Embed Size (px)
Citation preview

1
Podjela kartografskih projekcija može se napraviti na osnovi tri kriterija:
1. Prema vrsti deformacija
2. Prema položaju pola normalne kartografske mreže
3. Prema obliku normalne kartografske mreže
Vrste kartografskih projekcija
2
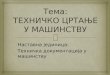
a) Konformne projekcije čuvaju kutne odnose Mjerilo ne ovisi o azimutu
(koriste se kod izrade nautičkih karata)
Mjerila duž paralela i meridijana su međusobno jednaka
Oblici ostaju slični nakon projekcije (...slične forme, otkud im ime), ali ne i površina
Male površine ostaju relativno nedeformirane, međutim takve projekcije nisu pogodne za prikaz velikih područja poput kontinenata i oceana
Primjeri Mercatorova projekcija UTM (Universal Transverse
Mercator) Gauss-Krüger
Projekcije prema vrsti deformacija
Usporedite prikaz Grenlanda sa nekim od kontinenata, npr. Afrike.Koja je stvarna površina Grenlanda u km2, a koja Afrike?
Mercatorova projekcija
3
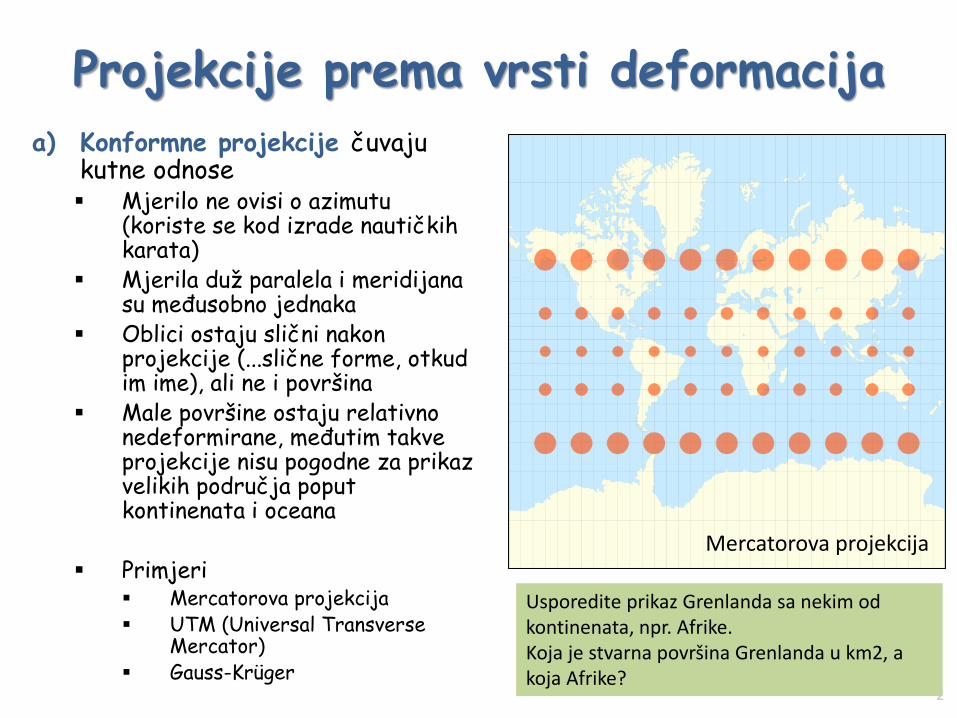
b) Ekvivalentne projekcije čuvaju površinu Gube se kutni odnosi – nemoguće je da jedna projekcija bude istovremeno
ekvivalentna i konformna Oblici se deformiraju Pogodne su za prikaz distribucije točaka preko velikih područja jer gustoća
točaka neće biti izmijenjen
Primjeri: Lambertova projekcija Albersova projekcija
Kako se odmičemo od ekvatora, šta se događa sa mjerilima u smjeru meridijana,a šta u smjeru paralela? Usporedi sada prikaz Grenlanda i Afrike.
Lambertova projekcija

