Embed Size (px)
Citation preview

Přednáška č. 5
ÚVOD DO MODELOVÁNÍ V MECHANICE
PRUŽNOST A PEVNOST
Prof. Ing. Vladislav Laš. CSc.

Úkolem PP z inženýrského hlediska je navrhnout součásti nebo konstrukce, kterésplňují svoji funkci a jsou bezpečné.
2 základní úlohy PP- pevnostní úloha- tuhostní úloha
Základní pojmyVnější síly - povrchové (F, M, …)
- objemové (vlastní tíha, ….)
Vnitřní síly – Vlivem působení vnějších sil se těleso deformuje a v tělese vznikajítzv. vnit řní síly .
MECHANIKA PODDAJNÝCH T ĚLES

Intenzitu vnitřních sil lze vyjádřit pomocí napětí
Napětí a deformace
Deformace materiálu
Poměrné prodloužení
Zkouška materiálu při smyku
Normálová složka napětí
Smyková složka napětí
Zkouška tahem
[ ]PaNmdA
dN == −2σ
[ ]PadA
dT=τ
l
l∆ε =
y
xtg
∆γγ ==ɺ
… zkosγ

G … modul pružnosti ve smyku
Závislost mezi nap ětím a deformací
Hookeův zákon pro smyk
Hookeův zákon
εσ ⋅= E
γτ ⋅= G
( ) PaE 11102,29,1 ⋅÷=
PaG 11108,0 ⋅=ɺ
ocel
Tahový diagram
… modul pružnosti v tahu [Pa]
Etg =α
E
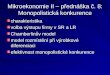
Rovinná napjatost je popsána složkami
V zatěžovaném tělese vzniká napjatost
Jednoosá napjatost – namáhání prostým tahem
Rovinná napjatost
Rovinná napjatost je taková napjatost, kde všechna napětí leží v jedné rovině.
A
Fx =σ
τσσ ,, yx
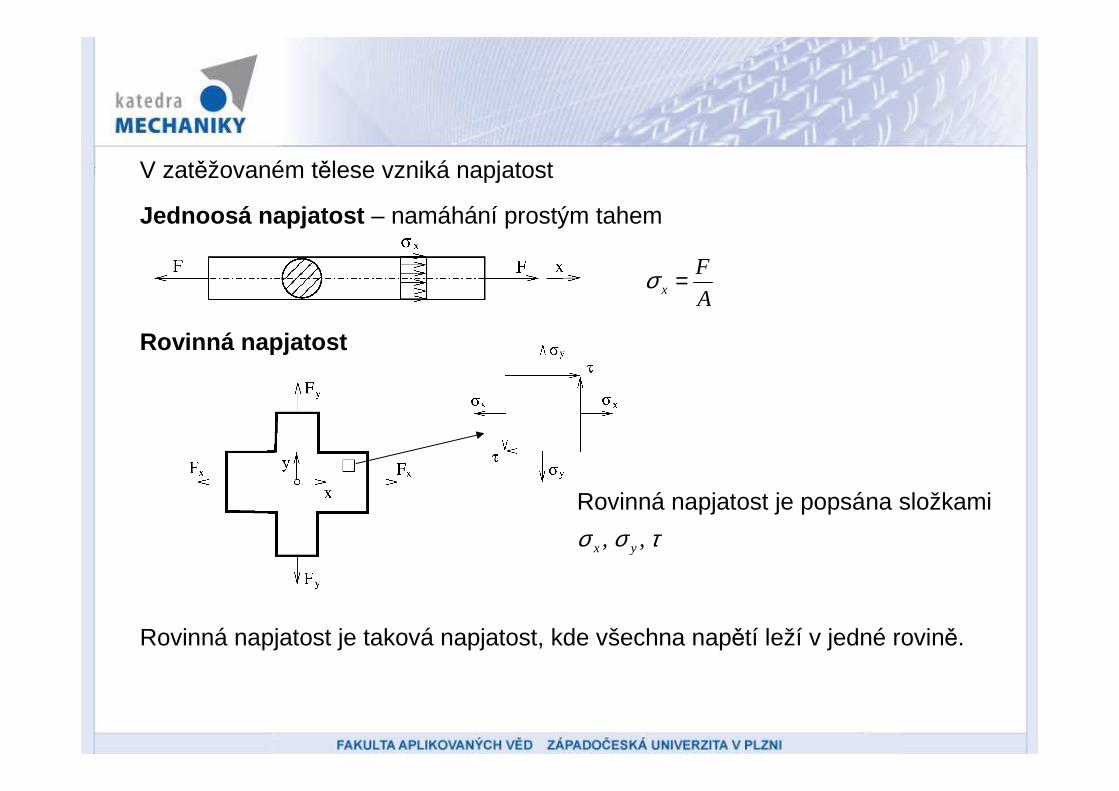
