Embed Size (px)
Citation preview

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 1/20
СИСТЕМ
улази излази
тенички
биолошки
друштвени
мешовити...
подсистем
Информациони –
кибернетски систем
посматра понашање система
са становишта размене
информација са околином.
Систем је целина која у околини делује самостално и са
одређеним циљем. Може бити физички (заузима деопростора) и апстрактни (систем једначина и сл.)

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 2/20
Улазне и излазне величине
улази излази
Улазне величине карактеришу оне улазе који битно
утичу на рад система.
Излазне величине су излази који представљају резултат
рада система за који смо заинтересовани.

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 3/20
УПРАВЉАЊЕ СИСТЕМОМ
поремећаји – улазне величине које
ометају нормално деловање система
управљање – делује на систем тако да седобије његово жељено понашање
излазне
величине
Систем може имати дејство из околине којим се делује да би се добио жељени
резултат. Дејство управљање може вршити човек, сам или уз помоћ неког техничког подсистема. Могуће је и управљање без непосредног људског дејства –
АУТОМАТСКО. Према томе, управљање може бит:
РУЧНО
ПОЛУАТОМАТСКО
АУТОМАТСКО

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 4/20
300 г. пне – водени сат (клепсидра)
1600 – Дробелов регуалатор температуре
1769 Ватов регулатор. Сматра се званичним почетком индустријске револуције. 1800 Ели Витни. Концепт унапред израђених измењивих делова у производњи (производња
мускети). Сматра се почетком масовне производње.
1913 Хенри Форд је увео аутоматизоване машине у аутомобилску индустрију.
1952 Нумеричка регулација алатних машина
1954 Георге Девол развија "програмирани пренос предмета". Претеча првог индустријског робота.
1960 Представљен први робот. Од 1961 се користи у ливницама.
1994 Масовна употреба управљања са повратном спрегом у аутомобилима.
ИСТОРИЈА

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 5/20
Зашто аутоматско управљање
Зашто се употребљава аутоматско управљање када се у претходним примерима
види да је и ручно сасвим прихватљиво?
Тешко за човека Тешко за машину
надзор и интервенција на системима
у веома топлом и отровном окружењу.
непрекидно понављање неке
операције.
приземљење авиона ноћу при лошим
временским условима.
повера клијавости семена у
расаднику.
вожња возила по неравном терену.
проналажење најскупљег од свих
дијаманата изложених на столу.
Кпје су улазне, а кпје
излазне величине?
Шта је урављаое, а
шта премећај??

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 6/20
Да ли аутоматско управљање
Треба наћи такво управљање да се полуга исправи!!!
(Одредити кретање y(t) тако да θ y(t) = 0)

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 7/20
Примери
Регулација нивоа воде (водокотлић)
Регулатор притиска
Управљање турбином

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 8/20
Примери

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 9/20
Примери Аутоматско паркирање
Аутоматски
сабилизатор тркачког
аутомобила
Противблокирајући уређај
Серво волан

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 10/20
Дијаграм система
Дијаграм система С је графички приказ система.
Систем и подсистеми се приказују правоугаоницима,
а улазне и излазне величине стрелицама.

