Embed Size (px)
Citation preview

Ecuaciones cuasilineales de primer orden
Yaneth Liliana Rivera
Director: Gilberto Pérez P.
Universidad Pedagógica y Tecnológica de Colombia
Facultad de Ciencias
Licenciatura en Matemáticas
Tunja, agosto de 2008
i

Índice general
Lista de símbolos III
Introducción IV
Objetivos V
0.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
0.2. Objetivos especí�cos . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
1. Conceptos básicos 11.1. Cálculo vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. Ecuaciones cusilineales de primer orden 92.1. Ecuaciones en derivadas parciales de primer orden. Ecuaciones de Euler 9
2.2. Ecuaciones cuasilineales . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3. Generación de una super�cie a partir de las curvas características . . . 17
2.4. Problema de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.5. Dependencia continua respecto a los datos . . . . . . . . . . . . . . . . 29
2.6. Soluciones débiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6.1. Condición de salto . . . . . . . . . . . . . . . . . . . . . . . . . 35
3. Ejercicios resueltos de EDP cuasilineales 41
Conclusiones 64
Bibliografía 65
ii

Lista de símbolos
R Números reales.
Rn Espacio Euclídeo n� dimensional.C([a; b]) Espacio de funciones continuas en el intervalo [a; b]:
C1([a; b]) Espacio de funciones con primera derivada continua en el intervalo [a; b]:
C1 (R3) Espacio de funciones con primera derivada continua en R3
h ; i Producto interno en Rn
k k Norma.
Br (x0) Bola de radio r y centro x0:
j j Valor absoluto.
rf Gradiente del campo escalar f
F Campo de vectores
rotF Rotacional de un campo F
divF Divergencia de un campo de vectoresF:
Subconjunto de R3 abierto y conexo.vol [Br (x0)] Volumen de una bola de radio r y centro x0@D Frontera del abierto D
n Vector normal a una super�cie
det Función Determinante
iii

Introducción
La historia de las ecuaciones diferenciales comenzó en el sigloXV II cuando Newton,
Leibniz y los Bernoulli resolvieron algunas ecuaciones diferenciales sencillas de primero
y segundo orden que se presentaron en problemas de geometría y Mecánica. Pronto
vieron que relativamente pocas ecuaciones diferenciales podían resolverse con recursos
elementales, fueron dándose cuenta que era en vano el empeño de intentar descubrir
métodos para resolver todas las ecuaciones diferenciales, en lugar de ello, encontraron
más provechoso averiguar si una ecuación dada tenía o no solución y aún cuando tenía,
intentar la deducción de propiedades de la solución a partir de la misma ecuación dife-
rencial. Con ello comenzaron a considerar las ecuaciones diferenciales como fuentes de
nuevas funciones. A partir del siglo XIX se desarrolló una fase importante de esta
teoría, siguiendo una tendencia de conseguir un desarrollo más riguroso de cálculo.
Las ecuaciones en derivadas parciales (EDP ); tienen gran aplicación en lasdiferentes profesiones que se relacionan con la matemática; por ejemplo la física, la
química y la ingeniería, entre otras.
En este trabajo se estudiará el método de las características para solucionar el
problema de Cauhy de ecuaciones cuasilineales de primer orden. Como guía se ha
seguido principalmente el texto [12]. Aunque este tipo de ecuaciones se pueden tratar
para un número cualquiera n de variables independientes, en este trabajo sólo se tratará
el caso n = 2, que permite mostrar de manera más clara la interpretación geométrica
de las soluciones de estas ecuaciones, es decir, se trabaja en un espacio bidimensional.
La redacción de un documento de texto donde se muestren los detalles de los re-
sultados básicos de una teoría con sus ejemplos, tiene como �n servir de ayuda a los
estudiantes interesados en incursionar por primera vez en esta. Este material puede
facilitar la comprensión de algunos conceptos y resultados elementales de las EDP
cuasilineales de primer orden.
iv

Objetivos
0.1. Objetivo general
Hacer un estudio de los resultados básicos de la teoría de ecuaciones en derivadas
parciales cuasilineales de primer orden.
0.2. Objetivos especí�cos
1. Estudiar el problema de Cauchy para ecuaciones cusilineales de primer orden.
2. Reconstruir de manera detallada los resultados básicos de esta teoría.
3. Ilustrar la temática por medio de la presentación de ejemplos y ejercicios.
4. Dar a conocer algunas aplicaciones que tienen las ecuaciones diferenciales cuasi-
lineales de primer orden.
5. Elaborar un documento donde se muestre los detalles del estudio desarrollado.
v

Capítulo 1
Conceptos básicos
Este capítulo contiene algunos conceptos y resultados que pueden ayudar a la com-
prensión del contenido de este trabajo.
1.1. Cálculo vectorial
Por Rn se entiende el espacio vectorial real R� :::� R con su estructura topológicausual; dotado de una norma sin importar cual, ya que en Rn todas las normas sonequivalentes.
Derivada direccionalLa derivada direccional expresa la razón de cambio de una función de dos o más
variables en cualquier dirección.
Si u es una función escalar de variables x1;..:; xn; el gradiente de u es la función
vectorial ru de�nida por
ru (x1; :::; xn) =�@u
@x1;:::;
@u
@xn
�:
Si y es un vector unitario, la derivada
u0(a;y) = hru (a) ;yi
se llama derivada direccional de u en a en la dirección de y. En particular, si y = ek (el
k-ésimo vector canónico) la derivada direccional u0(a; ek) se denomina derivada parcial
respecto a xk y se representa mediante el símbolo Dku(a) o@u
@xk. Es decir,
Dku(a) = u0(a; ek) =@u
@xk(a1; :::; an):
1

Si S es una super�cie y n es un vector normal a S en el punto a; la derivada rf (a) �nrepresenta la densidad del �ujo de f a través de la super�cie, esta derivada se escribe
también como@u
@n:
Función diferenciableSea u : S ! R un campo escalar de�nido de S � Rn: Sean a un punto interior a S
y Br (a) una n � bola contenida en S: Sea h un vector tal que khk < r; de modo que
a+ h 2Br (a) :Se dice que la función u es diferenciable en un punto a; si existe una función escalar
E (a;h) tal que
u (a+ h) = u (a) +ru (a) � h+ khkE (a;h) ;
donde E (a;h)! 0 cuando h! 0:
Una condición su�ciente de diferenciabilidad de la función u en el punto a; es la
existencia de sus derivadas parciales en alguna n� bola B (a) y la continuidad de estasen el punto a:
Regla de la cadena generalSuponga que u es una función diferenciable de las n variables x1; x2; :::; xn y cada xj
es una función diferenciable de las m variables t1; t2; :::; tm. Entonces u es una función
de t1; t2; :::; tm; y
@u
@ti=
@u
@x1
@x1@ti
+@u
@x2
@x2@ti
+ :::+@u
@xn
@xn@ti
para cada i = 1; 2; :::;m:
Regla de Leibniz
La regla de Leibniz a�rma que si F (x) =Z v
u
g (x; t) dt; donde u y v son funciones
de x; y t es una variable muda, entonces
d
dxF (x) =
Z v
u
@
@xg (x; t) dt+ g (x; v)
dv
dx� g (x; u)
du
dx:
Teorema de la función inversa
Teorema 1.1 Sea U � Rn abierto y u1 : U �! R; :::; un : U �! R con derivadas
parciales continuas. Considérense las ecuaciones8><>:y1 = u1(x1; : : : ; xn)...
...
yn un(x1; x2; : : : ; xn)
(1.1)
2

cerca de una solución dada x0;y0: Si el determinante Jacobiano
J (u) (x0) =@(u1; : : : ; un)
@(x1; : : : ; xn)
����x0
= det
0BBBB@@u1@x1
(x0) � � � @u1@xn
(x0)
.... . .
...@un@x1
(x0) � � � @un@xn
(x0)
1CCCCA 6= 0;
entonces (1.1) se puede resolver de manera única como x =g (y) para x en un entorno
A de x0 e y en un entorno B de y0. Además, la función g tiene derivadas parciales
continuas.
La función g obtenida en el teorema anterior se llama inversa local de u:
De�nición 1.2 (Campo vectorial) Sea D � R3: Un campo vectorial sobre R3 esuna función F que asigna a cada punto (x; y; z) en D, un vector tridimensional
F (x; y; z) = (f1 (x; y; z) ; f2 (x; y; z) ; f3 (x; y; z)) ;
donde las fi son funciones escalares.
La mejor forma de ilustrar un campo vectorial es representar el vector F (x; y; z)
con una �echa con origen en el punto (x; y; z) : Puesto que es imposible hacerlo para
todos los puntos de D, esta representación se hace sólo para algunos puntos, como se
muestra en los ejemplos siguientes.
Ejemplo 1.3 Campo vectorial F (x; y; z) = (y; z; x) :
2.51.25
01.25
2.5
2.51.25
01.25
2.52.5
1.250
1.252.5
x yzx yz
3

Ejemplo 1.4 Campo vectorial F (x; y; z) = (y;�x; z):
52.5
02.5
5
52.5
02.5
55
2.5
0
2.5
5x yzx yz
Teorema 1.5 Sea F = (F1; F2; F3) un campo de vectores en R3 tal que rotF = 0.
Entonces F es un campo conservativo, es decir, existe f : R3 �! R; f 2 C1(R3) talque rf = F; es decir, F1 = fx, F2 = fy; F3 = fz
Una tal f puede tener la forma
f(x; y; z) =
Z x
0
F1(s; y; z)ds+
Z y
0
F2(0; s; z)ds+
Z z
0
(0; 0; s)ds+ k;
donde k es una costante arbitraria.
De�nición 1.6 (Dominio regular) Sea D � RN un dominio acotado. Se dice que
D es regular si para cada x0 2 @D existe un entorno U de x0 en RN y una función
' : U ! R
continuamente diferenciable, de forma que
1. r'(x) 6= 0 si x 2 U;2. @D \ U = fx 2 U;'(x) = 0g ;3. D \ U = fx 2 U;'(x) < 0g :
La de�nición anterior establece que un dominio regular tiene su frontera de�nida
localmente por ceros de funciones continuamente diferenciables, es decir, por trozos de
super�cies diferenciables en RN de�nidas implícitamente.
4

Sea D un dominio regular y sea x 2 @D. Un vector normal a @D en x viene dado
por n = r'(x), donde ' es una función que de�ne a @D en un entorno de x. Se dice
que n es normal exterior a @D en x si para � > 0 su�cientemente pequeño y 0 < t < �
se veri�ca quex� tn 2 D;x+ tn 2 RN �D:
Si se denota por v(x) la normal exterior unitaria en x a @D y si D es regular, entonces
v(x) es un campo continuo en @D, [12].
Divergencia y RotacionalUnas operaciones que se efectúan sobre los campos vectoriales y que son usadas en
aplicaciones del cálculo vectorial son las llamadas divergencia y rotacional. La diver-
gencia se asemeja a la derivación y genera un campo escalar.
Sea F = (F1; :::; Fn) un campo vectorial en Rn; la divergencia de F se de�ne por
r � F = divF =Xn
i=1
@Fi@xi
:
En el modelo del campo de velocidades de un �uido, la divergencia mide la tasa de
cambio del volumen, [16].
El rotacional genera un campo vectorial. Para F = (F1; F2; F3) se de�ne por
RotF = r�rF =�@F3@x2
� @F2@x3
;@F1@x3
� @F3@x1
;@F2@x1
� @F1@x2
�:
Teorema 1.7 (Teorema de la divergencia de Gauss.) Sea D un dominio regular
en R3 y F 2 C1(D) un campo de vectores. EntoncesZ@D
hF;ni ds =ZD
divFdv;
donde n es un vector unitario normal a la frontera @D:
Teorema 1.8 Sea D un dominio en Rn y f : D �! R acotada y continua en D.
Entonces existe un punto z 2 D tal queZD
f(y)dy = V ol(D)f(z);
donde vol [Br(x0)] es el volumen de la bola de radio r y centro x0: Véase [3].
De este teorema se deduce la proposición siguiente.
5