Hookeův zákon pro rovinnou napjatost
−
−
=
τσσ
ν
ν
γεε
y
x
y
x
G
EE
EE
100
01
01
G
τγ =
[ ]xyxy
y EEEσνσσν
σε −=−= 1
[ ]yxyx
x EEEσνσ
σνσε −=−= 1
1−= CS
εSσ =
σCε =
~
~
~
~
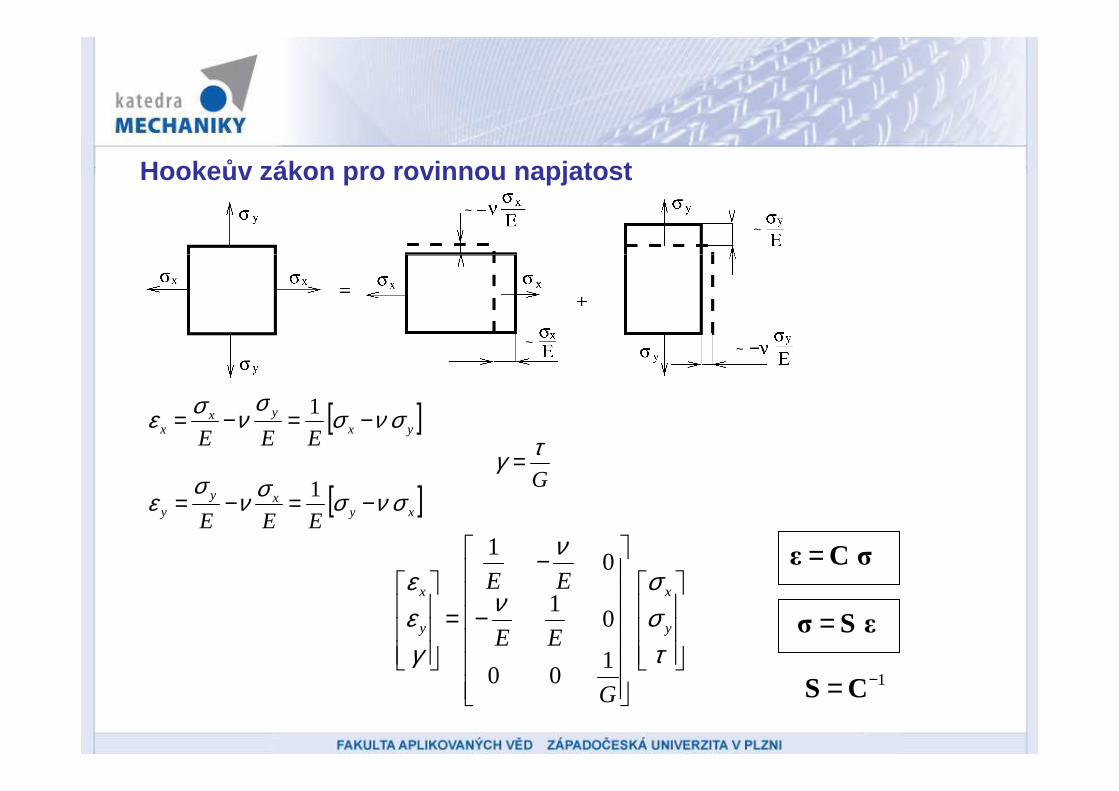
Namáhání p římého prutu- tah (tlak)- krut jejich kombinace- ohyb
Prostý tah Napětí
Poměrné prodloužení
A
F=σ
=
p
p
k
KD kk
σσσ
[ ]mEA
Fll
l
l
EA
F
E=⇒=== ∆∆εσε ;
Dll ∆∆ ≤
Dovolené napětí
Pevnostní podmínka Tuhostní podmínka
Dσσ ≤
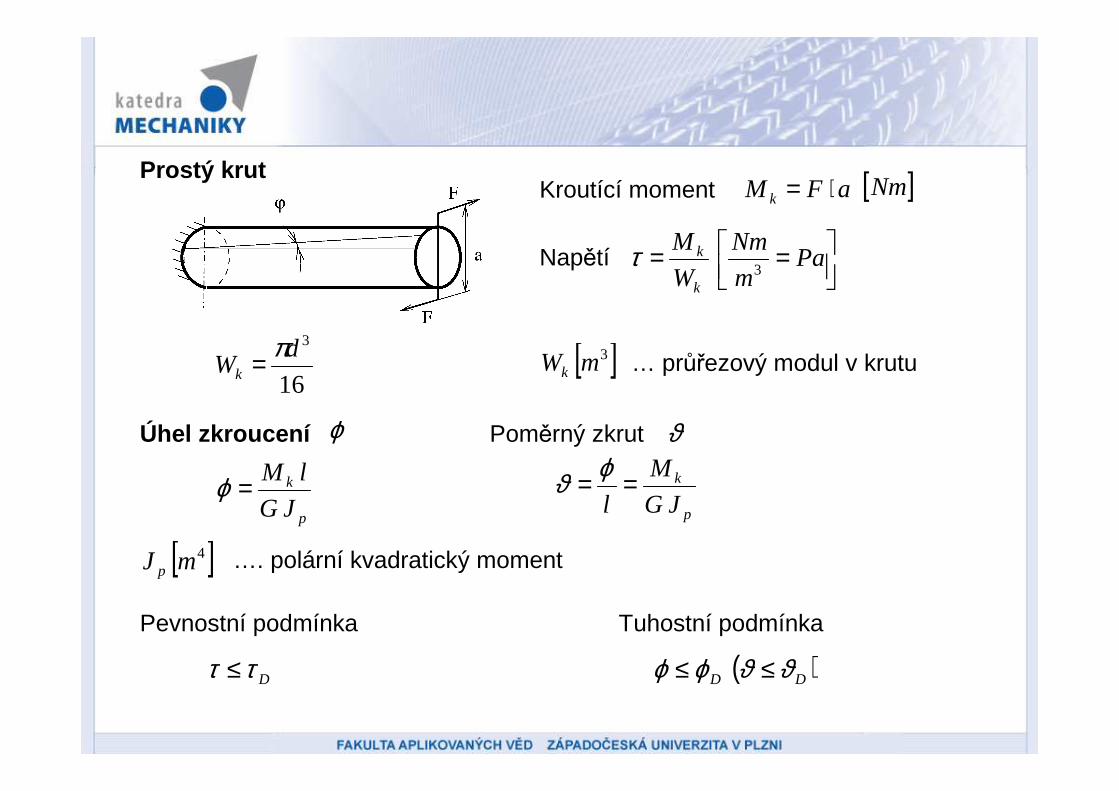
Prostý krutaFM k ⋅=
== Pam
Nm
W
M
k
k3
τ
[ ]3mWk16
3dWk
π= … průřezový modul v krutu
Úhel zkroucení Poměrný zkrut
…. polární kvadratický moment
Pevnostní podmínka Tuhostní podmínka
p
k
JG
lM=ϕ
ϕ
Dττ ≤ ( )DD ϑϑϕϕ ≤≤
[ ]4mJ p
p
k
JG
M
l== ϕϑ
ϑ
Kroutící moment
Napětí
[ ]Nm
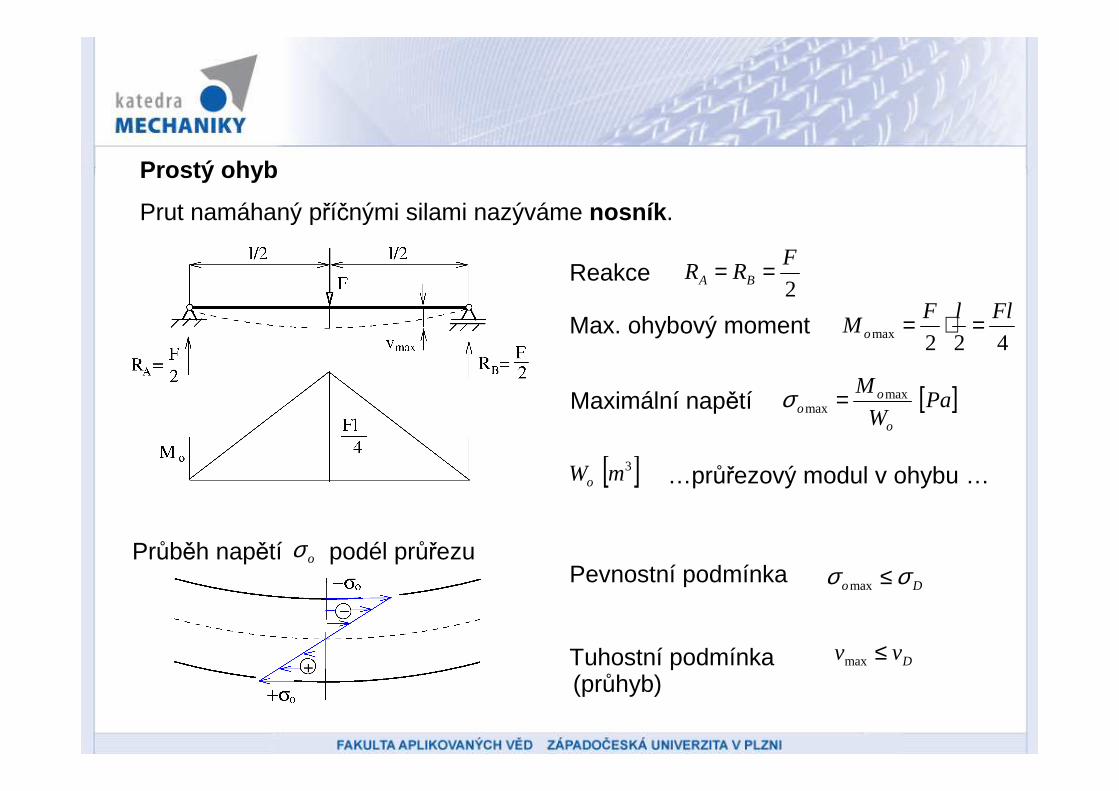
Prostý ohyb
2
FRR BA ==
Prut namáhaný příčnými silami nazýváme nosník .
422max
FllFM o =⋅=
[ ]PaW
M
o
oo
maxmax =σ
…průřezový modul v ohybu …
Pevnostní podmínkaPrůběh napětí podél průřezu
Do σσ ≤max
[ ]3mWo
oσ
Reakce
Max. ohybový moment
Maximální napětí
Tuhostní podmínka Dvv ≤max
(průhyb)
INŽENÝRSKÉ VÝPOČTY V TECHNICKÉ PRAXI
Přednáška č. 5a
Prof. Ing. Vladislav Laš. CSc.
Obsah:
• Význam výpočtů v technické praxi• Druhy výpočtových metod
• Princip a vývoj MKP• MKP systémy
• Aplikace MKP
Inženýrské výpo čty v technické praxi

