-
Neurocomputing 62 (2004) 3964www.elsevier.com/locate/neucom
Training RBF networks with selectivebackpropagation
Mohammad-Taghi Vakil-Baghmisheh , Nikola Pave*si+cLaboratory of
Articial Perceptions, Systems and Cybernetics, Faculty of
Electrical Engineering,
University of Ljubljana, Slovenia
Received 11 March 2002; received in revised form 8 July 2003;
accepted 19 November 2003
Abstract
Backpropagation with selective training (BST) is applied on
training radial basis function(RBF) networks. It improves the
performance of the RBF network substantially, in terms
ofconvergence speed and recognition error. Three drawbacks of the
basic backpropagation algo-rithm, i.e. overtraining, slow
convergence at the end of training, and inability to learn the
lastfew percent of patterns are solved. In addition, it has the
advantages of shortening trainingtime (up to 3 times) and
de-emphasizing overtrained patterns. The simulation results
obtainedon 16 datasets of the Farsi optical character recognition
problem prove the advantages of theBST algorithm. Three activity
functions for output cells are examined, and the sigmoid
activityfunction is preferred over others, since it results in less
sensitivity to learning parameters, fasterconvergence and lower
recognition error.c 2003 Elsevier B.V. All rights reserved.
Keywords: Neural networks; Radial basis functions;
Backpropagation with selective training; Overtraining;Farsi optical
character recognition
1. Introduction
Neural networks (NNs) have been used in a broad range of
applications, including:pattern classi:cation, pattern completion,
function approximation, optimization, pre-diction, and automatic
control. In many cases, they even outperform their classical
Corresponding author. LUKS, Fakulteta za elektrotehniko,
Tr*za*ska 25, 1000-Ljubljana, Slovenia.Tel.: +386-1-4768839; fax:
+386-1-4768316.
E-mail addresses: [email protected] (M.-T.
Vakil-Baghmisheh), [email protected](N. Pave*si+c).
0925-2312/$ - see front matter c 2003 Elsevier B.V. All rights
reserved.doi:10.1016/j.neucom.2003.11.011
mailto:[email protected]:[email protected]
-
40 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
2ly
1y
1z
2z
3lz
V1x
2x
1lx
i = 1,..., l1 m = 1,..., l2 j = 1,..., l3
U
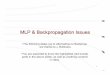
Fig. 1. Con:guration of the RBF Network (for explanation see
Appendix A).
counterparts. In spite of diEerent structures and training
paradigms, all NNs per-form essentially the same function: vector
mapping. Likewise, all NN applicationsare special cases of vector
mapping. Development of detailed mathematical models forNNs began
in 1943 with the work of McCulloch et al. [12] and was continued
byothers.According to Wasserman [20], the :rst publication on
radial basis functions for
classi:cation purposes dates back to 1964 and is attributed to
Bashkirof et al. [4] andAizerman et al. [1]. In 1988, based on
Covers theorem on the separability of patterns[6], Broomhead et al.
[5] employed radial basis functions in the design of NNs.The RBF
network is a two layered network (Fig. 1), and the common method
for
its training is the backpropagation algorithm. The :rst version
of the backpropagationalgorithm, based on the gradient descent
method, was proposed by Werbos [21] andParker [13] independently,
but gained popularity after publication of the seminal bookby
Rumelhart et al. [15]. Since then, many modi:cations have been
oEered by others,and Jondarr [10] has reviewed 65 varieties.Almost
all variants of backpropagation algorithm were originally devised
for the
multilayer perceptron (MLP). Therefore, any variant of the
backpropagation algorithmwhich is used for training the radial
basis function (RBF) network should be customizedto suit this
network, so it will be somehow diEerent from the variant suitable
for theMLP. Using the backpropagation algorithm for training RBF
network has three maindrawbacks:
overtraining, which weakens the networks generalization
property, slowness at the end of training, inability to learn the
last few percent of vector associations.
A solution oEered for overtraining problem is early stopping by
employing crossvalidation technique [9]. There are plenty of
research reports that argue against use-fulness of the cross
validation technique in the design and the training of NNs.
Fordetailed discussions the reader is invited to see [2,3,14].
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 41
From our point of view, there are two major reasons against
using early stoppingand the cross validation technique on our
data:
(1) The cross validation stops training on both learned and
unlearned data. Whilethe logic behind early stopping is preventing
overtraining on learned data, thereis no logic for stopping the
training on unlearned data, when the data is notcontradictory.
(2) In the RBF and the MLP networks, learning trajectory depends
on the randomlyselected initial point. This means that the optimal
number of training epochs whichis obtained by CV, is useful iE we
start training always from the same initial point,and the network
always traverses the same learning trajectory!
To improve the performance of the network, the authors suggest
the selective training,as there is no other way to improve the
performance of the RBF network on the givendatasets. The paper
shows that if we use early stopping or continue the training
withthe whole dataset, the generalization error will be much more
than the results obtainedby the selective training. In [19] the
backpropagation with selective training (BST)algorithm was
presented for the :rst time and was used for training the MLP
network.Based on the results obtained on our OCR datasets, the BST
algorithm has the
following advantages over the basic backpropagation
algorithm:
prevents from overtraining, de-emphasizes the overtrained
patterns, enables the network to learn the last percent of
unlearned associations in a shortperiod of time.
As there is no universally eEective method, the BST algorithm is
not an exception.Since the contradictory data or the overlapping
part of the data cannot be learned,applying the selective training
on data with a large overlapping area will destabilizethe system,
but it is quite eEective when dataset is error-free and
non-overlapping, as itis the case with every error-free
character-recognition database, when enough numberof proper
features are extracted.Organization of the paper: The RBF network
is reviewed in Section 2. In Section
3, the training algorithms are presented. Simulation results are
presented in Section 4,and conclusions are given in Section 5. In
addition, the paper includes two appendices.In most of the
resources the formulations for calculating error gradients of
RBF
networks are either erroneous and conOicting (for instance see
the formulas 4.57, 4.60,7.53, 7.54, 7.55 in [11]), or having not
been given at all (see for instance [20,16]).Thus in Appendix A, we
obtain these formulas for three forms of output cell activ-ity
function. Appendix B presents some information about feature
extraction methodsused for creating the Farsi optical character
recognition datasets, which are used forsimulations in this
paper.
Remark. Considering that in the classi:er every pattern is
represented by its featurevector as the input vector to the
classi:er, classifying the input vector is equivalent
-
42 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
to classifying the corresponding pattern. Frequently in the
paper, the vector which isto be classi:ed has been referred to by
the input pattern, or simply pattern, and viceversa.
2. RBF networks
In this section, the structure, training paradigms and
initialization methods of RBFnetworks are reviewed.
