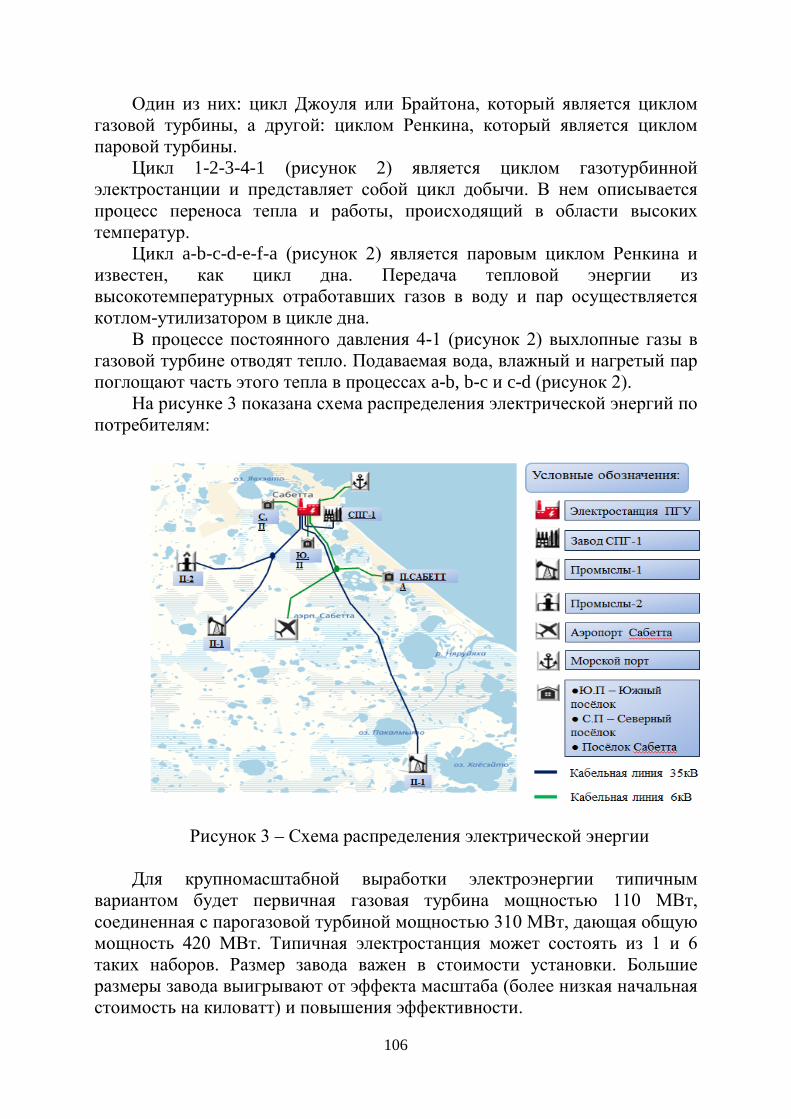
106
Один из них: цикл Джоуля или Брайтона, который является циклом газовой турбины, а другой: циклом Ренкина, который является циклом паровой турбины.
Цикл 1-2-3-4-1 (рисунок 2) является циклом газотурбинной электростанции и представляет собой цикл добычи. В нем описывается процесс переноса тепла и работы, происходящий в области высоких температур.
Цикл a-b-c-d-e-f-a (рисунок 2) является паровым циклом Ренкина и известен, как цикл дна. Передача тепловой энергии из высокотемпературных отработавших газов в воду и пар осуществляется котлом-утилизатором в цикле дна.
В процессе постоянного давления 4-1 (рисунок 2) выхлопные газы в газовой турбине отводят тепло. Подаваемая вода, влажный и нагретый пар поглощают часть этого тепла в процессах a-b, b-c и c-d (рисунок 2).
На рисунке 3 показана схема распределения электрической энергий по потребителям:
Рисунок 3 – Схема распределения электрической энергии
Для крупномасштабной выработки электроэнергии типичным вариантом будет первичная газовая турбина мощностью 110 МВт, соединенная с парогазовой турбиной мощностью 310 МВт, дающая общую мощность 420 МВт. Типичная электростанция может состоять из 1 и 6 таких наборов. Размер завода важен в стоимости установки. Большие размеры завода выигрывают от эффекта масштаба (более низкая начальная стоимость на киловатт) и повышения эффективности.
107
Газовые турбины мощностью около 110 МВт уже эксплуатируются по меньшей мере из четырех отдельных групп - General Electric и ее лицензиатов Alstom, Siemens и Westinghouse/Mitsubishi. Эти группы также разрабатывают, тестируют и продают газовые турбины мощностью около 200 МВт. Единицы комбинированного цикла состоят из одной или нескольких таких газовых турбин, каждая из которых содержит парогенератор для отработанного тепла, предназначенный для подачи пара в одну паровую турбину, образуя, таким образом, блок комбинированного цикла. Мощности блоков комбинированного цикла, предлагаемые тремя крупными производителями (Alstom, General Electric и Siemens), примерно в диапазоне от 50 МВт до 500 МВт [2].
При выработке электроэнергии комбинированный цикл представляет собой сборку тепловых двигателей, которые работают в тандеме от одного и того же источника тепла, превращая его в механическую энергию, которая, в свою очередь, обычно приводит в действие электрические генераторы. Принцип заключается в том, что после завершения цикла температура двигателя рабочей жидкости остается достаточно высокой, чтобы второй последующий тепловой двигатель мог извлекать энергию из отработанного тепла, которое производил первый двигатель. Объединив эти многократные потоки работы с одним механическим валом, поворачивающим электрический генератор, общая чистая эффективность системы может быть увеличена на 50-60%. То есть от общей эффективности, скажем, 34% (за один цикл) до, возможно, общей эффективности 62,22% (в механической комбинации двух циклов) в чистой термодинамической эффективности Карно. Это можно сделать, потому что тепловые двигатели могут использовать только часть энергии, которую генерирует их топливо (обычно менее 50%). В обычном тепловом двигателе остаточное тепло от сгорания обычно теряется.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ:
1. Е. Волкова, Т. Новикова Экономическая целесообразность
форсированного внедрения ПГУ и ГТУ при обновлении тепловых электростанций // Газотурбинные технологии. 2004 №1
2. Паровые и газовые турбины: Уебник для вузов / М.А. Трубилов, Г.В. Арсеньев, В.В., В.В. Фролов и др.; Под ред. А.Г. Костюка, В.В. Фролова – М.: Энергоатомиздат, 2014.- 352 с.

108
УДК 62-522 Смагулова К.К. (Караганда, КарГТУ) Рымбеков А.А. (Караганда, КарГТУ)
УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД «ЭЛЕКТРОПНЕВМОАВТОМАТИКА»
Учебно-лабораторный стенд «Электропневмоавтоматика» собран на
кафедре автоматизации производственных процессов. Для стенда использовалось оборудование промышленной автоматики компании FESTO. С помощью стенда студенты могут ознакомиться с основами пневматических систем управления, изучить их работу, типы, конструкции.Для подготовки сжатого воздуха изучить характеристики оборудования, принципы работы пневматических исполнительных устройств, распределителей, а также способы их взаимодействия.
На рисунке 1 представлен стенд «Электропневмоавтоматика».
Рисунок 1 - стенд «Электропневмоавтоматика»
Стенд «Электропневмоавтоматика» (рисунок 1)состоит из: 1. Масляного компрессораJUN AIR 6-25; 2. Алюминиевой профильной плиты для крепления элементов; 3. Комплекта элементов TP 101; 4. Комплекта элементов TP 201; 5. Програмно-логического комплекса SIEMENSSIMATICS7-300
CPU313C-2DP. Набор учебного оборудования позволяет собирать простые
пневматические системы управления. На данный момент по стенду «Электропневмоавтоматика»
разработано пять лабораторных работ и методические указания к ним: «Введение в электропневмоавтоматику»;«Производство и распределение
109
сжатого воздуха.Масляной компрессор JUN-AIR 6-25»;«Исполнительные устройства и выходные приборы.Управление пневмораспределителями. Ручное и механическое управление»;«Распределители с электромагнитным управлением.Релейные переключатели. Распределители с пневматическим и электропневматическим управлением»;«Проектирование систем управления».
В лабораторной работе №1 на тему «Введение в электропневмоавтоматику» рассмотрены основные параметры сжатого воздуха, такие как, состояние сжатого воздуха, давление, температура и удельный объем (или плотность), иосновные законы пневматики, к которым относятся:
1. Закон Бойля-Мариотта: при постоянной температуре газа PV = const;
2. Закон Гей-Люссака: при постоянном давлении V/T = const; 3. Закон Шарля: при постоянном объеме газа P/T = const. [2] В лабораторной работе №2 на тему «Производство и распределение
сжатого воздуха.Масляный компрессор JUN-AIR 6-25» приводится описание источников энергии пневмоприводов, их основные различия по виду источника и способу доставки пневмоэнергии, таких, как магистральный, компрессорный, аккумуляторный способы. В работе приведены все характеристики и принципы работы масляного компрессора JUN-AIR 6-25. Данный компрессор является основным источником сжатого воздуха для стенда «Электропневмоавтоматика». На рисунке 2 представлен масляный компрессорJUN-AIR 6-25.
Рисунок 2 - Масляный компрессор JUN-AIR 6-25 Лабораторная работа №3 на тему «Исполнительные устройства и
выходные приборы.Управление пневмораспределителями. Ручное и механическое управление»посвещено конструкциям и принципу действия
110
пневматических исполительных устройств. Пневматические исполительные устройства разделяются на два типа:
1. Устройства с поступательным движением выходного звена; 2. Устройства с вращательным движением выходного звена. В практической части работы дано развернутое описание основых
принципов управления пневмотическими системами. Целью лабораторной работы №4 на тему «Распределители с
электромагнитным управлением.Релейные переключатели. Распределители с пневматическим и электропневматическим управлением» является изучение принципов работы соленоида, распределителей с электромагнитным управлением, а также знокомство с конструцией электромагнитных и пилотных (электропневматических) распределителей. Изучение основ релейных переключателей и контакторов в пневмотических системах.
В лабораторной работе №5 на тему «Проектирование систем управления» представлены основные задачи системы управления пневмоприводом. Для проектирования системы управления пневмоприводов необходимо иметь следующие документы:
Эскиз объекта управления; Диаграмма типа «перемещение-шаг»;Диаграмма типа «перемещение-время»; Диаграмм управления пневмоприводом; Диаграмма функционирования пневмопривода; Функциональная схема системы управления пневмоприводом; Принципиальная схема системы управления пневмоприводом.
Для имитационного моделирования системы управления пневмопривода рекомендуется изучение прикладной программы FluidSim. В данной программе студенты научаться составлять схемы пневмопривода с ручным и электрическим управлением. В методических инструкциях приводится краткое описание по работе с программой.
Лабораторно-практический стенд «Электропневмоавтоматика» фирмы FESTO предоставляет возможность для получения практических навыков по работе с пневмоприводом. Студенты закрепляют знания по системам управления пневмопривода с ручным и электрическим управлением; получают знания о физических основах пневматики, а также знакомятся с областью применения электропневматических систем. [1]
На данном стенде можно проводить курсы по повышению квалификации работников в области автоматизации и энергетики.
Список использованной литературы:
1. Г. Преде, Д.Шольц, учебник «Электропневмоавтоматика. Основной курс». Германия, Festo, 1998г.
2. Пашков Е.В.Осинский Ю.А., Четверкин А.А.учебник «Электропневмоавтоматика в производственных процессах». 2003г.
111
УДК 621.311.24 Смагулова К.К. (Караганда, КарГТУ) Рымбеков А.А. (Караганда, КарГТУ)
СТРОИТЕЛЬСТВО ВЕТРЯНОЙ ЭЛЕКТРОСТАНЦИИ
НА ЗАВОДЕ«ЯМАЛ – СПГ» АРКТИКА
Международный инженерный чемпионат «Сase-in» – это практическая задача, основанная на реальной производственной ситуации.
В 2018 году международный инженерный кейс, посвященный развитию Арктики проходил под названием «Энергия на краю земли».
Чемпионат состоит из пяти направлений (лиг): электроэнергетика, горное дело, геологоразведка, металлургия, нефтегазовое дело.
Лиге по электроэнергетике были поставлены следующие задачи: 1. Сформировать перспективное целевое состояние системы
внешнего электроснабжения завода «Ямал - СПГ », сформировать к ней требования;
2. Разработать единый комплекс мероприятий строительства, ввода в работу и функционирования генерирующих мощностей и электросетевого комплекса для электроснабжения завода «Ямал - СПГ», в соответствии со сроками ввода в работу очередейзавода;
3. Составить план - график строительства генерирующих и электросетевых объектов на территории завода « Ямал - СПГ ».
4. Составить план - график строительства генерирующих и электросетевых объектов на территории завода « Ямал - СПГ»;
5. Предложить организационные и технические мероприятия по снижению потерь электроэнергии;
6. Рассмотреть вариант присоединения системы электроснабжения завода « Ямал - СПГ» на параллельную работу с ЕЭС России.
Ямал – полуостров на севере Ямало-Ненецкого автономного округа России. Полуостров слабо освоен человеком. Факторы, мешающие освоению острова – это суровый климат, холодная длинная зима, короткое лето, сильные ветра, сильная заболоченность, высокая влажность, слабо развита транспортная инфраструктура.
В данный момент на заводе «Ямал СПГ» ведется строительство газотурбинной электростанции (ГТУ) с общей мощностью 376 МВт и 138 Гкал. В декабре 2017 года введены в работу газотурбинная электростанцияSiemens 4х47МВт с суммарной мощностью 188МВт.
На рисунке 1 показана диаграмма электрической нагрузки завода «Ямал – СПГ» в 2017 году.
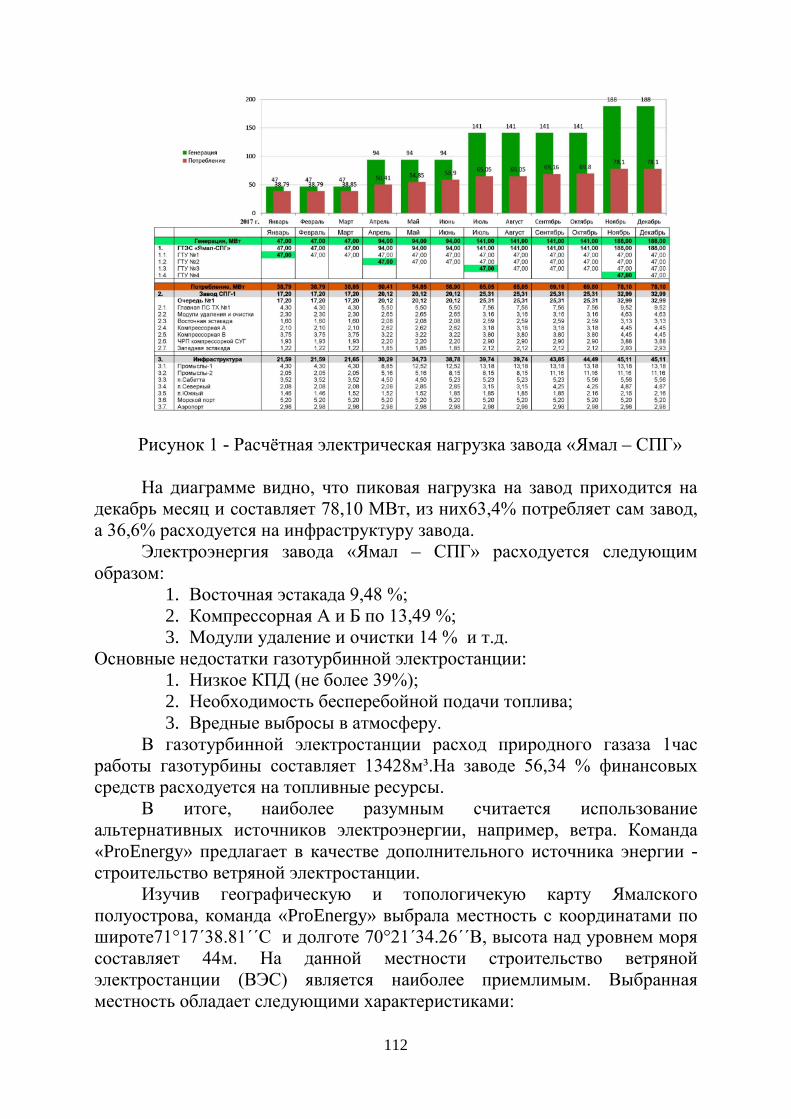
112
Рисунок 1 - Расчётная электрическая нагрузка завода «Ямал – СПГ»
На диаграмме видно, что пиковая нагрузка на завод приходится на декабрь месяц и составляет 78,10 МВт, из них63,4% потребляет сам завод, а 36,6% расходуется на инфраструктуру завода.
Электроэнергия завода «Ямал – СПГ» расходуется следующим образом:
1. Восточная эстакада 9,48 %; 2. Компрессорная А и Б по 13,49 %; 3. Модули удаление и очистки 14 % и т.д.
Основные недостатки газотурбинной электростанции: 1. Низкое КПД (не более 39%); 2. Необходимость бесперебойной подачи топлива; 3. Вредные выбросы в атмосферу.
В газотурбинной электростанции расход природного газаза 1час работы газотурбины составляет 13428м³.На заводе 56,34 % финансовых средств расходуется на топливные ресурсы.
В итоге, наиболее разумным считается использование альтернативных источников электроэнергии, например, ветра. Команда «ProEnergy» предлагает в качестве дополнительного источника энергии - строительство ветряной электростанции.
Изучив географическую и топологичекую карту Ямалского полуострова, команда «ProEnergy» выбрала местность с координатами по широте71°17´38.81´´С и долготе 70°21´34.26´´В, высота над уровнем моря составляет 44м. На данной местности строительство ветряной электростанции (ВЭС) является наиболее приемлимым. Выбранная местность обладает следующими характеристиками:
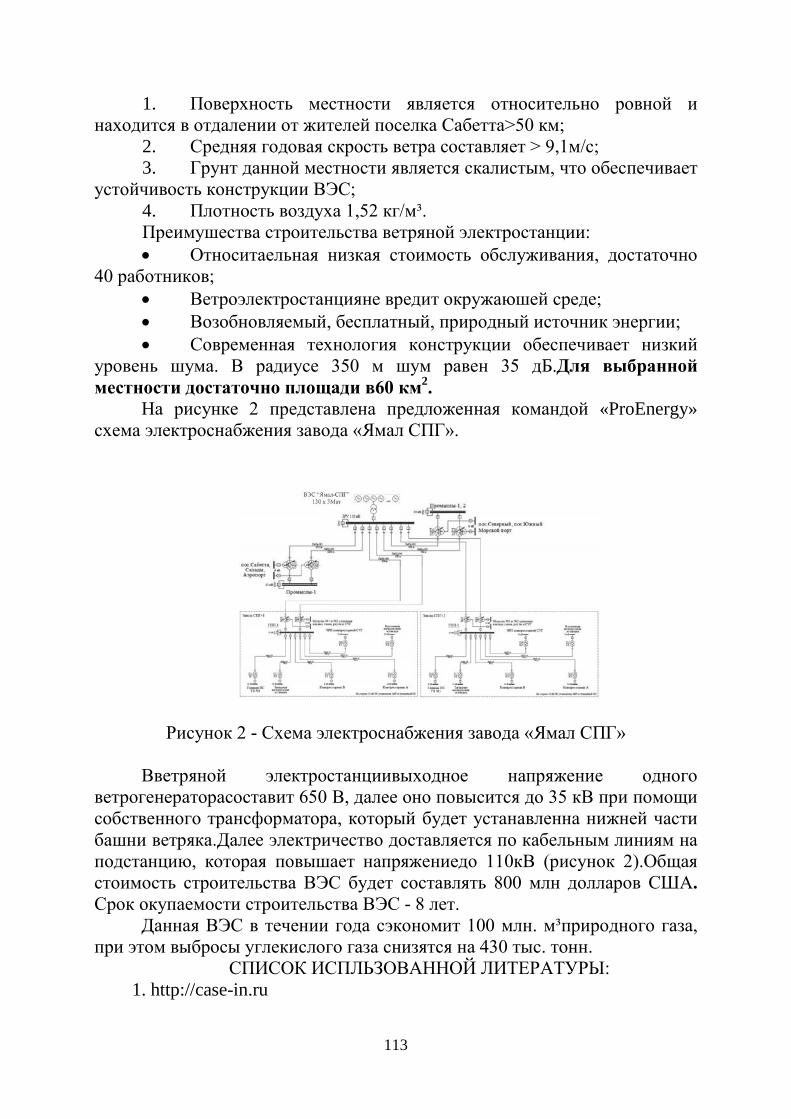
113
1. Поверхность местности является относительно ровной и находится в отдалении от жителей поселка Сабетта>50 км;
2. Средняя годовая скрость ветра составляет > 9,1м/с; 3. Грунт данной местности является скалистым, что обеспечивает
устойчивость конструкции ВЭС; 4. Плотность воздуха 1,52 кг/м³. Преимушества строительства ветряной электростанции: • Относитаельная низкая стоимость обслуживания, достаточно
40 работников; • Ветроэлектростанцияне вредит окружаюшей среде; • Возобновляемый, бесплатный, природный источник энергии; • Современная технология конструкции обеспечивает низкий
уровень шума. В радиусе 350 м шум равен 35 дБ.Для выбранной местности достаточно площади в60 км2.
На рисунке 2 представлена предложенная командой «ProEnergy» схема электроснабжения завода «Ямал СПГ».
Рисунок 2 - Схема электроснабжения завода «Ямал СПГ»
Вветряной электростанциивыходное напряжение одного ветрогенераторасоставит 650 В, далее оно повысится до 35 кВ при помощи собственного трансформатора, который будет устанавленна нижней части башни ветряка.Далее электричество доставляется по кабельным линиям на подстанцию, которая повышает напряжениедо 110кВ (рисунок 2).Общая стоимость строительства ВЭС будет составлять 800 млн долларов США. Срок окупаемости строительства ВЭС - 8 лет.
Данная ВЭС в течении года сэкономит 100 млн. м³природного газа, при этом выбросы углекислого газа снизятся на 430 тыс. тонн.
СПИСОК ИСПЛЬЗОВАННОЙ ЛИТЕРАТУРЫ: 1. http://case-in.ru
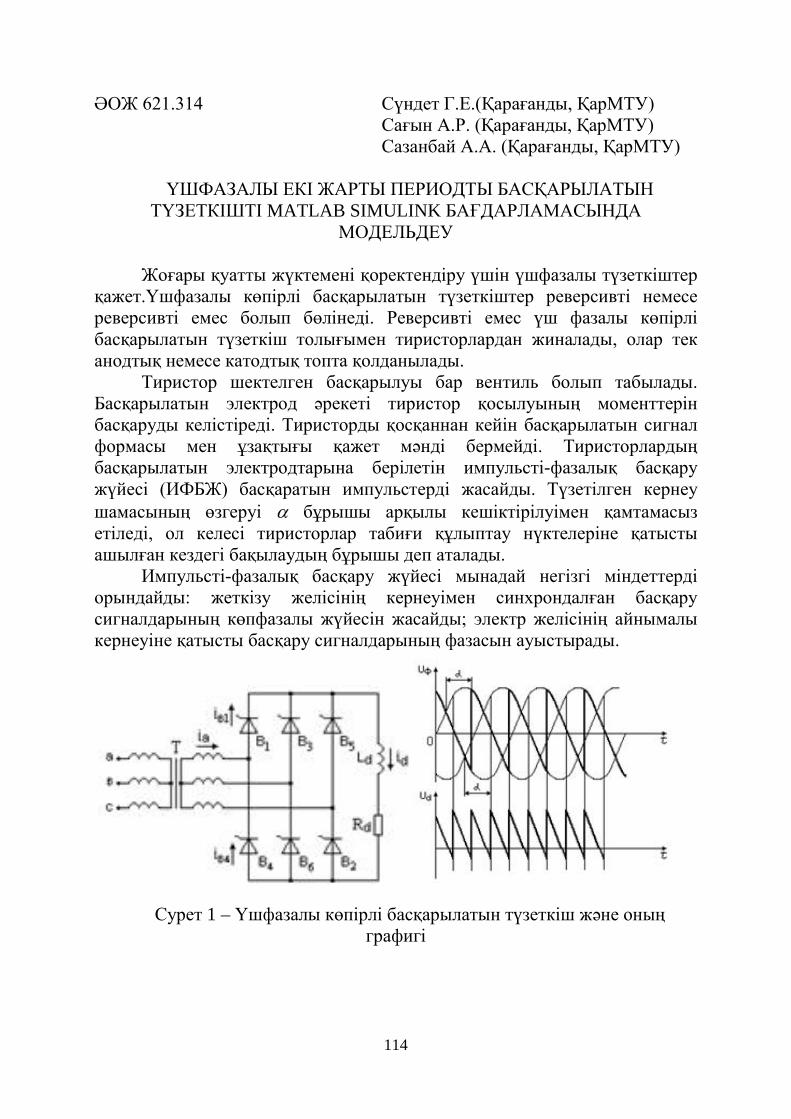
114
ӘОЖ 621.314 Сүндет Г.Е.(Қарағанды, ҚарМТУ) Сағын А.Р. (Қарағанды, ҚарМТУ) Сазанбай А.А. (Қарағанды, ҚарМТУ)
ҮШФАЗАЛЫ ЕКІ ЖАРТЫ ПЕРИОДТЫ БАСҚАРЫЛАТЫН
ТҮЗЕТКІШТІ MATLAB SIMULINK БАҒДАРЛАМАСЫНДА МОДЕЛЬДЕУ
Жоғары қуатты жүктемені қоректендіру үшін үшфазалы түзеткіштер
қажет.Үшфазалы көпірлі басқарылатын түзеткіштер реверсивті немесе реверсивті емес болып бөлінеді. Реверсивті емес үш фазалы көпірлі басқарылатын түзеткіш толығымен тиристорлардан жиналады, олар тек анодтық немесе катодтық топта қолданылады.
Тиристор шектелген басқарылуы бар вентиль болып табылады. Басқарылатын электрод әрекеті тиристор қосылуының моменттерін басқаруды келістіреді. Тиристорды қосқаннан кейін басқарылатын сигнал формасы мен ұзақтығы қажет мәнді бермейді. Тиристорлардың басқарылатын электродтарына берілетін импульсті-фазалық басқару жүйесі (ИФБЖ) басқаратын импульстерді жасайды. Түзетілген кернеу шамасының өзгеруі α бұрышы арқылы кешіктірілуімен қамтамасыз етіледі, ол келесі тиристорлар табиғи құлыптау нүктелеріне қатысты ашылған кездегі бақылаудың бұрышы деп аталады.
Импульсті-фазалық басқару жүйесі мынадай негізгі міндеттерді орындайды: жеткізу желісінің кернеуімен синхрондалған басқару сигналдарының көпфазалы жүйесін жасайды; электр желісінің айнымалы кернеуіне қатысты басқару сигналдарының фазасын ауыстырады.
Сурет 1 – Үшфазалы көпірлі басқарылатын түзеткіш және оның
графигі
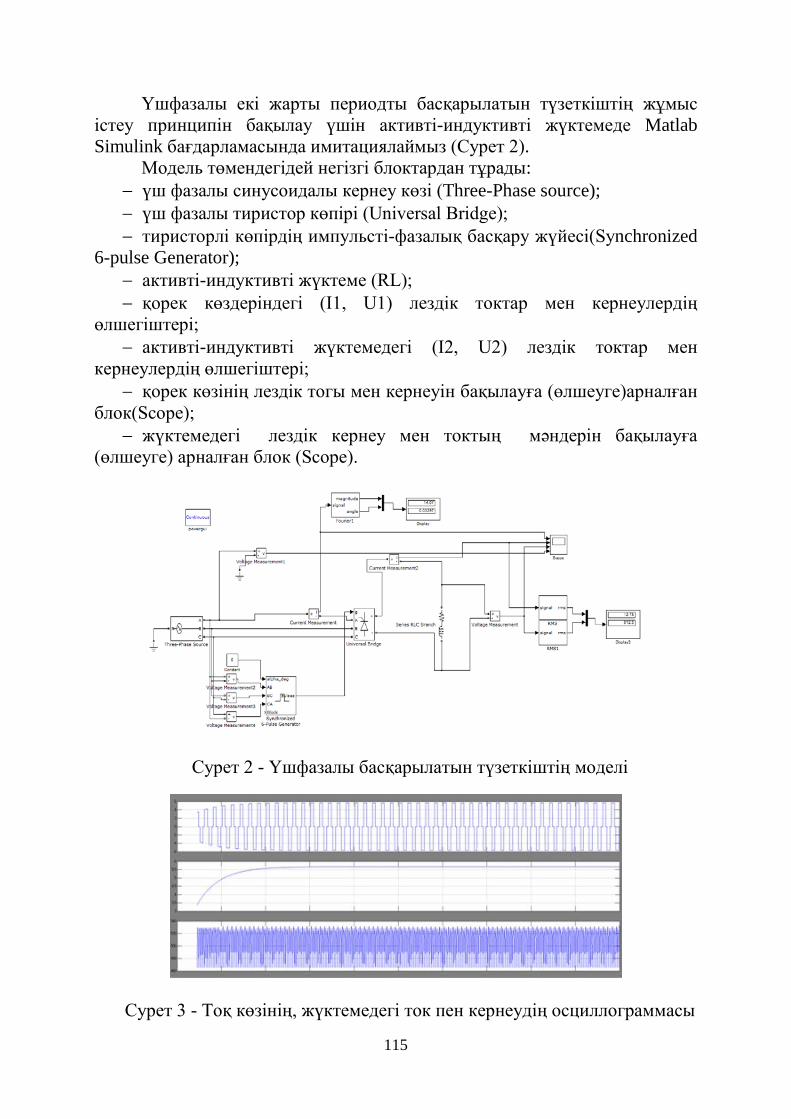
115
Үшфазалы екі жарты периодты басқарылатын түзеткіштің жұмыс істеу принципін бақылау үшін активті-индуктивті жүктемеде Matlab Simulink бағдарламасында имитациялаймыз (Сурет 2).
Модель төмендегідей негізгі блоктардан тұрады: − үш фазалы синусоидалы кернеу көзі (Three-Phase source); − үш фазалы тиристор көпірі (Universal Bridge); − тиристорлі көпірдің импульсті-фазалық басқару жүйесі(Synchronized
6-pulse Generator); − активті-индуктивті жүктеме (RL); − қорек көздеріндегі (I1, U1) лездік токтар мен кернеулердің
өлшегіштері; − активті-индуктивті жүктемедегі (I2, U2) лездік токтар мен
кернеулердің өлшегіштері; − қорек көзінің лездік тогы мен кернеуін бақылауға (өлшеуге)арналған
блок(Scope); − жүктемедегі лездік кернеу мен токтың мәндерін бақылауға
(өлшеуге) арналған блок (Scope).
Сурет 2 - Үшфазалы басқарылатын түзеткіштің моделі
Сурет 3 - Тоқ көзінің, жүктемедегі ток пен кернеудің осциллограммасы
116
Түзеткіш активті-индуктивті жүктемеде (қозғалтқыш) жұмыс істеген кезде, тиристорлардың басқарылатын электродтарына ені 60° артық басқарылатын импульстер немесе біріккен импульстарды беру керек. Ұзақтығы 60° аз дара импульсті қолданған кезде, қозғалтқыш қосылуы қамтамасыз етілмейді, өйткені вентиль анод пен катод топтарында бір уақытта ашылуы мүмкін емес. Түзетілген кернеу мен ток қисығы реттеу бұрышын өзгерту диапазонында 0° ден 60° дейін үздіксіз. Реттеу бұрышы а>60° болғанда түзетілген ток үзікті болады. Түзеткіштің түзетілген токпен жұмыс жасау кезінде жүктемедегі индуктивтілік айтарлықтай үлкен, жүктемедегі ток тұрақтандыратын бұрыштың барлық диапазонында үздіксіз болады.Бұл кезде тұрақтандыратын шекті бұрыш 90°.
Реттеудің шектік бұрышы жүктеменің кез келген түрі үшін 180 ° құрайды. Активті-индуктивті жүктемедегі үшфазалы көпірлі басқарылатын түзеткіш бұл кезде басқарылмайтын жұмыс режиміне ауысады. 3-сурет осы режимнің пайда болуын түсіндіретін кернеу мен ток диаграммаларын көрсетеді. Егер бірінші тиристор келесі үшінші резисторға басқару импульсін жібермесе, бірінші t1 уақытына дейін ашық қалады. Электр тізбегіндегі ток желілік кернеумен қамтамасыз етіледі.
Қорытындылай келе, тиристорлі түрлендіргіш тұрақты тоқ қозғалтқышыныңтөмендегідей басқару мүмкіндіктерін қамтамасыз етеді:
− біркелкі іске қосу және шектеулі тоқтату арқылы якорь тізбегін іске қосу;
− айналу бағытын өзгерту; − қозғалтқыш білігінің айналу жиілігін якорь орамындағы қорек көзі
арқылы реттеу. Пайдаланған әдебиеттер тізімі 1. Черных И.В. Моделирование электротехнических устройств в MatLab,
SimPowerSystems и Simulink. М.: ДМК Пресс, СПб: Питер, 2008. 288 с. 2. Оқулық /Жаңартылған энергия көздерінің жүйелері: Ф. Куашнинг; неміс
тілінен аударма. -Астана: Фолиант, 2015.-432 3. Герман-Галкин С.Г. Силовая электроника. Лабораторные работы на ПК.
СПб.: Учитель и ученик, КОРОНА принт, 2002. — 304 с. 4. В.Ф. Худяков, В.А. Хабузов. Моделирование источников вторичного
электропитания в среде MATLAB 7.x: учебное пособие. СПб. ГУАП, 2008, 332 с. 5. И.Х. Евзеров, А.С. Горобец, Б.И. Мошкович и др. под ред. канд. техн. наук
В.М. Перельмутера Комплектные тиристорные электроприводы: Справочник М.: Энергоиздат, 1988. – 319 с.: ил.
6. Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А. Силовая электроника Учебник для вузов. М.: Издательский дом МЭИ, 2007. - 632 с.
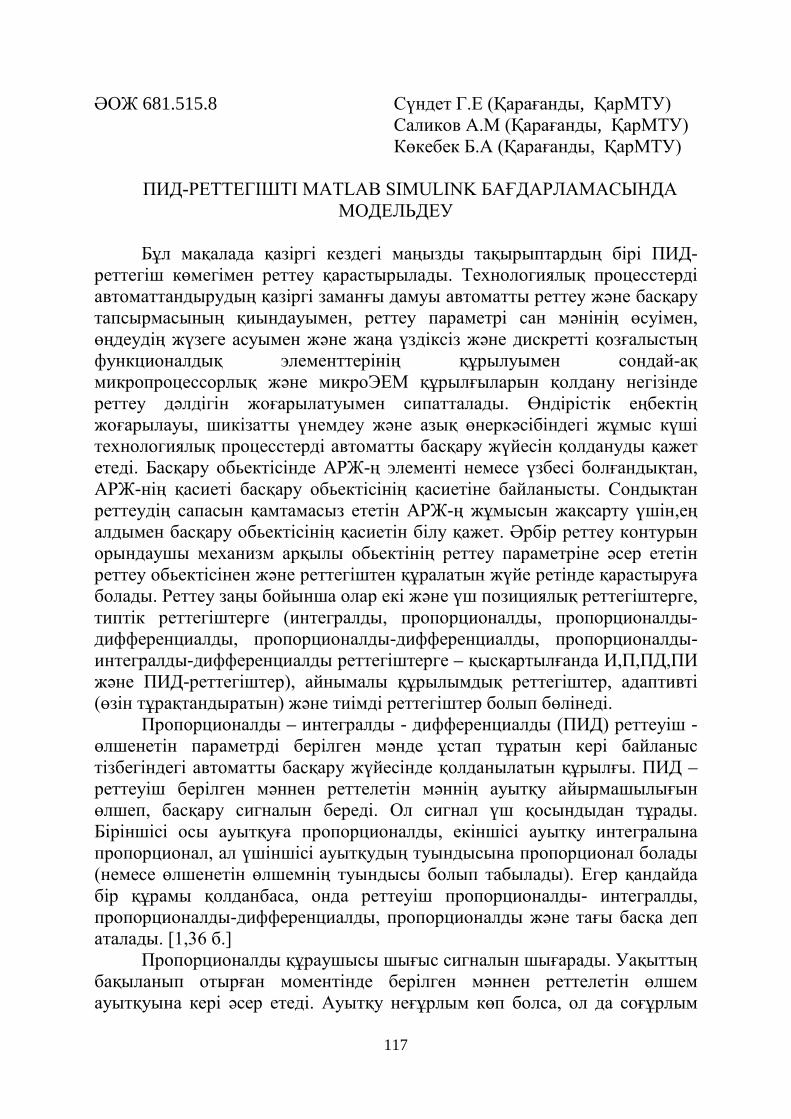
117
ӘОЖ 681.515.8 Сүндет Г.Е (Қарағанды, ҚарМТУ) Саликов А.М (Қарағанды, ҚарМТУ) Көкебек Б.А (Қарағанды, ҚарМТУ)
ПИД-РЕТТЕГІШТІ MATLAB SIMULINK БАҒДАРЛАМАСЫНДА
МОДЕЛЬДЕУ
Бұл мақалада қазіргі кездегі маңызды тақырыптардың бірі ПИД-реттегіш көмегімен реттеу қарастырылады. Технологиялық процесстерді автоматтандырудың қазіргі заманғы дамуы автоматты реттеу және басқару тапсырмасының қиындауымен, реттеу параметрі сан мәнінің өсуімен, өңдеудің жүзеге асуымен және жаңа үздіксіз және дискретті қозғалыстың функционалдық элементтерінің құрылуымен сондай-ақ микропроцессорлық және микроЭЕМ құрылғыларын қолдану негізінде реттеу дәлдігін жоғарылатуымен сипатталады. Өндірістік еңбектің жоғарылауы, шикізатты үнемдеу және азық өнеркәсібіндегі жұмыс күші технологиялық процесстерді автоматты басқару жүйесін қолдануды қажет етеді. Басқару обьектісінде АРЖ-ң элементі немесе үзбесі болғандықтан, АРЖ-нің қасиеті басқару обьектісінің қасиетіне байланысты. Сондықтан реттеудің сапасын қамтамасыз ететін АРЖ-ң жұмысын жақсарту үшін,ең алдымен басқару обьектісінің қасиетін білу қажет. Әрбір реттеу контурын орындаушы механизм арқылы обьектінің реттеу параметріне әсер ететін реттеу обьектісінен және реттегіштен құралатын жүйе ретінде қарастыруға болады. Реттеу заңы бойынша олар екі және үш позициялық реттегіштерге, типтік реттегіштерге (интегралды, пропорционалды, пропорционалды- дифференциалды, пропорционалды-дифференциалды, пропорционалды- интегралды-дифференциалды реттегіштерге – қысқартылғанда И,П,ПД,ПИ және ПИД-реттегіштер), айнымалы құрылымдық реттегіштер, адаптивті (өзін тұрақтандыратын) және тиімді реттегіштер болып бөлінеді.
Пропорционалды – интегралды - дифференциалды (ПИД) реттеуіш - өлшенетін параметрді берілген мәнде ұстап тұратын кері байланыс тізбегіндегі автоматты басқару жүйесінде қолданылатын құрылғы. ПИД – реттеуіш берілген мәннен реттелетін мәннің ауытқу айырмашылығын өлшеп, басқару сигналын береді. Ол сигнал үш қосындыдан тұрады. Біріншісі осы ауытқуға пропорционалды, екіншісі ауытқу интегралына пропорционал, ал үшіншісі ауытқудың туындысына пропорционал болады (немесе өлшенетін өлшемнің туындысы болып табылады). Егер қандайда бір құрамы қолданбаса, онда реттеуіш пропорционалды- интегралды, пропорционалды-дифференциалды, пропорционалды және тағы басқа деп аталады. [1,36 б.]
Пропорционалды құраушысы шығыс сигналын шығарады. Уақыттың бақыланып отырған моментінде берілген мәннен реттелетін өлшем ауытқуына кері әсер етеді. Ауытқу неғұрлым көп болса, ол да соғұрлым
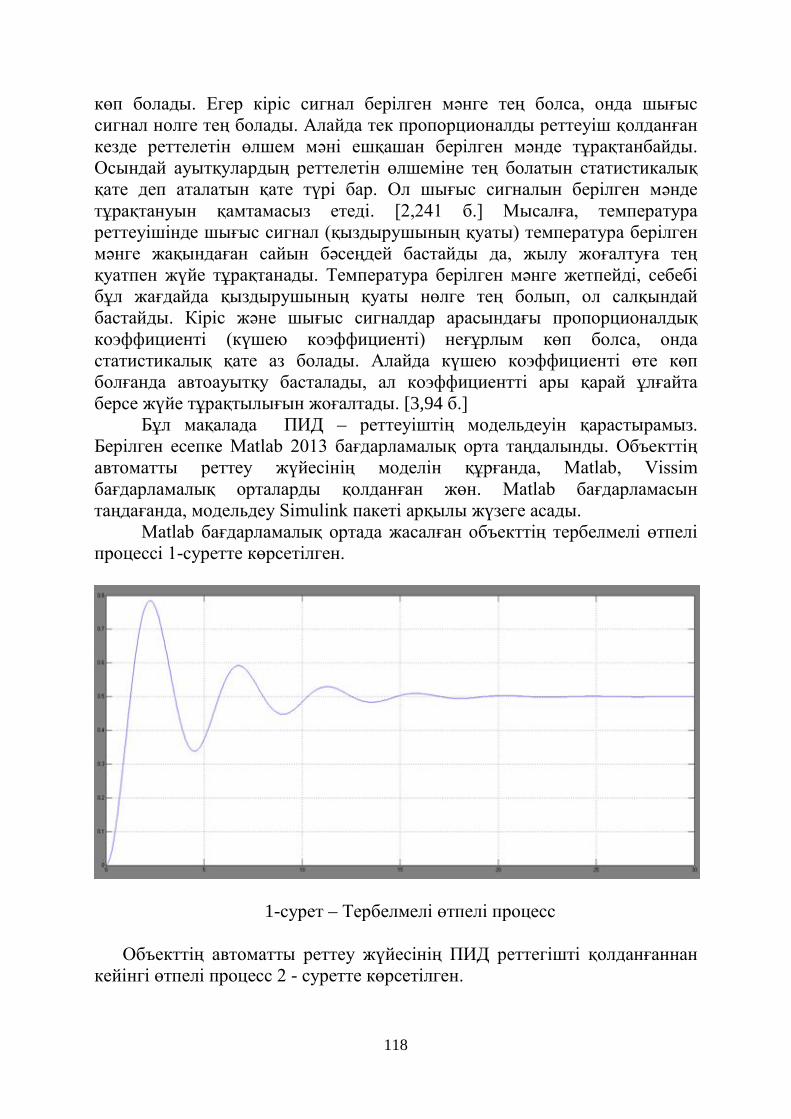
118
көп болады. Егер кіріс сигнал берілген мәнге тең болса, онда шығыс сигнал нолге тең болады. Алайда тек пропорционалды реттеуіш қолданған кезде реттелетін өлшем мәні ешқашан берілген мәнде тұрақтанбайды. Осындай ауытқулардың реттелетін өлшеміне тең болатын статистикалық қате деп аталатын қате түрі бар. Ол шығыс сигналын берілген мәнде тұрақтануын қамтамасыз етеді. [2,241 б.] Мысалға, температура реттеуішінде шығыс сигнал (қыздырушының қуаты) температура берілген мәнге жақындаған сайын бәсеңдей бастайды да, жылу жоғалтуға тең қуатпен жүйе тұрақтанады. Температура берілген мәнге жетпейді, себебі бұл жағдайда қыздырушының қуаты нөлге тең болып, ол салқындай бастайды. Кіріс және шығыс сигналдар арасындағы пропорционалдық коэффициенті (күшею коэффициенті) неғұрлым көп болса, онда статистикалық қате аз болады. Алайда күшею коэффициенті өте көп болғанда автоауытқу басталады, ал коэффициентті ары қарай ұлғайта берсе жүйе тұрақтылығын жоғалтады. [3,94 б.]
Бұл мақалада ПИД – реттеуіштің модельдеуін қарастырамыз. Берілген есепке Matlab 2013 бағдарламалық орта таңдалынды. Объекттің автоматты реттеу жүйесінің моделін құрғанда, Matlab, Vissim бағдарламалық орталарды қолданған жөн. Matlab бағдарламасын таңдағанда, модельдеу Simulink пакеті арқылы жүзеге асады.
Matlab бағдарламалық ортада жасалған объекттің тербелмелі өтпелі процессі 1-суретте көрсетілген.
1-сурет – Тербелмелі өтпелі процесс Объекттің автоматты реттеу жүйесінің ПИД реттегішті қолданғаннан
кейінгі өтпелі процесс 2 - суретте көрсетілген.
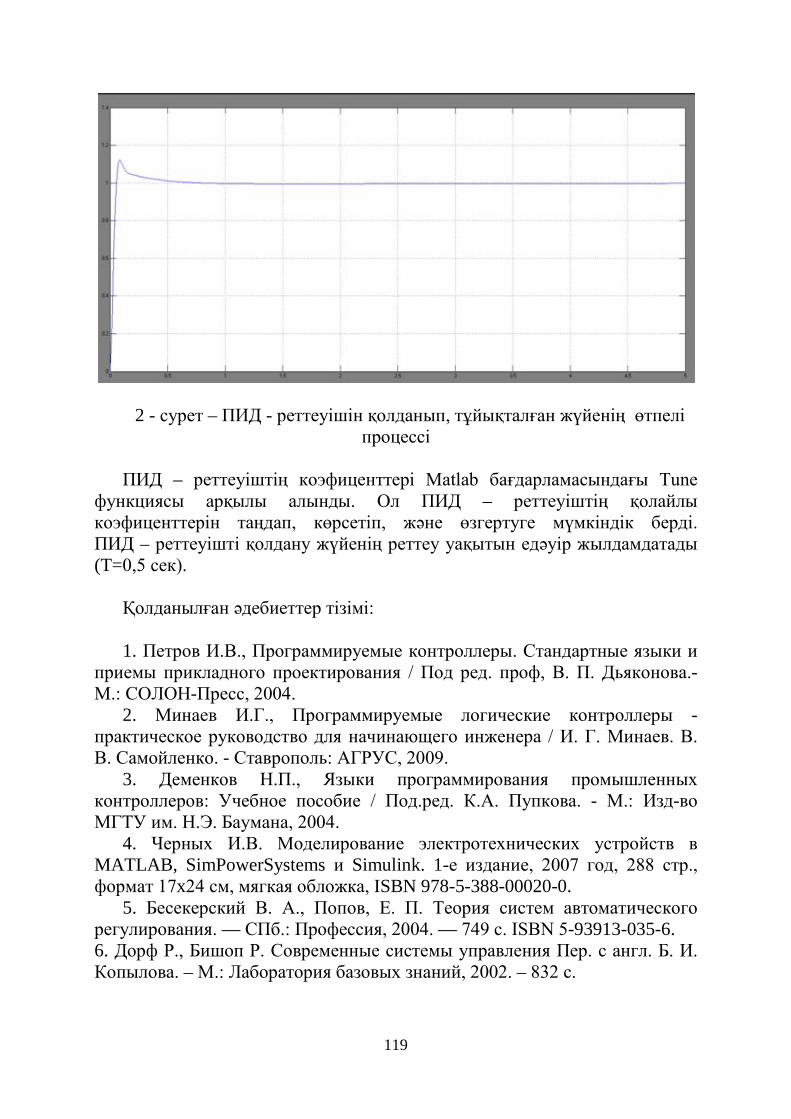
119
2 - сурет – ПИД - реттеуішін қолданып, тұйықталған жүйенің өтпелі процессі
ПИД – реттеуіштің коэфиценттері Matlab бағдарламасындағы Tune
функциясы арқылы алынды. Ол ПИД – реттеуіштің қолайлы коэфиценттерін таңдап, көрсетіп, және өзгертуге мүмкіндік берді. ПИД – реттеуішті қолдану жүйенің реттеу уақытын едәуір жылдамдатады (T=0,5 сек).
Қолданылған әдебиеттер тізімі: 1. Петров И.В., Программируемые контроллеры. Стандартные языки и
приемы прикладного проектирования / Под ред. проф, В. П. Дьяконова.- М.: СОЛОН-Пресс, 2004.
2. Минаев И.Г., Программируемые логические контроллеры - практическое руководство для начинающего инженера / И. Г. Минаев. В. В. Самойленко. - Ставрополь: АГРУС, 2009.
3. Деменков Н.П., Языки программирования промышленных контроллеров: Учебное пособие / Под.ред. К.А. Пупкова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2004.
4. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. 1-е издание, 2007 год, 288 стр., формат 17x24 см, мягкая обложка, ISBN 978-5-388-00020-0.
5. Бесекерский В. А., Попов, Е. П. Теория систем автоматического регулирования. — СПб.: Профессия, 2004. — 749 с. ISBN 5-93913-035-6. 6. Дорф Р., Бишоп Р. Современные системы управления Пер. с англ. Б. И. Копылова. – М.: Лаборатория базовых знаний, 2002. – 832 с.
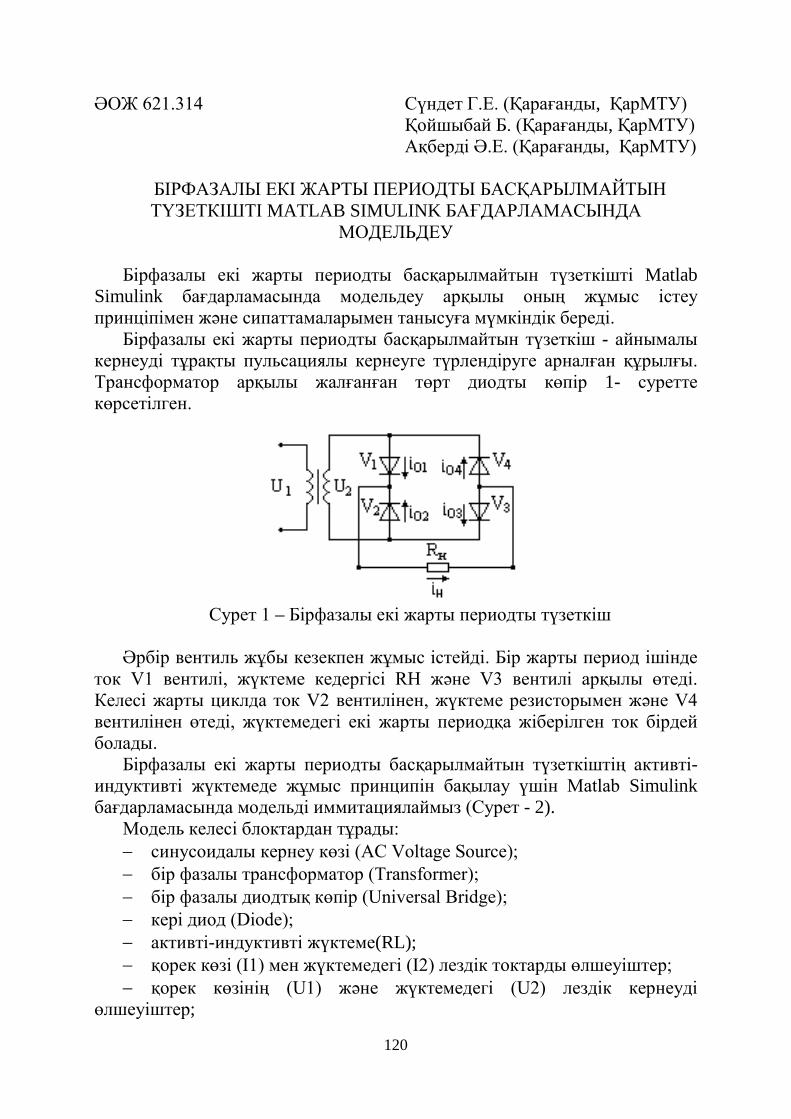
120
ӘОЖ 621.314 Сүндет Г.Е. (Қарағанды, ҚарМТУ) Қойшыбай Б. (Қарағанды, ҚарМТУ) Ақберді Ә.Е. (Қарағанды, ҚарМТУ)
БІРФАЗАЛЫ ЕКІ ЖАРТЫ ПЕРИОДТЫ БАСҚАРЫЛМАЙТЫН ТҮЗЕТКІШТІ MATLAB SIMULINK БАҒДАРЛАМАСЫНДА
МОДЕЛЬДЕУ
Бірфазалы екі жарты периодты басқарылмайтын түзеткішті Matlab Simulink бағдарламасында модельдеу арқылы оның жұмыс істеу принціпімен және сипаттамаларымен танысуға мүмкіндік береді.
Бірфазалы екі жарты периодты басқарылмайтын түзеткіш - айнымалы кернеуді тұрақты пульсациялы кернеуге түрлендіруге арналған құрылғы. Трансформатор арқылы жалғанған төрт диодты көпір 1- суретте көрсетілген.
Сурет 1 – Бірфазалы екі жарты периодты түзеткіш
Әрбір вентиль жұбы кезекпен жұмыс істейді. Бір жарты период ішінде
ток V1 вентилі, жүктеме кедергісі RH және V3 вентилі арқылы өтеді. Келесі жарты циклда ток V2 вентилінен, жүктеме резисторымен және V4 вентилінен өтеді, жүктемедегі екі жарты периодқа жіберілген ток бірдей болады.
Бірфазалы екі жарты периодты басқарылмайтын түзеткіштің активті-индуктивті жүктемеде жұмыc принципін бақылау үшін Matlab Simulink бағдарламасында модельді иммитациялаймыз (Сурет - 2).
Модель келесі блоктардан тұрады: − синусоидалы кернеу көзі (AC Voltage Source); − бір фазалы трансформатор (Transformer); − бір фазалы диодтық көпір (Universal Bridge); − кері диод (Diode); − активті-индуктивті жүктеме(RL); − қорек көзі (I1) мен жүктемедегі (I2) лездік токтарды өлшеуіштер; − қорек көзінің (U1) және жүктемедегі (U2) лездік кернеуді
өлшеуіштер;
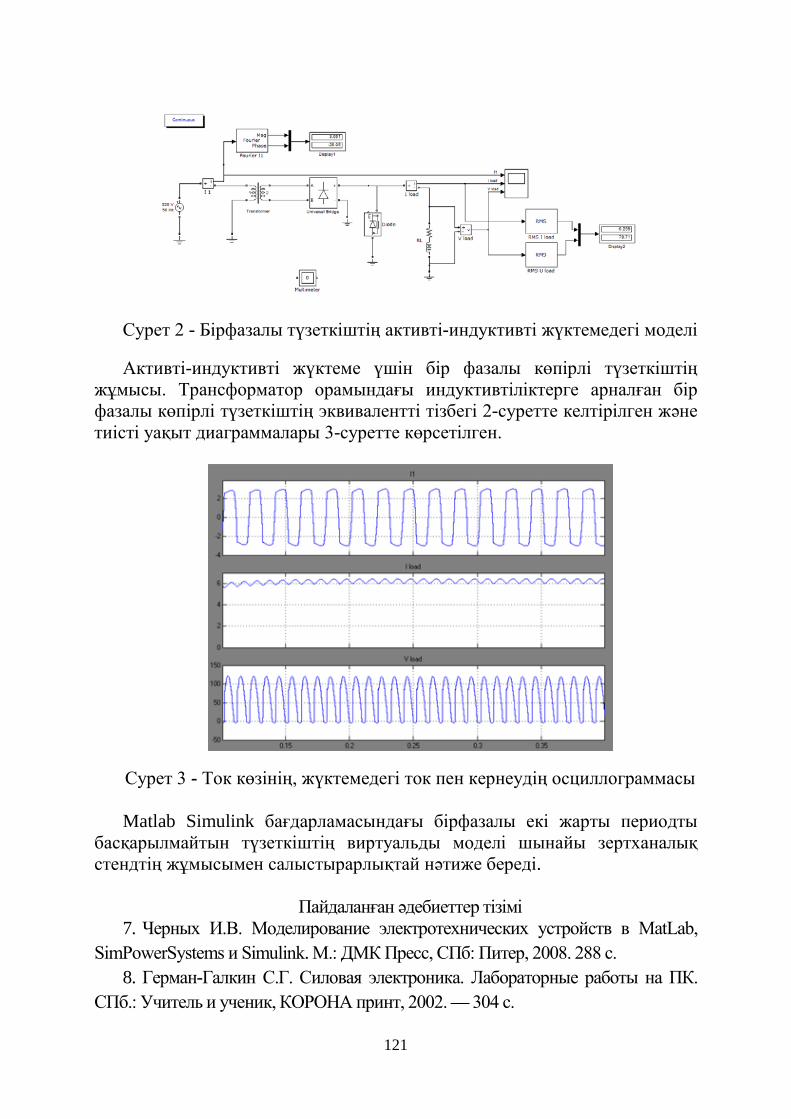
121
Сурет 2 - Бірфазалы түзеткіштің активті-индуктивті жүктемедегі моделі
Активті-индуктивті жүктеме үшін бір фазалы көпірлі түзеткіштің жұмысы. Трансформатор орамындағы индуктивтіліктерге арналған бір фазалы көпірлі түзеткіштің эквивалентті тізбегі 2-суретте келтірілген және тиісті уақыт диаграммалары 3-суретте көрсетілген.
Сурет 3 - Ток көзінің, жүктемедегі ток пен кернеудің осциллограммасы Matlab Simulink бағдарламасындағы бірфазалы екі жарты периодты
басқарылмайтын түзеткіштің виртуальды моделі шынайы зертханалық стендтің жұмысымен салыстырарлықтай нәтиже береді.
Пайдаланған әдебиеттер тізімі
7. Черных И.В. Моделирование электротехнических устройств в MatLab, SimPowerSystems и Simulink. М.: ДМК Пресс, СПб: Питер, 2008. 288 с.
8. Герман-Галкин С.Г. Силовая электроника. Лабораторные работы на ПК. СПб.: Учитель и ученик, КОРОНА принт, 2002. — 304 с.

122
УДК 669.162.244-83
Сүндет Г.Е. (Караганда, КарГТУ) Рымбеков А. А.(Караганда, КарГТУ)
МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА В
SIMULINK
Цель работы состоит в использовании разработанной в программной среде Matlab Simulink модели электропривода постоянного тока для облегчения процесса изучения, проектирования и исследования элементов автоматизированного электропривода.
Электропривод постоянного тока представляет электромеханический комплекс, состоящий из двигателя постоянного тока независимого возбуждения (ДПТ НВ), силового преобразователя (СП), системы импульсно-фазового управления (СИФУ) и источника электрической энергии (ИЭЭ).
Схема модели для исследования электропривода постоянного тока представлена на рисунке 1.
Она включает источник трехфазного синусоидального напряжения (380 V, 50 Hz), выпрямление и регулирование напряжения якоря осуществляется трёхфазным тиристорным мостом Universal Bridge 1, а напряжения возбуждения выпрямляется с помощью диодного моста Universal Bridge с емкостным фильтром. Управление тиристорным мостом фазоимпульсное и производится блоком Sinchronized 6-Pulse Generator (СИФУ).
Рисунок 1 - Модель исследование ДПТ с независимым возбуждением
Для исследования используется ДПТ НВ 151-AB компании АВВ, на
основе каталожных данных (табл. 1) которого определены параметры схемы замещения по следующим выражениям:
− E = Uя - (Iя*Rя) = 287 В, ЭДС в обмотке якоря;
123
− Iв = 1.61 A, ток в обмотке возбуждения;
− Rв = = 192,5 Oм , автивное сопротивление обмотки возбуждения;
− = = 81,64 рад/c, номинальная скорость вращения якоря;
− Laf = = 2,2 Гн, взаимная индуктивность обмоток возбуждения и обмотки якоря;
− Мн = = 45,32 Н*м, момент на вале ДПТ;
− J = = 0,22 кг*м2, суммарный момент инерции ДПТ и нагрузки.
Таблица 1
Параметры двигателя постоянного тока с независимым возбуждением
Тип ДПТ
Uя (В)
nн (об/мин)
P (кВт)
Iя (A)
Ŋ %
nmax (об/мин)
Rя (115°C)
Ом
Lя (мГн)
Pв Вт
Uв (В)
151-AB 420 780 3,7 13,5 60,2 1280 9,85 141 500 110-
440
Введённые параметры двигателя показаны на рисунке 2.
Рисунок 2 - Окно настройки параметров двигателя постоянного тока Результаты исследования отражаются на экране осциллографа Scope 1
в виде четырёх диаграмм: угловая скорость (рад/с), ток якоря в (А), ток
124
возбуждения (А), электромагнитный момент (Нм) и в XY Plot механическая характеристика ДПТ НВ (рис.3 и 4).
Рисунок 3 - Результаты моделирования ДПТ НВ
Рисунок 4 - Механическая характеристика ДПТ НВ При увеличении угла открытия тиристора на обмотку якоря ДПТ НВ
подаются неполные полуволны синусоиды, в результате снижается действующее напряжение, что приводит к снижению скорости вращения. Модель тиристорного регулятора скорости обеспечивает плавный пуск с ограничением пускового тока якоря и регулирование частоты вращения вала двигателя путем регулирования напряжения питания обмотки якоря.
Таким образом, предложенная модель позволяет на основе параметров элементов СП и ДПТ НВ оперативно строить механические характеристики и исследовать свойства автоматизированных электропиводов постоянного тока.
Список литературы 1. Терехин В.Б. Моделирование систем электропривода в Simulink
учебное пособие. - Томск: Изд-во ТПУ, 2008. - 320 с.
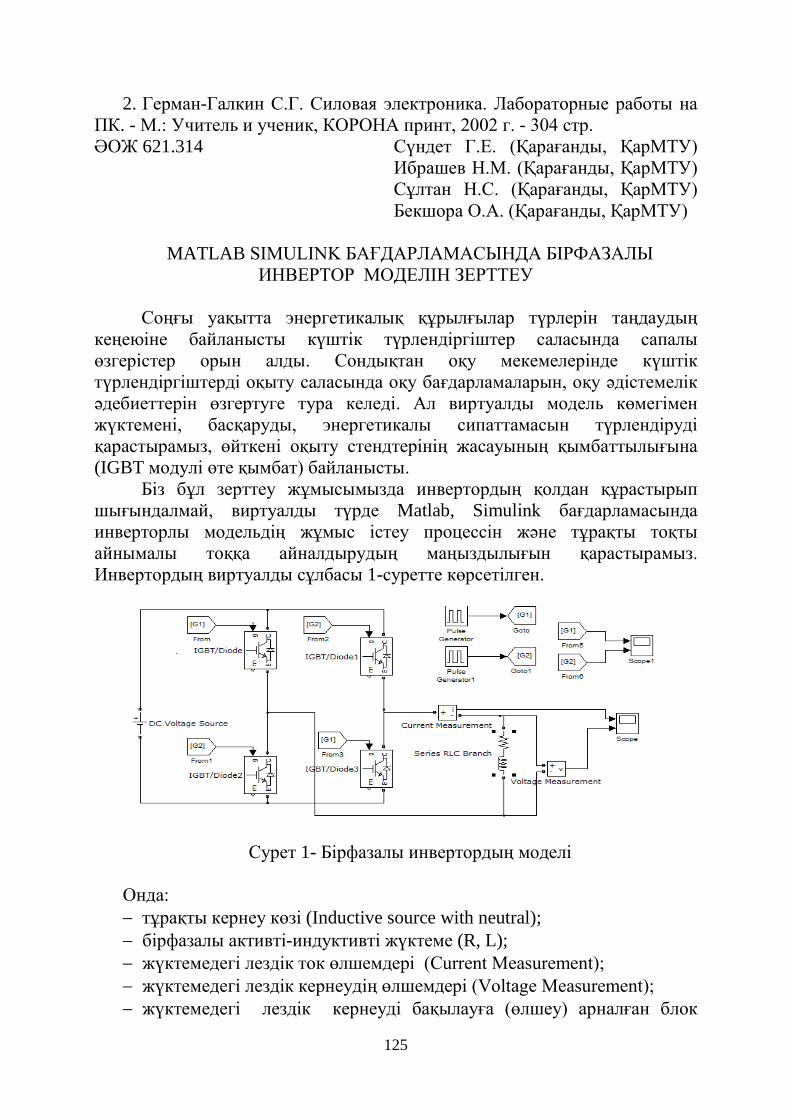
125
2. Герман-Галкин С.Г. Силовая электроника. Лабораторные работы на ПК. - М.: Учитель и ученик, КОРОНА принт, 2002 г. - 304 стр. ӘОЖ 621.314 Сүндет Г.Е. (Қарағанды, ҚарМТУ)
Ибрашев Н.М. (Қарағанды, ҚарМТУ) Сұлтан Н.С. (Қарағанды, ҚарМТУ) Бекшора О.А. (Қарағанды, ҚарМТУ)
MATLAB SIMULINK БАҒДАРЛАМАСЫНДА БІРФАЗАЛЫ
ИНВЕРТОР МОДЕЛІН ЗЕРТТЕУ
Соңғы уақытта энергетикалық құрылғылар түрлерін таңдаудың кеңеюіне байланысты күштік түрлендіргіштер саласында сапалы өзгерістер орын алды. Сондықтан оқу мекемелерінде күштік түрлендіргіштерді оқыту саласында оқу бағдарламаларын, оқу әдістемелік әдебиеттерін өзгертуге тура келеді. Ал виртуалды модель көмегімен жүктемені, басқаруды, энергетикалы сипаттамасын түрлендіруді қарастырамыз, өйткені оқыту стендтерінің жасауының қымбаттылығына (IGBT модулі өте қымбат) байланысты.
Біз бұл зерттеу жұмысымызда инвертордың қолдан құрастырып шығындалмай, виртуалды түрде Matlab, Simulink бағдарламасында инверторлы модельдің жұмыс істеу процессін және тұрақты тоқты айнымалы тоққа айналдырудың маңыздылығын қарастырамыз. Инвертордың виртуалды сұлбасы 1-суретте көрсетілген.
Сурет 1- Бірфазалы инвертордың моделі Онда: − тұрақты кернеу көзі (Inductive source with neutral); − бірфазалы активті-индуктивті жүктеме (R, L); − жүктемедегі лездік ток өлшемдері (Current Measurement); − жүктемедегі лездік кернеудің өлшемдері (Voltage Measurement); − жүктемедегі лездік кернеуді бақылауға (өлшеу) арналған блок
126
(Scope); − бірфазалы көпірлік транзисторлы инвертор (4 IGBT/ Diode); − басқару блогы (Pulse generator).
Егер моделімізде тұрақты уақыт аралықтары сайын IGBT/Diode және IGBT/Diode3 немесе IGBT/Diode1 және IGBT/Diode2 транзисторлары қосылса, онда біз қолданған активті және индуктивті жүктемелерде шамамен тікбұрышты формалы синусоидаға шамалас айнымалы тоқ туындайды. Транзистордың жұмысын жеңілдету үшін басқарылмайтын диод қосылған. Біздің бұл сұлбада алынатын сипаттаманың бұндай формасы сигналдың қажетті синусоидалы формасынан анағұрлым ерекшеленеді. Тоқтың және кернеудің өту процессі 2-суретте көрсетілген.
Сурет 2 – Инвертордың осциллограммадағы синусоидалы сұлбасы
Автономды түрлендіргіштің жұмыс моделін күштік электроникада және микросхематехникада тәжірибе жүзінде қолдануға мүмкіндік береді. Инвертордың Matlab бағдарламасында модельдеудің артықшылығы модель арқылы зерттеу мен түзету енгізуге болатындығы және виртуалды модельді құру күштік түрлендіргіш құрылғыларын пайдалануды және прототипті құруды қажет етпейді.
Пайдаланған әдебиеттер тізімі 1. Черных И.В. Моделирование электротехнических устройств в MatLab,
SimPowerSystems и Simulink. М.: ДМК Пресс, СПб: Питер, 2008. 288 с. 2. Оқулық /Жаңартылған энергия көздерінің жүйелері: Ф. Куашнинг; неміс
тілінен аударма. -Астана: Фолиант, 2015.-432 3. Герман-Галкин С.Г. Силовая электроника. Лабораторные работы на ПК.
СПб.: Учитель и ученик, КОРОНА принт, 2002. — 304 с.
127
УДК 621.316.9:621.315 Телбаева А.З. (Караганда, КарГТУ) Телбаева Ш.З. (Караганда, КарГТУ) Смагулова К.К. (Караганда, КарГТУ)
ОБЗОР СОВРЕМЕННЫХ МЕТОДОВ ДИАГНОСТИКИ
КОРРОЗИОННОГО СОСТОЯНИЯ УЗЛОВ КРЕПЛЕНИЯ АНКЕРНЫХ БОЛТОВ ВЛЭП
В настоящее время применяются некоторые способы косвенной
оценки состояния узла крепления оттяжек опор. Визуальная проверка натяжения тросов крепления и различные способы исследования поверхности грунта вокруг опоры не затрагивают глубинных слоев, где находится обследуемый анкерный узел. При проектировании линий производятся вертикальные зондирования с определением удельного сопротивления грунта на различной глубине. Однако прямой зависимости между коррозией металла и свойствами грунтовой среды пока не установлено [1].
Коррозия стали в грунте определяется: удельным сопротивлением грунта, концентрацией ионов С1- и SO4
-2 в грунтовой влаге, влажностью грунта, плотностью поляризующего тока [2, 3].
Группа косвенных методов нацелена на определение наиболее опасных в коррозионном отношении участков трассы ВЛ по проектным данным или по результатам натурного обследования.
Для этого необходимо проанализировать коррозионные параметры продольного профиля трассы, полученные при предпроектных изысканиях, на всей протяженности ВЛ. По данным геологических изысканий можно составить таблицы опор ВЛ с повышенной опасностью коррозии анкерных креплений оттяжек. По сумме опасных характеристик грунта и расположению опор на местности можно выделить опоры с наиболее вероятными коррозионными повреждениями (группа опор "повышенного коррозионного риска").
В целом, косвенная оценка опасности коррозии позволяет выделять участки повышенного коррозионного риска, однако влияние неучтенных факторов коррозии на точность косвенных оценок велико. При попытке производить оценку коррозионной опасности по физико-химическим параметрам грунта дает погрешность до 50%, что делает невозможным использование косвенных оценок для определения коррозионного состояния отдельно взятой опоры [1].
Вихретоковый метод предполагает, что в процессе коррозии образуются продукты коррозии, которые имеют отличные от металла свойства. В первом приближении коррозионный слой с продуктами коррозии – диэлектрик с потерями.
128
Процесс измерения состоит в следующем: анкерная петля с генераторным и индикаторным элементами связи представляет собой высокочастотную линию передачи. Когда по длине петли укладывается целое число полуволн, наступает резонанс. Изменение частоты может производиться от 400 до 5000 МГц. Влиянием грунта на таких частотах можно пренебречь.
Направление распространения прямой и обратной волны – параллельно поверхности петли. Электрическая и магнитная компоненты поля – перпендикулярны направлению прямой и обратной волн. Такой характер возбуждения и приема сигнала обусловлен расположением генераторного и индикаторного элементов связи. Если напряжение на генераторном элементе связи поддерживается одинаковым, что принципиально необходимо, то напряжение на индикаторном узле является уменьшенным в зависимости от поглощения энергии в коррозионном слое [3].
Электромагнитный метод оценки коррозионного состояния U-образных болтов предлагается проводить, измеряя их электрическое сопротивление на частоте 2 – 5 МГц. Использование таких частот позволяет отстроиться от помех линии и воспользоваться скин-эффектом, измеряя, по сути, сопротивление лишь поверхностного слоя болта, наиболее подверженного коррозии.
При использовании этого метода при измерениях электрического сопротивления на частотах выше нескольких килогерц предлагается использовать Т-образную мостовую схему [3]. В этих устройствах источник сигнала на входе и индикатор напряжения на выходе имеют общую точку, к которой может быть присоединён один из полюсов измеряемого объекта. Одновременно вся измерительная цепь помещается в металлический экран, который заземляется вместе с общей точкой генератора, приёмника и объекта измерения.
Особенностью Т-образных мостов является высокая чувствительность в узких пределах параметров схемы и рабочих частот вблизи равновесия моста (отсутствия напряжения на выходе). Это исключает возможность плавной настройки по частоте и создаёт необходимость применения фиксированной частоты измерения. С учётом глубины проникновения измерительного тока в исследуемый объект (5…10 мм) при аппаратной реализации метода для диагностики 35-мм U-образных болтов была выбрана частота 1,6 МГц [3].
Для интерпретации измерений электрического сопротивления U-образных анкерных болтов применён статистический подход.
Для диагностики анкерной петли предлагается метод поверхностных волн, основная идея которого заключается в следующем: в анкерной петле производится возбуждение от СВЧ генератора поверхностной стоячей волны, фиксируемой в момент резонанса, когда по длине анкерной петли
129
укладывается целое число полуволн. Величина затухания такой волны определяется степенью коррозии поверхностного слоя анкерной петли [1].
Поверхностная волна возникает и распространяется вдоль границ раздела разных сред: диэлектрик — проводник, или сред с разной оптической плотностью. Кроме того, чем больше затухание поверхностной волны в слое диэлектрика, тем меньше радиус распространения ее в почву. Поверхностная волна как бы «прилипает» к диэлектрику, что практически устраняет влияние грунта на результаты измерений затухания в коррозионном слое и позволяет измерить величины затухания поверхностных волн в анкерных петлях и болтах в реальных условиях.
Возбуждение и детектирование волны в петле осуществляется через U-образные болты, выходящие на поверхность земли, что резко упрощает применение метода [1].
В ходе обзора современных методов диагностики коррозионного состояния узлов крепления были рассмотрены несколько методов. При использовании косвенного и вихретокового метода были выявлены их недостатки, а именно: методы работают только в случае проектного взаиморасположения анкерной петли, U-образных болтов и искусственных заземлителей, что на практике, зачастую, не выполняется.
Электромагнитный метод и статистический подход для диагностики коррозионного состояния анкерного узла, не требуют отключения линии, вскрытия грунта и, в тоже время, недостатком этого метода является большое количество измеряемых параметров [2].
Протекающие в контурах опор наведенные токи могут приводить к усилению естественных коррозионных процессов в надземных и подземных контактных системах опоры. Протекающие в контурах опор наведенные токи могут быть использованы как диагностический параметр коррозионной системы опоры [3].
При проектировании опор воздушных ЛЭП и выборе защит от коррозии, помимо требований СНиП необходимо учитывать влияние электрической сети, в которой они предназначены работать [1].
Рассмотрев все достоинство и недостатки методов диагностики, целью работы является установление датчика коррозии непосредственно на анкерной петле с выводом информации на поверхность с последующей передачи ее по телеметрическому радиоканалу на диспетчерский пункт.
Литература 1. Тарасов А.Г. диссертация на соискание ученой степени кандидата
технических наук – Новосибирск, 2005. 2. Корогод А.А., Микитинский М.С., Морозов С.И. Оценка коррозии анкерных
креплений оттяжек опор ВЛ 330 кВ. - Энергетик, Москва, 1999, 11, с.с. 6-17. 3. Мозилов А.И. Диссертация на соискание ученой степени кандидата
технических наук – Новосибирск, 2002.
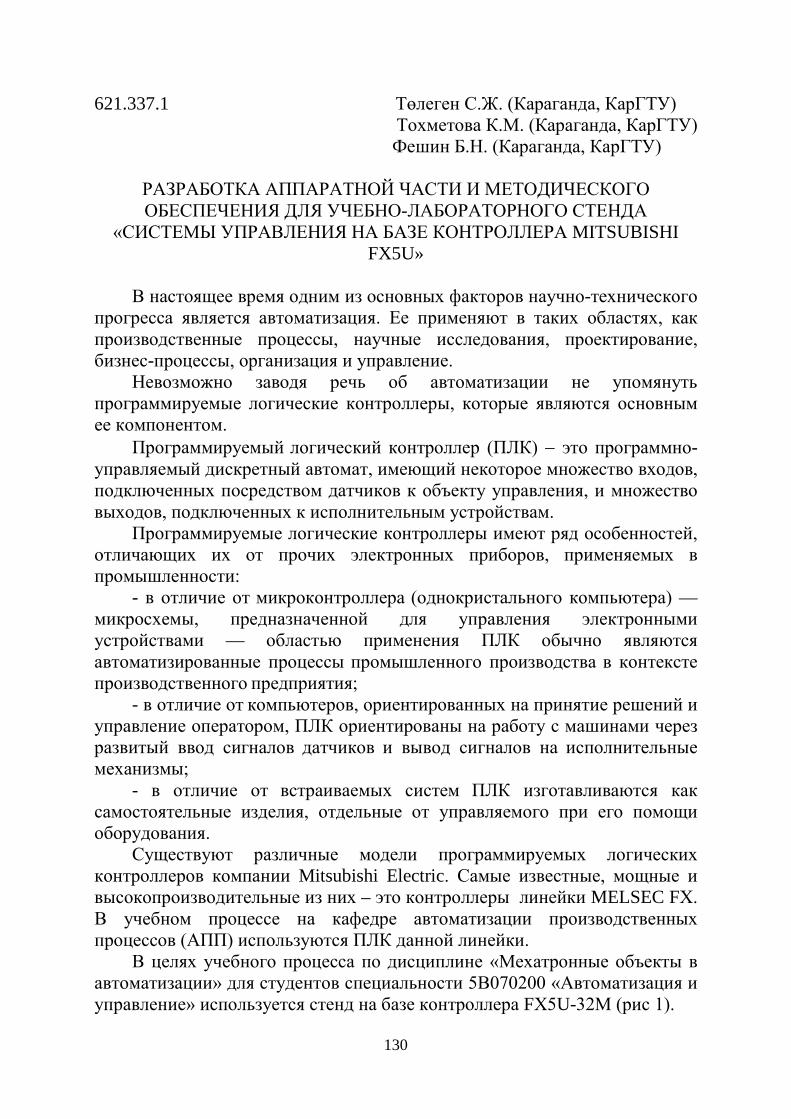
130
621.337.1 Төлеген С.Ж. (Караганда, КарГТУ) Тохметова К.М. (Караганда, КарГТУ)
Фешин Б.Н. (Караганда, КарГТУ)
РАЗРАБОТКА АППАРАТНОЙ ЧАСТИ И МЕТОДИЧЕСКОГО ОБЕСПЕЧЕНИЯ ДЛЯ УЧЕБНО-ЛАБОРАТОРНОГО СТЕНДА
«СИСТЕМЫ УПРАВЛЕНИЯ НА БАЗЕ КОНТРОЛЛЕРА MITSUBISHI FX5U»
В настоящее время одним из основных факторов научно-технического
прогресса является автоматизация. Ее применяют в таких областях, как производственные процессы, научные исследования, проектирование, бизнес-процессы, организация и управление.
Невозможно заводя речь об автоматизации не упомянуть программируемые логические контроллеры, которые являются основным ее компонентом.
Программируемый логический контроллер (ПЛК) − это программно-управляемый дискретный автомат, имеющий некоторое множество входов, подключенных посредством датчиков к объекту управления, и множество выходов, подключенных к исполнительным устройствам.
Программируемые логические контроллеры имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
- в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — областью применения ПЛК обычно являются автоматизированные процессы промышленного производства в контексте производственного предприятия;
- в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
- в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
Существуют различные модели программируемых логических контроллеров компании Mitsubishi Electric. Самые известные, мощные и высокопроизводительные из них – это контроллеры линейки MELSEC FХ. В учебном процессе на кафедре автоматизации производственных процессов (АПП) используются ПЛК данной линейки.
В целях учебного процесса по дисциплине «Мехатронные объекты в автоматизации» для студентов специальности 5В070200 «Автоматизация и управление» используется стенд на базе контроллера FХ5U-32М (рис 1).
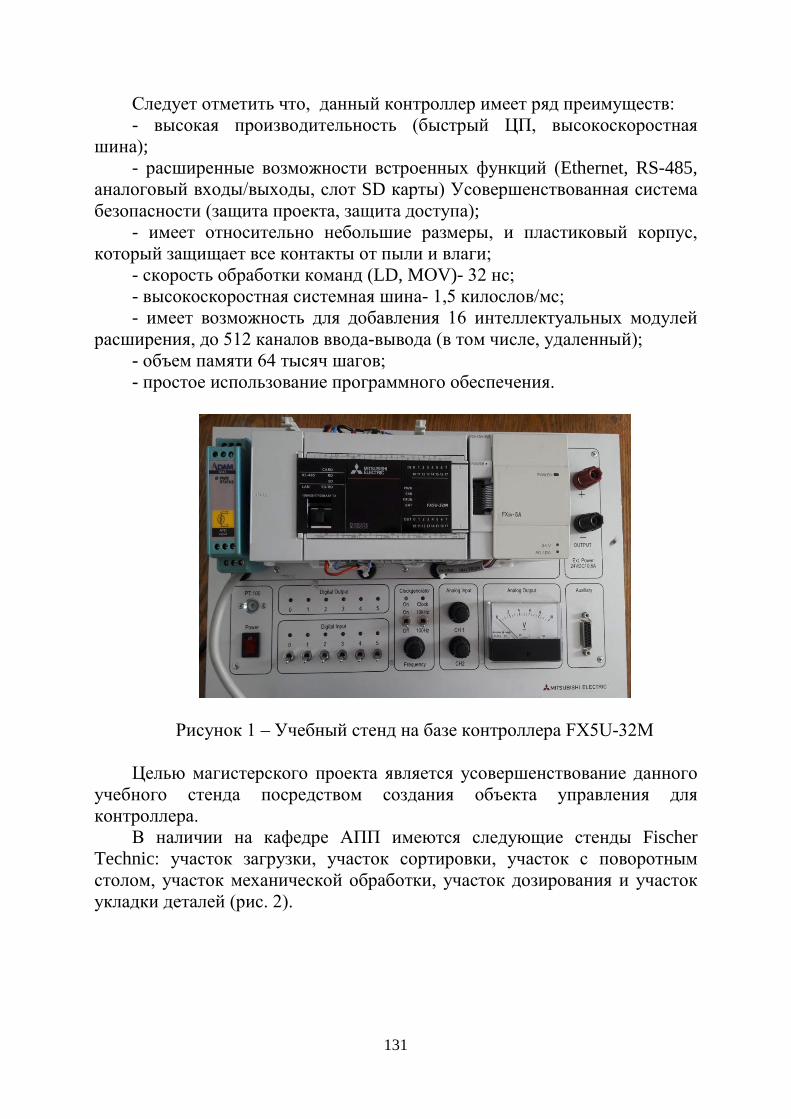
131
Следует отметить что, данный контроллер имеет ряд преимуществ: - высокая производительность (быстрый ЦП, высокоскоростная
шина); - расширенные возможности встроенных функций (Ethernet, RS-485,
аналоговый входы/выходы, слот SD карты) Усовершенствованная система безопасности (защита проекта, защита доступа);
- имеет относительно небольшие размеры, и пластиковый корпус, который защищает все контакты от пыли и влаги;
- скорость обработки команд (LD, MОV)- 32 нс; - высокоскоростная системная шина- 1,5 килослов/мс; - имеет возможность для добавления 16 интеллектуальных модулей
расширения, до 512 каналов ввода-вывода (в том числе, удаленный); - объем памяти 64 тысяч шагов; - простое использование программного обеспечения.
Рисунок 1 – Учебный стенд на базе контроллера FХ5U-32М Целью магистерского проекта является усовершенствование данного
учебного стенда посредством создания объекта управления для контроллера.
В наличии на кафедре АПП имеются следующие стенды Fischer Technic: участок загрузки, участок сортировки, участок с поворотным столом, участок механической обработки, участок дозирования и участок укладки деталей (рис. 2).

