Embed Size (px)
DESCRIPTION
tehnici
Citation preview

Tehnici si tehnologii moderne de achizitie a datelor spatiale
PROIECT: Sisteme de pozitionare GPS. Studii de caz
Student: Furdui Alin
Plic Amalia Maria
Mateiu Radu Bogdan
Cadru Didactic: Tudor Borsan

GNSS - Global Navigation Satellite System
Termenul Global Navigation Satellite System (GNSS) a fost introdus pentru a desemna toate sistemele de navigație bazate pe sateliți. Global Positioning System (GPS) este un sistem global de navigare prin satelit (GNSS – Global Navigation Satellite System) dezvoltat de către Departamentul de Apărare al Statelor Unite. Aceasta este singurul GNSS pe deplin funcţional din lume.
Se foloseşte de o constelaţie de 24 pana la 32 sateliţi de pe orbita medie a Pământului care transmit semnale precise de tip microunde, care permit receptoarelor GPS sa-si determine locaţia, timpul, şi viteza de deplasare. Numele oficial al GPS-ului este NAVSTAR GPS..
1.1.Pozitionarea cu tehnologia GNSS

Ca subsisteme ale GNSS se cunosc:
> NAVSTAR-GPS (NAVigation System with Timing And Ranging – Global Positioning System respectiv Sistem de navigaţie pentru urmărire şi distribuţie - sistem de poziţionare globală), dezvoltat în SUA şi cunoscut mai ales ca GPS, funcţional pentru folosinţa civilă parţial din 1992 şi complet din 1995;
> GLONASS (GLObal’naya NAvigatsionnaya Sputnikova Sistema) ca sistem global satelitar de navigaţie), realizat de Federaţia Rusă, operaţional din 1986;
> GALILEO EGNOS (European Geostationary Navigation Overlay Service) ca încercare europeană, în curs de implementare, cu etapă intermediară 2005-2006 şi finală în 2008, sistemul fiind interoperaţional cu primele două.
1.2.Sistemul de pozitionare GPS

Structura sistemului GPSDenumirea corectă a sistemelor de poziţionare globală
folosite în geodezie ar fi GPS - NAVSTAR, GPS GLONASS respectiv GPS - GALILEO. Inițial GPS a fost proiectat numai pentru aplicații militare. Curând, după ce acest obiectiv a fost atins a devenit evident ca GPS va putea fi folosit și pentru scopuri civile păstrând totuși anumite proprietăți numai pentru domeniul militar. Primele doua aplicații civile au fost navigația maritimă si măsurătorile tereste.
Un sistem de poziţionare globală, oricare ar fi el, este constituit din trei segmente, fiecare cu funcţii bine precizate:
-segmentul spaţial ;-segmentul de control ;-segmentul utilizator.
1.2.1.Alcătuire. Funcţionare

2.0. Metode si procedee de lucru
Metodele de masurare GPS se pot clasifica in doua categorii dupa cum urmeaza :
Metode clasice - Metoda statica
- Metoda rapid-statica
- Metoda kinematica
Metode moderne -Metoda RTK
Prin pozitionare se intelege determinarea pozitiei obiectelor stationare sau aflate in miscare (mobile) prin una din cele doua metode prezentate

- observaţiile se execută cu receptoare GPS instalate într-o statie fixa, stationate simultan intr-o sesiune de observatii.
- Timpul de observare variază de la 30 min până la două ore. - Precizia de determinare este ridicată, specifică reţelelor
geodezice de ordin superior. a)Varianta statica convenionala de pozitionare –b)Varianta static-rapid (fast static)
Metoda statica

Metoda cinematicaMetoda cinematică presupune masuratori cu doua sau mai
multe receptoare, din care unul amplasat într-un punct de coordonate cunoscute (base) si restul receptoarelor (rover) sunt în micare continua sau cu stationari foarte scurte. În acest context pozitia receptorului (receptoarelor) aflat în punctul nou se va determina functie de coordonatele cunoscute ale receptorului fix, prin însumarea cresterilor respectiv a coordonatelor relative aferente vectorului format de baza si rover.a) Varianta semicinematica (STOP and GO, PPK) este utilizata la determinarea rapida a coordonatelor, dar cu o precizie mai mare, timpul de stationare fiind minim. Se recomanda pentru ridicarea detaliilor, la distante de 5-6 km de la baza. AVANTAJE: pe suprafete mai mici se pozitioneaza rapid. DEZAVANTAJE: fata de metodele statice este necesara captarea permanenta de semnal între doua puncte masurabile.

b) Varianta cinematica în timp real RTK (Real Time Cinematic)
- Metoda elimină principalul inconvenient al metodelor şi procedeelor prezentate anterior, de a realiza poziţionarea doar prin post-procesare- permite determinarea şi cunoaşterea imediată a coordonatelor receptorului mobil, inclusiv verificarea calităţii măsurătorilor.
Tehnologia RTK asigură astfel un avantaj de bază în raport cu cele menţionate: corelarea şi corectarea erorilor de distanţă cu transmiterea datelor prin unde radio şi furnizarea în timp real, pe teren, a coordonatelor punctelor noi, inclusiv informaţii privind calitatea lor.