2.1. Structure
While there are various interpretations of RBF, in this paper we
will considerit from the pattern recognition point of view. The
main idea is to divide the in-put space into subclasses, and to
assign a prototype vector for every subclass inthe center of it.
Then the membership of every input vector in each subclass willbe
measured by a function of its distance from the prototype (or
kernel vector),that is fm(x) = f(x vm). This membership function
should have four speci:-cations:
1. Attaining the maximum value in the center (zero distance).2.
Having considerable value in the close neighborhood of center.3.
Having negligible value in far distances (where are close to other
centers).4. DiEerentiability.
In fact, any diEerentiable and monotonically decreasing function
of x vm will ful-:ll these conditions, but the Gaussian function is
the common choice. After obtainingthe membership values (or
similarity measures) of input vector in the subclasses, theresults
should be combined to obtain the membership degrees in every class.
The twolayered feed-forward neural network depicted in Fig. 1 is
capable of performing all theoperations, and is called the RBF
network.The neurons in the hidden layer of network have a Gaussian
activity function and
their inputoutput relationship is:
ym = fm(x) = exp(
x vm2
22m
); (1)
where vm is the prototype vector or the center of the mth
subclass and m is thespread parameter, through which we can control
the receptive :eld of that neuron.The receptive :eld of the mth
neuron is the region in the input space where fm(x)is high.The
neurons in the output layer could be sigmoid, linear, or
pseudo-linear, i.e. linear
with some squashing property, so the output could be calculated
using one of the
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 43
following equations:
zj =
11 + eSj
; sigmoid;
sjl2
; linear; with1l2
squashing function;
sjm ym
; pseudo-linear; with1m ym
squashing function;
(2)
where
sj =l2
m=1
ymumj; j = 1; : : : ; l3: (3)
Although in the most of literature, the neurons with linear or
pseudo-linear activityfunction have been considered for the output
layer, we strongly recommend using thesigmoidal activity function,
since it results in less sensitivity to learning parameters,faster
convergence and lower recognition error.
2.2. Training paradigms
Before starting the training, a cost function should be de:ned,
and through the train-ing process we will try to minimize it. Total
sum-squared error (TSSE) is the mostpopular cost function.Three
paradigms of training have been suggested in the literature:
1. No-training: In this the simplest case, all the parameters
are calculated and :xedin advance and no training is required. This
paradigm does not have any practicalvalue, because the number of
prototype vectors should be equal to the number oftraining samples,
and consequently the network will be too large and very slow.
2. Half-training: In this case the hidden layer parameters
(kernel vectors and spreadparameters) are calculated and :xed in
advance, and only the connection weightsof output layer are
adjusted through backpropagation algorithm.
3. Full-training: This paradigm requires the training of all
parameters including kernelvectors, spread parameters, and the
connection weights of output layer (vms, msand umjs) through the
backpropagation algorithm.
2.3. Initialization methods
The method of initialization of any parameter will depend on the
selected trainingparadigm. To determine the initial values of
kernel vectors, many methods have beensuggested, among them the
most popular are:
1. the :rst samples of the training set,2. some randomly chosen
samples from the training set,
-
44 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
3. subclass centers obtained by some clustering or classi:cation
method, e.g. k-meansalgorithm or LVQ algorithm.
Theodoridis [16] has reviewed some other methods and cited some
related reviewpapers.Wasserman [20] presents a heuristic which can
be useful in determining the method
of calculating initial values of spread parameters:
Heuristic: The object is to cover the input space with receptive
:elds as uniformlyas possible. If the spacing between centers are
not uniform, it may be necessary foreach subclass to have its own
value of . For subclasses that are widely separatedfrom others,
must be large enough to cover the gap, whereas for subclasses
thatare close to others, must have a small value.
Depending on the dataset, training paradigm, and according to
the heuristic, one of thefollowing methods can be adopted:
1. Assigning a small :xed value, say, = 0:05 or 0.1, which
requires a large numberof hidden neurons to cover the input
space.
2. = d=2l2, where d is the maximum distance between the chosen
centers, and l2
is the number of centers.3. In the case of using the k-means
algorithm to :nd the kernel vectors, m could be
the standard deviation of the vectors in the pertaining
subclass.
To assign initial values to the weights in the output layer,
there are two methods:
1. Some random values in the range [ 0:1;+0:1]. This method
necessitates weightadjustment through an iterative process (the
backpropagation algorithm).
2. Using the pseudo-inverse matrix to solve the following matrix
equation:
YU = Z; Y =
y1
...
yQ
; Z=
z1
...
zQ
;
yq Rl2 ;zq Rl3 ;
(4)
where y1; : : : ; yQ and z1; : : : ; zQ are the row vectors
obtained from the hidden and outputlayers, respectively, in
response to the x1; : : : ; xQ row vectors in the input layer,
andthe equation YU = Z is made as follows: for each input vector in
the training set xq,the outputs from the hidden layer are made a
row in the matrix Y, target outputs areplaced in corresponding rows
of target matrix Z and each set of weights associatedwith an output
neuron is made a column of matrix U.Considering that in large scale
problems, the dimension of Y is high and (YTY)1
is ill-conditioned, despite super:cial appeal of the
pseudo-inverse matrix method, the:rst iterative method is the only
applicable one.
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 45
3. Training algorithms
In this section, we will present two training algorithms for the
RBF network. Firstthe basic backpropagation (BB) algorithm is
reviewed, and then the modi:ed algorithmis presented.
3.1. Basic backpropagation for the RBF network
Here we will consider the algorithm for the full-training
paradigm; customizing itfor half-training is straightforward and
can be done simply by eliminating gradientcalculations and
weight-updating corresponding to the appropriate parameters.
Algorithm.
(1) Initialize network.(2) Forward pass: Insert the input and
the desired output, compute the network outputs
by proceeding forward through the network, layer by layer.(3)
Backward pass: Calculate the error gradients versus the parameters,
layer by layer,
starting from the output layer and proceeding backwards:
@E=@umj, @E=@vim, @E=@2m(see Appendix A).
(4) Update parameters:
umj(n+ 1) = umj(n) 3 @E@umj ; (5)
vim(n+ 1) = vim(n) 2 @E@vim ; (6)
2m(n+ 1) = 2m(n) 1
@E@2m
; (7)
where 1; 2; 3 are learning rate factors in the range [0; 1].(5)
Repeat the algorithm for all training inputs. If one epoch of
training is :nished,
repeat the training for another epoch.
Remarks. (1) Based on our experience, the addition of the
momentum termas it iscommon for the MLPdoes not help in training of
the RBF network.(2) If the sigmoidal activity function is used for
output cells, adding sigmoid prime
oEset 1 [8] will improve training substantially, similar to the
MLP.(3) Stopping should be decided based on the results of the
network test, which
is carried out every T epochs after cost function becomes
smaller than a thresholdvalue C.