Význam výpo čtů v technické praxi
Při produkci výrobků je nutné znátvlastnosti a chování daného výrobku
v reálných (provozních) podmínkách
Simulace provozního procesu („odezva výrobku“ na provozní podmínky)

Analyticky řešitelné úlohy pružnosti:
• Namáhání přímých prutů (tah, tlak, krut, vzpěr a stabilita, …)
• Tenkostěnné a silnostěnné rotační nádoby• Rotující kotouče
• Desky kruhové a obdélníkové• …
Praktické úlohy většinou podstatněji složitější
Použití přibližných diskrétních výpočtových metod
• Metoda sítí
• Metoda konečných objemů• Metoda hraničních prvků
• Metoda konečných prvků (MKP)• …

Výhody použití výpo čtových metod v kombinaci s CAD systémy:
• Zkrácení vývojového času• Redukce výrobních nákladů a úspora surovin
• Inovace a tvořivost• Zvyšování kvality
• Dodržování stále přísnějších norem• …
Vyšší efektivita výroby

Náklady na změnu
výrobyFlexibilita
definovánívýroby
koncepce výroby
seriovávýroba
Flexibilita vs. náklady na změnu výroby
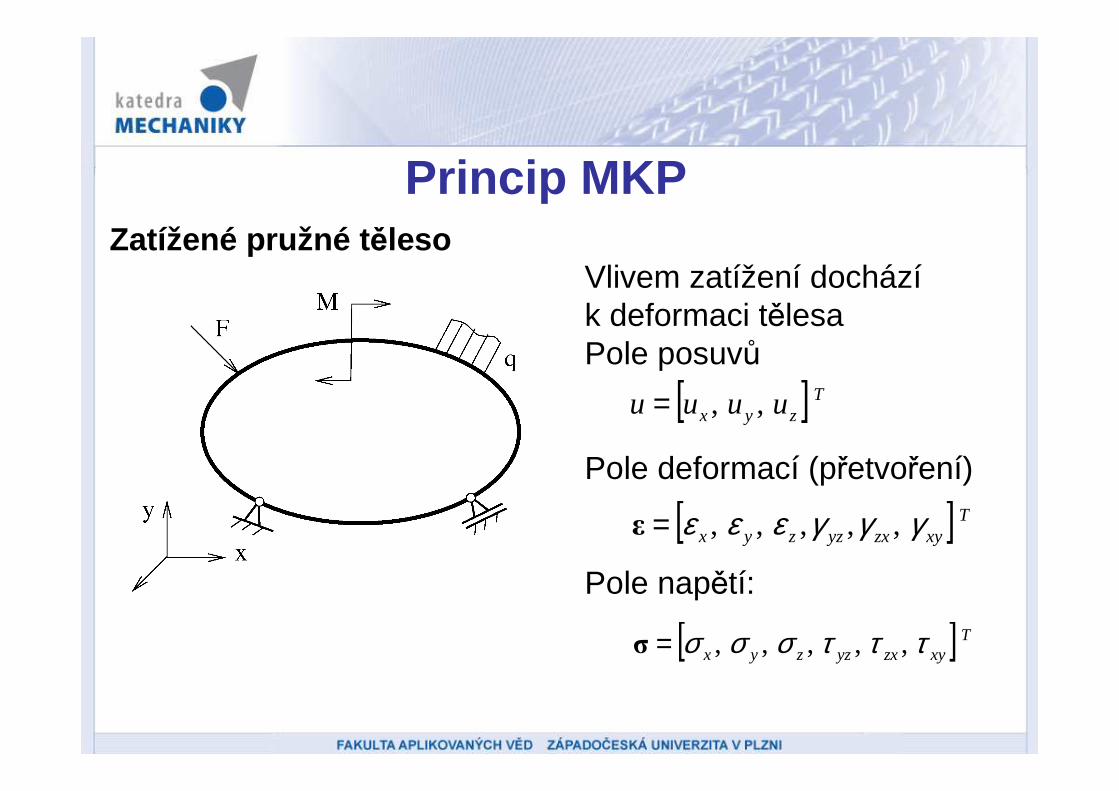
Vlivem zatížení docházík deformaci tělesaPole posuvů
Pole deformací (přetvoření)
Pole napětí:
Princip MKP
[ ]Txyzxyzzyx τττσσσ ,,,,,=σ
[ ]Tzyx uuuu ,,=
Zatížené pružné t ěleso
[ ]Txyzxyzzyx γγγεεε ,,,,,=ε

