Embed Size (px)
DESCRIPTION
Day 23. Extended Kalman Filter. with slides adapted from http://www.probabilistic-robotics.com. Kalman Filter Summary. Highly efficient : Polynomial in measurement dimensionality k and state dimensionality n : O(k 2.376 + n 2 ) Optimal for linear Gaussian systems ! - PowerPoint PPT Presentation
Citation preview

1
Extended Kalman FilterDay 23
with slides adapted from http://www.probabilistic-robotics.com
2
Kalman Filter Summary
• Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k2.376 + n2)
• Optimal for linear Gaussian systems!
• Most robotics systems are nonlinear!

3
Landmark Measurements• distance, bearing, and correspondence
1
0
t
t
t
yx
x
yj
xj
mm
,
,
it
itr
sjit
ttxjtyjit
tyjtxjit
ms
xmym
ymxmr
,
,,
2,
2,
),(atan2
)()(

4
Nonlinear Dynamic Systems• Most realistic robotic problems involve
nonlinear functions
),( 1 ttt xugx
)( tt xhz

5
Nonlinear Dynamic Systems• localization with landmarks
),( 1
)cos(cos)sin(sin
tt
t
t
t
t
t
t
t
t
xug
t
tvv
tvv
t
ttytx
x
),,(
,
,,
2,
2,
),(atan2)()(
mjxh
sj
txjtyj
yjxj
z
it
it
it
tit
mxmymymxm
s
r

6
Linearity Assumption Revisited
Figure 3.3 (a), p 55

7
Non-linear Function
Figure 3.3 (b), p 55

8
EKF Linearization (1)
Figure 3.4, p 57

9
EKF Linearization (2)
Figure 3.5 (a), p 62

10
EKF Linearization (3)
Figure 3.5 (b), p 62

11
Taylor Series• recall for f(x) infinitely differentiable
around in a neighborhood a
• in the multidimensional case, we need the matrix of first partial derivatives (the Jacobian matrix)
))(()(
...)(!2)()(
!1)()()( 2
axafaf
axafaxafafxf

12
• Prediction:
• Correction:
EKF Linearization: First Order Taylor Series Expansion
)(),(),(
)(),(),(),(
1111
111
111
ttttttt
ttt
tttttt
xGugxug
xxugugxug
)()()(
)()()()(
ttttt
ttt
ttt
xHhxh
xxhhxh
13
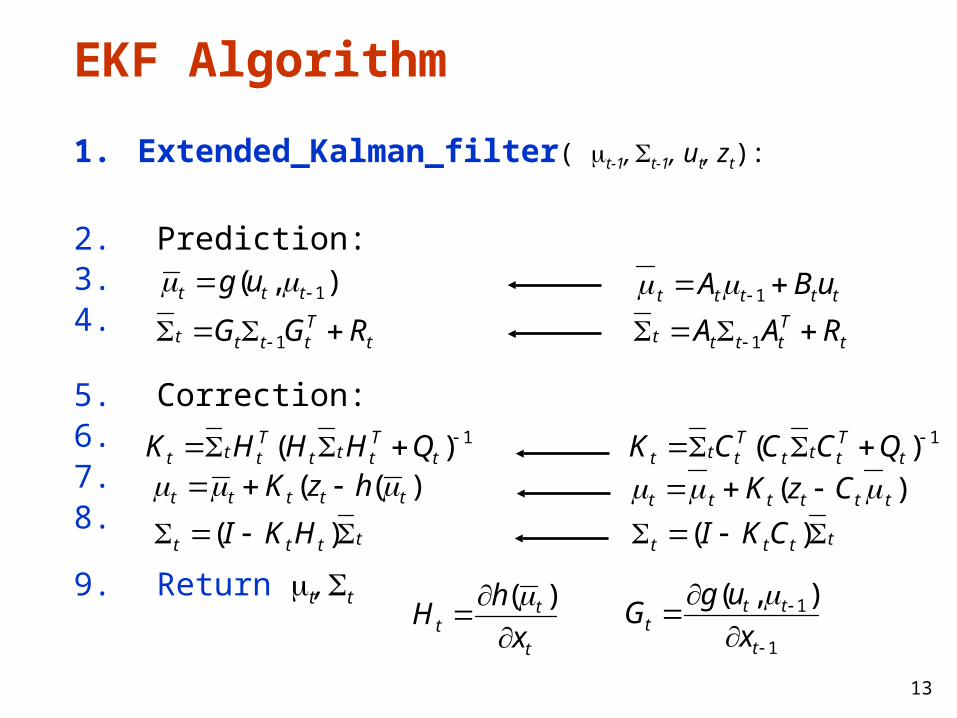
EKF Algorithm 1. Extended_Kalman_filter( t-1, St-1, ut, zt):
2. Prediction:3. 4.
5. Correction:6. 7. 8. 9. Return t, St
),( 1 ttt ug
tTtttt RGG SS 1
1)( SS tTttt
Tttt QHHHK
))(( ttttt hzK
tttt HKI SS )(
1
1),(
t
ttt x
ugG
t
tt x
hH
)(
ttttt uBA 1
tTtttt RAA SS 1
1)( SS tTttt
Tttt QCCCK
)( tttttt CzK
tttt CKI SS )(

14
Localization
• Given • Map of the environment.• Sequence of sensor measurements.
• Wanted• Estimate of the robot’s position.
• Problem classes• Position tracking• Global localization• Kidnapped robot problem (recovery)
“Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities.” [Cox ’91]

15
Landmark-based Localization

16
1. EKF_localization ( t-1, St-1, ut, zt, m):Prediction:
2.
3. 4.
),( 1 ttt ug Tttt
Ttttt VMVGG SS 1
,1,1,1
,1,1,1
,1,1,1
1
1
'''
'''
'''
),(
tytxt
tytxt
tytxt
t
ttt
yyy
xxx
xugG
tt
tt
tt
t
ttt
v
yvy
xvx
uugV
''
''
''
),( 1
243
221
||||00||||
tt
ttt v
vM
Motion noise
Jacobian of g w.r.t location
Predicted meanPredicted covariance
Jacobian of g w.r.t control

17
1. EKF_localization ( t-1, St-1, ut, zt, m):
Correction:
2. 3. 4. 5. 6.
)ˆ( ttttt zzK
tttt HKI SS
,
,
,
,
,
,),(
t
t
t
t
yt
t
yt
t
xt
t
xt
t
t
tt
rrr
xmhH
,,,
2,
2,
,2atanˆ
txtxyty
ytyxtxt
mmmmz
tTtttt QHHS S1S t
Tttt SHK
2
2
00
r
rtQ
Predicted measurement mean
Pred. measurement covarianceKalman gain
Updated meanUpdated covariance
Jacobian of h w.r.t location





























