Embed Size (px)
Citation preview

1
トラジェクトリ・ベース・オペレーション
平成22年11月27日
電子航法研究所
福田 豊
平成22年度TFOS年次シンポジウム 発表内容
♦トラジェクトリ・ベース・オペレーション(TBO)の運用概念
概要
米国NextGen 運用概念、アビオニクスロードマップ
欧州SESAR 基本計画
♦技術動向
性能準拠型航法(PBN)
♦電子航法研究所の研究紹介
TBO: Trajectory Based OperationPBN: Performance Based Navigation
TBOの概要
出発空港
目的空港
制御到着時刻CTA
データリンク
♦ トラジェクトリ(軌道):航空機の空中と地上での運動(位置、時刻、速度など)の記述(ICAO Doc 9854)
10:00
10:20
10:40
11:00
CCO: Continuous Climb Operation 継続的上昇運用CDO: Continuous Descent Operation 継続的降下運用UPT: User Preferred Trajectory 利用者設定軌道CTA: Controlled Time of Arrival 制御到着時刻
CCO
CDO
UPT
NextGen運用概念
♦増加する交通量を安全に取り扱う
♦TBO:管制される全ての航空機の運航の計画と実施の基盤として4DTを利用
♦4DT:ウェイポイントを含むパスの中心線と許容幅(前後方向、横方向、垂直方向)
♦HP-TBO:高密度空域での高精度4DT
データ通信、地上と機上の自動化システム
4DT: 4 Dimension Trajectory 4次元軌道HP-TBO: High-Performance Trajectory Based Operations 高性能TBO
4DTと許容幅
許容幅不確定性を制限
性能要件(精度と完全性)垂直方向
前後方向(時間)
横方向制御到着時刻CTA
階層的な航空交通管理(米国)
Concept of Operations for the NEXTGENより
2
アビオニクスロードマップ♦機上装置の時間軸に沿った発展内容の文書
♦ 3次元RNP出発/到着運用:RNPに基づくVNAV能力により、最適降下を含めて、到着・出発交通流のコンフリクトを解消する3D RNPを運用する。
♦ RTAを付加した経路承認と予定軌道のダウンリンク: RTAを付加した経路承認を、音声またはデータ通信により伝達し、航空機が予定軌道をダウンリンクすることで、地上におけるコンフリクト検出が向上する。
♦ RTAを付加した軌道承認:管制機関がRTAを付加した軌道(緯度、経度、高度)をデータ通信により承認する。 RNP: Required Navigation Performance 航法性能要件
VNAV: Vertical Navigation 垂直航法RTA: Required Time of Arrival 到着時刻要件
4DTの空地間の調整♦ RTCA SC-214/EUROCAE WG78において、軌道
調整手順が検討
♦航空機の意図軌道の地上システムへのダウンリンクにADS-Cを使用
♦承認軌道のアップリンクには、CPDLCを使用
♦承認軌道がパイロットにより受け入れられると、パイロットはそれを実行し、機上装置は更新軌道をダウンリンク
♦航空機が現状の承認軌道が望ましくなくなった、または、実施できなくなった場合は、更新軌道をCPDLCで承認要求
ADS-C: Automatic Dependent Surveillance-ContractCPDLC: Controller Pilot Data Link Communications
SESAR基本計画
♦導入時期として、サービスレベル(SL)とそれに対応する能力レベル(CL)が0から5まで計画されている。ここで、レベル0は現在、レベル5が長期を示す。
♦ SLは管制機関が提供し、運航者が利用する運用サービスである。
♦ CLは航空機、運航管理センター、管制機関、空港などが持つ能力である。
♦各レベルのCLにより、対応するSLが実現できる。
SL:Service Level サービスレベルCL: Capability Level 能力レベル
SESAR SL♦ SL1(2009年/2013年):TBOの準備
到着時の時間ベース間隔の導入、AMAN/DMAN連接など