Deformační stav pružného tělesa je podle matematické teorie pružnosti popsán 15-ti rovnicemi
3 podmínky rovnováhy (Cauchyho)
(3 rovnice)
kde je matice operátorů, vektor objemových sil
6 geometrických rovnic
6 fyzikálních rovnic (rozšířený Hookeův zákon)
Princip MKP
0=+ Rσ∂∂∂∂
∂∂∂∂
uεT∂∂∂∂=
εDσ =
[ ] TZYX ,,=R
Deforma ční varianta
• Hledání neznámých funkcí posunutí u (x, y, z) je nahrazenohledáním konečného po čtu hodnot těchto funkcí, z nichž lzezkonstruovat přibližné řešení.
• Hledané neznámé funkce posunutí aproximujeme pomocíbázových polynomických funkcí v diskrétních bodech a s jejich pomocí vyjádříme neznámé posuvy v celém kontinuu.
• Matematicky se tak řešení diferenciálních rovnic převádí nařešení soustav algebraických rovnic.
Princip MKP
Princip MKP je založen na Lagrangeově principu:
Těleso je v rovnováze, jestliže celková potenciální energie deformace soustavy je minimální.
Celková potenciální energie
…. potenciální energie deformace vnitřních sil
…. potenciální energie deformace vnějších sil
Minimum
Princip MKP
ei EE +=Π
0u
=∂Π∂
iE
eE
iE
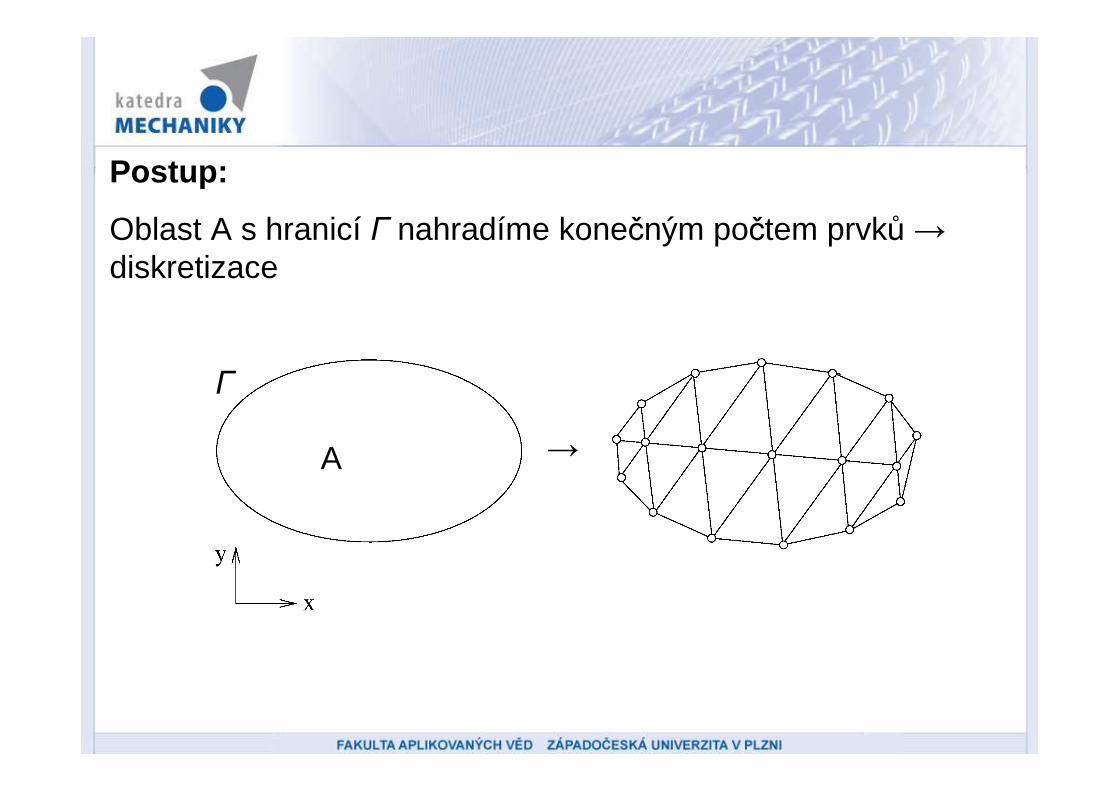
Postup:
Oblast A s hranicí Γ nahradíme konečným počtem prvků →diskretizace
→
Γ
A

b) Funkce posuvů u,v vyjádřímepomocí hodnot posuvův uzlových bodech
c) Sestavení celkové potenciální energie prvků jako funkceposuvů.
d) Sestavení celkové potenciální energie soustavy
zavedení okrajových podmínek
eiΠ
.3,2,1,, =ivu ii
,1∑
=
Π=Πn
i
ei
( ) yaxaayxv 654, ++=
( ) yaxaayxu 321, ++=
a) Funkce posuvů nahradíme polynomem

e) Minimalizace celkové potenciální energie soustavy
soustava lineárních algebraických rovnic s neznámými posuvy v uzlových bodech
f) Známe-li vektor neznámých posuvů u, potom lze
vyšetřit deformace
a napětí
Získáváme p řibližné řešení úlohy
uεT∂=
⇒=∂Π∂
0u
εDσ =
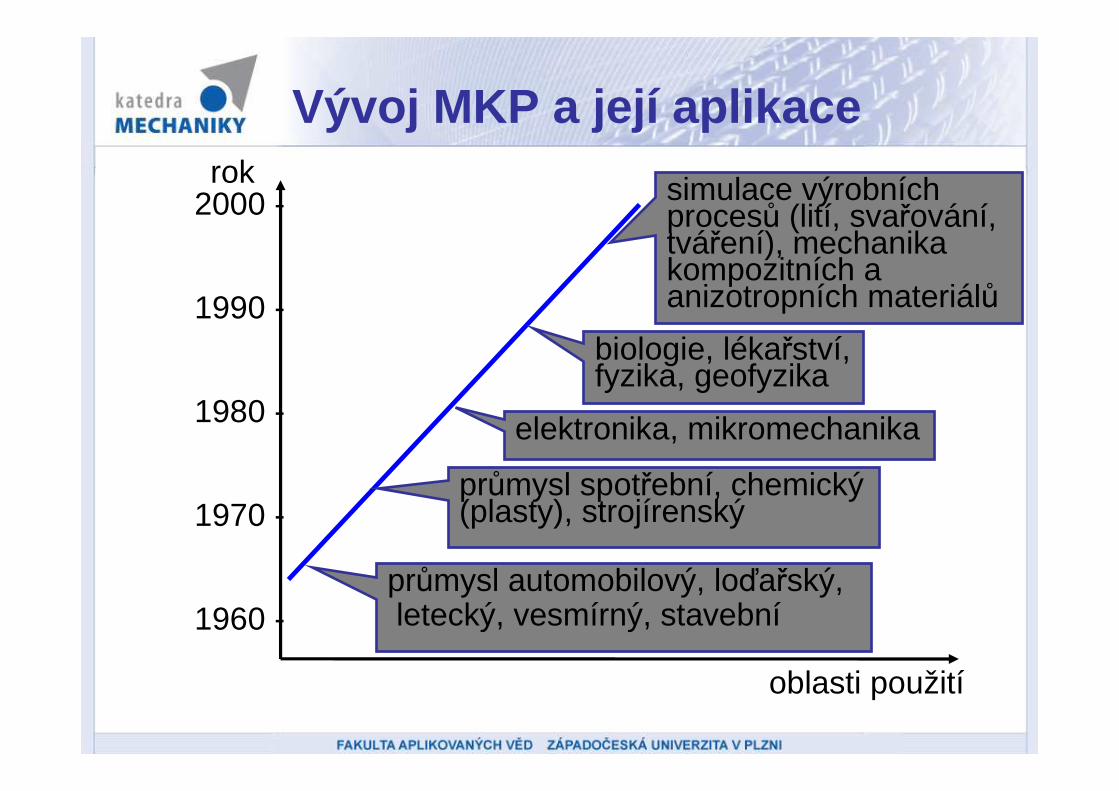
Vývoj MKP a její aplikacerok
oblasti použití
1960 -
1970 -
1980 -
1990 -
2000 -
průmysl automobilový, loďařský, letecký, vesmírný, stavební
průmysl spotřební, chemický (plasty), strojírenský
elektronika, mikromechanika
biologie, lékařství, fyzika, geofyzika
simulace výrobních procesů (lití, svařování, tváření), mechanika kompozitních a anizotropních materiálů
MKP systémy
Kompaktní systémy
• Vznik v 50. a 60. letech• Robustní systémy schopné řešit široké
spektrum úloh
• Vysoká cena• Např.: MARC, ANSYS, NASTRAN, ABAQUS,
COSMOS, SYSTUS, …