Proposición 1.9 Si f es una función continua se veri�ca que
f(x0) = l��mr!0
1
vol [Br(x0)]
ZBr(x0)
f(v)dv:
De esta proposición se deduce que si f es continua yRQfdv = 0; para cualquier
bola Q � D; entonces f = 0 en D:
Rango de una matriz
De�nición 1.10 Sea A una matriz de m� n: Se de�ne la imagen de A como
Imag (A) = fy 2 Rm : Ax = y; x 2Rng
y el rango de por
� (A) = dim (Imag (A)) :
1.2. Ecuaciones diferenciales
El desarrollo de modelos matemáticos hacen comprender mejor los fenómenos físi-
cos. Algunos de estos modelos producen ecuaciones que contiene derivadas de una
función incógnita. Esta ecuación es llamada ecuación diferencial.
De�nición 1.11 Una ecuación diferencial es cualquier ecuación en la que intervienenuna variable dependiente y sus derivadas con respecto a una o más variables indepen-
dientes.
Clasi�caciónLas ecuaciones diferenciales tienen varias clasi�caciones dependiendo de los criterios
que se evalúen.
Según la dependenciaSegún la dependencia de una o más variables independientes de la función des-
conocida se clasi�can en:
Ecuación diferencial ordinaria: Si la función desconocida depende sólo de una vari-
able.
En general una ecuación diferencial ordinaria de orden n, es una función F de la
forma
F�x; y; y0; : : : ; y(n)
�= 0; (1.2)
6

donde y es una variable dependiente de x:
Ecuación en derivadas Parciales: Si la función desconocida depende de más de una
variable aparecen derivadas parciales, en forma abreviada se escribe EDP . La forma
general de una ecuación en derivadas parciales es una relación
F (x; y; :::;u;ux; uy; :::;uxx; uxy; :::) = 0; (1.3)
que liga una función desconocida u de valor real de n � 2 variables x, y; :::; con estasvariables y las derivadas de orden k:
En la ecuación diferencial@v
@s+@v
@t= v
las variables s y t son independientes y v es la variable dependiente.
Según su ordenEl orden de una ecuación diferencial, es el orden de la derivada más alta que aparece
en la ecuación. La ecuación diferencial
@2u
@r2+1
r
@u
@r+1
r2@2u
@�2= 0;
es una ecuación en derivadas parciales de segundo orden, puesto que la derivada de
orden más alto que aparece es la derivada segunda.
Según su linealidadLas ecuaciones (1.2) y (1.3) se llaman lineales si F es lineal en la variable depen-
diente y sus derivadas.
La ecuación
ut + uux = 0
es una EDP no lineal de primer orden y será tratada al �nal del capítulo 2.
Según su homogeneidadUna ecuación lineal es homogénea si el término que no está afectado por la variable
dependiente ni por sus derivadas (término independiente) es cero para todo x.
Si las funciones y1 y y2 son soluciones de la ecuación diferencial
L (y) = y00 + p (x) y0 + q (x) y = 0; (1.4)
entonces la combinación lineal c1y1 + c2y2 es una solución de (1.4) y correspondiendo
a un número in�nito de valores que se puede asignar a c1 y c2, se puede elaborar
un número in�nito de soluciones de ésta. Se dice que dos soluciones y1 y y2 de la
7

ecuación (1.4) forman un conjunto fundamental de soluciones, si cualquier solución
puede expresarse como una combinación lineal de y1 y y2.
Si las funciones p y q son continuas sobre el intervalo abierto � < x < � y si y1, y2son soluciones de la ecuación diferencial (1.4) que satisfacen la condición
W (y1; y2) = y1 (x) y02 (x)� y01 (x) y2 (x) 6= 0;
para todo punto en � < x < �, entonces cualquier solución de la ecuación diferencial
(1.4) sobre el intervalo � < x < � puede expresarse como una combinación lineal de y1y y2, [4].
Lema de Gronwall
El lema de Gronwall permite pasar de una inecuación integral en la función y a
una estimación para y:
Lema 1.12 (Lema de Gronwall) Sean f : [a; b]! R y g : [a; b]! R+ dos funcionescontinuas. Sea y : [a; b] ! R una función continua que satisface para todo t 2 [a; b] ladesigualdad
y (t) � f (t) +
Z t
a
g (s) y (s) ds:
Entonces, para todo t 2 [a; b] ; se tiene
y (t) � f (t) +
Z t
a
f (s) g (s) exp
�Zg (u) du
�ds:
En particular, si f (t) = k; k una constante, entonces
y (t) � exp�Z t
a
g (s) ds
�:
Véase [7].
8

Capítulo 2
Ecuaciones cusilineales de primerorden
Antes de abordar el estudio de las ecuaciones cuasilineales se presenta la deducción
de un modelo para un problema físico a través de ecuaciones de primer orden.
2.1. Ecuaciones en derivadas parciales de primer
orden. Ecuaciones de Euler
Las EDP de primer orden más sencillas son de la forma
ux = P; uy = Q; uz = R;
donde u, P; Q, R son funciones de las variables independientes x; y; z.
Si se consideran por separado estas ecuaciones, las soluciones respectivas son
u(x; y; z) =
ZP (x; y; z)dx+ �(y; z)
u(x; y; z) =
ZQ(x; y; z)dy + (x; z)
u(x; y; z) =
ZR(x; y; z)dz + �(x; y):
Ahora, si las ecuaciones se consideran como un sistema, la solución U debe ser tal que
ru = (ux; uy; uz) = (P;Q;R) = F;
9

y según el Teorema 1.5, la solución existe si rotF = 0; es decir si��������i j k@
@x
@
@y
@
@zP Q R
�������� = (Ry �Qz; Pz �Rx; Qx � Py) = 0:
Entonces debe cumplirse que
Py = Qx; Pz = Rx; Qz = Ry; (2.1)
lo cual se conoce como diferencial exacta.
El mismo teorema a�rma que una solución está dada por
u(x; y; z) =
Z x
0
P (s; y; z)ds+
Z y
0
Q(0; s; z)ds+
Z z
0
R(0; 0; s)ds+ k;
donde k es una constante.
A continuación se presenta la deducción de un modelo físico a través de ecuaciones
de primer orden. Corresponde a las ecuaciones de Euler que rigen el movimiento de
�uidos no viscosos.
Sea � R3 una región ocupada por un �uido en movimiento. El objetivo es pre-sentar un modelo que describa su movimiento, para lo cual se tiene en cuenta tres
principios de la física.
I) Principio de conservación de masa.
II) Segunda ley de la dinámica de Newton.
III) Principio de la conservación de energía.
A nivel macroscópico se espera que la densidad del �uido �(x; t) sea una función
continua del espacio y del tiempo. Dada una bolaQ � , la masa del �uido que encierraen el instante t es
m(Q; t) =
ZQ
�(x; t)dV: (2.2)
Sea X(t) 2 la posición de una partícula en el instante t. Se supone que la partículadescribe una trayectoria bien de�nida y que por tanto la velocidad U (x; t) de ésta en
el instante t de�ne un campo de vectores en :
En los cálculos que se desrrollarán a continuación se supone que U y � tienen la
regularidad su�ciente para que estos sean válidos.
10

La ley de conservación de masa establece que la variación de la masa respecto al
tiempo es igual a la masa que entra menos la que sale, esto es, la tasa de variación de
masa respecto al tiempo en la bola Q;
dm
dt(Q; t) =
ZQ
@�
@t(x; t)dV; (2.3)
debe ser igual al �ujo a través de la frontera Q, es decir a
�Z@Q
� hU;ni dS = �Z@Q
h�U;ni ds = �ZQ
div(�U)dV; (2.4)
donde n representa un vector normal unitario exterior a @Q y tamabién se ha aplicado
el Teorema de la divergencia.
De (2.3) y (2.4) se tiene ZQ
�@�
@t+ div(�U)
�dV = 0:
Si se supone que el integrando es continuo y haciendo tender el diámetro de Q a cero,
se obtiene la expresión diferencial de conservación de masa
@�
@t+ div(�U) = 0; (2.5)
que se conoce como ecuación de continuidad.
Sin la hipótesis de regularidad, (2.3) queda
dm
dt(Q; t) =
@
@t
ZQ
�(x; t)dV
y en (2.4 ) no puede aplicarse el Teorema de la divergencia, luego la ecuación de
continuidad en este caso queda
@
@t
ZQ
� dV +
Z@Q
� hU;ni ds = 0; (2.6)
que es la forma de ley de conservación que aparece en física.
La formulación de problemas que incluyen ecuaciones como la ( 2.6), genera la
necesidad de introducir conceptos de solución más generales que el clásico, según el
cual la solución es derivable y se satisface puntualmente. Esto será analizado al �nal
del trabajo, donde se dará el concepto de solución débil.
Sea
X(t) = (x1(t); x2(t); x3(t))
11

la trayectoria seguida por una partícula de �uido.
En términos del campo de velocidades se tiene
dX(t)
dt= U (X(t); t) = (u1 [X(t); t] ; u2 [X(t); t] ; u3 [X(t); t]) ; (2.7)
de donde
(x01; x02; x
03) = (u1; u2; u3):
Derivado (2.7) se obtiene la aceleración
a(t) =d2X(t)
dt2=dU
dt[X(t); t] :
Aplicando la regla de la cadena para campos vectoriales, consúltese [1], se tiene
a(t) = DU [X(t); t]X 0(t) + Ut = DU [X(t); t]U + Ut
=
0B@ u1x1 u1x2 u1x3u2x1 u2x2 u2x3u3x1 u3x2 u3x3
1CA0B@ u1
u2
u3
1CA+0B@ u1t
u2t
u3t
1CA :
En algunos textos esta última expresión la describen como
a(t) = hU;riU + Ut:
Entonces el vector
a(t) = (a1(t); a2(t); a3(t)) = hU;riU + Ut;
es tal que
ai(t) =
3Xj=1
@ui@xj
uj +@ui@t; i = 1; 2; 3:
La segunda ley de Newton establece que
�a = F; (2.8)
donde F representa la densidad de fuerza o carga por unidad de volumen.
Las fuerzas que se consideran son de dos clases:
1. Fuerzas exteriores, como las gravitatorias cuya densidad se supone dada por un
campo f(x; t).
2. Tensiones internas.
12

En los �uidos perfectos, es decir los no viscosos, se supone que para las fuerzas
de tensión interna existe una función p(x; t) llamada presión, de la forma que si se
considera un elemento de super�cie S en el �uido y n su normal, las fuerzas de tensión
a través de S tienen una densidad en el punto x y en el instante t igual a p(x; t)n:
Esto signi�ca que no hay componentes tangenciales en las fuerzas de tensión interna,
es decir, en un �uido perfecto no se crean ni se destruyen rotaciones sin la acción de
fuerzas externas.
La tensión total a través de la frontera de la bola Q � R3 viene entonces dada por
S@Q = �Z@Q
pn dS;
y la proyección de dicha fuerza en la dirección de un vector unitario e 2 R3 es,
he; S@Qi =
�e;�
Z@Q
pnds
�= �
Z@Q
he; pni ds = �Z@Q
hpe;ni ds (2.9)
= �ZQ
div(pe)dV = �ZQ
hrp; ei dV = ��Z
Q
rpdV; e�;
donde se han aplicado propiedades del producto escalar, el Teorema de la divergencia
y la identidad div(gu) = div(u) + hrg; ui ; para g función a valor real y u campovectorial.
De (2.9) se deduce
he; S@Qi+�e;
ZQ
rpdV�=
�e; S@Q +
ZQ
rpdV�= 0;
y como el vector unitario e 2 R3 es arbitrario, entonces S@Q +RQrpdV = 0; es decir,
S@Q = �ZQ
rpdV: (2.10)
Como �a = F; dada por (2.8), es la fuerza por unidad de volumen, la fuerza total
ejercida sobre Q que es la suma de la tensión total con las fuerzas exteriores seráZQ
�a dV =
ZQ
FdV = �ZQ
rpdV +ZQ
fdV;
luego ZQ
(�a+rp� f)dV = 0:
Con la hipótesis de regularidad y haciendo tender el diámetro de Q a cero, se llega a
las llamadas ecuaciones de Euler
�a = �rp+ f;
13

que al reemplazar a resulta
� (Ut + hU;riU) = �rp+ f:
2.2. Ecuaciones cuasilineales
Se consideran ecuaciones de forma
f1 (x1; x2; u)ux1 + f2 (x1; x2; u)ux2 = f (x1; x2; u) : (2.11)
Estas ecuaciones se llaman cuasilineales, porque dependen linealmente de las derivadas
parciales ux1 ; ux2 ; pero la dependencia con respecto a u no es necesariamente lineal.
Las ecuaciones lineales tienen la forma
f1(x1; x2)ux1 + f2(x1; x2)ux2 = f(x1; x2)u:
Se observa que una ecuación lineal es una ecuación cuasilineal donde la dependencia
con respecto a u es también lineal.
Bajo el punto de vista vectorial, la ecuación (2.11) se puede escribir equivalen-
temente en términos de la base canónicanbi;bj;bko del espacio vectorial R3, como el
producto punto �f1bi+ f2bj + fbk� � � @u
@x1bi+ @u
@x2bj � bk� = 0:
Ejemplo 2.1 Un ejemplo de ecuación cuasilineal es
ut + a(u)ux = 0;
donde las variables independientes son t y x. Si
A(u) =
Z u
0
a(s)ds;
entonces
A(u)x =@
@x
Z u
0
a(s)ds =@
@u
Z u
0
a(s)ds@u
@x= a(u)ux
y la ecuación ut + (au)ux = 0; puede escribirse como una divergencia
ut + A(u)x = 0:
Para el estudio de la ecuación (2.11), se supone que f1; f2; f están de�nidas en un
abierto � R3. También se supone que:
14