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 11/20
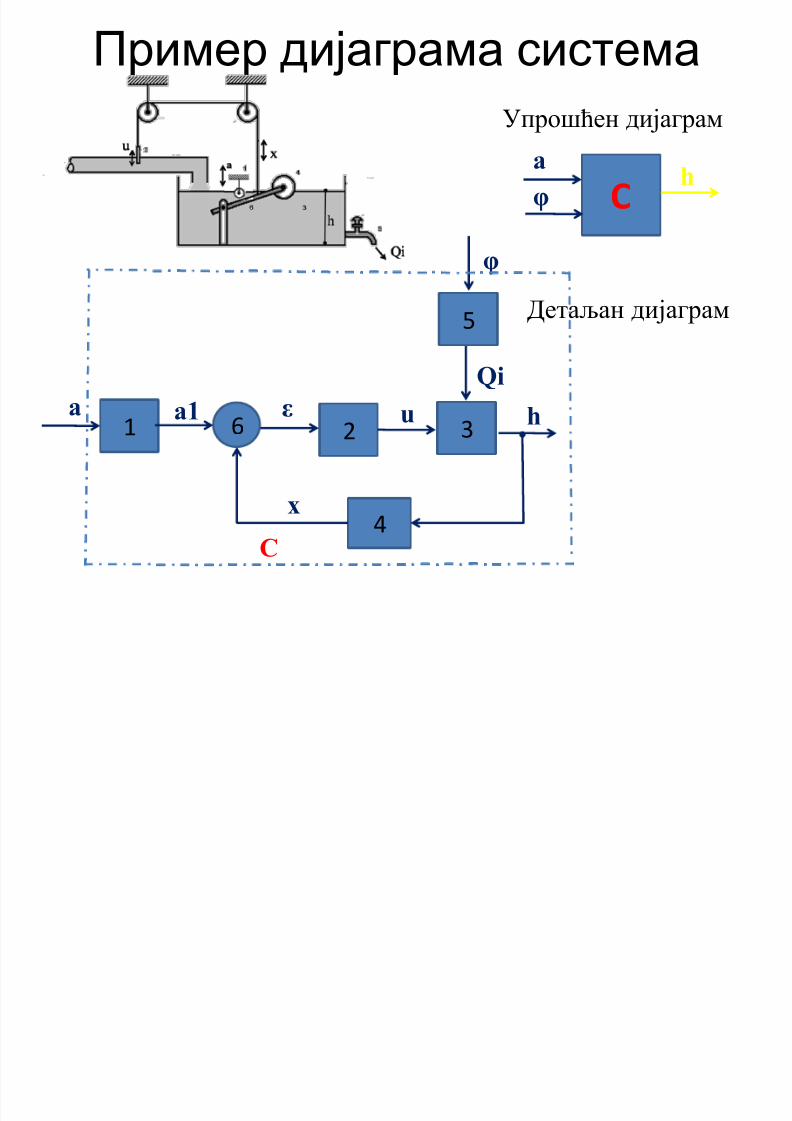
Пример дијаграма система
Систем регулише висину нивоа воде h у резервоару 3. Висина зависи од померања a
ослонца 1 полуге 6 и отока Qi, који је одређен отварањем φ славине 5. Пловак 4
мери висину и помера уже за x, па, преко котурова, затвара или отвара заслон 2.
8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 12/20
Пример дијаграма система
С a
φ h
Упрошћен дијаграм
Детаљан дијаграм
h21 3
4
u
x
Qi
а
5
φ
С
6а1 ε

