Embed Size (px)
DESCRIPTION
International Journal of Engineering Research and Applications (IJERA) is an open access online peer reviewed international journal that publishes research and review articles in the fields of Computer Science, Neural Networks, Electrical Engineering, Software Engineering, Information Technology, Mechanical Engineering, Chemical Engineering, Plastic Engineering, Food Technology, Textile Engineering, Nano Technology & science, Power Electronics, Electronics & Communication Engineering, Computational mathematics, Image processing, Civil Engineering, Structural Engineering, Environmental Engineering, VLSI Testing & Low Power VLSI Design etc.
Citation preview

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 655 | P a g e
The Spinning Motion of a Gyrostat under the Influence of
Newtonian Force Field and a Gyrostatic Moment Vector
T. S. Amer1, Y. M. Abo Essa
2, I. A. Ibrahim
3 and W. S. Amer
4
1,2,3
Mathematics Department, Faculty of Education and Science (AL-Khurmah Branch), Taif University,
Kingdom of Saudi Arabia (4)
Mathematics Department, Faculty of Science, Minufiya University, Shebin El-Koum, Egypt.
In this paper, the rotational motion of a gyrostat about a fixed point in a central Newtonian force field is
considered. This body is acted upon by a gyrostatic moment vector . We consider the motion of the body in a
case analogous to Lagrange's case. The analytical periodic solutions of the equations of motion are obtained
using the Poincaré’s small parameter method. A geometric interpretation of motion is given by using Euler’s
angles to describe the orientation of the body at any instant of time. The graphical representations of these
solutions are presented when the different parameters of the body are acted. The fourth order Runge-Kutta
method is applied to investigate the numerical solutions of the autonomous system. A comparison between the
analytical and the numerical solutions shows a good agreement between them and the deviations are very small.
MSC (2000): 70E15, 70D05, 73V20
Keywords: Euler's Equations, Gyrostat, Newtonian force field, Perturbation methods
I. Introduction The rotational motion of a gyrostat about a
fixed point in a uniform force field or in a Newtonian
one is one of the important problems in the theoretical
classical mechanics. This problem had shed the interest
of many outstanding researchers e. g. [1-14]. In fact
this problems require complicated mathematical
techniques. It is known that this motion is governed by
six non-linear differential equations with three first
integrals [15].
Many attempts were made by outstanding
scientists to find the solution of these equations but
they have not found it in its full generality, except for
three special cases (Euler-Poinsot, Lagrange-Poisson
and Kovalevskaya). These cases have certain
restrictions on the location of the body’s centre of mass
and on the values of the principal moments of inertia
[1-3]. Arkhangel’skii, Iu. A. [1] showed that this fourth
algebraic integral exists only in two special cases
analogous to those of Euler and Lagrange and that,
other cases with single-valued integrals are not
additional cases but it can be reduced to previous
cases. The necessary and sufficient condition for some
functions to be a first integral for the Euler- Poisson
equations when the motion of a rigid body is acted
upon by a central Newtonian force field is investigated
in [4]. The Hess’s case for the motion of a rigid body
was studied in [5] having the assumption of giving
initial high value for the angular velocity about some
axis, is imparted to the body.
The motion of Kovalevskaya gyroscope was
studied in [6-11]. In [8], the existance of periodic
solutions for the equation of motion of a rigid body in
a Kovalevskaya top are obtained and it has been
extended in [9]. The periodic solutions nearby
equilibrium points for the same problem are
investigated in [10] using the Liapunov theorem of
holomorphic integral when the body moves under the
influence of a central Newtonian field. The author
generalized this problem in [11] when the body acted
by potential and groscopic forces. An exceptional case
of motion of this gyroscope was treated in [12].
In [16], the authors have obtained the ten
classical integrals for the generalized problem of the
roto-translatory motion of n gyrostats 2n . This
problem was studied in [17], when a system was made
of two gyrostats attracting one another according to
Newton’s law. The problem of the earth’s rotation,
using a symmetrical gyrostat as a model was
considered in [18]. The authors considered the first two
components of the gyrostatic moment are null and the
third component is chosen as a constant. This study
was extended and was generalized in [19].
The small parameter method of Poincaré [20]
was used to find the first terms of the series expansion
of the periodic solutions of the equations of motion of
a rotating heavy rigid body about a fixed point when
the body spins rapidly about the dynamically
symmetric axis [21,22 ] and acted by the gravitaional
and Newtonian force field respectively. This problem
was generalized in [23] when the body moves under
the unfluence of Newtonian force field and the third
component of gyrostatic moment vector.
The problem of a perturbed rotational motion
of a heavy solid close to regular precession with
constant restoring moment was treated in [13] and
[14]. It is assumed that the angular velocity of the body
RESEARCH ARTICLE OPEN ACCESS