STUDIU DE CAZ 1. Proiectarea si determinarea retelei de sprijin planimetric
autorstrada Orastie-Sebes, tronsonul Geoagiu - Vintu de Jos
Leica 1200 Magellan Promark3

Pentru determinarea coordonatelor punctelor retelei de ridicare s-au executat determinari GPS simultane pe punctele retelei. Metoda folosita in observatii a fost cea statica cu post procesare pentru asigurarea unei precizii ridicate a rezultatelor. Masuratorile s-au efectuat cu 4 echipamente GPS: 2 echipamente GPS dubla frecventa LEICA 1200 si 2 echipamente simpla frecventa Magellan Promark3.
S-au achizitionat fisierele RINEX cu observatiile de la statiile pemanente Deva, Alba Iulia, pe intreaga perioada a observatiilor, aceste 2 statii constituind reteaua principala de puncte. Aceste 2 statii permanente incadrand toate punctele noi determinate.
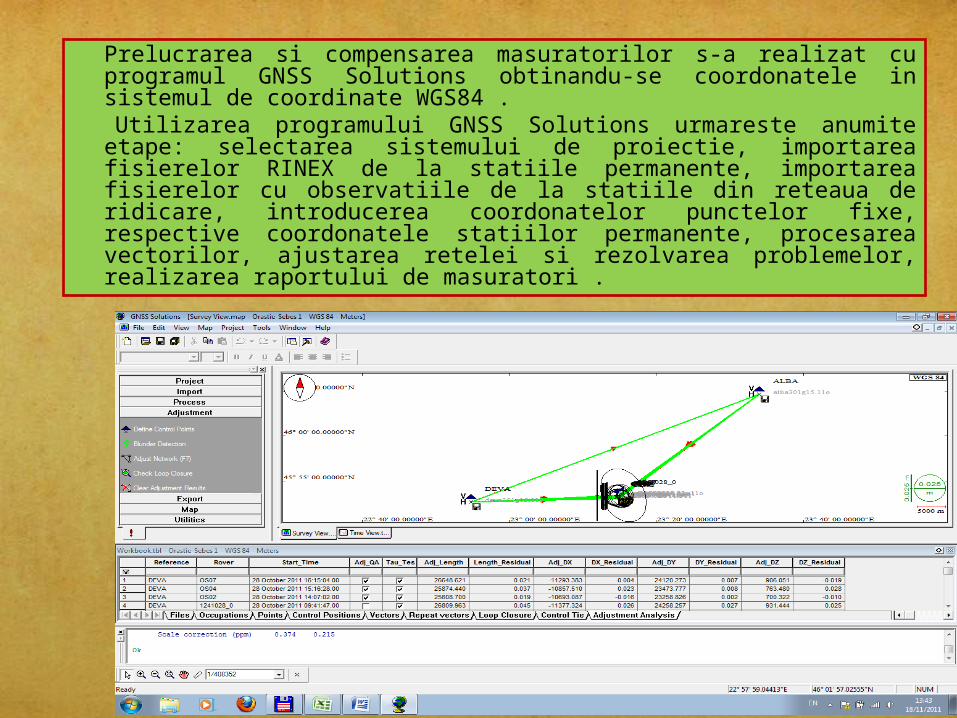
Prelucrarea si compensarea masuratorilor s-a realizat cu programul GNSS Solutions obtinandu-se coordonatele in sistemul de coordinate WGS84 .
Utilizarea programului GNSS Solutions urmareste anumite etape: selectarea sistemului de proiectie, importarea fisierelor RINEX de la statiile permanente, importarea fisierelor cu observatiile de la statiile din reteaua de ridicare, introducerea coordonatelor punctelor fixe, respective coordonatele statiilor permanente, procesarea vectorilor, ajustarea retelei si rezolvarea problemelor, realizarea raportului de masuratori .

