Embed Size (px)
Citation preview
Prof. Edmund Wittbrodt
Teoria Maszyn i Dynamika Mechanizmów II Wydział Mechaniczny, Kierunek studiów: Mechatronika, studia II stopnia (magisterskie), rok akademicki: 2010/2011 Liczba godzin: wykład – 15
ćwiczenia – 15
Wykład: prof. dr hab. inż. Edmund Wittbrodt
Ćwiczenia: dr inż. Krzysztof Lipi ński
Katedra Mechaniki i Mechatroniki p. 103 (sekretariat p. 104) WM
Prof. Edmund Wittbrodt
Charakterystyka przedmiotu Teoria Maszyn i Dynamika Mechanizmów II stanowi kontynuację przedmiotu Teoria Maszyn i Dynamika
Mechanizmów I. Przygotowuje studentów do stosowania zaawansowanych metod obliczeniowych w
analizie kinematycznej i dynamicznej mechanizmów i maszyn.
Powiązanie z innymi przedmiotami Konieczna jest znajomość: Matematyki, Mechaniki na poziomie studiów inżynierskich, Teorii
Mechanizmów i Dynamiki Maszyn I.
Forma zaliczenia przedmiotu
Na podstawie zaliczenia ćwiczeń oraz obecności na wykładach.
Prof. Edmund Wittbrodt
Program ramowy
Wstęp. Pojęcia podstawowe: maszyna, mechanizm, dynamika, napęd, sprawność, drgania. Sterowanie
maszyn. Modelowanie: struktura otwarta i zamknięta, układy wieloczłonowe, metody: SES, MES,
Wittenburg, Denavit-Hartenberg (2). Opis i analiza mechanizmów: wektorowy i macierzowy, układy
płaskie i przestrzenne (2). Notacja Denavita-Hartenberga: geometria, kinematyka (2). Opis łańcuchów
kinematycznych otwartych i zamkniętych – kinematyka (2). Dynamika mechanizmów z wykorzystaniem
notacji Denavita-Hartenberga: reakcje, napęd (2). Bilans energetyczny maszyny, sprawność (1). Drgania
w mechanizmach i maszynach (2).
Prof. Edmund Wittbrodt
Literatura
1. Blajer W.: Metody dynamiki układów wielorasowych. Wydawnictwo Politechniki Radomskiej, Radom 1998
2. Wojtyra M., Frączek J.: Metoda układów wieloczłonowych w dynamice mechanizmów. Ćwiczenia z zastosowaniem programu ADAMS. Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2007
3. Frączek J., Wojtyra M.: Kinematyka układów wieloczłonowych. Metody obliczeniowe. WNT, Warszawa 2008
4. Morecki A., Knapczyk J., Kędzior K.: Teoria mechanizmów i manipulatorów. Podstawy i przykłady zastosowań w praktyce. WNT, Warszawa 2002
5. Morecki A., Knapczyk J., i inni: Podstawy robotyki. Teoria i elementy manipulatorów i robotów. WNT, Warszawa 1993
6. Craig J.J.: Intorduction to Robotics, Mechanics and Control. Second Edition. Addison-Wesley Publishing Co. Inc., Reading Massachusetts, USA 1989
7. Wittbrodt E., Adamiec-Wójcik I., Wojciech S.: Dynamics of Flexible Multibody Systems. Rigid Finite Element Method. Foundations of Engineering Mechanics. Springer, Germany 2006
8. Kruszewski J., Sawiak S., Wittbrodt E.: Metoda sztywnych elementów skończonych w dynamice konstrukcji. WNT, Warszawa 1999
9. Kruszewski J., Wittbrodt E., Walczyk Z.: Drgania układów mechanicznych w ujęciu komputerowym. T. II. Zagadnienia wybrane. WNT, Warszawa 1996
10. Spong M.W., Vidyasagar M.: Dynamika i sterowanie robotów. WNT, Warszawa 1997
Prof. Edmund Wittbrodt
WSTĘP do Teorii Maszyn i Dynamiki Mechanizmów II
Analiza strukturalna – badanie ogólnych własności ruchowych mechanizmów wynikających z ich budowy,
z uwzględnieniem liczby i rodzajów elementów (członów) składowych oraz sposobów ich łączenia (więzi).
Kinematyka – badanie wzajemnych ruchów członów i punktów związanych z członami mechanizmu
(położenie, prędkość, przyspieszenie), z uwzględnieniem zadanego ruch elementu napędzającego i geometrii
układu.
Dynamika – badanie związków zachodzących pomiędzy siłami (momentami) działającymi na mechanizm
i przyśpieszeniami poszczególnych jego członów, a także relacji pomiędzy energiami skumulowanymi w
mechanizmie oraz dostarczanymi i odbieranymi z mechanizmu.
Sterowanie – taka realizacja (zadanego) procesu realizowanego przez maszynę, która likwiduje odstępstwa
od procesu prawidłowego.
Prof. Edmund Wittbrodt
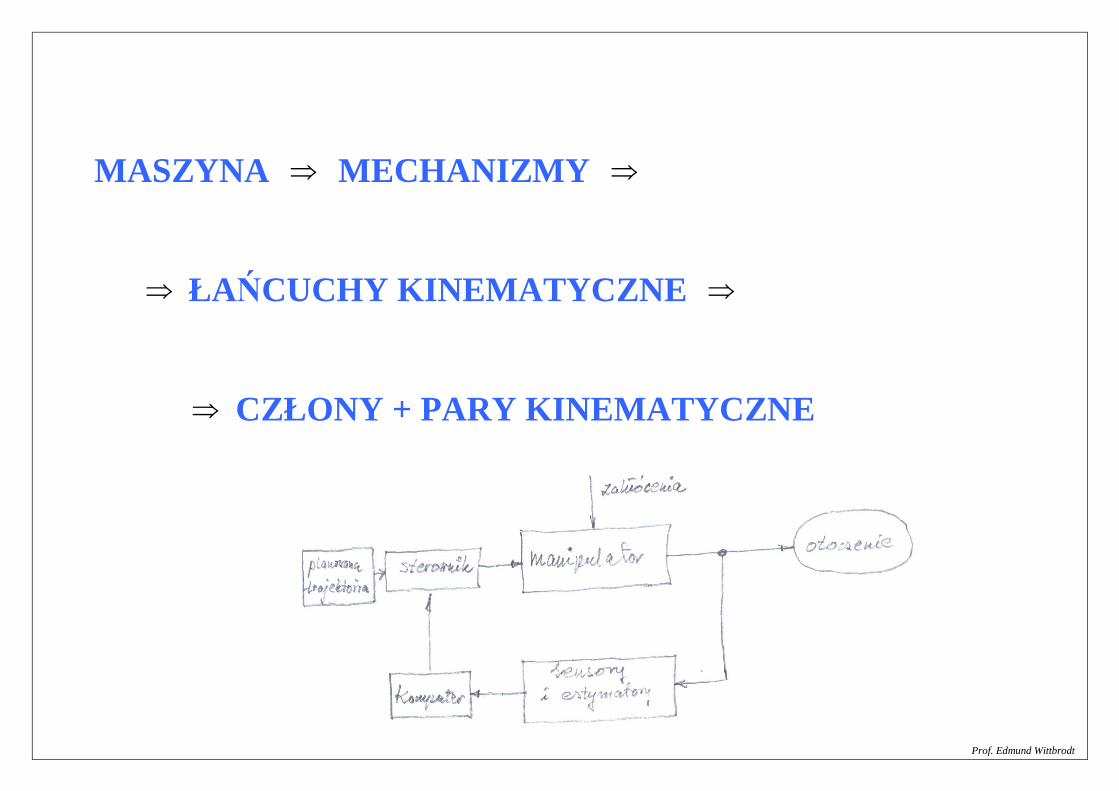
MASZYNA ⇒ MECHANIZMY ⇒
⇒ ŁAŃCUCHY KINEMATYCZNE ⇒
⇒ CZŁONY + PARY KINEMATYCZNE
Prof. Edmund Wittbrodt
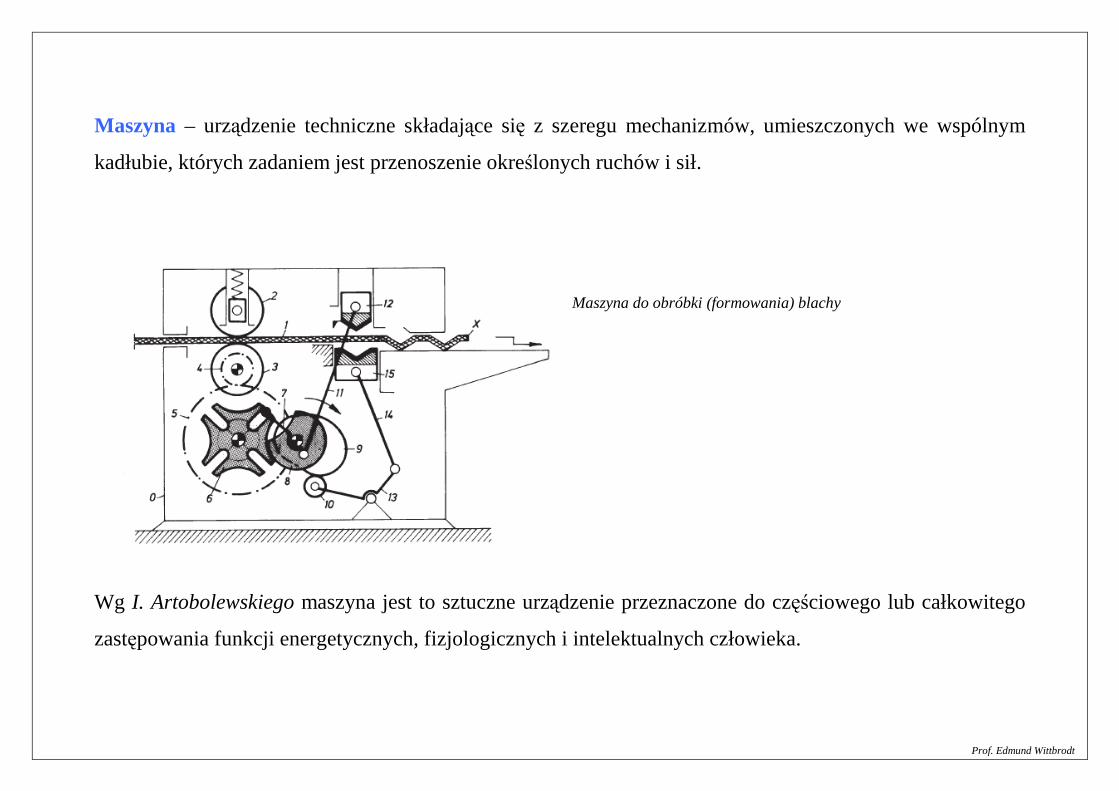
Maszyna – urządzenie techniczne składające się z szeregu mechanizmów, umieszczonych we wspólnym
kadłubie, których zadaniem jest przenoszenie określonych ruchów i sił.
Maszyna do obróbki (formowania) blachy
Wg I. Artobolewskiego maszyna jest to sztuczne urządzenie przeznaczone do częściowego lub całkowitego
zastępowania funkcji energetycznych, fizjologicznych i intelektualnych człowieka.
Prof. Edmund Wittbrodt
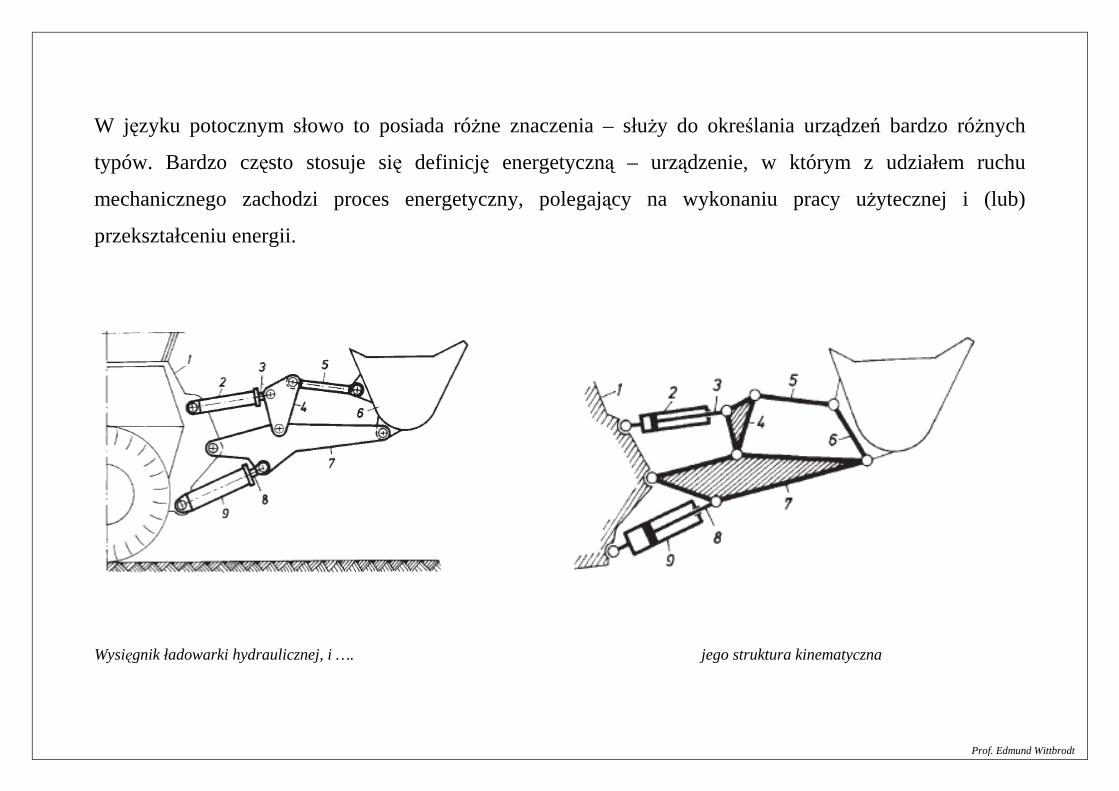
W języku potocznym słowo to posiada różne znaczenia – służy do określania urządzeń bardzo różnych
typów. Bardzo często stosuje się definicję energetyczną – urządzenie, w którym z udziałem ruchu
mechanicznego zachodzi proces energetyczny, polegający na wykonaniu pracy użytecznej i (lub)
przekształceniu energii.
Wysięgnik ładowarki hydraulicznej, i …. jego struktura kinematyczna
Prof. Edmund Wittbrodt
Maszyny robocze – przekształcają dostarczoną energię na energię związaną z przemieszczeniem lub
odkształceniem obrabianego przedmiotu (prasa, dźwig, koparka, tokarka).
Silniki i generatory – przekształcają jeden rodzaj energii w drugi (silnik spalinowy, silnik elektryczny,
generator prądu)
Maszyny o strukturze mieszanej – przekształcają jeden rodzaj energii w drugi (pompa hydrauliczna), z
jednoczesnym przemieszczeniem elementów
Prof. Edmund Wittbrodt
Mechanizm
Układ ciał (członów) służących przekształcaniu ruchu jednego lub wielu ciał w ruchy pożądane,
a także sił działających na jedno ciało w siły na innych ciałach.
Często pod pojęciem mechanizmu rozumiemy zamknięty łańcuch kinematyczny, z jednym
członem spełniającym funkcję podstawy. Liczba jego członów czynnych odpowiada jego
ruchliwości. Mechanizmem jest więc układ jednobieżny (o ruchliwości równej jeden)
umożliwiający przekazywanie ruchu.
Dodatkową, istotną funkcją mechanizmu jest możliwość zmiany parametrów przekazywanego
ruchu.
Strukturę mechanizmu określa liczba członów, liczba i rodzaj jego par kinematycznych oraz
sekwencja występujących między nimi połączeń.
