Embed Size (px)
Citation preview

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Vektorer i
planen

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
English abstract
This report is about the mathematical concept vectors. It explains what a vector is, and
how vectors are indicated with coordinates and arrows. It explains calculating with vectors
in general, with coordinates, and how to calculate the length of a vector. It also defines the
concept called ”tværvektor” in danish. It exlpains the concept ”dot product” of two vectors,
and the context between that and the angle between the vectors. It too explains the
concept called ”determinant” in danish, and how that is used to calculate the area of a
stretched parallelogram between two vectors. Through the report there will be
mathematical proves and illustrations to show and explain the methods being used.
Besides that it has the solutions of task 2, 3, 4, 5 and 6 from ”Bilag 1”.

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Indhold:
Indledning ............................................................................................... 2
Hvad er en vektor? ................................................................................. 2
Vektorens koordinater ............................................................................. 3
Stedvektorer ........................................................................................... 4
Regning med vektorer ............................................................................ 4
Addition .............................................................................................. 5
Subtraktion ......................................................................................... 5
Multiplikation ...................................................................................... 5
Division ............................................................................................... 6
Regneregler til hhv. addition, subtraktion og multiplikation: .............. 6
Tværvektor ............................................................................................. 6
Skalarprodukt ......................................................................................... 7
Skalarproduktet til vinkelberegning ...................................................... 8
Determinant ............................................................................................ 9
Determinanten til arealberegning ........................................................ 9
Opgaver (bilag 1) .................................................................................. 10
Opgave 2: ......................................................................................... 10
Opgave 3: ......................................................................................... 10
Opgave 4 ........................................................................................... 11
Opgave 5: ......................................................................................... 12
Opgave 6 .......................................................................................... 12
Konklusion ............................................................................................ 13
Perspektivering ..................................................................................... 14
Litteraturliste ......................................................................................... 14

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Indledning
Opgaven handler om vektorer i planen. Et begreb som bruges indenfor fysikken til
beskrivelse af fx krafter og hastigheder, men i sin natur er det et matematisk begreb.
Opgaven her er fra et matematisk synspunkt. Jeg forklarer bl.a. hvad en vektor er og
hvordan den angives med koordinater, herunder vil jeg også komme ind på vektorens
længde. Jeg vil komme ind på hvordan man regner med vektorer. Jeg vil definere og
redegøre for begreber, som stedvektor, tværvektor, skalarprodukt og determinant. Jeg vil
under skalarproduktet redegøre for hvordan vinklen mellem to vektorer beregnes, og
dennes sammenhæng med størrelsen af skalarproduktet. Derudover vil jeg under
determinant-begrebet komme ind på arealberegning af et udspændt parallelogram mellem
to vektorer. Henad vejen vil jeg bevise forskellige sætninger, heriblandt en regneregel for
skalarproduktet. Opgave 2,3,4,5 og 6 løses til sidst i
opgaven ved brug af begreber, formler og sætninger fra de gennemgåede afsnit.
Hvad er en vektor?
Hvis du spørger: ”Hvad er vektorer egentlig for en størrelse?” Så vil man nok svare dertil,
at det ikke bare er en størrelse, men også en retning. Vektorbegrebet er noget man bruger
indenfor beregninger i typisk 2 eller 3 dimensioner, hhv. i planen og i rummet.
Rent grafisk illustreres en vektor i form af en pil, som man plotter ind i et koordinatsystem.
Pile har som bekendt både en retning og en længde (størrelse), hvilket af netop denne
grund gør den idéel til formålet.
En vektor skrives som vektorens navn, fx a, med en lille pil henover. I opgaven her angives
vektorer med fed i stedet for brug af pilen.
Man har bl.a. det man kalder for en 0-vektor, som af navnet er en vektor uden nogen
størrelse eller retning. Udover 0-vektoren er der så alle de andre, som kaldes for egentlige
vektorer. En egentlig vektor med en bestemt størrelse og retning er i vektorverdenen en
repræsentant for alle andre vektorer med præcis den samme størrelse og retning.
Vektorens koordinater
En vektor kan angives med koordinater. En x-koordinat og en y-koordinat, som skrives
over hinanden eller bare som et hvert andet koordinatsæt, dvs. a = (a1, a2). I tilfælde af en
tredje dimension plotter du bare det sidste koordinat på til sidst eller nederst alt efter
hvilken notation du bruger.