1 As the output of the neurons approaches extreme values (0 or
1) there will be just a little learning orno learning. A solution
to this problem is adding a small oEset ( 0:1) to the derivative
@zj=@sj in Eq.(A.9), which is called the sigmoid prime o=set, thus
@zj=@sj never reaches zero. Based on our experience,adding such a
term is helpful only in calculation of (A.11), but not in
calculation of (A.26) or (A.30).
-
46 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
(4) To get better generalization performance, using the cross
validation [9] methodhas been reported in some cases as a stopping
criterion; this, howeveras was men-tioned in the introductionis
unsatisfactory and unconvincing, because it stops trainingon both
learned and unlearned inputs.(5) The number of output cells depends
on the number of classes and the approach
of coding, however, it is highly recommended to make it equal to
the number ofclasses.(6) Sometimes, in the net input of the sigmoid
function or the linear output a constant
term is also considered (called threshold term), which is
implemented using a constantinput (equal to 1). In some cases this
term triggers the moving target phenomenonand hinders training, and
in some other cases without it there is no solution. Therefore,it
must be examined for every case, separately.(7) In the rest of this
paper our purpose from BB is the backpropagation algorithm
with sigmoid prime oEset as explained in footnote 1, without the
momentum term.
3.2. Backpropagation with selective training
The diEerence between the BST algorithm and the BB algorithm
lies in the selectivetraining, which is appended to the BB
algorithm. When most of the vector associationshave been learned,
every input vector should be checked individually, and if it
islearned there should be no training on that input, otherwise
training will be carriedout. In doing so, a side eEect will arise:
the stability problem. That is to say, whenwe continue training on
only some inputs, the network usually forgets the other inputoutput
associations which were already learned, and in the next epoch of
training it willmake wrong predictions for some of the inputs that
were already classi:ed correctly.The solution to this side eEect
consists of considering a stability margin for thede:nition of the
correct classi:cation in the training step. In this way we also
carryout training on marginally learned inputs, which are on the
verge of being misclassi:ed.Selective training has its own
limitations, and cannot be used on conOicting data,
or on a dataset with large overlapping areas of classes. Based
on the obtained results,using the BST algorithm on an error free
OCR dataset has the following advantages:
prevents from overtraining, de-emphasizes the overtrained
patterns, enables the network to learn the last percent of
unlearned associations in a shortperiod of time.
BST algorithm.
(1) Start training with BB algorithm, which includes two steps:
forward propagation, backward propagation.
(2) When the network has learned most of the vector mappings and
the training pro-cedure has slowed down, i.e. TSSE becomes smaller
than a threshold value C,stop the main algorithm and continue with
selective training.
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 47
(3) For any pattern perform forward propagation and examine the
prediction of thenetwork:
zJ =maxJ(zj) j = 1; : : : ; l3;
if (zJ zj + ) j = J J is the predicted class;if (zJ zj + ) j = J
no-prediction;
(8)
where is a small positive constant, and is called the stability
margin.(4) If the network makes a correct prediction, do nothing,
go back to step 3 and repeat
the algorithm for the next input, else, network does not make a
correct prediction(including no-prediction case), carry out the
backward propagation.
(5) If the epoch is not complete, go to step 3, else check the
total number of wrongpredictions: if its trend is decreasing, go to
step 3 and continue the training oth-erwise stop training.
(6) Examine network performance on the test set:do only forward
propagation, and then:for any input: zJ =max
J(zj) j = 1; : : : ; l3 J is the predicted class.
Remarks. (1) An alternative condition for starting the selective
training is as follows:after TSSE becomes smaller than a threshold
value C, every T epochs carry out arecognition test on the training
set, and if it ful:lls a second threshold condition, thatis
(recognition error C1), start selective training. The recommended
value for T is36T 6 5.(2) If is chosen large, training will be
continued for most of the learned inputs,
and this will make our method ineEective. On the other hand, if
is chosen too small,during training we will face a stability
problem, i.e. with a small change in the weightsvalueswhich happens
in every epocha considerable number of associations will
beforgotten, thus the network will oscillate and training will not
proceed. After training,by a small change in the feature vector
that causes a small change in output values, theprediction of the
network will change, or for feature vectors from the same class
butwith minor diEerences, we will have diEerent predictions. This
also causes vulnerabilityto noise and weak performance on both the
test set and on the real world data out ofboth the training set and
the test set. The optimum value of should be small enoughto prevent
training on learned inputs, but not so small as to give way to
changing thewinner neuron with minor changes in weights values or
input values. Our simulationresults show that for the RBF network a
value in the range [0:1; 0:2] is the optimumfor our datasets.(3) It
is also possible to consider a no-prediction state in the :nal
test, that is
zJ =maxJ
(zj) j = 1; : : : ; l3;
if (zJ zj + 1) j = J J is the predicted class;if (zJ zj + 1) j =
J no-prediction
(9)
-
48 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
in which 0 1 . This no-prediction state will decrease the error
rate at the costof decreasing the correct prediction rate.
4. Experiments
In this section, :rst we give some explanation about datasets,
on which simulationshave been carried out. Then simulation results
are presented.
4.1. Datasets
A total of 18 datasets composed of feature vectors of 32
isolated characters of theFarsi alphabet, sorted in three groups,
were created through various feature extractionmethods, including:
principal component analysis (PCA), vertical, horizontal and
di-agonal projections, zoning, pixel change coding and some
combinations of them, withthe number of features varying from 4 to
78 per character according to Table 1.For creating these datasets,
34 Farsi fontswhich are used in publishing online
newspapers and web siteswere downloaded from the Internet. Fig.
2 demonstrates awhole set of isolated characters of one sample font
printed as text. Then, 32 isolatedcharacters of these 34 Farsi
fonts were printed in an image :le; 11 sets of thesefonts were
boldface and one set was italic. In the next step, by printing the
image:le and scanning it with various brightness and contrast
levels, two additional image:les were obtained. Then, using a 65 65
pixel size window, the character imageswere separated into images
of isolated characters. After applying a shift-radius invariant
Table 1Brief information about Farsi OCR datasets
Database Extraction method Explanation No. of featuresper
character
Group A db1 PCA 72db2 PCA 54db3 PCA 72db4 PCA 64db5 PCA 48
Group B dbn1 to dbn5 PCA Normalized versions of db1 to db5Group
C db6 Zoning 4
db7 Pixel change coding 48db8 Projection Horizontal and vertical
48db9 Projection Diagonal 30db10 Projection db8+db9 78db11 db6+db7
52db12 db6+db8 52db13 db6+db7+parts of db8 72
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 49
Fig. 2. A sample set of machine-printed Farsi characters
(isolated case).
image normalization [18], and by reducing the sizes of character
images to 24 24pixel, the features vectors were extracted as
explained in Appendix B.