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 13/20
Основне спреге у систему
Редна спрега: Излазна величина подсистема С1 је
истовремено улазна величина подсистема С2.
Паралелна спрега: Излазна величина система је
једнака збиру излазних величина подсистема С1 и С2.
8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 14/20
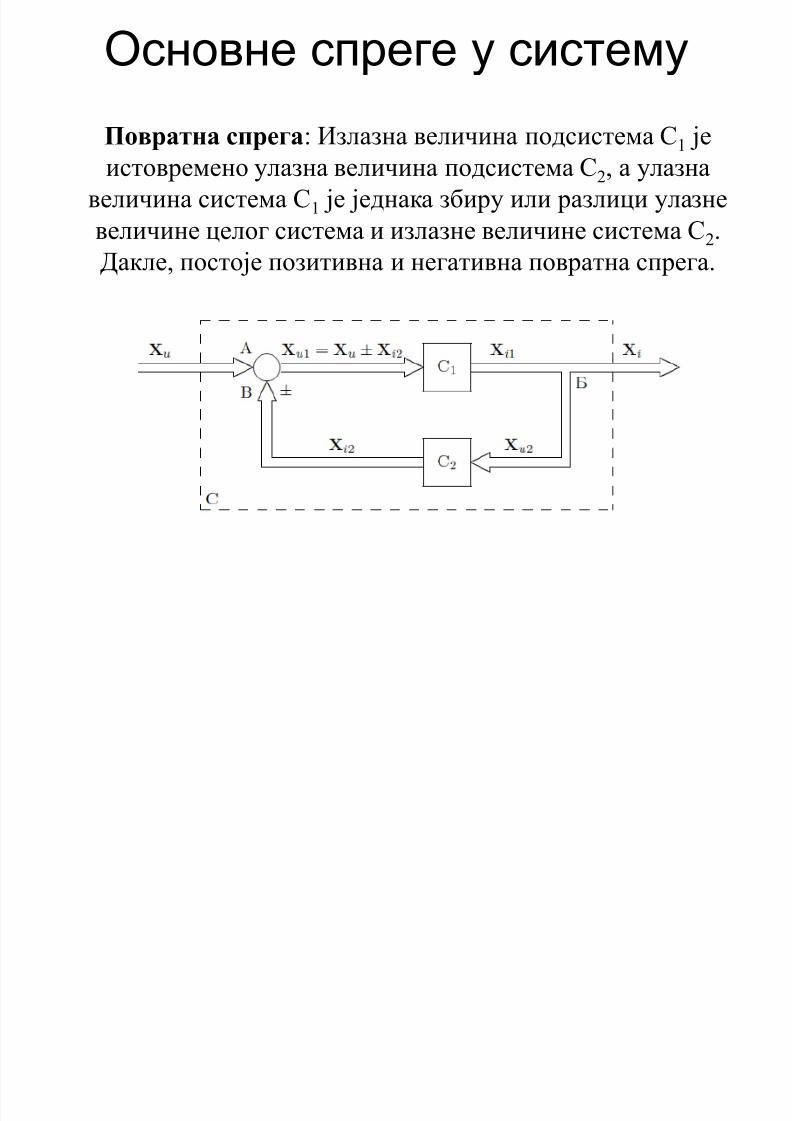
Основне спреге у систему
Повратна спрега: Излазна величина подсистема С1 јеистовремено улазна величина подсистема С2, а улазна
величина система С1 је једнака збиру или разлици улазне
величине целог система и излазне величине система С2.
Дакле, постоје позитивна и негативна повратна спрега.