1. f1; ; f2 2 C1 ()
2. jf1(x1; x2; u)j+ jf2(x1; x2; u)j > 0; si (x1; x2; u) 2 :
La hipótesis 1. da la condición su�ciente de regularidad y la hipótesis 2. garantiza
que hay ecuación en derivadas parciales en todo :
De�nición 2.2 Por solución de la ecuación (2.11) se entiende una función �, de�nidaen un abierto G � R2,
� : G �! R;
tal que � 2 C1(G) y
1. (x1; x2; �(x1; x2)) 2
2. Para todo (x1; x2) 2 G se veri�ca f1(x1; x2; �)�x1 + f2(x1; x2; �)�x2 = f(x1; x2; �):
La condición 2. expresa que � debe satisfacer la ecuación para (x1; x2) 2 G:El concepto de solución dado en la de�nición anterior es de carácter local, porque
sólo se exige que 1. y 2. se cumplan en el subconjunto G de R2 y se dice que el par(G; �) es una solución local. Cuando 1. y 2. se satisfacen para todo (x1; x2) 2 R2; a lasolución � se le llama solución global.
De�nición 2.3 Sean (G1; �1); (G2; �2) soluciones de la ecuación (2.11). Se dice queestas soluciones son iguales si se veri�ca
�1jG1\G2 = �2jG1\G2 ;
donde la notación �jA expresa la restricción de la función en � a un subconjunto A deldominio G.
Una forma de construir soluciones de una ecuación diferencial es recurriendo a su
signi�cado geométrico. De este análisis se deducen los datos que son admisibles para
plantear el problema de valores iniciales.
Supóngase una solución local � de (2.11),
� : G � R2 �! R;
con su grá�ca
� = f(x1; x2; �(x1; x2)) : (x1; x2) 2 Gg :
Sea u = �(x1; x2) y la función
g : � �! R
15

de�nida por
g(x1; x2; u) = �(x1; x2)� u = 0:
Entonces la super�cie
� = f(x1; x2; u) : (x1; x2; u) 2 g
es una super�cie de nivel cero para g(x1; x2; u) y
n = rg = (gx1 ; gx2 ; gu) = (�x1 ; �x2 ;�1)
es un vector normal a �:
Considérese el campo vectorial F dado por las funciones coe�ciente de la ecuación,
es decir F = (f1; f2; ; f); que está de�nida en . Como � es solución de la ecuación se
tiene
hn;Fi =��x1 ; �x2 ;�1
�; (f1; f2; f)
�= f1�x1 + f2�x2 � f = 0; en �;
lo cual dice que F es tangente a � en todos los puntos, como se muestra en la �gura
siguiente.
gR
∇gΣ
Lo anterior sugiere intentar construir las super�cies solución o grá�cas de soluciones,
a partir de las curvas de campo asociado al campo F, es decir, las curvas que en cada
uno de sus puntos son tangentes a F.
16

Si una curva con parametrización
X(t) = [x1(t); x2(t); u(t)]
es tangente en cada uno de sus puntos al campo F; entonces X 0(t) = F y así8>>><>>>:x01(t) = f1(x1; x2; u)
x02(t) = f2(x1; x2; u)
u0(t) = f(x1; x2; u):
(2.12)
Al sistema de ecuaciones (2.12) se le llama sistema característico de la ecuación (2.11)
y las grá�cas en R3 de las soluciones del sistema (2.12) se llaman curvas características.Dado que f1; f2 2C1(); el Teorema de existencia de Picard garantiza que el pro-
blema de Cauchy (2.12) con dato inicial
(x1 (0) ; x2 (0) ; u (0)) = (�01; �
02; �
0) 2 ; (2.13)
tiene solución local única. Además el Teorema de Peano sobre la diferenciabilidad,
establece que bajo las hipótesis impuestas al problema de Cauchy que se trata aquí,
las soluciones de este son diferenciables, consúltese [7].
2.3. Generación de una super�cie a partir de las
curvas características
Se �ja una curva : [0; 1] �! R3 regular, 2C1([0; 1]) de�nida por
(s) = (�1(s); �2(s); �(s))
y se considera una familia uniparamétrica de curvas solución de la ecuación (2.12 ) que
veri�que para cada s el dato inicial
(x1(0); x2(0); u(0)) = (�1(s); �2(s); �(s)):
Esta curva solución se denota
�(t; s) = (X1(t; s); X2(t; s); Z(t; s)) : (2.14)
Para s0 �jo, el vector tangente a �(t; s0) es
�t(t; s) = (X 01(t; s0); X
02(t; s0); Z
0(t; s0))
= (f1 [(X1(t; s0); X2(t; s0); Z(t; s0))] ; f2 [(X1(t; s0); X2(t; s0); Z(t; s0))] ;
f [(X1(t; s0); X2(t; s0); Z(t; s0))])
= (f1 [�(t; s0)] ; f2 [�(t; s0)] ; f [�(t; s0)]) = F [�(t; s0)] :
17

Por otra parte para t = 0;
�(0; s) = (X1(0; s); X2(0; s); Z(0; s)) = (x1(0); x2(0); u(0))
= (�1(s); �2(s); �(s)) = (s):
El vector tangente a (s) = �(0; s) es
0(s) = (�01(s); �02(s); �
0(s)) ;
y en consecuencia, para que �(t; s) sea la parametrización de la super�cie regular (es
decir con plano tangente en cada punto y que ésta varíe con continuidad de punto a pun-
to), se necesita que sobre la curva inicial las tangentes sean linealmente independientes,
esto es, que los los vectores �t(t; s) y 0(s) no sean vectores paralelos. Algebraicamente
esto quiere decir que
rango
0BBB@f1(�1(s); �2(s); �(s)) �01(s)
f2(�1(s); �2(s); �(s)) �02(s)
f (�1(s); �2(s); �(s)) �0(s)
1CCCA = 2: (2.15)
La condición (2.15) se llama condición de tranversalidad de la curva y el campo
F = (f1; f2; f) que de�ne la ecuación (2.11).
Al suponer la condición de transversalidad (2.15) se obtiene la forma de generar
soluciones de�nidas de forma paramétrica, es decir, se espera que el conjunto de todas
las curvas características formen la super�cie solución.
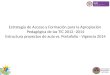
Ejemplo 2.4 Para ilustrar el análisis anterior se presentan los grá�cos de algunascurvas características y la super�cie solución correspondientes al problema
(x2 + 1)ux � xyuy =u
x; x = 1; u = y;
el cual se resuelve de manera explícita en el ejercicio 3.10 del capítulo tres de estetrabajo.
Para la condición de transversalidad se tiene
rango
0BBB@f1(1; s; s) 10
f2(1; s; s) s0
f (1; s; s) s0
1CCCA = rango
0B@ 2 0
�s 1
s 1
1CA = 2;
18

ya que esta matriz tiene dos renglones linealmente independientes.
En la primera grá�ca aparece la curva dato (en color verde) con parametrización
(s) = (1; s; s)
y algunas curvas solución del sistema característico (2.12 ), que en este caso es
dx
d�= x2 + 1;
dy
d�= �xy; du
d�=u
x:
Curva dato (s) = � (0; s) y algunas curvas características.
La grá�ca siguiente muestra la super�cie solución del problema, junto con la curva
dato la cual se ha resaltado con color verde. Esta grá�ca está dada por la ecuación
paramétrica
� (� ,s)=�tan��+
�
4
�,p2s cos
��+
�
4
�,p2s cos
��+
�
4
��, (� ,s) 2
�-3�
4,�
4
��(-1,1) ,
que corresponde a la función
u (x; y) = xy:
19

Grá�ca de la super�cie solución.
Para demostrar que las funciones así obtenidas, de�nen una solución de (2.11), debe
probarse que la condición de transversalidad implica que(x1 = X1(t; s)
x2 = X2(t; s)
tiene inversa local (s = S(x1; x2)
t = T (x1; x2);
y con esto faltaría establecer que
u = Z (T (x1; x2); S(x1; x2)) = �(x1; x2)
es solución de la ecuación (2.11). Además debe probarse que ésta es la única solución
que satisface el dato :
A continuación se presenta un ejemplo que también permite hacer todos los cálculos
de manera explícita.
Ejemplo 2.5 Considérese la ecuación lineal
a1ux1 + a2ux2 � b = 0;
20

donde a1; a2; b 2 R y ja1j+ ja2j > 0:
En este ejemplo F = (a1; a2; b) y el sistema característico es8><>:x01(t) = a1
x02(t) = a2
u0(t) = b:
Si el dato inicial es
(x1(0); x2(0); u(0) = (�01; �
02; �
0);
las curvas características están dadas por la parametrización8><>:x1(t) = a1t+ �01x2(t) = a2t+ �02u(t) = bt+ �0;
es decir, las curvas características son rectas en R3 dadas paramétricamente por
(x1(t); x2(t); u(t)) =�a1t+ �01; a2t+ �02; bt+ �0
�;
con vector dirección (a1; a2; b) :
Designando como dato inicial a una curva
(s) = (�1(s); �2(s); �(s))
transversal al vector (a1; a2; b); e imponiendo que
det
a1 a2
�01(s) �02(s)
!6= 0;
(esta imposición hace que se cumpla la condición de transversalidad (2.15)), se obtiene
�(t; s) = (a1t+ �1(s); a2t+ �2(s); bt+ �(s)) ; (2.16)
que corresponde a la ecuación paramétrica de un cilindro de generatrices paralelas al
vector (a1; a2; b):
Tomando en particular la curva (s) = (a2s;�a1s; s2; ); (obsérvese que esta curvasatisface la condición de transversalidad ya que se ha supuesto ja1j + ja2j > 0), de
(2.16) se obtiene
�(t; s) = (X1(t; s); X2(t; s); Z(t; s)) = (a1t+ a2s; a2t� a1s; bt+ s2):
21