4.2. Simulation results
In all of the simulations, two-thirds of the feature vectors,
obtained from the originalimage and the :rst scanned image, were
assigned for the training set, and one-thirdof feature vectors
obtained from the second scanned image were assigned for the
testset. Therefore, 68 samples per character were used for training
and 34 samples percharacter for testing. Thus, the total number of
samples in the training sets and testsets are 2176 and 1088,
respectively.We considered three types of activity functions for
the output layer: linear,
pseudo-linear, and sigmoid. And we faced numerous problems with
both linear andpseudo-linear activity functions. These problems are
explained later (in current sectionsee Considerations, item 2).
Hence in the sequel we present only the simulation resultsobtained
by the sigmoidal output neurons.In Table 2 the results obtained on
datasets of groups AC, by the BST and the BB
algorithms have been compared against each other.
4.2.1. Settings and initializationsIn all the cases, we
considered one prototype pattern per class, i.e. 32 prototype
vectors, and 32 output cells for the output layer. Thus, the
network con:guration isl13232, where l1 is the dimension of the
input vector which is equal to the numberof features per character
(see Table 1). Adding the threshold term to the sigmoidactivity
functions triggered the moving target phenomenon, so we eliminated
it. Alsowe did not add momentum term, because it did not help to
improve training. However,adding the sigmoid prime oEset boosted
the performance of network substantially.Two training paradigms
were examined, i.e. half- and full-training. In Table 2, we
have presented only the results obtained by the full-training
paradigm; the consequencesof adopting the half-training paradigm
will be discussed at the end.For initializing kernel vectors, two
methods were adopted: the :rst samples, and the
cluster centers obtained by k-means algorithm. Considering that
k was set equal to one,these centers are simply the average of
training samples of every class. For initializing
-
50M.-T.Vakil-B
aghmisheh,
N.Pave +si ,c/N
eurocomputing
62(2004)
3964
Table 2Comparing the recognition errors of the RBF network
obtained by the BB and the BST algorithms
Database BB BST Parameters
Epoch Error Epochs Error First phase Second phase Threshold
2
N Train Test n; N Train Test 3, 2, 1 3, 2, 1
db1 100 11 25 64, 104 0 17 5; 0.04; 0.001 1.7; 0.013; 0.0003 60
6db2 100 22 32 57, 90 4 22 5; 0.04; 0.001 1.7; 0.013; 0.0003 110
5
100, 140 2 19 5; 0.04; 0.001 1.7; 0.013; 0.0003 5db3 100 11 7
51, 90 0 0 5; 0.04; 0.001 1.7; 0.013; 0.0003 80 6db4 100 9 6 39, 55
0 0 8; 0.04; 0.001 2.7; 0.013; 0.0003 60 7db5 100 14 6 58, 95 0 0
5; 0.04; 0.001 1.7; 0.013; 0.0003 80 6db7 100 63 31 65, 105 3 1
1.4; 0.001; 5e-6 0.5; 0.00033; 1.7e-6 220 0.05
100, 140 2 0 1.4; 0.001; 5e-6 .5; 0.00033; 1.7e-6 0.05db8 100 83
40 77, 115 14 7 3; 0.001; 5e-6 1; 0.00033; 1.7e-6 220 0.2db10 100
20 10 68, 108 2 1 6; 0.001; 5e-6 2; 0.0003; 1.7e-6 120 0.2
100, 140 1 0 6; 0.001; 5e-6 2; 0.0003; 1.7e-6 0.2db11 100 49 28
48, 65 0 0 3; 0.001; 5e-6 1; 0.0003; 1.7e-6 170 0.05db12 100 68 32
77, 117 5 1 5; 0.001; 5e-6 1.7; 0.0003; 1.7e-6 200 0.15
100, 140 5 1 5; 0.001; 5e-6 1.7; 0.0003; 1.7e-6 0.15db13 100 4 2
49, 60 0 0 5; 0.001; 5e-6 2; 0.0003; 1.7e-6 80 0.15dbn1 100 12 18
71, 113 0 16 5; 0.001; 5e-6 1.7; 0.0003; 1.7e-6 50 0.5
100, 120 0 13 5; 0.001; 5e-6 1.7; 0.0003; 1.7e-6 0.5dbn2 100 1
27 64, 100 4 20 4; 0.001; 5e-6 1.3; 0.0003; 1e-6 100 0.4
100, 140 0 15 4; 0.001; 5e-6 1.3; 0.0003; 1e-6 0 0.4dbn3 100 8 5
53, 93 0 0 5; 0.001; 5e-6 1.7; 0.0003; 1e-6 60 0.5
100, 130 0 0 5; 0.001; 5e-6 1.7; 0.0003; 1e-6 0.5dbn4 100 3 1
45, 75 0 0 4; 0.001; 5e-6 1.3; 0.0003; 1e-6 70 0.6dbn5 100 17 9 65,
100 0 0 4; 0.001; 5e-6 1.3; 0.0003; 1e-6 80 0.6
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 51
spread parameters two policies were adopted:
(1) A :xed number slightly larger than the minimum of standard
deviations of allclusters created by k-means algorithm, de:ned as
in Eq. (10):
2 = mini(2i ); (10)
where 2i is the variance of the training patterns of the ith
cluster, de:ned by
2i =168
xqcluster i
(xq mi)2; for i = 1; : : : ; 32 (11)
and mi is the average vector of the ith cluster.(2) DiEerent
initial values equal to the variances of every cluster obtained by
the
k-means algorithm.
Total sum-squared error (TSSE) was considered as the cost
function, and randomnumbers in the range [ 0:1;+0:1] were assigned
to the initial weight matrix of theoutput layer. The results
presented in Table 2 were obtained while the initial
spreadparameters were equal, and the initial kernel vectors were
set equal to cluster centersof the k-means algorithm. For the BST
algorithm, the stability margin was set equalto 0:2. This value was
obtained based on the empirical results.
4.2.2. Training algorithms(1) BB algorithm: The network was
trained for 100 epochs with the BB algorithm.
The obtained results are given under column BB.(2) BST
algorithm: A threshold value for TSSE was chosen, after which the
training
procedure slows down. This threshold value was acquired from the
:rst trainingexperiment through the BB algorithm. Training was
restarted by the BB algorithmfrom the same initial point of the
:rst experiment; when TSSE reached to thethreshold value, we
changed the training algorithm from unselective to selectiveand
continued for a maximum of 40 epochs, with the values of learning
parameters,i.e. 3 2 and 1, decreased almost three times. Every :ve
epochs the network wastested; if the recognition error on the
training set was zero, training was stopped.Also training was
stopped if either dynamic recognition error 2 reached zero orif 40
epochs of training were over. The obtained results are given under
columnBST. In this column n and N represent the epoch numbers where
selective trainingstarts and ends.