Prof. Edmund Wittbrodt
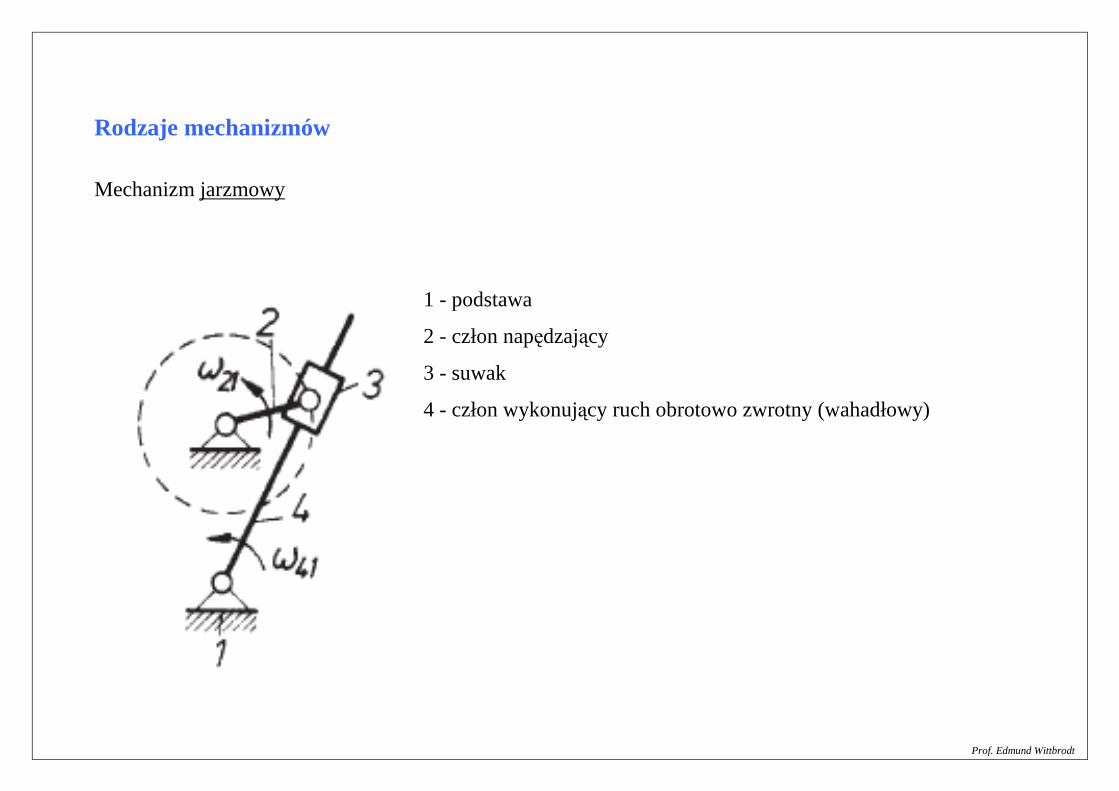
Rodzaje mechanizmów
Mechanizm jarzmowy
1 - podstawa
2 - człon napędzający
3 - suwak
4 - człon wykonujący ruch obrotowo zwrotny (wahadłowy)
Prof. Edmund Wittbrodt
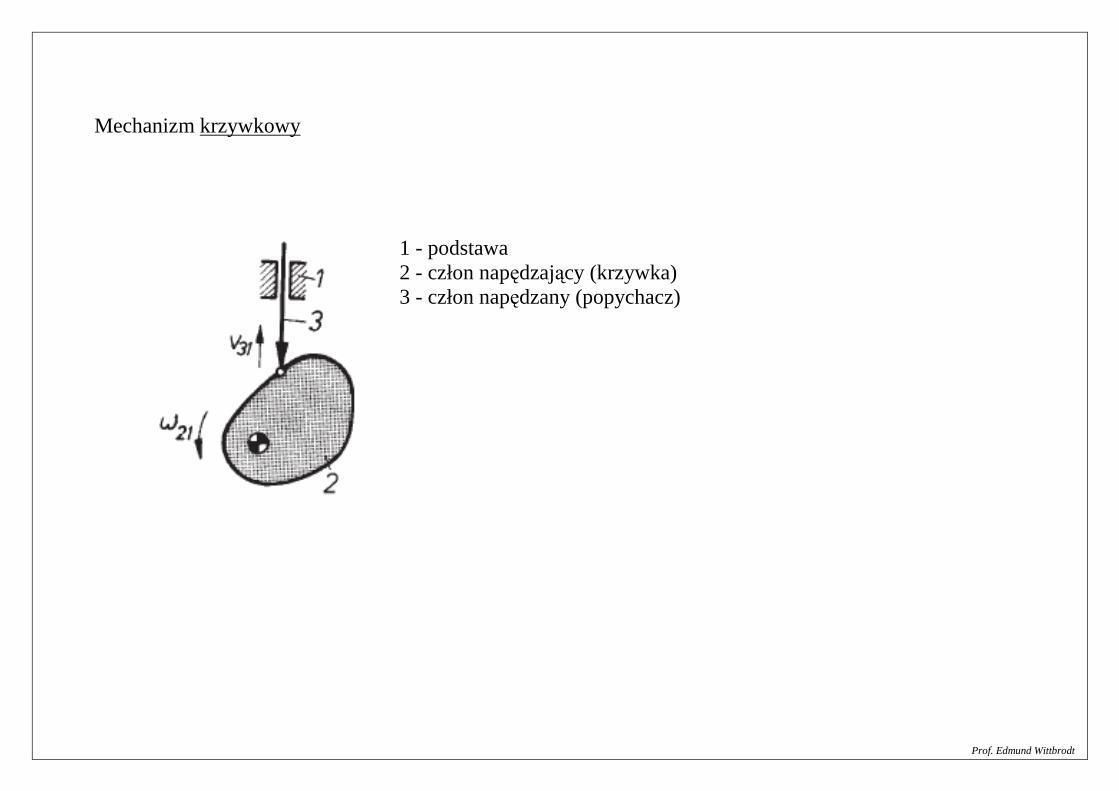
Mechanizm krzywkowy 1 - podstawa 2 - człon napędzający (krzywka) 3 - człon napędzany (popychacz)
Prof. Edmund Wittbrodt
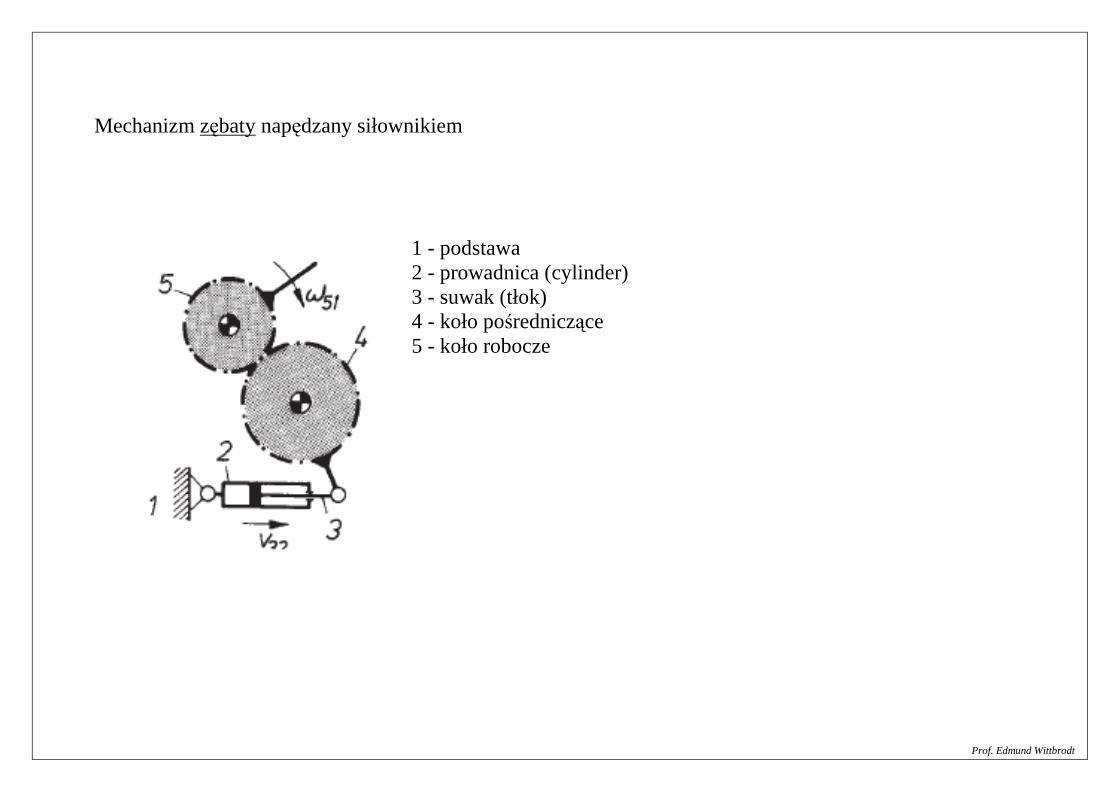
Mechanizm zębaty napędzany siłownikiem 1 - podstawa 2 - prowadnica (cylinder) 3 - suwak (tłok) 4 - koło pośredniczące 5 - koło robocze
Prof. Edmund Wittbrodt
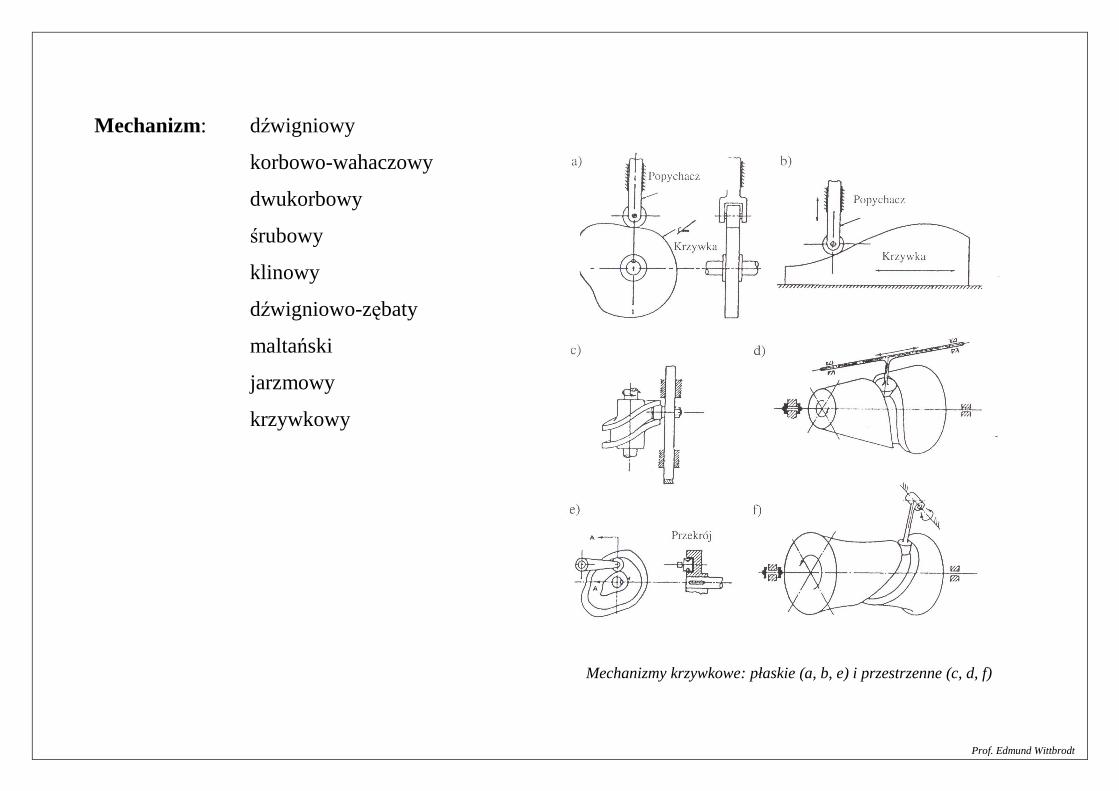
Mechanizm: dźwigniowy
korbowo-wahaczowy
dwukorbowy
śrubowy
klinowy
dźwigniowo-zębaty
maltański
jarzmowy
krzywkowy
Mechanizmy krzywkowe: płaskie (a, b, e) i przestrzenne (c, d, f)
Prof. Edmund Wittbrodt
Mechanizm: płaski – wszystkie punkty jego członów poruszają się po trajektoriach położonych w płaszczyznach
równoległych do płaszczyzny kierującej sferyczny – wszystkie punkty jego członów poruszają się po trajektoriach położonych na
powierzchniach koncentrycznych sfer przestrzenny – punkty jego niektórych członów poruszają się po trajektoriach przestrzennych lub
płaskich, znajdujących się na płaszczyznach nierównoległych do siebie ekwiwalentny (równoważny) – mechanizm, którego własności kinematyczne są ekwiwalentne
(równoważne), czyli w pewnym zakresie podobne do własności innego mechanizmu, o innej strukturze pokrewny – mechanizm różni się od danego geometrią, ale ma to samo przełożenie prowadzący – prowadzi człon z zadaną sekwencją (kolejnością) położeń kieruj ący – punkt członu realizujący zadaną trajektorię (w odróżnieniu od członu prowadzącego,
położenie pozostałych punktów członu nie jest istotne) przekładniowy – realizuje zadaną zależność funkcyjną pomiędzy prędkościami i przemieszczeniami
członu napędzanego oraz członu napędzającego
Prof. Edmund Wittbrodt
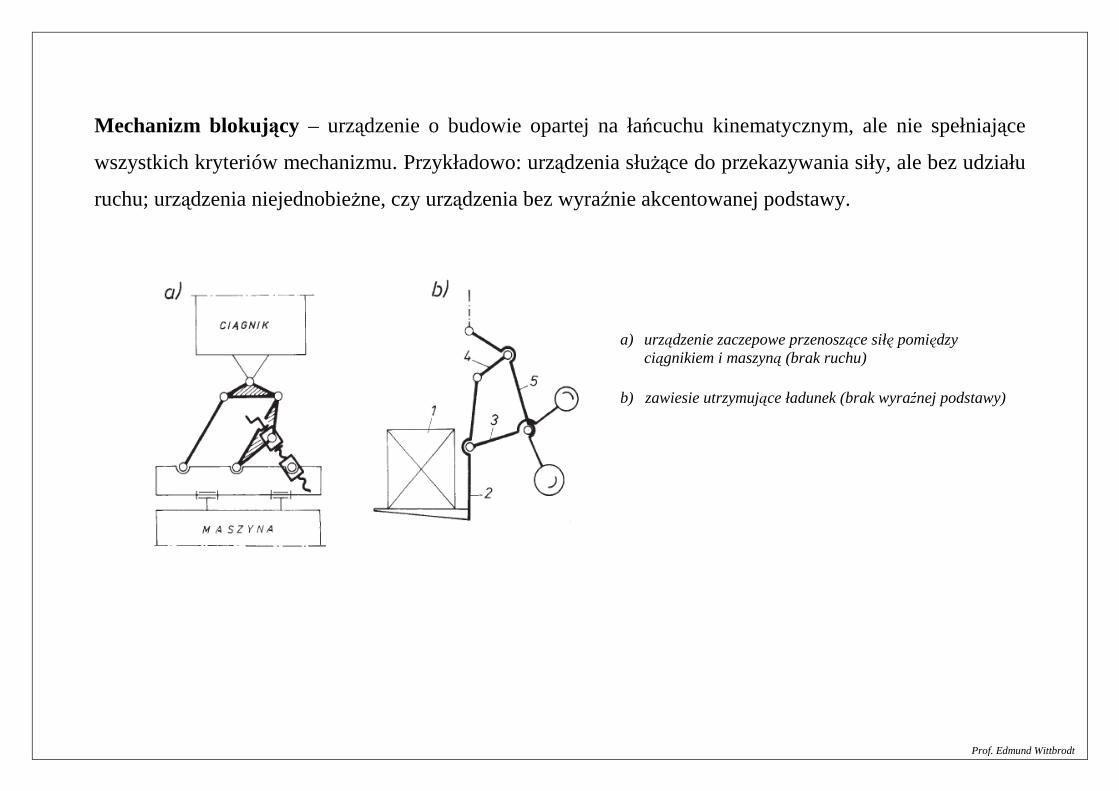
Mechanizm blokujący – urządzenie o budowie opartej na łańcuchu kinematycznym, ale nie spełniające
wszystkich kryteriów mechanizmu. Przykładowo: urządzenia służące do przekazywania siły, ale bez udziału
ruchu; urządzenia niejednobieżne, czy urządzenia bez wyraźnie akcentowanej podstawy.