Koordinaterne bestemmes udfra det vi kalder basisvektorer eller enhedsvektorer, som vi

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
indsætter i koordinatsystemet. De hedder hhv. i = (1, 0) og j = (0, 1) og er parallelle og
ensrettede med hhv. x- og y-aksen. Man benytter af og til andre basisvektorer, som så
også giver vektorerne andre koordinater. Jeg har et eksempel på dette i afsnittet om
Skalarproduktet. Disse basisvektorer er dog altid ortogonale på hinanden, hvilket vil sige at
de står vinkelret på hinanden. Dette skrives, i ⟂ j.
Vi bestemmer vores vektors koordinater ved at opløse den i basisvektorerene. Ved
opløsningen fås to vektorer, a1*i og a2*j, der lagt sammen bliver defineret som a´s
koordinater.
Dette gøres som vist i illustrationen til højre:
I illustrationen er a opløst i basisvektorerne og vi har
fået to vektorer, a1 = (3, 0) og
a2 = (0, 2). Som også skrives at:
a = a1* i + a2* j = (3, 0) + (0, 2) = (3, 2)
Dette udgør så vektorens koordinater a = (a1, a2) = (3, 2). (jeg vil forklare mere om addition
af vektorer i afsnittet om Addition)
Vi får hermed en retvinklet trekant ud af opløsningen, hvilket fører os til at kunne
bestemme vektorens længde, noteres IaI, ganske simpelt vha. pythagoras' sætning, a2 +
b2 = c2. Vi får således at:
IaI = √a12 + a2
2 = √ 32+ 22 = 3,6
Bevis:
Vi antager at Ia1*iI og Ia2*jI er kateterne på trekanten og IaI er hypotenusen.
IaI2 = Ia1*iI2 + Ia2*jI
2 <=>
IaI2 = a12 * IiI 2 + a2
2 * IjI2 (regneregel, (ab)x = axbx) <=>
IaI2 = a12 * 1 + a2
2 * 1 (da i og j er enhedsvektorer er deres længde = 1 så kan vi skrive at
IiI2 = 12 = 1) <=> IaI2 = a12 + a2
2 ■
Stedvektorer
Man kan også ved hjælp af stedvektorer bestemme en vektors koordinater. Hvis man har
to vilkårlige punkter, P og Q, vil man kunne tegne en vektor derimellem, PQ. For at
bestemme denne vektors koordinater, kan man tegne endnu en vektor fra
koordinatsystemets nulpunkt (0, 0), som også skrives O, og ud til P (p1, p2). En sådan
vektor kaldes en stedvektor og man skriver den som OP. Stedvektorens koordinater er
således de samme som punktet P's, så vi kan skrive: OP = P = (p1, p2). Man tegner
ligeledes en vektor ud til Q fra O og kalder denne OQ.

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Man kan nu ved hjælp af disse stedvektorer angive
koordinaterne til en vilkårligt indlagt vektor, som vist her:
Vi har punktet P = (p1, p2) og punket Q = (q1, q2) og vil
angive vektoren mellem disse punkter:
PQ = OQ - OP = (q1, q2) – (p1, p2) = (2, 2) – (3, -1) = (-1,
3) (jeg vil forklare mere om subtraktion i afsnittet om
subtraktion)
Bevis:
Man har det man kalder indskudsreglen, som går ud på at et punkt er skudt ind imellem to
punkter.1 I dette tilfælde er Q skudt ind imellem O og P, og reglen siger således at, OP +
PQ = OQ, så vi kan altså skrive at:
OP + PQ = OQ <=> PQ = OQ - OP ■
Regning med vektorer
Indenfor vektorregning kan man addere og subtrahere vektorer med hinanden som man
vil. Multiplikation og division er derimod lidt mere tricky. Du kan multiplicere vektorer med
tal, men ikke to vektorer med hinanden. Du må heller ikke dividere to vektorer med
hinanden eller et tal med en vektor. Det er derimod okay hvis du dividere en vektor med et
tal. Jeg vil i de følgende afsnit gå i dybden med hhv. addition, subtraktion, multiplikation og
division.