(3) BST algorithm: We did not set any threshold; training was
carried out for 100epochs on datasets dbn1, db2, dbn2, dbn3, db7,
db10 and db12 with the BB
2 Dynamic recognition error is obtained while the network is
under training, and after presenting anypattern, the network
parameters probably will change. Therefore, it is diEerent to the
recognition error whichis obtained after training. Generally, in
selective training, the dynamic recognition error on the training
setwill be larger than the recognition error, therefore we could
stop training earlier by performing a test on thetraining set after
every few epochs of training, but this will violate the stability
condition. Although, in ourcase study, this does not cause any
problem, it can increase recognition error in real on-line
operation.
-
52 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
algorithm, then followed with selective training for maximum of
40 epochs. Theobtained results are given under column BST, where
the threshold value has notbeen speci:ed, or where n is equal to
100.
4.2.3. Analysis(1) Results obtained by the BB algorithm: The
recognition errors on datasets dbn4,
db13, dbn3, db4, db3 and db5 are lower than those on others, and
db12, db8 and db7must be considered the worst ones. Data
normalization has improved the recognitionrate in all cases,
excluding dbn5. We notice that the performances on test sets ofdb1
and db2 are weaker than that on training sets of these datasets,
and this mustbe attributed to the inappropriate implementation of
the feature extraction method.The learning rates of kernel vectors
and spread parameters, i.e. 2 and 1 are muchsmaller for datasets of
groups B and C than those for the datasets of group A, butthe value
of 3 (the learning rate for weight matrix of the output layer),
does notchange substantially for datasets from diEerent groups. The
initial spread parametersfor datasets of group A are much larger
than for the datasets of groups B and C.(2) The results obtained by
the BST algorithm: The :rst eminent point is the
decreased recognition errors on all datasets. The BST algorithm
has achieved muchbetter results in shorter time; especially on db3,
db4, dn5, dbn3, dbn4, dbn5, db11,and db13 the recognition error has
reached zero. For evaluating and ranking thesedatasets we have two
other measures: convergence speed and the number of
features.Regarding convergence speed, the best datasets will be:
db4, db13, db11, dbn4, db3,dbn3, db5, dbn5, although in some cases
the diEerences are too slight to be meaningful;db3, dbn3 and db13
should be ruled out because of high dimension of their
featurevectors. In addition, training does not bene:t from data
normalization. Also the BSTalgorithm solves the overtraining
problem. We notice that it has decreased the errorrate on the
training set but not at the cost of increased error on the test
set. And thisis even more obvious from the results obtained on db1
and db2. In addition, this canbe veri:ed from the results
demonstrated in Table 3.(3) In Table 3 we have compared the
recognition errors at the epochs n and N , i.e.
at the beginning and the end of the selective training obtained
by the BST algorithm,against recognition error at the same epochs
obtained by the BB algorithm, on fourdatasets. It shows that after
TSSE reaches to the threshold value, if we continue trainingwith
basic backpropagation the recognition error either decreases very
trivially or evenincreases (e.g. on test set of db4 and db11). Some
researchers use the cross validationtechnique to :nd this point and
stop training at it, but we are opposing applying thecross
validation method on neural networks training.(4) Table 4 shows the
results of another experiment performed on db4 with diEerent
network settings. Threshold value was set equal to 100,
stability margin equal to 0.1,and learning rate parameters divided
only by two for the second phase of training, andthe initial weight
matrix was changed. While by epoch number 22 the error rates onboth
training set and test set are equal, i.e. 26 and 14, respectively,
the BST algorithmhas reached zero error on both sets in 23 epochs
of selective training, and the error ratesof the BB algorithm after
100 epochs of unselective training are 6 and 3, respectively,on
training set and test set.
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 53
Table 3Comparing the recognition errors of the BB and the BST
algorithms in two points of training
Database BB BST
Epoch Error Epoch Error
Train Test Train Test
db1 65 20 29 65 20 29104 11 25 104 0 17
db4 40 9 4 40 9 4100 9 6 55 0 0
db8 78 89 41 78 89 41115 83 40 115 14 7
db11 48 50 26 48 50 26100 49 28 65 0 0
Table 4Comparing the recognition errors of the RBF network on
db4 obtained by the BB and the BST algorithms
BB BST
Epoch Error Epoch Error
n Train Test n; N Train Test
22 26 14 22, 45 0 0100 6 3 100, 120 0 0
(5) The reader should recall that in the selective training
mode, the calculationfor weight updating (or backpropagating)which
is the most time-consuming step oftrainingis carried out only for
misclassi:ed patterns, whose number at the beginningof selective
training is less than 89, or 5% of all training samples (see Tables
2 and 3);thus one epoch of selective training is at least :ve times
faster than that of unselectivetraining, and by decreasing
misclassi:ed patterns through time it becomes faster andfaster.
Therefore the BST algorithm is at least three times faster than the
BB algorithm.(6) Fig. 3 demonstrates TSSE versus the epoch number,
obtained on db4, corre-
sponding with the experiment of Table 4. By changing the
training algorithm we facea sudden descent in TSSE, and this must
be attributed to the sharp decrease of learningrate factors. Our
explanation for this phenomenon is as follows:After approaching the
minimum well, by using large values of learning rate and
momentum factor we step over the well. But by decreasing the
step size we put ourleg in the middle of the minimum well and face
a fall to the bottom. This phenomenoninspired us to devise the
BDLRF [17] and BPLRF [19] algorithms. BDLRF and BPLRF
-
54 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
BB
BST
100 20 40 60 80 100 120
100
1000
Epoch number
TSS
E
Fig. 3. Convergence diagrams of the RBF network obtained by the
BB and the BST algorithms on db4,corresponding to Table 4.
are acronyms for backpropagation with declining leaning rate
factor and backprop-agation with plummeting leaning rate factor,
respectively. In [17,19] we have shownhow to speed up training and
improve the recognition rate in MLP by decreasing thelearning rate
factor. Also we have shown that by larger decrease in the values
oftraining factors can result in larger decrease in cost function,
and better recognitionrate.(7) In addition, we notice that by
training in the second phase while the recognition
error decreases, TSSE increases, which substantiates our
statement that our methoddoes not overtrain the network on learned
patterns. On the contrary, if the network hasbeen overtrained on
some patterns in the :rst phase, by increasing TSSE and
decreasingrecognition error it is de-emphasizing on already
overtrained patterns. In other words,decreased recognition error on
unlearned patterns must be a resultant of decreased SSE(sum-squared
error) resulting from the same patterns. Thus, for an increase of
TSSE,simultaneous with decrease of recognition error, there has to
be an increase in the SSEresulting from already learned patterns
without crossing the stability margin, and thismeans de-emphasizing
on overtrained patterns. Therefore, our method decreases theerror
on the training set, but not at the cost of overtraining and
increased error on thetest set.