132
Рисунок 2 – Внешний вид стендов Fischer Technic: а) участок загрузки; б) участок сортировки; в) участок с поворотным столом; г) участок механической обработки; д) участок дозирования; е) участок
укладки деталей
Объектом управления для учебного стенда на базе контроллера FХ5U-32М был выбран участок механической обработки Fischer Technic (рис. 3). Задачей является объединение двух учебных стендов и создание нового учебно-лабораторного стенда «Системы управления на базе контроллера Mitsubishi FX5U», а также разработка лабораторно-методического комплекса для использования в обучении студентов современным способам управления АСУ ТП.
Рисунок 3 – Внешний вид лабораторного стенда «Участок механической обработки»
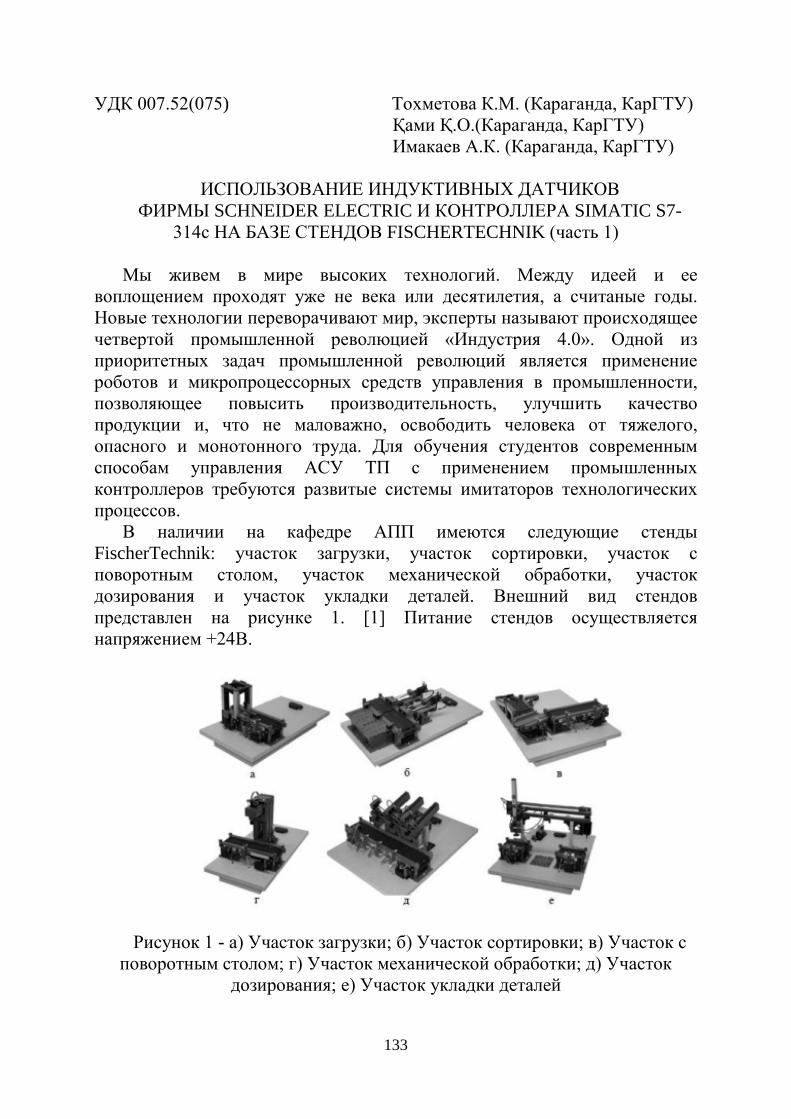
133
УДК 007.52(075) Тохметова К.М. (Караганда, КарГТУ) Қами Қ.О.(Караганда, КарГТУ) Имакаев А.К. (Караганда, КарГТУ)
ИСПОЛЬЗОВАНИЕ ИНДУКТИВНЫХ ДАТЧИКОВ ФИРМЫ SCHNEIDER ELECTRIC И КОНТРОЛЛЕРА SIMATIC S7-
314с НА БАЗЕ СТЕНДОВ FISCHERTECHNIK (часть 1) Мы живем в мире высоких технологий. Между идеей и ее
воплощением проходят уже не века или десятилетия, а считаные годы. Новые технологии переворачивают мир, эксперты называют происходящее четвертой промышленной революцией «Индустрия 4.0». Одной из приоритетных задач промышленной революций является применение роботов и микропроцессорных средств управления в промышленности, позволяющее повысить производительность, улучшить качество продукции и, что не маловажно, освободить человека от тяжелого, опасного и монотонного труда. Для обучения студентов современным способам управления АСУ ТП с применением промышленных контроллеров требуются развитые системы имитаторов технологических процессов.
В наличии на кафедре АПП имеются следующие стенды FischerTechnik: участок загрузки, участок сортировки, участок с поворотным столом, участок механической обработки, участок дозирования и участок укладки деталей. Внешний вид стендов представлен на рисунке 1. [1] Питание стендов осуществляется напряжением +24В.
Рисунок 1 - а) Участок загрузки; б) Участок сортировки; в) Участок с поворотным столом; г) Участок механической обработки; д) Участок
дозирования; е) Участок укладки деталей

134
Наличие индуктивных датчиков наличия деталей Schneider Electric и контроллера SIMATIC S7-314с позволило создать АСУ ТП, которое обеспечивает управление над стендами FischerTechnik.
В ходе работы была поставлена задача установить датчик наличия детали к стенду FischerTechnik, а именно в участок механической обработки, в которой каждая деталь подвергается обработке на стенде. Участок состоит из ленточного транспортера и станка механической обработки.
Рисунок 2 – Внешний вид лабораторного стенда «Участок механической обработки»
Таблица 1.1 - Условные обозначения на схеме лабораторного стенда
Наименование входа/выхода Наименование сигнала Х1 Датчик положения детали Х2 Конечное положение установки Х3 Датчик начального положения
установки Х4 Датчик верхнего положения Х5 Датчик нижнего положения Х6 Кнопка
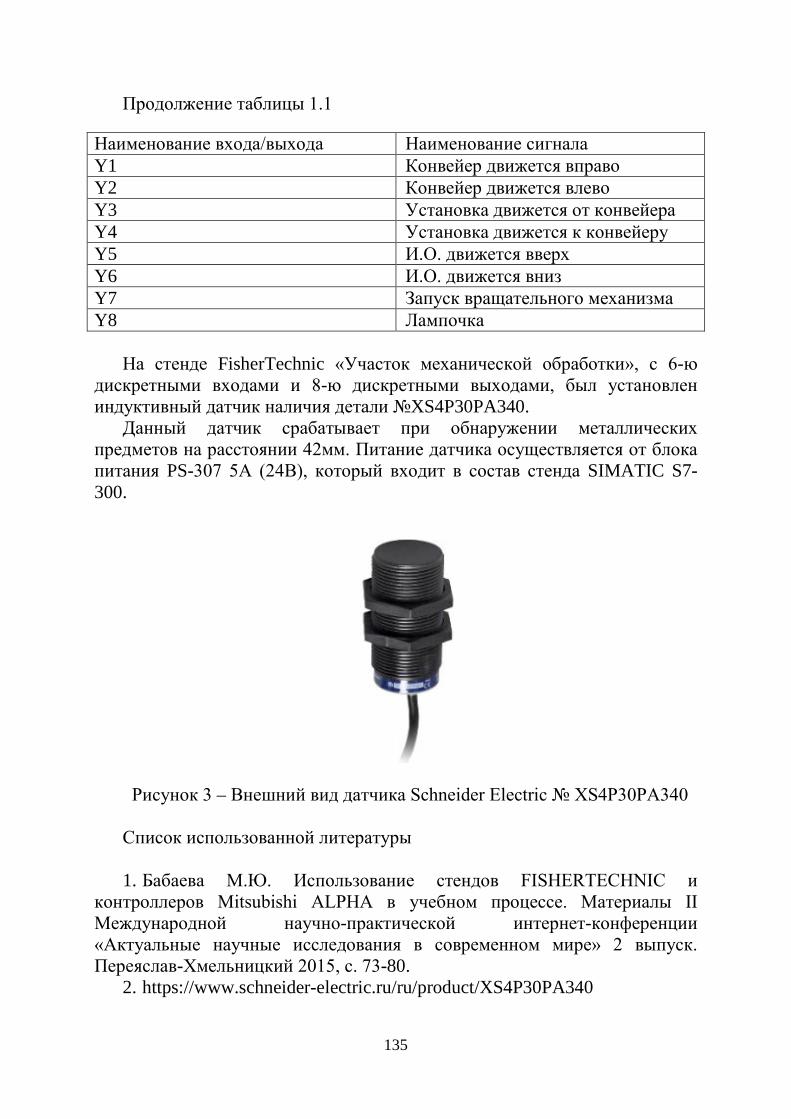
135
Продолжение таблицы 1.1
На стенде FisherTechnic «Участок механической обработки», с 6-ю
дискретными входами и 8-ю дискретными выходами, был установлен индуктивный датчик наличия детали №XS4P30PA340.
Данный датчик срабатывает при обнаружении металлических предметов на расстоянии 42мм. Питание датчика осуществляется от блока питания PS-307 5А (24В), который входит в состав стенда SIMATIC S7-300.
Рисунок 3 – Внешний вид датчика Schneider Electric № XS4P30PA340
Список использованной литературы
1. Бабаева М.Ю. Использование стендов FISHERTECHNIC и
контроллеров Mitsubishi ALPHA в учебном процессе. Материалы II Международной научно-практической интернет-конференции «Актуальные научные исследования в современном мире» 2 выпуск. Переяслав-Хмельницкий 2015, с. 73-80.
2. https://www.schneider-electric.ru/ru/product/XS4P30PA340
Наименование входа/выхода Наименование сигнала Y1 Конвейер движется вправо Y2 Конвейер движется влево Y3 Установка движется от конвейера Y4 Установка движется к конвейеру Y5 И.О. движется вверх Y6 И.О. движется вниз Y7 Запуск вращательного механизма Y8 Лампочка
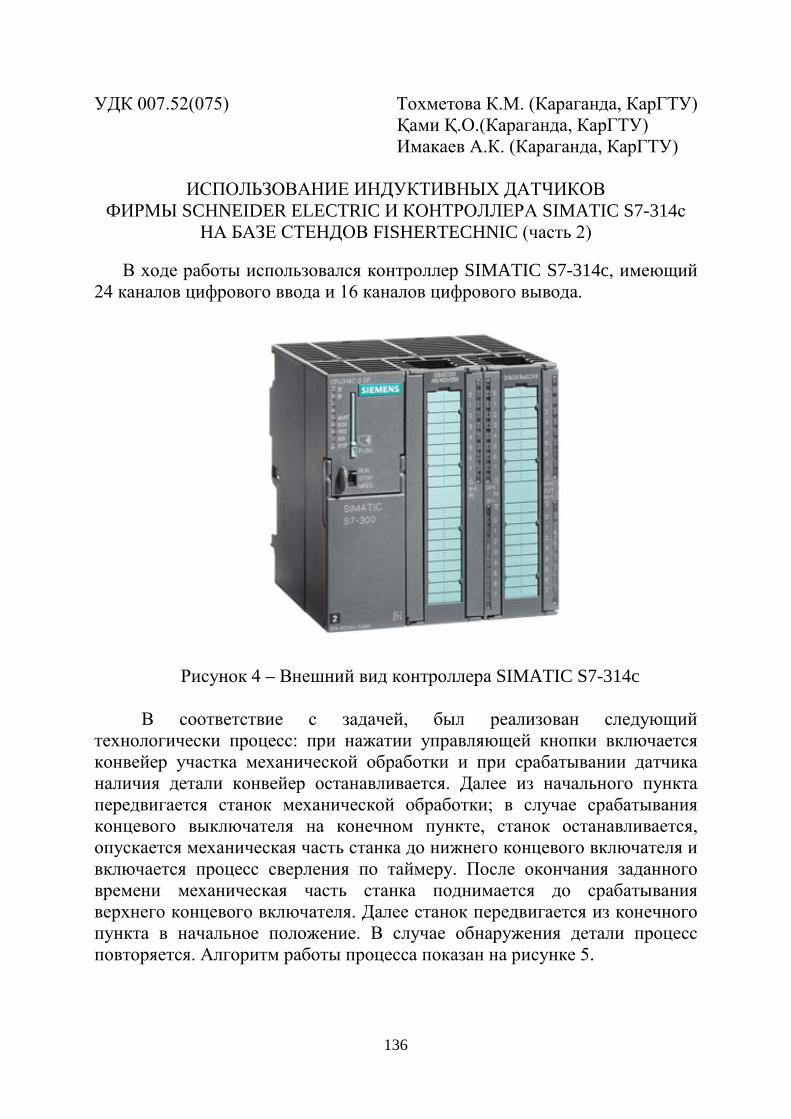
136
УДК 007.52(075) Тохметова К.М. (Караганда, КарГТУ) Қами Қ.О.(Караганда, КарГТУ) Имакаев А.К. (Караганда, КарГТУ)
ИСПОЛЬЗОВАНИЕ ИНДУКТИВНЫХ ДАТЧИКОВ
ФИРМЫ SCHNEIDER ELECTRIC И КОНТРОЛЛЕРА SIMATIC S7-314с НА БАЗЕ СТЕНДОВ FISHERTECHNIC (часть 2)
В ходе работы использовался контроллер SIMATIC S7-314c, имеющий
24 каналов цифрового ввода и 16 каналов цифрового вывода.
Рисунок 4 – Внешний вид контроллера SIMATIC S7-314c
В соответствие с задачей, был реализован следующий технологически процесс: при нажатии управляющей кнопки включается конвейер участка механической обработки и при срабатывании датчика наличия детали конвейер останавливается. Далее из начального пункта передвигается станок механической обработки; в случае срабатывания концевого выключателя на конечном пункте, станок останавливается, опускается механическая часть станка до нижнего концевого включателя и включается процесс сверления по таймеру. После окончания заданного времени механическая часть станка поднимается до срабатывания верхнего концевого включателя. Далее станок передвигается из конечного пункта в начальное положение. В случае обнаружения детали процесс повторяется. Алгоритм работы процесса показан на рисунке 5.
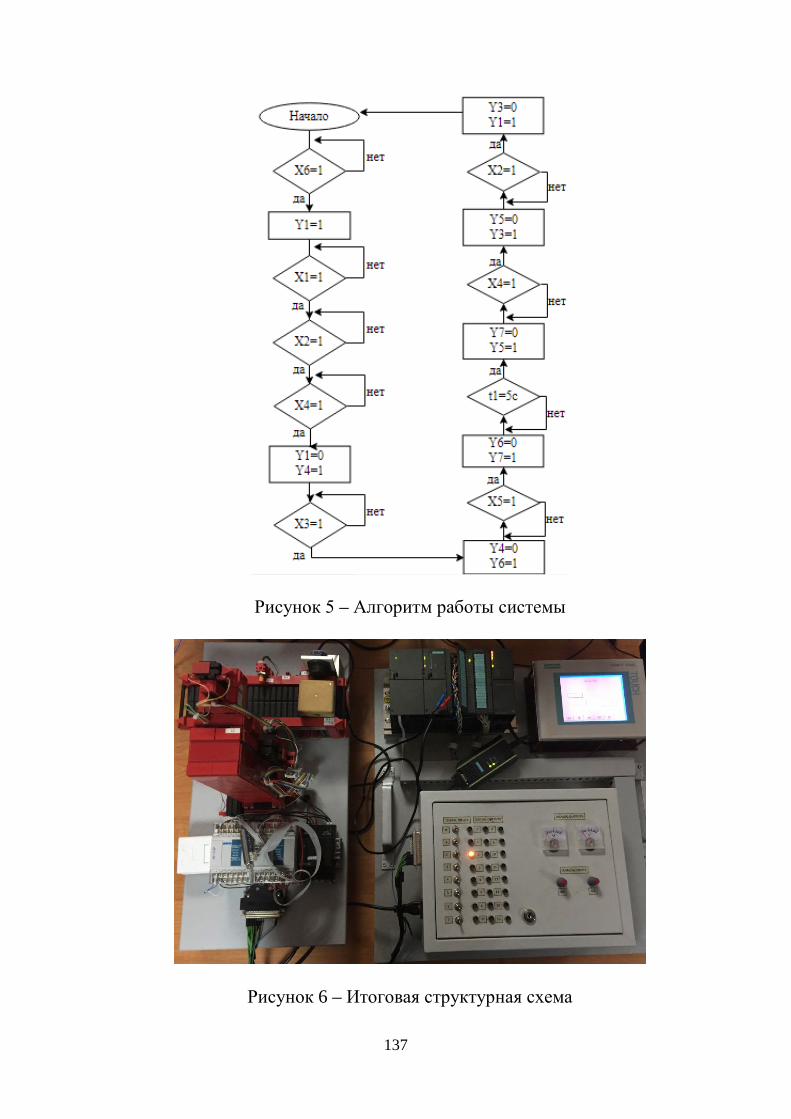
137
Рисунок 5 – Алгоритм работы системы
Рисунок 6 – Итоговая структурная схема
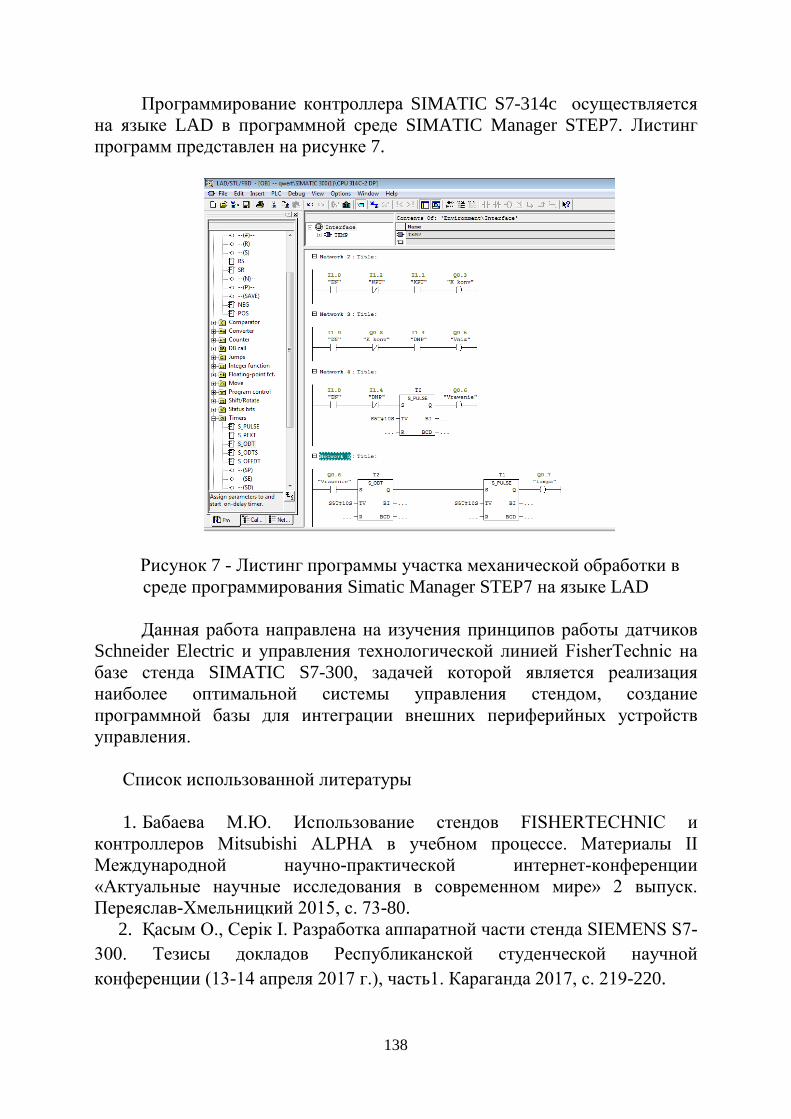
138
Программирование контроллера SIMATIC S7-314c осуществляется на языке LAD в программной среде SIMATIC Manager STEP7. Листинг программ представлен на рисунке 7.
Рисунок 7 - Листинг программы участка механической обработки в среде программирования Simatic Manager STEP7 на языке LAD
Данная работа направлена на изучения принципов работы датчиков
Schneider Electric и управления технологической линией FisherTechnic на базе стенда SIMATIC S7-300, задачей которой является реализация наиболее оптимальной системы управления стендом, создание программной базы для интеграции внешних периферийных устройств управления.
Список использованной литературы 1. Бабаева М.Ю. Использование стендов FISHERTECHNIC и
контроллеров Mitsubishi ALPHA в учебном процессе. Материалы II Международной научно-практической интернет-конференции «Актуальные научные исследования в современном мире» 2 выпуск. Переяслав-Хмельницкий 2015, с. 73-80.
2. Қасым О., Серік І. Разработка аппаратной части стенда SIEMENS S7-300. Тезисы докладов Республиканской студенческой научной конференции (13-14 апреля 2017 г.), часть1. Караганда 2017, с. 219-220.
139
УДК 62-83:621.313.2 Усова Е.Д. (Караганда, КарГТУ) Эм Г.А. (Караганда, КарГТУ)
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ЧАСТОТЫ ШИРОТНО-
ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ НА ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Развитие статических полупроводниковых преобразователей для
регулируемого электропривода постоянного тока непосредственно связано с разработкой и освоением новых и совершенствованием существующих полупроводниковых приборов. В последние годы в связи с освоением промышленного производства силовых полупроводниковых приборов нового технического уровня и бурным развитием компьютерных технологий появились возможности существенного улучшения статических и динамических характеристик электроприводов постоянного тока. С появление IGBT-транзисторов появилась возможность конструировать достаточно компактные и надежные силовые схемы широтно-импульсных преобразователей большой мощности (100 кВт и более) и соответственно системы электропривода на их основе.
Поиск оптимального варианта преобразователя для электроприводов заставил обратить внимание на возможность использования полупроводниковых импульсных преобразователей, питаемых от сети трехфазного тока через выпрямитель и работающих с частотно-импульсной модуляцией или с широтно-импульсной модуляцией. Особое значение широтно-импульсные преобразователи (ШИП) начинают приобретать в электроприводе механизмов с автономными источниками энергии (в дорожных и строительных машинах, электрокарах и т.п.).
В современных импульсных преобразователях период коммутации много меньше электромагнитной постоянной времени двигателя, а пульсации тока и, соответственно, потери в обмотке якоря существенно снижены, так как в них применяются высокочастотные полупроводниковые приборы. Однако с ростом частоты увеличиваются потери в ключе и магнитопроводе двигателя, поэтому выбор оптимальной частоты коммутации выполняется с учетом конкретных параметров электропривода. В существующих электроприводах чаще применяется регулирование с постоянной частотой.
Использование высокочастотных ШИП совместно с неуправляемыми выпрямителями в сетях переменного тока позволит существенно улучшить статические и динамические характеристики полупроводникового электропривода постоянного тока за счет исключения режимов прерывистых токов, запаздывания и значительного нагрева от пульсаций.
Перспективным вариантом является создание электропривода по
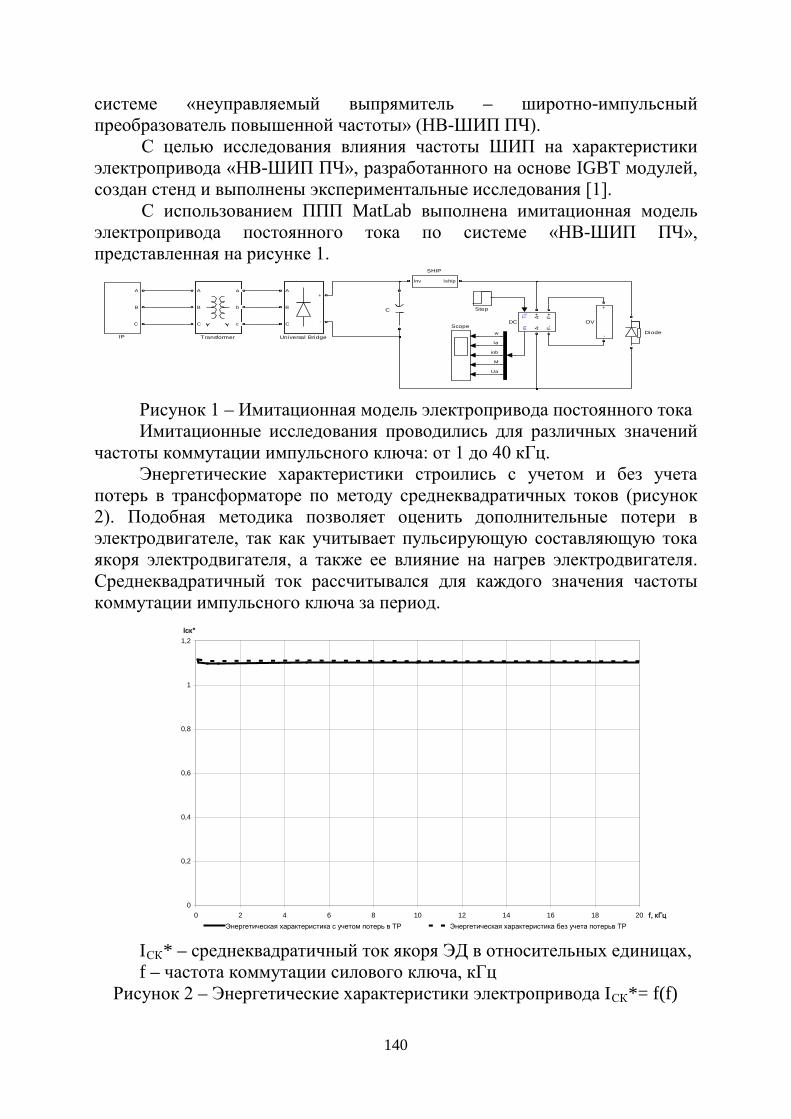
140
системе «неуправляемый выпрямитель – широтно-импульсный преобразователь повышенной частоты» (НВ-ШИП ПЧ).
С целью исследования влияния частоты ШИП на характеристики электропривода «НВ-ШИП ПЧ», разработанного на основе IGBT модулей, создан стенд и выполнены экспериментальные исследования [1].
С использованием ППП MatLab выполнена имитационная модель электропривода постоянного тока по системе «НВ-ШИП ПЧ», представленная на рисунке 1.
A
B
C
+
-
Universal Bridge
A
B
C
a
b
c
Transformer
Step
Scope
Inv Iship
SHIP
-+
OV
A
B
C
IPDiode
TLm
A+ F+
A- F-
DC
C
w
Ia
iob
M
Ua
Рисунок 1 – Имитационная модель электропривода постоянного тока Имитационные исследования проводились для различных значений
частоты коммутации импульсного ключа: от 1 до 40 кГц. Энергетические характеристики строились с учетом и без учета
потерь в трансформаторе по методу среднеквадратичных токов (рисунок 2). Подобная методика позволяет оценить дополнительные потери в электродвигателе, так как учитывает пульсирующую составляющую тока якоря электродвигателя, а также ее влияние на нагрев электродвигателя. Среднеквадратичный ток рассчитывался для каждого значения частоты коммутации импульсного ключа за период.
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12 14 16 18 20 f, кГц
Iск*
Энергетическая характеристика с учетом потерь в ТР Энергетическая характеристика без учета потерьв ТР IСК* – среднеквадратичный ток якоря ЭД в относительных единицах, f – частота коммутации силового ключа, кГц
Рисунок 2 – Энергетические характеристики электропривода IСК*= f(f)
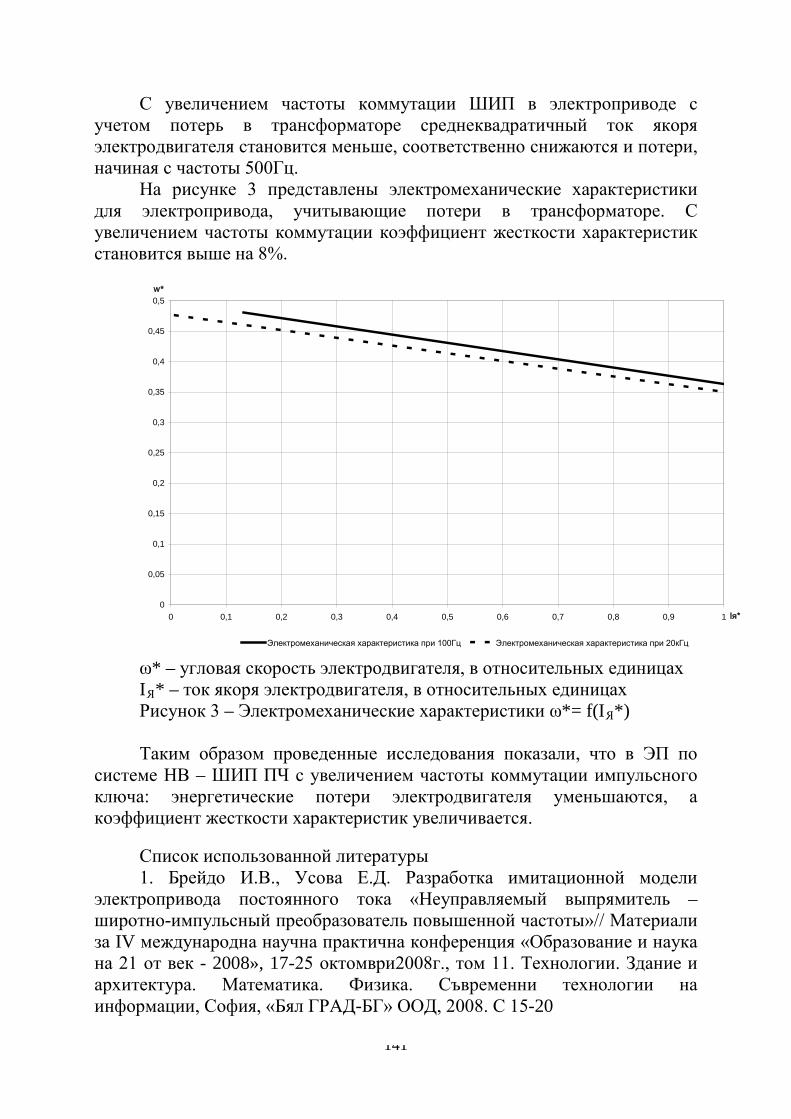
141
С увеличением частоты коммутации ШИП в электроприводе с учетом потерь в трансформаторе среднеквадратичный ток якоря электродвигателя становится меньше, соответственно снижаются и потери, начиная с частоты 500Гц.
На рисунке 3 представлены электромеханические характеристики для электропривода, учитывающие потери в трансформаторе. С увеличением частоты коммутации коэффициент жесткости характеристик становится выше на 8%.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 Iя*
w*
Электромеханическая характеристика при 100Гц Электромеханическая характеристика при 20кГц ω* – угловая скорость электродвигателя, в относительных единицах IЯ* – ток якоря электродвигателя, в относительных единицах Рисунок 3 – Электромеханические характеристики ω*= f(IЯ*) Таким образом проведенные исследования показали, что в ЭП по
системе НВ – ШИП ПЧ с увеличением частоты коммутации импульсного ключа: энергетические потери электродвигателя уменьшаются, а коэффициент жесткости характеристик увеличивается.
Список использованной литературы 1. Брейдо И.В., Усова Е.Д. Разработка имитационной модели
электропривода постоянного тока «Неуправляемый выпрямитель – широтно-импульсный преобразователь повышенной частоты»// Материали за IV международна научна практична конференция «Образование и наука на 21 от век - 2008», 17-25 октомври2008г., том 11. Технологии. Здание и архитектура. Математика. Физика. Съвременни технологии на информации, София, «Бял ГРАД-БГ» ООД, 2008. С 15-20
142
УДК 62-83 Шпакова Л.Г. (Караганда, КарГТУ) Байдильдин А. (Караганда, КарГТУ) Экзеков А. (Караганда, КарГТУ)
ПРОБЛЕМЫ ВЫБОРА ЭЛЕКТРОПРИВОДА
В РОБОТОТЕХНИЧЕСКИХ СИСТЕМАХ Робототехника – относительно новое направление, которое активно
внедряется образовательными учреждениями Казахстана. Этот комбинированный предмет, который сегодня преподаётся в сотнях республиканских школ и вузов, включает в себя целый ряд прикладных дисциплин: математика и физика, информатика и черчение. Перспективы для страны от интеграции робототехники в систему образования вполне очевидны [1]: мировой рынок робототехники и сопутствующих сервисов, по оценке IDC (январь 2017 года), достиг $91,5 млрд и к 2020 году приблизится к $188 млрд. Драйвер роста спроса на робототехнику — производственный сектор, на который приходится свыше 2/3 рынка. Внедрение автоматизированных и роботизированных систем — один из элементов Индустрии 4.0, промышленности четвертого поколения, переход к которой начали наиболее технологически развитые страны мира. В перспективе 10−15 лет эти изменения коснутся и казахстанского реального сектора [2].
Робот – это универсальное электро-механическое устройство, оснащённое мощными вычислительными ресурсами, которые позволяют в режиме реального времени обрабатывать информацию датчиков. Тем не менее, основным элементом робота, будь то манипулятора, квадрокоптера, мобильного устройства, остается привод. Именно система управления приводом робота позволяет устройству выполнять поставленные перед роботом задачи. Поэтому выбор приводи при создании мехатронного устройства является одной из основных задач. Цель данного исследования: изучение типов электроприводов в робототехнических системах в зависимости от условий работы объекта.
Есть три основных параметра, которые разработчики должны учитывать при выборе определенных типа и модели двигателя:
1. Минимальная и максимальная скорость двигателя (и соответствующее ускорение);
2. Максимальный крутящий момент двигателя, а также кривая соотношения момента и скорости;
3. Точность и повторяемость работы двигателя (без использования датчиков и управления по замкнутому циклу) [3];
4. Стоимость привода и системы управления приводом; 5. Вопросы подготовки кадров по работе с системой управления
приводом.
143
Привод, в последнее время часто используемый в робототехнике – это шаговый привод. Распространение он получил за счет простоты управления, невысокой стоимости, точного позиционирования в большинстве решаемых задач возможно использования без реализации сложной системы управления: датчиков и обратных связей. Тем не менее существуют недостатки в динамике системы, возможны проблемы проскальзывания ротора при повышенной нагрузке на вал. К тому же существует объективное ограничение на количество шагов в единицу времени из-за чего невозможно применения в системах с высокими требованиями по быстродействию.
Другой тип приводов, набирающих популярность в робототехнике - бесщеточный или бесколлекторный привод. Принцип работы данного привода основан на взаимодействии магнитных полей между электромагнитом и постоянным магнитом. Когда катушка находится под напряжением, противоположные полюса ротора и статора притягиваются друг к другу. Такие системы могут использоваться практически в любых роботах. Потому, что обладают рядом достоинств в быстродействии относительно характеристик вращающего момента, более высокой частота вращения, высокие динамические характеристики, длительный срок службы, бесшумную работу. Тем не менее бесколлекторный привод является сложным и требует дорогостоящий регулятор скорости, который включает в себя электронную систему управления приводом, соответственно требует особых знаний по настройке и управлению.
Привод, имеющий значительные преимущества по энергетическим показателям – это синхронный привод. К тому же этот тип приводов экономичен и прост в настройке и использовании. Однако регулирование по скорости в них несколько затруднено, особенно в условиях значительных масс механизмов. Данный недостаток обусловлен тем, что для пуска синхронного привода необходимо разогнать ротор с помощью внешнего момента до частоты вращения, близкой к синхронной, а сам он не имеет начального пускового момента. Синхронные приводы используются в промышленных роботах со средней грузоподъемностью и числом степеней подвижности от трех, но не более шести.
Наличие мощных полупроводников сделало практичным использование более простых асинхронных электродвигателей. Работают асинхронные двигатели от сети переменного тока, поэтому, в ряде случаев, возможно прямое включение в сеть без каких-либо преобразователей. Основное достоинство привода заключается в низкой стоимости, поскольку у электродвигателя отсутствует коллектор, из-за чего он прост и надежен, так же значительно низкая масса и меньшие габариты. Однако, привод может перегреваться, особенно под нагрузкой, невозможно стабильно держать частоту вращения, к тому же относительно небольшой пусковой момент и значительный пусковой ток.
144
Находят широкое применение в различных секторах робототехники и сервоприводы. Эти электромеханические двигатели перемещаются по сигналу в определенное положение и сохраняют его до следующего сигнала. В сервоприводах используется следящая система, то есть механизм обратной связи, позволяющий обрабатывать ошибки и исправлять их в позиционировании. Если какая-то сила оказывает давление на привод, изменяя его положение, двигатель будет применять силу в противоположном направлении, чтобы исправить возникающую ошибку. Таким образом, достигается высокая точность позиционирования. Благодаря высокой скорость вращения, высокой мощности и позиция механизма и доступности для корректирования, сервоприводы так распространены. Но из-за сложности системы подключения и управления требуются квалифицированное обслуживание, что влечет за собой высокую стоимость.
Управление роботом – это, прежде всего, управление приводом этого робота исходя из кинематикческой характеристики самого объекта, в условиях внешней среды и по заданным требованиям технологического процесса. В случаях, когда важна значительная грузоподъёмность целесообразно применение сервопривода, иногда бесколлекторный двигатель постоянного тока. Сервопривод, так же обеспечивает высокую скорость и максимальную точность работы за счет обязательной реализации обратной связи. В то же время шаговые приводы просты в управлении из-за отсутствия необходимости реализации обратной связи. По экономическим показателям выигрывают шаговые приводы и асинхронные.
Список литературы
1. Робототехника в школах: интерактивная методика обучения, Союз машиностроителей Казахстана, 31.05.17
2. Казахстан поборется за свой кусок мирового рынка робототехники, Димин С., Kapital.kz, 20.11.2017
3. Привода, опции управления расширяют возможности робототехники, Билл Швебер, Mouser Electronics, 2017
4. Приводы промышленных роботов, Михаил Владимирович Горбенко, Татьяна Ивановна Горбенко, Национальный исследовательский Томский государственный университет, Томск, 2015
5. Юревич Е.И. Основы робототехники. 2-е издание. Санкт-Петербург «БХВ- Петербург». 2005г. – 416 с.
6. Шаньгин Е.С. Управление роботами и робототехническими системами, Уфа, 2005г. – 190с.
7. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления: пер. с анг. – М.: Энергоатомиздат. 1987г. – 200с.
145
УДК 621.9:628:629 Эм Г.А. (Караганда, КарГТУ) Жуматаева Ж.М. (Караганда, КарГТУ)
СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСОМ ВОДОПОДГОТОВКИ
СТАНЦИИ ЖАНААРКА
В программе стратегии развития «Казахстан-2050», разработанной Президентом РК, большое внимание уделяется железнодорожному транспорту, как одному из основных видов транспорта и наиболее экономичному в условиях Казахстана. Развитию этого вида транспорта способствует большая протяженность и загруженность железных дорог.
Основными направлениями экономического и социального развития предусматривается ввести в эксплуатацию 2,3 тыс. км новых железнодорожных линий, построить не менее 4 тыс. км вторых путей, электрифицировать 8 тыс. км железнодорожных линий, обновить и пополнить парк локомотивов и вагонов путем оснащения его более надежными и экономичными локомотивами новых серий, электро- и дизель-поездами, грузовыми вагонами повышенной грузоподъемности и вместимости, пассажирскими вагонами и вагонами метрополитена улучшенной комфортабельности, увеличить объем перевозок грузов на 8÷10 %, пассажиров на 7÷9 %, повысить производительность труда работников, занятых на перевозках на 10÷12 %.
Жанааркинское эксплуатационное локомотивное депо осуществляет пассажирские и грузовые перевозки на участках Жезказган-Кызылжар-Жанаарка-Жарык общей протяженностью 418 км, а также производит маневровую и хозяйственную работу на этих станциях и др. С 2013 года в депо эксплуатируются локомотивы нового поколения серии ТЭ33А «Evolution», в 2014 году в парк ТЧЭ-15 зачислены уже 7 тепловозов серии ТЭ33А. В этих условиях одной из приоритетных задач является автоматизация технологических процессов по обеспечению локомотивного парка соответствующими расходными материалами, включая охлаждающую жидкость.
Согласно ГОСТ 30813-2002 «Вода и водоподготовка. Термины и определения», РД 10-165-97 «Методические указания по надзору за воднохимическим режимом паровых и водогрейных котлов» и РД 10-179-98 «Методические указания по разработке инструкций и режимных карт по эксплуатации установок докотловой обработки воды и ведению воднохимического режима паровых и водогрейных котлов»; «Правилам устройства и безопасной эксплуатации паровых и водогрейных котлов», (утв. постановлением Госгортехнадзора РФ от 11 июня 2003 г. N 88) и требованиями РД 24.031.121-2007 «Оснащение паровых стационарных котлов устройствами для отбора проб пара и воды», АОТ/485-09 «Инструкции по приготовлению и применению воды для охлаждения
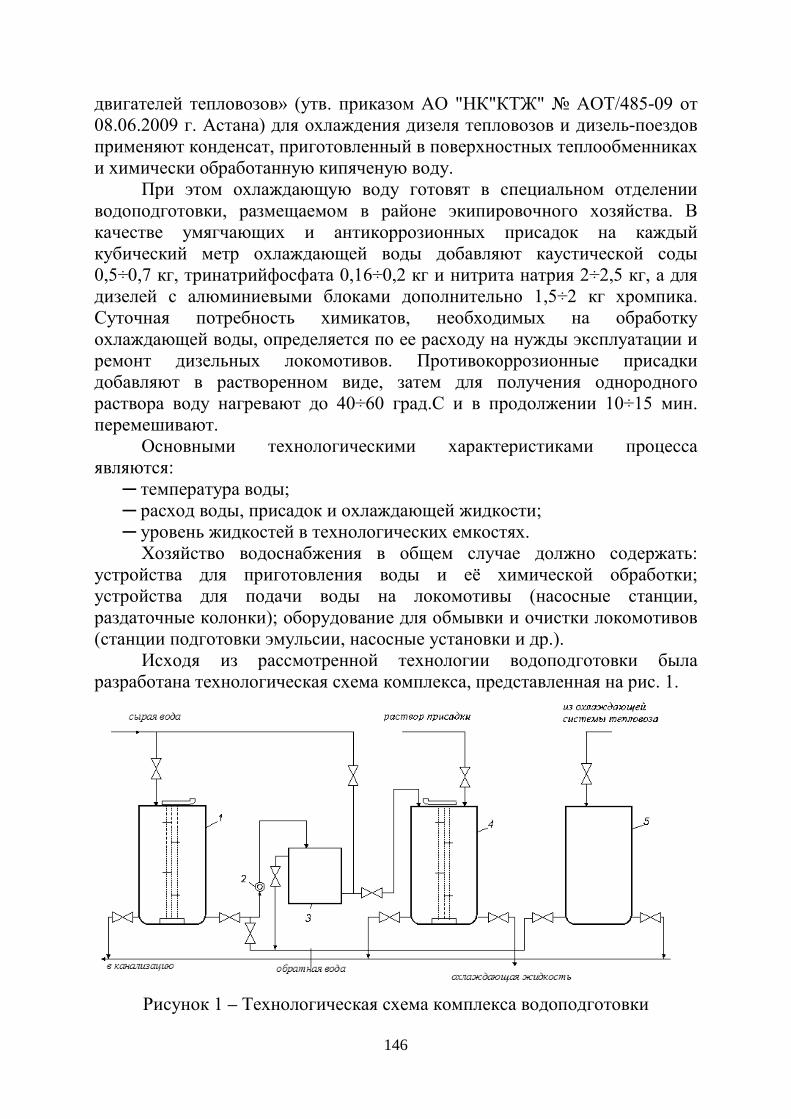
146
двигателей тепловозов» (утв. приказом АО "НК"КТЖ" № АОТ/485-09 от 08.06.2009 г. Астана) для охлаждения дизеля тепловозов и дизель-поездов применяют конденсат, приготовленный в поверхностных теплообменниках и химически обработанную кипяченую воду.
При этом охлаждающую воду готовят в специальном отделении водоподготовки, размещаемом в районе экипировочного хозяйства. В качестве умягчающих и антикоррозионных присадок на каждый кубический метр охлаждающей воды добавляют каустической соды 0,5÷0,7 кг, тринатрийфосфата 0,16÷0,2 кг и нитрита натрия 2÷2,5 кг, а для дизелей с алюминиевыми блоками дополнительно 1,5÷2 кг хромпика. Суточная потребность химикатов, необходимых на обработку охлаждающей воды, определяется по ее расходу на нужды эксплуатации и ремонт дизельных локомотивов. Противокоррозионные присадки добавляют в растворенном виде, затем для получения однородного раствора воду нагревают до 40÷60 град.С и в продолжении 10÷15 мин. перемешивают.
Основными технологическими характеристиками процесса являются:
─ температура воды; ─ расход воды, присадок и охлаждающей жидкости; ─ уровень жидкостей в технологических емкостях.
Хозяйство водоснабжения в общем случае должно содержать: устройства для приготовления воды и её химической обработки; устройства для подачи воды на локомотивы (насосные станции, раздаточные колонки); оборудование для обмывки и очистки локомотивов (станции подготовки эмульсии, насосные установки и др.).
Исходя из рассмотренной технологии водоподготовки была разработана технологическая схема комплекса, представленная на рис. 1.
Рисунок 1 – Технологическая схема комплекса водоподготовки
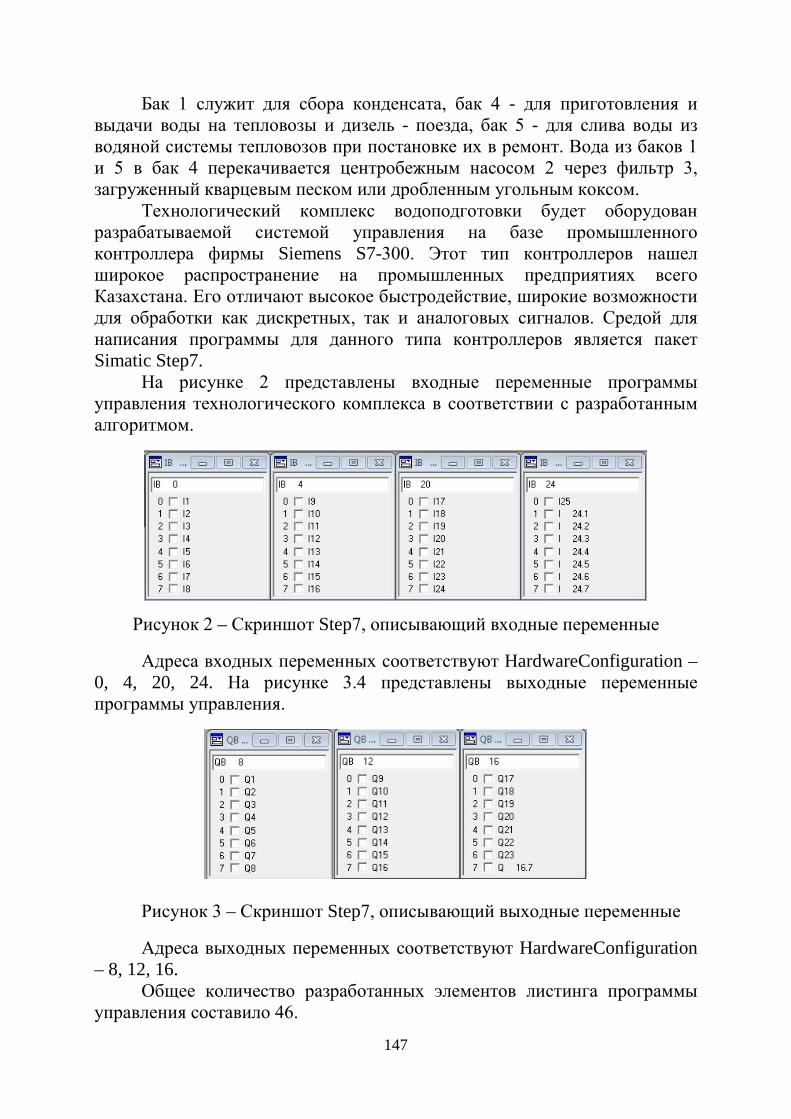
147
Бак 1 служит для сбора конденсата, бак 4 - для приготовления и выдачи воды на тепловозы и дизель - поезда, бак 5 - для слива воды из водяной системы тепловозов при постановке их в ремонт. Вода из баков 1 и 5 в бак 4 перекачивается центробежным насосом 2 через фильтр 3, загруженный кварцевым песком или дробленным угольным коксом.
Технологический комплекс водоподготовки будет оборудован разрабатываемой системой управления на базе промышленного контроллера фирмы Siemens S7-300. Этот тип контроллеров нашел широкое распространение на промышленных предприятиях всего Казахстана. Его отличают высокое быстродействие, широкие возможности для обработки как дискретных, так и аналоговых сигналов. Средой для написания программы для данного типа контроллеров является пакет Simatic Step7.
На рисунке 2 представлены входные переменные программы управления технологического комплекса в соответствии с разработанным алгоритмом.
Рисунок 2 – Скриншот Step7, описывающий входные переменные
Адреса входных переменных соответствуют HardwareConfiguration – 0, 4, 20, 24. На рисунке 3.4 представлены выходные переменные программы управления.
Рисунок 3 – Скриншот Step7, описывающий выходные переменные Адреса выходных переменных соответствуют HardwareConfiguration
– 8, 12, 16. Общее количество разработанных элементов листинга программы
управления составило 46.
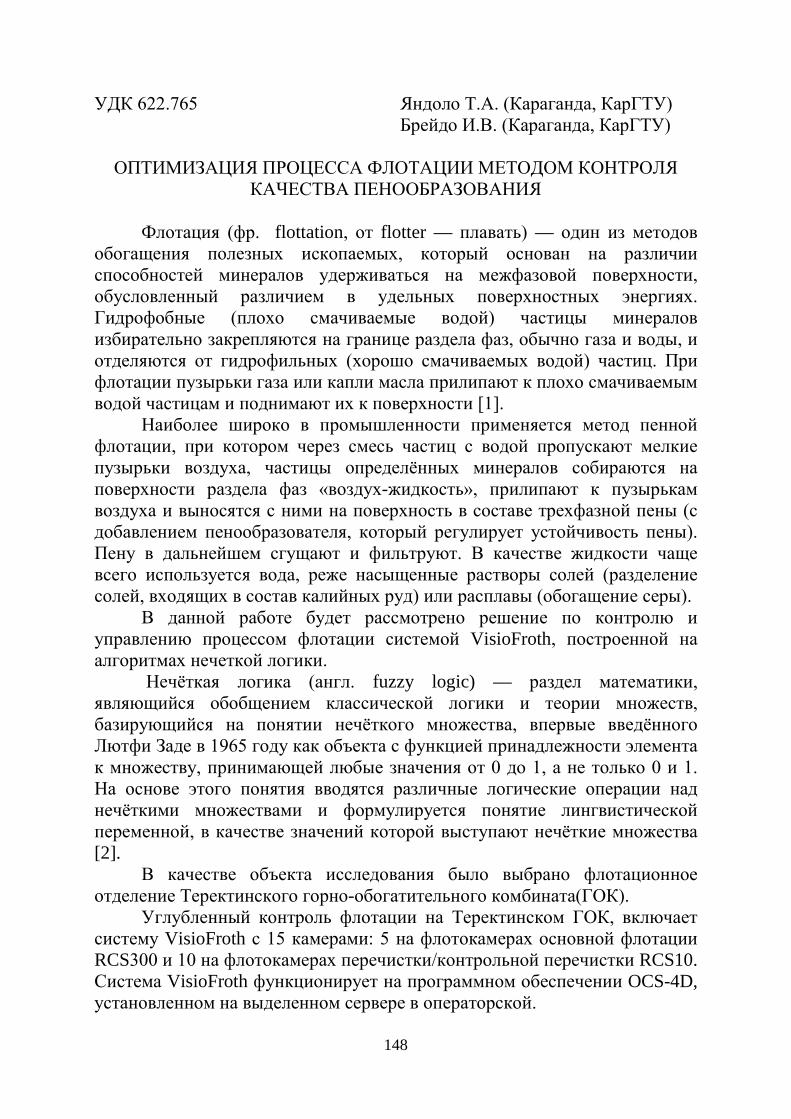
148
УДК 622.765 Яндоло Т.А. (Караганда, КарГТУ) Брейдо И.В. (Караганда, КарГТУ)
ОПТИМИЗАЦИЯ ПРОЦЕССА ФЛОТАЦИИ МЕТОДОМ КОНТРОЛЯ
КАЧЕСТВА ПЕНООБРАЗОВАНИЯ
Флотация (фр. flottation, от flotter — плавать) — один из методов обогащения полезных ископаемых, который основан на различии способностей минералов удерживаться на межфазовой поверхности, обусловленный различием в удельных поверхностных энергиях. Гидрофобные (плохо смачиваемые водой) частицы минералов избирательно закрепляются на границе раздела фаз, обычно газа и воды, и отделяются от гидрофильных (хорошо смачиваемых водой) частиц. При флотации пузырьки газа или капли масла прилипают к плохо смачиваемым водой частицам и поднимают их к поверхности [1].
Наиболее широко в промышленности применяется метод пенной флотации, при котором через смесь частиц с водой пропускают мелкие пузырьки воздуха, частицы определённых минералов собираются на поверхности раздела фаз «воздух-жидкость», прилипают к пузырькам воздуха и выносятся с ними на поверхность в составе трехфазной пены (с добавлением пенообразователя, который регулирует устойчивость пены). Пену в дальнейшем сгущают и фильтруют. В качестве жидкости чаще всего используется вода, реже насыщенные растворы солей (разделение солей, входящих в состав калийных руд) или расплавы (обогащение серы).
В данной работе будет рассмотрено решение по контролю и управлению процессом флотации системой VisioFroth, построенной на алгоритмах нечеткой логики.
Нечёткая логика (англ. fuzzy logic) — раздел математики, являющийся обобщением классической логики и теории множеств, базирующийся на понятии нечёткого множества, впервые введённого Лютфи Заде в 1965 году как объекта с функцией принадлежности элемента к множеству, принимающей любые значения от 0 до 1, а не только 0 и 1. На основе этого понятия вводятся различные логические операции над нечёткими множествами и формулируется понятие лингвистической переменной, в качестве значений которой выступают нечёткие множества [2].
В качестве объекта исследования было выбрано флотационное отделение Теректинского горно-обогатительного комбината(ГОК).
Углубленный контроль флотации на Теректинском ГОК, включает систему VisioFroth с 15 камерами: 5 на флотокамерах основной флотации RCS300 и 10 на флотокамерах перечистки/контрольной перечистки RCS10. Система VisioFroth функционирует на программном обеспечении OCS-4D, установленном на выделенном сервере в операторской.
149
Система углубленного контроля состоит из 3 уровней: 1. Оптимизация качества концентрата и массового потока для
максимизации извлечения ценного материала путем расчета профиля скорости съема пены (заданное значение). Этот уровень включает контроль реагентов.
2. Контроль скорости съема пены, стабилизирующий флотацию путем поддержания скорости съема пены. Сюда входит учет нарушений стабильности процесса, т.е. запуск/остановка схемы измельчения и резкие изменения текстуры пены.
3. Существующий регулирующий контроль потока воздуха и уровня пульпы.
Система стремится стабилизировать процесс флотации путем поддержания скорости перелива пены (выходная информация по анализу VisioFroth) на предпочтительном заданном значении. Система углубленного контроля достигает этой цели посредством контроля заданного значения подачи воздуха и заданного значения уровня пульпы. Подача воздуха и уровень пульпы поддерживаются на заданном значении, определенном OCS-4D, за счет имеющихся контроллеров, управляющих воздушными задвижками и клапанами. Система углубленного контроля флотации также учитывает текстуру пены (выходная информация по анализу VisioFroth) для определения того, адекватен ли размер пузырьков для текущей флотации. Содержание меди считывается с потоковых анализаторов и лабораторных анализов, вводимых вручную в SCADA оператором. Благодаря вводу этих данных углубленный контроль флотации отрегулирует заданные значения скорости съема пены каждой камеры. Зная принципы кинетики флотации, скорости съема пены на первых камерах линии обычно больше, чем скорости съема пены на последних камерах. Это создает так называемый “профиль скорости съема пены” [3]. Форма профиля подстраивается под особенности флотационного процесса Теректинского ГОК.
Система VisioFroth представляет собой систему анализа изображений процесса флотации. Камеры установлены наверху флотокамер, над желобами, чтобы иметь возможность видеть пенный слой.
Основные измерения VisioFroth: • Скорость съема пены: скорость перелива пены в желоб • Текстура: общая индикация текстуры пены, мелкая (близко к
0) или крупная (близко к 1) • Яркость: индикация яркости изображения • Цветовые параметры в различных цветовых пространствах:
цветовая характеристика всего изображения (не каждого отдельного пузырька). Сильно зависит от внешнего освещения, настроек камеры, чувствительности сенсора камеры, текстуры пены, реагента, типа руды и в
150
конце концов от содержания. Взаимосвязь между цветом и содержанием почти невозможно определить наверняка.
• Распределение пузырьков по размеру: полноразмерное распределение пузырьков. Применяется так же, как и параметр текстуры, но надежность этого замера гораздо больше зависит от внешних условий. Поэтому параметр Текстуры (более надежный) предпочтителен для контроля.
Выходные данные, используемые для контроля, это скорость съема пены, текстура и яркость.
Скорость съема пены связана с массовым содержанием на флотации. Это прямой замер продуктивности флотационной линии. В дополнение к измерению содержания, она позволяет контролировать показатели флотации в плане большей или меньшей продуктивности/селективности.
Параметр текстуры представляет собой замер по пенному аспекту. В зависимости от стадии во флотационной линии, мы ожидаем увидеть более или менее крупную пену. Это индикатор того, насколько хорошо минералы цепляются к пузырькам. Чем они крупнее, тем больше минералов цепляется, и наоборот. В камерах основной флотации очень важно поддерживать текстуру, чтобы флотировать пену, а не пульпу (шлам).
Яркость используется для проверки качества изображения, и, затем, качества замеров. Она также используется для подачи сигнала о “загрязнении камеры”.
Таким образом, интеллектуальные системы с нечеткой моделью управления все больше выбираются проектировщиками, так как логика и функционирование данных систем приближены к человеческому мышлению. Они менее сложны для эксплуатирующего персонала и зачастую обладают лучшими характеристиками, чем, к примеру, стандартные системы управления, использующие ПИД-регуляторы [3]. Данная работа показывает, что даже такой тонкий процесс как флотация, который считался полностью человеческим и многое, если не все зависело от опыта и квалификации флотатора, теперь можно передать на управление системам, основанным на нечеткой логике.
1. Заде Л. Понятие лингвистической переменной и его применение к
принятию приближенных решений: Пер. с англ.–М.: Мир, 1976, 166 с. 2. Флотация [Электронный ресурс] / Сайт «ru.wikipedia.org». – Режим
доступа: https://ru.wikipedia.org/wiki/Флотация. 3. Абрамов А.А. Переработка, обогащение и комплексное
использование твердых полезных ископаемых. Том 1. Обогатительные процессы и аппараты. Учебник для вузов. В 3 т. ISBN 5-7418-0281-8. — М.: Издательство Московского государственного горного университета, 2004. — 470 с.
ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
И ИНФОКОММУНИКАЦИОННЫЕ ТЕХНОЛОГИИ
152
УДК 004.4+651 Амиров А.Ж. (Караганда, КарГТУ)
Кожухова М.М. (Караганда, КарГТУ)
Штефан К.Б. (Караганда, КарГТУ)
ПРОБЛЕМЫ ВНЕДРЕНИЯ ЮРИДИЧЕСКИ ЗНАЧИМОГО
ЭЛЕКТРОННОГО ДОКУМЕНТООБОРОТА В КАЗАХСТАНЕ
В эру стремительно развивающихся технологий и их повсеместного
внедрения, электронный документооборот приобретает наиболее высокую
позицию по сравнению с бумажным аналогом. Изо дня в день растут
объёмы используемых в нашем современном мире документов.
Однозначно, полный отказ от бумажных документов практически не
выполним, однако, по мнению опытных экспертов в этой области,
преобладать всё же будут электронные варианты.
Мнения аналитиков говорят о том, что мировые рынки систем
электронного документооборота увеличиваются примерно на 20 %
ежегодно, при всём этом периодически появляются новые решения,
готовые предоставлять всё более удобные услуги. Сегодня системы
электронного документооборота внедряются во всем мире. Они имеют
внушительный ряд преимуществ, по сравнению с бумажными
документами. Всё большую важность получает электронный архив. Среди
общих проблем внедрения систем документооборота выделяют:
- человеческий фактор;
- фактор руководства;
- объективные факторы.
К человеческому фактору относится консерватизм. Отличительной
чертой систем электронного документооборота является то, что система
внедряется на всех рабочих местах персонала, связанных с обработкой,
созданием, хранением информации и ее редактированием, иначе
эффективность от этого будет минимальной. Данная особенность выявляет
одну из наиболее важных проблем внедрения электронного
документооборота: в организации найдутся сотрудники, не стремящиеся
оптимизации работы. Консерватизм сотрудников в основном обусловлен
нежеланием изучать новые технологии. Эта проблема приводит весь
процесс в тупик. В большинстве случаев, это касается организаций с
консервативной кадровой политикой.
Разрешается данная проблема разными способами, но в первую
очередь требуется работа с людьми. Зачастую требуется использовать
персональный подход к каждому сотруднику с учетом возрастных, личных
и профессиональных особенностей.
Для облегчения такого способа перехода, предлагается делать всё
постепенно. Внедрить электронную почту. Затем, реализовать несложную
интранет - систему, обучить сотрудников пользоваться «поисковиком»
153
необходимых им материалов на внутреннем сервере. Наилучшим
решением будет интеграция средств доступа к информации и электронной
почте, реализацией на начальном этапе частями будущего электронного
документооборота.
На подготовительном этапе требуется обучить сторонников, которые
в дальнейшем смогут помогать отстающим, осваивать новую систему. Эти
люди должны обладать дружелюбием и иметь желание оказывать помощь
другим осваивать то, что сами уже знают. По такому принципу могут быть
организованы курсы для обучения персонала. Во избежание
дополнительных проблем, курсы следует проводить для добровольцев.
При корректном подходе к организации курсов, сотрудники, пришедшие
по своей инициативе, будут заинтересованы получить новых знания. На
следующем этапе внедрения, обучение станет обязательным, но к тому
времени у людей появится интерес и будет некая информация, которую
они приобретут от сотрудников, прошедших обучение первыми [1].
Приоритетным будет являться фактор руководства. Одной из причин
скептического отношения к системе электронного документооборота
руководителей организаций считается боязнь прозрачности деятельности.
Так же присутствует фактор советского типа – неумение или нежелание
самостоятельно работать с компьютером, просматривать и редактировать
документы. Этот тип руководителей предпочитает иметь дело с живыми
людьми и бумагами, а не с электронными документами, которые нужно
перечитывать и вникать в них самостоятельно. К счастью, в наше время
таких руководителей все меньше. Решением проблемы является убеждение
руководителя в актуальности и необходимости перехода на электронный
документооборот.
Если объективные факторы на этапе планирования внедрения не
будут учтены, в перспективе они могут стать непреодолимыми.
Постоянные изменения в организации, это один из сложнейших факторов.
Если электронный документооборот уже существует в организации, то он
значительно упрощает деятельность структурных подразделений.
Организации с внедренным электронным документооборотом избегают
сложностей, возникающих при перемещении больших объемов
информации на бумажных носителях между подразделениями.
Во всяком случае, всё вышесказанное не означает, что внедрение
электронного документооборота в таких случаях невозможно. Можно
внедрять компоненты системы, требующиеся данному состоянию
организации. Очень важно чтобы внедрение электронного
документооборота осуществляла опытная кампания, у которой уже был
опыт по внедрению в аналогичных вашей организациях, планировалось
долгосрочное сотрудничество. Также следует учесть, чтобы система
являлась модульной, с возможностью допускать увеличение функционала
в перспективе развития кампании и актуализации системы.
154
При полном отсутствии в организации документооборота, даже
бумажного, существуют свои преимущества. Во-первых – отсутствует
необходимость кого-либо переучивать. В таком случае используется
простое решение – запускают пилотный проект. Анализируют
деятельность организации для выявления проблемных участков, наиболее
нуждающихся в формализации и ведении документов. По итогам
успешного внедрения получаем поддержку руководителей структурных
подразделений. Становится ясно, что делать дальше, появляются
сотрудники и руководители довольные нововведениями. Составляем
подходящую смету расходов на внедрение, руководство может смело
принимать решение о внедрении [2].
Так же большой проблемой является необходимость обеспечения
юридической силы электронных документов. Прежде всего, нужно
определиться, для чего вы хотите использовать возможности системы
документооборота, в которой применяется электронная цифровая подпись
(ЭЦП). От выбранной цели будет зависеть как техническая, так и
организационная сторона реализации вашего проекта.
Следует различать две цели использования ЭЦП:
- для обеспечения корпоративной неотрекаемости;
-для применения ЭЦП в условиях равнозначности собственноручной
подписи.
Система с корпоративной неотрекаемостью – это система обмена
электронными сообщениями (документами), в которой конфликтные
ситуации, связанные с использованием цифровой подписи, разрешаются на
уровне администрации предприятия/организации, без рассмотрения в
судебном порядке. Как правило, такие системы используются для
построения внутрикорпоративной системы делопроизводства и
документооборота [3,4].
В этой ситуации владелец системы (т.е. предприятие) сам определяет
правила использования цифровой подписи, ему не требуется соблюдать
нормы закона «Об электронной цифровой подписи» и закона «Об
утверждении Правил электронного документооборота». Получается, что
он не ставит перед собой задачу построения юридически значимой
системы электронного документооборота. Система с применением ЭЦП в
условиях равнозначности собственноручной подписи гарантирует, что её
электронные документы, подписанные ЭЦП, можно будет использовать в
конфликтных ситуациях (спорах) при их разрешении в судебном порядке.
Они будут признаны судом как полноценные документы, имеющие
юридическую силу. Поэтому про такие системы говорят, что в них
реализован юридически значимый документооборот.[4].
При построении подобной системы, ее организатор должен привести
свои правила использования ЭЦП в соответствие с нормами действующего
законодательства РК, включая нормы закона «Об электронной цифровой
155
подписи», закона «Об электронном документообороте» и закона «Об
утверждении Правил электронного документооборота».[4].
Система документооборота с применением ЭЦП основывается на
следующих основных элементах:
- сертифицированное средство ЭЦП - используется участниками
системы для создания и проверки ЭЦП электронных документов;
- ключ подписи и сертификат ключа подписи - изготавливается и
выдается удостоверяющим центром; удостоверяющий центр;
- соблюдение установленных законом «Об электронном
документообороте» и законом «Об утверждении Правил электронного
документооборота» правил электронного документооборота [4].
Эти элементы определены действующим законодательством и без
них невозможно построение юридически значимого электронного
документооборота в Казахстане.
В некоторых видах производства, в частности при интеграции с АСУ,
существует потребность в поддержании высокого уровня
отказоустойчивости и оперативности работы системы.
Эффект от электронного документооборота можно разделить на две
части:
- непосредственный эффект от внедрения, связанный с экономией
рабочего времени сотрудников, средств на материалы, и т. д.;
- косвенный эффект это преимущества для функционирования
организации, которые дает система (возможность накопления знаний,
контроль исполнительской дисциплины, прозрачность управления, и
др.) [3].
В заключение можно уточнить, что несмотря на сложности,
связанные с внедрением, рассмотренными выше, системы электронного
документооборота находят все более обширное применение.
Положительный эффект измеряется как прямой экономией ресурсов, так и
повышением качества работы структурных подразделений и организации в
целом. Для государственных структур это возможность наиболее
эффективно решать поставленные задачи, реализовать возможность
своевременного взаимодействия с различными ведомствами. При условии
внедрения юридически значимого электронного документооборота,
государственное управление становится более прозрачным, оперативным и
информативным.
156
УДК 004.01 Амиров А.Ж. (Караганда, КарГТУ)
Кожухова М.М. (Караганда, КарГТУ)
СОВРЕМЕННЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ ДЛЯ
РАБОТЫ С НОРМАТИВНО - ПРАВОВЫМИ АКТАМИ
В текущих реалиях жизни количество информации, которую должен
освоить студент растёт с каждым годом. Это приводит к тому, что
студенты физически не могут найти и усвоить тот объём информации,
необходимый им для самостоятельной работы. Особенно, эта проблема
актуальна для студентов юридических специальностей, так как нормативно
правовые акты постоянно обновляются и дополняются. Студенты просто
не в силах отслеживать все обновления даже в рамках конкретной
траектории обучения. Исходя из всего этого, назрела острая
необходимость упростить механизмы поиска и освоения информации не
только для студентов, но и для действующих юристов. Существует
множество проверенных методов освоения большого количества
информации, но в наш век на помощь в решении этой проблемы могут
быть привлечены также современные информационные технологии.
Одним из способов освоения информации является заучивание.
Преимуществом данного метода является то, что для его применения не
требуются никакие инструменты и средства, а только лишь упорство и
терпение. К недостаткам относится то, что во время заучивания
информации она может обновиться и обучающийся об этом просто может
не узнать. Поэтому приходится регулярно отслеживать различные
изменения с помощью печатных изданий которые чаще всего выбираются
для официального опубликования нормативно правовых актов (НПА).
Также помощниками могут стать различные «юридические вестники» -
издания которые могут сообщать только об изменениях в законах.
Помимо простого заучивания можно применять различные техники
по выборке необходимой и важной информации из актов и формирование
собственных конспектов с тезисами и ссылками на конкретные блоки в
нормативно правовых актах. Такой метод упрощает поиск нужных
законов, но при этом сохраняет недостатки предыдущего, в особенности
проблему отслеживания обновлений в НПА.
Современные преподаватели ВУЗов не могут уделить достаточно
времени для рассмотрения со студентами всех существующих законов, на
это нужно бесконечное количество времени, так как законодательство
постоянно изменяется. Именно поэтому учебные программы должны быть
направленны на обучение студентов быстрым способам нахождения
необходимой информации. Кто-то может сказать, что этому не надо
учиться и можно вбить пару слов в поисковую систему в сети Интернет и
получить ответ, но это не так. Точный ответ поисковая система может
157
вернуть зачастую только если будет введён заголовок конкретного НПА,
да и то нет гарантии, что найденный НПА действительно актуален на
сегодняшний день.
Помимо того, что преподаватели должны уделять существенное
внимание обучению студентов работе с различными юридическими
информационными системами, сами системы должны развиваться и
«обрастать» новыми инструментами, помогающими как студентам, так и
действующим юристам.
Современные средства для работы с НПА должны включать
следующие функции:
- Полнотекстовый поиск по базе НПА с возможностью указания
даты, на которую искомый НПА был действителен. Это особенно
актуально, когда юристу нужно найти закон, который действовал на
момент возникновения спора или преступления. Помимо этого,
полнотекстовый поиск позволяет найти не только основной НПА
описывающий конкретные разрешения или ограничения, но и другие НПА
от других источников, которые так же могут повлиять на рассмотрении
конкретной ситуации.
- Возможность тегирования документов. Это позволит специалистам,
наполняющим базу НПА выделять из актов ключевые слова и
формировать из них определённый банк данных. Студенты и юристы, в
свою очередь, могут использовать возможность нахождения информации
используя известные им ключевые слова.
- Возможность присвоения документам различных метаданных.
Метаданные, такие как место принятия, орган разработчик, юридическая
сила, источник опубликования и др., позволяют не только находить
нужные акты по известным свойствам, но и понимать область действия и
юридическую силу конкретного изучаемого НПА. Это существенно может
сэкономить время на поиск законов, которые действуют в области или
городе где ведёт свою деятельность юрист.
- Связывание документов. Все НПА в базах данных должны быть
связанный интерактивными гиперссылками для удобного перехода из
одного документа в другой. При этом для удобства пользователей
содержимое конкретного абзаца или конкретной статьи на которые может
вести ссылка должны отображаться пользователю при наведении на
гиперссылку для экономии времени и быстрого ознакомления со связанной
информацией. Помимо этого, данная информация должна отображаться в
том виде в котором она была по состоянию на дату, которая интересует
юриста в данный момент.
- Формирование личного банка избранных НПА. Данный
функционал позволит студентам сформировать некоторый пул
документов, которые они рассматривают в рамках текущего семестра или
отчётного периода. В свою очередь действующие юристы смогут
158
использовать данный функционал для формирования избранного набора
НПА, который они используют в рамках своей специализации. Очень
важно, чтобы подсистема ведения личного банка НПА обладала функцией
автоинформирования пользователя о выходе новой версии выбранных
НПА с возможность подсветки изменений в тексте акта. Это позволить
сэкономить большое количество времени, которое тратиться для
отслеживания изменений в действующей законодательной базе. Помимо
этого, личный банк НПА ускоряет поиск информации, ведь при его
использовании самые нужные акты всегда «под рукой».
Кроме этих обязательных функций желательно, чтобы система
позволяла находить нужные НПА которые связанны с текущим текстом,
который составляет студент или юрист. Это позволит специалистом
быстро проверять на соответствие всем текущим законам того материала,
который они составляют. Для удобства должна быть возможность
получать набор статей из конкретных законов, которые могут касаться
текущего (выделенного) абзаца текста. К счастью, в нашем государстве
законодательно утверждено что все НПА должны быть чётко
структурированы, и это может существенно упростить создание системы
их анализа и выборки значимых слов и словосочетаний. Для реализации
этого функционала необходимо использовать самые современные
технологии в области искусственного интеллекта и семантических сетей
при анализе текстов.
Таким образом, можно сделать вывод, что современные
информационные технологии способны помочь как студентам в их
обучении, так и действующим юристам в их работе. Они способны резко
снизить временные затраты на отслеживание изменений в НПА, а также
упростить подборку нужный законов для ведения дел в судах благодаря
использованию связей между документами и метаданных, которые
характеризуют конкретный НПА. В свою очередь самые последние
разработки в области искусственного интеллекта и семантических сетей
могут помочь в анализе юридических текстов на предмет их законности и
правильности. Не смотря на то, что при должной направленности процесса
обучения не на заучивание текстов, а на техники правильного поиска по
ним, нужно помнить, что каждый студент должен обязательно заучить
такие основы юриспруденции как конституция страны и основные кодексы
регулирующие юридические процессы в современной жизни.
159
УДК 621.387.143.665.632 Аникин А.В. (Томск, НИ ТПУ)
РАЗРАБОТКА СВЧ ПЛАЗМОТРОНА ДЛЯ КОНВЕРСИИ
ПРИРОДНОГО ГАЗА
Рациональное использование природных ресурсов требует развития
новых способов их глубокой переработки. Одним из них является
плазмохимический, основанный на использовании СВЧ энергии.
Продемонстрирована возможность его использования для
переработки природного и попутного нефтяного (ПНГ) газов в ценные
продукты: водород и углеродный наноматериал (УНМ) с эффективностью
до 70%.[1]
Рассмотренный плазматрон в качестве основного элемента входит в
состав экспериментальной установки для конверсии природного газа
(метана ) в водород и углерод. [2]
На базе разработанного плазмотрона создана лабораторная
установка, позволяющая конвертировать углеводородное сырье с
производительностью до 50 г/ч по УНМ и выходом водорода до 70 об. %.
Углеродный нано материал может быть однослойными или
многослойными, прямыми или спиральными, длинными и короткими
В предлагаемой технологии конечный продукт - метано-водородная
смесь - производится за счёт смешения природного газа с производимым в
установке чистым водородом, в одну стадию, что существенно упрощает и
удешевляет производство. Данная метано-водородная смесь может
использоваться в качестве топлива в газопоршневых и газотурбинных
двигателях. [3]
Данная установка в мобильном малотоннажном варианте может
найти применение на газоконденсатных месторождениях. При
определенных температуре и давлении в газопроводах могут зарождаться
гидратные образования (пробки), нарушающие нормальный режим работы
газопровода. Обнаружение и разрушение их представляет довольно
сложную техническую задачу.
Список использованных источников:
1. Microwave plasma torch for processing hydrocarbon gases. Alex G.
Zherlitsyn, Vladimir P. Schiyan, Pavel V. Demchenko. Resource – Efficient
Technologies 2 (2016) 11-14.
2. Сверхвысокочастотный плазматрон/ под редакцией Жерлицын А. Г.
Буянтуев В. В., Шиян В. П. – Томск: Приборы и техника,
эксперимент,2014г. – 100с
3. Плазмотрон для конверсии углеводородного газа с радиальной
системой инициирования разряда/ под ред. Жирлицын А. Г., Косицын В.
С., Канаев Г. Г., Шин В. П. – Изв. Вузов. Физика 2012 - №11/2, с 321
160
УДК 65.011 Бакенова А.А. (Томск, ТПУ)
Аймагамбетова Р.Ж. (Караганда, КарГТУ)
ВЫБОР ЭФФЕКТИВНЫХ МЕРОПРИЯТИЙ ПО ФОРМИРОВАНИЮ
ГИБКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПРЕДПРИЯТИЕМ
В 2000-х годах стартовала новая система управления предприятием,
которая основывается на двух основных показателях, это: повышение
финансового положения и планирование производственно-
организационных вопросов [1]. В дальнейшем в дополнение к системе
управления предприятием формировались информационные программы,
которые были автоматизированы и устанавливались в режиме реального
времени. С прохождением времени, данная система управления
предприятия давала сбой, так как некоторые показатели данной системы
противоречили друг другу, тем самым ухудшая положение предприятия
(компаний) [2]. Гибкая система управления предприятием это метод
быстрого реагирования на изменение какого-либо параметра внешней или
внутренней среды предприятия. Потребность в гибкой системе управления
предприятием в XXI веке очевидна, развивается технология, которая ведет
к увеличению потребностей, растет конкуренция, что приводит к
формированию мотивации и улучшению бизнес-процессов на
предприятии.
Главной задачей гибкой системы управления предприятием является
наиболее эффективное сочетание и осуществление бизнес-процессов на
предприятия, с помощью которого осуществляются его цели. Данная
система управления берет свою основу на анализе первоначальных данных
предприятия, непосредственным аудитом как внутренней, так и внешней
среды, а также занимается сканированием всех производственных
ресурсов, детально раскрывает процессный подход и оценкой
организационной среды предприятия [3].
Формирование гибкой системы основывается на трех процессах:
производственно-технический процесс, административно-
организационный процесс, процесс формирования результатов аудита
(формирование эффективных мероприятии).
Производственно-технический процесс реализует разработку и
проектирование продукта, непосредственно процесс производства
продукций, материально техническое обеспечение и контроль качества
производимого продукта. Основной задачей является формирование
технологического процесса, отвечающего всем стандартам и
удовлетворяющим потребителя, а также определить возможные потери,
риски на производстве.
Административно-организационный процесс основан на контроле
внутренней среды, организации рабочего процесса, улучшении
161
результативности производства предприятия. Предприятие формирует
политику, которая должна быть согласована с целями предприятия. Цели
должны быть измеримы и включать в себя необходимые требования к
выполнению. При планировании или внедрении изменения в систему
управления предприятием должна сохраняться целостность системы
менеджмента качества [5].
Процесс формирования результатов аудита является конечным и
весомым процессом в гибкой системе управления предприятием. На
данном этапе предприятие получает заключение стороннего лица
(аудитора), целью которого формирования эффективных мероприятий для
улучшения их показателей как на рыночной площадке, так и внутри
организации.
Формирование эффективных мероприятии в гибкой системе
управления предприятием реализуется из следующих показателей:
мониторинг производственно-технологического процесса, путем
отслеживания технологических карт и откликов продукта на рынке, где
статистическим методом определяется не соответствие товара (услуг) всем
требованиям. Далее изучение административно-организационного
процесса и разработка регламента каждого из рабочего подпроцесса.
Производится аудит всех данных на соответствие фактическим данным.
Формируется документооборот предприятия, где создается единая система
учета всех данных. Определяются несоответствия всем нормативным
требованиям и стандартам данной деятельности. Внедрение эффективных
мероприятий на конечном этапе оценивается сторонним лицом, т.е.
сертификацией ISO 9001:2015. ISO 9001:2015 «Система менеджмента
качеств. Требования» [4] является одним из эффективных мероприятий по
стандарту. Стандарт ISO 9001 свидетельствует, что на предприятии
внедрена и функционирует система менеджмента качества, которая в свою
очередь гарантирует неизменно высокое качество товара (услуг),
независимо от изменяющихся внешних или внутренних условий.
В свою очередь сертификат ISО 9001, является гарантом качества и
стабильности, оказывает положительный отклик на формирование
общественного мнения о положении предприятия на рынке продукции
(услуг), и в следствие, увеличивает количество заказов и обращений на
продукцию (услугу) предприятия. Сертификат ISО 9001 так же является
гарантом для партнеров предприятия по бизнесу, банков, инвестиционных
компаний и др.
Экономический эффект от получаемого сертификата ISO 9001
внушителен. Предприятие имеет возможность войти на международные
рынки, где основным требованием является функционирование системы
менеджмента качества, гарантом которого является сертификат ISO 9001.
Возможность предоставлять продукцию (услуги) в секторе, где функцию
регулирования занимает правительство.
162
Согласно статистике, в России самое большое количество выданных
сертификатов ISO 9001 было зафиксировано в 2010 году, когда их число
составило 62 265 сертификатов, что на 46 214 единиц больше по
сравнению с показателем, полученным в 2008 году. Отметим, что в 2010
году Россия стала лидером среди стран Европы по количеству выданных
сертификатов ISО 9001. В 2011 году произошел спад и количество
оформленных сертификатов ISO 9001 составило всего лишь 12 663
сертификата. Многие эксперты связывают данный спад с насыщением
рынка.
В разрезе отраслей промышленности лидером стал строительный
сектор, где за период с 1998 по 2011 годы было оформлено 836 547
сертификатов ISO 9001, далее следуют такие отрасли как [5]:
– металлургическая промышленность - 817 752;
– производство электрического и оптического оборудования - 701 326;
– машиностроение - 497 733;
– оптовая и розничная торговля; ремонт автотранспортных средств,
мотоциклов и личных и бытовых товаров - 476 896.
Приведенная статистика указывает на весомость стандартов ISO
9001.
Данная система управления предприятием на производстве,
основывается на ГОСТ ISO 9001:2015. Соответствие компаний данному
порядку правил и стандарту является доказательством грамотного
управления предприятием и является существенным преимуществом в
конкурентной борьбе.
Список использованных источников
1. Баранов В. В. Зайцев А.В. Соколов С.Н. Исследование систем
управления: Учебное пособие -М.: Альпина Паблишер, 2013. -216 с.
2. О'Лири Д. ERP системы. Современное планирование и управление
ресурсами предприятия: выбор, внедрение, эксплуатация. М.: Вершина,
2004. – 272 с.
3. Журавлев Ю.В. Прозоровская Л.В. Лазарев А.Н. Процедура
формирование системы управления предприятием на основе разработке
инновационных стратегий // Экономика и управление. – 2010. - 1(62). - С.
301-305.
4. ГОСТ ISO 9001:2015 «Система менеджмента качества. Требования».
5. Официальная статистика ISO/ ТЕХНОКОНС бизнес для бизнеса.
Режим доступа: http://technoconsgroup.ru/news/50-iso-9001-v-rossii-
oficialnaya-statistika.html (дата обращения: 09.05.2016).
163
УДК 539.375 Бакиров Ж.Б. (Караганда, КарГТУ)
Бакиров М.Ж. (Караганда, КарГТУ)
Такишов А.А. (Жезказган, ЖезУ)
РЕГРЕССИОННЫЕ ЗАВИСИМОСТИ ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ
СВОДА ЕСТЕСТВЕННОГО РАВНОВЕСИЯ ПОЛЕВЫХ ВЫРАБОТОК
При отработке рудных месторождений полевыми выработками под
рудной панелью проходятся штреки, в рудном теле веерным способом
пробуриваются скважины, куда закладывается заряд. Отколотая взрывом
руда падает в штрек и в дальнейшем транспортируется на поверхность.