Addition
Når man adderer vektorer finder man frem til summen af to vektorer. Man lægger x-
koordinaterne sammen for sig og y-koordinaterne for sig.
Det kan derfor være en fordel indenfor
vektorregning at benytte skrivemåden, hvor man stiller
koordinaterne over hinanden som i:
a + b = a1 + b1 = 1 + 2 = 3 = (3, 3)
a2 + b2 2 + 1 3
Grafisk ser en sådan konstruktion se ud som vist:
1Vektorer, Geometri og Differentialregning, af Claus Jessen, Peter Møller og Flemming Mørk, side 12

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Subtraktion
Ved subtraktion af vektorer skriver man som følgende:
a - b. Dette kommer nok ikke bag på mange. Man kan såvel også omskrive subtraktionen
til en addition således: a + (- b). Og derpå regnes det ud på samme måde som ved
addition.
Når man sætter minus foran en vektor svarer det til at vende vektoren 180°.
Resultatet af en subtraktion kan let aflæses grafisk ved at placere b´s begyndelsespunkt i
a´s begyndelsespunkt. Vektoreren der så går fra b´s slutpunkt til a´s slutpunkt er resultatet
af subtraktionen. Dette er illustreret til højre:
Som tidligere nævnt bliver b vendt 180° når man ændrer dets
fortegn. Dette vil dog ikke påvirke resultatet hvis man løser
det grafisk med metoden ovenfor. Man skal dog placere a´s
startpunkt i b´s slutpunkt i stedet og så tegne resultatet
imellem b's startpunkt og a's slutpunkt.
Multiplikation
Når man multiplicere en vektor med at tal svarer det til at du enten
forlænger vektoreren eller forkorter den alt efter tallets størrelse. Dette
kaldes også en skalering af vektoren. Grunden til dette er at man
indenfor vektorregning kalder tal for skalarer. Hvis tallet er større end 1
forlænges vektoreren, hvis mindre forkortes vektoren. Hvis tallet er
negativt bliver vektorens retning vendt 180°. Dette er illustreret til højre:
Når man multiplicerer skal man gange tallet med begge vektorens
koordinater. Så hvis vi tager et eksempel og antager at a = (1, 2) og
ganger den med 2, så:
2 a = 2 *1 = 2 = (2, 4)
2 *2 4
Division
Division er ikke noget der bliver brugt meget da man kan præcis det samme vha. multiplikation. Og