Specializované systémy:
• Zaměřeny na určitou oblast úloh• Např.: ADAMS, FLUENT, PAM-FLOW, PAM-
CRASH, DYNA, FORGE, FATIGUE …
Přístupné na Z ČU:
• Např.: ANSYS, MARC, ADAMS, SYSTUS, FLUENT, PAM-CRASH, DYNA, FATIGUE
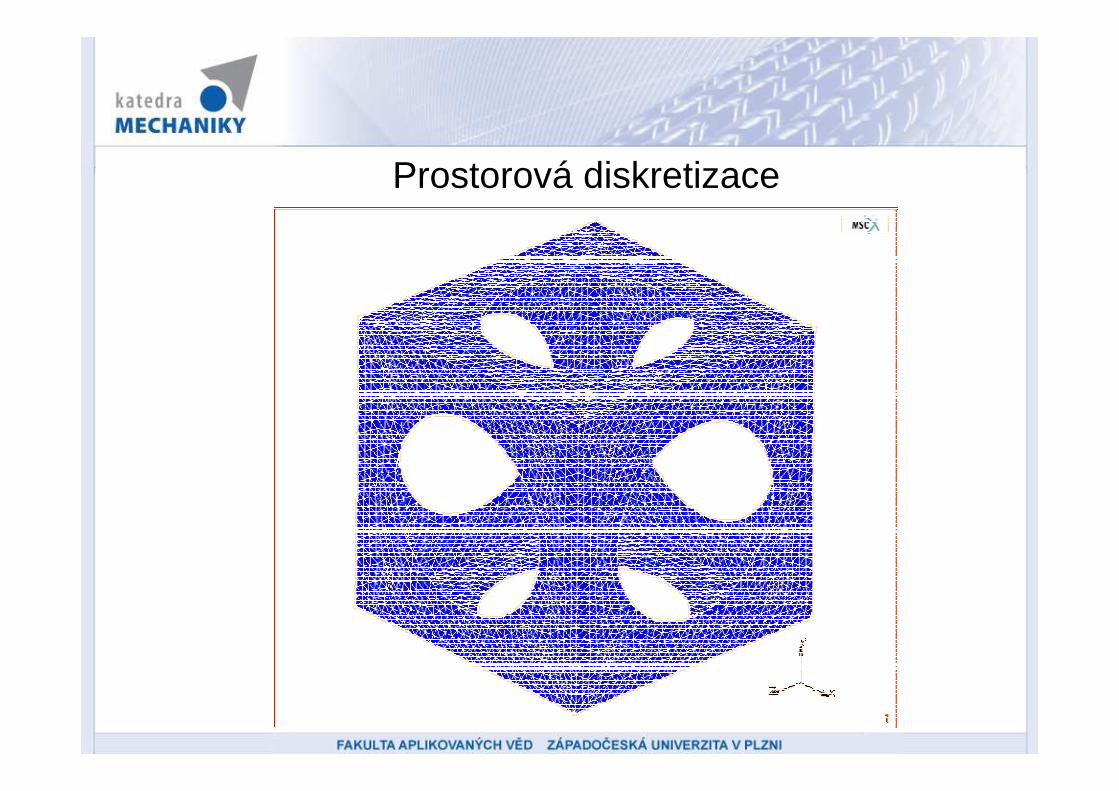
Prostorová diskretizace

Princip MKP
• Základním předpokladem MKP je diskretizacespojitého kontinua na prvky - konečné počtem i velikostí
• Postavení fyzikálního modelu :- stanovení cíle výpočtu- rozhodnutí o typu úlohy- rozhodnout o dimenzi úlohy- izolace tělesa a nahrazenívlivu okolí vazbami, tj. stanovení okrajových podmínekřešení
Metodický postup p ři definování MKP úlohy:

Metodický postup p ři definování MKP úlohy:
• Postavení MKP modelu
- Volba typu prvku
- Volba hustoty sítě
- Kontrola sítě