a) urządzenie zaczepowe przenoszące siłę pomiędzy ciągnikiem i maszyną (brak ruchu)
b) zawiesie utrzymujące ładunek (brak wyraźnej podstawy)
Prof. Edmund Wittbrodt
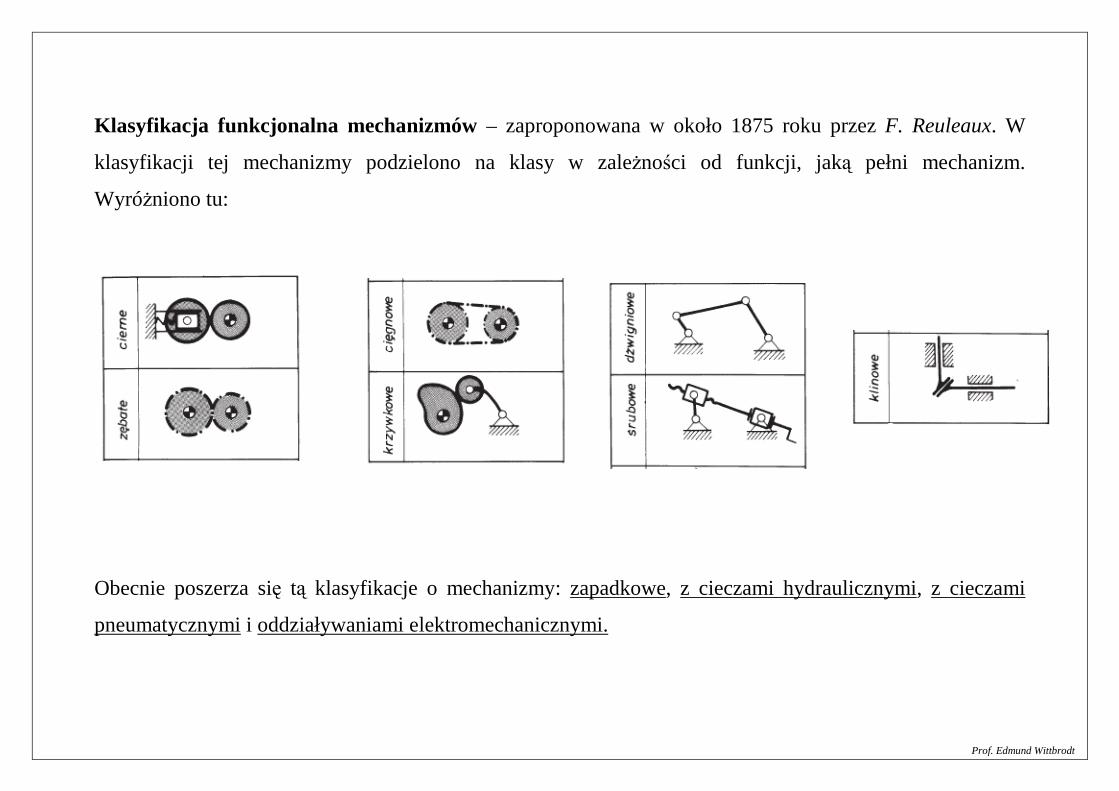
Klasyfikacja funkcjonalna mechanizmów – zaproponowana w około 1875 roku przez F. Reuleaux. W
klasyfikacji tej mechanizmy podzielono na klasy w zależności od funkcji, jaką pełni mechanizm.
Wyróżniono tu:
Obecnie poszerza się tą klasyfikacje o mechanizmy: zapadkowe, z cieczami hydraulicznymi, z cieczami
pneumatycznymi i oddziaływaniami elektromechanicznymi.
Prof. Edmund Wittbrodt
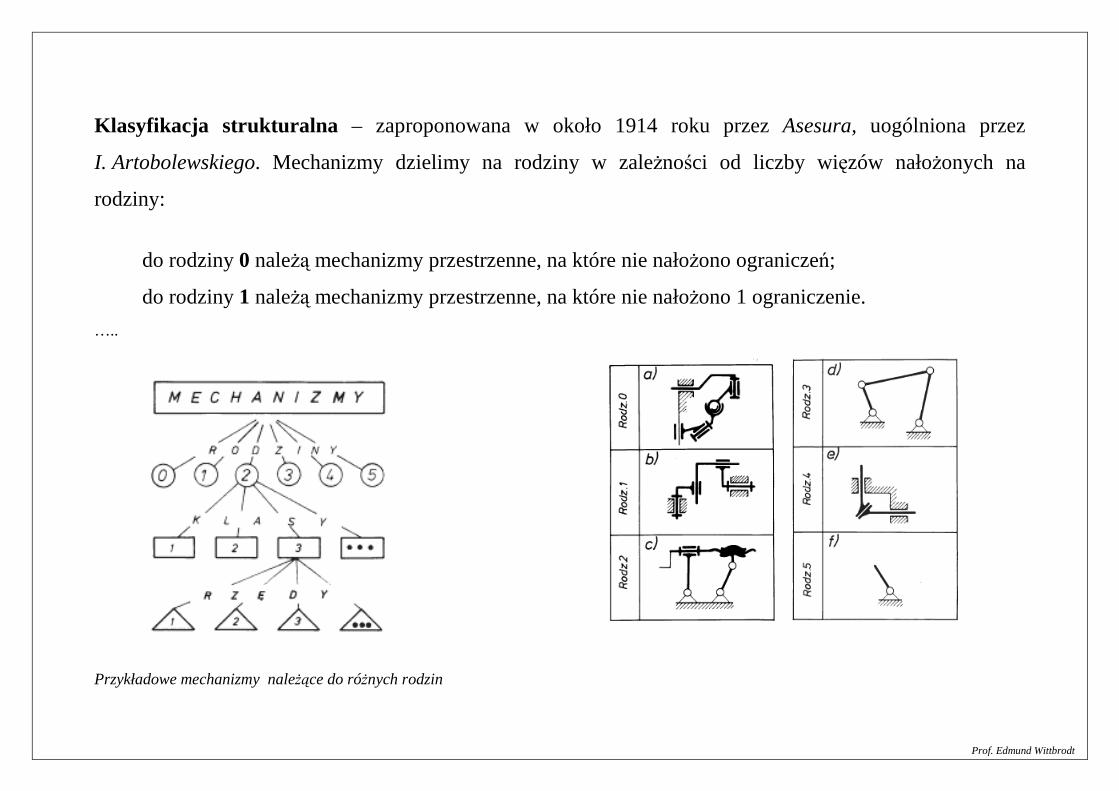
Klasyfikacja strukturalna – zaproponowana w około 1914 roku przez Asesura, uogólniona przez
I. Artobolewskiego. Mechanizmy dzielimy na rodziny w zależności od liczby więzów nałożonych na
rodziny:
do rodziny 0 należą mechanizmy przestrzenne, na które nie nałożono ograniczeń;
do rodziny 1 należą mechanizmy przestrzenne, na które nie nałożono 1 ograniczenie.
….. Przykładowe mechanizmy należące do różnych rodzin
Prof. Edmund Wittbrodt
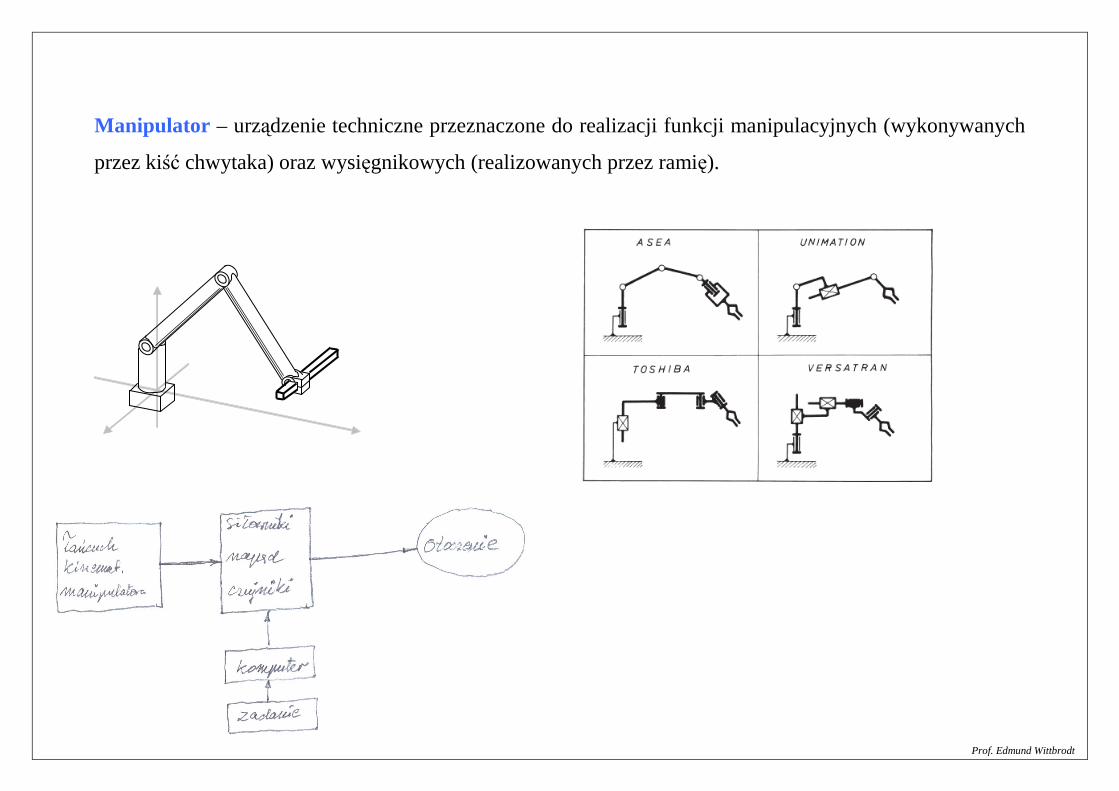
Manipulator – urządzenie techniczne przeznaczone do realizacji funkcji manipulacyjnych (wykonywanych
przez kiść chwytaka) oraz wysięgnikowych (realizowanych przez ramię).
Prof. Edmund Wittbrodt
Manipulator : antropomorficzny – manipulator, którego struktura jest zbliżona do struktury kończyny człowieka,
pod względem kształtu, funkcji i działania szeregowy – manipulator, którego struktura ma postać nierozwidlonego łańcucha kinematycznego równoległy – manipulator, którego struktura zawiera co najmniej jeden zamknięty łańcuch
kinematyczny
hybrydowy – manipulator, którego struktura jest kombinacją manipulatora równoległego i szeregowego
Prof. Edmund Wittbrodt
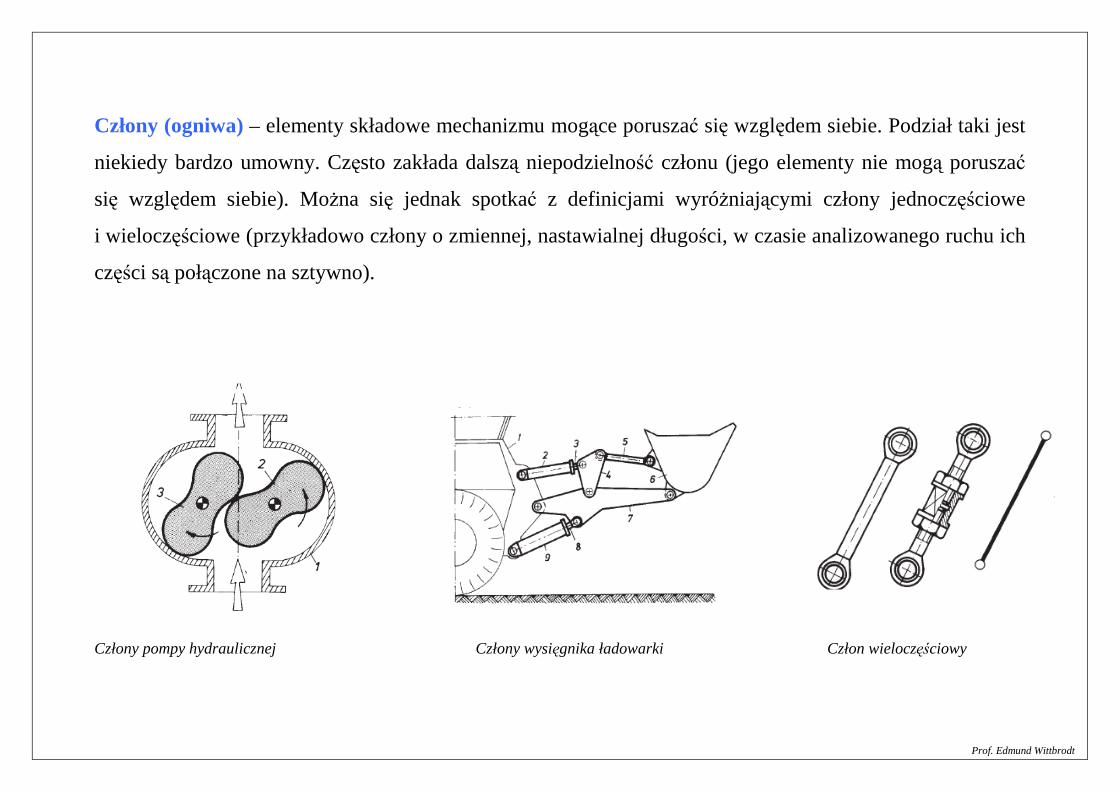
Człony (ogniwa) – elementy składowe mechanizmu mogące poruszać się względem siebie. Podział taki jest
niekiedy bardzo umowny. Często zakłada dalszą niepodzielność członu (jego elementy nie mogą poruszać
się względem siebie). Można się jednak spotkać z definicjami wyróżniającymi człony jednoczęściowe
i wieloczęściowe (przykładowo człony o zmiennej, nastawialnej długości, w czasie analizowanego ruchu ich
części są połączone na sztywno).
Człony pompy hydraulicznej Człony wysięgnika ładowarki Człon wieloczęściowy
Prof. Edmund Wittbrodt
Podstawa (ostoja) – człon, względem którego poruszają się inne człony (względem którego opisywany jest ruch pozostałych członów). Zwykle traktuje się go jako nieruchomy, choć niekiedy jako człon o zadanym, znanym ruchu, niezależnym od ruchu pozostałych członów mechanizmu
Człony czynne – człony, do których przyłożony jest napęd układu Człony bierne – napędzane ruchem i oddziaływaniami pochodzącymi od innych członów układu Człony pośredniczące – człony te jedynie pośredniczą w przekazywaniu siły i ruchu. Z ich ruchem nie
wiążą się żadne bezpośrednie oddziaływania na otoczenie mechanizmu Korba – człon wykonujący pełny ruch obrotowy Wahacz – człon o nawrotnym ruchu obrotowy (w granicy kąta obrotu mniejszego niż 2π) Suwak – człon wykonujący ruch postępowy
Prof. Edmund Wittbrodt
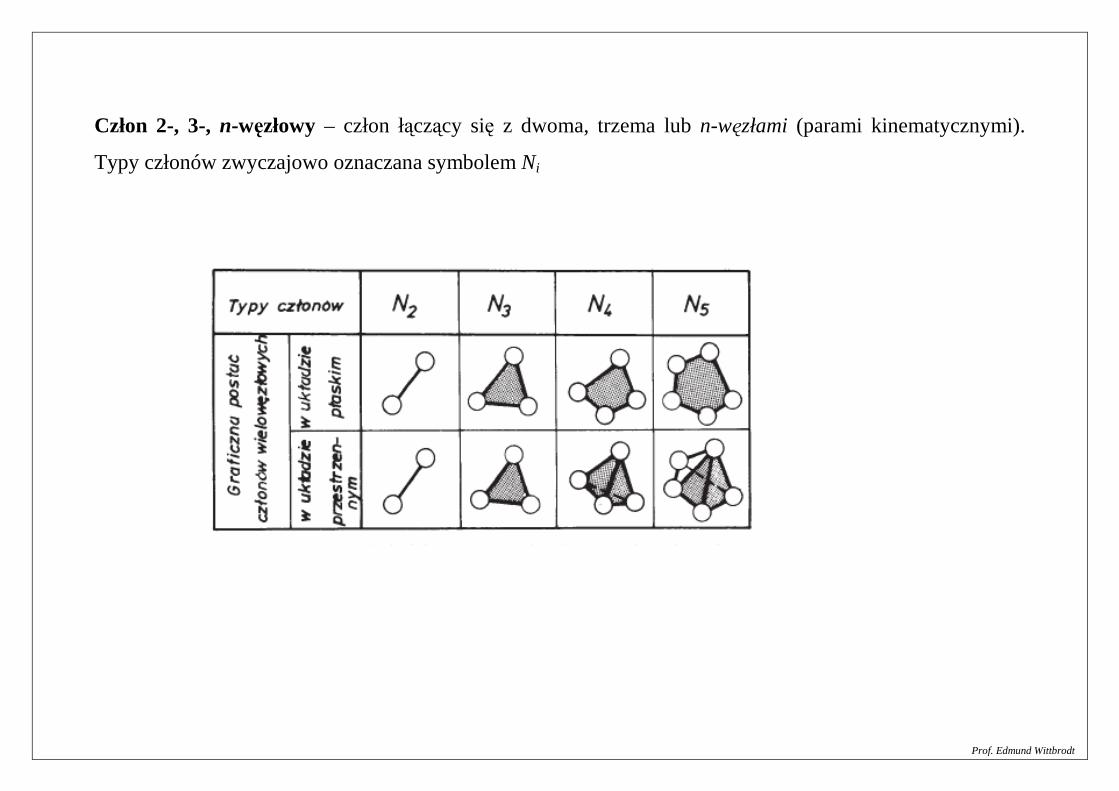
Człon 2-, 3-, n-węzłowy – człon łączący się z dwoma, trzema lub n-węzłami (parami kinematycznymi).