multiplikation er bare lettere at regne med, da du ved division skal tænke omvendt. Hvis tallet er
større end 1 forkortes vektoren, hvis tallet er mellem 0 og 1 forlænges den. Hvis tallet er negativt
vendes retningen 180° ligesom ved multiplikation. Som det også gøres ved multiplikation skal du
her dividere med begge vektorens koordinater.
Hvis vi igen antager at a = (1, 2) og dividere med tallet 2 :
Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
a / 2 = 1 2 = (0,5 ; 1)
2 2
Regneregler til hhv. addition, subtraktion og multiplikation:
a) a + 0 = a (0 er betegnelsen for nulvektoren)
b) a + b = b + a (den kommunikative lov)
c) a + (b + c) = (a + b) + c (den associative lov)
d) (s + t) a = s a + t a (den distributive lov)
e) s (a + b) = s a + s b (den distributive lov)
f ) s (t a) = (s t) a (faktorernes orden er underordnet)
g) a = b <=> a + c = b + c 2
Tværvektor
En tværvektor er en vektor der går på tværs af den oprindelige vektor og betegnes som
den oprindelige vektor bare med en lille ^ henover. Derfor kalder man også tværvektoren
for a for ”a-hat”.3Tværvektoren til enhver vektor a defineres som den vektor der
fremkommer ved at dreje a 90° mod uret, altså i positiv retning. Tværvektoren a^ er
således også ortogonal på a, a^⟂ a, på samme måde som basisvektorerne i og j er på
hinanden, som beskrevet tidligere. Basisvektor j er således også tværvektoren til
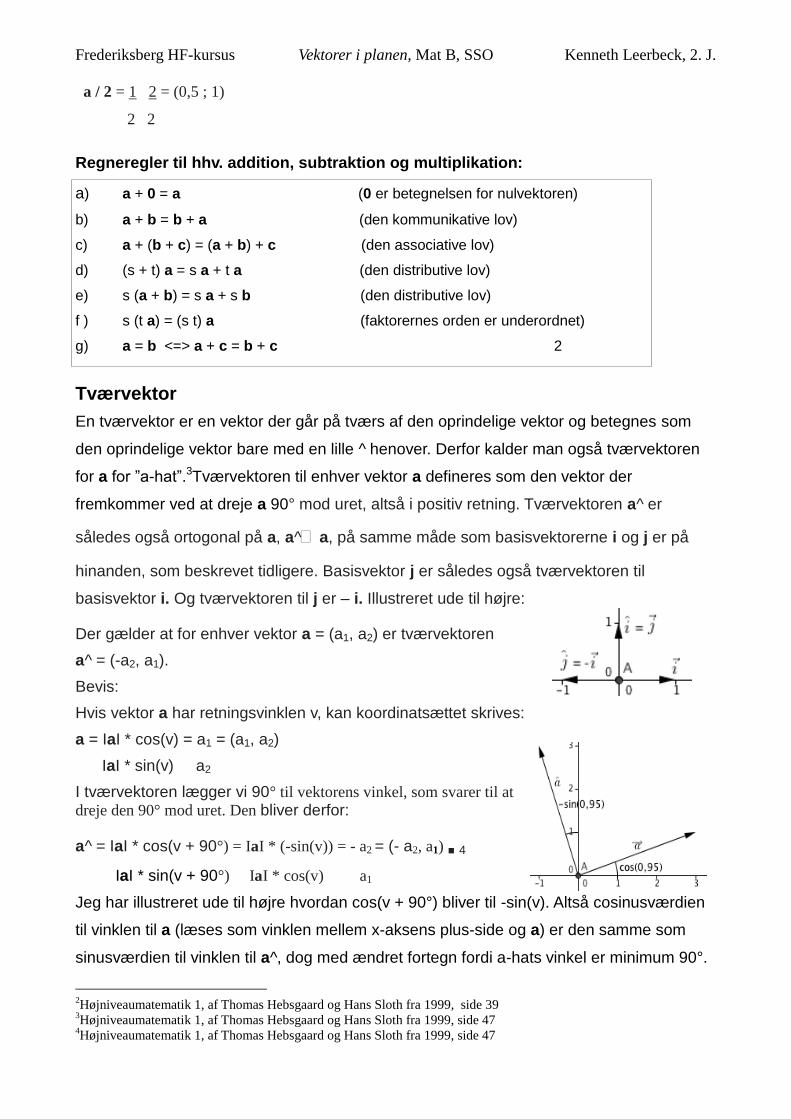
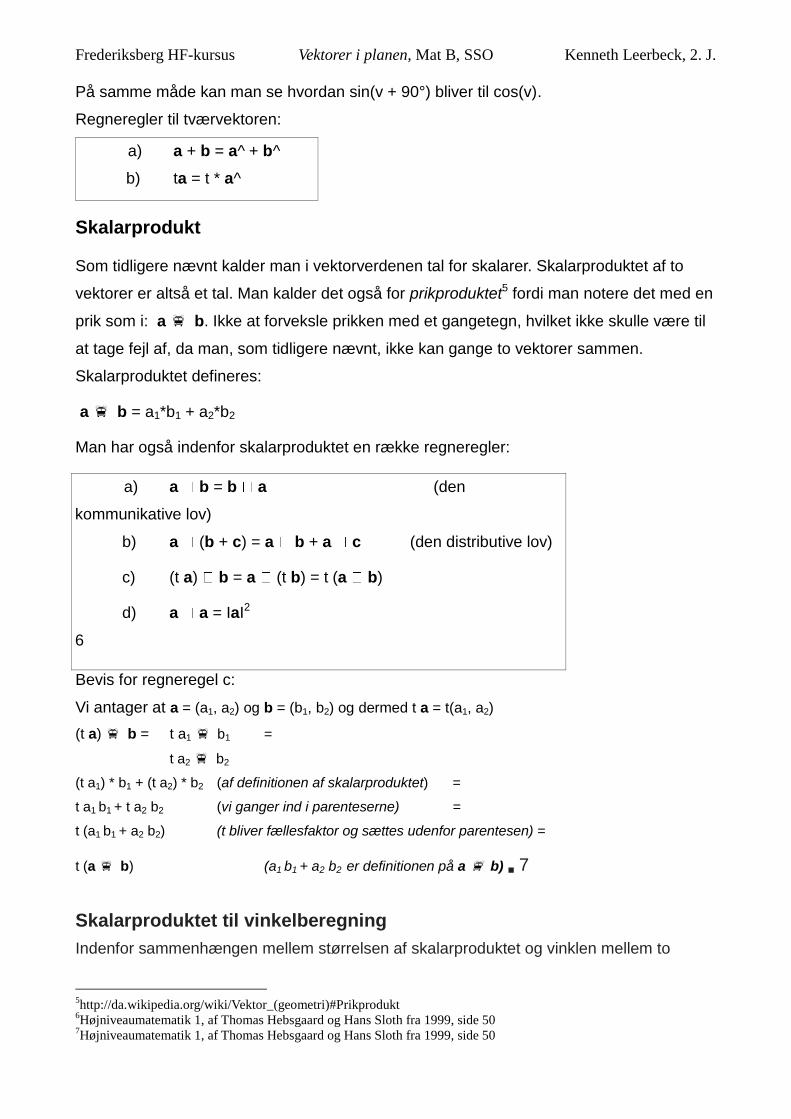
basisvektor i. Og tværvektoren til j er – i. Illustreret ude til højre:
Der gælder at for enhver vektor a = (a1, a2) er tværvektoren
a^ = (-a2, a1).
Bevis:
Hvis vektor a har retningsvinklen v, kan koordinatsættet skrives:
a = IaI * cos(v) = a1 = (a1, a2)
IaI * sin(v) a2
I tværvektoren lægger vi 90° til vektorens vinkel, som svarer til at
dreje den 90° mod uret. Den bliver derfor:
a^ = IaI * cos(v + 90°) = IaI * (-sin(v)) = - a2 = (- a2, a1) ■ 4
IaI * sin(v + 90°) IaI * cos(v) a1
Jeg har illustreret ude til højre hvordan cos(v + 90°) bliver til -sin(v). Altså cosinusværdien
til vinklen til a (læses som vinklen mellem x-aksens plus-side og a) er den samme som