Известно, что при определенных размерах выработки может
произойти самопроизвольное обрушение кровли с образованием свода
естественного равновесия (СЕР). Если обрушенная порода с учетом ее
разрыхления полностью заполнит отработанное пространство, то
произойдет его естественная забутовка. Поэтому для эффективной
разработки месторождения важно знать размеры СЕР в зависимости от
параметров отработки.
Для определения границ СЕР разработана методика, основанная на
анализе напряженного состояния вокруг выработки [1, 2]. Для этого
применяется программа конечно-элементного анализа ANSYS.
Расчетная схема выработки обоснована в работах [1, 2] и показана на
рисунке 1. Размеры массива вокруг выработки (H1, H2, L) для
твердотельного моделирования, тип конечного элемента и его размеры с
уменьшением в зонах концентрации напряжений приведены в [2].
Ранее установлено [1], что форма СЕР представляет собой вытянутый
вдоль ширины выработки полуэллипс с размерами hc, bc. Размеры СЕР
сильно зависят от предела прочности породы на растяжение σp, глубины
залегания рудного пласта H, ширины выработки b и в меньшей мере от
ширины штрека b1. Для вывода регрессионных зависимостей надо задать
пределы изменения этих параметров. Пределы изменения Н зададим от 400
до 700 метров, а ширину штрека меняем от 5 до 9,5 метров. Минимальное
значение ширины камеры определяется из условия превышения
максимальным растягивающим напряжением в кровле при минимальной
глубине залегания руды (принято 400м) предела прочности породы на
растяжение. Эта величина для каждой породы определяется путем
предварительного расчета. Регрессионные зависимости будем определять
для вмещающих пород рудника Жаман-Айбат: σр=6,9 МПа, σр=9,4 МПа,
σр=14,2 МПа.
В компьютерном эксперименте варьируемые параметры будем менять
на четырех равностоящих уровнях. Тогда варьируемые параметры на
различных уровнях имеют значения, приведенные в таблице 1.
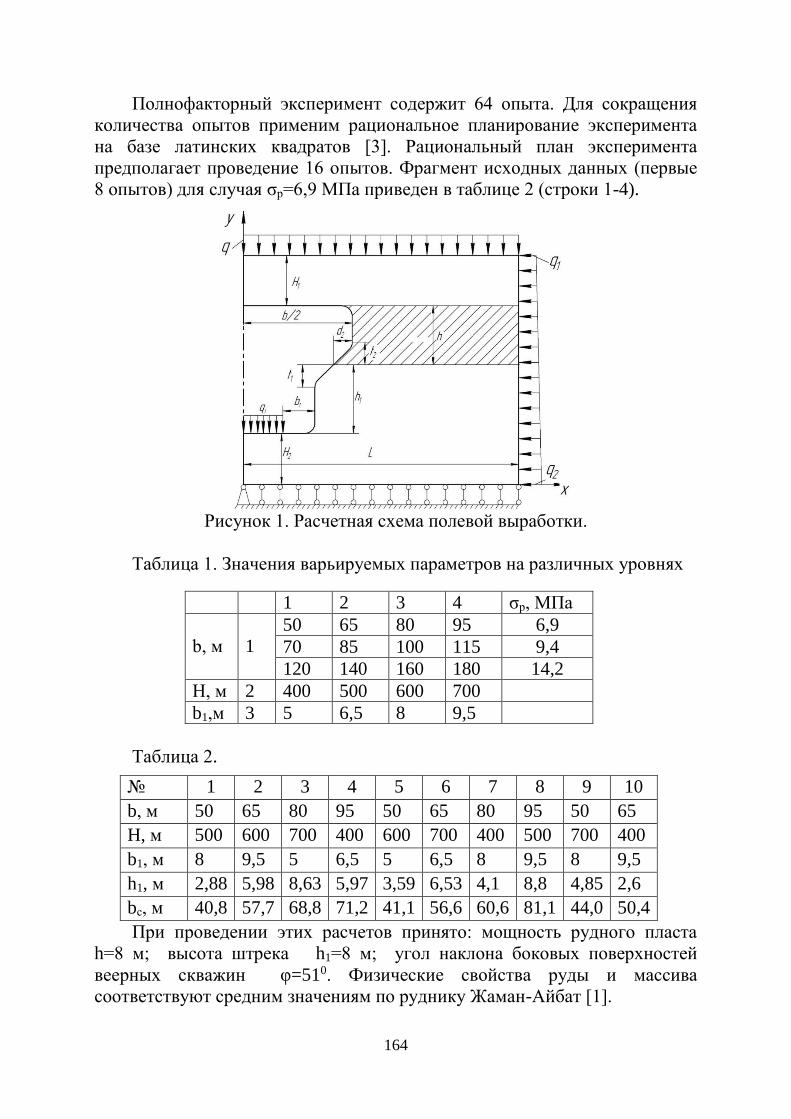
164
Полнофакторный эксперимент содержит 64 опыта. Для сокращения
количества опытов применим рациональное планирование эксперимента
на базе латинских квадратов [3]. Рациональный план эксперимента
предполагает проведение 16 опытов. Фрагмент исходных данных (первые
8 опытов) для случая σр=6,9 МПа приведен в таблице 2 (строки 1-4).
Рисунок 1. Расчетная схема полевой выработки.
Таблица 1. Значения варьируемых параметров на различных уровнях
1 2 3 4 σр, МПа
b, м
1
50 65 80 95 6,9
70 85 100 115 9,4
120 140 160 180 14,2
H, м 2 400 500 600 700
b1,м 3 5 6,5 8 9,5
Таблица 2.
№ 1 2 3 4 5 6 7 8 9 10
b, м 50 65 80 95 50 65 80 95 50 65
H, м 500 600 700 400 600 700 400 500 700 400
b1, м 8 9,5 5 6,5 5 6,5 8 9,5 8 9,5
h1, м 2,88 5,98 8,63 5,97 3,59 6,53 4,1 8,8 4,85 2,6
bс, м 40,8 57,7 68,8 71,2 41,1 56,6 60,6 81,1 44,0 50,4
При проведении этих расчетов принято: мощность рудного пласта
h=8 м; высота штрека h1=8 м; угол наклона боковых поверхностей
веерных скважин φ=510. Физические свойства руды и массива
соответствуют средним значениям по руднику Жаман-Айбат [1].
165
В результате каждого эксперимента определяем высоту и ширину СЕР
(hc, bc). Результаты расчетов приведены также в таблице 2 (строки 5-6).
Такие же расчеты проведены и для других типов пород.
Для получения зависимости размеров СЕР от параметров отработки
применим методику нетрадиционного регрессионного анализа и
программу ANETR, разработанные в КарГТУ [3]. В результате обработки
результатов компьютерных экспериментов получены зависимости высоты
и ширины СЕР от параметров отработки для различных пород. Для
аргиллита с трещинами с пределом прочности 6,9 МПа (таблица 2):
1
4253,90,3918 5,237;
22,631 0,1312c
bh b
b H
10,899 10489,9 / 136,325 / 39,826.cb b H b
При увеличении ширины камеры от 100 до 140 метров:
0,053
10,173 5048,9 / 12,013 11,068ch b H b ; 5 1
1201,276lg 10813,1/ [0,011 9,75 10 ] 396,96cb b H b .
Для песчаника с пределом прочности 9,4 МПа при ширине камеры от
70 до 115 метров:
10,1456 25,585lg 0,367 80,19ch b H b ;
1245,178 8982,6 / 29892,5 / 169,355 / .cb b H b
При расширении ширины камеры от 120 до 160 метров получено:
10,17 6213,5 / 4,462 / 2,214ch b H b ;
1229,035lg 19583,9 / 48,244 / 343,2cb b H b .
Для аргиллита с пределом прочности 14.2 МПа при b=120÷180 метров:
10,173 7929,65 / 24,054 / 2,085;ch b H b
1354,31 21513,2 / 46014,1/ 225,01/ .cb b H b
Список использованных источников
1. Бакиров Ж.Б., Такишов А.А, Бакиров М.Ж. Методика определения свода
естественного равновесия выработки рудного месторождения //
Материалы международной научно-практ. конф. «Интеграция науки,
образования и производства – основа реализации Плана нации». Часть 3. –
Караганда: КарГТУ, 2017. – С. 27 – 29.
2. Бакиров Ж.Б., Такишов А.А, Бакиров М.Ж. Исследование напряженного
состояния вокруг выработки при добыче руды веерными скважинами //
Труды университета. № 3. - Караганда: КарГТУ, 2017. - С. 54-58.
3. Ермеков М.А. Махов А.А. Статистико – детерминированный метод
построения многомерных моделей с использованием ЭВМ. – Караганда:
КарГТУ, 1988. – 96 с.
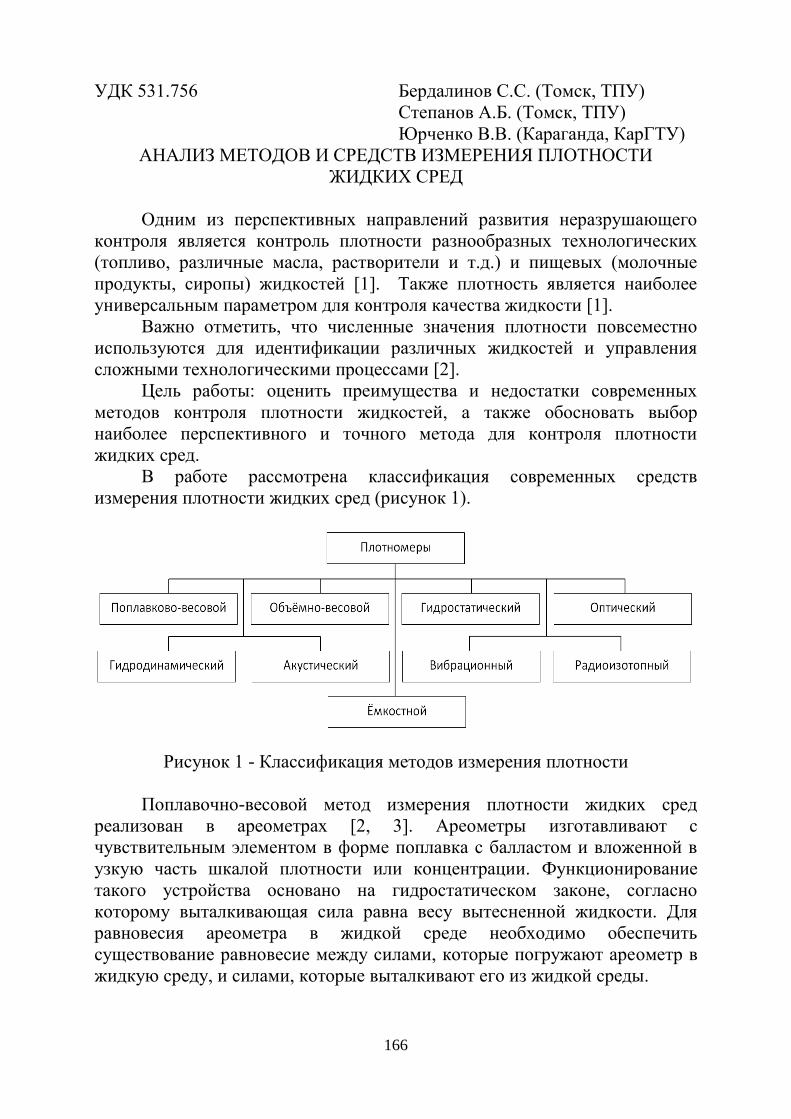
166
АНАЛИЗ МЕТОДОВ И СРЕДСТВ ИЗМЕРЕНИЯ ПЛОТНОСТИ
ЖИДКИХ СРЕД
Одним из перспективных направлений развития неразрушающего
контроля является контроль плотности разнообразных технологических
(топливо, различные масла, растворители и т.д.) и пищевых (молочные
продукты, сиропы) жидкостей [1]. Также плотность является наиболее
универсальным параметром для контроля качества жидкости [1].
Важно отметить, что численные значения плотности повсеместно
используются для идентификации различных жидкостей и управления
сложными технологическими процессами [2].
Цель работы: оценить преимущества и недостатки современных
методов контроля плотности жидкостей, а также обосновать выбор
наиболее перспективного и точного метода для контроля плотности
жидких сред.
В работе рассмотрена классификация современных средств
измерения плотности жидких сред (рисунок 1).
Рисунок 1 - Классификация методов измерения плотности
Поплавочно-весовой метод измерения плотности жидких сред
реализован в ареометрах [2, 3]. Ареометры изготавливают с
чувствительным элементом в форме поплавка с балластом и вложенной в
узкую часть шкалой плотности или концентрации. Функционирование
такого устройства основано на гидростатическом законе, согласно
которому выталкивающая сила равна весу вытесненной жидкости. Для
равновесия ареометра в жидкой среде необходимо обеспечить
существование равновесие между силами, которые погружают ареометр в
жидкую среду, и силами, которые выталкивают его из жидкой среды.
УДК 531.756 Бердалинов С.С. (Томск, ТПУ)
Степанов А.Б. (Томск, ТПУ)
Юрченко В.В. (Караганда, КарГТУ)
167
Объёмно-весовой метод измерения плотности жидких сред
реализован в пикнометрах [2, 3]. Пикнометр представляет собой сосуд
специальной формы и определенной вместимости, применяемый для
измерения плотности вещества. У весовых плотномеров принцип
действия основан на том, что для любого жидкого вещества его масса при
неизменном значении объёме вещества прямо пропорциональна значению
плотности такого вещества, то есть для измерения плотности жидкости
достаточно постоянно взвешивать определенный объём жидкого вещества.
В гидростатическом методе [2, 3] реализовано измерение перепада
давления столба жидкой среды на дроссельном элементе при постоянной
высоте. Принцип работы гидростатических плотномеров основан на том,
что давление 𝑃 в веществе на расстоянии 𝐻 от ее поверхности определяют
по следующему выражению:
𝑃 = 𝜌 ∗ 𝑔 ∗ 𝐻,
где 𝜌 – плотность жидкой среды; 𝑔 - ускорение свободного падения; 𝐻 –
высота столба жидкости.
У вибрационного плотномера [2, 3] принцип действия основан на
функциональной зависимости между параметрами упругих колебаний,
которые сообщаются трубе (сосуду) с исследуемой жидкой средой или
помещенному в неё телу, с одной стороны, и плотностью жидкого
вещества – с другой. В плотномерах такого типа измеряют частоту
собственных колебаний резонатора. При этом частота колебаний
резонатора функционально связана с плотностью жидкой среды. Такой
резонатор вместе с приводом (системой возбуждения) и системой
обратной связи образует электромеханический генератор. Зависимость
периода T колебаний резонатора от плотности жидкости имеет следующий
вид:
𝑇 = 𝑇0√1 + 𝑘 ∗ 𝜌,
где 𝑇0 – начальный период колебаний;
𝑘 – коэффициент чувствительности;
𝜌 – плотность жидкости.
Принцип действия радиоизотопного плотномера [2, 3] основан на
прохождении, например, пучка гамма лучей через жидкое вещество и
последующим ослаблением его интенсивности. Ослабление интенсивности
излучения в этом случае с одной стороны определяется спектральным
составом и энергией падающего пучка, а с другой стороны – химическим
составом и плотностью измеряемой жидкой среды. Поглощение гамма-
излучения жидким веществом может быть описано экспоненциальным
уравнением:
168
𝐽 = 𝐽0 exp(−𝑢′𝜌𝑑),
где 𝐽0 – начальная интенсивность пучка гамма-лучей;
𝑢′ – массовый коэффициент;
𝜌 – плотность;
𝑑 – толщина контролируемого материала.
Принцип действия ультразвукового плотномера [2, 3] основан на
прохождении скорости звука в жидкой среде. Скорость c распространения
ультразвуковых волн в жидкостях определяется уравнением:
𝑐жид = √1
𝛽ад∗𝜌,
где 𝛽ад – коэффициент адиабатической сжимаемости среды; 𝜌 –
плотность.
Оптический метод [2, 3] измерения плотности жидкости заключается
в захвате света движущейся средой (эффект Физо – Фринели) или в
рассеянии света движущимися частицами (эффект Доплера). По
разновидности реализации метода выделяют поляриметрический,
калориметрический, нефелометрический и рефрактометрический
плотномеры. Средства, реализующие данный метод, делят на
поляриметры, калориметры, нефелометры и рефрактометры.
Емкостный метод [2, 3] основан на измерении емкости конденсатора,
образованного погруженным в среду электродом и средой,
непосредственно контролируемой. Параметр материала, характеризующий
способность материала образовывать емкость, называется
диэлектрической проницаемостью и показывает, во сколько раз
увеличивается емкость конденсатора, когда между пластинами
конденсатора внести данный материал, не меняя при этом габаритов
конденсатора, по сравнению с вакуумом. Отметим, что плотномеры такого
типа могут применяться для измерения как неэлектрических, так и
электрических жидких сред.
В работе систематизированы и проанализированы существующие
методы и средства измерения плотности жидких сред, выявлены их
достоинства и недостатки.
Список использованных источников
1 Кивилис С.С. Плотномеры. М.: Энергия, 1980. 278 с.
2 Викторов В.А., Лункин Б.В. Измерение количества и плотности
различных сред. М.: Энергия, 1973. 109 с.
3 Измерение массы, плотности и вязкости / В.Я. Кузьмин, С.И.
Торопин, Ю.В. Тарбеев и др. М.: Изд-во стандартов, 1988. 175 с.
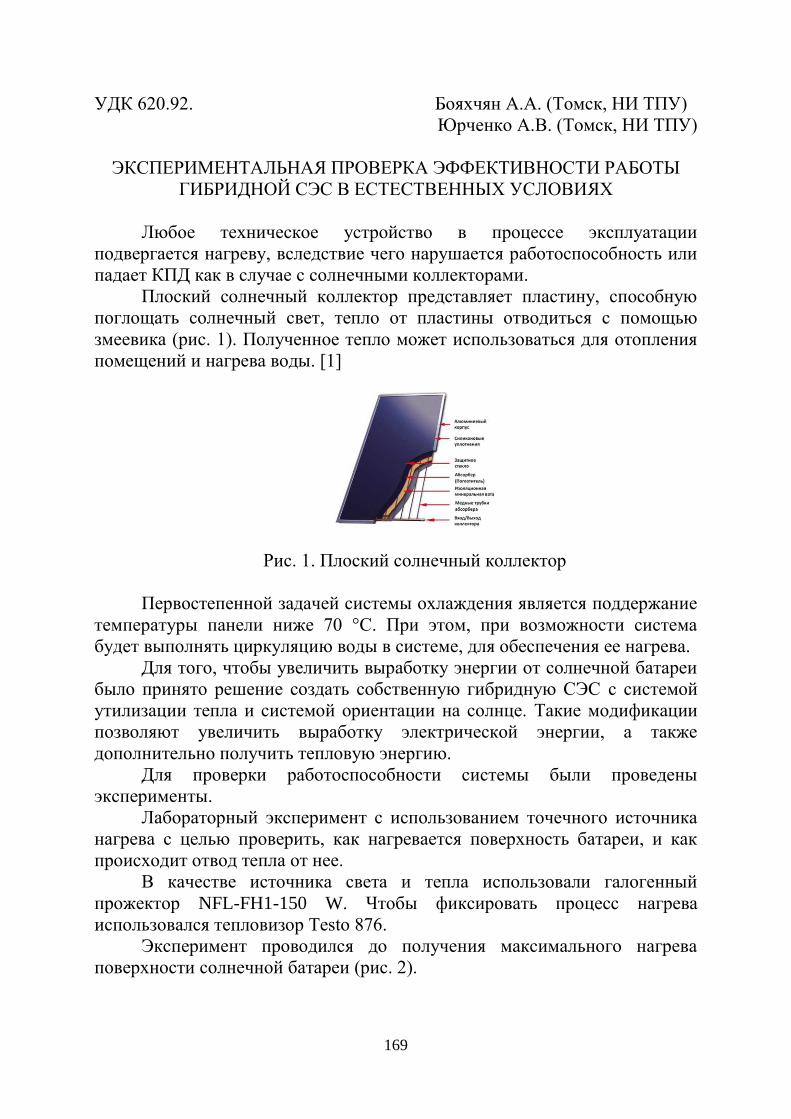
169
УДК 620.92. Бояхчян А.А. (Томск, НИ ТПУ)
Юрченко А.В. (Томск, НИ ТПУ)
ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА ЭФФЕКТИВНОСТИ РАБОТЫ
ГИБРИДНОЙ СЭС В ЕСТЕСТВЕННЫХ УСЛОВИЯХ
Любое техническое устройство в процессе эксплуатации
подвергается нагреву, вследствие чего нарушается работоспособность или
падает КПД как в случае с солнечными коллекторами.
Плоский солнечный коллектор представляет пластину, способную
поглощать солнечный свет, тепло от пластины отводиться с помощью
змеевика (рис. 1). Полученное тепло может использоваться для отопления
помещений и нагрева воды. [1]
Рис. 1. Плоский солнечный коллектор
Первостепенной задачей системы охлаждения является поддержание
температуры панели ниже 70 °С. При этом, при возможности система
будет выполнять циркуляцию воды в системе, для обеспечения ее нагрева.
Для того, чтобы увеличить выработку энергии от солнечной батареи
было принято решение создать собственную гибридную СЭС с системой
утилизации тепла и системой ориентации на солнце. Такие модификации
позволяют увеличить выработку электрической энергии, а также
дополнительно получить тепловую энергию.
Для проверки работоспособности системы были проведены
эксперименты.
Лабораторный эксперимент с использованием точечного источника
нагрева с целью проверить, как нагревается поверхность батареи, и как
происходит отвод тепла от нее.
В качестве источника света и тепла использовали галогенный
прожектор NFL-FH1-150 W. Чтобы фиксировать процесс нагрева
использовался тепловизор Testo 876.
Эксперимент проводился до получения максимального нагрева
поверхности солнечной батареи (рис. 2).
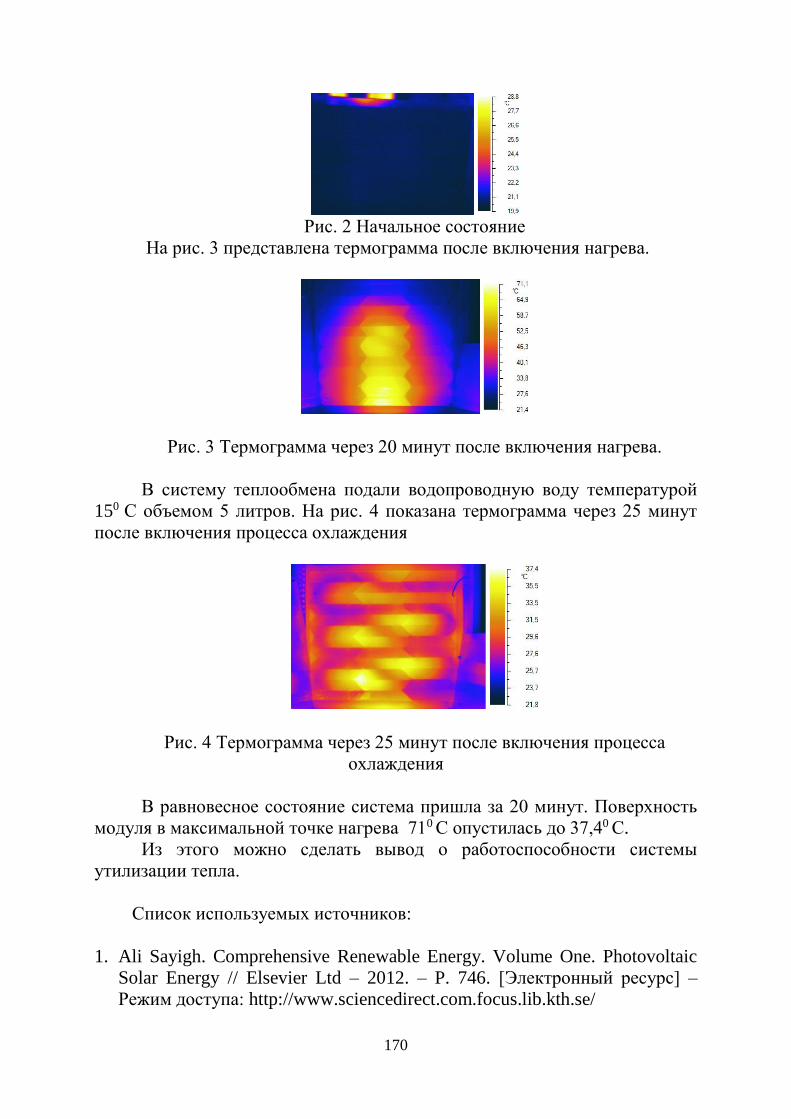
170
Рис. 2 Начальное состояние
На рис. 3 представлена термограмма после включения нагрева.
Рис. 3 Термограмма через 20 минут после включения нагрева.
В систему теплообмена подали водопроводную воду температурой
150 С объемом 5 литров. На рис. 4 показана термограмма через 25 минут
после включения процесса охлаждения
Рис. 4 Термограмма через 25 минут после включения процесса
охлаждения
В равновесное состояние система пришла за 20 минут. Поверхность
модуля в максимальной точке нагрева 710 С опустилась до 37,40 С.
Из этого можно сделать вывод о работоспособности системы
утилизации тепла.
Список используемых источников:
1. Ali Sayigh. Comprehensive Renewable Energy. Volume One. Photovoltaic
Solar Energy // Elsevier Ltd – 2012. – P. 746. [Электронный ресурс] –
Режим доступа: http://www.sciencedirect.com.focus.lib.kth.se/
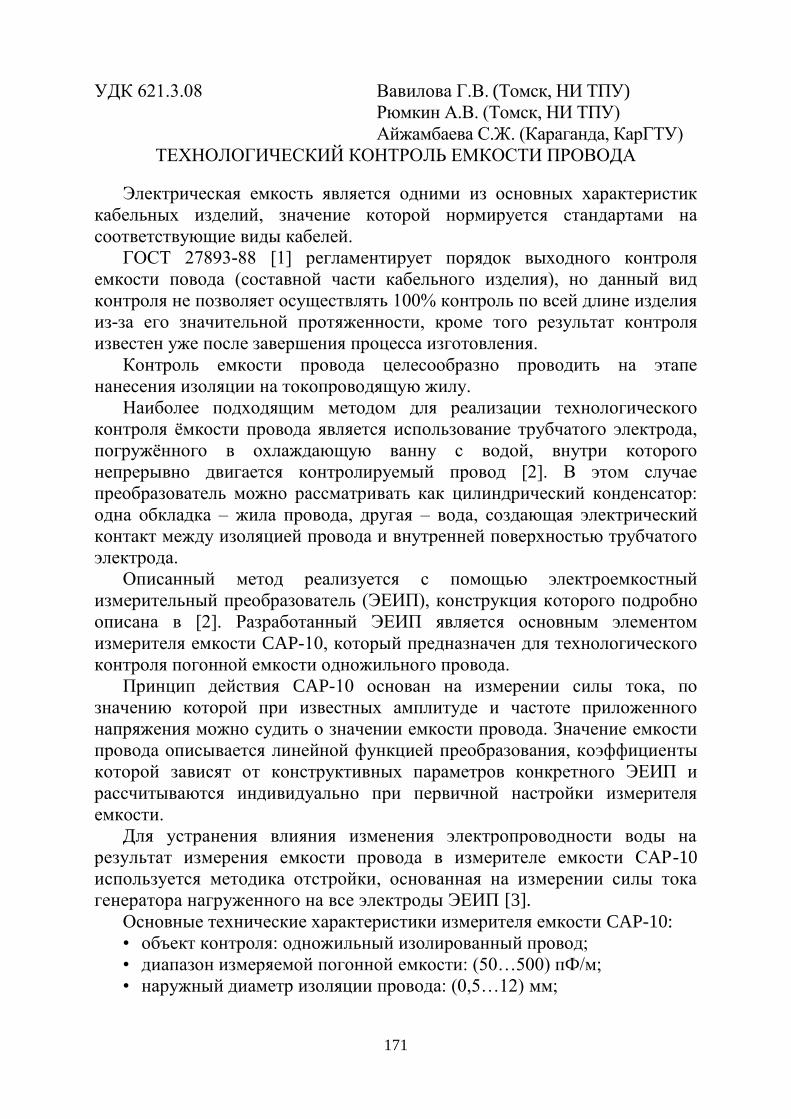
171
ТЕХНОЛОГИЧЕСКИЙ КОНТРОЛЬ ЕМКОСТИ ПРОВОДА
Электрическая емкость является одними из основных характеристик
кабельных изделий, значение которой нормируется стандартами на
соответствующие виды кабелей.
ГОСТ 27893-88 [1] регламентирует порядок выходного контроля
емкости повода (составной части кабельного изделия), но данный вид
контроля не позволяет осуществлять 100% контроль по всей длине изделия
из-за его значительной протяженности, кроме того результат контроля
известен уже после завершения процесса изготовления.
Контроль емкости провода целесообразно проводить на этапе
нанесения изоляции на токопроводящую жилу.
Наиболее подходящим методом для реализации технологического
контроля ёмкости провода является использование трубчатого электрода,
погружённого в охлаждающую ванну с водой, внутри которого
непрерывно двигается контролируемый провод [2]. В этом случае
преобразователь можно рассматривать как цилиндрический конденсатор:
одна обкладка – жила провода, другая – вода, создающая электрический
контакт между изоляцией провода и внутренней поверхностью трубчатого
электрода.
Описанный метод реализуется с помощью электроемкостный
измерительный преобразователь (ЭЕИП), конструкция которого подробно
описана в [2]. Разработанный ЭЕИП является основным элементом
измерителя емкости CAP-10, который предназначен для технологического
контроля погонной емкости одножильного провода.
Принцип действия CAP-10 основан на измерении силы тока, по
значению которой при известных амплитуде и частоте приложенного
напряжения можно судить о значении емкости провода. Значение емкости
провода описывается линейной функцией преобразования, коэффициенты
которой зависят от конструктивных параметров конкретного ЭЕИП и
рассчитываются индивидуально при первичной настройки измерителя
емкости.
Для устранения влияния изменения электропроводности воды на
результат измерения емкости провода в измерителе емкости САР-10
используется методика отстройки, основанная на измерении силы тока
генератора нагруженного на все электроды ЭЕИП [3].
Основные технические характеристики измерителя емкости CAP-10:
• объект контроля: одножильный изолированный провод;
• диапазон измеряемой погонной емкости: (50…500) пФ/м;
• наружный диаметр изоляции провода: (0,5…12) мм;
УДК 621.3.08 Вавилова Г.В. (Томск, НИ ТПУ)
Рюмкин А.В. (Томск, НИ ТПУ)
Айжамбаева С.Ж. (Караганда, КарГТУ)
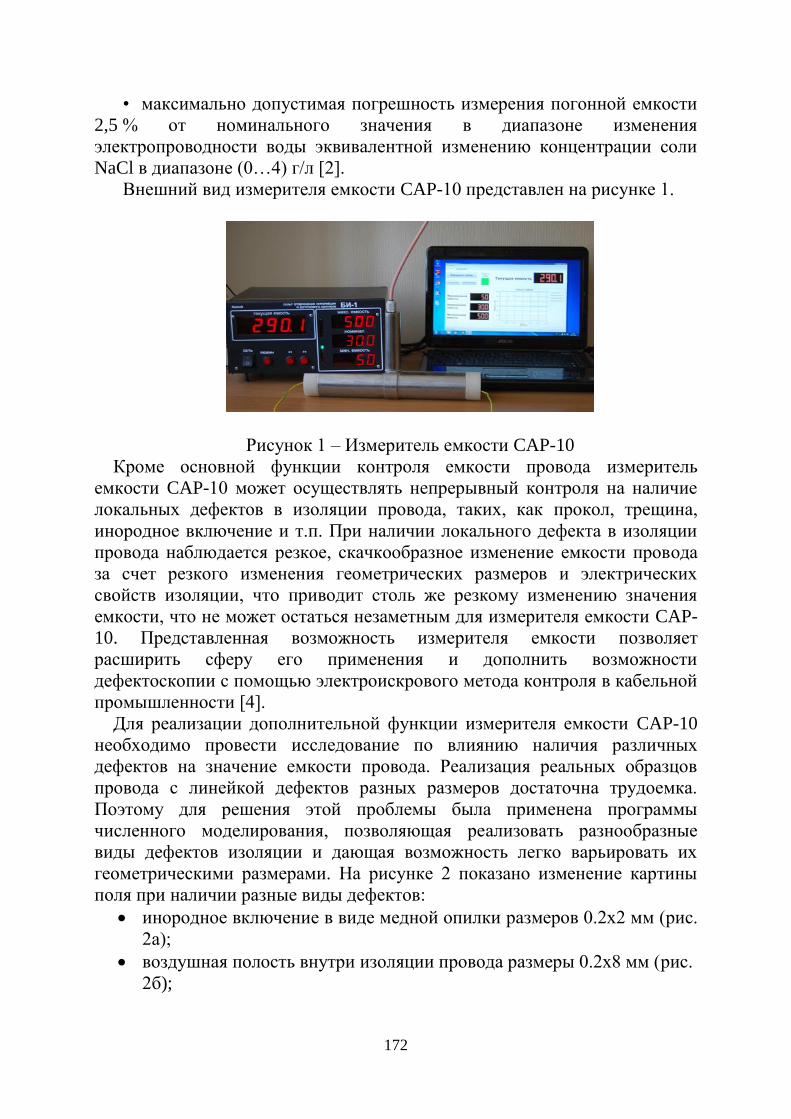
172
• максимально допустимая погрешность измерения погонной емкости
2,5 % от номинального значения в диапазоне изменения
электропроводности воды эквивалентной изменению концентрации соли
NaCl в диапазоне (0…4) г/л [2].
Внешний вид измерителя емкости CAP-10 представлен на рисунке 1.
Рисунок 1 – Измеритель емкости CAP-10
Кроме основной функции контроля емкости провода измеритель
емкости CAP-10 может осуществлять непрерывный контроля на наличие
локальных дефектов в изоляции провода, таких, как прокол, трещина,
инородное включение и т.п. При наличии локального дефекта в изоляции
провода наблюдается резкое, скачкообразное изменение емкости провода
за счет резкого изменения геометрических размеров и электрических
свойств изоляции, что приводит столь же резкому изменению значения
емкости, что не может остаться незаметным для измерителя емкости CAP-
10. Представленная возможность измерителя емкости позволяет
расширить сферу его применения и дополнить возможности
дефектоскопии с помощью электроискрового метода контроля в кабельной
промышленности [4].
Для реализации дополнительной функции измерителя емкости CAP-10
необходимо провести исследование по влиянию наличия различных
дефектов на значение емкости провода. Реализация реальных образцов
провода с линейкой дефектов разных размеров достаточна трудоемка.
Поэтому для решения этой проблемы была применена программы
численного моделирования, позволяющая реализовать разнообразные
виды дефектов изоляции и дающая возможность легко варьировать их
геометрическими размерами. На рисунке 2 показано изменение картины
поля при наличии разные виды дефектов:
инородное включение в виде медной опилки размеров 0.2х2 мм (рис.
2а);
воздушная полость внутри изоляции провода размеры 0.2х8 мм (рис.
2б);
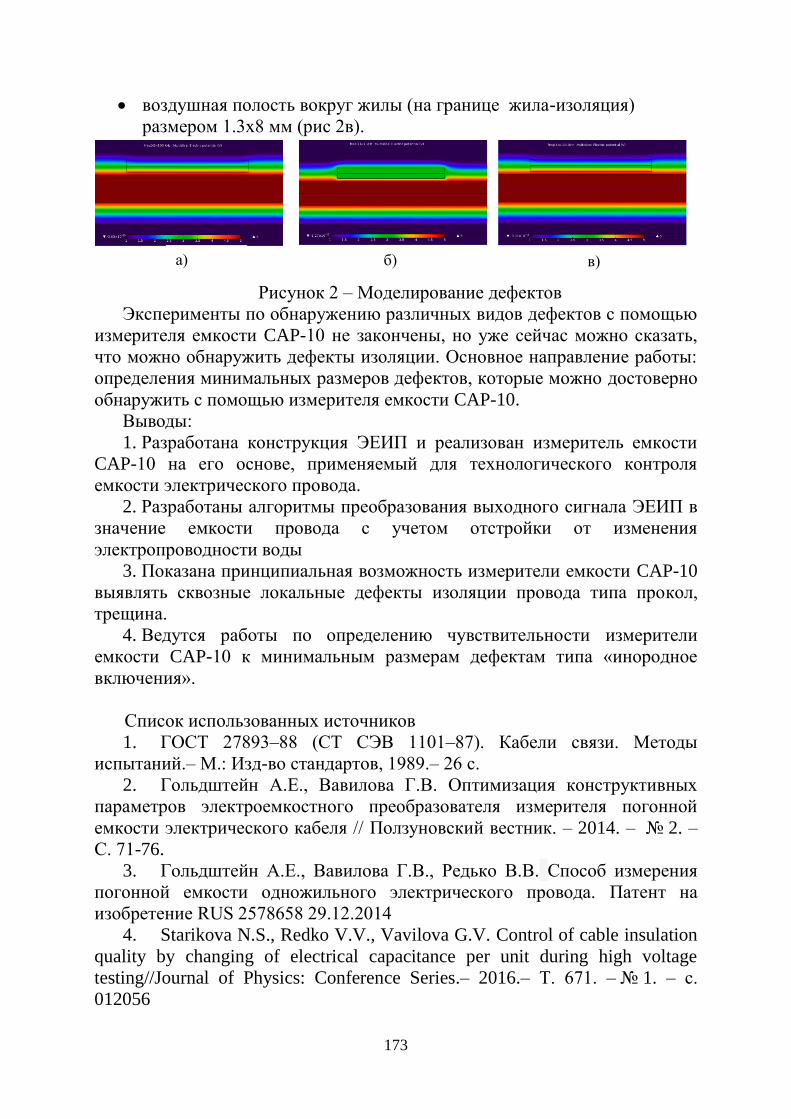
173
воздушная полость вокруг жилы (на границе жила-изоляция)
размером 1.3х8 мм (рис 2в).
Рисунок 2 – Моделирование дефектов
Эксперименты по обнаружению различных видов дефектов с помощью
измерителя емкости CAP-10 не закончены, но уже сейчас можно сказать,
что можно обнаружить дефекты изоляции. Основное направление работы:
определения минимальных размеров дефектов, которые можно достоверно
обнаружить с помощью измерителя емкости CAP-10.
Выводы:
1. Разработана конструкция ЭЕИП и реализован измеритель емкости
CAP-10 на его основе, применяемый для технологического контроля
емкости электрического провода.
2. Разработаны алгоритмы преобразования выходного сигнала ЭЕИП в
значение емкости провода с учетом отстройки от изменения
электропроводности воды
3. Показана принципиальная возможность измерители емкости CAP-10
выявлять сквозные локальные дефекты изоляции провода типа прокол,
трещина.
4. Ведутся работы по определению чувствительности измерители
емкости CAP-10 к минимальным размерам дефектам типа «инородное
включения».
Список использованных источников
1. ГОСТ 27893–88 (СТ СЭВ 1101–87). Кабели связи. Методы
испытаний.– М.: Изд-во стандартов, 1989.– 26 с.
2. Гольдштейн А.Е., Вавилова Г.В. Оптимизация конструктивных
параметров электроемкостного преобразователя измерителя погонной
емкости электрического кабеля // Ползуновский вестник. – 2014. – № 2. –
С. 71-76.
3. Гольдштейн А.Е., Вавилова Г.В., Редько В.В. Способ измерения
погонной емкости одножильного электрического провода. Патент на
изобретение RUS 2578658 29.12.2014
4. Starikova N.S., Redko V.V., Vavilova G.V. Control of cable insulation
quality by changing of electrical capacitance per unit during high voltage
testing//Journal of Physics: Conference Series.– 2016.– Т. 671. – № 1. – с.
012056
а) б) в)
174
УДК 622.272.б. Гаврилова М.А. (Караганда, КарГТУ)
Жамантаев Б. У. (Караганда, КарГТУ)
Женисов Ж. Н. (Караганда, КарГТУ)
ПОТЕНЦИАЛЬНЫЕ ИСТОЧНИКИ ПОМЕХ БЕСПРОВОДНОЙ
СВЯЗИ ПО СЕТИ WI-FI
Как известно, в беспроводных сетях в качестве среды
распространения сигнала используются радиоволны (радиоэфир), и работа
устройств и передача данных в сети происходит без использования
кабельных соединений. В связи с этим на работу беспроводных сетей
воздействует большее количество различного рода помех. Далее приведен
список самых распространенных причин, влияющих на работу
беспроводных сетей
Wi-Fi (IEEE 802.11b/g/n).
1. Другие Wi-Fi-устройства (точки доступа, беспроводные камеры и
др.), работающие в радиусе действия вашего устройства и использующие
тот же частотный диапазон.
Дело в том, что Wi-Fi-устройства подвержены воздействию даже
небольших помех, которые создаются другими устройствами,
работающими в том же частотном диапазоне.
В беспроводных сетях используются два частотных диапазона – 2,4 и
5 ГГц. Беспроводные сети стандарта 802.11b/g работают в диапазоне 2.4
ГГц, сети стандарта 802.11a – 5 ГГц, а сети стандарта 802.11n могут
работать как в диапазоне 2.4 ГГц, так и в диапазоне 5 ГГц.
Используемый частотный диапазон и эксплуатационные
ограничения в разных странах могут быть различные.
В полосе частот 2,4 ГГц для беспроводных сетей доступны 11 или 13
каналов шириной 20 МГц (802.11b/g/n) или 40 МГц (IEE 802.11n) с
интервалами 5 МГц между ними. Беспроводное устройство, использующее
один из частотных каналов, создает значительные помехи на соседние
каналы. Например, если точка доступа использует канал 6, то она
оказывает сильные помехи на каналы 5 и 7, а также, уже в меньшей
степени, – на каналы 4 и 8. Для исключения взаимных помех между
каналами необходимо, чтобы их несущие частоты отстояли друг от друга
на 25 МГц (5 межканальных интервалов).
2. В некоторых случаях на точке доступа рекомендуется понизить
мощность сигнала Wi-Fi до уровня 50 – 75%.
2.1. Использование слишком большой излучаемой мощности сигнала
Wi-Fi не всегда означает, что сеть будет работать стабильно и быстро.
Если радиоэфир, в котором работает точка доступа, сильно загружен, то
может сказываться влияние внутриканальных и межканальных помех.
Наличие таких помех влияют на производительность сети, т.к. резко
175
увеличивают уровень шума, что приводит к низкой стабильности связи из-
за постоянной перепосылки пакетов. В этом случае рекомендуется
понизить мощность передатчика в точке доступа.
2.2. Мощность передатчика точки доступа в роутере обычно выше в 2-3
раза, чем на клиентских мобильных устройствах
(ноутбук/смартфон/планшет). В зоне покрытия сети могут быть такие
места, где клиент будет слышать точку доступа хорошо, а точка доступа
клиента – плохо, или вообще не слышать (ситуация, когда сигнал на
клиентском устройстве есть, а связи нет). В канале связи возникает
асимметрия от разных значений мощностей и чувствительности
приемников. Для обеспечения хорошего уровня сигнала нужно, чтобы
между клиентским устройством и точкой доступа было как можно более
симметричное соединение, чтобы точка доступа и клиент уверенно
слышали друг друга. Как это не покажется странным, но для устранения
асимметрии и получения более стабильной связи иногда следует понизить
мощность передатчика в точке доступа.
3. Bluetooth-устройства, беспроводные клавиатуры и мыши,
работающие в зоне покрытия вашего Wi-Fi-устройства.
Bluetooth-устройства, беспроводные клавиатуры и мыши работают в
частотном диапазоне 2.4 ГГц, а следовательно, могут оказывать влияние на
работу точки доступа и других Wi-Fi-устройств.
4. Большие расстояния между Wi-Fi-устройствами. Необходимо
помнить, что беспроводные устройства Wi-Fi имеют ограниченный радиус
действия. Например, домашний интернет-центр с точкой доступа Wi-Fi
стандарта 802.11b/g имеет радиус действия до 60 м в помещении и до 400
м вне помещения. В помещении дальность действия беспроводной точки
доступа может быть ограничена несколькими десятками метров – в
зависимости от конфигурации комнат, наличия капитальных стен и их
количества, а также других препятствий.
5. Препятствия. Различные препятствия (стены, потолки, мебель,
металлические двери и т.д.), расположенные между Wi-Fi-устройствами,
могут частично или значительно отражать/поглощать радиосигналы,
что приводит к частичной или полной потере сигнала. В городах с
многоэтажной застройкой основным препятствием для радиосигнала
являются здания. Наличие капитальных стен (бетон+арматура), листового
металла, штукатурки на стенах, стальных каркасов и т.п. влияет на
качество радиосигнала и может значительно ухудшать работу
Wi-Fi-устройств. Внутри помещения причиной помех радиосигнала также
могут являться зеркала и тонированные окна. Даже человеческое тело
ослабляет сигнал примерно на 3 dB.
Вне помещений влиять на качество передаваемого сигнала может
ландшафт местности (например, деревья, леса, холмы). Атмосферные
помехи (дождь, гроза, снегопад) также могут являться причиной
176
уменьшения производительности беспроводной сети (в случае, если
радиосигнал передается вне помещений).
6. Различная бытовая техника, работающая в зоне покрытия
Wi-Fi-устройства. Перечислим бытовую технику, которая может являться
причиной ухудшения качества связи Wi-Fi:
− Микроволновые СВЧ-печи. Эти приборы могут ослаблять уровень
сигнала Wi-Fi, т.к. обычно также работают в диапазоне 2,4 ГГц;
− Мониторы с ЭЛТ, электромоторы, беспроводные динамики,
беспроводные телефоны и другие беспроводные устройства;
− Внешние источники электрического напряжения, такие как линии
электропередач и силовые подстанции, могут являться источниками
помех.
7. Устройства, работающие по стандарту USB 3.0 могут создавать
помехи для сети Wi-Fi в диапазоне 2,4 ГГц.
Такая проблема может быть вызвана помехами, исходящими от
подключаемых устройств или кабелей, разъемов, коннекторов c
интерфейсом USB 3.0. В частности, может иметь место отсутствие или
недостаточное экранирование кабеля или коннектора подключаемого
устройства, что может привести к помехам (интерференции) на частотах в
диапазоне 2,4 ГГц (на этой частоте работают большинство беспроводных
устройств).
8. Прочие потенциальные источники помех. Помимо вышеуказанных
причин, влияющих на работу беспроводных сетей Wi-Fi, потенциально
могут оказывать влияние и другие факторы. Например:
− Беспроводные динамики, работающие на частоте 2,4 или 5 ГГц;
− Некоторые источники электрического напряжения (например,
электропроводка) ; не размещать роутер с точкой доступа Wi-Fi у стены,
плинтуса или короба с электропроводкой, а также возле электрического
щитка;
− Кабели с недостаточным экранированием, а также коаксиальный
кабель и разъемы, используемые с некоторыми типами спутниковых
тарелок;
− Некоторые внешние мониторы и ЖК-экраны, работающие на частоте
2,4 ГГц;
− Беспроводные камеры, другие устройства Wi-Fi, находящие в
радиусе действия вашей сети Wi-Fi.
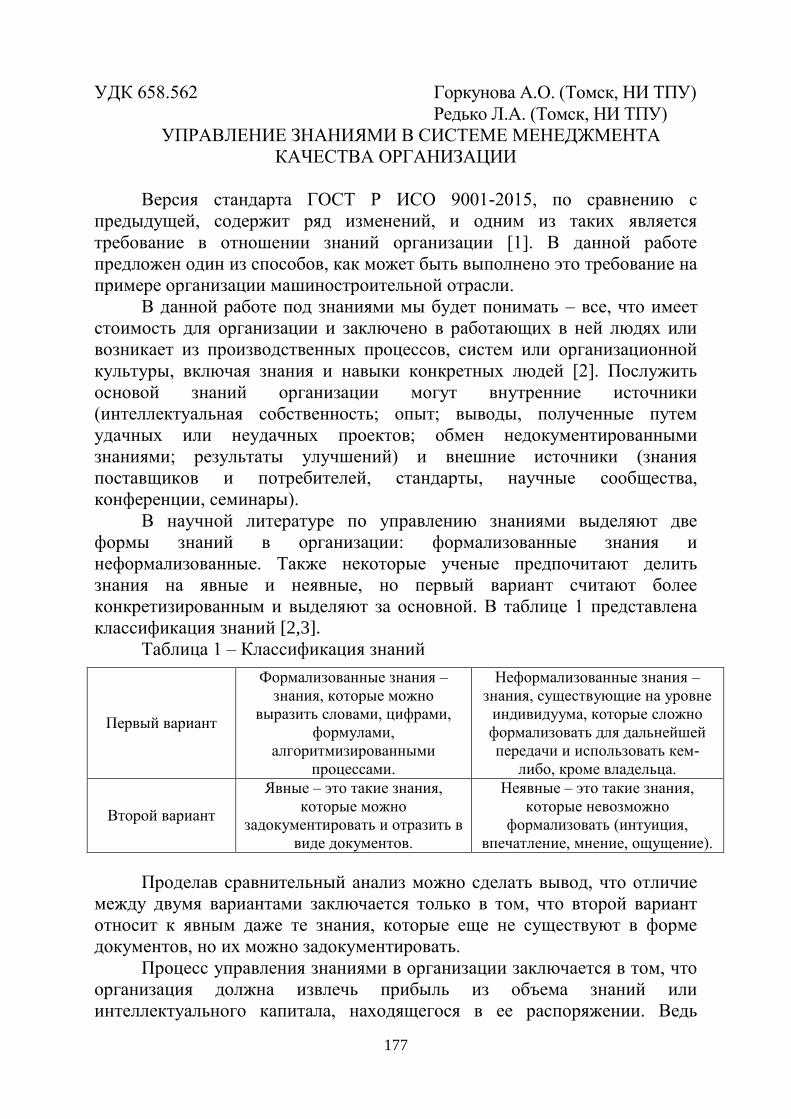
177
УПРАВЛЕНИЕ ЗНАНИЯМИ В СИСТЕМЕ МЕНЕДЖМЕНТА
КАЧЕСТВА ОРГАНИЗАЦИИ
Версия стандарта ГОСТ Р ИСО 9001-2015, по сравнению с
предыдущей, содержит ряд изменений, и одним из таких является
требование в отношении знаний организации [1]. В данной работе
предложен один из способов, как может быть выполнено это требование на
примере организации машиностроительной отрасли.
В данной работе под знаниями мы будет понимать – все, что имеет
стоимость для организации и заключено в работающих в ней людях или
возникает из производственных процессов, систем или организационной
культуры, включая знания и навыки конкретных людей [2]. Послужить
основой знаний организации могут внутренние источники
(интеллектуальная собственность; опыт; выводы, полученные путем
удачных или неудачных проектов; обмен недокументированными
знаниями; результаты улучшений) и внешние источники (знания
поставщиков и потребителей, стандарты, научные сообщества,
конференции, семинары).
В научной литературе по управлению знаниями выделяют две
формы знаний в организации: формализованные знания и
неформализованные. Также некоторые ученые предпочитают делить
знания на явные и неявные, но первый вариант считают более
конкретизированным и выделяют за основной. В таблице 1 представлена
классификация знаний [2,3].
Таблица 1 – Классификация знаний
Первый вариант
Формализованные знания –
знания, которые можно
выразить словами, цифрами,
формулами,
алгоритмизированными
процессами.
Неформализованные знания –
знания, существующие на уровне
индивидуума, которые сложно
формализовать для дальнейшей
передачи и использовать кем-
либо, кроме владельца.
Второй вариант
Явные – это такие знания,
которые можно
задокументировать и отразить в
виде документов.
Неявные – это такие знания,
которые невозможно
формализовать (интуиция,
впечатление, мнение, ощущение).
Проделав сравнительный анализ можно сделать вывод, что отличие
между двумя вариантами заключается только в том, что второй вариант
относит к явным даже те знания, которые еще не существуют в форме
документов, но их можно задокументировать.
Процесс управления знаниями в организации заключается в том, что
организация должна извлечь прибыль из объема знаний или
интеллектуального капитала, находящегося в ее распоряжении. Ведь
УДК 658.562 Горкунова А.О. (Томск, НИ ТПУ)
Редько Л.А. (Томск, НИ ТПУ)
178
знания – это единственный ключ к угрозам постоянно меняющегося
рынка, с помощью знаний можно улучшить организацию и приспособить
ее к изменчивой среде. Степень реализации данного процесса в
организации может зависеть от ее объема, отрасли и прочего. В данной
работе предложен один из способов, как это может быть выполнено на
примере приборостроительной организации.
Рассмотрим управление знаниями в СМК организации
машиностроительной отрасли, штат которой насчитывает 140 человек. В
организации используются такие инструменты, как База знаний и
Сообщество профессионалов, которые считаются наиболее эффективными.
В Базе знаний находятся книги, стандарты, журналы, нормативная
документация и прочие издания, соответствующие профессиональной
области, а так же информация о лучшей практике организации. В случае
необходимости пополнения базы знаний, сотрудники могут оставить
ответственному заявку на приобретение новых изданий или внесении
информации о лучшей практике. К Базе знаний также относится
клиентская база данных, в которой хранится вся необходимая информация
о заказчиках и сотрудничестве с ними.
Сообщество профессионалов, созданное в организации, представляет
собой интернет-форум, целью которого является решение задач, которые
не могут быть решены традиционными организационными структурами. В
своей практической деятельности члены Сообщества могут
взаимодействовать со всеми организациями холдинга. Решения, принятые
Сообществом профессионалов, несут рекомендательный характер.
Как показывает практика крупных организаций, чтобы занимать
лидирующие позиции в своей отрасли, знаниями необходимо управлять.
Именно поэтому новая версия стандарта серии 9001 содержит требования
к знаниям организации, благодаря этому организация сможет повысить
свою эффективность и результативность.
Список использованных источников
1. ГОСТ Р ИСО 9001-2015 Системы менеджмента качества.
Требования. – М.: Стандартинформ, 2015 – 24 с.
2. Алексеева А.В. Знания как главный источник конкурентных
преимуществ современного предприятия/ А.В. Алексеева// Проблемы
современной экономики. - 2013. - №11. – с. 141-145.
3. Лобзов А.В. Модель управления знаниями в проектно-
ориентированной организации/ А.В. Лобзов//Менеджмент сегодня. – 2015.
- № 4. – с. 218-225.
179
УДК 681.7.068. Горлов Н.И. (Новосибирск, СибГУТИ)
Югай В.В. (Караганда, КарГТУ)
Алькина А.Д. (Караганда, КарГТУ)
ИССЛЕДОВАНИЕ ДОПОЛНИТЕЛЬНЫХ ПОТЕРЬ ВОЛОКОННО-
ОПТИЧЕСКИХ ПРОВОДНИКОВ НАПРАВЛЯЮЩИХ СИСТЕМ
ТЕЛЕКОММУНИКАЦИИ
В процессе эксплуатации оптических кабелей в направляющих
системах телекоммуникации возникают негативные моменты, связанные с
различного рода механическими воздействиями на оптическое волокно,
что приводит к его изгибу, это обстоятельство вызывает увеличение
потери и затухание сигнала. Снижение оптической силы сигнала приводит
к неустойчивой работе системы телекоммуникации и снижает
качественные показатели ее работы. Такого рода потери называются
дополнительными. Соответственно необходимо уделять особое внимание
данной проблеме и проводить мероприятия по снижению дополнительных
потерь в волоконно-оптических кабелях. Нами проведен ряд исследований
по определению значений дополнительных потерь, которые возникают при
различных параметрах изгиба волокон в зависимости от длинна волны
оптического диапазона. Увеличение потерь при изгибе волокна на
больших длинах волн ограничивает диапазон пропускания одномодовых
волокон. Например, оптическое волокно с одномодовым режимом с
длиной волны отсечки 800 нм, которое можно использовать в диапазоне до
1 мкм, он не может быть использовано для 1500 нм, т. к. потери при изгибе
на этой длине волны будут очень большими. Наибольшие потери в
оптическом волокне вызывают изгибы с маленьким радиусом и большим
числом витков. Увеличение количества изгибов ведет с сильного росту
дополнительных потерь. Помимо роста потерь в оптическом кабеле,
изгибы способствуют разрушению кабеля и возникновению повреждений,
которые в свою очередь могут привести к росту затухания.
Рисунок 1 – Укладка кабеля на стенде
Для определения потерь на волокне при изгибах был сделан стенд
размером 0,5м*0,5м с пятью штырьковыми зонами для укладки кабеля.
Каждая штырьковая зона представляет собой массив 11х11 с шагом в 1см.
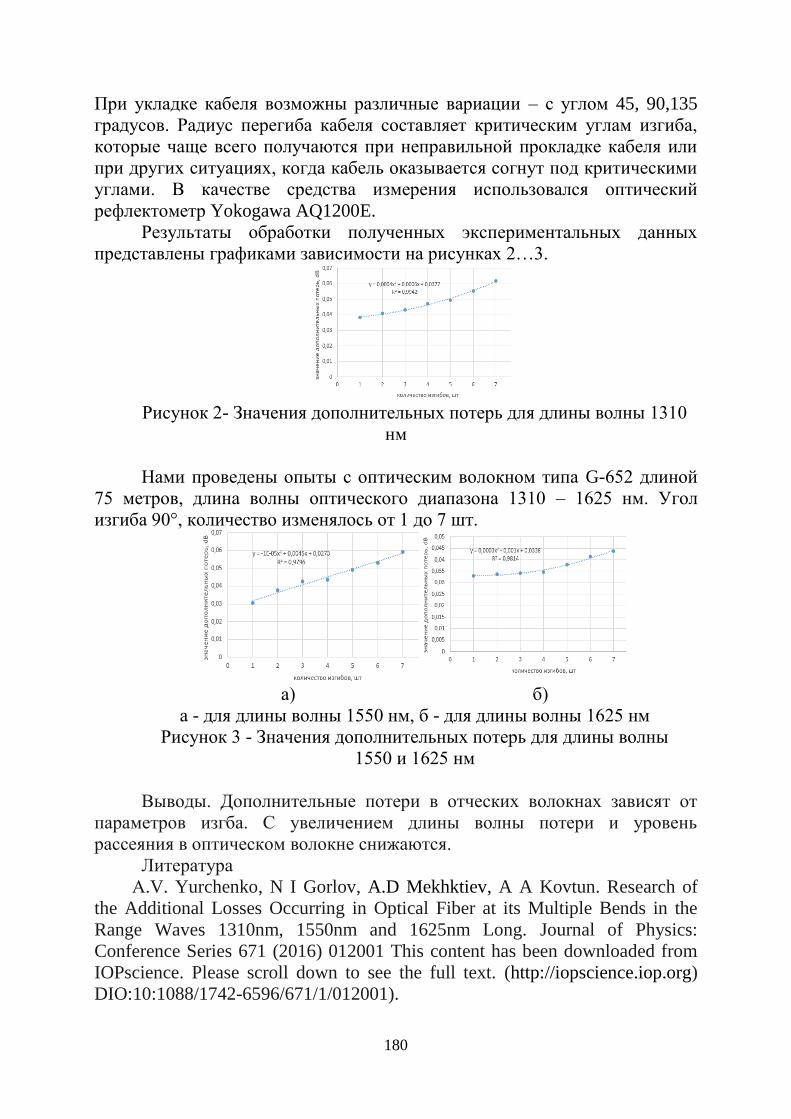
180
При укладке кабеля возможны различные вариации – с углом 45, 90,135
градусов. Радиус перегиба кабеля составляет критическим углам изгиба,
которые чаще всего получаются при неправильной прокладке кабеля или
при других ситуациях, когда кабель оказывается согнут под критическими
углами. В качестве средства измерения использовался оптический
рефлектометр Yokogawa AQ1200E.
Результаты обработки полученных экспериментальных данных
представлены графиками зависимости на рисунках 2…3.
Рисунок 2- Значения дополнительных потерь для длины волны 1310
нм
Нами проведены опыты с оптическим волокном типа G-652 длиной
75 метров, длина волны оптического диапазона 1310 – 1625 нм. Угол
изгиба 90°, количество изменялось от 1 до 7 шт.
а) б)
а - для длины волны 1550 нм, б - для длины волны 1625 нм
Рисунок 3 - Значения дополнительных потерь для длины волны
1550 и 1625 нм
Выводы. Дополнительные потери в отческих волокнах зависят от
параметров изгба. С увеличением длины волны потери и уровень
рассеяния в оптическом волокне снижаются.
Литература
А.V. Yurchenko, N I Gorlov, A.D Mekhktiev, A A Kovtun. Research of
the Additional Losses Occurring in Optical Fiber at its Multiple Bends in the
Range Waves 1310nm, 1550nm and 1625nm Long. Journal of Physics:
Conference Series 671 (2016) 012001 This content has been downloaded from
IOPscience. Please scroll down to see the full text. (http://iopscience.iop.org)
DIO:10:1088/1742-6596/671/1/012001).
181
УДК 658.5.012.7 Дектянников А.И. (Томск, ТПУ)
Сечин А.А. (Томск, ТПУ)
ВНЕДРЕНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОГЕННЫМИ
РИСКАМИ В ЭНЕРГЕТИЧЕСКОЙ ОТРАСЛИ
Топливно-энергетический комплекс является одним из основных
элементов гарантирующих стабильную жизнедеятельность всех отраслей
производства.
Входящая в состав ключевых задач, возникающая на пути
достижения цели устойчивого функционирования предприятий
энергетической отрасли, заключается в обеспечении безопасной работы
систем топливоподач.
Решение поставленной задачи может быть осуществлено
посредством внедрения на предприятии системы управления
техногенными рисками (далее – СУТР).
СУТР – это комплекс мероприятий, направленный на
идентификацию проблемных зон технологического процесса, их анализ,
оценка риска возникновения нежелательных событий, расчет
предполагаемого ущерба от их реализации, разработка мер по
минимизации и/или устранению, определение рентабельности этих
мероприятий, а также планирование по внедрению [1].
Управление техногенным риском осуществляется в основном, с
целью обеспечения безопасности человека, его жизнедеятельности и
окружающей среды. Поскольку безопасность этих компонентов есть
состояние защищенности, оно может регулироваться, т.е. фактически быть
объектом управления. Поэтому часто говорят об управлении
безопасностью человека, жизнедеятельности, окружающей среды [2].
В случаях техногенных рисков, испытываемых человеком, речь
может идти раздельно для персонала предприятия-источника опасности
(например, потенциально опасного объекта) и проживающего вблизи
населения. В этом случае по отношению к персоналу предприятия говорят
об управлении профессиональным риском, управлении безопасностью
профессиональной деятельности. Однако часто в сферу
профессионального риска в качестве его объектов включают вблизи
проживающее население и окружающую среду – природную и
искусственную. Такой подход обусловлен соображением, что в конечном
итоге этот риск является порождением чьей-то профессиональной
деятельности [3].
Схема функционирования данной системы представлена на рисунке
1 [4].
Для эффективного управления безопасностью различных видов
профессиональной деятельности необходимо иметь достаточно развитую
182
систему методов анализа и оценки сопровождающих рассматриваемый вид
деятельности опасностей. Эти методы, основываются на использовании
количественных показателей риска. Показатели риска должны
обеспечивать сравнимость:
- безопасности различных видов профессиональной деятельности;
- состояния безопасности между отраслями промышленности и
предприятиями;
- безопасности различных категорий работающих (профессий) [5].
Проблема внедрения данной системы на предприятии заключается в
сложности ее реализации, за счет обширности и сложности разграничения
этапов реализации. Зачастую специалисты на предприятии не обладают
достаточной осведомленностью в данной области, так как это не входит в
их должностные обязанности. Рекомендуется расширить область их
должностных обязанностей, проводить переобучение и регулярные
повышения квалификации.
Список использованных источников
1 Вишняков Я.Д. Общая теория рисков: учебное пособие для
студентов высших учебных заведений [Текст] / Я.Д. Вишняков, Н.Н.
Радаев. – М.: Академия, 2008. – стр. 368.
2 Управление рисками техногенных катастроф и стихийных бедствий
(пособие для руководителей организаций). Монография. Под общей
редакцией Фалеева М.И./ РНОАР. М.: ФГБУ ВНИИ ГОЧС (ФЦ), 2016. –
стр. 270.
3 Методические указания по проведению анализа риска опасных
производственных объектов [Текст] – утверждено постановлением
федерального горного и промышленного надзора России от 10 июля 2001
г. № 30 – стр. 42
4 Антонов А.В. Современные проблемы оценки риска. Управление
рисками на экологически-опасном производстве [Текст] / А.В. Антонов //
Современные наукоемкие технологии. – 2008. – № 4. – С. 157–158.
5 Управление техногенным риском [Электронный ресурс]: - Режим
доступа: http://www.obzh.ru/eco/1-3.html.
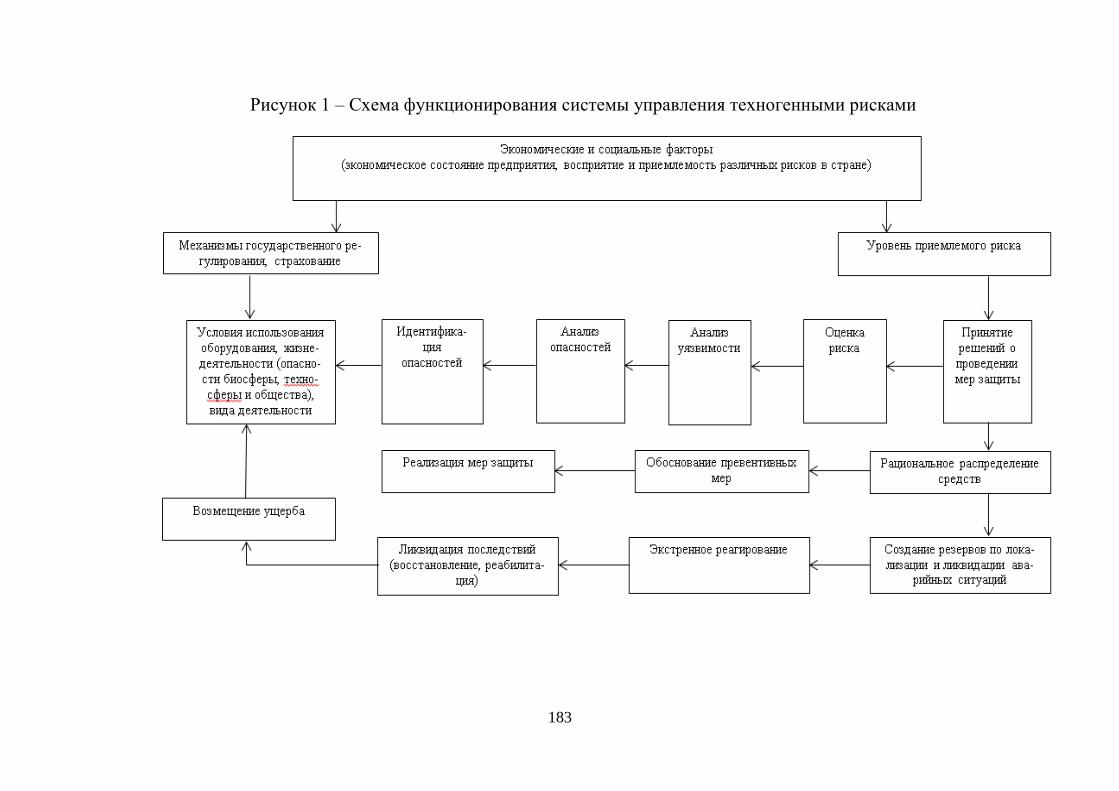
183
Рисунок 1 – Схема функционирования системы управления техногенными рисками
184
ӘОЖ 622.273
Дрижд Н.А. (Қарағанды, ҚарМТУ)
Жүніс Г.М. (Қарағанды, ҚарМТУ)
КӨМІР ШАХТАЛАРЫН ГАЗСЫЗДАНДЫРУ ТӘСІЛДЕРІНІҢ
ҚАЖЕТТІЛІГІН ТАЛДАУ
Заманауи тау-кен өндірісінде шахталық метан көмір өндіруді
жоғарылатуды экономикалық тиімді және қауіпсіздікті қамтамасыз етудің
негізгі мәселесі болып қарастырылады. Көмір тақталарын жерасты өндіру
кезінде метанның ауаға таралуы экологиялық, ал көмір мен газдың
кенеттен лақтырысы бүкіл әлемдік мәселеге айналып отырғаны белгілі.
Соңғы жылдары Қазақстанның көмір өнеркәсібі өндіріс көлемінің
артуымен, көмір өнеркәсібіндегі өндіріс қарқынының артуы терең жатқан
тақталарды қазуға өтумен сипатталады. Оларға әртүрлі газдардың жоғарғы
құрамы тән, сондықтан көмір шахталарын газсыздандыру қажетті
технологиялық үдірістер қатарына ауысады.
Шахталарды газсыздандыру, жерасты тау-кен қазбаларынан газды
немесе газ құрамды қоспаларды жоғарыға сору, жинақтау және шығару
бойынша шаралар. Шахтадан газды шығару тау-кен қазбаларында
жүргізілген, қазбаларды жоғарымен байланыстыратын құбырлар немесе
бұрғылау ұңғымаларымен жүзеге асырылады.
Шахталарды дегазациялау тау-кен қазбаларына тау-кен
жыныстарынан және көмір тақталарынан метанның түсімдерін азайту
үшін қолданылады және шахталардың желдетілуін жеңілдетеді,
қазбалардың газдануынан алынушы (өндіруші) учаскелердің тұрып қалуын
айтарлықтай төмендетеді немесе толығымен тоқтады; газды шахталарда
тиімсіз пневмотикалық энергияның орнына электр энергиясын қолдануға
мүмкіндік береді; жұмыскерлердің еңбек өнімділігін жоғарылатады және
газды шахталарда тау-кен жұмыстарының қауіпсіз жүргізілуін және
суфляр, көмір мен газдың лақтырысы және т.б. ерекше газдың көріністерін
белгілі бір жағдайларда жартылай (қарқындылығын төмендетеді) немесе
толықтай алдын алады.
Тау-кен өндірісінде қауіпсіздікті қамтамасыз ету, бірінші кезекте бұл
тау-кен жұмыстарына алдыңғы қатарлы тау-кен-өндіру техникаларын және
технологияларын енгізумен байланысты. Мұның барлығы көмір өндірудің
орташа тәуліктік белсенді ұлғаюына ықпал етеді. Шахталардың
метандылығын төмендету үшін негізгі метан бөліну көздерін
газсыздандыру тәсілдері қолданылады: қазылып жатқан көмір тақталарын,
аршылған кеңістіктегі газ құрамды жыныстардың және жақындатылған
үстінен және астынан алынатын көмір тақталарын газсыздандыру. Жұмыс
істеп тұрған шахталардың қазбалар желісінде ең метандылығы жоғары,
алынатын (өндірілетін) учаскелердің газдылық қорына байланысты, метан
185
бөліну көздерін газсыздандырудың бір немесе бірнеше тәсілдері
қолданылады.
Көмір тақталарын газсыздандыру тиімділігі олардың газ
өткізгіштігіне байланысты болады. Тау-кен жұмыстарының тереңдеуінің
жоғарылауымен газ өткізгіштілігі тез төмендейді. Барлық көмір
тақталарын газсыздандыру тәсілдерінің әдістері көмір тақталарының газ
өткізгіштілігін жасанды жарықтар құру жолымен және газдылықты
төмендету дәрежесіне қол жеткізу үшін газсындандыру мерзімін көбейтуге
негізделген.
Технологияның дамуы көмір шахталарын газсыздандыру міндеттерін
жеңілдетті. Тақталардың геологиялық ерекшеліктеріне байланысты
газсыздандыру үшін шахталық кеңістіктен тік ұңғымаларды алынған және
алынбаған учаскелерге немесе көлбеу және көлденең ұңғымаларды
бұрғылау жүргізілуі мүмкін. Метанды тақталарды зерттеуден жинақталған
тәжірибе жүргізілетін операциялардың тиімділігін жоғарылатуға және
газсыздандыру жүйесін нақты резервуарға жақсы бейімдеуге мүмкіндік
берді.
Шахталарды дегазациялауды қолдану газданған кенорындарды
өндіру, газданған көмір тақталарын қазу есебінен бағыттас метанды
өндірудің жаңа технологиясының құрылуына акелді.
Метан бөліну көздерін газсыздандыру жүйесінің тиімділігі оларды
орнату үйлесімі тиісті шаралар және техникалық қызмет көрсету, ұдайы
бақылау және жүйелі түрде бұрғылау бойынша елеулі түрде көтерілуі
мүмкін.
Көмір кенорындарын жерасты қазу қазіргі жағдайларда, газ
факторы тазарту кенжарына түсіретін жүктеменің жолдарына, өндіру
далаларын дайындау қарқанын арттыруға және кеншілердің қауіпсіз еңбек
жағдайын қамтамасыз етуге әсер ететін маңызды кедергілердің біріне
айналып жатыр.
Сондықтан, қазіргі уақыттағы көмір өндіретін өндіріс орындарының
қарқынды дамуына қарай тау-кен жұмыстарында метанқауіпсіздігін
қамтамасыз ету басымдық маңызға ие.
Қолданылған әдебиеттер тізімі
1. Бирюков Ю.М., Дрижд Н.А., Фоминых Е.И. Безопасное
ведение горных работ на выбросоопасных угольных пластах. Қарағанды,
ҚарМТУ баспасы, 2014.
2. Баймухаметов С.К. «Проблемы безопасности разработки
высокогазоносных угольных пластов», 2006.
3. Проблемы разработки метаноносных угольных пластов,
промышленного извлечения и использования шахтного метана в
Карагандинском бассейне – М.: Академии горных наук России. А.Т.
Айруни редак., 2002.
186
УДК 53.089.62 Есенбаев С.Х. (Караганда, КарГТУ)
Аймагамбетова Р.Ж. (Караганда, КарГТУ)
Белик М.Н. (Караганда, КарГТУ)
МАМАНДЫҚҚА МАШЫҚТАНДЫРУДЫҢ ӨНІМДІ ӘДІСІ
Өлшеудің қандай болсын техникалық, өндірістік немесе ғылымдық
түрлерінде жоғары дәлдігі, жоғары сенімділігі бар нәтижелер қажет. Оны
орындау үшін жоғары сапалы өлшеу құралдары қолданылады. Оқу
процесінде ондай қымбат құралдарды қолдануға көп қаражат керек, ондай
мүмкіндік кафедраның қолына тимейді. Бірақта сақталған бұрынғы өлшеу
құралдарын оқу процесінде тәжірибелік білім беру үшін қолдануға болады
деп есептейміз. Ертеден келе жатқан өлшеудің бірі – көпірлік өлшеу, оның
дәлдігі де, сенімділігі де өте жоғары саналады және қолдануға ыңғайлы,
тез үйренуге болады.
ӨТПЖ кафедраның зертханасында МОД-61 және МО-62 тұрақты ток
көпірлері сақталынып қалған, олар әлі де жұмыстық күйде және оқу
процесінде пайдалануға жарамды. Оған қоса, МСР-60М кедергілер
жиынтығы мен Р331, Р321, Р310 үлгілік кедергілерімен біріктіріп оқу
зерттеу зертханалық сабақтарын өткізу үшін стенд жасалған, онда
прецизиондық жиынтық пен кедергілерге поверка жасау әдістер жүзеге
асырылған.
Стендтің құрамына кіретіндер: дәлдік класы 0,01 болатын Р331 (1000
Ом, 100000 Ом), Р321 (0,1 Ом, 1 Ом), Р310 (0,01 Ом) арнайы үлгілік
кедергілер; дәлдік класы 0,02 болатын МСР-60М ауыстырмалы кедергілер
жиынтығы; дәлдік класы 0,05 болатын МОД-61 типті тұрақты ток көпірі;
дәлдік класы 0,1 болатын МО-62 тұрақты ток көпірі.
Дәлдік кластары әр түрлі болғандықтан, оларды өз ара құрастырып
бірнеше түрлі поверкалау сұлбаларды жинауға мүмкіндік туады.
Мысалы, МО-62 типті тұрақты ток көпірінің бес нүктесін
поверкалауға болады (сурет 1).
Сурет 1 – МО-62 тұрақты ток көпірі мен Р331 үлгілік кедергі
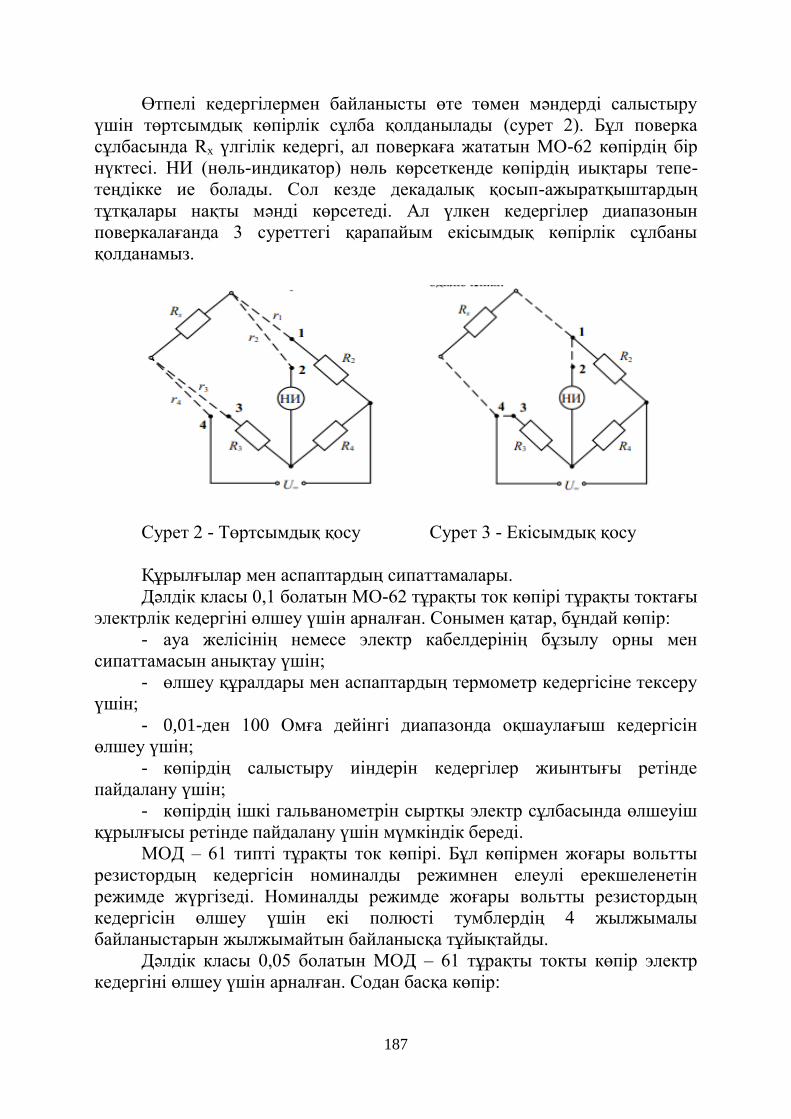
187
Өтпелі кедергілермен байланысты өте төмен мәндерді салыстыру
үшін төртсымдық көпірлік сұлба қолданылады (сурет 2). Бұл поверка
сұлбасында Rx үлгілік кедергі, ал поверкаға жататын МО-62 көпірдің бір
нүктесі. НИ (нөль-индикатор) нөль көрсеткенде көпірдің иықтары тепе-
теңдікке ие болады. Сол кезде декадалық қосып-ажыратқыштардың
тұтқалары нақты мәнді көрсетеді. Ал үлкен кедергілер диапазонын
поверкалағанда 3 суреттегі қарапайым екісымдық көпірлік сұлбаны
қолданамыз.
Сурет 2 - Төртсымдық қосу Сурет 3 - Екісымдық қосу
Құрылғылар мен аспаптардың сипаттамалары.
Дәлдік класы 0,1 болатын МО-62 тұрақты ток көпірі тұрақты токтағы
электрлік кедергіні өлшеу үшін арналған. Сонымен қатар, бұндай көпір:
- ауа желісінің немесе электр кабелдерінің бұзылу орны мен
сипаттамасын анықтау үшін;
- өлшеу құралдары мен аспаптардың термометр кедергісіне тексеру
үшін;
- 0,01-ден 100 Омға дейінгі диапазонда оқшаулағыш кедергісін
өлшеу үшін;
- көпірдің салыстыру иіндерін кедергілер жиынтығы ретінде
пайдалану үшін;
- көпірдің ішкі гальванометрін сыртқы электр сұлбасында өлшеуіш
құрылғысы ретінде пайдалану үшін мүмкіндік береді.
МОД – 61 типті тұрақты ток көпірі. Бұл көпірмен жоғары вольтты
резистордың кедергісін номиналды режимнен елеулі ерекшеленетін
режимде жүргізеді. Номиналды режимде жоғары вольтты резистордың
кедергісін өлшеу үшін екі полюсті тумблердің 4 жылжымалы
байланыстарын жылжымайтын байланысқа тұйықтайды.
Дәлдік класы 0,05 болатын МОД – 61 тұрақты токты көпір электр
кедергіні өлшеу үшін арналған. Содан басқа көпір:
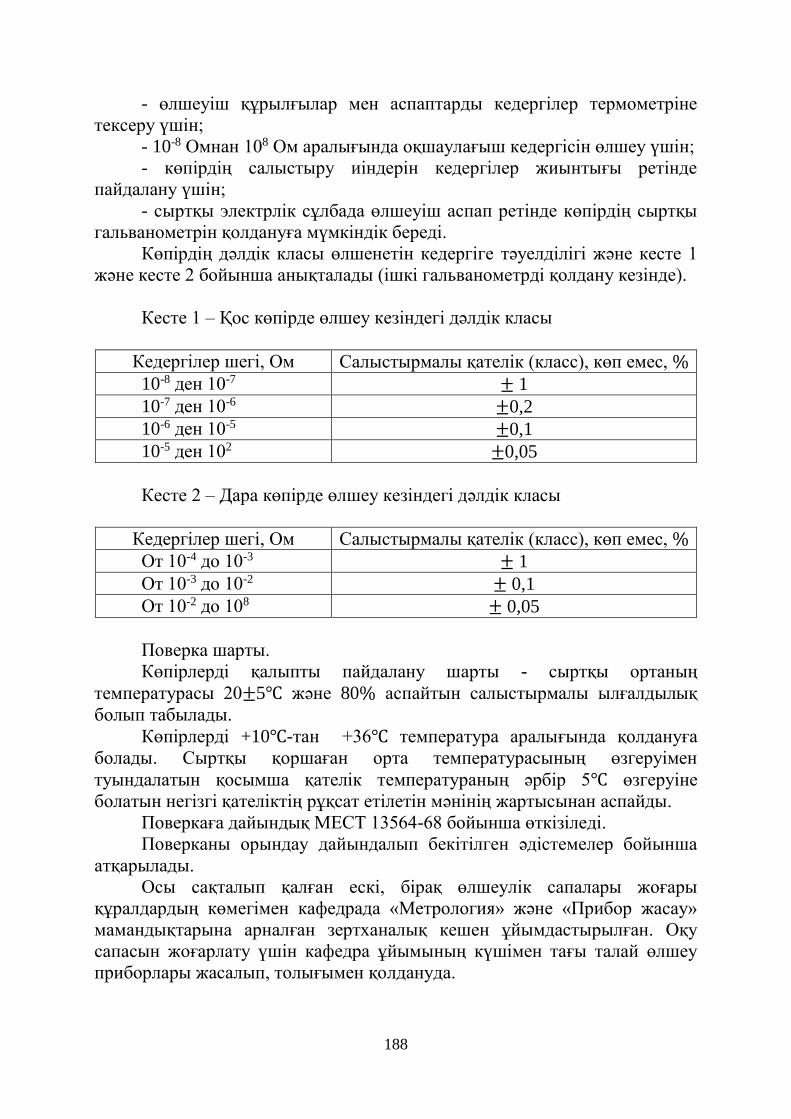
188
- өлшеуіш құрылғылар мен аспаптарды кедергілер термометріне
тексеру үшін;
- 10-8 Омнан 108 Ом аралығында оқшаулағыш кедергісін өлшеу үшін;
- көпірдің салыстыру иіндерін кедергілер жиынтығы ретінде
пайдалану үшін;
- сыртқы электрлік сұлбада өлшеуіш аспап ретінде көпірдің сыртқы
гальванометрін қолдануға мүмкіндік береді.