Typy członów zwyczajowo oznaczana symbolem Ni
Prof. Edmund Wittbrodt
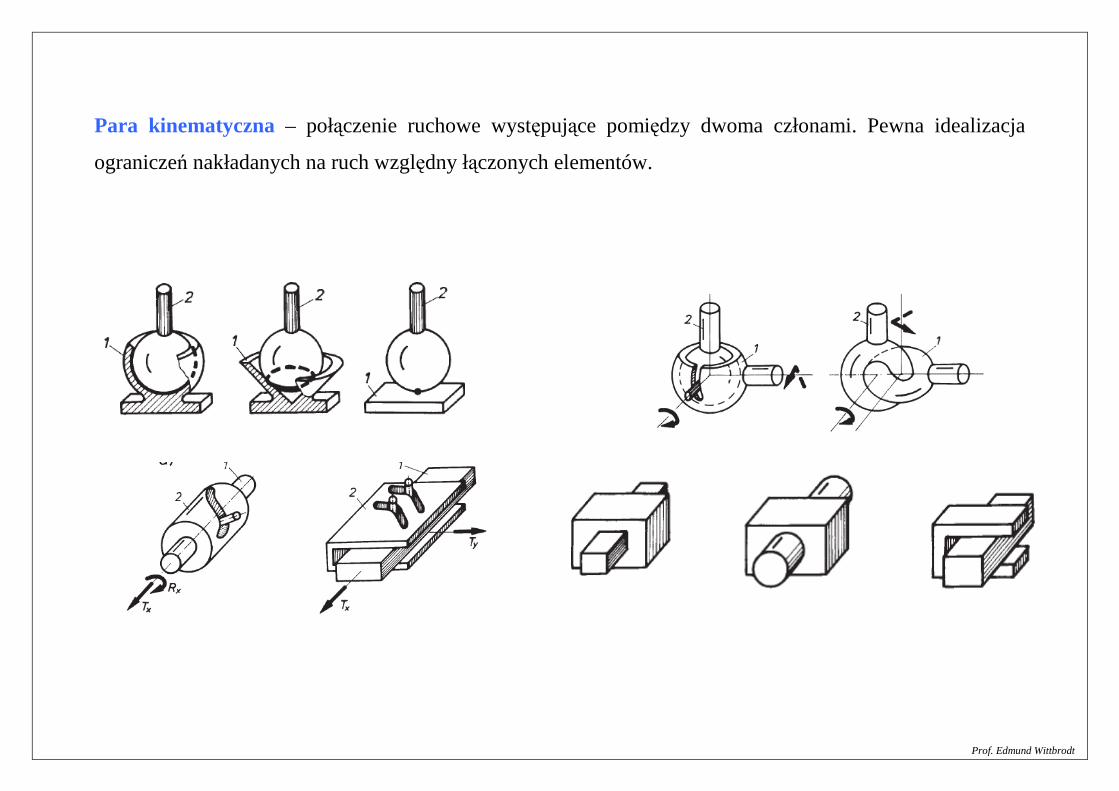
Para kinematyczna – połączenie ruchowe występujące pomiędzy dwoma członami. Pewna idealizacja
ograniczeń nakładanych na ruch względny łączonych elementów.
Prof. Edmund Wittbrodt
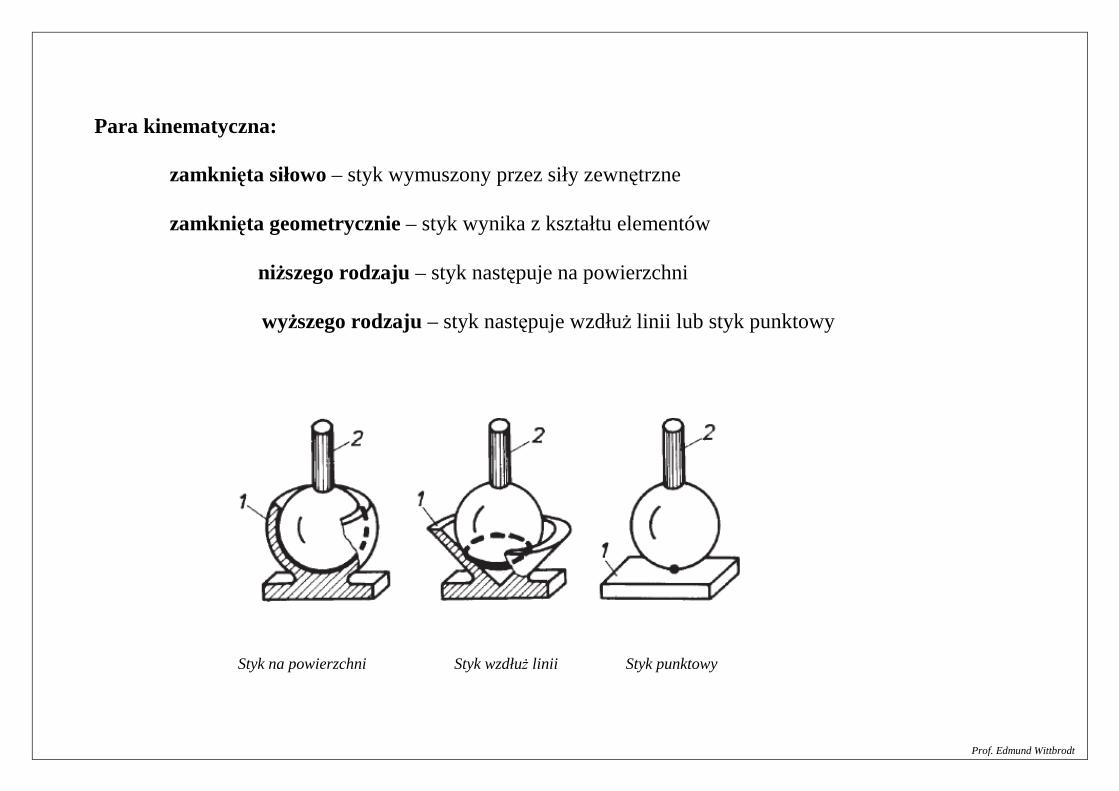
Para kinematyczna: zamknięta siłowo – styk wymuszony przez siły zewnętrzne zamknięta geometrycznie – styk wynika z kształtu elementów niższego rodzaju – styk następuje na powierzchni wyższego rodzaju – styk następuje wzdłuż linii lub styk punktowy Styk na powierzchni Styk wzdłuż linii Styk punktowy
Prof. Edmund Wittbrodt
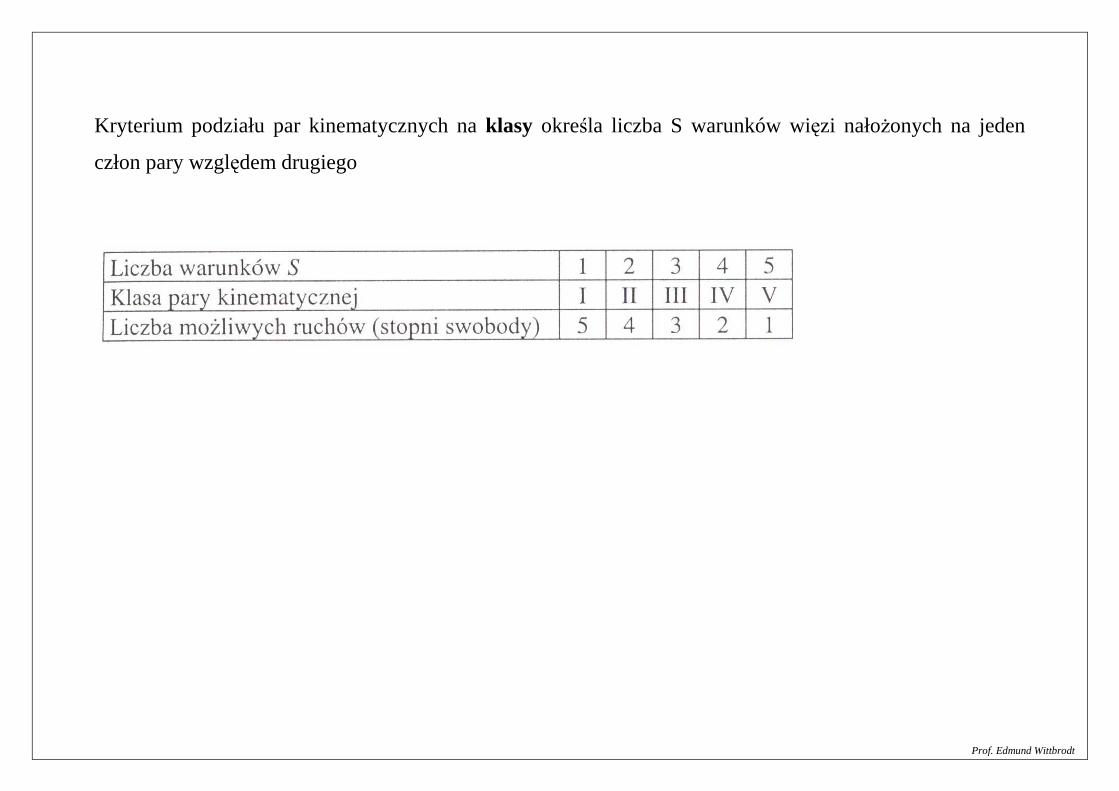
Kryterium podziału par kinematycznych na klasy określa liczba S warunków więzi nałożonych na jeden
człon pary względem drugiego
Prof. Edmund Wittbrodt
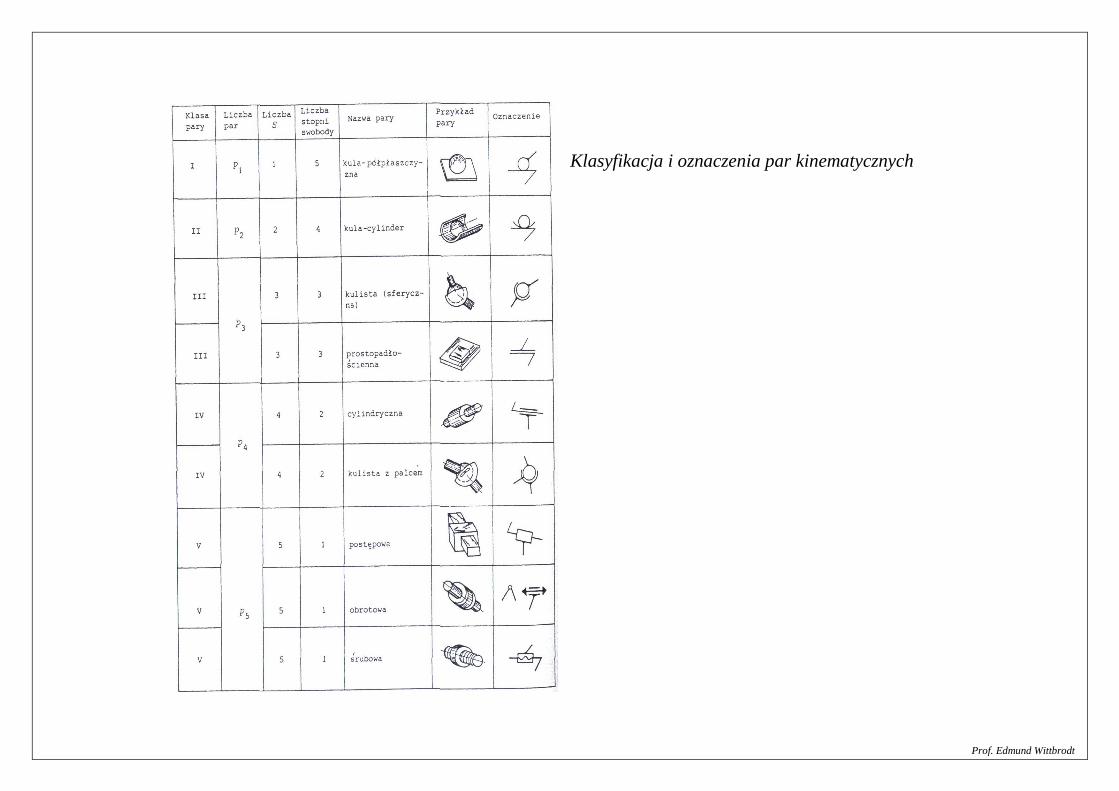
Klasyfikacja i oznaczenia par kinematycznych
Prof. Edmund Wittbrodt
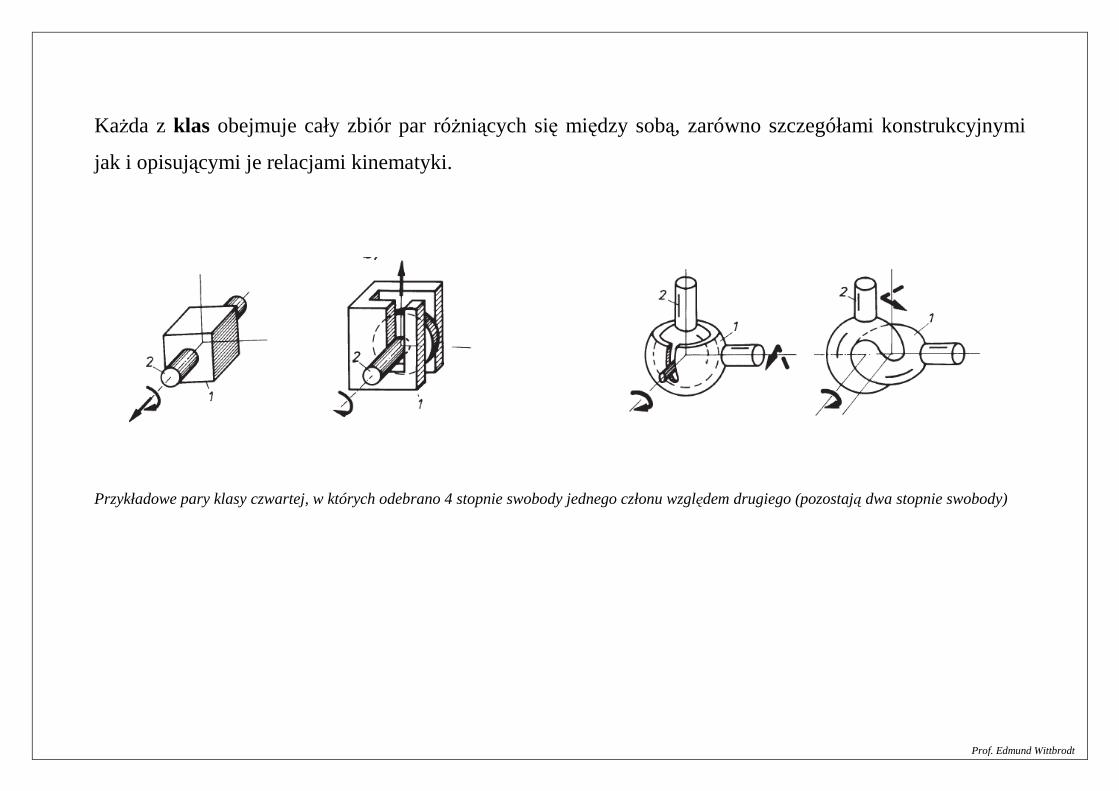
Każda z klas obejmuje cały zbiór par różniących się między sobą, zarówno szczegółami konstrukcyjnymi
jak i opisującymi je relacjami kinematyki.