sinusværdien til vinklen til a^, dog med ændret fortegn fordi a-hats vinkel er minimum 90°.
2Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 39
3Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 47
4Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 47
Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
På samme måde kan man se hvordan sin(v + 90°) bliver til cos(v).
Regneregler til tværvektoren:
a) a + b = a^ + b^
b) ta = t * a^
Skalarprodukt
Som tidligere nævnt kalder man i vektorverdenen tal for skalarer. Skalarproduktet af to
vektorer er altså et tal. Man kalder det også for prikproduktet5 fordi man notere det med en
prik som i: a b. Ikke at forveksle prikken med et gangetegn, hvilket ikke skulle være til
at tage fejl af, da man, som tidligere nævnt, ikke kan gange to vektorer sammen.
Skalarproduktet defineres:
a b = a1*b1 + a2*b2
Man har også indenfor skalarproduktet en række regneregler:
a) a b = b a (den
kommunikative lov)
b) a (b + c) = a b + a c (den distributive lov)
c) (t a) b = a (t b) = t (a b)
d) a a = IaI2
6
Bevis for regneregel c:
Vi antager at a = (a1, a2) og b = (b1, b2) og dermed t a = t(a1, a2)
(t a) b = t a1 b1 =
t a2 b2
(t a1) * b1 + (t a2) * b2 (af definitionen af skalarproduktet) =
t a1 b1 + t a2 b2 (vi ganger ind i parenteserne) =
t (a1 b1 + a2 b2) (t bliver fællesfaktor og sættes udenfor parentesen) =
t (a b) (a1 b1 + a2 b2 er definitionen på a b) ■ 7
Skalarproduktet til vinkelberegning
Indenfor sammenhængen mellem størrelsen af skalarproduktet og vinklen mellem to
5http://da.wikipedia.org/wiki/Vektor_(geometri)#Prikprodukt
6Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 50
7Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 50

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
egentlige vilkårlige vektorer a og b gælder der følgende:
a b > 0 <=> 0° < vinklen til (a, b) < 90°
a b = 0 <=> vinklen til (a, b) = 90° (Vektorerne er altså ortogonale)
a b < 0 <=> 90° > vinklen til (a, b) < 180°8
Altså fortæller skalarproduktet noget om hvorvidt vinklen mellem to egentlige vektorer er stump, spids eller ret.