♦ SL2(2013年/2017年):TMの導入ターミナル空域でのRNPベース運用、フリールート巡航、データリンクの利用によるCTAの最適化など
♦ SL3(2017年/2020年):共有軌道環境での先進的自動化の達成
RBTを利用した交通流管理、データリンクを利用した軌道管理
♦ SL4(2020年/2025年):新間隔モードの運用拡張3D精密軌道承認、ターミナル空域外のフリールート
♦ SL5(2025年以降):利用者設定軌道に基づく完全4D-TM4D精密軌道承認
AMAN: Arrival Manager DMAN: Departure ManagerCTA: Controlled Time of Arrival RBT: Reference Business Trajectory4D-TM: 4D- Trajectory Management
SESAR 航空機CL♦ CL1:2D-RNP、高角度進入および曲線進入、CDA/
CCD、飛行重量減少時のエンルートでの上昇を可能とする巡航上昇モードなど
♦ CL2:CTAの導入、精密軌道の管制承認、地上ベースの速度調整による軌道制御、ATC制約のアップリンクと4DTのダウンリンク
♦ CL3:飛行管理とデータリンクの更新によるデータ共有、気象データ(格子点の風)のアップリンク、CTAに加えて複数のフライオーバー制御時刻
♦ CL4:統合化した軌道管理と間隔管理、精密軌道管制承認を支援する前後方向の航法の改善と4DT許容誤差範囲の規定
CDA: Continuous Descent Arrival 継続的降下運用CCD: Continuous Climb Departure 継続的上昇運用
CARATS♦ 将来の航空交通システムに関する長期ビジョン
CARATS 国土交通省変革の方向性
1. 軌道ベース運用(TBO)2. 予見能力の向上3. 性能準拠型の運用(PBO)の促進4. 全飛行フェーズでの衛星航法の実現5. 地上・機上での状況認識能力の向上6. 人と機械の能力の最大活用7. 情報共有と協調的意思決定の徹底8. 混雑空港及び混雑空域における高密度運航の実現
国土交通省資料より
CARATS: Collaborative Actions for Renovation of Air Traffic Systems

3
航空管制の制御ループ
Donohue, “Air Transportation Systems Engineering”
状態ベクトル(観測値)
パイロット 航空機
監視システム管制官
飛行
計画
/運航
票
経路目的地
経路目的地
音声通信状態ベクトル(真値)
軌道コマンド
手動操縦
レーダ誘導(目標状態
コマンド)飛行計画変更(軌道コマンド)
目標状態コマンド
オートパイロット
FMS
軌道のダウンリンク
航空機の能力の活用♦飛行軌道情報を共有し、航空機のFMSの機能を
活用する運用方式地上側と機上で軌道の情報共有
危険事象の早期検出(先を見越した行動)と制御(FMSの機能の活用)
♦管制官とパイロットの作業量の低減
♦効率的な運航(CDO:継続降下到着方式など)予測性の向上
♦安全性の向上
CDO: Continuous Descent Operation
性能準拠型航法PBN
♦ ICAO:PBNマニュアル(RNAVの性能要件)
♦総合システム誤差(TSE)
パス定義誤差(PDE)
飛行技術誤差(FTE)
航法システム誤差(NSE)
♦横方向(TSE)、前後方向(NSEのみ)
♦RNP(警報機能)
♦今後の拡張(垂直RNP、4D能力)PBN: Performance Based Navigation RNP: Required Navigation PerformanceTSE: Total System Error PDE: Path Definition ErrorFTE: Flight Technical Error NSE: Navigation System Error
NSE
FTE
PDE
TSE
測定位置
真の位置
定義パス
要求パス
-5
0
5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
-15 -10 -5 0 5 10 15 20 25X(NM)
Y(N
M)
PLUTO
SNE
SALLY
YHUKI
NZE
RNAV出発経路の航跡
NZE
SNE
YHUKI
SALLY
75機空港->NZE通過平均値:80NM, 13分標準偏差:0.63NM, 29秒
