
ACS800 CraneDrive Control
Firmware Manual
ACC800 � ���� ���� ���� ���
�� ������� ���� ���� ���� ���� 7.1 for ACS800 Frequency Convertors
����


ACC800 Crane Application Program 7.1 for ACS800 Frequency Convertors
Firmware Manual
ABB Korea/ATDP/
� � : 2006-07-20
KR
3BSE 011179 R1025
EFFECTIVE : 2004-10-26
SUPERSEDES : 2004-10-01
2004 ABB Automation Technologies AB, Crane Systems. All Rights Reserved


��������������������� ��! "�# i
$ �&%�'$ �&%�'$ �&%�'$ �&%�'(*)(*)(*)(*)
+ , - ACS 800. / 0 , 1 2�3 4 5�6 7 8 9 : ; 4�5 <�= + > . ? @
A B�C D E F 7 G H , I JK. L MK3 N�O P
+ 6 Q R�D I S T U�T V�W X Y�ZK. L M + [�\K] > .
+ ^ . _�` - I S T�P a b ; E�F c C d e�2 P f g�B h�< C i�j k l > . m*n*om*n*om*n*om*n*o p*qp*qp*qp*q +
r s t�P W u v w�. x 2 <�= R > .
“ G D ” W y�z ; { 0 6 C < |�c G H } ~�; D ^ c [ \ C�� � , I JK. L�M V�W N O�7 Q R�W M ��6 ����W � N `�] > .
“ �K. ” W E F ��. � ��; ��.�� : XK��� � a �
N � P ~ � [�\�7 Q R W ��� y I 4 ��� R c G�H P N `K] > . �K.�W G D�P 5 � � 0 � y + < ? A�B � ��W x ] > . m*nm*nm*nm*n � � . ��� W
^ 5 P } ~ ; L�M + � I J�P � � ; � � � [ \ 7 Q R W M � P ~ ; ��B + > :
�*��*��*��*� 2 �2 �2 �2 � G DG DG DG D : D 2���P .�; I JK. � � �
^ 5 P L�M c ¡ Q R W M ��. G�D + > .
+ � �
> ¢ P�W
��� P ~ £ C�W ¤�¥ c /�� ; > .
¦ f y I¦ f y I¦ f y I¦ f y I G DG DG DG D : 2 ��y�I
+ § � > W
> ¨ ©�I P .��
^ 5�� I J�P L M c ¡ Q R�W M���. G D +�> . + � �
> ¢ P�W
��� P ~ £ C�W ¤�¥ c /�� ; > .
4 2 �4 2 �4 2 �4 2 � ¤ 2¤ 2¤ 2¤ 2 G DG DG DG D : 4 2�� ¤ 2 +
^ 5 P L M�c ¡ Q R�W M��K. G D + > .
+ � �K.
>�¢ / � -
��� c � C�W ¤ ¥ c � ª « > .
pp pp�qq qq ¬®®¯®° > ¢ � � � � BK]
^ 5K. ±�² P R a � ��; ��.�� 9 : C ��� V W � > ³ ³ ;
^ 5 P ~ ; 4�� � 9 :�C > :
�´.�´.�´.�´. ! ��4 ; µ�¶ P�W � � ; �K.�6 � · + ¸ W ¹ + > .
Note: ��z
^ 5�. ³�Z y I 4�� � � >
§ ` ; N ��c / � ; > .

��������������������� ��! "�#ii
º*»*¼�½º*»*¼�½º*»*¼�½º*»*¼�½ ¾*¿*À*Á¾*¿*À*Á¾*¿*À*Á¾*¿*À*Á +
x 2 <�= - ACS 800. U d E F P y `K] > . C gKÂ a r s t�. Ã Ä + < P
� � / � ; _ ` � > Å M�³ ;
x 2 <�= _ ` + R > .
m*nm*nm*nm*n! ACS 800. U�d 2 � y�I /�0 Æ 4�5 E F - h ÇK] 2 � � È � P .�� � Q É�� a j ; > .
ACS 8003 ����W
^ 5 W y Ë�C Ì Í <K� a j ? ; > .
ACS 800 P 2K© + I ��] M � P�� W a b ; E F Î B�Î C < Ï � j ; > . � 2K©�c Ð�Ñ ; Ò , DCÓ�ÔK. Õ Ö B�T�6 ¤ 2 C��
� � � M
5 × Ø � >�Ù
+ Ò ACS 800, U T , U T�2 Ú P ~ � E F�7
,. x 2 c
� C i E F c B E C � 2 I�S TK. DC 2 � + Û�Ü�Ý ¤�2 ��Þ W < ß à ; > ( 2 ��á 4 ^ 5�N ` ).
ACS 800 U T 2�Ú P W U TK. Y�E P Ê�â ã + � 2K© + I ����ä ��� ; D�2 � + å æ�R�Ì ç�c � Ý ��� � j ; > . ACS 800. � 2K©�c _ æ�Î è�Z�{ EKÓ�Ô�P .���� ACS 800 P
��� ; 2 � + I �K� a R c Q R > . ACS 800 c E F�7 8 f g B y�z ; �K.�6 � j ; > .
+ < = c A�B C ä I�J P 0 � M�c é c Q�Î R > .
m*nm*nm*nm*n! ACS 800 1 2 - ê - ë � Ô ��ä U�T , ì í�X Y Z , � â ^ 0 P � z ; > . î ¸ � U�d
^ 5 W
+ ï � � N�� c I ð�; Ò ±�² � a j ; > .
ACS800
- U TK. 4 ñ�2 � + ACS 800 é ò 2��K. Ë f
+ C + � � , U T 4 ñ�2 w � ACS 800 4 ñ 2 w�. 1/6 � > E ó ä Y�E + x ] > . U TK. Ë�ì � ô�P y�Ë�; �K.�� : X�] > .
ACS 800 õ ò - õ ò ��ö Q P Ê�â ã + D 2�� + > .
(@
� 2K© . 1.35 ...1.5 ÷ ).
+ 2 � - 2 Ú�� ô P î ¸ 100%
+ M ó Ô M ø�7 Q R > . i ù ~ U T 6 ì í C�W y ` + 9 :�C ä ABB Æ ú û M ü C�ý B þ .
+ ù ; N�� c A B ; > ä U T P ÿ X�y I L M c � � 7 Q Î R > .
U d Ë ì�à N W ACS 800. U d 2 Ú c × ��;
> ¢ Ü É ��j ; > . 4 ñ `���c � a�� 1�2 - B Î C�< Ï � j ; > .
+ N � c A B�C ä
ACS 80 P ÿ X�y I ��L + [ \�7 Q�Î R > .

��������������������� ��! "�# iii
�� �� �� ��� : i G D Æ �K. i G D i �K. i ¦ f y I x 2 < = ii
1 Chapter 1 – N ` / � �N ` / � �N ` / � �N ` / � � � �� �� �� � 1-1
1.1 � : 1-1
1.2 B E C � 2 P 1-1 1.3 N ` / � � Q� _ ` 1-1 1.4 Ê Ç µ � 1-2
2 Chapter 2 – �� I 2 `�� I 2 `�� I 2 `�� I 2 ` g ¸ +� g ¸ +� g ¸ +� g ¸ +� � Ô e��´3� Ô e��´3� Ô e��´3� Ô e��´3 CDP 312R ¶ a¶ a¶ a¶ a Ö�� PÖ�� PÖ�� PÖ�� P ~ ;~ ;~ ;~ ;
� :� :� :� : 2-1 2.1 � : 2-1
2.2 �� I 2�` g ¸�+� � Ô e�� 2-1 2.2.1 � ` r� Ô 2-1 2.2.2 ö ¸�� T e�� 2-1
2.3 ¶ a Ö�� 2-1 2.3.2 ������� + 2-2 2.3.3 N `�� 2-2
2.4 ¶ a Ö��K. { E 2-4 2.4.1 � Ö g U g 2-4 2.4.2 1 2 ��� 2-14
3 Chapter 3 – � Y� Y� Y� Y 3-1
3.1 � : 3-1
3.2 � Y�Ë Ð 3-1 3.3 � Y � + T 3-7
3.3.1 � Y � + T ö ¸�� T 3-7
4 Chapter 4 – ¶ a¶ a¶ a¶ a Y EY EY EY E 4-1 4.1 � : 4-1
4.2 Ü ¶�� � 4-1 4.3 � � Ú�� - Ü ¶�� � e�� 1,2 / � 4-4 4.4 þ w + ò 4-10 4.5 Ô�� ¶ a Æ è Z ¶ a 4-10
4.5.1 � Ö g 6
+ ` ; ¶ a 4-10 4.5.2 è�Z ¶ a 4-11
4.6 Ñ�� 1�2 U g P�� ¶ a � �K. ì í 4-12 4.7 9 g S�� U g P�� ¶ a � �K. ì í 4-13 4.8 RMIO � gK. è�Z 24V � ² 2K© 4-14
4.8.1 2K© I � Û I é ò�� � 4-14
5 Chapter 5 – �� I�� I�� I�� I � Ô e��� Ô e��� Ô e��� Ô e�� / �/ �/ �/ � 5-1 5.1 � : 5-1
5.2 � ` r� Ô 5-1 5.3 � Î <��� J I 5-2

��������������������� ��! "�#iv
5.4 Ñ�� 1 2 U�gK. 1�2 5-3 5.4.1 é õ ò�� � 5-3 5.4.2 è�Z ì�í 5-4 5.4.3 Ñ�� 1 2 U gK. ¶ a � � ì í 5-6 5.4.4 Ñ�� 1 2 U gK. ö ¸�� T / 4 5-7
5.5 9 g S�� U�gK. 1�2 5-8 5.5.1 é õ ò�� � 5-8 5.5.2 è�Z ì�í 5-9 5.5.3 9 g S�� U gK. ¶ a � � ì í 5-10 5.5.4 9 g S�� U�g P��K. � Î � 4 5-11 5.5.5 è�Z !�" # B ( 9�g S�� Æ Ñ�� 1 2 U�g U u y�` ��$ ) 5-11 5.5.6 9 g S�� U gK. ö ¸�� T / 4 5-12
5.6 ��$ U�% / � 5-14 5.6.1 Ô�� 1 2 -Local operation(60) 5-14 5.6.2 ��Î�# B -Speed monitor(61) 5-15 5.6.3 &��#�B -Torque monitor(62) 5-15 5.6.4 D�� 4�< -Fast stop(63) 5-16 5.6.5 �� I -Crane(64) 5-17 5.6.6 Ô�' { v�� -Logic handler(65) 5-26 5.6.7 &� Z�( -Torque proving(66) 5-29 5.6.8 � â y�I
� + ¶ a -Mechnical brake control(67) 5-30 5.6.9 õ ò*)�y,+ -Power optimisation(68) 5-33 5.6.10 <��� { v�� -Reference handler(69) 5-37 5.6.11
� 0 á 4 -Position measurment(70) 5-39 5.6.12 9 g S�� -�� -Field bus communication(71) 5-40 5.6.13 .���T / /�Ô H -Master/Follower(72) 5-48 5.6.14 2 ��0 -Electric shaft(73) 5-54 5.6.15 �� I Q ��#�B -Crane lifetime monitor(74) 5-56
5.7 N ` � r� Ô 5-57
6 Chapter 6 – ö ¸�� Tö ¸�� Tö ¸�� Tö ¸�� T 6-1 6.1 � : 6-1
6.2 ö ¸�� T e�� 6-1 6.2.1 e�� 10 ��<�1 é�ò -Digital Inputs 6-2 6.2.2 e�� 13
��2 Ô e é ò -Analogue Inputs 6-6 6.2.3 e�� 14 3�� + õ�ò -Relay Outputs 6-8 6.2.4 e�� 15
��2 Ô e õ ò -Analogue Outputs 6-10 6.2.5 e�� 16 B���4 ¶ a é ò -System Ctr Inputs 6-13 6.2.6 e�� 20 ¶ ; -Limits 6-15 6.2.7 e�� 21 ��Y / 4 < -Start/Stop 6-18 6.2.8 e�� 23 � Î�¶ a -Speed Ctrl 6-19 6.2.9 e�� 24 &� ¶ a -Torque Ctrl 6-24 6.2.10 e�� 26 U T�¶ a -Motor Control( ��5 ¸ U g P � ? ��6 ) 6-25 6.2.11 e�� 27 ¶�Y !�" -Brake Chopper 6-26 6.2.12 e�� 28 U T U�7 -Motor Model 6-28 6.2.13 e�� 30 þ�w ��$ -Fault Functions 6-29 6.2.14 e�� 50 8�� 9�: Å -Pulse Encoder 6-35 6.2.15 e�� 51 -�� U�% -Comm module 6-36 6.2.16 e�� 60 Ô�� 1�2 -Locall operation 6-37 6.2.17 e�� 61 � Î�# B -Speed monitor 6-38 6.2.18 e�� 62 &��#�B -Torque monitor 6-39

��������������������� ��! "�# v
6.2.19 e�� 63 D�� 4�< -Fast stop 6-40 6.2.20 e�� 64 �� I -Crane 6-41 6.2.21 e�� 65 Ô�' { v�� -Logic handler 6-44 6.2.22 e�� 66 &� Z�( -Torque proving 6-45 6.2.23 e�� 67 ��â y I
� + ¶ a -Mechanical brake contr. 6-46 6.2.24 e�� 68 õ ò,)�y,+ -Power optimisation 6-48 6.2.25 e�� 69 <��� { v � -Reference Handler 6-51 6.2.26 e�� 70
� 0 á 4 -Position measurement 6-52 6.2.27 e�� 71 9 g S�� -�� -Fieldbus Comm 6-53 6.2.28 e�� 72 .�� T / / Ô H -Master/Follower 6-55 6.2.29 e�� 73 2���0 -Electric Shaft 6-61 6.2.30 e�� 74 �� I Q � -Crane Lifetime 6-63 6.2.31 e�� 90 � + T ³�; <� ��� -Dataset REC Addr 6-64 6.2.32 e�� 92 � + T ³�; 2�= ��� -Dataset TR Addr 6-65 6.2.33 e�� 98 >�? U�% -Option modules 6-66 6.2.34 e�� 99 ��Y � + T -Start-up Data 6-69
7 Chapter 7 – þ wþ wþ wþ w � y� y� y� y @@ @@
§ < � Q§ < � Q§ < � Q§ < � Q 7-1 7.1 � : 7-1
7.2 G D 7-2 7.3 þ w 7-5
7.3.1 þ w + ò 7-5 7.4
§ < � Q 7-12 7.4.1 ¤�A � 7-12 7.4.2 B 7-13 7.4.3 Õ Ö B T 7-13
Z�Z�Z�Z� Z� A ö ¸�� T Æ ��C�/ 4 D� A-1 Z� B N ` � é õ ò (I/O) Interface Î�� B-1
Note:
+ / � ��P W 2�� y , � â y / 0 P Ê�; / � - E�F�� a R�< |�G l > . e ù ; Z�×�H - ACS800-01/U1, ACS800-02/U2,ACS800-04/U4 V�W ACS600 I�J g ¸�+� C�gK a / � � 6 � ý B�þ .

��������������������� ��! "�#vi
+ Ä + <�W .�Î y ó�Ô ��K ó Ô L�M�u Þ�G�l > .

��������������������� ��! "�# 1-1
NN NN OO OOQPP PP R �TS UWVR �TS UWVR �TS UWVR �TS UWV XZYXZYXZYXZY1.1
(*)(*)(*)(*) +
^ P ��W
+ / � ��. D y , Q��_ ` < c
>�[
,
+�\
+ / ��� P � N `K]
@ 4�H P ~ � / � C D Ê�ÇK] µ ��H�. D� c ��A�7
, é�l > . + N ` /�� � W ACC800 � ` ����;K a S�2 7.13 �,]�^�l > .
(signal 5.2 = ACAR71xx)
1.2 _a`cbad_a`cbad_a`cbad_a`cbad ¿ae¿ae¿ae¿ae + N ` /�� � W <�f�Z�T �� I g ¸�+� ¸ D g ² 7 ACS800 Crane
Drive Control P 9 Q�y�ó Ô 9 :�; ¶ a Æ ��Ô e�� P Ê�; 4 � 6 ¶�� C W�å D y�ó Ô k�l > . +
/ � ��6 h N�i�H + j � a j 7 :�k :. l ��C�y I 2�� ÷ Ú , 2���� � , í Ú�Î � ��P ~ ; < ð l ABB ¶�m ��3 ` a P ~ ; )n��;K. < ð
1.3 oapcqarasoapcqarasoapcqarasoapcqaras tauavaptauavaptauavaptauavap x 2 < = -
+ / � ��. i Æ ii P R�G l > . e�w�P � W
> ( ; G D�x���Æ / � � P y + W � ��¥�H c
>�z�\ { <�|,}�j 7
¦ f y I x 2 <�= Î > � l > . ¶ 1
^- � � , <�f ~�D R W
+ ^ P � W ���I g ¸ +� � Ô�e�� / � � Æ
+ /�� � P y i�� ��4�H c � � k�l > .
¶ 2
^- �� I 2�` g ¸�+� � Ô�e��K3 CDP 312R ¶ a Ö���P ~�;
� : P � W ¶ a Æ � Ô e ��� P N `���W CDP 312R ¶ a Ö���. {�E ¥�P ~ �
> ��l > . ¶ 3
^- ��Y P ��W ��Y�Ë Ð Æ ��Y � + T ö ¸�� T 6 A�� C D / ��k�l > .
¶ 4
^- ¶ a Y E�P � W Ü ¶�� � , � Ö�g ,è�Z ¶ a ,24Vè�Z�2K©n��² P ~ � > � l > .
¶ 5
^- �� I � Ô e�� / � P ��W E�F�� a R�W �� I � Q���$�H�c Ó�Ô Î 6 - C i / ��C�D N ` � r��Ô ��$ V ;
> ��l > . ¶ 6
^- ö ¸�� T�P � W �� I g ¸ +� ö ¸�� T�H c A�� C D � ö ¸�� T�H�. ��$�H c / � k�l > .
¶ 7
^- þ�w � y�P � W G D � þ�w � � B ��Þ c 8 þ w ��y Ë Ð�6 / � k l > . G D Æ þ�w�H - e ©�IK3 � í��K3 F�� ��Ô A �K� a R�G�l > .
Z� A- ö ¸�� T�Æ ��C�/ 4 D��P � W ���I�g ¸ +� . U d ö ¸�� T / 4K3 ��C� c ��x���Ô � i���l > . Z� B- N ` � é õ ò (I/O) Interface Î�� P ��W Ñ�� 1 2�U g Æ 9 g�S�� U g P ��. ��C é õ�ò � � ì í�c ��i�� l > .

¶�� ^ N ` / ����� �
��������������������� ��! "�#1-2
1.4 �a��a��a��a� �cs�cs�cs�cs +
/ � ��P ��� y ó�Ô �� I g ¸ +� N `�� µ � W
> ¢ 3 � -
, H + R�G l > . l ACS800-01/U1 C gK a / � � V W ACS800-02/U2 C�gK a / ��� l ACS800
I�J g ¸ +� C gK a / � � l ACS800 8�� 9�: Å RTAC-01 N `�� / ��� ( >�? ) l ACS800 é õ ò (I/O) Û ^ U�% (RDIO-01 & RAIO-01) N `�� /�� � ( >�? ) l ACS800 9 g S��
a�� T U�% N ` � / � � ( >�? ) l DriveWindow N ` � / � � ( >�? ) Å � - >�? U�%K3 Û ^ + ��$�; ��Ô 1 /�� � � õ�B,� � 4 é�l > . ABB KOREA P µK.�C�B � ����l > .

��������������������� ��! "�# 2-1
NN NN������PP PP � ��� � �� ��� � �� ��� � �� ��� � � � �T�W�� �T�W�� �T�W�� �T�W� ���� W����� W����� W����� W� ����� � O¡�,¢����� � O¡�,¢����� � O¡�,¢����� � O¡�,¢N £N £N £N £ ¤ ¥T¦¤ ¥T¦¤ ¥T¦¤ ¥T¦ §W¨§W¨§W¨§W¨ YZ©YZ©YZ©YZ©2.1
(*)(*)(*)(*)
+
^ P ��W �� I g ¸ +� . � Ô e ��� ©�� Æ CDP 312R ¶ a Ö�� c + ` ; ö ¸�� T�. Q�4 , Ü ¶ á 4 , g ¸ +� . ¶ a P ~ � / � k�l > . 2.2 ªa« ½ªa« ½ªa« ½ªa« ½ ¿ap¿ap¿ap¿ap ¬aa®a¯¬aa®a¯¬aa®a¯¬aa®a¯ °c±a²a³°c±a²a³°c±a²a³°c±a²a³ N ` � W � Ô e ��� c - � ���I g ¸ +� . / 4 c ��´ ó�Ô�µ :�X P Z�� 7 Q R�G l > . �� I g ¸ +� W ö ¸�� T /�4 c - � � Ô�e�� ^�l > .
2.2.1 � `� `� `� ` r� Ôr� Ôr� Ôr� Ô ö ¸�� T�W ;
��¶ /�4 7 Q Î R D
� � ��Ô e�� � a � ³�; 6 Ú�� C i N ` 7 Q R�G l > .
+�· Ì
� � � Ô e�� � a � ³�; 6 � ` r��Ô ¸ k l > . ¶ 5
^ ���I ��Ô e�� / � c ¸�{ C ³�: .
2.2.2 ö ¸�� Tö ¸�� Tö ¸�� Tö ¸�� T e��e��e��e�� Ø Ñ ; ��Ô e ��� c
� � ö ¸�� T�H - ¹ ��y�I e�� ó�Ô X�ôK� a R�G l > . � Y � + T e���. ö ¸�� T�H - ¶ 3
^ P��
>�¨ ö ¸�� T�H - ¶ 6
^ P / �K� a R ó \ � ��W ¶ 4
^ P / �K� a R�G�l > .
��Y � + T ö ¸�� T � Y � + T ö ¸�� T ( e�� 99) P W U T�Æ g ¸�+� 6 Y��,+ B�º ��C y I / 4�H + R�G l > . V ;
� � ��Ô e ��� � a R W � `�r� Ô�Î E�F�� a R�G l > . � Y � + T e���P W ��Y Ò ��» 9 :�� ã�W ö ¸�� T�H Î E�F � a R�G l > . ¶ 3
^ � Y�� + T 6 ¸�{ C ý�B þ .
� Y � + T e�� - ö ¸�� T U g�. à e�� ó�Ô � B,^�l > . ö ¸�� T 6 Ú�� C D / 4� �c ��¼�W 4KÛ�; Ë Ð�W ‘ � Ö�g U g - ö ¸�� T U�g Ñ�½ P R�G l > . � ö ¸�� T W ¶ 6
^ ö ¸�� T P / ��� a R�G l > .
2.3 ¾a¿¾a¿¾a¿¾a¿ ÀcÁÀcÁÀcÁÀcÁ
CDP 312R ¶ a Ö�� - Ô�� ¶ a Æ ACS800. � Ô e ��� P
+ `,^�l > . + , - 31�� < g ¸ +� 6 ¶ a C D # B 7 Q R�G l > . Ö�� - Ã�5�ÄK. µ P ' Í
^�Å 7 Q Î R D ¶ a ���� � - w P Æ�Ç + ð�ó Ô Î 7 Q R�G l > .
Ö�� ì�í CDP 312R Ö�� - RS485 ��È P È ; ABB g ¸ +� ¶�mK. � ` S�� � Ô�&�É�I Modbus -�� S�� 6 - � g ¸ +� P ì í,^�l > . -�����Î W 9600bit/s
+ D
+ S���6 - � 31
� . g ¸ +� Æ ; � . Ö�� + ì�í,� Q R ó \ � � ��H - ���K. ID Ê�� 6 ��Ë j ? k l > .

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö�� P ~ ; � :
��������������������� ��! "�#2-2
e�Ùe�Ùe�Ùe�Ù 2-1 CDP 312R ¶ a¶ a¶ a¶ a Ö��Ö��Ö��Ö��
2.3.2 ������� +������� +������� +������� +
20 � 4 ¡K. LCD ª�é ������� + . ¶ a Ö�� - LCD ª é�. ������� + Ô g ¸ +� ��$ , g ¸ +� ö ¸�� T Ú��,+�ä , ��ª g ¸�+� 4 ��H�c ��i�È > . ¶ a Ö���.
a�� � 6 Ú�Û�Ü�Ý P î ¸ µ ��� Þ � � � B,^�l > .
2.3.3 N `��N `��N `��N `�� ß
16� .
¸�à � a � á ä
Ú�â S�ã�c
+ `�� g ¸ +� ��$ , ö ¸�� T Ú�� , r� Ô ä G @ / 4 c Q�É 7 Q R�G�l > .

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö���P ~ ; � :
��������������������� ��! "�# 2-3
Ü�¶�� � � B U g
ö ¸�� T U g
��$ U g
g ¸�+� Ú�� U g
e�Ùe�Ùe�Ùe�Ù 2-2 ¶ a¶ a¶ a¶ a Ö��Ö��Ö��Ö�� ��H´.��H´.��H´.��H´. +*ä � B Æ+*ä � B Æ+*ä � B Æ+*ä � B Æ ��$��$��$��$
Ô�� ( Ö�� ) è�Z 1 2
4KÓ�2 � Y
þ w ��å æ Ó�2 4 <
<��� /�4 ��$
e�Ùe�Ùe�Ùe�Ù 2-3 ¶ a¶ a¶ a¶ a Ö��Ö��Ö��Ö�� �´.�´.�´.�´. 1 2 ���1 2 ���1 2 ���1 2 ���

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö�� P ~ ; � :
��������������������� ��! "�#2-4
2.4 ¾a¿¾a¿¾a¿¾a¿ ÀcÁ*qÀcÁ*qÀcÁ*qÀcÁ*q ça`ça`ça`ça` > ¢ -
¶ a Ö��K. {�E P Ê�C�i ��È ; > . ¶ a Ö���. ��Æ � B*+�ä P ~ C i W e�Ù 2-1, 2-2, 2-3 P � / �K� a R�G�l > . 2.4.1 � Ö g� Ö g� Ö g� Ö g U gU gU gU g
CDP 312R ¶ a Ö�� - è � < U g ( Ü ¶�� � � B U�g , ö ¸�� T U g , ��$ U g , g ¸ +� Ú�� U g ) 6 j�D R�G l > . ��� y ó Ô ¶ a Ö�� + ì íK��Þ�c 8 � � ; IDÛ�I � B*+�ä + � ª � > .
+ , P ~ C i�W é P Ø�ê Ý ��È C�ë�G l > .
ID Û�I � B £ ¢ ¶ a Ö���c g ¸�+� P ì�í C ��� g ¸�+� . 2�©�c I � C�ë�c 8 IDÛ�I � B*+�ä - Ö��K. ID Ê � Æ g ¸�+� P ì í�] ì��Ê ��6 � B k l > . �´.�´.�´.�´. : g ¸ +� P 2K© + I � � R W Y�x ¶ a Ö�� c ì�í 7 Q R�G�l > .
2 � Ò ��B,+�ä - Ú���] g ¸ +� . Ü ¶ ��� 6 � i�� l > .
Ü ¶�� � � B U�g + U g W Ü ¶�� � ��B Æ þ w + ò � B U�g u ��< 6 E�F ; > . Ü ¶ � � � B U g�6 Ú���í c 8 ú û Ü�¶�� ��� � B�] > .
? @ g ¸ +� � þ w M � I G H P�W þ�w � B�� ú û � i�î
, é l > .
¦ × Y x � Ö�g 6 Ú�Û < | ó�ä Ö�� - ��Y y ó Ô Ü ¶���� U g�Ô ï ��ð l > . ( ��è : g ¸�+� Ú�� U g , þ�w ��B U g )
Ü ¶�� � � B U�g P ��W ;�Ê P ³ ��<K. ���� c #�B 7 Q R�G�l > . Ü ¶�� � � B U�g P ~�; Å ��³ ; N�� - ¶ 4
^ ¶ a Ö�� c ¸ D C ý B þ . a b ; ³�� < � � �c � B 7�< P ~ ; /�4 ¤ ¥ - Ä + < 2-6. � 2-3 P / �K� a R�G l > .
þ w + ò - g ¸�+� P�� [ \ ; þ w , G D , ��å < ��. U d
+�ñ ; 4 � 6
64�� < �� k l > . RMIO . 2K© + ò < W Y x )nó 18
� .
+�ñ ;
+ ò - û ^ ��D )nóK. RMIO 2K©nô é�B Ø @
+�ñ ;
+ â + � BK� a�õ l > .
? @ } : ; AC800M ( V W AC80, AC4X0) B���4 + g ¸ +� P ì í�] > ä
+ B Ø - ô é B Ø ~�� P
2�ö x�ð ó Ô ��i õ l > . þ w + ò�. ÷ ¶ Ë Ð�P ~ C i W Ä + < 2-7 � 2-4 P � ÈK� a R�G�l > .

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö���P ~ ; � :
��������������������� ��! "�# 2-5
� � ø +�ù - þ w + ò�P û ^ ]
+�ñ ; 6 ��i�� l > . ���K.
+�ñ ;�H P A�ú 4 ��� E�FK� a R W < /�� k l > .
�� �� 2-1 þ wþ wþ wþ w + ò+ ò+ ò+ ò PP PP û ^ ]û ^ ]û ^ ]û ^ ]
+�ñ ;+�ñ ;+�ñ ;+�ñ ; +�ñ ;+�ñ ;+�ñ ;+�ñ ; 4 �4 �4 �4 � � B� B� B� B
ACS800 þ w [ \
+�ñ ; û�Ê
(Sequential number)
“+” Z � @ D ^ _ ` ß 2K© ô é B�Ø
þ w � ¶
+�ñ ; û�Ê
(Sequential number)
“-RESET FAULT” Ô ��B ß 2K© ô é B�Ø
ACS800 G D [ \
+�ñ ; û�Ê
(Sequential number)
“+” Z � @ G D _ ` ß 2K© ô é B�Ø
G D � ¶
+�ñ ; û�Ê
(Sequential number)
“-” Z � @ G D _ ` ß 2K© ô é B�Ø
þ w V W G D [ \ B g ¸ +� Ú�� U�g 6 ¶�è�C D WÎü B � B,^�l >�ý� 2-5 W þ�w ��å ¤�¥ c ��i�� l >�ý ¶ 7
^ þ w ��y 4�� 6þ¸ {�C ý B þ ýþ w � B�Ô Z T þ w ��å c C�< |�D > ¨ � B,+�ä�ó ÔWä�G + ��$ k l >�ý� A ï ��Î Ú�Û < |�ó ä þ w V W G�Dÿ+�ä - þ�w � ¶ÿ� 8  < ��B^�l >�ý � ��
�
�
�
�
�
�
�
�
�
�
�
�

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö�� P ~ ; � :
��������������������� ��! "�#2-6
�� �� 2-2 Ü ¶�� �´.Ü ¶�� �´.Ü ¶�� �´.Ü ¶�� �´. 2 J + â c2 J + â c2 J + â c2 J + â c � B C W� B C W� B C W� B C W ¤ ¥¤ ¥¤ ¥¤ ¥Ñ âÑ âÑ âÑ â ��$��$��$��$ Ú�âÚ�âÚ�âÚ�â
�� �� � 6� 6� 6� 6 Ú ¨Ú ¨Ú ¨Ú ¨
Ò´.Ò´.Ò´.Ò´. � B� B� B� B
1. 2 J + â ��B 6
� C i
ACT � 6 Ú ¨
� R W > .
���
2. ACT � 6 8 ä Ü�¶���� U g Ô 2*]
�������
�� �� 2-3 Ü ¶�� �Ü ¶�� �Ü ¶�� �Ü ¶�� � � B� B� B� B Ú��Ú��Ú��Ú�� ¤ ¥¤ ¥¤ ¥¤ ¥Ñ âÑ âÑ âÑ â ��$��$��$��$ Ú�âÚ�âÚ�âÚ�â
�� �� � 6� 6� 6� 6 Ú ¨Ú ¨Ú ¨Ú ¨
Ò´.Ò´.Ò´.Ò´. � B� B� B� B
1. Ü ¶�� � � B U�g P H a ð l > .
2. ä G C D �
- A ��
( � #� ����� ��� ��� )
3. Ü ¶�� � Ú�� U g Ô H a ð l > .
4.
> ¨ e�� Ú��
5. e�� _ C � D� ��
6a.
or
6b.
Ú�� c Û�4�C D Ü�¶�� � � B U g�Ô 2*]
�� c A�B C D � ��. �� c
§ < k�l > . Ú�� ; � Ö g U�g Ô H a ð l > .
¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö���P ~ ; � :
��������������������� ��! "�# 2-7
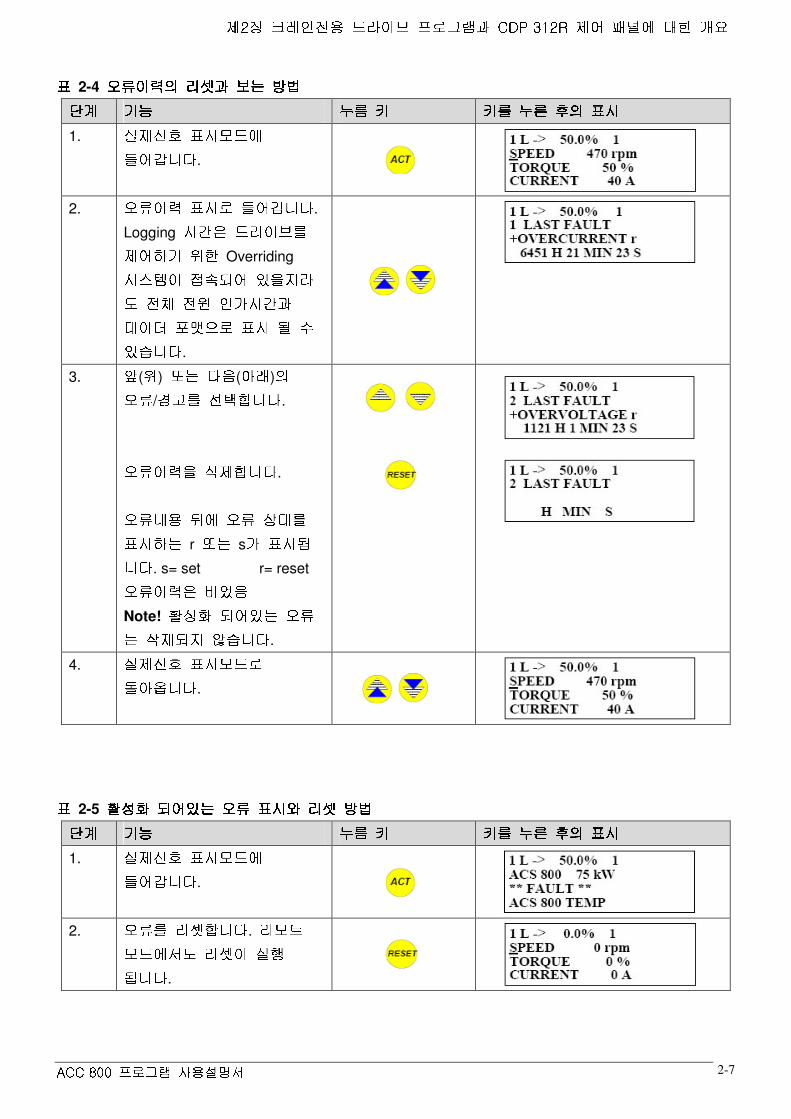
�� �� 2-4 þ w + ò´.þ w + ò´.þ w + ò´.þ w + ò´. ��å´3��å´3��å´3��å´3 � W� W� W� W ¤ ¥¤ ¥¤ ¥¤ ¥ Ñ âÑ âÑ âÑ â ��$��$��$��$ Ú�âÚ�âÚ�âÚ�â
�� �� � 6� 6� 6� 6 Ú ¨Ú ¨Ú ¨Ú ¨
Ò´.Ò´.Ò´.Ò´. � B� B� B� B
1. Ü ¶�� � � B U�g P H a ð l > .
2. þ w + ò � B Ô H a ð l > .
Logging B�Ø - g ¸ +� 6 ¶ a C �
� ; Overriding B���4 + Í��K� a R�c�< ¸ Î 2 J 2K© I�� B Ø�3 � + T E�� ó Ô � B � Q R�G l > .
3. � (
�) V W
> ¢(
� �). þ w / G D 6 Ú�� k�l > .
þ w + ò�c ÷ ¶�k l > .
þ w _ ` ��P þ w M�� 6 � B C W r V�W s � ��B,^ l > . s= set r= reset þ w + ò - 5 Þ ¢
Note! ��ô,+ � a R W þ w W ÷ ¶K��< |�G l > .
4. Ü ¶�� � � B U�g Ô ï � > l > .
�� �� 2-5 �*ô +�*ô +�*ô +�*ô + � a R W� a R W� a R W� a R W þ wþ wþ wþ w � B Æ� B Æ� B Æ� B Æ ��å��å��å��å ¤ ¥¤ ¥¤ ¥¤ ¥ Ñ âÑ âÑ âÑ â ��$��$��$��$ Ú�âÚ�âÚ�âÚ�â
�� �� � 6� 6� 6� 6 Ú ¨Ú ¨Ú ¨Ú ¨
Ò´.Ò´.Ò´.Ò´. � B� B� B� B
1. Ü ¶�� � � B U�g P H a ð l > .
2. þ w 6 ��å k l > . ��U�; U g P ��Î ��å + Ü�É ^�l > .

¶,Ì ^ �� I 2�` g ¸�+� � Ô�e��K3ÎÍÐÏÒÑÔÓÕ�ÖÌØ× ¶ a Ö�� P ~ ; � :
��������������������� ��! "�#2-8
ö ¸�� T U g ö ¸�� T U g W ���I g ¸ +� ö ¸�� T ä�G E F B P N�`,^�l > . 2K© ô é Ò C U g�P £ ¢ H a � c 8 1 Ê e�� à Ê�� ö ¸�� T 6 � B k l > .
> ¢ Z�T W
+ 2 P Ú��K] ö ¸�� T � � B*^�l > .
NOTE: y � ���K] ö ¸�� T P y � 6 C æ C ä
� � Æ � - G D � B < � � B,^�l > .
�� �� 2-6 ö ¸�� Tö ¸�� Tö ¸�� Tö ¸�� T Ú��Ú��Ú��Ú�� @@ @@ ä Gä Gä Gä G ¤¤ ¤¤ ¥¥ ¥¥ Ñ âÑ âÑ âÑ â ��$��$��$��$ Ú�âÚ�âÚ�âÚ�â
�� �� � 6� 6� 6� 6 Ú ¨Ú ¨Ú ¨Ú ¨
Ò´.Ò´.Ò´.Ò´. � B� B� B� B
1. ö ¸�� T U g Ô H a ð l > .
2. ö ¸�� T e�� c Ú���k�l > . � � ¤�� +���� 6 â�� Ú�Û D R�ó ä e�� ��3 Ê � ? ��B,^�l > . ��¶ C ä e�� _K. Ã�Ê�� ö ¸�� TK. + â , Ê � @ + ��B ^�l > .
3. e�� _K. ö ¸�� T 6 Ú�� k l > .
� � ¤�� +�� � 6 â��
Ú�Û D R�ó ä e�� �3 Ê � ? � B*^�l > . � ¶C ä e�� _K.
+ â, Ê�� @ + � B*^�l > .
4. ö ¸�� T / 4 ��$ ó�Ô H a ð l >
5. ö ¸�� T c ä G k�l > . (Ü Ù
ä G ) ( �¨
ä G )
6a.
or
6b.
� Ô 1 �c û ^ k l > .
� Ô 1 /�4 c A B C�D �� �! "�# .
$�%�& '�(�) *�)�+ ,�- ð�.�/
.

0 Ì2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N9O�PRQ�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 2-9
g�h *�) i�jP g�h !
$�% k l�8�m�n *�)�o
.�/.� p�:�q�r�s t /
/�u+�) v
CDP312Rs w g x�y g�h ! z�{�|.�/
.
p�:�q�r t�+�)�n )�:�;�<�N�} CDP312R + *�~ p�:�q�r , *�r i�� ��@���� ��l�m�� �
.�/. t�+�)
g�h�� )�:�;�<��
u7 ��N ���
k�� � ���.�/
. � , y�# ��� � t�+�) � � ��N�� � -��
� ���.�/
.
g������ + ,
/�u+�)�n CDP312R N�} )�:�;�<�+ p�:�q�r >�� 10 ~ 97 N � 1
& p�:�q�r�� ��l�|
.�/.
Note:� p�:�q�r >�� 98, 99 N ���&
��� , ��3�+ , *�r ��;�r v ID Run
��;�r�n ��l �# ¡��.�/
.
¢ 2-7
� p�:�q�r t /
/�u+�)
g�h
$�%@ ���
£�¤�! ¥���|.�/
.
t�+�¦ �
/�u+�¦ ;�7�N
��� -�§ |.�/
. ��¨ t�+�¦ ;�7�N
/�u+�¦�;
;�©�#�ª «�¬�s �® ¯�k�#�°
¢k��
.�/.
�
�
p�:�q�r�n ±�² )�:�;�<�s Software ³�'�# ´�7�@ application software ´�7�; µ�¶ P ·�N P�m�¸ t /
/�u+�) k�� � ���
.�/.
( 5.01 SW package version @ 5.02 APPL SW VERSION ! ¹�6�m�º�k�» .)
>�¼�# ¡ � �½ «�¬�s �® ¯�k�#�°
¢k��
.�/.
/�u
+�¦ ���
��N )�:�;�<�n y�# - � -�§ |.�/
. ��¨ )�:�;�<�° u7 ¾�¿�N�}
/�u+�)��
$�%m�ª «�¬�s �® ¯�k�#�°
¢k��
.�/.
0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N4O�P4Q�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f2-10
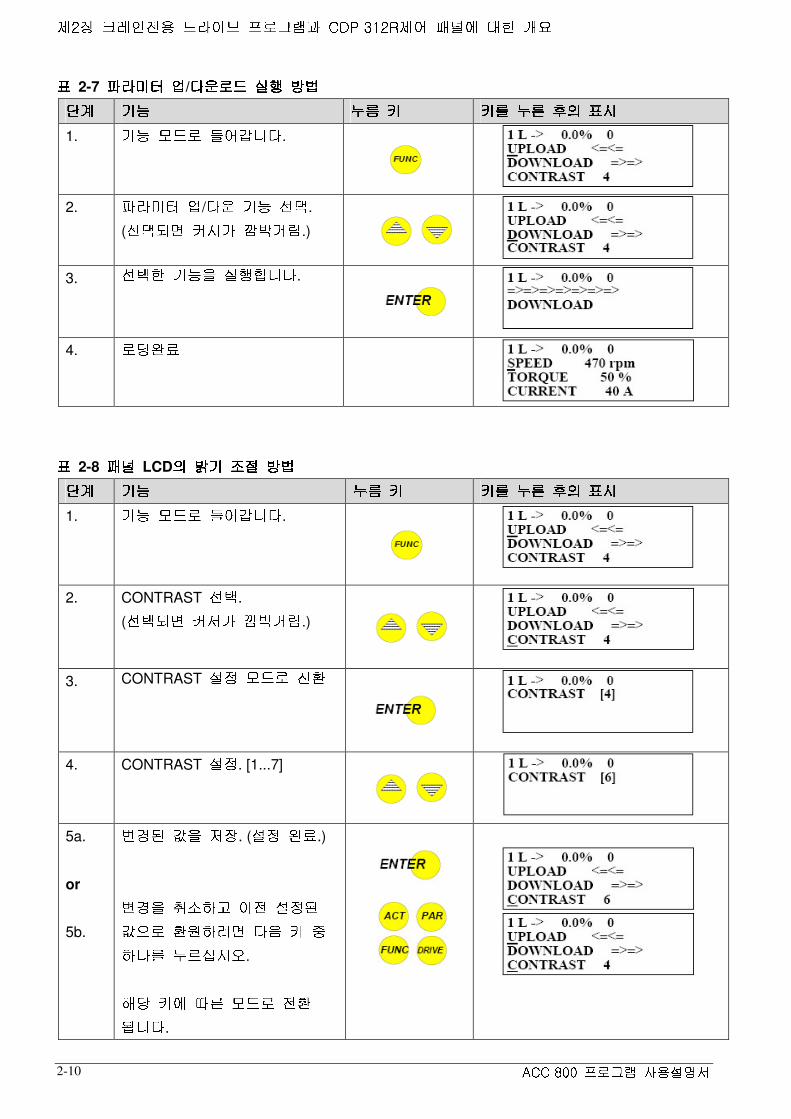
¢¢ ¢¢ 2-7 pÀ:ÀqÀrpÀ:ÀqÀrpÀ:ÀqÀrpÀ:ÀqÀr tt tt /
/Àu+À)
/Àu+À)
/Àu+À)
/Àu+À)
�À��À��À��À� ££ ££�¤¤ ¤¤
�ÀÁ�ÀÁ�ÀÁ�ÀÁ gÀhgÀhgÀhgÀh
ÂÀÃÂÀÃÂÀÃÂÀà '' '' 'À�'À�'À�'À� ÂÀÄÂÀÄÂÀÄÂÀÄ ÅÆsÅÆsÅÆsÅÆs
¢k
¢k
¢k
¢k
1. g�h
*�)�+ ,�-�Ç .�/
.
2. p�:�q�r t /
/�u g�h
$�%.
(
$�% �ª È�}�° É�Ê�Ë�Ì .)
3.
$�%P g�h !
��� |.�/
.
4. +�¦�Í�Î
¢¢ ¢¢ 2-8 (ÀM(ÀM(ÀM(ÀM LCD ss ss w gw gw gw g xÀÏxÀÏxÀÏxÀÏ £À¤£À¤£À¤£À¤
�ÀÁ�ÀÁ�ÀÁ�ÀÁ gÀhgÀhgÀhgÀh
ÂÀÃÂÀÃÂÀÃÂÀà '' '' 'À�'À�'À�'À� ÂÀÄÂÀÄÂÀÄÂÀÄ ÅÆsÅÆsÅÆsÅÆs
¢k
¢k
¢k
¢k
1. g�h
*�)�+ ,�-�Ç .�/
.
2. CONTRAST
$�%.
(
$�% �ª È�}�° É�Ê�Ë�Ì .)
3. CONTRAST ¥�y *�)�+ 7�Ð
4. CONTRAST ¥�y . [1...7]
5a.
or
5b.
Ñ &
Ò�! � 1 . ( ¥�y Í�Î .)
Ñ �! Ó�±�m�® ;�7 ¥�y&
Ò � + Ð�Ô�m�Õ�ª
/�Ö ' �
m�×�� Â�Ø�º�k�» .
Ù�Ú '�N Û�Ä *�)�+ 7�Ð
�.�/
.
0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N9O�PRQ�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 2-11
/Ä )�:�;�<�+�s p�:�q�r ��l g�h
*�)�s p�:�q�r t /
/�u +�)
g�h ! l�8�m�ª P ACC 800 N�}
/Ä
ACC 800� + p�:�q�r 10~97 >���! ��l�Ü � ���
.�/. =�+�Ý�²�Þ *�r
l�ß�; µ�¶ Ù § � l�8�Ü � ��®
� Ï�à�n software ´�7�; á�« § � |
.�/.
¾�Ý â�8 � «�¬ Ï�à�� Û�Ø�º�k�» .
1. ã ACC 800
j+ ��� ( >�� 98), ��3�+ ( >�� 99) � y�¹�ä ¥�y�m�º�k�» .
2. ã 7 µ g s y�å ��;�r ( 7 µ g ��æ ç�x ) �
Ù�Ú ACC800s 99 è
p�:�q�r >���N o�é�m�® , ID RUN ! ��� m�º�k�» .
3. g�ê ; �n ACC 800 � y�P
/�Ö, >�� 10 è ~ 97 è�s p�:�q�r , !
Ô�m�k�n Ò � + ¥�y m�º�k�» .
4. p�:�q�r , ! g�ê
ACC 800� +�ë�r
0 - (�M�+ t�+�) m�º�k�» .
(
¢2-7 ç�x )
5. 0 -
(�M�! ì�í�m�¸ ��l�m�®�î m�n ACC 800 )�:�;�<�N ����|.�/
.
6. 0 -
(�M�; ë�ï
&
/�Ö, “ +�ð
0 - *�) ” ¾�¿�6�# ¹�6�m�º�k�» .
(
¢k�ñ�s ò�ó ô�N�} “L” î�° õ�¸ § |
.�/.). ö�S�P �½ , '��
÷�ø 0 -
1�±�� Ñ m�º�k�» .
7. 0 -
(�M�+�ë�r ACC 800 )�:�;�<�+
/�u+�) m�º�k�» .
(
¢ 2-7 ç�x )
8. ×�ù�# ACC 800 )�:�;�<�s �½ 5~6 ��Á�� ú�� ��� m�º�k�» .
Note: ��� , ��3�+ , *�r ��;�r�Þ ��û&
>�� 98, 99 n ��l� �# ¡��.�/
.
w g x�Ï 0 - (�M�; ü�ì�ä w�# ¡ � ª
¢ 2-8 N ¥���P Ï�à�+ w g � x�Ï�m�º�k�» .

0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N4O�P4Q�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f2-12
71.� >�� 99s ý�þ *�r ��;�r�s
/�u+�)��
0 P�|.�/
.
i�jP �½�N
>�� 98, 99, >�� *�r ID_Run ��@�� t /
/�u+�) Ü � ���
.�/. ÿ
î�Ý�P â�8 � ABB N ��s�m�º�k�» .
0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N9O�PRQ�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 2-13
)�:�;�<
$�% *�)
O�ë�ì�s �½ , �
“ )�:�;�<
$�% *�) ” n l�8�m�# ¡��
.�/. ;
g�h��
m��s 0 -
(�M�N ¸ ø O�s ACS800 ; ��� (Modbus ��3 ) - ��n �½�N
l�8��.�/
.
Modbus ��3�n 0 -
(�M�@ ACS800,�� s ��� ��3 ����! ��m�� ,
ã On-line Station � �
Qj
ID è��° ë�¸ -�§ |.�/
.
ACS800 ID è��s g Ò � “1” o.�/
.
�Æs�Æs�Æs�Æs ! ACS800 ID è��s g Ò �
/Ä )�:�;�< , @ Modbus ��3�+ ���� -
��# ¡ � ª Ñ � � � /
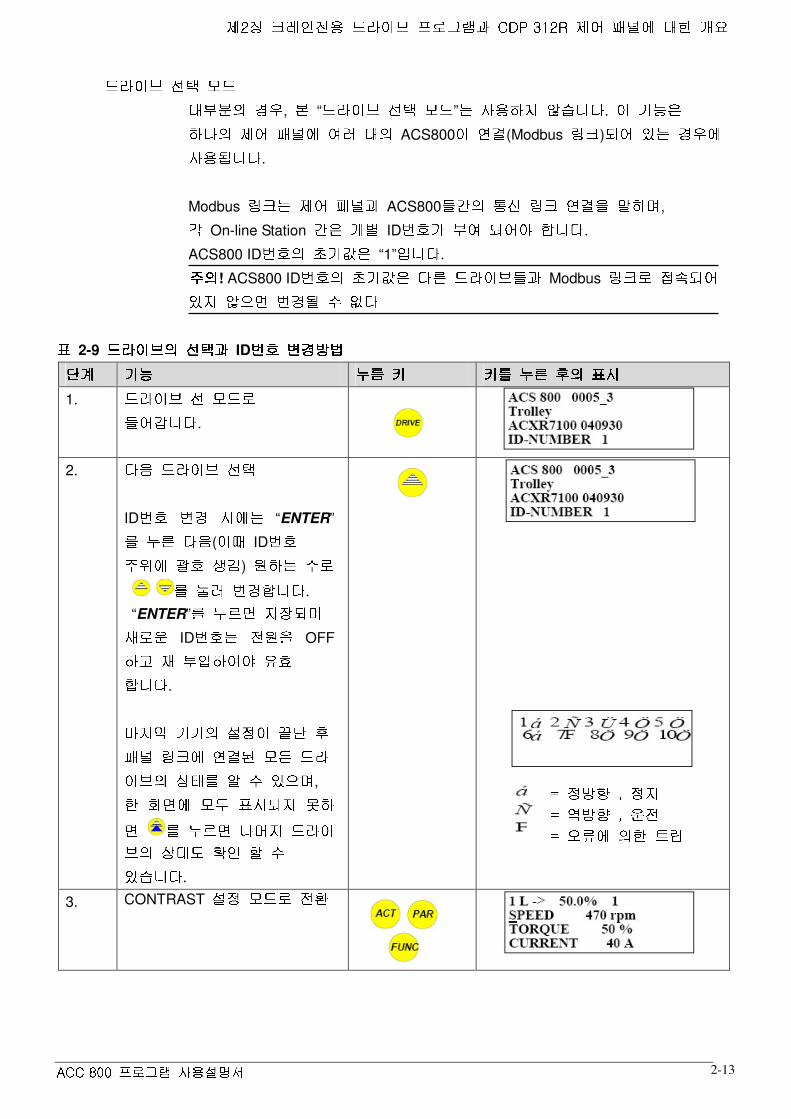
¢¢ ¢¢ 2-9 )À:À;À<Æs)À:À;À<Æs)À:À;À<Æs)À:À;À<Æs
$À%@
$À%@
$À%@
$À%@ ID è�è�è�è�
Ñ À£À¤Ñ À£À¤Ñ À£À¤Ñ À£À¤
�ÀÁ�ÀÁ�ÀÁ�ÀÁ gÀhgÀhgÀhgÀh
ÂÀÃÂÀÃÂÀÃÂÀà '' '' 'À�'À�'À�'À� ÂÀÄÂÀÄÂÀÄÂÀÄ ÅÆsÅÆsÅÆsÅÆs
¢k
¢k
¢k
¢k
1. )�:�;�<
$ *�)�+ ,�-�Ç .�/
.
2.
/�Ö )�:�;�<
$�%
ID è� Ñ k�N�n “ENTER”
� Â�Ä
/�Ö( ;�� ID è�
����N �� ��� ) �m�n ��+
� ÷�ø
Ñ �|
.�/.
“ENTER” � Â�Ø�ª � 1� �� � + u ID è��n 7�Ô�� OFF
m�® � ��o�m�¸ § "��
|.�/
.
�#��
g�g s ¥�y�; �� Å
(�M ��3�N ���&
*�~ )�:
;�<�s ¾�¿�� ! � � � � ,
P "�ª�N *�#
¢k� �# $�m
ª � Â�Ø�ª ×�ù�# )�:�;<�s ¾�¿�% ¹�6 Ü �
���.�/
.
& y�£�')(�y�#&+* £�')( u 7 & »�,�N s�P)-�.
3. CONTRAST ¥�y *�)�+ 7�Ð

0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N4O�P4Q�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f2-14
2.4.2
u7
u7
u7
u7��À��À��À��À�
3�5�6 )�:�;�<�s
u7��
0 - m g ��P
u7 ����N�n ACS800s
g µ/ y�#
7 µ g /�7 £�'�s Ñ , ��% / 0�3 #�� �� 1�; z�{��
.�/. ��% / 0�3 #��
���n 7 µ g s ��% 2�n 0�3�� 0 - m g ��P
g�ê ���+ l�8��
.�/.
0 - 1�± Ñ
CDP312R + 0 - m�Õ�ª ,
0 - 1�±�� ú�)�k +�ð 0 - + ¥�y�P �½�N��
���
° h |.�/
. «�¬ >�Ì�N�}�Þ á�; 0 -
(�M�s LCD N “L” +
¢k� �ª +�ð 0 -
¾�¿�N �Ö � 3�| .�/ .
í�*�- 0 -
(4�ë
u7 � N�}�s
u7 ) k «�¬�Þ á�; 5�6 � +
¢k��
.�/.
í�*�- 0 -
¾�¿�6 0 -
(�M�� l�8�m�¸ ACS 800 � 0 - Ü ��n � � × ��0
���s 7�k , p�:�q�r�s ¥�y /Ñ , p�:�q�r t +�) v ID è��s
Ñ
1 � ° h |.�/
.
0 - (�M�s LOC/REM '�� l�8�m�¸
0 - 1�±��
0 - (�M 2�n 4�ë
0 -
1�±�+ ¥�y ° h |.�/
. *�r�° y�# ¾�¿ ¶ ��N�� 0 -
��� Ñ �; ° h
|.�/
. +�ð 0 -
*�)�n µ k�N # °�# Q�±�N�}
0 - Ü � � � � P�8
(CDP312R 2�n Drives Window) N�}�� +�ð 0 - ° ° h |
.�/. '�(�)�Þ 4�ë 0 - N ��P õ
/ ¾�Ý�P â�8 �
04 1�� ç�®�m�º�k�» .
*�r�s /�7�£�' � «�¬�s "�9¢N s
Ù
¢k��
.�/.
g µ/ y�# , /�7 £�' v ��% #�� g µ
(Start), y�# (Stop) v 7 µ g /�7 £�' � 0 -
(�M�s ' ( «�¬ >�Ì ) �
l�8�m�¸ ��� �
.�/. 0 -
(�M�N s�P ¥�y £�¤ �
¢ 2-10 � ç�® m�º�k�» .
¢¢ ¢¢ 2-10
0 -0 -0 -0 - (ÀMÀN(ÀMÀN(ÀMÀN(ÀMÀN s Ps Ps Ps P ��%��%��%��% ¥Ày¥Ày¥Ày¥Ày £À¤£À¤£À¤£À¤
:<;<= ><;<=

0 J2143�5�6�7�89)�:�;�<9=�+�>�?�@4ACBEDGFIHKJ2L 0 - (�M�N9O�PRQ�S
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 2-15
¢¢ ¢¢ 2-10
0 -0 -0 -0 - (ÀMÀN(ÀMÀN(ÀMÀN(ÀMÀN s Ps Ps Ps P ��%��%��%��% #À�#À�#À�#À� £À¤£À¤£À¤£À¤
�ÀÁ�ÀÁ�ÀÁ�ÀÁ gÀhgÀhgÀhgÀh
ÂÀÃÂÀÃÂÀÃÂÀà '' '' 'À�'À�'À�'À� ÂÀÄÂÀÄÂÀÄÂÀÄ ÅÆsÅÆsÅÆsÅÆs
¢k
¢k
¢k
¢k
1. »�Ä�?�N
¢k�P '��
÷�ø
¾�¿¢k�@��
¢k�|
.�/.
2. ��% #�� g�h
$�%
È�}�° É�Ê�Ë�í�ª ��% #�� ê�A Í�Î�� s�q�|.�/
.
3. �m�n ��%�+ #�� . (� � #�� )
( ®�� #�� )
4. “ENTER” '�� ÷�ø
¥�y�Ò�� � 1 . #�����n ¯�*�í�N B�C ä � 1��
.�/.
¥�y�� ����m�®
/Ä *�)�+
7�Ð�m�Õ�ª »�Ä�? ' � m�×� Â�Ø�k�» .


TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-1
DD DDFEEEEHGG GG IKJIKJIKJIKJ
3.1 LNMLNMLNMLNM
; 1�N�}�n g µ Ï�à�Þ
g µ ��;�r Ñ ��� ¥���P
/. g µ ��;�r p�:�q�r�n
ACC800 @ *�r�s y�õ�� O�P�� g ��P
i�jP p�:�q�r�o
.�/. g µ ��;�r
p�:�q�r�n Q Ö g µ
k�N�� ¥�y�m�� , ;�Å�N ��y � ö�S�m�R ¡��.�/
.
3.2. SNTNUNVSNTNUNVSNTNUNVSNTNUNV
ACC800 ��p���W�´�r�s g µ Ï�à�n
¢ ê���� + ê�A - ��Ë�× 2�n
� 1�s
3�5�6 � 8 =�+�>�?�â�N
g�X - �/
.
À®À®À®À® ! �
1�N g�X &
*�~ 7 g�� 6 Y�t�;�× y A n Z�û&
7 g�g�X î�N sÙ
� � -�§ P/
. �
��[�\ Q Ö @ m�)<] -
��[�\�N g�X &
R�^ � ú�)�k Û�: § � P/
.
0
7 1 – ;�¾�_���k�s ®�1�` � £�¤ ç�x
aT
aTaT
aT b�cb�cb�cb�c
dd dd 77 77
eee
k µ Ï�à�n î�å���n 7 g g�X î�N P�m�¸
��� -�§ |.�/
.
k µ Ï�à � � ��N � ¯�[�\ ò�f�;�R�s
d 7 R�^�� Û�Ø�º�k�S .
k µ Ï�à 7�N m�)�] - ¥���}�N ��n ¥�� ¹�6�g�h�� ç�x�m�¸ ¥�� ¾�¿�� i�j�mº�k�S .
e
*�r g µ k
-�k P ��l�% ��n�R ¹�6�m�º�k�S .
g g µ k m�$
& *�r /�7�£�'�N s�P
C µ 1���s p�n�; ½�Õ< � C µ 1���� ì
í�m�º�k�S .
0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-2
aT
aTaT
aT b�cb�cb�cb�c
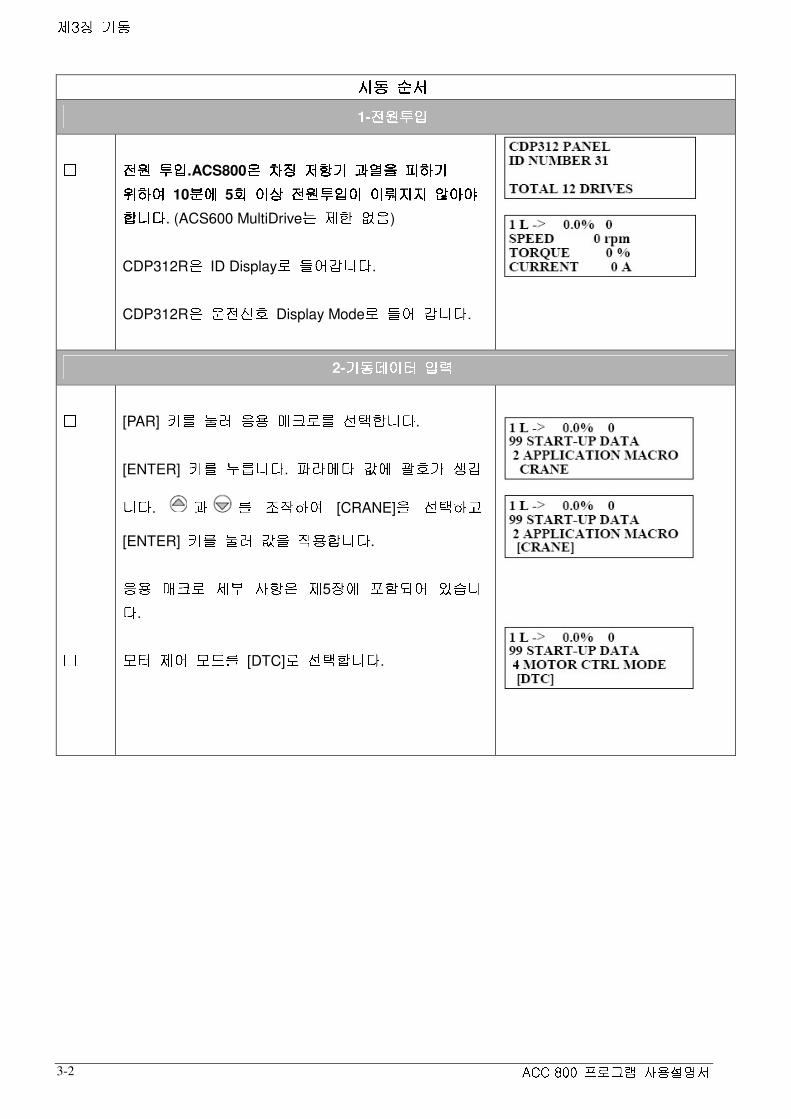
1- 7ÆÔN�Ào7ÆÔN�Ào7ÆÔN�Ào7ÆÔN�Ào
e
7ÆÔ7ÆÔ7ÆÔ7ÆÔ �Ào�Ào�Ào�Ào .ACS800�� ��
à�oà�oà�oà�o ��pÀg��pÀg��pÀg��pÀg
@ ô��@ ô��@ ô��@ ô�� qÀm gqÀm gqÀm gqÀm g
� mÀ¸� mÀ¸� mÀ¸� mÀ¸ 10 ìÀNìÀNìÀNìÀN 5 // // ;À¾;À¾;À¾;À¾ 7ÆÔN�ÀoÀ;7ÆÔN�ÀoÀ;7ÆÔN�ÀoÀ;7ÆÔN�ÀoÀ; ;Æ©NR�R;Æ©NR�R;Æ©NR�R;Æ©NR�R ¡À« §¡À« §¡À« §¡À« §
|.À/
|.À/
|.À/
|.À/
. (ACS600 MultiDrive n 0 P � Ö )
CDP312R�
ID Display + ,�-�Ç .�/
.
CDP312R�
u7��� Display Mode +
,�- Ç .�/
.
2-g µ �À;Àrg µ �À;Àrg µ �À;Àrg µ �À;Àr oÀéoÀéoÀéoÀé
e
e
[PAR] '�� ÷�ø
r�8 ��3�+��
$�%|.�/
.
[ENTER] '�� Â�s .�/ . p�:�¯�t Ò�N ���° ��u.�/. @ � x�Y�m�¸ [CRANE] �
$�%m�®
[ENTER] '�� ÷�ø
�� � 8�|
.�/.
r�8 ��3�+ Ý�ë l p�� 0
5 1�N z�{� - ���.
/.
*�r 0 -
*�)�� [DTC] +
$�%|.�/
.
0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-3
k µk µk µk µ vÀ}vÀ}vÀ}vÀ} e
e
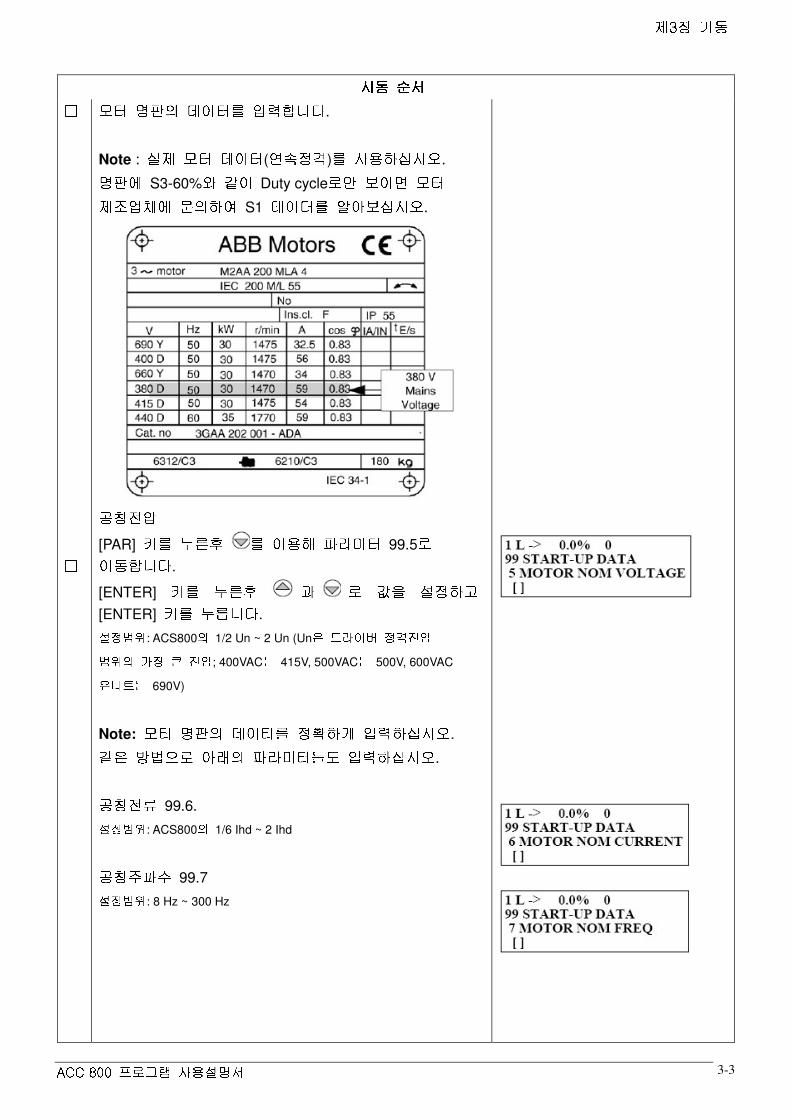
*�r ��æ�s ��;�r�� o�é�|.�/
.
Note : ��0
*�r ��;�r ( ����y�å ) � l�8�m�º�k�» .
��æ�N S3-60% Þ á�; Duty cycle +�� õ�;�ª *�r 0 x�t�w�N ��s�m�¸ S1 ��;�r�� !�«�õ�º�k�» .
5�x�7�y
[PAR] '�� Â�Ä�Å � ;�8Ù
p�:�q�r 99.5 + ; µ |
.�/.
[ENTER] '�� Â�Ä�Å @ + Ò�� ¥�y�m�® [ENTER] '�� Â�s .�/ . z<{}|�~
: ACS800 � 1/2 Un ~ 2 Un (Un � �<�}�}� {��<���
|�~ � �<� � �}�
; 400VAC� 415V, 500VAC� 500V, 600VAC �<��� � 690V)
Note: *�r ��æ�s ��;�r�� y�¹�m�� o�é�m�º�k�» .
á � £�¤ � + «�¬�s p�:�q�r , % o�é�m�º�k�» .
5�x�7�, 99.6. z<{}|�~: ACS800 � 1/6 Ihd ~ 2 Ihd
5�x���p�� 99.7 z<{}|�~: 8 Hz ~ 300 Hz

0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-4
k µk µk µk µ vÀ}vÀ}vÀ}vÀ} e
e
5�x���% 99.8 z<{}|�~: 1 rpm ~ 18000 rpm
*�r ��æ�@ á�%�h y�¹�m�� ¥�y�|.�/
. ( 7�ë�m ��%
y�å�; �%�h ) ��� ,�-
*�r y���% 1440rpm �
1500rpm� + ¥�y�m�ª )�:�;�<
u7�k »�,�° _��
� ���.�/
.
5�x�8�� 99.9. z<{}|�~: 0 kW ~ 9000 kW
*�r ��;�r�° o�é ���� � �® ¯�k�R�° ×�t�� ./. >�· � *�r p�:�q�r�° ¥�y �� Ö � ×�t�â�® ,
)�:�;�<�° *�r ID Run (ID magnetization) k�Y ê�A
¾�¿�° �� Ö � s�q�|.�/
. [PAR] '�� ÷�ø
99.10 *r
ID Run p�:�q�r�+ °�º�k�» .
e *�r ID Run 99.10
ID MAGN�
� � )�:�;�<�� 0 4�P O�ë�ì�N ������m
� � 8��
.�/. �
v�}¢s
/�Ö��Á�n ID MAGN � �� m�¸ ��r ID Runs
��� o.�/
. ID MAGN�
��r ID
Run � O��Ù
��� |
.�/.
��r ID Run�
�;�²�- ��:�;�´�N S C � .�/ .
ID Run�
��r�s ��� ����� ��� g �٠��� �
.�/.
ID Run N sÙ} ��� ÿ s q�������; ��r 0 - s y�¹�
� 100% ��� � ���.�/
. 03 1 ID Runs � � Ï�à�N ö�S�P
g µ ��;�r�ë�ì��
ç�®�m�º�k�S .