Kako se rezlikuju mjerila na sjevernom i južnom polu? Usporedi prikaz Grenlanda ipodručja Ognjene zemlje.
Albersova projekcija
5
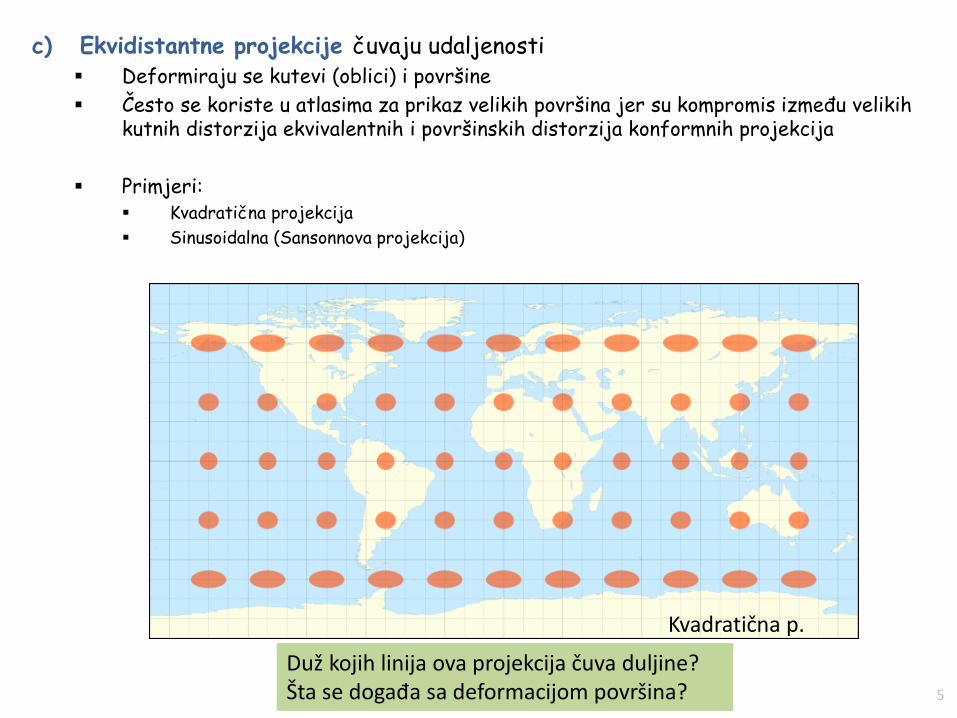
c) Ekvidistantne projekcije čuvaju udaljenosti Deformiraju se kutevi (oblici) i površine
Često se koriste u atlasima za prikaz velikih površina jer su kompromis između velikih kutnih distorzija ekvivalentnih i površinskih distorzija konformnih projekcija
Primjeri: Kvadratična projekcija
Sinusoidalna (Sansonnova projekcija)
Duž kojih linija ova projekcija čuva duljine? Šta se događa sa deformacijom površina?
Kvadratična p.
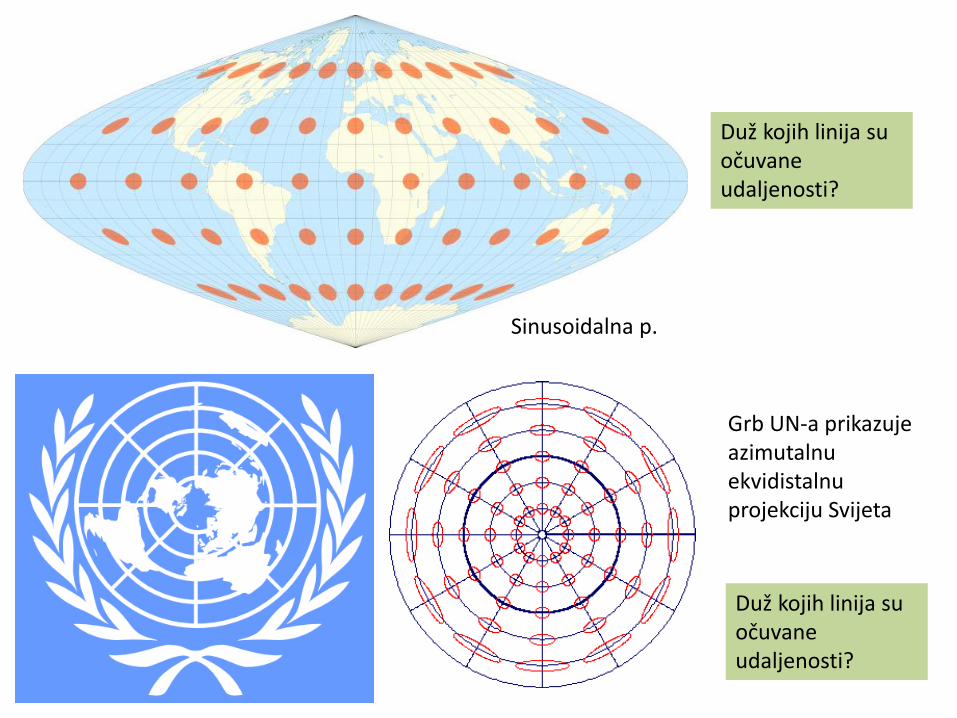
Grb UN-a prikazujeazimutalnu ekvidistalnuprojekciju Svijeta
Duž kojih linija su očuvane udaljenosti?
Sinusoidalna p.
Duž kojih linija su očuvane udaljenosti?