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 656 | P a g e
is sufficiently high, its direction is close to the axis of
dynamic symmetry of the body, and the perturbing
moments are small in comparison with the gravity
moments. Averaged systems of the equations of
motion are obtained in the first and second
approximations in terms of the small parameter. The
perturbed problem of the rotatory motion of a
symmetric gyrostat about a fixed point with the third
non-zero component of a gyrostatic moment vector
(about the axis of symmetry) and under the action of
some moments was considered in [24]. This problem is
generalized in [25]. The problem of existence of
periodic motions of a solid was studied in [26]. The
author used the Poincaré’s method of small parameter
to obtain the periodic solutions of the equations of
motion. It was assumed that the center of mass of the
solid differs little from a dynamically symmetric axis.
This problem was generalized in [27], when the body
rotates under the action of a central Newtonian force
field and the third component of the gyrostatic moment
vector.
In this work, the rotational motion of a
gyrostat about a fixed point in a central Newtonian
force field analogous to Lagrange's case is studied
when the body is acted upon by a gyrostatic moment
vector about the moving axes. The equations of motion
and their first integrals are obtained and have been
reduced to a quasilinear autonomous system of two
degrees of freedom with one first integral. Poincaré’s
small parameter method [20] is applied to investigate
the analytical periodic solutions of the equations of
motion of the body with one point fixed, rapidly
spinning about one of the principal axes of the
ellipsoid of inertia. A geometric interpretation of
motion is given by using Euler’s angles [28] to
describe the orientation of the body at any instant of
time. The numerical solutions of the autonomous
system are obtained using the fourth order Runge-
Kutta method [29]. The phase plane diagrams describe
the stability are presented. A comparison between the
analytical and the numerical solutions shows a good
agreement between them and the deviations are very
small.
The model of a gyrostat has a wide range of
applications in various fields such as satellite, robot
manipulators, and spacecraft. Moreover, the study of
the rotational motion of a gyrostat has been motivated
by industrial applications in many fields. This is
because the gyrostat provides a convenient model for
the satellite-gyrostat, spacecraft and like; see [30,31]
II. Equations of Motion and Change of
Variables Consider a rigid body (gyrostat) of mass M ,
with one fixed point O ; its ellipsoid of inertia is
arbitrary and acted upon by a central Newtonian force
field arising from an attracting centre 1O being located
on a downward fixed axis OZ passing through the
fixed point with gyrostatic moment vector
),,( 321 about yx, and z axes respectively.
It is taken into consideration that at the initial
time, the body rotates about axisz with a high
angular velocity 0r , and that this axis makes an angle
...),2,1,0(2/0 nn with the Z axis.
Without loss of generality, we select the positive
branches of the z axis and of the x axis in a way to
avoid an obtuse angle with the direction of the
Z axis. The equations of motion and their three first
integrals similar to Lagrange case take the forms
[32,33]
;)(,,
],)()()([
),(])([
),(])([
111111111111111
1111112111
1
0
2
1
11110
1
11
1
031
1
0
1
1111
11110
1
21
1
031
1
0
1
1111
pqrpqr
CkqpCpqCcr
BazbrcprBrpBq
AakzarcqrArqAp
(1)
;)(,1,1 2
0
2
1
2
1
2
12111
22
1
SrSr (2)
where
];)1(
)()([)()]()[(
)1(2]})1()()([)(){(
13
11021101
1
01110101110102
10
2
1
2
1
2
10
2
1
2
10
2
1
2
10
2
1
2
101
CcqqppaS
zkqqppaS
(3)
;10,0,,,,
,).(,,,
000101010
2
101010
rt
ddcNkrrrqcqpcp (4)

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 657 | P a g e
,,3,0,0,
,/,/,,)(
2
00000
2
11
RgRgNzyxrc
ClgMcCAbaBAAACBA
(5)
BA, and C are the principal moments of
inertia; 00 , yx and 0z are the coordinates of the
centre of mass in the moving coordinate system
,);( zyxO and are the direction cosines of
the downwards fixed axisZ of the fixed frame in
space ,);( qpZYXO and r are the projections
of the angular velocity vector of the body on the
principal axes of inertia; R is the distance from the
fixed point O to the centre of attraction 1O ; is the
coefficient of attraction of such centre; 21, and 3
are the components of the gyrostatic moment vector
; and ,,,, 00000 rqp and 0 are the initial
values of the corresponding variables.
III. Reduction of the Equations of Motion
to a Quasilinear Autonomous System
From the first two equations of (2), one can express the
variables 1r and 1 as
,])1(
)1(2[2
11
,])1(
)1(2[2
11
2
1
101
2
21
2
1
101
2
1
k
zSS
k
zSr
(6)
Differentiate the first and the fourth equations
of (1) and use (6) to reduce the four remaining
equations to the following two second order
differential equations
,})2(])1(
)1(2[)(2
1])1()1(2
)[1(2
1{})(])1(
)1(2[])1()1(
)1([][{}][
)()()1()(
)()()({)(
120
1
13
2
1
10111
1
0
2
100
11
1
10
3
3211
1
0
2
1
0011
1
13
1
01211111
2
11110
1
11
22
31110
1
1
011
2
11
1
02111
1
0
11
1
112111
1
0111
1
01
2
1
pSzaAkk
zSAkrAkz
SAazSAkrAk
zSAAprSACq
pAkpzapSAkza
rAAkAazqpCrA
SrAAqpqrCAAAcpp o
(7)
,)2(]
)()1([])
()()()()1[()(
2110
13
11
2
1
1
0111121111
2
121
11
1
01321
1
0111
1
011
SAkzaAk
qazqpSpASp
qrCpSrApArA
(8)
where is a new frequency called Ismail and Amer's
frequency [23] and takes the form
.,2 13
1
01
122 ArAA
Here 0r is large, so ,,3
0
2
0
rr are neglected.
Solving the first and the fourth equations of system (1),
and using (6), we obtain 1q and 1 in the form
).(
],)(
)(][)(1[)(
111
1
11
11110
1
121
1
03
1
101
1
111
qr
Aakza
prAcrrAArAq
(9)