Resolviendo el sistema (x1 = a1t+ a2s
x2 = a2t� a1s;
resulta 8>><>>:t =
a1x1 + a2x2a21 + a22
s =a2x1 � a1x2a21 + a22
:
Sustituyendo a t y s en Z(t; s) = bt+ s2; se obtiene
u(x1; x2) = Z(t; s) = ba1x1 + a2x2a21 + a22
+
�a2x1 � a1x2a21 + a22
�2;
que puede comprobarse directamente que soluciona la ecuación a1ux1 + a2ux2 � b = 0:
Como además se cumple que u(a2s;�a1s) = s2, se concluye que se ha encontrado una
super�cie solución de la ecuación, que contiene la curva (s), es decir, que sobre la
curva plana �(s) = (a2s;�a1s) la función u toma el valor s2:
Ejemplo 2.6 Considérese la ecuación ut + cux = 0, con dato inicial u(x; 0) = �(x):
El sistema característico es 8><>:x0(�) = c
t0(�) = 1
u0(�) = 0;
y la parametrización de la curva dato inicial es
(s) = (s; 0; �(s)):
Entonces las curvas características están dadas por8><>:t(�) = �
x(�) = c� + s
u(�) = �(s);
y la parametrización de la curva solución es
�(s; �) = (c� + s; � ; �(s)) = (X(s; �); T (s; �); Z(s; �)) = (x; t; u):
Se obtiene
x = c� + s y t = � ;
22

de donde
s = x� c� = x� ct;
y así
u(x; t) = Z(s; �) = �(x� ct):
La solución u(x; t) = �(x � ct) se conoce en el estudio de la ecuación de ondas como
una onda plana.
Los resultados en los dos ejemplos anteriores se han conseguido porque se ha podido
expresar explícitamente a (s; t) en términos de (x1; x2) y a (s; �) en términos (x; t)
respectivamente, lo cual ha sido fácil por ser expresiones lineales.
En el caso general el resultado de inversión lo da el Teorema de la Función Inversa,
[9].
A continuación se enuncian con precisión las hipótesis que se han conjeturado.
I. Hipótesis sobre la ecuación.Las condiciones que se suponen sobre la ecuación (2.11), es decir, sobre
f1(x1; x2; u)ux1 + f2(x1; x2; u)ux2 � f(x1; x2; u) = 0;
son:
1. f1; f2; f 2C1(), siendo � R3 un dominio abierto, es decir, un subconjuntoabierto y conexo.
2. jf1j+ jf2j > 0, para cada (x1;x2; u) 2 :
II. Hipótesis sobre la curva dato.
1. 2C1(I), donde I � R3 es un intervalo y (s) 2 para cada s 2 I, lo cual
signi�ca que
: I �! � R3:
2. j�01(s)j+ j�02(s)j > 0 sobre I. Esta condición establece que en ningún punto lacurva (s) tiene tangente paralela al eje 0u:
3. La condición de transversalidad (2.15) se postula sobre las dos primeras coor-denadas, es decir, se supone
det
0@ f1[�1(s); �2(s); �(s)] �01(s)
f2 [(�1(s); �2(s); �(s)] �02(s)
1A 6= 0
para cada s 2 I:
23

Las condiciones 2. y 3. se pueden imponer sobre otro par de coordenadas de�nien-
do la coordenada restante como función de ellas.
2.4. Problema de Cauchy
El problema de Cauchy o problema con valor inicial, consiste en que dada la ecuación
f1(x1; x2; u)ux1 + f2(x1; x2; u)ux2 � f(x1; x2; u) = 0
y la curva dato
(s) = (�1(s); �2(s); �(s));
debe encontrarse una función
� : G � R2 �! R; � 2 C1()
tal que:
i. (x1; x2; �) 2 si (x1; x2) 2 G;
ii. � satisface la ecuación, en el sentido que si (x1; x2) 2 G; entonces
f1(x1; x2; �)�x1 + f2(x1; x2; �)�x2 = f(x1; x2; �):
iii. �(�1(s); �2(s)) = �(s) paa s 2 I:
La denominación de problema con valor inicial que se da a un problema como el
anterior, se debe a que se está buscando una solución de la ecuación que sobre la curva
plana (�1(s); �2(s)) tome el valor �(s), es decir, que la super�cie solución o sea la
grá�ca de la función solución, contenga la curva :
Teorema 2.7 Considérese el problema de Cauchy
(P)
8<: f1(x1; x2; u)ux1 + f2(x1; x2; u)ux2 = f(x1; x2; u)
u(�1(s); �2(s)) = �(s);
donde la ecuación y el dato veri�can las hipótesis I. y II. Entonces, el problema (P)
tiene una única solución local u con
24

Prueba. 1. Existencia. Se comienza probando la existencia de al menos una solu-ción local regular, siguiendo los razonamientos geométricos anteriores. Para ello se
considera el problema de Cauchy para el sistema característico8>>>>>><>>>>>>:
dx1dt
= f1 (x1; x2; u)
dx2dt
= f2 (x1; x2; u)
du
dt= f (x1; x2; u) ;
con dato inicial para s �jo, 8><>:x1 (0) = �1 (s)
x2 (0) = �2 (s)
u (0) = � (s) :
El teorema de existencia y unicidad para ecuaciones diferenciales ordinarias establece
que este problema de Cauchy tiene una solución única,8>>><>>>:x1 = �1 (t; (�1 (s) ; �2 (s) ; � (s))) = X1 (t; s)
x2 = �2 (t; (�1 (s) ; �2 (s) ; � (s))) = X2 (t; s)
u = � (t; (�1 (s) ; �2 (s) ; � (s))) = Z (t; s) :
(2.17)
El Teorema de Peano sobre la diferenciabilidad de la solución de una ecuación dife-
rencial ordinaria, véase [7], implica que en un entorno del punto (0; s) se tiene que la
función vectorial
(t; s)! (X1 (t; s) ; X2 (t; s) ; Z (t; s)) ;
de�nida por (2.17) es continuamente derivable respecto de los datos iniciales, esto
signi�ca que además de haber continuidad respecto de los datos 1 hay además diferen-
ciabilidad respecto a ellos.
De esta manera la función vectorial (2.17).de�ne paramétricamente una super�-
cie C1 (G (0; s)) ; donde G (0; s) es un entorno del punto (0; s) ; porque se cumple la
condición de tarnsversalidad����� X1s X2s
X1t X22
����� =������
�01 (s) �02 (s)
f1 � (�1 (s) ; �2 (s) ; � (s)) f2 � (�1 (s) ; �2 (s) ; � (s))
������ 6= 0:1Una solución de una ecuación diferencial es continua respecto de datos (valores iniciales), si a
cambios pequeños de los valores iniciales corresponden cambios pequeños en los valores de las soluciones
respectivas, [7].
25

El Teorema de la Función Inversa implica que en un entorno de (0; s) la función
(X1 (t; s) ; X2 (t; s))
tiene inversa continuamente derivable,(x1 = T (x1; x2)
s = S (x1; x2) ;
luego, (x1 = X1 (T (x1; x2) ; S (x1; x2))
x2 = X2 (T (x1; x2) ; S (x1; x2))
y (0 = T (�1 (s) ; �2 (s))
s = S (�1 (s) ; �2 (s)) :
Se de�ne
u (x1; x2) = Z (T (x1; x2) ; S (x1; x2))
y se prueba que es solución del problema de Cauchy.
En efecto
f1ux1 + f2ux2 = f1 (ZtTx1 + ZsSx1) + f2(ZtTx2 + ZsSx2)
= Zt(f1Tx1 + f2Tx2) + Zs(f1Sx1 + f2Sx2)
= Zt(X1tTx1 +X2tTx2) + Zs(X1tSx1 +X2tSx2);
(2.18)
donde se ha utilizado la regla de la cadena para obtener
@u
@x1=
@
@x1Z(t; s) =
@Z
@t
@t
@x1+@Z
@s
@s
@x1= ZtTx1 + ZsSx1 ;
y de forma análoga@u
@x2= ZtTx2 + ZsSx2 :
También se ha usado el hecho que al ser (X1; X2) soluciones del sistema característico,
entonces
f1 =dx1dt
=@
@tX1(t; s) = X1t(t; s);
f2 =dx2dt
=@
@tX2(t; s) = X2t(t; s):
De otra parte, las funciones (X1; X2) y (T; S) son funciones inversas y por tanto sus
matrices Jacobianas X1t X1s
X2t X2s
!y
Tx1 Tx2Sx1 Sx2
!
26

son matrices inversas, es decir, Tx1 Tx2Sx1 Sx2
! X1t X1s
X2t X2s
!=
1 0
0 1
!;
de donde
X1tTx1 +X2tTx2 = 1
X1tSx1 +X2tSx2 = 0:
Además
f =du
dt=
@
@tZ(t; s) = Zt
y así (2.18) se convierte en
f1ux1 + f2ux2 = f;
es decir
u(x1; x2) = Z(t; s) = Z (T (x1; x2); S(x1; x2))
es solución de la ecuación.
La función u = Z(t; s) veri�ca el dato inicial porque
u(�1(s); �2(s)) = Z [T (�1(s); �2(s)); S(�1(s); �2(s))] = Z(0; s) = �(s):
La igualdad Z(0; s) = �(s) resulta del hecho que Z(t; s) hace parte de la solución del
problema de Cauchy para el problema característico.
2. Unicidad.
Lema 2.8 SeaS = f(x1; x2; �(x1; x2)) 2 G� Rg
una super�cie solución y P un punto de S. Si
�(t) = (x1(t); x2(t); u(t))
es la curva característica tal que P = �(0); entonces se veri�ca que �(t) 2 S para cadat tal que (x1(t); x2(t)) 2 G:
Prueba del Lema. Como P 2 S; entonces
P = (xo1; xo2; �(x
o1; x
o2))
con xo1; xo2 2 G: Ahora,
P = �(0) = (x1(0); x2(0); u(0)) ;
27

luego
x1(0) = xo1; x2(0) = xo2;
y
u(0) = �(xo1; xo2) = � (x1(0); x2(0)) :
Si se considera la función
U(t) = u(t)� �(x1(t); x2(t));
se tiene
U(0) = u(0)� � (x1(0); x2(0)) = 0:
Con base en este último resultado se procede a mostrar que U(t) = 0:
Derivando U(t) se obtiene
U 0(t) =d
dtu(t)� d
dt�(x1(t); x2(t))
= f (x1(t); x2(t); u(t))�@
@x1�(x1(t); x2(t))
dx1dt� @
@x2�(x1(t); x2(t))
dx2dt
= f(x1(t); x2(t); U(t) + �(x1(t); x2(t)))
� @
@x1�(x1(t); x2(t))f1 (x1(t); x2(t); U(t) + �(x1(t); x2(t)))
� @
@x2� (x1(t); x2(t)) f2 (x1(t); x2(t); U(t) + �(x1(t); x2(t)))
(2.19)
Entonces, U 0(t) es función de t y de U(t); es decir, U 0(t) = F (t; U(t)), y se concluye
que U soluciona el problema
(PO)
(U 0(t) = F (t; U(t))
U(0) = 0:
Como � es solución de la ecuación (2.11), la función nula U(t) = 0 satisface la ecuación
(2.19) y así U(t) = 0 es solución del problema (PO).
La unicidad de la solución del problema de Cauchy para EDO implica que la única
solución es U(t) = 0, quedando probado con esto el lema.
La unicidad de la solución del problema de Cauchy de la ecuación de primer orden
cuasilineal que se está estudiando resulta del razonamiento siguiente:
Las soluciones se obtienen con base en las curvas características, y el Lema 2.8 prueba
que si una curva característica tiene un punto en común con una super�cie solución, en-
tonces la curva está contenida en dicha super�cie. Si existiesen dos soluciones distintas
28

para la misma curva dato ; cada curva característica que pasara por un determinado
punto de , debería estar contenida en ambas super�cies, lo cual es imposible.
2.5. Dependencia continua respecto a los datos
Al igual que para las EDO, se tiene un resultado de dependencia continua respecto
a los datos. El desarrollo que sigue precisa el sentido de dicha continuidad y se presenta
con detalle la prueba del resultado.
Supóngase las curvas dato( (s) = (�1(s); �2(s); �(s))
(s) = (�1(s); �2(s); �(s));
donde �(s) y �(s) coinciden fuera de un intervalo compacto.
Sean �(t; s) y �(t; s) las soluciones respectivas escritas en forma paramétrica. En-
tonces para
�(t; s) = (X1(t; s); X2(t; s); Z(t; s)) ;
se tiene por (2.12) y (2.14)
X 01(t) = f1(x1; x2; u);
lo cual equivale a
X1t = f1 (X1(t; s); X2(t; s); Z(t; s)) = f1 (�(t; s)) ;
de donde
X1(t; s) =
Z t
0
f1 (�(� ; s)) d� + c;
pero �1(s) = X1(0; s) = 0 + c; y así
X1(t; s) =
Z t
0
f (�(� ; s)) d� + �1(s):
Con un procedimiento análogo al anterior se obtiene
X2(t; s) =
Z t
0
f2 (�(� ; s)) d� + �2(s)
Z(t; s) =
Z t
0
f (�(� ; s)) d� + �(s);
29