7
Kod projekcija koje čuvaju kuteve tissotove indikatrise će biti kružnice, ali često će biti veće ili manje od originala jer površine neće moći biti istovremeno očuvane
Kod projekcija koje čuvaju površine
tissotove indikatrise će biti elipse zbog
distorzija kuteva i dužina, ali jednakih
površina kao originalne kružnice
Kod projekcija koje čuvaju udaljenosti
duž određenih pravaca tissotove
indikatrise će biti elipse čija jedna os (u
smjeru očuvanja) je jednaka radiusu
originalne kružnice
8
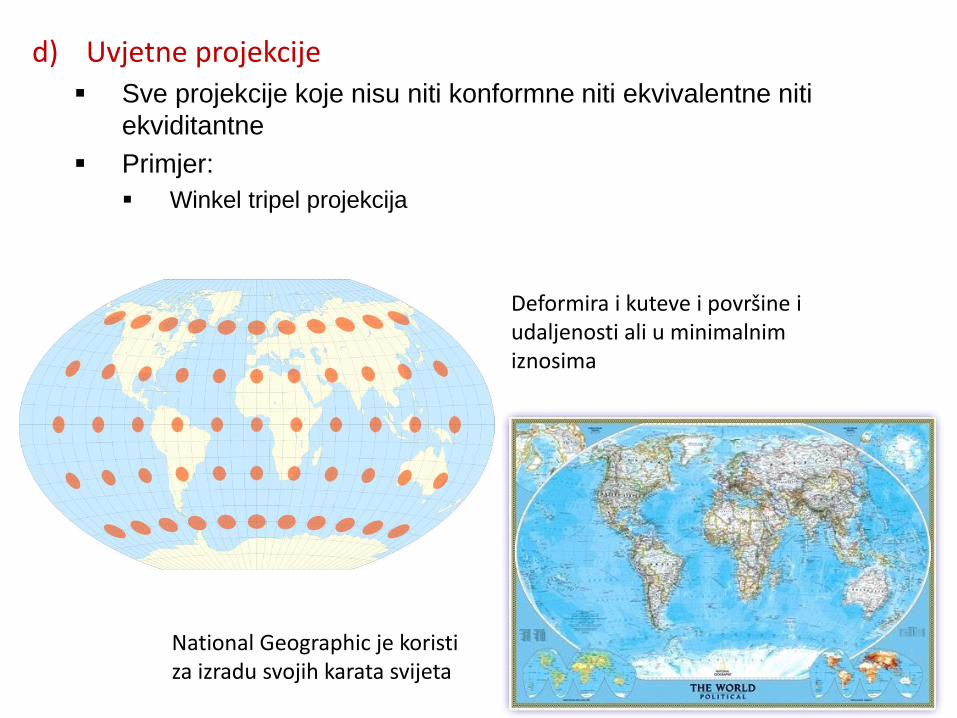
d) Uvjetne projekcije
Sve projekcije koje nisu niti konformne niti ekvivalentne niti
ekviditantne
Primjer:
Winkel tripel projekcija
Deformira i kuteve i površine i udaljenosti ali u minimalnim iznosima
National Geographic je koristi za izradu svojih karata svijeta
9
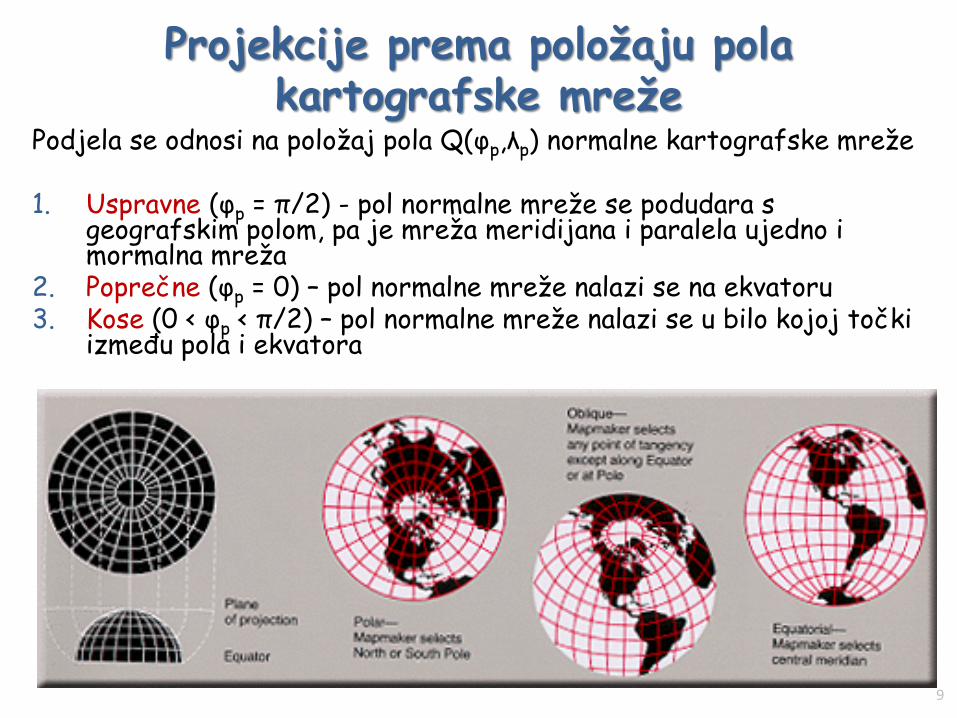
Podjela se odnosi na položaj pola Q(φp,λp) normalne kartografske mreže
1. Uspravne (φp = π/2) - pol normalne mreže se podudara s geografskim polom, pa je mreža meridijana i paralela ujedno i mormalna mreža
2. Poprečne (φp = 0) – pol normalne mreže nalazi se na ekvatoru3. Kose (0 < φp < π/2) – pol normalne mreže nalazi se u bilo kojoj točki
između pola i ekvatora
Projekcije prema položaju pola kartografske mreže