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 15/20
Структура система
Структура система обухвата све његове подсистеме са свимњиховим међусобним спрегама.
Структурни дијаграм система је његов дијаграм који приказује
његову структуру, односно све подсистеме и њихова међусобна
дејства.
h21 3
4
u
x
Qi
а
5
φ
С
6а1 ε
С
8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 16/20
Структура система
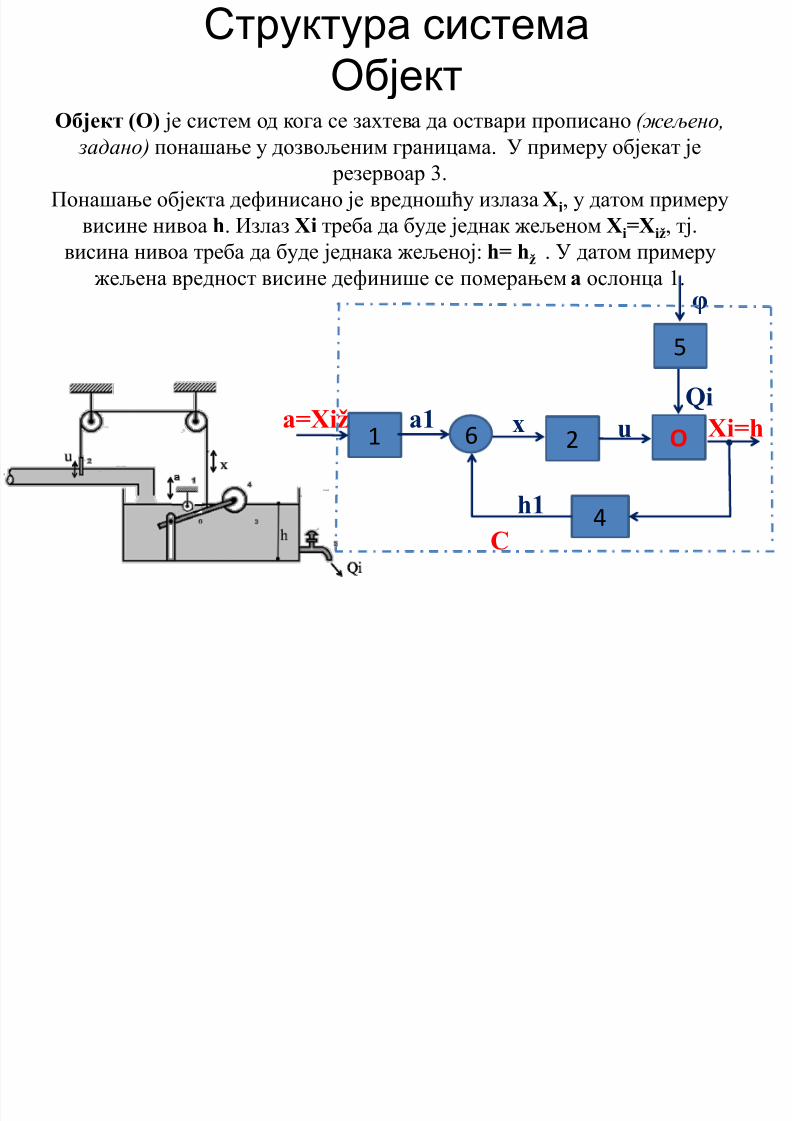
Објект Објект (О) је систем од кога се захтева да оствари прописано (жељено,
задано) понашање у дозвољеним границама. У примеру објекат је резервоар 3.
Понашање објекта дефинисано је вредношћу излаза Хi, у датом примеру
висине нивоа h. Излаз Хi треба да буде једнак жељеном Хi=Хiž, тј.
висина нивоа треба да буде једнака жељеној: h= hž . У датом примеру
жељена вредност висине дефинише се померањема ослонца 1.
Xi=h21 O
4
u
h1
Qi
а=Xiž
5
φ
С
6а1 x
С

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 17/20
Структура система
Поремећај
Због различитих спољашњих утицаја, жељено понашање објекта се
разликује од стварног. Улазна величина објекта која настаје и мења
се независно од његовог понашања је поремећај Z. У примеру,
отварањем славине празни се резервоар, тј. Z= φ
Xi 21 O
4
u
h1
Qiа1
5
φ=Z
С
6
Xiž x
С

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 18/20
Структура система
Управљање
Објект сам од себе не може да оствари жељено динамичко
понашање Хiž. То је могуће једино ако на њега делује улаз који се
назива управљање U. Управљање треба да обезбеди жељено
понашање објекта. У примеру то је отварања u вентила 2.
Xi 21 O
4
U=u
h1
QiXiž
5
Z
С
6xа1
С

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 19/20
Структура система
Управљачки систем
Систем чија је излазна величина управљање за дати објект јеуправљачки систем УС. Сви подсистеми, осим објекта, чине
управљачки систем. Управљачки систем мора добити информацију о
жељеном понашању објекта Xiž да би формирао сигнал управљања
U. Поред тога, управљачки систем може имати, као улазне величине,
и поремећај Z и излазну величину Xi
.
Xi 21 O
4
U
h1
QiXiž
5
Z
УС
6а1 x

8/13/2019 sistemi automatskog upravljanja uvod
http://slidepdf.com/reader/full/sistemi-automatskog-upravljanja-uvod 20/20





