Ulterior se transforma coordonatele in sistemul de proiectie Stereo 70 cu programul Transdatro 4.01(programul oficial de transformare al ANCPI).
Astfel dupa ce au fost prelucrate observatiile si s-a efectuat transformarea coordonatelor din sistemul WGS84 in sistemul Stereo 70 s-a intocmit cate o fisa pentru fiecare borna astfel determinata.
Control Points 95%
Name Components Error Status Control Error ALBA Long 23° 33'58.55513"E 0.000 FIXED
Lat 46° 04' 39.77005"N 0.000 FIXED Ellips height 307.535 0.000 FIXEDDEVA Long 22° 54' 48.71911"E 0.000 FIXED Lat 45° 52' 42.29431"N 0.000 FIXED Ellips height 246.729 0.000 FIXED

Denumire borna: B1 Tip borna: Beton
Sistem de coordinate WGS 1984
B 45˚53´10.96633” L 23˚14´37.65697” Helips 248.823
Sistem de coordinate Stereo 1970
Nord: 488906.926 Est: 363840.430 Cota: 205.859
KM: 0+075 Partea RHS Distanta din ax
95

STUDIU DE CAZ II. Culegerea şi procesarea primară a datelor cu tehnologia GNSS, sistemul GPS
Organizarea studiului de caz2.1.Obiective
Lucrarea prezinta culegerea şi procesarea primară a datelor cu tehnologia GNSS, sistemul GPS, în urma măsuratorilor realizate cu ajutorul aparaturii TRIMBLE.
Obiectivul principal al acestui studiu de caz este de a culege și procesa date din teren pentru determinarea poziției punctelor geodezice staționate cu ajutorul Metodei statice.
Lucrarea urmăreşte realizarea rețelei geodezice prin măsuratori GPS cu 4 receptoare staționate simultan, pe o perioadă mai mare de timp, denumită SESIUNE DE OBSERVAȚII în vederea îndesirii rețelei, în zona Cluj-Napoca, în 4 puncte geodezice: Dezmir, Dealul Feiurdeni, Pipa și Valea Gârbăului

2.2.Metoda de cercetareAm folosit în studiul nostru de caz metoda STATICA cu
mai multe receptoare. În teren s-au folosit 4 receptoare GPS care au receptionat semnal de la aceiasi minim 4 sateliti vizibili si au avut un timp comun de stationare. Cu cat numarul receptoarelor este mai mare, cu atat mai mult creste siguranta determinarilor. În funcție de pozitia, tipul receptorului (TRIMBLE R3) si timpul de stationare, am ales ca măsuratoarea sa fie de tip STATIC. Durata acesteia a fost stabilită în funcție de lungimea laturilor (4 ore), numărul de sateliți utilizabili, de geometria segmentului spațial observabili, evaluată de PDOP (Position Dilution of Precision).

2.3.Logistica utilizată
Pentru efectuarea lucrării am dispus de o dotare corespunzătoare de foarte bună calitate. Instrumentele de bază folosite au fost receptoare geodezice GPS, marca Trimble R3. Procesarea datelor s-a realizat cu ajutorul laptop-urilor HP, LENOVO. Programul de calcul utilizat la realizarea cercetărilor noastre a fost Trimble Total Control.
3.1.Identificarea punctelor
In cadrul studiului am utilizat un numar de 4 puncte vechi de coordonate cunoscute din zona municipiului Cluj Napoca (Feiurdeni, Dealul Pipa, Dezmir, Valea Garbaului). Identificarea acestora s-a realizat pe baza inventarului de coordonate primit de la OCPI Cluj si pe baza imaginilor satelitare.
Urmatoarea etapa a fost identificarea acestora in teren si verificarea starii tehnice a acestora.

3.2.Insalarea aparatului în staţie
Odata ajunsi la borna de pe Dealul Feiurdeni s-a efectuat punerea in statie a receptorului (Trimble R3):-Fixarea trepiedului deasupra bornei -Montarea receptorului pe trepied -Centrarea si calarea acestui pe punctul matematic materializat prin bulon metalic-Montarea unitatii de control pe unul din picioarele trepiedului si conectarea acestuia prin intermidiul unui cablu de date la receptor.
3.3.Setarea parametrilor de lucru
Se creează job nou pentru măsurători: Files – New Job. Se înscrie numele lucrării, după care se setează sistemul de coordonate și unitatea de măsură. Din meniul Survey se selectează submeniul FastStatic unde se setează antena Trimble A3. După ce antena este setată se introduce numărul punctului și înălțimea antenei(aparatului). După setarea parametrilor putem incepe înregistarea datelor.
3.4.Înregistrarea datelor
Durata de inregistrare a fost de aproximativ 4 ore, durata care a satisfacut nevoile noastre de precizie.