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 658 | P a g e
Let us introduce new variables 2p and 2 such that
,, 2122112 ppp (10)
where
,)( 1
2
2
122
10 yAArC
],)()()()1([)1( 310
11
0
2
11
1
0
12
1 AkzarAAkAaz
.3,2,1)(],)(1[)1( 1
03
1
01
12 iCcyrAA ii
In terms of the new variables 2p and 2 , the variables 1q and 1 take the form
,}2
1]
)[({])([)(
,})(2
1])
([{])([)(
21122122
112
1
0
2
212
1
0222
1
021
2121211
1
12110
1
1
2
112
1
0222
1
21
SpS
SrAXSrAXprAX
SAkXpSApSza
AkXSrAXyACpXq
(11)
where
.,],)(1[ 210
1
123
1
01
1
1 XAkzarAAAX
Making use of (11) and (10) into (3), we obtain the following expressions for 1S and 2S in terms of power series
in
)2,1(,2 2
2
1
iSSS i
i
ii (12)
where
)},(2])()(2
)()([)(){(
2202
12
2220
1
0
2
2
2
20
2
2
2
20
2
2
2
20
22
2
2
2011
ppyAXCrAX
kppXppaS
),(]})(
)([)()()
({)()]()(
)[(])()([
22022
12
2220
212202
1
0222020222
20202102220202220
112
1
0
2
222020122012
yAXCpp
SarAXppap
pakSkzpppp
SrAXappppaS
(13)
),)(1()(
)]}()()([){(
220
1
22201
2202
1
022202022202021
ACXayy
pprAXppXppaS
.)()(})()(
)()())((
)({])()()([
21322022201
2
2
2
202220
211
1
02220212
1
022
1
2
2
2
202
2
2
2
201220
2
2
2
2022
Syppyppy
XSrAppSrXyCA
ppXappaS

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 659 | P a g e
From (12), (13) and (6), we get
.])([)2
1(1
,])([2
11
21012
3
1122
2
211
21012
3
11
2
1
SzkSSSS
SzkSSr
(14)
Substituting (10), (11), (12), (13) and (14) into (7) and (8), we obtain the following quasilinear
autonomous system of two degrees of freedom
),,,,,()(
),,,,,(
22221
1
022
22221
1
12
2
2
pprA
ppFyAACpp
(15)
where
,, 3
2
213
2
21 FFFF
,)(})(
]2)2([{)()(
2221
1
022
1
21
1
22222
12
2
1
2
1
0111
1
01
CkrApyApAC
ppyApCrArAF
])([)()( 2222
1
1
1
2
1
0121
1
01 ppyAArCSrA
,)1(),()1(
),)(1(,)1(
2
2
1
2
23321
2
12133
21
2
222
2
122
pffF
pfF
]},])([[{
)()1()]()([
}])(][)([2)(2
1{)(2)(
)})((])(2[{)(
2222
1
12
1
211
11
01
1
11
21131
1
02121122
1
2
1
012
21212
1
01222
1
01222
1
01
2
22102
1
211
2
1211
1
0222
1
0
22
1
211
1
22
1
12
1
22
1
012
ppyACSAryAAC
pSArAASAkpyArAA
XAkSrAAprAArAA
pkAzpapSSArAprA
pyAACCApCAyrAf
),2(
)]}2([{)](
)([)1()1()](
[)(]})([)({
2120
1
21
22
1
2
12
2
2
1
1
0222
1
1
0122
1
112121112212
2222
1
0
2
2222
1
22
1
122
1
1
1
02
AkzaS
pyAyApXAkazpyA
rAAACSpAS
pprCpyApACSAr

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 660 | P a g e
)},(])(2[)({
)2(])()1([2
1
}])([2)({)()(
)1(})]())(())(
([])(][)([{
}]))()()((2)(2
1[)(){(])(2[
})(}]2
1)([{
])(2[)({)(
22
11
2222
1
2
1
12
1
021
0
1
121221
1
03120
1
11
021122211131
1
02222
1122
1
2
1
0122212
1
01
2222112
1
012
1
01221
212
1
01222
1
01222
1
01
2
210
1
212111122
2
22
2
1
1
2221212110
1
1
21
1
22
112
22
11
0123
pyACpyApACpr
zaAkSpAkrAAzaS
zkSSpSAArpS
AAkpyArAApSrAA
pXXSrAArAAAk
SrAAprAArAA
AkzaSSp
ppACSAkpSzaAk
pACpyACCrAf
(16)
.)2(
])()[(2}])2(
[{}]))()(())(
([)(])(][)([{
])()[1()2(])(
)([)(}])([]
)2
1([))(({)(
2120
1
21
2122
1
021122
1
2
2
22
1
2
1
2
2
2
0
1
2
1
012221
1
01212
22222
11
012222
1
02112
212122211221122122
221222
1
1
1
0222
1
0211222121
110
1
1222212222
11
1
1
0113
AkzaS
pAkrASpyAXpyAyA
pXzaprAArAAS
pppyArAArASpX
SSpASSpp
pSpArCrASpSAk
SzaAkppSpyAArCA
The first integral of system (15) can be obtained from (2) in the form
.1)(})2
1
(2])(][)([2
])(2[{}])(
][)([{2])(2[
2
011
22
2
2122122
1
0112
1
0122
1
012122222
2
2
22
21
1
01212
22
1
012222
1
01222
2
2
S
SSpSrASrAAX
rAASpppSrAAS
prAAprAA
(17)
Our aim is to find the periodic solutions of
system (15) under the condition CBA or
CBA (2 is positive). This means that, the
body is set in a fast initial spin 0r about the major axis
of the ellipsoid of inertia or about the minor axis of the
ellipsoid of inertia.
IV. Formal Construction of the Periodic
Solutions Since the system (15) is autonomous, the
following conditions
,0),0(
,0)0,0(
,)0,0(
2
2
1
1
12
p
yBACp
(18)
do not affect the generality of the solutions [23]. The
generating system of (15) is
,0,0 )0(
2
)0(
2
)0(
2
2)0(
2 pp (19)
which admits periodic solutions with period
nT 20 in the form
,cos,sincos 3
)0(
221
)0(
2 MMMp
(20)
where )3,2,1(, iM i are constants to be
determined. So, we suppose the required periodic
solutions of the initial autonomous system in the form