10
1. Konusne
2. Cilindrične
3. Azimutalne
4. Pseudokonusne
5. Pseudocilindrične
6. Polikonusne
7. Kružne
Projekcije prema obliku kartografske mreže

Azimutalna
Cilindrična
Konusna
Uspravna Poprečna Kosa

12
Konusne projekcije – kod uspravnih projekcija se meridijani preslikavaju kao pravci koji se sjeku u jednoj točki pod kutevima proporcionalnim odgovarajućim razlikama duljina, a paralele kao lukovi koncentričnih kružnica sa središtem u presjeku meridijana

13
Azimutalne projekcije – kod uspravnih projekcija meridijani su pravci koji se sijeku u jednoj točki pod kutovima jednakim razlikama njihovih geografskih duljina, a paralele su koncentrične kružnice sa središtem u presjeku meridijana
Stereografska az. projekcija

Centralna (gnomonska)az. projekcija
Ortografskaaz. projekcija

15
Cilindrične projekcije – kod uspravnih projekcija meridijani se preslikavaju kao međusobno paralelni pravci na razmaku proporcionalnom razlikama njihovih geografskih duljina, a paralele također kao paralelni pravci okomiti na meridijanePošto su meridijani i paralele okomiti položaj točaka možemo izražavati u pravokutnom koordinatnom sustavu (x i y)

16
Osnovna geološka karta SFRJ 1:100000 i ranije tiskane topografske karte (Hrvatska osnovna karta 1:5000, TK25...):
Gauss-Krüger projekcija
Besselov elipsoid Hermannskogel
datum

17
Gauss-Krüger projekcija Konformna poprečna
cilindrična projekcija
Austrija je uvodi 1917. za potrebe državne izmjere, kasnije Njemačka i bivša Jugoslavija
Dijeli se na zone široke 3°unutar kojih su deformacije male
Svaka zona ima drugi dodirni meridijan
• 15°= zona 5
• 18°= zona 6
U svakoj zoni je središnji meridijan os x koordinatnog sustava, a os y je ekvator
Dodirni meridijani
18
X koordinata se mjeri u metrima od ekvatora s pozitivnim smjerom prema sjeveru
Y koordinata se uvećava za z+500 000 m (z=broj zone) kako bi se izbjegle negativne vrijednosti
• 5 zona y=5 500 000 ± udaljenost prema istoku(+) ili zapadu (-) od središnjeg meridijana• 6 zona y=6 500 000 ± udaljenost prema istoku(+) ili zapadu (-) od središnjeg meridijana
Primjer: y = 5 550 635.17 x = 5 050 127.18
• Točka se nalazi u 5. zoni i to 50 635.17 metara istočno od središnjeg 15°meridijana
y = 6 451 832.54 x = 5 060 382.44
• Točka se nalazi u 6. zoni i to 48167.46 metara zapadno od središnjeg 18°meridijana
19
HTRS 96/TM Odlukom Vlade RH iz 2004. uvodi se nova projekcija HTRS
96/TM koja postaje službena od 2010.
Karakteristike:• Poprečna Mercatorova projekcija (Konformna poprečna cilindrična)
• Elipsoid je GRS80
• Datum je ETRS89
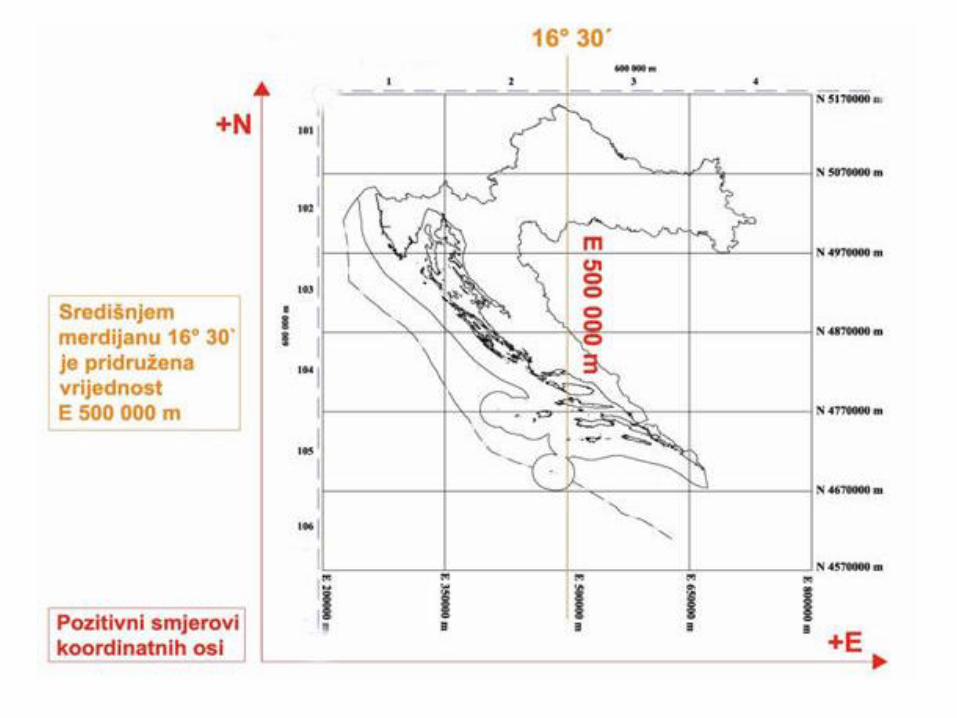
• Srednji meridijan je 16°30‘
• Projekcija ekvatora predstavlja os E (istočno), a projekcija srednjeg meridijana os N (sjeverno)
• Da bi se izbjegle negativne ordinate dodajemo svim ordinatama 500 000 metara odnosno os E ima koordinatu E = 500 000 metara. Tako točke koje leže istočno od srednjeg meridijana imaju ordinate veće od 500 000 m, a točke koje se nalaze zapadno od srednjeg meridijana imaju ordinate manje od 500 000 m, ali uvijek pozitivne
Transformacije koordinata