Skladba MKP systém ů
• Preprocesor
• Solver
• Postprocesor
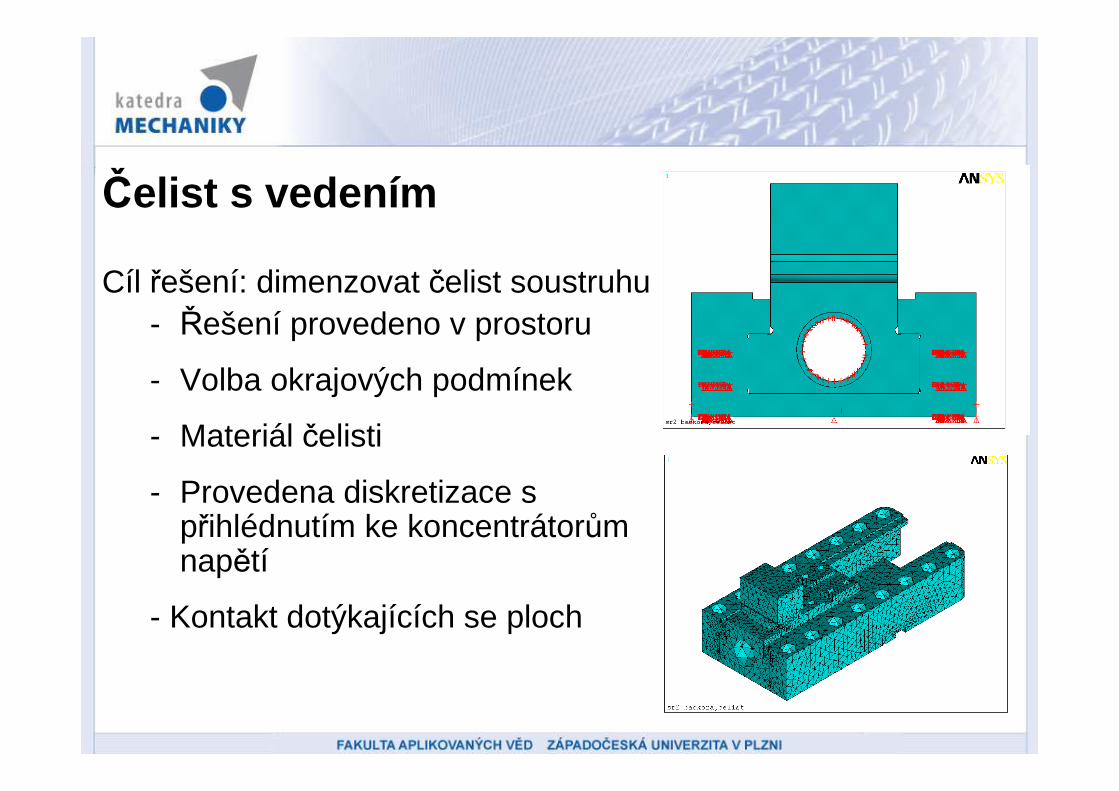
Čelist s vedením
Cíl řešení: dimenzovat čelist soustruhu- Řešení provedeno v prostoru
- Volba okrajových podmínek
- Materiál čelisti
- Provedena diskretizace s přihlédnutím ke koncentrátorům napětí
- Kontakt dotýkajících se ploch
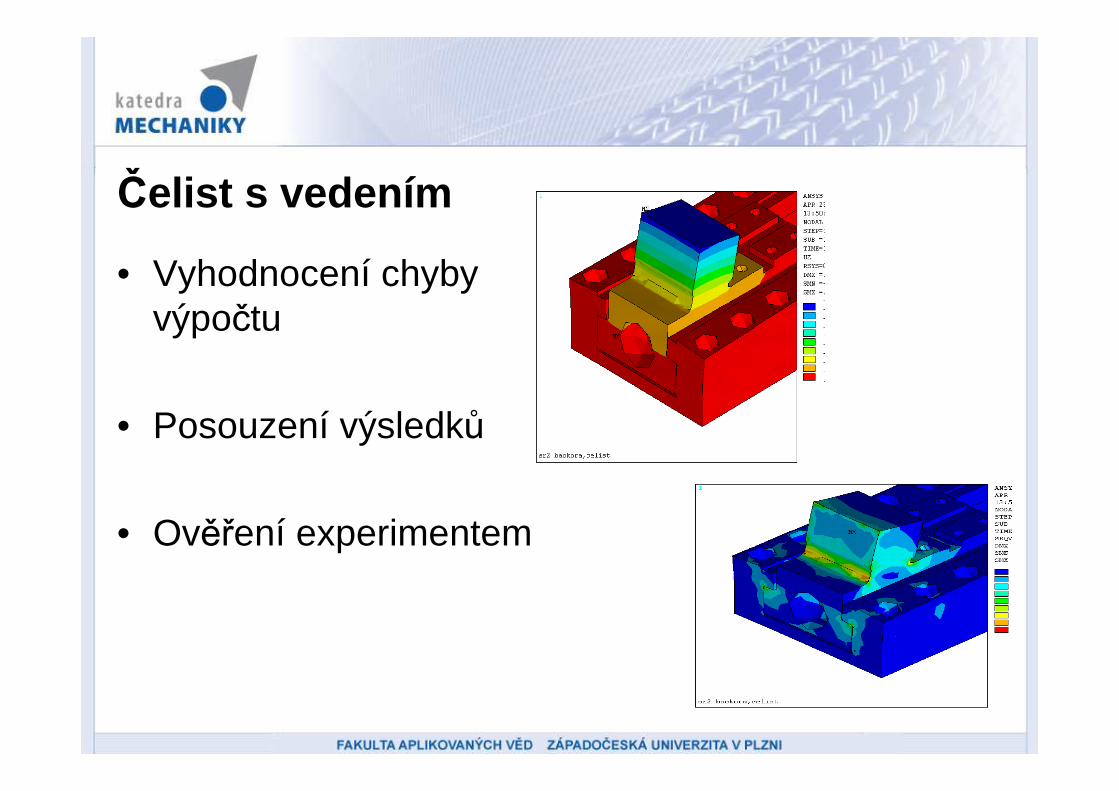
Čelist s vedením
• Vyhodnocení chyby výpočtu
• Posouzení výsledků
• Ověření experimentem

Napěťová analýza rámu lisu
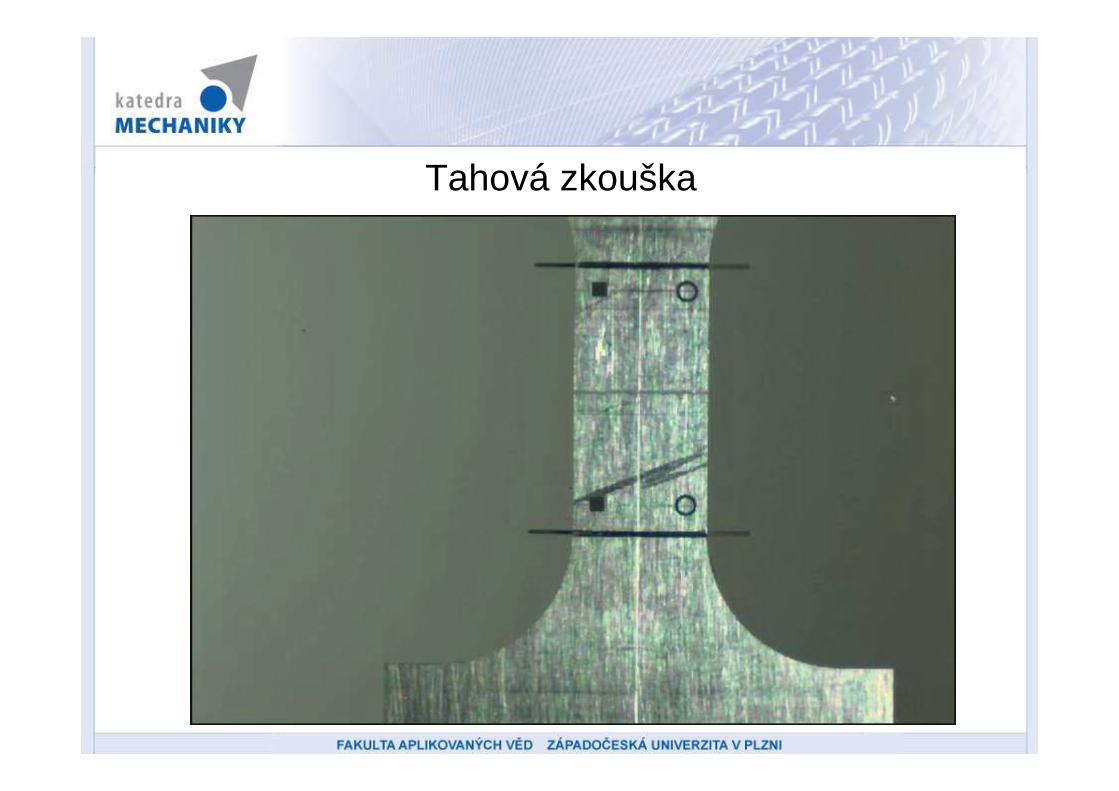
Tahová zkouška

