Embed Size (px)
Citation preview

Research ArticleA Simplified Kalman Filter for Integrated Navigation Systemwith Low-Dynamic Movement
Xixiang Liu12 Jian Sima12 Yongjiang Huang12 Xianjun Liu12 and Pan Zhang12
1School of Instrument Science amp Engineering Southeast University Nanjing 210096 China2Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology Ministry of Education Nanjing 210096 China
Correspondence should be addressed to Xixiang Liu scliuseu163com
Received 23 May 2016 Accepted 25 August 2016
Academic Editor Francesco Braghin
Copyright copy 2016 Xixiang Liu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In the integrated navigation system with inertial base the update frequency of Strapdown Inertial Navigation System (SINS) isalways higher than those of aided navigation systems thus updating inconsistency among subsystems becomes an issueThe analysisindicates that the state transition matrix in Kalman filter is essentially a function of carrier motion Based on this understandinga simplified Kalman filter algorithm for integrated navigation is designed for those carriers with low-dynamic motions With thissimplified algorithm when the filter is without aided information updating only calculation and accumulation on state transitionmatrix are executed and when the filter is with updating normal time and measurement update are done based on the averagedstate transition matrix Thus the calculation load in the simplified algorithm will be significantly lessened Furthermore dueto cumulative sum and average operation more accurate state transition matrix and higher fusion accuracy will arrive for thesmoothing effect on random noise of carrier motion parameters Simulation and test results indicate that when the carrier iswith a low-dynamic motion the simplified algorithm can complete the data fusion of integrated system effectively with reducedcomputation load and suppressed oscillation amplitude of state vector error
1 Introduction
The integrated navigation system is widely used for variousvehicles to provide speed position and (or) attitude It isgenerally believed that the integrated system can give full playto each navigation system constructing integrated system andachieve advantages of complementary or (and) combinationamong each other [1ndash3] Among many integrated navigationsystems the inertial integrated navigation system may be themost typical one [2ndash7] The most commonly used integratedsystems with inertial base are Strapdown Inertial NavigationSystem (SINS)Global Navigation Satellite System (GNSS)SINSVision SINSearth field (such as terrain magnetic andgravity) integrated navigation and so forth Kalman filter(KF) and other improved filters based on the structure of KFsuch as extended KF unscented KF and particle KF are themain tools for data fusion in integrated systems [8ndash11] Whenthemodels describing system andmeasurement processes areaccurate and the statistical properties of noise are knownoptimal estimation of the state vector can be obtained with
KF for data fusion [8] For convenience all the above filtersare named as Kalman-liking filters in the following text andonly KF is analyzed
In the integrated system the problems of time and spatialinconsistency caused should be first solved before the infor-mation fromdifferent navigation systems can be used for datafusion [12 13]The time inconsistency is mainly caused by theinconsistency of clocks used in different systems while spatialinconsistency is caused by different installing position of eachsystem To cope with the first problem a unified standardtime signal is usually introduced to synchronize each systemFor example the second-pulse signal fromGNSS is oftenusedto synchronize the clock of SINS in the integrated systemof SINSGNSS [12] To cope with the second one lever-arm compensation methods are always used For examplein the integrated SINSGNSS lever-arm length and themeasurement from SINS are often used to construct andcompensate lever-arm velocity when using velocity matchingalgorithm [13] Thus after unified time signal and lever-arm compensation method are introduced the inconsistent
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 3528146 9 pageshttpdxdoiorg10115520163528146
2 Mathematical Problems in Engineering
update frequency among each system becomes an importantissue Due to different working mechanism the data updatefrequency of each navigation system is quite different [18] For example the update frequency of SINS is always100Hz or 200Hz even up to 1 kHz [1] and the frequencyof GNSS is about 1Hzsim20Hz [7] and the frequency of earthfield navigation system always depends on the characteristicof earth field and there exists some uncertainty [2 3] Ingeneral the update frequency of inertial navigation systemalways used as main system in the integrated system withinertial base is much higher than those of aided navigationsystems
From the aspects of system evolution and measure-ment correction KF can be divided into time update andmeasurement update processes which provides a potentialsolution to the inconsistency problem of update frequency[1 8] When the update frequencies between the mainand aided systems are consistent time update and mea-surement update operation will be carried out successivelyWhen those are inconsistent only time update operationwill be run without measurement update of aided systemand both operations will be run with measurement update[8]
In theory the separated operation of time update andmeasurement update can solve the inconsistency betweenmain system and aided system in integrated system effec-tively In the time update process of KF the update calculationfor state vector error covariance of state vector and somerelated variance such as state transition matrix will beexecuted The calculation amount is relatively smaller thanthat of measurement update that needs inversion matrixoperation However higher update frequency of SINS willbring large calculation load because the same update fre-quency as that of SINS is needed When the frequencyof SINS is 100Hz the calculation amount caused by timeupdate is heavier than that of measurement update with 1Hzmeasurement update frequency
In this paper the system state equation of integratedsystem is analyzed and the analysis indicates that the timeupdate process in KF is essentially the update of parametersrelated to state matrix while the variables of state transitionmatrix are the motion functions of the carrier When thevehicle is with low-dynamic motion the changes of motionparameters are slow and then the changes in time updateare slow In this paper low-dynamic motion is defined asfollows a vehicle is with a constant velocity in the samedirection and (or) with a perturbation of acceleration butwithout constant acceleration Based on this understand-ing a simplified KF for those carriers with low-dynamicmotion is presented In this simplified algorithm only theupdate and summation on state transition matrix withoutthe standard time update process are carried out whenthere is no measurement update The case of integratedsystem of masterslave INS (MS INS) is studied and thesimulation and turntable tests indicate that the simplifiedalgorithm can fulfill data fusion with reduced studied andthe simulation and turntable tests indicate that the simplifiedalgorithm can fulfill data fusion with reduced calculationbut suppressed error oscillation of state vector when the
carrier is with a constant velocity or with a perturbation ofacceleration
The rest of this paper is organized as follows Theintegrated system of MS INS for ship condition is taken asexample and system andmeasurement equations are studiedin Section 2 In Section 3 KF is introduced to fulfill datafusion for MS INS integration In Section 4 the time updateprocess is analyzed and the simplified KF is designed andverified with simulation for those vehicles with low-dynamicmotion In Section 5 the results from turntable test are givenand the conclusion is in Section 6
2 Integration System of MS INS for Ship
As mobile platforms ships are usually equipped with gimbalinertial navigation system or gimbal compasslog and otherhigh accuracy navigation equipment to provide the shipmotion information including speed position and attitudeWith the excitation ofwindwave temperature difference andso forth deflection of ship deckwill be generated In this casethe navigation information from gimbal inertial navigationsystem cannot be used for weapons and (or) observationequipment because these types of equipment are installedat the head tail and highest position while MINS are atthe center of ship [14] Aiming to solve this problem SINSwith middle or low accuracy sensors are introduced andinstalled at the basis of the above-mentioned equipment toprovide information excluding deck deformation Generallythe accuracy of gimbal system is always higher than that ofSINS with one order of magnitude In order to use higheraccuracy information from gimbal system for SINS includinginitial alignment and error correction SINS and gimbalsystem are always integrated [14ndash16] In this case the gimbalsystem is defined asMaster INS (MINS)while SINS is as SlaveINS (SINS) In the rest of this paper Strapdown INS is usedas Slave INS and the difference is not distinguished
In the MS INS integrated system MINS can providevarious navigation information including velocity positionand attitude with a lower update frequency than that of SINSNote that when gyrocompass is used as MINS the velocityand position can be provided with log In the integrationof MS INS matching methods of velocity plus attitude andvelocity plus heading are always used [14ndash16] The purposeof this paper is to find a simplified KF algorithm thus onlyvelocity plus heading is selected for analysis
21 System State Equation In the integrated system of MSINS errors of SINS can be selected as state variables toconstruct state vector and navigation information fromMINS can be regarded as aided information to constructmeasurement vector The error of velocity position andattitude of SINS and the bias of gyroscope are all observablevariables with velocity plus heading matching Observabilityanalysis on integrated navigation system is a complex and bigissue but it will not be discussed because of the purpose ofthis paper Here the error of velocity misalignment anglesand bias of gyroscope are selected to construct state vector to
Mathematical Problems in Engineering 3
simplify the analysis The state vector of MS INS integratedsystem is as follows [16]
X = [120575119881119864120575119881
119873120601
119864120601
119873120601
119880120576
119909120576
119910120576
119911]
119879
(1)
where 120575119881119864and 120575119881
119873are the east and north velocity errors
respectively 120601119864 120601
119873 and 120601
119880are the misalignment angles of
pitch roll and yaw respectively and 120576119909 120576
119910 and 120576
119911are gyro
bias along 119909- 119910- and 119911-axis respectively
The system state equation can be constructed as follows[1 8]
X (119905) = A (119905)X (119905) + F (119905)W (119905) (2)
where A(119905) is the system state transition matrix W(119905) isthe system process noise and F(119905) is the noise interferenceinputmatrix According to the error propagation equations ofvelocity error misalignment angle and gyro bias the systemstate transition matrix can be expressed as follows
A (119905)
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119881
119873
119877
tan119871 2120596
119894119890sin 119871 + 119881119864
119877
tan 119871 0 minus119891
119880119891
1198730 0 0
minus (2120596
119894119890sin 119871 + 119881119864
119877
tan 119871) 0 119891
1198800 minus119891
1198640 0 0
0 minus
1
119877
0 120596
119894119890sin 119871 + 119881119864
119877
tan 119871 minus(120596