0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-5
aT
aTaT
aT b�cb�cb�cb�c
ID MAGN �� �� ;À8ÀP;À8ÀP;À8ÀP;À8ÀP ID Run
e
¡�¡�¡�¡� ÷Àø÷Àø÷Àø÷Àø
ID Run �� �� �À� mÀºÀkÀ»�À� mÀºÀkÀ»�À� mÀºÀkÀ»�À� mÀºÀkÀ» . �ÀrÀn�ÀrÀn�ÀrÀn�ÀrÀn ¢�£À¾À¿¢�£À¾À¿¢�£À¾À¿¢�£À¾À¿�NÀ}NÀ}NÀ}NÀ} 10~60�� ��
î¤"î¤"î¤"î¤"��.À/
�.À/
�.À/
�.À/
.
4- �ÀrÆs�ÀrÆs�ÀrÆs�ÀrÆs / 7À£�'/ 7À£�'/ 7À£�'/ 7À£�'
e
B ��%�N�}�ë�r Y � R���Ò � ��%�¥�í g :
[ACT],[PAR] 2�n [FUNC] � ÷�ø
¾�¿
¢k�@�N ¡�¦
������° ×�t�×�%�h m�º�k�» .
��%�R���Ò�� Ñ �Õ�ª [REF]
¡� Â�Ä�Å @ �
;�8�m�º�k�» . � ÷�ø
��r�� k µ m�º�k�» . ��r�s /�7�£�'�� ¹�6�m�º�k�» . ¡� ÷�ø
��r�� y�R�m�º�k�» . ��§}¨
© �}ª�« ¬� :
�<�}��®}¯}°<± ²<±�� ³ �µ´}¶ ·}¸ , ¹ 5 º}» dc ¼}½µ� ¾}¿À ±�� ª}�
Á Â�Ã<Ä ¨<Å}Æ � Å
. Ç}È}¼}½�� �}��¶
É {�Ê ¸ Ë �}±�� Ì ��Í ª}��Î
Ï ¶ Ð Ë�Ñ � Å .
��§}¨ Ò<��Ó Ô�Õ ¼}½}Ö�×
��§}¨ Ò<��Ó Ø}Ù ¶ Ú�Û�× Ô�ÕÑ � Å
.
³ ��´}¶
Ü}Ý}Þ ß ��§}¨
© �}ª�« à�á ¶ â}ã À}Ñ � Å .

0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-6
aT
aTaT
aT b�cb�cb�cb�c
5- ��% 0 P��% 0 P��% 0 P��% 0 P vv vv °° °°�7��7��7��7�� k �k �k �k �
e
[PAR]
¡� Â�Ä�Å @ � ;�8�m�¸ p�:�q�r��
� � m�º�k�» .
ä � ��%
[ENTER]
¡� Â�Ä�Å @ Ò�� ¥�y�m�®
[ENTER]
¡� ÷�ø
� 1�m�º�k�» .
«�¬�s p�:�q�r�% á � £�¤ � ¥�y�m�º�k�» .
���%
°���k �
7���k �
/Ä p�:�q�r�n
05 1 p�:�q�r ¥�y�s
¢ 5-1@ 5-
2 � ç�x�m�º�k�» .

0 F21 g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-7
3.3 SNT�åNæNçSNT�åNæNçSNT�åNæNçSNT�åNæNç 3.3.1
g µ �À;Àrg µ �À;Àrg µ �À;Àrg µ �À;Àr pÀ:ÀqÀrpÀ:ÀqÀrpÀ:ÀqÀrpÀ:ÀqÀr g µ ��;�r p�:�q�r�N ��è�m g �Ù}�n p�:�q�r ����N ��é�° § |�ê�ë . g µ ��;�r p�:�q�r�n x�Y
¦M�N
¢k���ê�ë .( p�:�q�r >�� 99) P�è ��r g µ ��;�r�� ¥�y�P ;�Å�N , ë�k p�:�q�r ���� ��é�ì � x�Y
¦M � °�í �
R���N î�ï� ���ð p�ñ�q�r >����
¢k�m�� ��
ÿ�ò ¾ p�ñ�q�r >�� 99
�ó�«�°�}
¢k�m�R�n ¡���ê�ë .
g µ � ò r ô���N�n ��ñ ò�õ Þ ��r�s � ò r�� ¶ ��k
¡ g �Ù
ö�S�P g�����ö ¥�y�Ò�� °�� ��r�y�õ p�ñ�q�r�Þ r�÷ ��ø� ��y�� ��P p�ñ
q�r�° z�{� �é ����ê�ë .
g µ � ò r p�ñ�q�r�� Ñ �Ü���n , ù 2 í ø�ú ö�û ÷ ��ñ ò�õ s ü� �ô�¬�ý
Q�S�s 2-8 ?�s
¢2-6, 3-8 ?�s
¢3-1 N
g�X<þ Ï�à�� Û�Ø�º�k�» . 3-8 ?�s ¢
3-1 N�n g µ � ò r p�ñ�q�r g�h ò ����ê�ë .
¢3-1 ã p�ñ�q�r�s ��� /
����N O�P Ý�ë�â�÷ �
¢s m���N ¥��� �é�����ê�ë .
______________________________________________________ ___
Note : g µ � ò r p�ñ�q�r�° 5�í�¥�y
g y���N�} Ñ � �R ¡�ÿ�Ë�× ��r�s
y�å û ,�° ö ´�r�s y�å û ,�N
A m�¸ ��� Y�ë�ª ��ñ ò�õ n g µ �R
¡�® , «�¬�s �®¢k�° ×�t�×�� ��ê�ë .
_________________________________________________ _______ _
��¨ ��r�ù�é�����° ( p�ñ�q�r 99.4) SCALAR ¥�y� �é���ë�ª , ��r�s 5�x
y�å û ,�Þ ö ´�r�s 5�x�y�å û ,�n
A�� �R ¡���ê�ë .
________________________________________ __________________
�Æs�Æs�Æs�Æs ! ë�y�¹�P g µ � ò r�
C µ í���Þ ��r��
u û Ü �½�N�n
u û s
ë�y�¹�
, ù�é�y�%�s 7�±�Þ í A N n�¾�� �¬�Ü � ����ê�ë .
_________________________________________

ù�F í g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-8
¢ 3-1 ô�� 99,
g µ � ò r p�ñ�q�r .
p�ñÀqÀrp�ñÀqÀrp�ñÀqÀrp�ñÀqÀr �¤��¤��¤��¤� / �¤��¤��¤��¤�
Ù¥
Ù¥
Ù¥
Ù¥
1.LANGUAGE Languages
¢k���é � �
2 APPLICATION
MACRO
Application macros r�÷ ��ø� �s � �
3 APPLIC
RESTORE
NO; YES 5�í�¥�y�Ò (g y�� )
� p�ñ�qr�� ����k�� .
4 MOTOR CTRL
MODE
DTC; SCALAR ��r ù�é�����s � � .
5 MOTOR NOM
VOLTAGE
1/2 * UN of ACC 800~
2 * UN of ACC 800
��r���æ�s y�å û y�Ò ¥�y .
6 MOTOR NOM
CURRENT
1/6 * Ihd of ACC 800~
2 * Ihd of ACC 800
y�å���r û ,�N ACC800 � ¶ ��k�� ( ��r���æ S1 Ò ¥�y )
7 MOTOR NOM
FREQ
8 ... 300 Hz ��r���æ�s y�å���p�� ¥�y .
8 MOTOR NOM
SPEED
1 ... 18 000 rpm ��r���æ�s y�å���% ¥�y
9 MOTOR NOM
POWER
0 ... 9000 Kw ��r���æ�s y�å��é ¥�y .
10 MOTOR ID
RUN?
ID MAGN
STANDARD;
REDUCED
��r ID RUN( î µ x�y )s k�Y .
Note: ID RUN k�YÀkk�YÀkk�YÀkk�YÀk �ÀrÀ°�ÀrÀ°�ÀrÀ°�ÀrÀ°
/ û/ û/ û/ û �� �� |�ê�ë|�ê�ë|�ê�ë|�ê�ë .
11 DEVICE NAME “ Ô�m�n �î ”
u û �n í A ��x�� ¥�y . ¶��, “Main Hoist”.
p�ñÀqÀrp�ñÀqÀrp�ñÀqÀrp�ñÀqÀr � �� �� �� �
ë Ö � g µ � ò r p�ñ�q�r�s ã�ã�N O�P
Ù¥�o�ê�ë . �Àr�Àr�Àr�Àr�� ò r� ò r� ò r� ò r p�ñÀqÀrp�ñÀqÀrp�ñÀqÀrp�ñÀqÀr
99.5 ... 99.9 nn nn
ää
ä
ä g µ kg µ kg µ kg µ k ú��Àkú��Àkú��Àkú��Àk ¥ÀyÆ Né §¥ÀyÆ Né §¥ÀyÆ Né §¥ÀyÆ Né § |�ê�ë|�ê�ë|�ê�ë|�ê�ë .
1 LANGUAGE ASC800�
� � m�� ��é� ��~ y�õ��
¢k�|�ê�ë .
B é , � ¶ é , ò� í�«�é ,
²�f ö é , z�����ì�é , ����6���é , ��é , ��ø�é , ��6���é , ��6���é , w���é ,
²�]���é�� R�Ô�|�ê�ë . ë�� ACC800 ±�ü�-<]�é ´ û 7.1�
B é , � ¶ é , ��é ,
²�f ö é , ��6���é���� R�Ô�|�ê�ë .
2 APPLICATION ò
p�ñ�q�r�n
�²�r / �� �½ ��� g�h�ò � ò ø�ú ö
g�h ��� °�� CRANE
MACRO ��ø� ��ø� ��ø� ��ø� �Þ
�²�r / �� �½ ��� + ø�ú ö�g�h � °�� M/F CTRL ��ø� ��ø� ��ø� ��ø� �� � � m
n�� l�÷�|�ê�ë . # ��ø� �s ¥�� ò ��n ù 5 í ����� ������� ��� �
ç�x�m�º�k�» . 2�P ���s p�ñ�q�r ¥�y�� � í�Ü � ��n USER MACRO
(USER 1 SAVE, USER 2 SAVE) v � í� �é ��n p�ñ�q�r Ò�� � � Ü �
����ê�ë .(USER 1 LOAD, USER 2 LOAD)

ù�F í g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-9
��ø� �� d N p�ñ�q�r�ô�� 99 °
j%� ��n · ò «�ê g !���N P�è
¥�y þ p�ñ�q�r�ô�� 99 g µ � ò r Ò � ��ø� ��
Ñ �m ÿ ñ�% g�"
¥�y�Ò ò ô�O� #�R���ê�ë .
Note: l�÷�î���ø� load(USER 1,2 LOAD) n g µ � ò r�¥�y ( ô�� 99)@ ��r
ID Run ��@ ��#�� � ø ��ê�ë . l�÷���r�N � |�P ¥�y ö R ��¹ ö m�º�k�» .
3 APPLIC Yes � � � m�ª «�¬�Þ á ò r�÷���ø� �s Ô�¬�¥�y�Ò � ������ê�ë :
RESTORE - r�÷���ø� �° CRANEò × M/F CTRL � � �ª , p�ñ�q�r�s Ò � 5�í�N�}
¥�y�P g Ò � �$����ê�ë . �<4 : ô�� 50,51,98,99 s p�ñ�q�r ¥�y�Ò � Ñ � �R ¡�® #�R���ê�ë .
-USER MACRO 1 ò × 2 ° � � �ª , p�ñ�q�r�Ò � °�í
�R���N
� í� ���ð
Ò � �$����ê�ë . 2�P ��r ID run ��@�% ������ê�ë . ( ù 5 í ç�x ).
��4 : ô�� 50,51,98s p�ñ�q�r ¥�y � Ñ � �R ¡�® #�R���ê�ë .
4 MOTOR ò
p�ñ�q�r�n ��r�ù�é������ ¥�y�|�ê�ë .
CTRL MODE
DTC
DTC (Direct Torque Control) ����n O�ë�ì�s ì § N � |�|�ê�ë . ACC 800
� ¢ ê�%�& ��r�s y�'�P ��%�ù�é�Þ 0�ø�ù�é�� � � |�ê�ë . (�² ��� ÿ
q���� � ��~ ø�ú ö ò ²�- � ÷���ñ ò�õ N S C ��ê�ë .
¸ ø O�s ��r�� )�*� ����m�n ë�m�N�} ã ��r�s y�å û y � ö ´�r�s
y�å û y�@ á�« § m�® , ã ��r�s y�å���p���% á�« § |�ê�ë . ��r�y�å û ,�s | � p�ñ�q�r 99.6(MOTOR NOMINAL CURRENT) N g o þ ù�P�� ò â�N�} ¥�y�m�¸ § |�ê�ë .
SCALAR
²�+�ñ�ù�é�����n ¸ ø O�s���r�° ��ñ ò�õ N ���� � `�,���ê�ë . 2�P
²�+�ñ�ù�é�n ��r�s y�å û ,�° ö ´�r�y�å û ,�s 1/6
ò m ò Ë�× ��r����
� ò ö ´�r i�j g ���
u û Ü���% `�,���ê�ë .
²�+�ñ�ù�é�N�}�n DTC ù�é�N�}�Þ á � ��@�° ����ê�ë . ²�+�ñ ����Þ DTC
����s à ò n �
��[�\�s ��û p�ñ�q�r�g�h�N�} ÿ
¥��� ·�o�ë .
��r ID RUN, 0�ø ù�é , ��r��é���¾�i�j (Parameter 30.10)�
²�+�ñ�����N�}
R�Ô� �R ¡���ê�ë .

ù�F í g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-10
5 MOTOR ò
p�ñ�q�r�n ��r���æ�N ��-
��r�y�å û y�O� ACC 800 � ¶ ��k�.�ê�ë .
NOM VOLTAGE ò
p�ñ�q�r�s ¥�y�� ò ACC 800 � g µ Ü ��n ����ê�ë .
Note: 1/2 * UN ò m�Ë�× 2 * UN
ò ¾�s y�å û y�� °�� ��r�n ����m�¸ u û Ü � ����ê�ë . ¸ g N�} UN
� ACC 800 N�} l�÷� �n
û y ö 415 V
500 V 2�n 690 V ��N m�×�o�ê�ë .
6 MOTOR NOM ò
p�ñ�q�r�N�n ��æ�s ��r�y�å û ,�Ò�� ¥�y�|�ê�ë . DTC ù�é�����N�}
CURRENT l�÷�Ü � ��n /�÷��<��n ACC 800s 1/6 * Ihd N�} 2 * Ihd l ò o�ê�ë
²�+�ñ ����N�}�s /�÷�����n ACC 800 s 0 * Ihd N�} 3 * Ihd o�ê�ë .
(Ihd : Heavy Duty Current, ��ë�m � ÷ û ,�� )
y�¹�P
u û � �Ù} ��r�s î<" û ,�n
ö ´�r�y�å û ,�s 90% � 0�R
��« § |�ê�ë .
7 MOTOR NOM ò
p�ñ�q�r�N�n ��æ�s ��r�y�å���p���Ò�� g h�|�ê�ë .
FREQUENCY 8 Hz N�} 300 Hz 1�R x�y ò ° h |�ê�ë .
8 MOTOR NOM ò
p�ñ�q�r�N�n ��æ�s ��r�y�å���%�Ò�� ¥�y�|�ê�ë .
SPEED
Note: ��%�ù�é�N�}
ä¾�s ù�é�y�%�� 2
�m g �
Ù}�n
ò p�ñ�q�r�s
¥�y ò ��½ ��S�|�ê�ë .
9 MOTOR NOM ò
p�ñ�q�r�N�n ��æ�s ��r�y�å KW Ò�� ¥�y�|�ê�ë . 0.5 kW ~ 9000 kW 1�R
POWER x�y ò ° h |�ê�ë .
10 MOTOR ID RUN ò
p�ñ�q�r�n ��r ID RUN � Ü � l�÷���ê�ë . ID Run µ d
ACC 800�
ä � s ù�é�� �Ù
��r�s
i��� p�3�Ü ·�o�ê�ë . ID Runs
����� ¨ 1 ì
y�% ±�S���ê�ë .
Note: Torque monitor, Torque proving, Power optimisation, Torque memory
1Æ@1Æ@1Æ@1Æ@ á �á �á �á � ø�ú ö�û ÷ø�ú ö�û ÷ø�ú ö�û ÷ø�ú ö�û ÷ �À� gÀhÀ��À� gÀhÀ��À� gÀhÀ��À� gÀhÀ� ID Runµ d NÀnµ d NÀnµ d NÀnµ d NÀn
µ Yµ Yµ Yµ Y� NR NR NR NR ¡À��ê�ë¡À��ê�ë¡À��ê�ë¡À��ê�ë .
ù�P�Ò�� o�é�m�n p�ñ�q�r�ô�� 20s Ò � ID Run ��@�N B '�� q���4�
��r ID Run � Í�Î�P ò Å�N
Ñ �m�¸ § |�ê�ë .(ID RUN k�n g y���� l�÷ )
ID MAGN
��r ID Run � ��� m�R ¡ � � O�ë�ì�s
� ÷�ì § N l�÷� � ����ê�ë . ��r
ù�é���� �
ä g µ k�N Á�5� �é�R�n�6 ,
B(zero) ��%�N�} ¨ 20~60 � ��r
î�"�� � � m�ª�} Á�5���ê�ë .

ù�F í g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f 3-11
Note : ID RUN(Standard, Reduced)�
ë Ö s �½�N � � ��ê�ë . 7 �u û i ò
B ��% è�Q ¶ �½ 7 ��r 5�x�0�ø ò ¾�s 8 �
B * N�1�R
u û�ò ö�S�P �½ v
é k P (�²���� ÿ q�����% ��n��½
STANDARD
¢ ê¢ ê¢ ê¢ ê ID Run
�����
ä¾�s ù�é�y�'�%�° �%�h õ�9�|�ê�ë .
¢ ê¢ ê¢ ê¢ ê ID Run � ��� m g
û N�n ú���k ��r�Þ ë�m�° ì�í� �é § |�ê�ë .
REDUCED
Reduced ID Run�
ë Ö s �½�N
¢ ê¢ ê¢ ê¢ ê ID Run O�� � � � ����ê�ë : 7 g Á � n ��ò 20%
ò ¾ �½ ( : , ��r�Þ ë�m�� ì�í�Ü�� ����� ) 7 ��r u û � î���s 7�±�° /�÷� �R ¡�� �½
( : , ��r�Þ )�*� õ�x�í���° ���� �é ����� )
Note : ��r ID Run � k�Y�m g�û N ��r�s / û £�'�� i�j�Ü · .
��r�n
u û m�n µ d y�£�' � / û Ü ·�o�ê�ë .
�Æs�Æs�Æs�Æs ! ��r ID Run � ��� m�n µ d ��r�n O�; y�å���%�s 50%~ 80%s
��%� / û Ü ·�o�ê�ë . �Àr�Àr�Àr�Àr ID RUN �� �� �� ���� mÀª� mÀª� mÀª� mÀª �ÀrÀ°�ÀrÀ°�ÀrÀ°�ÀrÀ°
u û <4� u û <4� u û <4� u û <4� d�û �>=��d�û �>=��d�û �>=��d�û �>=�� R>? §R>? §R>? §R>? § |�ê�ë|�ê�ë|�ê�ë|�ê�ë !
�Àr�Àr�Àr�Àr ID Run ss ss �À��À��À��À�
( ��ñ ò�õ n��ñ ò�õ n��ñ ò�õ n��ñ ò�õ n ú��Àkú��Àkú��Àkú��Àk Àð Àð Àð Àð ���À¸ §���À¸ §���À¸ §���À¸ § |�ê�ë|�ê�ë|�ê�ë|�ê�ë )
Note : ID Run ����û N p�ñ�q�r ( ô�� 10 N�} 98) �
Ñ �m�@�ë�ª � u
¥�y�Ò ò «�¬�s x�A�N O�n�R ¹ ö m�º�k�» . 7 B�C�D�E�FHG7 B�I�D�E�JHK�LNM�O�D�E�PRQSGUT7 B�I�V�W�JYXZG[GUT$\ ]_^a`cbed�fhg7 B�Iji�k$JHlSGUT
1) STANDARD Þ REDUCED � � Ñ :

ù�m í g µ
TVUIUXWZYZY\[�]�^�_a`cb�d�e�f3-12
2) � � ¹ ö � �Ù
[ENTER] � Â�s�ê�ë .
«�¬�s ¯�k�R�° ×�t�n ·�o�ê�ë .
3) ID Run � k�Y�m g �Ù
,
¡� Â�Ø�º�k�» .
û Ô ö ° o�é�� l�÷�P�ë�ª ú���k
û Ô ö ° ���° ��é�Þ § |�ê�ë .
( � : DI2, p�ñ�q�r 10.5 � ç�x�m�º�k�» .) ID Run oqpsr tvuqwsxvy ID Run zv{v| tYu wH}vy
ID Run
ò ~j� þ���� , ��ù ������������� [RESET]
¡ � �j��� ��é�ì �
����ê�ë .
��� ID Run � ù�é¦��
�
¡ � ����� ��ù�� ��� ���
� ����ê�ë .
ò�û ��� ������� ������� ��� [ACT], [FUNC] � [DRIVE] � ò�� � ��
��¡ ¢�£�¤ ¥j¤�¦ �$§���� ¨�©�ª�� «�¬ , ¨�©�ª�� 99.10 �® ¯j°�± ��² ,
ID Run ¦ ³�´�µ�¶�� ±�·�� ��¸ © STANDARD, REDUCED � ID MAGN �®
����¹�º�� . »�¼ 60 ½ ¦�¾ � ±�¿�À ��� Á�Â���� Ã�� ID Run ¦ ³�´�µ
¦�©�¤ ����������� Ä�Å ��� Æ Ç�È�º�� .
ID Run ¦ ~j��¯�¤ ��É ��� 16 IDENTIF RUN DONE � True ® ����¹jº�� .
Note : ID Run ¦¦ ¦¦ ~<�ËÊ~<�ËÊ~<�ËÊ~<�ËÊ �>��>��>��>�
«>�«>�«>�«>� Ì>¦>�Ì>¦>�Ì>¦>�Ì>¦>� ¨>©>ª>�¨>©>ª>�¨>©>ª>�¨>©>ª>� 99.5 ... 99.9 �� �� Í>ÎÍ>ÎÍ>ÎÍ>Î Ï>�>ÐÏ>�>ÐÏ>�>ÐÏ>�>Ð
¤¤ ¤¤ �>´ËÊ�>´ËÊ�>´ËÊ�>´ËÊ ID Run �� �� Ì>¦>�Ì>¦>�Ì>¦>�Ì>¦>������ �˧�˧�˧�˧�Ñ>º>�Ñ>º>�Ñ>º>�Ñ>º>� . ACC 800 ÎÎ ÎÎ �>��>��>��>� �>Ò>Ó�>Ò>Ó�>Ò>Ó�>Ò>Ó �� ��
�>Ô�>Ô�>Ô�>Ô ÐÐ ÐÐ ÕÕ ÕÕ Ö<�>�>�Ö<�>�>�Ö<�>�>�Ö<�>�>� ¿>×>п>×>п>×>п>×>Ð Ø>Ù � �Ø>Ù � �Ø>Ù � �Ø>Ù � � ID Run ÎÎ ÎÎ ( Ú>�Ú>�Ú>�Ú>� ½ Õ>Õ �½ Õ>Õ �½ Õ>Õ �½ Õ>Õ � ) �>��>��>��>� �>´>�>Û>Ü�>´>�>Û>Ü�>´>�>Û>Ü�>´>�>Û>Ü Ý>º>�Ý>º>�Ý>º>�Ý>º>� .
11.DEVICE NAME ¦ ¨�©�ª���� ¦�Þ ( ß : Main Hoist, on the drive) Î à���Ó á â�ã�Ý�º�� . ¦�Ç��
DriveWinow ¡ ä�����» à���Ó �
����º�� .(CDP312E å�®�� æ�ç�¡ È�è�Ó �
é���º�� ) à���Ê ¦�Þ�� DriveWindow ê CDP312R å�
([Drive] ��¡ Á�ë�Î
á )�
����¹jº�� .

ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-1
ÿÿ ÿÿ���������� ÿ ��� �ÿ ��� �ÿ ��� �ÿ ��� �
4.1 ���� ¦ � � ��� ��É ��� , �� �¾�ã���� , ��å�¬�ê
� ×���� � ����� à���Ý�º�� .
Note : ACS800 � Å���¡ É���Ð�� ����È�º�� . Å���� ��¨ � ¡ ����Ð�� Ï��
Ð�² ��� ±���ê ����º�� .
Å�� (rpm) = ( ��¨ � (Hz) / � � ) * 120
� � : 1,2,3….
� �
: 2,4,6….
4.2 !#"$ !#"$ !#"$ !#"$ ��É������ ACC 800 � ��´ � %�&�¦ é�¦ ACC 800� Ø�Ù�¡ '�(�Ý�º�� .
��É�����Í�� â�ã�ç � ����� à���Ó �
é��² , ¬�©�¦�) � ����� *���¯��
Ä�+�¯,� Ñ�º�� .
É���å�� ��É ��� ��� «�¬�� -�.�� ��É ����¡ Ä�Å���� ����Ý�º�� .
[ACT] ��¡ Á�ë�Î á , -�.�� ��É ����� ��/ ¦�Þ�¦ ������� ��¡ 0��¤
¼�� (8 æ�ç ) ê Í�¦ ����1�º�� .
2�3
4-1 ��É���� ��� «�¬ .
��4�5�¦�� � 4-1 � 6�7�Ð�� '�(�Ó �
��� Í98 Õ�: Î à���; ��É������ <�= È�º�� .
����Ð���ç Ð�� ��É ��� Í�� 6�7�>�?�� É 2 � - @�A�¶���ã ¬�©�¦�) B�®2
C � 5�¦�� 2-6, � 2-3�
à���¯#� ����º�� .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-2
� 4-1
2�F1, ������
�>É�>É�>É�>É �>��>��>��>� (
2GF2GF2GF2GF 1) ¼G�¼G�¼G�¼G� HËÖHËÖHËÖHËÖ / IËÖIËÖIËÖIËÖ àà àà�����
1 SPEED ESTIMATED SP ESTIM rpm J�� «�� Å�� (rpm)
2 MOTOR SPEED FILT SPEED rpm K���Ê Å���Í (rpm)
3 FREQUENCY FREQ Hz «���� ��¨ �
4 MOTOR CURRENT CURRENT A «�� ��
5 MOTOR TORQUE FILT TORQUE % Ä�+�Ê «�� L���@ .
100 = «�����M�L���@
6 POWER POWER % «�� ã�N .
100 = ��M ã�N .
7 DC BUS VOLTAGE V DC BUS V V DC O�®�� ��P
8 MAINS VOLTAGE MAINS V V Ä�+�Ê È�è���P .
9 OUTPUT VOLTAGE OUT VOLT V Ä�+�Ê «���Q�è���P .
10 ACS 800 TEMP ACS TEMP C( R ) >�S�T�� U�� .
11 APPLICATION
MACRO
MACRO CRANE; M/F;CTRL;
USER 1 LOAD;
USER 2 LOAD
12 SPEED REF SPEED REF % ��V���$� �� ��W .
13 CTRL LOCATION CTRL LOC LOCAL; I/O CTRL;
FIELDBUS;M/F CTRL
X�Y � �� ��Z .
14 OP HOUR COUNTER OP HOURS H(hourss) �9[�¶��$Ê â�ã���\ .
15 KILOWATT HOURS kW HOURS kWh kWh meter.
16 IDENTIF RUN DONE ID RUN True; False «�� ID Run� ~j����×
17 DI7-1 STATUS DI7-1 RMIO ]���^ È�è�� Ø�Ù
18 AI1 (V) AI1 (V) V RMIO ±�_�®2
È�è 1� Í .
19 AI2 (mA) AI2 (mA) mA RMIO ±�_�®2
È�è 2� Í .
20 EXT AI1(V) EXT AI1 V RAIO-01 È�è�Í .
21 RO3-1 STATUS RO3-1 RMIO `�A�¦ Q�è�� Ø�Ù
22 AO1 (mA) AO1 (mA) mA RMIO ±�_�®2
Q�è 1� Í .
23 AO2 (mA) AO2 (mA) mA RMIO ±�_�®2
Q�è 2� Í .
24 INERTIA
INERTIA kgm2 Q�è9a,b$¥ � �
Ä�+�¯,��³ �,c
25 EXT DI6-1 STATUS EX DI6-1 RDIO ]���^ È�è Ø�Ù
26 EXT RO4-1 STATUS EX RO4-1 RDIO ]���^ Q�è Ø�Ù
27 MOTOR RUN-TIME RUN-TIME H(hours) «���� ������\
28 MOTOR TEMP EST MOT TEMP C( R ) J�� «�� U��
29 CTRL BOARD TEMP CTRL B T C( R ) RMIO d�¬$� U��

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-3
�>É�>É�>É�>É �>��>��>��>� (
2GF2GF2GF2GF 1) ¼G�¼G�¼G�¼G� HËÖHËÖHËÖHËÖ / IËÖIËÖIËÖIËÖ àG�àG�àG�àG�
30 FAN ON TIME FAN TIME H(hours) ¢�b�Ê e ������\
31 AI3 (mA) AI3 (mA) mA RMIO ±�_�®2
È�è 3� Í
32 TOTAL OPER TIME TOTAL OP H(hours) )�A�¦�@ .�> Ø�Ù � �$� f ������\
33 LOAD TORQUE ton LOAD ton ton Ä�+�Ê ��¦�g�h ×�Ð�¿�Ô
34 LOAD SPEC FACT Km FACT Km ×�Ð�i�j ¶ �
35 LIFETIME LEFT% LIFETIME % @�A�¶�� k�� � �

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-4
4.3 "$#lm"$#lm"$#lm"$#lm - !"#$n !"#$n !"#$n !"#$n o#po#po#po#p qrqrqrqr 1 ss ss 2
1 SPEED ESTIMATED @�A�¶���ã ¬�©�¦�) � ��� Ä�+$Ê «���� J���Å���¡ rpm �® ���
( ¶�t�u�� v#c�¯,w�Î á j�x )
2 MOTSPEED FILT ¬�©�¦�) � � Ä�+�¯,y�� (�Q�Ê «��$� ��É�Å���� K���Ê�Í$� ��� Å���� rpm �® ��� .
3 FREQUENCY ¬�©�¦�) � � Ä�+�¯,� «���® z�{�¯�� ��¨ � ¡ ��� .
4 CURRENT ¬�©�¦�) � � *��$Ê «����� �¡ ��� .
5 MOTOR TORQUE ¬�©�¦�) � � Ä�+$Ê «�� L���@�¡ |�}�h�® ��� ,
6 POWER «���Q�è�Î |�}�h�® ��� .
7 DC BUS VOLTAGE V ¬�©�¦�) � � *���Ê DC Bus ��P�Î ��� , ��P�� DC ��P��® ��� .
8 MAINS VOLTAGE ¬�©�¦�) � � Ä�+$Ê È�è ��P�Î ��� , ��P�� Volt ® ��� .
Note : �9[ ¶�� ��� » Ä�+�¹�º�� .
9 OUTPUT VOLTAGE ¬�©�¦�) � � Ä�+�Ê ¬�©�¦�) Q�è���P�Î ��� .
10 ACS 800 TEMP >�S�T�� U���¡ ��� , I$Ö : ~�� 11 APPLICATION MACRO 6�7�Ê ��@�®�¡ ��� .( ¨�©�ª�� 99.2)
12 SPEED REF |�}�h�I�Ö�® ��V�Å�� � ��/ Å�� ��W��$� Í�Î ��� .
( ¨�©�ª�� 69.1)
13 CTRL LOCATION ��É É�����Z�¡ ��� . LOCAL, I/O CTRL, FIELDBUS 8 M/F CTRL µ � Ð���� 6�7�¹�º�� .
14 OP HOUR COUNTER ¦ ����� â�ã���� ��\�Î ����Ý�º�� . RMIO d�¬ � �9[j¦ ¶��$Ê Ø�Ù � �$� ��\�»�¦ Ä�+�¹�º�� . ¦ Í�� ½ Õ ¥ Ó
� é���º�� .
15 KILOWATT HOURS ¦ ����� ����µ�¶ ¬�©�¦�)$� ��è�Î Ä�+�Ý�º�� .
16 IDENTIFICATION «�� ID Run ¦ �#��¯,w�4�Î ��� . RUN DONE
17 DI7-1 STATUS RMIO ]���^ È�è DI1-6 + DI_IL (DI_IL � DI7 ¦�© ��x ) � Ø�Ù���� . +24 VDC � ����¯�¤ ‘1’ ¦ ���
2��� Ã��¤ ‘0’ ¦ ��� .
( ß : 1000010 = DI2 ê DI_IL � On, ������� Off ¡ ��ª�x , ��*�×�� DI1 )
18 AI1 (V) RMIO ±�_�®2
È�è 1� Í�¦ ��P��® ��� .
19 AI2 (mA) RMIO ±�_�®2
È�è 2� Í�¦ �� �Í��® ��� .
20 EXT AI1 (V) RAIO-01 ±�_�®2
È�è 1� Í�Î ��P��® ��� .
21 RO3-1 STATUS RMIO� 3 .�� `�A�¦ Q�è�Ø�Ù . 1 � `�A�¦�� ��Ò�; Ç�Î ��ª�Ð�� , 0 � `�A�¦�� ��Ò�Ð�� Ã�� Ç�Î ��ª�Ý�º�� .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-5
22 AO1 (mA) �� �Í [mA] �® ����¯j� RMIO ±�_�®
2 Q�è 1 � Í .
23 AO2 (mA) �� �Í [mA] �® ����¯j� RMIO ±�_�®
2 Q�è 2 � Í .
24 INERTIA Q�è9a,b$¥ ç���à���Î â�ã�Ð�� Ä�+�Ê �,c�Í�Î ����¾�² ¦�Í��
¨�©�ª�� 68.4 INERTIA TOTAL UP 8 68.5 INERTIA TOTAL DWN�
à���¹�º�� .
25 EXT DI6-1 STATUS RDIO � 6 . ]���^ È�è�� Ø�Ù�¡ ��� . È�è � ��P�¦ ¶��$¯�¤ 1, 2��� Ã��¤ 0 Î ��� .
26 EXT RO4-1 STATUS RDIO � 4 . `�A�¦ Q�è�� Ø�Ù�¡ ��� . 1 � `�A�¦�� ��Ò�; Ç�Î
��ª�Ð�� , 0 � `�A�¦�� ��Ò�Ð�� Ã�� Ç�Î �jª�Ý�º��
27 MOTOR RUN-TIME «���� ������\�Î ��� . �� �� ��£�� ���$� ��\�» Ä�+$¹�º�� . ¦ Í�� ¨�©�ª�� 97.10 RESTORE MOTOR RUN-TIME
� � ½ Õ ¥ Ó �
����º�� .
28 MOTOR TEMP EST «���� J�� U���¡ ~���® ��� . Note : «��$� U�� Ä�+�� RMIO
� ��[�¦ ¶���Ê � 30 R�×�� ��Ò .
29 CTRL BOARD TEMP RMIO d�¬�� *���Ê U���¡ ~���® ��� .
30 FAN ON TIME ����e�� ¢�b ������\�Î ���
Note : ����e�¦ ��/ ¯,w�Î á DriveWindow ¡ ¦�ã�Ð�� Í�Î ½ Õ ¥ ���
� ����º�� . RMIO d�¬�¡ ��/�Ð�� ��� � � K�� Õ�� � Í�Î ��â�Ð�� ��/�Ê d�¬ � È�è�Ð�� Õ ����º�� .
31 AI3 (mA) RMIO � ±�_�®
2 È�è 3� Í�Î �� �Í��® ��� . -�×�â����
¨�©�ª�� 20.10 Î ����Ð������ .
32 TOTAL OPER TIME )�A�¦�@ .�> Ø�Ù����9� ¬�©�¦�)9� f
������\�Î ��� . ( � �#��c ��«���� ��� )
33 LOAD TORQUE TIME ¨�©�ª�� 68.12-13 & 74.1 Î ¦�ã�; ×�Ð L���@�¡ ton �® ��� .
34 LOAD SPEC FACT Km @�A�¶
� � V�� Õ�: ( ¨�©�ª��
2�F 74) � �, Ä�+�Ê ¡�¦�g�h
� � ½98 ��ã�¢�{�¶ ×�Ð i�j ¶ � (0.0~1.0) ¡ ��� .
35 LIFETIME LEFT % Ä�+�Ê ¡�¦�g�h9�
Õ Ä�b�¶ k�� � ��Î ��� .
� �9� |�}�£�¦���¤ ¨�©�ª�� 74.2 � à��$¹jº�� .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-6
� 4-2
2�F2, ¾�× ¥�¡
¾>×G¦G¡¾>×G¦G¡¾>×G¦G¡¾>×G¦G¡ (
2GF2GF2GF2GF 2) HËÖHËÖHËÖHËÖ / IËÖIËÖIËÖIËÖ àG�àG�àG�àG�
1 SPEED REF 2 rpm ¨�©�ª�� 20.1 & 20.2 � �, É�;$Ê Å�����W�Í 2 SPEED REF 3 rpm ��V�Å���\�Î y�§ Å�� Q�è�Í 3 SPEED REF 4 rpm Å�� ��W�� Ý = ��V�Å���\�Î y�§ Å�����W
+ Å�� ����� 4 SPEED ERROR NEG rpm ¨ É Å�� – Å�� ��W�� Ý 5 TORQUE PROP REF % Å���É�� Õ � ��©�×9� Q�è 6 TORQUE INTEG REF % Å���É�� Õ � b�i�×9� Q�è 7 TORQUE DER REF % Å���É�� Õ � ª�i�×9� Q�è 8 TORQ ACC COMP REF % ��Å�d�Ø ��W�� 9 TORQUE REF 1 % ¶�ª���� È�è�¯#¤ L�@���W�� 10 TORQUE REF 2 % Å���É�� Õ � Q�è Ý + ��Å�d�Ø ��W�� .
¨�©�ª�� 20.4 & 20.5 ® É�; . 11 TORQUE REF 3 % L���@ 6�7 Õ � Q�è , ¨�©�ª�� 72.2 ��� 12 TORQUE REF 4 % TORQUE REF 3+ ×�Ð d�Ø 13 TORQUE REF 5 % TORQUE REF 4+ Torque step 14 TORQ USED REF % L���@�É�� Õ � â�ã�¯#¤ a,« L�@���W��
(TORQUE REF 5 with limits) 15 MOTOR TORQUE % ¨ É «�� L���@ 16 MOTOR SPEED rpm ¨ É «�� Å�� 17 SPEED MEASURED rpm *���Ê «���Å�� (RTAC) 18 POS ACT PPU +/- 32767 Ö,��*�� Í ( ¨�©�ª�� 70.1 ® ¬��Î ��� ) 19 START True; False
Õ ����W�� v,c 20 RUNNING True; False ¬�©�¦�) ��� ¶�� ( L���@9� ��® ) 21 BRAKE LIFT True; False )�A�¦�@ S
3 ��W
22 FAULT True; False ¬�©�¦�) �� ��� ( h�¯ ) 24 SPEED CORR rpm Å�� ����� 25 POWER SPEEDREF % Q�è9a,b$¥,� �# Ä�+$Ê Å�� Í 26 ELSHAFT POS ERROR ° ��¦�) ¬�©�¦�)������ � Õ�± Ö,��É�� �� 27 LIMIT WORD 1 0–FFFF Packed
boolean (Hex) ¬�©�¦�) ����� «�� É�;�� �#; ��� Ø�-�â���� ±���� � 4-3 ���
28 FAULTED INT INFO 0–FFFF Packed boolean (Hex)
INT d�¬ �� ��d Ø�-�â���� ±���� � 4-4 ���
29 TORQUE SELECTOR 0 – 5 L���@ ��W�Í (2.11) «�¬ v,c�¥ 0 = É�® É�� (= @�A�¶ ¬�©�¦�)�� Å���É�� ) 1 = Å�� É�� (Torq ref 2) 2= L���@ É�� (Torq ref1) 3 = a#Z�Í É�� (Torq ref1,2� Ò���Í ) 4 = a#²�Í É�� (Torq ref1,2� a#²�Í ) 5 = Ý�+ É�� (Torq ref1,2� Ý )
30 dV/dt Rpm/s Å�� ��V�Å Õ�³�Õ � ª�i�Ä � Speed ref3
½�´ O,� � � Ï�¥, 31 LOAD TORQUE % % «�� ��M L���@�� ²�; Ä�+�Ê ×�Ð L���@�� �� . ¥�¡�Í�� ¨�©�ª�� 68.1 � �, K��9µ 32 LIMIT WORD INV 0 – FFFF (Hex) ¨�©�ª�� 2.27� Ø�- à���Í9� ���
±��9� � 4-5 ��� 33 INT SC INFO 0 – FFFF (Hex) O�® I�¶$Ö,��� ²�; ��d . ±��9� � 4-6 ���

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-7
� 4-3 ¥�¡ 2.27 LIMIT WORD 1
�Gh�Gh�Gh�Gh ¦>Þ¦>Þ¦>Þ¦>Þ vcvcvcvc�¯¤¯¤¯¤¯¤ ÉG;ÉG;ÉG;ÉG; 0 TORQ MOTOR LIM É�;�Í ��·�� «�� L�@ ¸9v�¥ 1 SPD_TOR_MIN_LIM Å���É�� L���@ a,Z�Í É�; 2 SPD_TOR_MAX_LIM Å���É�� L���@ a,²�Í É�; 3 TORQ_USER_CUR_LIM â�ã�ç ¹�� �� É�;
4 TORQ_INV_CUR_LIM ¾�× �� É�; 5 TORQ_MIN_LIM L���@ a#Z�Í É�; 6 TORQ_MAX_LIM L���@ a#²�Í É�; 7 TREF_TORQ_MIN_LIM L���@ ��W�Í a,Z É�; 8 TREF_TORQ_MAX_LIM L���@ ��W�Í a,² É�; 9 FLUX_MIN_LIM ç�Å9� a#Z ��W�Í É�; 10 FREQ_MIN_LIMIT Å�� / ��¨ � a,Z�Í É�; 11 FREQ_MAX_LIMIT Å�� / ��¨ � a,²�Í É�; 12 DC_UNDERVOLT DC ����P É�; 13 DC_OVERVOLT DC 8,��P É�; 14 TORQUE LIMIT L���@ É�; 15 FREQ_LIMIT Å�� / ��¨ � É�;
Note : Bit 4 TORQ_INV_CUR_LIM � ¶�ª��9� U�� 8�×�Ð�� )�A�¦�º »�|��
Ò���Æ á v,c$¥ ¹�º�� . Ø�-�â���� 2.32 LIMIT WORD INV ¡ ����Ð������ .
� 4-4 ¥�¡ 2.28 FAULTED INT INFO
¦ æ�ç�¤ �� �� Ö,����d�¡ j�x�Ý�º�� : PPCC LINK, OVERCURRENT, EARTH FAULT,
SHORT CIRCUIT, ACS800 TEMP, TEMP DIF , POWERF INT.
�Gh�Gh�Gh�Gh ¦>Þ¦>Þ¦>Þ¦>Þ àG�àG�àG�àG� 0 INT 1 FLT INT 1 board fault (R8i module #1) 1 INT 2 FLT INT 2 board fault * (R8i module #2) 2 INT 3 FLT INT 3 board fault * (R8i module #3) 3 INT 4 FLT INT 4 board fault * (R8i module #4) a.s.o. 4 INT 5 FLT INT 5 board fault * 5 INT 6 FLT INT 6 board fault * 6 INT 7 FLT INT 7 board fault * 7 INT 8 FLT INT 8 board fault * 8 INT 9 FLT INT 9 board fault * 9 INT 10 FLT INT 10 board fault * 10 INT 11 FLT INT 11 board fault * 11 INT 12 FLT INT 12 board fault * 12…14 â�ã���x 15 PBU FLT PBU board fault
* ¶�ª���� ¼�½���������» â�ã . INT 1 � PBU CH1 � , INT 2 ¤ CH2 a.s.o. � ���
É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-8
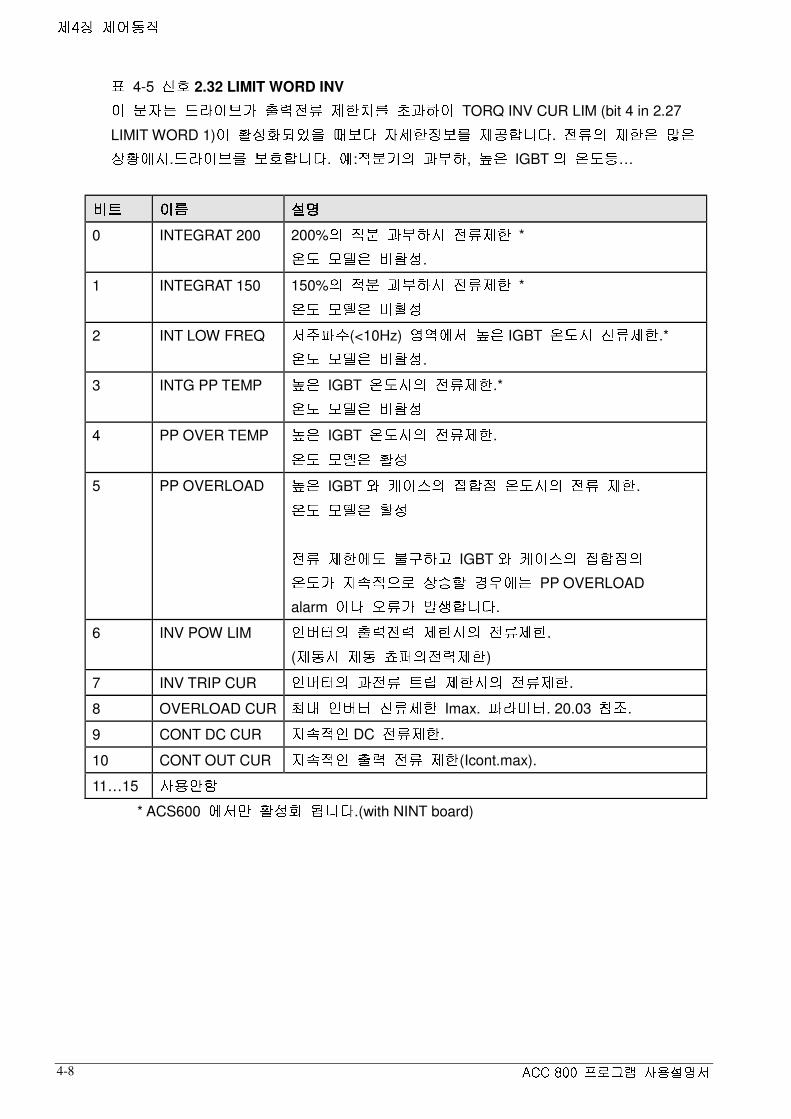
� 4-5 ¥�¡ 2.32 LIMIT WORD INV
¦ æ�ç�¤ ¬�©�¦�)�� Q�è��� É�;���¡ ½�8jÐ�� TORQ INV CUR LIM (bit 4 in 2.27
LIMIT WORD 1) ¦ v#c$¥�¯,w�Î á�d�� ç�-�;���d�¡ É�z�Ý�º�� . �� 9� É�;�� ¾��
Ø9¿,��� . ¬�©�¦�)�¡ d�¡�Ý�º�� . ß : b�i Õ � 8�×�Ð , À�� IGBT � U���¢ …
�Gh�Gh�Gh�Gh ¦>Þ¦>Þ¦>Þ¦>Þ àG�àG�àG�àG�
0 INTEGRAT 200 200% � b�i 8���� �� ��; *
U�� «�Á�� ��v,c .
1 INTEGRAT 150 150% � b�i 8���� �� ��; *
U�� «�Á�� ��v,c
2 INT LOW FREQ ����¨ � (<10Hz) %�Â���� À�� IGBT U���� �� �É�; .*
U�� «�Á�� ��v,c .
3 INTG PP TEMP À�� IGBT U����9� �� �É�; .*
U�� «�Á�� ��v,c
4 PP OVER TEMP À�� IGBT U����9� �� �É�; .
U�� «�Á�� v#c
5 PP OVERLOAD À�� IGBT ê Ã�¦�g�� Ä�Ý�' U����9� �� É�; .
U�� «�Á�� v#c
�� É�;���� Å�Æ�Ð�� IGBT ê Ã�¦�g9� Ä�Ý�'9�
U���� ��Å�b��® Ø�Ç�Ó ������¤ PP OVERLOAD
alarm ¦�� �� �� ��®�Ý�º�� .
6 INV POW LIM ¶�ª��9� Q�è���è É�;��9� �� �É�; .
( É���� É�� »�|9�#��è�É�; )
7 INV TRIP CUR ¶�ª��9� 8,�� h�¯ É�;��9� �� �É�; .
8 OVERLOAD CUR a,² ¶�ª�� �� �É�; Imax. ¨�©�ª�� . 20.03 ��� .
9 CONT DC CUR ��Å�b�¶ DC �� �É�; .
10 CONT OUT CUR ��Å�b�¶ Q�è �� É�; (Icont.max).
11…15 â�ã���x
* ACS600 ��È�» v,c$¥ ¹�º�� .(with NINT board)
É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-9
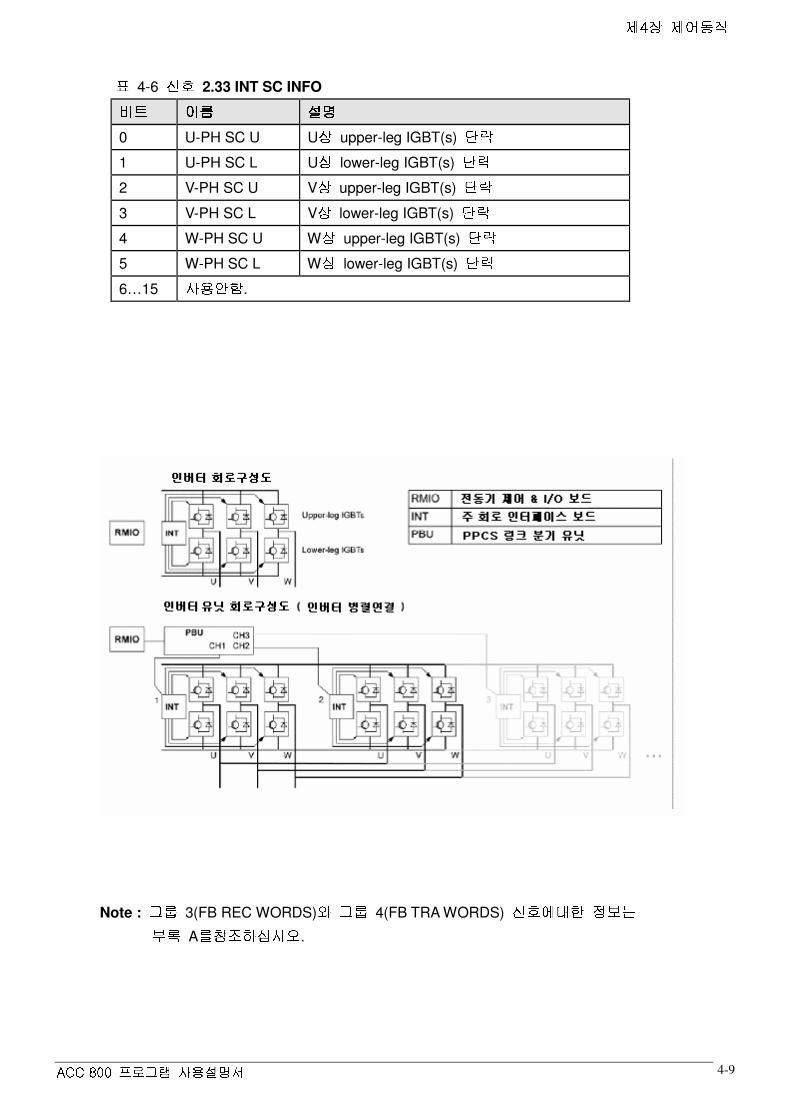
� 4-6 ¥�¡ 2.33 INT SC INFO
�Gh�Gh�Gh�Gh ¦>Þ¦>Þ¦>Þ¦>Þ àG�àG�àG�àG�
0 U-PH SC U U Ø upper-leg IGBT(s) I�¶
1 U-PH SC L U Ø lower-leg IGBT(s) I�¶
2 V-PH SC U V Ø upper-leg IGBT(s) I�¶
3 V-PH SC L V Ø lower-leg IGBT(s) I�¶
4 W-PH SC U W Ø upper-leg IGBT(s) I�¶
5 W-PH SC L W Ø lower-leg IGBT(s) I�¶
6…15 â�ã���x .
Note :
2�F 3(FB REC WORDS) ê
2�F 4(FB TRA WORDS) ¥�¡���²�; ��d�¤
× = A ¡�����Ð������ .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-10
4.4 ÉÊ#ËÌÉÊ#ËÌÉÊ#ËÌÉÊ#ËÌ �� �¦�è���¤ @�A�¶���ã ¬�©�¦�)���È a,Í���®�; 15 .9� ����� �� �� ²�;
��d�¡ j�x�Ý�º�� . ��x9� ¾�ã�8 f
�9[�¶�� ��\�¦ ���$¹�º�� . �9[�¶��
��\�� ¬�©�¦�)�� RMIO d�¬�� �9[j¦ ¶���¯j¤ ��Ø Ä�+ ¯#��Ñ�º�� .
É 2 � - @�A�¶���ã ¬�©�¦�) B�®2��Î�� .�Ï 5�¦�� 2-7, � 2-4 � É���å
�
� �� �¦�è ����ê Ð�É >�?�� ²� à���¯#��Ñ���º�� .
4.5 ÒÓ#!ÔÕÒÓ#!ÔÕÒÓ#!ÔÕÒÓ#!ÔÕ Ö×!ÔÖ×!ÔÖ×!ÔÖ×!Ô @�A�¶���ã ¬�©�¦�)�¤
� × É�����Z ( Å���Í , Õ � / Ø�Ù�¢9� ��W�Î Ú Û Ñ�Ü
º�� .) ê ®�Ý�É�� ( ��å�¬�� DriveWindow) ��Z���È â�ã�Ó Û Ñ�Ü�º�� .
2�34-2
��È ¬�©�¦�)9� É�����Z�¡ Þ Û Ñ�Ü�º�� .
[LOC REM] ��¡ ¦�ã� ®�Ý�É���ê � ×�É���¡ 6�7 Ó Û Ñ�Ü�º�� .
2�3 4-2 �� ��Z
ACC 800 ÎÎ ÎÎ ÉG�>Ð>�ÉG�>Ð>�ÉG�>Ð>�ÉG�>Ð>� ÑG¤ÑG¤ÑG¤ÑG¤ �G�>ê�G�>ê�G�>ê�G�>ê äG¥>¦äG¥>¦äG¥>¦äG¥>¦ ßG�GÙ>¤ßG�GÙ>¤ßG�GÙ>¤ßG�GÙ>¤ , ¨>©>ªGà¨>©>ªGà¨>©>ªGà¨>©>ªGà 30.12
MASTER FAULT FUNC, �� �� 30.2 PANEL LOSS �� �� Øá�>ÊØá�>ÊØá�>ÊØá�>Ê �>Ò>¦�>Ò>¦�>Ò>¦�>Ò>¦ ¨ ´Ë¹<º>�¨ ´Ë¹<º>�¨ ´Ë¹<º>�¨ ´Ë¹<º>� .
4.5.1 �>å>¬�>å>¬�>å>¬�>å>¬ ÉG�ÉG�ÉG�ÉG�
É�����W�â ACC 800 ¦ å�ã�«�¬�ä ��� É���å�ã���È ����Ñ�º�� .
É���å�ã�Ø�� L (Local) ® ����¹jº�� .
��Ò�Ø9� ��W98 Ù�W�Î É���å�ã���È Ó Û é���¤ , ±���� d�¤�Ç�8 ��¦ å
z�\��® ����_ Ç È�º�� .
Note : «�æ Ù�W�Í�â ��Ø SPEED SCALING RPM ( ¨�©�ª�à 69.1) � ²�;
% I�Ö�® ����Ñ�º�� .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-11
4.5.2 � ×� ×� ×� × ÉG�ÉG�ÉG�ÉG�
ACC 800 ¦ � ×�����«�¬�� Ñ��¤ , ��W�â Fieldbus � È�Q�è (Stand Alone
mode) µ ;�ç�Ì���È è��² ¨�©�ª�à 64.1 Stand Alone Sel ��È 6�7�Ó Û
Ñ�Ü�º�� .
Stand alone
»�¼ Stand Alone Sel ( ¨�©�ª�à 64.1) ¦ True (Õ�é Í ) �® È�è$¯,� Ñ��¤
Stand Alone «�¬�� 6�7$¹�º�� . � ×�É���«�¬���È�¤ ��¦�g�ê98 ��ª�h g�Ö#��� ë�Ä ����¹jº�� ]�Ù�^�È�è
DI 1 - DI 68 Ext DI1-DI4
2��� ±�_�®
2È�è AI1&AI2 � . @�A�¶
Õ�: «�ì��
����¯,� Ñ�º�� .( I , ��¦�g�ê ¥�¡�� K�¬�ª�g�¡ ä� @�A�¶ Õ�:
«�ì�� �
��¯,¤ FB ��¦�g�ê É�� «�¬�¤ ß � , ç�-�; â���â 5.6.5 ¡ ����Ð������ )
@�A�¶ Õ�:
«�ì�â On/OFF, START ¢�8 ��â ��W98 Ù�W���® ¦�í���Ñ�º�� .
Fieldbus
ACC 800 ¦ K�¬�ª�g «�¬�ä�á (64.1 Stand Alone Sel=False), ��W�â Ø$Ö,��g�î
��È K�¬�ª�g�ä�¥�Î ä� d�¾�Ñ�º�� .(5.6.. ��� )

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-12
4.6 ïð#ñòïð#ñòïð#ñòïð#ñò óôõóôõóôõóôõ ö÷øö÷øö÷øö÷ø !Ô"$!Ô"$!Ô"$!Ô"$
2�3 4-3 ��9[�8 �����Z9� 6�7

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 4-13
4.7 ùô#úûùô#úûùô#úûùô#úû óôõóôõóôõóôõ ö÷øö÷øö÷øö÷ø !Ô!Ô!Ô!Ô "$"$"$"$
2�3 4-4 ��9[�8 �����Z9� 6�7 .

É9DE� É�����Ò
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ4-14
4.8 RMIO üôüôüôüô,nnnn Ö×Ö×Ö×Ö× 24V ýþýþýþýþ � �9[�¦ z�{$¯,Ù Ã�Î ��� É���å�ã98 RMIO d�¬�¡ Ø�Ø�b��® ��Ò���� Õ
Ö, �È�¤ ÿ��9� 24Vdc �9[�¦ ����¯#��Ü Ý�º�� . Ø�-�; â���â ACS800
Ð�¬��,� ������Î ����Ð������ .
4.8.1 �á[�á[�á[�á[�¶>�¶>�¶>�¶>� �<¶�<¶�<¶�<¶ È>èG¥G¡È>èG¥G¡È>èG¥G¡È>èG¥G¡
@�A�¶���ã ¬�©�¦�)9� RMIO d�¬�� � × 24V �9[�¦ z�{�¯j� Ñ���¤
“Power on acknowledge”( ß ,DI2) ¥�¡�� AC Power On Contactor � d���Ä�'
NO(Normal Open) Ä�'�� ����Ð�¤ Ç�¦ K�Ï�Ý�º�� . È�è�â ¨�©�ª�à 10.5 ��È
6�7�¹�º�� . ¬�©�¦�)�¤ Power on acknowledge È�è ¥�¡�¡ â�ã�Ó á �9[�¦
¶���¯�¤ ç���b��® ����¹�º�� . Ú�; �9[ ��I�� »�| �� �ê PPCC Link
�� 9� b��; ���¤ Power on acknowledge È�è ¥�¡�¡ â�ã�Ó á ¦���Ñ�º
� . Power on acknowledge È�è “0” â @�A�¶���ã ¬�©�¦�)�� “OFF” ��W��® � ��¹�º�� . ; Coast Stop( �,c98 ����� �,; Ø�Ù ) 8 Õ Ä É�� Õ � ����Î
��ª�Ý�º�� . Power on acknowledge È�è ¥�¡�� “0” ¦�¤ ¬�©�¦�)�¤ ����¯,Ù
Ã�Ü�º�� .
Note : ACS800 Multidrive ¡ â�ã�Ð�¤ ¨�©�ª�à 10.5 POWER ON ACKN SEL â
à�Ø�¯,��Ü Ý�º�� . = DI2!
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 5-1
ÿÿ ÿÿ����� �� �� � ���� ���� ���� ��� ����� ������ ������ ������ � ! ! ! !
5.1 ���� "
����È�¤ @�A�¶ B�®2 C � #���Ù�� ��@�® (CRANE8 M/F CTRL) � Õ�: 8 #���Ù9� $�× É�� «�¬ ( K�¬�ª�g�«�¬�ê I�%�����«�¬ ) & à���Ý�º�� .
Ú�; #���Ù9� â�ã�ç ��@�®�& â�ã�Ð�¤ >�?�Î à���Ý�º�� .
" ����È�¤ ±��9� ¾�ã��®
"í���' Ñ�Ü�º�� : ( ) ã ��@�® Ø�d ( ��Ò , K�¬�ª�g�ê I�% ����«�¬ ( $j× È�Q�è ��� ( ¨�©�ª�à à�Ø ( B�®
2 C � Õ�:
Oj® Æ�c�� ( Õ�: «�ì à��
" �9� ¨�©�ª�à à�Ø���¤ â�ã�ç�� Û�Ø� �Ü�»�Ð�¤ ¨�©�ª�à�& *,+�� � ®
Ù���Ý�º�� .
× = A ��¤ � ¨�©�ª�à9� ½ Õ Í�Î -�¤ «�Ý à�Ø�Ø�Ù�& d���.�º�� .
5.2 /10/10/10/10 2,3Ò2,3Ò2,3Ò2,3Ò ) ã ��@�®�¤ CRANE 8 M/F CTRL # ��Ù�� Ñ�Ü�º�� .
"Ç9� 6�7�â
¨�©�ª�à 99.2 ) ã ��@�®���È Ð�² , Õ�é Í�â CRANE ��@�®�È�º�� .
CRANE ��@�®�¤ ��g�à / 4�®�� Õ�: Î É5$#; «�æ @�A�¶ Z�B�h5�,�
Õ�:
Î ��Ù�6 Ñ�Ü�º�� .
M/F CTRL ��@�®�¤ «�æ CRANE ��@�® Õ�: 8 ��g�à / 4�®�� Õ�: Î j�x�Ð
6 Ñ�Ü�º�� .(Master/Follwer (72) � Õ�: «�ì à���Î d������ .)
Note : ) ã���@�®�& Ï�7�Ð�8 ¨�©�ª�à2�F
99 ê «�à ID Run� Ì"à�Í�Î
É�$,; «�æ ¨�©�ª�à�� Í�Î ½ Õ * ��9�º�� . ¸ ©�È ��@�®�� 6�7�â
¨�©�ª�à�& È�è�Ð Õ ��� �,��Ð Õ & :,��Ý�º�� .

É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ5-2
5.3 <1=<1=<1=<1= >,?>,?>,?>,?A@@@@ B1CB1CB1CB1C
��D�� J���Æ Ç�È�º�� .

É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 5-3
5.4 ïð#ñòïð#ñòïð#ñòïð#ñò óônóônóônóôn ñòñòñòñò
«�æ ��W�8 Ù�W�È�è�â É���å�ã"�E
6�7�¯#��³ $�× É�����Z���È Ó Û
Ñ�Ü�º�� . É�����Z�¤ F�å�¬�Ø�� LOC REM F�® 6�7$¯,��Ù�² ¬�©")�¤
Å���É��$¹�º�� .
$�×�É�����È É�����Z�¤ Õ�é
È�Q�è"² , Ù�W�¥�¡�¤ AI1 � ����¯,6 ,
On/Start ê O,��>�&�â I�ç�² X21� DI2,,, DI4 � ����¹jº�� . DI5 ¤ È�´�����Î
Ö,; ��ª�h g$Ö,��& ����Ð�¤�Ì â�ã$¯�² Õ Ä�b�¶ 8j×�Ð
E ®�B�� G�H� I ��¤ ¥�¡�& è�± {�Ø�Ù���F Õ Ö,; ¥�¡�¤ DI6 � ����¹�º�� .
Õ Ä�b�¶
)�A"@�¤ DO1 Î ä� É���¯,��Ù�² ,
"Ç"
��Ò�¯,w���¤ )�J ¥�¡�¤ DI1 �
����¹�º�� . I�ç�²�Ø���È #�.9� ±�_�®2
¥�¡�ê -�.�� `�A"
Q�è�¥�¡�& "ã�Ó Û Ñ�Ü�º�� . É���å�ã�Ø�� ¨ É�¥�¡9�
Õ�é Í�â SPEED, TORQUE ê
CURRENT È�º�� . K�¬�ª�g ä�¥�Î ä�; K�¬�L Í : ¬�©")���È PLC ® d�¾
��¤ Í�â ä�¥�«�ì�Î
"ã�Ð�� I�%���� «�¬���È��
"ã�Ó Û Ñ�Ü�º�� .
( ¨�©�ª�à 98.2)
�>Ò�>Ò�>Ò�>Ò O<®GÆGcG�O<®GÆGcG�O<®GÆGcG�O<®GÆGcG�
Ù�W98
Õ � / Ø�Ù , O,��>�&9� ��W�â É���å�ã���È Ý�º�� .
$�×������® ��M Õ Ö# �È�¤ Ø�Ù�Ø�Ù���È LOC REM F�& N�O ����� .
Å���Ù�W�â ±�_�®
2 È�è AI1 Î ä� È�è�¹�º�� .
( I�ç�² X21). Õ � / Ø�Ù�ê O,��>�&9� ��W�â ]�Ù�^ È�è
DI2,DI3,DI4 ® È�è$¹�º�� . 2�3 5-1 I�%���� «�¬�� ��Ò O�®�Æ�c�� .
5.4.1 ÈGQ>èG¥G¡ÈGQ>èG¥G¡ÈGQ>èG¥G¡ÈGQ>èG¥G¡
È�Q�è ¥�¡9� ½ Õ Í ( �"g�ê É���>�� ) â @�A�¶���ã ¬�©
")�� �, 6�Ø
¯,��Ñ�º�� .( Ø�-�; â���â 5.6.5� @�A�¶ «�ì (64) Î ����Ð������ .)
È>èÈ>èÈ>èÈ>è ¥G¡¥G¡¥G¡¥G¡ Q>èG¥G¡Q>èG¥G¡Q>èG¥G¡Q>èG¥G¡
Brake Ackn: (DI1)
Zero Pos: (DI2)
Start Dir A: (DI3)
Start Dir B: (DI4)
Slow Down-N: (DI5)
±�_�®2
Q�è AO1: Speed
±�_�®2
Q�è AO2: Torque
`�A"
Q�è RO1: Brake lift
`�A"
Q�è RO2: Watch dog-N
`�A"
Q�è RO3: Fault-N
5.4.2 $<×G�G�$<×G�G�$<×G�G�$<×G�G�
É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ5-4
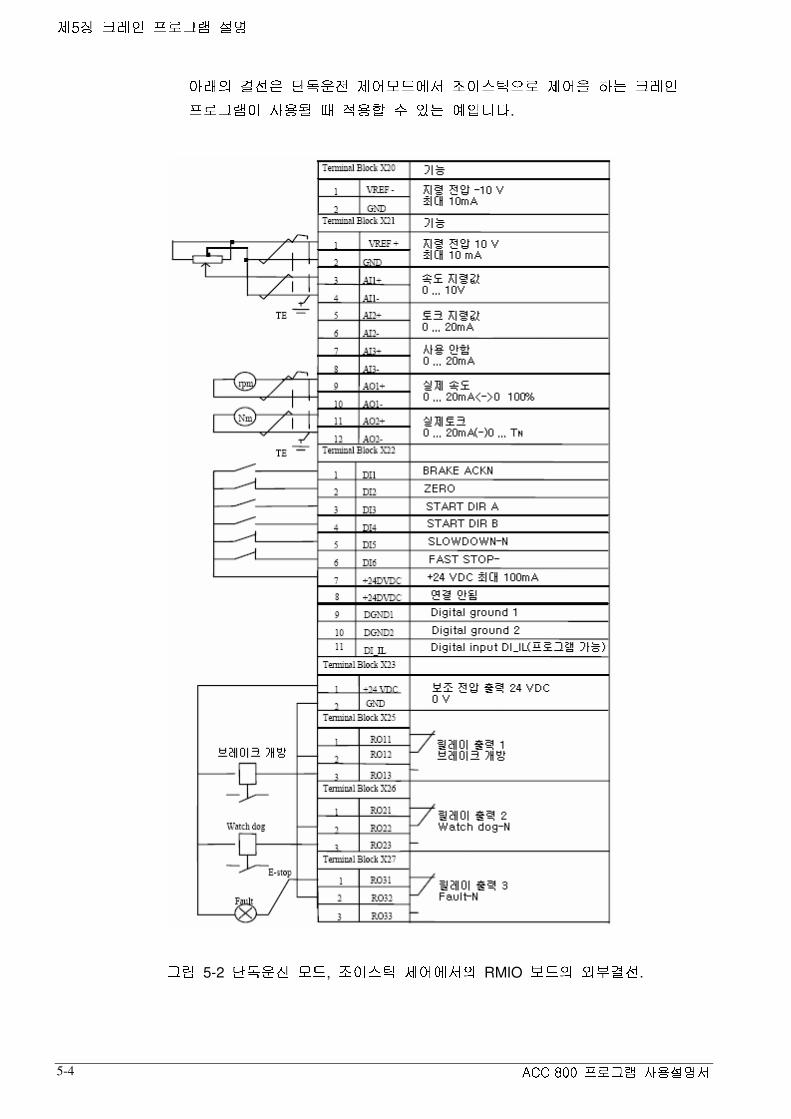
±��9� ��6�â I�%���� É���«�¬���È �"g�ê��® É���Î Ð�¤ @�A�¶
B�®2 C "
â�ã$Æ á b�ã�Ó Û Ñ�¤ ß�È�º�� .
2�3 5-2 I�%���� «�¬ , �
"g�ê É�����È�� RMIO d�¬�� $j×���6 .