Көпірдің дәлдік класы өлшенетін кедергіге тәуелділігі және кесте 1
және кесте 2 бойынша анықталады (ішкі гальванометрді қолдану кезінде).
Кесте 1 – Қос көпірде өлшеу кезіндегі дәлдік класы
Кедергілер шегі, Ом Салыстырмалы қателік (класс), көп емес, %
10-8 ден 10-7 ± 1
10-7 ден 10-6 ±0,2
10-6 ден 10-5 ±0,1
10-5 ден 102 ±0,05
Кесте 2 – Дара көпірде өлшеу кезіндегі дәлдік класы
Кедергілер шегі, Ом Салыстырмалы қателік (класс), көп емес, %
От 10-4 до 10-3 ± 1
От 10-3 до 10-2 ± 0,1
От 10-2 до 108 ± 0,05
Поверка шарты.
Көпірлерді қалыпты пайдалану шарты - сыртқы ортаның
температурасы 20±5℃ және 80% аспайтын салыстырмалы ылғалдылық
болып табылады.
Көпірлерді +10℃-тан +36℃ температура аралығында қолдануға
болады. Сыртқы қоршаған орта температурасының өзгеруімен
туындалатын қосымша қателік температураның әрбір 5℃ өзгеруіне
болатын негізгі қателіктің рұқсат етілетін мәнінің жартысынан аспайды.
Поверкаға дайындық МЕСТ 13564-68 бойынша өткізіледі.
Поверканы орындау дайындалып бекітілген әдістемелер бойынша
атқарылады.
Осы сақталып қалған ескі, бірақ өлшеулік сапалары жоғары
құралдардың көмегімен кафедрада «Метрология» және «Прибор жасау»
мамандықтарына арналған зертханалық кешен ұйымдастырылған. Оқу
сапасын жоғарлату үшін кафедра ұйымының күшімен тағы талай өлшеу
приборлары жасалып, толығымен қолдануда.
189
УДК 004.01 Есенжолов У.С. (Караганда, КарГТУ)
Конурбаева К.Ж. (Караганда, КарГТУ)
ПРОТОКОЛ LDAP КАК СПОСОБ ВНЕДРЕНИЯ
ВИРТУАЛЬНЫХ АТС
Чем крупнее компания, тем больше у неё возникает затруднений,
которые неведомы организациям поменьше. И далеко не всегда это
связано с ведением бизнеса. Виртуальная АТС раньше многими
воспринималась как продукт для небольших компаний, но сейчас
представление меняется. Средние и крупные предприятия всё шире
применяют виртуальные АТС, но попутно им приходится решать довольно
нетривиальные задачи — например, как в коммуникационную среду под
управлением виртуальной АТС поместить профили сотрудников и, самое
главное, поддерживать их в актуальном состоянии? Ведь когда в штате
компании несколько сотен или тысяч человек, занесение и постоянную
актуализацию их карточек вручную нельзя расценивать иначе как
наказание. Чтобы облегчить нашим клиентам жизнь, мы внедрили в
виртуальную АТС MANGO OFFICE поддержку протокола LDAP.
Обычно покупка виртуальной АТС связана с заменой существующей
связи. И, конечно, встает вопрос, как включить облачные коммуникации в
бизнес-инфраструктуру, как настроить единый интерфейс для
сотрудников, чтобы они сразу могли эффективно выполнять свои задачи
уже на новой телефонии.
И вот здесь на помощь приходит LDAP. Этот протокол
поддерживается в некоторых CRM, но среди виртуальных АТС до
недавнего времени он не встречался. Однако несомненно был бы полезен,
поскольку не только заметно упрощает, но и ускоряет переход на
виртуальную АТС — особенно, когда в компании большое количество
сотрудников. Виртуальная АТС MANGO OFFICE первой получила
поддержку LDAP.
С помощью LDAP можно с легкостью сохранять в актуальном
состоянии существующую базу сотрудников: ФИО, должность, отдел,
номер телефона, e-mail. Для этого не нужно устанавливать никакое
дополнительное ПО, не нужно импортировать таблицы Excel, не нужно
ничего заносить в систему руками. Достаточно один раз настроить
интеграцию виртуальной АТС со службой каталогов через LDAP — и
профили всех сотрудников будут импортированы с нужными правами.
Будут также импортированы (или созданы) короткие номера,
автоматически сгенерируются учётные записи SIP и после этого можно
настраивать правила переадресации входящих вызовов. MANGO OFFICE
поддерживаем все виды LDAP-серверов под любые ОС, в том числе
Microsoft Active Directory и популярный открытый сервер Open LDAP. То
190
есть компания, использующая, к примеру, Microsoft Outlook, может
пользоваться и преимуществами быстрого экспорта в виртуальную АТС, и
простой синхронизацией данных.
Непосредственно в виртуальной АТС можно задавать сотрудникам
роли с соответствующими правами доступа. Разрабатывая систему ролей,
мы постарались учесть все потребности среднего и крупного бизнеса, дав
возможность настраивать права пользователей в самых широких пределах.
С помощью LDAP роли можно быстро перенести в виртуальную
АТС и управлять ролями через единый интерфейс, не занимаясь этим в
разных базах данных по отдельности. После подключения виртуальной
АТС достаточно один раз настроить сотрудникам в соответствии с их
должностями права доступа к различной функциональности виртуальной
АТС - телефонии, коллтрекингу, отчетам, прослушиванию записей
разговоров и пр.
А когда придёт новый сотрудник или у действующего специалиста
поменяется должность, достаточно изменить его роль на LDAP-сервере, и
соответствующие изменения прав доступа автоматически применятся в
виртуальной АТС.
Особенно удобно, что от администратора не требуется
актуализировать данные в виртуальной АТС, они синхронизируются
автоматически. Когда в исходной БД удаляют или добавляют сотрудника,
изменяют данные, все нововведения подтягиваются в облачную АТС без
участия администратора.
Проектируя поддержку LDAP, мы учитывали пожелания сисадминов. К
примеру, реализовали настройку соответствия полей, потому что в разных
базах данных поля могут называться по-разному. Кроме того, многие админы
вносят в базы дополнительные поля. А благодаря настройкам соответствия
обеспечивается полная совместимость нашего LDAP с разными базами
данных и разными форматами LDAP-серверов. Также MANGO OFFICE
поддерживает LDAP-фильтры и отдельное поле для фильтров корня каталога.
Кроме того, мы реализовали гибкую систему правил синхронизации. Можно
указать, какие именно поля необходимо синхронизировать с виртуальной
АТС, а также задать принципы создания и перезаписи полей.
Защита информации - один из приоритетов при внедрении
поддержки LDAP. Во многих компаниях существуют строгие регламенты
безопасности, поэтому открывать LDAP-сервер для доступа облачных
систем зачастую не рекомендуется. Мы применяем для защиты данных
LDAPS —версию обмена данных с шифрованием SSL.
Поддержка LDAP заметно упрощает процесс интеграции облачной
бизнес-телефонии в инфраструктуру компании, в систему прав доступа. С
помощью LDAP можно быстро импортировать базу сотрудников в
виртуальную АТС, управлять учетными данными и разграничивать доступ
сотрудников к информации.
191
УДК 550.85 Ефименко С.А. (Жезказган,
ТОО «Корпорация Казахмыс»)
Ордубаев С.Г. (Жезказган,
ТОО «Корпорация Казахмыс»)
Исатаева Ф.М. (Карагнада, КарГТУ)
АППАРАТУРА ДЛЯ ГЕОЛОГИЧЕСКОГО ОБСЛУЖИВАНИЯ ГОРНЫХ
РАБОТ НА РУДНИКЕ КУСМУРЫН ТОО «КОРПОРАЦИЯ КАЗАХМЫС»
Горные предприятия ТОО «Корпорация Казахмыс» разрабатывают
такие сложные по вещественному составу руд медно–полиметаллические
месторождения, как: медно–свинцово–цинковые месторождения медистых
песчаников Жезказган и Жаман–Айбат (Cu, Pb, Zn, Ag, Cd, Re, S); золото–
медно–порфировое месторождение Нурказган (Cu, Au, Ag, Mo, Se, S);
колчеданно–медно–свинцово–цинковые месторождения Кусмурын (Cu,
Zn, Pb, Au, Ag, Cd, Se, Te, S) и Акбастау (Cu, Zn, Pb, Au, Ag, Cd, Se, S, Te);
золото–колчеданно–медно–свинцово–цинковое месторождение Абыз (Pb,
Zn, Cu, Au, Ag, S, Se, Te, Cd, In, Hg); Саякская группа медно–скарновых
месторождений (Сu, Mo, Fe, Au, Ag, Bi, Te, Se, Re); медно–порфировое
месторождение Шатырколь (Cu, Mo, Au, Ag, Te, Se, U.
Разработка таких сложных по вещественному составу руд
месторождений с максимальной экономической эффективностью
возможно только в случае реализации программ по комплексному
использования минерального сырья. Новые задачи требуют коренной
ломки традиционных подходов к аналитическому сопровождению
геологоразведочных и горно–подготовительных работ на действующих
предприятиях в направлении повышения их информативности в части
содержания в рудах всех основных, сопутствующих, мешающих, а также
экологически вредных компонентов. Реализация заявленного нами
подхода на практике требует кардинального переоснащения как
собственно экспресс–лабораторий горных предприятий, так и химических
лабораторий с элементами экспресс–лабораторий.
Задачей настоящей работы является оптимизация аналитической базы
экспресс–лабораторий горных предприятий, входящих в ТОО
«Корпорация Казахмыс», вообще и обслуживающих горные работы на
руднике Кусмурын, в частности.
Задача экспрессного аналитического контроля по всему списку
элементов в рудах осложнена: а) размером списка элементов; б) большим
размахом реальных концентрация этих элементов (от 1∙10-1 и менее до
80%). Сложно подобрать метод и реализующую его аппаратуру, чтобы
эффективно работать как внутри этого диапазона, так и на его краях. Тем
не менее, такой метод существует. Это рентгенофлуоресцентный метод
анализа руд – РФА. Метод РФА реализуется в экспресс – лабораториях
192
ТОО «Корпорация Казахмыс» на лабораторных энергодисперсионных
рентгенофлюоресцентных (EDXRF) спектрометрах казахстанского
производства. Базовой аппаратурой в экспресс–лабораториях горных
предприятий ТОО «Корпорация Казахмыс» являются лабораторные
EDXRF спектрометры РЛП–21Т (ТОО «Аспап Гео», Алматы). В основу
идеологии этих спектрометров положен принцип: «месторождения разные,
продукты переработки руд разные – градуировка одна».
EDXRF спектрометр РЛП–21Т в обычной комплектации обеспечивает
определение содержаний от 31 элемента (Cu, Pb, Zn, Ag, Cd, Mo, Fe, Se, As,
Ba, W, Bi, Ti, Cr, Mn, V, Ni, Al, Si, S, Ca, Co, Br, Sr, Zr, Rb, Y, Nb, Pd, U, Th)
в одном режиме без применения вакуумного насоса или инертного газа
при анализе на легкие элементы. Последние модификации спектрометров
РЛП–21Т позволяют определять от 38 (в РЛП–21Т Жайремском ГОК ТОО
«KAZZINC HOLDINGS» к базовому комплекту элементов добавлены Ga,
Ge, K, P, Sb, Sc, Sn) до 42 (РЛП – 21Т, внедренный в лаборатории ТОО
«Два Кэй», обеспечивает анализ руд на 40 элементов: Сu, Pb, Zn, Fe, Mo,
Ag, Cd, K, Ca, Ti, Cr, Mn, Co, Ni, As, Se, Rb, Sr, Y, Zr, Nb, Pd, Sn, Sb, Ba, Ta,
W, Bi, S, Si, Al, Y, U, Th, P, Sc, Ga, Ge, Br, Hg) элементов.
Спектрометр РЛП–21Т – это: кремниевый дрейфовый детектор (SDD)
площадью около 25мм2 и толщиной 300–500 микрон (охлаждение –
термохолодильник Пельтье); рентгеновская трубка VF–50J Rh (50 Вт)
фирмы Varian Medical Systems (США); экспозиция измерений 120÷150 сек;
облучение кюветы с пробой – сверху; турель на 9 кювет. Разрешение
спектрометра по линии 5,9 кэВ составляет 150 эВ при загрузке 100 кГц.
Мишень из теллура. Время формирования импульса 1,6 мкс. Сигнал
полностью оцифровывается. Диапазон энергий от 1,49 кэВ (AlKα) до 23,0
кэВ (CdKα). Спектрометр обеспечивает следующие пределы обнаружения
элементов (по критерию 3σ): Ag – 0,78 ppm (на госудаоственном
стандартном образце ГСО–3029; аттестованное содержание СAg = 2,1
ppm) и Cd – 0,95 ppm (на ГСО–4822 ДВГ; СCd = 5,0 ppm).
Уникальное программное обеспечение спектрометра РЛП–21Т
позволяет с высокой точностью определять функцию отклика
детектора, спектральный состав возбуждающего излучения, а также пики
двойных и тройных наложений. Восстановление спектра вторичного
излучения осуществляется с использованием нелинейного метода
наименьших квадратов и с учетом зависимости относительных
интенсивностей характеристических линий от вещественного состава. Как
следствие, обеспечивается точное нахождение истинных интенсивностей
аналитических линий элементов.
Нами проведены исследования эффективности применения
спектрометра РЛП–21Т на руднике Кусмурын. Обсужим результаты
исследований. В таблице 1 показана сходимость результатов РФА и
химического анализа только по части основных и сопутствующих
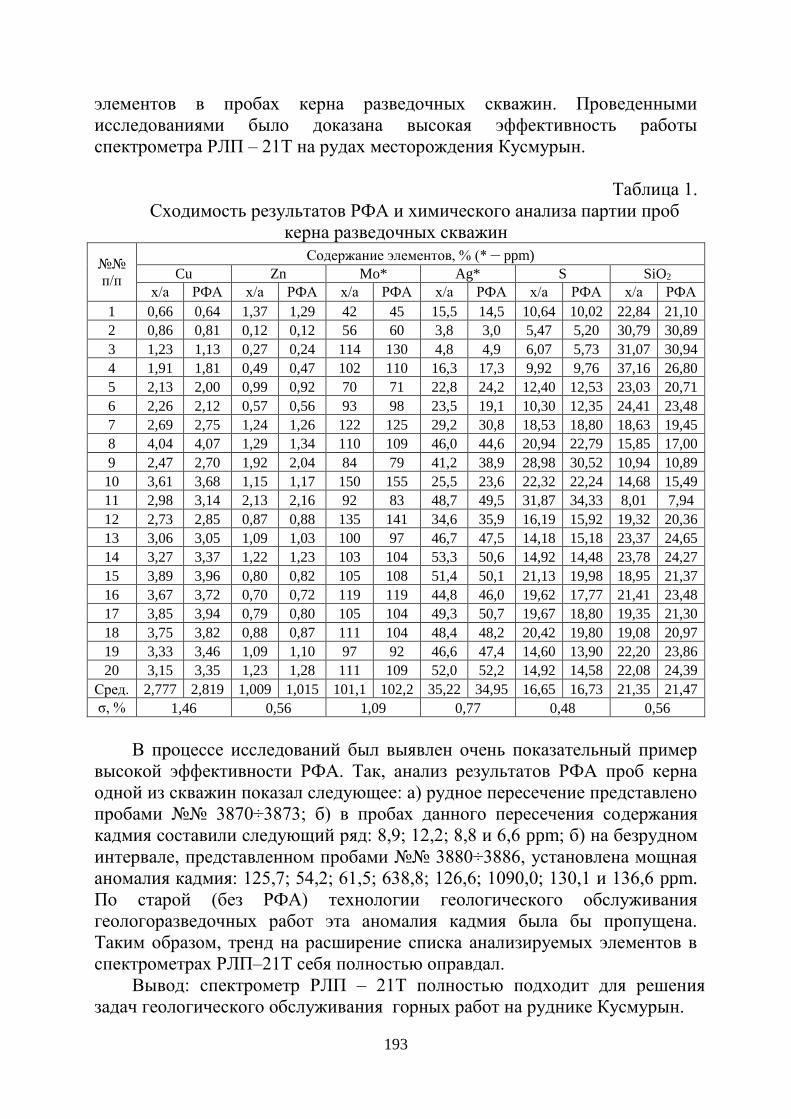
193
элементов в пробах керна разведочных скважин. Проведенными
исследованиями было доказана высокая эффективность работы
спектрометра РЛП – 21Т на рудах месторождения Кусмурын.
Таблица 1.
Сходимость результатов РФА и химического анализа партии проб
керна разведочных скважин
№№
п/п
Содержание элементов, % (* – ppm)
Cu Zn Mo* Ag* S SiO2
х/а РФА х/а РФА х/а РФА х/а РФА х/а РФА х/а РФА
1 0,66 0,64 1,37 1,29 42 45 15,5 14,5 10,64 10,02 22,84 21,10
2 0,86 0,81 0,12 0,12 56 60 3,8 3,0 5,47 5,20 30,79 30,89
3 1,23 1,13 0,27 0,24 114 130 4,8 4,9 6,07 5,73 31,07 30,94
4 1,91 1,81 0,49 0,47 102 110 16,3 17,3 9,92 9,76 37,16 26,80
5 2,13 2,00 0,99 0,92 70 71 22,8 24,2 12,40 12,53 23,03 20,71
6 2,26 2,12 0,57 0,56 93 98 23,5 19,1 10,30 12,35 24,41 23,48
7 2,69 2,75 1,24 1,26 122 125 29,2 30,8 18,53 18,80 18,63 19,45
8 4,04 4,07 1,29 1,34 110 109 46,0 44,6 20,94 22,79 15,85 17,00
9 2,47 2,70 1,92 2,04 84 79 41,2 38,9 28,98 30,52 10,94 10,89
10 3,61 3,68 1,15 1,17 150 155 25,5 23,6 22,32 22,24 14,68 15,49
11 2,98 3,14 2,13 2,16 92 83 48,7 49,5 31,87 34,33 8,01 7,94
12 2,73 2,85 0,87 0,88 135 141 34,6 35,9 16,19 15,92 19,32 20,36
13 3,06 3,05 1,09 1,03 100 97 46,7 47,5 14,18 15,18 23,37 24,65
14 3,27 3,37 1,22 1,23 103 104 53,3 50,6 14,92 14,48 23,78 24,27
15 3,89 3,96 0,80 0,82 105 108 51,4 50,1 21,13 19,98 18,95 21,37
16 3,67 3,72 0,70 0,72 119 119 44,8 46,0 19,62 17,77 21,41 23,48
17 3,85 3,94 0,79 0,80 105 104 49,3 50,7 19,67 18,80 19,35 21,30
18 3,75 3,82 0,88 0,87 111 104 48,4 48,2 20,42 19,80 19,08 20,97
19 3,33 3,46 1,09 1,10 97 92 46,6 47,4 14,60 13,90 22,20 23,86
20 3,15 3,35 1,23 1,28 111 109 52,0 52,2 14,92 14,58 22,08 24,39
Сред. 2,777 2,819 1,009 1,015 101,1 102,2 35,22 34,95 16,65 16,73 21,35 21,47
σ, % 1,46 0,56 1,09 0,77 0,48 0,56
В процессе исследований был выявлен очень показательный пример
высокой эффективности РФА. Так, анализ результатов РФА проб керна
одной из скважин показал следующее: а) рудное пересечение представлено
пробами №№ 3870÷3873; б) в пробах данного пересечения содержания
кадмия составили следующий ряд: 8,9; 12,2; 8,8 и 6,6 ppm; б) на безрудном
интервале, представленном пробами №№ 3880÷3886, установлена мощная
аномалия кадмия: 125,7; 54,2; 61,5; 638,8; 126,6; 1090,0; 130,1 и 136,6 ppm.
По старой (без РФА) технологии геологического обслуживания
геологоразведочных работ эта аномалия кадмия была бы пропущена.
Таким образом, тренд на расширение списка анализируемых элементов в
спектрометрах РЛП–21Т себя полностью оправдал.
Вывод: спектрометр РЛП – 21Т полностью подходит для решения
задач геологического обслуживания горных работ на руднике Кусмурын.
194
СОВРЕМЕННЫЙ РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ СПЕКТРОМЕТР
РПП–12Т, КАК ИНСТРУМЕНТ СОВЕРШЕНСТВОВАНИЯ МЕТОДОВ
ГЕОЛОГИЧЕСКОГО ОБСЛУЖИВАНИЯ РАЗВЕДОЧНЫХ И
ДОБЫЧНЫХ РАБОТ НА ШАХТАХ ПО «ЖЕЗКАЗГАНЦВЕТМЕТ»
Текущий контроль качества добываемых руд является наиболее
«узким» звеном системы геологического обслуживания разведочных и
добычных работ при разработке месторождений медь – содержащих
полиметаллических руд. Основа контроля – опробование руд. Мировым
опытом доказана целесообразность максимально широкого включения в
системы геологического обслуживания горных предприятий современных
технологий «оn–line» контроля качества руд, базирующихся, в том числе,
на рентгенофлуоресцентном методе.
Рентгенофлуоресцентное опробование (РФО) руд по стенкам забоев
применяется в ПО «Жезказганцветмет» с 1978 года. РФО производилось с
помощью энергодисперсионных рентгенофлуоресцентных спектрометров
(EDXRF) РПС4–01 «Гагара», РРК–103 «Поиск», РПП–12. В спектрометре
РПП–12 число одновременно определяемых элементов доведено до
четырех: медь, свинец, цинк и железо. Однако, несмотря на очень
надежную работу спектрометра РПП–12, обеспечивающего (за счет
использования мощного математического аппарата) полное разделение
аналитических линий меди и цинка при работе с пропорциональным
детектором излучений, РФО перестало соответствовать возросшим
требованиям горного производства. В частности, в список приоритетных
субъектов процесса контроля качества было включено серебро. Кроме
того, ужесточились требования безопасности проведения РФО.
Если учесть, что среднее содержание серебра в оставшихся
балансовых запасах Жезказганского месторождения медистых песчаников
составляет примерно 15 г/т (при минимальных содержаниях порядка 1–2
г/т), то задача определения его содержаний с помощью EDXRF
спектрометров представлялась очень сложной. Дополнительно усложняла
задачу специфика проведения РФО забоев на шахтах ПО
«Жезказганцветмет»: вертикальными сечениями высотой до 7 м. С
помощью спектрометра РПП–12 поставленная задача однозначно не могла
быть решена – требовался EDXRF спектрометр с кремниевым
полупроводниковым детектором (SDD).
ТОО «Аспап Гео» (г. Алма–Ата) – основной поставщик аппаратуры
для ТОО «Корпорация Казахмыс», разработал спектрометр РПП–12Т.
УДК 550.832.5 Ефименко С.А. (Жезказган,
ТОО «Корпорация Казахмыс»)
Кан А.Н. (Жезказган,
ТОО «Корпорация Казахмыс»)
Желаева Н.В. (Караганда, КарГТУ)
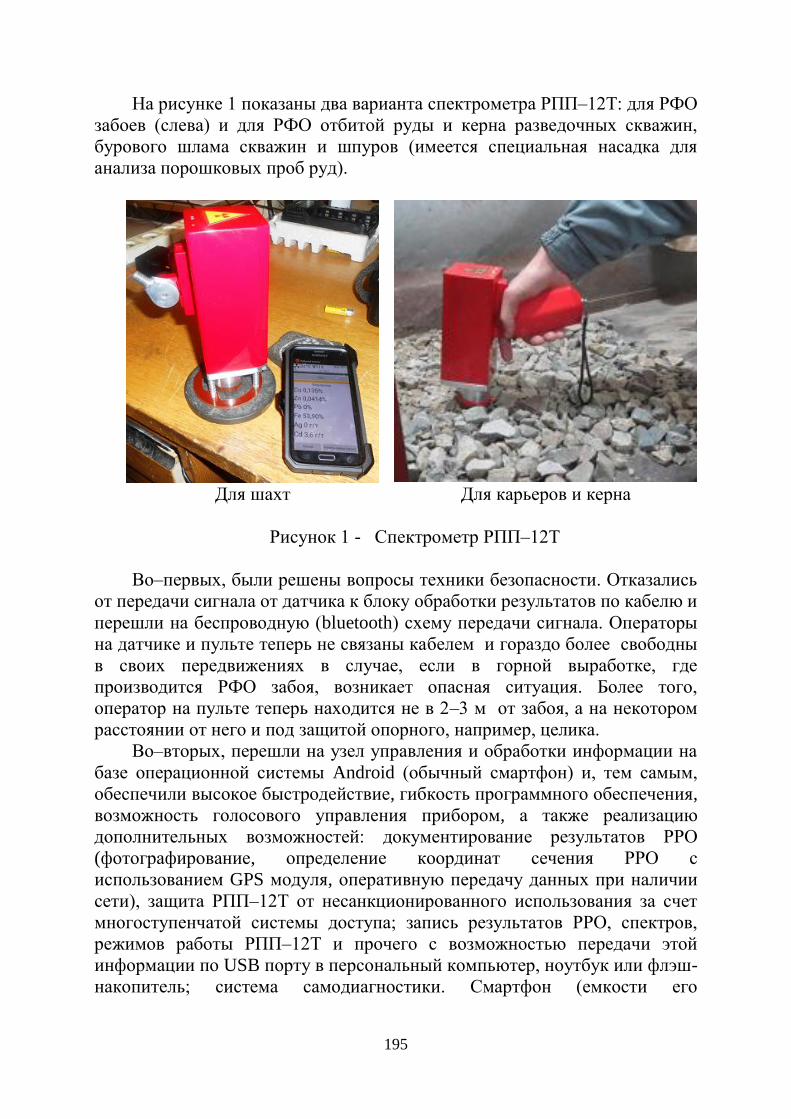
195
На рисунке 1 показаны два варианта спектрометра РПП–12Т: для РФО
забоев (слева) и для РФО отбитой руды и керна разведочных скважин,
бурового шлама скважин и шпуров (имеется специальная насадка для
анализа порошковых проб руд).
Для шахт Для карьеров и керна
Рисунок 1 - Спектрометр РПП–12Т
Во–первых, были решены вопросы техники безопасности. Отказались
от передачи сигнала от датчика к блоку обработки результатов по кабелю и
перешли на беспроводную (bluetooth) схему передачи сигнала. Операторы
на датчике и пульте теперь не связаны кабелем и гораздо более свободны
в своих передвижениях в случае, если в горной выработке, где
производится РФО забоя, возникает опасная ситуация. Более того,
оператор на пульте теперь находится не в 2–3 м от забоя, а на некотором
расстоянии от него и под защитой опорного, например, целика.
Во–вторых, перешли на узел управления и обработки информации на
базе операционной системы Android (обычный смартфон) и, тем самым,
обеспечили высокое быстродействие, гибкость программного обеспечения,
возможность голосового управления прибором, а также реализацию
дополнительных возможностей: документирование результатов РРО
(фотографирование, определение координат сечения РРО с
использованием GPS модуля, оперативную передачу данных при наличии
сети), защита РПП–12Т от несанкционированного использования за счет
многоступенчатой системы доступа; запись результатов РРО, спектров,
режимов работы РПП–12Т и прочего с возможностью передачи этой
информации по USB порту в персональный компьютер, ноутбук или флэш-
накопитель; система самодиагностики. Смартфон (емкости его
196
аккумулятора достаточно на полную смену) выполнен в специальном
защитном исполнении.
Спектрометр РПП–12Т оснащен SDD детектором площадью 25 мм2 с
термоохлаждением и энергетическим разрешение 140 эВ и
малогабаритным рентгеновским излучателем 50 кВ, 4 Вт. Блок
возбуждения и детектирования обеспечивает гибкость в выборе площади
сбора аналитической информации порядка (до 4 см2) и высокую светосилу
(входная загрузка свыше 100 кГц). Число определяемых элементов 30 (Cu,
Zn, Pb, Ag, Cd, As, Ba, Fe, Mo, Mn, Ti, V, Cr, Co, K, Ca, Ni, Ga, Br, Rb, Sr,
Zr, Y, Nb, Sn, Sb, Bi, W, Th, U).
Пределы обнаружения для большинства рудных элементов находятся
в диапазоне от n∙10-4% до n∙10-3%. Время непрерывной работы РПП–12Т
без подзарядки аккумуляторов не менее 10 часов. Вес РПП–12Т не более
1,5 кг.
Спектрометр РПП–12Т был всесторонне испытан на горных и
обогатительных предприятиях ПО «Жезказганцветмет». В рамках данной
статьи обсудим результаты испытаний на вагонных пробах ОТК,
отобранных с железнодорожных составов, поступающих на
Жезказганскую обогатительную фабрику № 2. Акцент в испытаниях на
дробленных вагонных пробах ОТК был сделан на бедных рудах с низкими
(< 15 г/т) содержаниями серебра. Вагонная проба, массой 5–6 кг каждая,
высыпалась на стол и разравнивалась. На каждой пробе выполнялось 40 ÷
45 десятисекундных измерений; режим измерений – «Естество». Процесс
РФО показан на рисунке 1. Результаты исследований приведены в таблице
1. Проведенными исследованиями было доказано, что спектрометр РПП–
12Т уверенно определяет низкие содержания серебра.
Таблица 1.
Результаты испытаний РПП–12Т на вагонных пробах руд
Эл. Метод
анализа
Шахта, портал, карьер Ср.
57 65 Анн 55 З.Порт Кр-Ц 65-Б
Cu,
%
РПП12Т 0,59 0,58 0,97 0,79 0,57 0,90 0,58 0,716
х/а 0,61 0,63 1,07 0,82 0,54 0,86 0,51 0,720
Ag,
ppm
РПП12Т 12,72 12,27 23,88 7,64 9,67 8,57 8,65 11,91
х/а 11,9 11,7 24,2 6,7 9,4 7,8 8,9 11,51
В результате проведенных исследований, аппаратурных и
методических разработок горные предприятия ПО «Жезказганцветмет»
получили надежный, легкий, простой в эксплуатации спектрометр,
который способен эффективно решать задачи геологического
обслуживания горных работ с учетом необходимости в определении в «on–
line» режиме содержаний серебра. Сейчас в эксплуатации находятся 4
прибора РПП–12Т.
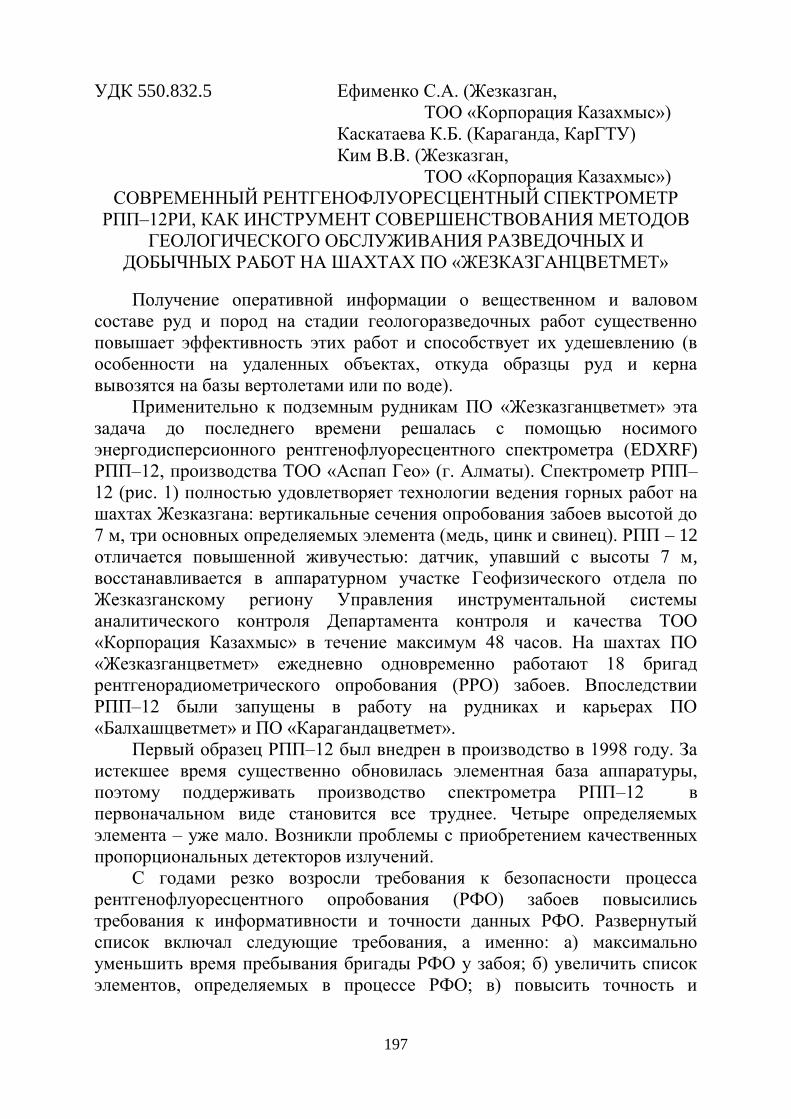
197
СОВРЕМЕННЫЙ РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ СПЕКТРОМЕТР
РПП–12РИ, КАК ИНСТРУМЕНТ СОВЕРШЕНСТВОВАНИЯ МЕТОДОВ
ГЕОЛОГИЧЕСКОГО ОБСЛУЖИВАНИЯ РАЗВЕДОЧНЫХ И
ДОБЫЧНЫХ РАБОТ НА ШАХТАХ ПО «ЖЕЗКАЗГАНЦВЕТМЕТ»
Получение оперативной информации о вещественном и валовом
составе руд и пород на стадии геологоразведочных работ существенно
повышает эффективность этих работ и способствует их удешевлению (в
особенности на удаленных объектах, откуда образцы руд и керна
вывозятся на базы вертолетами или по воде).
Применительно к подземным рудникам ПО «Жезказганцветмет» эта
задача до последнего времени решалась с помощью носимого
энергодисперсионного рентгенофлуоресцентного спектрометра (EDXRF)
РПП–12, производства ТОО «Аспап Гео» (г. Алматы). Спектрометр РПП–
12 (рис. 1) полностью удовлетворяет технологии ведения горных работ на
шахтах Жезказгана: вертикальные сечения опробования забоев высотой до
7 м, три основных определяемых элемента (медь, цинк и свинец). РПП – 12
отличается повышенной живучестью: датчик, упавший с высоты 7 м,
восстанавливается в аппаратурном участке Геофизического отдела по
Жезказганскому региону Управления инструментальной системы
аналитического контроля Департамента контроля и качества ТОО
«Корпорация Казахмыс» в течение максимум 48 часов. На шахтах ПО
«Жезказганцветмет» ежедневно одновременно работают 18 бригад
рентгенорадиометрического опробования (РРО) забоев. Впоследствии
РПП–12 были запущены в работу на рудниках и карьерах ПО
«Балхашцветмет» и ПО «Карагандацветмет».
Первый образец РПП–12 был внедрен в производство в 1998 году. За
истекшее время существенно обновилась элементная база аппаратуры,
поэтому поддерживать производство спектрометра РПП–12 в
первоначальном виде становится все труднее. Четыре определяемых
элемента – уже мало. Возникли проблемы с приобретением качественных
пропорциональных детекторов излучений.
С годами резко возросли требования к безопасности процесса
рентгенофлуоресцентного опробования (РФО) забоев повысились
требования к информативности и точности данных РФО. Развернутый
список включал следующие требования, а именно: а) максимально
уменьшить время пребывания бригады РФО у забоя; б) увеличить список
элементов, определяемых в процессе РФО; в) повысить точность и
УДК 550.832.5 Ефименко С.А. (Жезказган,
ТОО «Корпорация Казахмыс»)
Каскатаева К.Б. (Караганда, КарГТУ)
Ким В.В. (Жезказган,
ТОО «Корпорация Казахмыс»)
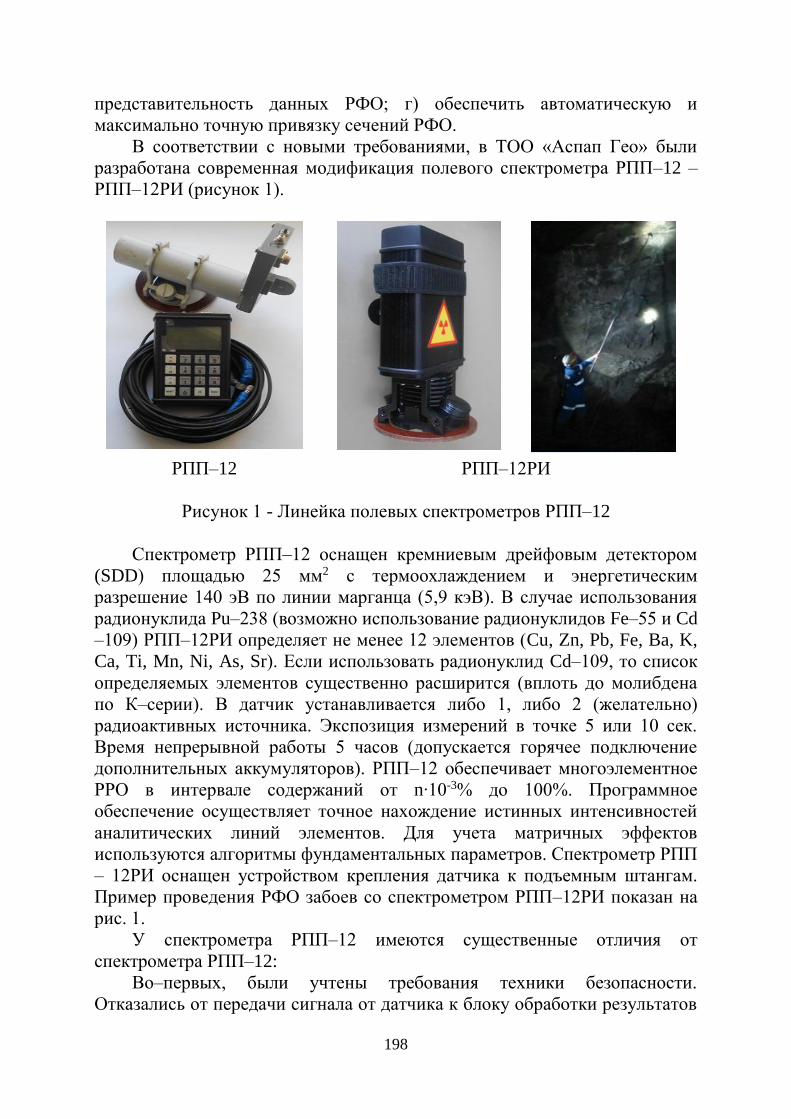
198
представительность данных РФО; г) обеспечить автоматическую и
максимально точную привязку сечений РФО.
В соответствии с новыми требованиями, в ТОО «Аспап Гео» были
разработана современная модификация полевого спектрометра РПП–12 –
РПП–12РИ (рисунок 1).
РПП–12 РПП–12РИ
Рисунок 1 - Линейка полевых спектрометров РПП–12
Спектрометр РПП–12 оснащен кремниевым дрейфовым детектором
(SDD) площадью 25 мм2 с термоохлаждением и энергетическим
разрешение 140 эВ по линии марганца (5,9 кэВ). В случае использования
радионуклида Pu–238 (возможно использование радионуклидов Fe–55 и Cd
–109) РПП–12РИ определяет не менее 12 элементов (Cu, Zn, Pb, Fe, Ba, K,
Ca, Ti, Mn, Ni, As, Sr). Если использовать радионуклид Cd–109, то список
определяемых элементов существенно расширится (вплоть до молибдена
по К–серии). В датчик устанавливается либо 1, либо 2 (желательно)
радиоактивных источника. Экспозиция измерений в точке 5 или 10 сек.
Время непрерывной работы 5 часов (допускается горячее подключение
дополнительных аккумуляторов). РПП–12 обеспечивает многоэлементное
РРО в интервале содержаний от n∙10-3% до 100%. Программное
обеспечение осуществляет точное нахождение истинных интенсивностей
аналитических линий элементов. Для учета матричных эффектов
используются алгоритмы фундаментальных параметров. Спектрометр РПП
– 12РИ оснащен устройством крепления датчика к подъемным штангам.
Пример проведения РФО забоев со спектрометром РПП–12РИ показан на
рис. 1.
У спектрометра РПП–12 имеются существенные отличия от
спектрометра РПП–12:
Во–первых, были учтены требования техники безопасности.
Отказались от передачи сигнала от датчика к блоку обработки результатов
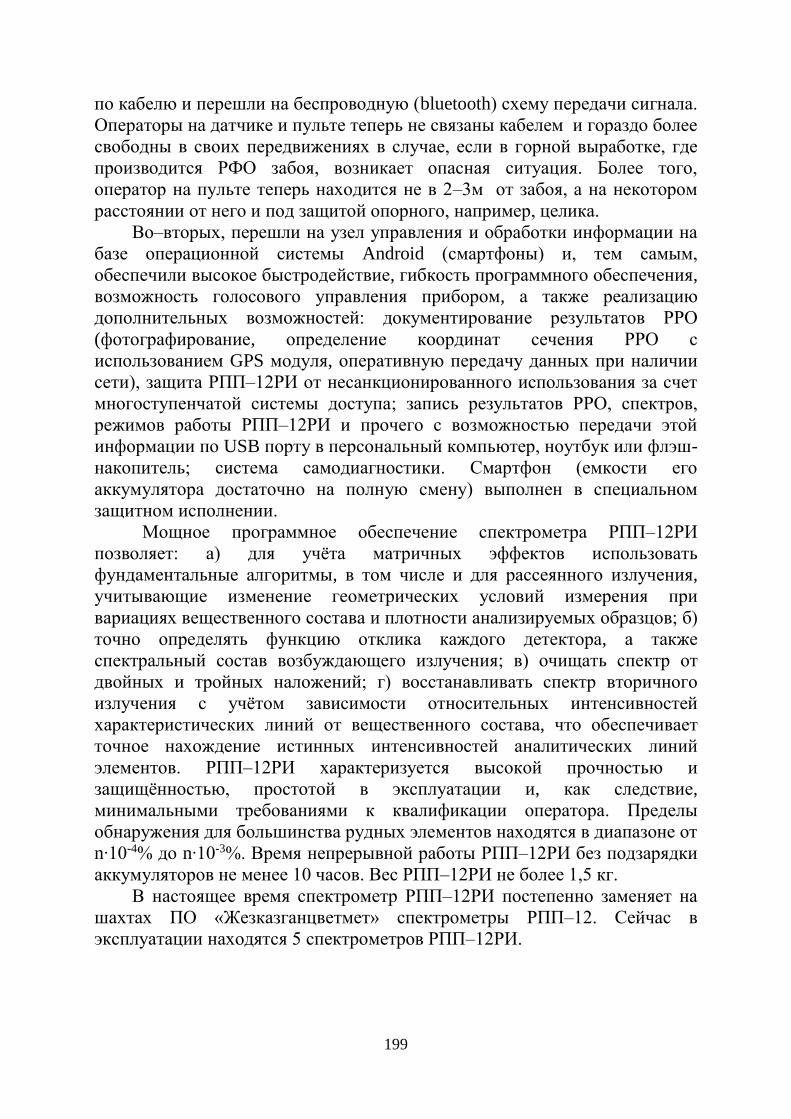
199
по кабелю и перешли на беспроводную (bluetooth) схему передачи сигнала.
Операторы на датчике и пульте теперь не связаны кабелем и гораздо более
свободны в своих передвижениях в случае, если в горной выработке, где
производится РФО забоя, возникает опасная ситуация. Более того,
оператор на пульте теперь находится не в 2–3м от забоя, а на некотором
расстоянии от него и под защитой опорного, например, целика.
Во–вторых, перешли на узел управления и обработки информации на
базе операционной системы Android (смартфоны) и, тем самым,
обеспечили высокое быстродействие, гибкость программного обеспечения,
возможность голосового управления прибором, а также реализацию
дополнительных возможностей: документирование результатов РРО
(фотографирование, определение координат сечения РРО с
использованием GPS модуля, оперативную передачу данных при наличии
сети), защита РПП–12РИ от несанкционированного использования за счет
многоступенчатой системы доступа; запись результатов РРО, спектров,
режимов работы РПП–12РИ и прочего с возможностью передачи этой
информации по USB порту в персональный компьютер, ноутбук или флэш-
накопитель; система самодиагностики. Смартфон (емкости его
аккумулятора достаточно на полную смену) выполнен в специальном
защитном исполнении.
Мощное программное обеспечение спектрометра РПП–12РИ
позволяет: а) для учёта матричных эффектов использовать
фундаментальные алгоритмы, в том числе и для рассеянного излучения,
учитывающие изменение геометрических условий измерения при
вариациях вещественного состава и плотности анализируемых образцов; б)
точно определять функцию отклика каждого детектора, а также
спектральный состав возбуждающего излучения; в) очищать спектр от
двойных и тройных наложений; г) восстанавливать спектр вторичного
излучения с учётом зависимости относительных интенсивностей
характеристических линий от вещественного состава, что обеспечивает
точное нахождение истинных интенсивностей аналитических линий
элементов. РПП–12РИ характеризуется высокой прочностью и
защищённостью, простотой в эксплуатации и, как следствие,
минимальными требованиями к квалификации оператора. Пределы
обнаружения для большинства рудных элементов находятся в диапазоне от
n∙10-4% до n∙10-3%. Время непрерывной работы РПП–12РИ без подзарядки
аккумуляторов не менее 10 часов. Вес РПП–12РИ не более 1,5 кг.
В настоящее время спектрометр РПП–12РИ постепенно заменяет на
шахтах ПО «Жезказганцветмет» спектрометры РПП–12. Сейчас в
эксплуатации находятся 5 спектрометров РПП–12РИ.
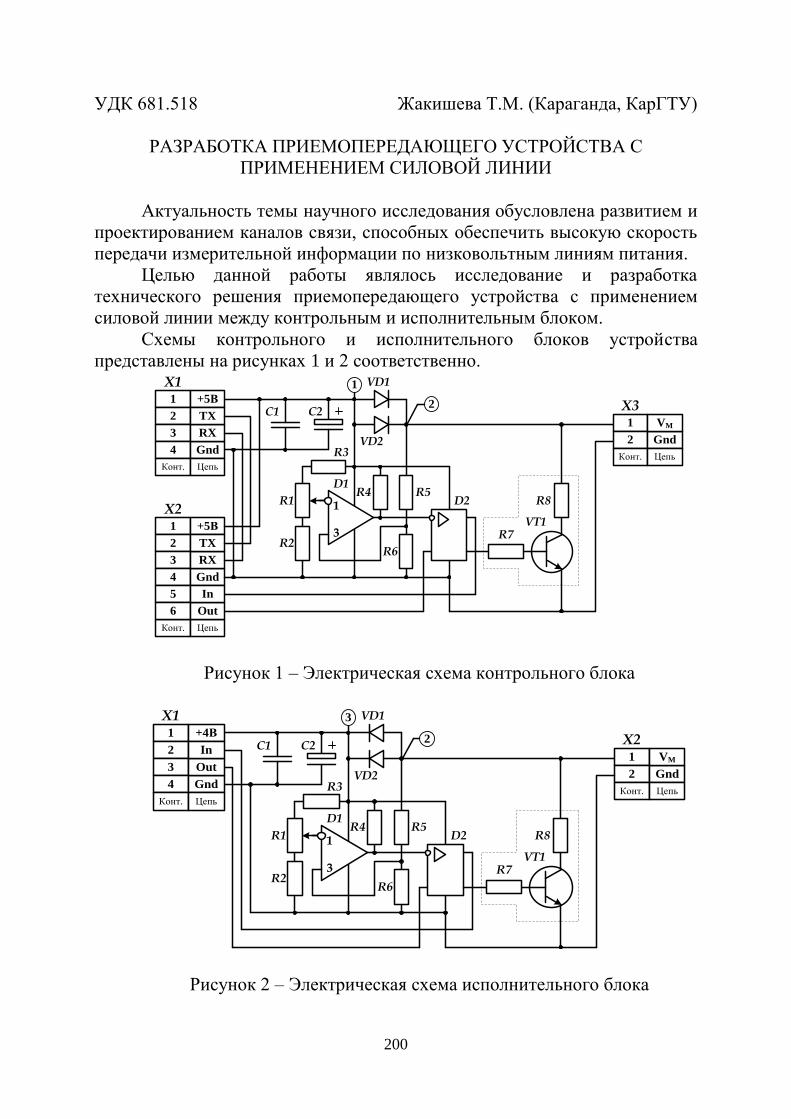
200
УДК 681.518 Жакишева Т.М. (Караганда, КарГТУ)
РАЗРАБОТКА ПРИЕМОПЕРЕДАЮЩЕГО УСТРОЙСТВА С
ПРИМЕНЕНИЕМ СИЛОВОЙ ЛИНИИ
Актуальность темы научного исследования обусловлена развитием и
проектированием каналов связи, способных обеспечить высокую скорость
передачи измерительной информации по низковольтным линиям питания.
Целью данной работы являлось исследование и разработка
технического решения приемопередающего устройства с применением
силовой линии между контрольным и исполнительным блоком.
Схемы контрольного и исполнительного блоков устройства
представлены на рисунках 1 и 2 соответственно.
Рисунок 1 – Электрическая схема контрольного блока
Рисунок 2 – Электрическая схема исполнительного блока
R1
X1 1
2
3
4 Gnd
RX
+5В
TX
Конт. Цепь
C2 C1
VD1
VT1
R3
D2
VD2
D1
1
3R2
R4 R5
R6
R7
R8
X3 1
2 Gnd
VM
Конт. Цепь
X2 1
2
3
4 Gnd
RX
+5В
TX
Конт. Цепь
5
6 Out
In
1
2
R1
X1 1
2
3
4 Gnd
+4В
Конт. Цепь
C2 C1
VD1
VT1
R3
D2
VD2
D1
1
3R2
R4 R5
R6
R7
R8
X2 1
2 Gnd
VM
Конт. Цепь
Out
In2
3
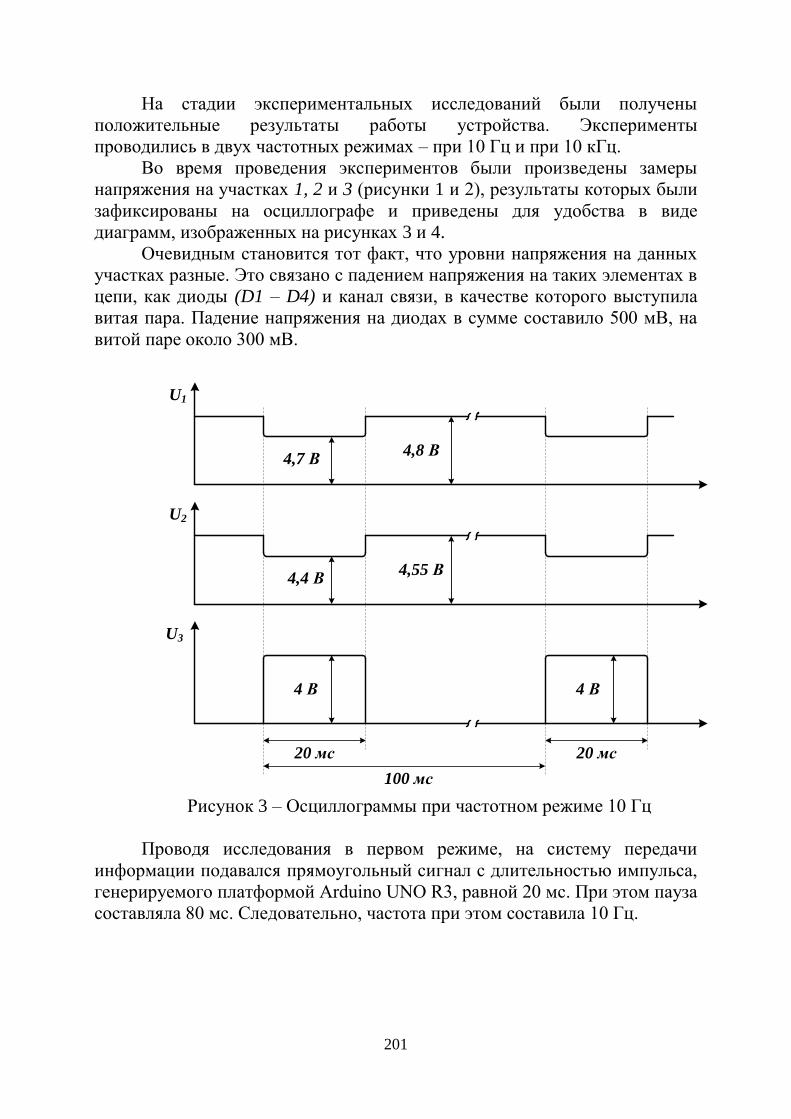
201
На стадии экспериментальных исследований были получены
положительные результаты работы устройства. Эксперименты
проводились в двух частотных режимах – при 10 Гц и при 10 кГц.
Во время проведения экспериментов были произведены замеры
напряжения на участках 1, 2 и 3 (рисунки 1 и 2), результаты которых были
зафиксированы на осциллографе и приведены для удобства в виде
диаграмм, изображенных на рисунках 3 и 4.
Очевидным становится тот факт, что уровни напряжения на данных
участках разные. Это связано с падением напряжения на таких элементах в
цепи, как диоды (D1 – D4) и канал связи, в качестве которого выступила
витая пара. Падение напряжения на диодах в сумме составило 500 мВ, на
витой паре около 300 мВ.
Рисунок 3 – Осциллограммы при частотном режиме 10 Гц
Проводя исследования в первом режиме, на систему передачи
информации подавался прямоугольный сигнал с длительностью импульса,
генерируемого платформой Arduino UNO R3, равной 20 мс. При этом пауза
составляла 80 мс. Следовательно, частота при этом составила 10 Гц.
U1
U2
4,8 В4,7 В
4,55 В4,4 В
4 В 4 В
20 мс
100 мс
20 мс
U3
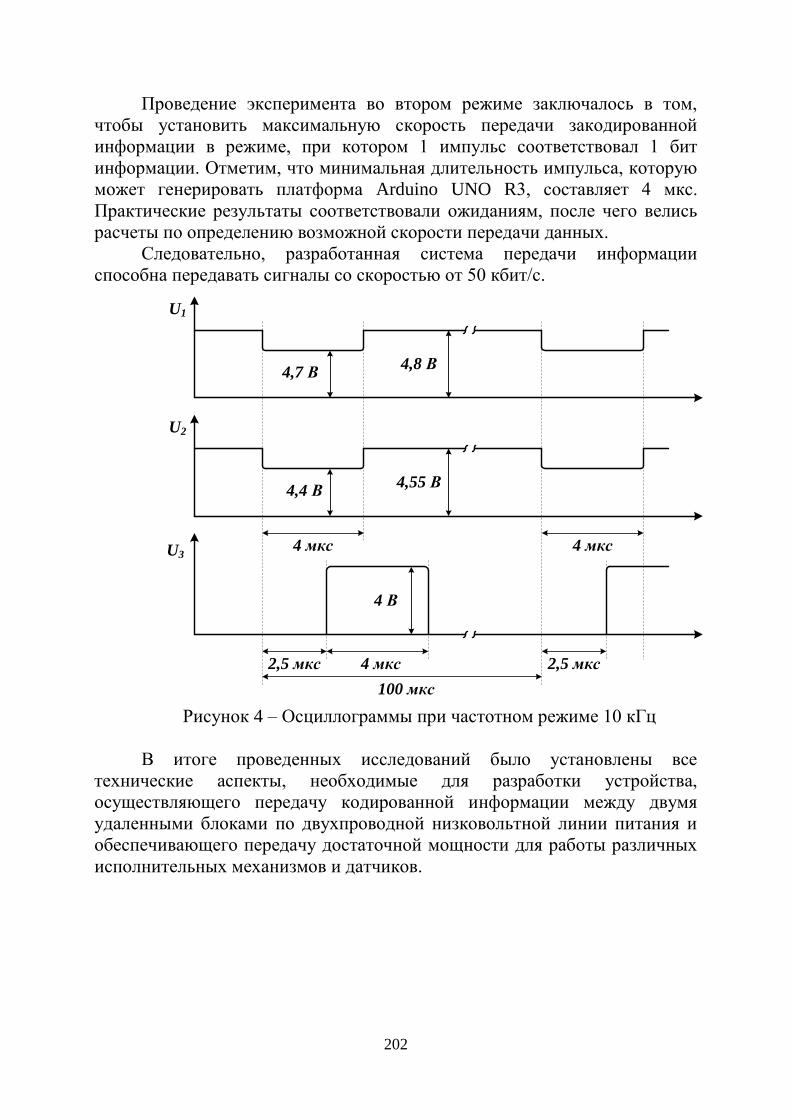
202
Проведение эксперимента во втором режиме заключалось в том,
чтобы установить максимальную скорость передачи закодированной
информации в режиме, при котором 1 импульс соответствовал 1 бит
информации. Отметим, что минимальная длительность импульса, которую
может генерировать платформа Arduino UNO R3, составляет 4 мкс.
Практические результаты соответствовали ожиданиям, после чего велись
расчеты по определению возможной скорости передачи данных.
Следовательно, разработанная система передачи информации
способна передавать сигналы со скоростью от 50 кбит/с.
Рисунок 4 – Осциллограммы при частотном режиме 10 кГц
В итоге проведенных исследований было установлены все
технические аспекты, необходимые для разработки устройства,
осуществляющего передачу кодированной информации между двумя
удаленными блоками по двухпроводной низковольтной линии питания и
обеспечивающего передачу достаточной мощности для работы различных
исполнительных механизмов и датчиков.
U1
U2
4,8 В4,7 В
4,55 В4,4 В
100 мкс
4 мкс 4 мкс
4 В
4 мкс2,5 мкс 2,5 мкс
U3
203
УДК 657.6:658 Жезбаев А.К. (Томск, НИ ТПУ)
Айжамбаева С.Ж. (Караганда, КарГТУ)
КОНТРОЛЬ КАК НЕОБХОДИМОЕ УСЛОВИЕ УСПЕХА
ОРГАНИЗАЦИИ.
Главный фактор конкурентоспособности является – качество.
Поэтому его улучшение является важнейшим фактором в современной
системе управления предприятием. Есть множество способов повысить
качество продукта, планирование, стратегический маркетинг, организация
процессов, регулирование, мотивация. Сюда так же входит
совершенствование контроля за персоналом и всеми важнейшими
процессами производства в частности внутренний контроль[1].
Система внутреннего контроля включает в себя:
Контроль соответствия деятельности;
Контроль сохранности активов;
Контроль экономного и рационального расходования ресурсов;
Контроль материально-технического обеспечения;
Внутренний аудит;
Контроль производства и продажи продукта;
Контроль исполнения распоряжений;
Мониторинг внутренней и внешней среды предприятия на предмет
обнаружения угроз безопасности;
Исходя из анализа рынка, на сегодняшний день в этом нуждается
множество предприятий малого и среднего бизнеса, так как для более
крупных организаций расписан регламент оптимального контроля.
Система контроля должна соответствовать требованиям, заданных рынком
на все этапы жизненного цикла продукта и готова к возможным,
прогнозируемым изменениям[2].
Важно создать универсальную систему контроля качества на всех
основных этапах цикла изделия, чтобы не допустить появление
недоброкачественной, дефектной продукции, также обеспечить
стабильность показателей продукции. Сущность всякого контроля
сводится к получению информации о фактическом состоянии продукта,
его показателях и признаках (первичная информация); сопоставлению этой
информации с ранее установленными нормами и требованиями, т е
определение соответствия или не соответствия фактическим ожидаемым
данным (вторичная информация) [5].
Поскольку контроль сам является бухгалтерской категорией, а так
же частью управленческой деятельности, в основу создания новой системы
контроля должны быть присущие контролю и общие для всех систем
управления принципы.
204
Принципы систематизирования потоков информации, реализуются с
помощью инвентаризации всех документов и информационных потоков,
участников их обработки, определения сроков исполнения, степени
ответственности и участия на каждом этапе обработки[4].
Таким образом, как и в любой системе всё взаимозависимо.
Реализация этих принципов позволит организовать контрольную
деятельность, и обеспечит фундамент для улучшения оптимизации
управленческого процесса. Каждая система уникальна, потому что
основана на присущих только ей задачах и целях, информационных
потоках.
Наличие действительно эффективно работающей и проработанной
системы внутреннего контроля будет являться одним из важнейших
факторов для роста конкурентоспособности. Международная практика
наглядно демонстрирует, наличие такой системы внутреннего контроля
создает предпосылки успешного и эффективного развития бизнеса, в связи
с появлением потенциала эффективного управления материальными и
трудовыми ресурсами хозяйственных субъектов, проводить успешную
ценовую политику, появлением возможности привлекать инвестиции
выгодно, путем повышения качества финансовой отчетности субъекта[5].
Список использованных источников
1. Никитин В.А. Управление качеством на базе стандартов ИСО 9000:
2000.-СПб.: Питер, 2002.
2. Гринь Я. Г. Совершенствование организации внутреннего контроля в
российских компаниях. 2017. — URL https://moluch.ru/archive/146/40964/
(дата обращения: 11.06.2017).
3. Совершенствование внутреннего контроля – фактор оптимизации
управленческих решений хозяйствующего субъекта.
https://creativeconomy.ru/lib/2154 (дата обращения: 22.08.2016).
4. Совершенствование системы качества предприятия.
https://www.fundamental-research.ru/ru/article/view?id=4635 (дата
обращения: 2014).
5. Создание, функционирование и совершенствование системы
внутреннего контроля. https://moluch.ru/archive/47/5891/ (дата обращения:
09.05.2015).
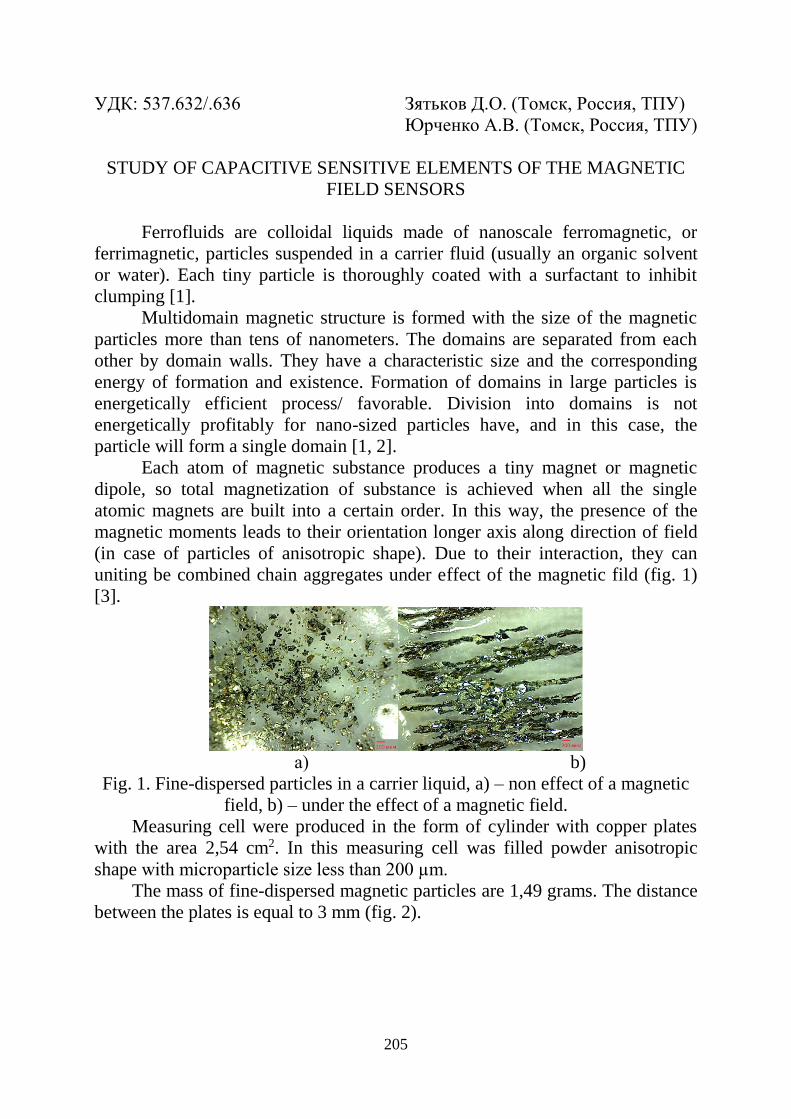
205
УДК: 537.632/.636 Зятьков Д.О. (Томск, Россия, ТПУ)
Юрченко А.В. (Томск, Россия, ТПУ)
STUDY OF CAPACITIVE SENSITIVE ELEMENTS OF THE MAGNETIC
FIELD SENSORS
Ferrofluids are colloidal liquids made of nanoscale ferromagnetic, or
ferrimagnetic, particles suspended in a carrier fluid (usually an organic solvent
or water). Each tiny particle is thoroughly coated with a surfactant to inhibit
clumping [1].
Multidomain magnetic structure is formed with the size of the magnetic
particles more than tens of nanometers. The domains are separated from each
other by domain walls. They have a characteristic size and the corresponding
energy of formation and existence. Formation of domains in large particles is
energetically efficient process/ favorable. Division into domains is not
energetically profitably for nano-sized particles have, and in this case, the
particle will form a single domain [1, 2].
Each atom of magnetic substance produces a tiny magnet or magnetic
dipole, so total magnetization of substance is achieved when all the single
atomic magnets are built into a certain order. In this way, the presence of the
magnetic moments leads to their orientation longer axis along direction of field
(in case of particles of anisotropic shape). Due to their interaction, they can
uniting be combined chain aggregates under effect of the magnetic fild (fig. 1)
[3].
а) b)
Fig. 1. Fine-dispersed particles in a carrier liquid, a) – non effect of a magnetic
field, b) – under the effect of a magnetic field.
Measuring cell were produced in the form of cylinder with copper plates
with the area 2,54 cm2. In this measuring cell was filled powder anisotropic
shape with microparticle size less than 200 µm.
The mass of fine-dispersed magnetic particles are 1,49 grams. The distance
between the plates is equal to 3 mm (fig. 2).
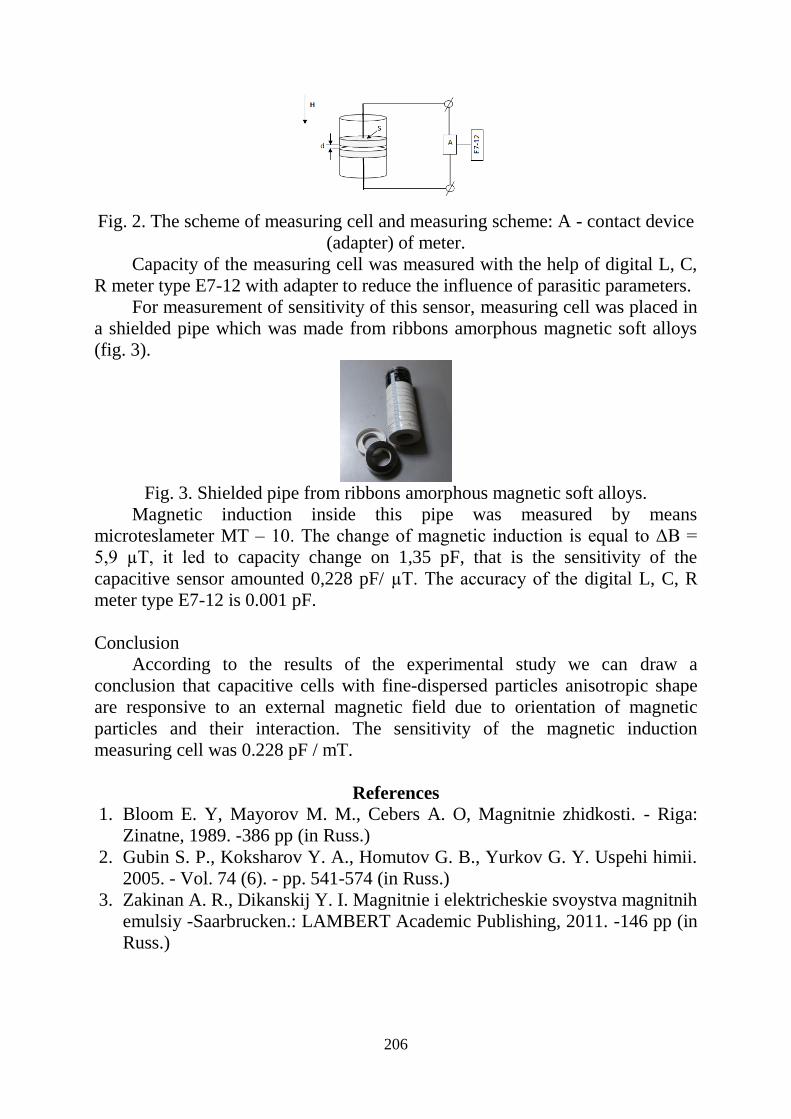
206
Fig. 2. The scheme of measuring cell and measuring scheme: A - contact device
(adapter) of meter.
Capacity of the measuring cell was measured with the help of digital L, C,
R meter type E7-12 with adapter to reduce the influence of parasitic parameters.
For measurement of sensitivity of this sensor, measuring cell was placed in
a shielded pipe which was made from ribbons amorphous magnetic soft alloys
(fig. 3).
Fig. 3. Shielded pipe from ribbons amorphous magnetic soft alloys.
Magnetic induction inside this pipe was measured by means
microteslameter MT – 10. The change of magnetic induction is equal to ΔВ =
5,9 µT, it led to capacity change on 1,35 pF, that is the sensitivity of the
capacitive sensor amounted 0,228 pF/ µT. The accuracy of the digital L, C, R
meter type E7-12 is 0.001 pF.
Conclusion
According to the results of the experimental study we can draw a
conclusion that capacitive cells with fine-dispersed particles anisotropic shape
are responsive to an external magnetic field due to orientation of magnetic
particles and their interaction. The sensitivity of the magnetic induction
measuring cell was 0.228 pF / mT.
References
1. Bloom E. Y, Mayorov M. M., Cebers A. O, Magnitnie zhidkosti. - Riga:
Zinatne, 1989. -386 pp (in Russ.)
2. Gubin S. P., Koksharov Y. A., Homutov G. B., Yurkov G. Y. Uspehi himii.
2005. - Vol. 74 (6). - pp. 541-574 (in Russ.)
3. Zakinan A. R., Dikanskij Y. I. Magnitnie i elektricheskie svoystva magnitnih
emulsiy -Saarbrucken.: LAMBERT Academic Publishing, 2011. -146 pp (in
Russ.)
207
УДК 622.06 Ивадилинова Д.Т. (Караганды, КарГТУ)
Исабек Т.К. (Караганды, КарГТУ)
АНАЛИЗ ПРИМЕНЕНИЯ ГИДРОЗАКЛАДКИ ВЫРАБОТАННОГО
ПРОСТРАНСТВА НА ШАХТАХ
КАРАГАНДИНСКОГО УГОЛЬНОГО БАССЕЙНА
При подземной разработке угольных месторождений большое
значение для повышения угледобычи имеют правильный выбор и
совершенствование способов управления горным давлением. Одним из
основных способов управления горным давлением является полная
закладка выработанного пространства.
Гидравлическая закладка – использовании потока воды для
транспортирования по трубопроводам закладочного материала и
заполнения им выработанного пространства.
Достоинствами гидравлической закладки выработанного
пространства являются:
– при любой мощности и угле падения, отрабатываемых
наклонными, поперечнонаклонными и горизонтальными слоями,
длинными столбами по простиранию и восстанию, камерно-столбовыми и
другими системами, а также в горнорудной промышленности при
разработке горизонтальными слоями, камерами и др.;
– высокая плотность (усадка 10–20%) и устойчивость закладочного
массива;
– возможность подачи закладочного материала в забой с
поверхности без перегрузок по трубопроводам;
– высокая производительность работ (до 400 м3/ч, иногда выше).
Недостатками гидравлической закладки выработанного пространства
являются:
– необходимость ввода в шахту значительного количества воды, что
осложняет общий режим работы шахты, вынос мелких фракций из массива
на откаточные выработки, необходимость осуществления спец.
мероприятий по управлению отработанной водой;
– управление отработанной водой в связи с ее большим объемом и
выносом мелких фракций закладочного материала;
– при работе по простиранию – полная изоляция крепи в забое, а по
восстанию – герметизация выработок, прилегающих к закладочному
массиву;
– осветления воды – дополнительные выработки, а для откачки –
насосные установки;
– крупные первоначальные затраты на сооружение
гидрозакладочного комплекса.
208
Условием применения гидрозакладки многие специалисты до
последнего времени считали наличие поблизости от шахт запасов песка.
Однако, опыт показывает, что при отсутствии этого в качестве материала
для гидрозакладки с успехом можно применять дробленые породы,
добываемые в специальных карьерах на поверхности, породы, получаемые
в шахте при проходке подготовительных выработок, материалы породных
отвалов, отходы обогащения и другие местные материалы, например:
металлургические шлаки, отходы сланцеперерабатывающих заводов и др.
На шахте имени 50-летия Октябрьской революции в 1973 году
проводились экспериментальные работы по выемке пласта К18 под
машиностроительным заводом №1 с полной гидравлической закладкой
выработанного пространства.
Запасы угля, находящиеся в охранном целике под машзаводом №1 и
подлежащие отработке, были расположены в отработанной части
шахтного поля и оконтурены откаточным (отметка +190,0 м) и
вентиляционным (отметка +230,0 м) штреками.
В работе экспериментального участка выявлен ряд узких мест,
ухудшающих технико-экономические показатели:
1. Малая производительность подземного закладочного
комплекса, сдерживающего работы по выемке угля.
2. Несовершенная конструкция илосборников, большие объемы
которых и малый срок службы увеличивают стоимость кубометра
закладки.
3. Значительный расход материалов на 1 тонну добычи.
В проекте гидрозакладочного комплекса для выемки пласта К18 из
охранного целика под машзаводом №1 не предусматривалось
строительство каких-либо зданий и сооружений на новых площадках.
Расчет годовых эксплуатационных расходов по закладочному
комплексу был произведен исходя из годового объема закладочного
материала (порода с обогатительной фабрики №38) – 150,0 тысяч
кубических метров необходимого для нормальной работы
экспериментального участка с годовой добычей угля 240,0 тысяч тонн.
Список использованной литературы:
1. А.С. Кузьмич. Гидравлическая закладка выработанного
пространства. Москва, Недра. – 1975 г.
2. Пояснительная записка к техно-рабочему проекту
«Закладочного гидрокомплекса для выемки пласта К18 из охранного
целика под Машзаводом №1». – 1973 г.
209
УДК 528.02 Ислямова А.Е. (Караганда, «Орталыкмаркшейдерия»)
Бесимбаева О.Г. (Караганда, КарГТУ)
Ярцева В.Ф. (Караганда, КарГТУ)
ТЕХНОЛОГИЯ СОЗДАНИЯ ЦИФРОВОГО
ТОПОГРАФИЧЕСКОГО ПЛАНА
Внедрение геоинформационных технологий позволяет
автоматизировать задачи, связанные с анализом пространственного
положения объектов и явлений, что в свою очередь является стимулом для
развития новых решений в области создания и использования цифровых
карт. Цифровой топографический план - это цифровая модель местности,
сформированная с учетом законов картографической генерализации в
принятых для планов проекциях, разграфки, системе координат и высот.
Для решения многих социальных, экономических и инженерных
задач с точки зрения их пространственного положения используются
географические информационные системы. Увеличение мощности
персональных компьютеров дает возможность обратиться к решению
геоинформационных задач с применением растровой «подложки», а
сочетание ее с частичными векторными данными дает мощный
инструмент к решению большинства геоинформационных задач. Для
получения растровых моделей используются существующие
топографические планы и карты [1].
Разработана технология создания условных знаков для
топографических планов, которая позволяет создавать библиотеки
условных знаков и использовать их при создании и обновлении цифровых
карт и планов.
Для получения растровых моделей используются существующие
топографические планы и карты. Растровое изображение получается
методом сканирования картографических материалов. Растровая модель
служит «подложкой» для геоинформационных систем, на которую
накладываются отдельные, необходимые для данной предметной области,
векторные слои. Тем самым обеспечивается высокая информативность и
качество конечного продукта с низкой стоимостью его получения. Для
обновления цифровых карт в растровой форме необходимо разработать
методику переноса обновляемого участка на растр, решив при этом ряд
задач:
- обеспечение точности взаимного ориентирования растровой и
обновляемой моделей;
- идентификация объектов цифровой и растровой моделей;
- отображение цифровой модели местности в цифровую карту
посредством условных знаков и переноса последней на растровую модель.
210
Технологический процесс создания ЦТП состоит из следующих
видов работ:
- сбор и анализ исходных данных;
- подготовка растрового изображения;
- редактирование цифровой модели рельефа и набор отметок высот;
- создание векторной модели рельефа;
- создание векторной модели контуров;
- совмещение векторной модели контуров и векторной модели
рельефа;
- преобразование векторной карты в растровое изображение в формате
ТIFF, в цветовой палитре RGB для печати;
Исходными материалами для создания ЦТП являются [1]:
- ортофотопланы, полученные путем нарезки ортофотомозаики,
созданной в результате обработки материалов цифровой аэросъемки;
- материалы топографического дешифрирования;
- каталоги координат и высот; паспорт аэросъемки и другие обзорно-
справочные материалы.
При создании ЦТП используются следующие виды растров,
полученные в результате камеральной обработки материалов аэросъемки:
- 1 растр уровень L1, созданный для работы в стереорежиме с
определенным процентом перекрытия;
- 2 растр уровень L2 - трансформированные ортофотоизображения
*.img, имеющие геодезическую привязку.
Растровое изображение уровня L1 используется для автоматического
построения цифровой модели рельефа и последующего редактирования
ЦМР в стереорежиме. При этом высоты точек ЦМР, которые не лежат на
поверхности фотограмметрической модели (крыши зданий, кроны
деревьев и другие объекты) редактируются вручную.
Растровое изображение уровня L2 создается с учетом ЦМР, что
позволяет уменьшить влияние погрешностей модели рельефа на точность
ортофотоплана. Готовый ортофотоплан разрезается на листы масштаба 1:2
000. Набор отметок высот осуществляется в стереорежиме в количестве 8-
10 характерных точек местности на 1 кв. дм плана.
Для получения векторной модели рельефа ЦМР импортируется из
3D в 2D изображение. Имя файлу присваивается согласно номенклатуре
плана с добавлением слова «rel» и сохраняется в общей папке «relief»
(рельеф).
Построение векторной модели контуров (цифровой модели
местности) производится на базе ортофотопланов уровня L2 в различных
программах с использованием «Классификатора условных знаков».
Векторизация объектов местности проводится по материалам
топографического дешифрирования. Объекты цифрового
топографического плана разделяются по элементам содержания на
211
тематические слои. Основной задачей векторизации является разложение
исходных данных на векторные элементы. Опознанные объекты
ортофотоплана и исходного растра карты необходимо превратить в
векторные примитивы в строгом соответствии с правилами описания
векторных объектов и взаимосвязей между ними. Каждая группа объектов
наносится на соответствующий векторный слой, который имеет свое
индивидуальное название и структуру, согласно действующему
классификатору [2].
Все элементы математической основы наносятся точно по
растровому изображению исходной топографической карты, остальные
элементы ситуации обновляются по ортофотоплану и полевым материалам
дешифрирования. Конечным результатом является цифровой
топографический план, оформленный таким образом, что в результате его
печати на плоттере получается качественный топографический план в
аналоговом виде и электронный цифровой план, оцифрованный согласно
принятой топологии с атрибутивной базой данных.
Векторизация ЦТП может производится в различных ГИС системах.
Готовя данные для ГИС, необходимо чётко представлять конечный
результат работы. Итак, электронный план состоит из линий, полигонов и
символов, план визуально может быть не читаем, и представлять собой
набор линий и невидимых точек, так как вся информация сидит в базе
объекта, а при необходимости оперативно генерируется на экране.
Для получения ЦТП векторная модель контуров совмещается с
векторной моделью рельефа. Так как векторная модель рельефа
представляет собой экспортированный файл из 3D в 2D, то для сохранения
параметров условных знаков, копия файла ЦММ подгружается к файлу с
рельефом [1, 2].
На созданный цифровой топографический план по координатам
наносят пункты ГГС, при этом необходимо согласовать отметки высот с
горизонталями. Нанесение точек планово-высотной основы путем
обработки цифрового каталога координат геодезических пунктов может
быть выполнено из форматов SXF, GML, TXT, DBF, XLS и других.
Средства геокодирования в задаче «База данных» позволяют нанести
объекты из базы данных различных форматов.
Разработанная технология обновления растровых моделей
топографических планов дает возможность перевода фондов
топографических планов населенных пунктов и городов на машинные
носители, а также поддержания их в актуальном состоянии.
Список литературы
1.Инструкция по фотограмметрическим работам при создании
цифровых топографических карт и планов.ГКИНП (ОНТА)-05-005-
07.Астана, 2008.
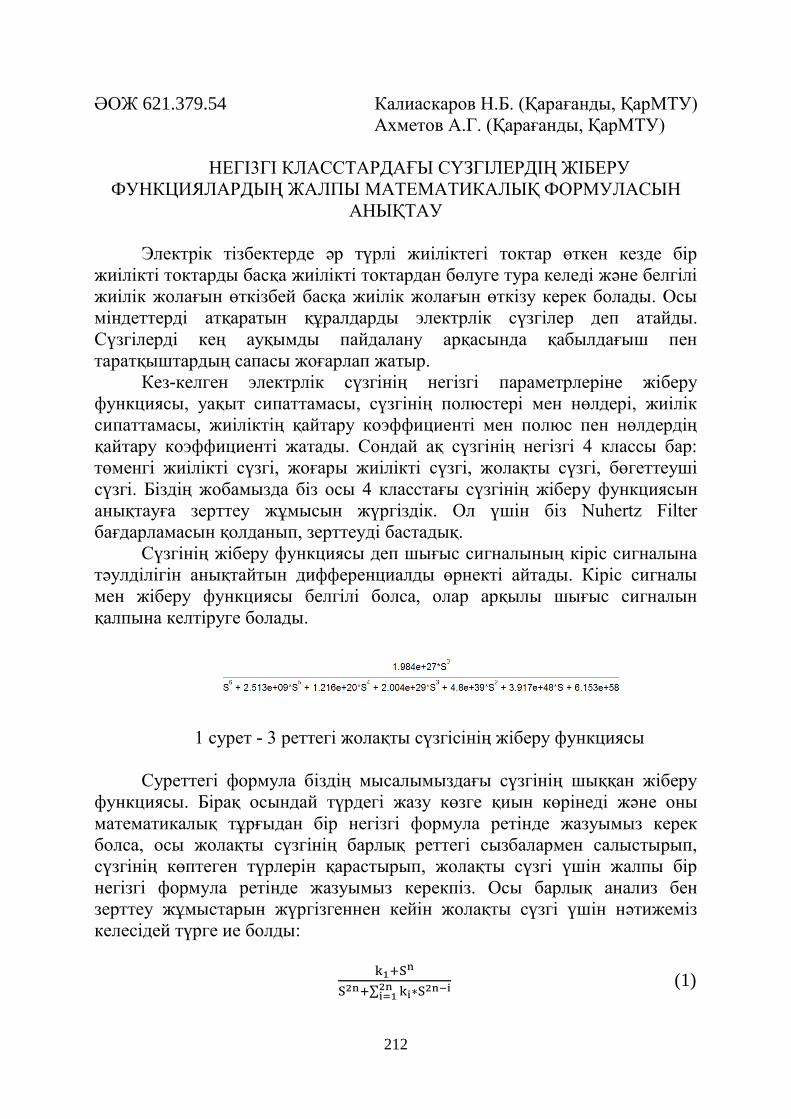
212
ӘОЖ 621.379.54 Калиаскаров Н.Б. (Қарағанды, ҚарМТУ)
Ахметов А.Г. (Қарағанды, ҚарМТУ)
НЕГІ3ГІ КЛАССТАРДАҒЫ СҮЗГІЛЕРДІҢ ЖІБЕРУ
ФУНКЦИЯЛАРДЫҢ ЖАЛПЫ МАТЕМАТИКАЛЫҚ ФОРМУЛАСЫН
АНЫҚТАУ
Электрік тізбектерде әр түрлі жиіліктегі токтар өткен кезде бір
жиілікті токтарды басқа жиілікті токтардан бөлуге тура келеді және белгілі
жиілік жолағын өткізбей басқа жиілік жолағын өткізу керек болады. Осы
міндеттерді атқаратын құралдарды электрлік сүзгілер деп атайды.