119894119890cos 119871 + 119881119864
119877
) minus119862
119899
11988711minus119862
119899
11988712minus119862
119899
11988713
1
119877
0 minus (120596
119894119890sin 119871 + 119881119864
119877
tan119871) 0 minus
119881
119873
119877
minus119862
119899
11988721minus119862
119899
11988722minus119862
119899
11988723
0 0 120596
119894119890cos 119871 + 119881119864
119877
119881
119873
119877
0 minus119862
119899
11988731minus119862
119899
11988732minus119862
119899
11988733
03times8
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(3)
where 119881119864and 119881
119873are east and north velocity respectively
120596
119894119890and 119877 are angular velocity and radius of the earth
respectively 119871 is the geographical latitude of the carrier119891
119864 119891
119873 and 119891
119880denote the projection of the accelerometer
measured data f119887 in navigation frame 119899 along east northand up direction respectively and 119862119899
119887119894119895(119894 119895 = 1 2 3) are the
elements of direct cosine matrix (DCM) of SINS
22 System Measurement Equation Take the differences ofvelocity and yaw between MINS and SINS as the measure-ment vector
Z = [119881119864 minus 119881119872119864 119881119873 minus 119881119872119873 119884 minus 119884
119872]
119879
(4)
where 119881119864 119881
119873 and 119884 are the east and north velocity and
heading from SINS respectively and 119881119872119864
119881119872119873
and 119884119872are
those fromMINS respectivelyThe system measurement equation can be constructed as
follows [1 8]
Z (119905) = H (119905)X (119905) + V (119905) (5)
where H(119905) is the measurement matrix and V(119905) is the mea-surement noise According to the relationship between themeasurement vector and the state vector the measurementmatrixH(119905) can be expressed as
H =
[
[
[
1 0 0 0 0
0 1 0 0 0 03times3
0 0 0 0 minus1
]
]
]
(6)
According to (2) (5) and the KF introduced in Section 3the data fusion between the MINS and SINS can be fulfilled
3 Data Fusion with Kalman Filter
Kalman filter is an optimal filtering algorithm based on itera-tive calculation In order to facilitate the iterative calculationof computer the continuous system as (2) and (5) should bediscretized and can be expressed as [1 8]
X119896= 120601119896119896minus1
X119896minus1
+ Γ119896119896minus1
W119896minus1
Z119896= H119896X119896+ V119896
(7)
where 119896 is the 119896th iterative update120601119896119896minus1
is the state transitionmatrix and Γ
119896119896minus1is the noise input transition matrix
When the system is accuratelymodeled and process noiseW and measurement noise V are both white noises withoutcorrelation between each other optimal estimation of statevector X can be obtained by KF If the statistic character-istics of W and V can be assumed as (0Q) and (0R)respectively the iterative update of KF can be expressedas shown in Figure 1 where X
119896is the estimation of state
vector X119896119896minus1
is the one-step predictive value of state vectorP119896is the error covariance matrix of state vector P
119896119896minus1is
the one-step predictive value of error covariance matrixof state vector and K
119896is the filter gain matrix From the
calculation process as shown in Figure 1 the filtering processcan be divided into the loops of gain calculation and filtercalculation From the update process the filtering processcan be divided into the time update andmeasurement updatestages
In integrated navigation system with inertial base thereexists a case that KF will run without measurement updatesince the update frequency of SINS is always higher than thatof aided system In the standard KF algorithm during timeupdate process 120601
119896119896minus1and Γ
119896119896minus1should be calculated X
119896119896minus1
and P119896119896minus1
should be iteratively updated and also X119896119896minus1
rarr
4 Mathematical Problems in Engineering
Loop for gain calculation Loop for filter
Mea
sure
men
t up
date
P0 k = 1
Qkminus1 Pkkminus1 = 120601kkminus1 +
Rkminus1
X0 k = 1
Xkkminus1 = 120601kkminus1Xkminus1
k + 1rarrk
Zk
Γkkminus1Qkminus1Γkkminus1
Tim
e up
date
Pkminus1120601T Tkkminus1
119823k = [119816 minus 119818k119815k]119823kkminus1
k = kkminus1 + [119833k minus 119815kkkminus1]
119818k = 119823kkminus1119815T
k[119815k119823kkminus1119815
T
k+ 119825k]
minus1
Figure 1 Kalman filter process
X119896and P
119896119896minus1rarr P119896should be updated for the following time
update The equations for time update are as follows [1 8]
X119896119896minus1
= 120601119896119896minus1
X119896minus1
P119896119896minus1
= 120601119896119896minus1
P119896minus1120601119879
119896119896minus1+ Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1
P119896119896minus1
997888rarr P119896
X119896119896minus1
997888rarr
X119896
(8)
Specific to the topic studied in this paper the updatefrequency of SINS is always as 100Hz while that of MINS isas 1Hz That means during one measurement update period(1 s) 100 times of time update is needed among which 99times is only used to maintain the iterative calculation ofKF Note that when close-correction mode is used the valuesof state vector will be cleared after the feedback correctionis done that is to say the state vector and the predictiveone are always zero before the next measurement update isexecuted and there is no need to update these vectors duringtime update but the calculation for 120601
119896119896minus1 Γ119896119896minus1
and P119896119896minus1
P119896119896minus1
rarr P119896is needed
Compared with that in measurement update the calcu-lation amount in time update is smaller but even so theamount of computation for numbers of time update cannotbe negligible Take PC104with a 333MHzCPUas an exampleand test results show that 15ms is taken to complete afull KF process [16] 5ms is needed for the calculations of120601119896119896minus1
Γ119896119896minus1
and P119896119896minus1
and 1ms is taken to complete onenavigation calculation That is to say during one updateperiod of SINS 6ms is taken to complete the navigationcalculation and the time update calculation for KF Whenthe update frequency is higher than 167Hz it is unable tocomplete the above calculatoins in one SINS update periodnever minding the calculation for measurement update
Reference [17] introduces the real-time multitaskingoperation system to solve the time-consuming problemofKFThe resources of computer can bemade full use of by dividingtasks with different priorities and then data fusion can bedispersed and fulfilled in multiple SINS navigation updateperiods But if there is no idle resource in SINS navigationperiod the above method cannot solve the problem If thecalculation amount of time update in the process of nomeasurement update can be reduced the idle resources in the
navigation calculation cycle can be guaranteed and the designdifficulty of the system can be reduced In the next section thecalculation for state transition matrix will be analyzed and asimplified KF algorithm will be presented
4 A Simplified Kalman Filterfor Integrated Navigation
41 A Simplified Kalman Filter with the Low-Dynamic MotionConstraint Discretization should be carried out on thecontinuous error propagation equations as shown in (2) toget discrete equations as shown in Figure 1 Discretizing A(119905)and ignoring higher order terms there exists [1 8]
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119905= I + A (119905
119896minus1) Δ119905 +O (Δ1199052)
asymp I + A (119905119896minus1) Δ119905
(9)
where I is the unit matrix and Δ119905 is the filtering periodSpecific to the integrated system of MS INS Δ119905 is thenavigation update period of SINS
Similar to operation as (9) on F(119905)W(119905) there exists [1 8]
Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1= (Q + 120601
119896119896minus1Q120601119879119896119896minus1
)
Δ119905
2
(10)
Note that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
in (8) are all func-tions of120601
119896119896minus1andP
119896minus1 P119896minus1
is the function of120601119896minus1119896minus2
whichcan be traced back to the fixed value P
0at the zero point
Then it can be concluded that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
are mainly determined by the elements of 120601119896119896minus1
which isdetermined by the elements ofA(119905)whileA(119905) is the functionof carrier motion parameters From the parameters in A(119905)it can be seen that the changing speed of 120601
119896119896minus1is decided
by the dynamic of carrier Taking the first element in A(119905)as an example (119881
119873tan 119871)119877 denotes the coefficient of east
velocity error to the changing rate of east velocity errorWhenthe carrier is with low-dynamic condition this coefficient isapproximated as a constant
Based on this understanding in this paper time update ofKF is not executed but the variables in state transition matrixin one measurement update period are recorded When themeasurement is updated time update of KF will be carriedout with the recorded state transition matrix and P at the lastmeasurement update time
Mathematical Problems in Engineering 5
Therefore the process of time update in KF is changed tosolveA(119905
119896) and accumulate it thensumA(119905)will be averaged at
the measurement update time as follows
A (119905119896minus1) =
1
119899
119894=119899
sum
119894=1
A (119905119894) (11)
where 119899 is the total number of SINS calculations in onemeasurement update period In this paperMS INS is studiedand 119899 is set as 100
Discretize (11) as follows
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119879= I + A (119905
119896minus1) Δ119879 +O (Δ1198792)
asymp I + A (119905119896minus1) ΔT
(12)
where Δ119879 = 119899 times Δ119905 is the measurement update period With120601119896119896minus1
related calculation in KF can be carried out Note thatthe symbol 119896 used in (12) and all related equations in KFdenote the number of iterative calculations And the intervalbetween 119896 minus 1 and 119896 is Δ119879 in simplified algorithm while Δ119905 isused before simplification
42 PerformanceAnalysis on the SimplifiedKalman Filter Forthe convenience of comparison the algorithm in Section 3is defined as standard KF while that in Section 41 isdefined as simplified KF Obviously compared with that instandard KF 119899 times calculation of A(119905
119894) and 119899 minus 1 times
of matrix summation and one time of average calculationare needed in the simplified KF but matrix multiplication isomitted Compared with the calculation amount in matrixmultiplication the above calculation in simplified KF can beignoredThen it can be concluded that the simplified KF canreduce computation amount of KF effectively
Meanwhile as analyzed in Section 41 elements in A(119905)are the functions of carrier motion thus both advantages anddisadvantages will be brought in simplified KF as followsWhen the noise in the parameters of carriermotion is big thenoise in A(119905) will be directly influenced because the parame-ters are used to calculateA(119905)directly in standardKF then thevariance of state estimation error will be directly influencedwhile in the simplified KF negative effect of the noise inmotion parameters will be smoothed for the summation andaverage operation on A(119905) then it can be deduced that withsimplified KF the estimation error in state vector will besuppressed and filtering accuracy will be increased But whenthe carrier carries a sustained acceleration or decelerationthe standard KF can track the motion effectively but thesimplified one cannot because the motion parameters are