Den præcise vinkel bestemmes ved formlen:
a b = IaI * IbI *cos(v) <=> a b / (IaI * IbI) = cos(v) <=>
v = cos-1
(a b / (IaI * IbI))
Bevis:
Vi benytter her et koordinatsystem, hvor vi lader basisvektorerne være ensrettede med hhv. a og a^ og kalder dem
hhv. ea og ea^. At vi benytter et andet koordinatsystem betyder ikke noget i
forhold til vinklen mellem a og b eller længden af vektorerne. Forudsat at
længdeenhederne på basisvektorerne ikke ændres.
Basisvektorerne er derfor:
ea = a / IaI
ea^= a^ / Ia^I = a^ / IaI
Retningsvinklen for b er i dette koordinatsystem den samme som vinklen mellem a og b. Man kan se udfra
betingelserne for dette system at a = (IaI, 0), og
b = (IbI*cos(v), IbI*sin(v)).
Skalarproduktet bliver derfor :
a b = IaI*IbI cos(v) + 0*IbI sin(v) = IaI*IbI cos(v) ■ 9
Determinant
Determinanten af et vektorpar (a, b) defineres som skalarproduktet af a^ og b. Dvs. : det(
a, b) = a^ b = -a2*b1 + a1*b2 = a1*b2 - a2*b1
Determinanten af to parallelle vektorer er altså nul, ifølge sætningerne for
sammenhængen mellem skalarproduktet og vinklen i det tidligere afsnit. Dette ses på at a^
står ortogonal, altså 90°, på a og dermed også på b, da vektorerne er parallelle.
Determinanten til arealberegning
Når man har to vektorer a og b, kan man udspænde et
parallelogram, som vist:
Arealet for dette parallelogram kan beregnes ved formlen, A =
8Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 53
9Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 52

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
│det(a, b) │
Der er her tale om en numerisk værdi og ikke en længde.
Bevis:
Arealformlen for et almindeligt parallelogram hedder : A =
h*g, h for højden og g for grundlinjen. I vektorverdenen kan
man indføre et koordinatsystem, som jeg også gjorde
tidligere, hvor x-aksen er parallel og ensrettet med a, som
vist:
a's koordinater hedder såvel (IaI, 0) og IaI er altså
grundlinjen i vores parallelogram. Højden er så den numeriske værdi af b's y-koordinat.
Man snakker om den numeriske værdi da b's y-koordinat godt kan være negativ, men
arealet af parallelogrammet kan altså kun være positivt.
Hvis vi kalder vinklen til a og b for v, er koordinaterne til b = (IbI*cos(v), IbI*sin(v)).
Når vi nu har både højde og grundlinje kan vi opstille formlen:
A = h*g = │IbI*sin(v) │* IaI = │IbI*sin(v) * IaI │ = │det(a, b) │
(det(a, b) er som tidligere defineret a^ b = a1*b2 -a2*b1 = IaI* IbI*sin(v) – 0 *IbI*cos(v)
= IaI* IbI*sin(v)) Derfor får vi : │det(a, b) │ ■ 10
Opgaver (bilag 1)
Her ser vi nogle eksempler på hvorledes de forskellige begreber, formler og sætninger vi
har været igennem kan benyttes indenfor vektorregning:
Opgave 2:
Det oplyses at IaI = 2. Bestem Ia + 3a^I
Da koordinatererne ikke betyder noget for svaret som bare er en længde, så er
der ikke noget ulovligt i at opdigte a's koordinater, så længe IaI = 2.