con lo cual
�(t; s)=�Z t
0
f1 (�(� ; s)) d�+�1(s);Z t
0
f2 (�(� ; s)) d�+�2(s);Z t
0
f (�(� ; s)) d�+�(s)�:
De manera análoga
�(t; s)=�Z t
0
f1��(� ; s)
�d�+�1(s);
Z t
0
f2��(� ; s)
�d�+�2(s);
Z t
0
f��(� ; s)
�d�+�(s)
�:
Fijando s se tiene, �(t; s)-��(t; s) =
0BBB@Z t
0
�f1(�(� ; s))� f1
��(� ; s)
��d� ;
Z t
0
�f2(�(� ; s))� f2
��(� ; s)
��d� ;Z t
0
�f(�(� ; s))� f
��(� ; s)
��d� +
��(s)� ��(s)
�1CCCA
�����Z t
0
�f1(�(� ; s))� f
��(� ; s)
��d�
����+ ����Z t
0
�f2(�(� ; s))� f2
��(� ; s)
��d�
����+
����Z t
0
�f(�(� ; s))� f
��(� ; s)
��d� +
��(s)� ��(s)
������Z t
0
��f1(�(� ; s))� f1��(� ; s)
��� d� + Z t
0
��f2(�(� ; s))� f2(��(� ; s))�� d� ;Z t
0
��f(�(� ; s))� f��(� ; s)
��� d� + ���(s)� ��(s)��=���(s)� ��(s)��+Z t
0
�2Pi=1
��fi(�(� ; s))� fi��(� ; s)
���+ ��f(�(� ; s))� f��(� ; s)
���� d� ;donde k:k es la norma euclídea y se ha utilizado la desigualdad kyk � jy1j+jy2j+:::+jynjpara y 2 Rn:Las hipótesis de regularidad sobre f1; f2 y f implican que sobre un conjunto com-
pacto las funciones krf1k ; krf2k y k rfk alcanzan un máximo, en consecuencia sonacotadas.
Al aplicar el Teorema del Valor Medio para campos escalares (ver capítulo de pre-
liminares) sobre una bola cerrada de R3 que contenga los puntos donde las curvas datono coincidan, se obtiene que existe un punto c1 en el segmento de recta que une a
�(� ; s) con �(� ; s) tal que���f1 [�(� ; s)]� f1
h~�(� ; s)
i��� =��rf1(c1) � ��(� ; s)� �(� ; s)���
� krf1(c1)k �(� ; s)� �(� ; s)
� k1 �(� ; s)� �(� ; s) ;
30

donde k1 es una cota de la función krf1k sobre la bola deR3 mencionada anteriormente.De forma análoga se obtiene que existen constantes k2 y k3, tal que para los valores
de �(� ; s) y �(� ; s) pertenecientes a esta bola de R3, satisfacen��f2 [�(� ; s)]� f2��(� ; s)
��� � k2 �(� ; s)� �(� ; s) ��f [�(� ; s)]� f
��(� ; s)
��� � k3 �(� ; s)� �(� ; s) :
Así, existe k = k1 + k2 + k3 tal que
2Xi=1
��fi [�(� ; s)]� fi��(� ; s)
���+ ��f [�(� ; s)]� f��(� ; s)
��� � k �(� ; s)� �(� ; s) :
Entonces resulta �(� ; s)� �(� ; s) � ���(s)� �(s)��+ k
Z t
0
�(� ; s)� �(� ; s) d� ;y por el caso particular de la desigualdad de Gronwall enunciado en el capítulo de
preliminares, se concluye que �(� ; s)� �(� ; s) � ���(s)� �(s)�� ekt:
Sea (�n(s)) una sucesión funciones de�nidas sobre un intervalo compacto que coinciden
fuera del intervalo compacto con �(s); y sea �n(t; s) la solución respectiva. Si (�n(s))
converge uniformemente a �(s); entonces para todo " > 0; existe N 2 Z+ tal que sin > N; entonces
���n(s)� �(s)�� < " para toda s en el intervalo compacto, y así �n(t; s)� �(t; s) � "ekt:
Se deduce que si �n(s) �! �(s) uniformemente sobre el intervalo compacto, entonces
�n(t; s) �! �(t; s).
Lo anterior prueba la dependencia continua de las soluciones respecto a la con-
vergencia uniforme sobre compactos.
ElTeorema de existencia y unicidad que se probó es de carácter local. En general
este resultado no se puede globalizar si el concepto de solución es el clásico, es decir,
si se entiende por solución una función con derivadas continuas que sustituida en la
ecuación la veri�que idénticamente. El ejemplo siguiente muestra tal hecho.
Ejemplo 2.9 Considérese el problema de Cauchy(ut + uux = 0
u(x; 0) = h(x):
31

El sistema característico es
dx
d�= u;
dt
d�= 1;
du
d�= 0;
y el dato parametrizado
(�1(s); �2(s); �(s)) = (s; 0; h(s)):
Solución del problema característico.
Comodu
d�= 0; entonces u = c(s); es constante con respecto a � :
Si se hace Z(� ; s) = c(s), entonces
h(s) = Z(0; s) = c(s) y así Z(� ; s) = h(s):
Ahoradt
d�= 1; implica que
t = � + c(s):
Al hacer T (� ; s) = � + c(s); se obtiene del dato inicial que
0 = T (0; s) = 0 + c(s) y así T (� ; s) = � :
De la ecuacióndx
d�= u; se obtiene
x = u� + c(s)
ya que u es una constante con respecto a � : Haciendo X(� ; s) = u� + c(s); resulta
s = X(0; s) = c(s);
luego
X(� ; s) = u� + s:
Entonces la solución del problema característico es8><>:X(� ; s) = u� + s
T (� ; s) = �
Z(� ; s) = h(s):
(2.20)
Como x = u� + s y t = � ; se obtiene s = x� ut y así
u(t; s) = Z(� ; s) = h(s) = h(x� ut);
32

que es una función de�nida implícitamente.
Como x = ut+s; entonces las dos primeras componentes de la curva característica que
pasa por el punto (s; 0; h(s)); de�nen sobre el plano xt la recta
x(t) = h(s)t+ s; (u = h (s) cuando � = 0).
que es la proyección de la característica sobre el plano xt:
Sobre esta recta se tiene
d
dt[u(x(t); t)] =
@u
@x
dx
dt+@u
@t= uux + ut = 0;
es decir, sobre esta recta el valor de u es constante.
Si t = 0, entonces
x0 = x(0) = s y u(x(0); 0) = u(x0; 0) = h(x0);
luego el valor de u sobre la recta x(t) = x0 + h(x0)t es h(x0):
Para dos valores x1 6= x2 las proyecciones correspondientes de las características sobre
el plano xt son
x = x1 + h(x1)t y x = x2 + h(x2)t:
Si h(x1) 6= h(x2); estas rectas se cortan en un punto P determinado por un valor de t
dado por
t0 =�(x2 � x1)
h(x2)� h(x1)= � 1
h(x2)� h(x1)
(x2 � x1)
:
Cuando x1 �! x2; entonces t0 �! � 1
f 0(x2)y así el tiempo mínimo en el que se
produce el choque es
t = m��nx2R
��1h0(x)
�:
De lo anterior se deduce que si existiese una función solución debería tomar a la vez
los valores de h(x1) y h(x2) en el punto P:
Se concluye en general, que es imposible encontrar una solución global clásica al pro-
blema.
A continuación se analiza la clase de singularidad que se presenta, analizando la
variación de ux sobre la recta proyección de una curva característica.
Como u = h(x0), entonces
@u
@x=
@u
@x0
@x0@x
= h0(x0)@x0@x
:
33

Ahora,@x0@x
=1
@x
@x0
=1
1 + h0(x0)t;
luego@u
@x= h0(x0)
1
1 + h0(x0)t:
Se tiene que si h0(x0) 6= 0, entonces
l��mt! � 1
h0(x0)
�@u
@x
�no existe,
y esto signi�ca que en el punto
t1 = �1
h0(x0);
la función deja de ser derivable con continuidad.
Si h0(x0) < 0, entonces
t1 = �1
h0(x0)> 0;
y se puede interpretar que si t representa el tiempo, existe un tiempo t = t1 > 0 para
el cual la solución no es derivable con continuidad.
2.6. Soluciones débiles
De acuerdo con la ecuación (2.6), existe una expresión integral que no requiere
la regularidad de la solución y que es equivalente a la ecuación puntual cuando la
solución es regular, para tal efecto se puede proceder de la manera siguiente:
Si se multiplica la ecuación ut + uux = 0 por una función A0(u); resulta
A0(u)ut + A0(u)uux = 0;
y haciendo A0(u)u = B0(u) se tiene
A0(u)ut +B0(u)ux = 0;
lo cual puede escribirse como la divergencia de un campo vectorial, esto es,
A(u)t +B(u)x = 0: (2.21)
34

Integrando (2.21) con respecto a x, con a; b y t arbitrarios, se tiene
0 =
Z b
a
A(u)tdx+
Z b
a
B(u)xdx
=d
dt
Z b
a
A[u(x; t)]dx+B[u(b:t)]�B[u(a; t)];
(2.22)
que es lo que se conoce en la física como una ley de conservación.
Si se cumple que u 2C1(R2); entonces a partir de (2.22), (invirtiendo los pasos quese efectuaron para obtener esta ecuación ), se llega a que u satisface la ecuación
ut + uux = 0:
La ecuación (2.22) es válida sin el requisito de regularidad u 2C1(R2), y ésta se usapara de�nir lo que se conoce como solución débil de la ecuación (2.21), es decir, u es
una solución débil de (2.21) si u satisface (2.22).
2.6.1. Condición de salto
Sea u una solución débil de la ecuación (2.21), que sea regular excepto en una
curva suave x = �(t), a través de la cual la solución tenga un salto �nito. Por salto
�nito se entiende que
u+ = l��mx!�(t)+
u(x; t) y u� = l��mx!�(t)�
u(x; t)
son �nitos. La curva �(t) se llama onda de choque.
Si a < �(t) < b; (2.22) puede escribirse como
0 =d
dt
Z �(t)
a
A[u(x; t)]dx+d
dt
Z b
�(t)
A[u(x; t)]dx+B[u(b; t)]�B[u(a; t)]:
Aplicando la regla de Leibniz se tiene
d
dt
Z �(t)
a
A[u(x; t)]dx =
Z �(t)
a
@
@tA[u(x; t)]dx+ l��mp!�(t)� A[u(p; t)]
@�
@t
=
Z �(t)
a
@
@tA[u(x; t)]dx+ A[u�]
@�
@t:
De manera igual,
d
dt
Z b
�(t)
A[u(x; t)]dx =
Z b
�(t)
@
@tA[u(x; t)]dx� l��mp!�(t)+ A[u(p; t)]
@�
@t
=
Z b
�(t)
@
@tA[u(x; t)]dx� A[u+]
@�
@t:
35

Como A(u)t +B(ux) = 0; se obtiene
0 = [A(u�)� A(u+)]@�
@t+B[u(b:t)]�B[u(a; t)] +
Z �(t)
a
At(u)dx+
Z b
�(t)
Bx(u)dx
= [A(u�)� A(u+)]@�
@t+B[u(b:t)]�B[u(a; t)]�
Z �(t)
a
Bx(u)dx�Z b
�(t)
Bx(u)dx
= [A(u�)� A(u+)]@�
@t�B(u�) +B(u+):
Entonces@�
@t(t) =
B(u+)�B(u�)
A(u+)� A(u�)(2.23)
da la velocidad de propagación de la discontinuidad en términos de la variación de
A y B en el salto de u.
La condición (2.23) se llama la condición de salto o de choque y en el estudio de
la dinámica de gases se conoce como la condición de Rankine-Hugoniot.
Obsérvese que la ecuación ut + uux = 0 puede escribirse como
ut +
�u2
2
�x
= 0:
Entonces en la ecuación correspondiente
A(u)t +B(ux) = 0;
se tiene
A(u) = u y B(u) =u2
2;
y así la condición de salto en este caso es
@�
@t=1
2
(u+)2 � (u�)2u+ � u�
=u+ + u�
2:
La ecuación ut + uux = 0 se llama ecuación de Burgers y es un caso especial de
las ecuaciones cuasilineales de la forma ut + f(u)x = 0, las cuales se conocen como
las leyes de conservación por la analogía que se presenta con el modelo de algunas
leyes de conservación de la física, por ejemplo las ecuaciones de dinámica de gases sin
viscosidad que están dadas por
vt � ux = 0 (conservación de la masa)
ut + px = 0 (conservación del momento)
Et + (up)x = 0 (conservación de la energía),
donde v es el volumen especí�co, u la velocidad, E la energía especí�ca y p la presión,
[14].
36