directly used in the former and average operations are in thelatterThismeans that simplifiedKFhas a certain lagwhen thecarrier has a sustainedmotion change Obviously the intervalfor summation and average that is the parameter 119899 in (11)plays an important role deciding the effect of smoothing andtracking and big interval takes better smoothing effects butbrings large lag
Take the elements 119891119873and 119881
119873in A(119905) as examples When
the carrier is with a constant velocity 119891119873can be expressed
as 119891119873+ 120575119891
119873 in which 119891
119873and 120575119891
119873are theatrical date and
noise With summation and average operation 120575119891119873can be
smoothed and the same conclusion on 119881119873can be obtained
thus filter accuracywill be improvedWhen the carrier is witha constant velocity119881
119873can be expressed as119881
1198730+119891
119873sdot119905+120575119881
119873 in
which1198811198730
is the initial data of current summation period119891119873
is acceleration and 120575119881119873denotes the noise With summation
and average operation 120575119891119873and 120575119881
119873can also be smoothed
but the averaged 119881119873at the point of measurement update are
not the real-time velocity thus a certain lag in filter result willbe generated
43 Simulation of Simplified Kalman Filter Algorithm
431 Simulation Condition Assume that the ship swingingmotion obeys the law of sine function and the swingingparameters are shown in Table 1 The translational motion isdivided into two cases In the first case the ship sails along119910-axis of the carrierrsquos body frame with the speed of 10ms Inthe second one the ship motion is divided into three stages(1) firstly it stills for 10min (2) then it accelerates along119910-axiswith an acceleration of 005ms lasting for 100 s (3) lastly itsails with a constant velocityWhen white noises are added toshiprsquos theoreticalmotion shipmotion including noises can betaken as the aided information from MINS The variances ofwhite noise in east north and heading are set as (01ms)2(01ms)2 and (01∘)2 respectively It is assumed that theinitial attitudes of ship are all zeros
The precision of the sensors (including gyro andaccelerometer) in SINS is set as in Table 2The ideal output ofsensor can be generated with the theoretical ship motion andreversal navigation solutionWhen the noise is added to theseideal outputs actual outputs of sensor can be simulated Inorder to simplify analysis the lever-arm deck deformationand time delay between MINS and SINS are not consideredin simulation Then the theoretical value of ship motion canbe used as references to evaluate the errors of SINS Duringsimulation the update frequencies of SINS and MINS are setas 100Hz and 1Hz respectively
The parameters for standard KF and simplified KF areboth set as follows
X0= [0 0 0 0 0 0 0 0]
119879
P0= diag [
(01ms)2 (01ms)2 (15∘)2 (15∘)2 (15∘)2 (10∘h)2 (10∘h)2 (10∘h)2]
Q = diag [(500 120583g)2 (500 120583g)2 (5∘)2 (5∘)2 (5∘)2 0 0 0
]
R = diag [(01ms)2 (01ms)2 (01∘)2]
(13)
6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
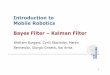
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
update frequency among each system becomes an importantissue Due to different working mechanism the data updatefrequency of each navigation system is quite different [18] For example the update frequency of SINS is always100Hz or 200Hz even up to 1 kHz [1] and the frequencyof GNSS is about 1Hzsim20Hz [7] and the frequency of earthfield navigation system always depends on the characteristicof earth field and there exists some uncertainty [2 3] Ingeneral the update frequency of inertial navigation systemalways used as main system in the integrated system withinertial base is much higher than those of aided navigationsystems
From the aspects of system evolution and measure-ment correction KF can be divided into time update andmeasurement update processes which provides a potentialsolution to the inconsistency problem of update frequency[1 8] When the update frequencies between the mainand aided systems are consistent time update and mea-surement update operation will be carried out successivelyWhen those are inconsistent only time update operationwill be run without measurement update of aided systemand both operations will be run with measurement update[8]
In theory the separated operation of time update andmeasurement update can solve the inconsistency betweenmain system and aided system in integrated system effec-tively In the time update process of KF the update calculationfor state vector error covariance of state vector and somerelated variance such as state transition matrix will beexecuted The calculation amount is relatively smaller thanthat of measurement update that needs inversion matrixoperation However higher update frequency of SINS willbring large calculation load because the same update fre-quency as that of SINS is needed When the frequencyof SINS is 100Hz the calculation amount caused by timeupdate is heavier than that of measurement update with 1Hzmeasurement update frequency
In this paper the system state equation of integratedsystem is analyzed and the analysis indicates that the timeupdate process in KF is essentially the update of parametersrelated to state matrix while the variables of state transitionmatrix are the motion functions of the carrier When thevehicle is with low-dynamic motion the changes of motionparameters are slow and then the changes in time updateare slow In this paper low-dynamic motion is defined asfollows a vehicle is with a constant velocity in the samedirection and (or) with a perturbation of acceleration butwithout constant acceleration Based on this understand-ing a simplified KF for those carriers with low-dynamicmotion is presented In this simplified algorithm only theupdate and summation on state transition matrix withoutthe standard time update process are carried out whenthere is no measurement update The case of integratedsystem of masterslave INS (MS INS) is studied and thesimulation and turntable tests indicate that the simplifiedalgorithm can fulfill data fusion with reduced studied andthe simulation and turntable tests indicate that the simplifiedalgorithm can fulfill data fusion with reduced calculationbut suppressed error oscillation of state vector when the
carrier is with a constant velocity or with a perturbation ofacceleration
The rest of this paper is organized as follows Theintegrated system of MS INS for ship condition is taken asexample and system andmeasurement equations are studiedin Section 2 In Section 3 KF is introduced to fulfill datafusion for MS INS integration In Section 4 the time updateprocess is analyzed and the simplified KF is designed andverified with simulation for those vehicles with low-dynamicmotion In Section 5 the results from turntable test are givenand the conclusion is in Section 6
2 Integration System of MS INS for Ship
As mobile platforms ships are usually equipped with gimbalinertial navigation system or gimbal compasslog and otherhigh accuracy navigation equipment to provide the shipmotion information including speed position and attitudeWith the excitation ofwindwave temperature difference andso forth deflection of ship deckwill be generated In this casethe navigation information from gimbal inertial navigationsystem cannot be used for weapons and (or) observationequipment because these types of equipment are installedat the head tail and highest position while MINS are atthe center of ship [14] Aiming to solve this problem SINSwith middle or low accuracy sensors are introduced andinstalled at the basis of the above-mentioned equipment toprovide information excluding deck deformation Generallythe accuracy of gimbal system is always higher than that ofSINS with one order of magnitude In order to use higheraccuracy information from gimbal system for SINS includinginitial alignment and error correction SINS and gimbalsystem are always integrated [14ndash16] In this case the gimbalsystem is defined asMaster INS (MINS)while SINS is as SlaveINS (SINS) In the rest of this paper Strapdown INS is usedas Slave INS and the difference is not distinguished
In the MS INS integrated system MINS can providevarious navigation information including velocity positionand attitude with a lower update frequency than that of SINSNote that when gyrocompass is used as MINS the velocityand position can be provided with log In the integrationof MS INS matching methods of velocity plus attitude andvelocity plus heading are always used [14ndash16] The purposeof this paper is to find a simplified KF algorithm thus onlyvelocity plus heading is selected for analysis
21 System State Equation In the integrated system of MSINS errors of SINS can be selected as state variables toconstruct state vector and navigation information fromMINS can be regarded as aided information to constructmeasurement vector The error of velocity position andattitude of SINS and the bias of gyroscope are all observablevariables with velocity plus heading matching Observabilityanalysis on integrated navigation system is a complex and bigissue but it will not be discussed because of the purpose ofthis paper Here the error of velocity misalignment anglesand bias of gyroscope are selected to construct state vector to
Mathematical Problems in Engineering 3
simplify the analysis The state vector of MS INS integratedsystem is as follows [16]
X = [120575119881119864120575119881
119873120601
119864120601
119873120601
119880120576
119909120576
119910120576
119911]
119879
(1)
where 120575119881119864and 120575119881
119873are the east and north velocity errors
respectively 120601119864 120601
119873 and 120601
119880are the misalignment angles of
pitch roll and yaw respectively and 120576119909 120576
119910 and 120576
119911are gyro
bias along 119909- 119910- and 119911-axis respectively
The system state equation can be constructed as follows[1 8]
X (119905) = A (119905)X (119905) + F (119905)W (119905) (2)
where A(119905) is the system state transition matrix W(119905) isthe system process noise and F(119905) is the noise interferenceinputmatrix According to the error propagation equations ofvelocity error misalignment angle and gyro bias the systemstate transition matrix can be expressed as follows
A (119905)
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119881
119873
119877
tan119871 2120596
119894119890sin 119871 + 119881119864
119877
tan 119871 0 minus119891
119880119891
1198730 0 0
minus (2120596
119894119890sin 119871 + 119881119864
119877
tan 119871) 0 119891
1198800 minus119891
1198640 0 0
0 minus
1
119877
0 120596
119894119890sin 119871 + 119881119864
119877
tan 119871 minus(120596
119894119890cos 119871 + 119881119864
119877
) minus119862
119899
11988711minus119862
119899
11988712minus119862
119899
11988713
1
119877
0 minus (120596
119894119890sin 119871 + 119881119864
119877
tan119871) 0 minus
119881
119873
119877
minus119862
119899
11988721minus119862
119899
11988722minus119862
119899
11988723
0 0 120596
119894119890cos 119871 + 119881119864
119877
119881
119873
119877
0 minus119862
119899
11988731minus119862
119899
11988732minus119862
119899
11988733
03times8
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(3)
where 119881119864and 119881
119873are east and north velocity respectively
120596
119894119890and 119877 are angular velocity and radius of the earth
respectively 119871 is the geographical latitude of the carrier119891
119864 119891
119873 and 119891
119880denote the projection of the accelerometer
measured data f119887 in navigation frame 119899 along east northand up direction respectively and 119862119899
119887119894119895(119894 119895 = 1 2 3) are the
elements of direct cosine matrix (DCM) of SINS
22 System Measurement Equation Take the differences ofvelocity and yaw between MINS and SINS as the measure-ment vector
Z = [119881119864 minus 119881119872119864 119881119873 minus 119881119872119873 119884 minus 119884