Сүзгілерді кең ауқымды пайдалану арқасында қабылдағыш пен
таратқыштардың сапасы жоғарлап жатыр.
Кез-келген электрлік сүзгінің негізгі параметрлеріне жіберу
функциясы, уақыт сипаттамасы, сүзгінің полюстері мен нөлдері, жиілік
сипаттамасы, жиіліктің қайтару коэффициенті мен полюс пен нөлдердің
қайтару коэффициенті жатады. Сондай ақ сүзгінің негізгі 4 классы бар:
төменгі жиілікті сүзгі, жоғары жиілікті сүзгі, жолақты сүзгі, бөгеттеуші
сүзгі. Біздің жобамызда біз осы 4 класстағы сүзгінің жіберу функциясын
анықтауға зерттеу жұмысын жүргіздік. Ол үшін біз Nuhertz Filter
бағдарламасын қолданып, зерттеуді бастадық.
Сүзгінің жіберу функциясы деп шығыс сигналының кіріс сигналына
тәулділігін анықтайтын дифференциалды өрнекті айтады. Кіріс сигналы
мен жіберу функциясы белгілі болса, олар арқылы шығыс сигналын
қалпына келтіруге болады.
1 сурет - 3 реттегі жолақты сүзгісінің жіберу функциясы
Суреттегі формула біздің мысалымыздағы сүзгінің шыққан жіберу
функциясы. Бірақ осындай түрдегі жазу көзге қиын көрінеді және оны
математикалық тұрғыдан бір негізгі формула ретінде жазуымыз керек
болса, осы жолақты сүзгінің барлық реттегі сызбалармен салыстырып,
сүзгінің көптеген түрлерін қарастырып, жолақты сүзгі үшін жалпы бір
негізгі формула ретінде жазуымыз керекпіз. Осы барлық анализ бен
зерттеу жұмыстарын жүргізгеннен кейін жолақты сүзгі үшін нәтижеміз
келесідей түрге ие болды:
k1+Sn
S2n+∑ ki∗S2n−i2ni=1
(1)
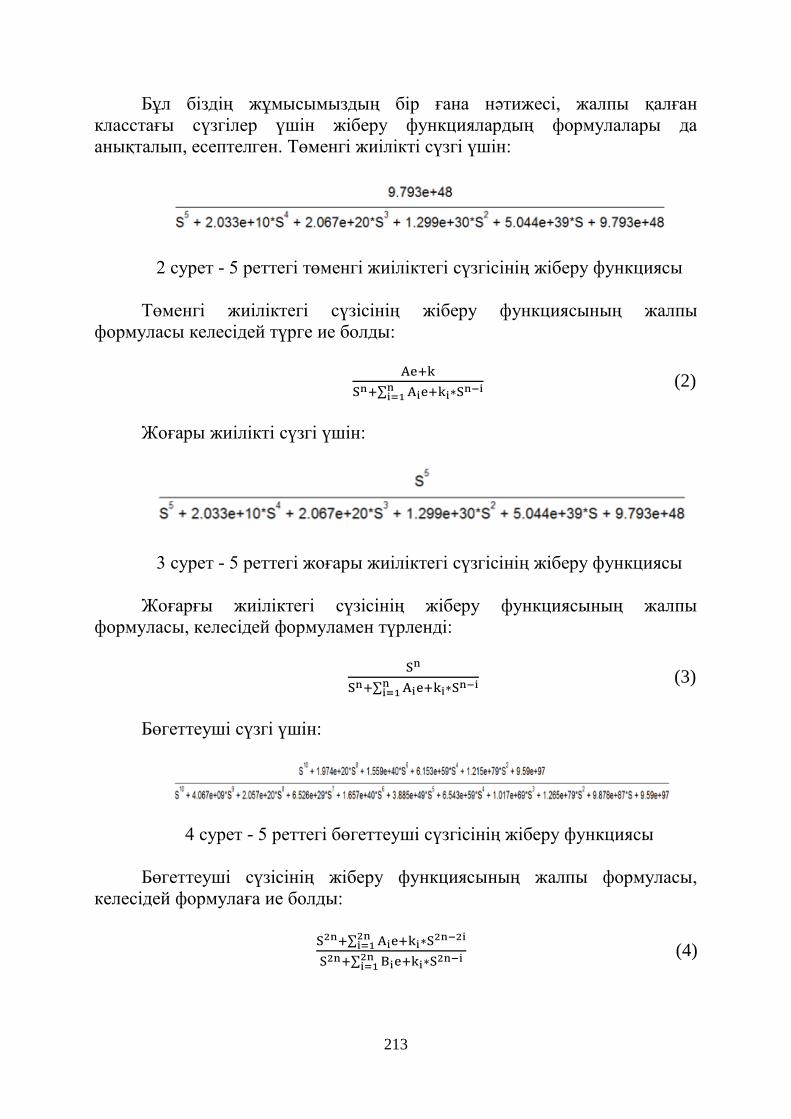
213
Бұл біздің жұмысымыздың бір ғана нәтижесі, жалпы қалған
класстағы сүзгілер үшін жіберу функциялардың формулалары да
анықталып, есептелген. Төменгі жиілікті сүзгі үшін:
2 сурет - 5 реттегі төменгі жиіліктегі сүзгісінің жіберу функциясы
Төменгі жиіліктегі сүзісінің жіберу функциясының жалпы
формуласы келесідей түрге ие болды:
Ae+k
Sn+∑ Aie+ki∗Sn−ini=1
(2)
Жоғары жиілікті сүзгі үшін:
3 сурет - 5 реттегі жоғары жиіліктегі сүзгісінің жіберу функциясы
Жоғарғы жиіліктегі сүзісінің жіберу функциясының жалпы
формуласы, келесідей формуламен түрленді:
Sn
Sn+∑ Aie+ki∗Sn−ini=1
(3)
Бөгеттеуші сүзгі үшін:
4 сурет - 5 реттегі бөгеттеуші сүзгісінің жіберу функциясы
Бөгеттеуші сүзісінің жіберу функциясының жалпы формуласы,
келесідей формулаға ие болды:
S2n+∑ Aie+ki∗S2n−2i2n
i=1
S2n+∑ Bie+ki∗S2n−i2ni=1
(4)
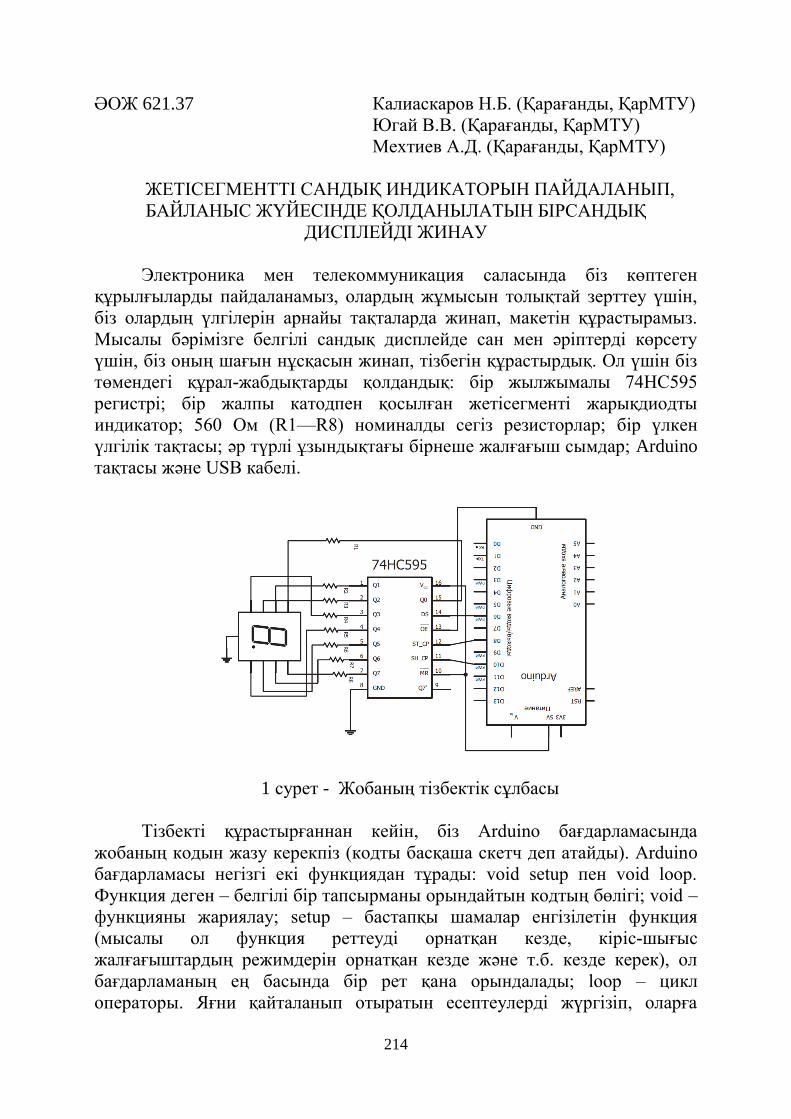
214
ӘОЖ 621.37 Калиаскаров Н.Б. (Қарағанды, ҚарМТУ)
Югай В.В. (Қарағанды, ҚарМТУ)
Мехтиев А.Д. (Қарағанды, ҚарМТУ)
ЖЕТІСЕГМЕНТТІ САНДЫҚ ИНДИКАТОРЫН ПАЙДАЛАНЫП,
БАЙЛАНЫС ЖҮЙЕСІНДЕ ҚОЛДАНЫЛАТЫН БІРСАНДЫҚ
ДИСПЛЕЙДІ ЖИНАУ
Электроника мен телекоммуникация саласында біз көптеген
құрылғыларды пайдаланамыз, олардың жұмысын толықтай зерттеу үшін,
біз олардың үлгілерін арнайы тақталарда жинап, макетін құрастырамыз.
Мысалы бәрімізге белгілі сандық дисплейде сан мен әріптерді көрсету
үшін, біз оның шағын нұсқасын жинап, тізбегін құрастырдық. Ол үшін біз
төмендегі құрал-жабдықтарды қолдандық: бір жылжымалы 74HC595
регистрі; бір жалпы катодпен қосылған жетісегменті жарықдиодты
индикатор; 560 Ом (R1—R8) номиналды сегіз резисторлар; бір үлкен
үлгілік тақтасы; әр түрлі ұзындықтағы бірнеше жалғағыш сымдар; Arduino
тақтасы және USB кабелі.
1 сурет - Жобаның тізбектік сұлбасы
Тізбекті құрастырғаннан кейін, біз Arduino бағдарламасында
жобаның кодын жазу керекпіз (кодты басқаша скетч деп атайды). Arduino
бағдарламасы негізгі екі функциядан тұрады: void setup пен void loop.
Функция деген – белгілі бір тапсырманы орындайтын кодтың бөлігі; void –
функцияны жариялау; setup – бастапқы шамалар енгізілетін функция
(мысалы ол функция реттеуді орнатқан кезде, кіріс-шығыс
жалғағыштардың режимдерін орнатқан кезде және т.б. кезде керек), ол
бағдарламаның ең басында бір рет қана орындалады; loop – цикл
операторы. Яғни қайталанып отыратын есептеулерді жүргізіп, оларға
215
әрекет ету үшін керек функция. Ол Arduino-ны активті басқару үшін керек.
Жобаның скетчы келесідей болады:
#define DATA 6
#define LATCH 8
#define CLOCK 10
int digits[] = {252, 96, 218, 242, 102, 182, 190, 224,
254, 246, 238, 62, 156, 122, 158, 142};
void setup()
{
pinMode(LATCH, OUTPUT); // регистрдің шығыстарын орнату
pinMode(CLOCK, OUTPUT); // регистрдің шығыстарын орнату
pinMode(DATA, OUTPUT); // регистрдің шығыстарын орнату
}
voidloop()
{
іnt i;
for ( i = 0 ; i< 16 ; i++ ) // 0-9 мен A-F сиволдарын шығару
{
digitalWrite(LATCH, LOW);
shiftOut(DATA, CLOCK, LSBFIRST, digits[i]);
digitalWrite(LATCH, HIGH);
delay(250); //созылу уақыты (милисекундпен өлшенеді)
}
for ( i = 0 ; i< 16 ; i++ )
{
digitalWrite(LATCH, LOW);
shiftOut(DATA, CLOCK, LSBFIRST, digits[i]+1); digitalWrite(LATCH,
HIGH);
delay(250);
}
}
2 сурет - Arduino тақтасында жиналған жетісегментті сандық
индикаторындағы 8 санын көрсету
216
УДК 621.313 Калужский Д.Л. (Новосибирск, НГТУ)
Мехтиев А.Д. (Караганда, КарГТУ)
ПЕРСПЕКТИВНЫЕ РАЗРАБОТКИ В ОБЛАСТИ МНОГОПОЛЮСНЫХ
СИНХРОННЫХ МАШИНЫ
Известно, что главными критериями, которые принимаются во
внимание при проектировании современных электроприводов, являются:
высокий момент, малая масса и минимальное потребление
электроэнергии. Традиционно, комплексное решение этой проблемы
осуществлялось за счет использования высокооборотных двигателей и
многоступенчатых передач.
Однако, наряду с несомненными достоинствами, такие объекты
имеют и ряд недостатков. Среди них: низкая надежность, малый срок
службы и плохие регулировочные способности, особенно в области малых
скоростей 0 – 20 об/мин.
Выяснилось, при наличии гибких механических соединений между
выходным валом редуктора и нагрузкой, электропривод, не обладая
должной динамикой и регулировочными способностями, не успевает
отслеживать заданные перемещения, а это приводит к появлению
гармонических колебаний и нарушению функционирования объектов
управления, в частности радиолокационных антенн различного
назначения.
Вышеизложенные обстоятельства, побудили разработчиков взять
курс на применение прямых электроприводов, либо приводов, в которых
используются механические редукторы с малым передаточным
отношением.
Исследование патентного и информационного массива позволило
установить, что качественный низкоскоростной электропривод должен
включать в себя:
- исполнительный двигатель с диапазоном частот вращения в
нерегулируемом режиме работы от нескольких десятков, до нескольких
сот оборотов в минуту. Это позволит предельно уменьшить передаточное
отношение, а в ряде случаев и полностью отказаться от редуктора;
- исполнительный двигатель с величиной удельного момента (т.е.
отношения момента к массе) большей, по крайней мере, в 4 – 5 раз, нежели
у электрических машин традиционного исполнения (асинхронных,
синхронных и постоянного тока);
- исполнительный двигатель, коэффициент мощности и КПД
которого, при работе от промышленной сети сопоставим с аналогичными
показателями высокооборотных электрических машин традиционного
исполнения.
217
Как показали исследования, выше озвученным требованиям в
наибольшей мере соответствуют электрические машины с дискретно –
распределенными обмотками (ДРО). Последние являются многофазными и
собираются из 1z катушек, каждая из которых выполнена с зубцовым
шагом.
Согласно базовому алгоритму, разработанному в [1], каждая фаза
ДРО состоит из 1р катушечных групп, а катушечную группу образуют 1s
согласно включенных катушек, размещенных на соседних зубцах статора.
Таким образом, 111 pmsz , где m - число фаз.
При протекании тока по многофазной дискретно – распределенной
обмотке, в зазоре образуются два встречно вращающихся МДС
)2
cos()2
cos( 112
111
pztF
pztFF mm
.
Таким образом, если проектируется синхронная машина с постоянными
магнитами, то ее ротор выполняется с числом пар полюсов равным
)(5.0 11 pzp .
Поскольку на практике распространение получили только трех и
двухфазные источники питания, при разработке теории электрических
машин с ДРО на первый план вышла проблема корректировки базовых
понятий о многофазной системе. Действительно, согласно широко
известным и общепринятым литературным источникам, каждая вторая
многофазная система является «исключением из правил».
Например, двухфазная – это частный случай четырехфазной
системы, шестифазная – это две трехфазные системы, смещенные на угол
тридцать градусов и т.д.
Исследования, проведенные в [2, 3] показали, что
характеристический угол должен определяться не из привычного
выражения m/2 , а как mm /)1( .
В последнем случае двухфазная система обретает право на
существование и, как положено, имеет сдвиг между фазными ЭДС
(токами) равный 2/ , а распределенные обмотки, независимо от того,
каким является число m (четным, или нечетным), проектируются по
одним и тем же базовым алгоритмам.
Помимо выше озвученных преференций, ориентация на новое
представление о характеристическом угле позволила решить еще одну
важную задачу – разработать электрические машины с многофазными
ДРО, работающими от двух, или трехфазных источников питания. Как
показала практика, подобные подходы позволили минимизировать число
катушек, при заранее оговоренном числе пар полюсов на роторе, а значит,
и увеличить линейную нагрузку.
218
Другой особенностью рассматриваемых машин является то, что ДРО
формируют МДС более похожие на ряды Уолша и Радемахера, а не на
привычные ряды Фурье.
Это обстоятельство заставило разработать теорию дискретных
функций [4], описывающих типичные законы изменения полей,
создаваемых ДРО, а также основные математические операции с ними
(сложение, интегрирование и т.д.). Отметим, при выполнении операций
интегрирования с дискретными функциями, конечные уравнения для
собственных и взаимных индуктивностей представляются в виде так
называемых «пилообразных» функций, которые имеют высокую
сходимость при переходе к основным гармоникам рядов Фурье. Последнее
обстоятельство позволило воспользоваться методом симметричных
составляющих и, впоследствии, представить уравнения синхронной
машины с ДРО в осях d, q, 0.
Анализ технических характеристик многополюсных электрических
машин, при ограничениях их наружного диаметра [5], показал:
1. Выигрыш по моменту, от применения ДРО, в сравнении машинами,
использующими распределенные обмотки, может составлять до 20 -
25%;
2. За счет малого вылета лобовой части ДРО осевая длина электрической
машины может быть существенно уменьшена, что особенно заметно
при проектировании двигателей с высоким удельным моментом.
3. Варьируя геометрию зубцово - пазовой зоны статора можно получить
временной закон изменения фазной ЭДС наиболее приближенный к
синусоиде. Это позволяет использовать электрические машины с ДРО
не только как двигатели, но и как генераторы.
Список литературы
1. Д.Л. Калужский, А.Н. Панарин, Т.Д. Ким и др. Синхронный редукторный
двигатель. А.с. СССР № 1674321, БИ 32, 1991.
2. Д.Л. Калужский. Методы анализа многофазных электрических машин.
Электричество, № 2, 1998.
3. Д.Л. Калужский, А.М. Стрижков, А.Т. Галимзянов. Уравнения электрического
равновесия и момента двухфазного индукторного двигателя. Электричество, №
8, 2010.
4. О.Н. Веселовский, Д.Л. Калужский. Уравнения электрического равновесия
синхронных и асинхронных двигателей с дискретно распределенными
обмотками. Электричество, № 5, 2000.
5. Калужский Д.Л., Сапсалев А.В. Шаговый режим работы индукторной машины с
зубцовым шагом. Инновации на основе информационных и коммуникационных
технологий (ИНФО – 2013): материалы 10 международной науч. – практ. конф.,
Сочи, 1- 10 окт. 2013 г. Москва: МИЭМ НИУ ВШЭ, 2013. – С. 465 – 468.
219
ӘОЖ 004.738.5(574) Каменова Ш.К. (Қарағанды, ҚарМУ)
Сланбекова А.Е. (Астана, ЕҰУ)
АҚПАРАТТЫҚ ЖҮЙЕЛЕРДІҢ КӘСІБИ ДАЙЫНДЫҒЫ
Заманауи қоғамды ақпараттық технологияларсыз елестету мүмкін
емес. Бүгін есептеу техникасының даму келешегін болжау тіпті мамандар
үшін күрделі жағдай. Бірақ болашақта қоғамды әлдебір орасан зор өзгеріс
күтіп тұрғаны белгілі.
Ақпараттық жүйелер қоғам өміріне нығыз орнықты және жұмыс пен
демалу үшін жаңа мүмкіндіктер ашып, адамның бейнетін жеңілдетті.
Заманауи қоғамды ақпараттандыру жүйесінің бір бағыты білім
беруді ақпараттандыру – білім беру сферасын оқыту мен тәрбиелеудің
психологиялық және педагогикалық мақсаттарын жүзеге асыруға
бағытталған жаңа ақпараттық технологияларды тиімді қолдану мен жасау
әдістемесімен және тәжірибесімен қамтамасыз ету болып табылады [1].
Қазіргі уақытта ақпараттық жүйелер түсінігін дербес компьютерде
ақпаратты өңдеудің негізгі техникалық құралы ретінде есептейді.
Қоғамның ақпараттандырылуы – бұл жаһандық әлеуметтік процесс,
қоғамдық өңдеу сферасындағы қызметтің басым түрі заманауи
микропроцессорлы және есептеу техникасының құралдары негізінде,
сонымен қатар ақпаратпен алмасудың әртүрлі құралдары арқылы жүзеге
асырылатын ақпаратты жинақтау, өңдеу, сақтау, жіберу және қолдану
оның ерекшелігі болып табылады. Қоғамды ақпараттандыру келесі
әрекеттермен қамтамасыз етеді:
- баспа қорында, ғылыми, өндірістік және қоғам мүшелері қызметінің
басқа да түрлерінде шоғырланған, әрдайым ұлғайып отыратын қоғамның
зерделілік шамасының белсенді түрде қолданылуын;
- ақпараттық технологиялардың қоғамдық өндірістің барлық
сферасының дамуын, еңбек қызметінің зерделі дамуын ынталандыратын,
ғылыми және өндірістік қызмет түрлеріне біріктірілуін;
- ақпараттық қызмет көрсету деңгейінің жоғары болуын, қоғам
мүшелерінің сенімді ақпарат қорына қолжетімді болуын, ұсынылған
ақпараттың визуализациясын, қолданылатын мәліметтердің
маңыздылығын.
Ақпарат технологиясы (ағылш. information technology, қысқаша IT) -
ақпараттық жүйелер техникалық базасының, үдерістің немесе құбылыстың
күйі туралы жаңа ақпарат алу үшін мәліметтерді жинау, өңдеу, жеткізу
тәсілдері мен құралдарының жиынтығын пайдаланатын процесс.
Ақпараттық жүйенің жұмысын қамсыздандыратын процесстерді
блоктардан құралған схема түрінде көруге болады: ақпаратты ішкі немесе
сыртқы көздерден енгізу, енгізілген ақпаратты қолайлы түрде көрсету
және өңдеу, басқа жүйеге тасымаладау немесе тұтынушыларға арналған
220
ақпаратты шығару, кері байланысты орнату – ол кіру ақпараттарын
сұрыптау үшін сол ұйымның қызметшілері өңдеген ақпараттың қызметін
атқарады.
Қолданыстағы алгоритмдер қарастырыла отырып, тиімділері
пайдаланылды. Осы мақсатта ALSER компаниясының есептік ақпараттық
жүйесі құрылып, пайдаланушы интерфейсін ұйымдастыру ағындарды,
бағдарлама көмегімен компанияда бар товарлардың, жұмыскерлердің
істейтін жұмысы, жұмыскерлер тізімі, компанияға келіп түскен
тапсырыстардың барлығы есепке алынып, ақпараттармен ыңғайлы және
бағдарламамен оңай жұмыс істеуге мүмкіндік беріледі, сол деректермен
автоматтандырылған жинауды, өңдеуді және монипуляциялауды іске
асырады [2].
Бағдарламаның негізгі алгоритмдерімен құрылымдық сұлбасы
жасалған және бағдарламашымен қолданушыға көмектер көрсетіледі. Осы
бағдарлама Oracle10g мәліметтер базасы және Delphi ортасымен
байланыстыра отырып жүзеге асырылған. Бұл бағдарламада интерфейсі
мен мәліметпен басқару қолданушыға түсінікті етіліп жасалған.
Жұмыстың мақсаты деректер базасын құру болып табылады.
Құрылған деректер базасы алты кестеден тұрады, мұнда жаңа мәлімет
қосу, мәліметті жаңарту, мәліметтерді өшіру, отчет жасауға және
бағдарламада функционалды пернелер арқылы, терезелер арқылы көшу
және фонын ауыстыру мүмкіндіктері бар.
Деректер базасындағы ақпарат қайшылықсыз артықсыз тұтас болуы
керек. Мәліметтер базасын басқару жүйесі деректер базасын құруға,
толтыруға, жаңартқанға, жоюға арналған программалық жабдық болып
табылады.
Ақпараттық технология (немесе көпшілікке IT атымен танымал
ұғым) - қазіргі компьютерлік технология негізінде ақпаратты жинау,
сақтау, өндеу және тасымалдау істерін қамтамасыз ететін математикалық
және кибернетикалық тәсілдер мен қазіргі техникалық құралдар жиыны.
Заманауи қоғам өңдеуден өткізуге мұқтаж ақпарат тасқынымен
толыққан. Сондықтан қоғам энергетикалық, көліктік, химиялық,
технологияларсыз қалай дұрыс қызмет ете алмаса, дәл солай ақпараттық
технологияларсыз да дұрыс қызмет атқара алмайды.
Әдебиеттер тізімі
1 Информационные технологии управления: Учебн. пособие для
вузов/ Под ред. проф. Г.А.Титоренко. – М.: ЮНИТИ – ДАНА, 2003.
2 Карпова Т.С. Базы данных: модели, разработка, реализация. СПб.:
Питер, 2012. – 303 с.
221
УДК 531.7:537.226 Кан О.А. (Караганда, КарГТУ)
Клюева Е.Г. (Караганда, КарГТУ)
ИЗМЕРЕНИЕ ЗАВИСИМОСТИ ДИЭЛЕКТРИЧЕСКОЙ
ПРОНИЦАЕМОСТИ КРИСТАЛЛОВ ОТ ПРИВЕДЕННОЙ ЧАСТОТЫ
В настоящее время анализ оптических свойств полупроводниковых
кристаллов является важнейшим методом изучения электронных
процессов в полупроводниках, составляющих основу микроэлектроники. В
физике полупроводников используются различные методы измерения
различных параметров полупроводниковых кристаллов, которые служат
базой для создания новых оптоэлектронных приборов. Теория,
описывающая оптические свойства кристаллов, основана на том, что
молекулы представляются в виде совокупности гармонических
осцилляторов [1].
Амплитуда колебаний увеличивается при поглощении молекулой
энергии. ИК–излучение, вследствие малой энергоемкости, не затрагивает
электроны в молекуле, поэтому с ИК–спектроскопией напрямую связаны
случаи вращательного и колебательного движения. Причем чисто
колебательных спектров не существует, так как молекулы в основном и
возбужденном колебательном состояниях распределены по ряду
вращательных состояний, и при переходе молекулы из одного
колебательного состояния в другое одновременно происходит изменение
их вращательных состояний. Поэтому при рассмотрении колебательных
переходов необходимо учитывать вращательные состояния.
Способность вещества поглощать энергию ИК–излучения зависит от
суммарного изменения дипольного момента молекулы при вращении и
колебании, т.е. поглощать ИК–излучение может лишь молекула,
обладающая электрическим дипольным моментом, величина или
направление которого изменяется в процессе колебания и вращения.
Дипольный момент означает несовпадение центров тяжести
положительных и отрицательных зарядов в молекуле, т. е. электрическую
асимметрию молекулы.
Оптические свойства изотропного вещества характеризуются
оптическими константами n (показатель преломления) и k (показатель
поглощения).
Для определения соотношения между комплексной диэлектрической
проницаемостью и частотами длинноволновых оптических колебаний
решетки воспользуемся моделью одного затухающего осциллятора.
Характер зависимости отражающей способности кристалла от
частоты таков, что в интервале между продольными и поперечными
колебаниями волновой вектор не имеет действительных значений.
222
Поэтому в этом интервале частот в кристалле не могут распространяться
волны и все падающее излучение должно полностью отражаться.
Коэффициент отражения R света, падающего нормально на
поверхность поглощающего материала, связан с комплексным показателем
преломления следующим соотношением [2]:
, (1)
где n – обычный показатель преломления; k – коэффициент экстинкции.
Выразим оптические постоянные n и k через действительную и
мнимую части комплексной диэлектрической проницаемости ,
имея в виду сравнение с результатами для модели осциллятора в
непоглощающей среде (n и ε вещественны). В поглощающей
среде существует аналогичная связь для комплексных величин .
Возводя это выражение в квадрат, получим:
ε1 = n2 – k2, (2)
ε2 = 2nk.
Откуда можно получить, что:
, (3)
. (4)
На основании формул (3), (4) была составлена компьютерная
программа, которая строит графики зависимости действительной (n2 – k2)
и мнимой (2nk) частей комплексной диэлектрической проницаемости от
приведенной частоты, вычисленной на основе модели одного
классического дисперсионного осциллятора (рис. 1). Цифрой 1 отмечен
график мнимой части комплексной диэлектрической проницаемости от
приведенной частоты. Цифрой 2 отмечен график действительной части
комплексной диэлектрической проницаемости от приведенной частоты.
n
22)1(
22)1(2
1
1
kn
kn
n
nR
21 i
2/1n,n
2
2221
1
n
2
2
2
11
2
(2
k
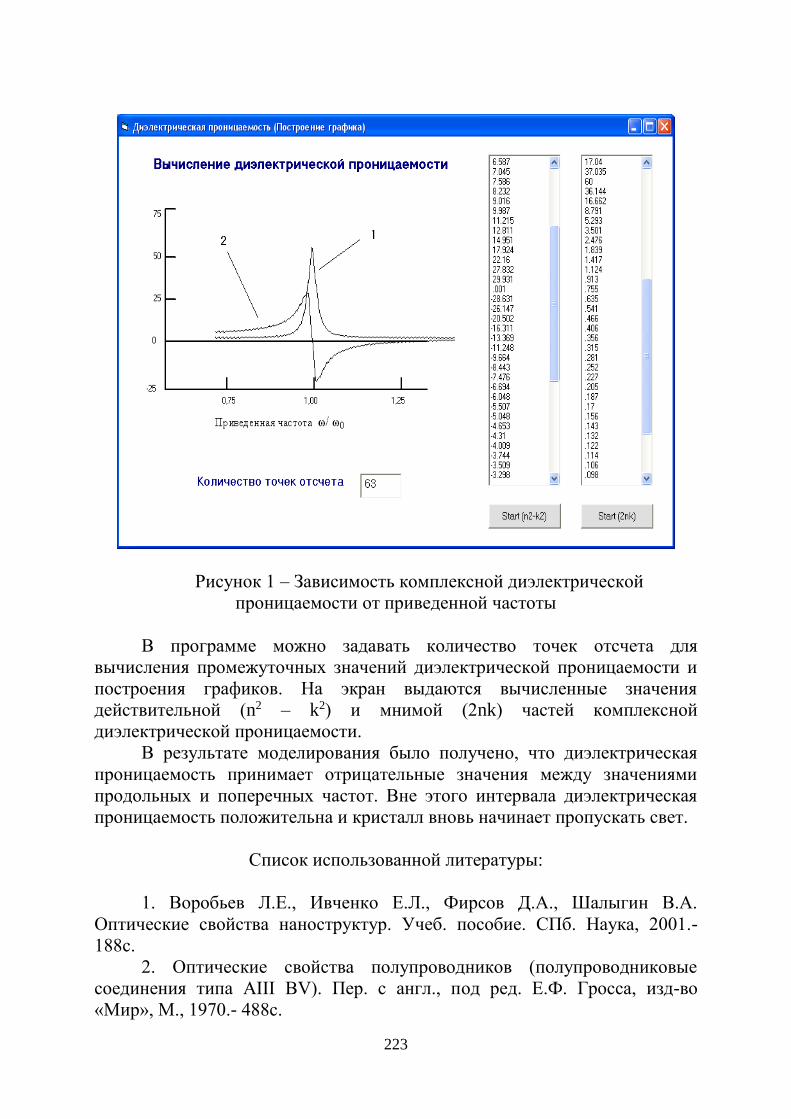
223
Рисунок 1 – Зависимость комплексной диэлектрической
проницаемости от приведенной частоты
В программе можно задавать количество точек отсчета для
вычисления промежуточных значений диэлектрической проницаемости и
построения графиков. На экран выдаются вычисленные значения
действительной (n2 – k2) и мнимой (2nk) частей комплексной
диэлектрической проницаемости.
В результате моделирования было получено, что диэлектрическая
проницаемость принимает отрицательные значения между значениями
продольных и поперечных частот. Вне этого интервала диэлектрическая
проницаемость положительна и кристалл вновь начинает пропускать свет.
Список использованной литературы:
1. Воробьев Л.Е., Ивченко Е.Л., Фирсов Д.А., Шалыгин В.А.
Оптические свойства наноструктур. Учеб. пособие. СПб. Наука, 2001.-
188с.
2. Оптические свойства полупроводников (полупроводниковые
соединения типа AIII BV). Пер. с англ., под ред. Е.Ф. Гросса, изд-во
«Мир», М., 1970.- 488с.
224
ӘОЖ 004.5 Кашкимбаева Н.М. (Астана, ЕҰУ)
Калдарова М.Ж. (Астана, ЕҰУ)
СЫРТТАЙ МОНИТОРИНГ ЖҮЙЕЛЕРІНДЕ КЕҢІСТІКТІК
АҚПАРАТПЕН ЖҰМЫС ІСТЕУ ҮШІН ИНТЕРФЕЙСТЕРДІ ҚҰРУ
Жұмыс сырттай мониторинг жүйелерінде кеңістіктік ақпаратпен
жұмыс істеу үшін интерфейстерді құруға арналған әмбебап
технологияның сипаттамасына арналған. Ұсынылған технология үлкен
көлемді спутниктік деректердің көп функционалды мұрағаттарымен және
оларды өңдеу нәтижелерімен жұмыс істеу үшін интерфейстерді жасауға
арналған. Бұл жағдайда технология деректерді іздеуді қамтамасыз ететін
интерфейстерді құру үшін ғана емес, сонымен қатар талдау және
деректерді басқару құралдарын жасау. Құжатта технологияны құру
принциптері мен тәсілдері талқыланып, оның негізгі ерекшеліктері
сипатталған және әр түрлі сырттай мониторинг жүйелерінде қолдану
мысалдары келтірілген.
Сырттай (біріншіден спутниктік) байқаудың заманауи
технологиялары көптеген құбылыстар мен объектілердің дамуын бақылап,
бағалауға және болжау жасауға мүмкіндік береді. Бұл соңғы онжылдықта
әртүрлі пәндік облыстарда қашықтан мониторинг жүйесін пайдалануды
бастауға және пайдалануға мүмкіндік берді. Мұндай жүйелер ірі
аумақтарда кездесетін түрлі процестерді талдау және бақылау үшін
субъективті бағалаудан мүмкіндігінше тәуелсіз объективті ақпарат алуға
мүмкіндік береді.
Сырттай мониторинг жүйесін құру мен пайдаланудың негізгі
мәселелерінің бірі - пайдаланушыларға берілген ақпаратпен тиімді
жұмысын ұйымдастыру. Осы мақсатқа жету үшін түрлі сырттай
мониторинг жүйелерінде туындайтын негізгі міндеттерді шешуге
мүмкіндік беретін мамандандырылған интерфейстерді құру қажет. Әрине,
әрбір мамандандырылған мониторинг жүйесі өзінің нақты міндеттеріне ие,
бірақ қазіргі уақытта мұндай жүйелерде пайда болатын жалпы
ерекшеліктерді бөліп алуға болады. Мысалы, сырттай мониторинг
жүргізудің заманауи ақпараттық жүйелерінің көпшілігі:
• елеулі аумақтардың мониторингін жүргізуге мүмкіндік береді және
географиялық тұрғыда таралған пайдаланушыларға бақыланатын
объектілер мен құбылыстар туралы жедел ақпарат береді;
• бақыланатын объектілер мен құбылыстарға үнемі мониторинг
жүргізу мүмкіндігін қамтамасыз ету, яғни үнемі жаңартылған ақпаратпен
жұмыс істеуге арналған;
• бақыланатын объектілер мен құбылыстардың әртүрлі
сипаттамаларын алуға мүмкіндік береді, сондықтан әр түрлі байқау
225
құралдарынан (әртүрлі спутниктер, әуе кемелерін байқау, жердегі байқау
және т.б.) алынған ақпаратты пайдалануға бағытталған;
• деректердің архивтерін жеткілікті ұзақ бақылау кезеңдерінде ұстап
отыру керек, өйткені көптеген жағдайларда мониторинг жүйелері
бақыланатын объектілер мен құбылыстардың «қалыпты» мінез-құлқынан
ауытқуларды анықтау міндетін атқарады;
• деректерді жеткілікті мөлшерде алу, өңдеу және сақтау (қазіргі
заманғы жүйелерде, мұрағаттардың көлемі әдетте ондаған және жүздеген
терабайттарда, ал көптеген жағдайларда петабайт шекарасына
жақындағанда немесе асып кеткен);
• бөлінген мұрағаттармен және дерекқорлармен жұмыс істеу
мүмкіндігін қамтамасыз етеді, өйткені ақпарат жинау, талдау, өңдеу және
сақтау түрлі аумақтық бөлінген орталықтарда жүзеге асырылуы мүмкін;
• жеткілікті түрдегі үлкен ағындармен және ақпарат көлемімен
жұмыс істеу қажеттілігіне байланысты деректерді жинау, өңдеу, тарату
және есепке алу үшін толығымен автоматтандырылған технологияларға
бағыттау керек;
• пайдаланушыларға жеткілікті терең өңделген ақпаратты, сондай-ақ
ыңғайлы құралды (оны талдау үшін интерфейстер) ұсынуға мүмкіндік
береді және көптеген жағдайларда пайдаланушы сұранысы кезінде сол
немесе басқа өнімдерді динамикалық түрде қалыптастыруға болады;
• пайдаланушыларға түрлі кеңістіктік ақпаратты алуға және талдауға
мүмкіндік беру;
• үшінші тараптардың әр түрлі мониторинг жүйелерінен деректерді
қарапайым түрде алу және біріктіруді қамтамасыз ету, сондай-ақ жүйе
ұсынатын түрлі ақпараттық өнімдерді, соның ішінде онлайн қызметтерді
ұсынуды жеңілдетуді қамтамасыз ету.
Осы міндеттердін барлығын шешу үшін сырттай мониторинг жүйесі
деректермен және түрлі ақпараттық өнімдермен жұмыс істеу үшін
жеткілікті түрде дамыған интерфейстерге ие болуы керек. Қамтамасыз етуі
керек интерфейстер:
• көп өлшемді деректер мұрағаттарымен жұмыс жасау (яғни, жүйеде
әрбір байқалатын нүкте (нысан) үшін әртүрлі сипаттамалардың уақытша
сериясы болуы мүмкін);
• өте қарапайым және түсінікті деректерді басқару (таңдау, іздеу,
талап етілетін сипаттамаларды көрсету үшін қосу және т.б.);
• көп өлшемді деректерді сақтауды қамтамасыз ететін жеткілікті
үлкен мұрағаттардан түрлі ақпараттық өнімдерді жылдам таңдау және
көрсету;
• әртүрлі ақпаратты бір мезгілде көрсету және олардың бірлескен
талдауын өткізу;
• әртүрлі ақпараттық өнімдердің кеңістіктік ақпараттары мен
уақыттық серияларымен жұмыс істеу;
226
• тұтынушылардың сұранысы бойынша базалық негізделген кешенді
өнімдерді қалыптастыру (бұл, негізінен, мониторинг жүйелерінің
міндеттері мен мүмкіндіктері кеңейтілген кезде, сақталған ақпараттық
өнімдер түрлерінің қарапайым көбеюі мұрағаттар көлемінің бақылаусыз
өсуіне әкеледі, сол себепті өнімнің бір бөлігі сұраным бойынша ғана
қалыптастырылуы тиіс);
• бөлінген ақпараттық ресурстарға қол жеткізу;
• үшінші тарап ақпараттық жүйелерінен әртүрлі ақпаратты
импорттау, сондай-ақ мұндай жүйелерге деректерді экспорттау
қызметтері;
• функционалдылықтың кеңеюі, сондай-ақ нақты жобалық
тапсырмаларды шешу үшін ыңғайлы және икемді параметрлер;
• жүйеде қолданылатын әртүрлі функциялар мен ақпараттық
өнімдерге қол жеткізу үшін пайдаланушыға рұқсат берудің икемді жүйесі;
• көптеген әзірлеушілерді қолдау және дамыту.
Бұл құжат технологияның негізгі ерекшеліктерін, оның
архитектурасын, конструкция ерекшеліктерін және түрлі белсенді
қашықтан мониторинг жүйелерінде қолдану мысалдарын сипаттайды.
Қолданылған әдебиеттер:
1. Антоненко А.В. Мониторинг и охрана городских земель:
Конспект лекций. /Челябинск: Изд-во ЮУрГУ. 2001.
2. Дюсенбеков З.Д. Проблемы рационального использова- ния
потенциала земельных ресурсов Республики Казахстан и его охраны
/Земельные ресурсы Казахстана, 2007. №5.
3. Земельный кодекс РК (Текст). Алматы: Юрист, 2009.
4. Инструкция по проведению инвентаризации земель сельских
населенных пунктов. Агентство РК по управлению земель- ными
ресурсами. ГосНПЦзем. Астана. 2004.
5. Қазақстан Республикасы Жер ресурстарын басқару агенттігінің
ресми сайты www.auzr.kzВарламов, А.А. Земельный кадастр. Т.6.
Географические и информационные системы Текст. / А.А. Варламов, С.А.
Гальченко. -М.: КолоС, 2005.
6. ЕсполовТ.И.,Джуламанов Т.Д.,Пентаев .Т.П.,Абдрамов О. Жер
кадастры . Алматы, 2016- 43 б
7. Земельное законодательства РК. Сб. нормативно-правовых
актов и некоторые комментарии земельного законодательства. Алматы:
Жеті Жарғы, 1998.
8. Құрманов Г.К., Сартабаева Ғ.С. «Жер мониторингі» оқу
әдістемелік кешені. Астана, 2008.
9. Түсіпова Б.Х. Жер мониторингі: Оқу құралы. – Алматы:
ҚазҰТУ, 2011.
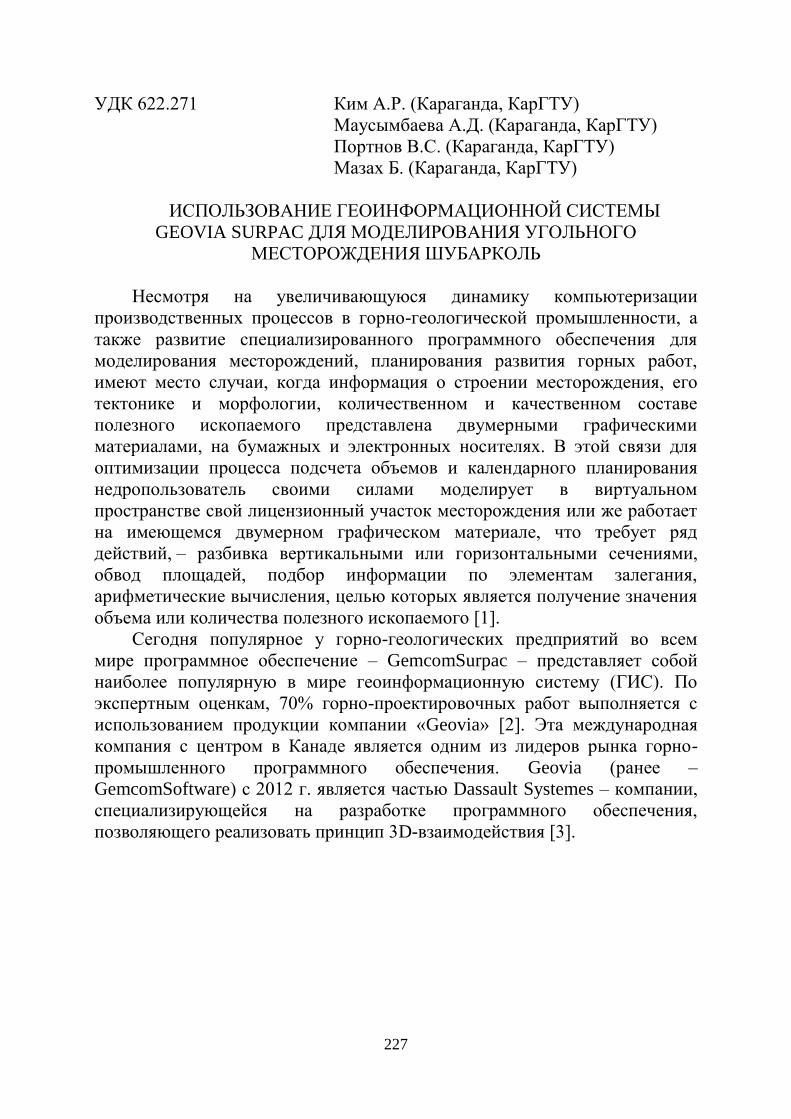
227
УДК 622.271 Ким А.Р. (Караганда, КарГТУ)
Маусымбаева А.Д. (Караганда, КарГТУ)
Портнов В.С. (Караганда, КарГТУ)
Мазах Б. (Караганда, КарГТУ)
ИСПОЛЬЗОВАНИЕ ГЕОИНФОРМАЦИОННОЙ СИСТЕМЫ
GEOVIA SURPAC ДЛЯ МОДЕЛИРОВАНИЯ УГОЛЬНОГО
МЕСТОРОЖДЕНИЯ ШУБАРКОЛЬ
Несмотря на увеличивающуюся динамику компьютеризации
производственных процессов в горно-геологической промышленности, а
также развитие специализированного программного обеспечения для
моделирования месторождений, планирования развития горных работ,
имеют место случаи, когда информация о строении месторождения, его
тектонике и морфологии, количественном и качественном составе
полезного ископаемого представлена двумерными графическими
материалами, на бумажных и электронных носителях. В этой связи для
оптимизации процесса подсчета объемов и календарного планирования
недропользователь своими силами моделирует в виртуальном
пространстве свой лицензионный участок месторождения или же работает
на имеющемся двумерном графическом материале, что требует ряд
действий, – разбивка вертикальными или горизонтальными сечениями,
обвод площадей, подбор информации по элементам залегания,
арифметические вычисления, целью которых является получение значения
объема или количества полезного ископаемого [1].
Сегодня популярное у горно-геологических предприятий во всем
мире программное обеспечение – GemcomSurpac – представляет собой
наиболее популярную в мире геоинформационную систему (ГИС). По
экспертным оценкам, 70% горно-проектировочных работ выполняется с
использованием продукции компании «Geovia» [2]. Эта международная
компания с центром в Канаде является одним из лидеров рынка горно-
промышленного программного обеспечения. Geovia (ранее –
GemcomSoftware) с 2012 г. является частью Dassault Systemes – компании,
специализирующейся на разработке программного обеспечения,
позволяющего реализовать принцип 3D-взаимодействия [3].
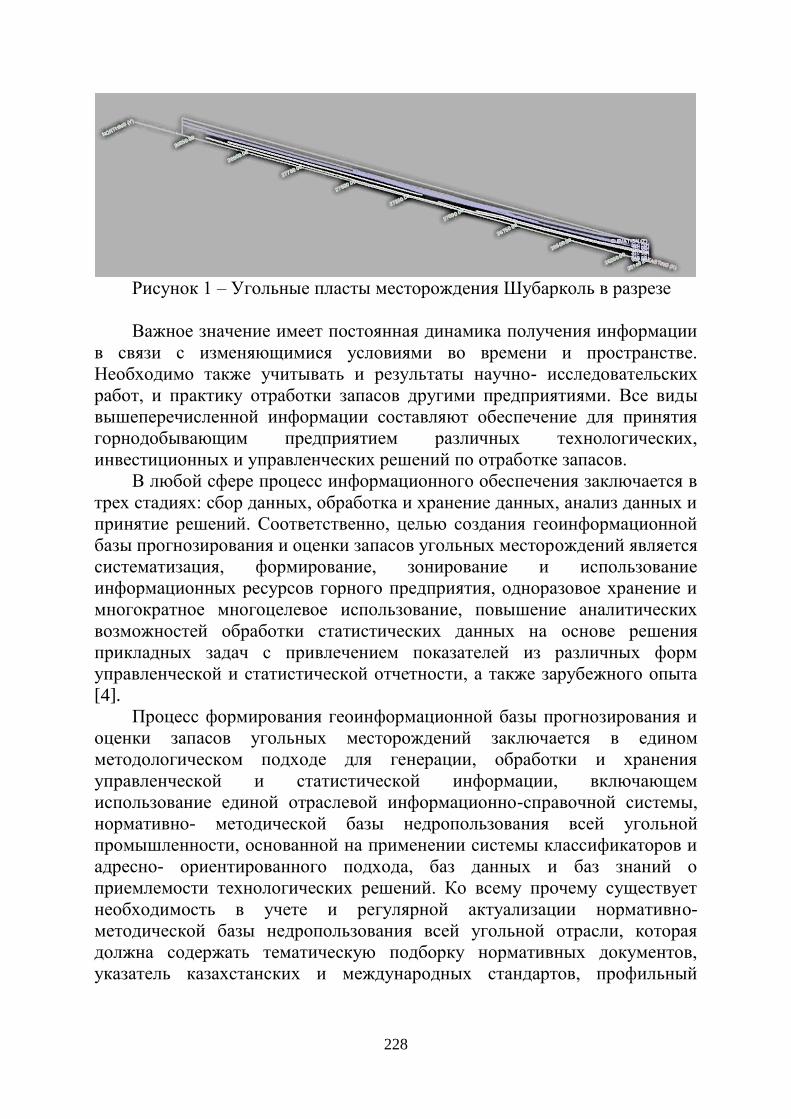
228
Рисунок 1 – Угольные пласты месторождения Шубарколь в разрезе
Важное значение имеет постоянная динамика получения информации
в связи с изменяющимися условиями во времени и пространстве.
Необходимо также учитывать и результаты научно- исследовательских
работ, и практику отработки запасов другими предприятиями. Все виды
вышеперечисленной информации составляют обеспечение для принятия
горнодобывающим предприятием различных технологических,
инвестиционных и управленческих решений по отработке запасов.
В любой сфере процесс информационного обеспечения заключается в
трех стадиях: сбор данных, обработка и хранение данных, анализ данных и
принятие решений. Соответственно, целью создания геоинформационной
базы прогнозирования и оценки запасов угольных месторождений является
систематизация, формирование, зонирование и использование
информационных ресурсов горного предприятия, одноразовое хранение и
многократное многоцелевое использование, повышение аналитических
возможностей обработки статистических данных на основе решения
прикладных задач с привлечением показателей из различных форм
управленческой и статистической отчетности, а также зарубежного опыта
[4].
Процесс формирования геоинформационной базы прогнозирования и
оценки запасов угольных месторождений заключается в едином
методологическом подходе для генерации, обработки и хранения
управленческой и статистической информации, включающем
использование единой отраслевой информационно-справочной системы,
нормативно- методической базы недропользования всей угольной
промышленности, основанной на применении системы классификаторов и
адресно- ориентированного подхода, баз данных и баз знаний о
приемлемости технологических решений. Ко всему прочему существует
необходимость в учете и регулярной актуализации нормативно-
методической базы недропользования всей угольной отрасли, которая
должна содержать тематическую подборку нормативных документов,
указатель казахстанских и международных стандартов, профильный
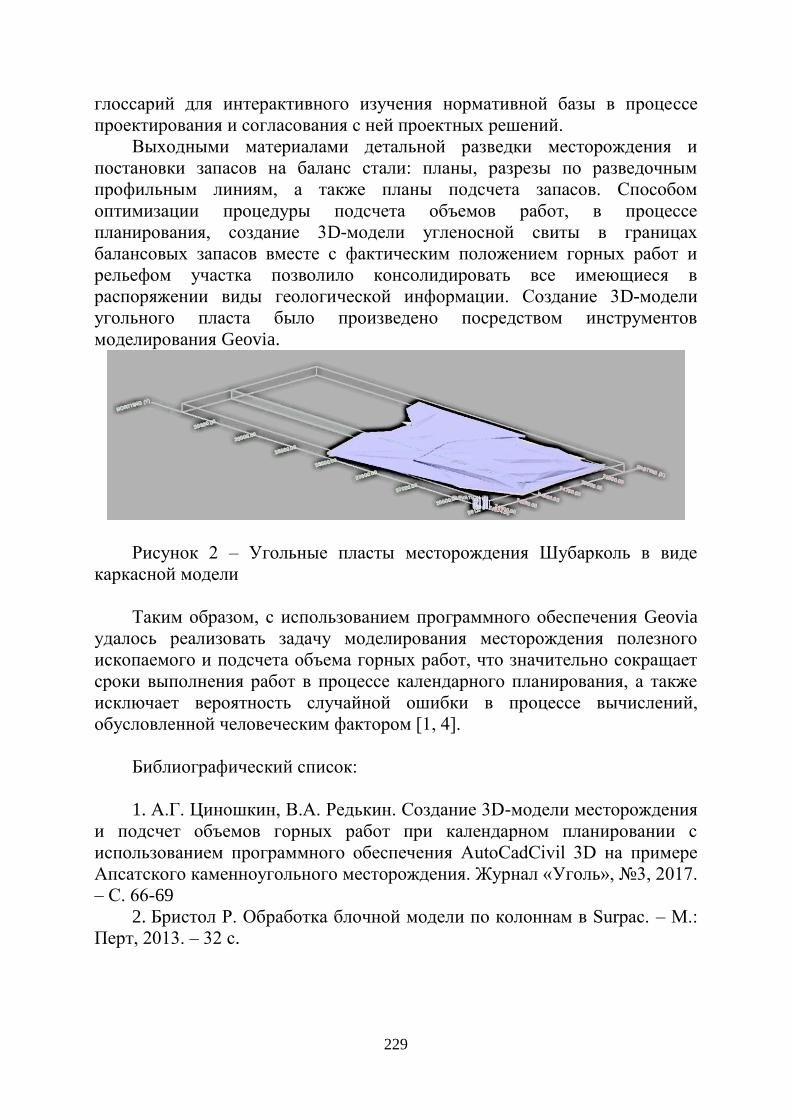
229
глоссарий для интерактивного изучения нормативной базы в процессе
проектирования и согласования с ней проектных решений.
Выходными материалами детальной разведки месторождения и
постановки запасов на баланс стали: планы, разрезы по разведочным
профильным линиям, а также планы подсчета запасов. Способом
оптимизации процедуры подсчета объемов работ, в процессе
планирования, создание 3D-модели угленосной свиты в границах
балансовых запасов вместе с фактическим положением горных работ и
рельефом участка позволило консолидировать все имеющиеся в
распоряжении виды геологической информации. Создание 3D-модели
угольного пласта было произведено посредством инструментов
моделирования Geovia.
Рисунок 2 – Угольные пласты месторождения Шубарколь в виде
каркасной модели
Таким образом, с использованием программного обеспечения Geovia
удалось реализовать задачу моделирования месторождения полезного
ископаемого и подсчета объема горных работ, что значительно сокращает
сроки выполнения работ в процессе календарного планирования, а также
исключает вероятность случайной ошибки в процессе вычислений,
обусловленной человеческим фактором [1, 4].
Библиографический список:
1. А.Г. Циношкин, В.А. Редькин. Создание 3D-модели месторождения
и подсчет объемов горных работ при календарном планировании с
использованием программного обеспечения AutoCadCivil 3D на примере
Апсатского каменноугольного месторождения. Журнал «Уголь», №3, 2017.
– С. 66-69
2. Бристол Р. Обработка блочной модели по колоннам в Surpac. – М.:
Перт, 2013. – 32 с.
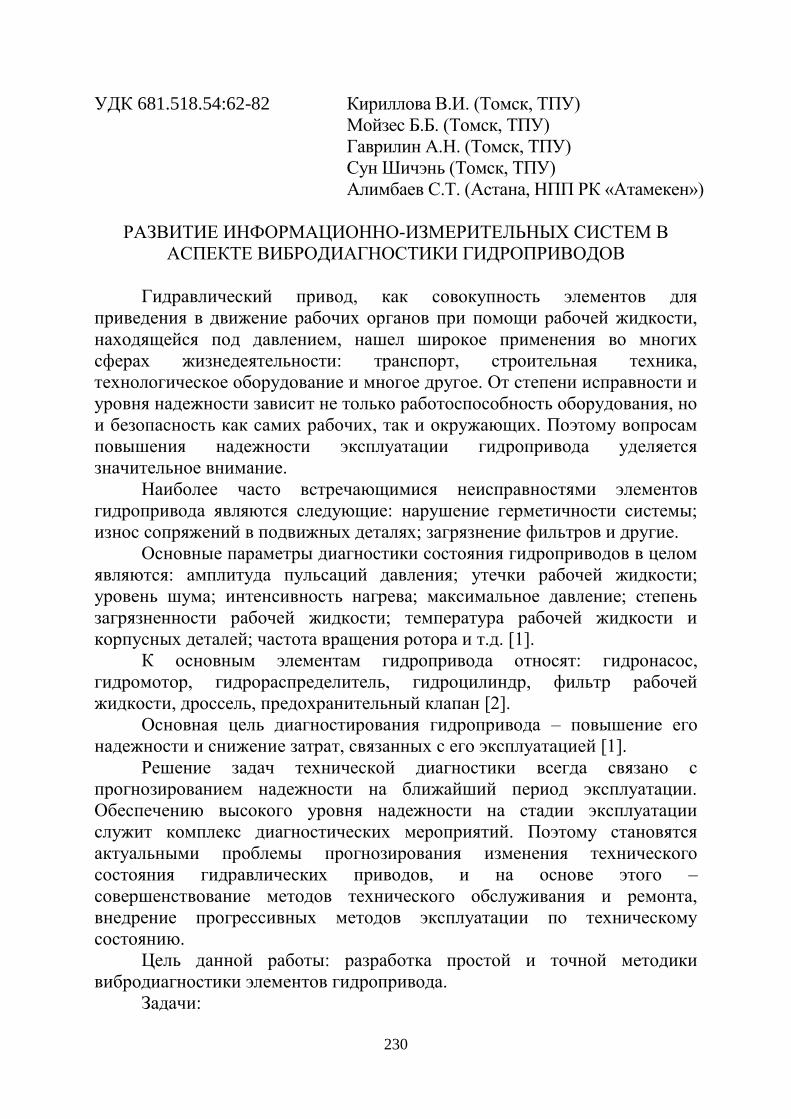
230
УДК 681.518.54:62-82 Кириллова В.И. (Томск, ТПУ)
Мойзес Б.Б. (Томск, ТПУ)
Гаврилин А.Н. (Томск, ТПУ)
Сун Шичэнь (Томск, ТПУ)
Алимбаев С.Т. (Астана, НПП РК «Атамекен»)
РАЗВИТИЕ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ В
АСПЕКТЕ ВИБРОДИАГНОСТИКИ ГИДРОПРИВОДОВ
Гидравлический привод, как совокупность элементов для
приведения в движение рабочих органов при помощи рабочей жидкости,
находящейся под давлением, нашел широкое применения во многих
сферах жизнедеятельности: транспорт, строительная техника,
технологическое оборудование и многое другое. От степени исправности и
уровня надежности зависит не только работоспособность оборудования, но
и безопасность как самих рабочих, так и окружающих. Поэтому вопросам
повышения надежности эксплуатации гидропривода уделяется
значительное внимание.
Наиболее часто встречающимися неисправностями элементов
гидропривода являются следующие: нарушение герметичности системы;
износ сопряжений в подвижных деталях; загрязнение фильтров и другие.
Основные параметры диагностики состояния гидроприводов в целом
являются: амплитуда пульсаций давления; утечки рабочей жидкости;
уровень шума; интенсивность нагрева; максимальное давление; степень
загрязненности рабочей жидкости; температура рабочей жидкости и
корпусных деталей; частота вращения ротора и т.д. [1].
К основным элементам гидропривода относят: гидронасос,
гидромотор, гидрораспределитель, гидроцилиндр, фильтр рабочей
жидкости, дроссель, предохранительный клапан [2].
Основная цель диагностирования гидропривода – повышение его
надежности и снижение затрат, связанных с его эксплуатацией [1].
Решение задач технической диагностики всегда связано с
прогнозированием надежности на ближайший период эксплуатации.
Обеспечению высокого уровня надежности на стадии эксплуатации
служит комплекс диагностических мероприятий. Поэтому становятся
актуальными проблемы прогнозирования изменения технического
состояния гидравлических приводов, и на основе этого –
совершенствование методов технического обслуживания и ремонта,
внедрение прогрессивных методов эксплуатации по техническому
состоянию.
Цель данной работы: разработка простой и точной методики
вибродиагностики элементов гидропривода.
Задачи:
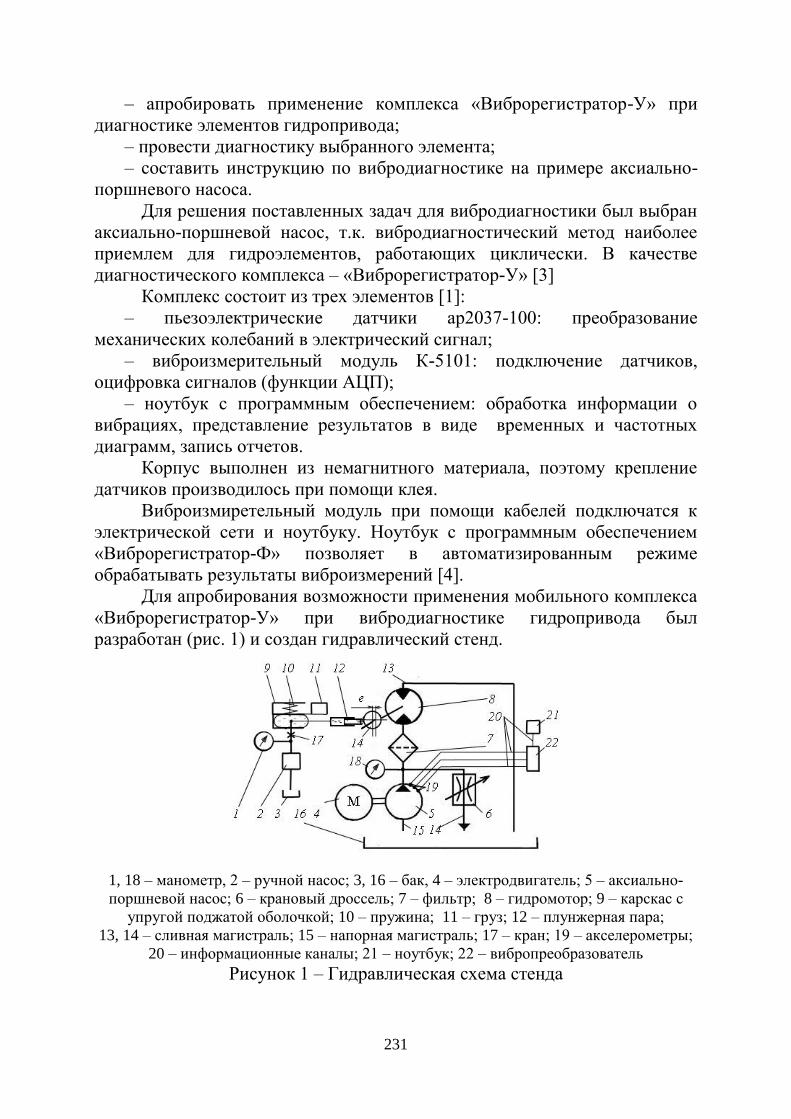
231
– апробировать применение комплекса «Виброрегистратор-У» при
диагностике элементов гидропривода;
– провести диагностику выбранного элемента;
– составить инструкцию по вибродиагностике на примере аксиально-
поршневого насоса.
Для решения поставленных задач для вибродиагностики был выбран
аксиально-поршневой насос, т.к. вибродиагностический метод наиболее
приемлем для гидроэлементов, работающих циклически. В качестве
диагностического комплекса – «Виброрегистратор-У» [3]
Комплекс состоит из трех элементов [1]:
– пьезоэлектрические датчики ар2037-100: преобразование
механических колебаний в электрический сигнал;
– виброизмерительный модуль К-5101: подключение датчиков,
оцифровка сигналов (функции АЦП);
– ноутбук с программным обеспечением: обработка информации о
вибрациях, представление результатов в виде временных и частотных
диаграмм, запись отчетов.
Корпус выполнен из немагнитного материала, поэтому крепление
датчиков производилось при помощи клея.
Виброизмиретельный модуль при помощи кабелей подключатся к
электрической сети и ноутбуку. Ноутбук с программным обеспечением
«Виброрегистратор-Ф» позволяет в автоматизированным режиме
обрабатывать результаты виброизмерений [4].
Для апробирования возможности применения мобильного комплекса
«Виброрегистратор-У» при вибродиагностике гидропривода был
разработан (рис. 1) и создан гидравлический стенд.
1, 18 – манометр, 2 – ручной насос; 3, 16 – бак, 4 – электродвигатель; 5 – аксиально-
поршневой насос; 6 – крановый дроссель; 7 – фильтр; 8 – гидромотор; 9 – карскас с
упругой поджатой оболочкой; 10 – пружина; 11 – груз; 12 – плунжерная пара;
13, 14 – сливная магистраль; 15 – напорная магистраль; 17 – кран; 19 – акселерометры;
20 – информационные каналы; 21 – ноутбук; 22 – вибропреобразователь
Рисунок 1 – Гидравлическая схема стенда
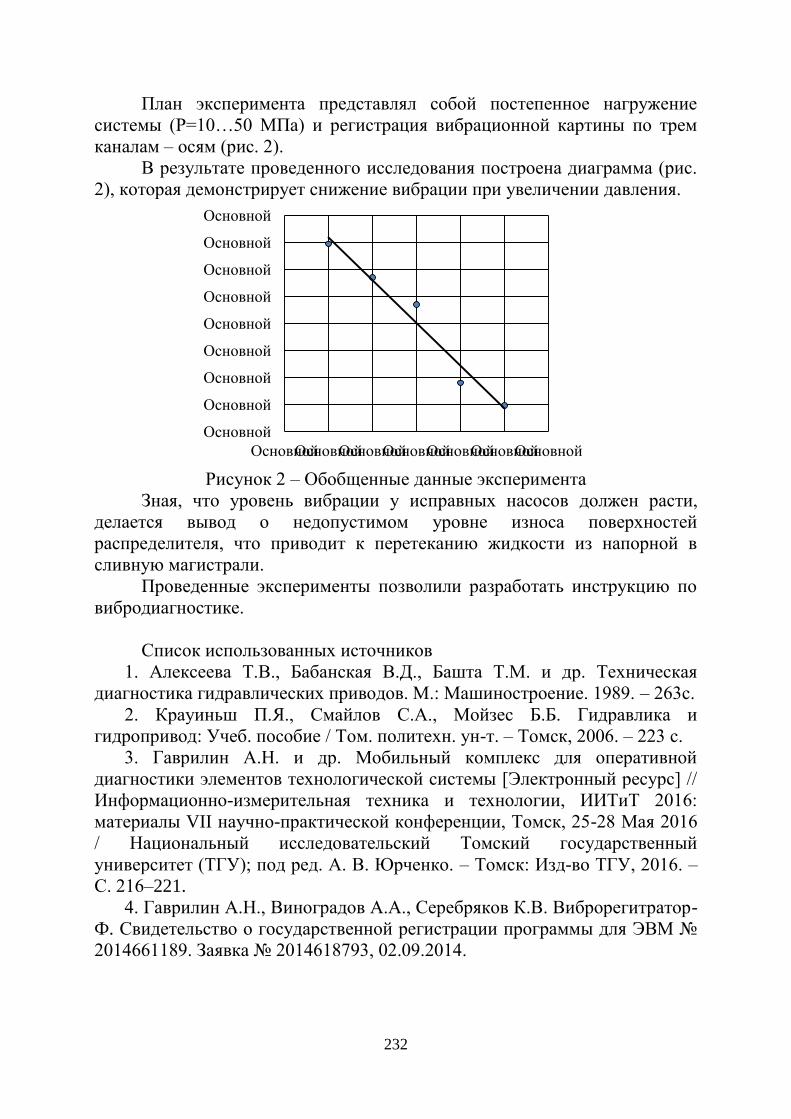
232
План эксперимента представлял собой постепенное нагружение
системы (Р=10…50 МПа) и регистрация вибрационной картины по трем
каналам – осям (рис. 2).
В результате проведенного исследования построена диаграмма (рис.
2), которая демонстрирует снижение вибрации при увеличении давления.
Рисунок 2 – Обобщенные данные эксперимента
Зная, что уровень вибрации у исправных насосов должен расти,
делается вывод о недопустимом уровне износа поверхностей
распределителя, что приводит к перетеканию жидкости из напорной в
сливную магистрали.
Проведенные эксперименты позволили разработать инструкцию по
вибродиагностике.
Список использованных источников
1. Алексеева Т.В., Бабанская В.Д., Башта Т.М. и др. Техническая
диагностика гидравлических приводов. М.: Машиностроение. 1989. – 263с.
2. Крауиньш П.Я., Смайлов С.А., Мойзес Б.Б. Гидравлика и
гидропривод: Учеб. пособие / Том. политехн. ун-т. – Томск, 2006. – 223 с.
3. Гаврилин А.Н. и др. Мобильный комплекс для оперативной
диагностики элементов технологической системы [Электронный ресурс] //
Информационно-измерительная техника и технологии, ИИТиТ 2016:
материалы VII научно-практической конференции, Томск, 25-28 Мая 2016
/ Национальный исследовательский Томский государственный
университет (ТГУ); под ред. А. В. Юрченко. – Томск: Изд-во ТГУ, 2016. –
С. 216–221.
4. Гаврилин А.Н., Виноградов А.А., Серебряков К.В. Виброрегитратор-
Ф. Свидетельство о государственной регистрации программы для ЭВМ №
2014661189. Заявка № 2014618793, 02.09.2014.
Основной
Основной
Основной
Основной
Основной
Основной
Основной
Основной
Основной
ОсновнойОсновнойОсновнойОсновнойОсновнойОсновнойОсновной
233
УДК 504.38 Кусаинова А.А. (Караганда, КарГТУ)
Мезенцева О.В. (Омск, ОмГПУ)
ОПРЕДЕЛЕНИЕ ЭКСТРЕМАЛЬНЫХ СУТОЧНЫХ ТЕМПЕРАТУР
ВОЗДУХА С ИСПОЛЬЗОВАНИЕМ ПРОГРАММЫ «WEATHER APP» ПО
ДАННЫМ НАБЛЮДЕНИЙ МЕТЕОРОЛОГИЧЕСКИХ СТАНЦИЙ
СЕВЕРНОГО И ЦЕНТРАЛЬНОГО КАЗАХСТАНА
Температура воздуха является важнейшим параметром внешней
среды, который в первую очередь учитывается людьми в процессе
жизнедеятельности и в производстве, а также определяет организацию
многих технологических процессов, выполняющихся на открытом воздухе.
В наши дни благодаря применению геоинформационных систем
стало возможным оперативно анализировать огромные массивы
накопленных национальными гидрометеорологическими службами
метеорологических данных за все годы наблюдений.
Исходными материалами для нашего анализа динамики
температурных режимов на территории Северного и Центрального
Казахстана явилась база данных, выставленная на сайте «meteo.ru» и
содержащая ежесуточные значения температуры воздуха на 222
метеорологических станциях территории бывшего СССР (России и
Казахстана) в пределах периода с 1880 по 2006 гг. База данных содержит
около 30 миллионов чисел и представляет богатейший первичный
материал, характеризующий векторы и поля важнейших ресурсных
метеорологических элементов.
Система управления базами данных «Weather App», разработанная в
2006 – 2009 гг. в Омском государственном педагогическом университете,
позволяет производить ежегодные выборки значений элементов –
максимальных, минимальных, средних суточных температур за годовой,
месячный или суточный интервал, а также за множество последовательных
суточных интервалов, например за любую декаду [1].
Рассмотрим примеры определения экстремальных суточных
температур воздуха по декадам с использованием программы «Weather
App» по данным наблюдений метеорологических станций Северного и
Центрального Казахстана. Для изучения закономерности распределения
экстремальных суточных температур воздуха на исследуемой территории
были использованы данные 2-х метеостанций: г.Петропавловск (данные за
1890-2005гг.) и г.Караганда (данные за 1936-2005гг.)
Как представлено в 1-таблице, в 1-ой декаде января 1948 года
установилась самая высокая температура воздуха зимой +5С, а также в 1-
ой декаде января 1901 года самая низкая температура воздуха -48С за весь
исследуемый период в г.Петропавловск (табл.1).
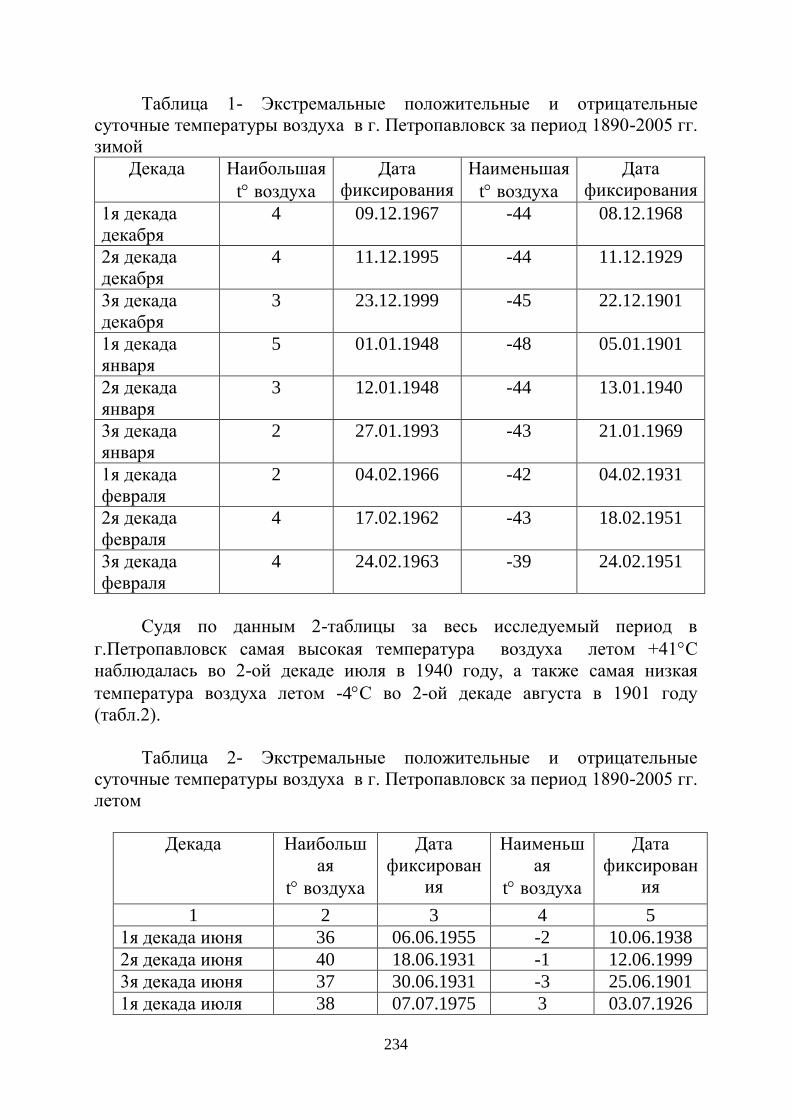
234
Таблица 1- Экстремальные положительные и отрицательные
суточные температуры воздуха в г. Петропавловск за период 1890-2005 гг.
зимой
Декада Наибольшая
t воздуха
Дата
фиксирования
Наименьшая
t воздуха
Дата
фиксирования
1я декада
декабря
4 09.12.1967 -44 08.12.1968
2я декада
декабря
4 11.12.1995 -44 11.12.1929
3я декада
декабря
3 23.12.1999 -45 22.12.1901
1я декада
января
5 01.01.1948 -48 05.01.1901
2я декада
января
3 12.01.1948 -44 13.01.1940
3я декада
января
2 27.01.1993 -43 21.01.1969
1я декада
февраля
2 04.02.1966 -42 04.02.1931
2я декада
февраля
4 17.02.1962 -43 18.02.1951
3я декада
февраля
4 24.02.1963 -39 24.02.1951
Судя по данным 2-таблицы за весь исследуемый период в
г.Петропавловск самая высокая температура воздуха летом +41С
наблюдалась во 2-ой декаде июля в 1940 году, а также самая низкая
температура воздуха летом -4С во 2-ой декаде августа в 1901 году
(табл.2).
Таблица 2- Экстремальные положительные и отрицательные
суточные температуры воздуха в г. Петропавловск за период 1890-2005 гг.
летом
Декада Наибольш
ая
t воздуха
Дата
фиксирован
ия
Наименьш
ая
t воздуха
Дата
фиксирован
ия
1 2 3 4 5
1я декада июня 36 06.06.1955 -2 10.06.1938
2я декада июня 40 18.06.1931 -1 12.06.1999
3я декада июня 37 30.06.1931 -3 25.06.1901
1я декада июля 38 07.07.1975 3 03.07.1926
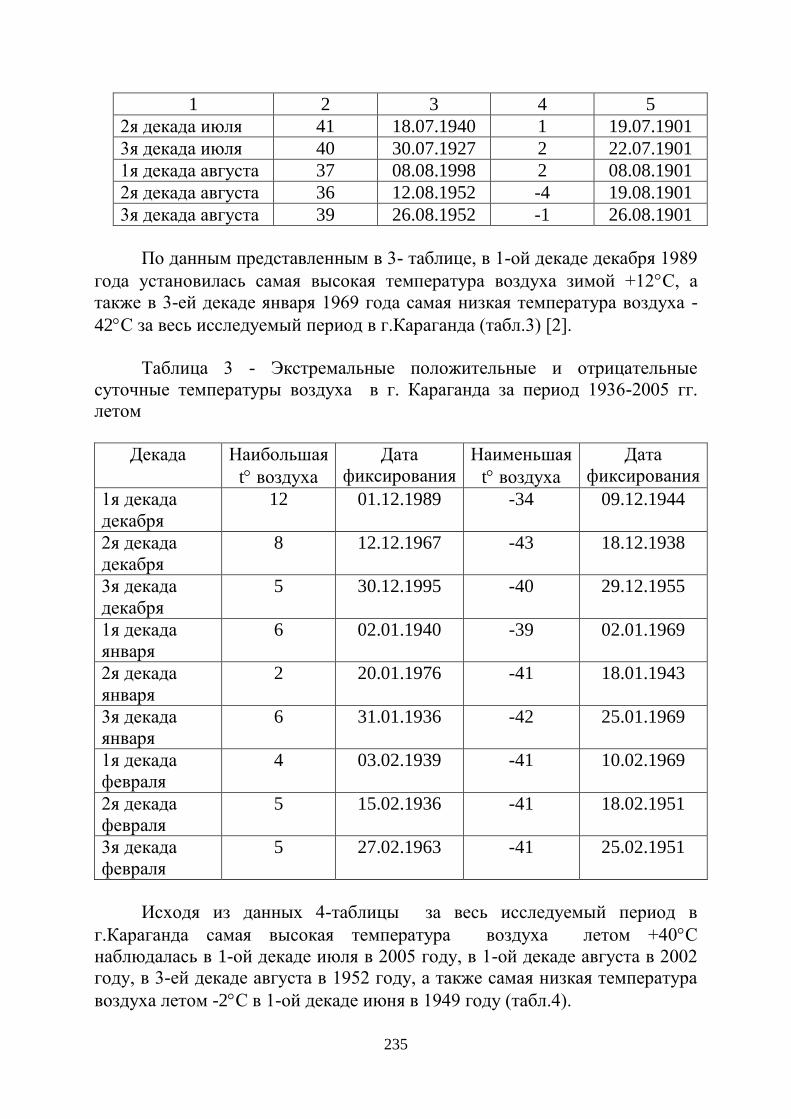
235
1 2 3 4 5
2я декада июля 41 18.07.1940 1 19.07.1901
3я декада июля 40 30.07.1927 2 22.07.1901
1я декада августа 37 08.08.1998 2 08.08.1901
2я декада августа 36 12.08.1952 -4 19.08.1901
3я декада августа 39 26.08.1952 -1 26.08.1901
По данным представленным в 3- таблице, в 1-ой декаде декабря 1989
года установилась самая высокая температура воздуха зимой +12С, а
также в 3-ей декаде января 1969 года самая низкая температура воздуха -
42С за весь исследуемый период в г.Караганда (табл.3) [2].
Таблица 3 - Экстремальные положительные и отрицательные
суточные температуры воздуха в г. Караганда за период 1936-2005 гг.
летом
Декада Наибольшая
t воздуха
Дата
фиксирования
Наименьшая
t воздуха
Дата
фиксирования
1я декада
декабря
12 01.12.1989 -34 09.12.1944
2я декада
декабря
8 12.12.1967 -43 18.12.1938
3я декада
декабря
5 30.12.1995 -40 29.12.1955
1я декада
января
6 02.01.1940 -39 02.01.1969
2я декада
января
2 20.01.1976 -41 18.01.1943
3я декада
января
6 31.01.1936 -42 25.01.1969
1я декада
февраля
4 03.02.1939 -41 10.02.1969
2я декада
февраля
5 15.02.1936 -41 18.02.1951
3я декада
февраля
5 27.02.1963 -41 25.02.1951
Исходя из данных 4-таблицы за весь исследуемый период в
г.Караганда самая высокая температура воздуха летом +40С
наблюдалась в 1-ой декаде июля в 2005 году, в 1-ой декаде августа в 2002
году, в 3-ей декаде августа в 1952 году, а также самая низкая температура
воздуха летом -2С в 1-ой декаде июня в 1949 году (табл.4).