É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 5-5
2�3 5-3 I�%���� «�¬ , �
"g�ê É�����È��
�,� È�Q�è «�ì RDIO-01,RAIO-01� $j×����
5.4.3 IP%G�G�IP%G�G�IP%G�G�IP%G�G� «>¬á�«>¬á�«>¬á�«>¬á� ÉG�G¥G¡ÉG�G¥G¡ÉG�G¥G¡ÉG�G¥G¡ �G��G��G��G�

É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ5-6
2�3 5-4 I�%���� «�¬�� É�� ¥�¡ ���
5.4.4 IP%G�G�IP%G�G�IP%G�G�IP%G�G� «>¬á�«>¬á�«>¬á�«>¬á� ¨>©>ªGà¨>©>ªGà¨>©>ªGà¨>©>ªGà àGØàGØàGØàGØ
É�;E� @�A�¶ B�®2 C à��
ì[íîíðïòñòñôó$õ$ö�÷ùøûú$ü�ý$þ 5-7
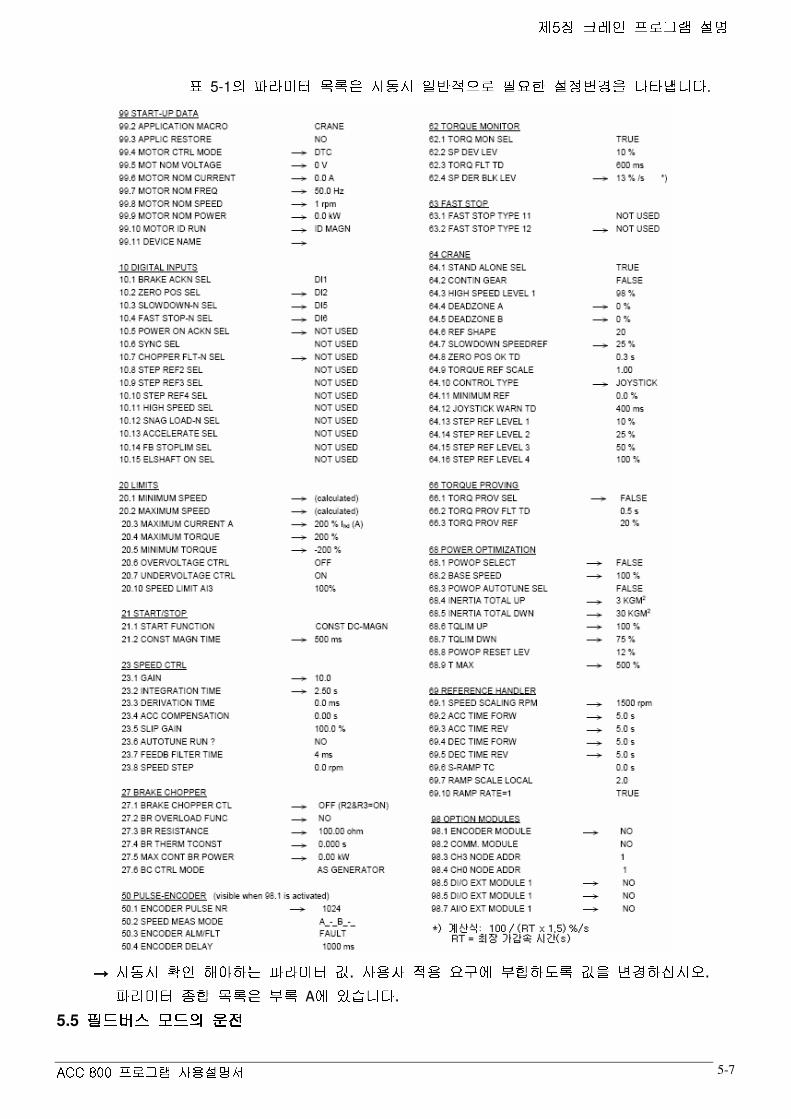
� 5-1� ¨�©�ª�à <�= â ����� ä�Q�b��® K�Ï�; à�Ø�Ï�7�Î
E�R�Sº�� .
����� T�U�T � VAW � X�Y�Z�[ � \�]�^�_ � ` �� a�b�c � d�b � e�f�g � h�i�Z�j�k � `�l � m�n�Z�o�T�p ��
\�]�^�_ � q�i � r�k�s � h�k � � g � t�u�v�w �� �
5.5 ùô#úûùô#úûùô#úûùô#úû óônóônóônóôn ñòñòñòñò

�;E� @�A�x B�y2 C{z �
|~}�}��������5�5�������5���5�5-8
���� ���5� � ��������s � ��� � ������� � ���� ,��¡ � ¢Ah � ����£�¤�g�¥ � ¦�l � § �
t�u�v�w �� ����£�¤�[ � ¨���©�ª5« � �������� ¨�¬ � ���5 A���� � ©�]���®�[ � �¯�° d�±�¬ � ²�j�����³ � i�v�w �� ¢Ah�����´ � µ�©�¶�· � ¸�¹�±�¬ � ����£�¤�³ � ��� �
Z�º � ����` �������� »�« � ¹�¼�[ � X�½� A[ � ¾���_�¿�À�¬�¬ � Á�Â�Ã,v�w �� �
�
�� l � X � Ä�Å�d�W � ®�Æ���Ç�³ � ����Z�È �� ��É�« � U�Ê � VAW�¹�¼�[ ��� g � Á�Â�i �
v�w �� �Ë ��Ì � ����Á�Â5« � Í�T ��
�����������������[ � ����Î � Ï�Î�Ä�« � Ð�Ñ�Ò�Ó�Ô � Á�Â�Õ�v�w ����������Ö � ×AØ �Ù�Ú� Û�Ñ � ¹�¼���È ����������������� ! s � �"#« � È�£�Ò�Ó�Ô � Á�Â�Õ�v�w �� �
�Ü�Ý��Þ�ß�Ô�¥ � à�á�« � â�ã�¬�ä�å � ¿�á5« � æ�Æ�� � ç�� � ¹�¼�è � é�ê�ë � § � �ì ±� � ��������Ô � ��í���Ö � î���¹�¼�ï�ð�« � Ä�ñ�ï�ò � ��$$���%�#&'$å �
�'##$!%��ó�ô ��õPöõPöõPöõPö ÷1yPøPùPú÷1yPøPùPú÷1yPøPùPú÷1yPøPùPú
��� �� Ä�Û �Ú ��å � ûAü�ý�þ�« � ����ò � ��������Ô�¥ � Õ�ó�ô ��
¢Aÿ���ü�±�¬ � ����Ä � ×���¥�Ö �Ú ��ª���Ô�¥ � �������� �
¨�³ � ������� �
��/ ��� ��� , ������� ������� ����� ��� ��� ��!�" . #%$
� ( �(� &%'%(%) � *+'-, � .%/ � 021%3%4+5 ��
5.5.1 68789687896878968789 �8:�8:�8:�8:
������� ;���< = , ( > , ? @ A�B
(PLC) C D�E FHG�� = ) I J�K�L M�N�O�P�Q R��TS 6 , 7�9 ��:�U "�V W X�Y�!�" .
6898�8:6898�8:6898�8:6898�8: 7898�8:7898�8:7898�8:7898�8:
Brake Ackn: (DI1)
Power On Ackn: (DI2)
Sync: (DI3)
Chopper Flt-N: (DI4)
Z�[ N�O 7�9 AO1: Speed Z�[ N�O 7�9 AO2: Torque \ K�] 7�9 RO1: Brake lift \ K�] 7�9 RO2: Watchdog-N \ K�] 7�9 RO3: Fault-N
5.5.2 ^`_8a8b^`_8a8b^`_8a8b^`_8a8b

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvu5���5� 5-9
Z�w I b�x�� ������� ;�� Q�y J�K�L M�N�O�P ] D�E z = { E�| } ~�U ��6�!�" .
O�� 5-6 ������� ;��TI ^H_�a�b
5.5.3 �8�8�8��8�8�8��8�8�8��8�8�8� ;8��I;8��I;8��I;8��I A8B8�8:A8B8�8:A8B8�8:A8B8�8: a8ba8ba8ba8b
A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvu5���5�5-10
O�� 5-7 ������� ;��TI A�B���: a�b
5.5.4 �8�8�8��8�8�8��8�8�8��8�8�8� ;8� Q8y I;8� Q8y I;8� Q8y I;8� Q8y I �Pú8�8?�Pú8�8?�Pú8�8?�Pú8�8?
A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvu5���5� 5-11
������� ;�� Q�y U ����]�� N ��ú���?���� ��� } ~�Y�!�" .
(ramp 7�9�� Q C���������� C���� ��� ��������!�" .)
������� ��� L�����]�� Q�y DataSet 3, Word 2 U ��ú���? 6�9���:����
a�b �H!�" . (ACC 800 ��E � M�� � B Q�y 8ms ����� C���� ������!�" ).
��ú ��?���� C������ ��ú�� W ��ú���?��TI ��] ��� / ��� ��ú R������ � WH��� ��ú�� A��T��!�" .( ���¡�� 20.1 & 20.2)
5.5.5 ^`_^`_^`_^`_ ¢8£8�8�¢8£8�8�¢8£8�8�¢8£8�8� ( �8�8�8�8¤�8�8�8�8¤�8�8�8�8¤�8�8�8�8¤ �8¥8¦8§�8¥8¦8§�8¥8¦8§�8¥8¦8§ ;8�;8�;8�;8� ;8¨;8¨;8¨;8¨ { E8C8©{ E8C8©{ E8C8©{ E8C8© )
^H_ A�¢�£�ª D�E�| «�¬ A
�¢�£ a�b �® (“nomally open” -‘a’ ¯�°
Q
a�b ; DC §�±�] L�CTF�� �®�C ²�� = ³�´�~�� a�b ) U µ���¶ 6�9 Q
a�b FHB ~�� = ����]�� Q I�� ����| } ~�Y�!�" .( ���¡�� 10.7
Chopper Flt-N Sel) ·�¸ ¯�°�] a�b F�� ��¹�º , ����]���U ������� »�¼ ,
��d�]�9 , ������� �®�½�¾ Q CHOPPER FAULT C ¿�À [ Á�6�!�" . Â��
Watchdog ��: (DO2) C
� ö | Á�6�!�" .
«8�«8�«8�«8� ! A�¢�£ �®�C Ã�Ä FHº ����]�� Q Å�Æ FHU AC § Ç�� È�ÉTFHB�Ê�·
��!�" ! ( ·�¸ �®�C A�¢�£ I ��Ë Q IH� Á�]���º DBR
Q Ì�Í�U §�®�ª Î B Ï } ~�U Ð�Ñ�� ]�Á ��¿ Ò�6�!�" .) ]�Á�� ����]�� Ó�?�����÷ N�Q
Watchdog-N 7�9 DO2 ª a�b����
� ö FH� | } ~�Y�!�" .
����]�� Q § Ç�� Ô�6���U
��Õ(DI2 Power On Ackn C “0”
Q�y ”1”N
Ö × )
¢�£ �®�����U Ø�ÙTS
� ö ª Ú��
@H��� ���¡�� 71.3I
Chopper Monit TdQ
R�� S �����Õ
����ª ��� ��Y�!�" .
·�¸ A�¢�£�C ��ËTF�B ~�U ?�Û N L����
Q § ÇH] Ô�6TFHº ����]�� I Ü §�Ý�Þ�] ��ßTz } ~�¹�à N ]�ª Ú��
@H� y ���¡�� ��� C�©�� � ö � R�����Ê���!�" . ( ��á . 1000 ms)
5.5.6 �8�8�8��8�8�8��8�8�8��8�8�8� ;8��I;8��I;8��I;8��I 8�8¡8� 8�8¡8� 8�8¡8� 8�8¡8� R8�R8�R8�R8�

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä5-12
����� åvævå � çTè � éTêìëví � îTïvðvñ � ò �� óvôTõ � öìô � ÷vøTù � úvûvëvüvý � òvþ � ÿ��vë��vå�� ��
îTïvðvñ � �vû � �vý�� � úvý � � ù � ����� �� �
�� ��vò�� � ��� � îTïvðvñ � ò � ������������ ������������������������������������

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä 5-13
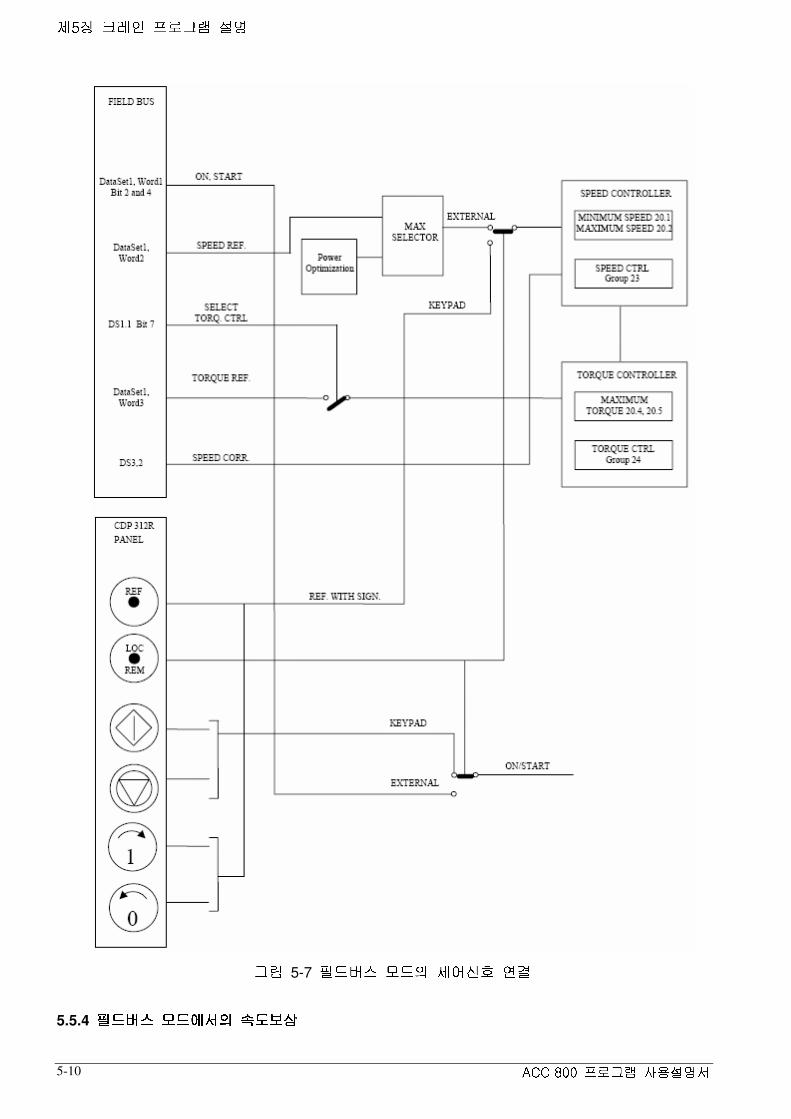
O�� 5-8
© ÷ N ø�ù�ú
5.6 ������������
������������ ������������
A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä5-14
5.6.1
N�� ¦8§N�� ¦8§N�� ¦8§N�� ¦8§ -Local operation (60)
]
© ;! �� L���� §�º Q _#" S A�B�»�¼ Q IH� y
N!� ;���ª
� ö
�!$
@�� �#%�� &�É�÷ N�N ]!'�B#( ~�Y�!�" . <!) { ¹ N ��¦�§�]�¿
��Ó�� Q · D�E��!* , L���� +�! � U A�B�»�¼ Q�y "�V I ����� ��Y�!�" : ��/ ��� , ��ú R�� ,
N!�/ É�; � , �®���A . ;!, J�K�L�§�E ����]�� I
©�� ( � :
!- { L ��K�]�J�A�B ) N!� ¦�§�;�� Q�y ú
� ö ��!�" .
( � , 7�9 � {/. U A ^ )
N��N��N��N�� ¦8§�08<8=¦8§�08<8=¦8§�08<8=¦8§�08<8= Slowdown Limits, Stop limits, Fast stop EE EE 6898�6898�6898�6898�
� ö �8�� ö �8�� ö �8�� ö �8�
�8U8Á Q�8U8Á Q�8U8Á Q�8U8Á Q 1�I1�I1�I1�IH��28�8��28�8��28�8��28�8 . �Pú�Pú�Pú�Pú �8?8�8��8?8�8��8?8�8��8?8�8�
� ö �8!8"� ö �8!8"� ö �8!8"� ö �8!8" .
���¡�� (60.1) LOC OPER INH = “true”N
R�����º ����]���U ^H_�A�B�;��
(LOCAL = “0 “)N
��� F�B 6�7�9 ��: N _�� ������� ����]�¿ ��¥�¦�§
;�� N · A�B ��!�" .
^H_ A�B�;�� Q�y N#� ;�� N 3�«��!4�¿ )�� N
N!� ;�� Q�y ^H_ A�B
;�� N 3�«��
@H� y U ;���C ZERO SPEED = “1" Â�U RUNNING = "0" W 5!6 ��K�]�J�C
� ö F�B ��� S ?�Û���Ê�· ��!�" .
N!� ¦�§�� ;��TI ��ú õ ��� @H� �#7 W
��/ ����ª @�� �!7�� C!8 õ�ö »�¼ Q�y 9#: �H!�" . C�������� (par. 69.2 - 5) � Ó!;�?�}�U RAMP SCALE
LOCAL (parameter 69.7, default = 2.0) ª C���� ~�U <�}�6�!�" . ;��TI ÷H§
Ð!=�� � , >�Ð!= �#7�¹ N Ö!?�!�" .
�� �!7�� @�Í�º ¾ . A
������] }!:TFH� ��ú R���� Q B�� ��ú�C
?!C���!�" . »�¼ I
�� �!7�� @!D#E LOC ZERO SPEED TD (60.3) ���
]!F Q ��ú�R���] ZERO SPEED LEV (61.1) ]�? ?!C���� ��¹�º ����]���U
"�� ��� | Á�6�!�" .
¦�§!0 Q �����#7�� @�Í�º ;���U ������� Q IH� y “0” ��ú N G�B���� ,
·�¸ CONTIN ON (65.1) = False ]�º OFF TD (65.2)Q
R��TS ���#E Q ;�� I
¾ . §�®�ú H���!�" . “0” ��ú Q�y �����!7�� } ���Õ
@�Í�º ¾ . §�®
(= I���� ��� ) U ���Tz Á�6�!�" .
Note : § ÇHL�C JHL 6�9 ��: ( ���¡�� 10.5) ª D�E����
POWER ON ACKN=”1” ] Z!K
«�¬ Q U N!�
( Â�U ^H_ ) ;�� Q�y ¦�§�| }
²�Y�!�" .
5.6.2 �Pú8�8��Pú8�8��Pú8�8��Pú8�8� -Speed monitor (61)

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä 5-15
]
© ;! �� ;�� I WH��ú�ª ������U!L D�E FM* , WH��ú � Q ����]�� Q
������:�ª �!N�!�" .
;�� I ��ú�C MOT OVERSPEED LEV(61.3)Q�y
b�� S }!O�� P�G�� =
»�¼ Q MOT OVER SPEED ��:�ª Q������ ��������¤ �®�]�9 Q Ý�d FM*
>!R { ¹ N ����]���ª �����!S�!�" .( I���� ��� + ��K�]�J )
5.6.3 T8J8�8�T8J8�8�T8J8�8�T8J8�8� -Torque monitor (62)
C����!0�]!4�¿ ��? { ¹ N ¦�§���U
��Õ W,ú�� ��ú#U!V I Ã�Ä���_�¤
C�������U 0 Q 3�«�� ��ú�R�� Q ;���C �#W���U���ª °!X���� ;�� I
T�J�ª ������U#L D�ETFHU
!Y ;! �6�!�" .
]
!Y�
� ö �!$
@H� y U TORQ MON SEL (62.1) � “True”N
R��������!�" .
��ú!U!V (SPEED REF4 - SPEED ACT) I Z�����] TORQ FLT TD( ���¡�� 62.3)
��" [������Õ
SP DEV LEV ( ���¡�� 62.2) ��� P�¹�º ����]���U »�¼ ,
��������¤ �®�]�9 Q ��:�ª �#F�� T�J �® (TORQ FLT)N
��� ��!�" .
���¡�� SP DER BLK LEV (62.4) U �!\
%N
3���U 9�A���ú I Ó#]�� ¿�À
F!* C����!0�< = ��:�d!^ I
� ö � _ @�� y R�����!�" . C������ ;��
��ú I 9�A 3 . ]�] ���¡�� SP DER BLK LEVI R�������" `#(�ú T�J
�® ��:�d!^�U
� ö ��� ��Y�!�" .
� : ��ª!a�B C�� ����� 5 ��N ��� , SP DER BLK LEV � 8 %/s
N R�����º
9�A C�������] 12.5�
(100% / 8%/s = 12.5 s)N
b�B!( ����]���C C����
U
��Õ T�J�A��!^ Q ú!c�����ú T�J �® N ��� FH� ��Y�!�" .
5.6.4 �8�8�8��8�8�8��8�8�8��8�8�8� -Fast stop (63)

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä5-16
����]���ª d�É �����#$
@H� &�É5÷ N�N ]!'�B!( ~�Y�!�" .
� Q U ������!$
@H� e�C�� I "!D!f��C ~�Y�!�" .
- T�J A���¹ N · ������� = fast stop 1
- T�J�A��!^�¤
!- { L ��K�]�J N ������� = fast stop 2
-
!- { L ��K�]�J N · ������� = fast stop 3
��������ª Ó�?�����¤ g���� h!2��� .
Note : Æ8�8� �Y
�Æ8�8� �Y
�Æ8�8� �Y
�Æ8�8� �Y
� Ni� ;8� Q8y UNi� ;8� Q8y UNi� ;8� Q8y UNi� ;8� Q8y U
� ö �8�� ö �8�� ö �8�� ö �8� �8Y8!8"�8Y8!8"�8Y8!8"�8Y8!8" !
��������U "!D f�Û�ª C!8 e#j I 7�9 ��:�C ~�Y�!�" .
FAST STOP 1 > , T�J�A���¹ N ����������:�C 6�9 F�º FAST ZERO SET �
“1”N
R�� ��!�" . ( ��K�]�J�U “0” ��ú Q�y
� ö ��!�" .)
FAST STOP 2 > , T�J�A�� W
#- { L A�d#^���:�C 6�9 F�G���= , e�C�� I
��: FAST ZERO SET, SPEED OFF ¤ FAST STOP ] “1”N
R�� �H!�" .
FAST STOP 3 > ,
!- { L A�d!^�·TI ��:�C 6�9 F�º FAST STOP ] “1”
N
R�� �H!�" .
“0 ��ú Q ú!c�� E Q "�� ����]���ª
���
@H� y U , k N ¦
�������
1 § Q
����:�ª É#l���Ê���!�" .
������� ����½�¾ Q�y ��������ª �!$
@�� ¨!j I 6�9���:�U FAST
STOP 1 W FAST STOP 11 ] ~�Y�!�" ( ��������¤ ��¥�¦�§ ;�� ;�¨
� ö):
- FAST STOP 1 = “1 “ � ������� 1 � �#N�!�" .
- FAST STOP 11 = “1 “ � ���¡�� 63.1 FAST STOP TYPE 11I x!m Q IH� y
������!�" .
�8�8]8�8U�8�8]8�8U�8�8]8�8U�8�8]8�8U FAST STOP 1 Â8UÂ8UÂ8UÂ8U FAST STOP 11(63.1 n1ù . ?8Ûn1ù . ?8Ûn1ù . ?8Ûn1ù . ?8Û ) II II A8B8Ó � CA8B8Ó � CA8B8Ó � CA8B8Ó � C
“1” << << == == ^`_8A8B^`_8A8B^`_8A8B^`_8A8B d8� Q8yd8� Q8yd8� Q8yd8� Q8y ��
��
��
��
zz zz }} }} ²8Y8!8"²8Y8!8"²8Y8!8"²8Y8!8" . N��N��N��N��
��
��
��
��
(CDP »8¼»8¼»8¼»8¼ ) �� ��
CY�8!8"C
Y�8!8"C
Y�8!8"C
Y�8!8" .
FAST STOP 11 � D�E��
@H� y U :
Fast stop 1: FAST STOP TYPE 11 (63.1) = 1 R��
Fast stop 2: FAST STOP TYPE 11 (63.1) = 2 R��
Fast stop 3: FAST STOP TYPE 11 (63.1) = 3 R��
��¥�¦�§ ;���ª D�E�| =�U �������TI e�C��!0 ��¿�ª x#m���� R���| }
~�¹!* µ���¶ 6�9 (FAST STOP-N) = "0"Q
I�� y
� ö FHU ���¡�� 63.2
FAST STOP TYPE 12 C ~�Y�!�" . ( ?#e�D�Þ�� CRANE(64) ª o õ )
FAST STOP TYPE 12I R�� Q ��� y U @�I FAST STOP TYPE 11 ª o õ .
Note : ��¥�¦�§ ;�� Q�y A�B�Ð#p ( ���¡�� 64.10) � FB JOYSTICK ¹ N x!m
��º FAST STOP 1W X�� µ���¶ 6�9�� ��� FAST STOP 12 ¤ �������
����½�¾�ª ��� FAST STOP 11 q�" D�E CY��!�" .
;!, ��������U ��: 4.5 FB AUX STATUSWORD bit11Q
Q��T�H!�" .
5.6.5 J8K8LJ8K8LJ8K8LJ8K8L -Crane (64)

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä 5-17
Note : �8¥8¦8§�8¥8¦8§�8¥8¦8§�8¥8¦8§ ;8�8U;8�8U;8�8U;8�8U 8�8¡8� 8�8¡8� 8�8¡8� 8�8¡8� 64.1 STAND ALONE SEL=”True”NN NN
R8�R8�R8�R8�
F`B8ÊF`B8ÊF`B8ÊF`B8Ê 9�:��`!8"9�:��`!8"9�:��`!8"9�:��`!8" .
Q 5-1 Stand Alone 6�7�9 ��: a�b A
!Y.
�8:�8:�8:�8: 689689689689 (O�rO�rO�rO�r
10
DI e �e �e �e � )
�Y �Y �Y �Y
BRAKE ACKN DI1 ��K�]�J�E ¯!s
( Â�U ��K�]�J ¯�° ) I
� õ ¯�° Q�y 6�9 FHU ��K�]�J �!W���:
ZERO POS DI2 õ ]��!tTI 0!u @M^ ¯�°
START DIR A DI3( ��� ) Stop Lim A ¤
!- { L WH_�� ��:�d!^TI
¯�° Q v#w N a�b S õ ]��!tTI Ð!= A
(pos.=up) ��:
START DIR B DI4( ��� ) Stop Lim B ¤ N�M
]/x ��:�d!^TI ¯�° Q
v!w N a�b S õ ]��#tTI Ð!= B
(neg.=down)
SLOWDOWN-N DI5 START DIR 6�9 I lim A ¤ B Ð!= I y :
��: . § ÇH] y!8!E y :�� ] 6�9�] “1”
N
zH=!z���· CY����!�" .
FAST STOP-N DI6 I���� Q 6�9 F�U ������� ��:
SPEED REF AI1( ��� ) õ ]��!t Q�y 6�9 FHU ��ú�R�� ��: .
0-10 V (“par.13.7”-10V) U 0-100 %Q
� \ �H!�" .
TORQ REF AI2( ��� ) õ ]��!t Q�y 6�9 FHU T�J R�����: .
0-20 mA U 0Q�y
��� T�J R���6�!�" .
( ���¡�� 64.9 TORQ REF SCALEN
�H���
� R�� )
SPEED CORR Ext AI1( ��� ) § !{
A�B +#|�¹ N _�� I ��ú ��?
��:
0–(+/-)10V U 0–(+/-)100% ��ú ��? ��:
BRAKE LIFT DO1 ��K�]�J ¯�° I 7�9
WATCHDOG-N DO2 ¯�°�] }�¹�º ����]���U ��?�]�� ¯�°�]
G�B���º Ó�?�����C
� ö; 1 ¯!s
U G�B
��� ��K�]�J�C
� ö ��!�" .
FAULT-N DO3 �® ��: ���
MEAS VALUE 1 AO1
!~ R���� : ;�� ��ú
MEAS VALUE 2 AO2
!~ R���� : ;�� T�J
õ ]8��tõ ]8��tõ ]8��tõ ]8��t A8BA8BA8BA8B ;8�;8�;8�;8� (64.10=JOYSTICK)

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä5-18
����]��TI 6�7�9���¾ Q õ ]��#t�� v�¯ a�b�| =�U ���¡�� 64.10
CONTROL TYPE � “JOYSTICK”(=
#~� )
Z8[ N8OZ8[ N8OZ8[ N8OZ8[ N8O R8�R8�R8�R8� 689689689689 :
Z�[ N�O R�� ��: (0 – �H��� ) 0 ��ú R���E��
Z�[ N�O
6�9 1Q
a�b���� T�J R���E�� Z�[ N�O
6�9 2Q
a�b���!�" . T�J R���� �!� ��ú R��TI Ð!=�x!m Q�y ��Ð!= (= :�]�� � @HÐ#= ) � 6�9 DI3(Start Dir
A)Q
a�b���� >�Ð#= ( :�]�� � Z�w Ð!= ) � DI4 (Start Dir B)
Q a�b���!�" .
��¡�� 13.7 “AI1 0% REF LEV”Q
0% ��ú R���� ¿�À�� �H� AI1 §�±!^�ª
R�����!�" .( D�E�� : 4-20mA ��: )
R8�8�R8�8�R8�8�R8�8� �8x�8x�8x�8x : õ ]��#t Q�y A�B�| «�¬ Q U Ð!= A ¤ BI Deadzone � R����
U ���¡���ª R�����!�" . (64.4 ¤ 64.5)
REF SHAPE(64.6) � � � x ;!�TI R������ ·!��!�" . ] ���¡���ª “0” ¹ N
R�����º v�x , “20” � X2, “100” � X3 ��x�� ·#��!�" .
õ ]8��tõ ]8��tõ ]8��tõ ]8��t J`LJ`LJ`LJ`L : ����]���C <!) { L ����¹ N ��� SME õ ]��!t�] ZERO POS
OK TD (64.8) ��" ��� �����Õ
0!u @M^ (DI2=1, DIR A:DI3=0 & DIR B:DI4=0)Q @M^�� ~�¹�º k N ¦
������]
� ö F�� ��Y�!�" . Z�w I ?�Û!0 ��¿
(õ ]��#t Â�U §�x I ½�A ) ª JOYSTICK WARN TD(64.12) ��" [ ���
��Õ
+������ ~�¹�º , »�¼ Q U “WARNIG JOYSTICK” ] Ã�Ä���!�" .
-
�� Q START DIR A= “1” ]�� START DIR B=”1” L «�¬ .
- õ ]��!t�] 0!u @�^ (ZERO POS = “1” DIR A = "0" W DIR B = "0")
Q�y
SPEED REF >1V Â�U TORQUE REF >2mA < «�¬ ¯���a�b�] �!����"�U
CYù�� ¿�À!N�!�" .
8� 8� 8� 8�: @ Q ¿!� S �®
õ!� ] Ã�Ä���� ��� START DIR A ¿ START DIR B
0 Q ��¿�C “1” ]�� ZERO POS ] "0" ]�º ����]���U
���H!�" . �/�H��U
R��!^ ?#C Q >!R { ¹ N B���C�U ¾ .M� ?TI
� ö( ]�¡ ¾ . FH� �#��� = )
W 5!6
� ö ��!�" . <#) { L ����� Q ¾ . §�®�U ���¡�� 65.2 OFF TDI
��a������ C!8#E Q y���!�" .
§ ÇHÔ�6 : READY ��:�C nAù . S E õ ]��#t�] 0!uT@M^ Q
§#z���U
¦�§ FH� ��Y�!�" .
�8�8¦8§�8�8¦8§�8�8¦8§�8�8¦8§ : ·�¸ SLOWDOWN-N DI5I ¯�°�]
� ö ��º ]�¡ R���� }!O�¹ N
( ���¡�� SPEED REF REDUCED 64.7) �����#* I�����U ] ¦�§�Ð#=��
!�
��� Å�Æ�§ Ç (AMC ��� § Ç ) ] y���� ��U � )���Ð#=�¹ N �H����ú ¦�§��
| } ~�ú�� ��!�" . ·�< § Ç�] y���� SLOWDOWN-N ] “0”N
6�9 FHº
��Ð!= ;�¨ Ý���¦�§�·�] ��E ��!�" . �!�Ý�Ü
� )����*�+!��+! !��$*�,� �
��(-��.� � Ú Ô � �H� �� �!�/� � �#��ò � �!�!�#��Ô!� � �!� � �Ý#�
� ��×,Ø � !¡ �¢!£� é�ê#¤!¥�Õ�ó�ô �� �!� � ý�þ � � Ö � ��(� #¡!�!¦ � �#� � ý�þ " Ö � ��.� !¡ �

A cedfJ�K�L M�N�O�P R��
gihjh-kmlmlonTpTq�rtsvuTâ�ãTä 5-19
��ó�ô ����(¤ � �//� §��#�!¨ �Ú ý�þ 0©Mª�ý�þ 1 «!�!¬ � �#����ü � �! � �®!¯!° £
� ±!²/³ ®!´ �� µ!¶!· 0 ¸#¹!¶!· 1 «#�!¬ � ±!²/³ ® � º!»#¼!½ ����.� � ���� �
§!¾!�!¨ � ¿!À £ � ÁM¼#½ ����(���.� Â!½ � �!� §#¾#�!¨ � �!�#Ã!Ä � ±!²!Å#� � ÆMÀ �
�! � Ã!Ä#� � ¤#¥!Ç!¼#½ ��
�!�!Ã!Ä � ¡!È 2��(�-���.2 É � Ê!�#Ë!� � Ì#�!Í � Î!Ï!«! � ¤!¥!Ç#¼!½ ��
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
� Ð�Ñ�Ò�ÓÐ�Ñ�Ò�ÓÐ�Ñ�Ò�ÓÐ�Ñ�Ò�Ó: Ô!Õ#0 FAST STOP-N DI6 Ö!×!Ø “0”( >!Ù!= Ú#Û!Ü Ý Þ!ß nMà/á )

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ����5-20
� ë ���� ��!Ø� ��
Ð!Ñ!Ò!ÓÜ ��������� .(
Ñ�� � � æ!â�� ��� ��� )
Fast Stop 1 = � æ#â�� � ë â � , Fast Stop 2 = � æ � ���� é
â �#Ø�! Fast stop 3 = ���� é
â ��"�# ��$ Ó
�%�& '���(�) FAST STOP TYPE 12(63.2) *�+ ,�-�. / 0�1���� .
“0”Ñ�� *
��2�Ð
Ð#Ñ!Ò!Ó
3�4�& 5 â ��� 6�5 ÒÙ�7 Ú#Û!Ü 8 �
"ZEROPOS" Ø “1”ë
Ö#×�9�: * '���(�) ZERO POS OK TD*
î Ò 9 ;�< = � > ;�<!Ø ?�@�� ��!Ø� �# ���#Ø
$�A 5�B���� . Ø #�(�� 3#Ø�C�D!Ø ��E!Ù�7 � ë F�G!Ø�� Õ * H�I 0.3 J���K ( ��L�M ) N "�O�6�P * Q�R�S 0 � T
� ��� U!���� .
VØ�C�W Ô!Õ�; X!Ý�# Y�Z�[�& \
Ó � : ��]���^�! _�`�� \
Ó: a�b�; c � Ô!Õ�& d���� 65
= V ä P ë `�) e�� f $�g�h & iÓ�j
Ö#× * G�k l�m 5 T n���� . Ø g�h N
Ð ä Ø o�p�q�&�r s�tÐ
ä P * Õ�uMØ v!Ö�w�� x�y � “NO”
g�h Ø ��T n���� . � æ�âz�� æ�âz�� æ�âz�� æ�âz� � AI2 TORQ REF
* Ö!×�w� Õ�{�|#Ø }�~ ( ��� Õ�u�v#Ö�: ) 2mA
Ø�a � ë ?�@Ð
AI1� ë
Ö!×�w� Ñ�� î Ò Ø 1V Ø���� r �������� . Ñ��
î Ò N AI1
* }�~ � ë 1V Ø�a�# Õ��#Ø � � e�� �������� .
( � Õ�u�v!Ö�: = ��L�M ) ��� � Ö!×!Ø
â�� P#Ø�a � ë Ö!×�w� Ñ�� â���$
��������� . Ñ�� � � æ
î Ò # ����;�<�N 32ms Ö���� . \Ñ
t�(�W C�6�P $ ������� ��!Ø� �� Ñ�� â��!ë
�!Þ�wÐ
\Ñ
��
î Ò M � ë Ñ��
Ü â�� n���� .
Ñz� =Ñz� =Ñz� =Ñz� = ÒÒ ÒÒ: f $ é
Ñ�� î Ò é Ñ��
= Ò
(Ext AI1=RAIO Ö#× AI1) Ö#×�N ��� é
Ñ�� î Ò # $ \
Ñ o�p�� �!× *
����� ramp time
�� �� $ Ó�Ó$ Ó�Ó$ Ó�Ó$ Ó�Ó
�Ð�Ð�Ð�Ð
� ���Ó� î Ò P!Ö���� . " Õ���� "
â���� ��W ë `�) Ö#×�w�� = Ò Ö#×�}�� ��� . / 0 ��� , Ø Ö!×�# ��� ;�<�N 8ms Ö���� .
0V �V� 0%
î Ò P�S � ��� 0-(+/-)10V ��6�� 0-(+/-)100%# Ñ��S
��1���� . f $ � ë �����C Ñ��
= Ò �
V(DS3.2) � ���#Ô!Õ �� *�+
� ��� . / 0�1���� .(Ext AI1 �
V f $ ) ��
= Ò
î Ò P�� ���� é
Ñ�� î Ò M�_
Ñ�� = Ò
î Ò M�# n#Ø
î Ò 9 ( '���(�) 20.1 & 20.2) H�� /H�I
Ñ�� â�� P!Ü �Ó
����
� ����� .
WATCHDOG: WATCHDOG-N( ��L�M : i
Ó�j Ö!× 2) �
V� é ��)�# K
Ò é
������`#Ü Ó;������
��� ����� . Ø �!×�N I ê W�� ��$ ��~ Ð ä "
� Y ��!!Ü ������
g�h Ø ¡ � B���� : �����C ¢���e�{ (MAS OSC FLT) - £�C�) / ¤ ë ß ��C ¢���e�{ (ch2) - Brake long falling time - ¥�¦�e�{ ( ��§ ¨�� _�`�� ) - ©�` e�{ - CPU stalls out ���
Ø ª è Ø �!× g�h Ø «!Ù�w�� ��!Ø� Õ�� * l�m 9
g�¬ ��� �;
«!Ù�w ��T �Ð
æ!è#é Õ � ��#Ø� �# ®�a
Ò#Ó *�+ S �!Ø ���� é è Ø æ�* ¯�°�w�� Õ�u�&
â ^���� è Ø æ�$ ����w���
5 T n���� .

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ���� 5-21
� 5-9 3!�C�D
â�� Ù�²�& Ø ��� ���!Ô#Õ �� æ#è!é # ³�t�´ ë

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ����5-22
µ , âz� �zµ , âz� �zµ , âz� �zµ , âz� �z (64.10=RADIO CTRL) ��� 3!Ø�C�D!Ø
µ , â�� � ,PLC S ��N ©` ä P * #5 + â�� w� ¶ * l�m w�·���� , "
µ , â�� " ( '���(�) 64.10) ��� â�� Ù�²�&
��� . / 0�1
��� . “ 3!Ø�C�D " â�� S�# ¸!Ø h N :
- "Zero Pos" Ö#×��V
(DI2) Ü ��� �
Ó�� �Ð
��¹�
º�~ .
- � � "Start Dir A" S "Start Dir B"#
ï�» Ø ��; * Ö!×�w�� , ��� ï�» _ î Ò
M�N *�¼�$
o�p���� ��K * � é )�Ø w � ,
é )�Ø ½�t�� Õ�¾
Ó� �
�V *
� � �����
� �
��#Ø� * 8 �Ó#Ó
��1���� .
- ��� ï�»�* ¿�À���� Õ * î Ò
/�Á�# � Ü �Ó
��1���� .
Ñ��, � æ �
Ñ�� = Ò(AI1-Ext AI1)
� î Ò Ö#×�N “ 3#Ø�C�D ”
â���*�+ S �!Ø
��N � A _ ®�Â�Ã!Ü $ B���� .
�
5 - 9 µ ,
â�� �� *�+ ���!Ô!Õ æ!è#é # ³�t�´ ë

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ���� 5-23
Motorised Potentiometer control mode(64.10=MOTOR POT)
��� � ��
Ü Ä $ ; c � 6 � C�6P!Ü $�Å
Æ�Ç�W â�� �!Ü
��� . Þ!ß â�� Ù�²�N ( '���(�) 64.10) “Motor Pot”ë
î Ò 5 T n���� .
"Start Dir A" S "Start Dir B" g�h N DI3 & DI4
* l�m n���� . " Ä $ "
g�h N DI2
( '���(�) 10.13 ACCELERATE SEL = DI2ë
î Ò ��� È�à )
* É�k ë
l�m 5 T
n���� .
ÊÙ�7 * " Ä $ "
g�h Ø Ö!×�w�� ��#Ø� �� ����wÐ
��� (+/-)100%
Ñ���Ë � ë
$ Ñ�Ì
U#Ø � ���
“ Ä $ ” h�h Ø «!Ù�w�� ��#Ø� ��
$ Ñ & Í�fÐ
Î�Ï # Ñ�� ë
Ô!ÕÌ
U!Ö���� . ��!Ø� * ��; “ Ä $ ” g�h Ø ����w��
��
� 100%Ë � ë
$ Ñ & �
Ñ. U#Ö���� . ���
Ù�7 g�h Ø
â ^�w�� ��#Ø� �� 0% Ñ���Ë � ë
\Ñ. U!Ö���� .
0%�� *
��2���!Õ * Ù�7
g�h Ø ��; ������� \ÑN Ò#ÓwÐ
Î�Ï
Ô!Õ�"!Ø�Ç Ñ�� ë
Ô#ÕÌ
U!���� .
AI1 Ø�! AI2 Ö!×�N Ø â�� Ù�² *�+ � �����
Ó � ��� ��E#Ö!×�N ���� é
� A & �1���� .
� 5 - 10 Motorised Potentiometer mode
*�+ ���!Ô!Õ
æ!è!é # ³�t�´ ë

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ����5-24
Note : ��!Ø� $ C�Ñ�� â�� ��!Ü
��� . r�� “Motor pot” ��!Ü ��� . /
º�1���� .
�z��z��z��z� 3�ØzCzD3�ØzCzD3�ØzCzD3�ØzCzD î Òî Òî Òî Ò
�z�z�z�z (64.10=STEP JOYST)
R�Ò ë!ì ����3�4���� ÓÕÔÕÖ � ×ÕØ � ÙÕÚÜÛÕÝ � ÞÕßÕà � �%$��5�6�%0 áÕâÕãÕä �
.�� )1� åÕæÕç � ÞÕßéèëêÕì � íÕîÕ× ��� ØÕï � ðÜñ � ñéòÕèëó � ØÕï � ôöõëç � ÷Õê �ø� ùÕú � ûÕüÕÖ � -�� ØÕý � ïÕþ � ôéõÕÿ � ���ÕÚ � �����ëîÕ× �� ����� � ��� � �� ñ� � ��� 0 ��� � ����� � å��ÕÖ � ��� 1 Ö � ���� � � � ���ÕîÕ× �� áÜâÕãÕä � �
)�7��%$��#$����$*�� )�8��%$��#$����$*� � � )� )��%$��#$����$*� � ��� �
à� �� !�"�#�$ � ïÕþ � ñÕü � ôéõ%$ � áÕâÕãÜä �.�� ����$$��#$��*$9$*� Ö�& � �
.�� .���$$��#$��*$9$*�� ðÕñ � '�(��ëîÕ× ��
�
å�) � #éõ � ïÕþ � '�( � ����� � !éõëØÕýéÿ � ïÜþ � '�(ÕÚ � *�+éè%, � õ�#�- � �.�/ �ÕêÕì�0 � íÕîÜ× ��1� �� ×ÕØ � '�( �*�:��� Ö � !�"�#�$ � ����� � �!� 2�3 � *�:�����*�:���� ���Õþ �
�!� èëê��ÕêÕì � íÕîÜ× ��
ÙÕÚÕÛÕÝéÿ � ;������<� Ô�4�$ � ÙÕÚÕÛÕÝ � 5ÜêÜåÕæ�6 � 7ÕÞ�8 � Ú � åÕæÜÖ�&Õþ � �9 � � :%� � ;Õó�#��Üà� �� ÙÕÚÕÛÕÝ � <Õà � ,�=�� � >%��?��ëîÕ× ��
�z��z��z��z� µ ,µ ,µ ,µ ,
îA@îA@îA@îA@ �z�z�z�z (64.10=STEP RADIO)
×ÕØ � '�( � ��� � ����� � BÕó � ��$ � C��5Üê�, � D�$ � �*�� ÞÜßÕà � �%$��#�����
0.�� )1� åÕæÕç � ÞÕß�� � � � ���ÕîÕ× �� EëÓ � � ØÕï � '�( � ôéõëç � 7�FÜíÕîÕ× ��
;������<� ��� � Ô�4�$ � Ú � åÕæÕÖ�& �9 �éè ñ � G��ÕîÕ× �� ÙÕÚÕÛÕÝ � <ÜàÕþ � �
*�+éèëñ � G��ÕîÕ× ��

â/ãåäçæ!è!éçê!ë!ì#íçî!ï
ðòñóñõô÷ö÷öiø�ù�ú#ûýü�þ�ÿ���� 5-25
FB 3AHzCzD3AHzCzD3AHzCzD3AHzCzD âz� �zâz� �zâz� �zâz� �z (64.10=FB JOYSTICK & 64.1=True)
I� JLKLM � NLOQPLRLS � KLT
ILUQV� WLKQXLY � ZQ[L\ � ]LM � �*� ^ � _
IYQ` � aLbLc �I
� dLegfih � jQk � lLmQnLR � JLK 0�#�!$�=�>���1 o � pLSL]Lq � rts � u � pLSLvLwQx ��
�
�"� _IYQ` � JLKQM � KQT
ILULy� zL{L| � aLc ��������������
V� }L~L�Q� � aLc � �� �
\ � �L[L� � WLKQXLY � �IL�L�L�QV
� �%�#%���#�����%�#%���#�"��;$#������L��
��L�L�� [Q�Lo � �LhL�QaQwLx ��
�
�*� � � ��g�
� �<��(����>M � }L�V
� �I
� ��L�L�
� � pLSg�iwLx ��
�<��(�+��>� �� �L_Q�L� � �L� �
��L�
���L�
���L�
���L�
� � [L�[L�[L�[L� � �g��g��g��g� � � �� �� �� � �)�,�"3�)��*�"� �"�;$#������ ? 2�?)2� _
IYL` � @)A�t� � [L� �
� �"��%�#%���#��� ? 2�?)2� _IYL` � �L� �� [L� 0��<�,��1�
�� �"��%�#%���#�"� ? 2�?)2� _IYL` � �L� "� [L� �
0��B�,>���1�
�� �"�5�6�%�%&��%#*� ? 2�?)2� _IYL` � L�L¡Qh �
yQ¢�
�� �"�$*�C��%��!� ? 2�?)2� RL£L¤ � ¡Qh � ¥Q¦ �
Bit 0~2 § PLC ¨�`�) 3QH�C�D �VL©
=Lª §��
��� ����� . FB 3QH�C�D �L« *�+ Dataset 1 word 2 DRIVE SPEED REF(5.5.12 scaling
@ =) § 3QH�C�D R�Ò
¨L¬ » M ( `VºQH )
© =Lª § �
��� ����� .
��eL® ¯ �©
��� �Q° , dataset 5 word 1
*�+ bit3 N “1” ¨ ± @ w � B���� .
��eL® » M ( `VºLH ) N dataset 1 word 3 TORQ REF �L« (5.5.12 scaling @ =
) ¨ =Lª B���� .
Bit 4 FB ELSHAFT ON N ²���� ¯ � ¨ � ��� ����� . 5.5.14. # ³�`
�L´ & µ 3��L¶�;�e .
\L· t�(�W C�6�PL§ 'L¸�(�) 10.3 SLOWDOWN –N SEL# «Q¸LHQ¹ iLj
ºL»�* m , . / 0�1Q¼L½ .
END t�(�W C�6PL§ 'L¸�(�) 10.14 FB STOPLIM SEL & µL¾L¿ � FB 3LH�C
D �L« $ ��� Ì
r ( �Q«���C �Q« *�+QÀ �QÁ
) «L¸QHL¹ DI3 + DI4*
m ,
;LÂ / 0�1L¼Q½ .
FB 3LH�C�D �L«©
�Q«���C ¢��LÃLÄQ¨ ��� ; , dataset 1 word 1(5.5.12 Å µ 3 ) N START OVR_ TORQ CTRL ®�WQÆ (QÇLÈ wt§ ÉLÊ ¯�© ¿Q¾ §
��� Ì
Ë ÌQÍL¼L½ .
�L«��LÎ ¢�� ÏLÐLÆ ÇLÈ�wt§ ÉLÊ ÑLÒ ¿ ¶QÐ�e : ÓLÔ ÃLÄQÕ ÖL×QÃLÄLØ ÌL§ Comtest toggle bit § «L¸LHQ¹LØLÙ ÖL× ¾ ÅLÊ ÚL¿LÛ
Ü ¿LÝ PLC ÞQ¨L¬Lß (5.5.12 Å ) Ø àQáãâtäLå æQ¼L½ .

¯gçèÅé®LêLëéÞL¨L¬Qßé±Lì
íïîðî�ñóòóòõôãöã÷QøúùüûãýLþãÿ5-26
5.6.6 ¨��¨��¨��¨������ Û��� Û��� Û��� Û -Logic handler ( 65 )
on-, off Õ Û�� ì��QØ �� �� �t¨L¨ H��Qä�� ÌLÍL¼Q½ .
On � ���©
Ä��tÐ��Q§ ì������ Û�� ì���� · À Õ �L®L¯Qä Û
© ��� Ð��Q¼
½ . �����LØ On ì��LÊ Ñ Û Ü��QÙL§ On ×��QÆ “1” ¨ âiäLå� æL¼Q½ .
�LÉ�� !�"�# Off ì���� ºL» âi $�%LÊ &�
����' ¼L½ :
- ²�(iëLÆ )ië (DI2) = "1".
- �����LÆ *�+�,L ÓQÔ Æ !�- & .(FAULT = “0”)
- .�/ # “0” ��0�� 1�2�3�3 $�%QÊ & (LOCAL STOP = “0”)
4�5��6QØLÙ LOCAL START 7
¿�8�9 ����: ��6LØLÙ 6�;���< On ( =�6��LÎ
��6 ) >�? START DIR A/ START DIR B ( @�A�B�C ��6 ) Æ�B�D E 9 Æ ��� E Ý
“On ×�� ” Æ ONâGF Ready For Run ×��QÆ H�3gâ�I ����J K��QâGL�M�?
���7 NQ�O�M . �P ����Q�R
×���7 5 S���TLØ N�3 U�E�F On ì���� “0”
4 V�W O�M .
Off ì���� “0” X�YLØQÙ .�/�# LOCAL STOP( ,�3 Z�[���0 ) � 9 \G] ^Lä�_�`
ØLÙ 6�;���< ON ×���J ( =�6��LÎ ��6 ) “0”
4 V�a F
����' O�M .
�P b�;�c�� CONTIN ON ( 65.1) = “false” ��I running � “0” � âGF ON ×��
? OFF TD ( 65.2 ) Ð�d�� 3�e f “0”
4 g�h ' O�M . �
Û�i � 6�;���<�J j 3�k OFF TD Ð�d���TLØ MLÐ ��� E�3 $�l�F K��G,�3�7
��� ���? �i
m O�M .
"��
ì�� " � START 2 = “1 “ n�& ��� æ�O�M . ����: ��6LØLÙ START OVR
( =�6��Q��6 )9
START DIR A / START DIR B ( @�A�B�C ��6 ) J ��
ì��LÊ
��
4�5��6LØQÙ�? .�/ Ó #
�� ��0�l
4 o�O�M .
Ready For Run ×��QØ #��LÙ ������J “On”= K��Lâ�L�M�? ×���7 N�3 $�l�F Û�� ì��QÊ p Ë�qLÍ�O�M .
REF ZERO SET ×���? I�X�,�3 ×���J m�r â�LLÊ & X�Y�3��LÊ “0”
4 H�3 s
É m O�M .
M�t 2 u���3�# ����4Õ v�[�Y�7 w���E�xQÐ�* .

^gçy_{zLêLëéÞ4�|
ß{}Lì
íïîðî�ñóòóòõôãöã÷QøúùüûãýLþãÿ 5-27
|�~ 5-12
��/ ,�3 Р�tΠ�d v�[�Y .

^gçy_{zLêLëéÞ4�|
ß{}Lì
íïîðî�ñóòóòõôãöã÷QøúùüûãýLþãÿ5-28
|�~ 5-13
4����� Û ����
4Y

^gçy_{zLêLëéÞ4�|
ß{}Lì
íïîðî�ñóòóòõôãöã÷QøúùüûãýLþãÿ 5-29
5.6.7 ��z��z��z��z ]] ]]��� �� -Torque proving (66) ���� ����� � ��������� �
�������� ������� � � � � ��� � ��� � ��� �
������ ��� �
��� ��������
� ������� � ������� � ������� � � � � � ��� � �� �� � ������¡ � �¢�£�¤�¥�0��D!�*�?;$#����$$�2, 1�
� � ����� � ¦���§�¨ � ��������� � ©�ª � «�¬�G® � ¯�°�± � ²���³ � � «�¬���� �¥�´
� �
������µ�¶ � «�¬�· � ¸ � ¹ £�¤�¥ ������ ����� � � � � � º � ��»�¼ � ½�¾ � ¿�À�Á º �
���� ¡� � � Ã�Ä�� � ¸�Å�Æ ¤�¥ ��Ç�È
����
� ����� � É�Ê �Ë � Ì ����� � � Í���� � ¸�Î�� � ¶�Ï���Ë �� � � � � � � �
��Ð�� � ����Ñ�µ º �¥�Ò
� Ó�Ô � � Õ�»�Ö ¤�¥ ������ ��� � � ×�Å���� � Õ�Ø�� � Ù���Ú�� � ����� � ¹���µ � Õ�Ø º � ¡�Û � � Ü�Ý�¡ � �Þ · � ¿�¶�ª � ß�à � á £�¤�¥ �0 â�ã � ))�4<1����� ����� �
¥�Ò� «�ä � � å�¿���� � ×�Å�Æ ¤�¥ ��
�%�#&��#�9��$*�0..� 1�,�?%����?����� ��� � ¡� �%�#&��#�9�#$�0..��1 � �%�#&��#�9�#$�
º� æ�ç�è�¦�� � Û�é �
�ê �� ×�� ���� � � =�%�%�#&� è�¦�ª���ë � ì���í ¤�¥ �����
� ����� � ×�Å��î�ï�® � É�Ê�� � �¡ �¢ ï�Ë �%�#&��#�9��E� æ�ç�è�¦�� � ?)2 � � �
Æ ¤�¥ ��
#'!!�!D� è�¦�� � ? 2� Ì �� ð�ñ�ë�� � ����G��¡�Ë �����
� ����� � ×�Å Æ ¤�¥ �����
� �
����� � ÉGÊ��� � ò � � ó � æ�ç�è�¦ �%�#&��#�9��E� � ? 2 � � Æ ¤�¥ ��Ç�È����
� ����� � ×�Å �� � ¶�ô�� � õ�ö�� � �����Ë ��%�#&��#�9��E� è�¦�� � ? 2�
ª � �¡ �¢ � � æ�ç�è�¦ �%�#&��#�9��*%� � ? 2 ª � �ê � ��������� � õ�ö�¿�¡ �
Æ ¤�¥ �� ÷�ø�¡�� � ������� � ù�ú ¼ � û ü � ����Õ�§�ý�� � þ�Õ�Æ ¤�¥ ��
�
!�������� ��� � ÿ�����µ�� �
���� ����� � ��»���¡ �
¢�£�¤�¥��0 ������ë � ..�
�� ������ ¶ � ��»���¡ �
¢�£�¤�¥1�
|�~ 5 - 13 ��z ]�� ����
4

^gçy_{zLêLëéÞ4�|
ß{}Lì
íïîðî�ñóòóòõôãöã÷QøúùüûãýLþãÿ5-30
5.6.8 ��Aë��Aë��Aë��Aë <����z<����z<����z<����z ^�^�^�^� -Mechnical brake control (67)
� 4�|��
� ����7 ,�3������ ��� C���� ������ ^ ��� 3�(���O�M .
C����� ^ � � ����7 ,�3������ �G J�_ n����� ����l4
]�6�2�B
^ ��� ^���7 ��O�M . ������ ^ � � ���� ������ !�"$#�� , %�J�3�#
J i�& � '�(�O�M :
- )���,�3
- I�X�,�3
� � i � ������ <�����z�7 ^���E�? �� �47 *�+���O�M . , r -��
BRAKE LIFT(2.21) � <�����z .~� m O�M . <�����z .
~ ��3�-���?
m�r
( / ;DI1) BRAKE ACKN
4 0�T�1�O�M .
� ��2 ��� <�����z�J .���? 3�^���d � 4�5�E�6 ramp � � ��d�3�7
}�,�� J i ��O�M .( b�;�c�� 67.8 SPEED REF TD).
ÿ�ë�� � ����8 � � ����� �º �
� ?)2� 9�¶�� � �Ë � ��Ô�8 � � � � � � � � :�;�<�= � �
Õ�Ø � ¡�Û�>�� � ��» ��? � Ö ¤�¥ ��
¿�¡�Õ º � ÿ�ë �F����<���>� @�æ � �� �
ÿ�ë � Ù���ô���� � ;$#����$$��0��D!�*��� ��1� æ�ç � è�¦�� � ?)2 A ¤�¥ ��
9�¶�� � ;$#����$$��*$90.G�.1� ��� � ��� � ;$#����$$��%�=$0.G�G1� Õ�Ø�� � B�¼ � �
�î � � ó � ;$#����$$�� � ? 2 � � Æ ¤�¥ �� ± � ��û º � ����C�Â�� � ©���¡�¡ �¢ � � �
F����<���>� �� ¡ � GË � ��Ô�8 � � � � � � � � D�E ¤�¥ ��
� �� �� �� � 2 2 2 2 :
<�����z .~� � ��F � G
m�r -�� START2= “1” � #��� , r -��
RUN=”1”
4 V�a I X�Y H ��z�^�����J I � ��O�M . TORQ PROV OK = “1 “
-���7 N�I ,�3 F�J � I � E�3 $�l�F BRAKE LIFT ? “1”
4 V�W O�M .
<�����z .~
F�J � b�;�c�� SPEED REF TD (67.8) � }�,�K ��d�� #���
3�7���L M '�(�O�M .
�N�O8 �
N�O8 �
N�O8 �
N�O8 � � ¿�¡¿�¡¿�¡¿�¡ � Ñ�µÑ�µÑ�µÑ�µ �
����C�Â�� � ��P �Ë � ¡�Â�Q�� � ) � � �� � 9�¶���� � û�RN
� ó � ��������� � ?)2�
9�¶�ª � S�9�· � T�A ¤�¥ �0 ¡�Â�Q � U�V�� 1� A�ç�è�¦ � ;$#����$$��,�? 2 ª � �Ë � �
� � � � � W�X�� � ?)2 ï�ª � å�¿�Æ ¤�¥ �� � � � � ��» � Y�Z�è�¦ � "#�E$���E!�,�?)2��� [�ï�Ë � #'! C�Â�� � "#�E$���**�%�=$�0.G� 1
Ç�\� ¡�Û�Õ�Ø�]�� � ?)2 ª � ^�_ ¤�¥ �� �
� � � � � ÿ�`�� � ;$#����$$�� � @�æ �¡ �¢ � � ������� � � � � � � W�X�¼ � #'!�
C� � � � a�¡�Ö ¤�¥ �� Ó � b�û�¿�¡ 0 ;���ñ�§ � ÿ�����µ � ��������������,�)�
Nó � �
$=$#D��%���,�? �?1 c � ��9�¿�¡ 0���%��%���,�? �?1� û�dG� � e�f�A ¤�¥ ��
�
������ë � .G���"#�E$�#$��$!�%���µ�� � ¿�¡�c � g �¥�Ò
� ����Ø � Ì � � � � � � �
D�h 0"#�E$�*��%,)1� g �¥�Ò
� � � � � º � W�X�C� 0"#�E$�*��%, 1 Ø º � i�j � �

^�ky_{z����l 4�|��
} F
monpnrqtstsvu$w$x�y{z}|$~��$� 5-31
Õ�Ø�¡�Û � � å�¿�· � ¸ � � £�¤�¥ ��
�
¿�û�8 � � Ù�����® � ����ô�� � "#�E$��*%�%��0.G��1º
� å�¿�Q�à ¥ � � � Õ�Ø���� � �
"���������0�� 1�,�) � � A�ç��Ë � � � � � õ�ö�� � ������ê � æ�ç�è�¦ � "#�E$��*%��� ��»�Õ�� � ������� � � õ�ö�¿�¡ � Õ�� � T�A ¤�¥ ��
�
¿�¡���� � ¶�ô 0"���������, 1 � � "#�E$�*�!D��%�%��0.G�(1º
� å�¿�Q�à ¥ � � � �
Õ�Ø���� � ��Õ�Ø � ������Ë � æ�ç�è�¦ � "#�E$�*�!D��%�=$�
� ù�ú ¼ � ;���ñ�§ � �
û�R���Ú�� � ®���Ä�� �� ������� � � b�û�¿�¡ 0 � � � � c � ������� º � � Í���Ó 1� �
Õ���� � ü � �+��>�B� æ�ç���� 0���1�
� ��»�Õ�� ¤�¥ ��
�|�~ 5 - 15 ������ <�����z ^�� �����
4

^�ky_{z����l 4�|��
} F
monpnrqtstsvu$w$x�y{z}|$~��$�5-32
� O5� O5� O5� O5
�������� � i� i� i� i
� _��� �? ��� ����� \�] ���� <�����z�7 ����� ������� T�] <��
��z�� ����K � O5
����� !�"�� � } F ��O�M . � O5
����? �GC�K�J
K�-�� ���� �� ��� ¡�¢ m O�M .
|�£�¤� K�¥ C�¦�J ��� §�¨�� v�©�K j K I�ª�K���� « ]�¬�l
4]�� ����� ]�$K <�����z ®�¯�z�7 ¬�����O
M . ª�3�� C�¦�J °�@ ±
£ �GC�K�? ¯� �²$� ³������ ´�µ 9 <�����z�� ¶ X�·�O�M .
b�;�c�� 67.11 MOTOR TYPE = COINCAL� }�ª�� ��� � O5
��� � i �
}�ª�·�O�M . ¸�¹�� b�;�c���? º4B ��»�¼ � K�I��l
4 ½�E�6 ,
� O5
��¾ !�"�� ���E�¿ ·�O�M .( b�;�c�� 67.11�
STANDARD
4 }�ª�E�F n��
�� ��»�¼ ��À�·�O�M .)
10.1 BRAKE ACKN SEL = INTERNAL ACK
21.2 CONST MAGN TIME = 30ms
65.2 OFF TD = 0.0 s
67.1 BRAKE FALL TIME = 0.0 s
67.6 ZERO SPEED LEV = 3.0 %
67.7 ZERO SPEED TIME = 1000ms
ª�3�� Á���¯�: � O5
����� “Roll back”(load dip)�
ÂG`4
E�� �GE�6
ª�3�I�Ã�Ä K�X � b�;�c�� 67.12RED FLUX LEVEL � }�ª�K ¼�l4
p m O�M .
��»�¼ 75% ? ��]�¬�� � O5
��¾�� Å�¬�E�3�Æ , 30~40kW � ��Ç ������
? “Roll back”�
ÂG`4
E�� �GE�6 75% 0�M È É�, =�Ê�J '�(�O�M . K�X � p���Ë ª�3�E�? Y�Ä���? ����C�¦�J )�Ì�Í�J���O�M . ��2�« ��H
4 Î�Ï
��� Ð�Ñ � Ò���E�6 C�¦ 6�H�J Å�¬�«�J�7 Ò�����Ó���O�M . n����l4
«�@�� Ô�Õ Î�Ï���J ¨�Ö #���1�O�M .
� K�X�� �`�? � O5
��� � i � b�;�c�� 67.11(=CONICAL) � }�ª�#��
'���Ó H�Ø���O�M .
��I�� Á���¯ � O5
����� “Roll back”(load dip)�
�`4
E�� �GE�6 ��I
��� K�X Ù��G? b�;�c�� 67.14 START FLUX TIME � }�ª�K ��d�I�Ú b�;�c
� 67.13 START FLUX LEVEL(100~140%) �� }�ª Ù��4
�J ��L M '�(
O�M .
b�;�c�� 67.7 ZERO SPEED TIME l4
ª�3�� � O5
����� <�����z Û�³
��d � 3�7 ��L M '�(�O�M . /�7�Ü�� M�t$� ��I F�J Ý�Þ � È ß�©�¿
½�E�I�K s
£ !�"�·GO�M .
NOTE : � O5
���4
ID-RUN�
��à s
£? b�;�c�� 99.10 �� ID-RUN
��� � REDUCED
4 ¨�Ö���Ó�Æ ��O�M . STANDARD ID-RUN Õ
� O5
���
ª�3���� á & #G? É�Õ K�X Ù$�4
��#��
£�¤� !�" ± M q�(�O�M .
Á���¯�:�� �"$K � O5
����? ã � È ä�6�å � ��6�� !�"�E�6�Ó���O�M .