4.2.4. Considerations(1) By starting from a diEerent initial
point, the number of training epochs will
change slightly, but not so much as to aEect the general
conclusions.(2) As already mentioned, we considered three types of
activity functions for
the output layer: sigmoid, linear, and pseudo-linear. And we
faced numerous problems
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 55
with both linear and pseudo-linear activity functions, as
explained in thefollowing:
Slow learning: they do not allow for using large learning rate
factors. In the caseof using a large learning rate, the network
will oscillate and will not converge tominimum.
High sensitivity to parameters values and wide range in which
the optimal parametersvalues lie for diEerent datasets. The optimal
values change enormously for diEerentdatasets (up to 4 orders of
magnitude), which makes the parameter tuning procedurean exhausting
task.
Contrary to their super:cial simplicity, they need far more
computations per iteration(refer to the appendix for their
formulations). Thus, they are slower than the sigmoidoutput from
this aspect as well.
Their recognition errors are higher than that of the sigmoidal
activity function. The afore-said problems worsen on the datasets
of groups B and C. The pseudo-linear activity function has better
performance than the linear one,in terms of convergence speed,
recognition rate, and sensitivity to learningparameters.
Therefore, output cells with a sigmoid activity function are
preferred over other ac-tivity functions, due to resulting in less
sensitivity to learning parameters, faster con-vergence, and lower
recognition error. Although applying the BST algorithm on theRBF
network with linear and pseudo-linear outputs does improve their
performances,they do not surpass the RBF network with sigmoid
output trained with the BSTalgorithm.(3) We tried three training
paradigms:
Half training: Only the weight matrix of the output layer was
under training Half training: The weight matrix of the output layer
and kernel vectors were undertraining.
Full training: The weight matrix of the output layer, kernel
vectors and spreadparameters were under training.
If the half-training paradigm is chosenconsidering that the
kernel vectors will not bein the optimal positions and the spread
parameters will not have the optimum valueswe have to increase the
number of kernel vectors, otherwise recognition error willincrease.
In the case of increasing the number of kernel vectors, both
training andon-line operation will slow down drastically. On the
other hand, if the full-trainingparadigm is chosen the number of
learning parameters increases to three, that is 32 and 1, adjusting
which is an exhausting task. All in all, the full-training
paradigmseems to be the most bene:cial method.(4) We adopted two
policies for initializing kernel vectors:
the :rst samples, the prototype vectors resulting from the
k-means algorithm.
-
56 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
Table 5Comparing performance of the RBF network with diEerent
initialization policies
BB BST Initial values
Epoch Error Epochs Error Kernel vectors 2
n Train Test n; N Train Test
22 26 14 22, 45 0 0 First samples 7100 6 3 100, 120 0 021 25 14
21, 45 0 0 k-Means cluster Centers 7100 9 6 100, 110 0 027 31 16
27, 45 0 0 First samples From k-means100 24 14 100, 104 0 038 27 13
38, 78 0 0 k-Means cluster From k-means100 19 9 100, 110 0 0
Centers
Although the last method of initialization does yield faster
convergence, neverthelessthe diEerence between these two types of
initialization becomes trivial when the numberof kernel vectors
grows smaller. More precisely, when the number of kernel vectorsis
kept small, using the second initialization method speeds up
convergence only atthe very beginning, but in the middle and at the
end of training convergence slowsdown, and the global convergence
is not better than that obtained by the :rst method(see Table 5).
Notwithstanding, before training the RBF network, we need to run
thek-means algorithm to get initial values for the spread
parameters, and using the createdcluster centers can be done in no
time.(5) A major drawback of the RBF network lies in its size, and
therefore its speed.
Unlike the MLP, in the RBF networks we cannot increase the size
of network incre-mentally. For instance, in our case study the
network size was l1 32 32; if wehad decided to enlarge the network,
the next size would have been l1 64 32, andthis means that the
network size would be doubled. Considering that speed will
de-crease by an order larger than one, the improved performance
would cost a substantialslow-down both in training and on-line
operation, which would make the RBF networkunable to compete with
other networks, and therefore be practically useless.
Conse-quently, usage of the RBF network is not recommended if the
number of pattern classesis high.(6) The best policy for initial
values of spread parameters is to set equal initial values
for all of them, but to change them through training.
Considering kernel vectors, themost important aspect is adjusting
them during training. In this case, selecting the :rstsamples or
the prototype vectors derived from the k-means algorithm yield
similarresults (see Table 5).(7) The data normalization method
oEered by Wasserman was tried [20, p. 161].
Wasserman oEers, for each component of the input training
vectors:
1. Find the standard deviation over the training set.
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 57
2. Divide the corresponding component of each training vector by
this standard devi-ation.
Considering that some components of feature vectors are equal
for all patterns ex-cept for some from speci:c classes, the
standard deviations of these components arevery small and by
dividing these components to their standard deviations, their
valuesextremely increase, and this attenuates the impact of other
components in the normof the diEerence vector xq vm, almost to
zero. The mere impact of Wassermansnormalization method was
destabilizing the whole system.(8) Decreasing the learning
parameters during selective training, stabilizes the net-
work and speeds up training by preventing repeated overtraining
and unlearning onsome patterns.
5. Conclusions
(1) In this paper we presented the BST algorithm, and showed
that on the givendatasets, the BST algorithm improves the
performance of RBF networks substan-tially, in terms of convergence
speed and recognition error. The BST algorithmachieves much better
results in shorter time. It solves three drawbacks of the
back-propagation algorithm: overtraining, slow convergence at the
end of training, andinability to learn the last few percent of
patterns. In addition, it has the advan-tages of shortening
training time (up to three times) and partially
de-emphasizingovertrained patterns.
(2) As there is no universally eEective method, the BST
algorithm is not an excep-tion and has its own shortcoming. Since
the contradictory data or the overlappingpart of the data cannot be
learned, applying the selective training on data with alarge
overlapping area will destabilize the system. But it is quite
eEective whendataset is error-free and non-overlapping, as it is
the case with every error-freecharacter-recognition database, when
enough number of proper features are ex-tracted.
(3) The best training paradigm is full training, because it
utilizes all the capacity ofthe network. Using the sigmoidal
activity function for the neurons of the outputlayer is
recommended, because it results in less sensitivity to learning
parameters,faster convergence and lower recognition error.
Acknowledgements
This work has been partially supported within the framework of
the SlovenianIranian Bilateral Scienti:c Cooperation Treaty. The
authors would like to thank theanonymous reviewers for their
valuable comments and suggestions which helped toimprove the
quality of the paper. We would like to thank Alan McConnell DuE
forlinguistic revision.