23
≈ registration• Važna operacija kod pripreme prostornih podataka za GIS
Georeferenciranje znači definiranje položaja podataka unutar fizičkog prostora, u smislu koordinatnog sustava i projekcije• Koristi se kako bi se utvrdio međuodnos rastera i vektora
sa projekcijskim koordinatama
• Načešće se koristi kod novih digitaliziranih (npr. skeniranih) podataka čije “digitalizirane” koordinate treba preobraziti u “stvarne projekcijske” prostorne koordinate
• Kod skeniranja su koordinate zabilježene kao udaljenosti u pikselima, inčima ili centimetrima od npr. gornjeg ljevog kuta slike
Georeferenciranje

24
Npr. kako ćemo preklopiti skeniranu avionsku snimku sa topografskom kartom ili satelitskom snimkom?

Obuhvaća transformaciju ili konverziju koordinata cijelog seta podataka na temelju kontrolnih točaka čiji nam je položaj u izvornom i ciljanom koordinatnom sustavu poznat!
Ciljani koordinatni sustav
Izvorni koordinatni sustav
x’
y’
x
y

Transformacije najčešće obuhvaćajurotacije, translacije i promjene mjerila
27
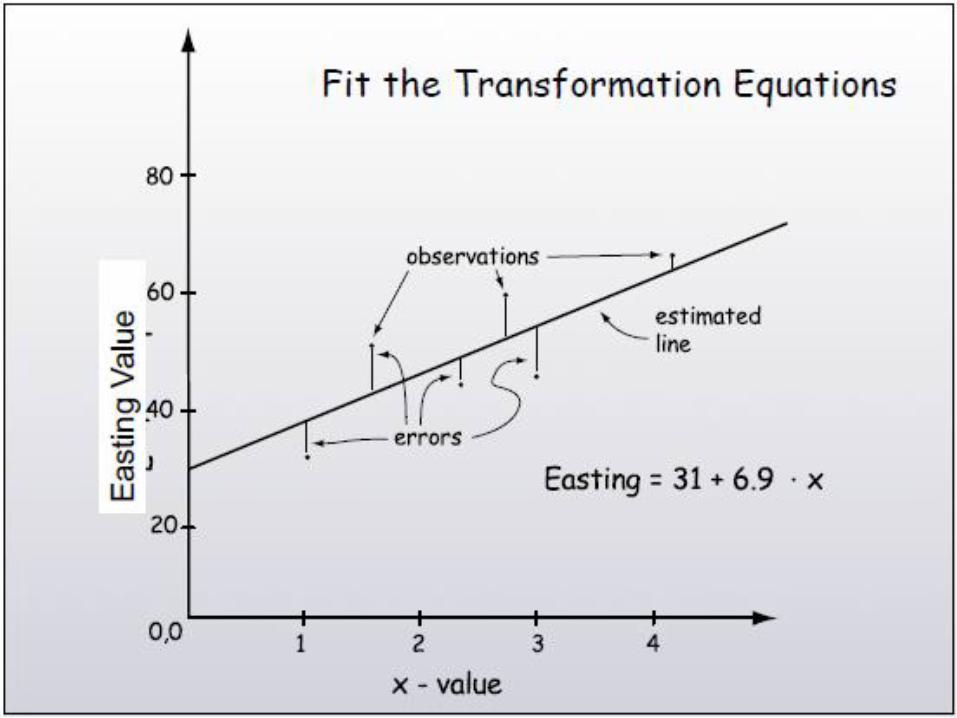
Set kontrolnih točaka nam služi za izradu transformacijskih jednadžbi
• Kontrolne točke su one za koje znamo i prostorne koordinate
• Na temelju odnosa “digitaliziranih” i “stvarnih projekcijskih” koordinata se putem statističke metode procjenjuju najprikladniji koeficijenti za transformaciju svih ostalih točaka za koje nemamo geografske koordinate