Úlohy pružnosti a pevnosti
Simulace tvárného lomu tyčky
Diskretizace úlohy pomocí konečných prvků

Kumulace dutin
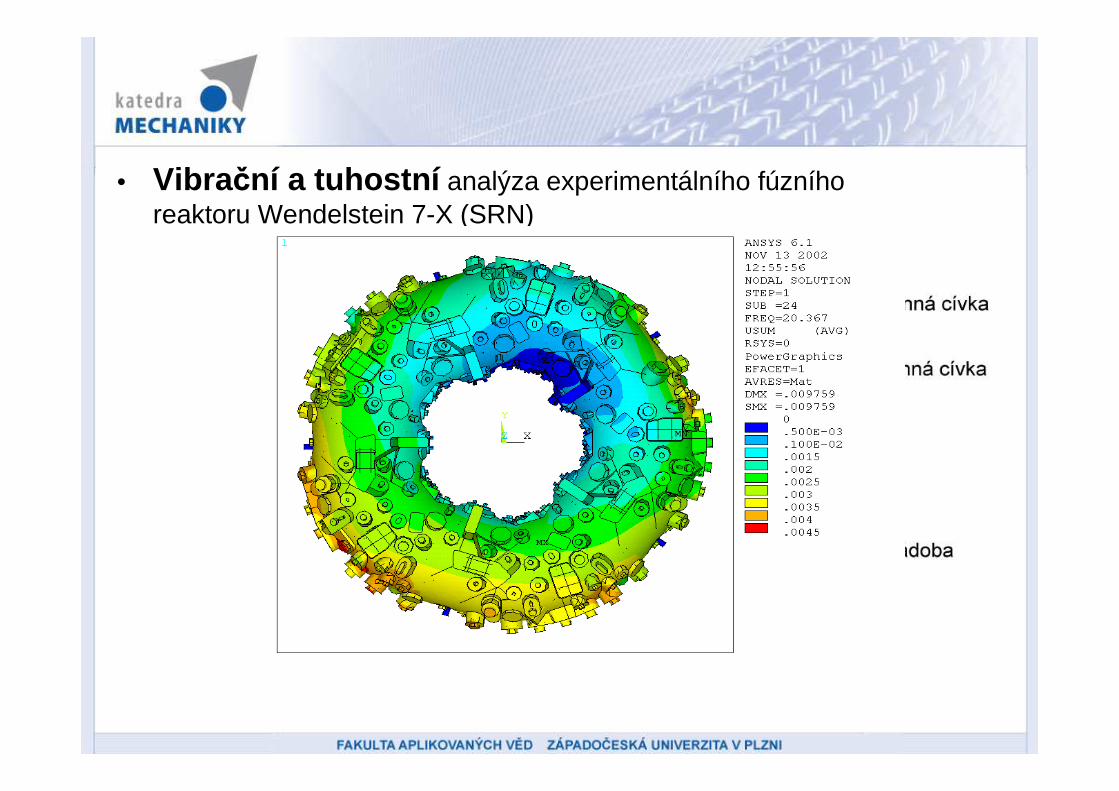
• Vibrační a tuhostní analýza experimentálního fúzního reaktoru Wendelstein 7-X (SRN)
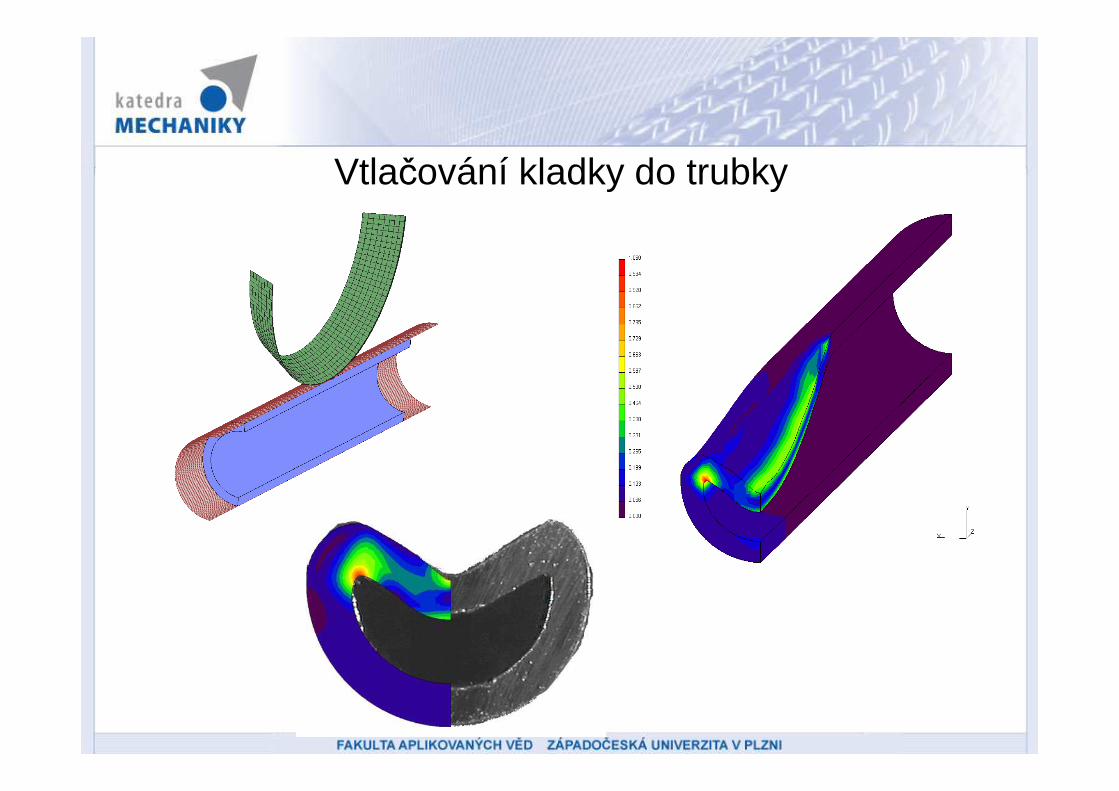
Vtlačování kladky do trubky
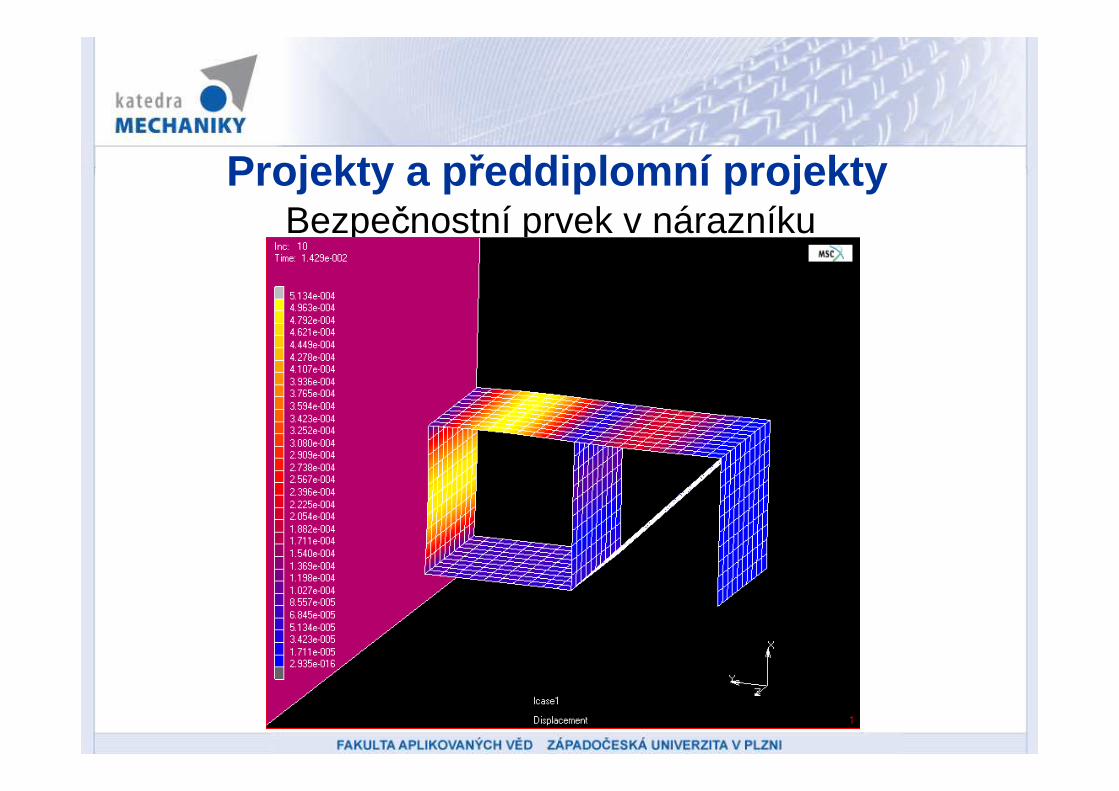
Projekty a p ředdiplomní projektyBezpečnostní prvek v nárazníku