Vi giver a koordinaterne (a1, a2) = (2, 0). Altså er længden stadig lig 2. Tværvektoren har
koordinaterne (- a2, a1) = (0, 2)
Ia + 3a^I = I(2, 0) + 3(0, 2)I = I(2, 0) + (0, 6)I = I(2, 6)I
Længden bestemmes vha. formlen IaI = √a12 + a2
2 :
10
Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999, side 64

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Ia + 3a^I = √22 + 62 = 6,3
Altså er længden af vektoren a + 3a^ lig med 6,3
Opgave 3:
Lad a = (-3, 5) og b = (1, 4)
Bestem vinklen mellem a og b:
Vi benytter her formlen a b = IaI * IbI *cos(v) og isolere v, som er vinklen.
a b = IaI * IbI *cos(v) <=> a b / (IaI * IbI) = cos(v) <=>
v = cos-1
(a b / (IaI * IbI)) = cos-1
((-3*1 + 5*4) / (√-32 + 5
2 * √1
2 + 4
2)) = 44,99°
Vinklen mellem a og b er altså 44,99 grader.
Bestem tallet t, så vektorerne a og a + t*b er ortogonale:
Fra sætningerne om sammenhængen mellem størrelsen af skalarproduktet og vinklen, ved vi at to
vektorer er ortogonale hvis skalarproduktet er lig 0. Derfor kan vi skrive at a (a + t*b) = 0 og så
isolere t:
a (a + t*b) = 0 <=>
a a + a t*b = 0 (her bruges regneregel: a (b + c) = a b + a c) <=>
IaI2 + a t*b = 0 (ifølge en regneregel for skalarproduktet er a a = IaI2) <=> IaI2 + (a1*
b1) + t(a2*b2) = 0 <=>
((a1* b1) + (a2*b2))t = -IaI2 <=>
t = -IaI2 / ((a1* b1) + (a2*b2)) <=>
t = -IaI2 / (a b) <=>
-(√-32 + 5
2)2 /
(-3*1 + 5*4) = -2
Hvis tallet t er lig med -2, får man en vektor a + t*b = (-3, 5) + (-2(1, 4)) = (-5, -3) der står ortogonalt
på a. Udfaldet giver god mening da denne vektor også er tværvektoren til a = (-3, 5). a^ = (-a2, a1)= (-5, -3).
Opgave 4
Bestem tallet t så vektorerne (2, -3t) og (1, t – 20) er parallelle:
Vi ved at hvis determinanten er lig 0, så er vektorparret parallelle, så derfor kan
vi altså skrive at, det(a, b) = 0 <=> det((2, -3t), (1, t – 20)) = 0.
Da determinanten er defineret som a^ b = (-(-3t), 2) (1, t – 20) kan vi altså
skrive følgende: -(-3t)*1 + 2* t – 20 = 0. Nu skal t bare isoleres:
-(-3t)*1 + 2* t – 20 = 0 <=>
-(-3t) + 2 t = 20 <=>
5 t = 20 <=> t = 20 / 5 <=> t = 4
Så vektorerne (2, -3*4) = (2, -12) og (1, 4 – 20) = (1, -16) er således to parallelle vektorer.

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Opgave 5:
I et koordinatsystem er givet tre punkter A(0, -6), B(-1, 2) og C(2, 6).
Beregn arealet af trekant ABC samt vinkel C i trekanten:
Vi kan her benytte stedvektorerne. Ved at tegne punkterne ind og tegne en stedvektor
ud til hvert af punkterne. Og derefter tegne trekantens sider ved kombinere
punkterne som vist ude til højre:
Som det ses ude til højre har vi bl.a. vektorerne OC, OA og AC. OC´s
koordinater er lig C's koordinater, og OA's koordinater er lig A's koordinater.
Derfor kan vi her sige:
AC = OC – OA = (2, 6) – (0, -6) = (2, 12)
Samme procedure køres igennem med AB og BC:
BC = OC – OB = (2, 6) - (-1, 2) = (3, 4)
AB = OB – OA = (-1, 2) – (0, -6) = (-1, 8)
Til beregning af arealet af et parallelogram har vi formlen
A = │det(a, b) │. Derfor kan vi dividere dette med 2 for dermed at få
resultatet af arealet af en trekant. Så vi får:
A = │det(AC, AB) │/ 2 = │det(2, 12),(-1, 8) │/ 2 = │(-12, 2) (-1, 8)│/ 2 =
│-12*(-1) + 2*8│/ 2 = 14
Dermed er trekant ABC's areal lig med 14 kvadratenheder.
Vinkel C i trekanten beregnes ved, v = cos-1
(a b / (IaI * IbI)) fra opgave 3.