Przykładowe pary klasy czwartej, w których odebrano 4 stopnie swobody jednego członu względem drugiego (pozostają dwa stopnie swobody)
Prof. Edmund Wittbrodt
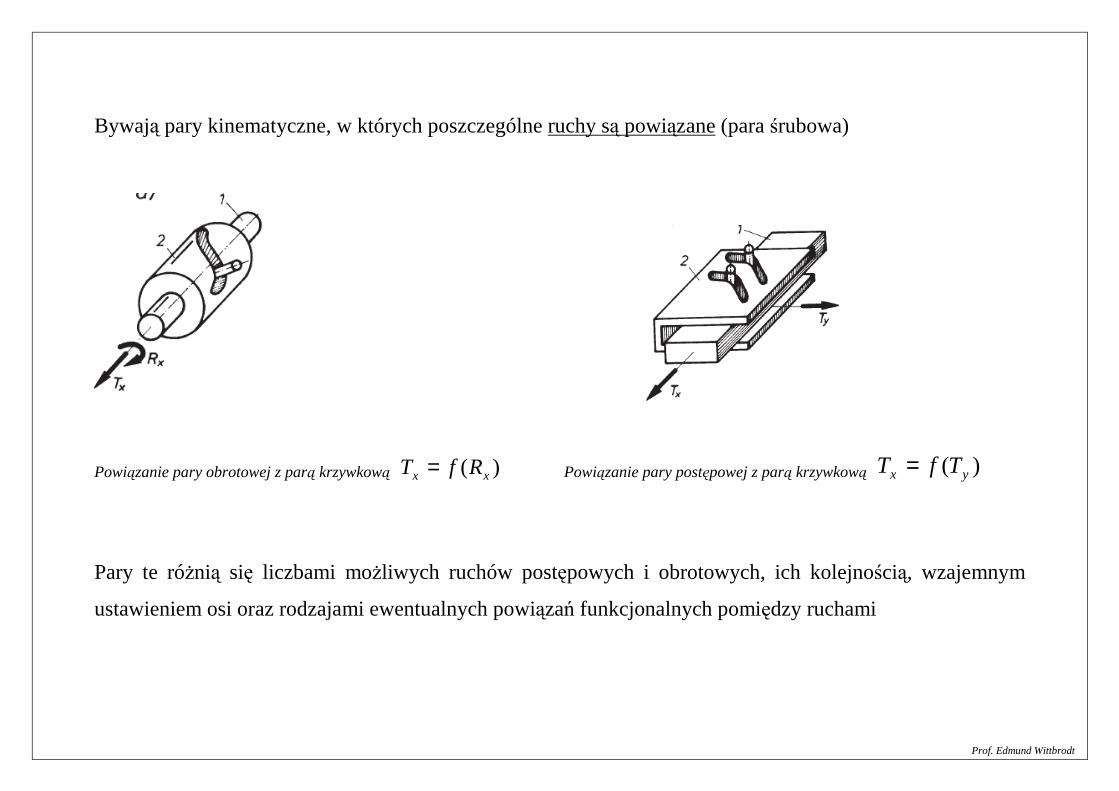
Bywają pary kinematyczne, w których poszczególne ruchy są powiązane (para śrubowa)
Powiązanie pary obrotowej z parą krzywkową )( xx RfT = Powiązanie pary postępowej z parą krzywkową )( yx TfT =
Pary te różnią się liczbami możliwych ruchów postępowych i obrotowych, ich kolejnością, wzajemnym
ustawieniem osi oraz rodzajami ewentualnych powiązań funkcjonalnych pomiędzy ruchami
Prof. Edmund Wittbrodt
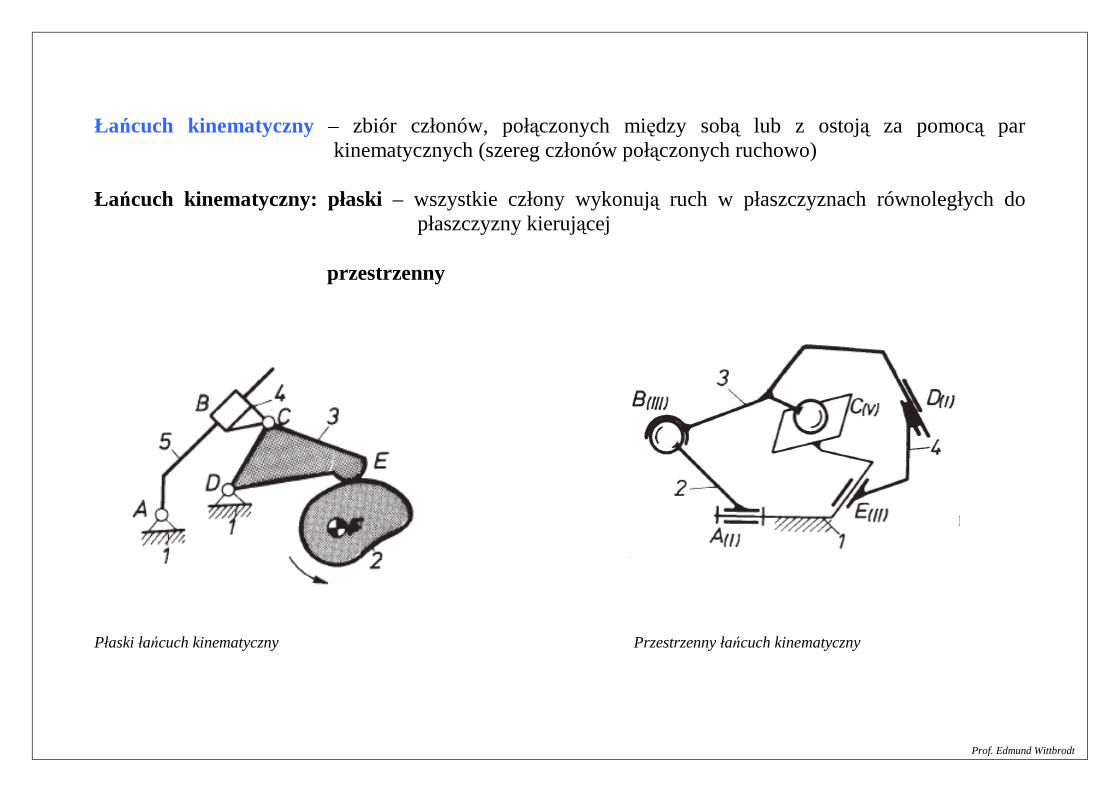
Łańcuch kinematyczny – zbiór członów, połączonych między sobą lub z ostoją za pomocą par kinematycznych (szereg członów połączonych ruchowo)
Łańcuch kinematyczny: płaski – wszystkie człony wykonują ruch w płaszczyznach równoległych do
płaszczyzny kierującej przestrzenny
Płaski łańcuch kinematyczny Przestrzenny łańcuch kinematyczny
Prof. Edmund Wittbrodt
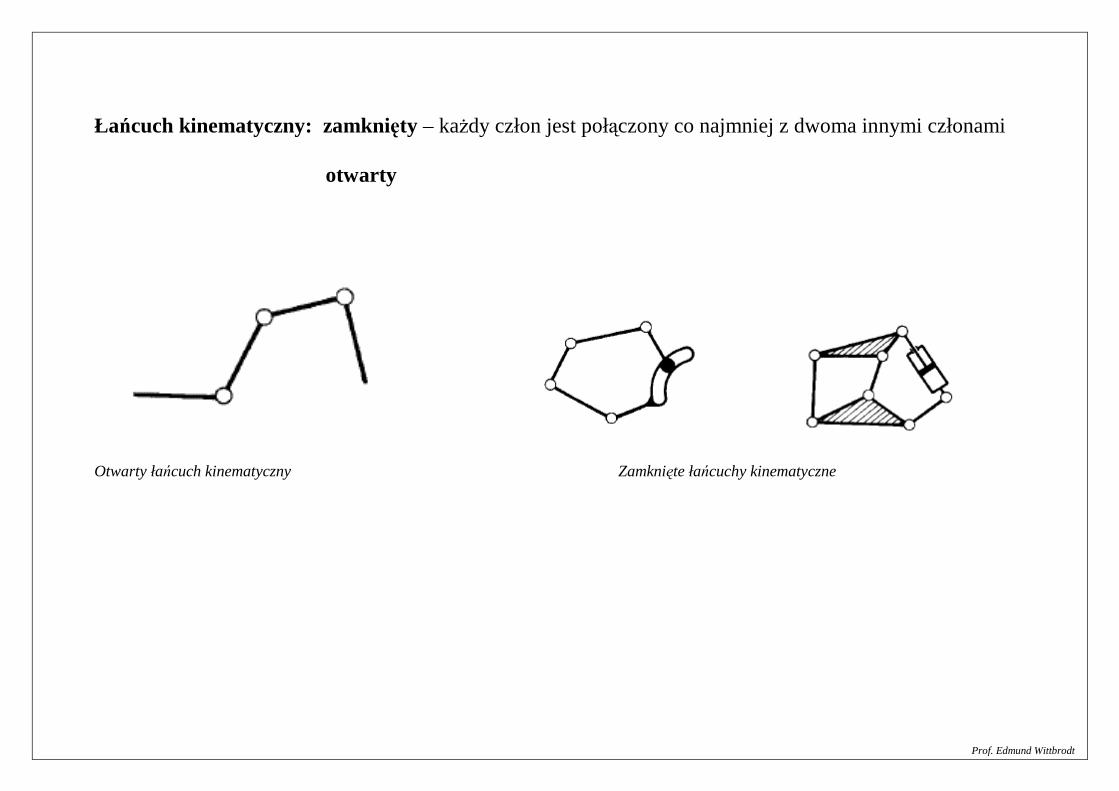
Łańcuch kinematyczny: zamknięty – każdy człon jest połączony co najmniej z dwoma innymi członami otwarty
Otwarty łańcuch kinematyczny Zamknięte łańcuchy kinematyczne
Prof. Edmund Wittbrodt
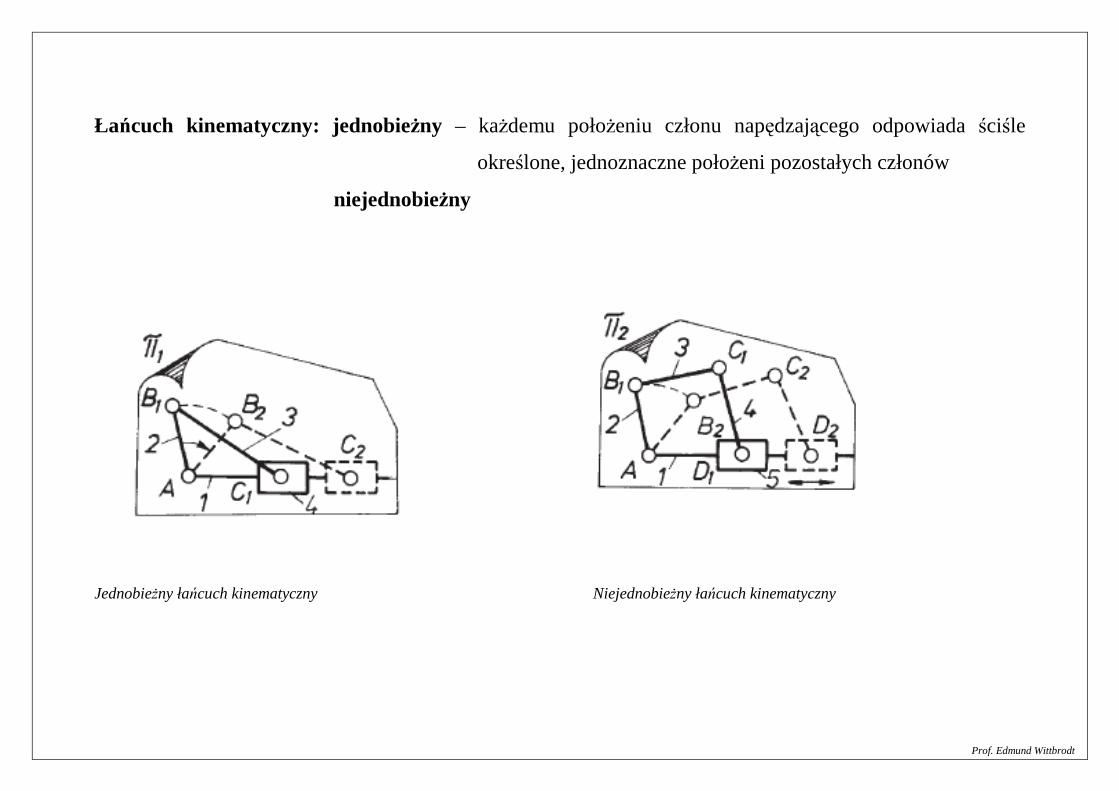
Łańcuch kinematyczny: jednobieżny – każdemu położeniu członu napędzającego odpowiada ściśle
określone, jednoznaczne położeni pozostałych członów
niejednobieżny
Jednobieżny łańcuch kinematyczny Niejednobieżny łańcuch kinematyczny
Prof. Edmund Wittbrodt
Opis łańcuchów kinematycznych Liczba członów układu
n – liczba członów mechanizmu ni – liczba członów i-węzłowy
Ponieważ każda para łączy dwa człony, mamy
p – liczba par występujących w układzie
654321 nnnnnnn +++++=
)65432(2
1654321 nnnnnnp +++++=

Prof. Edmund Wittbrodt
Liczba ruchomych członów układu (jeden człon jest nieruchomy – podstawa) Liczba stopni swobody przed połączeniem Liczba stopni swobody odebranych przez pary kinematyczne
pi – liczba par i-tej klasy występujących w układzie Ruchliwość
przestrzenny płaski
)1 ( −= nnr
)1 (6 −= nx
54321
5
1
2345)6( ppppppiyi
i ++++=−=∑=
54321 2345)1 (6 pppppnW −−−−−−=
212)1 (3 ppnW −−−=
Prof. Edmund Wittbrodt
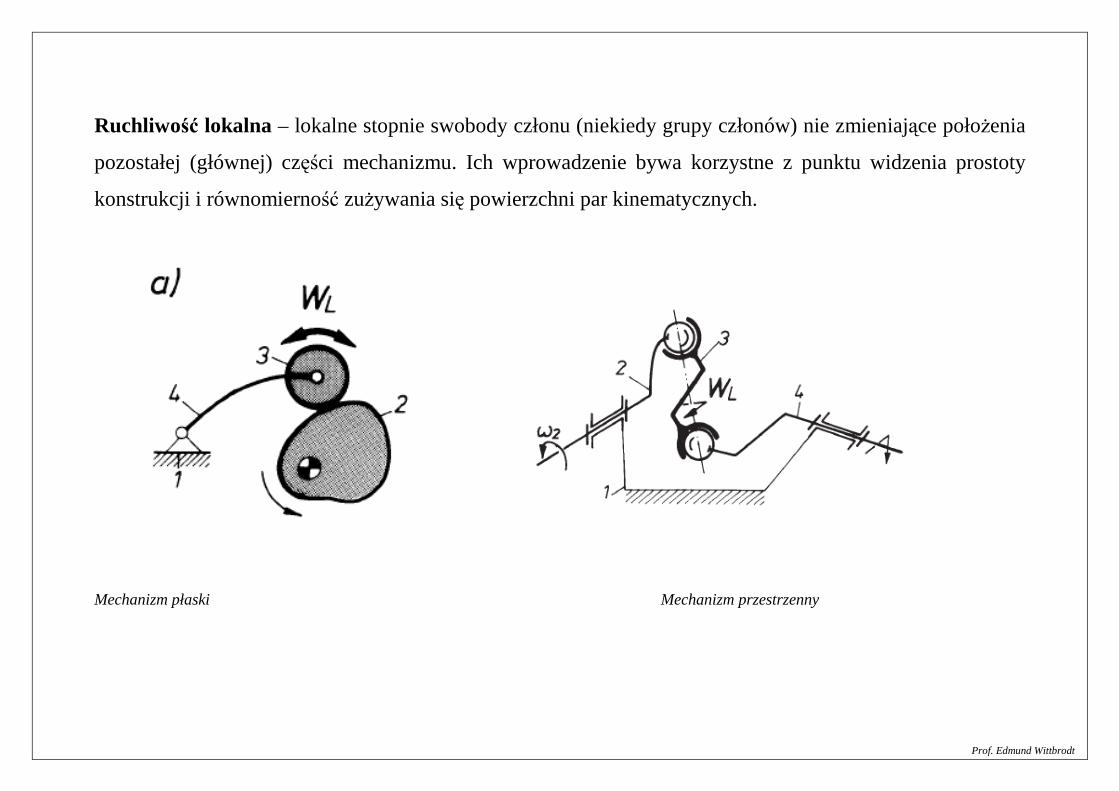
Ruchliwość lokalna – lokalne stopnie swobody członu (niekiedy grupy członów) nie zmieniające położenia
pozostałej (głównej) części mechanizmu. Ich wprowadzenie bywa korzystne z punktu widzenia prostoty
konstrukcji i równomierność zużywania się powierzchni par kinematycznych.