羽田空港
0
5,000
10,000
15,000
20,000
25,000
30,000
35,000
40,000
0 20 40 60 80
飛行距離(NM)
高度
(ft)
SNE YHUKI
31
33
35
37
129 131 133 135 137 139 141
経度(度)
緯度
(度
)
航跡例
青:羽田ー>福岡赤:福岡ー>羽田水色:飛行計画
経路緑色:大圏経路
0
10000
20000
30000
40000
129 131 133 135 137 139 141経度(度)
高度
(ft)
100マイル
降下区間で飛行距離が延伸する傾向がある。
航空機間の間隔確保
♦水平面:横間隔の確保
PBNにより経路を追従。
♦高度面:垂直間隔の確保
巡航中は巡航高度を追従。
上昇降下中のウェイポイントの高度は高度制限で実現可能、指定されない場合の高度はFMSに依存。
♦時間:前後間隔の確保
指示対気速度とマック数をFMSが制御。
高層風の影響で対地速度が変化。
RTA機能が活用できる可能性。
4
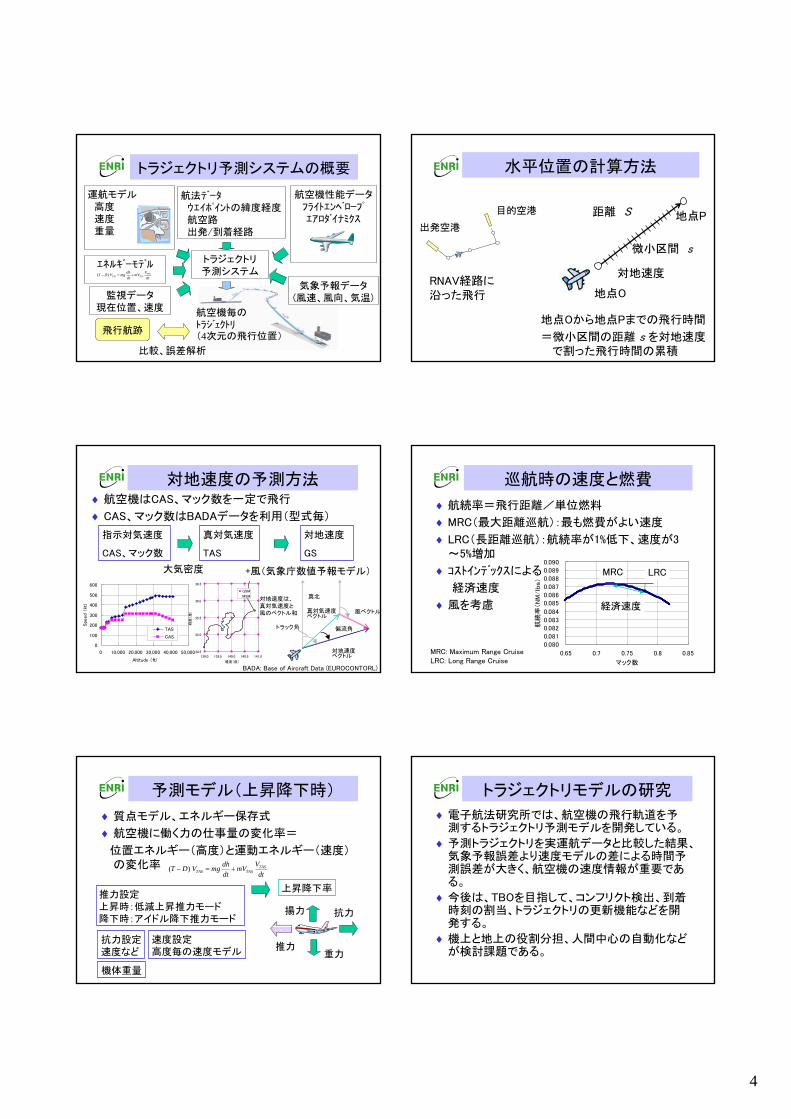
トラジェクトリ予測システムの概要
トラジェクトリ予測システム
運航モデル高度速度重量
航法データウエイポイントの緯度経度航空路出発/到着経路
航空機毎のトラジェクトリ(4次元の飛行位置)
航空機性能データフライトエンベロープエアロダイナミクス
気象予報データ(風速、風向、気温)
エネルギーモデル( ) TAS
TAS TASVdhT D V mg mV
dt dt− = +
飛行航跡
比較、誤差解析
監視データ現在位置、速度
水平位置の計算方法
地点Oから地点Pまでの飛行時間
=微小区間の距離 s を対地速度で割った飛行時間の累積
地点O
地点P距離 S
微小区間 s
対地速度
出発空港
目的空港
RNAV経路に沿った飛行
対地速度の予測方法♦航空機はCAS、マック数を一定で飛行
♦ CAS、マック数はBADAデータを利用(型式毎)
指示対気速度
CAS、マック数
真対気速度
TAS
対地速度
GS
+風(気象庁数値予報モデル)大気密度
0
100
200
300
400
500
600
0 10,000 20,000 30,000 40,000 50,000
Altitude (ft)
Spe
ed
(kt
)
TAS
CAS
BADA: Base of Aircraft Data (EUROCONTORL)
34.5
35.0
35.5
36.0
36.5
139.0 139.5 140.0 140.5 141.0
経度(度)
緯度
(度
)
GSM
MSM対地速度は、真対気速度と風のベクトル和 風ベクトル
真北
トラック角 偏流角
対地速度ベクトル
真対気速度ベクトル
巡航時の速度と燃費
♦航続率=飛行距離/単位燃料
♦MRC(最大距離巡航):最も燃費がよい速度
♦ LRC(長距離巡航):航続率が1%低下、速度が3~5%増加
♦ コストインデックスによる
経済速度
♦風を考慮
0.0800.0810.0820.0830.084
0.0850.0860.0870.0880.0890.090
0.65 0.7 0.75 0.8 0.85
マック数
航続
率(N
M/lb
s)
MRC LRC
経済速度
MRC: Maximum Range CruiseLRC: Long Range Cruise
予測モデル(上昇降下時)
♦質点モデル、エネルギー保存式
♦航空機に働く力の仕事量の変化率=
位置エネルギー(高度)と運動エネルギー(速度)の変化率
抗力
推力
揚力
重力
推力設定上昇時:低減上昇推力モード降下時:アイドル降下推力モード
抗力設定速度など
速度設定高度毎の速度モデル
上昇降下率
機体重量
( ) TASTAS TAS
VdhT D V mg mVdt dt
− = +
トラジェクトリモデルの研究
♦電子航法研究所では、航空機の飛行軌道を予測するトラジェクトリ予測モデルを開発している。
♦予測トラジェクトリを実運航データと比較した結果、気象予報誤差より速度モデルの差による時間予測誤差が大きく、航空機の速度情報が重要である。
♦今後は、TBOを目指して、コンフリクト検出、到着時刻の割当、トラジェクトリの更新機能などを開発する。
♦機上と地上の役割分担、人間中心の自動化などが検討課題である。





