^�ky_{z����l �æ|��
} F
monpnrqtstsvu$w$x�y{z}|$~��$� 5-33
5.6.9 , r Âçè¥, r Âçè¥, r Âçè¥, r Âçè¥ -Power optimisation ( 68 )
, r Â�$¥ � i Õ n����l�æ Á���¯�: 6�;���<��� �Æ !�"�E�? i I�]�E�"
6�;���<��� �Æ !�" ·GO�M . §�� �� �� X�Y é J ¼�Õ ����¼ (Dir A) �
#���Ó�Æ ��O�M .
��� ª�Ñ X�Y (base speed) ����l�æ ����� X�Y�7 Í�J�E�I�K s
h��
P���K B�C�� !�"�·GO .
|�ë 9 P���K�B�C�Õ ����� ��"�J i « Â�� ì�z�í
×�` ��î�O�M . ����? P���K B�C Ù$� T��� ]�E�í ^���E�����« Å�¬�«
ì�z�í ï�� Æ�Ü�M '�Y�ð Â�� ñ�"�X�Y�í ��ò���O�M . � � i�� , r Â�$¥ ó I ]�ô�õ�ö . ��÷�Õ Ä�ø�ù�� Â�� ñ�" ú�û�ü ý�ø�ù�� Â�� ñ�" ú�û
0�ö Ã�þ � ��ÿ���õ�ö .
��� ϯ��� ϯ��� ϯ��� ϯ � �� �� �� � : Á���¯�� ��ó ��� ü�ú�� PLC(DS1.2) æ ø���� ú�û é J Õ ��ó ÿ�� 68.2( / :50%) ��ª��� �� ú�û Ù$��æ �« #���Ó�Æ ��õ�ö . Æ�
,��Â�$¥�ü ��� Ï�¯
F�J ¤ (DS1.1) Bit2 �� HIGH SPEED -�Á�í ��� ,
Â�� ú�û�ü ñ�"�#�� ��
��� ( �� ú�û ��� ) ���� ,��Â���¥�æ ��ò
K Â�� ú�û é J ¼�Õ ramp ��õ�$� ���� ���K � ���� �! ú�û�æ
ü�ú" ÷���õ�ö . Â���ú�û�æ�ø�� ×�ú�#� HIGH SPEED $�Á� “0” ��æ
��ª�·�õ�ö . ú�û PLC é J ¼�� ü�ú# û�%�K Â�� é J ¼ (SPEED REF3,
DS4.1) � &�Ì�ù' RESCALE(�é ) �ö� �� ú�û ��ù�æ ± ÷���õ�ö .
*�+�,�-*�+�,�-*�+�,�-*�+�,�- � �� �� �� � : ú�û é J Õ I/O( . : ����¯�/ 0�� ��ó � AI1) 1� FB ���
¯/ 0�� � ��2 (��ó ÿ�� 64.10 CONTROL TYPE 3 Stand alone Mode æ
��ª ) PLC(DS1.2) í 4�ù' �5�õ�ö . ú�û é�6�Õ ��ó ÿ�� 69.1 SPEED
SCALING TIME �2 0~100% ü 7�08�õ�ö . � Ê ¶:9 é6�� Â�;�¼=< - �
Â���¥�� ��� ��ò 9 é6�¼�Õ Ramp ��õ��� ����æ ����·�õ�ö . ��ó
ÿ�� 64.3 HIGH SPEED LEVEL1 Õ HIGH SPEED $�Á�í ª$Ò�ù�¿ >�� ?��
�� ú�û Ù:? (��ó�@ ¾ 68.2 ��2 ��ª ) A B�¿ ��ª�·�õ�ö . ( C $�Á�
*+ ,-
D � ��ø����æ áE�·�õ�ö .)
C �F3 G�Ã�#H� ?��2 ��ó ÿ�I POWOP SELECT(68.1) í “True” æ
��ª���Ó�Æ J�õ�ö . ��ó ÿI TQLIM UP (68.6) < TQLIM DWN (68.7) Õ ª / � K
,- �2 Â�L�ø�ù ìM (- � �« ) ��õ�ö . ���ú�û�æ ü�ú�Ä� ú�û�ü
�� ú�û$� 90% � û�%:(�� C DN�Õ ö�þ�O� ��P Â�L ñ��ú�û�í ��ò
J�õ�ö . ( ���ú�û:Q 90% � û�%�ù� -
250ms G�Ú ú�ûA ì�M â�ª�3 �� ):

:RTSUMVWUX�æY�ZU�[
\^]_]a`cbcbed=f=g�hjilk=mn=o5-34
TORQ HOLD ø�ùp �q ( r�s 9 tu� û�%" v (= ú�ûws ) D�I xyM z < ø�ù level C Gw{ z ��õ�ö .) ù� ?�P
�| { x�MC� ü�ú�}�� DN
� Q�P2 �~=��õ�ö . w����� ���I�:?�� ( �C��/ ) Q ���C�p üS ��� � ?��#�� D�N�C HIGH SPEED = “1” [63 ���� , SPEED REF
POWOP ��� �~ 9 ��L ú�û q6 z �� �s:��õ�ö . ��L ú�û=Q s:��û
�� ú�û:Q 90% � û%�ù� - � �s 9
z � Q�P ��=��õ�ö . ú�û
<�û{ ripple C � ���:Q ü�ú�3 P��J�õ�ö .
��:���=� �� ú�û q6 z SPEED REF POWOP �� $� HIGH SPEED
ü “0” C� “0” �� ��s=��õ�ö . �~ 9 ��L ú�û q6 z � �� ú�û SPEED
ACTz C POWER RESET LEV(
�� ÿ�I 68.8) � L��ù� ú�û� ��ú ���
(�� “0” �� ���s:��õ�ö .
�~ 9 q�6 z (“HIGH SPEED switch” C - ) � 2.25 POWOP SPEEDREF $�
�2 ¡ ¢5�õ�ö .
?�� £¤�{ � A BC TORQUE HOLD
z � ���:���:� DN��2 ¥�ú����
�~:��õ�ö . LOAD TORQUE %(2.31) $��� D�¦ s§ xyM=Q % z û
üFJ�õ�ö . C $�� �� ÿI 68.10 LOAD TORQ FILT TC �2 �s�ù ws � I #¨���
� I© 9 z ��õ�ö .
C LOAD TORQUE $�� �� ÿI 68.11 SLACK ROPE TQ LEV ��s z C�ù
� ø�ù xyM�ü ª0�q “ �X:Q ÿ«¬� ” t:®�3 ¯��ù� ° ���:��±² .
�X:Q ÿ�«¬�� 4.05 FB AUX STATUSWORD (DS12.1) bit 10 ��2 q�#:��±² .
¯� 9 ��X:Q ÿ«¬��� �� C��:Q FAST STOP1 3 ³�G#´�±² . C µ¶
sq Fieldbus Dataset 5 Word 1: FB AUX COMMAND WORD(Signal 3.07) bit 7
Q DISABLE SLACKROPE $�p 4�·' ¸���¹ º ¡ ¢5±�² . 1�{ �� ¸
I 68.11= -400%( �» z ) Q ��s� ��¼sq�p ¸�¹ " ½��±² .
Note : �C��� DI=Q �¾�s�# W�¿IÀ Á: " ¡ ¢ F�����2
DI Ã¥ �:Ä xM (Tmax) p C��" ¡ ¢� ���
Å:?���2 À¼ (Æ�t ) Ç �¼ ( Æ�· ) · Gr
|È (� -É
xM� ÊË·Ì�Í �s=(�0�
J±² . Ã¥ �:Ä x�M� �� Å:?���2 1/n2 � &η�' ��;J±�² !
À¼}� ��:���:�� �s 9 -�É xM ( Ï�· + À¼ ) p ���·' Breakdown
torque TMAX(��� ¸I 68.9) ��2 �# 9 D�I�p Ð:<�·�q )�� ��
�2
ÀF{ ��L ¼�Ìp ��~ " ½��±² . C z � SPEED REF POWOP q6 z 3
{· �° ��=��±² .

:RTSUMVWUX�Y�ZU�[
\^]_]a`cbcbed=f=g�hjilk=mn=o 5-35
���Ñ�Ò�Ñ����Ñ�Ò�Ñ����Ñ�Ò�Ñ����Ñ�Ò�Ñ��pppp ·��·��·��·�� ?Ò{?Ò{?Ò{?Ò{ # ,�-# ,�-# ,�-# ,�- ��[��[��[��[ .
'��2� �� ¸I INERTIA TOTAL UP(68.4)< INERTIA TOTAL DWN (68.5),
TQLIM UP(68.6), TQLIM DWN(68.7) Ç
TMAX(68.9) p �s�· K�Ó 3 �[
J±² .
1. �� ¸I POWOP SELECT (68.1) p “True” � �sJ�±² . 1{ , Ô�#� 68.9 p
��L (500%) � �s�J±�² .
2. �� ¸I TQLIM UP (68.6) 3 DI=Q s§ x�M (100%) � �sJ�±² .
3. Ô#�� ��� ¸I TQLIM DWN (68.7) 3 DI s§xM=Q 75 % � ��sJ±² .
TQLIM FLD WEAK UP Õ�² TQLIM DWN 3 Ö× �s· C�� �C����
ws{ Ï�·p �0 s / � KØ ��2 Ù:Q B� ¼Ìp >�� ?�Ú�±�² .
4. �� ¸I INERTIA TOTAL UP< INERTIA TOTAL DWN � s / � K�Ø �2:Q À�¼
t¡�±�² . 75 ~ 100% Ï·p ���J±�² .
5. �� ¸I POWOP AUTOTUNE SEL (68.3) 3 “true “ � ��s·� ,
G�sÏ�À � � G³=��±² .
6. s / � ( ÛÛ )KØ ��� �� ¼Ì=Q q�63 7�� ( �Ü�1 Ý�Ï�0��2 ) ��G3
·� DI� ���¼Ì�� À¼:��±�² . DI ��~3 ����·� ?�P � 4 ÐGr
��¼Ì�p �q�" ½���±² . Þ� ��G[6=< q6 z C Ý�Ï�0S;��2 70
q�
G��s (
*+�,- D � �2 ,
��� ¸I 64.3=100% � ��s ) ·� Gr
HIGH SPEED OK $�� ¥ß:(�q )à�� J±�² . ��$� no.24 TOTAL
INERTIA À “0” C à�á z 3 Õw v ��~� ��� 9 ½C��
�� C�p
sqJ±�² .
7. âã=Q �� $� no.24 TOTAL INERTIA p ��WJ±�² .
Û ä -K�Ø �� ?�A�B�� Ãåp 2-3ä (�æ�C�·� �� ¸I INERTIA TOTAL
UP< INERTIA TOTAL � L{ ç�è z 3 ÛÛ ��~J±² .
8. C z 3 Û�Û ä -�K�Ø � éê
�� ¸I INERTIA TOTAL UP (68.4)< INERTIA
TOTAL DWN (68.5) � ���J±² . HIGH SPEED OK $��p ��¥ßJ±�² .
(*+,�-
D � �2 , ��� ¸I 64.3 3 98% � �s )
9. TQLIM UP< TQLIM DWN �s :
��L ��
= 100% ¼�Ì� ,- (�ÌÍ s:Q 9 ��L Ï�·A G�w{ Ï�·p ¥ß
J±² . �� ¸I TQLIM UP< TQLIM DWN 3 Ö�
z( . :40%) �� Öë±² .
�C�/��� ��L q�6 z (up/down) 3 7�0 # ,- 3 J�±² . ��L ¼�Ì Ì%
:RTSUMVWUX�Y�ZU�[
\^]_]a`cbcbed=f=g�hjilk=mn=o5-36
'Ïp ��WJ±�² . Þ�� 100% À (�q )�� 100% � Ì%"v�ìq TQLIM
UP, TQLIM DWN 3 5% í îÀ#�´±² .
10. C Gw�{ Ï·�� TMAX 68.9 p ï�å ð�Cñ ¼Ì�À UP/DOWN KØ �2
100% C·�� {=(�� #³· qï:Q òó z 3 ô3 v ì�q Û�Û # ,-
J±² . Æ�t=< Æ�·=Q õ KØ ��2 ' -�ö 100% ¼Ì� Ì%�P ¢3�v
ìq TMAX 68.9 p �¨�í îÀ#�´±² .
?�Q?�Q?�Q?�Q <Òs<Òs<Òs<Òs 4~8 ÷÷ ÷÷ øÒE z 3øÒE z 3øÒE z 3øÒE z 3 È ·� È ·� È ·� È ·� L É�K�ÓL É�K�ÓL É�K�ÓL É�K�Ó :
ø�E �� ¸I� ²¶
zù 3 ��s·� # ,�- ( À¼ , 2,3 Ð Gr:Q s�¼Ì , ¹ ,
�¼ ) 3 #³ / sq�" v DriveWindow p C�P 2.31 LOAD TORQUE %Q
$�p ��#J±�² . 20 ~ 100% Q Dú Ï·p ��" ¡ ¢5�±² . *
, ��¼Ì
Õ² µû�× ,�- ·q �ü#y . Æ�t
KØ ��� ��Ð ,�- 3 J±² .
�� ¸I 68.4 INERTIA TOTAL UPQ s=��{ z 3 ô�� s¼�Ì
,- Gr 2.31
LOAD TORQUE % $�� À¼:< �¼�C B� ¡ý3 Õ�w ½��±² . Ï·xM
$�À s�¼Ì È ¨Õ�² À¼ È ¨��2 þ ÿ× �¦��²�� INERTIA TOTAL UP
Q �� ¸�I
z 3 î�À�#�H�ü�#�yî�À�#�H�ü�#�yî�À�#�H�ü�#�yî�À�#�H�ü�#�y . �L=Q ��� ø�E z 3 Ö��ü#�y .
�� ¸I 68.5 INERTIA TOTAL DWN Ì Gw{ KÓ �� # ,- J±² . Ï·xM
$�À s�¼Ì È ¨Õ�² À¼ È ¨��2 þ ÿ× �¦��²�� INERTIA TOTAL
DWNQ �� ¸I
z 3 Ö���ü�#�yÖ���ü�#�yÖ���ü�#�yÖ���ü�#�y . �L=Q ��� ø�E z 3 î�À#H�ü�#y .
:RTSUMVWUX�Y�ZU�[
\^]_]a`cbcbed=f=g�hjilk=mn=o 5-37
5.6.10 q�6 zq�6 zq�6 zq�6 z ���������������� -Reference handler ( 69 ) C DN�� ²�ó:<�B�� ��C
ù 0¢�5±² : - À��¼ #¨=Q ��s - ¼Ì q6 z Q ��� - xM ��� �F À�¼ #�¨:Q �s�
�� ¸I 69.2 ACC TIME FORW, 69.3 ACC TIME REV, 69.4 DEC TIME FORW A 69.5 DEC TIME REV. �2 À¼=< ��¼ , 1
-� < � ( 1� t Ø < · Ø ) � LP ÛÛ ²�û× ��s" ¡ ¢5±�² . À�¼ #�¨:Q �s3 ?�{ ;�&��:Q ���� Ý�Ï0 (
* �� ¿�� D � Þ
P�� ) D � � �ÜD � �2 ÀF�J±² . Ý�Ï ,- D � �2 À�¼ #¨:Q �; &���
��� ¸I 69.10 "RAMP RATE=1" C “False” � ��s:(�0 ¢3 v t:? #�� ��2 RAMP RATE(DS3.1) $��p C�·�' �s:��±² .
�� ¸�I RAMP SCALE LOCAL (69.7) � �Ü�2
,- }w v ��:��±�² . �» z ��sC 2.0 C� ( ���I / ���� �M��
,- }�W ���I ��� C�p :Ý�·�� ��s z � 1.0
�� �s=��±² .), ��Ü�D � �2 ,- }�w v � À��¼ #�¨�
��� ¸I 69.2-69.5 � ��s 9 À��¼ #¨=Q ���À:(� ½3 Q�¸J±�² . Ý�Ï
�� ¿� ,- D � �2
,- }w v ¼Ì q6 z (64.1=FALSE): �� C�� DRIVE SPEED REF 1 SPEED REF POWOP } ÿ� z 3 �� J±² . DRIVE SPEED REF
�� C� �G�#=Q ��¼�Ì� �¶ q�6 z �± ² . Y��� ��2 ���:���:��À �� Ï�·� L�{
z 3 �~·��²� , ���¼Ì Ct��
,- C ÀF�P�q� ��
,�- Å:?���2 SPEED REF POWOPQ
¼Ì z 3 ��" ½��±�² . Õ�4 , �C��/ ( ¥�¼��0 ) ���ÏI q6 z 3 �; #���� “ ���� ” À Ï����× ��L�¼Ì� Ì%�" ¡ ¢Ì�Í DRIVE SPEED REF M�p ���sJ±�² .
*+,- D�� (64.1=True) �
,�- }� � � C��� 70 � � C�� q�6 z (FB �C�/ D��w v AI1 1 PLCQ DRIVE SPEED REF) } ³�� z³�� z³�� z³�� z 3 ��J ±² . �VCM=Q G³�¼ÌÀ ������ ( ���� #�¨C � �� ) SPEED REF TD (69.8) Q #¨3 C��·' ¼�Ì 0��� À� ¼Ì q6 ��!�3 q�¥#�� ¡ ¢5± ² . Ramp �±�" À��¼=Q #³:< #��2 Ï����× G³�#H� ?�{ S $� �F 3 Àq� ¢5�±² . S $�:Q #�s¡ % � ¸�I 69.6 S-RAMP TC �2 &sJ�± ² . % � ¸I START TORQ SEL (69.9) � �C���" � � C�� �G#�� “roll-back” (� ½3 '·�� ?�P�2 x�Mx�Mx�Mx�M ������������ ��F��F��F��F�3 ��(·� ?�P ���J±�² . NOT USED = ��À�W �G xM�À ��ó . AUTO TQ MEM =
G xM ����� s�q# ) | { Ï·�xMp �S�·�� ��G
# B� xM q�63 ���J±² . % � ¸I 67.10 START TORQ REFQ z �
xM ���=Q ��; z ��� ��:��±�² .

:RTSUMVWUX�Y�Z*&[
\^]_]a`cbcbed=f=g�hjilk=mn=o5-38
LOAD MEAS = �G x�M q6 z � PLC (DS5.2 LOAD MEAS REF) 1� ��S RAIO à�+�Y ��! 2 ( ����,:< B� S�� ¥ß ) ��2 ��5±² . “Ext AI2” ��! � % � ¸�I 13.6(Ext AI1 ���Ì �� ) �� )�I©:(�� % � ¸�I 64.9 TORQUE REF SCALE 3 4P ��-w©=��±² . % � ¸I 64.9 = 2.0 � ²ó ��-w©��� 7�08±�² : Ext AI2 = 10V �G xyM q6 z Q 200% A w� J±² . Note: DS 5.2 ��ÏIy� )��¿� q6 z C ��¹:(�× ·�� ?�P )���¿� [6 . �2 y LOAD MEAS SEL $��p “True” � &�s P��Þ J�±² . Fieldbus DS 5.2 q�6 z < Ext AI2 q6 z � þ�·'8±�² . % � ¸I 67.10 = �G xyM q�6 z � % � ¸�I 67.10 START TORQ REF �2 70
z < B�× �s &s:��±�² .
Y�/ 5-16 q6 z ����� 0��:�

:RTSUMVWUX�Y�Z*&[
\^]_]a`cbcbed=f=g�hjilk=mn=o 5-39
5.6.11 ?����s?����s?����s?����s -Position measurment (70)
C �FD�N� 1� 2�3þ ��! RTAC � NTAC ��ÏI ?��p �s�· °
��:(�ñ , )��¿� D��A *+�,-
D�� D���2 ���" ¡ ¢5�±² .
C �s� t:? 0���ÏI Õ��q POS PRECOUNT PPU � )���¿�
[6 .
1 4q�5 ��! hw-sync( % � ¸I 10.6 SYNC SEL) Q z�6 �
G�7:� #�� ¡ ¢5±�² .
Note: 4�q�5 ��! 6 ��ÏI:Q hw-sync � � C��À ,�- }C�q )�3�v�
��:(�q )5±�² .(2.20 RUNNING=0)
G�7:�Q Wqs�Õ t=?8 0�7=Q SYNC RDY � $�p Õ�9�±² . W�qsÕ:Q
P� t=?8 0�7�Ï�I RESET SYNC RDY $�p :�5±² .
Þ�� t:?; 0�7��ÏI ��!:(� HW SYNC INHIBIT = “1” C�< DI.3 p 4{ ·�� = 0 G�7=�� ��" ¡ �5±�² . DI.3Q G�7:� $�� % � ¸I SYNC
COND (70.2) � ��(�J�±² .
t:?8 0�7� Õ�>q �s� POS ACT PPU % � ¸I POS SCALE (70.1) Q z�6 � ��?0�@ A~ 9 1�:Q B�C��±² .
1�:Q ¡� % � ¸I 50.1 Pulse Nr < 50.2 Speed Meas ModeQ &s z �
Q�P2 A�~:��±�² . ¼�Ì�s D��:Q 7»�&�s�� 2�3þ=Q A A B D�ã�2
Á�E{ 1��:Q t�F Ç
·�G $��p D�� A~�J±² .
. : Þ�� 50.1 C 1024 ppr C�H 50.2 À 7» z C�< : “A_-_B_-_”, 1�� 2�3þ:Q
1 ä - � I 4*1024=4096Q 1�À ��J�±² .
?���s�� 1� 2�3�þ�À DI��� ��K ¥ß=(�q )à�Ì ( . : 2�3þÀ Ë�� 9
��LNM�� Ï�O 9 �� ) ��" ¡ ¢5�±² . % � ¸I 50.5 SPEED FEEDB
USED p “false” � &s�·�< 1� 2�3�þ�2 ��!:(� ¼Ì �s$���p ��
·q )5�±² .( � � C��� 2�3þ L$�� A~=( ¼Ì$��p �� " ½�±
² .) ?�A BC·�< 1� 2�3þ:Q $�� * q ?�� �s�� 6 ��Þ ���=��±² .

:RTSUMVWUX�Y�Z*&[
\^]_]a`cbcbed=f=g�hjilk=mn=o5-40
5.6.12 )���¿��)���¿��)���¿��)���¿�� 4�$4�$4�$4�$ -Field bus communication (71)
¡�$¡�$¡�$¡�$
C ÏË� )���¿� ( . : Advant link, CS31( ��L 8 C ), Profibus(10. C ), Modbus,
Interbus-S, Devicent.) A B� ��P:Q H�¼ ��Q�4$3 C��· t:? 0#�
6 �Ï�I $��p :�7=?�P ��=��±² . $�� WI�RC�� Û�Û:Q $�� ù C S s{ ?��À sP�@ ¢0 12 T . C:Q UÍ 6 �2 V�s:(�0 ¢5�±�² . C
DN� 1�{ 16 ¡ $��:Q [6
. C�$�p P + " ¡ ¢ { T=Q È E | ;
p WÚ ·�H ¢�5±² . °CI�X�" 1,3,5 ÷�3 °CI:Q Y$7�7 32ms C�H
FB SPEED REF p :Ý�{ FB TORQ REF, FB SPEED CORR 8ms ��±² . � �
C���2 t:? 0#��� 6 �:Q $�C�G� L�{ t�X��Z� )��¿�� 4$ [ $�7p Õü#�y .
Note: % � ¸I 7.15 DSET BASE ADDRESS � 7» z 1 L$� 10 3 &s·×
(8< à�\=Q D�ú °C�I X�"÷�� ( . : DS1->DS10, DS3->DS12…) � 9 p þ·
× ��±² .
] 5-4 ¡�$ Dataset 1( L É :10) Word 1
FB [6 . C = DataSet 1 Word 1 ( $� 3.1) ^`_badc^`_badc^`_badc^`_badc
e ce ce ce c f`gf`gf`gf`g hbihbihbihbi
0=Bit 0, LSB COMTEST REC “1” ”0” j elk ^m_ln
olp qlr 1 DRIVE ON "1" "0"
(1= slt )
ulvxwmy z vx{m| PLC}l~b� n vx�l�m� On( �m� )
2 HIGH SPEED "1" "0" (1= slt )
�l� �x�
( �x�m�x�m� ) 3 START OVR
"1" "0" (1= slt )
ulvxwmy z vx{m| PLC}l~b� n vx�l�m� �l�xil�
4 RAMP HOLD "1" "0" (1= slt )
�l� � �x�me c
5 SEPARATE "1" "0" (1= slt )
�x�m�x� �x�me c
( � ,M/F �x� {m|x�
) 6 TORQ CTRL
SEL "1" "0" (1= slt )
�l� �x� �x�
(�l�
�l�m� =DS1.3) 7 LOAD MEAS
SEL "1" "0" (1= slt )
~l� �x� �x� (LOAD MEAS REF
�l )
8 RESET OVR “0->1” (edge)
¡ g �x�m¢ yx£m¤ }l~x� n olp �m¥ (PLC)
9 FAST STOP 1 "1" "0" (1= slt )
¦m§ �l� 1
(�l� �l¨
�l� ) 10 FAST STOP 11 "1" "0"
(1= slt )
�l� �l� 11 �x� ( © �lª � 63.1)
11 PGM SYNC “0->1” (edge)
gx«m�x� ¬l}lx® n �l�l� .
12 HW SYNC INHIBIT
"1" "0" (1= slt )
gx«m�x� � vl¯ � (DI) �l�°� ± � 13 RESET SYNC
READY "1" "0" (1= slt )
�l�l� ² ^ e cln �m¥
14 USER MACRO CHANGE
"1" "0" (0=User1)
rl³x� ´ � } 1 µl¶ 2n
·m¸l¹xº
15= Bit 15, MSB
ENABLE FB CTRL
"1" "0" (1= slt )
�m»l¼x½ ¾ �myx¿ z vx{m| ulvxwmy �x� n
�l
(Sway( ÀlÁx )
�x�)

:RTSUMVWUX�Y�Z*&[
\^]_]a`cbcbed=f=g�hjilk=mn=o 5-41
] 5-5 ¡�à °�CI X�" 1,3,5,7( L É :10,12,14,16)
Ä: DS1.2 = DataSet 1, Word2 ÅbÆbÇbÈ°ÉÅbÆbÇbÈ°ÉÅbÆbÇbÈ°ÉÅbÆbÇbÈ°É
Ê�ËÊ�ËÊ�ËÊ�Ë ÌbÍÌbÍÌbÍÌbÍ Î°ÏΰÏΰÏÎ°Ï m�nm�nm�nm�n
DS1.2(DS10.2) FB SPEED REF -163.84-
+163.84
ÐxÑxÇ ÒxÓ ÔNÕxÖ , %
(20000=100%) DS1.3(DS10.3) FB TORQ REF -327.67-
+327.67
×xØ ÔxÕxÙ , %
(10000=100%) DS3.1(DS12.1) FB RAMP RATE 0.00-
32.767 1000=1.0
Ú�Û ÆlÜ�Ý m�Þlß
ÒNÓ àxá Ò âxãåä ælçxè Þ Ðlé êxë 1.0 (1000=1.0)
DS3.2(DS12.2) FB SPEED CORR
-163.84- +163.84
ÒxÓ ì Þ ÌxÍ ,% (20000=100%)
DS3.3(DS12.3) FB POS PRECOUNT
-32767- +32767
Ï�Ö í é�î ä ïxðlè Þlß Ù =ñ îåò Ù (1=1)
DS5.1(DS14.1) FB AUX COMM WORD
ìxè n ÕlÊ�Ë ( ó 5-6 ôlè )
DS5.2(DS14.2) FB LOAD MEAS REF
-327.67- +327.67
õ�öl÷ Þ ÔNÕxÙ , %
(10000=100%) DS5.3(DS14.3) “not used” DW ÌxÍ 3.9 DS7.1(DS16.1) PAR VALUE 1 -32767-
+32767
ø Û ï Ç 90.1Ý
ù�ú ß ø Û ï Ç Ù DS7.2(DS16.2) PAR VALUE 2 -32767-
+32767
ø Û ï Ç 90.2Ý
ù�ú ß ø Û ï Ç Ù DS7.3(DS16.3) PAR VALUE 3 -32767-
+32767
ø Û ï Ç 90.3Ý
ù�ú ß ø Û ï Ç Ù
"SPEED" Ã��û 100% wv 20000ü ý���þ ÿ��±² .
"TORQUE" Ã��û 100% wv 10000ü ý���þ ÿ��±² .
�Ã� FB STATUS WORD(DS1.1) ý�" 0 COMTEST REC t�� ¡�Ã�� 0� 1 ��� p �·�û ý�" ( x�� ý�" ) p
���� � ø8���±�² .
Þ�� ,”next edge” À s � �¨ COMTEST FLT TD(71.1) >�� ¡�Ã���q � 6 <
MAS OSC FLT y�PÀ Á�E·�H � ��� ��û s�q � ½�±² .
� ��� ��û t�� ������ (PLC)6 �Ï� ¡�Ã�� COMTEST REC � ü ��
ý�"p �������H � ½�þ FB COMMAND WORD(DS2.1) Bit 14 COMTEST TRA
� ����� Õ�9�±² .
Note: t�� ����� � � ¡�Ã�� ý�"�û ý�" z ü �� � � ²�� � ��� ���
Õ�>�@��±² !

�� �"!VWUX�Y�Z*&[
\^]_]a`cbcbed=f=g�hjilk=mn=o5-42
] 5-6 ¡�à ° � � X�" 5( # É : DS14)
. C 1
FB AUX COMM WORD = DS5.1( Ã� 3.7) æ É%$æ É%$æ É%$æ É%$ ÍÍ ÍÍ ÌbÍÌbÍÌbÍÌbÍ Î°ÏΰÏΰÏΰÏ
m�nm�nm�nm�n
0=Bit 0, LSB FB ZERO POS “1” “0” (1=&�' )
( Ú Ñ*)�+ è Æ*)�,*- f õ Ç
“0” Ï�ÖlÌxÍ�. /*0 ( 1 ,ø Û ï Ç 64.10
=FB JOYSTICK 2�3 ) 1 FB START DIR A “1” “0”
(1=&�' )
( Ú Ñ*)�+ è Æ*)�,*- f õ Ç
4�5 Af ä
î ñxÌxÍ�. /*0 ( 1 ,ø Û
ï Ç 64.10=FB JOYSTICK 2�3 ) 2 FB START DIR B “1” “0”
(1=&�' )
( Ú Ñ*)�+ è Æ*)�,*- f õ Ç
4�5 Bf ä
î ñxÌxÍ�. /*0 ( 1 ,ø Û
ï Ç 64.10=FB JOYSTICK 2�3 ) 3 FB JOYST
TQREF SEL “1” “0” (1=&�' )
( Ú Ñ*) è Æ*), 6 Ú
×xØ7�8 &�' ( 1 ,
ø Û ï Ç 64.10 =FB JOYSTICK 2�3 )
4 FB ELSHAFT ON “1” “0” (1=&�' )
9*)�Ç�: ;�< ÆlÜ
Ú�Û ÆåÜ . Ï= ( Ú Ñ>)
/ î*? 7�8 ñ@
5 RESTART DLOG
“0->1” (edge)
Ú�Û ÆlÜ ÅNÆxÇ
fA ä Bxâ�@
6 TRIGG LOGGER
“0->1” (edge)
Ú�Û ÆlÜ ä ÅxÆxÇ
f�A
Þ Ô
7 DISABLE SLACKROPE
“1” “0” (1=&�' )
f=d ï*CD�E Ý ä= FNÒ Þ Ô î*GH 7

�� �"!�I�J"K��LM*&�N
OQPRPTSVUVUXW�Y�Z[]\*^�_�`�a 5-43
� [� [� [� [ �
ÏË�b �c � ��d�Ï�� )��¿�e (
Ä: Advant link, CS31(fg# 8
. C ), Profibus
(10. C ), Modbus, Interbus-S, Devicenet) h ib H�jNü k�Q
��l�em
��� n û o�� ����e�p� Ã�q�m � [�n 7 �
����r�st
. [�u �
��� v�w�x
y�CNü T u z x þ {�J n 7 � ||Nü }�~l�e ����� ��N � m
{�J n�� ��� . ACCü ���Ã�q J��� � e�û |� �����g� v � ��
14 �
y��Nü �����d �����g� ��� st. � x
�
����b 16�u ü y���Ãq�d ���
� x
�xü �������m ��� n�� ��� st
. 8ms � t �����8û SPEED ACT,POS
ACT PPUü ��qm z�� x � � ���� 2,4,12 ¡Nü � � � ���¢�£�û 32ms ���
� � ���� 6,8 ¡xü ����¢£�û 56ms ¤ s�t.
Note: ¥c�¦�� 71.5 DSET BASE ADDRESS û £�§�¨ 1 #��� 10 þ ��� n�© ª�« ü �¬ � � ��� ¡�q�� 9 m �� s�t
.( ® : DS2->DS11, DS4->DS13…) ¯ 5-7 °� �±�²�� 2( ³�´ : DS11) y�� 1
FB STATUS WORD = DataSet 2 Word 1( �q 4.1) µ·¶%¸µ·¶%¸µ·¶%¸µ·¶%¸>¹¹ ¹¹ º ¹º ¹º ¹º ¹ »·¼»·¼»·¼»·¼
_%`_%`_%`_%`
0=Bit 0, LSB RDY FOR ON “1” “0” ON ½ µ 1 POWER ON ACKN “1” “0” ¾*¿À�Á À� ( à : DI_IL) 2 RDY FOR RUN “1” “0” Ä*Å ½ µ ( Æ>Ç È�É ) 3 RUNNING “1” “0” Ä*Å ( Ê�Ë Ì�Í ) 4 ZERO SPEED “1” “0” “0” Î�Ï 5 REM LOC “1” “0” Ð*Ñ ¶ /
Y�Ò(1= Ð*Ñ ¶ )
6 TORQ PROV OK “1” “0” Ê�Ë�ÓÔ Í�Õ 7 USER 1 OR 2 “1” “0”
\*^ Æ Ö*Ë Y 1 ×�Ø 2 Ù�Í 8 FAULT “1” “0” Ú�Û 9 WARNING “1” “0” Ü*Ý 10 LIMIT “1” “0” Ê�ËÞ�ß>à À áâ�ã*ä 11 SYNC “1” “0” ÅÄ Ç å�æ (DI3) ç èé 12 SYCN RDY “1” “0” ÅÄ Ç ½ µ 13 BRAKE LONG
FTIME “1” “0” äê�ã*Ë�ç ë ìí�î�ï ðî
14 COMTEST TRA “1” “0” ñ º î�ò ¾*ó µ*¶
15=Bit 15,MSB SNAG LOAD “1” “0” Snag Óô ðî

z�õ ö"÷�ø�ù"ú�d�ûü"��ý
þQÿRÿ��VUVUXW�Y�Z[]\*^�_�`�a5-44
¯ 5-8 °� �±�²�� 2,4,6,8,12( ³�´ : 11,13,15,17,21)
® : DS2.2 = ��±²��� 2, y� 2 � ã���� ¶� ã���� ¶� ã���� ¶� ã���� ¶ �%Æ�%Æ�%Æ�%Æ º ¹º ¹º ¹º ¹ »·¼»·¼»·¼»·¼ _%`_%`_%`_%`
DS2.2(DS11.2) SPEED ACT
( �� ) -163.84- +163.84
Þ Î�Ï� , % (20000=100%)
DS2.3(DS11.3) MOTOR TORQUE FILT ( �� )
-327.67- +327.67
Þ Ê�Ë� , % (10000=100%)
DS4.1(DS13.1) SPEED REF 3 (92.1)
-163.84- +163.84
Î�Ï Â�� 3=ramp æ (%) (20000=100%)
DS4.2(DS13.2) POS ACT PPU (92.2)
-32767- +32767
Þ ¼��� (1=1)
DS4.3(DS13.3) MOTOR CURR (92.3)
-3276.7- +3276.7
Ñ � ¾*Û (A) (10=1A)
DS6.1(DS15.1) FB FAULT WORD 1 (92.4)
� ^ Ú�Û
DS6.2(DS15.2) FB FAULT WORD 2 (92.5)
Ñ ��Þ�� Ú�Û
DS6.3(DS15.3) FB ALARM WORD (92.6)
Ü*Ý
DS8.1(DS17.1) MOTOR VOLT (92.7)
-32767- +32767
Ñ � ¾�� (V) (1=1V)
DS8.2(DS17.2) DC VOLT (92.8)
-32767- +32767
DC ¾�� (V) (1=1V)
DS8.3(DS17.3) POWER (92.9)
-3276.7- +3276.7
Ñ � � POWER(%) (10=1%)
DS12.1(DS21.1) FB AUX STATUSWORD ( �� )
��� èé �Æ
DS12.2(DS21.2) AI1 REF ( �� )
-163.84- +163.84
Ä�� ������� å�æ 1 Î�Ï Â�� (%) (20000=100%)

z�õ ö"÷�ø�ù"ú�d�ûü"��ý
þQÿRÿ�������� ���� "!�#�$&%�' 5-45
¯ 5-9 °� �±�²�� 12( ³�´ : DS21) y�� 1
FB AUX STATUSWORD=DS12.1 ( ��q 4.5) µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹ º ¹º ¹º ¹º ¹ »·¼»·¼»·¼»·¼ $(%$(%$(%$(%
0=Bit , LSB DIR A “1” “0” )�*�+¾ ,�- A % � 1 DIR B “1” “0” )�*�+¾ ,�- B % � 2 ZERO POS “1” “0” )�*�+¾ “0” ¼&� % � 3 SLOWDOWN
DIR A “1” “0” )�*�+¾ .���/�0 + ,�- A
4 SLOWDOWN DIR B
“1” “0” )�*�+¾ .���/�0 + ,�- B
5 ELSHAFT ON ACKN
“1” “0” ¾�Ä � Þ�� Ù�Í À� º ¹
6 BRAKE LIFT “1” “0” äê�ã*Ë 1�2 % � 7 FOLL SEP ACKN “1” “0” 3 ��/ 4 Ð 5 À 8 LOGG DATA
READY “1” “0” áâ�ã*ä
� ã��6��� � ã�� ½ µ (triggered)
9 AI3 LIMIT ACTIVE
“1” “0” ������� å�æ 3 Î�ÏÞ�ß Ù�Í�Ç (AI3<10mA) 10 SLACK ROPE “1” “0” � � 7�8�9�: ,  11 COMTEST MF “1” “0” ;�< � / 3 ��/ =&> < ¶ 12 FAST STOP “1” “0” Ý Î �� Ù�Í�Ç
¯ 5-10 FB �&? y�� 1 ��±�²�� 6( ³�´ :DS15) y�� 1
FB FAULT WORD 1= Dataset 6, Word 1( ��q 4.2) µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹ º ¹º ¹º ¹º ¹ ( @(A@(A@(A@(A Ú ÛÚ ÛÚ ÛÚ Û ) $(%$(%$(%$(%
0=Bit 0, LSB MOT OVERSP Ñ � B�Î�Ï Ú�Û 1 TORQ FLT Ê�Ë Ú�Û 2 BRAKE FLT Ä�C�D�À ä�ê�ã*Ë Ú�Û 3 ELECTR SHAFT ¾�Ä�D�À ��Þ�� Ú�Û 4 TORQ PR FLT Ê�Ë�ÓÔ Ú�Û 5 MAS OSC FLT E á�F < ” G�H ”
µ*¶ Ú�Û
6 CHOPPER FLT Þ Å�I�J Ú�Û 7 INV OVERLO À F�� B�Ó�ô 8 EXTERNAL FLT K Ó Ú�Û 9 MF COMM ERR ;�< � / 3 ��/ F <�ñ º Ú�Û 10 PANEL LOSS @�A ñ º Ú�Û 11 I/O COMM I/O � á ñ º Ú�Û 12 AMBIENT TEMP ASC800 L�¼�M�Ï N�O 13 THERMISTOR P 7 < � Ú�Û (DI6) 14 MF RUN FLT ;�< � / 3 ��/ +�¾*Ú�Û 15=Bit 15,MSB
COMM MODULE = Ñ�Q ñ º Ú�Û
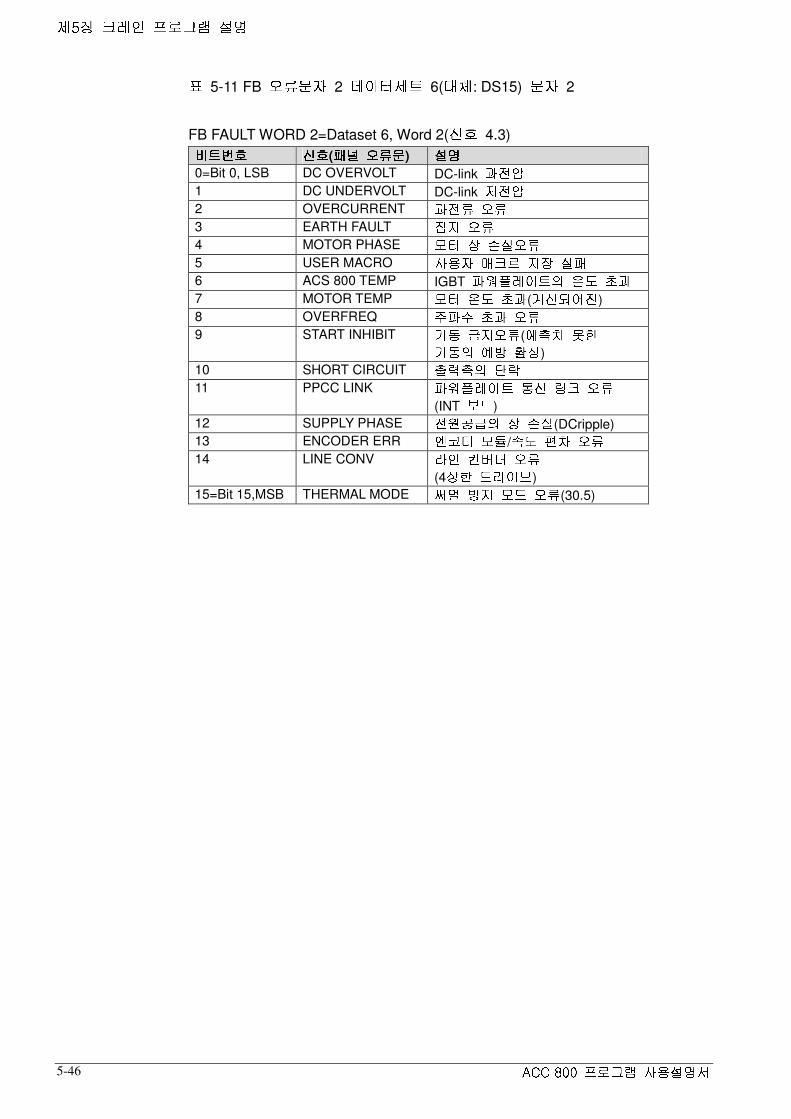
z�õ ö"÷�ø�ù"ú&R�ûü"��ý
þQÿRÿ�������� ���� "!�#�$&%�'5-46
¯ 5-11 FB �&?�y� 2 ��±�²�� 6( ³�´ : DS15) y�� 2
FB FAULT WORD 2=Dataset 6, Word 2( �q 4.3) µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹ º ¹º ¹º ¹º ¹ ( @(A@(A@(A@(A Ú ÛÚ ÛÚ ÛÚ Û �� �� ) $(%$(%$(%$(%
0=Bit 0, LSB DC OVERVOLT DC-link B ¾�� 1 DC UNDERVOLT DC-link S ¾�� 2 OVERCURRENT B ¾*Û Ú�Û 3 EARTH FAULT T� Ú�Û 4 MOTOR PHASE Ñ � è U Ú�Û 5 USER MACRO !�#Æ Ö*Ë�� S�V
@ 6 ACS 800 TEMP IGBT W�X�Yê�ã ¶ ç M�Ï Z�B 7 MOTOR TEMP Ñ � M�Ï Z�B ( C6[�\ ��H ) 8 OVERFREQ L�W�] Z�B Ú�Û 9 START INHIBIT Ä*Å ^ Â*Ú�Û ( Ã�_�� `�ß Ä*Å ç Ã�, Ù�Í ) 10 SHORT CIRCUIT æ�_�ç ) í 11 PPCC LINK W�X�Yê�ã ¶ ñ º a>Ë Ú�Û
(INT � á ) 12 SUPPLY PHASE ¾*¿ Õ�b�ç è U (DCripple) 13 ENCODER ERR c�d�e Ñ�Q /Î�Ï f&g Ú�Û 14 LINE CONV â À h�F�� Ú�Û
(4èß áâ�ã>ä ) 15=Bit 15,MSB THERMAL MODE P�i , Â Ñ á Ú�Û (30.5)

z�õ ö"÷�ø�ù"ú&R�ûü"��ý
þQÿRÿ�������� ���� "!�#�$&%�' 5-47
¯ 5-12 FB j&k y�� ��±�²�� 6( ³�´ : DS15) y�� 3
FB ALARM WORD = Dataset 6, Word 3( �q 4.4) µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹µ·¶%¸·¹ º ¹º ¹º ¹º ¹ ( @(A@(A@(A@(A Ü·Ý �Ü·Ý �Ü·Ý �Ü·Ý � ) $(%$(%$(%$(%
0=Bit 0, LSB MOTOR TEMP Ñ � Ý M (95%)( C�[�\ ��H ) 1 COMM MOUDULE = Ñ�Q ñ º Ü�� 2 ID RUN FAIL ID RUN
@ 3 ACS 800 TEMP IGBT W�X�Yê�ã ¶ ç Ý M 4 ENCODER ERR c�d�e Ñ�Q Î�Ï f�g Ü6� 5 JOYSTICK � ã <�l m�î Ü�� ( )�*�+¾ ) 6 START INHIBIT Ä*Å ^  Ü�� ( Ã6_�� `�ß Ä*Å ç ,  Ù�Í ) 7 “Not used” 8 THERMISTOR P 7 < � Ü6� (DI6) 9 NO MOT DATA Ñ �
� ã��>ç Ó�n ×�Ø o�p q�r Õ�s ¾*Û ç å�æ
10 LIFETIME>90% Ëê À ¹ ã < ¶ ç Ä�C�D ]�%�ã Wâ�7�� 74.2 t $ � ß u
]�%*ç 90% v Z�B 11 “Not used” 12 “Not used” 13 “Not used” 14 “Not used” 15=Bit 15,MSB “Not used”

z�õ ö"÷�ø�ù"ú&R�ûü"��ý
þQÿRÿ�������� ���� "!�#�$&%�'5-48
5.6.13 �(w%²�(w%²�(w%²�(w%² / x(R(yx(R(yx(R(yx(R(y -Master/Follower ( 72 ) z({z({z({z({
�&w�² / x&R&y�| } n&~��&� n | } n�� �&� n&� ��² ��± £&� , ø z , �
� � �&� �&R �&������� �
± ��² � 2 ³�� ÷�ø�ù °&� ~���±&��� �&� � | �&w�� � ���
����� �&�¤&� t .
�&w�² / x&R&y�| ~���±��&� ��±�� } �&~&� � z&�&�&� t . �&w�² ~���±&�&|
x&R&y ~���±&� � �&w² / x�R&y ��& &w�� �&� ý&¡�&¢&£ ¤&¡¨ ( ¥&¦&£ § ÷ )
� k&¨�� t . � x
�&w�² ~���±&��| � ° x ©�° � k�ö
� £����
x&R&y ~���±&��� ª�«�&k&� ¬�� �¤&�& .
�&w�² / x&R&y�| ¢±&w &£ ¢&® �&¯ � � ���&° ± � � ²�³& &w �&³&£
´&µ ©�° �&³ �&¯ � � �&�&° ± ��¶&�& .
�&w�² ³���±&��| ·�ª ¥&¦&¸&��&³�± � x�R�y ³&��±��&| �&ª § ÷&¸&�
�&³&� ���&�&�� .
Note: ��w�²&£ x&R&y ³&��±&� �&¯&| DTC ¸&���&³± ©&¹�º �&�� .(M/F
¸&�&| w�»&����³ � ��| ¼&½ � ¤ ¾�¶&�& .) R&y���} �&~&��� ��¿�À � £
���&�&| x&R&y ¥&¦ ¸&Á 20.1 20.2 � ��w�²�� ¥���¦�² 69.1 SPEED
SCALING ���¨&k& 5% Ã&Ä ���&� ¹&º ���& .
Å(ÆÅ(ÆÅ(ÆÅ(Æ
£(¼ �£(¼ �£(¼ �£(¼ � �ÇÁ�ÇÁ�ÇÁ�ÇÁ È(É(�(·È(É(�(·È(É(�(·È(É(�(·
÷�ø�ù�°�� ³&�±&��� ��� Ê £&¼ Ë�Ì&| ACS 800 � ³�Í�� �ý�� � ��ý
��� �&¶��& . �&w² / x&R&y Î�� ú�R�û�ü�� Ï&Ð È�É �&·�Ñ ª« £ Ò&¶
�& .
1 ÷�ø�ù°&� ³���±&� Ó&Ô�� °�Õ�Ö�× ö���� °�Õ � Ø � ��� . Ù�} Ú�R��
��° � ��� 5~�Û
£&�Ü � ��� .
2 x&R&y�� Ý&Þ 2�
��w�²�� Ý�Þ 2 � �&� �© M/F ß�÷&� º ³&à��&á . û&â
5-17 µ&ã ©�° ��³�� �&w�² / x&R&y ��� � ä �&� à��&á .
Note: ��w�² / x&R&y �w&� ��Á å�æ±&ç&Ñ è&¦&R ¢�é&� ¹ �&�� .
3 �&w�² ³&��±�� � ��}&¸&� �&¢&� �&�����& .
4 ¢�°�Õ � ê�¤��&�& .
5 ¯ ³&�±&� � M/F ¸&� ë�÷�R&� ¼&½&��ì��& .
( ¥&��¦² 99.2 Î&� ë÷&R = M/F CTRL)
6A ´&µ ©° í&³
�&w�² ³���±&��� ¥��¦�² î&ï :
- Stand Alone Sel ( ¥&�¦�² 64.1) = True
- Master/Follower Mode ( ¥&��¦�² 72.1) = Master.
x&R&y ³���±&��� ¥��¦�² î&ï :
- Stand Alone Sel ( ¥&�¦�² 64.1) = True
- Master/Follower Mode ( ¥&��¦�² 72.1) = Follower.
- Torque Selector ( ¥&�¦�² 72.2) = Torque
- Brake Int Ackn ( ¥���¦² 67.3) = True

¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�' 5-49
6B ²&³& �w í&³
�&w�² ³���±&��� ¥��¦�² î&ï :
- Enable Comm module( ¥&��¦�² 98.2)
- Stand Alone Sel ( ¥&�¦�² 64.1) = False
- Master/Follower Mode ( ¥&��¦�² 72.1) = Master.
x&R&y ³���±&��� ¥��¦�² î&ï :
- ²&ñ�� Enable Comm module( ¥&�¦�² 98.2)
- Stand Alone Sel ( ¥&�¦�² 64.1) = False
- Master/Follower Mode ( ¥&��¦�² 72.1) = Follower.
- Torque Selector ( ¥&�¦�² 72.2) = Torque
- Brake Int Ackn ( ¥���¦² 67.3) = True
7 ¯&ò ³���±&��� í¬ Î&� ¥&��¦²&� î�ï&�&�& .
8 ó&½ ô�Þ&ª�� õ [local/remote] � ��� ��© ACC 800 Ó&�� �� ��}�©�°
í&³&R ö�j&�&�� .( ÷�ø ¯ � ö�ù�� ú¡&û ü � L
¯ �&Ð ý&� ¹ ���& .)
¯&ò�� ³���±&��� Ü�þ��&�& .
9 ©�°�£�ÿ&£ í²&� ~ Ü&Á � ��� ©�° � �&�& . ± ��� �
� £����
x&R&y ³���±&��| ����R ¥&¦&¸�� í�³&R î�ï&�&�& .( ¥&��¦² 72.2 Torque
Selector= Speed). ��w² ¸&�&ô�Þ&R&}² ��w² ³&��±���� ª�� Rû / �&¤��
¤����±� ²&³� &w�� ¤� � ��� ¸����&¢�� k&¨&�& .
�&w�²&£ x&R&y ³&�±��&Ð ¸�³�R ¼�½ � |�¤ È&É&�&�� .
( í�² £ ó&½�ô&Þ�� ¯ ��ö&ù ): � �&w² ³���±&��� ��¼ , ï�¤ �&¢�Ð ³&�±��&� � ��� � ª ¤&|�Ð . �� ������������������������! #"�$�%'&�(���)�*
� x&R�y ³���±&��| +�w�² ³&�±&��� ¥&¦ ¤&¡�¨ � ,�-&|�Ð .
10 x&R&y ³&��±�� ª�� ¸&�&ô�Þ&Ñ ¼&½���¤ ¾�. � ³&��±��&� ¸��&° ±
ý&¶&�& .
11 x&R&y ³&��±��&� § ÷&¸&� í&³&R /�0��� .( ¥&��¦² 72.2=Torque)
12 ¢�°�Õ � 1&�� .
13 ©�° ��2�3 � | £�ÿ&£ í�² � � �&�&Á � ¢�°�Õ � ê¤&�&�� .

¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�'5-50
´(µ ©%°´(µ ©%°´(µ ©%°´(µ ©%° í(³í(³í(³í(³ 4 }&¸&� 5&¢&| ³&�±�� � �&������6 ª&«¤��& . +&w�² ³&��±���|
å�æ�±&ç 7�8&��5 ��� �&� x�R&y ³���±&��� ¸&�&���& .
Note: ¢�±�w�9 � :&��° j&y ¯&ò�� ³&��±�� í&¯ � { ³�� ;&w <�=�&£
RATC-01( >&| NTAC-02) Ð ?�� ¹ ���& .
= ¢�±�w�9 � �&�
û&â 5-17 ´&µ ©° í�³&� ��Á +&w² / x�R�y�� ��@�ï&k .
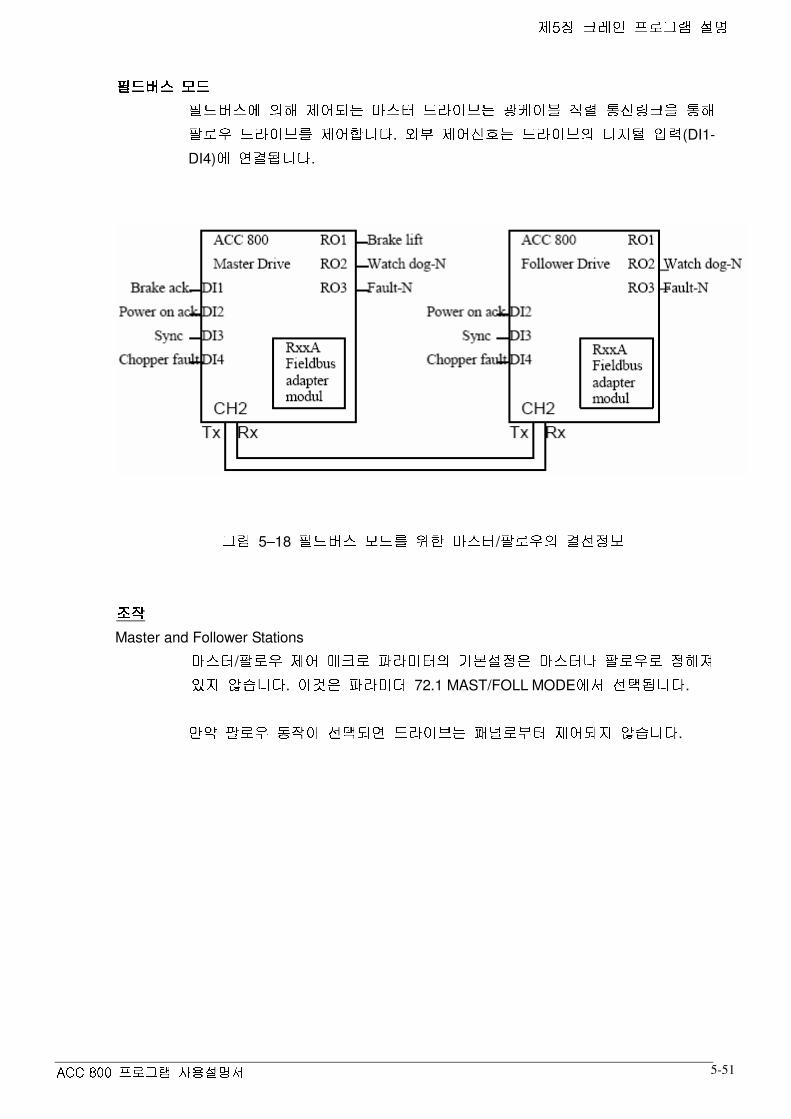
¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�' 5-51
²(³( (w²(³( (w²(³( (w²(³( (w í(³í(³í(³í(³
²&³& &w � ��� ¸&����| +&w�² ³&�±&�&| å�æ�±&ç 7�8 ��5&ß÷ � �&�
x&R&y ³���±&��� ¸����&�& . 4 } ¸&��5�¢�| ³&��±���� �&¤�� A� (DI1-
DI4)�
�&��B��& .
û&â 5–18 ²�³& &w í�³&� ��Á +&w² / x�R�y�� ��@�ï&k
ó(½ó(½ó(½ó(½
Master and Follower Stations
+&w�² / x&R&y ¸&� ë÷&R C&��D�²�� E�F�î�ï&Ñ +&w²� x&R&y�R ï&��G
?&¤ ¾&¶��& . ±�H�Ñ C&��D�² 72.1 MAST/FOLL MODE� � @�I�B��& .
º�J
x&R�y ¼�½�± @�I���ø ³���±&��| ô�Þ�R&}�² ¸�����¤ ¾&¶��� .

¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�'5-52
K�L � ó�½
+&w�² / x&R&y í&³ � � � �� M�7��±
~ Ü � ³&��±���� ¯ í�²�Ð
E&ÿ�:�ù �&� � ��� ©�°�N O +&w²� x�R&y ³&�±&��� ~ Ü�ó�½&Ñ K�L � ó�½ � ��� ��� N ± ?&¶&�� .
(� �� ³&�±&�&Ð P�ô �#Q � O )
³&��±&���&Ñ z�{ :�ù +&w�² / x&R&y ¼&½ � ��� �&� 3 ë÷&R 1 ( C&��D²
99.2 = M/F CTRL) K�L � ó&½ � ��Á �&� 3 ë�÷&R 2( C&��D�² 99.2=CRANE)
� ���
~ Ü&ó�½&° ± ?&¶&�& .
�&� 3 ë÷&R 1� � ��� 3 ë�÷�R 2 R�� °�R � ��� �&¤�� A��±�
²&³& &w ��5&é 3 � bit 14 � ���&° ± ?&¶��� .( C&��D² 16.5 ä&ó )
í�²&Ð E�ÿ�:�.�R ������� ? � O �ø�±�÷�| ¯&ò�� ³&�±&� í�¯ � ���
¸&����� ¹ �&�� .
~ Ü ó&½
²&³& &w ý&¡&é 3�S “SEPARATE “ 5&¢ (DS1.1 bit5) | D�w�² / x&R�y ©�°�.&R
}�² û�T�¤ ¾�Ñ z&{ :�ù ª&«�R /�U�E ��� �&��B��& .
´&µ ©° í&³&£
²&³& &w í&³ í&¯ � � �&� Ð�V&�&�� . x&R�y ³&��±���� j&y ²�³& &w
k&ó ª&«�é 3 (DS12.1 Bit 7)S
“separate change acknowledge” 5�¢&� ��� Ð�V
�&�& . 5.5.12 ä&ó
Note: SEPARATE 5�¢ (0� � 1, 1
� � 0) � °�R�Ñ ª&«�5&¢ RUNNING=0 z O �
º Ð�V&���& .
ô&Þ ~ Ü�©�°
+&w�²&£ x&R&y ³&�±��&| ¸&��ô&Þ >&| DriveWindow� �
~ Ü&ó&½ N ±
?&¶&�& . W : Ó�¤&k&± S , C���D�² 72.1 MAST/FOLL MODE = OFF) R î&ï )
S x&R�y&�
í�X ³&�±&� � � “Broadcast mode”( C���D�² 72.11=YES) � Y#Z�÷ ��[�.&R \ +&w�² / x�R&y
� ü � � ±&ª�� x&R&y ³&��±&��� �&��° ± ?&¶&�& .
6.2.27 ä&ó .
+&w�² ³���±&��| Ý�Þ 2 M/F &w&� ��� �&� � í�X x&R&y ³&��±�� � § ÷&£ ¥�¦ ¤�¡�] � k&¨&�& . û�^� ± í�³ � �&| +&w�² ³&�±�� � �
x&R&y ³���±&���&R E�¼�ý&¡ � k�_&± ý 2 +&w�² ³���±&� � � x�R&y
³&��±&����� ª�«&� ¿gù ° ± ý&¶&�� . E�¼�ý&¡� ª&«�¿gù ( í�X á&?�`�a
x&R&y ³���±&� ) Ñ í�X +&w�² / x�R&y ³��±&�&��� I/O ²&³� �w&� �&� 4 }�:�.�R � ¹�º ���� .

¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�' 5-53
+&w�² / x&R&y ß�÷ ��b&�
ß%÷��ß%÷��ß%÷��ß%÷�� ÷cE÷cE÷cE÷cE : � �� +�w�²&£
� �� x&R&y w�d�±�e± �&� Ð�V����& .
Transmission medium: å�æ�±&ç � f�Z�g : h&�&w�i j�@ , ¤�k 1mm, h&�&w�i�l�m�.&R k&¢ n o�p�q : 0.31 dB/m n æ�±�ç�� r�³ s± : 10m n E�t :
W%â�7��W%â�7��W%â�7��W%â�7�� uwv(uwv(uwv(uwv( ) ¼) ¼) ¼) ¼
��x M�Ï -55 +85 oC
$���M�Ï -20 +70 oC y r î�ï Å�z ç À V�æ 50 N y r î�ï Å�z ç {�Ó�2 |Â~}
25 mm
ë î�ï Å�z ç {�Ó&2 | Â}
35 mm
ë î�ï Å�z ç À V*Óô 1 N ��� 1000 cycles
å æ�±&ç�Ñ ACC 800� Ï&Ð @�I&��b ö��&R�� �b&Á s�±�R
�&� ° ± ?&¶��& .
RDCO-0x k(³��k(³��k(³��k(³�� �(�%ö(ù�(�%ö(ù�(�%ö(ù�(�%ö(ù : ��� – ±�5�� (hp 9534, T-1521);
Ú#� – ��5&� (hp 9534, R-2521)
�(Üc��(Üc��(Üc��(Üc� �c5�c5�c5�c5 tcAtcAtcAtcA : ¼�E&� , ± S ��5&���
°c�(¥(¦°c�(¥(¦°c�(¥(¦°c�(¥(¦ : 4 Mbit/s
°c� Ûc�°c� Ûc�°c� Ûc�°c� Ûc� : 4 ms
ú(R §c�ú(R §c�ú(R §c�ú(R §c� : Distributed Drives Communication System, DDCS

¸�õ ö"÷�ø�ù"ú&R�ûüðî�ý
þQÿRÿ�������� ���� "!�#�$&%�'5-54
5.6.14 °cE(�°cE(�°cE(�°cE(� -Electric shaft (73)
°�E&� ¸��&| ¯ ³&�±&��� ¼�E�÷ � ©�° � ��� ����B��� . W&���&� ,
Ò&Ñ } ��� E�ÿ�:�.�R µ&ã��
¯�³�� ¢�±&w�9&Ð �&���#Q � O ����B��& .
°�E&� ¸���E�V � ��� � E �����&| ¯�³�� ³&��±&� � í&¯ ;&w�<�=����
l&³���5�¢&Ð ²�ñ&�&�� . >�Á , +&w�²�£ ���±&� ³&�±&�&�± � Ý�Þ 2�
�&� � å æ�±�ç�± ²�ñ&�&�& .(RDCO-0x k�³ ²&ñ )
E�F�:�ù E�V&Ñ +&w²�£ ����±�� ³���±&��� ��� ��� ���±&� ³���±&� �
¥&¦&k&ï�] (+/-)�
�&� �&Ì&� “0” .�R ¸�� � | H�A&�� . ¥&¦&k�ï�]&Ñ +/- 5%
R ¸&Á�B��& . ï&¤�� � | C&��D�² 73.6 ELSH CTRL MIN SPD�
î�ï � ¥&¦
] ± � R�| k�ï�± ��¤&¾&¶&�� .( û�^� �&R�© E&¼�ý�¡�± �&��� � O ��ù
�&Ì&| ÿ���� 2 k&ï � ��� ����B��� .)
k&ï ����¸&��E�| C���D�� 73.2 ELSHAFT GAIN�
�&�B��& .
�E&� ¸��&|
´&µ ©�
í&³&£ ²&³& �w í&³ í&¯ � � �&��N ± ?�¶&�& . �E&� ¸��&| C&��D�� 10.15 ELSHAFT ON SEL� �&¤�� A� � �&��Á
ELSHAFT ON >&| k�ó ²&³& �w ý�¡&é 3 (DS5.1:4) 5&¢ FB ELSHAFT ON
Ò&Ñ 4 }�5&¢ � ��� On/Off ° ± ?&¶��& . �
4 }�5&¢&| +&w���£
�����&� ³&����� í�¯ � �&����� ¹ �&�& .
�E&� ¸��&Ð On ��Q � O E&¼ý&¡� ¤&¡�]�Ñ +&w�� ³&���&� ��º ñ�f�B
�& . +&w�� ³&������| +&w�� / x�R&y �w Ý&Þ 2 � ��� E�¼�ý&¡� ¤&¡�] �
������� ³����&� � k&¨&�& . �����&� ³����&��� Ð�o&¥ � Û Ñ { ³&�
+&w�� ³����&��£ Ò��� ��� ¹ �&�� . �E&� ¸��&Ð Off ��Q � O ¯ ³&�����&| ���
z&{ :ù ³����&��£ Ò��
¼&½&�&�� .(M/F ³&������� ~ Ü�©
� Ó&� )
í��&Ð ©� S&z
O
�E&� ¸&��� On >&| Off
� ø ³&���&�&| Ð�o�¥ � Û&�
��Á ï&¤�� ° H�A&�� . ó��&w�i � “0” ��ù � ������Ñ�� �E&¼�� Ð�V&�&�
.
+&w��� ������� ³����&�&Ð o�¥ ¸�Á w���ù�� 5&¢�� � � O ¯ ³&���
�&| � o&¥ ¥�¦&R ¸�Á N H�A&�& .(´
,
�E&� ¸&��Ð Y�Z�÷ ����? � O )
���r#:�÷�| ¢��&w�9 ³&���&���
�E�� � ���&° ± ?&¶&�� . ¯ ³&���&�
| í&¯ ���r�:�÷ E�V � �&��° ± ?&¶&�� . +�w��&£ ������� ³&���&� �
��� ÿ�� � H k� ¡&Ñ ¤�¡�]&Ñ ¯ ³����&� í&¯ � � �&�&° ± ?&¶
�& .
+&w��&£ ��������� ��R& Æ E���¢&w ��q � �&�&° j&y +�w��&£ �����
� ³&������� ¥&¦ ��q&Ñ C&��D�� 73.3 GEAR NUMERATOR £ 73.4 GEAR
DENOMIATOR � �&� ��� î&ï�° ± ?&¶&�� .
( ª�£&��·&Ñ ¤�e 6.2,28 � ä&ó � à&�&á .)

¸�¥§¦!¨�©�ª!«&R�¬�ðî�®
¯±°²°´³¶µ¶µ�·�¸�¹�º¼»~½�¾�¿�À 5-55
+�Á��&£ ������� ³����&�&Ð 100% �-�Ä î�ï � &ø (  , C&��D�� 69.1
SPEED SCALING RPMà î&ï�� �-�ø ) C�Ä�D�� 70.1 POS SCALE Ñ ³�Ä
��Å S Æ��Ç :&Ë&À :�È�É#Ê ¹ Ë�Ì� .
W : ������Å ³�Ä���Å�à Í�Î Ï�:�q�� +�Á�� Ð�Ä���Å�à 2 Ñ��&ø ������Å
Ð�Ä���Å�à POS SCALE Ò +�Á�� Ð�Ä���Å�à POS SCALEà 2 Ñ�Ó î&ï�É#Ê�Ô
Ë�Ì�Õ . �E�Ï Ö�ù á�× ( 5�Ø 2.26 ELSHAFT POS ERROR) Ù C�Ä�D�� 73.5 POS
ERROR LIMIT Ç î&ï�Ú Û�Ü�Ý Þ�ß#Æ�ø à Ð�Ä���Å�á â�×&ï�ã ä H���å
������Å Ð�Ä���Å�á “ELECTR SHAFT” â�×�Ù æ�ç�É 2 +�Á�� Ð�Ä���Å�á
“FOLL FAULT”(Follower fault) Ù æ�ç N�H�A�Ì�Õ .
�E�Ï è�Ê Y�Z�é :
+�Á���ê ������Å à Ð�Ä���Å�ë C�Ä�D�� 99.2
APPLICATION MACRO = M/F CTRL Ó @�I�Æ � Ch2 +�Á�� / ì�Ó�í î�5�ï�Ó ð�ñ Ë�Ì�Õ . à Ð�Ä���Å�à Ch2 ò���á ó#ô���õ ö�÷�� ø�ù�Ë�Ì�Õ . ú Á�� / ������Å�à î�û�Ý Ö#ü�ý�á þ�Ä�ÿ�� ú Á�� Ð�Ä���Å�á 72.1
MAST/FOLL MODE = MASTER, ������Å Ð�Ä���Å�á þ�Ä�ÿ�� 72.1
MAST/FOLL MODE = FOLLOWER Ó ð�ñ Æ�� ������Å�Ç�ý�á þ�Ä�ÿ�� 72.2
TORQUE SELECTOR = SPEED Ó ð�ñ Ë�Ì�Õ . ú Á�� Ð�Ä���Å�à þ�Ä�ÿ�� 73.1 ELSHAFT MODE SEL = MASTER, ������Å�á
SLAVE Ó ð�ñ Ë�Ì�Õ . ����� ��� Ð (  , þ�Ä�ÿ� 64.1 STANDALONE SEL = True) ª Ð�Ä���Å�ë ò�È
Æ� þ�Ä�ÿ� 10.15 ELSHAFT ON SEL Ý ð�ñ Æ�� Ê�� �ã�� ����Ý ����Ï
è�Ê ����é#Ç ò�È�ä�ã ����Æ���ç�â . �: þ�Ä�ÿ� 10.15 = EXT DI3à ����Ò ��¦ NDIO
��� #2, �ã�� ��� #1 Ý ��� Ë�Ì�Õ .
ú Á��ê ������Å
�à ð�ñ
.
ø�Ð���Á
�Ð ( þ�Ä�ÿ� 64.1 = False) �á
��� FB
� ��Á�!
�Ð�ë ò�È�ä " í�Ç�á #����£�$ no.5, %�& 1à '�$�(�Ø 4( '�$�(�Ø )�� 0….15) Ó ���
Ï è�Ê�ë ����é ç�* Û +�,�Ì�Õ .
¬.- /�0�ü�Ô�ä 1�2 þ�Ä�ÿ� :
98.1 3�4�5
��� = �
: RTAC SLOT1
50.1 Encoder pulse nr
69.1 Speed scaling rpm = 6�7 � ��Í�Î
69.2 - 5 ñ
/ 8 9�:�à Ù�;�Í ç�<
70.1 Pos scale(�
:no. of pulse/mm)
20.1 - 2 6�= /6�7 Í�Î è�> ( þ�Ä�ÿ� 69.1 ?�Õ 5% @�A ð�ñ
)
98.5 - 6 �ã�� � / B�� �#¦
��� 1 - 2 ¤�C
è�¥§¦!¨�©�ª!«�Ó�¬� ð ®
¯±°²°´³¶µ¶µ�·�¸�¹�º¼»~½�¾�¿�À5-56
5.6.15 ¨c©cª¨c©cª¨c©cª¨c©cª Ûc®Ûc®Ûc®Ûc® ;cç;cç;cç;cç -Crane lifetime monitor (74)
¨�©�ª Û�®�;�ç�à D ��E�Ò û�Ø 1.35 LIFETIME LEFT % ë î�Æ�� ¨�©�ª
Ø���Á�$�à ��F�G�ª Û�®�� H ú�I J�K�á�ã æ�ç�Æ�á L���Ì�Õ .
��L�Ò Õ�M�à û�Ø�N�Ç Ã#ü F�O.P#Ì�Õ :
- Ð�Ä���Å�à Q � � ç�< (= Å�©���¨ R�9 ç�< ), û�Ø 1.32 TOTAL OPER
TIME. û�Ø�á 'TS�U�� V��WÇ X�YTP#Ì�Õ .
- ö�Í�G�ï�Ó F�O�Ú Z�è Ø���Á�$ )�Æ , û�Ø 1.33 LOAD TORQUE ton.
- )�Æ [�\ ]�Û Km( )�Æ�ê ç�<�à 1�F�Ç 7�> ��E ), û�Ø 1.34 LOAD SPEC
FACT Km. û�Ø�á '.S^U�� V��WÇ X�Y.P�Ì�Õ .
ñ ��> )�Æ û�Ø�ë _���Ö#ü�ý�á 1�� þ�Ä�ÿ� 68.4 ê 68.5 ë `�Ð�ç ��ñ ü
Ô�Ë�Ì�Õ . ��ñ�a�b á c���ã 5-34 ë
� ��Æ���ç�â .
Note : d�e�Ý Ö�> )�Æ�f�g û�Ø�ë _���Ö�ü�ý þ�Ä�ÿ� 68.1 POWOP
SELECTI
68.2 BASE SPEED ë ð�ñ
ä ø�ù�á h�,�Ì�Õ .
i�jß
iÆ�à k 9�:�Ç�ý l�Ò )�Æ f�g�m�Ý _�A Æ�� Ö^>
Ø���Á�$�à ��F�G�] n�o�à ?jÝ Ö�ü�ý þ�Ä�ÿ� 68.12 LOADCORR FACT
UPß 68.13 LOADCORR FACT DWN Ý ��ñ ü�Ô�Ë�Ì�Õ .
�> , � þ�Ä�ÿ��N�Ò ñ�p )�Æ�Ã
i�jç
� f�g q�r�Ý s ñ '�o�Ó t Ð�á�#�Ç�Î ò�È�ä Û +�,�Ì�Õ .
û�Ø 1.33 “LOAD TORQUE ton” Ò þ�Ä�ÿ� 74.1 NOMINAL LOAD ë ��È�Æ��
s ñ '�o�Ó t N�Ê�Ô�Ë�Ì�Õ .
��F�G�] Û�®�Ò þ�Ä�ÿ� 74.3 CRANE LIFTTIME Ç�ý ð�ñ Ë�Ì�Õ .
��u ð�ñ � v^w�É� þ�Ä�ÿ� 74.3 START LIFETIMEON = ON Ç Ã�ü g�q�]
Û�® F�O�� ç�d.P#Ì�Õ .
Note : � þ�Ä�ÿ��á ò�È�& þ�Ä�ÿ��N�ß l��
W�x ä Û h�,�Ì�Õ .
û�Ø LIFETIME LEFT % Ù 10% ��Æ�Ç Î�y�Æ� Ð�Ä���Å�á “LIFTTIME>90%”
Ä�á " � V�ç�ã�ë
I�z�{ L���Ì�Õ .
NOTE :
ý�'�Á ÛWë Ö#ü |�}�à RMIO è�Ê ?�Ð�Ç�ý
� ' ?�Ð�Ó 6#û�à TOTAL
OPER TIMEß LOAD SPEC FACT Km û�Ø�m�N�Ý ��~�Æ��� ABB ý�'�Á���Ç
%�Ã#Æ���ç�â .