Ejemplo 2.10 Considérese el problema de Cuachy(ut + uux = 0
u(x; 0) = h(x);
con
h(x) =
8><>:1 si x < 0
1� x si 0 � x � 10 si 1 < x:
1.510.500.511.5
1.5
1.25
1
0.75
0.5
0.25
0
x
y
x
y
Grá�ca de y = h(x):
El tiempo mínimo de choque es
t� = m��n0�x�1
��1h0(x)
�=�1�1 = 1:
Entonces se puede intentar hallar una función solución para t < 1.
Como ya se vio en el ejemplo (2.9, el sistema característico es
dx
d�= u;
dt
d�= 1;
du
d�= 0
y el dato parametrizado
(s) = (s; 0; h(s)) :
La solución del problema característico es
X(� ; s) = s+ h(s)� ; T (� ; s) = � ; Z(� ; s) = h(s);
de donde
x = s+ h(s)t; u = h(x� ut):
37

Si x < 0 entonceas h (x) = 1; luego h(s) = 1 y (s) = (s; 0; 1), con s < 0. Resulta
x = s+ t; de donde s = x� t < 0, es decir, x < t: Por tanto
u = h(x� ut) = 1; para x < t:
Si x > 1, se tiene h(s) = 0 y (s) = (s; 0; 0); con s > 1, entonces x = s > 1, luego
u = h(x� ut) = 0; para x > 1:
Si 0 � x � 1, entonces h(s) = 1� s y (s) = (s; 0; 1� s), con 0 � s � 1: Como
x = s + (1 � s)t, se tiene s =x� t
1� t; luego 0 � x� t
1� t� 1; y así para t < 1 se
llega a t � x � 1: Ahora u = 1� (x� ut); de donde
u =1� x
1� t; para t � x � 1:
Se ha obtenido para t < 1 la solución clásica local dada por
u(x; t) =
8>>>>><>>>>>:
1; x < t
1� x
1� t; t � x � 1
0; 1 > x:
En t � 1 las características se cortan y no se puede tener solución regular.
Para encontrar la solución débil en t � 1, se usa la condición de salto ( 2.23),
basada en la solución local anterior u(x; t). Entonces
u+ = 0 y u� = 1;
de donded�
dt=0 + 1
2=1
2:
Al hacer que la recta x = �(t) contenga al punto (1; 1) (ver la grá�ca de abajo),
resulta x � 1 = 1
2(t � 1); luego x(t) = t+ 1
2es la curva en que la solución débil
u no es regular. Entonces para t � 1 se puede de�nir u por
u(x; t) =
8>><>>:1; x < 1 +
1
2(t� 1)
0; x > 1 +1
2(t� 1):
38

La �gura siguiente muestra los valores de la solución global débil en las distintas
regiones del plano xt para t > 0; :la cual obviamente contiene la solución local
para 0 < t < 1:
x = tu =1
u =1u = 0
u = 0
u = (1x) /(1 t )
x = 1+ (t1)/2t
x
t =1
Valores de la solución global débil.
Nota 2.11 Una solución suave de ut + uux = 0 satisface las ecuaciones
ut +
�u2
2
�x
= 0; y�u2
2
�t
+
�u3
3
�x
= 0;
pero esto no es cierto para las soluciones discontinuas. Para ver esto, nótese que en
la primera ecuación la condición de salto es
u+ + u�
2
y en la segunda
2
3
[(u+)2 + u+u� + (u�)2]
u+ + u�:
Como estas condiciones son diferentes, también lo serán las soluciones discontinuas
correspondientes. Entonces al escribir la ecuación diferencial en dos formas diferentes
de divergencia, cada una de estas puede tener soluciones débiles diferentes.
Otra manera de llegar a la de�nición de una solución débil de (2.21) es la descrita
a continuación.
39

Se supone inicialmente que u es solución clásica y se multiplica la ecuación por
una función � 2C10(R2) cuyo soporte 2 esté contenido en el rectángulo [a; b]� [T1; T2] yse integra sobre R2, esto es,ZZ
R2
[A(u)t +B(u)x]�dxdt =
Z T2
T1
Z b
a
A(u)t�dxdt+
Z T2
T1
Z b
a
B(u)x�dxdt = 0:
Efectuando la integración por partes se tiene,
bZa
Z T2
T1
A(u)t�dtdx =
bZa
�A(u)�jT2T1 �
Z T2
T1
A(u)�t dt
�dx = �
Z T2
T1
Z b
a
A(u)�tdxdt;
y tambiénZ T2
T1
Z b
a
B(u)x�dxdt =
Z T2
T1
�B(u)�jba �
Z b
a
B(u)�xdx
�dt = �
Z T2
T1
Z b
a
B(u)�x dx dt:
Entonces se llega a ZZR2
[A(u)�t +B(u)�x] dxdt = 0: (2.24)
Para que la ecuación (2.24) tenga sentido no se necesita que u sea suave, sólo que u se
acotada y medible (el concepto de función medible puede consultarse en [3]).
De�nición 2.12 Una función u(x; t) medible y acotada es una solución débil de la
ecuación (2.21), si satisface (2.24) para todo � 2C10(R2):
Este concepto de solución débil es conocido como solución en el sentido de las
distribuciones. El estudio de esta teoría requiere herramientas avanzadas del análisis
matemático.
2El soporte de una función �(t), notado como Sop(�(t)), es la adherencia del conjunto de puntos
donde la función no es nula, [12].
40

Capítulo 3
Ejercicios resueltos de EDPcuasilineales
En este capítulo se desarrollan algunos ejercicios sobre EDP cuasilineales de primer
orden, que se encuentran propuestos en la bibliografía citada al �nal del trabajo. La
letra c (o con sus índices respectivos) representará constantes arbitrarias.
Ejercicio 3.1 Considere la ecuación
yux � xuy = 0:
a. Encuentre algunas soluciones.
b. Resuelva el problema de Cauchy
yux � xuy = 0; u(x; 0) = x2:
Solución
a. El sistema característico es
dx
d�= y;
dy
d�= �x; du
d�= 0:
De las dos primeras ecuaciones se tiene
xdx+ ydy = 0;
cuya solución es
x2 + y2 = c1:
41

De la tercera ecuación característica resulta que u = c2.
Si se toma en particular una función arbitraria � 2 C1; entonces
�(c1) = �(x2 + y2);
y haciendo
c2 = �(c1) = �(x2 + y2);
entonces
u = �(x2 + y2); � 2 C1;
es solucion de la ecuación.
b. El dato inicial parametrizado es
(s) = (s; 0; s2):
Del apartado a. se deduce que para y = 0;
c1 = s2 y u = c2 = s2;
luego c1 = c2 y así �(c1) = c1, es decir, bajo la condición
u(x; 0) = x2;
� ha de ser la función idéntica. La solución del problema es
u(x; y) = x2 + y2:
Ejercicio 3.2 Sea u = f�xyu
�: Eliminar f y obtener la EDP que veri�ca u:
Solución@u
@x= f 0
�xyu
� @
@x
�xyu
�= f 0
�xyu
� yu� xyuxu2
@u
@y= f 0
�xyu
� @
@y
�xyu
�= f 0
�xyu
� xu� xyuyu2
:
Dividiendo@u
@xentre
@u
@yy simpli�cando se llega a
xux � yuy = 0:
Ejercicio 3.3 Obtener soluciones de la ecuación
(x+ y)ux + (u� x)uy = y + u:
42

SoluciónEl sistema característico es
dx
d�= x+ y;
dy
d�= u� x;
du
d�= y + u:
Sumando las dos primeras ecuaciones se obtiene
dx
d�+dy
d�= y + u;
e igualando éste resultado con la tercera se obtiene
du
d�+dy
d�=du
d�;
luegod
d�(x+ y � u) = 0;
y así
u = x+ y + c
es solución de la ecuación.
Ejercicio 3.4 Mostrar que la solución de ecuación no lineal
ux + uy = u2
que pasa a través de la curva inicial
x = t; y = �t; u = t
se vuelve in�nita a lo largo de la hipérbola
x2 � y2 = 4:
SoluciónEl sistema característico es
dx
d�= 1;
dy
d�= 1;
du
d�= u2;
y la curva dato ya está parametrizada. La solución del problema característico es
x = � + t; y = � � t; u =t
1� t�;
de donde
u (x; y) =1
4� (x2 � y2):
43

Ejercicio 3.5 Considerar la ecuación
(xy � u)ux + (y2 � 1)uy = yu� x
y las curvas dato:
a. y = 0; x2 � u2 = 1
b. x2 + y2 = 1; u = 0
Resolver el problema de Cauchy para cada dato.
Solución.El sistema característico es
dx
d�= xy � u;
dy
d�= y2 � 1; du
d�= yu� x;
la parametrización del dato en el caso a. es
(s) = (s; 0;�ps2 � 1);
y en el caso b, (s) = (s;�
p1� s2; 0):
a. De la segunda ecuación del sistema característico, se obtiene
ln
����y � 1y + 1
���� = 2� + c; y 2 (�1; 1) :
Si � = 0, entonces y = 0 y así c = 0, luego
ln
����y � 1y + 1
���� = 2� :Como y 2 (�1; 1), se tiene
ln1� y
y + 1= 2� ;
de donde
y =1� e2�
1 + e2�:
De la primera y la tercera ecuación del sistema característico se obtiene
xdx
d�� u
du
d�= y(x2 � u2);
44

lo cual equivale a1
2
d
d�(x2 � u2) = y(x2 � u2);
(x2 � u2)0
x2 � u2= 2y;
(x2 � u2)0
x2 � u2= 2
1� e2�
1 + e2�:
Integrando se llega a
ln��x2 � u2
�� = ln �c e2�
(1 + e2� )2
�; c > 0:
Como 2� = ln1� y
y + 1; resulta
ln��x2 � u2
�� = ln26664c
1� y
y + 1�1 +
1� y
y + 1
�237775 = ln h c4(1� y2)
i;
luego, ��x2 � u2�� = c
4(1� y2):
Si y = 0; se deduce que
c = 4 y��x2 � u2
�� = 1� y2:
Se escoge
�(x2 � u2) = 1� y2;
es decir,
u2 = x2 � y2 + 1;
que es la solución que satisface el dato inicial.
b. En la parte a. del problema se obtuvo que u dada por��x2 � u2�� = 4c(1� y2)
soluciona la EDP . Si u = 0; también c =1
4y��x2 � u2
�� = 1� y2:
45

Se escoge
x2 � u2 = 1� y2;
es decir
u2 = x2 + y2 � 1;
que es la solución que satisface la condición inicial.
Ejercicio 3.6 Considere la ecuación
uux � uy = 0:
a. Hallar las curvas características.
b. Determinar la solución que pasa por la curva
y = 0; u = x2 � 1
y dibujarla.
u(x; 0); u(x; 1=2); u(x; 1); u(x; 2); u(x; 3):
Solución
a. El sistema característico de la ecuación es
dx
d�= u;
dy
d�= �1; du
d�= 0:
Las curvas características son las grá�cas en R3 de las soluciones del sistemacaracterístico.
De la tercera ecuación se obtiene u = c1:
La solución de la segunda ecuación es
y = �� + c.
Reemplazando a u en la primera ecuación se llega a
x = c1� + c:
b. La parametrización del dato es
(s) = (s; 0; s2 � 1):
46