Så C's v = cos-1
(AC BC / (IACI * IBCI)) =
cos-1
( 2*3 + 12*4) / (√22 + 12
2 * √3
2 + 4
2)) = 27,4°
Vinklen til C er således lig med 27,4 grader.
Opgave 6
I et koordinatsystem er der for hver t givet to vektorer:
a = (1+t, 2 - t) og b = (t, 4 – t)
Bestem de værdier af t for hvilke a og b udspænder et parallelogram med areal 5:
For at finde ud af dette, skal vi gå ud fra arealformlen A =│det(a, b)│og sætte den lig 5. Da der er
tale om den numeriske værdi gælder der at │det(a, b)│= 5 <=> det(a, b) = 5 v det(a, b) = -5. Dette
betyder at der også findes en t-værdi til det(a, b) = -5. Altså er der to forskellige t-værdier:
1. t-værdi: det(a, b) = 5 <=> a^ b = 5 <=>

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
(-2 + t, 1 + t) (t, 4 – t) = 5 <=>
(-2 + t)*t + (1 + t)* (4 – t)= 5 <=>
-2t + t2 + 4 – t + 4t - t
2 = 5 <=>
t + 4 = 5 <=> t = 1
2. t-værdi: det(a, b) = -5 <=> a^ b = -5 <=>
(-2 + t, 1 + t) (t, 4 – t) = -5 <=>
(-2 + t)*t + (1 + t)* (4 – t) = -5 <=>
-2t + t2 + 4 – t + 4t - t
2 = -5 <=>
t + 4 = -5 <=> t = -9
Det betyder at arealet af det udspændte parallelogram er lig 5, hvis t = 1 og
hvis t = -9.
Konklusion
En vektor angives altså med koordinater bestemt af basisvektorer, og længden af en
vektor bestemmes vha. Pythagoras. I vektorregning med koordinater, kan man, både
addere, subtrahere, multiplicere og dividere. En tværvektor beskriver den oprindelige
vektor, som er drejet 90° mod uret og dermed står vinkelret på den oprindelige vektor.
Skalarproduktet af to vektorer er et tal, som fortæller noget om vinklen mellem vektorerne,
og kan beregnes udfra vektorernes koordinater ved en formel. Determinanten er også et
tal, defineret som skalarproduktet af vektoren b og tværvektoren til a. Man kan benytte
determinanten til beregning af arealet af et udspændt parallelogram mellem to vektorer.
Perspektivering
Vektorbegrebet blev indført tilbage i 1600-tallet, da det i højere og højere grad ikke
længere var nok at beskrive fysiske størrelser blot med tal. Man manglede en retning.11
Som tidligere beskrevet bruger man det til beregninger i hhv. planen og i rummet. Hvis
man eksempelvis tager et objekt med en hastighed af 50 km/t, så er det tit meget relevant
at vide hvad vej objektet bevæger sig. Man kan også benytte vektorer indenfor
byggeindustrien, i den forstand at et objekt har retningen nedad pga. tyngdekraften. Den
kraft skal holdes i skak af en anden kraft, så vi ender med at få en nul-vektor, hvilket
betyder at objektet nu står stabilt. Vektorer er altså noget man bruger i alle mulige
sammenhænge hvor der kræves beregninger i flere dimensioner.
11
http://www.fysikhistorie.dk/merer2/vekmer.html

Frederiksberg HF-kursus Vektorer i planen, Mat B, SSO Kenneth Leerbeck, 2. J.
Litteraturliste
Højniveaumatematik 1, af Thomas Hebsgaard og Hans Sloth fra 1999,
Nyt Teknisk Forlag
side 27-29, 33-39, 47-55 og 61-64
Vektorer, Geometri og Differentialregning, af Claus Jessen, Peter Møller og
Flemming Mørk, fra 1999, GYLDENDAL UDDANNELSE
side 12-25
Hjemmesider benyttet:
http://da.wikipedia.org/wiki/Vektor_(geometri)
http://www.fysikhistorie.dk/merer2/vekmer.html
Illustrationerne har jeg tegnet i GeoGebra, på hjemmesiden herunder:
http://www.geogebra.org/webstart/geogebra.html





