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 661 | P a g e
),(cos)(),(
),(sin)(cos)(),(
1
332
1
22112
k
k
k
k
k
k
HM
GMMp
(21)
with period ).()( 0 TT The quantities 1 ,
2 and 3 represent the deviations of the initial
values of 22, pp and 2 of system (15) from their
initial values of system (19); these deviations are
functions of and vanish when 0 . The initial
conditions of (21) can be expressed as
.0),0(,),0(),(),0(,),0( 2332222112 MMpMp (22)
Let us define the functions )(kG and ),3,2,1()( kHk by the operator [23]
kk
kk
hgu
HGU
M
u
M
u
M
u
M
uuU
,
,,
2
1 2
12
1
2
3
3
2
2
1
1
(23)
where
.)3,2,1()(sin)()(
,)(sin)(1
)(
0
111
)0(
0
111
)0(
ktdtth
tdttFg
kk
kk
(24)
Now, we try to find the expressions of the functions )0(
2
)0(
1
)0(
1 ,, FF and )0(
2 . The periodic solutions (20) can
be rewritten as
,cos),(cos 3
)0(
2
)0( MEp (25)
where
.tan, 12
12
2
2
1 MMMME
Making use of (25) and (13), we obtain
],)sin(sin[)(2sin)(2
]})(2cos1)[1(2
1sincos{
1
02
21
0133
2222222)0(
11
AcXEarAAMak
XXaES
],sin)cos1([
}])(sinsin[)(sin{
}])1[(cos)1(2
1])1([cos)1(
2
1cos{
213
1
01223
1
3
)0(
21
yyM
rAAEyMACXa
XXaEMS

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 662 | P a g e
,)(
sin)(}]]))sin(sin(sin[
)()sin(sin[])cos(coscos[
{})sin(sin])sin(sin[)({
}])(coscoscos[])(coscos[{
)0(
210
1
0223
2
2
)0(
213
1
0232
332
1
0
)0(
112
2
31
)0(
12
Skz
AcMXESM
rAXME
MEakMrAS
EXaMXEaS
(26)
.}])sin(
sin[])cos(cos[{}])(
))(sin([sin])sin(sin[
])([])(sinsin[
{}sin)cos1(])(coscos[{
)0(
213
21
1
0
2
122
)0(
112
1
0323
1
0
2
1
)0(
212
1
22
222
2
222
313
222)0(
22
Sy
yyErAA
SrAMXM
rAASAXCyEX
EaMMEaS
Substitution of (25) and (26) into formulas (16), to get
,cos)(
,]sincos[)(
,sin])([1{
,]cossin][)(2[
3
)0(
2
21
)0(
2
31
1
01
1
2
)0(
1
2122
1
01
)0(
1
NM
MMLF
MrCACXaAy
MMyrCAAF
(27)
where
,})(2])(
)1(´[2
1)]1(
2
1)[({
)(])(2[])1([)(
1
0
2
22
2
2
2
1
22
1
2
3
222
2
222
1
2
1
1
3
1
0
1
011
2
10
1
AcXMaMM
XaCMkXMXMa
AArrAakAzaL
(28)
.])()
()[2()(2
)()]1(
[))(1()()(
1
01221
131
1
0
1
0
2
22
1
1
1
0
2
2
1
1
2
1
1
0
2
2
2
1
222
2
222
1
rAXMay
MaMAkazAcXMa
AaryXAAk
bzMMaXMXMaN
Form (24), (27) and (28), the following results are obtained
).()(,0)(
]},)([1{)(,0)(
),()(),()()(
,)(2)(
,)(2)(
30202
1
1
01
1
230101
1022
1
02
22
1
01201
22
1
01101
NMnThTh
rCACXaAyMnThTh
LMnTgLMnTg
yrCAAMnTg
yrCAAMnTg
(29)
Substituting (22) into (17) for 0 , we obtain