Para � = 0; se obtiene de la parte a. y del dato (s) que
u = s2 � 1; y = �� ; x = (s2 � 1)� + s:
Como y = �� ; entoncesx = (1� s2)y + s:
Resolviendo la ecuación para s de obtiene
s =1�
p1� 4y(x� y)
2y;
y reemplazando en u = s2 � 1; resulta
u =1�
p1� 4y(x� y)� 2xy
2y2:
Si se de�ne
u(x; 0) = l��my!0
u(x; y);
la solución del problema con dato inicial
y = 0; u = x2 � 1
es
u =1�
p1� 4y(x� y)� 2xy
2y2;
ya que aplicando dos veces la regla de L�Hopital, resulta
u(x; 0) = l��my!0
1�p1� 4y(x� y)� 2xy
2y2= x2 � 1:
En la página siguiente se muestran las grá�cas de la super�cie solución u (x; y) y
las curvas pedidas en el literal b. de este ejercicio.
47

Super�cie u (x; y) =1�
p1� 4y(x� y)� 2xy
2y2:
La grá�ca siguiente muestra las curvas pedidas en el literal b, las cuales están con-
tenidas en la super�cie correspondiente a u (x; y) =1�
p1� 4y(x� y)� 2xy
2y2:
Grá�cas de u(x; 0); u(x; 1=2); u(x; 1); u(x; 2); u(x; 3):
48

Ejercicio 3.7 Sea el sistema diferencial
x0(t) = f(x(t); y(t); u(t));
y0(t) = g(x(t); y(t); u(t));
u0(t) = h(x(t); y(t); u(t)):
(3.1)
Se llama integral primera del sistema (3.1) a una función W (x; y; u) 2 C1 tal que esconstante a la largo de las trayectorias de (3.1).
¿Qué ecuación en derivadas veri�ca la integral primera W? Interpretar el resultado.
SoluciónQue W sea constante a lo largo de las trayectorias de (3.1) signi�ca que la derivada
de W en la dirección del vector v = (x0; y0; u0) es cero, es decir,
DvW (x; y; u) = rW: (f; g; h) = 0;
f@W
@x+ g
@W
@y+ h
@W
@u= 0:
Obsérvese que0 = DvW (x; y; u)
= f@W
@x+ g
@W
@y+ h
@W
@u
=@W
@xx0 +
@W
@yy0 +
@W
@uu0
=d
dtW (x; y; u) :
De lo anterior se deduce que el campo v = (x0; y0; u0) es tangente a las super�cies de
nivel de W; es decir, las curvas integrales del campo vectorial v están contenidas en las
super�cies de nivel de W:
Ejercicio 3.8 Dos super�cies se dicen ortogonales, si son ortogonales sus planos tan-gentes en los puntos en que se cortan.
a) Probar que para que la grá�ca de la función u = �(x; y) sea una super�cie ortogonal
a la familia uniparamétrica de super�cies de�nida implícitamente por H(x; y; u; �) = 0,
es necesario y su�ciente que veri�que la ecuación
Hx�x +Hy�y = Fu:
b) Hallar las super�cies ortogonales a la familia de�nida por x2 + y2 = 2�u.
49

Solucióna) Que dos planos sean ortogonales equivale a que sus vectores normales sean or-
togonales. Las ecuaciones
G (x; y; u) = �(x; y)� u = 0 y H(x; y; u; �) = 0;
son super�cies de nivel, luego los vectores
rG (x; y; u) =��x; �y;�1
�y rH (x; y; u) = (Hx; Hy; Hu)
son ortogonales a las super�cies de�nidas por G y H, respectivamente.
Si las super�cies son ortogonales entonces��x; �y;�1
�� (Hx; Hy; Hu) = 0;
Hx�x +Hy�y = Hu:
Inversamente, cada solución u = �(x; y) de la ecuación Hxux+Hyuy = Hu es ortogonal
la familia de super�cies generada por la ecuación H(x; y; u; �) = 0; puesto que
Hx�x +Hy�y = Hu equivale a��x; �y;�1
�� (Hx; Hy; Hu) = 0:
b) Sea H(x; y; u; �) = x2 + y2 � 2�u = 0: En la parte a) del ejercicio se mostró
que para encontrar super�cies ortogonales a la familia de super�cies de�nida por H se
debe resolver la ecuaciónHxux +Hyuy = Hu;
2xux + 2yuy = �2�:Del sistema característico se tiene8>>>>>><>>>>>>:
dx
dt= f1 (x1; x2; u) = Hx
dy
dt= f2 (x1; x2; u) = Hy
du
dt= f (x1; x2; u) = Hu;
luegodx
Hx
=dy
Hy
=du
Hu
dx
2x=dy
2y=
du
�2�:
50

Entoncesdx
x=dy
y=
du
��;
dx+ dy
x+ y=
du
��;
d (x+ y)
x+ y=
du
��;
u (x; y) = �� ln (x+ y) + C;
y así las super�cies ortogonales a x2 + y2 = 2�u son de la forma
u (x; y) = �� ln (x+ y) + C:
Ejercicio 3.9 (Teorema de Euler) Una función u(x1; x2) se dice homogénea de gra-do m > 0 si u(�x1; �x2) = �mu(x1; x2). Pruébese que la condición necesaria y su�ciente
para que u sea homogénea de grado m es que veri�que la ecuación
x1ux1 + x2ux2 = mu:
SoluciónCondición necesaria. Sea u(�x1; �x2) = �mu(x1; x2) y � = �x1; � = �x2: Entonces
u(�; �) = �mu(x1; x2); y derivando con respecto a � se obtiene
@u
@�=@u(�; �)
@�
@�
@�+@u(�; �)
@�
@�
@�= m�m�1u(x1; x2)
@u(�; �)
@�x1 +
@u(�; �)
@�x2 = m�m�1u(x1; x2):
Haciendo � = 1 se tiene � = x1; � = x2; y así
x1ux1 + x2ux2 = mu:
Condición su�ciente. Supóngase que una función u(x1; x2) satisface al ecuación
x1ux1 + x2ux2 = mu;
entonces haciendo
� (�) = u (�x1; �x2)
y derivando con respecto a � se obtiene
�0 (�) = x1@u
@x1(�x1; �x2) + x2
@u
@x1(�x1; �x2)
=1
�
��x1
@u
@x1(�x1; �x2) + �x2
@u
@x1(�x1; �x2)
�=m
�u (�x1; �x2) =
m
�� (�) ;
51

de donde�0 (�)
� (�)=m
�;
ln j� (�)j = ln (C1�n) ;
� (�) = �nC:
Tomando � = 1 resulta� (1) = C;
� (�) = � (1)�n;
u (�x1; �x2) = �nu (x1; x2) ;
ya que � (1) = u (x1; x2) :
Ejercicio 3.10 Considerar la ecuación cuasilineal
(x2 + 1)ux � xyuy =u
x
y la curva dato
x = 1; u = y:
a. Comprobar si se cumple la condición de transversalidad.
b. En el caso en que se cumpla, resolver el problema de Cauchy.
Solución.Este es el ejercicio que se utilizó en el ejemplo 2.4.
a. Las funciones coe�cientes son
f1(x; y; u) = x2 + 1; f2(x; y; u) = �xy; f(x; y; u) =u
x;
y la curva dato parametrizada
(s) = (1; s; s):
La condición de transversalidad consiste en que
det
0@ f1[�1(s); �2(s); �(s)] �01(s)
[f2(�1(s); �2(s); �(s)] �02(s)
1A 6= 0:
Para este problema se tiene
det
2 0
�s 1
!= 2:
52

b. El sistema característico es
dx
d�= x2 + 1;
dy
d�= �xy; du
d�=u
x:
De la primera ecuación se obtiene arctanx = � + c:
Si � = 0, entonces
arctan 1 = c;
y así
arctanx = � +�
4;
ó también
x = tan�� +
�
4
�:
Reemplazando a x en la segunda ecuación se obtiene
1
ydy = � tan
�� +
�
4
�d� ;
cuya solución es
jyj = c���cos�� + �
4
���� :Si � = 0 entonces jsj = cp
2y así
jyj =p2 jsj
���cos�� + �
4
���� :Reemplazando a x en la tercera ecuación se obtiene
du
u=
d�
tan�� +
�
4
� ;cuya solución es
juj = c���sin�� + �
4
���� :Si � = 0 entonces jsj = cp
2y así
juj =p2 jsj
���sin(� + �
4)��� :
De las expresiones correspondientes a juj ; jyj y x se obtienen
juj = jyj���cos�� + �
4
�������sin�� + �
4
���� = jyj ���tan�� + �
4
���� = jxyj :Se escoge u = xy, porque es la solución que satisface el dato.
53

Ejercicio 3.11 Considerar la ecuación cuasilineal
xux + yuy = 2(x2 + y2)u;
y la curva dato
x = 1 y u = e:
a. Comprobar si se cumple la condición de transversalidad.
b. En el caso que se cumpla, resolver el problema de Cauchy.
Solución
a. La parametrización de la curva dato es (s) = (1; s; e):La condición de transversalidad, se cumple porque
det
0@ f1 (�1(s); �2(s); �(s)) �01(s)
f2 (�1(s); �2(s); �(s)) �02(s)
1A = det
1 0
s 1
!= 1;
donde f1(x; y; u) = x; f2(x; y; u) = y:
b. El sistema característico es
dx
d�= x;
dy
d�= y;
du
d�= 2(x2 + y2)u:
Las soluciones de las dos primeras ecuaciones con el dato
(s) = (1; s; e);
son
jxj = e� y jyj = jsj e� :
Para solucionar la tercera ecuación obsérvese que
x2 + y2 = e2� (1 + s2);
luegodu
u= 2e2� (1 + s2);
cuya solución es
ln juj = e2� (1 + s2) + c:
54

Por el dato inicial resulta
ln juj = e2� (1 + s2)� s2:
Como
e2� = x2 y s2 =y2
x2;
se llega a
ln juj = x2 + y2 � y2
x2:
Entonces la solución del problema de Cauchy es
u = e(x2+y2�y2=x2);
la cual satisface el dato inicial.
Ejercicio 3.12
a. Solucionar el problema
vt + cvx = f(x; t); v(x; 0) = F (x):
b. Aplicar el resultado anterior al caso
f(x; t) = xt; F (x) = sin x:
Solución.
a. El sistema característico es
dx
d�= c;
dt
d�= 1;
dv
d�= f(x; t);
con dato inicial
(s) = (s; 0; F (s)):
De las primeras dos ecuaciones resulta
x = c� + s y t = � ;
entonces
s = x� ct:
55

La tercera ecuación quedadv
d�= f(c� + s; �);
luego
v =
Z �
0
f(cw + s; w)dw + c:
Cuando � = 0; entonces v = F (s) y así
v =
Z �
0
f(cw + s; w)dw + F (s):
Reemplazando a s y � en términos de x y t resulta como solución la función
v(x; t) =
Z t
0
f(cw + x� ct; w)dw + F (x� ct):
Si se desea probar que ésta última expresión satisface la ecuación, obsérvese que
@v
@x=
Z t
0
@
@xf(cw + x� ct; w)dw + F 0(x� ct)
=
Z t
0
@f
@z(z; w)dw + F 0(x� ct); donde z = cw + x� ct:
Para hallar@v
@tse utiliza la regla de Leibniz, con lo cual resulta
@v
@t=
Z t
0
@
@tf(cw + x� ct; w)dw + f(ct+ x� ct; t)� cF 0(x� ct)
=
Z t
0
�c@f@z(z; w)dw + f(x; t)� cF 0(x� ct):
b. Si f(x; t) = xt y F (x) = sinx; entonces
v(x; t) =
Z t
0
(cw + x� ct)wdw + sin(x� ct)
=t2
6(3x� ct) + sin(x� ct):
Ejercicio 3.13 Resolver el problema
tux + xut = cu; u(x; 0) = f(x):
56