Bezpečnostní prvek nárazníku
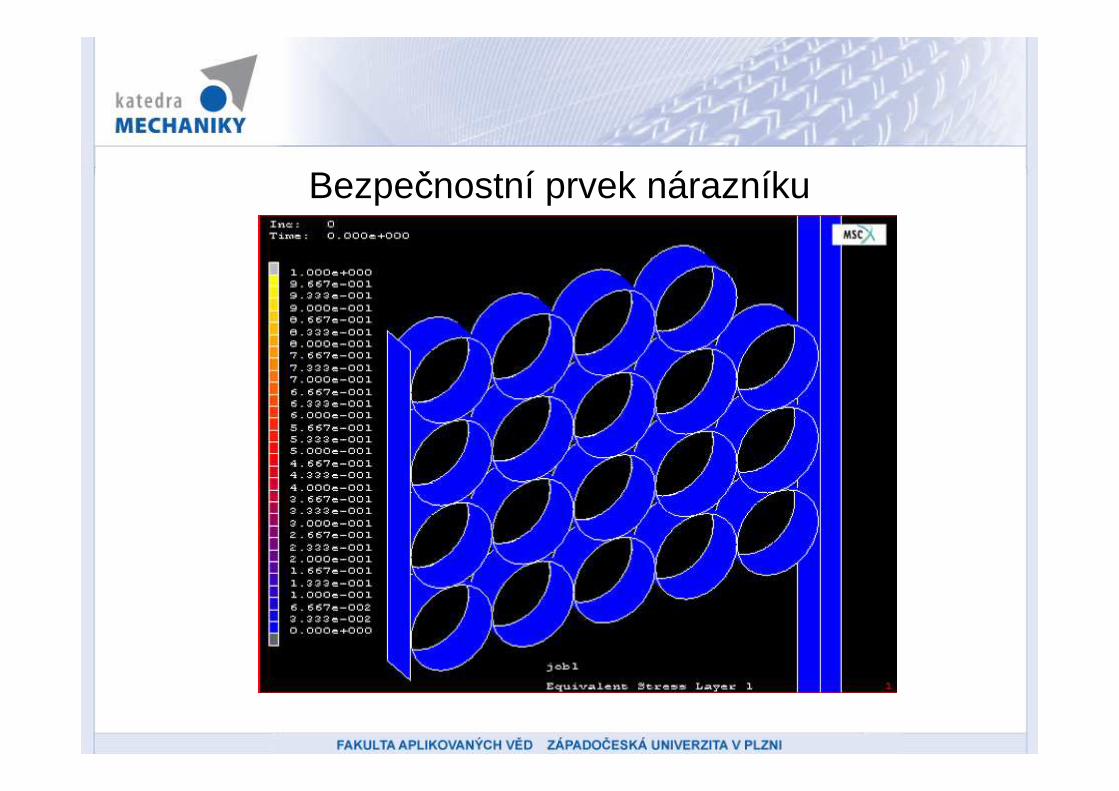
Bezpečnostní prvek nárazníku

Nárazník – absorber energie