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 663 | P a g e
.1)(])(
)())(([22
2
022
1
01223311
2
333
2
3
M
rAAMMMM
Supposing that 0 is independent of , we get 3M and 3 as
.)(,0)()1( 1133
1
0
2
0321
MMM (30)
The independent conditions for the periodicity are [21]
),(])()()([])([
,0])([}]))(
()(1)[)(()({
,0])([
}]))(()(1)[()({)(
03
2
0201
11
0133
02
11
01
33
1
0111
1
1111
02
11
0133
1
011
2
1
1
2
THTHTHrAM
TGrB
MrAyAACNLn
TG
rAMrANLn
(31)
where )(1 L and )(1 N can be obtained from (28) by replacing 21, MM and 3M by 21, and
33 M respectively. Then, we have
),()()()()()()( 43201
2
2
2
11
2
1 WWkWzWNL (32)
where
,))(1(])(][1)([2
1)( 22
31
1
0
22
1 XaAArXaW
]},)())((1[1{)( 1
0
2
1223311
211
2
rAAaMyaaaW
],)(2))((21[)( 2
1
0
2
1233111
2
13 rAAaMyaAAW
.]})([2)(41{4
1
)1()()2()()(
2
2
2
1
1
02
2
2
22
1
4
1
21
21
21
014
XAcXXya
AyXArAaW
From the condition that the z axis has to be
directed along the major or the minor axis of the
ellipsoid of inertia of the body, it follows that
0)(1 W for all under consideration. So, let
us assume
.0)()()( 4320 WWkWz
Using (31), the expression of 1 and 2 are obtained
in the form of a power series of integral powers of .
These expansions begin with terms of order higher
than 2 . Consequently, the first terms in the
expansions of the periodic solutions and the quantity
)( can be expressed as
,
]cos)([ 31
12
0
2
1
2
211
MrAACyp
,sin]
)(2[
32
32
2
012
1
1
MX
rAAakyAXCq
,sin)(1 1
0133
2
1 rAAaMkr
,cos31 M

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 664 | P a g e
,]}sin)(2[sin)(
sin{]}sin)cos1([1{)(sin
3
1
012
1
0133
32
2
213
1
01231
MXrAArAAbMk
MXyyMrAAM
.}sin)(
]sin)(sin)cos1([sin)(
)2cos1)((2
1)cos1({
]sin)(sin)cos1([1
1
013
1
0
2
1
2
22213
1
0
2
1
222133
2
1
0
2
1
2
222131
rAAak
rAAyCayyyrAA
aXMaaM
rAAyCayyM
.])2()()(
)1(}[])([1{)(
1
1
031
1
011
21
2
2
1
1
0
1
3330
1
1
AkazMyrAaAkAXy
azMrAn
(33)
The solutions obtained in [22], [34] and [35]
have singular points when .,31,21,3,2,1
These singularities are solved separately in [34], [36],
[37] and [38]. In our problem when we used Ismail and
Amer's frequency [23] instead of , there are no
singular points at all. Moreover, the obtained solutions
are valid for all rational values of and are
considered as a general case of [21], [22] and [23].
V. Geometric Interpretation of Motion In this section, the motion of the rigid body is
investigated by introducing Euler’s angles , and
, which can be determined through the obtained
periodic solutions. Since the initial system is
autonomous, the periodic solutions are still periodic if
t is replaced by )( 0tt , where 0t is an arbitrary
interval of time. Euler’s angles, in terms of time t ,
take the forms [27,28]
.cos,tan,1
,cos0
002
td
dr
td
dqp
td
d
(34)
Substituting (33) into (34), in which t has been replaced by 0tt , and using relations (4), the following
expressions for the angles , and are obtained as
,tan,)2/( 3
1
000 Mhr
)],()([)]()([ 22
2
110 hhthht
},])()([
])()([])()({[coseccos
33
2
2211000
hht
hhthhtc
)]},()([coscot)]()([{tan
)]}()([)]()({[coscot
4400330
2
22110000
hhtchht
hhthhtctr
where
,sin])(1[cos)( 02
1
0
22
12011 tryrAAactryt
,2cos)(tan2
1
sin}])([)({cos)()(
0210
032
1
12
1
01320312
trXa
trkArAAayytrayyt
],cos)(cos[)()( 0
1
102
1
0121 trtAArAAyCt
,2sintan)(4
1]tan
2
1)[()( 002
1
1002212
1
0
22
12 trArtXyyCrAAt