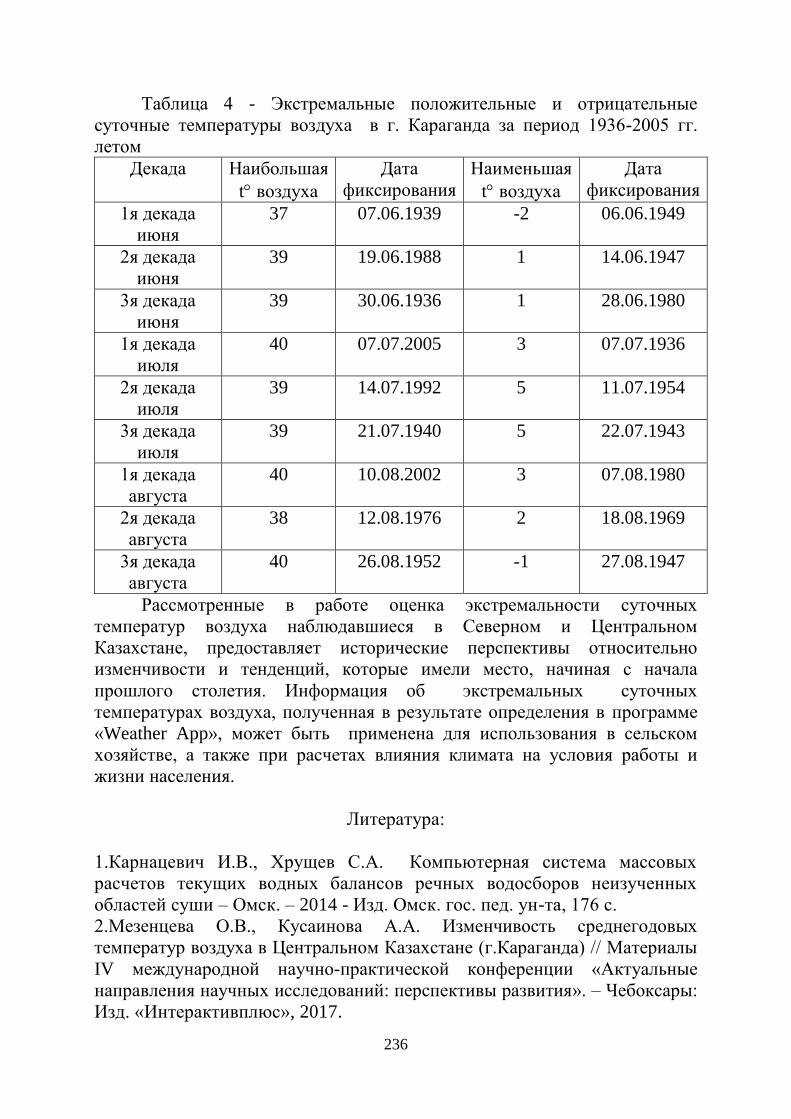
236
Таблица 4 - Экстремальные положительные и отрицательные
суточные температуры воздуха в г. Караганда за период 1936-2005 гг.
летом
Декада Наибольшая
t воздуха
Дата
фиксирования
Наименьшая
t воздуха
Дата
фиксирования
1я декада
июня
37 07.06.1939 -2 06.06.1949
2я декада
июня
39 19.06.1988 1 14.06.1947
3я декада
июня
39 30.06.1936 1 28.06.1980
1я декада
июля
40 07.07.2005 3 07.07.1936
2я декада
июля
39 14.07.1992 5 11.07.1954
3я декада
июля
39 21.07.1940 5 22.07.1943
1я декада
августа
40 10.08.2002 3 07.08.1980
2я декада
августа
38 12.08.1976 2 18.08.1969
3я декада
августа
40 26.08.1952 -1 27.08.1947
Рассмотренные в работе оценка экстремальности суточных
температур воздуха наблюдавшиеся в Северном и Центральном
Казахстане, предоставляет исторические перспективы относительно
изменчивости и тенденций, которые имели место, начиная с начала
прошлого столетия. Информация об экстремальных суточных
температурах воздуха, полученная в результате определения в программе
«Weаther App», может быть применена для использования в сельском
хозяйстве, а также при расчетах влияния климата на условия работы и
жизни населения.
Литература:
1.Карнацевич И.В., Хрущев С.А. Компьютерная система массовых
расчетов текущих водных балансов речных водосборов неизученных
областей суши – Омск. – 2014 - Изд. Омск. гос. пед. ун-та, 176 с.
2.Мезенцева О.В., Кусаинова А.А. Изменчивость среднегодовых
температур воздуха в Центральном Казахстане (г.Караганда) // Материалы
IV международной научно-практической конференции «Актуальные
направления научных исследований: перспективы развития». – Чебоксары:
Изд. «Интерактивплюс», 2017.
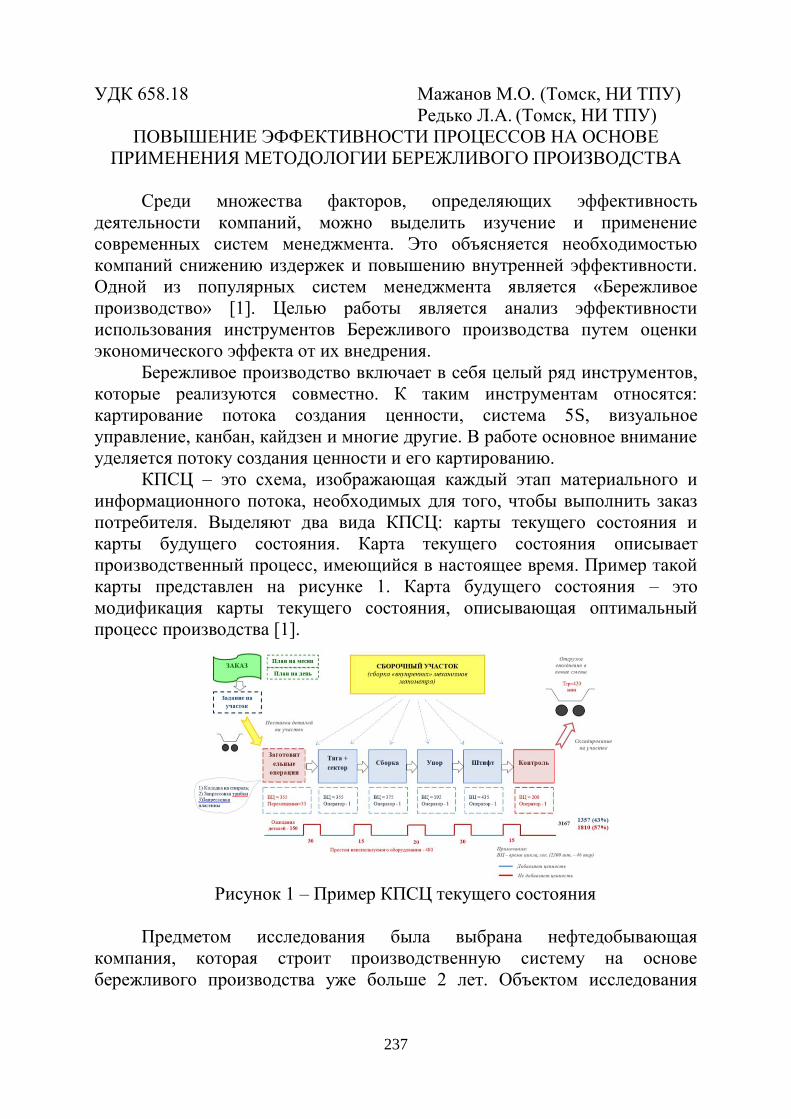
237
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ПРОЦЕССОВ НА ОСНОВЕ
ПРИМЕНЕНИЯ МЕТОДОЛОГИИ БЕРЕЖЛИВОГО ПРОИЗВОДСТВА
Среди множества факторов, определяющих эффективность
деятельности компаний, можно выделить изучение и применение
современных систем менеджмента. Это объясняется необходимостью
компаний снижению издержек и повышению внутренней эффективности.
Одной из популярных систем менеджмента является «Бережливое
производство» [1]. Целью работы является анализ эффективности
использования инструментов Бережливого производства путем оценки
экономического эффекта от их внедрения.
Бережливое производство включает в себя целый ряд инструментов,
которые реализуются совместно. К таким инструментам относятся:
картирование потока создания ценности, система 5S, визуальное
управление, канбан, кайдзен и многие другие. В работе основное внимание
уделяется потоку создания ценности и его картированию.
КПСЦ – это схема, изображающая каждый этап материального и
информационного потока, необходимых для того, чтобы выполнить заказ
потребителя. Выделяют два вида КПСЦ: карты текущего состояния и
карты будущего состояния. Карта текущего состояния описывает
производственный процесс, имеющийся в настоящее время. Пример такой
карты представлен на рисунке 1. Карта будущего состояния – это
модификация карты текущего состояния, описывающая оптимальный
процесс производства [1].
Рисунок 1 – Пример КПСЦ текущего состояния
Предметом исследования была выбрана нефтедобывающая
компания, которая строит производственную систему на основе
бережливого производства уже больше 2 лет. Объектом исследования
УДК 658.18 Мажанов М.О. (Томск, НИ ТПУ)
Редько Л.А. (Томск, НИ ТПУ)
238
выбран процесс «монтаж/демонтаж установки электроцентробежного
насоса (УЭЦН)».
В ходе работы были проведены картирования процесса, совместно с
владельцем процесса определены потери, рассчитана результативность
процесса, предложены корректирующие мероприятия и проведен
мониторинг внедренных корректирующих мероприятий.
В результате было выделено несколько преимуществ КПСЦ:
позволяет визуализировать процесс, что позволяет рассмотреть как
отдельные производственные операции (подъем ЭЦН, сварка и т.п.), так и
процесс (в терминологии БП - поток) в целом;
позволяет идентифицировать места возникновения потерь в потоке
ценности, изучать возможные источники повышения его эффективности;
это единый язык, на котором можно обсуждать производственные
процессы, что делает многие решения, связанные с потоком, ясными,
понятными и простыми;
показывает связь между информационным и материальным
потоками, чего не обеспечивает никакой другой инструмент [2].
Однако, использование КПСЦ имеет некоторые ограничения:
карта фиксирует единственный параметр – время выполнения
операции;
карта позволяет установить и оценить 3 из 8 возможных видов
потерь, а именно: транспортировка, перемещение, ожидание;
построение КПСЦ является трудоемким и ресурсозатратным
мероприятием;
на основании единожды проведенного картирования нельзя сделать
достоверные выводы о размерах потерь, так как в любом процессе
присутствует вариация.
Таким образом, чтобы получить полное представление о потерях и
оценить их величину необходимо дополнить построение КПСЦ
применением других инструментов БП. Для учета вариабельности, важно
иметь КПСЦ, построенные неоднократно для одних и тех же условий
процесса и применять статистические методы для обработки и анализа
данных.
Список используемых источников:
1. ГОСТ Р 56020-2014. Бережливое производство. Основные
положения и словарь. / База данных «Кодекс». – [Электронный ресурс].
Версия 2018 года.
2. Алтухов А. Л., Алтухова Л.Н., Стадольская Т.И. Использование карт
потока создания ценности как средство постоянного улучшения
деятельности организации // Омский научный вестник.– 2013.– №5 (122).–
С. 40-46.
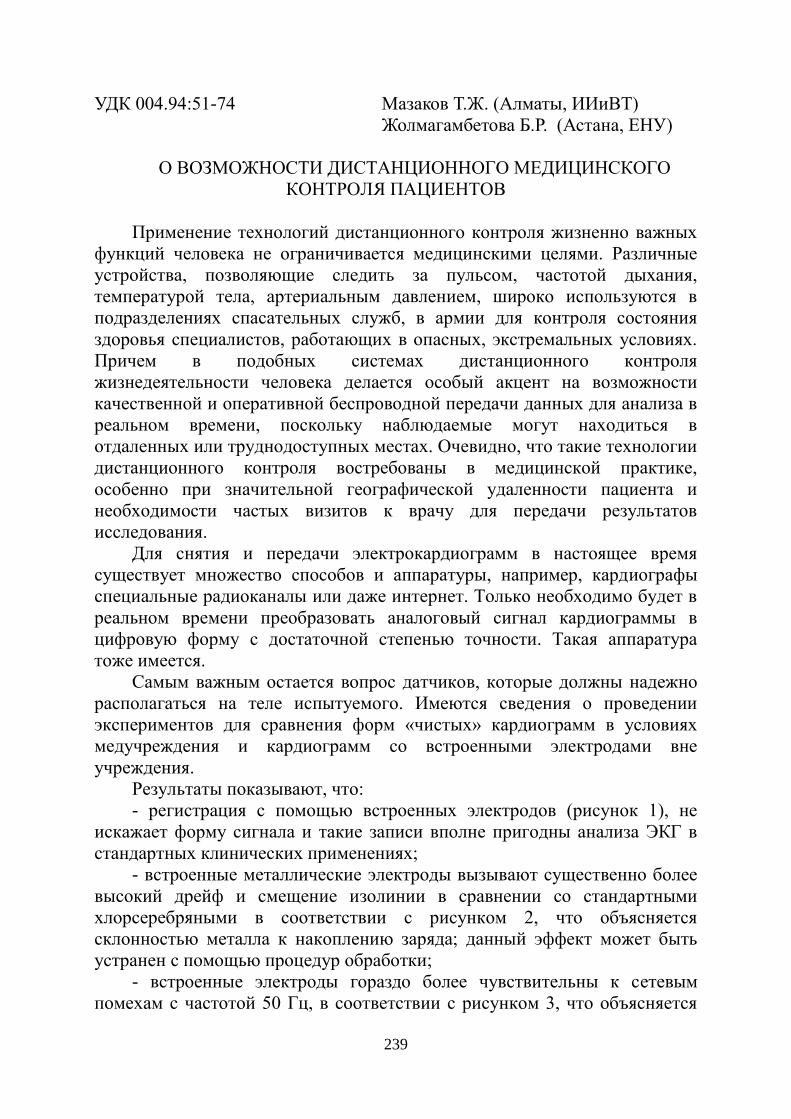
239
УДК 004.94:51-74 Мазаков Т.Ж. (Алматы, ИИиВТ)
Жолмагамбетова Б.Р. (Астана, ЕНУ)
О ВОЗМОЖНОСТИ ДИСТАНЦИОННОГО МЕДИЦИНСКОГО
КОНТРОЛЯ ПАЦИЕНТОВ
Применение технологий дистанционного контроля жизненно важных
функций человека не ограничивается медицинскими целями. Различные
устройства, позволяющие следить за пульсом, частотой дыхания,
температурой тела, артериальным давлением, широко используются в
подразделениях спасательных служб, в армии для контроля состояния
здоровья специалистов, работающих в опасных, экстремальных условиях.
Причем в подобных системах дистанционного контроля
жизнедеятельности человека делается особый акцент на возможности
качественной и оперативной беспроводной передачи данных для анализа в
реальном времени, поскольку наблюдаемые могут находиться в
отдаленных или труднодоступных местах. Очевидно, что такие технологии
дистанционного контроля востребованы в медицинской практике,
особенно при значительной географической удаленности пациента и
необходимости частых визитов к врачу для передачи результатов
исследования.
Для снятия и передачи электрокардиограмм в настоящее время
существует множество способов и аппаратуры, например, кардиографы
специальные радиоканалы или даже интернет. Только необходимо будет в
реальном времени преобразовать аналоговый сигнал кардиограммы в
цифровую форму с достаточной степенью точности. Такая аппаратура
тоже имеется.
Самым важным остается вопрос датчиков, которые должны надежно
располагаться на теле испытуемого. Имеются сведения о проведении
экспериментов для сравнения форм «чистых» кардиограмм в условиях
медучреждения и кардиограмм со встроенными электродами вне
учреждения.
Результаты показывают, что:
- регистрация с помощью встроенных электродов (рисунок 1), не
искажает форму сигнала и такие записи вполне пригодны анализа ЭКГ в
стандартных клинических применениях;
- встроенные металлические электроды вызывают существенно более
высокий дрейф и смещение изолинии в сравнении со стандартными
хлорсеребряными в соответствии с рисунком 2, что объясняется
склонностью металла к накоплению заряда; данный эффект может быть
устранен с помощью процедур обработки;
- встроенные электроды гораздо более чувствительны к сетевым
помехам с частотой 50 Гц, в соответствии с рисунком 3, что объясняется
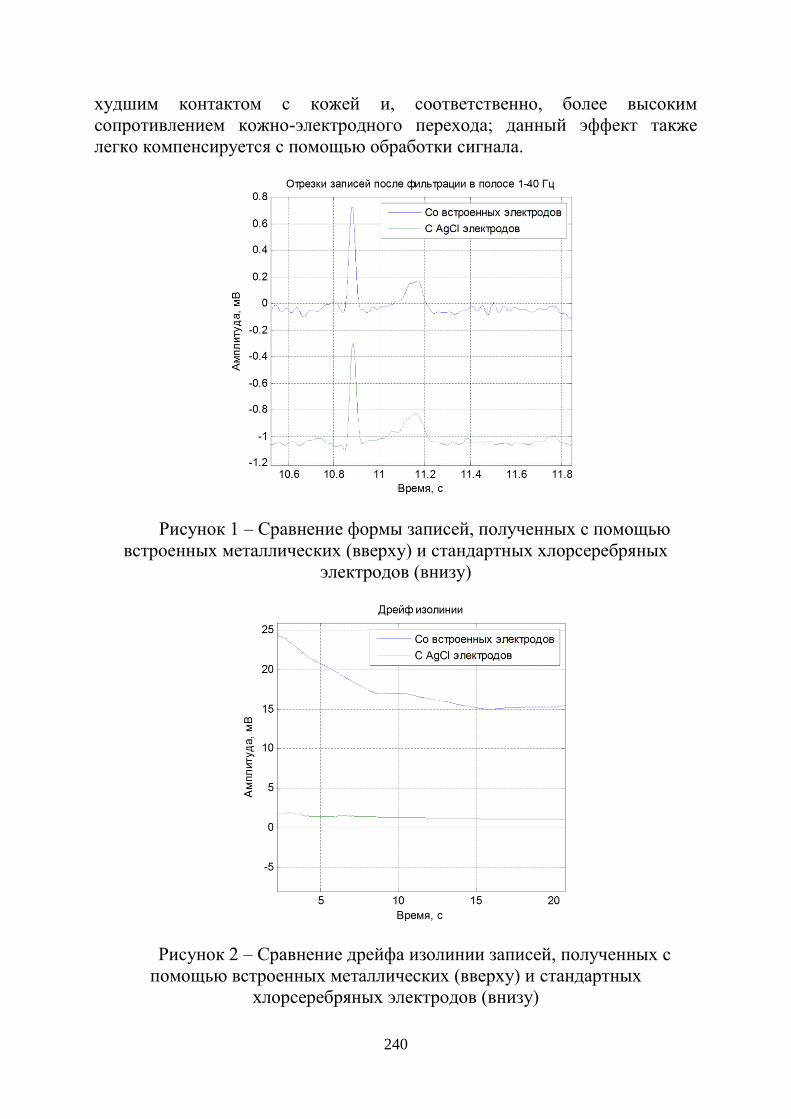
240
худшим контактом с кожей и, соответственно, более высоким
сопротивлением кожно-электродного перехода; данный эффект также
легко компенсируется с помощью обработки сигнала.
Рисунок 1 – Сравнение формы записей, полученных с помощью
встроенных металлических (вверху) и стандартных хлорсеребряных
электродов (внизу)
Рисунок 2 – Сравнение дрейфа изолинии записей, полученных с
помощью встроенных металлических (вверху) и стандартных
хлорсеребряных электродов (внизу)
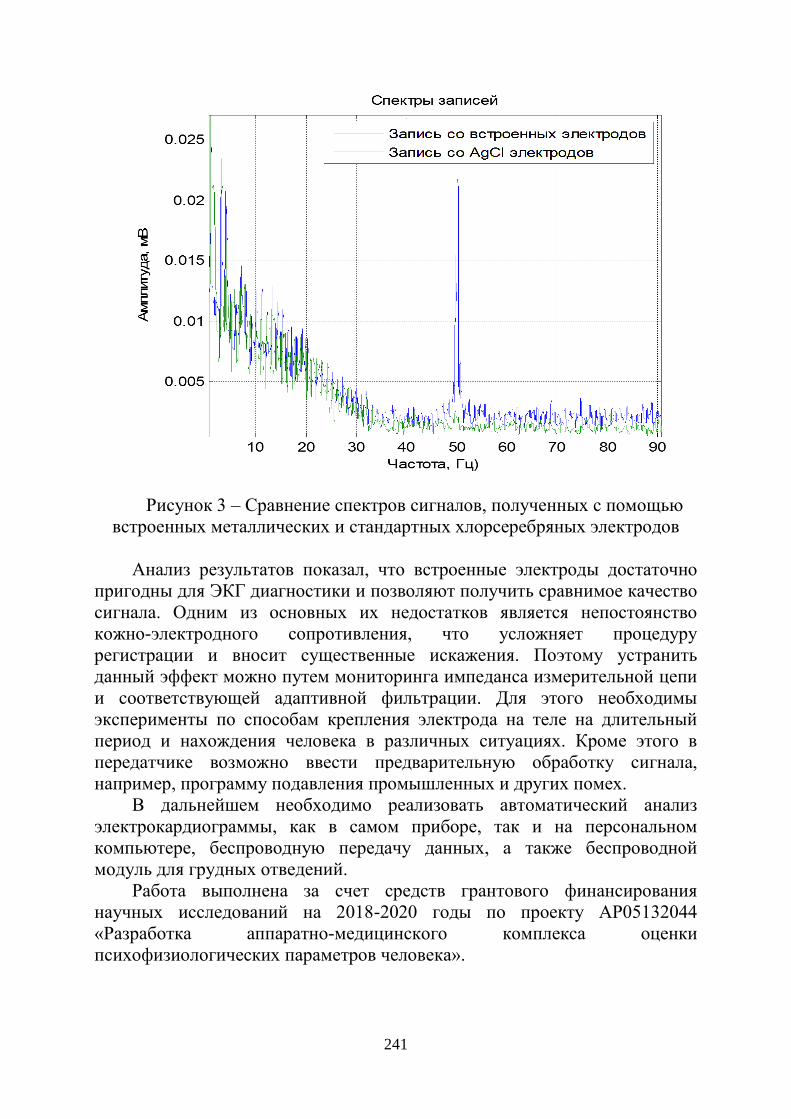
241
Рисунок 3 – Сравнение спектров сигналов, полученных с помощью
встроенных металлических и стандартных хлорсеребряных электродов
Анализ результатов показал, что встроенные электроды достаточно
пригодны для ЭКГ диагностики и позволяют получить сравнимое качество
сигнала. Одним из основных их недостатков является непостоянство
кожно-электродного сопротивления, что усложняет процедуру
регистрации и вносит существенные искажения. Поэтому устранить
данный эффект можно путем мониторинга импеданса измерительной цепи
и соответствующей адаптивной фильтрации. Для этого необходимы
эксперименты по способам крепления электрода на теле на длительный
период и нахождения человека в различных ситуациях. Кроме этого в
передатчике возможно ввести предварительную обработку сигнала,
например, программу подавления промышленных и других помех.
В дальнейшем необходимо реализовать автоматический анализ
электрокардиограммы, как в самом приборе, так и на персональном
компьютере, беспроводную передачу данных, а также беспроводной
модуль для грудных отведений.
Работа выполнена за счет средств грантового финансирования
научных исследований на 2018-2020 годы по проекту АР05132044
«Разработка аппаратно-медицинского комплекса оценки
психофизиологических параметров человека».
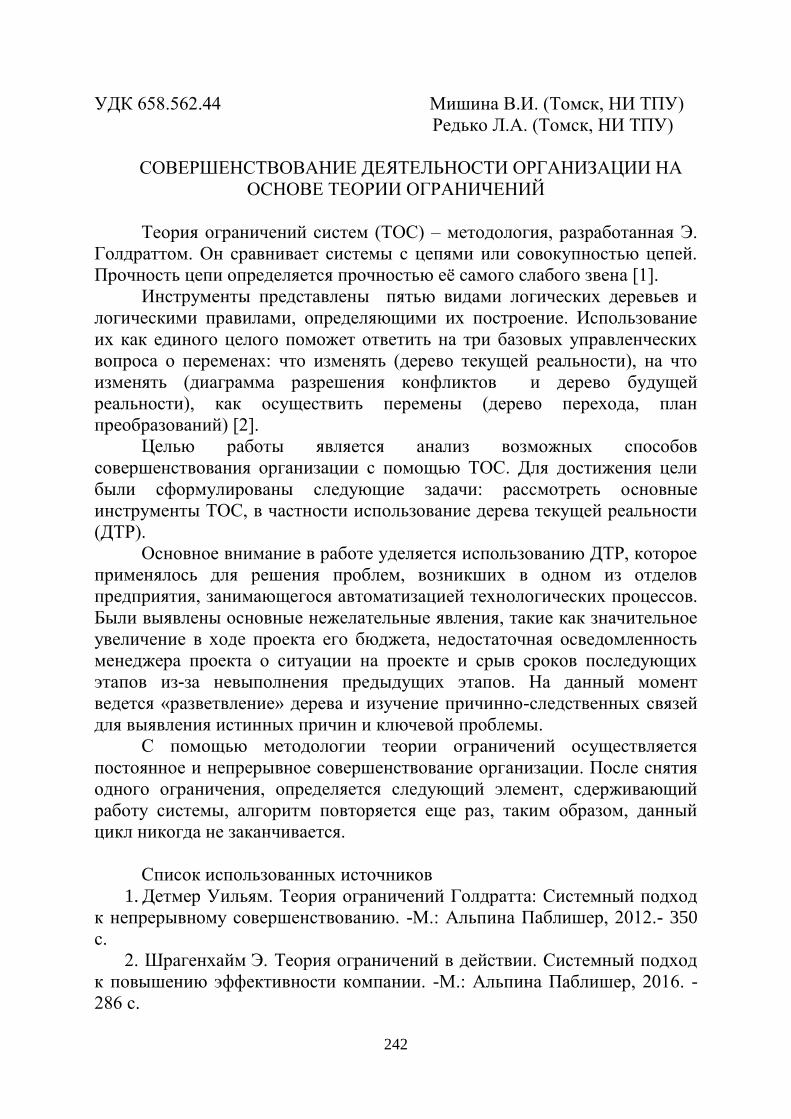
242
УДК 658.562.44 Мишина В.И. (Томск, НИ ТПУ)
Редько Л.А. (Томск, НИ ТПУ)
СОВЕРШЕНСТВОВАНИЕ ДЕЯТЕЛЬНОСТИ ОРГАНИЗАЦИИ НА
ОСНОВЕ ТЕОРИИ ОГРАНИЧЕНИЙ
Теория ограничений систем (ТОС) – методология, разработанная Э.
Голдраттом. Он сравнивает системы с цепями или совокупностью цепей.
Прочность цепи определяется прочностью её самого слабого звена [1].
Инструменты представлены пятью видами логических деревьев и
логическими правилами, определяющими их построение. Использование
их как единого целого поможет ответить на три базовых управленческих
вопроса о переменах: что изменять (дерево текущей реальности), на что
изменять (диаграмма разрешения конфликтов и дерево будущей
реальности), как осуществить перемены (дерево перехода, план
преобразований) [2].
Целью работы является анализ возможных способов
совершенствования организации с помощью ТОС. Для достижения цели
были сформулированы следующие задачи: рассмотреть основные
инструменты ТОС, в частности использование дерева текущей реальности
(ДТР).
Основное внимание в работе уделяется использованию ДТР, которое
применялось для решения проблем, возникших в одном из отделов
предприятия, занимающегося автоматизацией технологических процессов.
Были выявлены основные нежелательные явления, такие как значительное
увеличение в ходе проекта его бюджета, недостаточная осведомленность
менеджера проекта о ситуации на проекте и срыв сроков последующих
этапов из-за невыполнения предыдущих этапов. На данный момент
ведется «разветвление» дерева и изучение причинно-следственных связей
для выявления истинных причин и ключевой проблемы.
С помощью методологии теории ограничений осуществляется
постоянное и непрерывное совершенствование организации. После снятия
одного ограничения, определяется следующий элемент, сдерживающий
работу системы, алгоритм повторяется еще раз, таким образом, данный
цикл никогда не заканчивается.
Список использованных источников
1. Детмер Уильям. Теория ограничений Голдратта: Системный подход
к непрерывному совершенствованию. -М.: Альпина Паблишер, 2012.- 350
с.
2. Шрагенхайм Э. Теория ограничений в действии. Системный подход
к повышению эффективности компании. -М.: Альпина Паблишер, 2016. -
286 с.
243
УДК 004.41 Мурат М. Б. (Астана, ЕНУ)
ЭЛЕКТРЛІК БАРЛАУ ЕСЕПТЕРІНІҢ ӘДІСТЕРІ
Адам өмір сүру белсенділігінің нәтижесінің бірі - өмір сүруге
болатын кеңістікті пайдалану деңгейін арттыратын көптеген жерасты
объектілері. Осы объектілердің көпшілігі қазіргі заманғы жерасты
техникалық құралдарының (жер асты бөлігі, бункер, туннельдер, қалалық
және жер асты желілері, қадалар, жол жамылғылары мен бөгеттер,
қоймалар мен қоймалар) бөлігі болып табылады. Бұл объектілердің басқа
бөлігі археологиялық ескерткіштер мен мәдени мұра объектілері болып
табылады, ол пайдаланылмайды және жойылмаған күйде (ежелгі қорғаныс,
діни ғимараттар мен сарайлардың іргетасы, тұрғылықты жердің
қалдықтары және әртүрлі зираттар) сақталынады. Сыртқы
айырмашылықтарға қарамастан, геофизика тұрғысынан ежелгі және
заманауи объектілердің арасындағы айырмашылықтар негізінен жоқ. Бір
жағынан, барлық жасанды заттар нысандары табиғаттың таза формасында
табылмайтын материалдардан жасалады, сондықтан жасанды
материалдарды қолдануға байланысты физикалық қасиеттердің күшті
контрасты туындайды. Басқаша айтқанда, адамның жасаған технологиялық
ықпалы физикалық қасиеттердің күшті концентрациясы болатын жаңа
нысандардың ғана емес, сапалы жаңа материалдардың пайда болуына
әкеледі: электр өткізгіштігі, магниттік және диэлектрлік өткізгіштігі.
Әр түрлі геологиялық, археологиялық және инженерлік есептерді
шешуге арналған белсенді түрде қолданылатын көптеген электрлік
барлаудың әдістері бар.
Соңғы кезге дейін тік электрлік зондтау (ТЭЗ) және электрлік
кескіндеу (ЭК) арқылы зерттеу әдістері анағұрлым танымал таралған және
дамыған.
ТЭЗ және ЭК екі технологиясының біріктірілуі біздің елімізде
жиырма жыл бұрын электрлік томография ретінде бәріне белгілі Тұтас
электрлік зондтау әдісінің пайда болуына әкеліп соқтырды. Осылайша,
электрлік томография кедергілер әдісімен жұмыс істейтін заманауи тез
дамып келе жатқан әдіс болып келе жатыр. Бұл әдіске геоэлектрлік
қиманың екі өлшемді үлгісінің шеңберіндегі дадалық деректерді дадалық
бақылау, өңдеу және интерпретациялау әдістері кіреді. Ол үшін екі
өлшемді инверсия бағдарламалары қолданылады. Екі өлшемді үлгінің
интерпретациясы бұл әдісті күрделі геологиялық-геофизикалық қималарды
салу үшін сәтті қолдануға мүмкіндік береді.
Батыста электрлік томография әдістемесі 20 жылдан астам уақыт
қолданылып келе жатыр және көп уақыттан бері стандартты геофизикалық
құрал болып табылады. Екі өлшемді есептерді жылдам шешу жолдары
көрсетілген жұмысы әдісті дамытуда шешуші рөл атқарды.
244
Электрлік томография - кешенді өңдеу арқылы далалық бақылау
әдісінен тұратын технологияларды интерпретациялау болып табылады.
Оның ерекшелігі көп жағдайда пайдалану арқылы профильді электродтар
байқауларын бірдей бекітілген ұстанымын өлшеу болып табылады. Бұл
тәсіл заманауи өнімділігі жоғары жабдықтарды бір қолмен жұмыс істеуге
мүмкіндік береді, және екінші жағынан, тиімді алгоритмдері моделдеу
және инверсия қолдануымен қатар есептерді автоматты түрде аңықтауға
болады. Электрлік томография деректертерді түсіндіру арқылы екі
өлшемді және үш өлшемді модельдер шеңберінде жүзеге асырылады.
Электротомографияны дамытудың алғашқы кезеңдерінде Ресейде
көп электродты станциялар мен әдістемелердің жоқтығы және де соның
салдары ретінде электротомография әдістерін сәтті қолдану
мысалдарының жоқтығы әдісті енгізуде мәселелер тудырды.
Қазір барлық бұл мәселелер сәтті еңсерілді. Ресейде 2010 жылдың
басына қарай осындай жұмыстар үшін төрт аппаратуралық кешен пайда
болды: Скала-48 (Новосибирск қ.), ERA-MultyMAX (Санкт-Петербург қ.),
EGD-48 (Красноярск қ.) және Омего-48 (Раменское қ.) . «Линия» фирмасы
(Севастополь қаласы) 48 электродтардағы шалғылармен жұмыс істеу үшін
тағы бір ЭРП-1М станциясын жобалап құрды.
Осыған байланысты, жер беті бедерінің әсерін ескеруге арналған,
бүгінгі күні қолданыстағы әдістер мен алгоритмдерге зерттеу, талдау және
шолу жасалынды. Оның нәтижесінде, электрлік томография есептерін
шешу кезіндегі барлық артықшылықтарын ескере отырып, қойылған
есептің шешімін табу үшін, геофизика есептерін шешуге арналған
интегралдық теңдеулер әдісі таңдалынды.
Электрлік барлау - электромагниттік өрістердің көмегімен Жердің
құрылымында пайдалы қазбаларды іздестіру және басқа да қолданбалы
есептерді шешу мақсатында қолданылатын барлау геофизикасының бір
бөлігі. Электрлік барлау әр түрлі жыныстардың электромагниттік
қасиеттерінің әртүрлілігіне негізделген.
Кедергі әдісі. Кедергі әдісіне теориясы жасанды қорек көздерінен
тұратын белгілі бір параметрлерімен геологиялық ортадағы өткізгіш
тұрақты электрлік ток таралуларын үйренуге негізделген электрлік
барлаулардың модификациялары жатады[11].
Кедергі әдісінің негізінде жер бетінде бақыланатын үлестік қарсы
тұру кесіндідегі меншікті электрлік кедергідегі электрлік өріс тәуелділігі
жатады. Электрлік өріс А және В элекродтарынан өтетін IАВ тогының
әсерінен пайда болады. Электрлік өріс кернеулігі M және N қабылдағыш
электродтарының көмегімен өлшенеді. MN аз өлшемдерінде UMN
шамасының айырымы MN сызығы бағытындағы электрлік өріс
кернеулігіне тура пропорционал:
)( MNEUMN (
(1)
245
Қоректендіргіш және қабылдағыш электродтардың белгілі бір
күймен орналасқан жиынтығы электрлік барлама орналастыруы деп
аталады. Электрлік барлау орналастыруының көптеген нұсқалары бар. Бұл
ораналастырулар арқылы өлшеу нәтижелері оның конфигурациясы мен
орналастыруға жақын геоэлектрлік кесіндідегі кейбір аймақтарындағы
меншікті электрлік кедергілердің таралуларына байланысты. Бұл аймақтың
өлшемі, оның ішінде зерттеу тереңдігі орналастыру геометриясына, ең
алдымен қоректендіргіш және қабылдағыш ээлектродтарының
арақашықтығына тәуелді. Бұл арақашықтық орналаструдың таралуы деп
аталады. Орналастырудың таралуын (геометриясын) өзгерту арқылы біз
зерттелетін аймақтың ауқымдылығын өзгертеміз. Бұл тек қана беттік
өлшеулерді негізге ала отырып ауқымды кесінділерді үйренуге мүмкіндік
береді.
Ықтимал кедергі. Бақыланатын электрлік өрісті талдау және
түсіндіру қолайлылығы үшін ықтимал меншікті электрлік кедергі түсінігі
енгізілген.
Ықтимал кедергі келесі формуламен есептеледі:
AB
MN
KI
UK
(
(2)
Мұндағы UMN – M және N қабылдаушы электродтар арасындағы
потенциалдардың айырымының өлшемі, IAB – сызықтарды қоректендіргіш
ток, ал К – орналастырудың геометриялық коэффициенті (1) және (2)
формулаларын қараңыз).
Кедергі әдісінің құрылымы. Кедергі әдісінің шеңберінде зерттеу
модификацияларының көптеген түрлері бар . Дәстүрлі түрде
технологияның үш негізгі түрі ерекшеленеді.
Электрлік кескіндеу (ЭК) – орналастырудың кескіні бойынша өз
конфигурациясымен өзгеріссіз ауысып отырады . Ораналастыру
геометриясы өзгермейтін болғандықтан зерттеу ауқымдылығы тұрақты
болып калады.
Қолданылған әдебиеттер тізімі
1. Бобачев А.А., Ерохин С.А. Использование электротомографии в
инженерной геофизике. Материалы Пятой Общероссийской конференции
изыскательских организация, декабрь 2009, 143-146
2. Loke, M.H. and Barker, R.D., 1996. Rapid least-squares inversion of
apparent resistivity pseudosections using a quasi-Newton method. Geophysical
Prospecting, 44, 131-152.
3. Каминский А.Е. Программа двумерной интерпретации данных
метода сопротивлений и вызванной поляризации (наземный, скважинный
и акваторный варианты) ZONDRES2D. Zond Geophysical software. 2001-
2010. 81 стр.
246
УДК 622.1 Низаметдинов Р.Ф. (Караганда, КарГТУ)
Нагибин А.А. (Караганда, КарГТУ)
Илюбаев Н.С. (Караганда, КарГТУ)
ВЫСОКОТОЧНЫЕ ИНСТРУМЕНТАЛЬНЫЕ НАБЛЮДЕНИЯ
НА ОТКРЫТЫХ РАЗРАБОТКАХ
Появление приборов лазерного сканирования для горной
промышленности открывают уникальную возможность прогнозирования
состояния прибортовых массивов на открытых разработках.
Это возможно путем систематических инструментальных
наблюдений прибортовых массивов на карьерах с помощью лазерного
сканера выделенных участков, полученное облако точек трансформируется
в трехмерную модель и сравнивается с последующими сериями измерений.
Обеспечение высокой точности работ лазерным
сканером возможно только при соблюдении определенной
методики работ, которая заключается в следующем: устанавливают лазерный сканер над опорным пунктом с
известными координатами;
центрируют на точку с использованием оптического центрира;
горизонтируют прибор благодаря встроенному электронному
компенсатору, который значительно повышает точность
горизонтирования;
выполняют настройку лазерного сканера, используя полевой
планшет со специальным программным обеспечением;
вводят атмосферные поправки учитывающие давление,
температуру воздуха и относительную влажность (при высокоточных
измерениях расстояний атмосферная поправка должна определяться с
точностью до 1 ррт (1 мм на 1 км), температура воздуха – с точностью до
10С, атмосферное давление - до 3 мбар, относительная влажность – до
20%).
отмечают: название и координаты точки стояния сканера; высоту
инструмента, название и координаты точки ориентирования сканера;
выполняют ориентирование прибора;
заходят в режим измерения программы, где выделяют область
сканирования прибора и производят запуск измерения.
Для организации инструментальных наблюдений на карьере
необходимо:
выбрать потенциально неустойчивые или оползневые участки
на основе анализа инженерно-геологических и горно-технических условий
разработки для определения мест сканирования;
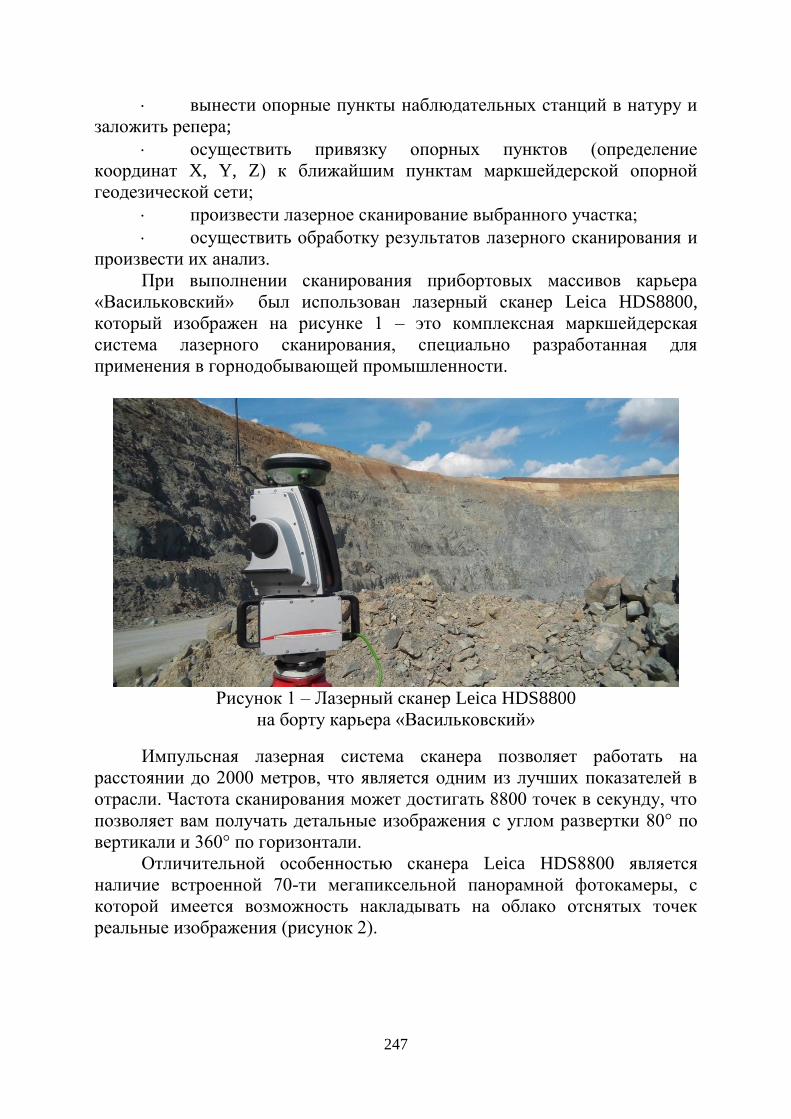
247
вынести опорные пункты наблюдательных станций в натуру и
заложить репера;
осуществить привязку опорных пунктов (определение
координат X, Y, Z) к ближайшим пунктам маркшейдерской опорной
геодезической сети;
произвести лазерное сканирование выбранного участка;
осуществить обработку результатов лазерного сканирования и
произвести их анализ.
При выполнении сканирования прибортовых массивов карьера
«Васильковский» был использован лазерный сканер Leica HDS8800,
который изображен на рисунке 1 – это комплексная маркшейдерская
система лазерного сканирования, специально разработанная для
применения в горнодобывающей промышленности.
Рисунок 1 – Лазерный сканер Leica HDS8800
на борту карьера «Васильковский»
Импульсная лазерная система сканера позволяет работать на
расстоянии до 2000 метров, что является одним из лучших показателей в
отрасли. Частота сканирования может достигать 8800 точек в секунду, что
позволяет вам получать детальные изображения с углом развертки 80° по
вертикали и 360° по горизонтали.
Отличительной особенностью сканера Leica HDS8800 является
наличие встроенной 70-ти мегапиксельной панорамной фотокамеры, с
которой имеется возможность накладывать на облако отснятых точек
реальные изображения (рисунок 2).
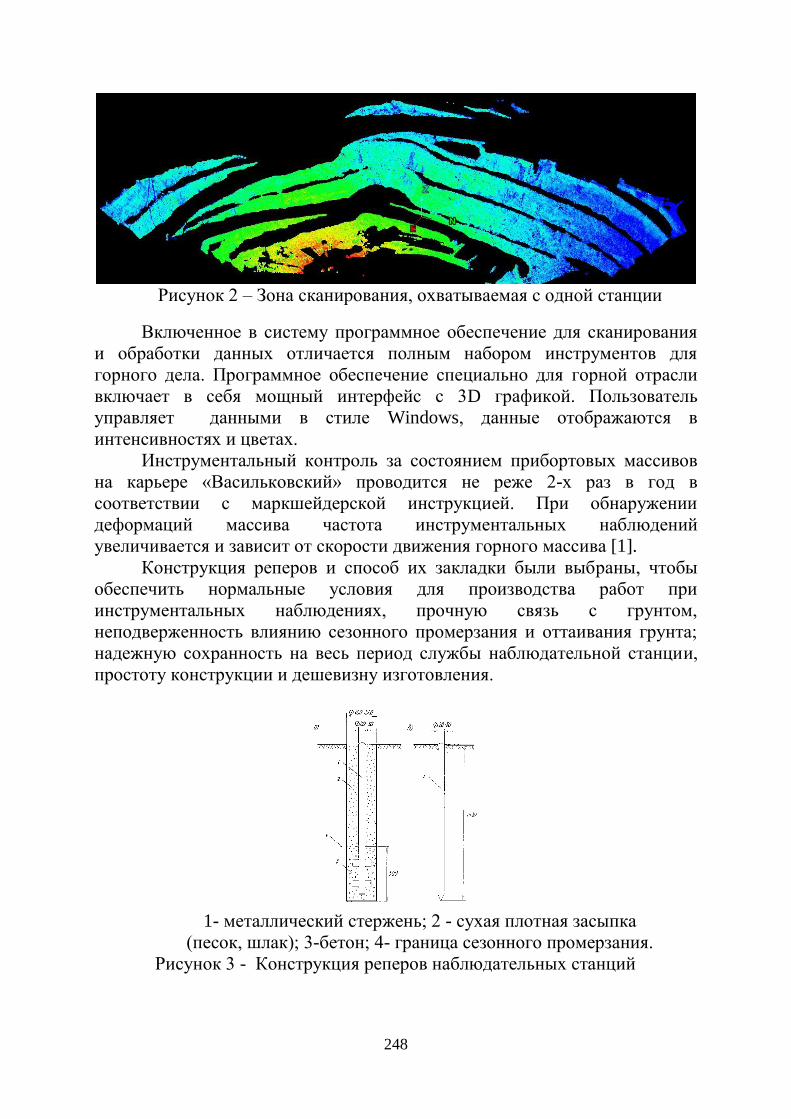
248
Рисунок 2 – Зона сканирования, охватываемая с одной станции
Включенное в систему программное обеспечение для сканирования
и обработки данных отличается полным набором инструментов для
горного дела. Программное обеспечение специально для горной отрасли
включает в себя мощный интерфейс с 3D графикой. Пользователь
управляет данными в стиле Windows, данные отображаются в
интенсивностях и цветах.
Инструментальный контроль за состоянием прибортовых массивов
на карьере «Васильковский» проводится не реже 2-х раз в год в
соответствии с маркшейдерской инструкцией. При обнаружении
деформаций массива частота инструментальных наблюдений
увеличивается и зависит от скорости движения горного массива [1].
Конструкция реперов и способ их закладки были выбраны, чтобы
обеспечить нормальные условия для производства работ при
инструментальных наблюдениях, прочную связь с грунтом,
неподверженность влиянию сезонного промерзания и оттаивания грунта;
надежную сохранность на весь период службы наблюдательной станции,
простоту конструкции и дешевизну изготовления.
1- металлический стержень; 2 - сухая плотная засыпка
(песок, шлак); 3-бетон; 4- граница сезонного промерзания.
Рисунок 3 - Конструкция реперов наблюдательных станций
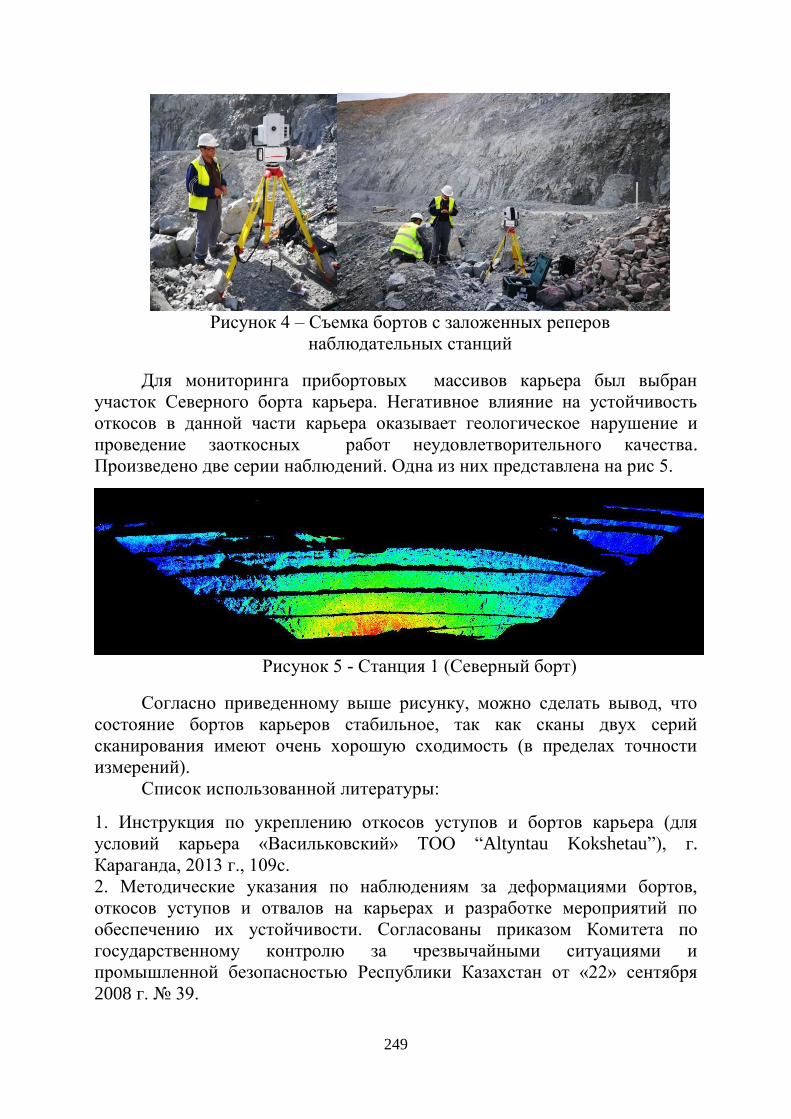
249
Рисунок 4 – Съемка бортов с заложенных реперов
наблюдательных станций
Для мониторинга прибортовых массивов карьера был выбран
участок Северного борта карьера. Негативное влияние на устойчивость
откосов в данной части карьера оказывает геологическое нарушение и
проведение заоткосных работ неудовлетворительного качества.
Произведено две серии наблюдений. Одна из них представлена на рис 5.
Рисунок 5 - Станция 1 (Северный борт)
Согласно приведенному выше рисунку, можно сделать вывод, что
состояние бортов карьеров стабильное, так как сканы двух серий
сканирования имеют очень хорошую сходимость (в пределах точности
измерений).
Список использованной литературы:
1. Инструкция по укреплению откосов уступов и бортов карьера (для
условий карьера «Васильковский» ТОО “Altyntau Kokshetau”), г.
Караганда, 2013 г., 109с.
2. Методические указания по наблюдениям за деформациями бортов,
откосов уступов и отвалов на карьерах и разработке мероприятий по
обеспечению их устойчивости. Согласованы приказом Комитета по
государственному контролю за чрезвычайными ситуациями и
промышленной безопасностью Республики Казахстан от «22» сентября
2008 г. № 39.
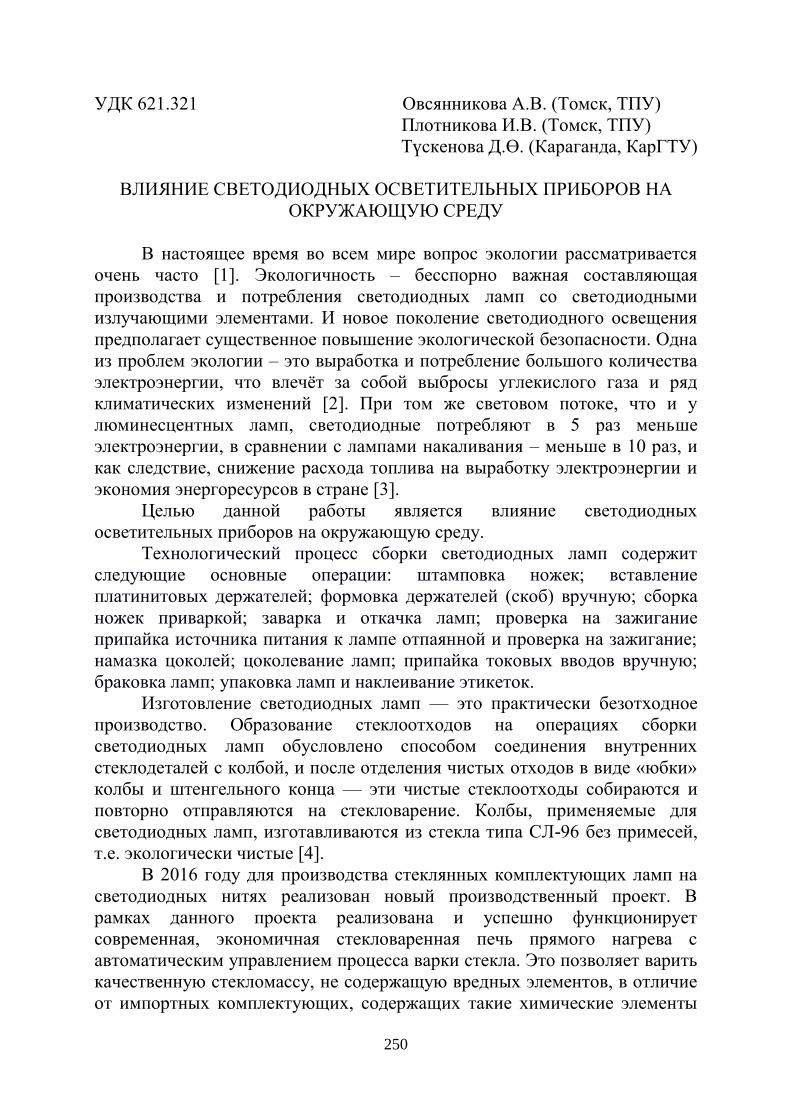
250
УДК 621.321 Овсянникова А.В. (Томск, ТПУ)
Плотникова И.В. (Томск, ТПУ)
Түскенова Д.Ө. (Караганда, КарГТУ)
ВЛИЯНИЕ СВЕТОДИОДНЫХ ОСВЕТИТЕЛЬНЫХ ПРИБОРОВ НА
ОКРУЖАЮЩУЮ СРЕДУ
В настоящее время во всем мире вопрос экологии рассматривается
очень часто [1]. Экологичность – бесспорно важная составляющая
производства и потребления светодиодных ламп со светодиодными
излучающими элементами. И новое поколение светодиодного освещения
предполагает существенное повышение экологической безопасности. Одна
из проблем экологии – это выработка и потребление большого количества
электроэнергии, что влечёт за собой выбросы углекислого газа и ряд
климатических изменений [2]. При том же световом потоке, что и у
люминесцентных ламп, светодиодные потребляют в 5 раз меньше
электроэнергии, в сравнении с лампами накаливания – меньше в 10 раз, и
как следствие, снижение расхода топлива на выработку электроэнергии и
экономия энергоресурсов в стране [3].
Целью данной работы является влияние светодиодных
осветительных приборов на окружающую среду.
Технологический процесс сборки светодиодных ламп содержит
следующие основные операции: штамповка ножек; вставление
платинитовых держателей; формовка держателей (скоб) вручную; сборка
ножек приваркой; заварка и откачка ламп; проверка на зажигание
припайка источника питания к лампе отпаянной и проверка на зажигание;
намазка цоколей; цоколевание ламп; припайка токовых вводов вручную;
браковка ламп; упаковка ламп и наклеивание этикеток.
Изготовление светодиодных ламп — это практически безотходное
производство. Образование стеклоотходов на операциях сборки
светодиодных ламп обусловлено способом соединения внутренних
стеклодеталей с колбой, и после отделения чистых отходов в виде «юбки»
колбы и штенгельного конца — эти чистые стеклоотходы собираются и
повторно отправляются на стекловарение. Колбы, применяемые для
светодиодных ламп, изготавливаются из стекла типа СЛ-96 без примесей,
т.е. экологически чистые [4].
В 2016 году для производства стеклянных комплектующих ламп на
светодиодных нитях реализован новый производственный проект. В
рамках данного проекта реализована и успешно функционирует
современная, экономичная стекловаренная печь прямого нагрева с
автоматическим управлением процесса варки стекла. Это позволяет варить
качественную стекломассу, не содержащую вредных элементов, в отличие
от импортных комплектующих, содержащих такие химические элементы
251
как свинец. Автоматизация процесса варки позволяет сделать сам процесс
более экологичным и абсолютно нетоксичным за счет оптимизации всех
параметров стекловаренной печи. В свою очередь, приведение процесса
сжигания к оптимальным режимам полного сжигания газа сводит к нулю
все вредные выбросы в атмосферу, таких как оксид углерода, азота и пр.
Производство стеклянных колб для светодиодных ламп
производится на карусельном автомате с капельным питанием типа "Р-25",
специально приобретенным под данный проект [5]. Автомат оснащен
системой сбора и утилизации масла, используемого в системе смазки этого
оборудования, что позволяет повторно использовать его в дальнейшей
работе и снизить до минимума его потребление и сбросы в окружающую
среду. А использование оборотного водоснабжения в производстве
стеклянных колб, снижает расход питьевой воды и делает колбовыдувной
автомат "Р-25" практически автономным и более экономичным по
сравнению со своими аналогами.
Отсутствие токсичных материалов в светодиодных лампах и, как
следствие, простая их утилизация. С точки зрения охраны окружающей
среды эти факторы играют значимую роль и позволяют говорить о
предпочтительности их перед другими источниками освещения. Большой
срок службы и высокая энергоэффективность светодиодных источников
света позволит снизить в десятки раз количество выпускаемых ламп, тем
самым сберечь энергоресурсы, снизить производственные издержки и, как
следствие, это приведёт к снижению загрязнения окружающей среды.
Список использованных источников
1. Глазырина Е.Д., Мустафина Р.М., Плотникова И.В., Чичерина Н.В.
Устойчивое развитие и экологическая компетентность студентов
технических специальностей // Современные наукоемкие технологии. –
2016, № 4-1. С. 89-92.
2. Плотникова И.В., Редько Л.А Статистические методы и анализ
проблем управления качеством // Стандарты и качество. -2017. № 3. - С.
50-53.
3. Производство выдувных изделий [Электронный ресурс] — Режим
доступа — http://www.stroitelstvo-new.ru/steklo/stekloduv/mechanization-
6.shtml
4. ГОСТ 12.1.014-84 Система стандартов безопасности труда (ССБТ).
Воздух рабочей зоны. Метод измерения концентраций вредных веществ
индикаторными трубками (с Изменением N 1) [Электронный ресурс] —
Режим доступа — http://docs.cntd.ru/document/5200317
5. ГН 2.2.5.1313-03 Предельно допустимые концентрации (ПДК)
вредных веществ в воздухе рабочей зоны [Электронный ресурс] — Режим
доступа — http://docs.cntd.ru/document/901862250
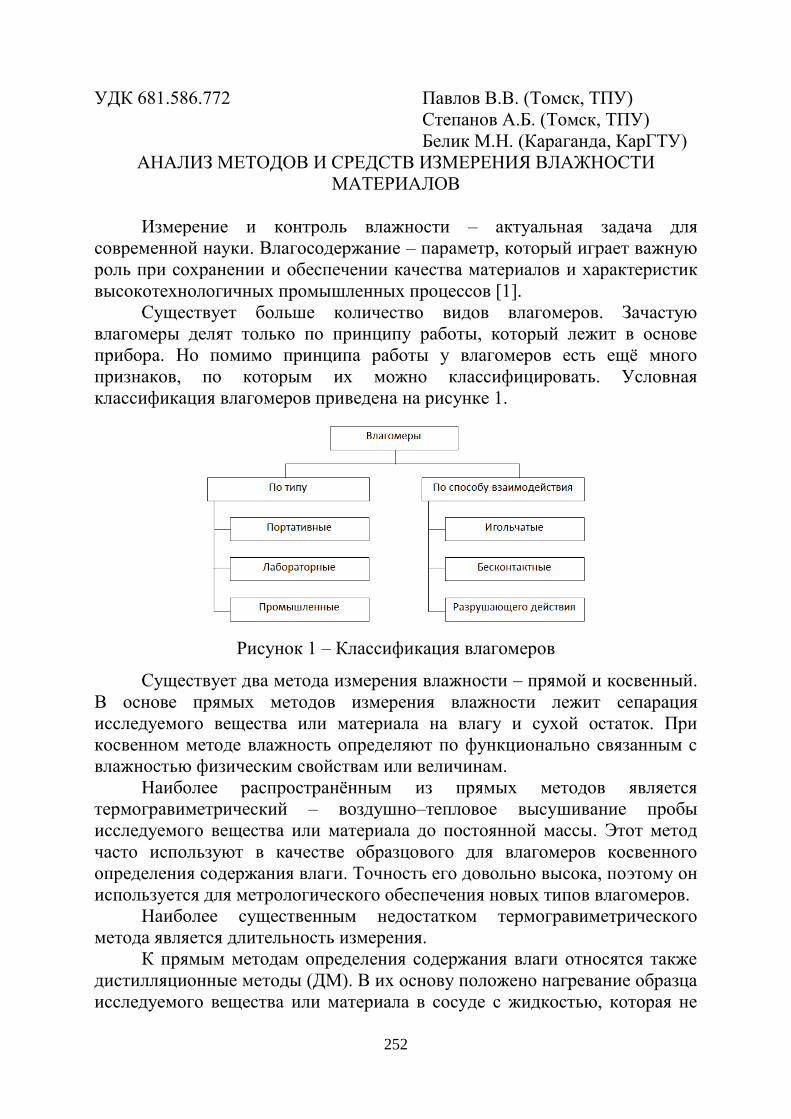
252
АНАЛИЗ МЕТОДОВ И СРЕДСТВ ИЗМЕРЕНИЯ ВЛАЖНОСТИ
МАТЕРИАЛОВ
Измерение и контроль влажности – актуальная задача для
современной науки. Влагосодержание – параметр, который играет важную
роль при сохранении и обеспечении качества материалов и характеристик
высокотехнологичных промышленных процессов [1].
Существует больше количество видов влагомеров. Зачастую
влагомеры делят только по принципу работы, который лежит в основе
прибора. Но помимо принципа работы у влагомеров есть ещё много
признаков, по которым их можно классифицировать. Условная
классификация влагомеров приведена на рисунке 1.
Рисунок 1 – Классификация влагомеров
Существует два метода измерения влажности – прямой и косвенный.
В основе прямых методов измерения влажности лежит сепарация
исследуемого вещества или материала на влагу и сухой остаток. При
косвенном методе влажность определяют по функционально связанным с
влажностью физическим свойствам или величинам.
Наиболее распространённым из прямых методов является
термогравиметрический – воздушно–тепловое высушивание пробы
исследуемого вещества или материала до постоянной массы. Этот метод
часто используют в качестве образцового для влагомеров косвенного
определения содержания влаги. Точность его довольно высока, поэтому он
используется для метрологического обеспечения новых типов влагомеров.
Наиболее существенным недостатком термогравиметрического
метода является длительность измерения.
К прямым методам определения содержания влаги относятся также
дистилляционные методы (ДМ). В их основу положено нагревание образца
исследуемого вещества или материала в сосуде с жидкостью, которая не
УДК 681.586.772 Павлов В.В. (Томск, ТПУ)
Степанов А.Б. (Томск, ТПУ)
Белик М.Н. (Караганда, КарГТУ)
253
разлагается при нагревании и не смешивается с влагой образца. Пары
воды, выделяющиеся при нагревании, вместе с парами жидкости
подвергаются отгонке и, при проходе через холодильник, конденсируются
в измерительном сосуде, где затем измеряется объём или масса влаги.
Аппаратурное оснащение ДМ более громоздкое и менее удобное в работе,
чем при термогравиметрическом методе. Это обстоятельство и ряд других
причин ограничивают применение ДМ в промышленности.
Одним из наиболее точных и чувствительных методов, обладающим
широким диапазоном измерения среди прямых методов является метод
Фишера. В основе метода лежит реакция реактива Фишера (раствора
металлического йода, безводного пиридина и сухого сернистого
ангидрида) с влагой образца исследуемого вещества или материала.
Отметим, что прямые методы выявления содержания влаги требуют
большого интервала времени измерения и сложного оборудования, однако
при этом они обладают малой погрешностью измерения, что
обусловливает их применение в качестве лабораторных и образцовых
методов.
Известно, что содержание влаги в веществе или материале
определяет его физические свойства – тепловые, оптические,
механические, электрофизические и т. д. Функциональная связь этих
свойств с содержанием влаги является основой построения различных
типов влагомеров, работающих по принципу косвенного определения
влажности материалов и веществ.
Самыми распространёнными косвенными методами измерения
влажности являются: кондуктометрический, диэлькометрический, СВЧ -
метод, оптические.
Кондуктометрический метод основан на измерении электрического
сопротивления (объемного или поверхностного). Главным достоинством
этого метода является простота схемы и конструкции измерительного
прибора. Однако влияние на результат измерения химической
составляющей исследуемого вещества, температуры вещества,
уплотнения, а также маленький измерительный диапазон ограничивают
распространённость этого метода.
Диэлькометрический метод основан на измерении диэлектрической
проницаемости влажных материалов и веществ в большом диапазоне
частот – от звуковых до СВЧ.
Основными характеристиками исследуемого материала при этом
являются зависимости диэлектрической проницаемости и диэлектрических
потерь от влагосодержания, частоты переменного поля, температуры,
плотности и т. д.
На результат измерения влажности диэлькометрическим методом [2]
влияют, кроме того, соотношение количества влаги различных состояний и
видов связи, большие проводимости и т. п.
254
Сверхвысокочастотные методы определения влажности отличаются
большой чувствительностью, точностью и возможностью бесконтактных
измерений. Принцип действия СВЧ влагомеров основывается на
определении влажности по отраженным или прошедшим через
контролируемое вещество электромагнитным волнам. В качестве
информативного параметра [3] используются амплитуда, фаза и т.д.
Несомненным достоинством СВЧ приборов является незначительная
чувствительность к физико-химическим свойствам исследуемых веществ и
материалов. Однако СВЧ влагомеры не получили пока широкого
распространения, что является, по-видимому, следствием сложности и
дороговизны аппаратуры [4].
Среди оптических приборов для измерения влажности самыми
распространёнными являются инфракрасные фотометрические влагомеры,
в основе которых лежит измерение выборочной абсорбции влагой
инфракрасного излучения, отраженного излучения от поверхности или
излучения, прошедшего через вещество.
Главными преимуществами ИК-методов – это высокая
избирательность, чувствительность и точность измерения, и
воспроизводимость проведённых опытов, а также возможность
постоянного неразрушающего контроля, бесконтактность и экспрессность
анализа [5].
Проведенные исследования показывают, что основным источником
погрешностей влагомеров является несоответствие значений измеряемых
физических параметров исследуемых влажных материалов их
действительной влажности.
Список использованных источников
1 Берлинер М.А. Измерения влажности/ М.А. Берлинер. Москва:
Энергия, 1973. 400 с.
2 Кричевский Е.С. Контроль влажности твёрдых и сыпучих
материалов/ Москва: Энергоатомиздат, 1987. 136 с.
3 Исматуллаев П.Р. Микроволновые методы измерения влажности
материалов/ Исматуллаев П.Р.; Ташкентский политехнический институт.
Ташкент: Фан, 1976.
4 Исматуллаев А.Р. Теоретическое и экспериментальное исследование
сверхвысокочастотного метода измерения влажности материалов/
Ташкент: Фан, 1982. 83 с.
5 Мухитдинов М.М. Оптические методы и устройства контроля
влажности/ М.М. Мухитдинов, Э.С. Мусаев/ Москва: Энергоатомиздат,
1986. 95 с.
255
IPv6 — НОВАЯ ВЕРСИЯ ПРОТОКОЛА IP
IPv6 — новая версия протокола IP, призванная решить проблемы, с
которыми столкнулась предыдущая версия (IPv4) при её использовании в
Интернете, за счёт использования длины адреса 128 бит вместо 32.
Протокол был разработан IETF.
В настоящее время протокол IPv6 уже используется в нескольких
тысячах сетей по всему миру (более 14000 сетей на осень 2013), но пока
ещё не получил столь широкого распространения в Интернете, как IPv4.
На конец 2016 года доля IPv6 в сетевом трафике составляла около 1 %. К
концу 2017 года ожидался рост до 3%. В России коммерческое
использование операторами связи невелико (не более 1 % трафика). DNS-
серверы многих российских регистраторов доменов и провайдеров
хостинга используют IPv6.
После того, как адресное пространство в IPv4 закончится, два стека
протоколов — IPv6 и IPv4 — будут использоваться параллельно (англ. dual
stack), с постепенным увеличением доли трафика IPv6, по сравнению с
IPv4. Такая ситуация станет возможной из-за наличия огромного
количества устройств, в том числе устаревших, не поддерживающих IPv6 и
требующих специального преобразования для работы с устройствами,
использующими только IPv6.
Иногда утверждается, что новый протокол может обеспечить до
5·1028 адресов на каждого жителя Земли. Такое большое адресное
пространство было введено ради иерархичности адресов (это упрощает
маршрутизацию). Тем не менее, увеличенное пространство адресов
сделает NAT необязательным. Классическое применение IPv6 (по сети /64
на абонента; используется только unicast-адресация) обеспечит
возможность использования более 300 млн IP-адресов на каждого жителя
Земли.
Из IPv6 убраны функции, усложняющие работу маршрутизаторов.
Маршрутизаторы больше не должны фрагментировать пакет, вместо этого
пакет отбрасывается с ICMP-уведомлением о превышении MTU и
указанием величины MTU следующего канала, в который этому пакету не
удалось войти. В IPv4 размер MTU в ICMP-пакете не указывался и
отправителю требовалось осуществлять подбор MTU техникой Path MTU
discovery. Для лучшей работы протоколов, требовательных к потерям,
минимальный MTU поднят до 1280 байт. Фрагментация поддерживается
как опция (информация о фрагментации пакетов вынесена из основного
заголовка в расширенные) и возможна только по инициативе передающей
стороны. Из IP-заголовка исключена контрольная сумма. С учётом того,
УДК 537. 52 Пак С.Ю. (Караганда, КарГТУ)
Валуйская А.Н. (Караганда, КарГТУ)
Гаврилова М.А. (Караганда, КарГТУ)
256
что канальные (Ethernet) и транспортные (TCP и UDP) протоколы имеют
свои контрольные суммы, ещё одна контрольная сумма на уровне IP
воспринимается как излишняя. Кроме того, модификация поля hop limit
(или TTL в IPv4) на каждом маршрутизаторе в IPv4 приводила к
необходимости её постоянного перерасчёта.
Несмотря на больший по сравнению с предыдущей версией
протокола размер адреса IPv6 (16 байтов вместо 4), заголовок пакета
удлинился всего лишь вдвое: с 20 до 40 байт.
Улучшения IPv6 по сравнению с IPv4:
1) в сверхскоростных сетях возможна поддержка огромных
пакетов (джамбограмм) — до 4 гигабайт;
2) time to Live переименовано в Hop Limit;
3) появились метки потоков и классы трафика;
4) появилось многоадресное вещание.
Основы адресации IPv6.
Существуют различные типы адресов IPv6: одноадресные (Unicast),
групповые (Anycast) и многоадресные (Multicast).
Адреса типа Unicast хорошо всем известны. Пакет, посланный на такой
адрес, достигает в точности интерфейса, который этому адресу
соответствует.
Адреса типа Anycast синтаксически неотличимы от адресов Unicast,
но они адресуют группу интерфейсов. Пакет, направленный такому адресу,
попадёт в ближайший (согласно метрике маршрутизатора) интерфейс.
Адреса Anycast могут использоваться только маршрутизаторами.
Адреса типа Multicast идентифицируют группу интерфейсов. Пакет,
посланный на такой адрес, достигнет всех интерфейсов, привязанных к
группе многоадресного вещания.
Широковещательные адреса IPv4 (обычно xxx.xxx.xxx.255)
выражаются адресами многоадресного вещания IPv6. Крайние адреса
подсети IPv6 (например, xxxx:xxxx:xxxx:xxxx:0:0:0:0 и
xxxx:xxxx:xxxx:xxxx:ffff:ffff:ffff:ffff для подсети /64) являются
полноправными адресами и могут использоваться наравне с остальными.
Группы цифр в адресе разделяются двоеточиями (например,
fe80:0:0:0:200:f8ff:fe21:67cf). Незначащие старшие нули в группах могут
быть опущены. Большое количество нулевых групп может быть
пропущено с помощью двойного двоеточия (fe80::200:f8ff:fe21:67cf).
Такой пропуск должен быть единственным в адресе.
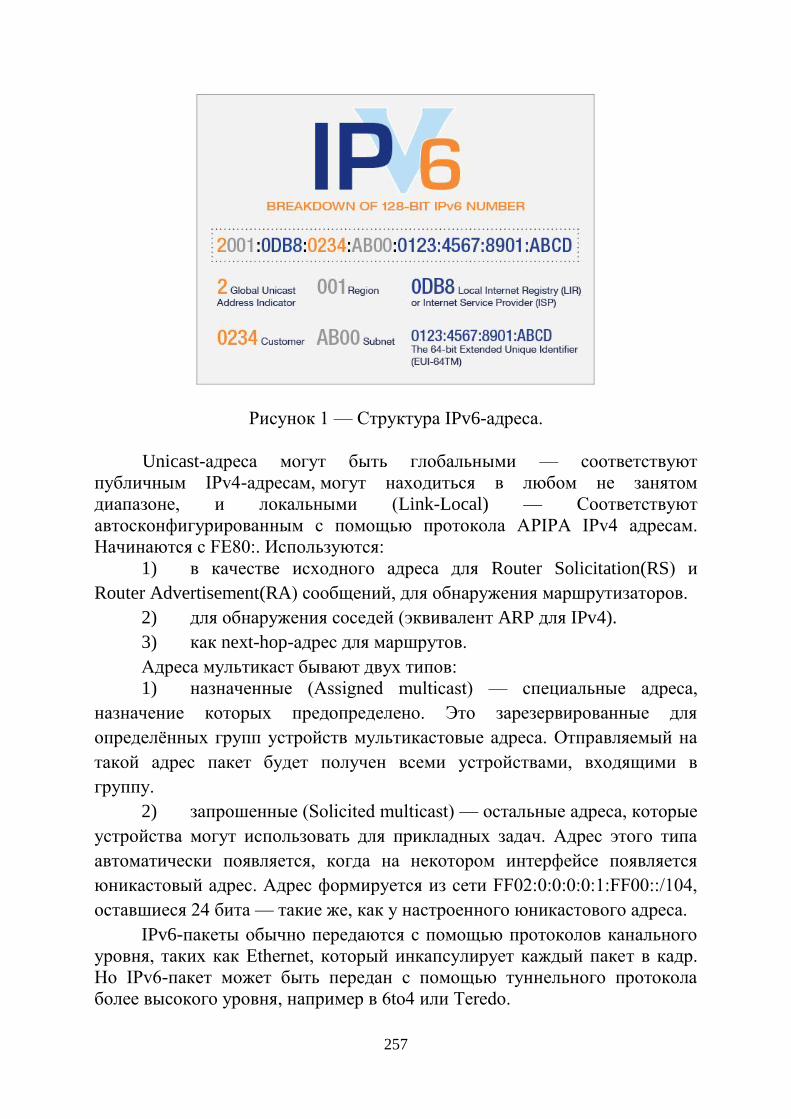
257
Рисунок 1 — Структура IPv6-адреса.
Unicast-адреса могут быть глобальными — соответствуют
публичным IPv4-адресам, могут находиться в любом не занятом
диапазоне, и локальными (Link-Local) — Соответствуют
автосконфигурированным с помощью протокола APIPA IPv4 адресам.
Начинаются с FE80:. Используются:
1) в качестве исходного адреса для Router Solicitation(RS) и
Router Advertisement(RA) сообщений, для обнаружения маршрутизаторов.
2) для обнаружения соседей (эквивалент ARP для IPv4).
3) как next-hop-адрес для маршрутов.
Адреса мультикаст бывают двух типов:
1) назначенные (Assigned multicast) — специальные адреса,
назначение которых предопределено. Это зарезервированные для
определённых групп устройств мультикастовые адреса. Отправляемый на
такой адрес пакет будет получен всеми устройствами, входящими в
группу.
2) запрошенные (Solicited multicast) — остальные адреса, которые
устройства могут использовать для прикладных задач. Адрес этого типа
автоматически появляется, когда на некотором интерфейсе появляется
юникастовый адрес. Адрес формируется из сети FF02:0:0:0:0:1:FF00::/104,
оставшиеся 24 бита — такие же, как у настроенного юникастового адреса.
IPv6-пакеты обычно передаются с помощью протоколов канального
уровня, таких как Ethernet, который инкапсулирует каждый пакет в кадр.
Но IPv6-пакет может быть передан с помощью туннельного протокола
более высокого уровня, например в 6to4 или Teredo.
258
ОЦЕНКА РЕЗУЛЬТАТИВНОСТИ СИСТЕМЫ МЕНЕДЖМЕНТА
КАЧЕСТВА ИННОВАЦИОННОГО ПРЕДПРИЯТИЯ
В настоящее время наличие системы менеджмента качества (далее –
СМК) в организации является «хорошим тоном» и большинство
уважающих себя компаний, понимая положительный эффект от внедрения
СМК, применили данный инструмент в своих организациях. После ее
внедрения возникает необходимость в оценке системы и периодическом
подтверждении того, что она работает и улучшается [1].
Улучшение системы менеджмента качества является одним из
принципов, который определяет функционирование системы организации.
Для того чтобы выяснить, как работает система, определить и
проанализировать реальную картину дел, понять результативность
предпринятых действий, успешность планирования и соответствие
продукции/ услуг требованиям потребителей необходимо оценивать СМК.
Самым распространенным способом оценки системы является мониторинг
ее результативности.
Результативность должна рассчитываться по всей цепи ключевых
функций и процессов организации. Непременной составляющей оценки
должно быть сравнение значений показателей по отдельным процессам и
функциям, которое следует применять как средство улучшения. В
результате оценки уточняется процессная модель организации,
налаживаются взаимоотношение между процессами, определяются
области для улучшения и собираются объективные данные о состоянии
процессов [2]. Однако в стандартах при декларации данного принципа не
предлагается определенного механизма комплексной оценки
результативности. Поэтому вопросы, связанные с проблемой адекватной и
объективной оценки, а также последующего анализа результативности
СМК приобретают вид задачи как теоретической, так и практической [3,4].
В качестве объекта исследования была выбрана система
менеджмента качества организации строительной отрасли, занимающаяся
разработкой и внедрением новых технологий в строительстве,
неразрушающим контролем строительно-монтажных работ.
При осуществлении перехода в организации на новую версию
стандарта ГОСТ Р ИСО 9001-2015 [1] были внесены существенные
изменения в СМК, в частности, в оценку ее результативности. Несмотря на
то, что объем, периодичность и методы оценки определяются самой
организацией, существует ряд требований, которые необходимо учесть при
проведении мониторинга результативности. В таблице 1 представлено
сравнение методик по оценке результативности СМК в организации в
зависимости от версии стандарта.
Таблица 1 – Сравнение требований к оценке результативности СМК
стандартов ИСО серии 9000.
УДК 658.562 Панина М.С. (Томск, НИ ТПУ)
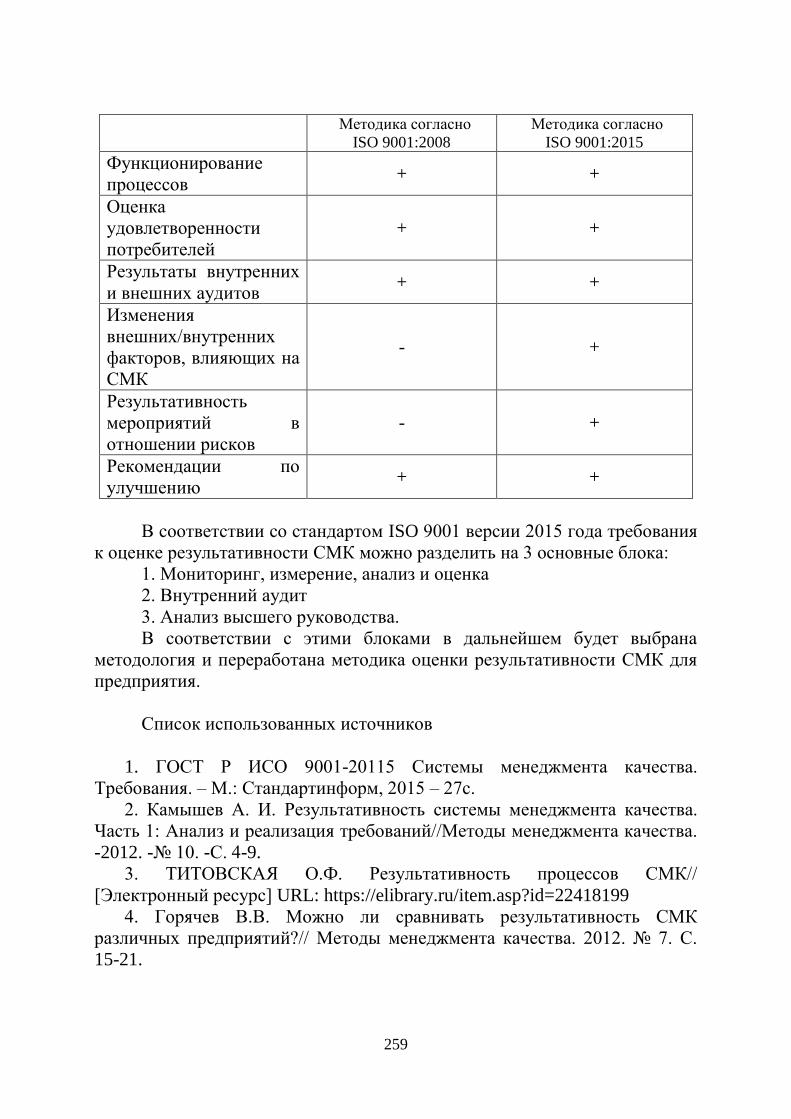
259
Методика согласно
ISO 9001:2008
Методика согласно
ISO 9001:2015
Функционирование
процессов + +
Оценка
удовлетворенности
потребителей
+ +
Результаты внутренних
и внешних аудитов + +
Изменения
внешних/внутренних
факторов, влияющих на
СМК
- +
Результативность
мероприятий в
отношении рисков
- +
Рекомендации по
улучшению + +
В соответствии со стандартом ISO 9001 версии 2015 года требования
к оценке результативности СМК можно разделить на 3 основные блока:
1. Мониторинг, измерение, анализ и оценка
2. Внутренний аудит
3. Анализ высшего руководства.
В соответствии с этими блоками в дальнейшем будет выбрана
методология и переработана методика оценки результативности СМК для
предприятия.
Список использованных источников
1. ГОСТ Р ИСО 9001-20115 Системы менеджмента качества.
Требования. – М.: Стандартинформ, 2015 – 27с.
2. Камышев А. И. Результативность системы менеджмента качества.
Часть 1: Анализ и реализация требований//Методы менеджмента качества.
-2012. -№ 10. -С. 4-9.
3. ТИТОВСКАЯ О.Ф. Результативность процессов СМК//
[Электронный ресурс] URL: https://elibrary.ru/item.asp?id=22418199
4. Горячев В.В. Можно ли сравнивать результативность СМК
различных предприятий?// Методы менеджмента качества. 2012. № 7. С.
15-21.