28
Karakteristike kontrolnih točaka:
• Precizne vrijednosti koordinata -preciznost bi trebala biti barem onolika kolika nam je preciznost potrebna u pozicioniranju prostornih podataka sa kojima radimo
• Trebaju biti ravnomjerno raspoređene preko prostora koje podaci obuhvaćaju
• Broj točaka bi trebao biti dostatan za statistički pristup koji koristimo

30
Konverzija koordinata
Ako su nam ulazni i ciljani koordinatni sustavi poznati, te su parametri za transformaciju također unaprijed poznati, govorimo o konverziji
• koriste se analitičke formule za konverziju
• specifični parametri transformacije između dva koordinatna sustava su preporučeni od strane odgovarajućih autoriteta (geodeti)


npr. Besselov elipsoidHermannskogel datum
npr. GRS80 elipsoidETRS89 datum
npr. Gauss-Kruger npr. HTRS96/TM
Različiti elipsoidi i datumi:
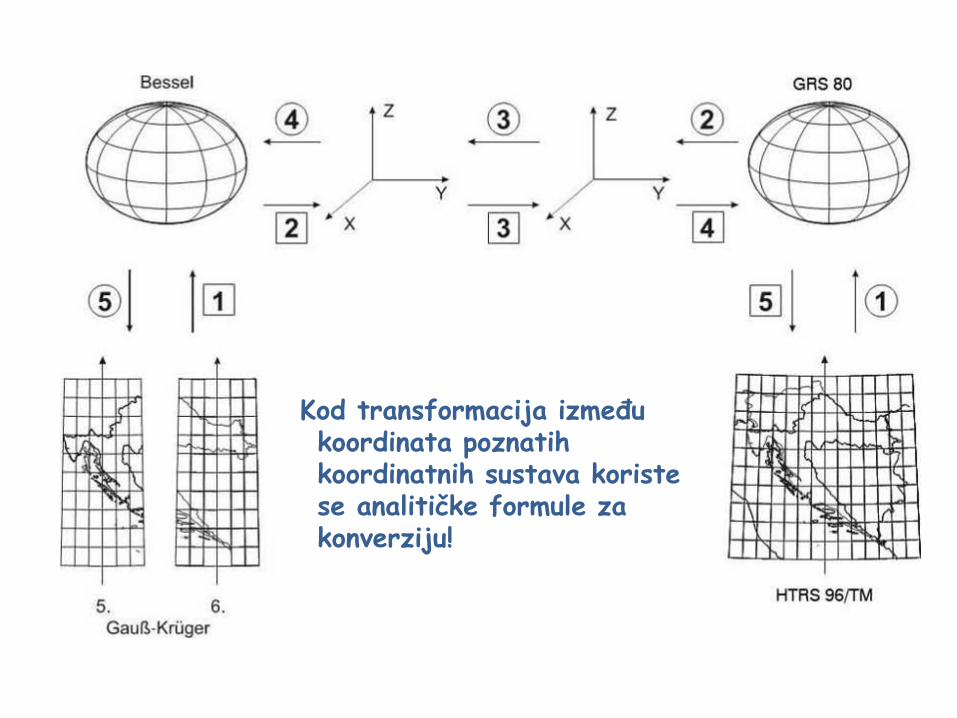
Kod transformacija između koordinata poznatihkoordinatnih sustava koriste se analitičke formule za konverziju!