Mechanizm płaski Mechanizm przestrzenny
Prof. Edmund Wittbrodt
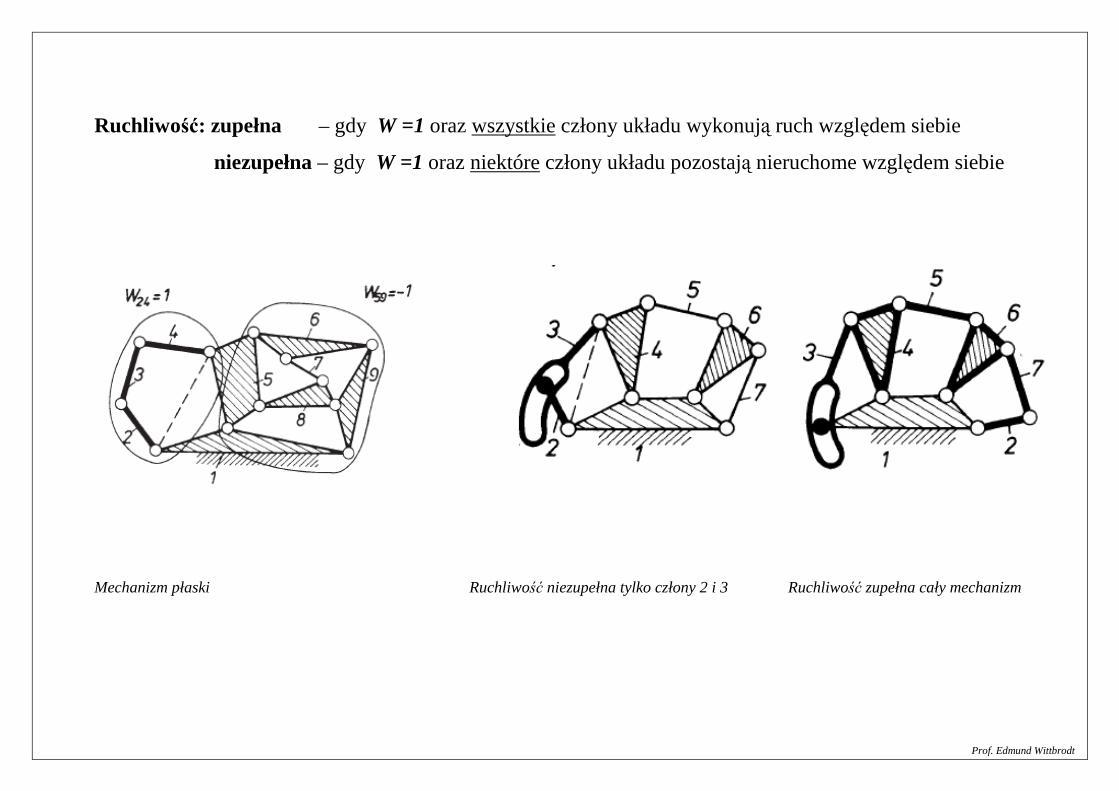
Ruchliwość: zupełna – gdy W =1 oraz wszystkie człony układu wykonują ruch względem siebie
niezupełna – gdy W =1 oraz niektóre człony układu pozostają nieruchome względem siebie
Mechanizm płaski Ruchliwość niezupełna tylko człony 2 i 3 Ruchliwość zupełna cały mechanizm
Prof. Edmund Wittbrodt
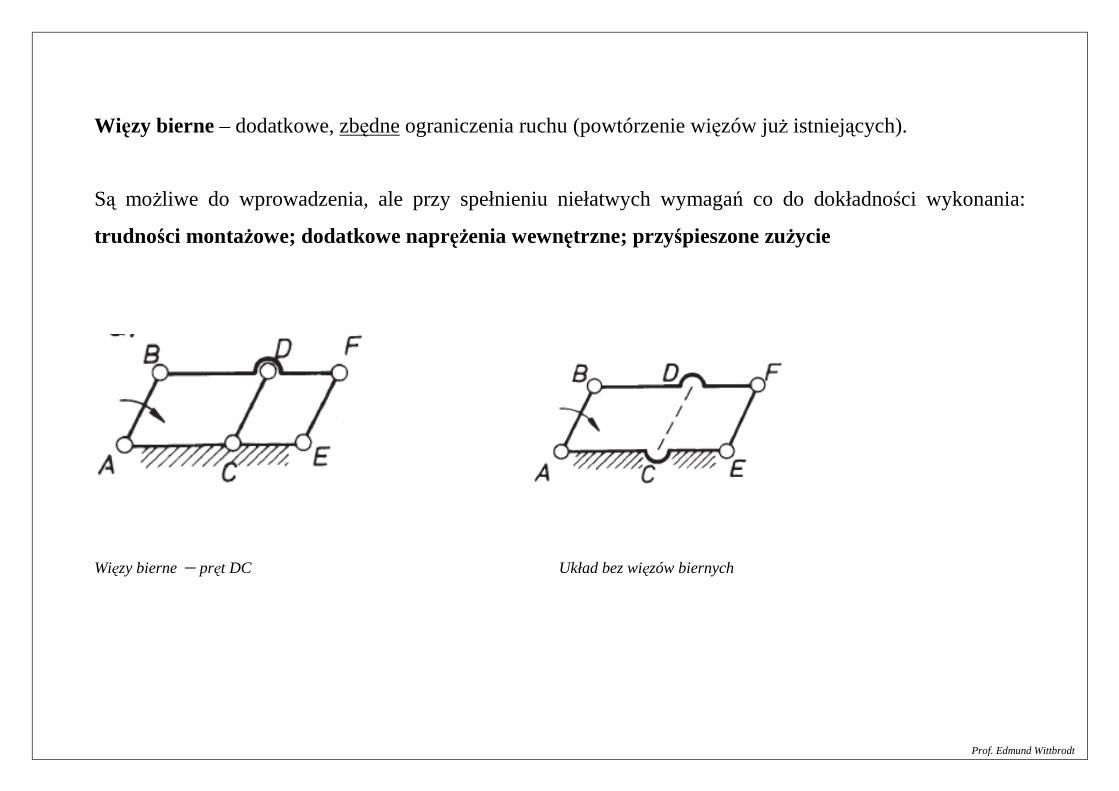
Więzy bierne – dodatkowe, zbędne ograniczenia ruchu (powtórzenie więzów już istniejących). Są możliwe do wprowadzenia, ale przy spełnieniu niełatwych wymagań co do dokładności wykonania:
trudności montażowe; dodatkowe naprężenia wewnętrzne; przyśpieszone zużycie
Więzy bierne – pręt DC Układ bez więzów biernych
Prof. Edmund Wittbrodt
Grupa – łańcuchy kinematyczne, które po przyłączeniu do podstawy mają ruchliwość zero (połączenie takie
zmienia go w układ sztywny).
Zasada klasyfikacji – każdy mechanizm można sklasyfikować przez odjęcie od członu napędzającego grup
różnych klas. Klasę mechanizmu określa najwyższa klasa grupy składowej.
Ponieważ, po połączeniu z podstawą, grupa posiada zerową ruchliwość, dla układów płaskich obowiązuje
wzór strukturalny
gdzie: n – liczba elementów łańcucha pi – liczba par i-tej klasy występujących w układzie Na podstawie tego wzoru można określić formę (strukturę) grupy kolejnych klas.
Grupę klasy II (najprostszą) charakteryzują liczby: n = 2, p1 = 3, p2 = 0
21230 ppn −−=
Prof. Edmund Wittbrodt
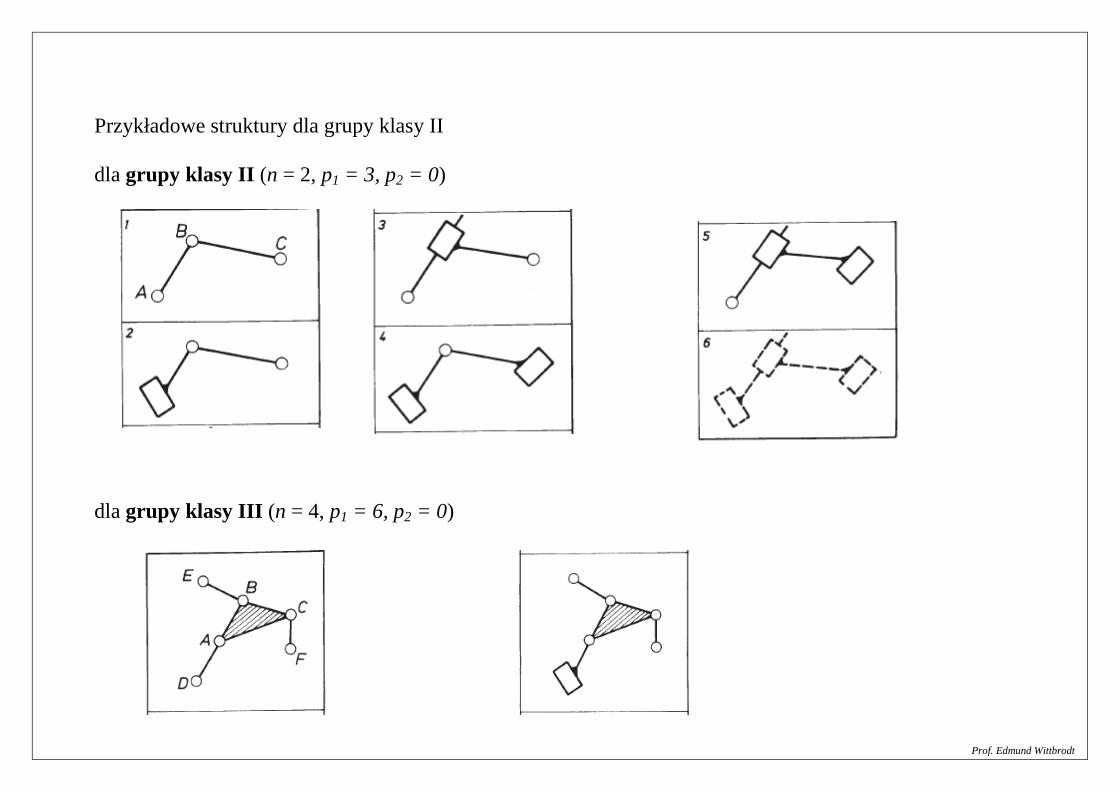
Przykładowe struktury dla grupy klasy II dla grupy klasy II (n = 2, p1 = 3, p2 = 0)
dla grupy klasy III (n = 4, p1 = 6, p2 = 0)
Prof. Edmund Wittbrodt
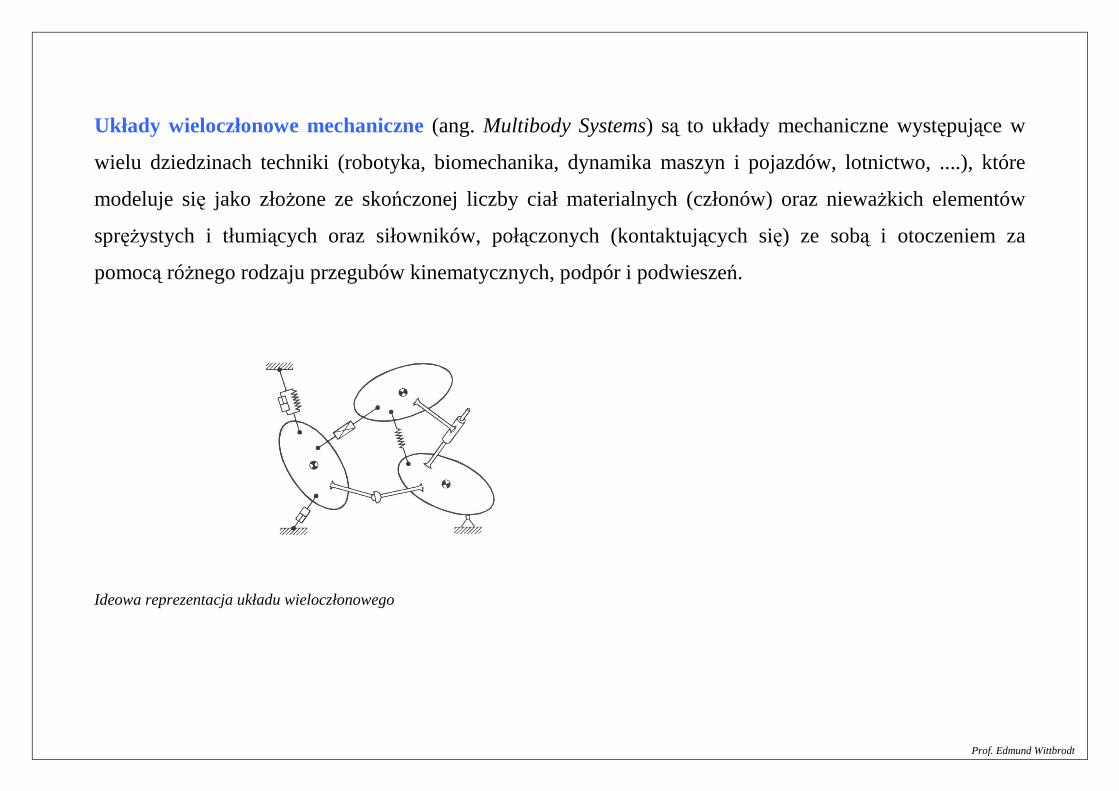
Układy wieloczłonowe mechaniczne (ang. Multibody Systems) są to układy mechaniczne występujące w
wielu dziedzinach techniki (robotyka, biomechanika, dynamika maszyn i pojazdów, lotnictwo, ....), które
modeluje się jako złożone ze skończonej liczby ciał materialnych (członów) oraz nieważkich elementów
sprężystych i tłumiących oraz siłowników, połączonych (kontaktujących się) ze sobą i otoczeniem za
pomocą różnego rodzaju przegubów kinematycznych, podpór i podwieszeń.