è.��Y�g�q�]���Ó���� ð ®
¯±°²°´³¶µ¶µ�·�¸�¹�º¼»~½�¾�¿�À 5-57
5.7 òcÈ�&òcÈ�&òcÈ�&òcÈ�& ��gcÓ��gcÓ��gcÓ��gcÓ
ò�È�& ��g�Ó�á |�}�à þ�Ä�ÿ� ð�ñ Ý V
��WÇ X�Y�Æ�á L���Ì�Õ . 2 R�Ã
ò�È�& ��g�Ó�ë t N Û +�,�Ì�Õ . ��L�Ò à�R�à ý�Ó�Õ��
��ë ���������
ë î�ü Æ I à Ð�Ä���Å�Ó � ��Æ�á
ñ ?�ë ����Æ�á�# ò�ÈTP#Ì�Õ .
� " > þ�Ä�ÿ��N�Ý X�Y�Æ�á 9�� :
1. è 2 Y g�q�] ��È Ð�Ä���Å ��Ó�������à R�ù�à æ 2-6 ��Ç ����Ú L ��� ��� #��� ����ï�Ó N�Ê�Ù���ç�â .
2. þ�Ä�ÿ� 99.2 APPLICATION MACRO ë USER1 SAVE ��Ò USER2 SAVE Ó ��� ��ç�â .
Note: ò�È�& ��g�Ó�à X�Y�� v^w.� � ��ã þ�Ä�ÿ� 10.17”User macro ch
srce” = NOT SEL Ý `�Ð�ç ��ã�Æ���ç�â .(10.17 Ò ò�È�& ��g�Ó�Ç X�Y�É#ã � ,�Ì�Õ .)
3. [ENTER] ë ��� X�Y�Ë�Ì�Õ .
|�}�à ð�ñ
m�N�Ò ò�È�& ��g�Ó�Ç X�Y.P�Ì�Õ . X�Y�Æ�á�#�Ç�á �[ ñ Î�Ã
ç�<�� =�ù�É�¡�Ó ¢�ç ��ÕW��ç�â . þ�Ä�ÿ�
ð�ñ m�N�Ò ò�È�& ��g�Ó�Ç
X�Y�Ú ð�ñ m�à £�Z h��
� " ç�* Û +�,�Ì�Õ . �.¤#Ý ¥�Õ ¦ §�Ç�Î
¤���à ò�È�& ��g�Ó ð�ñ m�Ò ��n�Ë�Ì�Õ .( Õ�� ¨�È ��g�Ó�à þ�Ä�ÿ�
ð�ñ
m�Ò �.¤^� ©���Ú
j�ªÇ�ý þ�Ä�ÿ��à ��«�m�ï�Ó Þ���é t Æ�ã
� ï� ,
þ�Ä�ÿ��m�Ý
� " >�§ [ENTER] ë ��� ¬��® X�Y.P#Ì�Õ .
ú ã�¯�ï�Ó X�Y�Ú þ�Ä�ÿ��ë ( ò�È�& ��g�Ó ) °�Ê N���á 9�� :
1. è 2 Y g�q�] ��È Ð�Ä���Å ��Ó�������à R�ù�à æ 2-6 ��Ç ����Ú L � � ��� #��� ����ï�Ó N�Ê�Ù���ç�â .
2. þ�Ä�ÿ� 99.2 APPLICATION MACRO ë USER1 LOAD � I USER2 LOAD Ó
� " Ë�Ì�Õ .
3. ENTER ë ��� ��Ó�����Ý °�Ê N���Ì�Õ .
t�± °�Ê N�s X�Y�Ú ò�È�& ��g�Ó�Ù h�Õ� â�×�V�ç�ã�Ù
I�z�² L���Ì�Õ .
ò�È�& ��g�Ó�á è 6 Y�Ç
ð ®�Ú L ���
þ�Ä�ÿ� 10.17 Ý ��È�ü �ã��
����� I ø�Ð���Á�ë î�ü �.³#ä Û +�,�Ì�Õ .

è.��Y�g�q�]���Ó���� ð ®
¯±°²°´³¶µ¶µ�·�¸�¹�º¼»~½�¾�¿�À5-58
ò�È�& ��g�Ó�á ]����Ù ñ ã�> §�Ç t  , Rdy For Run = 0 s�� ø�Ð���Á
î�û ��Ò �ã�� ����Ý î�ü
� " ç�* Û +�,�Ì�Õ . ò�È�& ��g�Ó�Ù
� "
É#á ��� Ð�Ä���Å�á � � É#ã
� Ý L���Õ . ;�ã û�Ø USER 1 �á 2
( �ã�� B�� �á ø�Ð���Á ) á ò�È�& ��g�Ó�Ã
� " � v�w É#Ê Õ�ç �����
Ù�E�ä ��ë I�z�´ Ì�Õ .
NOTE : °�Ê�N�] ò�È�& ��g�Ó�á
� ID Runà ÷�ß#ê
��à ��� #��� ð�ñ
m�Ý X�Y�Ë�Ì�Õ . ò�È�µ�]
��Ã
ð�ñ m�ß s�¶ Æ�á�ã ��]�Ë�Ì�Õ .

è.��Y�g�q�]���Ó���� ð ®
¯±°²°´³¶µ¶µ�·�¸�¹�º¼»~½�¾�¿�À 5-59
��·�Ò Ã�Î�G�ï�Ó ��¸�ï�Ó J�¹�à�º�,�Ì�Õ .


»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-1
ÏÏ ÏÏÑÐÐÐÐÓÒÒ ÒÒ Ô Õ×Ö×ØÔ Õ×Ö×ØÔ Õ×Ö×ØÔ Õ×Ö×Ø
6.1 ÙÛÚÙÛÚÙÛÚÙÛÚ
��Y�Ü�ý�á g�q�]���Ý Ð�Þ���ß þ�Þ�ÿ�.à ��E�ß ð�ñ Ü 7�á��
ð�â�ã�ä Õ .
6.2 åÛæ^çÛèåÛæ^çÛèåÛæ^çÛèåÛæ^çÛè éÛêéÛêéÛêéÛê g�q�]���Ý Ð�Þ���ß þ�Þ�ÿ��á � ��E�Ü ë�Þ ��� R.à ����ï�Ó [�×
P ä Õ . ��ì 6-1 Ò þ�Þ�ÿ� ���.à � � ä Õ . è 2 Y�Ü�á þ�Þ�ÿ�Tà ����ß ð�ñ Ü 7�á�� ð�â.í^î�ï
+�ï�å ��� #��� ð�ñ Ò è 3 Y�Ý
��� ��ð�ä Õ .
Þ�� ð�ñ
#��� ñ Z�è�m�Ü 7�á���á è 4 Y è î ��d )�[�Ü
j�ò® ð�â
í�î�ï +�, ä Õ . �> �R.à þ�Þ�ÿ��N�Ò ò�Ý í ã
� � +�ï�å ��Ó������Tà
<�=�é#ë Ö#ü ;�ó î�ï +�, ä Õ .
DôàDôàDôàDôà ! ��B�� � &�ë ���ä � á I à ��B��
� &�ë ò�Ý�á�� ��� R.à ��d
Ý ò�Ý�ä Û +�, ä Õ . ��B���� î � õ�G�Ý Ö#ü ��Ó����
í�î +�Õ� Õ��
þ�Þ�ÿ��Ó Õ�� õ�G�Ü ö�A ����>�Õ á���÷ ���.à ð�ñ N�� ��ãTP ä Õ .
��ì 6-1 þ�Þ�ÿ� ���

è.ø�Y!þ�Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-2
6.2.1 ������������ 10 c� c� c� c� ������������ -Digital Inputs
� þ�Þ�ÿ� m�N�Ò g�q�]���Ý Ð�Þ���ß�Ù � ��µ�Ü�÷
��ù Û +�, ä Õ . æ 6-1
à ð�ñ�ú Ö /
� Ö#á ð�ñ
Ù�E�> þ�Þ�ÿ� ú Ö#ë ?���û ä Õ .
j�ò> ð�â Ò ü ��ë
��� á���ç�â .
æ 6-1 ��� 10 ý�þôÿ��ý�þôÿ��ý�þôÿ��ý�þôÿ��
������������������������/ � �� �� �� �
Ì�ÍÌ�ÍÌ�ÍÌ�Í
1 BRAKE ACKN SEL INTERNAL ACK; DI1; DI2; DI5; DI6; DI_IL
���� ��� ����� ���
2 ZERO POS SEL NOT SEL; DI1; DI2; DI5; DI6; DI_IL
“0”��
����� ��� ( ������ ��� )
3 SLOWDOWN-N SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1 …EXT DI2.2; DI5+DI6; DI1.1+DI1.2; DI_IL
��� ����� ���
4 FAST STOP-N SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1 …EXT DI2.2; DI_IL
��� � � ����� ���
( ������ ��� )
5 POWER ON ACKN SEL
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1,1 …EXTDI2.2; EXT DI1.3; EXT DI2.3; DI_IL
��� �! �� ����� ���
6 SYNC SEL NOT SEL; DI1…DI6; EXT DI1.1..EXT DI2.2; DI_IL
"#�$ ����� ���
7 CHOPPER FLT-N SEL
ý�þTÿ�� 10.6 %'& (�) *�+ ����� ���
8 STEP REF2 SEL ý�þTÿ��
10.5 %'& ,�� ��-�. 2 ����� ��� ( ������ ��� )
9 STEP REF3 SEL ý�þTÿ��
10.5 %'& ,�� ��-�. 3 ����� ��� ( ������ ��� )
10 STEP REF4 SEL ý�þTÿ��
10.5 %'& ,�� ��-�. 4 ����� ��� ( ������ ��� )
11 HIGH SPEED SEL ý�þTÿ��
10.4 %'& /�� ����� ��� ( ������ ��� )
12 SNAG LOAD-N SEL NOT SEL; DI1…DI6; DI_IL
Snag 01 ����� ���
13 ACCELERATE SEL ý�þTÿ��
10.4 %'& !�� ����� ��� ( ������ ��� )
14 FB STOPLIM SEL NOT SEL; DI3+DI4; DI5+DI6; DI1.1+DI1.2
2 �3�4 � � 5�6 ����� ���
15 ELSHAFT ON SEL NOT SEL; DI1; DI2; EXT DI1.1..EXT DI2.2; EXT DI1.3; EXT DI2.3; DI5; DI6; DI_IL
� #�7 5�8 9�: ����� ���
16 FAULT RESET SEL NOT SEL; DI1…DI6; DI_IL
*�+ ;�< ����� ���
17 USER MACRO CH SRCE
NOT SEL; DI1…DI6; COMM MOD; DI_IL
ÈËÊ= > Å
� .'? �@ A�B
18 EXTERNAL FAULT NOT SEL; DI1-DI6; DI_IL
C 0 *�+ ���

è.ø�Y!þ�Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-3
1 BRAKE ACKN SEL ß�q���g ;ED�ûF�ë G^> ED�� ���Tà ���
INTERNAL ACK; DI1; DI2; DI5; DI6; DI_IL
INTERNAL ACK( H�)�G�] ;ED ) ð�ñI
ß�q���g ;ED�ûF�ë ò�ÝEJ K hEL � ò�Ý ã�äEM .
2 ZERO POS SEL “0”G�¶ ûEF�ë G^> ED�� ���.à ��� (����� �
�ENÜ ò�Ý )
NOT SEL; DI1; DI2; DI5; DI6; DI_IL
3 SLOWDOWN-N SEL ;EO�ûEF�ë G^> ED�� ��� (����� �
�NÜ ò�Ý ). DI5+DI6 P
DI1.1+DI1.2à ��� I QEQ SLOWDOWN DIR A-NR SLOWDOWN
DIR B-N ûEF�ë û äEM . DI5+DI6 ê DI1.1+DI1.2 P øN�S
�NÜ�ý
÷ ò�ÝEJ K
+�, äEM .
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1;
EXT DI2.2; DI5+DI6; DI1.1+DI1.2; DI_IL
4 FAST STOP-N SEL T�� ñ D ûEF�ë G�> ED�� ���.à ��� (
����� �
�NÜ ò�Ý )
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; DI_IL
5 POWER ON ACKN SEL �.¤ ©�� ]D�ûEFTà ED�� ���Tà ��� . è î �EU�Ü [W�V
24 Vdc �.¤^� �W.� � ò�Ý ( D��T¤ �����Tà ? � ��/�Ü ö�÷ )
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; EXT DI1.3;
EXT DI2.3; DI_IL
6 SYNC SEL SYNC ûEF�ë G�> ED�� ���Tà ��� . G�¶ X � .à áN�Y î G�]
����é#ë �EZEP�# ò�Ý .
NOT SEL; DI1…DI6; EXT DI1.1…EXT DI2.2; DI_IL
7 CHOPPER FLT-N SEL CHOPPER FLT-N ûEF�ë G�> ED�� ���.à ��� . [E\ ]^ �����
Ü ö�÷V
[E\��EU.à ]E^�ë æ�ç�áEP�# ò�Ý .
NOT SEL; DI1…DI6; EXT DI1.1…EXT DI2.2; DI_IL
8 STEP REF 2 SEL STEP REF 2 ûEF�ë G�> ED�� ���.à ��� . ����� �
�NÜ�ý M��
� �S�!�� I
M�� _�� è î ��ë ò�Ý�ç ò�Ý .
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; EXT DI1.3;
EXT DI2.3; DI-IL
9 STEP REF 3 SEL STEP REF 3 ûEF�ë G�> ED�� ���.à ��� . ����� �
�NÜ�ý M��
� �S�!�� I
M�� _�� è î ��ë ò�Ý�ç ò�Ý .
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; EXT DI1.3;
EXT DI2.3; DI-IL

è.ø�Y!þ�Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-4
10 STEP REF 4 SEL STEP REF 4 ûEF�ë G�> ED�� ���.à ��� . ����� �
�NÜ�ý M��
� �S�!�� I
M�� _�� è î ��ë ò�Ý�ç ò�Ý .
NOT SEL; DI1; DI2; DI5; DI6; E XT DI1.1…EXT DI2.2; EXT DI1.3;
EXT DI2.3; DI-IL
11 HIGH SPEED SEL HIGH SPEED ûEF�ë G^> ED�� ���Tà ��� . ����� �
�ENÜ�ý
B��.6�G�éV
O�÷ D`�m.à ���L G�ü ò�Ý .
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; DI_IL
12 SNAG LOAD-N SEL SNAG LOAD-N ûEF�ë G�> D�� ���.à ��� . øN�ES
�ENÜ�ý
�EO ñ D 2à �^��é#ë G#ü ò�Ý (�
,
i^jEaÜ t )
NOT SEL; DI1…DI6; DI_IL
13 ACCELERATE SEL ACCELERATE ûEFEb G�> ED�� ���.à ��� . ����� �
�ENÜ�ý
Motor Pot c îa
ò�Ý .
NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1…EXT DI2.2; DI_IL
14 FB STOPLIM SEL STOPLIM A d STOPLIM B ûEFEb G�> D�� ���.à ��� . øN�ES �EN
d ����� � FB
� �ES�!
�NÜ�ý ò�Ý .
NOT SEL; DI3+DI4; DI5+DI6; DI1.1+DI1.2
15 ELSHAFT ON SEL ELSHAFT ON ûEFEb G^> ED�� ���Tà ��� . ���Ee c î Ü�ý
ò�Ý .
NOT SEL; DI1; DI2; EXT DI1.1…EXT DI2.2; EXT DI1.3; EXT DI2.3;
DI5; DI6; DI_IL
16 FAULT RESET SEL NOT SEL; DI1,,,DI6; DI_IL
NOT SEL L ����á� ]E^
W�x I c îEfEg h f
NÜ�ý t Zi.P äM . t s ED�� ���EjEk ����á� ]E^EP -�) S�G�¶�Ü�ý
W�x í �
-�)Ec î
�ENs "El ÜP c îEfg Ü�ý
W�xP äEM .
ED�� ���.à
W�x I B ��/ ( m
a �En j�ª
) à R�9�Ü à#ü ��d.P ä M.( ED�� ���.à 8 oD
a)
Note: øN�ES
â `�%�& (RESET OVR) Ü à^>
W�x I -�)Ec î s � p j
q�Ý r�E�áEs ûF.à t oEDaÜ ��dTP äEM .

c.ø�Y!þ�Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-5
17 USER MACRO CH SRCE NOT SEL; DI1…DI6; COMM MODULE; DI_IL
� þ�Þ�ÿ�EP M M.à u â���� ED�� ����� I v
N�S w�ûEL
w�ü x�V
q�Ý�& ��gEkEb ����áEP�# q�Ý ã�äEM .: y t ED�� ����� I vN�ES ûEFEb ��Ü�ý XEk
��ù � ( 8 oD a
) User Macro 1 jk ut í � X�Ü�ý �Ek ��ù
� ( t oEDa
) User
Macro 2 r uEt.P äEM .
x�V
q�Ý�& ��gEkr z�}�áED � L ��ÜEP ]E^Er {
aP äM :
q�Ý�µ�] q�Ý�& ��gkP
NÞ���ßEr |E} ( &�~ tED
a, Rdy for Run
= 0) §�Ü t ED�� ����� I vN�ES wE��Ü à��
� " � K
+�, ä M. q�Ý�& ��gEk.à
� " a ÜEP
NÞ���ßEr d���áED
� L L�� äEM .
]EDE�EF USER 1 � I 2( ED�� B�� EP vN�ES ) P
� " � v^w í �
NÞ���ßEr }���� r�E
j�ªs � {
aP äEM .
18 EXTERNAL FAULT NOT SEL
-�) ]E^tEDEd Da���EL G�> ����� h�M .
DI1-DI6, DI_IL
� ��� I -�) ]E^ �FEb G�> ED�� ���Tà q�ÝEL à#ÿ ã�äEM .
-�)E]E^r UE��á� ( D�� ����� 0VDC k � îE� L � )
NÞ���ßP
tEDEJ L�� äEM .

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-6
6.2.2 ������������ 13 ü�² k��ü�² k��ü�² k��ü�² k�� ������������ -Analogue Inputs
� ��Þ�ÿ��N.à m I g�q�]���Ý
NÞ���ßEr
� ��µ�Ü�÷
� " � r�E�áEs ü �
{ 6-2à uEt ú G /� G^ÜEP uEt r�E�> ��Þ�ÿ�
ú G�L ?���D�� +�, äEM . j�ò u âI {
ü �Eb ���
��ð�äEM
.
NOTE : AI1R AI2à ���< pEI 32ms ��� EXT AI1( O�÷ ?Et )I
8ms � äEM .
{ 6-2 ��� 13.
��Þ�ÿ� ú G /
� G u â
1 SCALE AI1 0 ... 4.000 AI1à g�� � t�F K
2 FILTER AI1 0 s ... 4.00 s AI1à v�
at K
3 SCALE AI2 0 ... 4.000 AI2à g�� � t F K
4 FILTER AI2 0 s ... 4.00 s AI2à v�
at K
5 SCALE EXT AI1 0 ... 4.000 EXT AI1(RAIO)à
g�� � t F K
6 FILTER EXT AI1 0 s ... 4.00 s EXT AI1(RAIO)à
v� � t F K
7 AI1 0% REF LEV 0.0 … 10.0V O�÷ DE`�m “0” Ü 7�¨ í P AI1 �EF�q�r
1 SCALE AI1 ü�² k�� AI1 à g��
� t F K m .
2 FILTER AI1 ü�² k�� AI1 Ü 7�> v�
at K m ü�² k�� ����m��
� "Tí ºELa
��Þ�ÿ��Ü utV
a<H�Ü B���m�� 63 % Ü
÷�y.P äM . t s ut�mEL 6�=�m�] 0 �Ek ut á�5�Þ�÷
at K P 10 ms ��á
kEP í D
� , äEM .
��ì 6-2 v�
at K
3 SCALE AI2 ��Þ�ÿ� 13.1. ���
4 FILTER AI2 ��ÞE�� 13.2. ���
c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-7
5 SCALE EXT AI1 ��Þ�ÿ� 13.1. ���
6 FILTER EXT AI1 ��Þ�ÿ� 13.2. ���
7 AI1 0% REF LEV � ��Þ�ÿ��ÜE�EP “0%” O�÷ DE`�m�Ü 7�¨ í P AI1 à 6^= �E��mEL uEt ã�ä M. 4~20mA à D` �FEr AI1 Ü �E� í º M 500 � X p L D I 2-10V �EF
r D îE��äEM . ����F ú G 2-10V P 0-100% à O�÷ DE`�m�Ü '� ã�äEM .
(�
: 6V=50%) � ��Þ�ÿ��Ü uEtV
m ��á.à �E� I 0% O�÷k ]�TP äEM .

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-8
6.2.3 ������������ 14 ��q����q����q����q�� B��B��B��B�� -Relay Outputs j�òu âI { 6-3 ��Ü u â.í�î +�, äM .
NOTE : ��q�� B��Tà �E�a< I 32ms � äM .
{ 6-3 ��� 14.
��Þ�ÿ� ú G /
� G u â
1 RELAY RO1 OUTPUT ��q���B�� 1à H�Ý
2 RELAY RO2 OUTPUT ��q���B�� 2à H�Ý
3 RELAY RO3 OUTPUT ��q���B�� 3à H�Ý
4 EXT1 DO1 OUTPUT #1 RDIO, DO1à H�Ý
5 EXT1 DO2 OUTPUT #1 RDIO, DO2à H�Ý
6 EXT2 DO1 OUTPUT #2 RDIO, DO1à H�Ý
7 EXT2 DO2 OUTPUT
j�òq pI
ü �Tà �L ��� á��a] .
#2 RDIO, DO2à H�Ý
1 RELAY RO1 OUTPUT ��q���B�� 1à ��d �E� L
ü �Ed l�� ���EJ K +�, äEM .
NOT USED
READY NÞ���ßTà
� ���' v^w
j�ª. �.¤^]Er ]ED�EF (
�: DI2) r hE� I DC �ES
à �E�E�� , “� j ¶ ��> ����9D ” ��kEr R�9�]
"El( ��
NÞ���ß ) EP
]E^j��ÜE�EP ��q��r ��d í D
� , äEM .
RUNNING
g�q�]���Ý
NÞ���ßEr O�÷Ed f�g c î � �^��~�d ¡ ��� ã�äM .
FAULT
]E^ UE� .
j�ò q pEI c 7 Y ]^ ó�G H�Ý
���.
FAULT-N
�.¤ �EWa
��q�� ��d , ]^ UE�a
��q�� ¢�£ .
CONTROL LOC
c î G�¶ .
NÞ���ß c îEfEg Ü� ���
V -^) I kE¤
� � Y�=EDa
. CONTROL
LOC = False P kE¤ � �
�EN( c îEfg ) b D
a ã�äEM.
BRAKE LIFT
��F c���Y�¶Eb c î á�� G�> �EF .

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-9
WATCHDOG-N
wE�j�ª
;a
(MAS OSC FLT EP MF COMM ERR), c�� [E\ ]E^ (CHOPPER
FLT, BC OVERHEAT, BC SHORT CIR EP BR OVERHEAT), -�) ]^ (EXT
FAULT) d c���Y�¶.à Ya< ��d
a(BRAKE LONG FTIME) D
a. �> CPU r ¥ ó î �¦EL ��Ü�÷ D
aP äEM . �� �� ��F�P��F�P��F�P��F�P g�q�]g�q�]g�q�]g�q�]
NÞ���ßôà
NÞ���ßôàNÞ���ßôà
NÞ���ßôà '
jt�DaÜ'
jt�DaÜ'
jt�DaÜ'
jt�DaÜ
q�Ýq�Ýq�Ýq�Ý P äP äP äP äEMMMM .
NOTE : vN�ES w�
j�ª ;a
(MAS OSC FLT) P vN�ES
�ENd ����� �
FB � �ES�!
�ENÜ� t q�Ý r�E ã�äEM .
USER 1 OR 2
q��& ��gEk 1 � kN
í � I (=0), q�Ý�& ��gEk 2 r k
N í ºEL � (=1)
{a
.
REVERSE
����� �^��� 8�9�:�s � Da
.
OVERSPEED
�����Er R�O � �EjEk tEDa
Da
.( ��Þ�ÿ� 61.3 ÜE� ��d ú G ut )
RDY FOR RUN
�����Er &�~ (ON
j�ª) í º��
� �J �� �
í ºEL � Da
.
SPEED LIM 1
�����.à a 7�¶ O�÷�m�� ��Þ�ÿ� 61.4 SPEED LIM 1 ? M @L � d��
LIFETIME>90%
g�q�].à K�â ;
a �F 1.35 LIFETIME LEFT% r 10%( ��Þ�ÿ� 74.2 CRANE
LIFETIME à ¸�[�o ) ��áEr í ºL � d�� .
2 RELAY RO2 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���
3 RELAY RO3 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���
4 EXT1 DO1 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���
5 EXT1 DO2 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���
6 EXT2 DO1 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���
7 EXT2 DO2 OUTPUT ��Þ�ÿ� 14.1 RELAY RO1 OUTPUT ���

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-10
6.2.4 ������������ 15 ü�² k��ü�² k��ü�² k��ü�² k�� B��B��B��B�� -Analogue Outputs
� ��Þ�ÿ�EP
NÞ���ßr
� ��µ�Ü�÷
� " � r�E ã�äM . { 6-4 à uEt ú G / � G�ÜEP uEt r�E�> ��Þ�ÿ� ú G�L ?���D�� +�, äM .
j�ò u âI {
ü �
b ���
��ð�äM
.
NOTE : ü�² k�� B��Tà �E�
a< I 32ms � äEM .
{ 6-4 ��� 15.
��Þ�ÿ� ú G /
� G u â
1 ANALOGUE OUTPUT 1 ü � u â
���.
ü�² k�� B�� 1 à HÝ .
2 INVERT AO1 NO; YES ü�² k�� B�� 1 à �F�`�� .
3 MINIMUM AO1 0 mA; 4 mA ü�² k�� B�� 1à uEt
6�=�m .
4 FILTER AO1 0.00 s ... 10.00 s AO1 v�
at K .
5 SCALE AO1 10 % ... 1000 % ü�² k�� B�� 1à g�� � t F K .
6 ANALOGUE OUTPUT 2 ü � u â
���.
ü�² k�� B�� 2à H�Ý .
7 INVERT AO2 NO; YES ü�² k�� B�� 2 à �F
`�� .
8 MINIMUM AO2 0 mA; 4 mA ü�² k�� B�� 2 à �F
6�=�m .
9 FILTER AO2 0.00 s ... 10.00 s ü�² k�� B�� 2 à v� at K .
10 SCALE AO2 10 % ... 1000 % ü�² k�� B�� 2à g�� � t F K
1 ANALOGUE � ��Þ�ÿ�P ü�² k�� B�� AO1( �E^ �EF ) Ü
î � B�� �EFb �E�J
OUTPUT 1 DEb ���EJ K
+�A ã�äEM . ü ��ÜEP ��Þ�ÿ� 15.5 SCALE AO1à g�� � tEL 6^7 100% k ut�> LEL ?���û äEM .
NOT USED MEAS SPEED
����� �^�EO�÷ §Et .(RTAC
���). 0mA = ����� 6�7 ���O�÷.à -100 %
( ��Þ�ÿ� 20.1 R 20.2), 10mA = 0% O�÷ , 20mA = ����� 6�7 ���O�÷Tà
+100% SPEED ����� �^�EO�÷ . 20 mA = ����� t p O�÷.à 100 %(
a 7�m ).

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-11
FREQUENCY
B�� DE� K . 20 mA = ����� t p D� K . CURRENT
B�� �E^ . 20 mA = ����� t p �E^ . SIGN TORQUE
����� f�g . 0 mA = ����� t p à -100% :TORQUE REF SCALE* ( ��Þ�ÿ�
64.9), 10 mA = t p f�g.à 0 %, 20 mA = ����� t p f�g.à + 100%
:TORQUE REF SCALE * POWER
����� Ý� . 20 mA = ����� t p ÝE�Tà 100% (a 7�¶ ).
DC BUS VOLT
DC �ES �E� . 20 mA = 6�7 DC �ES �E�Tà 100%, 6�7 t p DC �E� =
675V(500V unit), 560V(400V unit) OUTPUT VOLT
����� �� . 20 mA = ����� t p �� . SIGN POSACT
G�¶E§Et (RATC) m ( �EF 2.18 ���
). 0 mA = -32767 �EU ( ��Þ�ÿ� 70.1 ÜE� g�� � t ), 10 mA = 0 �U , 20 mA = +32767 �EU . SIGN SP REF
O�÷ DE`�m (Speed ref3 = r�;O �E¨���Ü à�> B�� ), 0 mA = ����� 6�7 O�÷
( ��Þ�ÿ� 20.1 & 20.2)à -100%, 10 mA = 0% O�÷ , 20 mA = ����� 6�7 O�÷Tà
+100%. 2 INVERT AO1 YES ���
a ü�² k�� B�� AO1
I `���© .
3 MINIMUM AO1
ü�² k�� B��.à 6�=�m��Es 0 mA I
4 mA k uEtEJ K
+�, äEM . 4 FILTER ON AO1
ü�² k�� B�� AO1à v�
at K . ü�² k�� B���m��
�J � B���m�� 63 % �D ÷�y áEP
a<EL ª�áEs
t s
6�=�m 0 s k uEt�á� v�EP ��d í D � , äM .( c��ED 6-6 ��ì 6-2
���)
5 SCALE AO1 � ��Þ�ÿ�P
ü�² k�� B�� AO1à g�� � t�m��Es 100% uEt
a t p B���m I
20 mA r P äEM . t s 6�7 B���m�� 6�7 g��
� t�m�? M GELaP ��Þ�ÿ
mEL «Era¬
� t��
a] .
6 ANALOGUE � ��Þ�ÿ�P
ü�² k�� B�� AO2( �E^ �EF ) Ü î � B�� �EFb �E�JEDEb
OUTPUT 2 ���J K
+�A ã�äEM . ü ��ÜP ��Þ�ÿ� 15.10 SCALE AO2à g�� � tEL 6�7

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-12
100% k ut�> LL ?���û äEM . NOT USED SIGN SPEED
����� O�÷ . 0mA = ����� 6�7 ���O�÷.à -100 % ( ��Þ�ÿ� 20.1 R 20.2),
10mA = 0% O�÷ , 20mA = ����� 6�7 ���O�÷Tà +100% SPEED
����� �^�EO�÷ . 20 mA = ����� t p O�÷.à 100 %(a 7�m ).
FREQUENCY
B�� DE� K . 20 mA = ����� t p D� K . CURRENT
B�� �E^ . 20 mA = ����� t p �E^ . TORQUE
����� f�g . 20 mA = ����� t p f�g.à 100% (a 7�m ).
POWER
����� Ý� . 20 mA = ����� t p ÝE�Tà 100 %(a 7�m ).
DC BUS VOLT
DC �ES �E� . 20 mA = DC �ES.à 6^7 �E� ( ��Þ�ÿ� 15.1 ���
) OUTPUT VOLT
����� �� . 20 mA = ����� t p �� . TORQUE REF
f�gEc î ��Ü q�Ý í P f�g DE`�m . 20 mA = ����� t p f�g.à 100 %(a 7�m )
SIGN SP REF
O�÷ DE`�m (Speed ref3 = r�;O �E¨���Ü à�> B�� ), 0 mA = ����� 6�7 O�÷
( ��Þ�ÿ� 20.1 & 20.2)à -100%, 10 mA = 0% O�÷ , 20 mA = ����� 6�7 O�÷Tà
+100%. 7 INVERT AO2 ��Þ�ÿ� 15.2
���.
8 MINIMUM AO2 ��Þ�ÿ� 15.3
���.
9 FILTER ON AO2 ��Þ�ÿ� 15.4
���.
10 SCALE AO2 ��Þ�ÿ� 15.5
���.

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-13
6.2.5 ������������ 16
aS�
aS�aS�
aS� c î ���c î ���c î ���c î ��� -System Ctr Inputs
{ 6-5à uEt ú G /� G�P uEt r�E�> ��Þ�ÿ� m�NEL ?���û äEM .
j�ò q p I
{ ü �Eb
��� ��ð�äEM
.
{ 6-5 ��� 16
��Þ�ÿ� ú G /
� G u â
2 PARAMETER LOCK OPEN; LOCKED ��Þ�ÿ� ¢E® ��� .
3 PASS CODE 0 ... 30 000 ��Þ�ÿ� ¢E®E�c 4N
8 FAN SPD CTRL MODE CONST 50HZ;
RUN/STOP;
CONTROLLED
¯ O�÷Ec î
�N
9 FUSE SWITCH CNTR OFF; ON °E± S�G^¶ c î
10 INT CONFIG USER 1 … 12 ]��� ��
��� K
2 PARAMETER ��Þ�ÿ�.à ¢E® ��EEL uEt / �Ec á���& J � q�Ý ã�äM . ²Er í D �EI
LOCK ��Þ�ÿ�Tà
� " L ¯L K
+�, äM .
OPEN
��Þ�ÿ� ¢E®E�c . ��Þ�ÿ�
� " � r�E ã�äM .
LOCKED
c îEfEg ÜE� ��Þ�ÿ� ¢E®EL ut�á� ��Þ�ÿ�
� " � �Er�E�áEs ��Þ�ÿ�
16.3 PASS CODE Ü ��n�> 4Nb ���E�E³ t ��Þ�ÿ� ¢E®�� �Ec P äEM .
Note : q�Ý�& ��gkEb q�ÝEJ "El ÜP � ��EEL q�ÝJ
K h�, äM .
3 PASS CODE � ��Þ�ÿ�P ��Þ�ÿ� ¢®�Ü q�ÝT� f S�4
Nb uEt ã�äM .
��� uEt�m I “0” � äM . ��Þ�ÿ� ¢E®���EL �Ec�á�� G^> f S 4
NP 358
� äEM . ¢E®���E�� �c í &��Ejk ��Þ�ÿ��m�� “0” jEk
� " P äEM .
8 FAN SPD CTRL ACS800 �E�NÞ���ß�Ü +P ]���
¯ à ����G�] O�÷Ec î b G�> c î�EN
MODE. ���
CONST 50HZ ¯ à O�÷c î h�M . ¯IEp j
50 EP 60Hz à t p tEO�÷ � iEL
ã�äEM.
RUN/STOP ¯EI ]���Er
a�ad 6�=Ec�> ´�÷b ��R^>
"El Ü t p tEO�÷ � iEL ã�äEM
.
CONTROLLED

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-14
¯ O�÷EP ]���Tà ´�÷�Ü ë�Þ t p O�÷.à 30~110% q���ÜE� c î P äEM .
9 FUSE SWITCH ����G�] ]��� DC °± S�G�¶Eb G�> ��Þ�ÿ�.à ����~ .
CNTR
OFF
DC °E± S�G^¶ c î b G�> ��E '.�^��~ . DC °E± S�G^¶Er u�¶V
"El Ü
P `NEa
��Þ�ÿ�Eb ON jEk ���E�³ ã�äM
.
ON
DC °E± S�G^¶ c î b G�> ��E.à �^��~ . ����G�] DC S�G�¶r u�¶V
"El ÜEP ON jk ����á��a] .
10 INT CONFIG n*8i g��.à ]���b G�>
��Er�E�> ]���
���à �� . � ��Þ�ÿ�EP
USER Reduced Run( G I µEjEk � �EJ � ) ��EL G�� ¶�� í � R8i ]���
����
cE� í ºL � (�
: K W b G�>
"El) ��� ]���.à �� ( �E�
V
���à K
) Ü
7�¨�áEP ·�&��³ ã�äM
. t s ��� ]���.à �� K d ��Y B��
a uEt
V
m�� l M � ��Þ�ÿ�EP ü _¸ à�ÿEr h�, äEM .

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-15
6.2.6 ������������ 20 c�>c�>c�>c�> -Limits
� ��Þ�ÿ�EP
NÞ���ßr
� ��µ�Ü�÷
� " � r�E ã�äM . { 6-6à uEt ú G / � G�ÜEP uEt r�E�> ��Þ�ÿ� ú G�L ?���D�� +�, äM .
j�ò u âI {
ü �
b ���
��ð�äM
.
{ 6-6 ��� 20.
��Þ�ÿ� ú G /
� G u â
1 MINIMUM SPEED - -18 000/( ¹ K
)rpm...
6�7EO�÷ ( ��Þ�ÿ�
20.2 à ut�m )
� � 6�XO�÷ . SEº�Þ �ENÜE�P q�ÝJ
K
h�M (3-3 » � � )
2 MAXIMUM SPEED - 6�XEO�÷ ( ��Þ�ÿ�
20.1 à ut�m )...
18 000 /( ¹ K
)rpm
� � 6��O�÷ . SEº�Þ �ENÜE�P q�ÝJ
K
h�M .
3 MAXIMUM CURRENT A 0.00 Amp...Imax Amp 6�7 B����E^
4 MAXIMUM TORQUE 0.0 %...600.0 % + 6�7�B�� f�g
5 MINIMUM TORQUE -600.0 %...0.0% - 6�7�B�� f�g .
6 OVERVOLTAGE CTRL ON; OFF ¼E^ R��� c î �
7 UNDERVOLTAGE CTRL ON; OFF ¼E^ X��� c î �
8 MINIMUM FREQ -300.00 Hz...
6�7�DE� K ( ��Þ�ÿ�
20.9 à uEt�m )
� � 6�X DE� K .
SEº�Þ
�NÜE� t
q�Ý r�E .
9 MAXIMUM FREQ 6�X�DE� K ( ��Þ�ÿ�20.8 à uEt�m )
...300.00 Hz
� � 6�� DE� K .
SEº�Þ
�NÜE� t
q�Ý r�E .
10 SPEED LIMIT AI3 0.0%...100.0% AI3à O�÷ c�> ����~
11 P MOTORING LIM 0.0%...600.0% 6�7
����d.à B��
12 P GENERATING LIM -600.0%...0.0% 6�7 U�����d.à B�� .
13 TORQ RISE T LIM 0…”max”%/ms f�g
jE½a< c�>
1 MINIMUM SPEED O�÷ c î ��Ü ?EHEDP 6�XEO�÷ D`.à c�>�m�� äM . ����m I
� ����Ü
ë�Þ -750, -1000, -1500, -3000 rpm r P äEM .
" �" �" �" � : uu uuEt�m��t�m��t�m��t�m�� + s���Ps���Ps���Ps���P ������P������P������P������P 0 O�÷�kO�÷�kO�÷�kO�÷�k ;�O í D;�O í D;�O í D;�O í D � j�s� j�s� j�s� j�s ��� â `����� â `����� â `����� â `�� c��c��c��c�� aa aa
t�Dt�Dt�Dt�D P ä�MP ä�MP ä�MP ä�M !
� c�>�m I Sº�Þ c î�ENÜ�EP q�ÝEJ K h�, äEM .
2 MAXIMUM SPEED 6�7EO�÷ uEt c�>�m�� äEM . ��� ut�m I �tV
������Ü à�� �t í s

c.ø�Y���Þ�ÿ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-16
��m I 750, 1000, 1500 EP 3000 rpm � äEM .
" �" �" �" � : u�t�m��u�t�m��u�t�m��u�t�m�� - s���Ps���Ps���Ps���P ������P������P������P������P “0” O�÷�kO�÷�kO�÷�kO�÷�k ;�O í D;�O í D;�O í D;�O í D � j�s� j�s� j�s� j�s ��� â `��� â `��� â `��� â ` c��
ac��a
c��a
c��a
t�Dt�Dt�Dt�D P ä�MP ä�MP ä�MP ä�M !
� uEt�m I Sº�Þ
�NÜE�EP q�ÝEJ K h�, äEM .
3 MAXIMUM CURRENT A
NÞ���ßr ������Ü �EWEJ
K +EP 6�7 B����E^�m � äM . ��� uEt
m I ACS800
NÞ���ß�Ü {��
V “Imax” �E^�m�� äEM . ACS600 ��
NÞ���ß
à ����m I X�yEk��
jà m�? M ¾¿�] “200% Cycle load” � äEM .
4 MAXIMUM TORQUE ������Ü �EWEJ K
+P À�< 6�7 ²�Ý + f�g�mEL ut ã�äM . ACC800I
]���Ed �����Tà #����Ü à�� 6�7 f�g ut�mEL c�> ã�äM . ��� uEt
m I ����� t p f�gTà 200% � äEM .
� c�>�m I Sº�Þ c î�ENÜ�EP q�ÝEJ K h�, äEM .
5 MINIMUM TORQUE ������Ü �EWEJ K
+P À�< 6�7 ²�Ý - f�g�mEL ut ã�äM .
ACC800I
]���Ed �����.à #����Ü à�� 6�7 f�g uEt�mEL c�> ã�äEM .
��� uEt�m I ����� t p f�gTà -200% � äEM .
� c�>�m I Sº�Þ c î�ENÜ�EP q�ÝEJ K h�, äEM .
6 OVERVOLTAGE CTRL DC R��E� c î ��EL uEt / �Ec
a q�Ý ã�äEM .
s�`�GEjk �����Er U��
�ENk ��d
a DC �ES �E��� c�>�¶ �
jjEk
«Er�á� c î �P R^�� ��dEL 9ED�á�� G�� �����Tà f�gEb «r ( t�9�:
���a
)
aEÁ äM. Note : c����c����c����c���� [�\[�\[�\[�\ q�Ý
aPq�Ý
aPq�ÝaPq�Ý
aP RÛ���RÛ���RÛ���RÛ��� c î ��Ec î ��Ec î ��Ec î ��E u�t�Lu�t�Lu�t�Lu�t�L ��c��c��c��c a�¬
³ ã�ä�Ma�¬³ ã�ä�M
a�¬³ ã�ä�M
a�¬³ ã�ä�M .
7 UNDERVOLTAGE CTRL X��E� c î ��E.à uEt / �Ec
a q�Ý ã�äM .
�����E� ;�=�Ü ë�� DC �ES �E� Â�áa
X��E� c î �EP DC �S �E�
L á�>�¶ �jjEk �D�á���G�� ����� O�÷b Ã�� äM . �����b ;EOE Ej
kE� )�áTà 1^��Ü à^> ����ÜÄEDEr
NÞ���ß�Ü ��� í�î DC �S �E�EL
sEt�á�A �EDE jEkE� X��E� U�EL 9ED ã�äEM
. ¤�Å�[W� I
¯ l I
1���� Æ )�á�ÜE�EP �Ek�]�> B���£�Z�� U� P äEM .
8 MINIMUM FREQ B�� DE� K uEt�mTà 6�X�¶ uEta
q�Ý ã�äEM . " �" �" �" � : u�t�m��u�t�m��u�t�m��u�t�m�� + s���Ps���Ps���Ps���P ������P������P������P������P “0” O�÷�kO�÷�kO�÷�kO�÷�k ;�O í D;�O í D;�O í D;�O í D � j�s� j�s� j�s� j�s ��� â `��� â `��� â `��� â ` c��c��c��c�� aa aa
t�Dt�Dt�Dt�D P ä�MP ä�MP ä�MP ä�M !

c.ø�Y���ÞEÇ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-17
� ��E I SEº�Þ
�ENÜE� t q�Ý r�E ã�äM .
9 MAXIMUM FREQ B�� DE� K ut�m.à 6�7�¶ uta
q�Ý ã�äM . " �" �" �" � : u�t�m��u�t�m��u�t�m��u�t�m�� - s���Ps���Ps���Ps���P ������P������P������P������P “0” O�÷�kO�÷�kO�÷�kO�÷�k ;�O í D;�O í D;�O í D;�O í D � j�s� j�s� j�s� j�s ��� â `��� â `��� â `��� â ` c��
ac��a
c��a
c��a
t�Dt�Dt�Dt�D P ä�MP ä�MP ä�MP ä�M !
� ��E I SEº�Þ
�ENÜE� t q�Ý r�E ã�äM .
10 SPEED LIMIT AI3 ü�² k�� ��� 3 à �����E^Er 10mA ��á���
NÞ���ß�Ü D î DEP O�÷
DE`�m I � ·�Ü uEtV
mEjEk c�> í � 10mA �j�� O�÷ c�> I ��d í D
� , äEM . 100% P ��ÞEÇ� 69.1 SPEED SCALING RPM Ü uEtV
O�÷
d l�, äM .
� ��E I ����� �
�Nd v
N�ES
�EN
�¾�ÜE� q�ÝEJ
K +�, äEM .
11 P MOTORING LIM ]����Ü� ������Ü �WEJ K
+EP À�< 6^7 ²�Ý Ý�EL ut ã�äM .
� m I �����Tà t p ����Ü 7�> ¸�[�oEk {aP äM .
12 P GENERATING LIM ������Ü� ]����Ü �EW.� K
+EP À�< 6^7 ²�Ý ÝE�EL uEt ã�äEM .
� m I �����Tà t p ����Ü 7�> ¸�[�oEk {aP äM .
13 TORQ RISE T LIM � ��ÞEÇ�EP ÈW� � M �E� í P 6�7 ²�Ý f�g DE`�mL c�>�áEP�#
q�Ý.P äM . c�>�mTà B�� I 2.14 TORQ USED REF �Es ����m (= 6^7�m )I
]���Ed ����� g��Tà � ã Ü ë�Þ MÉ�äEM
.
NOTE: ��� 99 à
��#���EP � ��ÞEÇ�b uEt�á�� ��Ü uEt
í^î ³ t ã�äEM.
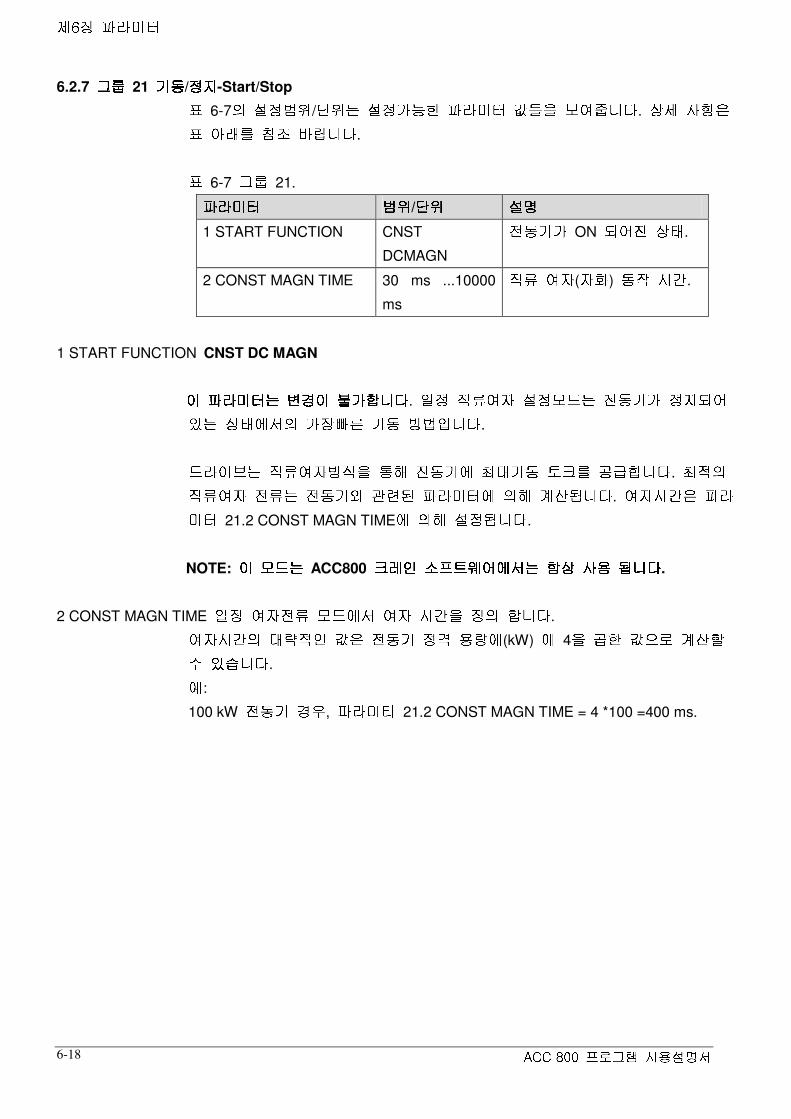
c.ø�Y���ÞEÇ�
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-18
6.2.7 ������������ 21 ������������ / t�Dt�Dt�Dt�D -Start/Stop
{ 6-7à uEt ú G / Ê�G�P uEtEr�E�> ��ÞEÇ� m�NEL ?���û äEM .
j�ò q pEI
{ üEË b
��� ��ð�äM
.
{ 6-7 ��� 21.
��Þ�Ç���Þ�Ç���Þ�Ç���Þ�Ç� ú Gú Gú Gú G / Ê�GÊ�GÊ�GÊ�G u âu âu âu â
1 START FUNCTION CNST
DCMAGN
�����Er ON í^î }
j�ª.
2 CONST MAGN TIME 30 ms ...10000
ms
¼E^ ��& ( &�~ ) ��d
a< .
1 START FUNCTION CNST DC MAGN
�� �� �����P�����P�����P�����P
� " �� " �� " �� " � ��r ã�ä�M��r ã�ä�M��r ã�ä�M��r ã�ä�M . sEt ¼E^���& uEt
�ENP �����r tED í^î
+EP
j�ªÜE�.à r�YT�� ��� 9���� äEM .
NÞ���ßP ¼E^���&�9�EL wE� ������Ü 6^7���� f�gEb �EW ã�äM . 6^G.à
¼E^���& �E^EP �����d 1�2V
��ÞÇ��Ü à�� F�OTP äEM . ��&a< I ��Þ
Ç� 21.2 CONST MAGN TIME Ü à�� uEtTP äEM .
NOTE: �� ��
��NP
��NP
��NP
��NP ACC800 g�q�]g�q�]g�q�]g�q�] =���$
Y î Ü���P=���$Y î Ü���P=���$Y î Ü���P=���$Y î Ü���P
p jp jp jp j q�Ýq�Ýq�Ýq�Ý PP PP ä�Mä�Mä�Mä�M .
2 CONST MAGN TIME sEt ��&��E^
�EN� ��&
a<EL tTà
ã�äM.
��&a<Tà 7EÌ�G�] m I ����� t p ÝE��Ü (kW) Ü 4 L Í�> mjk F�OEJ K
+�, äM . �:
100 kW ����� "El
, ��ÞEÇEÎ 21.2 CONST MAGN TIME = 4 *100 =400 ms.

c.ø�Y���ÞEÇEÎ
»½¼¾¼À¿ÂÁÂÁÄÃTÅTÆ�ÇÉÈËÊTÌ�ÍTÎ 6-19
6.2.8 ������������ 23 O�÷�c îO�÷�c îO�÷�c îO�÷�c î -Speed Ctrl
� ��ÞEÇÎEP
NÞ���ßr ÏEÐ�µ�Ü�÷
� " � r�E ã�äM . { 6-8à uEt ú G /
Ê�G�ÜEP uEt r�E�> ��ÞEÇEÎ ú G�L ?EÑ�DÒ +�, äM .
j�ò u âI {
üË
b ���
��ð�äM
. � ��ÞEÇEÎP SEº�Þ c î ÓNÜE�P q�ÝEJ K hEÔ äEM .
{ 6-8 ��� 23. ý�þôÿ��ý�þôÿ��ý�þôÿ��ý�þôÿ��
������������/ � �� �� �� �
Ì�ÍÌ�ÍÌ�ÍÌ�Í
1 GAIN 0.0 ... 100.0 ��Õ 5�8 # @ Ö�× ��Ø
. #�Ù .#�Ù .#�Ù .#�Ù . = 15
2 INTEGRATION
TIME
0.01 s ...
999.98 s
��Õ 5�8 # @ Ú�Û Ü�Ý . #�Ù .#�Ù .#�Ù .#�Ù . = 0.2 – 0.5 sec
3 DERIVATION TIME
0.0 ms ...
9999.8 ms
��Õ 5�8 # @ ÿ Û Ü�Ý .
4 ACC COMPENSATION 0.00 s ...
100.00 s
!�� Þ�ßÜ @ ÿ Û Ü�Ý .
Note: ID RUN àà àà “0” ? Å? Å? Å? Å Ì��Ì��Ì��Ì��
.
5 SLIP GAIN 0.0% ...400.0% � "# áâ @ Ö�× ��Ø . .
6 AUTOTUNE RUN NO; YES ��Õ 5�8 # @ = " & � .
7 FEEDB FILTER TIME 0 - 100 ms � "# ã5 ��Õ @ 2� Ü�Ý
8 SPEED STEP -1500.00 rpm
… 1500.00 rpm
DriveWindowÊ
��Õ ��ä
��� 23à ��ÞEÇÎ 1 ÜE� 5 å �EDEæ 6 å Autotune run L uEt EjkE�
ACC800 O�÷ c îEç à PID �EèEé�EL êEtJ K ëEÔ äEM .
ì ��ÞEÇÎ.à uEtEí I îEc O�÷Eí�R DE`Eí q
ìà ïð�Ü ñEò O�÷Ec îEç
à óEô õ�~ yö L tTà ã�äEM
. ÷�ì 6-3I
O�÷ c îç à øEÊEùú (Step
Response) Ü ñò ÐûüEý yEö L æþEHEÒ ëEÔ äEM .
øEÊEùEú�Ü ñEò yEö I
îEcE�EF 1.1 SPEED ESTIMATED b w�áEÑ ÿ�ýEJ K ëEÔ äM .
NOTE : Ð�� ç à {E� ID Run ( c 3 � – ç ���
ìÎ �Eê ) í�� I ��ÞÇEÎ 23.1,
23.2 d 23.4 Ü �kEÏ í��Ek ����� M .
ACC ü� ü� ü� ü� �����Y����
�����Y����
�����Y����
�����Y����
� ò� ò� ò� ò ID Run �� �� ����Ç�Î����Ç�Î����Ç�Î����Ç�Î 23.1 = 15, 23.2 = 0.5, 23.4 = 0
kk kk u�t����a]u�t����
a]u�t����a]u�t����
a] .
�EO���� O��c
�� �EüEý
K i I �E��
(Gain) íEL ���EÒ ü� a�!
L
ÃEÑ "�#a�$ K
ëEÔ�� M .
O��Ec� ç � óôEí I %�&Ec
� ç � '�(Eíì�)
s
ìí�* ���EÇEÎ 20.4
MAXIMUM TORQUE d 20.5� MINIMUM TORQUE
� ��� cò ���+ .

c,-�����EÇEÎ
.0/1/32545476�8�9�:<;>=�?�@�A 6-20
A: ��B�# : 23.2 INTEGRATION TIME C�D EEÒ 23.1 GAIN C�D F�G
B: H�IüEý ê�J , K��ê�J
C: H�IEüý ê�J , L��ê�J . B B�+ D�LEò �ü�L�M .
D: N�B�# : 23.2 INTERGRATION TIME C�D EEÒ 23.1 GAIN C�D O�G
÷�P 6-3 ø�Q '�(�R 1~10%
� ñEò S���T
� ç � ø�Q ùEú�U ö .
÷�P 6-4 S�� T� ç � V�W�� .
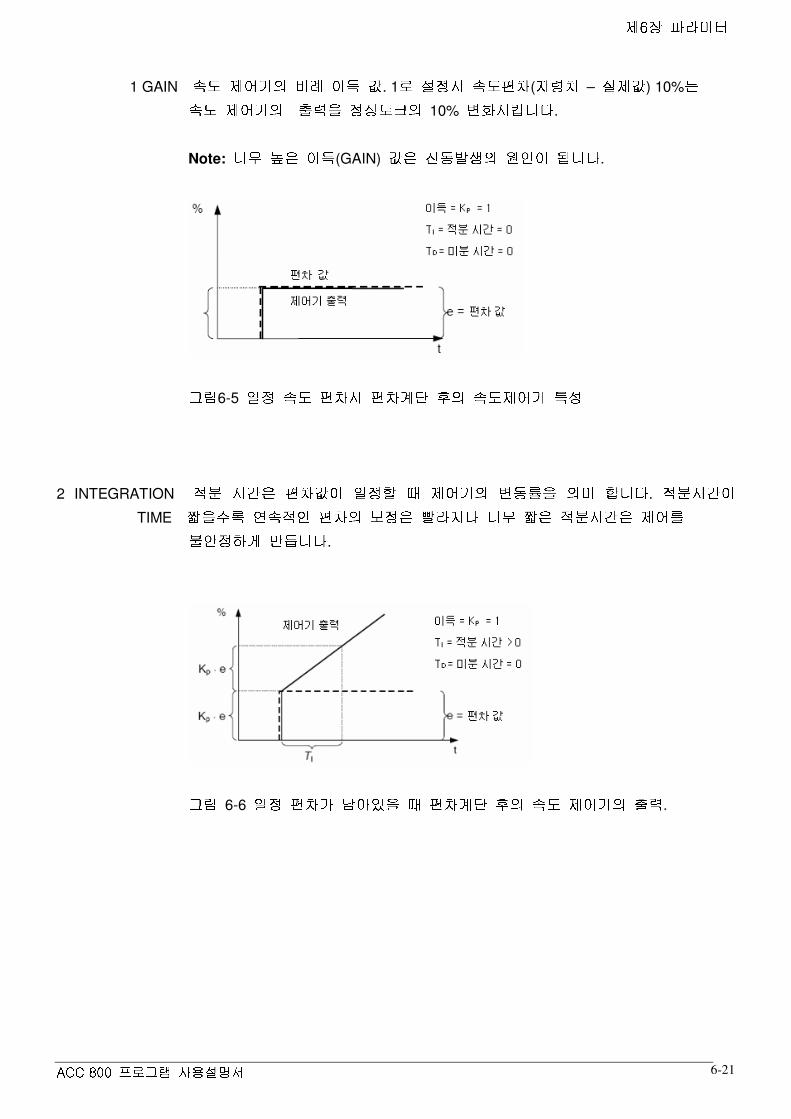
T,-�YX���ZEÎ
.0/1/32545476�8�9�:<;>=�?�@�A 6-21
1 GAIN S�� T� ç � ��[
ì�� í . 1 \ ]�J�^ S��ïEð ( '�(�R – î�TEí ) 10% _
S�� T� ç � óEô�` J�#�%�&�� 10% õa�^�b���+ .
Note: c�d O�*
ì��(GAIN) í�* e���f�g� h�ý
ì ���+ .
÷�P 6-5 H�J S�� ïð�^ ïEðEø�Q ��� S���T� ç
U ö
2 INTEGRATION ü� ^!* ïEðEí
ì H�J�i j T
� ç � õ���k�` ��Z l���+ . ü� �^!ì
TIME E�`�L�W m�Süý ïEð� B�J�* n���'Eæ c�d E�* ü� �^!* T
��o p�q J���r s�t���+ .
÷�P 6-6 H�J ïEð�u v�wEë�` j ïðEø�Q �� S�� T� ç � óô .

T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-22
3 DERIVATION Z� �y� �* ïEðíì
õ�i j T� ç � óEô�` #�z�^�{�| } Z� �^
!* ïð
TIME õa�^ T� ç � óEôEí�` ~�� #�z�^�b���+ . �Eò Z� �y� �* �������
ìæ
����
ñ�� ùú ö ` ����r s���
����+ . Z� �^!` 0 ��\ ]�J�^ T
� ç
_ PI T� ç \ ��y
)| ÷�
�_ PID T
� ç \ ��y����+ .
÷�P 6-7 H�J ïEð�u v�wEë�` j ïðEø�Q �� S�� T� ç � óô
NOTE:
ì X���Z�x�_ ��������~ �� �^
�s õ�� ����^�� .
4 ACC COMPENSATION u�S�B�#�` ��ò Z� �^!
]�J . u�S���_ � q � ö ` B�#�� ç ���
S���T� ç � óôEíN '�(�R� Z� Eí
ì ~�������+ . Z� ���y� h���_ ���
3 � DERIVATION TIME
� K���� ]��
)�� ëÔ���+ .
H�IEü���\
ì X���Z�x�� í�* ��� ç�� ��� ç ø�
ç øEü ^�J�L l�
50~100% \ ]�J���+ .
u�S�B�#u�S�B�#u�S�B�#u�S�B�# ��G��G��G��G u�S�B�#u�S�B�#u�S�B�#u�S�B�#
T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-23
5 SLIP GAIN �� �
ñEò ��[ì��
(Gain) í�` ]�J l���+ . 100 % _ ¡��Eò �� �B�#�` ��Z��| 0% _ �� �B�#
ì q¢ ` £�l���+ . ¤ ç ]�J�R�_ 100%
ì| ÷��� í�*
¡��Eò �� �B�#�� p�¥ ��¦ JüEý S�� ïð�f�g�^ �� ���+ .
§T
§T
§T
§T : S�� '�(�R
o 1000 rpm
� ]�J���¦ �� ��[
�(SLIP GAIN) ` 100%
]�J�¨��æ î�T ©�J�ª S���u 998rpm
ì�« JEüEý S��EïEð�_ 1000 rpm - 998
rpm = 2 rpm. ¬���+ . ïEðo
B�#�� ç �����_ �� ��[ì��
* JüEý S��ïð�u f�g���' ®�_ 106% ¯�' °�u ^�±�² l���+ .
6 AUTOTUNE RUN
ì X���Z�x
o �� ���³ ACC600 S�� T
� ç o K�� ê�J�i L ë�´���+ .
��[�
(Gain), ü� �^!
(Integration time), Z� �^!
(Derivation time) N u�S B�#
X���Z�x�_ µ���� ç øEüEý � ö ` ¦�¶��� ]�J ��² l���+ . K�� ê�J �
^���·�* N�B�# B�+�_ ��B�#�
u�¸�r ]�J ���+ .
K��Eê�J î�M ê�¹ : º ��� ç J�» S���� 20 ~ 70% \ J�S�� ��� . º X���Z�x 23.6 AUTOTUNE RUN ` YES \ ]�J .
K��Eê�Jì
î�M�ª � X���Z�x�_ K�����\ NO \ ¼½ ���+ .
NOTE: K��Eê�J�* ¾��ì�¿
u ����À H j�s u�Á���| I�¾�^ ��� ç �
µ���_ ��� ç�
m�Â
)���ò ë
�² l���+ . Ä�ü�� ÂN
o Å ç �����_
K��Eê�J î�M�� ��� ç _ J�»�S��� 20~40% \ ����À
ì��² l���+ .
ÆÇ�ÆÇ�ÆÇ�ÆÇ� ! K��Eê�J À�_ ��� ç _ u�È�S ^
! ]�JN ��ø��
ì 10 ~ 20% %�&
°�u � É�Ê J�»�S���� 10% J�� u�S ���+ . K���ê�JK���ê�JK���ê�JK���ê�J î�M��î�M��î�M��î�M�� I�¾�^I�¾�^I�¾�^I�¾�^ ÆÇ���ÆÇ���ÆÇ���ÆÇ��� q ��³�µoq ��³�µoq ��³�µoq ��³�µo
ÿ ýÿ ýÿ ýÿ ý ��^�Ë��^�Ë��^�Ë��^�Ë Ì�Í���+Ì�Í���+Ì�Í���+Ì�Í���+ .
7 FEEDB FILTER î�T S�� ����
ñò Î�x ^!` ]�J�l���+ . S�� ����_ H�Iü���\ øEè
TIME
)��e S�� ���
ì�Ïæ ����~ Ð�Ñ (RATC ��_ NTAC-02) ` Ò�� ��� ���
~�\�µ�x ©�Jª S�� ����¬���+ . ����~o
�� �� S�� ©�J�` ��' ®�` ��D�_ ( øèEí�` �� ���_ ��D ) Î�x�^
!` 0 – 2ms( X���Z�x ¤ ç í = 4ms) \
]�J�l���+ .
8 SPEED STEP S�� '�(Eí� +�Q ¬Eô ( u�È�S ç�Óç
��G ). Q , DriveWindow� +�Q ^�Ô
f�g ço
�� �i ^�s .

T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-24
6.2.9 ÷�Õ÷�Õ÷�Õ÷�Õ 24 %�&%�&%�&%�& T�
T�
T�
T�
-Torque Ctrl ì X���Z�x�_ ACC 800
ì ����À
�� õ��
ì u�Á�l���+ . Ö 6-9� ]�J�×� /
Q��_ ]�J u�ÁEò X���Z�x ×��` B�³�Æ�¦ ë�´���+ . #�� ]���* Ö
w�Øo
�ê Ì�Í���+ .
ì X���Z�x�_ Ù�\�D ¾��
����_ B
ì' ®�´���+ .( Ú���x / Ù�\�D T
�
Ð�¾ ü� �^ )
Ö 6-9 ÷�Õ 24.
X���Z�xX���Z�xX���Z�xX���Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 TORQ RAMP UP 0.00 s ...
120.00 s
%�& '�(íì
0
��J�»
%�& ¯�' õ���_ ^!
.
2 TORQ RAMP DOWN 0.00 s ...
120.00 s
%�& '�(íì
J�»�%�& � ”0” ¯�' õ���_ ^
!.
3 TORQ STEP -300.00 % …
300.00 %
DriveWindow +�Q f�g ço
�� %�& +�Q�¬Eô
1 TORQ RAMP UP '�(Eíì
“0”
� J�»�%�& ¯�' °�u���_�� � ¥
)_ ^
! ]�J .
2 TORQ RAMP DOWN '�(Eíì
J�»�%�&
� “0” ¯�' È�����_�� � ¥
)_ ^
! ]�J .
Note:
ì X���Z�x�_ Master/Follower T
�Ð�¾
��_ ���x
� Ù�\�D�\
B�Û�_ %�& '�(Eí�
ñ����_ Ü�"�` Æ�' ®�´���+ .
3 TORQ STEP u�È�S ^!Eì
��_ %�& '�(í +�Q�¬ô . Q , DriveWindow +�Q ^�Ô f�g ço
�� �i ^�s Ý�Þ .

T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-25
6.2.10 ÷�Õ÷�Õ÷�Õ÷�Õ 26 Ð�x�T�
�x�T�
�x�T�
�x�T�
-Motor Control ( ��ß����ß����ß����ß�� Ð�¾��sÐ�¾
��sÐ�¾
��sÐ�¾
��s àà àà LL LL ë�´���+ë�´���+ë�´���+ë�´���+ .)
Ö 6-10� ]�J�×�� / Q���_ ]�J�u�ÁEò X���Z�x í���` B�³�����+ .
#�� ����* Ö w�Øo
�Eê Ì�Í���+ .
Ö 6- 10 ÷�Õ 26.
X���Z�xX���Z�xX���Z�xX���Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
3 IR COMPENSATION 0 % ... 30 % B�# ��á L�â .
( ��ß�� Ð�¾�s ü� )
3 IR COMPENSATION ���� T�
Ð�¾��s ]�J u�Á�l���+ . ì
X���Z�x�_ 0 �X�L
�� ��� ç J�» ��á� 30% ¯�' ]�J�i L
����+ .
÷�P 6-8 IR B�#�* ��� ç�
ã��� ��á ( Ð�x ��á�
ñò ä� �å ) ` ü�
É���\�æ î�M���| Umax _ &�çEý��� ¾��ì�¿
� Ä�ñ óEô���á�¬���+ .

T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-26
6.2.11 ÷�Õ÷�Õ÷�Õ÷�Õ 27
¿çì&
¿çì&
¿çì&
¿çì& è�éè�éè�éè�é -Brake Chopper
Ö 6-11� ]�J�×�� / Q���_ ]�J�u�ÁEò X���Z�x í���` B�³�����+ .
#�� ����* Ö w�Øo
�Eê Ì�Í���+ .
Ö 6-11 ÷�Õ 27
X���Z�xX���Z�xX���Z�xX���Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 BRAKE CHOPPER OFF; ON
¿çì& è�é T
�
2 BR OVERLOAD FUNC NO; WARING;
FAULT
T������ N�µ�� ç Á
3 BR RESISTANCE 0.00 … 100.00 ê T�������� ���í
4 BR THERM TCONST 0.000 …
10000.000 s
T�������� ^�J�L
5 MAX CONT BR
POWER
0.00 … 10000.00
kW
Ä�ñ m�S T������� �ë
6 BC CTRL MODE AS GENERATOR;
COMMON DC
¿çì& è�é T
� Ð�¾
1 BRAKE CHOPPER
¿çì& è�é T
�� ì ö a .
OFF
¿çì& è�é T
�� �ì ö a .
ON
¿çì& è�é T
�� ì ö a . NOTE:
¿çì& è�é � ��� ç u ]�R
)���
N���á T� ç
( X���Z�x 20.6) u íÃë�_�' ÿ�ý�����^�î .
2 BR OVERLOAD
¿çì& è�é�� N�µ�� B��� ì ö a . ü� �u�Áò X���Z�x 27.03, 27.04,
FUNC 27.05 u ����+ .
NO
N�µ�� B��� �ì ö a .
WARNIG
N�µ�� B��� ì ö a . ¾��ì�¿��
N�µ���u È�')�«
��¦�u f�g����+ .