119872]
119879
(4)
where 119881119864 119881
119873 and 119884 are the east and north velocity and
heading from SINS respectively and 119881119872119864
119881119872119873
and 119884119872are
those fromMINS respectivelyThe system measurement equation can be constructed as
follows [1 8]
Z (119905) = H (119905)X (119905) + V (119905) (5)
where H(119905) is the measurement matrix and V(119905) is the mea-surement noise According to the relationship between themeasurement vector and the state vector the measurementmatrixH(119905) can be expressed as
H =
[
[
[
1 0 0 0 0
0 1 0 0 0 03times3
0 0 0 0 minus1
]
]
]
(6)
According to (2) (5) and the KF introduced in Section 3the data fusion between the MINS and SINS can be fulfilled
3 Data Fusion with Kalman Filter
Kalman filter is an optimal filtering algorithm based on itera-tive calculation In order to facilitate the iterative calculationof computer the continuous system as (2) and (5) should bediscretized and can be expressed as [1 8]
X119896= 120601119896119896minus1
X119896minus1
+ Γ119896119896minus1
W119896minus1
Z119896= H119896X119896+ V119896
(7)
where 119896 is the 119896th iterative update120601119896119896minus1
is the state transitionmatrix and Γ
119896119896minus1is the noise input transition matrix
When the system is accuratelymodeled and process noiseW and measurement noise V are both white noises withoutcorrelation between each other optimal estimation of statevector X can be obtained by KF If the statistic character-istics of W and V can be assumed as (0Q) and (0R)respectively the iterative update of KF can be expressedas shown in Figure 1 where X
119896is the estimation of state
vector X119896119896minus1
is the one-step predictive value of state vectorP119896is the error covariance matrix of state vector P
119896119896minus1is
the one-step predictive value of error covariance matrixof state vector and K
119896is the filter gain matrix From the
calculation process as shown in Figure 1 the filtering processcan be divided into the loops of gain calculation and filtercalculation From the update process the filtering processcan be divided into the time update andmeasurement updatestages
In integrated navigation system with inertial base thereexists a case that KF will run without measurement updatesince the update frequency of SINS is always higher than thatof aided system In the standard KF algorithm during timeupdate process 120601
119896119896minus1and Γ
119896119896minus1should be calculated X
119896119896minus1
and P119896119896minus1
should be iteratively updated and also X119896119896minus1
rarr
4 Mathematical Problems in Engineering
Loop for gain calculation Loop for filter
Mea
sure
men
t up
date
P0 k = 1
Qkminus1 Pkkminus1 = 120601kkminus1 +
Rkminus1
X0 k = 1
Xkkminus1 = 120601kkminus1Xkminus1
k + 1rarrk
Zk
Γkkminus1Qkminus1Γkkminus1
Tim
e up
date
Pkminus1120601T Tkkminus1
119823k = [119816 minus 119818k119815k]119823kkminus1
k = kkminus1 + [119833k minus 119815kkkminus1]
119818k = 119823kkminus1119815T
k[119815k119823kkminus1119815
T
k+ 119825k]
minus1
Figure 1 Kalman filter process
X119896and P
119896119896minus1rarr P119896should be updated for the following time
update The equations for time update are as follows [1 8]
X119896119896minus1
= 120601119896119896minus1
X119896minus1
P119896119896minus1
= 120601119896119896minus1
P119896minus1120601119879
119896119896minus1+ Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1
P119896119896minus1
997888rarr P119896
X119896119896minus1
997888rarr
X119896
(8)
Specific to the topic studied in this paper the updatefrequency of SINS is always as 100Hz while that of MINS isas 1Hz That means during one measurement update period(1 s) 100 times of time update is needed among which 99times is only used to maintain the iterative calculation ofKF Note that when close-correction mode is used the valuesof state vector will be cleared after the feedback correctionis done that is to say the state vector and the predictiveone are always zero before the next measurement update isexecuted and there is no need to update these vectors duringtime update but the calculation for 120601
119896119896minus1 Γ119896119896minus1
and P119896119896minus1
P119896119896minus1
rarr P119896is needed
Compared with that in measurement update the calcu-lation amount in time update is smaller but even so theamount of computation for numbers of time update cannotbe negligible Take PC104with a 333MHzCPUas an exampleand test results show that 15ms is taken to complete afull KF process [16] 5ms is needed for the calculations of120601119896119896minus1
Γ119896119896minus1
and P119896119896minus1
and 1ms is taken to complete onenavigation calculation That is to say during one updateperiod of SINS 6ms is taken to complete the navigationcalculation and the time update calculation for KF Whenthe update frequency is higher than 167Hz it is unable tocomplete the above calculatoins in one SINS update periodnever minding the calculation for measurement update
Reference [17] introduces the real-time multitaskingoperation system to solve the time-consuming problemofKFThe resources of computer can bemade full use of by dividingtasks with different priorities and then data fusion can bedispersed and fulfilled in multiple SINS navigation updateperiods But if there is no idle resource in SINS navigationperiod the above method cannot solve the problem If thecalculation amount of time update in the process of nomeasurement update can be reduced the idle resources in the
navigation calculation cycle can be guaranteed and the designdifficulty of the system can be reduced In the next section thecalculation for state transition matrix will be analyzed and asimplified KF algorithm will be presented
4 A Simplified Kalman Filterfor Integrated Navigation
41 A Simplified Kalman Filter with the Low-Dynamic MotionConstraint Discretization should be carried out on thecontinuous error propagation equations as shown in (2) toget discrete equations as shown in Figure 1 Discretizing A(119905)and ignoring higher order terms there exists [1 8]
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119905= I + A (119905
119896minus1) Δ119905 +O (Δ1199052)
asymp I + A (119905119896minus1) Δ119905
(9)
where I is the unit matrix and Δ119905 is the filtering periodSpecific to the integrated system of MS INS Δ119905 is thenavigation update period of SINS
Similar to operation as (9) on F(119905)W(119905) there exists [1 8]
Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1= (Q + 120601
119896119896minus1Q120601119879119896119896minus1
)
Δ119905
2
(10)
Note that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
in (8) are all func-tions of120601
119896119896minus1andP
119896minus1 P119896minus1
is the function of120601119896minus1119896minus2
whichcan be traced back to the fixed value P
0at the zero point
Then it can be concluded that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
are mainly determined by the elements of 120601119896119896minus1
which isdetermined by the elements ofA(119905)whileA(119905) is the functionof carrier motion parameters From the parameters in A(119905)it can be seen that the changing speed of 120601
119896119896minus1is decided
by the dynamic of carrier Taking the first element in A(119905)as an example (119881
119873tan 119871)119877 denotes the coefficient of east
velocity error to the changing rate of east velocity errorWhenthe carrier is with low-dynamic condition this coefficient isapproximated as a constant
Based on this understanding in this paper time update ofKF is not executed but the variables in state transition matrixin one measurement update period are recorded When themeasurement is updated time update of KF will be carriedout with the recorded state transition matrix and P at the lastmeasurement update time
Mathematical Problems in Engineering 5
Therefore the process of time update in KF is changed tosolveA(119905
119896) and accumulate it thensumA(119905)will be averaged at
the measurement update time as follows
A (119905119896minus1) =
1
119899
119894=119899
sum
119894=1
A (119905119894) (11)
where 119899 is the total number of SINS calculations in onemeasurement update period In this paperMS INS is studiedand 119899 is set as 100
Discretize (11) as follows
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119879= I + A (119905
119896minus1) Δ119879 +O (Δ1198792)
asymp I + A (119905119896minus1) ΔT
(12)
where Δ119879 = 119899 times Δ119905 is the measurement update period With120601119896119896minus1
related calculation in KF can be carried out Note thatthe symbol 119896 used in (12) and all related equations in KFdenote the number of iterative calculations And the intervalbetween 119896 minus 1 and 119896 is Δ119879 in simplified algorithm while Δ119905 isused before simplification
42 PerformanceAnalysis on the SimplifiedKalman Filter Forthe convenience of comparison the algorithm in Section 3is defined as standard KF while that in Section 41 isdefined as simplified KF Obviously compared with that instandard KF 119899 times calculation of A(119905
119894) and 119899 minus 1 times
of matrix summation and one time of average calculationare needed in the simplified KF but matrix multiplication isomitted Compared with the calculation amount in matrixmultiplication the above calculation in simplified KF can beignoredThen it can be concluded that the simplified KF canreduce computation amount of KF effectively
Meanwhile as analyzed in Section 41 elements in A(119905)are the functions of carrier motion thus both advantages anddisadvantages will be brought in simplified KF as followsWhen the noise in the parameters of carriermotion is big thenoise in A(119905) will be directly influenced because the parame-ters are used to calculateA(119905)directly in standardKF then thevariance of state estimation error will be directly influencedwhile in the simplified KF negative effect of the noise inmotion parameters will be smoothed for the summation andaverage operation on A(119905) then it can be deduced that withsimplified KF the estimation error in state vector will besuppressed and filtering accuracy will be increased But whenthe carrier carries a sustained acceleration or decelerationthe standard KF can track the motion effectively but thesimplified one cannot because the motion parameters are
directly used in the former and average operations are in thelatterThismeans that simplifiedKFhas a certain lagwhen thecarrier has a sustainedmotion change Obviously the intervalfor summation and average that is the parameter 119899 in (11)plays an important role deciding the effect of smoothing andtracking and big interval takes better smoothing effects butbrings large lag
Take the elements 119891119873and 119881
119873in A(119905) as examples When
the carrier is with a constant velocity 119891119873can be expressed
as 119891119873+ 120575119891
119873 in which 119891
119873and 120575119891
119873are theatrical date and
noise With summation and average operation 120575119891119873can be
smoothed and the same conclusion on 119881119873can be obtained
thus filter accuracywill be improvedWhen the carrier is witha constant velocity119881
119873can be expressed as119881
1198730+119891
119873sdot119905+120575119881
119873 in
which1198811198730
is the initial data of current summation period119891119873
is acceleration and 120575119881119873denotes the noise With summation
and average operation 120575119891119873and 120575119881
119873can also be smoothed
but the averaged 119881119873at the point of measurement update are
not the real-time velocity thus a certain lag in filter result willbe generated
43 Simulation of Simplified Kalman Filter Algorithm