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 665 | P a g e
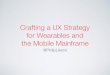
0 40 80 120 160 200
16E-05
12E-05
8E-05
4E-05
0
- 4E-05
-8E-05
-14E-05
320
310
0
Fig. (1) t-axis
p -axis2a
A = B < C
,cos)(2sintan4
1
]tan)(tan)(tan[2
1)(
0
1
0
2
122001
1
0
0
1
0
2
12220
1
0
2
132
2
013
trrAAyCtrr
trAAyrAAayXCkt
),()(),()(),()( 342211 tttttt
.cos)(8
1)( 0
1
0133 trrAAakt
It is evident that the Eulerian angles ,
and depend on some arbitrary constants
000 ,, and 0r ( 0r is large). For ,0 we
have 0,0 and 0r . This permits
permanent rotation of the body with spin 0r
(sufficiently large) about the z axis.
VI. Numerical Solutions Matching of
Analytical Solutions This section is devoted to ascertain accuracy
of the obtained solutions.
(i) We introduce the analytical solutions
through computer program. So, let us consider the
following data that determine the motion of the body
.566371.12,..)50,40,30,20,10,0(
,352.0,5,30,6.0,2000,1000
.4.33.32.50,.6.35.49.22
12
321
000
2222
Tsmkg
mzkgMmRmr
mkgCmkgBAmkgCmkgBA
Consider aap 22 , denoting the analytical solutions
22 , p . The graphical representations for these
solutions are given in figures (1)-(5) for the case
CBA and figures (6)-(10) for the case
CBA .
(ii) The quasilinear autonomous system (15) is
solved numerically using the fourth order Runge-Kutta
method through another program with the same
previous data and the initial values of the analytical
solutions. Consider nnp 22 , to denote the numerical
solutions 22 , p . The numerical graphical
representations are given in figures (11)-(15) for the
case CBA and figures (16)-(20) for the case
CBA .
The comparison between the analytical and
the numerical solutions shows quite agreement
between them, see the corresponding figures (1)-(5),
(11)-(15) and (6)-(10), (16)-(20) for the cases
CBA and CBA respectively. This
agreement gives powerful ascertain for the analytical
technique. The corresponding phase plane diagrams for
some of these solutions describing the stability of the
solutions are given in figures (4), (5), (9), (10) for the
analytical solutions and (14), (15), (19), (20) for the
numerical solutions.
Here, the concerned plots represent the
functional time dependence of the amplitude of the
waves revealing when increases. We conclude
that when increases the amplitude of the wave
increases also and the number of the waves remain
unchanged, see figures (1), (2), (11) and (12) for the
case CBA but for the case CBA , we
can see from figures (6), (7), (16) and (17) that the
amplitude of the wave decreases. Also, the solutions
a2 and n2 remain unchanged for different values of
because these solutions do not include the variables
BA,,,, 321 and C .

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 666 | P a g e
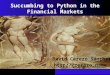
0 40 80 120 160 200
4E-04
3E-04
2E-04
1E-04
0
-1E-04
340
330
350
Fig. (2) t-axis
p -axis2a
A = B < C
0 40 80 120 160 200
2
1
0
-1
-2
Fig. (3) t-axis
-axis2a 340330 350, ,A = B < C
1.4E-04 2.2E-04 3E-04 3.8E-04
0.012
0.008
0.004
0
-0.004
-0.008
-0.012
350
Fig. (4)p -axis
2a
p -axis2a A = B < C
-2 -1 0 1 2
200
100
0
-100
-200
310
Fig. (5) -axis2a
-axis2a A = B < C
0 40 80 120 160 200
14E-05
8E-05
4E-05
0
- 4E-05
-8E-05
-12E-05
-18E-05
0
320
310
Fig. (6) t-axis
p -axis2a
A = B > C
0 40 80 120 160 200
1E-04
0
-1E-04
-3E-04
-5E-04
-7E-04
350
340
330
Fig. (7) t-axis
p -axis2a
A = B > C

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 667 | P a g e
0 40 80 120 160 200
2
1
0
-1
-2
Fig. (8)
-axis2a 340330 350, ,A = B > C
-6.2E-04 -5.4E-04 - 4.6E-04 -3.8E-04 -3.2E-04
0.014
0.008
0.004
0
-0.004
-0.008
-0.014
350
Fig. (9)p -axis
2a
p -axis2a A = B > C
-2 -1 0 1 2
200
100
0
-100
-200
310
Fig. (10) -axis2a
-axis2a A = B > C
0 40 80 120 160 200
16E-05
12E-05
8E-05
4E-05
0
- 4E-05
-8E-05
-14E-05
320
310
Fig. (11) t-axis
p -axis2n
A = B < C
0
0 40 80 120 160 200
4E-04
3E-04
2E-04
1E-04
0
-1E-04
350
330
340
Fig. (12) t-axis
p -axis2n
A = B < C
0 40 80 120 160 200
2
1
0
-1
-2
340330 350, ,
Fig. (13) t-axis
A = B < C -axis2n
-2 -1 0 1 2
200
100
0
-100
-200
310
Fig. (15)
-axis2n
-axis2n
A = B < C
1.4E-04 2.2E-04 3E-04 3.8E-04
0.012
0.008
0.004
0
-0.004
-0.008
-0.012
350
Fig. (14)p -axis
2n
p -axis2n A = B < C