T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-27
FAULT
N�µ�� B��� ì ö a . ¾��ì�¿��
N�µ���u È�')�«
î�ï J�'���+ .
3 BR RESISTANCE T������� ���Eí .
ì í�* N�µ�� B��
� �� ����+ . X���Z�x 27.02
o
�Eê�����^�î .
4 BR THERM T������� æ�ð ^�J�L .
ì í�* N�µ�� B��
� �� ����+ . X���Z�x 27.02
o
TCONST �Eê�����^�î .
5 MAX CONT BR T������ì
Ä�ñ ñ� �ò���
��ó�¨�` j Ä�ñ m�S T��� �ë .
ì í�* N�µ��
POWER B���
�� ����+ . X���Z�x 27.02
o �Eê�����^�î .
6 BC CTRL MODE
¿çì& è�é T
�Ð�¾ .
AS GENERATOR
DC ��á ( Ð�x� f�g
)_ ��á�N ý�ô�x� ��á ê�Jí )
ì T�� TòEí�`
¤N�i j ��y���+ .
ì õ�ö�* ��J�#ü���\ O�* ÷�ø���á
� ��� f�g
)_
DC ��á� #�z #ù�� ��y�`
§é�l���+ . } ^
!� q � ÷�ø���á� #�z
* è�é ¦���` ¤�Ø�l���+ .
COMMON DC
DC ��áì
T�� TEòí�` ¤N��«
��# è�é�u ��y���+ . ³�ú û�� ý�ô�xu ��ü� DC ô��
� m�Â
)���ý_ ��D
� �� �l���+ .
T,-�YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-28
6.2.12 ÷�Õ÷�Õ÷�Õ÷�Õ 28 Ð�xÐ�xÐ�xÐ�x Ð�þÐ�þÐ�þÐ�þ -Motor Model
Ö 6-12� ]�J�×�� / Q���_ ]�J�u�ÁEò X���Z�x ÿ���` B�³�����+ .
#�� ����* Ö w�Øo
��� ����+ .
Ö 6-12 ÷�Õ 28
X���Z�xX���Z�xX���Z�xX���Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 LONG DISTANCE
MODE
OFF; ON }
Ï� Ð�¾
2 TR TUNE -60 … +200 % ����K� ^�J�L ��J
1 LONG DISTANCE � ��Á�* ����� ��\�Û�� Ä�� ��á ��&�R� È�� � ý�ô�x� ��� Æ�X
MODE Lo
���_�� �� ���+ . � X���Z�x�_ 690V ý�ô�x Ý��� �� ü���\
ì ö a ���+ . ��� , ����� ����V� � Ë���u Ë ��D�� �� ���+ .
OFF
}
Ï� Ð�¾� �ì���a
ON
}
Ï� Ð�¾� ì��a .
2 TR TUNE � ��L�_ ����� ���� ÿ�
��� ���ª ����K� ^�J�L�
�"�` Z�����+ .
����* Ð�x ���� ÷�������¾ ÿ�� ��T µ���#��� S��
� ���
)'�®�`
��D�
�� ����+ .
§�o����, Ð�x ���� S��
� ��� ���ª �� �B�+ ��T
�� �� 10% O�`���D � X���Z�x�
+10%� ��L�ÿ�` ]�J�l���+ .( ��µ���^�
_ ���� 990 rpm( d�µ���^ 1000 rpm � ����� ) ��� 989 rpm � S���u � ���� j��
� 10 rpm �� �� w���� 11 rpm �� �� ���+ .)
Note: � X���Z�x�_ ��� ����~o
�� �^�s �� �i L
ý´���+ .

T,��YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-29
6.2.13 �Õ �Õ �Õ �Õ 30 î�ïî�ïî�ïî�ï ��Á��Á��Á��Á -Fault Functions
� X���Z�x�_ ACC 800 � ����À�� !���� u�Á�l���+ . Ö 6-11� ]�J�×� /
Q��_ ]�J�u�Á�� X���Z�x ÿ�` B�³�����+ .
#�� ����* Ö w�Øo
"�� ����+ .
Ö 6-11 �Õ 30
X���Z�xX���Z�xX���Z�xX���Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
2 PANEL LOSS FAULT; NO &�ç�#��� ¾����¿�
T����
o T��$�%
\
]�J�� #�&� �� ��#
^ ��y .
4 MOTOR THERM
PROT;
FAULT;
WARNING NO
����� N'�^ ��y .
5 MOT THERM P
MODE
DTC; USER
MODE;
THERMISTOR
����� N' B���Ð�¾ ]�J .
6 MOTOR THERM
TIME
256.0 s ... 9999.8 s ����� ò���u 63% ¯�'
#�z i�j�� ^!
.
7 MOTOR LOAD
CURVE
50.0 % ... 150.0 % ����� ��ï� Ä�� T���R .
8 ZERO SPEED LOAD 25.0 % ... 150.0 % 0 S����� �����
µ�� (�õ .
9 BREAK POINT 1.0 Hz ... 300.0 Hz ����� µ�� (�õ� ¿ç���& '�) .
10 MOTOR PHASE
LOSS;
NO; FAULT ������ �h �#�^ ��y .
11 EARTH FAULT NO; FAULT '�* f�g�^ ��y .
12 MASTER FAULT
FUNC
FAULT; NO;
WARNING
Î�¾�ô�� Ò�� î�ï�^
f�g .
13 COMM FLT TIME-
OUT
0.10 s ... 60.00 s Ò���î�ï ^!
'�m .

T,��YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-30
2 PANEL LOSS T�
����u T��$�%
\ ]�J�^ ACC 800� ���� J�'
)�+` j�� ��y
³�µo
J�� l���+ .
ÆÇ�ÆÇ�ÆÇ�ÆÇ� : s�H NO \ ]�J�¨�+«
T��$�%��
Ò�� ��#�� f�gª ��D�_ ���
³�µ�
��� q ������` ,�# ����^�� .
FAULT
T��$�%
-�&�#�
��T f�g�^ LCD
� ¦���� Ö�^
)| ACC 800 * J�' ( coast
stop + set brake) ���+ .
NO
B�� ��Á�` ]�J q É .
4 MOTOR THERM ����� N�' B�� ��Á�` ]�J�l���+ .
PROT
FAULT
��¦ '�^o
��| ����� �#�z�� ����R 100%
� ��ó�^ ACC800 * J�'
l���+ .
WARNING
������ ò���#�z�� ����R 95% ��ó�^ ��¦ '�^ .
NO
B�� ��Á�` ]�J q É .
Note: î�ï�ü ��¦�u Ö�^ª ��
� X���Z�xo
NO \ !���i ��D ¾����¿
T�
B�¾o
¤��a ����^�î .
T,��YX���Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-31
5 MOT THERM P �Z���x ©�J���ü æ�ð (Thermal) Ð�þ�` �� ���³ ����� N' B�� ��Á ]�J .
MODE &�ç�#��� ¾����¿_ +�GN .�* u�J��
� ����� ò�� #�z�` ��� l���+ . º0/�1�243�576�8�9�: � �h�� ÷�øª #�&� ������� Æ�� ò���_ 30°C º ����� u�'�* µ�� (�õ�� �P 6-9
� .�+�¦ u�J . ������u (�õ� ; µ� �
���)�«
J�#�ò�� ��#���\ ò���u #�z)¦ w�Ø µ�
� ���ª�+
«
J�#�ò�� ����\ <�����+ . ò�� #�zN =�> ��å�* X���Z�x MOTOR
THERM TIME
� ]�J����+ .
ò�� #�z ��?�@�A���\
!Q�� �ð Ð�þ�` �� ���� j��
� ������u B�S
�
m�S�C���\ ���4��j D���' ®�r ����J�' � L
ý´���+ . BRAKE POINT
ÿ�B�+ B�S� m�S ����� Î���� ��D
�_ E��� =�>�F�` ]�R ����^�� .
ÆÇ�ÆÇ�ÆÇ�ÆÇ� : G�'�ü ��H�I�\ #�� ������� =�>�ÞN�u B��4� ��D � B�� ��Á���\_ ����� N�'�` B���i L ��´�J�+ .
DTC
DTC (Direct Torque Control) µ���(�õ�* ������� ò���#�z�` ��?�i j ��K LJ�+ . ����� ò�� ^�J�L�_ ����� ��ï M N�L
o OÏ\ Ö�â K�=�P Q�R�ÝS
�����o
��â���\ ��Jª O���R ¬�J�+ .
s�H ��T� ]��ª ��¹��T� ������u ���ª�+«
DTC µ�U (�õ�* X�V�Zx 30.7 MOTOR LOAD CURVE \ &��
o ��J�i�L
ý��ü 30.6 MOTOR THERM
TIME, 30.8 ZERO SPEED LOAD �
30.9 BREAK POINT _ ]�J�i�L ��´�J+ .
Note: 99.6 MOTOR NOM CURRENT W ]�J�ÿ�� 800A B�+ X ��D K������
Ð�þ (DTC) * ��K i L ��´�J�+ . ��� USER MODE
o ��K�U�Y�^�î .
USER MODE
� Ð�¾�T��_ X�V�Z�x 30.6 MOTOR THERM TIME, 30.7 MOTOR LOAD CURVE,
30.8 ZERO SPEED LOAD �Z�¦ 30.9 BREAK POINT
o ]�J�U�³ ����� N�'
B�� ��Á�` ��K�i�L
ý´�J�+ .
THERMISTOR
����� N�' B���_ ����� Û�µ4W æ�Z���x ���o
[�'�\ ¬�]���\ ^�w ��y
L�J�+ .

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-32
� Ð�¾o
��K�U�� �U�³�_ ����� æ�Z���x ���o
[�'�\ ¬�] DI6�
+24
V T m� ��² l�J�+ . s�H æ�Z���x�u _�` m�Â)�a
��K�ª�+«
, [�'�\ ¬] DI6 _ B���R�u 4k ê ��b���\ b�z�i j ì��a LJ�+ . X�V�Z�x 30.4 u
FAULT \
)�« ¾�V��
¿_ J�'�i ��¬�J�+ . ��� æ�Z���x4W B���R�u 0 T�
1.5k ê ����# ��D�T�_ DI6 _ 0 ��\ Z�cdL�J�+ .
��¦��¦��¦��¦ ! IEC 664 e�J�T WÏU�³ ¾�V��
¿W [�'�\ ¬�] 6 T æ�Z���x
o m��i j ,
����� � æ�Z���x ����T f�m�ga�u � ¥ L�J�+ . f�m�ga�_ 8mm W h�»��
Î���l�J�+ .(400/500 VAC ��i ) æ�Z���x�u � ¥ T s�j)' ®�r ]�R
)�«
ACS800W +�k I/O x�Z%� `�)�T ��� ����
ý�Ïü æ�Z���x l�ç���u [
'�\ ¬�]���\�µ�x æ�Z���xo
m�Z�U�� ��� ��K)�a
² l�J�+ .
��¦��¦��¦��¦ ! ¤���ÿ���\ &�ç�#���K ¾�V��¿W [�'�\ ¬�] 6 � Fast stopW n���\
õ�ö)�a
��J�+ . X�V�Z�x 30.5 MOT THERM P MODE
o THERMISTOR \ !��
��T � ]�J�` !���U�Y�^�î . o , X�V�Z�x 30.5 MOT THERM P MODE�
.�* a�p� X�V�Z�x�T W��� S [�'�\ ¬�] 6 u ����n���\ ��K
)' ® S W ��²
l�J�+ .
6 MOTOR THERM �����4W ò S b�z�� ����R4W 63% ¯�' S ó�i�j ¯�'dW ^�h���\ �P 6-9
TIME _ ò S ^�J�L U�� (�õ�¬�J�+ . ����� N�' B�����Á�� DTC Ð�¾�\ ]�J)
++«
����� ò S ^�J�L ^�h�* � X�V�Z�x�\�µ�x qa��
��| ��_ X�V�Zx 30.5 MOT THERM P MODE u USER MODE \ ]�J
)a²�s !�� u�Á�l�J
+ .
UL � � ¥ U�_ ����� NEMA m�ï�T W� ����� N�'�B�� ��Á4W ò S ^�J�L_ t6 x 35
� .�´�J�+ (t6 _ ����� T�����u T�^�� ^�h���\ ������u J�»4W
6 r ��ï T� S q ��U�r ����i L
ý_ ^�h�` £�U�| ¤ Q��\ Ö�^ l�J
+ .) s� (�õ�T�4W ^�J�L�_ Class 10 : 350 s, Class 20 : 700 s , Class 30 :
1050 s ¬�J�+ .
�P 6-9 ����� ò S ^�J�L .

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-33
7 MOTOR LOAD ����� µ�U�(�õ�* �����dW ��� u�Á�� Ä� ñ�K�µ�Uo
]�J l�J�+ .
CURVE 100% ]�J�^ Ä�� ñ�K�µ�U�_ ����t���x X�V�Z�x 99.5 MOTOR NOM
CURRENT ]�J�R � ��H l�J�+ . �����4W Æ�� ò S u J�b�ò S � +���+«
µ�U (�õ�ç�u�` ��J U�Y�^�� .
�P 6-10 ����� µ�U�(�õ .
8 ZERO SPEED ����� µ�U�(�õ�T� J4W�ª 0 S S T� �����4W Ä�� ñ�K���ï ]�J .
LOAD
9 BREAK POINT ����� µ�U (�õ�� X�V�Z�x 30.7 MOTOR LOAD CURVE ]�J�R�T�
30.8 ZERO SPEED LOAD ]�J�R�\ È�n�U�� ^�y�U�_ '�)���| �P 6-10 ���� µ�U (�õ�` "�� Ì�Í�J�+ .
10 MOTOR PHASE U�ü ��_ ��bdW ����� Â�b f�g�^ ��y�` ]�J l�J�+ .
LOSS
FAULT
î�ï�'�^ � É�Ê ACC800 * J�'4LJ�+ ( ����� S S u +/- 40rpm ��b�^
��y ¢ .)
NO
B�� ��Á ��K q É .

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-34
11 EARTH FAULT ������ü ����� ��õ�T `�' ��b È�'�^ ��y ]�J .
FAULT
î�ï '�^ � É�Ê ACC800 * J�' L�J�+ .
NO
B�� ��Á ]�J q É .
12 MASTER FAULT ¾�V��¿ �
Î�¾�ô�� Ò���Ð�Ñ ����T Ò�� ��b È�'�^ ��y ]�J .
FUNC
FAULT
î�ï '�^ COMM MODULE v�^�' � É�Ê ACC800 * J�' LJ�+ .
NO
��Á ]�J q É .
WARNING
��¦ '�^ COMM MODULE � Ö�^4L�J�+ .
13 COMM FLT î�ï�f�g�T ��� '�m ^�h ]�J .( X�V�Z�x 30.12 "�� )
TIME-OUT

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-35
6.2.14 �Õ �Õ �Õ �Õ 50 ������������ ����~����~����~����~ -Pulse Encoder
� X�V�Z�x�_ ��������~ Ð�Ñ RTAC ü NTAC u ]�R)¦ X�V�Z�x 98.01
ENCODER MODULE � �a
)a�ý` j�s B���| ��J�� Î���l�J�+ .
�Õ 50W � X�V�Z�x�_ ����~4W ���o
!dw�U�¦ ����~�ü RATC/NTACW îï���¹�U�T� ACS800W ��y�` J4W�l�J�+ .
Ö 6-12 �Õ 50
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 PULSE NR 1 … 29999 1����y ����~ ��� L
2 SPEED MEAS MODE A_-B DIR; A_-_;
A_-_B DIR; A_-_B_-_
����~ ���4W ����@�A
3 ENCODER FAULT WARNIG; FAULT ����~ î�ï�ü ����~ Ò��W î�ï�u È�'
)�+` j
¾�V��¿W ��y
4 ENCODER DELAY 5 … 50000 ms ����~ È�^���ÁdW '�m�^�h
( X�V�Z�x 50.03 ENCODER
FAULT "�� )
5 SPEED FEEDB USED True; False S S ��¾�ä ��K
1 PULSE NR � X�V�Z�x�_ 1����y ����~ ����Lo
]�J�z�J�+ .
2 SPEED MEAS � X�V�Z�x�_ ����~ ���dW ����@�A�` ]�J�l�J�+ .
MODE
A_-B DIR
Ch A: S S � ��R ����` ��� J�@�{ |�'���K .
Ch B: @�{ .
A_-_
Ch A: S S � ��R ����` ��� J / }�@�{ |�'���K .
Ch B: ��K q É .
A_-_B DIR
Ch A: S S � ��R ����` ��� J / }�@�{ |�'���K .
Ch B: @�{ .
A_-_B_-_
S S � ��R ����` ��� A�
B ���4W �~ |�' ��K .

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-36
3 ENCODER FAULT � X�V�Z�x�_ ��������~ � RTAC ü NTAC ��� , ��_ RTAC/NTAC�
RMIO
����T Ò���î�ï�u È�')�+
` j ¾�V��¿W ��y�` JdW�l�J�+ .
+�G À ��u�' ��¹�T ��y�i ��D ����~ È�^���Á�� ì��a L�J�+ .
1. ¾�V��¿T� ����ª S S � ����~�T� ©�Jª S S ÿ�� 20% ��b4W � ��u � j .
2. ����� %�&�u T���ÿ�# � q T ����^ X�V�Z�x 50.4 ENCODER DELAY T
]�Jª ^�h�Û�T ����~dW ���o
^�' ®���` j .
WARNING
��¦�f�g . ¾�V��¿_ ���ª S S \ Ì4� � ¬�J�+ .
FAULT
î�ï�f�g . ¾�V��¿_ �����
o J�'�^�b�J�+ .
4 ENCODER DELAY ����^ ����~ È�^���Á�` ��� '�m�^�h .
( X�V�Z�x 50.03 ENCODER FAULT "�� ) � ÿ�� 0ms �«
� È�^���Á�*
i�a L�J�+ .
5 SPEED FEEDB
USED True
m�ª ����~ Ð�Ñ�\�µ�x ��¾�ä)_ ��T S S ÿ�* S S / %�& T
aT ��K4LJ
+ .
False
m�ª ����~ Ð�Ñ�\�µ�x ��¾�ä)_ ��T S S ÿ�* S S / %�& T
aT ��K
)'
®�´�J�+ .( Q , ��R�©�J�` ��� ��K)_ RATC ��_ NTAC Ð�Ñ�T� )
6.2.15 �Õ �Õ �Õ �Õ 51 Ò��Ò��Ò��Ò���Ð�ÑÐ�ÑÐ�ÑÐ�Ñ -Comm module
� X�V�Z�x�T ��� J�B�_ +�GdW ]���o
B�Y�^�î : >�>4W ��¬�T ��_
“ACS800 FIELDBUS adapter RxxA-01 Installation & Start-up Guide”
Note: Î�¾�ô�� ��(���K � b�&���K�_ � ]���4W 5.6.12 T ]��)a�ý
´�J�+ .
RPBA-01N .�* AnyBus Ð�Ñ�T� &�ç�#�¾�V��¿
n���s4�aT��_ “Vendor
specific mode” s 'h�LJ�+ .(“Generic mode” _ 'h)' ®�´�J�+ .)
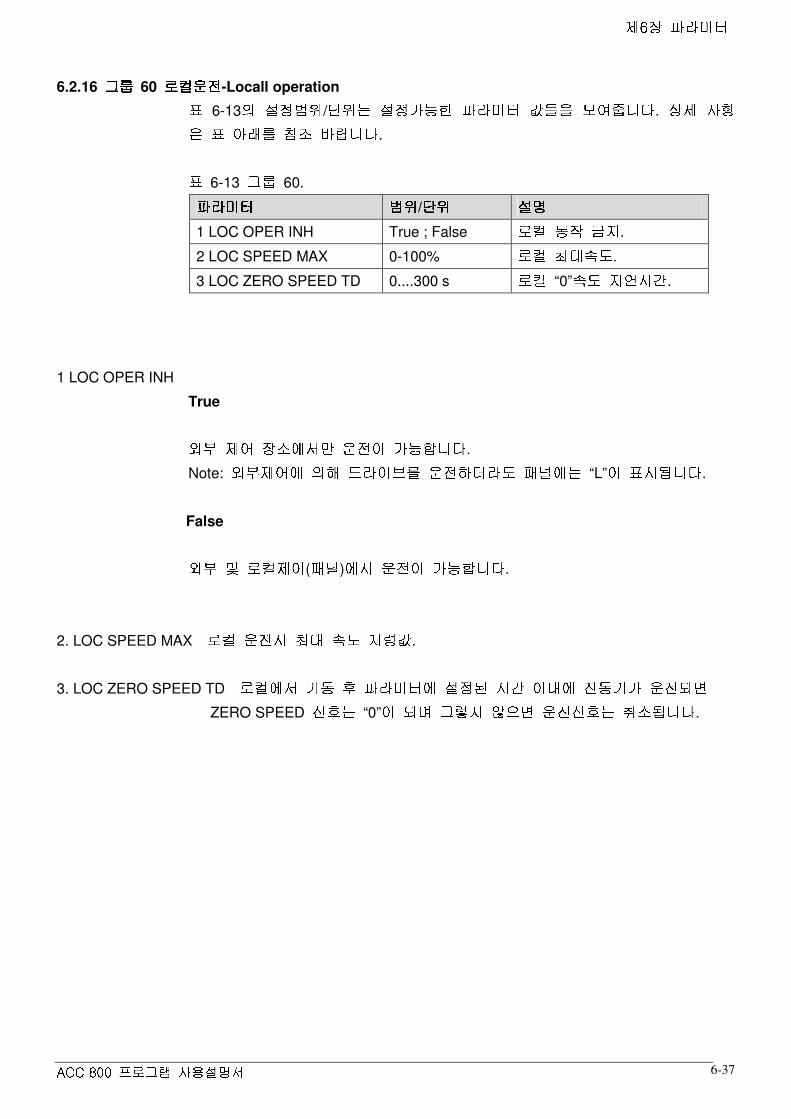
T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-37
6.2.16 �Õ �Õ �Õ �Õ 60 \x�����\x�����\x�����\x����� -Locall operation
Ö 6-13W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` B�³���J�+ . b�� ���
* Ö w�Øo
"�� ��J�+ .
Ö 6-13 �Õ 60.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 LOC OPER INH True ; False \�� ��y ��' .
2 LOC SPEED MAX 0-100% \�� ���S S .
3 LOC ZERO SPEED TD 0....300 s \�� “0” S S '�m�^�h .
1 LOC OPER INH
True
��µ Ta
��n�T��s ����� u�Á�l�J�+ .
Note: ��µ�TaT W�� ¾�V��
¿�o ����U�~�V S
$�%T�_ “L” � Ö�^dL�J�+ .
False
��µ M \���Ta
(
$�%) T� ����� u�Á�l�J�+ .
2. LOC SPEED MAX \�� ����^ Ä� S S '�(�ÿ .
3. LOC ZERO SPEED TD \���T� ��� � X�V�Z�x�T ]�J�ª ^�h ��Û�T ������u ���d�«
ZERO SPEED ����_ “0” � ��| ���� ®��«
��������_ ��n4LJ�� .

T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-38
6.2.17 �Õ �Õ �Õ �Õ 61 S S È�^S S È�^S S È�^S S È�^ -Speed monitor
Ö 6-14W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` B�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-23 �Õ 61.
XX XX�V�Z�xV�Z�xV�Z�xV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
3 MOT OVERSPEED LEV 0 … 200 % �����4W N�S�L�� .
4 SPEED LIM 1 0 … 200% S S T�� 1 W ÿ
3. MOT OVERSPEED LEV �����4W S S u MOT OVERSPEED LEV T ��Jª L�â�` ¤N�¨�` j
¾�V��¿_ MOT OVERSP
o �^�U�| J��dLJ�� .
100% ]�J � X�V�Z�x 69.1 SPEED SCALING RPM T ]�Jª ����� S S T
����l�J�� .
4 SPEED LIM 1 l�ç�� ?�] ��^���� SPEED LIM 1( �Õ 14 T� õ�ö ) _ ����� S S W f���ÿ��
� L�â ��b�H j ì��a L�J�� .
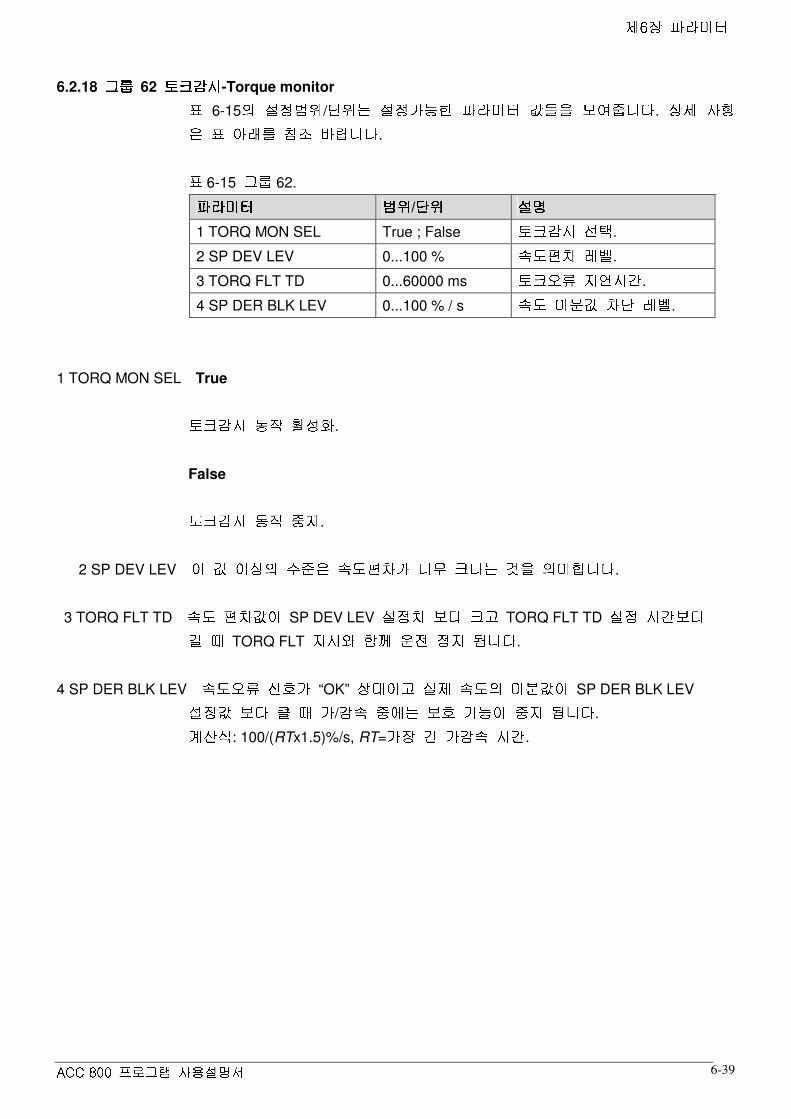
T,��YX�V�Z�x
.0/1/32545476�8�9�:<;>=�?�@�A 6-39
6.2.18 �Õ �Õ �Õ �Õ 62 �x��È�^�x��È�^�x��È�^�x��È�^ -Torque monitor
Ö 6-15W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` B�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-15 �Õ 62.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 TORQ MON SEL True ; False ����È�^ õ�ö .
2 SP DEV LEV 0...100 % S S�� � ç�u .
3 TORQ FLT TD 0...60000 ms ����î�ï ��m�^�h .
4 SP DER BLK LEV 0...100 % / s S S Z�m�ÿ � Q ç�u .
1 TORQ MON SEL True
�����^ ��y �a .
False
����È�^ ��y À�� .
2 SP DEV LEV � ÿ ��b4W L�â � S S�� � u c�d ����_ ��` W�Z�l�J�� .
3 TORQ FLT TD S S � � ÿ�� SP DEV LEV ]�J�R B�� ��¦ TORQ FLT TD ]�J ^�h�B��
Ë j TORQ FLT ��^ � É�Ê ��� J�� LJ�� .
4 SP DER BLK LEV S S î�ï ����u “OK” b�&���¦ ��T S S W Z�m�ÿ�� SP DER BLK LEV
]�J�ÿ B�� X j u / È�S À�T�_ B�� ��Á�� À�� L�J�� .
����P : 100/(RTx1.5)%/s, RT= u�� } u��S ^�h .
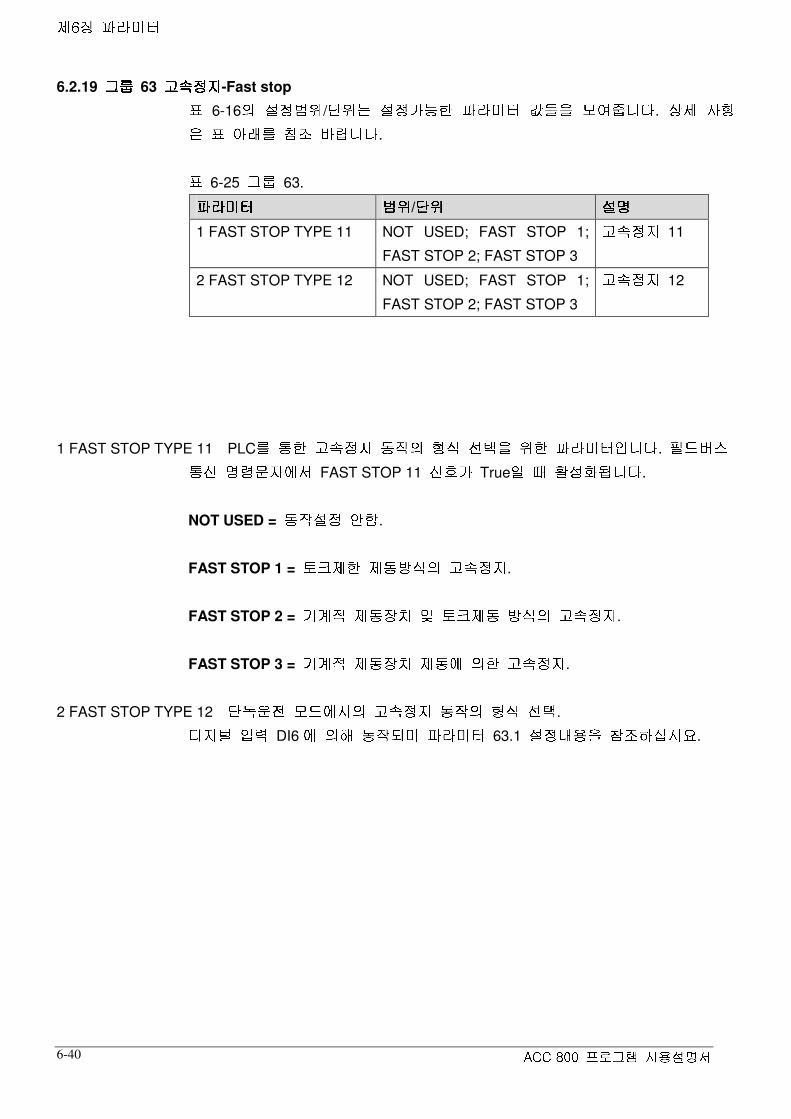
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-40
6.2.19 �Õ �Õ �Õ �Õ 63 ¦�S�Jx�¦�S�Jx�¦�S�Jx�¦�S�Jx� -Fast stop
Ö 6-16W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-25 �Õ 63.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 FAST STOP TYPE 11 NOT USED; FAST STOP 1;
FAST STOP 2; FAST STOP 3
¦�S�J�� 11
2 FAST STOP TYPE 12 NOT USED; FAST STOP 1;
FAST STOP 2; FAST STOP 3
¦�S�J�� 12
1 FAST STOP TYPE 11 PLC
o Ò�� ¦�S�J�� ��y4W R�P õ�ö�` �� X�V�Z�x�¬�J�� . Î�¾�ô��
Ò�� ��©���K�T� FAST STOP 11 ����u True H j ì�a�LJ�� .
NOT USED = ��y�]�J q É .
FAST STOP 1 = ����T�� T���@�P4W ¦�S�J�� .
FAST STOP 2 = ����C T�����R M ����T�� @�P4W ¦�S�J�� .
FAST STOP 3 = ����C T�����R T���T W�� ¦�S�J�� .
2 FAST STOP TYPE 12 Q�ª���� Ð�¾�T�4W ¦�S�J�� ��y4W R�P õ�ö .
[���\ ¬�] DI6 T W�� ��y4��| X�V�Z�x 63.1 ]�J�Û�K�` "���U�Y�^�� .
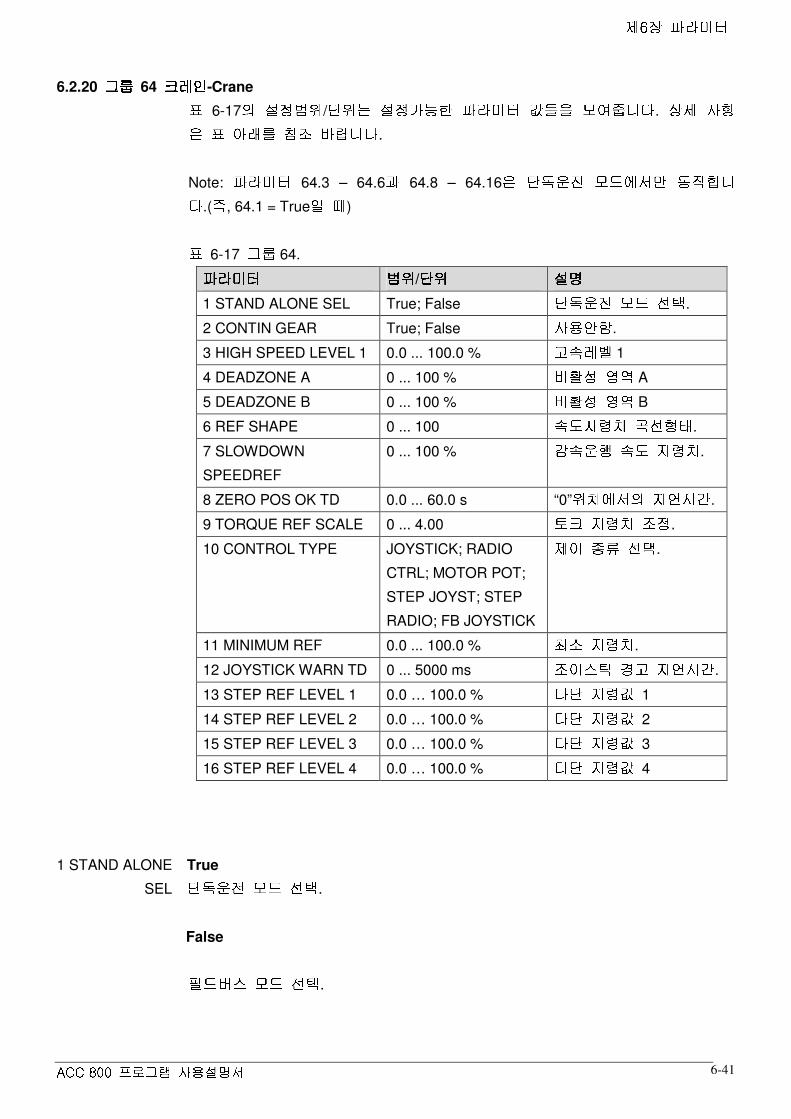
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-41
6.2.20 �Õ �Õ �Õ �Õ 64 ��çx#��çx#��çx#��çx# -Crane
Ö 6-17W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Note: X�V�Z�x 64.3 – 64.6N 64.8 – 64.16�
Q�ª���� Ð�¾�T��s ��y�l�J� .( o , 64.1 = True H j )
Ö 6-17 �Õ 64.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 STAND ALONE SEL True; False Q�ª���� Ð�¾ õ�ö .
2 CONTIN GEAR True; False ��K q É .
3 HIGH SPEED LEVEL 1 0.0 ... 100.0 % ¦�S�ç�u 1
4 DEADZONE A 0 ... 100 % i� �} A
5 DEADZONE B 0 ... 100 % i� �} B
6 REF SHAPE 0 ... 100 S S ��©�R (�õ�R�& .
7 SLOWDOWN
SPEEDREF
0 ... 100 % È�S���M S S ��©�R .
8 ZERO POS OK TD 0.0 ... 60.0 s “0” ��R�T�dW ��m�^�h .
9 TORQUE REF SCALE 0 ... 4.00 ��� ��©�R ��J .
10 CONTROL TYPE JOYSTICK; RADIO
CTRL; MOTOR POT;
STEP JOYST; STEP
RADIO; FB JOYSTICK
Ta
«�ï õ�ö .
11 MINIMUM REF 0.0 ... 100.0 % Ä�n ��©�R .
12 JOYSTICK WARN TD 0 ... 5000 ms ������¬ ��¦ ��m�^�h .
13 STEP REF LEVEL 1 0.0 … 100.0 % ��Q ��©�ÿ 1
14 STEP REF LEVEL 2 0.0 … 100.0 % ��Q ��©�ÿ 2
15 STEP REF LEVEL 3 0.0 … 100.0 % ��Q ��©�ÿ 3
16 STEP REF LEVEL 4 0.0 … 100.0 % ��Q ��©�ÿ 4
1 STAND ALONE True
SEL Q�ª���� Ð�¾ õ�ö .
False
Î�¾�ô�� Ð�¾ õ�ö .
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-42
2 CONTIN GEAR � X�V�Z�x�_ ACC n���sd�a
ô�� 5.2 ��b�T��_ ��K4�� ®�´�J�� .
3. HIGH SPEED LEVEL 1 ������¬ ?�] (
§: AI1) W S S ��©����
o ?�]�C�a
o ��� HIGH
SPEED ����\ ¨�Û���J�� .
4 DEADZONE A A @�{���\ ��©�ÿ�` #�u�U�� �4W ������¬ iì� Ü�} ]�J .
( J�@�{ : b @�{ )
5 DEADZONE B B @�{���\ ��©�ÿ�` #�u�U�� �4W ������¬ iì� Ü�} ]�J .
( }�@�{ : U @�{ )
6 REF SHAPE S S ��©�ÿ�` ®�H�õ (�õ���\ ]�J .
0 = _�õ .
20 = X2 (�õ
100 = X3 (�õ
7 SLOWDOWN È�S���Á (
§:DI5=0) � ��y �
+` j4W S S ��©�R È�S�]�J .
SPEEDREF
8 ZERO POS OK î�ï�J�� , ¦�S�J�� , ������¬ ��¦ ¯�T4W�� J���ª�� °�����U�� � ������¬��
TD 0 ��R�T
ý S W U�_ ��m�^�h .
9 TORQUE REF ������¬�` Ò�� (AI.2) ��� ��©�R4W ��� ��J .
§: TORQUE REF SCALE ` 2.0
SCALE ��\ ]�J�^ 100 % ������¬ ��©�R�_ ��� Ta��T 200% ��� ��©�R�\ #�P
L�J�� .
10 CONTROL TYPE JOYSTICK
Q�ª���� Ð�¾�T� [���\ ¬�]�T m�Â�ª Zero Pos(DI2), Dir A(DI3)�
Dir B(DI4)
`�) ��_ AI1( S S Ta
), AI2( ��� Ta
) T m�ª w���\� ��©�R�T W��
Ta��_ ������¬�` ��K�� ��µ�T
a ¬�J�� .
RADIO CONTROL
Q�ª���� Ð�¾�T� DI3�
DI4(Zero Pos _ p Î�� ) T m�ª Dir A , Dir B ��©N
AI1 ��_ AI2 T m�ª ��©�ÿ�T W�� Ta��_ PLC ü d�õ�T
a�o
��K��
��µ�Ta
¬�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-43
MOTOR POT
Q�ª���� Ð�¾�T� DI2 T m�ª u�S���� � DI3�
DI4 T m�Â�ª Dir A , Dir B
W ��� @�{ ]�J�T W�� Ta��_ F�±�s T
a�o
��K�� ��µ Ta
¬�J�� .
STEP JOYST
Q�ª���� Ð�¾�T� Zero Pos(DI2), Dir A(DI3), Dir B(DI4) `�)N X�V�Z�x 10.8 –
10.10 T õ�öª [���\ ¬�]�T m�ª ��Q�R�P4W ��©�ÿ���\ Ta��_ F�±�s
Ta�o
��K�� ��µ Ta
¬�J�� . ������¬ È�^�_ ì�a L�J�� .
STEP RADIO
Q�ª���� Ð�¾�T� DI3�
DI4 T m�Â�ª Dir A , Dir B ��©N X�V�Z�x 10.8 –
10.10 T õ�ö�ª [���\ ¬�]�T m�Â�ª ��Q�R�PdW ��©�ÿ���\ Ta��_ PLC ü
d�õ�Ta�o
��K�� ��µ�Ta
¬�J�� .
FB JOYSTICK(= Î�¾�ô��Î�¾�ô��Î�¾�ô��Î�¾�ô�� �x���x¬�x���x¬�x���x¬�x���x¬ )
Q�ª���� Ð�¾�T� Dir A , Dir B, Zero Pos ��� � Î�¾�ô�� Ò�� t���x ��so
Ò�� ��©�ÿ���\ Ta��_ PLC
o ��K�� ��µ�T
a ¬�J�� .( K���� ��� � 5.6.5 ²�³ W ´�µ�m�` "���U�Y�^�î .)
11 MINIMUM REF Q�ª���� Ð�¾�T�4W Än S S ��©�ÿ . µ�I�C���\ MOTOR POT Ta
R�PN
É�Ê ��KdL�J�� .
12 JOYSTICK WARN TD ������¬ È�^ ��m�^�h .
13 STEP REF ������©�^ Æa��_ ¶ Q��dW S S ��©�ÿ . o STEP JOYST ��_ STEP
LEVEL 1 RADIO Ta
R�P�` ��K�^ Dir A ü Dir B.
14 STEP REF X�V�Z�x 10.8 STEP REF2 SEL T ]�J�ª [���\ ¬�]�� Æa�·
` j4W ¸�¹�º
LEVEL 2 Q��4W S S ��©�ÿ .( ��� ��© ��� ì���b�& )
15 STEP REF X�V�Z�x 10.9 STEP REF3 SEL T ]�J�ª [���\ ¬�]�� Æa�·
` j4W ��¹�º
LEVEL 3 Q��4W S S ��©�ÿ .(Step Ref2 ��� ì���b�& )
16 STEP REF X�V�Z�x 10.10 STEP REF4 SEL T ]�Jª [���\ ¬�]�� Æa�·
` j4W »�¹�º
LEVEL 4 Q��4W S S ��©�ÿ .( Step Ref3 ��� ì���b�& )

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-44
6.2.21 �Õ �Õ �Õ �Õ 65 \x_x��Jx�\x_x��Jx�\x_x��Jx�\x_x��Jx� -Logic handler
Ö 6-18W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-18 �Õ 65.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 CONTIN ON True ; False ON b�& ��S .
2 OFF TD 0.0 ... 10000.0 s Off ��m�^�h .
1 CONTIN ON X�V�Z�x CONTIN ON = True �«
����� J�����T S ^�h T�� ��� ������_
³�K ( K�a ) b�&o
���l�J�� .
2 OFF TD ����� J�����T ³�K�b�&o
���i L
ý_ ^�h�` ]�J l�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-45
6.2.22 �ÕÕÕÕ 66 �x��µx¼�x��µx¼�x��µx¼�x��µx¼ -Torque proving
Ö 6-19W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-19 �Õ 66.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 TORQ PROV SEL True ; False ����µ�¼ õ�ö .
2 TORQ PROV FLT TD 0.0 ... 100.0 s ����µ�¼ î�ï ��m�^�h .
3 TORQ PROV REF 0.0 ... 200.0 % ����µ�¼ ��©�R .
1 TORQ PROV SEL True
����µ�¼ ��y õ�ö ( ��� ����~ Î�� ).
False
����µ�¼ ��y õ�ö q É .
2 TORQ PROV FLT TD TORQ PROV FLT î�ï ��� ��m�^�h .
3 TORQ PROV REF ����µ�¼ ��©�R .
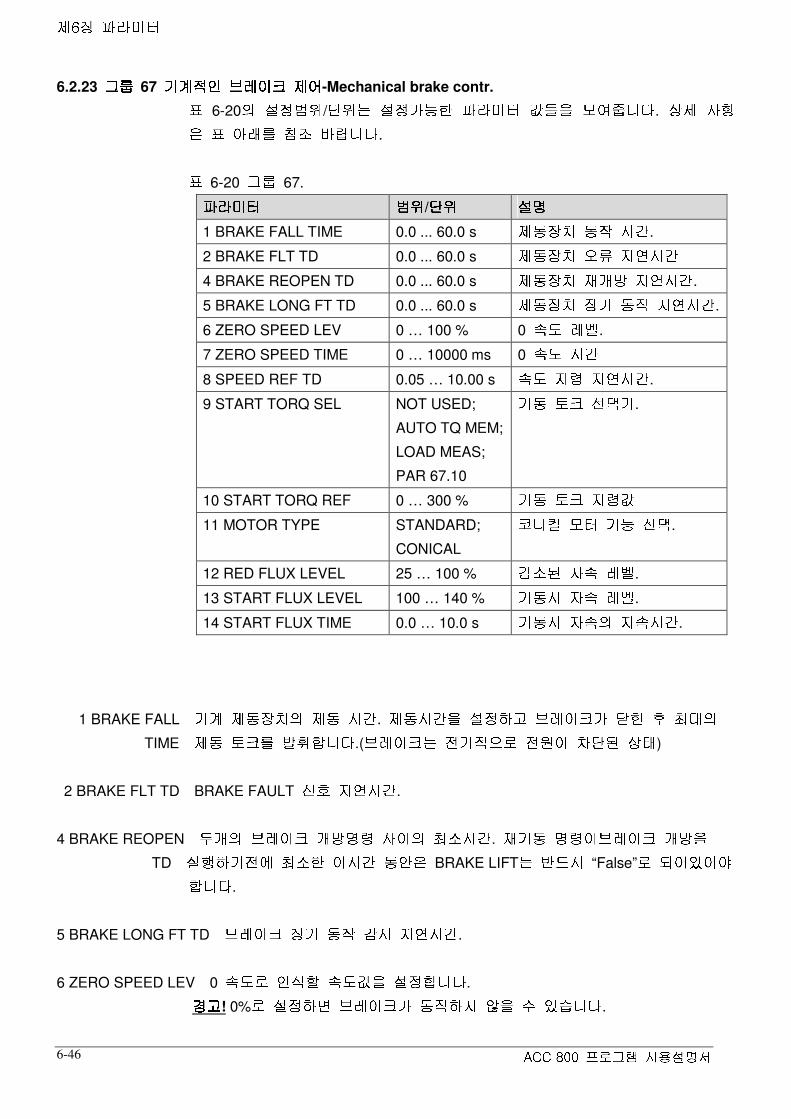
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-46
6.2.23 �Õ �Õ �Õ �Õ 67 �x�xCx#�x�xCx#�x�xCx#�x�xCx#
¿çx�x�
¿çx�x�
¿çx�x�
¿çx�x� T
aTa
Ta
Ta
-Mechanical brake contr.
Ö 6-20W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-20 �Õ 67.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 BRAKE FALL TIME 0.0 ... 60.0 s T�����R ��y ^�h .
2 BRAKE FLT TD 0.0 ... 60.0 s T�����R î�ï ��m�^�h
4 BRAKE REOPEN TD 0.0 ... 60.0 s T�����R °�û�@ ��m�^�h .
5 BRAKE LONG FT TD 0.0 ... 60.0 s T�����R ��� ��y ��m�^�h .
6 ZERO SPEED LEV 0 … 100 % 0 S S ç�u .
7 ZERO SPEED TIME 0 … 10000 ms 0 S S ^�h
8 SPEED REF TD 0.05 … 10.00 s S S ��© ��m�^�h .
9 START TORQ SEL NOT USED;
AUTO TQ MEM;
LOAD MEAS;
PAR 67.10
��� ��� õ�ö�� .
10 START TORQ REF 0 … 300 % ��� ��� ��©�ÿ
11 MOTOR TYPE STANDARD;
CONICAL
��J�� Ð�x ��Á õ�ö .
12 RED FLUX LEVEL 25 … 100 % È�nª K�S ç�u .
13 START FLUX LEVEL 100 … 140 % ����^ K�S ç�u .
14 START FLUX TIME 0.0 … 10.0 s ����^ K�S4W ��S�^�h .
1 BRAKE FALL ��� T�����RdW T�� ^�h . T���^�h�` ]�J�U�¦
¿ç�����u ½�¾ � Ä��dW
TIME T�� ���o
fd¿�l�J�� .(
¿ç�����_ ����C���\ �h��
� Q�ª b�& )
2 BRAKE FLT TD BRAKE FAULT ��� ��m�^�h .
4 BRAKE REOPEN ¸�û4W
¿ç���� û�@���© ���4W Ä�n�^�h . °���� ��©��
¿ç���� û�@�`
TD ��M�U�����T Ä�n�� ��^�h � q � BRAKE LIFT _ I�¾�^ “False” \ �a�ý�a
²
l�J�� .
5 BRAKE LONG FT TD
¿ç���� ��� ��y È�^ ��m�^�h .
6 ZERO SPEED LEV 0 S S \ #�P�i S S ÿ�` ]�J�l�J�� .
��¦��¦��¦��¦ ! 0% \ ]�J�U«
¿ç�����u ��y�U�� ®�` L
ý´�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-47
7 ZERO SPEED TIME ����� S S u ZERO SPEED LEV ��U�µ�j ZERO SPEED ����u 1 \ ]�J�����4W ��m�^�h . X�V�Z�x 67.11 MOTOR TYPE ` CONICAL \ ]�J�U
« È�n
ª K�S���\ ^dÀ��o
J���^�{�� ��� ��m�^�h�� ��KdL�J�� .
8 SPEED REF TD ����^ u�È�S Ý���T S S ��©�Ro
����dW ��m�^�h .
9 START TORQ SEL NOT USED = Á�u�C�# ��� ��� �� .
AUTO TQ MEM = K�� ��� v�Ð�Z õ�ö . Note: X�V�Z�x 67.10 T ]�Jª ÿ �
��� v�Ð�Z4W Ä�n�ÿ���\ ��K4LJ�� .
LOAD MEAS = \�¾�Ã�T� ©�Jª ÿ�Ä�Å b�� Ta��\ (DS5.2) µ�x ^�_ ���
��� ��©�ÿ .
PAR 67.10 = X�V�Z�x 67.10 MIN START TQ REF T ]�Jª ��� ç�u�` ��K��
������� ��©�ÿ�` ¦�J�l�J�� .
10 MIN START TQ REF X�V�Z�x 67.9 u “PAR 67.10” ��\ ]�J4�+` j ��K4��_ ������� ��©�R .
11 MOTOR TYPE CONICAL = ��J�� Ð�x ��Áì���a . J���^ X�V�Z�x 67.12 T ]�J�T W�� KS�` È�n ^�Æ L
ý��| ����^�T�_ K�S�` °�u ^�Æ L
ý´�J�� .( X�V�Z�x
67.13 & 67.14) ��J�� Ð�x ��ÁdW K���� ��� � 5-31 Ç 5.6.8 ����C�#
¿ç��
��Ta�o
¨�Y�^�î .
STANDARD = ��J�� Ð�x ��ÁdW i�ì��a .
12 RED FLUX LEVEL X�V�Z�x 67.11W ��J�� Ð�x ��Á�` ì��a ^�{«
����� J���^�T È�nª K�S�ç�u�� ��K4LJ�� . J���^ È�ä4W È�n�u Î���i j O � K�ëdW �b�K
��J�� �xo
�����_ ¤���ÿ�# 75% ¨�� É � ÿ�` ��K�l�J�� .
Note: J���^ È�nª K�S � ����� ��ïo
°�u�^�b�J�� . ��V� µ�I�C���\
��Q�� Ê #�ô�x�u Î���l�J�� .
13 START FLUX LEVEL X�V�Z�x 67.11W ��J�� Ð�x ��Á�` ì���a ^�{«
����^ °�u�ª K�Sç�u�` ��K�l�J�� . X�V�Z�x 67.14 T ]�Jª ^�h�� q °�u�ª K�S�ç�u�� ì��a L�J�� .
14 START FLUX TIME ����^ °�uª K�S�ç�u ( X�V�Z�x 67.13)�
START FLUX TIME T ]�Jª
^�h�� q �a L�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-48
6.2.24 �Õ �Õ �Õ �Õ 68 ?x]ÇÄËCÇa?x]ÇÄËCÇa?x]ÇÄËCÇa?x]ÇÄËCÇa -Power optimisation
Ö 6-21W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-21 �Õ 68.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 POWOP SELECT True ; False ?�]Ä�C�a õ�ö .
2 BASE SPEED 1.0 ... 100.0 % ��B�S S ]�J .
3 POWOP AUTOTUNE SEL True ; False ?�]Ä�C�a K�� ��J õ�ö .
4 INERTIA TOTAL UP 0.00 ... 100.00
KGM2
�b�^ � ����R .
5 INERTIA TOTAL DWN 0.00 ... 100.00
KGM2
�U�^ � ����R .
6 TQLIM UP 0.0 ... 200.0 % �b�^ ?�]�C�a ���
T���R .
7 TQLIM DWN 0.0 ... 200.0 % �U�^ ?�]�C�a ���
T���R .
8 POWOP RESET LEV 0 ... 100 % ?�]Ä�C�a Z�c ç�u .
9 T MAX 0 … 2000 % ����� Ä� ��� K�ë .
10 LOAD TORQ FILT TC 0 … 32000 ms µ�U ��� ��� Î�x ^�J�L
11 SLACK ROPE TQ LEV -400 % … 400 % \�� Z�Ì�ú�Í ���
Ö�^�ç�u
12 LOADCORR FACT UP 0.00 … 100.00 �b�^ µ�U�¨�J ��L
13 LOADCORR FACT DWN 0.00 … 100.00 �U�^ µ�U�¨�J ��L
1 POWOP SELECT True
?�]�C�a ��a .
False
?�]Ä�C�a iì�a .
2 BASE SPEED ?�]�Ä�Ca ����` ��� À���) . X�V�Z�x 69.1 SPEED SCALING RPM T é�Î�s\ ]�J . � S S ��b�T��_ X�V�Z�x 68.6 & 68.7 T ]�J�ª ç�u�T ����U�_
J�?�]�` �` L
ý´�J�� .
µ�I�C���\ Ï���K Ü�}�T�4W ����N ����� Ý�Þ ?�] ��Þ�R�u µ�J�i�j4W
S So
£�l�J�� . ����C���\ u�Á�� ��µ�U ����_ � S S T ó�¶ý´�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-49
3 POWOP True
AUTOTUNE SEL
��J ��y ��a .
Note: � ����ÿ�� >�> ���ª ��T � X�V�Z�x�_ False \ Z�c4L�J�� .
����ÿ � No. 1.24 TOTAL INERTIAW ��T�����T� à L
ý´�J�� .
>�>4W @�{�T� 2~3 � ����� INERTIA TOTAL UP N INERTIA TOTAL DWN
T >�> ¬�]4��_ Ð�Ñ ����ÿ ¬�J�� .
False
K�� ��J�Ð�¾ iì���a .
4 INERTIA TOTAL UP �b�^ ©�Jª � ����R .
Note: ����ÿdW ��� X�V�Z�x�_ ��Ò4W n���s4�a �
i���� !��4�+´�J
� .( ��ç�# C�K n���sd�a
ô�� ACAA7020N ��� ) ��Ò4W n���s4�a
ô�4W ¾�V��
¿�o Ó� �ç���¾ U������ X�V�Z�x 68.4 & 68.5
o ��Â4W ÷�P���\
��J�U�Y�^�î . ÔÔ ÔÔ �Ë��ÿ�Ë��ÿ�Ë��ÿ�Ë��ÿ = ((8363 * Pnom) / (nmax * nnom)) * �xÒÕW�xÒÕW�xÒÕW�xÒÕW �Ë��ÿ�Ë��ÿ�Ë��ÿ�Ë��ÿ .
-“Pnom” = X�V�Z�x 99.9 MOTOR NOM POWERW ÿ .
-“nmax” = X�V�Z�x 69.1 SPEED SCALING RPMW ÿ .
-“nnom” = X�V�Z�x 99.8 MOTOR NOM SPEEDW ÿ .
5 INERTIA TOTAL DWN �U�^ ©�Jª � ���R .
6 TQLIM UP �b�^ Ä� ñ�K µ�U ����ÿ .(= Ï���K ?�] T�� )
7 TQLIM DWN �U�^ Ä�� ñ�K µ�U ����ÿ .(= Ï���K ?�] T�� )
8 POWOP RESET ?�]Ä�Ca ��©�R�T�4W S S ç�u � �� u�S�� q Ô \�� ����â�i
o ���
LEV � ç�u�\ Z�cdLJ�� .
9 T MAX Ð�x Ö�ó�\� �T ��k ����� Ä�� ����K�ë .(Pull-out torqe ��_ Breakdown
torque V�¦ S ��É ) j�j�\ Tmax/Tn = 2.5 (=250 %) \ Æa��J�� .
Note: µ�I�C���\ Ö�ó�\� �b�T ��#�X��h ( _�¬�����^ ) T ��� Tmax ÿ�` ¬�]U�Y�^�î .
#�ô�x X�V�Z�x ]�J�T� Æae Tmax/Tn ÿ�` ��K�U�¶
« X�V�Z�x 68.9
o
]�J�U�� ��T ÿ�` I�¾�^ 0.7 \ ü�×aÆa² l�J�� .( �Z�¦ Å � ÿ�T
100 ` Ø�U�Y�^�î .)

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-50
10 LOAD TORQ ����ª ��� 2.31 LOAD TORQUE %(5-32 Ç "�� )
o ��� �x ^�J�L .
FILT TC
11 SLACK ROPE \�� Z�Ì�ú�Í È���ç�u .( � ��Á4W b������ � 5-33 Ç "�� ) µ�U���� ���
TQ LEV (2.31) u � ç�u ��U�\ <a�«
¾�V��¿_ \�� Z�Ì�ú�Í���\ #�P�U�¦ Fast
stop type 1 ` ��y�l�J�� . ¤���ÿ -400% W ]�J � ��k�J��o
��y�^�{�� ®�`
��¬�J�� .
12 LOADCORR �b�^ ��� 2.31 LOAD TORQUE %
o �� µ�U�¨�J ��L . J�»�µ�U�\ b�^4W
FACT UP ����� ��K�k ( o , ��µ�U�^ Ý���y Ð�x���� ) Ù�s w�J�V ������s Ð�x�T W��
���4��_ ������s ���dW ����C Þ�å ( Ý���y )S
®�É4LJ�� . §: Eff. 0.9 * Util. 1.0 = 0.90.
13 LOADCORR �U @�{4W µ�U�¨�J ��L . Note: U�^ Þ�å � 1/ ����C Þ�å \ ���4LJ�� .
FACT DWN
§: 1/0.9 =1.10.

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-51
6.2.25 �Õ �Õ �Õ �Õ 69 �x©�ÿ�x©�ÿ�x©�ÿ�x©�ÿ ��Jx���Jx���Jx���Jx� -Reference Handler
Ö 6-22W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-22 �Õ 69.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 SPEED SCALING RPM 0 ... 10000 RPM �� S S .
2 ACC TIME FORW 0.1 ... 60.0 s J @�{�^dW u�S ^�h .
3 ACC TIME REV 0.1 ... 60.0 s } @�{�^dW u�S ^�h .
4 DEC TIME FORW 0.1 ... 60.0 s J @�{�^dW �S ^�h .
5 DEC TIME REV 0.1 ... 60.0 } @�{�^dW �S ^�h .
6 S-RAMP TC 0.0 s...10.0 s S-ramp ^�J�L .
7 RAMP SCALE LOCAL 0.5 ... 100.0 \���T�dW u��S ��� ��J .
10 RAMP RATE=1 True ; False; AI3 u�È�S i�å õ�ö
1 SPEED SCALING RPM 100 % S S ��©�R�T�4W ����� Ú4W S S ]�J .
2 ACC TIME FORW S S 0 ~ +100 %( X�V�Z�x 69.1 T ����U�_ 100%) ¯��4W J�@�{ u�S ^�h
]�J .
3 ACC TIME REV S S 0 ~ -100 %( X�V�Z�x 69.1W ��©�R ) ¯��dW }�@�{ u�S ^�h ]�J .
4 DEC TIME FORW S S +100 ~ 0 %( X�V�Z�x 69.1W ��©�R ) ¯��dW J�@�{ È�S ^�h ]�J .
5 DEC TIME REV S S -100 ~ 0 %( X�V�Z�x 69.1W ��©�R ) ¯��dW }�@�{ È�S ^�h ]�J .
6 S-RAMP TC S S ��©�R u�È�S ^�h�T�4W s- (�õ ^�J�L ]�J .
7 RAMP SCALE LOCAL \�� ����^ u��S ^�h ��� ��J ��L .
10 RAMP RATE=1 Î�¾�ô�� Ð�¾�T� PLC Ta��\�µ�x4W RAMP RATE ����u . ¾�V��
¿T Î����
` j õ�ö . Î�¾�ô���ü Q�ª���� Ð�¾�T� u�È�S i�å�����\�æ w���\� ¬�](AI3)
o ì���a U�³ ��Û�i L
ý´�J�� .
True
Î�¾�ô�� Ò�����\ µ�xdW RAMP RATE ����u iì��a L�J�� . 1.0 ��\ ¦�J .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-52
False
Î�¾�ô�� Ò�� (DS3.1) ��\ µ�x4W RAMP RATE ����u ì��a L�J�� .
AI3
RAMP RATE W r�L���L ����_ w���\� ¬�] 3 T m�ÂdL�J�� . r�L���L 1.0
T ����U�_ ����ç�u � 4mA(0 – 4mA) ��U���¦ r�L���L 1.0 – 10.0 T ����U_ ����ç�u � 4mA – 20mA ��| i�[�l�J�� .
§: 12mA = 5.5.
6.2.26 �Õ �Õ �Õ �Õ 70 ��R�©�J��R�©�J��R�©�J��R�©�J -Position measurement
Ö 6-23W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� b�� ��� �
Ö w�Øo
"�� ��J�� .
Ö 6-23 �Õ 70.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 POS SCALE 1 ... 32767 PPU ��R ��� ��J .
2 SYNC COND Pos; Neg ���a ��¹ .
1 POS SCALE ���y ��L L . � ��R ���x4W ��� ��J���Lo
]�J�l�J�� . §: ��� L /mm.( ��R�©�J ÿ POSACT= ��� Ö���x / POS SCALE.)
2 SYNC COND Pos
DI3 ¬�]�� “0” T� “1” � � j U�¾d�a
���a ��y .
Neg
DI3 ¬�]�� “1” T� “0” � � j U�¾d�a
���a ��y .
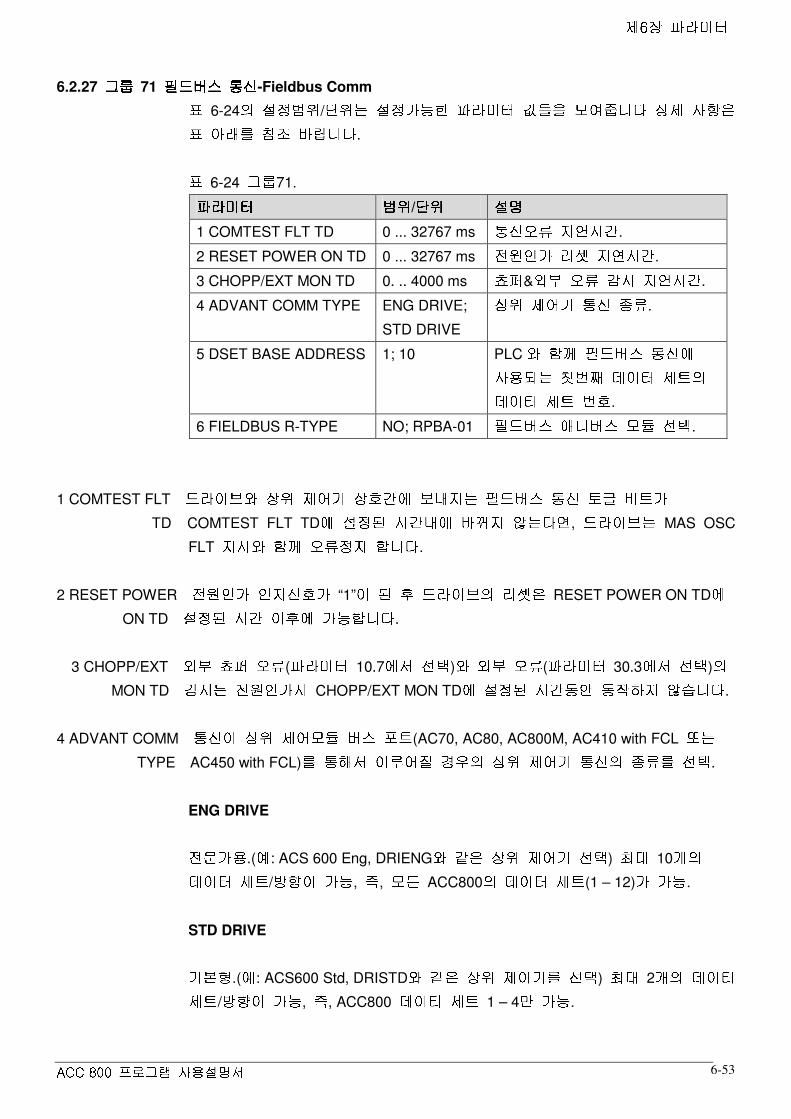
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-53
6.2.27 �Õ �Õ �Õ �Õ 71 Î�¾�ô��Î�¾�ô��Î�¾�ô��Î�¾�ô�� Ò��Ò��Ò��Ò�� -Fieldbus Comm
Ö 6-24W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� b�� ��� �
Ö w�Øo
"�� ��J�� .
Ö 6-24 �Õ 71.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 COMTEST FLT TD 0 ... 32767 ms Ò���î�ï ��m�^�h .
2 RESET POWER ON TD 0 ... 32767 ms �h�#�u Z�c ��m�^�h .
3 CHOPP/EXT MON TD 0. .. 4000 ms è�é &��µ î�ï È�^ ��m�^�h .
4 ADVANT COMM TYPE ENG DRIVE;
STD DRIVE
b� Ta� Ò�� «�ï .
5 DSET BASE ADDRESS 1; 10 PLC�
É�Ê Î�¾�ô�� Ò���T
��K4��_ ¶�¹�º t���x ��s4W
t���x ��s ¹�� .
6 FIELDBUS R-TYPE NO; RPBA-01 Î�¾�ô�� Ü�J�ô�� Ð�Ñ õ�ö .
1 COMTEST FLT ¾�V��¿ �
b�� Ta� b���h�T ¨�Û���_ Î�¾�ô�� Ò�� ��Ý i�s�u
TD COMTEST FLT TD T ]�J�ª ^�h�Û�T Ì4Þ�� ®�_��«
, ¾�V��¿_ MAS OSC
FLT ��^ � É�Ê î�ï�J�� l�J�� .
2 RESET POWER ��h�#�u #�������u “1” � ª � ¾�V��¿W Z�c � RESET POWER ON TD T
ON TD ]�Jª ^�h ����T u�Á�l�J�� .
3 CHOPP/EXT ��µ è�é î�ï ( X�V�Z�x 10.7 T� õ�ö )�
��µ î�ï ( X�V�Z�x 30.3 T� õ�ö ) W
MON TD È�^�_ ��h#�u�^ CHOPP/EXT MON TD T ]�Jª ^�h�� q ��y�U�� ®�´�J�� .
4 ADVANT COMM Ò���� b� TaÐ�Ñ ô�� ®�s (AC70, AC80, AC800M, AC410 with FCL ��_
TYPE AC450 with FCL)
o Ò��� ��ß
aI ��à4W b� T
a� Ò��dW «�ï
o õ�ö .
ENG DRIVE
����u�K .(
§: ACS 600 Eng, DRIENG
� . � b�� T
a� õ�ö ) Ä� 10 û4W
t���x ��s / @�{�� u�Á , o , Ð�~ ACC800W t���x ��s (1 – 12) u u�Á .
STD DRIVE
�� �R .(
§: ACS600 Std, DRISTD
� . � b� T
a�o
õ�ö ) Ä�� 2 û4W t���x
��s / @�{�� u�Á , o , ACC800 t���x ��s 1 – 4 s u�Á .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-54
5 DSET BASE b� Ta
^���·dW Î�¾�ô�� Ò���` ��� ��K4��_ ¶ ¹�º t���x ��s4W t��
ADDRESS x ��s ¹�� . � X�V�Z�x�T ]�J�ª t���x ��s�u ¾�V�¬�T Æa��_ ¶ ¹�º
t���x ��s���| �� t���x ��s�u ¾�V��¿\�µ�x Å�_ ¶ ¹�º t���x ��s
¬�J�� .( . � @�P���\ I�¼ )
1
t���x ��s ×�� : 1 … 12. t���x ��s 1,3,5,7�
¾�V��¿\ Æ
a��¦
2,4,6,8,12 _ ¾�V��¿\�µ�x PLC \ Æ
a��J�� .
10
t���x ��s ×�� : 10 … 21. t���x ��s 10,12,14,16�
¾�V��¿\ Æ
a��¦
11,13,15,17,21�
¾�V��¿\�µ�x PLC \ Æ
a��J�� .
6 FIELDBUS Ü�J�ô�� Ð�Ñ (R-type) ` ��K�U«
�Õ 51 Î�¾�ô�� X�V�Z�x�W ¤�� ]�J�`
R-TYPE Z�Z ��J�i L
ý´�J�� . ]��� 5.6.12 T ]��4�
a�ý_ ��Ä�Å Î�¾�ô��
o
s�á���\�æ ]�J�i L
ý´�J�� .
RPBA-01
�Õ 51W ��\���ô�� X�V�Z�xdW ¤�� ]�J�ÿ � ��ÂN .�� !��4LJ�� :
51.05=3, 51.06=6, 51.07=7, 51.08=10, 51.09=8, 51.10=11, 51.11=9, 51.12=12,
51.13=13, 51.14=16, 51.15=14, 51.16=17, 51.17=15, 51.18=18, 51.19=19,
51.20=22.