431 Simulation Condition Assume that the ship swingingmotion obeys the law of sine function and the swingingparameters are shown in Table 1 The translational motion isdivided into two cases In the first case the ship sails along119910-axis of the carrierrsquos body frame with the speed of 10ms Inthe second one the ship motion is divided into three stages(1) firstly it stills for 10min (2) then it accelerates along119910-axiswith an acceleration of 005ms lasting for 100 s (3) lastly itsails with a constant velocityWhen white noises are added toshiprsquos theoreticalmotion shipmotion including noises can betaken as the aided information from MINS The variances ofwhite noise in east north and heading are set as (01ms)2(01ms)2 and (01∘)2 respectively It is assumed that theinitial attitudes of ship are all zeros
The precision of the sensors (including gyro andaccelerometer) in SINS is set as in Table 2The ideal output ofsensor can be generated with the theoretical ship motion andreversal navigation solutionWhen the noise is added to theseideal outputs actual outputs of sensor can be simulated Inorder to simplify analysis the lever-arm deck deformationand time delay between MINS and SINS are not consideredin simulation Then the theoretical value of ship motion canbe used as references to evaluate the errors of SINS Duringsimulation the update frequencies of SINS and MINS are setas 100Hz and 1Hz respectively
The parameters for standard KF and simplified KF areboth set as follows
X0= [0 0 0 0 0 0 0 0]
119879
P0= diag [
(01ms)2 (01ms)2 (15∘)2 (15∘)2 (15∘)2 (10∘h)2 (10∘h)2 (10∘h)2]
Q = diag [(500 120583g)2 (500 120583g)2 (5∘)2 (5∘)2 (5∘)2 0 0 0
]
R = diag [(01ms)2 (01ms)2 (01∘)2]
(13)
6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
simplify the analysis The state vector of MS INS integratedsystem is as follows [16]
X = [120575119881119864120575119881
119873120601
119864120601
119873120601
119880120576
119909120576
119910120576
119911]
119879
(1)
where 120575119881119864and 120575119881
119873are the east and north velocity errors
respectively 120601119864 120601
119873 and 120601
119880are the misalignment angles of
pitch roll and yaw respectively and 120576119909 120576
119910 and 120576
119911are gyro
bias along 119909- 119910- and 119911-axis respectively
The system state equation can be constructed as follows[1 8]
X (119905) = A (119905)X (119905) + F (119905)W (119905) (2)
where A(119905) is the system state transition matrix W(119905) isthe system process noise and F(119905) is the noise interferenceinputmatrix According to the error propagation equations ofvelocity error misalignment angle and gyro bias the systemstate transition matrix can be expressed as follows
A (119905)
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119881
119873
119877
tan119871 2120596
119894119890sin 119871 + 119881119864
119877
tan 119871 0 minus119891
119880119891
1198730 0 0
minus (2120596
119894119890sin 119871 + 119881119864
119877
tan 119871) 0 119891
1198800 minus119891
1198640 0 0
0 minus
1
119877
0 120596
119894119890sin 119871 + 119881119864
119877
tan 119871 minus(120596
119894119890cos 119871 + 119881119864
119877
) minus119862
119899
11988711minus119862
119899
11988712minus119862
119899
11988713
1
119877
0 minus (120596
119894119890sin 119871 + 119881119864
119877
tan119871) 0 minus
119881
119873
119877
minus119862
119899
11988721minus119862
119899
11988722minus119862
119899
11988723
0 0 120596
119894119890cos 119871 + 119881119864
119877
119881
119873
119877
0 minus119862
119899
11988731minus119862
119899
11988732minus119862
119899
11988733
03times8
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(3)
where 119881119864and 119881
119873are east and north velocity respectively
120596
119894119890and 119877 are angular velocity and radius of the earth
respectively 119871 is the geographical latitude of the carrier119891
119864 119891
119873 and 119891
119880denote the projection of the accelerometer
measured data f119887 in navigation frame 119899 along east northand up direction respectively and 119862119899
119887119894119895(119894 119895 = 1 2 3) are the
elements of direct cosine matrix (DCM) of SINS
22 System Measurement Equation Take the differences ofvelocity and yaw between MINS and SINS as the measure-ment vector
Z = [119881119864 minus 119881119872119864 119881119873 minus 119881119872119873 119884 minus 119884
119872]
119879
(4)
where 119881119864 119881
119873 and 119884 are the east and north velocity and
heading from SINS respectively and 119881119872119864
119881119872119873
and 119884119872are
those fromMINS respectivelyThe system measurement equation can be constructed as
follows [1 8]
Z (119905) = H (119905)X (119905) + V (119905) (5)
where H(119905) is the measurement matrix and V(119905) is the mea-surement noise According to the relationship between themeasurement vector and the state vector the measurementmatrixH(119905) can be expressed as
H =
[
[
[
1 0 0 0 0
0 1 0 0 0 03times3
0 0 0 0 minus1
]
]
]
(6)
According to (2) (5) and the KF introduced in Section 3the data fusion between the MINS and SINS can be fulfilled
3 Data Fusion with Kalman Filter
Kalman filter is an optimal filtering algorithm based on itera-tive calculation In order to facilitate the iterative calculationof computer the continuous system as (2) and (5) should bediscretized and can be expressed as [1 8]
X119896= 120601119896119896minus1
X119896minus1
+ Γ119896119896minus1
W119896minus1
Z119896= H119896X119896+ V119896
(7)
where 119896 is the 119896th iterative update120601119896119896minus1
is the state transitionmatrix and Γ
119896119896minus1is the noise input transition matrix
When the system is accuratelymodeled and process noiseW and measurement noise V are both white noises withoutcorrelation between each other optimal estimation of statevector X can be obtained by KF If the statistic character-istics of W and V can be assumed as (0Q) and (0R)respectively the iterative update of KF can be expressedas shown in Figure 1 where X
119896is the estimation of state
vector X119896119896minus1
is the one-step predictive value of state vectorP119896is the error covariance matrix of state vector P
119896119896minus1is
the one-step predictive value of error covariance matrixof state vector and K
119896is the filter gain matrix From the
calculation process as shown in Figure 1 the filtering processcan be divided into the loops of gain calculation and filtercalculation From the update process the filtering processcan be divided into the time update andmeasurement updatestages
In integrated navigation system with inertial base thereexists a case that KF will run without measurement updatesince the update frequency of SINS is always higher than thatof aided system In the standard KF algorithm during timeupdate process 120601
119896119896minus1and Γ
119896119896minus1should be calculated X
119896119896minus1
and P119896119896minus1
should be iteratively updated and also X119896119896minus1
rarr
4 Mathematical Problems in Engineering
Loop for gain calculation Loop for filter
Mea
sure
men
t up
date
P0 k = 1
Qkminus1 Pkkminus1 = 120601kkminus1 +
Rkminus1
X0 k = 1
Xkkminus1 = 120601kkminus1Xkminus1
k + 1rarrk
Zk
Γkkminus1Qkminus1Γkkminus1
Tim
e up
date
Pkminus1120601T Tkkminus1
119823k = [119816 minus 119818k119815k]119823kkminus1
k = kkminus1 + [119833k minus 119815kkkminus1]
119818k = 119823kkminus1119815T
k[119815k119823kkminus1119815
T
k+ 119825k]
minus1
Figure 1 Kalman filter process
X119896and P
119896119896minus1rarr P119896should be updated for the following time
update The equations for time update are as follows [1 8]
X119896119896minus1
= 120601119896119896minus1
X119896minus1
P119896119896minus1
= 120601119896119896minus1
P119896minus1120601119879
119896119896minus1+ Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1
P119896119896minus1
997888rarr P119896
X119896119896minus1
997888rarr
X119896
(8)
Specific to the topic studied in this paper the updatefrequency of SINS is always as 100Hz while that of MINS isas 1Hz That means during one measurement update period(1 s) 100 times of time update is needed among which 99times is only used to maintain the iterative calculation ofKF Note that when close-correction mode is used the valuesof state vector will be cleared after the feedback correctionis done that is to say the state vector and the predictiveone are always zero before the next measurement update isexecuted and there is no need to update these vectors duringtime update but the calculation for 120601
119896119896minus1 Γ119896119896minus1
and P119896119896minus1
P119896119896minus1
rarr P119896is needed
Compared with that in measurement update the calcu-lation amount in time update is smaller but even so theamount of computation for numbers of time update cannotbe negligible Take PC104with a 333MHzCPUas an exampleand test results show that 15ms is taken to complete afull KF process [16] 5ms is needed for the calculations of120601119896119896minus1
Γ119896119896minus1
and P119896119896minus1
and 1ms is taken to complete onenavigation calculation That is to say during one updateperiod of SINS 6ms is taken to complete the navigationcalculation and the time update calculation for KF Whenthe update frequency is higher than 167Hz it is unable tocomplete the above calculatoins in one SINS update periodnever minding the calculation for measurement update
Reference [17] introduces the real-time multitaskingoperation system to solve the time-consuming problemofKFThe resources of computer can bemade full use of by dividingtasks with different priorities and then data fusion can bedispersed and fulfilled in multiple SINS navigation updateperiods But if there is no idle resource in SINS navigationperiod the above method cannot solve the problem If thecalculation amount of time update in the process of nomeasurement update can be reduced the idle resources in the
navigation calculation cycle can be guaranteed and the designdifficulty of the system can be reduced In the next section thecalculation for state transition matrix will be analyzed and asimplified KF algorithm will be presented
4 A Simplified Kalman Filterfor Integrated Navigation
41 A Simplified Kalman Filter with the Low-Dynamic MotionConstraint Discretization should be carried out on thecontinuous error propagation equations as shown in (2) toget discrete equations as shown in Figure 1 Discretizing A(119905)and ignoring higher order terms there exists [1 8]
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119905= I + A (119905
119896minus1) Δ119905 +O (Δ1199052)
asymp I + A (119905119896minus1) Δ119905
(9)
where I is the unit matrix and Δ119905 is the filtering periodSpecific to the integrated system of MS INS Δ119905 is thenavigation update period of SINS
Similar to operation as (9) on F(119905)W(119905) there exists [1 8]
Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1= (Q + 120601
119896119896minus1Q120601119879119896119896minus1
)
Δ119905
2
(10)
Note that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
in (8) are all func-tions of120601
119896119896minus1andP
119896minus1 P119896minus1
is the function of120601119896minus1119896minus2
whichcan be traced back to the fixed value P
0at the zero point
Then it can be concluded that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
are mainly determined by the elements of 120601119896119896minus1
which isdetermined by the elements ofA(119905)whileA(119905) is the functionof carrier motion parameters From the parameters in A(119905)it can be seen that the changing speed of 120601
119896119896minus1is decided
by the dynamic of carrier Taking the first element in A(119905)as an example (119881
119873tan 119871)119877 denotes the coefficient of east
velocity error to the changing rate of east velocity errorWhenthe carrier is with low-dynamic condition this coefficient isapproximated as a constant