260
УДК 621.713.38 Полюшко Д.А. (Томск, НИТПУ)
ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ТОЛЩИНОМЕРА
ЛЕГКОСПЛАВНЫХ БУРИЛЬНЫХ ТРУБ
В нефтяной и газовой промышленности, а также в
геологоразведочных работах при освоении месторождений особое
внимание уделяется бурению скважин. Разведочное и эксплуатационное
бурение проводится вращательным способом, при котором круговое
движение породоразрушающему инструменту передаётся либо от ротора,
расположенного на поверхности, либо от забойных двигателей. В таких
видах вращательного движения особо важную роль играет бурильная
колонна. В состав бурильной колонны входят: ведущая труба,
тонкостенные бурильные трубы и утяжелённые бурильные трубы, к
нижний части которых присоединяется буровое долото.
В целях снижения веса, повышения стабильности механических
свойств при низких температурах и коррозионной стойкости чаще всего в
компоновке буровой колонны используют легкосплавные бурильные
трубы (ЛБТ). Это особый вид бурильных труб, применяющийся для
глубоких, сверхглубоких, горизонтальных и наклонных бурильных работ.
ЛБТ изготавливаются из алюминиевых сплавов методом прямого
гидравлического прессования. К легкосплавным бурильным трубам
предъявляются следующие требования [1]:
– Наружная и внутренняя поверхности труб должны быть чистыми.
На поверхности труб не допускаются трещины, раковины, расслоения,
неметаллические включения и пятна коррозии;
– Предельное отклонение толщины стенки основного сечения, при
повышенной точности изготовления, должно составлять ±0,5 мм;
– Предельное отклонение толщины стенки протекторного утолщения
должно лежать в пределах от +0,1 до -0,2 мм.
Эксплуатация бурильной колонны происходит в условиях
обязательного касания трубами стенок скважины. Это приводит к
абразивному износу стенки основного тела трубы и, как следствие, к
разрушению трубы, что, в свою очередь, приводит к аварийной ситуации.
В целях её предотвращения на предприятиях проводится периодический
контроль толщины стенок труб с применением толщиномеров.
Для контроля толщины стенок легкосплавных бурильных труб
применяют ультразвуковые, радиографические и вихретоковые
толщиномеры. Наиболее пригодными для автоматизации измерений
являются вихретоковые толщиномеры, обладающие целым рядом
преимуществ по сравнению с остальными [2]. Принцип работы таких
толщиномеров основан на возбуждении в электропроводящем объекте
вихревых токов, магнитное поле которых зависит от толщины данного
261
объекта. Для решения подобной задачи контроля толщины стенок
легкосплавных бурильных труб в НИТПУ был разработан вихретоковый
толщиномер ВТ-15.01 [2].
В данном толщиномере для возбуждения вихревых токов и
измерения их магнитного поля применяется накладной
трансформаторный преобразователь, конструктивно состоящий из трёх
катушек индуктивности. Его существенным недостатком являются
относительно большие габаритные размеры, что приводит к созданию
относительно большого диаметра зоны контроля и делает его
чувствительным к незначительным перекосам относительно объекта
контроля. В связи с этим была поставлена задача разработать
вихретоковый преобразователь (ВТП) меньших габаритов.
На первом этапе расчёта конструкции ВТП была определена частота
тока обмотки возбуждения, при которой обеспечивается необходимая
глубина проникновения электромагнитного поля в объект контроля.
Формула для приближенной оценки частоты [3]:
𝜔 =2
𝛿2𝜎𝜇 (1)
где 𝛿 – глубина проникновения электромагнитного поля, м;
𝜎 – удельная электрическая проводимость материала, См/м;
𝜇 – абсолютная магнитная проницаемость материала, Гн/м.
Габаритные размеры вихретокового преобразователя определяются
радиальными размерами обмотки обладающей наибольшим диаметром, а
также расстоянием между обмоткой возбуждения и объектом контроля.
Обмотки измерения и компенсации было решено делать одинаковых
размеров с обмоткой возбуждения. Размеры обмотки возбуждения были
подобраны исходя из условия, которое заключается в том, что диаметр
зоны контроля должен быть намного меньше минимального диаметра
трубы. По ГОСТ 23786–79 для ЛБТ минимальный диаметр трубы
составляет 54 мм [1]. Формула для расчёта диаметра зоны контроля [3]:
𝐷з.к = 2 ∙ (𝐷ср
2+ 0,75 ∙ 𝐻) (2)
где 𝐷ср – средний диаметр обмотки возбуждения, мм;
H – расстояние между обмоткой возбуждения и объектом контроля,
мм.
После того, как были подобраны необходимые размеры обмотки,
требовалось определить число витков N, которое обеспечит заданный
диаметр обмотки:
𝑁 =ℎ∙𝑙
𝑑2∙ 𝑘 (3)
где h – высота обмотки возбуждения, мм;
l – длина обмотки возбуждения, мм;
d – диаметр провода, мм;
k – коэффициент заполнения.
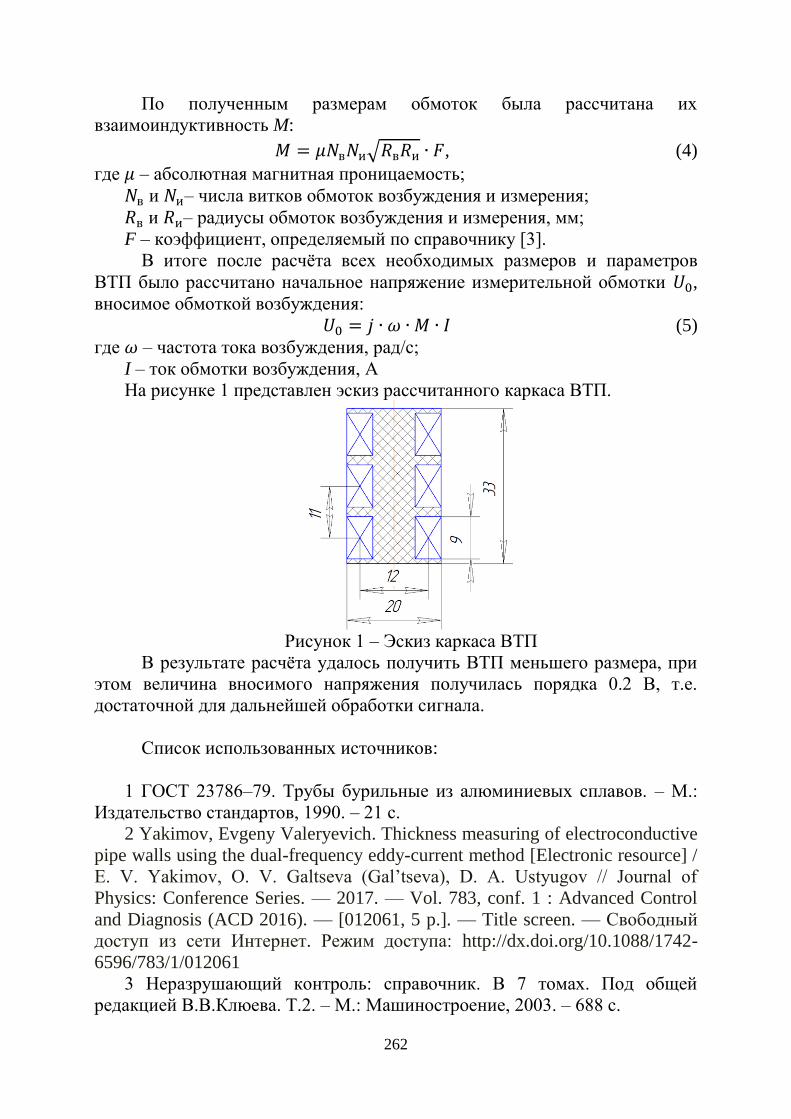
262
По полученным размерам обмоток была рассчитана их
взаимоиндуктивность M:
𝑀 = 𝜇𝑁в𝑁и√𝑅в𝑅и ∙ 𝐹, (4)
где 𝜇 – абсолютная магнитная проницаемость;
𝑁в и 𝑁и– числа витков обмоток возбуждения и измерения;
𝑅в и 𝑅и– радиусы обмоток возбуждения и измерения, мм;
F – коэффициент, определяемый по справочнику [3].
В итоге после расчёта всех необходимых размеров и параметров
ВТП было рассчитано начальное напряжение измерительной обмотки 𝑈0,
вносимое обмоткой возбуждения:
𝑈0 = 𝑗 ∙ 𝜔 ∙ 𝑀 ∙ 𝐼 (5)
где 𝜔 – частота тока возбуждения, рад/с;
I – ток обмотки возбуждения, А
На рисунке 1 представлен эскиз рассчитанного каркаса ВТП.
Рисунок 1 – Эскиз каркаса ВТП
В результате расчёта удалось получить ВТП меньшего размера, при
этом величина вносимого напряжения получилась порядка 0.2 В, т.е.
достаточной для дальнейшей обработки сигнала.
Список использованных источников:
1 ГОСТ 23786–79. Трубы бурильные из алюминиевых сплавов. – М.:
Издательство стандартов, 1990. – 21 с.
2 Yakimov, Evgeny Valeryevich. Thickness measuring of electroconductive
pipe walls using the dual-frequency eddy-current method [Electronic resource] /
E. V. Yakimov, O. V. Galtseva (Gal’tseva), D. A. Ustyugov // Journal of
Physics: Conference Series. — 2017. — Vol. 783, conf. 1 : Advanced Control
and Diagnosis (ACD 2016). — [012061, 5 p.]. — Title screen. — Свободный
доступ из сети Интернет. Режим доступа: http://dx.doi.org/10.1088/1742-
6596/783/1/012061
3 Неразрушающий контроль: справочник. В 7 томах. Под общей
редакцией В.В.Клюева. Т.2. – М.: Машиностроение, 2003. – 688 с.
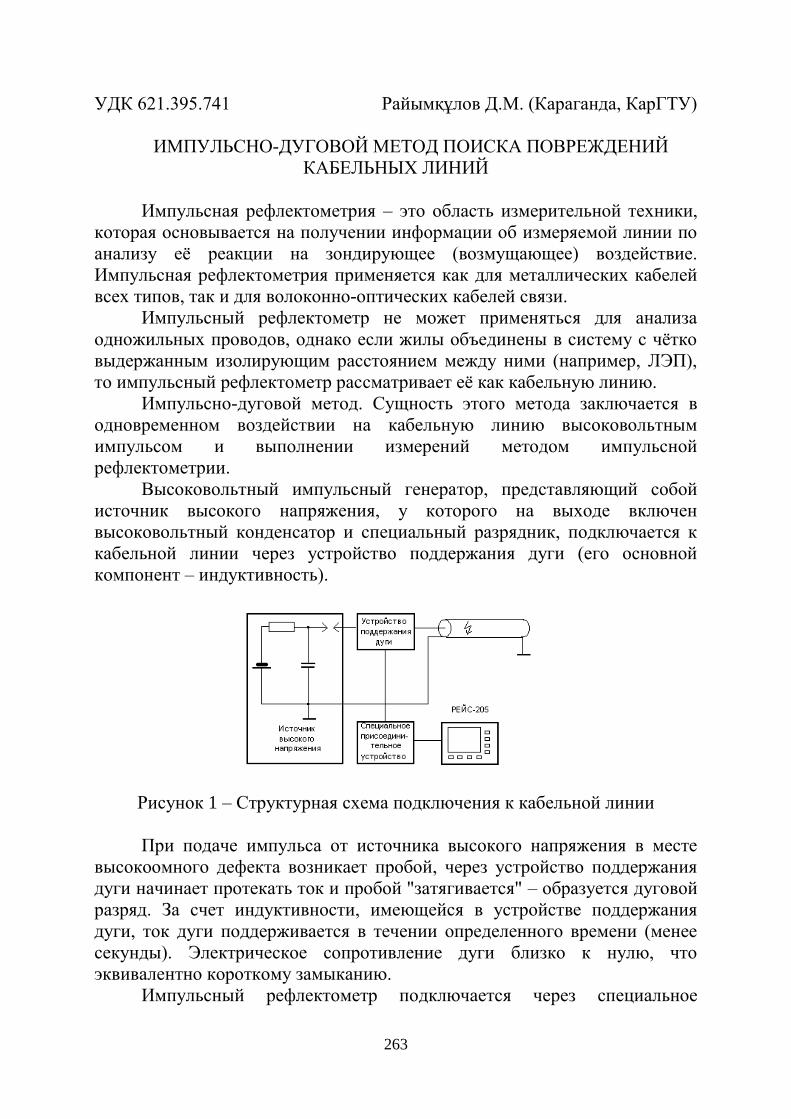
263
УДК 621.395.741 Райымқұлов Д.М. (Караганда, КарГТУ)
ИМПУЛЬСНО-ДУГОВОЙ МЕТОД ПОИСКА ПОВРЕЖДЕНИЙ
КАБЕЛЬНЫХ ЛИНИЙ
Импульсная рефлектометрия – это область измерительной техники,
которая основывается на получении информации об измеряемой линии по
анализу её реакции на зондирующее (возмущающее) воздействие.
Импульсная рефлектометрия применяется как для металлических кабелей
всех типов, так и для волоконно-оптических кабелей связи.
Импульсный рефлектометр не может применяться для анализа
одножильных проводов, однако если жилы объединены в систему с чётко
выдержанным изолирующим расстоянием между ними (например, ЛЭП),
то импульсный рефлектометр рассматривает её как кабельную линию.
Импульсно-дуговой метод. Сущность этого метода заключается в
одновременном воздействии на кабельную линию высоковольтным
импульсом и выполнении измерений методом импульсной
рефлектометрии.
Высоковольтный импульсный генератор, представляющий собой
источник высокого напряжения, у которого на выходе включен
высоковольтный конденсатор и специальный разрядник, подключается к
кабельной линии через устройство поддержания дуги (его основной
компонент – индуктивность).
Рисунок 1 – Структурная схема подключения к кабельной линии
При подаче импульса от источника высокого напряжения в месте
высокоомного дефекта возникает пробой, через устройство поддержания
дуги начинает протекать ток и пробой "затягивается" – образуется дуговой
разряд. За счет индуктивности, имеющейся в устройстве поддержания
дуги, ток дуги поддерживается в течении определенного времени (менее
секунды). Электрическое сопротивление дуги близко к нулю, что
эквивалентно короткому замыканию.
Импульсный рефлектометр подключается через специальное
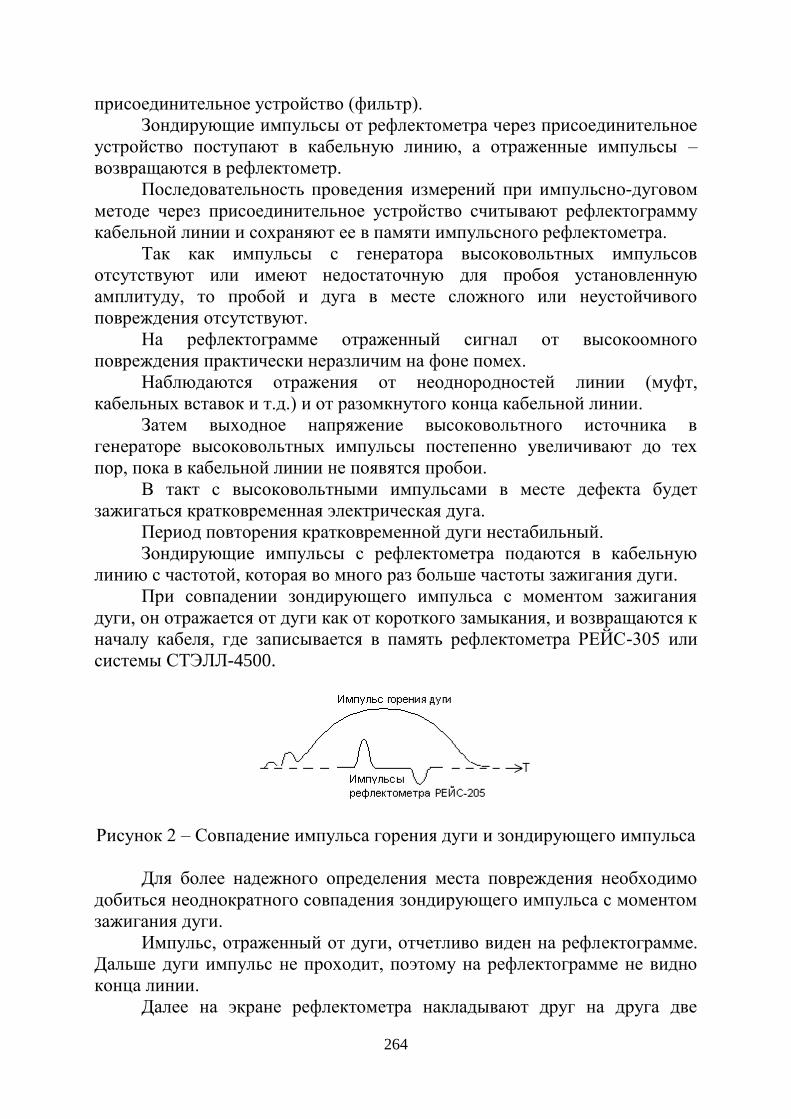
264
присоединительное устройство (фильтр).
Зондирующие импульсы от рефлектометра через присоединительное
устройство поступают в кабельную линию, а отраженные импульсы –
возвращаются в рефлектометр.
Последовательность проведения измерений при импульсно-дуговом
методе через присоединительное устройство считывают рефлектограмму
кабельной линии и сохраняют ее в памяти импульсного рефлектометра.
Так как импульсы с генератора высоковольтных импульсов
отсутствуют или имеют недостаточную для пробоя установленную
амплитуду, то пробой и дуга в месте сложного или неустойчивого
повреждения отсутствуют.
На рефлектограмме отраженный сигнал от высокоомного
повреждения практически неразличим на фоне помех.
Наблюдаются отражения от неоднородностей линии (муфт,
кабельных вставок и т.д.) и от разомкнутого конца кабельной линии.
Затем выходное напряжение высоковольтного источника в
генераторе высоковольтных импульсы постепенно увеличивают до тех
пор, пока в кабельной линии не появятся пробои.
В такт с высоковольтными импульсами в месте дефекта будет
зажигаться кратковременная электрическая дуга.
Период повторения кратковременной дуги нестабильный.
Зондирующие импульсы с рефлектометра подаются в кабельную
линию с частотой, которая во много раз больше частоты зажигания дуги.
При совпадении зондирующего импульса с моментом зажигания
дуги, он отражается от дуги как от короткого замыкания, и возвращаются к
началу кабеля, где записывается в память рефлектометра РЕЙС-305 или
системы СТЭЛЛ-4500.
Рисунок 2 – Совпадение импульса горения дуги и зондирующего импульса
Для более надежного определения места повреждения необходимо
добиться неоднократного совпадения зондирующего импульса с моментом
зажигания дуги.
Импульс, отраженный от дуги, отчетливо виден на рефлектограмме.
Дальше дуги импульс не проходит, поэтому на рефлектограмме не видно
конца линии.
Далее на экране рефлектометра накладывают друг на друга две
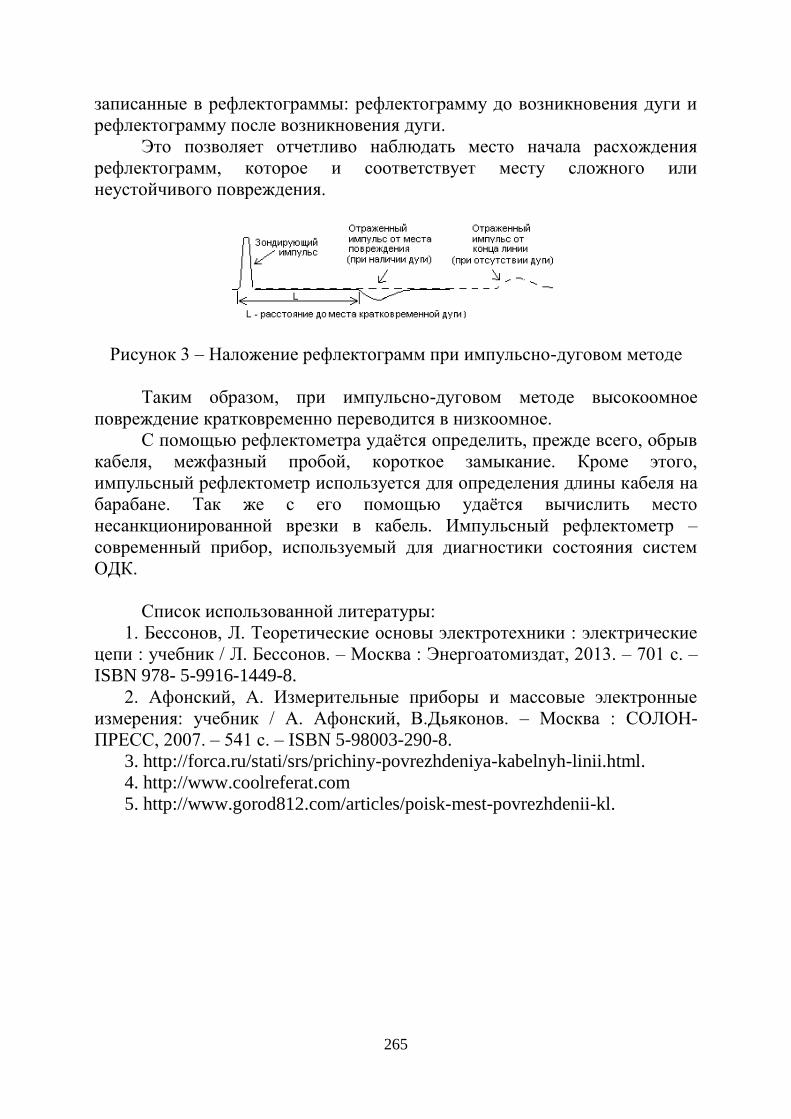
265
записанные в рефлектограммы: рефлектограмму до возникновения дуги и
рефлектограмму после возникновения дуги.
Это позволяет отчетливо наблюдать место начала расхождения
рефлектограмм, которое и соответствует месту сложного или
неустойчивого повреждения.
Рисунок 3 – Наложение рефлектограмм при импульсно-дуговом методе
Таким образом, при импульсно-дуговом методе высокоомное
повреждение кратковременно переводится в низкоомное.
С помощью рефлектометра удаётся определить, прежде всего, обрыв
кабеля, межфазный пробой, короткое замыкание. Кроме этого,
импульсный рефлектометр используется для определения длины кабеля на
барабане. Так же с его помощью удаётся вычислить место
несанкционированной врезки в кабель. Импульсный рефлектометр –
современный прибор, используемый для диагностики состояния систем
ОДК.
Список использованной литературы:
1. Бессонов, Л. Теоретические основы электротехники : электрические
цепи : учебник / Л. Бессонов. – Москва : Энергоатомиздат, 2013. – 701 с. –
ISBN 978- 5-9916-1449-8.
2. Афонский, А. Измерительные приборы и массовые электронные
измерения: учебник / А. Афонский, В.Дьяконов. – Москва : СОЛОН-
ПРЕСС, 2007. – 541 с. – ISBN 5-98003-290-8.
3. http://forca.ru/stati/srs/prichiny-povrezhdeniya-kabelnyh-linii.html.
4. http://www.coolreferat.com
5. http://www.gorod812.com/articles/poisk-mest-povrezhdenii-kl.
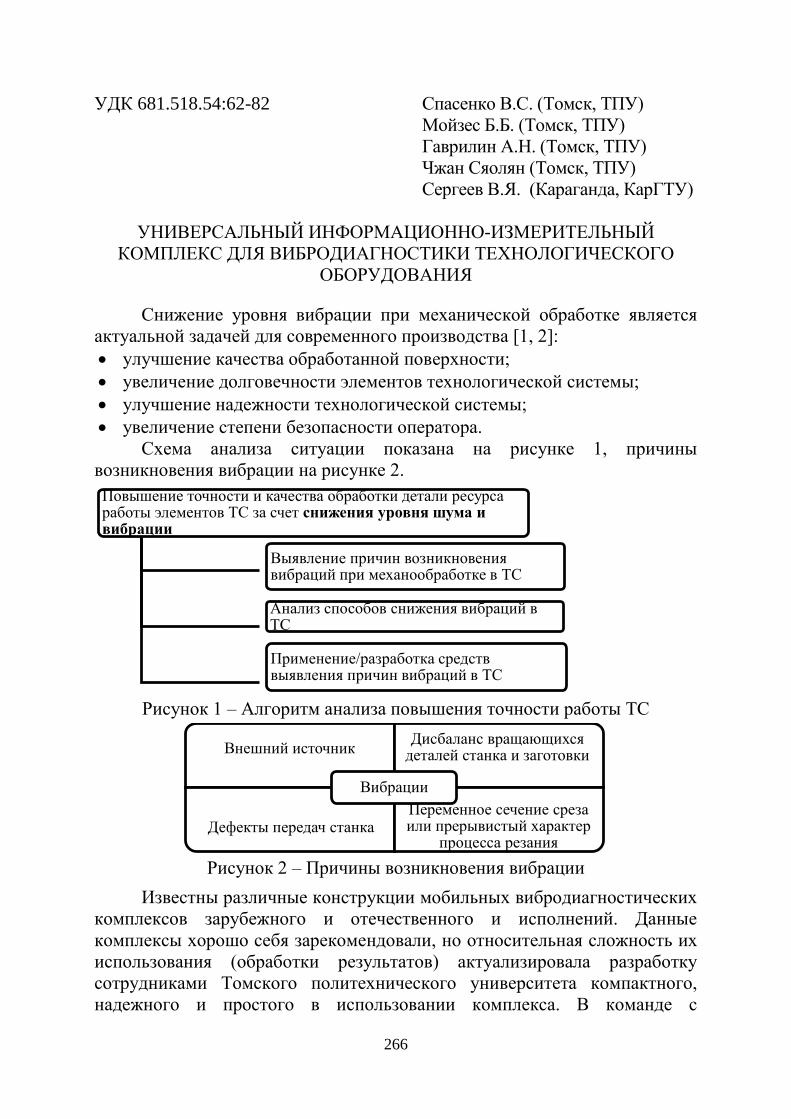
266
УДК 681.518.54:62-82 Спасенко В.С. (Томск, ТПУ)
Мойзес Б.Б. (Томск, ТПУ)
Гаврилин А.Н. (Томск, ТПУ)
Чжан Сяолян (Томск, ТПУ)
Сергеев В.Я. (Караганда, КарГТУ)
УНИВЕРСАЛЬНЫЙ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЙ
КОМПЛЕКС ДЛЯ ВИБРОДИАГНОСТИКИ ТЕХНОЛОГИЧЕСКОГО
ОБОРУДОВАНИЯ
Снижение уровня вибрации при механической обработке является
актуальной задачей для современного производства [1, 2]:
улучшение качества обработанной поверхности;
увеличение долговечности элементов технологической системы;
улучшение надежности технологической системы;
увеличение степени безопасности оператора.
Схема анализа ситуации показана на рисунке 1, причины
возникновения вибрации на рисунке 2.
Рисунок 1 – Алгоритм анализа повышения точности работы ТС
Рисунок 2 – Причины возникновения вибрации
Известны различные конструкции мобильных вибродиагностических
комплексов зарубежного и отечественного и исполнений. Данные
комплексы хорошо себя зарекомендовали, но относительная сложность их
использования (обработки результатов) актуализировала разработку
сотрудниками Томского политехнического университета компактного,
надежного и простого в использовании комплекса. В команде с
Повышение точности и качества обработки детали ресурса работы элементов ТС за счет снижения уровня шума и вибрации
Выявление причин возникновения вибраций при механообработке в ТС
Анализ способов снижения вибраций в ТС
Применение/разработка средств выявления причин вибраций в ТС
Внешний источникДисбаланс вращающихся
деталей станка и заготовки
Дефекты передач станкаПеременное сечение среза или прерывистый характер
процесса резания
Вибрации
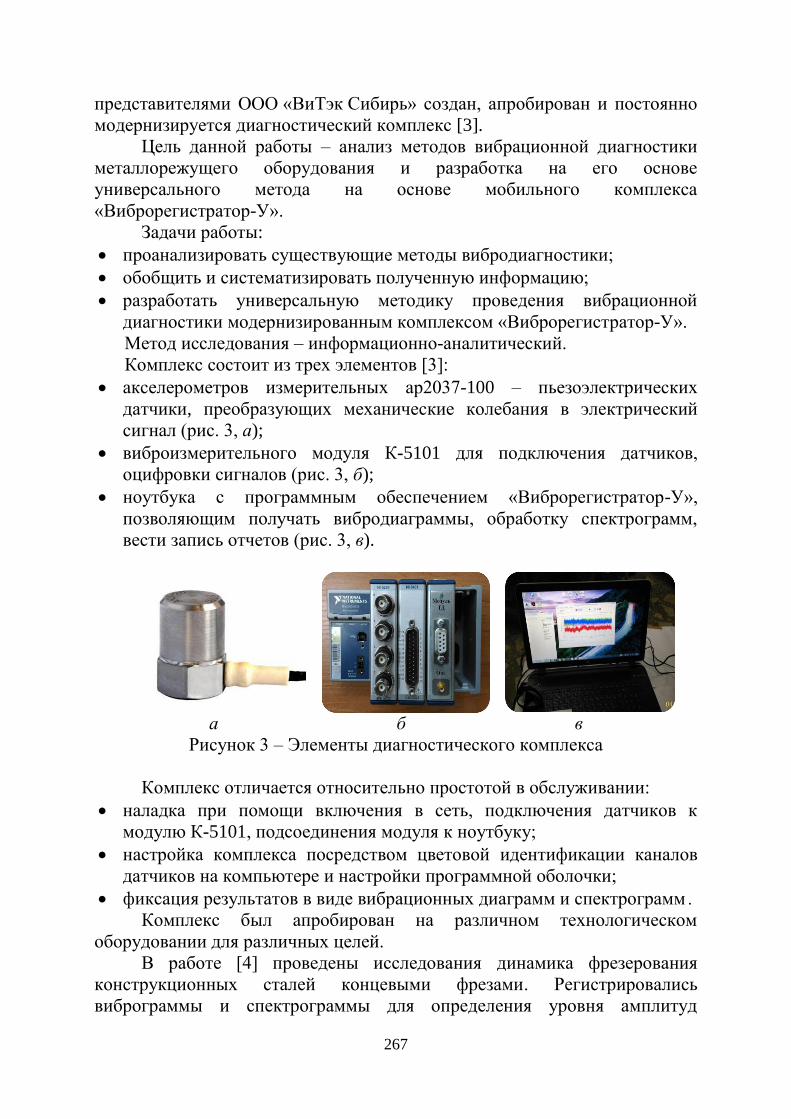
267
представителями ООО «ВиТэк Сибирь» создан, апробирован и постоянно
модернизируется диагностический комплекс [3].
Цель данной работы – анализ методов вибрационной диагностики
металлорежущего оборудования и разработка на его основе
универсального метода на основе мобильного комплекса
«Виброрегистратор-У».
Задачи работы:
проанализировать существующие методы вибродиагностики;
обобщить и систематизировать полученную информацию;
разработать универсальную методику проведения вибрационной
диагностики модернизированным комплексом «Виброрегистратор-У».
Метод исследования – информационно-аналитический.
Комплекс состоит из трех элементов [3]:
акселерометров измерительных ар2037-100 – пьезоэлектрических
датчики, преобразующих механические колебания в электрический
сигнал (рис. 3, а);
виброизмерительного модуля К-5101 для подключения датчиков,
оцифровки сигналов (рис. 3, б);
ноутбука с программным обеспечением «Виброрегистратор-У»,
позволяющим получать вибродиаграммы, обработку спектрограмм,
вести запись отчетов (рис. 3, в).
а б в
Рисунок 3 – Элементы диагностического комплекса
Комплекс отличается относительно простотой в обслуживании:
наладка при помощи включения в сеть, подключения датчиков к
модулю К-5101, подсоединения модуля к ноутбуку;
настройка комплекса посредством цветовой идентификации каналов
датчиков на компьютере и настройки программной оболочки;
фиксация результатов в виде вибрационных диаграмм и спектрограмм.
Комплекс был апробирован на различном технологическом
оборудовании для различных целей.
В работе [4] проведены исследования динамика фрезерования
конструкционных сталей концевыми фрезами. Регистрировались
виброграммы и спектрограммы для определения уровня амплитуд
268
вибрации при изменении режимов резания различными концевыми
фрезами. Исследования, представленные в работа [5], продемонстрировали
эффективность диагностики при обработке тел вращения, на примере
токарной обработке. Следующая работа [6] акцентировала применение
комплекса для вибродиагностики фрезерного станка при обработке
призматической детали. Дальнейшим развитием в аспекте применения
мобильного диагностического комплекса «Виброрегистратор-У» стало
диагностирование элементов гидропривода [7].
Таким образом, «Виброрегистратор-У» – универсальный
информационно-измерительный комплекс для вибродиагностики
технологического оборудования
Список использованных источников
1. Диагностика технологической системы «станок-приспособление-
инструмент-деталь»: учебное пособие / сост.: А.Н. Гаврилин, Б.Б. Мойзес;
Томский политехнический университет. – Томск: Изд-во Томского
политехнического университета, 2016. – 144 с.
2. Гаврилин А.Н., Мойзес Б.Б., Черкасов А.И. Конструктивные методы
повышения виброустойчивости металлорежущего оборудования //
Контроль. Диагностика. – 2013. – № 13. – С. 82-87.
3. Gavrilin A., Moyzes B., Cherkasov A., Mel′nov K., Zhang X. Mobile
complex for rapid diagnosis of the technological system elements // MATEC
Web of Conferences. 2016. – Vol. 79 – 7 p (01078).
4. Гаврилин А.Н., Коровин Г.И., Рожков П.С. Динамика фрезерования
конструкционных сталей концевыми фрезами // Известия Томского
политехнического университета. Инжиниринг георесурсов. – 2013. – Т.
323. № 2. – С. 56-58.
5. Гаврилин А.Н., Мойзес Б.Б. Метод оперативной диагностики
металлорежущего станка для обработки заготовок типа тел вращения //
Контроль. Диагностика. – 2013. – № 9. – С. 81-84.
6. Иванов С.Е., Гаврилин А.Н., Козырев А.Н., Мойзес Б.Б. Повышение
эффективности фрезерной обработки путём снижения ударно-
вибрационных нагрузок // Ползуновский вестник. – 2018. – № 1. – С. 77-81.
7. Сун Шичэнь и др. Развитие информационных технологий при
диагностике агрегатов гидравлического привода // Сборник трудов XV
Международной научно-практической конференции студентов, аспирантов
и молодых учёных, 04-07 декабря 2017 г., г. Томск; Национальный
исследовательский Томский политехнический университет; под ред. С. С.
Михалевич [и др.]. – Томск: Изд-во ТПУ, 2017. – С. 197-198.
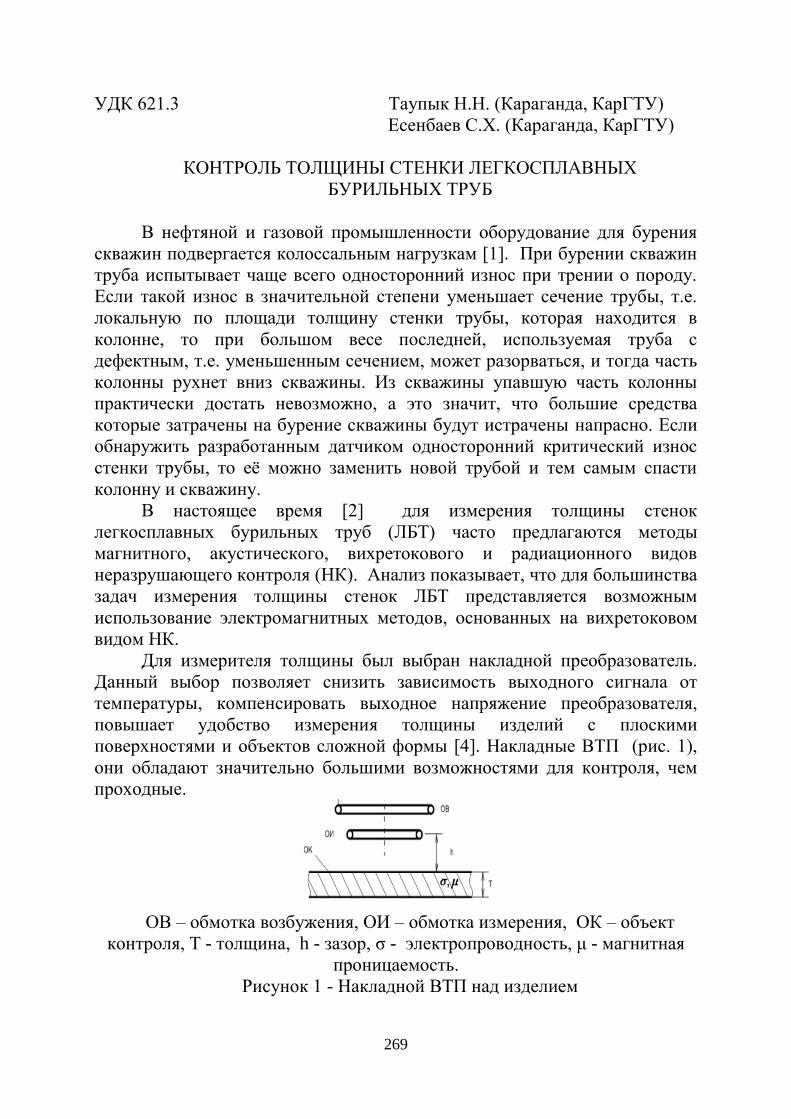
269
УДК 621.3 Таупык Н.Н. (Караганда, КарГТУ)
Есенбаев С.Х. (Караганда, КарГТУ)
КОНТРОЛЬ ТОЛЩИНЫ СТЕНКИ ЛЕГКОСПЛАВНЫХ
БУРИЛЬНЫХ ТРУБ
В нефтяной и газовой промышленности оборудование для бурения
скважин подвергается колоссальным нагрузкам [1]. При бурении скважин
труба испытывает чаще всего односторонний износ при трении о породу.
Если такой износ в значительной степени уменьшает сечение трубы, т.е.
локальную по площади толщину стенки трубы, которая находится в
колонне, то при большом весе последней, используемая труба с
дефектным, т.е. уменьшенным сечением, может разорваться, и тогда часть
колонны рухнет вниз скважины. Из скважины упавшую часть колонны
практически достать невозможно, а это значит, что большие средства
которые затрачены на бурение скважины будут истрачены напрасно. Если
обнаружить разработанным датчиком односторонний критический износ
стенки трубы, то её можно заменить новой трубой и тем самым спасти
колонну и скважину.
В настоящее время [2] для измерения толщины стенок
легкосплавных бурильных труб (ЛБТ) часто предлагаются методы
магнитного, акустического, вихретокового и радиационного видов
неразрушающего контроля (НК). Анализ показывает, что для большинства
задач измерения толщины стенок ЛБТ представляется возможным
использование электромагнитных методов, основанных на вихретоковом
видом НК.
Для измерителя толщины был выбран накладной преобразователь.
Данный выбор позволяет снизить зависимость выходного сигнала от
температуры, компенсировать выходное напряжение преобразователя,
повышает удобство измерения толщины изделий с плоскими
поверхностями и объектов сложной формы [4]. Накладные ВТП (рис. 1),
они обладают значительно большими возможностями для контроля, чем
проходные.
ОВ – обмотка возбужения, ОИ – обмотка измерения, ОК – объект
контроля, Т - толщина, h - зазор, σ - электропроводность, μ - магнитная
проницаемость.
Рисунок 1 - Накладной ВТП над изделием
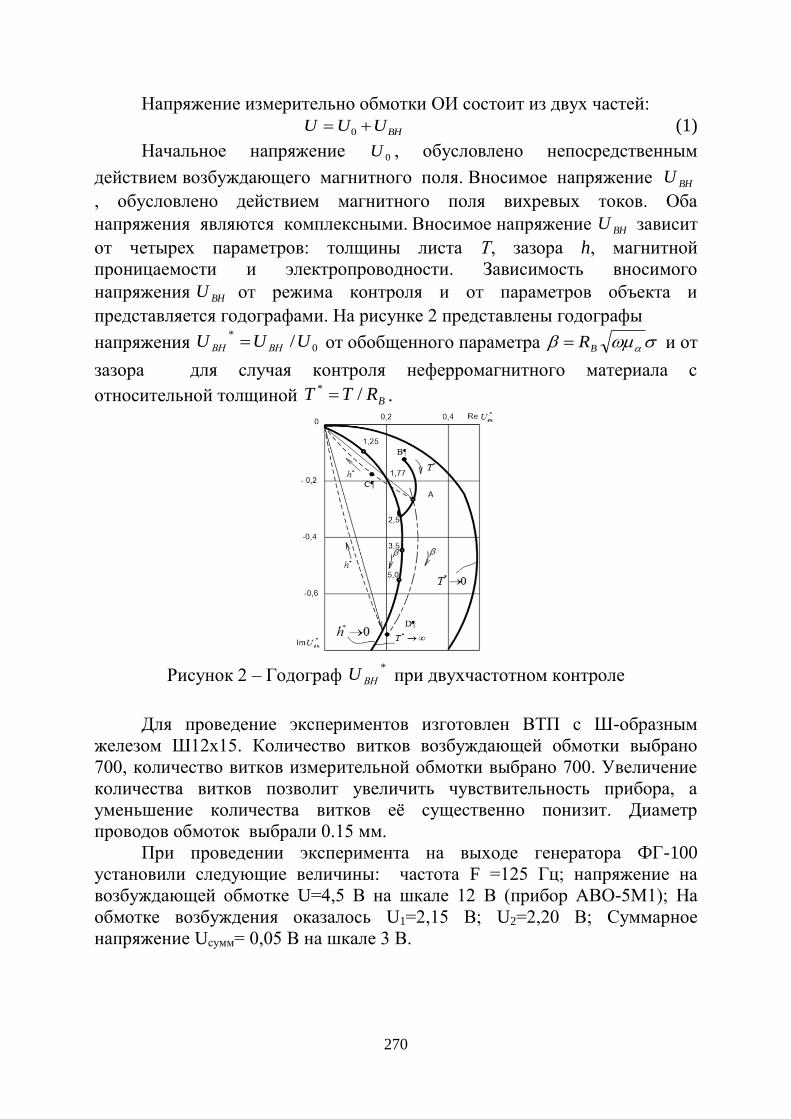
270
Напряжение измерительно обмотки ОИ состоит из двух частей:
BHUUU 0 (1)
Начальное напряжение 0U , обусловлено непосредственным
действием возбуждающего магнитного поля. Вносимое напряжение BHU
, обусловлено действием магнитного поля вихревых токов. Оба
напряжения являются комплексными. Вносимое напряжение BHU зависит
от четырех параметров: толщины листа Т, зазора h, магнитной
проницаемости и электропроводности. Зависимость вносимого
напряжения BHU от режима контроля и от параметров объекта и
представляется годографами. На рисунке 2 представлены годографы
напряжения 0
*/UUU ВНВН от обобщенного параметра BR и от
зазора для случая контроля неферромагнитного материала с
относительной толщиной BRTT /* .
Рисунок 2 – Годограф *
ВНU при двухчастотном контроле
Для проведение экспериментов изготовлен ВТП с Ш-образным
железом Ш12х15. Количество витков возбуждающей обмотки выбрано
700, количество витков измерительной обмотки выбрано 700. Увеличение
количества витков позволит увеличить чувствительность прибора, а
уменьшение количества витков её существенно понизит. Диаметр
проводов обмоток выбрали 0.15 мм.
При проведении эксперимента на выходе генератора ФГ-100
установили следующие величины: частота F =125 Гц; напряжение на
возбуждающей обмотке U=4,5 В на шкале 12 В (прибор АВО-5М1); На
обмотке возбуждения оказалось U1=2,15 В; U2=2,20 В; Суммарное
напряжение Uсумм= 0,05 В на шкале 3 В.
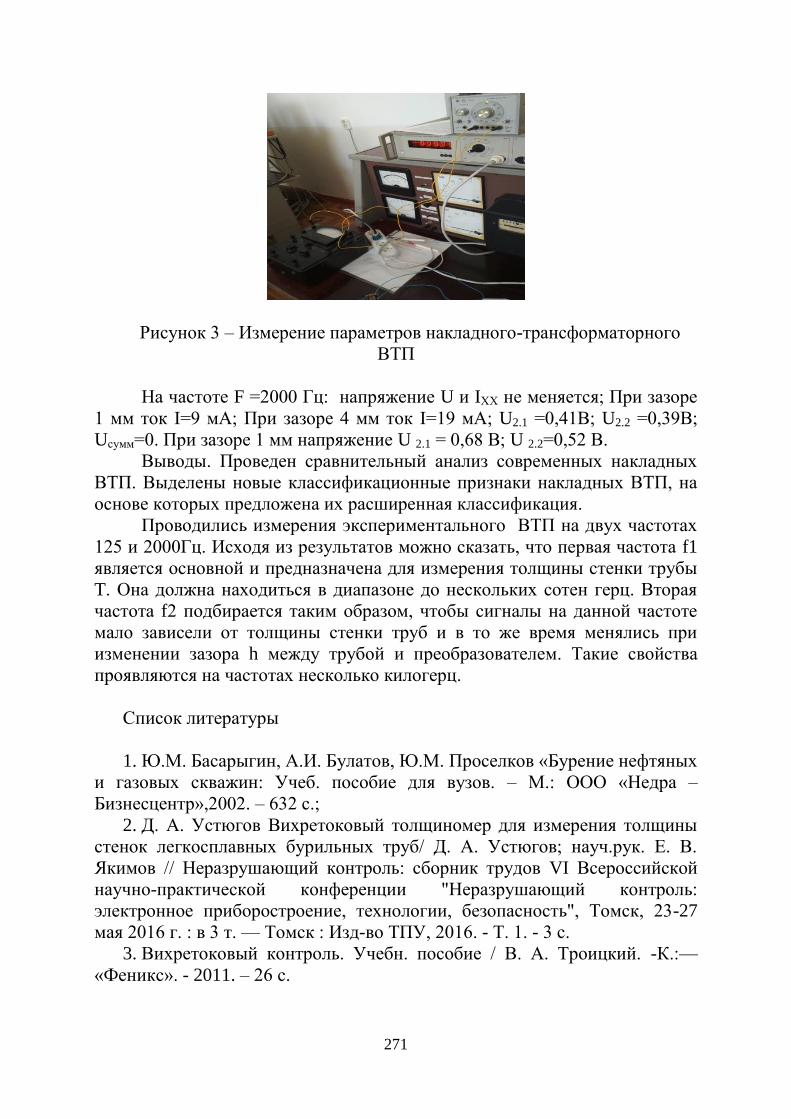
271
Рисунок 3 – Измерение параметров накладного-трансформаторного
ВТП
На частоте F =2000 Гц: напряжение U и IХХ не меняется; При зазоре
1 мм ток I=9 мА; При зазоре 4 мм ток I=19 мА; U2.1 =0,41В; U2.2 =0,39В;
Uсумм=0. При зазоре 1 мм напряжение U 2.1 = 0,68 В; U 2.2=0,52 В.
Выводы. Проведен сравнительный анализ современных накладных
ВТП. Выделены новые классификационные признаки накладных ВТП, на
основе которых предложена их расширенная классификация.
Проводились измерения экспериментального ВТП на двух частотах
125 и 2000Гц. Исходя из результатов можно сказать, что первая частота f1
является основной и предназначена для измерения толщины стенки трубы
T. Она должна находиться в диапазоне до нескольких сотен герц. Вторая
частота f2 подбирается таким образом, чтобы сигналы на данной частоте
мало зависели от толщины стенки труб и в то же время менялись при
изменении зазора h между трубой и преобразователем. Такие свойства
проявляются на частотах несколько килогерц.
Список литературы
1. Ю.М. Басарыгин, А.И. Булатов, Ю.М. Проселков «Бурение нефтяных
и газовых скважин: Учеб. пособие для вузов. – М.: ООО «Недра –
Бизнесцентр»,2002. – 632 с.;
2. Д. А. Устюгов Вихретоковый толщиномер для измерения толщины
стенок легкосплавных бурильных труб/ Д. А. Устюгов; науч.рук. Е. В.
Якимов // Неразрушающий контроль: сборник трудов VI Всероссийской
научно-практической конференции "Неразрушающий контроль:
электронное приборостроение, технологии, безопасность", Томск, 23-27
мая 2016 г. : в 3 т. — Томск : Изд-во ТПУ, 2016. - Т. 1. - 3 с.
3. Вихретоковый контроль. Учебн. пособие / В. А. Троицкий. -К.:—
«Феникс». - 2011. – 26 с.
272
УДК 537. 52 Толеу А.Т. (Караганда, КарГТУ)
Валуйская А.Н. (Караганда, КарГТУ)
Есенжолов У.С. (Караганда, КарГТУ)
5G - МОБИЛЬНАЯ СЕТЬ НОВОГО ПОКОЛЕНИЯ
Мобильная связь давно перестала быть просто звонками и sms.
Сейчас главная задача мобильных сетей – беспроводная передача данных,
подключение к интернету. Каждый день мы слышим о 3G, 4G, 5G. А вот
что это такое – знают не все. G – это английская заглавная буква,
обозначающая слово Generation («поколение»). Все мобильные сети
делятся на разные поколения:
3G - 3,6 МБит/с (скорость передачи данных в сети), голосовые и
видео-звонки через интернет, музыка и просмотр роликов онлайн.
4G - 1 ГБит/с, увеличенная площадь покрытия Wi-Fi, просмотр
фильмов, быстрая передача файлов.
5G - 20 ГБит/с, принцип работы мобильных устройств «всегда
онлайн», низкое энергопотребление, альтернатива проводному интернету.
5G (fifth generation) — это пятое поколение технологий мобильной связи с
огромной скоростью передачи данных — несколько гигабит в секунду.
Недавно в Швеции установили очередной рекорд — 15 Гбит/с. Это в 40 раз
быстрее действующих беспроводных сетей.
Еще 5G уменьшает задержку сигнала (в зависимости от среды
распространения и используемой частоты сигнал будет приходить к
получателю с той или иной задержкой) до одной миллисекунды — против
10 миллисекунд в сетях 4G и 100 миллисекунд в 3G.
Альянс мобильных сетей следующего поколения (NGMN)
определяет следующие требования, которым должны соответствовать
стандарты 5G:
скорость передачи данных десятки Мбит/с для десятков тысяч
пользователей одновременно;
скорость передачи данных 100 Мбит/с в условиях мегаполисов;
скорость передачи данных 1 Гбит/с одновременно для многих
пользователей на одном этаже;
одновременное подключение сотен тысяч беспроводных датчиков;
более высокая спектральная эффективность по сравнению с 4G;
улучшение охвата;
повышение эффективности передачи сигнала;
значительное снижение задержки по сравнению с LTE.
По оценкам представителей NGMN, 5G-сети для бизнес-аудитории и
рядовых пользователей должны быть развернуты в 2018 году. Так что
наряду с перечисленными качественными характеристиками, 5G-сети
273
создадут новые возможности для пользователей, такие как Интернет
вещей, а также широкополосные медиасервисы и связь в реальном
времени в районах природных катастроф. Поскольку базовые станции и
мобильные устройства потребуют для 5G-стандартов новых и более
быстрых процессоров и программных приложений, ведущие
производители носителей информации, чипмейкеры, такие как Advanced
Semiconductor Engineering (ASE) и Amkor Technology, Inc., готовят
производство соответствующей продукции.
Первые тесты технологии 5G проведены в России в июне 2016
оператором связи «МегаФон» совместно с Huawei. В сентябре МТС при
тестировании на канале связи с частотой 4,65—4,85 ГГц была достигнута
скорость передачи данных 4,5 Гбит/с при полосе 200 МГц.
22 сентября 2016 года «МегаФон» совместно c Nokia на бизнес-
саммите в Нижнем Новгороде запустили мобильный 5G-интернет. В ходе
испытаний была достигнута скорость передачи данных 4,94 Гбит/с. Через
построенную сеть передавался панорамный ролик в разрешении 8К Ultra
HD (7680×4320 точек).
1 июня 2017 года «МегаФон» совместно с Huawei показали
возможность передачи данных в сетях 5G со скоростью 35 Гбит/с на
частоте 70 ГГц.
«Telecom Italia Mobile» планирует в 2018 году запустить мобильную
сеть пятого поколения в Сан-Марино, обновив собственную 4,5G-
инфраструктуру. Отдельные элементы сети 5G испытываются в Турине и
Милане, но в Сан-Марино у оператора больше возможностей пользования
эфиром из-за меньшей зарегулированности.
В августе 2017 года «МТС» совместно с Nokia подготовили
технологическую платформу (МГТС 10G-PON[en]) для подключения
базовых станций 5G в Москве.
«Национальный исследовательский институт технологий и связи»
проводит испытания и тестирования сетей 5G на российском
оборудовании. НИИТС занимается анализом радиочастотного спектра для
стандарта 5G.
28 ноября 2017 года узбекистанский мобильный оператор
«Uzmobile» совместно с ZTE на базе лаборатории Центра развития
телекоммуникаций и персонала завершил лабораторный тест 5G в
Ташкенте.
Подводя итог, можно сказать, если опираться на то, что новые
поколения стандартов сотовой связи появлялись в среднем каждые 10 лет,
с первого 1G (NMT) 1981 года, 2G (GSM) 1992 года и 3G (W-
CDMA/FOMA), появившегося в 2001 году, 4G (3GPP Long Term Evolution,
WiMAX) в 2010 году, внедрение международного стандарта 5G можно
ожидать в районе 2018 года.
274
ӘОЖ 681.2:637.54-512.122 Турсунова А.Е. (Қарағанды, ҚарМТУ)
Искаков М.Б., (Қарағанды, ҚарМТУ)
ҚҰС ФАБРИКАСЫ ҒИМАРАТЫНДАҒЫ ТЕМПЕРАТУРАНЫ
БАҒАЛАУДЫҢ МАТЕМАТИКАЛЫҚ МОДЕЛІ
Мал шаруашылық және құс шаруашылық ғимараттарындағы
температура, ылғалдылық, ауаның басқа да физикалық және химиялық
қасиеттері жылдың түрлі мезгілдерінде, айларында және тіпті
тәуліктерінде әр түрлі факторлардың әсеріне ұшырауы мүмкін:
метрологиялық шарттардың өзгерісі, вентиляция-жылыту
құрылғыларының жұмыс өнімділігі, тәулік уақыты және т.б. Микроклимат
жануарларға тікелей және жанама түрде әсер етеді, бірақ жануарлар да ауа
ортасының құрамы мен қасиетін айтарлықтай дәрежеде өзгерте алады.
Ауа температурасы жануарлар мен құстар ағзасының жағдайына,
әсіресе олардың термореттелуіне әсер ететін, сыртқы ортаның физикалық
параметрлерінің бірі болып табылады. Ғимараттағы төмен температура,
жоғары ылғалдылық және ауа қозғалысының жылдамдығы жануар
ағзасының конвекция жолымен жылу шығаруына, бұл өз кезегінде сыртқы
орта мен ағза арасындағы жылулық тепе-теңдіктің бұзылуына және оның
резистенттілігінің төмендеуіне әкеледі [1]. Тәулік бойғы температураның
кенет өзгерісі жануарлар мен құстар ағзасына жағымсыз әсер етеді.
Оптималды температура аса тиімді.
Құс денсаулығына температуралық көрсеткіштердің әсері, құстарда
термореттеу жүйесінің жеткіліксіз жетілуімен түсіндіріледі, себебі онда
тер бездері жоқ және жылу берілу негізінен тыныс алу кезінде судың
булануы есебінен жүзеге асады.
Зоотехникалық талаптар құс қорасындағы ауа температурасының
келесі ең оңтайлы диапазонын бекітеді: жұмыртқа тұқымды ересек құс
үшін 12-16°С, бройлерлер үшін, оларды өсірудің соңғы кезеңінде – 18 -
23°С, үйректер мен қаздар үшін – 14-16°С [2]. Мұндай температура
тәртібінде құс ағзасында қарқынды метаболизмдік үрдістер жүреді,
энергетикалық ресурстардың жұмсалуы тиімді іске асады, құсқа өз ағзасы
мен ғимараттағы ауа ортасымен жылулық тепе-теңдікті сақтау оңайырақ
болады.
Көптеген зерттеулерде көрсетілгендей, құс шаруашылығы
ғимараттарында микроклиматтың қалыптасуы ішкі және сыртқы
факторлардың әсерінен жүзеге асады. Құс шаруашылығы ғимаратына
түсетін жылуды сандық бағалау үшін сәйкес талдау жүргізуге болады.
Құс шаруашылығы ғимаратындағы жылудың түсу түріне қарай
оларды екі топқа бөлуге болады [3]. Олардың біріншісіне тұрақты жылу
ағынын (Qs, Вт) жатқызады:
Qs= Qқ+ Qa+ Qжж+ Qтқ
275
мұндағы Qқ – құстардан бөлінетін жылу, Вт;
Qa – құс фермасында жұмыс істейтін адамдардан бөлінетін жылу, Вт;
Qжж – жасанды жарықтандыру көздерінен бөлінетін жылу, Вт;
Qтқ – технологиялық қондырғылардан бөлінетін жылу, Вт.
Жылу түсімінің екінші тобы ғимарат іші мен сыртындағы
температуралық көрсеткіштердің айырмашылығымен байланысты. Жылу
ағыны температурасы жоғары ортадан төмен температуралы ортаға өтетіні
белгілі. Ақиқатында, бұл жылу ғимараттың ауа ортасынан далаға немесе
кері бағытта құс зауыты ғимаратының қабырғалары мен шатыры арқылы
беріледі. Бұл жылу ағынының тұрақтанған – стационарлы тәртібі кезіндегі
қуатын келесі формула бойынша анықтауға болады:
мұнда kj – құс ғимараты құрылыс қоршауының і-лік жылу берілу
коэффициенті, Вт/(м2·К);
tc – ғимарат сыртындағы, ал tі – ішіндегі температура, °С;
Fj – құрылыс қоршауының сегментінің і-лік ауданы, м2.
Берілген жылу ағынының белгісі ғимараттағы және даладағы ауа
температурасының мәніне тәуелді. Осылайша, болғанда ағын мәні оң
болады, яғни даланың айтарлықтай жылы ауасы ғимарат құрылысының
қоршаулары арқылы оған өз жылуын береді, олай болмаған жағдайда
жылу ағыны – теріс болады, жылу ғимараттың қабырғалары мен терезелері
арқылы далаға шығады.
kv – суммасын ғимарат құрылысы қоршаулары арқылы жылу
берілудің қосынды коэффициенті деп атайды, Вт/К. Ол келесі формула
арқылы есептеледі
Қабырғалары кірпіштен жасалған, ағаш жабулары бар, сылақ
қабатының қалыңдығы 10-15 мм болатын, стандартты құс ғимараты үшін
қосынды коэффициент мәнін 950-1200Вт/К диапазоны аралығын алуға
болады.
Вентиляция жүйесі берілген теңгерімге тағы да екі жылу ағынын
қосады. Энергияның бір бөлігі ғимаратқа оған кіретін ауамен келеді:
Qc = C∙ρ∙G∙tc,
мұндағы G – ауаның көлемдік шығыны, м3/с;
tc – ғимарат сыртындағы ауа температурасы, °С;
ρ – ауа тығыздығы, кг/м3;
С – ауаның изобаралық жылусыйымдылығы, Дж/(кг К).
Жылудың екінші бөлігі ғимараттан одан шығарылатын ауамен бірге
шығады:
n
j 1
ісllv )tt(FkQ
n
j 1
jjv Fkk
276
Qi = C∙ρ∙G∙ti,
мұндағы ti – ғимарат ішіндегі ауа температурасы, °С.
Ең соңында құс ғимаратындағы жылу теңгерімі келесі түрдегі
теңдікпен алынады:
Qs+Qv+Qc+Qi=0,
Qs+kv(tc-ti)+ C∙ρ∙G∙tc + C∙ρ∙G∙ti =0
Теңдікті ti-ге қатысты шеше отырып, жылдың әр түрлі мезгіліндегі
және әр түрлі температура тәртібіндегі ғимарат ішіндегі ауа
температурасын анықтауға болады:
Құс ғимараттары ішіндегі ауа температурасын тұрақты зерттеуді
жүргізу кезінде әрбір айдың декадаларында (ал декада ішінде бірінші,
төртінші, жетінші және оныншы күндері) 10 күн бойы үзіліссіз өлшеулер
өткізіледі. Ал экспедициялық зерттеулер кезінде ғимарат ішіндегі ауа
температурасын жылдың әр мезгілінің 10 күні бойы үзіліссіз өлшеуге
болады.
Қорытынды: мақалада құс ғимаратының ауа температурасының
шекті мәндеріне талдау жасалып, оның математикалық моделі жасалынды.
Құс қорасындағы жылу теңгерімі көрсетіліп, соның негізінде жылу
түсімінің бағалауы жүргізілген. Бұрыннан жүргізілген зерттеулерге
сүйенсек, шындығында құс ғимаратындағы ауаның температуралы-
ылғалды параметрлері көп жағдайда зоотехникалық нормаларға сәйкес
келмейді. Бұл құс ғимаратындағы ауа ортасының қалыптасуына әсер ететін
факторлардың көптігімен түсіндіріледі. Бұл кемшіліктердің орнын
толтырып, құстардың максималды өнімділігіне қол жеткізу үшін
ғимараттың ауа ортасының параметрлерін тәулік бойы және жыл бойы,
толығымен бақылауда ұстау қажет.
Қолданылған әдебиеттер тізімі:
1. Гурницкий, В.Н. Температурные режимы содержания кур разных
пород / В.Н. Гурницкий, В.И. Трухачев, В.Ф. Филенко //Аграрная наука. -
2003. -№11. - С. 26-27.
2. Гирина, В. Микроклимат и окружающая среда /В. Гирина, А. Позина
// Животноводство России. -2008. - №2. - С. 23-26.
3. Бодров, В.И. Анализ современного состояния и перспективы
развития систем кондиционирования микроклимата сельскохозяйственных
зданий и сооружений / Бодров В.И. //Приволжский научный журнал. 2007.
№ 1. С. 43-51.
v
cvsi
kρCG
t)kρCG(Qt
277
BLUETOOTH 5.0 — НОВОЕ ПОКОЛЕНИЕ BLUETOOTH
Bluetooth 5.0 стал реальностью. По сравнению с Bluetooth 4.0 новая
версия имеет вдвое большую пропускную способность, увеличенную в
четыре раза дальность действия и целый ряд других улучшений.
Рассмотрим преимущества Bluetooth 5.0 над предшественниками, в том
числе на примере процессора CC2640R2F от Texas Instruments.
Популярность версии протокола Bluetooth 4, а также некоторые его
ограничения стали причинами для создания следующей спецификации
Bluetooth 5. Разработчики ставили перед собой целый ряд целей:
расширение радиуса действия, рост пропускной способности при рассылке
широковещательных пакетов, улучшение помехозащищенности и так
далее.
Теперь, когда стали появляться первые устройства с Bluetooth 5, у
пользователей и разработчиков справедливо возникают вопросы: какие из
заявленных ранее обещаний воплотились в реальность? Насколько
выросли радиус действия и скорость передачи данных? Как это отразилось
на уровне потребления? Каким образом изменился подход к
формированию широковещательных пакетов? Какие были сделаны
усовершенствования, направленные на рост помехозащищенности? И,
конечно, главный вопрос — существует ли обратная совместимость между
Bluetooth 5 и Bluetooth 4? Ответим на эти и некоторые другие вопросы и
рассмотрим основные преимущества Bluetooth 5.0 перед
предшественниками, в том числе – на примере реального процессора
CC2640R2F с поддержкой Bluetooth 5.0 производства компании Texas
Instruments.
Bluetooth 5 использует беспроводное соединение с физической
скоростью передачи данных до 2 Мбит/с, что в два раза выше, чем у
Bluetooth 4.x. Здесь стоит отметить, что эффективная скорость обмена
данными зависит не только от физической пропускной способности канала
передачи, но и от соотношения служебной и полезной информации в
пакете, а также от сопутствующих «накладных» расходов, например,
потери времени между пакетами (таблица 1).
В версиях Bluetooth 4.0 и 4.1 физическая пропускная способность
канала составляла 1 Мбит/с, что при длине пакета данных PDU в 27 байт
позволяло достигать скорости обмена до 305 кбит/с. В версии Bluetooth 4.2
появилось расширение LE Data Length Extension. Благодаря ему после
установления соединения между устройствами появлялась возможность
увеличить длину пакета до 251 байта, что приводило к росту скорости
обмена данными в 2,5 раза – до 780 кбит/с.
УДК 537. 52 Цесько О.Н. (Караганда, КарГТУ)
Толеу А.Т. (Караганда, КарГТУ)
Югай В.В. (Караганда, КарГТУ)
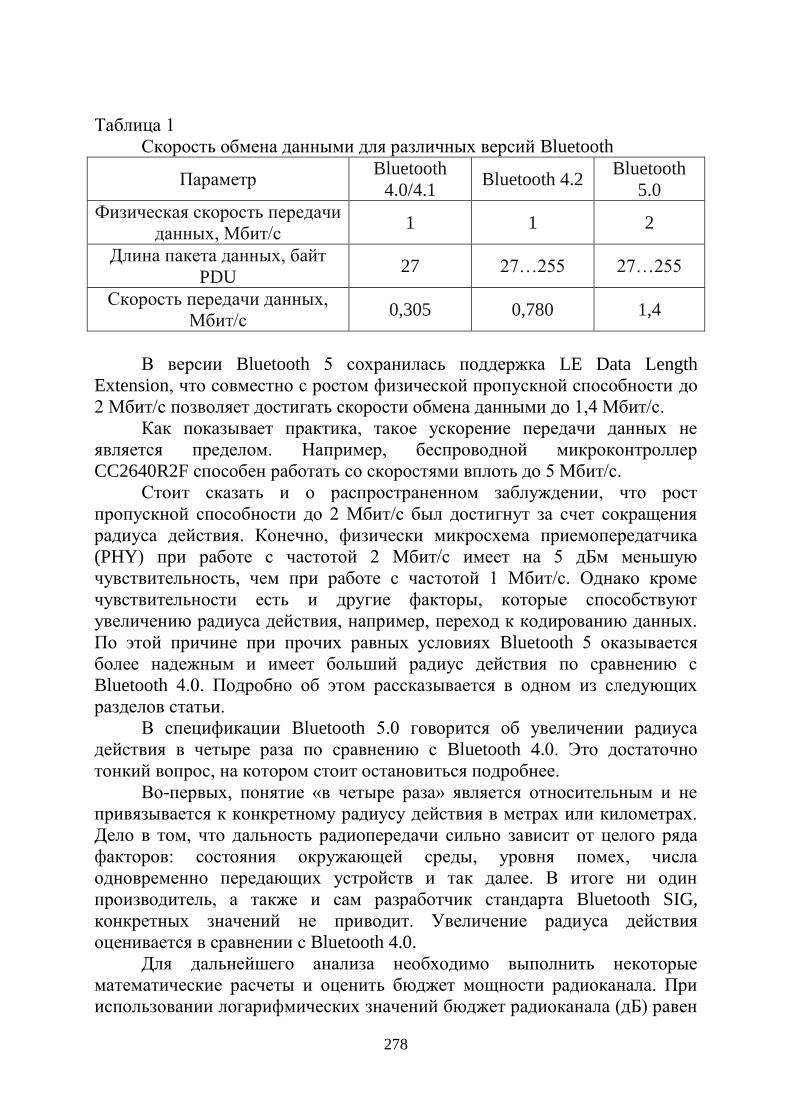
278
Таблица 1
Скорость обмена данными для различных версий Bluetooth
Параметр Bluetooth
4.0/4.1 Bluetooth 4.2
Bluetooth
5.0
Физическая скорость передачи
данных, Мбит/с 1 1 2
Длина пакета данных, байт
PDU 27 27…255 27…255
Скорость передачи данных,
Мбит/с 0,305 0,780 1,4
В версии Bluetooth 5 сохранилась поддержка LE Data Length
Extension, что совместно с ростом физической пропускной способности до
2 Мбит/с позволяет достигать скорости обмена данными до 1,4 Мбит/с.
Как показывает практика, такое ускорение передачи данных не
является пределом. Например, беспроводной микроконтроллер
CC2640R2F способен работать со скоростями вплоть до 5 Мбит/с.
Стоит сказать и о распространенном заблуждении, что рост
пропускной способности до 2 Мбит/с был достигнут за счет сокращения
радиуса действия. Конечно, физически микросхема приемопередатчика
(PHY) при работе с частотой 2 Мбит/с имеет на 5 дБм меньшую
чувствительность, чем при работе с частотой 1 Мбит/с. Однако кроме
чувствительности есть и другие факторы, которые способствуют
увеличению радиуса действия, например, переход к кодированию данных.
По этой причине при прочих равных условиях Bluetooth 5 оказывается
более надежным и имеет больший радиус действия по сравнению с
Bluetooth 4.0. Подробно об этом рассказывается в одном из следующих
разделов статьи.
В спецификации Bluetooth 5.0 говорится об увеличении радиуса
действия в четыре раза по сравнению с Bluetooth 4.0. Это достаточно
тонкий вопрос, на котором стоит остановиться подробнее.
Во-первых, понятие «в четыре раза» является относительным и не
привязывается к конкретному радиусу действия в метрах или километрах.
Дело в том, что дальность радиопередачи сильно зависит от целого ряда
факторов: состояния окружающей среды, уровня помех, числа
одновременно передающих устройств и так далее. В итоге ни один
производитель, а также и сам разработчик стандарта Bluetooth SIG,
конкретных значений не приводит. Увеличение радиуса действия
оценивается в сравнении с Bluetooth 4.0.
Для дальнейшего анализа необходимо выполнить некоторые
математические расчеты и оценить бюджет мощности радиоканала. При
использовании логарифмических значений бюджет радиоканала (дБ) равен
279
разности мощности передатчика (дБм) и чувствительности приемника
(дБм):
Бюджет радиоканала = мощность TX (дБм) – чувствительность RX
(дБм)
Для Bluetooth 4.0 стандартная чувствительность приемника
составляет -93 дБм. Если полагать мощность передатчика 0 дБм, то
бюджет составляет 93 дБ.
Увеличение радиуса действия в четыре раза потребует увеличения
бюджета на 12 дБ, что дает значение 105 дБ. Как же предполагается
достигать этого значения? Есть два пути:
1) увеличение мощности передатчиков;
2) увеличение чувствительности приемников.
Если идти по первому пути и увеличивать мощность передатчика,
это неизбежно вызовет рост потребления. Например, для CC2640R2F
переход на выходную мощность 5 дБм приводит к росту тока потребления
до 9 мА (рисунок 1). При мощности 10 дБм ток увеличится до 20 мА.
Такой подход не выглядит привлекательным для большинства
беспроводных устройств с батарейным питанием и не всегда подходит для
IoT, а ведь именно на эту область в первую очередь и ориентировался
Bluetooth 5.0. По этой причине второе решение выглядит более
предпочтительным.
Новая версия протокола Bluetooth 5.0 ориентирована на
максимальное соответствие потребностям Интернета вещей (IoT). По
сравнению с версией Bluetooth 4.0, она имеет целый ряд качественных
улучшений:
1) скорость передачи данных увеличилась в два раза и достигла 2
Мбит/с;
2) дальность передачи возросла в четыре раза за счет
кодирования данных Coded PHY и Forward Error Correction (FEC);
3) пропускная способность широковещательных сообщений
выросла в 8 раз.
Кроме того, Bluetooth 5.0 обеспечивает обратную совместимость с
устройствами Bluetooth 4.x, а также поддерживает большинство
расширений поздних версий протокола.
280
УДК 621.315.2.002:621.3.001.4:519.673 Цыденов Э.Б. (Томск, НИ ТПУ)
Вавилова Г.В. (Томск, НИ ТПУ)
Айжамбаева С.Ж. (Караганда, КарГТУ)
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ТЕМПЕРАТУРЫ ВОДЫ ПРИ КОНТРОЛЕ
ЕМКОСТИ ПРОВОДА
У кабельных изделий контролю на соответствие требования
нормативных документов [1] подвергаются их механические,
электрические, геометрические параметры. Емкость является одним из
важнейших параметром для контроля качества провода [1], который
является основной частью кабельного изделия. Емкость провода напрямую
связана с правильностью технологического процесса, следовательно,
контроль емкости важен на каждом этапе.
Изменение электропроводности воды при изменении температуры
воды оказывает влияние на изменение емкости провода [2]. Известно, что в
технологическом процессе изготовления провода его температура
изменяется в широком диапазоне [3], которую необходимо учитывать при
контроле емкости.
Цель данной работы – оценить степени влияния температуры воды
провода на измерение значения погонной емкости провода.
Рассмотрим температурные режимы технологических процессов для
изготовления провода с ПВХ-изоляцией. После волочения медная
проволока подвергается подогреву до температуры 100…150°С для
лучшей адгезии жилы и изоляции [3].
Температура однородной массы в экструдере для ПВХ-изоляции
составляет 100…130°С. После экструдирования нанесенную изоляцию
необходимо охладиться до температуры, при которой оно не будет
деформироваться или повреждаться на приемном барабане. Охлаждение
изоляции провода осуществляется воде охлаждающей ванны. Для
равномерного охлаждения используется трехсекционная ванна.
Температура воды в каждой секции соответственно равна 65...85°С,
25…55°С, 18…25°С [4]. После охлаждения провод проходит режим сушки,
где температура изоляции принимает значение окружающего воздуха
(15…30°С).
Для контроля емкости провода на каждом этапе производства
необходимо знать степень влияния изменения температуры воды в
диапазоне, характерном для технологического процесса, на изменения
действительное значение емкости провода. Для этого был проведен
эксперимент.
В качестве контрольного образца использовался собой отрезок
провода длиной 0,5 м диаметром жилы 1 мм и изоляции из ПВХ
диаметром 1,25 мм. Образец провода погружался в водопроводную воду с
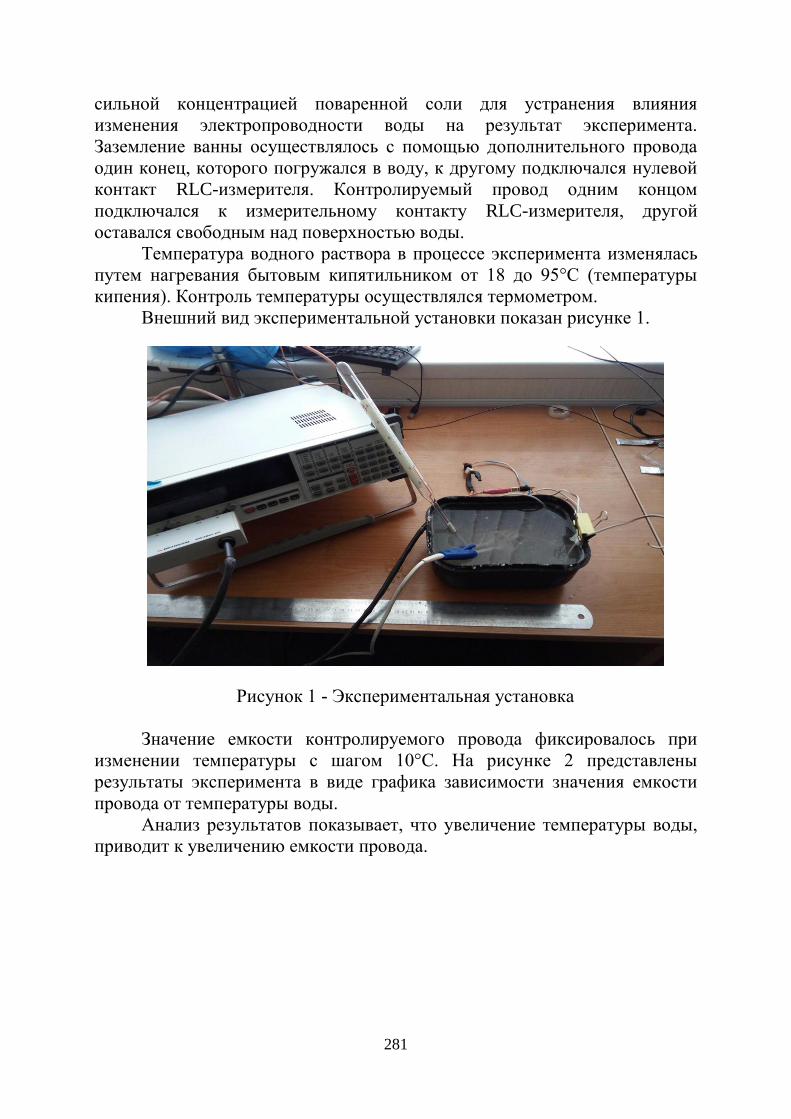
281
сильной концентрацией поваренной соли для устранения влияния
изменения электропроводности воды на результат эксперимента.
Заземление ванны осуществлялось с помощью дополнительного провода
один конец, которого погружался в воду, к другому подключался нулевой
контакт RLC-измерителя. Контролируемый провод одним концом
подключался к измерительному контакту RLC-измерителя, другой
оставался свободным над поверхностью воды.
Температура водного раствора в процессе эксперимента изменялась
путем нагревания бытовым кипятильником от 18 до 95°С (температуры
кипения). Контроль температуры осуществлялся термометром.
Внешний вид экспериментальной установки показан рисунке 1.
Рисунок 1 - Экспериментальная установка
Значение емкости контролируемого провода фиксировалось при
изменении температуры с шагом 10°С. На рисунке 2 представлены
результаты эксперимента в виде графика зависимости значения емкости
провода от температуры воды.
Анализ результатов показывает, что увеличение температуры воды,
приводит к увеличению емкости провода.
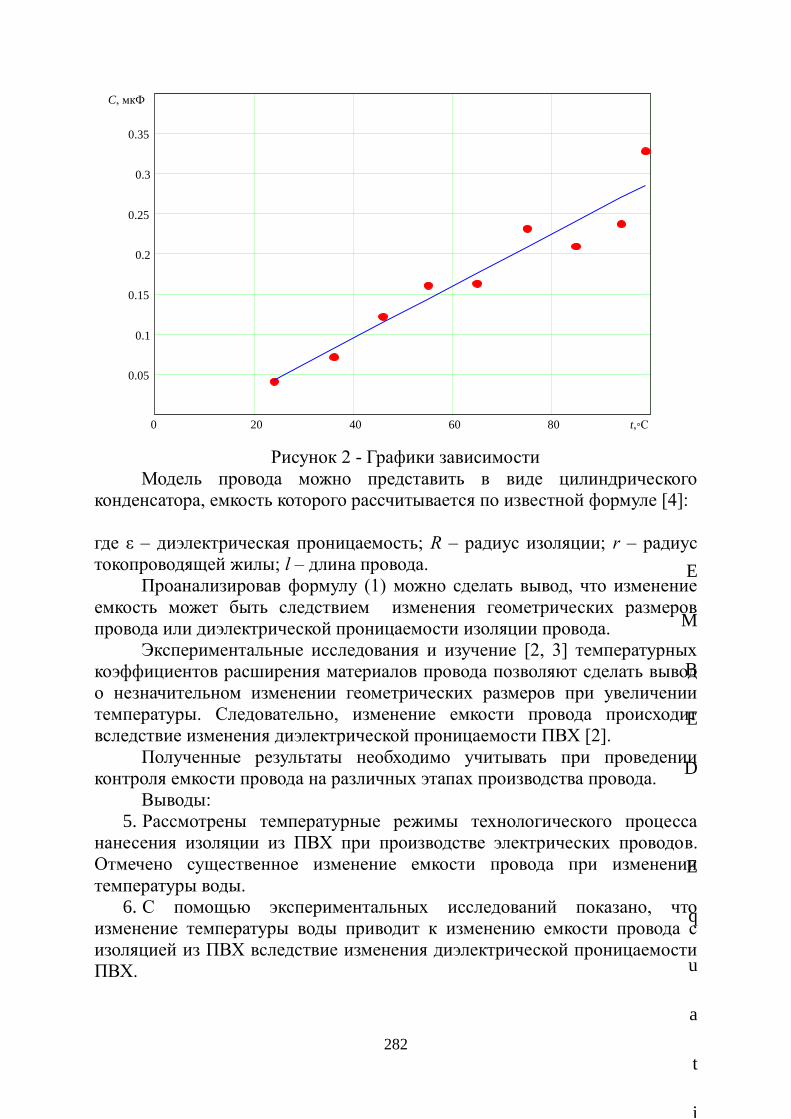
282
Рисунок 2 - Графики зависимости
Модель провода можно представить в виде цилиндрического
конденсатора, емкость которого рассчитывается по известной формуле [4]:
E
M
B
E
D
E
q
u
a
t
i
где ε – диэлектрическая проницаемость; R – радиус изоляции; r – радиус
токопроводящей жилы; l – длина провода.
Проанализировав формулу (1) можно сделать вывод, что изменение
емкость может быть следствием изменения геометрических размеров
провода или диэлектрической проницаемости изоляции провода.
Экспериментальные исследования и изучение [2, 3] температурных
коэффициентов расширения материалов провода позволяют сделать вывод
о незначительном изменении геометрических размеров при увеличении
температуры. Следовательно, изменение емкости провода происходит
вследствие изменения диэлектрической проницаемости ПВХ [2].
Полученные результаты необходимо учитывать при проведении
контроля емкости провода на различных этапах производства провода.
Выводы:
5. Рассмотрены температурные режимы технологического процесса
нанесения изоляции из ПВХ при производстве электрических проводов.
Отмечено существенное изменение емкости провода при изменении
температуры воды.
6. С помощью экспериментальных исследований показано, что
изменение температуры воды приводит к изменению емкости провода с
изоляцией из ПВХ вследствие изменения диэлектрической проницаемости
ПВХ.
0 20 40 60 80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
C, мкФ
t,◦C
283
7. Полученные результаты необходимо учитывать при определении
действительного значения емкости провода на разных этапах его
производства. Характеризуемых разными значениями температуры
провода.
Список использованных источников
1. ГОСТ 23286-78 Кабели, провода и шнуры. Нормы толщин изоляции,
оболочек и испытаний напряжением. [Электронный ресурс] – Режим
доступа: http://www.internet-law.ru/gosts/gost/32228/, свободный. – Загл. с
экрана. – Яз. рус. (дата обращения 15.02.2018).
2. Мазиков С.В., Вавилова Г.В. Метрологическое обеспечение
измерителя емкости САР – 10.1 // Ползуновский вестник. – №2. – 2016: –
С. 65-68.
3. Григорьян А.Г. Технология производства кабелей и проводов с
применением пластмасс и резин/ А.Г. Григорьян, Д.Н. Дикерман,
И.Б. Пешков. – М.: Машиностроение. 2011. – 368 с.
4. Starikova N.S., Redko V.V., Vavilova G.V. Control of cable insulation
quality by changing of electrical capacitance per unit during high voltage
testing//Journal of Physics: Conference Series.– 2016.– Т. 671. – № 1. – с.
012056.
284
УДК 620.179.152:620.192:622.691.4 Шибико А.В. (Томск, НИ ТПУ)
РАДИОВОЛНОВОЙ МЕТОД ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
ГИДРАТНЫХ ПРОБОК В МАГИСТРАЛЬНЫХ ГАЗОПРОВОДАХ
При определенных температуре и давлении в газопроводах могут
зарождаться гидратные образования (пробки), нарушающие нормальный
режим работы газопровода. Обнаружение и разрушение их представляет
довольно сложную техническую задачу.
В данной работе рассмотрена возможность использования
электромагнитных волн СВЧ диапазона для обнаружения и определения
местоположения гидратных образований (пробок) в газопроводах.