-
58 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
Appendix A. Error gradients of RBF network
Let the network have the con:guration as depicted in Fig. 1,
and
x input vector (=[x1; x2; : : : ; xl1 ]T)
l1 dimension of the input vectorl2 number of neurons in hidden
layervm prototype vector corresponding to the mth hidden cell
(=[v1m; v2m; : : : ; vl1m]
T)V matrix of prototype vectors (=[v1; v2; : : : ; vl2 ])ym
output of mth hidden celll3 dimension of the output vectoruj weight
vector of the jth output cell (=[u1j; u2j; : : : ; ul2j]
T)U weight matrix of output layer (=[u1; u2; : : : ; ul3 ])zj
actual output of the jth output celltj desired output of the jth
output cellQ number of training patterns
Let TSSE be the cost function de:ned as
TSSE =
q
Eq; Eq =
k
(tqk zqk )2 (q = 1; : : : ; Q) (A.1)
and let E be the simpli:ed notation for Eq
E =
j
(tj zj)2: (A.2)
We will calculate error gradients for pattern mode training.
Obtaining error gradientsfor batch mode training is
straightforward, as explained in the remark at the end ofthis
appendix.We will consider three types of activity functions for
output cells
zj =
11 + eSj
; sigmoid;
sjl2
; linear; with1l2
squashing function;
sjm ym
; pseudo-linear; with1m ym
squashing function;
(A.3)
where
sj =
m
ymumj (A.4)
and
ym = exp(
x vm2
22m
): (A.5)
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 59
A.1. Part 1Error gradients versus weights of output layer
By using the chain rule for derivatives we get
@E@umj
=
I@E@zj
II@zj@sj
III@sj@umj
(A.6)
and we will calculate all three terms in three cases.Computing
(I): The :rst term is the same for all three cases, i.e.
I =@E@zj
=2 (tj zj) for cases (13): (A.7)
Computing (II):
II =@zj@sj
=
1l2
for case (1);
1m ym
for case (2)(A.8)
and for the third case (sigmoid output) we have
II =@zj@sj
=esj
(1 + esj)2=
1 + esj 1(1 + esj)2
= zj z2j = zj(1 zj): (A.9)
Computing (III): The third term is identical for all cases
III =@sj@umj
= ym: (A.10)
By putting all partial results together we obtain
@E@umj
=
2(tj zj) yml2 ; case(1);
2(tj zj) ymm ym
; case(2);
2(tj zj) zj (1 zj)ym; case(3):
(A.11)
A.2. Part 2Error gradients versus components of prototype
vectors
We have
@E@vim
=
j
I@E@zj
II@zj@ym
III@ym@vim
: (A.12)
Computing (I): For all three cases we have
I =@E@zj
=2(tj zj): (A.13)
-
60 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
Computing (II): For case (1)
zj =sjl2
II = @zj@ym
=umjl2
: (A.14)
For case (2)
zj =sjm ym
=
m ymumjm ym
(A.15)
since m is dummy variable we can change it to k
zj =sjk yk
=
k ykukjk yk
; (A.16)
II =@zj@ym
=umj
k yk
k ykukj
(
k yk)2 =
umj
k yk sj(
k yk)2 : (A.17)
For case (3)
!zj!ym
=
IV!zj!sj
V!sj!ym
; (A.18)
considering
zj =1
1 + esj; (A.19)
and
sj =
m
umjym; (A.20)
we have
IV = zj (1 zj); (A.21)and
V = umj: (A.22)
Then by putting the partial derivatives together we obtain
II =@zj@ym
= zj (1 zj)umj: (A.23)
Computing (III): For all three cases we have
ym = exp(
x vm2
22m
)= exp
( (x vm)
2
22m
)(A.24)
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 61
then
III =@ym@vim
= ym
(xim vim
2m
): (A.25)
By putting the partial results together we have
@E@"im
=
J
2(tj zj) umjl2ym2m
(xim "im); case (1);
J
2(tj zj) umj
k yk sj(
k yk)2
ym2m
(xim "im); case (2);
j
2(tj zj)zj(1 zj)umj ym2m(xim "im); case (3):
(A.26)
A.3. Part 3Error gradients versus spread parameters
We have
@E@2m
=
j
I@E@zj
II@zj@ym
III@ym@2m
; (A.27)
terms I and II are exactly as in part 2, therefore we only need
to calculate the thirdterm, which will have an identical
formulation in all three cases
ym = exp(
x vm2
22m
)(A.28)
and
III =@ym@2m
= ymx vm2
24m(A.29)
by putting the partial results together we obtain
@E@2m
=
j
2(tj zj) umjl2 ym(x vm2
24m
); case(1);
j
2(tj zj) umj
k yk sj(
k yk)2 ym
(x vm224m
); case(2);
j
2(tj zj)zj(1 zj)umjym(x vm2
24m
); case(3):
(A.30)
Remark. All the above formulas have been calculated for pattern
mode training. Forbatch mode training, only the term
Qq=1 should be added in front of Eqs. (A.11),
(A.26) and (A.30), i.e. all partial results should be summed up.
Our experience showsthat batch mode training is much slower than
pattern mode training, in addition to itsimplementation intricacy
and high memory demand.
-
62 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
Appendix B. Feature extraction methods
B.1. Group Adb1db5
These datasets were created by extracting the principal
components, extracted bya single layer feedforward linear neural
network with generalized Hebbian TrainingAlgorithm (GHA) [9,7], as
summarized in the following:For extracting principal components, we
used m l single layer feedforward linear
network with Generalized Hebbian Training Algorithm (GHA).
db1: To train the network: 88 non-overlapping blocks of the
image of every characterwere considered as an input vector. The
image was scanned from top left tobottom right and l was set equal
to 8. Therefore for every character 72 featureswere extracted. The
training was performed with 34 samples per character andthe
learning rate was set to = 7 103. To give enough time for the
networkto learn the statistics of data, training procedure was
repeated for three epochs.
db2: The same as db1, but l was set equal to 6, thus for any
character 54 featureswere extracted.
db3: The image matrix of any character was converted into a
vector, by scanningvertically from top left to bottom right, then
this vector was partitioned into 9vectors which were inserted into
the network as 9 input vectors. In this way, 72features were
extracted for every character.
db4: Similar to db1, but the dimension of the input blocks was
considered to be 243,i.e. every three rows were considered as one
input vector. In this way, for anycharacter 64 features were
extracted.
db5: Similar to db4, but l was set equal to 6, thus for any
character 48 features wereextracted.
B.2. Group Bdbn1dbn5
These datasets are normalized versions of db1db5. After creating
any dataset, thefeature vectors were normalized by mapping the ith
component of all the vectors intothe interval [0; 1].