Based on this understanding in this paper time update ofKF is not executed but the variables in state transition matrixin one measurement update period are recorded When themeasurement is updated time update of KF will be carriedout with the recorded state transition matrix and P at the lastmeasurement update time
Mathematical Problems in Engineering 5
Therefore the process of time update in KF is changed tosolveA(119905
119896) and accumulate it thensumA(119905)will be averaged at
the measurement update time as follows
A (119905119896minus1) =
1
119899
119894=119899
sum
119894=1
A (119905119894) (11)
where 119899 is the total number of SINS calculations in onemeasurement update period In this paperMS INS is studiedand 119899 is set as 100
Discretize (11) as follows
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119879= I + A (119905
119896minus1) Δ119879 +O (Δ1198792)
asymp I + A (119905119896minus1) ΔT
(12)
where Δ119879 = 119899 times Δ119905 is the measurement update period With120601119896119896minus1
related calculation in KF can be carried out Note thatthe symbol 119896 used in (12) and all related equations in KFdenote the number of iterative calculations And the intervalbetween 119896 minus 1 and 119896 is Δ119879 in simplified algorithm while Δ119905 isused before simplification
42 PerformanceAnalysis on the SimplifiedKalman Filter Forthe convenience of comparison the algorithm in Section 3is defined as standard KF while that in Section 41 isdefined as simplified KF Obviously compared with that instandard KF 119899 times calculation of A(119905
119894) and 119899 minus 1 times
of matrix summation and one time of average calculationare needed in the simplified KF but matrix multiplication isomitted Compared with the calculation amount in matrixmultiplication the above calculation in simplified KF can beignoredThen it can be concluded that the simplified KF canreduce computation amount of KF effectively
Meanwhile as analyzed in Section 41 elements in A(119905)are the functions of carrier motion thus both advantages anddisadvantages will be brought in simplified KF as followsWhen the noise in the parameters of carriermotion is big thenoise in A(119905) will be directly influenced because the parame-ters are used to calculateA(119905)directly in standardKF then thevariance of state estimation error will be directly influencedwhile in the simplified KF negative effect of the noise inmotion parameters will be smoothed for the summation andaverage operation on A(119905) then it can be deduced that withsimplified KF the estimation error in state vector will besuppressed and filtering accuracy will be increased But whenthe carrier carries a sustained acceleration or decelerationthe standard KF can track the motion effectively but thesimplified one cannot because the motion parameters are
directly used in the former and average operations are in thelatterThismeans that simplifiedKFhas a certain lagwhen thecarrier has a sustainedmotion change Obviously the intervalfor summation and average that is the parameter 119899 in (11)plays an important role deciding the effect of smoothing andtracking and big interval takes better smoothing effects butbrings large lag
Take the elements 119891119873and 119881
119873in A(119905) as examples When
the carrier is with a constant velocity 119891119873can be expressed
as 119891119873+ 120575119891
119873 in which 119891
119873and 120575119891
119873are theatrical date and
noise With summation and average operation 120575119891119873can be
smoothed and the same conclusion on 119881119873can be obtained
thus filter accuracywill be improvedWhen the carrier is witha constant velocity119881
119873can be expressed as119881
1198730+119891
119873sdot119905+120575119881
119873 in
which1198811198730
is the initial data of current summation period119891119873
is acceleration and 120575119881119873denotes the noise With summation
and average operation 120575119891119873and 120575119881
119873can also be smoothed
but the averaged 119881119873at the point of measurement update are
not the real-time velocity thus a certain lag in filter result willbe generated
43 Simulation of Simplified Kalman Filter Algorithm
431 Simulation Condition Assume that the ship swingingmotion obeys the law of sine function and the swingingparameters are shown in Table 1 The translational motion isdivided into two cases In the first case the ship sails along119910-axis of the carrierrsquos body frame with the speed of 10ms Inthe second one the ship motion is divided into three stages(1) firstly it stills for 10min (2) then it accelerates along119910-axiswith an acceleration of 005ms lasting for 100 s (3) lastly itsails with a constant velocityWhen white noises are added toshiprsquos theoreticalmotion shipmotion including noises can betaken as the aided information from MINS The variances ofwhite noise in east north and heading are set as (01ms)2(01ms)2 and (01∘)2 respectively It is assumed that theinitial attitudes of ship are all zeros
The precision of the sensors (including gyro andaccelerometer) in SINS is set as in Table 2The ideal output ofsensor can be generated with the theoretical ship motion andreversal navigation solutionWhen the noise is added to theseideal outputs actual outputs of sensor can be simulated Inorder to simplify analysis the lever-arm deck deformationand time delay between MINS and SINS are not consideredin simulation Then the theoretical value of ship motion canbe used as references to evaluate the errors of SINS Duringsimulation the update frequencies of SINS and MINS are setas 100Hz and 1Hz respectively
The parameters for standard KF and simplified KF areboth set as follows
X0= [0 0 0 0 0 0 0 0]
119879
P0= diag [
(01ms)2 (01ms)2 (15∘)2 (15∘)2 (15∘)2 (10∘h)2 (10∘h)2 (10∘h)2]
Q = diag [(500 120583g)2 (500 120583g)2 (5∘)2 (5∘)2 (5∘)2 0 0 0
]
R = diag [(01ms)2 (01ms)2 (01∘)2]
(13)
6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Loop for gain calculation Loop for filter
Mea
sure
men
t up
date
P0 k = 1
Qkminus1 Pkkminus1 = 120601kkminus1 +
Rkminus1
X0 k = 1
Xkkminus1 = 120601kkminus1Xkminus1
k + 1rarrk
Zk
Γkkminus1Qkminus1Γkkminus1
Tim
e up
date
Pkminus1120601T Tkkminus1
119823k = [119816 minus 119818k119815k]119823kkminus1
k = kkminus1 + [119833k minus 119815kkkminus1]
119818k = 119823kkminus1119815T
k[119815k119823kkminus1119815
T
k+ 119825k]
minus1
Figure 1 Kalman filter process
X119896and P
119896119896minus1rarr P119896should be updated for the following time
update The equations for time update are as follows [1 8]
X119896119896minus1
= 120601119896119896minus1
X119896minus1
P119896119896minus1
= 120601119896119896minus1
P119896minus1120601119879
119896119896minus1+ Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1
P119896119896minus1
997888rarr P119896
X119896119896minus1
997888rarr
X119896
(8)
Specific to the topic studied in this paper the updatefrequency of SINS is always as 100Hz while that of MINS isas 1Hz That means during one measurement update period(1 s) 100 times of time update is needed among which 99times is only used to maintain the iterative calculation ofKF Note that when close-correction mode is used the valuesof state vector will be cleared after the feedback correctionis done that is to say the state vector and the predictiveone are always zero before the next measurement update isexecuted and there is no need to update these vectors duringtime update but the calculation for 120601
119896119896minus1 Γ119896119896minus1
and P119896119896minus1
P119896119896minus1
rarr P119896is needed
Compared with that in measurement update the calcu-lation amount in time update is smaller but even so theamount of computation for numbers of time update cannotbe negligible Take PC104with a 333MHzCPUas an exampleand test results show that 15ms is taken to complete afull KF process [16] 5ms is needed for the calculations of120601119896119896minus1
Γ119896119896minus1
and P119896119896minus1
and 1ms is taken to complete onenavigation calculation That is to say during one updateperiod of SINS 6ms is taken to complete the navigationcalculation and the time update calculation for KF Whenthe update frequency is higher than 167Hz it is unable tocomplete the above calculatoins in one SINS update periodnever minding the calculation for measurement update
Reference [17] introduces the real-time multitaskingoperation system to solve the time-consuming problemofKFThe resources of computer can bemade full use of by dividingtasks with different priorities and then data fusion can bedispersed and fulfilled in multiple SINS navigation updateperiods But if there is no idle resource in SINS navigationperiod the above method cannot solve the problem If thecalculation amount of time update in the process of nomeasurement update can be reduced the idle resources in the
navigation calculation cycle can be guaranteed and the designdifficulty of the system can be reduced In the next section thecalculation for state transition matrix will be analyzed and asimplified KF algorithm will be presented
4 A Simplified Kalman Filterfor Integrated Navigation
41 A Simplified Kalman Filter with the Low-Dynamic MotionConstraint Discretization should be carried out on thecontinuous error propagation equations as shown in (2) toget discrete equations as shown in Figure 1 Discretizing A(119905)and ignoring higher order terms there exists [1 8]
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119905= I + A (119905
119896minus1) Δ119905 +O (Δ1199052)
asymp I + A (119905119896minus1) Δ119905
(9)
where I is the unit matrix and Δ119905 is the filtering periodSpecific to the integrated system of MS INS Δ119905 is thenavigation update period of SINS
Similar to operation as (9) on F(119905)W(119905) there exists [1 8]
Γ119896119896minus1
Q119896minus1Γ119879
119896119896minus1= (Q + 120601
119896119896minus1Q120601119879119896119896minus1
)
Δ119905
2
(10)
Note that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
in (8) are all func-tions of120601
119896119896minus1andP
119896minus1 P119896minus1
is the function of120601119896minus1119896minus2
whichcan be traced back to the fixed value P
0at the zero point
Then it can be concluded that P119896119896minus1
and Γ119896119896minus1
Q119896minus1Γ119879119896119896minus1
are mainly determined by the elements of 120601119896119896minus1
which isdetermined by the elements ofA(119905)whileA(119905) is the functionof carrier motion parameters From the parameters in A(119905)it can be seen that the changing speed of 120601
119896119896minus1is decided
by the dynamic of carrier Taking the first element in A(119905)as an example (119881
119873tan 119871)119877 denotes the coefficient of east
velocity error to the changing rate of east velocity errorWhenthe carrier is with low-dynamic condition this coefficient isapproximated as a constant
Based on this understanding in this paper time update ofKF is not executed but the variables in state transition matrixin one measurement update period are recorded When themeasurement is updated time update of KF will be carriedout with the recorded state transition matrix and P at the lastmeasurement update time
Mathematical Problems in Engineering 5
Therefore the process of time update in KF is changed tosolveA(119905
119896) and accumulate it thensumA(119905)will be averaged at
the measurement update time as follows
A (119905119896minus1) =
1
119899
119894=119899
sum
119894=1
A (119905119894) (11)
where 119899 is the total number of SINS calculations in onemeasurement update period In this paperMS INS is studiedand 119899 is set as 100
Discretize (11) as follows
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119879= I + A (119905
119896minus1) Δ119879 +O (Δ1198792)
asymp I + A (119905119896minus1) ΔT
(12)