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 668 | P a g e
VII. Conclusion The problem of the three-dimensional motion of
a gyrostat in the Newtonian force field with a
gyrostatic moment about one of the principal axes of
the ellipsoid of inertia, is investigated by reducing the
six first-order non-linear differential equations of
motion and their first three integrals into a quasilinear
autonomous system with two degrees of freedom and
one first integral. Poincaré’s small parameter method is
used to investigate the periodic solutions of the present
problem up to the first order approximation in terms of
the small parameter . The periodic solutions (33) are
considered as a generalization of those obtained in [21]
(in the case of the uniform force field), [22] (in the
case of the Newtonian force field) and [23] (in the case
of presence 3 only). The solutions and the correction
of the period for the latter problems can be deduced
from the obtained solutions in this work as limiting
cases by reducing the Newtonian terms and the
gyrostatic moment. The introduction of an alternative
frequency instead of avoids the singularities
traditionally appearing in the solutions of other
treatments. The analytical solutions are analysed
geometrically using Euler’s angles to describe the
orientation of the body at any instant of time. These
solutions are performed by computer program to get
their graphical representations. The fourth order
Runge-Kutta method is applied through another
computer program to solve the autonomous system and
represent the obtained numerical solutions. The
comparison between both the analytical and the
numerical solutions is considered to show the
difference between them. These deviations are very
0 40 80 120 160 200
1E-04
0
-2E-04
- 4E-04
-6E-04
-7E-04
330
350
340
Fig. (17) t-axis
p -axis2n
A = B > C
0 40 80 120 160 200
2
1
0
-1
-2
Fig. (18) t-axis
-axis2n 340330 350, ,A = B > C
0 40 80 120 160 200
14E-05
8E-05
4E-05
0
-4E-05
-8E-05
-12E-05
-18E-05
0
320
310
Fig. (16) t-axis
p -axis2n
A = B > C
-6.2E-04 -5.4E-04 - 4.6E-04 -3.8E-04 -3.2E-04
0.014
0.008
0.004
0
-0.004
-0.008
-0.014
350
Fig. (19)p -axis
2n
p -axis2n A = B > C
-2 -1 0 1 2
200
100
0
-100
-200
310
Fig. (20)
-axis2n
-axis2n
A = B > C

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 669 | P a g e
small, that is the numerical solutions are in full
agreement with the analytical ones. The great effect of
the gyrostatic moment is shown obviously from the
graphical representations.
References [1] Arkhangel'skii, Iu. A., On the algebraic
integrals in the problem of motion of a rigid
body in a Newtonian field of force, PMM 27,
1, 171-175, 1963.
[2] Kharlamov, P. V., A solution for the motion
of a body with a fixed point, PMM 28, 1,
158-159, 1964.
[3] Keis, I. A., On algebraic integrals in the
problem of motion of a heavy gyrostat fixed
at one point, PMM 28, 3, 516-520, 1964.
[4] Ismail, A. I. and Amer, T. S., A Necessary
and Sufficient Condition for Solving a Rigid
Body Problem, Technische Mechanik 31, 1,
50 – 57, 2011.
[5] Arkhangel'skii, Iu. A., On the motion of the
Hess gyroscope, PMM 34, 5, 973-976, 1970.
[6] Arkhangel'skii, Iu. A., On the motion of
Kowalewski's gyroscope, PMM 28, 3, 521-
522, 1964.
[7] Arkhangel'skii, Iu. A., On the motion of
Kowalewska's gyroscope in the Delone case,
PMM 36, 1, 138-141, 1972.
[8] F.M. El-Sabaa, A new class of periodic
solutions in the Kovalevskaya case of a rigid
body in rotation about a fixed point, Celestial
Mechanics 37, 71-79, 1985.
[9] F.M. El-Sabaa, Periodic solutions in the
Kovalevskaya case of a rigid body in rotation
about a fixed point, Astrophysics and Space
Science 193, 309-315, 1992.
[10] F.M. El-Sabaa, The periodic solution of a
rigid body in a central Newtonian field,
Astrophysics and Space Science 162, 235-42,
1989.
[11] F.M. El-Sabaa, About the periodic solutions
of a rigid body in a central Newtonian field,
Celestial Mechanics and Dynamical
Astronomy 55, 323-330, 1993.
[12] Starzhinskii, V. M., An exceptional case of
motion of the Kovalevskaia gyroscope, PMM
47, 1, 134-135, 1984.
[13] Leshchenko, D. D. and Sallam S. N.,
Perturbed rotational motions of a rigid body
similar to regular precession, PMM 54, 2,
183-190, 1990.
[14] Leshchenko, D. D., On the evolution of rigid
body rotations, International Applied
Mechanics 35, 1, 93-99, 1999.
[15] Malkin, I. G., Some problems in the theory of
nonlinear oscillations, United States Atomic
Energy Commission, Technical Information
Service, ABC. Tr-3766, 1959.
[16] Cid, R. and Vigueras A., About the problem
of motion of n gyrostats: 1. The first
integrals, Celestial Mechanics 36, 155-162,
1985.
[17] Sansaturio, M. E. and Vigueras, A.,
Translatory-rotatory motion of a gyrostat in a
Newtonian force field, Celestial Mechanics
41, 297-311, 1988.
[18] Cid, R. and Vigueras, A., The analytical
theory of the earth's rotation using a
symmetrical gyrostat as a model, Rev. Acad.
Ciencias. Zaragoza 45, 83-93,1990.
[19] Molina, R. and Vigueras, A., Analytical
integration of a generalized Euler-Poinsot
problem: applications, IAV Symposium, No.
172, Paris, 1995.
[20] Nayfeh, A. H., Perturbations methods,
WILEY-VCH Verlag GmbH & Co. KGaA,
Weinheim, 2004.
[21] Arkhangel’skii, Iu. A., On the motion about a
fixed point of a fast spinning heavy solid,
PMM 27, 5, 864-877, 1963.
[22] El-Barki, F. A. and Ismail, A. I., Limiting
case for the motion of a rigid body about a
fixed point in the Newtonian force field,
ZAMM 75, 11, 821-829, 1995.
[23] Ismail, A. I. and Amer, T. S., The fast
spinning motion of a rigid body in the
presence of a gyrostatic momentum 3 , Acta
Mechanica 154, 31-46, 2002.
[24] Ismail, A. I. Amer, T. S. and Shaker, M. O.,
Perturbed motions of a rotating symmetric
gyrostat, Engng. Trans. 46, 3-4, 271-289,
1998.
[25] Amer, T. S., New treatment of the perturbed
motions of a rotating symmetric gyrostat
about a fixed point, Thai J. Math. 7, 151-170,
2009.
[26] Elfimov, V. S., Existence of periodic
solutions of equations of motion of a solid
body similar to the Lagrange gyroscope,
PMM 42, 2, 251-258, 1978.
[27] Ismail, A. I.; Sperling, L., and Amer, T. S.,
On the existence of periodic solutions of a
gyrostat similar to Lagrange’s gyroscope,
Technishe Mechanik 20, 4, 295-304, 2000.
[28] Rao, A. V., Dynamics of particles and rigid
bodies: A systematic approach, Cambridge
University Press, 2006.
[29] Faires, J. D., and Burden, R., Numerical
methods, Inc. Thomson Learning, 2003.
[30] Rotea, M., Suboptimal control of rigid body
motion with quadratic cost, Dyn. Control 8,
55–80, 1998.
[31] El-Gohary, A., On the orientation of a rigid
body using point mass, Appl. Math. Comput.
151, 163–179, 2004.
[32] Baruh, H., Analytical dynamics, WCB/
McGraw-Hill, 1999.
[33] Amer, T. S., On the motion of a gyrostat
similar to Lagrange’s gyroscope under the