Ideowa reprezentacja układu wieloczłonowego
Prof. Edmund Wittbrodt
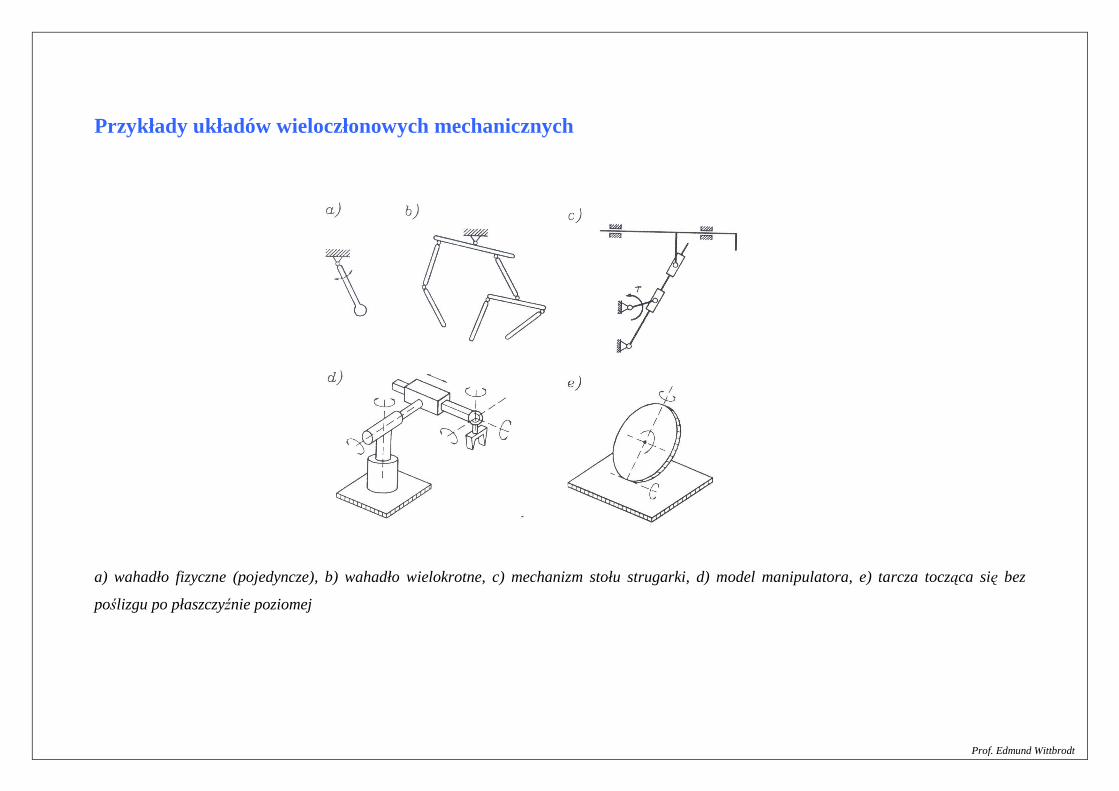
Przykłady układów wieloczłonowych mechanicznych
a) wahadło fizyczne (pojedyncze), b) wahadło wielokrotne, c) mechanizm stołu strugarki, d) model manipulatora, e) tarcza tocząca się bez
poślizgu po płaszczyźnie poziomej
Prof. Edmund Wittbrodt
Układ wieloczłonowy – model abstrakcyjny, którego elementami są człony sztywne i odkształcalne,
połączone ze sobą połączeniami (parami kinematycznymi) różnych klas (połączenia obrotowe, posuwiste,
sferyczne, …). Poddane są one działaniu sił różnego typu. Pod działaniem tych sił i momentów sił człony
poruszają się. Nie ma tu znaczenia czy człon reprezentuje element robota, pojazdu, maszyny
włókienniczej, stacji kosmicznej, kości człowieka, ssaka czy odnóże owada. W dynamice układów
wieloczłonowych poszukuje się algorytmów numerycznych. Wykorzystując dane opisujące wymiary, masę
(i jej rozkład), rodzaje połączeń i sił umożliwi ą one analizę kinematyczną i dynamiczną. Z uwagi na rozmiar
i złożoność algorytmów, często wykorzystane są komputery.
Prof. Edmund Wittbrodt
Układy wieloczłonowe mają różny stopień skomplikowania. Przyczyny złożoności układów:
• liczba stopni swobody układu
• liczba ciał oraz liczba połączeń między nimi
• struktura układu (otwarta lub zamknięta, niejednoznaczności wynikające z tzw. więzów biernych)
• charakter ruchu (płaski lub przestrzenny)
• rodzaj i charakter więzów krępujących ruchy ciał układu (holonomiczne lub nieholonomiczne,
skleronomiczne lub reonomiczne, jednostronne lub dwustronne, materialne, programowe –
serwowięzy)
• odkształcalność członów i podatność więzów (otoczenia)
• liniowość lub nieliniowość oraz stałość lub zmienność w czasie charakterystyk masowych, sprężystych
i tłumiących układu
• charakter oddziaływań zewnętrznych (deterministyczny lub probabilistyczny, stały, zmienny w czasie
lub zależny od stanu ruchu)
• uwzględnianie szczegółów mogących mieć wpływ na wyniki symulacji analizowanych zjawisk (luzy w
połączeniach i związane z nimi siły uderzeniowe, tarcie oraz mniej lub bardziej adekwatne modele, …)
Prof. Edmund Wittbrodt
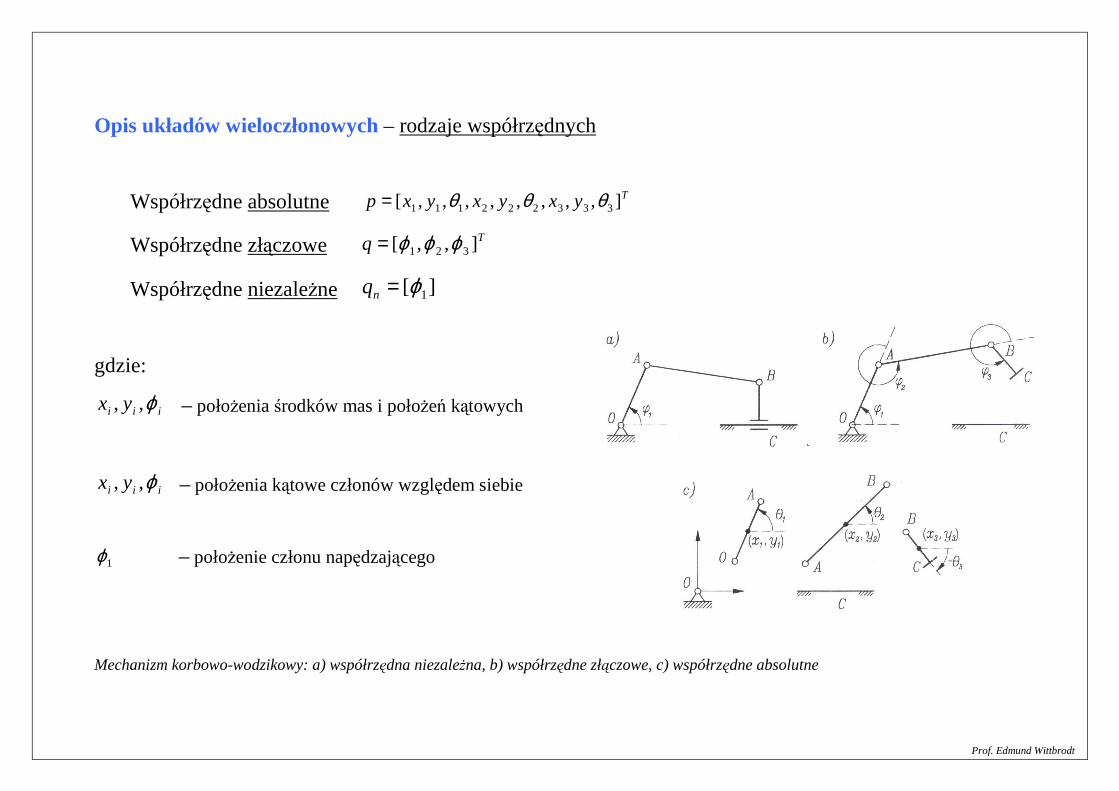
Opis układów wieloczłonowych – rodzaje współrzędnych
Współrzędne absolutne Tyxyxyxp ],,,,,,,,[ 333222111 θθθ=