where Δ119879 = 119899 times Δ119905 is the measurement update period With120601119896119896minus1
related calculation in KF can be carried out Note thatthe symbol 119896 used in (12) and all related equations in KFdenote the number of iterative calculations And the intervalbetween 119896 minus 1 and 119896 is Δ119879 in simplified algorithm while Δ119905 isused before simplification
42 PerformanceAnalysis on the SimplifiedKalman Filter Forthe convenience of comparison the algorithm in Section 3is defined as standard KF while that in Section 41 isdefined as simplified KF Obviously compared with that instandard KF 119899 times calculation of A(119905
119894) and 119899 minus 1 times
of matrix summation and one time of average calculationare needed in the simplified KF but matrix multiplication isomitted Compared with the calculation amount in matrixmultiplication the above calculation in simplified KF can beignoredThen it can be concluded that the simplified KF canreduce computation amount of KF effectively
Meanwhile as analyzed in Section 41 elements in A(119905)are the functions of carrier motion thus both advantages anddisadvantages will be brought in simplified KF as followsWhen the noise in the parameters of carriermotion is big thenoise in A(119905) will be directly influenced because the parame-ters are used to calculateA(119905)directly in standardKF then thevariance of state estimation error will be directly influencedwhile in the simplified KF negative effect of the noise inmotion parameters will be smoothed for the summation andaverage operation on A(119905) then it can be deduced that withsimplified KF the estimation error in state vector will besuppressed and filtering accuracy will be increased But whenthe carrier carries a sustained acceleration or decelerationthe standard KF can track the motion effectively but thesimplified one cannot because the motion parameters are
directly used in the former and average operations are in thelatterThismeans that simplifiedKFhas a certain lagwhen thecarrier has a sustainedmotion change Obviously the intervalfor summation and average that is the parameter 119899 in (11)plays an important role deciding the effect of smoothing andtracking and big interval takes better smoothing effects butbrings large lag
Take the elements 119891119873and 119881
119873in A(119905) as examples When
the carrier is with a constant velocity 119891119873can be expressed
as 119891119873+ 120575119891
119873 in which 119891
119873and 120575119891
119873are theatrical date and
noise With summation and average operation 120575119891119873can be
smoothed and the same conclusion on 119881119873can be obtained
thus filter accuracywill be improvedWhen the carrier is witha constant velocity119881
119873can be expressed as119881
1198730+119891
119873sdot119905+120575119881
119873 in
which1198811198730
is the initial data of current summation period119891119873
is acceleration and 120575119881119873denotes the noise With summation
and average operation 120575119891119873and 120575119881
119873can also be smoothed
but the averaged 119881119873at the point of measurement update are
not the real-time velocity thus a certain lag in filter result willbe generated
43 Simulation of Simplified Kalman Filter Algorithm
431 Simulation Condition Assume that the ship swingingmotion obeys the law of sine function and the swingingparameters are shown in Table 1 The translational motion isdivided into two cases In the first case the ship sails along119910-axis of the carrierrsquos body frame with the speed of 10ms Inthe second one the ship motion is divided into three stages(1) firstly it stills for 10min (2) then it accelerates along119910-axiswith an acceleration of 005ms lasting for 100 s (3) lastly itsails with a constant velocityWhen white noises are added toshiprsquos theoreticalmotion shipmotion including noises can betaken as the aided information from MINS The variances ofwhite noise in east north and heading are set as (01ms)2(01ms)2 and (01∘)2 respectively It is assumed that theinitial attitudes of ship are all zeros
The precision of the sensors (including gyro andaccelerometer) in SINS is set as in Table 2The ideal output ofsensor can be generated with the theoretical ship motion andreversal navigation solutionWhen the noise is added to theseideal outputs actual outputs of sensor can be simulated Inorder to simplify analysis the lever-arm deck deformationand time delay between MINS and SINS are not consideredin simulation Then the theoretical value of ship motion canbe used as references to evaluate the errors of SINS Duringsimulation the update frequencies of SINS and MINS are setas 100Hz and 1Hz respectively
The parameters for standard KF and simplified KF areboth set as follows
X0= [0 0 0 0 0 0 0 0]
119879
P0= diag [
(01ms)2 (01ms)2 (15∘)2 (15∘)2 (15∘)2 (10∘h)2 (10∘h)2 (10∘h)2]
Q = diag [(500 120583g)2 (500 120583g)2 (5∘)2 (5∘)2 (5∘)2 0 0 0
]
R = diag [(01ms)2 (01ms)2 (01∘)2]
(13)
6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Therefore the process of time update in KF is changed tosolveA(119905
119896) and accumulate it thensumA(119905)will be averaged at
the measurement update time as follows
A (119905119896minus1) =
1
119899
119894=119899
sum
119894=1
A (119905119894) (11)
where 119899 is the total number of SINS calculations in onemeasurement update period In this paperMS INS is studiedand 119899 is set as 100
Discretize (11) as follows
120601119896119896minus1
= 119890
A(119905119896minus1)Δ119879= I + A (119905
119896minus1) Δ119879 +O (Δ1198792)
asymp I + A (119905119896minus1) ΔT
(12)
where Δ119879 = 119899 times Δ119905 is the measurement update period With120601119896119896minus1
related calculation in KF can be carried out Note thatthe symbol 119896 used in (12) and all related equations in KFdenote the number of iterative calculations And the intervalbetween 119896 minus 1 and 119896 is Δ119879 in simplified algorithm while Δ119905 isused before simplification
42 PerformanceAnalysis on the SimplifiedKalman Filter Forthe convenience of comparison the algorithm in Section 3is defined as standard KF while that in Section 41 isdefined as simplified KF Obviously compared with that instandard KF 119899 times calculation of A(119905
119894) and 119899 minus 1 times
of matrix summation and one time of average calculationare needed in the simplified KF but matrix multiplication isomitted Compared with the calculation amount in matrixmultiplication the above calculation in simplified KF can beignoredThen it can be concluded that the simplified KF canreduce computation amount of KF effectively
Meanwhile as analyzed in Section 41 elements in A(119905)are the functions of carrier motion thus both advantages anddisadvantages will be brought in simplified KF as followsWhen the noise in the parameters of carriermotion is big thenoise in A(119905) will be directly influenced because the parame-ters are used to calculateA(119905)directly in standardKF then thevariance of state estimation error will be directly influencedwhile in the simplified KF negative effect of the noise inmotion parameters will be smoothed for the summation andaverage operation on A(119905) then it can be deduced that withsimplified KF the estimation error in state vector will besuppressed and filtering accuracy will be increased But whenthe carrier carries a sustained acceleration or decelerationthe standard KF can track the motion effectively but thesimplified one cannot because the motion parameters are
directly used in the former and average operations are in thelatterThismeans that simplifiedKFhas a certain lagwhen thecarrier has a sustainedmotion change Obviously the intervalfor summation and average that is the parameter 119899 in (11)plays an important role deciding the effect of smoothing andtracking and big interval takes better smoothing effects butbrings large lag
Take the elements 119891119873and 119881
119873in A(119905) as examples When
the carrier is with a constant velocity 119891119873can be expressed
as 119891119873+ 120575119891
119873 in which 119891
119873and 120575119891
119873are theatrical date and
noise With summation and average operation 120575119891119873can be
smoothed and the same conclusion on 119881119873can be obtained
thus filter accuracywill be improvedWhen the carrier is witha constant velocity119881
119873can be expressed as119881
1198730+119891
119873sdot119905+120575119881
119873 in
which1198811198730
is the initial data of current summation period119891119873
is acceleration and 120575119881119873denotes the noise With summation
and average operation 120575119891119873and 120575119881
119873can also be smoothed
but the averaged 119881119873at the point of measurement update are
not the real-time velocity thus a certain lag in filter result willbe generated
43 Simulation of Simplified Kalman Filter Algorithm
431 Simulation Condition Assume that the ship swingingmotion obeys the law of sine function and the swingingparameters are shown in Table 1 The translational motion isdivided into two cases In the first case the ship sails along119910-axis of the carrierrsquos body frame with the speed of 10ms Inthe second one the ship motion is divided into three stages(1) firstly it stills for 10min (2) then it accelerates along119910-axiswith an acceleration of 005ms lasting for 100 s (3) lastly itsails with a constant velocityWhen white noises are added toshiprsquos theoreticalmotion shipmotion including noises can betaken as the aided information from MINS The variances ofwhite noise in east north and heading are set as (01ms)2(01ms)2 and (01∘)2 respectively It is assumed that theinitial attitudes of ship are all zeros
The precision of the sensors (including gyro andaccelerometer) in SINS is set as in Table 2The ideal output ofsensor can be generated with the theoretical ship motion andreversal navigation solutionWhen the noise is added to theseideal outputs actual outputs of sensor can be simulated Inorder to simplify analysis the lever-arm deck deformationand time delay between MINS and SINS are not consideredin simulation Then the theoretical value of ship motion canbe used as references to evaluate the errors of SINS Duringsimulation the update frequencies of SINS and MINS are setas 100Hz and 1Hz respectively
The parameters for standard KF and simplified KF areboth set as follows
X0= [0 0 0 0 0 0 0 0]
119879
P0= diag [
(01ms)2 (01ms)2 (15∘)2 (15∘)2 (15∘)2 (10∘h)2 (10∘h)2 (10∘h)2]
Q = diag [(500 120583g)2 (500 120583g)2 (5∘)2 (5∘)2 (5∘)2 0 0 0
]
R = diag [(01ms)2 (01ms)2 (01∘)2]
(13)
6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (a
rcm
in)
(a) Pitch
minus10
0
10
Erro
r (a
rcm
in)
200 400 600 800 1000 12000t (s)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (a
rcm
in)
(c) Yaw
Figure 2 The attitude error curves of SINS in Case 1
minus02
002
Erro
r (m
s)
0 400 600 800 1000 1200200t (s)
(a) East velocity
minus02
002
Erro
r (m
s)
200 400 600 800 1000 12000t (s)
(b) North velocity
Figure 3 The velocity error curves of SINS in Case 1
Table 1 Swinging parameters of ship
Roll Pitch YawAmplitude (∘) 15 7 5Frequency (s) 01333 02778 01087
Table 2 Sensor errors in SINS
Axis Gyro bias (∘h) Acce bias (120583g)Constant Random Constant Random
119909 002 002 50 50119910 002 002 50 50119911 002 002 50 50
432 Simulation Results and Analysis
Case 1 (without acceleration) The simulation lasts for 1200 sand the results are shown in Figures 2 and 3 Figures 2 and3 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 2 and 3 clearly showed that bothstandard KF and simplified KF can fulfill data fusion of MSINS integration when the ship sails with a constant velocityDuring the whole process error curves keep convergent andstable But the curves also show that the amplitude of errorcurves obtained from standard KF is significantly larger thanthat of simplified one Considering the adjustment stageof KF the data during 201 ssim1200 s are collected and thestatistical results are shown in Table 3 Obviously statisticaldata verified the deduction in Section 42 effectivelyThat is to