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-55
6.2.28 �Õ �Õ �Õ �Õ 72 Ú���xÚ���xÚ���xÚ���x / Ù�\xàÙ�\xàÙ�\xàÙ�\xà -Master/Follower
Ö 6-25W ]�J�×� / Q���_ ]�J�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-25 �Õ 72.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 MAST/FOLL MODE OFF; MASTER;
FOLLOWER
(M/F CTRL ��\
õ�ö�^�T�s ]�J u�Á )
Ú���x / Ù�\�à Ð�¾ ]�J .
2 TORQUE SELECTOR ZERO; SPEED;
TORQUE; MINIMUM;
MAXIMUM; ADD
��� õ�ö�� ]�J .
3 LOAD SHARE 0.0 % ... 400.0 %
(M/F CTRL ��\
õ�ö�^�T�s ]�J u�Á )
µ�U m�ã .
4 WINDOW SEL OFF; ON ä S à Ta
]�J .
5 WINDOW WIDTH POS 0.0 rpm...1500.0 rpm ä S à + å ]�J .
6 WINDOW WIDTH NEG 0.0 rpm...1500.0 rpm ä S à – å ]�J .
7 DROOP RATE 0.0 % ... 100.0 % ¾�ß�æ i�å
8 TORQ REF A FTC 0 ms ... 32767 ms
(M/F CTRL ��\
õ�ö�^�T�s ]�J u�Á )
��� ��©�R4W A Î�x
^�J�L .
9 M/F FAULT TD 0 ms ... 32767 ms
(M/F CTRL ��\
õ�ö�^�T�s ]�J u�Á )
Ú���x / Ù�\�à
î�ï ��m�^�h .
10 M/F COMM ERR TD 0 ms ... 32767 ms
(M/F CTRL ��\
õ�ö�^�T�s ]�J u�Á )
Ú���x / Ù�\�à
Ò���î�ï ��m�^�h .
11 MF BROADCAST
MODE
NO; YES Ú���x / Ù�\�à
Broadcast Ð�¾ .
1 MAST/FOLL MODE Ú���x / Ù�\�à ��� Ð�¾ .
OFF
Ú���x ��_ Ù�\�à Ð�¾ iì���a . û�E���ü \�� Tas u�Á�l�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-56
MASTER
M/F Ta
Ð�¾�T� Ú���x�\ ]�J ¢ .
FOLLOWER
M/F Ta
Ð�¾�T� Ù�\�à�\ ]�J ¢ .
2 TORQUE SELECTOR Ù�\�à ¾�V��¿T�dW Ð�¾ õ�ö .
ZERO
��� õ�ö�� X�V�Z�x iì��a . S S ü ��� Ta
õ�ö � µ�I�C���\ I/O ü
Î�¾�ô��o
Ò�� ]�JdLJ�� .( ¤���ÿ = S S Ta
)
SPEED
S S Ta
Ð�¾���| , M/F ctrl â���\�u ì�a��«
(M/F ô�� Ò�� ��K�^ ) Ú���x
¾�V��¿\�µ�x S S ��©�R (Speed_ref3 ramp ?�] )
o ^�´�J�� . Note: Ù�\�à4W
S S u�È�^�h � Ú���x ¾�V��¿ �
.Ïü É�r ]�J�l�J�� .
TORQUE
��� Ta
Ð�¾���| M/F ctrl â���\�u ì���a��«
(Torq ref A) Ú���x ¾�V��¿\
µ�x ��� ��©�Ro
^�´�J�� . o , Ú���x � Ù�\�à ����T µ�Uo
m�ã�l�J�� .
MINIMUM
��� õ�ö���_ ��� ��©�R � S S Ta�4W ?�]�ÿ�` i���U�³ À C �
ÿ�� ����� ��� ��©�R�\ ��Kd�a��J�� . M/F ctrl â���\�u ì��a��
«
Ú���x ¾�V��¿\�µ�x S S � ��� ��©�R
o ^�´�J�� . �� �� Ð�¾�_Ð�¾�_Ð�¾�_Ð�¾�_ µ�IxC���\µ�IxC���\µ�IxC���\µ�IxC���\
��çx#xK��çx#xK��çx#xK��çx#xK ¾xVx�¿
¾xVx�¿
¾xVx�¿
¾xVx�¿T��_T��_T��_T��_ �xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx� !
MAXIMUM
��� õ�ö���_ ��� ��©�R � S S Ta�4W ?�]�ÿ�` i���U�³ À O �
ÿ�� ����� ��� ��©�R�\ ��Kd�a��J�� . M/F ctrl â���\�u ì��a��
«
Ú���x ¾�V��¿\�µ�x S S � ��� ��©�R
o ^�´�J�� . �� �� Ð�¾�_Ð�¾�_Ð�¾�_Ð�¾�_ µ�IxC���\µ�IxC���\µ�IxC���\µ�IxC���\
��çx#xK��çx#xK��çx#xK��çx#xK ¾xVx�¿T��_¾xVx�
¿T��_¾xVx�
¿T��_¾xVx�
¿T��_ �xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx��xKÕ�Ë��®�´xJx� !

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-57
ADD
��� õ�ö���_ ��� ]�J�R�T S S Ta� ?�]�` ~�U�|
¥ ����R�_ J�b����
Ü�}�T��_ ��� TaÐ�¾�\ ��ydL�J�� .
��� Ta��_ Ù�\�à ¾�V��
¿�o ��� S S È�^ ��Á�# ä S à�T
a � É�Ê
ADD ��Á�` õ�ö�U«
��ÂN .�� ��y L�J�� :
º J�b�C�# ��� Ü�}�T� Ù�\�à ¾�V��¿_ ��� ��©�R (TORQ REF A) T
W�� ���dL�J�� .
º ä S à Ta_ ä S à�T S S
� �( S S ��©�R – ��T S S ÿ ) u v�w
ý_
� S S Ta�dW ¬�?�]�` 0 ��\ Ý�� l�J�� .
º S S � � ÿ�� ä S à Ü�}�` ç
aü«
ä S à Ta_ S S
� � o S S
Ta��\ #�u�U�¦ S S T
a�4W ?�]�ÿ � Û�µ ��� ��©�R
o °�u�ü
È�n�^�{�| ��T�S S u <a�Ïü è�V�u�_ ��` @���l�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-58
3 LOAD SHARE Ù�\�à ¾�V��¿�4W ]�J�ÿ � Ú���x � Ù�\�à ���4W µ�U m�ã�` ��J�l�J�� .
100% ]�J � Ú���x � ��µ�� ����� J�» ����\ ��� ��| ��_ 50/50W
µ�U m�ã�` W�Z�l�J�� .
4 WINDOW SEL X�V�Z�x 72.2 TORQUE SELECTORW ADD ��ÁN É�Ê ��Kd��_ ä S à Ta
��Á � ��� Ta��_ ¾�V��
¿W S S È�^ ��Á�` l�J�� .
OFF
ä S à Ta
��Á ��K q É .
ON
ä S à Ta
��Á ��K . ��_ X�V�Z�x 72.2 TORQUE SELECTOR u ADD \
]�J �+` ��à�T�s ��K u�Á�l�J�� . ä S à T
a_ S S
� � ÿ ( S S ��©�R
– ��T S S ÿ ) ` Ò�T�U�| J�b���� Ü�}�T�4W ä S à Ta_ S S T
a�dW
¬�]�` 0 ��\ Ý�� l�J�� . S S Ta��_ ��Â�N . � ��à�T�s ��ydL�J�� .
º é S S � � u X�V�Z�x 72.5 WINDOW WIDTH POS ÿ�` ¤N�U
Ïü
º ê S S � � W f���ÿ�� X�V�Z�x 72.6 WINDOW WIDTH NEG ÿ�` ¤N .
S S � � u ä S à4W ×�
o çaü«
�o
ça�ë
S S�� � ÿ�� S S Ta
��T #�u4L�J�� . S S Ta��_ ¬�]N ��� ��©�R�T S S T
a�dW i�[���ì
( X�V�Z�x 23.1 GAIN) T ���ª S S ��©�Ro
g���U�| ��_ ����õ�ö���T�
��� ��©�R�\ ~�����| Â�N�ÿ � ��ç�#���K ¾�V��¿W Û�µ ��� ��©�R
\ ��K L�J�� .
§�o���a µ�U È�n b�&�T� ¾�V��
¿W Û�µ ��� ��©�R�_ ����� S S W
N S � b�z�` @���U�� ��� at�J�� . s�µ ä S à T
au ��y4�� ®�_��«
�����4W S S _ ¾�V��¿W S S T���R ¯�� b�z�i ��¬�J�� . X�V�Z�x
20.1 MINIMUM SPEED�
20.2 MAXIMUM SPEED T� S S T���Ro
]�J�i L ý´�J�� .
5 WINDOW WIDTH � X�V�Z�x ÿ � ä S à Tau ì�a ª b�&�T��s ��K4��| ]�J u�Á
POS ×��_ 0 T� 1500 rpm ¬�J�� .
S S Ta�dW ¬�] � + S S
� � ÿ�� WINDOW WIDTH POS ÿ�` ¤N�i j
¯�� 0 ��\ Ý��dL�J�� .
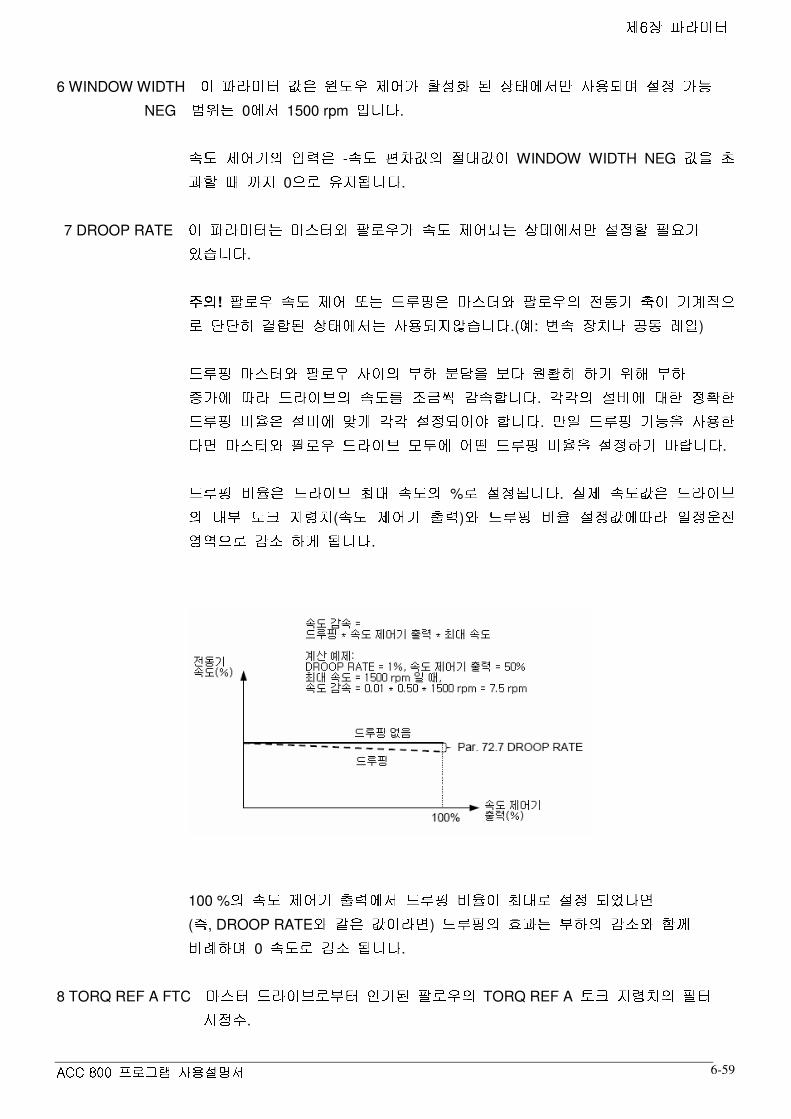
T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-59
6 WINDOW WIDTH � X�V�Z�x ÿ � ä S à Tau ì�a ª b�&�T��s ��K4��| ]�J u�Á
NEG ×��_ 0 T� 1500 rpm ¬�J�� .
S S Ta�4W ¬�] � - S S
� � ÿ4W f���ÿ�� WINDOW WIDTH NEG ÿ�` ¤N�i j ¯�� 0 ��\ Ý��4L�J�� .
7 DROOP RATE � X�V�Z�x�_ Ú���x � Ù�\�à�u S S Ta��_ b�&�T��s ]�J�i Î���u ý
´�J�� .
ÆÕWÆÕWÆÕWÆÕW ! Ù�\�à S S Ta
��_ ¾�ß�æ � Ú���x � Ù�\�à4W ����� Ú�� ����C��\ Q�Q�� Â�l�ª b�&�T��_ ��K4����®�´�J�� .(
§: !�S ��R�ü ÷�Ò ç�µ )
¾�ß�æ Ú���x � Ù�\�à ���4W µ�U m�ã�` ¨�� h�ì�� U�� ��� µ�U
°�u�T ��V ¾�V��¿W S S
o ����í È�S�l�J�� . >�>4W ]�i�T ��� J4,��
¾�ß�æ i�å � ]�i�T ��r >�> ]�Jd�a² l�J�� . s�µ ¾�ß�æ ��Á�` ��K��
�«
Ú���x � Ù�\�à ¾�V��¿
Ð�¸�T
a�î ¾�ß�æ i�å�` ]�J�U�� Ì�Í�J�� .
¾�ß�æ i�å � ¾�V��¿
Ä� S S W % \ ]�J4L�J�� . ��T S S ÿ � ¾�V��¿
W Û�µ ��� ��©�R ( S S Ta� ?�] )
� ¾�ß�æ i�å ]�J�ÿ�T���V µ�J����
�}���\ �n U�r LJ�� .
100 % W S S Ta� ?�]�T� ¾�ß�æ i�å�� Ä���\ ]�J �
+�«
( o , DROOP RATE�
. � ÿ���V«
) ¾�ß�ædW ÞN�_ µ�U4W È�n � É�Ê
i�[�U�| 0 S S \ �n L�J�� .
8 TORQ REF A FTC Ú���x ¾�V��¿\�µ�x #�uª Ù�\�à4W TORQ REF A ��� ��©�R4W Î�x
^�J�L .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-60
9 M/F FAULT TD Ù�\�à ¾�V��¿u Ú���x ¾�V��
¿\�µ�x ��� ��©�` ^���`�j ¼�Ç�T��_
M/F FAULT TD ^�h ���T RUNNING=1 ���o
)�ï l�J�� . s�µ � ���o
^�� ð�U«
MF RUN FLT ��^ � É�Ê ����J��4L�J�� .
Note: Ù�\�à ¾�V��¿W î�ï�J���T ��V Ú���x ¾�V��
¿_ î�ï�J�� L�J�� .
10 M/F COMM Ú���x � Ù�\�à Ð�¾�u ��yd��K�Ú�K ( X�V�Z�x 72.1 MAST/FOLL MODE) ¸
ERR TD ¾�V��¿_ ¸ ¾�V��
¿ ���
o î�u�_ ô�� Ò�� ��Ý i�s
o �^�U�� ^�y�l
J�� . s�ñ M/F COMM ERR TD T ]�Jª ^�h�¨�� } ^�h�� q ��Ý i�s�u
À�Q4�«
MF COMM ERR ��^ � É�Ê î�ï�J�� L�J�� .
Note; Ú���x / Ù�\�à Broadcast Ð�¾ ��K�^�T�_ MF COMM ERR ` ��� ��m
^�h�� y���U�� ®�´�J�� .
11 MF BROADCAST ³�ú��4W Ù�\�à ¾�V��¿u Î���� ��à�T�_ Ú���x / Ù�\�à Broadcast Ð�¾
MODE
o ��K�l�J�� . Ú���x � Ù�\�à Ð�¸�T YES \ ]�J�l�J�� . Broadcast Ð�¾�u
õ�ö4�«
Ú���x ¾�V��¿_ Ù�\�à�\ ]�Jª ( X�V�Z�x 72.1) Ð�~ ¾�V��
¿T
S S � ��� ��©�R�s�` ¨�ò���¬�J�� . Ú���x � Ù�\�à�_ ó%
2
o Ò�� �\ ô ����V�\ m� �
a² l�J�� . ����N ON ����_ õ�¾�^ I/O ü Î�¾�ô��
( Q�ª���� Ð�¾�ü Î�¾�ô�� Ð�¾ ��K�^ , X�V�Z�x 64.1)
o Ù�\�à�Ù�s w�J�V
Ú���x�T S >�>dW ¾�V��¿T _�` m�Âd�
a²�s l�J�� . ��� Ð�~ ¾�V��
¿W
�������dW È�^�_ õ�¾�^ ��µ�T� ��ßa�Ã
² l�J�� .
NO
Ú���x / Ù�\�à Broadcast Ð�¾ iì���a . µ�õ�C�# Ú���x / Ù�\�à4W µ���µ Ò��s u�Á .
YES
Ú���x / Ù�\�à Broadcast Ð�¾dW ì���a .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-61
6.2.29 �Õ �Õ �Õ �Õ 73 �x�xÚ�x�xÚ�x�xÚ�x�xÚ -Electric Shaft
Ö 6-26W ]�ö�×� / Q���_ ]�ö�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ����
Ö w�Øo
"�� ��J�� .
Ö 6-26 �Õ 73.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 ELSHAFT MODE SEL OFF; MASTER;
SLAVE
����Ú Ð�¾ õ�ö .
2 ELSHAFT GAIN 0.0 … 100.0 ����Ú Ta
i�[���ì .
3 GEAR NUMERATOR 1 … 32000 �a
������ö m�÷ .
4 GEAR DENOMINATOR 1 … 32000 �a
������ö m�Ð .
5 POS ERROR LIMIT 0 … 1000 “pos units” ��R � �
î�ï T���ÿ .
6 ELSH CTRL MIN SPD 0 … 100 % ����Ú Ta
Än�S S .
1 ELSHAFT MODE ����Ú ¾�V��¿Ð�¾ õ�ö .
SEL
OFF
Ú���x�ü ��Ø��¿
¾�V��¿W ����Ú T
a i��a .
MASTER
����Ú TaT� Ú���x�\ ��K�i ¾�V��
¿W õ�ö . ��� X�V�Z�x 99.2
Application macro = M/F CTRLN 72.1 Mast/Foll mode = MASTER \ ]�ö���²�s
l�J�� .
SLAVE
����Ú TaT� ��Ø��
¿\ ��K�i ¾�V��
¿W õ�ö . ��� X�V�Z�x 99.2
Application macro = M/F CTRLN 72.1 Mast/Foll mode = FOLLOWER, 72.2 Torque
selector = SPEED \ ]�ö���²�s l�J�� .
2 ELSHAFT GAIN ����Ú Ta� ( i�[ T
a� )W i�[���ì�ÿ . Q , ��Ø��
¿ ¾�V��
¿T��s y�� .
Elshaft Gain = 0.1 ��¦ Ú���x � ��Ø��¿
����T ��R � �
( ��Ø��¿
��� 2.26)
u 1unit �«
-0.1% W�S S ¨�ö�ÿ�� ��Ø��¿
¾�V��¿T ��KdL�J�� .
����Ú TaT ��� ]�� �
²�³ 5.5.14
o "�¦�U�Y�^�î .
3 GEAR NUMERATOR � X�V�Z�x�_ X�V�Z�x 73.4 Gear Denominator�
É�Ê Ú���x � ��Ø��¿
h4W ����C S S i�å�` T�÷�U�_�t ��K4L�J�� . S S i�å Ú���x / ��Ø��¿_
Gear Numerator/Gear Denominator�
.�´�J�� . � i�å�#�ø�_ ����Ú Tau
�a �+` j�T�s ����
¿ ¾�V��
¿W S S ��©�ÿ�N ��R�ÿ�T Ø�����J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-62
§: Ú���x � ��Ø��
¿ ¾�V��
¿W �b���_ Ä�� ����S S
o ��� X�V�Z�x
69.1 Speed scaling rpm T . � ÿ���\ ]�ö���²�l�J�� . !�S��4W i�å � ��\
Ú���x ¾�V��¿W Ä�� S S _ \���S S 3.6m/min T ����U�¦ ��Ø��
¿ ¾�V��¿
W Ä��S S _ \���S S 6.4m/min T ����i j Ú���x � ��Ø��¿
h4W S Si�å � 3.6/6.4 = 0.5625 u L�J�� .
¸�û4W ¾�V��¿�o
. � \�� S S (0 – (+/-)3.6 m/min) \ É�Ê ����U�� ����õ( ����Ú T
a ��b�& ) X�V�Z�x 73.3 Gear Numerator = 36, X�V�Z�x 73.4 Gear
Denominator = 64 (36/64 = 0.5625) \ ]�ö�U�¦ X�V�Z�x 70.1 POS SCALE�
¸
¾�V��¿u ��µ�U�r ]�ö4�
a² l�J�� .
NOTE: X�V�Z�x�_ ��Ø��¿
¾�V��¿T��s ì�a L�J��
4 GEAR DENOMINATOR X�V�Z�x 73.3W ]���` "���U�Y�^�î .
5 POS ERROR ����Ú Tau ì��a �
a�ý_ b�&�T� Ú���x � ��Ø��
¿ ¾�V��
¿ h�T ��R
LIMIT � �
( ��� 2.26) u � ÿ�` ¤NU«
¾�V��¿_ “ELECTR SHAFT” î�ï���^ �
É�Ê î�ï�ö���U�¦ Ú���x ¾�V��¿T�_ “FOLL FAULT” ��� Ö�^4� ��¬�J�� .
Ú���x ¾�V��¿W Z�c���© � ¸ ¾�V��
¿ Ð�¸�T C�Kd� ��¬�J�� . Q��_
X�V�Z�x 70.1 POS SCALE T ]�öª ��T W�� “pos units”(
§:mm) ¬�J�� .
� X�V�Z�x�_ ��Ø��¿
¾�V��¿T��s ì���a L�J�� .
6 ELSH CTRL ����Ú Ta_ ����� S S u � Ä�n S S ç�u ��b�µ�j�s ì�a L�J�� .
MIN SPD � £ � ������u ������ü ö���^ � .�� 0 S S T u�¯ Ó j Ta��_ ì�a
��� ®�´�J�� . � T���Ro
ùa«
Ta�dW ?�] � ¡�s�� !a
o ���
��� f�g4��| >�> TÏL�J�� .( o , ����^�� u�È�S�` °�u�^�{�¦ ö���^��
0 ��\ s�t�J�� .) � S S T���R ��U�T� ����À (
§: ����� ö���^ ) T ×�Cª
��R � � _ ������u Än S S T�� ELSH CTRL MIN SPD ÿ ��b�� ��÷�Ú�÷
0 ��\ Tai ��¬�J�� .
� X�V�Z�x�_ ��Ø��¿
¾�V��¿T��s ì���a L�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-63
6.2.30 �Õ �Õ �Õ �Õ 74 ��çx#��çx#��çx#��çx# ø��ø��ø��ø�� -Crane Lifetime
Ö 6-27 ]�ö�×�� / Q���_ ]�ö�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ��� �
Ö w�Øo
"�� ��J�� .
Ö 6-27 �Õ 74.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 NOMINAL LOAD 0.00 … 32767.00 ton ö�» �b µ�U .
2 CRANE LIFETIME 0 … 12500 hrs ��ç�#4W ø�� .
3 START LIFETIMEMON OFF; ON ��ç�# ø�� È�^4W ^�y .
1 NOMINAL LOAD 100% µ�U���� ( ��� 2.31) T ����U�_ ��ç�# ������s4W ton Q� ö�» ( � ) µ�U .
2 CRANE LIFETIME ^�h�Q���W ��ç�# ������s4W ]���ª ����C�# ø�� . ����ª LIFETIME
LEFT ��� 1.35 u 10% ��U�u �«
¾�V��¿_ “LIFETIME>90%” V�_
��¦�v����o
ü���ò ��¬�J�� .
3 START LIFETIMEMON “Load spectrum factor Km” W ����T W�� ��ç�# ø���È�^�_ X�V�Z�x
START LIFETIMEON = ONW ]�ö�T W�� ^�ydL�J�� .
Note: � X�V�Z�x�_ ¾�V��¿
^�����^ ON ��\ ��¹ ]�ö4�«
��K�÷�T
W�� Z�c�i ø ��´�J�� .

T4���YX�V�Z�x
�������������d�d�� ¢¡¤£d¥�¦d§ 6-64
6.2.31 �Õ �Õ �Õ �Õ 90 tx��xtx��xtx��xtx��x �xs�xs�xs�xs ¯�W¯�W¯�W¯�W ÆxnÆxnÆxnÆxn -Dataset REC Addr
Ö 6-28 ]�ö�×�� / Q���_ ]�ö�u�Á�� X�V�Z�x ÿ�` ¨�³���J�� . b�� ��� �
Ö w�Øo
"�� ��J�� .
Ö 6-28 �Õ 90.
XxV�Z�xXxV�Z�xXxV�Z�xXxV�Z�x ×Ç�×Ç�×Ç�×Ç� / QÇ�QÇ�QÇ�QÇ� ]��]��]��]��
1 DATASET 7 WORD 1 0 … 9999 t���x���s 7 ��÷ 1 W Æ�n .
2 DATASET 7 WORD 2 0 … 9999 t���x���s 7 ��÷ 2 W Æ�n .
3 DATASET 7 WORD 3 0 … 9999 t���x���s 7 ��÷ 3 W Æ�n .
�Õ 90�
t���x���s 7 ��÷ 1 – 3 T ú�³�e ¾�V��¿
X�V�Z�xo
ö4W�l�J�� .
1 DATASET 7 WORD 1 Î�¾�ô�� t���x���s 7 ��÷ 1W ö�ø�\�µ�x Åa��_ �Õ4û ü�W�T����
¾�V��¿
X�V�Z�x . “ n�ø X�V�Z�x ”
o ö�ø�\dW ������ö � n�ø4W ý�÷�T
W�� Æa��J�� .
§: X�V�Z�x 69.2 = 5.0 sec _ 50W ö�ø�ÿ4û .�´�J�� .
R�P : xxyy, ��þ xx = ÿ�V���x �Õ (10 – 99), yy = ÿ�V���x ü��
( ��b 2 ÷���ø�� ��K , o , 1 = 01). §: ��ö�ÿ 2001 = ÿ�V���� 20.1 MINIMUM SPEED.
( Î�¾�ô� t������s 7 ��÷ 1 ��µ�� ^ � ÿ )
2 DATASET 7 WORD 2 ÿ�V���� 90.1 DATASET 7 WORD 1 "�� .
3 DATASET 7 WORD 3 ÿ�V���� 90.1 DATASET 7 WORD 1 "�� .

� ���7ÿ�V����
�������������d�d�� ¢¡¤£d¥�¦d§ 6-65
6.2.32 �Õ �Õ �Õ �Õ 92 tx����xstx����xstx����xstx����xs �ó�Æxn �ó�Æxn �ó�Æxn �ó�Æxn -Dataset TR Addr
Ö 6-29W ��ö�×�� / ����� ��ö���Á�� ÿ�V���� ÿ���
¨�³���J�� . b� ���� Ö ��Ø�� "�� Ì�Í�J�� .
Ö 6-29 �Õ 92
ÿxV����ÿxV����ÿxV����ÿxV���� ×��×��×��×�� / ������������ ������������
1 DATASET 4 WORD 1 0 … 9999 t������s 4 ��÷ 1 W Æ�n .
2 DATASET 4 WORD 2 0 … 9999 t������s 4 ��÷ 2 W Æ�n .
3 DATASET 4 WORD 3 0 … 9999 t������s 4 ��÷ 3 W Æ�n .
4 DATASET 6 WORD 1 0 … 9999 t������s 6 ��÷ 1 W Æ�n .
5 DATASET 6 WORD 2 0 … 9999 t������s 6 ��÷ 2 W Æ�n .
6 DATASET 6 WORD 3 0 … 9999 t������s 6 ��÷ 3 W Æ�n .
7 DATASET 8 WORD 1 0 … 9999 t������s 8 ��÷ 1 W Æ�n .
8 DATASET 8 WORD 2 0 … 9999 t������s 8 ��÷ 2 W Æ�n .
9 DATASET 8 WORD 3 0 … 9999 t������s 8 ��÷ 3 W Æ�n .
�Õ 92 � �Õ 1 – 5 T� Î�¾�ô� t�������s 4, 6, 8 ��÷ 1 – 3 ��� ��� � �!�U�� “swichbox”��� � ��KdL�J�� .
1 DATASET 4 WORD 1 "�#�$� t������s 4 ��÷ 1W �%4û ü��dW &�n�'�( . ): t������s 4 ��÷ 1 T �*
� ���
��� SPEED REF3 � �!�U�+�,
ÿ�V���� 92.1 = 202( �% 2, ü�� 02) � ��ö�U�Y���- .
2 DATASET 4 WORD 2 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
3 DATASET 4 WORD 3 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
4 DATASET 6 WORD 1 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
5 DATASET 6 WORD 2 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
6 DATASET 6 WORD 3 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
7 DATASET 8 WORD 1 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
8 DATASET 8 WORD 2 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .
9 DATASET 8 WORD 3 ÿ�V���� 92.1 DATASET 4 WORD 1
� "�. .

� ���7ÿ�V����
�������������d�d�� ¢¡¤£d¥�¦d§ 6-66
6.2.33 �% �% �% �% 98 / ³�0�1/ ³�0�1/ ³�0�1/ ³�0�1 -Option modules 2 6-30W ��ö�3�� / ����� ��ö���4�5 ÿ�V���� 6
��� ¨�7���J�� . b� ����
2
��8�� "�. 9�:�J�� . 26-30 �% 98
ÿxV����ÿxV����ÿxV����ÿxV���� 3��3��3��3�� / ������������ ������������
1 ENCODER MODULE NTAC; NO; RTAC-SLOT1; RTAC-SLOT2; RTAC-DDCS
; <�=�> / ³�0�1 '�(
2 COMM. MODULE NO; FIELDBUS; ADVANT
? � / ³�0�1 '�( .
3 CH3 NODE ADDR 1 … 254 ó�@ 3 A�# &�n
4 CH0 NODE ADDR 0 … 125 ó�@ 0 A�# &�n
5 DI/O EXT MODULE 1 NDIO; NO; RDIO-SLOT1; RDIO-SLOT2; RDIO-DDCS
[���\ B�C�] D�E 0�1
1 '�( .
6 DI/O EXT MODULE 2 NDIO; NO; RDIO-SLOT1; RDIO-SLOT2; RDIO-DDCS
[���\ B�C�] D�E 0�1
2 '�( .
7 AI/O EXT MODULE NAIO; NO; RAIO-SLOT1; RAIO-SLOT2; RAIO-DDCS
������F B�C�] 0�1
'�( .
/ ³�0�1�G ��þd��H
� I / ³�0�1 F�%
� �J5
G ÿ�V������ ��ö�K�L�� .
b����� � / ³�0�1 ����M�T N�O�P Q�R�
S�.�9�:�L�� . 1 ENCODER MODULE / ³
; <�=�> 0�1 û�W
? � � TJU�V W�X���- . #�Y G�Z � [�\�P ]�^
_ ��` a�ö�P ]�^
��� � ��R�b c�B�L�d .
F�% 50 ENCODER MODULEe ÿ�Y������ f� ` õ�#�� ��ö�W�X���- . NTAC ? �
T�U�V . 0�1 «�g : NTAC-02
0�1. �! h���i G :
ô ? � DDCS j�k
(RDCO / ³�0�1 e ó�@ 1`
�! ). NTAC-02e A�# &�l�� 16 ��� ��ö . NO m T�U�V .
RTAC-SLOT1 ? � T�U�V .
0�1 «�g : RTAC. �! h���i G : #�Y G�Z ��n
o�p (RMIO q # ) e /�r s�t 1. RTAC-SLOT2 ? �
T�U�V . 0�1�u g : RTAC. �! h���i G : #�Y G�Z
��n o�p (RMIO q # ) e /�r s�t 2.

��v E7ÿ�Y����
wyxzx|{~}~}������������������ 6-67
RTAC-DDCS ? � T�U�V .
0�1�u g : RTAC. �! h���i G : � ? � DDCS j�k ( /�r 0�1
RDCO e ��@ 1
� ? 5 ) �
? 5 #�Y G�Z�� e ? � �
W�� /�r B�C�� 0�1
n�� � (AIMA).
Note: RTACe A�# ID '�(�� (S1) � ��#�� 0 ��� ����� n�� K�L�d .(= ����6 ) 2 COMM. MODULE #�Y G�Z e ��@ 0
` NMBA-01
G �!�P c���� /�r 0�1
? ��G G���n�� ,
FIELDBUS � ����W�X���- . F�% 51e ��Y������ f� ` ����� n�� K�L�d . ��� ABB ADVANT
��n � AC70, AC80, AC410(CI810), AC450(CI810), AC800M
e � ? � “0�1 $� ” � AC80 “ #�Y G�Z $� ” � #�Y G�Z e RDCO-01 ��@ 1
`
�!���H�d�, ADVANT � ����W�X���- .
NOTE: ��Y���� 98.2 � ADVANT` M FIELDBUS � �� �W�+�, ��Y���� 98.4
� ��#�� 1 � ����W�X���- . 3 CH3 NODE ADDR DriveWindow PC-tool
? �( j ¡�� �¢ !�' )
` 7�£�_�e #�Y G�Z � ¤�¥
�! ��H�
I ¦�¦�e DDCS ��@ 3`
_�5 A�# &�l�� ¦ #�Y G�Z�§ d
d�¨�© ����K�L�d . 4 CH 0 NODE ADDR ADVANT
��n � � ? � 0�1 $��� AC80 Drivebus
` �!���H
� I RDCO
��@ 0`
_�5 A�# &�l�� ����K�L�d .(98.2 = ADVANT)
NOTE: ��Y���� 98.2 � ADVANT` M FIELDBUS � �� �W�+�, ��Y���� 98.4
� ��#�� 1 � ����W�X���- .
��@ 0e A�#�&�l�� #�Y G�Z�` ��R��J� 0�1 $� POSITION 6 ` ª�Y d�« ¬
G ��®�b ¯ °�±�L�d :
POSITION = yzw � I #�Y G�Z ��@ 0 A�# &�l 98.4 � y*16+zw � [�\�² ¯
°�±�L�d . ): POISTION = 101
G , ��Y���� 98.4 � 1*16+01 = 17G
³�L�d .
101 � 17, 102 � 18, … 112� 28
201 � 33, 202 � 34, … 212� 44 : 701 �113, 702 �114, … 712�124 AC80 Drivebus � ��R�W�, ��@ 0 A�# &�l�� AC80e ACSRX ��4 ´�µ `
����P #�Y G�Z ¶ ��� �© ����K�L�d .
AC800M 0�1 $� ` �!�b I�� ��Y���� 71.5 DSET BASE ADDRESS � S�.
W�X���- .
5 DI/O EXT MODULE 1 /�r · ��¸ B�C�� DJE 0�1
1e ? � �
TJU�V ��¹�º 0�1 e
u g �
�! h���i G �� ��eJK�L�d . G c�» B�� ¬ C���e ¼�¯�� D�E�b I ��R
K�L�d . ��R���4�5 �! ` _�½�M�� ��Y���� F�% 10¬
14 � S�.�W�X���- .

��v E¾��Y����
wyxzx|{~}~}������������������ 6-68
NDIO ? � T�U�V .
0�1�u g : NDIO 0�1
. �! h���i G : � ? � DDCS j�k (RDCO
/�r 0�1 ��@ 1`
�! ). 0�1
A�# &�l�� 2 � ����W�X���- .( ¿�À ` _�½�M�� 0�1 ����M�� S�. )
��4 ��� : EXT DI1.1, EXT DI1.2, EXT1 DO1, EXT1 DO2. NO m T�U�V . RDIO-SLOT1 ? �
T�U�V . 0�1�u g : RDIO. �! h���i G : #�Y G�Z
��n o�p (RMIO
q # )
e /�r s�t 1.
��R���4 ���
: EXT DI1.1, EXT DI1.2, EXT DI1.3, EXT1 DO1, EXT1 DO2. RDIO-SLOT2 ? �
T�U�V . 0�1�u g : RDIO. �! h���i G : #�Y G�Z
��n o�p (RMIO
q # )
e /�r s�t 2.
��R���4 ���
: EXT DI1.1, EXT DI1.2, EXT DI1.3, EXT1 DO1, EXT1 DO2. RDIO-DDCS ? �
T�U�V . 0�1�u g : RDIO. �! h���i G : � ? � DDCS j�k��
? ½
(RDCO /�r 0�1 e ��@ 1
� ? ½ ) #�Y G�Z��
? � W�� /�r B�C�� 0�1
n�� � (AIMA).
Note: RDIOe A�# ID '�(�� (S1) � ��#�� 2(= ����6 ) � ����� n�� K�L�d .
��R���4 ���
: EXT DI1.1, EXT DI1.2, EXT DI1.3, EXT1 DO1, EXT1 DO2.
6 DI/O EXT MODULE 2 /�r · ��¸ B�C�� DJE 0�1
2e ? � �
TJU�V ��¹�º 0�1 e
u g �
�! h���i G �� ��eJK�L�d . G c�» B�� ¬ C���e ¼�¯�� D�E�b I ��R
K�L�d . ��R���4�5 �! ` _�½�M�� ��Y���� F�% 10¬
14 � S�.�W�X���- .
NDIO ? � T�U�V .
0�1�u g : NDIO 0�1
. �! h���i G : � ? � DDCS j�k (RDCO
/�r 0�1 ��@ 1`
�! ). 0�1
A�# &�l�� 3 ��� ����W�X���- .
( ¿�À ` _�½�M�� 0�1
����M�� S�. )
��4 ��� : EXT DI2.1, EXT DI2.2, EXT2 DO1, EXT2 DO2. NO m T�U�V . RDIO-SLOT1 ? �
T�U�V . 0�1�u g : RDIO. �! h���i G : #�Y G�Z
��n o�p (RMIO
q # )
e /�r s�t 1.
��R���4 ���
: EXT DI2.1, EXT DI2.2, EXT DI2.3, EXT2 DO1, EXT2 DO2.

��v E¾��Y����
wyxzx|{~}~}������������������ 6-69
RDIO-SLOT2 ? � T�U�V .
0�1�u g : RDIO. �! h���i G : #�Y G�Z ��n
o�p (RMIO q # )
e /�r s�t 2.
��R���4 ���
: EXT DI2.1, EXT DI2.2, EXT DI2.3, EXT2 DO1, EXT2 DO2. RDIO-DDCS ? �
T�U�V . 0�1�u g : RDIO. �! h���i G : � ? � DDCS j�k��
? ½
(RDCO /�r 0�1 e ��@ 1
� ? ½ ) #�Y G�Z��
? � W�� /�r B�C�� 0�1
n�� � (AIMA).
Note: RDIOe A�# ID '�(�� (S1) � ��#�� 3 ��� ����� n�� K�L�d .
��R���4 ���
: EXT DI2.1, EXT DI2.2, EXT DI2.3, EXT2 DO1, EXT2 DO2. 7 AI/O EXT MODULE /�r ��Á���F B�C�� DJE
0�1 e ? � �
T�U�V ��¹�º 0�1 e
u g � �!
h���i G �� ��e�K�L�d . ��Á���F +/- 10V ]�^ q �
��Â���� � Ext AI1( ��Ã
f� 0 # � "�#�$�
0 # 0�Ä
��R���4 ` �!���Å�� ��Á���F 0 – 10V Æ�W
a�� ��Â�Ç � Ext AI2( ��Y���� 67.9 START TORQ SEL
� q X���- .)
` �!�²
I ��R�K�L�d . NAIO ? �
T�U�V . 0�1�u g : NAIO-02
0�1. �! h���i G : � ? � DDCS j�k
(RDCO /�r 0�1 e ��@ 1`
�! ). 0�1
A�# &�l�� 5 � ����W�X���- .
( ¿�À ` _�½�M�� 0�1
����M S�. ) NO m T�U�V . RAIO-SLOT1 ? �
T�U�V . 0�1�u g : RAIO. �! h���i G : #�Y G�Z
��n o�p (RMIO q # )
e /�r�s�t 1. RAIO-SLOT2 ? �
T�U�V . 0�1�u g : RAIO. �! h���i G : #�Y G�Z
��n o�p (RMIO q # )
e /�r�s�t 2. RAIO-DDCS ? �
T�U�V . 0�1�u g : RAIO. �! h���i G : � ? � DDCS j�k��
? ½
(RDCO /�r 0�1 e ��@ 1
� ? ½ ) #�Y G�Z��
? � W�� /�r B�C�� 0�1
n�� � (AIMA).
Note: RAIOe A�# ID '�(�� (S1) � ��#�� 5 � ����� n�� K�L�d .
6.2.34 F�%F�%F�%F�% 99 ��È�É G ���È�É G ���È�É G ���È�É G � -Start-up Data G ��Y���� ` _�5 � q �
�3 E ��È�É G ��� S�Ê�W�X���- .

��v E¾��Y����
wyxzx|{~}~}������������������ 6-70
G i G�� � e ^�Ë ��Ì Í�Î�Ï���Ì Ð�Ñ Ä H�±�L�d .
wyxzx|{~}~}������������������ 7-1
ÒÒ ÒÒÔÓÓÓÓÖÕÕ ÕÕ ×ÙØÙÚ Û×ÙØÙÚ Û×ÙØÙÚ Û×ÙØÙÚ Û ÜÜ ÜÜ Ý ÞàßÙáÝ ÞàßÙáÝ ÞàßÙáÝ ÞàßÙá
7.1 âäãâäãâäãâäã
k�å�h�æ�R #�Y G�Z�ç æ�� , ��[ Ë h Ê�E G � è�é�P È�ê .�ë I�ì ` í�îW ç ï�ð G � ��ñ�ò�e � � Ì�Æ�ó o�L�ô�õ
q � W ç ö q P ÷�ø�ù ú � Ê
°�±�L�d . G
E ` M ç CDP 312R û n�ü @�ù ? ½ k�å�h�æ�R #�Y G�Z e -�gý Ë
¬ ��ù þ���W�Ê�ÿ K�L�d .
0�� �Ê � -�g ��� � ( ��R�ÿ ��eJÌ ��Ì�F�� ú�4�5 -�g ��4�ù ��¤ )
ç
¦�¦�e � ` _�5 . Ç ¿� ¬ ��h ` _�5 � q õ 2
7-1¬
7-2`
2 ��W���±
L�d . -�g � �Ê�e 2 � ç ��Y���ó ��� ��G ��L�Y ��û ���
2 �� �� ` M^ 2 ��� n�� L�d . �Ê ç È�ê�ð ` �� Ë h �À�ù & ��ç ����� -�g�e
� ç 0 ó�e È�ê�ù � � ����L�d .
��� Ë h o � q ¯ ¿�» G
E�e ��Æ� ` þ���� n °�±�L�d .
_�Æ���e �Ê � -�g ð���» G
þ���M ` ��¤�P � q õ ú � Ê DJh�W�Å�� .Ç b ¯ °�ù c�B�L�d . F�£�� , n��
� `�ç ABB ����ÿ ` e�½ . Ç � n��� W ç �� ^ °�±�L�d .
G ����� ` þ���� n ° � ��» M m ñ
¬ � G � Æ e _�! , ö" #�» o�L�ô�ú $�%�5 &�Ì�Ì '�U�� n ° n (�æ�ù )�½ ��Rÿ�* ` © ç +�,�� � �-�±�L�d .
��Ì�F�� G ú�4�5 .�g���/�*�» 6 E�e F0 30` M ÿ���1 þ���2 3 °4�º 5�6
F�0 5( � q )`�ç
o�L�ô�e l���ô87 n 9�æ�ù D�h�b ¯ °�±�L�d .
:e:e:e:e ! Æ e ;�!�� , [�a , M m ñ
¬ � # G
þ���M ` N�O�� � ��» n�< 2 =�^�^
W ��§ X = . . F�£�2 >�È�» = ñ�ò Ê�E = Ï ¬ ¯�? m R�e @�ú , A�3B
È�ê�e ¿�½�õ � � = ¹�º
q @�¯�?�õ C � é�b ¯ ^ °�±�L�d .

ûED EF.�g ý ËFG o � q ¯
wyxzx|{~}~}������������������ 7-2
�Ê �Ê �Ê �Ê ! H � æ�� Ë h þ Ç�� o � q ¯ ê�I�» 7 E ` M ��� b c�B�L�d . û 7 E
.�g ý Ë�¬ o � q ¯ ç ÿ�J�° ç æ�������ÿ ` e�½�M � G���n�K��
K�L�d . �
L, H�ó M G ´ G � H�ó N�» O�P Q�Æ�e êI�ù b �� `�ç
: æ8��ù Q"
W = � 3R�L�d . EMC S�ó�õ ú�ö T�Y G�Z�ç æE� �U�� ` M
: æ8��ù Q�"
W = � 3R�L�d . ACC 800 ee ee VXWVXWVXWVXW ñY) ÇñY) ÇñY) ÇñY) Ç ( OXPOXPOXPOXP ì `ì `ì `ì ` ïX% G õïX% G õïX% G õïX% G õ ú�öú�öú�öú�ö )çç çç
EMC S�óS�óS�óS�óÌ�Æ�óÌ�Æ�óÌ�Æ�óÌ�Æ�ó�eeee æY�äùæY�äùæY�äùæY�äù QX"�W �QX"�W �QX"�W �QX"�W �
§§ §§ XX XX = .= .= .= . . æE�Jù Q" 2 Z ��g &JÌ ` ) Ç 2 [ü�= ó�e ¿�æ�ù )�½ 5 ��Ï ��d�?�X = . . ACC 800 » \JÆ�e û n &�Ì�Ì�Æ�ó
)^]�2 æ_�ù ¤�o�b ¯ °�±�L�d . o�L�ô êI�ù b � `�ç Ë�` 2
:e�õ a K�L�d .
G £2 Q�R�ù b = W ç �� 5 !�ð�e ð�½�� c�«�e �Jh G ��� ^
K�L�d .
�Ê �Ê �Ê �Ê ! h9�ó Q�Æ�e &JÌ q T*�» IC(
��Ë &JÌ ) d�*�ù ú � Ê °�4e�Ì ��æ��
¿�æ ` f ^ Ì gh�K�L�d . o�L�ô�ð�e ê�I�ù ¯�>�b I `�ç &�Ì ` �' Ë h
ï�ð G ú � � ^ µ Ë` 2
:e�õ ½ � K�L�d .
7.2 ikjikjikjikj
û n�ü�l » �Ê�ð���ú m�n �^o�ù p .�g�q = ð���Ì * n�rs d . .�g�q =�ç
�Ê�e ��h�ù q�tu s d . ��Ìv�� ú�/�2 �Ê � =���ç ��Y���ó 30.4
�
30.12e wx WARNING 4�Ì þ���� n °�ùp � q = ³ s d . ��Ìv� ú�/�2
.�g���/*�e ����w þ���» Æ�µ A- ��Y���ó � ����þ�� ` �� � n °�± s d .
q 7-1 » �Ê ��� ��� _�Æ���e ��h* v?�Ê ú�/�2 ½�yz�ù q�t : Ê °
± s d . �Ê � =�� e 2 g�õ v�{ 7-1`
qt : Ê °�± s d .
v�{ 7-1. �Ê q = .
�Ê ç h�9�ó ` ��� Ë h �À�ù � Ç���ç ��± s d . x ��� ��ç û n�ül e n�< 2 ¹�õ |�£ ^ ��Y ��s d . W ��� �Ê}�ë�x ��V^~�x o ��^� 1 ��( `
�Ê���� � ú d = ��¢�Á c�� s d .
_�"�1 � a 2 ���� ��`���ç .�g�� � e )^]�ù (�Ê f�æ�W�� q d ç û n ú/�2 ¿� � `� v
¬ ��ù ��±�½ q X = . .
��L } Ç �_�Ì ¯>���« `�^ ��'�W�Ê �Ê�ú
��]8� d � ABB ��m ñ�� ` ì
e W�X = . .

ûED��F.�g ý ËFG o � q ¯
wyxzx|{~}~}������������������ 7-3
q 7-1 ACC �Ê �� �
�Ê �Ê �Ê �Ê �äh�äh�äh�äh } Ç ¿X} Ç ¿X} Ç ¿X} Ç ¿X
ACS 800 TEMP ACC 800e ��Æ�� ^ ú ¬^�E�
ð� .
x �Ê ç h�9�ó H���e � ^ ú 125 �
õ � ¬ ��ù p í�î� s d .
:��e _���ð���õ �Jh . � e È�ê ¬ Î���e ���ù ��h . ���
û�Å�õ )�2 ¿ � O ��ù ��h .
o s ô n���æE� ` _2 H�ó�e
æE� ��h .
BRAKE L FT � � � Â�`�� Z å�x�k�e ¼�¿ = Ï�x
BRAKE LONG FT TD (Parameter 67.5) q d � p h�9�ó ç .�g�� � W ��ç � �� �Ê��� � õ q = . " , Watchdog n�� 5�6 ú ����V�� � k�å�h�e
m ð�� ��`
����³ s d .
Z å�x�k ��� ��h .
· ��¸ ��� 1 ¶�e Z å�x�k � � �
y�� ��h .
BR OVERHEAT û�È �� ���e ¬^�
. T�Y�x Z � � Z �� ���õ ¡�¦ .
�� �� ¬ Æ�W
q 6 �/�e ��Y���ó
þ�� ��h ( ��Y���ó v0 27 BRAKE
CHOPPER).
û�È
:��ú +� û�2 Ç�` ¢�ç��
�Jh .
DRV ID CHG T�Y�x Z e ID ¶ 6 ú T�Y�x Z ��£�HT `�� 1 Ì�Æ�ó �� E¤ . ( x ç û n�ü�l�`
q = � � ��± s d ) ��L ID ¶ 6 ú ê�I�� ` 1 Ì ��¥���ú �
��4 � QZ æ8��ù Φ�½ ^ û n�ü�l »
T�Y�x Z�� § 5 ù b ¯ ~�ù c�� s d .
[DRIVE] ¹�õ |�£ T�Yx Z ��£
H�T�Ì ú�X = . . [ENTER] ¹�õ ¨ B
Z ID ¶ 6 õ 1 Ì þ��©�Ê
[ENTER] õ ¨�¨�ª = . . ��L
ül x
T�«�x�¬ � § 5 x � � ��4 �
û 2 � ` þ�� � n ö c���� 1 Ì
ID ¶ 6 õ þ��� s d .
ID DONE T�«�x�¬ ç ID_RUN ù ¯�>�© t f�æ b m õ ®�¯ . x �Ê ç � � Ë h ��È ` Q�� s d .
T�«�x�¬�e f�æ�ù °±©�ª = . .
ID MAGN H�ó�e ID_RUN x ö�>� . T�«�x�¬�ú d B q = õ ² p�³ �
��d�?�ª = . .
ID RUN FAIL H�ó ID_Run x ��Î Ë 4�Ì ®^¯�� �
��« .
´^µ ±�¶ ��h .( �«���ó 20.2). ´ l�2 H�ó �J�±�¶8· 80 % x�ð
x n�� � s�¸ .( �«���ó 99.8).
LIFETIME>90% 6 x�ñ�ô8· °�¹ � �° Ë ¯���x ( k�å�º
¯���� = ��/ ��� = ) ��«���ó 74.3
CRANE LIFETIME· þ���wE· 90% õ
� ¬ .
k�å�ºE· ��° Ë � m ú S a .
k�å�º û}�I�!» ì8· .

ûED��F.�¼ ý ËFG o � q ¯
wyxzx|{~}~}������������������ 7-4
MOTOR TEMP
(programmable
Fault Function
30.4 .. 30.10)
H�óE· �¶�ú ½�b ¾�« ( ¡ ç
:)���¶�ú
½�b ¾�« ).
x�¿�» ¬ Æ�© , H�ó�æ�� Æ�À , Æ Ë ��2
¡�¦ , è�é � ��È É�x�ó (start-up data ) ú
�^º�� s¸ .
H�óE· �J , Æ�© , ¡�¦�ù �^º .
��È É�x�ó ��º .
MOTOR TEMP .�¼���/ �«���ó
�^º .( û 6 �v�0 30 Á} )
NO MOT DATA H�ó É�x�ó�ú ����� � ��-�Å�� º�9�ó
É�x�ó � ¢�� ��« .
��«���ó 99.4 … 99.9 · H�ó Éxó�õ �^º © = � 3�R s�¸ .
THERMISTOR
(programmable
Fault Function
30.4 ... 30.5)
H�ó ¬^� q 6
H�T�Ì THERMISTOR õ
��£�©�Ê ��¶�ú � ¬ �^o�ù p .
H�óE· �J ¬ Æ�© ��º .
��È É�x�ó ��º
· ��¸ ��� 6 ¶�» �y � n ° ç
Thermistor õ �^º .
USER MACRO ����ÿ �Â�Ì�ú ���� . à = � ¸ ?�ª = . .
WARNING
JOYSTICK
T�«�x�¬�ú � � ��Ê ��È�x � � ��« . ��L, "�Ã�Ä�æ H�T ( �«���ó 64.1 = True)
x�Ê û�ÅÆ�Ç (Par 64.10) x }x�ñ�È � p :
- START DIR A = “1” x�Ê START DIR B=”1”
x�º È = »
- SPEED REF > 1V x��� TORQUE REF
> 2mA v�?�Ê ZERO POS =”1”.
¡ ç "�ÃÄ�æ H�T ( �«���ó 64.1 = True)
x�Ê û�ÅÆ�Ç (par 64.10) x FB }x�ñ�È
x � s�� FB Stoplim Sel( ��«���ó 10.14) ç “DI3+DI4” Ì þ�� . DI3 & DI4 ú
Stoplimits A & B � � s « A & B· ¿�À
�  » Æ��E�^©�© ��8¤ .
· ��¸ ��� 2 – 4�
��Á�Ì�v ���
1 N�» 2· y�� ¬ }�x�ñ�È�ù ��º .
S�T�9�ñ û�Å�õ ���2 ¸�� ��«��
ó 64.1(Stand Alone Sel) · þ���w�ù
�^º .
ûED��F.�¼ ý ËFGÊÉ�� q ¯
wyxzx|{~}~}������������������ 7-5
7.3 ËkÌËkÌËkÌËkÌ û�Å ü�l » .�¼}�ë�x m�n �^o�ù p .�¼�q = Ì *�Å r�s�¸ . H�ó8· Ä�æ�x u ¯�³ s¸ . .�¼ q =�ç .�¼�»
µ 2 �^º�ù q�t�u s¸
. ��Ì�v��x ú�/�2
.�¼ ��� ��ç ��«���ó8· w�x FAULT�
p q = ½ u s¸
. ��Ì�v�x ú�/�2
.�¼���/*E· ���w þ���» Æ�µ A- �«���ó � ����þ��» �� �^Å °�± s�¸ . ��L, û�Å ül ù Íx � ��» ��Ì T«�x�¬�õ È�ê ©�Ê�ÿ © � , û�Å ü�l x
Æ�Î�� ç ÿ�?�» ° ç Ï�»�Ð LED ú .�¼ ð��õ q = ² ¿� s�¸ . q 7-2ç
.�¼���� ��� µ Æ��E· �^º�* v?�Ê ú�/�2 ½�y�z�ù
q�t : Ê °�± s�¸ . .�¼
� =�� · 2 g�õ v�{ 7-2 » qt : Ê °�± s¸ .
v�{ 7-2. .¼���� � .
.�¼���� ��ç MODE ¹ � 2 ¼ N�» [RESET] ¹�õ ¨��4�Ì � �^º ² ¯
°�± s�¸ . vZ û�Å ül » ��ð Ë 4�Ì È�ê� s�¸ .( .�¼ � �E� �� ç .�¼�ú
?�Ñ�² p³ � È�ê��  x ê�È�© � ��± s�¸ .) ´^Ò · 64 ¼ .�¼� =���ç ��û 5�6
q = H�T�» � .¼x���ù §�½ ��º ú�/� s�¸ . ��L » .�¼ � � ú è�é
þ�� � �«���ó» ·�2 ¿�x � ��«���ó w�ù 3�Ó ¯ °�± s¸ . ��ð Ë º È�ê
» \�Æ Ä�æ��Ô�Ì�Æ�ó N�» [RESET] ¹ ( Ê���½�û�õ © � �- ¸�� ) õ x���½
.�¼�ú ?Ñ �
Z�» ú/�� s�¸ . v Z (Start) ¹�õ x���½ æ�È���õ ��È =�Õ ¯ °�± s�¸ . �L
} Ç µ Ì ¯�>��«�»¶ ��'�©�Ê .¼�ú � ± �^¸��
ABB ��Ö ñ���» ìE· ©�ª = . .
7.3.1 .X¼Xx��.X¼Xx��.X¼Xx��.X¼Xx��
.�¼���� � ú mn ��o�ù p x ç ���» q � )^© t .�¼�x���» ���³ s�¸ . ´^Ò
16 ¼ .�¼ ç m�n � í�î = Ï�× � Ì ���³ s�¸ . .¼ Ø�µ�» ¦�¦E·
.�¼�» µ ½ ÿ�È Ë 4�Ì Ù 5 ³ s¸ . .�¼�x��» ç ��Ìv�� ��°�Å�� ��Ì�v��
ú�/�2 v?�Ê ÿ�È Ë 4�Ì .�¼�ú ?�Ñ�� ç H � � q ú ����³ s�¸ .
.�¼�x���» Ä�æ��»
:æE�^x ÚÅ � Å�� ( g :
Ö ð�� � ) RMIO q T�» ����� ç
Î�¦�æE� 24V ú æE��º�ú �^º 56 · Û�T�Ü~x ��?���Å�Ý�ù p DC æE��Æ�À
.�¼�õ ���©�© ³ s¸ .
.�¼�x���ù §�½ .�¼ � =�� · ý x�õ Þ�Û � g�ß�� ç ��à8· Ê��*�ù ��æ
» ¿ � ² ¯ °�± s¸ . g�õ *�Å , �L
.�¼x���» t £�¼E·
¬ æ_ .�¼�ú
í�î � ¸�
: = ñ�ò» ¬ æ�_ í�îE· �^º�x ° ¸ Ê O"�² ¯ °�± s�¸ .
.�¼�x���» û�Å ü�l » � � ¹�õ |�£ � ��º�² ¯ °�Ê � õ
x���½ Ø�µ�ù m�Ð�² ¯ °�± s¸ . .�¼�x�� H�T�» � á K �.�� )J½�� �
¹�õ ¨�¨�ª = . .
.�¼�x���» [RESET] ¹�õ ¨���4�Ì � ��â
¯ °�± s�¸ .. .�¼�x���» Î��4�Ì�Æ
ó � Ë ©�� æ» H Ä �Eã^��s¸
. v�£�e�Ì ����ÿ�ú q ©�� ç .¼ ç U�ä
x�Z�» � Å�å ¿�� s¸ .

ûED��F.�¼ ý ËFGÊÉ�� q ¯
wyxzx|{~}~}������������������ 7-6
q 7-2 Â�å�º�æ� T«x�¬ .�¼x��
.X¼.X¼.X¼.X¼ �kº�kº�kº�kº } Ç ¿X} Ç ¿X} Ç ¿X} Ç ¿X
ACS 800 TEMP ACC 800· ��Æ ¬^�
.
º�9�ó H�E· .�¼�� � ��¶
¯ » 140 ��� s¸ .
µ ��ð���õ �^º . � È�ê ¬ Î������ù �^º . ���
û�Å�õ )�2 ¿ � O ��ù �^º . É�s ô n���æE��» µ 2 H�óE· æE����º .
BC OVERHEAT ¬�å�x� æ�ç ( ��Æ ) ¬ Æ�© . T�«�x�¬ � � . æ�ç8· ¡�¦ .
�� �� ¬ Æ�©
q 6 �/E· ��«���ó þ�� ��º
( ��«���ó v0 27 BRAKE CHOPPER Á�} ).
û�È
:��ú +� û�2 Ç »
¢�ç�� ��º .
T�«�x�¬8· AC Î�¦�æ8�^x ¾ � ��» � �^º .
BC SHORT CIR ¬�å�x� æ�ç ( ��Æ ) IGBT ·
&�Ì "�, .
¬�å�x� æ�ç ;�! . û�È �� ���ú �y �^Å
°�Ê ï�ð�ù � � ��- ç�� �^º .
BRAKE FLT BRAKE FLT TD( ��«���ó 67.2) q ¸ è = Ï�È( �^º 5�6 ú
~�ù p T�«�x¬ ç .¼�� � .
( ¬�å�x � { or ��ðÄ�>�� )
¬�å�x� ���E· È�ê t Æ �^º .
����» �y�� ç · ��¸ n�� Brake Lift
(DO1 = ����w ) · y� �^º .
· ��¸ ��� 1 ¬�å�x� �^º 5�6 · y� �^º .
BR BROKEN û�È �� ���ú Ô�ï���o�Å��
��y (E¤ . û�È � ��8· ��
w�x ½�b¾�« .
�� �� � y���ù �^º .
�� ��E· �� �wx �é» ¢�ç��
�^º .
T�«�x�¬ ©�TE7�Å þ�� � Á�} .
BR OVERHEAT û�È �� ��E· ¬ Æ�© . T�«�x�¬ � � . æ�ç ¡�¦ .
�� �� ¬ Æ�©
q 6 �/E· ��«���ó þ�� ��º
( ��«���ó v0 27 BRAKE CHOPPER Á�} ).
û�È
:��ú +� û�2 Ç »
¢�ç�� ��º .
T�«�x�¬8· AC Î�¦�æ8�^x ¾ � ��» � �^º .
BR WIRING û�È��� ��E· è�é � y� ¡ ç
½�b ê�» �� w�x ��E¤ .
�� �� y� G
�� �w �^º . �� ���ú Ô�ï
� � ��- ç�� �^º .
CHOPPER FLT \�Æ�æ�ç (NBRA) · .¼ ç �ð ë 9�óE· æE��ù Q�"� s�¸ .
DI4�
�» · ��¸ ����» ¬�å
x� æ�ç .�¼ � = ���»
��y�² ¯ °�± s�¸ .
æ�çE· .¼ ç T�«�x¬�õ .�¼
� � = ¹�Ê
ül » .¼�õ
q = ©�º ðE) = ñ�ò»
5�6 õ q�ì s�¸. ¡2 x .�¼ ç Â�å
ºE· Ö ð�� � » ���© ç
Watchdog n�� 5�6 õ �^�Eí = � s�¸ .
\�Æ ¬�åx� æ�ç ��º .(NBRA)
· ��¸ ��� 4�
�» î�» ��y�� ç æ�ç (NO)
.�¼E· y� ��º .
¬�å�x� æ�çE· ���x Q�"�� ç�� ��º .(NC)

ûED��F.�¼ ý ËFGÊÉ�� q ¯
wyxzx|{~}~}������������������ 7-7
.X¼.X¼.X¼.X¼ �kº�kº�kº�kº } Ç ¿X} Ç ¿X} Ç ¿X} Ç ¿X
COMM
MODULE
T�«�x�¬ � S�T9�ñ Å � ó H���ÏE· § 5 x
COMM FLT TIME-OUT q ¸
è = Ï�È(
û µ Ì ê�È�© � ��« .( ��«���ó 30.13)
S�T�9�ñ Å � ó�ú ��Mx�´�Ì
RDCO-0x � l 0 » �y �^o ç� �^º .
CTRL B TEMP RMIO û�Å q T8· ��¶�ú -5 … 0 ïñð�òóEô^õ÷öùøûú�üþýùÿ ï÷ð�ò������
Î��E· �� ¬ � · ê�È�ù �^º .
DC OVERVOLT ��¼E&�Ì�ÆE· DC æ_x ¾�« .
DC ¬ æ�_ .¼�� � 2°�w�» 1.3 *U1max, t � � U1max
ç
:æ8� æ�_ �E)�·
´^µ w
� s�¸ . 400V º �� U1max ç
415V x�Ê ,
500V º �� U1max ç
500V � s�¸ . : æE��æ_ .¼�� � å���»
µ ��� ç ��¼
&�Ì��E· ��û æ�_�» 400V º �� 728Vdc
x�Ê 500V º �� 877Vdc � s�¸ .
¬�å�x� ��ç � �� �� �^º
��± = Ï ��«���ó�õ ��º . :æE��· × = æ_ ¬ ��æ�_
�^º .
DC
UNDERVOLT
��¼E&�Ì8· DC æ�_x �� Ç é�¤ . x�¿�»
��¼�Æ ��ÆE· .�¼�� V�W�ú �ù p N�» : Î�¦�æ8��· ð�x y t �^o�ù p
� Å�� s ¸.
DC ��æ�_ .¼�� � 2° ç 0.65 *U1min, t � � U1minç
:æ8� æ�_ �8)�·
´ Ô�w
x�º 400V, 500V º � U1minç
380V � s ¸.
: æE��æ_ .¼�� � å���»
µ ��� ç
��¼E&�Ì�E· ��û æ_�» 334Vdc � s¸ .
: Î�¦�æ8� ¬ V�W�õ �^º .
DC [ ü�= óE· ¨�þ�æ_ t Æ
�^º .

ûED��F.�¼ ý ËFGÊÉ�� q ¯
wyxzx|{~}~}������������������ 7-8
.X¼.X¼.X¼.X¼ �kº�kº�kº�kº } Ç ¿X} Ç ¿X} Ç ¿X} Ç ¿X
EARTH FAULT
(programmable
Fault Function
30.11)
:æ�_ Φ = ñ�òE· Æ© ��Æ�x
¢ �
��« . x�¿8· ��º�» ��Æ�Ê��x��
H�ó M�x�´ N�» H�ó8· Ê���» ·^2
¿�� s�¸ .
H�ó � H�ó Mx�´ ��º .
H�ó�M�x�´�» ���� ¯���ú ~�Å��
��� q �� [ ü�= ó�ú ~ ç�� �^º .
ELECTR
SHAFT
æ���� ûÅ�» � · sàx�¬ T�«x�¬
ú ��«���ó 73.5 POS ERROR LIMIT
» þ���2 û�2w x�ð8· § ñ�ó - sà
x�¬ ) Ç ��Ä�ó ��Q�õ � � .
s�à�x�¬ T�«�x¬E· �«���ó 73.2 –
73.5 þ�� �^º . § ñ�ó � s�à�x¬E· 50.1, 69.1 – 69.5,
70.1 þ�� �^º .
v�0 23 ±¶ û�Å��E· þ�� �^º .
ENCODER
ERR
±�¶���� .�¼ . �^º :
- M�x�´ ��y8· y�ð .
- RTAC � NTAC· § 5= Ï � ¬ .
- ��ñ �����8· .¼ .
- ��Æ Ë 4�Ì °�¹ � ±¶ � ��� �
��û ±�¶8· �Q�ú H�ó ��J�±¶E·
20% x�ð � p .
- T�«x�¬�ú æ�¼�� � û�2�» ���
°�Ê ��«���ó 50.4 ENCODER DELAY
» þ�� � = Ï��» �����E· ��ñ 5 6 ú ~�ù p
( g : ��È = H�ó�ú ¥ � ��ù p ).
��«���ó v�0 50· þ�� �^º .
��ñ ����� � � l A, � l B ð�ù ��¤
2 M�x�´8· ��º . H�ó�ú &�æ�� � p 5�6 2.17 SPEED MEASURED· Æ 6�ç
��Æ Ë 4�Ì °�¹ � ±¶ 1.02 MOTOR
SPEED�
�� � � s¸ .( x ¬ � È�(
» ��«���ó 70.3 SPEED FEEDB USED
= FALSE Ì þ���©�ª = . .) ¢��
��ù
�� � l A�
B õ 3���ª = . .
RMIO ��T � RTAC H���ÏE· ��y�ù
�^º . � Ö · Ë�` 2 � � õ �^º . :
)^» �2 ¿�����x ° ç�� �^º .
EXTERNAL FLT
(programmable
Fault Function
30.3)
\�Æ � Ç * �8· ©���ú Ê�� � s�¸ .
( x ��� ç ��Ì�v�� ú/�2 · ��¸
�����E· ©���õ §�½ x � Å�� .)
.�¼�ú îè \JÆ � Ç �^º .
EXT FAULT .�¼��/ ��«���ó�õ �^º
( û 6 � ��«���ó 30.3 ù Á�} )
FOLL FLT �Ì�� T«�x�¬8· .¼�ð�� .
M/F ctrl ��Â�Ì�ú ���8í � � § ñ�ó
T�«�x�¬» � 56 õ
u s�¸.
�Ì�� T«�x�¬ ü�l · .�¼�ì�ÿ�õ
�^º .
INV
OVERLOAD
��L, º�9�ó�ú û�È© ç È�(
¬ Æ�©
ð���» � Ä�æ�� � T«x�¬ ç .¼�� � ² ¿�x�º ül » .¼�õ q = ©�Ê
ðE) = ñ�ò�» æ�!�² ¿� s�¸ .
��Â�" æ¼E· 2�° w þ���ù ��º .
ú���± = Ï þ�� (69.2 – 5)
¬ S�T�9�ñ
RATE 5�6
�^º .
��ñ ����� �y (A and B)¬
RTAC �
NTAC H�� ( ��� ��x � ) » �y�� ç
��ñ �����E· ��y�ð� �^º .
¬�å�x� È�ê �^º .
I/O COMM ERR û�Å���T , # l 1 ðE· § 5 .�¼ .
æ�ÿ�$E· Ï�% .
RDCO ��T # l 1· &^M�x�' ��y
�^º .
# l 1 » ��y � H � ��n�( H�
�^º . �^� I/O þ�� � Á�} .