Współrzędne złączowe Tq ],,[ 321 ϕϕϕ=
Współrzędne niezależne ][ 1ϕ=nq
gdzie:
iii yx ϕ,, – położenia środków mas i położeń kątowych
iii yx ϕ,, – położenia kątowe członów względem siebie
1ϕ – położenie członu napędzającego
Mechanizm korbowo-wodzikowy: a) współrzędna niezależna, b) współrzędne złączowe, c) współrzędne absolutne
Prof. Edmund Wittbrodt
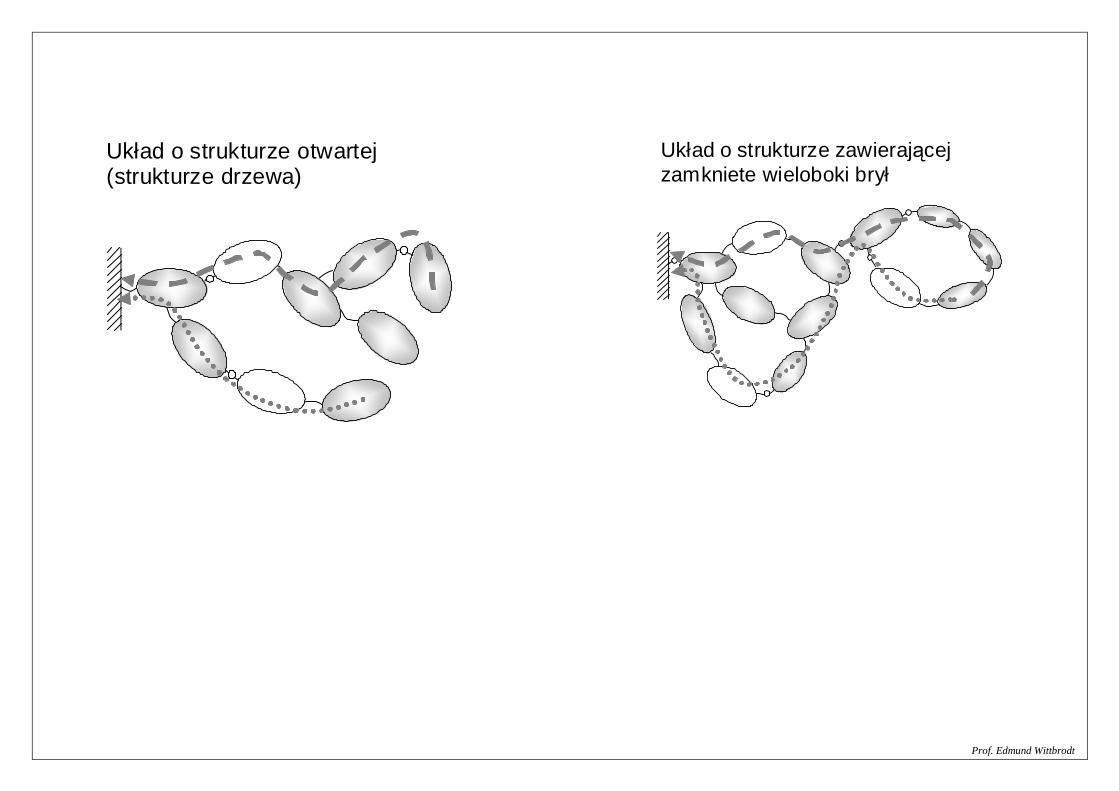
Układ o strukturze otwartej (strukturze drzewa)
Układ o strukturze zawierającej zamkniete wieloboki brył
Prof. Edmund Wittbrodt
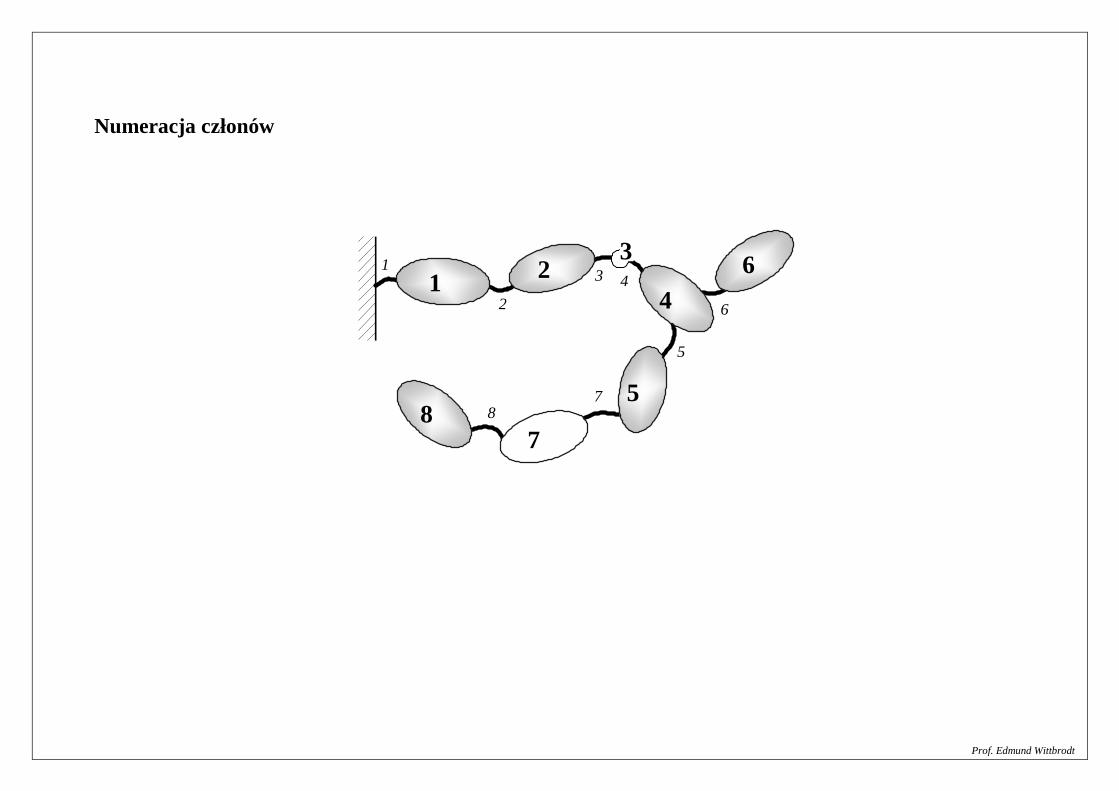
Numeracja członów
8
1
2
7
5
6
3 1
8 7
5
2 4
6 4
3
Prof. Edmund Wittbrodt
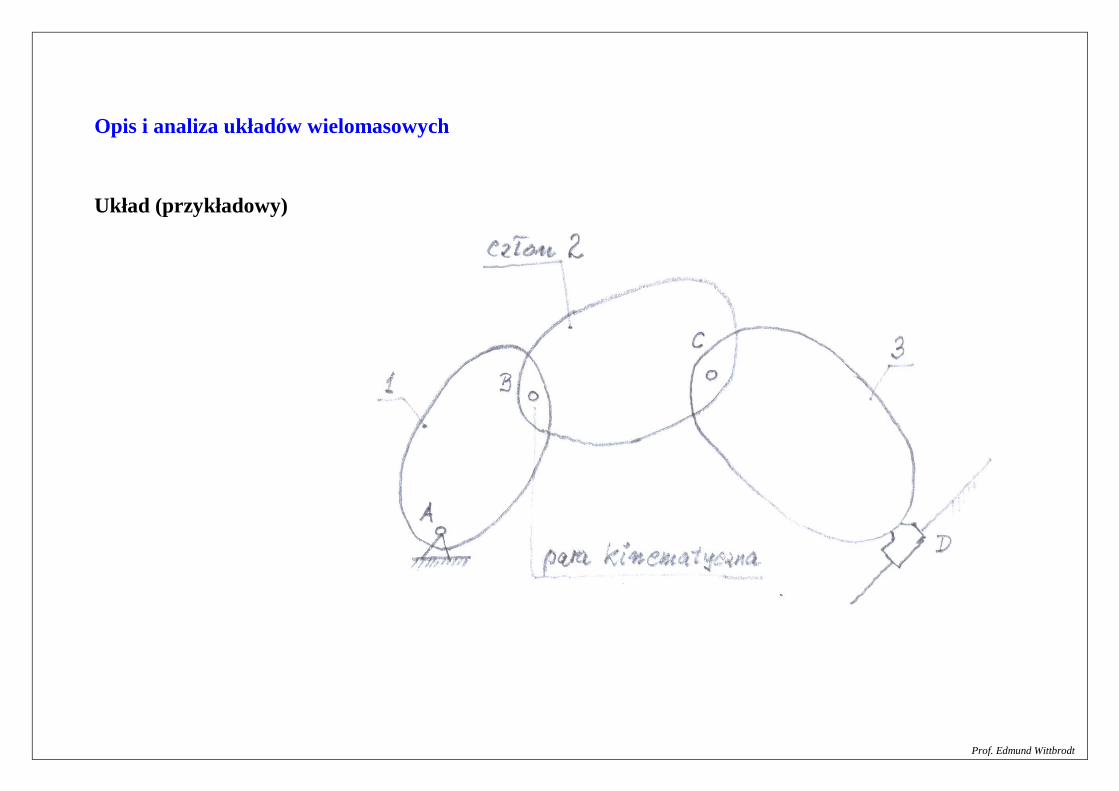
Opis i analiza układów wielomasowych
Układ (przykładowy)
Prof. Edmund Wittbrodt
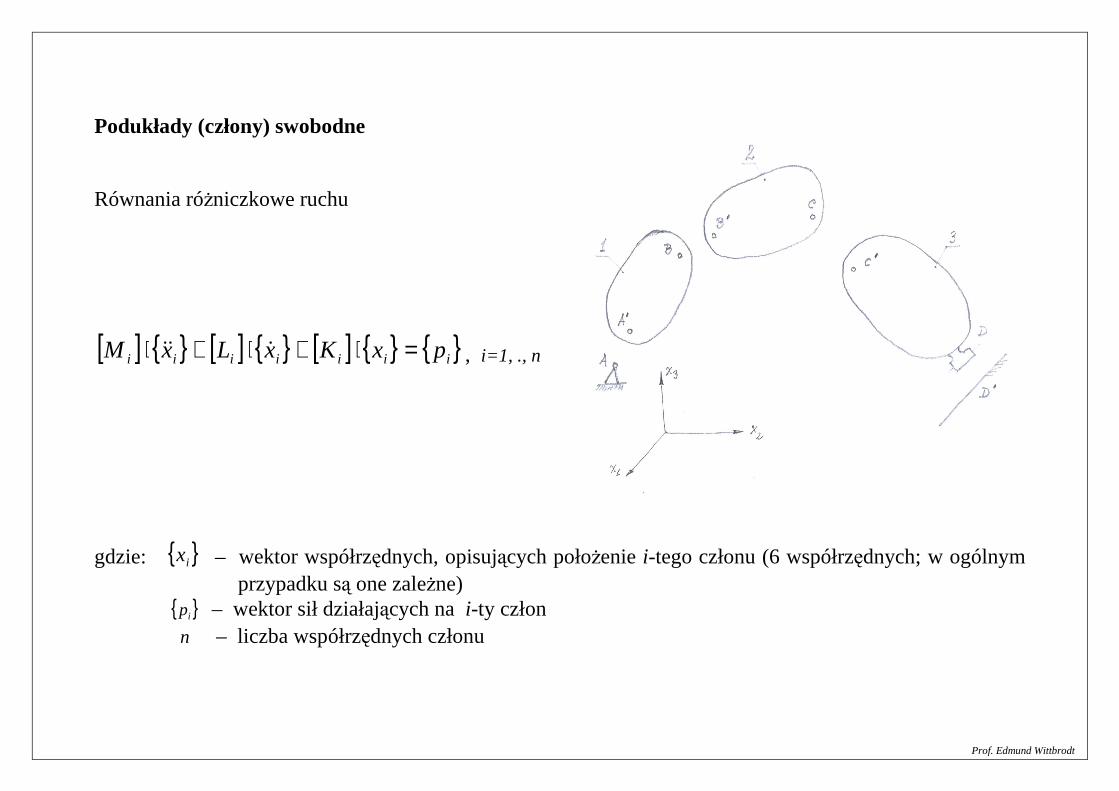
Podukłady (człony) swobodne Równania różniczkowe ruchu [ ] { } [ ] { } [ ] { } { }iiiiiii pxKxLxM =⋅+⋅+⋅ &&& , i=1, ., n gdzie: { }ix – wektor współrzędnych, opisujących położenie i-tego członu (6 współrzędnych; w ogólnym
przypadku są one zależne) { }ip – wektor sił działających na i-ty człon n – liczba współrzędnych członu
Prof. Edmund Wittbrodt
Równania więzi
)( jii qxx = , j=1, ..., s
gdzie: jq – współrzędna uogólniona (niezależna) s – liczba stopni swobody
Prof. Edmund Wittbrodt
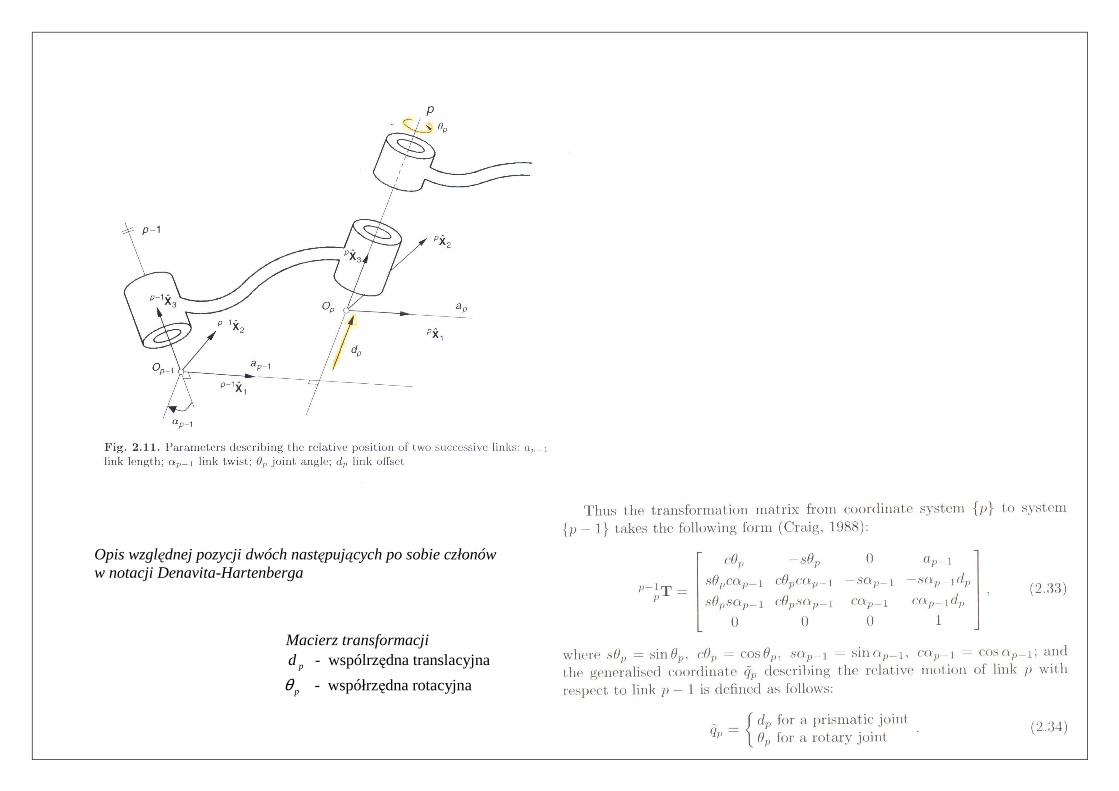
Opis względnej pozycji dwóch następujących po sobie członów w notacji Denavita-Hartenberga
Macierz transformacji pd - wspólrzędna translacyjna
pθ - współrzędna rotacyjna
Prof. Edmund Wittbrodt
Po wyeliminowaniu współrzędnych zależnych i określeniu sił uogólnionych (zgodnych z współrzędnymi niezależnymi), otrzymujemy
[ ] { } [ ] { } [ ]{ } { }QqKqLqM =+⋅+⋅ &&& ,
gdzie: [ ] [ ] [ ]KLM ,, – macierze bezwładności, tłumienia i sztywności układu z więzami
{ }Q – wektor sił uogólnionych układu z więzami.
Prof. Edmund Wittbrodt
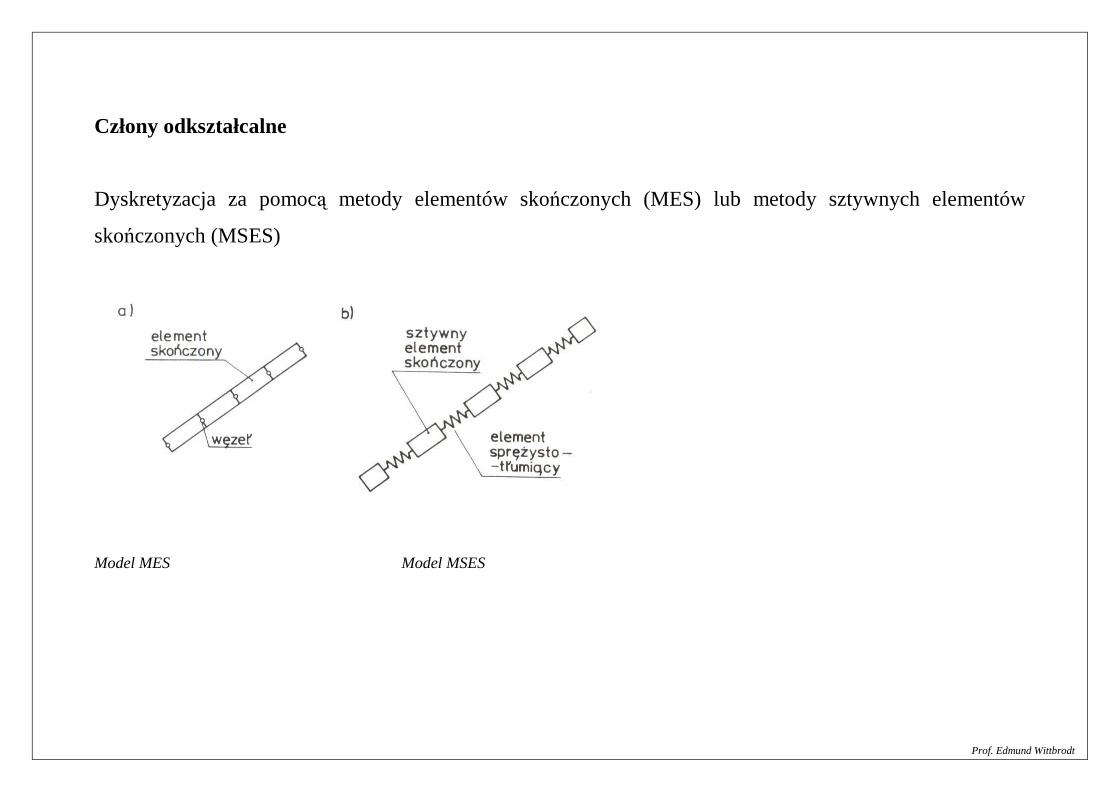
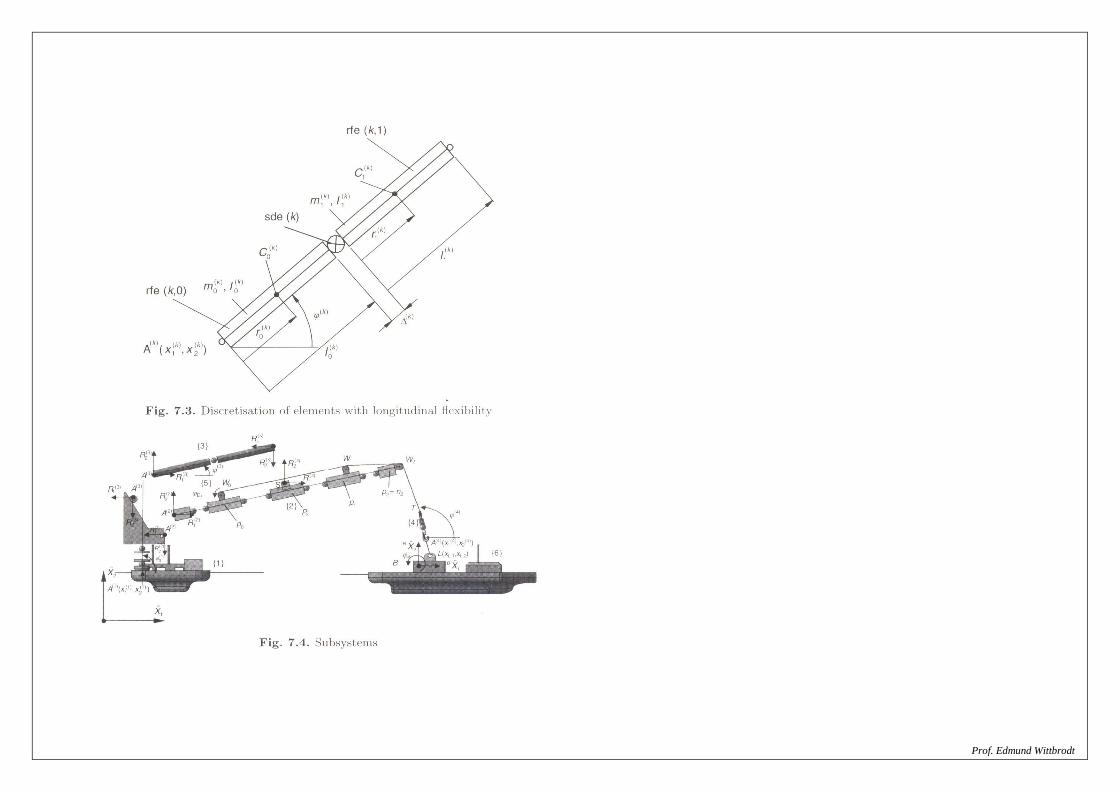
Człony odkształcalne Dyskretyzacja za pomocą metody elementów skończonych (MES) lub metody sztywnych elementów
skończonych (MSES)
Model MES Model MSES
Prof. Edmund Wittbrodt
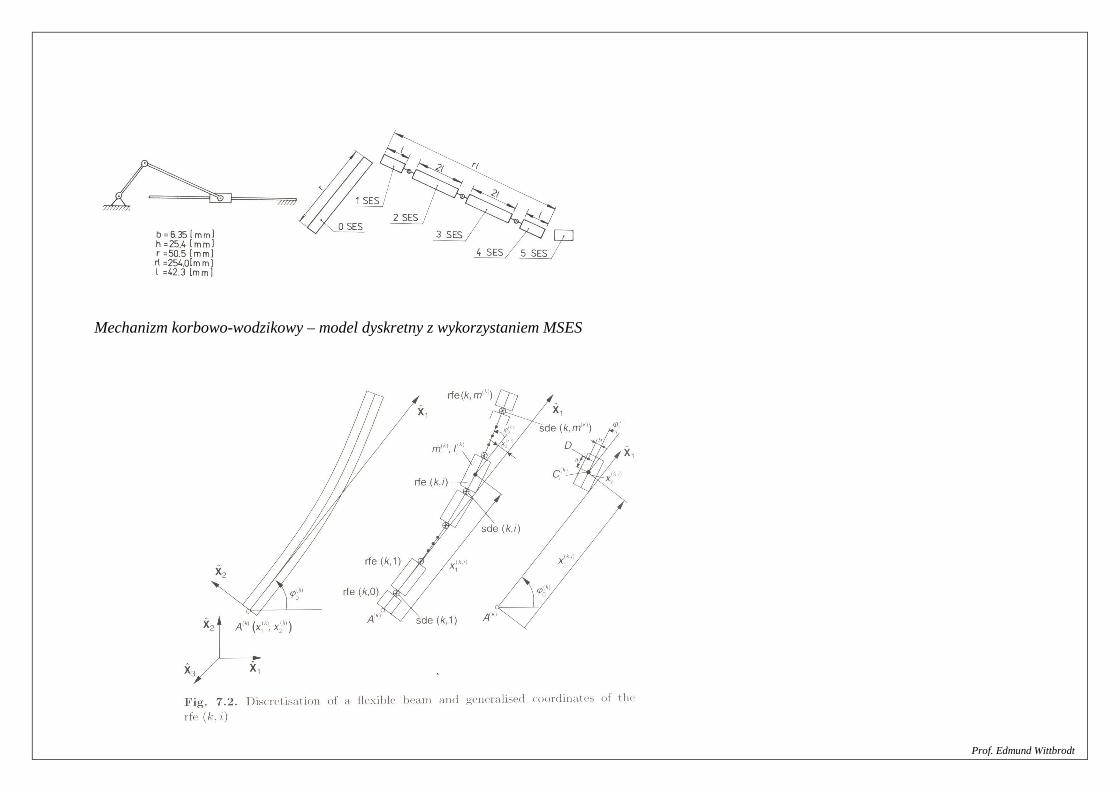
Mechanizm korbowo-wodzikowy – model dyskretny z wykorzystaniem MSES
Prof. Edmund Wittbrodt





