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 670 | P a g e
influence of a gyrostatic moment vector,
Nonlinear Dyn 54, 249-262, 2008.
[34] Arkhangel’skii, Iu. A., On a motion of an
equilibrated gyroscope in the Newtonian force
field, PMM 27, 6, 1099-1101, 1963.
[35] Ismail, A. I., On the application of Krylov-
Bogoliubov-Mitropolski technique for
treating the motion about a fixed point of a
fast spinning heavy solid, ZFW 20, 205-208,
1996.
[36] Ismail, A. I., Treating a singular case for a
motion a rigid body in a Newtonian field of
force, Arch. Mech. 49, 6, 1091-1101, 1997.
[37] Ismail, A. I., The motion of fast spinning rigid
body about a fixed point with definite natural
frequency, Aerospace Science and
Technology 3, 183-190, 1997.
[38] Ismail, A. I., The motion of a fast spinning
disc which comes out from the limiting
case 00 , Comput. Methods Appl. Mech.
Engrg. 161, 67-76, 1998.
Permanent Addresses: (1)
Mathematics Department, Faculty of Science, Tanta
University, Tanta 31527, Egypt. (2)
Mathematics Department, Faculty of Science, Al-
Azhar University, Nasr City 11884, Cairo, Egypt. (3)
Mathematics Department, Faculty of Science, Suez
Cana University, Egypt. (4)
Mathematics Department, Faculty of Science,
Minufiya University, Shebin El-Koum, Egypt.
Captions of Figures
Fig. 1
The graphical representation of the analytical solution
2p via t when
12 ..)320,310,0( smkgand for the case
.CBA
Fig. 2
The graphical representation of the analytical solution
2p via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 3
The graphical representation of the analytical solution
2 via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 4
The phase plane diagram of the analytical solution 2p
when 12 ..350 smkg for the case
.CBA
Fig. 5
The phase plane diagram of the analytical solution 2
when 12 ..310 smkg for the case
.CBA
Fig. 6
The graphical representation of the analytical solution
2p via t when
12 ..)320,310,0( smkgand for the case
.CBA
Fig. 7
The graphical representation of the analytical solution
2p via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 8
The graphical representation of the analytical solution
2 via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 9
The phase plane diagram of the analytical solution 2p
when 12 ..350 smkg for the case
.CBA
Fig. 10
The phase plane diagram of the analytical solution 2
when 12 ..310 smkg for the case
.CBA
Fig. 11
The graphical representation of the numerical solution
2p via t when
12 ..)320,310,0( smkgand for the case
.CBA
Fig. 12
The graphical representation of the numerical solution
2p via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 13
The graphical representation of the numerical solution
2 via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 14
The phase plane diagram of the numerical solution 2p
when 12 ..350 smkg for the case
.CBA

T. S. Amer et al. Int. Journal of Engineering Research and Application www.ijera.com
ISSN : 2248-9622, Vol. 3, Issue 5, Sep-Oct 2013, pp.655-671
www.ijera.com 671 | P a g e
Fig. 15
The phase plane diagram of the numerical solution 2
when 12 ..310 smkg for the case
.CBA
Fig. 16
The graphical representation of the numerical solution
2p via t when
12 ..)320,310,0( smkgand for the case
.CBA
Fig. 17
The graphical representation of the numerical solution
2p via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 18
The graphical representation of the numerical solution
2 via t when
12 ..)350,340,330( smkgand for the
case .CBA
Fig. 19
The phase plane diagram of the numerical solution 2p
when 12 ..350 smkg for the case
.CBA
Fig. 20
The phase plane diagram of the numerical solution 2
when 12 ..310 smkg for the case
.CBA





















![ROI in the age of keyword not provided [Mozinar]](https://img.dokumen.tips/doc/110x75/53eabc7a8d7f7289708b51f7/roi-in-the-age-of-keyword-not-provided-mozinar.jpg)