35
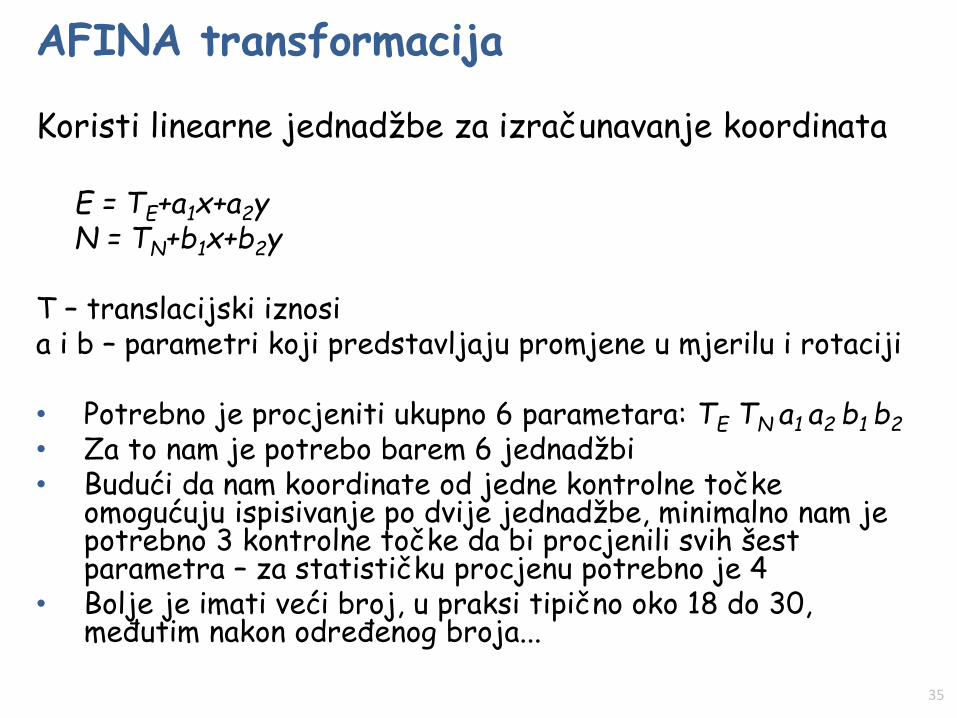
AFINA transformacija
Koristi linearne jednadžbe za izračunavanje koordinata
E = TE+a1x+a2yN = TN+b1x+b2y
T – translacijski iznosia i b – parametri koji predstavljaju promjene u mjerilu i rotaciji
• Potrebno je procjeniti ukupno 6 parametara: TE TN a1 a2 b1 b2
• Za to nam je potrebo barem 6 jednadžbi• Budući da nam koordinate od jedne kontrolne točke
omogućuju ispisivanje po dvije jednadžbe, minimalno nam je potrebno 3 kontrolne točke da bi procjenili svih šest parametra – za statističku procjenu potrebno je 4
• Bolje je imati veći broj, u praksi tipično oko 18 do 30, međutim nakon određenog broja...
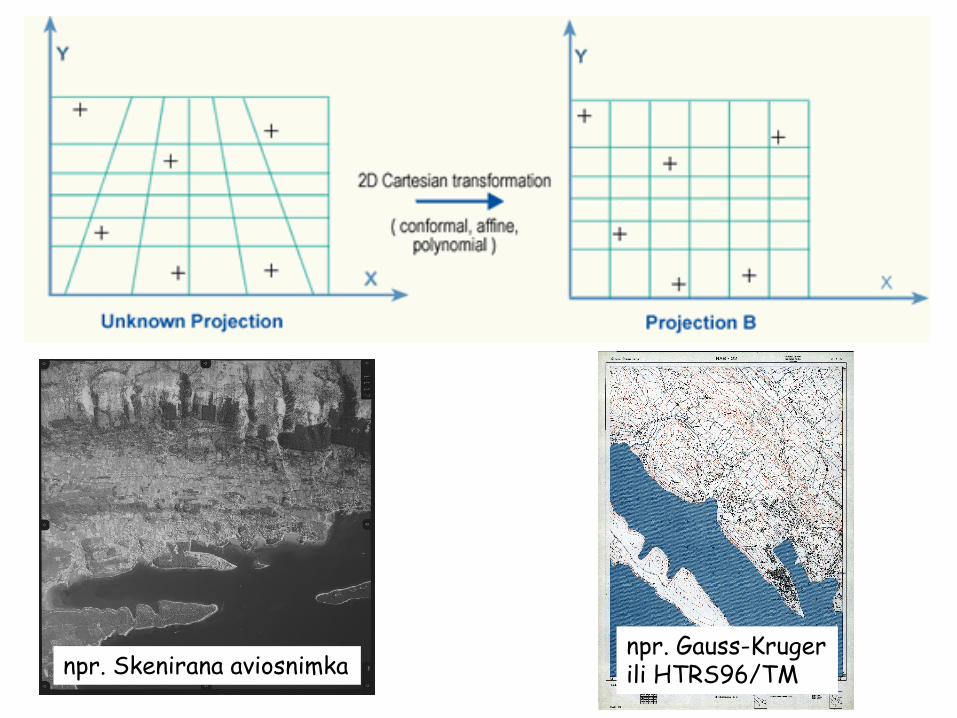
npr. Skenirana aviosnimkanpr. Gauss-Krugerili HTRS96/TM


38
• Žute ceste – pozicionirani podaci, UTM koordinate
• Slika – skenirana aviosnimka

To je empirijski,statistički proces!