SoluciónEl problema característico es
dx
d�= t;
dt
d�= x;
du
d�= cu; (s) = (s; 0; f(s)):
De las primeras dos ecuaciones se obtiene
d
d�(x+ t) = x+ t; luego
d(x+ t)
x+ t= d� :
Entonces
ln jx+ tj = � + c;
y por el dato inicial c = ln jsj; quedando
ln jx+ tj = � + ln jsj ó jx+ tj = jsje� :
También de las dos primeras ecuaciones se obtiene
dx
dt=t
x;
cuya solución esx2
2� t2
2= c;
y por el dato inicial resulta
x2 � t2 = s2:
La solución de la tercera ecuación es
juj = jf(s)j ec� :
De las igualdades
jx+ tj = jsje� y x2 � t2 = s2;
se obtiene
e2� =x+ t
x� t� 0;
es decir, x+ t y x� t han de tener el mismo signo. Si se toman positivos entonces,
jsj = jx+ tje�
=x+ tp
(x+ t) = (x� t)=px+ t:
px� t =
px2 � t2:
Escogiendo a s � 0, se llega a la solución
u(x; t) = fh(x2 � t2)
12
i�x+ t
x� t
� c2
lo cual satisface el dato inicial para x � 0:
57

Ejercicio 3.14
a. Probar que una solución general1 de la ecuación
f(x; y; z)@z
@x+ g(x; y; z)
@z
@y= h(x; y; z); (3.2)
se puede obtener de la forma
'(u(x; y; z); v(x; y; z)) = 0; (3.3)
donde ' 2C1 es una función arbitraria y
u(x; y; z) = k1; v(x; y; z) = k2; (3.4)
constituyen una solución del sistema de ecuaciones ordinarias
dx
f=dy
g=dz
h: (3.5)
b. Utilizar el resultado en a. para hallar una solución general de xzx + yzy = 3z:
Solución
a. Diferenciando la primera ecuación en (3.4) resulta
uxdx+ uydy + uzdz = 0: (3.6)
De (3.5) se obtiene
dy =g
fdx; dz =
h
fdx: (3.7)
Como u es solución de (3.5), entonces (3.6) y (3.7) son compatibles y sustituyendo
(3.7) en (3.6) se obtiene
fux + guy + huz = 0: (3.8)
De forma análoga se llega a
fvx + gvy + hvz = 0: (3.9)
Sumando la ecuación (3.8) multiplicada por �vx; con la (3.9) multiplicanda porux; se obtiene
g � (uxvy � uyvx)� h� (uzvx � uxvz) = g
����� ux uy
vx vy
������ h
����� uz ux
vz vx
����� = 0;1Una solución general de una EDP de primer orden F (x; y; z; zx; zy) = 0 es la que depende de una
función arbitraria, [5].
58

luegog
@(u; v)=@(z; x)=
h
@(u; v)=@(x; y);
donde@(u; v)
@(z; x)
denota el Jacobiano de (u; v) con respecto a z y x:
De manera análoga se obtiene
f
@(u; v)=@(y; z)=
h
@(u; v)=@(x; y);
y asíf
@(u; v)=@(y; z)=
g
@(u; v)=@(z; x)=
h
@(u; v)=@(x; y): (3.10)
Ahora se procede a diferenciar (3.3), pero antes obsérvese que en (3.4)
u(x; y; z) = U(x; y) = k1 y v(x; y; z) = V (x; y) = k2;
ya que z = z(x; y); luego
@U
@x=@u
@x+@u
@z
@z
@x;
@V
@x=@v
@x+@v
@z
@z
@x:
Las derivadas parciales de ' son
@'
@x=@'
@U
@U
@x+@'
@V
@V
@x=@'
@u[ux + uzzx] +
@'
@v[vx + vzzx] = 0; (3.11)
y@'
@y=@'
@U
@U
@y+@'
@V
@V
@y=@'
@u[uy + uzzy] +
@'
@v[vy + vzzy] = 0: (3.12)
De (3.11) y (3.12) resulta
ux + uzzxuy + uzzy
=vx + vzzxvy + vzzy
;
de donde@(u; v)
@(y; z)zx +
@(u; v)
@(z; x)zy =
@(u; v)
@(x; y); (3.13)
y de (3.10) se tiene
@(u; v)
@(y; z)=f
h
@(u; v)
@(x; y);
@(u; v)
@(z; x)=g
h
@(u; v)
@(x; y): (3.14)
59

Sustituyendo en (3.13) de obtiene
f
h
@(u; v)
@(x; y)zx +
g
h
@(u; v)
@(x; y)zy =
@(u; v)
@(x; y);
de donde
f(x; y; z)zx + g(x; y; z)zy = h(x; y; z):
Se concluye que (3.3) es solución de (3.2), si (3.4) es solución de (3.5).
b. Del sistema característico se obtiene
dx
x=dy
y=dz
3z;
de las igualdadesdx
x=dy
yy
dx
x=dz
3z
resultax
y= k1 y
z
x3= k2;
respectivamente.
Haciendo
u(x; y; z) =x
y= k1; v(x; y; z) =
z
x3= k2;
se obtiene una solución general para EDP de la forma
'
�x
y;z
x3
�= 0; ' 2 C1:
Si se hacen otras combinaciones aparecen otras soluciones generales, por ejemplo,
tomandodx
x=dy
yy
dy
y=dz
3z;
se llega a otra solución general de la forma '�x
y;z
y3
�= 0:
Ejercicio 3.15 Analizar los siguientes problemas de Cauchy.
a. ux + uy = 0; u (x; x) = k
b. ux + uy = u; u (x; x) = 1
c. ux + uy = x; u (x; x) = 1
60

SoluciónConsidérese el problema general
aux + buy = cu+ d; con dato u (x; h (x)) = f (x) ; (3.15)
donde a; b; c; d son funciones de x; y; y el dato
u (x; h (x)) = f (x)
corresponde a la solución y = h (x) del sistema
dx
d�= a (x; y) ;
dy
d�= b (x; y) ;
es decir, del sistema formado por las dos primeras ecuaciones de los sistemas carac-
terísticos, (esta función y = h (x) se conoce con el nombre de característica base, y
obsérvese que dy=dx = b=a). Lo que se está haciendo es tomar como dato a una curva
característica en el espacio (x; y; u) de�nida sobre la característica base y = h (x) ; es
decir sobre la curva
y = h (x) ; u (x; h (x)) = f (x) :
Derivando u a lo largo de la característica base se tiene
d
dxu (x; h (x)) =
@u
@x+@u
@yh0 (x) =
@u
@x+@u
@y
b
a= f 0 (x) ;
luego
aux + buy = af 0 (x) = cf + d:
Por tanto, para que exista solución, la función f debe satisfacer la condición de com-
patibilidad
af 0 (x) = cf + d; (3.16)
sobre la curva característica base y = h (x) :
Enseguida se analizan los tres problemas propuestos.
a. Utilizando el método de las características se tiene como solución del problemacaracterístico a
x = � + s; y = � + s; u = k;
ya que la parametrización del dato es
(s; s; k) ;
61

y así
x = y; y u (x; y) = k;
pero esto corresponde solo a una curva característica y no a una super�cie, en-
tonces el método no suministra ninguna solución.
Obsérvese que la curva dato corresponde a una curva característica y que además
la función f = k cumple la condición de compatibilidad (3.16). Esto signi�ca que
existe la condición necesaria para intentar hallar soluciones al problema.
Haciendo el cambio de variables
x = � + �; y = � � �;
se tiene
ux = U� + U�; uy = U� � U�;
y la ecuación diferencial se transforma en
2U� = 0;
entonces
u (x; y) = U (�; �) = f (�) = f (x� y) ;
donde f ha de tener primeras derivadas continuas. Para que se satisfaga el dato
se debe cumplir que
u (x; x) = f (x� x) = f (0) = k:
En conclusión el problema tiene in�nitas soluciones y son de la forma
u = f (x� y) con f 2 C1 y f (0) = k:
b. Si se intenta usar el método de las características se llega a
x = � + s; y = � + s; u = e� ;
de donde
x = y; y u (x; y) = ex�s:
Esta función satisface la ecuación diferencial pero no al dato inicial. Además esta
función corresponde a una curva característica y no a una super�cie. Con respecto
a la condición de compatibilidad (3.16), esta no se cumple y así se concluye que
el problema de Cauchy no tiene solución.
62

c. La solución del problema característico es
x = � + s; y = � + s; u =� 2
2+ s� + 1:
El análisis es similar al fectuado en el literal b. El problema no tiene soluciónporque el dato corresponde a una curva característica y la condición (3.16) no se
cumple.
Nota 3.16 La no unicidad o la no existencia de la solución para los problemas de esteejercicio es consecuencia del no cumplimiento de la condición de transversalidad. En
los tres casos
det
f1 �01(s
f2 �02(s)
!=
����� 1 1
1 1
����� = 0;y se dice que el problema de Cauchy está mal planteado.
63

Conclusiones
1. La interpretación geométrica de una ecuación cuasilineal de primer orden hace
intuir un método para encontrar sus soluciones y en particular para solucionar
un problema de cauchy.
2. El método que induce la interpretación geométrica se llama método de las carac-
terísticas, este reduce el problema de EDP a uno de EDO:
3. Para hallar la solución de las EDP cuasilineales de primer orden usando el méto-
do de las características se comienza solucionando problema característico. Si
la curva dato no coincide con alguna de las curvas características (condición de
tranversalidad), queda garantizada la existencia y unicidad de la solución local
para el problema de Cauhy.
4. El Teorema sobre la Existencia y Unicidad de la solución, en el sentido clásico,
del problema de Cauchy es de carácter local En general para hallar una solución
global se debe extender el concepto al de solución débil.
5. El modelado de problemas físicos a través de ecuaciones diferenciales es un medio
para su comprensión y análisis. Por ejemplo, la expresión diferencial de la con-
servación de masa o la ecuación de continuidad; y las ecuaciones de Euler que
describen el movimiento de �uidos no viscosos.
64

Bibliografía
[1] APOSTOL, Tom M. Cálculo en varias variables con aplicaciones a las probabili-
dades y al análisis vectorial, volumen 2. Editorial Reverté. Barcelona, 1965.
[2] BARTLE, R. SHERBERT, D. Introducción al Análisis Matemático de una Va-
riable. Ed. Limusa, Wiley. 2002.
[3] BARTLE, Robert, G, The Elements of Integrations and Lebesgue Mesure, Ed.
John Wiley & Sons, Inc.
[4] BOYCE, William E. DIPRIMA , Richard C. Ecuaciones Diferenciales y
problemas con Valores en la Frontera. Editorial Limusa S.A. México, 2001.
[5] CASTRO, Abel R., Curso básico de ecuaciones en derivadas parciales, Addison-
Wesley Iberoamericana, 1997.
[6] GARABEDIAN, P. R. Partial di¤erencial equations, Ed. John Wiley & Sons, 1964
[7] GUZMÁN, Miguel de. Ecuaciones diferenciales ordinarias. Ed. Alhambra 1980.
[8] HABERMAN, Richard, Ecuaciones en Derivadas Parciales con series de Fourier y
problemas de contorno, Ed. Pearson Educación 2003.
[9] MARSDEN, Jerrold E., TROMBA, J. Anthony, Cálculo vectorial, cuarta edición,
Ed. Prentice Hall, 1998
[10] RAINVILLE V, Earl D, BEDIENT, Phillip E, BEDIENT, Richard E. (1997)
Ecuaiones Diferenciales. Prentice Hall.
[11] ROSS, Shepley L. Ecuaciones Diferenciales. Ed Reverté S.A, 2aed, España 2002.
[12] PERAL, Alonso Ireneo. Primer Curso de Ecuaciones en Derivadas Parciales. Ed-
itorial Wesley Iberoamericana, Wilmington, Delaware, E.U.A, 1995.
65

[13] SIMMONS, George F. Ecuaciones Diferenciales con Aplicaciones y Notas Históri-
cas. Ed McGraw-Hill, 2aed, 1993.
[14] SMOLLER, J. Shock Waves and Reaction-Di¤usion Equations, Ed. Springer Ver-
lag, 1983
[15] SNEDDON, Ian N., Elements of Partial Di¤erential Equations, Ed. McGraw-Hill
[16] STEWART, James. Cálculo Multivariable. Cuarta Edición, Thomson Editores,
S.A, 2002.
[17] WEINBERGER, H.F., Ecuaciones Diferenciales en Derivadas Parciales, Ed. Re-
verté.
66