B.3. Group Cdb6db13
db6: This dataset was created by the zoning method. Each
character image was di-vided into four overlapping squares and the
percentage of black pixels in eachsquare was obtained. The size of
overlap was set to two pixels in each edge,which yields the best
recognition rate. The best recognition rate on this datasetdoes not
exceed 53%, so its features were used only in combination with
otherfeatures.
db7: Pixel change coding was used to extract the feature vectors
of this dataset.db8: The feature vectors of this dataset were
extracted by vertical and horizontal
projections.
-
M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62 (2004)
3964 63
db9: The feature vectors of this dataset were extracted by
diagonal projection. Tencomponents from the beginning and seven
components from the end were deleted,because their values were zero
for all characters. The best recognition rate onthis dataset does
not reach 85%, so its features were used only in combinationwith
other features.
db10: By concatenating the feature vectors of db8 and db9,
feature vectors of thisdataset were extracted.
db11: The feature vectors of this dataset were created by
concatenating the featurevectors of db6 and db7.
db12: The feature vectors of this dataset were created by
concatenating the featurevectors of db6 and db8.
db13: The feature vectors of this dataset were created by
concatenating the featurevectors of db11 and some selected features
from db8, that is 10 features fromthe middle of both vertical and
horizontal projections.
References
[1] M.A. Aizerman, E.M. Braverman, I.E. Rozonoer, Theoretical
foundations of the potential functionmethod in pattern recognition
learning, Automat. Remote Control 25 (1964) 821837.
[2] S. Amari, N. Murata, K.R. Muller, M. Finke, H.H. Yang,
Asymptotic statistical theory of overtrainingand cross-validatio,
IEEE Trans. Neural Networks 8 (5) (1997) 985996.
[3] T. Andersen, T. Martinez, Cross validation and MLP
architecture selection, Proceedings of InternationalJoint
Conference on Neural Networks, IJCNN99, Cat. No. 99CH36339, Vol. 3
(part 3), 1999,pp. 16141619.
[4] O.A. Bashkirov, E.M. Braverman, I.B. Muchnik, Potential
function algorithms networks for patternrecognition learning
machines, Automat. Remote Control 25 (1964) 629631.
[5] D.S. Broomhead, D. Lowe, Multivariable functional
interpolation and adaptive networks, ComplexSystems 2 (1988)
321355.
[6] T.M. Cover, Geometrical and statistical properties of
systems of linear inequalities with application inpattern
recognition, IEEE Trans. Electron. Comput. EC-14 (1965) 326334.
[7] K.I. Diamantaras, S.Y. Kung, Principal Component Neural
Networks: Theory and Applications, Wiley,New York, 1996.
[8] S.C. Fahlman, An empirical study of learning speed in
backpropagation networks, Technical ReportCMU-CS-88-162, Carnegie
Mellon University, Pittsburgh, PA 15213, September 1988.
[9] S. Haykin, Neural Networks: A Comprehensive Foundation,
Prentice-Hall, Englewood CliEs, NJ, USA,1999.
[10] G. Jondarr, Backpropagation family album, Technical Report,
Department of Computing, MacquarieUniversity, New South Wales,
August 1996.
[11] C.G. Looney, Pattern Recognition Using Neural Networks,
Oxford University Press, New York, 1997.[12] W.S. McCulloch, W.
Pitts, A logical calculus of the ideas imminent in nervous
activity, Bull. Math.
Biophy. 5 (1943) 115133.[13] D.B. Parker, Learning logic,
Invention Report S81-64, File 1, OXce of Technology Licensing,
Stanford
University, March 1982.[14] L. Prechelt, Automatic early
stopping using cross validation: quantifying the criteria, Neural
Networks
11 (4) (1998) 761767.[15] D.E. Rumelhart, J.L. McClelland,
Parallel Distributed Processing: Exploration in the Microstructure
of
Cognition, MIT Press, Cambridge, MA, 1986.[16] S. Theodoridis,
K. Koutroumbas, Pattern Recognition, Academic Press, USA, 1999.[17]
M.T. Vakil-Baghmisheh, N. Pave*sic, Backpropagation with declining
learning rate, Proceeding of the
10th Electrotechnical and Computer Science Conference,
Portoro*z, Slovenia, Vol. B, September 2001,pp. 297300.
-
64 M.-T. Vakil-Baghmisheh, N. Pave+si,c / Neurocomputing 62
(2004) 3964
[18] M.T. Vakil-Baghmisheh, Farsi character recognition using
arti:cial neural networks, Ph.D. Thesis,Faculty of Electrical
Engineering, University of Ljubljana, Slovenia, October 2002.
[19] M.T. Vakil-Baghmisheh, N. Pave*si+c, A fast simpli:ed fuzzy
ARTMAP network, Neural Process. Lett.,2003, in press.
[20] P.D. Wasserman, Advanced Methods in Neural Computing, Van
Nostrand Reinhold, New York, 1993.[21] P.J. Werbos, Beyond
regression: new tools for prediction and analysis in the behavioral
science, Ph.D.
Thesis, Harvard University, Cambridge, MA, 1974.
Mohammad-Taghi Vakil-Baghmisheh was born in 1961 in Tabriz,
Iran. He re-ceived his B.Sc. and M.Sc. degrees in electronics, from
Tehran University in 1987and 1991. In 2002, he received his Ph.D.
degree from the University of Ljubl-jana, Slovenia, with a
dissertation on neural networks in the Faculty of
ElectricalEngineering.
Nikola Pave0si1c was born in 1946. He received his B.Sc. degree
in electronics,M.Sc. degree in automatics, and Ph.D. degree in
electrical engineering from theUniversity of Ljubljana, Slovenia,
in 1970,1973 and 1976, respectively. Since 1970he has been a staE
member at the Faculty of Electrical Engineering in Ljubljana,where
he is currently head of the Laboratory of Arti:cial Perception,
Systems andCybernetics. His research interests include pattern
recognition, neural networks,image processing, speech processing,
and information theory. He is the author andco-author of more than
100 papers and 3 books addressing several aspects of theabove
areas.Professor Nikola Pave*si+c is a member of IEEE, the Slovenian
Association ofElectrical Engineers and Technicians (Meritorious
Member), the Slovenian Pattern
Recognition Society, and the Slovenian Society for Medical and
Biological Engineers. He is also a memberof the editorial boards of
several technical journals.
Training RBF networks with selective backpropagationIntroductionRBF
networksStructureTraining paradigmsInitialization methodsTraining
algorithmsBasic backpropagation for the RBF networkBackpropagation
with selective trainingExperimentsDatasetsSimulation
resultsSettings and initializationsTraining
algorithmsAnalysisConsiderationsConclusionsAcknowledgementsAppendix
A. Error gradients of RBF networkPart 1---Error gradients versus
weights of output layerPart 2---Error gradients versus components
of prototype vectorsPart 3---Error gradients versus spread
parametersAppendix B. Feature extraction methodsGroup
A---db1--db5Group B---dbn1--dbn5Group C---db6--db13References