42
e – rezidualne udaljenosti između pravih E i N koordinata i koordinata u izlaznim podacima
Statistički postupak minimizira:
Root mean square error(Srednja kvadratna pogreška)
Minimizira se razlika između modela i točaka

Cilj: transformacija sa RMSE < 5 metara
1. iteracija: modeliranje,promatranje reziduala i RMSE
E = 504 125.4 – 39.04x + 0.0414yN = 4999806.3 – 0.079x – 38.99yRMSE = 16.4 metara
Uklanjamo točke 4, 1 i 9, te ponavljamopostupak modeliranja
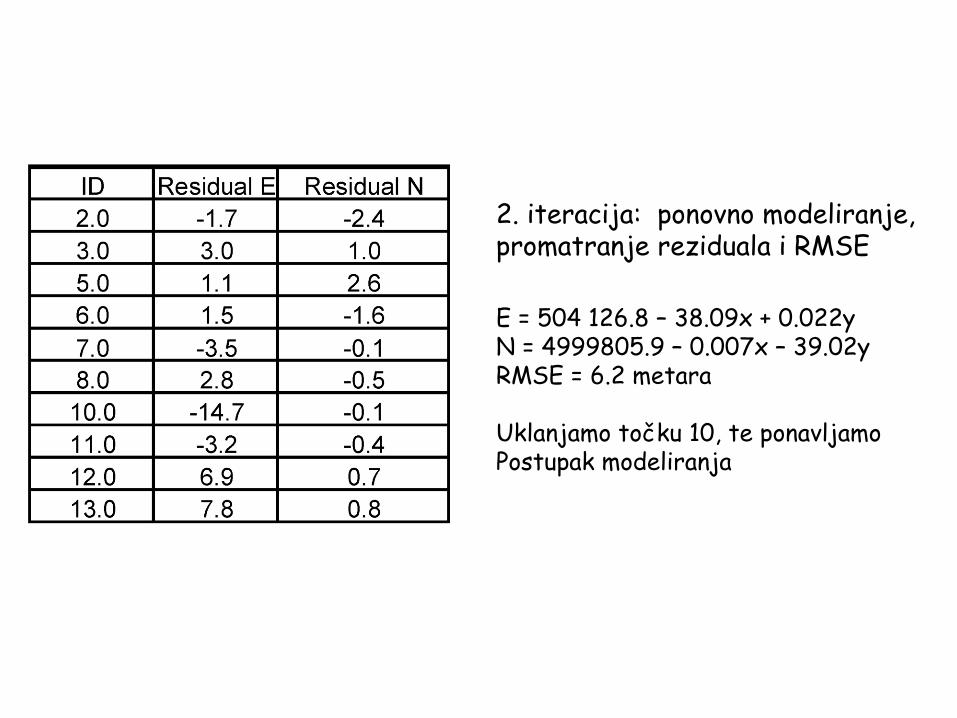
2. iteracija: ponovno modeliranje,promatranje reziduala i RMSE
E = 504 126.8 – 38.09x + 0.022yN = 4999805.9 – 0.007x – 39.02yRMSE = 6.2 metara
Uklanjamo točku 10, te ponavljamoPostupak modeliranja

3. iteracija: ponovno modeliranje sa preostalim točkama,promatranje reziduala i RMSE
E = 504 128.6 – 38.94x + 0.0299yN = 4999805.9 – 0.007x – 39.02yRMSE = 3.7 metara
RMSE je < 5, provjera pojedinih residuala, provjera da su preostale kontrolne točke jednolično raspoređene, prihvaćamo transformaciju


Polinomijalna transformacija trećeg redaE = Te + c1*x + c2*x2 + c3*x3
+ c4*y + c5*y2 +c6*y3…RMSE : 0,00033
Afina transformacija (prvog reda)E = Te + a1*x + a2*yRMSE = 7.2
Treba biti oprezan, najniži RMSE ne mora značiti najbolja transformacija, npr.:


49
hhKartometrijske snimkeORTOFOTO
Kartometrijske karte








![(09- Vježbe- Stereografska projekcija [Compatibility Mode])](https://img.dokumen.tips/doc/110x75/589998e11a28abe6468b6bda/09-vjezbe-stereografska-projekcija-compatibility-mode.jpg)