В основе метода лежит принцип радиоимпульсной рефлектометрии,
в котором информативным параметром является время распространения
СВЧ импульса в линии передачи до неоднородности и обратно к точке
излучения импульса.
Согласно этому методу в контролируемую трубу вводится СВЧ
импульс, например, наносекундной длительности. Распространяясь по
трубе импульс при наличии неоднородности (гидратной пробки, скребка
или поршня) отражается от него и возвращается к входу трубы. По
времени двойного пробега импульса (до объекта и обратно), при известной
скорости распространения электромагнитной волны в трубе, оценивается
расстояние до неоднородностей. Отражение СВЧ импульса от пробки
происходит за счет разницы электрофизических параметров
(диэлектрическая проницаемость, тангенс угла диэлектрических потерь)
рабочей среды в трубе и пробки.
Опытный образец устройства, реализующего данный метод,
опробован на газоконденсатном месторождении Мыльджино (Томская
область). Измерено затухание СВЧ импульса длительностью 10
наносекунд, частотой заполнения 10 ГГц в шлейфовой трубе диаметром
273 мм, составившее 0.35 дб/м, при котором надежно фиксировался
имитатор гидратной пробки (лед) объёмом 1.5 литра на расстоянии 50
метров от начала трубы.
Результаты показали работоспособность устройства и
перспективность его применения в реальных условиях месторождений для
оперативного обнаружения в газопроводах гидратных пробок и других
инородных объектов.
При чувствительности современной СВЧ аппаратуры -160 дБ/Вт
данный метод позволит обнаруживать гидратные пробки и определять их
местоположение в газопроводе на расстоянии в сотни метров от точки
ввода импульса в газопровод.
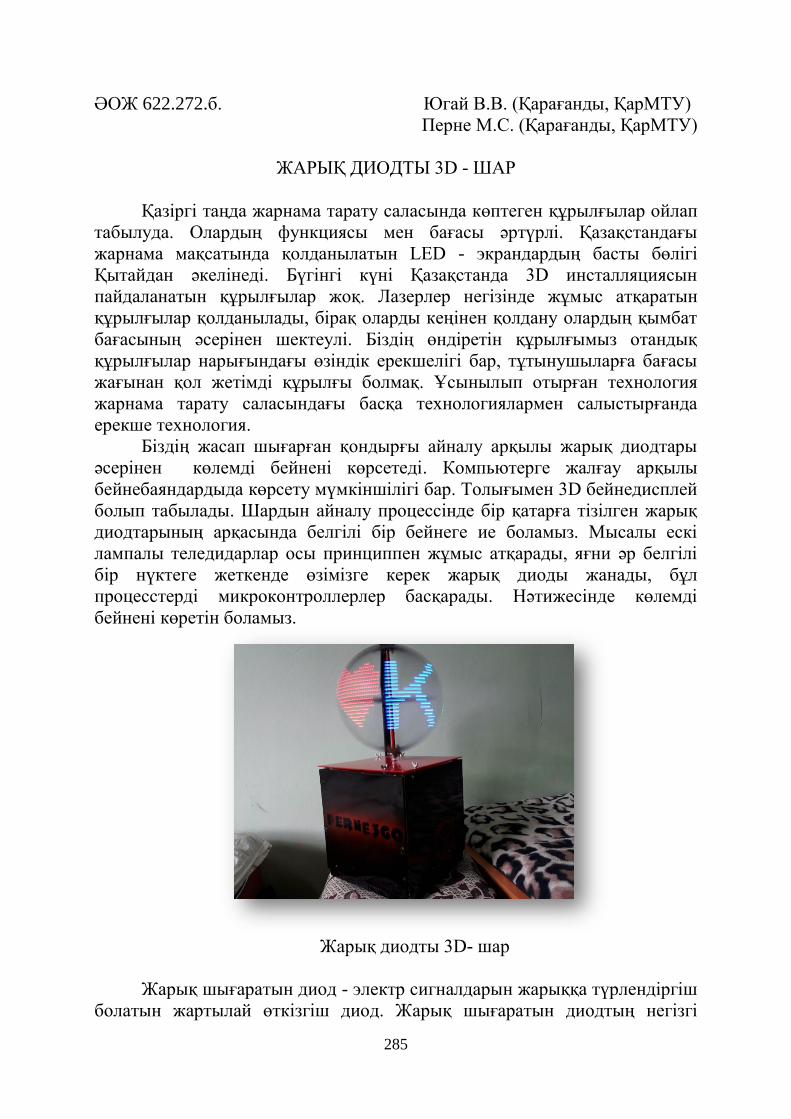
285
ӘОЖ 622.272.б. Югай В.В. (Қарағанды, ҚарМТУ)
Перне М.С. (Қарағанды, ҚарМТУ)
ЖАРЫҚ ДИОДТЫ 3D - ШАР
Қазіргі таңда жарнама тарату саласында көптеген құрылғылар ойлап
табылуда. Олардың функциясы мен бағасы әртүрлі. Қазақстандағы
жарнама мақсатында қолданылатын LED - экрандардың басты бөлігі
Қытайдан әкелінеді. Бүгінгі күні Қазақстанда 3D инсталляциясын
пайдаланатын құрылғылар жоқ. Лазерлер негізінде жұмыс атқаратын
құрылғылар қолданылады, бірақ оларды кеңінен қолдану олардың қымбат
бағасының әсерінен шектеулі. Біздің өндіретін құрылғымыз отандық
құрылғылар нарығындағы өзіндік ерекшелігі бар, тұтынушыларға бағасы
жағынан қол жетімді құрылғы болмақ. Ұсынылып отырған технология
жарнама тарату саласындағы басқа технологиялармен салыстырғанда
ерекше технология.
Біздің жасап шығарған қондырғы айналу арқылы жарық диодтары
әсерінен көлемді бейнені көрсетеді. Компьютерге жалғау арқылы
бейнебаяндардыда көрсету мүмкіншілігі бар. Толығымен 3D бейнедисплей
болып табылады. Шардын айналу процессінде бір қатарға тізілген жарық
диодтарының арқасында белгілі бір бейнеге ие боламыз. Мысалы ескі
лампалы теледидарлар осы принциппен жұмыс атқарады, яғни әр белгілі
бір нүктеге жеткенде өзімізге керек жарық диоды жанады, бұл
процесстерді микроконтроллерлер басқарады. Нәтижесінде көлемді
бейнені көретін боламыз.
Жарық диодты 3D- шар
Жарық шығаратын диод - электр сигналдарын жарыққа түрлендіргіш
болатын жартылай өткізгіш диод. Жарық шығаратын диодтың негізгі
286
элементі электрондық - тесіктік өту. Тікелей жылжығанда электрондардың
энергияның ең жоғары деңгейінен төмен деңгейіне өту себебінен
жарықтың кванттары сәулеленеді. Толқынның сәулелену ұзындығы диод
материалымен (галлий фосфидті және галлий арсенидті; кремний карбиді)
анықталады. Көрінетін спектрінде сәулелендіретін Жарық шығаратын
диодтер жарық көрсеткіш ретінде пайдаланылады. Жарық қашықтық
өлшеуіштерде спектрдің жақыл инфрақызыл бөлігінде сәулелендіретін
галлий арсенидті Жарық шығаратын диодтер пайдаланылады. Олардың
негізгі құндылығы - сәулелену модуляциясының қарапайымдылығы.
Контроллер - бұл кез-келген құрылғы, ең алдымен, ол компьютер
болса, содан соң бұл нәрсенің жұмысын бақылайтын және басқаратын
схема немесе чип (чип). Контроллердің міндеті оның күші бар жабдыққа
бағыну болып табылады. [1]
Айналатын шар көлемін 2,5 есеге үлкейттік, ең алғашында диаметері
10см болған. Болашақта 100см - ден жоғары шарларды жасау көзделуде.
Жәнеде біз микроконтроллерді дамытып, жұмыс жасау диапазонын
көбейттік.
Жұмыстың түпнұсқалығы көлемі 15 см-ден 50 см-ге дейін, ал
болашақта бірнеше метрлерге дейін жететін 3D инсталляциясын
пайдалану. Бұл инсталляциялар арқылы экрандарда бір уақытта толық
реңді тексттік мәліметтермен қатар, видеобейнелер көрсетіледі.
Түпнұсқалығы құрылғыны өндірудің конструктивті шешімдері мен
бағдарламалық қамтамасыздандыруды қолдануында көрсетіледі. Шарға
энергияны таратудың сымсыз түрі және оның жоғарғы сенімділігін
арттыратын сақина конструкциясы құрастырылды. Аталған құрылғы
бойынша интеллектуалды меншік куәлігіне сұраныс берілді. Өндіру
технологиясы, бағдарламалық қамтамасыздандыру және эскизді құжаттама
дайындалды. БЖТ кафедрасында тексттік ақпаратты, уақытты және
анимационды бейнені көрсететін диаметрі 15 см 3D шардың жұмыс
жасайтын түрі бар.
Сауда орындарына, жарнамаға мұхтаж орталықтарға сатуға болады.
Технология мемлекеттік орындармен қатар, жеке бизнес саласында да өз
орнын таппақ. Қаланы әсемдеугеде өте үлкен үлес қосады, себебі бұрын
соңды осы типтес 3D - шарлар қолданылмаған. Аталған жұмыс
видеобейнені көрсетуді, көлемді 3D технологиясы арқылы жарнама
құрылғысын құрастыру және коммерциялизациялауға бағытталған.
Қарағанды облысындағы жарнама саласын дамытып, қаланы
әсемдеуге, түрлі іс шараларда қолдануға болады.
Пайдаланылған әдебиет:
1. Берг А., Дин П. Светодиоды / Пер. с англ. под ред.А.Э. Юновича.
М., 2014.

287
УДК 621.316.849 Югай В.В. (Караганда, КарГТУ)
Савенков Г.Г. (Новосибирск, НГТУ)
BERILLIUM OXIDE CERAMICS WIDEBAND UHF ATTENUATOR
At the present time wideband high power attenuators based on planar film
resistors apply in telecommunication radio-channels and digital modulation
systems for input signal parameters control. [1-5]. Planar film resistor is a
segment of microstrip line with dissipative losses and specified value of wave
impedance. The basis of matched microwave attenuator is a symmetric T-shaped
structure, where planar film resistors are connected to each other via microstrip
line segment without dissipative losses with wave impedance 2 , as shown in
fig. 1.
Fig. 1. Structure of the wideband microwave attenuator
based on planar film resistors
The impedance values of concentrated resistors in symmetric T-shaped
structure defines via equations (1) и (2):
11 3
1
u
u
KR R
K
, (1)
2
22
1
u
u
KR
K
, (2)
where: 1R , 3R - the impedance values of side resistors of symmetric T-
shaped structure with wave impedance 1 , as shown in fig. 1;
R2 – the impedance value of the middle concentrated resistor of T-shaped
structure with wave impedance 2 ;
- the attenuator characteristic impedance equal to attenuator matched load
impedance;
uK - the T-structure voltage transfer factor;
Impedances of resistors 31 RR for attenuator with the 1 dB attenuation
( 891,010 20/1 uK ), matched to 50-Ohm load, are the following: R1 = R3
= 2,9 Ohm, R2 = 432,5 Ohm.
Equivalent electrical scheme of attenuator in Microwave Office software
is shown in fig. 2. Resistors R1 and R3 are realized via microstrip line segments
288
with length of 8 mm with linear impedance of 362,5 Оhm/m, the resistor R2
realized via microstrip line segments with length of 8 mm with linear impedance
of 54037,5 Оhm/m.
Fig.2. Electrical scheme of attenuator in Microwave Office software
The considered attenuator computer modeling results are shown in fig. 3.
Shown figure is the voltage standing wave ratio frequency characteristic.
Fig. 3. The attenuator VSWR frequency characteristic
Further the numeric electro-dynamic modeling of wideband attenuator
was performed via EMSight topology redactor in Microwave Office software.
The dielectric substrate performed from the beryllium oxide ceramics of 4
mm thickness with dielectric permeability of 6,6r and dielectric loss tangent
of 44 10tg was selected for microstrip line. A copper with electrical
conductivity of 75,9 10 Sm/m was used as a conductor
The VSWR frequency characteristic is shown in fig. 4 and the amplitude-
frequency characteristics of attenuator EM-model is shown in fig. 5.
As seen in fig. 5, the given attenuator has high input and output matching
quality within 1,5 GHz frequency band. The VSWR value of 1,25. The gain
flatness within given frequency band doesn’t exceed 0,2 dB, as follows from
fig. 5.
The fig. 3 and fig.5 analysis shows that the proposed attenuator model
based on transmission line segments lets to complete good initial structure or the
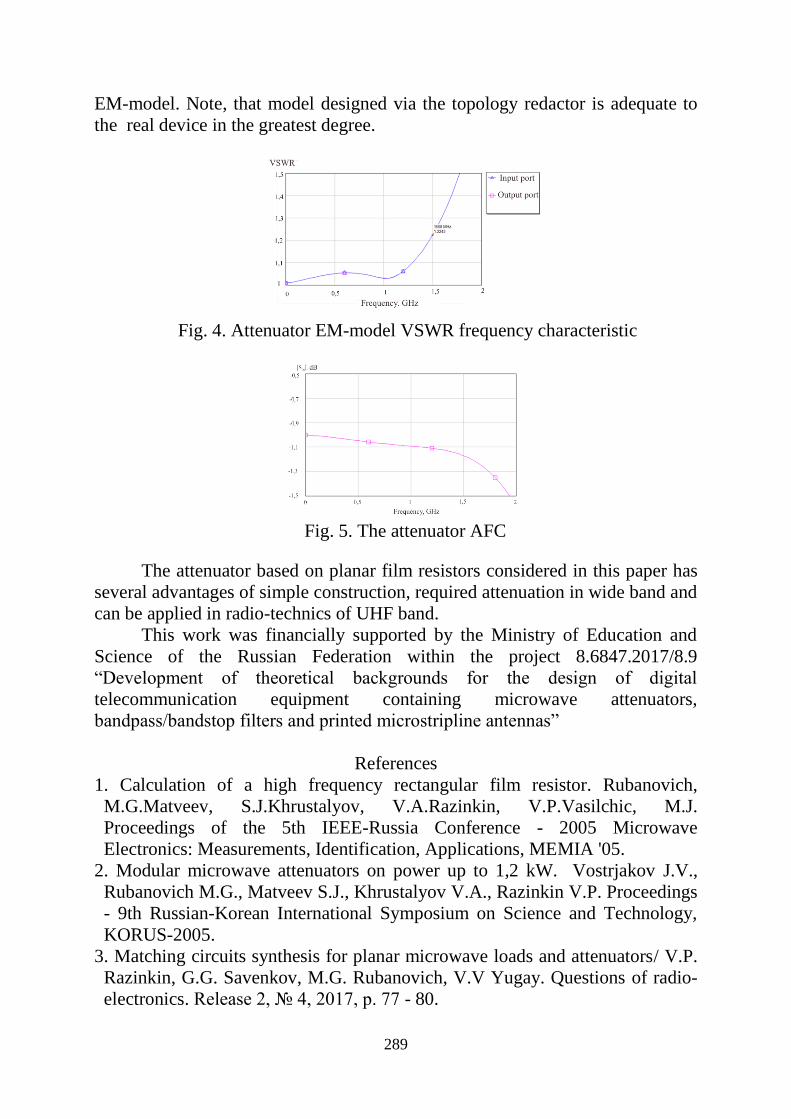
289
EM-model. Note, that model designed via the topology redactor is adequate to
the real device in the greatest degree.
Fig. 4. Attenuator EM-model VSWR frequency characteristic
Fig. 5. The attenuator AFC
The attenuator based on planar film resistors considered in this paper has
several advantages of simple construction, required attenuation in wide band and
can be applied in radio-technics of UHF band.
This work was financially supported by the Ministry of Education and
Science of the Russian Federation within the project 8.6847.2017/8.9
“Development of theoretical backgrounds for the design of digital
telecommunication equipment containing microwave attenuators,
bandpass/bandstop filters and printed microstripline antennas”
References
1. Calculation of a high frequency rectangular film resistor. Rubanovich,
M.G.Matveev, S.J.Khrustalyov, V.A.Razinkin, V.P.Vasilchic, M.J.
Proceedings of the 5th IEEE-Russia Conference - 2005 Microwave
Electronics: Measurements, Identification, Applications, MEMIA '05.
2. Modular microwave attenuators on power up to 1,2 kW. Vostrjakov J.V.,
Rubanovich M.G., Matveev S.J., Khrustalyov V.A., Razinkin V.P. Proceedings
- 9th Russian-Korean International Symposium on Science and Technology,
KORUS-2005.
3. Matching circuits synthesis for planar microwave loads and attenuators/ V.P.
Razinkin, G.G. Savenkov, M.G. Rubanovich, V.V Yugay. Questions of radio-
electronics. Release 2, № 4, 2017, p. 77 - 80.

290
УДК 681.518:622.86 Юрченко А.В. (Томск, НИ ТПУ)
Мехтиев А.Д. (Караганда, КарГТУ)
Алькина А.Д. (Караганда, КарГТУ)
Нешина Е.Г. (Караганда, КарГТУ)
ИСПОЛЬЗОВАНИЕ ОПТИЧЕСКОГО ВОЛОКНА ДЛЯ СОЗДАНИЯ
СИСТЕМ МОНИТОРИНГА
Актуальность темы обусловлена важностью вопроса создания
информационно-измерительной системы и систем мониторинга нового
поколения для обеспечения безопасности проведения горных работ и
добычи угля, позволяющих контролировать все необходимые параметры.
Особенно актуальны данные системы для горного производства шахт
Карагандинского угольного бассейна и используя эти технологии можно
получить ряд существенных преимуществ по сравнению с традиционными
электронными измерительными системами, особенно в условиях
повышенной искро- и взрывоопасности на производствах, опасных по
взрыву газа и пыли.
Целью работы является проведение комплексных научных
исследований, создание математических и компьютерных моделей,
опытно-промышленная апробация, разработка и внедрение
интеллектуальных волоконно-оптических датчиков нового поколения с
высокими метрологическими характеристиками. Системы мониторинга,
основанные на применении подобных датчиков, экономически
эффективны при использовании на крупномасштабных объектах - там, где
необходима установка сотен датчиков для продолжительных измерений
различных физических параметров. Волоконные брэгговские решетки
также являются самым надёжным решением при работе с агрессивными
средами, где датчики находятся в экстремальных условиях.
Датчики на оптическом волокне, обладают целым рядом
преимуществ: возможность мультиплексирования, дистанционные
измерения, устойчивость к электромагнитным помехам, отсутствие
электричества в точке измерения, долговременная стабильность.
Помимо высоких метрологических характеристик датчики должны
обладать высокой надёжностью, долговечностью, стабильностью и быть
совместимыми с микроэлектронными устройствами обработки
информации при низкой трудоёмкости изготовления и небольшой
стоимости [1]. Этим требованиям в максимальной степени удовлетворяют
современные волоконно оптические датчики (ВОД).
Отличительная особенность разрабатываемой системы с
использованием ВОД является то, что в качестве датчика используется
оптическое волокно, источник оптического излучения и светоприемное
устройство, вместо контрольного кабеля с электрическими сигналами
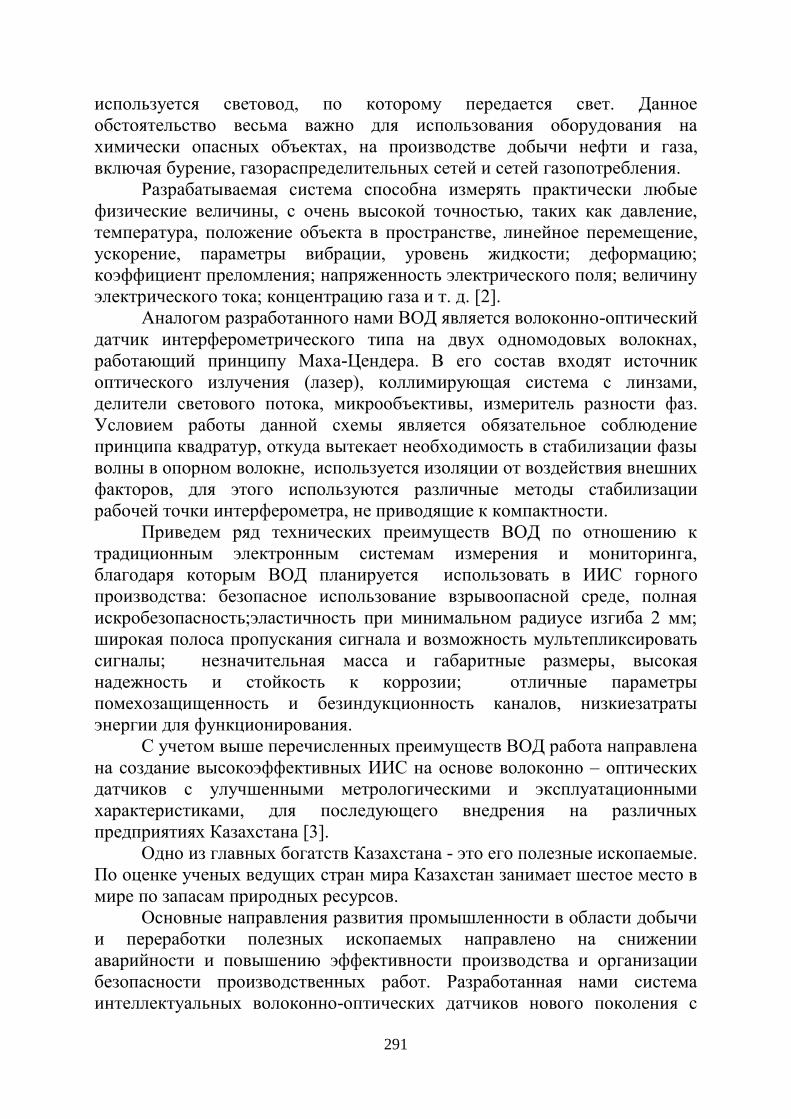
291
используется световод, по которому передается свет. Данное
обстоятельство весьма важно для использования оборудования на
химически опасных объектах, на производстве добычи нефти и газа,
включая бурение, газораспределительных сетей и сетей газопотребления.
Разрабатываемая система способна измерять практически любые
физические величины, с очень высокой точностью, таких как давление,
температура, положение объекта в пространстве, линейное перемещение,
ускорение, параметры вибрации, уровень жидкости; деформацию;
коэффициент преломления; напряженность электрического поля; величину
электрического тока; концентрацию газа и т. д. [2].
Аналогом разработанного нами ВОД является волоконно-оптический
датчик интерферометрического типа на двух одномодовых волокнах,
работающий принципу Маха-Цендера. В его состав входят источник
оптического излучения (лазер), коллимирующая система с линзами,
делители светового потока, микрообъективы, измеритель разности фаз.
Условием работы данной схемы является обязательное соблюдение
принципа квадратур, откуда вытекает необходимость в стабилизации фазы
волны в опорном волокне, используется изоляции от воздействия внешних
факторов, для этого используются различные методы стабилизации
рабочей точки интерферометра, не приводящие к компактности.
Приведем ряд технических преимуществ ВОД по отношению к
традиционным электронным системам измерения и мониторинга,
благодаря которым ВОД планируется использовать в ИИС горного
производства: безопасное использование взрывоопасной среде, полная
искробезопасность;эластичность при минимальном радиусе изгиба 2 мм;
широкая полоса пропускания сигнала и возможность мультепликсировать
сигналы; незначительная масса и габаритные размеры, высокая
надежность и стойкость к коррозии; отличные параметры
помехозащищенность и безиндукционность каналов, низкиезатраты
энергии для функционирования.
С учетом выше перечисленных преимуществ ВОД работа направлена
на создание высокоэффективных ИИС на основе волоконно – оптических
датчиков с улучшенными метрологическими и эксплуатационными
характеристиками, для последующего внедрения на различных
предприятиях Казахстана [3].
Одно из главных богатств Казахстана - это его полезные ископаемые.
По оценке ученых ведущих стран мира Казахстан занимает шестое место в
мире по запасам природных ресурсов.
Основные направления развития промышленности в области добычи
и переработки полезных ископаемых направлено на снижении
аварийности и повышению эффективности производства и организации
безопасности производственных работ. Разработанная нами система
интеллектуальных волоконно-оптических датчиков нового поколения с
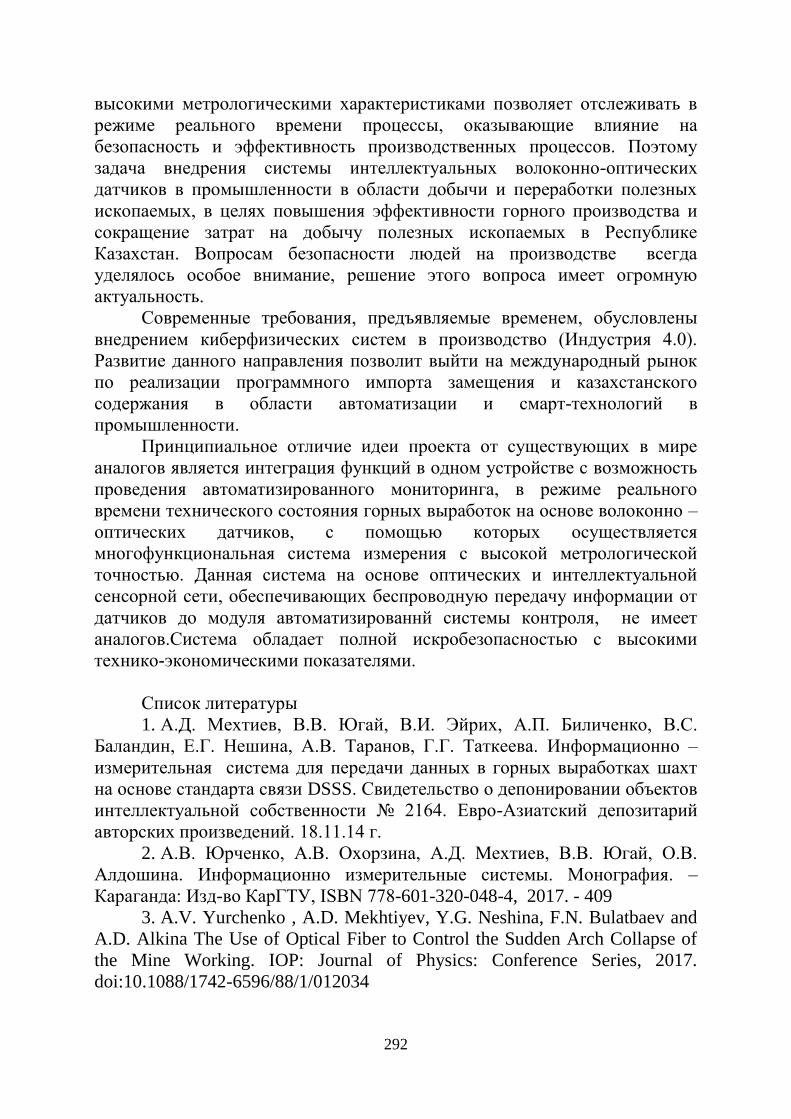
292
высокими метрологическими характеристиками позволяет отслеживать в
режиме реального времени процессы, оказывающие влияние на
безопасность и эффективность производственных процессов. Поэтому
задача внедрения системы интеллектуальных волоконно-оптических
датчиков в промышленности в области добычи и переработки полезных
ископаемых, в целях повышения эффективности горного производства и
сокращение затрат на добычу полезных ископаемых в Республике
Казахстан. Вопросам безопасности людей на производстве всегда
уделялось особое внимание, решение этого вопроса имеет огромную
актуальность.
Современные требования, предъявляемые временем, обусловлены
внедрением киберфизических систем в производство (Индустрия 4.0).
Развитие данного направления позволит выйти на международный рынок
по реализации программного импорта замещения и казахстанского
содержания в области автоматизации и смарт-технологий в
промышленности.
Принципиальное отличие идеи проекта от существующих в мире
аналогов является интеграция функций в одном устройстве с возможность
проведения автоматизированного мониторинга, в режиме реального
времени технического состояния горных выработок на основе волоконно –
оптических датчиков, с помощью которых осуществляется
многофункциональная система измерения с высокой метрологической
точностью. Данная система на основе оптических и интеллектуальной
сенсорной сети, обеспечивающих беспроводную передачу информации от
датчиков до модуля автоматизированнй системы контроля, не имеет
аналогов.Система обладает полной искробезопасностью с высокими
технико-экономическими показателями.
Список литературы
1. А.Д. Мехтиев, В.В. Югай, В.И. Эйрих, А.П. Биличенко, В.С.
Баландин, Е.Г. Нешина, А.В. Таранов, Г.Г. Таткеева. Информационно –
измерительная система для передачи данных в горных выработках шахт
на основе стандарта связи DSSS. Свидетельство о депонировании объектов
интеллектуальной собственности № 2164. Евро-Азиатский депозитарий
авторских произведений. 18.11.14 г.
2. А.В. Юрченко, А.В. Охорзина, А.Д. Мехтиев, В.В. Югай, О.В.
Алдошина. Информационно измерительные системы. Монография. –
Караганда: Изд-во КарГТУ, ISBN 778-601-320-048-4, 2017. - 409
3. A.V. Yurchenko , A.D. Mekhtiyev, Y.G. Neshina, F.N. Bulatbaev and
A.D. Alkina The Use of Optical Fiber to Control the Sudden Arch Collapse of
the Mine Working. IOP: Journal of Physics: Conference Series, 2017.
doi:10.1088/1742-6596/88/1/012034
293
УДК 621.396.2 Юрченко А.В. (Томск, НИ ТПУ)
Мехтиев А.Д. (Караганда, КарГТУ)
Алькина А.Д. (Караганда, КарГТУ)
Нешина Е.Г. (Караганда, КарГТУ)
ПАССИВНЫЕ СИСТЕМЫ ОХРАНЫ ПЕРИМЕТРОВ НА ОСНОВЕ
ОПТИЧЕСКИХ ВОЛОКОН
Обеспечение охраны секретных и опасных объектов государственного
назначения или просто частных территорий от несанкционированного
доступа, требует больших затрат и сложных коммуникации для
построения системы охраны и мониторинга периметра. Сегодня
разработано множество систем охраны разного технического уровня и
стоимости, которые основаны на различных принципах: инфракрасные,
виброакустические, магнитометрические, емкостные, сейсмические и
другие типы систем. Периметровые системы охраны осуществляется
постоянный мониторинг области пространства вдоль охраняемого рубежа
по некоторому активному физическому параметру (физическому полю),
при его нарушении и выходе параметров за допустимые срабатывается
сигнал тревоги, поступающий на систему сбора и обработки информации.
Все системы можно условно разделить на активные и пассивные.
Первые отличаются большей стоимостью и могут быть обнаружены
нарушителем до их срабатывания. Таким устройствам необходимо подвод
электрического питания, а также коммуникационной линии для передачи
сигналов или беспроводной системы данных по эфиру. К ним можно
применить специальные средства, выводящие их из действия. Пассивные
менее затратные, в отличии от активных являются скрытными. Например,
учеными из Новосибирска разработана пассивная система охраны
периметра с использованием сейсмоакустических датчиков (геофонов) [1].
Пассивные системы контролируют изменение физического поля колебания
среды и грунта, параметры которого в общем случае случайны, но при
этом нет неизлучения энергию в окружающее пространство, что
затрудняет их обнаружение.
На основании проведенных исследований предлагается к
рассмотрению пассивная система охраны периметра, имеющая все
достоинства системы с сейсмоакустическимидатчиками (геофонов), но
отличающуюся по принципу действия и не уступающую по техническим
параметрам работы, но менее сложную по конфигурации. Немаловажным
отличием будет ее меньшая стоимость. Основой разработки системы
послужили работы, направленные на мониторинг и измерение параметров
деформации, в режиме реального времени, строительных объектов
(фундаментов, трубопроводов, элементов конструкции мостов и др.).
294
Схожие разработки ведутся и в области горного дела, для
мониторинга и контроля деформации горных выработок, для защиты
персонала от внезапного обрушения выработки. Данные системы основаны
на использовании оптического волокна, используемого в
коммуникационных системах передачи информации. Принцип измерения
основан на контроле величины дополнительных потерь. При механическом
воздействии на оптическое волокно изменяются показатели рассеянья
энергии моды световой электромагнитной волны, проходящей по
оптическому волокну [2]. По данным направление проведена значительная
работа, проведен ряд экспериментов и полученные оригинальные
результаты. При помощи оптического волокна можно измерять множество
электрических и неэлектрических параметров параллельно, с достаточно
высокой точностью, о чем нами ранее были опубликованы ряд статей [2-3].
Ежегодное снижение стоимости оптического волокна на рынке и
повышение его потребительских свойств, например, в плане окон
прозрачности, делают его весьма привлекательным для использования в
системах охраны периметров.
Разработка системы требует проведения ряда исследований,
основанных на системном подходе. Необходимо провести компьютерное
моделирование и натурных экспериментов, для изучения процессов,
связанных с распространением света в оптическом волокне и вызванными
механическими деформациями потерь. Оценка величины потерь в
исследуемом объекте связана с разработкой детерминированных моделей,
отражающих его физическую сущность явлений и содержащих описание
механизмов протекания в них элементарных процессов.
Нашей задачей является создание охранной системы с
протяженностью одной зоны до 100 км с точностью обнаружения места
вторжения до ±50 м. Глубина залегания оптического кабеля от 5 до 50 см,
ширина чувствительной зоны до 4-5 метров. Под воздействием
механических вибраций оптические волоконные кабели дают отклик в
диапазоне частот от 1 Гц до 100 кГц, в дальнейшем для охранной системы
планируется ограничиться спектром частот от 100 Гц до 10 кГц.
Для реализации данной системы необходимо прокладка не мене двух
волоконно-оптических световодов, подземным способом на глубину около
7-10 см вдоль охраняемого периметра. Световоды должны быть
прикреплены к пластиковой сетке для повышения точности и
чувствительности работы системы. Корреляционная обработка сигналов от
двух волоконно-оптических кабелей позволяет отфильтровать сигналы
помех (шум дождя, транспорта и т.п.) и выделить на их фоне сигналы
реального вторжения. Данную систему можно использовать для охраны и
контроля целостности трубопроводов. Возможна конфигурация системы с
использованием замкнутой петли, когда оба конца подключаются к
электронным блокам. При обрыве сенсора система переходит в режим
295
работы с двумя отдельными лучами, сигнализируя о месте обрыва кабеля.
При этом функционирование сохраняется на всем периметре. В качестве
чувствительных элементов используются отдельные жилы стандартных
волоконных коммуникационных кабелей с оптическими потерями
примерно 0,3 дБ/км на длине волны 1550 нм.
На основании наших аналитических и практических исследований
можно сделать ряд выводов по достоинствам и недостаткам данных
систем. Выделим ряд преимуществ: трудность в обнаружении волоконно-
оптических датчиков (визуально или технически), так как сенсоры не
восприимчивы к электромагнитным и радиочастотным помехам,
значительная зона охраняемого периметра по протяженности (до 60...100
км) при точности обнаружения вторжения до нескольких метров. К
недостаткам можно отнести высокую стоимость оборудования, сложность
настройки, ряд подготовительных мероприятий по устройству траншеи,
необходимость выполнения ряда условий, обеспечивающих надежную
работу системы с оптимальными характеристиками, планирование
системы и инсталляцию сенсоров. Есть вероятность, что система может
дать ложную тревогу, так как чувствительна к вибрациям почвы и
сейсмическим сигналам, вызванным проходящим рядом автотранспортом,
крупными деревьями, железными дорогами, строящимися объектами. Если
присутствуют данные факторы, то необходимо сенсоры укладывались в не
глубокие траншеи, заполненные мелким гравием, в пределах «запретной»
зоны между двумя параллельными оградами, что позволяет отчасти
изолировать сенсоры от влияния указанных грунтовых сейсмических
воздействий.
Список литературы
1. Мархакшинов А.Л. Оценивание характеристик движения
человека в сейсмической системе охраны // Материалы всероссийской
научной студенческой конференции молодых ученых «Наука. Технологии.
Инновации». Новосибирск. – 2009. – Часть 2. – С. 111-112.
2. A.V. Yurchenko, A.D. Mekhtiev, N I Gorlov, AAKovtun. Research
of the Additional Losses Occurring in Optical Fiber at its Multiple Bends in the
Range Waves 1310nm, 1550nm and 1625nm Long. Journal of Physics:
Conference Series 671 (2016) 012001 This content has been downloaded from
IOPscience. Please scroll down to see the full text. (http://iopscience.iop.org)
DIO:10:1088/1742-6596/671/1/012001).
3. A. Yurchenko, A. Mekhtiev, A. Alkina, F. Bulatbayev, Y.
Neshina. The Questions of Development of Fiberoptic Sensors for Measuring
Pressure with Improved Metrological and Operational Characteristics. VII
Scientific Conference with International Participation “Information-Measuring
Equipment and Technologies” (IME&T 2016), MATEC Web of Conferences
79, 01085 DOI: 10.1051/01085/matecconf/201679001085.
296
ТРЕБОВАНИЯ К КОНТРОЛЮ ВЫБРОСОВ ЗАГРЯЗНЯЮЩИХ
ВЕЩЕСТВ ПРИ ПРОЕКТИРОВАНИИ ЭКОЛОГИЧЕСКИ ЧИСТЫХ
КОТЛОВ НА ТВЕРДОМ ТОПЛИВЕ
Современная отопительная котельная оснащена разнообразным
тепломеханическим оборудованием с развитой сетью паропроводов,
трубопроводов сырой и питательной воды, конденсатопроводов, дренажей.
Кроме котельного агрегата - основного источника теплоснабжения, в
котельной устанавливаются пароводяные подогреватели сетевой и горячей
воды для отопления, бытового горячего водоснабжения и произ-
водственно-технологических нужд. Для подогрева холодной воды и
утилизации низкопотенциальных тепловых выбросов устанавливаются
водоводяные теплообменники. Подготовка воды требуемого качества
осуществляется в деаэраторе и оборудовании химводоочистки.
Перемещение потоков воды, воздуха и продуктов сгорания происходит с
помощью питательных и циркуляционных насосов, дутьевых вентиляторов
и дымососов.
Для определения необходимой мощности котельной и выбора
основного и вспомогательного оборудования выполняется расчёт тепловой
схемы.
Для составления и расчёта тепловой схемы необходимо иметь
исходные данные: назначение данной котельной; теплоноситель; вид
топлива; характеристику системы теплоснабжения; величины тепловых
нагрузок и параметров теплоносителя; количество (или долю)
возвращаемого конденсата; должна быть известна температура сырой
воды, поступающей в котельную, и температура воды, идущей на
химводоочистку.
На рисунке 1 изображена принципиальная тепловая схема
отопительно-производственной котельной, оборудованной паровыми
котлами, снабжающей теплом закрытую систему теплоснабжения,
работающую по температурному графику 70...150 °С. На технологические
нужды отпускается пар низкого давления через редукционный клапан.
Конденсат от технологического потребителя возвращается в котельную.
Регулирование деятельности по сокращению выбросов
загрязняющих веществ от установок, сжигающих органическое топливо,
проводится в соответствии с Директивами ЕС [1, 2] по ограничению
выбросов определенных загрязнителей. Эти Директивы содержат
нормативы предельных концентраций загрязняющих веществ в дымовых
газах котельных установок, выбрасываемых в атмосферу. Для выполнения
этих нормативных требований используются технологии (способы),
входящие в справочники по НДТ.
УДК 504.064.36 Юрченко В.В. (Караганда, КарГТУ)
Сергеев В.Я. (Караганда, КарГТУ)
Белик М.Н. (Караганда, КарГТУ)
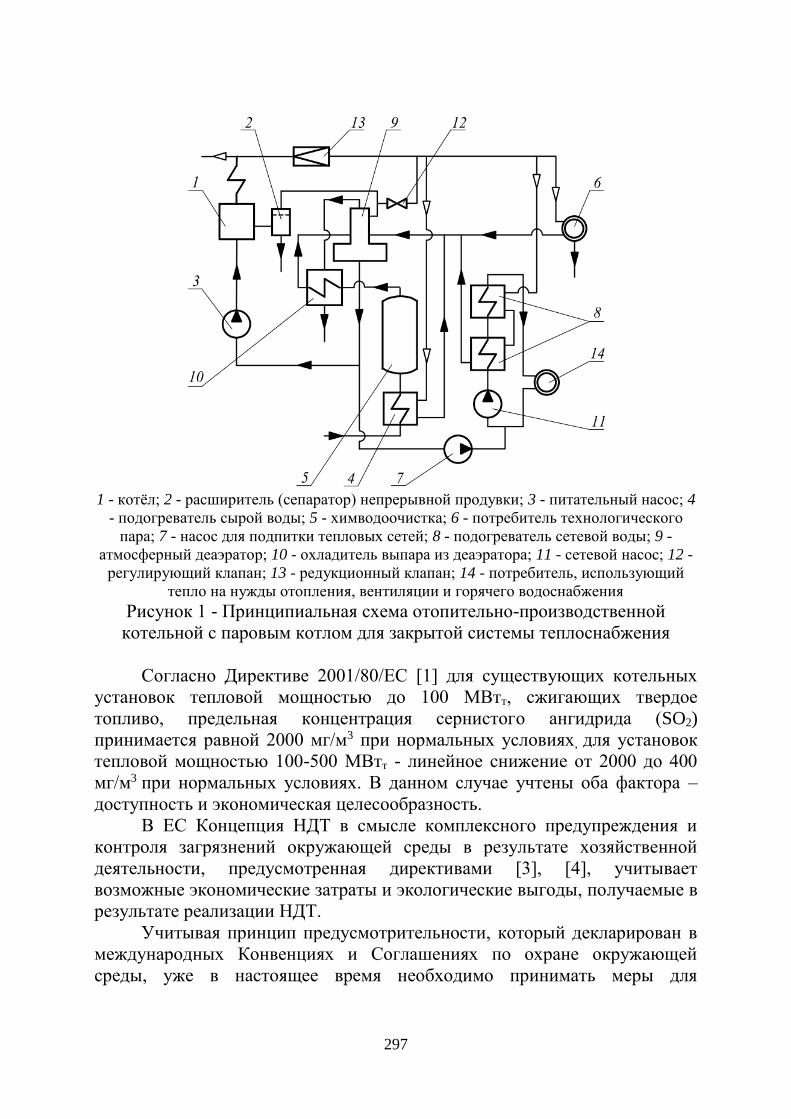
297
1 - котёл; 2 - расширитель (сепаратор) непрерывной продувки; 3 - питательный насос; 4
- подогреватель сырой воды; 5 - химводоочистка; 6 - потребитель технологического
пара; 7 - насос для подпитки тепловых сетей; 8 - подогреватель сетевой воды; 9 -
атмосферный деаэратор; 10 - охладитель выпара из деаэратора; 11 - сетевой насос; 12 -
регулирующий клапан; 13 - редукционный клапан; 14 - потребитель, использующий
тепло на нужды отопления, вентиляции и горячего водоснабжения
Рисунок 1 - Принципиальная схема отопительно-производственной
котельной с паровым котлом для закрытой системы теплоснабжения
Согласно Директиве 2001/80/ЕС [1] для существующих котельных
установок тепловой мощностью до 100 МВтт, сжигающих твердое
топливо, предельная концентрация сернистого ангидрида (SO2)
принимается равной 2000 мг/м3 при нормальных условиях, для установок
тепловой мощностью 100-500 МВтт - линейное снижение от 2000 до 400
мг/м3 при нормальных условиях. В данном случае учтены оба фактора –
доступность и экономическая целесообразность.
В ЕС Концепция НДТ в смысле комплексного предупреждения и
контроля загрязнений окружающей среды в результате хозяйственной
деятельности, предусмотренная директивами [3], [4], учитывает
возможные экономические затраты и экологические выгоды, получаемые в
результате реализации НДТ.
Учитывая принцип предусмотрительности, который декларирован в
международных Конвенциях и Соглашениях по охране окружающей
среды, уже в настоящее время необходимо принимать меры для
298
выполнения перспективного экологического законодательства РК, т.е.
перехода на технологическое нормирование.
Удельные выбросы вредных веществ в атмосферу от котельных
установок подлежат контролю с целью проверки соблюдения
утвержденных нормативов удельных выбросов.
Удельные выбросы загрязняющих веществ рассчитывают исходя из
известной величины выбросов в единицу времени и соответствующего
этим выбросам расхода топлива. Удельный выброс i-го вещества может
быть определен на единицу вводимого в топку тепла (г/МДж) или на тонну
условного топлива (кг/т условного топлива) или выражен в виде
концентрации этого вещества в 1 м3 дымовых газов, взятых при
нормальных условиях, и коэффициенте избытка воздуха α=1,4.
Нормативы удельных выбросов для котельных установок
устанавливаются для следующих загрязняющих веществ: оксиды азота (в
пересчете на NO2), диоксид серы, оксид углерода, зола твердого топлива.
Концентрация диоксида серы, оксидов азота и оксидов углерода
определяется по отношению к объему сухих газов, что соответствует
условиям измерения этих веществ инструментальными методами. Оксиды
азота (NOx) определяются в пересчете на диоксид азота (NO2).
Допускается не более чем двукратное превышение нормативов
удельных выбросов в течение не более 30 минут при условии, что общая
продолжительность 30-минутных превышений будет менее 5% времени за
год.
Список использованных источников
1 Директива 2001/80/EС «Об ограничении выбросов определенных
загрязнителей в воздух от крупных установок, сжигающих топливо»
2 Директива 2010/75/ЕС ЕС «О промышленных выбросах» (о
комплексном предупреждении и контроле загрязнений)
3 Директива Европейского парламента и Совета ЕС 96/61/ЕС от 24
сентября 1996 г. «О комплексном предупреждении и контроле
загрязнений» (Directive 96/61/ЕС of the European Parliament and of the
Council of 24 September 1996 concerning integrated pollution prevention and
control)
4 Директива Европейского парламента и Совета ЕС 2008/1/ЕС от 15
января 2008 г. «О комплексном предупреждении и контроле загрязнений»
(Directive 2008/1/ЕС of the European Parliament and of the Council of 15
January 2008 concerning integrated pollution prevention and control).
299
ҚАЛАНЫҢ ТҰРҒЫН АЛАБЫ ШАРТТАРЫНДАҒЫ СУДЫҢ
КОММЕРЦИЯЛЫҚ ЕСЕПТЕУДІҢ АВТОМАТТАНДЫРЫЛҒАН
ЖҮЙЕЛЕРІ
Қазіргі заман әлеміндегі энергия ресурстарына сұраныстың өрлеу
қарқыны олардың бағасының өсуімен бірге өлшемдес. «Өркениетті
әлемнің» көптеген мемлекеттері, әсіресе қай мемлекеттерде энергия
ресурстары импорттаушы мемлекеттерінен сатып алынады, судың,
жылудың, электр энергияның және газдың пайдалану есебін қатаң өткізеді.
Себебі энергия ресурстары үшін төлеуі әртүрлі деңгейлердің бюджеттердің
ірі шығын бабы болып табылады, олардың тұтынуының дұрыс
жаспарлауы, олардың есептеуі мен үлестіруі экономика тұрақтылығының
маңызды факторы болып табылады. Соңғы уақытта мемлекетте суды,
жылуды тұтыну дербес есептеу аспаптардың жаппай енгізуі басталды,
заңға сәйкес көрсеткіштерді алу сұрағы пайда болды. Есептеу
аспаптарынан алынатын, көптеген санның есептеугіштерінен
көрсеткіштерін орталықты алу және мәліметтерді өңдеу қажеттілігі болып
шықты.
Қарапайым арзан есептеугіштерінен көрсеткіштерді тек көзбен
шолып алуға болады. Онан соң осы мәліметтерді өңдеу және төлем ақы
есебін беру үшін нақты орталыққа беруі керек. Жиі осы міндет жеке
меншік иесіне немесе үй-жайды жалдаушыға жүктеленеді. Есептеу
мерзімінің (айдың) соңында жеке меншік иесі су есептеугіштің
көрсетікшетрін алып және ресурстарды тұтыну туралы мәліметтерді
арнайы мекемеге телефон арқылы немесе қағаз нұсқасы көмегімен
хабарлау керек. Одан басқа, бұл үй қожайына көп машақат келтіреді себебі
орнатылған су есептеугіштердің саны көбейген соң, есептеу
орталықтардың ақпаратты қолымен жасалатын өңдеу жүктемесі
жоғарлайды. Көрсеткіштерді қолмен алуда, беруде және ақпаратты
өндеуде жиі оның бұрмалану жағдайлары және қателері пайда болады.
Сонымен қатар көрсеткіштердің әдейі бұрмалау жағдайлары пайда болады,
себебі жеке меншікті иесімен ұсынылатын мәліметтердің шыңдығын
тексеру шарттары жоқ. Сондықтан энергиямен жабдықтау мекемелердің
қызметкерлері тұрғын үй-жайларды мерзімді аралап шығу және
есептеугіштердің көрсеткіштерін сонымен қатар пломбаларының
тұтастығын, аспаптардың жұмыс істеуіне зиян келтірмеуін қадағалау
мәжбүр боларды, бұл тұрғындар үшін және қадағалаушыларға бірқатар
ыңғайсыздықтарды тұдырады.
Мәліметтерді жинақтау және өндеу еңбек сыйымыдылығы мен
бағасын маңызды төмендету, объектке кіру, аспаптардың жұмысын
УДК 681.518.3 Юрченко В.В. (Карағанды, ҚарМТУ)
Белик М.Н. (Карағанды, ҚарМТУ)
Капжаппарова Д.У. (Карағанды, ҚарМТУ)
300
бақылау және т.б. проблемаларын шешу тәсілдері бар - бұл су мен
жылудың есептеу аспаптарынан көрсеткіштерді алу сымсыз Wi-Fi
технологияның негізіндегі ZENNER-мен жасалынған қашықтықтан
көрсеткіштерді алу жүйесін орнатуы болып табылады. Мәліметтер
мекеменің аспаптарынан бірмезгілді алынып Интернет желісі арқылы
беріледі. Және де тұтынушы әрбір аспаптан бір көрсеткіш емес, ал нақты
мерзім үшін (күнделікті, ай сайын, сағат сайын және т.б.) мәліметтер
жинағын алады, бұл динамикалық су- және жылу тұтыну бақылауды
өткізуге мүмкіндігін береді. Ғимараттың барлық аспаптарынан бірмезгілді
көрсеткіштерін алу жалпы үйлік және пәтер аралық аспаптардың
айырмашылығын қадағалау мүмкіндігін, заңсыз ойымын және
шығындарын анықтауға мүмкіндігін береді.
Жүйе еуропалық нарығында сәтті жұмыс істеуде. Жүйенің негізгі
артықшылықтары:
- көрсеткіштерді алу үшін орнатылған есептеу аспаптардың
бөлмелеріне кіру қажет емес – есептеу қашықтықтан өтеді;
- есептеу аспаптардан мәліметтерді жинақтау жабдыққа сым желістері
жоқ;
- көрсеткіштердің жоғары беру дәлдігі;
- еспетеу желістерді толық бақылауын қамтамасыз ету үшін
тұтынушыға толық техникалық және анықтамалық ақпаратты ұсыну;
- төлеу жүйелер, құжат айналымы және т.б. үшін толымды мәліметтер;
- салыстыру тұтыну, тұтыну тарихы, ресурстың дефициті бойынша
және т.б. жиынтық мәліметтерді алу, бұл энергия ресурстарының
шығындарын қолма-қол анықтауға мүмкіндігін береді;
- есептеу аспаптардың техникалық қызмет етуіне шығындарын
маңызды төмендету;
- энергия ресурстарын тұтыну бақылау қызметін ұстау шығындарын
төмендету;
- шығынның оптикалық есептеуін қолдану, магниттік өрістің әсеріне
қарсы толық тұрақты;
- авариялық қалыпы туралы сигнал беру жүйесі, ол одан басқа,
қаптаманы алу туралы немесе заңсыз ену туралы хабар береді;
- адам факторымен байланысты қателердің пайда болуын
болдырмайды;
- нақты күнде ғимараттағы барлық су мөлшерлерінен көрсеткіштерді
алу (бір ауқытта), басты су мөлшер мен пәтерлік су мөлшерлердің
көрсеткіштердің суммасының арасындағы айырмашылығын қысқартады;
- жолы қиын жерлерде орнатылған құрылғылардан мәліметтерді алу.
Көрсеткіштерді алу осы жүйе және объекттегі шығындар туралы
және энергия тасымалдаушыны бақылау мәліметтердің диспетчерлеуі
тұтынушылармен энергия тасымалдаушыны қолдану қолма-қол басқару
үшін негіздерін салуға, олардың шығындарын уақытында анықтау мен
301
жою мүмкіндігін береді. Осындай жүйені енгізу жеткізуші мен
тұтынушының арасындағы тым жоғары сапалы құқықтық қарым-
қатынастына көшу шынайы мүмкіндігін анықтайды.
Еуропалық сәтті практиканың көп жылдық тәжірибесін есепке ала
отырып, осы өнімнің беріктігі мен сапасы туралы, оны ресейлік нарыққа
енгізуінде жүйенің пайдалылығы туралы айтуға болады. Осы жүйе жылу,
су трассалардағы авариялары туралы алдын ала ескерту, шығындарды
қадағалау және бұрмалауларды тоқтату қабілетті. Ұқсас жүйелерді
қолдану мемлекеттің энергия ресурстарын сақтау көмектеседі, және де
үнемдеуі жылына 20%-ға дейін жету мүмкін.
Жүйенің құрамына кіретін негізгі аспаптар:
1) ақпаратты сақтайтын және беретін, есептеугіш пен модульге
орнатылатын ридерден тұратын Радиомодуль (RF–модуль). Бір
радиомодуль импульстік шығуымен екі аспапқа (мысалы суық және ыстық
су есептеугішке) орантылу мүмкін, кабельдің стандартты ұзындығы 1 м.
2) Репитер. Репитер радиомодульдерден қабылданған мәліметтерді
берілген уақыт интервалы бойынша GSM-ретрансляторға немесе жеткізу
нүктеге тікелей береді. Бір репитер 128 радиомодульдермен жұмыс істеу
мүмкін. Практикада бір репитерге тек бірнеше радиомодульдерді ғана
қосаламыз, барлығы радиомодульдердің оранласуына байланысты. Ең
күрделі жағдайларда (темір бетонды жертөле, құдықтар) бір репитерге бір
радимодуль қолданады.
3) GSM – ретранслятор. GSM ретранслятор радиомодульдерден
(тікелей немесе репитер арқылы) қабылданған мәліметтерді ұялы
байланстың провайдері арқылы серверге беру үшін қажет.
4) Жеткізу нүктесі –радиомодульдерден мәліметтердің қашықтықтан
қабылдағышы, WalkBy вариантты қабылдағанда көрсеткіштерді алу үшін
қолданылады.
5) WalkBy жүрісіндегі көрсетікшетрді алу жүйесі – есептеугіштерден
көрсеткіштерді алу тәсілдерінің бірі, онда берілген маршрут бойынша
жаяу немесе автокөлікпен жүретін тұтынушы мәліметтерді бастапқы
есептеу аспаптардан портативті компьютерге алады, ол тасымалдайтын
радио-қабылдау беру құрылғыға (жеткізу нүктесі) қосылған.
6) Дайындалған су есептеугіші импульстік қақпағымен қосымша
жабдықталады және имплульстік шығуымен (импульстік) толық құнды
есептеугіш болып табылады. Импульс есептеугішпен генераторланған
импульстердің санын санай отырып, олардың салмағын есепке алып біз
есептеугіш арқылы өткен су көлемін аламыз.
Жүйені ескі тұрғын үйлерде қолдану үшін есептеу аспаптардың
орталықты орнатуын қамтамасыз ету керек және мәліметтерді
жинақтаудың автоматтардыруын өткізу керек.
302
ОБРАТНЫЕ СВЯЗИ В СИСТЕМАХ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ И БИОЛОГИЧЕСКИХ СИСТЕМАХ.
ПОСТАНОВКА ЗАДАЧИ
Значительные успехи в разработке систем автоматического
регулирования (САР) позволили перейти от решения простейших
вопросов (автоматизация отдельных технологических процессов) к
комплексной автоматизации технологического процесса, а также
рассмотрения биологических процессов как объектов автоматического
управления. В последнем случае имеется ряд работ, в которых показано,
что постоянство внутренней среды организма (температура, давление
крови, рН-среды) обеспечивается работой органов дыхания,
кровообращения, пищеварения и т.д. путем действия в организме
автоматических регуляторов, «похожих» на автоматические регуляторы на
производстве, но сделанных из «мяса». Всем этим на протяжении столетий
занималась такая наука как физиология, которая на данный момент
развилась до уровня молекулярной физиологии.
С этой точки зрения большой интерес представляет собой работа [1],
в которой автор рассматривает некоторые болезни человека как итог
взаимодействия закона постоянства внутренней среды организма
(отрицательная обратная связь по терминологии кибернетиков) и закона
развития организма (положительная обратная связь).
Целью данного исследования является попытка моделирования
поведения живых систем при взаимодействии двух видов обратной связи:
отрицательной обратной связи (стабилизация) и положительной обратной
связи (развитие). Задачи моделирования:
1. Изучение выходной величины при заданной входной величине и при
действии отрицательной обратной связи.
2. Изучение выходной величины при заданной входной величине и при
действии положительной обратной связи.
3. Изучение выходной величины при заданной входной величине и при
одновременном действии положительной и отрицательной обратной
связи.
Моделирование предполагается проводить от создания простых
(аналоговых) моделей до сложных (цифровых).
СПИСОК ЛИТЕРАТУРЫ
1. Дильман В.М. Большие биологические часы. М.: Знание. 1981. - 208 с.
УДК 621.396 Яковлев Е.А. (Караганда, КарГТУ)
Мехтиев А.Д. (Караганда, КарГТУ)
Югай В.В. (Караганда, КарГТУ)
303
УДК 358.5-50 Ясинский В.Б. (Караганда, КарГТУ)
Черняков А.Б. (Караганда, ТОО РА «Аврора»)
Кузнецова Ю.А. (Караганда, КарГТУ)
СЕТЕВЫЕ ВОЗМОЖНОСТИ ПРОГРАММОГО КОМПЛЕКСА kBookArgo
В декабре 2017 года в Казахстане принята программа «Цифровой
Казахстан» [1], в которой, в частности, сказано, что, «…принимая во
внимание новые требования к молодому поколению, назревает
необходимость в пересмотре содержания среднего и высшего образования
через развитие креативного мышления и технических навыков».
Для достижения поставленной цели только оснащения учебных
учреждений компьютерной техникой мало. Нужны и иные программные и
аппаратные решения. В начале 2017 года нами был разработан
специализированный программный комплекс kBookArgo [2], который
позволяет наиболее эффективно использовать цифровые технологии в
учебном процессе. Возможности этого комплекса подробно описаны в [3].
Здесь же мы хотим более подробно остановиться на его сетевых
особенностях.
Программный комплекс включает в себя не только средства
разработки непосредственно учебников и их отображения на мобильных
устройствах, но и возможность новой (инновационной) организации
учебного процесса в классе (аудитории) в рамках локальной сети под
полным контролем преподавателя. При этом используется весь арсенал
средств управления современных мобильных устройств. Причём
постоянное подключение к Интернету для работы ни преподавателю, ни
учащимся не нужно, хотя, при необходимости, это возможно тоже.
В настоящее время большинством Wi-Fi устройств поддерживается
стандарт IEEE 802.11n, допускающий передачу данных со скоростью до
150 Мбит/с при передаче по одному лучу (антенне) и до 300 Мбит/с при
использовании нескольких антенн. Встроенные приёмопередатчики
мобильных устройств, как правило, имеют только одну антенну. Реальная
скорость обмена данными будет зависеть от набора технологий,
реализованных как на точке доступа, так и на клиентском устройстве,
количества подключённых устройств, расстояния от точки доступа до
клиентского устройства, взаимного пространственного расположения
приёмной и передающей антенн, характеристик помещения,
электромагнитной обстановки в зоне работы сети, а также
индивидуальных особенностей устройства. Хотя лучшего качества можно
добиться, перейдя на диапазоны 5150-5350 МГц или 5650-6425 МГц.
Но и при этих ограничениях к одной точке доступа без ухудшения
качества работы программы ArgoViewer c модулем ArgoServer даже при
скорости передачи данных на уровне порядка 150 Мбит/с в диапазоне
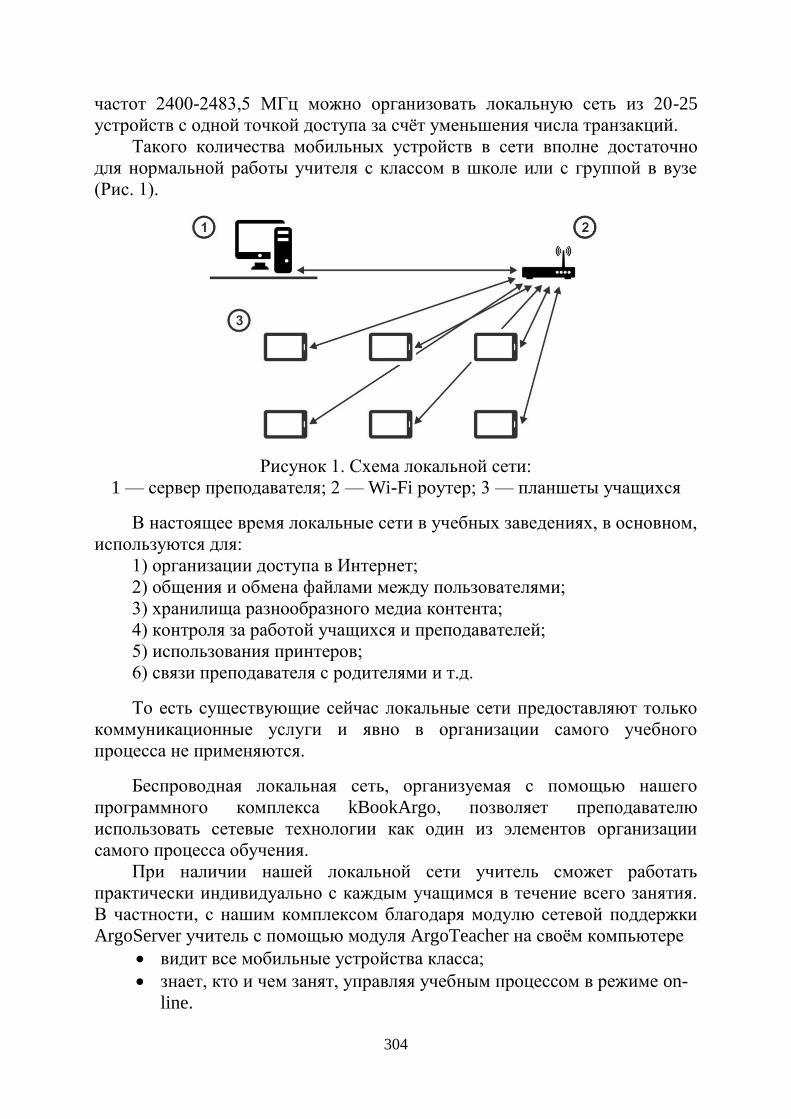
304
частот 2400-2483,5 МГц можно организовать локальную сеть из 20-25
устройств с одной точкой доступа за счёт уменьшения числа транзакций.
Такого количества мобильных устройств в сети вполне достаточно
для нормальной работы учителя с классом в школе или с группой в вузе
(Рис. 1).
Рисунок 1. Схема локальной сети:
1 — сервер преподавателя; 2 — Wi-Fi роутер; 3 — планшеты учащихся
В настоящее время локальные сети в учебных заведениях, в основном,
используются для:
1) организации доступа в Интернет;
2) общения и обмена файлами между пользователями;
3) хранилища разнообразного медиа контента;
4) контроля за работой учащихся и преподавателей;
5) использования принтеров;
6) связи преподавателя с родителями и т.д.
То есть существующие сейчас локальные сети предоставляют только
коммуникационные услуги и явно в организации самого учебного
процесса не применяются.
Беспроводная локальная сеть, организуемая с помощью нашего
программного комплекса kBookArgo, позволяет преподавателю
использовать сетевые технологии как один из элементов организации
самого процесса обучения.
При наличии нашей локальной сети учитель сможет работать
практически индивидуально с каждым учащимся в течение всего занятия.
В частности, с нашим комплексом благодаря модулю сетевой поддержки
ArgoServer учитель с помощью модуля ArgoTeacher на своём компьютере
видит все мобильные устройства класса;
знает, кто и чем занят, управляя учебным процессом в режиме on-
line.
305
При этом учитель может
провести общее или выборочное тестирование;
отправить учащимся задания на планшетные компьютеры;
проверить их выполнение;
сделать пометки на планшете ученика;
внести комментарии;
открыть или закрыть доступ к тем или иным разделам учебника и
многое другое.
Всё названное возможно за счёт взаимодействия учительского модуля
ArgoTeacher через локальную сеть Wi-Fi с клиентским модулем
ArgoViewer, установленным на планшете ученика, который может
работать под управлением наиболее распространённых операционных
систем: iOS, Android и Windows. При этом подключение планшетов к
локальной сети осуществляется автоматически модулем сетевой
поддержки ArgoServer сразу после их включения.
Разработанный нами специализированный программный комплекс
kBookArgo позволяет изменить не только привычный стиль проведения
занятий, включающий в себя триаду: передача знаний — закрепление на
практике — контроль, но и методику преподавания, позволяя выработать
отдельный подход для каждого учащегося в режиме реального времени,
постоянно раскрывая его потенциал, тем самым объединив на новом
уровне учителя и ученика.
Такой способ обучения очень близок к индивидуальному, но требует
и пересмотра методики обучения и снижения количества учеников или
студентов в группе до 12-15 человек.
Литература
1. Постановление Правительства Республики Казахстан от 12 декабря
2017 года № 827 «Об утверждении Государственной программы
«Цифровой Казахстан» — URL: http://adilet.zan.kz/rus/docs/P1700000827
2. СВИДЕТЕЛЬСТВО о государственной регистрации прав на объект
авторского права. Реестр Министерства юстиции Республики Казахстан,
запись № 659 от 10.04.2017 г. // Черняков А.Б., Ясинский В.Б. и др.
«Комплекс программ kBookArgo для создания и использования
мультиплатформенных мультимедийных учебников для операционных
систем iOS, Android, Windows».
3. Ясинский В., Черняков А., Кузнецова Ю. Инструментарий для
создания мультиплатформенных электронных учебников. // Открытое и
дистанционное образование. 2017. № 3(67). C. 52–56. — URL:
http://journals.tsu.ru/engine/download.php?id=104557&area=files
306
СОДЕРЖАНИЕ
АВТОМАТИЗАЦИЯ. РОБОТОТЕХНИКА
Абибеков Г.С., Котов Е.С. Разработка автоматизированной системы охранной и пожарной сигнализации……………………………... 6
Ағайнбеков А.Т. Мұнайды атмосфералық айдау үрдісінде энергия тиімділігін арттыру........................................................................... 9
Айтуганов Р.К., Сичкаренко А.В. Разработка самоорганизующейся сети телеметрической передачи информации с высоковольтных опор…………………………………………………………………. 12
Ахмет Г.С., Жеңісова Д.Д. Новые возможности применение промышленных роботов…………………………………………... 14
Ахметжанов К.Е., Рымов Н.Б., Тохметова К.М. Разработка системы управления ПАК «ПАССАЖИРСКИЙ ЛИФТ» на базе стенда «SIMATIC S7 -1516-3 PN/DP»……………………………………. 17
Әкимбай Р.Н., Смагулова К.К. Особенности средств управления асинхронным электроприводом…………………………………... 20
Бабаева М.Ю., Кочкин А.М. Интеллектуальные системы управления технологическими объектами…………………………………….. 23
Байзуллаев Б.К., Шоланов К.С. Выбор электрогенератора для ветряной электростанции с парусным чувствительным органом…………. 26
Баскаков П.В., Котов Е.С. Разработка системы визуализации работы стенда «Кран» Schneider Electric………………………………….. 29
Баскаков П.В., Гановский А.В., Сичкаренко А.В. Учебный стенд schneider electric «Система стабилизации электротельфера»…... 32
Бондаренко И.В., Лихачев В.В. Разработка программной и аппаратной части комплекса автоматизации коммерческих предприятий на базе RASPBERRY PI 2 MODEL B………………………………... 34
Гришаев К.О., Боярский Э.Ф. Повышение технико-экономических показателей и улучшение техно-логических процессов на электростанциях путем внедрения программно-технического комплекса SPPA-T3000……………………………………………. 36
Дайч Л.И., Цай А.С. Автоматизированная система управления и контроля конвейерных линий…………………………………….. 38
Дайч Л.И., Кауанов А.С., Мусаев М.Ж. Разработка цифровой системы управления солнечным трекером…………………………………. 41
Дайч Л.И., Тарлыков М.В., Бычек М.В. Исследование алгоритмов управления обратным маятником.................................................... 44
Демин В.Ф., Томилов А.Н. Автоматизация расчета технологических схем проведения горных выработок с анкерным креплением...... 47
Джаксалыков А.Н., Сичкаренко А.В. Модернизация системы позиционирования робота манипулятора-трипод……………….. 50
Ермолин Р.В., Лапина Л.М. Разработка системы мониторинга работы шагового привода………………………………………………….. 52
307
Жакеш А.А. Имитационное моделирование электропривода дымососа…. 54 Жуматаева Ж.М., Эм Г.А. Система управления электропривода
перемещения сварочного трактора……………………………….. 57 Иванов В.А., Сичкаренко А.В., Сундет Г.Е., Ідріс Ж.А. Учебный стенд-
имитатор «частотно-регулируемый электропривод» промышленных установок………………………………………… 60
Каверин В.В., Таран Н.Ю. Экспериментальные исследования энергетических характеристик резонансного трансформатора.... 63
Кауанов А.С., Котов Е.С. Использование лазерного 3d сканирования в системе удаленного мониторинга электрооборудования горного производства……………………………………………… 67
Кулмуратова А.Н. Современное состояние проблемы обледенения проводов линий электропередач...................................................... 69
Кулумбетов А.А., Есенбаев С.Х. Алгоритм контроля и управления граблинами сгустителя медного концентрата................................ 72
Қасенов А.Е., Шоланов К.С. Применение энергии ветра............................. 75 Лапин И.Д., Потемкина Е.Б. Development of the stepper drive control
system……………………………………………………………….. 78 Латухин П.Г., Кочкин А.М. Автоматизированная система управления
береговой насосной станцией ОФ «Нурказган»…………………. 80 Лисицын Д.В., Бабажанов К.Р. Разработка робототехнического
комплекса…………………………………………………………... 83 Малышев А.С., Мазитов В.Н., Сичкаренко А.В. Учебный стенд
Schneider Electric частотно-регулируемый электропривод……... 86 Ошков Н.А., Сичкаренко А.В. Разработка системы управления
стендами FisherTechnic с микропроцессорным комплексом EasyPIC……………………………………………………………... 89
Сайфулин Р.Ф. Составление базы правил для Fuzzy-ПИД-регулятора с нечеткой логикой…………………………………………………... 92
Саткангулов Р.К., Смагулова К.К. Разработка системы визуализации для разрабатываемой автоматической системы управления групповыми замерными установками на нефтяном месторождении «Восточный Молдабек» АО «Эмбамунайгаз».... 95
Серікбай А.Т., Телбаева Ш.З., Тохметова К.М. SIMATIC S7-314с стендінің аппараттық бөлімін әзірлеу............................................. 98
Смагулова К.К., Базылов Б.Р. Применение парогазовых установок на заводе «Ямал-СПГ» Арктика (часть 1) …………………………... 100
Смагулова К.К., Базылов Б.Р. Применение парогазовых установок на заводе «Ямал-СПГ» Арктика (часть 2)…………………………… 102
Смагулова К.К., Базылов Б.Р. Применение парогазовых установок на заводе «Ямал-СПГ» Арктика (часть 3)…………………………… 105
Смагулова К.К., Рымбеков А.А. Учебно-лабораторный стенд "Электропневмоавтоматика"……………………………………… 108
Смагулова К.К., Рымбеков А.А. Строительство ветряной электростанций на заводе «Ямал-СПГ» Арктика……………….. 111
308
Сұндет Г.Е., Сағын А.Р., Сазанбай А.А. Үшфазалы екі жарты периодты басқарылатын түзеткішті Matlab Simulink бағдарламасында модельдеу...........................................................................................
114 Сұндет Г.Е., Саликов А.М., Көкебек Б.А. ПИД-реттегішті Matlab
Simulink бағдарламасында модельдеу............................................. 117 Сұндет Г.Е., Қойшыбай Б., Ақберді Ә.Е. Бірфазалы екі жарты периодты
басқарылмайтын түзеткішті Matlab Simulink бағдарламасында модельдеу........................................................................................... 120
Сұндет Г.Е., Рымбеков А.А. Моделирование электропривода постоянного тока в Simulink............................................................. 122
Сұндет Г.Е., Ибрашев Н.М., Сұлтан Н.С, Бекшора О.А. Matlab Simulink бағдарламасында бірфазалы инвертор моделін зерттеу 125
Телбаева А.З., Телбаева Ш.З., Смагулова К.К. Обзор современных методов диагностики коррозионного состояния узлов крепления анкерных болтов ВЛЭП………………………………. 127
Төлеген С.Ж., Тохметова К.М., Фешин Б.Н. Разработка аппаратной части и методического обеспечения для учебно-лабораторного стенда «Системы управления на базе контроллера Mitsubishi FX5U………………………………………………………………... 130
Тохметова К.М., Қами Қ.О., Имакаев А.К. Использования индуктивных датчиков фирмы Schneider Electric и контроллера SIMATIC S7-314с на базе стендов FISHERTECHNIC Часть 1..... 133
Тохметова К.М., Қами Қ.О., Имакаев А.К. Использования индуктивных датчиков фирмы Schneider Electric и контроллера SIMATIC S7-314с на базе стендов FISHERTECHNIC Часть 2..... 136
Усова Е.Д., Эм Г.А. Исследование влияния частоты широтно-импульсного преобразователя на характеристики электропривода постоянного тока………………………………... 139
Шпакова Л.Г., Байдильдин А.Т., Экзеков А.Д. Проблема выбора привода в робототехнических системах......................................... 142
Эм Г.А., Жуматаева Ж.М. Система управления комплексом водоподготовки станции Жанаарка………………………………. 145
Яндоло Т.А., Брейдо И.В. Оптимизация процесса флотации методом контроля качества пенообразования……………………………... 148
ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ И ИНФОКОММУНИКАЦИОННЫЕ ТЕХНОЛОГИИ
Амиров А.Ж., Кожухова М.М., Штефан К.Б. Проблемы внедрения юридически значимого электронного документооборота в Казахстане………………………………………………………….. 152
Амиров А.Ж., Кожухова М.М. Современные информационные технологии для работы с нормативно - правовыми актами…….. 156
Аникин А.В. Разработка СВЧ плазмотрона для конверсии природного газа 159 Бакенова А.А., Аймагамбетова Р.Ж. Выбор эффективных мероприятий
по формированию гибкой системы управления предприятием... 160
309
Бакиров Ж.Б., Бакиров М.Ж., Такишов А.А. Регрессионные зависимости для определения размеров свода естественного равновесия полевой выработки…………………………………… 163
Бердалинов С.С., Степанов А.Б., Юрченко В.В. Анализ методов и средств измерения плотности жидких сред.................................... 166
Бояхчян А.А., Юрченко А.В. Экспериментальная проверка эффективности работы гибридной СЭС в естественных условиях………………… 169
Вавилова Г.В., Рюмкин А.В., Айжамбаева С.Ж. Технологический контроль емкости провода................................................................ 171
Гаврилова М.А., Жамантаев Б.У., Женисов Ж.Н. Потенциальные источники помех беспроводной связи по сети wi-fi…………….. 174
Горкунова А.О., Редько Л.А. Управление знаниями в системе менеджмента качества организации................................................ 177
Горлов Н.И., Югай В.В., Алькина А.Д. Исследование дополнительных потерь волоконно-оптических проводников направляющих систем телекоммуникации................................................................ 179
Дектянников А.И., Сечин А.А. Внедрение системы управления техногенными рисками в энергетической отрасли……………… 181
Дрижд Н.А., Жүніс Г.М. Көмір шахталарын газсыздандыру тәсілдерінің қажеттілігін талдау............................................................................ 184
Есенбаев С.Х., Аймагамбетова Р.Ж., Белик М.Н. Мамандыққа машықтандырудың өнімді әдісі....................................................... 186
Есенжолов У.С., Конурбаева К.Ж. Протокол LDAP как способ внедрения виртуальных АТС……………………………………... 188
Ефименко С.А., Ордубаев С.Г., Исатаева Ф.М. Аппаратура для геологического обслуживания горных работ на руднике Кусмурын ТОО «Корпорация Казахмыс»....................................... 191
Ефименко С.А., Кан А.Н., Желаева Н.В. Современный рентгенофлуоресцентный спектрометр РПП–12Т, как инструмент совершенствования методов геологического обслуживания разведочных и добычных работ на шахтах ПО «Жезказганцветмет».......................................................................... 194
Ефименко С.А., Ким В.В., Каскатаева К.Б. Современный рентгенофлуоресцентный спектрометр РПП–12РИ, как инструмент совершенствования методов геологического обслуживания разведочных и добычных работ на шахтах ПО «Жезказганцветмет»……………………………………………….. 197
Жакишева Т.М. Разработка приемопередающего устройства с применением силовой линии........................................................... 200
Жезбаев А.К., Айжамбаева С.Ж. Контроль как необходимое условие успеха организации........................................................................... 203
Зятьков Д.О., Юрченко А.В. Study of capacitive sensitive elements of the magnetic field sensors………………………………………………. 205
Ивандилинова Д.Т., Исабек Т.К. Анализ применения гидрозакладки выработанного пространства на шахтах Карагандинского угольного бассейна………………………………………………… 207
310
Ислямова А.Е., Бесимбаева О.Г., Ярцева В.Ф. Технология создания цифрового топографического плана................................................ 209
Калиаскаров Н.Б., Ахметов А.Г. Негізгі класстардағы сүзгілердің жіберу функциялардың, жалпы математикалық формуласын анықтау............................................................................................... 212
Калиаскаров Н.Б., Югай В.В., Мехтиев А.Д. Жетісегментті сандық индикаторын пайдаланып, байланыс жүйесінде қолданылатын бірсандық дисплейді жинау.............................................................. 214
Калужский Д.Л., Мехтиев А.Д. Перспективные разработки в области многополюсных синхронных машины…………………………… 216
Каменова Ш.К., Сланбекова А.Е. Ақпараттық жүйелердің кәсіби дайындығы......................................................................................... 219
Кан О.А., Клюева Е.Г. Измерение зависимости диэлектрической проницаемости кристаллов от приведенной частоты…………… 221
Кашкимбаева Н.М., Калдарова М.Ж. Cырттай мониторинг жүйелерінде кеңістіктік ақпаратпен жұмыс істеу үшін интерфейстерді құру.. 224
Ким А.Р., Маусымбаева А.Д., Портнов В.С., Мазах Б. Использование геоинформационной системы GEOVIA SURPAC для моделирования угольного месторождения Шубарколь………… 227
Кириллова В.И., Мойзес Б.Б., Гаврилин А.Н.,Сун Ш., Алимбаев С.Т. Развитие информационно-измерительных систем в аспекте вибродиагностики гидроприводов................................................... 230
Кусаинова А.А., Мезенцева О.В. Определение экстремальных суточных температур воздуха с использованием программы «Weather App» по данным наблюдений метеорологических станций Северного и Центрального Казахстана........................................... 233
Мажанов М.О., Редько Л.А. Повышение эффективности процессов на основе применения методологии бережливого производства...... 237
Мазаков Т.Ж., Жолмагамбетова Б.Р. О возможности дистанционного медицинского контроля пациентов................................................. 239
Мишина В.И., Редько Л.А. Совершенствование деятельности организации на основе теории ограничений.................................. 242
Мурат М. Б. Электрлік барлау есептерінің әдістері....................................... 243 Низаметдинов Р.Ф., Нагибин А.А., Илюбаев Н.С. Высокоточные
инструментальные наблюдения на открытых разработках........... 246 Овсянникова А.В., Плотникова И.В., Түскенова Д.Ө. Влияние
светодиодных осветительных приборов на окружающую среду 250 Павлов В.В., Степанов А.Б., Белик М.Н. Анализ методов и средств
измерения влажности материалов................................................... 252 Пак С.Ю., Валуйская А.Н., Гаврилова М.А. IPV6 — новая версия
протокола IP………………………………………………………... 255 Панина М.С. Оценка результативности системы менеджмента качества
инновационного предприятия.......................................................... 258 Полюшко Д.А. Вихретоковый преобразователь для толщиномера
легкосплавных бурильных труб....................................................... 260
311
Райымқұлов Д.М. Импульсно-дуговой метод поиска повреждений кабельных линий…………………………………………………...
263
Спасенко В.С., Мойзес Б.Б., Гаврилин А.Н, Чжан Сяолян, Сергеев В.Я. Универсальный информационно-измерительный комплекс для вибродиагностики технологического оборудования……………. 266
Тауапык Н.Н., Есенбаев С.Х. Контроль толщины стенки легкосплавных бурильных труб……………………………………………………. 269
Толеу А.Т., Валуйская А.Н., Есенжолов У.С. 5g – мобильная сеть нового поколения.............................................................................. 272
Турсунова А.Е., Искаков М.Б. Құс фабрикасы ғимараттарындағы температураны бағалаудың математикалық моделі 274
Цесько О.Н., Толеу А.Т., Югай В.В. Bluetooth 5.0 — новое поколение bluetooth.............................................................................................. 277
Цыденов Э.Б., Вавилова Г.В., Айжамбаева С.Ж. Исследование влияния температуры воды при контроле емкости провода........................ 280
Шибико А.В. Радиоволновой метод определения местоположения гидратных пробок в магистральных газопроводах……………… 284
Югай В.В., Перне М.С. Жарық диодты 3D- шар........................................... 285 Югай В.В., Савенков Г.Г. Berillium oxide ceramics wideband UHF
attenuator............................................................................................. 287 Юрченко А.В., Мехтиев А.Д., Алькина А.Д., Нешина Е.Г.
Использование оптического волокна для создания систем мониторинга………………………………………………………... 290
Юрченко А.В., Мехтиев А.Д., Алькина А.Д., Нешина Е.Г. Пассивные системы охраны периметров на основе оптических волокон…... 293
Юрченко В.В., Сергеев В.Я., Белик М.Н. Требования к контролю выбросов загрязняющих веществ при проектировании экологически чистых котлов на твердом топливе………………. 296
Юрченко В.В., Белик М.Н., Капжаппарова Д.У. Қаланың тұрғын алабы шарттарындағы судың коммерциялық есептеудің автоматтандырылған жүйелері........................................................ 299
Яковлев Е.А., Мехтиев А.Д., Югай В.В. Обратные связи в системах автоматического регулирования и биологических системах. Постановка задачи…………………………………………………. 302
Ясинский В.Б., Черняков А.Б., Кузнецова Ю.А. Сетевые возможности программного комплекса kBookArgo…………………………….. 303
Научное издание
Т Р У Д Ы Международной научно-практической конференции
«Интеграция науки, образования и производства – основа реализации Плана нации» (Сагиновские чтения № 10)
14-15 июня 2018 г.
Часть 3
Подписано в печать 31.05.2018 г. Заказ № 378 Формат 60x90/16 Объем 19,5 печ. л. Тираж 5 экз.
Цена договорная Издательство КарГТУ, 100027, г. Караганда, Б. Мира, 56





