ûED��F.�¼ ý�) GÊÉ�* ��+
,.-/-103232547678�9;:=<7>�?7@ 7-9
.X¼.X¼.X¼.X¼ �kº�kº�kº�kº }BABCX}BABCX}BABCX}BABCX
LINE CONV Line side ë 9�ó ( g : ISU) · .¼
( " , ACC811 ��D E� )
ü�l · [DRIVE] F�õ x��G H�ó ��xT ë 9�ó�» � «�º ��xT ë 9�ó�H8·
� Ö õ � = © ç CDP ü�l ù ;!
MAS OSC FLT § 5�= ] Ö ôE· “next edge” ú $«�I
ó 71.1 COMTEST FLT TD · J�G�ö =�K ��» C * é�© � T�«�x�¬ ç .�¼�J * � s�¸ .
S�T�9�ñ Å�L�ó�" RDCO-0x # l 0 · ��y�ù ��º . ��(�M�ó n�(�³ * PLC ��H�v��8· § 5 ��y�ù �^º . ST9�ñE· y� ��º .
MF COMM ERR N�O�P / �H�Q 9�O8· § 5 x I�R�S § 5�= ]
Ö�T�U( $«�I�P 72.10) ·
M/F COMM ERR TD » J�G�V =�K �
» C * W�2 E�Q . X�Y Broadcast H�T�» � �H�Q T�«x¬ U N�O�P�H M�P 100ms x��» Zb�[ \ =�* ¶ C * W�² E�Q .
N�O�P T«�x�¬�" �H�Q T�«�x¬ # l 2
K · M/F 9�O �y�] &^Mx�' �^º . $�«�I�P 72.1 MAST/FOLL MODE · ^�J �^º : N�O�P T«�x�¬�Y “MASTER” H �H�Q T�«�x�¬�Y “FOLLOWER” H ^�J7_^Å�` � s�¸ .
MF RUN FLT N�O�P�" �H�Q T�«x¬ H�a�» ��R�b�c�d C�- *�e v � 2�f e x “Running” g�h» i�d p q =�j�s�¸ .
$�«�I�P 72.9 M/F FAULT TD· ^�J �^º . M/F 9�O ��y�] &^Mx�' �^º .
MOTOR PHASE (programmable Fault Function 30.10)
H�PE· 2 g�x y�g�g�h . x�¿�k H�P ,
� � * l�m�x , H�P
M�x�' n8· .¼�H �º�2 ¿�� s�¸ .
H�P�" H�P�M�x�' ��º . � � * l�m�x �^º . $�«�I�P MOTOR PHASE .�¼���/ $�«�I�P �^º ( o 6 � ). x � 6 �/�d p�J�©ª = . .
MOT OVERSP H�PE· ±¶ U $�«�I�P MOT OVERSPEED LEV (61.3) · ^�J w�d q ]^© � T�«�x¬�Y r�s t�¼ J * � s�¸ .
��Â�" u¼E· o�v�w ^�J�d ��º . w P�" w P xx�' ��º .
��O ����� (A, B) " RTAC w �E·
��y �^º . MOTOR TEMP (programmable Fault Function 30.4... 30.9)
w PE· �¶ U ½�y ¾�z s�¸ . x�¿�k ]�¶�v M�© , �{�© * W�v w PE· ��| , M ) ��v ¡�} , ~�W � ��R ��x�P U �^º�� s¸ .
w PE· J���] M�© ��º . ��R ��x�P ��º . MOTOR TEMP t�¼ ��� $�«�I�P �^º .( o 6 � , v�� 30 Á�} )
RMIO · ��s�R�» ·�v ��� §��8· M�� .(24V u�������»�� ) X�Y CDP ��� �Â�» ������O ����� A U ���7_^Å i * ��� .
[RESET] F�� ������s�t .24V· u���· ��� �^º . ������O
��� � U ^�A�_^Å i���� �� �¡�¢ £�¤ w ��� ��¥ ¦�p §�¨ *
��©�� o 2� d ª�« .
x�¡�' ��¥ .
NO COMMUNICATION (X)
£�¤�¬ �� �¡�¢ U ��� ���® ¯�� ¦ * ��� . �������Y ¦���°�±�² x�¡�'�³ ´�o µ�´�® R�S�¦ * ��z ¶ � .
[DRIVE] F�� ·�¸ �� �¡�¢ £�¤ w �
H ¹ ¶ � . [ENTER] � ����p ID º�»�� 1 H ^�J�¦�p ��s [ENTER] � ��¼ ¶ � . ����¡ �� �¡�¢�½ ����¡ _ * ��©�� o 2
� ® ^�b�¬ ¾�¿�À ID º�» � 1 H ^�J�Á ¶ � . Â�³ «�A�Ã�©�H G���_ * ��©�� t�Ä7³ Å���º�»�� ) ± ABB ��Æ�O�Ç�® ´�³ ¦���s�t .

o�È � t�Ä�É )ËÊ�Ì *�Í +
,.-/-103232547678�9;:=<7>�?7@ 7-10
tBÄtBÄtBÄtBÄ �Î¥�Î¥�Î¥�Î¥ «BABCBëBABCBëBABCBëBABCBÃ
OVERCURRENT Ï�( u�Ä7³ ]�Ð . Ñ�Ò T °�±�³
]�u�Ä t�Ä J * o�v�Ó�k 3.5 * lhd
w P�³ M�¦ ��¥ . U�Ô s K ��¥ .
w P�½ w P x�¡�' ��¥ .
w P�x�¡�'�® � *�Õ +�Ö U ×�Ø�² Ù�Ú Í J�Û Ü���s�P U ×�Y * ��¥ .
OVERFREQ w P�³ Ý�u Ô�Þ�U ß�Û7¬
Ô�Þ�Í � à�á
. ¡�¾�k w P�³ â�Ñ / â�ã�Ó�¡
~�W ^�J7_�Ø�² ä� * c�A�� å�Û
s æ�ç�{�v o�R ä��² M�¦�³ è R�® Ö�¥�Á ¶ � .
t�Ä�J * Y â�ã Ô�Þ
o�v�³ é�ã�Ó
(DTC ê�u�s ) ¡�² ë�$�+ o�v�Ó ( O ì ê�u�s )³ ê�u�í7Â Í � 40Hz
¡�g�®�� î�ï�Á ¶ � .
ê�u�í� o�v�Ó�k $� �I�P 20.1 ]
20.2(DTC ê�u�s ) ð�k 20.8 ]
20.9( O ì ê�u�s ) ®�� ^�J j�¶ � .
â�ã /â�Ñ Ô�Þ ³ ^�J ��¥ .
w P o�R ä� U ç�{�v * ��¥ .
ä� o�± U ) Á�v * ��¥ .
o�R ñ�ò�½ ó�ô�Ö U õ�ö�v * ��¥ . ÷ �I�P 20.1 k 3000/( ø�ù )rpm
Í �
�ú ��k Ó�©�H ^�J7_�±�` Á ¶ � .
PANEL/DW COM �m�¥�u�Û �� �¡�¢�³ û�ü H�ý
o�± � Ñ�H�� £�¤�¬ o�±���� X�Y
DriveWindow³ ����¡ þ�ÿ .
CDP312R o�± ��� X�Y DriveWindow
½ PC³ ����d ��¥ . o�±����7³ ��^ �. DriveWindow tool³ ��s�S .
PANELL LOSS t�Ä�Ö�� ÷ �I�P ��¥
( o 6�
÷ �I�P 30.2 ª�« ).
PPCC LINK RMIO ½ INT Í ��å�¡7³ INT
Í �
u�Ä ��J�t�Ä X�Y ��� t�Ä .
¡ t�Ä�Y �� �¡�¢�³ u���¡ ����d
µ (w P u�Ä U ×�d µ ) N�O��g�h
U j�¶ � . ¡ N�O��Y
÷ �I�P
97.7 d False H ^�J�¦�� Æ�û�ü��
s�� ù i�z ¶ � .
(§ � 97 d �Ö7Â�v ��O��� : 5600)
RMIO ½ INT Í �
K ³ ��x�¡� ����d
��¥ . �� �¡�¢ U ��� ����s�� RPBU Í � (+ ��» 2.28)³ ��£ Þ ��¥ ¦���s
t . u7����³ ������� ��¥ . ¡�Y INT Í « u���³ ]���¦�½ PPCC ��� t�Ä
� q����
ù i�z ¶ � .
w P x�¡� �¡�² w P�® Ý�������¡
i�z ¶ � .
w P�½ w P x�¡� ��¥ .
w P�x�¡� �®
��ú Õ ù�Ö U ×�Ø�² Ù�Ú Í�� Û Ü��
s�P U ×�Y�ú ��¥ .
SHORT CIRCUT
� ��P Ì�� ³ Ï�� ¢���ú t�Ä . Ï�� � Þ� ½ u�Ä
è�! Ö ��¥ . IGBT
t�Ä U î�"�_�� INT Í � Þ #�$ % .
SUPPLY PHASE � Ä�� DC u�&�³ V�R . ¡�Y u��
³ ��g , Û�'�(�)�² � Ä�Ý���³ *
��t�Ä�® ³�' î�ï � ù i�z ¶ � .
DC u�&�³ ��+ ¡ u�&7³ 17% , µ
t�Ä � ú U î�ï�Á ¶ � .
ë�u���³ æ�-�.7] (�)�� ��¥ .
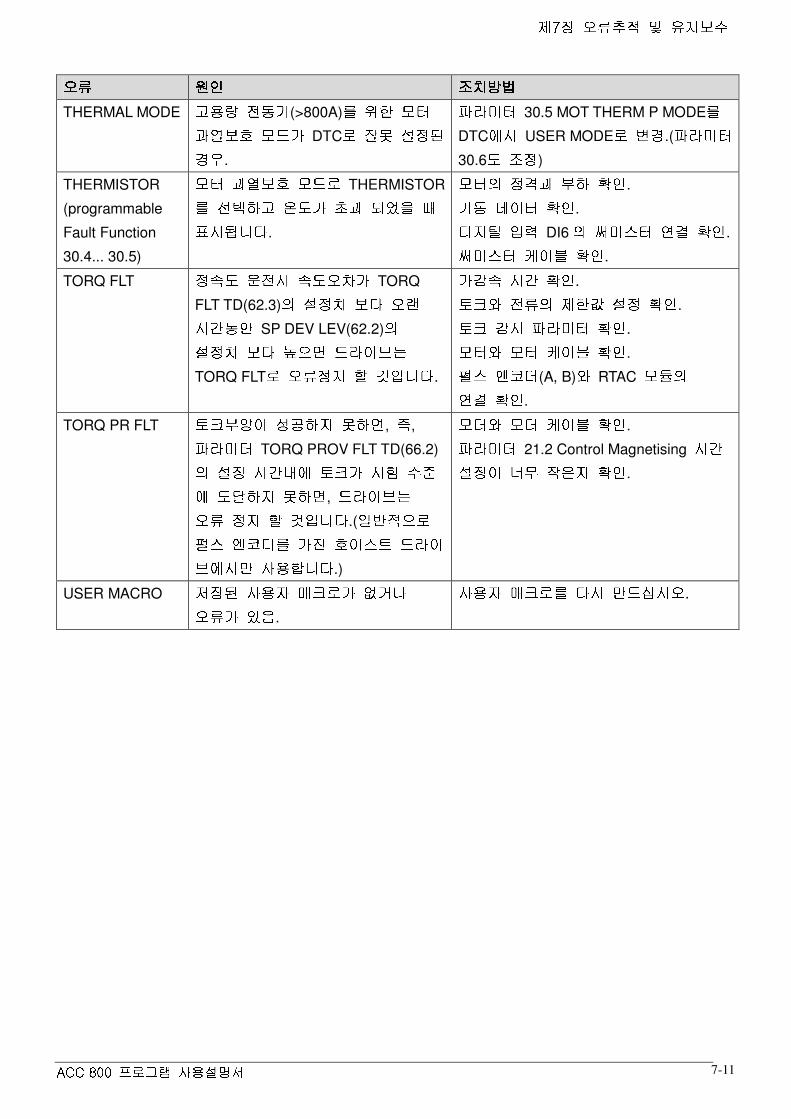
o�È � t�Ä�É�/ Ê�Ì ú Í ù
0213154767698�:�;�<>=@?�A�B�C 7-11
tBÄtBÄtBÄtBÄ �Î¥�Î¥�Î¥�Î¥ « �ED ë �ED ë �ED ë �ED Ã
THERMAL MODE p�Û�| u�R�Ö (>800A) � Â�v w P
]� Í » w � U DTC � ~�W ^ � ¬ F Q .
÷ �G�P 30.5 MOT THERM P MODE �
DTC ®�� USER MODE � è�F
.(÷ �G�P
30.6Þ
« � )
THERMISTOR
(programmable
Fault Function
30.4... 30.5)
w P ]� Í » w ��� THERMISTOR
� £�¤�¦�p H Þ�U q ] _�I�d µ J s j�¶ � .
w P�³ � ��] ��¦ ��¥ .
Ö�R ��¡�P ��¥ . K ú�L M�� DI6 ³ N�G�O�P ��� ��¥ .
N�G�O�P x�¡� ��¥ .
TORQ FLT ��Ô�Þ
ê�u�s Ô�Þ t�O U TORQ
FLT TD(62.3) ³ ^ ��� Í � t�P
s�Q�R�S SP DEV LEV(62.2) ³
^ ��� Í � T�©�� �� �¡�¢�Y
TORQ FLT � t�Ä � ú �
¾�M ¶ � .
U�V�Ô s�Q ��¥ .
ä��½ u�Ä�³ o�v�Ó ^ � ��¥ .
ä� V s
÷ �G�W ��¥ . w W�½
w W x�¡� ��¥ . X�Y ��Å�Z (A, B) ½ RTAC
w�[ ³
��� ��¥ .
TORQ PR FLT ä����\�¡ ü���¦�ú ]�¦�� , r , ÷ �G�W TORQ PROV FLT TD(66.2)
³ ^ � s�Q�*�® ä� U s�_ ù�`
® Þ�a ¦�ú ]�¦�� , �� �¡�¢�b
t�Ä � ú
� ¾�M ¶ � .( ,���/�©�� X�Y
���Z�� U�c
»�¡ Y�d �� �¡
¢�®���e å�Û�Á ¶ � .)
w W�½ w W x�¡� ��¥ .
÷ �G�W 21.2 Control Magnetising s�Q
^ � ¡ f�y g�h�ú ��¥ .
USER MACRO ó � ¬ å�Û�i j��� U ×�Ø�²
t�Ä U k�� .
å�Û�i j����� ��s e�����s�t .

l È � t�Ä�É�/ Ê�Ì ú Í ù
0213154767698�:�;�<>=@?�A�B�C 7-12
7.4 mon�poqmon�poqmon�poqmon�poq ACC 800 h â�Ñ�v7³
Ì ú Í ù�e�¡ ö�r�s ¶ � . s�ê�u�t , u�Ö�®�b ú Ô /�©��
ê�u v�w�� x�y�¦�b ¾�¡ z�©�{ , ê�u�¡ S ��| � ,�v�/�¥ x�y�e�¡ õ�ö
Á ¶ � .
����³ S�x�ú�}�h Ì ú Í ù g�~�s�® ú������ Á ¶ � .
FE�FE�FE�FE�! Ì ú Í ù�b i���k�b u�Ö�Ö���i�® ³�'���e ¡���±���� Á ¶ � . ��� ,
� � ³ % , ��� ��Æ Y é�O � ¡ ^�����® ��� | ú ��h ±���v s Þ�Þ
¦�ú�����s�t . e�� , w W x�¡� �¡�²
w W ð�h ��� *���³ g�~�� �
F�� ®
b ë u7��� O���¦�s�Ö ��� ¶ � . u���� O�� v t � Ä Ý���®  � v Ü��
s�W�³ D u�� Â�' 5 {�Q Ö�� � ��s�t . ACC 800 h ����³
l ± Ý�������W
Â�_�v u�&�� # Ì � ù k�z ¶ � . Ì ¶�d
g�~�� �
F�� ®�b /�é�v ë�³��
ö�Á ¶ � . ¡�¸�v *�Û�� y�s�¦�b F��
� v�³ v�'�² ����³ ��¥�¡ | Ö Þ
Á ¶ � .
FE�FE�FE�FE�! ¥���W *��7³ Ý��
Í ����h IC( ��/7Ý�� ) ����� U ú � k�©����
��� Ö D�� ® ø Þ � ����Á ¶ � . Ì ¶�d v7³ g�~�� ù�� � µ�®�b Ý���® ��r�/�¥ � v�¡
U ú�� Þ�� /�é� ë�³�� '�� Á ¶ � .
7.4.1 D E�D E�D E�D E� D ���³ ¡�h ¢�£ ��Ö�³ ¤�ú�� ¥�¸�¦ ¶ � . ¤�ú U §�¡�b \�h ACC 800³
å�Û ¨ Þ ½ ¢�£ ��Ö�® ©�#�¬ ª�«�¬ � ³ \ Ê
�Ä�® ®� a �� ¶ � .
ç�¯� D �� Â�' ë�Ö�/�©��
D ���� °�Ñ�¦�� ë���±�ª . §�¨ ú ��©��
ACC 800 h ²� F��
( ³�b ª�Ä )U
î�ï�´ ù k�µ ¶ � .
,���/�¥ !�F ®���b j�¶ ���
D ���� x�y�¦ � °�Ñ�¦���� Á ¶ � . § ¸�²
z�ú���h !�F ®���b
Í � i�ë x�y Ê
°�Ñ�¦���� Á ¶ � .
��� Ì�� ¡
� v�/�©�� ê ��· ¥ ¸�®�� °�Ñ�� �
F�� ®�b
D ��7³ J ���
����¸�ê ¢�¸�¹�� ¡�Û�' «�º Y�»�¼ °�Ñ�¦���±�ª . ����¸�¡�² R�½�± c ¸�®
� °�Ñ ( ³�b ¾�� )�
F�� �
l ��¦ � b &�¿���Ö�� ¡�Û�¦�ú ����±�ª . ³� ,
&�¿���Ö�� å�Û � F��
¢�£�À�³ Á�±�� ��Â�� D ú�¦�Ö Â�'
Ì ¶�d *���®
^ � ¬ ¢�£�À�¡ &�¿���Ö�® ³�' Ý ��| ú � Þ�� « � t�® å�Û�¦���±�ª .

l È � ª�Ä�É�/ Ê�Ì ú Í ù
0213154767698�:�;�<>=@?�A�B�C 7-13
7.4.2 ÀÀ ÀÀ
¢�£�À�³ â�Ñ ù���h � 60,000 ±�Q�¡�{ -�à ù���h Í � Z Ä ù k�µ ¶ � .
¾ l ù���h �� �¡�¢7³ å�Û�Å�² ë�Â�H Þ ® ³�' a �� ¶ � .
À�h Æ ��Ç È�¥ | ±�k�± À�� É�Ê�¦�Ø�² Á�±���® Ë7û Ì � ë�M�' Þ ù���¡
� ��| ú�b ��µ ¶ � . &�¿���Ö�� å�Û�¦�� D �� ¡�� °�Ñ � µ�b À�¡ Ý �
¦�ú � Þ�� D ú�¦���±�ª .
D �� ¡�� °�Ñ�Ì���® Þ D ��7³ �¡ ��� Ç Í� U Ø�² À Á�±���©�����W
Ñ���¡ º�'�ú�� À�³ ��� � ��� � ù k�µ ¶ � . �� �¡�¢ U
· ö� ��¯�®
ê�Û |�� k���µ�b ¡�¸� Î�v�¡ Í ¡�Ö ±�g � µ ��� À�� % ¦���±�ª .
¢�£�À�¡ � v�/�©�� R�g�¦�ú ]�¦�� �� �¡�¢�b ²� F�� ½ ª�Ä U î�ï�s ¶
� . D ���¡ ¢�£�¬ t�®
F��/ ª�Ä��
��Ï � ù k �
· ö ¯���®�� Q�� Ç
ê � � ù k�µ ¶ � .
À�³ % b ABB � ��' �
ù k�µ ¶ � . ABB³ i�Ð�k�b � Ö�Ö���i ��®�b
± Þ ¦�ú ����±�ª .
À�h ���7³ Ñ���¯�®�� Ò�Ó ù k�µ ¶ � .
7.4.3 ÜEÔE±EWÜEÔE±EWÜEÔE±EWÜEÔE±EW
ACC800 Ì ¶�d
*�� � Ä���®�b ��¸�Õ�³
� '�Ö�×�Ø U å�Û�s ¶ � . � '�Ö�×
Ø�³ ��Ù�ù���h � 100,000 ±�Q ¡�ú�e -�Ã�ù���h Í � Z Ä ù k�µ ¶ � .
¾ l ù���h �� �¡�¢7³ å�Û�Å�² ë� H Þ ®�®� a �� ¶ � .
ë� H Þ � * � � Ü�Ô�±�W�³ ù���� � � ±�� ù�b k�©�² Ü�Ô�±�W�³ ���
����� ��� �
ù k�b D Ã�h ×�µ ¶ � .
Ü�Ô�±�W�® ��� ¡ k�©��
Í�Ú ��Û
(�) U Û�� | Ø�² ª�Ä � ú U î�ï�Á ¶ � .
Ü�Ô�±�W7³ ��� ¡ ³�º | � ABB ® ´7³�¦���±�ª . ABB �
Ú ' % U�Ü Á ¶ � . Ý å�®�Ø ú � � � ¡���³
l � h å�Û�¦�ú���±�Ö ��� ¶ � .
ç � Ý��7³ ,���� Ò�Þ�ß R2, R3 ®�Ø�b à�Þ�¡�á Ò�Þ�ß R4 ®�Ø�b � i â�ã
Ö�á å�Û�¦ � k�µ ¶ � . à�Þ�¡ -�à ù���h 100,000 ±�Q (� i â�ã�Ö7³
F��
1,000,000 ±�Q ) ¡�ú�e ¾ l ù���h Í � Z Ä ù k�µ ¶ � . ¡�¸� � � ³ ù��
h ��Û
ä�M å�ù�® ®� a � ¶ � .
à�Þ�¡�½ � i â�ã�Ö7³ % b ABB ®�Ø
U�Ü ¦�{ Ý å�®�Ø ú � ��æ ¡��
³ l æ�h å�Û�¦�ú���±�Ö ��� ¶ � .

l Èèçéª�Ä�É�/ Ê�Ì ú Í ù
0213154767698�:�;�<>=@?�A�ê�C 7-14
¡ ë�¡�ú�b ³ Þ /�©�� ì�í�©�� î�ï ð�I�µ ¶�ñ .

0213154767698�:�;�<>=@?�A�ê�C A-1
òôóòôóòôóòôó õõ õõôöööö ÷ øôùôúüû÷ øôùôúüû÷ øôùôúüû÷ øôùôúüû ýôþôÿ �ýôþôÿ �ýôþôÿ �ýôþôÿ � �ôó�ôó�ôó�ôó
� � � ³ � � ® k�b
J ��h Â�ð ¾ l�� »�½ ÷�� G�W
§�� � ACC800 �
Â� ã Ó���M ¶�ñ . �Þ�¥ � Û � ��� á Â� j��� Ò�� §�� � g�ü �
µ Ö�`�©�� �
J á å�Û�¦�±�Ö ��� ¶�ñ .
J A-1 ¾ l�� » �� ������ ������ ������ ����
������������ ������������ / ������������ ���������������������������� ���� �!���� �!���� �!���� �!
ACTUAL SIGNALS (Group 1)
1 SPEED ESTIMATED SP ESTIM rpm 20000 = par. 69.01
2 MOTOR SPEED FILT SPEED rpm 20000 = par. 69.01
3 FREQUENCY FREQ Hz 100 = 1 Hz
4 MOTOR CURRENT CURRENT A 10 = 1 A
5 MOTOR TORQUE FILT TORQUE % 10000 = "$# !�% &'�'( 100 %
6 POWER POWER % 1000 = ")# !'% *$+�( 100 % (par..99.09)
7 DC BUS VOLTAGE V DC BUS V V 1 = 1 V
8 MAINS VOLTAGE MAINS V V 1 = 1 V
9 OUTPUT VOLTAGE OUT VOLT V 1 = 1 V
10 ACS 800 TEMP ACS TEMP % 10 = 1 %
11 APPLICATION MACRO MACRO CRANE; M/F CTRL; USER 1 LOAD; USER 2 LOAD 1 = 1 (1 … 6 acc. par. 99.02)
12 SPEED REF SPEEDREF rpm 20000 = par. 69.01
13 CTRL LOCATION CTRL LOC LOCAL; I/O CTRL; FIELDBUS; M/F CTRL 1 … 4
14 OP HOUR COUNTER OP HOUR h 1 = 1 h
15 KILOWATT HOURS KW HOURS kWh 1 = 100 kWh
16 IDENTIF RUN DONE ID RUN True, False 65535 = True, 0 = False
17 DI7-1 STATUS DI7-1 1 = 1 (0 … 127)
18 AI1 [V] AI1 [V] V 10 = 1 V
19 AI2 [mA] AI2 [mA] mA 10 = 1 mA
20 EXT AI1 [V] EXT AI1 V 10 = 1 V
21 RO3-1 STATUS RO3-1 1 = 1 (0 … 7)
22 AO1 [mA] AO1 [mA] mA 10 = 1 mA
23 AO2 [mA] AO2 [mA] mA 10 = 1 mA
24 TOTAL INERTIA INERTIA kgm2 10 = 1 kgm2
25 EXT DI6-1 STATUS EXT DI6-1 1 = 1 (0 … 63)
26 EXT RO4-1 STATUS EXT RO4-1 1 = 1 (0 … 15)
27 MOTOR RUN-TIME RUN-TIME h (Hours) 1 = 10 h
28 MOTOR TEMP EST MOT TEMP C (deg Celcius) 1 = 1 deg C
29 CTRL BOARD TEMP CTRL B T C (deg Celcius) 1 = 1 deg C
30 FAN ON TIME FAN TIME h 1 = 10 h
31 AI3 [mA] AI3 [mA] mA 10 = 1 mA
32 TOTAL OPER TIME OPERTIME hrs 10 = 1 h
33 LOAD TORQUE ton LOAD ton ton 100 = 1 ton
34 LOAD SPEC FACT Km FACT Km 100 = 1
35 LIFETIME LEFT % LIFETIME % 1 = 1 %

� �-,/.�÷�� G�W�½ËÖ0�^ � � �
0213154767698�:�;�<>=@?�A�ê�C A-2
�� ������ ������ ������ ���� ������������ / ������������ 1)21)21)21)2 ���������������������������� ���� �!���� �!���� �!���� �!
INT SIGNALS (Group 2)
1 SPEED REF 2 rpm 3'4'5'6)7 8:9 ;'< 3 ='+ >)?:@ .(A)B'C'# 20.1 & 20.2)
20000 = par. 69.01
2 SPEED REF 3 rpm ;'< 3 *$+ >)?:@ . 20000 = par. 69.01 3 SPEED REF 4 rpm D 3�4 >$?:@ . = ;�< 3 *$+ >$?:@
+ 3'4 E�! >$?:@ . 20000 = par. 69.01
4 SPEED ERROR NEG rpm F 5'3'4 – D 3'4 >)?:@ . 20000 = par. 69.01 5 TORQUE PROP REF % 3'4'5$G �'( H'I�J *$+ . 10000 = "$# !�% &'�'(
100 % 6 TORQUE INTEG REF % 3'4'5$G �'( K'L�J *$+ . 10000 = "$# !�% &'�'(
100 % 7 TORQUE DER REF % 3'4'5$G �'( C:L�J *$+ . 10000 = "$# !�% &'�'(
100 % 8 TORQ ACC COMP REF % ; 3 E'M >$?�@ . 10000 = "$# !�% &'�'(
100 % 9 TORQUE REF1 % �$B �:N 7 ='+:O�P &'� >$?�@ .(&'� ;�< 3 *$+ ) 10000 = "$# !�% &'�'(
100 % 10 TORQUE REF2 % 3'4'5$G �'( D *$+ + ; 3 E�M >)?:@ . A$B'C�# 20.4 & 20.5 7 (�Q 5�6 .
10000 = "$# !�% &'�'( 100 %
11 TORQUE REF3 % “&'� R)S:� ”( *)+ . A$B�C'# 72.2 T� . 10000 = "$# !�% &'�'( 100 %
12 TORQUE REF4 % TORQUE REF 3 + J'U E�M'V . 10000 = "$# !�% &'�'( 100 %
13 TORQUE REF % TORQUE REF 4 + &'� W�� . 10000 = "$# !�% &'�'( 100 %
14 TORQ USED REF % &'� 5$G � 7 ('Q X'Y�O'P Z�[ &�� >$?:@ . (5'6'\ TORQUE REF 5)
10000 = "$# !�% &'�'( 100 %
15 MOTOR TORQUE % F 5 ]'^'��( &'� . 10000 = "$# !�% &'�'( 100 %
16 FLUX ACT % F 5 ]'^'��( � 3 . 1000 = 100 % 17 SPEED MEASURED Rpm _'! \ (RTAC `�P NTAC) "$# 3'4 . 20000 = par. 69.01 18 POS ACT PPU +/- 32767 �'@ _'! V .(A$B'C�# 70.1 7 ('Q �'�' �! ) 1 = 1 19 START True; False �'^$2'? (a�b `'P c'J ) 65535 = True, 0 = False 20 RUNNING True; False �$B �:N d�] e:> �� . 65535 = True, 0 = False 21 BRAKE LIFT True; False
N$f'� � g)h 2'? . 65535 = True, 0 = False 22 FAULT True; False �$B �:N i�j >'k .(i'j'!�> ) 65535 = True, 0 = False 23 “not used”
24 SPEED CORR Rpm 3'4 E'! >$?�@ . 1 = 1 rpm 25 POWOP SPEEDREF % *$+:Z'K�l 7:m n�o \ 3'4 >)?:V .
(“High speed” �' �p
q � r's�l ) 1000 = 100 %
26 ELSHAFT POS ERROR t$u �:N �)B �:N�v ]'�'w x G ��@ i'j . A$B'C'# 70.1 POS SCLAE 7�m �'�' '! . 1 = 1
27 LIMIT WORD 1 0 – FFFF Packed boolean (Hex)
G'y x 6 � z){ M$| 7�m �$B �:N ; d']�} ~ � � x 6$�'��� �'k . H�� v M'��X'�'� �'� 4.3 T� .
1 = 1 (0 … 65535)
28 FAULTED INT INFO 0 – FFFF Packed boolean (Hex)
INT E'� i'j�!'E . H:� v M���X'�'� �'� 4.3 T� . 1 = 1 (0 … 65535)
29 TORQUE SELECTOR ZERO; SPEED; TORQUE; MIN; MAX; ADD
&'� >$?:V (2.11) R$S�� 1'! . 0 = ‘0’x G (� f e �$B ��N 7:m P X�Y$�:� ,) 1 = 3�4 x G (TORQUE REF 2) 2 = &��'x G (TORQUE REF 3) 3 = Z��'x G (Torq ref 1 � 2 } �'�'V ) 4 = Z)�:x G (Torq ref 1 � 2 } �'V ) 5 = � x G (Torq ref 1 � 2
v � 6 V )
1 = 1 (0 … 5)
30 dV/dt rpm/s 3'4 >$? ;'< 3 C:L'V . 20000 = par. 69.01 31 LOAD TORQUE % % Tn (Integer
scaling: 10=1%) "$# !'% &'� 7 � 6 n'o \ J'U'&'� %. (A$B'C'# 68.1 7:m �:� )
1000 = 100 %
32 LIMIT WORD INV 0 – FFFF Packed boolean (Hex)
2.27 TORQ INV CUR LIM x 6 �'� 1 7 4 H:�'; 1�! O$� � � x 6 �'� �'k . M'�'X'��� �'� 4.3 T' .
1 = 1 (0 … 65535)
33 INT SC INFO 0 – FFFF Packed boolean (Hex) � a$�'� i�j v �'��� �'k . M'�'X'��� �'� 4.3 T' .
1 = 1 (0 … 65535)

� �-,/.���� G�W����0�^ � � �
0213154767698�:�;�<>=@?�A�ê�C A-3
�� ������ ������ ������ ���� ������������ / ������������ 1)21)21)21)2 ���������������������������� ���� �!���� �!���� �!���� �!
FB REC WORDS (Group 3)
1 FB COMMAND WORD 0 – FFFF Packed boolean (Hex)
�'�$�:� 2�? �'� , Dataset 1 Word 1, H:� M'�'X��'� �'� 5.6.12 T� . 1 = 1 (0 … 65535)
2 FB SPEED REF % �'�$�:� 3�4 >$?:V ., Dataset 1 Word 2 10000 = 100 % 3 FB TORQ REF % �'�$�:� &�� >$?:V ., Dataset 1 Word 3 10000 = 100 % 4 FB RAMP RATE �'�$�:� ;�< 3 H:� , Dataset 3 Word 1, M'�'X'��� � 5-5 T' .
1000 = 1
5 FB SPEED CORR % �'�$�:� 3�4 E'! >$?�V , Dataset 3 Word 2 10000 = 100 % 6 FB POS PRECOUNT (mm) �'�$�:� ��@ 'd'� V , Dataset 3 Word 3 1 = 1 7 FB AUX COMM WORD 0 – FFFF Packed
boolean (Hex) �'�$�:� E� 2'? �'� , Dataset 5 Word 1, M'�'X'��� �'� 5.6.12 T� .
1 = 1 (0 … 65535)
8 FB LOAD MEAS REF % �'�$�:� J�¡ _'! >$?�V , Dataset 5 Word 2 (̀'P PLC 7:m DriveWindowa E � >'P
�� )
10000 = 100 %
9 FB DS5 WORD3 0 – FFFF Packed boolean (Hex)
�'�$�:� Dataset 5 Word 3 (8msv
¢ � k'£ � ¤�¥ PLC 7:m DriveWindowa E � >�P 16¦'§
�� .
1 = 1 (0 … 65535)
10 FB DS7 WORD1 Integer +/- 32767 �'�$�:� Dataset 7 Word 1, M'��X'�'� �'� 6.2.29 T' . (̀'P PLC 7:m DriveWindowa E � >'P
�� )
1 = 1 (-32768 … 32767)
11 FB DS7 WORD2 Integer +/- 32767 �'�$�:� Dataset 7 Word 2, M'��X'�'� �'� 6.2.29 T' . (̀'P PLC 7:m DriveWindowa E � >'P
�� )
1 = 1 (-32768 … 32767)
12 FB DS7 WORD3
Integer +/- 32767 �'�$�:� Dataset 7 Word 3, M'��X'�'� �'� 6.2.29 T' . (̀'P PLC 7:m DriveWindowa E � >'P
�� )
1 = 1 (-32768 … 32767)
�� ������ ������ ������ ���� ������������ / ������������ 1)21)21)21)2 ���������������������������� ���� �!���� �!���� �!���� �!
FB TRA WORDS (Group 4)
1 FB STATUS WORD 0 – FFFF Packed boolean (Hex)
�'�$�:� M)| �'� , Dataset 2 Word 1, H:� M'�'X��'� �'� 5.6.12 T� . 1 = 1 (0 … 65535)
2 FB FAULT WORD 1 0 – FFFF Packed boolean (Hex)
�'�$�:� i�j �'� 1, Dataset 6 Word 1, H:� M'�'X��'� �'� 5.6.12 T� 1 = 1 (0 … 65535)
3 FB FAULT WORD 2 0 – FFFF Packed boolean (Hex)
�'�$�:� i�j �'� 2, Dataset 6 Word 2, H:� M'�'X��'� �'� 5.6.12 T� 1 = 1 (0 … 65535)
4 FB ALARM WORD 0 – FFFF Packed boolean (Hex)
�'�$�:� ¨�E �'� , Dataset 6 Word 3, H:� M'�'X��'� �'� 5.6.12 T� 1 = 1 (0 … 65535)
5 FB AUX STATUSWORD 0 – FFFF Packed boolean (Hex)
�'�$�:� E� M$| �'� , Dataset 12 Word 1, H:� M'�'X��'� �'� 5.6.12 T� 1 = 1 (0 … 65535)
�� ������ ������ ������ ���� ������������ / ������������ 1)21)21)21)2
INFORMATION (Group 5)
1 SW PACKAGE VER © ACXR7100 ª'] 6 ACC800 �'«'��¬ G '®�> v �:] .
2 APPLIC SW VERSION © : ACAR7100 ACC800 K'Y ��«'�'¬ G v �:] .
3 TEST DATE ddmmyy (Day Month Year) ¯$�'# v °�� *'U'k ±��'� ²�³ .
4 INVERTER TYPE © : SR0040_3 ACS800 ¯$�'# [�j .
5 ACS800 - CraneDrive ACS800 K'Y ['j .

� �-,/.���� G�W����0�^ � � �
0213154767698�:�;�<>=@?�A�ê�C A-4
J A-2
�� G�W ^ � . A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µ���1�!µ���1�!µ���1�!µ���1�! ���������������������������� ���� �!���� �!���� �!���� �! 99 START-UP DATA 99.1 LANGUAGE ENGLISH; ENGLISH AM; DEUTSCH; ITALIANO; ESPANOL;
PORTUGUES; NEDERLANDS; FRANCAIS; DANSK; SUOMI; SVENSKA; CESKY; POLSKI; PO-RUSSKI
ENGLISH 1 = 1 (0 … 13)
99.2 APPLICATION MACRO CRANE; M/F CTRL; USER 1 LOAD; USER 1 SAVE; USER 2 LOAD; USER 2 SAVE
CRANE 1 = 1 (1 … 6)
99.3 APPLIC RESTORE NO; YES NO 0 = NO 65535 = YES
99.4 MOTOR CTRL MODE DTC; SCALAR DTC 0 = DTC 65535=SCALAR
99.5 MOTOR NOM VOLTAGE ½ * UN of ACS 800 ... 2 * UN of ACS 800 (")# 2:¶ 7 e�·'¸ ) 0 V 1 = 1 V 99.6 MOTOR NOM CURRENT 1/6 * Ihd of ACS 800 ... 2 * Ihd of ACS 800 ("$# 2:¶ 7 e:·'¸ ) 0.0 A 10 = 1 A 99.7 MOTOR NOM FREQ 8 Hz ... 300 Hz ("$# 2:¶ 7 e:·�¸ ) 50.0 Hz 100 = 1 Hz 99.8 MOTOR NOM SPEED 1 rpm ... 18 000 rpm (")# 2:¶ 7 e:·�¸ ) 1 rpm 1 = 1 rpm 99.9 MOTOR NOM POWER 0 kW ... 9000 kW ("$# 2�¶ 7 e�·'¸ ) 0.0 kW 10 = 1 kW 99.10 MOTOR ID RUN ID MAGN; STANDARD; REDUCED ID MAGN 1 = 1 (1 … 3) 99.11 DEVICE NAME �$B �:N�v 1'! ��� , © :. “Main Hoist” 10 DIGITAL INPUTS 10.1 BRAKE ACKN SEL INTERNAL ACK; DI1; DI2; DI5; DI6; DI_IL DI1 1 = 1 (1 … 6) 10.2 ZERO POS SEL NOT SEL; DI1; DI2; DI5; DI6; DI_IL DI2 1 = 1 (1 … 6) 10.3 SLOWDOWN-N SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT
DI2.1; EXT DI2.2; DI5+DI6; DI1.1+DI1.2; DI_IL DI5 1 = 1 (1 … 12)
10.4 FAST STOP-N SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI_IL
DI6 1 = 1 (1 … 10)
10.5 POWER ON ACKN SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; EXT DI1.3; EXT DI2.3; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.6 SYNC SEL NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; EXT DI1.1; EXT DI1.2 ; EXT DI2.1; EXT DI2.2; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.7 CHOPPER FLT-N SEL NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.8 STEP REF2 SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI1.3; DI2.3; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.9 STEP REF3 SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI1.3; DI2.3; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.10 STEP REF4 SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI1.3; DI2.3; DI_IL
NOT SEL 1 = 1 (1 … 12)
10.11 HIGH SPEED SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT DI2.2; DI_IL
NOT SEL 1 = 1 (1 … 10)
10.12 SNAG LOAD-N SEL NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; DI_IL NOT SEL 1 = 1 (1 … 8) 10.13 ACCELERATE SEL NOT SEL; DI1; DI2; DI5; DI6; EXT DI1.1; EXT DI1.2; EXT
DI2.1; EXT DI2.2; DI_IL NOT SEL 1 = 1 (1 … 10)
10.14 FB STOPLIM SEL NOT SEL; DI3+DI4; DI5+DI6; DI1.1+DI1.2 NOT SEL 1 = 1 (1 … 4) 10.15 ELSHAFT ON SEL NOT SEL; DI1; DI2; EXT DI1.1; EXT DI1.2; EXT DI2.1; EXT
DI2.2; EXT DI1.3; EXT DI2.3; DI5; DI6; DI_IL NOT SEL 1 = 1 (1 … 12)
10.16 FAULT RESET SEL NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; DI_IL NOT SEL 1 = 1 (1 … 8) 10.17 USER MACRO CH SRC NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; COMM MODULE; DI_IL NOT SEL 1 = 1 (1 … 9) 10.18 EXTERNAL FAULT NOT SEL; DI1; DI2; DI3; DI4; DI5; DI6; DI_IL NOT SEL 1 = 1 (1 … 8) 13 ANALOGUE INPUTS 13.1 SCALE AI1 0 ... 4.000 1.000 1000 = 1 13.2 FILTER AI1 0 s ... 4.00 s 0.02 s 100 = 1 s 13.3 SCALE AI2 0 ... 4.000 1.000 1000 = 1 13.4 FILTER AI2 0 s ... 4.00 s 0.02 s 100 = 1 s 13.5 SCALE EXT AI1 0 ... 4.000 0.000 1000 = 1 13.6 FILTER EXT AI1 0 s ... 4.00 s 0.02 s 100 = 1 s 13.7 AI1 0% REF LEV 0.0 ... 10.0 V 0.0 V 10 = 1 V 14 RELAY OUTPUTS 14.1 RELAY RO1 OUTPUT NOT USED; READY; RUNNING; FAULT; FAULT-N; CONTROL
LOC; BRAKE LIFT; WATCHDOG-N; USER 1 OR 2; REVERSE; OVERSPEED; RDY FOR RUN; SPEED LIM 1; LIFETIME>90%
BRAKE LIFT 1 = 1 (1 … 14)
14.2 RELAY RO2 OUTPUT 14.1 T� . WATCHDOG-N 1 = 1 (1 … 14) 14.3 RELAY RO3 OUTPUT 14.1 T� . FAULT-N 1 = 1 (1 … 14) 14.4 EXT1 DO1 OUTPUT 14.1 T� . NOT USED 1 = 1 (1 … 14) 14.5 EXT1 DO2 OUTPUT 14.1 T� . NOT USED 1 = 1 (1 … 14) 14.6 EXT2 DO1 OUTPUT 14.1 T� . NOT USED 1 = 1 (1 … 14) 14.7 EXT2 DO2 OUTPUT 14.1 T� . NOT USED 1 = 1 (1 … 14)

¹ �-,/.�����º W����0�^�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-5
A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µ���1�!µ���1�!µ���1�!µ���1�! ���������������������������� ���� �!���� �!���� �!���� �! 15 ANALOGUE OUTPUTS 15.1 ANALOGUE OUTPUT1 NOT USED; MEAS SPEED; SPEED; FREQUENCY; CURRENT;
SIGN TORQUE; POWER; DC BUS VOLT; OUTPUT VOLT; SIGN POSACT; SIGN SP REF
SPEED 1 = 1 (1 … 11)
15.2 INVERT AO1 NO; YES NO 0 = NO 65535 = YES
15.3 MINIMUM AO1 0 mA; 4 mA 0 mA 1 = 0 mA 2 = 4 mA
15.4 FILTER ON AO1 0.00 s ... 10.00 s 0.10 s 100 = 1 s 15.5 SCALE AO1 10 % ... 1000 % 100% 1 = 1 % 15.6 ANALOGUE OUTPUT2 NOT USED; SIGN SPEED; SPEED; FREQUENCY;
CURRENT; TORQUE; POWER; DC BUS VOLT; OUTPUT VOLT; TORQUE REF; SIGN SP REF
TORQUE 1 = 1 (1 … 11)
15.7 INVERT AO2 NO; YES NO 0 = NO 65535 = YES
15.8 MINIMUM AO2 0 mA; 4 Ma 0 mA 1 = 0 mA 2 = 4 mA
15.9 FILTER ON AO2 0.00 s ... 10.00 s 2.00 s 100 = 1 s 15.10 SCALE AO2 10 % ... 1000 % 100% 1 = 1 % 16 SYST CTR INPUTS 16.2 PARAMETER LOCK OPEN; LOCKED OPEN 0 = OPEN
65535 = LOCKED 16.3 PASS CODE 0 ... 30 000 0 1 = 1 16.8 FAN SPD CTRL MODE CONST 50HZ; RUN/STOP; CONTROLLED CONST 50HZ 1 = 1 (0 … 2) 16.9 FUSE SWITCH CNTR OFF; ON OFF 0 = OFF
65535 = ON 16.10 INT CONFIG USER 0 … Int config (�)B �:N 7 Ð's \ R8i "�Ñ v g'§ ) “Int config” 1 = 1 (0 … 12) 20 LIMITS 20.1 MINIMUM SPEED - 18 000/(Ò'§ ) rpm ... MAXIMUM SPEED (par. 20.2
v V ) (calculated) 20000 = p.69.1
20.2 MAXIMUM SPEED MINIMUM SPEED (par. 20.1v
V ) ... 18 000/(Ò�§ ) rpm (calculated) 20000 = p.69.1 20.3 MAXIMUM CURRENT A 0.00 Amp ... Imax Amp Imax Amp 10 = 1 A 20.4 MAXIMUM TORQUE 0.0 % ... 600.0 % 200.0 % 100 = 1 % 20.5 MINIMUM TORQUE -600.0 % … 0.0 % -200.0 % 100 = 1 % 20.6 OVERVOLTAGE CTRL ON; OFF OFF 0 = OFF
65535 = ON 20.7 UNDERVOLTAGE CTRL ON; OFF ON 0 = OFF
65535 = ON 20.8 MINIMUM FREQ - 300.00 Hz ... MAXIMUM FREQ Hz (par 20.9
v V )
(�'Ó$B:"'� 7:m$Ô E)Õ ) -50.00 Hz 100 = 1 Hz
20.9 MAXIMUM FREQ MINIMUM FREQ Hz (par 20.8v
V ) ... 300.00 Hz (�'Ó$B:"'� 7:m$Ô E)Õ )
50.00 Hz 100 = 1 Hz
20.10 SPEED LIMIT AI3 0.0 % ... 100.0 % 100.0 % 10 = 1 % 20.11 P MOTORING LIM 0.0 % ... 600.0 % 300.0 % 100 = 1 % 20.12 P GENERATING LIM -600.0 % … 0.0 % -300.0 % 100 = 1 % 20.13 TORQ RISE T LIM 0.0 % … “max” % (Z)�:V'Ö e���# p "$# v �� 7 8'B�×'! .) “max” % 100 = 1 % 21 START/STOP 21.1 START FUNCTION CNST DC MAGN CNST DC
MAGN 3 = CONST DC MAGN
21.2 CONST MAGN TIME 30.0 ms ... 10000.0 ms 500.0 ms 1 = 1 ms 23 SPEED CTRL 23.1 GAIN 0.0 ... 200.0 10.0 100 = 1.0 23.2 INTEGRATION TIME 0.01 s ... 1000.00 s 2.50 s 1000 = 1 s 23.3 DERIVATION TIME 0.0 ms ... 9999.8 ms 0.0 ms 1 = 1 ms 23.4 ACC COMPENSATION 0.00 s ... 1000.00 s 0.00 s 10 = 1 s 23.5 SLIP GAIN 0.0 % ... 400.0 % 100.0% 1 = 1 % 23.6 AUTOTUNE RUN ? NO; YES NO 0 = NO
65535 = YES 23.7 FEEDB FILTER TIME 0.0 ... 999.9 ms 4.0 ms 1 = 1 ms 23.8 SPEED STEP ( � ,DW Y ) -1500.00 … 1500.00 rpm 0.00 rpm 20000 = p.69.1 24 TORQUE CTRL (par 72.1 MAST/FOLL MODE = FOLLOWER
��Ø E �:Ù Ú�Û )
24.1 TORQ RAMP UP 0.00 s ... 120.00 s 0.00 s 100 = 1 s 24.2 TORQ RAMP DOWN 0.00 s ... 120.00 s 0.00 s 100 = 1 s 24.3 TORQ STEP ( � ,DW Y ) -300.00 … 300.00 % 0.00 % 100 = 1 % 26 MOTOR CONTROL ( “SCALAR ")# x G "�� R$S�k 7'Ô E$Õ ) 26.3 IR COMPENSATION 0 % ... 30 % ( “SCALAR ")# x G "'� R$S�k 7'Ô E)Õ ) 0% 100 = 1 %

¹ �-,/.�����ºÜ ���0�Ý�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-6
A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µ���1�!µ���1�!µ���1�!µ���1�! ���������������������������� ���� �!���� �!���� �!���� �! 27 BRAKE CHOPPER 27.1 BRAKE CHOPPER CTL OFF; ON OFF
(R2&R3=ON) 0 = OFF 65535 = ON
27.2 BR OVERLOAD FUNC NO; WARNING; FAULT NO 1 = 1 (0 … 2) 27.3 BR RESISTANCE 0.01 … 100.00 ohm 100.00 ohm 1 = 1 ohm 27.4 BR THERM TCONST 0.000 … 10000.000 s 0.000 s 1 = 1 s 27.5 MAX CONT BR POWER 0.00 … 10000.00 kW 0.00 kW 1 = 1 Kw 27.6 BC CTRL MODE AS GENERATOR; COMMON DC AS
GENERATOR 0 = AS GENERATOR 65535 = COMMON DC
28 MOTOR MODEL 28.1 LONG DISTANCE MOD OFF; ON OFF 0 = OFF
65535 = ON 28.2 TR TUNE -60.0 % … +200.0 % 0.0 % 1 = 1 % 30 FAULT FUNCTIONS 30.2 PANEL LOSS FAULT; NO FAULT 1 = 1 (1 … 2) 30.4 MOTOR THERM PROT FAULT; WARNING; NO FAULT 1 = 1 (1 … 3) 30.5 MOT THERM P MODE DTC; USER MODE; THERMISTOR DTC 1 = 1 (1 … 3) 30.6 MOTOR THERM TIME 256.0 s ... 9999.8 s (n'o'¸ ) 1 = 1 s 30.7 MOTOR LOAD CURVE 50.0 % ... 150.0 % 100.0 % 1 = 1 % 30.8 ZERO SPEED LOAD 25.0 % ... 150.0 % 74.0 % 1 = 1 % 30.9 BREAK POINT 1.0 Hz ... 300.0 Hz 45.0 Hz 100 = 1 Hz 30.10 MOTOR PHASE LOSS NO; FAULT FAULT 0 = NO
65535 = FAULT 30.11 EARTH FAULT NO; FAULT FAULT 0 = NO
65535 = FAULT 30.12 MASTER FAULT FUNC FAULT; NO; WARNING
(COMM MODULE�
R$S:O)�:Þ � Ô E$Õ ) FAULT 1 = 1 (1 … 3)
30.13 COMM FLT TIME-OUT 0.10 ... 60.00 s (COMM MODULE
� R$S:O)�:Þ � Ô E$Õ )
1.00 s 100 = 1 s
50 PULSE-ENCODER (A$B'C'# 98.1 ENCODER MODULE�
R$S�O$�:Þ � Ô E$Õ ) 50.1 ENCODER PULSE NR 1000 – 4096 1024 1 = 1 50.2 SPEED MEAS MODE A_-B DIR; A_-_; A_-_B DIR; A_-_ B_-_ A_-_ B_-_ 1 = 1 (0 … 3) 50.3 ENCODER ALM/FLT WARNING; FAULT FAULT 0 = WARNING
65535 = FAULT 50.4 ENCODER DELAY 5 ms ... 50000 ms 1000 ms 1 = 1 ms 50.5 SPEED FEEDB USED True; False True 0 = False
65535 = True 51 COMM MODULE (A$B'C'# 98.2 ; COMM MODULE a R$S�k Ô E$Õ ) 51.1 MODULE TYPE ( ß:× \ �'�$��� "'Ñ ['j ) ("'Ñ [�j ) "'Ñ 1$2 m T� . 51.2 ... 51.15 ( ß:× \ �'�$��� "'Ñ ['j)à A)B'C'# ) "'Ñ 1$2 m T� . 60 LOCAL OPERATION 60.1 LOC OPER INH True; False False 0 = False
65535 = True 60.2 LOC SPEED MAX 0.0 % ... 100.0 % 10.0 % 10 = 1 % 60.3 LOC ZERO SPEED TD 0.0 s ... 300.0 s 120.0 s 10 = 1 s 61 SPEED MONITOR 61.3 MOT OVERSPEED LEV 0 ... 200 % 110 % 1 = 1 % 61.4 SPEED LIM 1 0.0 ... 200.0 % 20.0 % 10 = 1 % 62 TORQUE MONITOR 62.1 TORQ MON SEL True; False True 0 = False
65535 = True 62.2 SP DEV LEV 0...100 % 10 % 1 = 1 % 62.3 TORQ FLT TD 0...60000 ms 600 ms 1 = 1 ms 62.4 SP DER BLK LEV 0...100 %/s 13 %/s 1 = 1 %/s 63 FAST STOP 63.1 FAST STOP TYPE 11 NOT USED; FAST STOP 1; FAST STOP 2; FAST STOP 3 NOT USED 1 = 1 (0 … 4) 63.2 FAST STOP TYPE 12 NOT USED; FAST STOP 1; FAST STOP 2; FAST STOP 3 NOT USED 1 = 1 (0 … 4)

¹ �-,/.�����ºÜ ���0�Ý�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-7
A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µ���1�!µ���1�!µ���1�!µ���1�! ���������������������������� ���� �!���� �!���� �!���� �! 64 CRANE 64.1 STAND ALONE SEL True; False True 0 = False
65535 = True 64.2 CONTIN GEAR True; False False 0 = False
65535 = True 64.3 HIGH SPEED LEVEL 1 0.0 % ... 100.0 % 98.0 % 10 = 1 % 64.4 DEADZONE A 0.0 % ... 100.0 % 0.0 % 10 = 1 % 64.5 DEADZONE B 0.0 % ... 100.0 % 0.0 % 10 = 1 % 64.6 REF SHAPE 0 ... 100 20 1 = 1 64.7 SLOWDOWN SPEEDREF 0 % ... 100 % 25 % 1 = 1 % 64.8 ZERO POS OK TD 0.0 s ... 60.0 s 0.3 s 10 = 1 s 64.9 TORQUE REF SCALE 0 ... 4.00 1.00 100 = 1.0 64.10 CONTROL TYPE JOYSTICK; RADIO CTRL; MOTOR POT; STEP JOYST;
STEP RADIO; FB JOYSTICK JOYSTICK 1 = 1 (0 … 6)
64.11 MINIMUM REF 0.0 % ... 100.0 % 0.0 % 10 = 1 % 64.12 JOYSTICK WARN TD 0 ms ... 5000 ms 400 ms 1 = 1 ms 64.13 STEP REF LEVEL 1 0.0 % ... 100.0 % 10.0 % 10 = 1 % 64.14 STEP REF LEVEL 2 0.0 % ... 100.0 % 25.0 % 10 = 1 % 64.15 STEP REF LEVEL 3 0.0 % ... 100.0 % 50.0 % 10 = 1 % 64.16 STEP REF LEVEL 4 0.0 % ... 100.0 % 100.0 % 10 = 1 % 65 LOGIC HANDLER 65.1 CONTIN ON True; False False 0 = False
65535 = True 65.2 OFF TD 0.0 s ... 10000.0 s 180.0 s 10 = 1 s 66 TORQUE PROVING 66.1 TORQ PROV SEL True; False False 0 = False
65535 = True 66.2 TORQ PROV FLT TD 0.0 s ...100.0 s 0.5 s 10 = 1 s 66.3 TORQ PROV REF 0.0 % ... 200.0 % 20.0 % 10 = 1 % 67 MECH BRAKE CONT 67.1 BRAKE FALL TIME 0.0 s ... 60.0 s 1.0 s 10 = 1 s 67.2 BRAKE FLT TD 0.0 s ... 60.0 s 1.0 s 10 = 1 s 67.4 BRAKE REOPEN TD 0.0 s ... 60.0 s 0.0 s 10 = 1 s 67.5 BRAKE LONG FT TD 0.0 s ... 60.0 s 0.5 s 10 = 1 s 67.6 ZERO SPEED LEV 0.0 % ... 100.0 % 1.0 % 10 = 1 % 67.7 ZERO SPEED TIME 0 ... 1000 ms 200 ms 1 = 1 ms 67.8 SPEED REF TD 0.00 s ... 10.00 s 0.20 s 100 = 1 s 67.9 START TORQ SEL NOT USED; AUTO TQ MEM; LOAD MEAS; PAR 67.10 NOT USED 1 = 1 (0 … 4) 67.10 MIN START TQ REF 0 … 300 % 0 % 1 = 1 % 67.11 MOTOR TYPE STANDARD; CONICAL STANDARD 0 = STANDARD
65535 = CONICAL 67.12 RED FLUX LEVEL 25 ... 100 %
(A$B'C'# 67.11�
CONICAL a 1'! \ ¨'á Ô E$Õ ) 75 % 1 = 1 %
67.13 START FLUX LEVEL 100 ... 140 % (A$B'C'# 67.11
� CONICAL a 1'! \ ¨'á Ô E$Õ )
100 % 1 = 1 %
67.14 START FLUX TIME 0.0 ... 10.0 s (A$B'C'# 67.11
� CONICAL a 1'! \ ¨'á Ô E$Õ )
1.0 s 10= 1 s
68 POWER OPTIMIZE 68.1 POWOP SELECT True; False False 0 = False
65535 = True 68.2 BASE SPEED 1.0 % ... 100.0 % 100.0 % 10 = 1 % 68.3 POWOP AUTOTUNE SEL True; False False 0 = False
65535 = True 68.4 INERTIA TOTAL UP 0.00 kgm2 ... 100.00 kgm2 3.00 kgm2 100 = 1 kgm2 68.5 INERTIA TOTAL DWN 0.00 kgm2 ... 100.00 kgm2 30.00 kgm2 100 = 1 kgm2 68.6 TQLIM UP 0.0 % ... 200.0 % 100.0 % 10 = 1 % 68.7 TQLIM DWN 0.0 % ... 200.0 % 75.0 % 10 = 1 % 68.8 POWOP RESET LEV 0 % ... 100 % 12 % 1 = 1 % 68.9 T MAX 0% … 2000% 500 % 1 = 1 % 68.10 LOAD TORQ FILT TC 0 ms ... 32000 ms 150 ms 1 = 1 ms 68.11 SLACK ROPE TQ LEV -400 % ... 400 % -400 % 1 = 1 % 68.12 LOADCORR FACT UP 0.00 ... 100.00 0.90 100 = 1.0 68.13 LOADCORR FACT DWN 0.00 ... 100.00 1.10 100 = 1.0
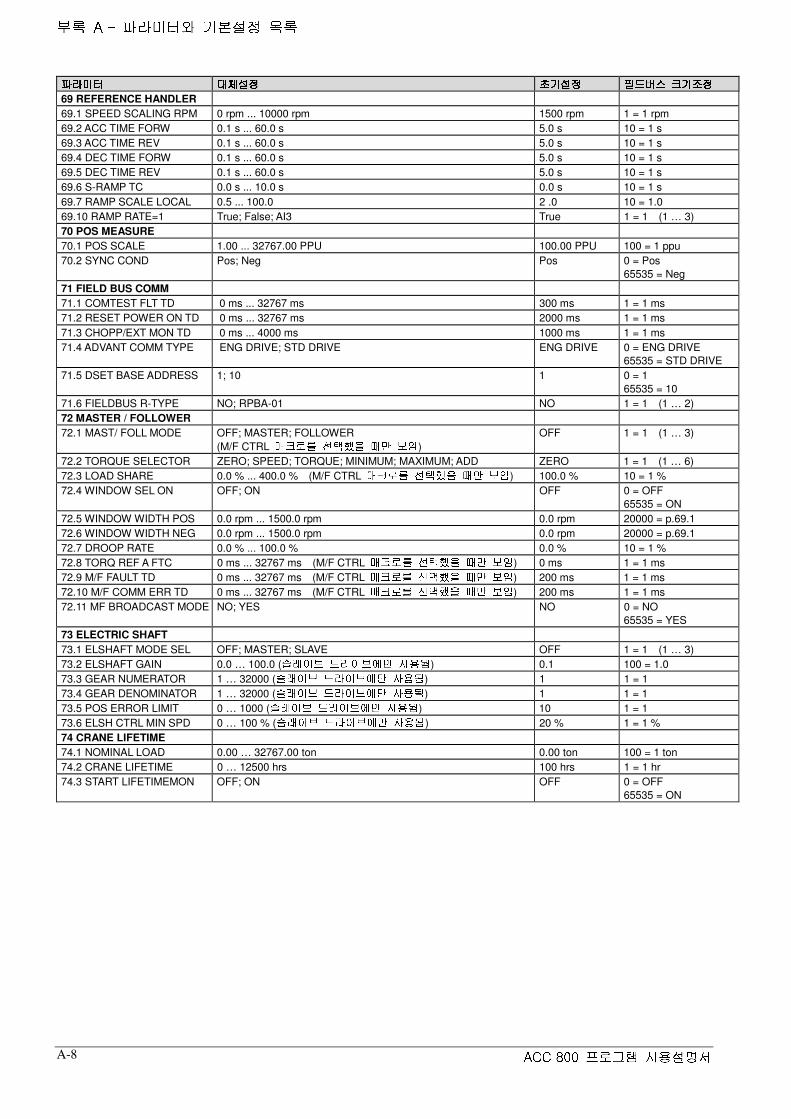
¹ �-,/.�����ºÜ ���0�Ý�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-8
A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µ���1�!µ���1�!µ���1�!µ���1�! ���������������������������� ���� �!���� �!���� �!���� �! 69 REFERENCE HANDLER 69.1 SPEED SCALING RPM 0 rpm ... 10000 rpm 1500 rpm 1 = 1 rpm 69.2 ACC TIME FORW 0.1 s ... 60.0 s 5.0 s 10 = 1 s 69.3 ACC TIME REV 0.1 s ... 60.0 s 5.0 s 10 = 1 s 69.4 DEC TIME FORW 0.1 s ... 60.0 s 5.0 s 10 = 1 s 69.5 DEC TIME REV 0.1 s ... 60.0 s 5.0 s 10 = 1 s 69.6 S-RAMP TC 0.0 s ... 10.0 s 0.0 s 10 = 1 s 69.7 RAMP SCALE LOCAL 0.5 ... 100.0 2 .0 10 = 1.0 69.10 RAMP RATE=1 True; False; AI3 True 1 = 1 (1 … 3) 70 POS MEASURE 70.1 POS SCALE 1.00 ... 32767.00 PPU 100.00 PPU 100 = 1 ppu 70.2 SYNC COND Pos; Neg Pos 0 = Pos
65535 = Neg 71 FIELD BUS COMM 71.1 COMTEST FLT TD 0 ms ... 32767 ms 300 ms 1 = 1 ms 71.2 RESET POWER ON TD 0 ms ... 32767 ms 2000 ms 1 = 1 ms 71.3 CHOPP/EXT MON TD 0 ms ... 4000 ms 1000 ms 1 = 1 ms 71.4 ADVANT COMM TYPE ENG DRIVE; STD DRIVE ENG DRIVE 0 = ENG DRIVE
65535 = STD DRIVE 71.5 DSET BASE ADDRESS 1; 10 1 0 = 1
65535 = 10 71.6 FIELDBUS R-TYPE NO; RPBA-01 NO 1 = 1 (1 … 2) 72 MASTER / FOLLOWER 72.1 MAST/ FOLL MODE OFF; MASTER; FOLLOWER
(M/F CTRL â:��a'� R$S:ã�Þ � Ô E$Õ ) OFF 1 = 1 (1 … 3)
72.2 TORQUE SELECTOR ZERO; SPEED; TORQUE; MINIMUM; MAXIMUM; ADD ZERO 1 = 1 (1 … 6) 72.3 LOAD SHARE 0.0 % ... 400.0 % (M/F CTRL â��'a'� R$S�ã'Þ � Ô E)Õ ) 100.0 % 10 = 1 % 72.4 WINDOW SEL ON OFF; ON OFF 0 = OFF
65535 = ON 72.5 WINDOW WIDTH POS 0.0 rpm ... 1500.0 rpm 0.0 rpm 20000 = p.69.1 72.6 WINDOW WIDTH NEG 0.0 rpm ... 1500.0 rpm 0.0 rpm 20000 = p.69.1 72.7 DROOP RATE 0.0 % ... 100.0 % 0.0 % 10 = 1 % 72.8 TORQ REF A FTC 0 ms ... 32767 ms (M/F CTRL â:�'a'� R)S:ã'Þ � Ô E$Õ ) 0 ms 1 = 1 ms 72.9 M/F FAULT TD 0 ms ... 32767 ms (M/F CTRL â:�'a'� R)S:ã'Þ � Ô E$Õ ) 200 ms 1 = 1 ms 72.10 M/F COMM ERR TD 0 ms ... 32767 ms (M/F CTRL â:�'a'� R)S:ã'Þ � Ô E$Õ ) 200 ms 1 = 1 ms 72.11 MF BROADCAST MODE NO; YES NO 0 = NO
65535 = YES 73 ELECTRIC SHAFT 73.1 ELSHAFT MODE SEL OFF; MASTER; SLAVE OFF 1 = 1 (1 … 3) 73.2 ELSHAFT GAIN 0.0 … 100.0 (t)u �:N �)B �:N 7'Ô X'Y'¸ ) 0.1 100 = 1.0 73.3 GEAR NUMERATOR 1 … 32000 (t)u �:N �)B �:N 7�Ô X�Y'¸ ) 1 1 = 1 73.4 GEAR DENOMINATOR 1 … 32000 (t)u �:N �)B �:N 7�Ô X�Y'¸ ) 1 1 = 1 73.5 POS ERROR LIMIT 0 … 1000 (t)u �:N �)B �:N 7�Ô X�Y'¸ ) 10 1 = 1 73.6 ELSH CTRL MIN SPD 0 … 100 % (t$u ��N �$B ��N 7�Ô X�Y'¸ ) 20 % 1 = 1 % 74 CRANE LIFETIME 74.1 NOMINAL LOAD 0.00 … 32767.00 ton 0.00 ton 100 = 1 ton 74.2 CRANE LIFETIME 0 … 12500 hrs 100 hrs 1 = 1 hr 74.3 START LIFETIMEMON OFF; ON OFF 0 = OFF
65535 = ON

¹ �-,/.�����ºÜ ���0�Ý�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-9
A)B�C�#A)B�C�#A)B�C�#A)B�C�# ��´�1�!��´�1�!��´�1�!��´�1�! µµ µµä��1�!��1�!��1�!��1�! ���������������������������� ���� �!���� �!���� �!���� �! 90 DATASET REC ADDR 90.1 DATASET 7 WORD 1 0 … 9999 0 1 = 1 90.2 DATASET 7 WORD 2 0 … 9999 0 1 = 1 90.3 DATASET 7 WORD 3 0 … 9999 0 1 = 1
92 DATASET TR ADDR 92.1 DATASET 4 WORD 1 0 … 9999 202 1 = 1 92.2 DATASET 4 WORD 2 0 … 9999 218 1 = 1 92.3 DATASET 4 WORD 3 0 … 9999 104 1 = 1 92.4 DATASET 6 WORD 1 0 … 9999 402 1 = 1 92.5 DATASET 6 WORD 2 0 … 9999 403 1 = 1 92.6 DATASET 6 WORD 3 0 … 9999 404 1 = 1 92.7 DATASET 8 WORD 1 0 … 9999 109 1 = 1 92.8 DATASET 8 WORD 2 0 … 9999 107 1 = 1 92.9 DATASET 8 WORD 3 0 … 9999 106 1 = 1
98 OPTION MODULES 98.1 ENCODER MODULE NTAC; NO; RTAC-SLOT1; RTAC-SLOT2; RTAC-DDCS NO 1 = 1 (0 … 4) 98.2 COMM. MODULE NO; FIELDBUS; ADVANT NO 1 = 1 (1 … 3) 98.3 CH3 NODE ADDR 1 ... 254 1 1 = 1 98.4 CH0 NODE ADDR 0 … 125 1 1 = 1 98.5 DI/O EXT MODULE 1 NDIO; NO; RDIO-SLOT1; RDIO-SLOT2; RDIO-DDCS NO 1 = 1 (1 … 5) 98.6 DI/O EXT MODULE 2 NDIO; NO; RDIO-SLOT1; RDIO-SLOT2; RDIO-DDCS NO 1 = 1 (1 … 5) 98.7 AI/O EXT MODULE NAIO; NO; RAIO-SLOT1; RAIO-SLOT2; RAIO-DDCS NO 1 = 1 (1 … 5)

¹ �-,/.�����ºÜ ���0�Ý�»¼� �
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ A-10
� ë ��åæ ç�è�é�êë ¨�ì�ì�êë î�ï�ð�í�µî ñ .

½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�êÈÏ B-1
òôóòôóòôóòôó ïï ïï öö öö ðòñ óðòñ óðòñ óðòñ ó ôöõ ÷ôöõ ÷ôöõ ÷ôöõ ÷ùøûúýüÿþ�� ú�������� �����øûúýüÿþ�� ú�������� �����øûúýüÿþ�� ú�������� �����øûúýüÿþ�� ú�������� ����� ������������
� ¹����
� æ ������� ��� �! "�#�$ %'& RMIO (�# I/O�
)�*�+�æ ,�-�é�. /�0
)�*�1 (�2�3� .

¹��54�6'7�8�95:�;�<�=?> @BADCE> FHGJILKNMNOQPHISR�T
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�UÈÏ B-2
�V��V��V��V� B-1: WVXVYV,WVXVYV,WVXVYV,WVXVYV, "V#"V#"V#"V# , Z �V[V\Z �V[V\Z �V[V\Z �V[V\ V! �V] ç V! �V] ç V! �V] ç V! �V] ç RMIO (V#(V#(V#(V# )V*)V*)V*)V*
.

¹��54�6'7�8�95:�;�<�=?> @BADCE> FHGJILKNMNOQPHIS^�T
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�UÈÏ B-3
�V��V��V��V� B-2: _VXVYV,_VXVYV,_VXVYV,_VXVYV, "V#"V#"V#"V# , Motor Pot V!V` V!V` V!V` V!V` RMIO çç çç )V*)V*)V*)V*
.

¹��54�6'a�8�95:�;�<�=?> @BADCE> FHGJILKNMNOQPHIS^�T
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�UÈÏ B-4
�V��V��V��V� B-3: _VXVYV,_VXVYV,_VXVYV,_VXVYV, "V#"V#"V#"V# , bVcV V!V` �bVcV V!V` �bVcV V!V` �bVcV V!V` � RMIO çç çç )V*)V*)V*)V*
.

¹��54�6'a�8�95:�;�<�=?> @BADCE> FHGJILKNMNOQPHIS^�T
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�UÈÏ B-5
�V��V��V��V� B-4: dV#Ve [dV#Ve [dV#Ve [dV#Ve [ "V#V`"V#V`"V#V`"V#V` RMIO çç çç )V*)V*)V*)V*
.

¹��54�6'a�8�95:�;�<�=?> @BADCE> FHGJILKNMNOQPHIS^�T
½¿¾À¾ÂÁÄÃÄÃÆÅÈÇÈÉÊÌË$ÍÈÎ�UÈÏ B-6
� ë ��åæ ç ^ é�êë f�g�ì�êë h�i�j�í�kî�� .


��� �ABB Automation Technologies AB
Crane Systems
ABB Korea
Telephone +82 2 528 2381
Fax +82 2 528 2338
Internet www.abb.com
Recommended

