Procesarea înregistrărilor
4.1.Configurarea programului de procesare
Procesarea datelor s-a efectuat cu softul Trimble Total Control 2.73. Se creează proiect nou din meniul File – New – Static. Se setează sistemul de coordonate Project – System; se alege proiectia Stereografica 1970-Romania.
4.2.Transferul şi verificarea înregistrărilor
După configurarea proiectului se face transferul și verficarea datelor. Datele sunt importate din meniul Import – Receiver Raw Data.

4.3 Procesarea primară a datelor
După verificarea datelor importate se face o procesare primară pentru obținerea vectorilor de poziție din meniul Process – Process project.
Vectori de pozitie4.4. Verificarea soluților obținute
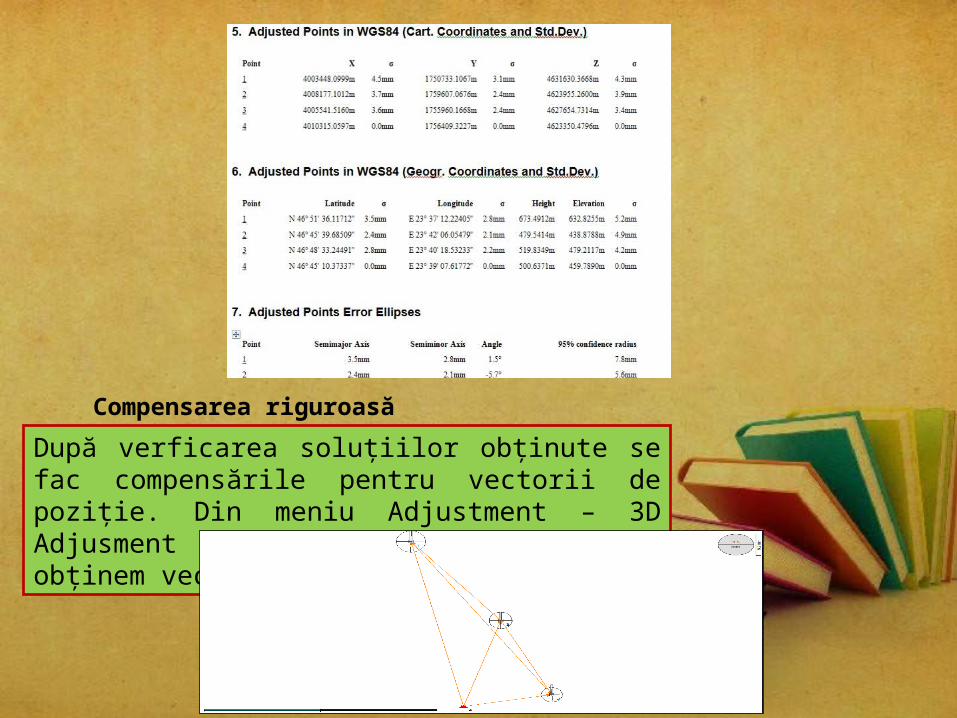
Compensarea riguroasă
După verficarea soluțiilor obținute se fac compensările pentru vectorii de poziție. Din meniu Adjustment – 3D Adjusment alegem metoda Biased și obținem vectorii compensați.

Aspecte finale
Spre deosebire de operarea cu staţia totală, lucrul cu receptoarele GPS implică timp de lucru efectuat de către operator mai mic, acesta constând doar în punerea aparatului în staţie, setarea JOB-ului şi a parametrilor esenţiali, precum şi iniţierea măsurătorilor. Ȋn acest sens, utilizatorului îi rămâne timp şi pentru monitorizarea întregului proces. Ȋn acelaşi timp, precizia măsurătorilor este mai mare, deoarece se reduc unele erori de centrare şi poziţionare a aparatului.GPS-ul poate realiza reţele geodezice naţionale şi internaţionale, realizează şi îndeseşte reţele de sprijin sau reţele de ridicare a detaliilor topografice.Cu toate acestea, utlizarea tehnologiei GPS are şi câteva dezavantaje, dintre care amintim: acoperirea mai redusă a semnalului satelitar, în special în ţara noastră, unde semnalul se transmite sub un unghi de înclinare, ceea ce face ca în zonele dens acoperite cu construcţii să ducă la pierderea frecventă a semnalului. Deasemenea, utilizarea unui singur receptor GPS duce la obţinerea unei precizii inferioare celei cu staţia totală, aceasta îmbunătăţindu-se prin adăugarea încă unui receptor GPS sau a unei staţii totale.





