say the simplified algorithm can smooth the noise in carriermotion and improve the accuracy of data fusion
Note that in Case 1 the ship is sailing along 119910-axis ofbody frame with a constant velocity but the ship is swingingobeying sine function when the motions are projected intonavigation frame there exist irregular sine motions along allaxes along navigation frame So Case 1 can be regarded asa motion with approximate constant velocity and periodicchanges of acceleration (or interference of acceleration) Inother words the simplified KF can be used when the carrieris with a constant velocity or with a small interference ofacceleration
Case 2 (with acceleration) The simulation also lasts for 1200 sand the results are shown in Figures 4 and 5 Figures 4 and5 are the errors curves of attitude and velocity respectivelywhere the dotted lines and solid lines denote the results fromstandard KF and simplified KF respectively
The curves in Figures 4 and 5 clearly show that (1) whenthe ship is still or with a constant velocity the errors obtainedfrom two algorithms are similar to those in Figures 2 and 3respectively and there are no significant differences (2) butat the beginning and stopping point of acceleration there isa jump in north velocity and pitch this phenomenon canbe analyzed as the jump of north acceleration brings thejump of north velocity which further generates the jump inpitch and the jump in standard KF is larger than that insimplified KF and (3) during the acceleration and uniformmotion stages the jumps will both converge slowly but thatfrom standard KF owns faster convergence speed The abovephenomena verified the deduction in Section 42 effectivelyNamely when the carrier is with a continuous acceleration or
Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 3 Statistics for simulation test
Pitch Roll Yaw East vel North vel
Standard method Mean minus013311 032575 minus003588 000274 minus000046Std 223900 235837 238984 005173 004896
Simplified method Mean minus006925 022736 minus038139 minus000273 minus000333Std 037249 038313 076169 0025341 002609
600 640 680 720 760 800
0
500
0 200 600 800 1000 1200400t (s)
minus10
0
10
minus500
Erro
r (ar
cmin
)
(a) Pitch
minus10
0
10
0 400 600 800 1000 1200200t (s)
Erro
r (ar
cmin
)
(b) Roll
0 200 600 800 1000 1200400t (s)
minus10
0
10
Erro
r (ar
cmin
)
(c) Yaw
Figure 4 The attitude error curves of SINS in Case 2
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
(a) East velocity
Erro
r (m
s)
minus02
002
200 400 600 800 1000 12000t (s)
600 640 680 720 760 800
40
20
0
minus40
minus20
(b) North velocity
Figure 5 The velocity error curves of SINS in Case 2
Intermediate frame
Inner frame
Outer frame
SINS
Turntable
Figure 6 Turntable and SINS
deceleration the parameters of carrier motion will changethen the estimation with simplified KF has a certain delay
5 Turntable Test
51 Test Setting The turntable used in this test is shown inFigure 6 In this turntable the angle information of all frames
Table 4 Swinging parameters of turntable
Inner frame Intermediateframe Outer frame
Amplitude (∘) 15 7 5Frequency (Hz) 01333 02778 01087
Table 5 Sensor precision of SINS for turntable test
Gyro AccelerometerConstant errors lt005 ∘h Constant errors plusmn5times 10minus5 gRandom errors lt02 ∘h Random errors lt5times 10minus3 g
can be provided via serial port as a response to external time-synchronization signal In the test the inner intermediateand outer frames are used to simulate the shiprsquos roll pitchand yaw respectively The swinging parameters are shown inTable 4
The SINS used in the test is shown in Figure 6 in whichflexible gyroscope and quartz accelerometers are used withthe precision shown in Table 5The SINS can receive externalaided navigation data through network In this test the
8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 6 Statistics for turntable test
Pitch Roll Yaw East vel North vel
Standard method Mean minus170061 minus082281 minus026547 000274 minus000005Std 438548 329477 698181 001885 002454
Simplified method Mean minus057426 minus035207 009800 000159 minus000279Std 114755 079726 249477 000709 001623
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(a) Pitch
200 400 600 800 1000 12000t (s)
minus10
0
10
Erro
r (ar
cmin
)
(b) Roll
200 400 600 800 1000 12000t (s)
minus10
010
Erro
r (ar
cmin
)
(c) Yaw
Figure 7 The attitude error curves of turntable experiment
Erro
r (m
s)
minus01
0
01
4000 600 800 1000 1200200t (s)
(a) East velocity
Erro
r (m
s)
0 200 600 800 1000 1200400t (s)
minus01
0
01
(b) North velocity
Figure 8 The velocity error curves of turntable test
information from turntable is used as aided information thenthe data of turntable should be sent firstly through serialport and resent through network During the test both SINSand turntable use the same time signal after the time delayscaused by data transitions the data of turntable can be usedas aided data among which only simulated heading is used asmeasurement The update frequencies of the measurementsfromSINS and turntable test are 100Hz and 1Hz respectively
As shown in Figure 6 the SINS is installed in turntablewith x- y- and 119911-axis coincidingwith the intermediate innerand outer frames respectively According to [16] sensorsrsquozero bias scale factors coupling coincident installing errorand the variables of the flexible gyro related to gravity canbe calculated and compensated by the exact calibration sothat the above-mentioned errors can be ignored if the testis followed by the calibration Because the turntable cannotsimulate translational motion which is with an ideal zerovelocity white noise with variance (01ms)2 is used as thevelocity measurement And the swing data of turntable isused as the heading reference values
52 Test Results and Analysis The test lasts 1200 s and theresults are shown in Figures 7 and 8 with the errors of
attitude and velocity respectively where the dotted linesand solid lines denote the standard KF and simplified KFrespectively
Similar to those in Figures 2 and 3 the curves in Figures7 and 8 show that both KFs can fulfill data fusion in MS INSintegration effectively During the whole process the curveskeep convergent and stableThemain difference between twoKFs is that the error amplitude from standard KF is largerthan that from simplified one Take the data from 201 ssim1200 sfor statistic and results are shown inTable 6 It can be seen thatthe results are similar to that in Section 432
From the results in Figures 2 3 7 and 8 and the statisticsin Tables 3 and 6 it can be concluded that the simplified KFcan reduce calculation amount of KF effectively and improvedata fusion accuracy when carrier is with a constant velocityor with a small interference of acceleration
6 Conclusion
In this paper the inconsistency problem caused by differentupdate frequency of subnavigation systems in integrated nav-igation system is studiedThe analysis indicates that standardKF needs a lot of time update calculation to maintain the
Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
iterative process because the update frequency of SINS isalways higher than those of aided systems
In order to lessen computation load caused by timeupdate the system state equation of the integrated systemwith inertial base is analyzed in detail and the analysisindicates that the elements in state transition matrix are thefunctions of carrier motion When the carrier is with low-dynamic motion the changes of elements in state transitionmatrix are very slow Based on this this paper changes thetime update process in standard KF with the calculation forstate matrix and summation of it when the measurement isupdated the accumulated state matrix will be averaged andtimemeasurement updates are carried out
Further analysis indicates that with the average operationin simplified KF the noise caused by carrier motion will besmoothed and the accuracy of integrated system is improvedbut when the carrier is with a continuous acceleration anddeceleration the estimation with simplified KF has a certaindelay because of the average operation Simulation andturntable test verified the advantage and disadvantage ofthe proposed simplified KF The results show that when thecarrier is with a constant velocity or a small interferenceof acceleration the variance of estimation error can beeffectively suppressed with a reduced calculation amount
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported in part by the National NaturalScience Foundation (61273056)
References
[1] D H Titterton and J L Weston Strapdown Inertial NavigationTechnology Lavenham Press London UK 2nd edition 2004
[2] B Jalving K Gade O K Hagen and K Vestgard ldquoA toolboxof aiding techniques for the HUGIN AUV integrated inertialnavigation systemrdquoModeling Identification and Control vol 25no 3 pp 173ndash190 2004
[3] L Paull S Saeedi M Seto and H Li ldquoAUV navigation andlocalization a reviewrdquo IEEE Journal of Oceanic Engineering vol39 no 1 pp 131ndash149 2014
[4] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[5] W Gao B Zhao G T Zhou Q Y Wang and C YYu ldquoImproved Artificial Bee Colony algorithm based gravitymatching navigation methodrdquo Sensors vol 14 no 7 pp 12968ndash12989 2014
[6] R E Hansen H J Callow T O Sabo and S A V SynnesldquoChallenges in seafloor imaging and mapping with syntheticaperture sonarrdquo IEEE Transactions on Geoscience and RemoteSensing vol 49 no 10 pp 3677ndash3687 2011
[7] J A Farrell and M Barth The Global Positioning Systems andInertial Navigation McGraw-Hill New York NY USA 1999
[8] M Fu Z Deng and J ZhangTheTheory of Kalan Filter and ItsApplication in Navigation System Science Press 2003
[9] L Chang B Hu A Li and F Qin ldquoUnscented type Kalmanfilter limitation and combinationrdquo IET Signal Processing vol 7no 3 pp 167ndash176 2013
[10] L Chang B Hu G Chang and A Li ldquoHuber-based novelrobust unscented Kalman filterrdquo IET Science Measurement andTechnology vol 6 no 6 pp 502ndash509 2012
[11] L Zhao N Gao B Huang Q Wang and J Zhou ldquoA novelterrain-aided navigation algorithm combined with the TER-COM algorithm and particle filterrdquo IEEE Sensors Journal vol15 no 2 pp 1124ndash1131 2015
[12] Q Cao M Zhong and Y Zhao ldquoDynamic lever arm com-pensation of SINSGPS integrated system for aerial mappingrdquoMeasurement vol 60 pp 39ndash49 2015
[13] G Yan X Sun JWengQ Zhou andYQin ldquoTime-asynchronyidentification between inertial sensors in SIMUrdquo Journal ofSystems Engineering and Electronics vol 26 no 2 pp 346ndash3522015
[14] D Wan and Y Liu ldquoSummary on removing influence of shipdeformation and providing accurate attitude references forwarshiprdquo Journal of Chinese Inertial Navigation vol 13 no 4pp 77ndash82 2005
[15] J E Kain and J R Cloutier ldquoRapid transfer alignment for tacti-cal weapon applicationsrdquo in Proceedings of the AIAA GuidanceNavigation and Control Conference pp 1290ndash1300 BostonMass USA 1989
[16] X Liu X Xu Y Liu and L Wang ldquoA fast and high-accuracytransfer alignment method between MS INS for ship based oniterative calculationrdquo Measurement vol 51 no 1 pp 297ndash3092014
[17] X Liu X Xu D Feng et al ldquoDesign of software structure ofSINS on VxWorksrdquo Journal of Chinese Inertial Navigation vol14 no 2 pp 1ndash4 2006
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of







![Kalman Filter Algorithm · [๑] Kalman Filter ถูกนํามาใช เป นครั้งแรกเพ ื่อประมาณสถานะของระบบน](https://img.dokumen.tips/doc/110x75/6062223c123db0056e485b97/kalman-filter-a-kalman-filter-aaaaaaaaafa-aa-aaaaaaaaaaa.jpg)